pontifÍcia universidade catÓlica do rio grande do … · microgravidade no corpo humano. ele tem...
TRANSCRIPT
1
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL
FACULDADE DE ENGENHARIA
CONSTRUÇÃO DE UM SISTEMA DE DESENVOLVIMENTO PARA
PLATAFORMA DE MEDIÇÃO DE FORÇA
Porto Alegre, 08 de dezembro de 2017.
Autor: Rodrigo Soriano Fay
Pontifícia Universidade Católica do Rio Grande do Sul
Curso de Engenharia Elétrica ou Engenharia de Controle e Automação
Av. Ipiranga 6681, - Prédio 30 - CEP: 90619-900 - Porto Alegre - RS - Brasil
Telefone: (51) 99922-3455 (celular) Email: [email protected]
Orientador: Júlio César Marques de Lima, Me. Eng.
Pontifícia Universidade Católica do Rio Grande do Sul
LEPUC - Laboratório de Eletrônica de Potência
Av. Ipiranga 6681, – Prédio 30 - Sala 312 CEP: 90619-900 – Porto Alegre – RS– Brasil
Telefone: (51) 3320-3500, ramal: 7688 – Email: [email protected]
RESUMO O presente trabalho desempenha um importante papel na compreensão dos efeitos da microgravidade no corpo humano. Ele tem como objetivo possibilitar a simulação de locomoção em microgravidade através da instrumentação de uma plataforma de medição de força. Assim, foi construído um protótipo de uma plataforma para testar diferentes configurações de hardware e software para captura de dados essenciais para a simulação. Com estes concluídos, foram implementados e se realizaram experimentos na plataforma presente no Laboratório de Engenharia Aeroespacial do Centro de Pesquisa em Microgravidade (MicroG). Concluiu-se que os instrumentos desenvolvidos apresentaram resultados melhores quando comparados à instrumentos de uso comercial.
Palavras-chave: instrumentação. hardware. software. simulação.
microgravidade.
2
ABSTRACT
CONSTRUCTION OF A DEVELOPMENT SYSTEM FOR A FORCE PL ATFORM
The present work develops an important role in the understanding of microgravity’s
effect in the human body. It has as objective to make microgravity locomotion simulation
possible through the instrumentation of a force platform. Thus, a platform prototype was
constructed to test different settings of hardware and software for the capture of
simulation’s essential data. With these concluded, they were implemented and experiments
were carried out at the platform present in the Microgravity Centre’s Aerospace
Engineering Laboratory. It was concluded that the developed instruments presented better
results compared with comercial instruments.
Key-words: instrumentation. hardware. software. simulation. microgravity.
1 INTRODUÇÃO
Os seres humanos estão presentes na estação espacial internacional por mais de 16 anos
contínuos, desde que a primeira equipe chegou, em novembro de 2000 (RAINEY, K., 2015).
As viagens espaciais estão cada vez mais frequentes e duradouras, trazendo aos astronautas
riscos fisiológicos antes desconhecidos.
O corpo humano começa a se deteriorar quando é exposto a um ambiente de
microgravidade, como acontece na estação espacial, ou à gravidade parcial como no solo
marciano. Experimentos mostram que em 10 dias de vôo no espaço começa a se observar
significativa perda óssea e muscular (HOLLINGHAM, R., 2014), e para minimizá-la é
necessário encontrar uma maneira de fortalecer o sistema musculoesquelético. Tendo isto em
vista, e dado o custo das viagens espaciais, pesquisadores vêm desenvolvendo meios para
simular a microgravidade e estudar seus efeitos no corpo aqui na terra.
1.1 Descrição do problema
Manter a saúde dos membros das tripulações em viagens espaciais é essencial para
preservar o desempenho das missões. O ambiente de microgravidade ou gravidade parcial em
que se encontram estes tripulantes tem efeito prejudicial e o corpo tentando se adaptar começa
a se deteriorar.
Uma maneira de evitar o enfraquecimento é criar uma rotina de exercícios eficaz, porém até
hoje não há uma técnica capaz de mitigar todos esses efeitos (PERUSEK P. G.,

3
LEWANDOWSKI B., GILKEY K, NALL M., JUST L. M., CAVANAGH R. P., KUKLIS
M., NOVOTNY S., 2007).
O Laboratório de Engenharia Aeroespacial do Centro de Pesquisa em Microgravidade
(MicroG) está construindo uma plataforma para simulação de locomoção em microgravidade
para que os efeitos possam ser melhor estudados. A partir desses resultados são desenvolvidos
dispositivos, exercícios e protocolos para astronautas em viagens de longa duração.
1.2 Descrição da proposta
Propõe-se a construção de um sistema de desenvolvimento e aquisição de dados para
que a plataforma possa ser monitorada.
O hardware do sistema para aquisição de dados será composto por quatro células de carga
conectadas em um arranjo do tipo ponte de Wheatstone. As células de carga estão associadas
a um amplificador conectado em um conversor A/D de alta resolução (16 a 24 bits). O
componente escolhido para tarefa de amplificar a converter o sinal foi o Hx710, de 24 bits de
resolução. Este conjunto será então conectado em um microcontrolador da família ARM. Os
dados coletados serão gravados localmente e enviados por meio de uma conexão wireless a
um computador para análise.
1.3 Principais objetivos
Este trabalho tem como objetivo final ajudar no desenvolvimento de rotinas de
treinamentos eficazes e simular locomoção planetária em gravidade parcial. Também são
estudados os efeitos fisiológicos da microgravidade no sistema musculoesquelético e o papel
de exercícios para a prevenção da osteoporose, dado que o mecanismo de perda óssea da
osteoporose é similar àquele em um ambiente de microgravidade.
De forma sintética, os objetivos são:
a) Trocar a tecnologia do microcontrolador usado atualmente na plataforma.
b) Simplificar o circuito de amplificação e conversão analógico-digital (A/D).
c) Tornar mais estável a resposta do sistema.
d) Tornar mais baixo o custo de implementação do sistema.
2 REFERENCIAL TEÓRICO
Neste referencial teórico serão abordados de forma sucinta, tópicos relacionados com a
proposta apresentada, considerados os mais importantes para a fundamentação deste artigo.

