manual de física ii - 1sem2013
TRANSCRIPT
Centro Universitário da FEI
Manual de Laboratório de
Física II
OSCILAÇÕES, TERMOLOGIA E
ONDULATÓRIA
versão: 01/02/2013
NOS TERMOS DA LEI, FICA TERMINANTEMENTE VEDADA A REPRODUÇÃO DESTE TEXTO, PARA COMERCIALIZAÇÃO, SEM AUTORIZAÇÃO EXPRESSA DOS AUTORES.
2
APRESENTAÇÃO
Dando continuidade a um trabalho que vem sendo desenvolvido no Departamento de Física,
o qual visa facilitar um conjunto de materiais didáticos aos alunos para o acompanhamento das dis-
ciplinas do Departamento, estamos disponibilizando uma nova versão do Manual de Laboratório de
Física II (http://moodle.fei.edu.br/moodle). Esta versão tem por base o Manual anterior que foi ela-
borado a partir de sugestões de diversos professores do Departamento, e é gratuitamente oferecido
aos alunos através do site da FEI. Gostaríamos de agradecer a todos os que, direta ou indiretamente,
colaboraram para que este material pudesse ser elaborado.
Na capa encontra-se a data da versão atualizada e revista. Na medida do possível, como vi-
mos fazendo até agora, estaremos realizando revisões para tornar este material sempre atualizado e
o mais compreensível possível.
Embora tenhamos procurado discutir os principais assuntos enfocados nas práticas de labo-
ratório da disciplina de Física II, este manual não deve ser visto como um texto definitivo e fonte
única de consulta. Ele deve ser encarado como um guia que apresenta pontos essenciais dos assun-
tos tratados nas aulas de laboratório, mas que não prescinde de outras fontes de estudo, como textos
bibliográficos indicados e livros clássicos de Física Básica para o curso superior. Deste modo, acre-
ditamos, o aluno estará instrumentado para um melhor aproveitamento das práticas de laboratório.
Quaisquer dúvidas, sugestões e/ou erros encontrados neste manual, pedimos que sejam en-
caminhados a qualquer um dos autores pessoalmente ou através dos endereços de correio eletrônico.
Prof. Dr. Wagner Sciani – [email protected]
Profa. Dra. Rosângela B. B. Gin – [email protected]
Prof. Dr. Vagner Bernal Barbeta – [email protected]
Prof. José Maria Bechara – [email protected]

3
ÍNDICE
I. Normas de funcionamento do Laboratório ......................... 04
II. Instruções para elaboração dos relatórios de Física II ...... 05
III. Modelo de capa dos relatórios ............................................ 07
IV. Aulas Complementares
A – Construção de gráficos Monolog ................................. 08
B – Construção de gráficos Dilog ....................................... 20
Leitura complementar: Porque, no papel dilog podemos,
obter o coeficiente angular medindo-se os lados do triângulo
diretamente com a régua?
27
V. Experimentos
01 – Molas Helicoidais ......................................................... 32
02 – Pêndulo de Molas ........................................................ 42
Leitura complementar: Solução de equações diferenciais de
2ª ordem, homogêneas e com coeficientes constantes
49
03 – Pêndulo Simples - CCI ................................................ 51
04 – Oscilações Amortecidas - CCI .................................... 59
05 – Calor Específico .......................................................... 75
06 – Efeito Joule ................................................................... 84
07 – Cordas Vibrantes ......................................................... 92
08 – Velocidade do Som .....................................................
103
VI. Referências bibliográficas ................................................... 110
4
I - NORMAS DE FUNCIONAMENTO DO LABORATÓRIO
1. O tempo máximo de atraso permitido para as aulas de laboratório é de 15 minutos. Neste pra-
zo, o aluno poderá ser descontado pelo atraso. Após este prazo, fica terminantemente proibida
sua entrada em sala e sua participação no trabalho experimental.
2. Desligue sempre o telefone celular ao entrar no laboratório.
3. Qualquer material do laboratório que venha a ser danificado será de responsabilidade do grupo.
As gavetas contendo o material deverão ser retiradas no almoxarifado e devolvidas ao término
do experimento, onde serão conferidos e verificados. Portanto, todos são responsáveis pelo
material e não apenas aquele que assinou o protocolo de retirada e/ou entrega.
4. Não serão admitidas brincadeiras de qualquer espécie dentro do laboratório, sob pena do grupo
perder os pontos relativos àquele experimento.
5. Os relatórios são em grupo de 3 alunos no máximo e deverão ser sempre entregues na aula
posterior àquela da realização do experimento.
6. Os relatórios deverão ser manuscritos e elaborados conforme instruções apresentadas adiante.
7. As atividades são individuais, manuscritas e deverão ser sempre entregues na aula posterior
àquela da realização do experimento.
8. As atividades serão elaboradas de acordo com as orientações de seu professor.
9. Os alunos sempre deverão ler com antecedência as instruções do experimento que será realiza-
do no laboratório.
10. Relatórios ou atividades copiados de outros alunos ou de sites serão recusados.
11. Não é permitida a realização de experimentos fora da turma destinada pela Escola. Os casos
excepcionais serão analisados pelo professor da turma.
12. Somente poderão entregar relatório ou atividade os alunos que fizeram o experimento.
13. Os alunos deverão realizar o experimento em grupos de até 3 pessoas, exceto para o caso de
experimentos simulados que poderão ser realizados individualmente.

5
II - INSTRUÇÕES PARA ELABORAÇÃO DOS RELATÓRIOS DE FISICA II
Todos os relatórios deverão ser manuscritos a tinta em papel sulfite ou almaço exceto as tabe-
las que poderão ser utilizadas do manual. Os relatórios deverão obrigatoriamente conter os seguin-
tes elementos:
CAPA contendo: (ver o modelo adiante)
- Nome da Instituição;
- “Laboratório de Física II”;
- Nome da Experiência;
- Nomes completos e respectivos números de matrícula;
- Período;
- Turma;
- Número do grupo ou da bancada;
- Nome do professor;
- Data da realização da experiência e data da entrega.
CORPO DO RELATÓRIO
1. Objetivos da experiência
Descrever, de forma resumida, o(s) objetivo(s) do experimento que foi realizado.
2. Introdução teórica Resumir a teoria relacionada com o assunto abordado (ou pesquisa a ser determinada pelo
professor).
3. Material utilizado
Descrever os equipamentos utilizados na experiência.
4. Procedimento experimental
Descrever todo o procedimento para a coleta de dados, os esquemas e métodos de coleta dos
dados. Não se esqueça de anotar a precisão de todos os instrumentos utilizados.
5. Resultados
Anotar os dados fornecidos no roteiro e dados coletados na experiência, identificando-os de
forma clara e objetiva.
6. Discussão dos resultados
Analisar os resultados obtidos através dos cálculos e dos gráficos e confrontá-los com os va-
lores esperados, calculando os erros percentuais.
7. Conclusão
Analisar os conceitos envolvidos confrontando-os com os resultados. Descrever a conclusão
de forma clara e coerente, tendo como base o objetivo da mesma.
8. Bibliografia
Referenciar a literatura utilizada na elaboração do relatório. Preferencialmente utilize a nor-
ma da ABNT para a colocação de referências bibliográficas. Consulte na biblioteca as nor-
mas da ABNT para referências bibliográficas (peça ajuda à bibliotecária ou a algum de seus
auxiliares) ou de acordo com a bibliografia indicada no final deste manual.
6
OBSERVAÇÕES FINAIS:
1. Prestar atenção no objetivo da experiência e no que é pedido no procedimento.
2. A introdução teórica NÃO deve ser copiada do roteiro do experimento. Também NÃO serão
aceitas impressões de páginas da Internet como introdução teórica (embora seja incentivada a
sua utilização como fonte de pesquisa).
3. Tenha certeza de ter calculado TUDO o que foi pedido.
4. Sempre coloque UNIDADES nas grandezas medidas e/ou calculadas e nos eixos dos gráficos.
5. Construa os gráficos seguindo rigorosamente as normas que foram ensinadas no Laboratório de
Física I e que estão descritas com detalhes no Manual de Laboratório de Física I (definição dos
módulos de escala, representação das legendas em cada eixo da escala, representação da escala
em cada eixo do gráfico, forma de representar a curva gráfica, etc.). Volte sempre a consultá-lo.
Para redigir um relatório de qualidade, existe o “Exemplo de um Relatório” que pode ser
consultado no site http://moodle.fei.edu.br/moodle na área da disciplina, em “Material de Labora-
tório” (ou acesse o site http://www.fei.edu.br e escolha a opção Moodle na barra de ferramentas à
direita da página. Quando entrar no Moodle, optar por Física, escolher FS2120/NF3120 – Física II e
buscar o “Material de Laboratório” onde você encontra o Exemplo de um Relatório).

7
Laboratório de Física II
Experimento: _______________________________________________
Número Nome Completo
-
-
-
Período: _____________________
Turma: Bancada: ______
Professor: ____________________
Data de realização: _____ /_____ /_____
Data de entrega: _____/ ____ /_____
Avaliação:

8
A – CONSTRUÇÃO DE GRÁFICOS MONOLOG
1. PARA QUE SERVEM OS PAPÉIS MONOLOG
Os papéis monolog são uma forma bastante conveniente de realizar anamorfose de funções
exponenciais. Suponha, por exemplo, que tenhamos feito um experimento onde são obtidos valores
da grandeza y em função de outra grandeza x (não importa o que essas grandezas representam), e
que saibamos que a expressão teórica que as relaciona seja a escrita abaixo:
xbeay
(que também é denominada de função exponencial) onde a e b são duas constantes que desejamos
determinar a partir dos dados experimentais. Se fizermos um gráfico de y versus x quando a relação
entre elas é a definida na expressão acima, certamente não obteremos uma reta Por outro lado, po-
deríamos fazer a seguinte anamorfose para linearizar este gráfico, utilizando-nos das propriedades
da função logarítmica:
elogb.xalogylog
onde: e = 2,71828182884590..... é o número de Neper, base dos logaritmos neperianos (ou na-
turais).
Se fizéssemos agora um gráfico, em papel milimetrado, de ylog em função de x , obtería-
mos uma reta cujo coeficiente angular seria igual a )log( eb e cujo coeficiente linear seria igual a
alog .
Uma maneira mais fácil de obter a reta descrita acima seria construir um gráfico de y versus
x em uma folha de papel “monologarítmico”. Este é um papel para construção de gráficos que pos-
sui o eixo “vertical” ou das ordenadas (ou das funções) já construído em escala logarítmica, e o
eixo “horizontal” ou das abscissas (ou das variáveis) em escala milimetrada. Nesse caso a escala,
por ser logarítmica, elimina a necessidade de calcularmos o logaritmo dos valores de y a serem alo-
cados no eixo das ordenadas (vertical).
Ao determinarmos os valores das constantes a e b, podemos escrever a lei matemática que
rege o comportamento da grandeza y em função da grandeza x. Na Física, muitos fenômenos na
natureza respeitam uma relação entre grandezas neles envolvidas, da forma como a representada na
função exponencial. Por exemplo:
A intensidade de corrente elétrica em função do tempo que percorre um circuito com resistor e
capacitor associados em série e que são alimentados por uma tensão variável do tipo “onda qua-
drada”;
O decaimento radioativo de uma amostra, na qual se mede o número de átomos da substância
que sofreram mutação em função do tempo;
A redução da “amplitude” da oscilação de um pêndulo em função do tempo, quando este oscila
em um meio fluido como o ar, a água ou o óleo;
A variação da resistividade de certos semicondutores em função da temperatura de trabalho;
A variação da concentração de uma solução em função do tempo de duração de uma eletrólise;
A variação da velocidade de um objeto que cai, sob ação da gravidade, no meio ar em função do
tempo.
9
O importante é que o coeficiente a representa o valor de y quando x = 0 e o valor de b recebe o
nome de “índice” ou “coeficiente” de variação da variável x. Por exemplo, no decaimento radioati-
vo, chama-se “coeficiente de decaimento”; no amortecimento do pêndulo, chama-se “índice de
amortecimento”; no estudo da velocidade ou no circuito elétrico RC chama-se “tempo de relaxa-
ção”, e assim por diante.
2. COMO FUNCIONAM AS ESCALAS LOGARÍTMICAS
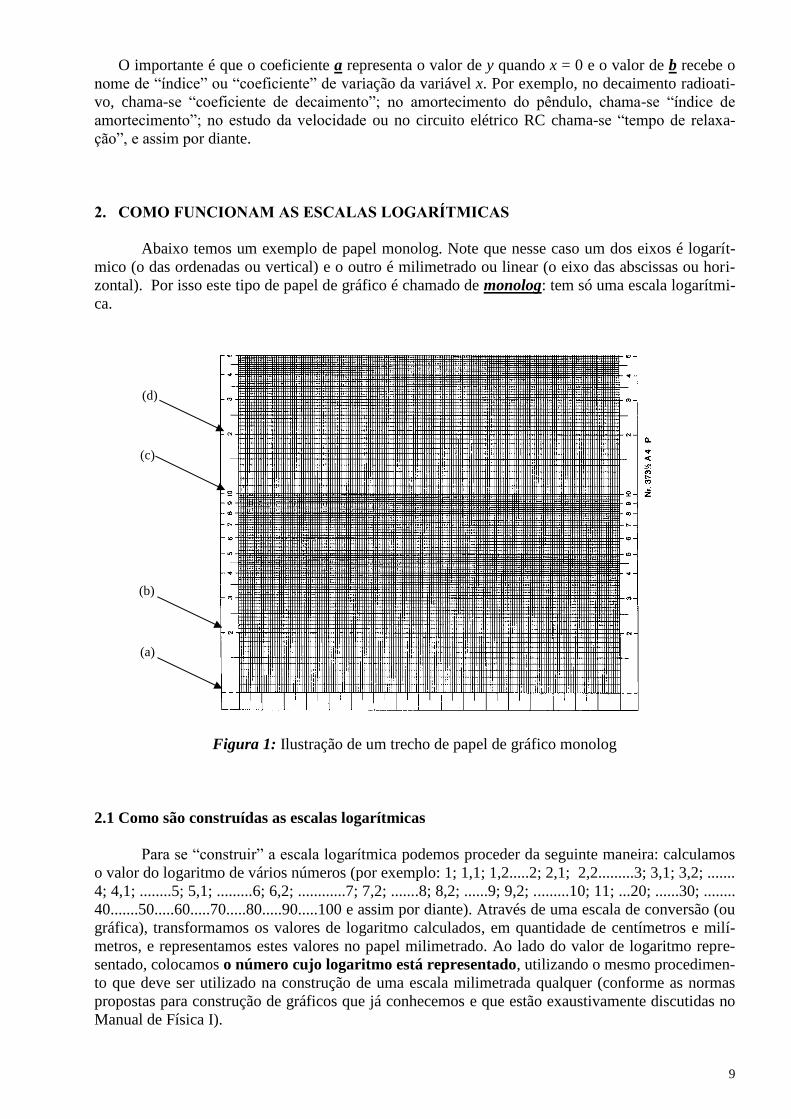
Abaixo temos um exemplo de papel monolog. Note que nesse caso um dos eixos é logarít-
mico (o das ordenadas ou vertical) e o outro é milimetrado ou linear (o eixo das abscissas ou hori-
zontal). Por isso este tipo de papel de gráfico é chamado de monolog: tem só uma escala logarítmi-
ca.
Figura 1: Ilustração de um trecho de papel de gráfico monolog
2.1 Como são construídas as escalas logarítmicas
Para se “construir” a escala logarítmica podemos proceder da seguinte maneira: calculamos
o valor do logaritmo de vários números (por exemplo: 1; 1,1; 1,2.....2; 2,1; 2,2.........3; 3,1; 3,2; .......
4; 4,1; ........5; 5,1; .........6; 6,2; ............7; 7,2; .......8; 8,2; ......9; 9,2; .........10; 11; ...20; ......30; ........
40.......50.....60.....70.....80.....90.....100 e assim por diante). Através de uma escala de conversão (ou
gráfica), transformamos os valores de logaritmo calculados, em quantidade de centímetros e milí-
metros, e representamos estes valores no papel milimetrado. Ao lado do valor de logaritmo repre-
sentado, colocamos o número cujo logaritmo está representado, utilizando o mesmo procedimen-
to que deve ser utilizado na construção de uma escala milimetrada qualquer (conforme as normas
propostas para construção de gráficos que já conhecemos e que estão exaustivamente discutidas no
Manual de Física I).
(a)
(b)
(c)
(d)
10
Se você estiver com uma calculadora ao alcance de suas mãos, acompanhe a explicação a
partir de agora:
Calcule o logaritmo dos números apresentados abaixo:
- log 1 = 0
- log 2 0,301
- log 3 0,477
- log 4 = 2.log 2 0,602
- log 5 0,699
- log 6 = log 2 + log 3 0,778
- log 7 0,845
- log 8 = 3.log 2 0,903
- log 10 = 1
- log 20 1,301
- log 200 2,301
Note que:
a) Os valores de logaritmo de números entre 1 e 10 são menores do que 1;
b) Os logaritmos de números entre 10 e 100 repetem os valores dos logaritmos entre 1 e 10, só
que acrescidos de 1 inteiro;
c) Nos logaritmos de números entre 100 e 1000 o mesmo acontece, mas acrescidos de 2 intei-
ros.
De fato, os logaritmos de um número se “repetem” acrescidos de inteiros de mesmo valor
que a ordem de grandeza do número (a ordem de grandeza é a potência de dez que você utiliza para
representar este número em notação científica. Por exemplo: 10 = 101, 100 = 10
2, 1000 = 10
3 e as-
sim por diante).
2.2 Interpretação da escala logarítmica
Observando a Figura 1, o eixo vertical ou das ordenadas é o eixo logarítmico. O primeiro 1
indicado na escala pela letra (a) pode ser qualquer valor do tipo 10n. Isto é, pode valer 0,1 ou 1,0 ou
10,0 ou 100 ou 0,001. Se for o 1, é a “origem” da escala logarítmica. Portanto:
“onde está o 1, está a origem da escala logarítmica”.
Da mesma forma, o número “2” indicado pela letra (b) pode ser um múltiplo de 2.10n. Con-
sequentemente, se o valor indicado por (a) for 1, o indicado por b será 2, e o indicado por (c) será
10 e o indicado por (d) será 20, e assim sucessivamente; se o valor indicado por (a) for 10, o indica-
do por b será 20, e o indicado por (c) será 100 e o indicado por (d) será 200, e assim sucessivamen-
te. Portanto, ao mudarmos de um valor (por exemplo, o “2”) para o próximo valor acima (próximo
“2”).
Portanto, ao mudarmos de um valor (por exemplo o “2”) para o próximo valor acima (pró-
ximo “2”), estaremos mudando de uma década, isto é, de 10 unidades (se o primeiro “2” vale 200,
o segundo irá valer 2.000). Ou seja:
“a escala logarítmica é uma “superposição de décadas repetitivas” nas quais os valores
das grandezas cujos logaritmos representam só podem variar por potências de dez”

11
Portanto:
NUNCA SE PODE ALTERAR O VALOR NUMÉRICO DE UM PONTO DA ES-
CALA LOGARÍTMICA.
Isto quer dizer que o ponto indicativo de 2 pode valer 2.10n, qualquer que seja o n inteiro,
positivo ou negativo, mas nunca poderá valer qualquer outro número que multiplique 2, exceção
feita ao dez.
Observe que, embora você não tenha muita liberdade de escolha para a escala do eixo loga-
rítmico, a escala do eixo milimetrado continua sendo definida segundo os parâmetros indicados na
construção de gráficos milimetrados, já vistos em Física I. Ou seja: o procedimento geral é adotar
módulos de escala fáceis de trabalhar, quais sejam: (1; 2; 5).10 n
, sendo “n” um inteiro.
3. COMO OBTER OS VALORES DE a
Já afirmamos no início que os papéis monolog são convenientes para se obter a anamorfose
de funções exponenciais, isto é, funções do tipo:
xbeay
Os coeficientes a e b de expressões como a dada acima estão relacionados com os valores de
coeficiente angular e linear da reta obtida no papel monolog. O método para obtê-los pode ser dife-
renciado, conforme mostrado a seguir.
A obtenção do coeficiente linear no caso de papel monolog é bastante simples. Basta verifi-
car o ponto em que o gráfico cruza (intercepta) o eixo logarítmico que parte da origem (x = 0) do
eixo milimetrado. Por exemplo, considere um experimento, cuja expressão teórica seja a seguinte:
xbeay
Quando 0x a expressão acima se reduzirá a:
ay ou seja: a nada mais é do que o valor de y para 0x
Este é o denominado “valor inicial da função”. A simples leitura do valor no ponto do eixo
logarítmico segundo a escala definida, já descreve o valor de a . Não é necessária nenhuma conta
ou “conversão”. Em se tratando de grandeza física, sempre a acompanha uma “unidade de medida”.
IMPORTANTE: Nem sempre é possível se determinar o valor de a pelo processo indicado acima.
Isto ocorre quando, devido à tabela de dados experimentais levantados, a escolha da escala milime-
trada fica melhor enquadrada quando a origem do eixo milimetrado não contém o valor nulo (veja o
exercício 4). Neste caso o valor de a pode ser determinado pelo seguinte processo:
1. Determinar o expoente b da exponencial;
2. Substituir valores de y e de x correspondentes na função exponencial, utilizando o expoente de-
terminado;
3. Obter o valor de a resolvendo a expressão: xbe
ya
4. Para que o valor de a seja o mais próximo possível do valor médio, torna-se interessante repetir
este cálculo para vários valores de pares (x, y) da tabela e calcular o valor médio de a.

12
4. COMO OBTER OS VALORES DE b
Para obtermos o valor do coeficiente angular (parâmetro b, no exemplo acima), o processo é
um pouco mais trabalhoso. Existem duas formas básicas de se obter o coeficiente angular para o
caso de papel monolog, conforme descreveremos abaixo.
Para a determinação de b será interessante distinguirmos o comportamento da função expo-
nencial em “crescente”, ou seja, os valores da função y aumentam quando crescem os valores da
variável x (neste caso o coeficiente b é positivo) e “decrescente”, ou seja, os valores da função y
diminuem quando crescem os valores da variável x (neste caso o coeficiente b é negativo e torna-se
mais simples trabalhar com ele como se fosse o negativo de seu módulo, ou seja: bb ).
4.1 Método Gráfico - Geralmente utilizado para o caso de retas gráficas com grandes inclinações
- Funções exponenciais crescentes 0b
A forma mais simples para a determinação do coeficiente b nessa situação é considerar o
seguinte exemplo: suponha que estejamos interessados em determinar a constante b da função ex-
ponencial dada pela expressão abaixo:
xbeay
Irá existir um valor x’ de x tal que o expoente da exponencial se torne a unidade positiva, ou
seja:
1xb o que equivale dizer que: x
1b
(note que estamos pensando apenas na variável positiva). Neste caso, a função exponencial teria a
seguinte expressão:
a72,2e.ay 1
Olhando o problema desta forma, quando a função se reduzir para um valor dado pelo valor
acima, a variável terá o valor x = x’. Esse ponto corresponderá ao inverso do valor da constante b .
Portanto, basta que no gráfico identifiquemos o valor de a (ponto onde a reta gráfica intercepta o
eixo logarítmico que passa pela origem de x), multipliquemos esse valor pelo número natural e
(e 2,72) e entremos com o resultado obtido no eixo vertical. Buscando o ponto da reta gráfica cor-
respondente a esta ordenada, encontraremos um valor da abscissa x (que é x’) o qual corresponde ao
inverso do valor da constante b da função exponencial, conforme mostrado na Figura 2 a seguir.
Note que, se aplicarmos o mesmo raciocínio para o logaritmo da função exponencial, obte-
remos que:
elogalogylog pois 0b
o que indica que, se somarmos o comprimento do eixo logarítmico que vai de 1 a 2,72 ao compri-
mento correspondente ao valor de a (já indicado pela intersecção da reta gráfica com o eixo loga-
rítmico), encontramos uma ordenada que, levada à reta gráfica, fornece a mesma abscissa x’ cujo
valor e utilidade já descrevemos acima.

13
Figura 2: Ilustração para determinação de 0b pelo método gráfico
- Funções exponenciais decrescentes 0b
Neste caso a função exponencial pode ser escrita de forma mais ilustrativa da seguinte for-
ma:
xb
eay
de modo que, para este caso, o valor de x’ que tornaria o expoente da exponencial igual à unidade
negativa seria:
1xb e, portanto: a368,0e
aeay 1
(continuamos pensando em x’ como variável positiva). Procedendo da mesma forma indicada para o
caso da função exponencial crescente, qual seja:
- Procuramos no eixo logarítmico a intersecção da reta gráfica com o eixo;
- O valor correspondente ao ponto de intersecção é multiplicado pelo fator aproximado de 0,368;
- Procuramos neste mesmo eixo logarítmico qual o ponto correspondente a este y;
- Vamos à reta gráfica e buscamos o ponto da reta gráfica correspondente a esta ordenada;
- Verificamos no eixo milimetrado qual o x’ que está associado a este ponto.
Obtemos o valor de b através da operação já conhecida:
x
1b
e
a
2,72a
x’

14
Figura 3: Ilustração para determinação de 0b pelo método gráfico
De modo equivalente, se trabalhamos com o logaritmo da função exponencial, teremos, no
caso de 0b :
elogalogylog pois 0b
indicando que, agora, devemos subtrair o comprimento de 1 a 2,72 do comprimento corresponden-
te ao valor de a , conforme indica a ilustração da Figura 3.
IMPORTANTE:
- b tem unidade de grandeza física. É a inversa da unidade da grandeza física do eixo das abscis-
sas;
- Se 0b , o sinal é atribuído na exponencial, uma vez que foi considerado na sua determinação.
4.2 Método Analítico - Geralmente utilizado para o caso de retas gráficas com pequenas inclina-
ções, mas é de aplicação geral em qualquer dos dois casos.
Este método também pode ser usado quando temos grandes inclinações e independe do sinal
do coeficiente b , pois ele, inclusive, permite determinar o sinal do coeficiente, embora a forma do
gráfico já denuncie este sinal, podendo-se determinar apenas o seu módulo.
Consiste basicamente no seguinte procedimento:
- Monte um triângulo retângulo qualquer com lados paralelos aos eixos (lembre-se que quanto
maior for o triângulo, maior será a precisão);
- A partir do triângulo montado, podemos identificar dois pares de pontos: (x1,y1) e (x2,y2);
- Substituir os pontos na expressão que deduziremos abaixo.
e
a
0,368a
x’

15
Note que temos definidos dois pares de pontos. A expressão teórica que estamos represen-
tando graficamente é a seguinte:
xbeay
Se extrairmos o logaritmo de ambos os lados, teremos:
elogb.xalogylog
Substituindo os pontos (x1,y1) e (x2,y2) na expressão acima, obteremos:
elogb.xalogylog 22
e:
elogb.xalogylog 11
Subtraindo a segunda expressão da expressão primeira, obteremos:
elogxxylogylog 1212
Assim sendo, o valor de b , que é o coeficiente angular da reta obtida será dado por:
Observe que se y2 > y1 então a razão será maior do que 1 e o logaritmo desta razão será posi-
tivo. Caso contrário será negativo. Se impuser a hipótese de que x2 é sempre maior do que x1, o de-
nominador será positivo e o sinal de b vai depender se y cresce ou decresce quando x cresce.
IMPORTANTE:
Se você usar o log dos valores de y é preciso calcular o 4343,0elog e substituí-lo na expressão.
Porém, se você calcular o logaritmo neperiano yln em vez de log, não é preciso substituir o eln ,
pois ele é igual à unidade. Portanto:
tanto faz calcular o logaritmo da função exponencial na forma da base 10 (log) ou na base natu-
ral (ln).
O que importa é fazer os cálculos CORRETAMENTE, para substituí-los na expressão de b . Então,
podemos reescrever a expressão de b na forma de logaritmo natural, que fica sendo:
elogxx
yy
log
elogxx
ylogylogb
12
1
2
12
12
12
1
2
12
12
xx
yy
ln
xx
ylnylnb

16
MUITA ATENÇÃO: quando se determinar o b por este método será necessário termos em mente
que a forma da expressão que está sendo utilizada é SEMPRE:
xbeay
SEM SINAL no expoente. Isto porque, na substituição de b na expressão geral a partir dos resulta-
dos obtidos pelo cálculo acima, o sinal vai junto com o valor de b . Se este cuidado não for tomado,
a superposição do valor de b obtido nos cálculos com o sinal já incluído na expressão, inverte o
sinal VERDADEIRO do expoente.
Outra coisa importante a ser considerada: os pares de valores (x1; y1) e (x2; y2) devem ser
tomados da reta gráfica, e nunca da tabela de valores utilizada na construção do gráfico. Isto porque
o valor desejado para b deve ser o médio dos valores levantados experimentalmente, e isto só será
possível de se obter a partir da reta média gráfica. Os pontos da tabela podem não pertencer à reta
média gráfica, o que comprometeria o valor médio de b.
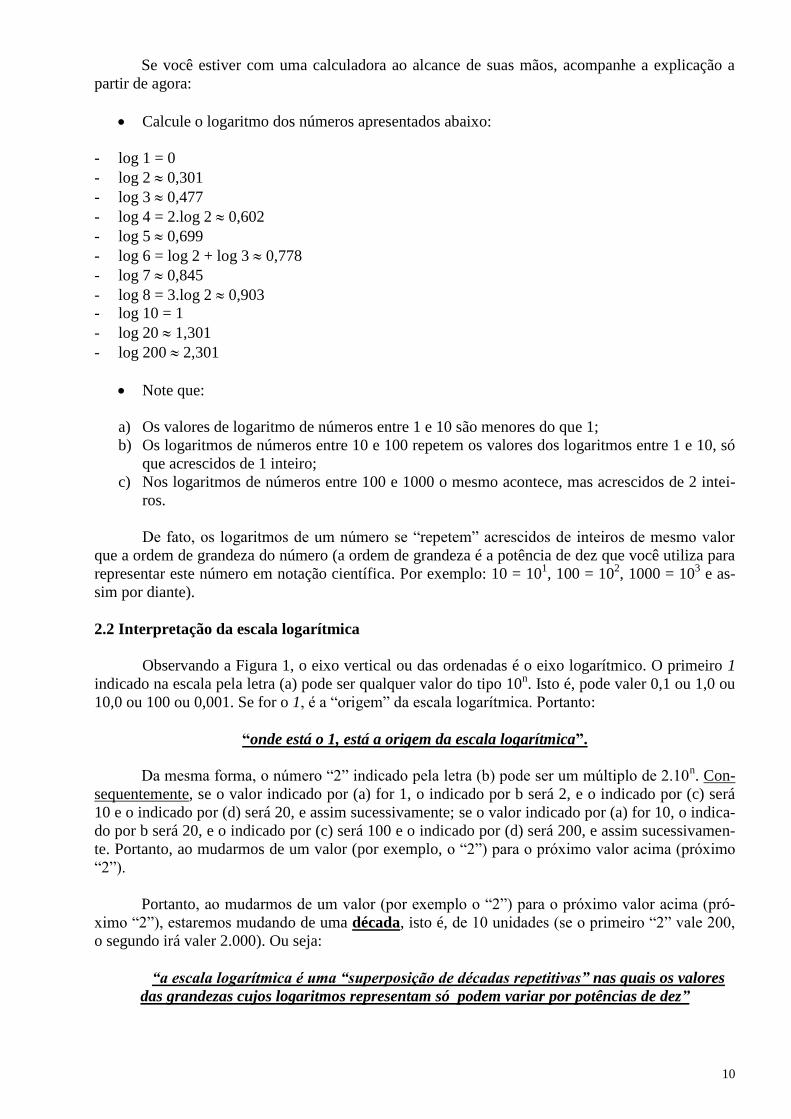
As figuras 4 e 5 são uma ilustração de como utilizar o método analítico para determinação
do coeficiente b para funções exponenciais, tanto para funções crescentes como para decrescentes:
Figura4: Ilustração da determinação de 0b pelo método analítico
17
Figura – 5: Ilustração da determinação de 0b pelo método analítico
LEMBRE-SE: A utilização de papel de gráfico (monolog, milimetrado, etc.) é um procedi-
mento técnico para se obter informações sobre o comportamento de grandezas que possuem uma
relação funcional, e que serve para se determinar a lei matemática (fórmula) que estabelece esta
relação entre elas.
Por ser um procedimento técnico, a frequência de utilização é o melhor método de aperfei-
çoar a utilização do procedimento. Portanto, MUITOS EXERCÍCIOS é a melhor forma de se fami-
liarizar com os detalhes do procedimento e adquirir flexibilidade na interpretação dos resultados.

