identificaÇÃo de sistemas e atualizaÇÃo de …
TRANSCRIPT

UNIVERSIDADE DE BRASÍLIA
FACULDADE DE TECNOLOGIA
DEPARTAMENTO DE ENGENHARIA CIVIL E AMBIENTAL
IDENTIFICAÇÃO DE SISTEMAS E ATUALIZAÇÃO DE
MODELOS NUMÉRICOS COM VISTAS À AVALIAÇÃO DA
INTEGRIDADE ESTRUTURAL
ANDREA BRASILIANO SILVA
ORIENTADOR: JOSÉ LUÍS VITAL DE BRITO
CO-ORIENTADORA: GRACIELA NORA DOZ DE CARVALHO
TESE DE DOUTORADO EM ESTRUTURAS E CONSTRUÇÃO CIVIL
PUBLICAÇÃO: PECC.TD - 06 A/05
BRASÍLIA/DF: JUNHO – 2005

ii
UNIVERSIDADE DE BRASÍLIA
FACULDADE DE TECNOLOGIA
DEPARTAMENTO DE ENGENHARIA CIVIL E AMBIENTAL
IDENTIFICAÇÃO DE SISTEMAS E ATUALIZAÇÃO DE MODELOS NUMÉRICOS COM VISTAS À AVALIAÇÃO DA INTEGRIDADE
ESTRUTURAL
ANDREA BRASILIANO SILVA
TESE SUBMETIDA AO DEPARTAMENTO DE ENGENHARIA CIVIL E AMBIENTAL DA FACULDADE DE TECNOLOGIA DA UNIVERSIDADE DE BRASÍLIA COMO PARTE DOS REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE DOUTOR EM ESTRUTURAS E CONSTRUÇÃO CIVIL.
APROVADA POR:
_________________________________________________
Prof. José Luís Vital de Brito, DSc. (ENC-UnB) (Orientador) _________________________________________________ Prof. Yosiaki Nagato, DSc. (ENC-UnB) (Examinador Interno) _________________________________________________ Profª. Suzana Moreira Avila, DSc. (ENC-UnB) (Examinadora Interna) _________________________________________________ Prof. Paulo Batista Gonçalves, DSc. (PUC-RIO) (Examinador Externo) _________________________________________________ Prof. Roberto Leal Pimentel, PhD. (UFPB) (Examinador Externo) BRASÍLIA/DF, 30 de JUNHO de 2005.

iii
FICHA CATALOGRÁFICA
BRASILIANO, ANDREA Identificação de Sistemas e Atualização de Modelos Numéricos com Vistas à Avaliação
da Integridade Estrutural. (2005) xxx, 222p., 297 mm (ENC/FT/UnB, Doutor, Estruturas e Construção Civil, 2005). Tese de Doutorado – Universidade de Brasília. Faculdade de Tecnologia. Departamento de Engenharia Civil e Ambiental. 1.Dinâmica das estruturas 2.Identificação de sistemas 3.Integridade estrutural 4.Atualização de modelos I. ENC/FT/UnB II. Título (série)
REFERÊNCIA BIBLIOGRÁFICA
BRASILIANO, A. (2005). Identificação de Sistemas e Atualização de Modelos Numéricos
com Vistas à Avaliação da Integridade Estrutural. Tese de Doutorado em Estruturas e
Construção Civil, Publicação PECC.TD-06A/05, Departamento de Engenharia Civil e
Ambiental, Universidade de Brasília, Brasília, DF, 222p.
CESSÃO DE DIREITOS
AUTOR: Andrea Brasiliano Silva.
TÍTULO: Identificação de Sistemas e Atualização de Modelos Numéricos com Vistas à
Avaliação da Integridade Estrutural.
GRAU: Doutor ANO: 2005
É concedida à Universidade de Brasília permissão para reproduzir cópias desta tese de
doutorado e para emprestar ou vender tais cópias somente para propósitos acadêmicos e
científicos. O autor reserva outros direitos de publicação e nenhuma parte dessa tese de
doutorado pode ser reproduzida sem autorização por escrito do autor.
____________________________
Andrea Brasiliano Silva SQN 216, BLOCO H, APTO 121. 70875-080 Brasília – DF – Brasil.

iv
AGRADECIMENTOS
A Deus, pelo amor, pela força e perseverança que permitiram que eu chegasse ao fim de
mais uma etapa da minha vida.
A Capes e ao CNPq, pelo auxílio financeiro.
Ao professor Brito pela dedicada orientação, pelo grande apoio e amizade e enorme
paciência que foram muito importantes para que eu pudesse chegar ao fim desse trabalho e
permitiram uma convivência bastante agradável durante todo o tempo.
À professora Graciela, pelo seu grande apoio, dentro e fora do meio acadêmico, e amizade,
que também contribuíram muito para que eu pudesse conseguir terminar esse trabalho e
fizeram com que fosse agradável todo o período que convivemos.
Aos professores Alberto Carlos Diniz e Jorge Luiz Ferreira do Departamento de
Engenharia Mecânica, pela ajuda na realização dos ensaios.
Aos funcionários José Filipe Lopes e Artur Rocha do laboratório e oficina do
Departamento de Engenharia Mecânica e aos funcionários do laboratório de Estruturas.
À Renata e Cleverson pela ajuda na realização dos ensaios.
À Drª. Elisabeth Penner, Marta Amani, Gustavo Palazzo, Drº. Daniel Ambrosini e Drº.
Mike Friswell, pela gentileza de ter enviado alguns trabalhos e pela disposição em tirar
dúvidas.
À minha família, pelo apoio, não só durante os quatro anos do doutorado, mas por toda a
minha vida.
A Gustavo, por toda dedicação, amor e compreensão dispensados a mim nos vários
momentos difíceis dessa jornada, e sempre.
Aos amigos, pela companhia e momentos felizes que passamos juntos.

v
DEDICATÓRIA
Aos meus pais, José Antônio e Marivalda com
todo amor, carinho, respeito e admiração.

vi
RESUMO
IDENTIFICAÇÃO DE SISTEMAS E ATUALIZAÇÃO DE MODELOS COM VISTAS À AVALIAÇÃO DA INTEGRIDADE ESTRUTURAL Autor: Andrea Brasiliano Silva Orientador: José Luís Vital de Brito Programa de Pós-graduação em Estruturas e Construção Civil Brasília, junho de 2005.
Ao longo dos anos, novas tecnologias têm sido desenvolvidas dentro da engenharia civil
surgindo diferentes tipos de estruturas, cada vez mais sofisticadas, com projetos estruturais
e processos construtivos de grande complexidade. Entretanto, apesar do avanço da
tecnologia, as estruturas têm apresentado muitas falhas produzidas em condições normais
de utilização. A detecção dessas falhas ou danos presentes numa estrutura pode ser feita
por meio da análise de algumas de suas características dinâmicas, como freqüências e
modos de vibração. No entanto, tais características precisam ser identificadas com precisão
a fim de que possam ser utilizadas em análises subseqüentes produzindo resultados
confiáveis a respeito do estado da estrutura. A escolha adequada de métodos de
identificação das propriedades modais é, portanto, de grande importância na qualidade dos
resultados. A determinação de parâmetros desconhecidos, como rigidez e massa, de
elementos estruturais, torna a atualização de modelos numéricos, por meio de métodos
iterativos baseados nas características dinâmicas, uma ferramenta importante na avaliação
da integridade estrutural. Diante da importância de se monitorar as estruturas, avaliando
seu comportamento, a fim de impedir que a deterioração sofrida ao longo de sua vida útil
venha produzir danos que possam comprometer sua segurança, este trabalho busca
estabelecer uma metodologia adequada para a avaliação das condições estruturais de
edificações civis, apresentando um estudo onde ferramentas, como a identificação de
sistemas e atualização de modelos, são avaliadas. A análise foi feita a partir da aplicação
de métodos de identificação de sistemas, baseados apenas na resposta da estrutura, e
métodos de atualização de modelos, baseados em funções de penalidade, a estruturas
simples ensaiadas em laboratório. Os resultados obtidos permitiram avaliar algumas
características dos métodos aplicados, indicando, em alguns casos, a viabilidade ou não da
sua aplicação a estruturas de grande porte.
Palavras chave: Dinâmica das estruturas; Identificação de sistemas; Integridade estrutural;
Atualização de modelos.

vii
ABSTRACT
SYSTEM IDENTIFICATION AND MODEL UPDATING IN ORDER TO EVALUATE STRUCTURAL INTEGRITY Autor: Andrea Brasiliano Silva Orientador: José Luís Vital de Brito Programa de Pós-graduação em Estruturas e Construção Civil Brasília, junho de 2005.
New technologies have been developed in civil engineering during the years. Because of
this it has been constructed more sophisticated structures with complex designs. Although
the advance of technology in civil engineering, the structures have presented many faults
produced under normal conditions of use. The identification of these faults may be done by
the analysis of some structural dynamic properties such as frequencies and mode shapes.
These properties, however, must be identified with a good accuracy in order to produce
reliable results about the structural conditions. In this sense the choice of modal properties
identification methods has a great importance in the quality of the results. The
determination of some unknown parameters such as stiffness or mass of structural elements
makes the finite element model updating an important tool to evaluate the structural
integrity. In this sense, this work intend to establish a suitable methodology to evaluate the
integrity of civil engineering structures by presenting a study in which tools such as system
identification and model updating are evaluated. The analysis was done by the application
of output-only system identification methods and penalty function methods to simple
structures tested in laboratory. The obtained results allowed to evaluate some
characteristics of the applied methods and also indicated the viability of their application to
real structures such as bridges.
Keywords: Structural dynamics; System identification; Structural integrity; Model
updating.

viii
SUMÁRIO
1 - INTRODUÇÃO ............................................................................................................. 1
1.1 - ASPECTOS GERAIS.............................................................................................1
1.2 - OBJETIVOS...........................................................................................................5
1.3 - METODOLOGIA...................................................................................................6
1.4 - ESTRUTURA DA TESE........................................................................................7
2 - REVISÃO BIBLIOGRÁFICA...................................................................................... 8
2.1 - IDENTIFICAÇÃO DE SISTEMAS ESTRUTURAIS.........................................8
2.2 - ATUALIZAÇÃO DE MODELOS DE ELEMENTOS FINITOS EM
DINÂMICA ESTRUTURAL........................................................................................19
3 - MODELOS DE SISTEMAS ESTRUTURAIS .......................................................... 27
3.1 - INTRODUÇÃO......................................................................................................... 27
3.2 - MODELO DE ELEMENTOS FINITOS ................................................................ 27
3.3 - MODELO NO ESPAÇO DE ESTADO .................................................................. 28
3.3.1 - Modelo contínuo no tempo ........................................................................ 28
3.3.2 - Modelo discreto no tempo.......................................................................... 30
3.4 - MODELOS ESTOCÁSTICOS DE ESPAÇO DE ESTADO ................................ 34
3.5 - CONTROLABILIDADE E OBSERVABILIDADE .............................................. 36
3.5.1 - Controlabilidade no domínio do tempo discreto ..................................... 37
3.5.2- Observabilidade no domínio do tempo discreto ....................................... 42
4 - ANÁLISE MODAL UTILIZANDO APENAS A RESPOSTA DO SISTEMA
(OUTPUT-ONLY MODAL ANALYSIS).......................................................................... 45
4.1 - INTRODUÇÃO......................................................................................................... 45
4.2 - TIPOS DE DADOS ................................................................................................... 45
4.2.1 - Dados de resposta no tempo ...................................................................... 45
4.2.2 - Covariância ................................................................................................. 47
4.3 - MÉTODO DE DETECÇÃO DE PICO................................................................... 48
4.4 - MÉTODO DE IDENTIFICAÇÃO ESTOCÁSTICA BASEADO NAS
COVARIÂNCIAS DAS RESPOSTAS DE REFERÊNCIA (REFERENCE-BASED
COVARIANCE-DRIVEN STOCHASTIC REALIZATION) ........................................... 52

ix
4.5 - ANÁLISE MODAL................................................................................................... 56
4.6 - MÉTODO DE IDENTIFICAÇÃO ESTOCÁSTICA BASEADO NAS
RESPOSTAS DE REFERÊNCIA (REFERENCE-BASED DATA-DRIVEN
STOCHASTIC SUBSPACE) ............................................................................................. 57
5 - MÉTODOS DE ATUALIZAÇÃO DE MODELOS DE ELEMENTOS FINITOS
BASEADOS EM FUNÇÕES DE PENALIDADE (Penalty fuction methods) ............. 64
5.1 - MAIS MEDIÇÕES DO QUE PARÂMETROS ..................................................... 65
5.2 - MAIS PARÂMETROS DO QUE MEDIÇÕES OU DADOS COM
RUÍDOS ............................................................................................................................. 67
5.3 - MÉTODO DE ATUALIZAÇÃO DE MODELOS CONSIDERANDO
SISTEMAS PERTURBADOS (Perturbed boundary condition testing) ........................ 70
6 - ANÁLISE NUMÉRICA .............................................................................................. 74
6.1 - IDENTIFICAÇÃO DAS PROPRIEDADES DINÂMICAS.................................. 74
6.1.1 - Método de identificação baseado nas covariâncias (SSI-COV/ref) e nos
dados de saída (SSI-DATA/ref) ............................................................................ 79
6.1.2 - Método de detecção de pico ....................................................................... 93
6.2 - ATUALIZAÇÃO DE MODELOS DE ELEMENTOS FINITOS EM DINÂMICA
ESTRUTURAL.................................................................................................................. 96
7 - ANÁLISE EXPERIMENTAL ................................................................................. 105
7.1 - PÓRTICO PLANO ................................................................................................. 105
7.1.1 - Identificação das propriedades dinâmicas do pórtico........................... 109
7.1.2 - Atualização do modelo de elementos finitos do pórtico ........................ 124
7.2 - VIGAS COM CONDIÇÕES DE APOIO LIVRE-LIVRE.................................. 128
7.2.1 - Identificação das propriedades dinâmicas da viga................................ 132
7.2.2 - Atualização dos modelos numéricos das vigas 1 e 2 a partir das
freqüências identificadas..................................................................................... 149
7.2.2.1 -Procedimento de atualização de modelos numéricos com adição
de massa - Perturbed boundary conditions testing .................................... 177

x
8 - CONCLUSÕES E SUGESTÕES PARA TRABALHOS FUTUROS .................. 198
8.1 - CONCLUSÕES ....................................................................................................... 198
8.1.1 - Análise numérica ...................................................................................... 198
8.1.1.1 -Identificação das propriedades modais....................................... 198
8.1.1.2 -Atualização de modelos de elementos finitos em dinâmica
estrutural..................................................................................................... 199
8.1.2 - Análise experimental ................................................................................ 200
8.1.2.1 -Identificação das propriedades modais das estruturas
analisadas .................................................................................................... 200
8.1.2.2 -Atualização de modelos numéricos a partir das freqüências
medidas experimentalmente...................................................................... 202
8.2 - SUGESTÕES PARA TRABALHOS FUTUROS................................................. 204
REFERÊNCIAS BIBLIOGRÁFICAS .......................................................................... 205
APÊNDICES
A – GRÁFICOS DAS RESPOSTAS DE ACELERAÇÃO NO TEMPO E DE SUAS
RESPECTIVAS DENSIDADES ESPECTRAIS DE POTÊNCIA DAS
ESTRUTURAS ENSAIADAS EM LABORATÓRIO..................................................211
B – MÉTODO DO ERRO RESIDUAL..........................................................................220

xi
LISTA DE TABELAS Tabela Título Página Tabela 6.1 Propriedades físicas e geométricas da viga e parâmetros de
integração de Newmark. 76
Tabela 6.2 Freqüências de vibração teóricas e identificadas - 34== rl -
SSI-COV/ref. 81
Tabela 6.3 Freqüências de vibração teóricas e identificadas - 34== rl -
SSI-DATA/ref. 83
Tabela 6.4 Comparação entre as freqüências obtidas acrescentando zeros às
respostas de aceleração e sem acrescentá-los – Impacto - SSI-COV/ref.
86
Tabela 6.5 Comparação entre as freqüências obtidas com excitação tipo
impacto e ruído branco – SSI-COV/ref. 90
Tabela 6.6 Comparação entre as freqüências obtidas com excitação tipo
impacto e ruído branco – SSI-DATA/ref. 92
Tabela 6.7 Comparação entre as freqüências obtidas com excitação tipo
impacto e ruído branco – método de detecção de pico. 94
Tabela 6.8 Parâmetros iniciais e de simulação para a viga em balanço
(figura 6.21). 97
Tabela 6.9 Valores dos parâmetros em algumas iterações considerando a 1ª
simulação. 98
Tabela 6.10 Valores das freqüências em algumas iterações considerando a 1ª
simulação. 99
Tabela 6.11 Valores dos parâmetros em algumas iterações considerando a 2ª
simulação. 99
Tabela 6.12 Valores das freqüências em algumas iterações considerando a 2ª
simulação. 99
Tabela 6.13 Valores dos parâmetros considerando modelo analítico
engastado e dados da 2ª simulação do exemplo anterior. 101
Tabela 6.14 Valores das freqüências obtidas do modelo atualizado em
algumas iterações – 2ª Simulação. 101
Tabela 6.15 Valores iniciais dos parâmetros do sistema massa-mola. 102

xii
Tabela 6.16 Parâmetros atualizados a cada iteração. Unidades: k (106 N/m) e m (kg). (Nalitolela et al. (1992)).
103
Tabela 6.17 Parâmetros atualizados a cada iteração. Unidades: k (106 N/m) e
m (kg). 103
Tabela 6.18 Parâmetros atualizados a cada iteração considerando o caso que
foi adicionada massa às coordenadas 1, 2, 3 e 4 do sistema. Unidades: k (106 N/m) e m (Kg).
104
Tabela 7.1 Massas das peças consideradas no cálculo da matriz de massa do
pórtico. 107
Tabela 7.2 Propriedades físicas das barras do pórtico. 107 Tabela 7.3 Descrição dos ensaios realizados no pórtico. 108 Tabela 7.4 Freqüências naturais de vibração identificadas pelos métodos de
detecção de pico, SSI-COV/ref e SSI-DATA/ref para o ensaio 1. 110
Tabela 7.5 Freqüências naturais de vibração identificadas pelos métodos de
detecção de pico, SSI-COV/ref e SSI-DATA/ref para o ensaio 2. 111
Tabela 7.6 Freqüências naturais de vibração identificadas pelos métodos de
detecção de pico, SSI-COV/ref e SSI-DATA/ref para o ensaio 1A.
112
Tabela 7.7 Freqüências naturais de vibração identificadas pelos métodos de
detecção de pico, SSI-COV/ref e SSI-DATA/ref para o ensaio 2A.
113
Tabela 7.8 Freqüências naturais de vibração identificadas pelos métodos de
detecção de pico, SSI-COV/ref e SSI-DATA/ref para o ensaio 3. 114
Tabela 7.9 MAC calculado entre os modos experimentais identificados pelo
método de detecção de pico e os teóricos – Ensaio 1. 117
Tabela 7.10 MAC calculado entre os modos experimentais identificados pelo
método de detecção de pico e os teóricos – Ensaio 2. 117
Tabela 7.11 MAC calculado entre os modos experimentais identificados pelo
método de detecção de pico e os teóricos – Ensaio 3. 117
Tabela 7.12 MAC calculado entre os modos experimentais identificados pelo
método de detecção de pico e os teóricos – Ensaio 1A. 117
Tabela 7.13 MAC calculado entre os modos experimentais identificados pelo
método de detecção de pico e os teóricos – Ensaio 2A. 117

xiii
Tabela 7.14 MAC calculado entre os modos experimentais identificados pelo SSI-COV/ref e os teóricos – Ensaio 1.
120
Tabela 7.15 MAC calculado entre os modos experimentais identificados pelo
SSI-COV/ref e os teóricos – Ensaio 2. 120
Tabela 7.16 MAC calculado entre os modos experimentais identificados pelo
SSI-COV/ref e os teóricos – Ensaio 3. 120
Tabela 7.17 MAC calculado entre os modos experimentais identificados pelo
SSI-COV/ref e os teóricos – Ensaio 1A. 120
Tabela 7.18 MAC calculado entre os modos experimentais identificados pelo
SSI-COV/ref e os teóricos – Ensaio 2A. 120
Tabela 7.19 MAC calculado entre os modos experimentais identificados pelo
SSI-DATA/ref e os teóricos – Ensaio 1. 122
Tabela 7.20 MAC calculado entre os modos experimentais identificados pelo
SSI-DATA/ref e os teóricos – Ensaio 2. 123
Tabela 7.21 MAC calculado entre os modos experimentais identificados pelo
SSI-DATA/ref e os teóricos – Ensaio 3. 123
Tabela 7.22 MAC calculado entre os modos experimentais identificados pelo
SSI-DATA/ref e os teóricos – Ensaio 1A. 123
Tabela 7.23 MAC calculado entre os modos experimentais identificados pelo
SSI-COV/ref e os teóricos – Ensaio 2A. 123
Tabela 7.24 Valores dos parâmetros: iniciais, em algumas iterações e
atualizados. Unidades: K (N/m) e M (Kg). 126
Tabela 7.25 Valores de freqüências: do modelo inicial, em algumas iterações,
do modelo atualizado e experimental. Unidades: Freqüência (Hz).
127
Tabela 7.26 Valores de δθδθδθδθ em algumas iterações. 127 Tabela 7.27 Propriedades das vigas ensaiadas. 129 Tabela 7.28 Pontos onde foram medidas as acelerações em cada etapa do
ensaio. 131
Tabela 7.29 Freqüências naturais de vibração identificadas pelo método de
detecção de pico e teóricas da VIGA 1. 133
Tabela 7.30 Freqüências naturais de vibração identificadas pelo método de
detecção de pico e teóricas da VIGA 2. 136

xiv
Tabela 7.31 MAC para os seis primeiros modos de vibração da VIGA 1 – Método de detecção de pico.
138
Tabela 7.32 MAC para os seis primeiros modos de vibração da VIGA 2 –
Método de detecção de pico. 138
Tabela 7.33 Freqüências naturais de vibração identificadas pelo método SSI-
COV/ref e teóricas da VIGA 1. 140
Tabela 7.34 Freqüências naturais de vibração identificadas pelo método SSI-
COV/ref e teóricas da VIGA 2. 142
Tabela 7.35 Freqüências naturais de vibração identificadas pelo método SSI-
DATA/ref e teóricas da VIGA 1. 144
Tabela 7.36 Freqüências naturais de vibração identificadas pelo método SSI-
DATA/ref e teóricas da VIGA 2. 146
Tabela 7.37 MAC para os seis primeiros modos de vibração da VIGA 1 –
SSI-COV/ref. 148
Tabela 7.38 MAC para os seis primeiros modos de vibração da VIGA 2 –
SSI-COV/ref. 148
Tabela 7.39 MAC para os seis primeiros modos de vibração da VIGA 1 –
SSI-DATA/ref. 148
Tabela 7.40 MAC para os seis primeiros modos de vibração da VIGA 2 –
SSI-DATA/ref. 140
Tabela 7.41 Valores dos parâmetros atualizados, obtidos em algumas
iterações, considerando um desvio padrão de 40% para os valores iniciais dos parâmetros do modelo numérico – VIGA 1.
151
Tabela 7.42 Valores dos parâmetros atualizados, obtidos em algumas
iterações, considerando diferentes desvios padrão para os valores iniciais dos parâmetros do modelo numérico – VIGA 1.
152
Tabela 7.43 Freqüências naturais de vibração experimentais e numéricas,
resultante do modelo inicial, da VIGA 1. 153
Tabela 7.44 Freqüências obtidas a partir do modelo atualizado, quando foi
considerado um desvio padrão de 40% para os parâmetros iniciais do modelo numérico – VIGA 1.
154
Tabela 7.45 Autovalores resultantes do modelo atualizado, quando foram
considerados desvios padrão diferentes para os parâmetros iniciais do modelo numérico – VIGA 1.
154

