projeto de um sistema eletro-hidráulico para acionamento de uma válvula de … · 2018-11-08 ·...
TRANSCRIPT
Departamento de Engenharia Mecânica
Projeto de um Sistema Eletro-hidráulico para Acionamento de
uma Válvula de Admissão de um Motor à Combustão Interna
Aluno: Renan Mury Nepomuceno
Orientador: Sérgio Leal Braga
Introdução
Foi realizado um estudo da viabilidade de se aplicar um sistema eletro-hidráulico no
acionamento de válvulas de admissão de um motor à combustão. O intuito é retirar a árvore de
comando de válvulas e substituí-las por atuadores eletro-hidráulicos. Na teoria, esse novo sistema
pode diminuir a inércia mecânica do motor; trazer liberdade no controle do tempo/posição das
válvulas adequado ao regime de rotação do motor, maior potência, torque e economia de
combustível. Serão feitas simulações para o controle da válvula e futuramente com o sucesso do
trabalho, a implementação real dos testes.
Cada atuador é independente dos outros, e pode variar tempo, duração de abertura e o
levante da válvula usando apenas programação eletrônica — o limite é o comprimento da haste da
válvula. Isso significa que pode-se ter quantos perfis de abertura de válvulas precisar. Em motores
de quatro válvulas por cilindro, por exemplo, é possível manter duas fechadas e trabalhar somente
com as outras duas.
Através do software MATLAB com o simulador Simulink será feito a modelagem do
sistema com a atuação da servo válvula para acionamento hidráulico do atuador a ser controlado.
Serão feitas simulações também no software FluidSIM da Festo, para verificar o comportamento
do sistema, como a velocidade de atuação, pressões, vazões etc.
Sistemas Hidráulicos Os sistemas servo-hidráulicos são amplamente utilizados na indústria para controle de
movimento, por exemplo, em plataformas de simulação, escavadeiras, etc. As vantagens dos sistemas servo-hidráulicos em comparação com os elétricos são que o primeiro pode entregar grandes quantidades de energia transferida através de pequenos tubos, e a alta densidade de potência e ampla gama de atuadores que podem usar essa energia. As desvantagens em relação aos elétricos são que se comportam, por exemplo, de maneira não linear. Além disso, os servo-sistemas hidráulicos muitas vezes têm atrito, vazamento de óleo e mostram comportamento dependente de posição. Geralmente são compostos pelos seguintes elementos:
Bomba, que fornece o fluido em alta pressão;
Capacitância fluida, devido à energia armazenada em um tanque ou reservatório;
Mangueiras, tubos e válvulas que conectam os vários reservatórios e controlam fluxo.
O modelo que foi construído no trabalho se encontra na Figura 1 abaixo, que possui o sistema de alimentação com a bomba, medidor de pressão, válvulas de alívio e tanque para o fluido de trabalho.

Departamento de Engenharia Mecânica
Figura 1. Modelo do projeto feito no software FluidSIM.
As principais variáveis para descrever os sistemas hidráulicos :
: pressão, medida em [Pa];
: vazão mássica, medida em [kg/s];
: vazão volumétrica, medida em [m³/s];
: massa, medida em [kg];
: volume, medido em [m³];
: massa específica, medida em [kg/m³].
Módulo de compressibilidade do fluido Um fluido é dito incompressível se sua massa específica se mantém constante, e
compressível caso contrário. Segundo [6], o módulo de compressibilidade fluido é dado por:
Equação 1. Onde é a massa específica do fluido em condições nominais de temperatura e pressão, e
mede a resistência do fluido à compressão medida também em [Pa]. Fluidos que possuem pequenas variações de massa específica sobre alta pressão ( pequeno) tem valor elevado de . O módulo da compressibilidade é o inverso da compressibilidade de um fluido. Este módulo pode ser visto também análogo ao módulo de elasticidade de um sólido, só que neste caso para o fluido. Um muito elevado implica que o fluido é extremamente ―rígido.
Departamento de Engenharia Mecânica
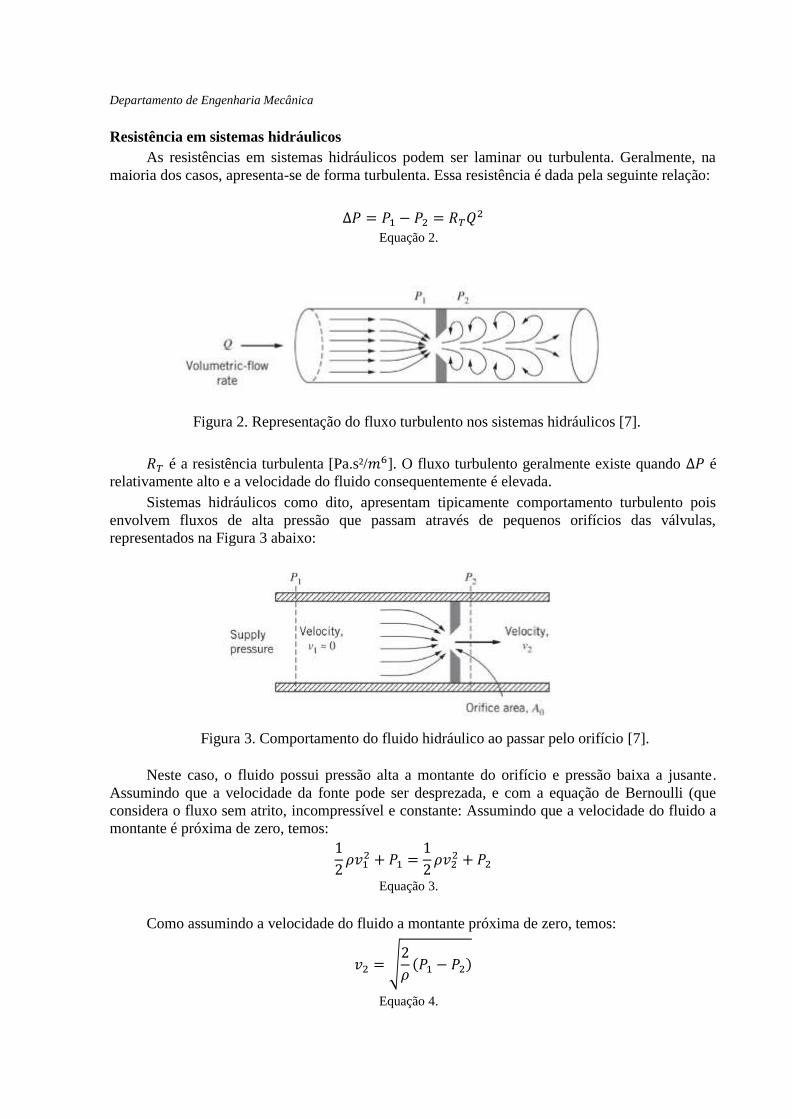
Resistência em sistemas hidráulicos
As resistências em sistemas hidráulicos podem ser laminar ou turbulenta. Geralmente, na
maioria dos casos, apresenta-se de forma turbulenta. Essa resistência é dada pela seguinte relação:
Equação 2.
