monografia - peixe robô
TRANSCRIPT

INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SÃO PAULO
MODELAGEM, SIMULAÇÃO E PROTOTIPAGEM DE UM PEIXE ROBÔ
HENRIQUE VITKAUSKAS DORIA NATÁLIA MENDES CEOLDO
ORIENTADOR: Alexandre Brincalepe Campo
São Paulo 2015

INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SÃO PAULO
MODELAGEM, SIMULAÇÃO E PROTOTIPAGEM DE UM PEIXE ROBÔ
HENRIQUE VITKAUSKAS DORIA 106231-X NATÁLIA MENDES CEOLDO 097280-1
ORIENTADOR: Professor Alexandre Brincalepe Campo
Monografia apresentada para obtenção do grau em Engenharia de Controle e Automação.
São Paulo 2015

Dedicamos este trabalho aos nossos amigos e familiares, muito compreensivos em todos os momentos da execução, e ao nosso orientador por sempre nos indicar o caminho certo na execução do trabalho.

AGRADECIMENTOS
Gostaríamos de agradecer aos amigos que de alguma forma auxiliaram na execução do projeto, especialmente à ANACOM, empresa de Engenharia que fez a impressão da estrutura final, e ao Labore, do Instituto Federal de São Paulo, que fez a impressão da primeira estrutura do projeto.

RESUMO Este trabalho tem por objetivo desenvolver um peixe robô autônomo que
mimetize o comportamento de um peixe real. Para a realização deste projeto primeiramente foi feita uma revisão bibliográfica para uma melhor compreensão do estado da arte de peixes robôs. Foi decidido desenvolver um peixe do tipo carangiforme capaz de nadar tanto em linha reta como realizar curvas, detectar obstáculos e desviar dos mesmos, assim como alterar sua profundidade debaixo d’água. O trabalho contém as descrições das estruturas mecânicas utilizadas em todas as fases de desenvolvimento do sistema, assim como os componentes eletrônicos que foram embarcados na versão final. Também serão apresentados os resultados de dois ensaios, o de propulsão a partir da flexão medida em uma barra engastada com o peixe fixado a mesma, e o ensaio final do peixe nadando de maneira autônoma, com controle de profundidade. Por fim, é apresentado a conclusão do projeto, discutindo propostas de aperfeiçoamento do sistema e melhorias que poderão ser incorporadas à estrutura do robô.

ABSTRACT This work aims to develop an autonomous robot fish that mimics the behaviour of a
real fish. To accomplish this goal first was made a review of the literature to better understand the state of the art of fish robots. It was decided to develop a fish of carangiform type that would be able to swim both straight as performs turning moves, detect obstacles and divert them, as well as change its underwater depth. The work contains the description of the mechanical structures used at all stages of system development, as well as the electronics that were embedded in the final version. It is also presented two tests, the propulsion one in which was measured the flexion forces applied to a bar where the fish was attached to, and the final testing of the fish swimming autonomously, with depth control. Finally it is presented the conclusion of the project, discussing system improvement proposals and additions that can be incorporated into the robot structure.

ÍNDICE DE FIGURAS Figura 1: Peixe robô utilizado para exploração arqueológica. ........................................... 13 Figura 2: Classificação de peixes de acordo com seu modo de propulsão. ........................ 14 Figura 3: Estrutura interna de um peixe-robô ................................................................... 14 Figura 4: Peixe robô nadando no tanque. ......................................................................... 16 Figura 5: Estrutura da cauda movimentada por tendão.. .................................................... 16 Figura 6: Desenho da estrutura do sistema de arfagem.. ................................................... 17 Figura 7: Estrutura com cauda a flexível e as demais partes rígidas.. ................................ 18 Figura 8: Gráfico que representa o posicionamento da cauda de um peixe robô carangiforme em diversos instantes, considerando a equação (1). ..................................... 19 Figura 9: Simulação do modelo proposto para realização de curvas. ................................. 20 Figura 10: Simulação dos ângulos dos servomotores para realização de curvas. ............... 21 Figura 11: Desenho em CAD do Tucuazul V1 ................................................................. 22 Figura 12: Vista isométrica do Tucuazul V2. .................................................................... 23 Figura 13: Vista lateral do Tucuazul V2. .......................................................................... 23 Figura 14: Impressora 3D Dimension bst 1200es.............................................................. 24 Figura 15: Disposição das peças para a impressão no software de interface com a impressora 3D .................................................................................................................. 24 Figura 16: Moldes produzidos pela impressora 3D ........................................................... 25 Figura 17: Moldes com o material de suporte retirado ...................................................... 25 Figura 18: Parte superior com as engrenagens. ................................................................. 26 Figura 19: Parte inferior com o circuito eletrônico e motor. .............................................. 26 Figura 20: Impermeabilização com graxa náutica. ............................................................ 27 Figura 21: Aplicação de parafina sobre o potenciômetro. ................................................. 27 Figura 22: Aplicação de fita isolante líquida na placa do circuito e nos contatos do motor. ........................................................................................................................................ 27 Figura 23: Servomotor com fita isolante líquida aplicada externamente. ........................... 28 Figura 24: Estrutura de ensaio para estudar as forças de propulsão de Tucuazul I ............. 29 Figura 25: Placa de aquisição e extensômetros fixados à esquerda. ................................... 30 Figura 26: Tucuzul V1 fixado na barra vertical ................................................................ 31

Figura 27: Proposta de Zhong et al.(2013) para controle de altitude do peixe robô. .......... 32 Figura 28: Sensor de pressão e temperatura BMP 180 ...................................................... 33 Figura 29: Malha de controle fechada para controle da profundidade do peixe. ................ 33 Figura 30: Vista superior da estrutura completa do peixe ................................................. 34 Figura 31: Eletrônica embarcada no peixe-robô................................................................ 35 Figura 32: Teste do peixe-robô ......................................................................................... 36 Figura 33: Resposta do peixe em relação a profundidade pré-estabelecida ........................ 37 Figura 34: Módulo RF 433MHz (emissor e receptor) ....................................................... 38 Figura 35: Estação local de recebimento de dados ............................................................ 39

SUMÁRIO
1 - INTRODUÇÃO ................................................................................................................................ 10 2 - JUSTIFICATIVA ............................................................................................................................. 12 3 - REVISÃO BIBLIOGRÁFICA ........................................................................................................ 14 4 - MODELAGEM MATEMÁTICA E SIMULAÇÃO ..................................................................... 19 5 - DESCRIÇÃO DA ESTRUTURA ................................................................................................... 22
Estrutura do Tucuazul V1 ................................................................................................................... 22 Estrutura do Tucuazul V2 ................................................................................................................... 22
6 – ISOLAÇÃO DOS COMPONENTES ELETRÔNICOS .............................................................. 26 7 - ENSAIO DE PROPULSÃO ............................................................................................................ 29 8 - ENSAIO DE DIREÇÃO E PROFUNDIDADE ............................................................................. 32 UTILIZANDO A BIBLIOTECA PIDV1........................................................................................................... 35 DADOS OBTIDOS: ...................................................................................................................................... 36 9 - COMUNICAÇÃO VIA RADIO FREQUÊNCIA .......................................................................... 38 10 - CONCLUSÃO ................................................................................................................................ 40 11 - REFERÊNCIAS ............................................................................................................................. 41

