o método do tubo de trajetórias para a equação de ... · parte ii: implementação ... o qual...
TRANSCRIPT

O Método do Tubo de Trajetórias para a Equação de Convecção.
Parte II: Implementação Numérica
Luciana P. M. Pena Laboratório de Ciências Matemáticas, (LCMAT/CCT),
Universidade Estadual do Norte Fluminense Darcy Ribeiro - UENF
Campos dos Goytacazes-RJ, Brasil
Nélio Henderson e Eline Flores Grupo de Termodinâmica e Otimização
Instituto Politécnico, Universidade do Estado do Rio de Janeiro
28601-970, Nova Friburgo-RJ, Brasil
Resumo. Nesta Parte II, é desenvolvido
um esquema robusto e eficiente para o método do
tubo de trajetórias, o qual foi formulado de uma
forma geral na Parte I deste artigo. Aqui são
também apresentados resultados de exemplos
numéricos e algumas comparações com outras
metodologias.
1. INTRODUÇÃO
Na primeira parte deste trabalho, veja [3],
desenvolvemos a formulação geral do método do
tubo de trajetórias destinado à resolução da
equação de convecção,
.( ) 0C
CVt
∂+ ∇ =
∂, (1)
onde a função incógnita ( , )C C X t= é
um escalar denotando a concentração de um
traçador, X é um vetor que representa a posição
e t simboliza o tempo. A função ( , )V V X t= , a
qual satisfaz o sistema de EDO’s
Vdt
dX= , (2)
é um campo de velocidade previamente
conhecido. Deduzimos o método do tubo de
trajetórias utilizando os princípios básicos da
mecânica dos meios contínuos, de modo que ele é
Lagrangiano e conservativo. Assim, conforme
mostrado na Parte I, considerando (num instante
de tempo tt ∆+ ) uma malha retangular como
indicada na Figura 1, obtemos
( )
tt
Dn t
dXtXC
C∆+
+
Ω=
∫ ),(
1, (3)
onde ∫∆+Ω
∆+ ≡Ω
tt
dXtt é a medida de uma
célula arbitrária tt ∆+Ω , tD a sua imagem
mapeada para o instante anterior t e ( )1+n
C é o
valor médio da concentração na célula tt ∆+Ω .
Como enfatizado na Fig. 1, este mapeamento é
feito seguindo-se as trajetórias do traçador no
sentido reverso do tempo. Logo, o elemento tD
não é necessariamente (apesar da ilustração na
referida figura) um quadrilátero, e possivelmente
encontra-se deformado com relação à tt ∆+Ω .
Note que a formulação na Eq. (3) é totalmente
explícita, uma vez que ela determina valores
médios de concentração no nível tt ∆+ em
função de valores de C no tempo anterior t .

Figura 1. Tubo de trajetória no domínio
discretizado.
Neste artigo, partindo da Eq. (3),
apresentamos um dos possíveis esquemas
numéricos para a formulação geral deduzida na
Parte I, [3], a qual foi desenvolvida inicialmente
na tese de doutorado de Sampaio, [4]. Tal
esquema foi analisado e exaustivamente testado
na dissertação de doutorado de Pena, [2]. Nossa
abordagem baseia-se em três paradigmas
fundamentais, robustez, eficiência e simplicidade.
2. ESQUEMA NUMÉRICO
Supomos, por simplicidade, que o
domínio mapeado tD (no nível tempo t ) é um
quadrilátero, mas não necessariamente um
retângulo (veja novamente a Fig. 1).
Consideramos que a trajetória de uma partícula
do traçador é determinada utilizando-se o campo
de velocidade V , referente ao fluido. Note que
esta hipótese é bastante razoável, pois de acordo
com o modelo físico adotado na Eq. (1) estamos
desprezando os efeitos da difusão molecular, ou
seja, estamos efetivamente considerando
( )aV V≅ , onde ( )aV denota a velocidade do
traçador.
O procedimento para o cálculo da
integral ( , )tDC X t dX∫ é elaborado como
descrito a seguir. O primeiro passo é constituído
de uma etapa denominada de “etapa de
backtracking”. Nessa etapa realizamos um
processo retroativo no tempo ao longo das
trajetórias. Efetivamente, os pontos 321 ,, XXX
e 4X (os vértices do suposto quadrilátero tD )
são obtidos resolvendo-se o sistema de equações
diferenciais ordinárias representado em Eq. (2),
com condições finais do tipo ( )X t t X+ ∆ = .
Isso é feito para cada vértice 321
~,
~,
~XXX e 4
~X
de tt ∆+Ω . Esse passo determina completamente o
(suposto) quadrilátero mapeado, tD . Depois, a
integral dXtXC
tD
),(∫ é aproximada através de
uma estratégia de integração eficiente. Essa
segunda etapa será denominada de “etapa de
integração”.
