modelação computacional em engenharia · pdf file2.7 problemas de difusão...
TRANSCRIPT
UniversidadeNova deLisboaFaculdadedeCiênciaseTecnologia
DepartamentodeEngenhariaCivil
ModelaçãoComputacionalemEngenhariaCivil
AULAS PRÁTICAS
C. Cismasiu M. A. G. Silva
Copyright c�
2002DEC/FCT

Conteúdo
List of tables iii
List of figures v
1 ModelaçãoFísica 11.1 Grandezasfísicas . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 AnáliseDimensional . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2.1 Classificaçãodasequações. . . . . . . . . . . . . . . . . 21.2.2 Conversãoentresistemasdeunidades . . . . . . . . . . . 31.2.3 Formadasrelações. . . . . . . . . . . . . . . . . . . . . 4
1.3 Modelosfísicosesemelhança . . . . . . . . . . . . . . . . . . . 15
2 ModelaçãoMatemática 192.1 Introdução. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.1.1 ImportânciadaComputaçãonosModelosMatemáticos. . 202.2 Estáticadecaboscomcargasparalelasdistribuídas . . . . . . . . 21
2.2.1 Caboparabólico . . . . . . . . . . . . . . . . . . . . . . 222.2.2 Catenária . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.3 Dinâmicadoscabos. . . . . . . . . . . . . . . . . . . . . . . . . 332.3.1 Hipótesessimplificativas . . . . . . . . . . . . . . . . . . 332.3.2 Equaçãodasondasuni-dimensionais. . . . . . . . . . . . 342.3.3 Métododeseparaçãodevariáveis.SériesdeFourier . . . 35
2.4 Vibraçõeslongitudinaisembarras . . . . . . . . . . . . . . . . . 432.4.1 Hipótesessimplificativas . . . . . . . . . . . . . . . . . . 432.4.2 Equaçãodasondasuni-dimensionais. . . . . . . . . . . . 45
2.5 Vibraçõestransversaisemvigas . . . . . . . . . . . . . . . . . . 512.5.1 Hipótesessimplificativas . . . . . . . . . . . . . . . . . . 512.5.2 Equaçãodasondas . . . . . . . . . . . . . . . . . . . . . 51
2.6 A transmissãodecalor . . . . . . . . . . . . . . . . . . . . . . . 572.6.1 Regimeestacionáriobidimensional . . . . . . . . . . . . 58
2.7 Problemasdedifusão . . . . . . . . . . . . . . . . . . . . . . . . 632.8 FormasQuadráticas. . . . . . . . . . . . . . . . . . . . . . . . . 65
2.8.1 DiagonalizaçãodeFormasQuadráticas . . . . . . . . . . 662.8.2 ClassificaçãodeFormasQuadráticas. . . . . . . . . . . . 67
i
ii Conteúdo
3 MétodosNuméricospara EquaçõesDiferenciaisParciais 713.1 Equaçõeselípticas. . . . . . . . . . . . . . . . . . . . . . . . . . 72
3.1.1 ProblemasDirichlet . . . . . . . . . . . . . . . . . . . . 733.1.2 ProblemasNeumannemistos . . . . . . . . . . . . . . . 77
3.2 Equaçõesparabólicas. . . . . . . . . . . . . . . . . . . . . . . . 793.2.1 O métododeCrank-Nicolson . . . . . . . . . . . . . . . 80
3.3 Equaçõeshiperbólicas . . . . . . . . . . . . . . . . . . . . . . . 90
Bibliografia 93
Lista deTabelas
2.1 Solução��������� emváriosmomentos� . . . . . . . . . . . . . . . 422.2 Deslocamento,velocidadeeaceleraçãoemváriosmomentos� . . 442.3 Primeirostrêsmodosdevibraçãolongitudinaldabarraencastrada 472.4 Primeirostrês modosde vibraçãotransversal da barra simples-
menteapoiada. . . . . . . . . . . . . . . . . . . . . . . . . . . . 542.5 Soluçõesdaequaçãotranscendental�� ��������������� ������� �"! . . . 552.6 Primeirostrêsmodosdevibraçãotransversaldavigaemconsola . 562.7 Soluçãodo problemaDirichlet paravários #��$�% . . . . . . . . . . 62
3.1 Osvaloresdatemperaturanospontosdabarraobtidoscomo mé-todoCrank-Nicolson . . . . . . . . . . . . . . . . . . . . . . . . 83
3.2 Erro relativo [%] . . . . . . . . . . . . . . . . . . . . . . . . . . 833.3 Osvaloresdatemperaturanospontosdabarraobtidoscomo mé-
tododirecto, &'�(!*),+�- . . . . . . . . . . . . . . . . . . . . . . . . 843.4 Comparaçãoentreo métododeCrank-Nicolson,o métododirecto
easoluçãoanalítica. . . . . . . . . . . . . . . . . . . . . . . . . 853.5 ��������� . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
iii

iv ListadeTabelas

Lista deFiguras
1.1 Barracilíndricarectasujeitaa forçasdetracção . . . . . . . . . . 121.2 Barragemdegravidade . . . . . . . . . . . . . . . . . . . . . . . 141.3 Vigademadeira,dequesepretendedeterminaraflechano ponto � 16
2.1 Cabosujeitoascargasparalelasdistribuídas . . . . . . . . . . . . 212.2 Caboparabólico. . . . . . . . . . . . . . . . . . . . . . . . . . . 222.3 Apoiosaomesmonível . . . . . . . . . . . . . . . . . . . . . . . 232.4 Apoiosdesnivelados . . . . . . . . . . . . . . . . . . . . . . . . 232.5 Catenária . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272.6 Deslocamentodo cabono momento� . . . . . . . . . . . . . . . 332.7 Modosnormaisdevibração. . . . . . . . . . . . . . . . . . . . . 382.8 Segundomodonormalemváriosmomentos� . . . . . . . . . . . 382.9 Função#����% easuaextensãoperiódicaímpar, #/.0�$�% . . . . . . . 402.10 Interpretaçãodafunção #/.0�$�21 34�� . . . . . . . . . . . . . . . . . 402.11 Deslocamentodabarranomomento� . . . . . . . . . . . . . . . 432.12 Vigasujeitaàacçãodinâmica:propriedadesecoordenadas. . . . 512.13 Forçasresultantesnumtroçodiferencialdaviga . . . . . . . . . . 522.14 As componentesdaequaçãotranscendental. . . . . . . . . . . . 562.15 Rectângulo5 eascondiçõesdefronteira . . . . . . . . . . . . . 58
3.1 Pontosnaaproximaçãodasderivadasparciais . . . . . . . . . . . 733.2 Regiãono plano �76 cobertaporumamalhaequidistante8 . . . . . 743.3 Placarectangularhomogénea:condiçõesde fronteira e a malha
paraasdiferençasfinitas . . . . . . . . . . . . . . . . . . . . . . 753.4 Região 5 : condiçõesdefronteiraemalha . . . . . . . . . . . . . 773.5 Malhaepontosnodaiscorrespondenteaequação(3.28) . . . . . . 793.6 OsseispontosutilizadosnasfórmulasdeCrank-Nicolson. . . . . 813.7 Malhautilizadano métododeCrank-Nicolson. . . . . . . . . . . 823.8 Distribuiçãodatemperaturanabarra . . . . . . . . . . . . . . . . 853.9 Malhaepontosnodaisparao problemadedifusão. . . . . . . . . 863.10 Penetraçãodecloretono betão . . . . . . . . . . . . . . . . . . . 883.11 Penetraçãodecloretono betãoapós2 anos. . . . . . . . . . . . . 893.12 Pontosdamalhautilizadosnasaproximações(3.38)e (3.39) . . . 903.13 Malhautilizada . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
v
vi ListadeFiguras
Capítulo 1
ModelaçãoFísica
1.1 Grandezasfísicas
As diversasgrandezasfísicaspodem-seexprimir emtermosdegrandezasconside-radascomofundamentais.Dá-seo qualificativo depuramentemecânicasàsgran-dezasquesepodemexprimir em funçãode apenastrêsgrandezasfundamentais:massa(M), comprimento(L) e tempo(T) ou força (F), comprimento(L) e tempo(T).
Algumasgrandezas,queintervêmnosfenómenoscomportandotrocasdequan-tidadesdecalor, osfenómenosditostérmicos,necessitamdeumaquartagrandezafundamental.Factoanálogoocorrecomcertasgrandezasaconsiderarnosfenóme-noseléctricos.
A dimensãodeumagrandeza,emrelaçãoaqualquerdasgrandezasfundamen-tais,éo expoentecomqueagrandezafundamentalconsideradaaparecenaexpres-sãodimensionaldagrandezaemquestão.Porexemplo,aexpressãodimensionaldavelocidadeé LT 9;: , onde � é a dimensãodavelocidadeemrelaçãoa comprimentoe 1<� éa dimensãoemrelaçãoaotempo.
1.2 AnáliseDimensional
A análisedimensionalbaseia-senosdoisaxiomasseguintes:= sósepodeestabelecerum estadode igualdadeentreduasgrandezasquete-nhamasmesmasdimensões;= arazãoentreduasgrandezaséindependentedaunidadeemquesãomedidas,desdequeseempregueamesmaunidadeparaambas.
A análisedimensionaléutilizadapara:
- classificarasequaçõesquetraduzemosfenómenosfísicose verificar-lhesageneralidade;
1
2 Capítulo1. ModelaçãoFísica
- passardeumsistemadeunidadesparaoutro;
- prever a forma dasrelaçõesentreasgrandezasque intervêmem um dadofenómenofísico;
- estabelecercondiçõesdesemelhançaparaa concepção,operaçãoe interpre-taçãodemodelosfísicos.
1.2.1 Classificaçãodasequações
Do pontodevistadimensional,asequaçõesqueregemosfenómenosfísicospodemclassificar-seem:
Equaçõesnão homogéneas: em queos diferentestermosnãoapresentamtodosasmesmasdimensões.Estasequaçõessó sãoválidasem um deter-minadosistemadeunidadese nãotraduzemumalei físicageral. Decorremgeralmentedeexperiênciasconduzidasempiricamente.
Exemplosdeequaçõesnãohomogéneas:asfórmulasparacálculodeescoa-mentoemtubosdesecçãotransversalcircularparatubosde:
- fibrocimento >?�"@�A�),+�B�C2DE FHGJI�DE KHF- ferro galvanizado >L�"@�@�)NM�M�C2DE OPKHQJI�DE KPR
onde > é a velocidademédiado escoamentoatravés da secçãotransversaldo tubos,emmetrospor segundo, C é o diâmetrodasecçãotransversalemmetrose I éa declividade.
Equaçõeshomogéneas: emquetodosostermostêmasmesmasdimensõese oscoeficientesporventuraexistentessãoadimensionais.Taisequaçõessãoválidasem qualquersistemacoerentedeunidades.Notequea homogenei-dadeconstituiumacondiçãonecessária,masnãosuficiente,paraa validadedeequações.
Exemplode equaçõeshomogéneas:a fórmula quefornecea distânciaper-corridapor umcorpoemquedalivre,novácuo,semvelocidadeinicial:S � �+UT � Q (1.1)
Equaçõeshomogéneasrestritas: emquefiguramcoeficientescomdimen-sões.Sósãoválidasemum determinadosistemadeunidades,no qualosre-feridoscoeficientesassumesosvaloresparticularesquefiguramnafórmula.Assim,por exemplo,seescrevemosaexpressão(1.1)soba formaS ��AV)WM�� Q (1.2)
1.2. AnáliseDimensional 3
tal equaçãosóseráválidapara S expressoemmetros,e � emsegundos.Seaescrevemossobforma S �X�0@�)Y�Z�[Q (1.3)
sópoderemosutilizá-lano sistemainglês,com S empése � emsegundos.
1.2.2 Conversãoentresistemasde unidades
Ocorre,muitasvezes,em cálculosde Engenharia,a necessidadede converter ovalor de uma certagrandezade um dadosistemade unidadesparaoutro. Doiscasospodemapresentar-se:
Os dois sistemasde unidadestêm as mesmasgrandezasfundamentais:Nestecaso,bastaescrever a expressãodimensionalda grandezanos doissistemase substituircadaum dossímbolosfiguradosemtal expressão,pelovalordarazãoentreasunidadesrespectivas.
Exemplo: Converter uma força expressaem dines(a unidadede força dosistemaCGS)paranewtons(a unidadede força do sistemaMKS). Os doissistemassãode tipo LMT. Escrevemosentãoa expressãodimensionaldeforça, F=MLT 9 Q . Em seguida,substituímosF, M, L e T pelosvaloresdasrespectivasunidadesnossistemasMKS eCGS.
Utilizando,por exemplo,o programaUnits [12] (disponível emplataformasUNIX/Linux), temos:
1 newton = kg m / s^2 = 1 kg m / s^21 dyne = gram cm / s^2 = 1e-05 kg m / s^2
Resultará:
1 newton = 100000 dyne
Isto é, um newton é equivalentea �0! K dines.Porconseguinte,dividindo por�0! K o valorconhecidodagrandezaemdines,teremoso valorcorrespondenteemnewtons.
Os dois sistemasde unidades têm grandezasfundamentais diferentes:Nestecaso,temosdeexprimir asgrandezasfundamentaisdeumdossistemasemfunçãodasgrandezasfundamentaisdo outro.
Exemplo: Dadoum valordecoeficientedeviscosidadedinâmicono sistemainglês,pretende-seexprimi-lo emunidadesdesistemaCGS,sabendoqueaexpressãodimensionaldo coeficienteé\ � M L 9;: T 9;: (1.4)

4 Capítulo1. ModelaçãoFísica
numsistemado tipo L, M, T, e \ � FL 9 Q T (1.5)
numsistemado tipo F, L, T.
O sistemainglêsédo tipo F, L, T, comasunidadesfundamentaisrespectivasdelibra, péesegundo.O sistemaCGSédotipo L, M, T, sendoo centímetro,o gramaeo segundoasunidadesfundamentais.
Podeserutilizadaqualquerdasexpressões(1.4) ou (1.5). Assim,a unidadedo coeficientedeviscosidadedinâmicaresulta,
Utilizandoadefinição(1.4)Sistemainglês: slug / ft s = 47.880259 kg / m s
SistemaCGS: gram / cm s = 0.1 kg / m s
Utilizandoadefinição(1.5)Sistemainglês: lbf s / ft^2 = 47.880259 kg / m s
SistemaCGS: dyne s / cm^2 = 0.1 kg / m s
Resultaquea unidadedeviscosidadedinâmicado sistemainglêsequivaleaA^]_B�)WB�!`+�-�M unidadesdeviscosidadedinâmicadosistemaCGS.
1.2.3 Forma dasrelações
Osdois instrumentosdequea análisedimensionaldispõeparaprever a formadasrelaçõesentreas grandezasque intervêmnum fenómenofísico qualquer, sãooteoremadeBridgmaneo teoremadeBuckingham.
Teoremade Bridgman
Toda grandezasecundáriapodeser expressapor um produtode potênciasdasgrandezasprimárias.
Suponhamosqueumagrandezasecundáriaa sejaumafunçãodasgrandezasprimáriasb : , b Q , . . . , bdc . O teoremadeBridgmandiz quesepoderáescrever,aL��efbJg*h: bJg`iQ )j)j);bJg�kcsendoe umaconstanteadimensionale e : , e Q , . . . , elc , expoentespositivosou negativos,inteirosou fracionários.
Exemplo1: Sepretendedeterminara forma da relaçãoentrea distânciaS ,percorridana vertical por um corpoem quedalivre, no vácuo,a partir dorepouso,eaaceleraçãodagravidadeT , eaduraçãodaqueda,� .Utilizandoo teoremadeBridgman,podemosescrever,S �(e T g*h^�mg`i

1.2. AnáliseDimensional 5
Trata-sededeterminarosvaloresdosexpoentese : e e Q pelaanálisedimen-sional. Sendoe adimensional,seuvalor sópoderáserdeterminadoexperi-mentalmente.
Escrevemosasexpressõesdimensionaisde S , T e � . Temos:
[ S ] � L[ T ] � LT 9 Q[ � ] � T
Substituímosasgrandezas,na expressãofornecidapela teoremade Bridg-man,pelasrespectivasexpressõesdimensionais,e resulta:
L � (LT 9 Q ) g*h T g`iou
L � L g h T 9 Q g hon g iIgualando,paraos dois membrosdestaequação,os expoentesdasmesmasgrandezasfundamentais,resulta:e : �p� e Q �q+Assim,o teoremadeBridgmanconduziu-nosà conclusãodequea distânciavertical percorridapor um corpoem quedalivre, no vácuo,a partir do re-pouso,éproporcionalàaceleraçãodagravidadeeaoquadradodaduraçãodaqueda: S �(e T �[QO valordocoeficienteadimensionale sópoderáserdeterminadoexperimen-talmente.
Exemplo2: Pretende-sedeterminara forma da relaçãoentrea distânciaS ,percorridana vertical por um corpoem quedalivre, no vácuo,a partir dorepouso,eaaceleraçãodagravidadeT , a duraçãodaqueda� , eo pesor .
Utilizandoo teoremadeBridgman,teríamos,S �"e T g*h � g`i r g�sEscrevemosasexpressõesdimensionaisde S , T , � e r . Temos:
[ S ] � L[ T ] � LT 9 Q[ � ] � T[ r ] � MLT 9 Q
Substituímosasgrandezas,na expressãofornecidapela teoremade Bridg-man,pelasrespectivasexpressõesdimensionais,e resulta:
L � (LT 9 Q ) g*h T g`i (MLT 9 Q ) g�s

6 Capítulo1. ModelaçãoFísica
ouL � L g*h n g�s M g�s T 9 Q g*h n g`i 9 Q g�s
Igualando,paraos dois membrosdestaequação,os expoentesdasmesmasgrandezasfundamentais,resulta:e : �X� e Q �"+ eutl�(!Conclui-seque eut , o expoentedo peso,é igual a ! ou, em outraspalavras,queadistânciaprocuradaé independentedopesodocorpo,sendodadaporS ��e T �[QExemplo3: Se se supusesseque a distânciapercorridapor um corpo emquedalivre, no vácuoe a partir do repouso,só dependesseda duraçãodaqueda,escrever-se-ia: S �(ev�mg*he,dimensionalmente,
L � T g hresultando �U�(! e e : �(!A primeiradasduasequaçõesé um absurdo,e mostraqueo raciocíniodepartidaé errado,e a segundaequaçãoestáem contradiçãocom o que seadmitiuinicialmente.
Notas:
– Sósepodeaplicar o teoremadeBridgmana grandezasentre asquaishá alguma razão teórica ou experimentalque permita admitir queexistaumarelação.
– O teoremasópermitedeterminarinteiramenteosvaloresdosexpoentesincógnitasquandoo número de tais incógnitasé igual ao número deequaçõesindependentesdecondiçãoa quepodemosrecorrer.
Reduçãodo número de variáveis
Seumfenómenofísico qualquerseregepor umarelaçãoentrew grandezas,#��oa : �7a Q �Z)�)j)���a�c`x�"!��podemserlocalizadosconjuntosdevariáveisqueconstituemagrupamentosnaturaise, trabalhandocomeles,reduziradimensionalidadedo problema.
Buckinghamsugeriuqueseformassegruposde parâmetrosadimensionaisa partir de umasériede parâmetrosdefinidoresdo fenómeno.Tais grupos

1.2. AnáliseDimensional 7
seriamformadospormultiplicação,factoquepoderáexplicarautilizaçãodotermosimbólico y paraosrepresentar. Um termo y forma-secomosesegue,yz��a g h: a g iQ )j)�)7a g kcmultiplicandotodososparâmetrosdasériedescritivadepoisdeoselevarmosàspotênciase : , e Q , . . . , elc . Buckinghamargumentouqueumaadequadaselecçãodosexpoenteslevaria a um termo y adimensional.Paraescolherelc , adopta-sea regradahomogeneidadedimensional.Estaregraestabelecequeasequaçõesanaliticamentededuzidasqueregemosfenómenos,terãodeserválidasparatodosossistemasdeunidades.
Assim,por exemplo,paraum corpoemqueda,a relaçãoS � �+ T �[Qé dimensionalmentehomogénea.A distânciapercorridanum segundo,novácuo,próximodasuperfíciedaTerraéS � �+ T �[Qu� �+�{z| +*),+ { ��Qu�X�j@�)}� ft
paraumobservador“inglês”, eS � �+7T � Q � �+ { M�)NB { � Q ��AV)NM m
paraum observador“métrico”. Obtêm-sedistânciasidênticasseseefectuaranecessáriamudançadeunidades.
Esteexemplotemoutrapropriedadesurpreendente:T � QS �"+Um corpocaindolivrementenumvácuopróximodasuperfíciedaTerracaidetal formaqueo valor T � Q � S semantémconstantee igual a + .Aplicandoa regradehomogeneidadedimensionala esteproblemadaquedadeumcorpo, #�� T � S �����"!Deduzimoso(s)grupo(s)adimensional(is)apartir dey�� T g*h S g`i � g�s (1.6)
As expressõesdimensionaisde T , S e � contêmadimensãofundamentalcom-primento,L, e tempo,T. A dimensãofundamentalcomprimentoencontra-se

8 Capítulo1. ModelaçãoFísica
presenteno conjuntodeparâmetros:surgeem y e em � comoL D , e em S e TcomoL : . Assim,aequação(1.6)podeexprimir-sedaseguinteforma,
L Dl� L : g*h L : g`i L Dobtendo-sea equaçãoexponencial:!<�"e : �~e QO mesmoraciocinoparaa dimensãofundamentaltempo,conduzà seguinteformaparaaequação(1.6),
T Dl� T 9 Q g*h L D L : g�se aequaçãoexponencial: !��X1�+�e : ��eutComonãofiguramoutrasdimensõesfundamentaisno conjuntode parâme-tros,asequaçõesexponenciaissão:� e : � e Q � !1�+_e : � eut�� !Temosduasequaçõese três incógnitas. Uma poderáserescolhidaarbitra-riamenteem funçãodasnossasconveniências.Uma vez queestamosinte-ressadosnumaexpressãoparaS , forcemosS aparecernogrupoadimensionalelevadaà primeirapotência.Fazendoe Q ��� , resultae : ��1�� e eutU��1�+ ,e o grupoadimensionalédefinidopor:y�� T g*h S g`i � g�s � T 9;: S : � 9 Qu� ST � QPortanto,dadoum conjuntodeparâmetrosquedescreve um fenómeno,paraidentificarosgruposadimensionais:
– identificámoso númerode dimensõesfundamentaispresentesnesseconjunto;
– escrevemosasequaçõesexponenciaisemnúmeroigual aodasdimen-sões;
– fixámosarbitrariamentetodosos expoentesquematematicamentepo-deríamosfixar edeterminamososexpoentesremanescentes.
Estabelecimentodeum conjunto completode variáveisadimensionais
Considere-sedenovo asériedeparâmetros��a�c�� e a funçãoprocurada#��oa : �7a Q �Z)�)j)���a�c`x�"!��Seja � o númerodedimensõesfundamentaisnasériedeparâmetrose seja�o� : �%� Q �Z)�)j)������l aexpressãosimbólicadoconjuntodedimensõespresentes.Seja ����� o expoenteda dimensão��� na variável a�� . Podemosformar agoraumamatrizdedimensões(matrizdimensional):

1.2. AnáliseDimensional 9a : a Q . . . a�c� : � :H: � : Q . . . � : c� Q � Q : � QHQ . . . � Q c. . . . . . . . . . . . .��� ��� : ��� Q . . . ����c
Oselementosdestamatrizfundamentalrepresentamoscoeficientesdasequa-çõesexponenciais:����� ���� � :H: e : � � : Q e Q � )j)j)�� � : cxelc � !� Q : e : � � QHQ e Q � )j)j)�� � Q cxelc � !
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .��� : e : � ��� Q e Q � )j)j)�� ����c�elc � !Há � equaçõesexponenciaise w expoentes.A característica& destamatrizéaordemdomaiordeterminatediferentedezerosusceptível deserconstruídoa partir dela. O númerodegruposadimensionaissusceptíveisdeseremen-contradosnasériecompletaé �ow21�&� , emque w éo númerodeparâmetrose& é aordemdamatrizdimensional.Nota-seque &���� .
Escreve-seentãoamatrizdesoluçõese : e Q . . . elc 9^� elc 9^� n : . . . elcy : � ! . . . !y Q ! � . . . !. . . . . . . . . . . . .y;c 9^� ! ! . . . �
Ao grupo de termos y à esquerdachama-sesériecompletade parâmetrosadimensionaisparao femómenodescritopor a : , a Q , . . . , a�c . O quadroficarácompletoquandosedeterminaremos valoresdosexpoenteselc 9^� n : à elc ,correspondentea escolhaparticularde e : à elc 9^� .TeoremadeBuckingham
Agora,queemprincípiodeterminámosostermosy , segueo teoremadeBuc-kingham:
Seumfenómenofísicoqualquerseregepor umarelaçãoentre w grandezas,#���a : ��a Q ��)j)j)��7a`c���"!��o fenómenopoderáser exprimido por umarelaçãoentre w�1�& grandezasadimensionaise independentesentresi,T �$y : �Vy Q �Z)j)�)��;y;c 9^� x�(!��onde& éa característicadamatrizdasdimensões.

10 Capítulo1. ModelaçãoFísica
Estemétodopermitereduzirdrasticamenteo custoexperimental.Sesãone-cessários pontosparadefinir satisfatoriamenteumacurva e w parâmetrosparadescrever o fenómeno,o númerodeexperiênciasnecessáriasparades-crever o fenómeno,é ¡¢�~ c 9;: na abordagemdirecta,e ¡¤£;� c 9^��9;: nocasodautilizaçãodeparâmetrosadimensionais.A razão¡¤£¡ � c 9^��9;: c 9;: � � �Exemplo1: Determinara relaçãoexistenteentrea energia cinética, ¥�¦ , deumapartículasujeitaaummovimentodetranslação,asuamassa,� , easuavelocidade,> . #���¥§¦4�;�z�7>�x�"!Utilizandoum sistemadeunidadesfundamentaisdetipo M, L, T, asexpres-sõesdimensionaisde ¥�¦ , � e > são:
[ ¥�¦ ] � FL � MLT 9 Q L � ML Q T 9 Q[ � ] � M[ > ] � LT 9;:
e amatrizdedimensõesé ¥�¦ � >M � � !L + ! �T 1�+ ! 1��
A característicadamatrizé a ordemdo maiordeterminantenãonulo quesepodeconstruira partir dela. Comoa matriz é quadrada,o maior determi-nanteé ¨¨¨¨¨¨¨ � � !+ ! �1�+ ! 1�� ¨¨¨¨¨¨¨ �"!e, por isso,a característicaé menordo quetrês.O determinantedeordem2no cantosuperiordireitodamatrizdasdimensões騨¨¨¨ � !! � ¨¨¨¨¨ �p�ª©�"!e,por isso,acaracterísticadamatrizdasdimensõesédois.
Com o númerodasgrandezasdo conjuntode parâmetros��¥§¦d�7�z�;>� é trêse a característicada matrizdasdimensõesé dois, resulta w�� | e &'�q+ . Onúmerodegruposadimensionaisnasériecompletaé w«1 &'� | 1~+'�X� . Amatrizdesoluçõesé:
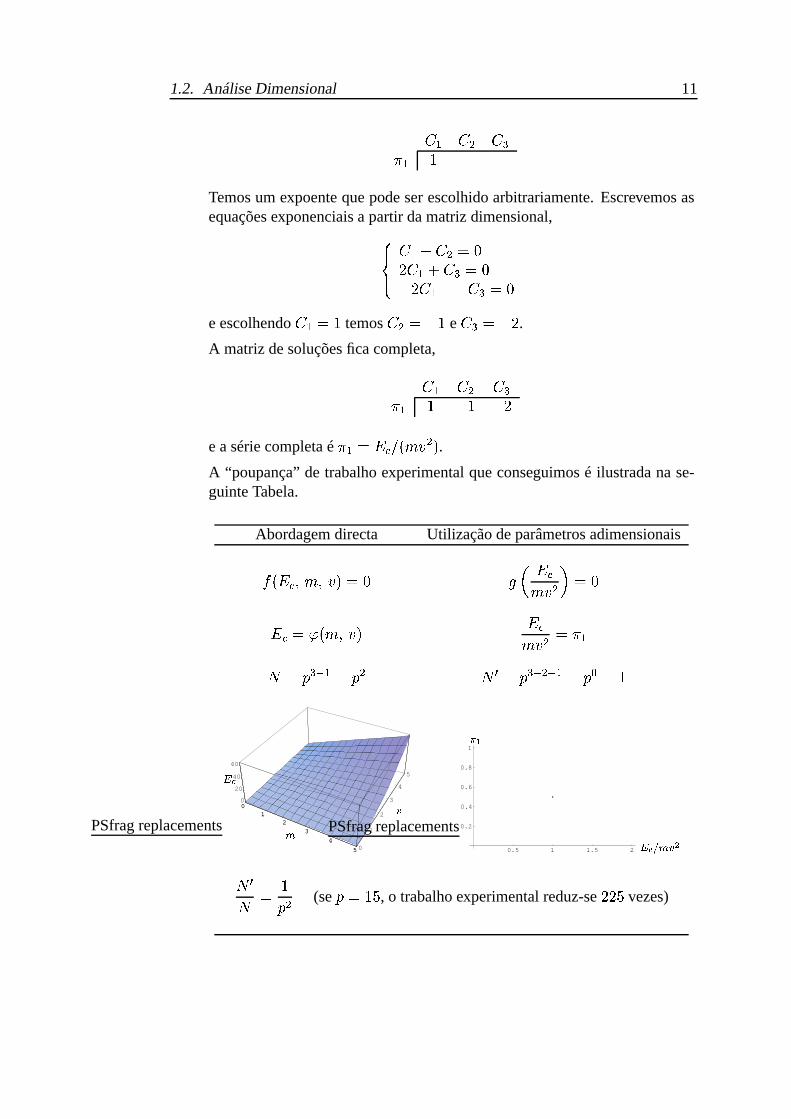
1.2. AnáliseDimensional 11e : e Q euty : �Temosum expoentequepodeserescolhidoarbitrariamente.Escrevemosasequaçõesexponenciaisa partir damatrizdimensional,��� �� e : ��e Q �"!+�e : ��eutl�"!1�+�e : ��1Ueut¬�"!eescolhendoe : �X� temose Q �p1<� e eutu��1�+ .A matrizdesoluçõesfica completa,e : e Q euty : � 1�� 1�+easériecompletaé y : �"¥§¦m�V�$�«> Q .A “poupança”de trabalhoexperimentalqueconseguimosé ilustradana se-guinteTabela.
Abordagemdirecta Utilizaçãodeparâmetrosadimensionais#��o¥�¦4�;�z�7>*x�(! T2 ¥§¦�«> Q�® �(!¥�¦��(¯u�$�z�7>� ¥§¦�«> Q �°y :¡¢�± t 9;: �± ;Q ¡ £ � t 9 Q 9;: � ;D¬���0
12
3
4
5 0
1
2
3
4
5
0
20
40
60
01
2
3
4
5
PSfragreplacements
²�³�� ´
0.5 1 1.5 2
0.2
0.4
0.6
0.8
1
PSfragreplacements
µ h² ³�¶ � ´ i¡¤£¡ � � Q (se ·�X��- , o trabalhoexperimentalreduz-se+�+�- vezes)

12 Capítulo1. ModelaçãoFísica
Exemplo2: Considereumabarracilíndricarectasolicitadaporforçasdetrac-ção.Determinara relaçãoexistenteentreo alongamento,¸ , o comprimento,¹, a forçadetracção,r , aáreadasecçãotransversal,º eo módulodeelasti-
cidadedo material,¥ . #��o¸0�7r§�;º<�7¥ª� ¹ ��"!» » » »» » » »¼ ¼ ¼¼ ¼ ¼½ ¾ ¿ À
Á
ÁFigura1.1: Barracilíndricarectasujeitaa forçasdetracção
Podemosdefinir asdimensõesdosparâmetrosdo fenómenoemfunçãodasdimensõesfundamentais,porexemplo,numasistemado tipo F, L, T.
[ ¸ ] � L[ r ] � F[ º ] � L Q[ ¥ ] � FL 9 Q[¹] � L
Estainformaçãoé representadapelaseguintematrizdimensional:¸ r º ¥ ¹F ! � ! � !L � ! + 1�+ �
O determinantedireitodamatrizdimensionalédiferentedezero,¨¨¨¨¨ � !1�+ � ¨¨¨¨¨ �X�©�(!e,porconsequência,acaracterísticadamatrizédois.Destemodo,a teoremadeBuckingham, y��"w«1 &Ã�q-�1±+<� |