4
2.1 Célula de Carga
A célula de carga é um transdutor de força, ou seja, um sensor capaz de medir a força
aplicada. Este transdutor utiliza um extensômetro, que é um fio fino em zigue-zague para
medir a deformação causada pela aplicação da força sobre um bloco metálico padrão. O
formato do transdutor foi pensado para sofrer uma deformação elástica quando a este bloco
metálico for aplicada certa força. Quando instrumentado este transdutor, um sinal elétrico cuja
amplitude é linearmente proporcional à força aplicada é gerado.
Este sinal elétrico pode ser uma variação de tensão, corrente ou frequência,
dependendo do tipo de célula de carga utilizado (LOADSTAR SENSORS, 2017).
A plataforma de força é uma estrutura em forma de “H” com quatro células de carga,
uma em cada extremidade da plataforma. O funcionamento da plataforma é semelhante a uma
mesa em que cada pé foi substituído por uma mola. Quando uma carga é aplicada no centro
da mesa, cada mola sofre uma deflexão igual. Se a carga for deslocada sobre a superfície da
mesa, a mola mais próxima deflexiona-se mais que a mola mais distante, mas a deflexão total
das quatro molas será a mesma. Assim, a medição de força aplicada sobre a superfície da
placa independe do ponto de aplicação (BALBINOT A., BRUSAMARELLO V. J., 2007).
2.2 Microcontrolador ARM
ARM é o líder da indústria em fornecimento de tecnologia de microprocessadores. O
núcleo do processador ARM é um componente chave de muitos sistemas 32-bits embarcados
bem sucedidos e está presente em 95% dos smartphones, com mais de 50 bilhões de chips
produzidos (MURRY S., 2014).
Um dos objetivos deste trabalho é o desenvolvimento de um sistema simples e
compacto para a medição de força, filtragem de ruído presente nas células, armazenamento,
processamento e envio destes dados para um computador por meio de uma conexão wireless.
Para esta tarefa foi escolhido um microcontrolador Cortex-M, pois este dispositivo apresenta
capacidade de processamento muito superior aos microcontroladores de 8 e 16 bits. Entre as
características mais significativas estão o baixo consumo de energia e a simplicidade do
hardware, que permite o desenvolvimento de um circuito confiável, compacto e de baixo
custo. Além disto, estes microcontroladores possuem excelentes ferramentas de
desenvolvimento e depuração em linguagem C.

5
2.3 Transmissão de Dados Wireless
A transferência de dados será feita com a utilização de um dispositivo de
radiofrequência (RF) de baixo consumo. Há duas opções sendo estudadas para o projeto: a
tecnologia Zigbee e a Spirit1.
A primeira utiliza uma tecnologia segura de comunicação de alto-nível para criar redes
sem fio de área pessoal (PAN) com rádio digital, como em automação residencial, aquisição
de dados de dispositivos médicos e outras necessidades (LEGG G., 2004). Zigbee é então,
uma rede wireless segura, de baixo consumo, com baixa taxa de transferência de dados e curta
distância, ou seja, é um dispositivo indicado para projetos de pequena escala.
Spirit1 é um módulo de radiofrequência compacto de ultrabaixo consumo com uma
interface fácil de usar, permitindo que usuários criem uma conectividade sem fio em projetos
sem a necessidade de ter experiência com RF.
Serão confrontadas as principais características de cada rádio para determinar qual o
melhor para esta aplicação.
2.4 Filtragem de Sinais
Muitas vezes quando dados são coletados seus sinais vêm carregados de ruído e
oscilações inerentes ao equipamento utilizado para a coleta, como por exemplo,
amplificadores e conversores analógico/digital (A/D).
Filtragem é um processo matemático que remove componentes indesejadas de um
sinal, então, uma maneira de remover as oscilações intrínsecas ao conversor A/D é aplicar
filtros no sinal coletado.
Para este trabalho serão analisados dois filtros, o de média móvel e de mediana. O
primeiro soma um vetor de leituras em uma variável e faz a média delas, criando um novo
valor. No segundo, as leituras são armazenadas em um vetor, organizadas em ordem crescente
e o valor mediano (centro das amostras ordenadas) é retornado.
3 METODOLOGIA
Neste item será descrita a metodologia proposta, destacando os itens mais importantes
para a construção do sistema de desenvolvimento para a plataforma de medição de força.
Dentre esses, serão abordados com maior ênfase o projeto em desenho assistido por
computador (CAD), a aquisição e interpretação dos dados e a programação em linguagem C.