Figura 2. Representação do fluxo turbulento nos sistemas hidráulicos [7].
é a resistência turbulenta [Pa.s²/ ]. O fluxo turbulento geralmente existe quando é
relativamente alto e a velocidade do fluido consequentemente é elevada.
Sistemas hidráulicos como dito, apresentam tipicamente comportamento turbulento pois
envolvem fluxos de alta pressão que passam através de pequenos orifícios das válvulas,
representados na Figura 3 abaixo:
Figura 3. Comportamento do fluido hidráulico ao passar pelo orifício [7].
Neste caso, o fluido possui pressão alta a montante do orifício e pressão baixa a jusante.
Assumindo que a velocidade da fonte pode ser desprezada, e com a equação de Bernoulli (que
considera o fluxo sem atrito, incompressível e constante: Assumindo que a velocidade do fluido a
montante é próxima de zero, temos:
Equação 3.
Como assumindo a velocidade do fluido a montante próxima de zero, temos:
√
( )
Equação 4.
Departamento de Engenharia Mecânica
Para modelar a vazão volumétrica, multiplica-se a velocidade pela área do orifício. Em
um fluxo real ocorrerá perdas por atrito, sendo considerado através do coeficiente de descarga
( ), obtendo:
√
( )
Equação 5.
Em que é o coeficiente de descarga, com valores típicos de 0,62 em sistemas hidráulicos
industriais, e a área podendo ser constante para orifícios de geometria fixa ou variável para
válvulas.
Aplicando a conservação de massa em um volume de controle (VC) pode-se obter modelos
matemáticos para os sistemas fluidos:
Figura 4. Conservação de massa em um VC [7].
Respeitando a equação de conservação:
∑ ∑
Equação 6.
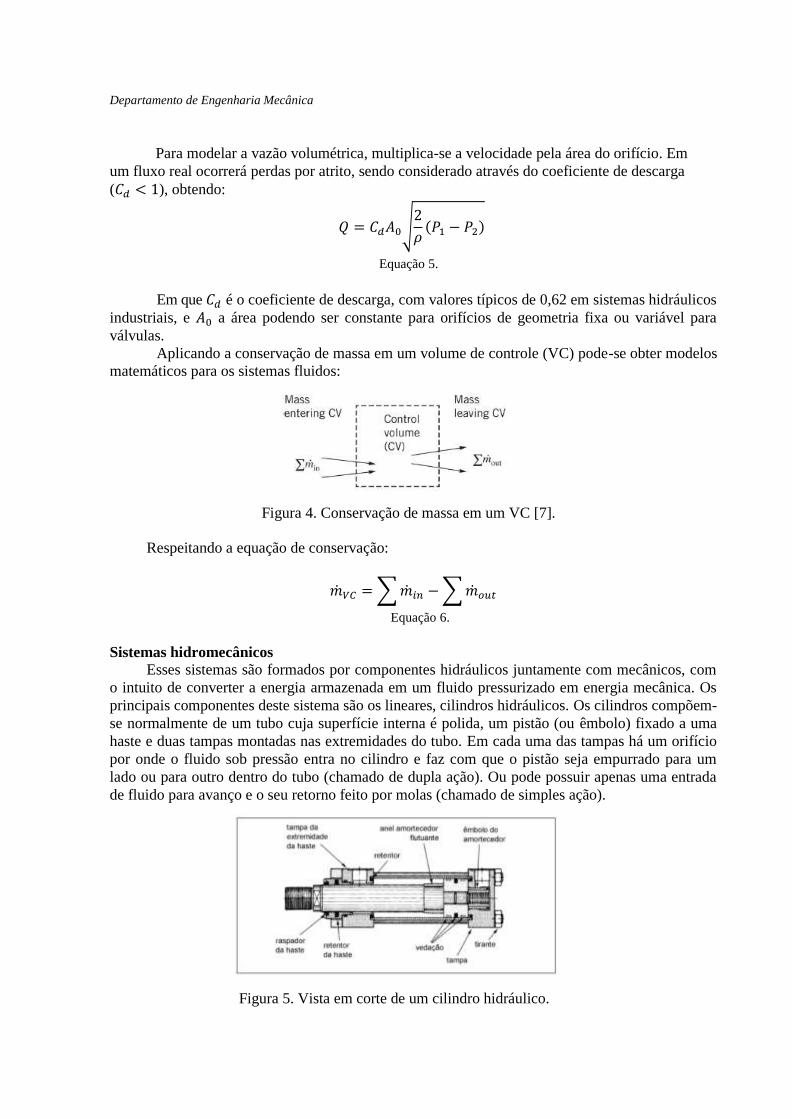
Sistemas hidromecânicos
Esses sistemas são formados por componentes hidráulicos juntamente com mecânicos, com
o intuito de converter a energia armazenada em um fluido pressurizado em energia mecânica. Os
principais componentes deste sistema são os lineares, cilindros hidráulicos. Os cilindros compõem-
se normalmente de um tubo cuja superfície interna é polida, um pistão (ou êmbolo) fixado a uma
haste e duas tampas montadas nas extremidades do tubo. Em cada uma das tampas há um orifício
por onde o fluido sob pressão entra no cilindro e faz com que o pistão seja empurrado para um
lado ou para outro dentro do tubo (chamado de dupla ação). Ou pode possuir apenas uma entrada
de fluido para avanço e o seu retorno feito por molas (chamado de simples ação).
Figura 5. Vista em corte de um cilindro hidráulico.

Departamento de Engenharia Mecânica
O óleo hidráulico pressurizado que atua sobre o êmbolo flui com uma vazão como na Figura 6 abaixo:
Figura 6. Modelo de um cilindro hidráulico.
Seguindo a equação da conservação de massa:
Equação 7.
