luiz rijo com
TRANSCRIPT
Luiz Rijo
Álbebra Linearcom
Mathematica
EA B
F G
BA
CAPÍTULO 1
Espaços VetoriaisIniciar o MathKernel
In[1]:= 2 + 2
Out[1]= 4
A noção de espaço vetorial é a base do estudo que faremos; é o terreno onde se desenvolve toda a ÁlgebraLinear: Esta seção apresenta os axiomas de espaço vetorial, deduz suas conseqüências mais imediatas e exibe osexemplos mais importantes dessa noção.
Um espaço vetorial E é um conjunto, cujos elementos são chamados vetores, no qual estão definidos duas oper-
açõses: a adição, que a cada par de vetores u, v œ E faz corresponder un novo u + v œ E, chamado a soma de u e
v, e a multiplicação por um número real, que a cada número a œ e a cada vetor v œ E faz corresponder um
vetor av , chamado o produto de a por v . Essas operações devem satisfazer, para quaisquer a, b œ e u, v, w œE, as condições abaixo, chamadas os axiomas de espaço vetorial:
comutatividade: u + v = v + u;
associatividade: ( u + v) + w = u + ( v + w) e (ab)v = a(bv);
vetor nulo: existe um vetor 0 œ E, chamado vetor nulo, ou vetor zero, tal que v + 0 = 0 + v = v para todo v œ E;
inverso aditivo: para cada vetor v œ E existe um vetor -v œ E, chamado o inverso aditivo, ou o simétrico de v, talque -v + v = v + ( -v) = 0;
distributividade: (a + b )v = a v + b v e a (u + v) = a u + a v;
multiplicação por 1: 1 .v = v.
EXEMPLO 1.1 Para todo número natural n, o símbolo n representa o espaço vetorial euclidiano n-dimensional. Oselementos de n são as listas ordenadas u = Ha1, . . . , anL , v = Hb1, . . . , bnL de números reais.
Por definição, a igualdade vetorial u = v significa as n igualdades numéricas a1 = b1 , ..., an = bn .
Os números a1 , ..., an são chamados as coordenadas do vetor u. As operações do espaço vetorial n são definidapondo
u + v = Ha1 + b1 , . . ., an + bnL, g u = (g a1 ,...,g an ).
O vetor zero é, por definição, aquele cujas coordenadas são todas iguais a zero: 0 = (0, 0, ... ,0).
O inverso aditivo de u = (a1 ,...,an ). é -u = (- a1 ,...,- an ). Verifica-se, sem dificuldade, que estas definições fazem do
n espaço vetorial. Para n = 1 , tem-se 1 = = reta numérica, 2 é o plano euclidiano e 3 é o espaço euclidianotri-dimensional da nossa experiência cotidiana.
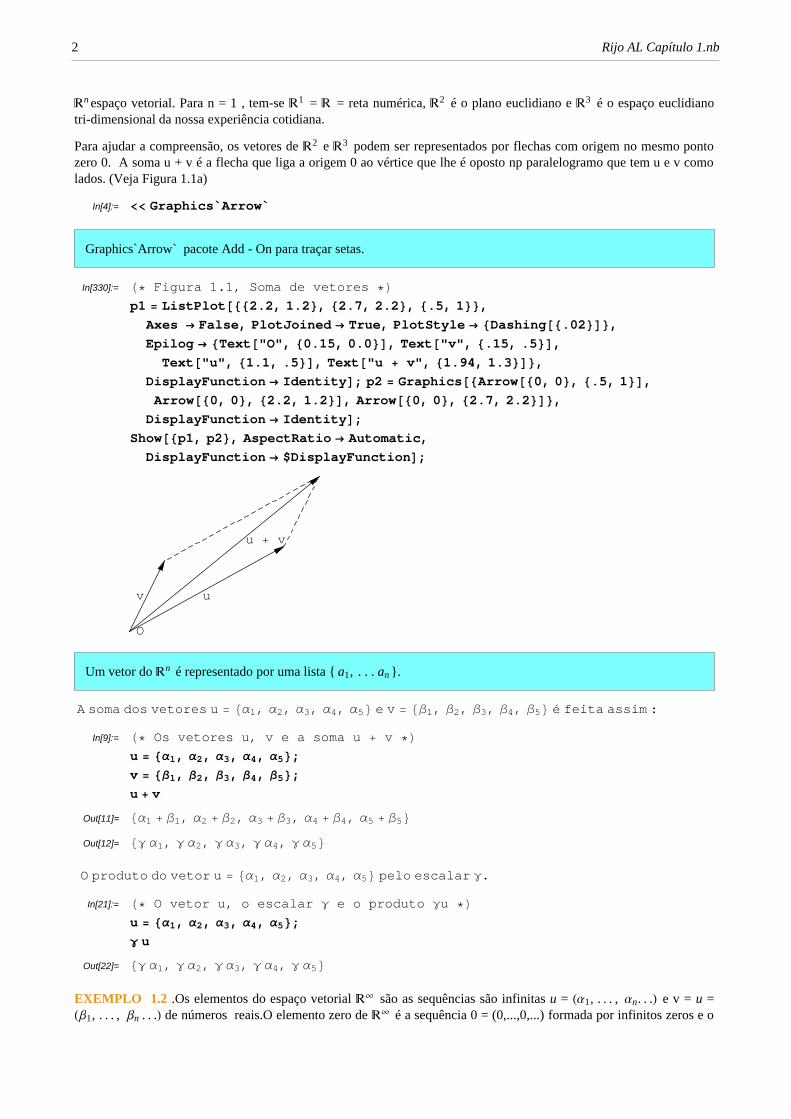
Para ajudar a compreensão, os vetores de 2 e 3 podem ser representados por flechas com origem no mesmo pontozero 0. A soma u + v é a flecha que liga a origem 0 ao vértice que lhe é oposto np paralelogramo que tem u e v comolados. (Veja Figura 1.1a)
In[4]:= << Graphics`Arrow`
Graphics`Arrow` pacote Add - On para traçar setas.
In[330]:= H∗ Figura 1.1, Soma de vetores ∗Lp1 = [email protected], 1.2<, 82.7, 2.2<, 8.5, 1<<,
Axes → False, PlotJoined → True, PlotStyle → [email protected]<D<,Epilog → 8Text@"O", 80.15, 0.0<D, Text@"v", 8.15, .5<D,
Text@"u", 81.1, .5<D, Text@"u + v", 81.94, 1.3<D<,DisplayFunction → IdentityD; p2 = Graphics@8Arrow@80, 0<, 8.5, 1<D,
Arrow@80, 0<, 82.2, 1.2<D, Arrow@80, 0<, 82.7, 2.2<D<,DisplayFunction → IdentityD;
Show@8p1, p2<, AspectRatio → Automatic,DisplayFunction → $DisplayFunctionD;
O
v u
u + v
Um vetor do n é representado por uma lista { a1, . . . an }.
A soma dos vetores u = 8α1, α2, α3, α4, α5< e v = 8β1, β2, β3, β4, β5< é feita assim :
In[9]:= H∗ Os vetores u, v e a soma u + v ∗Lu = 8α1, α2, α3, α4, α5<;v = 8β1, β2, β3, β4, β5<;u + v
Out[11]= 8α1 + β1, α2 + β2, α3 + β3, α4 + β4, α5 + β5<Out[12]= 8γ α1, γ α2, γ α3, γ α4, γ α5<
O produto do vetor u = 8α1, α2, α3, α4, α5< pelo escalar γ.
In[21]:= H∗ O vetor u, o escalar γ e o produto γu ∗Lu = 8α1, α2, α3, α4, α5<;γ u
Out[22]= 8γ α1, γ α2, γ α3, γ α4, γ α5<
EXEMPLO 1.2 .Os elementos do espaço vetorial ¶ são as sequências são infinitas u = Ha1, . . . , an. . .L e v = u =Hb1, . . . , bn . . .L de números reais.O elemento zero de ¶ é a sequência 0 = (0,...,0,...) formada por infinitos zeros e o
2 Rijo AL Capítulo 1.nb

inverso aditivo da sequência u = Ha1, . . . , an. . .L é -u = H-a1, . . . , -an. . .L .As operações de adição e multiplicaçãopor um número real são definidas por
u + v = Ha1 + b1, . . . , an + bn. . .L g u = Hga1, . . . , g an. . .L .
EXEMPLO 1.3 Uma matriz (real) m × n a = @aij D é uma lista de números reais aij com índices duplos, onde 1§ i § me 1§ j § n. Costuma-se representar a matriz a como um quadro numérico com m linhas e n colunas, no qual o elementoaij situa-se no cruzamento da i-ésima rn linha com a j-ésima coluna:
O vetor Hai1, ai2, . . . , ai nLœ n é o i-ésimo vetor-linha da matriz a e o vetor Ha1 j, a2 j, . . . , an jLœ m é o j-ésimovetor-coluna de a. Quando m = n, diz-se que a é uma matriz quadrada. O conjunto M(m × n) de todas as matrizes m ×n torna-se um espaço vetorial quando nele se define a soma das matrizes a = @aijD e b = @bijD como a + b = [aij + bij ] eo produto da matriz a pelo número real a como ga = @gaijD . A matriz nula 0 œ M(m × n) é aquela formada por zeros eo inverso aditivo da matriz a = @aijD e -a = @- aijD .
Uma matriz real m µ n a = @aij D é representada por uma lista de lista {{ a11, . . . a1 n },{ a21, . . . a2 n }, . . ., { am1, . . . amn }}
MatrixForm[lista] mostra os elementos da matriz num forma retangular.
A soma das matrizes
u =i
kjjjjjj
α11 α12 α13 α14α21 α22 α23 α24α31 α32 α33 α34
y
{zzzzzz e v =
i
k
jjjjjjjβ11 β12 β13 β14β21 β22 β23 β24β31 β32 β33 β34
y
{
zzzzzzz
In[17]:= H∗ As matrizes u, v e a soma u + v ∗Lu = 88α11, α12, α13, α14<, 8α21, α22, α23, α24<, 8α31, α32, α33, α34<<;v = 88β11, β12, β13, β14<, 8β21, β22, β23, β24<, 8β31, β32, β33, β34<<;MatrixForm@u + vD
Out[19]//MatrixForm=
i
k
jjjjjjjα11 + β11 α12 + β12 α13 + β13 α14 + β14α21 + β21 α22 + β22 α23 + β23 α24 + β24α31 + β31 α32 + β32 α33 + β33 α34 + β34
y
{
zzzzzzz
O produto da matriz u =i
kjjjjjj
α11 α12 α13 α14α21 α22 α23 α24α31 α32 α33 α34
y
{zzzzzz pelo escalar γ.
In[26]:= H∗ A matriz u, o escalar γ e o produto γu ∗Lu = 88α11, α12, α13, α14<, 8α21, α22, α23, α24<, 8α31, α32, α33, α34<<;MatrixForm@γ uD
Out[27]//MatrixForm=
i
kjjjjjj
γ α11 γ α12 γ α13 γ α14γ α21 γ α22 γ α23 γ α24γ α31 γ α32 γ α33 γ α34
y
{zzzzzz
EXEMPLO 1.4. .Seja X um conjunto não-vazio qualquer. O símbolo F(X; ) representa o conjunto de todas as funções reais f, g: X Ø.. Ele se torna um espaço vetorial quando se define a soma f + g de duas funções e o produto g.f do número g pela função f da maneira natural:
(f + g)(x) = f(x) +g(x), (gf)(x) = gf(x)
Valem num espaço vetorial E, como conseqiiências dos axiomas, as regras operacionais habitualmente usadas nasmanipulações numéricas. Vejamos algumas delas
Rijo AL Capítulo 1.nb 3

I. Se w + u = w + v então u = v. Em particula1, w + u = w implica u = 0 e w + u = 0 implica u = - w. Se w + u = wimplica w + u = w + 0, logo u = 0. E se w + u = 0 então w + u = w + (-w) logo u = -w.
2. Dados 0 œ e v œ E tem-se 0. v = 0 œ E. Analogamente, dados g œ e v œ E, vale g.0 = 0.
3. Se g ∫ 0 e v ∫ 0 então gv ∫ 0.
4. (-1) v = - v. Escreveremos u - v pera significar u + (-v). Evidentemente, u - v = w ó u = v + w.
EXEMPLO 1.5. Sejam u = (a, b) e v = (c, d) vetores em 2 com u ∫ 0, isto é.a ∫ 0 e b ∫ 0. A fim de que v sejamúltiplo de u, isto é, v = g u para algum g œ é necessário e suficiente que se tenha ad - bc ∫ 0. A necessidede éimediata pois v = gu signiftca c = ga e a = gb. Multiplicando a primeirn destas igoaldedee por b e a segunda por gobtemos bc = gab e ad = gab, logo ad = bc, ou seja, ad - bc = 0. Reciprocamente, se ad = bc então, supondo g ∫ 0obtemos d= (c/a)b. Além disso, é claro que c = (c/a)a. Logo, pondo g = c/a, vem d = gb e c = ga, isto é v = gu. Se for b∫ 0, tomeremos a =d/b pera ter v = gu.
Exercícios (ELL pág. 5)
1.1 Dadas as matrizes
a = J 1 −1 23 2 1
N , b = J 2 3 0−2 −3 1
N e c = J −4 −5 412 13 1 N
(a) Calcule a matriz 3 a - 2 b + c
In[8]:= H∗ Os vetores a, b, c e a soma 3 a −2 b +c ∗La = 881, −1, 2<, 83, 2, −1<<;b = 882, 3, 0<, 8−2, −3, 1<<;c = 88−4, −8, 4<, 812, 13, 1<<;MatrixForm@3 a − 2 b + cD
Out[11]//MatrixForm=
J −5 −17 1025 25 −4
N
(b) Ache os números a e b, ambos diferentes de zero, tais que a a + b b + c tenha a primeira coluna nula.
In[12]:= H∗ A matriz αa + βb + c ∗LMatrixForm@α a + β b + cD
Out[12]//MatrixForm=
J −4 + α + 2 β −8 − α + 3 β 4 + 2 α
12 + 3 α − 2 β 13 + 2 α − 3 β 1 − α + βN
In[13]:= H∗ Solução do sistema −4 + α + 2 β = 0, 12 + 3 α − 2 β = 0 ∗LSolve@8−4 + α + 2 β 0, 12 + 3 α − 2 β 0<, 8α, β<D
Out[13]= 88α → −2, β → 3<<
Resposta: a = -2 e b = 3.
Solve[eqns, vars] tenta resolver uma equação ou um sistema de equações com várias variáveis.
4 Rijo AL Capítulo 1.nb

In[14]:= H∗ Verificação do resultado ∗LMatrixForm@α a + β b + cD ê. 8α → −2, β → 3<
Out[14]//MatrixForm=
J 0 3 00 0 6
N
In[188]:= m = 882, 1<, 8−3, 4<<;b = 8−1, 2<;a = 8x, y<;m.a
Out[191]= 82 x + y, −3 x + 4 y<
In[192]:= [email protected] b, 8x, y<D
Out[192]= 99x → −611
, y →111
==
1.3 Ache o valor de t que torne a matriz abaixo igual à matriz nula:
ikjjj t2 - 1 t2 - t
t3 - 1 t2 - 3 t + 2y{zzz
In[213]:= H∗ Solução das equações t2 − 1 = 0,t2 − t = 0, t3 − 1 = 0, t2 + 3 t + 2 = 0, ∗Lm = 88t^2 − 1 , t^2 − t<, 8t^3 − 1 , t^2 − 3 t + 2<<;eq1 = Solve@m@@1, 1DD 0, 8t<D;eq2 = Solve@m@@1, 2DD 0, 8t<D;eq3 = Solve@m@@2, 1DD 0, 8t<D;eq4 = Solve@m@@2, 2DD 0, 8t<D;
In[218]:= Intersection@eq1, eq2, eq3, eq4DOut[218]= 88t → 1<<
Resposta: t = 1.
In[219]:= H∗ Verificação da resposta ∗LMatrixForm@mD ê. t → 1
Out[219]//MatrixForm=
J 0 00 0
N
1.4 Determine os vetores u, v œ 4 sabendo que as coordenadas de u são todas iguais, a última coordenadas de v é igual a 3 e u + v = (1, 2 ,3, 4).
In[220]:= H∗ Solução do sistema u1 + v1 = 1,u1 + v2 = 2, u1 + v3 = 3, v4 = 3 , u1 + v4 = 4 ∗L
Solve@8u1 + v1 1, u1 + v2 2, u1 + v3 == 3, v4 3, u1 + v4 4<,8u1, v1, v2, v3, v4<D
Out[220]= 88u1 → 1, v1 → 0, v2 → 1, v3 → 2, v4 → 3<<
Resposta: u = (1, 1, 1, 1} e v = (0, 1, 2, 3).
1.5 Dados u = (1, 2 ,3), v = (3, 2, 0) e w = (2, 0, 0), ache números a, b, g tais que a u + b v + g w = (1, 1, 1).
Rijo AL Capítulo 1.nb 5

In[234]:= H∗ Solução do sistema α + 3 β + 2 γ = 1, 2 α + 2 β = 1, 3 α = 1 ∗Lu = 81, 2, 3<; v = 83, 2, 0<; w = 82, 0, 0<;Solve@8α + 3 β + 2 γ 1, 2 α + 2 β 1, 3 α 1<, 8α, β, γ<D
Out[234]= 99α →13, β →
16, γ →
112
==
Resposta: α = 13 , β = 1
6 , γ = 112
In[235]:= H∗ Verificação da resposta ∗LFlatten@α u + β v + γ w ê. %D
Out[235]= 81, 1, 1<
1.16 Dados os vetores u = (1, 2 ,3), v = (3, 2, 1), w = (-3, 2, 7) em 3 , obtenha números a, b tais que w = a u + b v. Quantas soluções admite este problema?
In[240]:= H∗ Achar os vetores u, v e w ∗Lu = 81, 2, 3<; v = 83, 2, 1<; w = 8−3, −2, 7<;Solve@8α + 3 β −3, 2 α + 2 β 2, 3 α + β 7<, 8α, β<D
Out[241]= 88α → 3, β → −2<<
Resposta: a = 3 e b = -2. Admite uma única solução.
In[242]:= H∗ Verificação da resposta ∗LFlatten@α u + β v ê. %D
Out[242]= 8−3, 2, 7<
1.17 Sejam os vetores u = (1, 1), v = (1, 2), w = (2, 1). Ache números a, b, c, a, b, g, todos não-nulos, tais que au + b v + c w = a u + b v + g w, com a ∫ a, b ∫ b, g ∫ c.
In[246]:= H∗ Supondo α = 1, β = 2, γ = 3, determinar αu + βv + γw ∗Lu = 81, 1<; v = 81, 2<; w = 82, 1<;8α, β, γ< = 81, 2, 3<;α u + β v + γ w
Out[248]= 89, 8<
In[269]:= H∗ Supondo a = −4, determinar b e c tal −4 u + bv + cw = u + 2 v + 3 w ∗LClear@a, b, cD;Solve@8a −4, a + b + 2 c 9, a + 2 b + c 8<, 8a, b, c<D
Out[270]= 99a → −4, b →113
, c →143
==
Resposta: a = - 4, b = 11/3, c = 14/3, a = 1, b = 2, g = 3
In[271]:= H∗ Verificação da resposta ∗L8a, b, c< = 8−4, 11ê3, 14ê3<;8α, β, γ< = 81, 2, 3<;a u + b v + c w α u + β v + γ w
Out[273]= True
6 Rijo AL Capítulo 1.nb
CAPÍTULO 2
SubespaçosIniciar o MathKernel
In[1]:= 2 + 2
Out[1]= 4
Um subespaço vetorial do espaço vetorial E é um subconjunto F Õ E que, relativamente às operações de E, éainda um espaço vetorial. Os subespaços vetoriais constituem uma rica fonte de exemplos de espaços vetoriais,como se verá nas seções seguintes.
Seja E um espaço vetorial. Um subespaço vetorial (ou simplesmente um subespaço) de E é um subconjunto F Õ Ecom as seguintes propriedades:
1. 0 œ F;
2. Se u e v œ F então u + v œ F;
3. Se v œ F então, para todo a œ , av œ F .
Segue-se que se u e v pertencem ao subespaço F e a, b são números reais quaisquer então a.au + bv œ F. Mais
geralmente, dados v1 , ..., vm œ F e a1 , ..., am œ tem-se v = a1 v1 + . . . + am vm œ F.
O conjunto {0}, com o único elemento 0, e o espaço inteiro E são exemplos triviais de subespaços de E. Todosubespaço é, em si mesmo, um espaço vetorial.
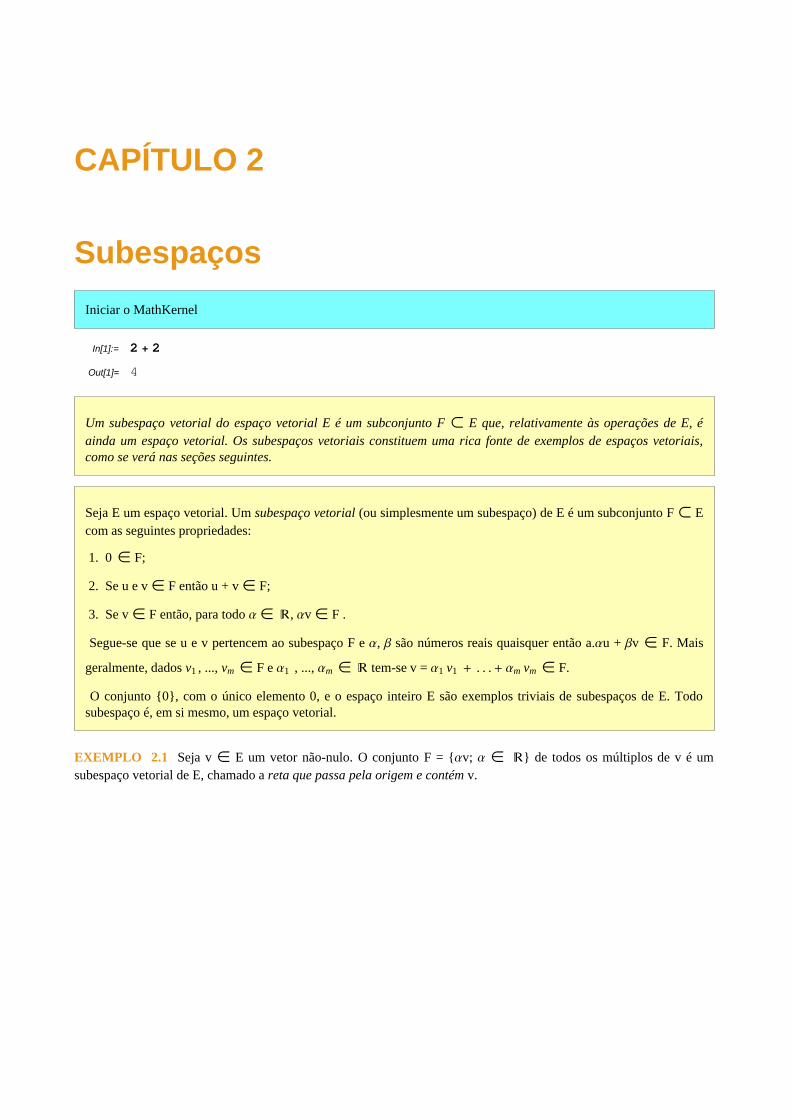
EXEMPLO 2.1 Seja v œ E um vetor não-nulo. O conjunto F = {av; a œ } de todos os múltiplos de v é umsubespaço vetorial de E, chamado a reta que passa pela origem e contém v.

In[22]:= H∗ Subespaços do plano HretasL gerados pelos vetores H1, −2L e H1, 4L ∗L<< Graphics`ImplicitPlot`ImplicitPlot@82 x + y 0, 4 x − y 0<, 8x, −5, 5<,
PlotStyle −> 8RGBColor@1, 0, 0D, RGBColor@0, 0, 1D<, PlotRange → 8−4, 4<D;
-4 -2 2 4
-4
-3
-2
-1
1
2
3
4
EXEMPLO 2.2 Seja E = F(; ) o espaço vetorial das funções reais de uma variável real f: Ø . Para cada k œN, o conjunto Ck () das funções k vezes continuamente deriváveis é um subespaço vetorial de E. Também sãosubespaços de E o conjunto C0 () das funções contínuas, o conjunto C¶ () das funções infinitamente deriváveis, oconjunto P = P() dos polinômios p(x) = a0 + a1 x + ...+ an xn e o conjunto Pn dos polinômios de grau § n. Para n, k
œ N quaisquer, "' tem-se:
C0 () Ck () Ck + 1 () C¶ () P Pn.
Observe que o conjunto dos polinômios de grau n não é um subespaço vetorial de E pois a soma de dois polinômios degrau n pode ter grau < n.
In[194]:= H∗ Soma dos ploninômios p1 e p2 de P4 ∗Lp1 = a0 + a1 t + a2 t2 + a3 t3 + a4 t4;p2 = b0 + b1 t + b2 t2 + b3 t3 + b4 t4;p1 + p2
Out[196]= a0 + t a1 + t2 a2 + t3 a3 + t4 a4 + b0 + t b1 + t2 b2 + t3 b3 + t4 b4
Organizando os temos obten − se a0 +
Ha1 + b1L t + Ha2 + b2L t2 + Ha3 + b3L t3 + Ha4 + b4L t4
In[201]:= H∗ Soma do ploninômio p1 de P4 pelo escalar α ∗Lp1 = a0 + a1 t + a2 t2 + a3 t3 + a4 t4;α p1 êê Expand
Out[202]= α a0 + t α a1 + t2 α a2 + t3 α a3 + t4 α a4
EXEMPLO 2.3 Sejam a1 , ..., an números reais. O conjunto H de todos os vetores espaços os vetores v =
Hx1, . . . , xnL œ n tais que
a1 x1 + . . . + an xn = 0
é um subespaço vetorial de n. No caso desinteressante em que a1 = . . . = an = 0, o subespaço H é todo n . Se, aocontrário, pelo menos um dos ai é ∫ de 0, H chama-se um hiperplano de n que passa pela origem.
2 Rijo AL Capítulo 2.nb

Subespaços S1 e S2 de 2 gerados pelos vetores {u1 = (1, 1, 1), u2 = (3, 4, -7)} e {v1 = (1, 0, -3), v2 = (3, 2, -1)}, respectivamente.
In[2]:= H∗ Subespaços do 3 HplanosL gerados pelos vetores: u1 = H1, 1, −1L,u2 = H3, 4, −7L e v1 = H1, 0, −3L, v2= H3, 2, −1L ∗L
p1 = Plot3D@x + y , 8x, −5, 5<, 8y, −10, 10<, DisplayFunction → IdentityD;p2 = Plot3D@3 x − 4 y , 8x, −5, 5<, 8y, −10, 10<, DisplayFunction → IdentityD;Show@8p1, p2<, DisplayFunction → $DisplayFunctionD;
-5
-2.5
0
2.5
5-10
-5
0
5
10
-10
0
10
-5
-2.5
0
2.5
Seja X um subconjunto do espaço vetorial E. O subespaço vetorial de E gerado por X é, por definição, o conjuntode todas as combinações lineares
a1 v1 + a2 v2 + . . . + am vm
de vetores v1 , . . . , vm œ X.
É fácil ver que o conjunto de todas as combinações lineares que se podem formar com vetores retirados do con-junto X é, de fato, um subespaço vetorial, que indicaremos pelo símbolo S(X).
O subespaço S(X), gerado pelo subconjunto X œ E, contém o conjunto .X e, além disso, é o menor subespaço de
E que contém X. Noutras palavras, se F é um subespaço vetorial de E e X œ F então S(X) œ F. Evidentemente,se X já é um subespaço vetorial, então S(X) = X. Quando o subespaço S(X) coincide com E, diz-se que X é umconjunto de geradores de E.
Explicitamente: um conjunto X é um conjunto de geradores do espaço vetorial E quando todo vetor w œ E podeexprimir-se como combinação linear
w = a1 v1 + a2 v2 + . . . + am vm
de vetores v1 , . . . , vm pertencentes a X.
EXEMPLO 2.5. Se v œ E é um vetor não-nulo, o subespaço gerado por v é a reta que passa pela origem e contém v.
EXEMPLO 2.6. Sejam u = (a,b) e v = (c, d) vetores de 2 tais que nenhum deles é múltiplo do outro. Então u ∫ 0, v∫ 0 e, pelo Exem0lo 1.5, ad - bc ∫ 0. Afirmamos que X = {u, v} é um conjunto de geradores de 2 , ou seja, que
qualquer vetor w = ( r, s ) œ 2 pode exprimir-se como uma combinação linear w = xu + yv. De fato esta igualdade
Rijo AL Capítulo 2.nb 3

vetorial em 2 equivale às duas igualdades numéricas
ax + cy = r
bx + dy = s.
Como ad - bc ∫ 0, o sistema de equações acima possui uma solução (x, y), logo existem x,y œ tais que xu + yv =w. Esta mesma conclusão pode também ser obtida geometricamente conforme mostra a Figura 2.1:
In[325]:= H∗ Figura 1.1, Soma de vetores ∗L<< Graphics`Arrow`p1 = ListPlot@880, 0<, 8.8, 1.6<, 83, 2.333<, 82.2, .733<, 80, 0<<,
Axes → False, PlotJoined → True, PlotStyle → [email protected]<D<,Epilog → 8Text@"O", 80, 0<D, Text@"u", 81, .2<D,
Text@"xu", 82, .5<D, Text@"v", 8.15, .5<D, Text@"yv", 8.45, 1.3<D,Text@"w = xu + yv", 81.5, 1.3<D<, DisplayFunction → IdentityD;
p2 = Graphics@8Arrow@80, 0<, 8.5, 1<D, Arrow@80, 0<, 81.5, .5<D,Arrow@80, 0<, 83, 2.333<D<,
DisplayFunction → IdentityD;Show@8p1, p2<, AspectRatio → Automatic,
DisplayFunction → $DisplayFunctionD;
Ou
xuv
yv w = xu + yv
EXEMPLO 2.7. Os chamados vetores canônicos
e1 = H1, 0, 0, . . . , 0L,e1 = H0, 1, 0, . . . , 0L,
ª
e1 = H1, 0, 0, . . . , 1Lconstituem um conjunto de geradores do espaço n . Com efeito, dado or v = Ha1, a2 , . . . , anLœ n , tem-se v =a1 e1 + a2 e2 + . . . + an en . Analogamente os monômios 1, x, x2, . . ., xn, . . . (um número infinito) f ormam umconjunto de geradores do espaço P dos polinômios reais. Por sua vez, , os n + 1 primeiros deles, a saber, 1 , x, ..., xn
constituem um conjunto de geradores de Pn , espaço vetorial dos polinômios de grau § n.
Resulta do Exemplo 2.6 que os únicos subespaços vetoriais de 2 são {0}, as retas que passam pela origem e o próprio 2 .
EXEMPLO 2.8. O sistema linear de m equações a n incógnitas
a11 x1 + a12 x2 + . . . + a1 n xn = b1
a21 x1 + a22 x2 + . . . + a1 n xn = b2
ª
am1 x1 + am2 x2 + . . . + amn xn = bm
4 Rijo AL Capítulo 2.nb

possui uma solução Hx1 , ..., xn ) se, e somente se, o vetor b = Hb1, . . . bmL é combinação linear dos vetores-coluna
v1 = Ha11, a21, . . . , am1L,ª
vn = Ha1 n, a2 n, . . . , amnL, da matriz a = @aijD.
Sejam F1 e F1 subespaços vetoriais de E. O subespaço vetorial de E gerado pela reunião F1 ‹ F2 é; como se vê
facilmente, o conjunto de todas as somas v1 + v2 , onde v1 œ F1 e v2 œ F2 . Ele é representado pelo símbolo F1 +F2 .
Mais geralmente, dados os subconjuntos X, Y Õ E, indica-se com X + Y o conjunto cujos elementos são as somas
u + v, onde u œ X e v œ Y. Quando X = {u} reduz-se a um único elemento u, escreve-se u + Y em vez de {u} +Y. Diz-se então que u + Y resulta de Y pela translação de u.
Quando os subespaços F1 , F2 œ E têm em comum apenas o elemento {0}, escreve-se F1 ∆ F2 em vez de F1 +F2 e diz-se que F = F1 ∆ F2 é a soma direta de F1 e F2 .
Teorema 2.1. Sejam F, F1 , F2 subespaços vetoriais de E, com F1 Õ F e F2 Õ F. As seguintes afirmações sãoequivalentes:
(1) F = F1 ∆ F2
(2) Todo elemento w œ F se escreve, de modo único, como soma w = v1 + v2 , onde v1 œ F1 e v2 œ F2.
EXEMPLO 2.9. Em 4 , sejam F1 o subespaço gerado pelos vetores e1 = (1, 0, 0, 0), e3 = (0, 0, 1, 0) e F2 o sube-spaço gerado pelos vetores e2 = (0, 1 0, 0), e = (0, 0, 0, 1). Então F1 é o conjunto dos vetores da forma Ha1 , 0, a3 , 0)enquanto os vetores de F2 têm a forma (0, a2 , 0, a4 ). É claro que 4 = F1 ∆ F2 .
A noção de subespaço vetorial abrange as retas, planos e seus análogos multidimensionais apenas nos casos emque esses conjuntos contêm a origem. Para incluir retas, planos, etc. que não passam pela origem, tem-se a noçãode variedade afim, que discutiremos agora.
Seja E um espaço vetorial. Se x, y œ E e x ∫ y, a reta que une os pontos x, y é, por definição o conjunto
r = {(l - t)x + ty; t œ }.
Pondo v = y - x, podemos ver que r = {x + tv; t œ }.
Um subconjunto V Õ E chama-se uma variedade afim quando a reta que une dois pontos quaisquer de V está
contida em V. Assim,V Õ E é uma variedade afim se, e somente se, cumpre a seguinte condição:
x, y œ V, t œ ï (1 - t)x + ty œ V.
Rijo AL Capítulo 2.nb 5
In[439]:= H∗ Representação esquemática de variedade afim ∗Lp1 = ListPlot@80, 0<, Axes → False,
Epilog → 8Text@"O", 80, −.15<D, Text@"x", 8.4, .8<D, Text@"F", 81.5, .55<D,Text@"x + F", 81.7, 1.6<D<, DisplayFunction → IdentityD;
p2 = ListPlot@88−1, −.5<, 82, 1<<, PlotJoined → True,Axes → False, DisplayFunction → IdentityD;
p3 = ListPlot@88−1, .5<, 82, 2<<, PlotJoined → True,Axes → False, DisplayFunction → IdentityD;
p4 = ListPlot@880, 0<, 81, 1.5<<, PlotJoined → True,Axes → False, DisplayFunction → IdentityD;
Show@8p1, p2, p3, p4<, DisplayFunction → $DisplayFunctionD;
O
xF
x + F
EXEMPLO 2.10. . Um exemplo óbvio de variedade afim é um subespaço vetorial. Ao contrário dos subespaçosvetoriais, que nunca são vazios pois devem conter o zero, a definição acima é formulada de tal modo que o conjunto
vazio a cumpre, logo « é uma variedade afim. Se v1 , ..., vm œ E são variedades afins então a interseção V = V1 › ...
› Vm é ainda uma variedade afim. Todo ponto p œ E é uma variedade afim.
Teorema 2.2. Seja V uma variedade afim não-vazia no espaço vetorial E. Existe um único subespaço vetorial F ÕE tal que, para todo x œ V tem-se
V = x + F = {x + v; v œ F}.
EXEMPLO 2.12. Vimos no exemplo 2.8 que o conjunto V das soluções de um sistema linear de m equações com n
incógnitas é uma variedade afim. Supondo V ∫ «, tomemos x0 œ V e chamemos de F o subespaço vetorial de n
formado pelas soluções do sistema homogêneo correspondente. Tem-se V = x0 + F. Diz-se então que "todas assoluções do sistema se obtêm somando uma solução particular com a solução geral do sistema homogêneo associado".
6 Rijo AL Capítulo 2.nb