6
3.1 Fluxograma descrevendo a metodologia utilizada
A figura 1 apresenta um fluxograma que sumariza as principais etapas realizadas na
elaboração deste trabalho.
Figura 1 - Fluxograma descrevendo a metodologia utilizada.
Fonte: Autoria própria.
3.2 Breve descrição da metodologia
Neste item as etapas destacadas no fluxograma consideradas mais importantes da
metodologia serão descritas de maneira objetiva.
3.2.1 Escolha do tema
Para a definição do tema o aluno conversou com pesquisadores da Pontifícia
Universidade Católica do Rio Grande do Sul (PUCRS), buscando projetos para aplicar o
Escolha do tema
Elaboração do referencial
teórico
Montagem do protótipo
Teste
funcional
Projeto CAD
Verificação.
Erro?
Programação em linguagem
C
Erros?
Aquisição e interpretação
dos dados.
Não OK
OK
Correção
Sim
Não
Sim
Não
Não
7
máximo do conhecimento adquirido durante o curso. Dentre os projetos apresentados foi
escolhido o que pareceu ser mais complexo e relevante para formação acadêmica. A proposta
escolhida foi desenvolver a plataforma de força.
3.2.2 Elaboração do referencial teórico
A fase inicial consistiu em uma pesquisa bibliográfica para obter uma visão geral das
tarefas e componentes envolvidos ao longo do projeto.
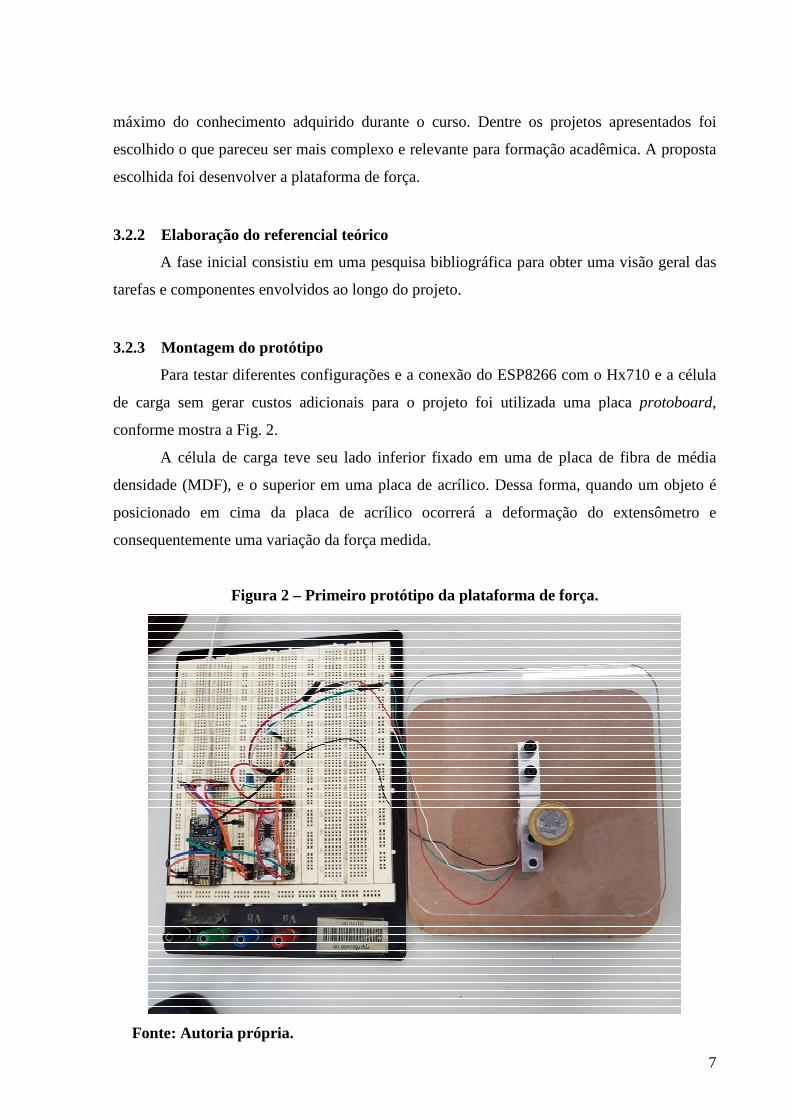
3.2.3 Montagem do protótipo
Para testar diferentes configurações e a conexão do ESP8266 com o Hx710 e a célula
de carga sem gerar custos adicionais para o projeto foi utilizada uma placa protoboard,
conforme mostra a Fig. 2.
A célula de carga teve seu lado inferior fixado em uma de placa de fibra de média
densidade (MDF), e o superior em uma placa de acrílico. Dessa forma, quando um objeto é
posicionado em cima da placa de acrílico ocorrerá a deformação do extensômetro e
consequentemente uma variação da força medida.
Figura 2 – Primeiro protótipo da plataforma de força.
Fonte: Autoria própria.
8
3.2.4 Projeto CAD
Para o hardware foram utilizadas PCI’s, que são placas feitas de uma base de material
não condutivo para fixar mecanicamente os componentes. Ilhas e trilhas são feitas de uma
camada condutiva de cobre para fazer a conexão elétrica dos componentes eletrônicos.
A representação gráfica do circuito elétrico, ou esquemático, e design da placa foram
feitos utilizando o software Altium Designer, a partir do esboço de um circuito elaborado no
início do projeto.
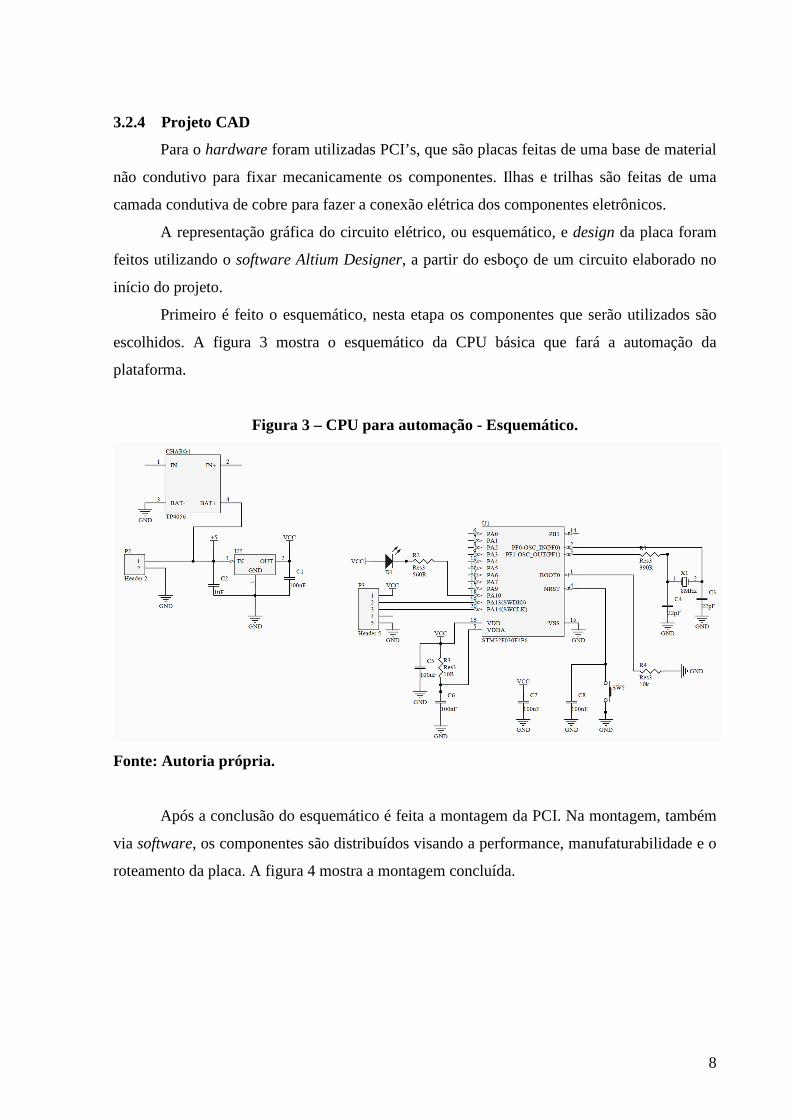
Primeiro é feito o esquemático, nesta etapa os componentes que serão utilizados são
escolhidos. A figura 3 mostra o esquemático da CPU básica que fará a automação da
plataforma.
Figura 3 – CPU para automação - Esquemático.
Fonte: Autoria própria.
Após a conclusão do esquemático é feita a montagem da PCI. Na montagem, também
via software, os componentes são distribuídos visando a performance, manufaturabilidade e o
roteamento da placa. A figura 4 mostra a montagem concluída.

9
Figura 4 – CPU para automação – Montagem.
Fonte: Autoria própria.
É possível também, via software, obter a visão 3D da placa desenvolvida, como
mostra a Fig. 5.
Figura 5 – CPU para automação – Placa em 3D.
Fonte: Autoria própria.
O modelo ótimo da placa utilizada para captura de dados de medição de força foi
projetado em CAD, a Fig. 6 mostra o esquemático da placa.

10
Figura 6 – Circuito para medição de força – Esquemático.
Fonte: Autoria própria.
Visando facilitar o uso da placa os conectores foram posicionados nas extremidades,
conforme mostra a montagem na Fig.7.
Figura 7 – Circuito para medição de força – Montagem.
Fonte: Autoria própria.
Na visão 3D o projetista pode observar sob uma perspectiva melhor como os
componentes são distribuídos, componentes muito próximos podem, posteriormente,
impossibilitar a soldagem. A figura 8 mostra a distribuição dos componentes em 3D.

11
Figura 8 – Circuito para medição de força – Placa em 3D.
Fonte: Autoria própria.
Os componentes utilizados no circuito são equivalentes aos usados na protoboard (vide
Fig. 2), porém agora foram empregados componentes surface mount device (SMD), que
utilizam tecnologia de montagem superficial.
3.2.5 Programação em linguagem C
Para utilizar o transmissor wireless ESP8266 NodeMCU, foi preciso programá-lo em
linguagem C através do ambiente de desenvolvimento integrado (IDE) Arduino.
Foram definidas as portas utilizadas no ESP8266. Um vetor N de 11 posições foi
criado para posteriormente ser utilizado no filtro de média móvel. Com base nas
especificações do datasheet do Hx710 (vide Fig. 9) foi criada uma função para cada placa de
medição, esta função gera a sequência de pulsos necessária para fazer a leitura de dados e
retornar um valor de 0 a 16777215.
Para atenuar oscilações na leitura, dois filtros foram implementados separadamente. O
mais eficaz foi então utilizado no projeto.
Como a plataforma está pressionada contra a célula de carga, ela apresenta um valor
inicial indesejado. Para que este valor não atrapalhe as leituras foi criada uma função que tara,
ou seja, zera os valores iniciais lidos da célula de carga. Isto é feito subtraindo uma média de
25 leituras feitas quando começa a coleta de dados, sem quaisquer outras forças atuando sobre
a plataforma.