No presente trabalho, consideramos
somente exemplos bidimensionais. Assim,
escreveremos ),( yxX = e ),( vuV = . Em
todos os exemplos, usaremos uma grade de
células centradas possuindo yx NN × blocos de
tamanho uniforme, com espaçamentos
xx NLx =∆ e yy NLy =∆ , onde xL e yL
são as dimensões do domínio retangular nas
direções x e y , respectivamente, veja a Fig. 2.
Figura 2. Grade de células centradas.
Deste modo, no instante tt ∆+ , a
variável )1(
,
+n
jiC denotará o valor médio de C na
célula ( , )
1 2 1 2 1 2 1 2[ , ] [ , ]i j
t t i i j jx x y y+∆ − + − +Ω = × .
Aqui, tal quantidade efetivamente representará o
valor da concentração no centro de .),( ji
tt ∆+Ω Na

etapa de backtracking, resolveremos o sistema de
equações diferenciais indicado em Eq. (2), sujeito
às condições finais dadas por xttx ~)( =∆+ e
ytty ~)( =∆+ . Isso é feito através do método de
Runge-Kutta de quarta ordem.
Apesar da possibilidade de
empregarmos métodos de integração em duas
variáveis, no entanto, objetivando a eficiência e
simplicidade do esquema, a integral dupla de
),( tXC sobre o domínio tD será calculada
como segue,
Λ≅∫ CdXtXCtD
ˆ),( , (4)
sendo ),ˆ(ˆ tXCC = , onde X é um ponto
em tD obtido por backtracking do centro da
célula ),( ji
tt ∆+Ω , e Λ é a medida de uma área
apropriadamente escolhida, a ser descrita abaixo.
Após a determinação de X , o cálculo de
),ˆ(ˆ tXCC = solicita uma interpolação
bidimensional. Isso é exigido pois esse ponto não
recai, necessariamente, no centro de uma célula
da grade, referente ao instante t , veja Fig. 3.
Empregamos uma interpolação 2-D com pesos.
Trata-se de uma interpolação robusta que utiliza
o valor da concentração definido no centro da
célula que contém o ponto )ˆ,ˆ(ˆ yxX = e os
valores definidos em cada célula vizinha ao bloco
que possui o referido ponto, veja a Fig.4.
Figura 3. O backtracking e a localização do
ponto X .
Assim, se os nós ),( ii yx representam
(de uma forma geral) os centros das células
indicadas na Fig. 4, então a interpolação
bidimensional com pesos pode ser escrita na
seguinte forma:
Figura 4. Exemplos de pontos usados na
interpolação 2-D com pesos.
∑
∑−
−
≅
ii
iii
d
dC
C1
1
ˆ , (5)
onde as distâncias
22 )ˆ()ˆ( iii yyxxd −+−= são os pesos
considerados.
Finalmente para completar o cálculo de
∫tD
dXtXC ),( é necessário determinar a área Λ
indicada na Eq. (4). Aqui, de acordo com a Fig. 1,
suporemos que Λ é a área do quadrilátero cujo
os vértices são os pontos ),( 111 yxX = ,
),( 222 yxX = , ),( 333 yxX = e
),( 444 yxX = , os quais já foram obtidos por
backtracking. Assim sendo, podemos calcular Λ
pela soma dos seguintes determinantes,
1
1
1
2
1
1
1
1
2
1
44
33
22
44
22
11
yx
yx
yx
yx
yx
yx
+=Λ .
(6)

3. RESULTADOS NUMÉRICOS
Com objetivo comparar o método do
Tubo de Trajetórias com outras metodologias,
optamos por dois métodos descritos e analisados
no artigo de Giraldo e Neta, [1]. Nossa escolha
reside em alguns pontos fundamentais. O
primeiro refere-se ao fato dos códigos
computacionais dos algoritmos analisados por
Giraldo e Neta (escritos em FORTRAN 77)
estarem disponíveis, sendo de fácil acesso no
endereço eletrônico
http://math.nps.navy.mil/~bneta . O segundo
ponto tem haver com os tipos de metodologias
disponibilizadas por esses autores. Foi
desenvolvido um código de um método Euleriano
que utiliza uma estratégia sofisticada de
elementos finitos, e um outro método que
combina a mesma discretização em elementos
finitos com uma abordagem Lagrangiana para a
equação de convecção. Assim, podemos
comparar o método do Tubo de Trajetórias com
um método do tipo Euleriano, além de compará-
lo com um outro método típico da sua própria
classe.
4. Testes Comparativos
Nos testes comparativos selecionamos
um problema proposto por Leveque (1996).