10
1 - INTRODUÇÃO As pesquisas na área de robótica vêm crescendo em anos recentes. As tecnologias
envolvidas no projeto desse tipo de dispositivo evoluem com grande velocidade e viabilizam novas propostas.
Dividindo por áreas, nota-se que o sensoriamento, a comunicação, o gerenciamento de energia, a eletrônica embarcada, a mecânica, o controle e a computação (Inteligência Artificial) são áreas relacionadas ao estudo de robôs móveis. Pode-se observar, como exemplo, a base de artigos do Institute of Electrical and Electronics Engineers – (IEEE). Em pesquisa feita em julho de 2012 nota-se que 50% dos 540 artigos disponíveis no banco de artigos (conferências e periódicos) com as palavras robot e fish foram publicados nos anos de 2010, 2011 e 2012.
Os sensores que utilizam a tecnologia Microelectromechanical Systems (MEMS) possibilitam a medição com precisão do estado em que se encontra o robô. Os giroscópios e acelerômetros digitais de três eixos ficaram disponíveis a baixo custo apenas em anos recentes, permitindo a medição da orientação do robô e o controle de atitude - ângulos de rotação, guinada e arfagem.
A tecnologia de transmissão de dados sem fio está disseminada e os protocolos que permitem troca de dados entre dispositivos de forma a minimizar perdas de informação também evoluíram em anos recentes.
As baterias e outros sistemas de armazenamento, geração e reaproveitamento de energia têm sido aperfeiçoados, sendo hoje um aspecto muito importante para a evolução da pesquisa na área.
Os dispositivos eletrônicos necessários para o processamento dos sinais dos sensores e para o controle do robô possuem uma capacidade de processamento crescente, sendo que as tecnologias utilizadas podem envolver um ou mais microcontroladores integrados num mesmo robô, até dispositivos lógicos programáveis do tipo FPGA (Field Programmable Gate Array) especificamente desenhados para o gerenciamento do sistema (HARTENSTEIN, 2007).
O projeto de robôs envolve um grande esforço de projeto mecânico, dado que a estrutura deve ser suficientemente leve para que possa ser suportada pelos servomotores, assim como deve ser robusta para suportar as condições a que o sistema é submetido. A pesquisa de materiais para a construção dos robôs é um dos tópicos abordados na

11
bibliografia sobre o assunto. O projeto e a construção do dispositivo podem ser feitos utilizando novos recursos disponíveis, como os scanners 3D e as impressoras 3D, ambos disponíveis no IFSP.
O estudo da teoria de controle aplicada ao robô envolve desde o controle da cinemática e da dinâmica do sistema, como o controle e supervisão do conjunto em ambientes diversos, através da análise e processamento dos sinais dos sensores. As técnicas de Inteligência
Artificial também têm sido aplicadas intensivamente na tentativa de solução dos problemas complexos que se apresentam na implementação de soluções para dispositivos robóticos.
Diante da multidisciplinaridade que o campo da robótica engloba e através de estudos das áreas mencionadas, este trabalho tem como objetivo desenvolver um peixe robô autônomo que mimetize o comportamento de um peixe real
Para que este objetivo seja alcançado foram determinadas as seguintes etapas para o desenvolvimento do projeto:
a) elaboração de uma revisão bibliográfica sobre o tema (capítulo 3); b) estudo da relação entre os parâmetros que definem a movimentação da cauda e
a força de propulsão gerada (capítulos 4 e 7); c) desenvolvimento de sistemas eletrônicos e mecânicos que permitam a execução
de tarefas aquáticas (capítulos 5 e 6); d) desenvolvimento de sistema de controle de profundidade (capítulo 8). e) desenvolvimento do sistema de comunicação para coleta de dados dos sensores
embarcados (capítulo 9).

12
2 - JUSTIFICATIVA Segundo Wang et al.(2011) a principal justificativa para se projetar um peixe robô
em substituição a equipamentos aquáticos submarinos com propulsores movidos a hélices se deve à grande eficiência dinâmica do peixe, que no lugar de propulsores utiliza a deformação e movimento de seu corpo para se locomover. No caso de um peixe robô a atuação se dá através de atuadores elétricos e diversos outros materiais apropriados.
Segundo Chan et al, 2007 excluindo veículos submarinos com turbinas de alta velocidade, os peixes são mais eficientes no deslocamento, geram menos ruído com superior vantagem para exploração e vigilância subaquática. Partindo-se desse pressuposto, vê-se as vantagens do desenvolvimento de um peixe robô para uso tanto de exploração marinha como exposição em aquários.
Outras diversas aplicações para a utilização de um peixe robô: Exploração oceânica ou em rios; Vigilância; Inspeção de destroços; Manutenção de plataformas offshore; Inspeção ambiental; Inspeção de tubulações de óleo; Inspeção de dutos de esgoto; Inspeção de redes de abastecimento de água ou Coleta e análise de dados intra-corpóreos.
Um exemplo é o peixe robô SPC-03 (Figura 1) utilizado para exploração
arqueológica em 2004 de um navio de guerra naufragado. Segundo Chowdhury, 2014, o robô explorou mais de 4000 m² de superfície em seis horas de imersão, registrou fotografias e as transmitiu para a superfície.

13
Figura 1: Peixe robô utilizado para exploração arqueológica.

14
3 - REVISÃO BIBLIOGRÁFICA Desde 2004 a equipe do pesquisador Yu produziu diversos artigos analisando
variados aspectos do projeto de peixes robô (2004, 2005, 2006, 2007, 2008e 2011), e os classifica em relação ao modo como executam sua propulsão nas seguintes classes: anguiliformes, carangiformes e ostraciformes, como mostra a Figura 2, em que a parte pintada do corpo representa a proporção da cauda que realiza o movimento.
Figura 2: Classificação de peixes de acordo com seu modo de propulsão.
Fonte: Yu, 2005. Na Figura 3 é apresentada a estrutura interna de um robô carangiforme
desenvolvido pelo grupo de Yu.
Figura 3: Estrutura interna de um peixe-robô
Fonte: Yu, 2005

15
Segundo Chan et al. (2007) o modelo mais simples de locomoção de um peixe é o
modo ostraciforme, desse modo para o início do desenvolvimento desse robô foi escolhido esse tipo por se tratar de um sistema mecânico mais simples e por usar apenas um atuador para gerar deslocamento, utilizando sistemas de variação do centro de gravidade do peixe para equilíbrio e direcionamento do peixe.
Segundo a bibliografia pesquisada, os peixes robô são o futuro da exploração aquática e vigilância marinha (Chan et al., 2007), mas também podem ser encontradas aplicações em monitoramento ambiental (Oyekan, 2011) e observação da vida marinha (Bhadauria et al., 2010).
O estudo do movimento dos peixes robô através da construção de protótipos e de simulações computacionais vem permitindo a análise de diversas configurações de estrutura, possibilitando uma melhor compreensão do problema.
Chowdhury et al. (2011) estudam a dinâmica de um robô que imita a locomoção de um peixe real, ou seja, usando movimentos oscilatórios senoidais. Em seu trabalho são apresentadas simulações computacionais e permitindo uma parametrização do projeto através da ferramenta MATLAB, que também está sendo utilizada nesta pesquisa.
No trabalho de Kim et al. (2007) é feito um estudo da otimização de propulsão de um peixe-robô articulado. Seus elos utilizam servomotores, já a segunda ligação é feita com uma mola, para simular o movimento suave dos peixes. Outras estruturas estudadas incluem o uso de um maior conjunto de nadadeiras (Lachat et al., 2006) e (Parameswaran et al., 2011), além de utilizarem diversos sensores para determinar a orientação do robô (Liu et al., 2005).
Alguns trabalhos são direcionados para a adaptação de características do comportamento dos peixes reais aos protótipos robóticos, como o trabalho de Swain et al. (2012), que apresenta um sistema em que o peixe segue um “líder” como referência.
Segundo Tan et al. (2006) o peixe robô autônomo desenvolvido apresenta um dispositivo que mimetiza movimentos naturais possuindo boa eficiência energética e baixo ruído (Figura 4). Para executar a propulsão do robô é utilizado um atuador IPMC (compósito iônico de metal-polímero) equipado com receptor GPS, módulo de comunicação wireless ZigBee, um microcontrolador PIC e um sensor de temperatura LM335.

