pedro sampaio vieira um sistema de modelagem 3d de coluna...
TRANSCRIPT
Pedro Sampaio Vieira
Um sistema de modelagem 3D de coluna vertebral baseado em imagens de raios-x
DISSERTAÇÃO DE MESTRADO
DEPARTAMENTO DE INFORMÁTICA
Programa de Pós-Graduação em Informática
Rio de Janeiro, agosto de 2009

Pedro Sampaio Vieira
Um sistema de modelagem 3D de coluna vertebral
baseado em imagens de raios-x
Dissertação de Mestrado
Dissertação apresentada como requisito parcial para obtenção do título de Mestre pelo Programa de Pós-Graduação em Informática da PUC-Rio.
Orientador: Prof. Marcelo Gattass
Rio de Janeiro, agosto de 2009
Pedro Sampaio Vieira
Um sistema de modelagem 3D de coluna vertebral
baseado em imagens de raios-x
Dissertação apresentada como requisito parcial para obtenção do título de Mestre pelo Programa de Pós-Graduação em Informática da PUC-Rio. Aprovada pela Comissão Examinadora abaixo assinada.
Prof. Marcelo Gattass Orientador
Departamento de Informática – PUC-Rio
Prof. Waldemar Celes Filho Departamento de Informática – PUC-Rio
Prof. Ítalo de Oliveira Matias Núcleo de Pesquisa e Desenvolvimento – UCAM-Campos
Prof. Paulo Cezar Pinto Carvalho IMPA
Rio de Janeiro , 21 de agosto de 2009

Todos os direitos reservados. É proibida a reprodução total ou parcial do trabalho sem autorização da universidade, do autor e do orientador.
Pedro Sampaio Vieira
Ficha Catalográfica
Incluí referências bibliográficas.


Agradecimentos
Resumo
VIEIRA, P. S.; GATTASS, M. Um sistema de modelagem 3D de coluna vertebral baseado em imagens de raios-x. Rio de Janeiro, 2009. Dissertação de Mestrado - Departamento de Informática, Pontifícia Universidade Católica do Rio de Janeiro.
Nos dias atuais, pesquisas envolvendo a computação gráfica e a área
médica, têm contribuído muito para a evolução tecnológica de exames e
diagnósticos. Uma vertente desses trabalhos está relacionada diretamente à
reconstrução 3D de estruturas anatômicas do corpo humano, em específico a
coluna vertebral. O sedentarismo e a alta dependência dos computadores vêm
aumentando e agravando os problemas posturais das pessoas. Por esse
motivo, novas técnicas de reconstrução 3D baseada em exames de tomografia
computadorizada (TC), ressonância magnética (RM) e raios-x são
desenvolvidas, tornando as avaliações clínicas cada vez mais precisas. Neste
trabalho é proposto um sistema de modelagem 3D baseado em radiografias
digitais com a finalidade de recriar a coluna vertebral em um ambiente virtual. A
recuperação das informações tridimensionais de cada vértebra ajuda a
melhorar a avaliação feita atualmente com base apenas em imagens 2D. A
técnica utilizada no desenvolvimento do método se baseia na
estereoradiografia. E a utilização de radiografias, em relação à TC e RM, reduz
consideravelmente o tempo de exposição do paciente à radiação, além de ser
mais acessível à população pelo seu menor custo. Os resultados obtidos
apresentaram uma boa precisão do sistema. Além do mais, o método proposto
atingiu resultados bem próximos aos de pesquisas baseadas em TC e RM,
onde os dados de entrada são bem mais “legíveis” do que as imagens de raios-
x.
Palavras-chave Radiografia digital; modelagem 3D; estereoradiografia; avaliação postural.

Abstract
VIEIRA, P. S.; GATTASS, M. A spine 3D modeling system based on x-ray images. Rio de Janeiro, 2009. MScThesis - Computer Science Department, Pontifícia Universidade Católica do Rio de Janeiro.
Research involving computer graphics and laboratory exams has
contributed much to the quality of the Medical diagnose. One aspect of these
researches is directly related to 3D reconstruction of anatomical structures of
the human body, especially the spine. The sedentary lifestyle and the high
dependence of computers have increased the postural problems of the
population. Therefore, new techniques for 3D reconstruction based on
Computed tomography (CT), magnetic resonance imaging (MRI) and x-ray
images are required, in order to make the clinical evaluation increasingly
accurate. This work proposes a 3D modeling system based on x-ray images
that yields a virtual spine model. The recovery of three-dimensional information
of each vertebra helps improve the assessment currently made using only 2D
images. The technique used here is based on stereo radiographic. The use of
x-ray images instead of CT or MRI, significantly reduces the exposure time of
the patient to radiation, and is more useful to the general population due to its
lower cost. The results presented here show good accuracy despite its lower
cost. The proposed method has achieved results very close to those based on
expensive CT or MRI, where the input image is better than x-ray images.
Palavras-chave Digital radiographs; 3D modeling; stereoradiographic; postural
assessement.
9
Sumário
1 Introdução 10�
2 Trabalhos Relacionados 13�
3 Sistema de Modelagem 17�
3.1. Aquisição das imagens de raios-x 19�
3.2. Recuperação dos pontos 3D 22�
3.2.1. Método 1 25�
3.2.2. Método 2 27�
3.3. Posicionamento do modelo 3D das vértebras 33�
4 Experimentos Computacionais 38�
4.1. Validação da técnica 39�
4.2. Recuperação do ponto 3D 41�
4.3. Avaliação clínica dos resultados 46�
5 Conclusão e Trabalhos Futuros 49�
REFERÊNCIAS 52�
Apêndice A - Pré-processamento das imagens de raios-x 56�

10
1 Introdução
Atualmente a Computação Gráfica (CG) é uma das áreas de pesquisa da
Ciência da Computação de maior expansão e importância, principalmente devido
ao alto número de projetos multidisciplinares em que ela está envolvida. E em
muitos momentos, esses tipos de projetos tomaram uma proporção muito grande
pelo fato de alguns deles serem reconhecidos como um marco de outras
disciplinas que, em sua essência, não estão ligadas diretamente à computação.
Tudo isso devido à contribuição da CG.
Um exemplo dessa realidade pode ser visto na evolução tecnológica da
medicina. Há vários exames que auxiliam os médicos a terem uma visão bem
detalhada de vários problemas específicos, o que conseqüentemente lhes
permitem fornecerem diagnósticos mais precisos aos pacientes. Como, por
exemplo: tomografia computadorizada, ressonância magnética, endoscopia,
ultra-sonografia, etc.
Figura 1.1: Sistema da Vinci Si utilizado como ferramenta de apoio a cirurgias.
Contundo muito desses benefícios vêm da evolução das técnicas de visão
computacional, empregadas na realização da maioria destes exames. Tem-se a
presença forte de tais técnicas tanto numa simples ressonância magnética
(deixando claro que o termo “simples” é por ser atualmente um exame mais
comum) quanto no exame que é a “sensação” do momento hoje, a ultra-
sonografia 4D. Nele se é possível observar, em tempo real num ambiente tri-
11
dimensional, toda a forma e a movimentação do feto dentro da barriga da mãe,
permitindo assim um estudo melhor da morfologia fetal e ajudando na detecção
de anomalias e síndromes.
Inclusive, em uma pesquisa recente, foi desenvolvido um sistema capaz de
reconstruir tridimensionalmente o feto ainda na barriga da mãe. E além da
reconstrução, o sistema permite que o modelo 3D seja impresso numa
impressora específica, gerando um modelo real da criança (figura 1.2).
Figura 1.2: Modelo real do feto ainda na barriga da mãe.
Na mesma corrente, a área biomédica também tem sido muito explorada
pelas pesquisas aplicadas envolvendo a Computação Gráfica. Novas linhas de
pesquisa vêm sendo criadas e técnicas já conhecidas vêm ganhando melhorias
significativas. Um exemplo muito interessante são pesquisas relacionadas à
reconstrução tridimensional da coluna vertebral do paciente, permitindo uma
avaliação lateral mais precisa da curvatura da coluna.
Esse campo de pesquisa é muito interessante para se trabalhar, porque
trata de problemas de postura que vem sendo muito comum na vida das
pessoas, já que o estilo de vida hoje em dia se caracteriza pelo sedentarismo e,
principalmente, por uma alta dependência que as pessoas têm do computador.
O tempo sentado em frente do computador, somado a falta de preocupação
quanto a postura, faz com que esses problemas sejam acentuados.
Outro ponto importante é que apesar de existir alguns trabalhos
relacionados à esse problema, ainda têm muitos caminhos a serem explorados
para que se possa obter diagnósticos mais precisos em relação ao que se é feito
nos dias atuais sem o auxilio da computação. Além de proporcionar uma
12
melhora também na definição e no monitoramento do tratamento necessário
para recuperação do paciente.
Desta forma, este trabalho propõe o desenvolvimento de um sistema de
modelagem tridimensional de coluna vertebral baseado em radiografias digitais.
Esse mesmo tipo de reconstrução 3D também pode ser feito, de uma forma bem
precisa, com base em dados coletados através tanto de um exame de
tomografia computadorizada (TC) quanto de ressonância magnética (RM).
Porém, a opção da utilização de radiografias é devido a 3 fatores importantes,
como: o alto custo financeiro de um exame de TC e RM; à dificuldade
(psicológica ou técnica) que algumas pessoas têm para conseguirem realizar tais
exames; e à alta dose de radiação [1,6] que o paciente é exposto em uma TC e
RM.
É importante destacar que o conhecimento de biomecânica, que serve de
suporte para o desenvolvimento desta pesquisa, foi obtido através da
participação de profissionais da área biomédica no projeto. Ambos são
fisioterapeutas, professores e pesquisadores do Instituto Superior de Ensino do
CENSA, instituição localizada na cidade de Campos dos Goytacazes, RJ, Brasil.
Portanto, no próximo capítulo serão mostradas algumas pesquisas
relacionadas ao tema em questão. Em seguida, serão explicadas mais
detalhadamente as técnicas que foram usadas para atingir o objetivo da
pesquisa, bem como o conteúdo teórico que dá sustentação para todas as
etapas do processo. Logo após, serão apresentados os resultados dos
experimentos computacionais. E ao final, algumas considerações são feitas
juntamente com a conclusão da pesquisa.
13
2 Trabalhos Relacionados
Existem diversas pesquisas no campo da computação gráfica voltada a
área médica. Muito se tem estudado sobre a representação virtual, em
ambientes tridimensionais, de várias partes do corpo humano. Todas com o
intuito tanto de simular o ambiente real em treinamentos, quanto de detectar
patologias [20, 21].
Pesquisas destinadas a esse campo de atuação são mais freqüentes
quando o método de coleta de informações clínicas do paciente é feito baseado
em exames de Tomografia Computadorizada (TC) e Ressonância Magnética
(RM). Isso ocorre devido à vasta e qualificada quantidade de informações
extraídas a partir dos exames gerados por tais dispositivos. O que permite que
se tenha um elevado nível de precisão na concepção do ambiente virtual. Em
[18, 22] vemos alguns trabalhos nessa linha.
Entretanto, pesquisas baseadas em exames de raios-x, não são tão
freqüentes assim. Tal fato deve-se principalmente à dificuldade de se processar
imagens desta natureza. Isso pela razão de ainda apresentarem muito ruído
provenientes de outras partes do corpo humano, que não são o foco da
aplicação. Apesar disso, devido ao seu custo, o volume de trabalhos nesta linha
dos exames de raios-x tende a crescer no decorrer dos próximos anos.
Geralmente, o procedimento de modelagem tridimensional da coluna
vertebral é dividido em duas etapas: pré-processamento das radiografias e
recuperação do ambiente 3D. Isso porque, para efetuar a reconstrução da
coluna vertebral do paciente é necessário inicialmente extrair das imagens de
raios-x pontos chaves de cada uma dessas vértebras.
Esta etapa é extremamente importante para que se tenha um resultado
preciso ao final do processo. Encontrar tais pontos automaticamente é
considerado um dos principais desafios em pesquisas deste tipo. Principalmente
por causa do ruído, ainda não há um método que faça esse processo de
14
segmentação e extração de pontos chave de forma automática [1]. O que força
que os pontos sejam marcados manualmente por profissionais especializados da
área médica, aumentando consideravelmente o tempo em que todo o
procedimento de modelagem seja concluído. O que do ponto de vista da
agilidade exigida no fluxo de trabalho diário necessário para realizar um exame,
talvez possa ser uma questão importante a ser levada em consideração.
Contudo, alguns trabalhos propõem aproximações para que tanto a etapa
seja feita com mais agilidade, quanto para fornecer mais recursos ao profissional
que definirá as marcações. Em [6] é proposto um método semi-automático para
buscar características nas imagens de raios-x que identifica a deformidade que o
paciente possui na parte lombar da coluna. Mesmo utilizando técnicas de
aprendizagem computacional para classificar as deformidades possíveis, ainda é
necessário que o radiologista faça marcações iniciais na radiografia para criar os
classificadores. Porém no momento de avaliar um novo caso, os autores
propõem uma segmentação da imagem a fim de encontrar tais pontos. A técnica
utilizada por eles foi Active Appearance Modeling [7,17].
Tal técnica aproxima a marcação dos pontos de referência para facilitar o
trabalho do usuário. Desta forma, o usuário precisaria apenas corrigir algum
ponto quando houver necessidade. Os autores ressaltam que o fato do
framework proposto ser genérico, outras técnicas podem também serem
aplicadas. São elas: Active Contour Segmentation [8], Active Shape Modeling [9]
e Shape Particle Filtering [10].
Já em [11], também almejando uma reconstrução 3D, é usada uma técnica
de detecção de arestas para o processo de segmentação. O método proposto
pelos autores é uma modificação do clássico algoritmo de extração de arestas
Canny-Deriche [12,13]. Em sua versão original, o algoritmo possui uma etapa
inicial onde se realiza uma suavização gaussiana na imagem antes de partir
diretamente para a detecção das arestas. No Local Canny-Deriche, como foi
chamado pelos autores, tal processamento inicial foi substituído por um filtro
anisotrópico, a fim de preservar a estrutura das arestas e reduzir o ruído da
radiografia. O algoritmo é aplicado localmente na região de interesse, um
bounding box englobando apenas a estrutura da coluna vertebral.
15
Em contrapartida a essa linha de raciocínio, em [4], além das marcações
serem feitas manualmente, informações de vértebras reais coletadas pelos
autores durante anos ajudam ao processo. A partir de medidas realizadas nas
peças reais, o banco de dados é formado contendo uma série de modelos de
vértebras. Cada uma delas contém até 214 coordenadas 3D (no espaço do
objeto) referentes a específicos pontos anatômicos.
O artigo propõe um método original baseado em 2 radiografias (ântero-
posterior e perfil). Através de manipulações geométricas, das informações do
banco de dados e de modelos estatísticos, os autores conseguiram recuperar o
posicionamento das vértebras no espaço. A partir daí, esse resultado parcial é
projetado nas radiografias originais para que o usuário faça um ajuste fino e
corrija qualquer imperfeição que possa ter ocorrido na geometria de cada
vértebra. Desse jeito, segundo os autores, o método é capaz de apresentar uma
boa precisão, além de mostrar um resultado gráfico mais fiel à estrutura da
coluna vertebral.
Com características semelhantes a esse artigo, em [1] a proposta é utilizar
apenas uma única imagem de raios-x combinada com o mesmo banco de dados
citado anteriormente. A identificação dos pontos de referência é feita
manualmente e o processo de calibração é o mesmo do que já é aplicado em
câmeras normais. A diferença principal entre eles está na adição de um
tratamento para correção radial do posicionamento das vértebras no espaço.
Segundo os autores, o processo de mapeamento da vértebra no espaço
pode ocasionar erros grandes. Isso ocorre devido ao pequeno campo de visão
da projeção perspectiva. Sendo assim, o algoritmo de alinhamento proposto foi
desenvolvido para buscar um conjunto de translações das vértebras, na direção
radial, que minimiza o erro de alinhamento presente na junção de duas
vértebras.
Em [14] é abordado o problema da calibração das radiografias. Apesar de
o artigo possuir uma finalidade diferente do que essa dissertação propõe, ele
apresenta características muito semelhantes em relação ao ambiente montado
para captura das imagens de raios-x. A estrutura escolhida, que foi montada
para a aquisição das imagens de raios-X, possui o mesmo princípio da que foi
construída neste trabalho.
16
A metodologia de calibração proposta pelos autores é baseada no método
de minimização não-linear de Rougée [15]. No entanto, apenas os parâmetros
extrínsecos são estimados por meio deste método, a fim de atingir a alta
precisão requerida pelo problema. Pelo mesmo motivo, e por causa da
velocidade computacional, foi aplicado o método de Wang e Tsai [16], levemente
modificado, para produzir uma boa estimativa inicial desses parâmetros,
necessários para o processo de minimização. Dessa forma eles obtiveram alta
precisão e velocidade de processamento, satisfazendo a produtividade requerida
pelo projeto.
Atualmente, se é muito utilizado um software de avaliação postural
desenvolvido no Projeto SAPO [33]. O objetivo desse projeto foi desenvolver
uma ferramenta gratuita com fundamentação científica, banco de dados e
acesso a pela internet. O software consiste de fotos tiradas do paciente, onde
através desse material se é possível mensurar posição, comprimento, ângulo e
alinhamento dos segmentos corporais de um indivíduo. Todas as medidas são
baseadas numa escala pixel/cm inserida pelo usuário nas fotos, o que faz toda a
análise ser somente baseada em informações 2D.
Neste trabalho optamos por utilizar um método de calibração similar ao
que foi utilizado em [4]. Já para o cálculo das rotações das vértebras, propomos
uma manipulação geométrica baseada nos pontos marcados estrategicamente
nas radiografias. Além disso, para atingir o objetivo final de modelagem da
coluna vertebral, o sistema necessitou apenas de 5 pontos chaves identificados
em cada vértebra, sem o auxilio de qualquer banco de informações coletadas
previamente.