Exercícios (ELL pág. 18)
2.7 Sejam F1 = SHu1, v1L e F2 = SHu2, v2L os subespaços de 3 gerados pelos vetores u1 = H0, 1, -2L , u2 = H1, 1, 1L , v1 = H-1, 0, 3L e v2 = H2, -1, 0L . Ache números a1, b1, c1 e a2, b2, c2 tais que se tenha
F1 = 8Hx, y, zL œ 3; a1 x + b1 y + c1 z = 0< F2 = 8Hx, y, zL œ 3; a2 x + b2 y + c2 z = 0<
Resposta:
Para achar os números a1, b1 e c1 basta resolver o sistema de equações b1 - 2 c1 = 0 e a1 + b1 + c1 = 0. Portanto,
In[10]:= H∗ Achar os números a1, a2 e a3 ∗LSolve@8 b1 − 2 c1 0, a1 + b1 + c1 0<, 8a1, b1<D
Out[10]= 88a1 → −3 c1, b1 → 2 c1<<
Logo, a equação do plano gerado pelos vetores u1 e u2 é dada por - 3 c1 x + 2 c1 y + c1 z = 0. Supondo c1 ∫ 0, então - 3 x + 2 y + z = 0.
Para achar os números a2, b2 e c2 procede-se da mesma maneira. Então,
In[11]:= H∗ Achar os números a1, a2 e a3 ∗LSolve@8 −a1 + 3 c1 0, 2 a1 − b1 0<, 8a1, b1<D
Out[11]= 88a1 → 3 c1, b1 → 6 c1<<
Portanto, a equação do plano gerado pelos vetores uv1 e v2 é dada por 3 c1 x + 6 c1 y + c1 z = 0. Supondo c1 ∫ 0, então 3 x + 6 y + z = 0.
2.10. Exiba três vetores u, v, w œ 3 com as seguintes propriedades: nenhum é múltiplo do outro, nenhuma das coordenadas é igual a zero e 3 não é gerado por eles.
Resposta:
Consideremos dois vetores quaisquer de 3 em que um deles não seja múltiplo do outro. Por exemplo, os vetores u = ( 1, 2, 3) e v = (4, 5, 6). Muliplicando o vetor v por 2 e subtraindo o vetor u, obtemos o terceiro vetor w = 2 v - u = (7, 8 ,9). Nenhuma coordenada do vetor w é zero, nenhum dos vetores é multiplo do outro e eles não geram 3 , pois w esta no mesmo plano gerado por u e v.
2.11. Seja F o subespaço de 3 gerados pelos vetores u = (1, 1, 1) e v = (1, -1, -1). Ache números a, b, c com as seguintes propriedades: um vetor w = (x, y, z) pertence a F se, e somente se, ax + by + cz = 0.
2.12. Exprima o vetor (1, -3, 10) como combinação linear dos vetores u = (1, 0, 0), v = (1, 1, 0) e w = (2,-3,5).
Resposta:
Devemos achar números a, b e c tais que a u + b v + c w = (1, -3, 10).
Rijo AL Capítulo 2.nb 7

In[452]:= H∗ Achar números a, b, c da combinação linear au + bv + cw ∗LSolve@8a + b + 2 c 1, b − 3 c −3, 5 c 10<, 8a, b, c<D
Out[452]= 88a → −6, b → 3, c → 2<<
Portanto, a combinação linear deseja é - 6 u + 3 v + 5 w
In[453]:= H∗ Verificação da resposta ∗Lu = 81, 0, 0<; v = 81, 1, 0<; w = 82, −3, 5<;−6 u + 3 v + 2 w
Out[453]= 81, −3, 10<
2.13. Mostre que a matriz d = J 4 −4−6 16 Npode ser escrita como combinação linear das matrizes
a = J 1 23 4
N , b = J −1 23 −4
N e c = J 1 −2−3 4
N .
In[473]:= H∗ Achar os númeors α, β, γ da combinação linear αa + βb + γc ∗LSolve@8α − β + γ 4, 2 α + 2 β − 2 γ −4,
3 α + 3 β − 3 γ −6, 4 α − 4 β + 4 γ 16<, 8α, β, γ<DSolve::svars :
Equations may not give solutions for all "solve" variables. More…
Out[473]= 88α → 1, β → −3 + γ<<
Resposta:
O sistema de equações tem uma infinidade de soluções. Portanto, a = 1, b = - 3 + g sendo g qualquer número real.
In[470]:= H∗ Verificação da resposta para γ = 1 ∗La = 881, 2<, 83, 4<<; b = 88−1, 2<, 83, −4<<; c = 881, −2<, 8−3, 4<<;MatrixForm@a − 2 b + cD
Out[471]//MatrixForm=
J 4 −4−6 16 N
In[476]:= H∗ Verificação da resposta para γ = −5 ∗La = 881, 2<, 83, 4<<; b = 88−1, 2<, 83, −4<<; c = 881, −2<, 8−3, 4<<;MatrixForm@a − 8 b − 5 cD
Out[477]//MatrixForm=
J 4 −4−6 16 N
2.15. Quais dos seguintes subconjuntos são subespaços vetoriais?
(a) O conjunto X Õ 3 formado pelos vetores v = (x, y, z) tais que z = 3x e x = 2y.
(b) O conjunto Y Õ 3 formado pelos vetores v = (x, y, z) tais que xy = 0.
(c) O conjunto Z das matrixes 2x3 nas quais alguma coluna é formada por elementos iguais.
(d) O conjunto F = Õ F( : ) formado pelas funções f: Ø tais que f(x + 1) = f(x) para todo x œ .
(e) O conjunto L Õ n dos vetores v = (x, 2 x, . . ., n x), onde x œ é arbitrário.
8 Rijo AL Capítulo 2.nb

(f) O conjunto dos vetores v œ 5 que tenham duas ou mais coordenadas nulas.
(g) O conjunto dos vetores de 3 que têm pelo menos uma coordenada ¥ 0.
Resposta:
(a) Sim, é uma reta gerada pelo vetor (2, 1, 6),
(b) Não, a soma dos vetores (1, 0, 3) e (0, 5, -2) é (1, 5, 1) que não pertence a Y.
(c) Não, a soma das matrizes J 2 0 32 −5 −6
Ne J 1 −3 34 −3 6
N é J 3 −3 66 −8 0
Nque não pertence a Z.
(d) Sim, é uma reta gerada pelo vetor (2, 1, 6),
(e) Sim, é uma reta gerada pelo vetor (1, 2, . . ., n),
(f) Não, a soma dos vetores (2, 0, 0, 5, 6) e (0, 3, 4, 0, 0, 0) é (2, 3, 4, 5, 6) que não tem nenhuma coordenada nula,
(g) Não, a soma dos vetores (2, -3, 0) e (-3, 2, -1) é (-1, -1,-1) que não pertence a 3 .
2.17. Obtenha números a, b, c, d tais que a variedade afim (plano) de 3 definida pela equação ax + by + cz = d contenha os pontos e1 = H1, 0, 0L, e2 = H0, 1, 0L e e3 = H0, 0, 1L.Resposta:
a = b = c = 1. Com efeito, x + y + z = 1 contém os pontos e1, e2 e e3.
2.20. Sejam v1, v2, v3 os vetores-linha e w1 , w2, w3 os vetores-coluna da matriz
i
k
jjjjjjj1 2 34 5 67 8 9
y
{
zzzzzzz
Verifique as relações v3 = 2 v2 - v1 , w3 = 2 w2 - w1. Exprima w1 e w2 como cobinação linear de v1 e v2 e vice-versa. Conclua que os vetores-linha e os vetores-coluna da matriz dada geram o mesmo subespaço de 3 .
In[481]:= v1 = 81, 2, 3<; v2 = 84, 5, 6<; v3 = 87, 8, 9<;w1 = 81, 4, 7<; w2 = 82, 5, 8<; w3 = 83, 6, 9<;v3 2 v2 − v1w3 2 w2 − w1
Out[483]= True
Out[484]= True
In[1]:= Solve@8a + 4 b 1, 2 a + 5 b 4, 3 a + 6 b 7<, 8a, b<D
Out[1]= 99a →113
, b → −23==
In[2]:= Solve@8a + 4 b 2, 2 a + 5 b 5, 3 a + 6 b 8<, 8a, b<D
Out[2]= 99a →103
, b → −13==
In[4]:= Solve@8a + 2 b 1, 4 a + 5 b 2, 7 a + 8 b 3<, 8a, b<D
Out[4]= 99a → −13
, b →23==
In[5]:= Solve@8a + 4 b 4, 2 a + 5 b 5, 3 a + 6 b 6<, 8a, b<DOut[5]= 88a → 0, b → 1<<
Rijo AL Capítulo 2.nb 9

2.21. Dê um exemplo de uma matriz 3 × 3 cujos vetores-linha geram um subespaço de 3 diferente daquele gerado pelos vetores coluna.
Resposta:
Os vetores-linha da matriz
i
k
jjjjjjj1 3 −20 a 0
−3 −9 6
y
{
zzzzzzz
geram o 2 (a teceira linha é múltipla da primeira) e os vetores-coluna geram o próprio 3 , para qualquer a ∫ 0.
2.35. Sejam E, F espaços vetoriais. Uma função f: E Ø F chama-se par (respectivamente ímpar) quando f(-v) = f(v)
(respectivamente f(-v) = - f(v)) para todo v œ E. Prove:
O conjunto A das funções pares e o conjunto B das funções ímpares são subespaços vetoriais de F(E; F) e vale F(E; F) = A ∆ B.
Resposta:
A soma de duas fun;õs pares e par. Com efeito, [f+g](-v) = f(-v) + g(-v) = f(v) + g(v) = [f + g](v), além disso, [lf](-v) = lf(-v) = lf(v) = [lf](v). A função identicamente zero é par. Portanto, o conjunto A das funções pares é um subespaço vetorial de F(E; F).
Analogamente, a soma de duas funções impar é impar. De fato, [f+g](-v) = f(-v) + g(-v) = -f(v) - g(v) = -[f + g](v) e também [lf](-v) = lf(-v) = -lf(v) = -[lf](v). A função identicamente zero é ímpar. Portanto, o conjunto B das funções impares é um subespaço vetorial de F(E; F).
Qualquer função f: E Ø F pode ser escrita como a soma de um função par e um ímpar. Com efeito, basta observar que as componentes par e impar de f são dadas por
fparHxL = f HxL + f H-xLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ2 e fimparHxL = f HxL - f H-xLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ2 .
Finalmente, a função identicamente nula é a única função f: E Ø F que é simultaneamente par e ímpar. Portanto, F(E; F) = A ∆ B.
10 Rijo AL Capítulo 2.nb
CAPÍTULO 3
BasesIniciar o MathKernel
In[1]:= 2 + 2
Out[1]= 4
Os espaços vetoriais de dimensão finita, objetos centrais do nosso estudo, possuem uma estrutura algébricaextremamente simples, evidenciada pelas idéias de base e dimensão, que apresentaremos agora. Uma vez fixadauma base num espaço vetorial de dimensão n, seus elementos são meramente combinações lineares dos n vetoresbásicos, com coeficientes univocamente determinados. Nesta seção, esses fatos serão estabelecidos e analisadosem detalhe.
Seja E um espaço vetorial. Diz-se que um conjunto X Õ E é linearmente independente (abreviadamente, L.I.)
quando nenhum vetor v œ X é combinação linear de outros elementos de X. Para evitar ambigiiidade, no caso emque X = {v} consta de um único elemento v, diz-se que X é L.I., por definição, quando v ∫ 0. Quando X é L.I.,diz-se também que os elementos de X são vetores linearmente independentes.
Quando o conjunto X é L.I. seus elementos são todos ∫ 0, pois o vetor nulo é combinação linear de quaisqueroutros: 0 = 0. v1 + . . . + 0. vn (Se não há "outros", X = {v}, v ∫ 0.)
Teorema 3.1. Seja X um conjunto L.I. no espaço vetorial E. Se a1 v1 + . . . + am vm = 0 coma1 = . . . = am = 0. Reciprocamente, se a única combinação linear nula de vetores de X é aquela cujos coefi-cientes são todos iguais a zero, então X é um conjunto L.I..
Corolário. Se v = a1 v1 . . . + am vm = b1 v1 . . . + bm vm e os vetores v1, . . . vm são L.I. entãoa1 = b1, . . . am = bm.
EXEMPLO 3.1 Os vetores canônicos e1 = (1,0,... ,0),... , en = , (0,... ,0,1) em n são L.I.. Com efeito,a1 e1 + . . . + an en = 0 significa Ha1, . . . , an ) = 0, logo a1 = ... = an = 0.
Analogamente, os monomIos 1, x, ..., xn em Pn sâo L.L. pois a0 + a1 x + . . . + an xn = pHxL é o vetor nulo em Pn
somente quando p(x) é a função identicamente nula, isto é, p(x) = 0 para todo x œ . Isto obriga a ser a0 = ... = an =0 pois um polinômio não nulo de grau k tem no máximo k raízes reais. Esta observação nos permite ainda concluir que
X = {1 , x, ..., xm , ...} Õ P é um conjunto infinito L.I.
Teorema 3.2. Sejam v1 , ..., vm vetores não-nulos do espaço vetorial E. Se nenhum deles é combinação linear dosanteriores então o conjunto X = 8v1 , . . . vm< é L.I..

EXEMPLO 3.2 Os vetore u = (1, 2, 3), v = (4, 5, 6), w = (7, 8, 9) em 3 são L.D. pois w = 2v - u.
EXEMPLO 3.3 Quando os vetores v1 , ... , vm . são L.D., isto não significa que qualquer um deles seja combinação
linear dos demais. Por exemplo se u = (1, 2), v = (3, 4) e w = (4, 8) então {u,v,w} Õ 2 é um conjunto L.D. pois w =4u + 0 .v porém v não é combinação linear de u e w.
Uma base de um espaço vetorial E é um conjunto B Õ E linearmente independente que gera E. Isto significa que
todo vetor v œ E se exprime, de modo único, como combinação linear v = a1 v1 . . . + am vm de elementos v1 , ...,vm da base B. Se B é uma base de E e v = a1 v1 . . . + am vm , entao os numeros a1 , . . . am chamam-se as coordena-das do vetor v na base B.
EXEMPLO 3.4 Os vetores e1 = (1, 0, ... ,0), ... , en = (0, ... , 0, 1) constituem uma base 8e1, . . . en< de n , chamadaa base canônica.
Analogamente, os monômios 1 , x, ..., xn formam uma base para o espaço vetorial Pn dos polinômios de grau § n. Oconjunto {1, x,... , xn ,...} dos monômios de graus arbitrários constitui uma base (infinita) para o espaço vetorial P detodos os polinômios rais.
Um sistema linear é chamado homogêneo quando o segundo membro de cada equação é igual a zero. Todo sistemahomogêneo admite pelo menos a solução trivial (0, 0, ..., 0).
Lema 3.1. Todo sistema linear homogêneo cujo número de incógnitas é maior do que o número de equaçõesadmite uma solução não-trivial.
Teorema 3.3. Se os vetores v1 , ..., vm geram o espaço vetorial E então qualquer conjunto com mais de m vetoresem E é L.D.
Diz-se que o espaço vetorial E tem dimensão finita quando admite uma base B = {v1 , ..., vn } com um númerofinito n de elementos. Este número, que é o mesmo para todas as bases de E, chama-se a dimensão do espaçovetorial E: n = dim E. Por extensão, diz-se que o espaço vetorial E = {0} tem dimensão zero.
Corolário 3. Se a dimensão de E é n, um conjunto com n vetores gera E se, e somente se, é L.I.
Diz-se que a variedade afim V Õ E tem dimensão r quando V = x + F, onde o subespaço vetorial F Õ E temdimensão r.
EXEMPLO 3.5 Os monômios 1, x, ..., xn constituem uma base do espaço vetorial Pn , dos polinômios de grau n,logo Pn tem dimensão finita e dim Pn = n + 1. Por outro lado, o conjunto infinito {1, x, ..., xn , ...} é uma base doespaço vetorial P de todos os polinômios, o qual tem dimensão infinita.
EXEMPLO 3.6 O espaço vetorial M ( m x n) , das matrizes m x n, tem dimensão finita, igual a m.n. Uma base paraM(m x n) é formada pelas matrizes eij , cujo ij-ésimo elemento (na interseção da i-ésima linha com a j-ésima coluna) éigual a 1 e os demais elementos são iguais a zero.
EXEMPLO 3.7 Se os coeficientes a1 , ..., an não são todos iguais a zero, o hiperplano
H = 8Hx1, . . . ,xnL œ n; a1 x1 + . . . + an xn = 0<é um subespaço vetorial de dimensão n - 1 em n .
2 Rijo AL Capítulo 3.nb

Exercícios (ELL págs. 33 - 38)
3.1 [3.1]. Dados os vetores u = Ha1, a2, a3L , v = Hb1, b2, b3L e w = Hc1, c2, c3L , escrever u' = Ha1, a2L , v' = Hb1, b2L e w' = Hc1, c2L . Supondo que u' e v' L.I. existem a e b œ tais que w' = a u' + b v'. Prove que (u, v, w) é L.D. se, somente se, w = a u + b v (com os mesmos a e b) Use esse critério para determinar se os vetores u, v e w abaixo são L.I. ou L.D.:
(a) u = (1, 2, 3), v = (1, 3, 2), w = (-1, 2, 3)
(b) u = (1, 2, 3), v = (1, 3, 2), w = (1, 4, 1)
Resposta:
Determinação dos a e b dos vetores em (a)
In[50]:= Solve@8α + β == −1, 2 α + 3 β == 2<, 8α, β<DOut[50]= 88α → −5, β → 4<<
In[55]:= 8−1, 2, 3< == −5 81, 2, 3< + 4 81, 3, 2<Out[55]= False
Os vetores em (a) são L.I.
Determinação dos a e b dos vetores de (b)
In[56]:= Solve@8α + β == 1, 2 α + 3 β 4<, 8α, β<DOut[56]= 88α → −1, β → 2<<
In[57]:= 81, 4, 1< == −81, 2, 3< + 2 81, 3, 2<Out[57]= True
Os vetores em (b) são L.D.
Uma outra maneira de resolver o problema é verificar se o sistema de equações a u + b v + g w = 0 tem solução trivial (L.I) ou não (L.D).
In[61]:= Solve@8α + β − γ == 0, 2 α + 3 β + 2 γ == 0, 3 α + 2 β + 3 γ == 0<, 8α, β, γ<DOut[61]= 88α → 0, β → 0, γ → 0<<
Os vetores em (a) são L.I.
In[60]:= Solve@8α + β + γ == 0, 2 α + 3 β + 4 γ == 0, 3 α + 2 β + γ == 0<, 8α, β, γ<DSolve::svars :
Equations may not give solutions for all "solve" variables. More…
Out[60]= 88α → γ, β → −2 γ<<
Os vetores em (b) são L.D.
Rijo AL Capítulo 3.nb 3

3.2 [3.2]. Mostre que as matrizes a, b, c abaixo são L.I.
a = J 1 10 0
N , b = J 1 00 1
N , c = J 1 11 1
N
Resposta:
As matrizes a e b são L.I por que uma não é múltipla da outra. A matriz c não é combinação linear de a e b por que a a21 + b b21 ∫ c21 = 1 para qualquer a e b. Entào pelo Teorema 3.2, a, b, c são L.I.
3.3 [3.3]. Prove que os polinômios seguintes são linearmente independentes
p(x) = x3 - 5 x2 + 1, q(x) = 2 x4 + 5 x - 6, r(x) = x2 - 5 x + 2 .
Resposta:
Devemos mostra que a (0 x4 + x3 - 5 x2 + 0 x + 1) + b ( 2 x4 + 0 x3 + 0 x2 + 5 x - 6) + g ( 0 x4 + 0 x3 + x2 - 5 x + 2) = 0 implica em a = b = g = 0. Assim,
In[2]:= Solve@82 β 0, α 0, −5 α + γ 0, 5 β − 5 γ 0, α − 6 β + 2 γ 0<, 8α, β, γ<DOut[2]= 88α → 0, β → 0, γ → 0<<
Como a, b e g são todos nulos segue que os polinomios p(x), q(x) e r(x) são L.I..
3.4 [3.5]. No espaço P3 dos polinômios de grau § 3, verifique se os polinômios abaixo são L.I. ou L.D.:
p(x) = x3 - 3 x2 + 5 x + 1,
q(x) = x3 - x2 + 6 x + 2,
r(x) = x3 - 7 x2 + 4 x .
Resposta:
Devemos encontrar a (x3 - 3 x2 + 5 x + 1) + b ( x3 - x2 + 6 x + 2) + g ( x3 - 7 x2 + 4 x + 0) = 0 para saber se os polinômios dados são L.I. ou L.D.. Assim,
In[4]:= Solve@8α + β + γ 0, −3 α − β − 7 γ 0, 5 α + 6 β + 4 γ 0, α + 2 β 0<, 8α, β, γ<D
Out[4]= 88α → 0, β → 0, γ → 0<<
Como a, b e g são todos nulos segue que os polinomios p(x), q(x) e r(x) são L.I..
3.5 [3.8]. Exiba uma base para cada um dos subespaços de 4 listados a seguir
F = 8Hx1, x2, x3, x4L; x1 = x2 = x3 = x4< ,
G = 8Hx1, x2, x3, x4L; x1 = x2 e x3 = x4< ,
H = 8Hx1, x2, x3, x4L; x1 = x2 = x3< ,
K = 8Hx1, x2, x3, x4L; x1 + x2 + x3 + x4 = 0< ,
Resposta:
Base de F {(1, 1, 1, 1)}, base de G { (1, 1, 0, 0), {0, 0, 1, 1)}, base de H { (1, 1, 1, 0), {0, 0, 0, 1)}, base de K { (1, 0, 0, -1), {0, 1, 0, -1)},{0, 0, 1, -1)}
3.6 [3.10]. Seja F o subespaço vetorial (plano) de 2 formado pelos vetores v = (x, y, z) tais que x - 2 y + 4z = 0. Obtenha uma base 8u1, u2, u3< Õ 3 tal que u1 e u2 pertençam a F.
4 Rijo AL Capítulo 3.nb
Resposta:
Base de F {(1, 1, 1, 1)}, base de G { (1, 1, 0, 0), {0, 0, 1, 1)}, base de H { (1, 1, 1, 0), {0, 0, 0, 1)}, base de K { (1, 0, 0, 0), {0, 1, 0, 0)},{0, 0, 1, 0)}
3.7 [3.11]. Mostre que polinômios 1, x - 1 e x2 - 3 x + 1 formam uma base de P2 . Exprima o polinômio 2 x2 - 5 x + 6 como cobinação linear dos elementos dessa base.
Resposta:
Primeiro devemos mostrar que os três polinômios dados são linearmente independentes. Então,
In[5]:= Solve@8α 0, −3 α + β 0, α − β + γ 0<, 8α, β, γ<DOut[5]= 88α → 0, β → 0, γ → 0<<
É fácil ver que eles geram P2. Logo, eles formam uma base de P2. Agora vamos achar a, b e c da combinação linear a (x2 - 3 x + 1) + b ( x - 1) + c =
2 x2 - 5 x + 6
In[9]:= Solve@8a 2, −3 a + b −5, a − b + c 6<, 8a, b, c<DOut[9]= 88a → 2, b → 1, c → 5<<
Verificação do resultado:
In[8]:= 2 Hx2 − 3 x + 1L + Hx − 1L + 5 êê Simplify
Out[8]= 6 − 5 x + 2 x2
3.8 [3.12]. Mostre que os vetores u = (1, 1) e v = (-1, 1) formam uma base de 2. Exprima cada um dos vetores e1 = H1, 0L e e2 = H0, 1L como cobinação linear dos elementos dessa base.
Resposta:
Primeiro devemos mostrar que os vetores u = (1, 1) e v = (-1, 1) são linearmente independentes. Então,
In[10]:= Solve@8α − β 0, α + β 0<, 8α, β<DOut[10]= 88α → 0, β → 0<<
É fácil ver que eles geram 2. Logo, eles formam uma base de 2 . Agora vamos achar a e b da combinação linear a (1, 1) + b ( -1, 1) =
(1, 0)
In[12]:= Solve@8a − b 1, a + b 0<, 8a, b<D
Out[12]= 99a →12
, b → −12==
Agora vamos achar a e b da combinação linear a H1, 1L + b H-1, 1L = H0, 1L
In[13]:= Solve@8a − b 0, a + b 1<, 8a, b<D
Out[13]= 99a →12
, b →12==
Portanto,e1 = H1, 0L = 1ê2 H1, 1L − 1ê2 H−1, 1L e e2 = H0, 1L = 1ê2 H1, 1L + 1ê2 H−1, 1L
3.9 [3.13]. Mostre que os vetores u = (1, 1, 1), v = (1, 2, 1) e w = (2, 1, 2) são L.D..
Rijo AL Capítulo 3.nb 5

Resposta:
Devemos mostrar que existem a, b e g diferentes de zero tal que a u + b v + g w = 0. Com rfeito,
In[18]:= Solve@8α + β + 2 γ == 0, α + 2 β + γ 0, α + β + 2 γ 0<, 8α, β, γ<DSolve::svars :
Equations may not give solutions for all "solve" variables. More…
Out[18]= 88α → −3 γ, β → γ<<
Por exemplo, tomando g = 1, obtemos a = -3 e b = 1. Asim, w = 3 u - v.
Verificação:
In[16]:= 3 81, 1, 1< − 81, 2, 1<Out[16]= 82, 1, 2<
3.10 [3.20]. Ache uma solução não-trivial para o sistema homogêneo:
x1 + 2 x2 + x3 + 4 x4 = 02 x1 + x2 + x3 - x4 = 03 x1 - 2 x2 + x3 - 2 x4 = 0
e a partir daí , obtenha uma cobinação linear nula dos vetores v1 = H1, 2, 3L, v2 = H2, 1, -2L , v3 = H3, 1, 1L, v4 = H4. - 1, -2L, na qual os coeficientesnão são todos iguais a zero.
Resposta:
Devemos mostrar que existem x1 , x2 , x3 e x4 diferentes de zero tal que x1 v1 + x2 v2 + x3 v3 + x4 v4 = 0. Com rfeito,
In[19]:= Solve@8x1 + 2 x2 + 3 x3 + 4 x4 == 0, 2 x1 + x2 + x3 − 4 x4 == 0,3 x1 − 2 x2 + x3 − 2 x4 == 0<, 8x1, x2, x3, x4<D
Solve::svars :
Equations may not give solutions for all "solve" variables. More…
Out[19]= 99x1 →23 x4
8, x2 →
13 x4
8, x3 → −
27 x4
8==
Por exemplo, tomando g = 1, obtemos a = -3 e b = 1. Asim, w = 3 u - v.
Verificação:
In[16]:= 3 81, 1, 1< − 81, 2, 1<Out[16]= 82, 1, 2<
3.11 [3.22]. Prove que 81, ex, e2 x, e3 x, e4 x< é um conjunto L.I. no espaço C¶HL .
Resposta:
Iniciando com a combinação linear α + β x + γ 2 x + δ 3 x + ζ 4 x = 0 e derivando-a e dividindo por ‰x , três vezes consecutivamente, obtemos o sistema de equações
α + β x + γ 2 x + δ 3 x + ζ 4 x = 0β + 2 γ x + 3 δ 2 x + 4 ζ 3 x = 02 α + 6 δ x + 12 ζ 2 x = 06 δ x + 24 ζ x = 0
6 Rijo AL Capítulo 3.nb

In[31]:= Solve@8α + β x + γ 2 x + δ 3 x + ζ 4 x == 0, β + 2 γ x + 3 δ 2 x + 4 ζ 3 x == 0,γ + 3 δ x + 4 ζ 2 x == 0, δ x + 4 ζ x == 0<, 8α, β, γ, δ, ζ<D
Solve::svars :
Equations may not give solutions for all "solve" variables. More…
Out[31]= 88α → − 3 x H−4 + xL ζ, β → 4 2 x H−3 + xL ζ, γ → −4 x H−3 + xL ζ, δ → −4 ζ<<
Se ζ ≠ 0, α, β, γ, δ serão também diferentes de zero. Portanto,o conjunto 81, x, 2 x, 3 x, 4 x< e L.I.
Verificação:
In[32]:= α + β x + γ 2 x + δ 3 x + ζ 4 x ê. % êê Simplify
Out[32]= 80<
3.12 [3.28]. Exiba uma base para cada um dos espaços vetoriais abaixo e daí calcule sua dimensão.
(a) polinômios pares de grau § n.
(b) polinômios ímpares de grau § n.
(c) polinômios de grau § n que se anulam para x = 2 e x = 3.
(d) vetores de n (n ¥ 6) nos quais a segunda, a quarta e a sexta coordenadas são iguais
Resposta:
(a) 81 , x2, . . .x2 j, . . . , x2 m< em que m = n/2. A dimwnsão é igual a (n + 1)/2.
(b) 81 , x1, . . .x2 j +1, . . . , x2 m +1< em que m = n/2. A dimwnsão é igual a (n + 1)/2.
(c) 81 , x, x2< A dimwnsão é igual 3.
(d) 8H1, 0, 0, 0, 0, 0, . . .L, H0, 1, 0, 1, 0, 1, . . .L, H0, 0, 1, 0, 0, 0 . . .L,H0, 0, 0, 0, 1, 0, . . . L , H0, 0, 0, 0, 0, 1 ....<, H0, 0, 0, 0, 0, 0, 1 ....< ...<.
A dimwnsão é igual n - 2 com n ¥ 6.
3.13 [3.30]. Mostre que os vetores u = (1, 1, 1), v = (1, 2, 3) e w = (1, 4, 9) formam uma base de 3. Exprima cada um dos vetores e1, e2, e3 da base canônica de 3 como combinação linear de u, v e w.
Resposta:
Devemos mostrar que os vetores u, v, w são L.I. e que geram 3 .
In[33]:= Solve@8α + β + γ == 0, α + 2 β + 4 γ 0, α + 3 β + 9 γ 0<, 8α, β, γ<DOut[33]= 88α → 0, β → 0, γ → 0<<
Os vetores u, v, w são L.I.. É fácil ver que eles geram 3 . Agora vamos exprimir os vetores e1, e2, e3 da base canônica de 3 como combinação linear de u, v, w.
In[42]:= Solve@8α + β + γ 1, α + 2 β + 4 γ == 0, α + 3 β + 9 γ == 0<, 8α, β, γ<D
Out[42]= 99α → 3, β → −52
, γ →12==
O vetor e1 = 3 u − 5ê2 v + 1ê2 w
In[43]:= 3 81, 1, 1< − 5ê2 81, 2, 3< + 1ê2 81, 4, 9< êê Simplify
Out[43]= 81, 0, 0<
Rijo AL Capítulo 3.nb 7

