projeto de um equipamento hidráulico de desencarceramento de
TRANSCRIPT
PROJETO DE UM EQUIPAMENTO HIDRÁULICO DE DESENCARCERAMENTO
DE VÍTIMAS DE ACIDENTES AUTOMOTIVOS
Daniel Fuzato Cipriano
Projeto de Graduação apresentado ao Curso de
Engenharia Mecânica da Escola Politécnica,
Universidade Federal do Rio de Janeiro, como
parte dos requisitos necessários à obtenção do
título de Engenheiro.
Orientador:
Prof. Armando Carlos de Pina Filho, D.Sc.
RIO DE JANEIRO, RJ - BRASIL
NOVEMBRO DE 2015

UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
DEPARTAMENTO DE ENGENHARIA MECÂNICA
DEM/POLITÉCNICA/UFRJ
PROJETO DE UM EQUIPAMENTO HIDRÁULICO DE DESENCARCERAMENTO
DE VÍTIMAS DE ACIDENTES AUTOMOTIVOS
Daniel Fuzato Cipriano
PROJETO FINAL SUBMETIDO AO CORPO DOCENTE DO DEPARTAMENTO
DE ENGENHARIA MECÂNICA DA ESCOLA POLITÉCNICA DA
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS
REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE
ENGENHEIRO MECÂNICO.
Aprovado por:
________________________________________________
Prof. Armando Carlos de Pina Filho, D.Sc. (Orientador)
________________________________________________
Prof. Daniel Alves Castello, D.Sc.
________________________________________________
Prof. Vitor Ferreira Romano, Dott.Ric.
RIO DE JANEIRO, RJ - BRASIL
NOVEMBRO DE 2015

i
Cipriano, Daniel Fuzato
Projeto de um Equipamento Hidráulico de
Desencarceramento de Vítimas de Acidentes Automotivos /
Daniel Fuzato Cipriano - Rio de Janeiro: UFRJ / Escola
Politécnica, 2015.
VIII, 76 p.: il.; 29,7 cm.
Orientador: Armando Carlos de Pina Filho
Projeto de Graduação – UFRJ / Escola Politécnica /
Curso de Engenharia Mecânica, 2015.
Referências bibliográficas: p. 73-76.
1. Equipamento Hidráulico. 2. Mecanismo de
Corte. 3. Equipamento de Resgate. 4. Projeto Mecânico.
I. Pina Filho, Armando Carlos de. II. Universidade
Federal do Rio de Janeiro, Escola Politécnica, Engenharia
Mecânica. III. Título.

ii
Dedico este trabalho aos
meus avôs Antônio Fuzato e
Joaquim Cipriano
iii
AGRADECIMENTOS
Primeiramente gostaria de agradecer aos meus pais, José Vicente Cipriano de
Souza e Eliane Helena Fuzato Alten por toda a dedicação, amor e apoio que me deram
durante toda a minha vida. Vocês sempre estiveram do meu lado e é só pelo seu bom
trabalho como pais que pude me tornar quem eu sou e chegar até aqui.
Agradeço ao meu irmão, Lucas, pelo carinho, a alegria e a confiança que sempre
depositou em mim.
Agradeço ao meu padrasto, Frank Alten, que é uma pessoa muito importante na
minha vida e sempre me tratou como seu próprio filho, me apoiando e aconselhando a
sempre seguir em frente.
Agradeço à Verônica Vieira por todas as conversas, o carinho e a amizade que
me proporcionou durante todos estes anos.
Agradeço aos meus amigos mais próximos Rafaell, Sudá, Pedro Gruzman, Júlio
e Rodrigo (Sudá + Metne) por tudo o que passamos neste curso: alegrias, intercâmbios,
preocupações, ansiedades e noites mal dormidas estudando para a prova no dia seguinte
(às 8 da manhã). Vocês sempre me empurraram para frente nos momentos de
dificuldades e devo muito a vocês, também, pelo fato de chegar até o fim desta jornada.
Por fim, agradeço à UFRJ e ao seu corpo docente pelo enorme esforço e
dedicação em nos presentear com um inestimável tesouro, a profissão de engenheiro.
Em especial gostaria de agradecer ao professor Armando pela disponibilidade em me
orientar nesse trabalho de conclusão, estando sempre presente para me ajudar a
desenvolver esta ideia.
iv
Resumo do Projeto de Graduação apresentado à Escola Politécnica/UFRJ como parte
dos requisitos necessários para a obtenção do grau de Engenheiro Mecânico.
PROJETO DE UM EQUIPAMENTO HIDRÁULICO DE DESENCARCERAMENTO
DE VÍTIMAS DE ACIDENTES AUTOMOTIVOS
Daniel Fuzato Cipriano
Novembro/2015
Orientador: Armando Carlos de Pina Filho
Curso: Engenharia Mecânica
Os automóveis são sem dúvidas um dos grandes ícones da modernidade,
permitindo que pessoas e bens sejam transportados a velocidades e distâncias nunca
antes imagináveis. Entretanto, estes mesmos veículos que nos proporcionam tanto
conforto e comodidade, são uma das principais causas de mortes violentas no mundo,
gerando perdas humanas e financeiras que superam a marca de 500 bilhões de dólares
anualmente. Neste trabalho foi projetado um equipamento hidráulico para facilitar o
resgate das vítimas destes acidentes, ao permitir o corte e separação das ferragens dos
veículos acidentados, dando aos socorristas mais tempo para tentar salvar estas vidas. O
projeto foi focado em dar segurança à operação, introduzindo inovações como o
controle remoto do dispositivo. Além disso, tentou-se reduzir a dependência de sistemas
proprietários, utilizando sempre que possível componentes facilmente encontrados na
indústria, especialmente em relação ao atuador hidráulico. Finalmente, foi projetada
uma unidade de bombeamento hidráulico (skid), destinada a acionar o equipamento,
mantendo tanto quanto possível a compacidade e facilidade de transporte.
Palavras-chave: equipamento hidráulico, mecanismo de corte, equipamento de resgate.

v
Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulfillment of
the requirements for the degree of Mechanical Engineer.
DESIGN OF A HYDRAULIC EQUIPMENT FOR THE RELEASE OF
AUTOMOBILE ACCIDENT VICTIMS
Daniel Fuzato Cipriano
November /2015
Advisor: Armando Carlos de Pina Filho
Course: Mechanical Engineering
The automobiles are without doubt one of the greatest icons of modernity,
allowing people and goods to be transported at speeds and distances never before
imagined. However, these same vehicles that provide us with such deal of comfort and
convenience are one of the main causes of violent deaths, generating human and
financial losses that amount to more than 500 billion US dollars yearly. On this work, a
hydraulic equipment has been designed in order to facilitate the rescue of victims of
these accidents by allowing the cutting and separation of the damaged vehicle’s scraps,
giving the rescue team more time to try and save these lives. This project has focused on
having a safe operation, introducing new features such as the remote control of the
device. Furthermore, it was attempted to reduce the dependence on proprietary systems,
by using components readily available on the industry as much as possible, especially
when it comes to the hydraulic actuator. Finally, a hydraulic pumping unit has been
designed in order to activate the equipment, keeping the best compactness and ease of
transportation possible.
Keywords: hydraulic equipment, cutting mechanism, rescue mechanism.
vi
Sumário
1 Introdução.................................................................................................................. 1
1.1 Acidentes rodoviários ........................................................................................ 1
1.2 Salvamento ......................................................................................................... 1
1.3 Equipamentos hidráulicos de desencarceramento ............................................. 3
1.3.1 Tipo de atuador ...................................................................................................... 3
1.3.2 Unidade de potência .............................................................................................. 4
1.4 Evolução dos automóveis – Novos desafios para o desencarceramento ........... 6
1.5 Objetivos gerais e específicos ............................................................................ 6
1.6 Metodologia ....................................................................................................... 7
2 Ferramenta de desencarceramento ............................................................................ 8
2.1 Dimensionamento básico da garra ..................................................................... 8
2.1.1 Ângulo de abertura ................................................................................................ 8
2.1.2 Forças envolvidas na abertura da garra ............................................................... 14
2.2 Escolha do cilindro hidráulico ......................................................................... 18
2.2.1 Simples ação ........................................................................................................ 18
2.2.2 Dupla ação ........................................................................................................... 18
2.2.3 Simbologia dos cilindros ..................................................................................... 19
2.2.4 Especificação do cilindro .................................................................................... 19
2.3 Análise do cilindro e geometria detalhada da garra ......................................... 22
2.3.1 Lâmina ................................................................................................................. 23
2.3.2 Posicionamento da lâmina nas ferragens ............................................................. 25
2.3.3 Redução da massa ............................................................................................... 25
2.3.4 Espaço para os pinos ........................................................................................... 26
2.3.5 Gancho ................................................................................................................ 26
2.3.6 Uso remoto .......................................................................................................... 27
2.3.7 Critério de falha de von Mises ............................................................................ 28
2.4 Acoplador ......................................................................................................... 30
vii
2.4.1 Dimensionamento ................................................................................................ 31
2.4.2 Material ............................................................................................................... 33
2.5 Pinos ................................................................................................................. 34
2.6 Barra pinada ..................................................................................................... 36
2.6.1 Dimensionamento para falha por esmagamento.................................................. 37
2.6.2 Flambagem .......................................................................................................... 37
2.7 Adaptador para extremidade do cilindro ......................................................... 39
2.8 Acionamento .................................................................................................... 40
2.8.1 Segurança ............................................................................................................ 41
2.9 Capa de proteção .............................................................................................. 41
2.10 Alça para manuseio ...................................................................................... 42
2.11 Classificação de acordo com a NFPA 1936 e comparação com outra
ferramenta ................................................................................................................... 42
2.11.1 Lowest spreading force (LSF) ............................................................................. 43
2.11.2 Classe de corte ..................................................................................................... 43
2.11.3 Comparação com uma ferramenta similar ........................................................... 44
3 Unidade de bombeamento ....................................................................................... 46
3.1 Princípio de Pascal ........................................................................................... 46
3.2 Principais componentes de um sistema hidráulico .......................................... 47
3.2.1 Bombas ................................................................................................................ 47
3.2.2 Fontes de energia para bombas ........................................................................... 49
3.2.3 Atuadores ............................................................................................................ 50
3.2.4 Válvulas ............................................................................................................... 51
3.2.5 Reservatório ........................................................................................................ 55
3.2.6 Filtros .................................................................................................................. 55
3.3 Circuito hidráulico-elétrico .............................................................................. 55
3.3.1 Circuito hidráulico ............................................................................................... 56
3.3.2 Circuito elétrico ................................................................................................... 56
viii
3.4 Dimensionamento e seleção dos componentes ................................................ 57
3.4.1 Cálculo da vazão ................................................................................................. 57
3.4.2 Potência de bombeamento ................................................................................... 57
3.4.3 Perda de carga ..................................................................................................... 58
3.4.4 Escolha do motor ................................................................................................. 60
3.4.5 Escolha da bomba ................................................................................................ 61
3.4.6 Válvula direcional ............................................................................................... 63
3.4.7 Válvula de alívio ................................................................................................. 63
3.4.8 Acumulador ......................................................................................................... 64
3.4.9 Filtro .................................................................................................................... 66
3.4.10 Reservatório ........................................................................................................ 67
3.4.11 Bateria ................................................................................................................. 67
3.4.12 Conexões ............................................................................................................. 68
3.4.13 Proteção e tampa ................................................................................................. 69
4 Conclusão ................................................................................................................ 71
5 Referências Bibliográficas ...................................................................................... 73
1
1 Introdução
1.1 Acidentes rodoviários
A segurança dos transportes tornou-se um tema de extrema importância desde a
invenção e popularização dos automóveis, que permitiram às pessoas se locomoverem a
grandes velocidades pelas ruas e estradas. Grandes somas de dinheiro e recursos
humanos são investidos neste mercado, o que trouxe enormes avanços tecnológicos
como airbags, sistemas de freios mais eficientes, controle de tração etc.
Entretanto, milhares de pessoas ainda sofrem sequelas permanentes ou morrem todos os
anos devido a acidentes automobilísticos. A interrupção dessas vidas, muitas vezes
durante a idade de plena atividade econômica, traz grandes prejuízos humanos e
financeiros para a sociedade. Por exemplo, em 2014, foram pagas 52.226 indenizações
por morte no trânsito e 595.693 indenizações por invalidez permanente às vítimas de
acidente no Brasil [1].
O custo anual da violência no trânsito no mundo é de US$ 518 bilhões, com cerca de
1,24 milhão de mortes. O Brasil perde 1,2% do seu PIB com custos relacionados a esses
acidentes [2].
1.2 Salvamento
Na ocasião de acidentes é imprescindível que as vítimas recebam tratamento hospitalar
em até uma hora a partir do momento do acidente, especialmente em casos em que há
hemorragia ou danos à coluna vertebral [3].
Entretanto, muitas vezes a colisão do veículo causa grande deformação da sua estrutura
e lataria (Figura 1), tornando difícil ou mesmo impossível o acesso às vítimas e sua
remoção através das portas ou teto solar. Mesmo quando não há grandes deformações
da estrutura, pode haver dificuldades de se retirar a vítima de maneira controlada,
medida muito importante quando há danos à coluna vertebral.

2
Figura 1 - Exemplo de automóvel com ferragem retorcida [3]
Para contornar esse problema, deve-se fazer o corte e desmontagem da estrutura e da
lataria do veículo com auxílio de ferramentas, processo conhecido como
desencarceramento. Até a década de 1970 não havia equipamento apropriado para este
tipo de serviço e eram utilizadas serras manuais ou elétricas que eram muito lentas,
ruidosas (causando ainda mais estresse para a vítima) e perigosas, além de pés de cabra
e macacos mecânicos. Em 1972, a Hurst Performance, uma companhia norte
americana, inventou o primeiro equipamento hidráulico de desencarceramento,
inicialmente usado para resgates em corridas de fórmula Indy, mas que rapidamente foi
adotada por agências de Corpos de Bombeiros [4], como pode ser visto na Figura 2.
Figura 2 - Equipamento sendo utilizado para cortar a coluna frontal do veículo [5]
3
1.3 Equipamentos hidráulicos de desencarceramento
Os equipamentos de desencarceramento funcionam por meio de um atuador,
hidraulicamente acionado, que fará o corte ou a separação das ferragens, sendo
classificados pelo tipo de atuador e pela unidade de potência.
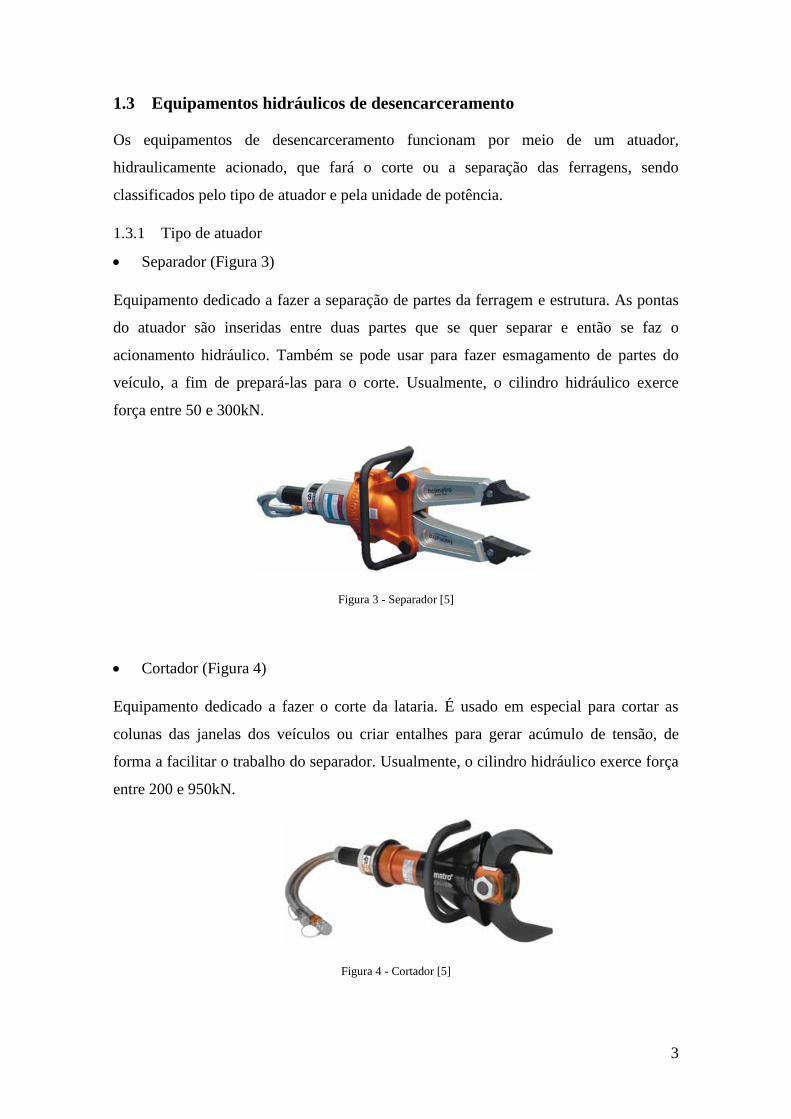
1.3.1 Tipo de atuador
Separador (Figura 3)
Equipamento dedicado a fazer a separação de partes da ferragem e estrutura. As pontas
do atuador são inseridas entre duas partes que se quer separar e então se faz o
acionamento hidráulico. Também se pode usar para fazer esmagamento de partes do
veículo, a fim de prepará-las para o corte. Usualmente, o cilindro hidráulico exerce
força entre 50 e 300kN.
Figura 3 - Separador [5]
Cortador (Figura 4)
Equipamento dedicado a fazer o corte da lataria. É usado em especial para cortar as
colunas das janelas dos veículos ou criar entalhes para gerar acúmulo de tensão, de
forma a facilitar o trabalho do separador. Usualmente, o cilindro hidráulico exerce força
entre 200 e 950kN.
Figura 4 - Cortador [5]
4
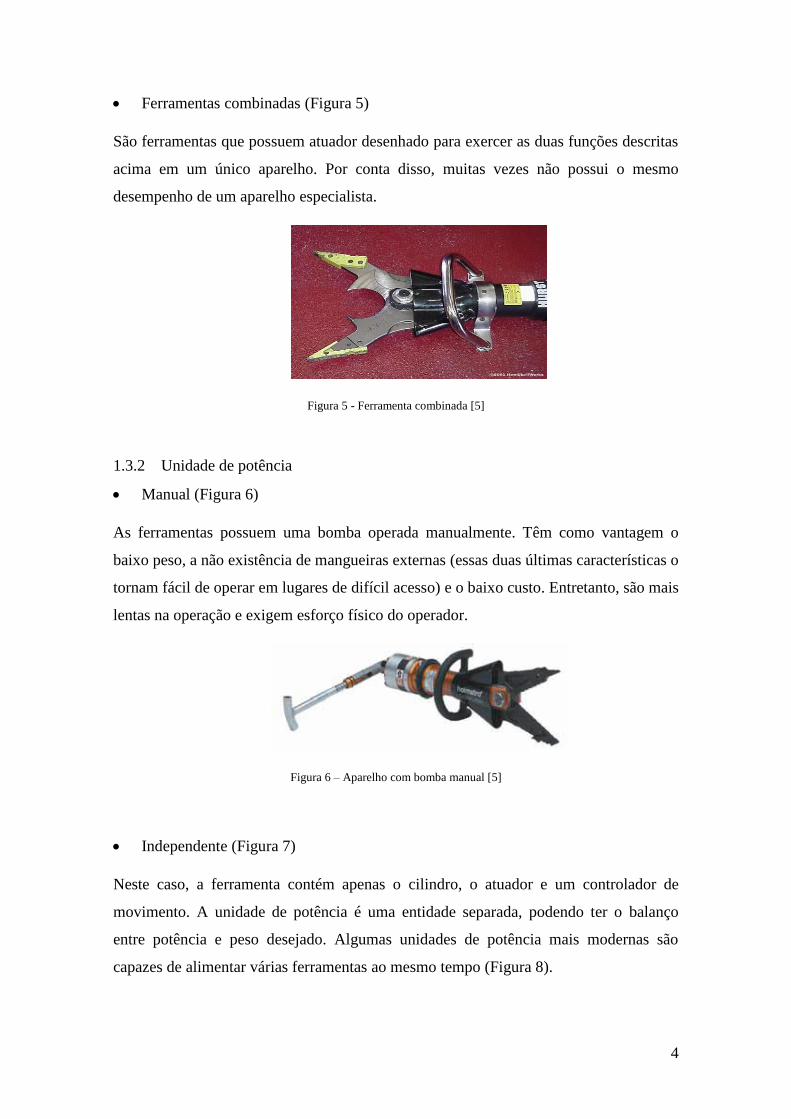
Ferramentas combinadas (Figura 5)
São ferramentas que possuem atuador desenhado para exercer as duas funções descritas
acima em um único aparelho. Por conta disso, muitas vezes não possui o mesmo
desempenho de um aparelho especialista.
Figura 5 - Ferramenta combinada [5]
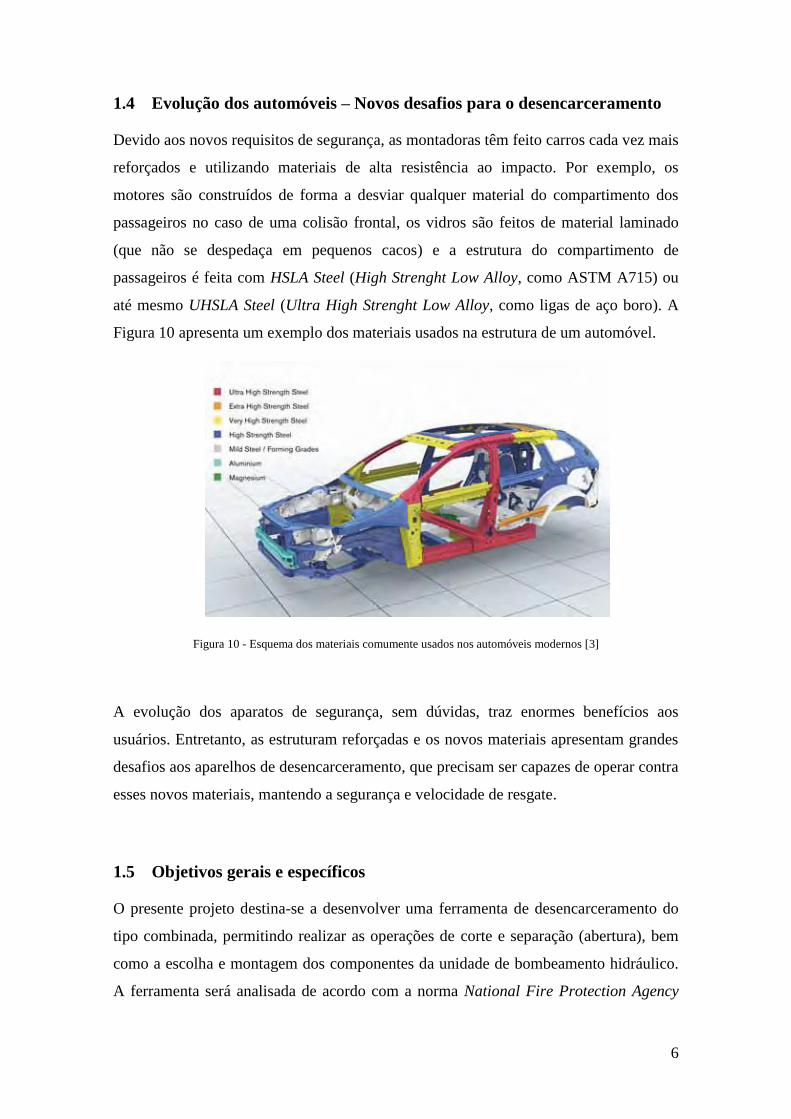
1.3.2 Unidade de potência
Manual (Figura 6)
As ferramentas possuem uma bomba operada manualmente. Têm como vantagem o
baixo peso, a não existência de mangueiras externas (essas duas últimas características o
tornam fácil de operar em lugares de difícil acesso) e o baixo custo. Entretanto, são mais
lentas na operação e exigem esforço físico do operador.
Figura 6 – Aparelho com bomba manual [5]
Independente (Figura 7)
Neste caso, a ferramenta contém apenas o cilindro, o atuador e um controlador de
movimento. A unidade de potência é uma entidade separada, podendo ter o balanço
entre potência e peso desejado. Algumas unidades de potência mais modernas são
capazes de alimentar várias ferramentas ao mesmo tempo (Figura 8).

5
Figura 7 - Unidade de potência simples [5]
Figura 8 - Unidade de potência para vários equipamentos [5]
Ferramentas autônomas (Figura 9)
São ferramentas em que a unidade de potência é integrada ao atuador. Possuem as
mesmas vantagens dos aparelhos manuais em relação à mobilidade e à inexistência de
mangueiras externas, com a vantagem extra de possuírem maior potência e exigirem
menos esforço do operador. Entretanto, são mais pesadas e caras.
Figura 9 - Aparelho autônomo [5]
6
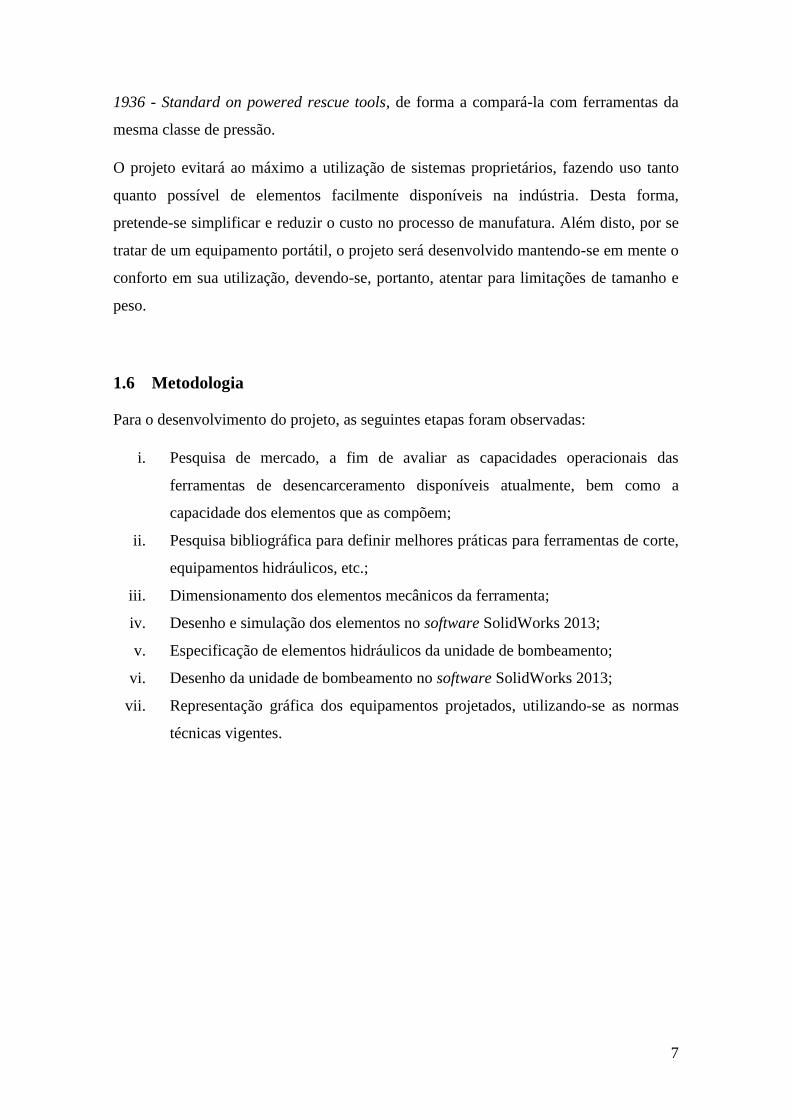
1.4 Evolução dos automóveis – Novos desafios para o desencarceramento
Devido aos novos requisitos de segurança, as montadoras têm feito carros cada vez mais
reforçados e utilizando materiais de alta resistência ao impacto. Por exemplo, os
motores são construídos de forma a desviar qualquer material do compartimento dos
passageiros no caso de uma colisão frontal, os vidros são feitos de material laminado
(que não se despedaça em pequenos cacos) e a estrutura do compartimento de
passageiros é feita com HSLA Steel (High Strenght Low Alloy, como ASTM A715) ou
até mesmo UHSLA Steel (Ultra High Strenght Low Alloy, como ligas de aço boro). A
Figura 10 apresenta um exemplo dos materiais usados na estrutura de um automóvel.
Figura 10 - Esquema dos materiais comumente usados nos automóveis modernos [3]
A evolução dos aparatos de segurança, sem dúvidas, traz enormes benefícios aos
usuários. Entretanto, as estruturam reforçadas e os novos materiais apresentam grandes
desafios aos aparelhos de desencarceramento, que precisam ser capazes de operar contra
esses novos materiais, mantendo a segurança e velocidade de resgate.
1.5 Objetivos gerais e específicos
O presente projeto destina-se a desenvolver uma ferramenta de desencarceramento do
tipo combinada, permitindo realizar as operações de corte e separação (abertura), bem
como a escolha e montagem dos componentes da unidade de bombeamento hidráulico.
A ferramenta será analisada de acordo com a norma National Fire Protection Agency
7
1936 - Standard on powered rescue tools, de forma a compará-la com ferramentas da
mesma classe de pressão.
O projeto evitará ao máximo a utilização de sistemas proprietários, fazendo uso tanto
quanto possível de elementos facilmente disponíveis na indústria. Desta forma,
pretende-se simplificar e reduzir o custo no processo de manufatura. Além disto, por se
tratar de um equipamento portátil, o projeto será desenvolvido mantendo-se em mente o
conforto em sua utilização, devendo-se, portanto, atentar para limitações de tamanho e
peso.
1.6 Metodologia
Para o desenvolvimento do projeto, as seguintes etapas foram observadas:
i. Pesquisa de mercado, a fim de avaliar as capacidades operacionais das
ferramentas de desencarceramento disponíveis atualmente, bem como a
capacidade dos elementos que as compõem;
ii. Pesquisa bibliográfica para definir melhores práticas para ferramentas de corte,
equipamentos hidráulicos, etc.;
iii. Dimensionamento dos elementos mecânicos da ferramenta;
iv. Desenho e simulação dos elementos no software SolidWorks 2013;
v. Especificação de elementos hidráulicos da unidade de bombeamento;
vi. Desenho da unidade de bombeamento no software SolidWorks 2013;
vii. Representação gráfica dos equipamentos projetados, utilizando-se as normas
técnicas vigentes.
8
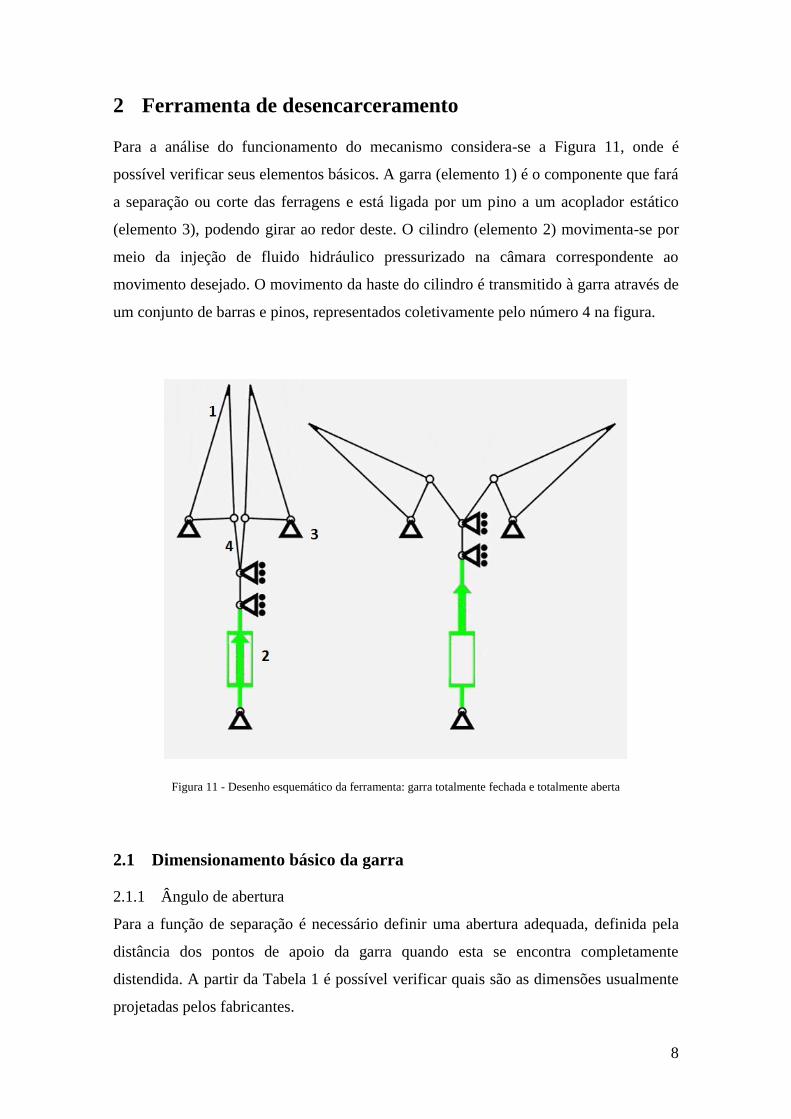
2 Ferramenta de desencarceramento
Para a análise do funcionamento do mecanismo considera-se a Figura 11, onde é
possível verificar seus elementos básicos. A garra (elemento 1) é o componente que fará
a separação ou corte das ferragens e está ligada por um pino a um acoplador estático
(elemento 3), podendo girar ao redor deste. O cilindro (elemento 2) movimenta-se por
meio da injeção de fluido hidráulico pressurizado na câmara correspondente ao
movimento desejado. O movimento da haste do cilindro é transmitido à garra através de
um conjunto de barras e pinos, representados coletivamente pelo número 4 na figura.
Figura 11 - Desenho esquemático da ferramenta: garra totalmente fechada e totalmente aberta
2.1 Dimensionamento básico da garra
2.1.1 Ângulo de abertura
Para a função de separação é necessário definir uma abertura adequada, definida pela
distância dos pontos de apoio da garra quando esta se encontra completamente
distendida. A partir da Tabela 1 é possível verificar quais são as dimensões usualmente
projetadas pelos fabricantes.