16
Figura 4: Peixe robô nadando no tanque.
Fonte: Tan, 2006. Os trabalhos de Xu et al. (2011), Xiao et al. (2011) e Wang et al. (2011) apresentam
a modelagem e o controle de um peixe robô. Nestes trabalhos resultados experimentais e simulações com diversas técnicas de controle são estudadas.
O controle de atitude de um peixe robô é apresentado por Barbera et al. (2011) utilizando resultados experimentais coletados através de acelerômetros e giroscópios digitais.
Zhong et al. (2013), desenvolveu um peixe robô utilizando um tendão na cauda a partir de um único fio rígido, tendo assim um movimento mais suave, utilizando para isso um único servomotor (Figura 5). Toda a parte de orientação foi feita utilizando nadadeiras peitorais.
Figura 5: Estrutura da cauda movimentada por tendão.
Fonte: Zhong, 2013.
17
No trabalho de Phamduy et al. (2015), é dado um enfoque maior no campo educacional, onde foi desenvolvido um peixe que possui interatividade com um iDevice, numa plataforma didática, é possível que uma pessoa leiga ‘desenhe’ uma trajetória para o peixe, ou então que o controle manualmente. O modo autônomo também é desenvolvido nessa versão.
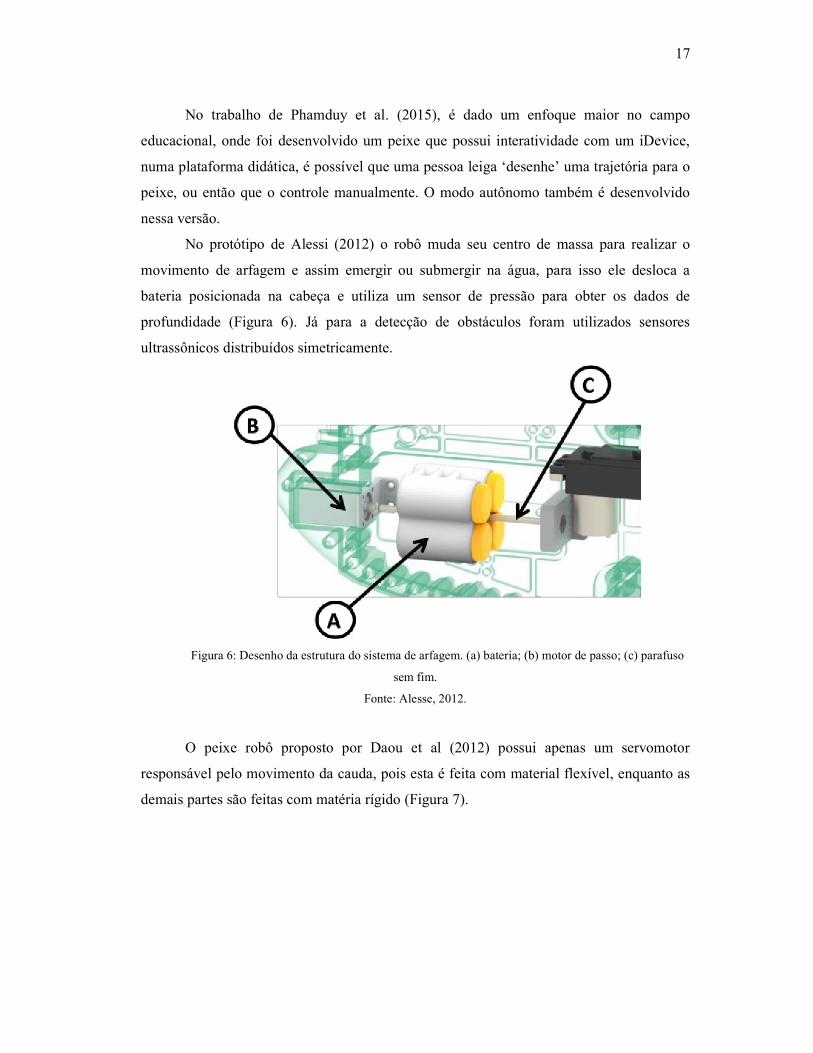
No protótipo de Alessi (2012) o robô muda seu centro de massa para realizar o movimento de arfagem e assim emergir ou submergir na água, para isso ele desloca a bateria posicionada na cabeça e utiliza um sensor de pressão para obter os dados de profundidade (Figura 6). Já para a detecção de obstáculos foram utilizados sensores ultrassônicos distribuídos simetricamente.
Figura 6: Desenho da estrutura do sistema de arfagem. (a) bateria; (b) motor de passo; (c) parafuso
sem fim. Fonte: Alesse, 2012.
O peixe robô proposto por Daou et al (2012) possui apenas um servomotor
responsável pelo movimento da cauda, pois esta é feita com material flexível, enquanto as demais partes são feitas com matéria rígido (Figura 7).

18
Figura 7: Estrutura com cauda a flexível e as demais partes rígidas.
Fonte: Daou, 2012.

19
4 - MODELAGEM MATEMÁTICA E SIMULAÇÃO No trabalho de Yu et al. (2005) é apresentado um modelo matemático que
representa a movimentação da cauda de um robô carangiforme enquanto este executa seu movimento na água, de acordo com a função representada pela equação 1.
)()(),( 2
21 tkxsenxcxctxycorpo (1) Nota-se que se trata de uma função senoidal modulada por uma função quadrática,
sendo que os parâmetros c1, c2 e k podem ser ajustados para representar o movimento específico de um determinado peixe.
O parâmetro pode ser utilizado para escolher a frequência de oscilação da cauda do robô, alterando sua velocidade de propulsão.
O parâmetro t define o instante em que é representado o posicionamento completo da cauda. Este estudo pode ser utilizado como referência para a definição da cinemática direta a ser aplicada no peixe robô.
Figura 8: Gráfico que representa o posicionamento da cauda de um peixe robô carangiforme em
diversos instantes, considerando a equação (1). Fonte: elaborado pelo autor.
O gráfico da Figura 8 foi gerado a partir de simulações executadas em programa
MATLAB, de acordo com os resultados apresentados por Yu et al. (2005).