In[38]:= Solve@8α + β + γ 0, α + 2 β + 4 γ 1, α + 3 β + 9 γ == 0<, 8α, β, γ<DOut[38]= 88α → −3, β → 4, γ → −1<<
O vetor e2 = −3 u + 4 v − w
In[45]:= −3 81, 1, 1< + 4 81, 2, 3< − 81, 4, 9< êê Simplify
Out[45]= 80, 1, 0<
In[39]:= Solve@8α + β + γ 0, α + 2 β + 4 γ == 0, α + 3 β + 9 γ 1<, 8α, β, γ<D
Out[39]= 99α → 1, β → −32
, γ →12==
O vetor e3 = u − 3ê2 v + 1ê2 w
In[46]:= 81, 1, 1< − 3ê2 81, 2, 3< + 1ê2 81, 4, 9< êê Simplify
Out[46]= 80, 0, 1<
8 Rijo AL Capítulo 3.nb

CAPÍTULO 4
Transformações LinearesIniciar o MathKernel
In[1]:= 2 + 2
Out[1]= 4
Álgebra Linear pode ser apresentada sob três pontos de vista equivalentes: transformações lineares, matrizes ouformas quadráticas. A ênfase (ou até mesmo a exclusividade} que se dá a uma dessas abordagens é muitas vezesuma questão de hábito, gosto pessoal ou convicção. Neste livro, os três aspectos serão devidamente tratadosporém a primazia será concedida às transformações lineares, pelos três motivos apontados, principalmente oúltimo.
Uma transformação linear A: E Ø F é um tipo particular de função que tem o espaço vetorial E como domínio e oespaço F como contra-domínio.
Definição de Transformação linear
Sejam E, F espaços vetoriais. Uma transformação linear A: E Ø F é uma correspondência que associa a cada vetor
v œ E um vetor A(v) = A. v = Av œ F de modo que valham, para quaisquer u, v œ E e a œ , as relações:
A(u + v) = Au + Av,
A(a.v) = aAv.
O vetor A.v chama-se a imagem (ou o transformado) de v pela transformação A.
Se A: E Ø F é uma transformação linear então A. 0 = 0.
Soma e Produto de transformação linear
A soma de duas transformações lineares A, B: E Ø F e o produto de uma transformação linear A: E Ø F por um
número a œ são as transformações lineares A + B: E Ø F e aA: E Ø F , definidas respectivamente por (A +
B)v = Av + Bv e (aA)v = a.Av, para todo v œ E. O símbolo 0 indica a transformação linear nula 0: E Ø F,definida por 0. v = 0 e, definindo -A: E Ø F por ( -A) .v = -Av, vê-se que ( -A) + A = A + ( -A) = 0.
Operadores e funcionais lineares e espaço dual
Seja L(E; F) o conjunto das transformações lineares de E em F. As definições acima tomam L(E; F) um espaçovetorial. Quando E = F , usaremos a notação L(E) em vez de L(E; E). As transformações lineares A: E Ø E doespaço vetorial E em si mesmo são chamadas operadores lineares em E. Por sua vez, as transformações lineares j:

E Ø , com valores numéricos, são chamadas funcionais lineares. Escreve-se E* em vez de L(E; ) e o conjuntoE* dos funcionais lineares j: E Ø chama-se o espaço vetorial dual de E.
Operador identidade
Um operador linear especial é o operador identidade I: E Ø E, definido por I. v = v para todo v œ E. Quando fornecessário especificar, escreveremos IE em vez de I.
O que toma as transformações lineares tão manejáveis é que, para se conhecer Aœ L(E; F), basta que se saibam os
valores A.v que A assume nos vetores v œ B, onde B é uma base de E. Isto é particularmente útil quando E tem
dimensão finita. Neste caso, um número finito de valores A.v1 , ..., A. vn (onde {v1 , ..., vn } œ E é uma base)atribuídos arbitrariamente, definem inteiramente uma transformação linear A: E Ø F. Mais precisamente, vale o
Teorema 4.1. Sejam E, F espaços vetoriais e B uma base de E. A cada vetor U œ B, façamos corresponder (de
maneira arbitrária) um vetor u' œ F. Então existe uma única transformação linear A: E Ø F tal que A. U = u'
para cada U œ B.
Matriz da transformação linear
Em virtude do Teorema 4.1, se quisermos definir uma transformação linear A: n Ø m basta escolher, para cada
j = 1, ..., n, um vetor v j = (a1 j , a2 j , ..., amj ) œ m e dizer que v j = A. e j é a imagem do j-ésimo vetor da basecanônica, e j = (0, ...,1, ...,0), pela transformação linear A. A partir daí, fica determinada a imagem A.v de qualquer
vetor v = ( x1 , ..., xn ) œ n .
Isto significa que uma transformação linear A: n Ø m fica inteiramente determinada por uma matriz a = [aij ] œM(m x n). Os vetores-coluna dessa matriz são as imagens A.e j dos vetores da base canônica de n . A imagem de
A.v de um vetor arbitrário v = ( x1 , ..., xn ) œ n é o vetor w = ( y1 , ..., ym ) œ m cujas coordenadas são dadaspelas equações
y1 = a11 x1 + a12 x2 + . . . + a1 n xn
y2 = a21 x1 + a22 x2 + . . . + a2 n xn
ª
ym = am1 x1 + am2 x2 + . . . + amn xn
nas quais ocorrem os vetores-linha da matriz a. Diz-se que a é a matriz da transformação A relativa às basescanônicas de n e m . Tem-se
A.e j = ⁄i = 1m aij ei (j = 1, . . . , n),
onde os e j estão em n e os ei em m . Em particular, a matriz de um funcional linear j: E Ø é do tipo 1 × n,
logo pode ser escrita simplesmente como @a1, a2, . . . , anD , onde a j = j(e j ). Para todo vetor v = ( x1 , ..., xn ) œn tem-se j(x) = a1 x1 + a2 x2 + . . . + an xn .
EXEMPLO 4.1 Se dim E = 1, todo operador A: E Ø E é do tipo A = a I, isto é, existe uma constante a œ tal que
Av = a v para todo v œ E. Com efeito, seja u œ E um vetor não-nulo. Então {u}Õ E é uma base: todo vetor em E é
2 Rijo AL Capítulo 4.nb

múltiplo de u. Portanto existe a œ tal que Au = a u. Para qualquer outro vetor v œ E, temos v = l u portanto Av =A(l u) = l Au = l a u = a (l u) = a v.
EXEMPLO 4.2 (Rotação de ângulo q em torno da origem em 2 ) Trata-se do operador R: 2 Ø 2 , que levacada vetor v no vetor Rv que dele resulta pela rotação de ângulo q em torno da origem. A Fig. 4.1 deixa claro que R(u
+ v) = R.u + R.v. É bem mais claro ainda que R (av) = a .Rv para œ 2 e a œ , logo R é uma transformação linear.
In[2]:= H∗ Figura 4.1, Rotação de vetores ∗L<< Graphics`Arrow`p1 = [email protected], 1.6<, 83, 2.333<, 82.2, .733<<,
Axes → False, PlotJoined → True, PlotStyle → [email protected]<D<,Epilog → 8Text@"O", 8−.2, 0<D, Text@"u", 81.4, .26<D, Text@"v", 8.3, 1<D,
Text@"u + v", 81.3, 1.3<D, Text@"Ru", 8−.3, 2<D, Text@"Rv", 8−1.5, .5<D,Text@"RHu + vL", 8−1.1, 1.5<D<, DisplayFunction → IdentityD;
p2 = Graphics@8Arrow@80, 0<, 8.8, 1.6<D, Arrow@80, 0<, 82.2, .733<D,Arrow@80, 0<, 83, 2.333<D<,
DisplayFunction → IdentityD;p3 = ListPlot@88−1.6, .8<, 8−2.333, 3<, 8−.733, 2.2<<,
Axes → False, PlotJoined → True,PlotStyle → [email protected]<D<, DisplayFunction → IdentityD;
p4 = Graphics@8Arrow@80, 0<, 8−1.6, .8<D,Arrow@80, 0<, 8−.733, 2.2<D, Arrow@80, 0<, 8−2.333, 3<D<,
DisplayFunction → IdentityD;Show@8p1, p2, p3, p4<, AspectRatio → Automatic,
DisplayFunction → $DisplayFunctionD;
Ou
vu + v
Ru
Rv
RHu + vL
Para um vetor v = (x, y) œ 2 arbitrário, seja R.v = (x', y'). Sabemos que x' = a x + b y e y' = c x + d e queremosdeterminar a matriz
J a bc d
N
onde Re1 = (a, c) e Re2 = (b, d), com e1 = (1, 0) e e2 = (0, 1).
Ora, pelas definições de seno e cosseno, o vetor unitário Re1 , que forma com e1 um ângulo q, tem coordenadas cos q esen q, o seja, Re1 = (cos q, sen q). Além disso, como e2 forma com e1 um ângulo reto, Re2 também forma comRe1 um ângulo reto. Logo Re2 ( -sen q, cos q). (Veja Fig. 4.2.)
Rijo AL Capítulo 4.nb 3

In[6]:= H∗ Figura 4.2, Rotação de um ângulo θ ∗L<< Graphics`Arrow`
p1 = ListPlotA882.5, 0<, 82.5, 1.5<, 80, 1.5<<,
PlotRange → 8−.2, 3<, PlotJoined → True, PlotStyle → [email protected]<D<,Epilog → 9Text@"O", 8−.2, 0<D, Text@"cos θ", 82, .2<D,
Text@"sen θ", 8.5, 1.7<D, Text@"cos θ", 8.5, 2.5<D,Text@"−sen θ", 8−1, .2<D, Text@"e1", 82.8, .2<D,
Text@"e2", 8.3, 2.8<D, TextA"Re1", 82.5, 1.7<E,
TextA"Re2", 8−1.2, 2.7<E=, DisplayFunction → IdentityE;
p2 = Graphics@8Arrow@80, 0<, 82.5, 0<D, Arrow@80, 0<, 83, 0<D,Arrow@80, 0<, 82.5, 1.5<D<,
DisplayFunction → IdentityD;p3 = ListPlot@
88−1.5, 0<, 8−1.5, 2.5<, 80, 2.5<<, Axes → False, PlotJoined → True,PlotStyle → [email protected]<D<, DisplayFunction → IdentityD;
p4 = Graphics@8Arrow@80, 0<, 8−1.5, 2.5<D,Arrow@80, 0<, 80, 2.5<D, Arrow@80, 0<, 80, 3<D<,
DisplayFunction → IdentityD;Show@8p1, p2, p3, p4<,
AspectRatio → Automatic, DisplayFunction → $DisplayFunctionD;
-1 1 2 3
0.5
1
1.5
2
2.5
3
Ocos θ
sen θ
cos θ
−sen θ e1
e2
Re1
Re2
Portanto, a rotação R: 2 Ø 2 leva um vetor v = (x, y) no Rv = (x', y'), onde
x' = x cos q - y sen q;
y' = x sen q + y cos q.
A matriz de R relativa à base canônica de 2 é
J cos θ −sen θsen θ cos θ
N .
EXEMPLO 4.3 (Projeção ortogonal sobre uma reta) A reta y = a x é o conjunto dos pontos (x, ax) œ 2 , onde xvaria em . Ela é o subespaço vetorial de 2 gerado pelo vetor (1, q). Consideremos o operador P: 2 Ø 2 que faz
corresponder a cada v = (x, y) œ 2 o vetor Pv = ( x' , ax' ) , cuja extremidade é o pé da perpendicular de v sobre areta y = a x. (Veja Fig. 4.3.)
4 Rijo AL Capítulo 4.nb

In[7]:= H∗ Figura 4.3, Projeção ortogonal sobre uma reta ∗L<< Graphics`Arrow`p1 = ListPlot@88−1, −.5<, 82.5, 1.25<<,
PlotRange → 88−1, 3<, 8−1, 3<<, PlotJoined → True,Epilog → 8Text@"O", 8−.1, −.15<D, Text@"y = αx", 82.6, 1.4<D, Text@"v",
81.7, 2.4<D, Text@"Pv", 82.2, .8<D<, DisplayFunction → IdentityD;p2 = [email protected], 1.05<, 81.5, 2.5<<, PlotJoined → True,
PlotStyle → [email protected]<D<, DisplayFunction → IdentityD;p3 = Graphics@8Arrow@80, 0<, 82.1, 1.05<D, Arrow@80, 0<, 81.5, 2.5<D<,
DisplayFunction → IdentityD;Show@8p1, p2, p3<, AspectRatio → Automatic,
DisplayFunction → $DisplayFunctionD;
-1 -0.5 0.5 1 1.5 2 2.5 3
-1
-0.5
0.5
1
1.5
2
2.5
3
O
y = αx
v
Pv
Pelo teorema de Pitágoras, temos
distHv, 0L2 = distHPv, 0L2 + distHv, PvL2 ,
ou seja,
x2 + y2 = Hx'L2 + a2 Hx'L2+ Hx - x'L2 + Hy - y'L2
Suponhamos x'∫ 0 e simplificando esse expressão, obtemos
x' = 1ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ1 + a2 x + aÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ1 + a2
Esta expressão também é válida se x' = 0.
Vemos, em particular, que a projeção P: 2 Ø 2 é um operador linear cuja matriz na base canônica de 2 é
ikjjjjj
11 + α2
α1 + α2
α1 + α2
α2
1 + α2
y{zzzzz .
EXEMPLO 4.4 (Reflexão em torno de uma reta) Seja S: 2 Ø 2 a reflexão em torno da reta y = ax. Para todo v
= (x, y) œ 2 , a reta y = ax é a bissetriz do ângulo entre v e Sv e é perpendicular à reta que liga v a Sv. Seja P: 2 Ø
2 a projeção ortogonal sobre a reta y = ax. A Fig. 4.4 mostra que, para todo v œ 2 , tem-se v + Sv = 2Pv, ou seja,que I + S = 2P, onde I: 2 Ø 2 é o operador identidade. Daí vem S = 2P - I. Usando o exemplo anterior, concluímosque, para todo v = (x, y), tem-se Sv = (x',y'), onde a matrix na base canônica de 2 é
ikjjjjj
1 − α2
1 + α22 α
1 + α2
2 α1 + α2 − 1 − α2
1 + α2
y{zzzzz .
Rijo AL Capítulo 4.nb 5

In[10]:= H∗ Figura 4.4, Reflexão em torno de uma reta ∗L<< Graphics`Arrow`p1 = ListPlot@88−1, −.8<, 82.5, 2<<, PlotRange → 88−1, 4<, 8−1, 3<<,
PlotJoined → True, Epilog → 8Text@"O", 8−.1, −.15<D,Text@"Sv", 82.2, .4<D, Text@"Pv", 81.5, 1.4<D, Text@"v", 8.8, 2<D,Text@"2P = v + Sv", 82.6, 2.2<D<, DisplayFunction → IdentityD;
p2 = [email protected], .4<, 82.5, 2<, 80.8, 1.8<, 81.9, .4<<, PlotJoined → True,PlotStyle → [email protected]<D<, DisplayFunction → IdentityD;
p3 = Graphics@8Arrow@80, 0<, 81.9, .4<D,Arrow@80, 0<, 80.8, 1.8<D, Arrow@80, 0<, 82.5, 2<D<,
DisplayFunction → IdentityD;Show@8p1, p2, p3<, AspectRatio → Automatic,
DisplayFunction → $DisplayFunctionD;
-1 1 2 3 4
-1
-0.5
0.5
1
1.5
2
2.5
3
O
Sv
Pv
v2P = v + Sv
EXEMPLO 4.5 Como vimos acima, o único tipo de funcional linear j: n Ø é o da forma j(v) = a1 x1 + . . .+an xn , para v = (x1 , . . ., xn ). Por outro lado, se E = C0 ([a, b]) é o espaço vetorial das funções contínuas f: [a, b] Ø ,podemos definir o funcional linear j: E Ø pondo
jH f L = Ÿab f HxL „ x .
Outro exemplo de funcional linear em E consiste em fixar um ponto c œ [a, b] e definir, para cada f œ E, (f) = f(c).
Ainda no contexto do espaço de funções E = C0 ([a, b]), podemos definir um operador linear K: E Ø E do seguinte
modo: fixamos uma função contínua k: [a, b] × [a, b] Ø , de duas variáveis, e fazemos corresponder a cada f œ E a
função g = Kf œ E dada por
gHxL = ŸabKHx, yL f HyL „ y .
Finalmente, temos o importante operador de derivação D: C¶ ( ) Ø C¶ ( ), definido por Df = f' = derivada de f.
Exercícios
4.1 [4.2]. Sejam R, P, S: 2 Ø 2 respectivamente a rotação de 30° em torno da origem, a projeção ortogonal sobre a reta y = x/3 e a reflexão em torno da mesma reta. Dado o vetor v = ( 2, 5 ) , determine os vetores Rv, Pv e Sv.
6 Rijo AL Capítulo 4.nb

Resposta:
In[1]:= H∗ Os operadores de rotação R, projeção P e reflexão S ∗LClear@opR, opP, opSDθ = π ê6;opR@8x_, y_<D := 8Cos@θD x − Sin@θD y, Sin@θD x + Cos@θD y<α = 1ê3;opP@8x_, y_<D := 8xêH1 + α2L + α yêH1 + α2L, α xêH1 + α2L + α2 yêH1 + α2L<opS@8x_, y_<D :=
8x H1 − α2LêH1 + α2L + 2 α yêH1 + α2L, 2 α xêH1 + α2L − H1 − α2L yêH1 + α2L<
In[7]:= H∗ Determonação de Rv ∗LopR@82, 5<D
Out[7]= 9−52
+ è!!!3 , 1 +5 è!!!3
2=
Rv = (-5/2 + è!!!3 , 1 + 5 è!!!3 /2)
In[8]:= H∗ Determonação de Rv ∗LopP@82, 5<D
Out[8]= 9 3310
,1110
=
Pv = (33/10, 11/10)
In[9]:= H∗ Determonação de Sv ∗LopS@82, 5<D
Out[9]= 9 235
, −145
=
Sv = (23/5, -14/5).
4.2 [4.5]. Dados os vetores u1 = (2, -1), u2 = (1,1), u3 = (-1, -4), v1 = (1, 3), v2 = (2, 3) e v3 = ( -5, -6), decida se existe ou não um operador linear A: 2 Ø 2 tal que Au1 = v1, Au2 = v2 e Au3 = v3 . Mesma pergunta com v3 = (5, -6) e com v3 = (5, 6).
Resposta:
In[1]:= H∗ Resolve o sistema de equações lineares para v3 = H−5, −6L ∗LSolve@82 a − b 1, 2 c − d 3, a + b 2,
c + d 3, −a − 4 b −5, −c − 4 d −6<, 8a, b, c, d<DOut[1]= 88a → 1, b → 1, c → 2, d → 1<<
Existe e o operador A é definido por A(x,y) = {x + y, 2 x + y}, De fato,
In[2]:= H∗ Definição do operador A ∗LopA@8x_, y_<D := 8x + y, 2 x + y<
Rijo AL Capítulo 4.nb 7

In[3]:= H∗ Os vetores u1, u2, u3, v1, v2, v3 ∗Lu1 = 82, −1<;u2 = 81, 1<;u3 = 8−1, −4<;v1 = 81, 3<;v2 = 82, 3<;v3 = 8−5, −6<;
In[9]:= H∗ Verifica se Au1 = v1, Au2 = v2 e Au3 = v3 ∗LopA@u1D v1opA@u2D v2opA@u3D v3
Out[9]= True
Out[10]= True
Out[11]= True
In[12]:= H∗ Resolve o sistema de equações lineares para v3 = H5, −6L ∗LSolve@82 a − b 1, 2 c − d 3, a + b 2,
c + d 3, −a − 4 b 5, −c − 4 d −6<, 8a, b, c, d<DOut[12]= 8<
O sistema não tem solução, portanto para v3 = H5, −6L não existe tal operador.
In[13]:= H∗ Resolve o sistema de equações lineares para v3 = H5, 6L ∗LSolve@82 a − b 1, 2 c − d 3, a + b 2,
c + d 3, −a − 4 b 5, −c − 4 d 6<, 8a, b, c, d<DOut[13]= 8<
O sistema não tem solução, portanto para v3 = H5, 6L não existe tal operador.
4.3 [4.6]. A expressão geral de um operador linear A: 2 Ø 2 é A(x, y) = (ax + by, cx + dy). Determine as con-stantes a, b, c e d de modo que A transforme os vetores u = (1,2) e v = (3, 4) nos vetores Au = (1,1) e Av = (2,2).
Resposta:
In[1]:= H∗ Resolve o sistema de equações lineares ∗LSolve@8a + 2 b 1, c + 2 d 1, 3 a + 4 b 2, 3 c + 4 d 2<, 8a, b, c, d<D
Out[1]= 99a → 0, b →12
, c → 0, d →12==
Verificação
In[2]:= H∗ Definição do operador A ∗LopA@8x_, y_<D := 8yê2, yê2<;
In[3]:= H∗ Verifica o valor de Au ∗LopA@81, 2<D
Out[3]= 81, 1<
8 Rijo AL Capítulo 4.nb

In[4]:= H∗ Verifica o valor de Av ∗LopA@83, 4<D
Out[4]= 82, 2<
4.4 [4.7]. A expressão geral de um funcional linear A: 3 Ø é f(x, y, z) = ax + by + cz. Dados os vetores u = (1, 2, 3), v = (-1,2,3) e w = (1, -2, 3) determine a, b e c de modo que se tenha f(u) = 1, f(v) = 0 e f(w) = 0.
Resposta:
In[1]:= H∗ Solução do sistema de equações lineares ∗LSolve@8a + 2 b + 3 c 1, −a + 2 b + 3 c 0, a − 2 b + 3 c 0<, 8a, b, c<D
Out[1]= 99a →12
, b →14
, c → 0==
In[2]:= H∗ Definição do funcional linear f ∗LClear@flFDflF@8x_, y_, z_<D := xê2 + yê4;
In[4]:= H∗ Mostra que f HuL = 1 ∗Lu = 81, 2, 3<;flF@uD
Out[5]= 1
In[6]:= H∗ Mostra que f HvL = 0 ∗Lv = 8−1, 2, 3<;flF@vD
Out[7]= 0
In[8]:= H∗ Mostra que f HwL = 0 ∗Lw = 81, −2, 3<;flF@wD
Out[9]= 0
4.5 [4.8]. Seja A: 2 Ø 2 o operador linear definido por A(x, y) = (5x + 4y, -3x - 2y). Ache vetores não-nulos u = (x, y) e v = (s, t) tais que Au = u e Av = 2v. São únicas as soluções? Será possível achar w ∫ 0 em 2 com Aw = a w, onde a ∫ 1 e a ∫ 2?
Resposta:
In[1]:= H∗ Solução do sistema de equações lineares no caso de Au = u ∗LSolve@85 x + 4 y x, −3 x − 2 y y<, 8x, y<DSolve::svars :
Equations may not give solutions for all "solve" variables. More…
Out[1]= 88x → −y<<
In[2]:= H∗ Definição do operador linear A ∗LClear@opADopA@8x_, y_<D := 8−y, y<
Uma infinidade de vetores do tipo (x, -x) com x∫ 0.
Rijo AL Capítulo 4.nb 9

In[4]:= H∗ Mostra que A Hx,−xL = Hx,−xL ∗LopA@8x, −x<D
Out[4]= 8x, −x<
In[5]:= H∗ Solução do sistema de equações lineares no caso de Av = v ∗LSolve@85 x + 4 y 2 x, −3 x − 2 y 2 y<, 8x, y<DSolve::svars :
Equations may not give solutions for all "solve" variables. More…
Out[5]= 99x → −4 y3
==
In[6]:= H∗ Definição do operador linear A ∗LClear@opADopA@8x_, y_<D := 8−4 yê3, y<
Uma infinidade de vetores do tipo (x, -3x/4) com x∫ 0.
In[8]:= H∗ Mostra que A Hx,−3 xê4L = Hx,−3 xê4L ∗LopA@8x, −3 xê4<D
Out[8]= 9x, −3 x4
=
4.6 [4.10]. . Tem-se uma transformação linear A: 2 Ø 3 . Sabe-se que A( -1, 1) = (1, 2, 3) e A(2, 3) = (1, 1, 1).
Pede-se a matriz a œ M(3, 2) de A relativamente às bases canônicas de 2 e 3 .
Resposta:
In[1]:= H∗ Solução do sistema de equações lineares ∗LSolve@8−a + b 1, −c + d 2, −e + f 3,
2 a + 3 b 1, 2 c + 3 d 1, 2 e + 3 f 1<, 8a, b, c, d, e, f<D
Out[1]= 99a → −25
, b →35
, c → −1, d → 1, e → −85
, f →75==
In[2]:= H∗ A matriz da transformação linear A ∗LmatA = 88−2ê5, 3ê5<, 8−1, 1<, 8−8ê5, 7ê5<<;
In[3]:= H∗ Fprma explicita da matriz A ∗LMatrixForm@matAD
Out[3]//MatrixForm=
i
k
jjjjjjjjj
− 25
35
−1 1
− 85
75
y
{
zzzzzzzzz
In[4]:= H∗ Verifica que A H−1,1L = H1, 2, 3L ∗LmatA.8−1, 1<
Out[4]= 81, 2, 3<
In[5]:= H∗ Verifica que A H2,3L = H1, 1, 1L ∗LmatA.82, 3<
Out[5]= 81, 1, 1<
10 Rijo AL Capítulo 4.nb
4.7 [4.21]. Seja f: 2 Ø um funcional linear. Sabendo que f(1, 1) = 3 e f(2, 3) = 1 calcule f(1, 0) e f(0, 1).
Resposta:
In[1]:= H∗ REsolver o sistema de equações lineares ∗LSolve@8a + b 3, 2 a + 3 b 1<, 8a, b<D
Out[1]= 88a → 8, b → −5<<
In[2]:= H∗ Definição do operador linear A ∗LClear@flFDflF@8x_, y_<D := 8 x − 5 y
In[4]:= H∗ Determina f H1,0L ∗LflF@81, 0<D
Out[4]= 8
In[5]:= H∗ Determina f H0,1L ∗LflF@80, 1<D
Out[5]= −5
Rijo AL Capítulo 4.nb 11
CAPÍTULO 5
Produtos de Transformações LinearesIniciar o MathKernel
In[1]:= 2 + 2
Out[1]= 4
O produto de transformações lineares, que introduziremos nesta seção, é um exemplo concreto de estruturaalgébrica que apresenta variados e intessantes fenômenos, não encontrados nas operações entre números ouentre vetares.
Definição de produto de transformações lineares
Dadas as transformações lineares A: E Ø F, B: F Ø G, onde o domínio de B coincide com o contra-domínio de A,
define-se o praduto BA: E Ø G pondo para cada v œ E, (BA)v = B(Av),
E ØA F ØB
G
ØBA
Vê-se imediatamente que BA é uma transformação linear, Observe-se também que BA nada mais é do que acomposta BoA das funções B e A. Segue-se então dos princípios gerais que se C: G Ø H é outra transformaçãolinear, vale a
Associatividade: (CB)A = C(BA),
Diltributividade à esquerda: (B + C)A = BA + CA,
Diltributividadeà direita: C(A + B) = CA + CB,
Homogeneidade: B(aA) = a(BA).
EXEMPLO 5.1 Sejam f, g, h: Ø definidas por f(x) = x, g(x) - x + 1 e h(x) = x2 . Então [h o (f + g)](x) = 4 x2 +4x + 1, enquanto [(h o f) + (h o g)](x) = 2 x2 + 2x + 1, logo h o (f + g) ∫ h o f + h o g. Isto se dá porque h não é linear.
Evidentemente, dada A: E Ø F, tem-se AIE = A = IF A, de modo que as aplicações identidade IE : E Ø E, IF : F ØF são elementos neutros para a multiplicação, cada uma delas do lado apropriado.
Diferenças entre produto de transformações lineares e produto de números reais
Diferenças notáveis entre o produto de transformações lineares e o produto de números reais são as ausências dacomutatividade, da lei do corte e da inversa multiplicativa para uma transformação ∫ 0, além da presença de
transformações nilpotentes, para as quais tem-se An = 0 com A ∫ 0. Deve-se ainda mencionar a restrição de que oproduto BA só está definido quando A toma valores no domínio de B. Esta restrição desaparece, naturalmente,quando se trata de operadores lineares no mesmo espaço E: então o produto BA está definido quaisquer que sejam
A, B œ L(E).
EXEMPLO 5.2 Sejam P, R: 2 Ø 2 respectivamente a projeção ortogonal sobre a reta y = x e a rotação de um
ângulo de 90° em torno da origem. Então, para todo v = (x, y) œ 2 , tem-se Pv = 1/2(x + y, x + y), Rv = (-y, x).Segue-se que
RPv = 1/2 (-x - y, x + y)
e
PRv = 1/2 (x - y, x - y)
Portanto RPv ∫ PRv, para todo v, exceto para v = (0, 0). Observe que bastaria que RPv ∫ PRv para um único v a fimde termos RPv ∫ PRv.
EXEMPLO 5.3 Seja P: 2 Ø 2 a projeção ortogonal sobre uma certa reta r. Para todo v sobre a reta r, tem-se Pv =
v. Assim, para qualquer v œ 2 , tem-se PPv = Pv, pois Pv está sobre r. Noutras palavras, valePP = P, ou seja PP = PI,embora P ∫ I. Assim, não é permitido cortar o fator P à esquerda em ambos os membros da igualdade PP = PI. Seg-
ue-se que não existe Q œ L(2 ) tal que QP = I. Com efeito, se um tal operador Q existisse, de PP = P concluiríamosQPP = QP , isto é, IP = I, donde P = I.
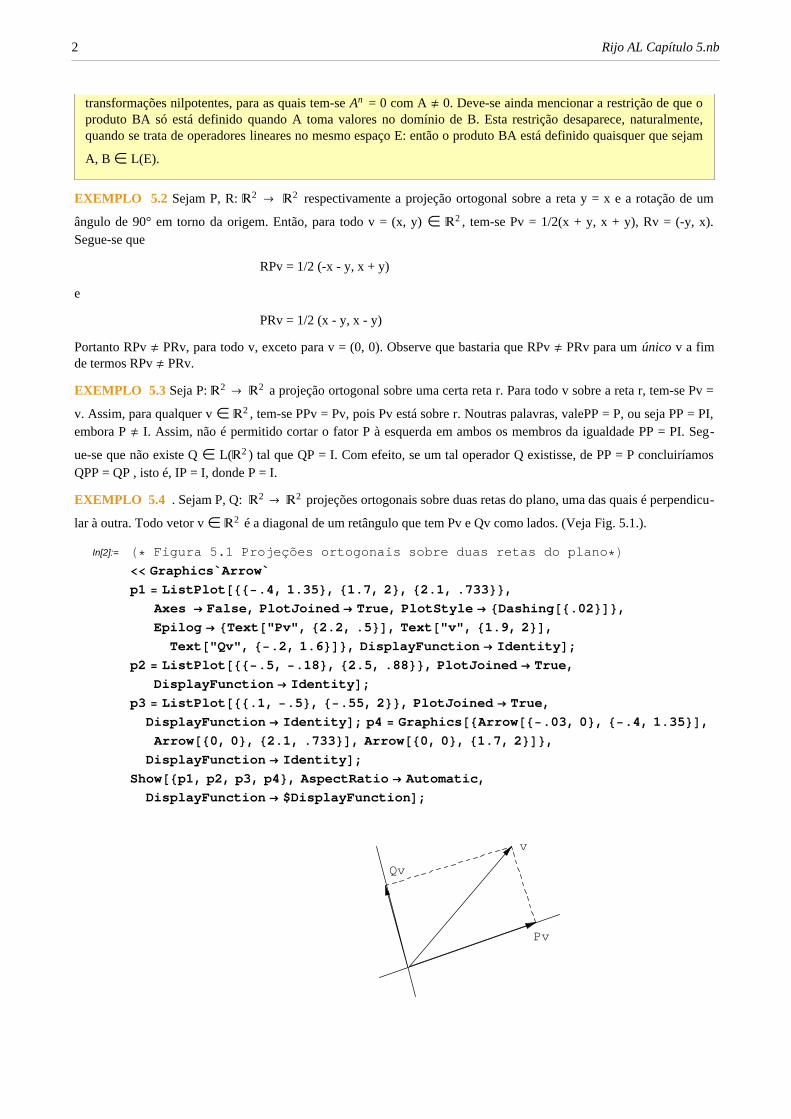
EXEMPLO 5.4 . Sejam P, Q: 2 Ø 2 projeções ortogonais sobre duas retas do plano, uma das quais é perpendicu-
lar à outra. Todo vetor v œ 2 é a diagonal de um retângulo que tem Pv e Qv como lados. (Veja Fig. 5.1.).
In[2]:= H∗ Figura 5.1 Projeções ortogonais sobre duas retas do plano∗L<< Graphics`Arrow`p1 = ListPlot@88−.4, 1.35<, 81.7, 2<, 82.1, .733<<,
Axes → False, PlotJoined → True, PlotStyle → [email protected]<D<,Epilog → 8Text@"Pv", 82.2, .5<D, Text@"v", 81.9, 2<D,
Text@"Qv", 8−.2, 1.6<D<, DisplayFunction → IdentityD;p2 = ListPlot@88−.5, −.18<, 82.5, .88<<, PlotJoined → True,
DisplayFunction → IdentityD;p3 = [email protected], −.5<, 8−.55, 2<<, PlotJoined → True,
DisplayFunction → IdentityD; p4 = Graphics@8Arrow@8−.03, 0<, 8−.4, 1.35<D,Arrow@80, 0<, 82.1, .733<D, Arrow@80, 0<, 81.7, 2<D<,
DisplayFunction → IdentityD;Show@8p1, p2, p3, p4<, AspectRatio → Automatic,
DisplayFunction → $DisplayFunctionD;
Pv
v
Qv
2 Rijo AL Capítulo 5.nb

