ponte-h com controle pwm (mec009)
TRANSCRIPT
28/11/13 Ponte-H com controle PWM (mec009)
www.newtoncbraga.com.br/index.php/robotica/1213-ponte-h-com-pwm 1/5
Principal
Instituto New ton C. Braga
Mensagens Recebidas
Contato
ELETRÔNICA
Artigos
Banco de circuitos
Circuitos Simulados
Como Funciona
Dicas de PIC
Eletrônica Paranormal
Idéias, Dicas e Inf.
Instrumentação
Microcontroladores
Mundo das Válvulas
Novos Componentes
Telecomunicações
TECNOLOGIA
Curiosidades
Meio Ambiente e Saúde
Memória Histórica
Novas Tecnologias
Profissões e Carreiras
Videolog
EDUCAÇÃO TECNOLÓGICA
Almanaque Tecnológico
Apostilas
Astronomia e Astrofísica
Inglês para eletrônica
Matemática na eletrônica
Mini Projetos
Projetos Educacionais
MyDAQ - Proj. e Aplicações
ELETRICIDADE
Industrial - Eletrotécnica
Instalações residenciais
PRÁTICAS DE SERVICE
Aparelhos de TV
Aparelhos de Som
Aparelhos Diversos
AUTOMAÇÃO
Industrial
Residencial - Predial
MECATRÔNICA
Kits
Robótica
CURSOS ON-LINE
Ponte-H com controle PWM (mec009)
DetalhesEscrito por Newton C Braga
Dois circuitos são fundamentais em qualquer aplicação que envolva motores de corrente contínua: pontes H econtroles PWM. Neste circuito, dedicado aos projetistas de equipamentos de automação, robótica, mecatrônica eeletrônica embarcada combinamos os dois circuitos num só, com a possibilidade de se ter ao mesmo tempo ocontrole de sentido de rotação e potência para um motor DC comum.
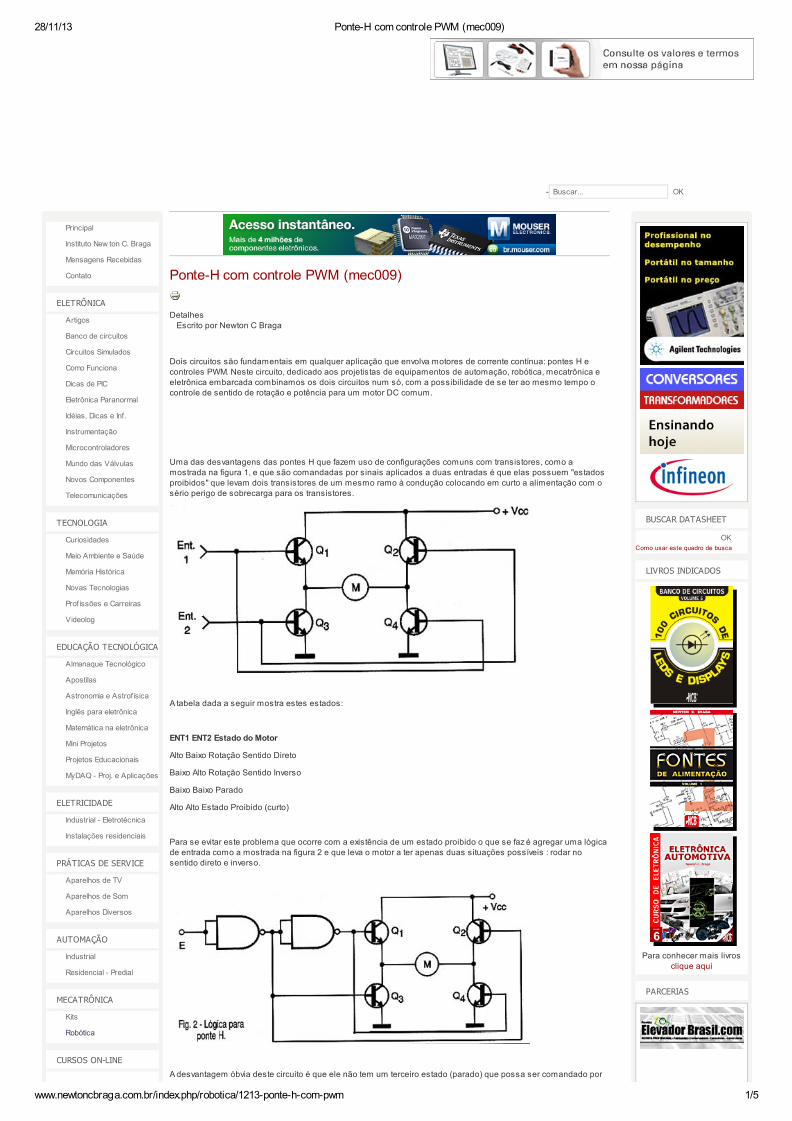
