ilustraÇÃo da cinemÁtica e da cinÉtica … · isoladamente, sem considerar as interrelações...
TRANSCRIPT

Miguel Terra de Araújo Coelho
ILUSTRAÇÃO DA CINEMÁTICA E DA CINÉTICA CORPORAL DURANTE ATIVIDADES EM CADEIA
FECHADA: revisão de literatura
Belo Horizonte
Escola de Educação Física, Fisioterapia e Terapia Ocupacional/UFMG
2012

Miguel Terra de Araújo Coelho
ILUSTRAÇÃO DA CINEMÁTICA E DA CINÉTICA CORPORAL DURANTE ATIVIDADES EM CADEIA
FECHADA: revisão de literatura
Monografia apresentada ao Curso de Graduação
em Fisioterapia da Escola de Educação Física,
Fisioterapia e Terapia Ocupacional da
Universidade Federal de Minas Gerais, como
requisito para obtenção do título de bacharel em
Fisioterapia.
Orientador: Prof. Dr. Sérgio Teixeira Fonseca
Belo Horizonte
Escola de Educação Física, Fisioterapia e Terapia Ocupacional/UFMG
2012

RESUMO
A escassez de ilustração na literatura didática sobre o estudo do movimento do
corpo em cadeia cinética fechada pode ser um limitador para a compreensão da
cinesiologia por parte do aluno, especialmente quando estuda-se o corpo em cadeia
cinética fechada. O propósito deste trabalho consiste-se em reunir literatura didática
já reconhecida que aborda o assunto, e construir um atlas do movimento em cadeia
cinética fechada em duas situações convenientes para a prática fisioterápica –
avaliação postural e de marcha. Serão feitas ilustrações de movimentos e posturas
ideais já documentadas e algumas descrições de como compensações posturais
podem ocasionar disfunções de movimento. Espera-se que este trabalho venha
facilitar a compreensão do estudo do movimento nestas duas situações ideais, e que
possa servir de base para o aluno na compreensão das disfunções de movimento.
Palavras-chave: Ilustração. Cadeia cinética fechada. Avaliação postural. Marcha.

ABSTRACT
The shortage of illustration in didactic literature on the study of body movement in
closed kinetic chain may be a limitation for the understanding of kinesiology by the
student, especially when the body is studied in closed kinetic chain. The purpose of
this work consists in gathering already recognized didactic literature that approaches
the subject, and make an atlas of motion in closed kinetic chain for two situations
suitable for physiotherapy practice - assessment of posture and gait. Will be made
illustrations of ideals movements and postures already documented and some
descriptions of how postural compensations can cause movement dysfunctions. It is
hoped that this work will facilitate the understanding of the study of motion in these
two ideal situations, and can serve as a basis for the student comprehend movement
dysfunctions.
Keywords: Illustration. Closed kinetic chain. Assessment posture. Gait.

SUMÁRIO
1 INTRODUÇÃO 6
2 REPRESENTAÇÃO GRÁFICA DA AVALIAÇÃO DA POSTURA 10
2.1 Descarga de Peso 11
2.2 Contole Muscular 13
3 REPRESENTAÇÃO GRÁFICA DA AVALIAÇÃO DA MARCHA 15
3.1 Descarga de Peso 15
3.1.1 Contato inicial 15
3.1.2 Apoio Médio 17
3.1.3 Impulso 18
3.2 Fáscia Tóraco-Lombar e sua Participação na Marcha 19
3.3 Controle Muscular 20
3.3.1 Contato Inicial 20
3.3.2 Apoio Médio 21
3.3.3 Impulso 22
4 CONCLUSÃO 43
REFERÊNCIAS____________________________________________________44
ÍNDICE___________________________________________________________48

LISTA DE FIGURAS
FIGURA 1 24
FIGURA 2 25
FIGURA 3 26
FIGURA 4 27
FIGURA 5 28
FIGURA 6 29
FIGURA 7 30
FIGURA 8 31
FIGURA 9 32
FIGURA 10 33
FIGURA 11 34
FIGURA 12 34
FIGURA 13 35
FIGURA 14 35
FIGURA 15 36
FIGURA 16 37
FIGURA 17 38
FIGURA 18 39
FIGURA 19 40
FIGURA 20 41
FIGURA 21 42

6
1 INTRODUÇÃO
A observação empírica da cinemática do corpo segue, tradicionalmente, um
método comum da ciência para tentar entendê-lo: fragmenta-se o objeto de estudo
em partes para depois reconstruí-lo (BUNGEE, 2009). Nas áreas médicas, é comum
entender a parte e focar sua atenção até que se esgotem as possibilidades de
descobertas sobre os processos patológicos que podem originar daquela fração.
Este processo de particionamento do conhecimento permite, supostamente,
compreender a doença e, ao conhecer mais sobre a parte estudada, aumenta as
chances de uma intervenção local bem sucedida (NISHIKAWA, 2009). Nesse
sentido, o direcionamento da formação acadêmica e profissional com foco nas
especialidades têm se torna do cada vez mais comuns (BUNGEE, 2009).
Na cinesiologia do corpo humano a abordagem tradicional não é diferente. O
estudo cinesiológico busca a compreensão de partes específicas do corpo em que o
movimento acontece e procura identificar como os segmentos corporais trabalham
durante o movimento com o objetivo de reconhecer processos atípicos que podem
contribuir para a ocorrência de lesões crônicas ou agudas (KISNER, 2005). Este fato
é ilustrado pela existência de capítulos separados para cada articulação do corpo,
especificando cada detalhe cinesiológico e alterações mais comuns de cada região
(NEUMANN, 2005; NORKIN, 2001). O estudo de cada região (segmento corporal)
isoladamente, sem considerar as interrelações entre os diferentes segmentos, leva a
uma compreensão restrita do movimento. Por exemplo, uma tendinite de bíceps
femoral deve ter sua causa dentro dos limites da articulação do joelho; uma ruptura
de um tendão de supraespinhoso terá a resposta do que a ocasionou dentro da
articulação glenoumeral; uma fasceíte plantar será consequência de alterações do
segmento tornozelo-pé, entre outros inúmeros exemplos (KISNER, 2005).
Entender esses processos de maneira tão reducionista parece confortável a
primeira vista, pois, aparentemente, permite a criação de protocolos de tratamento
que podem ter efeitos em curto prazo e com menor custo para o cliente
(CAMPBELL, 1992). Certamente, esta abordagem não é de todo indesejável, pois as
ciências da saúde buscam, além do bem estar do indivíduo, a redução dos custos de
tratamento que impactam diretamente nos gastos do Estado para os cuidados da