12
Figura 9 – Sequência de pulsos.
Fonte: “Hx710 datasheet,” Adaptado para português de Avia Semiconductor (Xiamen) Co. LTD., Xiamen, China. A tabela 1 descreve o valor e significado das siglas utilizadas na Fig. 9.
Tabela 1 – Descrição das siglas utilizadas na Fig. 9
Fonte: “Hx710 datasheet,” Adaptado para português de Avia Semiconductor
(Xiamen) Co. LTD., Xiamen, China.
3.2.6 Aquisição e interpretação dos dados
A aquisição de dados acontece como mostra a Fig. 10. A deformação no extensômetro
da célula de carga gera uma variação de tensão que é amplificada e convertida pelo Hx710.
A interpretação é feita pelo microcontrolador ESP8266. O Hx710 é um conversor A/D com
24 bits de resolução. A resolução do conversor determina o número de valores discretos que
ele pode representar. Como os valores são armazenados eletronicamente na forma binária e a
resolução é expressa em bits, o intervalo de valores é encontrado através de uma potencia de
dois. Por exemplo, um conversor com 24 bits de resolução pode gerar 224 valores, ou seja,
16777215 valores, sendo o maior valor dado quando uma massa de 10kg é posicionada na
célula de carga, e 0 quando não há massa. Utilizando pesos-padrão, o fator de conversão foi
calculado e implementado em linguagem C para que a leitura seja dada em gramas.

13
Figura 10 – Representação simplificada da ligação do protótipo.
Fonte: Autoria própria.
A figura 11 mostra o funcionamento do protótipo na forma de um diagrama de blocos.
Figura 11 – Diagrama em blocos do protótipo.
Fonte: Autoria própria.
Para a captura dos dados wireless foram utilizados dois módulos Xbee S2C ZigBee, um
para emitir e outro para receptar. A figura 12 apresenta o módulo utilizado no trabalho.
Figura 12 – Módulo Xbee S2C Zigbee utilizado no trabalho.
Fonte: Autoria própria.
Massa é
posicionada
na plataforma
Extensômetro
deforma e
produz uma
variação na
tensão
Hx710
amplifica e
converte o
sinal da
tensão
ESP8266
interpreta os
dados e
mostra massa
em gramas
14
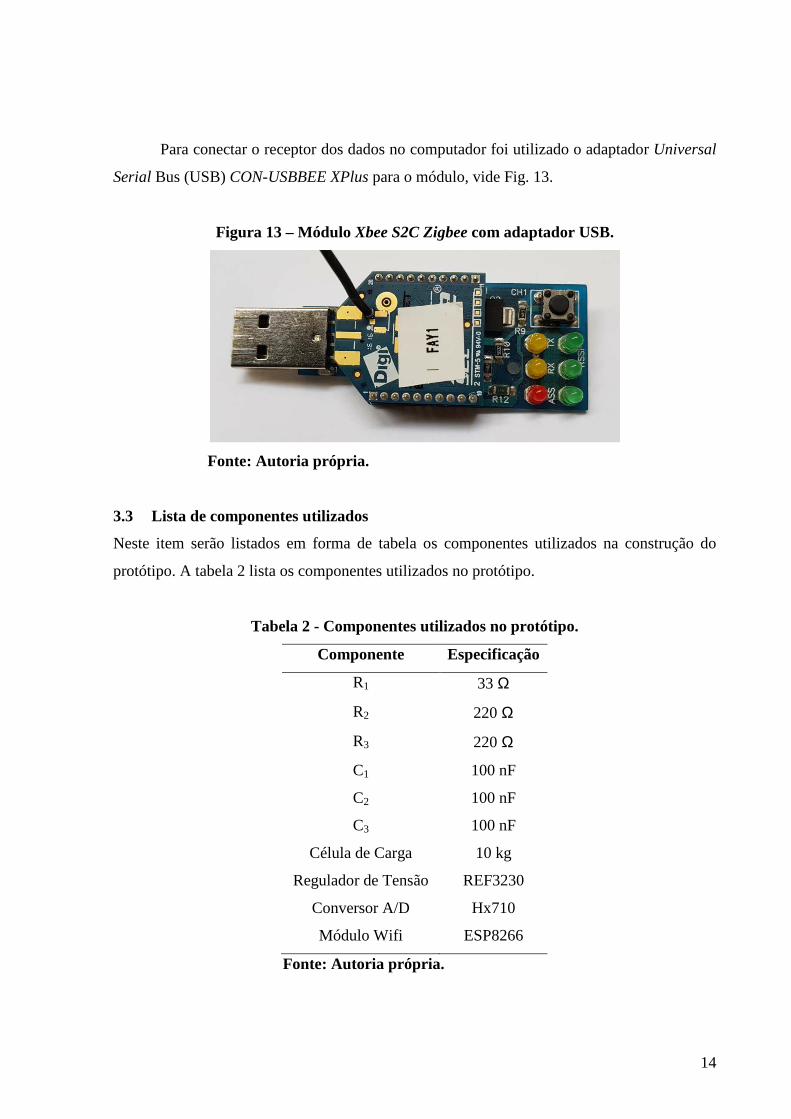
Para conectar o receptor dos dados no computador foi utilizado o adaptador Universal
Serial Bus (USB) CON-USBBEE XPlus para o módulo, vide Fig. 13.
Figura 13 – Módulo Xbee S2C Zigbee com adaptador USB.
Fonte: Autoria própria.
3.3 Lista de componentes utilizados
Neste item serão listados em forma de tabela os componentes utilizados na construção do
protótipo. A tabela 2 lista os componentes utilizados no protótipo.
Tabela 2 - Componentes utilizados no protótipo.
Componente Especificação
R1 33 Ω
R2 220 Ω
R3 220 Ω
C1 100 nF
C2 100 nF
C3 100 nF
Célula de Carga 10 kg
Regulador de Tensão REF3230
Conversor A/D Hx710
Módulo Wifi ESP8266
Fonte: Autoria própria.