Trata-se da rotação de um sólido definido no
domínio [ ] [ ]0, 1 0, 1B = × . O corpo sólido tem
seu estado inicial definido pela seguinte função:
100( , ,0) [1 cos( ( , ))]
2C x y r x yπ= + , (7)
onde
2 2
0 0( , ) min( ( ) ( ) , ) /c cr x y x x y y r r= − + − ,(8)
sendo 0.25c
x = , 0.5c
y = e 0 0.2r = .
O corpo é posto a girar no sentido anti-
horário com velocidade angular ω , em torno de
um eixo fixo que passa através do ponto
( ) Byx ∈00 , e tem direção normal ao plano xy .
Os valores que representam a velocidade linear
nas direções x e y são dados, respectivamente,
pelas relações:
( )0yyu −−= ω , (9)
( )0xx −= ωv , (10)
sendo, 0 0 0.5x y= = e 1=ω .
Com intuito de comparar a solução
numérica com a solução exata dada por
( , , ) ( , ,0)f
C x y t C x y= foram especificados
cinco diferentes valores para k: 1, 2, 3, 4 e 5,
sendo kpt f = com ωπ /2=p (o tempo de uma
revolução completa do corpo).
A análise comparativa realizada aqui leva
em consideração o estudo erro 2ε , definido por:
( )
( )
2numérica analítica
, ,,
2 2analítica
,,
i j i ji j
i ji j
C C
Cε
−=
∑
∑ (11)
Além disso, comparamos também o erro
relativo de conservação de massa definido por: . ( ) ( , )
,,
.
( , , )
( , , )
teor n i j
i j ti j
CM teor
C x y t dX C
C x y t dXε Ω
Ω
− Ω
≡
∑∫
∫.(12)
onde a integral .( , , )teor
B
C x y t dX∫
representa a massa exata obtida com auxílio da
solução teórica e o somatório ( ) ( , )
,,
n i j
i j ti j
C Ω∑
representa a massa total calculada com a solução
numérica, ambas tomadas sobre o domínio B.
A figura 5 mostra a solução analítica, em
qualquer instante de tempo.
Figura 5. Superfície e curvas de nível da solução
exata.
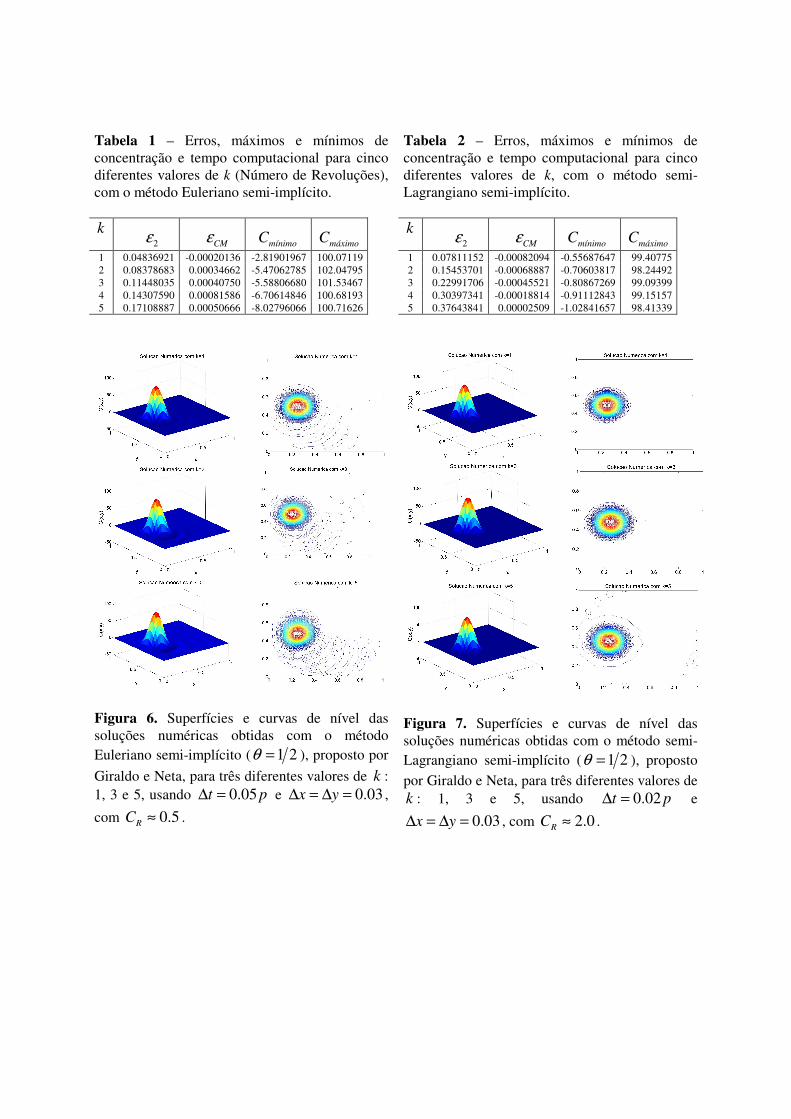
Tabela 1 – Erros, máximos e mínimos de
concentração e tempo computacional para cinco
diferentes valores de k (Número de Revoluções),
com o método Euleriano semi-implícito.