7
população (DETTINGER, 2002). Uma pessoa economicamente ativa afastada de
seu ofício por razões de saúde, além de deixar de contribuir com sua mão de obra,
pode ainda ser causa da retirada de outra(s) pessoa(s) do mercado de trabalho que
passarão a cuidar dela (DETTINGER, 2002).
A intervenção ortopédica com um escopo de conhecimento especializado nem
sempre resulta em um tratamento bem sucedido (HEBERT, 1998). Milhares de
pessoas ainda continuam a sofrer de queixas primárias mesmo após o tratamento
classicamente prescrito. Isso nos leva a interrogar, como profissionais da
reabilitação, onde estaria, de fato, as causas da queixa persistente. Essa abordagem
limitada ocorre não pela falta de pesquisas e discussões sobre anatomia, histologia,
patologia, farmacologia, engenharia, cinesiologia, ortopedia, neurologia, psicologia,
dentre outros, mas porque nos falta um melhor entendimento sobre como o processo
de adoecimento acontece (PERRACINI, 2009). Talvez o ponto de partida seja mudar
a estratégia de como entendemos o sistema musculoesquelético. O fracionamento
dos estudos das áreas da saúde (médicos, fisioterapeutas, terapeutas ocupacionais,
fonoaudiólogos, educadores físicos e outros) e da ergonomia (engenheiros,
arquitetos, psicólogos, designers e outros) pode ser responsável pela lacuna
existente no conhecimento global do corpo. A síntese desse conhecimento pode ser
o gatilho para uma nova forma de estudar a biomecânica.
Perder de vista a compreensão do todo (o sistema locomotor como uma
unidade interdependente entre suas partes e o meio em que se situa) faz com que
determinados conhecimentos fiquem negligenciados (BUNGEE, 2009). Por exemplo:
cada articulação do corpo relaciona-se com a adjacente, e esta com outra,
sucessivamente, de acordo com a tarefa realizada dentro de um determinado
ambiente (casa, rua, trabalho, quadra, piscina, praia, etc.) (STEINDLER, 1973).
Entretanto, esta visão macro do corpo humano não é abordada nos estudos que são
desenvolvidos de forma demasiadamente particionada e específica.
O corpo pode ser comparado, com seu alinhamento ósseo e articulações
diversas que limitam os graus de liberdade possíveis, a uma estrutura mecânica.
Todavia, o modelo estrutural (ou as representações gráficas utilizadas) comumente é
estudado de modo fracionado (STEINDLER, 1973). Entender esta estrutura
mecânica como um sistema (elementos que se relacionam) poderá nos dar uma

8
maior clareza de como essa harmonia intersegmentar ocorre durante a postura e o
movimento em atividades funcionais (CAMPOS, 1982). Assim, atividades realizadas
em cadeia cinética fechada, como subir escada, carregar objetos, alcançar uma
peteca em um jogo de quadra, devem ser analisadas como um todo e não por meio
do estudo de articulações separadas.
Este trabalho tem como foco a ilustração gráfica de modo global da postura e
do movimento. Considerando que uma das grandes dificuldades do aluno na
graduação do curso de Fisioterapia em compreender a cinemática está ligada aos
movimentos complexos que ocorrem em cadeia cinética fechada, será apresentado
um atlas resumido da cinemática e cinética do corpo humano em situações estáticas
(postura) e dinâmica (movimentos, especificamente a marcha). Portanto, este
trabalho propõe criar uma ilustração do o corpo durante a avaliação da postura e do
movimento humano em cadeia cinética fechada, interrelacionando os segmentos
corporais e as estruturas do sistema musculoesquelético, por meio de modelos com
desenhos ilustrativos.
No sentido de facilitar o entendimento do processo de avaliação
fisioterapêutica, este trabalho será dividido em duas partes. A primeira parte
consistirá em um atlas de avaliação postural. A segunda parte abordará a
representação gráfica da avaliação do movimento. Cada parte desta monografia
será organizada por meio de ilustrações que abordarão as forças que causam a
postura e/ou o movimento em dois contextos distintos:
A) Representação dos torques passivos produzidos pelos pesos segmentares
e força de reação do solo (torques externos), e pela resistência ligamentar e
articular;
B) Representação dos torques ativos produzidos pela força muscular (torque
interno), responsáveis pelo controle do movimento na postural e na marcha.
Nestes contextos, além da representação do movimento e postura típicos,
algumas alterações posturais ou de movimento serão descritas no sentido de
demonstrar a importância dessas forças na produção de processos comumente
encontrados na clínica fisioterápica.

9
Os desenhos serão criados a partir do estudo de peças anatômicas ou
ilustrações contidas em atlas anatômicos ou livros de cinesiologia. Esses desenhos
consistirão, principalmente, de modelos representativos dos segmentos corporais e,
portanto, não irão reproduzir fidedignamente cada estrutura óssea, ligamentar ou
muscular do corpo humano. Para cada desenho apresentado, haverá uma descrição
do que deverá ser observado para seu entendimento. Os desenhos serão
apropriados para ilustrar questões importantes do sistema músculo-esquelético
durante a avaliação da postura e do movimento pelo estudante de Fisioterapia. As
ilustrações foram elaboradas preferencialmente considerando o sistema de maneira
integral, mas, quando necessário, regiões segmentadas foram enaltadas.

10
2 REPRESENTAÇÃO GRÁFICA DA AVALIAÇÃO DA POSTURA
O objetivo dessa seção consiste em ilustrar como as forças que atuam ativa e
passivamente sobre o corpo produzem torques que atuam na posição ortostática e
em repouso. A postura ideal será utilizada para descrever o que se deve observar
durante a postura em ortostatismo, e detalhes das articulações mais importantes
serão ressaltados para ilustrar cada etapa de descarga de peso.
Inicialmente faremos uma descrição das forças passivas atuantes no corpo,
como o peso dos segmentos corporais e a força de reação do solo. Estas forças
provocam torques sobre os segmentos e articulações do corpo em cadeia cinética
fechada, o que influencia nos movimentos de todos os segmentos corporais
participantes na manutenção da postura. A representação detalhada desse “efeito
em cadeia” é fundamental para a compreensão de como movimentos puntuais sobre
uma região podem influenciar outros segmentos que aparentemente não possuem
relação. Além disso, a análise será em sentido caudo-cefálico.
Após a apresentação das forças passivas (descarga de peso e força de
reação do solo) atuantes sobre as estruturas corporais e seus torques resultantes,
deve ser demonstrado como o corpo controla ativamente essas forças. Para se
manter o equilíbrio de forças no sistema, sua resultante deve ser igual a zero. Logo,
para que o corpo mantenha sua postura em repouso, estruturas ativas músculo-
tendíneas devem responder à resultante de forças originadas das forças passivas.
Nesta segunda parte da avaliação postural, descreveremos os torques ativos que
anulam essa resultante de forças.
Assim, nestas ilustrações serão realizadas representações globais e locais de
como a musculatura participa da manutenção da postura. A orientação dessas
forças será feita em sentido caudo-cefálico, indicando as forças necessárias e as
estruturas responsáveis no controle de movimento resultante das forças passivas.