Segue-se então que v = Pv + Qv para todo v œ 2 , ou seja, P + Q = I e Q = I - P. Portanto PQ = P{I - P) = P - P2 = P- P = 0. Obtemos assim dois operadores não-nulos P, Q com PQ = 0. É possível mesmo que um operador não-nulo A
œ L(2 ) cumpra A2 = 0. Basta pôr A(x, y) = (x - y, x - y).
Operador nilpotente
Um operador A chama-se nilpotente quando, para algum n œ N, tem-se An = 0. Um exemplo significativo deoperador nilpotente é a derivação D : Pn Ø Pn . Para todo polinômio p de grau § n tem-se Dn + 1 p = 0, logo Dn + 1 =0.
EXEMPLO 5.5 Se Ra , Rb : 2 Ø 2 são rotações em torno da origem com ângulos a e b respectivamente, entãoRa .Rb = Ra + b . (Isto pode ser visto geometricamente na Fig. 5.2 ou usando as fórmulas de cos(a + b) e sen(a + b)).Se S: 2 Ø 2 é a reflexão em torno de uma reta então S.S = I. Isto se segue da expressão S = lP - I, levando emconta que P.P = P, mas também pode ser visto geometricamente.
Exercícios
5.1 [5.2]. Considere os operadores lineares R, P, S: 2 Ø 2 , onde R a rotação de 30° em torno da origem, S é a reflexão em torno da reta y = 2x e P é a projeção ortogonal sobre a mesma reta.
(i) Mostre que se tem PS = SP = P.
(ii) Verifique a igualdade RSR = S.
(iii) Mostre que R não comuta com S nem com P.
(iv) Determine todos os vetores v tais que PRv = 0 e RPv ∫ 0.
Resposta:
In[1]:= H∗ Os operadores de rotação R, de projeção P e de reflexão S ∗LClear@opR, opP, opSDθ = π ê6;opR@8x_, y_<D := 8Cos@θD x − Sin@θD y, Sin@θD x + Cos@θD y<α = 2;
opP@8x_, y_<D := 9 1
1 + α2 x +
α
1 + α2 y,
α
1 + α2 x +
α2
1 + α2 y=
opS@8x_, y_<D := 9 1 − α2
1 + α2 x +
2 α
1 + α2 y,
2 α
1 + α2 x −
1 − α2
1 + α2 y=
(i) Mostre que se tem PS = SP = P.
In[6]:= opP@opS@8x, y<DD opS@opP@8x, y<DD opP@8x, y<D êê Simplify
Out[6]= True
(ii) Verifique a igualdade RSR = S.
Rijo AL Capítulo 5.nb 3
In[7]:= opR@opS@opR@8x, y<DDD opS@8x, y<D êê Simplify
Out[7]= True
(iii) Mostre que R não comuta com S nem com P.
In[8]:= H∗ R não comuta com S ∗LopR@opS@8x, y<DD opS@opR@8x, y<DD ê. 8x → 1, y → 2< êê Simplify
Out[8]= False
In[9]:= H∗ R não comuta com S ∗LopR@opP@8x, y<DD opP@opR@8x, y<DD ê. 8x → 1, y → 2< êê Simplify
Out[9]= False
(iv) Determine todos os vetores v tais que PRv = 0 e RPv ∫ 0.
In[10]:= Solve@opP@opR@8x, y<DD 0, 8x, y<DSolve::svars :
Equations may not give solutions for all "solve" variables. More…
Out[10]= 99x → −I−1 + 2 è!!!3 M y
2 +è!!!3
==
In[11]:= opP@opR@8x, y<DD ê. 9x −> −I−1 + 2
è!!!!3 M y
2 +è!!!!
3, y → y= êê Simplify
Out[11]= 80, 0<
Os vetores v tais que PRv = 0 são I- -1 + 2 è!!!!3ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ2 + è!!!!3
y, yM com y real.
In[12]:= Solve@opR@opP@8x, y<DD 0, 8x, y<DSolve::svars :
Equations may not give solutions for all "solve" variables. More…
Out[12]= 88x → −2 y<<
In[13]:= opR@opP@8x, y<DD ê. 8x −> −2 y, y → y< êê Simplify
Out[13]= 80, 0<
Os vetores v tais que RPv ∫ 0 devem ser diferentes de H- yÅÅÅÅ2 , yL com y real.
5.2 [5.6]. Dados os operadores A, B: 2 Ø 2 dados por A(x, y) = (x + y, 0) e B(x, y) = (-y, x), obtenha as expressões dos operadores A + B, AB, BA, A2 e B2 . Descreva geometricamente esses cinco operadores. (Exemplo: A é a projeção sobre o eixo x paralelamente a uma certa reta. (Qual?)).
Resposta:
In[1]:= H∗ Os operadores A e B ∗LClear@opA, opBDopA@8x_, y_<D := 8x + y, 0<opB@8x_, y_<D := 8 −y, x<
4 Rijo AL Capítulo 5.nb
In[3]:= H∗ O operador A + B ∗LopA@8x, y<D + opB@8x, y<D
Out[3]= 8x, x<
In[4]:= H∗ O operador AB ∗LopA@opB@8x, y<DD
Out[4]= 8x − y, 0<
In[5]:= H∗ O operador AB ∗LopB@opA@8x, y<DD
Out[5]= 80, x + y<
In[6]:= H∗ O operador AB ∗LopA@opA@8x, y<DD
Out[6]= 8x + y, 0<
In[7]:= H∗ O operador AB ∗LopB@opB@8x, y<DD
Out[7]= 8−x, −y<
5.3 [5.7]. Seja A: 3 Ø 3 dado por A(x, y, z) = (ay + bz, cz, 0). Mostre que A3 = 0.
Resposta:
In[1]:= H∗ O operador A ∗LClear@opADopA@8x_, y_, z_<D := 8a y + b z, c z, 0<
In[2]:= H∗ O operador A3 ∗LNest@opA, 8x, y, z<, 4D
Out[2]= 80, 0, 0<
Nest[f, arg, n] aplica recursivamente uma função f[arg] n vezes.
5.4 [5.8]. Sejam A, B, C, D: 2 Ø 2 os operadores dados por A(x, y) = (x, 0), B(x, y) = (-y, x), C(x, y) = (0, y) e D(x, y) = (y, -x). Determine o operador ABCD.
Resposta:
In[1]:= H∗ Os operadores A, B, C, D ∗LClear@opA, opB, opC, opDDopA@8x_, y_<D := 8x, 0<opB@8x_, y_<D := 8−y, x<opC@8x_, y_<D := 80, y<opD@8x_, y_<D := 8y, −x<
In[5]:= H∗ O operador ABCD ∗LopA@opB@opC@opD@8x, y<DDDD
Out[5]= 8x, 0<
Rijo AL Capítulo 5.nb 5

Em resumo, ABCD = A
5.5 [5.9]. Considere as transformações lineares A: 2 Ø 3 e B: 3 Ø 2 , definidas por: A(x, y) = (x, y, x + y) e B(x, y, z) = (ax + (a - l) y + (1- a) z, - b x + (1- b ) y + b z). Determme o operador BA: 2 Ø 2 .
Resposta:
In[1]:= H∗ As transformadas lineares A e B ∗LtlA@8x_, y_<D := 8x, y, x + y<tlB@8x_, y_, z_<D := 8a x + Ha − 1L y + H1 − aL z, −b x + H1 − bL y + b z<
In[3]:= H∗ O operador BA ∗LtlB@tlA@8x, y<DD êê Simplify
Out[3]= 8x, y<
Em resumo, BA = I
5.6 [5.10]. Dado o operador A: 2 Ø 2 , com A(x, y) = (3x - 2y, 2x + 7y), ache um vetor não-nulo v = (x, y) tal que Av = 5v.
Resposta:
In[1]:= H∗ O operadores A ∗LClear@opADopA@8x_, y_<D := 83 x − 2 y, 2 x + 7 y<
In[2]:= Solve@83 x − 2 y 5 x, 2 x + 7 y 5 y<, 8x, y<DSolve::svars :
Equations may not give solutions for all "solve" variables. More…
Out[2]= 88x → −y<<
Vetores do tipo (x, -x) com x ∫ 0. De fato,
In[3]:= opA@8x, −x<DOut[3]= 85 x, −5 x<
5.7 [5.12]. Sejam A, B: 3 Ø 3 , definidos por A(x, y, z) = (x, y, 0) e B(x, y, z) = (x + z, y, 0). Obtenha vetores u, v
œ 3 tais que Au e Av sejam L.D. porém ABu e ABv sejam L.I.
Resposta:
In[1]:= H∗ O operador A ∗LClear@opA, opBDopA@8x_, y_, z_<D := 8x, y, 0<opB@8x_, y_, z_<D := 8x + z, y, 0<
In[4]:= Clear@αDopA@8x, y, z<DopA@8α x, α y, z<D
Out[5]= 8x, y, 0<Out[6]= 8x α, y α, 0<
Os vetores u = (x, y, z) e v = (a x, a y, z) satisfazem a questão.
6 Rijo AL Capítulo 5.nb

In[7]:= opA@opB@8x, y, z<DDOut[7]= 8x + z, y, 0<
In[8]:= opA@opB@8 α x, α y, z<DDOut[8]= 8z + x α, y α, 0<
Os vetores ABu e ABv são L.I.
5.8 [5.13]. .No espaço vetorial P dos polinômios, considere os operadores lineares D, A: P Ø P de derivação (Dp(x) = p'(x)) e multiplicação por x (Ap(x) = x p(x)) respectivamente. Determine DA - AD.
Resposta:
DA[p(x)] = D[x p(x)] = p(x) + x D[p(x)] = p(x) + x p'(x)
AD[p(x)] = Ap'(x) = x p'(x)
DA - AD = p(x) + x p'(x) - x p'(x) = p(x)
Portanto DA - AD = I, isto é, o operador identidade.
Rijo AL Capítulo 5.nb 7

CAPÍTULO 6
Núcleo e ImagemIniciar o MathKernel
In[1]:= 2 + 2
Out[1]= 4
Nesta seção, será examinada com cuidado a possibilidade de uma transformação linear admitir ou não umainversa. Veremos que isto está associado à existência e à unicidade da solução de um sistema de equaçõeslineares. Serd introduzido o conceito de isomorfismo, que dará um sentido preciso à afirmação de que doisespaços vetoriais de mesma dimensão são algebricamente indistinguíveis. Tudo começa com o núcleo e a imagemde uma transformqção.
A toda transformação linear A: E Ø F estão associados dois subespaços vetoriais indispensáveis para estudar ocomportamento de A: o núcleo de A, que é um subespaço de E, e a imagem de A, que é um subespaço de F
Imagem de uma transformação linear
A imagem de A é o subconjunto Im(A) Õ F, formado por todos os vetores w = Av œ F que são imagens deelementos de E pela transformação A.
A noção de imagem tem sentido seja qual for a função A: E Ø F, seja linear ou não. Quando A é linear, entãoIm(A) é um subespaço vetorial de F, como se yê facilmente.
Transformação sobrejetiva
Se Im(A) = F, diz-se que a transformação A é sobrejetiva. Isto significa que, para qualquer w œ F dado, pode-se
achar v œ E tal que A.v = w.
EXEMPLO 6.1 Dado um sistema linear de m equações a n incógnitas
a11 x1 + a12 x2 + . . . + a1 n xn = b1
a21 x1 + a22 x2 + . . . + a2 n xn = b2
ª
am1 x1 + am2 x2 + . . . + amn xn = bm
seja A: n Ø m a transformação linear cuja matriz nas bases canô- nicas de n e m é a = @aijD . Isto significa,como sabemos, que, para j = 1, 2, ..., n, os vetores

v j = A.e j = ⁄i = 1m aij ei = a1 j + a2 j + . . . + amj œ m
são os vetores-coluna da matriz a. Em termos da transformação linear A, o sistema acima pode ser interpretado como o
problema de achar um vetor x = Hx1, . . . , xn L œ m tal que Ax = b, onde b = Hb1, . . . bmL . Portanto o sistema admitesolução se, e somente set o vetor b pertence à imagem da transformação linear A, o que equivale a dizer que os conjun-tos 8v1 , ..., vn } e 8v1 , ..., vn , b} geram ambos o mesmo subespaço Im(A).
EXEMPLO 6.2 . Um funcional linear f: E Ø é sobrejetivo ou é igual a zero, pois {0} e são os únicos sube-spaços vetoriais de . A derivação D: Ck H L Ø Ck - 1 H L é sobrejetiva, e o mesmo se dá com o operador D: C¶ H LØ C¶ H L e com a transformação linear D: Pn Ø Pn-1 . Se P: 2 Ø 2 é a projeção ortogonal sobre uma reta r, aimagem de P é essa reta r
Evidentemente, dada A: E Ø F, tem-se AIE = A = IF A, de modo que as aplicações identidade IE : E Ø E, IF : F ØF são elementos neutros para a multiplicação, cada uma delas do lado apropriado.
Inversa à direita
Uma transformação linear B: F Ø E chama-se uma inversa à direita da transformação linear A: E Ø F quando se
tem AB = IF , ou seja, quando A(Bw) = w para todo w œ F.
Teorema 6.1. A fim de que uma transformação linear A: E Ø F, entre espaços vetoriais de dimensão finita,
possua uma inversa à direita B œ L(F; E) é necessário e suficiente que A seja sobrejetiva.
EXEMPLO 6.3 Uma transformação linear sobrejetiva A: E Ø F pode admitir mais de uma inversa à direita B: F ØE. Um exemplo simples é dado pela transformação linear A: 3 Ø 2 , definida por A(x, y, z) = (x, y). Fixados
arbitrariamente a, b œ , a transformação linear , B: 2 Ø 3 , definida por B(x, y) = (x, y, ax + by), é uma inversaà direita para A. Variando os numeros a e b, obtemos infinitastas possibilidades para B
EXEMPLO 6.4 Uma inversa à direita para a derivação D: Pn + 1 Ø Pn é a transformação linear J: Pn Ø Pn-1 , que acada polinômio p(x) = a0 + a1 x + ...+ an xn de grau § n faz corresponder o polinômio
Jp(x) = a0 x + a1ÅÅÅÅÅÅÅ2 x2 + . + anÅÅÅÅÅÅÅÅÅÅÅÅn + 1 xn + 1 .
Núcleo de uma transformação linear
O núcleo da transformação linear A: E Ø F é o conjunto dos vetores v œ E tais que Av = 0. Usaremos a notaçãoN(A) para representar o núcleo de A. É fácil ver que N(A) é um subespaço de E.
Transformação injetiva
.Uma transformação linear A: E Ø F chama-se injetiva quando v ∫ v' em E fl Av ∫, Av' em F. Equivalentemente:Av = Av' fl v = v'. Esta noção tem sentido para qualquer função A: E Ø F , seja ela linear ou não. No caso linear,porém, o teorema abaixo simplifica a verificação da injetividade.
Teorema 6.2. A fim de que uma transformação linear A: E Ø F seja injetiva é necessário e suficiente que seunúcleo N(A) contenha apenas o vetor nulo.
Teorema 6.3. Uma transformação linear é injetiva se, e somente se, leva vetores L.I. em vetores L.I.
2 Rijo AL Capítulo 6.nb

Segue-se deste teorema que se E tem dimensão finita n e A: E Ø F é uma transformação linear injetiva então dimF ¥ n. .Assim,por exemplo, não existe uma transformação linear injetiva de 3 em 2 .
Teorema 6.4. Seja A: E Ø F uma transformação lineal: Para todo b œ Im(A), o conjunto V = {x œ E; Ax = b},formado pelas soluções do sistema linear Ax = b, é uma variedade afim em E, paralela ao núcleo N(A).
EXEMPLO 6.5 O núcleo de uma rotação ou de uma reflexão no plano 2 reduz-se a {0}. O núcleo da projeçãoortogonal P: 2 Ø 2 sobre a reta r é a reta que contém 0 e é perpendicular a r. O núcleo da derivação D: Ck H L ØCk - 1 H L é o subespaço uni-dimensional de Ck H L formado pelas funções constantes. O núcleo de um funcional
linear não-nulo j: E Ø é um hiperplano H Õ E.
Inversa à esquerda
Sejam A: E Ø F e B: F Ø E transformações lineares. Diz-se que B é uma inversa à esquerda de A quando BA =
lE , isto é, quando B(Av) = v para todo v œ E.
EXEMPLO 6.6 Seja A: 2 Ø 3 definida por A(x, y) = (x + 2y, 2x + 3y, 3x + 4y ). A transformação linear B: 3 Ø2 , dada por B(x, y, z) = (-3x + 2y, 2x - y) cumpre a relação
B(A(x, y)) = B(x + 2y, 2x + 3y, 3x + 4y)
= (-3(x + 2) +2(2x + 3y), 2(x + 2y) - (2x + 3y))
= (x, y)
para qualquer ( x, y ) œ 2 . Logo B é uma inversa à esquerda para A.
EXEMPLO 6.7 Uma transformação linear pode admitir uma infinidade de inversas à esquerda. Por exemplo, seja A:
2 Ø 3 dada por A(x, y) = (x, y, 0). Para quaisquer a, b œ , a transformação linear B: 3 Ø 2 , dada por B(x, y,
z) = (x + az, y + bz) é uma inversa à esquerda de A, pois BA(x, y) = B(x, y, 0) = (x, y) para todo (x, y) œ 2 .
Teorema 6.5. Sejam E e F espaços vetoriais de dimensão finita. A transformação linear A: E Ø F possui inversa àesquerda se, e somente se, é injetiva.
Transformação invertível
Uma transformação linear A: E Ø F chama-se invertível quando existe B: F Ø E linear tal que BA = IE e AB = IF ,ou seja, quando B é, ao mesmo tempo, inversa à esquerda e à direita de A. Neste caso, diz-se que B é a inversa deA e escreve-se B = A-1 .
Isomorfismo
A fim de que a transformação linear A seja invertível, é necessário e suficiente que ela seja injetiva e sobrejetiva.Diz-se, então, que A é uma bijeção linear entre E e F ou, mais apropriadamente, que A: E Ø F é um isomorfismo eque os espaços vetoriais E e F são isomorfos.
Se A: E Ø F e B: F Ø G são isomorfismos,então A-1 : E Ø F e BA: E Ø G também são isomorfismos.Tem-se HBAL-1 = A-1 B-1 e, para a ∫ 0, HaAL-1 = 1ÅÅÅÅÅa A-1 .
Um isomorfismo A: E Ø F entre espaços vetoriais transforma toda base de E numa base de F. Reciprocamente, se uma transformação linear A: E Ø F leva alguma base de E numa base de F então A é um isomorfismo.
Rijo AL Capítulo 6.nb 3
Do que foi dito acima resulta, em particular, que dois espaços vetoriais de dimensão finita isomorfos têm a mesma dimensão.
Todo espaço vetorial de dimensão n é isomorfo n
Como o inverso A-1 : E Ø n e o produto BA-1 : E Ø F de A por outro isomorfismo B: n Ø F são isomorfismos,segue-se que dois espaços vetoriais E, F, ambos de dimensão n, são isomorfos.
EXEMPLO 6.8 . O espaço Pn , dos polinômios de grau § n, tem dimensão n + 1, logo é isomorfo a n - 1 . Por suavez, o espaço M(m x p), das matrizes m x p, é isomorfo a mp , portanto Pn é isomorfo a M(m x p) se, e somente se, n+ 1 = mp.
Teorema 6.6. (Teorema do Núcleo e da Imagem) Sejam E, F espaços vetoriais de dimesão finita. Para todatransformação linear A: E Ø F tem-se dim E = dlm N(A) + dim Im(A).
Corolário. Sejam E, F espaços vetoriais de mesma dimensão finita n. Uma transformação linear A: E Ø F éinjetiva se, e somente se, é sobrejetiva e portanto é um isomorfismo.
EXEMPLO 6.9 Um caso particular do corolário acima diz que, num espaço vetorial de dimensão finita, um operadorlinear é injetivo se, e somente se, é sobrejetivo, Isto seria falso num espaço de dimensão infinita, como se vê noseguinte exemplo: sejam A, E: ¶ Ø ¶ definidos por
AHx1, x2, x3, . . . L = H0, x1, x2, x3, . . . Le
BHx1, x2, x3, . . . L = Hx2, x3, x4, . . . LA e B são operadores lineares. O primeiro é injetivo mas não é sobrejetivo e o segundo é sobrejetivo mas não éinjetivo.
EXEMPLO 6.10 O Teorema do Núcleo e da Imagem dá outra explicação para o fato de um hiperplano H Õ n terdimensão n - 1. Por esse teorema, se dim E = n e é f: E Ø um funcional linear ∫ 0 então o núcleo de f é um sube-spaço vetorial de dimensão n -1 em E, pois f não-nulo implica Im(f) = logo dim Im(f) = 1 e dim N(f) - dim E - dimIm( f) = n - 1. Ora, o hiperplano
H = 8Hx1, x2, . . . , xnL œ n; a1 x1 + . . . an xn = 0<é o núcleo do funcional linear não nulo f: n Ø , definido por
f Hx1, x2, . . . , xnL = a1 x1 + . . . an xn ,
Teorema 6.7. Se uma transformação linear A: E Ø F tem uma inversa à esquerda B: F Ø E e uma inversa àdireita C: F Ø E então B = C e A é um isomorfismo, com A-1 = B = C.
Corolário. Seja dim E = dim F. Se as transformações lineares A: E Ø F, B: F Ø E são tais que BA = IE então
AB = IF e B = A-1 .
4 Rijo AL Capítulo 6.nb
Exercícios
6.1 [6.3]. Encontre números a, b, c, d de modo que o operador A: 2 Ø 2 , dado por A (x, y) = (ax + by, cx + dy) tenha como núcleo a reta y =3x.
Resposta:
Sendo o núcleo do operador a reta y = 3x , segue que A(x, y) = (3 x - y, 3 x - y). Portanto, a = 3, b = -1, c = 3 e d = - 1.
6.2 [6.4]. Ache a, b, c, d tais que o operador A: 2 Ø 2 com A(x, y) = ( ax + by, cx + dy), tenha a reta y = 2x como imagem.
Resposta:
Sendo a imagem do operador a reta y = 2 x , segue que A(x, y) = (x + y, 2 x + 2 y). Portanto, a = 1, b = 1, c = 2 e d = 2.
6.3 [6.5] Escreva a expressão de um operador A: 2 Ø 2 cujo núcleo seja a reta y = x e cuja imagem seja a reta y = 2x.Resposta:
Sendo o núcleo do operador a reta y = x , segue que A(x, y) = (a x - a y , b x - b y ) com b, d ∫ 0. Por outro lado, a imagem do operador é a reta y = 2 x , logo a =1 e b = 2. Portanto, A(x, y) = (x - y, 2 x - 2 y).
In[53]:= p1 = ListPlot@88−1, −1<, 81, 1<<,PlotJoined → True, PlotStyle → 8RGBColor@1, 0, 0D<,AspectRatio −> Automatic, DisplayFunction → IdentityD;
p2 = ListPlot@88−1, −2<, 81, 2<<, PlotJoined → True,PlotStyle → 8RGBColor@0, 0, 1D<,AspectRatio −> Automatic, DisplayFunction → IdentityD;
Show@GraphicsArray@8p1, p2<D, DisplayFunction → $DisplayFunctionD;
-1 -0.5 0.5 1
-1
-0.5
0.5
1
-1 -0.5 0.5 1
-2
-1
1
2
6.4 [6.6] Defina um operador A: A: 2 Ø 2 que tenha como núcleo e como imagem o eixo x.
Rijo AL Capítulo 6.nb 5
Resposta:
Sendo o núcleo do operador a reta y = 0 , segue que A(x, y) = (b y , d y ) com b, d ∫ 0. Por outro lado, a imagem do operador é a reta y = 0 , logo c = 1 e d = 0, logo A(x, y) = (y, 0).
In[69]:= p1 = ListPlot@88−1, 0<, 81, 0<<,PlotJoined → True, PlotStyle → RGBColor@1, 0, 0D,AspectRatio −> Automatic, DisplayFunction → IdentityD;
p2 = ListPlot@88−1, 0<, 81, 0<<, PlotJoined → True,PlotStyle → RGBColor@0, 0, 1D,AspectRatio −> Automatic, DisplayFunction → IdentityD;
Show@GraphicsArray@8p1, p2<D, DisplayFunction → $DisplayFunctionD;
-1 -0.5 0.5 1
-1
-0.5
0.5
1
-1 -0.5 0.5 1
-1
-0.5
0.5
1
6.5 [6.7] Resolva um exercício análogo ao anterior, com a reta y = 5 x em lugar do eixo x.
Resposta:
Sendo o núcleo do operador a reta y = 5 x , segue que A(x, y) = (5 a x - a y, 5 b x - 5 b y ) com a, b ∫ 0. Por outro lado, a imagem do operador é a reta y = 5 x , logo a = 1 e b = 5, logo A(x, y) = (5 x - y, 25 x - 5 y).
In[75]:= p1 = ListPlot@88−1, −5<, 81, 5<<, PlotJoined → True,PlotStyle → RGBColor@1, 0, 0D, DisplayFunction → IdentityD;
p2 = ListPlot@88−1, −5<, 81, 5<<, PlotJoined → True,PlotStyle → RGBColor@0, 0, 1D, DisplayFunction → IdentityD;
Show@GraphicsArray@8p1, p2<D, DisplayFunction → $DisplayFunctionD;
-1 -0.5 0.5 1
-4
-2
2
4
-1 -0.5 0.5 1
-4
-2
2
4
6.6 [6.8] Considere a transformação linear A: 4 Ø 3 , dada por
A(x, y, z, t) = (x + y + z + 2 t, x - y + 2 z, 4 x + 2 y + 5 z + 6 t),
6 Rijo AL Capítulo 6.nb

encontre um vetor b œ 3 que não pertença à imagem de A e com isso exiba um sistema linear de três equações com quatro incógnitas sem solução.
In[78]:= Solve@8x + y + z + 2 t 0, x − y + 2 z 0, 4 x + 2 y + 5 z + 6 t 0< , 8x, y, z, t<DSolve::svars :
Equations may not give solutions for all "solve" variables. More…
Out[78]= 99x → −t −3 z2
, y → −t +z2==
Fazendo z = 2 e t = 1, o vetor (-4, 0, 2, 1) pertence ao núcleo de . Com efeito,
In[79]:= tlA@x_, y_, z_, t_D := 8x + y + z + 2 t, x − y + 2 z, 4 x + 2 y + 5 z + 6 t<
In[82]:= tlA@−4, 0, 2, 1DOut[82]= 80, 0, 0<
O vetor (-4, 0, 2, 2) não pertence ao núcleo. De fato,
In[83]:= tlA@−4, 0, 2, 2DOut[83]= 82, 0, 6<
Resposta:
6.5 [6.7 Seja E = C0 () o espaço das funções contínuas f: Ø . Defina o operador linear A: E Ø E pondo, para
cada f œ E, Af = j, onde j(x] = Ÿ0x f HtL dt, x œ . Determine o núcleo e a imagem do operador A.
Resposta:
6.6 [6.13] .Prove que cada uma das transformações lineares abaixo é injetiva e obtenha uma inversa à esquerda linear para cada uma delas.
(a) A: Ø n ; A(x) = (x, 2 x, . . . , n x).
(b) B: 2 Ø 3 ; B(x, y) = (x + 2 y, x + y, x - y).
(c) D: 3 Ø 4 ; D(x, y, z) = (2 x, 3 y, 5 z ,x + y + z).
(d) C: Pn Ø Pn + 2 ; C . p(x) = Hx2 + 1Lp(x).
Resposta:
(a) Devemos mostrar que A(x) = A(y) ï x = y. Com efeito, (x, 2x , . . . , n x) = (y, 2y, . . ,n y) ï x = y.
O funcional B : n Ø definido por B(x, y, .. z) = x é um inverso à esquerda de A. De fato, BA.x = B(A(x)) = B(x, 2x, . . . n x) = x
(b) Devemos mostrar que B(x, y) = B(x', y') ï (x, y) = (x', y'). Com efeito, (x + 2y , x + y, x - y) = (x' + 2 y", x' + y', x' - y') ï (x, y) = (x', y').
Seja C : 3 Ø 2 dada por C(x, y, z) = (a1 x + a2 y + a3 z , b1 x + b2 y + b2 z ) . Para determinar a1, a2, a3, b1, b2, b3 devemos resolver o sistema abaixo
In[2]:= Solve@8a1 + a2 + a3 1, 2 a1 + a2 − a3 0, b1 + b2 + b3 0, 2 b1 + b2 − b3 1<,8a1, a2, a3, b1, b2, b3<DSolve::svars :
Equations may not give solutions for all "solve" variables. More…
Out[2]= 88a1 → −1 + 2 a3, a2 → 2 − 3 a3, b1 → 1 + 2 b3, b2 → −1 − 3 b3<<
Rijo AL Capítulo 6.nb 7