15
Na CPU para automação foram utilizados os componentes listados na Tab. 3.
Tabela 3 - Componentes utilizados na CPU para automação.
Componente Especificação
R1 390 Ω
R2 560 Ω
R3 10 Ω
R4 10 kΩ
C1 100 nF
C2 1 µF
C3 22 pF
C4 22 pF
C5 100 nF
C6 100 nF
C7 100 nF
SW1 Pushbutton
Regulador de Tensão LD33
Microcontrolador STM32F0
Oscilador de Cristal 8 MHz
D1 LED
Fonte: Autoria própria.
4 RESULTADOS EXPERIMENTAIS
Neste item serão apresentados os dispositivos projetados para a implementação da
plataforma de medição de força, bem como os resultados obtidos através de análises
experimentais.
4.1 PCI para medição de força
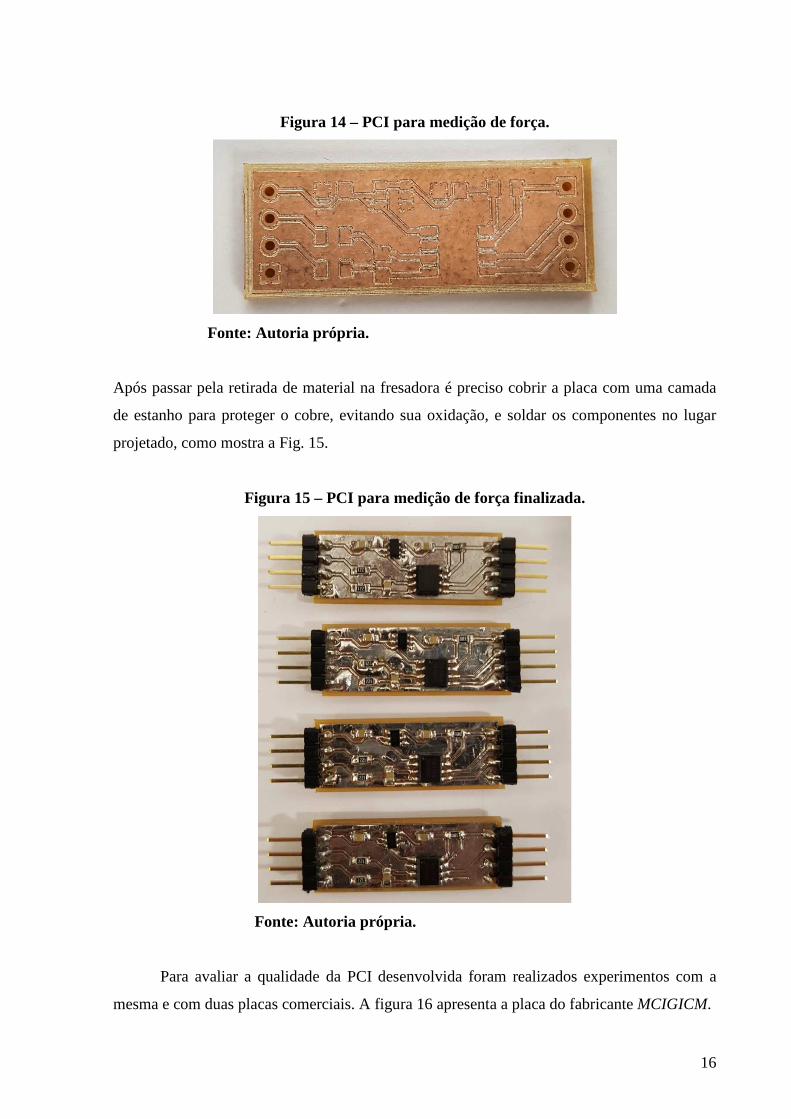
Para a construção da PCI apresentada na Fig. 8 foi utilizada uma fresadora Computer
Numeric Control (CNC) que realizou a transferência do circuito para a placa por meio da
remoção de material, como mostra a Fig. 14.
16
Figura 14 – PCI para medição de força.
Fonte: Autoria própria.
Após passar pela retirada de material na fresadora é preciso cobrir a placa com uma camada
de estanho para proteger o cobre, evitando sua oxidação, e soldar os componentes no lugar
projetado, como mostra a Fig. 15.
Figura 15 – PCI para medição de força finalizada.
Fonte: Autoria própria.
Para avaliar a qualidade da PCI desenvolvida foram realizados experimentos com a
mesma e com duas placas comerciais. A figura 16 apresenta a placa do fabricante MCIGICM.

17
Figura 16 – PCI comercial do fabricante MCIGICM.
Fonte: Autoria própria.
A figura 17 apresenta a placa do fabricante TENSTAR ROBOT.
Figura 17 – PCI comercial do fabricante TENSTAR ROBOT.
Fonte: Autoria própria.
4.2 Funcionamento do protótipo
Para calibrar uma célula de carga são necessários pesos-padrão, assim o valor lido pelo
A/D pode ser atribuído via software a uma massa conhecida. A figura 18 mostra os pesos-
padrão utilizados para calibrar o protótipo da plataforma de medição de força.
Figura 18 – Pesos-padrão.
Fonte: Autoria própria.

18
A figura 19 mostra o peso-padrão posicionado no protótipo para medição.
Figura 19 – Peso-padrão posicionado para medição.
Fonte: Autoria própria.
4.3 Principais dados experimentais
Neste item serão apresentados dados obtidos de forma experimental, utilizando o
hardware, do protótipo e da plataforma, construídos ao longo do projeto. Vale ressaltar que
devido ao curto prazo para conclusão do trabalho, o autor apesar de ter implementado dois
sistemas de desenvolvimento, um com o ESP8266 e outro com o microcontrolador ARM,
utilizou apenas o primeiro para coleta de dados.
4.3.1 Resultados obtidos com o protótipo
Para visualizar e interpretar melhor os dados coletados foram utilizadas duas
ferramentas da IDE do Arduino, Serial Plotter e Serial Monitor.
O conversor A/D realiza as leituras a 10 Hz, ou seja, 10 leituras por segundo. O eixo x
representa o número de leituras, sendo que cada marcação corresponde a um intervalo de 100
leituras, ou 10 segundos. O eixo y representa a massa em gramas. Como explicado no item
3.2.5, foram desenvolvidos dois filtros, os dados coletados foram estudados a fim de escolher
o mais adequado para ser implementado.

19
A figura 20 mostra os dados coletados e filtrados com a média móvel quando uma
massa de 20 gramas é posicionada no protótipo.
Figura 20 – Medição de uma massa de 20 gramas com filtro de média móvel.
Fonte: Autoria própria.
A figura 21 mostra a medição de uma massa de 500 gramas utilizando o mesmo filtro.
Figura 21 – Medição de uma massa de 500 gramas com filtro de média móvel.
Fonte: Autoria própria.

20
Na figura 22 foi medida uma massa de 20 gramas, neste caso utilizando o filtro de
mediana.
Figura 22 – Medição de uma massa de 20 gramas com filtro de mediana.
Fonte: Autoria própria.
A figura 23 mostra a medição de uma massa de 500 gramas com o sinal filtrado pela
mediana.
Figura 23 – Medição de uma massa de 500 gramas com filtro de mediana.
Fonte: Autoria própria.