Uma das desvantagens das pontes H que fazem uso de configurações comuns com transistores, como amostrada na figura 1, e que são comandadas por sinais aplicados a duas entradas é que elas possuem "estadosproibidos" que levam dois transistores de um mesmo ramo à condução colocando em curto a alimentação com osério perigo de sobrecarga para os transistores.
A tabela dada a seguir mostra estes estados:
ENT1 ENT2 Estado do Motor
Alto Baixo Rotação Sentido Direto
Baixo Alto Rotação Sentido Inverso
Baixo Baixo Parado
Alto Alto Estado Proibido (curto)
Para se evitar este problema que ocorre com a existência de um estado proibido o que se faz é agregar uma lógicade entrada como a mostrada na figura 2 e que leva o motor a ter apenas duas situações possíveis : rodar nosentido direto e inverso.
A desvantagem óbvia deste circuito é que ele não tem um terceiro estado (parado) que possa ser comandado por
BUSCAR DATASHEET
OK Como usar este quadro de busca
LIVROS INDICADOS
Para conhecer mais livrosclique aqui
PARCERIAS
- Buscar... OK
28/11/13 Ponte-H com controle PWM (mec009)
www.newtoncbraga.com.br/index.php/robotica/1213-ponte-h-com-pwm 2/5
Eletrônica Automotiva
Eletrônica Digital
Eletrônica Básica
Reparação eletrônica
MultiSIM 11
Técnicas de Montagem
O AUTOR
Método de Ensino
Sobre o Autor
Palestras e Cursos
Fotolog
As trapalhadas de Eltron
Aventuras do Prof. Ventura
LITERATURA TÉCNICA
Livros Nacionais
Livros Internacionais
Livros para Dow nloads
Li, Lendo e Recomendo
Biblioteca do Instituto
COLABORADORES
Perfil
níveis lógicos externos. A nossa proposta neste projeto é interessante: mantemos a configuração lógica para doissentidos de rotação e agregamos um controle PWM que permite não só agregar este terceiro estado (parado)comandado por nível lógico como também um controle de velocidade PWM.