A transformação C : 3 Ø 2 definido por C(x, y, z) = (x - y + z, 3 x - 5 y + z) é uma inversa à esquerda de B. Com efeito,
In[3]:= tlB@8x_, y_<D := 8x + 2 y, x + y, x − y<tlC@8x_, y_, z_<D := 8x − y + z, 3 x − 4 y + z<
In[6]:= tlC@tlB@8x, y<DD êê Simplify
Out[6]= 8x, y<
(c) Devemos mostrar que D(x, y, z) = D(x', y', z) ï (x, y', z) = (x', y', z'). Com efeito, (2 x, 3 y , 5 z, x + y + z) = (2 x', 3 y", 5 z ', x' + y' + z') ï (x, y', z) = (x', y', z')).
Seja E : 4 Ø 3 dada por C(x, y, z, w) = (a1 x + a2 y + a3 z + a4 w , b1 x + b2 y + b2 z+ b4 w , c1 x + c2 y + c2 z+ c4 w) . Para determinar a1, a2, a3, a4, b1, b2, b3 , b4 devemos resolver o sistema abaixo
In[15]:= Solve@82 a1 + a4 1, 3 a2 + a4 0, 5 a3 + a4 0, 2 b1 + b4 0,3 b2 + b4 1, 5 b3 + b4 0, 2 c1 + c4 0, 3 c2 + c4 0, 5 c3 + c4 1<,8a1, a2, a3, a4, b1, b2, b3, b4, c1, c2, c3, c4<DSolve::svars :
Equations may not give solutions for all "solve" variables. More…
Out[15]= 99a1 →12
−a42
, a2 → −a43
, a3 → −a45
, b1 → −b42
,
b2 →13
−b43
, b3 → −b45
, c1 → −c42
, c2 → −c43
, c3 →15
−c45
==
A transformação E : 4 Ø 3 definido por C(x, y, z, w) = (- 1ÅÅÅÅ3 y - 1ÅÅÅÅ5 z + w, - 1ÅÅÅÅ2 x - 1ÅÅÅÅ5 z + w, - 1ÅÅÅÅ2 x - 1ÅÅÅÅ3 y + w) é uma inversa à esquerda de D. Com efeito,
In[19]:= tlD@8x_, y_, z_<D := 82 x , 3 y, 5 z, x + y + z<tlE@8x_, y_, z_, w_<D :=
8−1ê3 y − 1ê5 z + w, −1ê2 x − 1ê5 z + w, −1ê2 x − 1ê3 y + w<
In[21]:= tlE@tlD@8x, y, z<DD êê Simplify
Out[21]= 8x, y, z<
(d) Devemos mostrar que C. p(x) = C.q(x) ï p(x) = q(x). Com efeito, devidindo por Hx2 + 1L , Hx2 + 1Lp(x) = Hx2 + 1L q(x) ï p(x) = q(x) .
A transformação linear D: Pn + 2 Ø Pn definido por D.p(x) = pHxL ê Hx2 + 1L é um inverso à esquerda de C. De fato, DC.p(x) = D.(C.p(x)) = DHHx2 + 1L pHxLL= Hx2 + 1L pHxL ê Hx2 + 1L= p(x).
6.7 [6.18] .Seja A: Pn Ø Pn o operador linear definido por A . p(x) = x. p"'(x). Descreva o núcleo e a imagem de A. Obtenha bases para N(A) e para Im(A).
Resposta:
6.8 [6.21] .Prove que cada uma das transformações lineares a seguir são sobrejetivas e obtenha uma inversa à direita linear para cada uma delas.
(a) A: 3 Ø 2 ; A(x. y, z) = (2 x + y, z)
(b) B: Pn Ø ; B. p(x) = p(1).
(c) C: 2 Ø 2 ; C(x, y) = (x + y, x - y).
(d) P: n Ø n - 1 ; PHx1, . . . xnL = Hx1, . . . xn - 1L .
8 Rijo AL Capítulo 6.nb
Resposta:
(a) Primeiro, vamos achar a inversa à direita da A. Seja B : 2 Ø 3 dada por B(x, y) = (a1 x + a2 y , b1 x + b2 y , c1 x + c2 y) . Para determinar a1, a2, b1, b2, c1 , c2 devemos resolver o sistema abaixo
In[38]:= Solve@82 a1 + b1 1, 2 a2 + b2 0, c1 0, c2 1< , 8a1, a2, b1, b2, c1, c2<DSolve::svars :
Equations may not give solutions for all "solve" variables. More…
Out[38]= 99a1 →12
−b12
, a2 → −b22
, c1 → 0, c2 → 1==
A transformação B : 2 Ø 3 definido por B(x, y) = ( - 1ÅÅÅÅ2 y, x + y, y) é uma inversa à direita de A. Com efeito,
In[25]:= tlA@8x_, y_, z_<D := 82 x + y, z<tlB@8x_, y_<D := 8−1ê2 y, x + y, y<
In[27]:= tlA@tlB@8x, y<DD êê Simplify
Out[27]= 8x, y<
Pelo Teorema 6.1 a transformação linear A dada é sobrejetiva.
(b) Primeiro, vamos achar a inversa à direita da B. Seja transformação linear C(x): Ø Pn definido por CHxL = x p(x)/p(1). Ela é uma inversa à direita de B. Com efeito, BCx = B(C(x)) = BHx pHxL ê pH1LL = ( 1/p(1)) B(x p(x)) = ( 1/p(1)) x B(p(x)) = x
(c) Primeiro, vamos achar a inversa à direita da C. Seja D : 2 Ø 2 dada por D(x, y) = (a1 x + a2 y , b1 x + b2 y) . Para determinar a1, a2, b1, b2 devemos resolver o sistema abaixo
In[28]:= Solve@8a1 + b1 1, a2 + b2 0, a1 − b1 0, a2 − b2 1< , 8a1, a2, b1, b2<D
Out[28]= 99a1 →12, a2 →
12, b1 →
12, b2 → −
12==
A transformação D : 2 Ø 3 definido por D(x, y) = ( 1ÅÅÅÅ2 x + 1ÅÅÅÅ2 y, 1ÅÅÅÅ2 x - 1ÅÅÅÅ2 y) é uma inversa à direita de A. Com efeito,
In[35]:= tlC@8x_, y_<D := 8x + y, x − y<tlD@8x_, y_<D := 81ê2 x + 1ê2 y, 1ê2 x − 1ê2 y<
In[37]:= tlC@tlD@8x, y<DD êê Simplify
Out[37]= 8x, y<
6.9 [6.22] Seja T: Pn Ø Pn o operador linear definido por T. p (x) = 5 p (x) - 4 p'(x) + p"(x). Mostre que seu núcleo é
{0} e conclua que, para todo polinômio b(x) existe um polinômio p(x) tal que 5p(x) - 4p'(x) + p"(x) = b(x). Resposta:
O operador T é injetivo. Com efeito, T.p(x) = T.q(x) ï 5 (p(x) - q(x)) +4(p'(x) -q'(x)) +(p'' (x) - q''(x) )= 0 ï p(x) = q(x). Do Teorema 6.2 resulta que o núcleo de T é {0}. Como o domínio e o contra domínio T têm a mesma dimensão finita, segue do Corolário do Teorema 6.6 que T é um isomorfismo e portanto existe um polinômio p(x) tal que 5p(x) - 4p'(x) + p'' (x) = b(x) para todo polinômio b(x).
6.10 [6.28] Dadas as transformações lineares A: E Ø F, B: F Ø G, assinale V(erdadeiro) ou F(also) nas seguintes implicações:
(F) BA sobrejetiva ï B sobrejetiva.
Contra exemplo: Sejam A(x, y) = (x + y, x - y) e B(x, y) = (x. x/2). É claro que B é não sobrejetiva, entretanto BA(x,
Rijo AL Capítulo 6.nb 9

y) = B(A(x, y)) = B(x + y, x - y) = (x+y, x/2 + y/2) é sobrejetiva.
(F) BA sobrejetiva ï A sobrejetiva.
(F) BA injetiva ï B injetiva.
(F) BA injetiva ï A injetiva.
Prove ainda que se E = F = G então as quatro implicações são verdadeiras. Com efeito, E, F e G são isomórficas e portanto as quatro implica;ões são verdadeiras.
10 Rijo AL Capítulo 6.nb
CAPÍTULO 7
Soma Direta e ProjeçãoIniciar o MathKernel
In[1]:= 2 + 2
Out[1]= 4
Esta seção trata da decomposição de um espaço vetorial como soma de subespaços independentes, mostra queessa decomposição equivale a definir um operador idempotente no espaço e estabelece a conexão entre projeçõese involuções, ou simetrias.
Soma direta
No Capítulo 2, vimos que se F1 e F2 são subespaços do espaço vetorial E, o subespaço vetorial de E gerado pela
reunião F1 ‹ F2 é o conjunto F1 + F2 de todas as somas u + v, onde u œ F1 e v œ F2 . No caso particular em queF1 › F2 = {O}, escreve-se F1 ∆ F2 em vez de F1 + F2 , diz-se que F1 ∆ F2 é a soma direta de F1 com F2 e
prova-se que a condição F1 › F2 = {O} equivale a dizer que u + v = u' + v', com u, u' œ F1 e v, v' œ F2 ,implica u = u' e v = v'.
Produto cartesiano E1 × E2
Existe uma noção análoga à de soma direta, que é o produto cartesiano E1 × E2 de dois espaços vetoriais E1 e E1 .
Aqui E1 e E2 não precisam ser subespaços vetoriais do mesmo espaço E. Os elementos do conjunto E1 × E2 são
os pares ordenados (u, v), onde u œ E1 e v œ E2 . As operações que tornam E1 × E2 um espaço vetorial sãodefinidas por
(u, v) + (u', v') = (u + u', v + v'), a(u, v) = (au,av),
para quaisquer u, u' œ E1 e v, v œ E2 e a a œ . O vetor nulo de E1 × E2 é o par (0, 0) e o inverso aditivode (u, v) é (-u, -v). Portanto, E1 × E2 é um espaço vetorial cuja dimensão satisfaz a relação dim (E1 × E2 )= dim E1 + dim E2.
Isomorfismo entre F1 × F2 e F1 ≈ F2
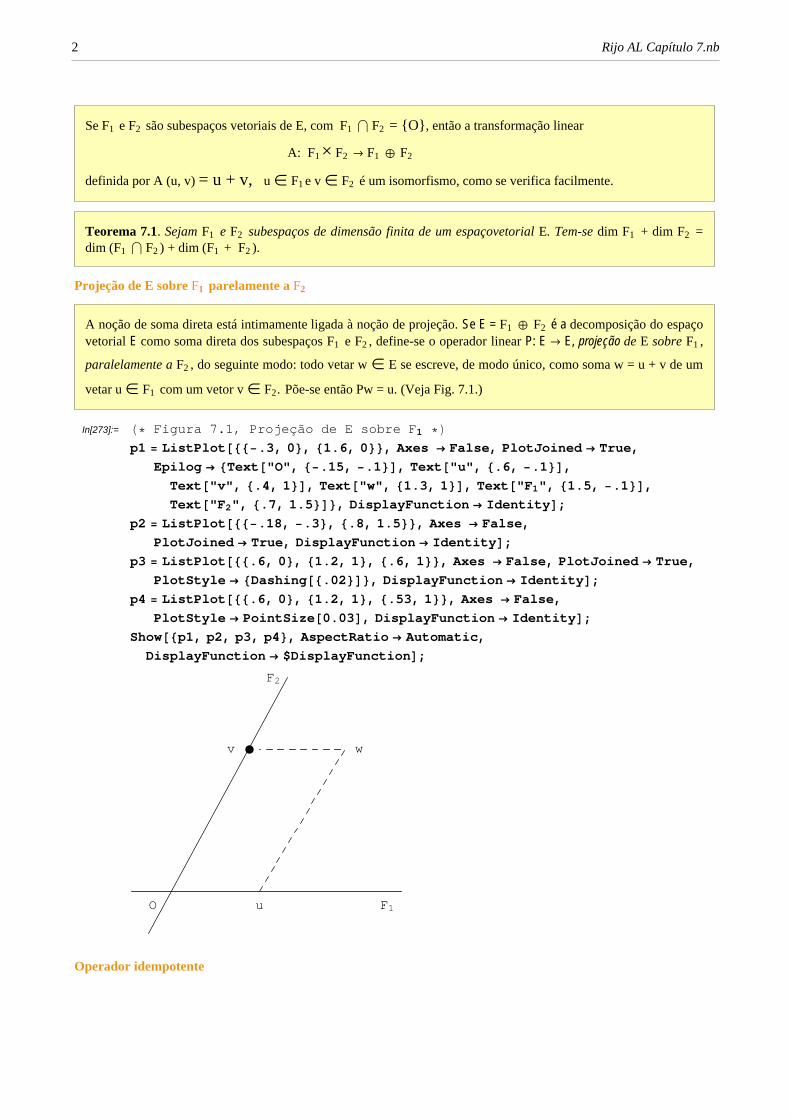
Se F1 e F2 são subespaços vetoriais de E, com F1 › F2 = {O}, então a transformação linear
A: F1 × F2 Ø F1 ∆ F2
definida por A (u, v) = u + v, u œ F1 e v œ F2 é um isomorfismo, como se verifica facilmente.
Teorema 7.1. Sejam F1 e F2 subespaços de dimensão finita de um espaçovetorial E. Tem-se dim F1 + dim F2 =dim (F1 › F2 ) + dim (F1 + F2 ).
Projeção de E sobre F1 parelamente a F2
A noção de soma direta está intimamente ligada à noção de projeção. Se E = F1 ∆ F2 é a decomposição do espaçovetorial E como soma direta dos subespaços F1 e F2 , define-se o operador linear P: E Ø E, projeção de E sobre F1 ,
paralelamente a F2 , do seguinte modo: todo vetar w œ E se escreve, de modo único, como soma w = u + v de um
vetar u œ F1 com um vetor v œ F2. Põe-se então Pw = u. (Veja Fig. 7.1.)
In[273]:= H∗ Figura 7.1, Projeção de E sobre F1 ∗Lp1 = ListPlot@88−.3, 0<, 81.6, 0<<, Axes → False, PlotJoined → True,
Epilog → 8Text@"O", 8−.15, −.1<D, Text@"u", 8.6, −.1<D,Text@"v", 8.4, 1<D, Text@"w", 81.3, 1<D, Text@"F1", 81.5, −.1<D,Text@"F2", 8.7, 1.5<D<, DisplayFunction → IdentityD;
p2 = ListPlot@88−.18, −.3<, 8.8, 1.5<<, Axes → False,PlotJoined → True, DisplayFunction → IdentityD;
p3 = [email protected], 0<, 81.2, 1<, 8.6, 1<<, Axes → False, PlotJoined → True,PlotStyle → [email protected]<D<, DisplayFunction → IdentityD;
p4 = [email protected], 0<, 81.2, 1<, 8.53, 1<<, Axes → False,PlotStyle → [email protected], DisplayFunction → IdentityD;
Show@8p1, p2, p3, p4<, AspectRatio → Automatic,DisplayFunction → $DisplayFunctionD;
O u
v w
F1
F2
Operador idempotente
2 Rijo AL Capítulo 7.nb
O operador linear P: E Ø E assim definido tem imagem F1 e núcleo F2 . Além disso, como se vê facilmente, P éidempotente, isto é, P2
= P. O teorema seguinte mostra que, reciprocamente, todo operador linear idempotente éuma projeção.
Teorema 7.2. Seja P: E Ø E um operador linear. Se P2 = P então E é a soma direta do núcleo com aimagem de P. Além disso, P é a projeção sobre Im{P) paralelamente a N{P).
Involução
Uma involução é um operador linear S: E Ø E tal que S2 = I, ou seja, S(Sv) = v paratodo v œ E. .Noutras palavras, uma involução é um operador invertível, igual ao seu próprio inverso. Umexemplo de involução é a reflexão (ortogona!) no plano em torno de uma reta que passa pela origem.
Veremos agora que toda involução é a reflexão em torno de um subespaço, paralelamente a outro.
Teorema 7.3. Seja S: E Ø E uma involução. Os conjuntos F1 = {u œ E; Su = u} e F2 = {v œ E; Sv = -v} são
subespaços vetoriais e E = F1 ∆ F2 . Para todo w = u + v, com u œ F1 e v œ F2 tem-se Sw = u - v. Alémdisso, P = 1ÅÅÅÅ2 (S + I) é a projeção sobre F1 paralelamente a F1 . (Veja Fig. 7.2.)
Rijo AL Capítulo 7.nb 3
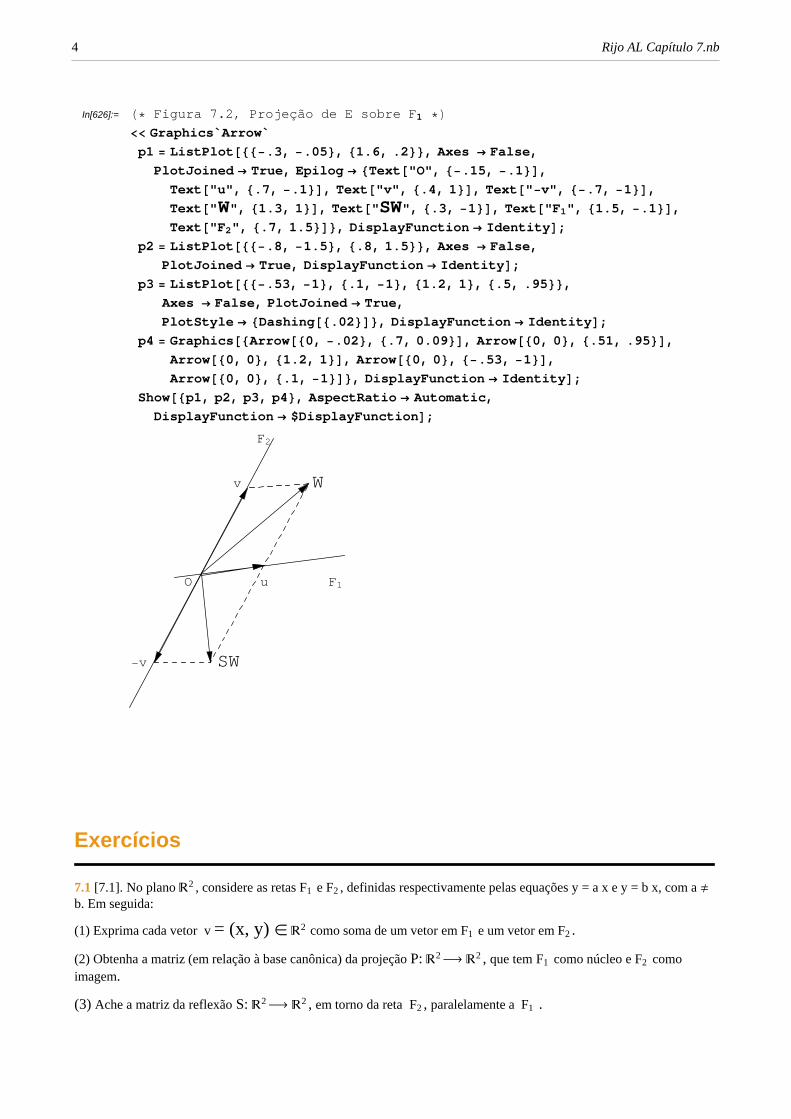
In[626]:= H∗ Figura 7.2, Projeção de E sobre F1 ∗L<< Graphics`Arrow`
p1 = ListPlot@88−.3, −.05<, 81.6, .2<<, Axes → False,PlotJoined → True, Epilog → 8Text@"O", 8−.15, −.1<D,
Text@"u", 8.7, −.1<D, Text@"v", 8.4, 1<D, Text@"−v", 8−.7, −1<D,Text@"W", 81.3, 1<D, Text@"SW", 8.3, −1<D, Text@"F1", 81.5, −.1<D,Text@"F2", 8.7, 1.5<D<, DisplayFunction → IdentityD;
p2 = ListPlot@88−.8, −1.5<, 8.8, 1.5<<, Axes → False,PlotJoined → True, DisplayFunction → IdentityD;
p3 = ListPlot@88−.53, −1<, 8.1, −1<, 81.2, 1<, 8.5, .95<<,Axes → False, PlotJoined → True,PlotStyle → [email protected]<D<, DisplayFunction → IdentityD;
p4 = Graphics@8Arrow@80, −.02<, 8.7, 0.09<D, Arrow@80, 0<, 8.51, .95<D,Arrow@80, 0<, 81.2, 1<D, Arrow@80, 0<, 8−.53, −1<D,Arrow@80, 0<, 8.1, −1<D<, DisplayFunction → IdentityD;
Show@8p1, p2, p3, p4<, AspectRatio → Automatic,DisplayFunction → $DisplayFunctionD;
O u
v
−v
W
SW
F1
F2
Exercícios
7.1 [7.1]. No plano 2 , considere as retas F1 e F2 , definidas respectivamente pelas equações y = a x e y = b x, com a ∫ b. Em seguida:
(1) Exprima cada vetor v = (x, y) œ 2 como soma de um vetor em F1 e um vetor em F2 .
(2) Obtenha a matriz (em relação à base canônica) da projeção P: 2ö 2 , que tem F1 como núcleo e F2 como imagem.
(3) Ache a matriz da reflexão S: 2ö 2 , em torno da reta F2 , paralelamente a F1 .
4 Rijo AL Capítulo 7.nb

Resposta:
(1)
In[72]:= H∗ Determina as componentes do vetor v =Hx, yL ∈ 2 na base HH1, aL, H1,bLL ∗L
Solve@8α + β x, a α + b β y<, 8α, β<D
Out[72]= 99α → −b x − ya − b
, β → −−a x + ya − b
==
O vetor v = Hx, yL ∈ 2 na base HH1, aL, H1, bLL é J b x − yb − a
,a x − yb − a
N
(2)
(3) Da identidade S = 2 P - I do Teorema 7.3, resulta
7.2 [7.3]. Exprima um vetor arbitrário v = (x, y, z) œ 3 como soma de um vetor do plano F1 , cuja equação é x + y - z = 0 com um vetor da reta F2 , gerada pelo vetor (1, 2, 1). Conclua que 3 = F1 ∆ F2 . Determine a matriz (relativa à base canônica) da projeção P: 3ö 3 , que tem imagem F1 e núcleo F2 .
Resposta:
7.3 [7.6]. Mostre que
i
k
jjjjjjjjjjjj
1 0 a b0 1 c d0 0 0 00 0 0 0
y
{
zzzzzzzzzzzz
é a matriz (na base canônica) de uma projeção P: 4ö 4 . Escreva as equações que definem o núcleo e a imagem dessa projeção.
Resposta:
In[3]:= H∗ O operador P ∗LClear@a, b, c, dD;p = 881, 0, a, b<, 80, 1, c, d<, 80, 0, 0, 0<, 80, 0, 0, 0<<;
In[5]:= H∗ Testa se o operador P é uma projeção ∗Lp.p p
Out[5]= True
In[6]:= H∗ Acha a imagem do operador P ∗LRowReduce@pD
Out[6]= 881, 0, a, b<, 80, 1, c, d<, 80, 0, 0, 0<, 80, 0, 0, 0<<
In[7]:= H∗ Elimina os vetores nulos ∗LTake@%, 2D
Out[7]= 881, 0, a, b<, 80, 1, c, d<<
In[8]:= H∗ Acha o núcleo do operador P ∗LNullSpace@pD
Out[8]= 88−b, −d, 0, 1<, 8−a, −c, 1, 0<<
Rijo AL Capítulo 7.nb 5
In[17]:= H∗ Acha os coeficientes da equação da imagem do operador P ∗LSolve@8a1 + a a3 + b a4 0, a2 + c a3 + d a4 0<, 8a1, a2, a3, a4<DSolve::svars :
Equations may not give solutions for all "solve" variables. More…
Out[17]= 88a1 → −a a3 − a4 b, a2 → −a3 c − a4 d<<
A equação da imagem é - (a + b) x - (c +d ) y + z + w = 0
In[18]:= H∗ Acha os coeficientes da equação do núcleo do operador P ∗LSolve@8−b a1 − d a3 + a4 0, −a a1 − c a2 + a3 0<, 8a1, a2, a3, a4<DSolve::svars :
Equations may not give solutions for all "solve" variables. More…
Out[18]= 99a2 → −a a4b c
−a3 H−b − a dL
b c, a1 →
a4b
−a3 db
==
A equação do núcleo é (c - c d) x - (a - b - a d ) y + b c z + b c w = 0
7.4 [7.7]. Prove que o operador P: 2ö 2 , dado por P(x, y) = (-2 x - 4 y, 3ÅÅÅÅ2 x + 3y) é a projeção sobre uma reta. Determine o núcleo e a imagem de P.
Resposta:
In[9]:= H∗ O operador P ∗Lp = 88−2, −4<, 83ê2, 3<<;
In[101]:= H∗ Testa se o operador P é uma projeção ∗Lp.p p
Out[101]= True
In[10]:= H∗ Acha a imagem do operador P ∗LRowReduce@pD
Out[10]= 881, 2<, 80, 0<<
In[11]:= H∗ Elimina os vetores nulos ∗LTake@%, 1D
Out[11]= 881, 2<<
In[12]:= H∗ Acha o núcleo do operador P ∗LNullSpace@pD
Out[12]= 88−2, 1<<
O nucleo é a reta y = -1/2 x e a imagem é reta y = 2 x
7.5 [7.8]. Considere o operador linear A: 3 Ø 3 , dado por
A(x, y, z) = (40 x + 18 y - 6 z, 18 x + 13 y + 12 z, -6 x + 12 y + 45 z).
Mostre que P = 1ÅÅÅÅÅÅÅ49 A é uma projeção, que Im(P) é um plano e determine a equação desse plano.
Resposta:
In[13]:= H∗ O operador P ∗Lp = 1ê49 8840, 18, −6<, 818, 13, 12<, 8−6, 12, 45<<;
6 Rijo AL Capítulo 7.nb

In[106]:= H∗ Testa se o operador P é uma projeção ∗Lp.p p
Out[106]= True
In[14]:= H∗ Acha a imagem do operador P ∗LRowReduce@pD
Out[14]= 991, 0, −32=, 80, 1, 3<, 80, 0, 0<=
In[15]:= H∗ Elimina os vetores nulos ∗LTake@%, 2D
Out[15]= 991, 0, −32=, 80, 1, 3<=
Estes dois vetores formam a base do plano que corresponde à imagem de P
In[16]:= H∗ Acha o núcleo do operador P ∗LNullSpace@pD
Out[16]= 99 32, −3, 1==
In[19]:= H∗ Acha os coeficientes da equaçãodo plno que forma a imagem do operador P ∗L
Solve@8a − 3ê2 c 0, b + 3 c 0<, 8a, b, c<DSolve::svars :
Equations may not give solutions for all "solve" variables. More…
Out[19]= 99a →3 c2
, b → −3 c==
A equação do plano que corresponde à imagem de P é 3 x - 6 y + 2 z = 0
Rijo AL Capítulo 7.nb 7

CAPÍTULO 8
A Matriz de uma Transformação LinearIniciar o MathKernel
In[1]:= 2 + 2
Out[1]= 4
A matriz de uma transformação linear é um objeto concreto, associado a essa transformação na presença debases em seu domínio e seu contra-domínio. A matriz permite obter uma variedade ilimitada de exemplos detransformações lineares, bem como calcular especificamente a imagem de um dado vetor por uma transformação.Nesta seção será estudada a relação entre uma transformação linear e sua matriz. Em particular, o produto detransformações conduzirá a uma profícua noção de produto de matrizes. Veremos como se relacionam asmatrizes da mesma transformação tomadas em bases diferentes e daremos uma demonstração direta da igualdadeentre o posto-linha e o posto-coluna de uma matriz.
Definição de produto de transformações lineares
Vimos no Capítulo 4 que uma transformação linear A: n Ø m fica inteiramente determinada pela matriz a =
@aijD œ M(m × n), cujo ij-ésimo termo uij é a i-ésima coordenada do vetor A . e j œ m .
Matriz retangular da transformação linear A: E Æ F
Sejam E, F espaços vetoriais de dimensão finita e A: E Ø F uma transformação linear. Fixadas bases V =8v1, . . . vn< Õ E e W = 8w1, . . . wn< Õ F, para cada j = 1,... , n o vetor AV j se exprime como combinação lineardos vetores da base W:
Av j = a1 j w1 + a2 j w2 + . . . , amj wm = ⁄i = 1m aij w j .
Assim, a transformação linear A: E Ø F juntamente com as bases V Õ E e W Õ F determinam uma matriz a =
@aijD œ M(m × n), chamada a matriz de A relativamente a essas bases (ou nas bases V, W).
Por definição, a j-ésima coluna da matriz a é formada pelas coordenadas de Av j em relação à base W.
a = {{a11, a12, . . ., a1n}, {a21, a22, . . . a2n}, . . . , {am1, am2, . . , amn}} define a matriz a m x n.
In[7]:= a = 88a11, a12, a13, a14<, 8a21, a22, a23, a24<, 8a31, a32, a33, a24<<;
MatrixForm[ a ] imprime a matriz a na forma retangular

In[8]:= MatrixForm@aDOut[8]//MatrixForm=
i
k
jjjjjjja11 a12 a13 a14a21 a22 a23 a24a31 a32 a33 a24
y
{
zzzzzzz
Matriz quadrada do operador linear A: E Æ E
No caso em que A: E Ø E é um operador linear, a menos que seja feita menção explícita em contrário, consid-
era-se apenas uma base V = 8v1, . . . vn< Õ E e a matriz a = @aijD do operador A relativamente à base V (ou nabase V) é definida pelas n igualdades
Av j = ⁄i = 1n aij v j , (j = 1, 2, . . . , n).
Neste caso, a = @aijD œ M(n × n) é a matriz quadrada n × n cuja j-ésima coluna é formada pelas coordenadas dovetor
Av j = a1 j v1 + a2 j v2 + . . . , anj vn
na base V.
In[9]:= a = 88a11, a12, a13<, 8a21, a22, a23<, 8a31, a32, a33<<;
In[10]:= MatrixForm@aDOut[10]//MatrixForm=
i
k
jjjjjjja11 a12 a13a21 a22 a23a31 a32 a33
y
{
zzzzzzz
Quando considerarmos uma transformação linear A: n ö m e dissermos apenas a matriz de A, estaremossignificando a matriz de A relativamente às bases canônicas de n e m . Caso utilizemos outras bases, isto serádito explicitamente.
EXEMPLO 8.1 Consideremos um espaço vetorial E, de dimensão finita. Dado a œ , seja A: E Ø E o operadorlinear definido por Av = a v
todo v œ E. Relativamente a qualquer base V = 8v1, . . . vn< Õ E a matriz a do operador A é sempre a mesma, comnúmeros a na diagonal e zeros fora dela:
a =
i
k
jjjjjjjjjjjj
α 0 ∫ 00 α ∫ 0
ª ª ª ª
0 0 ∫ 0
y
{
zzzzzzzzzzzz
O operador A = a I é o que se chama uma homotetia de razão a. Estes são os únicos operadores cujas matrizes indepen-dem da base dada.
EXEMPLO 8.2 Seja P: E Ø E a projeção sobre o subespaço F1 , paralelamente ao subespaço F2 . Sejam ainda V1 Õ
F1 e V2 Õ F2 bases quaisquer desses subespaços. Então V = V1 ‹ V2 é uma base de E, relativamente à qual amatriz p de P tem os k primeiros termos da diagonal iguais a 1 (k = dim F1 ) e todos os demais termos (sobre a diago-nal ou fora dela) iguais a zero. Analogamente, se S: E Ø E é a reflexão em torno de F1 paralelamente a F2 , sua matrizs na base V tem os primeiros k termos da diagonal iguais a 1, os restantes iguais a - 1 e todos os termos fora dadiagonal iguais a zero.
2 Rijo AL Capítulo 8.nb
A fixação das bases V Õ E e W Õ F determina portanto uma transformação linear
j: L(E; F) Ø M(n × n)
que faz corresponder a cada A œ L(E; F) sua matriz a nas bases V, W.
Em particular, a cada fluncional linear f: n ö corresponde, de modo natural, uma matriz @a1, . . . , anD œ M(1 x n) ou, o que é o mesmo, um vetor Ha1, . . . , anL.
Entre transformações lineares, além das operações A + B e a A, existe também a multiplicação BA. O isomor-fismo j faz corresponder ao produto BA o produto ba das matrizes de B e de A, segundo definiremos a seguir.
Produto Interno
Sejam u = Ha1, . . . anL e v = Hb1, . . . , bnL vetores em n . O produto interno de u por v é definido como onúmero
X u, v \ = a1 b1 + . . . + an bn.
Produto de matrizes
Sejam b = @bijD œ M(m × n) e a = @aijD œ M(m × p) matrizes tais que o número de colunas de b é igual ao
número de linhas de a. O produto da matriz b pela matriz a (nesta ordem) é a matriz ba = c œ M(m × p), cujoij-ésimo elemento
cij = bi1 a1 j + bi2 a2 j +. . . + bin anj = ⁄i = 1m bik akj .
é o produto interno do i-ésimo vetor-linha de b pelo j-ésimo vetor coluna de a.
a.b o produto da a e b
In[21]:= a = 88a11, a12, a13<, 8a21, a22, a23<<;b = 88b11, b12<, 8b21, b22<, 8b31, b32<<;c = a.b;MatrixForm@cD
Out[24]//MatrixForm=
J a11 b11 + a12 b21 + a13 b31 a11 b12 + a12 b22 + a13 b32a21 b11 + a22 b21 + a23 b31 a21 b12 + a22 b22 + a23 b32
N
In[25]:= a = 88a11, a12<, 8a21, a22<, 8a31, a32<, 8a41, a42<<;b = 88b11, b12, b13, b14<, 8b21, b22, b23, b24<<;c = a.b;MatrixForm@cD
Out[28]//MatrixForm=
i
k
jjjjjjjjjjjj
a11 b11 + a12 b21 a11 b12 + a12 b22 a11 b13 + a12 b23 a11 b14 + a12 b24a21 b11 + a22 b21 a21 b12 + a22 b22 a21 b13 + a22 b23 a21 b14 + a22 b24a31 b11 + a32 b21 a31 b12 + a32 b22 a31 b13 + a32 b23 a31 b14 + a32 b24a41 b11 + a42 b21 a41 b12 + a42 b22 a41 b13 + a42 b23 a41 b14 + a42 b24
y
{
zzzzzzzzzzzz
Rijo AL Capítulo 8.nb 3

EXEMPLO 8.3 Uma transformação linear A: n Ø m pode ser interpretada como uma multiplicação de matrizes:
em vez de A œ L( n ; m considera-se sua matriz a = @aijD œ M(m × n). Em particilar os funcionais lineares f:
n Ø são substituídos por matrizes 1 x n, ou seja, por vetores-linha. Além disso, os vetores x = Hx1, . . . xnL œ n
e b = Hb1, . . . , bmL passam a ser considerados como matrizes n x 1 e m x 1 respectivamente, ou seja,como vetores-coluna. Então a igualdade Ax = b passa a ser escrita sob a forma a x = b, isto é
i
k
jjjjjjjjjjj
a11 ∫ a1 n
a21 ∫ a2 n
ª ª ª
am1 ∫ amn
y
{
zzzzzzzzzzz
i
k
jjjjjjjjjjj
x1
x2
ª
xn
y
{
zzzzzzzzzzz=
i
k
jjjjjjjjjjj
b1
b2
ª
bm
y
{
zzzzzzzzzzz
In[45]:= a = 881, 2, 3<, 83, 4, 5<, 87, 8, 9<<;b = 81, 2, 1ê2<;c = a.b
Out[47]= 9 132
,272
,552
=
In[32]:= a = 881, 2, 3, 4<, 85, 8, 7, 9<<;b = 82, 1, 1, 2<;a.b
Out[34]= 815, 43<
Teorema 8.1. A matriz de BA: E Ø G nas bases U, W é o produto ba œ M(m × p) das matrizes b e a.
Símbolo de Kronecker dij
Resulta imediatamente do teorema acima e do isomorfismo j: L(E; F) Ø M(m x n) que as regras operacionais doproduto de transformações lineares se transferem diretamente para o produto de matrizes. No que se segue,indicaremos com o símbolo In a matriz identidade n x n. Tem-se In = @dijD , onde dij é o símbolo de Kronecker: dij= 0 se i ∫ j e dii = 1. Quando não houver ambigüidade, escreveremos simplesmente I em vez de In .
As propriedades abaixo listadas se provam considerando, para cada a E œ M(m × n) , a transformação linear A:n Ø m cuja matriz é a e aplicando a propriedade correspondente para transformações lineares, já provadaanteriormente.
1) (c b) a = c (b a);
2) c (a + b) = c a + c b; (b + c) a = b a + c a;
3) a. In = a, Im a = a se a œ M(m × n)
4) b (a a) = a(b a).
Inversa à esquerda e inversa à direita
Dada a œ M(m × n) , diz-se que x œ M(n × m) é uma matriz inversa à esquerda de a quando x a = In e que y œM(n × m) é uma matriz inversa à direita de a quando a y = Im .
5) Uma matriz m x n possui inversa à esquerda se, e somente se, seus vetares-coluna são L.I. e uma inversa àdireita se, e somente se, esses vetares-coluna geram m .
4 Rijo AL Capítulo 8.nb