xv
Tabela 7.46 Diferenças percentuais entre os autovalores atualizados, considerando diferentes desvios padrão para os parâmetros iniciais, e os experimentais.
154
Tabela 7.47 Freqüências resultantes do modelo atualizado considerando
diferentes desvios padrão para os parâmetros iniciais do modelo numérico da VIGA 1.
155
Tabela 7.48 Valores de δθ , obtidos em algumas iterações, no processo de
atualização. 157
Tabela 7.49 Índice MAC calculado entre os modos experimentais e os
numéricos resultantes do modelo atualizado, apresentados nas figuras 7.42 e 7.43.
160
Tabela 7.50 Diagonal do MAC entre os modos experimentais e os numéricos
resultantes do modelo atualizado, considerando diferentes desvios padrão para os parâmetros iniciais.
160
Tabela 7.51 Valores dos parâmetros atualizados, considerando um desvio
padrão de 40% para os valores iniciais dos parâmetros (modelo inicial sem modificações) – VIGA 2.
162
Tabela 7.52 Valores dos parâmetros atualizados, considerando um desvio
padrão de 70% para os valores iniciais dos parâmetros dos elementos 18 e 19 (modelo inicial sem modificações) – VIGA 2.
163
Tabela 7.53 Freqüências naturais de vibração experimentais da VIGA 2 e
numéricas resultantes do modelo inicial. 164
Tabela 7.54 Freqüências resultantes do modelo atualizado, quando foi
considerado o mesmo desvio padrão (σ = 40 %) para todos os parâmetros iniciais (modelo inicial sem modificações) – VIGA 2.
164
Tabela 7.55 Freqüências resultantes do modelo atualizado quando foi
considerado um desvio padrão maior (σ = 70%) para os parâmetros iniciais dos elementos 18 e 19 (modelo inicial sem modificações) – VIGA 2.
164
Tabela 7.56 Índice MAC calculado entre os modos experimentais da VIGA 2
e os numéricos resultantes do modelo inicial considerado no processo de atualização.
165
Tabela 7.57 Índice MAC calculado entre os modos experimentais da VIGA 2
e os numéricos resultantes do modelo atualizado considerando um desvio padrão de 40% para os parâmetros iniciais.
165

xvi
Tabela 7.58 Índice MAC calculado entre os modos experimentais da VIGA 2 e os numéricos resultantes do modelo atualizado considerando um desvio padrão de 70% para os parâmetros iniciais dos elementos 18 e 19.
165
Tabela 7.59 Valores dos parâmetros atualizados, considerando desvios
padrão diferentes para os valores iniciais dos parâmetros (modelo inicial com modificações) – VIGA 2.
171
Tabela 7.60 Valores dos parâmetros atualizados, considerando desvios
padrão maiores para os parâmetros iniciais dos elementos 18 e 19 e um desvio padrão de 40% para os outros elementos (modelo inicial com modificações) – VIGA 2.
172
Tabela 7.61 Freqüências naturais de vibração experimentais da VIGA 2 e
numéricas resultantes do modelo inicial. 173
Tabela 7.62 Freqüências de vibração do modelo atualizado, quando foram
considerados desvios padrão diferentes para os parâmetros iniciais (modelo inicial com modificações) – VIGA 2.
173
Tabela 7.63 Freqüências de vibração do modelo atualizado, quando foram
considerados desvios padrão maiores para os parâmetros iniciais dos elementos 18 e 19 (modelo inicial com modificações) – VIGA 2.
173
Tabela 7.64 MAC entre os modos experimentais da VIGA 2 e os numéricos
do modelo atualizado considerando um desvio padrão de 40% para os parâmetros iniciais.
176
Tabela 7.65 MAC entre os modos experimentais da VIGA 2 e os numéricos
do modelo atualizado considerando um desvio padrão de 70% para os parâmetros iniciais dos elementos 18 e 19.
177
Tabela 7.66 Valores dos parâmetros atualizados pelo procedimento de adição
de massa, considerando desvios padrão diferentes para os parâmetros iniciais – VIGA 1.
179
Tabela 7.67 Valores dos parâmetros atualizados pelo procedimento de adição
de massa, considerando um desvio padrão de 40% para os parâmetros iniciais – VIGA 1.
180
Tabela 7.68 Freqüências de vibração medidas experimentalmente para todos
os sistemas, perturbados e original – VIGA 1. 181
Tabela 7.69 Freqüências de vibração obtidas, a partir do modelo numérico
inicial, para todos os sistemas, perturbados e original – VIGA 1. 182

xvii
Tabela 7.70 Freqüências de vibração obtidas, a partir do modelo atualizado, para todos os sistemas, perturbados e original – VIGA 1. (σ = 20%)
183
Tabela 7.71 Freqüências de vibração obtidas, a partir do modelo atualizado,
para todos os sistemas, perturbados e original – VIGA 1. (σ = 40%)
184
Tabela 7.72 Freqüências de vibração obtidas, a partir do modelo atualizado,
para todos os sistemas, perturbados e original – VIGA 1. (σ = 60%)
185
Tabela 7.73 Freqüências de vibração obtidas, a partir do modelo atualizado,
para todos os sistemas, perturbados e original – VIGA 1. (σ = 80%)
186
Tabela 7.74 Diagonal do MAC calculado entre os modos experimentais e
numéricos resultantes do modelo atualizado pelo procedimento de adição de massa.
188
Tabela 7.75 Valores dos parâmetros atualizados pelo procedimento de adição
de massa, considerando desvios padrão diferentes para os parâmetros iniciais – VIGA 2.
190
Tabela 7.76 Freqüências de vibração obtidas experimentalmente para todos
os sistemas, perturbado e original – VIGA 2. 191
Tabela 7.77 Freqüências de vibração obtidas a partir do modelo numérico
inicial para todos os sistemas, perturbado e original – VIGA 2. 192
Tabela 7.78 Freqüências de vibração obtidas a partir do modelo atualizado
para todos os sistemas, perturbado e original – VIGA 2. (σ = 20%)
193
Tabela 7.79 Freqüências de vibração obtidas a partir do modelo atualizado
para todos os sistemas, perturbado e original – VIGA 2. (σ = 40%)
194
Tabela 7.80 Autovalores e freqüências correspondentes do modelo atualizado
para todos os sistemas, perturbado e original – VIGA 2. (σ = 20% - 40%)
195
Tabela 7.81 Diagonal do MAC calculado entre os modos experimentais e
numéricos do modelo atualizado pelo procedimento de adição de massa – VIGA 2.
195

xviii
LISTA DE FIGURAS
Figura Título Página Figura 1.1 (a) Ponte de madeira no Tibet, (Bennet, 1999). (b) Ponte JK
– Brasília, DF. 01
Figura 1.2 Trecho do viaduto que desabou no Rio de Janeiro (Cunha,
1998). 02
Figura 1.3 Passarela que desabou devido à corrosão das armaduras
(Revista Bridge – Design & Engineering, 2001). 02
Figura 5.1 Esquema do algoritmo de atualização. 71 Figura 6.1 Carregamento aplicado à viga – Impacto. 75 Figura 6.2 Carregamento aplicado à viga – Ruído Branco. 75 Figura 6.3 Vista superior da viga indicando sua discretização, o ponto
de aplicação da carga impacto e os graus de liberdade dos elementos.
76
Figura 6.4 Seção transversal da viga metálica considerada. 76 Figura 6.5 Seis primeiros modos de vibração teóricos da viga. 78 Figura 6.6 Respostas de aceleração obtidas em alguns pontos da viga
quando esta foi submetida a: (a) Impacto; (b) Ruído branco. 79
Figura 6.7 Três primeiros modos de vibração da viga identificados pelo
método SSI-COV/ref, considerando N = 16000 e N = 4000 e excitação do tipo impacto.
81
Figura 6.8 4º, 5º e 6º modos de vibração identificados pelo método SSI-
COV/ref, considerando N = 16000 e N = 4000 e excitação do tipo impacto.
82
Figura 6.9 Três primeiros modos de vibração da viga identificados pelo
método SSI-DATA/ref, considerando N = 4000 e excitação do tipo impacto.
83
Figura 6.10 4º, 5º e 6º modos de vibração identificados pelo método SSI-
DATA/ref, considerando N = 4000 e excitação do tipo impacto.
84
Figura 6.11 Comparação entre os três primeiros modos de vibração
identificados pelo método SSI-COV/ref quando acrescentados zeros no início dos registros. N = 16000. Excitação do tipo impacto.
86

xix
Figura 6.12 Comparação entre o 4º, 5º e 6º modos de vibração
identificados pelo método SSI-COV/ref quando acrescentados zeros no início dos registros. N = 16000. Excitação do tipo impacto.
87
Figura 6.13 Comparação entre os três primeiros modos de vibração
identificados pelo método SSI-COV/ref quando acrescentados zeros no início dos registros - N = 4000. Excitação do tipo impacto.
88
Figura 6.14 Comparação entre o 4º, 5º e 6º modos de vibração
identificados pelo método SSI-COV/ref quando acrescentados zeros no início dos registros. N = 4000. Excitação tipo impacto.
89
Figura 6.15 Comparação entre os três primeiros modos de vibração
identificados pelo método SSI-COV/ref com excitação do tipo impacto e ruído branco.
90
Figura 6.16 Comparação entre o 4º, 5º e 6º modos de vibração
identificados pelo método SSI-COV/ref com excitação do tipo impacto e ruído branco.
91
Figura 6.17 Comparação entre os três primeiros modos de vibração
identificados pelo método SSI-DATA/ref com excitação do tipo impacto e ruído branco.
92
Figura 6.18 Comparação entre o 4º, 5º e 6º modos de vibração
identificados pelo método SSIDATA/ref com excitação do tipo impacto e ruído branco.
93
Figura 6.19 Comparação entre os três primeiros modos de vibração
identificados pelo método detecção de pico com excitação do tipo impacto e ruído branco.
95
Figura 6.20 Comparação entre o 4º, 5º e 6º modos de vibração
identificados pelo método detecção de pico com excitação do tipo impacto e ruído branco.
96
Figura 6.21 Modelo de elementos finitos da viga analisada. 97 Figura 6.22 Modelo de elementos finitos a ser atualizado. 100 Figura 6.23 Sistema massa-mola com 4 graus de liberdade. 102 Figura 7.1 Configuração do pórtico ensaiado. 106 Figura 7.2 (a) Equipamento utilizado para a aquisição dos sinais
provenientes dos acelerômetros. (b) Pórtico ensaiado. 108

xx
Figura 7.3 Modos de vibração identificados pelos métodos de detecção
de pico, SSI-COV/ref e SSI-DATA/ref – Ensaio 1. 110
Figura 7.4 Modos de vibração identificados pelos métodos de detecção
de pico, SSI-COV/ref e SSI-DATA/ref para o Ensaio 2. 111
Figura 7.5 Modos de vibração identificados pelos métodos de detecção
de pico, SSI-COV/ref e SSI-DATA/ref para o Ensaio 1A. 112
Figura 7.6 Modos de vibração identificados pelos métodos de detecção
de pico, SSI-COV/ref e SSI-DATA/ref para o Ensaio 2A. 113
Figura 7.7 Modos de vibração identificados pelos métodos de detecção
de pico, SSI-COV/ref e SSI-DATA/ref para o Ensaio 3. 114
Figura 7.8 Modos de vibração identificados pelo método de detecção de
pico, para cada ensaio realizado. 116
Figura 7.9 Diagonal do índice MAC calculado entre os modos
experimentais, identificados pelo método de detecção de pico, e os teóricos, para cada ensaio realizado.
118
Figura 7.10 Modos de vibração identificados pelo SSI-COV/ref, para
cada ensaio realizado. 119
Figura 7.11 Diagonal do índice MAC calculado entre os modos
experimentais, identificados pelo método SSI-COV/ref, e os teóricos, para cada ensaio realizado.
121
Figura 7.12 Modos de vibração identificados pelo SSI-DATA/ref, para
cada ensaio realizado. 122
Figura 7.13 Diagonal do índice MAC calculado entre os modos
experimentais, identificados pelo método SSI-DATA/ref, e os teóricos, para cada ensaio realizado.
124
Figura 7.14 Modelo inicial do pórtico para atualização. 125 Figura 7.15 Convergência dos parâmetros atualizados para o pórtico. 127 Figura 7.16 Convergência das freqüências do pórtico. 128 Figura 7.17 Seção transversal das vigas ensaiadas. 129 Figura 7.18 Esquema de ensaio das vigas. 129 Figura 7.19 a) Detalhe do apoio das vigas; b) Detalhe dos acelerômetros
fixados nos pontos 1, 2, 3 e 4. 129

xxi
Figura 7.20 Vista frontal da VIGA 2 com detalhe dos elementos 18 e 19
modificados. 130
Figura 7.21 Vista superior da viga indicando o ponto de aplicação do
impacto. 131
Figura 7.22 Vista superior da viga mostrando os pontos onde os
acelerômetros de referência permaneceram fixos em todas as etapas.
131
Figura 7.23 Modelo numérico com 68 graus de liberdade. 133 Figura 7.24 3 primeiros modos de vibração da VIGA 1 identificados pelo
método de detecção de pico. 134
Figura 7.25 4º, 5º e 6º modos de vibração da VIGA 1 identificados pelo
método de detecção de pico. 135
Figura 7.26 3 primeiros modos de vibração da VIGA 2 identificados pelo
método de detecção de pico. 136
Figura 7.27 4º, 5º e 6º modos de vibração da VIGA 2 identificados pelo
método de detecção de pico. 137
Figura 7.28 Uso dos sensores de referência para agrupar as partes dos
modos identificadas em cada etapa do ensaio. 139
Figura 7.29 3 primeiros modos de vibração da VIGA 1 identificados pelo
método SSI-COV/ref. 140
Figura 7.30 4º, 5º e 6º modos de vibração da VIGA 1 identificados pelo
método SSI-COV/ref. 141
Figura 7.31 3 primeiros modos de vibração da VIGA 2 identificados pelo
método SSI-COV/ref. 142
Figura 7.32 4º, 5º e 6º modos de vibração da VIGA 2 identificados pelo
método SSI-COV/ref. 143
Figura 7.33 3 primeiros modos de vibração da VIGA 1 identificados pelo
método SSI-DATA/ref. 144
Figura 7.34 4º, 5º, e 6º modos de vibração da VIGA 1 identificados pelo
método SSI-DATA/ref. 145
Figura 7.35 3 primeiros modos de vibração da VIGA 2 identificados pelo
método SSI-DATA/ref. 146
Figura 7.36 4º, 5º, e 6º modos de vibração da VIGA 2 identificados pelo 147

xxii
método SSI-DATA/ref. Figura 7.37 Diagonal do MAC calculado entre os modos experimentais
da VIGA 1 e os teóricos. 149
Figura 7.38 Diagonal do MAC calculado entre os modos experimentais
da VIGA 2 e os teóricos. 149
Figura 7.39 Convergência de alguns parâmetros no processo de
atualização – VIGA 1. 153
Figura 7.40 Convergência dos autovalores para os diferentes desvios
padrão considerados. 155
Figura 7.41 Convergência dos quatro primeiros autovalores no processo
de atualização. 156
Figura 7.42 Comparação entre os três primeiros modos experimentais e
numéricos obtidos a partir do modelo atualizado – VIGA 1. 158
Figura 7.43 Comparação entre o 4º, 5º e 6º modos de vibração
experimentais e numéricos obtidos a partir do modelo atualizado – VIGA 1.
159
Figura 7.44 Comparação entre os três primeiros modos de vibração
experimentais da VIGA 2 e numéricos resultantes do modelo atualizado considerando um desvio padrão de 40% para os parâmetros iniciais.
166
Figura 7.45 Comparação entre os modos de vibração experimentais da
VIGA 2 e numéricos resultantes do modelo atualizado considerando um desvio padrão de 40% para os parâmetros iniciais.
167
Figura 7.46 Localização das regiões modificadas na VIGA 2, por meio
do método do erro residual para os três primeiros modos de vibração.
169
Figura 7.47 Localização das regiões modificadas na VIGA 2, por meio
do método do erro residual para o 4º e 5º modos de vibração e multiplicação do erro para todos os modos.
169
Figura 7.48 Modelo numérico inicial da VIGA 2 com modificações. 170 Figura 7.49 Autovalores atualizados para diferentes desvios padrão. 174 Figura 7.50 Comparação entre os três primeiros modos de vibração
experimentais da VIGA 2 e numéricos resultantes do modelo atualizado considerando um desvio padrão de 40% para os parâmetros iniciais.
175

xxiii
Figura 7.51 Comparação entre o 4º, 5º e 6º modos de vibração
experimentais da VIGA 2 e numéricos resultantes do modelo atualizado considerando um desvio padrão de 40% para os parâmetros iniciais.
176
Figura 7.52 Comparação entre os modos experimentais, do sistema
original, e numéricos resultantes do modelo atualizado pelo procedimento de adição de massa, considerando um desvio padrão de 40% para os parâmetros iniciais.
187
Figura 7.53 Comparação entre os modos experimentais, do sistema
original, e numéricos do modelo atualizado pelo procedimento de adição de massa, considerando um desvio padrão de 20% para os parâmetros iniciais.
196
Figura 7.54 Comparação entre os modos experimentais, do sistema
original, e numéricos do modelo atualizado, pelo procedimento de adição de massa, considerando um desvio padrão de 40% para os parâmetros iniciais dos elementos 18 e 19.
197
Figura A.1 Registros de aceleração obtidos nos três pavimentos do
pórtico para o ensaio 1. 212
Figura A.2 Registros de aceleração obtidos nos três pavimentos do
pórtico para o ensaio 1A. 212
Figura A.3 Registros de aceleração obtidos nos três pavimentos do
pórtico para o ensaio 2. 213
Figura A.4 Registros de aceleração obtidos nos três pavimentos do
pórtico para o ensaio 2A. 213
Figura A.5 Registros de aceleração obtidos nos três pavimentos do
pórtico para o ensaio 3. 214
Figura A.6 Densidade espectral de potência dos registros apresentados
na figura A.2. 214
Figura A.7 Densidade espectral de potência dos registros apresentados
na figura A.5. 215
Figura A.8 Registros de aceleração obtidos nos pontos de referência da
VIGA 1. 215
Figura A.9 Registros de aceleração obtidos nos pontos 4, 8, 23 e 27 da
VIGA 1. 216
Figura A.10 Registros de aceleração obtidos nos pontos de referência da 216

xxiv
VIGA 2. Figura A.11 Registros de aceleração obtidos nos pontos 4, 8, 23 e 27 da
VIGA 2. 217
Figura A.12 Densidade espectral de potência dos registros obtidos nos
pontos 1 e 19 da VIGA 1 (pontos de referência). 217
Figura A.13 Densidade espectral de potência dos registros obtidos nos
pontos 16 e 34 da VIGA 1 (pontos de referência). 218
Figura A.14 Densidade espectral de potência dos registros obtidos nos
pontos 4 e 23 da VIGA 1. 218
Figura A.15 Densidade espectral de potência dos registros obtidos nos
pontos 1 e 19 da VIGA 2 (pontos de referência). 219
Figura A.16 Densidade espectral de potência dos registros obtidos nos
pontos 16 e 34 da VIGA 2 (pontos de referência). 219
Figura A.17 Densidade espectral de potência dos registros obtidos nos
pontos 4 e 23 da VIGA 2. 220

xxv
LISTA DE SÍMBOLOS
M Matriz de massa global do sistema C2 Matriz de amortecimento global do sistema K Matriz de rigidez global do sistema n2 Graus de liberdade do sistema q(t) Vetor de deslocamentos, contínuo no tempo )t(q& Vetor de velocidades, contínuo no tempo
)t(q&& Vetor de acelerações, contínuo no tempo
l Pontos de medição m Número de entradas (excitação) no tempo contínuo (t)f Força de excitação
2B Matriz que descreve a posição em que a excitação é aplicada com dimensão (n2 x m)
(t)u Vetor que descreve as m entradas n tempo contínuo com dimensão (m x
1)
CA Matriz de estado com dimensão (n x n)
CB Matriz de entrada com dimensão (n x m)
(t)x Vetor de estado com dimensão (n x l) (t)y Vetor de saídas com dimensão (l x 1)
avd e , CCC Matrizes de saída para deslocamento, velocidade e aceleração respectivamente, com dimensões (l x n2)
CC Matriz de saída com dimensão (l x n)
CD Matriz de transmissão direta com dimensão (l x m)
T Matriz quadrada não-singular complexa com dimensão (n x n)
kϖϖϖϖ Ruído devido a perturbações e imprecisões do modelo, dimensão (n x 1)

xxvi
kυυυυ Ruído de medição devido à imprecisão dos sensores com dimensão (l x 1)
[ ]•E Valor esperado
pqδ Delta de Kronecker
p e q Instantes de tempo arbitrários Σ Matriz de covariância de estado
iR Matrizes de covariância das saídas, com dimensão (l x l)
i Retardo de tempo arbitrário (time lag) G Next state-output covariance matrix, com dimensão (n x l) k Tempo Qp Matriz de controlabilidade, com dimensão (n x pr)
nI e prI Matrizes identidade de ordem n e pr, respectivamente
n Ordem do sistema
pu vetor de controle
( )∗
• Significa a pseudo-inversa de uma matriz
αααα vetor arbitrário com dimensão (nr x l) Ψ Matriz modal cujas colunas são os autovetores da matriz A
1λ Autovalor
Pp Matriz bloco de observabilidade
1mx Coordenada modal
refky Saídas de referência, com dimensão (r x l)
ref~ky Outras saídas que não são de referência, com dimensão (l-r x 1)
L1 Matriz que seleciona as saídas de referência, com dimensão (r x l)
refH Matriz Hankel

xxvii
refiR Matriz de covariância das saídas de referência
refi1T Matriz Toeplitz formada pelas matrizes de covariância das saídas de
referência, com dimensão (li x ri)
)t(kx , )t(ky Processos aleatórios estacionários
Rxx Função de covariância do processo aleatório )t(kx Ryy Função de covariância do processo aleatório )t(ky Rxy Função de covariância cruzada entre os processos aleatórios )t(kx e
)t(ky Sxx Função densidade espectral de potência do processo aleatório )t(kx Syy Função densidade espectral de potência do processo aleatório )t(ky Sxy Função densidade espectral de potência cruzada entre os processos
aleatórios )t(kx e )t(ky w Função filtro usada para evitar leakage Sy Função densidade espectral de potência estimada
)f( kA Transformada discreta de Fourier da resposta discreta no tempo
)f( k
TA Transposta conjugada de )f( kA
Pij Magnitude do pico para o modo i no ponto j Prefi Magnitude do pico correspondente ao sensor de referência ϕ Fase do espectro cruzado
ji ,A Amplitude modal (para cada modo i) de cada ponto j medido
PSD Power Spectral Density CSD Cross Spectral Density Oi Matriz de observabilidade, com dimensão (li x n)
refiC Matriz de controlabilidade, com dimensão (n x ri)
U e V Matrizes ortonormais, com dimensões (li x li) e (ri x ri)

xxviii
S Matriz diagonal contendo os valores singulares em ordem decrescente,
dimensão (li x ri)
refG Next state-output-reference covariance matrix A Matriz de estado discreta C
ref ref0
ˆ ˆ ˆ, , , A G C R
Estimativas das matrizes reais do sistema
n p Ordem do modelo ( )pv e ( 1)pv − Vetores modais ΛΛΛΛ Matriz diagonal contendo autovalores complexos discretos no tempo, (n
x n) λq Autovalor complexo do sistema discreto no tempo ΨΨΨΨ Matriz cujas colunas representam os autovetores do sistema discreto no
tempo, (n x n) AC Matriz de estado contínua ΛΛΛΛC Matriz diagonal contendo autovalores complexos contínuos no tempo, (n
x n) ΨΨΨΨC Matriz cujas colunas representam os autovetores do sistema contínuo no
tempo, (n x n)
qξ Razão de amortecimento do modo q e qω é a freqüência (rad/s) do modo
referente ao modo q λCq Autovalor complexo do sistema contínuo no tempo
qΦΦΦΦ Matriz cujas colunas representam as partes observadas dos autovetores do sistema ΨΨΨΨ
SVD Singular Value Decomposition MAC Modal Assurance Criterion x0 Estado inicial estimado P0 Covariância inicial do estado estimada

xxix
1kˆ +x Estado estimado do filtro Kalman (non-steady-state Kalman filter state estimates)
Kk Matriz de ganho (gain matrix) do filtro Kalman Pk+1 Matriz de covariância do estado
iX̂ Seqüência de estado do filtro Kalman, (n x N)
refiP Matriz de projeção
Q Matriz ortonormal, (N x N) IN Matriz identidade de ordem N R Matriz triangular inferior, ((r+l)i x N)
iiY Matriz Hankel com apenas uma linha bloco, (l x N)
Wi e Vi Matrizes que representam resíduos, com dimensões (n x N) e (l x N),
respectivamente δθδθδθδθ Representa a alteração nos parâmetros θθθθ δδδδz Diferença entre os autovalores medidos e analíticos
jS Matriz de sensibilidade
jθ Vetor de parâmetros estimado após j iterações
jz Vetor de autovalores analíticos correspondentes aos parâmetros jθ
θ Vetor de parâmetros reais que reproduzem os dados medidos
iλ Autovalor correspondente ao modo i
iφφφφ Autovetor correspondente a iλ
θ
K
δ
δ
Matriz formada pela diferenciação de cada elemento da matriz de rigidez, K, com respeito ao parâmetro θ
θ
M
δ
δ
Matriz formada pela diferenciação de cada elemento da matriz de massa, M, com respeito ao parâmetro θ
εεεε Erro entre os autovalores medidos e àqueles obtidos a partir dos
parâmetros atualizados

xxx
( )θδδδδJ Função de penalidade
εεεεεεεεW Matriz diagonal cujos elementos são iguais ao inverso da variância dos autovalores medidos
θθθθθθθθW Matriz diagonal cujos elementos são o inverso da variância estimada dos parâmetros a serem atualizados

1. INTRODUÇÃO
1.1 ASPECTOS GERAIS
As estruturas civis, de um modo geral, estão presentes e são de grande importância em
todos os segmentos da sociedade. As pontes, por exemplo, constituem uma parte
importante na infra-estrutura de um país e, ao longo dos anos, têm contribuído para o
progresso da humanidade, vencendo distâncias e ultrapassando barreiras naturais como
rios, vales, lagos e até mesmo mares. As pontes sejam elas simples ou com projeto
arrojado, construídas com concreto ou aço (figura 1.1), têm servido para atender a
necessidade de melhor acesso, transporte e comércio entre comunidades locais ou entre
países, ressaltando a importância dessas estruturas no desenvolvimento sócio-econômico
de uma nação.
(a) (b)
Figura 1.1 – (a) Ponte de madeira no Tibet, (Bennet, 1999). (b) Ponte JK – Brasília, DF.
Ao longo dos anos, novas tecnologias têm sido desenvolvidas surgindo diferentes tipos de
estruturas, cada vez mais sofisticadas, com projetos estruturais e processos construtivos de
grande complexidade. Entretanto, apesar do avanço da tecnologia na engenharia civil, as
estruturas têm apresentado muitas falhas produzidas em condições normais de utilização.
Isto tem sido observado, em diversos lugares do mundo, e em particular, em pontes,
viadutos e passarelas, que chegam muitas vezes até a ruptura causando perda de vidas e
grandes prejuízos econômicos.
O processo de deterioração que acontece durante a vida útil de uma estrutura pode ser
proveniente da ação de fatores como fenômenos naturais, entre estes a ação do vento,
terremotos etc., condições de utilização indevidas, acidentes, fadiga, corrosão, entre outros.