9
Tabela 1 - Abertura das ferramentas existentes [4] e [5]
Modelo Fabricante Abertura (mm)
MOC Combi Hurst 422
SC 557 Combi Hurst 430
SC 357 Combi Hurst 365
CT 5117 Holmatro 431
Média 402,8
Pode-se adotar, portanto, um valor aproximado de 400 mm como uma boa largura de
abertura.
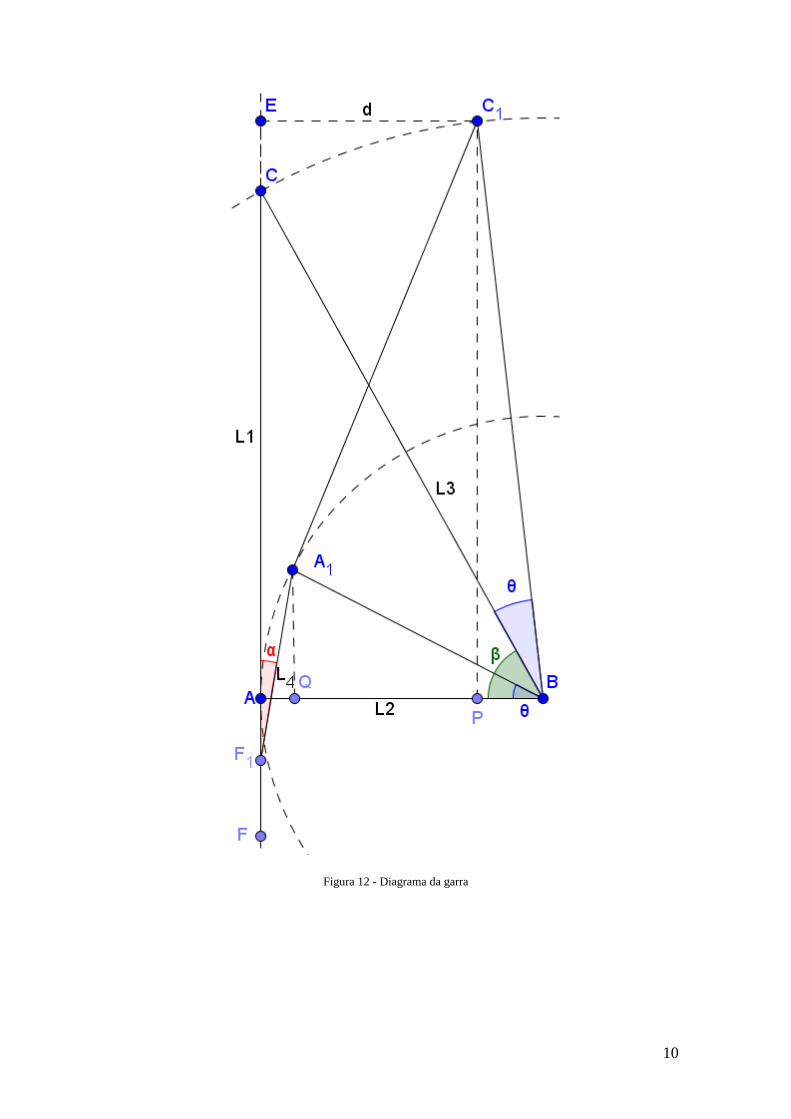
Em seguida, em função das dimensões da garra, pode-se avaliar qual será o ângulo de
abertura e o curso do cilindro necessário. Para isso, foi analisado o diagrama
apresentado na Figura 12.
O triângulo ABC (de catetos L1 e L2 e hipotenusa L3 e com ângulo entre L2 e L3 igual a
β) representa uma das garras (ou lâmina) do equipamento. A garra está conectada a uma
estrutura estática no ponto B através de um pino (daqui em diante chamado de pino
fixo), sendo capaz de girar ao redor deste. A garra também se liga ao cilindro hidráulico
através de uma barra pinada em A e F, de tamanho L4, que é capaz de girar ao redor de
ambos estes pontos.
O cilindro hidráulico, quando realizando seu curso de avanço, empurra linearmente o
ponto F na direção da reta FE, causando uma rotação θ da garra ao redor do ponto B. O
ponto C (agora C1) terá se deslocado de uma distância d em relação à reta FE e também
projeta um ponto P na reta AB. Pode-se escrever então:
𝐴𝐵 = 𝐴𝑃 + 𝑃𝐵 = 𝑑 + 𝑃𝐵 → 𝑑 = 𝐴𝐵 − 𝑃𝐵 = 𝐿2 − 𝐿3 cos(𝛽 + 𝜃) →
−𝐿3 cos(𝛽 + 𝜃) = 𝑑 − 𝐿2
𝜃 = cos−1 (
𝐿2 − 𝑑
𝐿3) − 𝛽 (1)
10
Figura 12 - Diagrama da garra

11
Quando o equipamento estiver se abrindo, a barra pinada AF estará sob compressão,
correndo risco de flambar. Da Mecânica dos Sólidos, sabe-se que quanto mais curta
uma barra, melhor será sua resistência à flambagem. Por outro lado, um comprimento
muito curto fará com que a barra precise girar muito ao redor de F, diminuindo o
momento da força que ela exerce na garra ao redor de B. Assim, será determinado seu
comprimento de forma que, quando a garra estiver completamente distendida, o ponto F
coincida com o ponto A. Será analisada então a configuração resultante desta decisão.
A projeção do ponto A1 na reta AB é dada pelo ponto Q. Portanto, pode-se escrever:
𝐴1𝑄 = 𝐴1𝐵 sin 𝜃 = 𝐴1𝐴 cos 𝛼
Como 𝐴1𝐵 = 𝐿2 𝑒 𝐴1𝐴 = 𝐿4, então tem − se 𝐿2 sin 𝜃 = 𝐿4 cos 𝛼 , logo:
𝐿4 =𝐿2 sin 𝜃
cos 𝛼
Esta equação relaciona L2 e θ, conhecidos a priori, com L4 e α (máxima rotação da
barra). Como existem duas incógnitas, é preciso encontrar uma nova equação:
𝐴𝐵 = 𝐿2 = 𝐴𝑄 + 𝑄𝐵 = 𝐿4 sin 𝛼 + 𝐿2 cos 𝜃 → 𝐿4 =𝐿2 − 𝐿2 cos 𝜃
sin 𝛼→
𝐿4 =𝐿2(1 − cos 𝜃)
sin 𝛼
Portanto, com a equação anterior:
𝐿2 sin 𝜃
cos 𝛼=
𝐿2(1 − cos 𝜃)
sin 𝛼→
sin 𝛼
cos 𝛼=
𝐿2(1 − cos 𝜃)
𝐿2 sin 𝜃→
tan 𝛼 =
1 − cos 𝜃
sin 𝜃 (2)
A seguir serão estudadas as consequências da relação entre as dimensões L1 e L2
analisando o diagrama da Figura 13.

12
Figura 13 - Forças externas aplicadas ao conjunto barra-garra
Nessa figura, pode-se observar a força F1, que é a resistência da lataria à abertura da
garra, a força F2, que é exercida pelo cilindro e a força F3, gerada pelo pino em B.
Quanto menor for L1, menor será o braço do momento de F1 em relação ao pino e, logo,
menor será a força a ser exercida pelo cilindro para girar a garra. Entretanto, quanto
menor for L1, maior será o ângulo de abertura θ necessário para atingir o afastamento
requerido, o que aumenta o curso do cilindro e, em consequência, seu tamanho e peso.
Além disso, um ângulo de abertura grande significa que a barra AF estará bastante
inclinada (grande α), diminuindo o braço de momento de sua força em relação ao pino
B.
As dimensões L1 e L2 devem ser as menores possíveis, de forma a diminuir o tamanho e
peso do equipamento, mas ser grandes o suficiente para permitir um acoplamento
adequado às outras partes do dispositivo, em especial ao cilindro hidráulico.
13
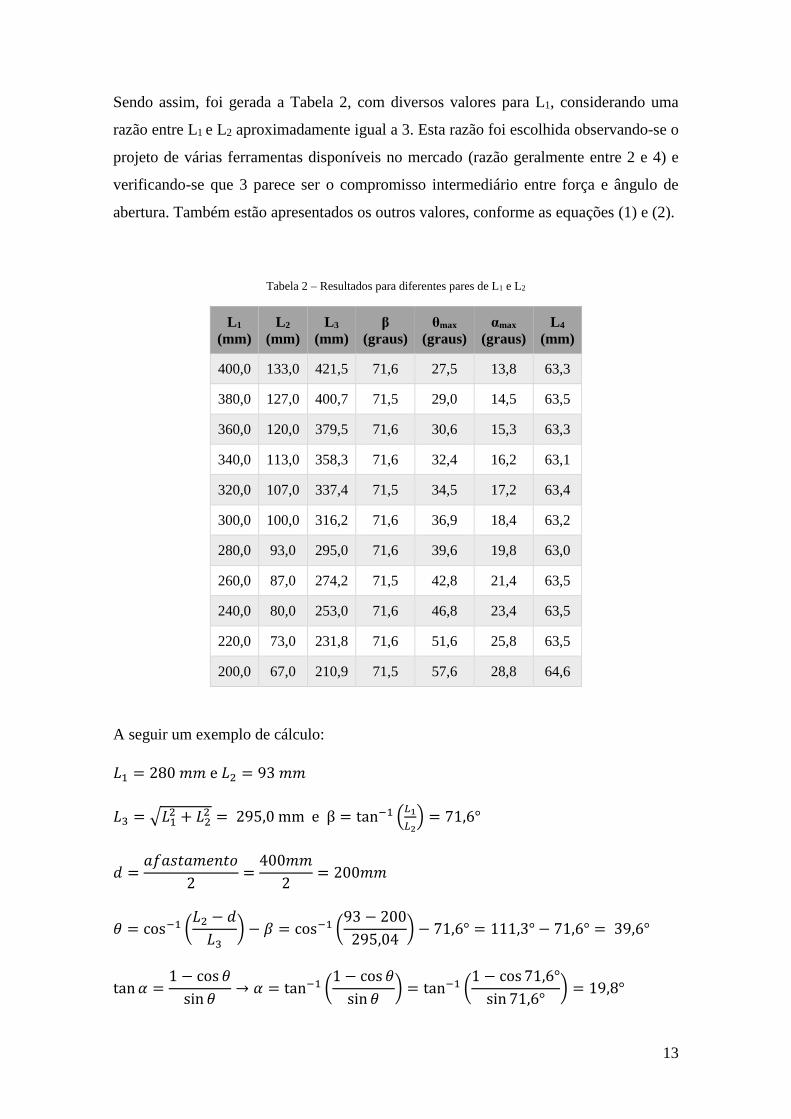
Sendo assim, foi gerada a Tabela 2, com diversos valores para L1, considerando uma
razão entre L1 e L2 aproximadamente igual a 3. Esta razão foi escolhida observando-se o
projeto de várias ferramentas disponíveis no mercado (razão geralmente entre 2 e 4) e
verificando-se que 3 parece ser o compromisso intermediário entre força e ângulo de
abertura. Também estão apresentados os outros valores, conforme as equações (1) e (2).
Tabela 2 – Resultados para diferentes pares de L1 e L2
L1
(mm)
L2
(mm)
L3
(mm)
β
(graus)
θmax
(graus)
αmax
(graus)
L4
(mm)
400,0 133,0 421,5 71,6 27,5 13,8 63,3
380,0 127,0 400,7 71,5 29,0 14,5 63,5
360,0 120,0 379,5 71,6 30,6 15,3 63,3
340,0 113,0 358,3 71,6 32,4 16,2 63,1
320,0 107,0 337,4 71,5 34,5 17,2 63,4
300,0 100,0 316,2 71,6 36,9 18,4 63,2
280,0 93,0 295,0 71,6 39,6 19,8 63,0
260,0 87,0 274,2 71,5 42,8 21,4 63,5
240,0 80,0 253,0 71,6 46,8 23,4 63,5
220,0 73,0 231,8 71,6 51,6 25,8 63,5
200,0 67,0 210,9 71,5 57,6 28,8 64,6
A seguir um exemplo de cálculo:
𝐿1 = 280 𝑚𝑚 e 𝐿2 = 93 𝑚𝑚
𝐿3 = √𝐿12 + 𝐿2
2 = 295,0 mm e β = tan−1 (𝐿1
𝐿2) = 71,6°
𝑑 =𝑎𝑓𝑎𝑠𝑡𝑎𝑚𝑒𝑛𝑡𝑜
2=
400𝑚𝑚
2= 200𝑚𝑚
𝜃 = cos−1 (𝐿2 − 𝑑
𝐿3) − 𝛽 = cos−1 (
93 − 200
295,04) − 71,6° = 111,3° − 71,6° = 39,6°
tan 𝛼 =1 − cos 𝜃
sin 𝜃→ 𝛼 = tan−1 (
1 − cos 𝜃
sin 𝜃) = tan−1 (
1 − cos 71,6°
sin 71,6°) = 19,8°

14
𝐿4 =𝐿2 sin 𝜃
cos 𝛼=
93 sin 39,6°
cos 19,8°= 63,0 𝑚𝑚
Agora, basta escolher um dos valores apresentados na Tabela 2. Escolhendo-se L2 muito
maior que o raio externo do cilindro, a garra irá se estender muito lateralmente,
aumentando o volume total do equipamento, o que é inconveniente para sua operação.
Escolhendo-se L2 muito menor que o raio externo do cilindro, a garra será difícil de
montar, pois seu ponto de apoio (B) estará próximo da haste do cilindro. Portanto, uma
escolha que faça L2 aproximadamente igual ao raio externo do cilindro parece
adequada. Entretanto, para isto, será preciso primeiramente escolher o cilindro
hidráulico, conforme será visto na Seção 2.2.
2.1.2 Forças envolvidas na abertura da garra
Devido à baixa velocidade de abertura, foram desconsiderados efeitos dinâmicos, e
assumindo equilíbrio das forças em cada posição, conforme Figura 14:
∑ �� = 𝐹1 + 𝐹2
+ 𝐹3 = 0
∑ 𝐹𝑥 = −𝐹1 + 𝐹2 sin 𝛼 + 𝐹3𝑥 = 0 → 𝐹3𝑥 = 𝐹1 − 𝐹2 sin 𝛼 (3)
∑ 𝐹𝑦 = 𝐹2 cos 𝛼 − 𝐹3𝑦 = 0 → 𝐹3𝑦 = 𝐹2 cos 𝛼 (4)
Vale ressaltar que F1 é uma força distribuída na ponta da garra que faz contato com a
ferragem, representando a resistência da lataria à sua abertura. No início da abertura,
como a ponta da garra possui degraus (ver 2.3.2), a força resistente terá direção
horizontal no esquema da Figura 14. À medida que a garra vai se abrindo, novos pontos
de contato são criados entre o material progressivamente deformado e os degraus na
ponta da ferramenta, resultando em diversas forças de contato. É muito difícil modelar a
direção resultante desta força, pois ela depende de como o material irá deformar-se.
Assim, será feita a simplificação de que a resultante das forças distribuídas age na
direção horizontal, pois essa é a direção de interesse.

15
Figura 14 - Ação de abertura
Escrevendo as equações de equilíbrio para os momentos em relação ao pino B:
∑ 𝑀𝐵 = 𝑀𝐹1
+ 𝑀𝐹2 = 0
𝑀𝐹1 = 𝑟1 × 𝐹1
𝑟1 = (−𝐿2 cos 𝜃 + 𝐿1 sin 𝜃)𝑖 + (𝐿2 sin 𝜃 + 𝐿1 cos 𝜃)𝑗
𝐹1 = −𝐹1𝑖
𝑀𝐹1 = [
𝑖 𝑗 ��−𝐿2 cos 𝜃 + 𝐿1 sin 𝜃 𝐿2 sin 𝜃 + 𝐿1 cos 𝜃 0
−𝐹1 0 0
]
𝑀𝐹1 = 𝐹1(𝐿2 sin 𝜃 + 𝐿1 cos 𝜃)��
𝑀𝐹2 = 𝑟2 × 𝐹2
𝑟2 = −𝐿2 cos 𝜃𝑖 + 𝐿2 sin 𝜃 𝑗
𝐹2 = 𝐹2(sin 𝛼 𝑖 + cos 𝛼 𝑗)

16
𝑀𝐹2 = [
𝑖 𝑗 ��−𝐿2 cos 𝜃 𝐿2 sin 𝜃 0𝐹2 sin 𝛼 𝐹2 cos 𝛼 0
] = 𝐹2𝐿2 [𝑖 𝑗 ��
− cos 𝜃 sin 𝜃 0sin 𝛼 cos 𝛼 0
]
𝑀𝐹2 = −𝐹2𝐿2(cos 𝜃 cos 𝛼 + sin 𝜃 sin 𝛼)��
𝑀𝐹1 + 𝑀𝐹2
= 0 → 𝐹1(𝐿2 sin 𝜃 + 𝐿1 cos 𝜃)�� − 𝐹2𝐿2(cos 𝜃 cos 𝛼 + sin 𝜃 sin 𝛼)�� = 0
𝐹2 = 𝐹1
𝐿2 sin 𝜃 + 𝐿1 cos 𝜃
𝐿2(cos 𝜃 cos 𝛼 + sin 𝜃 sin 𝛼) (5)
Entretanto, existem duas garras que o cilindro deverá acionar. Portanto, observando a
Figura 15, pode-se escrever:
∑ �� = ��𝑐𝑖𝑙𝑖𝑛𝑑𝑟𝑜 + 𝐹2𝑎 + 𝐹2𝑏
= 0
|��𝑐𝑖𝑙𝑖𝑛𝑑𝑟𝑜| = 2 ∙ 𝐹2 cos 𝛼 = 2 (𝐹1
𝐿2 sin 𝜃 + 𝐿1 cos 𝜃
𝐿2(cos 𝜃 cos 𝛼 + sin 𝜃 sin 𝛼)) cos 𝛼
|��𝑐𝑖𝑙𝑖𝑛𝑑𝑟𝑜| = (2 cos 𝛼
𝐿2 sin 𝜃 + 𝐿1 cos 𝜃
𝐿2(cos 𝜃 cos 𝛼 + sin 𝜃 sin 𝛼)) ∙ 𝐹1 (6)
Figura 15 - Elementos de conexão do cilindro com a garra, mostrando a haste do cilindro e as barras pinadas
Verifica-se, portanto, que a força atuante no cilindro é função do ângulo da barra pinada
em relação à haste do cilindro (α) e da força F2. A força F2, por sua vez, é função de três
constantes (L1, L2 e F1, supostamente constante durante a abertura) e das variáveis α e θ
(ângulo de abertura de cada garra).

17
Para a ação de corte da garra, deve-se fazer uma análise semelhante, de acordo com o
diagrama da Figura 16. A força de corte é distribuída em uma região da lâmina que faz
contato com a ferragem a ser seccionada e pode ser substituída por uma única força de
efeito equivalente. O ponto D (afastado de A por uma certa distância Lc) representa a
posição onde esta força equivalente é aplicada.
Figura 16 - Ação de corte
Escrevendo as equações de equilíbrio para as forças e momentos, de forma análoga ao
movimento de avanço, obtêm-se:
∑ 𝐹𝑥 = 𝐹𝑐 − 𝐹2 sin 𝛼 − 𝐹3𝑥 = 0 → 𝐹3𝑥 = 𝐹𝑐 − 𝐹2 sin 𝛼
(7)
∑ 𝐹𝑦 = 𝐹3𝑦 − 𝐹2 cos 𝛼 = 0 → 𝐹3𝑦 = 𝐹2 cos 𝛼
(8)
𝐹2 = 𝐹𝑐
𝐿2 sin 𝜃 + 𝐿𝑐 cos 𝜃
𝐿2(cos 𝜃 cos 𝛼 + sin 𝜃 sin 𝛼)
(9)
𝐹𝑐𝑖𝑙𝑖𝑛𝑑𝑟𝑜 = 2𝐹2 cos 𝛼 = (2 cos 𝛼
𝐿2 sin 𝜃 + 𝐿𝑐 cos 𝜃
𝐿2(cos 𝜃 cos 𝛼 + sin 𝜃 sin 𝛼)) ∙ 𝐹𝑐 (10)

18
2.2 Escolha do cilindro hidráulico
O cilindro hidráulico é um atuador que transforma a energia hidráulica de um fluido
(geralmente óleo mineral) em trabalho mecânico. Consiste, basicamente, de um cilindro
metálico oco, um êmbolo móvel conectado a uma haste e conexões hidráulicas.
Normalmente são fabricados em aço, porém existem alternativas como cilindros de
alumínio, fibra de carbono, kevlar, etc. Os cilindros comuns são especificados para
pressões de 70 até 350 bar, entretanto é possível encontrar no mercado produtos com
pressões nominais superiores a 700 bar. Existem dois tipos básicos: simples ação e
dupla ação.
2.2.1 Simples ação
São cilindros em que a movimentação da haste é feita em uma direção usando-se o
fluido hidráulico (avanço), e na direção oposta (retorno) utilizando-se algum outro
agente, sendo comum o retorno por mola (Figura 17) ou gravidade.
Figura 17 - Pequeno cilindro de simples ação e retorno por mola [6]
2.2.2 Dupla ação
São cilindros em que a movimentação da haste é feita usando-se o fluido hidráulico
tanto no avanço como no retorno (Figura 18).
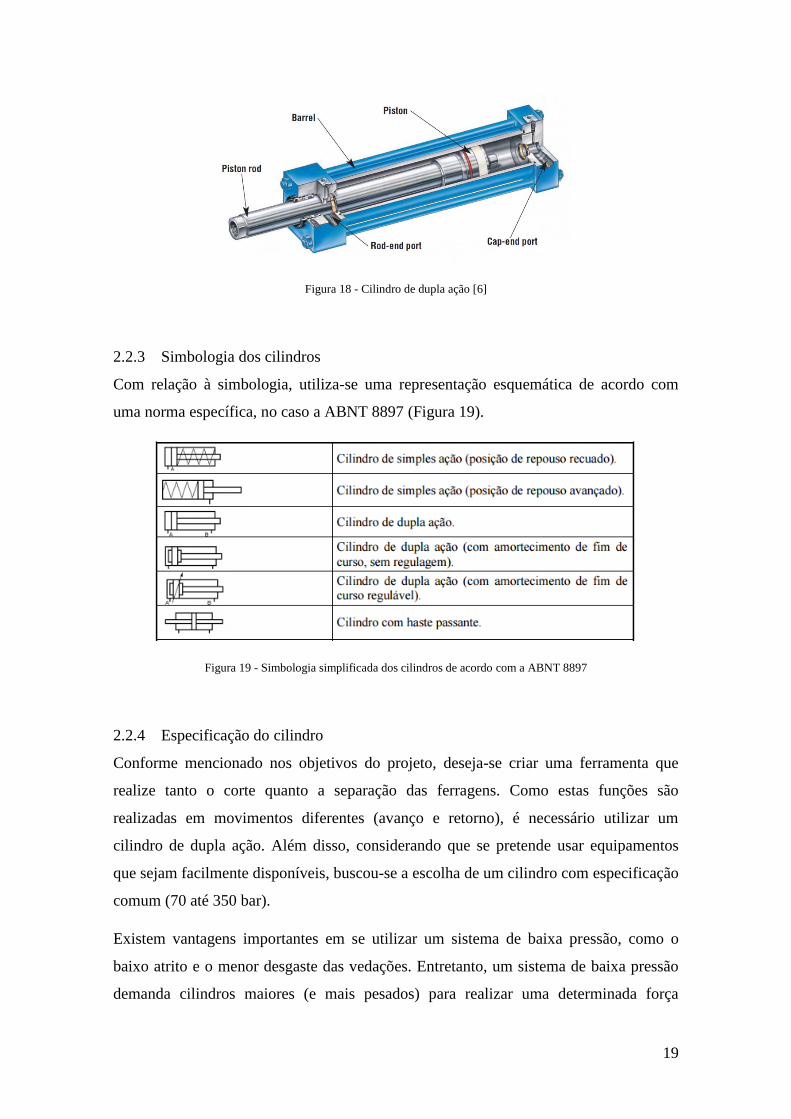
19
Figura 18 - Cilindro de dupla ação [6]
2.2.3 Simbologia dos cilindros
Com relação à simbologia, utiliza-se uma representação esquemática de acordo com
uma norma específica, no caso a ABNT 8897 (Figura 19).
Figura 19 - Simbologia simplificada dos cilindros de acordo com a ABNT 8897
2.2.4 Especificação do cilindro
Conforme mencionado nos objetivos do projeto, deseja-se criar uma ferramenta que
realize tanto o corte quanto a separação das ferragens. Como estas funções são
realizadas em movimentos diferentes (avanço e retorno), é necessário utilizar um
cilindro de dupla ação. Além disso, considerando que se pretende usar equipamentos
que sejam facilmente disponíveis, buscou-se a escolha de um cilindro com especificação
comum (70 até 350 bar).
Existem vantagens importantes em se utilizar um sistema de baixa pressão, como o
baixo atrito e o menor desgaste das vedações. Entretanto, um sistema de baixa pressão
demanda cilindros maiores (e mais pesados) para realizar uma determinada força
20
quando comparado a sistemas de alta pressão, o que no caso de uma ferramenta portátil
se torna um grande problema. Além disso, cilindros grandes são mais caros, demandam
mais óleo e em consequência precisam de mangueiras e bombas maiores. Por isso, será
utilizado um cilindro com a maior pressão disponível, 350 bar.
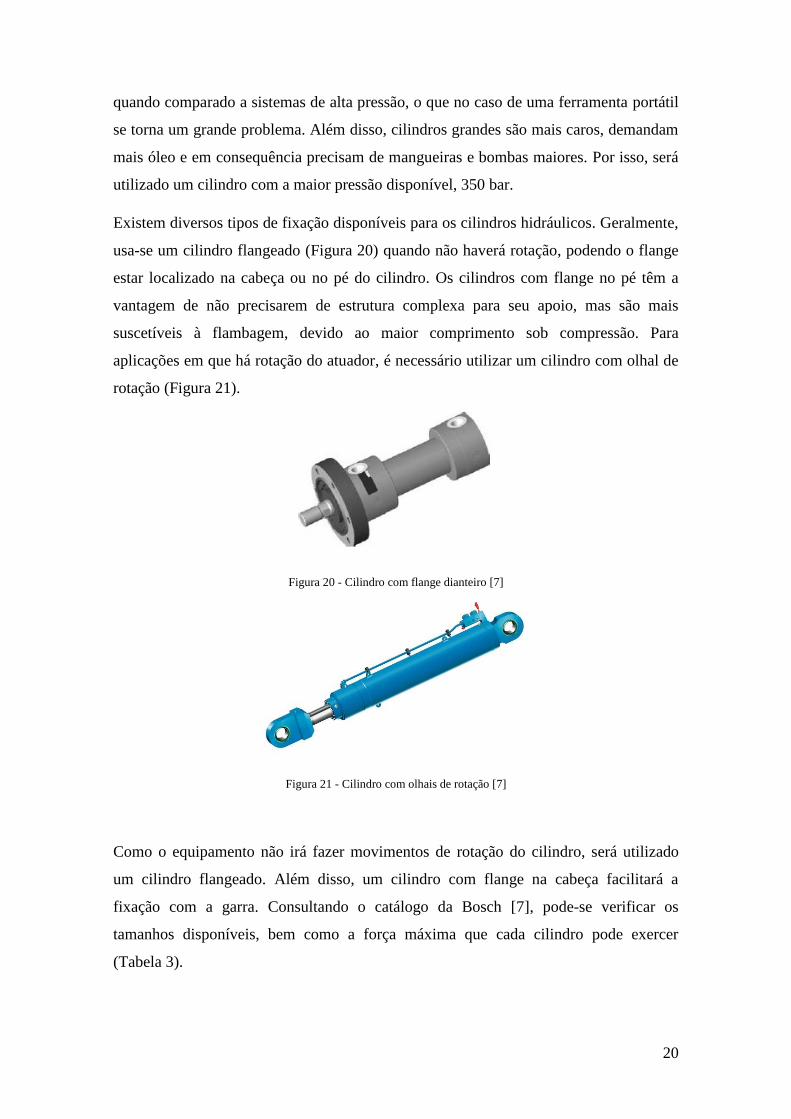
Existem diversos tipos de fixação disponíveis para os cilindros hidráulicos. Geralmente,
usa-se um cilindro flangeado (Figura 20) quando não haverá rotação, podendo o flange
estar localizado na cabeça ou no pé do cilindro. Os cilindros com flange no pé têm a
vantagem de não precisarem de estrutura complexa para seu apoio, mas são mais
suscetíveis à flambagem, devido ao maior comprimento sob compressão. Para
aplicações em que há rotação do atuador, é necessário utilizar um cilindro com olhal de
rotação (Figura 21).
Figura 20 - Cilindro com flange dianteiro [7]
Figura 21 - Cilindro com olhais de rotação [7]
Como o equipamento não irá fazer movimentos de rotação do cilindro, será utilizado
um cilindro flangeado. Além disso, um cilindro com flange na cabeça facilitará a
fixação com a garra. Consultando o catálogo da Bosch [7], pode-se verificar os
tamanhos disponíveis, bem como a força máxima que cada cilindro pode exercer
(Tabela 3).
21
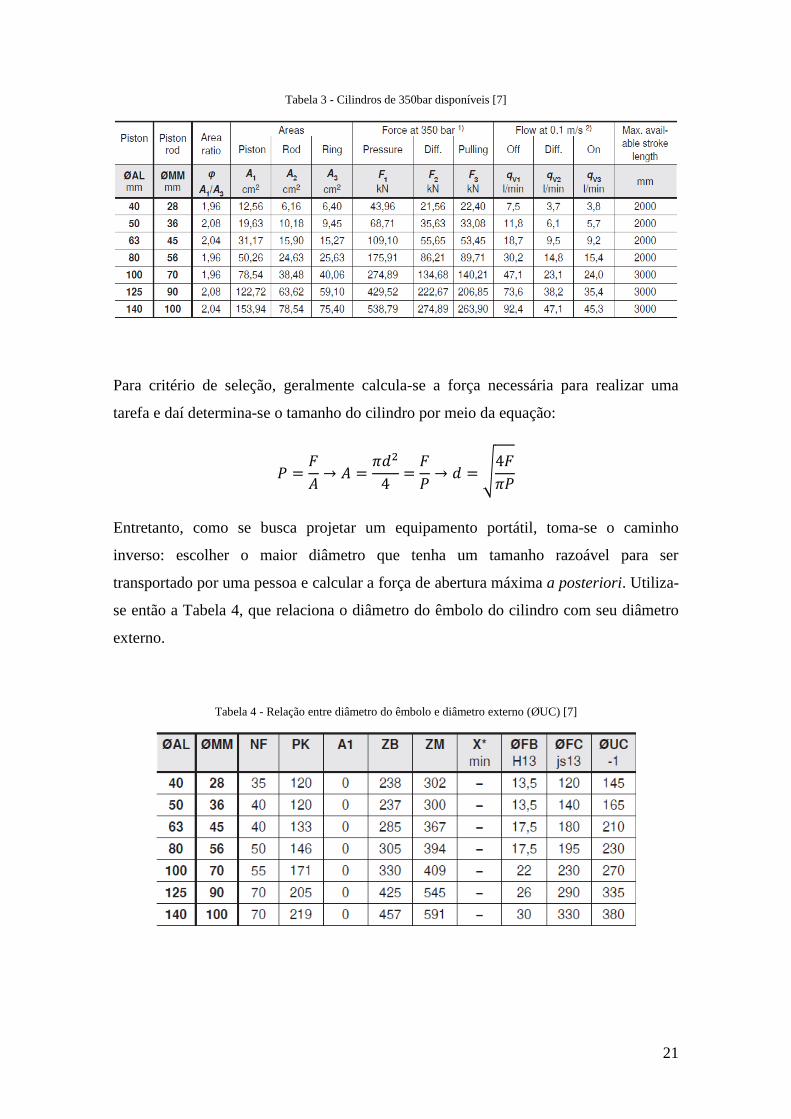
Tabela 3 - Cilindros de 350bar disponíveis [7]
Para critério de seleção, geralmente calcula-se a força necessária para realizar uma
tarefa e daí determina-se o tamanho do cilindro por meio da equação:
𝑃 =𝐹
𝐴→ 𝐴 =
𝜋𝑑2
4=
𝐹
𝑃→ 𝑑 = √
4𝐹
𝜋𝑃
Entretanto, como se busca projetar um equipamento portátil, toma-se o caminho
inverso: escolher o maior diâmetro que tenha um tamanho razoável para ser
transportado por uma pessoa e calcular a força de abertura máxima a posteriori. Utiliza-
se então a Tabela 4, que relaciona o diâmetro do êmbolo do cilindro com seu diâmetro
externo.
Tabela 4 - Relação entre diâmetro do êmbolo e diâmetro externo (ØUC) [7]

22
Portanto, considerando-se essa caraterística do equipamento, foi decidido utilizar o cilindro de diâmetro externo
cilindro de diâmetro externo 230mm, que possui êmbolo de 80mm, força máxima de avanço de 175,91kN e força
avanço de 175,91kN e força máxima de retorno de 89,71kN, conforme a
Tabela 3.
Quanto ao avanço, será a distância que o ponto F deve percorrer (veja Figura 12, página
10). Como ele se desloca desde sua posição inicial até o ponto A, o avanço será o
próprio comprimento L4 da barra pinada.
2.3 Análise do cilindro e geometria detalhada da garra
Agora que foi definido o cilindro, pode-se escolher uma garra de tamanho apropriado.
Analisando a Tabela 2 (página 12), verifica-se que o comprimento de L2 que mais se
aproxima do raio externo do cilindro é o de 100mm. Entretanto, L2 é a distância entre os
centros do pino fixo e pino móvel da garra, que se estende um pouco além destes dois
pontos. Assim, escolhe-se a garra imediatamente menor, ou seja, L2 = 93mm. O
tamanho da barra pinada e o do avanço serão, portanto, L4 = 63mm.
A seguir, determina-se a maior força de abertura e fechamento (considerando o ponto de
corte a 60mm do pino móvel) computando os seguintes valores em função de θ, desde o
ângulo para a garra fechada (θ = 0°) até a abertura máxima (θ = 39,6°), a partir das
equações:
𝛼 = sin−1 (𝐿2
𝐿4
(1 − cos 𝜃))
𝐹𝑐𝑖𝑙𝑖𝑛𝑑𝑟𝑜
𝐹1= (2 cos 𝛼
(𝐿2 sin 𝜃 + 𝐿1 cos 𝜃)
𝐿2(cos 𝜃 cos 𝛼 + sin 𝜃 sin 𝛼))
𝐹𝑐𝑖𝑙𝑖𝑛𝑑𝑟𝑜
𝐹𝑐= (2 cos 𝛼
(𝐿2 sin 𝜃 + 𝐿𝑐 cos 𝜃)
𝐿2(cos 𝜃 cos 𝛼 + sin 𝜃 sin 𝛼))
Os valores calculados estão apresentados na Tabela 5. Vê-se, portanto, que a maior
força aplicada no cilindro durante a abertura do mecanismo será de 6,54 vezes o valor
da força de abertura das ferragens. Como foi especificado que a força de avanço será de
175,91kN, tem-se:

23
𝐹𝑐𝑖𝑙𝑖𝑛𝑑𝑟𝑜
𝐹1|
𝑚á𝑥= 6,54 → 𝐹1|𝑚á𝑥 =
175,91kN
6,54= 26,88𝑘𝑁
Tabela 5 - Razão entre Fcil e F1 e entre Fcil e Fcorte
θ α Fcil/F1 F1 (kN) Fcil/Fc Fc (kN)
0,00 0,00 6,02 29,21 1,29 69,53
2,00 0,05 6,09 28,88 1,36 65,96
4,00 0,21 6,16 28,56 1,43 62,74
6,00 0,46 6,23 28,25 1,50 59,84
8,00 0,82 6,29 27,97 1,57 57,20
10,00 1,28 6,35 27,71 1,64 54,82
12,00 1,85 6,40 27,47 1,70 52,65
14,00 2,51 6,45 27,27 1,77 50,69
16,00 3,28 6,49 27,11 1,83 48,92
18,00 4,14 6,52 26,99 1,90 47,33
20,00 5,10 6,54 26,91 1,95 45,89
22,00 6,16 6,54 26,88 2,01 44,62
24,00 7,33 6,54 26,91 2,06 43,49
26,00 8,58 6,52 26,99 2,11 42,51
28,00 9,94 6,48 27,14 2,15 41,67
30,00 11,40 6,43 27,37 2,19 40,96
32,00 12,95 6,36 27,67 2,22 40,39
34,00 14,60 6,27 28,06 2,24 39,96
36,00 16,36 6,16 28,55 2,26 39,67
38,00 18,22 6,03 29,16 2,27 39,53
39,60 19,78 5,92 29,74 2,27 39,53
2.3.1 Lâmina
Para o corte de chapas em um processo de manufatura, é recomendado que exista uma
certa folga entre as lâminas. Se a folga for demasiadamente estreita, as linhas de fratura
irão sobrepor-se, aumentando consideravelmente a força necessária para o corte. Se essa
folga for excessiva, o corte terá um acabamento inadequado [8]. Para cálculo da folga,
consideram-se os valores da Figura 22 e a seguinte equação:
𝑐 = 𝐴𝑐𝑡
Figura 22 - Valores de Ac para diferentes materiais [8]
24
Obviamente não existe a preocupação com a qualidade superficial do corte nessa
aplicação, então a ferramenta poderá ter uma folga generosa. Tomando como base a
espessura máxima (2,75mm) do pilar central de um Ford Focus [9], obtém-se:
𝑐 = 𝐴𝑐𝑡 = 0,075 ∗ 2,75𝑚𝑚 ≈ 0,2𝑚𝑚
Portanto, a lâmina foi projetada com esta recomendação.
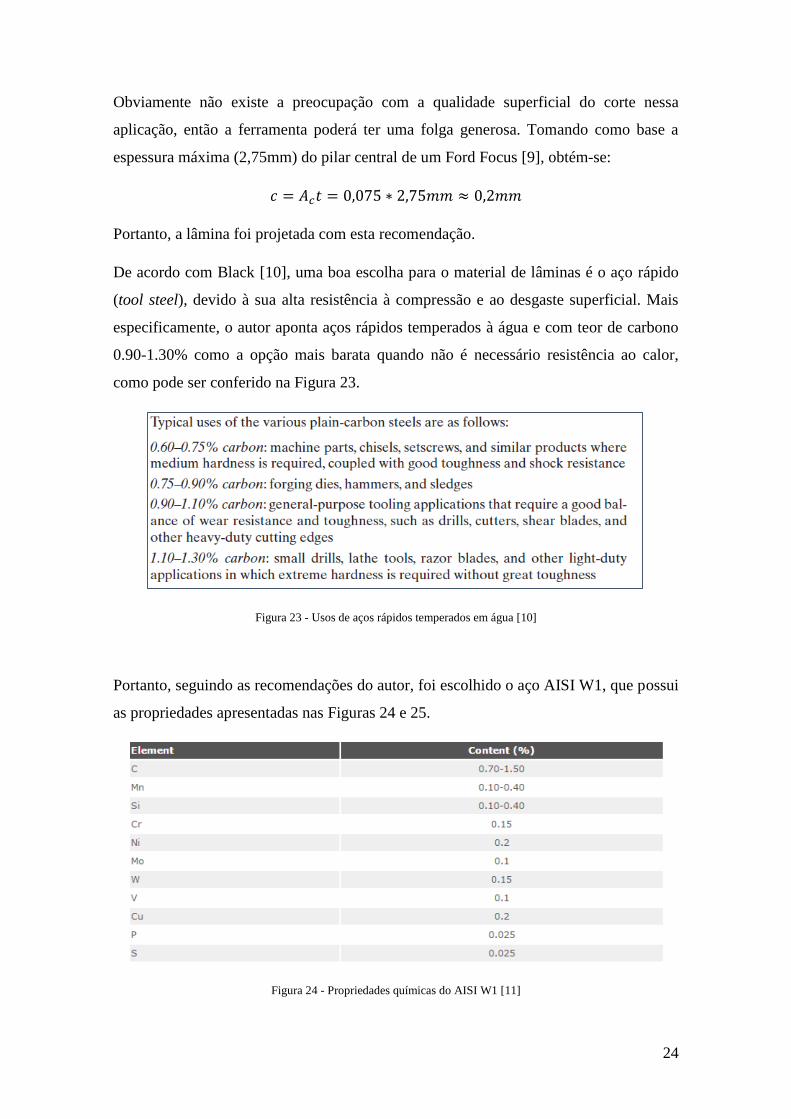
De acordo com Black [10], uma boa escolha para o material de lâminas é o aço rápido
(tool steel), devido à sua alta resistência à compressão e ao desgaste superficial. Mais
especificamente, o autor aponta aços rápidos temperados à água e com teor de carbono
0.90-1.30% como a opção mais barata quando não é necessário resistência ao calor,
como pode ser conferido na Figura 23.
Figura 23 - Usos de aços rápidos temperados em água [10]
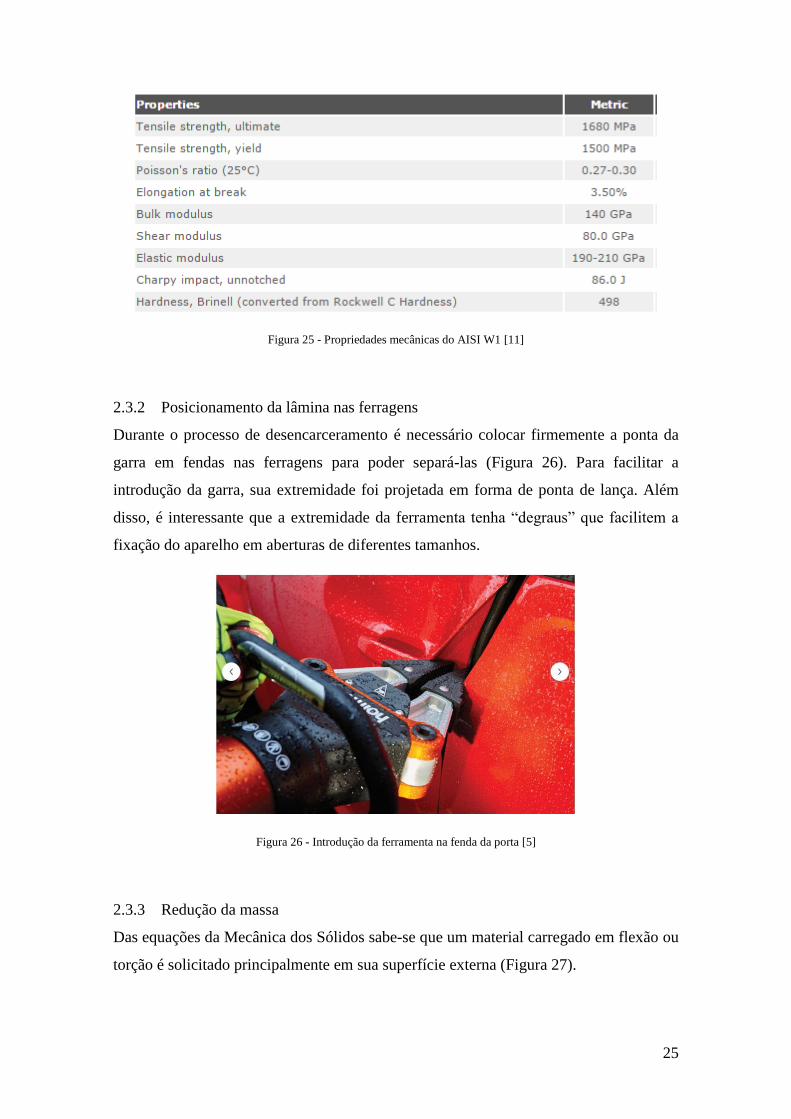
Portanto, seguindo as recomendações do autor, foi escolhido o aço AISI W1, que possui
as propriedades apresentadas nas Figuras 24 e 25.
Figura 24 - Propriedades químicas do AISI W1 [11]
25
Figura 25 - Propriedades mecânicas do AISI W1 [11]
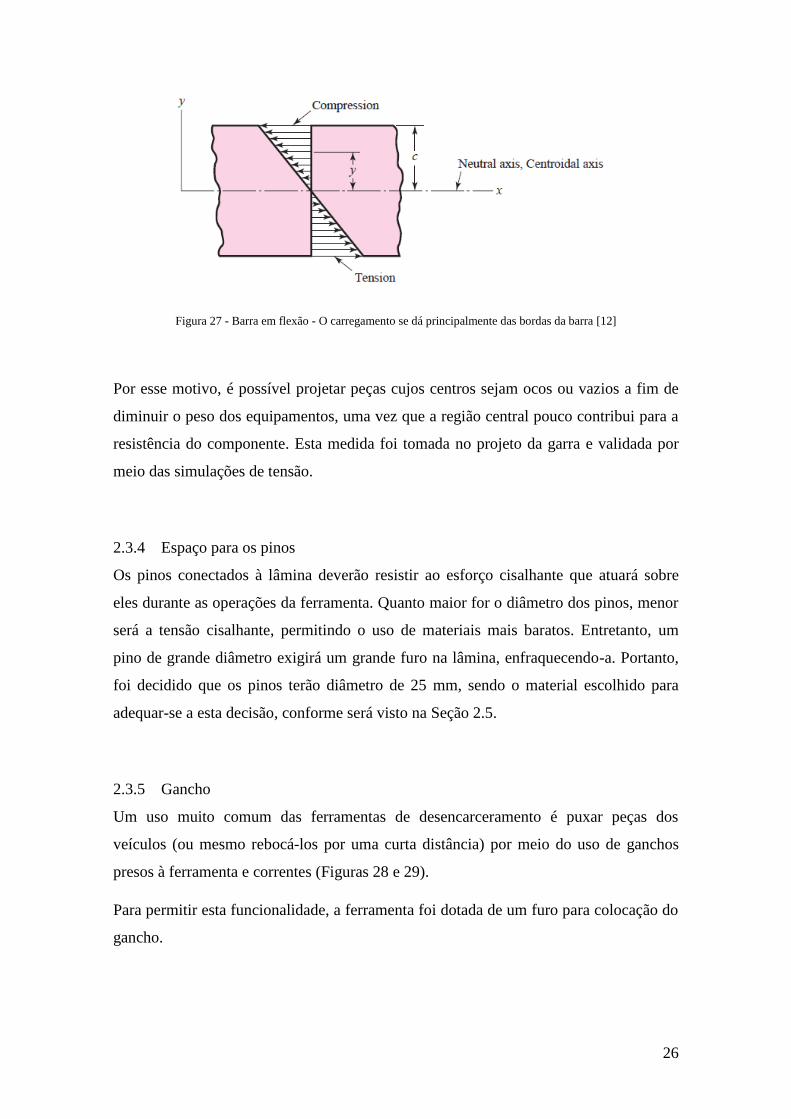
2.3.2 Posicionamento da lâmina nas ferragens
Durante o processo de desencarceramento é necessário colocar firmemente a ponta da
garra em fendas nas ferragens para poder separá-las (Figura 26). Para facilitar a
introdução da garra, sua extremidade foi projetada em forma de ponta de lança. Além
disso, é interessante que a extremidade da ferramenta tenha “degraus” que facilitem a
fixação do aparelho em aberturas de diferentes tamanhos.
Figura 26 - Introdução da ferramenta na fenda da porta [5]
2.3.3 Redução da massa
Das equações da Mecânica dos Sólidos sabe-se que um material carregado em flexão ou
torção é solicitado principalmente em sua superfície externa (Figura 27).
26
Figura 27 - Barra em flexão - O carregamento se dá principalmente das bordas da barra [12]
Por esse motivo, é possível projetar peças cujos centros sejam ocos ou vazios a fim de
diminuir o peso dos equipamentos, uma vez que a região central pouco contribui para a
resistência do componente. Esta medida foi tomada no projeto da garra e validada por
meio das simulações de tensão.
2.3.4 Espaço para os pinos
Os pinos conectados à lâmina deverão resistir ao esforço cisalhante que atuará sobre
eles durante as operações da ferramenta. Quanto maior for o diâmetro dos pinos, menor
será a tensão cisalhante, permitindo o uso de materiais mais baratos. Entretanto, um
pino de grande diâmetro exigirá um grande furo na lâmina, enfraquecendo-a. Portanto,
foi decidido que os pinos terão diâmetro de 25 mm, sendo o material escolhido para
adequar-se a esta decisão, conforme será visto na Seção 2.5.
2.3.5 Gancho
Um uso muito comum das ferramentas de desencarceramento é puxar peças dos
veículos (ou mesmo rebocá-los por uma curta distância) por meio do uso de ganchos
presos à ferramenta e correntes (Figuras 28 e 29).
Para permitir esta funcionalidade, a ferramenta foi dotada de um furo para colocação do
gancho.
27
Figura 28 - Remoção do volante [5]
Figura 29 - Uso da ferramenta com gancho [5]
2.3.6 Uso remoto
Um dos problemas do uso do gancho é a possibilidade de que objetos se soltem e sejam
arremessados na direção do operador. Além disso, as ferramentas de desencarceramento
são usadas com frequência para auxiliar em resgates em edifícios desmoronados, pois
permitem a remoção de escombros. Esta operação também é arriscada, pois a remoção
de escombros pode causar desmoronamentos secundários. Por isso, foi desenvolvido um
sistema na unidade de potência que permitirá o uso remoto do aparelho. Este sistema
está explicado em detalhes na Seção 3.3.
28
2.3.7 Critério de falha de von Mises
O Critério da Energia de Distorção ou Critério de von Mises é uma teoria de falha
geralmente recomendada para avaliação de projetos. Esta teoria prevê que um corpo
carregado irá fluir no momento em que a energia de distorção por unidade de volume do
corpo superar a energia de distorção por unidade de volume de um corpo de prova do
mesmo material axialmente carregado ao ponto de escoamento [12]. Matematicamente,
a energia de distorção por unidade de volume de um sólido é:
𝜎′ = √(𝜎1 − 𝜎2)2 + (𝜎2 − 𝜎3)2 + (𝜎1 − 𝜎3)2
2
Onde σ’ é a tensão de von Mises e σ1, σ2 e σ3 são as tensões principais as quais o sólido
está submetido. A falha ocorrerá, portanto, quando a seguinte relação for verdadeira:
𝜎′ > 𝑆𝑦
Onde Sy é a tensão de escoamento do material, determinada a partir de ensaio de tração.
Para determinar o valor do coeficiente ou fator de segurança, utiliza-se a seguinte
equação:
𝐹𝑆 =𝑆𝑦
𝜎′
Devido à complexidade do formato da garra, é conveniente avaliar a sua estrutura por
meio de elementos finitos. A simulação foi feita considerando-se as forças calculadas
pelo modelo proposto. O furo do pino fixo foi restringido, como condição de contorno,
de forma a permitir apenas a rotação daquela região. O software (Solidworks)
automaticamente calcula e aplica as forças de reação nas faces fixadas. A malha adotada
foi a sugerida pelo software, que é calculada através de uma rotina interna,
considerando a geometria da peça, a aplicação das forças e o poder de processamento do
computador.
29
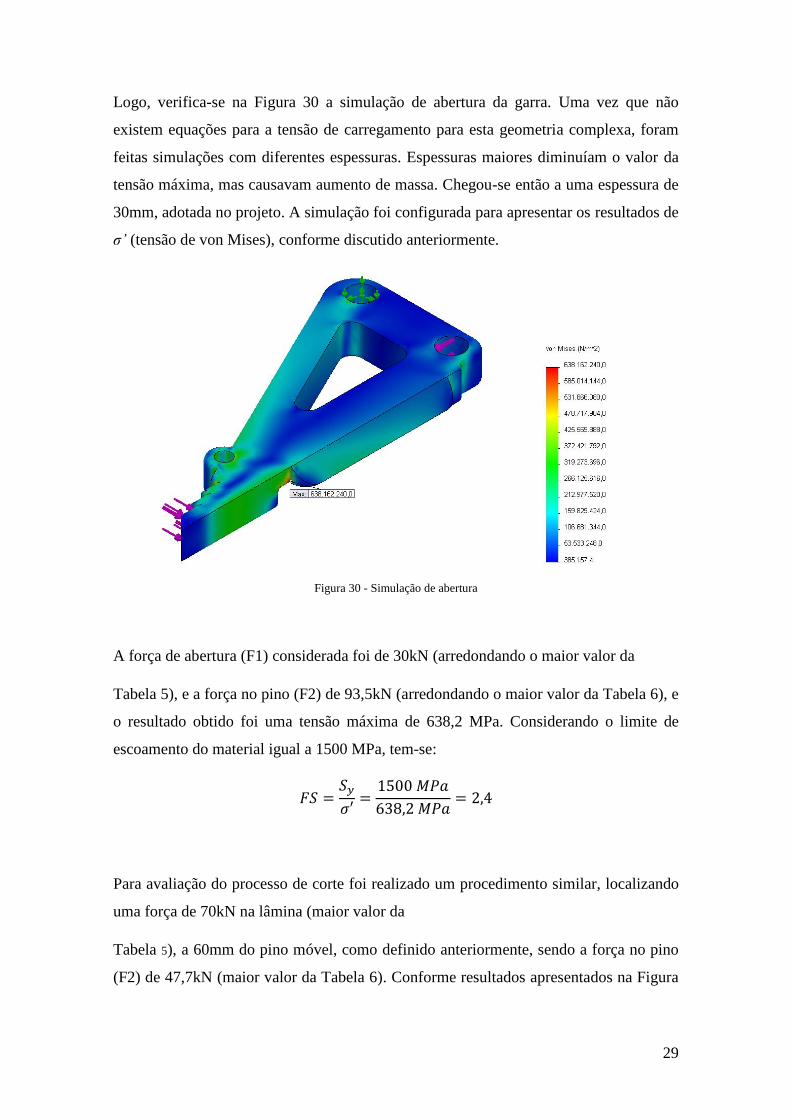
Logo, verifica-se na Figura 30 a simulação de abertura da garra. Uma vez que não
existem equações para a tensão de carregamento para esta geometria complexa, foram
feitas simulações com diferentes espessuras. Espessuras maiores diminuíam o valor da
tensão máxima, mas causavam aumento de massa. Chegou-se então a uma espessura de
30mm, adotada no projeto. A simulação foi configurada para apresentar os resultados de
σ’ (tensão de von Mises), conforme discutido anteriormente.
Figura 30 - Simulação de abertura
A força de abertura (F1) considerada foi de 30kN (arredondando o maior valor da
Tabela 5), e a força no pino (F2) de 93,5kN (arredondando o maior valor da Tabela 6), e
o resultado obtido foi uma tensão máxima de 638,2 MPa. Considerando o limite de
escoamento do material igual a 1500 MPa, tem-se:
𝐹𝑆 =𝑆𝑦
𝜎′=
1500 𝑀𝑃𝑎
638,2 𝑀𝑃𝑎= 2,4
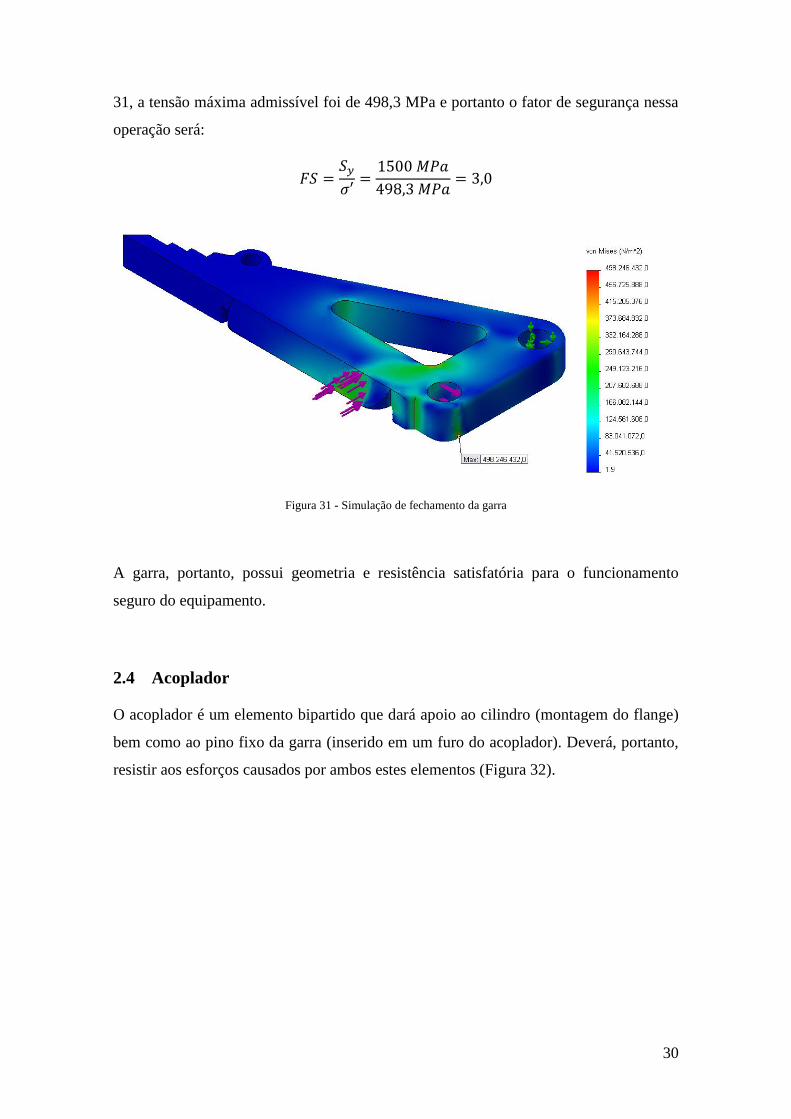
Para avaliação do processo de corte foi realizado um procedimento similar, localizando
uma força de 70kN na lâmina (maior valor da
Tabela 5), a 60mm do pino móvel, como definido anteriormente, sendo a força no pino
(F2) de 47,7kN (maior valor da Tabela 6). Conforme resultados apresentados na Figura
30
31, a tensão máxima admissível foi de 498,3 MPa e portanto o fator de segurança nessa
operação será:
𝐹𝑆 =𝑆𝑦
𝜎′=
1500 𝑀𝑃𝑎
498,3 𝑀𝑃𝑎= 3,0
Figura 31 - Simulação de fechamento da garra
A garra, portanto, possui geometria e resistência satisfatória para o funcionamento
seguro do equipamento.
2.4 Acoplador
O acoplador é um elemento bipartido que dará apoio ao cilindro (montagem do flange)
bem como ao pino fixo da garra (inserido em um furo do acoplador). Deverá, portanto,
resistir aos esforços causados por ambos estes elementos (Figura 32).

31
Figura 32 - Diagrama das forças externas no acoplador
As barras pinadas da garra e a porção exposta da haste ficarão contidas entre as duas
metades do acoplador, tanto para a segurança de operação (evitando que os dedos do
operador fiquem presos em partes móveis) quanto para proteção destes elementos
mecânicos contra choques e sujeira.
2.4.1 Dimensionamento
Para dimensionar o acoplador deve-se analisar F3r, que é a reação à força F3 exercida na
garra pelos pinos fixos.
Na abertura utilizam-se as equações (3), (4) e (5), já definidas anteriormente:
𝐹3𝑥 = 𝐹1 − 𝐹2 sin 𝛼
𝐹3𝑦 = 𝐹2 cos 𝛼
𝐹2 = 𝐹1
(𝐿2 sin 𝜃 + 𝐿1 cos 𝜃)
𝐿2(cos 𝜃 cos 𝛼 + sin 𝜃 sin 𝛼)
E no corte utilizam-se (7), (8) e (9):
𝐹3𝑥 = 𝐹𝑐 − 𝐹2 sin 𝛼
𝐹3𝑦 = 𝐹2 cos 𝛼
32
𝐹2 = 𝐹𝑐
(𝐿2 sin 𝜃 + 𝐿𝑐 cos 𝜃)
𝐿2(cos 𝜃 cos 𝛼 + sin 𝜃 sin 𝛼)
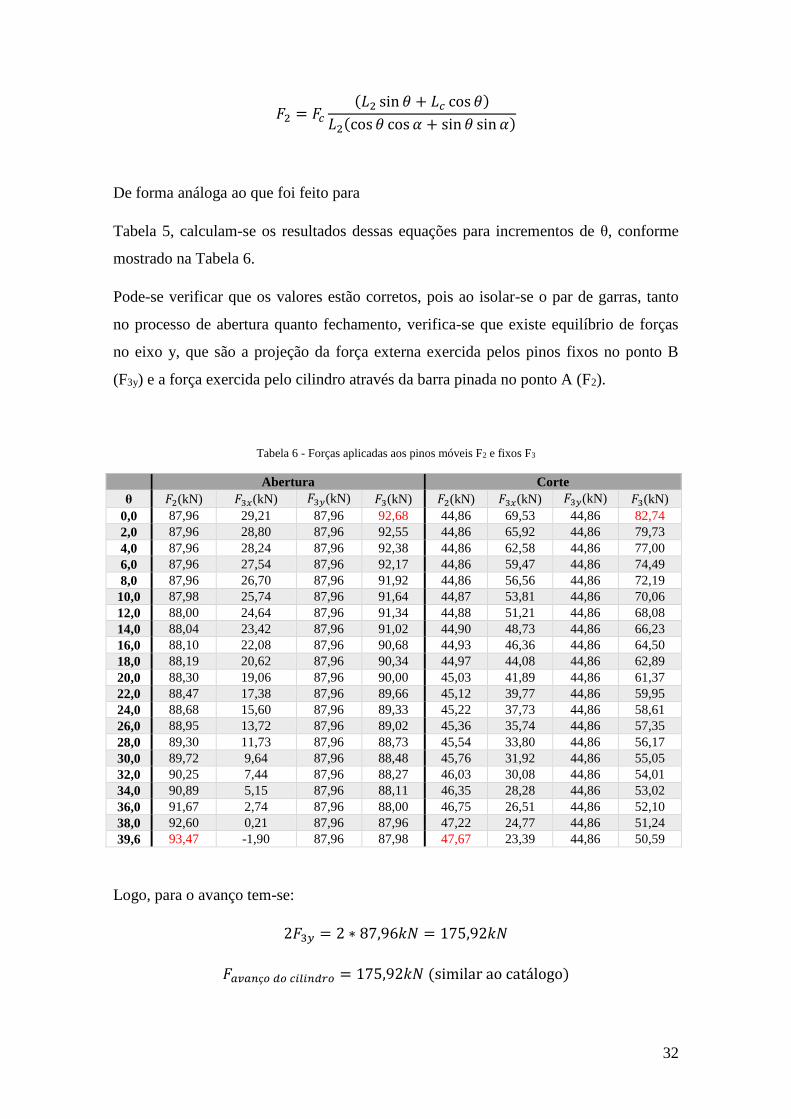
De forma análoga ao que foi feito para
Tabela 5, calculam-se os resultados dessas equações para incrementos de θ, conforme
mostrado na Tabela 6.
Pode-se verificar que os valores estão corretos, pois ao isolar-se o par de garras, tanto
no processo de abertura quanto fechamento, verifica-se que existe equilíbrio de forças
no eixo y, que são a projeção da força externa exercida pelos pinos fixos no ponto B
(F3y) e a força exercida pelo cilindro através da barra pinada no ponto A (F2).
Tabela 6 - Forças aplicadas aos pinos móveis F2 e fixos F3
Abertura Corte
θ 𝐹2(kN) 𝐹3𝑥(kN) 𝐹3𝑦(kN) 𝐹3(kN) 𝐹2(kN) 𝐹3𝑥(kN) 𝐹3𝑦(kN) 𝐹3(kN)
0,0 87,96 29,21 87,96 92,68 44,86 69,53 44,86 82,74
2,0 87,96 28,80 87,96 92,55 44,86 65,92 44,86 79,73
4,0 87,96 28,24 87,96 92,38 44,86 62,58 44,86 77,00
6,0 87,96 27,54 87,96 92,17 44,86 59,47 44,86 74,49
8,0 87,96 26,70 87,96 91,92 44,86 56,56 44,86 72,19
10,0 87,98 25,74 87,96 91,64 44,87 53,81 44,86 70,06
12,0 88,00 24,64 87,96 91,34 44,88 51,21 44,86 68,08
14,0 88,04 23,42 87,96 91,02 44,90 48,73 44,86 66,23
16,0 88,10 22,08 87,96 90,68 44,93 46,36 44,86 64,50
18,0 88,19 20,62 87,96 90,34 44,97 44,08 44,86 62,89
20,0 88,30 19,06 87,96 90,00 45,03 41,89 44,86 61,37
22,0 88,47 17,38 87,96 89,66 45,12 39,77 44,86 59,95
24,0 88,68 15,60 87,96 89,33 45,22 37,73 44,86 58,61
26,0 88,95 13,72 87,96 89,02 45,36 35,74 44,86 57,35
28,0 89,30 11,73 87,96 88,73 45,54 33,80 44,86 56,17
30,0 89,72 9,64 87,96 88,48 45,76 31,92 44,86 55,05
32,0 90,25 7,44 87,96 88,27 46,03 30,08 44,86 54,01
34,0 90,89 5,15 87,96 88,11 46,35 28,28 44,86 53,02
36,0 91,67 2,74 87,96 88,00 46,75 26,51 44,86 52,10
38,0 92,60 0,21 87,96 87,96 47,22 24,77 44,86 51,24
39,6 93,47 -1,90 87,96 87,98 47,67 23,39 44,86 50,59
Logo, para o avanço tem-se:
2𝐹3𝑦 = 2 ∗ 87,96𝑘𝑁 = 175,92𝑘𝑁
𝐹𝑎𝑣𝑎𝑛ç𝑜 𝑑𝑜 𝑐𝑖𝑙𝑖𝑛𝑑𝑟𝑜 = 175,92𝑘𝑁 (similar ao catálogo)
33
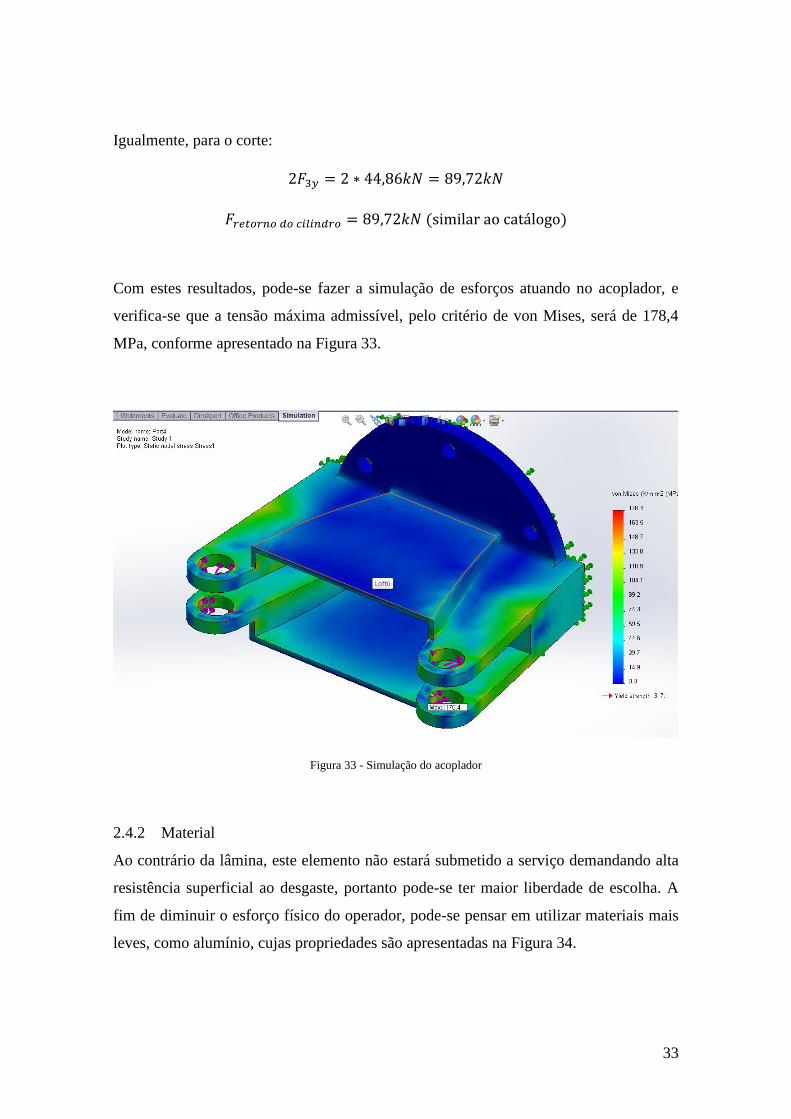
Igualmente, para o corte:
2𝐹3𝑦 = 2 ∗ 44,86𝑘𝑁 = 89,72𝑘𝑁
𝐹𝑟𝑒𝑡𝑜𝑟𝑛𝑜 𝑑𝑜 𝑐𝑖𝑙𝑖𝑛𝑑𝑟𝑜 = 89,72𝑘𝑁 (similar ao catálogo)
Com estes resultados, pode-se fazer a simulação de esforços atuando no acoplador, e
verifica-se que a tensão máxima admissível, pelo critério de von Mises, será de 178,4
MPa, conforme apresentado na Figura 33.
Figura 33 - Simulação do acoplador
2.4.2 Material
Ao contrário da lâmina, este elemento não estará submetido a serviço demandando alta
resistência superficial ao desgaste, portanto pode-se ter maior liberdade de escolha. A
fim de diminuir o esforço físico do operador, pode-se pensar em utilizar materiais mais
leves, como alumínio, cujas propriedades são apresentadas na Figura 34.
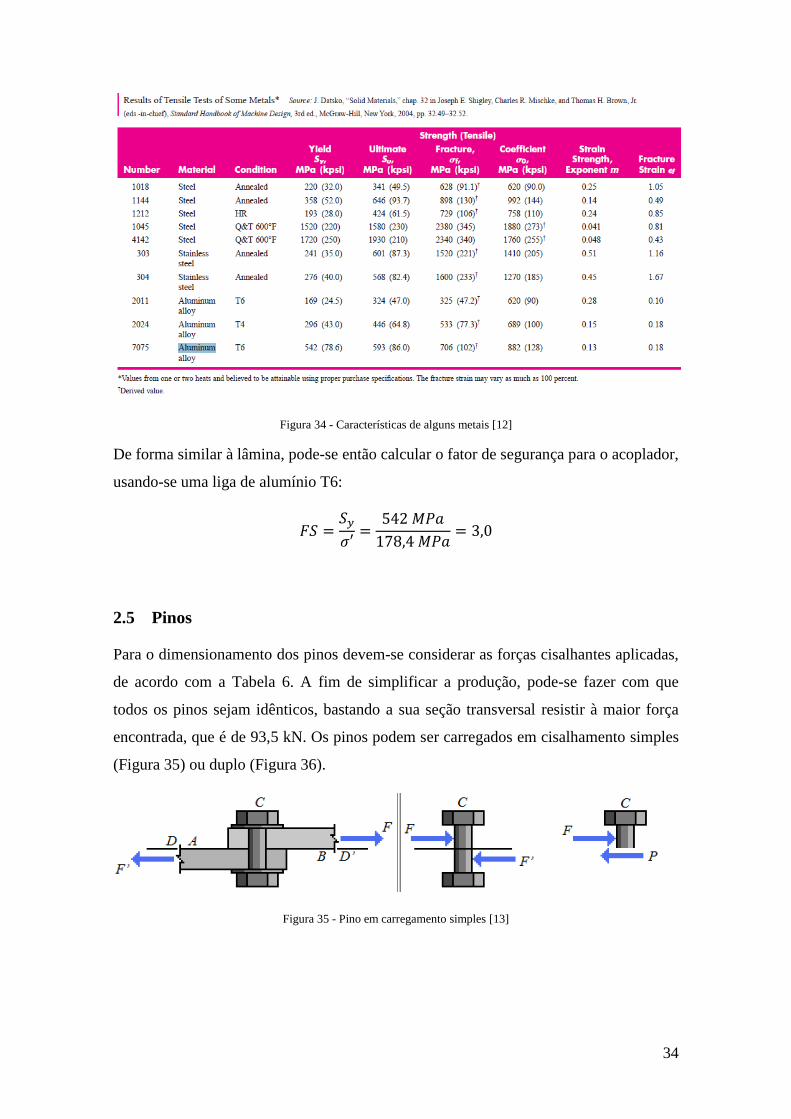
34
Figura 34 - Características de alguns metais [12]
De forma similar à lâmina, pode-se então calcular o fator de segurança para o acoplador,
usando-se uma liga de alumínio T6:
𝐹𝑆 =𝑆𝑦
𝜎′=
542 𝑀𝑃𝑎
178,4 𝑀𝑃𝑎= 3,0
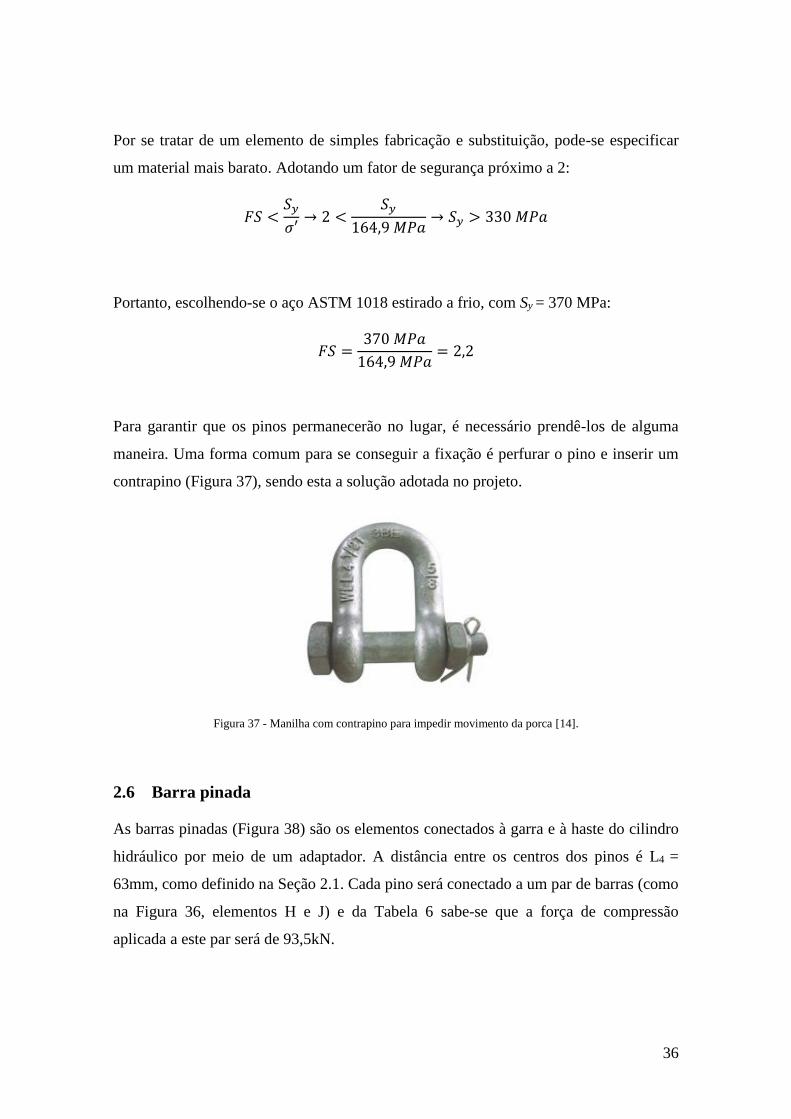
2.5 Pinos
Para o dimensionamento dos pinos devem-se considerar as forças cisalhantes aplicadas,
de acordo com a Tabela 6. A fim de simplificar a produção, pode-se fazer com que
todos os pinos sejam idênticos, bastando a sua seção transversal resistir à maior força
encontrada, que é de 93,5 kN. Os pinos podem ser carregados em cisalhamento simples
(Figura 35) ou duplo (Figura 36).
Figura 35 - Pino em carregamento simples [13]