20
A Equação 1 modela o movimento da cauda do peixe para nadar em linha reta, para
fazer curvas é proposta uma nova equação (Equação 2), com a adição de uma variável vc elevada ao expoente 3,5. Quando a variável vc for diferente de 0, a função irá oscilar em torno de uma curva.
ccorpo vtkxsenxcxctxy )()(),( 221 (2)
O gráfico a seguir (Figura 9) mostra o resultado obtido de uma simulação no
MATLAB de acordo com a equação 2, considerando um valor vc>0. A curva azul (contínua) representa a função, enquanto os segmentos vermelhos (tracejado) representam os elos do peixe-robô, e as cruzes representam as juntas, sendo a última cruz representando o último ponto da cauda do peixe-robô.
Figura 9: Simulação do modelo proposto para realização de curvas.
Fonte: elaborado pelo autor. Para vc>0 o sentido da curva é feita para o lado direito do peixe, para vc<0, a curva
é feita para o lado esquerdo.

21
A figura 10 mostra os valores dos ângulos de cada servomotor em função do tempo, também obtidos a partir da simulação utilizando a equação 2. Sendo que quanto mais próximo o servomotor da cabeça, menor a amplitude da senóide.
Figura 10: Simulação dos ângulos dos servomotores para realização de curvas. Sendo:
(a) servomotor mais próximo a cabeça; (b) servomotor do meio; (c) servomotor mais distante da cabeça. Fonte: elaborado pelo autor.
22
5 - DESCRIÇÃO DA ESTRUTURA Nos itens a seguir serão descritas as estruturas utilizadas para fazer o estudo do
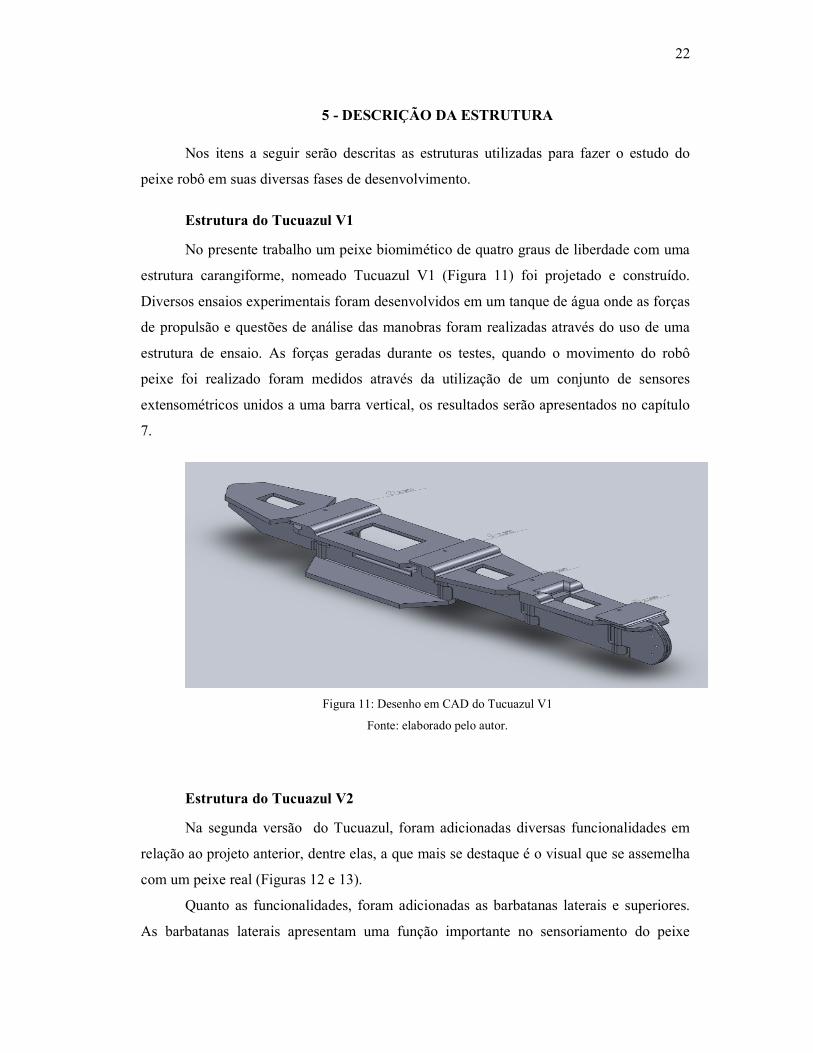
peixe robô em suas diversas fases de desenvolvimento. Estrutura do Tucuazul V1 No presente trabalho um peixe biomimético de quatro graus de liberdade com uma
estrutura carangiforme, nomeado Tucuazul V1 (Figura 11) foi projetado e construído. Diversos ensaios experimentais foram desenvolvidos em um tanque de água onde as forças de propulsão e questões de análise das manobras foram realizadas através do uso de uma estrutura de ensaio. As forças geradas durante os testes, quando o movimento do robô peixe foi realizado foram medidos através da utilização de um conjunto de sensores extensométricos unidos a uma barra vertical, os resultados serão apresentados no capítulo 7.
Figura 11: Desenho em CAD do Tucuazul V1
Fonte: elaborado pelo autor.
Estrutura do Tucuazul V2 Na segunda versão do Tucuazul, foram adicionadas diversas funcionalidades em
relação ao projeto anterior, dentre elas, a que mais se destaque é o visual que se assemelha com um peixe real (Figuras 12 e 13).
Quanto as funcionalidades, foram adicionadas as barbatanas laterais e superiores. As barbatanas laterais apresentam uma função importante no sensoriamento do peixe

23
dentro da água, sendo responsável pela mudança de profundidade e estabilização do mesmo.
Figura 12: Vista isométrica do Tucuazul V2.
Fonte: elaborado pelo autor.
Figura 13: Vista lateral do Tucuazul V2.
Fonte: elaborado pelo autor.

24
Os desenhos foram feitos no software SolidWorks, e toda a prototipagem foi feita utilizando uma impressora 3D da marca Dimension bst 1200es, que pode ser vista na figura 14.
Figura 14: Impressora 3D Dimension bst 1200es.
A partir dos desenhos feitos no SolidWorks, foram gerados os arquivos com a
extensão .STL que seriam posteriormente usados no programa de interface da impressora 3D. Para melhor aproveitamento da impressão, foram acomodadas diversas peças para serem impressas simultaneamente, como pode ser visto na figura 15:
Figura 15: Disposição das peças para a impressão no software de interface com a impressora 3D
Fonte: elaborado pelo autor.

25
Logo após a impressão, as peças foram retiradas como pode ser visto na Figura 16. Todo o material em amarelo é a estrutura em si, e o material em cinza consiste num material de suporte utilizado durante o processo de impressão, podendo ser removido posteriormente.
Figura 16: Moldes produzidos pela impressora 3D
Fonte: elaborado pelo autor.
Na figura 17, é possível observar as partes da estrutura já com o material de suporte retirado. Nessa imagem são apresentadas as nadadeiras laterais (esquerda e direita), assim como as coberturas superiores e inferiores da parte frontal do peixe.
Figura 17: Moldes com o material de suporte retirado
Fonte: elaborado pelo autor.

26
6 – ISOLAÇÃO DOS COMPONENTES ELETRÔNICOS Um dos desafios da elaboração de um robô subaquático é isolar toda sua eletrônica
de qualquer contato com a água para evitar curto circuitos que podem danificar seu funcionamento.
Para impermeabilizar os servomotores foram utilizados os seguintes materiais: graxa náutica, parafina e fita isolante líquida.
A estrutura mecânica do servomotor pode ser dividida em duas partes: a superior que contém o sistema de engrenagens acoplado ao eixo do motor elétrico (Figura 18) e a inferior que contém o circuito eletrônico e onde encontra-se o motor elétrico (Figura 19).
Figura 18: Parte superior com as engrenagens.
Fonte: elaborado pelo autor.
Figura 19: Parte inferior com o circuito eletrônico e motor.
Fonte: elaborado pelo autor.
A graxa náutica foi utilizada na parte superior para evitar que água entre pelo eixo do servomotor. A graxa náutica permite a impermeabilização das engrenagens mantendo sua mobilidade e lubrificação (Figura 20).