1.2. AnáliseDimensional 13
indicaquetrêsvariáveissemdimensõespermitemdescrevero fenómeno.
Os elementosda matriz dimensionalsãoos coeficientesdasequaçõesex-ponenciais. A partir da primeira e segundalinhas da matriz dimensional,resulta: � e Q ��e R �(!e : �Ä+_eutÅ1~+_e R �~e K �"!Paraestabelecera matrizde soluções,começamospor construirà esquerdaa matrizdeidentidade,queé compostapor umadiagonalprincipalcomele-mentosiguaisàunidadee todososoutroselementosnulos.e : e Q eut e R e Ky : � ! !y Q ! � !y7t ! ! �Asseguramosdestemodoque,em y : , apareça , masnão r nem º , que,emy Q , apareçar , masnão ¸ nem º , eque,em y7t , apareçaº , masnão ¸ nem r .
Paracompletara fila deelementosdamatrizdesoluçõespara y : , resolvem-seasequaçõesexponenciaispara e : �X� , e Q �(eutl�"! , obtendo-see R �"!e e K ��1<� .Para completar os restanteselementos da fila correspondentea y Q ,resolvem-seasequaçõesexponenciaispara e Q �X� , e : �(eutl�"! , obtendo-se e R �p1�� e e K �X1�+ .Os restanteselementosda fila correspondentea y7t obtêm-se,resolvem-seasequaçõesexponenciaispara eutu�p� , e : �(e Q �(! , obtendo-see R �(! ee K ��1�+ .A matrizdesoluçõescompletaée : e Q eut e R e Ky : � ! ! ! 1��y Q ! � ! 1�� 1�+y7t ! ! � ! 1�+Ostermosadimensionaisresultam:y : ��¸�� ¹ y Q �(r���¥ ¹ Q y7t¬��º�� ¹ Qeo fenómenopodeserrepresentadopelafunçãoT ��y : �;y Q �;y7tJ��(!
14 Capítulo1. ModelaçãoFísica
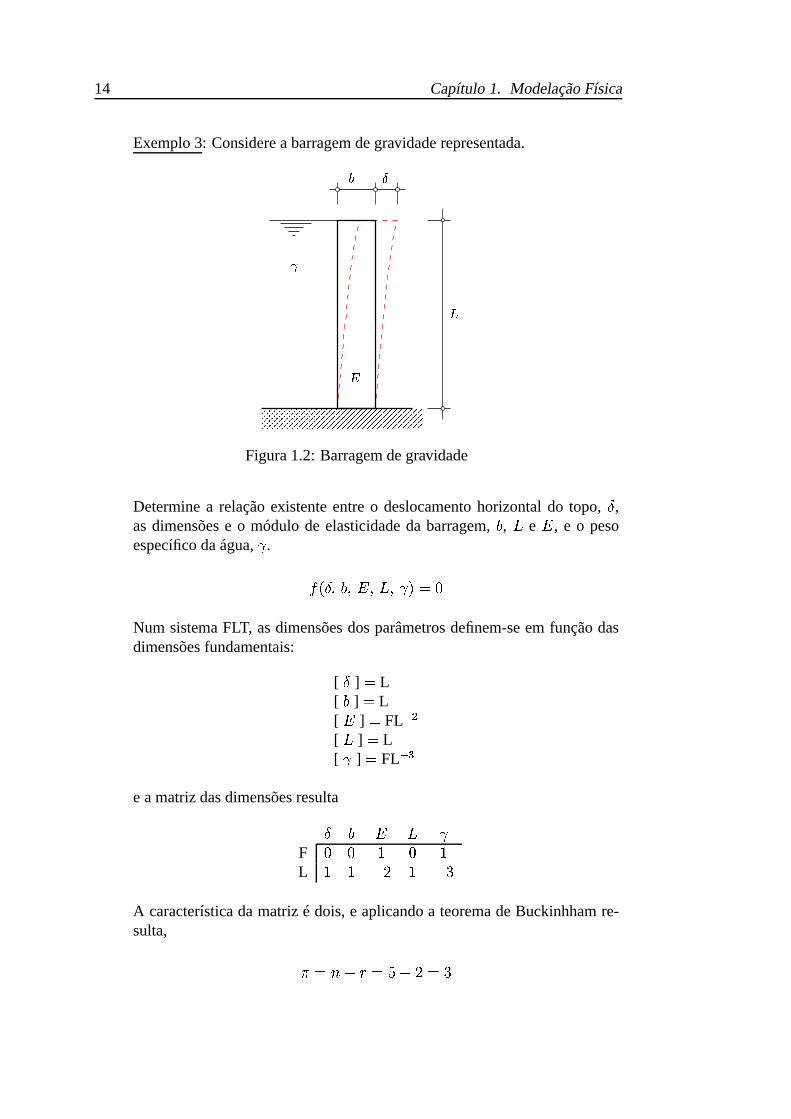
Exemplo3: Considereabarragemdegravidaderepresentada.
Æ Æ Æ Æ Æ Æ Æ ÆÇ Ç Ç Ç Ç Ç Ç Ç
È ½É
À ÊFigura1.2: Barragemdegravidade
Determinea relaçãoexistenteentreo deslocamentohorizontaldo topo, ¸ ,asdimensõese o módulode elasticidadeda barragem,b , � e ¥ , e o pesoespecíficodaágua,Ë . #���¸0�7b0��¥ª�7�¬�;ËÌ���!Num sistemaFLT, asdimensõesdosparâmetrosdefinem-seem funçãodasdimensõesfundamentais:
[ ¸ ] � L[ b ] � L[ ¥ ] � FL 9 Q[ � ] � L[ Ë ] � FL 9 t
e amatrizdasdimensõesresulta¸ b ¥ � ËF ! ! � ! �L � � 1�+ � 1 |
A característicadamatrizé dois,e aplicandoa teoremadeBuckinhhamre-sulta, y��"w«1 &Ã�q-�1±+<� |

1.3. Modelosfísicosesemelhança 15
Comooselementosdamatrizdimensionalsãooscoeficientesdasequaçõesexpenenciais,escreve-se� eut���e K �"!e : ��e Q 1~+�eutÍ�~e R 1 | e K ��!A matrizdesoluçõescompletaée : e Q eut e R e Ky : � ! ! 1�� !y Q ! � ! 1�� !y7t ! ! � 1�� 1��resultandoosseguintestermosadimensionais:y : � ¸� y Q � b� y7t¬� ¥�xËO fenómenopodeserrepresentadopelafunçãoT ��y : �;y Q �;y7tJ��(!
1.3 Modelosfísicose semelhança
Considere-seumavigademadeira( ¥p����)W! |Â{ �0! R N/mm2),comsecçãorectade15por30cm,simplementeapoiada,colocadasobreumvãode365cmesuportandoumacargade21kN a152cm doapoiodaesquerda.A figura1.3representaavigacomosrespectivosparâmetrosassinalados.
A relaçãofuncionalentreosparâmetrosé#��o6��;a;��b0�7�7�V����r¬�7¥ª� ¹ ��(!emque 6 é aflechasobacarganaposição� .
As dimensõesdosparâmetrossão,numsistemado tipo F, L, T:
[ 6 ] � L [ � ] � L[ a ] � L [ r ] � F[ b ] � L [ ¥ ] � FL 9 Q[ � ] � L [
¹] � L
eamatrizdedimensõesresulta6 a b � � r ¥ ¹F ! ! ! ! ! � � !L � � � � � ! 1�+ �

16 Capítulo1. ModelaçãoFísicaÁÎÏ ¾Ð ÈÒÑ
Figura1.3: Vigademadeira,dequesepretendedeterminara flechano ponto �O determinanteda direita é diferentede zeroe, por conseguinte,a caracterís-
tica damatrizdimensionalé doise o númerodevariáveisadimensionaismasériecompletaé y��"w«1 &'�(BÃ1±+��"@
As equaçõesexponenciaissão� e F ��e O �(!e : ��e Q ��eutÍ��e R �~e K 1±+_e O �~e G �"!resultandoa seguintematrizdesoluções:e : e Q eut e R e K e F e O e Gy : � ! ! ! ! ! ! 1��y Q ! � ! ! ! ! ! 1��y7t ! ! � ! ! ! ! 1��y R ! ! ! � ! ! ! 1��y K ! ! ! ! � ! ! 1��y F ! ! ! ! ! � 1<� 1�+
A sériecompletaéy : ��6�� ¹ y Q �(a�� ¹ y7tu�(bÓ� ¹ y R �(��� ¹ y K ���%� ¹ y F ��rU�_¥ ¹ Qea relaçãofuncionalentreosparâmetrospoderáexprimir-sedaseguinteforma:T·Ô 6 ¹ � a ¹ � b ¹ � � ¹ � � ¹ � r¥ ¹ Q�Õ �(!
Estarelaçãocaracterizao problemaparaqualquerdimensões,módulodeelas-ticidadeou carga aplicada. Se, considerandouma viga com outrosparâmetros,todosos termosadimensionaisy são idênticos,dizemosque as duasvigas sãosemelhantese quecadaumaé um modelodaoutra. Taismodelospodemsergeo-metricamentesemelhantes,isto é, teremdimensõesproporcionais.
A análisedasequaçõessugere-nosque a existênciade um valor único paraqualquertermo y nãoimplica a existênciade um valor único paraos parâmetros

1.3. Modelosfísicosesemelhança 17
queconstituemo termo y , factoquenosindicaapossibilidadedeconstruirmosummodelofísico davigademadeira,detamanhoe atédematerialdiferentes(deaço,por exemplo).
Considerandoa viga demadeiracomoo protótipo,a sériede termosy paraomodeloéaseguinte: 6��u� ¹ � , a��l� ¹ � , bd�¬� ¹ � , �`�l� ¹ � , �;�u� ¹ � e r��u�_¥§� ¹ Q� .
Se os termos y do modeloe do protótipo forem idênticos,o modeladortemliberdadeparadecidir:
- aescalalinearemqueo modeloéconstruído;
- o materialdequedeveráserconstruído.
As medidasdomodelolinearsãoobtidasa partir deumaexpressãodegénero:
dimensãodemodelo � factordeescala{ dimensãodo protótipo
No casodaflecha6 ,y : � 6 ¹ � 6_�¹ � Ö 6_� � ¹ � ¹ 6?� S 6em que S é o factor de escala. Para as outrasdimensõeslineares,segue-sequea��~� S a , bd��� S b , ���~� S � e �;�~� S � . O sexto termo y resultay F � r¥ ¹ Q � r��¥¬� ¹ Q� Ö r��~� ¥¬� ¹ Q�¥ ¹ Q r×� S Q ¥¬�ur¥
Paraummodelodeaço( ¥p�(+*)N!`] { �0! K N/mm2)àescala� / �0! ,¹ ���"!*)}� {z| @`-'� | @�)W- cma����"!�)Y� { ��-�+'�p�0-*),+ cmbd���"!*)}� { ��-'�p��),- cm�`�±�(!�)Y� {�| !�� | cmr��~� !*)}� Q { +*)N!`] { �0! K { +����)N! |?{ �0! R �°AV)W+�+ kN
O pontodo modeloondesedevemedira flechaé o ponto �;����!�)}��� e a flechadoprotótipo(viga real)é 6?�°6_�l��!�)Y���p�0!�6�� .
Nota:
Quandoseformulamcondiçõesdesemelhançaa partir daaplicaçãodo teo-remadeBuckinghamaomodeloeaoprotótipo,aoigualarmosostermosadi-mensionaispara osdoissistemase deduzirmosvaloresdeescalas,a análisedimensionalnadanosdiz,por si mesma,se, aoprocederassim,continuamosounãodentro doslimitesdevalidadeda lei queregeo fenômeno.

18 Capítulo1. ModelaçãoFísica
Porconseguinte,aodeduzirmosvaloresdeescalasa partir dasigualidadesdostermosadimensionais,precisamosestaralertaparanãosairdoslimitesdevalidadedalei.
Porexemplo,nocasodavigademadeirasimplesmenteapoiadaedoseumodeloem aço,devemosverificar seo comportamentodosmateriaisé elásticonosdoiscasos.
Da Resistênciados Materiais, [17], sabe-sequea tensãonormalmáximanasolicitaçãodeflexãocircularéØ
máx �ÚÙ máxÛ � @�r�a��m�¬1±a�� ¹ bJ� Qe,paraavigademadeiraresultaØ
máx � @ { +*�j!�!�! { ��-�+_! { �m�§1Ü��-�+_!`� | @`-_!`��-�! {z| !�! Q �"B*) | N/mm2
Como Ømáx �"B�) | N/mm2 Ý Ø;Þ4ßmadeira�p� | N/mm2
resultaqueavigademadeiraestásolicitadaemregimeelástico.A relaçãoentrea tensãonormal máximano modeloe no protótipo, resulta
aplicandoapropriedadedesemelhança:Ømáxß �Ø
máx� r��r a��a �[��1fa`�u� ¹ �l�[��1±a�� ¹ bbd� Ô ���� Õ Q � S Q ¥§�¥ S �S �S Q � ¥§�¥
Porconseguinte,a tensãonormalmáximano modelodeaçoseráØmáxß � � ¥§�¥ Ø máx � +*)N!`] { �0! K��)N! |L{ �0! R { B�) | �X�0@�@*)WB N/mm2
Como Ømáxß � �p�0@�@�)WB N/mm2 Ý Ø ÞJßaço �(+�+�! N/mm2
resultaquetambémo modelodeaçoestásolicitadaemregimeelásticoe a análisedoprotótipopodesersubstituidaporaanálisedo modelo.
Poderáserutilizadoo modeloemaçoparaqualquervalor dacarga?Vamosvero queaconteceseacargaaplicadanavigademadeiracrescede21 para31kN.
Utilizando as mesmasfórmulas,a tensãonormal na viga de madeiravai ser��+*)W+ N/mm2,o quesignificaqueavigademadeiraestásolicitadaaindaemregimeelástico.
Contudo,a tensãonormalmáximano modelodeaçopasaa ser +_A^-�),+ N/mm2,ultrapassandoa limite elástica.
Significaque,enquantoo protótipopor hipótesetemum comportamentoelás-tico, o modelopassaaterumcomportamentoelasto-plásticoeportantonãoécom-pativel como protótipo.
Capítulo 2
ModelaçãoMatemática
2.1 Intr odução
A simulaçãodeumasituaçãooudeumfenómenofísicoatravésdehipótesestradu-zidaspor expressõesmatemáticasqueconduzema funçõesquepermitemprever ocomportamentorelevantedeum sistema,sobo pontodevista técnicodeinteresseparao avalistadessasituaçãoou fenómeno,constituio quesedesignapor modelomatemático.
Semprequea exploraçãodaspotencialidadesdo modeloexigema introduçãodetécnicasnuméricasoucomputacionais,diz-se,emboracomrigor discutível,queo modelo(matemático)énuméricooucomputacional.
A procuradedefiniçãomaisrigorosademodelomatemáticonãopareceindis-pensável, podendosatisfazera seguinte:ummodelomatemáticoéumaconstruçãoabstracta,simplificada,relacionadacomumapartedarealidade,criadaparaanali-sarumproblema,traduzidanalinguagemprópriadaMatemática[4].
Ao falar em simplificaçõesestáa reconhecer-se quehá variáveis quenãosefazemintervir no modelo,soba hipótesede sepoderemdesprezarasrespectivascontribuiçõesparao fenómenoquesepretendeentender. Algumasdestasvariáveispoderãoserindispensáveisaoestudodo mesmosistemafísico seo objectodo es-tudo for diversodaquelequeseestáa considerar:e.g. sefor desejadoconheceradeformaçãodeumavigasoba acçãodo própriopeso,o respectivo modelonãoin-clui arepresentaçãodoamortecimentooudasaceleraçõesinduzidasporumaacçãosísmicasobrea mesmaviga.
Há,ainda,nosmodelosparâmetrosourelaçõesquesãodados,e.g.asforçasex-ternasou a relaçãotensão-deformação(emcertosproblemas)e queseconsideramvariáveisexógenas.
As quantidadesque se pretendeque o modelo permita prever e quantificarchamam-sevariáveisendógenas.
As definiçõesdasvariáveisconstituemashipótesesdomodelo.Ao modelarumsistematemqueseterumaatitudedeobservaçãoampladofenómenoedosistema,evitandodesprezarou ignoraro queé significativo ou concluir apressadamenteapartir deumaobservaçãoparcial.
19
20 Capítulo2. ModelaçãoMatemática
Osmodelostêmqueserensaiados,i.e. temquesecompararasprevisõesquepossibilitamcomosresultadosconhecidosparacasosconcretos.
A eventualdivergênciaderesultadosobrigaa rever ashipótesesfeitase asva-riáveisescolhidaseaprocederaalteraçõesatéqueo modelopareçafiável ecertifi-cado.Nemsempreestaverificaçãoépossível, sejapeloscustos,pelasdificuldadeslogísticasou pelocarácterextremoda realidadesimulada(war games),masdevesersempretentada.
Em EngenhariaCivil a modelaçãopratica-see.g. emanálisedeestruturas,namecânicade fluidos, nos isolamentosacústicose térmicos,na formaçãode filasde esperanosterminaisde transportese no estudode propriedadesde difusãodehumidadeemmateriaisdeconstrução.
No casodossistemasmecânicos,desdea publicaçãodosPrincípiosdaMecâ-nicapor I. Newtonem1687queseconsideraqueossistemasmecânicos,emgeral,sepodemestudarcomomecanismossujeitosa leis de movimentoqueé possívelestudar.
Há, assim,um conjuntoreduzidodeexpressõesdaFísicaqueregeo compor-tamentomecânicodo sistema.A procurade traduzirpor expressõesmatemáticasa complexidadedo movimentoe dadeformaçãodo corpoconduzaosrespectivosmodelosmatemáticos.
O rigor aparentedasexpressõesdeduzidasdosmodelosmatemáticosnãoper-mite,noentanto,concluirquesãoexactassobo pontodevistadofenómenonaturalconcretizado.A fasedecriaçãodemodeloécríticaparaaqualidadedosresultadosobtidose estestêmqueserexaminadospor comparaçãocomaproximaçõesmuitosimples,bemcomo,inicialmente,por benchmarkingadequado.
O conhecimentodaslimitaçõese doslimites doserrosimplícitosno modeloéimperativo semprequehá riscosparaa vida humanaou parao bemestare segu-rançadaspessoaseobrigaàanálisedetalhadadasmetodologiasusadas.
2.1.1 Importância da ComputaçãonosModelosMatemáticos
A modelaçãomatemáticano seurápidodesenvolvimentoinicial assentouemsec-toresdo conhecimentomatemáticoque,noscasosem quea admissibilidadedassimplificaçõespermitiu,asseguravama existênciadesoluçõese a suaestabilidadee,emmuitoscasos,conduziamasoluçõesanalíticas.
O refinamentoda modelação,o aparecimentode novosmateriais,a possibili-dadee o interessede trabalharcomníveisde tensãoe deformaçãocadavezmaisaltos,o próprio progressocientíficoconduziram,porém,a casosemquea nãoli-nearidadedasformulações,por exemplo,ou o muito grandenúmerodeincógnitastornaraminviável quersoluçõesanalíticas,quera obtençãode resultadosa partirdealgumassoluçõesanalíticas,elasprópriascomplexas.
O aparecimentodemeiosdecomputaçãodecapacidadevertiginosamentecres-centeveio, nasúltimasdécadas,tornarpossível a soluçãonuméricadeproblemasdessanaturezaetornou-seindissociáveldaexploraçãodamaioriadosmodelosma-temáticosgeradosemEngenharia.
2.2. Estáticadecaboscomcargasparalelasdistribuídas 21
Oscomputadoressurgemdeváriosmodosnasoluçãodeproblemasfísicos[9],desdea aplicaçãoprogramadade métodosnuméricos,à exploraçãode basesdedados,à implementaçãoheurísticadesistemaspericiaise aoprópriocálculosim-bólico.
Nestadisciplinaprocurar-se-àmotivar osalunos(i) Construindomodelosma-temáticosparaproblemascorrentesde engenhariacivil; (ii) Explorandoa via dassoluçõesanalíticas;(iii) Recorrendoa algoritmosnuméricose tambémaocálculosimbólicoparaobtere interpretarresultadose fazerestudosdesensibilidadepara-métrica.
2.2 Estáticadecaboscomcargasparalelasdistrib uí-das
Oscabossãoelementosderesistênciautilizadosemmuitasaplicaçõesdeengenha-ria, tal comopontessuspensase atirantadas,teleféricos,cabosdefixaçãodetorresaltas,estruturasemtendas,etc.
De acordocom o carregamentoa queestãosujeitos,os cabosdividem-seemduascategorias: cabosquesuportamcargasconcentradase cabosquesuportamcargasdistribuídas.O estudoqueseguerefere-seasegundacategoria,poiséo tipodecarregamentomaisencontradonaprática.
Considere-sequeo caboé flexível (a suaresistênciaà flexãoé pequenae podeserdesprezada)e é inextensível (o comprimentoentredoispontosdo caboé cons-tante). ¿ àá â á â ã
ã�ä Áå
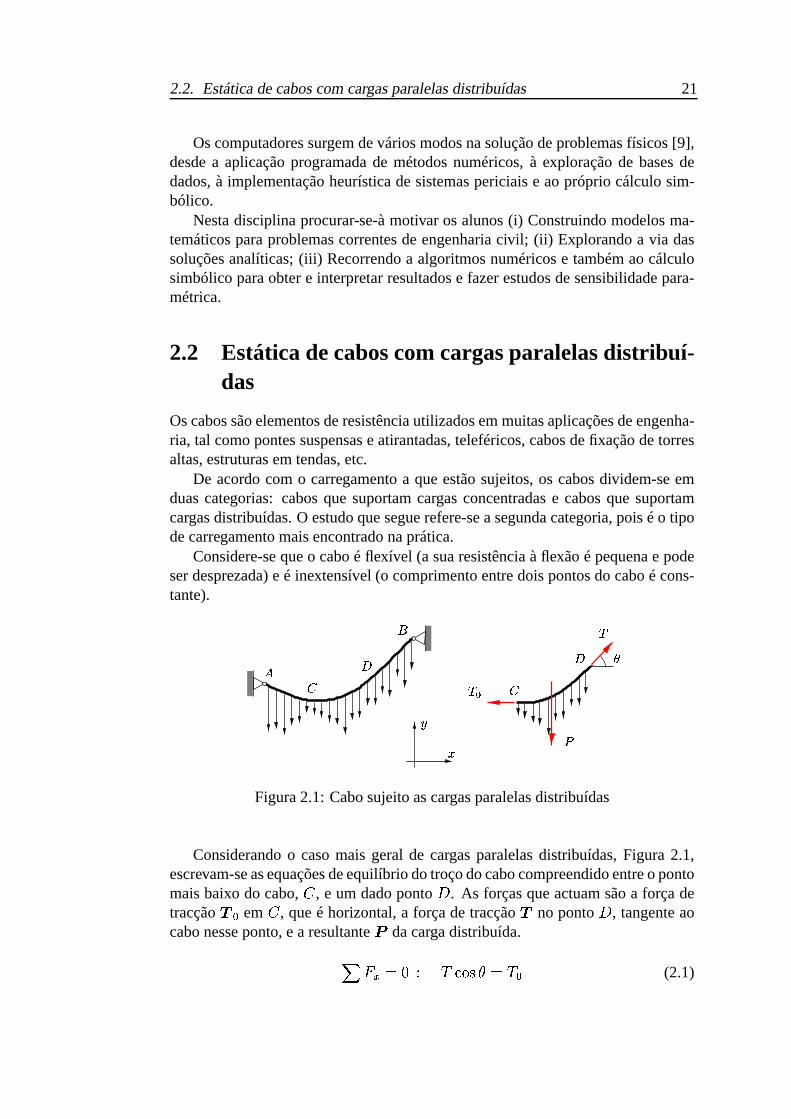
ÏÐFigura2.1: Cabosujeitoascargasparalelasdistribuídas
Considerandoo casomais geral de cargasparalelasdistribuídas,Figura 2.1,escrevam-seasequaçõesdeequilíbriodotroçodocabocompreendidoentreopontomaisbaixodo cabo, e , e um dadoponto C . As forçasqueactuamsãoa forçadetracçãoæ D em e , queé horizontal,a forçadetracçãoæ no ponto C , tangenteaocabonesseponto,e a resultanteç dacargadistribuída.è é�ê �"!�ë ìí�� ��7î<�°ì D (2.1)
22 Capítulo2. ModelaçãoMatemáticaè é�ï ��!�ë ìí�ðòñ§î��(r (2.2)ì��pó ì QD ��r Q e ôdõ�ñ§î�� rì D (2.3)
Verifica-sequeacomponentehorizontaldaforçadetracçãoæ éigualemtodosospontosdocaboequeacomponenteverticalde æ éigualàresultanteç dacargaaplicadaentreo pontomaisbaixo e o ponto C . A intensidadede æ é portantomínimanopontomaisbaixodocabo.
2.2.1 Caboparabólico
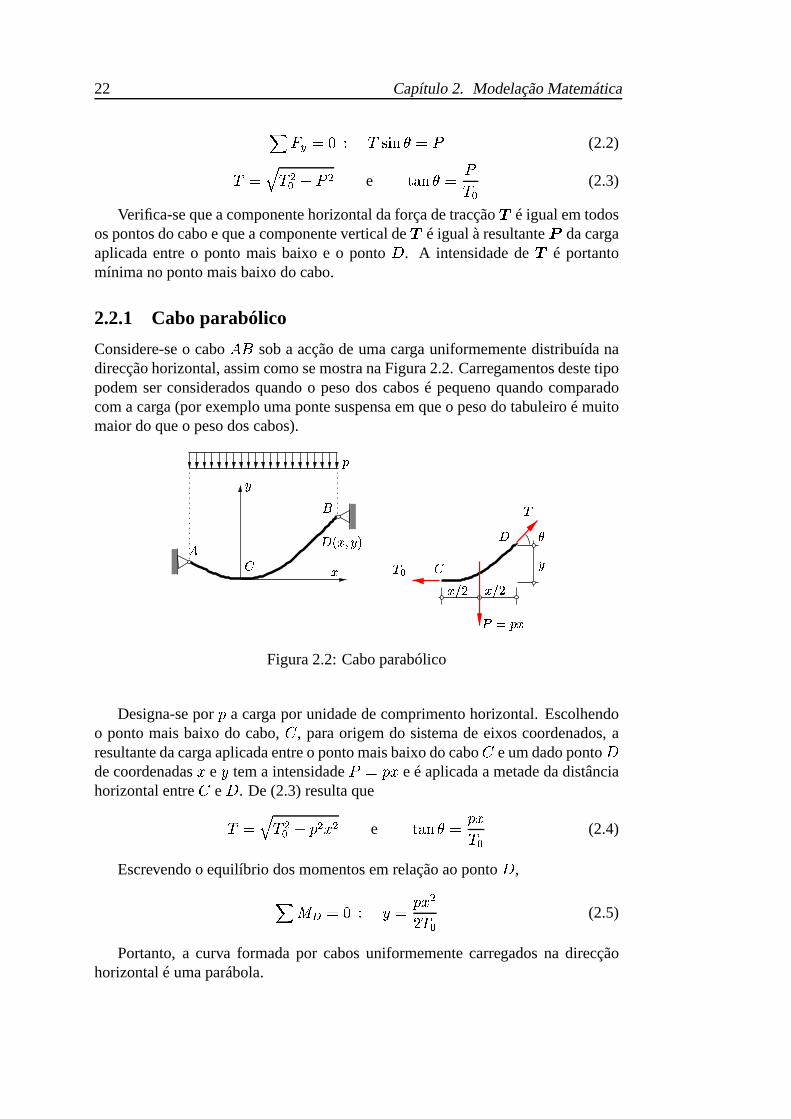
Considere-seo cabo º�ö soba acçãode umacarga uniformementedistribuídanadirecçãohorizontal,assimcomosemostranaFigura2.2.Carregamentosdestetipopodemserconsideradosquandoo pesodoscabosé pequenoquandocomparadocoma carga(por exemploumapontesuspensaemqueo pesodo tabuleiroé muitomaiordoqueo pesodoscabos).
¿ à á â ãã�ä
åáÐ
Ï÷
Á�ø ÷�ÏÐÏ�ùJú Ï`ùJúâ'û Ï�üoÐ�ý
Figura2.2: Caboparabólico
Designa-sepor a cargapor unidadedecomprimentohorizontal.Escolhendoo pontomaisbaixo do cabo, e , paraorigemdo sistemade eixoscoordenados,aresultantedacargaaplicadaentreo pontomaisbaixodocaboe eumdadoponto Cdecoordenadas� e 6 tema intensidader��� V� eé aplicadaametadedadistânciahorizontalentre e e C . De (2.3) resultaqueì°�pó ì QD �þ Q � Q e ôdõ�ñ§î�� V�ì D (2.4)
Escrevendoo equilíbriodosmomentosemrelaçãoaoponto C ,è Ù ÿ �(!�ë 6?� V� Q+�ì D (2.5)
Portanto,a curva formadapor cabosuniformementecarregadosna direcçãohorizontalé umaparábola.
2.2. Estáticadecaboscomcargasparalelasdistribuídas 23
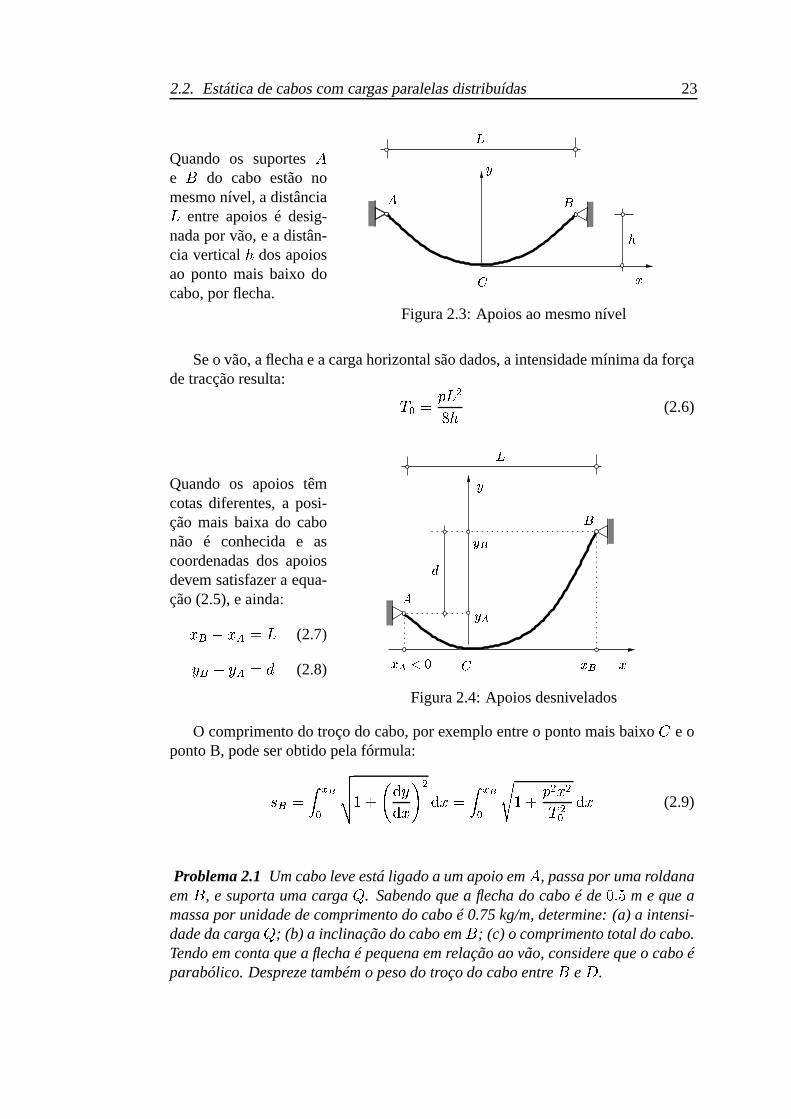
Quando os suportes ºe ö do cabo estão nomesmonível, a distância� entre apoiosé desig-nadapor vão,e a distân-cia vertical 8 dosapoiosao ponto mais baixo docabo,por flecha.
пá
àÏ
Ê �Figura2.3: Apoiosaomesmonível
Seo vão,aflechaeacargahorizontalsãodados,a intensidademínimadaforçadetracçãoresulta: ì D � ;� QB�8 (2.6)
Quando os apoios têmcotasdiferentes,a posi-ção mais baixa do cabonão é conhecida e ascoordenadasdos apoiosdevemsatisfazera equa-ção(2.5),eainda:���í1f��� �"� (2.7)6��í1 6�� �"� (2.8)
àÊÐ
Ïá¿ Ñ
Ï��Ï��� Ð��Ð
Figura2.4: Apoiosdesnivelados
O comprimentodo troçodo cabo,por exemploentreo pontomaisbaixo e e opontoB, podeserobtidopelafórmula:S ��� � ê��D ���� � � Ô�� 6� � Õ Q � � � �
ê��D � � � Q � Qì QD � � (2.9)
Problema 2.1 Umcaboleveestáligadoa umapoioem º , passapor umaroldanaem ö , e suportaumacarga � . Sabendoquea flecha do caboé de !*),- m e queamassapor unidadedecomprimentodocaboé 0.75kg/m,determine:(a) a intensi-dadedacarga � ; (b) a inclinaçãodocaboem ö ; (c) o comprimentototal docabo.Tendoemcontaquea flecha épequenaemrelaçãoaovão,considerequeo caboéparabólico.Desprezetambémo pesodo troçodo caboentre ö e C .
24 Capítulo2. ModelaçãoMatemática
Ê ø�� m � ø ���� m�¿ à
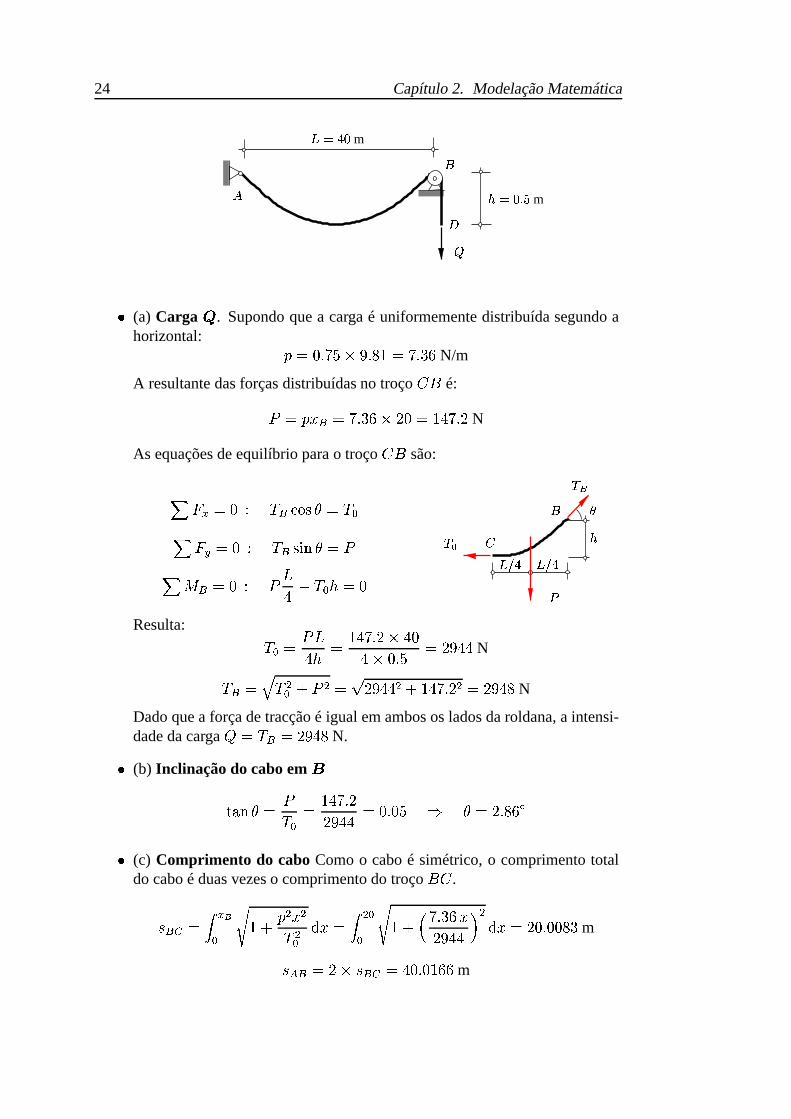
â= (a) Carga . Supondoquea cargaé uniformementedistribuídasegundoa
horizontal: 2�(!�)W]�- { M�)NB��U�q]*) | @ N/m
A resultantedasforçasdistribuídasno troço e<ö é:rq�~ V�����(]*) | @ { +�!��X�jA^]*)W+ N
As equaçõesdeequilíbrioparao troço e<ö são:è é�ê ��!�ë ì!���� ��7î���ì Dè é�ï �"!Äë ì!�'�ðòñ�î��"rè Ù ���"!�ë r � A 1vì D 8·��!á à ã �
ã äå
Á�
Ê ù � Ê ù �Resulta: ì D � r<�A^8 � �jA^]�),+ { A`!A { !�)W- �q+_M�A�A Nì!�z� ó ì QD ��r Q �#" +_M�A�A Q ����A^]*)W+ Q �(+�M�A�B N
Dadoquea forçadetracçãoé igualemambososladosdaroldana,a intensi-dadedacarga ���°ì!�z�"+�M�A`B N.= (b) Inclinação do caboem $ô4õ�ñ�î�� rì D � �jA^]*)W++�M�A�A �"!�)N!`- Ö î��"+*)WB�@�%= (c) Comprimento do cabo Comoo caboé simétrico,o comprimentototaldo caboéduasvezeso comprimentodo troço ö e .S � g � � ê��D � � � Q � Qì QD � �«� � QHDD � � � ]�) | @��+_M�A�A ® Q � �¤�"+�!�)N!�!�B | mS �&���q+ { S � g �°A`!�)N!��0@�@ m
2.2. Estáticadecaboscomcargasparalelasdistribuídas 25
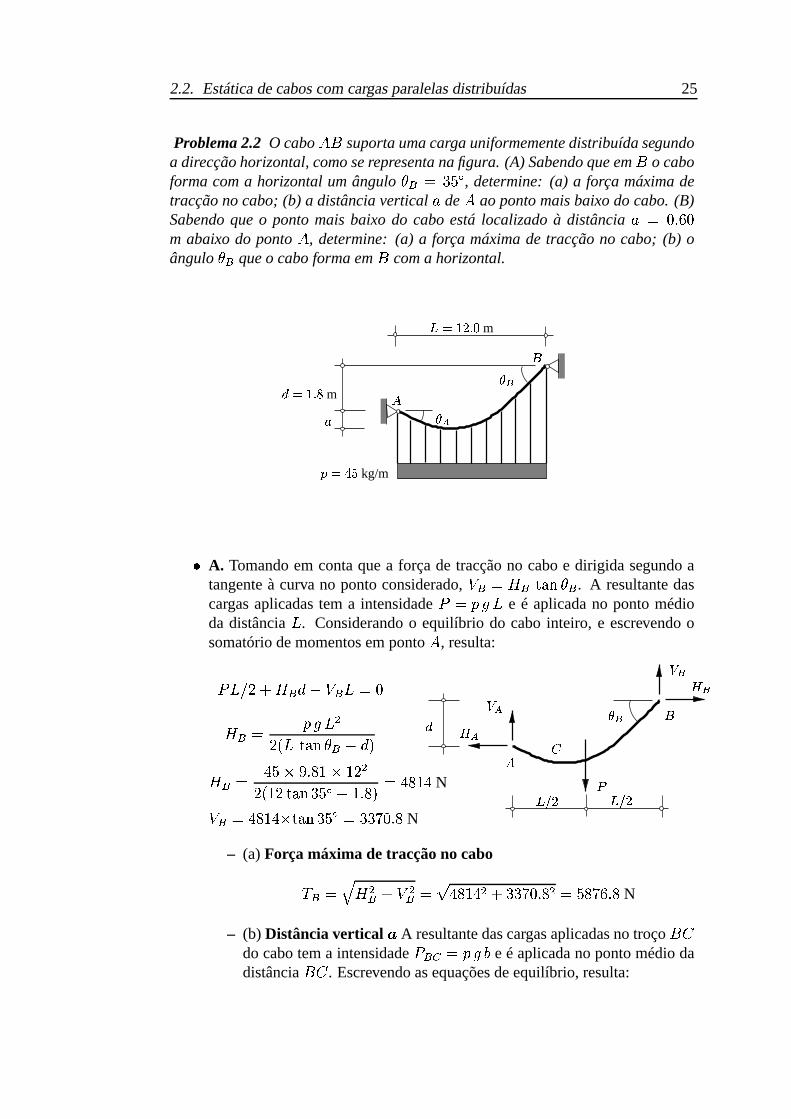
Problema 2.2 O cabo º�ö suportaumacargauniformementedistribuídasegundoa direcçãohorizontal,comoserepresentanafigura. (A) Sabendoqueem ö o caboforma coma horizontalum ângulo î'�°� | - % , determine:(a) a força máximadetracçãono cabo;(b) a distânciavertical a de º ao pontomaisbaixodo cabo.(B)Sabendoqueo pontomaisbaixo do caboestálocalizadoà distância a°� !�)W@�!m abaixodo ponto º , determine:(a) a força máximade tracçãono cabo; (b) oângulo î'� queo caboformaem ö coma horizontal.
à¿ å å �Ñ ø)( � * mÎ Ê ø+( ú'� m
÷ ø,� � kg/m
= A. Tomandoem contaquea força de tracçãono caboe dirigida segundoatangenteà curva no pontoconsiderado,-����/.0��ô4õ_ñUî'� . A resultantedascargasaplicadastem a intensidader×�± T � e é aplicadano pontomédioda distância� . Considerandoo equilíbrio do cabointeiro, e escrevendoosomatóriodemomentosemponto º , resulta:r��Å��+§�1.0�Z�<12-���� �(!.0��� T � Q+����Äô4õ_ñ§î'�í1±��.3��� A^- { M*)WB�� { �0+ Q+V�[��+�ô4õ�ñ | - % 1���)WB� ��A`B���A N-����"A`B��jA { ôdõ�ñ | - % � |�| ]�!�)NB N
ÑÊ ùJú Ê ùJú
à¿ Á4 �5 �4 5 á å �
– (a) Forçamáxima de tracçãono caboì6��� ó . Q� �7- Q� �#" A`B��jA Q � |�| ]�!�)NB Q �(-_B`]�@�)NB N
– (b) Distânciavertical 8 A resultantedascargasaplicadasnotroço ö�edo cabotema intensidader9� g �~ T b e é aplicadano pontomédiodadistânciaö�e . Escrevendoasequaçõesdeequilíbrio,resulta:

26 Capítulo2. ModelaçãoMatemática
è é�ê �"!~ë ì D �/.0�è é�ï �"!~ë -����"r:� gè Ù ���"!�ë ì D �`¦���r9� g bÓ��+4 �5 �
ã�ä ø�4 �á àÑ<; È ùÓú È ùÓúÁ � ;
b¬� -�� T � |�| ]�!�)NBA^- { M�)NB�� �q]*)N@ | -�] m
�`¦�� T b Q+�.0� � A^- { M�)NB�� { ]*)N@ | -�] Q+ { A`B���A �q+*)N@`] |�| m
aL�"�`¦�1 �L�(+�)W@`] |�| 1���)NB<�"!�)WB�] |�| m= B. Dadasasdistâncias� , � e a , esabendoqueo caboéparabólico,podemosescrever:
������������ ����������� 6��«�>= � Q�+�ì D6����?= � Q �+�ì D���í1f��� ��� Ö����� ���� ������ ® Q � 6��6�����í1v�������
onde= �~ T éa cargauniformementedistribuídamedidaemN.
Tomandoemcontaque ���zÝ�! e ���A@Ü! , resulta:��� �X1���� � 6�6�� e ����� ��Å� � 6�6������� ��+� � � !�)W@+*)NA �"B m e ��� �X1�B � !�)N@+*) A �X1UA m
ì D � = � Q �+�6�� � A`- { M�)WB*� { B Q+ { +*)NA �(-�B�B�@ N
Escrevendoasequaçõesdeequilíbriono troço ö�e :.0����ì D �q-�B�B�@ N-����(r9� g �~ T ���z��A^- { M�)NB�� { B�� | - | ��)N@ N
2.2. Estáticadecaboscomcargasparalelasdistribuídas 27
– (a) Forçamáxima de tracçãoì6��� ó . Q� �7- Q� � " -_B�B�@ Q � | - | ��)N@ Q �(@�B�@�AV)W+�! N
– (b) Ângulo î'�ôdõ�ñ§î'�z� -��.0� � | - | ��)W@-_B�B�@ ��!�)W@ Ö î'�z� | !�)WM�@ %2.2.2 Catenária
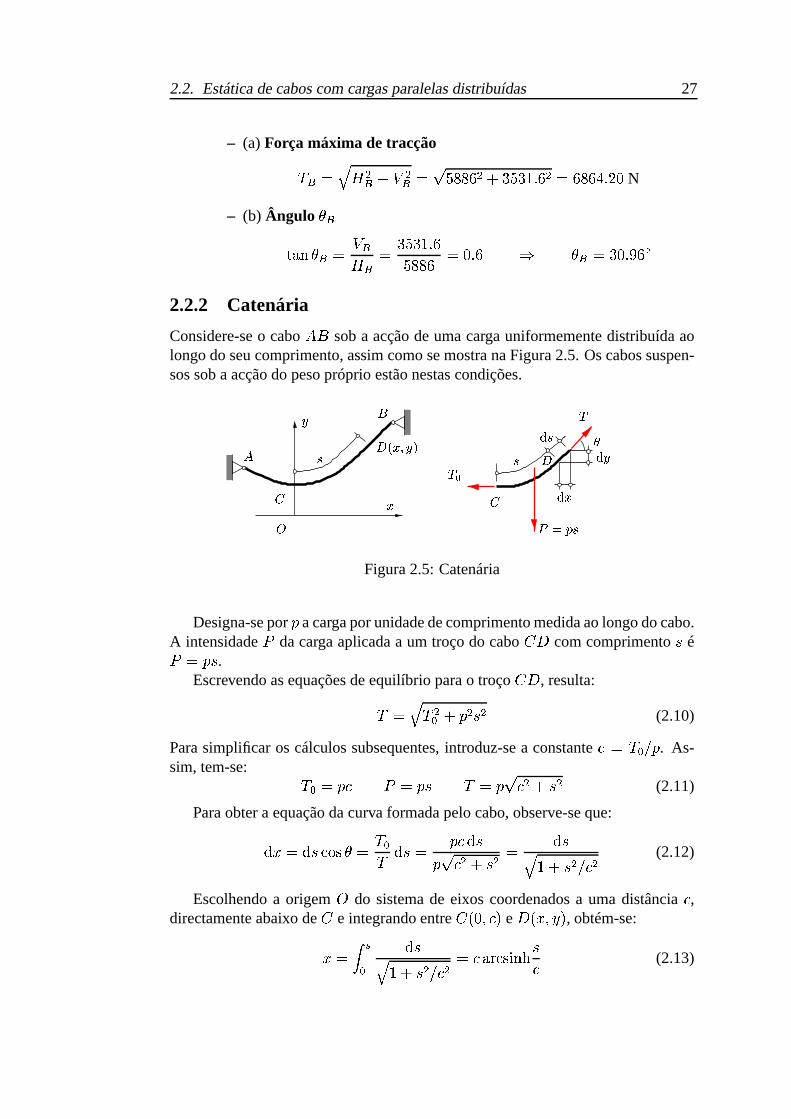
Considere-seo cabo º�ö soba acçãodeumacargauniformementedistribuídaaolongodoseucomprimento,assimcomosemostranaFigura2.5.Oscabossuspen-sossobaacçãodo pesopróprioestãonestascondições.¿ à ã
ã�äâ�û Ï�ü�Ð�ýá ÏÐ
BC á âC D C D Ï D ÐÁ�ø ÷�C
åFigura2.5: Catenária
Designa-sepor acargaporunidadedecomprimentomedidaaolongodocabo.A intensidader dacargaaplicadaa um troçodo cabo e�C comcomprimentoS érq�~ S .
Escrevendoasequaçõesdeequilíbrioparao troço e�C , resulta:ì�� ó ì QD �þ Q S Q (2.10)
Parasimplificar oscálculossubsequentes,introduz-sea constante3Â��ì D �Ó . As-sim, tem-se: ì D �± 73 r�� S ì��± E" 3 Q � S Q (2.11)
Paraobtera equaçãodacurva formadapelocabo,observe-seque:� �«� � S �� ��7î'� ì Dì � S � ;3 � S " 3 Q � S Q � � Só � � S Q ��3 Q (2.12)
Escolhendoa origem F do sistemade eixoscoordenadosa uma distância 3 ,directamenteabaixode e e integrandoentre e2�o!��43� e C��$���d6� , obtém-se:�¤� �3GD � Só � � S Q ��3 Q �"3/õ�H���ðòñ�� S 3 (2.13)

28 Capítulo2. ModelaçãoMatemática
ou S ��3'��ðòñV� � 3 (2.14)
Estaequaçãorelacionao comprimentoS do troço e<C do cabocom a distânciahorizontal� .
A relaçãoentreascoordenadas� e 6 podeserobtidaagoraescrevendo,
� 6?��ô4õ�ñ�î � �«� rì D � �¤� S3 � �¤���ðòñ�� � 3 � � (2.15)
e integrandoentre eª��!*�43� e Cz�����d6V :6 1±3u� � êD ��ðòñV� � 3 � �¤�(3JI �� ��� � 3LK ê D �(3 �� ���� � 3 1�� ® (2.16)
ou 6?�(3��� ��� � 3 (2.17)
Estaé a equaçãode umacatenáriade eixo vertical. A ordenada3 do pontomaisbaixodocabo,chama-separâmetrodacatenária.
Elevando ao quadradoambosos membrosdas equações(2.14) e (2.17) esomando-os,obtém-seaseguinterelaçãoentre6 e S :6�Q�1 S Ql�"3JQ (2.18)
Utilizandoesteresultado,asrelações(2.11)podemserescritas:ì D � 73 r��± S ì°�± ;6 (2.19)
A última relaçãoindicaquea força de tracçãoemqualquerpontodo caboé pro-porcionalàdistânciaverticaldo pontoà linhahorizontalquerepresentao eixo � .
Nota-sequecertosproblemasdecatenáriasenvolvemequaçõestranscendentes.No entanto,quandoaflechadocaboépequenaemrelaçãoaovão,acargapodeserconsideradauniformementedistribuídana direcçãohorizontal,e a catenáriapodesersubstituídapor umaparábola.
Problema 2.3 Umcabouniformecom -_! N/mdepesoestásuspensoemdoispon-tos, º e ö , comosemostranafigura. Determine:(a)osvaloresmáximosemínimosda intensidadeda forçadetracçãono cabo;(b) o comprimentodocabo.
à¿ ( �M m N m
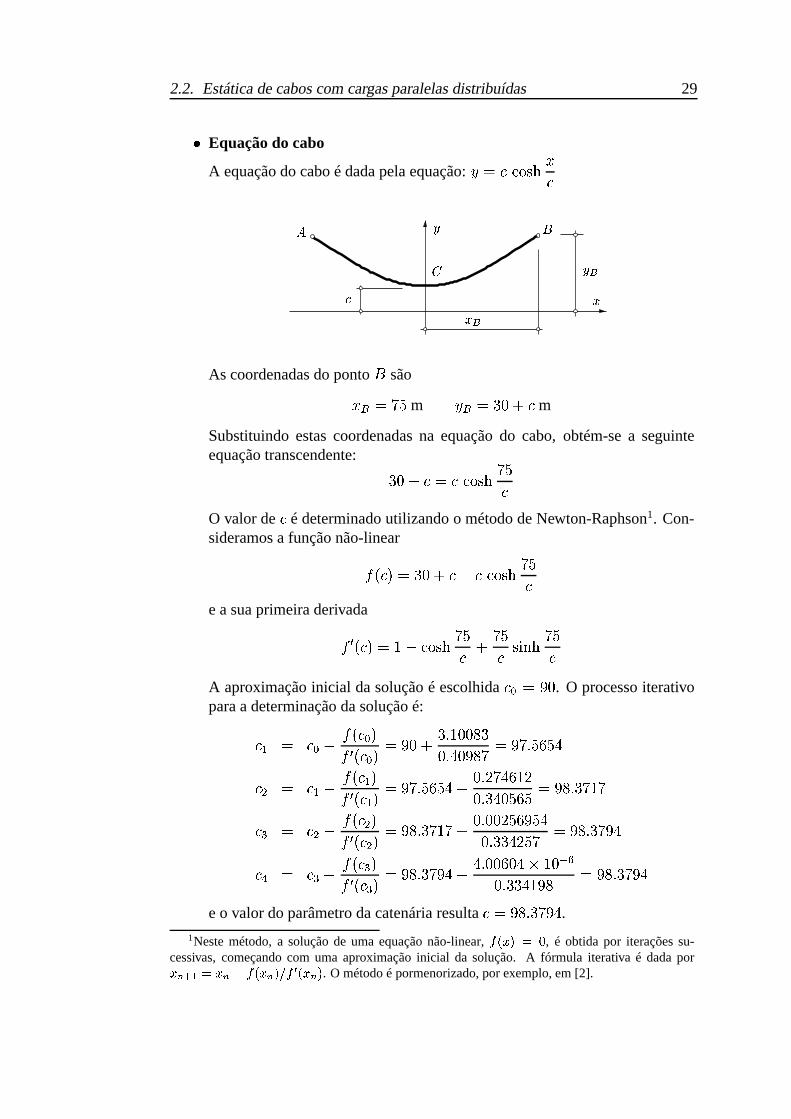
2.2. Estáticadecaboscomcargasparalelasdistribuídas 29= Equaçãodo cabo
A equaçãodo caboédadapelaequação:6?�(3��� ��� � 3à¿ Ð Ð��O á ÏÏ �As coordenadasdo ponto ö são�����(]�- m 6���� | !§��3 m
Substituindoestascoordenadasna equaçãodo cabo, obtém-sea seguinteequaçãotranscendente: | !���3§��3��� ���� ]�-3O valor de 3 é determinadoutilizandoo métododeNewton-Raphson1. Con-sideramosa funçãonão-linear#���3�x� | !���3 1 3Ã�� ���� ]�-3easuaprimeiraderivada# £ �o3���p�§1 �� ��� ]�-3 � ]�-3 �ðòñ�� ]�-3A aproximaçãoinicial dasoluçãoé escolhida3 D � M�! . O processoiterativoparaadeterminaçãodasoluçãoé:3 : � 3 D 1 #���3 D # £ ��3 D �"M�!�� | )}�0!�!�B |!*)NA`!�M�B`] �(M`]�),-�@�-_A3 Q � 3 : 1 #���3 : # £ ��3 : �"M`]*)W-�@`-�A�� !�)W+�]_A`@*��+!�) | A`!`-_@`- �(M�B�) | ]*�0]3Jt � 3 Q 1 #���3 Q # £ ��3 Q �"M�B�) | ]*�0]¬� !�)N!�!`+�-_@�M`-_A!�) |�| A`+�-�] ��M�B�) | ]�M�A3 R � 3Ót�1 #���3JtJ# £ ��3JtJ �"M�B�) | ]�M_A�� AV)N!�!�@�!_A { �0!�9 F!�) |�| AV�0M�B �(M�B�) | ]�M_Aeo valordoparâmetrodacatenáriaresulta3§�"M�B�) | ]�M�A .
1Nestemétodo,a soluçãode uma equaçãonão-linear, P û Ï�ý ø , é obtida por iteraçõessu-cessivas, começandocom uma aproximaçãoinicial da solução. A fórmula iterativa é dadaporÏQMRTS ø ÏQVU P û Ï�Q�ý�ù P�W û ÏQ�ý . O métodoé pormenorizado,porexemplo,em[2].

30 Capítulo2. ModelaçãoMatemática= (a) Valoresmáximo emínimo da forçade tracçãoì máx �°ì6���~ ;6��í�~ �� | !���3�x�q-�! { � | !���M�B�) | ]�M_A^��(@�A��0B�)NM`- Nì mín �°ì D �~ 73¬�(-�! { M�B�) | ]�M�A���A`M��0B�)NM`] N= (b) Comprimento do cabo
Metadedo comprimentodoarcoéobtidoutilizandoa relaçãoentre6 e S :6�Q� 1 S Q g � ��3ÓQ Ö S g ���#" �0+�B�) | ]�M�A Q 1±M�B�) | ]�M�A Q �"B�+*)NA`]�B�B`] m
O comprimentototal docaboé,então:S �X���q+ S g ���"+ { B�+*)NA`]�B�B`]Ã�X�j@�AV)NM`-�]�]_A m
Problema 2.4 O cabo º�ö temmassapor unidadede comprimentode A^- kg/m.Sabendoqueo pontomaisbaixo do caboestálocalizadoà distância a � !�)N@ mabaixodo apoio º , determine: (a) a localizaçãodo pontomaisbaixo e ; (b) aforçadetracçãomáximano cabo.
Ñ ø)( � * mÎ Oà¿ Ê øY( ú�� m
á ÐÏUZÏ Ï �B
= Dadasas distâncias� , � e a , e sabendoque a curva de equilíbrio é umacatenária,podemosescrever:���������� ��������� ���í1 ��� �(�6��¤��3��� ���� ���36��í�(3��� ���� ���3 Ö
����������� ���������� ���z�(���±���6��3 �"�� ���� ���36��3 �"�� ��� �z�±���3������ ����� õ�H����� ��� 6��3 �(õ�H���� ���� �� ��� ���3 ® �[Z ���3õ�H����� ��� 6��3 �(õ�H����� ��� �� ���� ���±���3 ® �[Z �z�±���3

2.2. Estáticadecaboscomcargasparalelasdistribuídas 31
Tomandoemcontaque ���zÝÜ! e ���±���+@Ü! , resulta:1§���í�(3Ìõ�H����� ��� 6�3 �(3ÌõH���� ��� 3x��a3 �"3Ìõ�H���� ���� � � a 3 ®���±��� �"3Ìõ�H���� ���� 6��3 �(3Ìõ�H����� ��� 3���aÃ�~�3 �"3/õ�H���� ���� Ô � � a����3 Õ�f�"3Ìõ�H����� ��� Ô � � a��~�3 Õ ��3/õ�H���� ���� � � a 3 ®O valor do parâmetroda catenáriaé determinadoutilizando o métododeNewton-Raphson,com2#���3�x�(3A\ õ�H���� ���� Ô �Å� a����3 Õ �~õ�H���� ���� � � a 3 ®6] 1 �# £ �o3�x�X1 � aa��Ä+�3 1 � aÃ���a��~���Ä+_3 �Ãõ�H����� ��� �l� a 3 ® �Ãõ�H����� ��� Ô �l� aÃ�~�3 ÕSubstituindoosvaloresnuméricos,a funçãoeasuaderivadasão#���3�x�X1���+§��3^I õ�H���� ���� � � !�)N@3 ® ��õ�H����� ��� �l� +*) A3 ® K# £ �o3�x�X1 � !�)N@!*)W@��Ä+_3 1 � +*) A+*) AU�Ä+�3 �Ãõ�H���� ���� � � !�)W@3 ® �Ãõ�H����� ��� � � +*) A3 ®ecomeçandocomumaaproximaçãoinicial 3 D �X�0! , resulta:w 3Jc #���34c� #�£$�o3Jc� 3Jc n : ��3JcÃ1~#���34c`���#�£ ��34c`0 10.0000 1���),]�-�@ | @ 0.526373 13.33671 13.3367 1U!�)}�0+�B`]�!`- 0.454486 13.61992 13.6199 1�!�)N!�!�!�@�B | ���0- 0.449652 13.62143 13.6214 1UB�)N@`-�@�!�@`_`�0! 9 F 0.449627 13.6214
O parâmetrodacatenáriaé,portanto,3¬�X� | )N@`+*��A m.= (a)Localizaçãodo ponto a1����í�"3/õ�H���� ���� � � a 3 ® �p� | )N@`+*�jAÅõ�H����� ��� � � !�)W@� | )N@`+*��A ®��� ��1UA�)W!`+_B`+�B m ���z����+�1 AV)W!�+�B`+�B'�q]�)WM`]���]�+ m= (b) Forçade tracçãomáximaì máx �~ V6����°A^- { M�)NB�� { �m��)NB§��!*)W@���� | )W@�+*�jA^x�"]�!`]�+*)N@`- N
2Seaexpressãoanalíticadaderivadaédifícil deserencontrada,podeserutilizadaaaproximação
daderivadaP W û Ï�ý!b P û Ïdc3euýXU P û Ï�ýe , onde e é umintervalopequeno,por exemplo f� ( .

32 Capítulo2. ModelaçãoMatemática
Oscabossuspensossoba acçãodo pesoprópriosãouniformementecarregadosaolongodo comprimentoenãonadirecçãohorizontal,eportantonãoformamumparábola.O erro introduzidoaosupor-sea formaparabólicaé pequenoquandoaflechaé suficientementepequenaemrelaçãoaovão. Paraexemplificar, osresulta-dosobtidosemProblema2.2 e Problema2.4sãoapresentadosjuntos.Na Tabela,aparecetambémo comprimentoS ea representaçãográficadacurvadeequilíbrio.
Caboparabólico Catenária� m 12 12� m 1.8 1.8a m 0.6 0.6� g 1f��� m 4 4.028��� 1 � g m 8 7.972ì D N 5886 6013.17ì máx N 6864.20 7072.65
Equação 6?�"!�)W! | ]�-��7Q 6��X� | )N@`+*�jA��� ��� �� | )N@`+*��A ®S m 12.5161 12.5219
Gráfico -4 -2 2 4 6 8
0.2
0.4
0.6
0.8
1
1.2
1.4
PSfragreplacements êï
-4 -2 2 4 6 8
13.6
13.8
14.2
14.4
14.6
14.8
15
PSfragreplacements
êï
O comprimentodascurvasdeequilíbriofoi calculadoapartir dadefinição,S � � G �Ghg � S � � ê �ê g ���� � � Ôi� 6� � Õ Q � �Osintegraisforamcalculadosutilizandoo programaMathematica[19]. O mesmofoi utilizadopararepresentargraficamenteascurvasde equilíbrio. Assim,paraocaboparabólico,
In[1]:= Integrate[Sqrt[ 1+(0 .0 75 x)^2],{x,-4,8}]Out[1]= 12.5161In[2]:= Plot[0.0375 x^2,{x,-4,8}]Out[2]= -Graphics-
enquantoparaacatenária,
In[3]:= Integrate[Sqrt[ 1+(S in h[ x/1 3. 6214]^ 2)] ,{ x, -4 .0 28, 7. 972} ]Out[3]= 12.5219In[4]:= Plot[13.6214 Cosh[x/13.6214] ,{ x, -4 .02 8, 7. 972} ]Out[4]= -Graphics-
2.3. Dinâmicadoscabos 33
Paraumavariável qualquer> , o erro relativo introduzidoao supor-sea formadeequilíbrioparabólicaemvezdecatenária,édefinidocomoj ´ � ¨¨¨¨¨ > catenária1 > parábola> catenária
¨¨¨¨¨ { �j!�! %
Assimsendo,oserrosrelativosintroduzidosno valor do comprimentoe datensãomínimaemáximasão: j G �(!�)N!�A`@ | �0B�B %j�kml �q+*)Y���jA�B�@ %j�k
máx�q+*)NM�A^]�+�] %
2.3 Dinâmica doscabos
Oscabos,vistoscomoelementosde resistênciaemaplicaçõesdeengenharia,sãosujeitosa váriassolicitaçõesdinâmicas,taiscomocargasmóveis,acçãodo vento,sismos,etc. Tais solicitaçõesinduzemem cabospequenasvibraçõesqueconsti-tuemo assuntodoestudoquesegue.
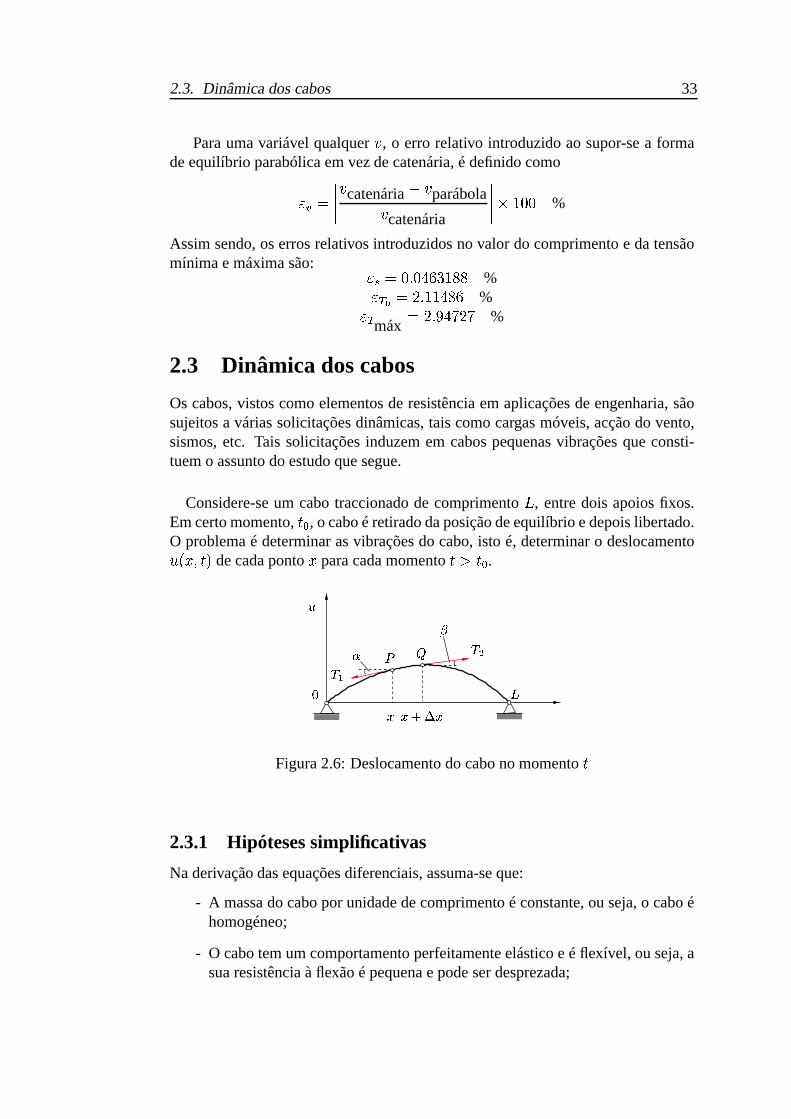
Considere-seum cabotraccionadode comprimento� , entredois apoiosfixos.Emcertomomento,� D , o caboéretiradodaposiçãodeequilíbrioedepoislibertado.O problemaé determinarasvibraçõesdo cabo,isto é, determinaro deslocamento�Í������� decadaponto � paracadamomento�d@Ä� D .
Ï«ÏVc�e Ï Ê n Á �ã S ãpoq r
Figura2.6: Deslocamentodo cabonomomento�2.3.1 Hipótesessimplificativas
Naderivaçãodasequaçõesdiferenciais,assuma-seque:
- A massado cabopor unidadedecomprimentoé constante,ou seja,o caboéhomogéneo;
- O cabotemumcomportamentoperfeitamenteelásticoeéflexível, ouseja,asuaresistênciaàflexãoépequenaepodeserdesprezada;

34 Capítulo2. ModelaçãoMatemática
- A forçadetensãono caboé grandequandocomparadacomo seupesopró-prio eassimo pesopodeserdesprezado;
- O cabotem pequenosmovimentostransversaisnum plano vertical, isto é,cadapartículado cabotem um movimento vertical e o deslocamentoe atangenteemcadapontosãopequenosemvalorabsoluto.
Considerandoválidasesteshipótesessimplificativas,asolução�Í�$����� daequa-çãodiferencialquevai serobtidadescreverárazoavelmenteaspequenasvibraçõesdocabofísico real,homogéneo,commassapequenae forçadetensãogrande.
2.3.2 Equaçãodasondasuni-dimensionais
Paraobteraequaçãodiferencialdeequilíbrio,considere-seasforçasqueactuamnotroçodo cabo r^� , vejaFigura2.6. Comoo cabonãoofereceresistênciaà flexão,a tensãoé tangenteaocaboemtodosospontos.Seja ì : e ì Q a tensãonospontosterminaisdo troço, r e � .
Comonãohá movimentohorizontal,asequaçõesde equilíbrio do troço r^�são: s é�ê �(!~ë ì : �� ���tþ��ì Q �� ��Lu���ì°�"3mv�w S �J) (2.20)
s é�w ���1x�×ëqì Q �ðòñyuí1 ì : ��ðòñztþ�|{~}��,� Q �� � Q (2.21)
A equação(2.21)é dividida em seguidapor ì , e tomandoem contao resul-tado(2.20),resulta:ì Q ��ðòñyuì Q �� ���u 1 ì : �ð}ñztì : �� ���t ��ô4õ�ñzu 1fô4õ�ñ�tþ� {V}��ì � Q �� � Q (2.22)
Mas,emcadamomento� , as ô4õ�ñ�t e ôdõ�ñzu sãoastangentesno caboem r e �eportanto: ô4õ�ñzt�� Ô � �� � Õ ê ô4õ�ñyu�� Ô � �� � Õ ê nX� ê (2.23)
Dividindoa equação(2.22)por }L� eutilizandoasigualdades(2.23),segue,�}�� \ Ô � �� � Õ ê nX� ê 1 Ô � �� � Õ ê ] � {ì � Q �� � Q (2.24)
Se }�� tendeparazero,de(2.24)resultaa equaçãodasondasuni-dimensional,� Q �� � Q ��3ÓQ�� Q �� � Q com 3ÓQl� ì { (2.25)

2.3. Dinâmicadoscabos 35
2.3.3 Método de separaçãodevariáveis.SériesdeFourier
Paradeterminaro movimentodocabo,devemosacharasoluçãodaequação(2.25),�:��������� , quesatisfazascondiçõesimpostaspeloproblemafísico. Comoo cabotemdoisapoiosfixos, temosduascondiçõesdefronteira, para����� e ���/� :�:���&�������/� e �:�h�y��������� ��� (2.26)
A formademovimentodocabovai dependerdodeslocamentoedavelocidadeinicial (no ���|� ). Considerandoo deslocamentoinicial � ���E� eavelocidadeinicial�!���E� , temosduascondiçõesiniciais:�:�������p��� � ���E� e � �� �~����� ���X� � �!���E� (2.27)
Determinaro movimentodo cabosignifica,portanto,determinara soluçãodaequação(2.25)quesatisfazascondições(2.26)e(2.27).Estasoluçãovai serobtidadeseguintemodo:
- Aplicandoo métodode separaçãode variáveis, vão resultarduasequaçõesdiferenciaisordinárias;
- Vai serdeterminadaasoluçãoquesatisfazascondiçõesdefronteiraparacadaumadestasequações;
- UtilizandoassériesdeFourier, assoluçõesvãosercompostasdemodoaob-ter a soluçãodaequaçãodasondas(2.25)quesatisfaztambémascondiçõesiniciais.
Duasequaçõesdiferenciaisordinárias
No métodode separaçãode variáveis, a soluçãoda equaçãodasondas(2.25) éprocuradadeforma �9�����������/¡����E�X¢������ (2.28)
queé um produtodeduasfunções,o cadaumadependentedeumasóvariável, �e � , respectivamente.Diferenciandoa equação(2.28)e utilizandocomonotaçãooponto,paraa derivadaemrelaçãoao � , e a linha, paraa derivadaemrelaçãoao � ,obtém-se, �L£ �� � £ �/¡¥¤¢ e ��£ �� � £ �/¡§¦ ¦¨¢ (2.29)
Inserindoosresultados(2.29)naequação(2.25),resulta,¡¥¤¢[�/© £ ¡J¦ ¦ª¢ou,dividindopor © £ ¡«¢ ,

