modelos de sistemas amostrados -...
TRANSCRIPT
Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
20
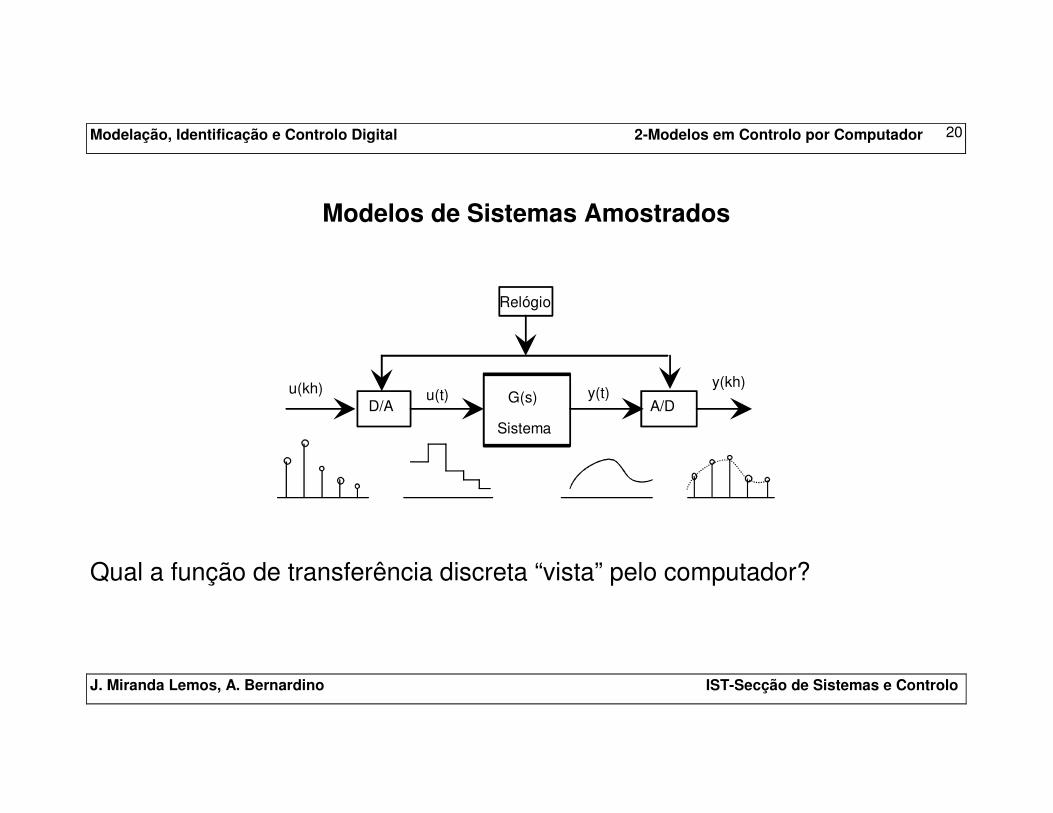
Modelos de Sistemas Amostrados
Relógio
D/A A/DG(s)
Sistema
u(kh) y(kh)u(t) y(t)
Qual a função de transferência discreta “vista” pelo computador?
Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
21
Recorde-se que, para determinar a função de transferência, devemos:
• Aplicar um sinal à entrada do sistema, com condições iniciais nulas
• Observar a saída
• Determinar as transformadas Z da entrada e da saída correspondente
• Calcular a função de transferência como o quociente entre a transformada Z
da saída e a transformada Z da entrada
Que sinal de teste é mais conveniente aplicar?

Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
22
Método Escalão Invariante
Se aplicarmos um escalão discreto à entrada, à entrada do sistema contínuo
aparecerá também um escalão, o que facilita as contas
Relógio
D/A A/DG(s)
Sistema
u(kh) y(kh)u(t) y(t)
Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
23
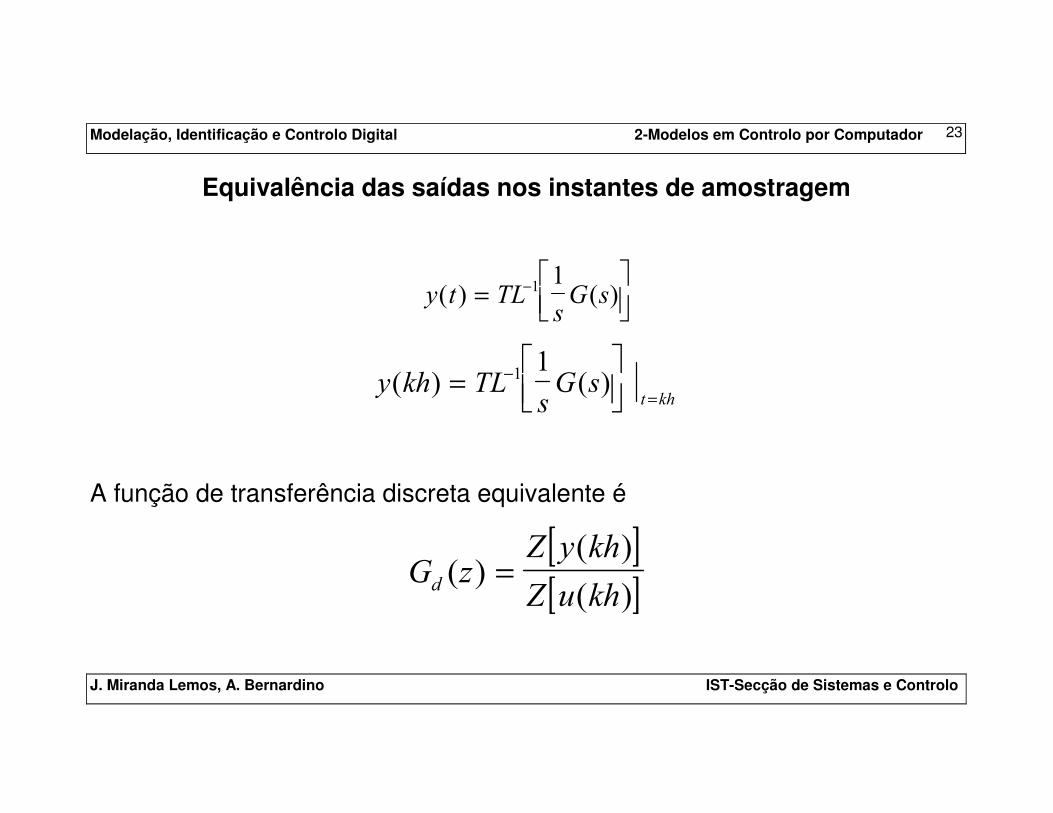
Equivalência das saídas nos instantes de amostragem
� � ���� �� � � �=
�
���
��−� �
� �� ���� �
� ��� � � �=
�
���
��−
=��
A função de transferência discreta equivalente é
[ ][ ]� � ��
� ��� � �
� �
� �=

Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
24
Função de Transferência Discreta
Sendo u(kh) um escalão discreto, a sua transformada Z é:
[ ] � ��
� � =− −
�
� �
Portanto:
� �� � �� �� � �� � � �
�� ��� � ��
� ��� �� � �
� �� �
− −=
� �� �= = − � �� �� �� �

Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
25
Método Escalão Invariante (Conclusão)
Relógio
D/A A/DG(s)
Sistema
u(kh) y(kh)u(t) y(t)
Do ponto de vista do computador, i.e. entre a entrada e a saída discreta, este
sistema é equivalente a um SLIT discreto com função de transferência
� ���� �� � ��
� � � � � �= −�
���
���
���
��− −
=�
�� �

Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
26
Tabelas Auxiliares
TZ de sinais amostrados Equivalentes ZOH

Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
27
Modelo de sistema amostrado – Exemplo
Qual a função de transferência discreta (causal) que se obtém quando se amostra o
sistema contínuo com função de transferência
� �
� � � =
+ ?
Solução:
� ��
� � � � ��� � � �
� �= −
+�
���
���
��
�
��
− −=
� � �
Decompondo em fracções simples
� � � � � �+= −
+� �
Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
28
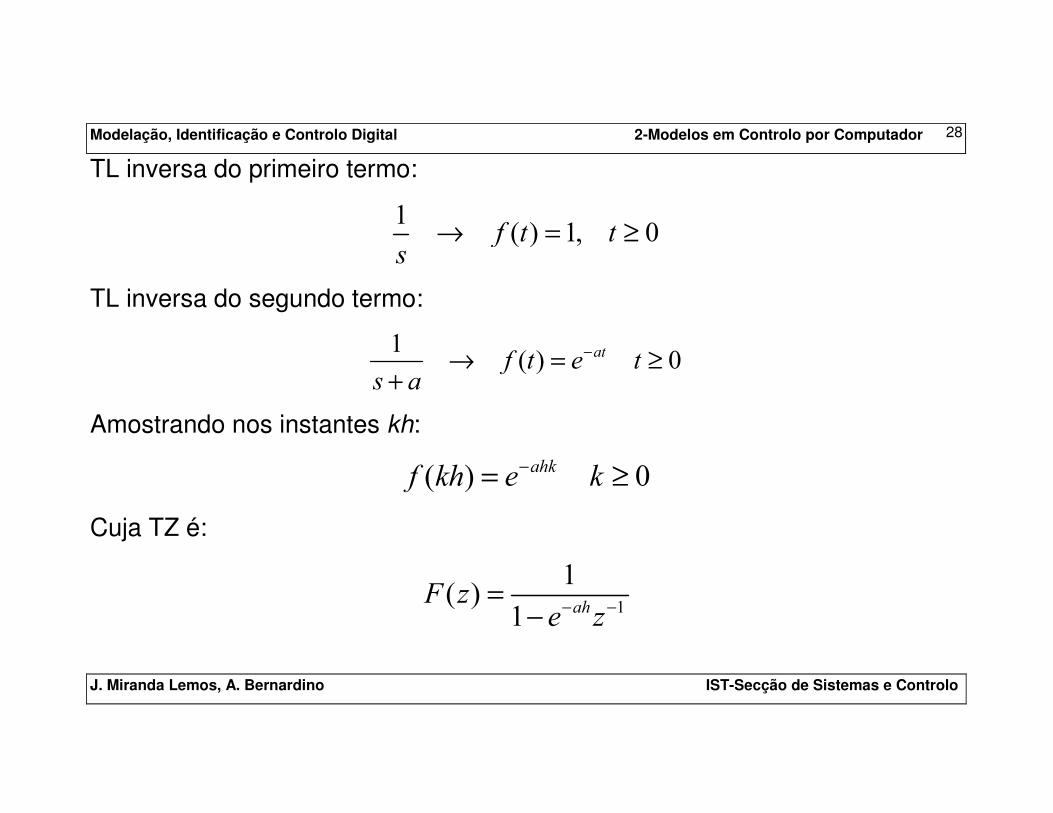
TL inversa do primeiro termo:
�� � �� ��� �
�→ = ≥
TL inversa do segundo termo:
�� � � ��� � �
�
−→ = ≥+
Amostrando nos instantes kh:
� � � ����� � �−= ≥
Cuja TZ é:
�
�� �
� ��
� − −=−

Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
29
Finalmente, a função de transferência discreta vem dada por:
� � � �� � � �= −
−−
−�
�
��−
− − −��
�
�
�
�
� �
� �
� �
�
�� �� �
=−−
− −
− −
�
�
�
�
A região de convergência deve ser escolhida por forma a que o sistema seja
causal.
Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
30
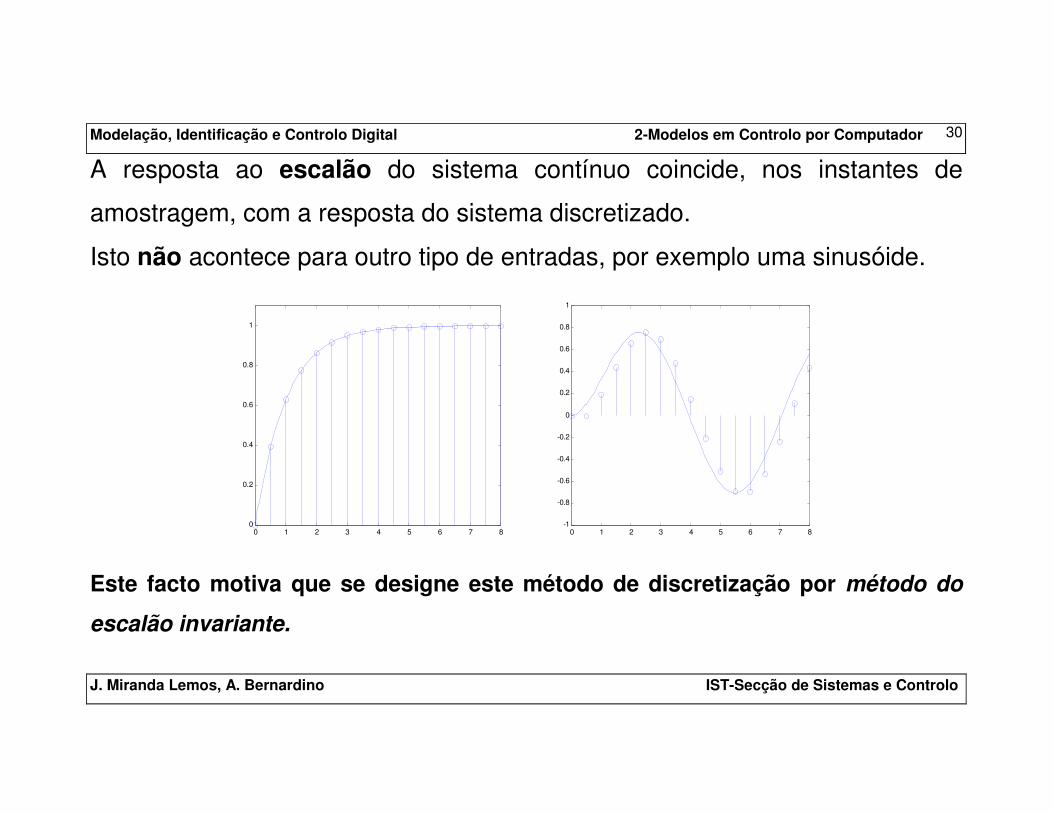
A resposta ao escalão do sistema contínuo coincide, nos instantes de
amostragem, com a resposta do sistema discretizado.
Isto não acontece para outro tipo de entradas, por exemplo uma sinusóide.
0 1 2 3 4 5 6 7 80
0.2
0.4
0.6
0.8
1
0 1 2 3 4 5 6 7 8-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Este facto motiva que se designe este método de discretização por método do
escalão invariante.

Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
31
Entradas Constantes por Troços (Zero-Order-Hold)
Se os sinais de entrada de um sistema provêm de um retentor de amostras de ordem
zero (zero-order-hold) então a saída dos sistemas contínuo e discreto equivalem-se
nos instantes de amostragem:
0 1 2 3 4 5 6 7 8 9 10−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1u(t) = sin(t), h = 0.5s

Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
32
Transformação dos pólos
Na discretização com retentor de amostras de ordem zero os pólos são
transformados de acordo com uma transformação exponencial.
Um pólo em �� no contínuo é transformado num pólo � dado por:
��
� ��=
• Características de estabilidade são preservadas: semi-plano complexo
esquerdo é mapeado no interior do círculo unitário.
• Unicidade não é preservada: vários pontos do plano-s são mapeados
num mesmo ponto do plano-z (aliasing).

Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
33
Exemplo de transformação de pólos

Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
34
Sistema de 2ª ordem com pólos complexos conjugados
ωζω ω
�
�
�
� �
��� �+ +
Os pólos são transformados nas
raízes do polinómio
�
� �+ +
( ) � ��
�
�
�� ��= − −−ζω ζ ω�
� �
�
� �= − ζω

Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
35
Transformação dos zeros
A transformação dos zeros é mais complexa e não existe uma regra geral simples.
Para elevadas frequências de amostragem, um sistema contínuo com N polos e M
zeros finitos (si, j = 1,...,M), conduz a um sistema discreto com:
• N-1 zeros finitos (d = 1)
• M zeros em �� �
� �≈
• N-M-1 zeros tendem para as raízes dos polinómios da tabela:
N-M A(z) Raízes
1 1
2 z+1 -1
3 z2 + 4z +1 -3.7321, -0.2679
4 z3 + 11 z2 + 11z + 1 -9.8990, -1, -0.1010
5 z4 + 26z3 + 66z2 + 26z + 1 -23.2875, -0.0154, -1.3486 ± j0.9860

Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
36
Deve ser notado que um sistema contínuo de fase mínima pode dar origem,
por amostragem, a um sistema de fase não mínima (i. e. em que há zeros
fora do círculo unitário), o que pode dar origem a problemas no controlo.
Em muitos casos isto acontece para ritmos de amostragem o que sugere
sugere que nem sempre é bom aumentar o ritmo de amostragem (ao
contrário do que nos diz a intuição e do que sucede em problemas de
Processamento de Sinal).

Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
37
Método Rampa Invariante
Em alguns sistemas, não é adequado introduzir sinais do tipo escalão
(descontinuidades). Uma forma de eliminar o problema é a utilização de retentores de
ordem-1 na entrada do sistema:
0 1 2 3 4 5 6 70
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
time
• Para gerar o sinal a partir de t=kh, é necessário
conhecer o seu valor para t = kh+1. Por isso,
este método costuma também denominar-se
“predictive first-order hold”.
• Para aplicar este modelo em controlo, os
controladores projectados valor da actuação do
sistema u(kh+1) no instante t = kh. Requerem,
portanto, um atraso adicional.

Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
38
Equivalente discreto com Predictive First-Order Hold (PFOH)
Pode ser implementado com um ZOH, um integrador, e um novo sinal de entrada v(k).
�����
����
�� ��
�
�����
�
�����
− ��
���=
��
���=
{ } ��
���−=�
����
�
������
�����
ZOH A/D 1/s G(s) �
������
�������
−+= ����
PFOH A/D G(s) ������ +���� ����
�
����

Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
39
Oscilações Escondidas
Os modelos de sistemas amostrados anteriores apenas nos dizem o que acontece nos
instantes de amostragem. No intervalo entre esses instantes, coisas “estranhas”
podem acontecer.
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
1.2
1.4
Para evitar estes efeitos, deveremos
garantir que o intervalo entre amostras
seja bastante mais curto do que o
período das frequências naturais do
sistema.

Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
40
Selecção do Ritmo de Amostragem
Regra prática: A frequência de amostragem deve ser cerca de 10 a 30 vezes
superior à largura de banda (-3dB) do sistema em análise.
• Para efeitos de aproximação entre as respostas do sistema contínuo e seu
equivalente discreto, considerar a largura de banda do sistema em malha
aberta.
• No entanto, na maior parte das vezes pretende-se efectuar o controlo do sistema e
portanto, deve-se considerar a largura de banda desejada do sistema em malha
fechada.

Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
41
Exercícios
1 – Considere o modelo simplificado de um motor DC:
����
��
��
+=
a) Deduza, utilizando a definição, o seu equivalente discreto ZOH.
b) Confirme a validade da expressão obtida com o resultado listado na tabela de transformadas.
c) Mostre que o mesmo equivalente discreto pode ser obtido pela discretização ZOH do termo 1/s,
seguido da discretização PFOH do termo ��� � + .

Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
42
2 – Considere o sistema contínuo descrito pela função de transferência G(s):
� �
�� �
� � �� ��� �
� � �=
+ +
a) Obtenha a função de transferência discreta do sistema para um intervalo de amostragem h
= 0.5 (pode usar a função matlab ‘c2d’).
b) Quais os valores dos polos e zeros do sistema discreto ? Confirme a regra exponencial de
transformação dos polos.
c) Faça h tender para zero. Para que valores tendem os polos e zeros do sistema dado?
Confirme o comportamento assimptótico dos zeros dado pela tabela da pag. 2-34.
d) Escolha uma frequência de amostragem adequada para efectuar o controlo por retroacção
unitária deste sistema.