7. controlo adaptativo - users.isr.ist.utl.ptusers.isr.ist.utl.pt/~alex/micd0506/micd7a.pdf · as...
TRANSCRIPT

Modelação, Identificação e Controlo Digital 7-Controlo Adaptativo
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
1
7. Controlo Adaptativo
Objectivo: Mostrar como é possível integrar os blocos anteriormente
estudados de identificação de sistemas e projecto de controladores
para obter controladores adaptativos.

Modelação, Identificação e Controlo Digital 7-Controlo Adaptativo
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
2
Motivação para o Controlo Adaptativo
Há situações em que a dinâmica do sistema a controlar se pode alterar ao longo do
tempo.
Isto pode ser devido, por exemplo, à existência de não linearidades nos actuadores ou
no próprio sistema. Neste caso, a dinâmica linearizada vai variar com o ponto de
trabalho (por exemplo com a velocidade de equilíbrio).
Pode ainda acontecer que a dinâmica varie devido a factores como o envelhecimento
ou alterações do ambiente.
Nesta situação, a afinação do controlador adequada a um ponto de trabalho pode não
o ser para outro.

Modelação, Identificação e Controlo Digital 7-Controlo Adaptativo
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
3
Um exemplo
R yuK(1+ )+
-
e 1Ti s f(.) G(s)
Controlador PI Actuador Sistema
� � �� � = � � � �� �
� �=
+�
� � � = ���� �� = �
Nestas circunstâncias, a resposta do sistema controlado depende do ponto de
funcionamento. Um controlador bem afinado para um ponto de funcionamento
pode não estar bem afinado para outro.

Modelação, Identificação e Controlo Digital 7-Controlo Adaptativo
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
4
As figuras seguintes mostram a resposta a um escalão na referência de
amplitude 0.1, para diversos pontos de funcionamento, com um PI sintonizado
em torno de r=0.2.
0 10 20 30 40 50 60 70 80 90 1000.1
0.15
0.2
0.25
0.3
0.35
0.4
0 10 20 30 40 50 60 70 80 90 1002.9
2.95
3
3.05
3.1
3.15
3.2
3.25
3.3
0 10 20 30 40 50 60 70 80 90 1004.9
4.95
5
5.05
5.1
5.15
5.2
5.25
5.3

Modelação, Identificação e Controlo Digital 7-Controlo Adaptativo
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
5
Exemplo de variação da dinâmica num avião
Num avião a dinâmica linearizada altera-se com as condições de voo. A figura
mostra a dependência dos valores próprios do sistema com a velocidade de
equilíbrio
Extraída de Neves da Silva, R. (1994). Controlo de Aeronave não tripulada usando técnicas LQG/LTR de ganho variável Tese de Mestrado, IST -
Departamento de Engenharia Electrotécnica e de Computadores.

Modelação, Identificação e Controlo Digital 7-Controlo Adaptativo
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
6
Devido à variação da dinâmica com as condições de voo, utilizando um
controlador de ganhos fixos, pode ter-se um bom comportamento numa gama
de funcionamento e um mau funcionamento noutras zonas.
Exemplo do controlo do ângulo de pitch com um controlador fixo quando a
velocidade aumenta progressivamente:
.Extraído de Rato, L. M. (1994). Técnicas de Controlo Adaptativo aplicadas a uma aeronave não tripulada Tese de Mestrado, IST - Departamento de
Engenharia Electrotécnica e de Computadores

Modelação, Identificação e Controlo Digital 7-Controlo Adaptativo
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
7
Uma possibilidade consiste em adaptar os ganhos para compensar alterações
da dinâmica devidas a variações da velocidade.
Para tal, podem usar-se várias estruturas. Uma possibilidade é:
Adaptador
Controladoru
y
Ajuste dosganhos do controlador

Modelação, Identificação e Controlo Digital 7-Controlo Adaptativo
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
8
O bloco Adaptador por ser obtido de vários modos:
• Tabela que altera os ganhos do controlador de um modo fixo, para cada
valor de velocidade. Esta técnica denomina-se gain-scheduling.
• Identificação da dinâmica com o método dos mínimos quadrados,
refazendo-se o cálculo dos ganhos repetidamente, em tempo real. Esta
técnica denomina-se Controlo Adaptativo.