A combinação desses fatores com as condições de carregamento, dependendo da
intensidade com que ocorram, pode produzir danos de diferentes tipos nas estruturas e até
conduzir ao seu colapso. No caso de pontes, a literatura apresenta vários relatos sobre
acidentes estruturais ocorridos ao longo dos anos.
Cunha et al. (1998) relatam um acidente estrutural no qual um vão de um viaduto no Rio
de Janeiro desabou sobre uma linha férrea causando um grande prejuízo econômico, figura
1.2. Os autores apresentam também outros casos de pontes que entraram em processo de
colapso devido a danos provocados pela deterioração da estrutura.
Figura 1.2 – Trecho do viaduto que desabou no Rio de Janeiro (Cunha, 1998).
Em Palazzo (2001) encontram-se citados outros acidentes com pontes, por exemplo, o
colapso da ponte sobre o rio San Juan localizado na cidade de Caucete e outra ponte na
cidade de Mendoza, ambas na Argentina. A figura 1.3 mostra o colapso de uma passarela
devido a danos provocados por corrosão de armaduras.
Figura 1.3 – Passarela que desabou devido à corrosão das armaduras (Revista Bridge –
Design & Engineering, 2001).

Também nos Estados Unidos tem-se verificado problemas relacionados às pontes, pois,
segundo a Federal Highway Administration, mais de 40% das pontes inventariadas no país
apresentam deficiências estruturais ou estão funcionalmente obsoletas necessitando de
reparos ou substituição (Palazzo, 2001).
No Brasil também se observa este tipo de problema. Segundo um estudo feito pelo
Tribunal de Contas do Estado de Santa Catarina (TCE/SC) sobre a qualidade das obras
públicas, 69,2% das pontes no estado necessitam de uma recuperação profunda,
demonstrando a ausência de manutenção periódica dessas estruturas. Na cidade de São
Paulo existem mais de 1400 obras de arte entre pontes e viadutos, segundo informação
contida no site da Prefeitura Municipal de São Paulo, sendo que a maioria dessas estruturas
apresenta algum tipo de deterioração.
Em conseqüência da deterioração da estrutura, sua capacidade de carga pode ser afetada,
fazendo com que surjam outros problemas como fissuração e vibrações excessivas, que
causem desconforto e insegurança para os usuários. Dessa forma, inspeções regulares e a
avaliação das condições de estruturas civis são necessárias a fim de que se possa detectar a
existência de danos na fase inicial e, assim, estabelecer procedimentos de manutenção e
reparos que irão garantir a segurança e confiabilidade da estrutura com custos mínimos.
O método comumente adotado para avaliar as condições estruturais e detectar danos tem
sido por meio de inspeção visual. No entanto, devido à crescente complexidade das
estruturas atuais essa técnica tem se tornado ineficiente e inadequada, principalmente no
que diz respeito à identificação de danos invisíveis ao olho humano. Além disso, a
inspeção visual de estruturas complexas e de grande porte pode se tornar um processo caro
e demorado. A utilização de técnicas como ultra-som, raios-X, etc. pode ser uma
alternativa para detectar a existência de danos, porém, são técnicas de aplicação localizada
e, portanto, requerem um conhecimento prévio da região afetada além da acessibilidade a
tais áreas.
Por outro lado, métodos de detecção de danos que forneçam uma visão global sobre as
condições de uma estrutura, a partir de suas características dinâmicas, são bastante
adequados para avaliar o seu estado. Tais métodos se baseiam no fato de que o dano
presente em uma estrutura produz alterações em suas propriedades dinâmicas tais como,

freqüências naturais, modos de vibração e razão de amortecimento. Doebling et al. (1998)
e Zou et al. (2000) apresentam uma revisão sobre vários métodos de detecção de dano
baseados nas propriedades dinâmicas das estruturas.
As características dinâmicas frequentemente usadas na identificação de danos são as
freqüências naturais e os modos de vibração. As freqüências permitem detectar a existência
de danos, uma vez que sofrerão alterações em relação às freqüências da estrutura intacta. Já
os modos de vibração fornecem informações localizadas ao longo de toda estrutura e,
portanto, podem ser utilizados na localização do dano.
O passo anterior à detecção de danos, por meio das características dinâmicas, seria a
identificação de tais características, que precisam ser obtidas com o máximo de precisão a
fim de que possam ser utilizadas nos métodos de detecção de danos e produzam resultados
confiáveis a respeito do estado da estrutura. Portanto, a escolha adequada de métodos de
identificação das propriedades modais é de grande importância na qualidade dos
resultados.
De forma geral, a identificação das características dinâmicas é feita a partir dos sinais
provenientes da resposta da estrutura a uma determinada excitação. Esta excitação, por sua
vez, pode ser produzida a partir de testes de vibração forçada com vibradores, socadores
mecânicos que produzem cargas de impacto ou outros equipamentos especiais, ou ainda a
partir de excitações ambientes produzidas pelo tráfego de veículos, de pessoas ou pelo
vento.
A excitação ambiente é muito utilizada no caso de estruturas de grande porte, como pontes
e viadutos, pois permite realizar um monitoramento contínuo ou intermitente sem a
interrupção do tráfego, além de ser, muitas vezes, uma alternativa técnica e
economicamente mais viável.
A identificação de sistemas que permite a obtenção das propriedades modais, por meio de
métodos que requerem apenas a resposta da estrutura, não permite, entretanto, identificar
os parâmetros desconhecidos dessa estrutura, tais como propriedades físicas e/ou
geométricas. Uma forma de se obter esses parâmetros é por meio da atualização de
modelos de elementos finitos a partir das características dinâmicas medidas.

Na década de 90, a atualização de modelos, em particular modelos de elementos finitos,
passou a ser vista como um objeto de grande importância na análise de estruturas civis e
mecânicas. Em geral, a atualização de modelos de elementos finitos em dinâmica estrutural
é usada para ajustar modelos numéricos a resultados experimentais por meio de métodos
diretos ou iterativos. Os métodos diretos permitem identificar as matrizes de massa e/ou de
rigidez usando as equações de movimento da estrutura e as equações de ortogonalidade dos
modos. Seus resultados, porém, nem sempre apresentam significado físico. Já os métodos
iterativos permitem atualizar variáveis físicas do modelo como módulo de elasticidade,
densidade, espessura etc., de forma iterativa e independente, permitindo obter resultados
com significado físico.
O modelo numérico atualizado de uma estrutura, a partir de dados medidos como
freqüências e modos de vibração, pode ser utilizado como ferramenta para prever seu
comportamento dinâmico, com precisão, frente a modificações sofridas ao longo da sua
vida útil. Nos últimos tempos, essa ferramenta tem sido utilizada na avaliação das
condições estruturais de pontes. Dentre alguns trabalhos desenvolvidos nesse sentido
podem ser citados Brownjohn et al. (2001), Teughels et al. (2002) e Teughels e De Roeck
(2004).
Diante da importância de se monitorar as estruturas, avaliando seu comportamento, a fim
de impedir que a deterioração sofrida ao longo de sua vida útil venha produzir danos que
possam comprometer sua segurança, torna-se necessário estabelecer metodologias que
permitam avaliar as condições de funcionamento de estruturas civis.
1.2 OBJETIVOS
Este trabalho está inserido em uma linha de pesquisa, do grupo de dinâmica e controle
estrutural do PECC, que busca estabelecer uma metodologia adequada para a avaliação das
condições estruturais de edificações civis, principalmente de pontes, a partir de seu
comportamento dinâmico.
É, portanto, objetivo deste trabalho, fornecer elementos para o desenvolvimento da
metodologia indicada, visando sua aplicação a estruturas de pontes, por meio da análise de
estruturas simples como vigas e pórticos planos. Para isso, é importante estudar algumas

ferramentas que possam ser utilizadas em procedimentos de avaliação estrutural, tais como
métodos de identificação de sistemas e métodos de atualização de modelos numéricos.
Esses métodos permitirão obter as propriedades dinâmicas e determinar ou atualizar
parâmetros desconhecidos, como rigidez e massa, a partir das freqüências e/ou modos de
vibração medidos experimentalmente, possibilitando assim a posterior aplicação de
técnicas adequadas de detecção de danos.
Neste caso, seriam objetivos específicos deste trabalho aplicar alguns métodos de
identificação de sistemas a partir apenas da resposta da estrutura assim como métodos
iterativos de atualização de modelos numéricos de modo que se possa avaliar seu
comportamento, eficiência e aplicabilidade em procedimentos de avaliação estrutural.
1.3 METODOLOGIA
Para alcançar os objetivos enunciados, serão estudados o método de detecção de pico e os
métodos de identificação de subespaços estocásticos SSI-COV/ref (Reference-based
covariance-driven stochastic realization) e SSI-DATA/ref (Reference-based data-driven
stochastic subspace). Além destes, serão avaliados dois métodos de atualização de
modelos de elementos finitos baseados em funções de penalidade (Penalty function
methods). Ambos se baseiam em análise de sensibilidade, porém, um deles, conhecido
como Perturbed boundary condition testing, consiste em perturbar a estrutura por meio de
adição de massa em determinadas coordenadas. Todos os métodos serão implementados
computacionalmente utilizando o programa computacional MATLAB.
Na etapa experimental serão ensaiadas vigas metálicas e um pórtico plano de três
pavimentos. Os registros de acelerações obtidos servirão de base para avaliar o
comportamento dos métodos em estudo quando aplicados a registros que contém também
ruídos.
A partir dos resultados obtidos, será feita uma avaliação crítica dos métodos analisados
com relação à sua aplicabilidade em procedimentos de avaliação estrutural.

1.4 ESTRUTURA DA TESE
Este trabalho apresenta oito capítulos divididos da seguinte forma:
No primeiro capítulo encontra-se uma breve introdução ao problema que será abordado,
apresentando aspectos gerais, objetivos e metodologia adotada.
O segundo capítulo apresenta uma revisão bibliográfica sobre identificação de sistemas e
atualização de modelos de elementos finitos.
O terceiro capítulo traz uma fundamentação teórica necessária para o entendimento dos
métodos aplicados neste trabalho.
O quarto e quinto capítulos tratam da descrição dos métodos de identificação sistemas
baseados apenas na resposta da estrutura e dos métodos de atualização de modelos que
foram aplicados neste trabalho, respectivamente.
O sexto e sétimo capítulos apresentam os resultados obtidos a partir de uma análise
numérica e experimental, respectivamente.
O oitavo capítulo trata das conclusões e sugestões para trabalhos futuros.

8
2. REVISÃO BIBLIOGRÁFICA
2.1 IDENTIFICAÇÃO DE SISTEMAS ESTRUTURAIS
É sabido que as estruturas, ao longo do tempo, sofrem processos de deterioração
provenientes de diversos fatores. É, portanto, de grande importância, o estudo de
ferramentas viáveis para a avaliação das condições de estruturas, sejam estas de pequeno
ou grande porte, de modo que se possa ter informações confiáveis sobre seu
comportamento em condições de serviço e a sua segurança.
Métodos como inspeções visuais ou o uso de experimentos localizados como ultra-som,
raios-X, entre outros, têm sido utilizados para avaliar uma estrutura. Estes métodos, porém
requerem um prévio conhecimento de regiões danificadas ou, ainda, acesso a pontos da
estrutura que nem sempre são possíveis de se alcançar. Devido a isto, vários métodos
baseados nas alterações das propriedades dinâmicas de uma estrutura têm sido
desenvolvidos. Doebling et al. (1998) e Zou et al. (2000) fazem uma extensa apresentação
de métodos deste tipo, cujo ponto principal é o fato de que danos, normalmente, provocam
uma diminuição na rigidez da estrutura produzindo alterações em suas propriedades
dinâmicas, como freqüências e modos de vibração.
Neste sentido, é importante obter tais propriedades com precisão procurando minimizar os
erros inerentes aos procedimentos experimentais de aquisição dos sinais que serão
utilizados na identificação. Além disso, é importante avaliar métodos de identificação que
sejam mais adequados ao tipo de estrutura analisada.
A obtenção das características dinâmicas de uma estrutura é feita a partir da identificação
de sistemas através de métodos tanto no domínio da freqüência quanto no domínio do
tempo. A identificação de sistemas pode ser definida como o processo de desenvolver ou
melhorar uma representação matemática de um sistema físico usando dados experimentais.
Tais dados podem ser, por exemplo, sinais adquiridos a partir de testes de vibração em
estruturas.

9
Juang e Pappa (1985) desenvolveram um método chamado ERA – Eigensystem
Realization Algorithm que permite a identificação das propriedades modais e a redução de
modelos de sistemas dinâmicos a partir de dados experimentais. O método consiste em
duas partes principais; a realização de modelos de mínima ordem e a identificação dos
parâmetros modais. A realização dos modelos de mínima ordem significa construir uma
representação no espaço de estado a partir de dados experimentais, de tal forma que este
possua a menor dimensão entre todos os possíveis sistemas realizados que tenham a
mesma relação de entrada e saída (excitação e resposta) dentro de um grau de precisão
especificado. A partir deste modelo, que caracterizará a dinâmica do sistema, os
parâmetros modais serão identificados. A fim de ilustrar o algoritmo, os autores utilizaram
dados experimentais de aceleração de uma estrutura aeroespacial, chegando a resultados
bastante satisfatórios. Vale salientar que o ERA requer informações tanto da entrada
quanto da resposta do sistema e foi desenvolvido no domínio do tempo.
Ainda tratando da identificação das propriedades modais via teoria de realização de
sistemas, Juang (1987) apresentou um método alternativo para o ERA juntamente com a
técnica de polireferência (Polyreference Technique). O autor apresentou ainda o
desenvolvimento do algoritmo ERA no domínio da freqüência e estabeleceu relações entre
este e outros métodos como a técnica de poli referência e a regressão por mínimos
quadrados.
Algum tempo depois, Yang e Yeh (1990) estenderam o algoritmo ERA e desenvolveram
um novo método que permitia também identificar as matrizes de massa, de rigidez e de
amortecimento diretamente da decomposição em valor singular da matriz Hankel. Os
autores aplicaram o método proposto a um sistema massa-mola com amortecimento e
conseguiram identificar as matrizes com sucesso.
Roemer e Mook (1992) propuseram um algoritmo de identificação de sistemas que
combina as técnicas de identificação no domínio do tempo Eigensystem Realization
Algorithm – ERA (Juang e Pappa, 1985) e o método da resposta impulso (Meirovitch,
1975) com um algoritmo de estimação chamado Minimum Modal Error – MME (Mook e
Junkins, 1988). O método da resposta impulso é baseado apenas na manipulação dos dados
de resposta da estrutura a uma carga impulsiva e permite identificar as matrizes de massa,
de rigidez e de amortecimento, sendo a identificação da matriz de massa bastante robusta a

10
ruídos de medição enquanto que a identificação das outras matrizes é bastante sensível a
este tipo de ruídos. O algoritmo MME é formulado no espaço de estado e permite estimar
as variáveis de estado. Este método não considera o erro de modelagem como um ruído
branco de covariância conhecida como os outros filtros e sim como uma quantidade
determinística sendo estimada como parte da solução. O método proposto utiliza as
vantagens de cada um dos algoritmos citados, obtendo um procedimento menos sensível a
ruídos para determinar as matrizes do sistema. Os autores apresentam um exemplo
numérico cujos resultados comprovam a eficiência do método integrado na identificação
das matrizes do sistema analisado com níveis de ruído de até 5%.
Na identificação de sistemas, a matriz de amortecimento é mais difícil de ser obtida
precisamente a partir de dados com ruídos. Segundo Chen et al. (1996), uma das razões
que levam a isto é o fato de que as matrizes de massa, de rigidez e de amortecimento são
identificadas, geralmente, em forma conjunta, e como a ordem de grandeza dos
coeficientes de amortecimento é muito menor que a dos coeficientes de massa e de rigidez,
o erro relativo é maior na identificação do amortecimento. Baseados nisto, os autores
desenvolveram um método de identificação que permite estimar a matriz de amortecimento
separadamente das matrizes de massa e de rigidez, melhorando, com isso, a precisão na
identificação da matriz de amortecimento. No método, uma matriz de transformação obtida
da relação entre as funções de resposta de freqüência (FRF) normal e complexa de uma
estrutura, é utilizada para calcular a matriz de amortecimento do sistema, enquanto que as
matrizes de massa e de rigidez são identificadas a partir das funções de resposta de
freqüência normal usando o método de mínimos quadrados. A fim de ilustrar o método,
dois sistemas são analisados e os resultados obtidos indicam que a matriz de
amortecimento pode ser identificada precisamente quando separada da identificação das
outras matrizes.
Xiao et al. (2001) propuseram um procedimento onde as matrizes de rigidez e de
amortecimento de um sistema são determinadas a partir de dados da excitação e da
resposta (entrada e saída) usando um método de identificação de subespaço. O método é
baseado no algoritmo ERA (Eingensystem Realization Algorithm - Juan e Pappa, 1985) e
no método de identificação de subespaço Ho-Kalman. Os autores apresentaram, ainda, um
procedimento no qual é possível localizar elementos danificados e quantificar o dano
presente nestes.