17
3 Sistema de Modelagem
A maioria das pesquisas sobre reconstrução 3D de coluna vertebral
baseado em radiografias possui três etapas: captura das imagens de raios-x;
pré-processamento e marcação dos pontos chave; e recuperação das
informações 3D das vértebras.
Este trabalho não chega a propor uma reconstrução total da coluna
vertebral, ou seja, recriar em 3D exatamente a coluna do paciente incluindo o
tamanho real, e atual, de cada vértebra. O nosso objetivo é modelar a coluna
vertebral, recuperando a posição e rotação de cada vértebra no espaço 3D. Pois
assim teremos a forma da coluna vertebral e a linha que a define recriada no
ambiente virtual.
Entretanto, neste capítulo são apresentadas apenas as etapas de
aquisição das radiografias e recuperação das informações 3D de cada vértebra.
Isso porque é definido de que a etapa de marcação dos pontos chave é feita
manualmente pelos médicos. Essa decisão foi tomada, já que todos os métodos
tentados não apresentaram melhoria significativa para que fosse decidido
realizar tal procedimento de outra forma. Porém, no apêndice A demonstramos
as técnicas empregadas nessas tentativas, bem como os resultados obtidos por
elas.
Voltando ao sistema de modelagem, a técnica utilizada é baseada em [4],
e a proposta é realizar tal procedimento com base em duas imagens de raios-x,
perfil e ântero-posterior (AP), podendo, posteriormente, ser introduzida no
processo uma terceira imagem na posição oblíqua para aumentar a precisão.
Tais imagens foram capturadas com a tecnologia da radiologia digital, e a sua
escolha deve-se ao fato da mesma possuir uma resolução bem superior do que
uma imagem de raio-x convencional, além de ser um equipamento de custo bem
inferior comparado aos tomógrafos por exemplo. Esse segundo ponto permite
que esta técnica possa ser aplicada a um maior número de pacientes, uma vez
que equipamentos deste tipo estão contemplados na infra-estrutura de muitas
18
unidades públicas de saúde, tornando esse tipo de análise mais acessível a
maioria da população.
A reconstrução 3D da coluna vertebral foi feita com base nos pontos
chave, de cada vértebra, previamente marcados pelos médicos. Tais pontos
ajudam a encontrarmos a posição e inclinação de cada vértebra no ambiente
virtual. Por conseqüência desse procedimento, podemos encontrar a linha
imaginária, que representa a coluna vertebral do paciente, nos permitindo extrair
informações para a avaliação do mesmo, como, por exemplo, o ângulo de Cobb.
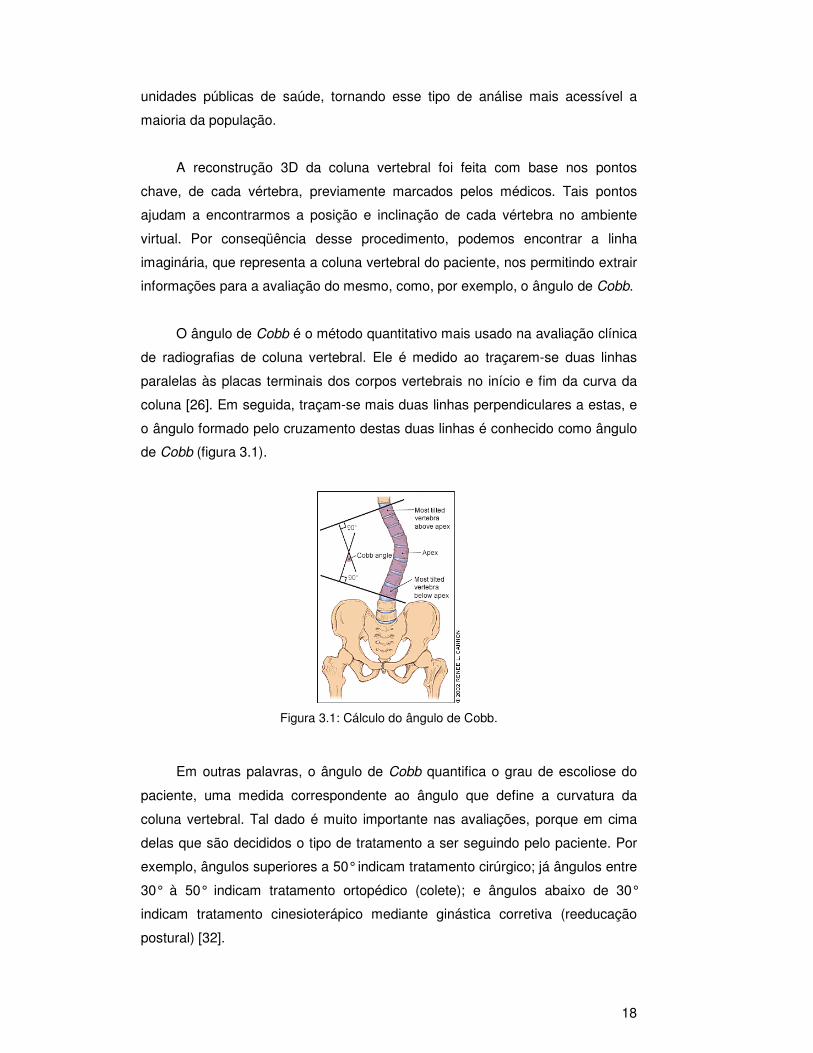
O ângulo de Cobb é o método quantitativo mais usado na avaliação clínica
de radiografias de coluna vertebral. Ele é medido ao traçarem-se duas linhas
paralelas às placas terminais dos corpos vertebrais no início e fim da curva da
coluna [26]. Em seguida, traçam-se mais duas linhas perpendiculares a estas, e
o ângulo formado pelo cruzamento destas duas linhas é conhecido como ângulo
de Cobb (figura 3.1).
Figura 3.1: Cálculo do ângulo de Cobb.
Em outras palavras, o ângulo de Cobb quantifica o grau de escoliose do
paciente, uma medida correspondente ao ângulo que define a curvatura da
coluna vertebral. Tal dado é muito importante nas avaliações, porque em cima
delas que são decididos o tipo de tratamento a ser seguindo pelo paciente. Por
exemplo, ângulos superiores a 50° indicam tratamento cirúrgico; já ângulos entre
30° à 50° indicam tratamento ortopédico (colete); e ângulos abaixo de 30°
indicam tratamento cinesioterápico mediante ginástica corretiva (reeducação
postural) [32].
19
Porém, esse método de avaliação possui significativas limitações pelo fato
dele ser medido apenas baseado em imagens de raios-x, representadas em
duas dimensões. Logo, a grande limitação é a perda de informação quanto à
rotação das vértebras, o que torna a avaliação um tanto quanto imprecisa.
Sendo assim, a partir das próximas seções, as técnicas responsáveis pela
criação de todo o sistema serão apresentadas para que possamos detalhar
melhor cada etapa do processo.
3.1. Aquisição das imagens de raios-x
Como a base do sistema de modelagem proposto são as imagens de
raios-X, uma estrutura teve de ser montada, cuidadosamente, para que as
radiografias fossem capturadas de forma que não prejudique nenhuma etapa
posterior do sistema. O objetivo principal nesta etapa é diminuir o erro no final do
processo de modelagem.
Utilizando as instalações de uma clínica especializada em exames
radiológicos, foi possível gerar todas as radiografias necessárias para o projeto.
Porém, antes disso, foi necessário fazer um reconhecimento do local para
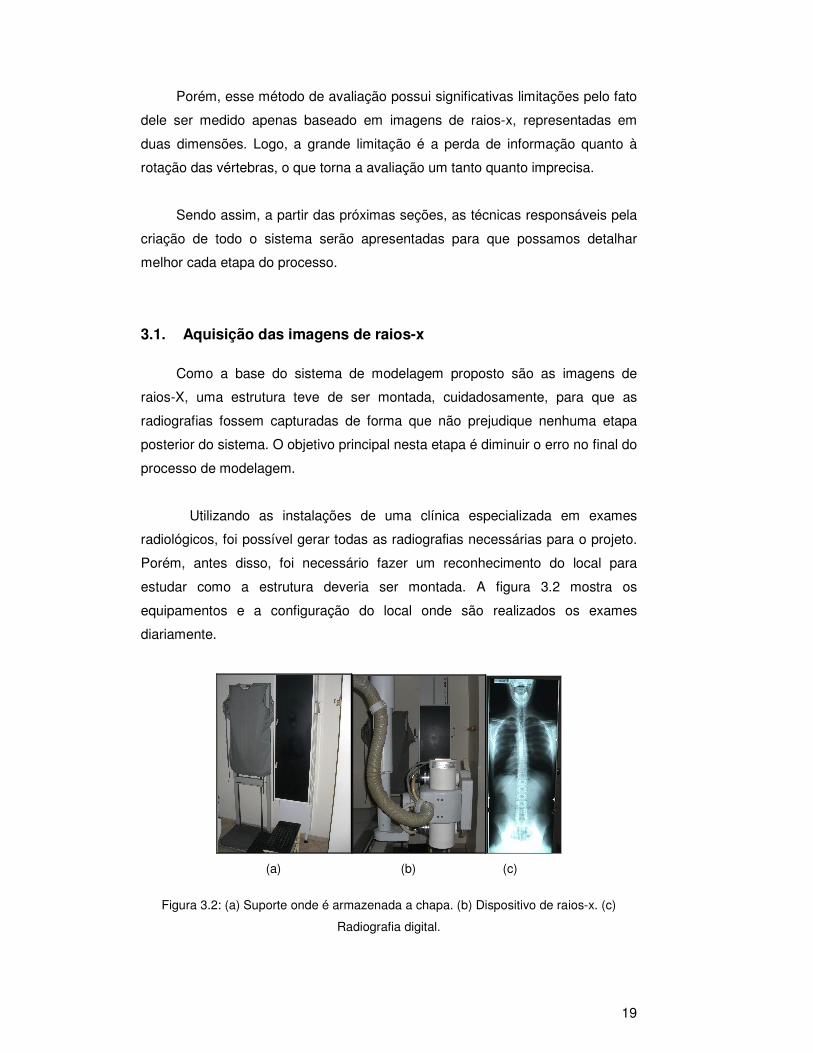
estudar como a estrutura deveria ser montada. A figura 3.2 mostra os
equipamentos e a configuração do local onde são realizados os exames
diariamente.
(a) (b) (c)
Figura 3.2: (a) Suporte onde é armazenada a chapa. (b) Dispositivo de raios-x. (c)
Radiografia digital.
20
A figura 3.2a mostra o suporte que armazena a chapa (“filme” onde a
imagem é projetada), que capturam os raios emitidos pelo dispositivo de raios-x
(figura 3.2b). As chapas são armazenadas em um suporte e a quantidade delas
utilizadas em cada radiografia varia com a altura do paciente. É importante
destacar que esse suporte é fixado na parede. Após a exposição à radiação, as
chapas são levadas a uma máquina que trabalha como um scanner conectado
diretamente ao computador, que recebe e junta todas as imagens geradas para
se ter a radiografia completa do paciente (figura 3.2c).
Geralmente, para se obter uma radiografia perfil e ântero-posterior (AP),
o paciente precisa se mover para mudar a sua posição, já que o suporte está
fixado na parede. O fato do paciente se movimentar de qualquer maneira pode
criar um erro grande quando estivermos na etapa de reconstrução 3D. Isso
porque, quando ele sai da posição inicial e se locomove de qualquer maneira
para uma outra posição, ele altera o seu eixo central imaginário em relação a
sua posição anterior.
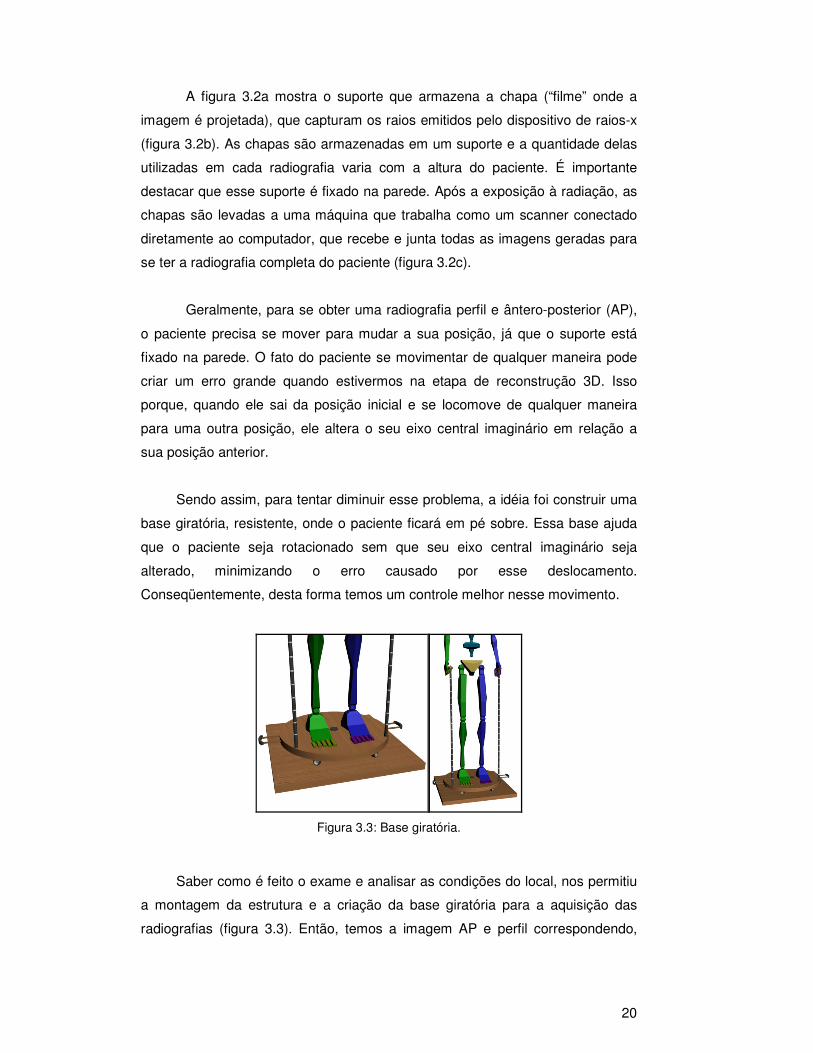
Sendo assim, para tentar diminuir esse problema, a idéia foi construir uma
base giratória, resistente, onde o paciente ficará em pé sobre. Essa base ajuda
que o paciente seja rotacionado sem que seu eixo central imaginário seja
alterado, minimizando o erro causado por esse deslocamento.
Conseqüentemente, desta forma temos um controle melhor nesse movimento.
Figura 3.3: Base giratória.
Saber como é feito o exame e analisar as condições do local, nos permitiu
a montagem da estrutura e a criação da base giratória para a aquisição das
radiografias (figura 3.3). Então, temos a imagem AP e perfil correspondendo,
21
respectivamente, ao paciente de frente ao emissor de raios-x e ao paciente
rotacionado 90°, em seu próprio eixo, ficando de lado para o emissor.
Uma peça adicional foi estudada para acrescentar na base, com o objetivo
de manter uma estabilidade maior do paciente no momento em que o mesmo for
rotacionado, diminuindo a chance dele se mexer muito. Então, foram projetadas
duas hastes para servir de apoio para o paciente.
Algumas informações importantes da cena real, que envolvem toda a
configuração do ambiente montado para a aquisição das imagens, também
precisam ser mencionadas. São medidas como: distância entre a base e o
emissor, entre base e chapa, entre o piso e emissor, etc. Tais dados são
importantes para posicionarmos cada elemento da cena virtual em seu local
correto, considerando a origem no centro da base. Por questões de
padronização, definimos que neste trabalho todas as medidas da cena real serão
representadas em centímetros.
Outro ponto importante é uma marcação feita no suporte onde as imagens
são projetadas na chapa. Fixando marcadores, a idéia foi formar um retângulo
marcando o enquadramento da coluna vertebral na radiografia. Com essa
marcação sendo a mesma tanto em AP quanto em perfil, temos uma referência
que une as duas radiografias num mesmo ponto no espaço de cena.
Um fator que deve ser observado na montagem da cena é se o centro da
base está posicionado no centro do enquadramento da imagem em relação ao
eixo x. Pois, mais na frente, será percebido que ter esse alinhamento feito de
forma correta será fundamental quando os métodos de reconstrução forem
demonstrados.
Utilizando mais um marcador, de largura e altura conhecidas, nos permitiu
calcular a relação de escala pixel/cm, na horizontal e na vertical, necessária para
encontrar a posição no espaço dos pontos marcados na radiografia. Tal
marcador pode ser, por exemplo, uma pequena placa de metal retangular.
Diante destas considerações apontadas, se tornou necessário a criação de
um protocolo para a aquisição das radiografias. O protocolo consiste dos
seguintes passos:
22
• Alinhar pelo centro, no eixo x, o emissor, suporte e centro da base.
• Fixar no suporte os marcadores que definem o enquadramento da
coluna vertebral do paciente, levando em consideração que o
centro desse enquadramento tenha que estar alinhado, em x, com
o ponto central do suporte. Uma estratégia que facilita esta
marcação é posicionar primeiramente o paciente em cima da base
e marcar o limite superior e inferior do enquadramento em y. Após
fazer isso, com o paciente fora da base, ajustar a largura
centralizando-a, em x, em relação ao ponto central do suporte.
• Fixar no suporte o marcador referente à escala pixel/cm.
• Com as marcações prontas, posicionar o paciente em cima da base
e retirar a primeira radiografia em AP. Depois, rotacionar a base em
90º no sentido horário e retira a segunda radiografia em perfil.
• Por fim, medir: a altura do emissor ao piso; a largura e altura do
enquadramento; a altura do limite inferior do enquadramento com o
piso; a distância entre emissor e centro da base; e a distância entre
centro da base e suporte.