27
Figura 20: Impermeabilização com graxa náutica.
Fonte: elaborado pelo autor. Para parte inferior primeiro aplicou-se parafina sobre o potenciômetro (Figura 21)
para que depois ao aplicar a fita isolante líquida (Figura 22), a mesma não infiltrasse no lado das engrenagens.
Figura 21: Aplicação de parafina sobre o potenciômetro.
Fonte: elaborado pelo autor.
Figura 22: Aplicação de fita isolante líquida na placa do circuito e nos contatos do motor.
Fonte: elaborado pelo autor.

28
Por último, aplicou-se a fita isolante líquida externamente na estrutura do servomotor para evitar que a água entre pelas frestas de seus encaixes (Figura 23).
Figura 23: Servomotor com fita isolante líquida aplicada externamente.
Fonte: elaborado pelo autor. A bateria, a placa eletrônica com o microcontrolador e os sensores de
infravermelhos foram isolados do contato com a água dentro de caixa vedadas com silicone.
29
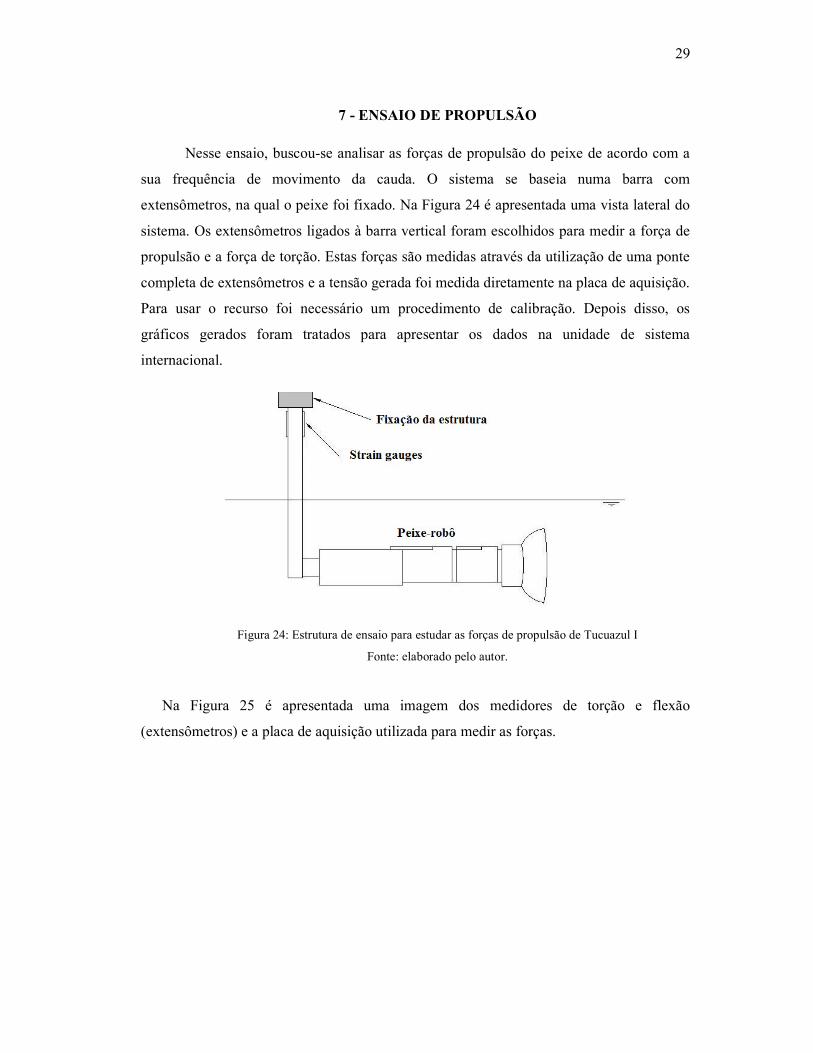
7 - ENSAIO DE PROPULSÃO Nesse ensaio, buscou-se analisar as forças de propulsão do peixe de acordo com a
sua frequência de movimento da cauda. O sistema se baseia numa barra com extensômetros, na qual o peixe foi fixado. Na Figura 24 é apresentada uma vista lateral do sistema. Os extensômetros ligados à barra vertical foram escolhidos para medir a força de propulsão e a força de torção. Estas forças são medidas através da utilização de uma ponte completa de extensômetros e a tensão gerada foi medida diretamente na placa de aquisição. Para usar o recurso foi necessário um procedimento de calibração. Depois disso, os gráficos gerados foram tratados para apresentar os dados na unidade de sistema internacional.
Figura 24: Estrutura de ensaio para estudar as forças de propulsão de Tucuazul I
Fonte: elaborado pelo autor.
Na Figura 25 é apresentada uma imagem dos medidores de torção e flexão (extensômetros) e a placa de aquisição utilizada para medir as forças.

30
Figura 25: Placa de aquisição e extensômetros fixados à esquerda. Fonte: elaborado pelo autor.
Aplicando a solução cinemática apresentada na equação 2, em diferentes freqüências, observou-se que a raiz quadrada da média da força de propulsão é maior em freqüências mais altas. Este era o resultado esperado uma vez que a velocidade de propulsão maior de peixes carangiformes são observados quando existe uma elevada frequência no movimento da cauda. Na freqüência de 1,2Hz, observou-se uma força total de propulsão de 41,9 gf. (Tabela 1)
Com uma frequência de 0,6 Hz, observou-se que a diminuição força de propulsão a 16 gf. Com a mesma frequência, mas utilizando uma maior amplitude de movimento da cauda, observou-se uma força de propulsão de 25,6 gf
Tabela 1 - Resumo dos resultados experimentais obtidos para análise da propulsão.
Frequência (HZ) Fator Multiplicador de Amplitude Propulsão (gf)
0.6 1 16 1,2 1,1 41,9 0,8 1,1 23,5 0,6 1,1 22,2 0,6 1,3 25,4 0,6 1,2 20,1
A estrutura de testes é apresentada na figura 26. É possível ver os servomotores, os
links e a barra na qual está fixada ao peixe e onde estão fixados os extensômetros.

31
Figura 26: Tucuzul V1 fixado na barra vertical
Fonte: elaborado pelo autor.

32
8 - ENSAIO DE DIREÇÃO E PROFUNDIDADE Neste trabalho é apresentado o estudo sobre a influência nadadeiras peitorais em
direção e profundidade de um peixe robô carangiforme autônomo dentro de um tanque de água. De acordo com os dados adquiridos pelo sensor de pressão do peixe-robô, o equilíbrio e profundidade são controlados utilizando dois servomotores ligados às barbatanas peitorais. A profundidade do peixe pode ser analisada usando estes dados. Nesse ensaio é analisada também a resposta do peixe nadando de maneira autônoma, com a detecção de obstáculos via sensor infravermelho.
Segundo Zhong et al. (2013), utilizando as barbatanas laterais (Figura 27), é possível manter o equilíbrio do peixe e alterar seu deslocamento latitudinal.
Figura 27: Proposta de Zhong et al.(2013) para controle de altitude do peixe robô.
Fonte: Zhong, 2013.
A mudança de profundidade é feita a partir do mesmo princípio, mudando a direção
das barbatanas, é possível fazer com que o peixe mude sua orientação dentro do ambiente aquático.
Para a aquisição de dados do sensor e estudo da resposta, foi utilizado um módulo de comunicação RF de 433MHz (maiores informações podem ser vistas no capítulo 9).