18
5. EXERCÍCIOS
1. Na explicação sobre a construção da escala logarítmica, sugerimos que você calcule o logaritmo
de diversos números e, após uma conveniente escolha de escala, representasse o log dos núme-
ros calculados na escala milimetrada vertical. Usando uma folha de papel milimetrado, construa
uma escala logarítmica no eixo vertical, usando a conversão de escalas sugerida abaixo:
y log y em cm y log y em cm
1,0 0 0 15
1,5 20
2,0 25
2,5 30
3,0 35
3,5 40
4,0 45
4,5 50
5,0 55
5,5 60
6,0 65
6,5 70
7,0 75
7,5 80
8,0 85
8,5 90
9,0 95
9,5 100 2 20
10,0 1 10 200
Para o gráfico ser construído, você deve transcrever os valores de logaritmo dos números indicados
como y, obtidos a partir da calculadora (ou tabela de logaritmos).
A escala a ser utilizada é de 10 cm quando o ylog vale 1 (y = 10). Transcreva os valores obtidos
em centímetros para a escala vertical do eixo milimetrado, e escreva ao lado do valor transcrito, o
valor do y que deu origem àquele ponto.
A escala horizontal continua milimetrada.
Este é o processo operativo de construção de uma escala logarítmica.

19
2. A corrente que circula em um circuito RC, quando o capacitor está se carregando, segue a ex-
pressão
t
0 e.II
. Abaixo temos a tabela da corrente em um circuito RC em função do tempo.
Montar o gráfico monolog de I x t e determinar o valor de I0 e de .
t (s) I (A)
0,1 0,0606
0,2 0,0368
0,3 0,0223
0,4 0,0135
0,5 0,0082
0,6 0,0050
0,7 0,0030
0,8 0,0018
0,9 0,0011
1,0 0,0007
3. A tabela abaixo mostra o processo de decaimento radioativo de uma amostra em função do tem-
po:
t(s) 20 40 80 120 160 200 240 280
N(núcleos radioativos) 4000 2700 1220 542 239 111 48 21
a) Construir o diagrama N x t em papel monolog.
b) Sabendo que a desintegração radioativa segue a lei N = No.e-t
, determinar as constantes No e
a partir do gráfico.
4. Um pesquisador deseja determinar a resistividade de um certo material semicondutor, cujo
comportamento segue a seguinte lei exponencial:
TKe0
onde T é a temperatura absoluta na qual se encontra o material. Levantando dados através
de um processo experimental, no qual mede a resistividade do semicondutor em função da
temperatura, obteve a tabela abaixo:
m. 7,2.108
2,6.108
1,1.108
4,5.107
2,0.107
9,7.106
4,9.106
2,5.106
1,4.106
KT 12,0 12,5 13,0 13,5 14,0 14,5 15,0 15,5 16,0
11 KT
a) Construir um diagrama versus T
1 em papel monolog.
b) Obter, a partir do gráfico, o valor de 0 e da constante K .
20
B – CONSTRUÇÃO DE GRÁFICOS DILOG
1. COMO SÃO OS PAPÉIS DE GRÁFICO DILOGARÍTMICOS
Os papéis de gráfico dilogarítmicos (papel dilog) são papéis de gráfico tais que os dois eixos
de representação gráfica (vertical e horizontal) estão AMBOS em escala logarítmica. Ou seja, co-
mo:
NUNCA SE PODE ALTERAR O VALOR NUMÉRICO DE UM PONTO DA ES-
CALA LOGARÍTMICA,
não se pode alterar os valores numéricos de nenhuma das escalas, mas apenas a ordem de grandeza
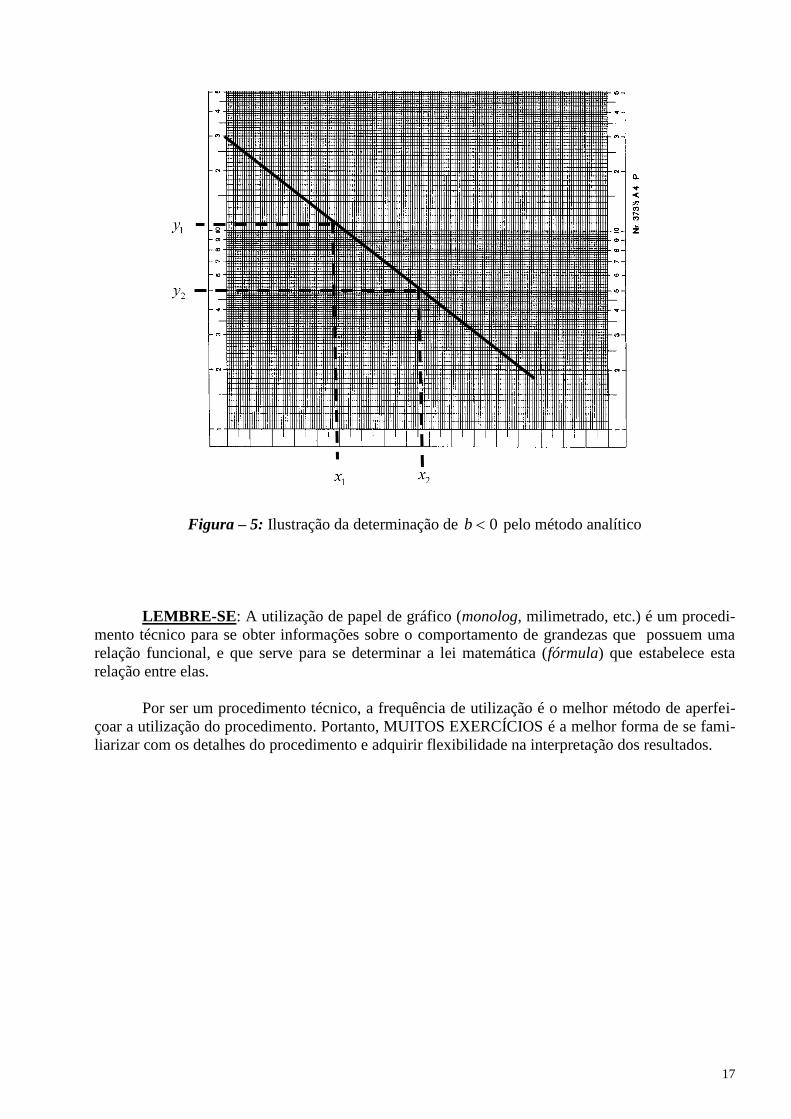
a ser representada EM CADA ESCALA. Na figura 1 está uma ilustração de um trecho de papel
dilog.
Figura 1: Representação de um trecho de papel dilog
Note na figura 1, que o eixo “vertical” possui duas décadas completas e o eixo “horizontal”
possui duas décadas completas e uma 3ª década incompleta (vai até o “7”).
Você pode escolher para o início do eixo vertical uma dada potência de 10 (as demais serão
sempre potências de ordem superior, como já vimos em escalas logarítmicas), e para o eixo hori-

21
zontal OUTRA potência de 10 diferente. A escolha da potência de 10 a ser utilizada para “iniciar”
cada eixo depende dos valores das grandezas a serem representadas em cada eixo.
Note também que, na própria “construção” dos eixos logarítmicos, o módulo de escala
(comprimento de 1 década) em cada eixo PODE SER DIFERENTE. Na figura 1 você pode verificar
se isto ocorre ou se nos dois eixos o módulo de escala é o mesmo.
2. PARA QUE SERVEM OS PAPÉIS DILOG
Na análise dimensional estudamos um teorema que, junto com a condição de homogeneida-
de das equações físicas, nos permite escrever fórmulas físicas, ou seja: expressão matemática que
estabelece as relações entre grandezas físicas (variáveis) cuja variação interfere no comportamento
de outra grandeza física (função), derivada das variáveis (que podem não ser fundamentais). Diz o
Teorema de Bridgman:
“TODA GRANDEZA DERIVADA QUE SATISFAZ A CONDIÇÃO DE SIGNIFICADO ABSO-
LUTO DO VALOR RELATIVO, PODE SER EXPRESSA PELO PRODUTO DE UMA CONS-
TANTE PURAMENTE NUMÉRICA, POR POTÊNCIAS CONVENIENTES DE GRANDEZAS
FUNDAMENTAIS."
Por exemplo: seja G uma grandeza física que dependa da variação das quantidades físicas x,
y e z. Então, podemos escrever a fórmula geral da grandeza G como função de x, y e z da seguinte
forma:
zyxKG
onde: x, y e z são grandezas físicas e K, , e são constantes numéricas, ou seja, adimensionais.
Os papéis dilog são muito úteis para se obter a anamorfose de funções com esta forma de
expressão, de tal modo que se possam determinar as constantes numéricas acima citadas. Para escla-
recermos os procedimentos necessários para se obter estas constantes, vamos partir de um exemplo
simples.
Suponha, por exemplo, que tenhamos feito um experimento onde são obtidas as grandezas x
e y (não importa o que essas grandezas representam), e que sabemos que a expressão teórica que
relaciona a grande x e a grandeza y é a seguinte:
bxay
onde a e b são duas constante que desejamos determinar a partir dos dados experimentais. Se fizer-
mos um gráfico de y versus x, não obteremos uma reta (exceto se b = 1). Por outro lado, conhecen-
do as propriedades da função logarítmica, poderíamos fazer a seguinte anamorfose para linearizar
este gráfico:
)(log)(log bxby
ou seja: )(log)(log)(log xbay
Se fizéssemos agora um gráfico, em papel milimetrado, de log(y) em função de log(x) (ob-
serve bem que y é a função e x é a variável, independente do eixo no qual as representamos!), obte-
ríamos uma reta com coeficiente angular (ou inclinação) igual a b. Ao invés disso, poderíamos fazer
um gráfico de y versus x em uma folha de papel dilog, o que nos levaria também a obter uma reta.

22
Nesse caso a escala, por ser logarítmica, elimina a necessidade de extrairmos o logaritmo dos valo-
res a serem representados nos eixos X e Y logarítmicos.
Os coeficientes b e a das expressões anteriores estão relacionados com os valores de coefici-
ente angular e linear da reta obtida no papel dilog. Porém, tome MUITO CUIDADO, pois o coefi-
ciente linear a só pode ser obtido nos gráficos dilog, pelo valor da intersecção da reta gráfica com
uma paralela ao eixo em que foi representada a função (no caso, o eixo no qual foram representados
os valores de y) e que passa pelo ponto 1 (unidade) do eixo da variável (no caso, o eixo no qual fo-
ram representados os valores de x). Dependendo da tabela de valores representados, nem sempre
isto se torna possível. Acompanhe a explicação mais detalhada dada abaixo.
3. COMO OBTER O VALOR DE b
Para a obtenção do coeficiente angular de uma reta obtida em um papel dilog, basta montar
um triângulo retângulo qualquer, de modo que a hipotenusa seja a reta gráfica obtida.
3.1 Método gráfico
Se as escalas logarítmicas forem iguais nos dois eixos (da função e da variável), medir com uma
régua comum os catetos do triângulo construído e fazer a razão entre os catetos deste triângulo,
ficando no numerador o comprimento do cateto paralelo ao eixo da função e no denominador o
comprimento do cateto paralelo ao eixo da variável, conforme mostrado na Figura 2 a seguir
(note que diversos elementos do gráfico estão faltando, como: unidades das grandezas represen-
tadas nos eixos, grandezas que se está representando, etc.). Como a função que está sendo repre-
sentada graficamente é:
bxay
o coeficiente angular da reta obtida num gráfico feito em papel dilog desta função, e que representa
o parâmetro b (expoente da variável), pode ser obtido da seguinte forma:
x
y.ang.coefb
onde y é o comprimento (em cm ou mm) do cateto paralelo ao eixo da função e x é o compri-
mento (em cm ou mm) do cateto paralelo ao eixo da variável.
Se as escalas logarítmicas nos dois eixos do papel dilog forem “distorcidas”, isto é, o compri-
mento (em cm ou mm) de uma década na direção horizontal não é o mesmo que o comprimento
de uma década na direção vertical, os comprimentos medidos devem ser “ajustados” para que a
distorção das escalas não interfira da determinação do coeficiente b provocando erro. Isto é par-
ticularmente importante quando se faz cópias ou versões eletrônicas do papel dilog, já que as
copiadoras, scanners e editores de texto podem deformar a relação dos lados (verifique na figu-
ra 1 ou na figura 2 se existe ou não a distorção das escalas).
A “correção” dos valores obtidos da medida dos comprimentos dos catetos se faz, então, da se-
guinte maneira:
1. Divide-se o comprimento medido para o cateto paralelo ao eixo da função (y) pelo valor do
comprimento (em cm ou mm) da década deste eixo;

23
2. Divide-se o comprimento medido para o cateto paralelo ao eixo da variável (x) pelo valor
do comprimento (em cm ou mm) da década deste eixo;
3. Estabelece-se a razão entre os valores obtidos, ou seja:
horizontaldécadadaocomprimentx
verticaldécadadaocomprimenty.ang.coefb
O sinal de b deve ser atribuído segundo a inclinação do gráfico: positivo se a reta gráfica
é crescente e negativo se a reta gráfica for decrescente.
Figura – 1: Representação gráfica em dilog da função b
xay
3.2 Método Analítico
O método geral, que dispensa a análise da igualdade ou distorção das escalas dos eixos logarít-
micos, utiliza a função logarítmica da expressão original. De fato, obtendo o logaritmo de am-
bos os membros da igualdade física, tem-se:
)x(logb)a(log)y(log
Se lermos no gráfico os valores dos pares, correspondentes aos pontos onde a reta gráfico toca
as paralelas aos eixos no triângulo desenhado, (x1; y1) e (x2; y2), como já fizemos no estudo do
papel monolog, substituindo estes valores na equação logarítmica acima, obtemos:
)x(logb)a(log)y(log 11
)x(logb)a(log)y(log 22
y
x
y2
y1
x2 x1

24
subtraindo uma da outra, obtém-se:
)x(log)x(logb)y(log)y(log 1212
que pode ser reescrito utilizando as propriedades das funções logarítmicas, fornecendo o valor de b:
12
12
12
12
xxln
yyln
xxlog
yylogb
O importante a ser considerado neste método geral é que, observando-se a mesma ordem nos
índices das grandezas no numerador e denominador, o valor de b vem acompanhado do sinal que
lhe compete: positivo se a função é crescente e negativo se é decrescente. Observe-se, além disso,
que a razão acima pode ser obtida (com mesma resposta) tanto com o uso do log como do ln.
4. COMO OBTER O VALOR DE a
O valor do parâmetro a pode ser obtido de diferentes formas.
4.1 Método gráfico
Só pode ser utilizado se no eixo das variáveis gráfico dilogarítmico (no exemplo, onde estão
sendo representados os valores de x) existir o valor unitário (1).
Neste caso, trace uma reta paralela ao eixo das funções (no exemplo, onde estão representa-
dos os valores de y) que contenha o ponto unitário do eixo das variáveis. A intersecção desta reta
com a reta gráfica indica o valor de a (ver ilustração da figura 3).
Figura 3: Determinação de a pelo método gráfico
a
y
x (10-1
)
25
Na figura 3, a multiplicação dos valores do eixo x por 10-1
representa que o valor do primei-
ro “1” que aparece no eixo x tem valor 0,1 e que o “1” seguinte tem valor “1”. POR ESTE PONTO
(x = 1) é traçada a reta paralela ao eixo y até interceptar a reta do gráfico. Esta intersecção é o valor
de a. Como se pode facilmente perceber, só é aplicável este critério para caso particular de valores
de x.
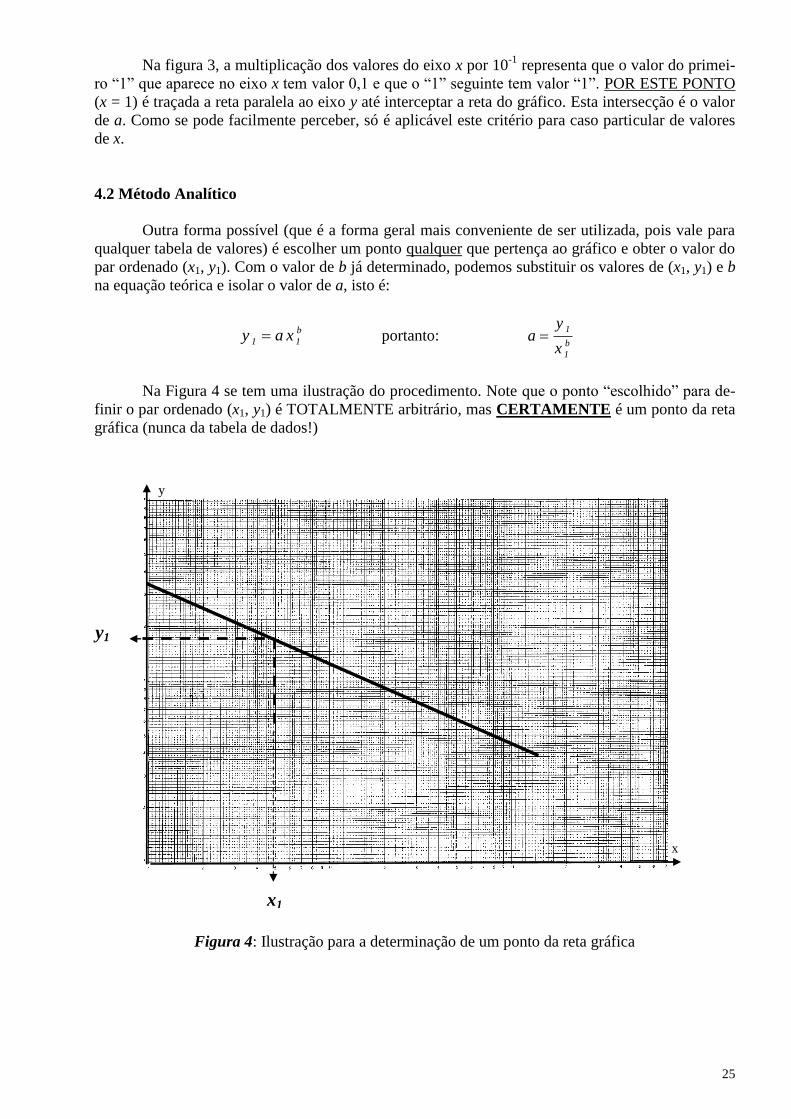
4.2 Método Analítico
Outra forma possível (que é a forma geral mais conveniente de ser utilizada, pois vale para
qualquer tabela de valores) é escolher um ponto qualquer que pertença ao gráfico e obter o valor do
par ordenado (x1, y1). Com o valor de b já determinado, podemos substituir os valores de (x1, y1) e b
na equação teórica e isolar o valor de a, isto é:
b
11 xay portanto: b
1
1
x
ya
Na Figura 4 se tem uma ilustração do procedimento. Note que o ponto “escolhido” para de-
finir o par ordenado (x1, y1) é TOTALMENTE arbitrário, mas CERTAMENTE é um ponto da reta
gráfica (nunca da tabela de dados!)
Figura 4: Ilustração para a determinação de um ponto da reta gráfica
y
x
y1
x1

26
5. FUNÇÃO DE VÁRIAS VARIÁVEIS
A partir do Teorema de Bridgman podemos observar que, de modo geral, as quantidades
físicas são funções de múltiplas variáveis. Na forma como o escrevemos, a grandeza física G de-
pende de variáveis x, y e z e de coeficientes numéricos K, , e , ou seja:
zyxKG
Neste caso será óbvio que, para se definir a expressão de G, tenhamos que possuir dados
acerca do comportamento de G em relação a cada uma das variáveis das quais depende. Ou seja:
deveremos ter uma tabela de dados que indique como G se comporta quando variamos somente x e
mantemos constates os valores de y = yo e de z = zo; outra tabela de dados que indique como se
comporta G quando variamos somente y e mantemos constantes os valores de x = xo e de z = zo e
uma terceira tabela de dados que indique como se comporta G quando variamos somente z e man-
temos constantes os valores de x = xo e de y = yo.
De posse destas tabelas, construímos um gráfico em papel dilog para cada tabela: um para a
variação de G com x; outro a variação de G com y e um último com a variação G com z. De cada
um destes gráficos obtemos as constantes numéricas referentes aos expoentes (, e respectiva-
mente de cada um), utilizando um dos métodos já explicados neste texto (Determinação do coefici-
ente b).
Determinados estes expoentes, substituímos na expressão geral de G o valor Go que é co-
mum a xo, yo e zo. Ou seja: será possível encontrar, em qualquer dos gráficos construídos para a
determinação dos expoentes, um valor Go que é o valor da grandeza quando substituímos na sua
expressão os valores utilizados de xo, yo e zo para a determinação deste valor. Então, teremos:
00o
0
zyx
GK
IMPORTANTE:
Como as tabelas foram obtidas mantendo-se constantes certos valores das variáveis x, y e z
em cada fase da coleta de dados, somente com estes valores mantidos constantes é possível obter a
constante K quando utilizamos um dos gráficos para a relação entre os valores de G e suas variá-
veis. Se utilizarmos outro valor de G para o qual não se respeite esta restrição, o valor de K não será
correto.
O valor de K assim determinado é um valor particular que depende da precisão da coleta dos
dados utilizados Uma maneira de se obter um valor de K mais próximo do médio, é repetir o calculo
de K para vários valores de diferentes gráficos (NÃO DAS TABELAS) respeitando-se as condições
impostas acima (relação entre as variáveis NAQUELE ponto onde se busca determinar a constante),
e depois obter o valor médio dos que foram determinados nestas circunstâncias.

27
LEITURA COMPLEMENTAR:
Porque, no papel dilog podemos, obter o coeficiente angular medindo-se os lados do triângulo
diretamente com a régua?
Para entendermos porque podemos obter o coeficiente angular no papel dilog medindo-se os
lados do triângulo diretamente com a régua, precisamos primeiro entender como o papel dilog é
construído. Imagine um eixo logarítmico, mostrado na Figura 5 abaixo, onde podemos observar
duas décadas consecutivas. Chamemos de K a distância medida com a régua entre estas duas déca-
das, e de h1 a distância até um ponto genérico x1.
Figura 5: Ilustração da construção da escala logarítmica
Deste modo, podemos escrever:
K)10ln(K)1ln()10ln(
Isto é, a distância de uma década é proporcional a ln (10), onde é um fator de escala. Da
mesma forma, a distância h1 é proporcional a ln (x1).
11 h)xln(
Considere agora a reta ilustrada na Figura 6 abaixo, obtida em um papel dilog.
Figura 6: Ilustração de uma reta obtida em escala dilogarítmica
O coeficiente angular a desta reta será dado por:
)xln()xln(
)yln()yln(a
12
12
K
1 10 x1
h1
(x1,y1)
(x2,y2)
h1
h2
v2
v1
28
Mas, conforme vimos anteriormente, podemos escrever (considerando o fator de escala
na vertical e na horizontal):
22 v)yln( 11 v)yln( 22 h)xln( 11 h)xln(
Portanto o coeficiente angular será dado por:
12
12
hh
vva
12
12
hh
vva
Quando os fatores de escala horizontal e vertical são os mesmos, resulta em:
12
12
hh
vva
onde: (v2-v1) é a distância vertical (medida com a régua em cm ou mm)
(h2-h1) é a distância horizontal (medida com a régua em cm ou mm)
Quando os fatores de escala são distintos (casos já mencionados anteriormente no texto),
substitui-se os valores de e de obtidos para a escala logarítmica em cada eixo, para compensar
o que denominamos de “distorção” no texto acima.

29
6. EXERCÍCIOS
1. Em uma transformação adiabática, sabemos que a pressão e o volume do gás estão relacionados
entre si segundo a lei física:
KVp
Para uma dada transformação adiabática, obteve-se a tabela abaixo para os valores de p e V. A partir
desta tabela, montar o gráfico de p em função de V em papel dilog e obter os valores de e de K.
(CUIDADO! Neste caso – lei física – K não é uma constante adimensional. Portanto, tem unidades
físicas pois é um coeficiente constante físico. Lembre-se: 1Pa = 1N/m2).
V (m3) p (Pa)
0,01 199.000
0,02 80.800
0,03 47.700
0,04 32.830
0,05 24.500
0,06 19.380
0,07 15.800
0,08 13.300
0,09 11.400
0,10 10.000
2. Numa experiência com pêndulo de molas, foram feitos dois ensaios:
1o ensaio : Mola com k = 50,0 N/m (constante):
m (kg) 0,020 0,080 0,200 0,500 0,800 1,500 2,000
T (s) 0,126 0,251 0,397 0,628 0,794 1,088 1,256
2o ensaio : Mantendo-se m = 0,500 kg (constante):
k (N/m) 4,0 10,0 30,0 50,0 80,0 200,0 300,0
T (s) 2,220 1,404 0,811 0,628 0,496 0,314 0,256
a) Construir o gráfico de T em função de m e o gráfico de T em função de k em papel dilog.
b) Sabendo que o período de oscilação T depende de m e de k de acordo com a expressão T =
C.m.K
, determinar as constantes , e C.

30
3. Na tabela abaixo temos a massa molecular M e o raio r de algumas moléculas:
Substância H2O N2 CO2 Glicose
M (g/mol) 18 28 44 180
R (x 10-10
m) 1,5 1,8 2,1 3,7
a) Sabendo que a relação entre as variáveis R e M é do tipo R=C.Mk, encontre os valores de C
e k através de um gráfico em papel dilog, indicando no gráfico os pontos utilizados para a
obtenção dos valores. R.: 0,50 x 10-10
m.mol/g e 0,386
b) Calcular o raio da molécula de Ribonuclease ( M = 13500 g/mol). R.: 36,7 x 10-10
m

31
4. Um estudante de Física III deseja determinar experimentalmente a expressão para o campo
magnético (B) no centro de uma espira circular de raio R, quando uma corrente de intensidade I
percorre essa espira. Lembrando das aulas de laboratório de Física II, ele faz dois ensaios:
1º Ensaio: Mantendo o raio R da espira fixo em R = 0,20m, ele varia a intensidade da corrente I
e mede a intensidade do campo magnético B. O gráfico de “B versus I” está mostrado na figura
1 abaixo.
2º Ensaio: Mantendo a intensidade da corrente elétrica fixa em I = 0,5 A, ele varia o raio R da
espira e mede a intensidade do campo magnético B. O gráfico de “B versus I” está mostrado na
figura 2 abaixo.
a) Sabendo que B = C . I . R
, determine, a partir dos gráficos abaixo, os valores de , e o
da constante C e suas respectivas unidades no S.I. R.: 1, – 1 e 6,0 x 10-7
Tm/A
b) Escreva a expressão para o campo magnético no centro da espira e calcule sua intensidade
quando I = 1,0 A e R = 0,05 m. Obs.: No S.I., a unidade de campo magnético é T (Tesla).
R.: 1,2 x 10-5
T.