3.2. Recuperação dos pontos 3D
Este trabalho desenvolveu dois métodos para recuperar informações da
coluna vertebral em 3D através das imagens de raios-x (AP e perfil). O primeiro
método é mais simples e intuitivo de se pensar, já que temos a disposição
imagens em dois pontos de vista diferentes. Já o segundo, possui um tratamento
mais refinado, justamente para melhorar a precisão do primeiro. Ambos os
métodos utilizam exatamente os mesmos dados de entrada, os quais são: as
radiografias, com seus respectivos pontos chaves marcados de cada uma das
vértebras nas imagens; e as medidas dos objetos na cena real.
Os pontos chaves são passados para o sistema como coordenadas 2D
(u,v), tomando como referência a origem (0,0) no canto inferior esquerdo da

23
imagem. Como todo o processo baseado em estereoscopia, é essencial que o
ponto marcado em AP seja o mesmo ponto marcado em perfil, para que todo o
procedimento tenha uma boa precisão na recuperação de sua coordenada 3D.
Em outras palavras, é importante conseguir identificar o mesmo ponto em ambos
os pontos de vista.
(a) (b)
Figura 3.4: Placa de metal utilizado como marcador de escala. (a) Medida real da placa
(em cm). (b) Medida da placa na radiografia (em pixel).
Também precisamos conhecer a escala pixel/cm para que possamos
saber medidas da cena real apenas olhando paras os pixels na imagem. Neste
momento, é que entram em foco aquelas medidas feitas da placa de metal,
mencionadas na seção anterior. O cálculo é feito através da relação entre a
largura e altura real da placa (wmundo, hmundo) com suas respectivas medidas em
pixels na imagem (wimagem, himagem), ver figura 3.4.
Entretanto, devido à resolução da imagem, geralmente, não ser quadrada,
o pixel também não é quadrado. Então, não podemos usar a mesma relação na
horizontal e na vertical. Sendo assim, calculamos o fator de escala, tanto na
direção horizontal (�hori) quanto na direção na vertical (�vert), através da equação
3.1.
24
imagem
mundovert
imagem
mundohori
hh
ww
=
=
κ
κ
(3.1)
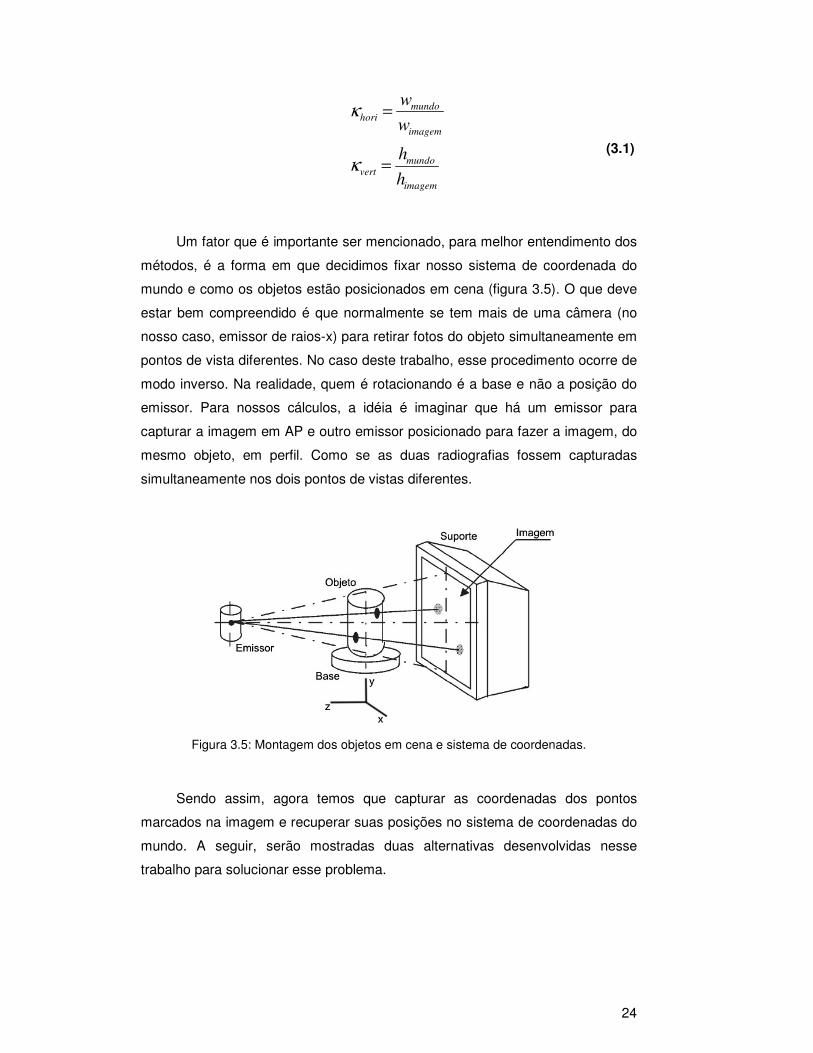
Um fator que é importante ser mencionado, para melhor entendimento dos
métodos, é a forma em que decidimos fixar nosso sistema de coordenada do
mundo e como os objetos estão posicionados em cena (figura 3.5). O que deve
estar bem compreendido é que normalmente se tem mais de uma câmera (no
nosso caso, emissor de raios-x) para retirar fotos do objeto simultaneamente em
pontos de vista diferentes. No caso deste trabalho, esse procedimento ocorre de
modo inverso. Na realidade, quem é rotacionando é a base e não a posição do
emissor. Para nossos cálculos, a idéia é imaginar que há um emissor para
capturar a imagem em AP e outro emissor posicionado para fazer a imagem, do
mesmo objeto, em perfil. Como se as duas radiografias fossem capturadas
simultaneamente nos dois pontos de vistas diferentes.
Figura 3.5: Montagem dos objetos em cena e sistema de coordenadas.
Sendo assim, agora temos que capturar as coordenadas dos pontos
marcados na imagem e recuperar suas posições no sistema de coordenadas do
mundo. A seguir, serão mostradas duas alternativas desenvolvidas nesse
trabalho para solucionar esse problema.
25
3.2.1. Método 1
Esse primeiro método é mais intuitivo e simples de ser implementado. Ele
consiste em visualizar a imagem AP fornecendo a posição do ponto em relação
a dois dos três eixos que compõem o sistema tridimensional. E partir desse
princípio, recuperamos a terceira coordenada (profundidade) através da imagem
em perfil.
Porém, para isso é preciso se ter uma referência, algum ponto em comum
que unem as duas radiografias num mesmo sistema de coordenadas. Esse é o
motivo de que no momento em que as radiografias foram capturadas, ouve-se a
preocupação de alinhar o centro da base com o centro da imagem pelo eixo x.
Porque assim, como a nossa origem está posicionada no centro da base e a
rotação do paciente é realizada em relação ao eixo central da base, garantimos
que ambas as imagens possam ser visualizadas no mesmo sistema.
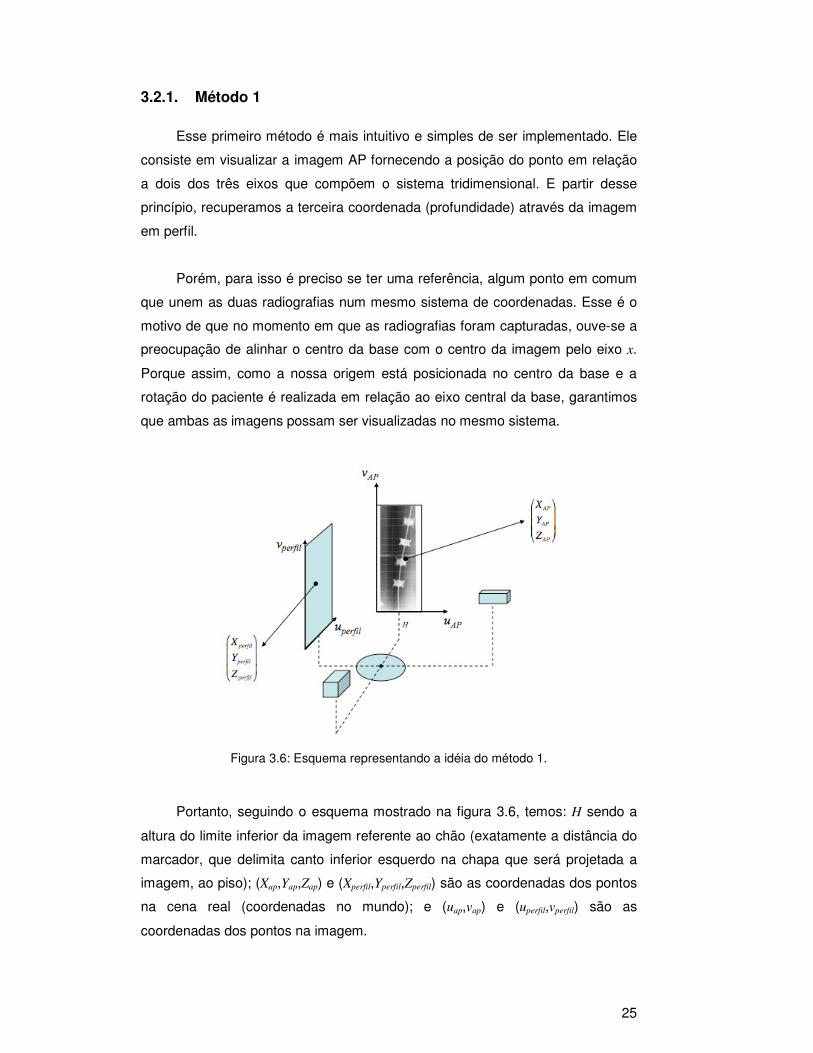
Figura 3.6: Esquema representando a idéia do método 1.
Portanto, seguindo o esquema mostrado na figura 3.6, temos: H sendo a
altura do limite inferior da imagem referente ao chão (exatamente a distância do
marcador, que delimita canto inferior esquerdo na chapa que será projetada a
imagem, ao piso); (Xap,Yap,Zap) e (Xperfil,Yperfil,Zperfil) são as coordenadas dos pontos
na cena real (coordenadas no mundo); e (uap,vap) e (uperfil,vperfil) são as
coordenadas dos pontos na imagem.
26
Desta forma, logo podemos descartar as variáveis Zap e Xperfil pela razão de
já termos mencionado que o cálculo do ponto final (P) ser uma composição dos
pontos Pap e Pperfil. Com isso, temos:
Px = X ap
Py = Yap = Yperfil
Pz = Z perfil
(3.2)
Px = κhori uap −wap
2
�
� �
�
� �
Py = κvert vap( )+ H
Pz = −κhori uperfil −wperfil
2
�
� �
�
� �
(3.3)
Então, com todas as informações necessárias em mãos, para calcular Px e
Pz basta acharmos a distância, em pixel, do ponto marcado ao centro da imagem
e aplicar a conversão para o sistema métrico do mundo (cm, no caso deste
trabalho) como está mostrado nas equações 3.1 e 3.3. Note que apesar de
possuir o mesmo princípio, há uma pequena diferença no cálculo de Px e Pz. A
troca de sinal feita no cálculo de Pz se faz necessário devido ao simples fato de
que na divisão pela metade da imagem AP o lado direito representa valores
positivos no eixo x, e já na imagem perfil o lado direito representa valores
negativos no eixo z.
Por fim, calculamos Py, primeiramente, aplicando o valor correspondente à
distância (em pixel) do ponto ao limite inferior da imagem (sua própria
coordenada v) à mesma fórmula de conversão citada para x e z. A esse
resultado, soma-se a altura H.
Com esse procedimento, aplicamos em cada um dos pontos chaves
marcados nas imagens e recuperamos suas coordenadas no espaço 3D.
27
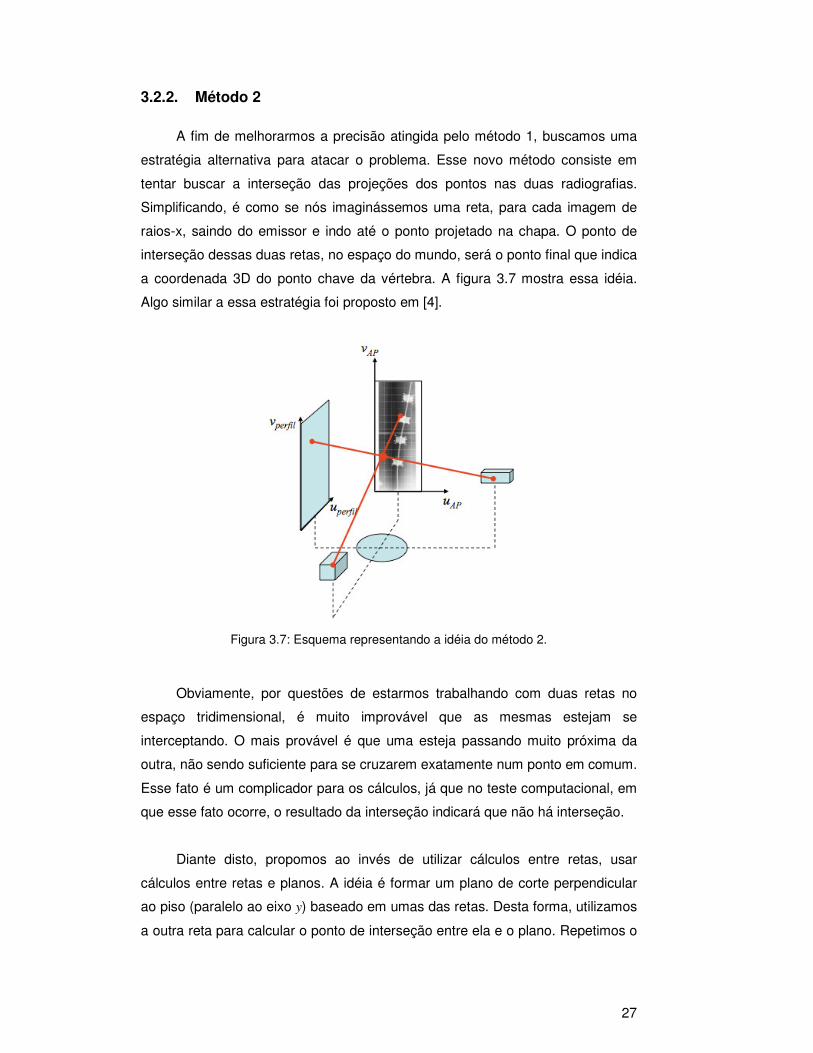
3.2.2. Método 2
A fim de melhorarmos a precisão atingida pelo método 1, buscamos uma
estratégia alternativa para atacar o problema. Esse novo método consiste em
tentar buscar a interseção das projeções dos pontos nas duas radiografias.
Simplificando, é como se nós imaginássemos uma reta, para cada imagem de
raios-x, saindo do emissor e indo até o ponto projetado na chapa. O ponto de
interseção dessas duas retas, no espaço do mundo, será o ponto final que indica
a coordenada 3D do ponto chave da vértebra. A figura 3.7 mostra essa idéia.
Algo similar a essa estratégia foi proposto em [4].
Figura 3.7: Esquema representando a idéia do método 2.
Obviamente, por questões de estarmos trabalhando com duas retas no
espaço tridimensional, é muito improvável que as mesmas estejam se
interceptando. O mais provável é que uma esteja passando muito próxima da
outra, não sendo suficiente para se cruzarem exatamente num ponto em comum.
Esse fato é um complicador para os cálculos, já que no teste computacional, em
que esse fato ocorre, o resultado da interseção indicará que não há interseção.
Diante disto, propomos ao invés de utilizar cálculos entre retas, usar
cálculos entre retas e planos. A idéia é formar um plano de corte perpendicular
ao piso (paralelo ao eixo y) baseado em umas das retas. Desta forma, utilizamos
a outra reta para calcular o ponto de interseção entre ela e o plano. Repetimos o
28
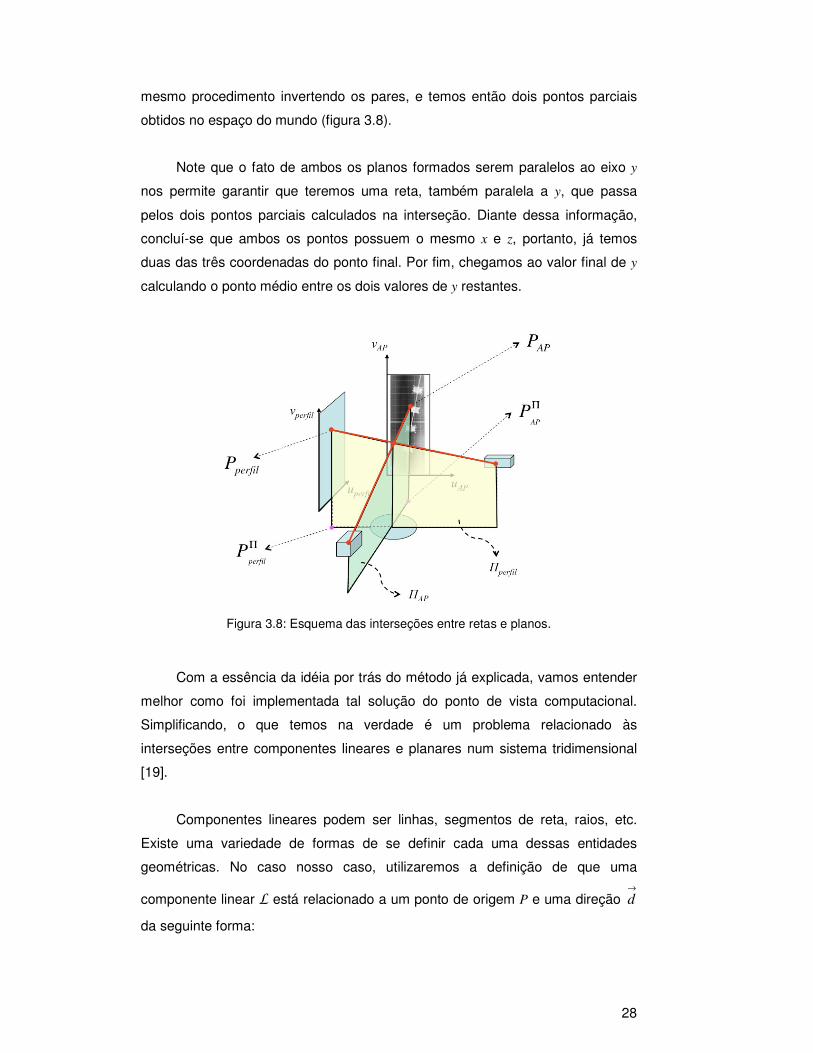
mesmo procedimento invertendo os pares, e temos então dois pontos parciais
obtidos no espaço do mundo (figura 3.8).