33
O sensor de pressão utilizado foi o BMP 180 (Figura 28), que possui internamente um sensor de temperatura e pressão. O sensor em questão utiliza o protocolo I2C para interface com um microcontrolador.
Figura 28: Sensor de pressão e temperatura BMP 180
Figura 29: Malha de controle fechada para controle da profundidade do peixe.
Fonte: elaborado pelo autor.
O diagrama de blocos do controle de profundidade em malha fechada pode ser visto na figura 29, cujo bloco PLANTA corresponde à função de transferência que relaciona a posição dos atuadores com a variável de saída, que no caso é a profundidade do peixe.
A partir dos dados do sensor de pressão, foi desenvolvida uma lógica utilizando o microcontrolador para estabilizar o peixe, mantendo o equilíbrio do mesmo, utilizando as barbatanas.

34
Figura 30: Vista superior da estrutura completa do peixe
Fonte: elaborado pelo autor. Na figura 30 é possível ver toda a estrutura da plataforma utilizada no teste de
profundidade, desde os servomotores responsáveis pela propulsão do robô, os servomotores de controle das barbatanas, sensores infravermelho para detecção de obstáculos, e as caixas para acomodação da eletrônica embarcada e da bateria de lítio. Na figura 31 é possível ver em detalhes a caixa que contêm o microcontrolador, sensor de pressão e módulo emissor RF.

35
Figura 31: Eletrônica embarcada no peixe-robô
Fonte: elaborado pelo autor. O microcontrolador Arduino Nano foi utilizado como controlador PI. Nos testes
feitos, os ganhos do controlador PI foram estipulados arbitrariamente da seguinte maneira: Ganho proporcional do controlador – 1 Ganho integral do controlador – 0.1 Utilizando a biblioteca PIDv1 float Kp = 1; float Ki = 0.1; float Kd = 0; double Setpoint, Input, Output, ServoOutput; PID myPID(&Input, &Output, &Setpoint, Kp, Ki, Kd, DIRECT); /* CONFIGURAÇÃO DO PID*/ //leitura valor de pressão do BMP085 Input = bmp.readAltitude(); //leitura de valor da altitude a partir do BMP085 //setar objeto PID para automatico //setar os limites do servo para -80 e 80 myPID.SetMode(AUTOMATIC);

36
myPID.SetOutputLimits(-80,80); Setpoint = 15; //IMPORTANTE AJUSTAR SET POINT Input = bmp.readAltitude(); //computa a saída dos servos no alcance de -80 a 80 myPID.Compute(); ServoOutput=102+Output; // IMPORTANTE AJUSTAR ESSE VALOR //escreve o valor de saída no servo Servo4.write(ServoOutput); Servo5.write(ServoOutput); Dados obtidos:
Figura 32: Teste do peixe-robô
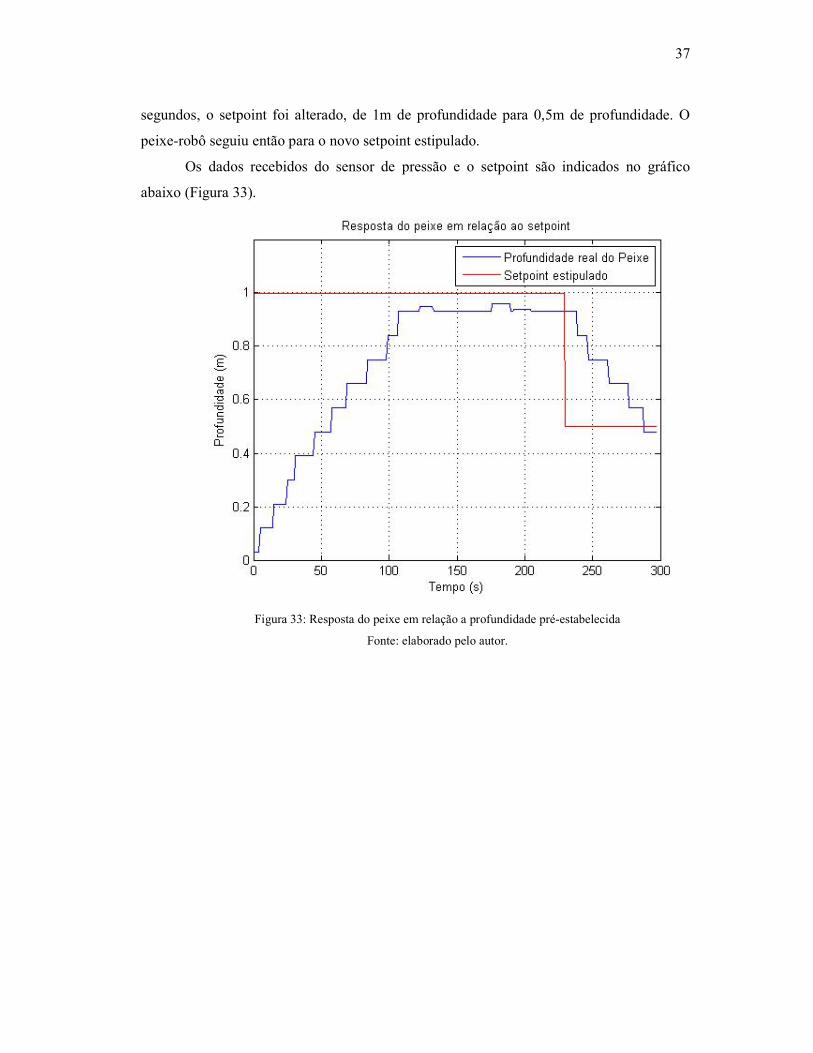
Fonte: elaborado pelo autor. O peixe foi então colocado no tanque (Figura 32), com um setpoint previamente
estabelecido, 1m de profundidade em relação a superfície. Considerando que o peixe estava a 0m de profundidade no início, depois de 110 segundos, chegou à um valor próximo ao setpoint, com um erro de regime de aproximadamente 0,08m. Após 220
37
segundos, o setpoint foi alterado, de 1m de profundidade para 0,5m de profundidade. O peixe-robô seguiu então para o novo setpoint estipulado.
Os dados recebidos do sensor de pressão e o setpoint são indicados no gráfico abaixo (Figura 33).
Figura 33: Resposta do peixe em relação a profundidade pré-estabelecida
Fonte: elaborado pelo autor.
38
9 - COMUNICAÇÃO VIA RADIO FREQUÊNCIA Módulos mais populares de comunicação como Wifi e Bluetooth apresentam uma
frequência muito alta (2.4GHz). Essas frequências apresentam problemas para comunicação especialmente em ambiente aquático, onde não é possível enviar dados muito além de alguns centímetros.
Os módulos RF operam numa faixa de frequência menor do que as convencionais, que é 433MHz. Essas baixas frequências operam muito bem em ambiente aquático, e até mesmo para operações menos robustas, como por exemplo controle remoto de tv, garagem, etc. No ambiente aquático, foi possível receber dados do módulo RF em distâncias de até 7m.
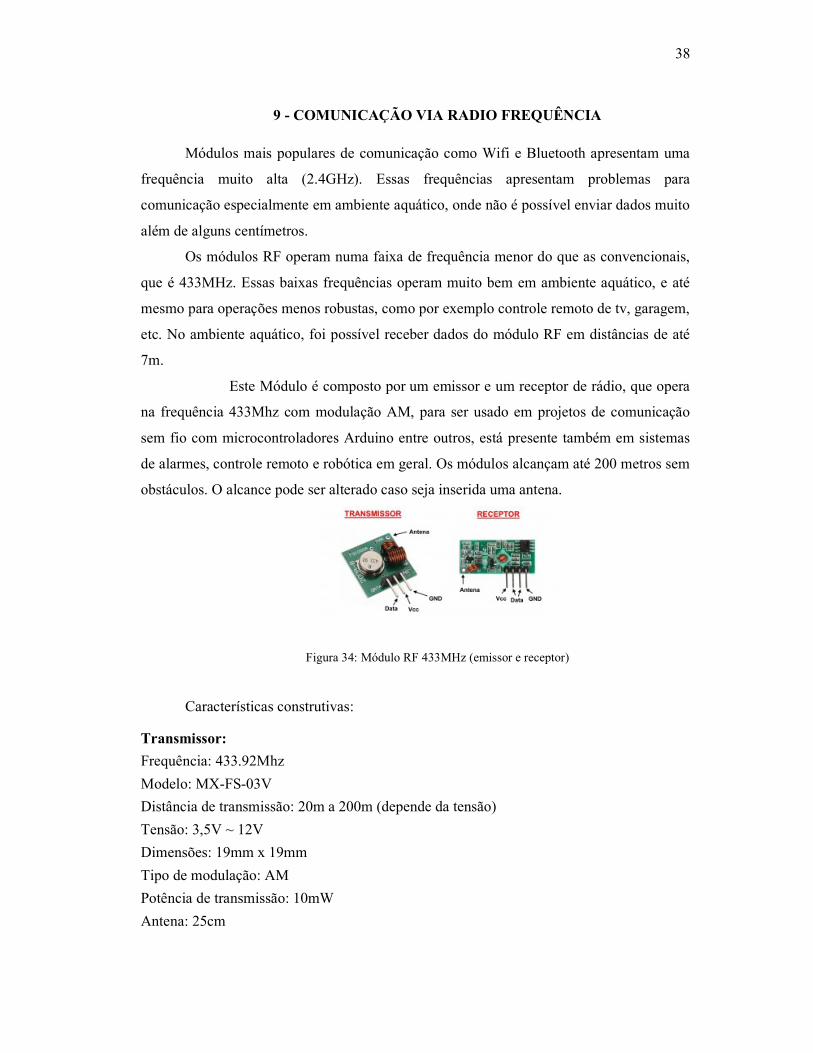
Este Módulo é composto por um emissor e um receptor de rádio, que opera na frequência 433Mhz com modulação AM, para ser usado em projetos de comunicação sem fio com microcontroladores Arduino entre outros, está presente também em sistemas de alarmes, controle remoto e robótica em geral. Os módulos alcançam até 200 metros sem obstáculos. O alcance pode ser alterado caso seja inserida uma antena.
Figura 34: Módulo RF 433MHz (emissor e receptor) Características construtivas:
Transmissor: Frequência: 433.92Mhz Modelo: MX-FS-03V Distância de transmissão: 20m a 200m (depende da tensão) Tensão: 3,5V ~ 12V Dimensões: 19mm x 19mm Tipo de modulação: AM Potência de transmissão: 10mW Antena: 25cm