A derivada no tempo da massa específica pode ser expressa através da regra da cadeia:
E com a definição de módulo de compressibilidade da Equação 1:
Pode-se escrever então que a taxa de variação da massa específica é:
Equação 8.
Substituindo a Equação 8 na Equação 7 reescrevendo-a e realizando as simplificações
necessárias, encontra-se o modelo fundamental para a taxa de variação da pressão no tempo em
um cilindro hidráulico com fluido compressível:
( )
Equação 9.

Departamento de Engenharia Mecânica
Modelagem do Projeto
Para o projeto em questão, que será trabalhado como na Figura 1 com uma válvula de 4 vias, tem-se o seguinte esquema a ser estudado:
Figura 7. Modelo do sistema hidromecânico com atuador
cilíndrico dupla ação e válvula 4 vias [7].
Aplicando a Equação 9, agora para um sistema de dupla ação que possui duas câmaras
(chambers) com parâmetros representados por 1 e 2:
{
( )
( )
Equação 10.
Sabendo que e ( ) , onde é o deslocamento do pistão do
cilindro e L o comprimento do cilindro em que o pistão pode-se deslocar, temos e
. Substitudino nas equações em 10:
{
( )
( )( )
Equação 11.
Nota-se que neste caso o sinal da equação de fluxo pode variar de acordo com o
deslocamento z do carretel (―spool valve”) da servo válvula. Então, para obter as vazões de
entrada, utilizando a Equação 5:

Departamento de Engenharia Mecânica
Para a câmara 1:
√
( )
{
Equação 12.
Para a câmara 2:
√
( )
{
Equação 13.
é a pressão da fonte e é a pressão de dreno para o tanque. Para modelar a parte
mecânica, pode-se enxergar o sistema através de um diagrama de corpo livre e verificar as forças
atuantes:
Figura 8. Diagrama de corpo livre no pistão do atuador [7].
∑
Sabendo que , e coloca-se a equação acima em função de . Desta forma obtemos
as 4 funções que modelam o modelo final do sistema:
{
( )
( )( )
Equação 14.

Departamento de Engenharia Mecânica
Juntamente com as funções que modelam os fluxos para as entradas:
√
( ) {
√
( ) {
Equação 15.
Onde as restrições de movimento são em .
Propriedades para escolha dos componentes
Em motores convencionais, a compressão da mistura de ar/combustível chega a pressões de
100 a 200 psi ou mais. Para que a válvula seja aberta, é preciso vencer a pressão interna da
câmara, ou seja, o atuador tem que exercer uma força alta o bastante para isso. Sabendo a área da
válvula e sabendo qual a pressão de compressão na câmara é possível encontrar a força sobre a
válvula. Para melhor dimensionar o projeto, vamos considerar um fator de segurança de 1.5x.
Figura 9. Válvula de admissão Sigma 1.6 .
A área da seção de abertura da válvula para um diâmetro de 30 mm é:
( )
Considerando que a pressão interna na compressão é em torno de 220 psi = 1,5 MPa e
sabendo que , substituindo os valores encontra-se uma força de , e para um fator
de segurança de 1.5x como foi projetado acima, encontra-se então uma força de .
Departamento de Engenharia Mecânica
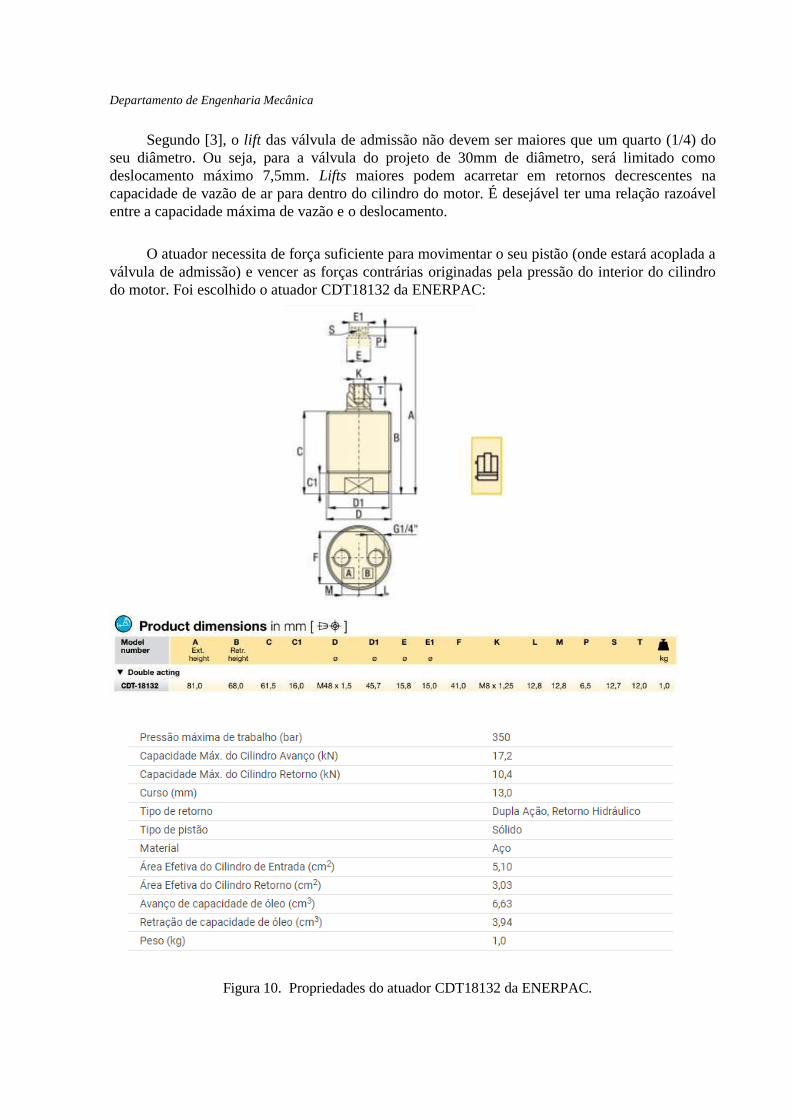
Segundo [3], o lift das válvula de admissão não devem ser maiores que um quarto (1/4) do
seu diâmetro. Ou seja, para a válvula do projeto de 30mm de diâmetro, será limitado como
deslocamento máximo 7,5mm. Lifts maiores podem acarretar em retornos decrescentes na
capacidade de vazão de ar para dentro do cilindro do motor. É desejável ter uma relação razoável
entre a capacidade máxima de vazão e o deslocamento.