21
Foram realizados extensivos experimentos com ambos os filtros, variando a massa
medida e o tempo de medição, sempre comparando com o sinal medido. As leituras
apresentavam variação de mais um menos um grama quando era exercida uma força
constante, o que representa 0,1% em uma força de um quilograma.
Os filtros obtiveram resultados bastante similares, observando atentamente foi possível
notar que o filtro de mediana respondia mais rápido, o que para o trabalho proposto não era
interessante, visto que as vezes ele acabava acompanhando a oscilação. Por isso, apesar de
apresentar um atraso maior, o filtro de média móvel foi escolhido para ser implementado na
plataforma.
Para avaliar a qualidade da PCI de medição de força produzida pelo autor, a placa foi
comparada com as comerciais através de experimentos com o protótipo. Com o propósito de
facilitar a análise dos dados, a placa comercial do fabricante MCIGICM foi chamada de placa
comercial #1, e a do fabricante TENSTAR ROBOT de placa comercial #2.
Para compará-las, os dados foram obtidos com o Serial Monitor da IDE do Arduíno e
graficados utilizando o software MATLAB, do desenvolvedor MathWorks. A figura 24
apresenta o gráfico das três placas em um experimento sem carga sobre o protótipo.
Figura 24 – Comparação das placas, experimento sem carga.
Fonte: Autoria própria.
22
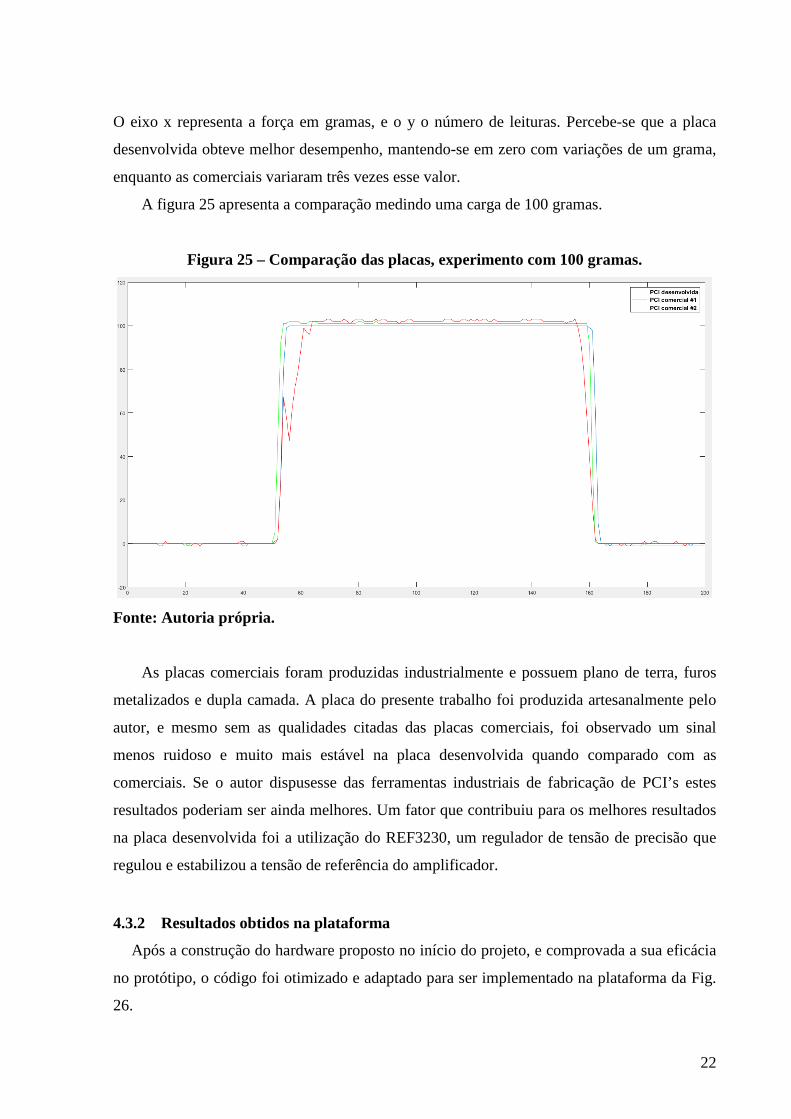
O eixo x representa a força em gramas, e o y o número de leituras. Percebe-se que a placa
desenvolvida obteve melhor desempenho, mantendo-se em zero com variações de um grama,
enquanto as comerciais variaram três vezes esse valor.
A figura 25 apresenta a comparação medindo uma carga de 100 gramas.
Figura 25 – Comparação das placas, experimento com 100 gramas.
Fonte: Autoria própria.
As placas comerciais foram produzidas industrialmente e possuem plano de terra, furos
metalizados e dupla camada. A placa do presente trabalho foi produzida artesanalmente pelo
autor, e mesmo sem as qualidades citadas das placas comerciais, foi observado um sinal
menos ruidoso e muito mais estável na placa desenvolvida quando comparado com as
comerciais. Se o autor dispusesse das ferramentas industriais de fabricação de PCI’s estes
resultados poderiam ser ainda melhores. Um fator que contribuiu para os melhores resultados
na placa desenvolvida foi a utilização do REF3230, um regulador de tensão de precisão que