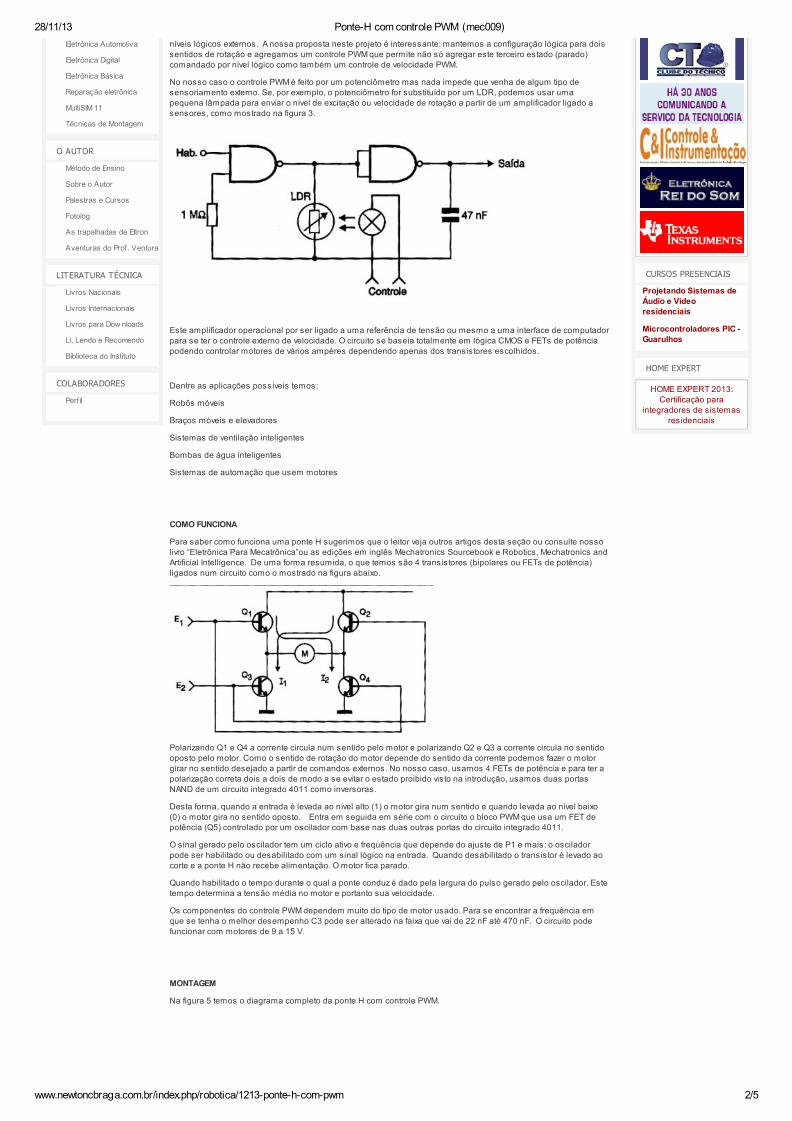
No nosso caso o controle PWM é feito por um potenciômetro mas nada impede que venha de algum tipo desensoriamento externo. Se, por exemplo, o potenciômetro for substituído por um LDR, podemos usar umapequena lâmpada para enviar o nível de excitação ou velocidade de rotação a partir de um amplificador ligado asensores, como mostrado na figura 3.
Este amplificador operacional por ser ligado a uma referência de tensão ou mesmo a uma interface de computadorpara se ter o controle externo de velocidade. O circuito se baseia totalmente em lógica CMOS e FETs de potênciapodendo controlar motores de vários ampères dependendo apenas dos transistores escolhidos.
Dentre as aplicações possíveis temos:
Robôs móveis
Braços móveis e elevadores
Sistemas de ventilação inteligentes
Bombas de água inteligentes
Sistemas de automação que usem motores
COMO FUNCIONA
Para saber como funciona uma ponte H sugerimos que o leitor veja outros artigos desta seção ou consulte nossolivro “Eletrônica Para Mecatrônica”ou as edições em inglês Mechatronics Sourcebook e Robotics, Mechatronics andArtificial Intelligence. De uma forma resumida, o que temos são 4 transistores (bipolares ou FETs de potência)ligados num circuito como o mostrado na figura abaixo.
Polarizando Q1 e Q4 a corrente circula num sentido pelo motor e polarizando Q2 e Q3 a corrente circula no sentidooposto pelo motor. Como o sentido de rotação do motor depende do sentido da corrente podemos fazer o motorgirar no sentido desejado a partir de comandos externos. No nosso caso, usamos 4 FETs de potência e para ter apolarização correta dois a dois de modo a se evitar o estado proibido visto na introdução, usamos duas portasNAND de um circuito integrado 4011 como inversoras.
Desta forma, quando a entrada é levada ao nível alto (1) o motor gira num sentido e quando levada ao nível baixo(0) o motor gira no sentido oposto. Entra em seguida em série com o circuito o bloco PWM que usa um FET depotência (Q5) controlado por um oscilador com base nas duas outras portas do circuito integrado 4011.