35
Figura 36 - Pino em carregamento duplo [13]
Para cada caso, a tensão cisalhante será:
𝜏 =𝐹
𝐴 (𝑠𝑖𝑚𝑝𝑙𝑒𝑠)
𝜏 =𝐹
2𝐴 (𝑑𝑢𝑝𝑙𝑜)
Fica claro que a grande vantagem no cisalhamento duplo é que a tensão gerada é metade
daquela do carregamento simples. Portanto será utilizada esta solução, que demandará
duas barras pinadas por pino móvel (análogo aos elementos H e J na Figura 36).
Para a teoria de von Mises no caso de cisalhamento puro, pode-se escrever:
𝜎′ = √(𝜎1 − 𝜎2)2 + (𝜎2 − 𝜎3)2 + (𝜎1 − 𝜎3)2
2, 𝜎1 = 𝜏, 𝜎2 = −𝜏, 𝜎3 = 0
𝜎′ = √(𝜏 − (−𝜏))2 + ((−𝜏) − 0)2 + (𝜏 − 0)2
2= √
(2𝜏)2 + (−𝜏)2 + (𝜏)2
2= √
6𝜏2
2
𝜎′ = 𝜏√3 =𝐹√3
2𝐴
Como já definido na Seção 2.3.4, o pino terá diâmetro de 25 mm. Logo:
𝜎′ =√3
2
𝐹
𝐴=
√3
2
93500 𝑁
𝜋 ∙ (25 𝑚𝑚)2
4
= 164,9 𝑀𝑃𝑎
36
Por se tratar de um elemento de simples fabricação e substituição, pode-se especificar
um material mais barato. Adotando um fator de segurança próximo a 2:
𝐹𝑆 <𝑆𝑦
𝜎′→ 2 <
𝑆𝑦
164,9 𝑀𝑃𝑎→ 𝑆𝑦 > 330 𝑀𝑃𝑎
Portanto, escolhendo-se o aço ASTM 1018 estirado a frio, com Sy = 370 MPa:
𝐹𝑆 =370 𝑀𝑃𝑎
164,9 𝑀𝑃𝑎= 2,2
Para garantir que os pinos permanecerão no lugar, é necessário prendê-los de alguma
maneira. Uma forma comum para se conseguir a fixação é perfurar o pino e inserir um
contrapino (Figura 37), sendo esta a solução adotada no projeto.
Figura 37 - Manilha com contrapino para impedir movimento da porca [14].
2.6 Barra pinada
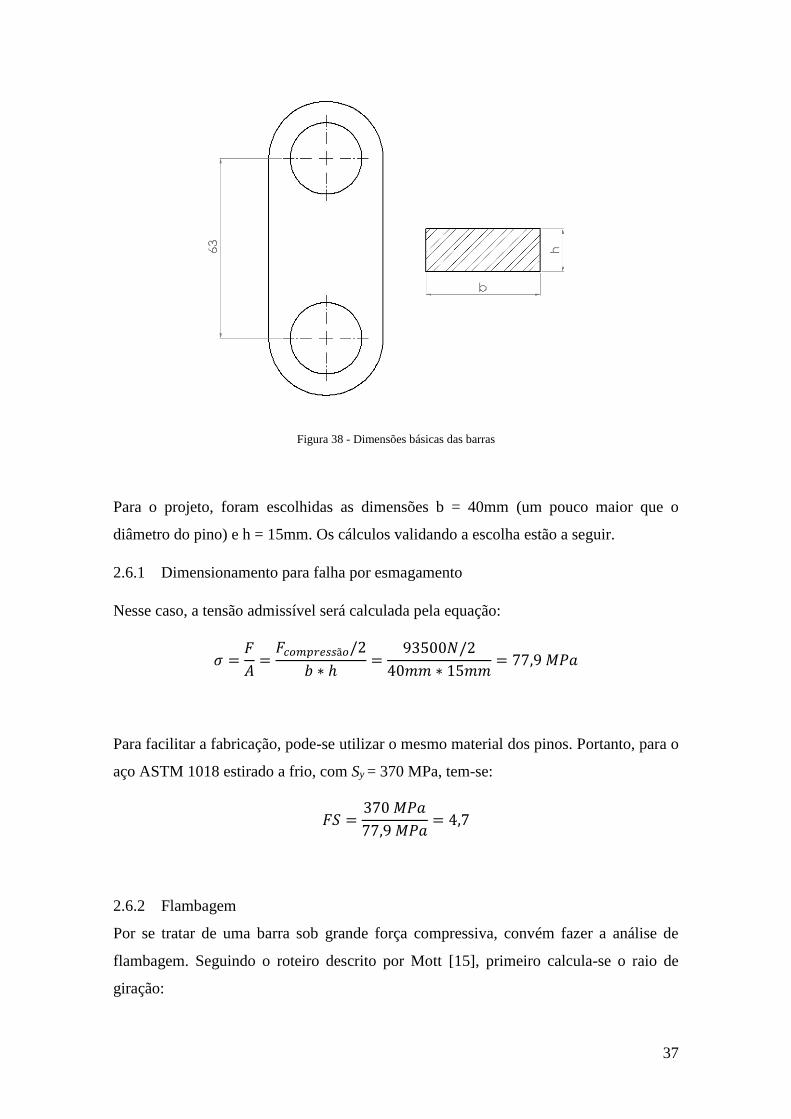
As barras pinadas (Figura 38) são os elementos conectados à garra e à haste do cilindro
hidráulico por meio de um adaptador. A distância entre os centros dos pinos é L4 =
63mm, como definido na Seção 2.1. Cada pino será conectado a um par de barras (como
na Figura 36, elementos H e J) e da Tabela 6 sabe-se que a força de compressão
aplicada a este par será de 93,5kN.
37
Figura 38 - Dimensões básicas das barras
Para o projeto, foram escolhidas as dimensões b = 40mm (um pouco maior que o
diâmetro do pino) e h = 15mm. Os cálculos validando a escolha estão a seguir.
2.6.1 Dimensionamento para falha por esmagamento
Nesse caso, a tensão admissível será calculada pela equação:
𝜎 =𝐹
𝐴=
𝐹𝑐𝑜𝑚𝑝𝑟𝑒𝑠𝑠ã𝑜/2
𝑏 ∗ ℎ=
93500𝑁/2
40𝑚𝑚 ∗ 15𝑚𝑚= 77,9 𝑀𝑃𝑎
Para facilitar a fabricação, pode-se utilizar o mesmo material dos pinos. Portanto, para o
aço ASTM 1018 estirado a frio, com Sy = 370 MPa, tem-se:
𝐹𝑆 =370 𝑀𝑃𝑎
77,9 𝑀𝑃𝑎= 4,7
2.6.2 Flambagem
Por se tratar de uma barra sob grande força compressiva, convém fazer a análise de
flambagem. Seguindo o roteiro descrito por Mott [15], primeiro calcula-se o raio de
giração:
38
𝑟 = √𝐼
𝐴=
√𝑏ℎ3
12𝑏ℎ
= √ℎ2
12= 4,33𝑚𝑚
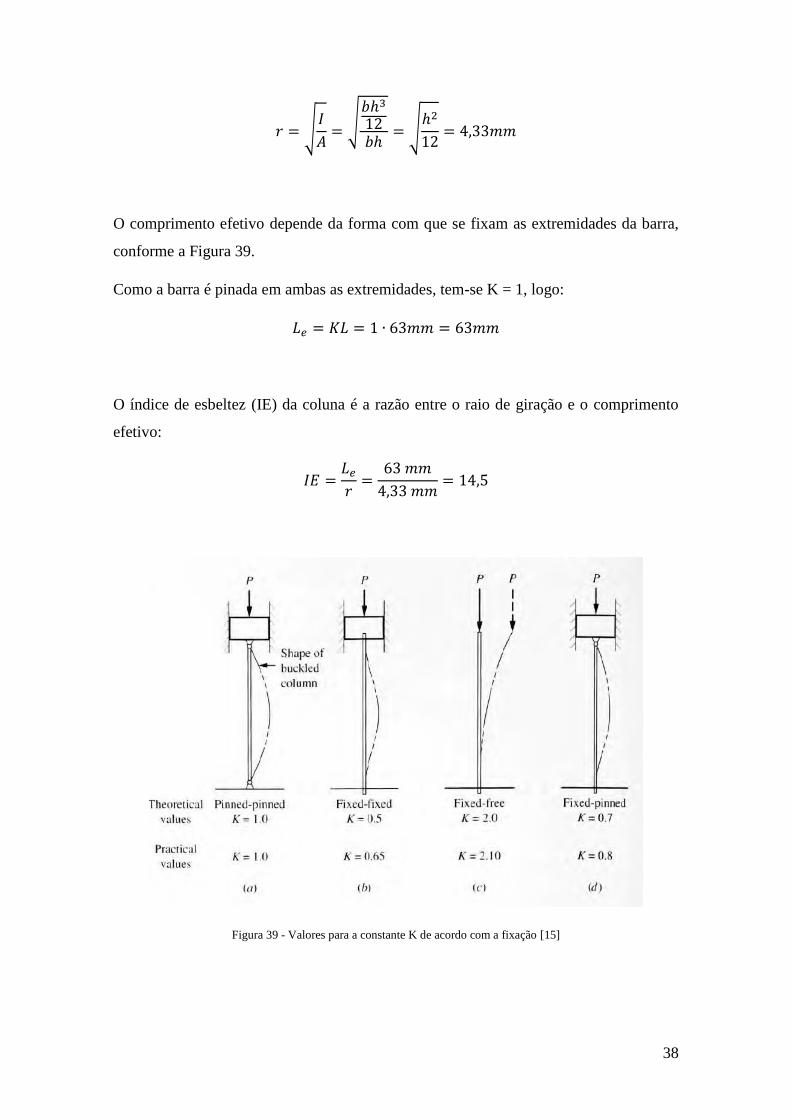
O comprimento efetivo depende da forma com que se fixam as extremidades da barra,
conforme a Figura 39.
Como a barra é pinada em ambas as extremidades, tem-se K = 1, logo:
𝐿𝑒 = 𝐾𝐿 = 1 ∙ 63𝑚𝑚 = 63𝑚𝑚
O índice de esbeltez (IE) da coluna é a razão entre o raio de giração e o comprimento
efetivo:
𝐼𝐸 =𝐿𝑒
𝑟=
63 𝑚𝑚
4,33 𝑚𝑚= 14,5
Figura 39 - Valores para a constante K de acordo com a fixação [15]

39
Para decidir se a coluna será tratada como coluna de Euler ou coluna curta, deve-se
comparar o índice de esbeltez com a constante da coluna (Cc). Caso o índice de esbeltez
seja menor que Cc, a coluna será curta. No caso:
𝐶𝑐 = √2𝜋2𝐸
𝑆𝑦= √
2𝜋2190𝐺𝑃𝑎
370𝑀𝑃𝑎= 100,7
Portanto a coluna é curta e será usada a fórmula de Johnson para carga crítica:
𝑃𝑐𝑟 = 𝐴𝑆𝑦 [1 −𝑆𝑦𝐼𝐸2
4𝜋𝐸] = 600𝑚𝑚2 ∙ 370𝑀𝑃𝑎 [1 −
370𝑀𝑃𝑎 ∙ 14,52
4𝜋 ∗ 190𝐺𝑃𝑎] = 214,8𝑘𝑁
𝑃𝑐𝑟 >93,5 𝑘𝑁
2 → 𝑃𝑐𝑟 > 46,7 𝑘𝑁
Logo, como a carga crítica Pcr é maior que a carga aplicada, a escolha da geometria e
material foi adequada.
2.7 Adaptador para extremidade do cilindro
Os cilindros hidráulicos, ao atuarem, podem ou não manter a direção do seu eixo
principal. Por exemplo, o cilindro em uma prensa hidráulica (Figura 40) trabalha
linearmente, sem sofrer rotação, e sua haste pode ter a extremidade simples (roscada).
Para outras aplicações pode ser necessário utilizar um adaptador na ponta da haste e na
base do cilindro.
Figura 40 - Detalhe de uma prensa vertical. Observe que neste caso não existe rotação do cilindro [16]
40
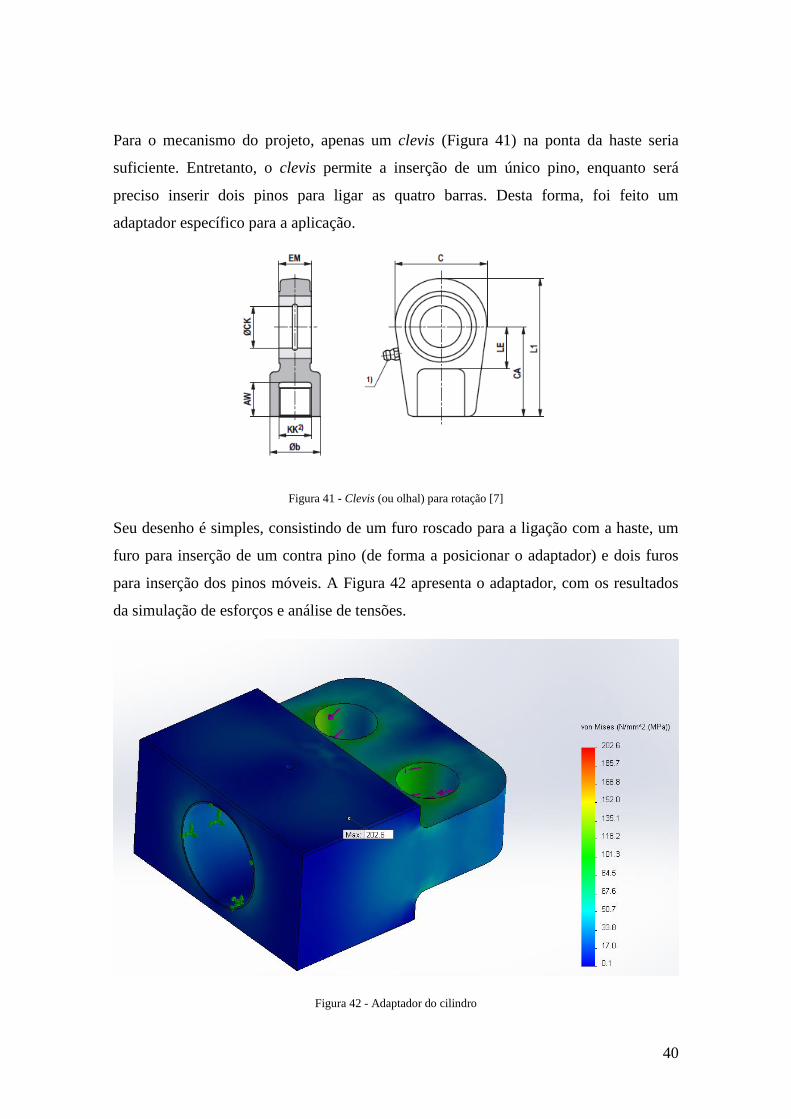
Para o mecanismo do projeto, apenas um clevis (Figura 41) na ponta da haste seria
suficiente. Entretanto, o clevis permite a inserção de um único pino, enquanto será
preciso inserir dois pinos para ligar as quatro barras. Desta forma, foi feito um
adaptador específico para a aplicação.
Figura 41 - Clevis (ou olhal) para rotação [7]
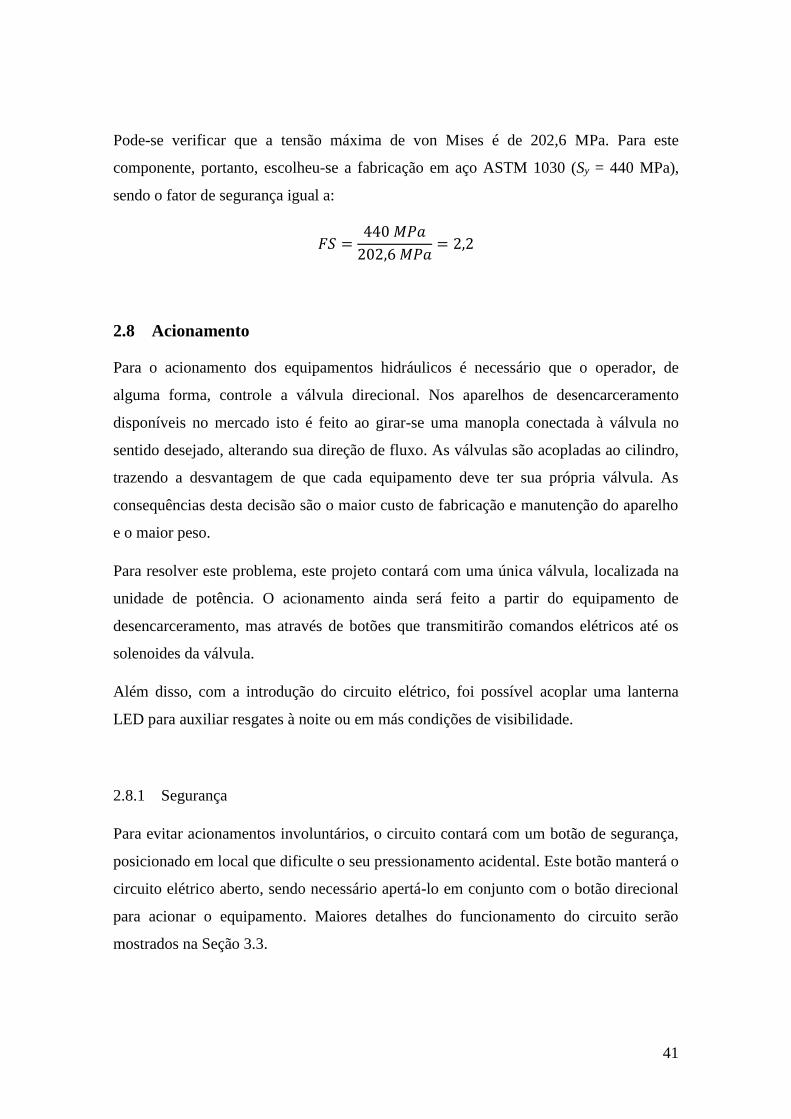
Seu desenho é simples, consistindo de um furo roscado para a ligação com a haste, um
furo para inserção de um contra pino (de forma a posicionar o adaptador) e dois furos
para inserção dos pinos móveis. A Figura 42 apresenta o adaptador, com os resultados
da simulação de esforços e análise de tensões.
Figura 42 - Adaptador do cilindro
41
Pode-se verificar que a tensão máxima de von Mises é de 202,6 MPa. Para este
componente, portanto, escolheu-se a fabricação em aço ASTM 1030 (Sy = 440 MPa),
sendo o fator de segurança igual a:
𝐹𝑆 =440 𝑀𝑃𝑎
202,6 𝑀𝑃𝑎= 2,2
2.8 Acionamento
Para o acionamento dos equipamentos hidráulicos é necessário que o operador, de
alguma forma, controle a válvula direcional. Nos aparelhos de desencarceramento
disponíveis no mercado isto é feito ao girar-se uma manopla conectada à válvula no
sentido desejado, alterando sua direção de fluxo. As válvulas são acopladas ao cilindro,
trazendo a desvantagem de que cada equipamento deve ter sua própria válvula. As
consequências desta decisão são o maior custo de fabricação e manutenção do aparelho
e o maior peso.
Para resolver este problema, este projeto contará com uma única válvula, localizada na
unidade de potência. O acionamento ainda será feito a partir do equipamento de
desencarceramento, mas através de botões que transmitirão comandos elétricos até os
solenoides da válvula.
Além disso, com a introdução do circuito elétrico, foi possível acoplar uma lanterna
LED para auxiliar resgates à noite ou em más condições de visibilidade.
2.8.1 Segurança
Para evitar acionamentos involuntários, o circuito contará com um botão de segurança,
posicionado em local que dificulte o seu pressionamento acidental. Este botão manterá o
circuito elétrico aberto, sendo necessário apertá-lo em conjunto com o botão direcional
para acionar o equipamento. Maiores detalhes do funcionamento do circuito serão
mostrados na Seção 3.3.
42
2.9 Capa de proteção
Para a proteção do cilindro, circuito elétrico e hidráulico, bem como posicionamento
dos botões, foi feita uma capa plástica que envolverá por completo todos estes
elementos. Para facilitar a montagem do equipamento esta capa foi projetada como um
elemento bipartido, permitindo seu simples fechamento sobre os componentes.
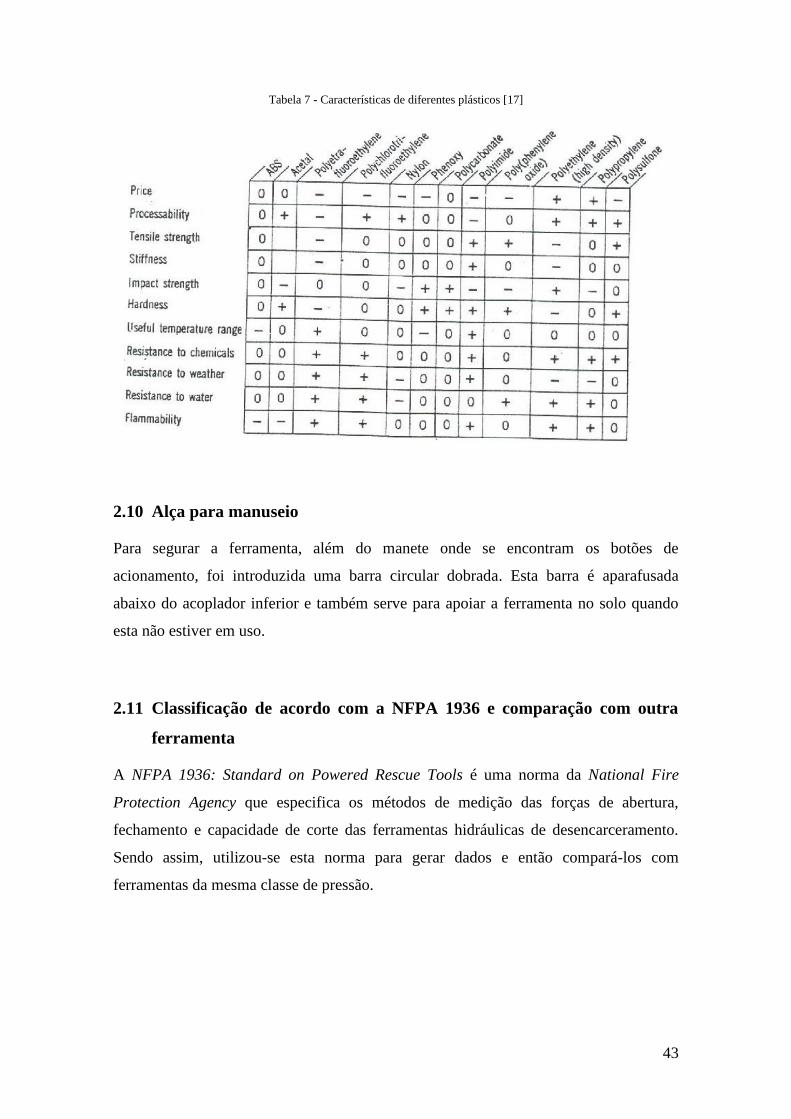
Devido à aplicação, são desejáveis propriedades como resistência a choques, resistência
à água, baixa flamabilidade, facilidade de fabricação e baixo custo. Para comparar estas
características com os plásticos facilmente disponíveis no mercado, pode-se fazer uso da
Tabela 7, na qual o sinal +, 0 e - indicam que o material é bom, intermediário ou ruim,
respectivamente, naquela determinada característica.
Dentre as opções, foi escolhido o polietileno de alta densidade, em especial por seu
preço baixo, processabilidade e resistência a impactos.
43
Tabela 7 - Características de diferentes plásticos [17]
2.10 Alça para manuseio
Para segurar a ferramenta, além do manete onde se encontram os botões de
acionamento, foi introduzida uma barra circular dobrada. Esta barra é aparafusada
abaixo do acoplador inferior e também serve para apoiar a ferramenta no solo quando
esta não estiver em uso.
2.11 Classificação de acordo com a NFPA 1936 e comparação com outra
ferramenta
A NFPA 1936: Standard on Powered Rescue Tools é uma norma da National Fire
Protection Agency que especifica os métodos de medição das forças de abertura,
fechamento e capacidade de corte das ferramentas hidráulicas de desencarceramento.
Sendo assim, utilizou-se esta norma para gerar dados e então compará-los com
ferramentas da mesma classe de pressão.
44
2.11.1 Lowest spreading force (LSF)
Este fator informa a força de abertura das garras quando estas estão completamente
fechadas, sendo essa a posição mais crítica no processo de abertura, pois é quando as
ferragens oferecem a maior resistência. De acordo com a
Tabela 5 (página 22), no início da abertura (θ = 0°) a maior força que o aparelho
consegue vencer é de 29,2 kN, logo:
𝐿𝑆𝐹 = 29,2 kN
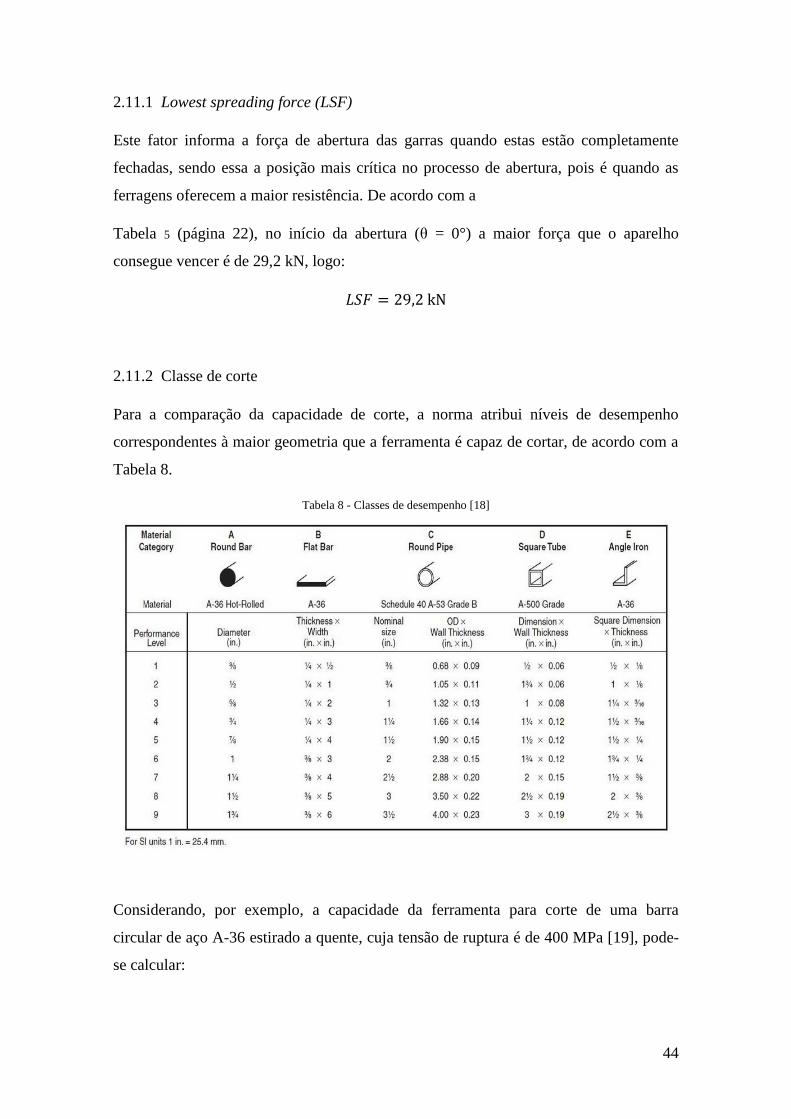
2.11.2 Classe de corte
Para a comparação da capacidade de corte, a norma atribui níveis de desempenho
correspondentes à maior geometria que a ferramenta é capaz de cortar, de acordo com a
Tabela 8.
Tabela 8 - Classes de desempenho [18]
Considerando, por exemplo, a capacidade da ferramenta para corte de uma barra
circular de aço A-36 estirado a quente, cuja tensão de ruptura é de 400 MPa [19], pode-
se calcular:
45
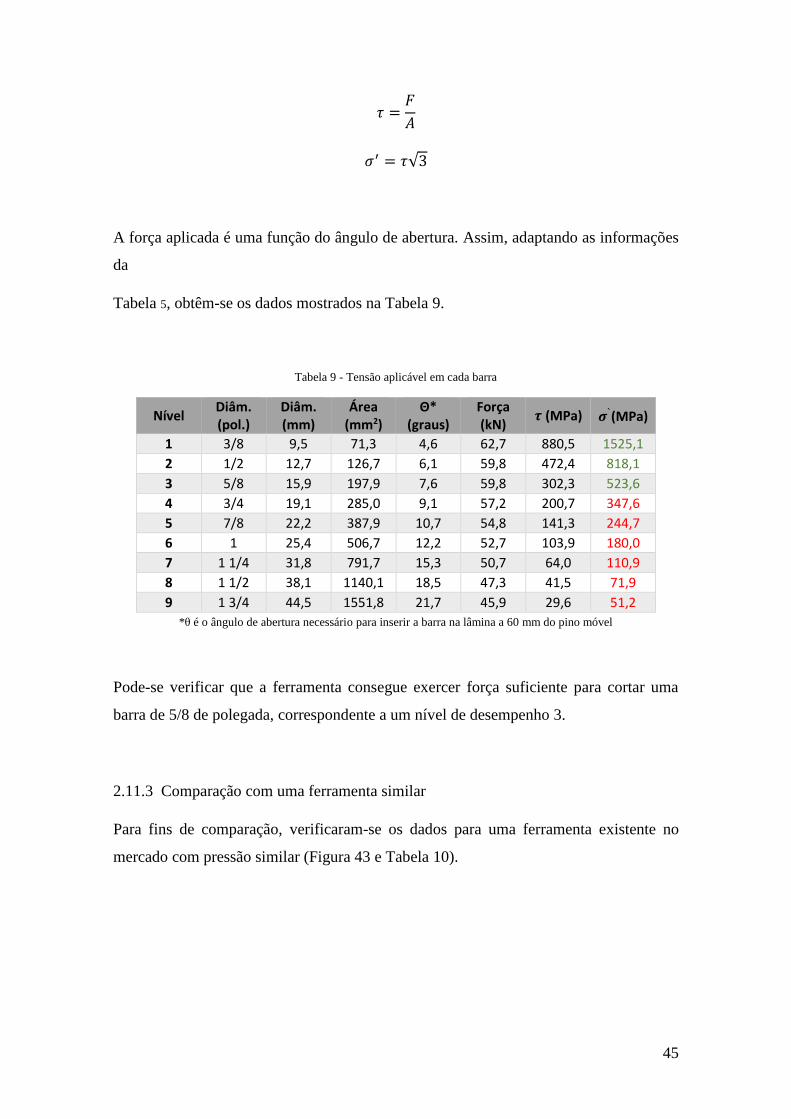
𝜏 =𝐹
𝐴
𝜎′ = 𝜏√3
A força aplicada é uma função do ângulo de abertura. Assim, adaptando as informações
da
Tabela 5, obtêm-se os dados mostrados na Tabela 9.
Tabela 9 - Tensão aplicável em cada barra
Nível Diâm. (pol.)
Diâm. (mm)
Área (mm2)
Θ* (graus)
Força (kN)
𝝉 (MPa) 𝝈`(MPa)
1 3/8 9,5 71,3 4,6 62,7 880,5 1525,1
2 1/2 12,7 126,7 6,1 59,8 472,4 818,1
3 5/8 15,9 197,9 7,6 59,8 302,3 523,6
4 3/4 19,1 285,0 9,1 57,2 200,7 347,6
5 7/8 22,2 387,9 10,7 54,8 141,3 244,7
6 1 25,4 506,7 12,2 52,7 103,9 180,0
7 1 1/4 31,8 791,7 15,3 50,7 64,0 110,9
8 1 1/2 38,1 1140,1 18,5 47,3 41,5 71,9
9 1 3/4 44,5 1551,8 21,7 45,9 29,6 51,2
*θ é o ângulo de abertura necessário para inserir a barra na lâmina a 60 mm do pino móvel
Pode-se verificar que a ferramenta consegue exercer força suficiente para cortar uma
barra de 5/8 de polegada, correspondente a um nível de desempenho 3.
2.11.3 Comparação com uma ferramenta similar
Para fins de comparação, verificaram-se os dados para uma ferramenta existente no
mercado com pressão similar (Figura 43 e Tabela 10).
46
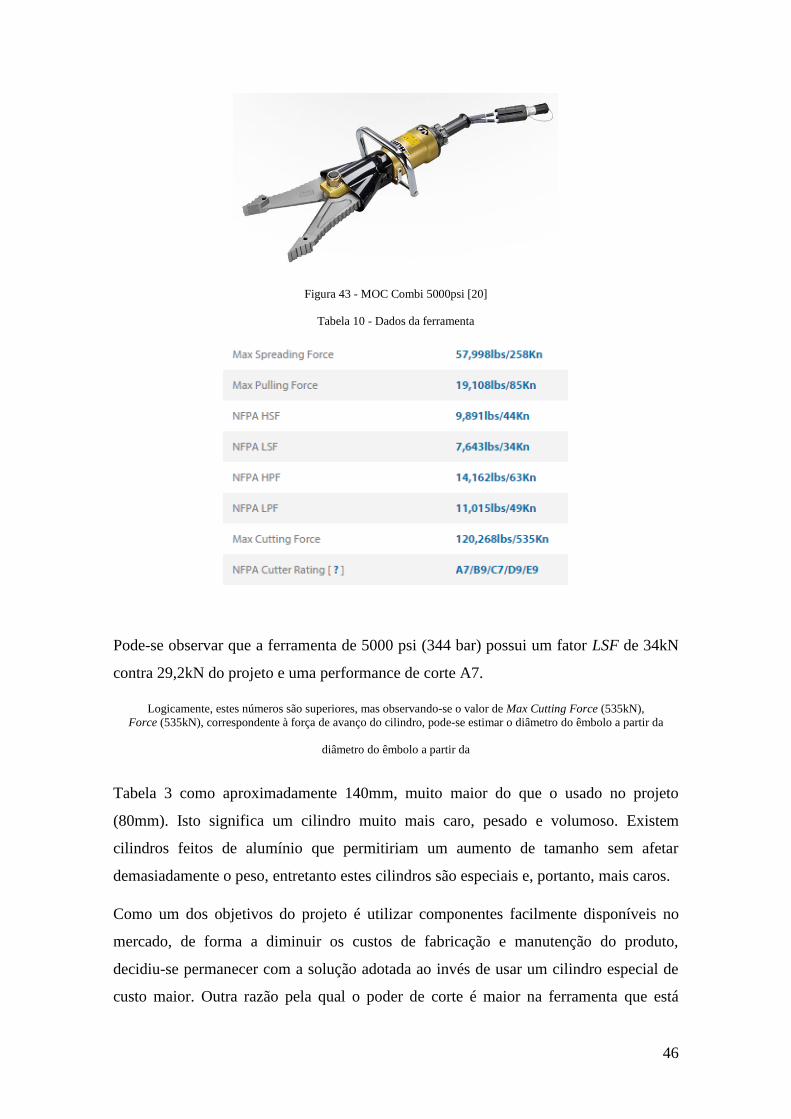
Figura 43 - MOC Combi 5000psi [20]
Tabela 10 - Dados da ferramenta
Pode-se observar que a ferramenta de 5000 psi (344 bar) possui um fator LSF de 34kN
contra 29,2kN do projeto e uma performance de corte A7.
Logicamente, estes números são superiores, mas observando-se o valor de Max Cutting Force (535kN),
Force (535kN), correspondente à força de avanço do cilindro, pode-se estimar o diâmetro do êmbolo a partir da
diâmetro do êmbolo a partir da
Tabela 3 como aproximadamente 140mm, muito maior do que o usado no projeto
(80mm). Isto significa um cilindro muito mais caro, pesado e volumoso. Existem
cilindros feitos de alumínio que permitiriam um aumento de tamanho sem afetar
demasiadamente o peso, entretanto estes cilindros são especiais e, portanto, mais caros.
Como um dos objetivos do projeto é utilizar componentes facilmente disponíveis no
mercado, de forma a diminuir os custos de fabricação e manutenção do produto,
decidiu-se permanecer com a solução adotada ao invés de usar um cilindro especial de
custo maior. Outra razão pela qual o poder de corte é maior na ferramenta que está