k
2ε CM
ε mínimo
C máximo
C
1 0.04836921 -0.00020136 -2.81901967 100.07119
2 0.08378683 0.00034662 -5.47062785 102.04795
3 0.11448035 0.00040750 -5.58806680 101.53467
4 0.14307590 0.00081586 -6.70614846 100.68193
5 0.17108887 0.00050666 -8.02796066 100.71626
Figura 6. Superfícies e curvas de nível das
soluções numéricas obtidas com o método
Euleriano semi-implícito ( 1 2θ = ), proposto por
Giraldo e Neta, para três diferentes valores de k :
1, 3 e 5, usando 0.05t p∆ = e 0.03x y∆ = ∆ = ,
com 0.5R
C ≈ .
Tabela 2 – Erros, máximos e mínimos de
concentração e tempo computacional para cinco
diferentes valores de k, com o método semi-
Lagrangiano semi-implícito.
k
2ε CM
ε mínimo
C máximo
C
1 0.07811152 -0.00082094 -0.55687647 99.40775
2 0.15453701 -0.00068887 -0.70603817 98.24492
3 0.22991706 -0.00045521 -0.80867269 99.09399
4 0.30397341 -0.00018814 -0.91112843 99.15157
5 0.37643841 0.00002509 -1.02841657 98.41339
Figura 7. Superfícies e curvas de nível das
soluções numéricas obtidas com o método semi-
Lagrangiano semi-implícito ( 1 2θ = ), proposto
por Giraldo e Neta, para três diferentes valores de
k : 1, 3 e 5, usando 0.02t p∆ = e
0.03x y∆ = ∆ = , com 2.0R
C ≈ .

Tabela 3 – Erros, máximos e mínimos de
concentração e tempo computacional para cinco
diferentes valores de k, com o método do Tubo de
Trajetórias.
k
2ε CM
ε mínimo
C máximo
C
1 9.0012956E-08 0.00022293 1.90983E-13 99.574735
2 1.7882476E-07 0.00044557 1.90898E-13 99.228029
3 2.6673821E-07 0.00066816 1.90813E-13 98.88279
4 3.5385191E-07 0.00089070 1.90728E-13 98.539012
5 4.4027660E-07 0.00111319 1.90643E-13 98.196691
Figura 7. Superfícies e curvas de nível das
soluções numéricas obtidas com o método semi-
Lagrangiano semi-implícito ( 1 2θ = ), proposto
por Giraldo e Neta, para três diferentes valores de
k : 1, 3 e 5, usando 0.02t p∆ = e
0.03x y∆ = ∆ = , com 2.0R
C ≈ .
5. CONCLUSÕES
Comparações numéricas com duas
metodologias diferentes, uma Euleriana e a outra
semi-Lagrangiana, demonstram a superioridade
do método proposto.
Os resultados computacionais
confirmaram que o esquema analisado apresenta
na prática uma boa propriedade conservativa,
estabilidade e precisão numérica, e eficiência
suficiente para ser empregado em problemas
práticos, modelados pela equação de convecção.
Em resumo, a análise experimental
desenvolvida neste artigo ressalta a superioridade
da solução gerada pelo método do Tubo de
Trajetórias.
6. REFERÊNCIAS
[1] Giraldo, F. X. e Neta, B., A Comparison of a
Family of Eulerian and Semi-Lagrangian
Finite Element Method for the Advection-
Diffusion Equation, In Computer Modelling
of Seas and Coastal Regions Iii, J. R. Acinas
and C. A. Brebbia (eds), Computational
Mechanics Publications, Southampton, U. K.,
(1997).
[2] Pena, L. P. M., Análise de um Método para a
Equação de Convecção Formulado à Luz da
Mecânica dos Meios Contínuos com
Aplicações a Advecção de Anomalias
Oceânicas e Meteorológicas, Tese de
Doutorado, IPRJ-UERJ, (2006).
[3] Pena, L. P. M., Sampaio M., Henderson, N. e
Platt, G. M., O Método do Tubo de
Trajetórias para a Equação de Convecção.
Parte I: Formulação, artigo completo a ser
submetido ao XXX CNMAC, Florianópolis,
Santa Catarina, (2007).
[4] Sampaio, M., O Método do Tubo de
Trajetórias: Uma Abordagem Semi–
Lagrangiana para Equações de Convecção-
Difusão, Tese de Doutorado, IPRJ-UERJ,
(2006).