11
Koh et al. (1995), com o objetivo de avaliar as condições das estruturas, propuseram um
método para identificar a rigidez dos pavimentos de um edifício. O modelo completo do
edifício é considerado em três dimensões e o método, chamado Improved Condensation
Method, permite condensá-lo, através de condensações estáticas e cinemáticas, a fim de
reduzir o número de graus de liberdade para a identificação. É introduzido um outro
modelo chamado Remedial Model a fim de aproximar o modelo condensado da estrutura
real minimizando, com isso, o erro no modelo. Para identificar os parâmetros do Remedial
Model é aplicado o filtro Kalman estendido (Extended Kalman Filter) no domínio do
tempo e esses parâmetros são utilizados para ajustar (update) o modelo completo. Índices
de integridade são obtidos para quantificar as alterações na rigidez de cada pavimento. Os
autores apresentaram um exemplo numérico onde os resultados indicaram que o método
proposto mostrou-se bastante eficiente na identificação da rigidez de cada pavimento do
edifício.
Wang e Wu (1995) aplicaram a estruturas de engenharia civil uma técnica de identificação
de sistemas bastante eficiente no campo da comunicação, chamada Least Mean Square
Adaptive Technique. O método consiste em minimizar o quadrado do erro (mean-squared
error) entre a reposta estimada e a resposta medida na estrutura, baseado numa estimativa
do vetor gradiente ponderado (gradient weight vector). Os autores apresentaram exemplos
numéricos e experimentais a partir dos quais concluíram que a técnica proposta foi
bastante eficiente na identificação de sistemas estruturais lineares e não lineares.
Tan e Weng (1996) desenvolveram um método para identificar as propriedades dinâmicas
de estruturas isoladas do solo durante terremotos por um sistema chamado laminated
rubber bearing. No método é considerado um modelo linear para representar a
superestrutura e um modelo bilinear de histerese para o sistema de isolamento. Os
parâmetros são obtidos a partir da minimização do erro entre as respostas medidas e as
respostas teóricas dos sistemas. O método é baseado no conceito de varredura modal
(modal sweep concept) que leva em consideração a contribuição de cada modo de
vibração. Dois exemplos numéricos são apresentados, a fim de ilustrar o procedimento
proposto, e os resultados obtidos mostraram-se bastante satisfatórios.
O método proposto por Jaksic(
e Boltezar(
(2002) foi desenvolvido para a identificação de
sistemas dinâmicos com um grau de liberdade a partir de um modelo matemático não

12
linear, sendo este um sistema Duffing com atrito seco (dry friction). Numa primeira etapa
procura-se reconstruir o espaço de estado, isto é, reconstruir a série temporal de velocidade
e deslocamento, a partir da série de aceleração medida por meio de integração numérica. Já
na etapa seguinte procede-se à estimação dos parâmetros que é obtida aplicando-se
mínimos quadrados à função qui-quadrada obtida da equação de movimento do sistema
Duffing. O método foi testado numérica e experimentalmente e os resultados apresentaram
boa aproximação na identificação dos parâmetros para séries temporais curtas usando
apenas poucos dados. Os autores concluíram que a técnica é insensível às condições
iniciais e apenas o tipo da equação de movimento precisa ser conhecido.
Todos os trabalhos citados até aqui tratam da identificação das propriedades dinâmicas por
meio de métodos que requerem informações tanto da entrada (excitação) quanto da
resposta do sistema. No entanto, no caso de grandes estruturas de engenharia civil, realizar
testes de vibração usando excitações artificiais, como vibradores ou através de impacto, é
muitas vezes impraticável, principalmente quando se deseja monitorar continuamente tais
estruturas.
Uma forma mais viável de se obter as características dinâmicas de estruturas de grande
porte é por meio de excitações ambientes, como o tráfego de veículos sobre uma ponte ou
a ação do vento. As excitações ambientes, por sua vez, não são medidas e, portanto, é
necessária a utilização de métodos de identificação baseados apenas na resposta da
estrutura (output-only modal analysis) ou também chamados métodos estocásticos. Nestes
métodos, a entrada, que é produzida por excitações ambientes, passa a ser modelada
implicitamente por termos de ruído do tipo branco e com média zero.
Para a identificação de sistemas utilizando apenas os dados de resposta existem várias
técnicas baseadas nos modelos ARMAV (Autoregressive Moving Average Vector) ou
ARV (Autoregressive Vector), algoritmos de realização estocástica (Stochastic Realization
Algorithm) ou de identificação de subespaços estocásticos (Stochastic Subspace
Identification Algorithm), dentre outros no domínio do tempo. O método de detecção de
pico trabalha no domínio da freqüência e é muito usado na engenharia civil para
determinar as freqüências de vibração de estruturas. Este método permite que a
identificação seja feita on-line uma vez que as respostas medidas no tempo são

13
transformadas para o domínio da freqüência através da transformada discreta de Fourier e
as freqüências são determinadas simplesmente como os picos do espectro.
Com relação à identificação das propriedades dinâmicas de estruturas submetidas à
excitação ambiente, por meio de métodos baseados apenas na resposta do sistema, muitos
trabalhos têm sido desenvolvidos, principalmente no sentido de estabelecer metodologias
para monitoramento das condições estruturais de pontes, edifícios altos e torres.
Jones et al. (1995) apresentaram um método baseado na aplicação do filtro Kalman que
permite identificar as características do sistema. Neste trabalho, uma formulação no
domínio do tempo, permite a identificação das variáveis de estado que representam a
freqüência de vibração e o amortecimento do sistema. O problema também foi formulado
no domínio da freqüência tomando um ponto de freqüência como passo de tempo no filtro
Kalman. Neste caso são identificados, além da freqüência e do amortecimento, os
parâmetros que definem a função densidade espectral de potência da entrada. Como
exemplos numéricos, os autores mostraram uma identificação no domínio do tempo e no
domínio da freqüência onde a entrada foi simulada como excitações ambientes. A partir
dos resultados obtidos de um sistema de um grau de liberdade, os autores concluíram que o
método apresenta um potencial significativo para aplicação em identificação de sistemas.
Parâmetros como freqüências, razões de amortecimento e modos de vibração podem ser
identificados precisamente, a partir do método proposto. Os autores mostraram ainda que é
possível identificar parâmetros da entrada (ou excitação).
Saito e Yokota (1996) estimaram as freqüências naturais de vibração e as razões de
amortecimento de edifícios altos submetidos à excitação sísmica. O método consiste em
aplicar modelos ARMAX (Autoregressive Moving Average with Exogenous Variable) a
registros, obtidos a partir da resposta dos edifícios a terremotos, identificando seus
parâmetros. As características dinâmicas dos edifícios, freqüências e razão de
amortecimento, são calculadas a partir dos parâmetros do modelo identificados,
especialmente dos pólos da função de transferência obtida do modelo ARMAX. No artigo,
é analisado um par de edifícios gêmeos localizados em Tóquio que estiveram submetidos a
terremotos ocorridos de 1992 a 1993. Na análise, o sistema é considerado apenas com uma
entrada e uma saída (SISO – Single Input Single Output). Os resultados obtidos da
aplicação do modelo ARMAX foram comparados a resultados obtidos da análise da

14
transformada rápida de Fourier (FFT – Fast Fourier Transform) mostrando boa
correspondência entre os métodos. Os autores concluíram, ainda, que os métodos de
identificação no domínio do tempo apresentam vantagens em relação aqueles no domínio
da freqüência, pois permitem identificar o sistema mesmo se os dados de registros forem
curtos ou se os parâmetros modais sofrerem alterações durante a obtenção dos registros.
Farrar e James III (1997) apresentaram um método que permite identificar as freqüências
de vibração e o amortecimento a partir de funções de correlação cruzada entre duas
respostas medidas de uma estrutura submetida a excitações ambientes. Os autores
mostraram que isto é possível uma vez que a função de correlação cruzada entre estes tipos
de respostas tem forma similar à função de resposta impulso do sistema. Tal afirmação é
baseada na hipótese de que excitações ambientes produzem entradas do tipo ruído branco.
Portanto, algoritmos desenvolvidos para analisar a resposta impulso, como o polyreference
method, complex exponential method ou o eigensystem realization algorithm, podem ser
aplicados às funções de correlação cruzada para obter as freqüências e o amortecimento da
estrutura. O método proposto apresenta uma vantagem sobre os procedimentos padrões,
que identificam as freqüências a partir dos picos do espectro de potência e o
amortecimento a partir da largura deste espectro, que é a possibilidade de identificar modos
muito próximos e seus respectivos amortecimentos. Os autores aplicaram o método a
dados experimentais obtidos a partir de ensaios de vibração de uma ponte sob a ação do
tráfego de veículos (excitação ambiente). Os resultados obtidos indicaram a boa eficiência
do método proposto em identificar as propriedades dinâmicas de estruturas.
He e De Roeck (1997) propuseram um modelo autoregressivo multivariado de alta ordem
(M-AR(P)) para identificar os parâmetros modais de estruturas submetidas a excitações
ambientes. O método é baseado no princípio da transformação de impulso-invariante
(impulse-invariant transformation) que consiste em transformar a função de transferência
do sistema do domínio de Laplace para o domínio discreto Z. O procedimento é validado a
partir de dados obtidos de uma torre submetida à excitação do vento. Os resultados
indicaram a eficiência do modelo na determinação das freqüências naturais assim como da
razão de amortecimento da estrutura analisada.
Hermans e Van der Auweraer (1999) discutiram e compararam métodos que permitem
identificar os parâmetros modais a partir apenas dos dados de resposta do sistema. São

15
discutidas as habilidades e limitações da técnica NExT (Natural Excitation Technique)
além de dois algoritmos de identificação de subespaço estocástico (BR – Balanced
Realization e CVA – Canonical Variate Analysis). Os métodos foram avaliados através do
estudo de três casos, sendo um destes, uma ponte em concreto submetida a excitações
ambientes produzidas pelo tráfego e pela ação do vento. Os resultados indicaram que todos
os métodos analisados permitiram identificar satisfatoriamente as propriedades dinâmicas
das estruturas consideradas.
Maalej et al. (1999) propuseram um método para processamento dos sinais de resposta dos
sistemas estruturais, submetidos a excitações ambientes, que permite a determinação das
freqüências fundamentais de vibração. O método é baseado na análise de espectrogramas,
ou seja, na análise da evolução da densidade espectral de potência com o tempo. Três
métodos discretos no tempo foram considerados na análise, o método periodograma e os
métodos paramétricos de Yuler-Walker e Burg os quais consideram um modelo
autoregressivo para representar o sinal. O método proposto foi aplicado a registros obtidos
da ponte Salmon River, no Canadá, submetida a excitações ambientes (tráfego). Os
resultados obtidos foram comparados a valores teóricos apresentando uma aproximação
satisfatória. Os autores ressaltaram ainda que a metodologia proposta permite identificar,
por meio da observação das alterações com o tempo nos padrões dos sinais de resposta
bem como nas freqüências do sistema, as mudanças na rigidez do mesmo resultantes de
alterações nas condições de contorno ou de danos.
Peeters e De Roeck (1999) também apresentaram um método para identificação das
características dinâmicas de estruturas submetidas a excitações ambientes, a partir de
medições apenas da resposta do sistema. O método é formulado no domínio do tempo e faz
uso das covariâncias entre um conjunto limitado de respostas tomadas como referência,
agrupadas em uma matriz Toeplitz. A técnica é validada a partir dos dados de vibração de
uma torre de transmissão metálica excitada pela carga do vento. Amani e Riera (2002)
utilizaram o mesmo método para identificar as propriedades dinâmicas de um pórtico plano
submetido à excitação sísmica (exemplo numérico) e de um modelo tridimensional de uma
aeronave cuja resposta, a uma excitação, foi obtida experimentalmente.
Ndambi et al. (2000) apresentaram uma comparação entre duas técnicas de identificação
de parâmetros modais sendo estas o método de identificação de subespaço estocástico (SSI

16
– Stochastic Subspace Identification) e o FDPI (Frequency Domain Direct Parameter
Identification). Foi feita ainda, uma análise sobre a influência do tipo de excitação na
identificação das freqüências ressonantes e do amortecimento do sistema. Os métodos
foram aplicados a dados obtidos do ensaio de três vigas de concreto armado submetidas a
três diferentes tipos de excitação e os resultados mostraram que as freqüências
identificadas por ambos os métodos foram bastante próximas, porém, os valores de
amortecimento resultaram bem diferentes. Quanto à influência dos tipos de excitação, os
autores verificaram que, para a estrutura ensaiada, as freqüências são pouco afetadas ao
contrário dos valores de amortecimento que se mostraram bastante sensíveis.
Huang (2001) apresentou um procedimento para determinar as freqüências naturais, razões
de amortecimento e formas modais de sistemas estruturais usando um modelo
autoregressivo multivariado (ARV). No método, as matrizes de coeficientes do modelo
ARV são obtidas a partir de uma versão modificada de mínimos-quadrados, que fornece
resultados precisos com modelos ARV de ordem bem menor do que a necessária no
método de mínimos-quadrados tradicional. As características dinâmicas são, então,
identificadas a partir dessas matrizes aplicando o conceito da técnica ITD (Ibrahim Time
Domain). A modificação feita no método dos mínimos-quadrados é baseada na relação
equivalente entre a função de autocorrelação e as respostas de vibração livre do sistema
estrutural considerado. O método proposto foi aplicado a uma ponte de 360 m de
comprimento submetida a excitações ambientes produzidas pelo tráfego. Também foi feita
uma simulação numérica de um shear building, com seis pavimentos, submetido a entradas
dos tipos ruído-branco e ruído-branco com filtro passa-baixa. Na simulação numérica
foram avaliados, ainda, os efeitos do tipo de sinal de resposta (velocidade e aceleração),
efeitos de ruído, do número de graus de liberdade medidos e os efeitos de entradas sem ser
ruído-branco. Os resultados obtidos foram comparados àqueles obtidos da técnica de
mínimos-quadrados tradicional, indicando a superioridade do método proposto sobre o
último.
Palazzo (2001) aplicou um método de identificação de sistemas que não utiliza a medida
da excitação, e aplicou-o a uma viga em laboratório e a uma ponte localizada na cidade de
San Miguel de Tucumán (Argentina). A identificação consistiu em estimar os parâmetros
modais, freqüências naturais e formas modais, das estruturas analisadas através do método
de detecção de pico. O autor concluiu que, a partir dos resultados obtidos, o procedimento

17
adotado para a identificação forneceu valores confiáveis dos parâmetros modais tanto para
a estrutura de laboratório como para a estrutura da ponte.
A fim de desenvolver um procedimento de monitoramento das condições estruturais de
pontes submetidas a cargas de tráfego, Lee et al. (2002) propuseram um método que
consiste na identificação das propriedades modais do sistema e na localização e
quantificação de possíveis danos presentes na estrutura. A técnica RD (Random
Decrement) é usada para estimar sinais de respostas de vibração livre amortecidas (free-
decay signals, i.e. randomdec signatures) a partir de dados de vibrações ambientes, não
medidas, produzidas por carregamento de tráfego. As freqüências de vibração e as formas
modais são determinadas a partir das funções densidade espectral de potência cruzada dos
sinais de resposta estimados. A identificação do dano é feita, baseada nos parâmetros
modais identificados, usando a técnica de redes neurais. O procedimento proposto foi
avaliado a partir de um estudo experimental num modelo de ponte submetido a
carregamento de veículos e os resultados obtidos foram bastante satisfatórios.
Quanto a excitações naturais produzidas pelo vento, Xu et al. (2002) comentaram que este
tipo de excitação pode ser modelada como um processo aleatório não-estacionário e que,
em geral, as técnicas de identificação de sistemas como a ITD (Ibrahim Time Domain
identification technique), a técnica ARMAV (Auto Regressive Moving Average Vector), a
SSI (Stochastic Subspace Identification), entre outras, não se mostram muito eficientes na
identificação das características de sinais transientes. Os autores apresentaram resultados
obtidos de medições feitas na ponte suspensa Humen, localizada na China. As medições
foram feitas através de um GPS (Global Position System) RTK (Real-Time Kinematic)
instalado na ponte a fim de monitorar, em tempo real, os movimentos da mesma. Três
técnicas de identificação de sistemas foram aplicadas à resposta da ponte submetida à
excitação produzida pelo vento: a técnica WD (Wigner Distribution) nos domínios do
tempo e da freqüência, a FFT (Fast Fourier Transform) no domínio da freqüência e a
técnica ARMAV (Auto Regressive Moving Average Vector). Os parâmetros identificados
foram as freqüências de vibração e o amortecimento da estrutura. Os autores concluíram
ainda que a técnica WD é mais eficiente na análise de sinais transientes.
Chaudhary et al. (2002) utilizaram o conceito de função de transferência juntamente com a
técnica de decomposição em valor singular (SVD – Singular Value Decomposition) a fim

18
de identificar as freqüências de vibração e os valores de razão de amortecimento da ponte
Onneto, localizada no Japão. Medidas de aceleração da ponte, registradas durante quatro
terremotos ocorridos na região, foram usadas na identificação dos parâmetros modais
através de técnicas no domínio da freqüência. Os registros de aceleração do solo durante os
terremotos foram usados como entrada no processo de identificação. A análise foi feita a
fim de avaliar o funcionamento do sistema de isolamento da ponte.
Peeters e Ventura (2003) apresentaram um estudo comparativo de várias técnicas para a
avaliação das propriedades dinâmicas de pontes a partir de dados experimentais. Foi
avaliado também o comportamento desses métodos mediante as respostas obtidas de
diferentes tipos de excitações. Os autores avaliaram métodos no domínio da freqüência tais
como, o método de detecção de pico, o CMIF (Complex Mode Indication Function) e o
RFP (Rational Fraction Polynomial), e métodos no domínio do tempo. Os métodos no
domínio do tempo foram o ITD (Ibrahim Time-domain Method), o 2LS (Two-stage Least
Squares Method) e métodos de identificação de subespaços estocásticos. Os resultados
obtidos pelos métodos RFP e pelos métodos de identificação de subespaços estocásticos
forneceram estimativas mais completas e consistentes dos parâmetros modais.
Cremona et al. (2003) também apresentaram um estudo sobre a identificação das
características dinâmicas de estruturas submetidas à excitação ambiente. Os autores
avaliaram métodos no domínio do tempo, tais como; o método do decremento aleatório
(RD – Random Decrement), o método de subespaço BR (Balanced Realization), ARMA
(Autoregressive Moving Average) e métodos recursivos, quando direcionados ao
monitoramento de pontes.
Recentemente, Amani et al. (2004) apresentaram um método aplicável no caso da
excitação não possuir componentes harmônicas de freqüências constantes. O método
proposto é uma modificação do método de detecção de picos e foi denominado método dos
modos complexos. Os resultados obtidos pelo método em questão, tanto da análise
numérica quanto da experimental, foram comparados a resultados obtidos pelo método
SSI-COV. A partir destes resultados, os autores concluíram que as freqüências foram
estimadas com boa precisão, porém, os coeficientes de amortecimento apresentaram maior
grau de incerteza.

19
2.2 ATUALIZAÇÃO DE MODELOS DE ELEMENTOS FINITOS EM DINÂMICA
ESTRUTURAL
Ao longo dos anos, têm-se desenvolvido modelos computacionais bastante sofisticados a
fim de se analisar sistemas de engenharia, cujo propósito principal é tanto predizer a
resposta do sistema a perturbações como identificar as vantagens que podem ser obtidas
num projeto a partir de modificações na configuração do sistema. Entretanto, tais
predições, quando comparadas a resultados experimentais, apresentam um grau de
correlação não satisfatório para que o modelo possa ser aplicado com segurança.
Segundo Mottershead e Friswell (1993), existem três formas de erro mais comuns que
produzem imprecisões nas predições do modelo:
a) erros na estrutura do modelo – ocorrem quando há incertezas na concepção das
equações governantes. Esses erros ocorrem tipicamente na modelagem de processos
neurofisiológicos e quando há um comportamento fortemente não-linear em certos
sistemas de engenharia;
b) erros nos parâmetros do modelo – incluem a consideração de condições de contorno
impróprias e hipóteses simplificadoras;
c) erros na ordem do modelo – surgem na discretização de sistemas complexos e podem
resultar num modelo de ordem insuficiente.
Além dos erros associados aos modelos numéricos, existem também aqueles presentes nos
resultados experimentais, que surgem devido à influência dos equipamentos utilizados no
ensaio ou ainda, à sensibilidade dos sensores a fatores como temperatura e campos
magnéticos ou acústicos. Podem surgir, ainda, erros no pós-processamento dos dados como
os fenômenos de aliasing e leakage ou a linearização de efeitos não-lineares.
Como já foi mencionado, existem diferenças significativas entre as predições numéricas e
os dados experimentais. A estrutura de um modelo de elementos finitos é um arranjo
discreto de massas, rigidezes e termos de amortecimento e sua ordem é geralmente bem
definida. Assim, o propósito da atualização de modelos dinâmicos de elementos finitos é
modificar os parâmetros do modelo numérico como rigidez, massa e amortecimento, a fim
de se obter uma melhor correlação ou concordância entre os resultados numéricos e os
experimentais.

20
Na construção de modelos de elementos finitos é comum adotar-se hipóteses
simplificadoras. Isto ocorre devido ao fato de que, freqüentemente, existem detalhes que
requerem uma malha mais refinada para se ter uma representação geométrica precisa de
determinada estrutura, ou ainda por não se conhecer ou entender algumas condições de
contorno ou conexões entre componentes como, por exemplo, conexões parafusadas,
soldadas, etc. Um modelo de elementos finitos que será atualizado deve ser construído
observando-se alguns aspectos que não seriam considerados em outros casos. O aspecto
mais importante diz respeito à escolha dos parâmetros a serem atualizados. Estes
parâmetros devem ser escolhidos de tal forma que as predições numéricas como
freqüências e modos de vibração, sejam sensíveis a quaisquer alterações que venham a
ocorrer nos mesmos. Além disso, deve-se avaliar o nível de confiança que deve ser
atribuído às várias características do modelo. Por exemplo, o vão principal de uma viga
pode ser modelado com maior nível de confiança do que as condições de contorno.
Pode-se avaliar, ainda, que juntas e restrições sejam modeladas com menor precisão e,
portanto, são parâmetros candidatos a serem atualizados. Segundo Friswell e Mottershead
(1995), resultados experimentais mostram que as freqüências naturais são afetadas
significativamente por pequenas diferenças na construção de conexões, porém, pode ser
muito difícil encontrar parâmetros da conexão cujas predições numéricas sejam sensíveis.
Se os dados numéricos não forem sensíveis ao parâmetro escolhido, a atualização resultará
em valores incertos. Isto ocorre porque a diferença entre os resultados numéricos e
experimentais seria minimizada a partir das alterações em outros parâmetros mais sensíveis
e, neste caso, o modelo atualizado reproduziria os dados experimentais, mas não teria
significado físico.
Para atualizar modelos usando dados modais existem dois grandes grupos de métodos,
aqueles chamados de métodos diretos e os métodos iterativos. Os métodos diretos por não
requererem iteração, possuem a grande vantagem de eliminar a possibilidade de
divergência e ainda exigir pequeno esforço computacional. Esses métodos apresentam a
característica de reproduzir exatamente os dados experimentais e por isso são considerados
representativos.
Espera-se, porém, que os resultados fornecidos pelo modelo numérico e os experimentais
apresentem diferenças devido a ruídos de medição e erros do modelo. A atualização, por

21
estes métodos, é feita na tentativa de otimizar os parâmetros do modelo e não tem o
compromisso de reproduzir exatamente os ruídos. Sendo assim, se o modelo atualizado
reproduzir dados imprecisos, qualquer análise subseqüente pode ser falha. Pode-se
concluir, portanto, que os métodos diretos ou representativos requerem uma modelagem
mais precisa e dados de alta qualidade.
É possível obter as freqüências naturais de uma estrutura com precisão, o que não acontece
com os modos de vibração. Existe ainda a necessidade de expandir os modos de vibração
para o número de graus de liberdade do modelo de elementos finitos, o que introduz erros
nos dados requeridos pelo algoritmo de atualização. Neste caso, uma alternativa seria
reduzir o modelo para o número de graus de liberdade medidos experimentalmente, porém,
isto leva a um modelo atualizado onde as alterações nas matrizes devidas aos erros de
modelagem ou a danos se espalhem por muitos graus de liberdade o que dificultará, por
exemplo, a detecção de danos nas estruturas.
A grande desvantagem dos métodos diretos ou representativos é que as matrizes de rigidez
ou de massa atualizadas têm pouco ou nenhum significado físico e não podem ser
relacionadas às alterações físicas do modelo original, ou experimental. A conectividade
dos nós não é garantida e as matrizes atualizadas deixam de ser banda (Friswell e
Mottershead, 1995).
Existem vários métodos diretos de atualização baseados no multiplicador de Lagrange
cujas características são as funções a serem minimizadas e as restrições impostas.
Normalmente, estes métodos consideram os dados modais medidos e as matrizes de massa
e de rigidez analíticas ou teóricas. Baruch (1982) descreveu tais métodos como métodos
baseados em referência (reference basis methods) uma vez que um dos três parâmetros (a
matriz de rigidez, de massa ou os dados modais) é considerado exato ou de referência,
enquanto os outros passam a ser atualizados. O autor considera os modos de vibração
medidos como referência. Berman e Nagy (1983) aplicaram um método similar ao de
Baruch (1982), porém, consideraram os dados modais como referência e atualizaram as
matrizes de massa e de rigidez analíticas. A matriz de massa é atualizada de modo a
garantir a ortogonalidade dos modos medidos e a de rigidez é atualizada a partir desta
última.