Note que o fato de ambos os planos formados serem paralelos ao eixo y
nos permite garantir que teremos uma reta, também paralela a y, que passa
pelos dois pontos parciais calculados na interseção. Diante dessa informação,
concluí-se que ambos os pontos possuem o mesmo x e z, portanto, já temos
duas das três coordenadas do ponto final. Por fim, chegamos ao valor final de y
calculando o ponto médio entre os dois valores de y restantes.
Figura 3.8: Esquema das interseções entre retas e planos.
Com a essência da idéia por trás do método já explicada, vamos entender
melhor como foi implementada tal solução do ponto de vista computacional.
Simplificando, o que temos na verdade é um problema relacionado às
interseções entre componentes lineares e planares num sistema tridimensional
[19].
Componentes lineares podem ser linhas, segmentos de reta, raios, etc.
Existe uma variedade de formas de se definir cada uma dessas entidades
geométricas. No caso nosso caso, utilizaremos a definição de que uma
componente linear � está relacionado a um ponto de origem P e uma direção d→
da seguinte forma:

29
� t( )= P + t d→
(3.4)
Geralmente, um raio � é definido usando um vetor normalizado, enquanto
uma linha � pode ou não ser definida desta forma. Sendo assim, temos:
� t( )= P + t d∧
, 0 � t � � (3.5)
� t( )= P + t d→
, -� � t � +� (3.6)
Considerando um segmento de reta �, representado pelos pontos P1 e P2,
podemos aplicar a mesma técnica de interseção raio/plano convertendo � na
forma de raio.
� t( )= P1 + t P2 − P1( ) (3.7)
Vale a pena notar que o vetor de direção d→
é definido pela diferença entre
os dois pontos que definem o segmento �. Além disso, nota-se também que em
geral || d→
|| � 1. No entanto, não é necessário que o vetor de direção esteja
normalizado. Tendo P2 = P1 + d→
, se nós computarmos a interseção entre esse
“raio” e um plano, então o ponto de interseção se encontra no seguimento de
reta S, se e somente se, 0 � t � 1.
Passando agora para a componente planar, definimos um plano � como:
ax + by + cz + d = 0,
(3.8)
onde a2 + b2 + c2 = 1. Expressando como um vetor, n∧
= a,b,c[ ] representa a
normal do plano, enquanto |d| indica a distância mínima em que o plano está da
origem [0,0,0].
30
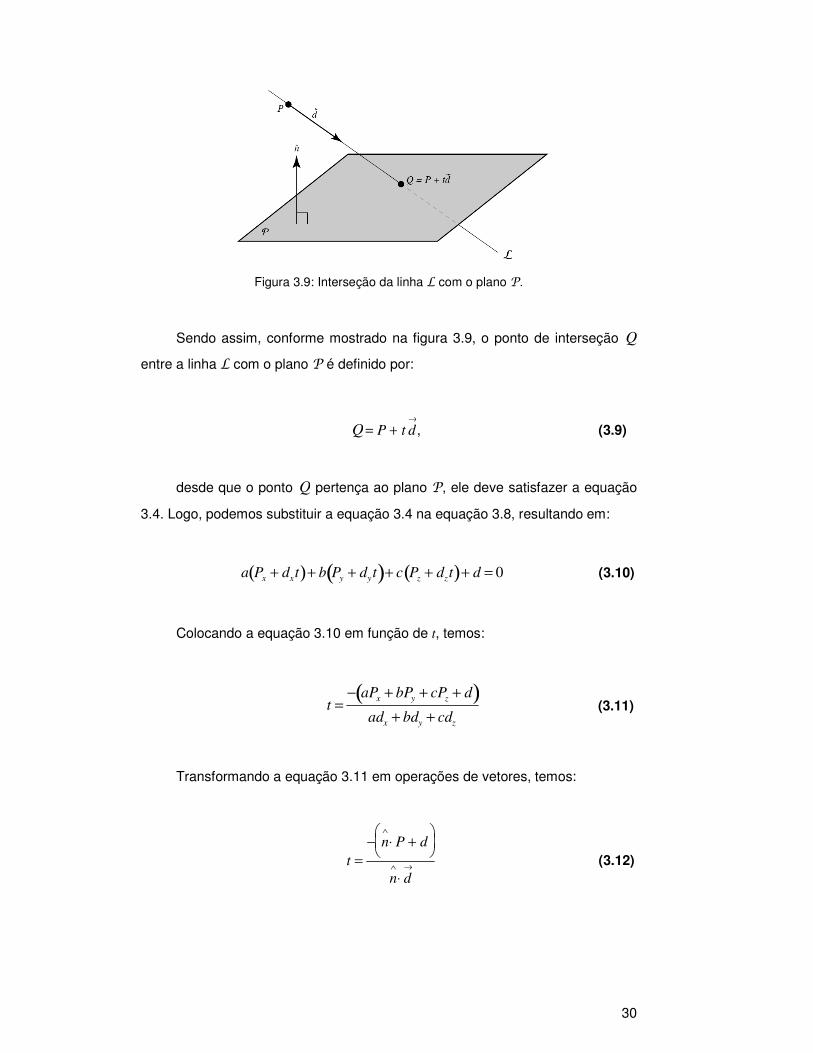
Figura 3.9: Interseção da linha � com o plano �.
Sendo assim, conforme mostrado na figura 3.9, o ponto de interseção Q
entre a linha � com o plano � é definido por:
Q= P + t d→
, (3.9)
desde que o ponto Q pertença ao plano �, ele deve satisfazer a equação
3.4. Logo, podemos substituir a equação 3.4 na equação 3.8, resultando em:
a Px + dxt( )+ b Py + dyt( )+ c Pz + dzt( )+ d = 0 (3.10)
Colocando a equação 3.10 em função de t, temos:
t =− aPx + bPy + cPz + d( )
adx + bdy + cdz
(3.11)
Transformando a equação 3.11 em operações de vetores, temos:
t =
− n∧⋅ P + d
� � �
� � �
n∧⋅ d
→ (3.12)
31
Note que o denominador é o produto escalar da normal do plano com a
direção do raio. Se este valor for 0, significa que o vetor de direção faz um
angulo de 90° com a normal e, portanto, o raio e o plano são paralelos.
Conseqüentemente, neste caso há então duas possibilidades: ou o raio está no
plano, tendo infinitos pontos de interseção entre eles; ou o raio está fora do
plano, não apresentando qualquer ponto de interseção.
Por razões computacionais, principalmente em relação à aproximação de
casas decimais, pode acontecer que o raio não seja exatamente paralelo ao
plano. Para solucionar este problema, pode-se utilizar um threshold no teste do
denominador, a fim de descartar diretamente os casos indesejados. O valor
desse limite de corte varia quanto à precisão dos dados utilizados no cálculo.
Por fim, calculamos t e substituímos na equação 3.9, obtendo o ponto de
interseção Q.
Desta forma, voltando a se basear nas varáveis do problema
demonstrados no início dessa seção, dividimos a solução em duas vertentes e
ao final compomos a solução final ( Qfinal ). Sendo assim, primeiramente
calculamos o ponto de interseção Qp1 entre a LinhaAP e o Planoperfil, e
posteriormente calculamos o ponto de interseção entre a LinhaPerfil e o PlanoAP.
Respectivamente, as LinhaAP e LinhaPerfil consistem nos raios que saem do
emissor e vão até a um ponto projetado na imagem de raio-x em AP e perfil.
Para encontrarmos a equação que define o plano, precisamos conhecer
primeiro o seu vetor normal. Para isto, basta calcularmos o produto vetorial de
dois vetores que estão no plano em questão. Assim, para o Planoperfil, temos:
Vet1 = Pperfil − E perfil
Vet2 = PperfilΠ − E perfil
n∧
perfil = Vet1×Vet2
Vet1 e Vet2 são dois vetores que pertencem ao plano e serão tratados como
variáveis auxiliares para a demonstração dos cálculos. Então, fazendo o mesmo
procedimento para o PlanoAP, temos:

32
Vet1 = PAP − EAP
Vet2 = PAPΠ − EAP
n∧
ap = Vet1 ×Vet2
Aplicando as normais calculadas à equação 3.8, calculamos o coeficiente d
de ambos os planos por:
dperfil = −a Pxperfil( )− b Py
perfil( )− c Pzperfil( )
dAP = −a PxAP( )− b Py
AP( )− c PzAP( )
Por fim, com base nas equações 3.9 e 3.12, calculamos o ponto de
interseção Qp1 da seguinte forma:
d→
= PAP − EAP
t =− n
∧perfil ⋅ EAP + dperfil
� � �
� � �
n∧
perfil ⋅ d→
Qp1 = EAP − t d→
Da mesma forma, calculamos o ponto Qp2 por:
d→
= Pperfil − E perfil
t =− n
∧ap⋅ E perfil + dAP
� � �
� � �
n∧
ap⋅ d→
Qp 2 = E perfil − t d→
Agora, com ambos os pontos de interseção calculados, compomos o ponto
final Qfinal da seguinte forma:
33
Qxfinal = Qx
p1 = Qxp 2
Qyfinal =
Qyp1 + Qy
p 2
2Qz
final = Qzp1 = Qz
p 2
Logo, aplicando esses cálculos para cada o ponto marcado nas duas
radiografias, nos permite reconstruir a cena real em um ambiente virtual
tridimensional.
3.3. Posicionamento do modelo 3D das vértebras
Agora, com os pontos marcados e registrados no ambiente tridimensional,
o próximo passo é posicionar os modelos 3D de cada vértebra em seu devido
lugar, para então criar o modelo completo da coluna vertebral. Para simplificar a
explicação, tomaremos como base um bloco definido por 8 pontos frutos de uma
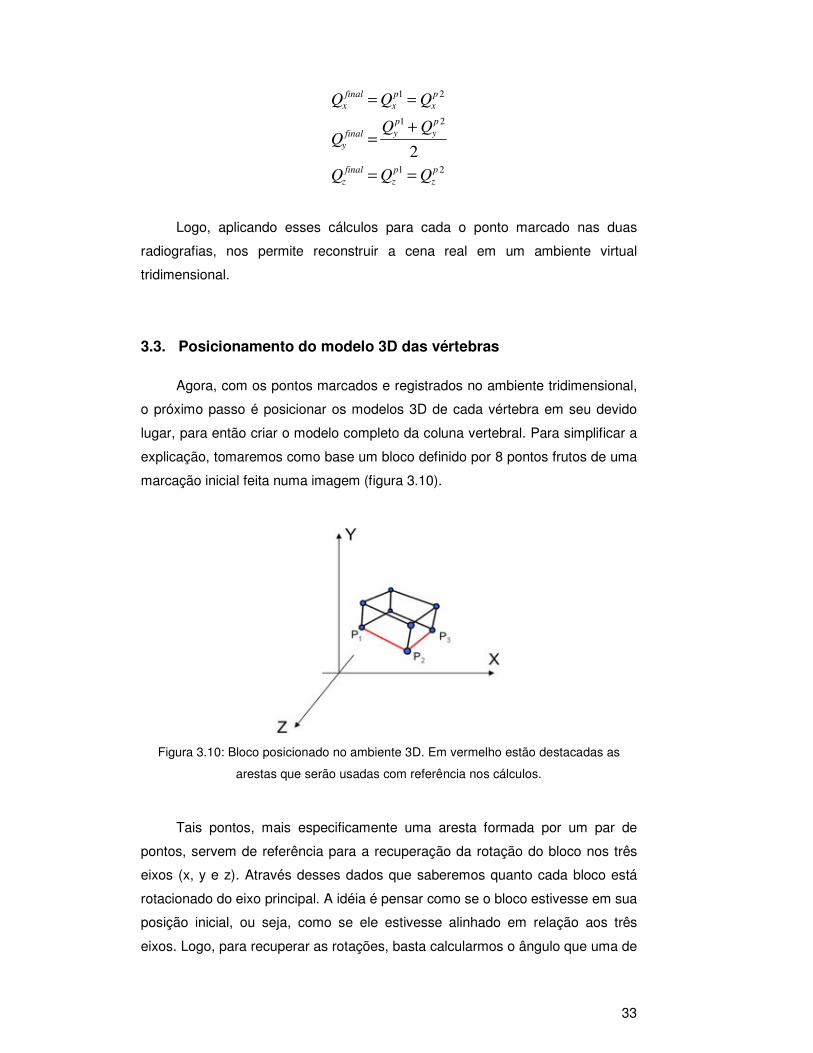
marcação inicial feita numa imagem (figura 3.10).
Figura 3.10: Bloco posicionado no ambiente 3D. Em vermelho estão destacadas as
arestas que serão usadas com referência nos cálculos.
Tais pontos, mais especificamente uma aresta formada por um par de
pontos, servem de referência para a recuperação da rotação do bloco nos três
eixos (x, y e z). Através desses dados que saberemos quanto cada bloco está
rotacionado do eixo principal. A idéia é pensar como se o bloco estivesse em sua
posição inicial, ou seja, como se ele estivesse alinhado em relação aos três
eixos. Logo, para recuperar as rotações, basta calcularmos o ângulo que uma de

34
suas arestas faz com uma outra aresta, não pertencente ao bloco, que esteja
paralela ao eixo em questão.
Desta forma, tratamos esse problema como sendo uma tarefa de calcular
ângulos entre dois vetores que estejam num mesmo plano paralelo a dois dos
três eixos. Em outras palavras, para achar a rotação em relação ao eixo x os
vetores estarão num plano que é paralelo a yz. Seguindo essa relação, rotação
em y, plano paralelo a xz; e rotação em z, plano paralelo a xy.
O ponto importante dessa idéia é compreender que através de uma aresta
conseguimos encontrar os dois vetores que nos fornecerão essa rotação em
torno do eixo. Portanto, o começaremos pela rotação em relação ao eixo x. Na
figura 3.11 temos a demonstração gráfica da posição dos vetores auxiliares (V1 e
V2) definida através dos pontos que formam a aresta P2 P3.
Figura 3.11: Demonstração gráfica para a rotação em relação ao eixo x.
Porém o ângulo calculado entre os vetores V1 e V2 não traz informação
sobre para que lado o bloco rotacionou. Sendo assim, utilizamos, neste caso,
como referência a coordenada y para identificar para qual lado houve a rotação.
Os cálculos para se chegar ao ângulo � foram:
35
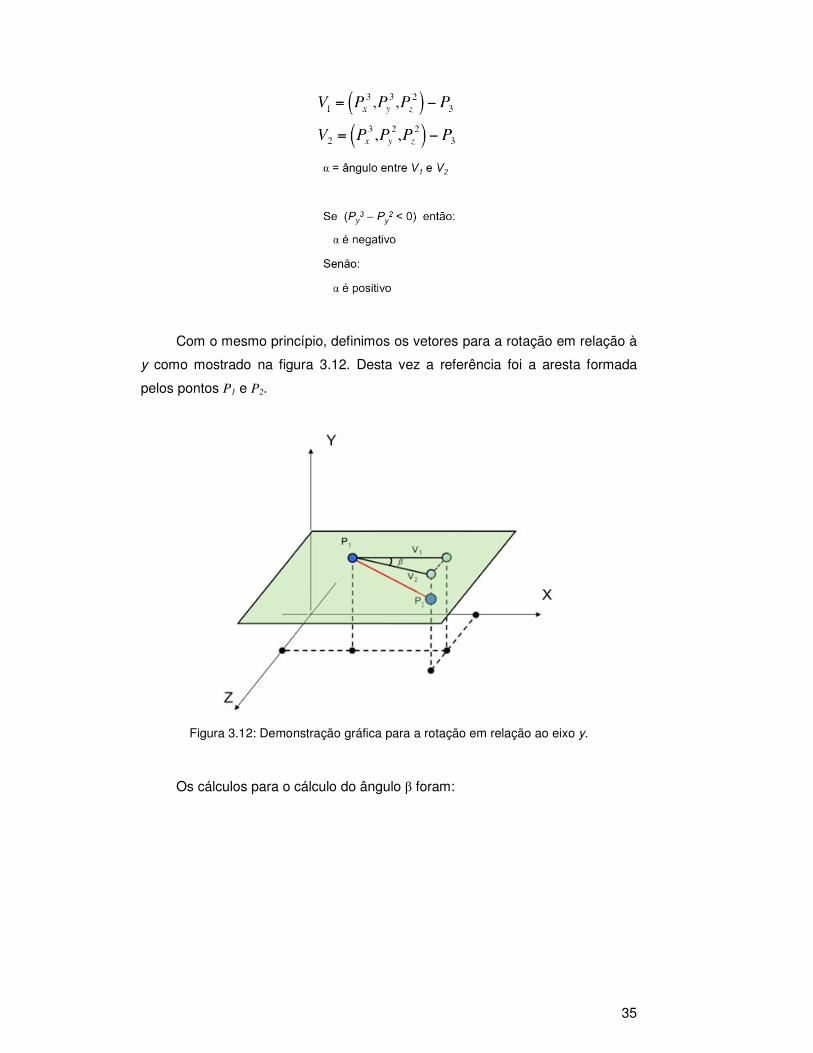
Com o mesmo princípio, definimos os vetores para a rotação em relação à
y como mostrado na figura 3.12. Desta vez a referência foi a aresta formada
pelos pontos P1 e P2.
Figura 3.12: Demonstração gráfica para a rotação em relação ao eixo y.