O atuador necessita de força suficiente para movimentar o seu pistão (onde estará acoplada a
válvula de admissão) e vencer as forças contrárias originadas pela pressão do interior do cilindro
do motor. Foi escolhido o atuador CDT18132 da ENERPAC:
Figura 10. Propriedades do atuador CDT18132 da ENERPAC.
Departamento de Engenharia Mecânica
Considerando um caso máximo de 3600 RPM (rotações por minuto) do motor:
3500 rot . . . . . . . . . 60 s
1 rot . . . . . . . . . x = 16,67 ms
O tempo de abertura da válvula é medido em graus de rotação do motor. Em média o tempo
de abertura de uma válvula é de 245º de rotação. Assim:
360º . . . . . . . . . 16, 67 ms
245º . . . . . . . . . x = 11,35 ms
Este então é o tempo que dura a abertura da válvula de admissão dentro do motor. Pode-se
dizer que neste instante, a válvula demora em torno de 3,25 ms para abrir e 3,25 ms para fechar. O
restante do tempo ela permanece aberta.
Com as informações do atuador hidráulico escolhido, serão calculadas a velocidade e a
vazão necessária para o caso máximo e então ter condições de projetar e escolher a servo válvula.
Sabendo o deslocamento máximo que é necessário do atuador (7.5mm) e sabendo o tempo de
abertura da válvula de admissão, podemos encontrar a sua velocidade:
Tendo então a capacidade de óleo máxima 6,63 cm³ = 6,63 x m³. A vazão máxima
então, será dada por preencher totalmente este volume de óleo suportado, durante um tempo de
descida maior (em torno de 5,80 ms). Assim encontraremos a vazão máxima e poderemos
dimensionar a servo válvula com esta vazão:
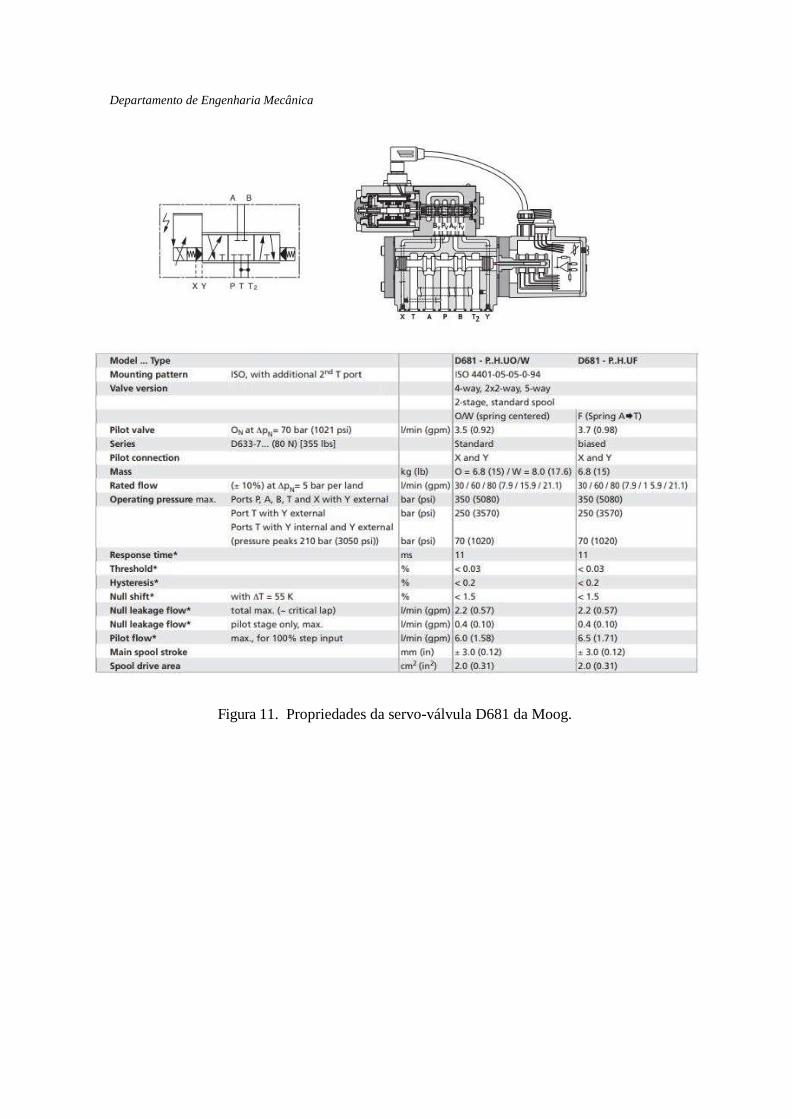
A servo-válvula precisa satisfazer essas condições. Foi escolhida a D681 da Moog de 4 vias
e 3 posições, com vazão máxima suportada de 80 L/min para atender os 69 L/min do projeto. Essas
servo-válvulas oferecem controle exato de posição em sistemas hidráulicos com a máxima
repetibilidade. Através da variação gradual da corrente elétrica em um motor de torque que atua
sobre um dispositivo chamado flapper. Este, por sua vez, controla com precisão a vazão e pressão
do fluído que move o carretel (spool – na direção do projeto), responsável pelo direcionamento do
fluído para as saídas de serviço da válvula. As especificações estão na Figura 11 a seguir:
Departamento de Engenharia Mecânica
Figura 11. Propriedades da servo-válvula D681 da Moog.