22
Uma alternativa apresentada por Wei (1990a-b) foi atualizar as matrizes de massa e de
rigidez simultaneamente usando a matriz de autovetores medidos como referência. Neste
caso, as restrições impostas foram a ortogonalidade da matriz de massa, a equação de
movimento e a simetria das matrizes atualizadas.
Datta (2002) apresentou uma visão geral dos métodos diretos de atualização de modelos
ressaltando suas vantagens e limitações.
Quanto aos métodos iterativos, seu objetivo é também melhorar a correlação entre os dados
medidos e aqueles resultantes do modelo analítico (numérico). Esta correlação pode ser
determinada por uma função de penalidade que envolve os autovalores e autovetores. Na
verdade, freqüentemente é usada a soma dos quadrados das diferenças entre os autovalores
medidos e os estimados. As funções de penalidade são, geralmente, funções não-lineares
dos parâmetros e, por isso, requerem um processo iterativo para serem minimizadas. Vale
ressaltar que os métodos iterativos permitem uma ampla escolha dos parâmetros a serem
atualizados, e ainda os dados medidos e os parâmetros iniciais analíticos podem ser
ponderados o que dá ao método robustez e versatilidade.
Segundo Friswell e Mottershead (1995) existem três problemas principais ao relacionar os
dados medidos e suas estimativas analíticas correspondentes. Um destes problemas diz
respeito à correspondência entre as freqüências naturais e os modos de vibração
experimentais e teóricos. Por exemplo, devido a estimativas incorretas dos parâmetros, a
freqüência analítica mais baixa pode ser a de um modo de flexão da estrutura enquanto que
a freqüência correspondente medida experimentalmente pode ser de um modo de torção.
Para solucionar este problema aconselha-se utilizar o índice MAC (Modal Assurance
Criterion) (Allemang e Brown, 1982) que mede a correlação entre dois modos de vibração.
O segundo problema está relacionado à escala dos modos medidos e analíticos. Neste caso,
pode-se escalar os modos medidos em relação aos analíticos multiplicando-os pelo fator de
escala modal MSF (Modal Scale Factor) proposto por Allemang e Brown (1982).
O terceiro problema diz respeito ao amortecimento. Quando este não estiver presente no
modelo de elementos finitos, apenas as freqüências naturais estarão incluídas nas respostas
experimentais medidas e analíticas. No caso em que o amortecimento esteja presente no

23
modelo, as freqüências naturais e as razões de amortecimento estarão incluídas nas
respostas.
Uma questão que deve ser comentada é como escolher o melhor método para ajustar um
modelo analítico de modo que este reproduza, o mais próximo possível, os dados
experimentais. Neste sentido, vários trabalhos têm sido desenvolvidos. Baruch (1978)
descreveu um método que minimiza uma norma ponderada do erro entre as matrizes de
massa ou de rigidez analíticas e estimadas, sujeitas à restrição de que o sistema estimado
tem as mesmas freqüências naturais e modos de vibração que os medidos na estrutura real.
Os ruídos são desconsiderados o que implica ser necessário uma grande variação dos
parâmetros para se obter as freqüências naturais e modos de vibração exatos.
Collins et al. (1974) consideraram os erros ou ruídos presentes nas medições (freqüências e
modos) e nas estimativas analíticas dos parâmetros. Os parâmetros eram atualizados de
modo a obter uma variância mínima. Segundo os autores, este era um problema
equivalente à solução de mínimos quadrados com matrizes de ponderação particulares.
Friswell (1989) abordou este mesmo método, porém, considerou que os ruídos
provenientes das medições e das estimativas dos parâmetros eram dependentes. O autor
mostrou que havia uma convergência mais rápida para os resultados corretos.
Nalitolela et al. (1992) apresentou uma técnica para atualizar ou ajustar um modelo de
elementos finitos. Neste método tanto a estrutura quanto o modelo são perturbados
adicionando-se massa ou rigidez em suas coordenadas. Os autovalores medidos antes e
depois da adição de massa ou de rigidez são usados na atualização dos parâmetros por
meio de análise de sensibilidade. Este método foi utilizado neste trabalho e será descrito
com mais detalhes posteriormente.
Alguns autores desenvolveram trabalhos a respeito da atualização de parâmetros das juntas
e restrições ou condições de contorno. Nobari et al. (1993) atualizou modelos de juntas a
partir das freqüências naturais e modos de vibração medidos usando parâmetros de rigidez
e de massa. Os autores recomendaram que as juntas muito rígidas fossem desconsideradas
no processo de atualização.

24
Baruch e Boka (1993) representaram as condições de contorno por molas e identificaram
sua rigidez. Os problemas de mau condicionamento no processo de identificação ou
atualização não foram comentados explicitamente, embora a ausência da sensibilidade das
medições (freqüências e modos) a mudanças nas rigidezes da mola tenha sido
demonstrada.
Kim et al. (1989) usaram dados experimentais incompletos e um modelo de elementos
finitos condensado para atualizar as rigidezes e coeficientes de amortecimento de molas.
Mottershead e Shao (1993) usaram um procedimento de atualização em duas etapas a fim
de reduzir os efeitos do erro de discretização de uma junta modelada como uma mola
discreta. Mottershead et al. (1996) estudaram o uso de parâmetros geométricos para a
atualização de modelos de elementos finitos de juntas por meio de análise de sensibilidade
dos autovalores. Os autores investigaram ainda o quanto de significado físico podia ser
atribuído aos parâmetros atualizados.
Prells e Friswell (1999) estenderam o método ORM – Output Residual Method, que
permite atualizar modelos de elementos finitos no domínio da freqüência para estimar,
além dos parâmetros desconhecidos, a excitação desconhecida. No procedimento proposto,
também foi utilizado o método chamado VPM – Variable Projection Method com o
objetivo de separar a estimação dos parâmetros da estimação da excitação.
Wu e Li (2004) avaliaram métodos de atualização de modelos de elementos finitos
baseados na análise de sensibilidade dos autovalores e autovetores por meio da aplicação
destes a uma torre de comunicação de 310,10m de altura, chamada Nanjing TV Tower,
localizada em Nanjing, China. Diversas técnicas de estimação dos parâmetros baseadas no
método da pseudo-inversa, mínimos quadrados ponderados e estimação Bayesiana foram
utilizadas para identificar o mais adequado e efetivo método para a atualização do modelo
de elementos finitos de estruturas esbeltas. A partir dos resultados obtidos, os autores
concluíram que o procedimento de atualização baseado em mínimos quadrados ponderados
se mostrou mais eficiente para o caso estudado.
Sinha et al. (2004) avaliaram a capacidade de predição dos modelos atualizados no caso de
alguma alteração estrutural acontecer, a fim de garantir a confiança nesse modelo. Os
autores aplicaram o método baseado em função de penalidade para atualizar um modelo de

25
elementos finitos de um tubo perfurado, o qual foi submetido a ensaios de vibração a fim
de se obter suas freqüências naturais. Os autores mostraram, ainda, que o modelo
atualizado permitiu prever as freqüências de vibração do tubo quando este estivesse
submerso em água.
Cottin e Reetz (2004) estudaram quantas freqüências naturais de um sistema devem ser
medidas. Os autores avaliaram, ainda, a precisão com que as freqüências devem ser
medidas para obter estimativas confiáveis dos parâmetros do modelo. Nesse sentido,
Modak et al. (2005) realizaram um estudo sobre o subseqüente uso de um modelo
atualizado para predizer os efeitos de modificações estruturais. Nesse caso, os modelos
atualizados foram obtidos por um método baseado em otimização restringida e um método
iterativo baseado em dados modais. Os procedimentos e os modelos atualizados foram
testados a partir de exemplos numéricos e experimentais. A partir dos resultados obtidos os
autores concluíram que o método baseado em otimização restringida forneceu modelos
atualizados cujas predições são mais confiáveis.
Os dados medidos experimentalmente contêm uma quantidade limitada de informações e
para evitar problemas de mau condicionamento, o número de parâmetros a serem
atualizados deve ser pequeno. Tais parâmetros devem ser escolhidos com o objetivo de
corrigir determinadas incertezas do modelo e, além disso, os dados medidos (freqüências e
modos) devem ser sensíveis a estes parâmetros. Portanto, a escolha dos parâmetros é um
passo importante na atualização de modelos. Zapico et al. (2003) discutiram este problema
considerando a atualização de um modelo experimental reduzido de uma ponte. Os autores
atualizaram o modelo ensaiando a estrutura com diferentes configurações. Isto fazia com
que cada configuração tivesse um número pequeno de parâmetros a serem atualizados
resultando em um conjunto de problemas bem condicionado.
Friswell e Mottershead (1995) discutiram também a importância da escolha dos parâmetros
no processo de atualização de modelos considerando, não só o problema de mau
condicionamento, como também do significado físico dos parâmetros entre outros.
O fato da atualização de modelos por meio de métodos iterativos baseados nas
características dinâmicas da estrutura proporcionar a determinação de parâmetros
desconhecidos como rigidez, massa ou amortecimento, torna esses métodos ferramentas de

26
grande importância na avaliação das condições de serviço ou do comportamento de
estruturas em geral. Brownjohn et al. (2001) descreveram um método de atualização de
modelos de elementos finitos baseado em análise de sensibilidade e sua aplicação na
avaliação das condições estruturais, em particular, de pontes. Os autores discutiram, ainda,
considerações específicas sobre a construção de um modelo de elementos finitos adequado
para a atualização e sobre o procedimento de atualização em si para que este seja eficiente
na avaliação. Nesse trabalho, também foi investigada a eficiência do método na
quantificação de danos.
Sinha et al. (2002) apresentaram um procedimento para modelar fissuras em vigas
submetidas à vibração transversal, que considera os elementos de viga de Euler-Bernoulli
com pequenas modificações na flexibilidade local na vizinhança das fissuras. O modelo da
fissura é, então, utilizado para estimar o tamanho e a localização das fissuras por meio da
minimização das diferenças entre as freqüências medidas e aquelas resultantes do modelo
via atualização. Os autores ressaltam, ainda, que o modelo simplificado da fissura permite
que a localização e a extensão do dano sejam estimadas diretamente. O método foi
aplicado a três exemplos experimentais nos quais foi verificado uma maior eficiência na
estimação da localização das fissuras. Quanto à aplicação da técnica a problemas reais, os
autores comentam que a localização precisa de um dano é mais importante para uma
manutenção preventiva do que saber exatamente sua extensão ou magnitude.
Teughels et al. (2002) e Teughels e De Roeck (2004) abordaram a atualização de modelos
de elementos finitos com uma técnica de identificação global de danos em estruturas
baseados no fato de que os parâmetros modais, freqüências e modos de vibração, são
afetados pelos danos estruturais. O método utilizado também é baseado na análise de
sensibilidade e procura minimizar diferenças nas freqüências e modos de vibração obtidos
a partir de vibração ambiente. Neste artigo foi proposto ainda o uso de funções de dano a
fim de diminuir o número de parâmetros a serem atualizados e evitar o problema de mau
condicionamento da matriz de sensibilidade. O procedimento foi validado por meio de uma
aplicação a uma ponte de concreto protendido e o dano foi identificado pela atualização
dos módulos de elasticidade longitudinal e transversal.

27
3. MODELOS DE SISTEMAS ESTRUTURAIS
3.1 INTRODUÇÃO
Na identificação de sistemas, inicialmente, adota-se um modelo para representar o sistema,
sendo, em seguida, atribuídos valores aos parâmetros do modelo de modo que este se
ajuste aos dados experimentais. Neste capítulo serão apresentados alguns modelos
estruturais que serão utilizados nos métodos de identificação descritos no capítulo seguinte.
Para se construir um modelo surge uma questão fundamental sobre se o sistema de
interesse pode ser excitado (controlado) e/ou observado. Para responder tal pergunta
precisa-se entender a teoria de controlabilidade e observabilidade que também será
apresentada neste capítulo.
3.2 MODELO DE ELEMENTOS FINITOS
O movimento de um sistema dinâmico pode ser descrito pelo seguinte sistema de equações
diferenciais:
(t)(t)(t)(t)(t) uBfqKqCqM 22 ==++ &&& (3.1)
onde:
M, C2 e K ∈ 2 2 x n nR : matrizes de massa, de amortecimento e de rigidez global,
respectivamente;
2 x 1(t), (t) e (t) n∈q q q& && R : vetores de deslocamento, velocidade e aceleração, contínuos no
tempo, respectivamente;
2 x 1(t) n∈f R : força de excitação que pode ser decomposta na matriz 2 x 2
n m∈B R , que
descreve a posição em que a excitação é aplicada, e no vetor x 1(t) m∈u R , que descreve as
m entradas no tempo contínuo t;
n2: número de graus de liberdade do sistema.
A equação (3.1) é obtida como uma aproximação por meio de elementos finitos de um
sistema com n2 graus de liberdade onde a estrutura é dividida em elementos. As matrizes

28
de rigidez e de massa são obtidas a partir da geometria e das propriedades do material dos
elementos. Quanto à matriz de amortecimento C2, sua obtenção será discutida mais
adiante.
Apesar do modelo de elementos finitos (3.1) ser uma boa representação do comportamento
dinâmico de estruturas, este apresenta alguns inconvenientes quando se trata de
modelagem a partir de dados experimentais. Para se obter um modelo (3.1) preciso é
necessário medir todos os deslocamentos e rotações, definidos como graus de liberdade do
modelo, o que não é possível. Além disso, a equação (3.1) é contínua no tempo, enquanto
que os dados medidos são tomados em instantes de tempo discretos. Um outro ponto é o
fato de que existem outras fontes de excitação desconhecidas além de f(t) e de que erros de
medição ocorrem em experimentos. Tais erros não são levados em consideração no modelo
representado por (3.1). Dessa forma, o objetivo deste capítulo não é obter um modelo de
elementos finitos e sim tomá-lo como ponto de partida para desenvolver modelos mais
adequados ao contexto da modelagem experimental.
3.3 MODELO NO ESPAÇO DE ESTADO
3.3.1 Modelo contínuo no tempo
A partir das definições (3.2) pode-se transformar o sistema de equações diferenciais (3.1),
de 2ª ordem, para um sistema de 1ª ordem na forma da equação de estado (3.3):
=)t(
)t()t(
q
qx
&
C 12
2n
− −
= − −
1
0 IA
M K M C (3.2)
C2
−
=
1
0B
M B
C C(t) (t) (t)= +x A x B u& (3.3)

29
onde x C n n∈A R é a matriz de estado ( 22n n= ), x
C n m∈B R é a matriz de entrada e
x 1(t) n∈x R é o vetor de estado cujo número de elementos é igual ao número de variáveis
independentes necessárias para descrever o estado de um sistema, neste caso, (t) e )t( qq & .
Na prática, se a resposta de um sistema dinâmico é medida por sensores, tais como
acelerômetros ou transdutores de velocidade ou deslocamento, dispostos em l pontos da
estrutura, a equação de observação pode ser escrita como:
a v d(t) (t) (t) (t)y = C q +C q +C q&& & (3.4)
onde x 1(t) l∈y R é o vetor de saídas e 2 x d v a, e l n∈C C C R são as matrizes de saída para
deslocamento, velocidade e aceleração, respectivamente.
Resolvendo a equação (3.1) para )t(q&& e substituindo em (3.4), tem-se:
a 2 2 v d(t) (t) (t) (t) (t) (t)-1y = C M [B u -C q - Kq ]+C q +C q& &
ou:
C C(t) (t) (t)y = C x + D u (3.5)
onde C d a v a[= -1 -12C C -C M K C -C M C ] e C a 2
-1D = C M B .
Na equação (3.5), x C
l n∈C R é a matriz de saída e x C
l m∈D R é a matriz de transmissão
direta. Quando não são usados acelerômetros, a matriz CD desaparece da equação (3.5). O
subscrito c significa contínuo no tempo.
Assim, o modelo de espaço de estado contínuo no tempo é dado pela combinação das
equações (3.3) e (3.5).

30
C C(t) (t) (t)= +x A x B u&
(3.6)
C C(t) (t) (t)= +y C x D u
A equação de estado pode ser usada para calcular a resposta y(t) da estrutura, dada a
entrada u(t). A ordem do modelo n é definida como a dimensão do vetor de estado e este
contém os deslocamentos e velocidades correspondentes a todos os graus de liberdade.
Pode-se definir um novo vetor de estado como sendo:
)t()t( Tzx = (3.7)
onde x Cn n∈T é uma matriz quadrada não-singular complexa. Esta definição é chamada de
transformação de similaridade. Substituindo (3.7) em (3.6) tem-se:
1 1C C(t) (t) (t)− −= +z T A Tz T B u&
(3.8)
C C(t) (t) (t)= +y C Tz D u
É importante observar que as matrizes ) , , ,( CCCC1 DTCBTTAT 1−− descrevem a mesma
relação entre a entrada e a saída das matrizes originais. Portanto, pode-se concluir que
existe um número infinito de representações no espaço de estado que descrevem a mesma
relação entre a entrada e a saída. Entretanto, diferentemente do vetor de estado x(t), o novo
vetor de estado z(t) não tem o significado físico das velocidades e dos deslocamentos.
3.3.2 Modelo discreto no tempo
Quando se realizam testes de vibração em estruturas, os dados de saída, ou a resposta
destas, são obtidos em instantes de tempo discretos. Daí, torna-se necessário desenvolver
modelos discretos a fim de melhor representarem os dados experimentais (observados).

31
Considere-se o sistema representado pelo modelo contínuo (3.6). A fim de encontrar a
solução para a equação de estado (3.3), dados o estado inicial x(0) e a entrada u(t),
considere-se a seguinte propriedade:
C C Ct t tC C
de e e
dt= =A A AA A (3.9)
Pré-multiplicando ambos os lados da equação (3.3) por Cte−A tem-se;
)t(e)t(e)t(e Ct
Ctt CCC uBxAx AAA −−− =−&
ou ainda:
C Ct tC
d(e (t)) e (t)
dt− −=A Ax B u (3.10)
(aplicando a derivada do produto e a propriedade (3.9) em (3.10) obtém-se a expressão
anterior).
Integrando-se, de 0 a t, a equação (3.10) tem-se:
C C
ttτ τ
Cτ 00
e ( ) e ( )dτ τ τ− −
== ⇒∫
A Ax B u
C C
tt τ
C
0
e (t)-e (0) e ( )dτ τ− −= ∫A A0x x B u (3.11)
Considerando que C Ct t-1(e ) e− =A A e I0 =e (Chen, 1999), chega-se à solução da equação
de estado (3.3):
C C
tt (t-τ)
C
0
(t) e (0) e ( )dτ τ= + ∫A Ax x B u (3.12)
Substituindo a equação (3.12) em (3.5) obtém-se a solução da equação de observação:

32
C C
tt (t-τ)
C C C C
0
(t) e (0) e ( )d (t)τ τ= + +∫A Ay C x C B u D u (3.13)
A equação (3.12) descreve a variação do estado x(t) com o tempo contínuo em relação à
condição inicial x(0) e a entrada u(t). A evolução de x(t) em intervalos igualmente
espaçados de tempo t pode ser obtida pela representação discreta de (3.3).
Para desenvolver o modelo discreto considere-se que u(t) varia em instantes de tempo
discretos. Portanto, temos;
kt)(k(t) uuu =∆= , K2 1, ,0k = e t1)(kttk ∆+≤≤∆ (3.14)
Para esta entrada, a solução de (3.3) continua sendo dada por (3.12). Calculando (3.12)
para tkt ∆= e t1)(kt ∆+= , tem-se:
C C
k tk t (k t- )
k C
0
(k t) e (0) e ( ) dτ τ τ∆
∆ ∆= ∆ = + ∫A Ax x x B u (3.15)
C C
(k 1) t(k 1) t ((k 1) t- )
k 1 C
0
((k 1) t) e (0) e ( ) dτ τ τ+ ∆
+ ∆ + ∆
+ = + ∆ = + ∫A Ax x x B u (3.16)
Reescrevendo (3.16) tem-se:
C C C C
(k 1) tk tt k t (k t- ) (k t t- )
k 1 C C
0 k t
e e (0) e ( ) d e ( ) dτ ττ τ τ τ+ ∆∆
∆ ∆ ∆ ∆ +∆
+
∆
= + +
∫ ∫
A A A Ax x B u B u (3.17)
Introduzindo uma nova variável τ−∆+∆=α ttk e substituindo (3.14) e (3.15), chega-se à
seguinte expressão:
C C
tt
k 1 k C k
0
e e dα α∆
∆
+
= +
∫
A Ax x B u (3.18)
Portanto, se uma entrada varia apenas em instantes de tempo discretos tk∆ e considerando
as seguintes definições:

33
C te ∆= AA
C
t
C
0
e dα α∆
= ∫
AB B (3.19)
C C e = =C C D D
chega-se ao modelo de espaço de estado discreto:
kk1k BuAxx +=+
(3.20)
kkk DuCxy +=
A equação (3.20) constitui, portanto, o modelo de espaço de estado discreto no tempo de
um sistema dinâmico. Uma vez que os dados experimentais são discretos, este modelo
forma a base para a identificação de sistemas dinâmicos lineares e invariantes no tempo.
As matrizes A, B, C e D na equação (3.20) descrevem a relação entre a entrada e a saída
através de um vetor de estado kx discreto no tempo.
Se a matriz A não for singular, a matriz B pode ser calculada pela seguinte expressão:
1C C( )−= −B A A I B (3.21)
A equação (3.21) é fácil de ser demonstrada substituindo o termo t∆cAe pela sua forma em
série de Taylor (Chen, 1999).
KK +∆
+∆
+∆=τ
+++∫
∆2C
3
C
2t
0
22CC !3
t
!2
tt d
!2
ττ AAIAAI
( )C
2 3t1 2 3 1
C C C C C
t tt e
2! 3!∆− − ∆ ∆
∆ + + + + − = −
AA A A A I I A IK

34
3.4 MODELOS ESTOCÁSTICOS DE ESPAÇO DE ESTADO
Ao obter-se o modelo de espaço de estado discreto, adequado no contexto da modelagem
experimental, superaram-se dois dos inconvenientes apresentados anteriormente pelo
modelo de elementos finitos: o número de graus de liberdade a ser considerado e a resposta
da estrutura obtida em intervalos discretos de tempo. Porém, precisa-se introduzir termos
estocásticos, ou ruídos, no modelo, que considerem ou representem os erros presentes nos
dados de medições reais.
Até agora, tinha-se considerado que o sistema era regido apenas por uma entrada
determinística uk, porém, ao introduzir os termos de ruído no modelo (3.20) obtém-se o
seguinte modelo determinístico-estocástico:
kkk1k ϖϖϖϖ++=+ BuAxx
(3.22)
kkkk υυυυ++= DuCxy
onde x 1k
n∈Rϖϖϖϖ é o ruído devido a perturbações e imprecisões nos parâmetros iniciais do
modelo, e x 1k
l∈Rυυυυ é o ruído de medição devido à imprecisão dos sensores. Tais ruídos
não podem ser medidos, mas são considerados com média zero, brancos e com matrizes de
covariância definidas por:
{ }p T Tq q pqT
p
E δ
=
Q S
S R
ϖϖϖϖϖ υϖ υϖ υϖ υ
υυυυ (3.23)
onde [ ]•E significa o valor esperado, pqδ é o delta de Kronecker ( 1δpq = , se qp = e
0δpq = , se qp ≠ ), p e q são instantes de tempo arbitrários.
Como já foi comentado anteriormente, o interesse deste trabalho é estudar sistemas
submetidos a excitações ambientes onde a entrada ku não pode ser medida e as únicas
informações disponíveis são as respostas da estrutura a tal excitação.