Os cálculos para o cálculo do ângulo � foram:
36
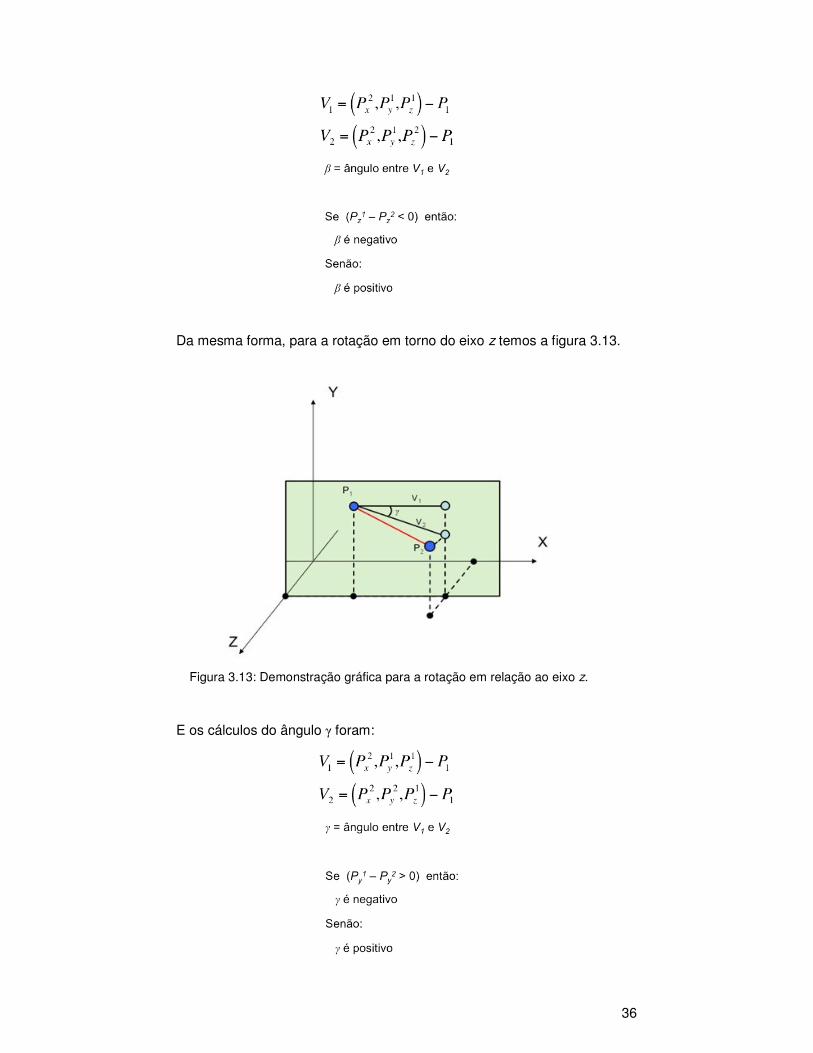
Da mesma forma, para a rotação em torno do eixo z temos a figura 3.13.
Figura 3.13: Demonstração gráfica para a rotação em relação ao eixo z.
E os cálculos do ângulo � foram:
37
Por fim, utilizamos operações com quaternions, a partir dos 3 ângulos
(�,�,�) calculados, para orientação do modelo 3D no ambiente virtual.
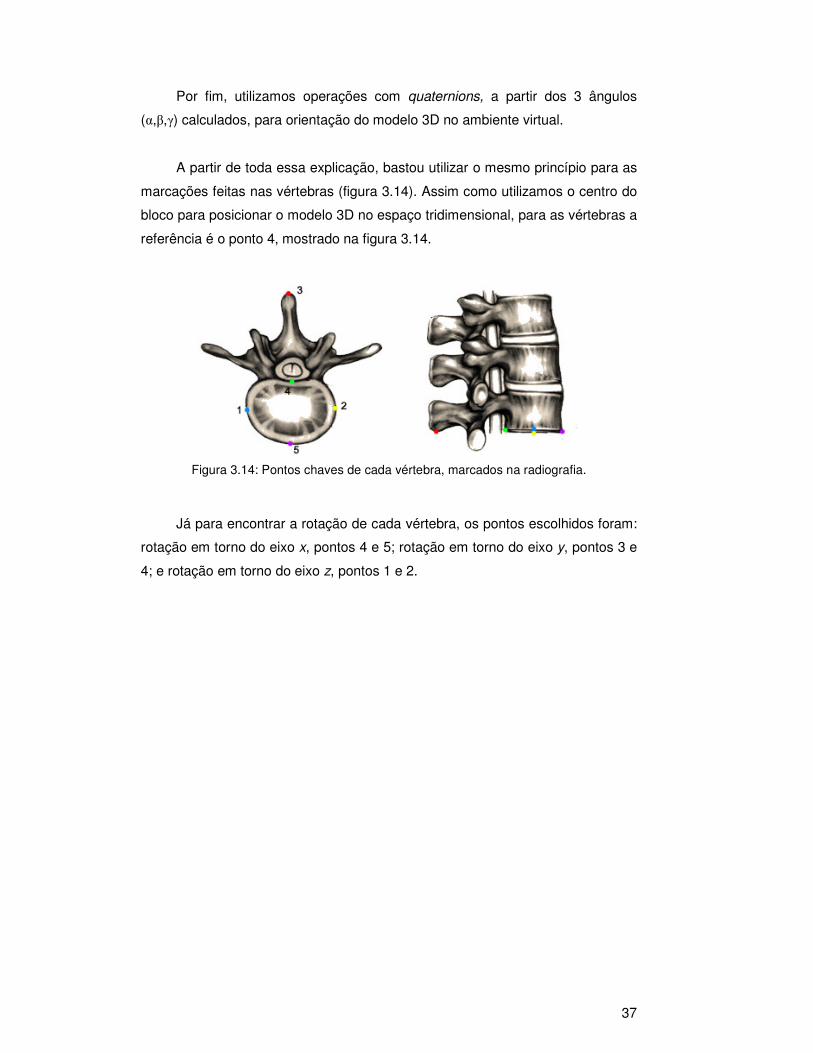
A partir de toda essa explicação, bastou utilizar o mesmo princípio para as
marcações feitas nas vértebras (figura 3.14). Assim como utilizamos o centro do
bloco para posicionar o modelo 3D no espaço tridimensional, para as vértebras a
referência é o ponto 4, mostrado na figura 3.14.
Figura 3.14: Pontos chaves de cada vértebra, marcados na radiografia.
Já para encontrar a rotação de cada vértebra, os pontos escolhidos foram:
rotação em torno do eixo x, pontos 4 e 5; rotação em torno do eixo y, pontos 3 e
4; e rotação em torno do eixo z, pontos 1 e 2.
38
4 Experimentos Computacionais
O programa desenvolvido neste trabalho foi todo implementado na
linguagem de programação C/C++. Dentre as bibliotecas utilizadas, destacamos:
o OpenCV [23], para processamento e armazenamento de dados de imagem; o
GTK [24], para interface gráfica; e o Ogre3D [25], para a representação do
ambiente virtual.
A realização dos experimentos computacionais, que serão demonstrados a
seguir, contou também com a colaboração da clínica de radiologia, RAD-MED,
situada na cidade de Campos dos Goytacazes - RJ. A clínica nos forneceu o
espaço para que se fosse montada a estrutura física (mencionada nas seções
anteriores) e o acesso ao equipamento de raios-x digital. Lá foram feitas todas
as radiografias utilizadas nos experimentos a seguir.
Porém, algumas informações relevantes devem ser enfatizadas em relação
a aquisição das radiografias. Além de todas as medidas que precisam ser feitas
para a calibração do sistema (mostradas no capítulo 3), existem dois pontos
técnicos na máquina de raios-x que devem ser considerados. Estamos falando
da kilovoltagem (kVp) e da corrente do tubo (mA), ajustes que definem o grau de
penetração da radiação, influenciando diretamente na nitidez da radiografia.
A combinação kVp / mA controla o contraste radiográfico através da
densidade radiográfica, fornecendo qualidade (penetração) ao feixe de radiação
emitido pela máquina. Quanto menor o kVp (baixa penetração), maior o
contraste; e, conseqüentemente, quanto maior o kVp (alta penetração), menor o
contraste.
O valor de mA está relacionado com a seleção do tamanho do ponto focal.
No entanto, o mA não pode ser ajustado independentemente, deve ser ajustado
em conjunto com o tempo de exposição e o kVp.
39
Quando o objetivo for observar detalhes na imagem, é conveniente optar
por um valor de mA baixo de forma a permitir o uso de um ponto focal pequeno.
Por outro lado, se o desejo for reduzir o kVp para aumentar o contraste, deve
optar por um valor de mA mais elevado. Segundo [5], o contraste e a visibilidade
de pequenos objetos são efetivamente reduzidos pelo aumento da penetração e
pela perda de definição.
Obviamente, esses detalhes são mais para se ter em mente e saber da
sua existência, já que tais ajustes já fazem parte do protocolo de cada clínica
para este tipo de exame. Conhecer esse fator pode ser importante caso haja
necessidade de se alterar a característica da radiografia por algum motivo
específico. Neste trabalho, optamos por utilizar o padrão já usado no dia-a-dia da
clínica. O que nós buscamos fazer foi diminuir o ponto focal, utilizando o menor
FOV (Field of View) possível, enquadrando apenas a coluna vertebral.
Diante disto, para melhor entendimento, separamos esse capítulo em 3
partes: validação da técnica aplicada, recuperação do ponto 3D e avaliação
clínica dos resultados obtidos. Como já mencionado anteriormente, no apêndice
A são mostrados os experimentos relacionados ao pré-processamento das
imagens de raios-x.
4.1. Validação da técnica
Nesta seção explicamos como vamos testar a precisão das técnicas
propostas nesta pesquisa.
Para o experimento inicial, foi construída uma estrutura simulando uma
coluna real. A estrutura consiste de uma haste roscada de aço galvanizado,
flexível, onde foram fixados 4 blocos de madeira de 6x6x3,5 cm, com
aproximadamente 10 cm de distância entre eles. Nos vértices de cada bloco
foram colocadas esferas de metal de 5 mm de diâmetro para facilitar na
identificação de cada bloco na radiografia. A escolha do tipo de material usado
deve-se a forma em que a madeira e o metal se comportam diante à exposição
da radiação emitida pelo aparelho de raios-x. A idéia principal é que as esferas,
por serem de metal, estejam destacadas dos blocos sendo facilmente
identificadas nas imagens (figura 4.1).

40
Figura 4.1: Estrutura dos blocos.
O objetivo desse experimento é trabalhar com uma estrutura conhecida,
o que nos permite ter um controle maior sobre o processo. Tal controle se refere
ao fato de podermos “modelar” a estrutura simulando uma coluna real. A partir
daí, podemos realizar medidas na estrutura do tipo: tamanho do bloco, distância
entre esferas do mesmo bloco e distância entre esferas de blocos diferentes.
Isso nos permite comparar tais medidas com o modelo 3D reconstruído e, então,
medir a precisão dos métodos propostos.
Sendo assim, a avaliação e validação das técnicas aplicadas durante a
etapa de reconstrução, torna-se bem mais simples de ser realizada. A figura 4.2
mostra um exemplo das radiografias do modelo construído.
Figura 4.2: Radiografia da estrutura dos blocos.
41
Cada bloco corresponde a uma vértebra e a haste representa a “linha
imaginária” que desenha a forma da coluna vertebral. Com a forma geométrica
conhecida de cada bloco, bem como as medidas de toda a configuração
montada no momento da aquisição das radiografias, a relação de pixel / cm, e as
marcações dos pixels feitas nas imagens, temos dados suficientes para avaliar o
sistema.
4.2. Recuperação do ponto 3D
A dificuldade de conseguirmos uma quantidade maior de material para
este tipo de teste, tanto pelo motivo de não termos encontrado algum banco de
dados de radiografias com tais informações, quanto por não ser possível estar
freqüentemente interrompendo o fluxo de trabalho da clínica, impediu que mais
situações fossem testadas neste trabalho. O que também não significa dizer que
teríamos uma conclusão muito diferente ao final do testes, já que as
características principais do procedimento não sofrem modificações significativas
de um exemplo para outro.
Devido a esse fato, iremos demonstrar os resultados obtidos de um exame
de raios-x dos blocos (avaliação quantitativa e qualitativa), e um exame normal
de um paciente (avaliação qualitativa). Todos os exames usados neste
experimento foram feitos na clínica especificamente para esta pesquisa.
42
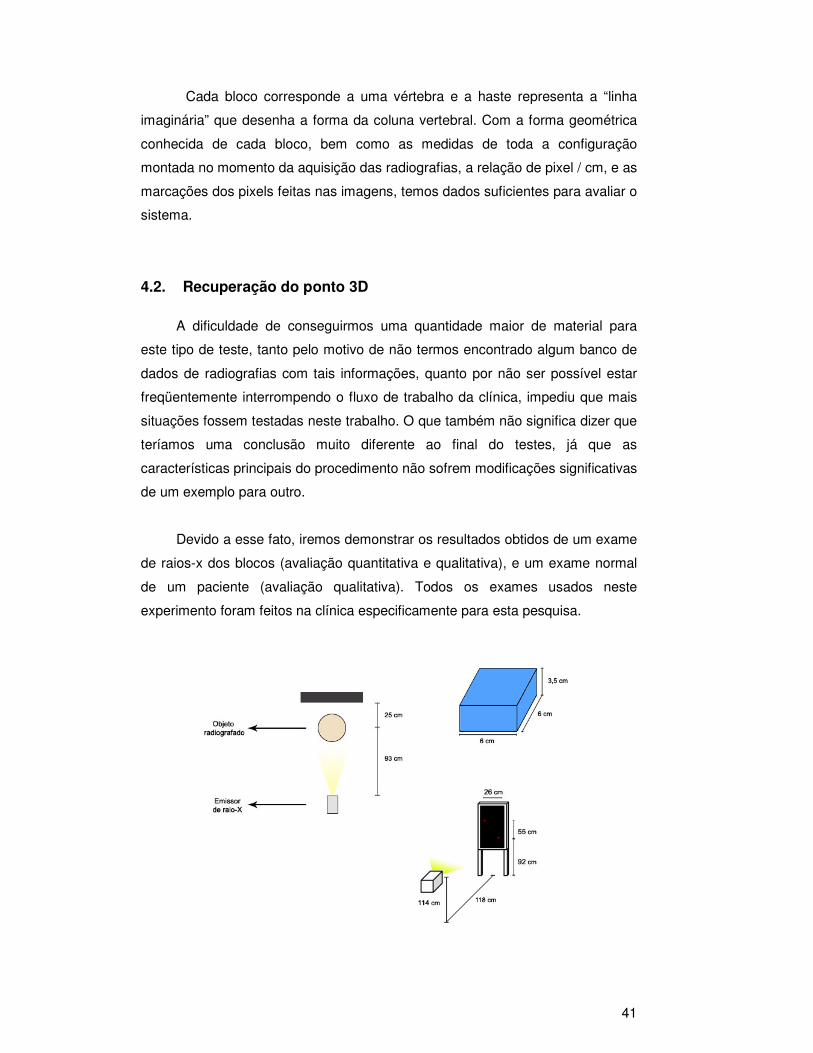
Figura 4.3: Configuração do ambiente para o experimento dos blocos de madeira.
Para o experimento dos blocos de madeira, utilizamos a configuração do
ambiente montado para a realização do exame de raios-x como mostrado na
figura 4.3. Definimos a precisão como sendo a média da diferença entre
distâncias medidas no objeto real e nos pontos 3D fornecidos pelos métodos.
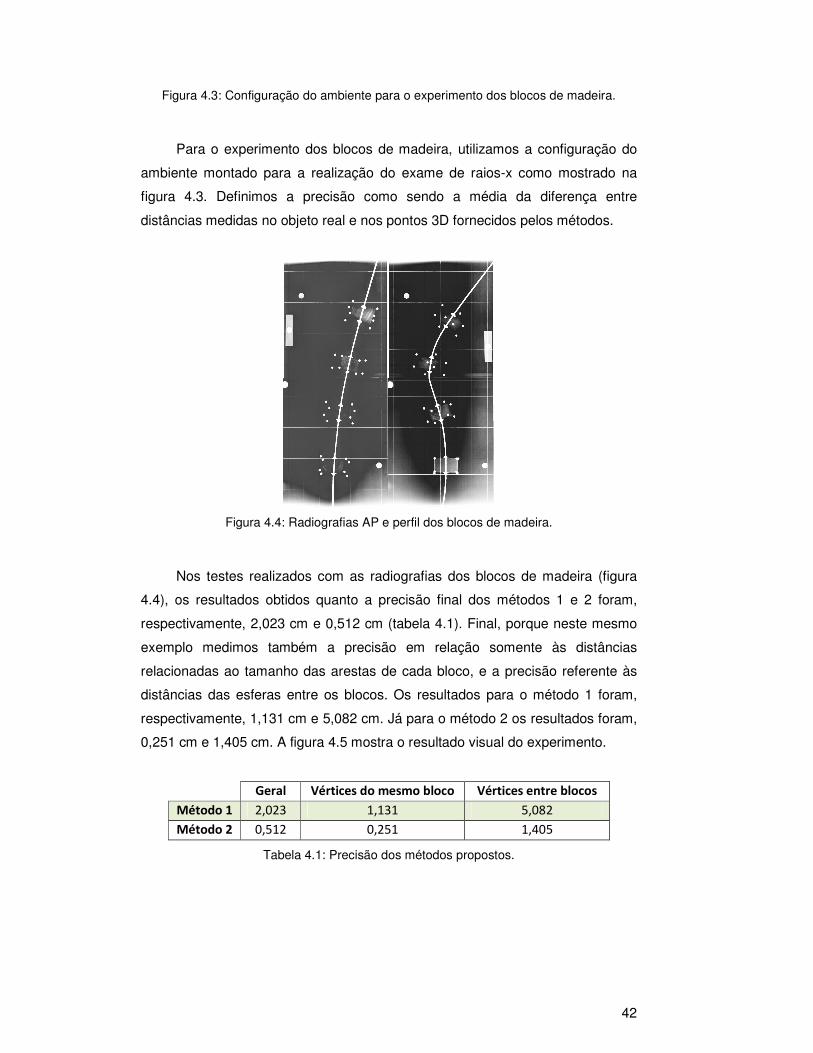
Figura 4.4: Radiografias AP e perfil dos blocos de madeira.