32
01 – MOLAS HELICOIDAIS
1. OBJETIVOS DA EXPERIÊNCIA:
Verificar a lei de Hooke e determinar a constante elástica de molas helicoidais e da associa-
ção de molas e seus efeitos.
2. FUNDAMENTAÇÃO TEÓRICA:
2.1 Mola helicoidal
Uma mola helicoidal consiste basicamente de um fio enrolado em forma helicoidal, apresen-
tando em suas extremidades hastes que podem ser retas ou curvas, com dobras para dentro ou para
fora. As molas possuem diversas aplicações, sendo um dos componentes principais da suspensão de
um veículo. Neste caso, o papel da mola é absorver de uma forma suave e confortável as irregulari-
dades do piso. A mola da suspensão de um veículo pode ser helicoidal, de lâmina ou uma simples
barra de torção. Existem diferentes tipos de mola, como as de torção, de tração, compressão, etc. A
figura 1 representa a lustração de uma mola do tipo helicoidal cilíndrica.
Figura 1: Ilustração de mola helicoidal cilíndrica. Observe-se os ganchos para suspensão da
mola nas suas extremidades.
Um dos parâmetros fundamentais para se caracterizar uma mola é a sua constante elástica
(k). A constante elástica de uma mola nos fornece o quanto uma mola é deformada quando subme-
tida a certa força de deformação.
A construção da mola faz com que ela possua um comprimento ℓo característico, que é de-
nominado de comprimento natural. Quando submetida a uma força, o fio das espiras sobre uma
torção que provoca uma separação maior (ou menor) entre as espiras. Com isto, o comprimento da
mola sofre uma variação para mais (ou para menos). Se denominarmos este novo comprimento de
ℓ, a diferença entre o comprimento da mola sob ação da força e o comprimento natural denomina-se
deformação sofrida pela mola:
ℓ - ℓo = x
Esta deformação tem sinal algébrico. Se ℓ > ℓo, então x > 0 e dizemos que a mola foi disten-
dida. É o que ocorre quando a força aplicada às extremidades da mola é uma força de tração. Se ℓ <
ℓo, então x < 0 e dizemos que a mola foi comprimida. É o que ocorre quando a força aplicada nas
extremidades da mola é uma força de compressão.
33
2.2 Sistemas deformáveis elásticos. Lei de Hooke.
Um sistema é chamado de deformável quando, submetido a qualquer tipo de força, ele sofre
uma deformação. Esta deformação pode ser:
a) Irrecuperável (ou permanente): neste caso o sistema é denominado de plástico. É o caso de se
aplicar um dado esforço em uma lâmina de metal de tal ordem que, ao cessar o esforço, a lâmi-
na fique retorcida, não recuperando a antiga forma natural.
b) Parcialmente recuperável: neste caso o sistema é denominado de semielástico. É o caso da apli-
cação de um esforço em certa tira de borracha. Com o esforço, ela aumenta seu comprimento,
mas cessado o esforço ela não retorna imediatamente ao seu comprimento (ou mesmo sua for-
ma) anterior.
c) Totalmente recuperável: neste caso, a deformação sofrida pelo sistema desaparece quando ces-
sa o esforço. É o caso do sistema denominado de elástico. Por exemplo: molas de aço (helicoi-
dais ou não) que recuperam as condições iniciais que apresentavam antes da aplicação do es-
forço, como se nada tivesse ocorrido com a aplicação dele. Quando submetidos a esforços su-
periores à sua tolerância elástica, o sistema passa a trabalhar como sistema plástico.
Se um sistema é elástico, existe uma relação linear que se pode estabelecer entre o esforço
aplicado ao sistema e sua deformação enquanto ele se mantém na região de regime elástico (ou seja:
não sejam aplicados esforços acima dos quais a deformação fica irrecuperável). Esta relação recebe
o nome de Lei de Hooke. Esta lei afirma que:
“em sistema perfeitamente elástico, a deformação do sistema é diretamente proporcional ao
esforço aplicado para deforma-lo”
Esta afirmação pode ser escrita em uma formulação matemática, levando-se em conta ape-
nas a relação entre as grandezas envolvidas, com o objetivo de descrever seus valores:
| | | | (1)
Se estamos falando de um sistema elástico e a ação de deformação é realizada por um agente
externo (“esforço aplicado para deforma-lo”), o sistema reage a esta ação. Se o esforço é de disten-
são, a reação, de sentido oposto à ação, será de recuperação. Ou seja: se a ação é para aumentar o
comprimento da mola, a reação do sistema é contrária ao aumento do comprimento. O mesmo
raciocínio pode ser utilizado se o esforço é de compressão (diminuir o comprimento da mola): a
reação será contrária à compressão.
Sendo assim, a força aplicada pelo sistema elástico tem orientação oposta à deformação
provocada nela pelo agente externo. Esta força aplicada pelo sistema é que se denomina “força da
mola”, e pode ser descrita de modo vetorial, pois força e deformação (deslocamento de ponto) são
grandezas vetoriais, como sendo:
(2)
sendo: o deslocamento do ponto do sistema elástico pela deformação;
é a força que o sistema exerce sobre o ponto deslocado, chamada de força elástica;
é a constante elástica da mola.
A expressão escrita na equação (2) é conhecida, de modo impreciso, mas muito popular, de
“Lei de Hooke” e a equação (1) é a forma de exprimir o valor (ou módulo) desta força. Observe
que, no Sistema Internacional de unidades, a força tem unidade newton (N) e a deformação é medi-
da em metros (m). Portanto, a constante elástica da mola deve ser representada na unidade (N/m).
34
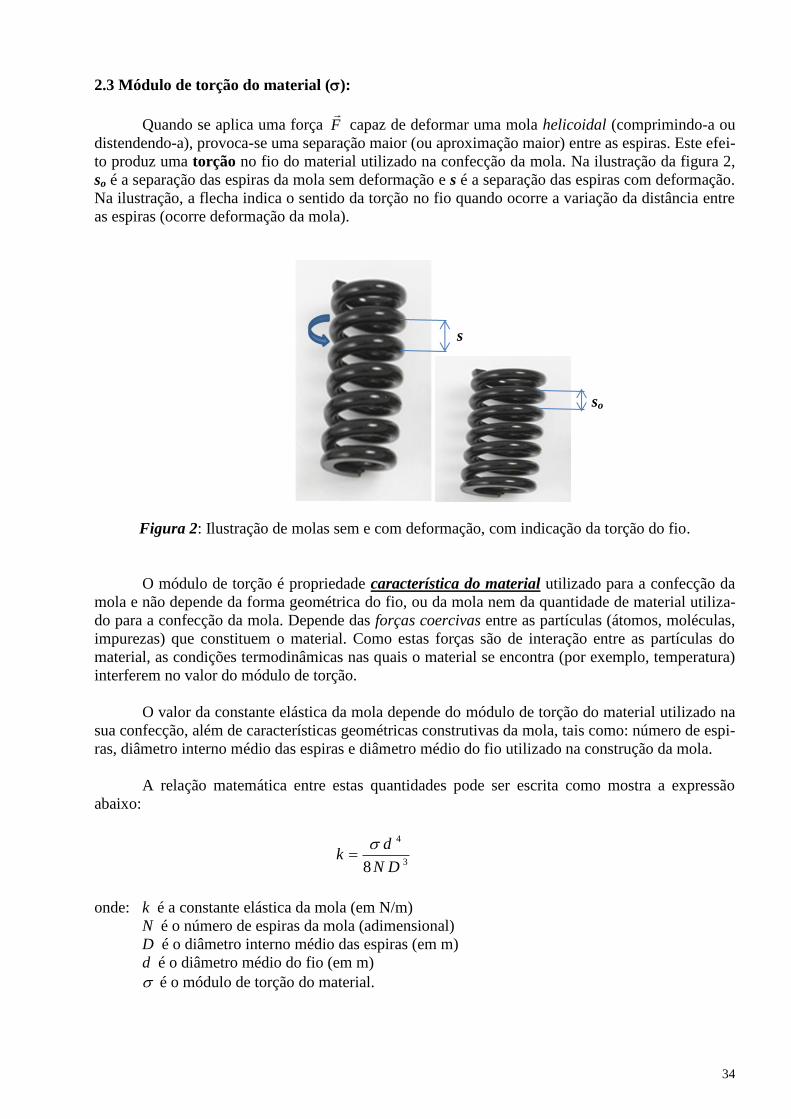
2.3 Módulo de torção do material ():
Quando se aplica uma força F
capaz de deformar uma mola helicoidal (comprimindo-a ou
distendendo-a), provoca-se uma separação maior (ou aproximação maior) entre as espiras. Este efei-
to produz uma torção no fio do material utilizado na confecção da mola. Na ilustração da figura 2,
so é a separação das espiras da mola sem deformação e s é a separação das espiras com deformação.
Na ilustração, a flecha indica o sentido da torção no fio quando ocorre a variação da distância entre
as espiras (ocorre deformação da mola).
Figura 2: Ilustração de molas sem e com deformação, com indicação da torção do fio.
O módulo de torção é propriedade característica do material utilizado para a confecção da
mola e não depende da forma geométrica do fio, ou da mola nem da quantidade de material utiliza-
do para a confecção da mola. Depende das forças coercivas entre as partículas (átomos, moléculas,
impurezas) que constituem o material. Como estas forças são de interação entre as partículas do
material, as condições termodinâmicas nas quais o material se encontra (por exemplo, temperatura)
interferem no valor do módulo de torção.
O valor da constante elástica da mola depende do módulo de torção do material utilizado na
sua confecção, além de características geométricas construtivas da mola, tais como: número de espi-
ras, diâmetro interno médio das espiras e diâmetro médio do fio utilizado na construção da mola.
A relação matemática entre estas quantidades pode ser escrita como mostra a expressão
abaixo:
3
4
8 DN
dk
onde: k é a constante elástica da mola (em N/m)
N é o número de espiras da mola (adimensional)
D é o diâmetro interno médio das espiras (em m)
d é o diâmetro médio do fio (em m)
é o módulo de torção do material.
s
so

35
Aplicando-se os princípios de equações dimensionais, observa-se que a unidade de medida
do módulo de torção ( ) é o N/m2 = Pa (pascal), que é a mesma de pressão (força aplicada por
unidade de área).
2.4 Equilíbrio de forças: corpo preso a mola
Consideremos, agora, um sistema elástico que é constituído por uma mola helicoidal que
possui uma de suas extremidades presa em um ponto fixo, e que um corpo de massa m, sob ação da
gravidade, seja pendurado na outra extremidade da mola.
Neste caso, a força deformadora da mola será a força peso P que atua sobre o corpo. Como o
corpo está preso à mola, a mola se deforma de . Sofrendo esta deformação, a mola exer-
ce sobre a massa m com força elástica que respeita a lei de Hooke. Se apenas estas forças são exer-
cidas na massa, ela fica em equilíbrio. Ou seja:
Ou seja:
A ilustração da figura 3 mostra as forças aplicadas no corpo de massa m em equilíbrio. Co-
mo ele está preso à extremidade inferior da mola, sendo yo a posição desta extremidade quando a
mola não está deformada (sem a massa), e y é a posição deste mesmo ponto da mola, quando a mas-
sa m está pendente da mola sob ação do peso. A deformação x, neste caso, é o módulo do desloca-
mento da posição do ponto de apoio da massa (yi – yo), que é o mesmo que a diferença de compri-
mentos da mola com e sem deformação.
.
Figura 3: Ilustração do equilíbrio de corpo pendente preso a uma mola
Na ilustração, a força aplicada para deformar a mola é o peso da massa m (P) que, no equilí-
brio, tem o mesmo valor da força elástica exercida pela mola sobre o corpo (Fel), a qual depende da
deformação sofrida pela mola. Para se obter a constante elástica da mola, devemos relacionar a for-
ça elástica com a deformação da mola. Para evitar erros acidentais, devemos fazer várias medidas
de força e relaciona-la com as respectivas deformações.
x =
Fel
P
yo
yi
y
36
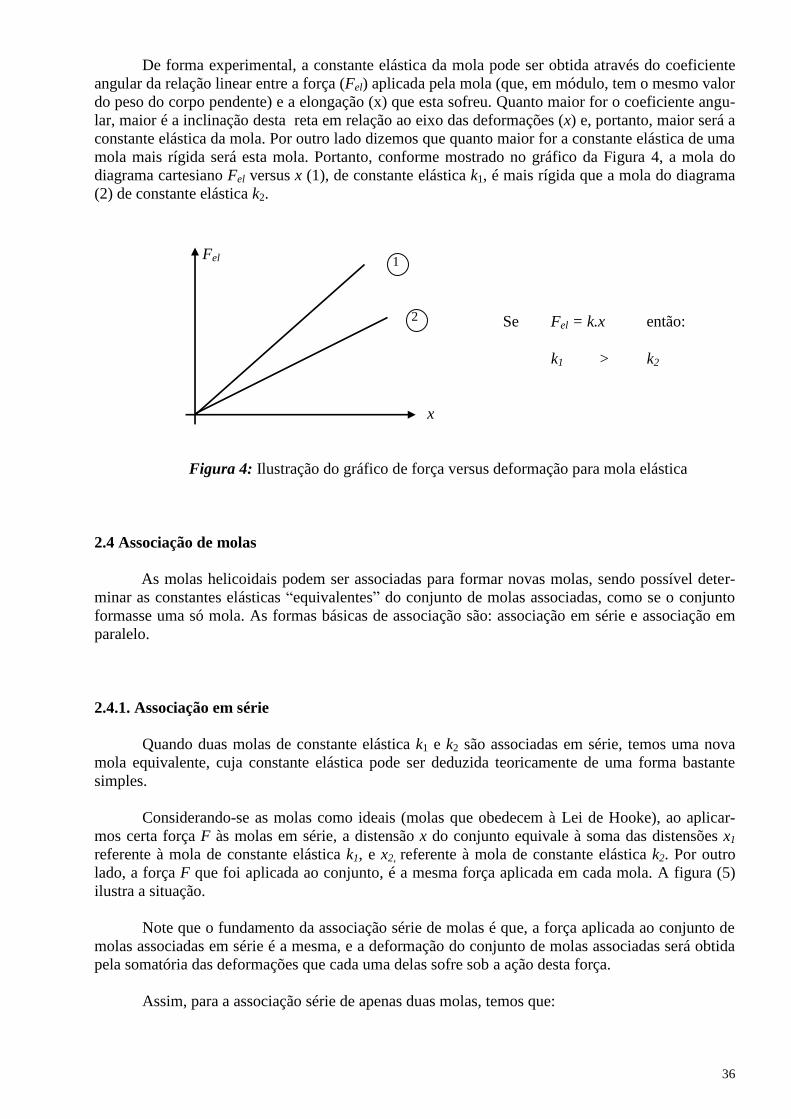
De forma experimental, a constante elástica da mola pode ser obtida através do coeficiente
angular da relação linear entre a força (Fel) aplicada pela mola (que, em módulo, tem o mesmo valor
do peso do corpo pendente) e a elongação (x) que esta sofreu. Quanto maior for o coeficiente angu-
lar, maior é a inclinação desta reta em relação ao eixo das deformações (x) e, portanto, maior será a
constante elástica da mola. Por outro lado dizemos que quanto maior for a constante elástica de uma
mola mais rígida será esta mola. Portanto, conforme mostrado no gráfico da Figura 4, a mola do
diagrama cartesiano Fel versus x (1), de constante elástica k1, é mais rígida que a mola do diagrama
(2) de constante elástica k2.
Figura 4: Ilustração do gráfico de força versus deformação para mola elástica
2.4 Associação de molas
As molas helicoidais podem ser associadas para formar novas molas, sendo possível deter-
minar as constantes elásticas “equivalentes” do conjunto de molas associadas, como se o conjunto
formasse uma só mola. As formas básicas de associação são: associação em série e associação em
paralelo.
2.4.1. Associação em série
Quando duas molas de constante elástica k1 e k2 são associadas em série, temos uma nova
mola equivalente, cuja constante elástica pode ser deduzida teoricamente de uma forma bastante
simples.
Considerando-se as molas como ideais (molas que obedecem à Lei de Hooke), ao aplicar-
mos certa força F às molas em série, a distensão x do conjunto equivale à soma das distensões x1
referente à mola de constante elástica k1, e x2, referente à mola de constante elástica k2. Por outro
lado, a força F que foi aplicada ao conjunto, é a mesma força aplicada em cada mola. A figura (5)
ilustra a situação.
Note que o fundamento da associação série de molas é que, a força aplicada ao conjunto de
molas associadas em série é a mesma, e a deformação do conjunto de molas associadas será obtida
pela somatória das deformações que cada uma delas sofre sob a ação desta força.
Assim, para a associação série de apenas duas molas, temos que:
x
Fel
x
1
2 Se Fel = k.x então:
k1 > k2

37
x
Fkeq ;
1
1x
Fk ;
2
2x
Fk e 21 xxx
Portanto:
2121
2111
1
kkk
F
k
F
F
xx
Fkeq
Ou seja:
21eq k
1
k
1
k
1 ou, ainda:
21
21
kk
kkkeq
(3)
2.4.2 Associação em paralelo
Quando duas molas estão associadas em paralelo, pode-se considerar o sistema como sendo
representado por uma única mola com constante elástica equivalente (keq). A força F aplicada à as-
sociação em paralelo das molas é a soma total das forças aplicadas a cada uma delas: F1 aplicada na
mola de constante elástica k1 e F2 aplicada na mola de constante elástica k2.
De fato, a condição de paralelismo entre as molas impõe que elas sejam solidárias na extre-
midade onde é aplicada a força de deformação (F). Sendo solidárias, a deformação de ambas será a
mesma: x1 = x2 = x. Como cada uma tem uma constante elástica diferente, a força sobre cada
uma delas será diferente. Assim, para a associação paralelo de apenas duas molas, temos:
F1 = k1.x
F2 = k2.x
Desta forma, podemos escrever:
x.kkFFF 2121
Portanto:
212121 kk
x
xkxk
x
FFkeq
21eq kkk (4)
F
F
Figura 5: Associação série de molas
k1
k2
F
F1 F2
Figura 6: Associação paralelo de molas
k1 k2

38
3. MATERIAL UTILIZADO
- molas helicoidais
- suporte
- régua
- porta-massas
- massas diversas
- paquímetro
4. PROCEDIMENTO EXPERIMENTAL
a) Identifique as molas. Dê a uma delas o número (1) e à outra o número (2);
b) Pendure a mola 1 com o porta-massas na haste horizontal;
c) Coloque a régua verticalmente próxima à mola;
d) Meça a posição y0 de um ponto do sistema (por exemplo: um ponto do porta-massas) com o
porta-massas vazio;
e) Acrescente uma a uma as massas no porta-massas de acordo com os valores estabelecidos
pelo seu professor, medindo as novas posições (yi.) do ponto escolhido para medir yo e cal-
cule a deformação x da mola para cada medida, preenchendo as tabelas do item 5.1. A ace-
leração da gravidade utilizada para determinar os valores de força (F) pode ser adotada igual
a 10 m/s2.Meça o diâmetro do fio da mola (1) e conte o número de espiras que ela pos-
sui;Repita o mesmo procedimento de (a) a (e) para a mola (2).Para a associação em série e
para a associação em paralelo, repita os procedimentos de (a) a (e).Nas associações não é
necessário medir diâmetros de molas, números de espiras e diâmetros de fios;

39
5. RESULTADOS Tabelas e medidas:
Mola 1 (com uma marca)
x0 (posição inicial da mola só com porta-cargas) (cm) =
m(g)
F(N)
xi (mola deformada) (cm)
X= xo - xi (m)
Número de espiras Diâmetro da espira Diâmetro do fio
N1 = D1 = (mm) d1 = (mm)
Mola 2 (com duas marcas)
x0 (posição inicial da mola só com porta-cargas) (cm) =
m(g)
F(N)
xi (mola deformada) (cm)
X= xo - xi (m)
Número de espiras Diâmetro da espira Diâmetro do fio
N2 = D2 = (mm) d2 = (mm)
Associação em série
x0 (posição inicial das molas só com porta-cargas) (cm) =
m(g)
F(N)
xi (cm)
X= xo - xi (m)
Associação em paralelo
x0 (posição inicial das molas só com porta-cargas) (cm) =
m(g)
F(N)
xi (cm)
X= xo - xi (m)
6. ANÁLISE DOS RESULTADOS
6.1 Gráficos
Para cada tabela, construa os gráficos milimetrados em papel A4 (uma folha de papel mili-
metrado para cada tabela), respeitando as condições e critérios estudados na “Construção de Gráfi-
cos de Física I”. Respeite a utilização dos módulos de escala recomendados e não se esqueça de
caracterizar as grandezas representadas em cada eixo, acompanhadas das respectivas unidades de
medida.

40
Figura 3: Gráfico de força (F) em função da deformação (X)
6.2 Cálculos
6.2.1 Calcule a constante elástica experimental da mola (1), pelo coeficiente angular do gráfico
obtido a partir da tabela de dados desta mola;
6.2.2 Calcule a constante elástica experimental da mola (2), pelo coeficiente angular do gráfico
obtido a partir da tabela de dados desta mola;
6.2.3 Calcule a constante elástica experimental da associação série das molas, pelo coeficiente
angular do gráfico obtido a partir da tabela de dados desta associação;
6.2.4 Calcule da constante elástica experimental da associação paralelo das molas, pelo coeficien-
te angular do gráfico obtido a partir da tabela de dados desta associação;
6.2.5 Calcule a constante elástica teórica da associação série das molas, utilizando a expressão (3)
deduzida na secção 2.4.1;
6.2.6 Calcule o erro percentual entre os valores experimental, obtido a partir do coeficiente angu-
lar do gráfico, e “teórico”, obtido a partir da equação (3), da associação série de molas:
100.%
teo
teolab
k
kkE
6.2.7 Calcule a constante elástica teórica da associação paralelo das molas, utilizando a expressão
(4) deduzida na secção 2.4.2;
6.2.8 Calcule o erro percentual entre os valores experimental, obtido a partir do coeficiente angu-
lar do gráfico, e “teórico”, obtido a partir da equação (3), da associação paralelo de molas:
100.%
teo
teolab
k
kkE
6.2.9 Calcule o módulo de torção da mola (1):
4
1
3
1111
...8
d
DNk
6.2.10 Calcule o módulo de torção da mola (2):
4
2
3
2222
...8
d
DNk
x(m)
F
X
F(N)
X
Fk

41
7. CONCLUSÕES
Compare os erros calculados nos itens 6.2.6 e 6.2.8 e justifique a validade da expressão teó-
rica das constantes elásticas equivalentes das associações.
Discuta as seguintes questões:
a) Os materiais que compõe as duas molas são diferentes? No que você se baseia para esta
afirmação?
b) Qual das molas apresenta maior rigidez? Justifique.
c) Qual das associações apresentou maior desvio? Justifique a razão.
d) Como posso associar molas de mesmo material de forma a aumentar a rigidez do sistema
equivalente?
8. EXERCÍCIOS
1. Duas molas estão associadas conforme o esquema
ao lado. Considerando-se que os fios (1) e (2) estão
justos, porém não tracionados e que o fio (3) (ligando
as duas molas) é de comprimento desprezível, pode-
mos dizer que (responder verdadeiro ou falso e justi-
ficar):
a) Antes de cortar o fio (3) a constante elástica equi-
valente vale keq = (k1.k2)/(k1 + k2)
b) Antes de cortar o fio (3) a constante elástica equi-
valente vale keq = k1 + k2
c) Após corta o fio (3) o corpo de massa m sobe
d) Após cortar o fio (3) o corpo de massa m desce
e) Após cortar o fio (3) o corpo de massa m não altera sua posição
f) Após cortar o fio (3) (de comprimento desprezível) não é possível saber se o corpo de massa m
altera sua posição
g) Após cortar o fio (3) a constante elástica equivalente vale keq = k1 + k2
h) Após cortar o fio (3) a constante elástica equivalente vale keq = (k1.k2)/(k1 + k2)
i) Após cortar o fio (3) a constante elástica equivalente vale keq = (k1 + 2k2)
2. Em um experimento de molas helicoidais, obteve-se a tabela abaixo para a mola. Determine gra-
ficamente o valor da constante elástica da mola. Adote g = 10m/s2.
m(g) 200 250 300 350 400 450
x(m) 0,013 0,018 0,021 0,024 0,028 0,033
R: k = 143 N/m
fio (1)
fio (2) fio (3)
k1
k2
m

42
02 – PÊNDULO DE MOLA
1. OBJETIVOS DA EXPERIÊNCIA:
Estudar o movimento oscilatório de sistema massa-mola e determinar a constante elástica das
molas pelo método dinâmico, comparando-as com as obtidas a partir do método estático.
2. FUNDAMENTAÇÃO TEÓRICA:
Movimento oscilatório de um sistema massa-mola
Considere um sistema massa-mola que se encontra em equilíbrio estático, conforme mostra
a ver Figura 1(a). Como foi descrito na experiência de Molas Helicoidais, no equilíbrio da massa m
suspensa, a força peso é equilibrada pela força elástica da mola e, através da condição de equilíbrio,
escrevemos:
0ykgmFPR estest (1)
Agora, vamos considerar a situação em que o sistema sofre uma força momentânea adicio-
nal, que deforma a mola de uma quantidade x além da deformação que provoca equilíbrio (xest).
Sobre o corpo de massa m deslocado vai atuar uma força elástica superior ao seu peso, conforme
ilustrado na Figura 1(b):
Figura 1 (a) Corpo em equilíbrio Figura 1 (b) Sistema oscilante
Ao soltarmos a massa a partir desta nova posição, o sistema começa a oscilar com um perí-
odo característico T. Nesta condição, as forças não se anulam de forma que a força resultante em
qualquer instante será dada pela força elástica restauradora da mola (- ky), onde y representa o des-
locamento em relação à posição de equilíbrio (O) e é uma função do tempo do tempo t, ou seja:
tyk)t(y.kykmgyykgmFPR estestel (2)
Aplicando-se a 2ª lei de Newton podemos escrever:
y P
k
m
Fel
k
m
P
Fest
O

43
)t(ykdt
)t(ydm
dt
)t(ydmamR
2
2
2
2
(3)
Entretanto, se dividirmos os dois membros pelo valor da massa, obteremos a seguinte equa-
ção:
)t(ym
k
dt
)t(yd2
2
(4)
A equação (4) é uma equação diferencial ordinária de 2ª ordem que caracteriza um movi-
mento harmônico simples (MHS), cuja solução pode ser descrita por:
tcosAty (5)
sendo:
A: amplitude do movimento
: frequência angular do MHS, dada por m
k2
: fase inicial do movimento
Sabendo-se que a frequência angular pode ser descrita por:
2
obtêm-se a seguinte relação:
k
m2 ou
k
mT 22 4 (6)
De forma prática, podemos obter a constante elástica da mola através da relação entre o
período (T) e a massa (m) conforme identificado na equação (6). Construindo um gráfico T2 em
função m (Figura 2), podemos obter uma reta cujo coeficiente angular b será dado por:
m
Tb
2
Figura 2: Ilustração de um gráfico de T2 em função de m
m
T2
T2(s
2)
m (kg)
44
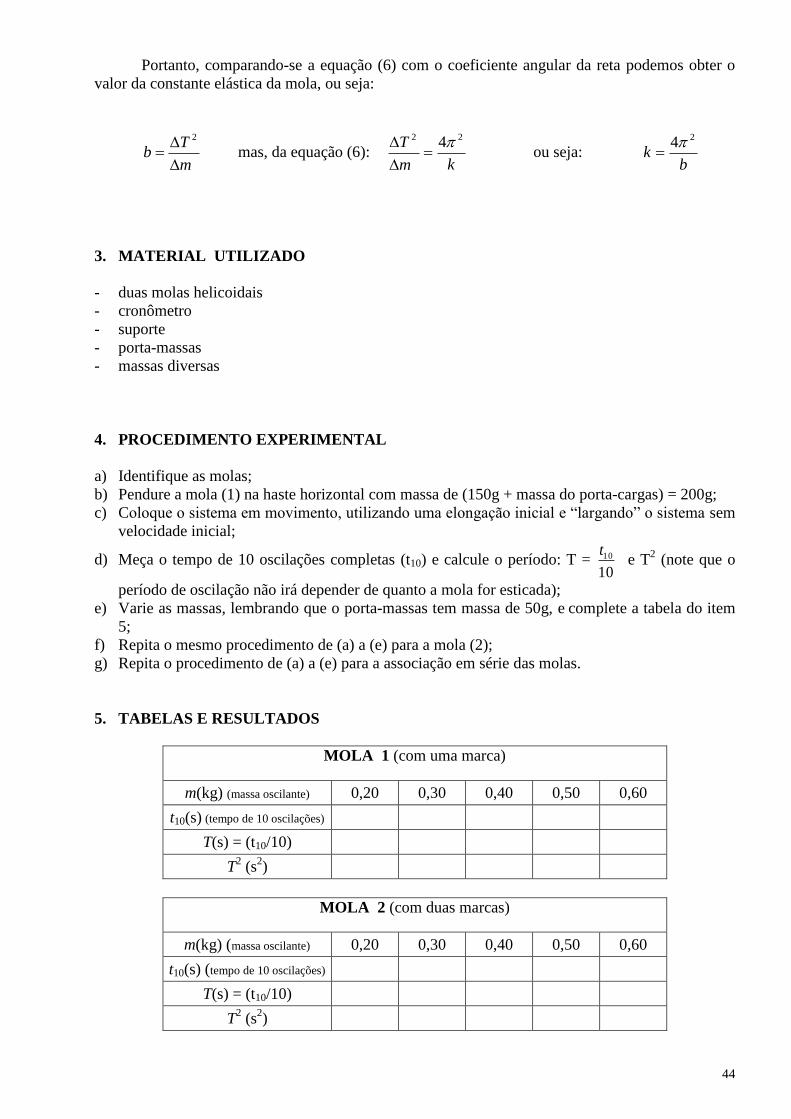
Portanto, comparando-se a equação (6) com o coeficiente angular da reta podemos obter o
valor da constante elástica da mola, ou seja:
m
Tb
2
mas, da equação (6): km
T 22 4
ou seja:
bk
24
3. MATERIAL UTILIZADO
- duas molas helicoidais
- cronômetro
- suporte
- porta-massas
- massas diversas
4. PROCEDIMENTO EXPERIMENTAL
a) Identifique as molas;
b) Pendure a mola (1) na haste horizontal com massa de (150g + massa do porta-cargas) = 200g;
c) Coloque o sistema em movimento, utilizando uma elongação inicial e “largando” o sistema sem
velocidade inicial;
d) Meça o tempo de 10 oscilações completas (t10) e calcule o período: T = 10
10t e T
2 (note que o
período de oscilação não irá depender de quanto a mola for esticada);
e) Varie as massas, lembrando que o porta-massas tem massa de 50g, e complete a tabela do item
5;
f) Repita o mesmo procedimento de (a) a (e) para a mola (2);
g) Repita o procedimento de (a) a (e) para a associação em série das molas.
5. TABELAS E RESULTADOS
MOLA 1 (com uma marca)
m(kg) (massa oscilante) 0,20 0,30 0,40 0,50 0,60
t10(s) (tempo de 10 oscilações)
T(s) = (t10/10)
T2 (s
2)
MOLA 2 (com duas marcas)
m(kg) (massa oscilante) 0,20 0,30 0,40 0,50 0,60
t10(s) (tempo de 10 oscilações)
T(s) = (t10/10)
T2 (s
2)

45
ASSOCIAÇÃO EM SÉRIE DAS MOLAS
m(kg) (massa oscilante) 0,20 0,30 0,40 0,50 0,60
t10(s) (tempo de 10 oscilações)
T(s) = (t10/10)
T2 (s
2)
MUITA ATENÇÃO:
1. Na tomada dos dados, deve-se ter muita atenção com a contagem do tempo! Em caso de dú-
vida, consulte seu professor.
2. Para se obter a massa oscilante indicada na tabela, é preciso acrescentar o que falta, levando-
se em conta a massa do porta-massas (50g). Por exemplo: para m = 0,20kg = 200g, acres-
centar 150g sobre o porta-massas. E assim por diante.
6.1 ANÁLISE DOS RESULTADOS
6.1 Gráficos
Com os dados levantados e transcritos nas tabelas acima, construa em papel milimetrado,
seguindo rigorosamente as normas de construção de gráficos milimetrados ensinadas no La-
boratório de Física I, os gráficos de T2 versus m para cada mola e para a associação série delas.
6.2 Cálculos
A partir dos gráficos construídos e utilizando o método ensinado no final da fundamentação
teórica, calcule:
6.2.1 A constante elástica da mola (1) ;
6.2.2 A constante elástica da mola (2) ;
6.2.3 A constante elástica experimental da associação série das molas
;
6.2.4 A constante elástica “teórica” da associação série das molas, utilizando a expressão de cons-
tante equivalente deduzida na fundamentação teórica de Molas Helicoidais. Use os valores
das constantes elásticas de cada mola obtidas neste experimento ( e ):
din2din1
din2din1teórica
seriekk
kkk
6.2.5 O erro percentual entre os valores experimental e “teórico” da associação série de molas:
100.k
kk%E
teórico
série
teórico
série
exp
série

46
6.3 Comparação dos resultados obtidos pelos métodos estático e dinâmico
Você pode comparar os valores experimentais encontrados das constantes elásticas da mola
(1), da mola (2) e dos valores experimentais (obtidos a partir dos gráficos) da associação em série,
do experimento de Molas Helicoidais com aqueles que você obteve neste experimento..
Para tanto, você deve transcrever nos espaços correspondentes do quadro abaixo, os valores
das constantes elásticas pedidas que você obteve na experiência anterior, na qual estas constantes
foram determinadas pela aplicação do método estático.
Para obter os valores pelo método dinâmico (Pêndulo de Molas), preencha os dados das ta-
belas abaixo e elabore-os segundo as orientações deste manual. Lembre-se: para que as compara-
ções possam ser válidas, você deve utilizar, na experiência de Pêndulo de Molas, as mesmas molas
que utilizou em Molas Helicoidais. Certifique-se que isto está sendo feito!
Comparação entre os Métodos Estático e Dinâmico
Constante
elástica da
mola (N/m)
Valor experimental:
método estático
Valor experimental:
método dinâmico
Erros (%)
100.%
est
dinest
k
kkE
k1
k2
ksérie
7. CONCLUSÕES:
Compare o valor da constante das molas associadas em série obtida experimentalmente com o
valor teórico esperado;
Compare os valores experimentais obtidos através dos gráfico para os métodos estático e dinâ-
mico;
Qual dos métodos parece apresentar melhor resultado de medida? Justifique (qual dos métodos
utiliza operações – de construção de gráficos e de cálculos – mais simples?).