35
Neste caso, do ponto de vista da identificação de sistemas, devido à falta de informação
sobre a entrada, não é possível fazer distinção entre os termos em ku e os termos de ruído
kϖϖϖϖ e kυυυυ nas equações (3.22) (Peeters, 2000). Portanto, é de interesse um modelo
puramente estocástico representado pelas equações abaixo:
kk1k ϖϖϖϖ+=+ Axx (3.24)
kkk υυυυ+= Cxy
com 0== ]E[]E[ kk υυυυϖϖϖϖ e com matrizes de covariância dadas por (3.23).
No modelo (3.24) a entrada é modelada implicitamente pelos termos de ruído. É
importante ressaltar que as hipóteses de ruído branco não podem ser desconsideradas, pois
são necessárias para provar os métodos de identificação de sistemas descritos no capítulo
seguinte. Se, por exemplo, a entrada apresentar, além do ruído branco, algumas
componentes da freqüência dominante, estas componentes não poderão ser separadas das
autofreqüências do sistema e aparecerão como falsos (autovalores) pólos da matriz de
estado A.
Propriedades dos sistemas estocásticos
O processo estocástico é considerado estacionário com média zero, 0x =]E[ k , onde a
matriz de covariância de estado, Σ , independe do tempo, Σxx =]E[ Tkk , e os termos kϖϖϖϖ e
kυυυυ são independentes do estado real 0x =]E[ Tkkϖϖϖϖ , 0x =]E[ T
kk υυυυ .
As matrizes de covariância da saída ll x i R∈R são definidas como:
]E[ Tkiki yyR +≡ (3.25)
onde i é um retardo (time lag) arbitrário.
A matriz de covariância x n l∈G R (next state-output covariance matrix) é dada por:

36
]E[ Tk1k yxG +≡ (3.26)
A partir das definições (3.25) e (3.26), as seguintes propriedades podem ser deduzidas:
QAA += TΣΣΣΣΣΣΣΣ
T0 = +R CΣC R (3.27)
SCAG += TΣΣΣΣ
GCAR 1-ii =
(3.28) TT1-iT
i- )( CAGR =
A propriedade (3.28) é muito importante, pois constitui a solução do problema de
identificação, isto é, a seqüência de covariâncias das saídas pode ser estimada a partir dos
dados medidos, logo, sendo possível decompor tais seqüências conforme (3.28), as
matrizes de estado (A e C) são encontradas.
3.5 CONTROLABILIDADE E OBSERVABILIDADE
Saber se um sistema pode ser controlado e/ou observado é uma questão que surge tanto em
investigações práticas como teóricas nos campos de controle e de identificação de
sistemas. Considere-se o modelo discreto no espaço de estado (3.29) e (3.30):
kk1k BuAxx +=+ (3.29)
kkk DuCxy += (3.30)
As matrizes A, B, C e D representam a operação interna de um sistema linear e são usadas
para determinar a resposta do sistema submetido a uma entrada qualquer. A solução para a
representação discreta no tempo ft p t= ∆ , onde t∆ é o período de amostragem, é dada
por:
-1
1
( ) (0) ( )p
p i
i
p p i=
= + −∑x A x A Bu (3.31)

37
ou, numa forma mais compacta:
1
( 1)
( 2)
( ) (0) ( 3)
(0)
p p
p
p
p p−
− −
= + −
2
u
u
x A x B AB A B A B u
u
L
M
(3.32)
onde 0(0) ( )t=x x é o estado inicial em 0t t= .
3.5.1 Controlabilidade no domínio do tempo discreto
O estado inicial de um sistema x(k) é dito controlável se este estado pode ser atingido, a
partir de qualquer estado inicial do sistema, num intervalo de tempo finito por alguma ação
de controle.
Para determinar a completa controlabilidade no tempo k, é suficiente e necessário
determinar se o estado zero, ao invés de todos os estados iniciais, pode ser transferido para
todos os estados finais. Reescrevendo a equação (3.32), a qual é equivalente a começar do
estado zero e ir até o estado final ˆ ( ) ( ) (0)pp p= −x x A x , tem-se:
ˆ ( ) ( ) (0)pp p= −x x A x
1
( 1)
( 2)
ˆ ( ) (0) (0)( 3)
(0)
p p p
p
p
p p−
− −
= + − ⇒−
2
u
u
x A x B AB A B A B A xu
u
L
M
1
( 1)
( 2)
ˆ ( ) ( 3)
(0)
p
p
p
p p−
− −
= −
2
u
u
x B AB A B A B u
u
L
M
(3.33)

38
Portanto, se o sistema pode ir de um estado zero para qualquer estado ˆ ( )px , então este
pode ir de qualquer estado (0)x para qualquer ( )px . Observando a equação (3.33),
verifica-se que a matriz 1p− 2B AB A B A BL é importante na determinação da
controlabilidade do sistema.
Teorema 3.1:
O sistema dinâmico constante, linear, discreto no tempo, de dimensão finita,
kk1k BuAxx +=+ de ordem n, é controlável se, e somente se, a matriz de controlabilidade
pmn
p
x R∈Q tiver rank n, onde:
1p
p
− = 2Q B AB A B A BL (3.34)
Prova do Teorema 3.1:
Aplicando-se decomposição em valores singulares (SVD – Singular Value Decomposition)
à matriz pQ tem-se:
[ ]T
T0 T
0
k k
p k
= =
kΣ 0 Σ 0 SQ R S R R
0 0 0 0 S (3.35)
onde Tn=R R I , pmISS =T e 1 2diag[ , , , ]k kσ σ σ=Σ K com 1 2 0kσ σ σ≥ ≥ ≥ >K . As
matrizes nI e pmI são matrizes identidades de ordem n e pm, respectivamente. Como
Tn=R R I e pmISS =T tem-se que T
k k k=R R I e Tk k k=S S I . Nesta decomposição, é
considerado que o número de valores singulares não nulos k é menor do que a ordem do
sistema n.
Como R é uma matriz não singular, pode-se pré-multiplicar a equação (3.33) por TR .
Dessa forma, obtém-se:

39
T T 1
( 1)
( 2)
ˆ ( ) ( 3)
(0)
p
p
p
p p−
− −
= =−
2
u
u
R x R B AB A B A B u
u
L
M
T T
( 1)
( 2)
( 3)
(0)
k
p
p
p
− − = −
u
uΣ 0
R R S u0 0
u
M
(3.36)
A equação (3.36) pode ser reescrita na seguinte forma:
T T T
T T0 0
ˆ ( )
ˆ ( )kk k k k p
p
p
p
= =
Σ 0R x S Σ S uu
0 0R x S 0 (3.37)
A partir desta equação, verifica-se que a parte de baixo do vetor no lado esquerdo da
equação não pode ser atingida por nenhum vetor de força pu , a partir do estado zero. Isto
implica que apenas os vetores ˆ ( )px da componente T0 ˆ p =R x 0 podem ser atingidos a partir
do estado zero, i.e., o estado não é controlável.
Para tornar o sistema controlável, é necessário e suficiente eliminar a porção nula do lado
direito da equação (3.37). Para isto, aumenta-se o número de valores singulares não nulos k
até k n= , onde n é a ordem do sistema. Se k n= ,
[ ]T
T T
T0
ˆ ( ) n
n p n n pp
= =
SR x Σ 0 u Σ S u
S (3.38)
Como Σ e nS têm ordem n, o vetor de controle pu pode ser escrito como;
T 1 T T Tˆ( ) ( ) [ ( ) ]p n n n np∗ − ∗= + − =u S Σ R x I S S α
1 T Tˆ ( ) [ ]n n n np−= + −S Σ R x I S S α (3.39)

40
onde ( )∗
• significa a pseudo-inversa de uma matriz e 1 x R nm∈α é um vetor arbitrário.
Note-se que T T 1( ) ( )n n n n n
∗ −= =S S S S S já que Tn n n=S S I .
A equação (3.39) indica que, para qualquer vetor desejado ˆ ( )px e um vetor arbitrárioα ,
existe uma entrada pu que irá transferir o estado zero para o estado ˆ ( )px . Uma vez que α
é um vetor arbitrário, o vetor pu não é único, o que significa que existe mais de uma
entrada pu que pode transferir o estado zero para o estado desejado ˆ ( )px .
Pode-se concluir então que, um sistema dinâmico linear, constante, discreto no tempo, com
dimensão finita é controlável se e somente se sua matriz de controlabilidade tem rank igual
a ordem do sistema n.
Teorema 3.2:
Considere-se um vetor ( )ku e o sistema kk1k buAxx +=+ onde b é um vetor coluna.
Considere-se que a matriz constante A tem autovalores distintos iλ . O sistema é
controlável se, e somente se, o vetor constante bΨb 1−=l não tem elementos nulos, onde
Ψ é a matriz modal com autovetores de A como colunas.
Prova:
Considere-se a matriz de controlabilidade:
-1
1 -1 1
1 1 -1 1
1 1 1 1 -1 1
p
p
p
p
p
− −
− − −
− − − − −
=
=
=
=
Q b Αb A b
b ΑΨΨ b A ΨΨ b
ΨΨ b ΑΨΨ b A ΨΨ b
Ψ Ψ b Ψ ΑΨΨ b Ψ A ΨΨ b
K
K
K
K
(3.40)
Note que:

41
lbbΨ =−1
11 2diag[ , ]nλ λ λ− = =Ψ AΨ ΛK
1 2 1 1 2 2 2 21 2[ ][ ] diag[ , ]nλ λ λ− − −= = =Ψ A Ψ Ψ AΨ Ψ AΨ ΛK (3.41)
M
1 1 11 2[ ] [ ] diag[ , ]p p p p p
nλ λ λ− − − = =Ψ A Ψ Ψ AΨ Ψ AΨ ΛK K
Substituindo (3.41) em (3.40) tem-se:
[ ]lp
llp bΛΛbbΨQ 1−= K
11 1 1 1 1
12 2 2 2 2
1
p
p
p
n n n n n
b b b
b b b
b b b
λ λ
λ λ
λ λ
−
−
−
=
Ψ
K
K
M M O M
K
(3.42)
onde
=
n
l
b
b
b
M2
1
b .
Se algum elemento ib do vetor lb for igual a zero, por exemplo, 1 0b = , então a matriz de
controlabilidade passa a ser escrita como:
1
2 2 2 2 2
1
0 0 0p
p
p
n n n n n
b b b
b b b
λ λ
λ λ
−
−
=
Q Ψ
K
K
M M O M
K
(3.43)
A matriz 1
2 2 2 2 2
1
0 0 0p
p
n n n n n
b b b
b b b
λ λ
λ λ
−
−
K
K
M M O M
K
tem ordem menor que n, pois tem apenas n-1 linhas
diferentes de zero, logo, tal sistema não é controlável, pois todos os elementos ib para
1,2i n= K deveriam ser diferentes de zero. Em estruturas, 1 0b = significa que a força u

42
foi aplicada num nodo de um modo correspondente ao autovalor 1λ , o que implica que,
neste caso, o modo não é controlável.
3.5.2 Observabilidade no domínio do tempo discreto
Um estado ( )px num dado instante de tempo p de um sistema é observável se o
conhecimento da entrada u(k) e da saída y(k) sobre um intervalo finito de tempo 0 k p< ≤
determina completamente o estado ( )px .
Para determinar a observabilidade completa é necessário e suficiente verificar se o estado
inicial x(0) do sistema com entrada nula, i.e., ( ) 0k =u , pode ser completamente
determinado a partir da saída y(k) ( 0,1,2 1)k p= −K , porque o conhecimento do estado
inicial x(0) e da entrada u(k) ( 0,1,2 1)k p= −K permite o cálculo do estado x(p-1) da
equação (3.32).
Teorema 3.3:
O sistema dinâmico constante, linear, com dimensão finita, discreto no tempo
kk1k BuAxx +=+ de ordem n com a equação de observação kkk DuCxy += de ordem l é
observável se, e somente se, a matriz bloco de observabilidade npl
p
x R∈P tiver rank n,
onde:
2
1
p
p−
=
C
CA
P CA
CA
M
(3.44)
Prova:
Para provar o teorema 3.3 é suficiente verificar se o estado inicial x(0) pode ser
reconstruído a partir do conhecimento de y(k) para 0,1, 2 1k p= −K , no caso onde u(k) =0.
Das equações (3.29) e (3.30) com u(k) = 0, tem-se:

43
1
(0) (0)
(1) (1) (0)
( 1) ( 1) (0)pp p −
=
= =
− = − =
y Cx
y Cx CAx
y Cx CA x
M (3.45)
Esta equação pode ser reescrita como:
(0)
(1)(0)
( 1)
p p
p
= =
−
y
yY P x
y
M (3.46)
onde uma única solução existe se, e somente se, pP tiver rank n. A única solução deveria
ser (0) p p
∗=x P Y onde (*) significa pseudo-inversa.
Teorema 3.4:
Considere-se o sistema discreto
1k k k+ = +x Ax Bu (3.47)
e um vetor de observação ( ), 1, 2,3k k =y K da equação de observação kkk ducxy +=
onde c e d são vetores linhas constantes, indicando que o sistema tem um único sensor de
saída. Considere-se que a matriz A tem distintos autovalores iλ . O sistema é observável se
e somente se o vetor constante cΨc =l tem elementos não nulos, onde Ψ é a matriz
modal com autovetores de A como colunas.
Prova:
A prova deste teorema é equivalente a do Teorema 3.2. Fisicamente, este teorema implica
que se existe apenas um sensor e este está localizado num nodo de um modo, então, o
modo se torna “não observável”.

44
Transformando o sistema:
1k k k+ = +x Ax Bu
(3.48) ( ) ( ) ( )k k k= +y cx du
em:
klll kkuBΛxx +=
+1
(3.49)
kklk duxcy +=
em coordenadas modais onde: lΨxx = , BΨB 1−=l , cΨc =l , 1 2diag[ , ]nλ λ λ=Λ K .
Se algum elemento ic do vetor lc for igual a zero, então, a coordenada 1l
x não é
observável no sentido de que a resposta [ ]
=
nl
l
l
n
x
x
x
cckM
K 2
1
20)(y não contém qualquer
contribuição da coordenada modal1l
x .

45
4. ANÁLISE MODAL UTILIZANDO APENAS A RESPOSTA DO SISTEMA
(OUTPUT-ONLY MODAL ANALYSIS)
4.1 INTRODUÇÃO
Dá-se o nome de identificação de sistemas ao processo de desenvolver ou melhorar uma
representação matemática ou o modelo de um sistema físico a partir de dados
experimentais. Como já foi apresentado, existem vários métodos de identificação, entre
estes, os métodos estocásticos.
No contexto da engenharia civil, a identificação estaria relacionada à estimação dos
parâmetros modais de estruturas como pontes, torres ou edifícios, que seriam os sistemas.
Nos modelos estocásticos, a entrada ou excitação é modelada implicitamente por termos de
ruído branco.
Neste capítulo serão descritos três métodos de identificação estocástica sendo dois destes
formulados no domínio do tempo e um no domínio da freqüência. Tais métodos foram
escolhidos uma vez que tratam da identificação de sistemas submetidos à excitação
ambiente, ou melhor, por serem métodos que requerem apenas informações sobre a
resposta da estrutura. Os métodos no domínio do tempo são métodos paramétricos e
partem de um modelo de espaço de estado. Dentre os vários métodos estudados, optou-se
por aplicar o método estocástico de identificação baseado nas covariâncias das respostas de
referência (Reference-Based Covariance-Driven Stochastic Realization), o método baseado
apenas nos dados de saída (Reference-Based Data-Driven Stochastic Subspace – SSI-
DATA/ref) (Peeters e De Roeck 1999 e Peeters, 2000). Já o método no domínio da
freqüência é o método de detecção de pico, escolhido por sua simplicidade e por ser
bastante utilizado no campo da engenharia civil.
4.2 TIPOS DE DADOS
4.2.1 Dados de resposta no tempo
Os modos de vibração experimentais são determinados pela posição e pelo número de
sensores dispostos na estrutura. Normalmente, são utilizados muitos sensores nessa tarefa

46
e, teoricamente, se nenhum destes sensores estiver posicionado num nodo de um modo,
todos os sinais apresentarão a mesma informação sobre as freqüências e as razões de
amortecimento. A fim de tornar os algoritmos de identificação mais rápidos sem perder
muita precisão, alguns dos sensores são parcialmente omitidos no processo de
identificação, sendo, depois, novamente incluídos para obter o modo “completo” (full
modes).
Considere-se que os l sinais de resposta da estrutura sejam divididos em um conjunto de r
sinais ou sensores de referência escolhidos adequadamente, por exemplo, sensores que
estejam localizados na estrutura em pontos onde se espera que todos os modos possam
estar presentes nos sinais medidos. O outro conjunto de resposta será composto dos l-r
sensores. Arrumando de tal forma que se tenha as r saídas de referência primeiro, tem-se:
≡ref~
k
refk
ky
yy , ref
1k k=y L y
(4.1) [ ]0IL r1 ≡
onde 1 x refk R r∈y são as saídas de referência e ~ref ( ) x 1
kl -r∈y R são as outras saídas e
x 1
r l∈L R é a matriz que seleciona as referências.
No desenvolvimento de alguns métodos de identificação, é conveniente colocar as
respostas, ou saídas, em uma matriz bloco Hankel (matriz cuja antidiagonal consiste dos
mesmos elementos) composta por 2i linhas blocos e N colunas. Por razões estatísticas,
considera-se que N → ∞. Como as saídas de referência são posicionadas primeiro, os
primeiros i blocos terão r linhas e os últimos, l linhas.
A matriz Hankel pode ser dividida em um conjunto de respostas de referências “passadas”,
e um conjunto de todas as respostas “futuras”, conforme mostrado na expressão (4.2). Os
termos passado e futuro se referem aos instantes de tempo em que as respostas foram
obtidas, ou seja, o conjunto de todas as respostas “futuras”, representado na equação (4.2),
foi obtido em instantes de tempo posteriores àqueles em que foram obtidas as respostas de
referência.

47
ref ref ref0 1 N 1
ref ref ref1 2 N
ref refref ref ref0 i 1 pref i-1 i i N-2
i i 1 i N-1 fi 2i 1
i 1 i 2 i N
2i-1 2i 2i N 2
ri1 "passado"
li "futuroN
−
−+
+ + −
+ + +
+ −
≡ ≡ ≡
y y y
y y y
Y Yy y yH
y y y Y Y
y y y
y y y
L
L
M M L M
bL
bL
L
M M L M
L
( ) i x
"r l N+∈R (4.2)
Os subscritos p e f, em (4.2), se referem a passado e futuro, respectivamente. Pode-se obter
outra divisão de refH acrescentando uma linha bloco às referências passadas e omitindo a
primeira linha bloco das saídas futuras (4.3). Uma vez que as referências são apenas uma
parte das saídas, l-r linhas ~ref ( - ) x i i
l r N∈Y R ficarão separadas nesta nova divisão.
ref ref+0 i p
ref ~ref ~refi i i i
-fi 1 2i-1
(i 1)
r
(i 1)
r
l
l+
+ = = −
−
Y Y
H Y Y
Y Y
b
b
b
(4.3)
4.2.2 Covariância
As matrizes de covariância das saídas foram definidas na equação (3.25) como:
∑=
+∞→
+ =≡1-N
0k
Tkik
N
Tkiki N
1lim]E[ yyyyR (4.4)
A segunda igualdade em (4.4) é devida à consideração de ergodicidade.
As matrizes de covariância entre todas as saídas e as saídas de referência são definidas
como as r primeiras colunas das matrizes definidas em (4.4):
Tref ref T x
i k i k i 1E[ ] l r
+≡ = ∈R y y R L R (4.5)
A matriz Gref (next-state output covariance matrix) é definida como:

48
Tref ref T x
k i k 1E[ ] n r
+≡ = ∈G x y GL R (4.6)
Para K 3 2, 1,i = , a partir da propriedade (3.28) tem-se:
ref1-iT1i
refi GCALRR ==
(4.7) TT1-iTref
i-1
Trefi CAGRLR ==
As matrizes refiR podem ser agrupadas em uma matriz Toeplitz (matriz cuja diagonal
consiste dos mesmos elementos) ref i x i1 i
l r∈T R que pode ser calculada a partir da matriz
Hankel (4.2). Considerando ergodicidade e que ∞→N tem-se:
== +
refi
ref2-2i
ref1-2i
ref2
refi
ref1i
ref1
ref1-i
refi
Trefpf
refi1
RRR
RRR
RRR
YYT
L
MMMM
L
L
(4.8)
Na realidade, é disponível um número N finito de dados e, portanto, pode-se obter uma
estimativa das covariâncias iR̂ da seguinte forma:
T
-1ref
i0
1ˆN
k i k
kN+
=
= ∑R y y (4.9)
4.3 MÉTODO DE DETECÇÃO DE PICO
Conforme já foi mencionado, no caso de monitoramento contínuo de estruturas, ou quando
estas possuem dimensões consideráveis, a realização de ensaios de vibrações por meios
artificiais não é uma opção viável. Nestes casos, a excitação produzida pelo tráfego, ação
do vento ou até micro-sismos (nos locais onde este tipo de evento ocorre) é uma alternativa
importante que permite realizar ensaios sem interromper, por exemplo, o tráfego sobre uma
ponte.
A excitação, ou entrada do sistema, não é conhecida e passa a ser necessário estimar os
parâmetros modais através de métodos de identificação baseados apenas nas medidas de

49
resposta. O método de detecção de pico é o método mais simples para estimar as
características dinâmicas de estruturas submetidas à excitação ambiente (Peeters, 2000) e
baseia-se na função densidade espectral de potência da resposta (f.d.e.p. ou PSD – Power
Spectral Density). Esta técnica trabalha no domínio da freqüência e é muito usada na
engenharia civil devido à simplicidade e a rapidez de processamento (Palazzo, 2001),
porém, só pode ser aplicada a estruturas com freqüências naturais bem separadas.
O método de detecção de pico consiste em transformar a resposta no tempo para o domínio
da freqüência aplicando-se a transformada discreta de Fourier e com isso obtendo-se a
f.d.e.p. ou espectro da resposta. As freqüências são estimadas como sendo os picos de tal
espectro.
A função densidade espectral de potência (f.d.e.p.)
A função densidade espectral de potência pode ser definida a partir das funções de
covariância. Considere-se dois processos aleatórios estacionários )t(kx e )t(ky , as
funções de covariância são definidas como:
[ ])τt()t(E)τ( += kkxx xxR
[ ])τt()t(E)τ( += kkyy yyR (4.10)
[ ])τt()t(E)τ( += kkxy yxR
onde [ ]•E representa o valor esperado.
Aplicando-se a transformada de Fourier a ambos os lados da equação (4.10) obtêm-se as
funções densidade autoespectral de )t(kx e )t(ky e a função densidade espectral cruzada
entre )t(kx e )t(ky :

50
dτe )τ()f( ωτi2π-
∫∞
∞−
= xxxx RS
τde )τ()f( πωτi2-
∫∞
∞−
= yyyy RS (4.11)
τde )τ()f( πωτi2-
∫∞
∞−
= xyxy RS
Quando as repostas medidas em vários pontos k da estrutura submetida a vibrações
constituir um processo )t(ky , as equações (4.11) podem ser aplicadas, determinando assim
as funções densidade autoespectral para cada resposta e a função densidade espectral
cruzada entre as diferentes respostas. Tais funções servem para estimar os parâmetros
modais no método em questão.
Como as respostas )t(ky obtidas nos ensaios dinâmicos são discretas no tempo e de
duração T segundos (0 ≤ t ≤ T), as f.d.e.p. não podem ser obtidas a partir da transformada
contínua de Fourier devendo-se aplicar, então, a transformada discreta de Fourier para um
tempo finito. Segundo Peeters (2000) uma das técnicas mais populares para estimar as
f.d.e.p. é o método de Welch. A função densidade espectral de potência é estimada como o
produto entre a transformada discreta de Fourier da resposta discretizada no tempo )f( kA
por sua transposta conjugada )f( kTA :
1.-N ... 2 1, 0,k ),f()f(
w
1)f( k
Tk1N
0q
2
q
k ==
∑−
=
AAS y (4.12)
onde ∑−
=
1N
0q
2
qw representa a norma ao quadrado da função filtro w usada para evitar
leakage.
No caso de )f( kA e )f( kTA corresponderem à mesma resposta, obtém-se uma estimativa
do autoespectro, caso contrário, ou seja, se )f( kA e )f( kTA corresponderem a respostas
distintas se obtém uma estimativa do espectro cruzado.

51
Em ensaios de vibração, as respostas da estrutura analisada são obtidas por meio de
sensores dispostos em diferentes pontos da mesma. No entanto, quase sempre, não se
dispõe de um número de sensores suficiente para cobrir toda a estrutura sendo, portanto, o
ensaio realizado em várias etapas. Em cada etapa do ensaio são mantidos alguns sensores
fixos em determinados pontos de modo que estes sirvam de referência no processamento
dos registros adquiridos. Isto se justifica pelo fato de que, em cada etapa do ensaio, a
excitação é diferente (não estacionária) e, logo, os espectros correspondentes possuem
magnitudes diferentes.
Considerando o método de detecção de pico, as freqüências naturais serão obtidas como
sendo os picos dos autoespectros das respostas adquiridas. As formas modais serão obtidas
a partir da definição de três componentes: direção, magnitude e sentido da amplitude
modal. A direção das formas modais identificadas será aquela na qual foram dispostos os
sensores, por exemplo, neste trabalho foram medidas as acelerações na direção vertical.
A magnitude da amplitude modal para cada modo é associada à magnitude do pico
correspondente da função auto-espectro. Como a excitação é não-estacionária em cada
etapa do ensaio, será considerada a relação entre a magnitude do pico relativa ao sensor
deslocável e aquela relativa ao sensor fixo. Portanto, para cada modo i, a amplitude modal
de cada ponto j medido será definida da seguinte forma:
iref
ij
i,j PSD
PSDA = (4.13)
onde ijPSD representa o pico do espectro correspondente ao modo i no ponto j e irefPSD
representa o pico do espectro correspondente ao modo i no ponto de referência.
Para determinar o sentido de cada valor da amplitude modal é calculado o espectro cruzado
entre cada resposta e a resposta de referência. O sentido positivo ou negativo será definido
pela fase desse espectro cruzado de acordo com o seguinte intervalo: se -70º < ϕ < 70º a
amplitude será positiva, -250º < ϕ < -110º ou 110º < ϕ < 250º a amplitude será negativa
(Palazzo, 2001).