36 Capítulo2. ModelaçãoMatemática
¤¢© £ ¢ � ¡ ¦ ¦¡Como a expressãoda esquerdasó dependede � e a expressãoda direita só
dependede � , paraquea igualdadeexistaparaqualquer� e � , resultaqueasduasexpressõesdevemserconstantes.Portanto,¤¢© £ ¢ � ¡ ¦ ¦¡ �|¬e, logodaí,asduasequaçõesdiferenciaisordinárias,¡§¦ ¦®¯¬y¡¥�/� (2.30)¤¢/2© £ ¬d¢#�|� (2.31)
comaconstante¬ , arbitrária.
Satisfaçãodascondiçõesde fr onteira
As soluções¡ daequação(2.30)e ¢ daequação(2.31)serãodeterminadasdetalmodoque ���/¡^¢ satisfazascondiçõesdefronteira(2.26),ouseja,�:�h�T�������/¡��h�p�X¢���������� e �:���z��������¡������X¢���������� ���
As soluções¡¥°[� e ¢#°[� nãosãodeinteresse,poisresulta��°[� , eportantoo caboestariaemrepouso.± Soluçãoda equação(2.30)
As condiçõesdefronteirapara ¡����E� são:¡��h�p���|� e ¡��h�����|� (2.32)
Procurandoumasoluçãodeforma ¡²�[³µ´�¶ , a equaçãocaracterísticaobtém-sedeforma, · £ ¯¬3�/�comassoluções
·!¸ �²§¹ ¬ e· £ �¥¹ ¬ . Sea constantearbitráriaé positiva,¬3�|º £ , asoluçãogeneralde(2.30)é¡¥��»Y³<¼ ¶d½1¾ ³¿À¼ ¶
e, tomandoemcontaascondições(2.32),resulta¡¥°[� .A únicaalternativa é de escolhera constante¬ negativa, ¬Á�Â�à £ . Nestecaso,asoluçãogeneralpodeserescritacomo¡¥�|»#Ä<Å�Æ�Ã&� ½1¾ Æ�ÇÉÈ�ÃX�

2.3. Dinâmicadoscabos 37
e tomandoemconta(2.32),¡����p����»|�/� e ¡��h����� ¾ Æ�ÇÉÈ�Ã��2�/�Deve serescolhido¾ Ê�Ë� , paranãoobterde novo ¡Ì°Í� , o quesignificaque Æ�ÇÉÈ�Ã��2�/� , ouÃ��2��ÎEÏ Ð Ã�� ÎEÏ� Î inteiro
Escolhendo¾ �ÒÑ , é obtidaumainfinidadede soluções,¡ÔÓL���E� , todaselassatisfazendoascondições(2.32)¡ÔÓX���E���|Æ�ÇÉÈ ÎEÏ� � ÎÕ�ÖÑ���×T�iØµØµØ (2.33)± Soluçãoda equação(2.31)
A constante¬ é restritaaos valores ¬0�Ö�à £ �²Ù��ÎEÏÔÚ���� £ e, portanto,aequação(2.31)tomaa forma,¤¢ ½ · £Ó ¢#��� · Ó«� ©MÎEÏ�cujasoluçãogeralé ¢JÓX������� ¾ Ó�Ä<Å�Æ · Óf� ½Û¾ÙÜÓ Æ�ÇÉÈ · Óf� (2.34)
As funções�LÓ&�����������/¡�ÓL���E��¢§ÓL����� , definidaspor�LÓ&�����������Ý� ¾ Ó�ÄmÅ�Æ · Óf� ½Û¾ ÜÓ Æ�ÇÞÈ · Óf���&Æ�ÇÞÈ ÎEÏ� � ÎÕ�ÖÑ���×T�iصØ<Ø (2.35)
são soluçõesda equaçãodas ondas(2.25) e satisfazemas condiçõesde fron-teira(2.26).
Cada ��Ó representa um movimento harmónico com a frequência· Ó�Ú�×fÏß�/©MÎiÚ�×�� ciclos por unidadede tempo. Estesmovimentossão conhe-cidospormodosprópriosdevibração. O primeiromodopróprio,obtidopor Îß�²Ñchama-seo modofundamental.
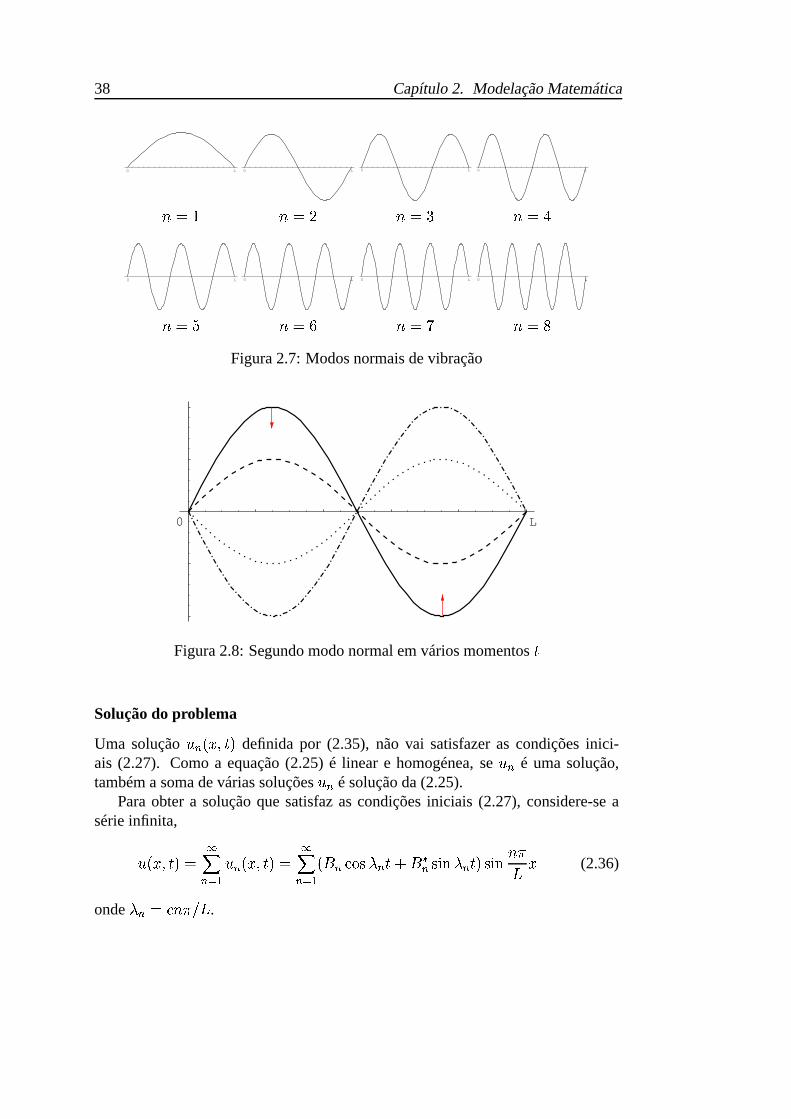
Comoem(2.35),Æ�ÇÞÈ Î�Ï6�� �/� para ��� � Î � ×��Î �iصصØm� Îà7ÑÎ �y�o modopróprio Î tem Î+¥Ñ nodos,ou seja,pontosna cordaquenãosemovem(alémdosdoisapoiosfixos,vejaFigura2.7).
Figura2.8 mostrao segundomodonormalem váriosmomentos� . Em cadainstante,o cabotem a forma de umasinusóide.Quandoa parteda esquerdadocabodesce,apartedadireitasobe,eaocontrário.Paraosoutrosmodos,asituaçãoésimilar.
38 Capítulo2. ModelaçãoMatemática
L0 L0 0 L L0ÎÕ�²Ñ ÎÕ�[× Îß�|á ÎÕ��âL0 L0 L0 L0ÎÕ�/ã ÎÕ�/ä Îß�/å ÎÕ�|æFigura2.7: Modosnormaisdevibração
L0
Figura2.8: Segundomodonormalemváriosmomentos�Soluçãodo problema
Uma solução �LÓX��������� definidapor (2.35), não vai satisfazeras condiçõesinici-ais (2.27). Comoa equação(2.25) é linear e homogénea,se �LÓ é umasolução,tambéma somadeváriassoluções�LÓ ésoluçãoda(2.25).
Paraobtera soluçãoquesatisfaz ascondiçõesiniciais (2.27), considere-seasérieinfinita,�:����������� çèÓ � ¸ �LÓ&����������� çèÓ � ¸ � ¾ Ó�Ä<Å�Æ · Ó� ½1¾ ÜÓ Æ�ÇÉÈ · Ó����&Æ�ÇÉÈ Î�Ï� � (2.36)
onde· Ó«�|©MÎEÏÔÚ� .

2.3. Dinâmicadoscabos 39± Satisfazero deslocamentoinicial
Introduzindoa expressão(2.36)naexpressão(2.27)paraascondiçõesinici-ais,obtém-se,parao deslocamentoinicial,�:����������� çèÓ � ¸ ¾ Ó�Æ�ÇÞÈ Î�Ï6�� � � ���E� (2.37)
Oscoeficientes¾ Ó resulta,aplicandoa teoriadassériesdeFourier[10],¾ ÓJ� ×�êé0ë� � ���E�&Æ�ÇÞÈ Î�Ï6�� ì � Îß�#Ñ���×T�iصØ<Ø (2.38)± Satisfazera velocidadeinicial
Demodosimilar, diferenciando(2.36)emrelaçãoaotempo,obtém-se,� �� � ����� ���X� � çèÓ � ¸ ¾ ÜÓ · Ó�Æ�ÇÞÈ ÎEÏ!�� �í�!���E�resultando ¾ ÜÓ · Ó«� ×�êé ë� �6���E�&Æ�ÇÉÈ ÎEÏ6�� ì � ÎÕ�ÖÑ���×®�iصصØou, ¾ ÜÓ � שMÎEÏßé3ë� �!���E�&Æ�ÇÉÈ ÎEÏ6�� ì � ÎÕ�²Ñ���×T�iØµØµØ (2.39)± Solução
A soluçãodoproblemadefinidopelaequação(2.25)epelascondições(2.26)e (2.27),é dadapor (2.36)comcoeficientes(2.38)e (2.39),coma restriçãoquea série(2.36)deve serconvergente,assimcomoassériesobtidasdife-renciandoduasvezes(2.36)emrelaçãoao � e � .Considerando,parasimplicidade,o casoemquea velocidadeinicial �!���E� ézero,oscoeficientes¾ ÜÓ sãozero,easolução(2.36)tomaa forma:�:����������� çèÓ � ¸ ¾ Ó�Ä<Å�Æ · Óf�yÆ�ÇÉÈ ÎEÏ6�� · Ó^� ©MÎEÏ� (2.40)
Utilizandoasfórmulastrigonométricas3, podeescrever-se:Ä<Å�Æ ©MÎEÏ!�� Æ�ÇÉÈ ÎEÏ6�� � Ñ×3î Æ�ÇÞÈ)ï Î�Ï� ��� ½ ©����ñð ½ Æ�ÇÞÈßï Î�Ï� ����2©����ñðXò3 óhôöõ�÷�ø3ó�ôöõ�ùiúàûLóhôöõ ÷�ø3ùû üþý ó ÷~ÿÙùû
40 Capítulo2. ModelaçãoMatemática
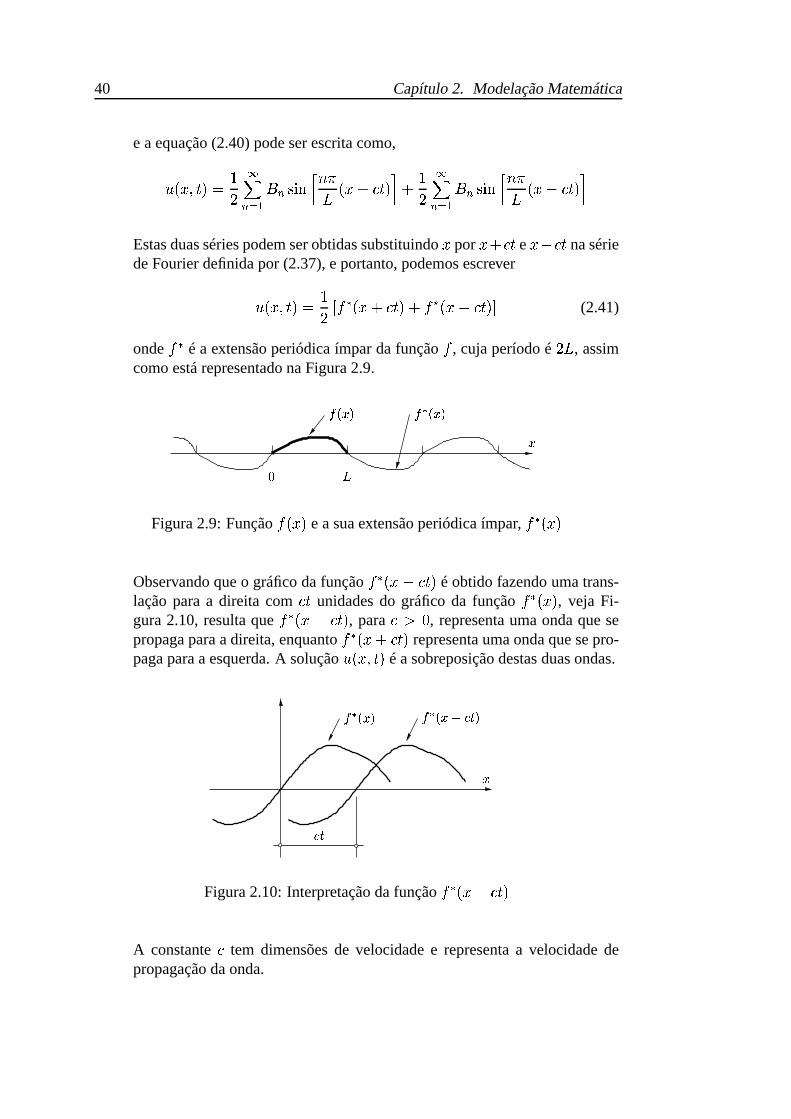
e aequação(2.40)podeserescritacomo,�:����������� Ñ× çèÓ � ¸ ¾ Ó�Æ�ÇÞÈ ï Î�Ï� ��� ½ ©���� ð ½ Ñ× çèÓ � ¸ ¾ Ó�Æ�ÇÞÈ ï ÎEÏ� ����¯©���� ðEstasduassériespodemserobtidassubstituindo� por � ½ ©�� e ��,©�� nasériedeFourierdefinidapor (2.37),eportanto,podemosescrever�:����������� Ñ×�� � Ü ��� ½ ©M��� ½ � Ü ����¯©������ (2.41)
onde � Ü é a extensãoperiódicaímpardafunção � , cujaperíodoé ×� , assimcomoestárepresentadonaFigura2.9.����� ��� ����
� � �Figura2.9: Função� ���E� e asuaextensãoperiódicaímpar, � Ü ���E�
Observandoqueo gráficodafunção � Ü ���,Û©M��� é obtidofazendoumatrans-laçãoparaa direita com ©M� unidadesdo gráfico da função � Ü ���E� , veja Fi-gura2.10,resultaque � Ü ���Õí©M��� , para ©�� � , representaumaondaquesepropagaparaadireita,enquanto� Ü ��� ½ ©���� representaumaondaquesepro-pagaparaaesquerda.A solução�:��������� éasobreposiçãodestasduasondas.
����
��� ���� ������� ÿ ���
Figura2.10: Interpretaçãodafunção � Ü ����¯©����A constante© tem dimensõesde velocidadee representaa velocidadedepropagaçãodaonda.

2.3. Dinâmicadoscabos 41
Problema 2.5 Determinea soluçãodaequaçãodasondas(2.25),correspondentea umdeslocamentoinicial,� ���E��� ������ ����� ×�¬� � para ���Á��� � ××�¬� ��� ê�E� para
� × �Á���í�ea velocidadeinicial nula.
Como �!���E�~°Ý� , oscoeficientes¾ ÜÓ sãozero e a soluçãopodeserescrita,vejaequação(2.40),como �:����������� çèÓ � ¸ ¾ Ó�Ä<Å�Æ ©MÎEÏ6�� Æ�ÇÞÈ Î�Ï6��ondeoscoeficientes¾ Ó sãodadospor:¾ Ó«� ×� é0ë� � ���E�&Æ�ÇÉÈ ÎEÏ6�� ì �
Introduzindoo deslocamentoinicial nadefiniçãodoscoeficientes¾ Ó , resulta:¾ Ó«� ×� ��é3ë! £� ×�¬À�� Æ�ÇÉÈ ÎEÏ6�� ì � ½ é3ëë! £ ×�¬� ���AA�E�yÆ�ÇÞÈ Î�Ï6�� ì �#"¾ Ó^� âp¬� £ ��é ë! £� �+Æ�ÇÞÈ ÎEÏ!�� ì � ½ é ëë! £ ��� ê�E�dÆ�ÇÉÈ ÎEÏ6�� ì �#"Utilizandoo programaMathematica[19], resulta,
In[1]:= 4*k/L^2*(Integrate[x*Sin[n*Pi* x/L], {x,0 ,L/2} ]+Integrate[(L-x)*Sin[n*Pi*x/L ],{x, L/2, L}])
n Pi n Pi 332 k Cos[----] Sin[----]
4 4Out[1]= ----------------------------
2 2n Pi
ou seja, ¾ Ó«� á�×�¬Î £ Ï £ Ä<Å�Æ���Î�ÏÔÚâÀ�dÆ�ÇÉÈ�$���ÎEÏÔÚâp�ea consequentesolução�:��������� :�:����������� çèÓ � ¸ áp×�¬Î £ Ï £ ÄmÅ�Æ���Î�ÏÔÚâÀ�dÆ�ÇÞÈ#$f��ÎEÏÔÚfâÀ�dÄ<Å�Æ ©MÎEÏ6�� Æ�ÇÉÈ Î�Ï6��A sérierepresentandoa solução,é definidadentro deMathematicacomouma
funçãode � , � e denúmerosdetermosemsérie, % � ,

42 Capítulo2. ModelaçãoMatemática
u[x_, t_, Nt_] := Sum[Bn*Cos[c n Pi t/L]*Sin[n Pi x/L],{n,1,Nt}]
A representaçãográficada solução�:��������� , obtidapara váriosnúmerosdeter-mosnasériedeFourier, emváriosmomentos� , éapresentadana Tabela2.1.� % ¸ �²Ñ % ¸ �[ã % ¸ �²Ñ'� % ¸ �²Ñ'����
0.2 0.4 0.6 0.8 1
-1
-0.75
-0.5
-0.25
0.25
0.5
0.75
1
0.2 0.4 0.6 0.8 1
-1
-0.75
-0.5
-0.25
0.25
0.5
0.75
1
0.2 0.4 0.6 0.8 1
-1
-0.75
-0.5
-0.25
0.25
0.5
0.75
1
0.2 0.4 0.6 0.8 1
-1
-0.75
-0.5
-0.25
0.25
0.5
0.75
1
��Úâp©0.2 0.4 0.6 0.8 1
-1
-0.75
-0.5
-0.25
0.25
0.5
0.75
1
0.2 0.4 0.6 0.8 1
-1
-0.75
-0.5
-0.25
0.25
0.5
0.75
1
0.2 0.4 0.6 0.8 1
-1
-0.75
-0.5
-0.25
0.25
0.5
0.75
1
0.2 0.4 0.6 0.8 1
-1
-0.75
-0.5
-0.25
0.25
0.5
0.75
1
��Ú�×�©0.2 0.4 0.6 0.8 1
-1
-0.75
-0.5
-0.25
0.25
0.5
0.75
1
0.2 0.4 0.6 0.8 1
-1
-0.75
-0.5
-0.25
0.25
0.5
0.75
1
0.2 0.4 0.6 0.8 1
-1
-0.75
-0.5
-0.25
0.25
0.5
0.75
1
0.2 0.4 0.6 0.8 1
-1
-0.75
-0.5
-0.25
0.25
0.5
0.75
1
á���Úâp©0.2 0.4 0.6 0.8 1
-1
-0.75
-0.5
-0.25
0.25
0.5
0.75
1
0.2 0.4 0.6 0.8 1
-1
-0.75
-0.5
-0.25
0.25
0.5
0.75
1
0.2 0.4 0.6 0.8 1
-1
-0.75
-0.5
-0.25
0.25
0.5
0.75
1
0.2 0.4 0.6 0.8 1
-1
-0.75
-0.5
-0.25
0.25
0.5
0.75
1
��Ú�©0.2 0.4 0.6 0.8 1
-1
-0.75
-0.5
-0.25
0.25
0.5
0.75
1
0.2 0.4 0.6 0.8 1
-1
-0.75
-0.5
-0.25
0.25
0.5
0.75
1
0.2 0.4 0.6 0.8 1
-1
-0.75
-0.5
-0.25
0.25
0.5
0.75
1
0.2 0.4 0.6 0.8 1
-1
-0.75
-0.5
-0.25
0.25
0.5
0.75
1
Tabela2.1: Solução�9��������� emváriosmomentos�Problema 2.6 Determineasoluçãodaequaçãodasondas(2.25),paraocabocomdois apoiosfixossituadosa umadistância �Ý�ËÏ um de outro, e cuja constante© £ �'&yÚ)( � Ñ , seo deslocamentoinicial � ���E� e a velocidadeinicial �6���E� sãodefinidospor: � ���E�����&ØÉÑ�Æ�ÇÞÈd� �!���E���# �&Øö×�Æ�ÇÉÈd�
Segundoa definição,oscoeficientes¾ Ó sãodefinidospor¾ Ó«� ×Ï é+*� �TØÉÑ�Æ�ÇÉÈV�+Æ�ÇÞÈyÎE� ì �à������ ���� �&ØÉÑ Îß�#Ñ�&ت×Ï Æ�ÇÉÈzÎEÏÑzêÎ £ ��� Îß�|×T��á&�iصصØ
eoscoeficientes¾ ÜÓ , por¾ ÜÓ � ×Î�Ï é *� �&Øö×�Æ�ÇÞÈd�+Æ�ÇÞÈyÎ�� ì ��� ����� ���� �TØª× ÎÕ�²Ñ �TØ âÎ�Ï Æ�ÇÞÈyÎ�ÏÑz2Î £ �/� ÎÕ�/×®��á&�iصصØ
2.4. Vibraçõeslongitudinaisembarras 43
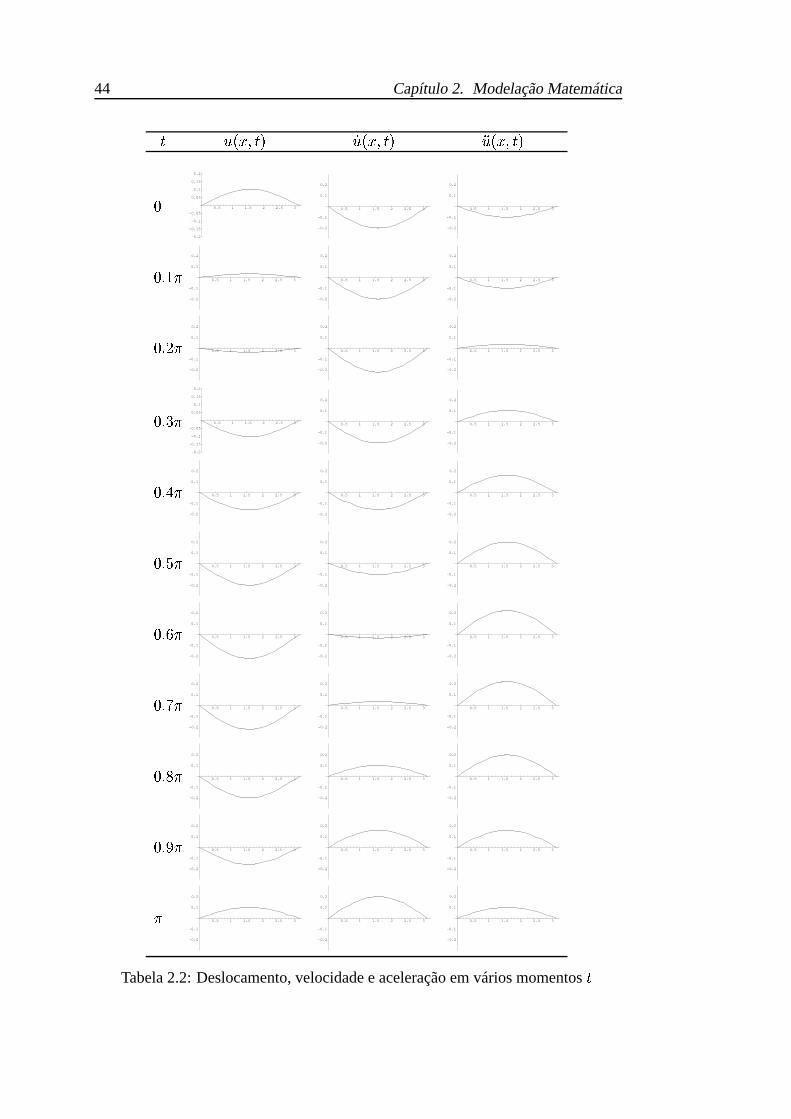
O deslocamento�:��������� , resulta,conformeà definição(2.36),�:����������� �h�&Ø�Ñ�Ä<Å�ÆT�9¯�&Øö×�Æ�ÇÉÈd���yÆ�ÇÞÈd�Diferenciandoemrelaçãoao tempo,obtêm-seas expressõesda velocidadee
da aceleração: ,�:�����������Ý�þ �&ØÉÑ�Æ�ÇÞÈd�:¯�&ت×�ÄmÅ�Æ&���yÆ�ÇÞÈd�¤�Ô����������� � �TØÉÑ�Ä<Å�ÆX� ½ �&ت×�Æ�ÇÞÈd���dÆ�ÇÉÈd�Asrepresentaçõesgráficasdo deslocamento�:��������� , da velocidade
,�Ô��������� edaaceleração ¤�:��������� , emváriosmomentos� , sãoapresentadasna Tabela2.2.
2.4 Vibraçõeslongitudinais embarras
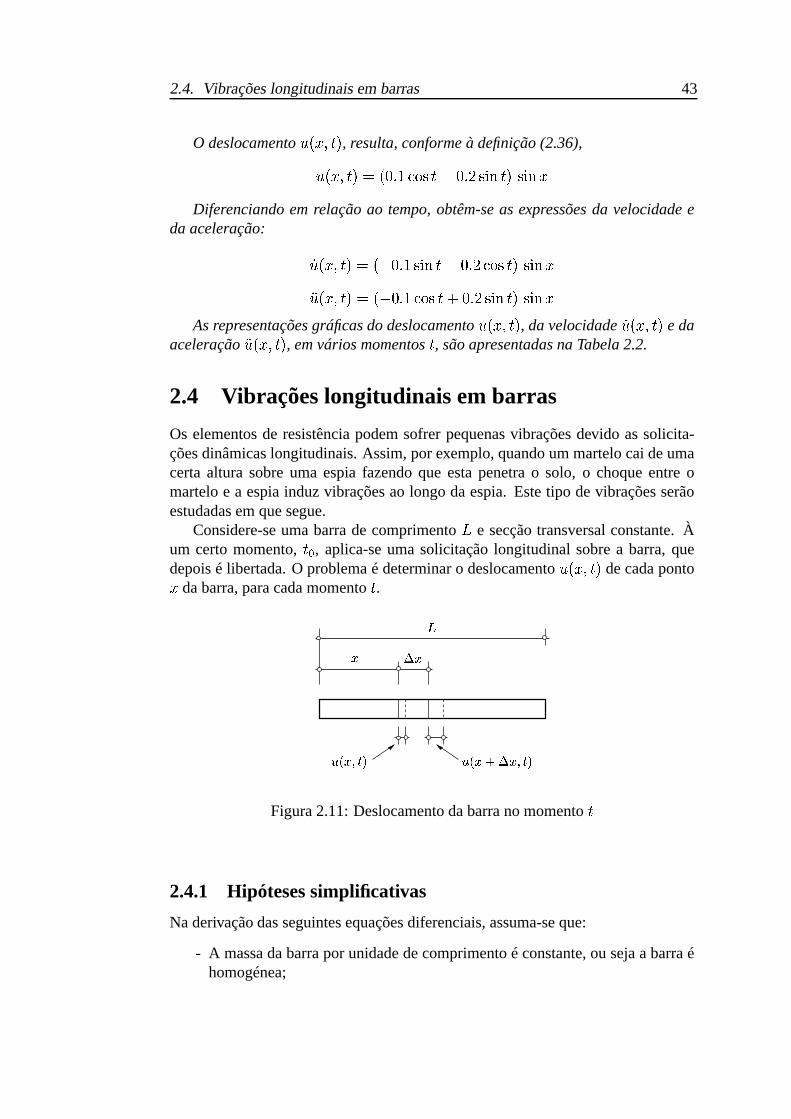
Os elementosde resistênciapodemsofrerpequenasvibraçõesdevido assolicita-çõesdinâmicaslongitudinais.Assim,porexemplo,quandoummartelocaideumacertaaltura sobreuma espiafazendoque estapenetrao solo, o choqueentreomarteloe a espiainduzvibraçõesao longodaespia.Estetipo devibraçõesserãoestudadasemquesegue.
Considere-seumabarrade comprimento� e secçãotransversalconstante.Àum certomomento,� � , aplica-seumasolicitaçãolongitudinalsobrea barra,quedepoisé libertada.O problemaé determinaro deslocamento�:��������� decadaponto� dabarra,paracadamomento� .
- ��� ø�. �0/ � - ���0/ � � . � �
Figura2.11:Deslocamentodabarranomomento�2.4.1 Hipótesessimplificativas
Naderivaçãodasseguintesequaçõesdiferenciais,assuma-seque:
- A massadabarrapor unidadedecomprimentoé constante,ou sejaa barraéhomogénea;
44 Capítulo2. ModelaçãoMatemática� �9��������� ,�:��������� ¤�Ô����������0.5 1 1.5 2 2.5 3
-0.2
-0.15
-0.1
-0.05
0.05
0.1
0.15
0.2
0.5 1 1.5 2 2.5 3
-0.2
-0.1
0.1
0.2
0.5 1 1.5 2 2.5 3
-0.2
-0.1
0.1
0.2
�TØÉÑ<Ï0.5 1 1.5 2 2.5 3
-0.2
-0.1
0.1
0.2
0.5 1 1.5 2 2.5 3
-0.2
-0.1
0.1
0.2
0.5 1 1.5 2 2.5 3
-0.2
-0.1
0.1
0.2
�Tت×fÏ0.5 1 1.5 2 2.5 3
-0.2
-0.1
0.1
0.2
0.5 1 1.5 2 2.5 3
-0.2
-0.1
0.1
0.2
0.5 1 1.5 2 2.5 3
-0.2
-0.1
0.1
0.2
�TØöáÏ0.5 1 1.5 2 2.5 3
-0.2
-0.15
-0.1
-0.05
0.05
0.1
0.15
0.2
0.5 1 1.5 2 2.5 3
-0.2
-0.1
0.1
0.2
0.5 1 1.5 2 2.5 3
-0.2
-0.1
0.1
0.2
�TØ â�Ï0.5 1 1.5 2 2.5 3
-0.2
-0.1
0.1
0.2
0.5 1 1.5 2 2.5 3
-0.2
-0.1
0.1
0.2
0.5 1 1.5 2 2.5 3
-0.2
-0.1
0.1
0.2
�TتãfÏ0.5 1 1.5 2 2.5 3
-0.2
-0.1
0.1
0.2
0.5 1 1.5 2 2.5 3
-0.2
-0.1
0.1
0.2
0.5 1 1.5 2 2.5 3
-0.2
-0.1
0.1
0.2
�TØöäÏ0.5 1 1.5 2 2.5 3
-0.2
-0.1
0.1
0.2
0.5 1 1.5 2 2.5 3
-0.2
-0.1
0.1
0.2
0.5 1 1.5 2 2.5 3
-0.2
-0.1
0.1
0.2
�TتåfÏ0.5 1 1.5 2 2.5 3
-0.2
-0.1
0.1
0.2
0.5 1 1.5 2 2.5 3
-0.2
-0.1
0.1
0.2
0.5 1 1.5 2 2.5 3
-0.2
-0.1
0.1
0.2
�TØöæÏ0.5 1 1.5 2 2.5 3
-0.2
-0.1
0.1
0.2
0.5 1 1.5 2 2.5 3
-0.2
-0.1
0.1
0.2
0.5 1 1.5 2 2.5 3
-0.2
-0.1
0.1
0.2
�TØ21Ï0.5 1 1.5 2 2.5 3
-0.2
-0.1
0.1
0.2
0.5 1 1.5 2 2.5 3
-0.2
-0.1
0.1
0.2
0.5 1 1.5 2 2.5 3
-0.2
-0.1
0.1
0.2
Ï0.5 1 1.5 2 2.5 3
-0.2
-0.1
0.1
0.2
0.5 1 1.5 2 2.5 3
-0.2
-0.1
0.1
0.2
0.5 1 1.5 2 2.5 3
-0.2
-0.1
0.1
0.2
Tabela2.2: Deslocamento,velocidadeeaceleraçãoemváriosmomentos�

2.4. Vibraçõeslongitudinaisembarras 45
- Os deslocamentossãopequenosde tal modoquea lei de Hooke podeseraplicada,ouseja,abarratemumcomportamentoperfeitamenteelástico;
- As forçasdecompressãooutracçãodesenvolvidassãograndesquandocom-paradascomo pesoprópriodabarra,peloqueo pesopodeserdesprezado;
- As secçõestransversaisdabarraficamplanasduranteo movimento;
- Os deslocamentosdosapoiosou os deslocamentosiniciais da barrasãoto-dosao longo da barrae constantesem cadasecçãotransversal,causandoomovimentodassecçõesnadirecçãolongitudinal.
As equaçõesdiferenciaisquedescrevemaspequenasoscilaçõesdabarraserãodeduzidasemseguida.
2.4.2 Equaçãodasondasuni-dimensionais
Considere-seum troço de barrade comprimento3 � , veja Figura2.11. No mo-mento � , o deslocamentolongitudinaldasecção� é �9��������� . No mesmomomento,o deslocamentoda secção� ½ 3 � é �:��� ½ 3 ������� . Isto significaque,o troço dabarradecomprimento3 � temumadeformação�:��� ½ 3 ��������2�:��������� . Porhipó-teseestadeformaçãorespeitaa lei do Hooke e considerandoque 3 � tendeparazero,a forçaprovocadapor estadeformaçãonumasecção� édadaporÃÔ�����������54«» 6ÉÇ879 ¶�: � �:��� ½ 3 �������92�:���������3 � �54«»+�L¦����������
Escrevendoasequaçõesdeequilíbriodo troçodabarra,resulta; ¤�:��� ½ 3 �EÚ�×T�������¯ÃÔ��� ½ 3 ��������)ÃÔ���������(p» 3 � ¤�9��� ½ 3 �EÚ�×T�������¯ÃÔ��� ½ 3 �������9)ÃÔ���������edividindopor (p» 3 � e tomandoemcontaque 3 � tendeparazero,��£ �� � £ �|© £ �L£ �� � £ com © £ � 4 ( (2.42)
Note-sequeaequaçãodasondasquegovernaaspequenasoscilaçõeslongitudi-naisnabarraésimilaràequaçãodasondasemcabos,(2.25),comaúnicadiferençana definiçãoda constante© . Resultadaí queparadeterminara soluçãode (2.42)devemserutilizadososmesmosmétodosqueforamutilizadosno casodaequaçãodasondasemcabos.
46 Capítulo2. ModelaçãoMatemática
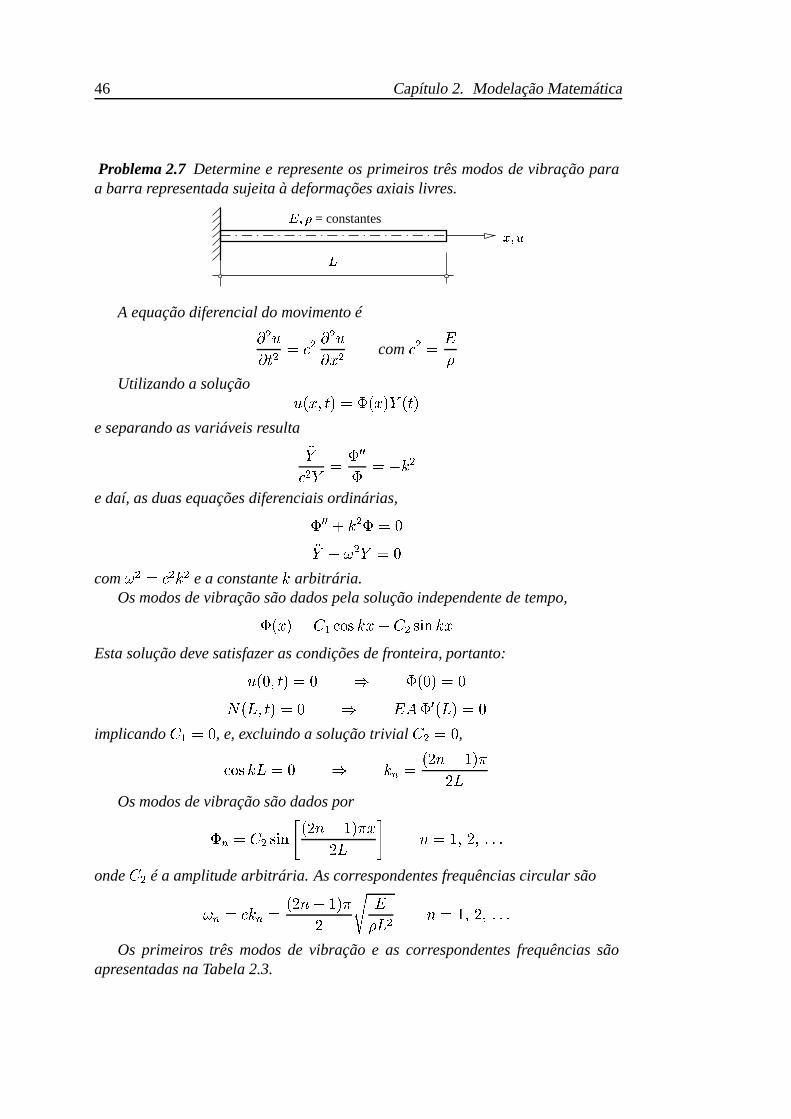
Problema 2.7 Determinee representeosprimeiros trêsmodosdevibraçãoparaa barra representadasujeitaà deformaçõesaxiaislivres.
� �0/ -< />== constantes
A equaçãodiferencialdo movimentoé�L£ �� � £ �/© £ �L£ �� � £ com © £ � 4 (Utilizandoa solução �:�����������5?§���E�A@,�����
eseparandoasvariáveisresulta ¤@© £ @ � ? ¦ ¦? �#`¬ £edaí,asduasequaçõesdiferenciaisordinárias,?~¦ ¦ ½ ¬ £ ?Á�|�¤@ ½CB £ @²�/�com B £ ��© £ ¬ £ ea constante¬ arbitrária.
Osmodosdevibraçãosãodadospelasoluçãoindependentedetempo,?§���E���ED ¸ ÄmÅ�ÆE¬®� ½ D £ Æ�ÇÞÈ ¬®�Estasoluçãodevesatisfazerascondiçõesdefronteira, portanto:�:�h�&�����9�/� Ð ?§���p���|�% ���z�������|� Ð 4^»F?~¦��h�����|�implicando D ¸ �|� , e, excluindoa soluçãotrivial D £ �/� ,ÄmÅ�Æ�¬&�¯��� Ð ¬�Ó«� �h×Î� Ñ��ñÏ×��
Osmodosdevibraçãosãodadospor?~Ó«�GD £ Æ�ÇÞÈ � � ×Î� Ñ��ñÏ6�×� " ÎÕ�²Ñ���×T��صصØondeD £ éa amplitudearbitrária. Ascorrespondentesfrequênciascircular sãoB Ó«��©<¬�Ó^� �h×Î� Ñ��ñÏ× H 4(À� £ Îà�ÖÑ���×T�iصصØ
Os primeiros três modosde vibração e as correspondentesfrequênciassãoapresentadasna Tabela2.3.
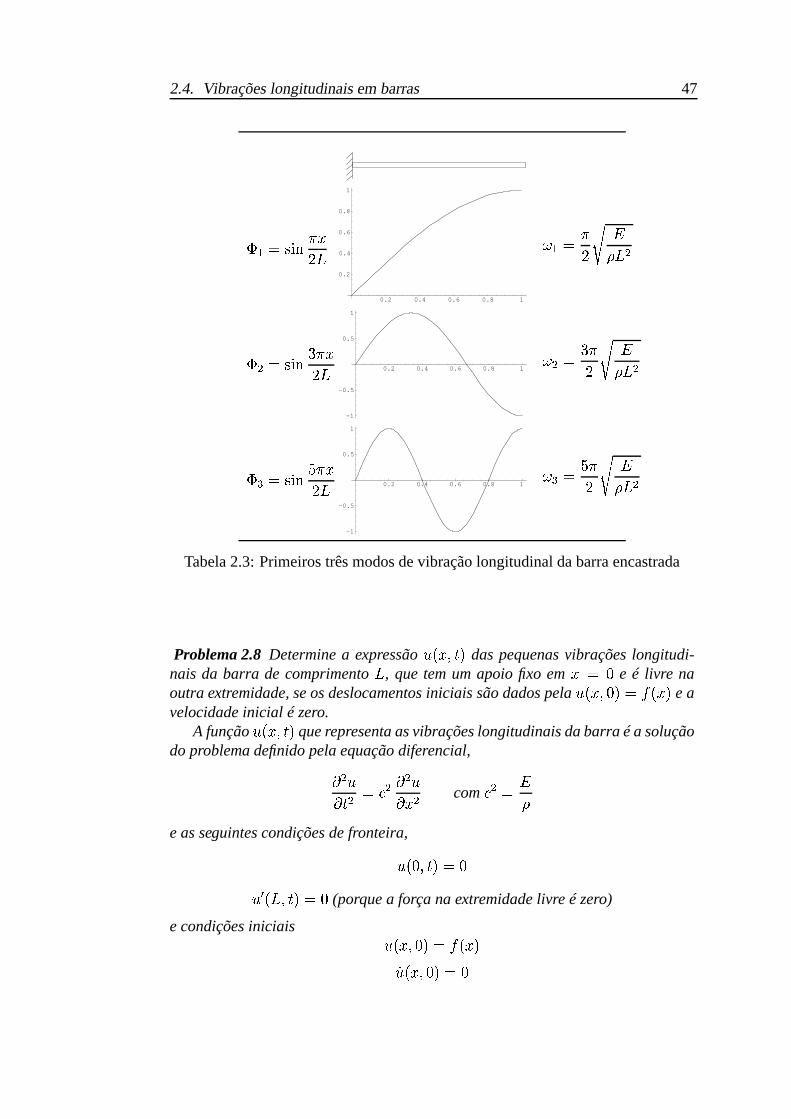
2.4. Vibraçõeslongitudinaisembarras 47
? ¸ �|Æ�ÇÉÈ Ï6�×��0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1 B ¸ � Ï × H 4(À� £? £ �|Æ�ÇÉÈ áÏ6�×�� 0.2 0.4 0.6 0.8 1
-1
-0.5
0.5
1 B £ � áÏ×FH 4(À� £? $ �|Æ�ÇÉÈ ãfÏ6�×�� 0.2 0.4 0.6 0.8 1
-1
-0.5
0.5
1 B $ � ãfÏ×FH 4(À� £Tabela2.3: Primeirostrêsmodosdevibraçãolongitudinaldabarraencastrada
Problema 2.8 Determinea expressão�9��������� daspequenasvibraçõeslongitudi-nais da barra de comprimento� , quetemum apoio fixo em �/� � e é livre naoutra extremidade, seosdeslocamentosiniciais sãodadospela �9�������p��� � ���E� eavelocidadeinicial ézero.
A função�:��������� querepresentaasvibraçõeslongitudinaisdabarra éa soluçãodo problemadefinidopelaequaçãodiferencial,�L£ �� � £ �|© £ �L£ �� � £ com © £ � 4 (easseguintescondiçõesdefronteira,�9���&�������/��L¦��h�y�������|� (porquea forçana extremidadelivreézero)
econdiçõesiniciais �9�������p��� � ���E�,�9�������p���/�
48 Capítulo2. ModelaçãoMatemática
Utilizandoo métododeseparaçãodevariáveis,vejao parágrafo2.3.3,procu-ramosumasoluçãoquepodeserescritadeforma �:�����������|¡����E��¢������ . Utilizandoa soluçãogeral para ¡ , ¡����E����»²Ä<Å�Æ�ÃX� ½Û¾ Æ�ÇÞÈ�ÃX�e tomando em conta as condições de fronteira, �:�h�T�������|¡��h�p�þ¢��������/� e� ¦ ���z�������|¡ ¦ �h����¢��������|� , resulta¡§¦����E���#�ÃL»²Æ�ÇÉÈ�ÃX� ½ à ¾ Ä<Å�ÆpÃX�¡��h�p���í»/�|� e ¡ ¦ �������¯Ã ¾ ÄmÅ�Æ�Ã��2�|� Ð ÃXÓ^� � ×Î�ÁÑ'� Ï×��ouseja,escolhendo¾ �ÖÑ ,¡ÔÓX���E���|Æ�ÇÞÈ�ÃXÓf� ÃXÓ^� � ×Î�ÁÑ'� Ï×��
A soluçãogeral para a função ¢§Ó resulta¢JÓX������� ¾ Ó0Ä<Å�Æ · Ó� ½1¾ ÜÓ Æ�ÇÞÈ · Ó� · Ó^� �h×Î�ÁÑ��þ©MÏ×��eentão,a funções�LÓ&�����������/¡�ÓL���E��¢§ÓL����� sãodefinidaspor�LÓL�����������Ý� ¾ Ó3Ä<Å�Æ�ÃXÓ�©�� ½Û¾ ÜÓ Æ�ÇÉÈ�Ã&Ó�©����dÆ�ÇÞÈ�Ã&Ó� ÃXÓ«� � ×Î� Ñ'� Ï×��
Asconstantes¾ Ó e ¾ ÜÓ sãodeterminadasforçandoa solução�:����������� çèÓ � ¸ ��Ó&����������� çèÓ � ¸ � ¾ Ó3Ä<Å�Æ�Ã&Ó�©�� ½Û¾ ÜÓ Æ�ÇÉÈ�ÃXÓ�©����dÆ�ÇÉÈ�ÃXÓ�a satisfazerascondiçõesiniciais.�:����� �p��� çèÓ � ¸ �LÓX�������p��� çèÓ � ¸ ¾ Ó3Æ�ÇÉÈ�ÃXÓ��� � ���E�¾ Ó^� ×�Aé3ë� � ���E�&Æ�ÇÉÈ�ÃXÓf� ì �,�Ô����������� çèÓ � ¸,�LÓX�������p��� çèÓ � ¸ Ã&Ó�© ¾ ÜÓ Æ�ÇÉÈ�ÃXÓ���|�¾ÙÜÓ ���
A soluçãodo problemaé,portanto,�:����������� çèÓ � ¸ ¾ Ó0Æ�ÇÞÈ�ÃXÓ��+Ä<Å�Æ�ÃXÓ�©��onde ¾ Ó^� ×� é ë� � ���E�&Æ�ÇÞÈ�ÃXÓ�� ì � e ÃXÓ^� � ×Î� Ñ��ñÏ×��
2.4. Vibraçõeslongitudinaisembarras 49
Problema 2.9 A barra uniformede comprimento� temumaextremidadefixa ea extremidadelivre é alongadauniformementeaté a um comprimento� � e emseguidalibertadano momento�d�Ý� . Determineasresultantesvibraçõeslongitu-dinais. �
�JI �Deacordocomo resultadoobtidonoProblema2.8, a soluçãogeral parabarras
comumaextremidadefixa ea outra livreédadapor�:����������� çèÓ � ¸ � ¾ Ó0Ä<Å�Æ�ÃXÓ�©�� ½7¾ ÜÓ Æ�ÇÞÈ�Ã&Ó�©����dÆ�ÇÞÈ�ÃXÓf� ÃXÓ«� � ×Î�ÁÑ'� Ï×��com © £ �K4ÙÚ)( e ondeas constantes¾ Ó e ¾ ÜÓ são determinadasdas condiçõesiniciais do problema: �:����� �p��� � � ¯�� � (2.43)L � �� �JM ���X� �/� (2.44)
Da condiçãoinicial (2.44),resulta,� ���X� � çèÓ � ¸ � ×Î� Ñ'� Ï�©×�� ¾ ÜÓ Æ�ÇÉÈ � ×Î�ÁÑ��ñÏ6�×�� ��� Ð ¾ ÜÓ �|�Da condiçãoinicial (2.43),resulta�:�������p��� çèÓ � ¸ ¾ Ó3Æ�ÇÞÈ �h×Î� Ñ��ñÏ6�×�� � � � ¯�� �
eaplicandoassériesdeFourier [10], oscoeficientes¾ Ó sãodadospor¾ Ó^� ×X��� � 2���� £ é0ë� �+Æ�ÇÉÈ � ×Î� Ñ'� Ï6�×�� ì ��� �þ^Ñ�� ÓON ¸ æL�h� � ¯���Ï £ �h×Î�ÁÑ��Portanto,a vibraçãolongitudinaldabarra édadapor�:����������� æL�h� � 2���Ï £ çèÓ � ¸ �þ^Ñ�� ÓON
¸ Ñ×Î� Ñ Æ�ÇÉÈ � ×Î� Ñ��ñÏ6�×� ÄmÅ�Æ � ×fÎ� Ñ�� Ï�©��×��

50 Capítulo2. ModelaçãoMatemática
Problema 2.10 Determinea vibraçãolongitudinal forçadada barra uniformedecomprimento� actuadapor umaforça sinusoidal ¡ � Æ�ÇÞÈ B � na extremidadelivre,assimcomosemostra na Figura.
Considera apenasa soluçãoestacionária.
A equaçãodiferencialquegovernaaspequenasosci-laçõeslongitudinaisna barra é�L£ �� � £ �|© £ �L£ �� � £onde � é o deslocamentodumasecçãotransversaldabarra e © £ �E4 Ú)( .Seja�:�����������QPÛ���E�&Æ�ÇÞÈ B � a soluçãogeral dasvibra-çõesforçadasestacionárias.Substituindoestasolu-çãonaequaçãodomovimento,resulta:ì £ Pì � £ ½ R B ©TS £ P �|� U I ó�ôöõWV �
�
A soluçãoP podeserescritacomoPÛ���E���í» ¸ Ä<Å�Æ R B �©�S ½ » £ Æ�ÇÉÈ R B �©�Sresultando, �:����������� ï » ¸ ÄmÅ�Æ R B �©�S ½ » £ Æ�ÇÉÈ R B �©XS ðÔÆ�ÇÉÈ B �
Ascondiçõesdefronteira para esteproblemasão�9���&��������� Ð » ¸ �|�e 4^» � �� � �����ZY ë�[ ��\ �/¡ � Æ�ÇÞÈ B � Ð 4«» B » £© Ä<Å�Æ R B �©]S Æ�ÇÞÈ B ���/¡ � Æ�ÇÉÈ B �» £ � ¡ � ©4^» B Æ_^mÄ R B �©CS
Resultaque, asvibraçõeslongitudinaisforçadasda barra, no regimeestacio-nário, sãodadaspor�:����������� ¡ � ©4«» B ÆA^<Ä R B �©]S Æ�ÇÞÈ R B �©�S Æ�ÇÞÈ B �
2.5. Vibraçõestransversaisemvigas 51
2.5 Vibraçõestransversaisem vigas
As solicitaçõesdinâmicasem vigas,tal comoa circulaçãodosveículosnaspon-tes,induzemvibraçõestransversais.As equaçõesdiferenciaisquegovernamestesmovimentospodemserdeduzidas,numcasosimplificado,considerandoumavigadesecçãotransversalconstantee apenaso efeitodo momentoflector. Outrosefei-tos,tal comoamortecimento,elasticidadedosapoios,forçasaxiais,etc.,podemserincorporadostambémnaformulação.
O estudoquesegueresuma-seno casoelementar, em quesó é consideradooefeitodomomentoflector.
2.5.1 Hipótesessimplificativas
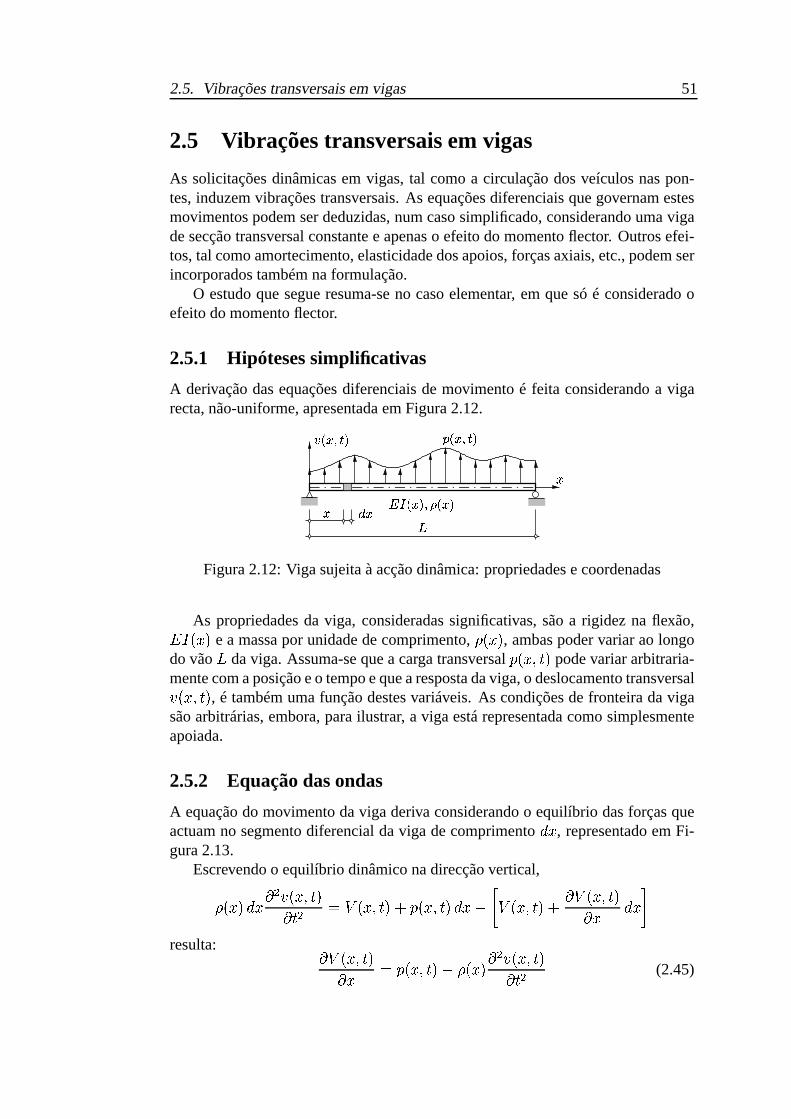
A derivaçãodasequaçõesdiferenciaisde movimentoé feita considerandoa vigarecta,não-uniforme,apresentadaemFigura2.12.
� ` �a ���0/ � �b ���c/ �
<ed �����/f=������Figura2.12:Vigasujeitaàacçãodinâmica:propriedadesecoordenadas
As propriedadesda viga, consideradassignificativas,sãoa rigidez na flexão,4hgE���E� e a massapor unidadedecomprimento,(����E� , ambaspodervariarao longodo vão � daviga. Assuma-sequea cargatransversalÃ���������� podevariararbitraria-mentecomaposiçãoeo tempoequearespostadaviga,o deslocamentotransversaliE��������� , é tambémumafunçãodestesvariáveis. As condiçõesdefronteiradavigasãoarbitrárias,embora,parailustrar, a viga estárepresentadacomosimplesmenteapoiada.
2.5.2 Equaçãodasondas
A equaçãodo movimentodaviga deriva considerandoo equilíbriodasforçasqueactuamno segmentodiferencialdaviga decomprimentoj � , representadoemFi-gura2.13.
Escrevendoo equilíbriodinâmiconadirecçãovertical,(����E� j � � £ iE���������� � £ �lk���������� ½ ÃÔ��������� j �� � k���������� ½ � k,���������� � j �#"resulta: � k����������� � �¯ÃÔ����������](����E� ��£ iE���������� � £ (2.45)
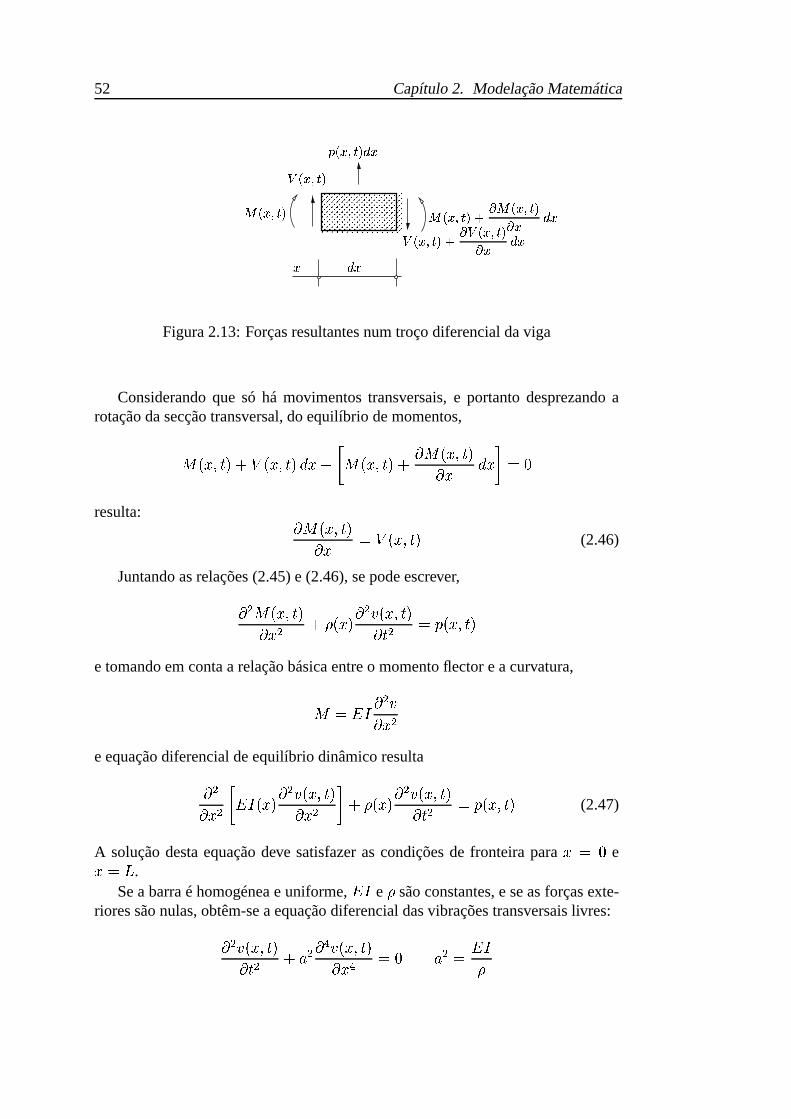
52 Capítulo2. ModelaçãoMatemática
m m m m mm m m m mn n n nn n n n` ��
o ���c/ � p ���c/ � øFq p ���c/ � q � ` �p ���c/ � a ���0/ � ` �
o ���0/ � ø q o ���0/ � q � ` �Figura2.13:Forçasresultantesnumtroçodiferencialdaviga
Considerandoque só há movimentostransversais,e portantodesprezandoarotaçãodasecçãotransversal,doequilíbriodemomentos,r ��������� ½ k,��������� j �� � r ��������� ½ � r ���������� � j � " �|�resulta: � r ���������� � �Ek���������� (2.46)
Juntandoasrelações(2.45)e (2.46),sepodeescrever,� £ r ���������� � £ ½ (����E� � £ iE���������� � £ �ÛÃÔ���������e tomandoemcontaa relaçãobásicaentreo momentoflectoreacurvatura,r �G4sg �L£ i� � £eequaçãodiferencialdeequilíbriodinâmicoresulta�L£� � £ � 4sgE���E� �L£ i!���������� � £ " ½ (����E� ��£ iE���������� � £ �2ÃÔ��������� (2.47)
A soluçãodestaequaçãodeve satisfazerascondiçõesde fronteirapara �/� � e����� .Sea barraéhomogéneae uniforme, 4sg e ( sãoconstantes,e seasforçasexte-
rioressãonulas,obtêm-seaequaçãodiferencialdasvibraçõestransversaislivres:� £ iE���������� � £ ½ut £ ��v iE���������� � v �|� t £ � 4hg(
2.5. Vibraçõestransversaisemvigas 53
Problema 2.11 Determineos modosnormaisde vibraçãotransversal para umaviga simplesmenteapoiada,homogénea,de comprimento� e secçãotransversalconstante.
A equaçãodiferencialquegovernaasvibraçõestransversaisda viga homogé-neadesecçãotransversalconstante, é�L£ iE���������� � £ ½wt £ � v iE���������� � v �/�com t �yx 4hg&Úz( . Assuma-seumasoluçãode tipo iE���������J�{PÛ���E�0& ����� e substi-tuindoestasoluçãonaequaçãodiferencialobtêm-se:P ¤& ½ut £ P}|�~�&����ondeP |�~ � j v P�Ú j � v . EstaequaçãopodeserescritaP |�~P �² ¤&t £ & �/¬ vcom ¬ uma constantearbitrária, de onderesultaas duasequaçõesdiferenciaisordinárias: P |�~ ¯¬ v PÒ�/� (2.48)
e ¤& ½]B £ &í�|� B £ � t £ ¬ v (2.49)
A soluçãodaequação(2.49)é:& ��������»+ÄmÅ�Æ B � ½Û¾ Æ�ÇÞÈ B �A soluçãodaequação(2.48)procura-sedetipo PÛ���E���/³ ´�¶ , resultando· v Û¬ v ��� Ð · �l�^¬E��� î ¬
edaí4 PÛ���E���ED ¸ Ä<Å�Æ�¬®� ½ D £ Æ�ÇÞÈ ¬®� ½ D $ ÄmÅ�Æ_� ¬®� ½ D v Æ�ÇÉÈ�� ¬®�Nocasodeumavigasimplesmenteapoiada,o deslocamentoeo momentoflec-tor sãozero nasextremidadesda viga, o quesignificaqueasquatro condiçõesdefronteira são:P�� ¶ �X� �/�&� P�� ¶ � ë �|�&� j £ Pj � £ ����� ¶ �X� �/� j £ Pj � £ ����� ¶ � ë �/�4Foramutilizadasasseguintesfórmulastrigonométricas:ó�ôöõ � ú�� î ��ÿ ��� î �û î / üþý ó � úw� î �Ôø ��� î �û / óhô õ�� � úC� ��ÿ ��� �û / ü ý ó>� � úw� �Ôø ��� �û �

54 Capítulo2. ModelaçãoMatemática
Utilizandoestascondiçõesdefronteira,asconstantesD�� podemsercalculadas:P�� ¶ �X� �5D ¸ ½ D $ �/� j £ Pj � £ ����� ¶ �X� �²�D ¸ ½ D $ �/�deonde D ¸ �ED $ �/� , eP�� ¶ � ë �5D £ Æ�ÇÞÈ�¬&� ½ D v Æ�ÇÉÈ�� ¬&�2�/�j £ Pj � £ ����� ¶ � ë �Ö ¬ £ D £ Æ�ÇÉÈ ¬T� ½ ¬ £ D v Æ�ÇÞÈ���¬T�2�/�deonde D v �/� e Æ�ÇÉÈ ¬T�2�|� , ou seja,¬&�2�|Î�Ï Ð B �|Î £ Ï £ H 4sg(À� v ÎÕ�²Ñ���×®�iصصØ
Os primeiros três modosde vibração e as correspondentesfrequênciassãoapresentadasna Tabela2.4.
P ¸ ��Æ�ÇÞÈ Ï6��0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1 B ¸ ��Ï £ H 4sg(À� vP £ ��Æ�ÇÞÈ ×fÏ6�� 0.2 0.4 0.6 0.8 1
-1
-0.5
0.5
1 B £ �|â�Ï £ H 4sg(À� vP $ ��Æ�ÇÞÈ áÏ6�� 0.2 0.4 0.6 0.8 1
-1
-0.5
0.5
1 B $ �E1Ï £ H 4sg(À� vTabela2.4: Primeirostrêsmodosde vibraçãotransversalda barrasimplesmenteapoiada

2.5. Vibraçõestransversaisemvigas 55
Problema 2.12 Determineos modosnormaisde vibraçãotransversal para umavigaemconsola,homogénea,decomprimento� esecçãotransversalconstante.
Os modosnormaisde vibraçãoda barra vão ser obtidosforçandoa soluçãoindependentedo tempo,PÛ���E���ED ¸ Ä<Å�Æ�¬®� ½ D £ Æ�ÇÞÈ ¬®� ½ D $ ÄmÅ�Æ_� ¬®� ½ D v Æ�ÇÉÈ�� ¬®�asatisfazerascondiçõesdefronteira(vejaProblema2.11), quedestavezsãodeslo-camentoe rotaçãonulasno encastramentoe momentoflectore esforço transversonulosnaextremidadelivre: PÛ�h�p���|� P)¦��h�p���/�r ���~���54hg�P)¦ ¦����~���|� k,���~���54sg�P)¦ ¦ ¦��h�����/�
AsconstantesD�� sãoportantoobtidasdo seguintesistemadeequaçõeslinea-res: ����� Ñ � Ñ �� ¬ � ¬`¬ £ ÄmÅ�Æ�¬&� ¬ £ Æ�ÇÞÈ�¬&� ¬ £ ÄmÅ�Æ_� ¬&� ¬ £ Æ�ÇÞÈ���¬&�¬ $ Æ�ÇÉÈ�¬&� ¬ $ Ä<Å�ÆE¬&� ¬ $ Æ�ÇÞÈ���¬&� ¬ $ ÄmÅ�Æ_� ¬&� �Z���� ����� ���� D
¸D £D $D v� �������� � ����� ���� ���� � ��������
Dasprimeirasduasequaçõesresulta D $ � �D ¸ e D v � �D £ . Substituindoestesresultadosesimplificando,resulta:� ��ÄmÅ�Æ�¬&� ½ Ä<Å�ÆA� ¬&��� ��Æ�ÇÞÈ ¬&� ½ Æ�ÇÞÈ�� ¬&�����Æ�ÇÞÈ�� ¬&� 2Æ�ÇÉÈ�¬&��� ��Ä<Å�Æ�¬&� ½ ÄmÅ�Æ_� ¬&��� "h� D ¸D £ � � � �� �Para o sistemaadmitir umasoluçãonãotrivial, o determinantedeveserzero, re-sultando: ÄmÅ�Æ�¬&�2�² ÑÄmÅ�Æ_� ¬&�
Utilizandoo métododeNewton-Raphson,implementadoemMathematica[19],obtêm-seassoluçõesapresentadasnaTabela2.5.Î �h¬&��� Ó � ×Î�7Ñ�� ÏÔÚ�×
1 Ñ�Ø æpå�ãTÑ Ñ�Øöã�å���æ2 âXØ ä1�âXÑ âXØöåTÑ�×â3 åTØ æpãâpæ åTØ æpãâp�4 Ñ'�&Ø�11pã�ã Ñ'�&Ø�11pã�ä5 ѵâXØ�Ñ'ápå�× ÑµâXØ�Ñ'ápå�×
Tabela2.5: SoluçõesdaequaçãotranscendentalÄmÅ�Æ�¬&� ½ Ñ�Ú�Ä<Å�ÆA��¬&�¯�|�
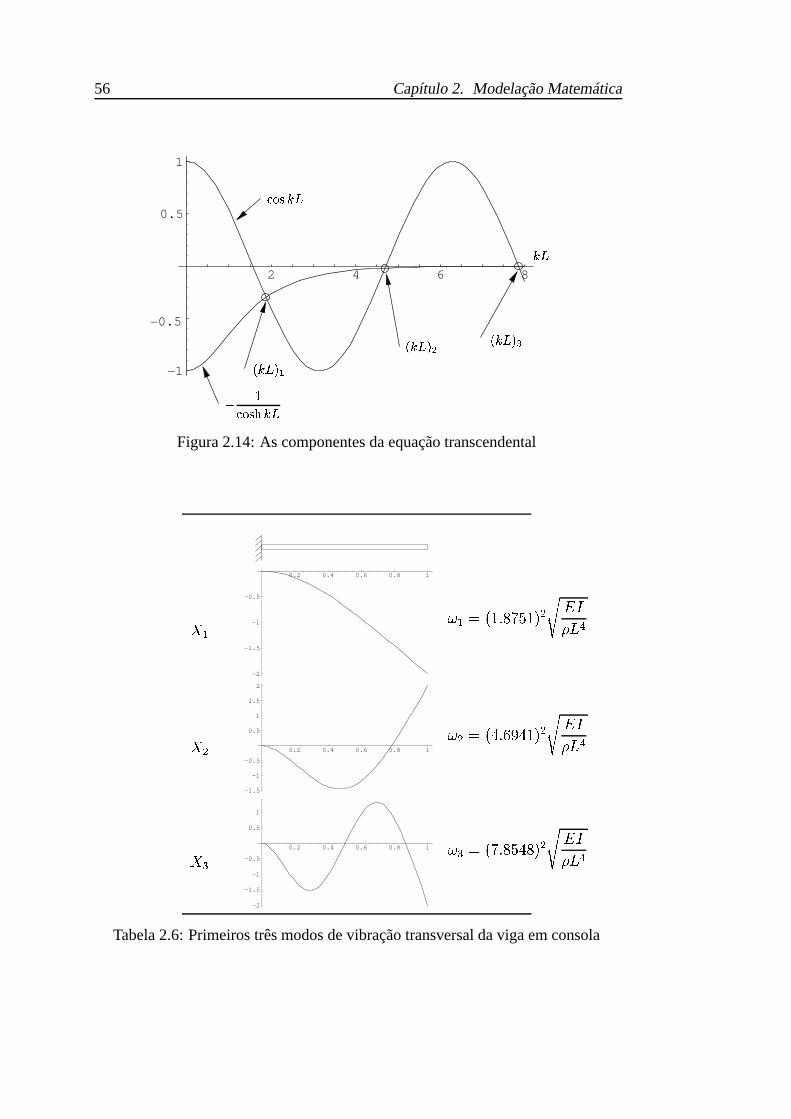
56 Capítulo2. ModelaçãoMatemática
2 4 6 8
−1
−0.5
0.5
1
� �� � � f � � � >¡� � � £¢
ÿ ¤üþý óf� � �
ü ý ó � �
Figura2.14:As componentesdaequaçãotranscendental
P ¸ 0.2 0.4 0.6 0.8 1
-2
-1.5
-1
-0.5 B ¸ � � Ñ�Ø æpå�ãTÑ�� £ H 4sg(À� vP £ 0.2 0.4 0.6 0.8 1
-1.5
-1
-0.5
0.5
1
1.5
2 B £ � ��âXØ ä1�âXÑ�� £ H 4sg(À� vP $ 0.2 0.4 0.6 0.8 1
-2
-1.5
-1
-0.5
0.5
1 B $ � �håTØ æpãâpæp� £ H 4sg(À� vTabela2.6: Primeirostrêsmodosdevibraçãotransversaldavigaemconsola