47
sendo usada para comparação é que o seu pino fixo fica no centro das garras (ver Figura
43), como uma tesoura. Isso significa que o processo de corte se dá no avanço do
cilindro, que é quando este consegue exercer a maior força possível. Entretanto, esta
decisão faz com que a abertura da garra se dê durante o retorno do cilindro, com menos
força. Como se pode ver, mesmo usando um cilindro com êmbolo de 140mm, 75%
maior que o de 80mm, a LSF é apenas 16,4% superior a do projeto.
48
3 Unidade de bombeamento
3.1 Princípio de Pascal
Como qualquer equipamento hidráulico, os equipamentos de desencarceramento
funcionam baseados no princípio de Pascal. Este princípio diz que um acréscimo de
pressão em um ponto qualquer de um fluido confinado e em equilíbrio irá causar igual
acréscimo de pressão em todas as partes desse fluido.
Ao provar este fenômeno, Pascal percebeu que ao conectar dois cilindros de diâmetros
diferentes, o cilindro maior poderia ser usado para exercer uma grande força, bastando a
aplicação de uma força pequena no cilindro menor.
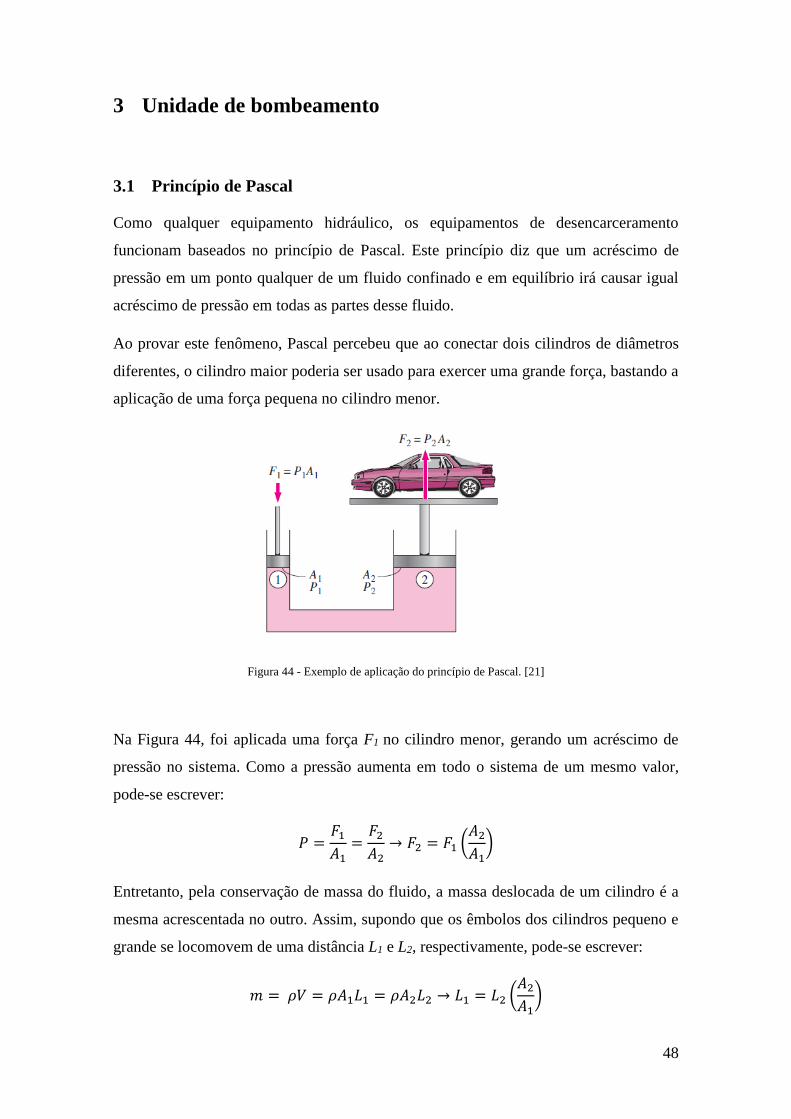
Figura 44 - Exemplo de aplicação do princípio de Pascal. [21]
Na Figura 44, foi aplicada uma força F1 no cilindro menor, gerando um acréscimo de
pressão no sistema. Como a pressão aumenta em todo o sistema de um mesmo valor,
pode-se escrever:
𝑃 =𝐹1
𝐴1=
𝐹2
𝐴2→ 𝐹2 = 𝐹1 (
𝐴2
𝐴1)
Entretanto, pela conservação de massa do fluido, a massa deslocada de um cilindro é a
mesma acrescentada no outro. Assim, supondo que os êmbolos dos cilindros pequeno e
grande se locomovem de uma distância L1 e L2, respectivamente, pode-se escrever:
𝑚 = 𝜌𝑉 = 𝜌𝐴1𝐿1 = 𝜌𝐴2𝐿2 → 𝐿1 = 𝐿2 (𝐴2
𝐴1)
49
Onde m é a massa do fluido deslocado, ρ é a densidade do fluido e V é o volume
deslocado. Assim, percebe-se que é necessário percorrer uma distância maior com o
êmbolo pequeno. Para contornar este problema, pode-se causar o aumento de pressão no
fluido por meio de bombas hidráulicas, evitando a necessidade de cilindros pequenos
com grandes cursos quando se utiliza o esquema apresentado.
3.2 Principais componentes de um sistema hidráulico
3.2.1 Bombas
Bombas são máquinas hidráulicas que “...conferem energia ao líquido com a finalidade
de transportá-lo de um ponto para outro obedecendo às condições de processo. Elas
recebem energia de uma fonte motora qualquer e cedem parte desta energia ao fluido
sob forma de energia de pressão, cinética ou ambas. Isto é, elas aumentam a pressão do
líquido, a velocidade, ou ambas essas grandezas” [22]. Existem diversos tipos de
bombas, destacando-se dois grandes grupos: turbobombas e bombas volumétricas (ou
de deslocamento positivo).
Turbobombas são bombas nas quais “...a movimentação do líquido é produzida
por forças que se desenvolvem na massa líquida em consequência da rotação de uma
roda (impelidor) com um certo número de pás.” [22]. Nesse grupo destacam-se as
bombas centrífugas radiais e axiais.
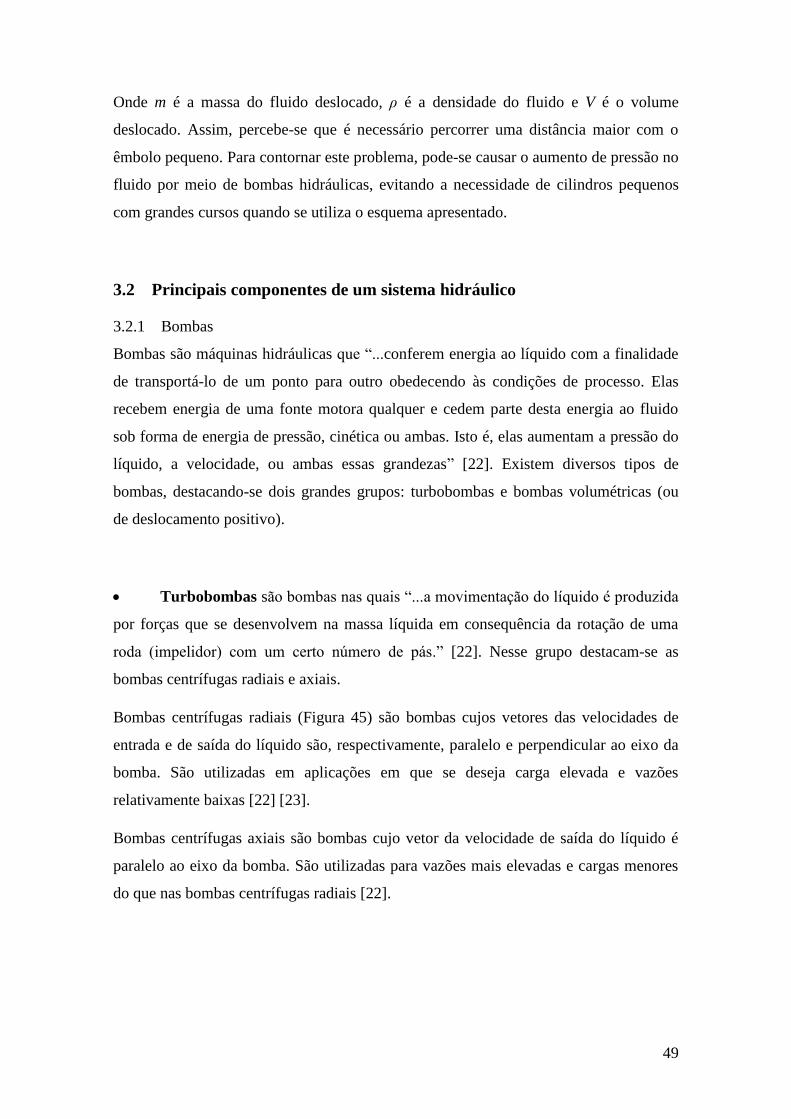
Bombas centrífugas radiais (Figura 45) são bombas cujos vetores das velocidades de
entrada e de saída do líquido são, respectivamente, paralelo e perpendicular ao eixo da
bomba. São utilizadas em aplicações em que se deseja carga elevada e vazões
relativamente baixas [22] [23].
Bombas centrífugas axiais são bombas cujo vetor da velocidade de saída do líquido é
paralelo ao eixo da bomba. São utilizadas para vazões mais elevadas e cargas menores
do que nas bombas centrífugas radiais [22].
50
Figura 45 - Exemplo de uma bomba centrífuga [23]
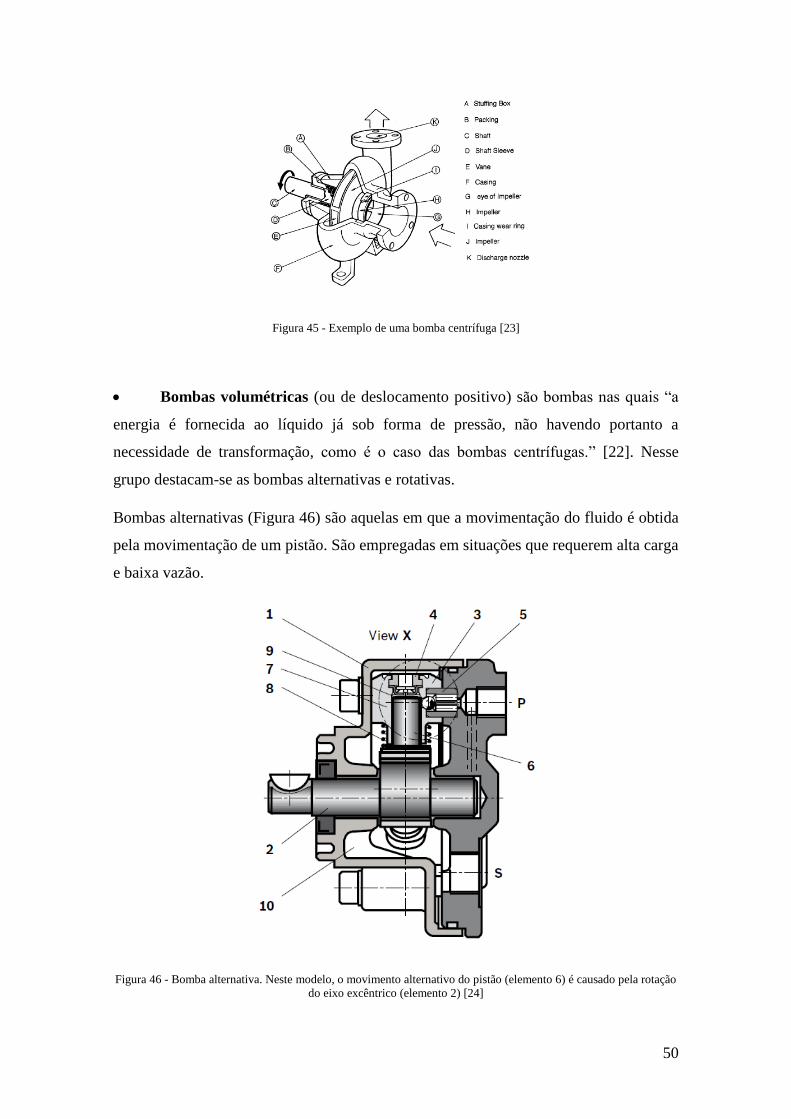
Bombas volumétricas (ou de deslocamento positivo) são bombas nas quais “a
energia é fornecida ao líquido já sob forma de pressão, não havendo portanto a
necessidade de transformação, como é o caso das bombas centrífugas.” [22]. Nesse
grupo destacam-se as bombas alternativas e rotativas.
Bombas alternativas (Figura 46) são aquelas em que a movimentação do fluido é obtida
pela movimentação de um pistão. São empregadas em situações que requerem alta carga
e baixa vazão.
Figura 46 - Bomba alternativa. Neste modelo, o movimento alternativo do pistão (elemento 6) é causado pela rotação
do eixo excêntrico (elemento 2) [24]
51
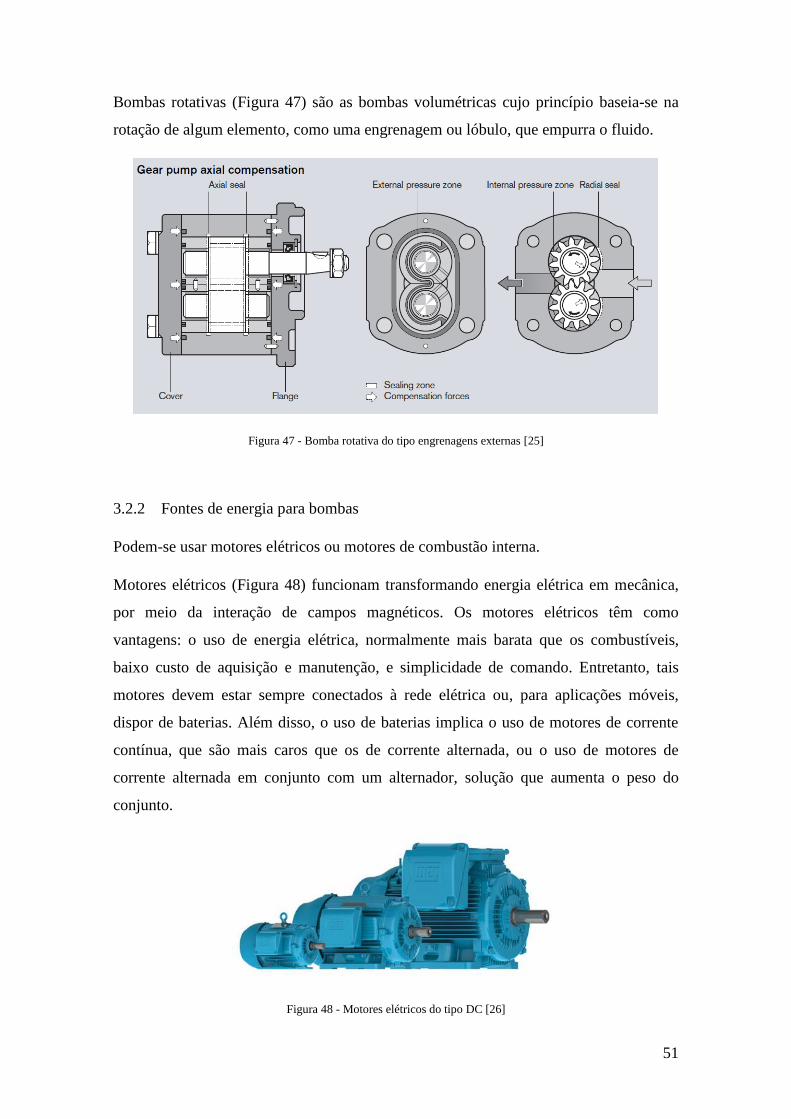
Bombas rotativas (Figura 47) são as bombas volumétricas cujo princípio baseia-se na
rotação de algum elemento, como uma engrenagem ou lóbulo, que empurra o fluido.
Figura 47 - Bomba rotativa do tipo engrenagens externas [25]
3.2.2 Fontes de energia para bombas
Podem-se usar motores elétricos ou motores de combustão interna.
Motores elétricos (Figura 48) funcionam transformando energia elétrica em mecânica,
por meio da interação de campos magnéticos. Os motores elétricos têm como
vantagens: o uso de energia elétrica, normalmente mais barata que os combustíveis,
baixo custo de aquisição e manutenção, e simplicidade de comando. Entretanto, tais
motores devem estar sempre conectados à rede elétrica ou, para aplicações móveis,
dispor de baterias. Além disso, o uso de baterias implica o uso de motores de corrente
contínua, que são mais caros que os de corrente alternada, ou o uso de motores de
corrente alternada em conjunto com um alternador, solução que aumenta o peso do
conjunto.
Figura 48 - Motores elétricos do tipo DC [26]
52
Motores de combustão interna são máquinas térmicas que transformam a energia
química armazenada em combustíveis em energia mecânica por meio de sua combustão.
O tipo mais comum é o de cilindros, mas existem alternativas como o motor Wankel.
Os motores de combustão podem ser de dois ou quatro tempos (Figura 49). Os motores
de dois tempos têm como vantagens a simplicidade, menor custo e uma melhor relação
entre potência e peso quando comparados aos motores de quatro tempos. Entretanto, os
motores de dois tempos são menos eficientes e mais poluentes e por isso vêm caindo em
desuso.
Figura 49 - Motor V8, 6.2L, 4 tempos [27]
Quando comparados aos motores elétricos, os motores de combustão interna são menos
eficientes, precisam de um mecanismo ou motor auxiliar para partida e são mais
poluentes. Entretanto, os hidrocarbonetos têm uma densidade de energia muito superior
às baterias atualmente disponíveis, o que é uma grande vantagem nas aplicações
móveis.
3.2.3 Atuadores
Os atuadores são equipamentos que, por meio de uma fonte de energia (especialmente
elétrica, pneumática ou hidráulica), movem mecanismos ou sistemas [28]. Os atuadores
lineares (pistões) e rotativos (motores) promovem um movimento retilíneo ou rotativo,
respectivamente. Os pistões hidráulicos já foram mencionados na Seção 2.2.
53
Os motores hidráulicos são construtivamente muito semelhantes às bombas, podendo,
inclusive, atuar como uma bomba dependendo do tipo de motor. Os tipos básicos de
motores são os de engrenagens, palhetas e pistões.
Quando comparados a motores elétricos, possuem uma relação peso/potência melhor
(cada HP de motor elétrico pesa em torno de 13,5 kg, enquanto o do motor hidráulico
pesa 5,5kg [29]), podem parar e partir com frequência, reverter o sentido de rotação
rapidamente, trabalhar submersos, em atmosfera explosiva ou superaquecidos sem
demandar construção especial. Entretanto, os motores elétricos são mais eficientes e, em
aplicações estacionárias, é mais fácil prover-lhes energia.
3.2.4 Válvulas
Válvulas são elementos hidráulicos que controlam a direção, sentido, velocidade e/ou
pressão dos fluidos. São os elementos mais importantes das tubulações e seu número
deve ser o menor possível, devido ao seu custo, perda de cargas e possibilidade de
vazamento. Existem muitos tipos de válvulas, cada uma com sua aplicação, vantagens e
desvantagens. De acordo com Telles [30], pode-se dividir as principais válvulas quanto
à atuação e à função.
Atuação:
Manual: acionadas por um operador, por meio de volante, alavanca, engrenagens, etc.
Atuada: acionadas por um atuador elétrico, pneumático ou hidráulico.
Automática: acionadas automaticamente pelo fluido (pilotada), molas ou contrapesos.
Função:
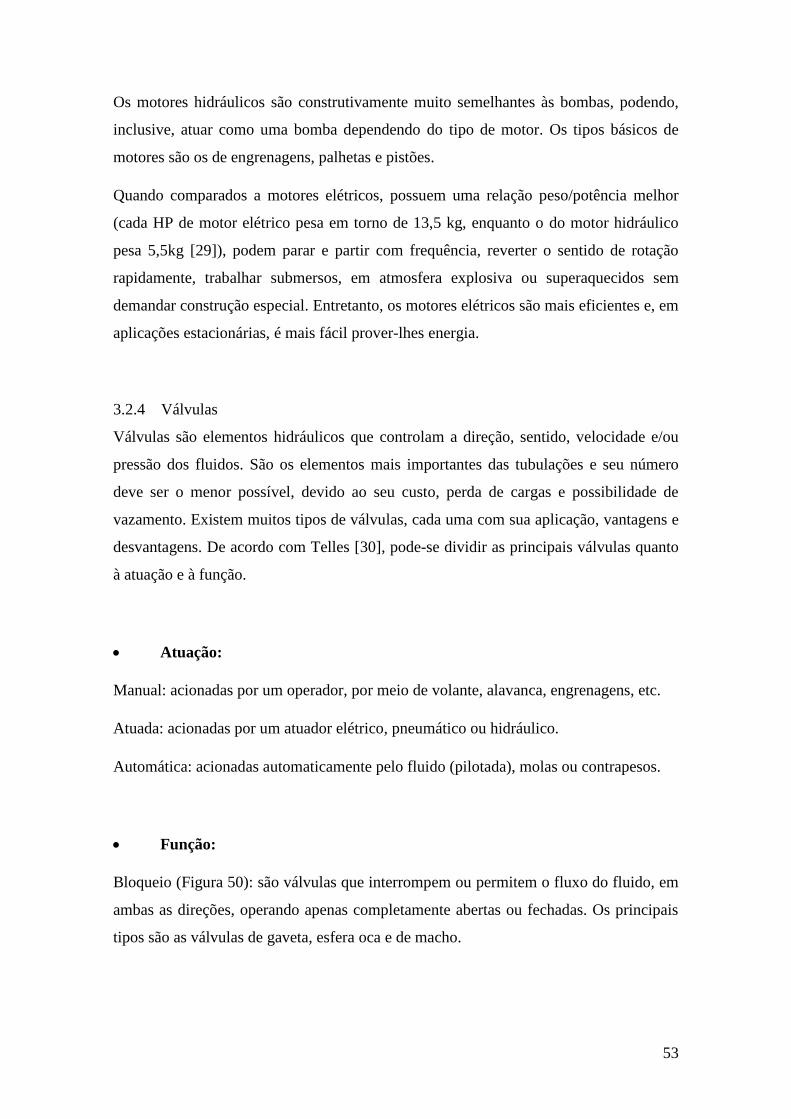
Bloqueio (Figura 50): são válvulas que interrompem ou permitem o fluxo do fluido, em
ambas as direções, operando apenas completamente abertas ou fechadas. Os principais
tipos são as válvulas de gaveta, esfera oca e de macho.
54
Figura 50 - Válvula de bloqueio tipo esfera oca, na posição aberta [30]
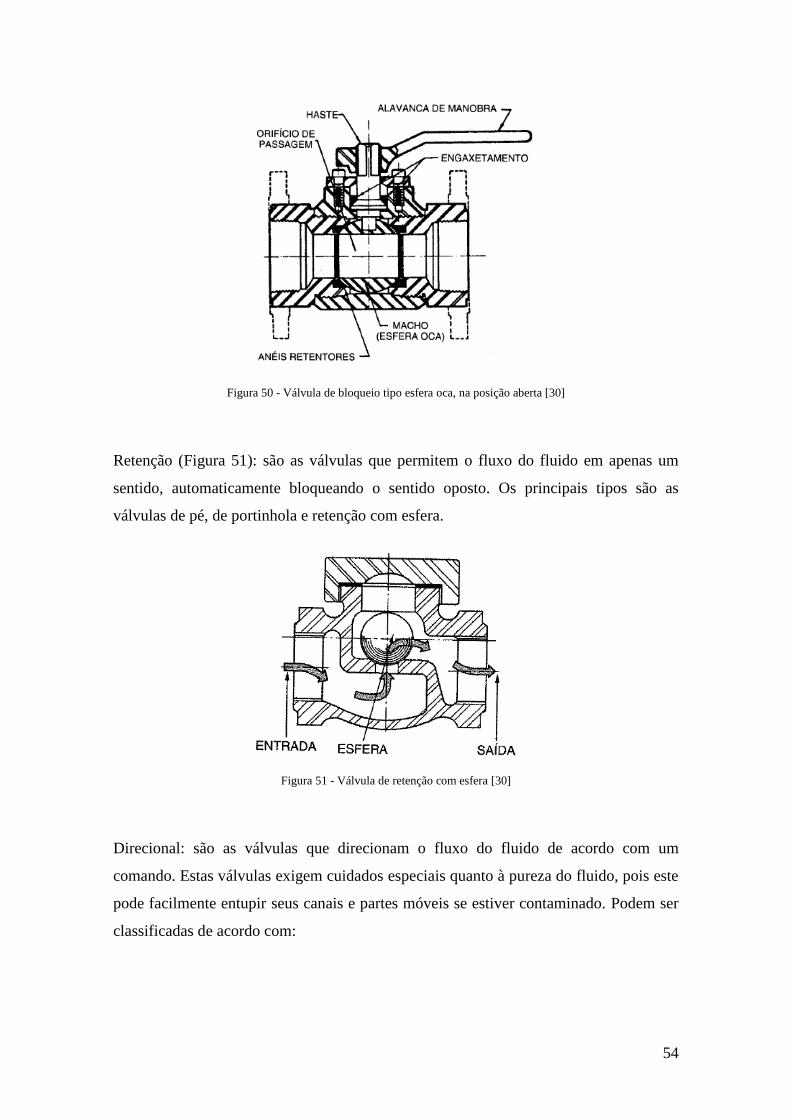
Retenção (Figura 51): são as válvulas que permitem o fluxo do fluido em apenas um
sentido, automaticamente bloqueando o sentido oposto. Os principais tipos são as
válvulas de pé, de portinhola e retenção com esfera.
Figura 51 - Válvula de retenção com esfera [30]
Direcional: são as válvulas que direcionam o fluxo do fluido de acordo com um
comando. Estas válvulas exigem cuidados especiais quanto à pureza do fluido, pois este
pode facilmente entupir seus canais e partes móveis se estiver contaminado. Podem ser
classificadas de acordo com:
55
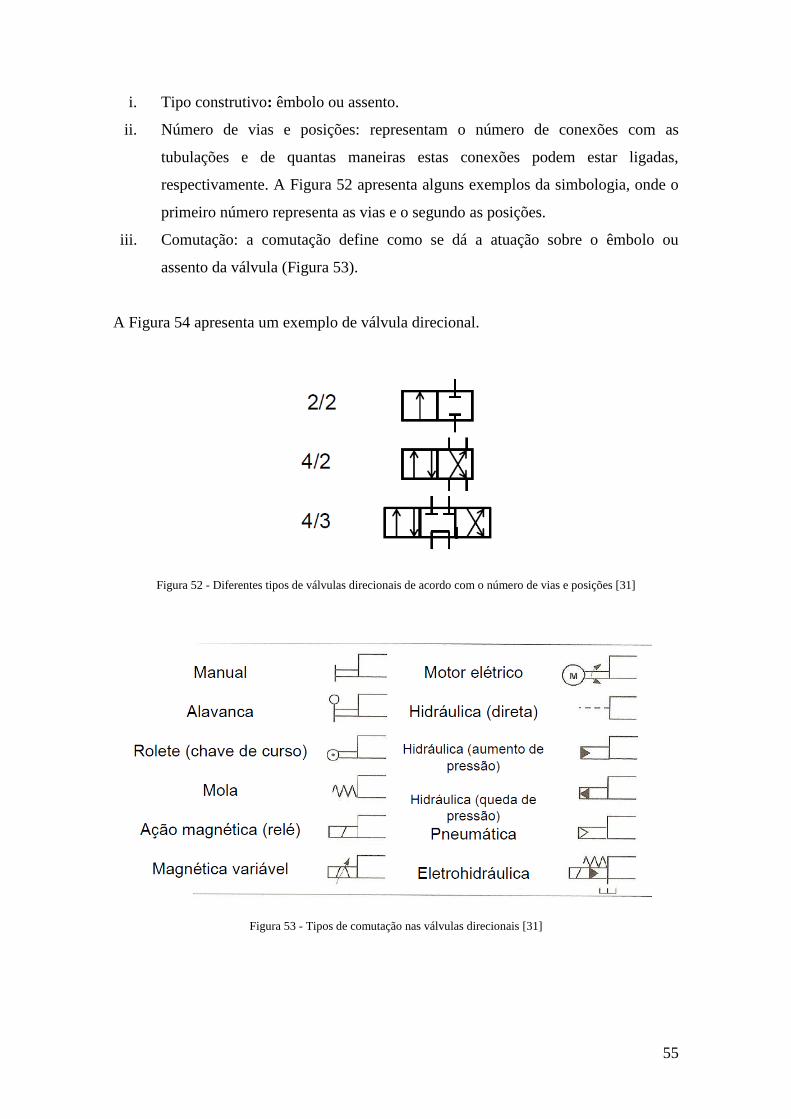
i. Tipo construtivo: êmbolo ou assento.
ii. Número de vias e posições: representam o número de conexões com as
tubulações e de quantas maneiras estas conexões podem estar ligadas,
respectivamente. A Figura 52 apresenta alguns exemplos da simbologia, onde o
primeiro número representa as vias e o segundo as posições.
iii. Comutação: a comutação define como se dá a atuação sobre o êmbolo ou
assento da válvula (Figura 53).
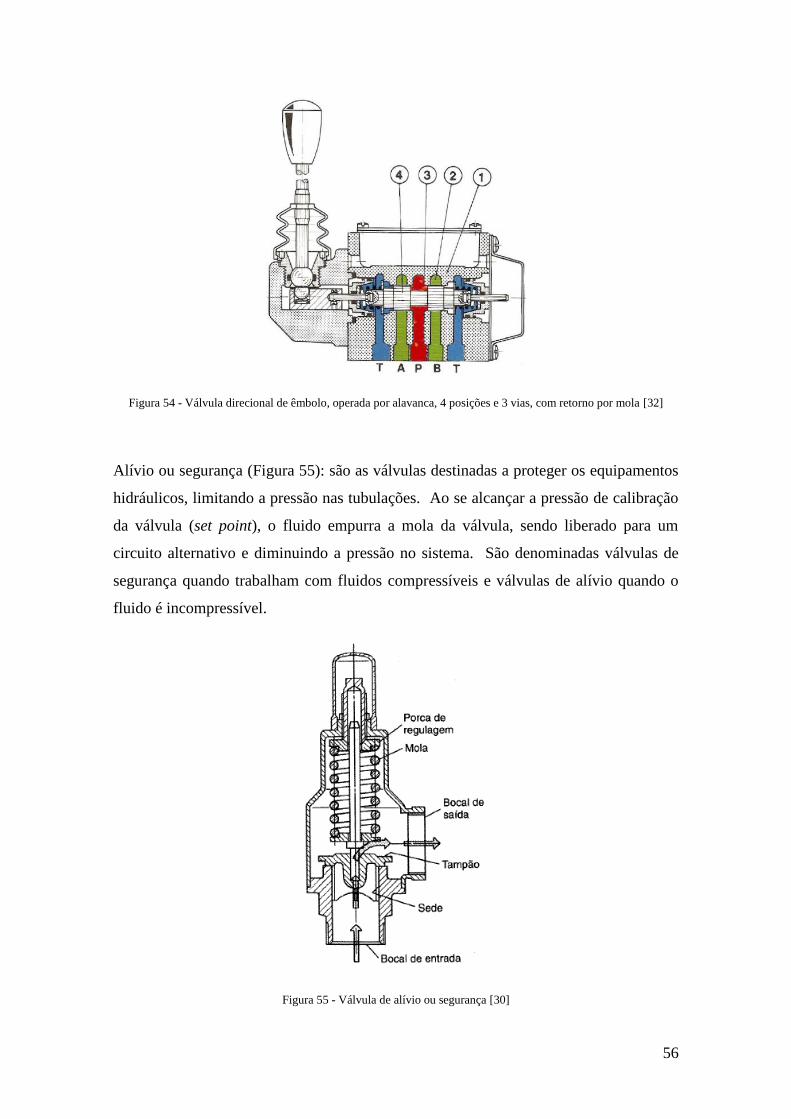
A Figura 54 apresenta um exemplo de válvula direcional.
Figura 52 - Diferentes tipos de válvulas direcionais de acordo com o número de vias e posições [31]
Figura 53 - Tipos de comutação nas válvulas direcionais [31]
56
Figura 54 - Válvula direcional de êmbolo, operada por alavanca, 4 posições e 3 vias, com retorno por mola [32]
Alívio ou segurança (Figura 55): são as válvulas destinadas a proteger os equipamentos
hidráulicos, limitando a pressão nas tubulações. Ao se alcançar a pressão de calibração
da válvula (set point), o fluido empurra a mola da válvula, sendo liberado para um
circuito alternativo e diminuindo a pressão no sistema. São denominadas válvulas de
segurança quando trabalham com fluidos compressíveis e válvulas de alívio quando o
fluido é incompressível.
Figura 55 - Válvula de alívio ou segurança [30]
57
3.2.5 Reservatório
Os reservatórios são elementos hidráulicos que cumprem várias funções, sendo a mais
evidente delas comportar o fluido e suas variações de nível. As variações podem ocorrer
por diversos motivos, como mudança de temperatura ou extensão e contração dos
cilindros de simples ação (quando o cilindro está contraído, o volume da haste desloca o
fluido, que deverá ser direcionado ao reservatório).
Outras duas funções importantes dos reservatórios são o resfriamento do fluido e a
decantação de impurezas. Pode-se obter ambos efeitos permitindo que o fluido passe
tempo suficiente no reservatório, o que pode ser melhorado pela introdução de uma
chicana. A chicana é um obstáculo que força o fluido a percorrer um longo caminho ao
seu redor, permitindo a perda de calor e a precipitação de impurezas.
3.2.6 Filtros
O filtro é um elemento que possui superfície porosa ou malha de filtragem, destinada a
capturar impurezas no fluido. É usado para proteger os equipamentos dos efeitos
abrasivos das impurezas, de forma a prolongar sua vida útil. De acordo com a
montagem, podem ser classificados em:
a) Filtros de linha de pressão: São montados na linha de pressão do sistema (após a
bomba). São montados antes de algum elemento específico que se deseja proteger.
b) Filtros de sucção: São montados na linha de sucção da bomba. Deve-se tomar
cuidado com sua seleção, pois malhas muito finas ou superfície porosa causam
grande perda de carga, podendo causar cavitação na bomba.
c) Filtros de retorno: São montados na linha de retorno, antes do reservatório.
3.3 Circuito hidráulico-elétrico
No fluxograma anexo ao projeto pode-se observar o funcionamento das partes
hidráulica e elétrica do sistema. Estas partes são descritas nas seções a seguir.
58
3.3.1 Circuito hidráulico
O equipamento terá três estados de atuação (avanço, retorno ou neutro), por isso deve-se
utilizar uma válvula direcional de três posições. Quando o solenoide S1 está energizado,
o fluido bombeado é deslocado até o lado sem haste do êmbolo (produzindo o
movimento de abertura da garra) e quando o solenoide S2 estiver energizado, o fluido
será enviado para o lado oposto (produzindo o movimento de corte). Em ambos os
casos, o fluido de retorno é enviado diretamente ao tanque. Quando nenhum solenoide
está energizado, a garra não se move e a válvula direcional envia o fluido diretamente
ao tanque.
Um acumulador foi introduzido após a bomba, conforme recomendação da Rancine
[29], de forma a proteger os componentes de eventuais choques hidráulicos. Estes
choques podem acontecer em várias ocasiões durante a operação, por exemplo, quando
o operador muda repentinamente a direção do fluxo do fluido, quando uma peça que
estava sendo separada do veículo solta-se repentinamente ou quando alguém desliga o
circuito elétrico por motivo de emergência, trazendo a válvula para a posição fechada
repentinamente.
Também foi adicionado um filtro de sucção para a proteção da bomba.
3.3.2 Circuito elétrico
O funcionamento da parte elétrica do sistema é bastante simples.
Uma chave (Ch 01) liga ou desliga o sistema e a próxima chave (Ch 02) faz a escolha
entre o circuito de funcionamento normal (acionamento através da ferramenta) ou o
circuito remoto (através dos botões na unidade de bombeamento).
No circuito normal é necessário apertar o botão de segurança (chamado “B Segurança”
no fluxograma) para habilitar o funcionamento do botão de abertura (“B Abertura”) ou
de corte (“B Corte”). Uma vez pressionados os botões, o circuito estará fechado,
carregando o solenoide correspondente. No circuito normal, uma lanterna de LED é
acionada continuamente para melhorar a visibilidade.
O circuito remoto, mencionado na Seção 2.3.6, visa permitir a operação da ferramenta à
distância em situações de risco, a partir da unidade hidráulica. Ao acionar a chave Ch02
na posição “remoto” os botões na ferramenta são desconectados do circuito, impedindo