11
2.1 Descarga de Peso
A linha que representa a força da gravidade passa anterior ao eixo da
articulação talo-crural, provocando um torque dorsiflexor (P.1) (NORKIN, 2001). A
força de reação ao solo no calcâneo, por se concentrar lateralmente à esta
articulação subtalar, provoca um torque de pronação no retropé (P.2) (MICHAUD,
1993). O movimento resultante é a eversão de calcâneo e adução com flexão plantar
de tálus. Como a articulação talo-crural permite pouca rotação sobre o eixo vertical,
a perna acompanha a adução de tálus com um movimento de rotação medial (P.3)
(MICHAUD, 1993).
Com a eversão do calcâneo durante a pronação de retropé, a borda medial do
antepé vai de encontro ao chão. A força de reação concentrada sobre a cabeça do
primeiro metatarso provoca uma força inversora no antepé (P.4) (pronação do eixo
oblíquo e supinação sobre o eixo longitudinal da articulação mediotársica) (NORKIN,
2001; MICHAUD, 1993).
O movimento de eversão do calcâneo também provoca uma relativa redução
do comprimento do membro inferior pelo abaixamento do tálus. Isso pode influenciar
a postura de pelve se a eversão for assimétrica entre os dois pés (P.5) (MICHAUD,
1993).
Na articulação do joelho, a linha de gravidade passa anteriormente,
provocando um momento extensor (P.6) (NORKIN, 2001). Essa articulação em
extensão durante a postura ortostática mantém a relação de tíbia e fêmur sobre o
eixo vertical devido às estruturas ligamentares que participam da artrocinemática do
joelho (mecanismo em parafuso, ou “screw-home”) (NORKIN, 2005). A rotação
medial da tíbia leva o fêmur também em rotação medial (P.7), produzindo um
aumento do ângulo Q (SARHMANN, 2005). A tração de estruturas laterais, como
retináculos laterais da patela, banda ílio-tibial e músculo reto femoral também
contribui para esse posicionamento da patela (P.8) (MICHAUD, 1993).

12
A linha da gravidade passa posteriormente à articulação do quadril,
provocando um momento extensor (P.9). Ocorre também rotação medial de fêmur
provocada pela rotação medial da tíbia e adução do tálus (P.10). O ligamento ílio-
femoral, ísquio-femoral e pubo-femoral resistem a este torque de extensão e rotação
medial, o que roda a pelve anteriormente (P.11) (MICHAUD, 1993).
Caso a cabeça femoral, condilo medial femoral e o calcâneo sobre o estejam
alinhados verticalmente, não ocorrerá torques em valgo ou varo no joelho (P.12)
(NORKIN, 2001).
O posicionamento anterior do centro de gravidade em relação ao eixo de
rotação da sacro-ilíaca provoca um momento de nutação sacral (P.13) (NORKIN,
2001). Os ligamentos sacrotuberosos e sacroespinhal resistem ao movimento com
um torque de contra-nutação (P.14).
A postura do sacro influencia diretamente na curvatura da coluna vertebral
(P.15), pois qualquer alteração na base dessa coluna trará movimentos
compensatórios por toda sua extensão. Por exemplo, um aumento do ângulo lombo-
pélvico trará um aumento da lordose lombar, resultando em postura alterada dos
quadrantes superiores (P.16).
A linha da gravidade que passa sobre as coluna torácica e lombar encontra-
se anterior à transição tóracolombar (T12 e L1) e posterior à coluna lombar baixa
(L3) (P.17), provocando, respectivamente, um torque flexor e outro extensor. A linha
da gravidade que atravessa a coluna, portanto, acentua as curvas lordóticas e
cifóticas naturais das regiões cervical, tóracica e lombar (P.18) (NORKIN, 2001).
A postura da coluna torácica influencia o posicionamento espacial da cintura
escapular, pois esta acompanha o formato do gradil costal (P.19). Por exemplo, um
aumento da cifose torácica por uma anteversão pélvica coloca a escápula em
inclinação anterior relativa sobre o eixo sagital (SARHMANN, 2005); um
desnivelamento pélvico resultante de uma diferença de comprimento funcional ou
estrutural de membros pode provocar uma escoliose funcional, alterando o
posicionamento escapular (MICHAUD, 1993; SARHMANN, 2005).
O peso do membro superior provoca uma força de translação inferior de
úmero sobre a fossa glenóide (P.20), um torque de rotação inferior de escápula

13
próximo à articulação acrômio-clavicular (P.21), e depressão de clavícula devido ao
torque sobre a articulação esterno-clavicular (P.22). (NEUMANN, 2006).
O centro de massa da cabeça está localizado anteriormente à articulação
atlanto-occipital, provocando um torque em flexão (P.23). A tração do ligamento
nucal provocada pela força flexora gera uma extensão da coluna cervical superior
(P.24). Na região cervical baixa, o centro de massa anteriorizado provoca um torque
flexor (P.25) (NORKIN, 2001). A articulação atlanto-axial mantém-se alinhada
seguindo um alinhamento retrógado de coluna vertebral até cintura pélvica (P.26)
(NORKIN, 2001).
2.2 Controle Muscular
O controle da força inversora no antepé é feito pelo alongamento da fáscia
plantar, ligamentos plantares (Q.1) (em mola, plantar longo, aponeurose plantar e
plantar curto, em ordem de importância – MOORE, 1985, apud NORKIN, 2001), e
músculos flexor longo do hálux e fibular longo (MICHAUD, 1993). A pronação de
retropé é controlada pelo ligamento deltóide, interósseo e pelas musculaturas do
tibial anterior e posterior (Q.2) (MICHAUD, 1993).
O momento de dorsiflexão é resistido pelo tríceps sural que realiza um torque
de flexão plantar (Q.3).
O torque de extensão causado pela linha da gravidade que passa
anteriormente à articulação do joelho é controlada pelos isquiossurais, gastrocnêmio
e cápsula articular (Q.4) (NORKIN, 2001).
A rotação medial do fêmur será controlada pelos rotadores laterais de quadril
(Q.5) (glúteo máximo, glúteo médio posterior e musculatura intrínseca)
(SAHRMANN, 2005). A anteversão pélvica provocada pela rotação medial de fêmur
será controlada pelas musculaturas extensora de quadril (glúteo máximo e
isquiossurais) e abdominais (principalmente o reto e oblíquo externo).