2.6. A transmissãodecalor 57
Assimcomoresultada Tabela2.5eda Figura 2.14,assoluçõesdestaequaçãotranscendentalaproxima-sedo valor�h¬&��� Ós¥ Ï × �h×Î�ÁÑ��para Χ¦ â . AsfrequênciasdevibraçãoresultamB Ó«�Ý� ¬T�~� £Ó H 4sg(À� vea constanteD £ podeserexprimidaemfunçãode D ¸ ,D £ �Ö ÄmÅ�Æ�¬&� ½ Ä<Å�ÆA� ¬&�Æ�ÇÞÈ ¬&� ½©¨Oª ÎW«�¬&� D ¸assimque, osmodosnormaisdevibraçãosãoexprimidosporP0ÓX���E���ED ¸ � ÄmÅ�Æ�¬®��êÄ<Å�ÆA�`¬À�� ÄmÅ�Æ�¬&� ½ Ä<Å�ÆA� ¬T�Æ�ÇÉÈ�¬&� ½ Æ�ÇÞÈ#��¬&� ��Æ�ÇÞÈ�¬À�,êÆ�ÇÞÈ�� ¬®�E�¬"onde D ¸ éumaconstantearbitrária.
2.6 A transmissãode calor
O comportamentohigrotérmicodoselementosdaenvolventeexterior deedifíciosé um problemaimportanteem engenhariacivil. O estudodestesfenómenose aaplicaçãodosresultadosnafasedeprojectotraduzem-senummelhoramentosigni-ficativo do confortohigrotérmicodosedifícios.
A temperatura�:�����®E�®¯&����� numcorpohomogéneoédadapelaequaçãodecalor� �� � �/© £ °0£ �Ô� © £ �'±² ( � (2.50)
onde © £ é a difusibilidadetérmica, ± é a conductibilidadetérmica, ² é o calorespecíficoe ( amassavolumétrica.
O Laplaciandatemperatura,° £ � , é definidoemrelaçãoa um sistemaCartesi-anodecoordenadas� , , ¯ , ° £ ��� �L£ �� � £ ½ �L£ �� £ ½ ��£ �� ¯ £
Sea distribuiçãodo calor no volumedo corpoé estacionária(o sejaindepen-dentedo tempo, � ), então � �EÚ � ����� e a equaçãode calor reduz-seà equaçãodeLaplace ° £ ���|� (2.51)
Um problemadecalornoregimeestacionário,consisteemconsideraraequaçãodeLaplacedefinidanumaregião ³ doespaçoeumacondiçãodefronteiranacurvaD quedelimitaaregião ³ . Um talproblemaéconhecidocomoproblemadevaloresna fronteira.
Osproblemasdevaloresnafronteirapodemser:
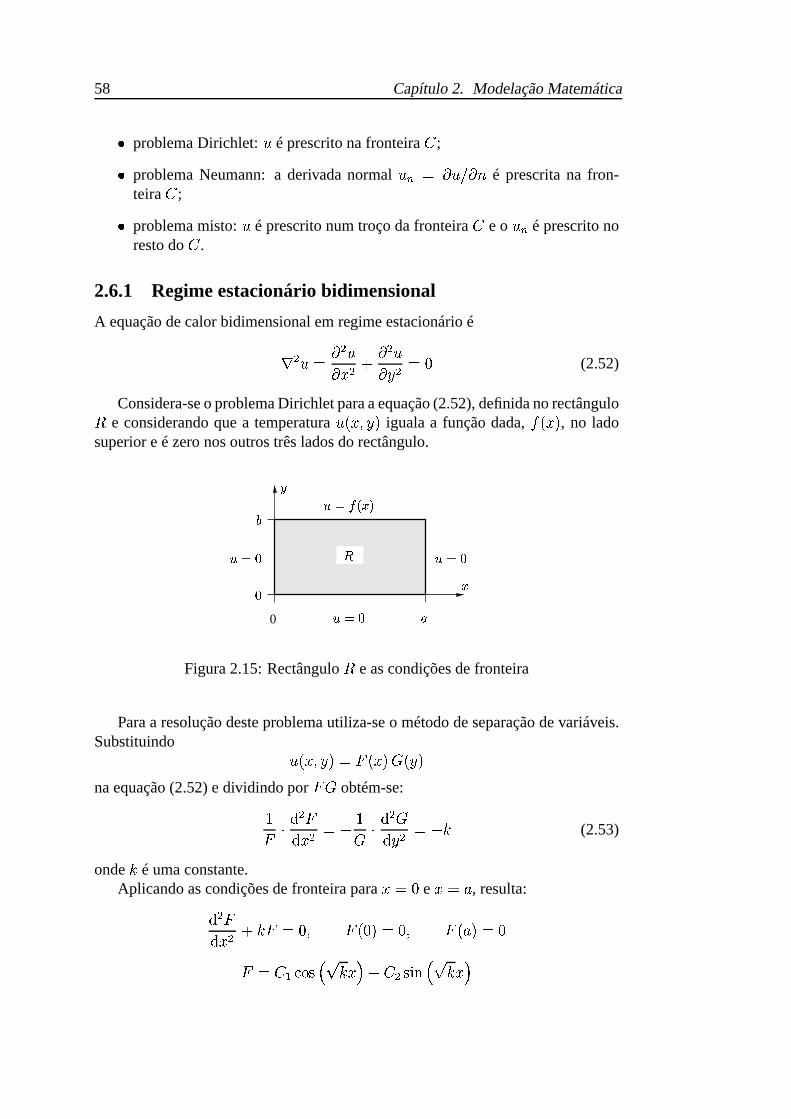
58 Capítulo2. ModelaçãoMatemática± problemaDirichlet: � éprescritonafronteira D ;± problemaNeumann:a derivadanormal �LÓÁ� � �EÚ � Î é prescritana fron-teira D ;± problemamisto: � é prescritonumtroçodafronteira D eo �LÓ é prescritonorestodo D .
2.6.1 Regimeestacionáriobidimensional
A equaçãodecalorbidimensionalemregimeestacionárioé°0£ ��� ��£ �� � £ ½ �L£ �� £ ��� (2.52)
Considera-seoproblemaDirichlet paraaequação(2.52),definidanorectângulo³ e considerandoquea temperatura�:�����®X� igualaa funçãodada, � ���E� , no ladosuperioreézeronosoutrostrêsladosdo rectângulo.
÷0 - ú �´
µ- ú � �
- ú �����ù�- ú �
Figura2.15:Rectângulo³ eascondiçõesdefronteira
Paraa resoluçãodesteproblemautiliza-seo métododeseparaçãodevariáveis.Substituindo �:�����_X���|¡����E�X¢��£X�naequação(2.52)e dividindopor ¡^¢ obtém-se:Ñ¡·¶ ì £ ¡ì � £ �Ö Ñ¢¸¶ ì £ ¢ì £ �Ö ¬ (2.53)
onde ¬ éumaconstante.Aplicandoascondiçõesdefronteirapara���/� e ��� t , resulta:ì £ ¡ì � £ ½ ¬&¡[�/�&� ¡����p���/�&� ¡�� t ���|�¡¥�ED ¸ Ä<Å�Æe¹ ¹ ¬®�»º ½ D £ Æ�ÇÉÈ�¹ ¹ ¬®�»º

2.6. A transmissãodecalor 59¡��h�p����� Ð D ¸ �|�¡�� t ���|� Ð D £ Æ�ÇÉÈ ¹ ¹ ¬ t º �|�obtendo-se¬3�Ý��Î�ÏÔÚ t � £ eascorrespondentessoluções¡����E���/¡ÔÓX���E���|Æ�ÇÞÈ Î�Ït � ÎÕ�²Ñ���×T�iØ<ØµØ (2.54)
A equaçãoparao ¢ torna-seì £ ¢ì £ R Î�Ït S £ ¢#�|�cujasoluçãogeralé ¢��>&���|¢§ÓL�£X���í» Ó�³ Ó *½¼ !¿¾ ½1¾ Ó�³¿ Ó *½¼ !¿¾
A condiçãodefronteirapara0��� implica¢JÓX�h�����/� Ð ¾ Ó«�²�» Ó¢JÓX�>&���|»�Ó ¹ ³ Ó *�¼ !¿¾ ¯³¿ Ó *½¼ !¿¾ º �[×f» Ó�Æ�ÇÞÈ�� Î�ÏÀtNotando×» Ó«�í» ÜÓ e juntandoo resultado(2.54),resulta�LÓL�����®X����¡ÔÓX���E�X¢§ÓL�£X���í» ÜÓ Æ�ÇÞÈ Î�Ï6�t Æ�ÇÞÈ�� Î�ÏÀt (2.55)
Paraobterumasoluçãoquesatisfaztambéma condiçãodefronteira�:�����ÂÁ���� � ���E� (2.56)
consideramosasérieinfinita �:�����®&��� çèÓ � ¸ �LÓ&�����®&�obtendo-se �:�����®Ám��� � ���E��� çèÓ � ¸ » ÜÓ Æ�ÇÉÈ ÎEÏ6�t Æ�ÇÉÈ�� ÎEÏTÁtou �:�����®Ám��� çèÓ � ¸ L » ÜÓ Æ�ÇÞÈ�� ÎEÏÀÁt M Æ�ÇÉÈ ÎEÏ6�to quemostraquea expressãoentreparêntesisdeve sero coeficienteFourier Á Ó dafunção � ���E� , ouseja:Á Ó«�|» ÜÓ Æ�ÇÞÈ�� ÎEÏÀÁt � ×t é+¾� � ���E�&Æ�ÇÉÈ ÎEÏ6�t ì �
A soluçãofinal é portanto
60 Capítulo2. ModelaçãoMatemática
�:�����®X�9� çèÓ � ¸ » ÜÓ Æ�ÇÞÈ Î�Ï6�t Æ�ÇÞÈ#� Î�ÏÀt (2.57)
com » ÜÓ � ×t Æ�ÇÉÈ�����ÎEÏTÁ�Ú t � é ¾� � ���E�&Æ�ÇÞÈ Î�Ï6�t ì � (2.58)
Utilizandoo programaMathematica[19], a soluçãodesteproblemafoi calcu-ladaparaváriasfunções� ���E� . Osresultadosobtidosutilizando ѵ� termosnasérie,bemcomo códigodeentradaparaMathematica, sãoapresentadosnaTabela2.7.
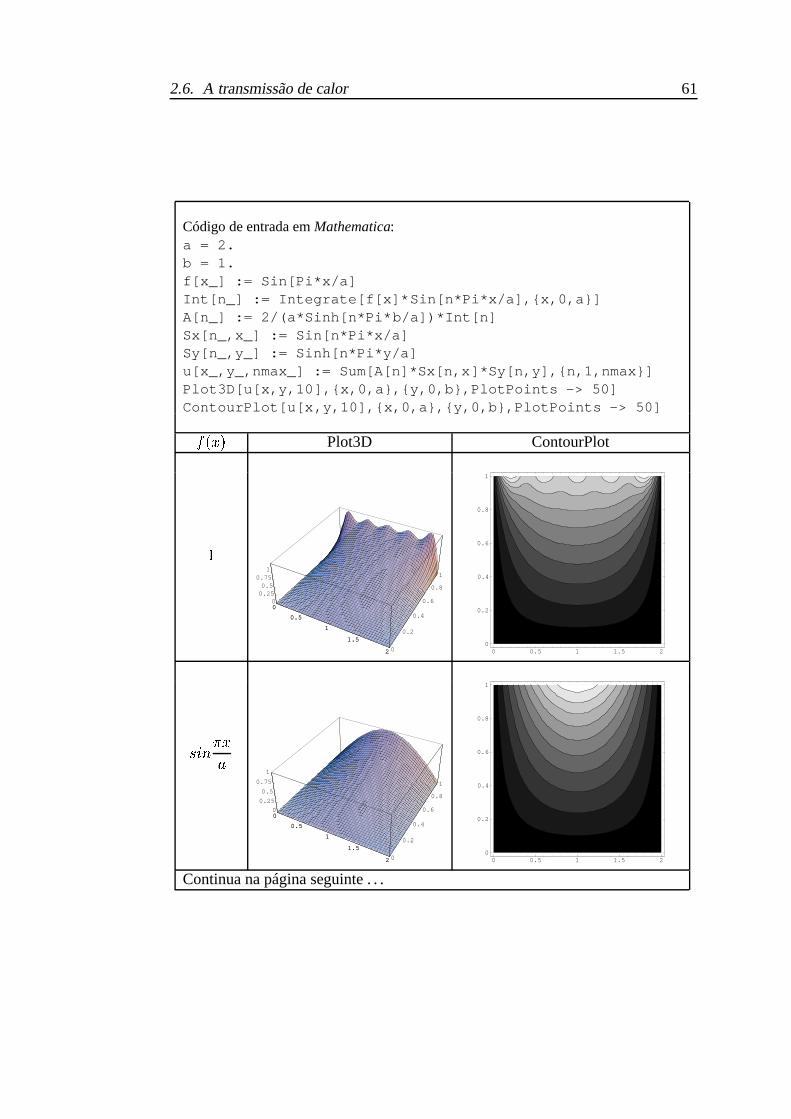
2.6. A transmissãodecalor 61
CódigodeentradaemMathematica:a = 2.b = 1.f[x_] := Sin[Pi*x/a]Int[n_] := Integrate[f[x]* Si n[n *P i* x/ a] ,{x ,0 ,a }]A[n_] := 2/(a*Sinh[n*Pi* b/ a] )*I nt [n ]Sx[n_,x_] := Sin[n*Pi*x/a]Sy[n_,y_] := Sinh[n*Pi*y/a]u[x_,y_,nmax_] := Sum[A[n]*Sx[n,x ]* Sy[n ,y] ,{ n, 1, nmax} ]Plot3D[u[x,y,10 ], {x, 0, a} ,{ y, 0,b }, Pl ot Point s -> 50]ContourPlot[u[x ,y ,10 ], {x ,0 ,a },{ y, 0, b} ,P lot Poin ts -> 50]� ���E� Plot3D ContourPlot
Ñ0
0.5
1
1.5
2 0
0.2
0.4
0.6
0.8
1
00.250.5
0.751
0
0.5
1
1.5
2 0 0.5 1 1.5 20
0.2
0.4
0.6
0.8
1
¨Oª Î Ï!�t0
0.5
1
1.5
2 0
0.2
0.4
0.6
0.8
1
0
0.25
0.5
0.75
1
0
0.5
1
1.5
2 0 0.5 1 1.5 20
0.2
0.4
0.6
0.8
1
Continuanapáginaseguinte. . .
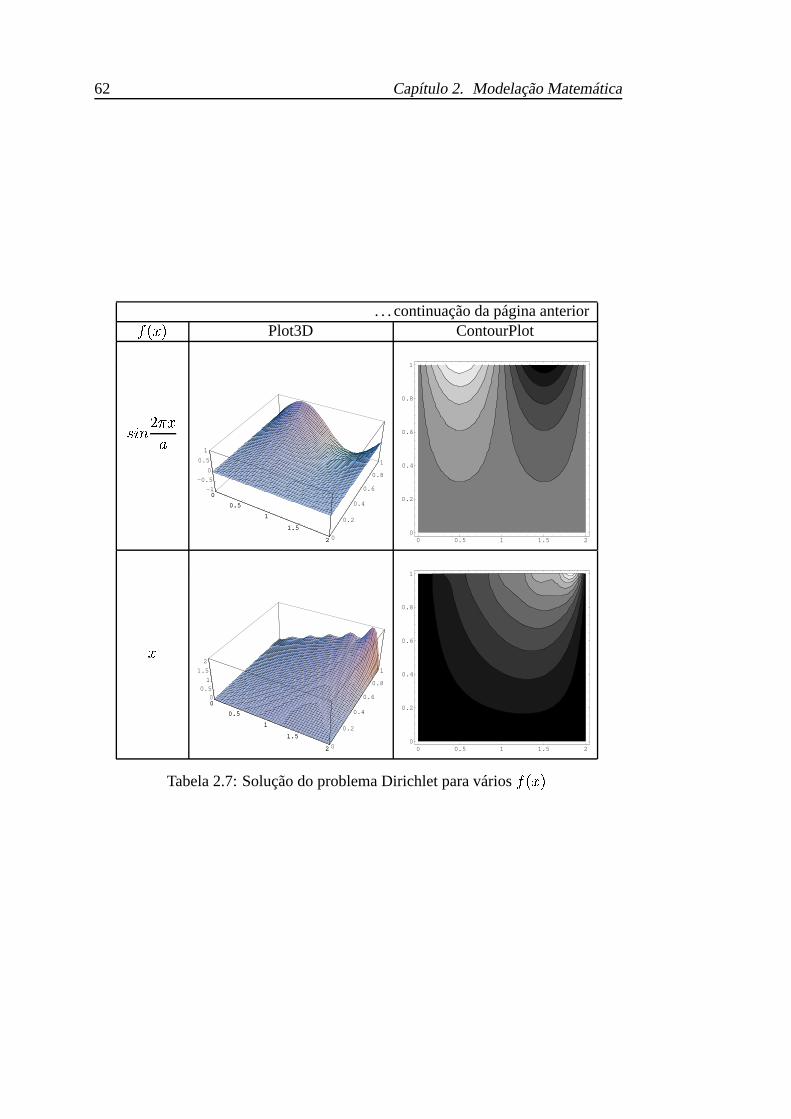
62 Capítulo2. ModelaçãoMatemática
. . . continuaçãodapáginaanterior� ���E� Plot3D ContourPlot
¨Oª Î ×fÏ6�t0
0.5
1
1.5
2 0
0.2
0.4
0.6
0.8
1
-1
-0.5
0
0.5
1
0
0.5
1
1.5
2 0 0.5 1 1.5 20
0.2
0.4
0.6
0.8
1
�0
0.5
1
1.5
2 0
0.2
0.4
0.6
0.8
1
0
0.5
1
1.5
2
0
0.5
1
1.5
2 0 0.5 1 1.5 20
0.2
0.4
0.6
0.8
1
Tabela2.7: Soluçãodo problemaDirichlet paravários � ���E�
2.7. Problemasdedifusão 63
2.7 Problemasdedifusão
O transportefísicodesubstânciasmiscíveisemáguaécaracterizadoporadvecção,difusão, dispersãoeadsorpção. Emcasosconcretos,osprocessosinteragemenãoé fácil distingui-los,masa descriçãoem separadoé maissimplese, por isso,serefereabaixo.
A advecçãocorrespondeao transporteda substânciaassociadoao movimentodo fluido emqueestádissolvida.A velocidadei do fluido no meioporosoé dadapelalei deDarcy, i0�²Äà ° Ãemqueà éapressãoe à apermeabilidadedomeioporoso.Esteprocessoprevaleceparavelocidadesdefluxo relativamentealtas, �[Ñ'� ¿cÅ m/s.
A difusãocorrespondeao transporteconseguidopor movimentosmolecularesaleatórios,o chamadomovimentoBrowniano,denaturezacomparável àdacondu-çãodo calor. Estaanalogiafoi reconhecidapor Fick [7] que,em1855,a utilizouparaderivarasequaçõesfundamentaisdadifusãoapartirdasleisestabelecidasporFourier[8], em1822,parao calor.
A primeiralei deFick sóéaplicável a regimesdeconcentraçãotemporalmenteestacionáriaeafirmaqueo fluxo ¡ dasubstânciaquesedifundeé proporcionalaogradientedaconcentração© , sendoÆ o coeficientededifusão:¡#�# Æ � ©� �
A segundalei de Fick aplica-sea regimesnãoestacionáriose é estabelecidausandoaprimeiralei eo princípiodaconservaçãodamassaqueconduzema:� ©� � �EÇ ° £ ©O coeficientede difusividade Ç podeserdependenteda concentração.Na difu-são,o fluido nãosedeslocae a migraçãodeve-seà transferênciadepartículasdasregiõesdemaiselevadaconcentraçãoparaasdeconcentraçãomaisbaixa.O fenó-menoprevaleceemfluxosdebaixavelocidade,È Ñ'� ¿cÅ m/s.
A dispersãoé devida a fenómenostransientesassociadosà velocidadevariáveldediferentespartículasdofluido emmovimento.
A adsorpçãoéumprocessodeinteracçãoentreo solutoea fasesólida,emqueumapartedasubstânciadissolvidaé retiradadofluido transportador.
Problema 2.13 Difusão comcondiçõesde contorno não-homogéneasSejadadaa equaçãodiferencialpara o domínioespacial,� ©� � �5Ç �L£ ©� ¯ £

64 Capítulo2. ModelaçãoMatemática
comasseguintescondiçõesdecontorno©� ׫6�������/©�h�T�������ED �e iniciais ©�f¯&� �p���/�
O primeiro passoaconselhávelé transformaro problemademodoa ter condi-çõesdecontornohomogéneas.Sendoesseo caso,fazendoa substituição�:�f¯&��������©��>¯&�������D �resulta � �� � �5Ç ��£ �� ¯ £�9�h׫6���������:���&�������|��:�f¯T���p���²�D �Segue-se, agora, o procedimentohabitual de sobreporo integral particular àsoluçãodo problemahomeogéneo. Para a soluçãohomogéneapodefazer-se ahabitualseparaçãodevariáveis ���5É�&a qual conduza ,& & � ÇÊÉ ¦ ¦É �Ö�Ë £ (i.e. constantenegativa)
A soluçãode ÇÊÉ�¦ ¦ ½ Ë £ Éí�/�fornecevaloresemodoscaracterísticos,atravésdascondiçõesnocontorno:Æ�ÇÞÈ L ׫Ì˹ Ç M �|� Р׫Ì˹ Ç �|ÎEÏ Ð Ë�Ó«� ÎEÏ ¹ Ç׫
A condiçãono tempo,,& ½ Ë £ &í���
transforma-seem,& ½ Î £ Ï £ Çâ�« £ &����comsoluçõesexponenciaisdecrescentes.Assoluçõeshomogéneaspodem,então,
escrever-se, �LÓ^�|³ Î £ Ï £ Çâ�« £ Æ�ÇÉÈ R Î�Ï׫ ¯ S

2.8. FormasQuadráticas 65
É precisocombinarestassoluçõesde modoa satisfazera condiçãoinicial�:�>¯&���p���Ö�D � , para obter �:�f¯&����� . Fazendo«�/� e impondoa condiçãoinicial,�D � � çè ¸ ¾ Ó�Æ�ÇÉÈ R Î�Ï׫ ¯ Sisto é, encontra-se, naturalmente, a necessidadede desenvolver a função �D �numasériedeFourier sesenospara segeraremoscoeficientes¾ Ó . Obtém-se¾ Ó^� ×;,Ï �þ^Ñ���Í�D �ea concentraçãodofluidoemdifusão,por volumedevaziosdo sólido,é:©��>¯&�������5D �
���� Ñ ½ ×Ï è �þ^Ñ���ÍV³ Î £ Ï £ Ç��â�« £ Æ�ÇÞÈ R Î�Ï׫ ¯ S �Z���2.8 FormasQuadráticas
As formasquadráticassãofunçõespolinomiaishomogéneasdesegundograu,for-masestasquesurgemcomfrequênciaassinalável na formulaçãodeproblemasdeengenharia.De modo geral, podemassociar-se a Î variáveis � ¸ , � £ , . . . , �LÓ eescrever-se: Î ��� ¸ �X� £ �iصصØm�X�LÓÀ��� Óè� � ¸ ÓèÏ � ¸ ©Â� Ï �Ì� � Ïemque © � Ï sãooscoeficientesdefinidoresdeumamatriz Ð Ó�ÑÓ . Usandoa notaçãomatricial,a formaquadráticaescreve-se:Î �fÒÔÓ!���5ÒÕÓ Ð Òemque Ò Ó éo vectortranspostode Ò e Ð éumamatrizsimétrica.Mostra-sequeamatriz Ð éúnica,i.e. nãohá Ö Ê� Ð tal qie
Î �fÒ Ó ���EÒ Ó Ö Ò .A obtençãodamatriz Ð apartirde × éfeitaobservandoqueépossívelescrevert � Ï � Ñ× �h©Â� Ï ½ © Ï ���
garantindot � Ï � t Ï � eobservandoque t �Ø�!��© �Ø� geraoselementosdiagonais.Nota-sequeanotaçãonãoimplica asoma.
Problema 2.14 Determineos coeficientesda matriz simétrica Ð , para que aformaquadrática Î �fÒ Ó ���í� £ ½ ×z £ ½ ¯ £ ê�» ½ â0¯

66 Capítulo2. ModelaçãoMatemática
possaserescrita Î �>ÒÙÓ!���5ÒÙÓ Ð ÒOscoeficientesda matrizsimétrica Ð resulta:t ¸ñ¸ �Ý� Ñ ½ Ñ���Ú�×J�ÖÑ t ¸ £ �Ý� «Ñ ½ �p��Ú�×J�² �&Øöã t ¸ $ �Ý�h� ½ ����Ú�×J�/�t £ ¸ �Ý���§ Ñ���Ú�×J�# �&Øöã t £ñ£ �Ý�h× ½ ×���Ú�×^�/× t £ $ �Ý��â ½ ����Ú�×J�[×t $ ¸ �Ý��� ½ �p��Ú�×J�/� t $ £ �Ý��� ½ âÀ��Ú�×^�/× t $�$ �Ý�þÑ ½ Ñ'��Ú�×J�ÖÑ
Ð � ��� Ñ �&Øöã � �&Øöã × ×� × Ñ �Z��Ò Ó Ð Ò2�ÛÚ � ¯wÜ ��� Ñ �&Øöã � �&Øöã × ×� × Ñ � �� ��� �� � ¯ � ���� ÐÒÕÓ Ð ÒA��� £ ½ ×) £ ½ ¯ £ ê�» ½ â�#¯
2.8.1 Diagonalizaçãode FormasQuadráticas
A diagonalizaçãode matrizespermitemaior simplicidadematemáticana análisedecomportamentodesistemase, por vezes,maioresclarecimentofísico, comoseveráaolongodo curso.
A diagonalizaçãode formasquadráticasgozadesseduplo interessee permitesubstituira relaçãoÒ Ó Ð Ò com Ð simétrica,por Ò Ó�Ý Ò com Ý diagonal.
Recorda-sedaÁlgebraLinearqueumamatrizsimétricaÐ deelementosreaissepodediagonalizaratravésdeumatransformaçãoortogonaldefinidapor Þ , comasseguintespropriedades: Þ Ó Þ �Eße Þ Ó ÐàÞ � Ýemque ß é a matrizdaidentidadee a matriz Ý temcomoelementosdiagonaisosvalorespróprios
· � damatriz Ð .Fazendoamudançadevariáveisde Ò paraá , definidaporÒ2� Þâá
esubstituindoÒ em
Î �fÒ Ó , obtém-se:Î �>Ò Ó ���5Ò Ó Ð ÒA� � Þâá � Ó Ð � ÞXá ��� á Ó � Þ Ó ÐlÞ � á � á Ó Ý á

2.8. FormasQuadráticas 67
i.e., Î �>ÒÔÓ!��� ·6¸ £¸ ½ · £ ££ ½ ØµØµØ ½ · Ó� £ÓResumindo,adiagonalizaçãodeumaformaquadráticatemasseguintesetapas:
– Obtém-seamatrizsimétricaÐ , tal que
Î �EÒ Ó Ð Ò ;– Determine-seosvalorespróprios
· � damatriz Ð . Nota-seque,comoamatrizésimétrica,osvaloresprópriossãoreais;
– Constrói-seamatrizortogonalÞ ;
– Define-seamudançadevariáveis Òê� Þâá ;– Calcula-sea formaquadrática
Î � á Ó Ý á , comamatriz Ý diagonal.
2.8.2 ClassificaçãodeFormas Quadráticas
A classificaçãode formasquadráticastem impotrânciaem engenhariaporqueépossível associarcomportamentosfísicosdecertossistemasaotipo deformaqua-dráticaqueselhesassocia.
Considere-se ã#äfåÔæ�çéèGåÙæ�êGåcomåwë�ìîí
A formaquadráticadiz-se:
a) Positivadefinidaseã�ä>åéçðï©ñ#ò ó�åEôèEñ
;
b) Positivasemi-definidase
ã#äfåéçöõQñ#ò ó�ålôèEñ;
c) Indefinidasetomarvaloresquerpositivos,quernegativospara
åuë�ì í.
À classificaçãocitadaassocia-seumteoremaquepermite,emcasogeral,deter-minarsea formaquadráticaépositivadefinidaou semi-definida.
Teorema: dadaa forma quadrática
ã�ä>å æ çîè÷å æ êGå, com
ê í�ø)ísimétrica,
e valorespróprios ùWú ò ùÌû òOü½üOü½ò ù í , é condiçãonecessáriae suficientepara queaformasejapositivadefinidaquetodososvaloresprópriossejampositivos(ousemi-definidasetodososvaloresprópriosforemnãonegativos).
A aplicaçãodesseteoremaemproblemasdeestabilidadedeequilíbrioemsis-têmasmecânicosfaze-seutilizandoo critério energético[15] queafirmaqueumaconfiguraçãodeequilíbrioé estável sea formaquadráticaquedefinea energia po-tencialtotal dosistemafor positivadefinida.
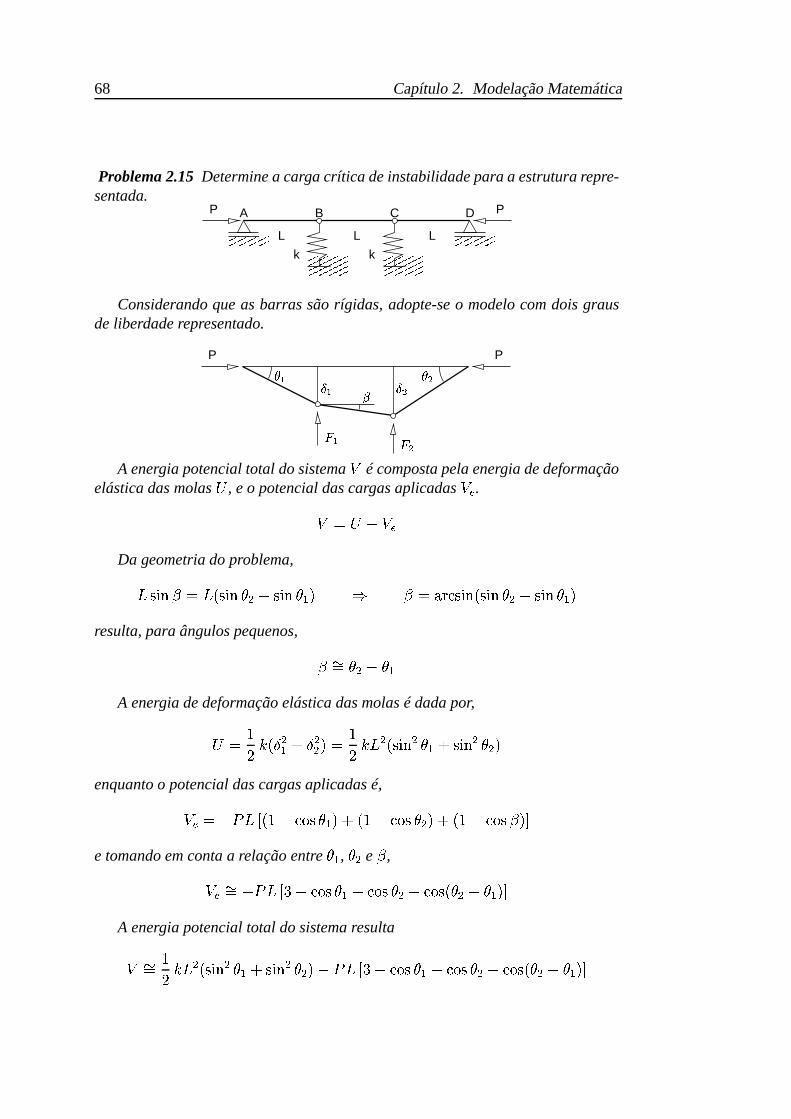
68 Capítulo2. ModelaçãoMatemática
Problema 2.15 Determinea cargacrítica deinstabilidadepara a estrutura repre-sentada.
ý ýý ýþ þþ þ ÿ ÿÿ ÿ� �� �� �� � � �� �A B C D
k k
L L L
P P
Considerandoqueas barrassãorígidas, adopte-seo modelocomdois grausdeliberdaderepresentado.
P P��� ��� � � �� � � �
A energia potencialtotal dosistema écompostapelaenergia dedeformaçãoelásticadasmolas � , eo potencialdascargasaplicadas �� . è ���� ��
Da geometriado problema,��������� è � ä ������� û! �����"� ú ç # � è%$'&�( ����� ä �����)� û! �����)� ú çresulta,para ângulospequenos, �+* è � û! � ú
A energia dedeformaçãoelásticadasmolasédadapor,� è-,.0/ ä21 ûú � 1 ûû ç è3,.4/ � û ä ����� û � ú5� ����� û � û çenquantoo potencialdascargasaplicadasé, �� è 76 �98 ä , (;: ��� ú ç � ä , (<: ��� û ç � ä , (<: �=� ç?>e tomandoemcontaa relaçãoentre
� ú , � û e � , �� * è "6 �@8BA (;: ��� úC (<: �=� û! (<: � ä � û! � ú çD>A energia potencialtotal dosistemaresulta * è ,. / � û ä ����� û � ú5� ����� û � û ç E6 �@8BA (;: �=� úC (;: ��� û! (<: � ä � ûF � ú çD>