47
8. EXERCÍCIOS
1. Sabe-se que, na figura mostrada ao lado, m = 1,0 kg e k = 50 N/m.
Pede-se:
a) Qual o período de oscilação do sistema?
b) Qual a variação na elongação, quando trocamos a massa m por 2m
R: a) T = 0,73 s; b) x = 13 cm.
2. Uma massa m é presa a uma mola de constante elástica k. O sistema é posto para oscilar, e o pe-
ríodo foi medido para diferentes valores de massa m, sendo obtida a tabela abaixo.
m(kg) 0,20 0,25 0,30 0,35 0,40 0,45
T(s) 0,32 0,37 0,41 0,44 0,47 0,51
Determine, a partir do gráfico de T2 vs m, o valor de k (constante elástica da mola). R: k = 70 N/m
3. Um pêndulo de mola é posto para oscilar, sendo obtido um período T = 0,75 s, quando é utilizada
a mola 1. Quando é utilizada a mola 2, com a mesma massa, é obtido o período T = 0,50 s. Deter-
mine o valor do período quando as duas molas são associadas em paralelo e o sistema é posto para
oscilar com a mesma massa. R: T = 0,42 s
4. Um pêndulo de mola é posto para oscilar, sendo obtido um período T = 0,85 s, quando é utilizada
a mola 1. Quando é utilizada a mola 2, com a mesma massa, é obtido o período T = 0,60 s. Deter-
mine o valor do período quando as duas molas são associadas em série e o sistema é posto para os-
cilar com a mesma massa. R: T = 1,04 s
5. Um pêndulo de mola é montado associando-se em série duas molas de constantes elásticas k1 e
k2. Um aluno ensaiou o sistema, montou o gráfico de T2 vs m, e obteve o valor do coeficiente angu-
lar como sendo b = 0,92 s2/kg. Sabendo-se que uma das molas tinha constante elástica k1 = 60 N/m,
determine o valor da constante elástica k2 da mola 2. R: k2 = 152 N/m
6. Uma mola de 15 cm e constante elástica 200 N/m é cortada em duas partes, sendo uma delas com
5 cm de comprimento e a outra com 10 cm, formando duas novas molas de constantes elásticas k1 e
k2 respectivamente. Associam-se as novas molas em paralelo e coloca-se na extremidade dessa as-
sociação uma massa de 2,0 kg. O sistema é posto a oscilar. Pedem-se:
a) as constantes elásticas das novas molas; R : k1 = 600 N/m ; k2 = 300 N/m
b) o período de oscilação do sistema. R: 0,296 s
7. O esboço gráfico abaixo foi obtido na experiência de pêndulo de mola. Calcular:
a) a constante elástica da mola; R.: 56,40 N/m
b) se associarmos a mola do item anterior em série com uma mola idêntica à mesma, qual deve ser
o período de oscilação do sistema para uma massa suspensa de 300 g ? R.: 0,648 s
k
k
k
m
0,4
0,28
T2 (s2)
m(kg)

48
8. Um pêndulo de mola oscila com período 0,70 s ao se utilizar uma massa m e uma mola de cons-
tante elástica k1 . Ao se utilizar uma mola cuja constante elástica é k2 e uma massa 2m, é obtido o
período 0,92 s. Calcular o valor do período quando as duas molas são associadas em paralelo e o
sistema é posto para oscilar com a massa m. R.: 0,477 s
9. Com uma mola de constante elástica K1 e outra de constante elástica K2, sendo K1 > K2, mon-
tou-se uma associação em série e mediu-se a força restauradora F em função da elongação x da
associação. Depois, montou-se uma associação em paralelo e novamente mediu-se a força restaura-
dora F em função da elongação x. Esses dois resultados estão mostrados no gráfico abaixo. Pe-
dem-se:
a) Identifique, na figura, qual das duas retas, se A ou B,
é a obtida para a associação em série e qual é a obtida
para a associação em paralelo das molas. Justifique sua
resposta.
b) Determine as constantes elásticas equivalentes das
associações: em série (KS) e em paralelo (KP).
R.: 150 N/m e 36 N/m
c) Determine as constantes elásticas das molas 1 e 2, K1
e K2, respectivamente. Lembre-se que K1 > K2. R.: 90 N/m e 60 N/m
10. Um grupo realizou a experiência sobre Pêndulo de Molas com uma mola de constante elástica
K1 e outra de constante elástica K2. Ao lado, têm-se os dados
representados em um gráfico do quadrado do período ( T2 ) em
função da massa ( m ). Pedem-se:
a) Qual dos sistemas ( 1 ou 2 ) oscila mais rápido, consideran-
do a mesma massa ? Justifique sua resposta.
b) Determine as constantes elásticas das molas 1 e 2, K1 e K2,
respectivamente. c) Associando as molas 1 e 2 em série, qual deve ser o valor
do respectivo coeficiente angular de um gráfico de T2 = f (m)
para esta associação ?
R.: Sistema 2; 9,995 N/m e 14,898 N/m; 6,60 s2/kg.
11. Adotar, caso necessário, g = 10 m/s2. Uma mola helicoidal de constante elástica 18 N/m foi
cortada em três partes iguais.
a) Associando essas três partes em paralelo e suspendendo na extremidade dessa associação uma
massa de 200 g, determinar o período de oscilação do sistema. R.: 0,22 s
b) Associando essas três partes em série e suspendendo na extremidade dessa associação uma
massa de 200 g, determinar o período de oscilação do sistema. R.: 0,66 s

49
LEITURA COMPLEMENTAR: Solução de equações diferenciais de 2ª ordem, homogêneas e
com coeficientes constantes.
Quando chegamos à equação da resultante que atua na massa presa à mola, quando damos à
mola uma deformação superior àquela que equilibra a força peso do corpo de massa m, obtivemos
uma equação que foi denominada de equação diferencial ordinária de 2ª ordem e se apresentou
uma solução.
Vamos, nesta leitura complementar, procurar chegar à solução apresentada, partindo da
equação diferencial e levando em conta informações que já se possua sobre comportamento de fun-
ções quanto às suas derivadas. Isto porque, equações deste tipo, são muito comuns em problemas de
física e engenharia, e seria muito interessante que se tivesse uma ideia de como são tratadas e como
se pode chegar a uma solução para elas.
No nosso caso, a equação a ser resolvida é a dada abaixo:
)t(ym
k
dt
)t(yd2
2
Podemos reescrever esta equação da seguinte forma:
0)t(ym
k
dt
)t(yd2
2
Se analisarmos um pouco a expressão acima, percebemos que:
1. O coeficiente que multiplica a função
é um coeficiente constante, que independe do
tempo;
2. Não existe nenhum termo nesta equação que independa do tempo;
3. A equação “afirma” que ( ) é uma função tal que, em qualquer instante, sua derivada se-
gunda somada à própria função multiplicada pelo coeficiente constante, deve ser nula.
Conhece-se uma função típica, na matemática, cuja derivada é ela mesma a menos de uma
constante, que é a função exponencial. Como a função deve depender do tempo, podemos escrever:
( ) (I)
Onde a é uma constante adimensional e o expoente da exponencial TEM que ter o coeficiente cons-
tante b multiplicando a variável t porque TODO EXPOENTE É ADIMENSIONAL.
De fato, se derivarmos a função acima teremos:
Substituindo a derivada segunda e a função ( ) na equação diferencial, teremos:
( )
Ora, para qualquer valor de t esta igualdade será nula se: ( )

50
Portanto: logo: √
Mas, da teoria dos números complexos: √ Então:
Notar que existem DUAS soluções para b: a positiva e a negativa. Na teoria geral das equa-
ções diferenciais, se afirma que: “se para uma mesma equação diferencial existem mais do que uma
particular solução, a somatória das soluções particulares é solução geral da equação”, ou seja:
Uma solução particular: ( )
Outra solução particular: ( )
Assim sendo, a solução geral da equação diferencial que estamos tentando resolver, será:
( ) ( ) (II)
No estudo de funções de variáveis complexas (Cálculo III)*, ver-se-á que:
( ) (III)
Se multiplicarmos e dividirmos a equação (II) por 2, não alteramos a equação e podemos
escreve-la como:
( ) ( )
Substituindo nesta equação a equação (III) e fazendo: temos:
( ) (IV)
Note que na equação (IV), em comparação com a equação (5) da fundamentação teórica, fal-
ta a quantidade , que é a fase inicial do movimento. Esta fase é importante para que se ajuste a
função harmônica a qualquer condição inicial do movimento (posição inicial do corpo osci-
lante em relação ao ponto O, ponto de equilíbrio em relação ao qual ocorre a oscilação).
Por exemplo:
1. Se no instante inicial (t = 0) a posição do corpo for y = - A, basta inserirmos na função cos-
seno: = π e teremos então: ( ) em t = 0.
2. Se no instante inicial (t = 0) a posição do corpo for y = A/2, basta inserirmos na função cos-
seno: = π/3 e teremos então: (
)
em t = 0.
3. Se no instante inicial (t = 0) a posição do corpo for y = 0, não basta inserirmos na função
cosseno: = π/2 , pois a solução também vale para = - π/2 , pois teremos então, (
) em t = 0. Temos que saber se, neste instante, a velocidade é positiva ou negativa,
para que possamos “escolher” o sinal. Se v(0) > 0, então: = - π/2; se v(0) < 0, então: =
π/2.
Assim sendo, a solução geral solução da equação diferencial dada seria:
( ) ( )
Que corresponderia à identidade: ( ) ( ( ) ( ))

51
03 – PÊNDULO SIMPLES Simulação Computacional
1. OBJETIVO DO EXPERIMENTO
Estudar o pêndulo simples, verificando a dependência do período de oscilação com a ampli-
tude inicial e, no limite de validade da aproximação de pequenas oscilações, as relações entre perío-
do de oscilação e comprimento e período de oscilação e aceleração local da gravidade.
2. FUNDAMENTAÇÃO TEÓRICA
Um movimento muito importante na natureza é o movimento oscilatório de um pêndulo
simples. O pêndulo simples é um dispositivo constituído por uma “partícula” de massa m conside-
rável que oscila pendente de um fio flexível “ideal” (de inércia desprezível e de comprimento
invariável). Quando abandonada com o fio na vertical, a massa fica em equilíbrio (figura 1-a);
quando afastada da posição de equilíbrio de um ângulo (amplitude angular) inicial θo e “largada”
desta posição, a massa se movimenta de forma periódica em relação à sua posição de equilíbrio
(figura 1-b).
Se deslocarmos a massa m de sua posição de equilíbrio de um ângulo o e a soltarmos, o
pêndulo oscilará entre as posições simétricas o e -o. Desprezando-se a presença de forças de atri-
to com o meio, as demais forças que atuam sobre a massa são: a força peso mg e a tensão da cor-
da. Podemos escrever a componente tangencial da força peso (FT), que é a projeção do peso na di-
reção perpendicular ao fio e, portanto, tangente à trajetória circular de raio da massa m como
sendo:
sinmgFT , sendo TT maF (1)
Do estudo do movimento circular, sabemos que o deslocamento de m em sua trajetória circular é:
2
2
T2
2
dt
da
dt
sds
Figura 1-a: Ilustração de um pêndulo simples
em equilíbrio
P=mg
T
Figura 1-b: Ilustração de um pêndulo
simples oscilante
T’

52
e a equação (1) pode ser reescrita como indicado abaixo:
sinmgdt
dm
2
2
ou, então, como uma equação diferencial homogênea de 2a ordem:
0sing
dt
d2
2
(2)
Esta equação não tem uma expressão muito simples para θ(t) pois, nela, a derivada segunda
de θ(t) está relacionada a uma função de θ(t) e não diretamente a θ(t), como vimos na leitura com-
plementar da experiência de Pêndulo de Molas.
Entretanto, no caso de pequenas oscilações (pequenos valores de ângulo ), podemos escre-
ver que sin . Portanto, a equação diferencial (2) se reduz a :
0g
dt
d2
2
Que se enquadra no modelo de equação diferencial cuja solução pode ser obtida pelo método mos-
trado na leitura complementar. Para esta equação diferencial simples, a solução conveniente é a
dada por:
)tsin(A)t(
onde A e são constantes que dependem das condições iniciais do movimento. Adotando o critério
de substituir o coeficiente constante da equação diferencial por: ⁄ , o período deste pêndu-
lo será dado por:
g
22
To
No caso de grandes amplitudes, a aproximação adotada deixa de valer, e é preciso então
fazer algumas correções. No caso geral, podemos escrever a energia total do pêndulo como sendo:
potencialcinética
2
2 EE)cos1(mgdt
dm
2
1E
(3)
Se a energia total tem valores mgE 2 , o pêndulo oscilará entre as posições simétricas
0. Para a posição de retorno a velocidade deve se anular, ou seja: 0dt
d
. Portanto, a energia
pode ser escrita como:
)cos1(mgE 0 (4)
Subtraindo da equação (3) a equação (4), temos que:

53
0)cos(cosmgdt
dm
2
10
2
2
ou seja:
)cos(cosg2
dt
d0
sendo que o sinal positivo vale para uma metade do período e o sinal negativo para a outra metade.
Se integrarmos durante a primeira metade, teremos que:
0
00coscos
d
g22
T
Esta integral não pode ser expressa em termos de funções elementares. Ela é conhecida co-
mo integral elíptica e seus valores numéricos podem ser encontrados em tabelas próprias.
O período de oscilação deste pêndulo é, então, dado pela série infinita:
...
2sin
4.2
3.1
2sin
2
11
g2T 04
22
22
02
2
2
Desta forma, o período de oscilação do pêndulo, com uma correção de primeira ordem, pode
ser aproximado para:
2
0o
2
016
11T
16
11
g2T
onde é medido em metros, g em (m/s2) e o em radianos (nunca em “graus”). Neste caso oT é o
período com a aproximação feita para pequenas oscilações (sem a correção).
Na Tabela 1 temos a relação entre T e T0 (T0 é o período sem correção) para alguns valores
diferentes do ângulo . Pode-se observar que para um ângulo de cerca de 20o, a correção é de me-
nos de 1 %. Note, no entanto, que um erro de 1% no período T leva a um erro de 2% (isto é, o do-
bro) quando calculamos a aceleração da gravidade g usando a expressão sem correção.
Tabela 1: Relação entre os valores de período corrigido e sem correção para várias amplitudes ini-
ciais do pêndulo simples.
T/T0
10o
1,002
20o
1,008
40o
1,030
60o
1,069
80o
1,122
90o
1,154

54
3. MATERIAL UTILIZADO
Software de simulação “Pêndulo Simples”.
4. PROCEDIMENTO EXPERIMENTAL
4.1 Disponibilizando a simulação:
a) Ligue o micro e digite seu username e senha
b) Clique em “Iniciar” > Todos os Programas > Aplica~1 > Física > DOSBox > “Pendulo Sim-
ples” (digite “D”)
Caso não tenha conseguido entrar no programa, procure assistência junto ao professor.
4.2 Executando a simulação
IMPORTANTE:
1. Você deve digitar os valores numéricos utilizando a parte superior do teclado e NUNCA o
teclado numérico. No DOSBox este teclado não é reconhecido.
2. No DOS não se utiliza a virgula para separação decimal, mas o PONTO.
Vamos supor que se deseja simular um pêndulo com um comprimento de 2 m, num local
onde a aceleração da gravidade vale 5 m/s2, o qual é posto a oscilar a partir de um ângulo de 30
0.
Para tanto, devemos realizar os seguintes passos:
a. Inicie o programa como indicado no item 4.1
b. Entre com o valor de l digitando 2 em “comprimento do fio” e depois, <enter>
c. Entre com o valor de g digitando 5 em “acel. da grav.” e depois, <enter>
d. Entre com ângulo inicial o digitando 30 em “ângulo inicial” e depois, <enter>
e. Entre com o instante de tempo final 20 em “tempo final” e depois, <enter>. Para este caso, um
tempo de 20 segundos já fornece uma boa visualização do experimento.
f. Digite E para executar a simulação. Com isto, o pêndulo ilustrado na tela começa a oscilar. Es-
colha um ponto de referência para contagem dos tempos (uma boa posição é quando a massa es-
tá ou no extremo à esquerda ou à direita da tela).
g. Escolhida a posição de referência para contagem do tempo, ligue o cronômetro, apertando qual-
quer tecla.
h. Após contar 10 oscilações completas, desligue o cronômetro. Para desligar o cronômetro, aperte
novamente qualquer tecla. Leia o valor do “tempo Total”, na última linha de “Condições de Si-
mulação”, logo abaixo de “tempo final”.
Caso não tenha sido cometido nenhum engano, deverá ser observada uma tela similar àquela
mostrada na Figura 2. No quadriculado ao lado do pêndulo oscilante, aparece um gráfico da varia-
ção posição angular o pêndulo (Teta – em graus) em função do tempo (t em segundos). No estudo
que valos realizar, este gráfico não terá maior importância. Para apaga-lo após cada simulação, digi-
te “L”.
Quando você quiser alterar um dos parâmetros “comprimento do fio” ou “Aceleração da
gravidade”, digite “F” que as “Características Físicas” – tabela à esquerda superior da tela – fica
limpa, podendo ser digitados outros valores.

55
Quando você quiser alterar o valor da “Amplitude Inicial” ou “Tempo máximo”, digite “S” que as
“Condições de simulação” – tabela à esquerda superior da tela – fica limpa, podendo ser digitados
novos valores.
Para repetir um valor digitado na tela anterior (por exemplo: “tempo máximo”), basta digitar
<enter>, que o valor anteriormente anotado reaparece na tela.
Figura 2: Tela do computador para a simulação com os dados sugeridos
4.3 Comandos disponíveis
L – Limpa a área de gráficos, bem como a escala.
E – Executa uma simulação
A – Grava em disco o resultado de uma simulação. Neste caso será criado um arquivo com duas
colunas: tempo e ângulo.
F – Altera as características físicas do experimento
S – Altera as condições da simulação
G – Liga e desliga a grade fina
O – Liga o localizador de ponto
T – Termina a simulação
5. TABELAS E DADOS
5.1 Estudo do comportamento do período de oscilação (T) em função do ângulo inicial de lan-
çamento (0 ).
Para um comprimento fixo e mantendo g constante, obtenha o período T para diferentes
ângulos iniciais de lançamento (0 ). Meça o tempo de 10 oscilações completas do pêndulo (t10) e
depois divida por 10 para obter o período T. Com os dados obtidos a partir da simulação, preencha a
Tabela 2.
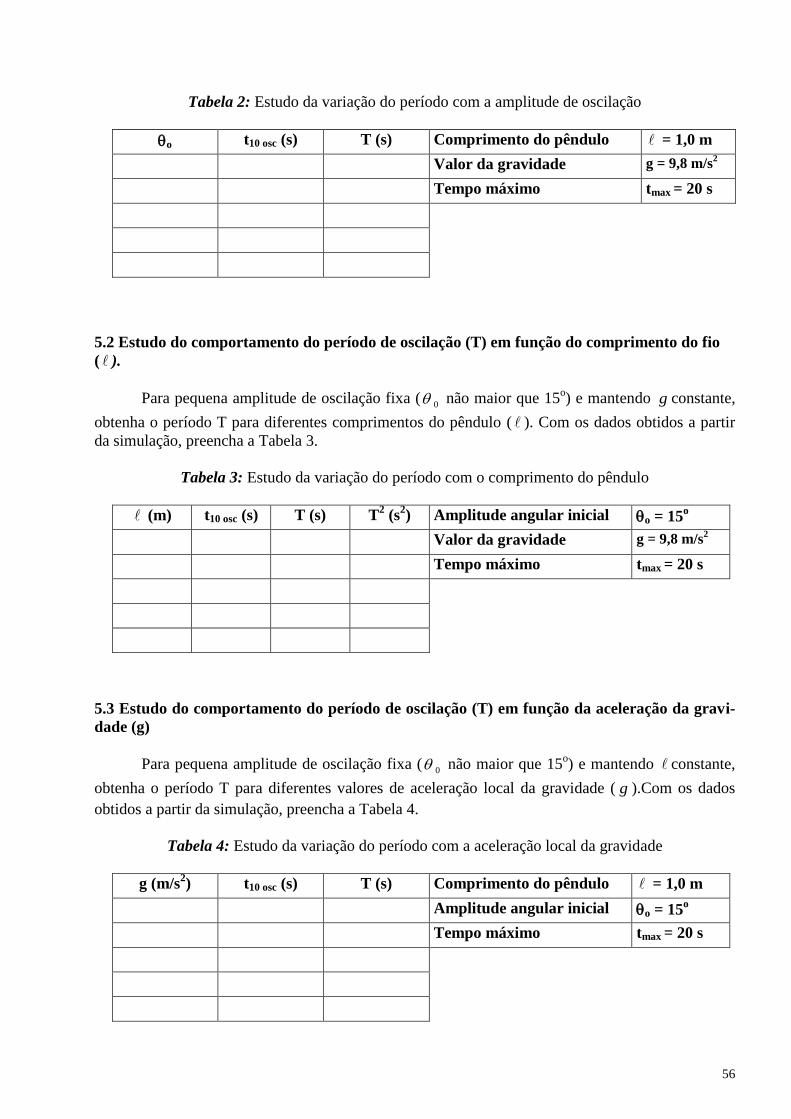
56
Tabela 2: Estudo da variação do período com a amplitude de oscilação
o t10 osc (s) T (s) Comprimento do pêndulo = 1,0 m
Valor da gravidade g = 9,8 m/s2
Tempo máximo tmax = 20 s
5.2 Estudo do comportamento do período de oscilação (T) em função do comprimento do fio
( ).
Para pequena amplitude de oscilação fixa (0 não maior que 15
o) e mantendo g constante,
obtenha o período T para diferentes comprimentos do pêndulo ( ). Com os dados obtidos a partir
da simulação, preencha a Tabela 3.
Tabela 3: Estudo da variação do período com o comprimento do pêndulo
(m) t10 osc (s) T (s) T2 (s
2) Amplitude angular inicial o = 15
o
Valor da gravidade g = 9,8 m/s2
Tempo máximo tmax = 20 s
5.3 Estudo do comportamento do período de oscilação (T) em função da aceleração da gravi-
dade (g)
Para pequena amplitude de oscilação fixa (0 não maior que 15
o) e mantendo constante,
obtenha o período T para diferentes valores de aceleração local da gravidade ( g ).Com os dados
obtidos a partir da simulação, preencha a Tabela 4.
Tabela 4: Estudo da variação do período com a aceleração local da gravidade
g (m/s2) t10 osc (s) T (s) Comprimento do pêndulo = 1,0 m
Amplitude angular inicial o = 15o
Tempo máximo tmax = 20 s

57
6. CÁLCULOS E RESULTADOS
6.1 Estudo do comportamento do período com a amplitude de oscilação:
Construa um gráfico em papel milimetrado de T versus 0 (T na vertical e
0 na horizon-
tal) utilizando os dados da Tabela 2 e discuta o comportamento do período em função da variação
do ângulo inicial de lançamento do pêndulo (ou amplitude de oscilação). Pela equação do período
do pêndulo o resultado obtido era esperado? Esta variação é muito grande? Justifique (discuta a
partir da variação percentual entre os valores obtidos para os períodos). Usando sua calculadora,
compare os valores de sen0 com os valores em radianos do ângulo inicial de lançamento. A partir
de que ângulo esta diferença é considerável? Escreva alguns valores para justificar sua resposta.
Calcule o desvio percentual entre os valores de oT (para pequenas amplitudes) e T (para
grandes amplitudes). Veja as expressões na Fundamentação Teórica. Pergunte ao seu professor qual
deve ser a amplitude grande 0 . Note que você pode resolver este problema literalmente, sem co-
nhecer o comprimento do pêndulo e a aceleração local da gravidade, mas só o ângulo grande 0 em
radianos. Para calcular o erro percentual use a expressão:
100T
TT%E
o
o
6.2 Estudo do comportamento do período com o comprimento do pêndulo:
Construa um gráfico em papel milimetrado de T versus (T na vertical e na horizontal) a
partir da origem. A linha gráfica é reta ou curva? É a forma esperada para a função deduzida na
teoria g
2T
?
Construa agora um gráfico em papel milimetrado de T2 versus (T
2 na vertical e na hori-
zontal). É uma anamorfose do anterior? Calcule o coeficiente angular da reta gráfica (L
T 2
),
ache o valor da aceleração da gravidade (
24g ) e compare com o valor utilizado na simulação.
Qual o valor do erro percentual cometido?
100
g
gg%E
adotado
adotadoobtido. O experimento comprova
a expressão de período deduzida na teoria? Justifique.
6.3 Estudo do comportamento do período com a gravidade local:
Construa um gráfico em papel milimetrado de T versus g (T na vertical e g na horizontal.
Interprete o gráfico. É uma reta? Que tipo de curva foi obtida? Como deve variar o período de osci-
lação do pêndulo com o aumento da gravidade local? E com a diminuição? Na Terra, quanto mais
próximo dos polos, a gravidade aumenta e quanto mais próximo dos trópicos, diminui. O que deve
acontecer com um relógio de pêndulo quando transportado do Alasca para o Pará? Explique. Procu-
re saber o valor da aceleração da gravidade (média) na Lua. Se um mesmo pêndulo de 1 m fosse
colocado para oscilar na Terra e depois na Lua, onde ele teria o maior período?

58
7. EXERCÍCIO
1. Um aluno realizou um experimento de pêndulo simples com o intuito de determinar o valor da aceleração
da gravidade (g). O valor do comprimento utilizado foi = 2,0 m e o período medido através de um sistema
automatizado foi T = 2,97 s. No entanto, na realização do experimento, o aluno soltou o sistema de um ângu-
lo = 52o. Determinar o valor de g que seria obtido usando-se a aproximação de pequenas oscilações e aque-
le que seria obtido usando-se a expressão com a correção de 1a. ordem. R: gnc = 8,95 m/s
2; gc = 9,93 m/s
2
2. Considerando a simulação de pêndulo simples:
a) Um aluno obteve o valor de 2,50 s2/m para o coeficiente angular do gráfico de T
2 em função de L. Cal-
cule a aceleração da gravidade para esta simulação; R.: 15,79 m/s2
b) Se o mesmo pêndulo fosse colocado para oscilar na Terra e depois na Lua (g = 1,6 m/s2), onde ele osci-
laria mais lentamente? Justifique sua resposta. R.: na Lua
c) se lançarmos um pêndulo de um ângulo de 70o e depois lançarmos o mesmo pêndulo de um ângulo de
5o, em qual das situações teríamos uma melhor aproximação do movimento do pêndulo para um MHS? Justi-
fique sua resposta. R.: 5º.
3. Na simulação do movimento de um pêndulo simples, usou-se ângulo inicial θo = 15º e fez-se simulações
do período (T) do movimento em função do comprimento (L) do pêndu-
lo para dois diferentes valores da aceleração da gravidade (g). O gráfico
de “T(s) versus L(m)” está esquematizado abaixo, onde as curvas A e B
representam resultados para valores diferentes de g.
a) Determine os valores das acelerações gravitacionais usadas nas si-
mulações A e B. R. 3,70 m/s2 e 7,99 m/s
2
b) Qual o valor do período TB indicado no gráfico? R.: 2,32 s
c) Qual seria esse valor se o ângulo inicial fosse de 72o ? R.: 2,55 s
4. Ao lado temos representados dois ensaios, 1 e 2, feitos na simu-
lação do pêndulo simples, considerando diferentes valores da acele-
ração da gravidade, onde T é o período e L é o comprimento do fio,
sendo T2 o quadrado do período e L o comprimento do pêndulo.
a) Calcular a aceleração da gravidade no ensaio 1; R.: 8,51m/s2
b) Considerando o mesmo comprimento para o pêndulo, em qual
das simulações (1 ou 2) ele irá oscila mais lentamente? Justifique
sua resposta. R. simulação 1
c) Determinar a razão entre as gravidades g2 / g1. R.: 2,65
5. Em uma simulação sobre pêndulo simples, um aluno usou 1,25 m para o comprimento do pêndulo e, g
para a aceleração da gravidade, obtendo o resultado mostrado na
figura ao lado para a variação do período de oscilação (T) em função
do ângulo () que o pêndulo faz com a direção vertical. Pede-se:
a) Até qual valor do ângulo o movimento pode ser considerado
harmônico simples? Justifique sua resposta. Respostas sem justifica-
tivas plausíveis não serão consideradas. R.: 18º.
b) Determine o valor da aceleração da gravidade usada na simula-
ção. R.: 19,77 m/s2
c) Determine o período de oscilação quando o pêndulo for solto de
um ângulo de 80o com a direção vertical. R.: 1,77 s.
T2 (s
2)
L (m)
1
2
1,2
5,57
2,10
0 10 20 30 40 50 60
1,60
1,65
1,70
T (s)
(graus)
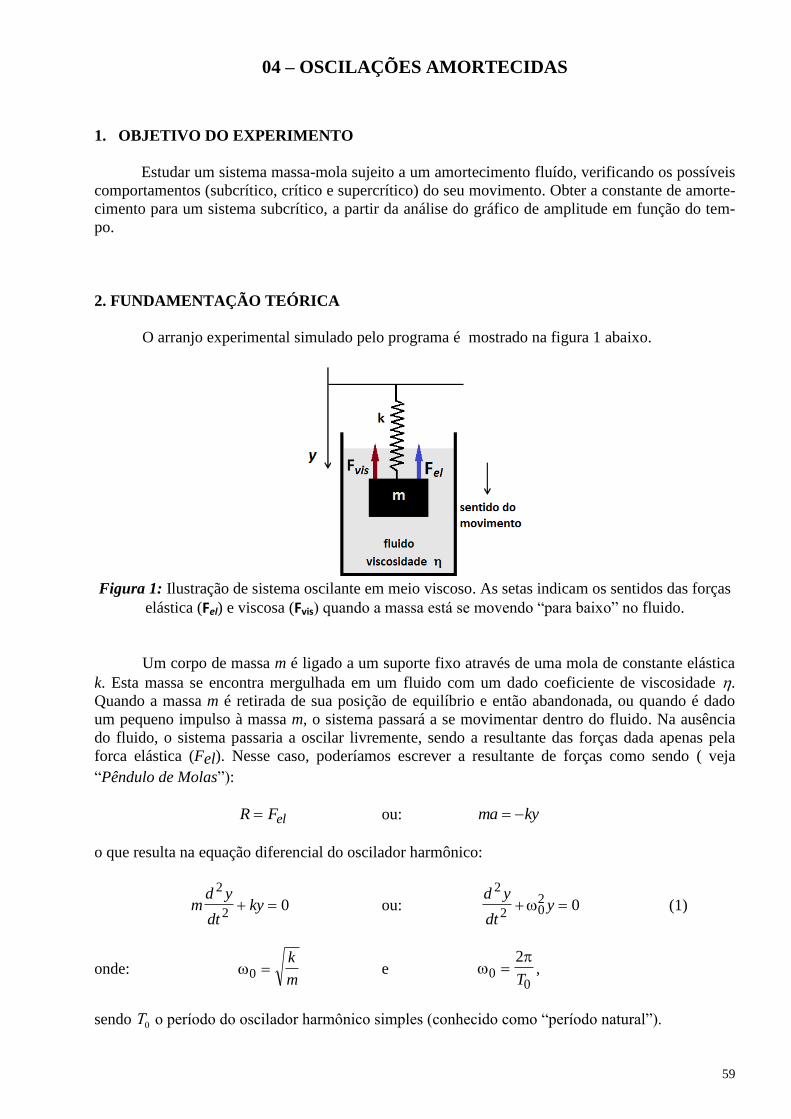
59
04 – OSCILAÇÕES AMORTECIDAS
1. OBJETIVO DO EXPERIMENTO
Estudar um sistema massa-mola sujeito a um amortecimento fluído, verificando os possíveis
comportamentos (subcrítico, crítico e supercrítico) do seu movimento. Obter a constante de amorte-
cimento para um sistema subcrítico, a partir da análise do gráfico de amplitude em função do tem-
po.
2. FUNDAMENTAÇÃO TEÓRICA
O arranjo experimental simulado pelo programa é mostrado na figura 1 abaixo.
Figura 1: Ilustração de sistema oscilante em meio viscoso. As setas indicam os sentidos das forças
elástica (Fel) e viscosa (Fvis) quando a massa está se movendo “para baixo” no fluido.
Um corpo de massa m é ligado a um suporte fixo através de uma mola de constante elástica
k. Esta massa se encontra mergulhada em um fluido com um dado coeficiente de viscosidade .
Quando a massa m é retirada de sua posição de equilíbrio e então abandonada, ou quando é dado
um pequeno impulso à massa m, o sistema passará a se movimentar dentro do fluido. Na ausência
do fluido, o sistema passaria a oscilar livremente, sendo a resultante das forças dada apenas pela
forca elástica (Fel). Nesse caso, poderíamos escrever a resultante de forças como sendo ( veja
“Pêndulo de Molas”):
R Fel ou: ma ky
o que resulta na equação diferencial do oscilador harmônico:
md y
dtky
2
20 ou:
d y
dty
2
2 02 0 (1)
onde: 0 k
m e
0
0
2
T,
sendo T0 o período do oscilador harmônico simples (conhecido como “período natural”).