O sinal gerado pelo oscilador tem um ciclo ativo e frequência que depende do ajuste de P1 e mais: o osciladorpode ser habilitado ou desabilitado com um sinal lógico na entrada. Quando desabilitado o transistor é levado aocorte e a ponte H não recebe alimentação. O motor fica parado.
Quando habilitado o tempo durante o qual a ponte conduz é dado pela largura do pulso gerado pelo oscilador. Estetempo determina a tensão média no motor e portanto sua velocidade.
Os componentes do controle PWM dependem muito do tipo de motor usado. Para se encontrar a frequência emque se tenha o melhor desempenho C3 pode ser alterado na faixa que vai de 22 nF até 470 nF. O circuito podefuncionar com motores de 9 a 15 V.
MONTAGEM
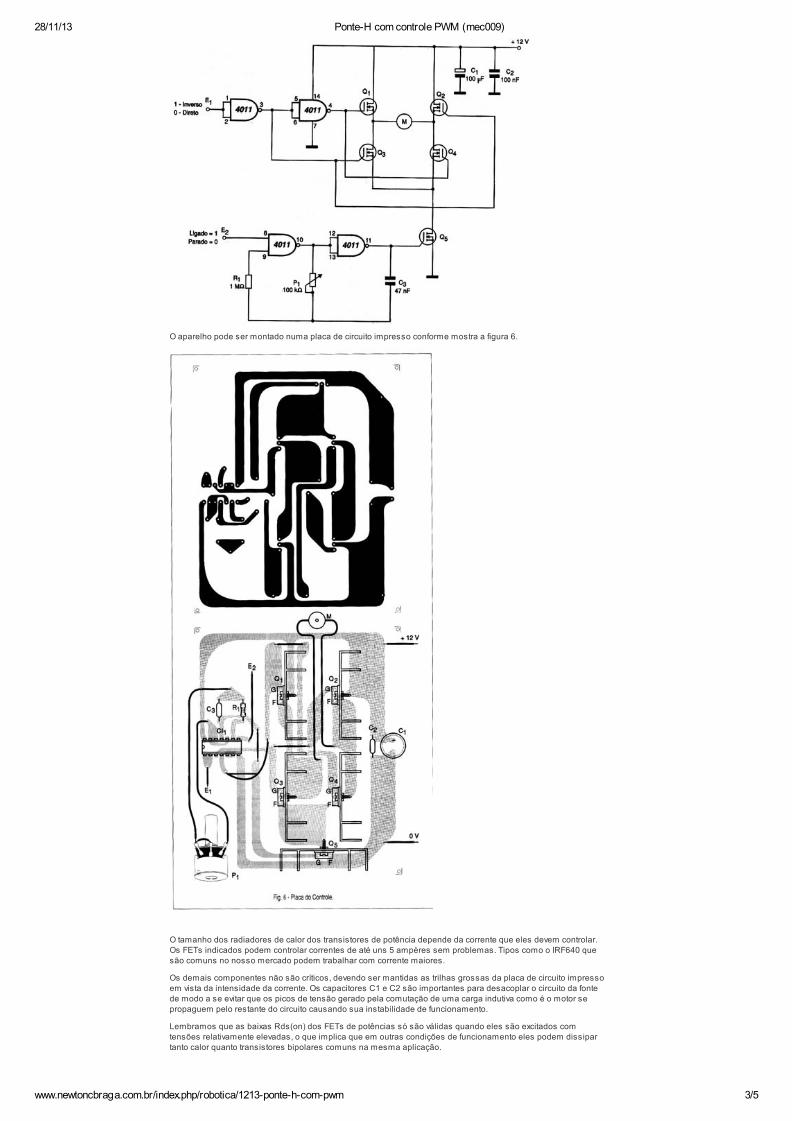
Na figura 5 temos o diagrama completo da ponte H com controle PWM.