2.8. FormasQuadráticas 69
A energia potencialpodeserexprimidanaseguinteformaquadratica, è ,.0G æ ê Gemque G æ èIH � ú � ûKJ . Fazendoa multiplicação, è ,. ä2L ú�ú � ûú � L ú>û � ú � ûM� L û_ú � ú � ûM� L û�û � ûû çTomandoem conta a simetria da matriz
ê, o seuscoeficientesresulta,para a
posiçãonão-deformadada estrutura (� ú è � û èEñ ), diferenciando:L ú�ú èON û N � ûú PPPPP � ú è � û è5ñ è / � û . 6 �L û�û è N û N � ûû PPPPP � ú è � û è5ñ è / � û . 6 �L ú>û èQL û_ú è N û N � ú N � ú PPPPP � ú è � û èGñ è 6 �
A matrizda formaquadratica resulta:ê èSR / � û . 6 � 6 �6 � / � û . 6 �%TOsvaloresprópriosdestamatrizsãodadosporù�ú è � ä / � A 6 ç ù»û è � ä / � U6 çConformeao teoremaenunciado,a forma quadratica é positiva definidase
todososvaloresprópriosfossespositivos.Para isto, temque6 ï / �!V'ALogo, a violaçãodo equilíbrio estávelocorre para 6 ï / �!V'A , carga crítica deinstabilidade.
70 Capítulo2. ModelaçãoMatemática
Capítulo 3
MétodosNuméricospara EquaçõesDiferenciaisParciais
Osmétodosnuméricosdesenvolvidosparaobterasoluçãodasequaçõesdiferenci-aissãodegrandeimportânciaparaengenheiros,poisinúmerosproblemaspráticasconduzema equaçõesdiferenciaisquenãotem soluçãoanalítica,ou, em casote-nham,a expressãodasoluçãoé tãocomplexa quenãopodeserutilizadado pontode vista prático. Nestassituações,é preferível obtera soluçãosobforma de umatabeladevalorespor intermédiodummétodonumérico.
O estudoqueseguerefere-seaosmétodosnuméricosparaequaçõesdiferenciaisparciaiseemparticularparaaequaçãodeLaplace,equaçãodocaloreaequaçãodeondasquerepresentammodelosdeequaçõeselípticas,parabólicasehiperbólicas.
Uma equaçãodiferencial parcial chama-sequaselinear se pode ser escritacomoumacombinaçãolineardederivadasdeordemsuperior. Assim,umaequaçãoquaselinear de segundaordemem duasvariáveis independentes,W e X , podeserescrita: L N û�YN W û � .'Z N ûYN W N X ��[ N ûYN X û èQ\^] W ò X ò Y ò N YN W ò N YN XC_ (3.1)
onde Y éa funçãoincógnita.A equaçãoéchamada` elíptica,seL [a Z û ï ñ (exemplo:equaçãodeLaplace);` parabólica,se
L [a Z û è5ñ (exemplo:equaçãodo calor, X éo tempob );` hiperbólica,se
L [a Z û�c ñ (exemplo:equaçãodasondas,X éo tempob ).Oscoeficientes
L,Z
e [ podemserfunçõesde W e X , portantoaequação3.1podeserdiferenteemváriasregiõesdoplano W�X .
Estaclassificaçãoé importante,poiso comportamentodassoluçõesé diferenteparacadatipo de equação,assimcomo as condiçõesde fronteira e iniciais quedevemserconsideradas.
71

72 Capítulo3. MétodosNuméricosparaEquaçõesDiferenciaisParciais
3.1 Equaçõeselípticas
As equaçõeselípticasconduzemasproblemasdevaloresnafronteirado domíniod, conhecidaspor
– problemadeDirichlet, se Y édadonafronteira e do domíniod
;
– problemadeNeumann,se Y í (derivadanormaldo Y ) é dadana fronteira edo domínio
d;
– problemamisto,se Y é dadonumapartedafronteirae Y í napartequerestadafronteira e .
As maisimportantesequaçõeselípticasqueaparecememaplicaçõesdeenge-nhariasãoaequaçãodeLaplace° û Y èfN ûYN W û � N ûYN X û èGñ (3.2)
eaequaçãodePoisson ° û Y è N ûYN W û � N ûYN X û èhgÙä W ò X ç (3.3)
Paraobterasoluçãopor intermédiodummétodonumérico,asderivadasparci-aissãosubstituídaspelasdiferençasdivididascorrespondentes.Assim,utilizandoo desenvolvimentoemsériedeTaylor,Y ä Wi�kj ò X ç è Y ä W ò X ç ��j N Y ä W ò X çN W � j û. N ûlY ä W ò X çN W û � jnmo N m Y ä W ò X çN W m � ü½üOü (3.4)Y ä Wp Uj ò X ç è Y ä W ò X ç qj N Y ä W ò X çN W � j û. N û�Y ä W ò X çN W û jrmo N m Y ä W ò X çN W m � üOüOü (3.5)
Subtraindo(3.5)do (3.4)edesprezandoostermosem j m , jns , . . . , obtêm-seN Y ä W ò X çN W t ,. j 8 Y ä Wi�kj ò X ç Y ä Wu qj ò X ç?> (3.6)
Demesmomodo,considerandoumaperturbaçãosegundoX , obtêm-seN Y ä W ò X çN X t ,. / 8 Y ä W ò X4� / ç Y ä W ò Xv / ç?> (3.7)
As segundasderivadasobtêm-sesomando(3.5)e(3.4)edesprezandoostermosem jnw , jnx , . . . , Y ä Wy��j ò X ç � Y ä Wu qj ò X ç t . Y ä W ò X ç �kj û N ûY ä W ò X çN W û (3.8)
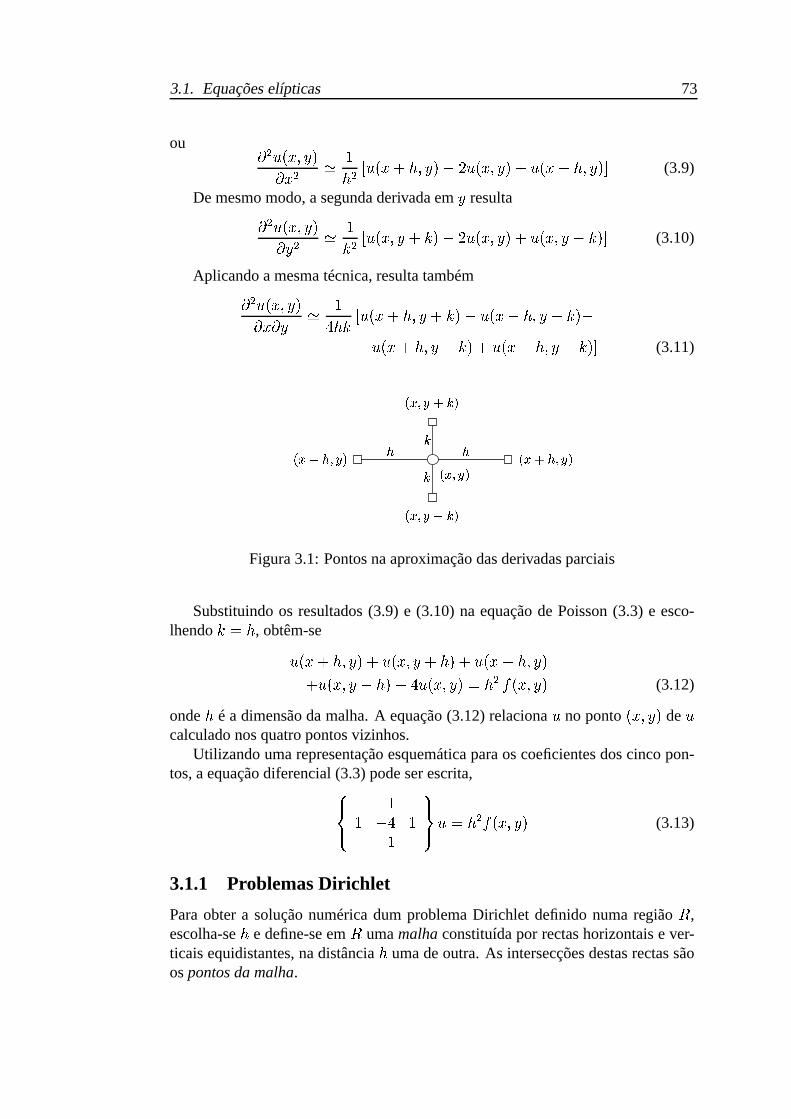
3.1. Equaçõeselípticas 73
ou N û�Y ä W ò X çN W û t ,j û 8 Y ä Wy��j ò X ç . Y ä W ò X ç � Y ä Wu Uj ò X çD> (3.9)
Demesmomodo,asegundaderivadaem X resultaN û Y ä W ò X çN X û t ,/ û 8 Y ä W ò X4� / ç . Y ä W ò X ç � Y ä W ò Xv / çD> (3.10)
Aplicandoamesmatécnica,resultatambémN ûY ä W ò X çN W N X t ,z j / 8 Y ä Wi�kj ò X{� / ç Y ä Wu Uj ò X{� / ç Y ä Wi�kj ò Xv / ç � Y ä Wu qj ò X| / çD> (3.11)
}�~����������}�~����a�y���}�~������u���
}�~��2�����}�~)�y���2��� ��Figura3.1: Pontosnaaproximaçãodasderivadasparciais
Substituindoos resultados(3.9) e (3.10)na equaçãode Poisson(3.3) e esco-lhendo / è j , obtêm-seY ä Wi�kj ò X ç � Y ä W ò X4�kj ç � Y ä Wp qj ò X ç� Y ä W ò X| �j ç z Y ä W ò X çÙè j û gÙä W ò X ç (3.12)
onde j é a dimensãodamalha.A equação(3.12)relacionaY no ponto
ä W ò X ç de Ycalculadonosquatropontosvizinhos.
Utilizandoumarepresentaçãoesquemáticaparaoscoeficientesdoscincopon-tos,aequaçãodiferencial(3.3)podeserescrita,��� �� ,, z ,, � ���� Y è j û gÙä W ò X ç (3.13)
3.1.1 ProblemasDirichlet
Paraobtera soluçãonuméricadum problemaDirichlet definidonumaregiãod
,escolha-sej e define-seem
dumamalhaconstituídapor rectashorizontaise ver-
ticaisequidistantes,nadistânciaj umadeoutra.As intersecçõesdestasrectassãoospontosda malha.

74 Capítulo3. MétodosNuméricosparaEquaçõesDiferenciaisParciais
� � � ~� ���� �?� � ���� �2������
�
Figura3.2: Regiãonoplano W�X cobertapor umamalhaequidistantejAproxima-sedepoisa equaçãodiferencialquegovernao problemapor suare-
presentaçãoemdiferençasfinitas,o querelacionaosvaloresincógnitosdafunçãoY nospontosda malhaemd
e com os valoresdadosna fronteira. Obtêm-seas-simumsistemalineardeequaçõesalgébricas,cujasoluçãosãoosvaloresde Y nospostosdamalhaem
d. Comoemcadaponto, Y sóé relacionadoaosvaloresdos
pontosvizinhos,obtêm-seumamatrizesparsa, o seja,umamatrizcompoucosele-mentosnãonulos.Tomandoemcontao elevadoo índicedeesparsidadedosistemaresolutivo é convenientearmazenar, processare resolverestessistemasrecorrendoàstécnicasdisponíveisparaamanipulaçãodesistemasesparsos[11, 18].
Admita-seaseguintenotaçãosimplificadaparaospontosdamalhaeosrespec-tivosvaloresdasolução,vejatambémaFigura3.2,65 ¢¡ è ä�£ j ò�¤ j ç Y ¢¡ è Y ä�£ j ò�¤ j ç (3.14)
Comestanotação,aequaçãodePoissonpassaa teraseguinteforma:Y �¥�ú?¦ ¡C� Y �¦ ¡�¥�ú§� Y �¨Ìú?¦ ¡M� Y �¦ ¡¨Ìú© z Y ¢¡ è j û g ¢¡ (3.15)
Problema 3.1 Osquatro ladosdaplacarectangularhomogéneade, .
cmdelado,sãomantidosna temperatura constantede
ñ«ªC e
, ñ�ñ«ªC, assimcomosemostra na
Figura 3.3. Utilizando umamalhadez
cm, determinea temperatura emregimeestacionárionospontosda malha.
A equaçãodecalornoregimeestacionárioreduz-seaequaçãodeLaplace.Uti-lizandoanotaçãosimplificada,escreve-separacadapontointeriorumaequaçãodetipo (3.15),tomandoemcontaque
g ¢¡ èEñ .
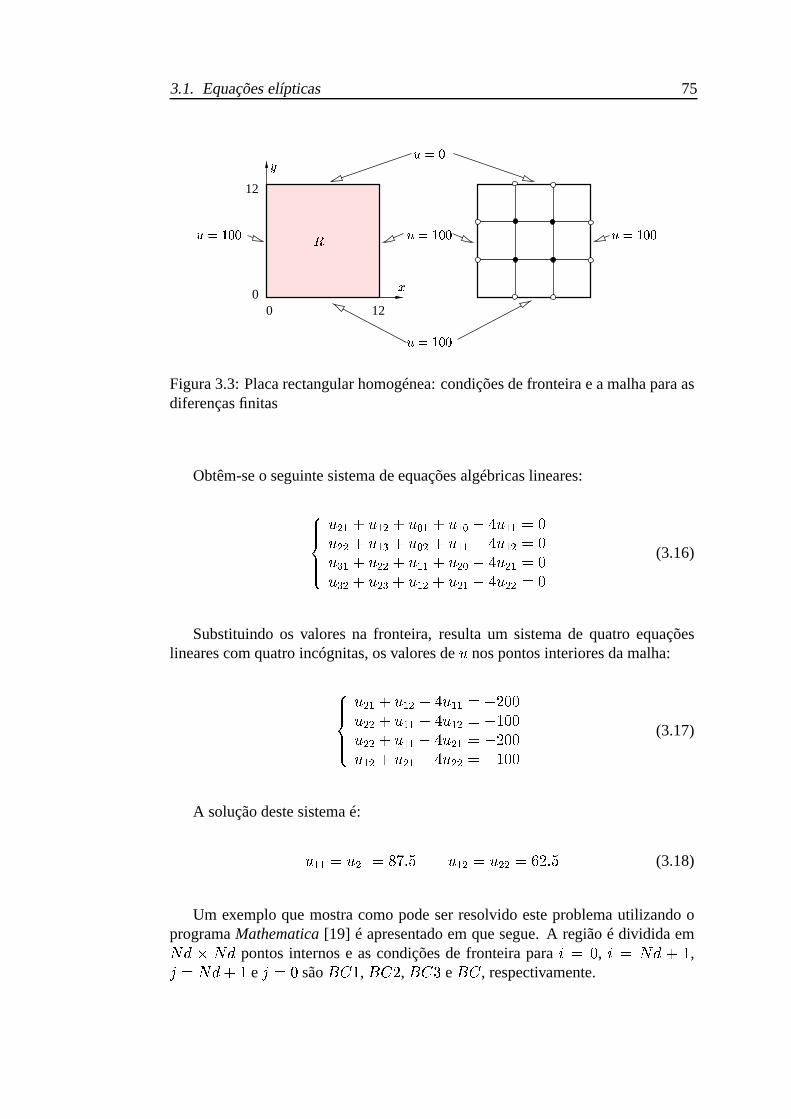
3.1. Equaçõeselípticas 75
0
12
0 12
¬7 �
¬"+® �l�¬"+® �l�¯ ~
�¬"°® �;�¬7+® �l�
Figura3.3: Placarectangularhomogénea:condiçõesdefronteiraeamalhaparaasdiferençasfinitas
Obtêm-seo seguintesistemadeequaçõesalgébricaslineares:����� ���� Y û_ú±� Y ú>û²� Y�³ ú´� Y ú ³ z Y ú�ú èGñY û�û²� Y ú m � Y�³ ûM� Y ú�ú² z Y ú>û èGñY m ú±� Y û�û²� Y ú�ú´� Y û ³ z Y û_ú èGñY m û²� Y û m � Y ú>ûM� Y û_ú² z Y û�û èGñ (3.16)
Substituindoos valoresna fronteira, resultaum sistemade quatroequaçõeslinearescomquatroincógnitas,osvaloresde Y nospontosinterioresdamalha:����� ���� Y û_ú´� Y ú>û! z Y ú�ú è . ññY û�ûM� Y ú�úM z Y ú>û è , ññY û�ûM� Y ú�úM z Y û_ú è . ññY ú>ûM� Y û_úM z Y û�û è , ññ (3.17)
A soluçãodestesistemaé:Y ú�ú è Y û_ú è%µ·¶cü¹¸ Y ú>û è Y û�û è o·. ü¹¸ (3.18)
Um exemploquemostracomopodeserresolvidoesteproblemautilizandooprogramaMathematica[19] é apresentadoemquesegue. A regiãoé dividida emº¼»+½Uº@»
pontosinternose ascondiçõesde fronteirapara£ è ñ
,£�è º@» � ,
,¤ è º@» � ,e¤�èEñ
são ¾ie , , ¾ie . , ¾ie A e ¾ie , respectivamente.
76 Capítulo3. MétodosNuméricosparaEquaçõesDiferenciaisParciais
Nd = 2
A = Array[a,{Nd*Nd,Nd*Nd}]For[i=1, i<=Nd*Nd, i++,
For[j=1, j<=Nd*Nd, j++, A[[i,j]]=0]]
B = Array[b,Nd*Nd]For[i=1, i<=Nd*Nd, i++, B[[i]]=0]
BC1[i_]:=100BC2[j_]:=100BC3[i_]:=0BC4[j_]:=100
For[i=1, i<=Nd, i++,For[j=1, j<=Nd, j++,
row = i+(j-1)*Nd;If[i+1<=Nd,A[[row,i+1+(j-1) *Nd]] =1,
B[[row]]=B[[row]]-BC2[j]];If[j+1<=Nd,A[[row,i+j*Nd]]= 1,
B[[row]]=B[[row]]-BC3[i]];If[i-1>=1,A[[row,i-1+(j-1)* Nd]]= 1,
B[[row]]=B[[row]]-BC4[j]];If[j-1>=1,A[[row,i+(j-2)*Nd ]]=1,
B[[row]]=B[[row]]-BC1[i]];A[[row,row]]=-4
]]
X = Inverse[A] . B
u[i_,j_]:= X[[i+(j-1)*Nd]]
Solution = Array[s,{Nd+2,Nd+2}]
For[i=1, i<=Nd, i++, For[j=1, j<=Nd, j++,Solution[[i+1,j+1]]=u[i,j]]]
For[i=1, i<=Nd+2, i++, Solution[[i,1]]=BC1[i]]For[i=1, i<=Nd+2, i++, Solution[[i,Nd+2]]=BC3[i]]For[j=1, j<=Nd+2, j++, Solution[[1,j]]=BC4[j]]For[j=1, j<=Nd+2, j++, Solution[[Nd+2,j]]=BC2[j]]
ListPlot3D[Solution]
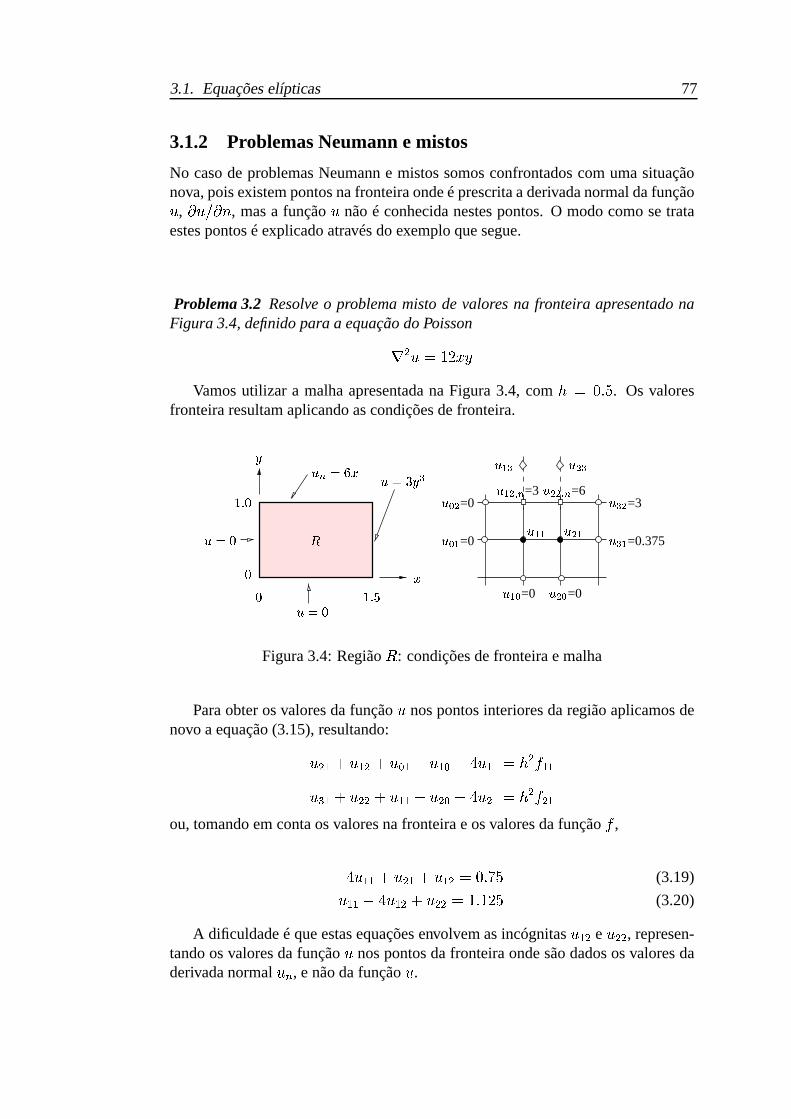
3.1. Equaçõeselípticas 77
3.1.2 ProblemasNeumannemistos
No casode problemasNeumanne mistossomosconfrontadoscomumasituaçãonova,poisexistempontosnafronteiraondeéprescritaaderivadanormaldafunçãoY ,N Y V Nr¿ , masa função Y nãoé conhecidanestespontos.O modocomosetrata
estespontoséexplicadoatravésdo exemploquesegue.
Problema 3.2 Resolveo problemamistode valoresna fronteira apresentadonaFigura 3.4,definidopara a equaçãodoPoisson° û Y è , . W�X
Vamosutilizar a malhaapresentadana Figura3.4, com j è ñ#üÀ¸ . Os valoresfronteiraresultamaplicandoascondiçõesdefronteira. ¬ ��Á¬ ��Á¬ ���ÃÂ Ä =3 ¬ ���DÂ Ä =6¬'Å � =0
¬ Å � =0 ¬ Á?� =0.375
¬ Á�� =3
¬ � Å =0¬ � Å =0
¬ ��� ¬ �Æ�¯� ®;Ç È�
®lÇ �~
� ¬ Ä ÊÉ ~
¬" �¬7 �
¬" � � Á
Figura3.4: Regiãod
: condiçõesdefronteiraemalha
Paraobterosvaloresdafunção Y nospontosinterioresdaregiãoaplicamosdenovo aequação(3.15),resultando:Y û_ú´� Y ú>ûC� Y=³ ú±� Y ú ³ z Y ú�ú è j û g ú�úY m ú´� Y û�ûC� Y ú�ú±� Y û ³ z Y û_ú è j û g û_úou, tomandoemcontaosvaloresnafronteiraeosvaloresdafunção
g, z Y ú�ú±� Y û_ú´� Y ú>û èGñ#üÀ¶«¸ (3.19)Y ú�ú² z Y ú>ûM� Y û�û è , ü , . ¸ (3.20)
A dificuldadeé queestasequaçõesenvolvemasincógnitasY ú>û e Y û�û , represen-tandoosvaloresdafunção Y nospontosdafronteiraondesãodadososvaloresdaderivadanormal Y í , e nãodafunçãoY .

78 Capítulo3. MétodosNuméricosparaEquaçõesDiferenciaisParciais
Paraultrapassaressadificuldade,imagina-sea regiãod
extendidaparacima,demodoa incluir primeirafila de pontosexternos(correspondentesao X è , üÀ¸
),e assuma-sequea equaçãodiferencialé válidatambémnaregiãoextensa.Assim,podemosescrevermaisduasequações,correspondentesaospontos6 ú>û e 6Ôû�û :Y û�ûM� Y ú m � Y�³ ûM� Y ú�ú² z Y ú>û è j û g ú>ûY m ûM� Y û m � Y ú>ûM� Y û_ú² z Y û�û è j û g û�ûou Y û�û²� Y ú m � Y ú�úM z Y ú>û è , üÀ¸ (3.21)Y û m � Y ú>û²� Y û_úM z Y û�û èGñ (3.22)
Observa-seque,nasequações(3.21)e (3.22),aparecemmaisduasincógnitas,osvaloresdafunçãoY nospontosexternos6éú m e 6 û m . Paraeliminarestasincógnitasadicionais,utiliza-sea condiçãodefronteirano ladosuperior, escrevendo:A è N Y ú>ûN X t Y ú m Y ú�ú. j è Y ú m Y ú�ú ou Y ú m è Y ú�ú´� Ao è N Y û�ûN X t Y û m Y û_ú. j è Y û m Y û_ú ou Y û m è Y û_ú´� o
Substituindoestesresultadosem(3.21)e (3.22)esimplificando,resultam. Y ú�ú² z Y ú>ûM� Y û�û è , ü¹¸ (3.23)Y ú>ûC� . Y û_ú² z Y û�û è o (3.24)
Juntandoasequações(3.19),(3.20),(3.23)e(3.24)resultaumsistemadequatroequaçõeslinearescomquatroincógnitas,queescreve-seemformamatricial,ËÌÌÌÍ z , , ñ, z ñ ,. ñ z ,ñ . , z
ÎBÏÏÏÐ ����� ���� Y ú�úY û_úY ú>ûY û�û ��������� è
����� ����ñ#üÀ¶«¸�ñ, ü , . ¸ , üÀ¸�ññ o ü�ñññ �
��������A soluçãodo sistemaéY ú>û è5ñ#üѵ o«o (exacto
,) Y û�û è , üѵ , . (exacto
.)Y ú�ú è5ñ#ü�ñ·¶«¶ (exacto
ñ#ü , . ¸) Y û_ú èEñ#ü ,�Ò�, (exacto
ñ#ü . ¸)
onde,entreparêntesis,eapresentadaasoluçãoexacta.
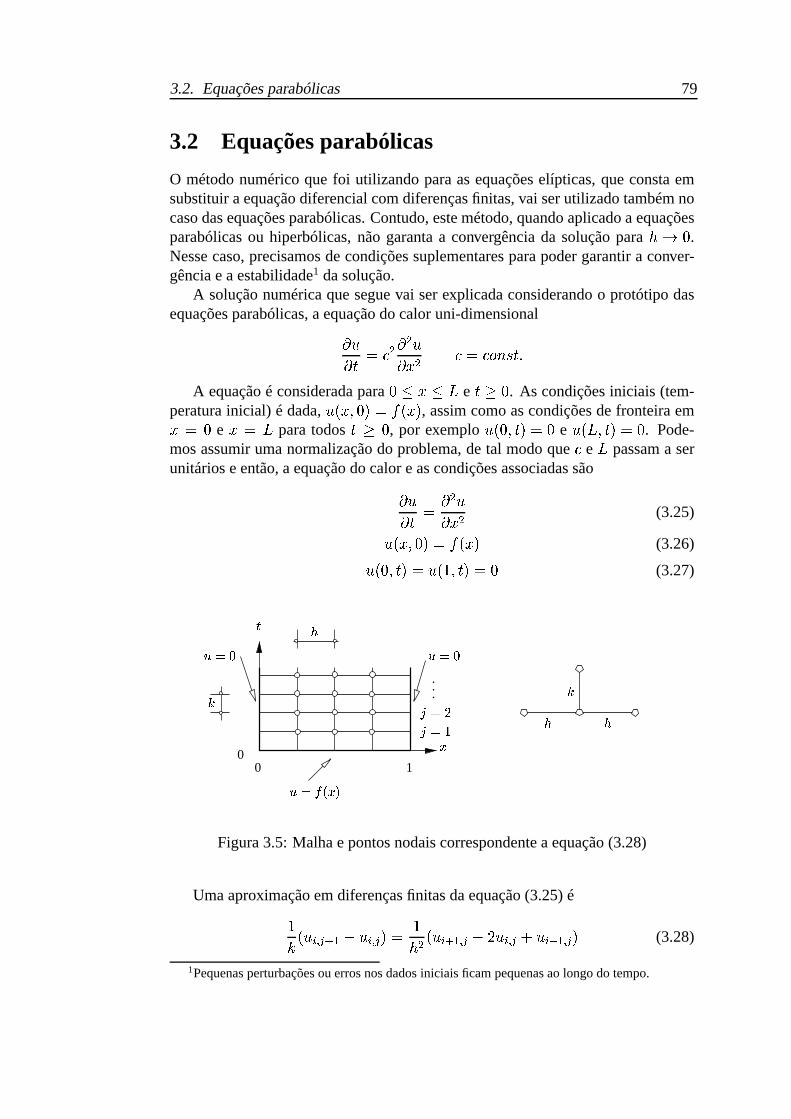
3.2. Equaçõesparabólicas 79
3.2 Equaçõesparabólicas
O métodonuméricoquefoi utilizandoparaasequaçõeselípticas,queconstaemsubstituiraequaçãodiferencialcomdiferençasfinitas,vai serutilizadotambémnocasodasequaçõesparabólicas.Contudo,estemétodo,quandoaplicadoaequaçõesparabólicasou hiperbólicas,nãogarantaa convergênciada soluçãopara jÔÓ ñ .Nessecaso,precisamosdecondiçõessuplementaresparapodergarantira conver-gênciaeaestabilidade1 dasolução.
A soluçãonuméricaqueseguevai serexplicadaconsiderandoo protótipodasequaçõesparabólicas,aequaçãodocaloruni-dimensionalN YN b è [ û N û YN W û [ è [lÕ ¿±Ö b ü
A equaçãoé consideradapara
ñy× W × �e b õQñ . As condiçõesiniciais (tem-
peraturainicial) é dada,Y ä W òÂñ�ç è%gÙä W ç , assimcomoascondiçõesdefronteiraemW èyñ e W è �paratodos b õ ñ , por exemplo Y ä>ñ#ò b çÙè5ñ e Y ä � ò b ç è5ñ . Pode-
mosassumirumanormalizaçãodo problema,de tal modoque [ e�
passama serunitárioseentão,aequaçãodocaloreascondiçõesassociadassãoN YN b è N ûYN W û (3.25)Y ä W òÂñ�ç èQgÙä W ç (3.26)Y ä>ñ#ò b ç è Y ä , ò b ç èEñ (3.27)
.
.
.
00 1
�� ~
ج7 � ¬" �
¬7ÊÙ }�~'�Ú °®Ú ¼Û � ��
Figura3.5: Malhaepontosnodaiscorrespondenteaequação(3.28)
Umaaproximaçãoemdiferençasfinitasdaequação(3.25)é,/ ä Y �¦ ¡�¥�ú© Y �¦ ¡ çéè ,j û ä Y �¥�ú?¦ ¡! . Y �¦ ¡M� Y �¨Ìú?¦ ¡ ç (3.28)
1Pequenasperturbaçõesouerrosnosdadosiniciaisficampequenasaolongodo tempo.
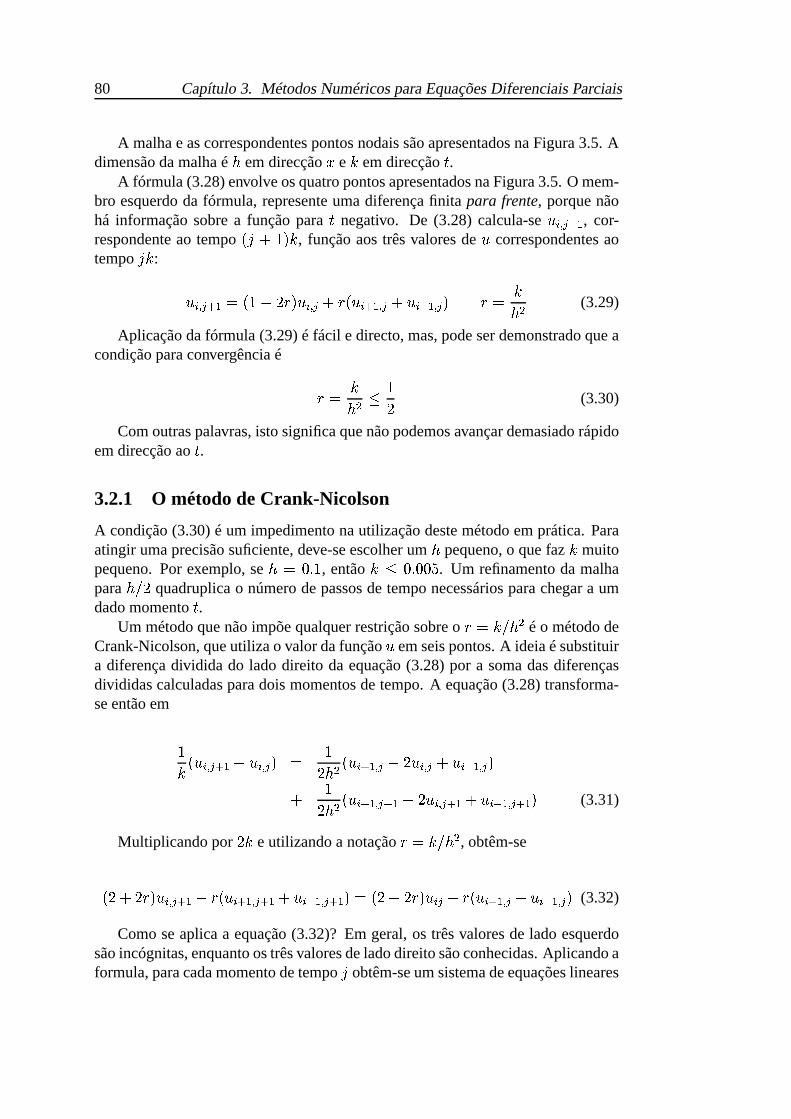
80 Capítulo3. MétodosNuméricosparaEquaçõesDiferenciaisParciais
A malhaeascorrespondentespontosnodaissãoapresentadosnaFigura3.5.Adimensãodamalhaé j emdirecçãoW e / emdirecçãob .
A fórmula(3.28)envolveosquatropontosapresentadosnaFigura3.5.O mem-bro esquerdoda fórmula, representeumadiferençafinita para frente, porquenãohá informaçãosobrea funçãopara b negativo. De (3.28) calcula-seY �¦ ¡�¥�ú , cor-respondenteao tempo
ä�¤ � , ç / , funçãoaostrêsvaloresde Y correspondentesaotempo
¤ / : Y �¦ ¡�¥�ú è ä , .ÝÜ ç Y �¦ ¡²� Ü ä Y �¥�ú?¦ ¡M� Y �¨Ìú?¦ ¡ ç Ü è /j û (3.29)
Aplicaçãodafórmula(3.29)é fácil edirecto,mas,podeserdemonstradoqueacondiçãoparaconvergênciaé Ü è /j û × ,. (3.30)
Comoutraspalavras,istosignificaquenãopodemosavançardemasiadorápidoemdirecçãoao b .3.2.1 O métodode Crank-Nicolson
A condição(3.30)é um impedimentonautilizaçãodestemétodoemprática.Paraatingir umaprecisãosuficiente,deve-seescolherum j pequeno,o quefaz / muitopequeno.Por exemplo,se j è ñ#ü , , então / ×·ñ0ü2ññ«¸ . Um refinamentoda malhapara j V . quadruplicao númerodepassosde temponecessáriosparachegara umdadomomentob .
Um métodoquenãoimpõequalquerrestriçãosobreoÜ è / V j û é o métodode
Crank-Nicolson,queutiliza o valordafunçãoY emseispontos.A ideiaésubstituira diferençadividida do lado direito da equação(3.28)por a somadasdiferençasdivididascalculadasparadoismomentosdetempo.A equação(3.28)transforma-seentãoem ,/ ä Y �¦ ¡�¥�ú´ Y �¦ ¡ ç÷è ,. j û ä Y �¥�ú?¦ ¡F . Y �¦ ¡C� Y �¨Ìú?¦ ¡ ç� ,. j û ä Y �¥�ú?¦ ¡�¥�ú© . Y �¦ ¡�¥�úÞ� Y �¨Ìú?¦ ¡�¥�ú ç (3.31)
Multiplicandopor. / eutilizandoa notação
Ü è / V j û , obtêm-seä . � .ÝÜ ç Y �¦ ¡�¥�ú´ Ü ä Y ߥ�ú?¦ ¡�¥�ú=� Y �¨Ìú?¦ ¡�¥�ú ç è ä . .ÝÜ ç Y ¢¡©� Ü ä Y �¥�ú?¦ ¡©� Y �¨Ìú?¦ ¡ ç (3.32)
Comoseaplicaa equação(3.32)? Em geral,os trêsvaloresde lado esquerdosãoincógnitas,enquantoostrêsvaloresdeladodireitosãoconhecidas.Aplicandoaformula,paracadamomentodetempo
¤obtêm-seumsistemadeequaçõeslineares