59
comandos conflitantes, e os solenoides passam a ser comandados pelos botões “B
Abertura 02” e “B Corte 02”.
A chave Ch 01 pode ser usada como chave de emergência, pois sua desconexão abre o
circuito, fazendo a válvula direcional retornar à sua posição central (fechada).
3.4 Dimensionamento e seleção dos componentes
3.4.1 Cálculo da vazão
Para o cálculo da vazão, precisa-se estipular o tempo de abertura. Tempos de ciclo
muito curtos exigem altas vazões, aumentando a potência do motor. Por outro lado,
tempos de ciclo muito longos podem prejudicar o resgate. Portanto, procurou-se
selecionar os equipamentos de forma a obter um tempo de abertura de aproximadamente
10 segundos. Dessa forma:
𝑃𝑚á𝑥 = 350𝑏𝑎𝑟, 𝑑𝑒𝑚𝑏𝑜𝑙𝑜 = 80 𝑚𝑚 → 𝐴𝑒𝑚𝑏𝑜𝑙𝑜 =𝜋 ∙ 802
4= 5026𝑚𝑚2
𝐶𝑢𝑟𝑠𝑜 = 63𝑚𝑚 → 𝑣ℎ𝑎𝑠𝑡𝑒 =𝑐𝑢𝑟𝑠𝑜
𝑡𝑒𝑚𝑝𝑜 𝑑𝑒 𝑎𝑏𝑒𝑟𝑡𝑢𝑟𝑎=
63𝑚𝑚
10𝑠= 6,3 𝑚𝑚/𝑠
𝑄 = 𝐴𝑒𝑚𝑏𝑜𝑙𝑜 ∙ 𝑣ℎ𝑎𝑠𝑡𝑒 = 5026𝑚𝑚2 ∙ 6,3𝑚𝑚
𝑠= 31664
𝑚𝑚3
𝑠≅ 1,9
𝑙
𝑚𝑖𝑛
No corte, o fluido irá preencher apenas o volume existente entre o cilindro e o êmbolo, causando um retorno mais
causando um retorno mais rápido. Dos dados da
Tabela 3:
𝑄 = 𝐴𝑒𝑚𝑏𝑜𝑙𝑜 ∙ 𝑣ℎ𝑎𝑠𝑡𝑒 = 𝐴3 ∙ 𝑣ℎ𝑎𝑠𝑡𝑒(𝑐𝑜𝑟𝑡𝑒)
𝑣ℎ𝑎𝑠𝑡𝑒(𝑐𝑜𝑟𝑡𝑒) =𝐴𝑒𝑚𝑏𝑜𝑙𝑜
𝐴3∙ 𝑣ℎ𝑎𝑠𝑡𝑒 = 1,96 ∙ 6,3 𝑚𝑚/𝑠 = 12,3𝑚𝑚/𝑠
3.4.2 Potência de bombeamento
A potência requerida pela bomba é calculada por:

60
𝑃𝑟𝑒𝑞 = 𝑄 ∙ 𝑃 = 3,1 ∙ 10−5𝑚3
𝑠∙ 35𝑀𝑃𝑎 = 1085 𝑊 = 1,45𝐻𝑃
Considerando uma eficiência geral de transmissão e bombeamento de 80%, pode-se
estimar a potência do motor:
𝑃𝑟𝑒𝑞 = 𝑃𝑚𝑜𝑡𝑜𝑟 ∙ 𝜂 → 𝑃𝑚𝑜𝑡𝑜𝑟 =𝑃𝑟𝑒𝑞
𝜂=
1,45 𝐻𝑃
0,8≅ 1,8 𝐻𝑃
3.4.3 Perda de carga
Devido à baixa vazão, deve-se usar a menor tubulação suportada pelos catálogos de
equipamentos da Bosch, que é de 1/4". Além disso, essa escolha têm as vantagens de ser
mais compacta e leve. Logo, para o processo de abertura da garra:
𝑑 =1
4" = 6,35𝑚𝑚 → 𝐴𝑡𝑢𝑏 = 31,7𝑚𝑚2
𝑄 = 𝐴𝑡𝑢𝑏 ∙ 𝑉𝑓𝑙𝑢𝑖𝑑𝑜 → 𝑉𝑓𝑙𝑢𝑖𝑑𝑜 =𝑄
𝐴𝑡𝑢𝑏=
31664𝑚𝑚3
𝑠31,7𝑚𝑚2
≅ 1𝑚
𝑠
Pelas equações de Reynolds, considerando X = 90 (mangueiras flexíveis [29]):
𝑅𝑒 = 10 𝑣𝐷
𝜗= 10
100𝑐𝑚𝑠 ∙ 6,35 𝑚𝑚
15 𝑐𝑆𝑡= 423,3 → 𝑓 =
𝑋
𝑅𝑒=
90
423,3= 0,21
Para a perda de carga, foi considerada uma mangueira com 8m de comprimento (8m
para avanço e 8m para retorno):
∆𝑃 = 𝑓𝐿
𝐷
𝑢2𝛾
9266
1
215915= 0,21
800𝑐𝑚
0,635𝑐𝑚
(100𝑐𝑚𝑠 )
2
∙ 880𝑘𝑔𝑚3
9266 ∗ 215915= 1,2 𝑏𝑎𝑟
Ao entrar na câmara sem haste do pistão, o fluido empurra o êmbolo, que por sua vez
empurra o fluido na câmara oposta. Este fluido retorna para o reservatório com uma
vazão Qinduzida. Logo, aplicando procedimento de cálculo similar para linha de retorno:
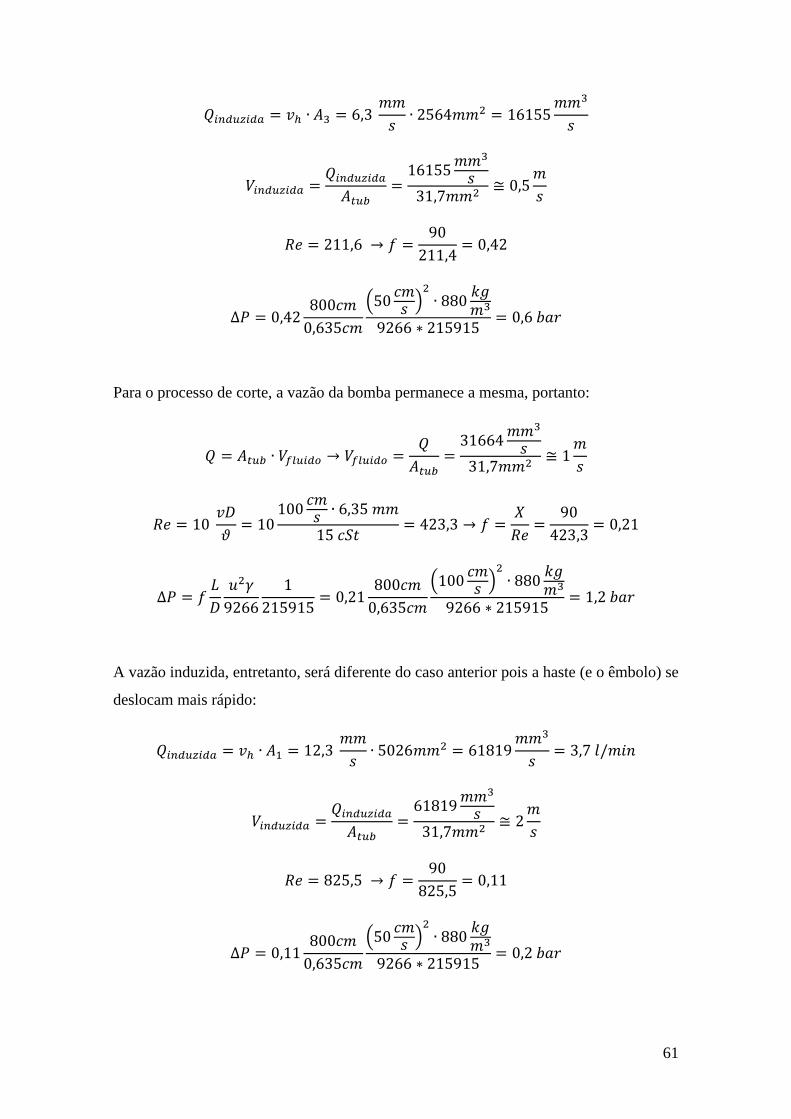
61
𝑄𝑖𝑛𝑑𝑢𝑧𝑖𝑑𝑎 = 𝑣ℎ ∙ 𝐴3 = 6,3 𝑚𝑚
𝑠∙ 2564𝑚𝑚2 = 16155
𝑚𝑚3
𝑠
𝑉𝑖𝑛𝑑𝑢𝑧𝑖𝑑𝑎 =𝑄𝑖𝑛𝑑𝑢𝑧𝑖𝑑𝑎
𝐴𝑡𝑢𝑏=
16155𝑚𝑚3
𝑠31,7𝑚𝑚2
≅ 0,5𝑚
𝑠
𝑅𝑒 = 211,6 → 𝑓 =90
211,4= 0,42
∆𝑃 = 0,42800𝑐𝑚
0,635𝑐𝑚
(50𝑐𝑚𝑠 )
2
∙ 880𝑘𝑔𝑚3
9266 ∗ 215915= 0,6 𝑏𝑎𝑟
Para o processo de corte, a vazão da bomba permanece a mesma, portanto:
𝑄 = 𝐴𝑡𝑢𝑏 ∙ 𝑉𝑓𝑙𝑢𝑖𝑑𝑜 → 𝑉𝑓𝑙𝑢𝑖𝑑𝑜 =𝑄
𝐴𝑡𝑢𝑏=
31664𝑚𝑚3
𝑠31,7𝑚𝑚2
≅ 1𝑚
𝑠
𝑅𝑒 = 10 𝑣𝐷
𝜗= 10
100𝑐𝑚𝑠 ∙ 6,35 𝑚𝑚
15 𝑐𝑆𝑡= 423,3 → 𝑓 =
𝑋
𝑅𝑒=
90
423,3= 0,21
∆𝑃 = 𝑓𝐿
𝐷
𝑢2𝛾
9266
1
215915= 0,21
800𝑐𝑚
0,635𝑐𝑚
(100𝑐𝑚𝑠 )
2
∙ 880𝑘𝑔𝑚3
9266 ∗ 215915= 1,2 𝑏𝑎𝑟
A vazão induzida, entretanto, será diferente do caso anterior pois a haste (e o êmbolo) se
deslocam mais rápido:
𝑄𝑖𝑛𝑑𝑢𝑧𝑖𝑑𝑎 = 𝑣ℎ ∙ 𝐴1 = 12,3 𝑚𝑚
𝑠∙ 5026𝑚𝑚2 = 61819
𝑚𝑚3
𝑠= 3,7 𝑙/𝑚𝑖𝑛
𝑉𝑖𝑛𝑑𝑢𝑧𝑖𝑑𝑎 =𝑄𝑖𝑛𝑑𝑢𝑧𝑖𝑑𝑎
𝐴𝑡𝑢𝑏=
61819𝑚𝑚3
𝑠31,7𝑚𝑚2
≅ 2𝑚
𝑠
𝑅𝑒 = 825,5 → 𝑓 =90
825,5= 0,11
∆𝑃 = 0,11800𝑐𝑚
0,635𝑐𝑚
(50𝑐𝑚𝑠 )
2
∙ 880𝑘𝑔𝑚3
9266 ∗ 215915= 0,2 𝑏𝑎𝑟
62
A perda de carga dos demais componentes será determinada nas Seções 3.4.6 e 3.4.9.
3.4.4 Escolha do motor
Para este projeto foi escolhido um motor a gasolina, de quatro tempos. Por se tratar de
uma aplicação móvel, a utilização de motores elétricos exigiria o uso de baterias, que
têm duração limitada, além da necessidade do uso de um motor DC, de alto custo ou
AC com inversor de corrente, solução de peso elevado. Foi dada preferência ao motor
de 4 tempos por sua maior eficiência e disponibilidade no mercado. Consultando o
catálogo da Honda [33], foi escolhido o motor GXH 50, apresentado na Figura 56.
Figura 56 - Motor GHX 50 [33]
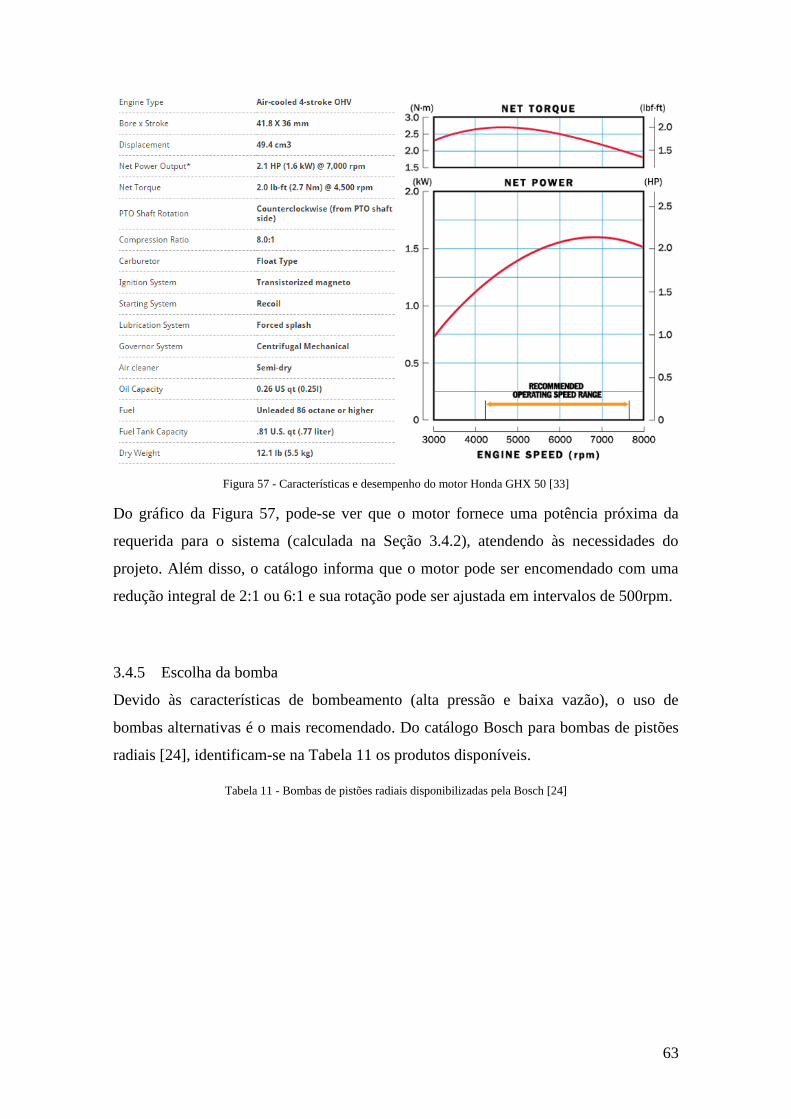
63
Figura 57 - Características e desempenho do motor Honda GHX 50 [33]
Do gráfico da Figura 57, pode-se ver que o motor fornece uma potência próxima da
requerida para o sistema (calculada na Seção 3.4.2), atendendo às necessidades do
projeto. Além disso, o catálogo informa que o motor pode ser encomendado com uma
redução integral de 2:1 ou 6:1 e sua rotação pode ser ajustada em intervalos de 500rpm.
3.4.5 Escolha da bomba
Devido às características de bombeamento (alta pressão e baixa vazão), o uso de
bombas alternativas é o mais recomendado. Do catálogo Bosch para bombas de pistões
radiais [24], identificam-se na Tabela 11 os produtos disponíveis.
Tabela 11 - Bombas de pistões radiais disponibilizadas pela Bosch [24]

64
Devido às pressões de operação (350 bar), podem-se eliminar as bombas de tamanho
nominal 1,60 e 2,00 cm3. Para as bombas restantes, têm-se as faixas de rotação,
conforme Tabela 12.
Tabela 12 - Faixas de rotação [24]
Para a relação entre vazão, tamanho nominal e rotação, usa-se a fórmula:
𝑄 [𝑐𝑚3
𝑚𝑖𝑛] = 𝑉 [
𝑐𝑚3
𝑟𝑜𝑡] ∙ 𝑛[𝑟𝑝𝑚]
Resolvendo esta equação para V, em diferentes velocidades de rotação do motor com
uma redução de 2:1, e considerando a vazão de 1,9 l/min calculada anteriormente,
obtêm-se os resultados da Tabela 13.
Tabela 13 - Tamanho nominal para diferentes velocidades de rotação
n (rpm) V (cm3/rot)
2250 0,84
2500 0,76
2750 0,69
3000 0,63
3250 0,58
3500 0,54
3750 0,51
A velocidade de 3000 rpm está adequada para o uso da bomba de tamanho nominal
0,63cm3/rot, além de estar dentro de sua faixa de rotação. Ainda é necessário fazer o
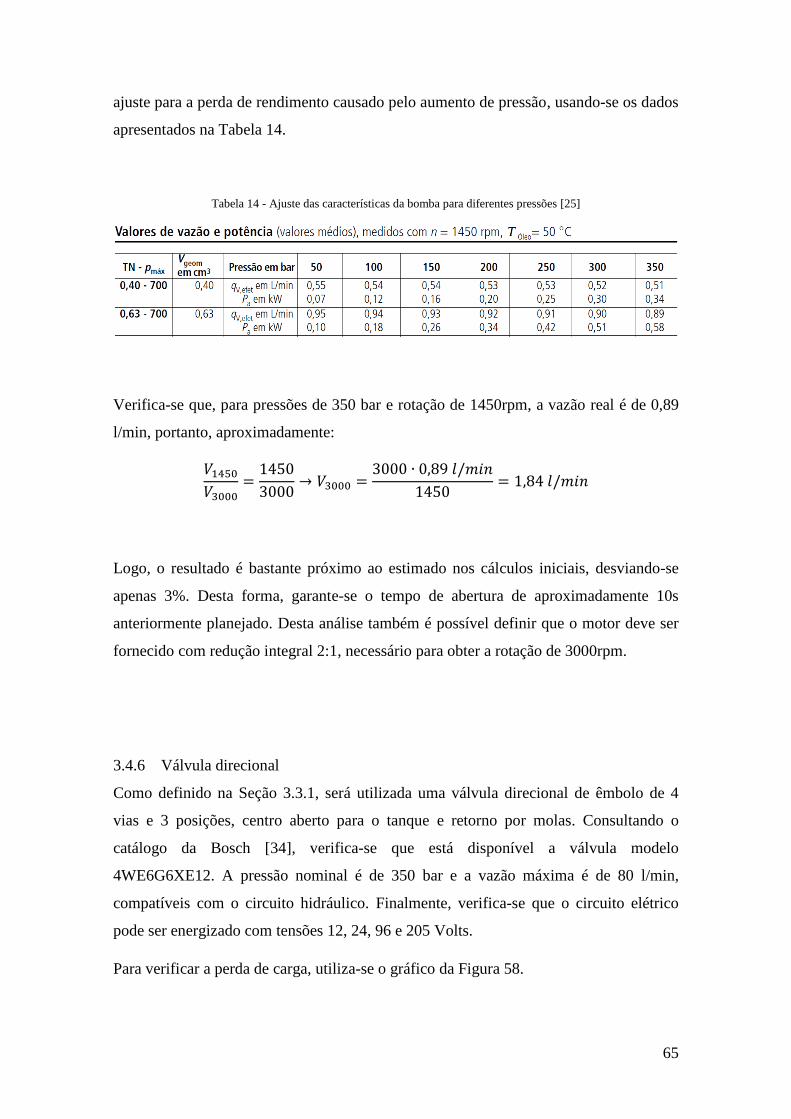
65
ajuste para a perda de rendimento causado pelo aumento de pressão, usando-se os dados
apresentados na Tabela 14.
Tabela 14 - Ajuste das características da bomba para diferentes pressões [25]
Verifica-se que, para pressões de 350 bar e rotação de 1450rpm, a vazão real é de 0,89
l/min, portanto, aproximadamente:
𝑉1450
𝑉3000=
1450
3000→ 𝑉3000 =
3000 ∙ 0,89 𝑙/𝑚𝑖𝑛
1450= 1,84 𝑙/𝑚𝑖𝑛
Logo, o resultado é bastante próximo ao estimado nos cálculos iniciais, desviando-se
apenas 3%. Desta forma, garante-se o tempo de abertura de aproximadamente 10s
anteriormente planejado. Desta análise também é possível definir que o motor deve ser
fornecido com redução integral 2:1, necessário para obter a rotação de 3000rpm.
3.4.6 Válvula direcional
Como definido na Seção 3.3.1, será utilizada uma válvula direcional de êmbolo de 4
vias e 3 posições, centro aberto para o tanque e retorno por molas. Consultando o
catálogo da Bosch [34], verifica-se que está disponível a válvula modelo
4WE6G6XE12. A pressão nominal é de 350 bar e a vazão máxima é de 80 l/min,
compatíveis com o circuito hidráulico. Finalmente, verifica-se que o circuito elétrico
pode ser energizado com tensões 12, 24, 96 e 205 Volts.
Para verificar a perda de carga, utiliza-se o gráfico da Figura 58.
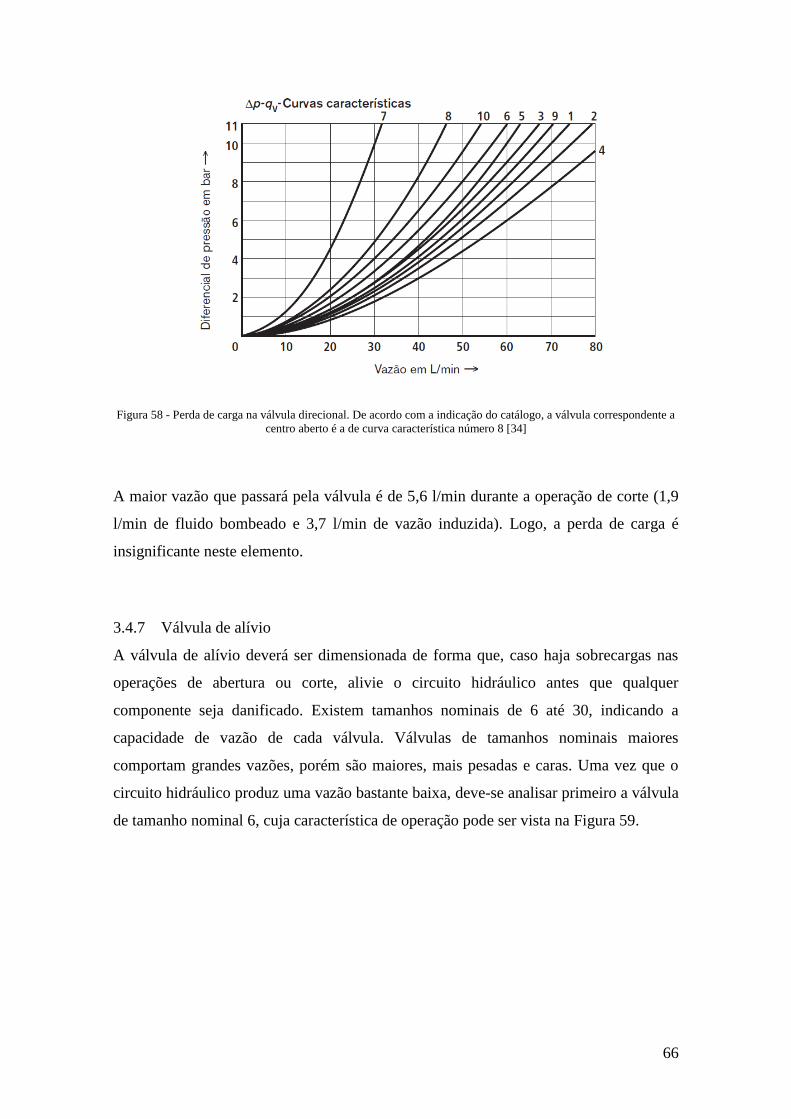
66
Figura 58 - Perda de carga na válvula direcional. De acordo com a indicação do catálogo, a válvula correspondente a
centro aberto é a de curva característica número 8 [34]
A maior vazão que passará pela válvula é de 5,6 l/min durante a operação de corte (1,9
l/min de fluido bombeado e 3,7 l/min de vazão induzida). Logo, a perda de carga é
insignificante neste elemento.
3.4.7 Válvula de alívio
A válvula de alívio deverá ser dimensionada de forma que, caso haja sobrecargas nas
operações de abertura ou corte, alivie o circuito hidráulico antes que qualquer
componente seja danificado. Existem tamanhos nominais de 6 até 30, indicando a
capacidade de vazão de cada válvula. Válvulas de tamanhos nominais maiores
comportam grandes vazões, porém são maiores, mais pesadas e caras. Uma vez que o
circuito hidráulico produz uma vazão bastante baixa, deve-se analisar primeiro a válvula
de tamanho nominal 6, cuja característica de operação pode ser vista na Figura 59.
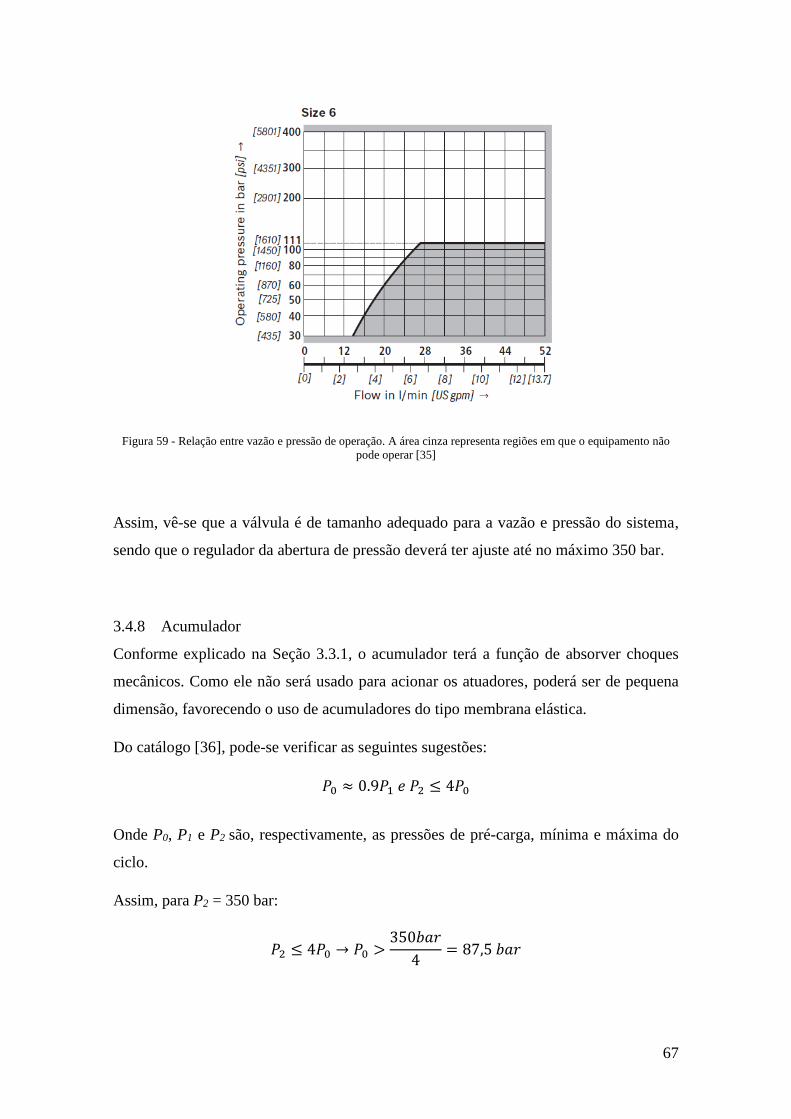
67
Figura 59 - Relação entre vazão e pressão de operação. A área cinza representa regiões em que o equipamento não
pode operar [35]
Assim, vê-se que a válvula é de tamanho adequado para a vazão e pressão do sistema,
sendo que o regulador da abertura de pressão deverá ter ajuste até no máximo 350 bar.
3.4.8 Acumulador
Conforme explicado na Seção 3.3.1, o acumulador terá a função de absorver choques
mecânicos. Como ele não será usado para acionar os atuadores, poderá ser de pequena
dimensão, favorecendo o uso de acumuladores do tipo membrana elástica.
Do catálogo [36], pode-se verificar as seguintes sugestões:
𝑃0 ≈ 0.9𝑃1 𝑒 𝑃2 ≤ 4𝑃0
Onde P0, P1 e P2 são, respectivamente, as pressões de pré-carga, mínima e máxima do
ciclo.
Assim, para P2 = 350 bar:
𝑃2 ≤ 4𝑃0 → 𝑃0 >350𝑏𝑎𝑟
4= 87,5 𝑏𝑎𝑟
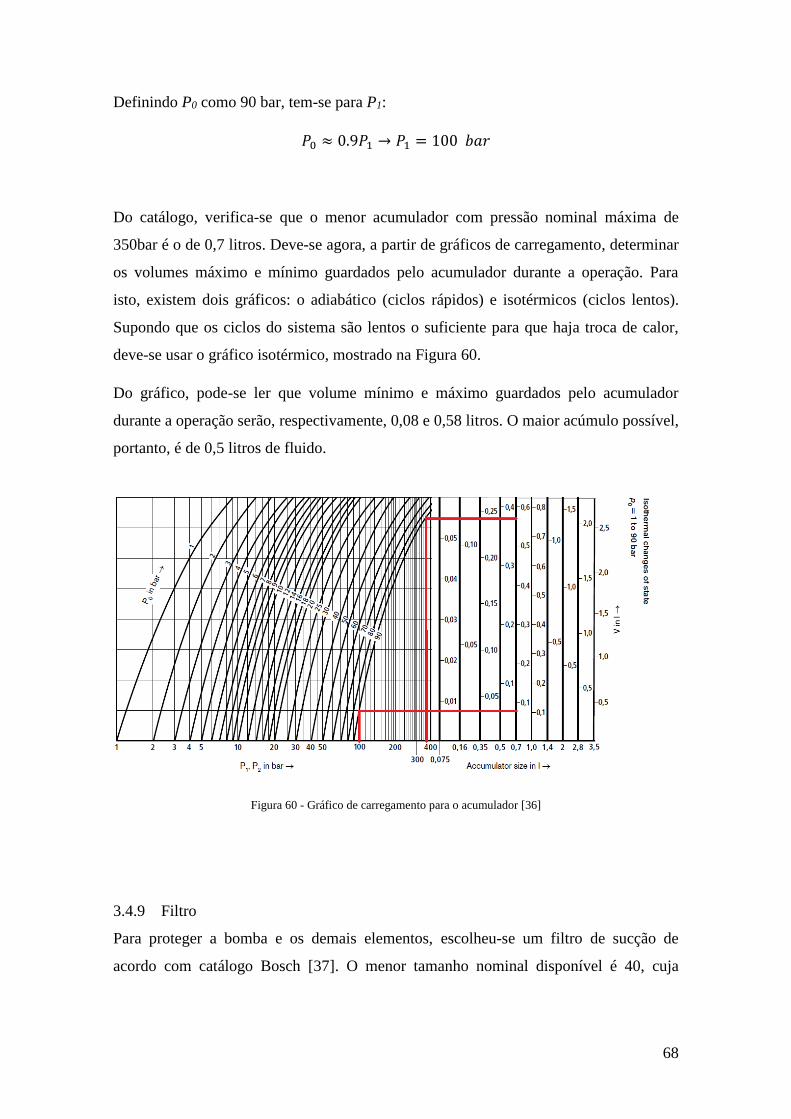
68
Definindo P0 como 90 bar, tem-se para P1:
𝑃0 ≈ 0.9𝑃1 → 𝑃1 = 100 𝑏𝑎𝑟
Do catálogo, verifica-se que o menor acumulador com pressão nominal máxima de
350bar é o de 0,7 litros. Deve-se agora, a partir de gráficos de carregamento, determinar
os volumes máximo e mínimo guardados pelo acumulador durante a operação. Para
isto, existem dois gráficos: o adiabático (ciclos rápidos) e isotérmicos (ciclos lentos).
Supondo que os ciclos do sistema são lentos o suficiente para que haja troca de calor,
deve-se usar o gráfico isotérmico, mostrado na Figura 60.
Do gráfico, pode-se ler que volume mínimo e máximo guardados pelo acumulador
durante a operação serão, respectivamente, 0,08 e 0,58 litros. O maior acúmulo possível,
portanto, é de 0,5 litros de fluido.
Figura 60 - Gráfico de carregamento para o acumulador [36]
3.4.9 Filtro
Para proteger a bomba e os demais elementos, escolheu-se um filtro de sucção de
acordo com catálogo Bosch [37]. O menor tamanho nominal disponível é 40, cuja
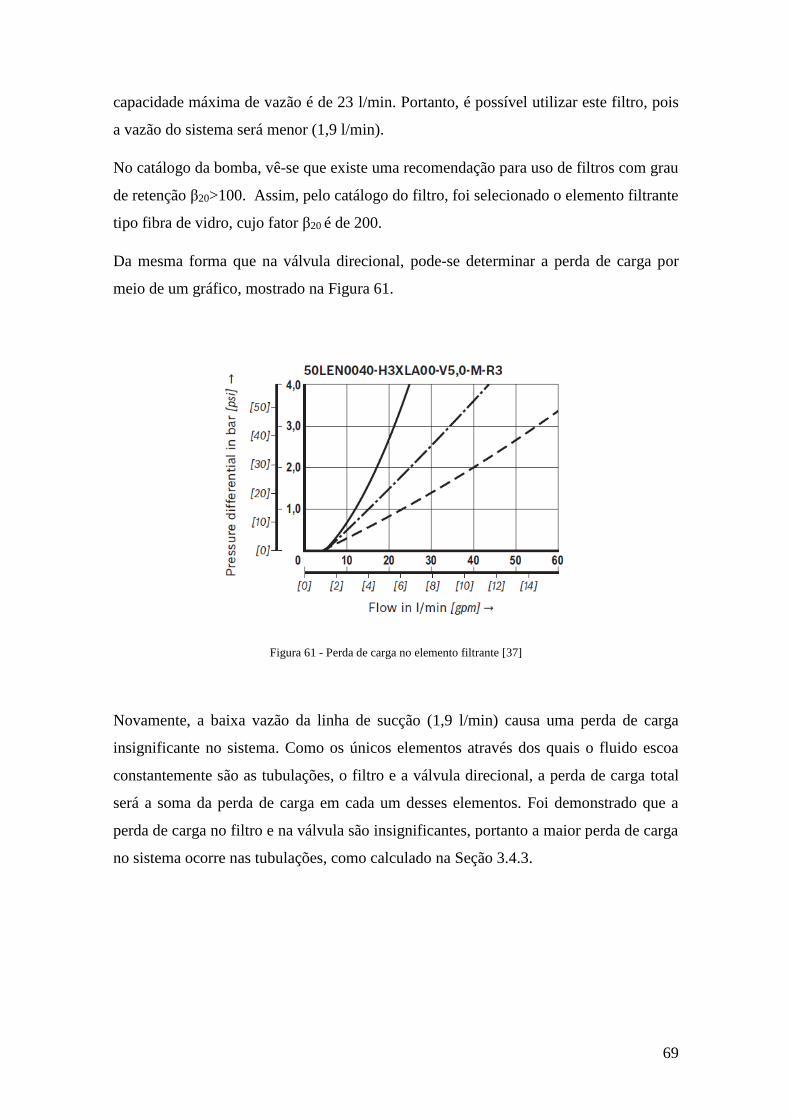
69
capacidade máxima de vazão é de 23 l/min. Portanto, é possível utilizar este filtro, pois
a vazão do sistema será menor (1,9 l/min).
No catálogo da bomba, vê-se que existe uma recomendação para uso de filtros com grau
de retenção β20>100. Assim, pelo catálogo do filtro, foi selecionado o elemento filtrante
tipo fibra de vidro, cujo fator β20 é de 200.
Da mesma forma que na válvula direcional, pode-se determinar a perda de carga por
meio de um gráfico, mostrado na Figura 61.
Figura 61 - Perda de carga no elemento filtrante [37]
Novamente, a baixa vazão da linha de sucção (1,9 l/min) causa uma perda de carga
insignificante no sistema. Como os únicos elementos através dos quais o fluido escoa
constantemente são as tubulações, o filtro e a válvula direcional, a perda de carga total
será a soma da perda de carga em cada um desses elementos. Foi demonstrado que a
perda de carga no filtro e na válvula são insignificantes, portanto a maior perda de carga
no sistema ocorre nas tubulações, como calculado na Seção 3.4.3.