regulou e estabilizou a tensão de referência do amplificador.
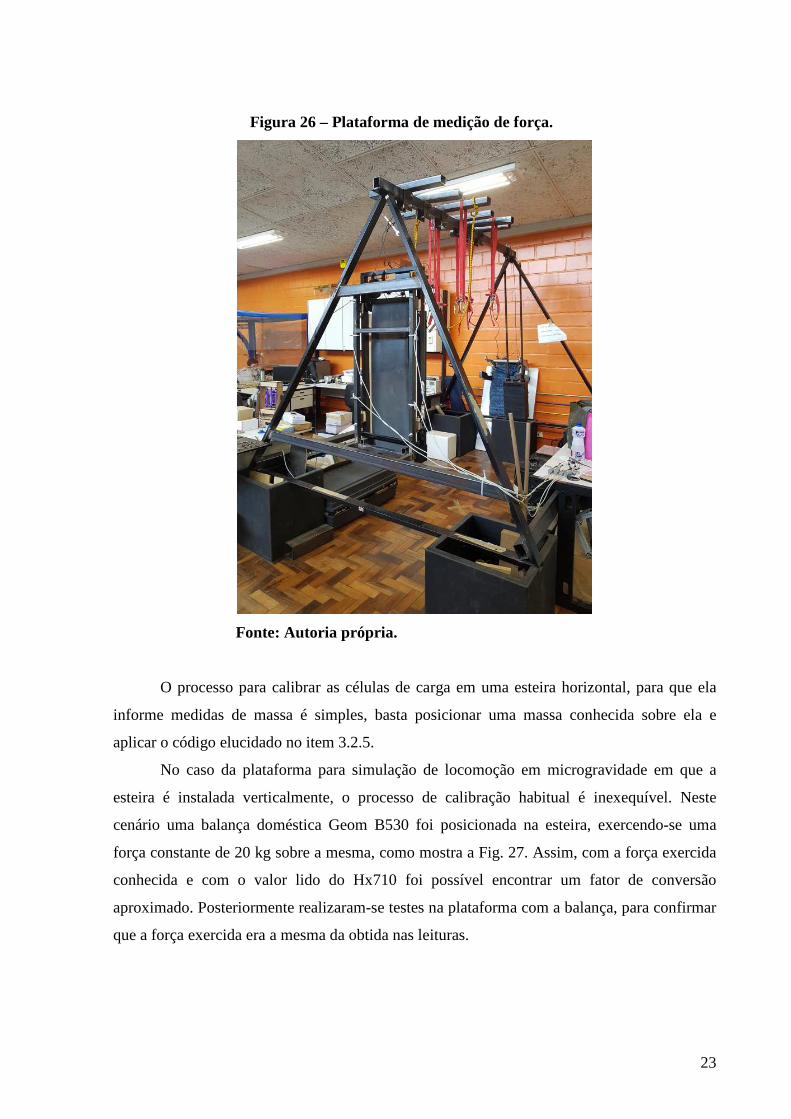
4.3.2 Resultados obtidos na plataforma
Após a construção do hardware proposto no início do projeto, e comprovada a sua eficácia
no protótipo, o código foi otimizado e adaptado para ser implementado na plataforma da Fig.
26.
23
Figura 26 – Plataforma de medição de força.
Fonte: Autoria própria.
O processo para calibrar as células de carga em uma esteira horizontal, para que ela
informe medidas de massa é simples, basta posicionar uma massa conhecida sobre ela e
aplicar o código elucidado no item 3.2.5.
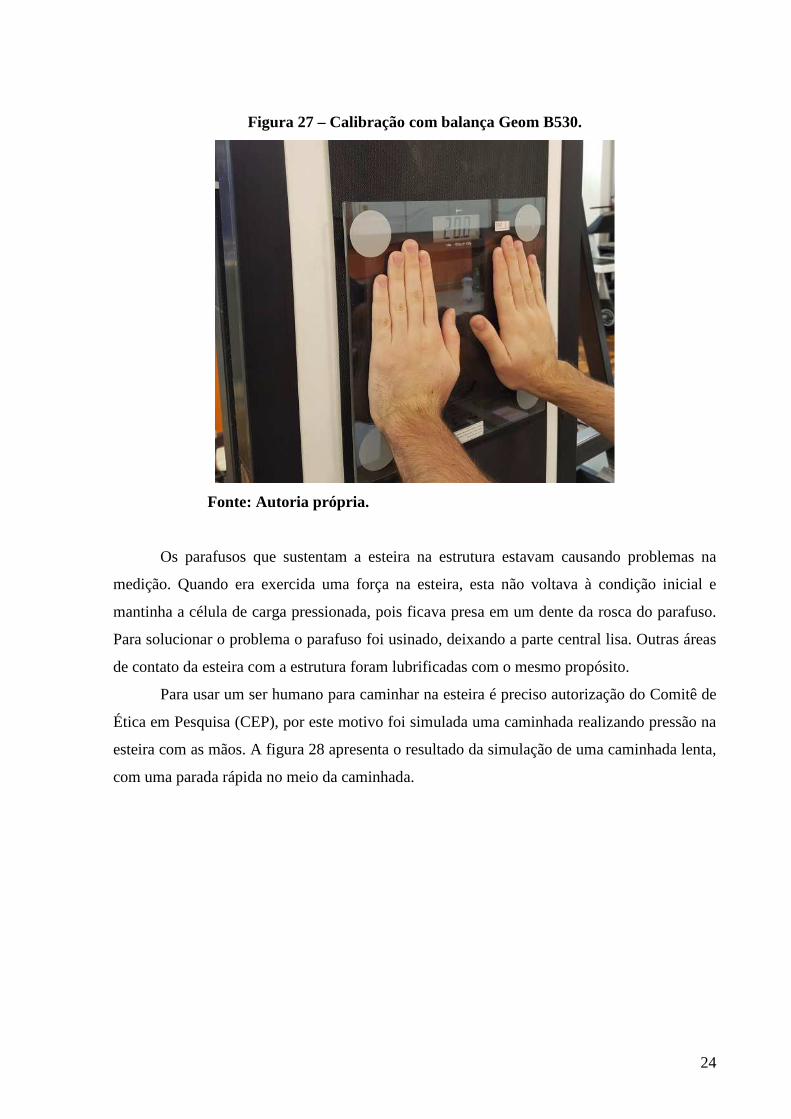
No caso da plataforma para simulação de locomoção em microgravidade em que a
esteira é instalada verticalmente, o processo de calibração habitual é inexequível. Neste
cenário uma balança doméstica Geom B530 foi posicionada na esteira, exercendo-se uma
força constante de 20 kg sobre a mesma, como mostra a Fig. 27. Assim, com a força exercida
conhecida e com o valor lido do Hx710 foi possível encontrar um fator de conversão
aproximado. Posteriormente realizaram-se testes na plataforma com a balança, para confirmar
que a força exercida era a mesma da obtida nas leituras.
24
Figura 27 – Calibração com balança Geom B530.
Fonte: Autoria própria.
Os parafusos que sustentam a esteira na estrutura estavam causando problemas na
medição. Quando era exercida uma força na esteira, esta não voltava à condição inicial e
mantinha a célula de carga pressionada, pois ficava presa em um dente da rosca do parafuso.
Para solucionar o problema o parafuso foi usinado, deixando a parte central lisa. Outras áreas
de contato da esteira com a estrutura foram lubrificadas com o mesmo propósito.
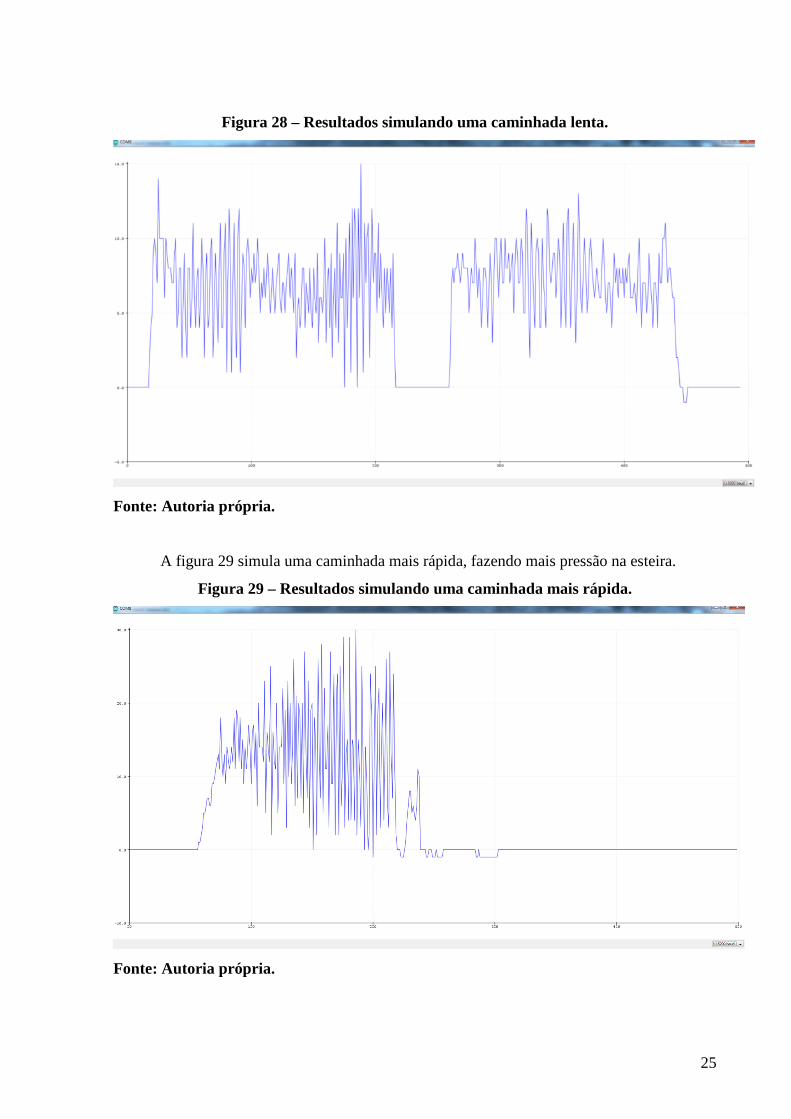
Para usar um ser humano para caminhar na esteira é preciso autorização do Comitê de
Ética em Pesquisa (CEP), por este motivo foi simulada uma caminhada realizando pressão na
esteira com as mãos. A figura 28 apresenta o resultado da simulação de uma caminhada lenta,
com uma parada rápida no meio da caminhada.
25
Figura 28 – Resultados simulando uma caminhada lenta.
Fonte: Autoria própria.
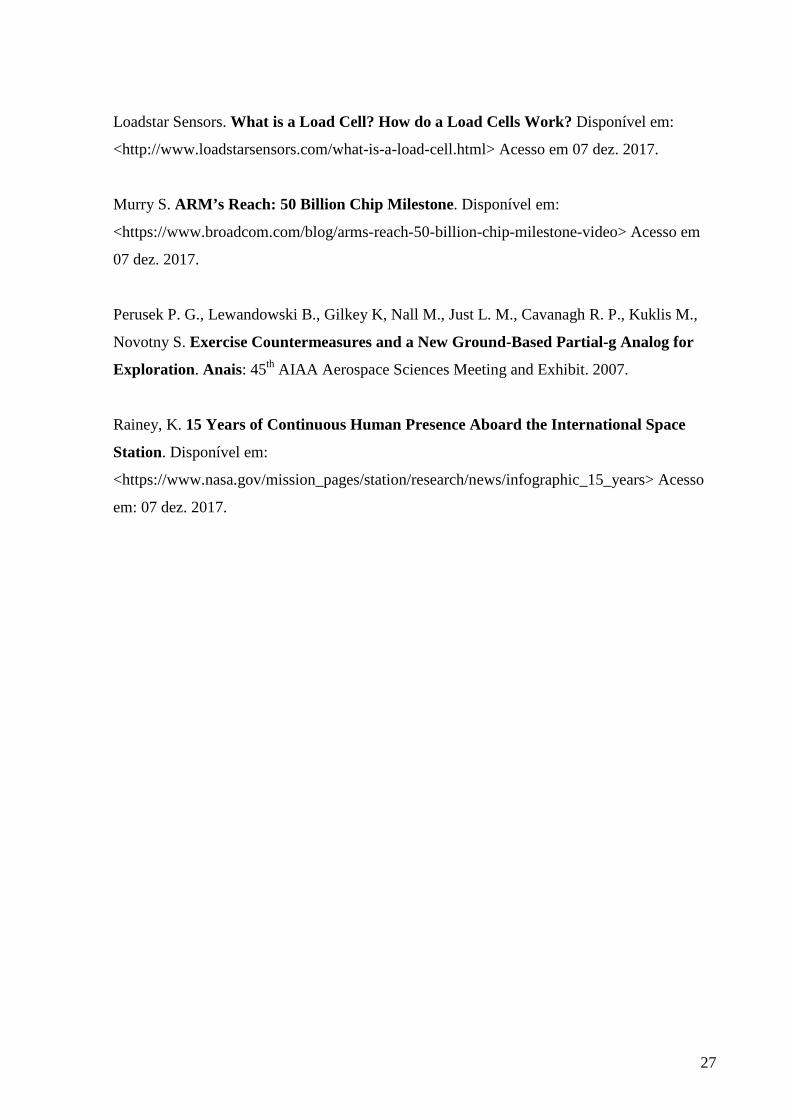
A figura 29 simula uma caminhada mais rápida, fazendo mais pressão na esteira.
Figura 29 – Resultados simulando uma caminhada mais rápida.
Fonte: Autoria própria.