Departamento de Engenharia Mecânica
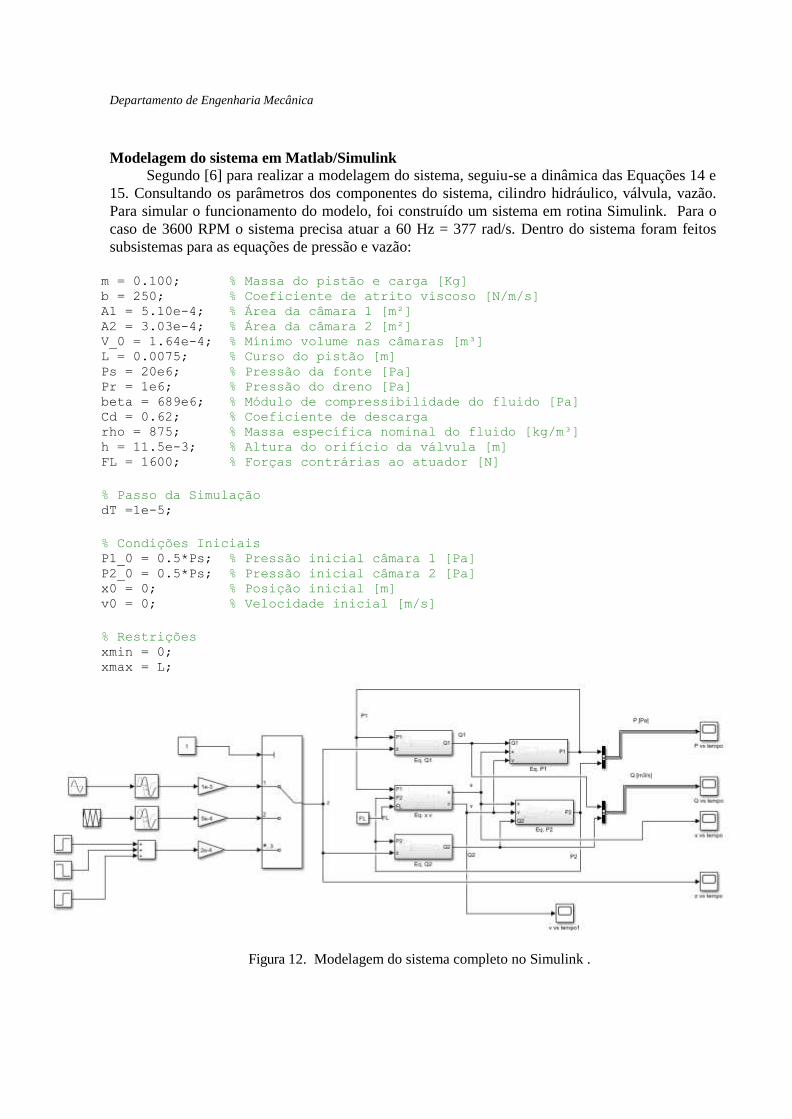
Modelagem do sistema em Matlab/Simulink
Segundo [6] para realizar a modelagem do sistema, seguiu-se a dinâmica das Equações 14 e
15. Consultando os parâmetros dos componentes do sistema, cilindro hidráulico, válvula, vazão.
Para simular o funcionamento do modelo, foi construído um sistema em rotina Simulink. Para o
caso de 3600 RPM o sistema precisa atuar a 60 Hz = 377 rad/s. Dentro do sistema foram feitos
subsistemas para as equações de pressão e vazão:
m = 0.100; % Massa do pistão e carga [Kg] b = 250; % Coeficiente de atrito viscoso [N/m/s] A1 = 5.10e-4; % Área da câmara 1 [m²] A2 = 3.03e-4; % Área da câmara 2 [m²] V_0 = 1.64e-4; % Mínimo volume nas câmaras [m³] L = 0.0075; % Curso do pistão [m] Ps = 20e6; % Pressão da fonte [Pa] Pr = 1e6; % Pressão do dreno [Pa] beta = 689e6; % Módulo de compressibilidade do fluido [Pa] Cd = 0.62; % Coeficiente de descarga rho = 875; % Massa específica nominal do fluido [kg/m³] h = 11.5e-3; % Altura do orifício da válvula [m] FL = 1600; % Forças contrárias ao atuador [N]
% Passo da Simulação dT =1e-5;
% Condições Iniciais P1_0 = 0.5*Ps; % Pressão inicial câmara 1 [Pa] P2_0 = 0.5*Ps; % Pressão inicial câmara 2 [Pa] x0 = 0; % Posição inicial [m] v0 = 0; % Velocidade inicial [m/s]
% Restrições xmin = 0; xmax = L;
Figura 12. Modelagem do sistema completo no Simulink .
Departamento de Engenharia Mecânica
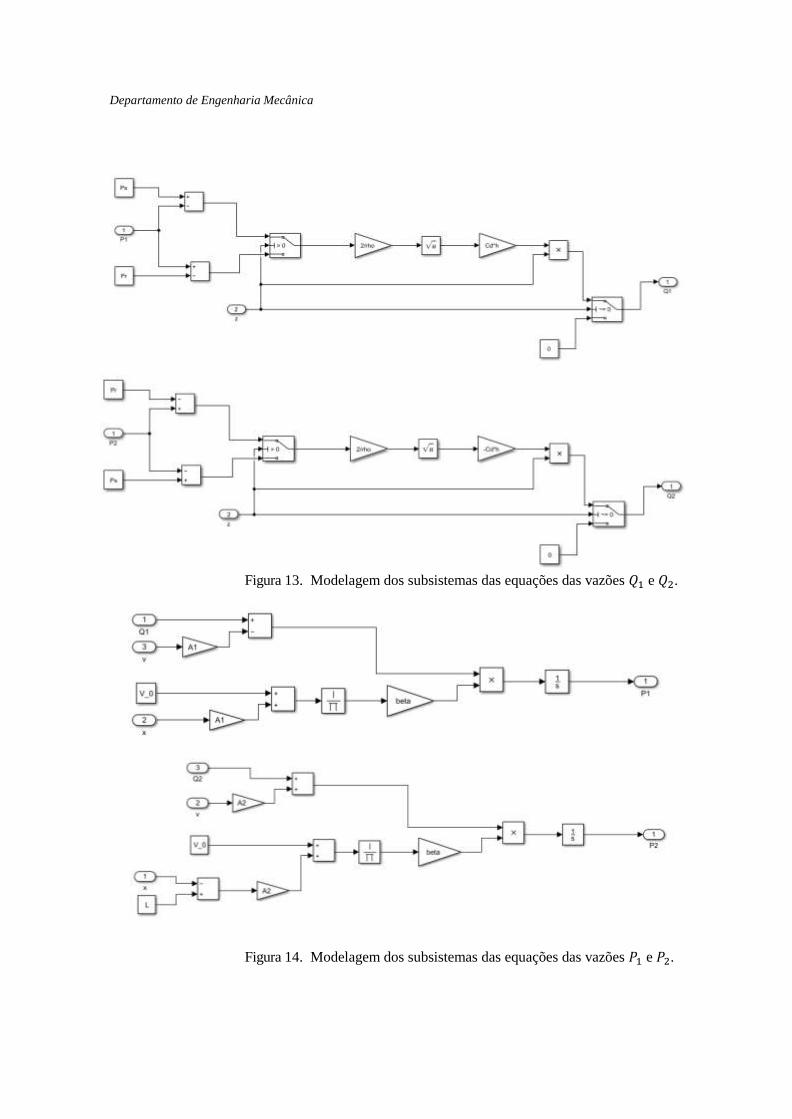
Figura 13. Modelagem dos subsistemas das equações das vazões e .