Matriz invertível
Uma matriz a chama-se invertível quando é quadrada e existe uma matriz a-1 , chamada a inversa de a, tal que a-1
a = a a-1 = I.
6) Se uma matriz a possui uma inversa à esquerda x e uma inversa à direita y então a é quadrada, é invertível e x= y = a-1 .
7) Uma matriz quadrada a admite uma inversa à esquerda se, e somente se, admite uma inversa à direita. Nestecaso, a matriz a é vertível e cada uma dessas inversas laterais é igual a a-1 .
A seguir, determinaremos como varia a matriz de uma transformação linear A: E Ø F quando se mudam as basesem E e F.
Sejam V = 8v1, . . . vn< Õ E e W = 8w1, . . . wn< Õ F bases, em relação às quais a matriz da transformação linear
A: E Ø F é a = @aijD œ M(m × n). Isto significa que
Av j = ⁄i = 1n aij w j , (j = 1, 2, . . . , n).
Tomando novas bases V = 8v'1, . . . v 'n< Õ E e W = 8w'1, . . . w'n< Õ F, a transformação linear A tem
nova matriz a' = @a 'ijDœ M(m × n), definida por:
Av' j = ⁄i = 1n a 'ij w ' j , (j = 1, 2, . . . , n).
Matrizes de passagem p e q.
Para obter a relação entre as matrizes a e a', consideramos as matrizes de passagem p = @pijD œ M(m × n) e
q = @qijD œ M(m × n), definidas pelas igualdades
v ' j = ⁄k = 1n pkj vk e w'r = ⁄i = 1
m qir wi
Por definição, p é a matriz de passagem da base V para a base V' e q é a matriz de passagem da base W para abase W'.
A fórmula que nos dá a matriz a' de A nas bases V', W' em função da matriz a de A nas bases V, W é
a' = q-1 a p
No caso particular de um operador A: E Ø E e de suas matrizes a, a' relativas às bases V, V', temos uma únicamatriz de passagem p, que nos dá
a' = p-1 a p.
As duas matrizes quadradas a e p-1 a p dizem-se semelhantes.
EXEMPLO 8.4 Seja P: 2 Ø 2 o operador linear que consiste na reflexão em torno da reta y = a x. Como se viuno Exemplo 4.4, a matriz de A relativamente à base canônica de 2 é
a = ikjjjjj
1 − α2
1 + α22 α
1 + α2
2 α1 + α2 − 1 − α2
1 + α2
y{zzzzz
Seja V = 8v1, v2< Õ 2 a base formada pelos vetores v1 = 81, a< e v1 = 8- a, 1< . Para todo vetor v = (x, y) œ 2 ,temos
Rijo AL Capítulo 8.nb 5

A(x, y) = I 1 − α2
1 + α2 x + 2 α1 + α2 y, 2 α
1 + α2 x − 1 − α2
1 + α2 yM
logo Av1 = v1 e Av2 = - v2 . Portanto a matriz de A na base V é
a = J 1 00 −1
N
A matriz de passagem da base canônica de 2 para a base V é
p = J 1 −α
α −1N
Segue-se que a' = p-1 a p em que p-1 = 11 + α2 J
1 −α
α −1N .
Posto de uma transformação linear A
Seja A: E Ø F uma transformação linear entre espaços vetoriais de dimensão finita. O posto de A é a dimensão dasua imagem. Evidentemente, dim Im(A) A) § dim F. Além disso, pelo Teorema do Núcleo e da Imagem, dimIm(A) § dim E. Segue-se que o posto de A não excede dim E nem dim F. O posto de A é igual à dimensão de Ese, e somente se, A é injetiva. E é igual à dimensão de F se, e somente se, A é sobrejetiva.
Posto segundo coluna de uma matriz a
O posto segundo colunas de uma matriz a œ M(m × n) é o número máximo de colunas linearmente indepen-dentes em a. Este número é igual à dimensão do subespaço vetorial de m gerado pelos vetores-coluna de a.(Espaço-coluna de a.)
Posto segundo linha de uma matriz a
O posto segundo colunas de uma matriz a œ M(m × n) é o número máximo de linhas linearmente independentesem a. Este número é igual à dimensão do subespaço vetorial de n gerado pelos vetores-linha de a. (Espaço-linhade a.)
Teorema 8.2. Para toda matriz a œ M(m × n), o posto segundo linhas e o posto segundo colunas sãoiguais.
Posto de uma matriz a
O posto de uma matriz a é o número máximo de linhas, ou de colunas, L.I. dessa matriz.
NullSpace[ a ] dá a lista dos vetores que formam a base do espaço nulo (núcleo) da matriz a.
EXEMPLO 8.6 O espaço-linha e o espaço-coluna da matriz
J 1 12 2
N
são duas retas distintas em 2
In[1]:= NullSpace@881, 1<, 82, 2<<DOut[1]= 88−1, 1<<
6 Rijo AL Capítulo 8.nb
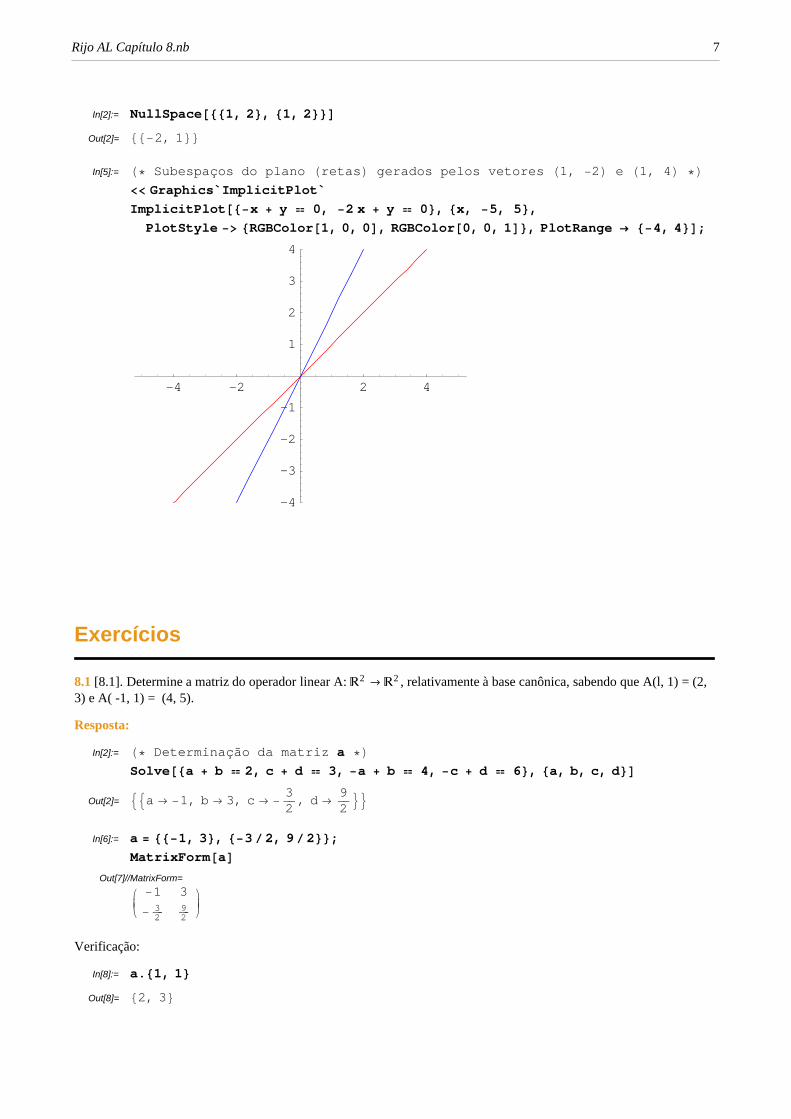
In[2]:= NullSpace@881, 2<, 81, 2<<DOut[2]= 88−2, 1<<
In[5]:= H∗ Subespaços do plano HretasL gerados pelos vetores H1, −2L e H1, 4L ∗L<< Graphics`ImplicitPlot`ImplicitPlot@8−x + y 0, −2 x + y 0<, 8x, −5, 5<,
PlotStyle −> 8RGBColor@1, 0, 0D, RGBColor@0, 0, 1D<, PlotRange → 8−4, 4<D;
-4 -2 2 4
-4
-3
-2
-1
1
2
3
4
Exercícios
8.1 [8.1]. Determine a matriz do operador linear A: 2 Ø 2 , relativamente à base canônica, sabendo que A(l, 1) = (2, 3) e A( -1, 1) = (4, 5).
Resposta:
In[2]:= H∗ Determinação da matriz a ∗LSolve@8a + b 2, c + d 3, −a + b 4, −c + d 6<, 8a, b, c, d<D
Out[2]= 99a → −1, b → 3, c → −32
, d →92==
In[6]:= a = 88−1, 3<, 8−3ê2, 9ê2<<;MatrixForm@aD
Out[7]//MatrixForm=
ikjjj
−1 3
− 32
92
y{zzz
Verificação:
In[8]:= a.81, 1<Out[8]= 82, 3<
Rijo AL Capítulo 8.nb 7

In[9]:= a.8−1, 1<Out[9]= 84, 6<
8.2 [8.2]. O produto vetorial de dois vetores v = (x, y, z) e W = (x', y', z') em 3 é, por definição, o vetor v× w = (yz' - zy', zx' - xz', xy' - yx'). Fixado o vetor u = (a, b, c), determine a matriz, relativamente à base canônica, do operador A: 3 Ø 3 , definido por A. v = v × u. Descreva geometricamente o núcleo desse operador e obtenha a equação da sua imagem.
Resposta:
8.3 [8.3]. Determine a matriz do operador de derivação D: Pn Ø Pn relativamente à base {1, t , t2 ,... , tn }.
i
k
jjjjjjjjjjjjjjjjjj
0 0 0 ∫ 00 1 0 ∫ 00 0 2 t ∫ 0
ª ª ª ª ª
0 0 0 0 ntn −1
y
{
zzzzzzzzzzzzzzzzzz
Resposta:
8.4 [8.4]. Considere os subespaços vetoriais F e G do espaço C¶ (), cujas bases são, respectivamente, os conjuntos {cos x, sen x} e
{ex cos x, ex sen x, e2 x cos x, e2 x sen x, e3 x cos x, e3 x sen x}.
Determine a matriz do operador de derivação em cada um desses subespaços.
Resposta:
J −sen x 00 cosx
N
i
k
jjjjjjjjjjjjjjjjjjjjjjjj
ex Hcos x − senxL 0 0 00 ex Hsen x + cos x L 0 0
0 0 e2 x H2 cos x − senxL 00 0 0 e2 x H2 sen x + cos x L0 0 0 0 e3 x
0 0 0 0
8.5 [8.6]. Ache o valor de x para o qual operador P: 3 Ø 3 , cuja matriz na base canônica é
i
k
jjjjjjjjj
12 − 1
212
−1 0 1
− 12 − 1
2 x
y
{
zzzzzzzzz
seja uma projeção.
Resposta:
8.6 [8.7]. Qual é a matriz, na base canônica, do operador A: 2 Ø 2 , tal que A(2, 3) = (2, 3) e A(-3, 2) = (0, 0)?
Resposta:
8 Rijo AL Capítulo 8.nb

In[13]:= H∗ Determinação da matriz a ∗LClear@a, b, c, dD;Solve@82 a + 3 b 2, 2 c + 3 d 3, −3 a + 2 b 0, −3 c + 2 d 0<, 8a, b, c, d<D
Out[14]= 99a →4
13, b →
613
, c →6
13, d →
913
==
In[21]:= a = 884ê13, 6ê13<, 86ê13, 9ê13<<;MatrixForm@aD
Out[22]//MatrixForm=
ikjjjj
413
613
613
913
y{zzzz
Verificação:
In[23]:= a.82, 3<Out[23]= 82, 3<
In[24]:= a.8−3, 2<Out[24]= 80, 0<
In[26]:= MatrixForm@881, α<, 80, 1<<DOut[26]//MatrixForm=
J 1 α
0 1N
8.7 [8.8]. Calcule a n-ésima potência da matriz J 1 α
0 1N .
Resposta:
In[47]:= a = 881, α<, 80, 1<<;a.a.a.a.a.a.a.a.a.a
Out[48]= 881, 10 α<, 80, 1<<
In[50]:= MatrixForm@881, n α<, 80, 1<<DOut[50]//MatrixForm=
J 1 n α
0 1N
8.8 [8.11]. Seja a uma matriz 5 x 5 cujos elementos sobre a diagonal e abaixo dela são iguais a zero. Sem fazer nen-hum cálculo, conclua que a5 = 0.
Resposta:
In[71]:= a = 880, 1, 1, 1, 1<, 80, 0, 2, 2, 2<,80, 0, 0, 3, 3<, 80, 0, 0, 0, 4<, 80, 0, 0, 0, 0<<;
In[79]:= a.a.a.a.a
Out[79]= 880, 0, 0, 0, 0<, 80, 0, 0, 0, 0<,80, 0, 0, 0, 0<, 80, 0, 0, 0, 0<, 80, 0, 0, 0, 0<<
Rijo AL Capítulo 8.nb 9

8.9 [8.20]. Determine a matriz da projeção P: 2 Ø 2 , P(x, y) = (x, 0) relativamente à base {u, v} Õ 2 , onde u = (1, 1) e v = (1, 2).
Resposta:
A matriz da projeção sobre a reta y = a x é
ikjjjjj
11 + α2
α1 + α2
α1 + α2
α2
1 + α2
y{zzzzz .
Como a é zero temos
a = J 1 00 0
N
In[87]:= H∗ A matriz da projeção relativa a base canônica ∗La = 881, 0<, 80, 0<<;
Out[87]= 881, 0<, 80, 0<<
In[83]:= H∗ Matriz de passagem p ∗Lp = 881, 2<, 81, 1<<;
In[91]:= H∗ Inversa da matriz de passagem p ∗LinVp = Inverse@pD;
In[95]:= H∗ A matriz da projeção relativa a base HH1,1L, H1, 2LL∗Lb = inVp.a.p
Out[95]= 88−1, −2<, 81, 2<<
In[96]:= MatrixForm@bDOut[96]//MatrixForm=
J −1 −21 2
N
8.10 [8.21]. Sabendo que a matriz do operador A: 3 Ø 3 relativamente à base {u, v, w} Õ 3 , onde u = (1, 1, 1), v = (1,2,1), w = (1, l, 3), é
1ÅÅÅÅ2
i
k
jjjjjjj3 1 30 2 0
−1 −1 −1
y
{
zzzzzzz
determine a matriz de A relativamente à base canônica de 3 .
Resposta:
8.11 [8.33]. Calcule o posto da matriz
i
k
jjjjjjj1 2 34 5 62 1 0
y
{
zzzzzzz
e mostre que o subespaço gerado por suas linhas é diferente daquele gerado por suas colunas.
Resposta:
In[51]:= H∗ Matriz a ∗La = 881, 2, 3<, 84, 5, 6<, 82, 1, 0<<;
10 Rijo AL Capítulo 8.nb

In[86]:= H∗ Espaço nulo da matriz a segundo as linhas ∗LNullSpace@aD
Out[86]= 881, −2, 1<<
In[87]:= H∗ Posto da matriz a ∗LLength@NullSpace@aDD
Out[87]= 1
In[91]:= H∗ Espaço nulo da matriz a segundo as colunas ∗LNullSpace@Transpose@aDD
Out[91]= 882, −1, 1<<
In[92]:= Length@NullSpace@aDDOut[92]= 1
8.12 [8.34]. Obtenha números a, b, c tais que ax + by + cz = 0 seja a equação do plano gerado pelas colunas da matriz
i
k
jjjjjjj1 1 11 2 32 3 4
y
{
zzzzzzz
Resposta:
In[79]:= Clear@a, b, cD;Solve@8a + b + 2 c 0, a + 3 b + 4 c 0<, 8a, b, c<DSolve::svars :
Equations may not give solutions for all "solve" variables. More…
Out[80]= 88a → −c, b → −c<<
Fazendo c = 1, obtemos a = -1, b = -1.
Verificação
In[81]:= f@x_, y_, z_D := −x − y + z
In[82]:= f@1, 1, 2DOut[82]= 0
In[83]:= f@1, 2, 3DOut[83]= 0
In[84]:= f@1, 3, 4DOut[84]= 0
Rijo AL Capítulo 8.nb 11

CAPÍTULO 9
EliminaçãoIniciar o MathKernel
In[1]:= 2 + 2
Out[1]= 4
Este capítulo rata de aspectos computacionais dos assuntos tratados até aqui. Seu valor educativo é inestimávelpois exibe um processo simples e bem sucedido para responder a perguntas naturais sobre subespaços, transfor-mações lineares, sistemas de equações e matrizes.matriz de uma transformação linear é um objeto concreto,associado a essa transformação na presença de bases em seu domínio e seu contra-domínio.
Dimensão do subespaço gerado por m vetores
Resulta do Teorema 3.2 que se cada um dos vetores não-nulos w1, . . . wr tem uma coordenada diferente de zero e amesma coordenada é zero em todos os vetores seguintesa ele nesta lista então {w1, . . . wr } é L.I.
EXEMPLO 9.1 Sejam v1 = H0, 1, 2, 3, 4< , v2 = H0, 0, 0, 1, 2, 3L e v3 = H0, 0, 0, 0, , 1L . Neste caso, asegunda coordenada de v1 é 1mas a segunda coordenada de v2 e v3 são nulas. A terceira coordenada de v2 é 1 mas aterceira coordenad de v3 é zero. Logo 8v1 , v2, v3< Õ 5 é um conjunto L. I..
O critério acima enunciado, que garante a independência linear dos vetores w1, . . . wr œ n , pode ser refraseadoassim: a primeira coordenada não-nula de cada wi tem índice menor do que a primeira coordenada não-nula dosvetores subseqüentes wi+ 1, . . . wr .
Se, para cada i = 1,... , r, escrevermos wi = Hai1, . . . ainL , teremos uma matriz a = @aijD œ M(r x n), cujos r vetores-linha são w1, . . . wr . Diremos que essa matriz é escalonada quando o primeiro elemento não-nulo de cada uma desuas linhas está à esquerda do primeiro elemento não-nulo de cada uma das linhas subseqüentes e, além disso, aslinhas nulas (se houver) estão abaixo das demais.
Com esta definição, podemos dizer que as linhas não-nulas de uma matriz escalonada são vetores linearmenteindependentes, ou seja, uma matriz escalonada r x n tem posto r se suas linhas forem todas diferentes de zero.
EXEMPLO 9.2 As matrizes abaixo são escalonadas:
i
k
jjjjjjj1 3 7 20 2 5 10 0 0 3
y
{
zzzzzzz e
i
k
jjjjjjjjjjjj
0 1 2 3 10 0 4 5 20 0 0 6 30 0 0 0 0
y
{
zzzzzzzzzzzz
Ambas têm posto 3.

As seguintes modificações, chamadas operações elementares, leram os vetores v1 ,. .. , vm œ n em vetores v'1 ,. ..
, v'm œ n que grram o mesmo subespaço: S (v'
1 ,. .. , v'm ) = S (v1 ,. .. , vm ).
(1) Trocar a posição de dois vetores vi , v j (i < j) na lista dada. Esta operaeração é esquematizada como
Hv1, . . . , vi, . . . , v j, . . . , vmL Ø Hv1, . . . , v j, . . . , vi, . . . , vmL(2) Somar a um dos vetores um múltiplo de outro vetor da lista, ou seja, substituir v j por v'
j = v j + a vi , i ∫ j.
Em termos da matriz cujas linhas são os vetores dados, estas ~rações elementares se exprimem assim:
(1) Trocar a posição de duas linhas;
( 2) Somar a uma linha um múltiplo de outra linha.
Portanto, o subespaço gerado pelas linhas (ou seja,. o espaçolha) de uma matriz não se altera quando essas duaEoperações eleentares são aplicadas a essa matriz.
Processo de eliminação
Descreveremos a seguir o processo de eliminação (ou escalonamto), o qual, mediante aplicações sucessivas dasduas operações elementares às linhas de uma matriz, produz uma matriz escalonada. O procedimento é o seguinte:
(a) Se a11∫ 0, o processo começa deixando a primeira linha intacta e somando a cada linha Li , com i ¥ 2, apitimeira linha: multiplicada -ai1 ê a11 . Com isto se obtém uma maí,rlz cuja primeira coluna é Ha11, 0, . . . , 0L .
(b) Se a11 ∫ 0, uma troca de linhas fornece uma matriz com a a11 ∫ 0, desde que a primeira coluna não sejanula. Se, porém, todos os elementos da primeira coluna são iguais a zero, passa-se para a segunda coluna ou, maisgeralmente, para a coluna mais próxima, à direita da meira, onde haja algum elemento não-nulo e opera-se comoantes, de modo a obter uma matriz cuja primeira coluna não-nula começa com elemento ∫ 0 mas todos osdemaissão iguais a zero. A partir dai não se mexe mais na primeira linha.Recomeça-se o processo. trabalhando com aslinhas a partir da segunda, até obter uma matriz escalonada.
EXEMPLO 9.3 Sejam os vetores v1 = H1, 2 , 3, 4L, v2 = H5, 6, 7, 8L e v3 = H9, 10, 11, 12L em 4 Indicamosabaixo a seqüência de operações elementares efetuadas sobre a matriz cujas linhas são estes vetores, conduzindo a umamatriz escalonada
i
k
jjjjjjj1 2 3 45 6 7 89 10 11 12
y
{
zzzzzzz L2 - 5 L1 e L3 - 9L1
i
k
jjjjjjj1 2 3 40 −4 −8 −120 −8 −16 −24
y
{
zzzzzzz L3 Ø 2 L2 i
k
jjjjjjj1 2 3 40 −4 −8 −120 0 0 0
y
{
zzzzzzz
Como a matriz escalonada final tem duas linhas diferentes de zero, os três vetores dados geram um subespaço vetorialde dimensão 2 em 4 e w1 = (1, 2, 3, 4), w2 = (0, -4, -8, -12) formam uma base desse subespaço.
RowReduce[m] escalona a matrix m com os elementos ∫ 0 da diagonal principal igual a 1.
In[19]:= H∗ A matrix formada pelos vetores v1, v2 e v3 dados ∗LmatA = 881, 2, 3, 4<, 85, 6, 7, 8<, 89, 10, 11, 12<< ;
2 Rijo AL Capítulo 9.nb
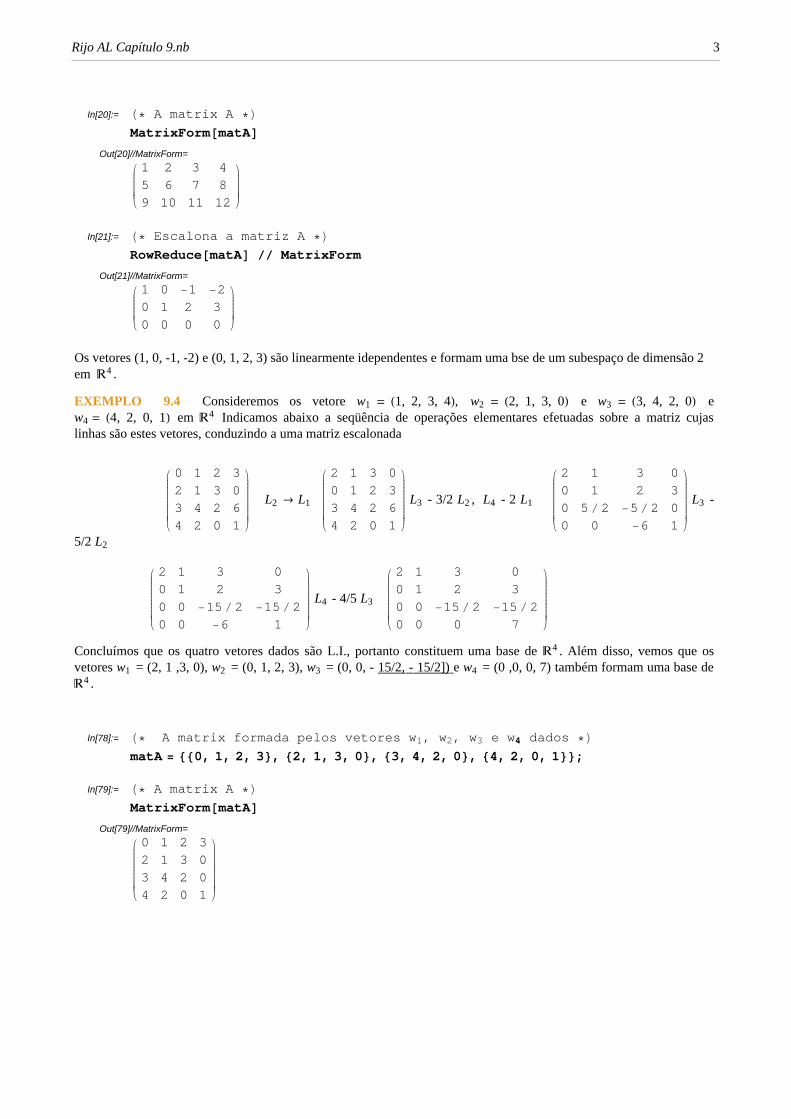
In[20]:= H∗ A matrix A ∗LMatrixForm@matAD
Out[20]//MatrixForm=
i
k
jjjjjjj1 2 3 45 6 7 89 10 11 12
y
{
zzzzzzz
In[21]:= H∗ Escalona a matriz A ∗LRowReduce@matAD êê MatrixForm
Out[21]//MatrixForm=
i
k
jjjjjjj1 0 −1 −20 1 2 30 0 0 0
y
{
zzzzzzz
Os vetores (1, 0, -1, -2) e (0, 1, 2, 3) são linearmente idependentes e formam uma bse de um subespaço de dimensão 2 em 4 .
EXEMPLO 9.4 Consideremos os vetore w1 = H1, 2, 3, 4L, w2 = H2, 1, 3, 0L e w3 = H3, 4, 2, 0L ew4 = H4, 2, 0, 1L em 4 Indicamos abaixo a seqüência de operações elementares efetuadas sobre a matriz cujaslinhas são estes vetores, conduzindo a uma matriz escalonada
i
k
jjjjjjjjjjjj
0 1 2 32 1 3 03 4 2 64 2 0 1
y
{
zzzzzzzzzzzz L2 Ø L1
i
k
jjjjjjjjjjjj
2 1 3 00 1 2 33 4 2 64 2 0 1
y
{
zzzzzzzzzzzzL3 - 3/2 L2 , L4 - 2 L1
i
k
jjjjjjjjjjjj
2 1 3 00 1 2 30 5ê2 −5ê2 00 0 −6 1
y
{
zzzzzzzzzzzzL3 -
5/2 L2
i
k
jjjjjjjjjjjj
2 1 3 00 1 2 30 0 −15ê2 −15ê20 0 −6 1
y
{
zzzzzzzzzzzzL4 - 4/5 L3
i
k
jjjjjjjjjjjj
2 1 3 00 1 2 30 0 −15ê2 −15ê20 0 0 7
y
{
zzzzzzzzzzzz
Concluímos que os quatro vetores dados são L.I., portanto constituem uma base de 4 . Além disso, vemos que osvetores w1 = (2, 1 ,3, 0), w2 = (0, 1, 2, 3), w3 = (0, 0, - 15/2, - 15/2]) e w4 = (0 ,0, 0, 7) também formam uma base de4 .
In[78]:= H∗ A matrix formada pelos vetores w1, w2, w3 e w4 dados ∗LmatA = 880, 1, 2, 3<, 82, 1, 3, 0<, 83, 4, 2, 0<, 84, 2, 0, 1<<;
In[79]:= H∗ A matrix A ∗LMatrixForm@matAD
Out[79]//MatrixForm=
i
k
jjjjjjjjjjjj
0 1 2 32 1 3 03 4 2 04 2 0 1
y
{
zzzzzzzzzzzz
Rijo AL Capítulo 9.nb 3
In[80]:= H∗ Escalona a matriz A ∗LRowReduce@matAD êê MatrixForm
Out[80]//MatrixForm=
i
k
jjjjjjjjjjjj
1 0 0 00 1 0 00 0 1 00 0 0 1
y
{
zzzzzzzzzzzz
Os vetores w1 , w1 , w1 e w1 dados são linearmente idependentes e formam uma base de 4 .
Cálculo do posto de uma transformação linear
Dada a transformação linear A: n Ø m a base de Im(A) é formada pelas colunas da matriz escalonada obtida damatriz A ou sobre as linhas da matrz transposta de A. O núcleo de A é a dimensão da base de Im(A).
EXEMPLO 9.5 Obter uma base para a imagem da transformação linear A: 3 Ø 4 , definida por
A(x, y, z) = (x + 5 y + 9 z, 2x + 6 y + 10 z, 3x + 7 y + 11z, 4x + 8y + 12z).
In[42]:= H∗ A matrix formada pelos vetores w1, w2, w3 e w4 dados ∗LmatA = 881, 2, 3, 4<, 85, 6, 7, 8<, 89, 10, 11, 12<<;
In[43]:= H∗ A matrix A ∗LMatrixForm@matAD
Out[43]//MatrixForm=
i
k
jjjjjjj1 2 3 45 6 7 89 10 11 12
y
{
zzzzzzz
In[44]:= H∗ Escalona a matriz A ∗LRowReduce@matAD êê MatrixForm
Out[44]//MatrixForm=
i
k
jjjjjjj1 0 −1 −20 1 2 30 0 0 0
y
{
zzzzzzz
A transformação A tem posto 2.
NullSpace[m] dá a lista dos vetores que formam o núcleoescalona a matrix m com os elementos ∫ 0 da diago-nal principal igual a 1.
In[39]:= H∗ Uma base do núcleo da matriz A ∗LNullSpace@matAD
Out[39]= 882, −3, 0, 1<, 81, −2, 1, 0<<
In[46]:= H∗ Posto da matriz A ∗LLength@NullSpace@matADD
Out[46]= 2
Resolução de sistemas lineares
4 Rijo AL Capítulo 9.nb

O sistema ax = b possui solução se, e somente se, o vetor b œ m (correspondente à matriz b) pertence ao sube-
spaço gerado pelas colunas de a. Isto equivale a dizer que a matriz aumentada [a; b] œ M( m x (n + 1)) tem omesmo posto que a matriz a do sistema.
O sistema ax = b, com a œ M(m x n), x œ M(n x l) e b œ M( m x l), admite as seguintes alternativas:
(1) Não possui solução quando o posto da matriz aumentada [a; b] é maior do que o posto de a;
(2) Possui uma única solução quando a matriz a e a matriz aumentada [a; b] têm o mesmo posto, igual ao númeron de incógnitas;
(3) Possui infinitas soluções quando se tem posto [œ; b] = posto a = r < n. Neste caso, o conjunto das soluções éuma variedade afim de dimensão n - r.
O processo de eliminação se baseia na observação de que ao efetuar uma operação elementar sobre as linhas damatriz aumentada [a;b] obtém-se uma matriz [a'; b'] que é a matriz aumentada de um sistema a'x = b', equivalenteao sistema original ax = b. (Dois sistemas se dizem equivalentes quando possuem o mesmo conjunto de soluções.)
No final do processo, obtém-se um sistema a'x = b', equivalente ao sistema proposto ax = b, no qual a matriz [a';b'] é escalonada. (Isto é o mesmo que dizer que a' é escalonada.) O sistema a'x = b' é facilmente resolvido de baixopara cima: acha-se primeiro o valor da última incógnita, substituindo-a por esse valor na equação anterior e assimpor diante.
Vejamos alguns exemplos.
EXEMPLO 9.6 Consideremos o sistema
y + 2z + 3t = 1
2x + y + 3z = 1
3x + 4y + 2z = 1
4x + 2y + t = 1
In[47]:= H∗ A matrix aumentada do sistema dado ∗LmatA = 880, 1, 2, 3, 1<, 82, 1, 3, 0, 1<, 83, 4, 2, 0, 1<, 84, 2, 0, 1, 1<<;
In[48]:= H∗ A matrix matA ∗LMatrixForm@matAD
Out[48]//MatrixForm=
i
k
jjjjjjjjjjjj
0 1 2 3 12 1 3 0 13 4 2 0 14 2 0 1 1
y
{
zzzzzzzzzzzz
Rijo AL Capítulo 9.nb 5