60
Entretanto, quando um corpo se move dentro de um fluido como o mostrado na figura 1
acima, passa a atuar sobre ele uma força viscosa que se opõe ao movimento. Se a velocidade com
que o corpo se move é baixa, pode-se supor que esta força é diretamente proporcional à velocidade
e oposta a ela. Isto é, podemos escrever que a força viscosa (Fvis) será dada por:
vKFvis ou: bvFvis sendo Kb
onde K é um parâmetro que depende da geometria do corpo (no caso de uma esfera de raio R, pode-
se mostrar que K R 6 , que é a chamada Lei de Stokes), é o coeficiente de viscosidade do meio
e b será chamado aqui de coeficiente de resistência viscosa. Na Tabela 1 são indicados os coeficien-
tes de viscosidade para alguns fluidos a 20 oC (obs.: a unidade cp é ‘centi-poise’ e vale 1 cp = 10
-3
Ns/m2).
Tabela 1: Coeficiente de viscosidade de alguns meios
Fluido (cp)
Óleo SAE-20 ~9
Água 1,005
Ar 0,018
Glicerina ~ 800
Deste modo, devido à presença do meio viscoso, este sistema não irá se comportar como um
oscilador harmônico simples. Dependendo das características do meio, da massa e da constante
elástica da mola, o sistema poderá oscilar ou não. Caso o sistema oscile, a amplitude da oscilação
irá decair, sendo que após algum tempo o corpo voltará novamente à condição de equilíbrio.
Supondo o corpo de massa m preso a uma mola de constante elástica k e imerso em um flui-
do com coeficiente de resistência viscosa b (vide figura 1) movendo-se de cima para baixo, no
sentido positivo do eixo y, podemos escrever a resultante das forças neste caso como sendo:
R F Fvis el ou: ma bv ky
A equação acima pode ser reescrita ainda como:
md y
dtb
dy
dtky
2
2 0 ou: d y
dt
b
m
dy
dt
k
my
2
20
onde o coeficiente b é, como discutido acima, proporcional à viscosidade do meio e dependente
das características geométricas do corpo de massa m.
Utilizando-se a mesma notação do oscilador não amortecido, podemos reescrever a equação
do oscilador amortecido como sendo:
d y
dt
dy
dtyo
2
222 0 (2)
onde b
m2 é o chamado parâmetro de amortecimento.

61
A solução desta equação diferencial depende do grau de amortecimento
0. Pode-se
distinguir três casos distintos:
a) Amortecimento fraco ou subcrítico ( < 1): O movimento é oscilatório, com a amplitude da
oscilação diminuindo exponencialmente com o tempo. Nesta condição, o corpo oscila em torno da
posição de equilíbrio estático do sistema, com um período um pouco maior do que no correspon-
dente MHS ( ).
b) Amortecimento crítico ( = 1): Não ocorre oscilação, apenas um decaimento da amplitude com
o tempo. Nesta condição, a posição de equilíbrio é alcançada no menor tempo possível, sem que
haja oscilação. Este fato é utilizado, por exemplo, na construção de galvanômetros, onde a posição
de equilíbrio do ponteiro precisa ser alcançada o mais rápido possível sem oscilação. É também a
condição utilizada na construção de amortecedores (de autos, de portas, etc.).
c) Amortecimento forte ou supercrítico ( > 1): Não há oscilação, porém o decaimento é mais
lento que no caso de amortecimento crítico. Tirado da posição de equilíbrio e abandonado, o corpo
gasta um tempo considerável para retornar à posição de equilíbrio.
Na figura 2, estão representados os três tipos possíveis de gráficos de posição do corpo de
massa m em relação ao ponto de equilíbrio estático do sistema (0), obtidos para os três casos co-
mentados: amortecimento (a) subcrítico, (b) crítico e (c) supercrítico.
Nestes casos estudados e representados na figura 2, a condição do movimento corresponde
ao corpo afastado da posição inicial de equilíbrio até uma posição com deformação da mola, e de-
pois abandonado sob ação da resultante obtida pela somatória da ação da força elástica e da força de
resistência viscosa.
Figura 2: Representação gráfica da variação da posição da massa em função do tempo para diferen-
tes casos de amortecimento.

62
Vejamos separadamente as equações que são soluções para a equação diferencial (2) para os
três casos comentados acima. Se utilizarmos a técnica de solução de equações diferenciais de 2ª
ordem, homogêneas e de coeficientes constantes, descrito na leitura complementar no estudo de
Pêndulo de Molas, podemos tentar uma função exponencial como solução genérica para esta equa-
ção também:
( )
que, substituindo-se na equação diferencial (2) fornece a seguinte condição:
( ) (3)
Ora, para que esta condição seja satisfeita para todo instante t, temos que impor:
cuja solução para a fornece:
√
√
As grandezas que estão dentro da raiz quadrada devem possuir a mesma equação dimensional (T-1
).
Podemos, portanto, definir uma quantidade equivalente com significado de “pulsação” descrita pela
identidade:
(4)
que denominaremos de “pulsação do movimento amortecido”, de tal sorte que o período do movi-
mento oscilatório amortecido seja descrito por:
Assim sendo, podemos agora descrever como: √
Tipos de movimento
a) Amortecimento subcrítico:
Se , então . Neste caso, existe e pode-se definir T que é o período de
oscilação do sistema massa mola. Logo é o caso de uma oscilação amortecida (ou movimento de
amortecimento subcrítico). Neste caso, a solução geral da equação diferencial do movimento toma a
seguinte forma:
( ) ( ) ( ) ( )
que na forma trigonométrica pode ser escrita como solução geral:
)tcos(ea)t(y 0
t
o
onde:
ay
0
0
0
cos( )
,
0 2 ,
arctan( ) , 0
2 2

63
sendo a pulsação do movimento oscilatório amortecido.
A velocidade e a aceleração serão dadas respectivamente por:
)cos()( 000 teatv t
)2cos()( 0
2
00 teata t
b) Amortecimento crítico:
Se , então . Neste caso, e, portanto, NÃO existe T que é o período de
oscilação do sistema massa mola. Logo, NÃO há oscilação (movimento de amortecimento crítico).
Neste caso, a solução geral da equação diferencial do movimento toma a seguinte forma:
( ) com: a = yo
A solução mais completa e geral admite esta solução combinada com uma variação linear dela, to-
mando assim a forma:
tetyty )1()( 0
A velocidade e a aceleração serão dadas respectivamente por:
tteytv 2
0)(
tetyta )1()( 2
0
c) Amortecimento supercrítico:
Se , então . Neste caso, é substituído por uma constante real A que deve ser
determinada em função da relação entre e . Certamente NÃO há oscilação (movimento de
amortecimento supercrítico). Neste caso, a solução geral da equação diferencial do movimento toma
a seguinte forma:
( ) com: a = yo
A solução mais completa e geral admite esta solução combinada com uma variação linear dela, to-
mando assim a forma:
tAtAt eAeACety )1()1()( ou
)(cosh)(2)( tAAtAsinhCety t
onde: A
1
0
2
2
1 2
/
e Cy
A
0
2
A velocidade e a aceleração serão dadas respectivamente por:
)()1(2)( 2 tAsinhAeCtv t
64
tAsinhtAAeACta t cosh12 22
Nas nossas simulações, a partir dos valores de k, m, b e y0, o programa irá obter o valor de ,
escolhendo então as equações apropriadas.
3. MATERIAL UTILIZADO
Software de simulação “Oscilação Amortecida”
4. PROCEDIMENTO EXPERIMENTAL
Descrição de utilização da simulação “Oscilação Amortecida“
4.1 Disponibilizando a simulação:
a) Ligue o micro e digite seu username e senha
b) Clique em “Iniciar” > Todos os Programas > Aplica~1 > Física > DOSBox > “Oscilação Amor-
tecida” (digite “C”)
Caso não tenha conseguido entrar no programa, procure assistência.
4.2 Executando a simulação
IMPORTANTE:
1. Você deve digitar os valores numéricos utilizando a parte superior do teclado e NUNCA o
teclado numérico. No DOSBox este teclado não é reconhecido.
2. No DOS não se utiliza a virgula para separação decimal, mas o PONTO.
Vamos supor que se deseja simular o arranjo experimental mostrado na figura 3 a seguir,
com os valores de k, m e yo indicados nela:
Figura – 3: Ilustração do arranjo experimental simulado
1. Entre com o valor de k digitando 50 em “Const. Da Mola”, e digite <enter>
2. Entre com o valor de m digitando 0.1 em “Massa do corpo”, e digite <enter>
3. Entre com o tipo de meio viscoso digitando O em “Meio viscoso”. Aí não é preciso digitar <en-
ter>.
4. Entre com o valor de yo digitando 0.05 em “Elongação inicial”, e digite <enter>.
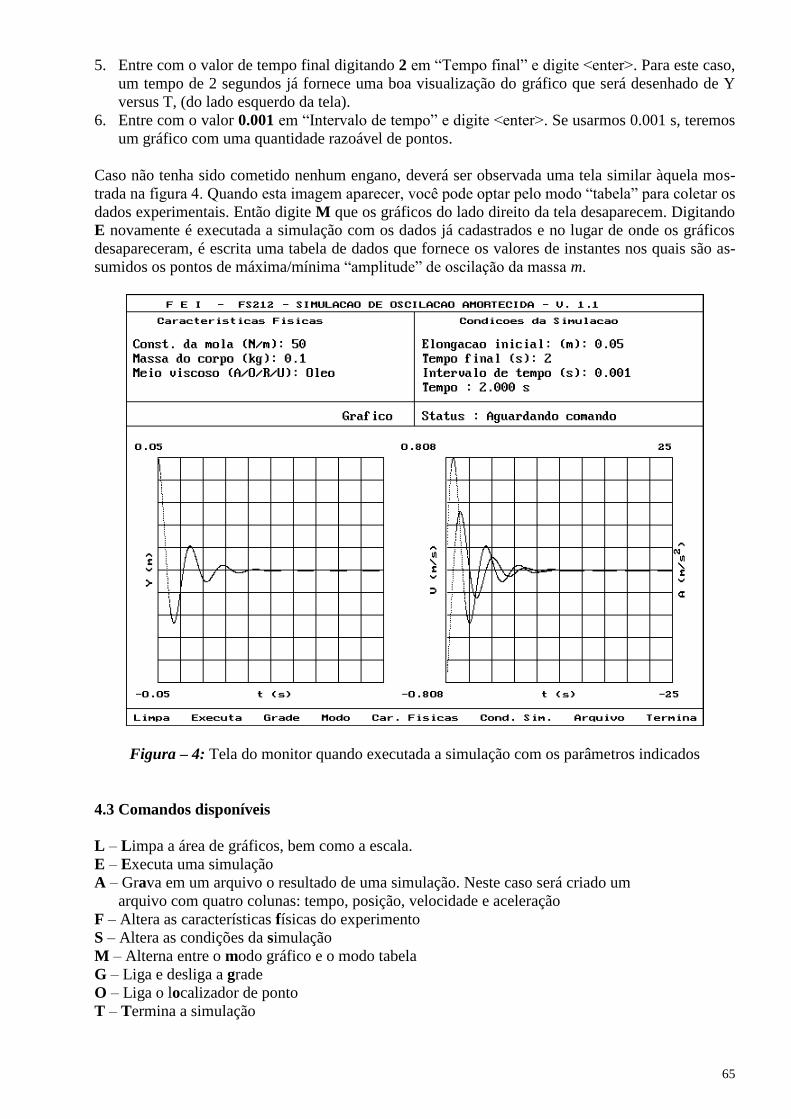
65
5. Entre com o valor de tempo final digitando 2 em “Tempo final” e digite <enter>. Para este caso,
um tempo de 2 segundos já fornece uma boa visualização do gráfico que será desenhado de Y
versus T, (do lado esquerdo da tela).
6. Entre com o valor 0.001 em “Intervalo de tempo” e digite <enter>. Se usarmos 0.001 s, teremos
um gráfico com uma quantidade razoável de pontos.
Caso não tenha sido cometido nenhum engano, deverá ser observada uma tela similar àquela mos-
trada na figura 4. Quando esta imagem aparecer, você pode optar pelo modo “tabela” para coletar os
dados experimentais. Então digite M que os gráficos do lado direito da tela desaparecem. Digitando
E novamente é executada a simulação com os dados já cadastrados e no lugar de onde os gráficos
desapareceram, é escrita uma tabela de dados que fornece os valores de instantes nos quais são as-
sumidos os pontos de máxima/mínima “amplitude” de oscilação da massa m.
Figura – 4: Tela do monitor quando executada a simulação com os parâmetros indicados
4.3 Comandos disponíveis
L – Limpa a área de gráficos, bem como a escala.
E – Executa uma simulação
A – Grava em um arquivo o resultado de uma simulação. Neste caso será criado um
arquivo com quatro colunas: tempo, posição, velocidade e aceleração
F – Altera as características físicas do experimento
S – Altera as condições da simulação
M – Alterna entre o modo gráfico e o modo tabela
G – Liga e desliga a grade
O – Liga o localizador de ponto
T – Termina a simulação
66
5. TABELAS E DADOS
IMPORTANTE: O professor de sua turma pode exigir que os parâmetros para a simulação (Con-
dições Físicas, à esquerda superior da tela e Condições da Simulação, à direita superior da tela) se-
jam específicos da tua turma. Peça a ele que indique os parâmetros que deseja:
Características físicas (“F”):
Constante elástica da mola: k
Massa do corpo: m
Condições de simulação (“S”):
Elongação inicial:
Tempo final:
Intervalo de tempo: 0,001s
4.1 Corpo oscilando imerso no Ar (meio R)
Em “Meio viscoso” digite “R”, que elege o meio AR.
O meio Ar (R) possui viscosidade desprezível, de modo que podemos considerar que o sis-
tema massa-mola, oscilando imerso no ar, está livre de amortecimento. Nesta simulação, o impor-
tante é determinarmos o período do movimento oscilatório do sistema massa-mola, que será consi-
derado como “período natural” (To) do sistema oscilante.
Preencha a Tabela 2 abaixo, copiando em sequência os valores ao lado do gráfico da simula-
ção, quando no modo “tabela”. Serão valores de sinal (+) e de sinal (-), correspondentes a pontos de
máximo/mínimo de posição, adotados pela massa m. Desta tabela, anote o valor do tempo decorrido
entre duas posições de máximo sucessivas de mesmo sinal e anote em Período de Oscilação no AR.
O período de oscilação (tempo decorrido para uma oscilação completa) é aquele obtido pela dife-
rença entre os tempos marcados para duas posições de máximo sucessivas de mesmo sinal.
Tabela 2: Período de oscilação do sistema no Ar
Características Físicas
Constante da Mola: _________ N/m Massa do corpo: _________ kg Meio viscoso: R
Condições de Simulação
Elongação inicial: _________ m Tempo final: 2,0 s Intervalo de tempo: 0,001 s
y (m) t (s)
Período de oscilação no AR: T Ar = __________ s

67
5.2. Corpo oscilando imerso na Água (meio A)
Em “Meio viscoso” digite “A”, que elege o meio ÁGUA.
O meio Água (A) possui viscosidade de pequeno valor, o que pode ser observado pela varia-
ção das “amplitudes” de oscilação do sistema massa-mola com o decorrer do tempo, notando que
esta variação é pouca.
Preencha a Tabela 3 copiando os valores ao lado do gráfico da simulação, quando no modo
“tabela”, em sequência. Serão valores de sinal (+) e de sinal (-), correspondentes a pontos de máxi-
mo/mínimo de posição, adotados pela massa m. Desta tabela, o pseudo-período de oscilação (tempo
decorrido para uma oscilação completa) é aquele obtido pela diferença entre os tempos marcados
para duas posições de máximo sucessivas de mesmo sinal e anote em Período de Oscilação na
ÁGUA.
Tabela 3: Pseudo-período de oscilação do sistema na Água
Características Físicas
Constante da Mola: _________ N/m Massa do corpo: _________ kg Meio viscoso: A
Condições de Simulação
Elongação inicial: _________ m Tempo final: 2,0 s Intervalo de tempo: 0,001 s
y (m) t (s)
Pseudo-período de oscilação
na ÁGUA: T água = __________ s
5.3. Corpo oscilando imerso no Óleo (meio O)
Em “Meio viscoso” digite “O”, que elege o meio ÓLEO.
O meio Óleo (O) possui viscosidade de valor bem maior que os meios anteriores, o que pode
ser facilmente observado pela variação das “amplitudes” de oscilação do sistema massa-mola com o
decorrer do tempo.
Preencha a Tabela 4 copiando os valores ao lado do gráfico da simulação, quando no modo
“tabela”, em sequência. Serão valores de sinal (+) e de sinal (-), correspondentes a pontos de máxi-
mo/mínimo de posição, adotados pela massa m. Desta tabela, o pseudo-período de oscilação (tempo
decorrido para uma oscilação completa) é aquele obtido pela diferença entre os tempos marcados
para duas posições de máximo sucessivas de mesmo sinal e anote em Período de Oscilação na
ÓLEO.
68
Tabela 4: Pseudo-período de oscilação do sistema no Óleo
Características Físicas
Constante da Mola: _________ N/m Massa do corpo: _________ kg Meio viscoso: O
Condições de Simulação
Elongação inicial: _________ m Tempo final: 2,0 s Intervalo de tempo: 0,001 s
y (m) t (s)
Pseudo-período de oscilação
no ÓLEO: T óleo = __________ s
5.4. Corpo oscilando imerso em meios de viscosidade variável (meios U)
Em “Meio viscoso” digite “U”. Abaixo de “outro”, aparece a opção “Coef. de Visc.” (Ns/m) di-
ante do qual você deve digitar um valor numérico a ser indicado pelo teu professor.
Esta aplicação da simulação nos permite observar os diferentes movimentos (subcrítico,
crítico e supercrítico) de um sistema massa-mola imerso num meio viscoso. Na fundamentação teó-
rica vimos que o coeficiente de resistência viscosa (b) depende do coeficiente de viscosidade () do
meio. Alterando-se o valor de b estamos alterando a viscosidade do meio (b pode ser descrito pela
mesma unidade de medida, mas representada por diferentes quantidades: [kg/s] ou Ns/m]). Na si-
mulação, o valor de b que utilizamos numa dada simulação deve ser colocado em “Características
Físicas” da simulação, após digitar (U) em “meio viscoso”, na posição correspondente a “coef. de
viscosidade”, embora b não seja este coeficiente (mas seu valor está associado ao deste coeficiente,
a menos de um fator de forma).
Varie o valor do coeficiente de resistência viscosa b e verifique o comportamento do sistema
à medida que b aumenta: tipo de movimento; valor da amplitude de oscilação; valor do pseudo-
período; número de ciclos até o sistema parar; etc. Anote estas observações. Seu Professor deverá
sugerir valores para b na coluna em branco que sejam compatíveis com os parâmetros k e m utiliza-
dos no experimento.

69
Tabela 5: Valores sugeridos para alteração da viscosidade do meio
(os valores de b (N.s/m) correspondem a “coef. de visc.” na simulação)
Características Físicas
Constante da Mola: _________ N/m Massa do corpo: _________ kg Meio viscoso: U
Condições de Simulação
Elongação inicial: _________ m Tempo final: 2,0 s Intervalo de tempo: 0,001 s
b (N.s/m) Tipo de amortecimento
Reproduza em forma de esboço, no quadriculado abaixo, os gráficos de y versus t para os casos
observados na simulação. Especifique e indique no esboço os valores de b, utilizados na tabela
acima, que geram os diferentes tipos de movimento: amortecido, crítico e supercrítico.
70
6. RESULTADOS E DISCUSSÕES
6.1. Gráficos:
Utilizando folhas de papel monolog, construa os gráficos de maxy (na escala logarítmica)
versus t (na escala milimetrada), para o sistema oscilando na Água (tabela 3) e no Óleo (tabela 4).
Neste gráfico não nos interessa o sinal de maxy , mas apenas o seu valor associado ao instante
em que foi assumido.
Em um papel milimetrado reproduza (em forma de esboço o mais fiel possível) as figuras de
y versus t obtidas na tela do monitor quando se altera o valor de b. Faça cada desenho com uma cor
ou tipo de traço diferente e indique a qual valor de b se refere cada desenho.
6.2 Cálculos e resultados:
6.2.1 Coeficiente de resistência viscosa da Água:
Do gráfico monolog de maxy versus t, construído a partir dos dados da Tabela 3, obtenha o
valor do parâmetro de amortecimento do meio água (água ). A partir deste valor e conhecendo a
massa m do corpo oscilante, determina o valor do coeficiente de resistência viscosa da água (águab ).
6.2.2 Coeficiente de resistência viscosa do Óleo:
Repita o processo utilizado para o meio água com o gráfico monolog obtido com os dados
da Tabela 4, determinando o parâmetro de amortecimento do meio óleo (óleo ) e o valor do coefi-
ciente de resistência viscosa do óleo ( óleob ).
6.2.3 Período natural do pêndulo de mola
Com os dados da Tabela 2, determine o “período natural” de oscilação do sistema massa-
mola utilizado. Lembre-se: o valor do período será dado pela diferença entre os valores de tempo
anotados para dois valores de amplitude ( maxy ) consecutivos de mesmo sinal.
Este período pode ser determinado pela mesma expressão já deduzida no estudo do Pêndulo
de Molas:
k
m2To
onde: m é o valor em quilogramas da massa oscilante
k é o valor em (N/m) da constante elástica da mola
Com os valores de k da mola e da massa m adotados para a simulação, confira se o valor
obtido experimentalmente ( exp
0T ) é muito diferente do valor obtido a partir da fórmula teórica. Cal-
cule o erro percentual:
100T
TT%E
0
0
exp
0
71
6.2.4 Pseudo-período para sistema oscilante na Água e no Óleo:
Da fundamentação teórica temos:
Pulsação natural: m
k0
sendo: 0
0T
2 e 0T o período natural
A pulsação da oscilação amortecida é: 22
0
Sendo: T
2 e T o pseudo-período
O parâmetro de amortecimento é: m2
b
Portanto, podemos reescrever a expressão da pulsação da oscilação amortecida como sendo:
22
0
2 ou, então: 2
2
0
2
2
2 44
TT
Simplificando e extraindo a raiz quadrada temos:
2
2
2
0 4
1
1
T
T
Substituindo na expressão acima os valores experimentais de exp
0T e obtido no gráfico,
podemos obter o valor calculado do pseudo-período ( calcT ) para cada meio.
Compare estes valores com os obtidos experimentalmente a partir das Tabelas 3 e 4.
LEMBRE-SE: os valores experimentais dos pseudo-períodos em cada meio podem ser obtidos a
partir das respectivas tabelas, subtraindo-se os valores dos instantes entre dois valores de maxy con-
secutivos de mesmo sinal. Determine o erro percentual entre os valores calculados do pseudo-
período em cada meio e seus valores experimentais:
100T
TT%E
exp
calcexp
6.2.5 Comportamento do sistema oscilante em diferentes meios viscosos:
Tendo por base as anotações contidas na Tabela 5 e o gráfico milimetrado no qual se repro-
duziu esboços dos gráficos y versus t do sistema oscilando em meios com diferentes coeficientes
de atrito viscoso, responda às questões abaixo:
a) O que ocorre com a amplitude à medida que se aumenta o coeficiente de resistência viscosa b?
Explique.
b) Quais são os valores de b utilizados que ilustram cada um dos modos de oscilação do sistema:
sub amortecido, amortecimento crítico e superamortecido, respectivamente?

72
c) O que é observável no comportamento dos gráficos nas condições de super amortecimento?
Qual seria a tendência do gráfico, se o amortecimento tendesse ao infinito?
d) Qual a relação entre b, a constante elástica da mola (k) e a massa (m) para os modos acima
citados. Utilize as relações 02 2 ,
m
k2
0 e m
b
2 .
7. EXERCÍCIOS
1. Suponha que a suspensão de uma caminhonete, com 500kg de carga em cada amortecedor, deva
ceder apenas 10 cm nesta carga (ache o k da mola da suspensão) e que, com esta carga, o modo
de movimento do sistema oscilante da suspensão seja crítico (ache o e o b do fluido do amor-
tecedor). Mantendo o k e o b determinados, o que ocorreria com o modo do movimento se a
suspensão sustentasse 1000kg em cada amortecedor? E se fosse somente 250kg em cada amor-
tecedor? (sugestão: ache o ’ e o o’ para cada nova situação e compare-os).
2. Estude o comportamento da suspensão de um automóvel popular padrão (de1 a 4 passageiros de
80kg cada um + 200kg de carga máxima no porta-malas, com “tara” de 800kg). Para que você
possa calibrar o amortecedor de modo a não sair muito da situação de amortecimento crítico
(desde 880kg até 1320kg igualmente distribuídos nas 4 molas), suponha que ele, na situação de
equilíbrio estático, não deve ceder mais que 15cm quando totalmente carregado. Determine:
a) o valor da constante elástica de cada mola da suspensão;
b) o valor da pulsação natural da suspensão em cada roda com 1 passageiro e sem carga, e
com 4 passageiros e carga total;
c) o valor do parâmetro de amortecimento de cada amortecedor da suspensão, para satisfazer
a condição de amortecimento crítico com meia carga do veículo (“tara” + 2 passageiros +
10kg de carga).
d) o coeficiente de resistência viscosa do fluido dos amortecedores para satisfazer a condição
de amortecimento crítico com meia carga do veículo (“tara” + 2 passageiros + 10kg de car-
ga).
e) Com o b escolhido para o fluido, determine o parâmetro de amortecimento e estude qual se-
ria o modo de movimento da suspensão com o carro vazio (“tara” + 1 passageiro e sem car-
ga)?
f) Com o b escolhido para o fluido, determine o parâmetro de amortecimento e estude qual se-
ria o modo de movimento da suspensão com o carro cheio (“tara” + 4 passageiros e carga to-
tal)?
3. Na simulação de “Oscilações Amortecidas”, foram inseridos os seguintes valores: Constante da
mola: 50 N/m e Massa do corpo: 0,500 kg. a) Qual deve ser o valor de b (e sua respectiva
unidade) para que o sistema seja criticamente amortecido? b) Faça um esboço do gráfico da po-
sição y em função do tempo t para a situação acima. (Resp.:10 kg/s)
4. Uma massa presa a uma mola executa um MHS com período de oscilação de 2,00 s. Essa massa
é colocada para oscilar em um ambiente onde passa a sofrer amortecimento, com uma constante
de amortecimento proporcional à sua velocidade. Após 2,00 s, sua amplitude de oscilação caiu
para 35% de seu valor inicial. Qual o período T do oscilador no novo ambiente? R.: 2,03 s
5. Uma massa m = 2 kg está suspensa em uma extremidade de uma mola (k = 14 N/m) e oscila
sujeita a uma força de amortecimento Fvisc = – b . v. A amplitude é reduzida de ¼ de seu valor
inicial quando são completadas 4 oscilações. Assumindo que o período com amortecimento é
igual ao período sem amortecimento, calcular a constante b. R.: 0,121 kg/s

73
6. Uma esfera de 0,05 kg, pendurada em uma mola de constante 25 N/m, movimenta-se vertical-
mente em um líquido, oscilando com amplitude que varia com o tempo de acordo com a função
A(t) = 0,30 . e– 0,22.t
[S.I.]
a) Determinar a função horária da posição da esfera no interior do líquido supondo que a fase ini-
cial seja = 0. R.: x(t) = 0,30 . e– 0,22.t
. cos(22,36 . t) [S.I.]
b) Determinar a função horária para a velocidade da esfera e calcular seu valor quando t = 0,1s.
c) Calcular a amplitude ao término da 5ª oscilação. R.: 0,22 m
7. Um bloco de 130 g preso a uma mola ideal é posto a oscilar em um meio viscoso, com amplitu-
de inicial de 120 mm. Após 1,8 min, a amplitude diminui para 30 mm. Determinar, no S.I., o
valor da constante de amortecimento b. R.: 3,34 x 10-3
kg/s
8. Um objeto de massa m, preso a uma mola de constante elástica k, se move imerso em um fluido
viscoso, caracterizado por uma constante de amortecimento b. A figura abaixo mostra a dimi-
nuição de sua amplitude em função do tempo para uma parte do movimento. Considere que o
movimento se iniciou no instante t = 0 s. Sendo m = 0,2 kg e Ta = 0,630 s (o período do movi-
mento amortecido), pede-se:
a) A amplitude inicial do movimento; R.: 0,1 m
b) A constante de amortecimento b; 0,208 kg/s
c) A constante elástica k, e R.: 19,95 N/m
d) Para m = 0,2 kg e com o valor de b obtido no item b) acima, qual deve ser o valor da cons-
tante elástica da mola para o amortecimento ser crítico? R.: 0,054 N/m
9. Na atividade “Oscilações Amortecidas”, um aluno realizou 2 simulações:
Simulação 1: massa m presa a mola de constante elástica k apresenta oscilação crítica quando
colocado para oscilar em um meio viscoso com coeficiente de viscosidade b.
Simulação 2: o valor da massa foi multiplicado por 3 e a constante elástica da mola foi reduzida
pela metade, mantendo-se o coeficiente b fixo.
Seja = /o o grau de amortecimento. Pede-se:
a) Calcule a razão entre 1 (primeira simulação) e 2 (segunda simulação). (1,225)
b) Para a segunda simulação, qual o tipo de amortecimento? Justifique. (subcrítico)

74
10. Na simulação de Oscilações Amortecidas foram obtidos os seguintes valores para a amplitude
(yMAX) em função do tempo (t) para um sistema massa-mola (m=0,20 kg, k=80 N/m) oscilando
em um meio viscoso cuja constante de amortecimento é b:
t(s) 0,40 0,80 1,20 1,60 2,00
yMAX(cm) 65,5 50,0 38,0 28,9 22,1
a) Representar os pontos no gráfico monolog abaixo, iniciando a escala horizontal em 0;
b) Determinar a amplitude no instante t = 0 e o parâmetro de amortecimento γ, ambos através do
gráfico, indicando os pontos usados para o cálculo. R.: 86 cm; 0,68 s-1
.
c) Qual seria um novo valor para b para sistema ser criticamente amortecido? R.: 8 kg/s

75
05 – CALOR ESPECÍFICO
1. OBJETIVO DA EXPERIÊNCIA
Determinar a capacidade térmica de um calorímetro e o calor específico de uma peça metálica.
2. FUNDAMENTAÇÃO TEÓRICA
2.1 Temperatura e Calor:
O conceito de temperatura está relacionado com sensações de “quente” e “frio” associadas
ao nosso tato. Sob o ponto de vista científico, está associado à medida de energia cinética das molé-
culas que constituem um corpo material. Esta noção, bastante complexa, será estudada quando se
estabelecer uma relação entre o “estado de agitação” devido aos movimentos de choques entre par-
tículas e de vibração das moléculas que constituem corpos materiais nos diferentes estados de agre-
gação (gases, líquidos e sólidos), quando se procurar medir a energia que os corpos possuem devido
aos movimentos das partículas que o constituem.
Portanto, a ideia de temperatura está associada à ideia de energia, que poderíamos definir
como “uma medida de estado”, ou seja: de condições de interações físicas entre as moléculas umas
com os outras e do sistema como um todo com outros sistemas. Por isso é muito comum se afirmar
que “a temperatura de um corpo mede o estado de agitação molecular que ele possui”
Quando corpos em temperaturas diferentes (ou seja: com diferentes energias térmicas) são
colocados em contato, aquele que possui mais energia tende a cede-la para aquele que possui menos
energia. A energia transferida de um corpo para outro é denominada de calor trocado. A transferên-
cia cessa quando os dois corpos atingirem a mesma temperatura (estado de equilíbrio térmico).
Portanto, calor não está obrigatoriamente associado a variação de temperatura, mas à de
transferência de energia. A 1ª lei da Termodinâmica, inclusive, diz que “o estado de energia interna
térmica de um corpo está relacionado ao calor que ele troca e aos trabalho que forças externas
realizam sobre ele”.
De fato, quando um corpo recebe ou cede calor, tanto pode variar sua temperatura (chama-se
ao calor trocado, neste caso, de calor sensível), como pode mudar o estado de agregação de suas
partículas (chama-se, neste caso, de calor latente). Logo, um corpo não “tem” calor: tem energia
interna que lhe permite estar em dada temperatura. Nem se diz que “o calor está forte”, mas “a
temperatura está elevada”.
2.1.1 Calor sensível e Calor latente:
O calor sensível é aquele que, quando o corpo troca, altera a sua temperatura. Se um corpo
se encontra em uma temperatura To e, após receber calor passa a uma temperatura T, relacionamos
esta variação de temperatura com a mudança de sua energia interna causada por uma quantidade de
calor que ele trocou e que “sentiu” esta alteração. Neste caso, o calor trocado pelo corpo está relaci-