Figura 14. Modelagem dos subsistemas das equações das vazões e .
Departamento de Engenharia Mecânica
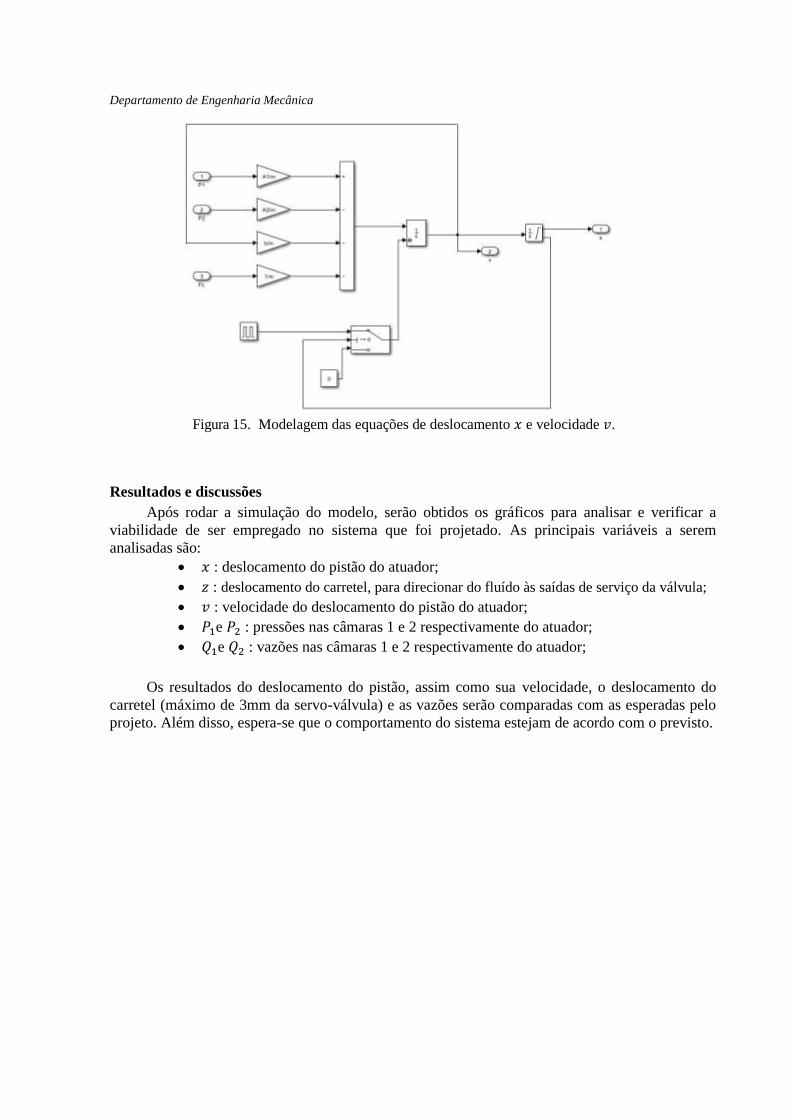
Figura 15. Modelagem das equações de deslocamento e velocidade .
Resultados e discussões
Após rodar a simulação do modelo, serão obtidos os gráficos para analisar e verificar a
viabilidade de ser empregado no sistema que foi projetado. As principais variáveis a serem
analisadas são:
: deslocamento do pistão do atuador;
: deslocamento do carretel, para direcionar do fluído às saídas de serviço da válvula;
: velocidade do deslocamento do pistão do atuador;
e : pressões nas câmaras 1 e 2 respectivamente do atuador;
e : vazões nas câmaras 1 e 2 respectivamente do atuador;
Os resultados do deslocamento do pistão, assim como sua velocidade, o deslocamento do
carretel (máximo de 3mm da servo-válvula) e as vazões serão comparadas com as esperadas pelo
projeto. Além disso, espera-se que o comportamento do sistema estejam de acordo com o previsto.
Departamento de Engenharia Mecânica
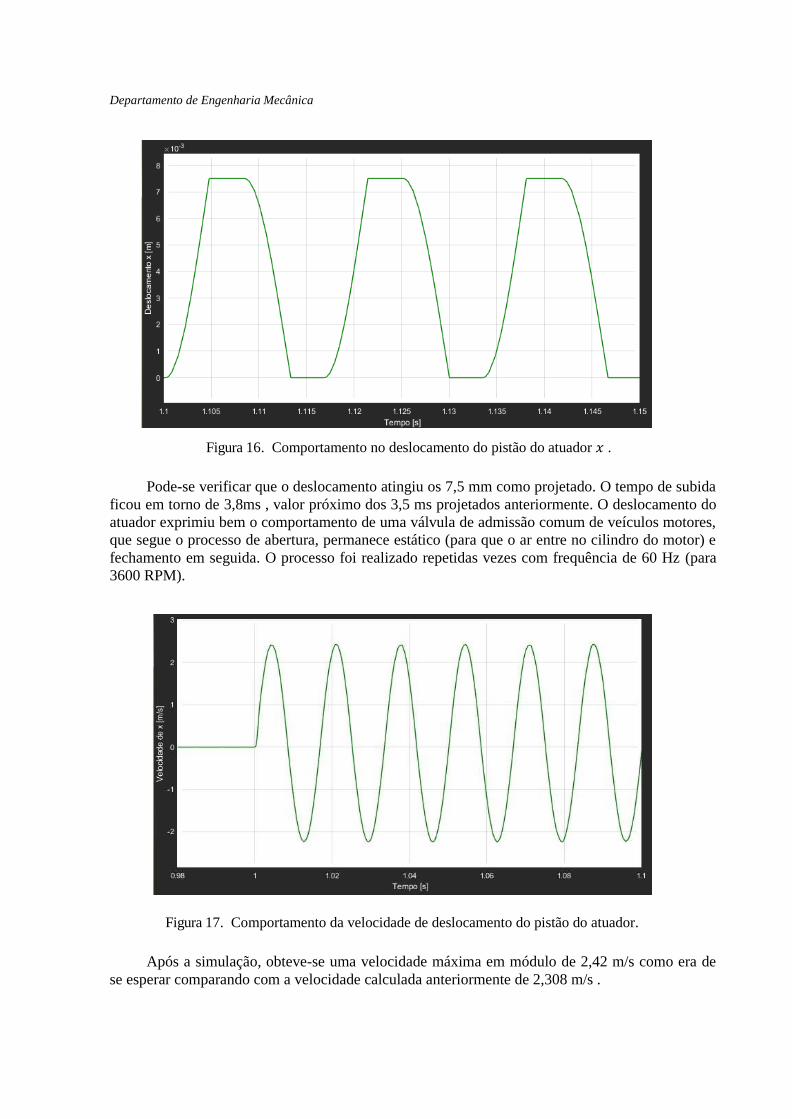
Figura 16. Comportamento no deslocamento do pistão do atuador .