Nos testes realizados com as radiografias dos blocos de madeira (figura
4.4), os resultados obtidos quanto a precisão final dos métodos 1 e 2 foram,
respectivamente, 2,023 cm e 0,512 cm (tabela 4.1). Final, porque neste mesmo
exemplo medimos também a precisão em relação somente às distâncias
relacionadas ao tamanho das arestas de cada bloco, e a precisão referente às
distâncias das esferas entre os blocos. Os resultados para o método 1 foram,
respectivamente, 1,131 cm e 5,082 cm. Já para o método 2 os resultados foram,
0,251 cm e 1,405 cm. A figura 4.5 mostra o resultado visual do experimento.
� ������ ������� ��� ��� �������� �������������������
� �� ���� ������ ������ ������
� �� ���� ������ ������ �����
Tabela 4.1: Precisão dos métodos propostos.

43
Figura 4.4: Resultado visual do método 1 (esquerda) e método 2 (direita).
A fim de verificar a estratégia proposta para o posicionamento do modelo
3D na cena, aplicamos para estrutura dos blocos. Obviamente, apenas trocando
os pontos de referência, se baseando nas arestas que formam a base de cada
bloco. O resultado é mostrado na figura 4.5.
Figura 4.5: Resultado do posicionamento do modelo 3D em relação aos pontos dos
blocos.
Com esses experimentos iniciais, passamos agora para a radiografia do
paciente “real”. O princípio de captura da imagem foi o mesmo do que foi
explicado para os blocos de madeira. Portanto, a configuração do ambiente é a
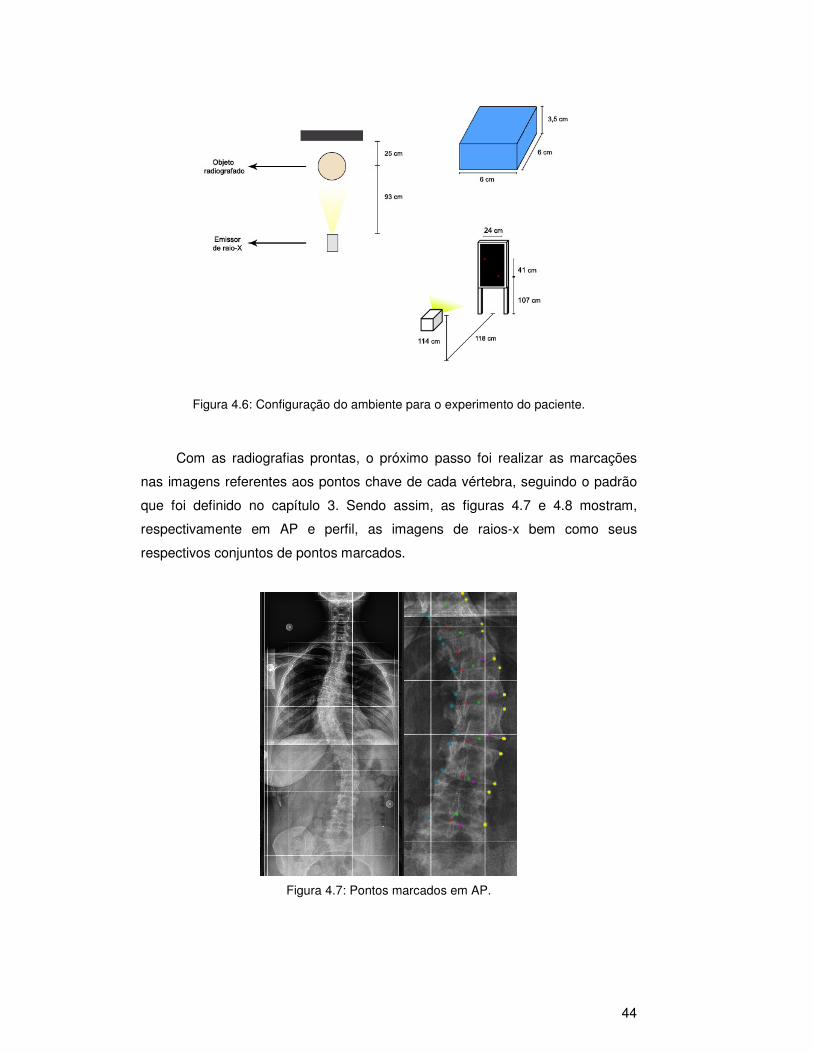
que está sendo exibida pela figura 4.6.
44
Figura 4.6: Configuração do ambiente para o experimento do paciente.
Com as radiografias prontas, o próximo passo foi realizar as marcações
nas imagens referentes aos pontos chave de cada vértebra, seguindo o padrão
que foi definido no capítulo 3. Sendo assim, as figuras 4.7 e 4.8 mostram,
respectivamente em AP e perfil, as imagens de raios-x bem como seus
respectivos conjuntos de pontos marcados.
Figura 4.7: Pontos marcados em AP.

45
Porém, devido a dificuldade de identificar visualmente, nessas radiografias,
as vértebras torácicas, não foi possível marcar todos os pontos de todas as
vértebras. A região mais crítica foi a torácica, devido ao ruído ocasionado pela
sobreposição de outras partes do corpo humano. Esse fator impossibilitou de se
enxergar todos os pontos chave das vértebras presentes nessa parte da coluna
vertebral.
Uma forma de enxergar com mais definição essa região, é aumentar um
parâmetro referente ao nível de penetração da radiação, configurada
manualmente no aparelho de raios-x. Entretanto, com esse ajuste, as vértebras
torácicas poderiam ficar visíveis, mas, em contrapartida, as vértebras cervicais
poderiam desaparecer da imagem. Uma solução para este problema, seria
retirar as radiografias com 2 níveis de intensidade diferente e depois uni-las em
uma única imagem, preservando os detalhes das partes em questão.
Figura 4.8: Pontos marcados em perfil.
Diante disso, para estas radiografias, focamos apenas nas vértebras da
parte cervical e lombar. Utilizando as marcações, novamente recuperamos os
pontos 3D da mesma forma que foi feito para os blocos de madeira. Com tais
pontos calculados, posicionamos os modelos 3D na cena (figura 4.9).
46
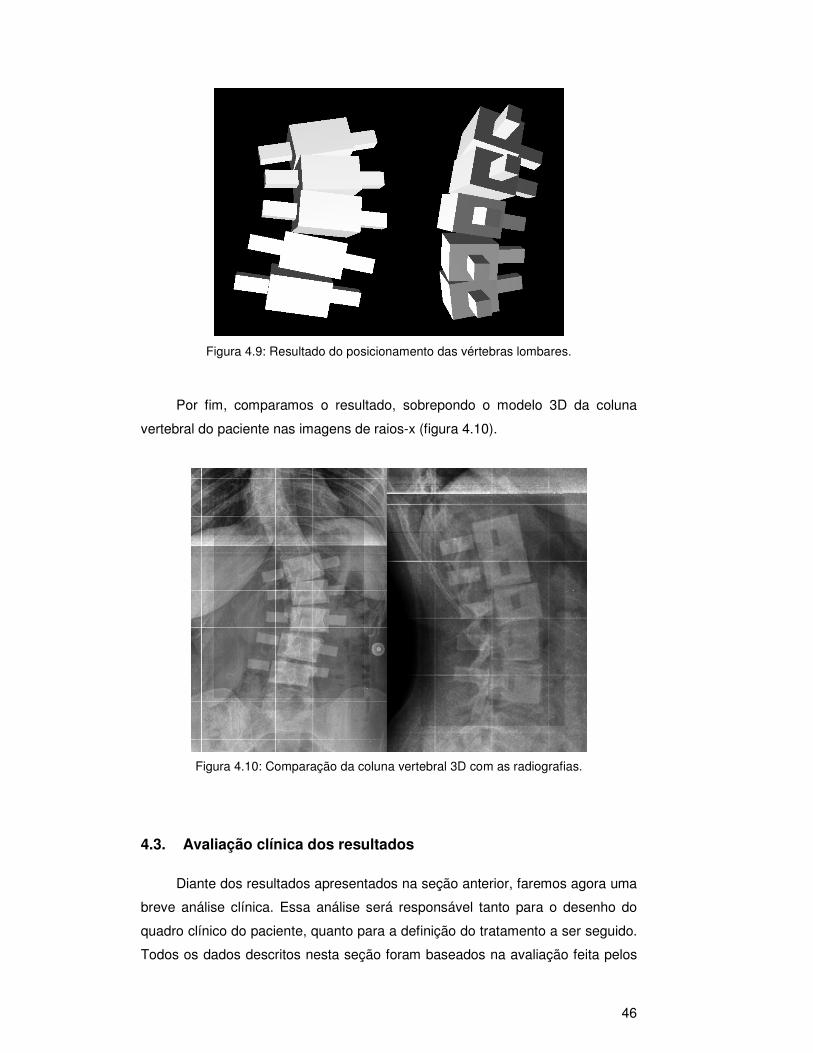
Figura 4.9: Resultado do posicionamento das vértebras lombares.
Por fim, comparamos o resultado, sobrepondo o modelo 3D da coluna
vertebral do paciente nas imagens de raios-x (figura 4.10).
Figura 4.10: Comparação da coluna vertebral 3D com as radiografias.
4.3. Avaliação clínica dos resultados
Diante dos resultados apresentados na seção anterior, faremos agora uma
breve análise clínica. Essa análise será responsável tanto para o desenho do
quadro clínico do paciente, quanto para a definição do tratamento a ser seguido.
Todos os dados descritos nesta seção foram baseados na avaliação feita pelos
47
especialistas da área médica que acompanharam todo o desenvolvimento deste
trabalho.
Como uma primeira fase de qualquer exame médico, inicialmente,
realizou-se uma pré-análise do paciente. Ou seja, perguntas foram destinadas
ao paciente a fim de se obter informações iniciais de seu quadro clínico.
Segundo o paciente, ele costuma a sentir dores de cabeça, nos olhos e às vezes
na lombar.
Sendo assim, olhando a coluna gerada virtualmente (sempre do ponto de
vista do profissional que está analisando), pode ser visto com mais detalhes e
clareza o fator causador de tais dores. Em relação à lombar, é visto uma
compressão do lado esquerdo e uma tração do lado direito (figura 4.9). Isso faz
com que o paciente sinta uma dor em pontada do lado da compressão, e uma
queimação do lado da tração. A grande vantagem da modelagem 3D nesse
ponto é poder identificar exatamente o local onde está ocorrendo essa
compressão, o que facilita o diagnóstico e a atuação no tratamento.
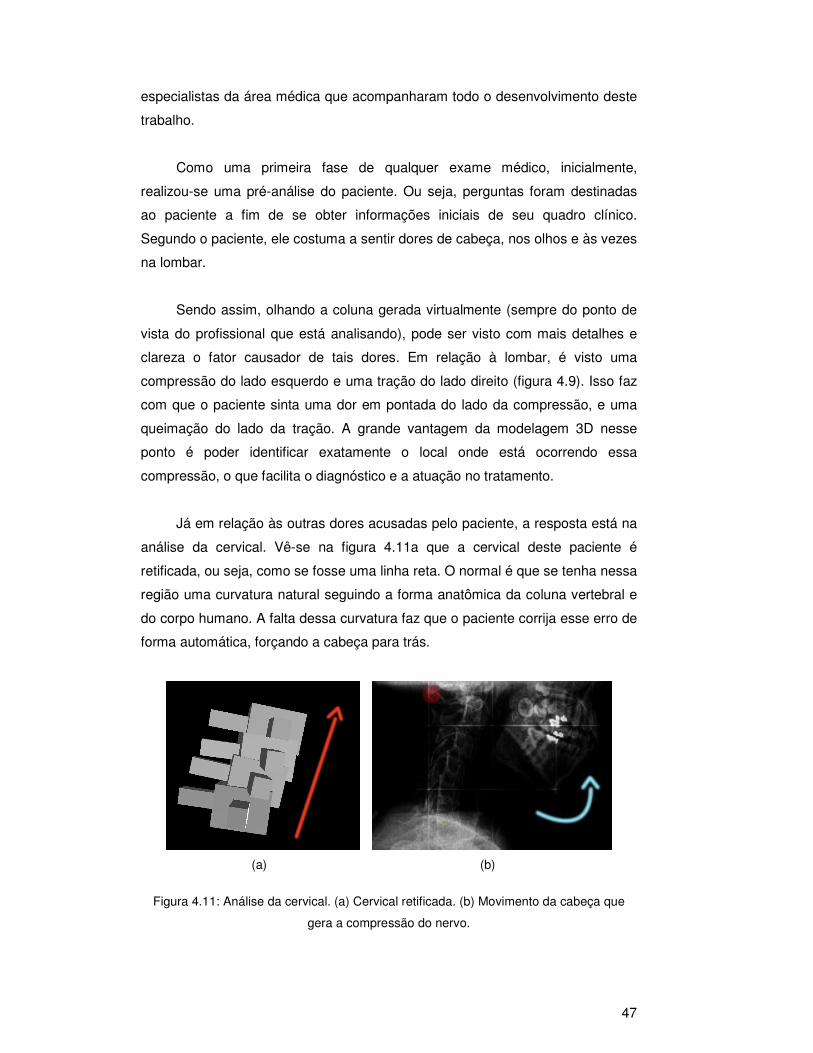
Já em relação às outras dores acusadas pelo paciente, a resposta está na
análise da cervical. Vê-se na figura 4.11a que a cervical deste paciente é
retificada, ou seja, como se fosse uma linha reta. O normal é que se tenha nessa
região uma curvatura natural seguindo a forma anatômica da coluna vertebral e
do corpo humano. A falta dessa curvatura faz que o paciente corrija esse erro de
forma automática, forçando a cabeça para trás.
(a) (b)
Figura 4.11: Análise da cervical. (a) Cervical retificada. (b) Movimento da cabeça que
gera a compressão do nervo.
48
Esse fator gera uma compressão numa determinada área do pescoço
(figura 4.11b). A conseqüência dessa compressão são: cansaço no pescoço,
cefaléia (dores de cabeça), dores na base do crânio e no fundo do olho. O último
sintoma deve-se ao fato de que na área comprimida, passa-se um nervo que
possui uma ligação direta com os olhos.
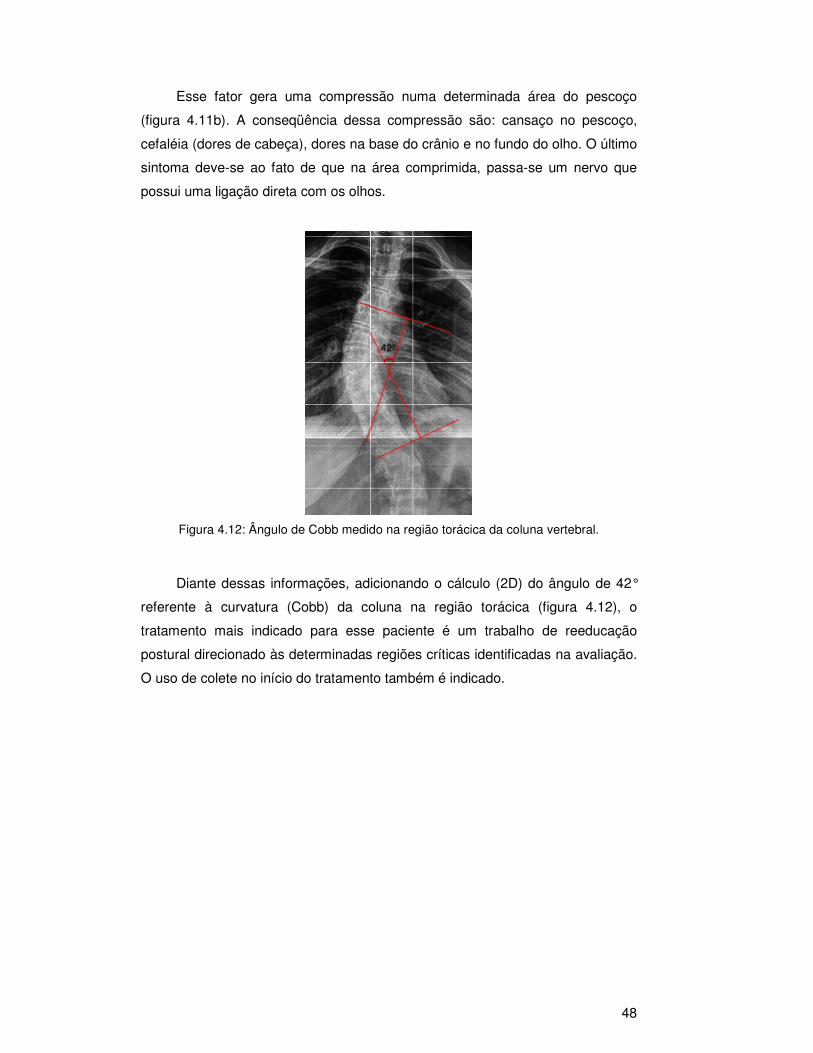
Figura 4.12: Ângulo de Cobb medido na região torácica da coluna vertebral.
Diante dessas informações, adicionando o cálculo (2D) do ângulo de 42°
referente à curvatura (Cobb) da coluna na região torácica (figura 4.12), o
tratamento mais indicado para esse paciente é um trabalho de reeducação
postural direcionado às determinadas regiões críticas identificadas na avaliação.
O uso de colete no início do tratamento também é indicado.