76
onado com a quantidade de matéria que o corpo possuem (massa m) e umas grandeza característica
associada ao material que constitui o corpo, e que mede quanto calor por unidade de massa este
material necessita para varia sua temperatura de um grau de temperatura:
( )
No sistema internacional, a unidade de calor é a de energia (joule), a de massa é quilograma
e a de temperatura é grau kelvin. Portanto, por análise dimensional percebe-se que a grandeza ca-
racterística do material constitutivo do corpo em unidade ( ⁄ ). Contudo, é muito comum utili-
zarmos como medida de energia, quando se trata de calo, a caloria (cal), a massa em gramas (g) e a
temperatura em grau célsius (oC).
O calor latente é aquele que, quando o corpo troca, não se altera a temperatura do corpo,
mas se altera o estado de agregação das partículas que o constituem (também denominado de mu-
dança de fase). Ou seja: se o estado de agregação anterior o descrevia como um sólido, o novo esta-
do recebendo o calor latente será, por exemplo, de líquido, ou vice-versa. Enquanto o corpo altera
seu estado de agregação, sua temperatura não se altera porque o calor é “utilizado” para alterar as
forças de agregação entre as partículas e não para aumentar ou diminuir a agitação das partículas. O
calor latente só depende da quantidade de matéria que constitui o corpo e de uma quantidade carac-
terística do material e de processo de mudança de fazer que ele sofre (solidificação ↔ fusão ou li-
quefação ↔ vaporização) que é denominado genericamente de L. No sistema Internacional sua uni-
dade de medida é ⁄ . Neste caso, a quantidade de calor necessária para a transição seria:
O sinal algébrico está relacionado a calor recebido ou a color doado, dependendo do processo.
Como a troca de calor entre os corpos pode alterar o estado de energia interna térmica que
ele possui, existe uma lei que define as condições nas quais ocorre troca de calor entre corpos e
quando ela cessa. Chama-se Lei Zero da Termodinâmica. Ela é fundamental para se estudar o com-
portamento de corpos que possuem diferentes temperaturas.
2.2 Capacidade calorífica ou Capacidade térmica:
É a quantidade de calor necessária para que um corpo ou sistema varie sua temperatura em 1
grau. Sendo Q o calor trocado e a variação da temperatura, a capacidade térmica C é definida
por:
Note que a capacidade térmica é uma propriedade de um sistema termodinâmico e não uma
característica intrínseca de um material. É, portanto, uma grandeza extensiva (depende das dimen-
sões do sistema). Isto pode ser entendido assim: se pegarmos 100g de um determinado material,
este terá uma certa capacidade térmica; se pegarmos 200g do mesmo material, a capacidade térmica
será o dobro. Esta grandeza representa a “inércia termodinâmica” de um sistema para se promover
nele uma variação de temperatura. Isto é, quanto maior a capacidade térmica de um sistema, maior é
a dificuldade de alterar a sua temperatura (maior a quantidade de calor necessária para se provocar
uma certa variação de temperatura). No Sistema Internacional de Unidades a capacidade térmica é
medida em J/K, embora normalmente utilize-se como unidade cal/ºC.
QC

77
2.3 Calor específico:
É descrito como sendo a capacidade térmica de um corpo por unidade de massa. Esta é uma
propriedade intrínseca de cada material, não dependendo da quantidade de material em questão.
Por isso, essa grandeza é do tipo intensiva. Se fizermos um paralelo entre massa (inércia à alteração
do estado de movimento de um corpo) com capacidade térmica (inércia de um sistema à alteração
de sua temperatura), teremos um paralelo semelhante entre a densidade (propriedade intrínseca de
um material) e o calor específico.
O calor específico é dado por:
No Sistema Internacional de Unidades, o calor específico é medido em J/kg.K, embora o mais co-
mum seja utilizar a unidade cal/g ºC. No Sistema Inglês de Medidas é utilizado o Btu/lb.oF.
2.4 Lei Zero da Termodinâmica
“Em um sistema termicamente isolado, se vários corpos a diferentes temperaturas são colo-
cados juntos, a quantidade de calor cedida pelos corpos que esfriam é igual à quantidade de calor
recebida pelos corpos que se aquecem. A troca de calor cessa, quando todos os corpos do sistema
atingirem a mesma temperatura”.
Na verdade, o que a Lei Zero nos afirma é que a energia em um sistema fechado se con-
serva, e que existe fluxo de energia dos corpos quentes para os frios, enquanto existe diferença de
temperatura entre eles.
Se denominarmos de T1, T2, ....Tn às temperaturas dos diferentes corpos que pertencem ao
sistema termicamente isolado, e de Q1, Q2...Qn aos colores que cada corpo troca (cede ou recebe),
podemos escrever uma identidade que representa o que é afirmado na Lei Zero:
sendo negativo o calor cedido pelo corpo e positivo o calor recebido pelo corpo. O equilíbrio térmi-
co ocorre quando a temperatura de TODOS os corpos pertencentes ao sistema for a mesma (Te).
2.4.1 Determinação de capacidade térmica de um calorímetro:
O calorímetro é um sistema construído de tal forma que constitua um sistema termicamente
isolado. Ou seja: corpos com temperatura distintas, colocadas no seu interior, trocam calor entre si e
com o calorímetro, mas não com o ambiente, possibilitando o controle da troca de calor entre os
corpos. É muito utilizado em experimentos que envolvem troca de calor, nos quais interessa contro-
lar as variáveis de temperatura dos corpos.
Os calorímetros são constituídos de diferentes materiais: recipiente interno de metal ou vi-
dro, isolamento de espuma ou madeira, termômetro adicionado de vidro ou metal, certa quantidade
de ar que ocupa os espaços vazios (cujo valor é variável: depende da quantidade de material que
ocupe o espaço interno do calorímetro), agitador que facilita o processo de “mistura” dos materiais
nele acondicionados, etc. Esta complexidade faz com que se associe ao calorímetro a capacidade
térmica para se medir o calor que ele troca com os corpos que ele acondiciona.
m
Cc
m
Qc

78
Consideremos um calorímetro ao qual é adicionada uma dada massa ma água fria. Fechando
o sistema e aguardando um tempo não muito longo, a água e o calorímetro entram em equilíbrio
térmico, acusando uma temperatura final do sistema calorímetro + água fria que vamos denominar
de θa (usamos o símbolo θ para representar temperaturas em escala relativa de medida – grau cel-
sius ou grau fahrenheit). Se adicionarmos a quantidade de massa mq de água quente, misturando-a
ao sistema calorímetro + água fria, a água quente cede calor e a água fria + calorímetro recebem
calor. Seja θq a temperatura da água quente adicionada. Após certo tempo, o sistema água fria +
calorímetro + água quente atinge uma temperatura de equilíbrio θeq.
Equacionando-se esta situação segundo a Lei Zero da Termodinâmica, temos:
Ou seja, a capacidade térmica do calorímetro será dada por:
Note que, da própria definição de capacidade térmica de um sistema ou mistura, o valor da
capacidade térmica deve ser sempre positivo. De fato, se o sistema recebe calor, a variação da tem-
peratura do sistema será positiva e a razão entre o calor trocado pelo sistema e a variação de sua
temperatura será positiva. Se o sistema cede calor, a variação da temperatura do sistema será nega-
tiva e a razão entre o calor trocado pelo sistema e a variação de sua temperatura será também positi-
vo. Portanto, se ao calcular a capacidade térmica do calorímetro que você está usando o sinal ficar
negativo, não tente “esconder” o fato mudando o sinal. Reveja os cálculos e peça auxílio de seu
professor para verificar se os dados que coletou ou os cálculos que fez estão corretos.
2.4.2 Determinação do calor específico de um material sólido:
Com o uso de um calorímetro, podemos determinar o calor específico de um material que
constitui um corpo sólido. Coloque no interior do calorímetro uma massa ma’ de água, aguarde o
equilíbrio térmico com o calorímetro e meça a temperatura θa’ do conjunto calorímetro + água fria.
Tome um sólido qualquer e determine a massa mb do sólido. Coloque o sólido dentro de um vasi-
lhame com água e aqueça-o até a água do vasilhame ficar em ebulição. Meça a temperatura θb do
sólido imerso na água em ebulição. Transfira o sólido para dentro do calorímetro com água. Feche
rapidamente o calorímetro para evitar muita perda de calor. Agitando o sistema até atingir o equilí-
brio térmico, meça a temperatura de equilíbrio do sistema θeq’.
Aplicando-se a Lei Zero da Termodinâmica para o novo sistema constituído por calorímetro
+ água fria + sólido aquecido, obteremos:
A partir da identidade acima, podemos determinar o calor específico do sólido. Ou seja, o
calor específico do corpo será dado por:
0)()()( qeqáguaqaeqáguaaaeq cmcmC
)(
)()(
aeq
eqqáguaqeqaáguaa cmcmC
beqbbaeqáguaaaeq cmcmC0
)(m
)(C)(cmc
eqbb
aeqaeqáguaa
b

79
A tabela 1 informa os valores de calor específico de alguns materiais. Esta tabela foi obtida
a partir do texto “Física II – Termodinâmica e Ondas” de Young & Freedman (12ª. edição).
Tabela 1: Valores tabelados de calores específicos
Substância c (cal/goC) c (J/kg.K)
Água (líquida) 1,00 4190
Álcool etílico 0,579 2428
Alumínio (Al) 0,217 910
Berilo 0,470 1970
Chumbo (Pb) 0,0310 130
Cobre (Cu) 0,0931 390
Ferro (Fe) 0,112 470
Mármore (CaCO3) 0,210 879
Prata (Ag) 0,0558 234
3. MATERIAL UTILIZADO
- chapa elétrica de aquecimento
- panela de alumínio c/ tampa
- panela de alumínio s/ tampa
- peça metálica
- proveta
- termômetro
- calorímetro com agitador
- pegador metálico
- água
4. PROCEDIMENTO EXPERIMENTAL
4.1 Procedimentos iniciais
Como neste trabalho experimental utilizaremos água aquecida, você poderá agilizar a reali-
zação do experimento se tomar algumas providências iniciais, que fazem parte dos procedimentos
parciais específicos.
1. Medir a massa do sólido a ser utilizado no experimento, utilizando a balança disponível na
sala de laboratório;
2. Colocar água na panela com tampa, até a altura correspondente a aproximadamente 2 cm
abaixo da borda;
3. Colocar o sólido dentro da panela com água e feche a tampa da panela. O sólido imerso, de-
ver estar totalmente coberto pela água;
4. Colocar a panela com o sólido dentro sobre o aquecedor elétrico;
5. Ligar o aquecedor com a orientação de seu professor.
4.1. Determinação da capacidade térmica do calorímetro: Preencher a Tabela 2
a) Colocar no calorímetro certa massa (ma) de água à temperatura ambiente. Esta quantidade, em
gramas, é numericamente igual ao volume de água medido no tubo graduado em ml (ou cm3). O
calor específico médio da água é ca = 1,00 cal/g ºC.
b) Agitar a água para rapidamente atingir o equilíbrio térmico com o calorímetro e medir a tempe-
ratura inicial do sistema (a).
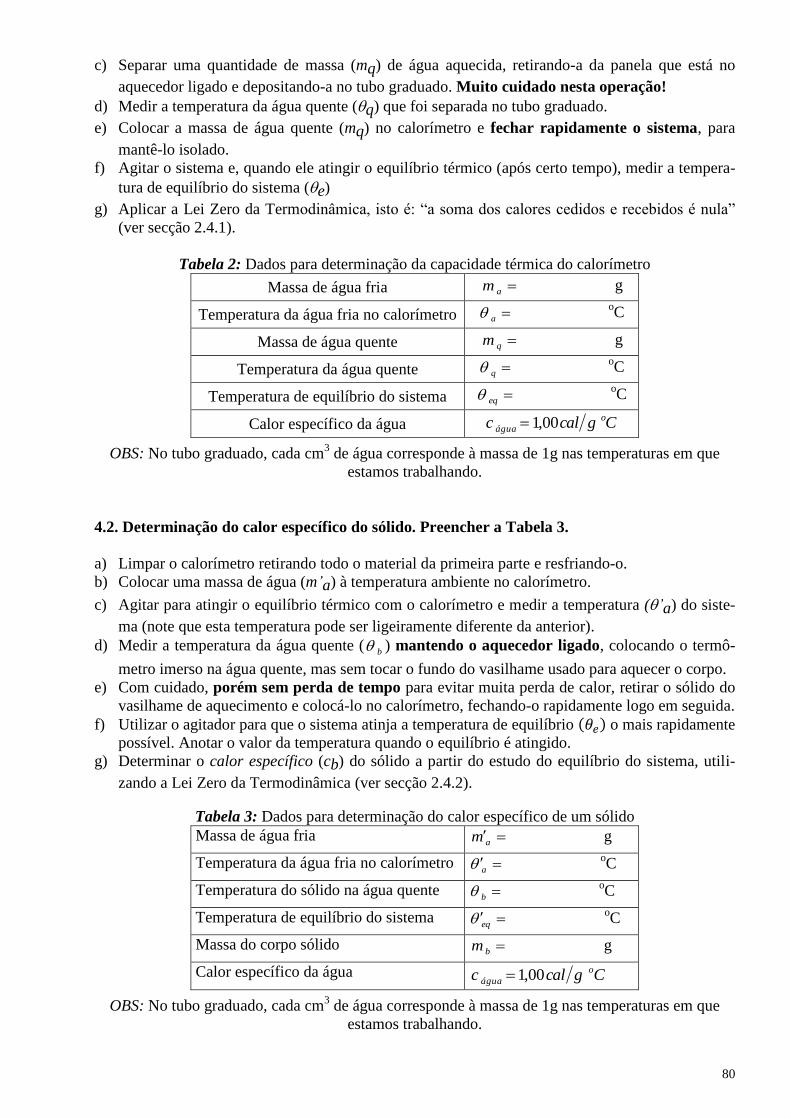
80
c) Separar uma quantidade de massa (mq) de água aquecida, retirando-a da panela que está no
aquecedor ligado e depositando-a no tubo graduado. Muito cuidado nesta operação!
d) Medir a temperatura da água quente (q) que foi separada no tubo graduado.
e) Colocar a massa de água quente (mq) no calorímetro e fechar rapidamente o sistema, para
mantê-lo isolado.
f) Agitar o sistema e, quando ele atingir o equilíbrio térmico (após certo tempo), medir a tempera-
tura de equilíbrio do sistema (e)
g) Aplicar a Lei Zero da Termodinâmica, isto é: “a soma dos calores cedidos e recebidos é nula”
(ver secção 2.4.1).
Tabela 2: Dados para determinação da capacidade térmica do calorímetro
Massa de água fria am g
Temperatura da água fria no calorímetro a oC
Massa de água quente qm g
Temperatura da água quente q oC
Temperatura de equilíbrio do sistema eq oC
Calor específico da água Cgcalc o
água 00,1
OBS: No tubo graduado, cada cm3 de água corresponde à massa de 1g nas temperaturas em que
estamos trabalhando.
4.2. Determinação do calor específico do sólido. Preencher a Tabela 3.
a) Limpar o calorímetro retirando todo o material da primeira parte e resfriando-o.
b) Colocar uma massa de água (m’a) à temperatura ambiente no calorímetro.
c) Agitar para atingir o equilíbrio térmico com o calorímetro e medir a temperatura (’a) do siste-
ma (note que esta temperatura pode ser ligeiramente diferente da anterior).
d) Medir a temperatura da água quente (b ) mantendo o aquecedor ligado, colocando o termô-
metro imerso na água quente, mas sem tocar o fundo do vasilhame usado para aquecer o corpo.
e) Com cuidado, porém sem perda de tempo para evitar muita perda de calor, retirar o sólido do
vasilhame de aquecimento e colocá-lo no calorímetro, fechando-o rapidamente logo em seguida.
f) Utilizar o agitador para que o sistema atinja a temperatura de equilíbrio ( ) o mais rapidamente
possível. Anotar o valor da temperatura quando o equilíbrio é atingido.
g) Determinar o calor específico (cb) do sólido a partir do estudo do equilíbrio do sistema, utili-
zando a Lei Zero da Termodinâmica (ver secção 2.4.2).
Tabela 3: Dados para determinação do calor específico de um sólido
Massa de água fria am g
Temperatura da água fria no calorímetro a oC
Temperatura do sólido na água quente b oC
Temperatura de equilíbrio do sistema eq
oC
Massa do corpo sólido bm g
Calor específico da água Cgcalc o
água 00,1
OBS: No tubo graduado, cada cm3 de água corresponde à massa de 1g nas temperaturas em que
estamos trabalhando.
81
5. CÁLCULOS E RESULTADOS
5.1 Determinar a capacidade térmica do calorímetro (C) usando a expressão da secção 2.4.1:
5.2 Determinar o calor específico de um sólido ( bc ) usando a expressão da secção 2.4.2 e o valor
obtido da capacidade térmica do calorímetro utilizado:
5.3 Calcule o erro percentual experimental do calor específico do sólido, baseado nos valores tabe-
lados fornecidos na Tabela 1. Sabe-se que: 100%
exp
tabelado
b
tabelado
bb
c
ccE
6. CONCLUSÕES
Discuta os erros percentuais encontrados e avalie a qualidade dos resultados obtidos na ex-
periência. Fundamente suas observações e comentários.
Responda às seguintes questões:
a) A capacidade térmica pode assumir valores negativos? Justifique.
b) Se houve perda de calor na transferência do sólido para o calorímetro, a temperatura
do sólido ao ser colocado no calorímetro será menor do que aquela medida. Conside-
re que θb = θ’b + ∆θ onde θ’b é a temperatura REAL do sólido ao ser depositado no
calorímetro e ∆θ é a variação de temperatura entre a medida por você na panela com
água aquecida e a temperatura real na hora do depósito. Descreva a variação entre o
valor do calor específico determinado para o sólido e aquele que seria medido se não
houvesse perda de calor: calculando . A variação na
temperatura do sólido afeta a temperatura de equilíbrio após a mistura? De quanto?
)(
)()(
aeq
eqqáguaqeqaáguaa cmcmC
)(
)()(
eqbb
aeqaeqáguaa
bm
Ccmc
82
7. EXERCÍCIOS
Para os exercícios a seguir, caso nada esteja indicado, utilize os seguintes valores para os
calores latentes e específicos das substâncias:
Calor específico (J/kg.K) Calor latente (J/kg)
da água 4190 de fusão do gelo 3,34 x 105
do gelo 2100 de vaporização da água 2,256 x 106
do vapor d’água 2010 de fusão do etanol 1,042 x 105
do cobre (Cu) 390 de vaporização do etanol 8,54 x 105
da prata (Ag) 234 de fusão da prata 8,83 x 104
do chumbo (Pb) 130
do alumínio (Al) 910 Temperaturas de fusão e vaporização (oC)
do etanol líquido 2428 fusão da prata 960
fusão do etanol – 114
vaporização do etanol 78
1. Calcular o calor específico de um metal a partir dos seguintes dados: Um recipiente feito do
metal tem massa 1,20 kg e contém 5,00 kg de água, ambos a 16 oC. Uma peça de 0,600 kg
deste metal, inicialmente a 90 oC, é colocada dentro da água. A temperatura final do sistema é
30 oC. R.: 15276,0 J/kg.K
2. Suponha que um grupo de laboratório de Física II realizou dois ensaios:
a) Ensaio 1: Um calorímetro contém 40 g de água em temperatura 94 oC. Coloca-se 200 g de
água a 15 oC e verifica-se que a temperatura de equilíbrio ocorre a 45
oC. Determine a ca-
pacidade térmica do calorímetro. Use cágua = 1cal/g oC. R.: 82,45 cal/
oC
b) Ensaio 2: O mesmo calorímetro usado no ensaio 1 contém agora, 120 g de água em tempe-
ratura 90 oC. Adiciona-se uma chapa metálica de massa 80 g e em temperatura inicial de
25 oC. Verifica-se que o equilíbrio térmico ocorre em 54
oC. Determine o calor específico
do metal. R.: 3,14 cal/g oC
3. Um grupo de laboratório de Física II realizou dois ensaios:
a) Ensaio 1: Um calorímetro contém 60 g de água em temperatura 90 oC. Coloca-se 100 g de
água a 20 oC e verifica-se que a temperatura de equilíbrio ocorre a 53
oC. Determine a ca-
pacidade térmica do calorímetro. Use cágua = 1cal/g oC. R.: 29,2 cal/
oC
b) Ensaio 2: O mesmo calorímetro usado no ensaio 1 contém agora, 100 g de água em tempe-
ratura 85 oC. Adiciona-se uma chapa metálica de massa 500 g e em temperatura inicial de
20 oC. Verifica-se que o equilíbrio térmico ocorre em 45
oC. Determine o calor específico
do metal. R.: 0,413 cal/g oC
4. Em um calorímetro de cobre, de massa 100 g, estão em equilíbrio térmico 100 g de água e 18 g
de gelo. Adiciona-se uma peça de chumbo, de massa 100 g e a temperatura de 255,00 oC, e es-
pera-se o sistema atingir um novo equilíbrio térmico. Sendo dados:
a) A temperatura de equilíbrio após ter-se adicionado a peça de chumbo. R.: 0 oC
b) As massas finais de água, gelo e vapor. R.: 8 g, 110 g, 0 g
c) Qual seria a resposta do item a) se a massa de chumbo fosse 500 g? R.: 17,65 oC.
5. Num calorímetro de cobre de massa 60 g à temperatura de 60 oC são adicionados 20 g de gelo a
– 8 oC e 300 g de prata sólida. Determinar:
a) a temperatura de equilíbrio, sabendo que a temperatura inicial da prata é 300 oC; (87,08
oC)
b) a temperatura inicial da prata para que o equilíbrio no calorímetro seja estabelecido a 0 oC
somente com água líquida. (79,94 oC)

83
6. Um calorímetro de cobre com 0,500 kg contém 0,070 kg de gelo , ambos inicialmente a -18 oC.
Colocam-se nesse sistema 0,020 kg de vapor d’água a 100 oC e 0,050 kg de água a 10
oC. Após
todo esse procedimento, pedem-se:
a) a temperatura de equilíbrio térmico; ( 33,34 oC)
b) as massas finais de gelo e de água. (0 g e 140 g)
7. Num calorímetro de capacidade térmica desprezível, adicionam-se 10 g de vapor d’água a
100 oC e 500 g de gelo a – 50
oC. Determinar :
a) a temperatura do equilíbrio; R.: – 20,92 oC
b) a massa de gelo, de água e de vapor d’água no calorímetro após atingida a temperatura de
equilíbrio. R.: mgelo = 510 g
8. Um calorímetro de alumínio, de 0,2 kg, contem 0,6 kg de água a 20 oC.
a) Um pedaço de gelo de 0,1 kg, a – 15 oC, é colocado no calorímetro. Calcular a temperatura
final do sistema; (5,58 oC)
b) Com o calorímetro contendo apenas 0,6 kg de água a 20 oC, qual deveria ser a massa de ge-
lo, a – 15 oC, a ser introduzida no calorímetro, para que se obtenha metade desta massa de
gelo no equilíbrio térmico ? (0,272 kg)
9. Um calorímetro de cobre, de 0,10 kg, contém 0,20 kg de água inicialmente a 30 oC.
a) Um cubo de gelo de 0,050 kg removido de um congelador a -15 oC é introduzido neste calo-
rímetro. Calcular a temperatura final no equilíbrio térmico. (7,40 oC)
b) Qual seria a temperatura final no equilíbrio térmico se fossem introduzidos dois cubos de
gelo de 0,050 kg ( massa de cada cubo ), removidos do mesmo congelador ao invés de um
cubo ? (0 oC)
10. Um calorímetro de capacidade térmica desprezível contém 200 g de água a 20 oC. Coloca-se no
calorímetro certa massa de gelo a – 50 oC e observa-se que o equilíbrio térmico do sistema
ocorre a – 20 oC. Em seguida, acrescenta-se vapor d’água a 100
oC e observa-se que, ao atingir
o novo equilíbrio térmico, restam quantidades iguais de água e gelo no calorímetro.
a) Calcular a massa de gelo a – 50 oC que foi introduzida no calorímetro. (1,46 kg)
b) Qual a massa de vapor d’água introduzida no calorímetro? (0,122 kg)
11. Num calorímetro de capacidade térmica desprezível misturam-se 180 g de etanol sólido a
– 114 oC e 500 g de prata líquida à temperatura de 960
oC.
a) Calcular a temperatura de equilíbrio do sistema. R.: 78 oC
b) Atingido o equilíbrio térmico, determine as massas de etanol (sólido, líquido e vapor) e de
prata (sólida e líquida) que se encontram no calorímetro. R.: etanol: 0 g, 128 g, 52 g; prata: 500 g, 0 g.
12. Num calorímetro de capacidade térmica desprezível, misturam-se certa massa de vapor d’água
a 100 oC e 800 g de etanol líquido a 60
oC. Supondo que essa experiência tenha sido feita a
pressão constante e que, no equilíbrio térmico, exista etanol líquido e vapor de etanol em quan-
tidades iguais, determine:
a) A massa de vapor d’água; (0,160 kg)
b) Atingido o equilíbrio térmico, quais as massas de etanol líquido, vapor de etanol, água e
vapor d’água? (etranol: 400 g; água: 160 g, 0 g)

84
06 – EFEITO JOULE Equivalente mecânico do calor
1. OBJETIVO DO EXPERIMENTO
Determinar o equivalente mecânico do calor (J), através do chamado “Efeito Joule” obser-
vado em um resistor de aquecimento de água.
2. FUNDAMENTAÇÃO TEÓRICA
A grandeza “quantidade de calor” é normalmente expressa em calorias. Por outro lado, cos-
tuma-se expressar energia em joule. Como sabemos, a grandeza calor é energia fluindo de um corpo
mais quente para um corpo mais frio. O fator de conversão entre joule e caloria é denominado de
equivalente mecânico do calor (J).
Historicamente, estas duas grandezas (calor e energia) eram tidas como grandezas indepen-
dentes. Imaginava-se o calor como sendo um fluido invisível, que não podia ser criado nem destruí-
do, chamado de calórico. Segundo a teoria do calórico, quando um corpo quente era colocado em
contato com um corpo frio, um “fluido” (o calórico), fluía do corpo mais quente para o corpo mais
frio até que o equilíbrio térmico fosse atingido. Por muito tempo esta teoria foi aceita até que foi
finalmente abandonada em face dos resultados de experimentos que a colocaram em xeque.
A primeira grande observação experimental que sugeria que a teoria do calórico não expli-
cava bem diversos fenômenos foi feita no final do século XVIII por Benjamin Thompson (chamado
Conde Rumford). Enquanto supervisionava a produção de canhões em Munique, notou que existia
uma grande quantidade de calor (calórico) sendo produzida pela ferramenta de perfuração do bron-
ze, já que grande quantidade de água era necessária para o resfriamento do sistema. Notou que uma
broca cega, que produzia menos aparas que uma broca afiada, produzia a mesma quantidade de ca-
lor que a broca afiada. Assim, seria possível manter a broca cega trabalhando por um período ex-
tremamente longo, produzindo uma enorme quantidade de calor sem praticamente produzir aparas
(que, supunha-se, era quem carregava o calórico para a água de resfriamento). Imaginou então que o
calor deveria ser uma espécie de movimento que se transferia da broca quente para a água utilizada
para resfriá-la.
Somente no século XIX é que se desenvolveu o conceito moderno do calor graças, em gran-
de parte, às pesquisas de James Prescott Joule. Joule foi quem estabeleceu o princípio da conserva-
ção da energia e a equivalência entre o calor e outras formas de energia (potencial, cinética, etc.).
Na Figura 1 temos um esquema do experimento clássico de Joule para se estabelecer a equivalência
entre o trabalho mecânico e o calor.
Figura 1: Esquema do experimento clássico de Joule

85
agitador
base
do
calorímetro
agitador
aquecedor
tampa
do
calorímetro
Neste experimento, quando soltamos as massas presas a um fio que se enrolava em volta de
um tambor solidário a uma haste soldada a uma placa, se elas descessem de uma altura h com velo-
cidade constante, toda a energia potencial perdida pelas massas será transformada em calor pelo
atrito entre as paletas e água (desprezando-se o atrito nos rolamentos e a perda de calor para o am-
biente). A constante de proporcionalidade encontrada por Joule foi de 1cal = 4,18 J. Atualmente,
define-se a caloria como sendo exatamente 4,186 J.
OBSERVAÇÃO: Uma unidade de medida de calor muito utilizada na área de Engenharia, é o Btu
(unidade do Sistema Inglês de Medidas). 1 Btu equivale a 1054,35 J ou a 252 cal.
Joule fez este experimento também utilizando uma resistência imersa em um líquido, estu-
dando o que chamamos hoje de “Efeito Joule”. O Efeito Joule é a transformação de energia elétrica
em calor, que ocorre em condutores percorridos por corrente elétrica. Quando um campo elétrico é
aplicado a um condutor (ligando-se os terminais de uma pilha, por exemplo), os elétrons livres do
material são acelerados por um certo período de tempo, aumentando assim a sua energia cinética.
Porém, essa energia cinética é rapidamente transformada em energia térmica devido às colisões que
ocorrem entre os elétrons e a rede cristalina. Isto leva a um aquecimento do condutor, chamado de
aquecimento Joule ou Efeito Joule.
Em termos práticos, podemos calcular o equivalente mecânico de calor utilizando o Efeito
Joule em um resistor elétrico. Um resistor R deve permanecer em equilíbrio térmico com certa mas-
sa de água contida em um recipiente (calorímetro). Fazendo-se passar uma corrente elétrica I cons-
tante pelo resistor R, a resistência sofrerá aquecimento (devido ao Efeito Joule), transformando a
energia elétrica (W) consumida pelo resistor em calor (Q) que aquece a água e o calorímetro.
Figura 2: Esquema de uma montagem para estudo do Efeito Joule
Figura 3: Foto do equipamento utilizado na montagem experimental no Laboratório
I
R
A