Pode-se verificar que o deslocamento atingiu os 7,5 mm como projetado. O tempo de subida
ficou em torno de 3,8ms , valor próximo dos 3,5 ms projetados anteriormente. O deslocamento do
atuador exprimiu bem o comportamento de uma válvula de admissão comum de veículos motores,
que segue o processo de abertura, permanece estático (para que o ar entre no cilindro do motor) e
fechamento em seguida. O processo foi realizado repetidas vezes com frequência de 60 Hz (para
3600 RPM).
Figura 17. Comportamento da velocidade de deslocamento do pistão do atuador.
Após a simulação, obteve-se uma velocidade máxima em módulo de 2,42 m/s como era de
se esperar comparando com a velocidade calculada anteriormente de 2,308 m/s .
Departamento de Engenharia Mecânica
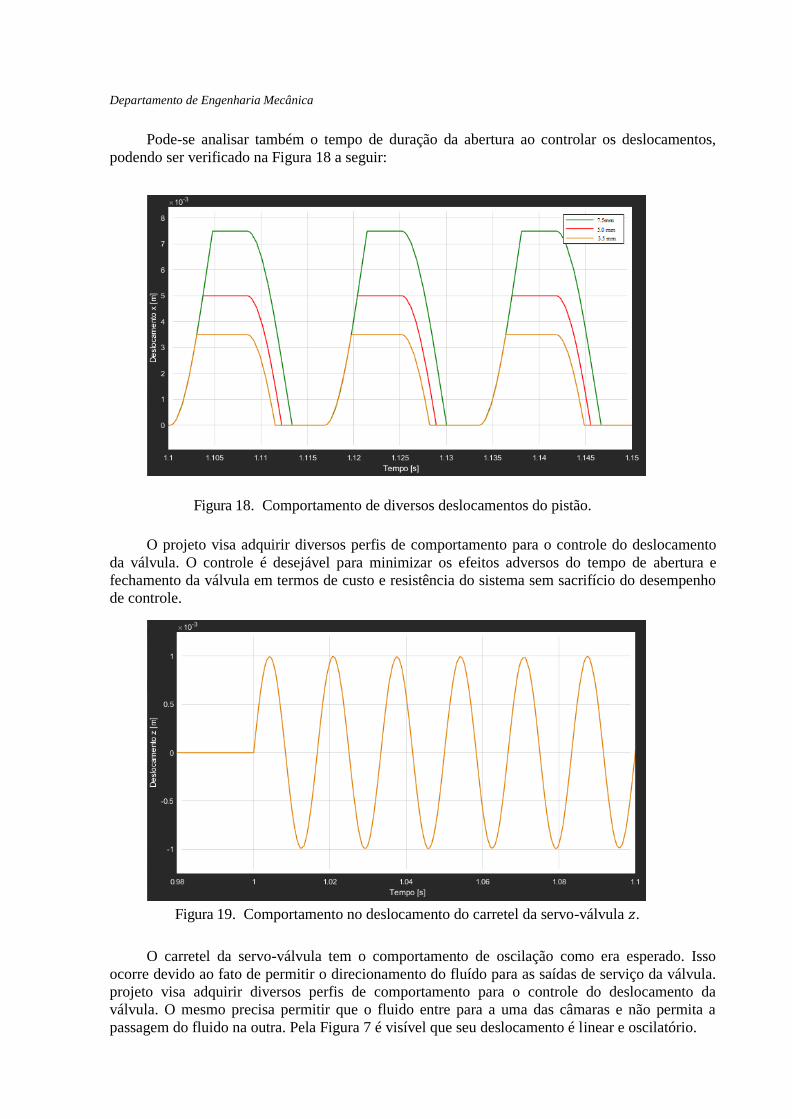
Pode-se analisar também o tempo de duração da abertura ao controlar os deslocamentos,
podendo ser verificado na Figura 18 a seguir:
Figura 18. Comportamento de diversos deslocamentos do pistão.
O projeto visa adquirir diversos perfis de comportamento para o controle do deslocamento
da válvula. O controle é desejável para minimizar os efeitos adversos do tempo de abertura e
fechamento da válvula em termos de custo e resistência do sistema sem sacrifício do desempenho
de controle.
Figura 19. Comportamento no deslocamento do carretel da servo-válvula .
O carretel da servo-válvula tem o comportamento de oscilação como era esperado. Isso
ocorre devido ao fato de permitir o direcionamento do fluído para as saídas de serviço da válvula.
projeto visa adquirir diversos perfis de comportamento para o controle do deslocamento da
válvula. O mesmo precisa permitir que o fluido entre para a uma das câmaras e não permita a
passagem do fluido na outra. Pela Figura 7 é visível que seu deslocamento é linear e oscilatório.