26
5 CONCLUSÃO
Estudar e entender os efeitos da microgravidade no corpo é essencial para a
manutenção dos astronautas no espaço e também para as pessoas aqui na terra, dada a
similaridade dos efeitos da osteoporose e os da microgravidade.
Neste trabalho foi realizada a construção de um sistema de desenvolvimento e
aquisição de dados que vai possibilitar a realização de estudos no sistema musculoesquelético
através de simulações de locomoção em microgravidade por meio da inversão postural (uso
da esteira vertical). Além de ter atingido os objetivos propostos no início do projeto, os
resultados obtidos foram muito bons, uma vez que a placa de aquisição desenvolvida tem um
funcionamento muito melhor em relação as comerciais no que diz respeito a redução do ruído
presente na captura dos dados. A PCI produzida proporcionou leituras mais estáveis, com
pouca oscilação, e o código desenvolvido implementou filtros digitais para atenuação das
oscilações e ruídos inerentes às células de carga. Outrossim, o autor teve a oportunidade de
aplicar e aprofundar os conhecimentos adquiridos nas diversas áreas do curso de Engenharia
de Controle e Automação, como instrumentação, eletrônica, processadores e programação em
linguagem C.
Pra trabalhos futuros recomenda-se desenvolver um sistema mais preciso para calibrar
a plataforma, utilizar acelerômetros em conjunto com as células de carga e utilizar a PCI
produzida para a automação da plataforma.
6 REFERÊNCIAS
Balbinot A., Brusamarello V. J., Instrumentação e Fundamentos de Medida, 2. ed., LTC,
2007.
Gary Legg. ZigBee: Wireless Technology for Low-Power Sensor Networks. Disponível
em:
<http://www.eetimes.com/document.asp?doc_id=1275760> Acesso em 07 dez. 2017.
Hollingham, R. The effects of space travel on the human body. Disponível em:
<http://www.bbc.com/future/story/20140506-space-trips-bad-for-your-health> Acesso em: 07
dez. 2017.
27
Loadstar Sensors. What is a Load Cell? How do a Load Cells Work? Disponível em:
<http://www.loadstarsensors.com/what-is-a-load-cell.html> Acesso em 07 dez. 2017.
Murry S. ARM’s Reach: 50 Billion Chip Milestone. Disponível em:
<https://www.broadcom.com/blog/arms-reach-50-billion-chip-milestone-video> Acesso em
07 dez. 2017.
Perusek P. G., Lewandowski B., Gilkey K, Nall M., Just L. M., Cavanagh R. P., Kuklis M.,
Novotny S. Exercise Countermeasures and a New Ground-Based Partial-g Analog for
Exploration . Anais: 45th AIAA Aerospace Sciences Meeting and Exhibit. 2007.
Rainey, K. 15 Years of Continuous Human Presence Aboard the International Space
Station. Disponível em:
<https://www.nasa.gov/mission_pages/station/research/news/infographic_15_years> Acesso
em: 07 dez. 2017.