52
O método de detecção de pico foi implementado neste trabalho utilizando o software
MATLAB 7.0.1. Para o cálculo da função auto-espectro foi utilizado o comando PSD
(Power Spectral Density) do MATLAB que fornece uma estimativa da função densidade
espectral de potência de um sinal discreto no tempo usando o método do periodograma de
Welch modificado. Já para o cálculo do espectro cruzado foi utilizado o comando CSD
(Cross Spectral Density) que permite estimar a função densidade espectral cruzada entre
dois sinais discretos no tempo, também usando o método do periodograma de Welch
modificado.
4.4 MÉTODO DE IDENTIFICAÇÃO ESTOCÁSTICA BASEADO NAS
COVARIÂNCIAS DAS RESPOSTAS DE REFERÊNCIA (REFERENCE-BASED
COVARIANCE-DRIVEN STOCHASTIC REALIZATION)
O método de identificação estocástica baseado nas covariâncias das respostas de referência
difere do método clássico no fato de que só necessita das covariâncias entre as saídas e um
conjunto limitado de saídas de referência ao invés das covariâncias entre todas as saídas. O
conceito do primeiro algoritmo ajuda a entender o método de identificação baseado nos
registros de saída no tempo (reference-based data-driven stochastic subspace), a ser
apresentado na próxima seção, que faz uso direto dos dados de saída sem a necessidade de
se estimar as covariâncias das mesmas.
O método SSI-COV identifica um modelo estocástico de espaço de estado, equação (3.24),
a partir apenas dos dados de resposta do sistema. Aplicando-se a propriedade (4.7) à matriz
ref i x i1 i
l r∈T R , tem-se:
ref ref refi i-1 1
ref ref refref i 1 ref i 2 ref ref ref ref2i+1 i 2
i i1i
ref ref refi-12i-1 2i-2 i
n− −
= = =
CR R R
CAR R R
T A G A G AG G OCCA
R R RCA
L
LL b
M M O MM
Lsuuuuuuur
n (4.14)
A partir da equação (4.14), pode-se observar as definições das matrizes de observabilidade,
i x l n
i ∈O R , e de controlabilidade, ref x ii
n r∈C R . Se o sistema é observável e controlável e

53
para ir n≥ , o rank da matriz Toeplitz é igual a n. Aplicando-se a decomposição em
valores singulares (SVD) à matriz Toeplitz, obtém-se uma estimativa do rank e, portanto
da ordem do sistema:
[ ]T
1ref T T11 2 1 1 11 i T
2
= = =
S 0 VT USV U U U S V
0 0 V (4.15)
onde i x il l∈U R e i x ir r∈V R são matrizes ortonormais T Til= =U U UU I e
T Tir= =V V VV I e i x il r∈S R é uma matriz diagonal contendo os valores singulares em
ordem decrescente. A ordem de uma matriz é estimada como sendo igual ao número de
valores singulares diferentes de zero. Na última igualdade da equação (4.15), os valores
singulares nulos e os vetores singulares correspondentes estão omitidos. Daí tem-se
nli x 1 RU ∈ , i x
1r n∈V R e x n n∈S R .
Comparando as equações (4.14) e (4.15), pode-se obter as matrizes Oi e refiC dividindo a
decomposição em valores singulares em duas partes:
2/111i SUO =
(4.16) T1
2/11
refi VSC =
Conhecidas as matrizes Oi e refiC , resolve-se o problema de identificação. Da equação
(4.14) sabe-se que C corresponde às l primeiras linhas de Oi e refG corresponde às r
últimas colunas de refiC . Em notação do MATLAB tem-se:
i (1: ,:)l=C O (4.17)
ref refi (:, ( 1) 1: )r i ri= − +G C

54
A matriz de estado A pode, por exemplo, ser obtida a partir da propriedade de
decomposição de uma matriz Toeplitz deslocada ref2 i 1+T que tem estrutura similar a ref
i 1T ,
mas é composta das covariâncias refkR do retardo (time lag) 2 ao i+1:
refii
ref1i2 ACOT =
+ (4.18)
Introduzindo a equação (4.16) na equação (4.18) e resolvendo para A, obtém-se:
2/111
ref1i2
T1
2/11
*refi
ref1i2
*i
−
+
−
+== SVTUSCTOA (4.19)
onde ( )∗• representa a pseudo-inversa de uma matriz.
A matriz A também pode ser obtida a partir da matriz de observabilidade Oi da seguinte
forma (Kung, 1978 apud Peeters, 2000):
i i(1: (i 1),:) ( 1: i,:)l l l∗= − +A O O (4.20)
Uma vez obtidas as matrizes A, refG e C e a ordem do sistema n, o problema de
identificação está teoricamente resolvido. Para o cálculo dos parâmetros modais, que será
discutido no próximo item, apenas as duas matrizes A e C são suficientes.
É importante comentar que o número de medições obtidas na prática não é infinito, como
considerado na equação (4.2), e as covariâncias das saídas são estimadas pela equação
(4.9), refiR̂ . Dessa forma, as matrizes do sistema identificadas devem ser consideradas uma
estimativa das matrizes reais do sistema: ref ref0
ˆ ˆ ˆ, , , A G C R .
Um outro aspecto que deve ser comentado é que, na teoria, a ordem do sistema n pode ser
determinada observando o número de valores singulares da matriz ref1 iT (4.8) diferentes de
zero. No entanto, na prática, a matriz estimada de covariância Toeplitz ref1 iT é afetada por
ruídos que levam a valores singulares todos diferentes de zero, o que não seria real. Como
fontes de ruído pode-se citar imprecisões no modelo, isto é, no caso de um sistema real que

55
gerou os dados não poder ser representado exatamente por um modelo estocástico no
espaço de estado, ruídos de medição introduzidos pelos equipamentos de medição, ruídos
computacionais devido à precisão finita do computador, além do número finito de dados
disponíveis. Este último implica no seguinte fato: uma vez que as covariâncias são
estimadas, a propriedade de fatoração (4.7) não vale exatamente e, conseqüentemente, o
rank da matriz Toeplitz não será exatamente n (equação 4.14).
Para se obter um bom modelo para aplicação em análise modal, Peeters (2000) sugere a
construção de um diagrama de estabilização a partir da identificação de um conjunto de
modelos com diferentes ordens. Neste caso, os pólos correspondentes a um modelo de
certa ordem são comparados com os pólos de um modelo de ordem menor. Se as
diferenças entre as freqüências, as razões de amortecimento e os modos estiverem entre
limites pré-determinados, o pólo é dito estável. Por exemplo, escolhendo os seguintes
limites: 1% para as freqüências, 5% para as razões de amortecimento e 2% para os modos,
os requisitos de estabilidade são:
( ) ( 1)
( )100% 1%
p p
p
f f
f
−−<
( ) ( 1)
( )100% 5%
p p
p
ξ ξ
ξ
−−< (4.21)
100%(1 ( , 1)) 2%p p− + <MAC
onde p é a ordem do modelo na qual os parâmetros são identificados e MAC é o Modal
Assurance Criterion que representa a correlação entre dois vetores modais, ( )pv e ( 1)pv − :
2( ) ( 1)
( ) ( ) ( 1) ( 1)( , 1)
( )( )
Hp p
H Hp p p p
v vp p
v v v v
−
− −+ =MAC (4.22)
Na equação acima, ( )H significa complexo conjugado transposto.
No método SSI-COV, uma construção eficiente do diagrama de estabilização é conseguida
calculando a decomposição em valores singulares (SVD) da matriz de covariâncias
Toeplitz apenas uma vez. O número de linhas bloco e colunas i devem ser tais que

56
maxir n≥ , ordem máxima do modelo. Dessa forma, modelos de diferentes ordens são
obtidos incluindo um número diferente de valores singulares e vetores no cálculo de iO e
refiC .
4.5 ANÁLISE MODAL
Neste item, explicam-se como os resultados obtidos na identificação de sistemas da seção
anterior podem ser usados na análise modal de estruturas. Como resultado da identificação,
a matriz de estado discreta A foi obtida. O comportamento dinâmico do sistema é
caracterizado por seus autovalores:
1−= ΨΛΨΨΛΨΨΛΨΨΛΨA (4.23)
onde ( ) x qdiag λ C , q 1, 2, , n n n= ∈ =Λ K é uma matriz diagonal contendo os autovalores
complexos discretos e nn x C∈ΨΨΨΨ contém os autovetores como colunas. A equação de
estado contínua (3.3) é equivalente à equação diferencial de movimento (3.1) e
conseqüentemente, elas têm os mesmos autovalores e autovetores. Estes, por sua vez,
podem ser obtidos a partir de uma decomposição em autovalor da matriz de estado
contínua AC:
-1CCCC ΨΨΨΨΛΛΛΛΨΨΨΨ=A (4.24)
onde ( ) ,Cλdiag nn x qCC ∈=ΛΛΛΛ é uma matriz diagonal contendo os autovalores complexos
contínuos no tempo e nn x C C∈ΨΨΨΨ contém os autovetores como colunas. Da relação (3.19),
∆tCeAA = (4.25)
tem-se que:
( )∆t
λlnλ , q
qCC == ΨΨΨΨΨΨΨΨ (4.26)
Os autovalores de AC ocorrem em pares complexos conjugados e podem ser escritos como:

57
2qqqqqCqC ξ1jωωξλ,λ −±−=∗ (4.27)
onde qξ é a razão de amortecimento do modo q e qω é a freqüência (rad/s) referente ao
modo q. As formas modais nos locais dos sensores, definidas como colunas qΦΦΦΦ de
x Cl n∈Φ , são as partes observadas dos autovetores do sistema ΨΨΨΨ e são obtidas usando a
equação de observação (3.5):
ΨΨΨΨΦΦΦΦ C= (4.28)
Dessa forma, os parâmetros modais qω , qξ e qΦΦΦΦ são obtidos a partir das matrizes do
sistema identificadas, A e C.
4.6 MÉTODO DE IDENTIFICAÇÃO ESTOCÁSTICA BASEADO NAS
RESPOSTAS DE REFERÊNCIA (REFERENCE-BASED DATA-DRIVEN
STOCHASTIC SUBSPACE)
Como já foi dito, este método faz uso direto dos dados de saída do sistema, sem a
necessidade de se estimar as covariâncias das saídas. A idéia é tomar apenas as saídas de
referência passadas ao invés de todas as saídas passadas, o que permite reduzir a dimensão
do problema e o tempo computacional. Para se escolher quais saídas tomar como
referência, é importante entender que em aplicações de análise modal são usados muitos
sensores distribuídos pela estrutura fornecendo sinais de diferente qualidade. Alguns
desses sensores são localizados em pontos nodais de um modo de vibração e outros podem
estar localizados em pontos próximos a extremidades fixas. Dessa forma, o número de
sensores de referência é limitado e, portanto, sua qualidade é muito importante, pois todos
os modos devem estar presentes nos dados medidos por tais sensores. Logo, se os
“melhores” sensores forem escolhidos como referência, não haverá perda na qualidade da
identificação e os resultados podem ser mais precisos. Assim como o método SSI-COV, o
método SSI-DATA identifica um modelo estocástico no espaço de estado.
Filtro Kalman

58
O filtro Kalman tem um papel importante na identificação estocástica de subespaços e o
seu significado será explicado resumidamente. O objetivo do filtro Kalman é produzir uma
predição ótima para o vetor de estado 1k+x fazendo uso de observações das saídas no
tempo k e das matrizes do sistema disponíveis juntamente com as covariâncias conhecidas
do ruído. Estas predições ótimas são representadas por 1kˆ +x .
Quando o estado inicial estimado ( )00 =x , a covariância inicial do estado estimada
[ ]( )0xxEP =≡ T000 ˆˆ e as medidas da saída ( )k0 yy L são dados, o estado estimado do
filtro Kalman (non-steady-state Kalman filter state estimates) 1kˆ +x é definido pelas
seguintes fórmulas recursivas:
( )kkkk1k ˆˆˆ xCyKxAx −+=+
( )( ) 1Tk0
Tkk
−−−= CCPCAPGK ΛΛΛΛ (4.29)
( )( ) ( )TTk
1Tk0
Tk
Tk1k CAPGCCPCAPGAAPP −−−+=
−
+ ΛΛΛΛ
onde 1kˆ +x representa o estado Kalman estimado, Kk a matriz de ganho (gain matrix) do
filtro Kalman e Pk+1 a matriz de covariância do estado.
A seqüência de estado do filtro Kalman é definida como
( ) x i i i+1 i+j-1
ˆ ˆ ˆ ˆ n N≡ ∈X x x xL R (4.30)
Teoria de Identificação de Subespaços Estocásticos Baseada nos Dados de Saída
A idéia do método SSI-DATA é projetar o bloco de linhas correspondentes às saídas
futuras no espaço das saídas de referência passadas e com isso reter toda a informação no
passado que é útil para predizer o futuro. Essa projeção é definida como:
( )T Tref ref ref ref ref refi f P f P P P P
∗
≡ ≡P Y Y Y Y Y Y Y (4.31)

59
onde as matrizes x f
li N∈Y R e ref i x p
r N∈Y R são partes da matriz Hankel de dados (4.2). A
equação (4.31) é apenas a definição de refiP e não indica como calcular esta projeção. O
cálculo é feito aplicando a decomposição QR na matriz Hankel.
refpref
pref ~ref Ti i
f -f
+
≡ = =
YY
H Y RQY
Y
(4.32)
onde x N N∈Q R é uma matriz ortonormal, T TN= =Q Q QQ I e ( ) i x r l N+∈R R é uma matriz
triangular inferior. Como ( ) i r l N+ < , pode-se omitir os zeros em R e as linhas
correspondentes em QT:
T11 1
T21 22ref 2
T31 32 33 3
T41 42 43 44 4
(
( 1) ( 1)
ri r l r l i
ri ri
r r
l r l r
l i l i
− −
− −
− −
=
←→ ←→ ←→
R 0 0 0 Q
R R 0 0 QH
R R R 0 Q
R R R R Q
b b
b b
b b
b b
1)
N→∞←→ ←→
(4.33)
A divisão apresentada na equação acima é feita de tal forma que as submatrizes em (4.32)
possam ser expressas em função das submatrizes R e Q. Dessa forma, refiP pode ser
calculada como:
21
ref T x i 31 1
41
li N
= ∈
R
P R Q
R
R (4.34)
O principal teorema da identificação de subespaços estocásticos diz que a projeção
refiP pode ser decomposta como um produto da matriz de observabilidade Oi (4.14) pela
seqüência de estado do filtro Kalman iX̂ (4.30).

60
( )ref 2i i i+1 i+ -1 i i
i-1
ˆˆ ˆ ˆ
N
n
n
= ≡
←→
C
CA
P x x x O XCA
CA
bL
M
(4.35)
A escolha dos sensores de referência parece não ser importante, pois para qualquer escolha
a decomposição (4.35) é válida. De fato, teoricamente o estado interno de um sistema não
depende da escolha ou do número de respostas observadas. No entanto, em problemas de
identificação onde os estados são estimados com base em observações, estes fatores são
relevantes, pois saídas de referência diferentes produzirão diferentes estimativas do estado
do filtro Kalman (Peeters, 2000).
Aplicando o filtro Kalman a um modelo reduzido no espaço de estado que inclui apenas as
saídas de referência, devem-se fazer as seguintes substituições na equação (4.29):
refk k k→ =y y Ly
T→G GL
→C LC
T0 0→R LR L
O rank da matriz de projeção é n, se li n≥ , pois, esta matriz é o produto de uma matriz
com n colunas por uma matriz com n linhas. Assim como no método SSI-COV, é aplicada
a SVD à matriz de projeção, refiP , o que permite estimar o rank desta, e a matriz de
observabilidade e a seqüência de estado do filtro Kalman são obtidas dividindo a SVD em
duas partes:
ref Ti 1 1 1=P U S V (4.36)
2/111i SUO =
(4.37)

61
refi i i
ˆ ∗=X O P
Note-se que, na equação (4.36), os valores singulares nulos e os correspondentes vetores
singulares estão omitidos. Assim, nli x 1 R∈U , x
1N n∈V R e x n n∈S R .
A ordem do sistema n, a matriz de observabilidade iO e a seqüência de estado iX̂ foram
obtidas, no entanto, deseja-se obter as matrizes do sistema: A, G, C, R0. A partir da matriz
Hankel, uma outra projeção pode ser definida:
ref - refi-1 f P i-1 i-1
ˆ+= =P Y Y O X (4.38)
A matriz de observabilidade i-1O é obtida desprezando-se as l últimas linhas de iO (4.39) e
a seqüência de estado i-1X̂ é calculada segundo a equação (4.40).
i-1 i (1: ( 1),:)l i= −O O (4.39)
refi-1 i-1 i-1
ˆ ∗=X O P (4.40)
Da mesma forma que refiP , a matriz de projeção ref
i-1P pode ser expressa em função dos
fatores RQ:
[ ]T
ref 1i-1 41 42 T
2
=
QP R R
Q (4.41)
onde ref (i-1) x i-1
l N∈P R .
As matrizes do sistema podem ser determinadas a partir do seguinte sistema de equações
lineares:
i-1i
i i
ˆˆ i
i
= +
X WAX
Y VC (4.42)

62
onde x i i
l N∈Y R é uma matriz Hankel com apenas uma linha bloco (4.2), x i
n N∈W R e
x i
l N∈V R são os resíduos. A matriz i iY pode ser escrita como:
T1
21 22 T2i i
31 32 33 T3
=
QR R 0
Y QR R R
Q
(4.43)
Obtidas as seqüências de estado iX̂ e i-1X̂ , as saídas, e admitindo que os resíduos não
sejam correlacionados com iX̂ , o conjunto de equações pode ser resolvido para A e C por
mínimos-quadrados:
i-1i
i i
ˆˆ ∗
=
XAX
YC (4.44)
As matrizes de covariância dos ruídos Q, R e S são obtidas como as covariâncias dos
resíduos Wi e Vi:
i T Ti iT
i
=
WQ SW V
VS R (4.45)
A partir das propriedades dos sistemas estocásticos, as matrizes A, C, Q, R e S podem ser
transformadas nas matrizes A, G, C, e 0ΛΛΛΛ . Resolvendo a equação de Lyapunov para ΣΣΣΣ :
QAA += TΣΣΣΣΣΣΣΣ (4.46)
As matrizes G e R0 podem ser calculadas como:
T0 = +R CΣC R
(4.47) SCAG += TΣΣΣΣ

63
Baseados apenas na resposta do sistema, identificou-se a ordem n e as matrizes do sistema
A, G, C e 0R . Quanto à identificação da ordem do sistema, valem os mesmos comentários
feitos no algoritmo baseado nas covariâncias (SSI-COV). Recomenda-se, novamente, a
construção de um diagrama de estabilização a partir da identificação de um conjunto de
modelos com diferentes ordens. Neste caso, o número i de linhas bloco da matriz Hankel
deve ser tal que maxir n≥ e os modelos de ordens diferentes são obtidos incluindo
diferentes números de valores singulares e vetores no cálculo de iO e iX̂ .
Assim como no método SSI-COV, os parâmetros modais são obtidos a partir das matrizes
A e C segundo o item 4.5.

64
5. MÉTODOS DE ATUALIZAÇÃO DE MODELOS DE ELEMENTOS
FINITOS BASEADOS EM FUNÇÕES DE PENALIDADE
(PENALTY FUNCTION METHODS)
O propósito de atualização de modelos dinâmicos é modificar parâmetros do modelo
numérico como rigidez e massa a fim de se obter uma melhor correlação ou concordância
entre os resultados numéricos e experimentais. Para isso, existem dois grandes grupos de
métodos que são chamados diretos e iterativos.
Os métodos diretos apresentam algumas vantagens tais como: exige pequeno esforço
computacional e elimina a possibilidade de divergência. Porém, os parâmetros atualizados
têm pouco ou nenhum significado físico e não podem ser relacionados às propriedades
físicas da estrutura. Já os métodos iterativos permitem a obtenção de parâmetros com
significado físico e, portanto, seriam mais adequados como ferramenta na avaliação das
condições estruturais. Por esse motivo, optou-se por utilizar neste trabalho métodos
iterativos baseados em funções de penalidade.
De um modo geral, estes métodos partem de uma expansão em série de Taylor dos dados
modais, truncado no segundo termo a fim de produzir a seguinte aproximação linear:
θS δδδδδδδδ jz = (5.1)
Onde, jθθδθ −= representa a alteração nos parâmetros; jm zzz −=δδδδ é a diferença entre
os autovalores medidos e analíticos e jS é a matriz de sensibilidade.
Na equação (5.1) jθ representa o vetor de parâmetros estimado após j iterações e jz
representa o vetor de autovalores analíticos correspondentes a estes parâmetros. O vetor de
parâmetros θ representa os parâmetros reais que reproduzem os dados medidos, o que
significa que num processo iterativo, θ representa a estimativa refinada após a iteração j.
Os elementos da matriz de sensibilidade jS são dados pela primeira derivada dos
autovalores e/ou autovetores, obtidos dos parâmetros correntes jθ , com respeito aos
parâmetros que serão atualizados. Esta matriz pode ser obtida por vários métodos como,

65
por exemplo, o proposto por Fox e Kapoor (1968) onde a derivada dos autovalores é
calculada da seguinte forma:
iiTi
i λλ
φφφφδδδδ
δδδδ
δδδδ
δδδδφφφφ
δδδδ
δδδδ
−=
θ
M
θ
K
θ (5.2)
onde iφφφφ é o autovetor correspondente a iλ . Esta equação permite calcular a sensibilidade
de cada autovalor com respeito aos parâmetros a serem atualizados. θ
K
δδδδ
δδδδ e
θ
M
δδδδ
δδδδsão
matrizes formadas pela diferenciação de cada elemento das matrizes K e M,
respectivamente, com respeito aos parâmetros que estão sendo atualizados.
Por exemplo, suponha que o parâmetro que está sendo atualizado seja a rigidez EI de uma
estrutura e o primeiro elemento da matriz K seja igual a 3l
EI12. O primeiro elemento da
matriz θ
K
δδδδ
δδδδ (θ = EI) será igual a
3l
12 e os elementos da matriz
θ
M
δδδδ
δδδδ serão iguais a zero, já
que estes não dependem de EI.
5.1 MAIS MEDIÇÕES DO QUE PARÂMETROS
Considerando a solução de mínimos quadrados, suponha que existam mais dados medidos
do que parâmetros desconhecidos. Isto implica que a equação (5.1) fornecerá mais
equações do que incógnitas e o sistema de equações simultâneas é sobredeterminado. A
solução de mínimos quadrados é obtida premultiplicando a equação (5.1) por TS e obtendo
a solução para os parâmetros desconhecidos, resultando na equação:
[ ] zSSSθ δδδδδδδδ T1T −= (5.3)
ou na forma completa,
[ ] ( )jmTj
1Tjj1j zzSSSθθ −+=
−
+ (5.4)

66
O resultado da equação (5.3) também pode ser obtido pela minimização da seguinte função
de penalidade
( ) εεεεεεεεδδδδ TJ =θ (5.5)
onde θSz δδδδδδδδεεεε −= é o erro entre os autovalores medidos e aqueles obtidos a partir dos
parâmetros atualizados. Substituindo a expressão do erro na equação (5.5) e expandindo-a
tem-se:
( ) { } { } θSSθzSθzzθSzθSzθ δδδδδδδδδδδδδδδδδδδδδδδδδδδδδδδδδδδδδδδδδδδδ TTTTTT 2J +−=−−= (5.6)
Minimizar a função ( )θδδδδJ dada pela equação (5.6) com respeito a cada elemento de θδδδδ
implica em diferenciar com respeito a cada elemento de θδδδδ e igualar o resultado a zero.
Dessa forma obtém-se a equação (5.3) e os parâmetros podem ser atualizados a partir da
equação (5.4). Uma desvantagem desta aproximação é que são atribuídos pesos iguais para
cada componente dos dados medidos enquanto que num ensaio típico de vibração as
freqüências naturais são obtidas com um desvio padrão de aproximadamente 1% e os
modos de vibração, 10% (Friswell e Mottershead, 1995). Isto significa que os dados de
modos de vibração são menos confiáveis que as freqüências naturais quando obtidos
experimentalmente. Além disso, as freqüências naturais mais altas não são medidas tão
precisamente quanto as mais baixas.
Esta precisão relativa é incorporada ao algoritmo de atualização minimizando a seguinte
função de penalidade ponderada:
( ) εεεεεεεεδδδδ εεεεεεεεWθ TJ = (5.7)
onde εεεεεεεεW é uma matriz de pesos positiva definida. Esta matriz costuma ser diagonal e com
elementos iguais ao inverso da variância dos autovalores correspondentes. A escolha desta
matriz será comentada posteriormente.