49
5 Conclusão e Trabalhos Futuros
Os resultados obtidos mostraram uma diferença bastante grande de
precisão entre os dois métodos propostos. O método 2 se mostrou bem melhor,
apresentando uma boa precisão quando comparado às distâncias entre os
vértices dentro de um mesmo bloco. Já quando comparado às medidas entre
vértices de blocos diferentes essa valor tendeu a cair um pouco em relação à
primeira comparação. Porém, na média geral, a precisão do método 2 mostrou
ser satisfatória, apesar de ainda não estar na faixa aproximada de 1 mm à 2 mm,
obtida pelo métodos que utilizam dados de TC [4, 22].
Uma comparação direta com o sistema proposto em [4] talvez não seja
muito adequada, tanto pelo fato do desenvolvimento não possuir as mesmas
características, em relação aos dados de entrada, quanto pela diferença de
casos testados. Porém, focando apenas no que cada trabalho se propõe a fazer,
o sistema proposto fica bem próximo. Enquanto em [4] a precisão atingida está
numa faixa aproximada de 3 mm à 4 mm, neste trabalho atingimos uma faixa
aproximada de 4 mm (valor referente a distância da precisão obtida com raios-x
da TC, acompanhando a forma em que o artigo esboça seus resultados).
A vantagem de se ter um sistema de visualização 3D para exames de
coluna vertebral, é a identificação mais clara dos pontos de compressão e tração
das vértebras. Além disso, o acompanhamento dos segmentos vertebrais em 3D
torna o processo mais preciso, porque o movimento humano é sempre em 3D.
Essa identificação da artrocinemática, que é a trajetória articular de pequenos
movimentos, não é fornecida pelas imagens de raios-x.
A partir daí, consegue-se identificar pontos de maior compressão e tensão
dos discos intervertebrais, possibilitando realizar intervenções preventivas. O
que infere sobre o grau de tensão dos ligamentos e músculos intervertebrais
(profundos), que não se é capaz de identificar através da palpação no exame
físico do local afetado.
50
No tratamento a vantagem está no seu monitoramento devido à
possibilidade de realizar comparações entre as fases em que o paciente é
submetido. A comparação do antes e depois, para avaliar o ganho do
tratamento, permite analisar correções referentes à rotação que não é possível
ver na radiografia. E na maioria das vezes o ganho maior se tem nesse ponto.
Contudo, algumas melhorias futuras são necessárias para aumentar cada
vez mais a precisão do método de recuperação dos pontos 3D. A principal delas
é investigar o motivo para a perda de precisão quando distâncias maiores são
medidas e comparadas, como no caso da comparação de vértices entre os
blocos. Talvez, algum método de minimização possa ser aplicado a fim de
minimizar esse erro.
Um fator que certamente melhoraria os resultados obtidos seria um exame
de raios-x que realmente utilizasse dois dispositivos que capturariam as imagens
do pacientes simultaneamente. Entretanto, essa característica é muito mais
incomum de se ter nas clínicas, principalmente pela questão financeira.
Provavelmente, apenas uma minoria composta pelas grandes clínicas
especializadas neste tipo de pesquisa deve possuir tal estrutura.
Já em relação à qualidade visual dos exames de raios-x, o ideal é que
sejam utilizados equipamentos que forneçam realmente imagens digitais, onde a
radiação é captada por sensores, que ligados diretamente ao computador,
gerem a radiografia digitalmente. Isso porque, tais radiografias oferecem uma
definição muito melhor dos seguimentos vertebrais, sendo possível marcar os
pontos em todas as vértebras da coluna.
A maioria dos equipamentos que existem nas clínicas especializadas
nesse tipo de exame, possuem um equipamento “semi-digital”. Esse
equipamento utiliza um filme composto por uma composição de fósforo que
possui uma reação à radiação diferente dos raios-x tradicionais. O filme então é
digitalizado num scanner especial e a imagem gerada é processada por um
programa de computador, que realiza ajustes no contraste da imagem. O raio-x
computadorizado, como e chamado esse exame, apesar de apresentar uma
definição bastante superior em relação ao exame tradicional, ainda é inferior
comparado ao equipamento digital.
51
Seria interessante também uma tentativa de tirar mais informações das
imagens de raios-x, a fim de recuperar a forma geométrica de cada vértebra.
Uma idéia inicial seria iniciar o processo com um modelo 3D genérico, e a partir
dele realizar deformações com base nas informações extraídas das radiografias.
Uma interface no final deste processo poderia ser disponível para que o usuário
do sistema possa fazer um ajuste fino, caso haja necessidade.
Um ponto importante a ser destacado, é que a característica do sistema
projetado neste trabalho permite que o método seja facilmente adaptado para
atender à pesquisas envolvendo outras partes do corpo humano. O fato das
técnicas não dependerem do objeto em estudo, ajudam nesse processo de
adaptação.
Diante disto uma idéia que vêm logo à cabeça, obviamente indo bem mais
além no caminho dos trabalhos futuros, seria estudar uma forma de tentar
integrar a esse processo de modelagem, um processo de captura de movimento
para simular internamente o funcionamento de uma estrutura óssea em questão.
A idéia seria criar uma animação, por exemplo, para o modelo 3D da coluna
vertebral, seguindo um modelo que definisse o comportamento padrão das
vértebras diante de um movimento feito pela pessoa.
Concluindo, os resultados obtidos mostram que sistemas de reconstrução
3D baseadas em imagens de raios-x podem ser uma boa alternativa para uma
avaliação postural mais precisa e efetiva. Mesmo que ainda exista um longo
caminho de melhorias a seguir, as ferramentas propostas e desenvolvidas neste
trabalho permitem que o profissional da área médica tenha um suporte maior
para tomar certas decisões clínicas.
52
REFERÊNCIAS
[1] NOVOSAD J., CHERIET F., PETIT Y., LABELLE H. Three-Dimensional (3D) Reconstruction of the Spine From a Single X-Ray Image and Prior Vertebra Models. IEEE Transactions on Biomedical Engineering, 51(9):1628-1639, Setembro 2004.
[2] JAREMKO J. L., PONCET P., RONSKY J., HARDER J., DANSEREAU J., LABELLE H., ZERNICKE R. F. Indices of torso asymmetry related to spinal deformity in scoliosis. Clinical Biomechanics, 17(8):559–568, Outubro 2002.
[3] PONCET P., DELORME S., RONSKY J. L., DANSEREAU J. Reconstruction of laser-scanned 3D torso topography and sterioradiographical spine and rib-cage geometry in scoliosis. Computer Methods in Biomechanics and Biomedical Engineering, 4(1):59–75, 2000.
[4] POMERO V., MITTON D., LAPORTE S., GUISE J. A., SKALLI W. Fast accurate stereoradiographic 3d-reconstruction of the spine using acombined geometric and statistic model. Clinical Biomechanics, 19(3):240–247, Março 2004.
[5] PRORAD. Gerador de raios-x. Disponível em http://www.clicpoa.com.br/curso_de_especializacao.html.
[6] KOOMPAIROJN S., HUA K. A., BHADRAKOM C. Automatic Classification System for Lumbar Spine X-ray Images. Proceedings of the 19th IEEE Symposium on Computer-Based Medical Systems. 2006.
[7] STEGMANN M. B. Active appearance Model, theory extensions and cases. Master Thesis. Technical University of Denmark, 2000.
[8] TAGARE H. Deformable 2-D template matching using orthogonal curves. IEEE Transaction Medical Imaging, 16(1), pp 108-117, Fevereiro 1997.
[9] COOTES T. F., EDWARDS G. J., TAYLOR C. J. Active appearance model. In Proc. 5th European Conference on Computer Vision. Freiburg, Germany, 1998.
53
[10] BRUIJNE M., NIELSEN M. Image segmentation by shape particle filtering. In Proceedings of the 17th International on Pattern Recognition, (3):722–725, Agosto 2004.
[11] MEZGHANI N., DESCHÊNES S., GODBOUT B., BRANCHAUD D., GUISE J. A. Spinal vertebrae edge detection by anisotropic filtering and a local Canny-Deriche edge detector. IEEE International symposium on Image/video communications, ISIVC 2006.
[12] DERICHE R. Using Canny’s criteria to derive a recursively implemented optimal edge detector. International Journal of Computer Vision, 2(1):167–187, 1987.
[13] CANNY J. F. Finding edges and lines in images. Master thesis. Massachusetts Institute of Technology. Cambridge, 1983.
[14] KYRIAKOPOULOS K. J., YIANNAKOS P., KALLIPOLITES V., DOMALES K. A Geometric Calibration Methodology for Single-Head Cone-Beam X-ray Systems. Journal of Intelligent and Robotic Systems, 24(2):151-174, Fevereiro 1999.
[15] ROUGÉE A., PICARD C., PONCHUT C., TROUSSET Y. Geometrical calibration of X-ray imaging chains for three dimensional reconstruction, Computerized medical imaging and graphics: the official journal of the Computerized Medical Imaging Society, 17(4-5):295-300, 1993.
[16] WANG L. L., TSAI W.-H. Camera calibration by vanishing lines for 3-D computer vision. IEEE Transactions on Pattern Analysis and Machine Intelligence. 13(4):370–376, Abril 1991.
[17] ZHAN S., CHANG H., JIANG J.-Q., LI H. Spinal Images Segmentation Based on Improved Active Appearance Models. In: The 2nd International Conference on Bioinformatics and Biomedical Engineering. Maio 2008.
[18] NYUL L. G., KANYO J., MATE E., MAKAY G., BALOGH E., FIDRICH M., KUBA A. Method for Automatically Segmenting the Spinal Cord and Canal from 3D CT Images. Computer Analysis of Images and Patterns, 3691: 456-463, Setembro 2005.
[19] SCHNEIDER P. J., EBERLY D. H. Geometric tools for computer graphics. San Francisco: Elsevier Science. 2003.
[20] KLEIN J., BARTZ D., FRIMAN O., HADWIGER M., PREIM B., RITTER F., VILANOVA A., ZACHMANN G. Advanced Algorithms in Medical Computer
54
Graphics. Annex to the Conference Proceedings of EUROGRAPHICS, 25-44, 2008.
[21] NEDEL L. P. Realidade Virtual & Medicina. SBC 4th Symposium on Virtual Reality. Outubro 2001.
[22] BICHLMEIER C., NAVAB N. Virtual Window for Improved Depth Perception in Medical AR. International Workshop on Augmented Reality environments for Medical Imaging and Computer-aided Surgery (AMI-ARCS), 2006.
[23] INTEL. Open Computer Vision Library (OpenCV). 2000. Disponível em http://sourceforge.net/projects/opencvlibrary.
[24] GTK+. The GTK+ Project. Disponível em http://www.gtk.org.
[25] OGRE. Object-Oriented Graphics Rendering Engine. 2001. Disponível em http://www.ogre3d.org.
[26] SHEA K. G., STEVENS P. M., Nelson M., Smith J. T., Masters K. S., Yandow S. A. A comparison of manual versus computer-assisted radiographic measurement: Intraobserver measurement variability for Cobb angles. Spine, 23(5):551-5, 1998.
[27] KASS M., WITKIN A., TERZOPOULOS D. Snakes: Active Contour Models. International Journal of Computer Vision. 1(4):321-331, Janeiro 1988.
[28] DERICHE R. Using Canny’s criteria to derive a recursively implemented optimal edge detector. International Journal of Computer Vision. 1(2):167-187, Junho 1987.
[29] CANNY J. F. Finding edges and lines in images. MSc. Thesis, Massachusetts Institute of Technology, Cambridge, MA, 1983.
[30] GEUSEBROEK J. M., SMEULDERS A. W. M., WEIJER J. V. Fast anisotropic gauss filtering. IEEE Transactions on Image Processing. 12(8):983-943, Agosto 2003.
[31] NATIONAL CENTER FOR HEALTH STATISTICS. Second National Health and Nutrition Examination Survey (NHANES II) Public-Use Data Files. Disponível em www.cdc.gov/nchs/products/elec_prods/subject/nhanesii.htm
55
[32] TRIBASTONE F. Tratado de Exercícios Corretivos Aplicados à Reeducação Motora Postural. Trad. Daniela Heffer da Costa de Luna Alencar Moreira. Barueri, SP: Manole, 2001.
[33] FAPESP. Software para Avaliação Postural – SAPO. 2003. Disponível em http://sapo.incubadora.fapesp.br/portal.
56
Apêndice A Pré-processamento das imagens de raios-x
Como foi mencionado no capítulo 3, o pré-processamento das imagens de
raios-x faz parte de uma das etapas do sistema de modelagem da coluna
vertebral. Nesta fase do trabalho, serão demonstradas alternativas pesquisadas
para aproximar, de forma semi-automática, as marcações de pontos chaves de
cada vértebra.
Porém, identificar automaticamente a coluna vertebral, e ainda mais as
vértebras, numa radiografia é uma tarefa bastante complexa. Fato explicado
principalmente pelo ruído causado pela sobreposição de outras estruturas
anatômicas do corpo humano.
Portanto, no intuito de auxiliar o profissional da área médica nas
marcações dos pontos chaves das vértebras, ou até mesmo proporcionar que
um técnico possa manusear o sistema de modelagem, buscamos melhorar a
qualidade das informações extraídas das imagens de raios-x através de um pré-
processamento. Neste processo a idéia é tentar aproximar os pontos pela
localização das vértebras na radiografia. Para isso, duas técnicas de
segmentação foram investigadas: Local Canny-Deriche Edge Detector [8] e
Active Contour Models (Snake) [27]. Uma pequena variação do Snake também
foi experimentada.
Local Canny-Deriche Edge Detector
O método de detecção de arestas Canny-Deriche inicialmente proposto em
[28, 29]. Sendo I(x,y) a imagem a ser filtrada no ponto (x,y), o algoritmo consiste
dos seguintes passos:
1. Suavizar a imagem através de um filtro Gaussiano:
S x, y[ ]= G x, y,σ[ ]∗ I x, y[ ],
57
onde G[x,y,�] representa o filtro e � é a abertura da gaussiana.
2. Computar a magnitude do gradiente através de diferenças
finitas pelas derivadas parciais.
∇S = ∂ S∂ x� � �
� � �
2
+ ∂ S∂ y
�
� �
�
� �
2�
�
� � �
12
3. Aplicar o método de supressão de pontos não-máximos (non-
maximum suppression) à magnitude do gradiente;
4. Aplicar o algoritmo double thresholding para detectar as
arestas.
Porém, a fim de melhorar a qualidade das radiografias, removendo os
ruídos e preservando as estruturas das arestas nas imagens, aplicamos uma
modificação na primeira etapa do algoritmo mostrado no parágrafo anterior.
Substituímos o filtro Gaussiano por um filtro Anisotrópico.
Tal filtro, introduzido no processo, foi proposto em [30]. Segundo os
autores, a dificuldade de detectar linhas e arestas é aumentada quando as
imagens ou apresentam arestas muito próximas uma da oura, ou quando há um
cruzamento entre elas. Isso geralmente costuma ocorrer em cenários complexos
como imagens de raios-x, por exemplo, onde há diversas sobreposições entre
partes do corpo humano.
E neste caso, é dito por eles, que estratégias de filtragem isotrópica (como
o filtro Gaussiano) não produzem bons resultados. Isso porque além de remover
ruídos, ele acaba removendo detalhes da imagem. Nas arestas próximas e
paralelas, por exemplo, esse tipo de filtragem tende a aplicar um blur na área em
questão, transformando duas arestas em uma. Já em relação ao cruzamento
entre arestas, a detecção não é feita de forma eficiente devido a seletividade
orientada pela forma da distribuição Gaussiana.
58
Portanto, nesses casos é conveniente ter um método de detecção que
ignore a distorção dos dados referentes à vizinhança das arestas, enquanto
acumula evidências das próprias arestas ao longo de sua orientação.
Aproveitando, assim, a vantagem da natureza anisotrópica característica de
linhas e arestas. O que justifica a opção pela filtragem anisotrópica.
Por fim, definimos o método Local Canny-Deriche como sendo a aplicação
do algoritmo Canny-Deriche modificado apenas na região que envolve a coluna
vertebral do paciente.
Active Contour Model
Uma snake é definida em [27] como sendo uma energy-minimizing spline
guiada por uma força constante externa e influenciada por uma imagem. Forças
essas, que “empurram” ela na direção de linhas e arestas. Uma snake (ou
contorno ativo) tende a se modelar minimizando sua função de energia, relativa
às forças atuantes no contorno ativo. Esta função possui uma componente
interna e uma externa. A energia interna depende de propriedades intrínsecas,
tais como sua elasticidade e curvatura. A parte externa da energia depende da
estrutura da imagem à qual se aplica a snake, sendo normalmente usado o
gradiente da imagem.