In[49]:= H∗ Escalonamento da matriz aumentada ∗LRowReduce@matAD êê MatrixForm
Out[49]//MatrixForm=
i
k
jjjjjjjjjjjjjjj
1 0 0 0 15
0 1 0 0 0
0 0 1 0 15
0 0 0 1 15
y
{
zzzzzzzzzzzzzzz
A solução do sistema é x = 1/5, y = 0, z = 1/5, t = 1/5
O Mathematica resolve diretamente o sistema com o comando LinearSolve[m, b].
LinearSolve[m, b] acha um vetor x que resolve a equação matricial m.x == b.
In[54]:= H∗ A matrix do sistema e o vetor b ∗LmatA = 880, 1, 2, 3<, 82, 1, 3, 0<, 83, 4, 2, 0<, 84, 2, 0, 1<<;b = 81, 1, 1, 1<;
In[56]:= H∗ Resolve o sistema de equações lineares ∗LLinearSolve@matA, bD
Out[56]= 9 15, 0, 1
5, 1
5=
EXEMPLO 9.7 Determinar a solução do sistema caso exista
x + 2 y - 3z = 4
2x + 3y + 4z = 5
4x + 7y - 2z = 12
In[57]:= H∗ A matrix do sistema e o vetor b ∗LmatA = 881, 2, −3<, 82, 3, 4<, 84, 7, −2<<;b = 84, 5, 12<;
In[59]:= H∗ Resolve o sistema de equações lineares ∗LLinearSolve@matA, bDLinearSolve::nosol :
Linear equation encountered which has no solution. More…
Out[59]= LinearSolve@881, 2, −3<, 82, 3, 4<, 84, 7, −2<<, 84, 5, 12<D
O Sistema dado não tem solução.
In[60]:= H∗ A matrix aumentada do sistema dado ∗LmatA = 881, 2, −3, 4<, 82, 3, 4, 5<, 84, 7, −2, 12<<;
In[61]:= H∗ A matrix matA ∗LMatrixForm@matAD
Out[61]//MatrixForm=
i
k
jjjjjjj1 2 −3 42 3 4 54 7 −2 12
y
{
zzzzzzz
6 Rijo AL Capítulo 9.nb
In[62]:= H∗ Escalonamento da matriz aumentada ∗LRowReduce@matAD êê MatrixForm
Out[62]//MatrixForm=
i
k
jjjjjjj1 0 17 00 1 −10 00 0 0 1
y
{
zzzzzzz
O sistema dado é equivalente ao sistema
x + 0 y + 17 z = 0
0x + y - 10 z = 0
0x + 0y + 0z = 1
que obviamente não tem solução.
EXEMPLO 9.8 Determinar a solução do sistema caso exista
x + 2 y + 3z + 4 t = 1
5x + 6y + 7z + 8t = 2
9x + 10y + 11z + 12t = 3
In[63]:= H∗ A matrix do sistema e o vetor b ∗LmatA = 881, 2, 3, 4<, 85, 6, 7, 8<, 89, 10, 11, 12<<;b = 81, 2, 3<;
In[65]:= H∗ Resolve o sistema de equações lineares ∗LLinearSolve@matA, bD
Out[65]= 9−12, 3
4, 0, 0=
In[66]:= H∗ A matrix aumentada do sistema dado ∗LmatA = 881, 2, 3, 4, 1<, 85, 6, 7, 8, 2<, 89, 10, 11, 12, 3<<;
In[67]:= H∗ A matrix aumentada ∗LMatrixForm@matAD
Out[67]//MatrixForm=
i
k
jjjjjjj1 2 3 4 15 6 7 8 29 10 11 12 3
y
{
zzzzzzz
In[68]:= H∗ Escalonamento da matriz aumentada ∗LRowReduce@matAD êê MatrixForm
Out[68]//MatrixForm=
i
k
jjjjjjjjj
1 0 −1 −2 − 12
0 1 2 3 34
0 0 0 0 0
y
{
zzzzzzzzz
Rijo AL Capítulo 9.nb 7
EXEMPLO 9.9 Achar a base para o nucleo da transformada linear cuja matriz (nas bases canônicas) é
a = i
k
jjjjjjj1 2 3 1 23 4 5 3 41 0 −1 1 0
y
{
zzzzzzz
In[73]:= matA = 881, 2, 3, 1, 2<, 83, 4, 5, 3, 4<, 81, 0, −1, 1, 0<<;
In[74]:= H∗ Acha a base do núcleo de matrix A ∗LNullSpace@matAD
Out[74]= 880, −1, 0, 0, 1<, 8−1, 0, 0, 1, 0<, 81, −2, 1, 0, 0<<
A base do nécleo da transformação dada é formada pelos vetores w1 = H0, −1, 0, 0, 1L,w1 = H−1, 0, 0, 1, 0L, w1 = H1, −2, 1, 0, 0L.
O método de Gauss-Jordan
O método de eliminação que vimos utilizando é também chamado "método de Gauss". Existe ainda o "método deGauss-Jordan".
Ele continua a eliminação iniciada pelo método de Gauss, chegando no final a uma matriz escalonada, com apropriedade adicional de que, acima e abaixo do primeiro elemento não-nulo de cada linha, todos os elementos sãoiguais a zero. Se a matriz for (quadrada e) invertível, o primeiro elemento não-nulo de cada linha da matriz esca-lonada está sobre a diagonal. Portanto, neste caso, o método de Gauss-Jordan produz uma matriz cujos elementosnão-nulos constituem a diagonal.
O método de Gauss-Jordan tem apenas interesse acadêmico. Ele não é usado na prática.
EXEMPLO 9.10 Achar a base para o nucleo da transformada linear cuja matriz (nas bases canônicas) é
a =
i
k
jjjjjjjjjjjj
0 1 2 32 1 3 03 4 2 04 2 0 1
y
{
zzzzzzzzzzzz
In[81]:= H∗ A matrix formada pelos vetores w1, w2, w3 e w4 dados ∗LmatA = 880, 1, 2, 3<, 82, 1, 3, 0<, 83, 4, 2, 0<, 84, 2, 0, 1<<;
In[82]:= H∗ A matrix A ∗LMatrixForm@matAD
Out[82]//MatrixForm=
i
k
jjjjjjjjjjjj
0 1 2 32 1 3 03 4 2 04 2 0 1
y
{
zzzzzzzzzzzz
In[83]:= H∗ Faz o sscalonamento da matriz A ∗LRowReduce@matAD êê MatrixForm
Out[83]//MatrixForm=
i
k
jjjjjjjjjjjj
1 0 0 00 1 0 00 0 1 00 0 0 1
y
{
zzzzzzzzzzzz
8 Rijo AL Capítulo 9.nb

Método prático para calcular a inversa a-1
Acrescenta-se a matriz identidade In à direita de a, de modo a ter uma matriz aumentada n x 2n:
i
k
jjjjjjjjjjjjjjjjjjjjj
a11 a12 . . . a1 n 1 0 . . . 0a21 a22 . . . a2 n 0 1 . . . 0. . . . . . . .. . . . . . . .. . . . . . . .an1 an2 . . . ann 0 0 . . . 1
y
{
zzzzzzzzzzzzzzzzzzzzz
Em seguida aplicam-se operações elementares às linhas dessa matriz aumentada de modo a reduzir a matriz a àidentidade In , chegando-se a
:
i
k
jjjjjjjjjjjjjjjjjjjjj
1 0 . . . 0 x11 x12 . . . x1 n
0 1 . . . 0 x21 x22 . . . x2 n
. . . . . . . .
. . . . . . . .
. . . . . . . .0 0 . . . 1 xn1 xn2 . . . xnn
y
{
zzzzzzzzzzzzzzzzzzzzz
A matriz @xijD à direita é a inversa de a.
O Mathematica calcula a inversa de uma matriz invertível com o comando Inverse[m].
Inverse[m] acha a inversa de uma matriz quadrada m.
EXEMPLO 9.11 Achar a inversa da matriz
i
k
jjjjjjj2 4 30 1 −13 5 7
y
{
zzzzzzz
In[97]:= H∗ Define a matriz A ∗LmatA = 882, 4, 3<, 80, 1, −1<, 83, 5, 7<<;
In[96]:= H∗ Acha a inversa da matriz A ∗LInverse@matAD êê MatrixForm
Out[96]//MatrixForm=
i
k
jjjjjjjjjj
4 − 133 − 7
3
−1 53
23
−1 23
23
y
{
zzzzzzzzzz
Rijo AL Capítulo 9.nb 9
Exercícios
9.1 [8.1]. Determine o posto da a matriz
i
k
jjjjjjjjjjjj
1 2 3 45 6 7 89 10 11 1213 14 15 16
y
{
zzzzzzzzzzzz
Resposta:
In[98]:= H∗ Define a matriz A ∗LmatA = 881, 2, 3, 4<, 85, 6, 7, 8<, 89, 10, 11, 12<, 813, 14, 15, 16<<;
In[100]:= H∗ Acha a inversa da matriz A ∗LLength@NullSpace@matADD
Out[100]= 2
O posto é 2.
9.1 [8.1]. Decida se as matrizes abaixo são invertíveis ou não. No caso afirmativo, determine a(s) inversa(s). Caso uma
delas (digamos a) não seja invertível, ache uma matriz x œ M(3 x l) tal que ax = 0:
a = i
k
jjjjjjj1 2 34 5 91 3 4
y
{
zzzzzzz e b = i
k
jjjjjjj2 4 30 1 −13 5 7
y
{
zzzzzzz
Resposta:
In[101]:= H∗ Define a matriz A ∗LmatA = 881, 2, 3<, 84, 5, 9<, 81, 3, 4<<;
In[102]:= H∗ Acha a inversa da matriz A ∗LInverse@matAD êê MatrixForm
Inverse::sing : Matrix 881, 2, 3<, 84, 5, 9<, 81, 3, 4<< is singular. More…
Out[102]//MatrixForm=
Inverse@881, 2, 3<, 84, 5, 9<, 81, 3, 4<<D
In[104]:= H∗ Define a matriz B ∗LmatB = 882, 4, 3<, 80, 1, −1<, 83, 5, 7<<;
In[105]:= H∗ Acha a inversa da matriz A ∗LInverse@matBD êê MatrixForm
Out[105]//MatrixForm=
i
k
jjjjjjjjjj
4 − 133 − 7
3
−1 53
23
−1 23
23
y
{
zzzzzzzzzz
10 Rijo AL Capítulo 9.nb

A matriz a não é invertivel enquanto que a matriz b é invertivel
9.5 Calcule a dimensão do subespaço vetorial de 5 gerado pelos vetores v1 = (2, 4, 8, -4, 7), v2 = (4, -2, -1, 3, 1), v3 = (3, 5, 2, -2, 4) e v4 = (-5, 1, 7, -6, 2). Decida se o vetor b = (6, 18, 1, -9, 8) pertence ou não a esse subespaço.
In[121]:= H∗ Define a matriz A ∗LmatA =
882, 4, 8, −4, 7<, 84, −2, −1, 3, 1<, 83, 5, 2, −2, 4<, 85, 1, 7, −6, 2<<;
In[112]:= MatrixForm@matADOut[112]//MatrixForm=
i
k
jjjjjjjjjjjj
2 4 8 −4 74 −2 −1 3 13 5 2 −2 45 1 7 −6 2
y
{
zzzzzzzzzzzz
In[124]:= H∗ Faz o escalonamento da matriz A ∗LmatB = RowReduce@matAD;
In[125]:= MatrixForm@matBDOut[125]//MatrixForm=
i
k
jjjjjjjjjjjjjjjjj
1 0 0 0 29282
0 1 0 0 7194
0 0 1 0 139141
0 0 0 1 145141
y
{
zzzzzzzzzzzzzzzzz
A dimensão do subespaço gerado pelos vetores dados é 4
O posto é 2.
9.11.Resolva os seguintes sistemas lineares:
x + 3 y + z = 1
2x + 6y + 9 z = 7
2x + 8y + 8z = 6
x + y + 0 z + t = 0
x + 2y + z + t = 1
3x + 3y + z + 2t = -1
0x + y + 3z - t = 3
x + y - z + 2t = 0
0x + 3y - z + 3t = 0
2x - y - z + t = 0
Resposta:
Rijo AL Capítulo 9.nb 11
In[126]:= H∗ Define a matriz A ∗LmatA = 881, 3, 1<, 82, 6, 9<, 82, 8, 8<<;b = 81, 7, 6<;
In[128]:= H∗ Acha a inversa da matriz A ∗LLinearSolve@matA, bD
Out[128]= 9 57, −
17, 5
7=
A solução do primeiro sistema é (5/7, -1/7, 5/7)
In[129]:= H∗ Define a matriz A ∗LmatA = 881, 1, 0, 1<, 81, 2, 1, 1<, 83, 3, 1, 2<, 80, 1, 3, −1<<;b = 80, 1, −1, 3<;
In[131]:= H∗ Acha a inversa da matriz A ∗LLinearSolve@matA, bD
Out[131]= 8−2, −2, 3, 4<
A solução do segundo sistema é (-2, -2, 3, 4)
In[132]:= H∗ Define a matriz A ∗LmatA = 881, 1, −1, 2<, 80, 3, −1, 3<, 82, −1, −1, 1<<;b = 80, 0, 0<;
In[134]:= H∗ Acha a inversa da matriz A ∗LLinearSolve@matA, bD
Out[134]= 80, 0, 0, 0<
A solução do terceiro sistema é (0, 0, 0, 0)
9.14. Decida quais das matrizes abaixo possuem inversa e calcule a inversa quando existir.
A = J 1 23 4
N, B = i
k
jjjjjjj4 2 34 5 67 8 8
y
{
zzzzzzz , C =
i
k
jjjjjjjjjjjj
1 2 3 45 6 7 89 10 11 124 3 2 1
y
{
zzzzzzzzzzzz , D =
i
k
jjjjjjjjjjjj
1 1 1 12 3 2 13 1 1 21 2 1 3
y
{
zzzzzzzzzzzz
Resposta:
Inversa da matriz A
In[140]:= H∗ Define a matriz A ∗LmatA = 881, 2<, 83, 4<<;
In[141]:= H∗ Acha a inversa da matriz A ∗LInverse@matAD êê MatrixForm
Out[141]//MatrixForm=
ikjjj
−2 132 − 1
2
y{zzz
Inversa da matriz B
12 Rijo AL Capítulo 9.nb

In[145]:= H∗ Define a matriz B ∗LmatB = 884, 2, 3<, 84, 5, 6<, 87, 8, 8<<;
In[146]:= H∗ Acha a inversa da matriz B ∗LInverse@matBD êê MatrixForm
Out[146]//MatrixForm=
i
k
jjjjjjjjjj
821 − 8
2117
− 1021 − 11
2147
17
67 − 4
7
y
{
zzzzzzzzzz
Inversa da matriz C
In[153]:= H∗ Define a matriz C ∗LmatC = 881, 2, 3, 4<, 85, 6, 7, 8<, 89, 10, 11, 12<, 84, 3, 2, 1<<;
In[154]:= matC êê MatrixForm
Out[154]//MatrixForm=
i
k
jjjjjjjjjjjj
1 2 3 45 6 7 89 10 11 124 3 2 1
y
{
zzzzzzzzzzzz
In[155]:= H∗ Acha a inversa da matriz C ∗LInverse@matCD êê MatrixForm
Inverse::sing :
Matrix 881, 2, 3, 4<, 85, 6, 7, 8<, 89, 10, 11, 12<, 84, 3, 2, 1<<is singular. More…
Out[155]//MatrixForm=
Inverse@881, 2, 3, 4<, 85, 6, 7, 8<, 89, 10, 11, 12<, 84, 3, 2, 1<<D
A matriz C não possui inversa.
Inversa da matriz D
In[157]:= H∗ Define a matriz D ∗LmatD = 881, 1, 1, 1<, 82, 3, 2, 1<, 83, 1, 1, 2<, 81, 2, 1, 3<<;
In[158]:= matD êê MatrixForm
Out[158]//MatrixForm=
i
k
jjjjjjjjjjjj
1 1 1 12 3 2 13 1 1 21 2 1 3
y
{
zzzzzzzzzzzz
In[159]:= H∗ Acha a inversa da matriz D ∗LInverse@matDD êê MatrixForm
Out[159]//MatrixForm=
i
k
jjjjjjjjjjjjjjjjj
− 23
16
12 − 1
6
− 53
23 0 1
3
3 − 12 − 1
2 − 12
13 − 1
3 0 13
y
{
zzzzzzzzzzzzzzzzz
Rijo AL Capítulo 9.nb 13
CAPÍTULO 10
Produto InternoIniciar o MathKernel
In[1]:= 2 + 2
Out[1]= 4
O produto interno, que já foi mencionado brevemente antes, na definição do produto de duas matrizes, seráapresentado formalmente nesta seção e adotado sistematicamente a partir daqui. Trata-se de uma noção quecompleta e enriquece a estrutura de um espaço vetorial, permitindo a utilização de uma linguagem geométricaaltamente sugestiva e o destaque de tipos especiais de operadores, os quais admitem uma análise mais profundade suas propriedades, como se verá a seguir.
Difinição de produto interno
Um produto interno num espaço vetorial E é um funcional bilinear simétrico e positivo em E. Mais precisamente,
um produto interno é uma função E x E Ø , que associa a cada par de vetores u, v œ E um número real X u, v \,chamado o produto interno de u por v, de modo que sejam válidas as seguintes propriedades, para quaisquer u, u' ,
v, v' œ E e a œ l:X
Bilinearidade: X u + u', v \ = X u, v \ + X u', v \, X au, v \ = a X u, v \, X u, v + v' \ = X u, v \ + X u, v' \, X u, av \ = a X u, v \;
Comutatividade (simetria): X u, v \ = X v, u \;Positividade: X u, u \ > 0 se u ∫ 0.
Como X 0, v \ = X 0 + 0, v\ = X 0, v \ + X 0, v \, segue-se que X 0, v \ = X v, 0 \ = 0 para todo v œ E.
A operação u.v calcula o produto interno dos vetores euclidianos u e v.
Resulta da positividade que se X u, v \ = 0 para todo v œ E então u = 0.
Segue-se desta observação que se u, u' œ E são vetores tais que X u, v \ = X u', v \ para todo v œ E então u = u'.
Difinição da norma de um vetor
O número não-negativo | u | = è!!!!!!!!!!!!!!!X u, u \ chama-se a norma ou o comprimento do vetor u. Com esta notação,tem-se | u »2 = X u, u \ e a igualdade

X u + v, u + v \ = X u, u \ + X u, v\ + X v, u \ + X v, v \ lê-se: | u + v »2 = | u »2 + | v »2 + 2 Xu, v \.
A operação è!!!!!!!u.u calcula a norma do vetor u.
Quando | u | = 1 diz-se que u œ E é um vetor unitário.
Todo vetor u ∫ 0 se escreve como u = | u |. u', onde u' é um vetor unitário. Basta pôr u' = | u »-1 . u.
EXEMPLO 10.1 No espaço euclidiano n , o produto interno canônico dos vetores u = (a1 , . . ., an ) e v = ( b1 , . . .
, bn ) é definido por (u, v) = a1 b1 + . . + an bn . Este é o produto interno que consideraremos em n , salvo aviso emcontrário.
EXEMPLO 10.2 Consideremos 2 como o modelo aritmético do plano euclidiano, no qual se introduziu um sistemade coordenadas cartesianas. Dados u = ( a1 , a2 ) e v = ( b1 , b2 ), os números
| u | = "#################a12 + a2
2 e | v | = "#################b12 + b2
2
medem realmente os comprimentos das flechas que representam esses vetares
Ângulo entre dois vetores
Suponhamos u ∫ 0, v ∫ 0 e chamemos de q o ângulo formado por essas flechas. Afirmamos que o produtointerno X u, v \ = | u | | v | cosq.
EXEMPLO 10.3 Seja E = C0 ([a, b]) o espaço vetorial cujos elementos são as funções contínuas g, f: [a, b] œ E.Um produto interno em E pode ser definido pondo
X v, u \ = Ÿab f HxL gHxL „ x
Neste caso, a norma da função f é
| f | = $%%%%%%%%%%%%%%%%%%%%%%%Ÿab f HxL2 „ x
Todo espaço vetorial de dimensão finita pode ser munido de um produto interno.
In[55]:= << LinearAlgebra`Orthogonalization`
Conjuntos ortogonal e ortonormal
Seja E um espaço vetorial com produto interno. Dois vetores u, v œ E chamam-se ortogonais (ou perpendicu-
lares) quando X u, v \ = 0. Escreve-se, então, u t v. Em particular, 0 é ortogonal a qualquer vetor de E. Um
conjunto X Õ E diz-se ortogonal quando dois vetores distintos quaisquer em X são ortogonais. Se, além disso,
todos os vetores de X são unitários então X chama-se um conjunto ortonormal. Portanto, o conjunto X Õ E é
ortonormal se, e somente se, dados u, v œ X tem-se X u, v \ = 0 se u ∫ v e X u, v \ = 1 se v = u. Umabase ortonormal é uma base de E que é um conjunto ortonormal.
2 Rijo AL Capítulo 10.nb

Teorema 10.1. Num espaço vetorial E com produto interno, todo conjunto ortogonal X de vetores não-nulos éL.I. .
EXEMPLO 10.4 A base canônica (e1 , . .. , en ) Õ n é ortonormal: tem-se X ei , e j \ = dij , onde dij = 0 se i ∫ j edij = 1 se i = j. No plano 2 os vetores u = (1, 1) e v = (- 1, 1) são ortogonais. Pondo
u ' = ( è!!!2 ë 2, è!!!2 ë 2) e v ' = ( - è!!!2 ë2, è!!!2 ë 2)
o conjunto {u', v' } Õ 2 é uma base ortonormal.
Teorema de Pitágoras
Quando u e v são ortogonais, a igualdade | u + v »2 = | u »2 + | v »2 + 2 X u, v \ se torna | u + v »2 = | u »2 + | v »2Esta é a versão do Teorema de Pitágoras para um espaço vetorial com produto interno.
Projeção ortogonal
Num espaço vetorial E com produto interno, seja u um vetor unitário. Dado qualquer V œ E, o vetor Xu, v \ . u chama-se a projeção ortogonal de v sobre o eixo que contém u. A justificativa para esta denom-inação está no fato de que, escrevendo w = v - X u, v \ u, temse v = X u, v \ u + w, onde w éperpendicular a u. Com efeito, tomando o produto interno de u por ambos os membros da igualdade w = v - X u,v \u tem-se
X u, w \ = X u, v \ - X u, v \ X u, v \ = X u, v \ -X u, v \ = 0,
pois X u, u \ = 1.Quando se tem apenas u ∫ 0, o eixo que contém u é o mesmo que contém o vetor unitário u' = u/| u | ( = | u »-1 .u ). A projeção ortogonal de v sobre este eixo é, portanto, igual a X u', v \ u', ou seja, (X u, v \ / X u, u \) . u. Usare-mos a notação
pruHvL = X u, v \ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅX u, u \ . u
para indicar a projeção ortogonal do vetor v sobre o eixo que contém o vetor não-nulo u.
Desigualdade de Schwartz
Se z = pruHvL tem-se v = z + w, com w z. Pelo Teorema de Pitágoras, | v »2 = | z »2 + | w »2 . Em particular vemosque | z | § | v |, isto é, o comprimento da projeção pruHvL é menor do que ou igual ao comprimento de v.
Ora, a norma do vetor pruHvL é igual a | X u, v \ |/| u |. Segue-se então que, para quaisquer u, v œ E, tem-se , | Xu, v \ |/| u | § | v | ou seja
| X u, v \ | § | u |. | v |
Distância entre dois vetores
Num espaço vetorial E munido de produto interno, a distância entre os vetores u, v é por definição d(u, v) = | u - v|. Tem-se d(u, u) = 0, d(u, v) > 0 se u ∫ v, d(u, v) = d(v, u) e d(u, w) § d(u, v) + d(v, w).
Rijo AL Capítulo 10.nb 3

Processo de ortogonalização de Gram - Schmidt
O processo de ortonormalização de Gram-Schmidt, um algoritmo que ensina a passar de uma base qualquer8v1, . . ., vn< Õ E para uma base ortonormal 8u1, . . . , un<... , un} Õ E, com a importantepropriedade de que, para m = 1, . .. ,n, os vetores u1, . . . , um pertencem ao subespaço Fm , gerado porv1, . . ., vm .
Dada a base 8v1, . . ., vn< Õ E, obteremos primeiro uma base ortogonal 8w1, . . ., wn< Õ E e depois poremos u1
= w1 ê » w1 », . . . , un = wn ê » wn » para chegar à base ortonormalizada 8u1, . . ., un< Õ E .
Começamos o processo tomando w1 = v1 e prosseguimos por indução. Suponhamos já obtidos os vetores não-nu-los w1, . . ., wm , dois a dois ortogonais, gerando o subespaço Fm , o mesmo que é gerado por v1, . . ., vm . Defini-mos wm + 1 pondo
wm + 1 = vm + 1 - ‚i = 1
m <wi, wm + 1>ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ<wi, wi> wi
Um cálculo simples mostra que wm + 1 é ortogonal a w1, . . ., wm . Além disso, wm + 1 ∫ 0 porque wm + 1 nãopertence ao subespaço Fm gerado por w1, . . ., wm (ou por v1, . . ., vm ). E, finalmente, wm + 1 pertence ao sube-spaço gerado por {w1, . . ., wm , wm + 1 }, o qual é igual a Fm + 1 . Isto completa o processo.
<<LinearAlgebra`Orthogonalization`
GramSchmidt[vectors] realiza o processo de ortogonalização de GramSchidt de um lista de vetores.
Exercícios
10.1 [10.6]. Sem fazer cálculo algum, diga quais são as bases obtidas de V = Hv1, v2, v3Lpelo processo de Gram-Schmidt nos seguintes casos
(a) v1 = (3, 0, 0), v2 = (-1, 3, 0), v3 = (2, -5, 1);
(b) v1 = (-1, 1, 0), v2 = (5, 0, 0), v3 = (2, -2, 3);
Resposta:
(a)
In[78]:= H∗ Os vetores u, v, w ∗Lu = 83, 0, 0<;v = 8−1, 3, 0<;w = 82, −5, 1<;
4 Rijo AL Capítulo 10.nb
In[81]:= H∗ Processo de ortogonalização de GramSchimdt ∗L<< LinearAlgebra`Orthogonalization`s = GramSchmidt@8u, v, w<D
Out[82]= 881, 0, 0<, 80, 1, 0<, 80, 0, 1<<
A base ortonormal de 3 procurada é {(1, 0, 0), (0, 1, 0), (0, 0, 1)}.
(b)
In[83]:= H∗ Os vetores u, v, w ∗Lu = 8−1, 1, 0<;v = 85, 0, 0<;w = 82, −2, 3<;
In[86]:= H∗ Processo de ortogonalização de GramSchimdt ∗L<< LinearAlgebra`Orthogonalization`s = GramSchmidt@8u, v, w<D
Out[87]= 99− 1è!!!2
, 1è!!!2
, 0=, 9 1è!!!2
, 1è!!!2
, 0=, 80, 0, 1<=
A base ortonormal de 3 procurada é {(-1 ëè!!!2 , 1 ëè!!!2 , 0), (1 ëè!!!2 , 1 ëè!!!2 , 0), (0, 0, 1)}.
Verificação que este resultado esta correto
In[88]:= s@@1DD.s@@1DDOut[88]= 1
In[89]:= s@@2DD.s@@2DDOut[89]= 1
In[90]:= s@@3DD.s@@3DDOut[90]= 1
In[91]:= s@@1DD.s@@2DDOut[91]= 0
In[92]:= s@@1DD.s@@3DDOut[92]= 0
In[93]:= s@@2DD.s@@3DDOut[93]= 0
10.1 [10.17]. Calcule três produtos internos entre os vetores u = (1, 0, -1), v = (4, 1, 4), w = (-3, 24, -3) e conclua que eles são linearmente independentes.
Resposta:
In[1]:= H∗ Os vetores u, v, w ∗Lu = 81, 0, −1<;v = 84, 1, 4<;w = 8−3, 24, −3<;
Rijo AL Capítulo 10.nb 5
In[5]:= H∗ Produto interno entre os vetores u, v, w∗Lu.vu.wv.w
Out[5]= 0
Out[6]= 0
Out[7]= 0
Segue dai que os vetores u, v, w são multualmente perpendiculares, portanto eles são linearmente independentes.
10.2 [10.18]. Em cada um dos casos abaixo, determine se o conjunto {u,v,w} Õ 3 é ortnormal, apenas ortogonal ou nenhum dos dois.
(a) u = (1, 2, 1), v = (1, -1, 1), w = (-1, 1, 2)
(b) u = (a, b, c), v = (-b, a, 0), w = (-ac, -bc, a2 + b2 )
(c) u = 1ÅÅÅÅ7 (2, 6, 3), v = 1ÅÅÅÅ7 (3, 2, -6), w = 1ÅÅÅÅ7 (6, -3, 2)
Resposta:
(a)
In[30]:= H∗ Os vetores u, v, w ∗Lu = 81, 2, 1<;v = 81, −1, 1<;w = 8−1, 1, 2<;
In[33]:= H∗ Produto interno entre os vetores u, v, w∗Lu.vu.wv.w
Out[33]= 0
Out[34]= 3
Out[35]= 0
Os vetores u, v, w não são ortogonais.
(b)
In[48]:= H∗ Os vetores u, v, w ∗Lu = 8a, b, c<;v = 8−b, a, 0<;w = 8−a c, − b c, a2 + b2<;
6 Rijo AL Capítulo 10.nb

In[45]:= H∗ Produto interno entre os vetores u, v, w∗Lu.v êê Simplifyu.w êê Simplifyv.w êê Simplify
Out[45]= 0
Out[46]= 0
Out[47]= 0
In[51]:= H∗ Normas dos vetores u, v, w∗Lè!!!!!!!!!
u.u êê Simplifyè!!!!!!!!!
v.v êê Simplifyè!!!!!!!!!
w.w êê Simplify
Out[51]=è!!!!!!!!!!!!!!!!!!!!!!!!a2 + b2 + c2
Out[52]=è!!!!!!!!!!!!!!!a2 + b2
Out[53]=è!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!Ha2 + b2L Ha2 + b2 + c2L
Os vetores u, v, w são apenas ortogonais.
(c)
In[20]:= H∗ Os vetores u, v, w ∗L
u =1
7 82, 6, 3<;
v =1
7 83, 2, −6<;
w =1
7 86, − 3, 2<;
In[23]:= H∗ Produto interno entre os vetores u, v, w ∗Lu.vu.wv.w
Out[23]= 0
Out[24]= 0
Out[25]= 0
In[27]:= H∗ Normas dos vetores u, v, w∗Lè!!!!!!!!!
u.uè!!!!!!!!!
v.vè!!!!!!!!!
w.w
Out[27]= 1
Out[28]= 1
Out[29]= 1
Os vetores u, v, w são ortonormais.
Rijo AL Capítulo 10.nb 7
10.3 [10.21]. Qual é a base ortonormal de 3 obtida pelo processo de Gram-Schmidt a partir da base {u, v, w}, onde u = (2, 6, 3), v = (-5, 6, 24), w = (9, -1, -4)?
Resposta:
(a)
In[56]:= H∗ Os vetores u, v, w ∗Lu = 82, 6, 3<;v = 8−5, 6, 24<;w = 89, −1, −4<;
In[60]:= H∗ Processo de ortogonalização de GramSchimdt ∗L<< LinearAlgebra`Orthogonalization`s = GramSchmidt@8u, v, w<D
Out[60]= 99 27
,67
,37=, 9− 3
7, −
27
,67=, 9 6
7, −
37
,27==
A base ortonormal de 3 procurada é {(2/7, 6/7, 3/7), (-3/7, -2/7, 6/7), (6/7, -3/7, 2/7)}.
Verificação que este resultado esta correto
In[61]:= s@@1DD.s@@1DDOut[61]= 1
In[62]:= s@@2DD.s@@2DDOut[62]= 1
In[63]:= s@@3DD.s@@3DDOut[63]= 1
In[64]:= s@@1DD.s@@2DDOut[64]= 0
In[65]:= s@@1DD.s@@3DDOut[65]= 0
In[66]:= s@@2DD.s@@3DDOut[66]= 0
10.3 [10.21]. Mesma pergunta do exercício anterior para u = (3, 4, 12), v = (7, -8, 15), w =( -15, 6, 44)?
Resposta:
(a)
In[67]:= H∗ Os vetores u, v, w ∗Lu = 83, 4, 12<;v = 87, −8, 15<;w = 8−15, 6, 44<;
8 Rijo AL Capítulo 10.nb

In[70]:= H∗ Processo de ortogonalização de GramSchimdt ∗L<< LinearAlgebra`Orthogonalization`s = GramSchmidt@8u, v, w<D
Out[71]= 99 313
,4
13,
1213
=, 9 413
, −1213
,3
13=, 9− 12
13, −
313
,4
13==
A base ortonormal de 3 procurada é {(3/13, 4/13, 12/13), (4/13, -12/13, 3/13), (-12/13, -3/13, 4/13)}.
Verificação que este resultado esta correto
In[72]:= s@@1DD.s@@1DDOut[72]= 1
In[73]:= s@@2DD.s@@2DDOut[73]= 1
In[74]:= s@@3DD.s@@3DDOut[74]= 1
In[75]:= s@@1DD.s@@2DDOut[75]= 0
In[76]:= s@@1DD.s@@3DDOut[76]= 0
In[77]:= s@@2DD.s@@3DDOut[77]= 0
Rijo AL Capítulo 10.nb 9
CAPÍTULO 11
A AdjuntaIniciar o MathKernel
In[1]:= 2 + 2
Out[1]= 4
Mostraremos, nesta seção, como o produto interno nos permite associar a cada transformação linear A: E Ø Fuma nova transformação A *: F Ø E, chamada a adjunta de A. A adjunta nos dá, por assim dizer, uma visão datransformação A sob um novo ângulo. Essa mudança de ponto de vista é reveladora, especialmente quando sedeseja determinar uma inversa de A .
Espaço dual E*
Seja E um espaço vetorial de dimensão finita, dotado de um produto interno. Definimos uma transformação linear
E: E Ø E * fazendo corresponder a cada vetor v œ E o funcional linear E : v = v* , tal que v*(w) = Xw, v\ para
todo w œ E
Teorema 11.1. Seja E um espaço vetorial de dimensão finita com produto interno. A correspondência E: E Ø E *
que associa a cada v œ E o funcional linear E(v) = v*, tal que v*(w) = Xw, v\ para todo w œ E, é um
isomorfismo.
Difinição de adjunta de A
A adjunta de A é uma transformação linear A *: F Ø E tal que, para v œ E e w œ F quaisquer se tenha:
XAv, w\ = Xv, A*w\.
Transposta de uma matriz a
A transposta de uma matriz a = @aijD œ M(m x n) é a matriz aT = @ajiD œ M(n x m) que tem como linhas ascolunas de a e como colunas as linhas de a, na mesma ordem.