70
3.4.10 Reservatório
Para o reservatório, deve-se observar a recomendação da Rancine [29], em que o
reservatório deverá ter capacidade para armazenar o volume de óleo de todos os
elementos mais o equivalente a três minutos de vazão, ou seja:
𝑉𝑟 = 𝑉𝑐𝑖𝑙𝑖𝑛𝑑𝑟𝑜 + 𝑉𝑎𝑐𝑢𝑚𝑢𝑙𝑎𝑑𝑜𝑟 + 𝑉𝑚𝑎𝑛𝑔𝑢𝑒𝑖𝑟𝑎𝑠 + 3[𝑚𝑖𝑛] ∙ 𝑄𝑏𝑜𝑚𝑏𝑎 [𝑙
𝑚𝑖𝑛]
𝑉𝑟 = (𝜋802
4∙ 63) 𝑚𝑚3 + 0,5 𝑙 + 2 ∙ (
𝜋6,352
4∙ 8000) 𝑚𝑚3 + 3[𝑚𝑖𝑛] ∙ 1,84 [
𝑙
𝑚𝑖𝑛]
𝑉𝑟 = 6,5 𝑙
Entretanto, como o próprio texto afirma, essa recomendação é bastante flexível e o
tamanho ideal depende de vários outros fatores como grau de impureza do fluido,
temperatura, etc. Para aplicações móveis, este volume poderá ser relaxado em favor de
ganhos em peso e volume. Por esses motivos e uma vez que está sendo utilizado um
filtro com mais que o dobro da capacidade mínima determinada pelo fabricante da
bomba, foi determinado o uso de um reservatório de 2 litros.
3.4.11 Bateria
Para o funcionamento do sistema elétrico foi selecionada uma bateria recarregável
comum. Do catálogo da Panasonic [38], foi escolhida a bateria LC-RA1212P(a), de 12V
e 12Ah. Do catálogo da válvula direcional, vê-se que seu consumo é de 30W. A duração
da bateria será portanto:
𝑃 = 𝑈𝐼 → 𝐼 =𝑃
𝑈=
30𝑊
12𝑉= 2,5𝐴
𝑄[𝐴ℎ] = 𝐼[𝐴] ∙ 𝑡[ℎ] → 𝑡[ℎ] =12𝐴ℎ
2,5𝐴= 4,8ℎ
O sistema elétrico pode operar, portanto, por quase 5 horas continuamente. Entretanto, o
consumo ocorre somente quando os solenoides estão sendo energizados, o que significa
que a duração real da bateria pode ser muito superior a este tempo. As lâmpadas de
LED não foram incluídas nesse cálculo pois seu consumo geralmente não supera 1W
nos modelos mais comuns, tendo pouco impacto na duração da bateria.
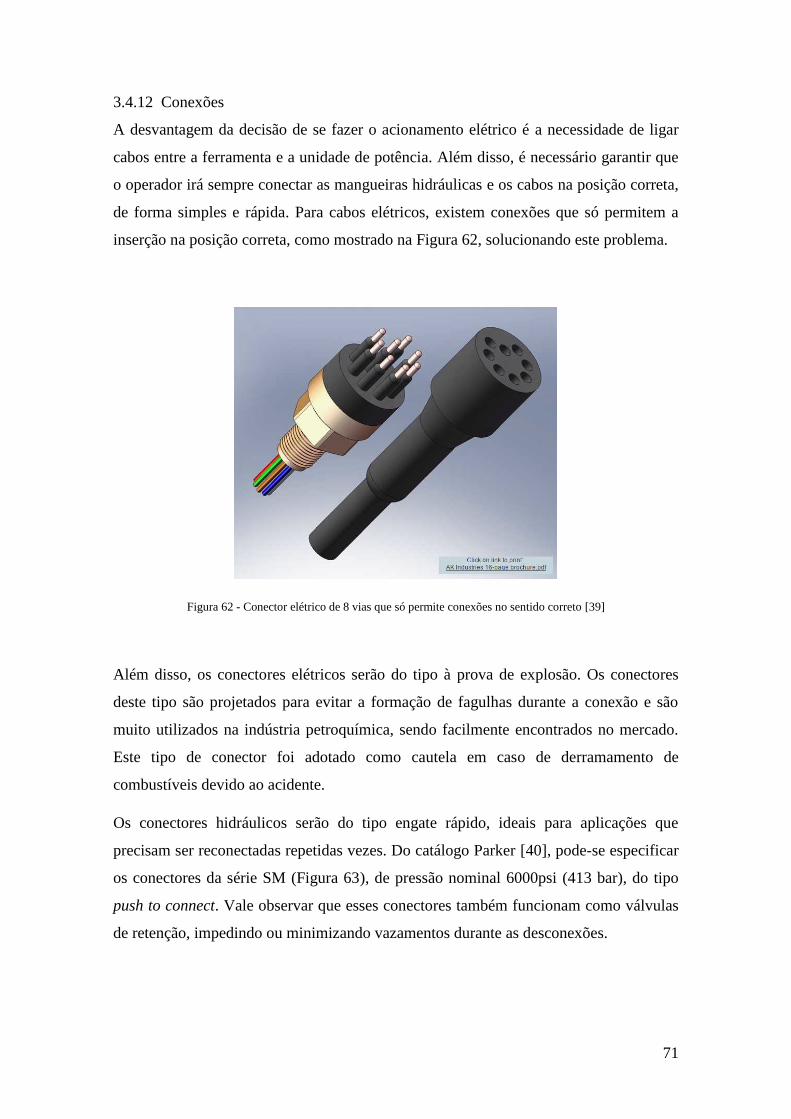
71
3.4.12 Conexões
A desvantagem da decisão de se fazer o acionamento elétrico é a necessidade de ligar
cabos entre a ferramenta e a unidade de potência. Além disso, é necessário garantir que
o operador irá sempre conectar as mangueiras hidráulicas e os cabos na posição correta,
de forma simples e rápida. Para cabos elétricos, existem conexões que só permitem a
inserção na posição correta, como mostrado na Figura 62, solucionando este problema.
Figura 62 - Conector elétrico de 8 vias que só permite conexões no sentido correto [39]
Além disso, os conectores elétricos serão do tipo à prova de explosão. Os conectores
deste tipo são projetados para evitar a formação de fagulhas durante a conexão e são
muito utilizados na indústria petroquímica, sendo facilmente encontrados no mercado.
Este tipo de conector foi adotado como cautela em caso de derramamento de
combustíveis devido ao acidente.
Os conectores hidráulicos serão do tipo engate rápido, ideais para aplicações que
precisam ser reconectadas repetidas vezes. Do catálogo Parker [40], pode-se especificar
os conectores da série SM (Figura 63), de pressão nominal 6000psi (413 bar), do tipo
push to connect. Vale observar que esses conectores também funcionam como válvulas
de retenção, impedindo ou minimizando vazamentos durante as desconexões.

72
Figura 63 - Conector de engate rápido série SM [40]
Finalmente, as conexões (elétricas e hidráulicas) deverão ser bem fixadas de forma que
puxões acidentais (por exemplo, alguém tropeçando na linha) não as desfaçam. Assim,
foi criado um adaptador assimétrico (Figura 64), permitindo apenas conexões na
posição correta. O adaptador contém travas que impedem sua desconexão acidental.
Também é provido de capa plástica para proteção das conexões quando os
equipamentos não estiverem em uso.
Figura 64 - Adaptador assimétrico
3.4.13 Proteção e tampa
Para a proteção dos elementos, foi projetada uma caixa, feita de chapa metálica dobrada.
Esta caixa envolve completamente todos os elementos, ficando de fora apenas os botões
de comando, o conector para cabos e mangueiras hidráulicas, bem como a exaustão e
cordão de partida do motor.

73
A caixa possui uma tampa para acesso e manutenção dos componentes, pés para sua
colocação no solo, alça para carregamento e olhal de içamento.
Devido ao uso em ambientes externos, a caixa deverá ser feita de aço carbono pintado
com tinta anticorrosiva.
74
4 Conclusão
Analisando os resultados do projeto, verifica-se que o objetivo traçado de se usar ao
máximo equipamentos e partes disponíveis na indústria foi alcançado. Por exemplo,
todos os elementos hidráulicos são de uso frequente na indústria e oriundos de catálogo,
podendo facilmente ser substituídos em caso de falha ou quebra. A Bosch foi escolhida
como fornecedor principal por se tratar de uma empresa conhecida e prestigiada.
Entretanto, qualquer componente hidráulico poderia ser substituído por um similar de
um outro fornecedor, caso fosse vantajoso, requerendo pouca ou nenhuma modificação
no projeto. Caso tivessem sido utilizados equipamentos especiais, como os cilindros
usados nos equipamentos disponíveis no mercado, essa mesma flexibilidade em relação
ao fornecimento dos componentes não seria possível. A mesma observação é válida
para os outros componentes, como o motor elétrico e a bateria.
Ademais, pode-se destacar que o projeto apresentou preocupações com a ergonomia
(exemplificado pela manopla de pegada, com formato confortável à mão), novos
elementos de segurança, como o botão de segurança que impede o acionamento
acidental do equipamento e a capacidade de acionamento remoto, e o uso de materiais
comuns na indústria como alumínio, aço carbono e aço rápido, contribuindo para
redução no custo de fabricação.
Do ponto de vista crítico, algumas decisões de projeto apresentam certos pontos
negativos. Por exemplo, os cilindros industriais não foram projetados para aplicações
portáteis e portanto, como o peso não é um quesito tão importante em sua estrutura, seu
fator de segurança é obtido pelo emprego de paredes espessas. Além disso, a fim de
acomodar diversos dispositivos (como amortecedores de fim de curso), podem ser
bastante longos em relação ao comprimento de curso. Sendo assim, o cilindro utilizado
neste projeto tem o curso de apenas 63mm, mas o comprimento total do cilindro é de
349mm. Um cilindro proprietário poderia trazer grandes vantagens, como o uso de
materiais mais resistentes e comprimento reduzido, fornecendo ganhos em volume e em
peso. Essa decisão, por sua vez, negaria as vantagens de custo e flexibilidade
mencionadas anteriormente.
Acredita-se que, no âmbito da engenharia mecânica, o projeto foi bastante completo,
pois envolveu diversas áreas como mecânica dos sólidos, mecânica dos fluidos,
hidráulica de potência, projeto de máquinas (e, em consequência, conceitos de
75
fabricação e manutenção) e ciências dos materiais. O projeto foi desafiador no sentido
de que trouxe como tema um tipo de ferramenta pouco estudada e para a qual existe
pouca literatura específica. Além disso, o projeto de um equipamento portátil traz outros
tipos de desafios, como por exemplo, tentar fazer uma montagem compacta dos
elementos.
Como possível projeto futuro, baseado no trabalho aqui apresentado, sugere-se a
pesquisa sobre novos materiais para a fabricação de cilindros hidráulicos, como ligas de
aço mais resistentes, alumínio e materiais compósitos. Caso o uso desses materiais fosse
mais comum (e barato), certamente haveria uma grande gama de aplicações em
equipamentos portáteis.
76
5 Referências Bibliográficas
1. DPVAT. Boletim Estatístico. [S.l.]. 2014.
2. ORGANIZAÇÃO MUNDIAL DA SAÚDE. Global status report on road safety.
Luxembourg. 2013. (978 92 4 156456 4).
3. SWEDISH CIVIL CONTINGENCIES AGENCY. Extrication from Cars during.
Stockholm. 2011. (ISBN 978-91-7383-165-9).
4. HURST PERFORMANCE. Why Hurst. Hurst Corporation, 2015. Disponivel em:
<http://www.jawsoflife.com/en/why-hurst>. Acesso em: 13 Outubro 2015.
5. HOLMATRO. Vehicle Rescue. Holmatro, 2015. Disponivel em:
<http://www.holmatro.com/en/vehicle-rescue/productcategorie/1-vehicle-
rescue.html>. Acesso em: 20 Outubro 2015.
6. PENTON. Cylinders. Penton Hydraulics and Pneumatics, 01 Janeiro 2012.
Disponivel em: <http://hydraulicspneumatics.com/>. Acesso em: 2015 Outubro 24.
7. BOSCH REXROTH. Hydraulic cylinder, mill type. Lohr am Main: [s.n.], 2015.
8. GROOVER, M. P. Fundamental of Modern Manufacturing. 4. ed. Hoboken, NJ:
JOHN WILEY & SONS, INC., 2010. ISBN 978-0470-467002.
9. SAE INTERNATIONAL. Focus B-pillar 'tailor rolled' to 8 different thicknesses.
Articles SAE, 24 Fevereiro 2010. Disponivel em: <http://articles.sae.org/7695/>.
Acesso em: 25 Outubro 2015.
10. BLACK, J.; KOHSER, R. Materials & Processes in Manufacturing. 10. ed. [S.l.]:
John Wiley & Sons, 2008. ISBN 13-978-0470-05512-0.
11. AZO MATERIALS. W1 Tool Steel - Water-Hardening Tool Steel (UNS T72301).
AZoM.com. Disponivel em: <http://www.azom.com/article.aspx?ArticleID=9114>.
Acesso em: 25 Outubro 2015.
12. BUDYNAS, ; NISBETT,. Shigley’s Mechanical Engineering Design. 9. ed. Nova
Iorque: McGraw-Hill, 2011. ISBN 978–0–07–352928–8.
77
13. ENGINEERING ARCHIVES. Single and double shear. Engineering Archives,
2008. Disponivel em: <http://www.engineeringarchives.com/>. Acesso em: 29
Outubro 2015.
14. SERMAP. MANILHA RETA GALVANIZADA 35,00T 2 X 2.1/4". SERMAP
Galvanizados. Disponivel em: <https://www.sermap.com.br/>. Acesso em: 27
Outubro 2015.
15. MOTT, R. L. Machine Elements in Mechanical Design. 4. ed. Phoenix: Pearson,
2004. ISBN 0-13-061885-3.
16. NEXOLOCAL. PRENSA HIDRAULICA CAP. 12TONS. CON GATO MIKELS
MOD. GH-12. nexoLOCAL, 2006. Disponivel em: <http://ciudad-
guadalajara.nexolocal.com.mx/p39288772-prensa-hidraulica-cap-12tons-con-gato-
mikels-mod-gh-12>. Acesso em: 29 Outubro 2015.
17. SHACKELFORD, J. F. Introduction to Material Science for Engineers. 7. ed.
[S.l.]: Maxwell Macmillan Publishing.
18. NATIONAL FIRE PROTECTION AGENCY. NFPA 1936: STANDARD ON
POWERED RESCUE TOOLS. 4. ed. Atlanta: NFPA, 2015.
19. ONEAL METAL. ASTM A36 BAR. ONEAL Metal. Disponivel em:
<http://www.onealsteel.com/>. Acesso em: 30 Outubro 2015.
20. HURST JAWS OF LIFE. MOC Combi. HURST Jaws of Life, 2015. Disponivel
em: <http://www.jawsoflife.com/>. Acesso em: 31 Outubro 2015.
21. CENGEL, A. ; JOHN , M.. Fluid Mechanics Fundamentals and Applications. 7.
ed. Nova Iorque: Mc Graw Hill, 2006. ISBN 0-07-247236-7.
22. DE FALCO, R.; DE MATTOS, E. Bombas Industriais. 2. ed. Rio de Janeiro:
Interciência, 1998. ISBN 98-0325.
23. PROCESS INDUSTRY FORUM. Different Types of Pumps. Process Industry
Forum. Disponivel em: <http://www.processindustryforum.com/article/different-
types-pumps-centrifugal-pumps>. Acesso em: 20 Outubro 2015.