39
Velociade de transmissão: 4Kb/s Pinos: Dados, VCC e GND
Receptor: Frequência: 433.92Mhz Modelo: MX-05V Tensão: 5VCC Corrente: 4mA Sensibilidade: -105db Antena: 35cm Dimensões: 30mm x 17mm x 7mm
O módulo transmissor foi embarcado no peixe, e envia dados via Rádio Frequência para uma estação local, com um receptor, ligado a um Arduino Uno, conectado a um computador (Figura 35). Os dados foram recebidos via monitor serial, e posteriormente transcritos a uma planilha Excel para tratamento dos dados.
Figura 35: Estação local de recebimento de dados Fonte: elaborado pelo autor.

40
10 - CONCLUSÃO Os resultados obtidos com os ensaios ficaram dentro do esperado. O ensaio de
propulsão nos mostra que quanto maior é a velocidade ou a amplitude do movimento da cauda, maior é a força de propulsão exercida pelo peixe.
Já o segundo ensaio mostra que o peixe-robô foi capaz de mudar sua profundidade na água através do movimento das barbatanas laterais e buscar o valor de referência configurado, apesar de existir um erro estacionário. Uma possível causa do erro é o ajuste dos ganhos do controlador Proporcional-integral (PI), que poderá ser aperfeiçoado.
O atual tempo de resposta está relacionado particularmente a três fatores: novamente os valores de ganho do controlador PI; limitação mecânica da influência das barbatanas laterais para mudança de profundidade; e/ou velocidade da movimentação da cauda do peixe-robô. A finalização desta etapa do projeto abre novas possibilidade de melhorias e implementações de funcionalidades para o peixe-robô. Um exemplo de aperfeiçoamento está relacionado à adição de sensores extras, tais como o acelerômetro e o giroscópio. Também poderiam ser utilizados sensores de temperatura e de pH para medir a acidez da água ou até mesmo um modo de controle manual a partir de uma interface em smartphone ou tablet para interação com visitantes de um aquário.
Por conta da multidisciplinaridade deste trabalho, foi possível obter uma experiência muito rica para todos os envolvidos neste projeto, pois agregou conhecimento em diferentes áreas da Engenharia como mecânica, eletrônica e computação. Além disso durante todo o desenvolvimento do projeto não faltaram oportunidades para melhorar habilidades essenciais para um profissional de engenharia como trabalho em equipe, pesquisa, planejamento e resolução de problemas.