14
A ativação do músculo bíceps femoral auxilia no aumento de tensão do
ligamento sacrotuberoso, auxiliando no controle da nutação sacral (Q.6). Os
músculos piriforme e o glúteo máximo também colaboram para o torque de contra-
nutação (Q.7) (VLEEMING, 1997).
Sobre o eixo da articulação esterno-clavicular, a porção superior do trapézio
produz um torque no plano frontal sobre a articulação esterno-clavicular no sentido
de elevar a clavícula (Q.8) (SAHRMANN, 2005). A rotação inferior da escápula é
contida pela ação da musculatura do serrátil anterior, trapézios superior e inferior
(Q.9) (NEUMANN, 2006). Alterações na postura de repouso da cabeça umeral
podem ser devido à postura alterada de escápula (Q.10) (LUDEWIG, 2000, apud
NEUMANN, 2006).
Os extensores cervicais de pescoço e cabeça resistem ao torque de flexão de
cervical baixa e alta, respectivamente (Q.11) (BRODY & HALL, 2005). O ligamento
nucal resiste ao movimento de flexão cervical alta, mantendo a postura dessa região
em extensão (Q.12) (NORKIN, 2001).

15
3 REPRESENTAÇÃO GRÁFICA DA AVALIAÇÃO DA MARCHA
O objetivo desta seção é a descrição das forças passivas e ativas que agem
no sistema musculoesquelético durante marcha para que esta atividade possa ser
controlada voluntariamente. Como a marcha é um processo complexo de interações
entre estruturas passivas e ativas, é apropriado descrevê-la em seus eventos
principais, como comumente é feito na literatura.
A marcha foi subdividida nas fases de contato inicial, apoio médio e impulso.
Cada fase possui suas particularidades cinesiológicas, e terá uma discrição
separada das forças ativas e passivas que estão atuando no sistema
musculoesquelético. A análise da fase de balanço será feita do membro contralateral
que está na fase de apoio.
Inicialmente, como na avaliação postural, serão feitas descrições das forças
passivas que atuam sobre o corpo em cada uma das fases. Estas forças (peso
corporal e a força de reação do solo) serão descritas, e os movimentos resultantes
ilustrados. Como a fase de apoio da marcha também é considerada um movimento
em cadeia cinética fechada, a interrelaçao entre os segmentos será realizada para
cada torque puntual que ocorre em cada segmento. O sentido das descrições será
em sentido caudo-cefálico.
Na segunda parte, como feito na avaliação postural, serão analisadas as
forças ativas que controlam o movimento e mantêm as características cinemáticas já
descritas na literatura. Essa descrição também será realizada no sentido caudo-
cefálico.
3.1 Descarga de Peso
3.1.1 Contato inicial
A força de reação do solo, aplicada na região postero-lateral do calcanhar
(A.1), produz um torque de pronação subtalar (A.2) e flexão plantar talo-crural (A.3)

16
(MICHAUD, 1993). A força de reação do solo movimenta a subtalar entre 4 a 12º de
pronação. Conforme descrito na postura, este movimento de pronação envolve
flexão plantar e rotação medial (adução) do tálus, o que força a tíbia a entrar em
rotação medial concomitantemente (A.4).
Na descarga de peso sobre o antepé, a força de reação ao solo provoca a
força inversora da mediotársica, composta de pronação pelo eixo oblíquo e
supinação sobre o eixo longitudinal (A.5) (MICHAUD, 1993). Energia elástica é
absorvida pelas estruturas que suportam o arco longitudinal medial em até 17 joules
(KER et al., apud MICHAUD, 1993) (A.6).
A rotação medial da tíbia promove o “destravamento” da articulação do joelho
(A.7), permitindo a flexão da articulação em uma maior amplitude de movimento
(A.8). Nesta fase, a patela é submetida a uma grande força de reação da tróclea
femoral na amplitude de movimento necessária nessa fase (até 30º de flexão)
(NEUMANN, 2006). A rotação medial da tíbia de até 6º durante a resposta à carga
cria uma redução dinâmica do ângulo Q (a tíbia roda medialmente mais do que o
fêmur), o que favorece o aumento da resultante de forças de reação retropatelar
medial (HUBERTI, apud MICHAUD, 1993) (A.9).
O quadril inicia nesta fase com 30º de flexão, e reduz essa angulação à
medida que há progressão do centro de gravidade do corpo sobre os pés em direção
ao apoio médio (A.10). O fêmur roda medialmente, acompanhando a movimentação
de rotação medial da tíbia, até a fase de apoio médio, quando a articulação subtalar
está supinando (A.11). Com a progressão da marcha, a pelve começa a entrar em
rotação para a direita (em direção ao membro em apoio) devido ao avanço do
quadril contralateral na fase de balanço (A.12) (MICHAUD, 1993).
A hemipelve ipsilateral ao contato inicial termina de rodar posteriormente
sobre o eixo da articulação sacroilíaca, nutando-a (A.13), e começa a rodar
anteriormente à medida que o corpo progride sobre o membro de apoio (A.14). No
lado contralateral, a hemipelve está em rotação anterior com sacro contranutado. Ao
iniciar a fase de balanço, esta hemipelve começa a rodar posteriormente enquanto
avança para o próximo contato inicial.