78
24. BOSCH REXROTH. Radial piston pump - PR4 series 1X. Lohr am Main: [s.n.],
2015. ISBN RA 11260.
25. BOSCH REXROTH. External Gear Pumps Series S. Schwieberdingen: [s.n.],
2009.
26. WEG. WEG. Severe Duty and General Purpose: High Efficiency & NEMA
Premium, 2015. Disponivel em: <http://www.weg.net/us/Products-
Services/Electric-Motors/Severe-Duty-and-General-Purpose-High-Efficiency-
NEMA-Premium/W22-High-Efficiency>. Acesso em: 27 Outubro 2015.
27. KIMBLE, D. V8 Engines. Movdata. Disponivel em: <http://www.movdata.net/v8-
engine.html>. Acesso em: 31 Outubro 2015.
28. SCLATER, N. Mechanisms and Mechanical Devices Sourcebook. [S.l.]:
McGraw-Hill, 2007.
29. RANCINE REXNORD. Manual de Hidráulica Básica. Rio de Janeiro: [s.n.],
1981. ISBN CDU 532.
30. TELLES, P. S. Tubulações Industriais. 10. ed. Rio de Janeiro: ltc editora, 2001.
31. WILL, D.; GEBHARDT, N.; STROHL, H. Hidraulik – Grundlagen,
Komponenten, Schaltungen. 2. ed. Berlin: Springer. ISBN-10: 3-54034322-9.
32. SCHMITT, A. Treinamento Hidráulico. [S.l.]: Rexroth GmbH, 1981.
33. HONDA ENGINES. GXH50. HONDA Engines. Disponivel em:
<http://engines.honda.com/models/model-detail/gxh50>. Acesso em: 31 Outubro
2015.
34. BOSCH REXROTH. Válvulas direcionais 4/3, 4/2 e 3/2. Lohr am Main, 2004.
35. BOSCH REXROTH. Pressure relief valve, direct operated. Lohr am Main, 2014.
36. BOSCH REXROTH. Diaphragm-type accumulator. Lohr am Main, 2013.
37. BOSCH REXROTH. Inline filter. Lohr am Main, 2013.
79
38. PANASONIC. Valve Regulated Lead Acid Batteries. [S.l.], 2005.
39. AK INDUSTRIES. Underwater Electrical Connectors. AK Industries. Disponivel
em: <http://www.ak-ind.com/>. Acesso em: 29 Outubro 2015.
40. PARKER. High Pressure, Steel Quick Couplings. Parker Catalog, 2015.
Disponivel em: <http://ph.parker.com/us/en/quick-couplings-hydraulic-up-to-6000-
psi-sm-series-sm-series-nipples-1>. Acesso em: 29 Outubro 2015.
41. INDUSTRIAL CORNER. Centrifugal Pumps. Industrial Corner, 17 Agosto 2015.
Disponivel em: <http://www.industrialcorner.com/centrifugal-pumps/centrifugal-
pumps.html>. Acesso em: 20 Outubro 2015.
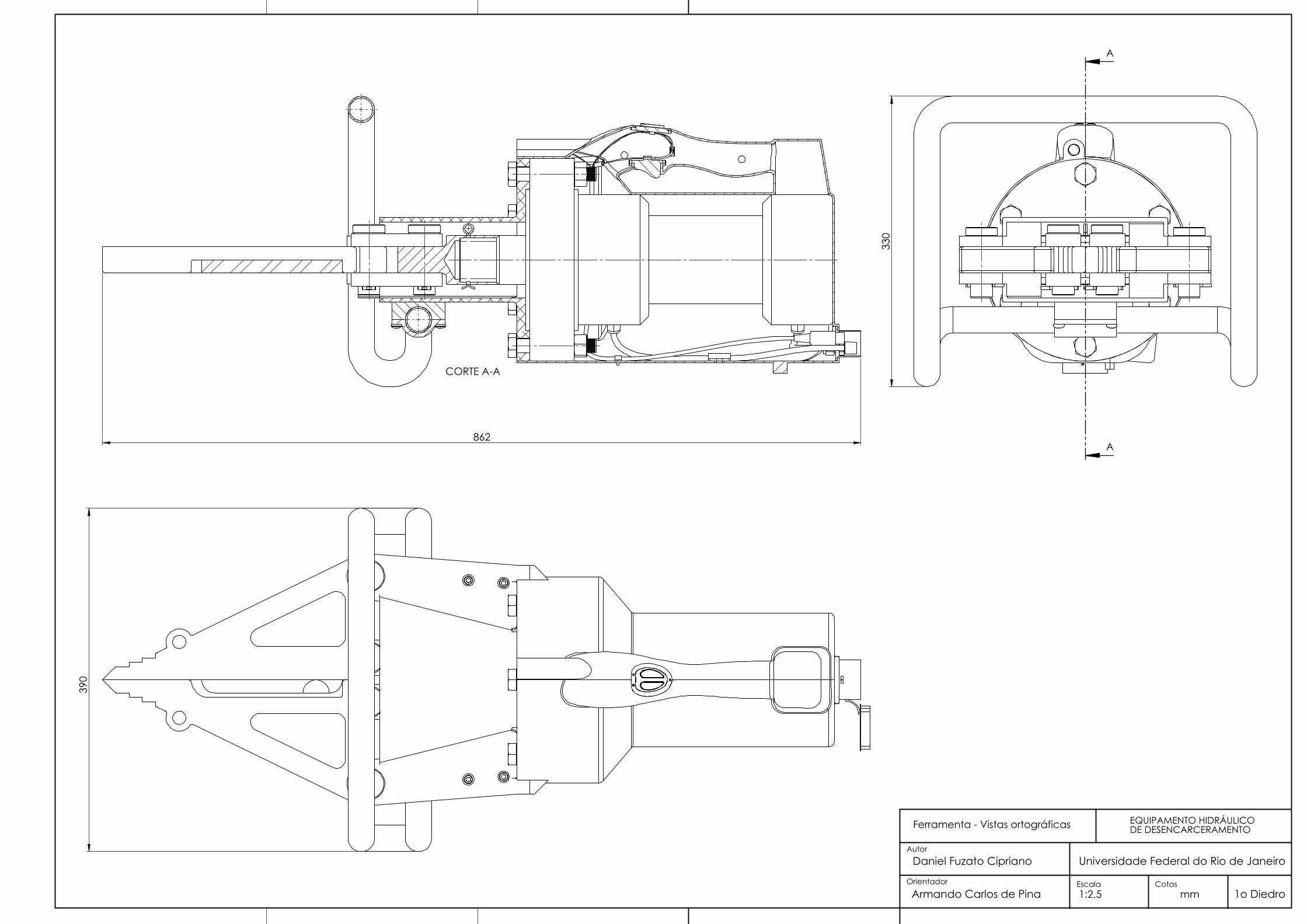
330
A
A
390
862
CORTE A-A
Escala CotasArmando Carlos de Pina
Daniel Fuzato Cipriano Universidade Federal do Rio de JaneiroAutor
Orientador
1o Diedromm
Ferramenta - Vistas ortográficas EQUIPAMENTO HIDRÁULICO DE DESENCARCERAMENTO
1:2,5
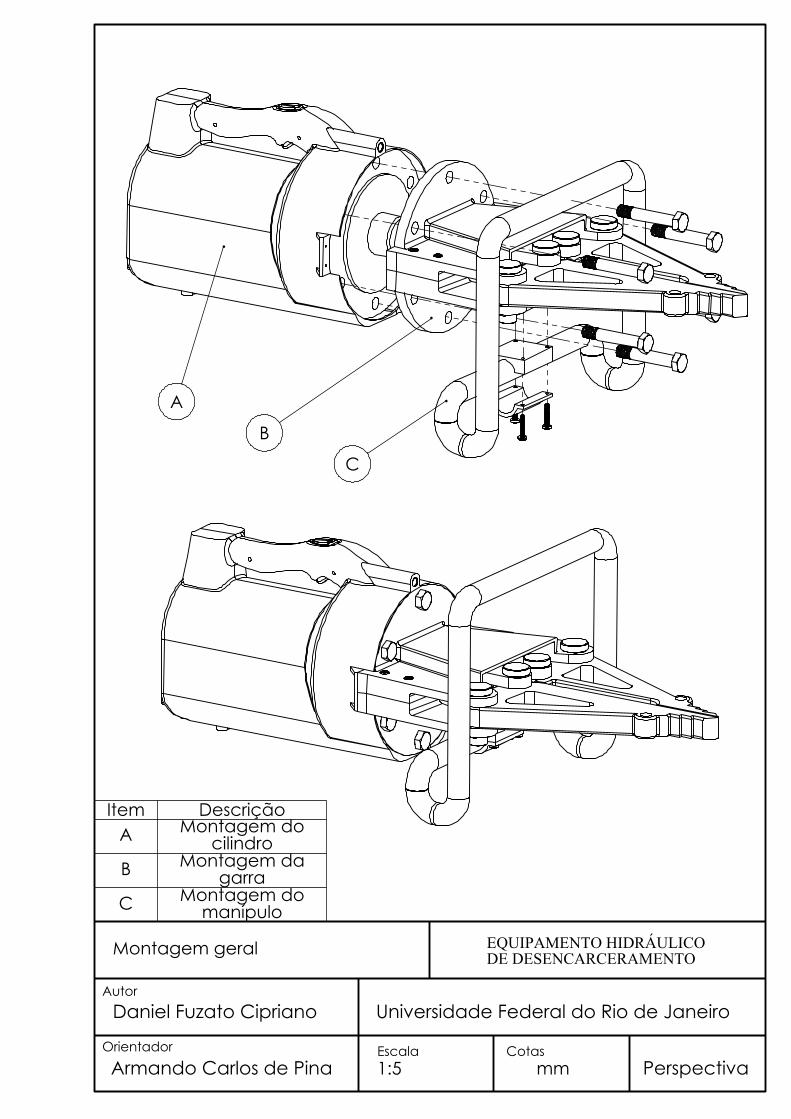
A
B
C
Item DescriçãoA Montagem do
cilindroB Montagem da
garraC Montagem do
manípulo
Escala CotasArmando Carlos de Pina
Daniel Fuzato Cipriano Universidade Federal do Rio de JaneiroAutor
Orientador
Perspectivamm
Montagem geral EQUIPAMENTO HIDRÁULICO DE DESENCARCERAMENTO
1:5
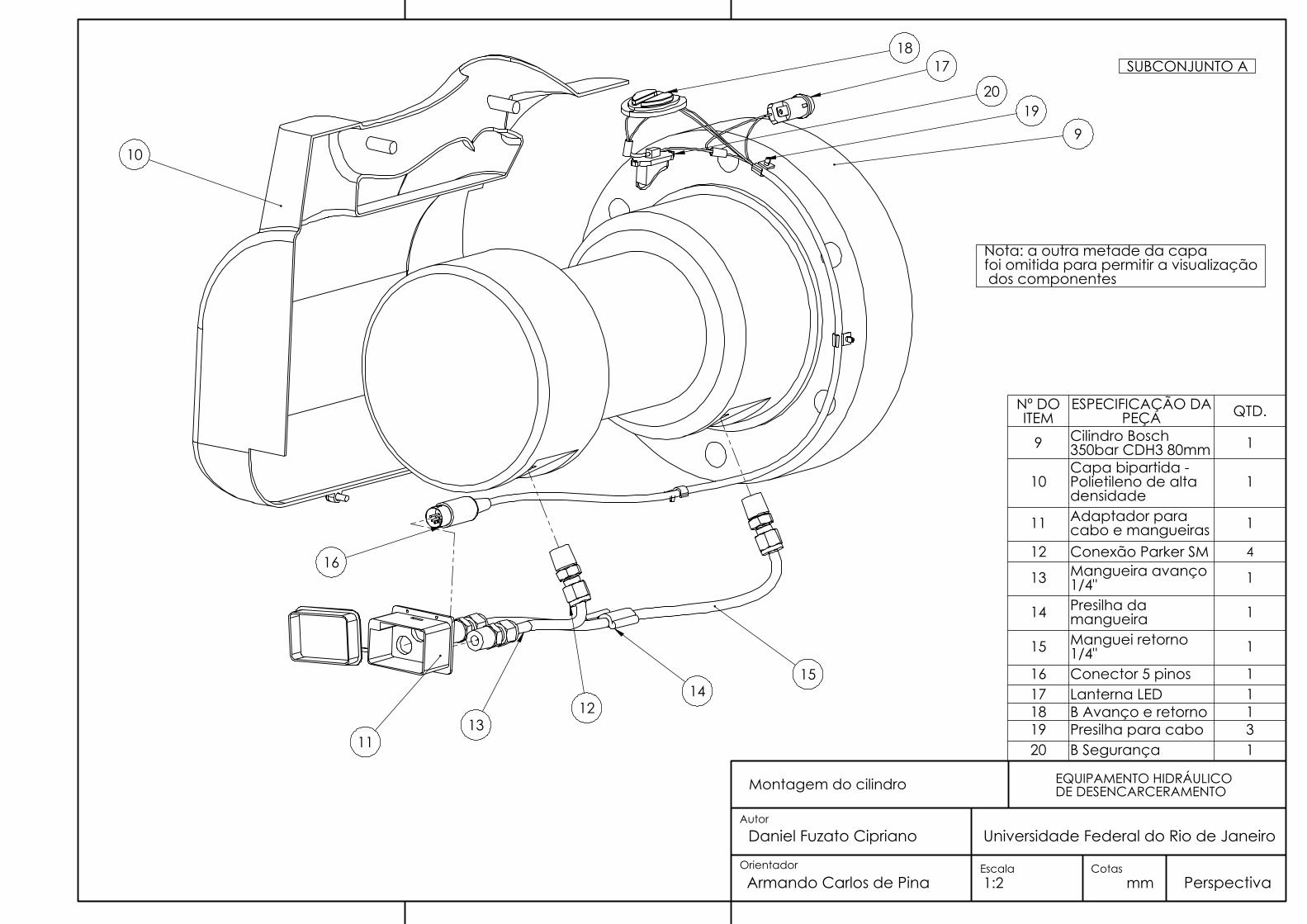
20
18
919
17
10
1415
1213
16
11
Nota: a outra metade da capafoi omitida para permitir a visualização dos componentes
SUBCONJUNTO A
Nº DO ITEM
ESPECIFICAÇÃO DA PEÇA QTD.
9 Cilindro Bosch 350bar CDH3 80mm 1
10Capa bipartida - Polietileno de alta densidade
1
11 Adaptador para cabo e mangueiras 1
12 Conexão Parker SM 4
13 Mangueira avanço 1/4" 1
14 Presilha da mangueira 1
15 Manguei retorno 1/4" 1
16 Conector 5 pinos 117 Lanterna LED 118 B Avanço e retorno 119 Presilha para cabo 320 B Segurança 1
EQUIPAMENTO HIDRÁULICO DE DESENCARCERAMENTO Montagem do cilindro
mm PerspectivaOrientador
AutorUniversidade Federal do Rio de JaneiroDaniel Fuzato Cipriano
Armando Carlos de PinaCotasEscala
1:2
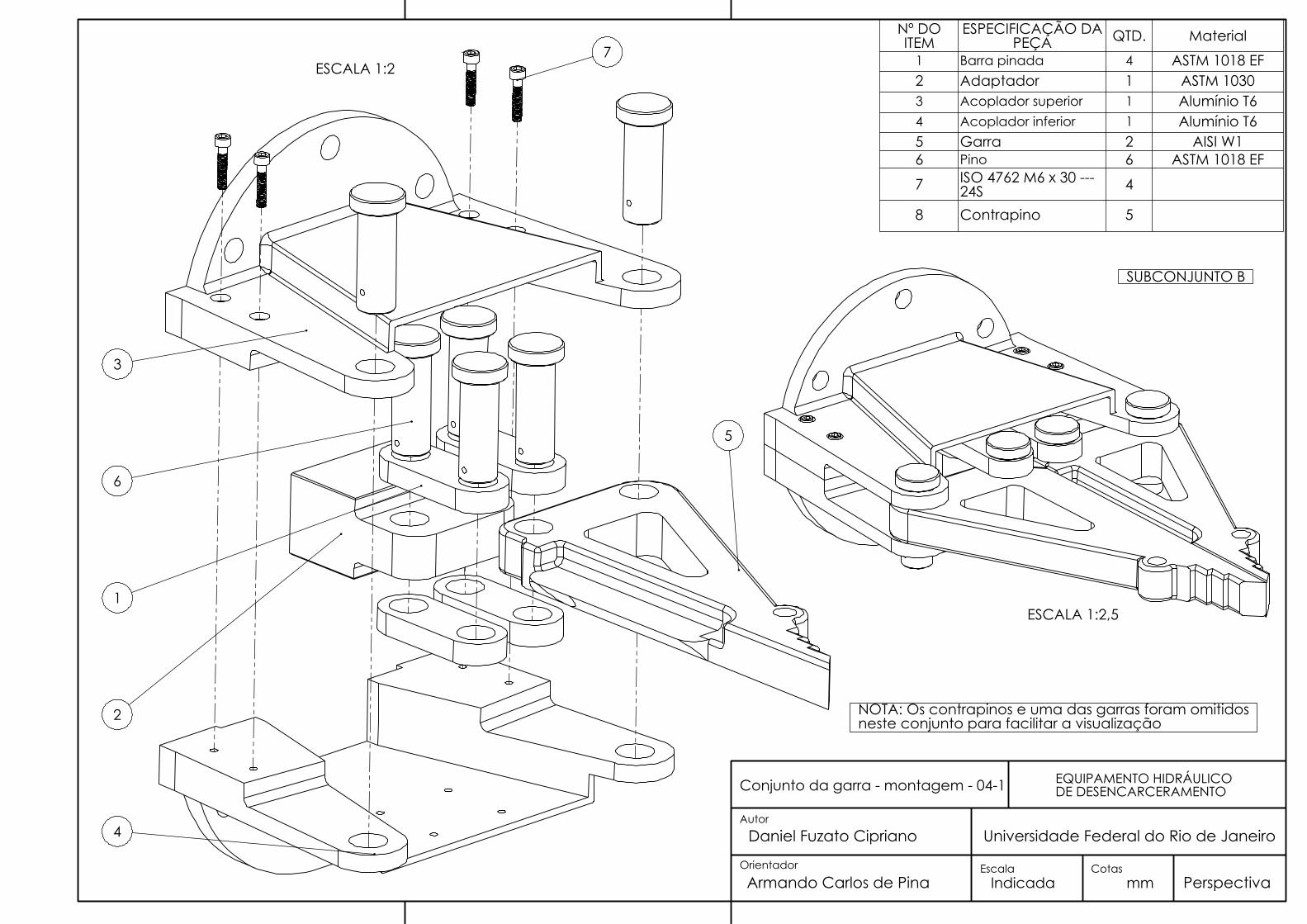
7
5
4
2
1
6
3
ESCALA 1:2
ESCALA 1:2,5
SUBCONJUNTO B
NOTA: Os contrapinos e uma das garras foram omitidosneste conjunto para facilitar a visualização
Nº DO ITEM
ESPECIFICAÇÃO DA PEÇA QTD. Material
1 Barra pinada 4 ASTM 1018 EF2 Adaptador 1 ASTM 10303 Acoplador superior 1 Alumínio T64 Acoplador inferior 1 Alumínio T65 Garra 2 AISI W16 Pino 6 ASTM 1018 EF
7 ISO 4762 M6 x 30 --- 24S 4
8 Contrapino 5
EQUIPAMENTO HIDRÁULICO DE DESENCARCERAMENTO Conjunto da garra - montagem - 04-1
mm PerspectivaOrientador
AutorUniversidade Federal do Rio de JaneiroDaniel Fuzato Cipriano
Armando Carlos de PinaCotasEscala
Indicada
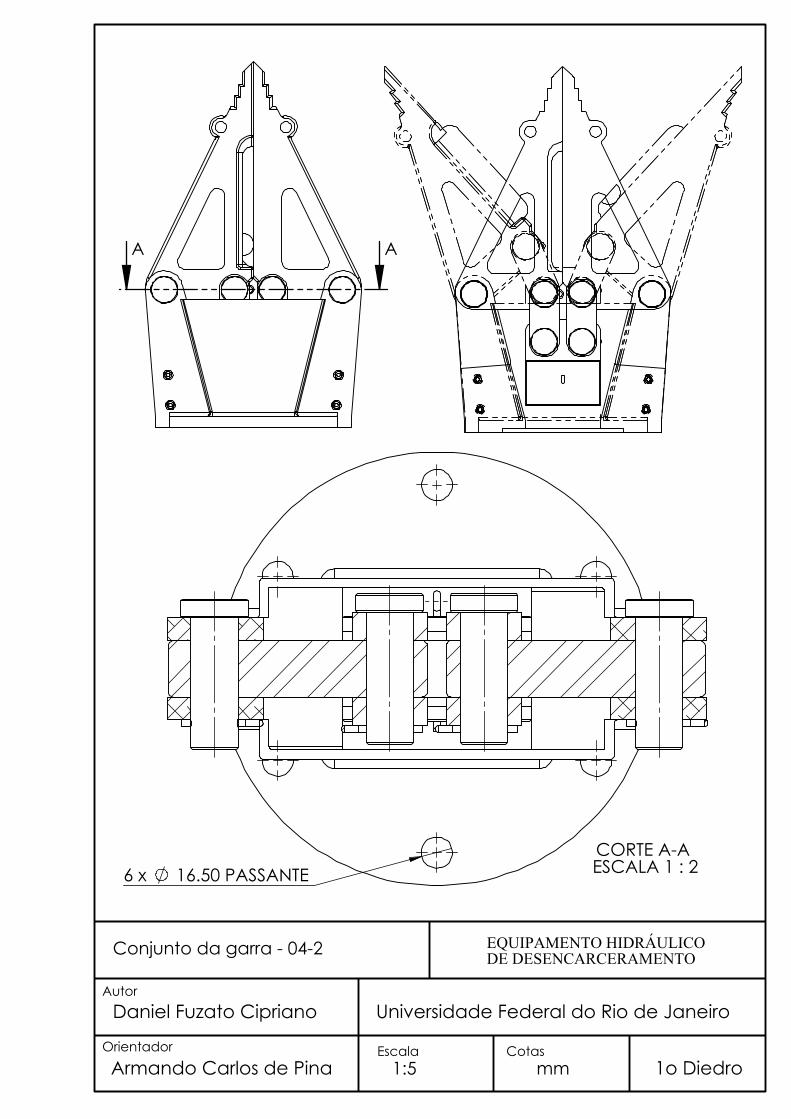
AA
6 x 16.50 PASSANTECORTE A-A ESCALA 1 : 2
Escala CotasArmando Carlos de Pina
Daniel Fuzato Cipriano Universidade Federal do Rio de JaneiroAutor
Orientador
1o Diedromm
Conjunto da garra - 04-2 EQUIPAMENTO HIDRÁULICO DE DESENCARCERAMENTO
1:5
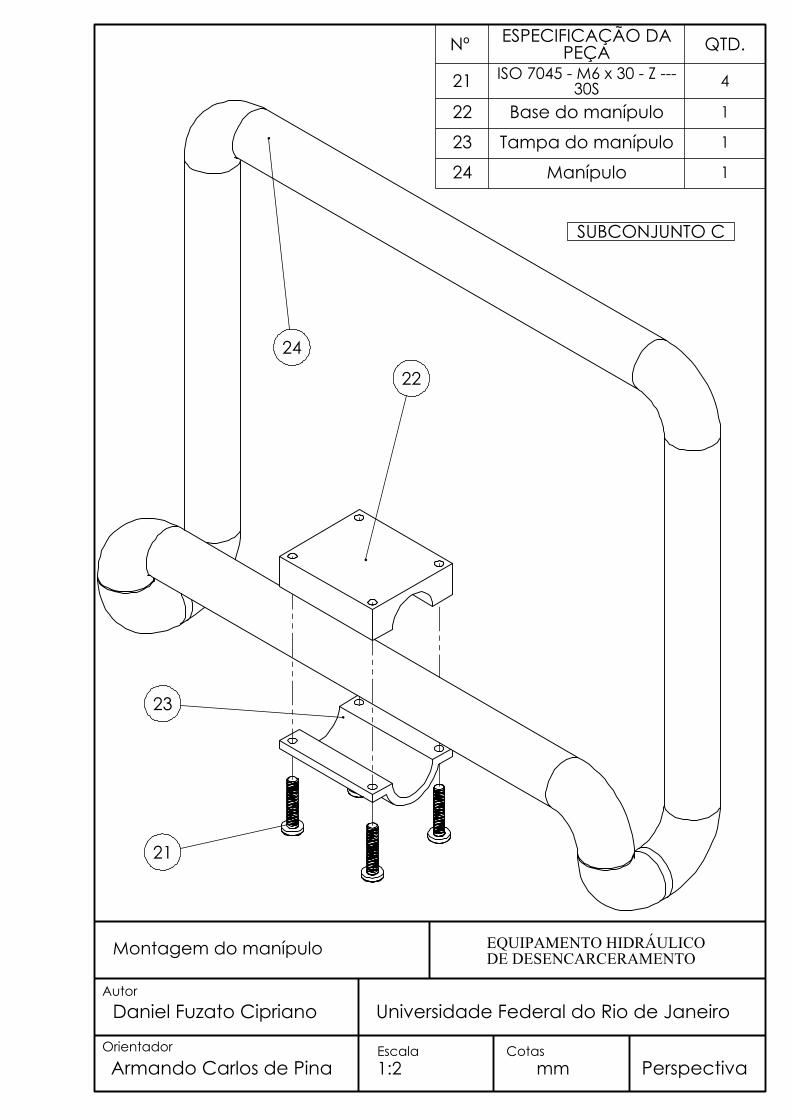
24
21
23
22
SUBCONJUNTO C
Nº ESPECIFICAÇÃO DA PEÇA QTD.
21 ISO 7045 - M6 x 30 - Z --- 30S 4
22 Base do manípulo 1
23 Tampa do manípulo 1
24 Manípulo 1
Escala CotasArmando Carlos de Pina
Daniel Fuzato Cipriano Universidade Federal do Rio de JaneiroAutor
Orientador
Perspectivamm
Montagem do manípulo EQUIPAMENTO HIDRÁULICO DE DESENCARCERAMENTO
1:2
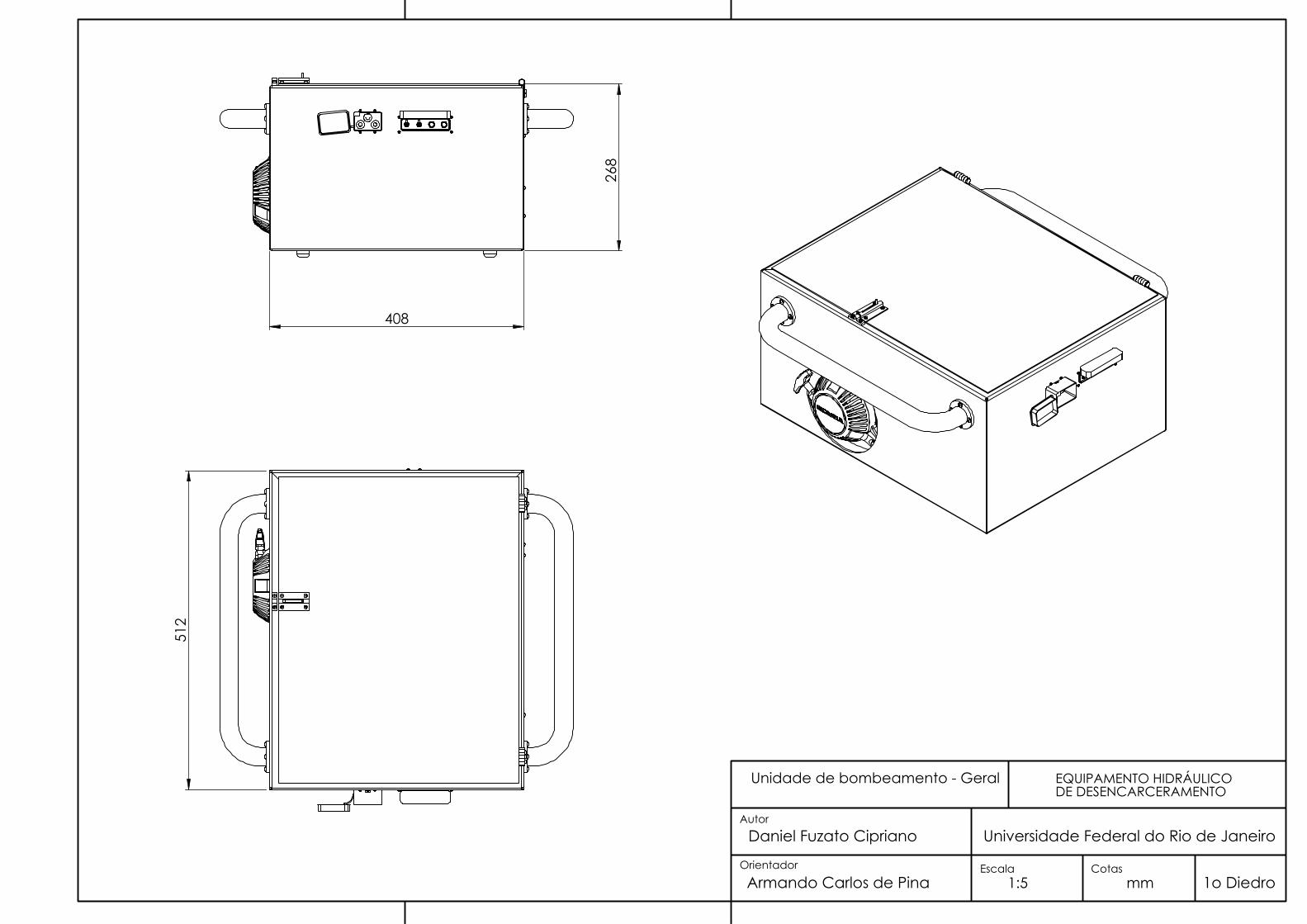
512
268
408
Unidade de bombeamento - Geral
1:5
EQUIPAMENTO HIDRÁULICO DE DESENCARCERAMENTO
mm 1o DiedroOrientador
AutorUniversidade Federal do Rio de JaneiroDaniel Fuzato Cipriano
Armando Carlos de PinaCotasEscala
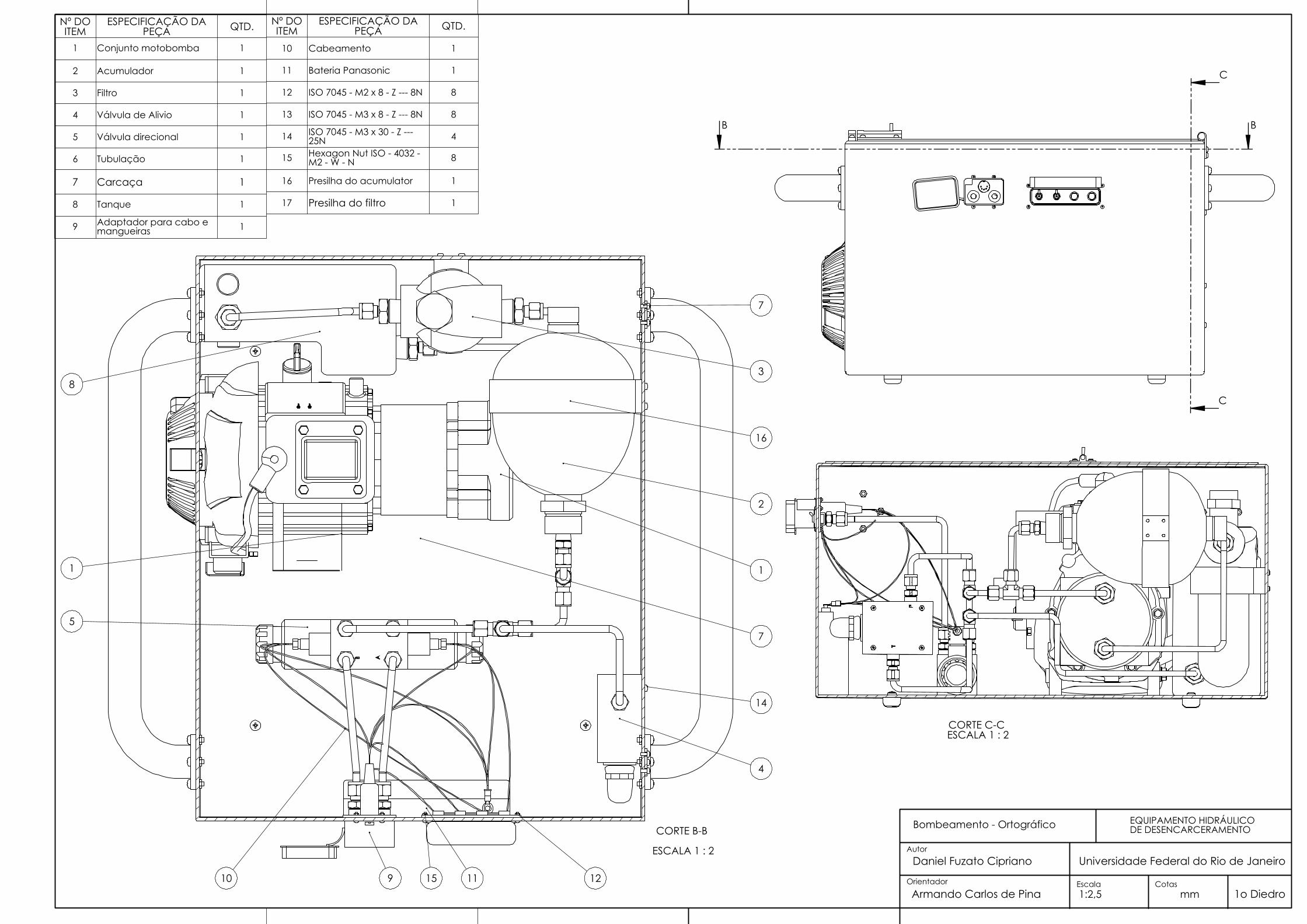
BB
C
C
CORTE C-C ESCALA 1 : 2
83
16
7
1
2
7
14
4
5
121115910
1
CORTE B-B
ESCALA 1 : 2
Nº DO ITEM
ESPECIFICAÇÃO DA PEÇA QTD.
1 Conjunto motobomba 1
2 Acumulador 1
3 Filtro 1
4 Válvula de Alivio 1
5 Válvula direcional 1
6 Tubulação 1
7 Carcaça 1
8 Tanque 1
9 Adaptador para cabo e mangueiras 1
Nº DO ITEM
ESPECIFICAÇÃO DA PEÇA QTD.
10 Cabeamento 1
11 Bateria Panasonic 1
12 ISO 7045 - M2 x 8 - Z --- 8N 8
13 ISO 7045 - M3 x 8 - Z --- 8N 8
14 ISO 7045 - M3 x 30 - Z --- 25N 4
15 Hexagon Nut ISO - 4032 - M2 - W - N 8
16 Presilha do acumulator 1
17 Presilha do filtro 1
Escala CotasArmando Carlos de Pina
Daniel Fuzato Cipriano Universidade Federal do Rio de JaneiroAutor
Orientador
1o Diedromm
Bombeamento - Ortográfico EQUIPAMENTO HIDRÁULICO DE DESENCARCERAMENTO
1:2,5
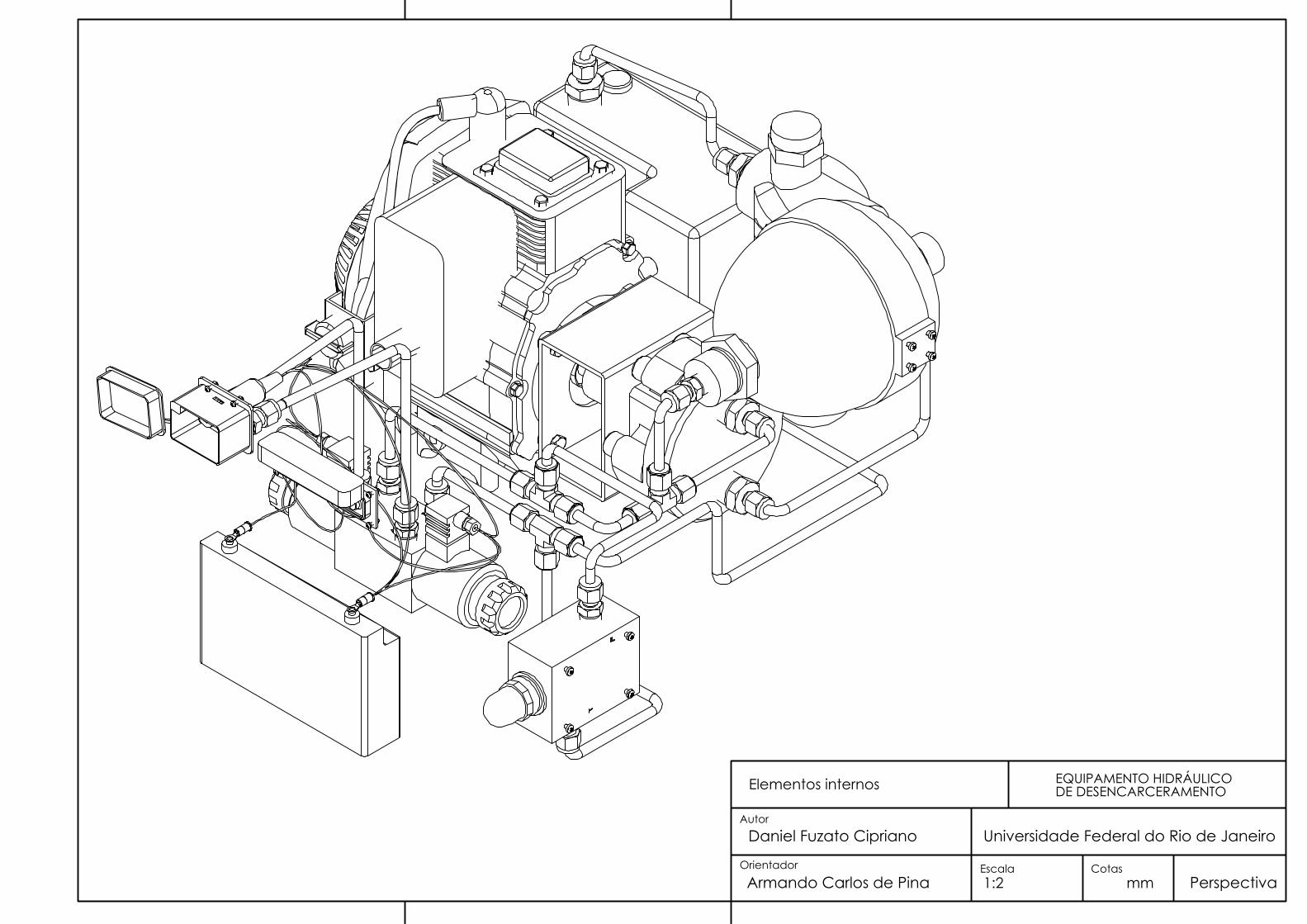
EQUIPAMENTO HIDRÁULICO DE DESENCARCERAMENTO Elementos internos
mm PerspectivaOrientador
AutorUniversidade Federal do Rio de JaneiroDaniel Fuzato Cipriano
Armando Carlos de PinaCotasEscala
1:2
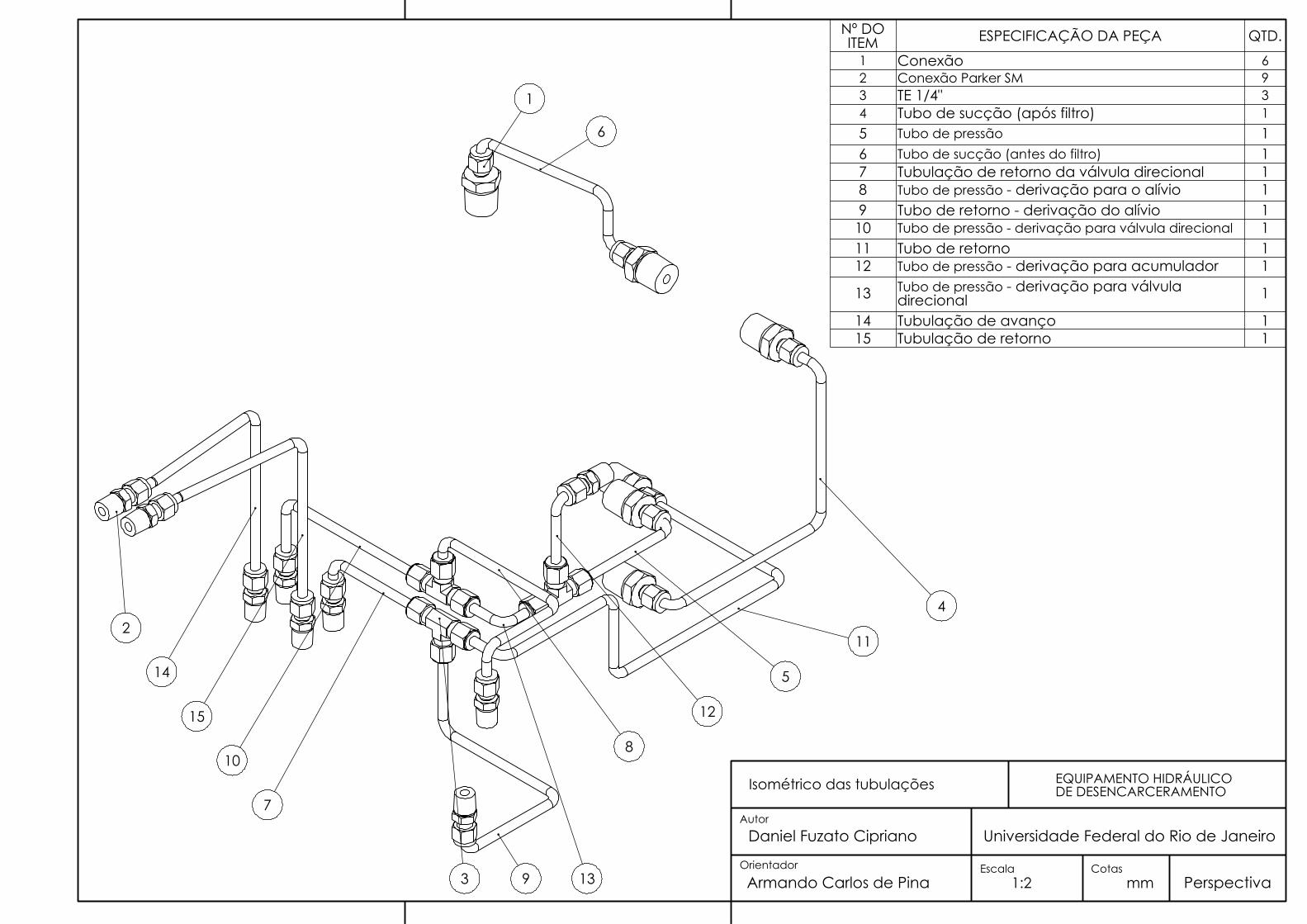
1
6
12
5
4
8
11
1393
7
10
2
15
14
Nº DO ITEM ESPECIFICAÇÃO DA PEÇA QTD.
1 Conexão 62 Conexão Parker SM 93 TE 1/4" 34 Tubo de sucção (após filtro) 15 Tubo de pressão 16 Tubo de sucção (antes do filtro) 17 Tubulação de retorno da válvula direcional 18 Tubo de pressão - derivação para o alívio 19 Tubo de retorno - derivação do alívio 110 Tubo de pressão - derivação para válvula direcional 111 Tubo de retorno 112 Tubo de pressão - derivação para acumulador 1
13 Tubo de pressão - derivação para válvula direcional 1
14 Tubulação de avanço 115 Tubulação de retorno 1
EQUIPAMENTO HIDRÁULICO DE DESENCARCERAMENTO Isométrico das tubulações
mm PerspectivaOrientador
AutorUniversidade Federal do Rio de JaneiroDaniel Fuzato Cipriano
Armando Carlos de PinaCotasEscala
1:2
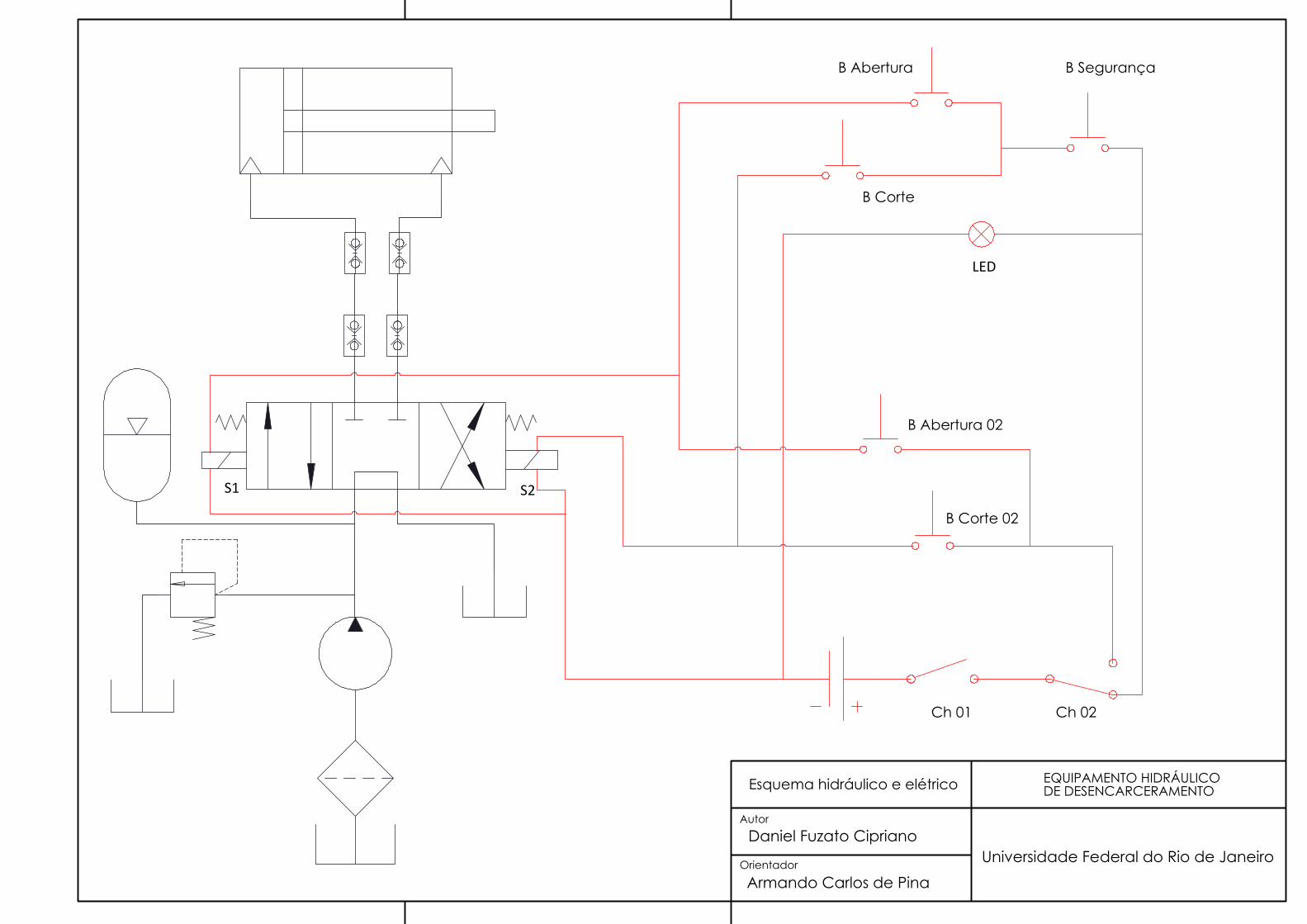
LED
S1
Ch 01 Ch 02
B Abertura
B Corte
B Segurança
B Abertura 02
B Corte 02
S2
EQUIPAMENTO HIDRÁULICO DE DESENCARCERAMENTO Esquema hidráulico e elétrico
Orientador
Autor
Universidade Federal do Rio de JaneiroDaniel Fuzato Cipriano
Armando Carlos de Pina