3.2. Equaçõesparabólicas 81
TempoÚTempoÚ � ®�� �
Figura3.6: OsseispontosutilizadosnasfórmulasdeCrank-Nicolson
de onderesultamas incógnitasfunçãoas condiçõesde fronteira e as condiçõesiniciais.
Apesardo factoqueÜ è / V j û já nãoé restrito, um valor pequenodo
Üvai
produzirresultadosmelhores.Habitualmente,escolha-seum / demodoa reduziro esforçocomputacional,massemfazer
Üdemasiadogrande.Um valor do
Üque
é normalmenterecomendável, éÜ è ,
. Comestevalor, a equação(3.32) tomaaformasimplificadaz Y �¦ ¡�¥�ú© Y ߥ�ú?¦ ¡�¥�ú© Y �¨Ìú?¦ ¡�¥�ú è Y ߥ�ú?¦ ¡C� Y �¨Ìú?¦ ¡ (3.33)
Problema 3.3 Considereumabarra deaçoisoladadecomprimento,
comasca-racterísticasde tal modoqueo [ û è ,
na equaçãodo calor. Asextremidadesdabarra sãomantidasna temperatura constantede
ñ ªC e a temperatura inicial ao
longodabarra édadapor gÙä W çéè ������à WAplicandoo métododeCrank-Nicolson,com j è ñ#ü . e
Ü è ,, calculaa tempera-
tura Y ä W ò b ç da barra no intervalode tempo
ñ9× b ×Ûñ#ü . . Compare os resultadoscoma soluçãoexacta. Apliquedepoisa equação(3.28)comum
Üquesatisfaza
condição(3.30),por exemploÜ èÛñ0ü . ¸
, e comumvalor quenãosatisfaza condi-ção(3.30),por exemplo
Ü è ,eÜ è . üÀ¸
.
Soluçãoutilizando o métododeCrank-NicolsonA equaçãodo calor, para
ñ@× W × ,, [ û è ,
e aplicandoo métododeCrank-Nicolson,com j èGñ#ü . e
Ü è ,, éz Y �¦ ¡�¥�ú© Y ߥ�ú?¦ ¡�¥�ú© Y �¨Ìú?¦ ¡�¥�ú è Y ߥ�ú?¦ ¡C� Y �¨Ìú?¦ ¡
Como j è·ñ#ü . eÜ è ,
, resulta / è j û è·ñ#ü�ñ z e paracobrir todoo intervalode tempodevemosfazer5 passos.A malhautilizadana resoluçãodo problemaéapresentadanaFigura3.7. Osvaloresiniciais dafunção Y resultamdascondiçõesiniciais. Assim,Y ú ³ è ����� ñ#ü . à èEñ#üÀ¸'µ·¶'¶'µ·¸ Y û ³ è ����� ñ#ü z à è5ñ#ü Ò ¸ , ñ·¸«¶

82 Capítulo3. MétodosNuméricosparaEquaçõesDiferenciaisParciais
á � á � á âÈá +® á âÛ á Êã0 0.6 1.00.2 0.4 0.8
0.200.160.120.080.04
0
Ú âÈÚ äãÚ �Ú âÛÚ +®Ú � ~Ø
Figura3.7: Malhautilizadano métododeCrank-Nicolson
Y m ³ è ����� ñ#ü o à èGñ#ü Ò ¸ , ñ·¸'¶ Y w ³ è ����� ñ#üÀµ à è5ñ#ü¹¸Ýµ·¶«¶'µ·¸Paracadamomento
¤, háquatropontosinternosdamalha,o quesignificaque
paracadapassodetempoé precisoresolver um sistemalineardequatroequaçõescomquatroincógnitas.Dascondiçõesdefronteira,resultaY�³ ¡ è Y s ¡ è ñ . Comoa distribuição inicial da temperatura,assimcomo as condiçõesde fronteira sãosimétricasemrelaçãoao W èGñ#üÀ¸ , vamosobter Y m ú è Y û_ú e Y w ú è Y ú�ú paraprimeiropassodetempoesimilarparaospassosseguintes.Tomandoemcontaestasimetria,podemostrabalharparacadapassodetempocomsistemasdeapenasduasequaçõeseduasincógnitas.
Parao passodetempo
¤, tomandoemcontaa simetriae ascondiçõesdefron-
teira,resultaå z Y ú?¦ ¡�¥�ú© Y û�¦ ¡�¥�ú è Y û�¡ Y ú?¦ ¡�¥�ú´� A Y û�¦ ¡�¥�ú è Y ú�¡M� Y û�¡ # å Y ú?¦ ¡�¥�ú èÛä Y ú�¡M� z Y û�¡ ç V ,«,Y û�¦ ¡�¥�ú èÛä z Y ú�¡M� ¸ Y û�¡ ç V ,«,A soluçãodestesistemafoi obtidacomo programaMathematica, utilizandoas
seguintesinstruções:
u1 = Array[uu1,6]u2 = Array[uu2,6]
u1[[1]] = Sin[0.2*Pi]u2[[1]] = Sin[0.4*Pi]
For[i=1, i<=5, i++,u1[[i+1]]=(u1[[i]]+4*u2[[i]])/ 11;u2[[i+1]]=(4*u1[[i]]+5*u2[[i]] )/11]
Osresultados,osvaloresdatemperaturanospontosdabarraemváriosmomen-tos,sãoapresentadosnaTabela3.1.

3.2. Equaçõesparabólicas 83b W èEñ W èEñ#ü . W è5ñ0ü z W èGñ#ü o W èEñ#üѵ W è ,0.00 0 0.587785 0.951057 0.951057 0.587785 00.04 0 0.399274 0.646039 0.646039 0.399274 00.08 0 0.271221 0.438844 0.438844 0.271221 00.12 0 0.184236 0.298100 0.298100 0.184236 00.16 0 0.125149 0.202495 0.202495 0.125149 00.20 0 0.085012 0.137552 0.137552 0.085012 0
Tabela3.1: Osvaloresda temperaturanospontosdabarraobtidoscomo métodoCrank-Nicolson
Comparaçãocoma soluçãoanalíticaA soluçãoexactadesteproblemapodeserobtidautilizandoo métododesepa-
raçãodevariáveis.ConsiderandoaequaçãodiferencialN YN b è N ûYN W ûeprocurandoumasoluçãodeformaY ä W ò b ç è%\ ä W çnæ ä b çquesatisfazascondiçõesdefronteiraY ä>ñ#ò b ç è Y ä , ò b ç èEñeascondiçõesiniciais Y ä W òÂñ�ç è ����� ä à W çresulta Y ä W ò b ç è ����� ä à W ç�çlèêé ä à û b ç
O errorelativo entreasoluçãoobtidapordiferençasfinitaseasoluçãoanalíticaeapresentadonaTabela3.2. b W è5ñ#ü . W è5ñ#ü z
0.00 0.00 0.000.04 0.81 0.810.08 1.63 1.630.12 2.45 2.450.16 3.28 3.280.20 4.12 4.12
Tabela3.2: Erro relativo [%]

84 Capítulo3. MétodosNuméricosparaEquaçõesDiferenciaisParciais
Soluçãopor métododir ecto(3.29),comÜ è5ñ#ü . ¸
Para j è ñ#ü . eÜ è / V j û è ñ#ü . ¸ , resulta / è ñ#ü�ñ , . Isto significaque,parao
mesmointervalo detempo,devemosfazerquatrovezesmaispassosdequeforamfeitos utilizandoo métodode Crank-Nicolson.Para
Ü è'ñ0ü . ¸, a fórmula (3.29)
transforma-seem Y �¦ ¡�¥�ú èEñ#ü . ¸�ä Y �¨Ìú?¦ ¡M� . Y ¢¡C� Y ߥ�ú?¦ ¡ çParao passodetempo
¤, tomandoemcontaa simetriae ascondiçõesdefron-
teira,resulta å Y ú?¦ ¡�¥�ú èGñ#ü . ¸�ä . Y ú�¡ z Y û�¡ çY û�¦ ¡�¥�ú èGñ#ü . ¸�ä Y ú�¡C� A Y û�¡ ç V ,«,A soluçãodestesistemafoi obtidacomo programaMathematica, utilizandoas
seguintesinstruções:
u1 = Array[uu1,21]u2 = Array[uu2,21]
u1[[1]] = Sin[0.2*Pi]u2[[1]] = Sin[0.4*Pi]
For[i=1, i<=20, i++,u1[[i+1]]=0.25*(2*u1[[i]]+u2[[ i]]);u2[[i+1]]=0.25*(u1[[i]]+3*u2[[ i]])]b W è5ñ0ü . W è5ñ#ü z0.01 0.531657 0.8602390.02 0.480888 0.7780930.03 0.434967 0.7037920.04 0.393432 0.6365860.05 0.355862 0.5757970.06 0.321880 0.5208130.07 0.291144 0.4710800.08 0.263342 0.4260960.09 0.238195 0.3854080.10 0.215449 0.348604
b W è5ñ0ü . W è5ñ#ü z0.11 0.194876 0.3153160.12 0.176267 0.2852060.13 0.159435 0.2579710.14 0.144210 0.2333370.15 0.130439 0.2110550.16 0.117983 0.1909010.17 0.106717 0.1726720.18 0.096527 0.1561830.19 0.087309 0.1412690.20 0.078972 0.127779
Tabela3.3: Osvaloresdatemperaturanospontosdabarraobtidoscomo métododirecto,
Ü èEñ#ü . ¸Uma comparaçãodassoluçõesobtidaspor métodode Crank-Nicolson(CN)
e por métododirecto (D), assimcomoa soluçãoanalítica(A), é apresentadanaTabela3.4. Observa-seque,apesardo númeromaiordepassosqueforamefectua-dosno métododirecto,a precisãodosresultadosé a mesmaaométododeCrank-Nicolson.
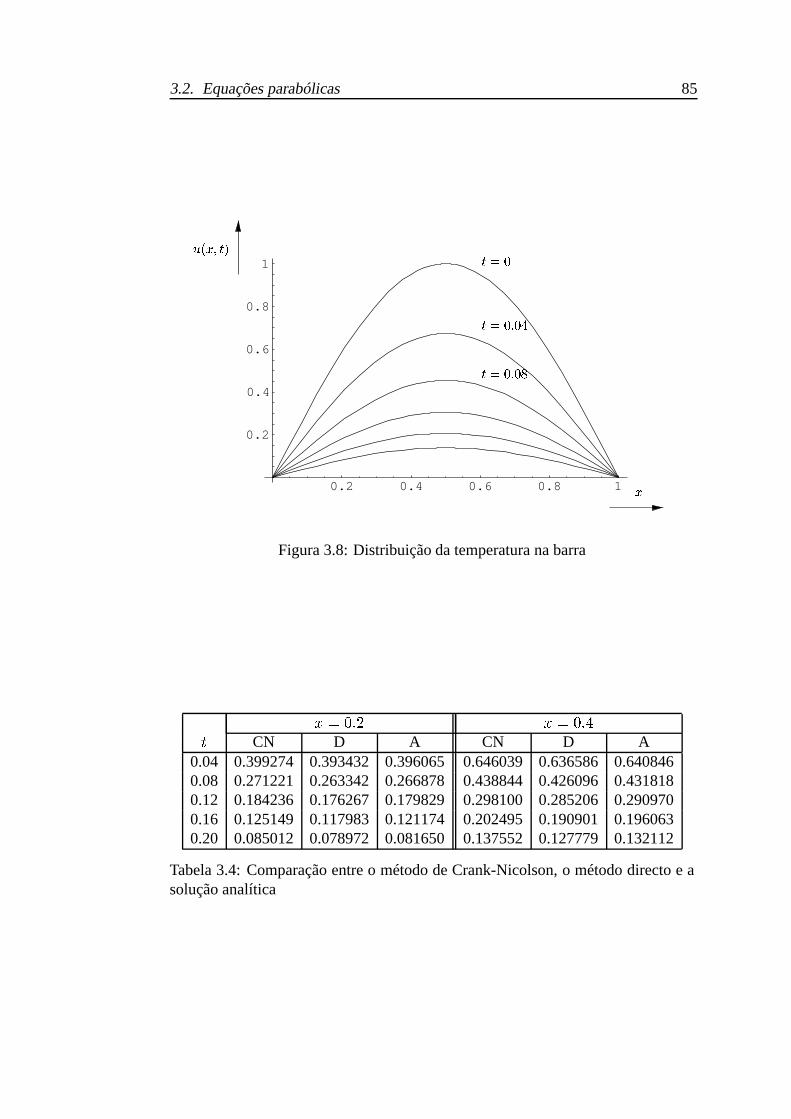
3.2. Equaçõesparabólicas 85
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
~
¬ }�~�� Ø � Ø �Ø � Ç � ãØ � Ç �lë
Figura3.8: Distribuiçãodatemperaturanabarra
W è5ñ#ü . W èEñ0ü zb CN D A CN D A0.04 0.399274 0.393432 0.396065 0.646039 0.636586 0.6408460.08 0.271221 0.263342 0.266878 0.438844 0.426096 0.4318180.12 0.184236 0.176267 0.179829 0.298100 0.285206 0.2909700.16 0.125149 0.117983 0.121174 0.202495 0.190901 0.1960630.20 0.085012 0.078972 0.081650 0.137552 0.127779 0.132112
Tabela3.4: Comparaçãoentreo métododeCrank-Nicolson,o métododirectoe asoluçãoanalítica

86 Capítulo3. MétodosNuméricosparaEquaçõesDiferenciaisParciais
Problema 3.4 A segundalei deFick aplica-seà difusãodecloretosno betão.Nocasouni-dimensional,a equaçãodedifusãoéN [N b èQìíN û [N W û
Considereumalaje semi-infinitadebetãosituadanazonahúmidademarésoude embatede ondascuja coeficientede difusividade
ìé constante. Assumaque
a condiçãode contornoé permanentee impõeumaconcentraçãode cloreto, nasuperfície, dadapor [ ³ .
Determinea concentraçãode cloreto à distância W do contactocoma águasalgada,no instanteb contadoapóso início docontactodasuperfíciecoma água.
(Valoresnuméricos:[ ³ è ,�Ò kg/mm , ì¸èQ¸0ü . ¶ ½ , ñ ¨Ìú>û mû /s)
Soluçãoemdiferençasfinitas
.
.
.
00
�� ~"îIï
Øð5äðDÅÚ °®Ú ¼Û � ��
Figura3.9: Malhaepontosnodaisparao problemadedifusão
O problemaédefinidopelaequaçãodiferencialN [N b èQìíN û [N W ûacondiçãodefronteira [ äfñ#ò b çéè [ ³eacondiçãoinicial [ ä W òÂñ�çéè å [ ³ W èGññ W ôèGñ

3.2. Equaçõesparabólicas 87
A equaçãodedifusãoescritaemdiferençasfinitasconduzà[� �¦ ¡�¥�ú èÛä , .ÝÜ ç [ �¦ ¡M� Ü ä [ �¥�ú?¦ ¡C�q[� �¨Ìú?¦ ¡ ç Ü è ì /j ûem que j e / sãoas dimensõesda malhaem direcção W e b . A condiçãoparaconvergênciaé Ü è ì /j û × ,.
Seráanalisadaumaprofundidadede 30 cm com umamalhade 3 cm, o queimplica 11pontosnodais.O passodetemposerá1 mês,o queimplicaÜ è ì /j û è ¸0ü . ¶ ½ , ñ ¨Ìú>û ½9A o ñ�ñ ½ . z ½9A ññ#ü�ñ A û *è ,o«oou seja,acondiçãodeconvergênciaésatisfeita.
A análiseseráextensapor10anos,oqueimplica121pontosnodaisemdirecçãoaotempo.UtilizandoMathematica, o problemapodeserresolvidocoma seguintesequênciadeinstruções.
Nx = 11Nt = 12*10+1c0 = 19DD = 5.27 /10^12 (*: difussion coeficient *)k = 3600*24*30 (*: time step *)h = 0.03 (*: space step *)r = DD*k/h^2c = Array[cc,{Nx,Nt}]
For[i=1, i<=Nx, i++,For[j=1, j<=Nt, j++,
c[[i,j]] = 0 ]]
For[j=1, j<=Nt, j++, c[[1,j]] = c0]
For[j=1, j<Nt, j++,For[i=2, i<Nx, i++,
c[[i,j+1]] = (1-2*r)*c[[i,j]] +r*(c[[i+1,j]]+c[[i-1,j]])]]
L = Array[ll,Nt]For[j=1, j<=Nt, j++,
L[[j]] = Table[c[[i,j]],{i,1,Nx}]]
Frames = Table[ListPlot[L[[i]],
88 Capítulo3. MétodosNuméricosparaEquaçõesDiferenciaisParciais
PlotJoined ->True,AxesOrigin ->{1,0}],{i,1,Nt}]
<< Graphics‘Animation‘ShowAnimation[Frames]
A penetraçãode cloreto no betãoao longo do tempo é apresentadana Fi-gura 3.10, ondeno eixo horizontal temosos pontosnodais,
£. A distância W é
dadapor
ä�£ , ç©ñ j .
2 4 6 8 10
2.5
5
7.5
10
12.5
15
17.5
2 4 6 8 10
2.5
5
7.5
10
12.5
15
17.5
0 anos 1 ano
2 4 6 8 10
2.5
5
7.5
10
12.5
15
17.5
2 anos
Figura3.10:Penetraçãodecloretono betão
Comparaçãocoma soluçãoanalítica
A soluçãoanalíticadesteproblemaé[ ä W ò b çéè [ ³ R , erf
] W.�ò ì b _ Temquea funçãoerro[1] é definidapor
erf
ä�ó�çéè .à¼ô�õ³Eö ¨�÷�ørù bUma comparaçãoentrea soluçãoanalíticae a soluçãonumérica,para b igual
a doisanos,é apresentadanaFigura3.11. O erroobtidonasoluçãonumérica(a)é explicável pela malhagrosseiraadoptada,j èKñ#ü2ñ A m. Uma soluçãomelho-radapodeserobtidarefinandoa malha,assimcomosemostrano caso(b) emquej èEñ0ü2ñ , m.
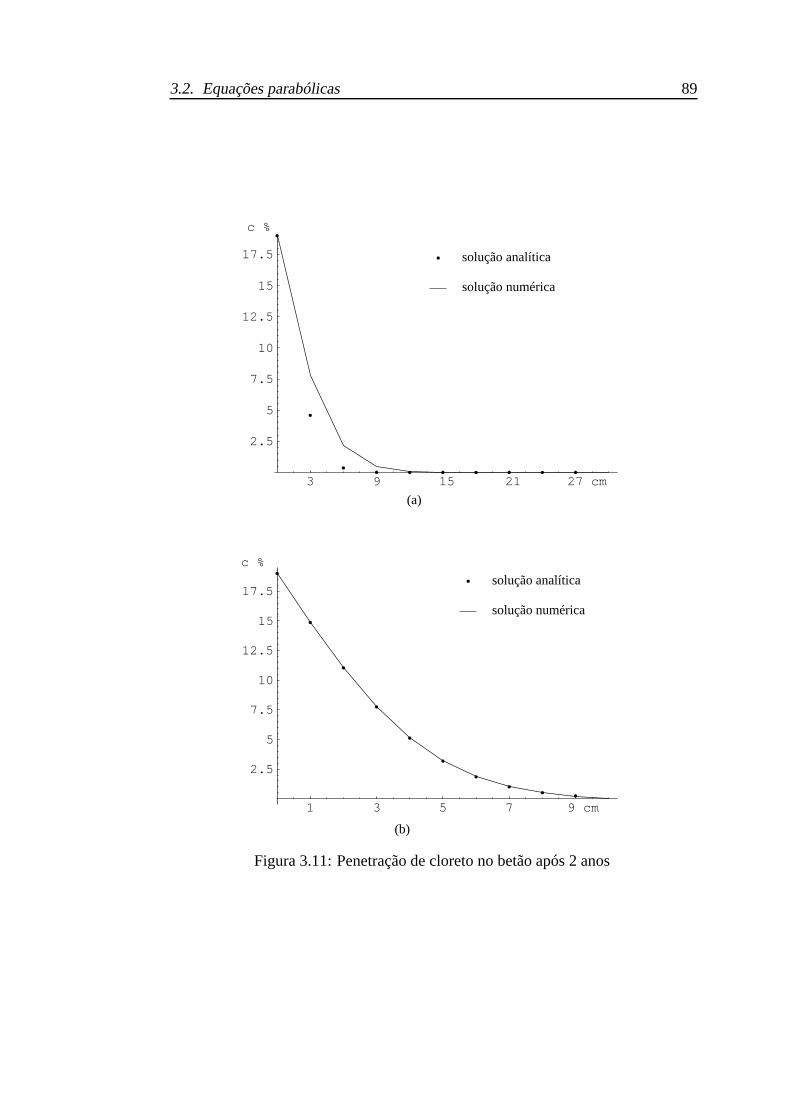
3.2. Equaçõesparabólicas 89
1
3
3
9
5
15
7
21
9 cm
27 cm
2.5
2.5
5
c %
5
c %
7.5
7.5
10
10
12.5
12.5
15
15
17.5
17.5
soluçãoanalítica
soluçãonumérica
(b)
soluçãoanalítica
soluçãonumérica
(a)
Figura3.11:Penetraçãodecloretono betãoapós2 anos

90 Capítulo3. MétodosNuméricosparaEquaçõesDiferenciaisParciais
3.3 Equaçõeshiperbólicas
Considere-seo protótipodasequaçõeshiperbólicas,aequaçãodasondas,N ûlYN b û è [ û N ûYN W û [ û èûú ü(3.34)
Para simplicidade,e semperdera generalidade,o métodonuméricovai serapresentadoparao casodaspequenasvibraçõestransversaisdumcabodecompri-mentounitário,comasextremidadesfixase [ è ,
. O problemaé definidoentãopor N ûYN b û è N ûYN W û ñý× W × , ò b õQñ (3.35)
Y ä W ò®ñ�ç èhgÙä W ç�ò N Y ä W ò®ñ�çN b èÿþ�ä W ç (condiçõesiniciais) (3.36)Y äfñ0ò b ç è Y ä , ò b çÙèEñ (condiçõesdefronteira) (3.37)
Substituindoasderivadaspor diferençasfinitas,resultade(3.35),/ û ä Y �¦ ¡�¥�ú© . Y ¢¡M� Y �¦ ¡¨Ìú ç è ,j û ä Y ߥ�ú?¦ ¡F . Y ¢¡M� Y �¨Ìú?¦ ¡ ç (3.38)
ondej éadimensãodamalhaem W e / éadimensãodamalhaem b . A equaçãoemdiferençasfinitas (3.38),relacionaoscincopontosapresentadosnaFigura3.12,oquesugereumamalharectangular, similar a malhautilizadano casodasequaçõesparabólicas.Escolhendo
Ü�� è / û V j û è , , resulta:Y �¦ ¡�¥�ú è Y �¨Ìú?¦ ¡M� Y �¥�ú?¦ ¡! Y �¦ ¡�¨Ìú (3.39)
Ú � ®ÚÚ � ®��� �
(a)Fórmula(3.38) (b) Fórmula(3.39)
Figura3.12:Pontosdamalhautilizadosnasaproximações(3.38)e (3.39)
Podeser mostradoque, parañ c Ü�� × ,
o métodoé estável. Contudo,aequação(3.39)contemtrêspassosdetempo,
¤ , , ¤ e¤ � , , enquantoasfórmulas

3.3. Equaçõeshiperbólicas 91
no casodasequaçõesparabólicassócontemdoispassosdetempo.Todavia, destaveztemosduascondiçõesiniciais emvezdeumasó.
Parapodercomeçar, utilizamosacondiçãoinicial emvelocidades,paraobter,. / ä Y �¦ ú² Y �¦�¨Ìú ç è þ ou Y �¦�¨Ìú è Y �¦ ú² . / þ (3.40)
onde,
þ è þ�ä�£ j ç .A equação(3.39)escritaparab èEñ , ou seja,
¤ èEñ, éY �¦ ú è Y �¨Ìú?¦ ³ � Y �¥�ú?¦ ³ Y �¦�¨Ìú
Depoisdesubstituiro valordo Y �¦�¨Ìú dadopor (3.40),resultaY 8ú è ,. ä Y �¨Ìú?¦ ³ � Y ߥ�ú?¦ ³ ç � / þ (3.41)
ou queexprima Y 8ú funçãoaosdadosiniciais.
Problema 3.5 Aplica o métodonuméricoapresentadocom j è / è ñ#ü . no pro-blemadefinidopelasequações(3.35)-(3.37),ondegÙä W çeè ������à W þWä W ç è5ñ
á � á � á âÈá +® á ¼Û á Ôã0 0.6 1.00.2 0.4 0.8
1.00.80.60.40.2
0
Ú âÈÚ äãÚ �Ú âÛÚ +®Ú � ~Ø
Figura3.13:Malhautilizada
A malhautilizadanaresoluçãodo problemaé apresentadanaFigura3.13. Osvaloresiniciais dafunçãoY resultamdascondiçõesiniciais. Assim,Y ú ³ è ����� ñ#ü . à èEñ#üÀ¸'µ·¶'¶'µ·¸ Y û ³ è ����� ñ#ü z à è5ñ#ü Ò ¸ , ñ·¸«¶Y m ³ è ����� ñ#ü o à èEñ#ü Ò ¸ , ñ·¸«¶ Y w ³ è ����� ñ#üѵ à è5ñ#üÀ¸'µ·¶'¶'µ·¸
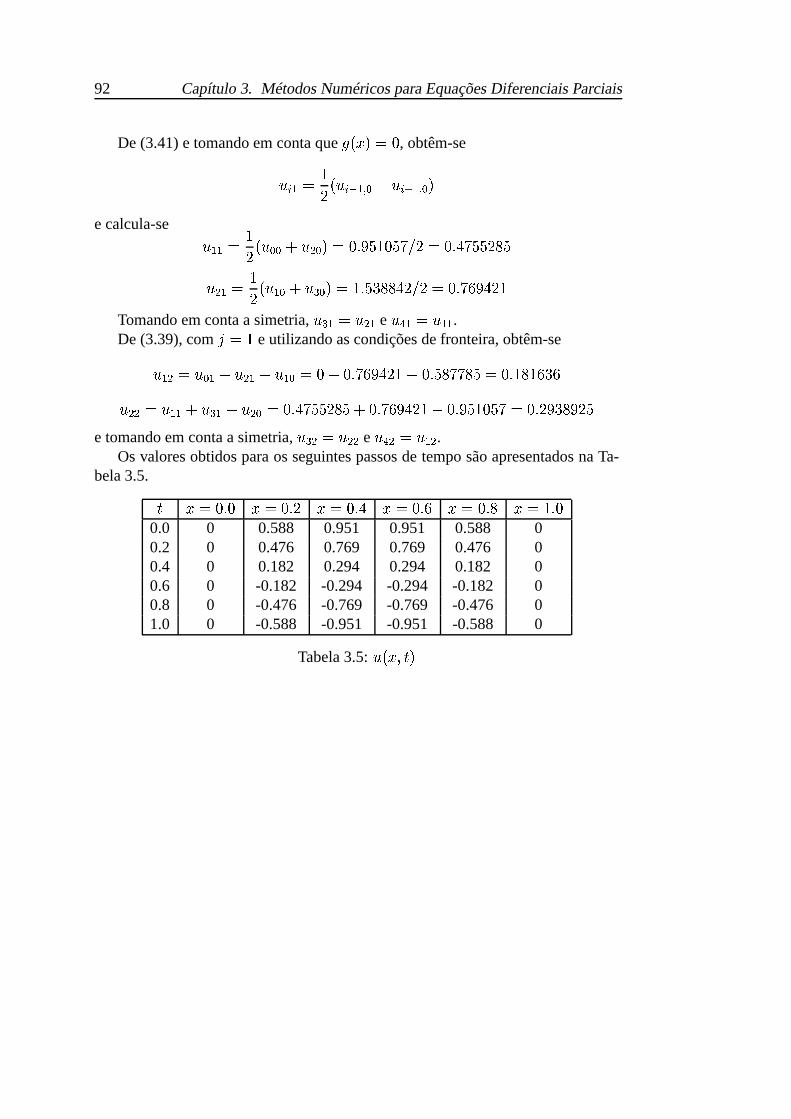
92 Capítulo3. MétodosNuméricosparaEquaçõesDiferenciaisParciais
De (3.41)e tomandoemcontaque
þWä W çéè5ñ , obtêm-seY 8ú è ,. ä Y �¨Ìú?¦ ³ � Y �¥�ú?¦ ³ çecalcula-se Y ú�ú è ,. ä Y�³?³ � Y û ³ ç èEñ#ü Ò ¸ , ñ·¸'¶ V . è5ñ0ü z ¶'¸«¸ . µ·¸Y û_ú è ,. ä Y ú ³ � Y m ³ çéè , üÀ¸ A µ«µ z . V . èEñ0ü¹¶ o Ò z . ,
Tomandoemcontaasimetria,Y m ú è Y û_ú e Y w ú è Y ú�ú .De (3.39),com
¤�è ,eutilizandoascondiçõesdefronteira,obtêm-seY ú>û è Y�³ ú´� Y û_ú² Y ú ³ è5ñ � ñ#ü¹¶ o Ò z . , ñ0ü¹¸'µ«¶«¶'µ·¸ èGñ#ü , µ , o A oY û�û è Y ú�ú´� Y m úC Y û ³ èEñ#ü z ¶«¸«¸ . µ·¸ � ñ#ü¹¶ o Ò z . , ñ#ü Ò ¸ , ñ·¸«¶ èGñ#ü . Ò A µ Ò . ¸
e tomandoemcontaasimetria,Y m û è Y û�û e Y w û è Y ú>û .Osvaloresobtidosparaosseguintespassosde temposãoapresentadosnaTa-
bela3.5. b W è5ñ#ü�ñ W èGñ#ü . W è5ñ#ü z W èEñ0ü o W èEñ#üѵ W è , ü�ñ0.0 0 0.588 0.951 0.951 0.588 00.2 0 0.476 0.769 0.769 0.476 00.4 0 0.182 0.294 0.294 0.182 00.6 0 -0.182 -0.294 -0.294 -0.182 00.8 0 -0.476 -0.769 -0.769 -0.476 01.0 0 -0.588 -0.951 -0.951 -0.588 0
Tabela3.5: Y ä W ò b ç
Bibliografia
[1] ABRAMOWITZ, M., AND STEGUN, I . A. Handbookof MathematicalFunc-tions With Formulas,Graphs,and MathematicalTables, 10th ed. AppliedMathematicsSeries* 55.NationalBureauof Standards,December1972.
[2] ATKINSON, K. E. Anintroductionto numericalanalysis. JohnWiley & Sons,1989.(CotaQA297.ATK).
[3] BEER, F. P., AND JOHNSTON JR., E. R. MecânicaVectorialpara Engenhei-ros.Estática, 6 ed. McGraw-Hill, 1996.
[4] BENDER, E. AnIntroductionto MathematicalModeling. DoverPublications,1978.
[5] CLOUGH, R. W., AND PENZIEN, J. Dynamicsof structures, seconded.McGraw-Hill, Inc., 1993.
[6] DA SILVA , M. A. G. Modelaçãofísicadacontaminaçãodesolosporpoluen-tesmiscíveisemágua.Geotecnia, 82 (Mar. 1998),35–50.
[7] FICK , A. Überdiffusion. AnnalenderPhysikBd.94 (1855),59.
[8] FOURIER, J. ThéorieAnalytiquedela Chaleur. 1822.
[9] GOULD, H., AND TOBOCHNIK , J. An introductionto computersimulationmethods:applicationsto physicalsystems, 2nded. Addison-Wesley, 1996.
[10] KREYSZIG, E. Advancedengineeringmathematics, 8th ed. JohnWiley &Sons,Inc., 1999.(CotaQA401.KRE).
[11] KUNDERT, K. S., AND SANGIOVANNI-V INCENTELLI , A. SparseUser’sGuide. A SparseLinear EquationSolver. Version1.3.a. Departmentof Elec-tricalEngineeringandComputerSciences,Universityof California,Berkeley,Berkeley, Calif. 94720,1 April 1988.
[12] MARIANO, A. Units. FreeSoftwareFoundation,Inc., 9 January1997. Ver-sion1.9.
93
94 Bibliografia
[13] M ISCHIKE, C. R. Construçãode modelosmatemáticosem engenha-ria: uma introduçãoà engenharia. Livros Técnicose Cientificos, 1984.(CotaTA342.MIS).
[14] MOTTA , F. V. Cursodeteoriadasemelhança. EdiçõesURGS,??
[15] REIS, A., AND CAMOTIM , D. EstabilidadeEstrutural. McGraww-Hill,2001.
[16] SETO, W. W. Theoryand problemsof mechanical vibrations. Schaum’soutlineseries.McGraw-Hill Book Company, 1964.
[17] SILVA , V, D. Mecânicae ResistênciadosMateriais, 2 ed. ZUARI - EdiçãodeLivrosTécnicos,Lda.,Coimbra,1999.
[18] THEORETICAL STUDIES DEPARTAMENT OF AEA TECHNOLOGY,HARWELL. Harwell Subroutine Library, Specifications(Release11), Vol.1-2, seconded. Oxfordshire,UK, June1993.
[19] WOLFRAM RESEARCH, INC. Mathematica4.0, 1988-1999.