Modelação, Identificação e Controlo Digital 7-Controlo Adaptativo
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
9
"Gain-scheduling"
x
x
x
+
ControladorV baixo
ControladorV médio
ControladorV alto
u
V
V
V
φ(V)
φ(V)
φ(V)
u
O valor da variável manipulada em
cada instante resulta resulta da
combinação linear das variáveis
calculadas pelos vários
controladores.
Por exemplo, a velocidades baixas, o
controlador respectivo é multiplicado
por um peso próximo de 1 enquanto
o controlador de velocidades altas é
multiplicado por zero.

Modelação, Identificação e Controlo Digital 7-Controlo Adaptativo
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
10
Controlo Adaptativo vs. "Gain Scheduling"
A solução do controlo de sistemas variáveis no tempo por "gain scheduling" é
útil em muitas situações mas levanta problemas quando:
• Não é possível conhecer a priori qual o controlador a utilizar numa dada
situação;
• É necessário recorrer a um número muito elevado de controladores.
Uma possibilidade, que se estuda neste curso é o Controlo adaptativo.
Modelação, Identificação e Controlo Digital 7-Controlo Adaptativo
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
11
Controlo Adaptativo
Numa das famílias de Controlo Adaptativo, o Adaptador é constituído por dois
blocos:
• Identificador, que estima continuamente os parâmetros (e. g. a posição
dos pólos, dos zeros e o ganho) de um modelo, a partir dos dados de
entrada e saída medidos.
• Projecto do Controlador, que recalcula continuamente os ganhos do
controlador tendo em conta as novas estimativas do modelo.
Deste modo, quando a dinâmica do sistema se altera, o identificador dá conta
desse facto e os ganhos do controlador são alterados para fazer face à nova
situação.

Modelação, Identificação e Controlo Digital 7-Controlo Adaptativo
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
12
No caso do exemplo do controlo do ângulo de pitch, é possível, recorrendo ao
Controlo Adaptativo, obter uma resposta com características razoavelmente
constantes quando a velocidade varia de 10 a 40 m/s:
Extraído de Rato, L. M. (1994). Técnicas de Controlo Adaptativo aplicadas a uma aeronave não tripulada Tese de Mestrado, IST - Departamento de
Engenharia Electrotécnica e de Computadores
Modelação, Identificação e Controlo Digital 7-Controlo Adaptativo
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
13
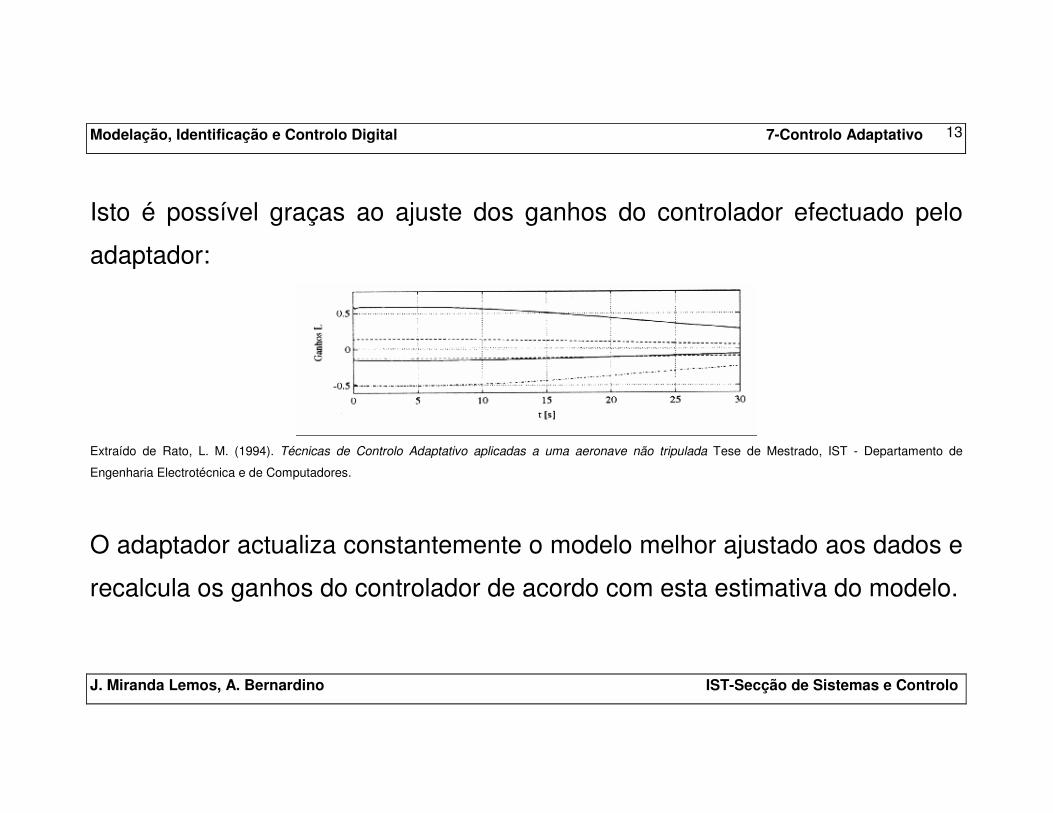
Isto é possível graças ao ajuste dos ganhos do controlador efectuado pelo
adaptador:
Extraído de Rato, L. M. (1994). Técnicas de Controlo Adaptativo aplicadas a uma aeronave não tripulada Tese de Mestrado, IST - Departamento de
Engenharia Electrotécnica e de Computadores.
O adaptador actualiza constantemente o modelo melhor ajustado aos dados e
recalcula os ganhos do controlador de acordo com esta estimativa do modelo.