17
A coluna lombar roda para o lado contralateral ao contato inicial, mas o
alinhamento das EIAS é mantido (GREENMAN, 1997) (A.15). Os segmentos entre
T5 e T10, principalmente, rodam para o lado contralateral à coluna lombar,
mantendo segmentos vertebrais superiores alinhados com a pelve
(GRACOVETSKY, 1997) (A.16). Isso ocorre graças à movimentação dos membros
superiores em sentido contrário ao movimento da pelve no plano transverso,
reduzindo o torque sobre a pelve (A.17) durante a marcha (GRACOVETSKY, 1997).
3.1.2 Apoio Médio
Da resposta à carga até a elevação de calcanhar, o pé começa a ressupinar
(B.1). Isso ocorre graças ao aproveitamento da energia cinética do membro
contralateral que progride durante a fase de balanço (B.2), levando o membro
inferior de apoio a rodar lateralmente (B.3) (MICHAUD, 1993). Com a rotação lateral
do membro em apoio, o tálus acompanha o movimento e o calcâneo se inverte até a
posição neutra. Esse movimento de supinação no retropé aumenta a estabilidade da
articulação mediotársica por diminuir o paralelismo entre seus eixos (MICHAUD,
1993). O antepé precisa realizar uma força eversora para manter seu contato com o
solo (B.4), e isso ocorre pela força de reação do solo lateral à planta do pé (B.5)
(NORKIN, 2001).
À medida que o membro de apoio se aproxima de extensão completa, ocorre
rotação lateral para acompanhar o quadril (B.3).
O quadril entra em extensão e, devido ao torque provocado pela energia
cinética do membro inferior em balanço, roda lateralmente (B.3). Ocorre uma queda
pélvica contralateral ao membro de apoio, evitando deslocamento superior do centro
de massa corporal em aproximadamente 1/8 polegadas, ou 0,325cm (MICHAUD,
1993).
Há rotação anterior da hemipelve do membro em apoio, o que aumenta a
força de contra-nutação sacral (B.6). A hemipelve contralateral (à medida que o
membro em balanço progride para frente) inclina inferiormente e roda

18
posteriormente, num movimento de nutação sacral (GREENMAN, 1997). Há um
aumento do torque de nutação sacral do lado do membro em balanço, enquanto no
lado do membro em apoio a contra-nutação é resistida pelo ligamento sacroilíaco
dorsal (LEE, 1995).
A coluna lombar flete lateralmente em direção ao membro de apoio e roda
para o lado contrário, chamado de movimento conjugado desse segmento de L5-S1
(B.7) (GREENMAN,1997). Na coluna torácica, há um movimento de rotação
contrária à rotação lombossacra, principalmente entre os segmentos T5-T10, o que
permite ao tórax manter-se alinhado para frente (B.8) (GRACOVETSKY,1997).
Os membros superiores continuam seu movimento pendular, auxiliando na
dissipação do torque provocado pelos segmentos superiores sobre a pelve (B.9).
3.1.3 Impulso
O centro de massa localizado anteriormente ao antepé provoca um torque
para frente, facilitando a progressão da marcha (C.1). Isso provoca um
deslocamento da força de reação do solo no pé para a porção medial do antepé,
liberando o calcâneo para continuar a supinação (C.2). A articulação calcâneo-
cubóide everte, garantindo a alavanca de propulsão do pé (C.3).
A abdução do tálus ainda é assistida pela perna em balanço, que continua a
rotação lateral do quadril da perna de apoio. A supinação também é auxiliada pela
fáscia plantar que, ao ser alongada pela extensão de hálux, provoca a supinação ao
aproximar os pilares anterior e posterior do arco longitudinal medial (MICHAUD,
1993) (C.4).
Da retirada do calcanhar até o final da impulsão, o joelho flete
progressivamente, preparando-se para a fase de balanço (C.5) (MICHAUD, 1993).
O quadril alcança sua extensão máxima de 10º de extensão, rodando
anteriormente a hemipelve ipsilateral (C.6). As alturas das duas pelves se igualam

19
quando o membro contralateral alcança a fase de resposta à carga (NEUMANN,
2006).
A coluna lombar, o sacro e a pelve estão voltados para o membro em apoio.
O ligamento sacroilíaco dorsal longo está tensionado, resistindo à força de contra-
nutação, enquanto no lado oposto resistem à nutação sacral os ligamentos
interósseo e o sacrotuberoso com sua conexão com o bíceps femoral (LEE, 1997). A
coluna lombar roda para a direção do membro em apoio, acompanhando o
movimento pélvico (C.7), e as cristas ilíacas estão alinhadas pelo apoio do membro
contralateral que entra na fase de contato inicial e descarga de peso.
Os segmentos torácicos de T5 até T10 rodam para o lado contrário,
acompanhando o movimento de torque compensatório da pelve (C.8)
(GREGERSON e LUCAS, apud GRACOVETSKY, 1997).
Os membros superiores estão realizam e extensão contralateral e ipsilateral,
respectivamente. Ambos prontos para novo movimento pendular em sentido
contrário do próximo passo.
3.2 Fáscia Tóraco-Lombar e sua participação na marcha
Os músculos abdominais oblíquo interno e transverso possuem ligação direta
com a rafe lateral da fáscia tóraco-lombar (FTL), e a contração simultânea desses
músculos estabiliza a coluna lombar pela tensão direta sobre as vértebras lombares
gerada pela FTL.
A FTL é tensionada também por ação direta do bíceps femoral que transfere
energia para o ligamento sacrotuberoso (D.8), e deste para os eretores da espinha
(multífidos, longuíssimo e espinhal) (GRACOVETSKY,1997). Os eretores da
espinha, por se localizarem sob a FTL, exercem tensão via mecanismo de “pump up”
(VLEEMING, 1998).
Outro músculo que tensiona a FTL é o glúteo máximo. Fibras deste músculo
se interdigitam com as fibras da lâmina superficial da camada posterior da FTL, que