Transpose[m] acha a transposta da matriz m
ExemploIn[2]:= H∗ Matriz M ∗L
matM = 881, 2, 3<, 84, 5, 6<<;MatrixForm@matMD
Out[3]//MatrixForm=
J 1 2 34 5 6
N
In[4]:= H∗ Transposta da matriz M ∗LTranspose@matMD êê MatrixForm
Out[4]//MatrixForm=
i
k
jjjjjjj1 42 53 6
y
{
zzzzzzz
Teorema 11.2. Sejam U = 8u1, . . . , un< œ E e V = 8v1, . . . , vn< œ F bases ortonormais. Se a = @aijD œ M(m x n)é a matriz da transformação linear A: E Ø F nas bases U, V então a matriz da adjunta A*: F Ø E nas bases V, U
é a transposta aT = @ajiD œ M(n x m) de a.
Corolário. Uma transformação linear A e sua adjunta A* têm o mesmo posto.
Propriedades operacionais da adjunta
É apresentada a seguir uma lista de propriedades operacionais da adjunta de uma transformação linear, as quais setraduzem em propriedades da transposta de uma matriz, via Teorema 11.2.
I* = I HInLT = In
(A + B)* = A* + B* (a + b LT = aT + bT
(aA)* = aA* (a a LT = a aT
(BA)* = A*B* (ba LT = aT bT
A** = A (aT LT = a
A adjunta de um isomorfismo A: E Ø F é um isomorfismo A*: F Ø E. Além disso, de A-1 A = IE resulta A*(A-1 ) * = IE logo (A* L-1 = (A-1 )*.
Analogamente, uma matriz quadrada a é invertível se, e somente se, sua transposta aT é invertível e, no casoafirmativo, HaTL-1 = Ha-1LT .
Complemento ortogonal
2 Rijo AL Capítulo 11.nb
As noções de retas e planos perpendiculares da Geometria Elementar se estendem em Álgebra Linear ao conceitode complemento ortogonal, o qual ajuda a entender as relações entre uma transformação linear e sua adjunta.
Seja E um espaço vetorial com produto interno. O complemento ortogonal de um conjunto não-vazio X Õ E é o
conjunto XÆ formado pelos vetores v œ E que são ortogonais a todos os vetores x œ X. Portanto
v œ XÆ ó X v, x\ = 0 para todo x œ X.
· Dado X Õ E, temos X 0, x\ = 0 para todo x œ X, logo 0 œ XÆ .
· Se v œ XÆ e a œ então X av, x \ = a X v, x \ = 0 para todo x œ X, portanto av œ XÆ .
· Se u œ XÆ e v œ XÆ então, para todo x œ X, tem-se X u + v, x \ = X u, x \ + X v, x \ = 0, logo u + v œXÆ .
Segue-se das três observações acima que o complemento ortogonal de qualquer conjunto não-vazio X Õ E éum subespaço vetoria! de E.
EXEMPLO 11.1 . Tem-se 80<Æ = E e EÆ = {0} Se F Õ n é o subespaço vetorial gerado pelo vetor não nulo v =8a1, . . . an< (reta que passa pela origem), o complemento ortogonal FÆ é o hiperplano definido pela equaçãoa1 x1 + . . . + an xn = 0.
Teorema 11.3. Seja E um espaço vetorial de dimensão finita munido de produto interno. Para todo subespaçovetorial F Õ E tem-se a decomposição em soma direta E = F ∆ FÆ .
Corolário 1. dim F + dim FÆ = dim E.
Corolário 2. Para todo subespaço vetorial F Õ E, tem-se HFÆLÆ = F.
Projeção ortogonal sobre F
Indicaremos com a notação Pf : E Ø E, ou simplesmente P: E Ø E, quando não houver perigo de confusão, aprojeção associada à decomposição E = F ∆ FÆ , a qual chamaremos a projeção ortogonal sobre F.
Teorema 11.4. Dada a transformação linear A: E Ø F, entre espaços vetoriais de dimensão finita munidos deproduto interno, tem-se
N(A*) = ImHALÆ .
Im(A*) = NHALÆ
N(A) = ImHA*LÆ
ImHAL = N HA*LÆ
Rijo AL Capítulo 11.nb 3
Seja A: E Ø F uma transformação linear entre espaços vetoriais de dimensão finita, munidos de produto interno.
(a) Se A é sobrejetiva então AA *: F Ø F é invertível e A * (AA* L-1 : F Ø E é uma inversa à direita de A.
(b) Se A é injetiva então A * A: E Ø E é invertível e (AA* L-1 A* é uma inversa à esquerda de A.
In[17]:= ? Inverse
Inverse@mD gives the inverse of a square matrix m. More…
Inverse[m] acha a inversa da matriz m.
Exercícios
11.2 Achar uma inversa à direita para a transformação linear A: 3 Ø 2 , dada por A (x, y , z) = (x + 2y + 3z, 2x - y - z) e uma inversa à esquerda para a transformação linear B: 2 Ø 4 , onde A(x, y) = (x + 2y, 2x - y, x + 3y, 4x + y).
Resposta:
A inversa à direita da transformação A é dada por A * (AA* L-1
In[1]:= H∗ Matriz da transformação A ∗LmatA = 881, 2, 3<, 82, −1, −1<<;
In[2]:= H∗ Transposta da matriz da transformação A ∗LmatAT = Transpose@matAD;
In[3]:= H∗ Calculo da inversa à direita da transformação A ∗LinvDA = [email protected] ;MatrixForm@invDAD
Out[4]//MatrixForm=
i
k
jjjjjjjjjj
425
3175
325 − 8
7515 − 1
15
y
{
zzzzzzzzzz
In[5]:= H∗ Verificação do resultado ∗LmatA.invDA êê MatrixForm
Out[5]//MatrixForm=
J 1 00 1
N
A inversa à direita da transformação A é A * (AA* L-1 = 8 4ÅÅÅÅÅÅÅ25 x + 31ÅÅÅÅÅÅÅ75 y, 3ÅÅÅÅÅÅÅ25 x - 8ÅÅÅÅÅÅÅ75 y, 1ÅÅÅÅ5 x - 11ÅÅÅÅÅÅÅ15 y<
A inversa à esquerda da transformação B é dada por (B*B L-1 B*
In[6]:= H∗ Matriz da transformação B ∗LmatB = 881, 2<, 82, −1<, 81, 3<, 84, 1<<;
4 Rijo AL Capítulo 11.nb

In[7]:= H∗ Transposta da matriz da transformação B ∗LmatBT = Transpose@matBD;
In[8]:= H∗ Calculo da inversa à esquerda da transformação B ∗LinvIB = [email protected] ;MatrixForm@invIBD
Out[9]//MatrixForm=
ikjjjj
1281
37281 − 6
28153
28137
281 − 36281
59281 − 6
281
y{zzzz
In[10]:= H∗ Verificação do resultado ∗LinvIB.matB êê MatrixForm
Out[10]//MatrixForm=
J 1 00 1
N
A inversa à direita da transformação A é A * (AA* L-1 = 8 1ÅÅÅÅÅÅÅÅÅÅ281 x + 37ÅÅÅÅÅÅÅÅÅÅ281 y - 6ÅÅÅÅÅÅÅÅÅÅ281 z + 53ÅÅÅÅÅÅÅÅÅÅ281 w , 37ÅÅÅÅÅÅÅÅÅÅ281 x - 36ÅÅÅÅÅÅÅÅÅÅ281 y + 59ÅÅÅÅÅÅÅÅÅÅ281 z - 6ÅÅÅÅÅÅÅÅÅÅ281 w<
11.3 Dada a matriz a =J 1 1 11 1 2
N calcule aaT e, a partir daí, encontre uma matriz b œ M(3 x 2) tal que ab = I2 .
Resposta:
A inversa à direita da transformação A é dada por A * (AA* L-1
In[1]:= H∗ Matriz a ∗LmatA = 881, 1, 1<, 81, 1, 2<<;
In[2]:= H∗ Transposta da matriz a ∗LmatAT = Transpose@matAD;
In[3]:= H∗ Calculo de aaT ∗LmatAAT = matA.matAT;MatrixForm@matAATD
Out[4]//MatrixForm=
J 3 44 6
N
A matriz b = uma inversa à direita da matriz a e é dada por aT (aaT L-1
In[5]:= H∗ Calculo da inversa à direita da a ∗LmatB = matAT.Inverse@matAATD ;MatrixForm@matBD
Out[6]//MatrixForm=
i
k
jjjjjjjjj
1 − 12
1 − 12
−1 1
y
{
zzzzzzzzz
Rijo AL Capítulo 11.nb 5

In[7]:= H∗ Verificação do resultado ∗LmatA.matB êê MatrixForm
Out[7]//MatrixForm=
J 1 00 1
N
A matriz b = i
k
jjjjjjjjj
1 − 12
1 − 12
−1 1
y
{
zzzzzzzzz
11.7. No espaço vetorial E das funções contínuas f: [-1, 1] Ø , sejam F, G Õ E os subespaços vetoriais formados pelas funções pares e pelas funções ímpares, respectivamente. Relativamente ao produto interno X f, g\ = Ÿ-1
1 f HxL gHxL „ x , em E, mostre que G é o complemento ortogonal de F.
Resposta:
Devemos mostrar que g œ F ó X g, f\ = 0 para todo f œ E.
Para isso basta observar que o produto de uma função par por uma função ímpar é uma funçãio ímpar e que a integral de um função impar no intervalo [-1, 1] é identicamente zero.
11.20. Ache uma base para o complemento ortogonal do subespaço (plano) de 3 gerado pelos vetores u = (3, -1, 2) e v = (-1, 2, 3).
Resposta:
Devemos achar um vetor perpendicular ao plano gerado pelos vetores u = (3, -1, 2) e v = (-1, 2, 3).
In[1]:= H∗ Plano gerado pelos vetore u e v ∗LSolve@83 α − β + 2 γ == 0, −α + 2 β + 3 γ 0, α 1<D
Out[1]= 99α → 1, β →117
, γ → −57==
Assim, a equação do plano é x + 117 y − 5
7 z = 0 ou 7 x +11y -5 z = 0.
Portanto, o vetor de 3 perpendicular ao plano 7 x +11y -5 z = 0 é {7, 11, -5}. Consequentemente, este vetor é a base do complemento ortogonal (reta) do plano gerado por u e v.
11.21. Dado o operador A : 3 Ø 3 , definido por A(x, y, z) = (x + y + z, 3x - 2y - z, -2x + 3y + 2z), obtenha
bases para os seguintes subespaços de 3 : Im( A), N(A), Im( A*) e N(A* ).Resposta:
In[1]:= H∗ Matriz da transformação A ∗LmatA = 881, 1, 1<, 83, −2, −1<, 8−2, 3, 2<<;
Primeiro vamos achar uma base de N(A).
In[2]:= H∗ Base de N HAL ∗LNullSpace@matAD
Out[2]= 88−1, −4, 5<<
O equação do plano perpendicular a N(A) é -x - 4y + 5z = 0. Dai, os vetores (1, 1, 1) e (0, 1/4, 1/5) formam um base de NHALÆ . Como Im( A*) = NHALÆ , esses vetores também formam um base de Im( A*).
Agora vamos achar uma base de N(A* ).
6 Rijo AL Capítulo 11.nb

In[3]:= H∗ Transposta da matriz da transformação A ∗LmatAT = Transpose@matAD
Out[3]= 881, 3, −2<, 81, −2, 3<, 81, −1, 2<<
In[4]:= H∗ Base de N HA∗ L ∗LNullSpace@matATD
Out[4]= 88−1, 1, 1<<
O equação do plano perpendicular a N(A* ) é -x + y + z = 0. Dai, os vetores (0, -1, 1) e (1, 1, 0) formam um base
de N(A* LÆ . Como Im( A) = NHA * LÆ , esses vetores também formam um base de Im( A).
Rijo AL Capítulo 11.nb 7
CAPÍTULO 12
Subespaços InvariantesInicia o MathKernel
In[1]:= 2 + 2
Out[1]= 4
Quanto menor é a dimensão do espaço E, mais fácil é estudar os operadores lineares A: E Ø E. (Isto é especial-mente verdadeiro quando dim E = 1 ou dim E = 2.) Por isso, quando se tem um operador A: E Ø E, é natural quese tente, de alguma maneira, "decompô-lo" em operadores definidos em subespaços de dimensões menores. Opasso inicial nessa busca é a noção de subespaço invariante por um operador, que estudaremos nesta seção.
Definição de subespaços invariantes
Diz-se que um subespaço vetorial F Õ E é invariante pelo operador linear A: E Ø E quando A(F) Õ F, isto é,
quando a imagem Av de qualquer vetor v œ F é ainda um vetor em F.
Autovetor e autovalor de um operador
Um vetor v ∫ 0 em E chama-se um autovetor do operador A: E Ø E quando existe l œ tal que
Av = lv.
O número l œ , por sua vez, chama-se um autovalor do operador A quando existe um vetor não-nulo vœ E tal que Av = lv. Diz-se então que o autovalor l corresponde, ou pertence, ao autovetor v e, vice-versa, que o autovetor v também corresponde, ou pertence, ao autovalor l. Então, para todo w = a v, tem-se Aw = lw.
Achar um autovetor (ou, o que é equivalente, um autovalor) do operador A é, portanto, o mesmo que achar um subespaço de dimensão 1 invariante por A.
Autovetor e autovalor de uma matriz
Analogamente, diz-se que o número real l é um autovalor da matriz a œ M( n x n) quando l é um autovalor do operador A: n Ø n , cuja matriz na base canônica é a. Isto significa que existe um vetor x ∫ 0 em n tal que Ax
= lx ou, o que é, o mesmo, uma matriz não-nula x œ M(n xl) tal que ax = lx.
Exemplo 12.1 Os subespaços {0} e E são invariantes por qualquer operador A: E Ø E. O núcleo N(A) e aimagem Im(A) são também exemplos óbvios de subespaços invariantes. Um subespaço F de dimensão 1 (reta pas-
sando pela origem) é invariante por A se, e somente se, existe um número l tal que Av = lv para todo v œ F.
Exemplo 12.2 Uma rotação R: 2 Ø 2 em torno da origem, de ângulo diferente de 0° e 180°, não admite
outros subespaços invariantes além de {0} e 2 . Por outro lado, para todo a œ ., a rotação A: 3 Ø 3 de ângulo aem torno do eixo z, definida por
A(x, y, z) = (x cos a - y sen a, x sen a + y cos a, z),
tem o eixo z e o plano z = 0 como subespaços invariantes. Para todo z ∫ 0, o vetor v = (0, 0, z) é um autovetor de A,cujo autovalor correspondente é 1, pois Av = v. Já no caso de uma reflexão S: E Ø E em torno do subespaço F1,paralelamente a F2, todo vetor não-nulo em Fl é um autovetor de S, com autovalor 1, enquanto que os vetores não-nu-los em F2 são autovetores correspondentes ao autovalor -1. Finalmente, se o operador A tem núcleo não-trivial então
todo vetor não-nulo v œ N(A) é um autovetor pois Av = 0. v.
Exemplo 12.3 O operador A: 2 Ø 2 , definido por A(x, y) = (x + ay, y), chama -se cisalhamento. Se a ∫0, os únicos subespaços invariantes por A são {0}, 2 e o eixo das abcissas.
Teorema 12.1. Todo operador linear num espaço vetorial de dimensão finita possui um subespaço invariante de dimensão 1 ou 2.
Teorema 12.2. A autovalores diferentes do mesmo operador correspondem autovetores linearmente independentes.
Corolário. Seja dim E = n. Se um operador linear A: E Ø E possui n autovalores diferentes então existe uma base
8v1, . . . vn< œ E em relação à qual a matriz de A é diagonal (isto é, tem a forma @aijD com aij = 0 se i ∫ j).
Com efeito, se Av1 = l1 v1 , . . . , Avn = ln vn com os vi não-nulos e os li dois a dois distintos então 8v1, . . . vn< é, em virtude do Teorema 12.2, uma base de E. A matriz de A nesta base é
i
k
jjjjjjjjjjjj
λ1
λ2
∏
λn
y
{
zzzzzzzzzzzz
na qual os termos que não aparecem são iguais a zero.
A igualdade Av = lv equivale a (A - l)v = 0, logo v é um autovetor do operador A: E Ø E se, e somente se, é um elemento nãonulo do núcleo N(A - lI). Noutras palavras, a fim de que À seja um
Polinômio característico
A igualdade Av = lv equivale a (A - l)v = 0, logo v é um autovetor do operador A: E Ø E se, e somente se, é um elemento não nulo do núcleo N(A - l). Noutras palavras, a fim de que l seja um autovalor de A é necessário e suficiente que o operador A - lI: E Ø E não possua inverso. Isto significa que, det(a - li) = 0 onde a é a matriz de A em relação a qualquer base e i é a matriz identidade nesta mesma base. A equação det(a - li) = 0 é denomi-nada de equação característica e o polinômio det(a - li) é chamado polinômio característico.
2 Rijo AL Capítulo 12.nb

Exemplo 12.4 Os autovalores e os autovetores do operador A: 2 Ø 2 , A(x, y, z) = (4x + y -z, 2x + 5y -2z, x + y + 2z) são obtidos assim: Primeiro, devemos escrever a matriz do operador A na base canônica. Em seguidaresolver a equação característica para achar os autovalores e por fim determinar os autovetores.
In[7]:= H∗ Matriz do operador A ∗LmatA = 884, 1, −1<, 82, 5, −2<, 81, 1, 2<<;MatrixForm@matAD
Out[8]//MatrixForm=
i
k
jjjjjjj4 1 −12 5 −21 1 2
y
{
zzzzzzz
In[11]:= H∗ Resolve a equação característica para determinar os autovalores ∗LlenA = Length@matAD;Solve@Det@matA − λ IdentityMatrix@lenADD 0, λD
Out[12]= 88λ → 3<, 8λ → 3<, 8λ → 5<<
Os autovalores são λ1 = 3, λ2 = 3 e λ2 = 5.
In[13]:= H∗ Resolve a equação característica para determinar os autovalores ∗LNullSpace@matA − 3 IdentityMatrix@lenADDNullSpace@matA − 5 IdentityMatrix@lenADD
Out[13]= 881, 0, 1<, 8−1, 1, 0<<Out[14]= 881, 2, 1<<
Os autovetores correspondentes a λ1 = 3, λ2 = 3 e λ2 = 5 são,respectivamente, 81, 0, 1<, 8−1, 1, 0<, 81, 2, 1<.
Como é de se esperar, o Mathematica calcula os autovalores e autovetores automaticamente coim os seguintes comandos:
CharacteristicPolynomial[matM, var] retorna retorna o polinômio característico da matriz matM expresso em termo da variável var.
Eigenvalues[matM] retorna a lista dos autovalores da matriz matM.
Eigenvectors[matM] retorna a lista dos autovetores da matriz matM.
Eigensystem[matM] retorna a lista na forma {autovalores, autovetores} da matriz matM.
Refazer o Exemplo 12.4 usando estes comandos.
In[16]:= H∗ Acha o polinômio característico da matriz do Exemplo 12.4 ∗LCharacteristicPolynomial@matA, λD
Out[16]= 45 − 39 λ + 11 λ2 − λ3
In[17]:= H∗ Retorna os autovalores da matriz do Exemplo 12.4 ∗LEigenvalues@matAD
Out[17]= 85, 3, 3<
Rijo AL Capítulo 12.nb 3

In[18]:= H∗ Retorna os autovetores da matriz do Exemplo 12.4 ∗LEigenvectors@matAD
Out[18]= 881, 2, 1<, 81, 0, 1<, 8−1, 1, 0<<
In[19]:= H∗ Retorna a lista dos8autovalores, autovetores< da matriz do Exemplo 12.4 ∗L
Eigensystem@matADOut[19]= 885, 3, 3<, 881, 2, 1<, 81, 0, 1<, 8−1, 1, 0<<<
Exemplo 12.5 Determinar os valores aproximados dos autovalores da matriz 10x10 definida por
aij = 9 i + j - 1 se i + j § 1121 - i - j se i + j > 11
In[20]:= H∗ Escreve a matriz aij ∗Lf@i_, j_D := i + j − 1 ê; i + j ≤ 11f@i_, j_D := 21 − i − j ê; i + j > 11matA = Array@f, 810, 10<D;MatrixForm@matAD
Out[23]//MatrixForm=
i
k
jjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjj
1 2 3 4 5 6 7 8 9 102 3 4 5 6 7 8 9 10 93 4 5 6 7 8 9 10 9 84 5 6 7 8 9 10 9 8 75 6 7 8 9 10 9 8 7 66 7 8 9 10 9 8 7 6 57 8 9 10 9 8 7 6 5 48 9 10 9 8 7 6 5 4 39 10 9 8 7 6 5 4 3 2
10 9 8 7 6 5 4 3 2 1
y
{
zzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzz
In[25]:= H∗ Retorna os valores aproximados dos autovalores da matriz aij ∗LEigenvalues@N@matADD
Out[25]= 867.8404, −20.4317, 4.45599, −2.42592,1.39587, −1., 0.756101, −0.629808, 0.55164, −0.512543<
Exemplo 12.6 Um caso particular importante ocorre quando dim E = 2. Vimos no Exemplo 2.6 que se {u,
v}Õ E é uma base então os vetores a u + b v e g u + d v são linearmente dependentes se, e somente se, ad - bg = 0.
Dados o operador A: E Ø E e a base {u, v} Õ E, sejam Au = au + cv e Av = bu + dv. Noutras palavras, a matriz dooperador A na base {u, v} é
J a bc d
N
Então (A - l I) u = (a - l)u + cv e (A - lI)v = bu + (d - l)v. Afim de que A - lI não seja invertível é necessário esuficiente que os vetores (A - lI)u e (A - lI)v sejam L.D., ou seja, que (a - l)( d - l) - bc = 0, ou ainda, que l seja raizdo polinômio
p(l) = l2 - (a + d)l + ad - bc,
4 Rijo AL Capítulo 12.nb

chamado o polinômio característico do operador A.
Portanto, o número real l é um autovalor do operador A: E Ø E, onde dim E = 2, se, e somente se,
é uma raiz do polinômio característico do operador A, o qual, por definição, é p(l) = l2 - (a + d)l +ad - bc, Os coeficientes dep(l) são tirados da matriz de A em relação a uma base qualquer de E.
Observação. A matriz do operador A muda quando se passa de uma base para outra. Mas o polinômio p(l) (isto é, as expressões a + d e ad - bc, que são seus coeficientes) permanece (isto é, permanecem) sem alteração. No
presente caso (dim E = 2), é claro que a + d = traço de A, logo independe da base escolhida.
Exemplo 12.7 No caso da rotação R: 2 Ø 2 , R(x, y) = (x cos q - y sen q, x sen q + y cos q), b = - sen q, c= sen q, d = cos q, logo o polinômio caracteristico de R é
p(l = l2 - H2 cos qL l + 1
Se q ∫ 0 e q ∫ 1800, o trinômio p(l) não possui raiz real pois neste caso seu discriminante D = 4( cos2 q - 1) énegativo. Conseqüentemente R só possui autovalores (reais) se q = 0 ou q = 1800 .
In[32]:= H∗ Matriz do operador R ∗LmatR = 88Cos@θD, −Sin@θD<, 8Sin@θD, Cos@θD<<;MatrixForm@matAD
Out[33]//MatrixForm=
J Cos@θD −Sin@θDSin@θD Cos@θD N
In[35]:= H∗ Acha o polinômio característico do operador R ∗LCharacteristicPolynomial@matA, λD êê Simplify
Out[35]= 1 + λ2 − 2 λ Cos@θD
Exemplo 12.8 Definamos o operador A: 2 Ø 2 pondo A(x, y) = (4x + 3y, x + 2y). Seu polinômio car-acterístico é p (l) = l2 - 6l + 5, cujas raízes são l1 = 1 e l2 = 5. Estes números são autovalores de A. Existem,portanto, vetores não-nulos v1 , e v2 em 2 , tais que Av1 = v1 e Av2 = 5v2 . Pelo Teorema 12.2, v1 , e v2 formam umabase de 2 , em relação à qual a matriz do operador A tem a forma diagonal:
a = J 1 00 5
N
A fim de determinar os vetores v1 = (x, y) e v2 = (r, s) exprimimos as igualdades Av1 = v1 e Av2 = 5v2 em termos decoordenadas, obtendo os sistemas lineares
4 x + 3 y = x
x + 2 y = y
e
4 r + 3 s = 5 r
r + 2 s = 5 s
Ambos os sistemas acima são indeterminados, e tinham que ser assim pois se v é autovetor de A, todo múltiplo av
Rijo AL Capítulo 12.nb 5
também é. Tomando uma solução não-nula de cada um desses sistemas obtemos v1 = (1, -1), v2 = (3,1) tais que {v1 ,
v2 } Õ 2 é uma base formada por autovetores de A.
Repetição do Exemplo 12.8 com o Mathematica.
In[26]:= H∗ Matriz do operador A ∗LmatA = 884, 3<, 81, 2<<;MatrixForm@matAD
Out[27]//MatrixForm=
J 4 31 2
N
In[28]:= H∗ Acha o polinômio característico da matriz do Exemplo 12.4 ∗LCharacteristicPolynomial@matA, λD
Out[28]= 5 − 6 λ + λ2
In[29]:= H∗ Retorna a lista dos8autovalores, autovetores< da matriz do Exemplo 12.4 ∗L
Eigensystem@matADOut[29]= 885, 1<, 883, 1<, 8−1, 1<<<
Exercícios
12.1 (12.19) O determinante da matriz a = J a bc d
N é, por definição, o número det a = a d - b c. Mediante um
cálculo direto, mostre que se
m = J p qr s
N então det (a m) = det a. det m. Prove ainda que det a ∫ 0 se, e somente se, a é invertível. Conclua que,
para toda matriz invertível m, tem-se det a = det( m-1 a m), logo todas as matrizes do operador A: E Ø E, com dim E = 2, têm o mesmo determinante, o qual é chamado o determinante do operador A.
Resposta:
In[147]:= H∗ Mostra que det Ha mL=det a.det m ∗LmatA = 88a, b<, 8c, d<<;matM = 88p, q<, 8r, s<<;[email protected] Det@matAD Det@matMD êê Simplify
Out[149]= True
In[150]:= H∗ Inversa de a se det a = a d − b c ∗LInverse@matAD
Out[150]= 99 d−b c + a d
, −b
−b c + a d=, 9−
c−b c + a d
,a
−b c + a d==
De det( m-1 a m) = det m-1 det( a m) segue que det m-1 det a det m = det m-1 det m det a = det a, Portanto, det a = det( m-1 a m).
6 Rijo AL Capítulo 12.nb

12.2 (12.20) Mostre que os subespaços vetoriais de C¶ ( , ) gerados por cada um dos conjuntos abaixo são invari-antes pelo operador de deri
vação D: C¶ ( , )ØC¶ ( , ).
(a) {cos x, sen x};
(b) 8ex, x ex, x2 ex< .
Resposta:
Devemos mostrar que as imagens dos conjuntos {cos x, sen x} e 8ex, x ex, x2 ex< pelo operador derivação pertencem a C¶ ( , ). Com efeito,
(a) D({cos x, sen x}) = {-sen x, cos x} Õ C¶ ( , );
(b) D( 8ex, x ex, x2 ex<) = 8ex, H1 + xL ex, H2 x + x2L ex< Õ C¶ ( , ).
12.3 (12.30) Sej a A: 2 Ø 2 o operador definido por A (x, y) = (y, 0). Quais são os autovalores de A? E os autovetores? Se a = J 0 1
0 0N
existe alguma matriz invertível p œ M (2 x 2) tal que p-1 ap seja uma matriz diagonal?
Resposta:
In[78]:= H∗ Matriz do operador A ∗LmatA = 880, 1<, 80, 0<<;MatrixForm@matAD
Out[79]//MatrixForm=
J 0 10 0
N
In[3]:= H∗ Retorna os autovalores do operador A ∗LEigenvalues@matAD
Out[3]= 80, 0<
In[80]:= H∗ Retorna os autovetores do operador A ∗LEigenvectors@matAD
Out[80]= 881, 0<, 80, 0<<
In[100]:= H∗ Determinação da matriz p ∗LClear@p1, p2, p3, p4D;matP = 88p1, p2<, 8p3, p4<<;[email protected] matP.880, 0<, 80, 0<<, 8p1, p2, p3, p4<D
Out[102]= 88p1 → 0, p2 → 0, p3 → 0, p4 → 0<<
A matriz p é nula, portanto não invertível.
12.4 (12.31) Sej a A: 2 Ø 2 o operador definido por A (x, y) = (2x - y, x + 4y). Mostre que A possui um autovalor único igual a 3 e que o subespaço E3 tem dimensão 1. Conclua que se a = J 2 −1
1 4N então não existe uma matriz
invertível b œ M (2 x 2) tal que b-1 ab seja diagonal?
Resposta:
Rijo AL Capítulo 12.nb 7

In[125]:= H∗ Matriz do operador A ∗LmatA = 882, −1<, 81, 4<<;MatrixForm@matAD
Out[126]//MatrixForm=
J 2 −11 4
N
In[123]:= H∗ Retorna os autovalores do operador A ∗LEigenvalues@matAD
Out[123]= 83, 3<
In[124]:= H∗ Retorna os autovetores do operador A ∗LEigenvectors@matAD
Out[124]= 88−1, 1<, 80, 0<<
Existe apenas um autovetor (-1, 1), portanto o subespaço E3 tem dimensão 1.
In[135]:= H∗ Determinação da matriz b ∗LClear@b1, b2, b3, b4D;matB = 88b1, b2<, 8b3, b4<<;[email protected] matB.883, 0<, 80, 3<<, 8b1, b2, b3, b4<DSolve::svars :
Equations may not give solutions for all "solve" variables. More…
Out[137]= 88b1 → −b3, b2 → −b4<<
O determinante da matriz b = J −b3 −b4b3 b4
N é zero, portanto b é singular e consequentemente não invertível..
12.5 (12.32) Sej a A: 2 Ø 2 o operador definido por A (x, y) = (3x + y, 2x + 2y). Mostre que A possui os autova-lores 4 e 1. Ache uma base {u, v} tal que Au = 4u e Av = v. Dada a matriz a = J 3 1
2 2N ache uma matriz invertível
p œ M (2 x 2) tal que p-1 ap = J 4 00 1
N
Resposta:
In[111]:= H∗ Matriz do operador A ∗LmatA = 883, 1<, 82, 2<<;MatrixForm@matAD
Out[112]//MatrixForm=
J 3 12 2
N
In[31]:= H∗ Retorna os autovalores do operador A ∗LEigenvalues@matAD
Out[31]= 84, 1<
In[30]:= H∗ Retorna os autovetores do operador A ∗LEigenvectors@matAD
Out[30]= 881, 1<, 8−1, 2<<
A base procurada é {(1, 1}, (-1,2)}
8 Rijo AL Capítulo 12.nb
In[25]:= H∗ Au = 4 u ∗LmatA.8u1, u1< 84 u1, 4 u1<
Out[25]= True
In[27]:= H∗ Av = v ∗LmatA.8−v1, 2 v1< 8−v1, 2 v1<
Out[27]= True
In[113]:= H∗ Determinação da matriz p ∗LClear@p1, p2, p3, p4D;matP = 88p1, p2<, 8p3, p4<<;[email protected] matP.884, 0<, 80, 1<<, 8p1, p2, p3, p4<DSolve::svars :
Equations may not give solutions for all "solve" variables. More…
Out[115]= 99p1 → p3, p2 → −p42
==
A matriz p = J p3 −p4ê2p3 p4
N . Fazendo, por exemplo, p3= 1, p4 = −2 , obtém-se a matriz p = J 1 11 −2
N .
In[70]:= H∗ Verificação p−1 ap ∗LmatP = 881, 1<, 81, −2<<;[email protected] 884, 0<, 80, 1<<
Out[71]= True
Rijo AL Capítulo 12.nb 9