Modelação, Identificação e Controlo Digital 7-Controlo Adaptativo
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
14
Estimador de Mínimos Quadrados Recursivo
RLS – Recusrsive Least Squares
Objectivo: Obter estimativas de mínimos quadrados combinando uma
estimativa anterior com novos dados, aproveitando cálculos já efectuados
anteriormente.
RLS
Novos dados
� � � � �ϕ − �
Estimativa anterior θ � � − � e
variáveis auxiliares � �− �
Nova estimativa θ � � e
variáveis auxiliares � �

Modelação, Identificação e Controlo Digital 7-Controlo Adaptativo
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
15
Estimador não recursivo dadas observações:
( )�� �θ �= ′ ′−Φ Φ Φ�
Pode ser escrita como (mostre!):
�� � � � � � � �θ ϕ � � ��
= −−
=�Λ �
�
�
em que a matriz de informação é dada por
� � � � � � � ��
= − ′ −=�ϕ ϕ� ��

Modelação, Identificação e Controlo Digital 7-Controlo Adaptativo
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
16
Matriz de informação verifica
Λ Λ� � � � � � � � = − + − ′ −� � �ϕ ϕ (1)
Tem-se ainda
�� � � � � � � �θ ϕ � � ��
= −−
=�Λ �
�
� (2) e � � �� � � � � � � � ��
θ ϕ= −=� ��
(3)
Pretende-se escrever �� �θ em função de �� �θ −� , de Λ� � , de � � � e de ϕ� � −�
Sugestão: Isolar o último termo do somatório em (2).
Escrever (3) para −� ;
Usar (1);