20
por sua vez também mantém conexão com o músculo grande doral contralateral
(D.9) (VLEEMING, 1998).
3.3 Controle Muscular
3.3.1 Contato Inicial
No pé durante o contato inicial, a flexão plantar é resistida pela contração
excêntrica da musculatura de compartimento anterior de perna (D.1).
O quadríceps controla excentricamente a flexão de joelho (D.2). Os
isquiotibiais estão se contraindo para auxiliar na extensão de quadril e no controle da
rotação medial de tíbia – neste último, especificamente, por ação do músculo bíceps
femoral (D.3).
Na resposta à carga, a ativação do vasto medial oblíquo diminui as forças
lateralizantes, participando do equilíbrio de forças atuantes na patela (D.4)
(NEUMANN, 2006). A ativação de vasto lateral colabora para aumentar a tensão da
banda ílio-tibial devido ao aumento da área transversa da musculatura (D.5)
(VLEEMING, 1997).
Os abdutores de quadril trabalham para controlar a queda pélvica que
acompanha o membro contralateral em balanço, e sua ativação dura até a fase final
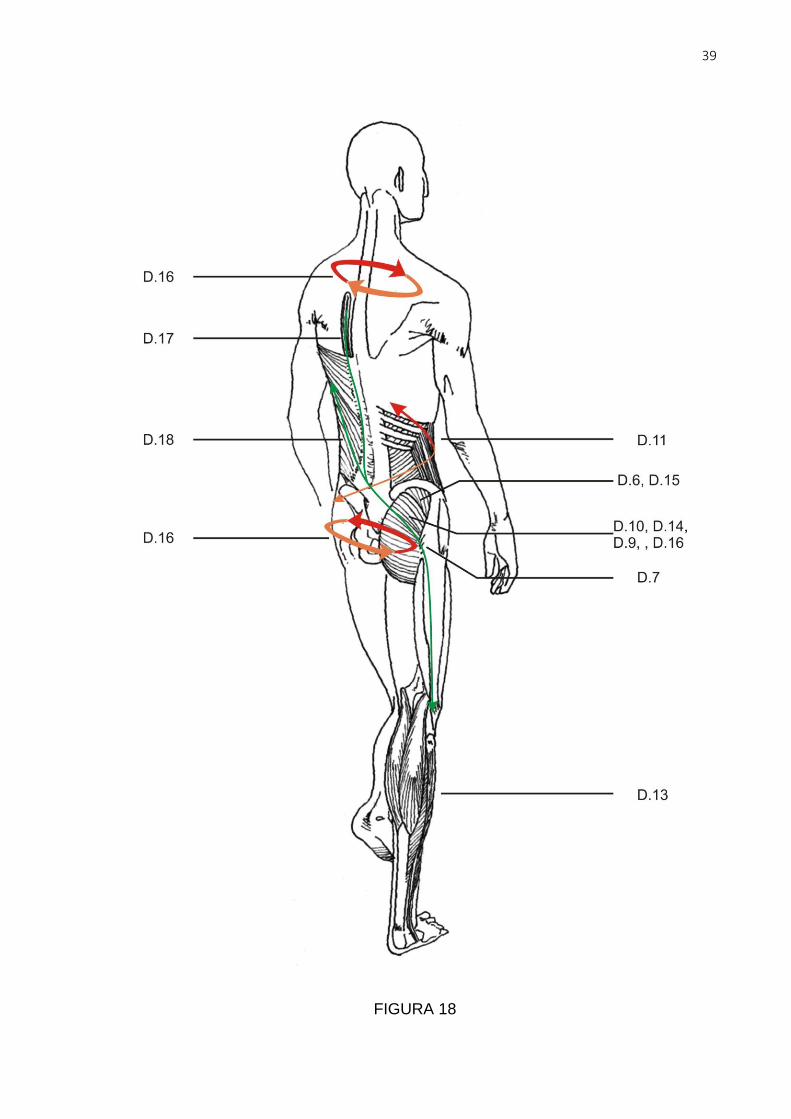
da fase de apoio (D.6). Os extensores e rotadores externos de quadril controlam
excentricamente a flexão de quadril e a rotação interna de fêmur. O glúteo máximo,
por sua conexão sobre a banda ílio-tibial, traciona-a, tranferindo tensão para o tibial
anterior (D.7) (VLEEMING, 1997).
Na resposta à carga, os abdutores e os extensores de quadril começam a
contrair-se e excêntricamente para controlar a queda pélvica e a flexão de quadril,
respectivamente (NEUMANN, 2006).

21
O ligamento sacrotuberoso recebe tensão pela contração de bíceps femoral, o
que ajuda a controlar a nutação sacral (D.8) (LEE,1997). O glúteo máximo colabora
para a estabilidade da articulação sacro ilíaca por fechamento de força, além de
transferir forças para o grande dorsal contralateral através de sua conexão pela
lâmina superficial da camada posterior da FTL (VLEEMING, 1997) (D.9).
Em uma linha (via) diagonal posterior, a contração do glúteo ipsilateral à
perna de apoio, que transmite energia mecânica para a camada superficial da FTL e
deste para o grande dorsal contralateral à perna de apoio, cria uma força diagonal
para extensão e rotação interna do quadril em balanço (D.10) (GRACOVETSKY,
1997). Na linha diagonal anterior, o oblíquo externo ipsilateral à perna de apoio e o
oblíquo interno contralateral produzem um torque de rotação de coluna, “puxando” a
pelve com seu membro inferior (D.11).
3.3.2 Apoio Médio
Não há atividade significante de musculatura intrínseca de pé, pois o torque
produzido por estas é muito inferior quando se compara com a magnitude de forças
necessárias para o controle do movimento neste segmento. As estruturas tensivas
passivas, como ligamentos e cápsulas articulares, são responsáveis pela maior parte
da absorção e produção de forças no arco do pé durante a marcha (D.12)
(MICHAUD, 1993). No tornozelo, o tríceps sural controla excêntricamente o
movimento de dorsiflexão que ocorre nessa etapa, e é auxiliado pelas outras
musculaturas do compartimento posterior da perna (D.13) (MICHAUD, 1993).
A atividade de quadríceps e isquiossurais reduzem à medida que a coxa se
aproxima de sua posição neutra (MICHAUD, 1993), pois o torque sobre esta
articulação também reduz à medida que seu braço de alavanca com o centro de
gravidade diminui. Somado a este fator há a velocidade corporal em sentido
horizontal para frente, que produz um torque em extensão de joelho e diminui
também a demanda pelas musculaturas extensoras da articulação (NEUMANN,
2006).

22
A atividade muscular de glúteo máximo é reduzida, mas mantém-se para
continuar o movimento de rotação de tronco (D.14) (VLEEMING, 1997). A
musculatura abdutora de quadril (glúteo médio e mínimo) controla excentricamente a
queda pélvica contralateral (D.15).
As cadeias diagonais anterior e posterior superficial estão em atividade para
garantir a estabilidade lombo-pélvica e o movimento de rotação inverso de tronco em
relação à pelve (D.16) (LEE, 1997). O músculo quadrado lombar e o ílio-costal
controlam a flexão lateral para o lado de apoio, “puxando” a pelve para cima e
controlando a rotação pélvica posterior (D.17).
O músculo grande dorsal contralateral à perna em apoio está em atividade,
transmitindo energia mecânica para a FTL pela cadeia diagonal posterior, rodando o
tronco no sentido contrário à pelve e estendendo o ombro contralateral (D.18)
(GRACOVETSKY, 1997).
3.3.3 Impulso
O músculo sóleo e a musculatura do compartimento posterior de tíbia controla
a dorsiflexão de tornozelo causada pelo deslocamento anterior do centro de massa
(D.19), e faz com que a força de reação do solo se concentre medialmente sobre o
antepé (D.20). Os fibulares evertem o cubóideo (D.21), tornando a articulação
mediotársica rígida sobre o eixo longitudinal, e transferem a força de reação do solo
para a cabeça do primeiro metatarso, enquanto o adutor do hálux supina a
mediotársica (MICHAUD, 1993).
O músculo gastrocnêmio, que participa ativamente da flexão plantar no
tornozelo desde o apoio, também atua na flexão de joelho junto com os
isquiossurais, sendo que este entra somente na etapa de impulso (D.22) (MICHAUD,
1993). O momento para frente causado pela localização anterior do centro de massa
causa um torque de extensão sobre o joelho (D.23).