CURSOS PRESENCIAIS
Projetando Sistemas deÁudio e Vídeoresidenciais
Microcontroladores PIC -Guarulhos
HOME EXPERT
HOME EXPERT 2013:Certificação para
integradores de sistemasresidenciais
28/11/13 Ponte-H com controle PWM (mec009)
www.newtoncbraga.com.br/index.php/robotica/1213-ponte-h-com-pwm 3/5
O aparelho pode ser montado numa placa de circuito impresso conforme mostra a figura 6.
O tamanho dos radiadores de calor dos transistores de potência depende da corrente que eles devem controlar.Os FETs indicados podem controlar correntes de até uns 5 ampères sem problemas. Tipos como o IRF640 quesão comuns no nosso mercado podem trabalhar com corrente maiores.
Os demais componentes não são críticos, devendo ser mantidas as trilhas grossas da placa de circuito impressoem vista da intensidade da corrente. Os capacitores C1 e C2 são importantes para desacoplar o circuito da fontede modo a se evitar que os picos de tensão gerado pela comutação de uma carga indutiva como é o motor sepropaguem pelo restante do circuito causando sua instabilidade de funcionamento.
Lembramos que as baixas Rds(on) dos FETs de potências só são válidas quando eles são excitados comtensões relativamente elevadas, o que implica que em outras condições de funcionamento eles podem dissipartanto calor quanto transistores bipolares comuns na mesma aplicação.

28/11/13 Ponte-H com controle PWM (mec009)
www.newtoncbraga.com.br/index.php/robotica/1213-ponte-h-com-pwm 4/5
PROVA E USO
Para provar pode-se usar qualquer motor DC comum ligado ao circuito. Alimenta-se o circuito com a tensãonecessária ao seu funcionamento e coloca-se a entrada E2 no nível alto para habilitar o controle PWM e a entradaE1 no nível baixo.
Não se recomenda usar o circuito com tensões de alimentação abaixo de 9 V dada as características de altaresistência apresentadas pelos Power FETs quando excitados com baixas tensão.
Girando o potenciômetro de modo a reduzir sua resistência o motor deve acelerar até a velocidade máxima. Seisso não ocorrer da forma esperada o capacitor C3 deve ser alterado até se encontrar o valor que leve ao melhordesempenho. Valores na faixa de 22 nF até 470 nF podem ser experimentados.
Eventualmente um capacitor de poliéster de 100 nF a 1 uF deve ser ligado em paralelo com o motor caso sejanotada instabilidade no seu funcionamento.
Passando agora a entrada e1 ao nível alto (ligando ao positivo da fonte) o motor deve inverter sua rotação.Comprovado o funcionamento é só fazer sua utilização.
LISTA DE MATERIAL
Semicondutores:
CI-1 - 4011 - circuito integrado CMOS
Q1, Q2, Q3, Q4, Q5 - IRF640, IRF720, IRF511 ou qualquer equivalente - FETs de potência
Resistores: (1/8W, 5%)
R1 - 1 M ohms
P1 - 100k ohms - potenciômetro
Capacitores:
C1 - 100 uF/16 V - eletrolítico
C2 - 100 nF - poliéster
C3 - 47 nF - poliéster (ver texto)
Diversos:
Placa de circuito impresso, radiadores de calor para os transistores, botão para o potenciômetro, fios, solda, etc
Artigos Relacionados
PatriotaNão existem patriotas em filas do INPS.
Luis Fernando Veríssimo (1936) - A Grande Mulher Nua
+conexões
RSS
Apoio Social Advertise in BrazilIf your business is Electronics,components or devices, this
LIVROS TÉCNICOS

28/11/13 Ponte-H com controle PWM (mec009)
www.newtoncbraga.com.br/index.php/robotica/1213-ponte-h-com-pwm 5/5
Instituto Newton C Braga - 2013 - Entre em contato - Como Anunciar - Políticas do Site facebook
site is the correct place toinsert your advertisement (see
more)