41
11 - REFERÊNCIAS ALESSI, A.; SUDANO, A.; ACCOTO, D.; GUGLIELMELLI, E. Development of an Autonomous Robotic Fish. IN: The Fourth IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics, Roma, Italy, June 24-27, 2012. BARBERA, G.; PI, L.; DENG, X. Attitude Control for a Pectoral Fin Actuated Bio-inspired Robotic Fish. IN: IEEE International Conference on Robotics and Automation, Shanghai International Conference Center, Shanghai, China, May 9-13, 2011.
BHADAURIA, D.; ISLER, V.; STUDENSKI, A.; TOKEKAR, P. A Robotic Sensor Network for Monitoring Carp in Minnesota Lakes. IN: IEEE International Conference on Robotics and Automation, Anchorage Convention District, Anchorage, Alaska, USA, May 3-8, 2010.
CHAN, W. L.; KANG, T.; LEE, Y. J. SUNG, S. K.; YOON, K. J. Swimming Study on an Ostraciiform Fish Robot. IN: International Conference on Control, Automation and Systems, COEX, Seoul, Korea, Oct. 17-20, 2007.
CHAN, W. L.; KANG, T. Simultaneous Determination of Drag Coefficient and Added Mass. IN: IEEE JOURNAL OF OCEANIC ENGINEERING, VOL. 36, Nº. 3, pp. 422-430, July, Dept. of Aerosp. Inf. Eng., Konkuk Univ., Seoul, South Korea, 2011. CHOWDHURY, A. R. Modeling and Control of a Bioinspired Robotic Fish Underwater Vehicle and its Propulsion Mechanism. 2014. Tese doutorado – Department of Electrical and Computer Engineering, National University of Singapore, Singapore. DAOU, H. E.; SALUMÄE, T.; TOMING, G.; KRUUSMAA, M. A Bio-inspired Compliant Robotic Fish: Design and Experiments. IN: IEEE International Conference on Robtics and Automation, RiverCentre, Saint Paul, Minnesota, USA, May 14-18, 2012.
42
GEDER, J. D.; PALMISANO, J.; RAMAMURTI, R.; SANDBERG, W. C.; RATNA, B. Fuzzy Logic PID Based Control Design and Performance for a Pectoral Fin Propelled Unmanned Underwater Vehicle. IN: International Conference on Control, Automation and Systems, COEX, Oct. 14-17, Seoul, Korea, 2008.
GAO, A.; TECHET, A. H. Design Considerations for a Robotic Flying Fish. Department of Mechanical Engineering Massachusetts Institute of Technology Cambridge, Massachusetts, 19-22 Sept, MA, USA, 2011.
HARTENSTEIN, R. , KAISERSLAUTERN, T., Basics of Reconfigurable Computing. In: Henkel, J. Parameswaran, S. (Ed.). Designing Embedded Processors. Netherlands: pp. 451–501, Springer, 2007.
PALMISANO, J.; GEDER, J.; RAMAMURTI, R.; LIU, K.; COHEN, J.; MENGESHA, T.; NACIRI, J.; SANDBERG, W.; RATNA, B. Design, Development, and Testing of Flapping Fins with Actively Controlled Curvature for an Unmanned Underwater Vehicle, p. 283-294, 2008.
KIM, H. S.; LEE, B. R.; KIM, R. A Study on the Motion Mechanism of Articulated Fish Robot. IN: IEEE International Conference on Mechatronics and Automation, August 5 - 8, 2007, Harbin, China. Harbin, 2007.
LACHAT, D.; CRESPI, A.; IJSPEERT, A. J. BoxyBot: a swimming and crawling fish robot controlled by a central pattern generator. IN: BIOROB-CONF-2006-010, Lausanne, Switzerland, 2006.
LIU, J.; HU, H. Mimicry of Sharp Turning Behaviours in a Robotic Fish. IN: IEEE International Conference on Robotics and Automation, Barcelona, Spain, April 2005. Barcelona, 2005.
MING, W.; JUNZHI, Y.; MIN, T.; GUIQINGL, Z. A CPG-based Sensory Feedback Control Method for Robotic Fish Locomotion. IN: 30th Chinese Control Conference, July 22-24, 2011, Yantai, China. Yantai, 2011.

43
OYEKAN, J.; LU, B.; HU, H.; GU, D. Using CFD in Robotic Simulators for pollution Monitoring. IN: 3rd Computer Science and Electronic Engineering Conference (CEEC) University of Essex, UK, 2011.
PARAMESWARAN, S.; SELVIN, S. Fish Model for Underwater Robots. IN: IEEE/INDICON India Conference, Ernakulam, India, December 16-18, 2011. PHAMDUY, P.; LeGRAND, R.; PORFIRI, M. Design and Characterization of an Interactive iDevice-Controlled Robotic Fish for Informal Science Education. IN: IEEE Robotics & Automation Magazine, New York, United States, March, 2015. ROSSI, C.; CORAL, W.; COLORADO, J.; BARRIENTOS, A. A Motor-less and Gear-less Bio-mimetic Robotic Fish Design. IN: IEEE International Conference on Robotics and Automation, Shanghai International Conference Center, , Shanghai, China, May 9-13, 2011. SWAIN, D. T.; COUZIN, I. D.; LEONARD, N. E. Real-Time Feedback-Controlled Robotic Fish for Behavioral ExperimentsWith Fish Schools. IN: IEEE Vol. 100,Nº. 1, January 2012. Anais… New Jersey, 2012.
TAN, X.; KIM, D.; USHER, N.; LABOY, D.; JACKSON, J.; KAPETANOVIC, A.; RAPAI, J.; SABADUS, B.; ZHOU, X. An Autonomous Robotic Fish for Mobile Sensing. IN: IEEE/RSJ International Conference on Intelligent Robots and Systems, October 9 - 15, 2006, Beijing, China. Beijing, 2006.
WANG, S.; DONG, X.; SHANG, L. J. Thrust Analysis of the Undulating Ribbon-Fin for Biomimetic Underwater Robots. IN: 2nd International Conference on Intelligent Control and Information Processing, Harbin, China, Jul 25-28, 2011,.
WANG, J.; ALEQUIN, F. R.; TAN, X. Dynamic Modeling of Robotic Fish and Its Experimental Validation. IN: IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA September 25-30, 2011.

44
XIAO, Q.; KONG, F.; TAO, J. Research on Point-to-point of Biomimetic Robot-fish Based on Fuzzy Control. IN: International Conference on Electric Information and Control Engineering (ICEICE), , Liuzhou, China, 2011.
XU, J. X.; NIU, X. L. Analytical control design for a biomimetic robotic fish. IEEE International Symposium on Industrial Electronics (ISIE), , Singapore, Singapore, 27-30 June 2011.
YU, J.; TAN, M.; WANG, S.; CHEN, E. Development of a Biomimetic Robotic Fish and Its Control Algorithm. IN: IEEE Transactions on Onsystems, man, and cybernetics - TRANSACTIONS - PART B: CYBERNETICS, VOL. 34, Nº. 4, Beijing, China, august 2004.
YU, J.; WANG, L.; TAN, M. A Framework for Biomimetic Robot Fish’s Design and Its Realization. IN: American Control Conference,. Portland, OR, USA, June 8-10, 2005.
YU, J.; LIU, L.; TAN, M. Dynamic Modeling of Multi-link Swimming Robot Capable of 3-D Motion. IN: IEEE International Conference on Mechatronics and Automation, Harbin, China. Harbin, August 5 - 8, 2007.
YU, J.; WANG, L.; TAN, M. Geometric Optimization of Relative Link Lengths for Biomimetic Robotic Fish. IN: IEEE TRANSACTIONS ON ROBOTICS, VOL. 23, Nº. 2, Tallinn, Estonia, APRIL 2007.
YU, J,; LIU, L.; WANG, L. TAN, M. XU, D. Turning Control of a Multilink Biomimetic Robotic Fish. IN: IEEE TRANSACTIONS ON ROBOTICS, VOL. 24, NO. 1, , Beijing, China, FEBRUARY 2008.
YU, J.; WANG, M.; WANG, W.; ZHANG, J. Design and Control of a Fish-Inspired Multimodal Swimming Robot. IN: IEEE International Conference on Robotics and Automation, Shanghai International Conference Center, Shanghai, China, May 9-13, 2011.

45
ZHONG, Y.; Li, Z. The design and Prototyping of a Wire-driven Robot Fish with Pectoral Fins. IN:IEEE International Conference on Robotics and Biomimetics (ROBIO), Shenzhen, China, December 2013.