23
Os flexores de quadril (reto femoral, tensor da fáscia lata e iliopsoas) e os
adutores (longo e magno) começam a ativar, se preparando flexão de quadril da
pelve durante a fase de balanço (D.24).
A rotação posterior da pelve hemipelve ipsilateral chega ao seu fim,
preparando para a rotação anterior durante a fase de balanço. O controle excêntrico
da musculatura flexora de quadril freia o movimento e acumula energia elástica para
a fase de balanço (NEUMANN, 2002). Os paravertebrais e quadrado lombar são
ativados nesse momento, controlando a queda pélvica ipsilateral (WATERS et al.,
apud SHIAVI, 1985).
As cadeias diagonais anterior (D.25) e posterior (D.26) opostas terminam de
se alongar, preparando para o balanço contrário do próximo passo com o membro
contralateral.

24
FIGURA 1

25
FIGURA 2

26
FIGURA 3

27
FIGURA 4

28
FIGURA 5

29
FIGURA 6

30
FIGURA 7

31
FIGURA 8

32
FIGURA 9

33
FIGURA 10

34
FIGURA 11
FIGURA 12

35
FIGURA 13
FIGURA 14

36
FIGURA 15

37
FIGURA 16

38
FIGURA 17
39
FIGURA 18

40
FIGURA19

41
FIGURA 20

42
FIGURA 21

43
4 CONCLUSÃO
O presente trabalho buscou ilustrar didaticamente como os movimentos
articulares e segmentares do corpo humano trabalham em cadeia cinética fechada a
fim de facilitar a avaliação cinesiológica de conduta fisioterapêutica.
O estudante de fisioterapia possui muita dificuldade de compreender a
integração dos vários componentes corporais durante uma atividade em cadeia
cinética fechada, a qual é pouco descrita na literatura (NORKIN, 2001; NEUMANN,
2005; GOULD, 1993). A visão restrita na literatura didática do movimento articular
dificulta o entendimento de como esses componentes interagem entre si, e pouco
ilustra a importância de como uma movimentação em uma parte da articulação pode
afetar segmentos distantes do movimento observado.
Somado a esse obstáculo didático, também há o fato de haver pouca
ilustração a respeito do assunto, dificultando ainda mais a compreensão pelo aluno
de graduação. Como o movimento é essencialmente espacial, descrições abstratas
do movimento podem causar confusão, erros no entendimento, ou mesmo
desinteresse do leitor sobre o assunto. Por esse motivo, existe uma demanda dos
alunos de graduação em Fisioterapia por um guia com exemplos ilustrativos do
corpo, analisado durante a avaliação fisioterápica, em pacientes com disfunções
ortopédicas.
Foram feitas descrições e ilustrações do corpo durante o ortostatismo em
repouso e durante a marcha, as quais são etapas importantes da avaliação física.
Este trabalho não concluiu todo o conhecimento sobre as possíveis alterações e
suas explicações para alterações na postura, limitando em descrever somente o
corpo em postura ideal. No entanto, abre caminho para uma compreensão maior
pelo leitor de como a cadeia cinética fechada pode alterar o padrão de postura e
movimento.
Guiado pelo ditado popular, “uma imagem vale mais do que mil palavras”,
espera-se que este trabalho seja útil para futuros estudantes de fisioterapia, ou
mesmo para os interessados na cinesiologia do corpo humano.

44
REFERÊNCIAS
BUNGE, M. Two Unification Strategies: Analysis or reduction, and Synthesis or Integration. In: RAHMAN et al. Logic, Epistemology, and the Unity of Science. 1. ed. Londres: Springer, 2009. v. 1, p. 145-158.
CAMPBELL, W.C. Campbell’s Operative Orthopaedics. 8 ed. St. Louis: Mosby, 1992. 5v.
CAMPOS, O. Estruturas Isostáticas. 4 ed, Belo Horizonte: Edições de Arquitetura e Engenharia, 1982. 261 p.
DETTINGER, E. Informal caregiving and retirement timing among men and women: Gender and caregiving relationships in late midlife. Journal of Family Issues, v. 23, n. 7, p. 857-879, jan. 2005.
GOULD, J.A. Fisioterapia na Ortopedia e na Medicina do Esporte. São Paulo: Manole, 1993. 691 p.
GRACOVETSKY, S.A. Linking the Spinal Engine with the Legs: a Theory of Human Gait. In: VLEEMING, A. Movement, Stability & Low Back Pain, London: Churchill Livingstone, 1997, p. 243-251.
GREENMAN, P.E. Clinical Aspects of the Sacroiliac Joint in Walking. In: VLEEMING, A. Movement, Stability & Low Back Pain, London: Churchill Livingstone, 1997, p. 235-241.
GREGERSON, G.G; LUCAS, D.B. An in vivo study of the axial rotation of the human thoracolumbar spine, Journal of Bone and Joint Surgery, v. 49, n.2, p. 247-262 apud GRACOVETSKY, S.A. Linking the Spinal Engine with the Legs: a Theory of Human Gait. In: VLEEMING, A., Movement, Stability & Low Back Pain, London: Churchill Livingstone, 1997, p. 243-251.
45
HALL, C.M. Exercício Terapêutico: na busca da função, 2. ed. Rio de Janeiro: Guanabara Koogan, 2007, 786 p.
HODGES, P.W.; RICHARDSON, C.A. Contraction of the abdominal muscles associated with movement of the lower limb. Phys Ther., v. 77, p.132-144, 1997 apud HALL, C.M.; BRODY, L.T. Exercício Terapêutico: na busca da função, 2 ed., Rio de Janeiro: Guanabara Kogan, 2007, 355-408.
HEBERT, S. Ortopedia e Traumatologia: princípios e prática, 2. ed, Porto Alegre, Artmed, 1998, 830p.
HUBERTI, H.H.; HAYES, W.C. Patellofemoral Contact Pressures, J Bone Joint Surg 1984; 66A: 715-724 apud MICHAUD, T.C. Foot Orthoses and Other Forms of Conservative Care, Baltimore: Williams & Wilkins, 1993, p. 57-180.
KER, R.F.; BENNETT, M.B.; BIBBY, S.R.; KESTER, R.C.; ALEXANDER, R. The spring arch of the human foot, Nature, v. 325, p. 147-149, 1987 apud MICHAUD, T.C. Foot Orthoses and Other Forms of Conservative Care, Baltimore: Williams & Wilkins, 1993, p. 57-180.
KISNER, C. Exercícios Terapêuticos: fundamentos e técnicas, 4. ed, Barueri: Manole, 2005. 841p.
LEE, D. Instability of the Sacroiliac Joint and the Consequences for Gait. In: VLEEMING, A. Movement, Stability & Low Back Pain, London: Churchill Livingstone, 1997, p. 231-233.
LUDEWIG, P.M.; COOK, T.M. Alterations in Shoulder Kinematics and Associated Muscle Activity in People with Symptoms of Shoulder Impingement, Phys Ther., v. 80 (S12B), p.276-291, 2000 apud NEUMANN, D.A. Cinesiologia do Aparelho Musculoesquelético: fundamentos para a reabilitação física, Rio de Janeiro: Guanabara Koogan, 2006, p. 93-136.
MICHAUD, T.C. Foot Orthoses and Other Forms of Conservative Care, Baltimore: Williams & Wilkins, 1993, 248p.