86
No intervalo de tempo t, e energia elétrica consumida pelo resistor é dada por:
tPW . sendo: I.UP
onde: U é a tensão medida nos terminais do resistor;
I é a corrente que o percorre.
OBSERVAÇÃO: Segundo a Lei de Ohm, para um resistor podemos escrever U = R . I. Portanto,
também podemos reescrever a potência elétrica, transformada em calor por Efeito Joule, como sen-
do P = R . I2.
No mesmo intervalo de tempo t, o calor Q recebido pela água e pelo calorímetro é dado
por:
.CcmQ aa
onde: ma é a massa de água colocada no interior do recipiente (calorímetro)
ca = 1,00 cal/goC é o calor específico da água
C é a capacidade térmica do calorímetro
é a variação de temperatura sofrida pelo sistema
O equivalente mecânico do calor (J ) será dado por:
Ou seja, substituindo-se: t.I.Ut.PW e .CcmQ aa
Vem que:
3. MATERIAL NECESSÁRIO
- proveta
- termômetro
- calorímetro com tampa que possua agitador e aquecedor
- fonte de corrente com voltímetro e amperímetro acoplados
- cronômetro de precisão
- água
)( cal
joule
Q
WJ
)
cal
joule(
Ccm
tU.I.
Q
WJ
aa
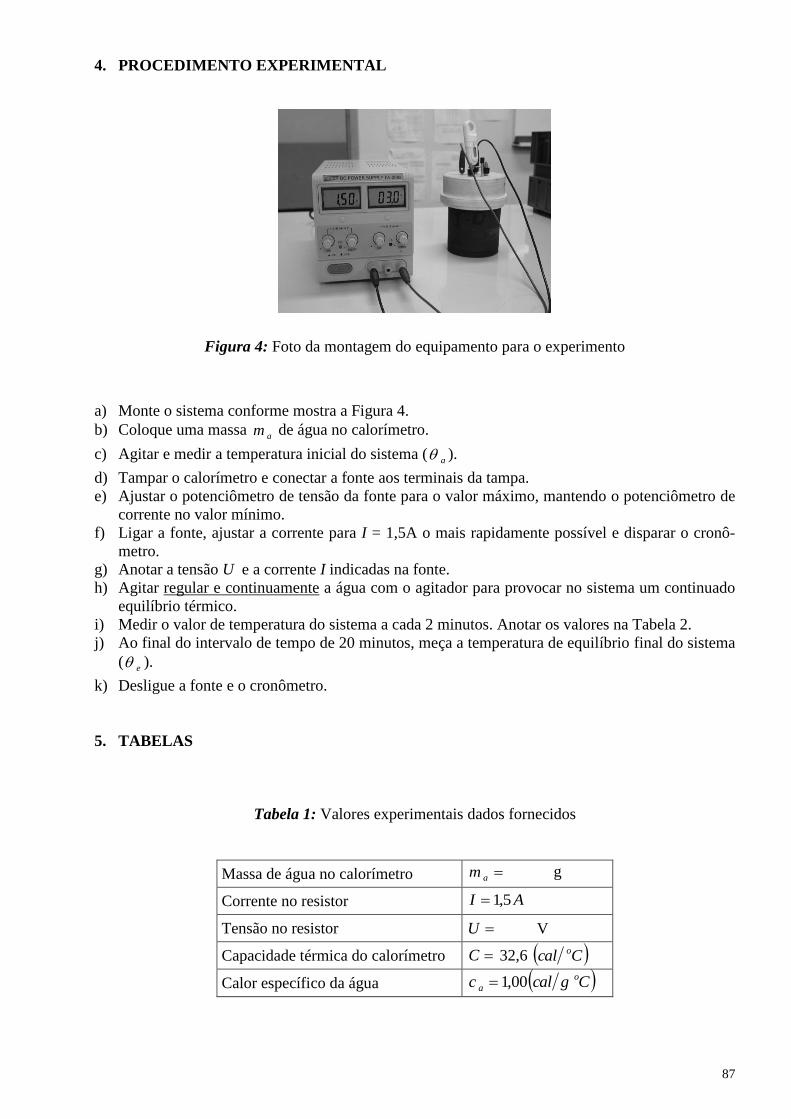
87
4. PROCEDIMENTO EXPERIMENTAL
Figura 4: Foto da montagem do equipamento para o experimento
a) Monte o sistema conforme mostra a Figura 4.
b) Coloque uma massa am de água no calorímetro.
c) Agitar e medir a temperatura inicial do sistema (a ).
d) Tampar o calorímetro e conectar a fonte aos terminais da tampa.
e) Ajustar o potenciômetro de tensão da fonte para o valor máximo, mantendo o potenciômetro de
corrente no valor mínimo.
f) Ligar a fonte, ajustar a corrente para I = 1,5A o mais rapidamente possível e disparar o cronô-
metro.
g) Anotar a tensão U e a corrente I indicadas na fonte.
h) Agitar regular e continuamente a água com o agitador para provocar no sistema um continuado
equilíbrio térmico.
i) Medir o valor de temperatura do sistema a cada 2 minutos. Anotar os valores na Tabela 2.
j) Ao final do intervalo de tempo de 20 minutos, meça a temperatura de equilíbrio final do sistema
(e ).
k) Desligue a fonte e o cronômetro.
5. TABELAS
Tabela 1: Valores experimentais dados fornecidos
Massa de água no calorímetro am g
Corrente no resistor AI 5,1
Tensão no resistor U V
Capacidade térmica do calorímetro C 32,6 Ccal o
Calor específico da água Cgcalc o
a 00,1

88
Tabela 2: Valores experimentais obtidos para temperatura de equilíbrio do sistema
mint st Co
0 0 inicial
2 120
4 240
6 360
8 480
10 600
12 720
14 840
16 960
18 1080
20 1200 final
6. CÁLCULOS
6.1 Determinação do valor de grafJ a partir do gráfico θ versus ∆t:
6.1.1 Construa um gráfico milimetrado de (em oC) versus t (em segundos), colocando a tem-
peratura no eixo vertical e o tempo no eixo horizontal.
6.1.2 Trace uma reta média pelos pontos do gráfico e calcule o coeficiente angular (ou inclinação)
desta reta.
Coeficiente angular = t
6.1.3 Se a energia elétrica (em joule) consumida pelo resistor é: tIUW ..
e o calor trocado pelo sistema é: CcmQ aa
então:
Ccm
I.U
Ccm
t.I.UJ
aaaa
graf
Substitua os valores anotados na Tabela 1 e o valor do coeficiente angular na equação e
obtenha o equivalente mecânico do calor pelo método gráfico, grafJ .
6.1.4 Se o valor do equivalente mecânico do calor tabelado é calJJtab 186,4 , calcule o erro
percentual entre o valor obtido no experimento e o valor tabelado:
100%tab
graftab
J
JJE

89
6.2 Determinação do valor de expJ a partir dos valores de tabela:
6.2.1 A equação obtida na fundamentação teórica pode ser reescrita de outra forma: De fato:
aeaaaa Ccm
tIU
Ccm
tIUJ
....
onde: a é a temperatura inicial do sistema antes de ligar a fonte (em 0t )
e é a temperatura final de equilíbrio do sistema (em min20t )
Substitua na expressão acima os valores indicados na Tabela 1 e Tabela 2, e obtenha o valor
do equivalente mecânico de calor que denominaremos de expJ .
6.2.2 Calcule o erro percentual entre o valor de expJ obtido em 6.2.1 e o valor tabelado:
100J
JJ%E
tab
exptab
7. CONCLUSÕES
Responda às questões abaixo nas tuas conclusões:
d) Qual dos dois valores é mais próximo do valor tabelado (menor erro)?
e) O valor obtido a partir do gráfico deve ser mais correto ou o valor obtido a partir dos
dados de temperatura inicial e final? Justifique sua resposta (está relacionado a valor
médio e valores extremos).
f) Se o gráfico de temperatura versus tempo foi linear? O que isto representa? Não for
linear, mas aproximado de uma reta, o que isto quer dizer sobre o calor trocado entre
o sistema e o meio?
g) O sistema pode receber calor do meio? Porque? Pode ceder? Como? Justifique suas
respostas.

90
8. EXERCÍCIOS
1. Em um experimento de equivalente mecânico do calor, duas massas iguais a m = 5 kg foram
deixadas para que caíssem sob efeito da ação da gravidade de uma altura de 2,5 m, fazendo com
que girassem pás imersas em um calorímetro com 100g de água. Supondo que a velocidade de
queda foi constante e que não houve perdas de calor para o ambiente e nos rolamentos, determi-
ne o valor do equivalente mecânico do calor, sabendo-se que a capacidade térmica do caloríme-
tro vale C = 18 cal/ ºC e que a variação de temperatura da água foi de 0,5 ºC. ( 4,24 J/cal)
2. Em um experimento de efeito Joule, uma resistência R = 2 foi imersa em 150 g de água que
se encontravam dentro de um calorímetro com capacidade térmica igual a 30 cal/ ºC. Passou-se
uma corrente igual a 2 A por um período de 20 minutos. Considerando-se que a resistência não
teve seu valor alterado apreciavelmente durante o experimento e sabendo-se que o valor do
equivalente mecânico do calor obtido pelo estudante foi J = 4,08 J/cal, determine a variação de
temperatura observada pelo aluno. ( = 13,1 oC)
3. No experimento do efeito Joule, uma resistência de 3 Ω foi imersa em 180 g de água que esta-
vam no interior de um calorímetro de capacidade térmica 32,6 cal/oC. Uma corrente elétrica
igual a 2,5 A circulou sobre a resistência durante certo intervalo de tempo ∆t, provocando um
aumento de temperatura interna de 22,4 oC. O equivalente mecânico do calor obtido foi de 4,35
J/cal. Calcular ∆t. (1104,84 s = 18,41 min)
4. Um estudante extremamente aplicado estimou a perda média de calor para o ambiente em um
experimento de efeito Joule como sendo igual a 20 cal durante o período de 20 minutos em que
o aquecedor foi mantido ligado. Sabendo-se que os resultados obtidos pelo aluno sem a correção
levou a um valor de J = 4,35 J/cal, qual o valor de J corrigido para levar em conta essa perda de
calor para o ambiente, sabendo-se que o calor que foi calculado como sendo recebido pelo sis-
tema água + calorímetro (isto é, sem considerar a perda) foi igual a 620 cal? (4,21 J/cal)
5. Um estudante de Física II obteve um valor de J = 4,38 J/cal. Desconfiou que o erro em seu ex-
perimento poderia ter sido causado por perda de calor para o ambiente. É possível que esse va-
lor de J tenha sido causado por perda de calor para o ambiente? Em caso afirmativo, qual seria o
valor aproximado do calor perdido para justificar o erro que obteve, sabendo que o calor recebi-
do pelo sistema água + calorímetro medido por ele foi igual a 700 cal? (Sim; Qper = 32,4 cal)
6. Sabe-se que as grandezas tensão (U) e corrente (I) podem ser descritas formalmente pelas ex-
pressões: U = W/q e I = q/t , onde W = trabalho e q = carga elétrica. Mostre usando o sis-
tema MLTQ (onde Q = [carga elétrica]) que a grandeza E = U.I.t tem dimensão de energia,
isto é, ML2T
-2.
7. No experimento de Efeito Joule, uma corrente de intensidade I percorre um resistor R durante
um intervalo de tempo T, fazendo com que o calorímetro e certa massa ma de água sofram um
aumento de em suas temperaturas. O calorímetro tem capacidade térmica C = 32,6 cal/oC e
não é ideal. Ao realizar o experimento, um grupo utilizou I = 2,0 A, R = 2 e T = 20 min.
Depois de feitas as medidas, ao calcular o equivalente mecânico do calor o grupo se atrapalhou
e fez as contas com I = 1,5 A, obtendo J = 2,64 J/cal. Percebendo o erro, os alunos refizeram os
cálculos com o valor correto para a corrente elétrica. (a) Qual é o valor do equivalente mecâni-
co do calor quando os cálculos são feitos com I = 2,0 A? (b) Sabendo que o valor de JTeórico =
4,19 J/cal, qual foi o calor transferido para o ambiente? Use I = 2,0 A e o valor de J calculado
no item anterior. (4,69 J/cal; 244,26 cal)

91
8. Na experiência para a determinação do equiva-
lente mecânico do calor, um grupo obteve o grá-
fico ao lado usando os seguintes parâmetros:
tensão elétrica aplicada: 4,5 V;
corrente elétrica: 2,0 A;
massa de água: 200 g;
calor específico da água: 1 cal/g.oC;
capacidade térmica do calorímetro: 35,2 cal/oC.
a) Calcular o equivalente mecânico do calor. R.: 4,502 J/cal
b) Em uma análise mais cuidadosa, o grupo estimou que o calor perdido do sistema para o
ambiente foi de 160 cal. Considerando esta hipótese, determinar o novo equivalente mecânico
do calor. R.: 4,220 J/cal
9. Em um experimento de efeito Joule, uma resistência de 2 Ω foi imersa em 150 g de água que
estavam no interior de um calorímetro de capacidade térmica 35 cal/oC. A intensidade da cor-
rente elétrica que circulou na resistência foi 1,5 A durante 25 minutos, que provocou um aumen-
to de temperatura Δθ. Sabendo que o valor calculado do equivalente mecânico do calor foi 4,38
J/cal, calcular Δθ. Dado: cágua = 1 cal/g oC. R.: 8,33
oC.
10. a) Um calorímetro de capacidade térmica C contém 100 g de água a 25oC. Adicionam-se a este
sistema 70 g de água à temperatura de 95 oC. Verifica-se que o equilíbrio térmico ocorre a 50
oC. Calcular a capacidade térmica do calorímetro. (26,0 cal/
oC)
b) O calorímetro é esvaziado, esfriado e colocam-se 200 g de água a 25 oC. Uma resistência
de 3 Ω é imersa nesse sistema e faz-se circular pela mesma uma corrente elétrica de 2 A por 16
minutos. Verifica-se que a variação de temperatura deste sistema é de 12,4 oC neste tempo.
Calcular o equivalente mecânico do calor desprezando a capacidade térmica do calorímetro.
(4,645 J/cal)
c) Se considerássemos a capacidade térmica do calorímetro no cálculo do item anterior, o novo
valor do equivalente mecânico do calor seria maior, menor ou igual ao obtido no item b): Justi-
fique sua resposta. (menor)
(oC)
35,2
25,0
20
t (min)
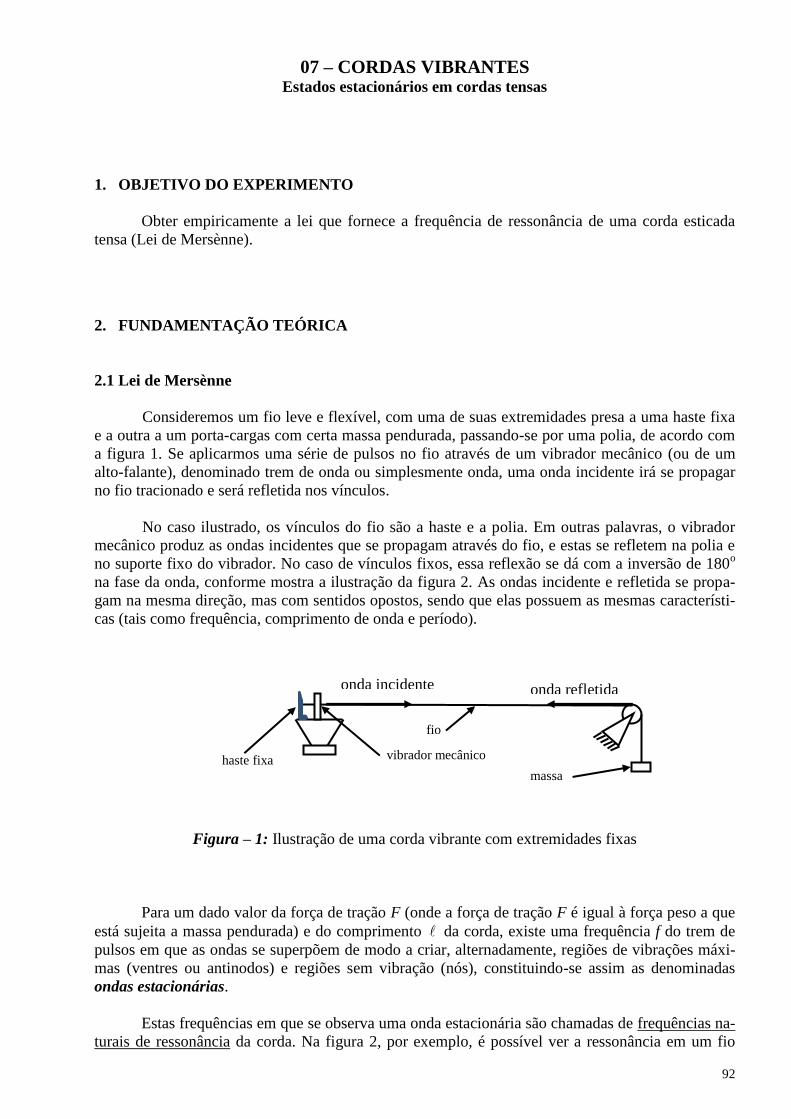
92
07 – CORDAS VIBRANTES Estados estacionários em cordas tensas
1. OBJETIVO DO EXPERIMENTO
Obter empiricamente a lei que fornece a frequência de ressonância de uma corda esticada
tensa (Lei de Mersènne).
2. FUNDAMENTAÇÃO TEÓRICA
2.1 Lei de Mersènne
Consideremos um fio leve e flexível, com uma de suas extremidades presa a uma haste fixa
e a outra a um porta-cargas com certa massa pendurada, passando-se por uma polia, de acordo com
a figura 1. Se aplicarmos uma série de pulsos no fio através de um vibrador mecânico (ou de um
alto-falante), denominado trem de onda ou simplesmente onda, uma onda incidente irá se propagar
no fio tracionado e será refletida nos vínculos.
No caso ilustrado, os vínculos do fio são a haste e a polia. Em outras palavras, o vibrador
mecânico produz as ondas incidentes que se propagam através do fio, e estas se refletem na polia e
no suporte fixo do vibrador. No caso de vínculos fixos, essa reflexão se dá com a inversão de 180o
na fase da onda, conforme mostra a ilustração da figura 2. As ondas incidente e refletida se propa-
gam na mesma direção, mas com sentidos opostos, sendo que elas possuem as mesmas característi-
cas (tais como frequência, comprimento de onda e período).
Figura – 1: Ilustração de uma corda vibrante com extremidades fixas
Para um dado valor da força de tração F (onde a força de tração F é igual à força peso a que
está sujeita a massa pendurada) e do comprimento da corda, existe uma frequência f do trem de
pulsos em que as ondas se superpõem de modo a criar, alternadamente, regiões de vibrações máxi-
mas (ventres ou antinodos) e regiões sem vibração (nós), constituindo-se assim as denominadas
ondas estacionárias.
Estas frequências em que se observa uma onda estacionária são chamadas de frequências na-
turais de ressonância da corda. Na figura 2, por exemplo, é possível ver a ressonância em um fio
fio
vibrador mecânico
massa
onda incidente onda refletida
haste fixa

93
com a presença de 4 ventres (n = 4). A distância entre dois nós consecutivos corresponde à metade
do comprimento de onda (/2).
Figura 2: Ondas estacionárias estabelecidas em fio com extremidades fixas (n = 4)
Por outro lado, sabemos que a velocidade de propagação v de uma onda através de uma cor-
da de densidade linear e sujeita a uma tração F é dada por:
Fv (1)
onde a densidade linear de um fio de comprimento e massa m é dada pela expressão:
= m /
Mas a velocidade da onda também pode ser calculada pela expressão:
v = .f (2)
onde é o comprimento da onda e f é a frequência da onda incidente (e refletida) no fio.
Igualando as expressões (1) e (2) da velocidade, obteremos:
F
f .
Ff .
1
Podemos usar o comprimento de onda no estado estacionário () dado pela relação:
= n.(/2) = 2 /n
onde é o comprimento do fio limitado entre a haste e a polia, /2 é a distância entre dois nós e n é
o número de “meios comprimentos de ondas” ou o número de ventres da onda estacionária estabe-
lecida no fio.
ventre ventre ventre
nó nó nó /2
ventre
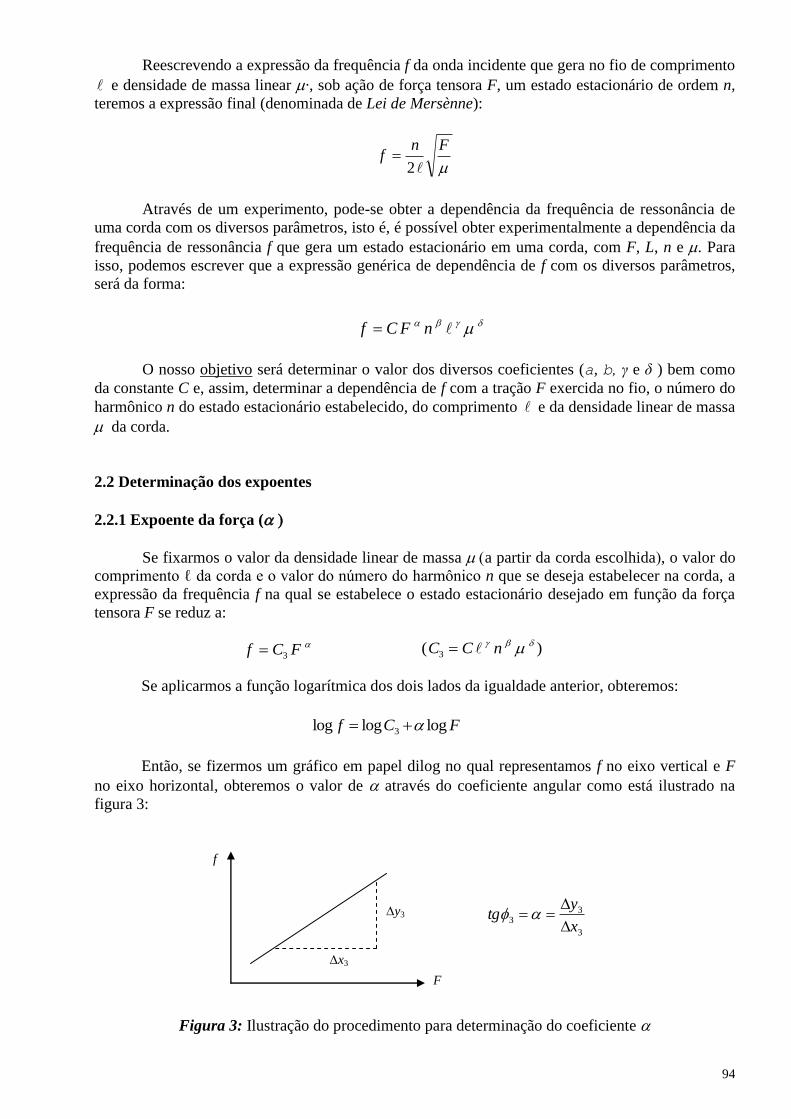
94
Reescrevendo a expressão da frequência f da onda incidente que gera no fio de comprimento
e densidade de massa linear ·, sob ação de força tensora F, um estado estacionário de ordem n,
teremos a expressão final (denominada de Lei de Mersènne):
Fnf
2
Através de um experimento, pode-se obter a dependência da frequência de ressonância de
uma corda com os diversos parâmetros, isto é, é possível obter experimentalmente a dependência da
frequência de ressonância f que gera um estado estacionário em uma corda, com F, L, n e . Para
isso, podemos escrever que a expressão genérica de dependência de f com os diversos parâmetros,
será da forma:
O nosso objetivo será determinar o valor dos diversos coeficientes (a, b, γ e δ ) bem como
da constante C e, assim, determinar a dependência de f com a tração F exercida no fio, o número do
harmônico n do estado estacionário estabelecido, do comprimento e da densidade linear de massa
da corda.
2.2 Determinação dos expoentes
2.2.1 Expoente da força (
Se fixarmos o valor da densidade linear de massa a partir da corda escolhida, o valor do
comprimento ℓ da corda e o valor do número do harmônico n que se deseja estabelecer na corda, a
expressão da frequência f na qual se estabelece o estado estacionário desejado em função da força
tensora F se reduz a:
Se aplicarmos a função logarítmica dos dois lados da igualdade anterior, obteremos:
Então, se fizermos um gráfico em papel dilog no qual representamos f no eixo vertical e F
no eixo horizontal, obteremos o valor de através do coeficiente angular como está ilustrado na
figura 3:
Figura 3: Ilustração do procedimento para determinação do coeficiente
nFCf
3
33
x
ytg
F
f
y3
x3
)( 3
nCC FCf 3
FCf logloglog 3

95
2.2.2 Expoente do número do harmônico (β
Se fixarmos o valor do comprimento da corda, o valor da densidade linear de massa da
corda () e a tração F a ser aplicada nela, a dependência entre a frequência f da onda incidente que
gera na corda um estado estacionário e a ordem n do estado estacionário gerado se reduzirá à se-
guinte expressão:
Se aplicarmos a função logarítmica dos dois lados da igualdade anterior, obteremos:
Assim, se utilizarmos um papel dilog no qual representamos f no eixo vertical e n no eixo
horizontal, obteremos o valor de através do coeficiente angular como está ilustrado na figura 4:
Figura 4: Ilustração do procedimento para determinação do coeficiente
2.2.3 Expoente do comprimento da corda (
Se fixarmos o valor da força tensora F no fio, do número do harmônico n que se deseja esta-
belecer nele e da densidade linear de massa da corda utilizada, a dependência entre a frequência f
da onda incidente que gera na corda um estado estacionário e o comprimento ℓ da corda se reduzirá
à expressão:
Se aplicarmos a função logarítmica dos dois lados da igualdade anterior, obteremos:
Se fizermos um gráfico em papel dilog no qual representamos f no eixo vertical e no eixo
horizontal, obteremos o valor de através do coeficiente angular como está ilustrado na figura 5:
nCf logloglog 1
)( 1
FCC nCf 1
n
1
11
x
ytg
f
y1
x1
LCf logloglog 2
2Cf nFCC 2
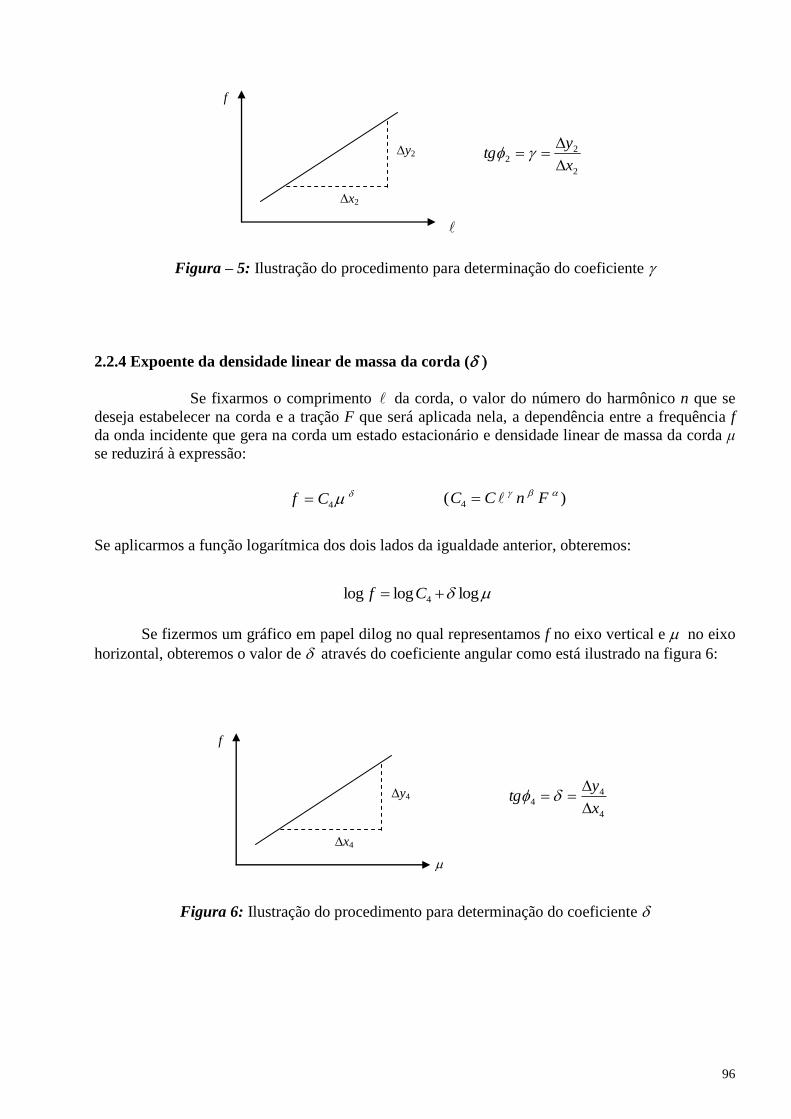
96
Figura – 5: Ilustração do procedimento para determinação do coeficiente
2.2.4 Expoente da densidade linear de massa da corda (
Se fixarmos o comprimento da corda, o valor do número do harmônico n que se
deseja estabelecer na corda e a tração F que será aplicada nela, a dependência entre a frequência f
da onda incidente que gera na corda um estado estacionário e densidade linear de massa da corda μ
se reduzirá à expressão:
Se aplicarmos a função logarítmica dos dois lados da igualdade anterior, obteremos:
Se fizermos um gráfico em papel dilog no qual representamos f no eixo vertical e no eixo
horizontal, obteremos o valor de através do coeficiente angular como está ilustrado na figura 6:
Figura 6: Ilustração do procedimento para determinação do coeficiente
4
44
x
ytg
f
y4
x4
2
22
x
ytg
f
y2
x2
4Cf )( 4
FnCC
logloglog 4 Cf

97
2.3 Determinação da constante C
Para a determinação da constante C, uma vez determinados os parâmetros , , e , pode-
mos realizar o seguinte procedimento:
1. Escolhemos em um dos gráficos dilog construídos para a determinação dos expoentes, o va-
lor de frequência f’ correspondente ao valor da variável representada no eixo horizontal do
gráfico escolhido; PARA ESTA ESCOLHA, USE O GRÁFICO E NÃO OS VALORES
DA TABELA QUE DEU ORIGEM AO GRÁFICO.
2. Verificamos na tabela correspondente ao gráfico escolhido, quais os valores das grandezas
que foram mantidas constantes para a coleta de dados que deram origem àquele gráfico;
3. Substituindo estes valores na equação da frequência e isolando o termo em C, obtemos o va-
lor da constante numérica (adimensional), conforme ilustrado na equação abaixo:
MUITO IMPORTANTE:
1. É aconselhável que sejam utilizados os expoentes da expressão teórica (Lei de Mersènne) e
não os valores obtidos a partir dos coeficientes angulares dos gráficos dilog (conforme o
procedimento experimental detalhado em 2.2), pois acumulando-se os erros das determina-
ções experimentais destes expoentes com os que, certamente, ocorreram durante a tomada
das medidas experimentais, o valor da constante numérica C pode ficar muito distante do
valor esperado segundo a teoria.
2. Para melhorar a determinação de C, eliminando possíveis erros de construção dos gráficos, o
procedimento acima deverá ser aplicado a cada gráfico (basta um valor para cada gráfico),
determinando-se vários valores Ci da constante adimensional. O valor médio dos obtidos pe-
lo procedimento, seria um valor mais apurado de C.
3. MATERIAL NECESSÁRIO
- gerador de áudio
- amplificador
- vibrador (alto-falante com pino vibratório ou sistema equivalente)
- fios de nylon
- polia
- porta-massas
- massas diversas
- régua
nF
fC
'

98
4. PROCEDIMENTO EXPERIMENTAL
Monte o seguinte experimental conforme mostra a ilustração esquemática da figura 7:
Figura 7: Ilustração esquemática da montagem experimental
4.1 Variação da frequência com a força aplicada na corda (use g = 10m/s2)
Fixe o comprimento e o tipo de corda (densidade µ) para esta fase do experimento, con-
forme os valores citados abaixo. Altere a tração F, alterando o valor da massa colocada no porta-
massas, e ajuste a frequência de ressonância f no gerador de áudio para a obtenção do segundo
harmônico (n = 2), preenchendo a Tabela 1.
Manter fixo: ℓ = 1,0 m, n = 2 e = 4,78.10-4
kg/m (diâmetro = 0,70 mm)
Tabela 1: Dados para determinação do expoente
Massa (g) m 100 150 200 250 300
Força (N) = m.g F 1,50 2,00 2,50 3,00 3,50
Frequência (Hz) f
IMPORTANTE: Os valores de força F correspondem aos valores de massas adicionadas no
porta-massas, acrescidos da massa do próprio porta-massas que é de 50g.
4.2 Variação da frequência com a ordem do estado estacionário
Mantendo a mesma corda do item anterior () e o mesmo comprimento da corda, aplique
uma força de tração F. Determine as frequências de ressonância f da corda para a observação dos
diferentes harmônicos (n), preenchendo a Tabela 2.
Manter fixo: F = 1,50 N, ℓ = 1,0m e = 4,78.10-4
kg/m (diâmetro = 0,70 mm)
Tabela 2: Dados para determinação do expoente
ordem n 1 2 3 4
Frequência (Hz) f
Gerador
de áudio Amplificador