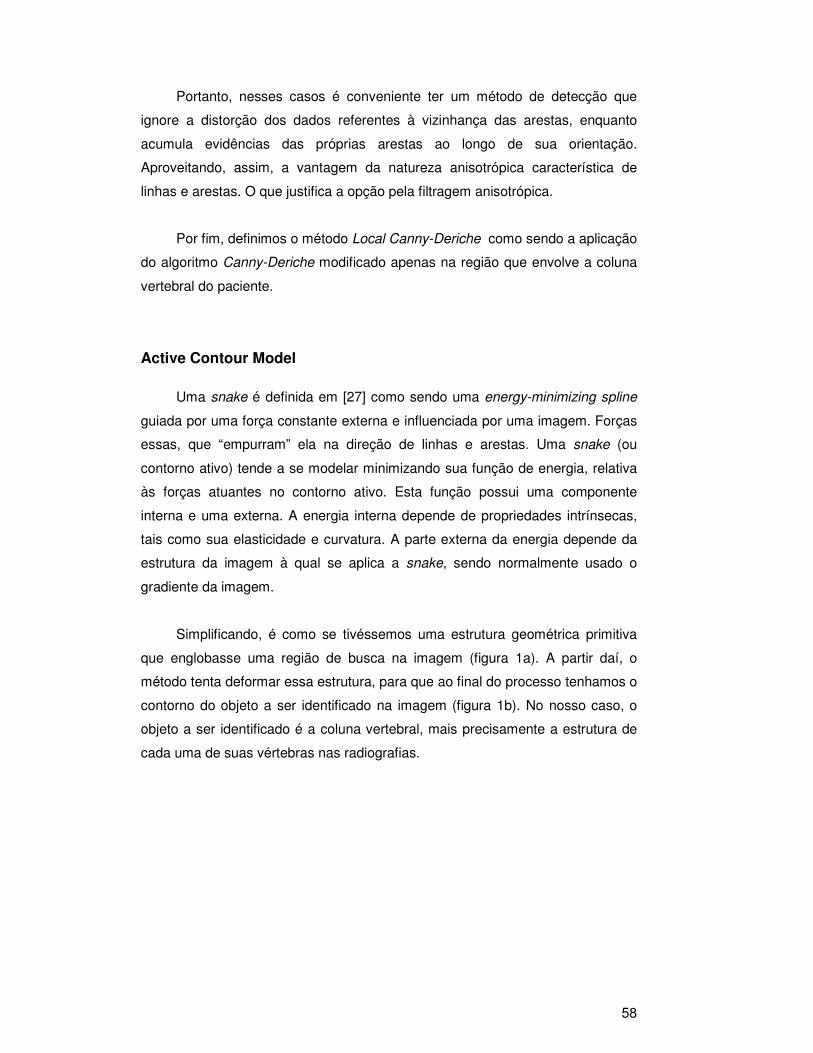
Simplificando, é como se tivéssemos uma estrutura geométrica primitiva
que englobasse uma região de busca na imagem (figura 1a). A partir daí, o
método tenta deformar essa estrutura, para que ao final do processo tenhamos o
contorno do objeto a ser identificado na imagem (figura 1b). No nosso caso, o
objeto a ser identificado é a coluna vertebral, mais precisamente a estrutura de
cada uma de suas vértebras nas radiografias.
59
(a) (b)
Figura 1: Princípio do método: (a) marcação inicial, (b) resultado final.
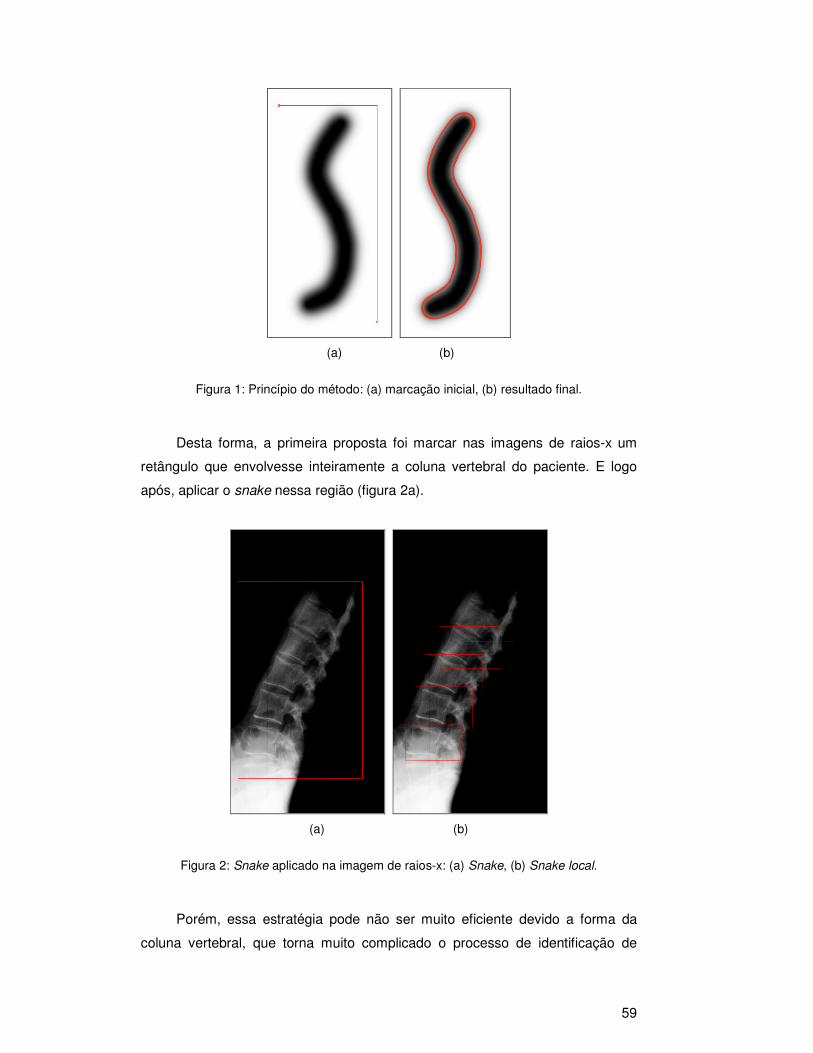
Desta forma, a primeira proposta foi marcar nas imagens de raios-x um
retângulo que envolvesse inteiramente a coluna vertebral do paciente. E logo
após, aplicar o snake nessa região (figura 2a).
(a) (b)
Figura 2: Snake aplicado na imagem de raios-x: (a) Snake, (b) Snake local.
Porém, essa estratégia pode não ser muito eficiente devido a forma da
coluna vertebral, que torna muito complicado o processo de identificação de
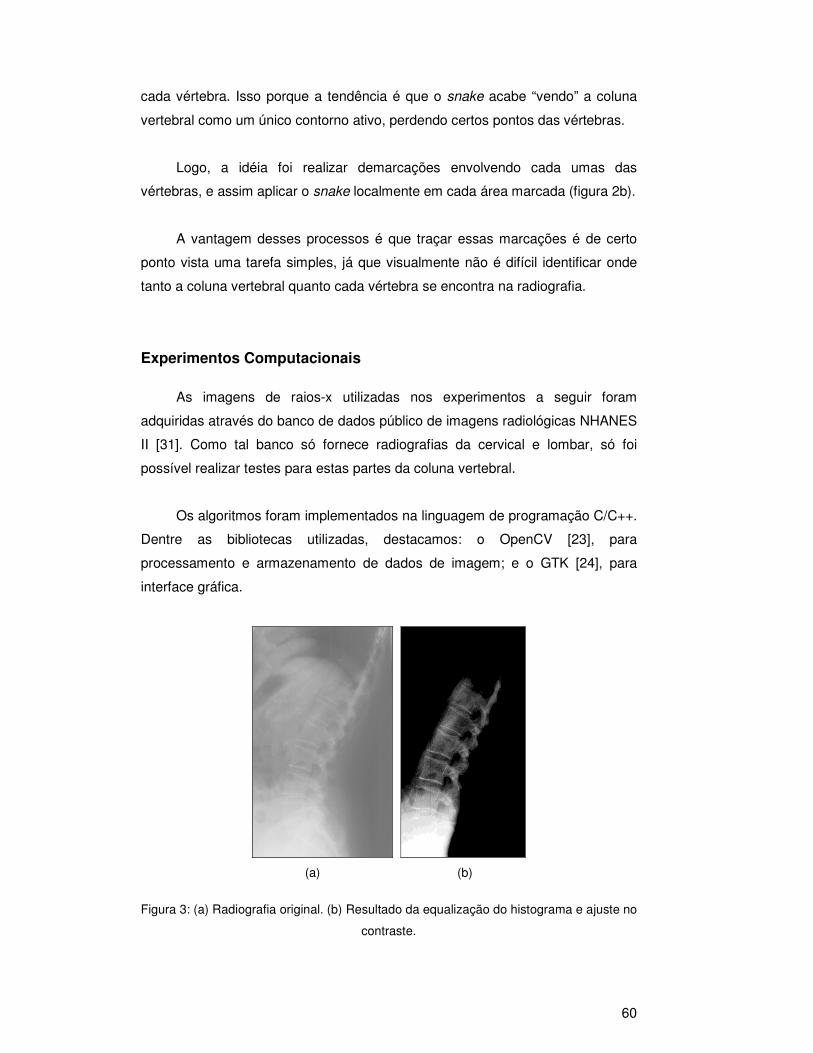
60
cada vértebra. Isso porque a tendência é que o snake acabe “vendo” a coluna
vertebral como um único contorno ativo, perdendo certos pontos das vértebras.
Logo, a idéia foi realizar demarcações envolvendo cada umas das
vértebras, e assim aplicar o snake localmente em cada área marcada (figura 2b).
A vantagem desses processos é que traçar essas marcações é de certo
ponto vista uma tarefa simples, já que visualmente não é difícil identificar onde
tanto a coluna vertebral quanto cada vértebra se encontra na radiografia.
Experimentos Computacionais
As imagens de raios-x utilizadas nos experimentos a seguir foram
adquiridas através do banco de dados público de imagens radiológicas NHANES
II [31]. Como tal banco só fornece radiografias da cervical e lombar, só foi
possível realizar testes para estas partes da coluna vertebral.
Os algoritmos foram implementados na linguagem de programação C/C++.
Dentre as bibliotecas utilizadas, destacamos: o OpenCV [23], para
processamento e armazenamento de dados de imagem; e o GTK [24], para
interface gráfica.
(a) (b)
Figura 3: (a) Radiografia original. (b) Resultado da equalização do histograma e ajuste no
contraste.
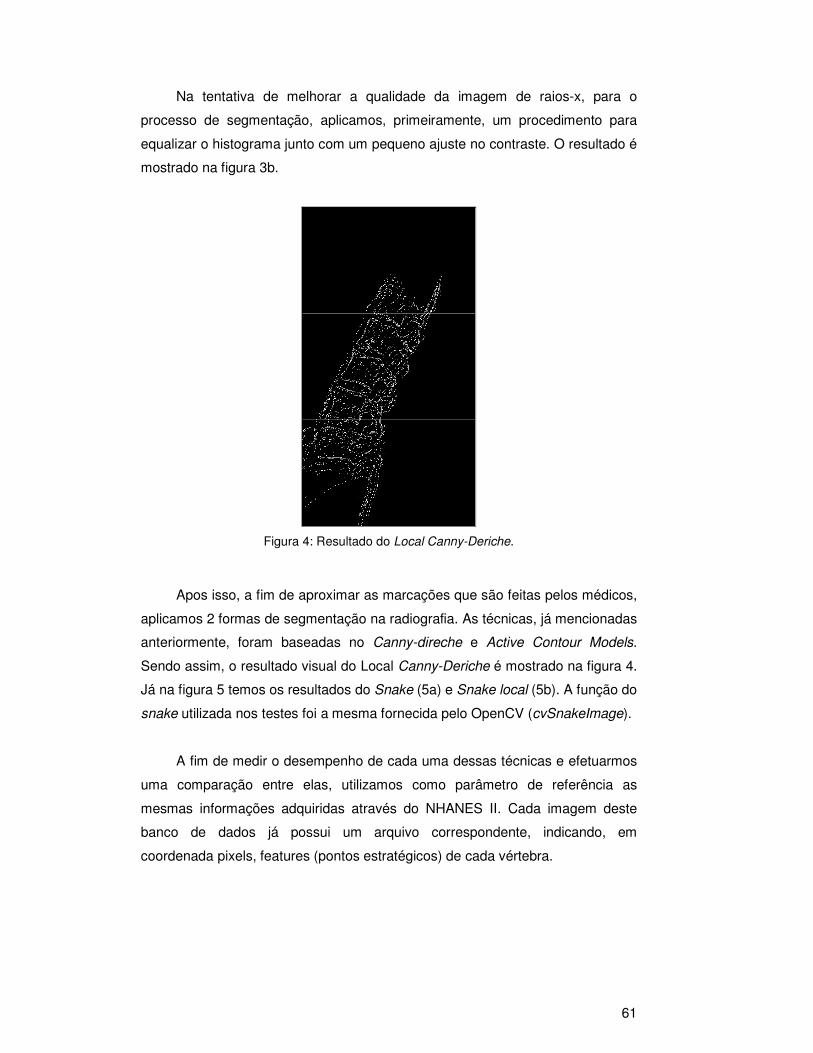
61
Na tentativa de melhorar a qualidade da imagem de raios-x, para o
processo de segmentação, aplicamos, primeiramente, um procedimento para
equalizar o histograma junto com um pequeno ajuste no contraste. O resultado é
mostrado na figura 3b.
Figura 4: Resultado do Local Canny-Deriche.
Apos isso, a fim de aproximar as marcações que são feitas pelos médicos,
aplicamos 2 formas de segmentação na radiografia. As técnicas, já mencionadas
anteriormente, foram baseadas no Canny-direche e Active Contour Models.
Sendo assim, o resultado visual do Local Canny-Deriche é mostrado na figura 4.
Já na figura 5 temos os resultados do Snake (5a) e Snake local (5b). A função do
snake utilizada nos testes foi a mesma fornecida pelo OpenCV (cvSnakeImage).
A fim de medir o desempenho de cada uma dessas técnicas e efetuarmos
uma comparação entre elas, utilizamos como parâmetro de referência as
mesmas informações adquiridas através do NHANES II. Cada imagem deste
banco de dados já possui um arquivo correspondente, indicando, em
coordenada pixels, features (pontos estratégicos) de cada vértebra.
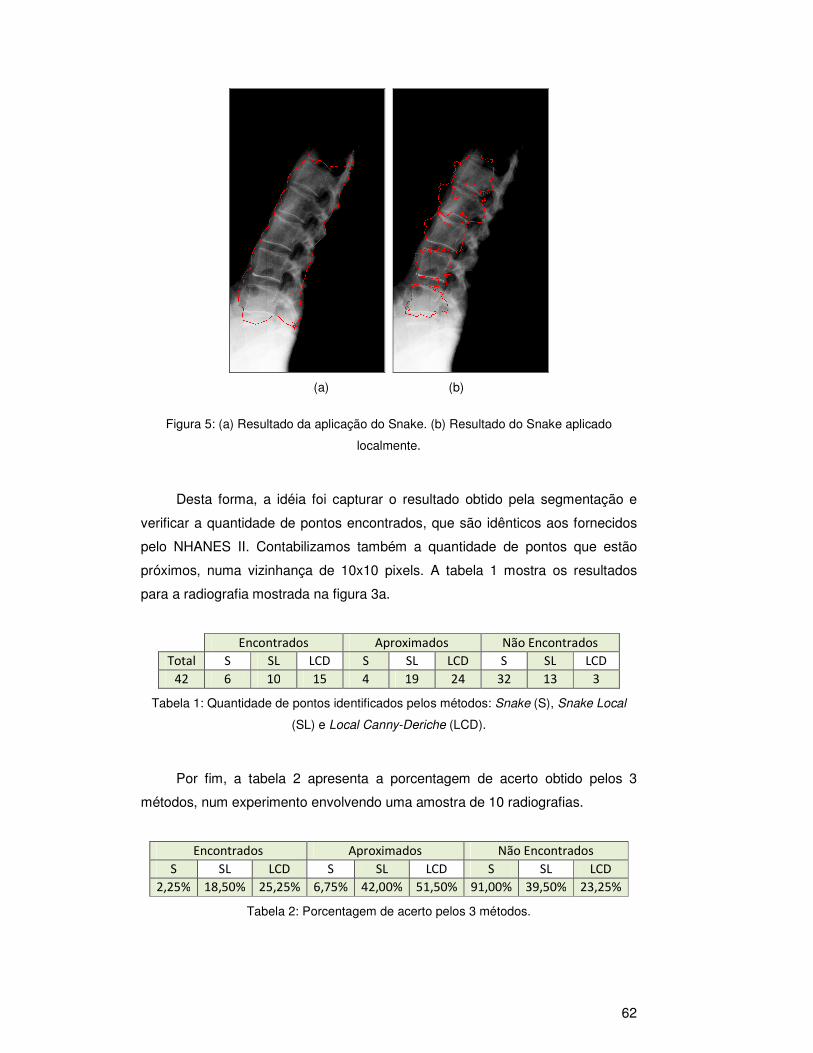
62
(a) (b)
Figura 5: (a) Resultado da aplicação do Snake. (b) Resultado do Snake aplicado
localmente.
Desta forma, a idéia foi capturar o resultado obtido pela segmentação e
verificar a quantidade de pontos encontrados, que são idênticos aos fornecidos
pelo NHANES II. Contabilizamos também a quantidade de pontos que estão
próximos, numa vizinhança de 10x10 pixels. A tabela 1 mostra os resultados
para a radiografia mostrada na figura 3a.
� �� ����� �� ��� ��� �� �� � � ��� ����� ��
� ���� �� ��� ��� � �� ��� ��� � �� ��� ��� �
�� � ��� ��� � �!� �� ��� ��� ��
Tabela 1: Quantidade de pontos identificados pelos métodos: Snake (S), Snake Local
(SL) e Local Canny-Deriche (LCD).
Por fim, a tabela 2 apresenta a porcentagem de acerto obtido pelos 3
métodos, num experimento envolvendo uma amostra de 10 radiografias.
�� ����� �� ��� ��� �� �� � � ��� ����� ��
�� ��� ��� � �� ��� ��� � �� ��� ��� �
����" � �����" � �����" � �#�" � ����" � �����" � !����" � �!���" � �����" �
Tabela 2: Porcentagem de acerto pelos 3 métodos.

63
Os resultados obtidos mostraram que dos 3 métodos experimentados o
que apresentou melhor resultado foi Local Canny-Deriche. Já em relação ao
Snake Local e o Snake o primeiro foi melhor, confirmando a suspeita levantada
anteriormente sobre como o método iria se comportar quanto a forma em que a
coluna vertebral é representada na radiografia.
Entretanto, visualmente os resultados não justificaram a substituição das
imagens de raios-x originais pelas pré-processadas, pois não houve uma
melhoria significativa que auxiliasse o profissional da área medica na marcação
dos pontos chaves das vértebras. Talvez fosse interessante uma investigação
mais detalhada nessa linha de pesquisa para encontrar alguma forma de
relacionar os mesmos pontos tanto em AP quanto em Perfil, já que a maioria dos
pontos foi identificada. Nesse caminho, a técnica template matching [8] poderia
ser experimentada.