46
MOONEY, V. Sacroiliac Joint Dysfunction. In: VLEEMING, A. Movement, Stability & Low Back Pain, London: Churchill Livingstone, 1997, p. 37-52.
NETTER, F.H. Atlas de anatomia humana, 3. ed., Porto Alegre: Artmed, 2003, 542 lâminas, 48 p.
NEUMANN, D.A. Cinesiologia do Aparelho Musculoesquelético: fundamentos para a reabilitação física. Rio de Janeiro: Guanabara Koogan, 2006, 593p.
NISHIKAWA, T.F. Metodologia da pesquisa científica, São Paulo: Pearson Education do Brasil, 2009, 174p.
NORKIN, C.C. Articulações, estrutura e funções: uma abordagem prática e abrangente, 2 ed. Rio de Janeiro, 2001. 498p.
PERRACINI, M.R. Funcionalidade e Envelhecimento. Rio de Janeiro: Guanabara Koogan, 2009, 557p.
PORTERFIELD, J.A.; DEROSA, C. Mechanical Low Back Pain: Perspectives in Functional Anatomy, 2 ed., Philadelphia: WB Saunders, 1998 apud HALL, C.; BRODY, L.T. Exercício Terapêutico: na busca da função, 2. ed. Rio de Janeiro: Guanabara Koogan, 2007, p. 355-408.
SAHRMANN, S. Diagnóstico e Tratamento das Síndromes de Disfunção dos Movimentos. São Paulo: Santos, 2005, 460p.
STEINDLER, A. Kinesiology of the human body: under normal and pathological conditions. Springfield: Charles C. Thomas, 1977, 708p.

47
VLEEMING, A. et al The Role of the Sacroiliac Joints in Coupling Between Spine, Pelvis, Legs and Arms. In: VLEEMING, A. Movement, Stability & Low Back Pain, London: Churchill Livingstone, 1997, p. 53-72.
WATERS, R.; MORRIS, J. Electrical activity of Muscles of the Trunk during Walking, J Anat 111:191-199, 1972 apud SHIAVI, R. Electromyographic Patterns in Adult Locomotion: a comprehensive review, J Rehab Res Dev, v. 22 n. 3 BPR 10-42 p. 85-98, jul. 1985.

48
ÍNDICE
Descritos abaixo em quais figuras se encontram ilustradas as siglas.
Ex: D.23 (sigla) – 10 (nº da figura)
A
A.1 – 7
A.2 – 8, 11
A.3 – 7
A.4 – 8
A.5 – 8, 12
A.6 – 12
A.7 – 8
A.8 – 7
A.9 – 17
A.10 – 7
A.11 – 8
A.12 – 8
A.13 – 7
A.14 – 8
A.15 – 7, 8
A.16 – 7, 8
A.17 – 8
B
B.1 – 9
B.2 – 9
B.3 – 9
B.4 – 9, 13
B.5 – 9
B.6 – 9
B.7 – 9
B.8 – 9
B.9 – 9
C
C.1 – 10
C.2 – 10, 13
C.3 – 10, 20, 21
C.4 – 13
C.5 – 10
C.6 – 10
C.7 – 10
C.8 – 10

49
D
D.1 – 17
D.2 – 17
D.3 – 16
D.4 – 17
D.5 – 16, 17
D.6 – 16, 17, 19
D.7 – 16, 17, 18
D.8 – 15, 16
D.9 – 15, 18
D.10 – 16, 18
D.11 – 17, 18, 19
D.12 – 13
D.13 – 18, 19
D.14 – 18
D.15 – 18
D.16 – 18
D.17 – 18
D.18 – 18
D.19 – 20, 21
D.20 – 20, 21
D.21 – 14, 19, 20, 21
D.22 – 20
D.23 – 10
D.24 – 21
D.25 – 20, 21
D.26 – 20
P
P.1 – 1, 3
P.2 – 2, 3
P.3 – 1, 2, 3
P.4 –2, 3, 12
P.5 – 3
P.6 – 1
P.7 – 3
P.8 – 3
P.9 – 1
P.10 – 1, 2, 3
P.11 – 1, 3, 4
P.12 – 2
P.13 – 3
P.14 – 4
P.15 – 3
P.16 – 4
P.17 – 1
P.18 – 1
P.19 – 4
P.20 – 2
P.21 – 2
P.22 – 2
P.23 – 1
P.24 – 4
P.25 – 1
P.26 – 1
Q
Q.1 – 12
Q.2 – 5
Q.3 – 5
Q.4 – 5
Q.5 – 5
Q.6 – 5
Q.7 – 4, 5
Q.8 – 6
Q.9 – 6
Q.10 – 4
Q.11 – 5
Q.12 – 4