Departamento de Engenharia Mecânica
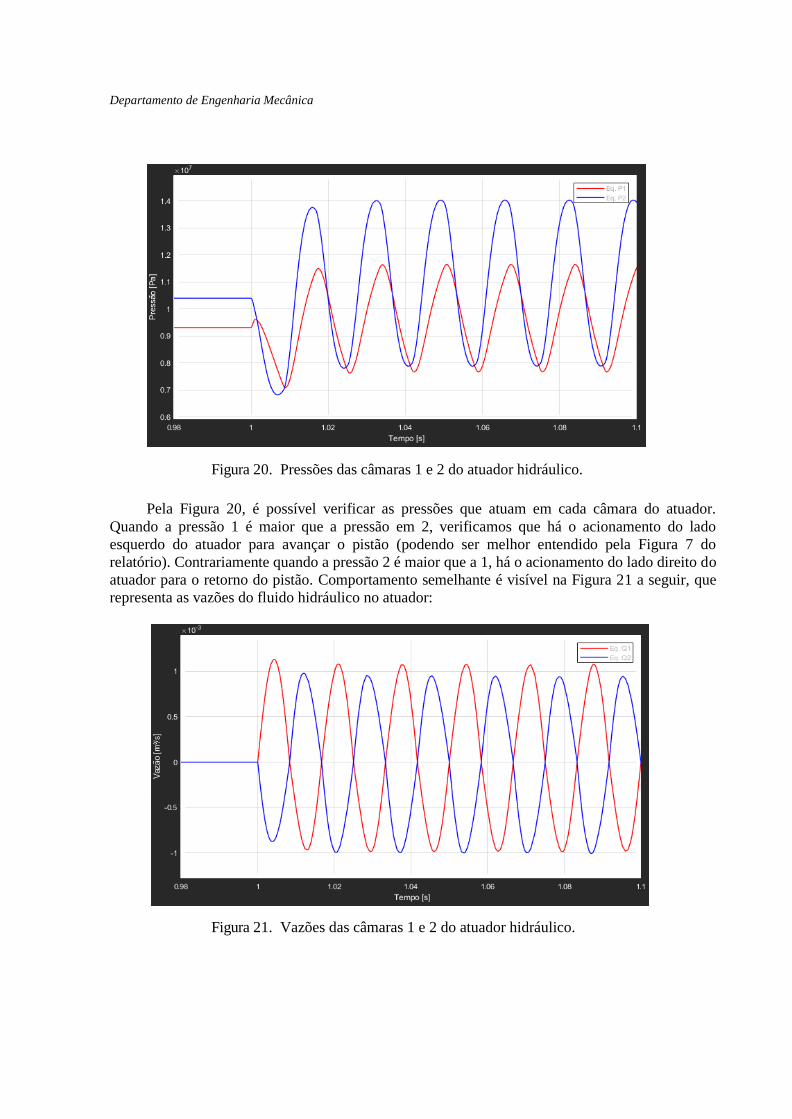
Figura 20. Pressões das câmaras 1 e 2 do atuador hidráulico.
Pela Figura 20, é possível verificar as pressões que atuam em cada câmara do atuador.
Quando a pressão 1 é maior que a pressão em 2, verificamos que há o acionamento do lado
esquerdo do atuador para avançar o pistão (podendo ser melhor entendido pela Figura 7 do
relatório). Contrariamente quando a pressão 2 é maior que a 1, há o acionamento do lado direito do
atuador para o retorno do pistão. Comportamento semelhante é visível na Figura 21 a seguir, que
representa as vazões do fluido hidráulico no atuador:
Figura 21. Vazões das câmaras 1 e 2 do atuador hidráulico.

Departamento de Engenharia Mecânica
Como esperado, a maior vazão resultou em 1,078 x m³/s , sendo menor que a necessária
de 1,14 x m³/s calculada anteriormente, porém ambas são permissíveis ao funcionamento da
servo-válvula escolhida. Observa-se que enquanto uma recebe uma maior vazão por parte da
bomba a outra diminui. Isso acaba por explicar o funcionamento de um atuador dupla ação, onde o
fluido sob pressão entra por uma câmara do cilindro e faz com que o pistão seja empurrado para
um lado realizando o avanço ou entre pela outra câmara e empurre o pistão para o retorno. A
diferença de amplitude se dá pelo fato das câmaras apresentarem áreas diferentes, e
consequentemente volumes distintos.
Utilizando o software FluidSIM da Festo, foi reproduzido o mesmo modelo adicionando os
parâmetros necessários das pressões de alimentação, propriedades do atuador e da servo-válvula e
do sistema como um todo. Foi feito um sistema de acionamento elétrico para reproduzir o
acionamento de avanço e retorno do atuador e verificar a velocidade do processo:
Figura 22. Simulação do modelo no Software FluidSIM da Festo.
A velocidade encontrada de 2,66 m/s está coerente com a simulação numérica em MATLAB
e com os cálculos feitos para o projeto. Pode-se dizer então que o modelo foi bem representado em
ambas as plataformas, permitindo sua posterior aplicação real com realização de testes.
Conclusões
Neste estudo, um sistema para controle de válvulas é proposto para aplicação em um motor
sem árvore de comando. Uma quantidade significativa de pesquisa em um sistema de acionamento
da válvula ―camless‖ foi feito. O sistema de atuação controlado permitiu uma maior compreensão
do comportamento, em que para garantir o posicionamento preciso das válvulas do motor é preciso
totalmente do controle.
Os tempos de resposta das válvulas são muito rápidos (na faixa de 3 a 5 ms) , sendo
necessário então vazões altas para o funcionamento ideal do atuador. Esta necessidade de alta
vazão acaba que torna inicialmente inviável fisicamente numa aplicação direta de um veículo. Por
isso, requer válvulas de controle de fluxo de alto desempenho juntamente com sensores de
posição. O sistema inicialmente feito apesar de simples exprime bem a ideia do projeto.
Departamento de Engenharia Mecânica
Os resultados da modelagem do sistema foram satisfatórios, onde todos os valores
resultantes das simulações, tais como deslocamento da válvula, velocidade e vazões atenderam aos
parâmetros calculados. O modelo no FluidSIM também apresentou resultados coerentes com o
esperado pelo trabalho.
É importante ressaltar que este projeto será posteriormente projetado com os componentes
listados no presente relatório. Devido a extrema complexidade do trabalho e por se tratar de
equipamentos de alto custo, foi-se necessário realizar estas simulações numéricas inicialmente
antes que fosse realmente construído. Este será dado em continuidade numa futura tese de
mestrado.
Referências
1 - KANGHYUN NAM , KWANGHYUN CHO , SANG-SHIN PARK , SEIBUM B. CHOI. -
Design and Performance Evaluation of an Electro-Hydraulic Camless Engine Valve
Actuator for Future Vehicle Applications, 2017.
2 – ADIL KARAKAYIS - Investigation of Control System Strategies for Hydraulic Valve
Actuation in an IC Engine University of Brighton, 2014.
3 – TAYLOR, C. F. Internal Combustion Engines Vol. 1 / Vol.2, 1985.
4 – IAIN CAMERON, BRUCE MINAKER, Valve Lift Profile Development and Optimization
Using Matlab, University of Windsor, 2013.
5 – HERBERT E. MERRIT, Hydraulic Control Systems, 1967.
6 – HELON VICENT HULTMANN AYALA, Modelagem de Sistemas Fluido Térmicos .
7 – CRAIG A. KLUEVER, Dynamic Systems: Modeling, Simulation and Control, 2015 .