Modelação, Identificação e Controlo Digital 7-Controlo Adaptativo
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
17
�� � � � � � � �θ ϕ � � ��
= −−
=�Λ �
�
�
�� � � � � � � � � � � �θ ϕ ϕ � � � � �
= − + −�
��
�
��
−
=
−
�Λ �
�
�
� �
� � �� � � � � � � � ��
− − = −=
−
�� � ��
�
θ ϕ
[ ]�� � � � � � �� � � � � �θ θ ϕ � = − − + −−Λ Λ� � � �
Modelação, Identificação e Controlo Digital 7-Controlo Adaptativo
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
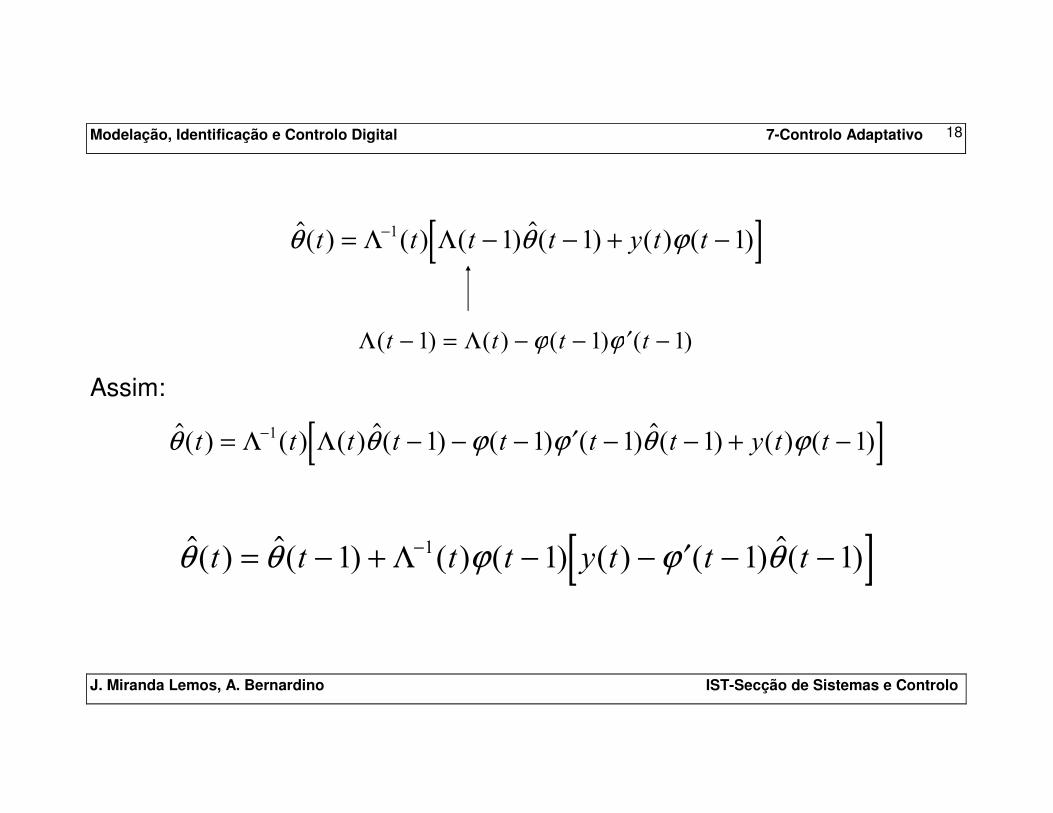
18
[ ]�� � � � � � �� � � � � �θ θ ϕ � = − − + −−Λ Λ� � � �
Λ Λ� � � � � � � � − = − − ′ −� � �ϕ ϕ
Assim:
[ ]�� � � � � � �� � � � � � �� � � � � �θ θ ϕ ϕ θ ϕ � = − − − ′ − − + −−Λ Λ� � � � � �
[ ]�� � �� � � � � � � � � � �� �θ θ ϕ ϕ θ � = − + − − ′ − −−� � � ��Λ

Modelação, Identificação e Controlo Digital 7-Controlo Adaptativo
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
19
As equações do estimador recursivo são:
[ ]�� � �� � � � � � � � � � �� �θ θ ϕ ϕ θ � = − + − − ′ − −−� � � ��Λ
Λ Λ� � � � � � � � = − + − ′ −� � �ϕ ϕ
É necessário inverter uma matriz em cada iteração !
Diferença entre o que esperamos que seja y(t)
dada a estimativa e o que observamos
Nova
estimativa Estimativa
anterior Ganho
vectorial

Modelação, Identificação e Controlo Digital 7-Controlo Adaptativo
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
20
Será que podemos alterar o algoritmo para evitar inversão de matrizes?
[ ]�� � �� � � � � � � � � � �� �θ θ ϕ ϕ θ � = − + − − ′ − −−� � � ��Λ
Λ Λ� � � � � � � � = − + − ′ −� � �ϕ ϕ
Se trabalharmos com a matriz de covariância as equações ficam:
[ ]�� � �� � � � � � � � � � �� �θ θ ϕ ϕ θ � = − + − − ′ − −� � � �
[ ] � � � � � � � �= − + − ′ − −Λ � � ��ϕ ϕ

Modelação, Identificação e Controlo Digital 7-Controlo Adaptativo
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
21
Lema de inversão de matrizes
[ ] [ ]� �� � � �� � ��+ = − +− − − − − − −� � � � ��
�
Aplique-se este lema a
[ ] � � � � � � � �= − + − ′ − −Λ � � ��ϕ ϕ
com
� − −= − = −� � � �Λ � � � � , = −ϕ � �� , � = � , � = ′ −ϕ � ��
Obtém-se:
[ ] � � � � � � � � � � � � � � � �= − − − − ′ − − + ′ − −−� � � � � � � �
�ϕ ϕ ϕ
Escalar