99
4.3 Variação da frequência com o comprimento da corda
Mantendo a mesma corda do item anterior () e a mesma tração (F ), varie o comprimento
da corda e observe a frequências de ressonância f para a obtenção do segundo harmônico
(n = 2), preenchendo a Tabela 3.
Manter fixo: F = 1,50 N, n = 2 e = 4,78.10-4
kg/m (diâmetro = 0,70 mm)
Tabela 3: Dados para determinação do expoente
Comprimento (m) L 1,0 0,9 0,8 0,7 0,6
Frequência (Hz) f
4.4 Variação da frequência com a densidade linear de massa da corda
Mantenha a força de tração da corda em F = 1,50 N (adicionando 100g ao porta-massas).
Mantenha a posição do alto-falante (vibrador) de modo que as cordas possuam mesmo comprimen-
to ℓ = 1,0 m. Substitua a corda e observe a frequência de ressonância f para a obtenção do segundo
harmônico (n = 2), preenchendo a Tabela 4.
Manter fixo: F = 1,50 N, n = 2 e ℓ = 1,0 m
Tabela 4: Dados para determinação do expoente
Diâmetro (mm) 0,50 0,60 0,70 0,80
Densidade (kg/m) 2,43.10-4
3,47.10-4
4,78.10-4
5,89.10-4
Frequência (Hz) f
5. CÁLCULOS E RESULTADOS
Com os dados das tabelas construa os gráficos em papel dilog da frequência f no eixo verti-
cal em função de cada uma das variáveis ( ordem n do harmônico, comprimento da corda, força
tensora F aplicada nela e densidade linear de massa da corda) representadas no eixo horizontal.
LEMBRE-SE: pode ser necessária a utilização de mais do que uma escala decádica (potên-
cia de 10 a ser adotada no eixo) para certas grandezas. Portanto, seria bom que cada tabela fosse
representada em um papel dilog independente, para que não ocorra confusão na determinação dos
expoentes. Note, ainda, que alguns dos expoentes serão positivos (funções crescentes) e outros ne-
gativos (função decrescente).
Extraia de cada um dos gráficos dilog o valor experimental do expoente correspondente.
Compare-o com o valor teórico que lhe corresponde segundo o esperado na expressão teórica (Lei
de Mersènne) e obtenha o erro percentual para cada caso:
100.exp
expexp%
exp
teorico
teorico
oente
oenteoenteE
onde: expoenteexp é o obtido a partir dos gráficos dilog
expoenteteórico é o descrito na expressão da Lei de Mersènne

100
Utilizando os valores de n, , F ou que ficaram fixos em cada fase e cada um dos gráficos
dilog construídos, que fornecem frequência f de vibração da corda no estado estacionário em fun-
ção de cada uma das variáveis válidas em cada tabela, e substituindo os valores teóricos dos expo-
entes, determine o valor da constante numérica C. Encontra um valor de C associado a cada gráfico
(que, eventualmente, podem ser iguais).
CUIDADO: Use os valores obtidos de f e da respectiva variável no eixo das abscissas, associadas
às grandezas mantidas fixas naquele tabela que deu origem ao gráfico que você está utilizando. Os
valores de f e da variável NÃO DEVEM SER OS DA TABELA, pois são valores pontuais que,
geralmente, nem pertencem ao gráfico traçado e, portanto, não dizem respeito à reta cuja constante
você procura.
Determine o valor médio dos valores de C encontrados e compare este valor com o expresso
na Lei de Mersènne. Calcule o erro percentual, onde o valor experimental é o obtido da média dos
valores de C determinados a partir dos gráficos e valores de cada tabela e o teórico é o dado pela
Lei de Mersènne.
100C
CC%E
teorico
teoricoexp
6. CONCLUSÕES
Justifique os erros encontrados (possíveis fontes experimentais, formas de determinação,
aproximações nos cálculos, etc.).
Pelos resultados obtidos para os expoentes e para a constante numérica, pode-se afirmar que
a expressão teórica foi comprovada? Justifique.
7. EXERCÍCIOS
1. Em um experimento de cordas vibrantes, obteve-se que a ressonância da corda para n = 2,
L = 1,4 m, F = 2,6 N ocorria em uma frequência f = 120 Hz. Determine o diâmetro desta corda,
sabendo-se que a densidade volumétrica do material vale 3,36.102 kg/m
3. ( = 0,6 mm)
2. Um aluno realizou um experimento de cordas vibrantes e cometeu um erro, deixando de consi-
derar a massa do porta-massas, para a determinação da força de tração. No entanto, o experi-
mento foi feito com instrumentos que permitiam obter uma grande precisão nos dados coleta-
dos. Sabendo-se que a frequência de ressonância obtida por ele foi f = 102 Hz, para n = 2, L =
0,9 m e = 1,69.10-4
kg/m e que a massa que estava suspensa era de 120 g, determine o valor
aproximado da massa do porta-massas. (m = 22 g)
3. Em um experimento de cordas vibrantes a frequência de ressonância é de 125 Hz quando a força
de tração é de 2,6 N. Qual o valor esperado para a frequência de ressonância, quando a corda for
tracionada com uma força de 4,6 N? ( f’ = 166 Hz)
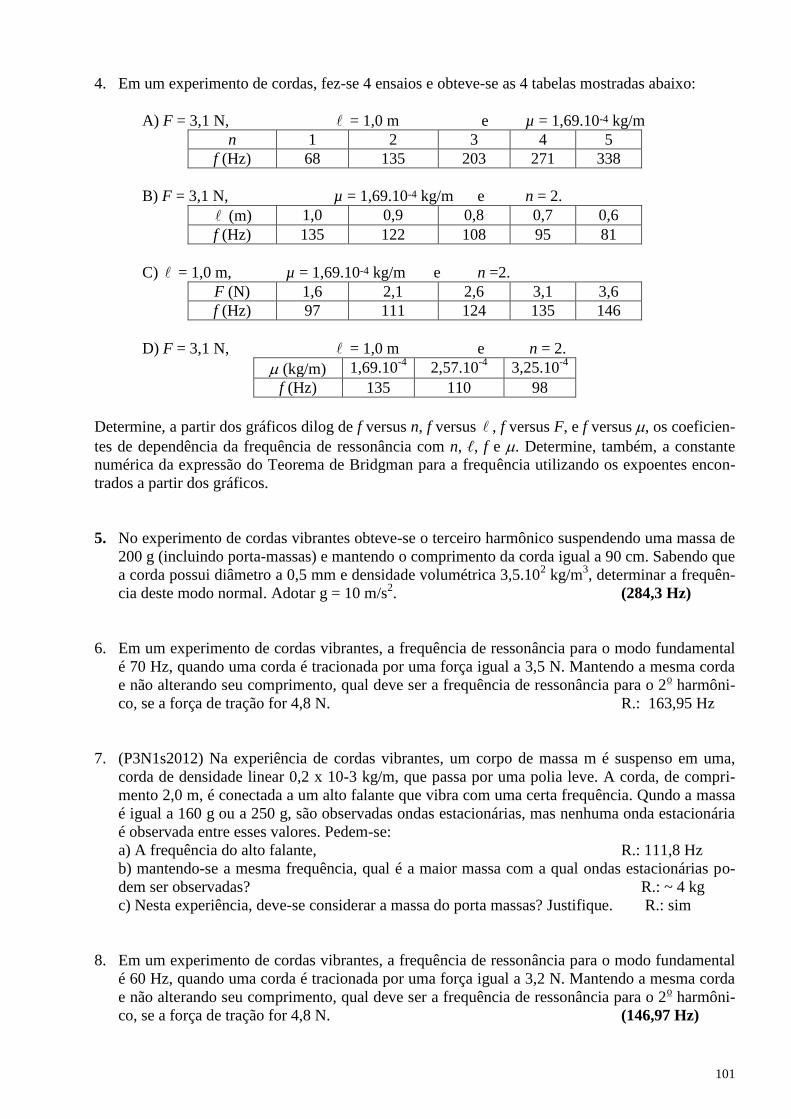
101
4. Em um experimento de cordas, fez-se 4 ensaios e obteve-se as 4 tabelas mostradas abaixo:
A) F = 3,1 N, = 1,0 m e µ = 1,69.10-4 kg/m
n 1 2 3 4 5
f (Hz) 68 135 203 271 338
B) F = 3,1 N, µ = 1,69.10-4 kg/m e n = 2.
(m) 1,0 0,9 0,8 0,7 0,6
f (Hz) 135 122 108 95 81
C) = 1,0 m, µ = 1,69.10-4 kg/m e n =2.
F (N) 1,6 2,1 2,6 3,1 3,6
f (Hz) 97 111 124 135 146
D) F = 3,1 N, = 1,0 m e n = 2.
(kg/m) 1,69.10-4
2,57.10-4
3,25.10-4
f (Hz) 135 110 98
Determine, a partir dos gráficos dilog de f versus n, f versus , f versus F, e f versus , os coeficien-
tes de dependência da frequência de ressonância com n, ℓ, f e . Determine, também, a constante
numérica da expressão do Teorema de Bridgman para a frequência utilizando os expoentes encon-
trados a partir dos gráficos.
5. No experimento de cordas vibrantes obteve-se o terceiro harmônico suspendendo uma massa de
200 g (incluindo porta-massas) e mantendo o comprimento da corda igual a 90 cm. Sabendo que
a corda possui diâmetro a 0,5 mm e densidade volumétrica 3,5.102 kg/m
3, determinar a frequên-
cia deste modo normal. Adotar g = 10 m/s2. (284,3 Hz)
6. Em um experimento de cordas vibrantes, a frequência de ressonância para o modo fundamental
é 70 Hz, quando uma corda é tracionada por uma força igual a 3,5 N. Mantendo a mesma corda
e não alterando seu comprimento, qual deve ser a frequência de ressonância para o 2o harmôni-
co, se a força de tração for 4,8 N. R.: 163,95 Hz
7. (P3N1s2012) Na experiência de cordas vibrantes, um corpo de massa m é suspenso em uma,
corda de densidade linear 0,2 x 10-3 kg/m, que passa por uma polia leve. A corda, de compri-
mento 2,0 m, é conectada a um alto falante que vibra com uma certa frequência. Qundo a massa
é igual a 160 g ou a 250 g, são observadas ondas estacionárias, mas nenhuma onda estacionária
é observada entre esses valores. Pedem-se:
a) A frequência do alto falante, R.: 111,8 Hz
b) mantendo-se a mesma frequência, qual é a maior massa com a qual ondas estacionárias po-
dem ser observadas? R.: ~ 4 kg
c) Nesta experiência, deve-se considerar a massa do porta massas? Justifique. R.: sim
8. Em um experimento de cordas vibrantes, a frequência de ressonância para o modo fundamental
é 60 Hz, quando uma corda é tracionada por uma força igual a 3,2 N. Mantendo a mesma corda
e não alterando seu comprimento, qual deve ser a frequência de ressonância para o 2o harmôni-
co, se a força de tração for 4,8 N. (146,97 Hz)

102
9 Numa experiência sobre “Cordas Vibrantes”, uma corda de comprimento L e densidade linear de
massa µ é posta a vibrar com as 2 extremidades fixas. Determinou-se em 252 Hz a frequência de
oscilação de certo modo de vibração e, para o modo seguinte, 336 Hz. Sabendo que L = 1 m e
µ = 2,43 x 10-4
kg/m,
a) Determinar a frequência de oscilação do modo fundamental;
b) Para a corda vibrando com 252 Hz, esboce o modo de vibração e determine o comprimento
de onda. c) Determinar a tensão na corda. (84Hz;0,667m;6,86 N)
10 Nos esquemas apresentados ao lado, as cordas 1 e 2 vibram com mesma amplitude, têm mesmo
comprimento mas têm densidades lineares de
massas () diferentes. Sabe-se que a fre-
quência de oscilação da corda 1 é duas vezes
maior que a da corda 2. Pedem-se:
(a) Se as massas m1 e m2 são iguais, qual
corda tem menor densidade linear de massa? Justifique.
(b) Mantendo-se a frequência da corda 1 duas vezes maior que a da corda 2, para as cordas vi-
brarem no mesmo harmônico deve-se aumentar ou diminuir o valor da massa m2? Justifique sua
resposta. (Resp.: corda 1 tem menor densidade; aumentar o valor da massa m2)
11 Numa experiência sobre “Cordas Vibrantes”, um grupo resolveu unir 2 cordas de densidades
diferentes, tracionando-as através de uma massa m = 55,6g,
conforme mostra a figura ao lado. Sabendo que o ponto de
união entre as cordas, identificado por X na figura, não osci-
la, 1 = 2,43 x 10-4
kg/m, 2 = 5,89 x 10-4
kg/m, g = 10 m/s2,
L1 + L2 = 1,00 m e que uma corda oscila no primeiro har-
mônica e a outra oscila no segundo, pedem-se:
(a) Determine a velocidade de propagação das ondas em cada corda;
(b) Se uma das cordas vibra em seu estado fundamental e a outra no 2º modo (harmônico), de-
termine os possíveis valores dos comprimentos L1 e L2;
(c) Determine a frequência de vibração para as situações obtidas no item anterior.
103
08 – VELOCIDADE DO SOM
1. OBJETIVOS DA EXPERIÊNCIA
Medir a velocidade do som no meio ambiente da sala do laboratório. Verificar, a partir dos
resultados, a compatibilidade entre os resultados obtidos e as expectativas da teoria de ondas em
meios gasosos.
2. FUNDAMENTAÇÃO TEÓRICA
2.1 Onda sonora
Ondas sonoras são ondas mecânicas longitudinais, produzidas através da compressão e rare-
fação da matéria. Essas ondas necessitam de um meio para se propagar como por exemplo, sólidos,
líquidos ou gases. Quando as ondas sonoras se propagam, as partículas deste meio vibram e geram
variações de pressão P e de densidade da matéria que ocupa o meio, na direção da propagação da
onda. Desta forma, uma sequência de regiões de compressão e rarefação são geradas na direção do
deslocamento desta onda.
A velocidade do som também depende do meio onde se propaga, pois esta depende da elas-
ticidade do meio. Em geral, o som se propaga mais rapidamente nos sólidos (vferro = 5130 m/s) do
que nos líquidos (vágua (25oC) = 1493 m/s) e nos gases (var (0
oC) = 331 m/s). Isto ocorre devido ao efei-
to da pressão, da densidade e da massa molecular do meio. Se um meio compressível tiver módulo
de compressibilidade B e a densidade de massa , a velocidade do som neste meio pode ser dada
por:
Bv
onde: B = V/V
p
(módulo de compressibilidade)
sendo: p : variação de pressão
VV / : variação fracional do volume
Nos gases ideais a velocidade do som pode ser calculada a partir da equação abaixo:
M
TRvsom
onde : é a constante da transformação adiabática do gás
R é a constante universal dos gases perfeitos
M é a massa molecular do gás
T é a temperatura absoluta
(1)

104
2.2 Velocidade do som no ar seco
Considerando, de forma um tanto ousada, o ar em pressões até 1atm e isento de impurezas e
de vapor de água com comportamento próximo ao de um “gás perfeito” e sabendo-se que:
R = 8,314 J/mol K
e que, para o ar: = 1,4
M = 28,95 (g/mol) para o ar seco
e, ainda, substituindo-se estes valores na equação (1), temos:
T05,20v )osecar(som (2)
onde: somv é descrito em m/s
T = 273 + θ é descrito em (K) (θ é a temperatura descrita em oC) (3)
Fazendo este cálculo para o ar seco a 0oC temos aproximadamente 331,5 m/s, ou 1200km/h.
Já, a uma temperatura de aproximadamente 20 oC temos 343m/s ou 1235km/h. Por outro lado, po-
demos reescrever a equação (2) substituindo o valor da temperatura absoluta pela expressão que a
determina em função da temperatura relativa como indicado na equação (3):
273.05,20)sec( oarsomv
A equação (4) pode, ainda, ser escrita de forma simplificada se o valor da temperatura em
grau celsius for muito pequena em comparação com o valor 273, ou seja: se θ <<< 273 (valores de
temperatura de até, aproximadamente, 50oC). Neste caso, a equação (4) admite um cálculo aproxi-
mado que pode ser obtido por aplicação da expansão binomial de Newton:
2732127305,2027305,2027305,20v 21
)osecar(som
Resolvendo as contas indicadas, obtém-se:
arnosomv = 331,5 + 0,6 θ(oC) (5)
Além disso, a velocidade do som no ar também pode ser escrita de outra forma, substituin-
do-se na expressão de velocidade do som em meio gasoso a temperatura absoluta a partir da equa-
ção de Clapeyron:
TRnVp ou seja: Rn
VpT
onde: p é a pressão atmosférica na região de propagação
V é o volume do ar envolvido no processo
n é o número de moles de ar no volume V
Por outro lado, sabemos que o número de moles de um gás pode ser obtido pela razão entre
a massa de gás no volume considerado e a massa molar do gás:
M
mn
(4)
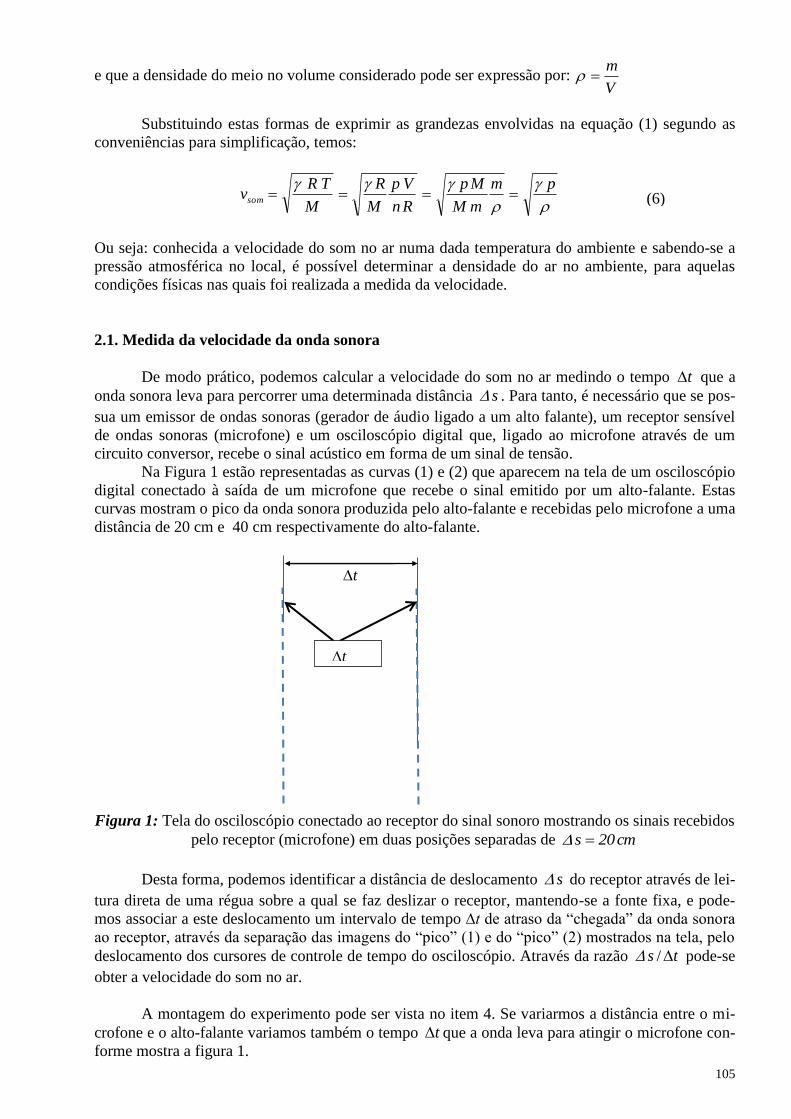
105
e que a densidade do meio no volume considerado pode ser expressão por: V
m
Substituindo estas formas de exprimir as grandezas envolvidas na equação (1) segundo as
conveniências para simplificação, temos:
pm
mM
Mp
Rn
Vp
M
R
M
TRvsom
Ou seja: conhecida a velocidade do som no ar numa dada temperatura do ambiente e sabendo-se a
pressão atmosférica no local, é possível determinar a densidade do ar no ambiente, para aquelas
condições físicas nas quais foi realizada a medida da velocidade.
2.1. Medida da velocidade da onda sonora
De modo prático, podemos calcular a velocidade do som no ar medindo o tempo t que a
onda sonora leva para percorrer uma determinada distância s . Para tanto, é necessário que se pos-
sua um emissor de ondas sonoras (gerador de áudio ligado a um alto falante), um receptor sensível
de ondas sonoras (microfone) e um osciloscópio digital que, ligado ao microfone através de um
circuito conversor, recebe o sinal acústico em forma de um sinal de tensão.
Na Figura 1 estão representadas as curvas (1) e (2) que aparecem na tela de um osciloscópio
digital conectado à saída de um microfone que recebe o sinal emitido por um alto-falante. Estas
curvas mostram o pico da onda sonora produzida pelo alto-falante e recebidas pelo microfone a uma
distância de 20 cm e 40 cm respectivamente do alto-falante.
Figura 1: Tela do osciloscópio conectado ao receptor do sinal sonoro mostrando os sinais recebidos
pelo receptor (microfone) em duas posições separadas de cm20s
Desta forma, podemos identificar a distância de deslocamento s do receptor através de lei-
tura direta de uma régua sobre a qual se faz deslizar o receptor, mantendo-se a fonte fixa, e pode-
mos associar a este deslocamento um intervalo de tempo ∆t de atraso da “chegada” da onda sonora
ao receptor, através da separação das imagens do “pico” (1) e do “pico” (2) mostrados na tela, pelo
deslocamento dos cursores de controle de tempo do osciloscópio. Através da razão s / t pode-se
obter a velocidade do som no ar.
A montagem do experimento pode ser vista no item 4. Se variarmos a distância entre o mi-
crofone e o alto-falante variamos também o tempo t que a onda leva para atingir o microfone con-
forme mostra a figura 1.
(6)
t
t

106
3. MATERIAL UTILIZADO
- osciloscópio
- microfone
- gerador de onda quadrada
- alto falante
- circuito amplificador de sinal
- régua
- termômetro digital
4. PROCEDIMENTO EXPERIMENTAL
Monte o experimento conforme Figura 2 mostrada abaixo:
s s
( )2 ( )1
"Trigger"RS-232
Figura – 2: Ilustração da montagem experimental
Siga as instruções indicadas abaixo:
a) Posicione o microfone a uma distância inicial, a mais próxima possível do alto-falante;
b) Ligue o amplificador, o gerador de áudio e o osciloscópio;
c) Ajuste o gerador de áudio para uma frequência de 250 Hz;
d) No osciloscópio verifique se as funções estão ativas: “Run”, “ Edge”, “Cursors “, “(canal) 1” e
“AC”;
e) Identifique o pulso que será tomado como referência;
f) Ajuste o cursor X1 do osciloscópio de forma a coincidir com o pico do pulso escolhido, quando
o microfone está na posição inicial. Para ajustar os cursores é preciso acionar na sequência os
botões “Cursors”, X, X1 e (que é um botão situado muito próximo da tela e tem este sinal).
g) Ajustada a posição do cursor X1, aperte o botão correspondente ao cursor X2 e não retorne mais
ao X1 até a coleta final dos dados, pois sua posição inicial será a “referência de tempo”;
h) Varie a distância s entre o alto-falante e o microfone de 5 cm em 5cm e ajuste a posição do
cursor X2 para obter o intervalo de tempo t (identificado na tela do osciloscópio como x )
correspondente ao s provocado no microfone;
i) Faça várias medidas conforme tabela do item 5.1 (a quantidade de pontos a serem estudados
deve ser fornecida pelo professor da turma) e calcule a velocidade média do som no ar;
j) Meça a temperatura ambiente;
k) Calcule a velocidade teórica (usando a equação (5)) e compare com o valor experimental;
gerador de
onda qua-
drada microfone
osciloscópio cursores

107
l) Calcule a densidade do ar, substituindo na equação (6) a velocidade do som encontrada experi-
mentalmente e o valor da pressão fornecida pelo professor e válida para São Bernardo do Cam-
po.
5. TABELAS E RESULTADOS
5.1. Medidas
Medida s (m) t (s) vsom = s/t
01
02
03
04
05
06
07
08
09
10
N
vv
somi
som
exp smvsom exp
5.2. Velocidade teórica para a temperatura do ar ambiente:
arnosomv = 331,5 + 0,6 T(oC)
θambiente = ( Co )
v teórico do som no ar = m/s
100.v
vv%E
t
expt = %
5.3. Densidade do ar ambiente:
pv
2v
p com: )(4,1 adiabática
0p = 1 atm 1,013 x 105 N/m
2 ( o = 0 Co ) 0 = 1,293 kg/m
3
SBCampop 700 mm Hg 0,933 x 105 N/m
2 (1 mmHg = 133,3 N/m
2 )
= kg/m3
108
6. CONCLUSÕES
Responda às questões:
1. O valor da velocidade do som obtida experimentalmente é aceitável?
2. A densidade do ar ambiente (leve em conta que nem a temperatura do meio é 0 oC, nem es-
tamos ao nível do mar!) corresponde ao esperado? Justifique suas respostas com argumentos
físicos e/ou estatísticos.
3. Utilizando a equação (1) de velocidade do som em gases ideais, determine a velocidade do
som nos gases nobres (veja quais são e quais os valores de sua massa molar em uma tabela
periódica) quando a temperatura é θ = 0oC.
7. EXERCÍCIOS
1. Fazer os exercícios 15.1, 15.2, 15.3, 15.4 e 15.5 da página 131 do livro texto (12ª. edição).
2. Quando o som sai do ar e penetra na água, sua frequência se altera? E seu comprimento de on-
da? E sua velocidade? E se o som é produzido em uma corda e se propaga pelo ar, o que ocorre
com a frequência, o comprimento de onda e a velocidade? Explique suas respostas.
3. Após obter um ótimo resultado na determinação da velocidade do som, um grupo calculou a
densidade do ar no ambiente do laboratório (). Comparando-a com o valor da densidade do ar
a 0 oC ao nível do mar (o), espera-se que o valor de seja maior, menor ou igual a o. Justifi-
que. ( < o)
4. Em um teste, um avião voando a uma altitude de 100 m produz ondas sonoras com nível de
intensidade de 150 dB, percebidos por uma pessoa no solo. Supondo que o som se propaga
igualmente em todas as direções, que o ar é um gás diatômico de densidade volumétrica 1,29
kg/m3 e massa molar 29 g/mol e que a temperatura ambiente é 22
oC, pede-se:
a) a velocidade de propagação do som nessas condições; (344,12 m/s)
b) a amplitude de pressão da onda sonora produzida; (942,9 Pa)
c) a altitude que o jato precisa voar para que o som não ultrapasse
o limiar de dor de 120 dB. (3,16 km)
5. Suponha que um diafragma de alto falante vibre com amplitude de 0,020 mm para produzir uma
onda sonora de frequência 300 Hz com potência de 0,245 W. Sendo ar = 1,29 kg/m3 e vsom no ar
= 340 m/s. Determinar:
a) a amplitude de pressão da onda sonora, e (16,53 Pa)
b) a intensidade e o nível de intensidade sonora do som a
5,0 m do alto falante (7,8 x 10-4
W/m2 e 88,9 dB)

109
6. Uma corda de violão fixa nas duas extremidades e tracionada por uma força de 156,00 N, é
tocada para produzir uma nota “lá”, com frequência de 440 Hz. A onda sonora produzida se
propaga pelo ar com amplitude de deslocamento de 1,43 x 10-8
m. Sabe-se que 0,05 s após ser
produzida a onda sonora chega aos ouvidos de uma pessoa que se encontra a 17,50 m de dis-
tância do violão. Considere que o meio (o ar) é uniforme e que a onda sonora se propaga
igualmente em todas as direções. Considere ainda: densidade volumétrica do ar = 1,293 kg/m3
e densidade linear de massa da corda do violão: 9,948 x 10-4
kg/m. Pedem-se:
a) A velocidade de propagação do som na corda. (396,0 m/s)
b) A velocidade de propagação do som no ar. (350,0 m/s)
c) A amplitude de pressão da onda sonora que se propaga pelo ar. (17,9 x 10-3
Pa)
d) O nível de intensidade sonora percebido pelo ouvinte. (55 dB)
7. O som de uma sirene é emitido em todas as direções. A 8,0 m da sirene, o nível de intensidade
sonora é de 32 dB. Sabe-se que: frequência do som: 250 Hz, temperatura ambiente: 25 oC;
pressão atmosférica: 1,0 x 105 Pa. Desprezando os efeitos de reflexão das ondas sonoras no so-
lo, pedem-se:
a) a velocidade de propagação do som nessas condições; (347,1 m/s)
b) a amplitude de pressão a 8,0 m da fonte sonora, e (1,15 x 10-3
Pa)
c) a distância da sirene em que o nível de intensidade sonora é de 50 dB. (~ 1,0 m)
Dados: = 1,4 Mar = 28,8 g/mol ar = 1,2 kg/m3
8. O som emitido por um instrumento musical tocando certa nota possui frequência de 524 Hz e
apresenta nível de intensidade sonora de 50 dB a 8 m do mesmo. Suponha que esse sm se pro-
paga igualmente em todas as direções. Considerando como sendo 344 m/s a velocidade de pro-
pagação do som no ar e usando 1,2 kg/m3 para a densidade volumétrica do ar, calcular:
a) a amplitude de pressão e a amplitude de deslocamento a 8 m da fonte
b) a que distância deve-se estar do instrumento para aumentar o nível de intensidade sonora
em 10 dB? (9,09 x 10-3
Pa e 6,69 x 10-9
m; 2,53 m)

110
REFERÊNCIAS COMPLEMENTARES E SUGESTÕES DE LEITURAS
1. SQUIRES, G. L. Practical Physics. 3. ed. Cambridge: Cambridge University Press, 1998.
2. NUSSENZVEIG, H. M. Curso de Física Básica. v. 2 São Paulo: Ed. Edgard Blücher, 1997.
3. KELLER, F. J., GETTYS, W. E., SKOVE, M. J. Física. v. 2 São Paulo: Makron Books do Bra-
sil, 1997.
4. YOUNG, H. D., FREEDMAN, R. A. Física II - Termodinâmica e Ondas 12. ed. São Paulo:
Pearson Education do Brasil, 2008.
5. SERWAY, R.E., JEWETT Jr., J. W. Princípios de Física. v. 2 São Paulo: Pioneira Thomson
Learning, 2004.
6. HALLIDAY, D., RESNICK, R., KRANE, K.S. Física 2. Rio de Janeiro: Livros Técnicos e
Científicos Editora S.A., 1996.
7. ALONSO, M., FINN, E. J. Física. São Paulo: Addison-Wesley Longman do Brasil Ltda.,
1999.
8. TIPLER, P. Física - Termodinâmica e Ondas. Rio de Janeiro: Ed. Guanabara Koogan, 1995.
9. BOYCE, W.E., DIPRIMA, R.C. Equações Diferenciais Elementares e Problemas de Valores
de Contorno. 3. ed. Rio de Janeiro: Editora Guanabara Dois, 1979.