Modelação, Identificação e Controlo Digital 7-Controlo Adaptativo
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
22
Algoritmo de Mínimos Quadrados Recursivo (RLS)
Modelo:
� � �� � � � � �= ′ − +ϕ θ�
Estimador:
[ ]�� � �� � � � � � �� � � �θ θ θ ϕ � � = − + − − −� � �
� � � � � � �= −ϕ � ("Ganho de Kalman")
� � � �
� � � � � � � �
� � � � � �= − − − − ′ − −
+ ′ − − −�
� � � �
� � � �
ϕ ϕϕ ϕ "Equação de Riccati"

Modelação, Identificação e Controlo Digital 7-Controlo Adaptativo
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
23
Alternativamente, o ganho de Kalman e a equação de Riccati podem ser
escritos como (demonstre!):
�
� �
� � � �
� � � � � �= − −
+ ′ − − −� �
� � � �
ϕϕ ϕ
[ ] � � � � � � � � � �= − ′ − −ϕ � �
Esta forma é vantajosa porque permite adaptar a estimativa dos parâmetros
antes de adaptar a estimativa da matriz de covariância.

Modelação, Identificação e Controlo Digital 7-Controlo Adaptativo
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
24
Exemplo: Estimação recursiva de um parâmetro
0 20 40 60 80 100 120 140 160 180 2000
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Ganho fixo=0.03
Ganho fixo=0.5
Ganho de Kalman
� � �
�
� � � � � �= − +=
ϕ θθ
�
Ganho do estimador:
Alto leva a convergência rápida mas a
grande variância das estimativas em
regime estacionário.
Baixo leva a convergência lenta.
O ganho de Kalman é alto no início e
baixo no fim, variando no tempo.

Modelação, Identificação e Controlo Digital 7-Controlo Adaptativo
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
25
Programa MATLAB usado no exemplo thrls=0;
thsm=0;
thbig=0;
p=10;
theta0=2;
tfinal=200;
for t=1:tfinal
pp(t)=p;
fi=1+0.1*rand;
y=theta0*fi+0.2*randn;
p=p-p*fi*fi*p/(1+fi*p*fi);
kalm=p*fi;
thrls=thrls+kalm*(y-thrls*fi);
thsm=thsm+0.03*(y-thsm*fi);
thbig=thbig+0.5*(y-thbig*fi);
sth(t,1)=thrls;
sth(t,2)=thsm;
sth(t,3)=thbig;
end;
axis([0 tfinal 0 5])
hold on
plot(sth)
hold off

Modelação, Identificação e Controlo Digital 7-Controlo Adaptativo
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
26
Este exemplo ilustra a convergência dos mínimos quadrados recursivos.
Inicialmente, como a nossa incerteza sobre o valor verdadeiro do parâmetro a
estimar é grande, escolhemos um valor elevado para a covariância.
Neste caso, = �� . O ganho de Kalman é elevado inicialmente pelo que a
convergência é rápida.
Há medida que o tempo passa e vamos
recebendo dados, diminui e o
ganho de Kalman também. Isto leva à
convergência da estimativa pois o termo
de correcção fica progressivamente menor. 0 20 40 60 80 100 120 140 160 180 200
10-3
10-2
10-1
100
101

Modelação, Identificação e Controlo Digital 7-Controlo Adaptativo
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
27
O estimador pode ser encarado
como um mecanismo que reduz
a nossa incerteza sobre o
valor verdadeiro do parâmetro
através das observações.
A incerteza é medida por uma
função densidade de probabilidade
do erro na estimativa. Neste
exemplo esta incerteza é gaussiana
e com variância proporcional a . 0 0.5 1 1.5 2 2.5 3 3.5 4
0
1
2
3
4
5
6
Parameter probability densitygiven 200 observations
Initial parameter probabilitydensity function

Modelação, Identificação e Controlo Digital 7-Controlo Adaptativo
J. Miranda Lemos, A. Bernardino IST-Secção de Sistemas e Controlo
28
Um exemplo com parâmetros não identificáveis
-5 -4 -3 -2 -1 0 1 2 3 4 5-5
-4
-3
-2
-1
0
1
2
3
4
5
Aumentando o número de observações, reduz-se a incerteza da soma mas
mantém-se a incerteza na direcção perpendicular (assume-se � constante).
� � � � � � � � � �� � � � � � � �= − + − +� ��
Apenas a soma pode ser estimada
Densidade de
probabilidade
dos parâmetros