67
A equação (5.7) pode ser expandida como a equação (5.5) e seu mínimo encontrado por
diferenciação. O sistema de equações resultante pode ser resolvido premultiplicando a
equação (5.1) por εεεεεεεεWST . Os parâmetros atualizados são dados então por:
[ ] zWSSWSθ δδδδδδδδ εεεεεεεεεεεεεεεεT1T −
= (5.8)
ou na forma completa
[ ] ( )jmTj
1Tjj1j zzWSSWSθθ −+=
−
+ εεεεεεεεεεεεεεεε (5.9)
Deve-se lembrar que em ambos os casos (equações 5.4 e 5.9) partiu-se da hipótese de que
o número de medidas era maior que o número de parâmetros e portanto SWS εεεεεεεεT é
quadrada e será de full rank logo, as equações podem ser resolvidas. Pode também
acontecer da matriz não ser full rank se um dos parâmetros não tiver influência nos
autovalores ou ainda se pelo menos duas combinações de parâmetros fizerem o mesmo
efeito na resposta medida.
Um outro problema que acontece freqüentemente é que a solução do conjunto de equações
resultantes de (5.4) e (5.9) é mal condicionada. Embora os parâmetros tenham sido
escolhidos corretamente, isto ocorrerá se algum destes tiver uma pequena influência nos
autovalores ou existir combinações de parâmetros que produzam efeitos similares nas
medidas. Estas equações são melhores solucionadas usando decomposição em valor
singular, pois se a matriz for mal condicionada ou com rank deficiente, os parâmetros ou
combinações destes que estiverem provocando o problema serão identificados e
consequentemente desconsiderados no processo de atualização.
5.2 MAIS PARÂMETROS DO QUE MEDIÇÕES OU DADOS COM RUÍDOS
Na prática, o número de parâmetros desconhecidos freqüentemente excederá o número de
dados medidos. Nestes casos, SST certamente terá um rank deficiente já que o número de
equações em (5.1) será menor do que o número de incógnitas. O sistema de equações é

68
subdeterminado e consequentemente existe um número infinito de conjunto de parâmetros
que satisfarão à equação (5.1).
O conjunto de parâmetros que deve ser escolhido é aquele que produza a menor variação
nos parâmetros θδδδδ . O problema agora pode ser redefinido como um problema de
otimização restringido:
Minimizar θθ δδδδδδδδ T sujeito a θSδδδδδδδδ =z (5.10)
A solução para este problema pode ser obtida usando o multiplicador de Lagrange ou uma
técnica similar. Pelo multiplicador de Lagrange a solução é dada por:
[ ] zSSSθ δδδδδδδδ1TT −
= (5.11)
ou
[ ] ( )jm
1Tjj
Tjj1j zzSSSθθ −+=
−
+ (5.12)
Normalmente, em uma análise de elementos finitos, alguns parâmetros podem ser
estimados mais precisamente que outros e, isto pode ser refletido na otimização definida
pela equação (5.10) introduzindo uma matriz de pesos θθθθθθθθW que produzirá um novo
problema de otimização restringido:
Minimizar θWθ δδδδδδδδ θθθθθθθθT sujeito a θSz δδδδδδδδ = (5.13)
A matriz de pesos deve ser positiva definida e escolhida de modo que os parâmetros que
sejam estimados precisamente no modelo de elementos finitos inicial não mudem tanto
quanto aqueles cujas estimativas iniciais sejam pobres. Assim como εεεεεεεεW , θθθθθθθθW é uma
matriz diagonal cujos elementos são o inverso da variância estimada dos parâmetros
correspondentes. Embora seja difícil estimar quantitativamente estas variâncias, a
habilidade de estabelecer níveis de incerteza aos parâmetros é muito poderosa.
A solução para o problema dado em (5.13) resulta na seguinte equação para os parâmetros
atualizados:

69
[ ] ( )jm
1Tj
1j
Tj
1j1j zzSWSSWθθ −+=
−−−+ θθθθθθθθθθθθθθθθ (5.14)
Uma outra alternativa é ponderar explicitamente tanto as variações nos parâmetros quanto
os erros nos autovalores medidos. Isto pode ser obtido adicionando um termo à função de
penalidade dada pela equação (5.7):
( ) θWθWθ δδδδδδδδεεεεεεεεδδδδ θθθθθθθθεεεεεεεεTTJ += (5.15)
Substituindo θSzε δδδδδδδδ −= na equação (5.15) e rearranjando os termos, obtém-se:
( ) [ ] θWSWSθzWSθzWzθ δδδδδδδδδδδδδδδδδδδδδδδδδδδδ θθθθθθθθεεεεεεεεεεεεεεεεεεεεεεεε ++−= TTTTT 2J (5.16)
Minimizando esta função de penalidade com respeito a θδδδδ tem-se que a alteração nos
parâmetros é dada por:
[ ] zWSWSWSθ δδδδδδδδ εεεεεεεεθθθθθθθθεεεεεεεεT1T −
+= (5.17)
ou na forma completa
[ ] ( )jmTj
1
jTjj1j zzWSWSWSθθ −++=
−
+ εεεεεεεεθθθθθθθθεεεεεεεε (5.18)
Uma aproximação similar para obter um sistema de equações bem condicionado é
ponderar as estimativas iniciais dos parâmetros desconhecidos. Assim, a nova função de
penalidade é dada por:
( ) ( ) ( ) ( )( ) ( )( ){ }0jT
0jT
0T
0T WJ θθθθθθWθθWθθWθ −+−++=−−+= δδδδδδδδεεεεεεεεεεεεεεεεδδδδ θθθθθθθθεεεεεεεεθθθθθθθθεεεεεεεε
(5.19)
onde 0θ é o vetor de parâmetros iniciais estimados. Expandido o segundo termo e
substituindo θSzε δδδδδδδδ −= chega-se à seguinte função de penalidade:

70
( ) ( ) ( ) ( ){ }
[ ] θWSWSθ
θθWzWSθθθWθθzWzθ
δδ
δδδδδ
θθεε
θθεεθθεε
++
+−−−−−+=
TT
0jTT
0jT
0jT
2J (5.20)
Minimizando esta função com respeito a θδδδδ tem-se:
( ) ( ){ }0jT1T θθWzWSWSWSθ −−+=
−
θθθθθθθθεεεεεεεεθθθθθθθθεεεεεεεε δδδδδδδδ (5.21)
ou
( ) ( ) ( ){ }0jjmTj
1
jTjj1j θθWzzWSWSWSθθ −−−++=
−
+ θθθθθθθθεεεεεεεεθθθθθθθθεεεεεεεε (5.22)
Neste trabalho foram implementados os algoritmos dados pelas equações (5.9), (5.12) e
(5.22). Sobre as matrizes de pesos εεεεεεεεW e θθθθθθθθW , vale comentar que, para permitirem atribuir
incertezas relativas aos parâmetros ou medidas (autovalores), sua escolha é baseada em
estimativas de desvios padrões. Como já foi dito, essas matrizes são diagonais e seus
elementos representam o inverso da variância (o quadrado do desvio padrão) dos
parâmetros ou medidas correspondentes. Deve-se comentar ainda que, segundo Friswell e
Mottershead (1995), nos métodos baseados em funções de penalidade, os valores absolutos
das matrizes de peso não afetam prejudicialmente o resultado final do modelo atualizado.
5.3 MÉTODO DE ATUALIZAÇÃO DE MODELOS CONSIDERANDO SISTEMAS
PERTURBADOS (PERTURBED BOUNDARY CONDITION TESTING)
Em geral, os dados medidos experimentalmente não são obtidos em quantidade suficiente
para permitir estimar parâmetros únicos. Uma alternativa para aumentar a quantidade de
dados disponíveis é ensaiar a estrutura com diferentes configurações ou com massas ou
molas adicionadas a esta.
Esta técnica é chamada de perturbed boundary condition testing e pode ser usada também
para melhorar a condição numérica de métodos de extração modal (Friswell e Mottershead
1995). Este algoritmo de atualização pode ser melhor entendido a partir do esquema da
figura (5.1) e utiliza apenas os autovalores da estrutura.

71
Figura 5.1 – Esquema do algoritmo de atualização.
Se não convergir ⇒ nova iteração
Escolha dos parâmetros Ensaio de vibração da estrutura
Construção do modelo de elementos finitos da
estrutura
Identificar as freqüências da
estrutura
Resolver o problema de autovalores
Extrair os autovalores Construção do modelo de elementos finitos da estrutura perturbada com massas ou molas
Adicionar massa ou mola à estrutura
Identificar as freqüências da estrutura
perturbada
Extrair os autovalores Resolver o problema de autovalores
Estimador Bayesiano Equação (5.22)
Parâmetros atualizados
Repetir para cada massa ou rigidez adicionada
Repetir para cada massa ou rigidez adicionada

72
As freqüências naturais da estrutura ou seus autovalores experimentais podem ser obtidos a
partir das funções de resposta em freqüência (FRFs) ou outros métodos de análise modal.
Em seguida é adicionada massa ou rigidez em uma ou mais coordenadas da estrutura e
seus autovalores são medidos novamente. São obtidos também os autovalores analíticos a
partir de modelos de elementos finitos considerando uma estimativa inicial dos parâmetros
a serem atualizados. Daí, a cada iteração, os autovalores medidos e os correspondentes
analíticos são comparados.
Suponha que sejam medidos m autovalores tanto no sistema original quanto nos r sistemas
perturbados. Assim, tem-se m(r+1) autovalores medidos e pode-se obter os
correspondentes autovalores do modelo. A sensibilidade de cada um destes autovalores
pode ser determinada com respeito a cada parâmetro desconhecido, ou seja, a cada
parâmetro que se deseja atualizar, por meio da equação (5.2). Se o número de parâmetros
for p então, a matriz de sensibilidade S será formada por m(r+1) linhas e p colunas.
No caso de dados livres de ruídos e nenhuma diferença entre o modelo de elementos finitos
e a estrutura real, os parâmetros podem ser atualizados usando a equação (5.1). Assim, esta
equação é usada iterativamente e os parâmetros atualizados serão determinados quando a
diferença entre os autovalores medidos e analíticos for a menor possível. Na prática, os
dados medidos contêm erros e, além disso, há diferenças entre o modelo de elementos
finitos e a estrutura real. Neste caso, os parâmetros podem ser atualizados iterativamente
por meio da aproximação dada pela equação (5.22).
Para aplicar este método é necessário, primeiramente, escolher quais coordenadas serão
perturbadas. Tais coordenadas devem ser escolhidas de modo que mais informações sejam
disponibilizadas para atualizar os parâmetros. Para obter valores únicos dos parâmetros
desconhecidos, freqüências suficientes, provenientes de várias perturbações no sistema, são
requeridas a fim de produzir um número maior de equações independentes que permitam a
atualização dos parâmetros. Apenas observar se o número de freqüências medidas é maior
que o número de parâmetros desconhecidos não é um critério confiável. É necessário,
portanto, verificar a independência linear das equações usadas para atualizar os parâmetros
e isso pode ser feito calculando o número de condição da matriz de sensibilidade dada na
equação (5.3), ou melhor, o número de condição de SST . Neste caso, a matriz de

73
sensibilidade precisa ser calculada considerando várias configurações de sistemas
perturbados.

74
6. ANÁLISE NUMÉRICA
A avaliação dos métodos foi feita por meio de sua aplicação a diferentes estruturas
considerando alguns tipos de excitação. Esta aplicação foi dividida em duas etapas, uma
vez que foi considerada a identificação das propriedades modais, e a atualização de
modelos numéricos. Neste capítulo serão apresentados os resultados obtidos a partir de
uma análise numérica.
A análise numérica teve como objetivo principal aferir a implementação dos métodos
descritos nos capítulos 4 e 5, e testar a influência do tamanho dos registros de respostas e
do tipo de excitação nos resultados dos métodos de identificação das características
dinâmicas. Neste caso, quanto à identificação das propriedades dinâmicas, os métodos
foram aplicados a um exemplo de viga, com condições de apoio livre-livre, com as
mesmas características da viga analisada experimentalmente. Para este exemplo, foram
aplicados os métodos de detecção de pico, o SSI-COV/ref e o SSI-DATA/ref.
Ainda na análise numérica, foram aplicados os métodos de atualização de modelos
baseados em funções de penalidade, tanto considerando apenas um sistema original,
quanto o procedimento de adição de massa, em que coordenadas do modelo e da estrutura
são perturbadas. Os métodos foram aplicados a exemplos simples de viga engastada e
sistemas massa-mola.
6.1 IDENTIFICAÇÃO DAS PROPRIEDADES DINÂMICAS
A primeira etapa da análise numérica consistiu na identificação das propriedades
dinâmicas baseada apenas na resposta da estrutura, onde o método de identificação
estocástica baseado nas covariâncias das respostas de referência, SSI-COV/ref, o método
baseado nas respostas de referência, SSI-DATA/ref, e o método de detecção de pico foram
aplicados. O exemplo adotado nesta etapa foi de uma viga com condições de apoio livre-
livre.
É importante ressaltar, ainda, que, neste item, os resultados referidos como teóricos
correspondem àqueles obtidos a partir da solução do problema de autovalor:

75
0ΛΦMΦK =− ) ( (6.1)
onde K e M são as matrizes de rigidez e de massa da estrutura, respectivamente, ΦΦΦΦ é a
matriz cujas colunas representam os modos de vibração e ΛΛΛΛ é uma matriz diagonal cujos
valores são as freqüências de vibração da estrutura.
Para simular um ensaio dinâmico obteve-se a resposta da estrutura através da integração
numérica da equação de movimento (equação 3.1) por meio do método de Newmark. Para
isso, a viga foi excitada em um ponto, por meio de uma carga impacto apresentada na
figura 6.1. Num outro exemplo, a viga foi excitada por meio do carregamento apresentado
na figura 6.2.
-0.01 0 0.01 0.02 0.03 0.04 0.050
2
4
6
8
10
12
14
16
Tempo (s)
Carga (N)
Figura 6.1 – Carregamento aplicado à viga – Impacto.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-5
-4
-3
-2
-1
0
1
2
3
4
5
Tempo (s)
Carga (N)
Figura 6.2 – Carregamento aplicado à viga – Ruído Branco.

76
A viga estudada foi discretizada em 33 elementos de igual comprimento, com dois graus
de liberdades por nó, conforme mostra a figura 6.3. As propriedades físicas e geométricas
da viga considerada na análise numérica são as mesmas da viga usada na parte
experimental e encontram-se apresentadas na tabela 6.1. Os dados utilizados no método de
Newmark, sendo estes: os parâmetros de integração β1 e β2 e o passo de tempo – h, também
se encontram na tabela 6.1. A figura 6.4 apresenta a seção transversal da viga estudada.
1 17 20 345 10 25 30
2,155 m
Ponto de aplicação da excitação
Elemento
Figura 6.3 – Vista superior da viga indicando sua discretização, o ponto de aplicação da
carga impacto e os graus de liberdade dos elementos.
Figura 6.4 – Seção transversal da viga metálica considerada.
Tabela 6.1 – Propriedades físicas e geométricas da viga e parâmetros de integração de Newmark.
Propriedades Valores
Momento de Inércia – I 1,302 x 10-7 m4 Área da Seção Transversal – A 1,053 x 10-3 m2 Módulo de Elasticidade Longitudinal – E 2,07 x 1011 N/m2 Massa Específica – ρ 7850 kg/m3
Razão de Amortecimento – ξ 1% Parâmetro de Integração – β1 0,25 Parâmetro de Integração – β2 0,50 Passo de Tempo – h 2,5 x 10-4 s

77
Na análise também foi feita uma condensação estática (Clough e Penzien, 1993) de modo a
obter apenas os graus de liberdade de translação, uma vez que experimentalmente, são
obtidos apenas os deslocamentos transversais dos modos de vibração. As matrizes de
rigidez e de massa do elemento são dadas pelas equações (6.2) e (6.3), respectivamente.
−
−−−
−
−
=
L
4EI
L
6EI
L
2EI
L
6EI
L
6EI
L
12EI
L
6EI
L
12EI
L
2EI
L
6EI
L
4EI
L
6EI
L
6EI
L
12EI
L
6EI
L
12EI
22
2323
22
2323
k
(6.2)
=
0000
0100
0000
0001
2
ρALm (6.3)
k: matriz de rigidez do elemento;
m: matriz de massa do elemento;
A matriz de amortecimento foi determinada pelo método de Rayleigh (Clough e Penzien,
1993). Neste método a matriz de amortecimento é considerada proporcional às matrizes de
massa e de rigidez conforme a equação (6.4):
KMC 10 aa += (6.4)
onde:
C: matriz de amortecimento da estrutura;
M: matriz de massa da estrutura;
K: matriz de rigidez da estrutura;
a0 e a1: fatores de amortecimento de Rayleigh.
Os fatores 0a e 1a são obtidos em função da razão de amortecimento ξ e da freqüência ω
resolvendo-se o seguinte sistema:

78
+=
1
ωω
ωω
2ξ
a
a nm
nm1
0 (6.5)
onde mω é a freqüência fundamental e nω é tomada como uma freqüência mais alta cujo
modo correspondente contribui significativamente para a resposta dinâmica da estrutura.
Neste estudo, nω foi tomada como a freqüência do 5° modo de vibração da viga, obtendo-
se os seguintes valores para os fatores de amortecimento; -10 s 100759,5a = e
s 10 x 119620,5a -61 = . Substituindo tais valores na equação (6.3), a matriz de
amortecimento da estrutura foi determinada.
A figura 6.5 apresenta os seis primeiros modos de vibração teóricos da viga analisada e a
figura 6.6 apresenta o registro de saída obtido pelo método de integração de Newmark,
constituído das acelerações em alguns pontos da viga.
1 6 11 16 21 26 31-1
0
1
1º Modo
1 6 11 16 21 26 31-1
0
1
2º Modo
1 6 11 16 21 26 31-1
0
1
3º Modo
1 6 11 16 21 26 31-1
0
1
4º Modo
1 6 11 16 21 26 31-1
0
1
Nós
5º Modo
1 6 11 16 21 26 31-1
0
1
Nós
6º Modo
Figura 6.5 – Seis primeiros modos de vibração teóricos da viga.

79
0 0.2 0.4 0.6 0.8 1-15
-5
5
15
20
Tempo (s)
Aceleração (m/s2)
0 0.2 0.4 0.6 0.8 1-10
-5
0
5
10
Tempo (s)
Aceleração (m/s2)
0 0.2 0.4 0.6 0.8 1-4
-2
0
2
4
Tempo (s)
Aceleração (m/s2)
0 0.2 0.4 0.6 0.8 1-4
-2
0
2
4
Tempo (s)Aceleração (m/s2)
Ponto 1 Ponto 1
Ponto 17 Ponto 17
(a) (b)
Figura 6.6 – Respostas de aceleração obtidas em alguns pontos da viga quando esta foi submetida a: (a) Impacto; (b) Ruído branco.
6.1.1 Método de identificação baseado nas covariâncias (SSI-COV/ref) e nos dados de
saída (SSI-DATA/ref)
De acordo com a equação (4.2), o número de pontos medidos no tempo (N), por razões
estatísticas, deve tender a infinito. Por outro lado, registros muito longos requerem um
tempo de processamento maior. Por este motivo, optou-se por variar o tempo final de
simulação e comparar os resultados obtidos a partir de registros com N “pequeno” e
“grande” a fim de avaliar se este parâmetro (N) comprometeria a eficiência do método.
As respostas da estrutura à excitação considerada foram obtidas em todos os pontos da viga
sendo, portanto, 34== rl , onde l é o número de pontos de medição e r o número de
pontos de referências. Na simulação do ensaio dinâmico, as respostas em todos os pontos
da viga foram obtidas ao mesmo tempo e por esse motivo, como a viga foi excitada apenas
uma vez, todos os pontos medidos podem ser considerados como referência. A excitação
considerada num primeiro exemplo foi de impacto no ponto 2 da viga e as respostas foram
simuladas com N = 16000 resultando num tempo final de simulação de 4s. Foi simulada
também uma resposta com N = 4000 resultando num tempo final de simulação de 1s. O
passo de tempo utilizado encontra-se na tabela 6.1.

80
Determinados os parâmetros l e r e escolhido o valor de i, foram estimadas as covariâncias
entre as respostas por meio da equação (4.9) e, com isso, montou-se a matriz Toeplitz
ref x 1
li ri
i∈T R (Equação 4.8). Os valores das freqüências naturais de vibração identificadas
pelo método SSI-COV/ref, para N = 16000 e N = 4000, e teóricos, para o carregamento do
tipo impacto, são apresentados na tabela 6.2. O parâmetro i foi adotado igual a 20.
As freqüências foram obtidas como sendo os autovalores da matriz de estado A
identificada pelo método, conforme exposto no capítulo 4, e os modos de vibração como os
autovetores de A, multiplicados pela matriz de observação C também identificada pelo
método (equação 4.28). As figuras 6.7 e 6.8 apresentam os seis primeiros modos de
vibração da viga obtidos a partir das matrizes identificadas considerando N = 16000 e N =
4000, respectivamente, para o carregamento do tipo impacto.
Para a identificação das propriedades modais da viga pelo método SSI-DATA/ref, partiu-se
da matriz Hankel, refH , (equação 4.2), montada a partir das respostas obtidas em todos os
pontos da viga. Foram adotados os mesmos parâmetros utilizados no SSI-COV/ref (l, r e i).
A tabela 6.3 apresenta os valores das freqüências identificadas pelo método SSI-DATA/ref
quando foi aplicada à viga a excitação representada na figura 6.1 (Impacto). As figuras 6.9
e 6.10 apresentam os seis primeiros modos de vibração da viga livre-livre identificados
pelo SSI-DATA/ref.

81
Tabela 6.2. Freqüências de vibração teóricas e identificadas - 34== rl - SSI-COV/ref.
SSI-COV/ref Freqüências (Hz) Teórica
N = 16000 N = 4000 1ª 43,6557 43,6366 43,6366 2ª 120,1035 119,7478 119,7478 3ª 235,0019 232,3839 232,3839 4ª 387,7275 376,3611 376,3611 5ª 578,0880 542,6395 542,6395 6ª 805,8569 718,4341 718,4341
1º Modo - Método SSI-COV/ref
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
N = 4000 N = 16000
2º Modo - Método SSI-COV/ref
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
N = 4000 N = 16000
3º Modo - Método SSI-COV/ref
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
N = 4000 N = 16000
Figura 6.7 – Três primeiros modos de vibração da viga identificados pelo método SSI-
COV/ref, considerando N = 16000 e N = 4000 e excitação do tipo impacto.

82
4º Modo - Método SSI-COV/ref
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
N = 4000 N = 16000
5º Modo - Método SSI-COV/ref
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
N = 4000 N = 16000
6º Modo - Método SSI-COV/ref
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
N = 4000 N = 16000
Figura 6.8 – 4º, 5º e 6º modos de vibração identificados pelo método SSI-COV/ref, considerando N = 16000 e N = 4000 e excitação do tipo impacto.

83
Tabela 6.3. Freqüências de vibração teóricas e identificadas - 34== rl - SSI-DATA/ref.
SSI-DATA/ref Freqüências (Hz) Teórica
N = 4000 1ª 43,6557 43,6366 2ª 120,1035 119,7478 3ª 235,0019 232,3839 4ª 387,7275 376,3611 5ª 578,0880 542,6395 6ª 805,8569 718,4341
1º Modo - Método SSI-DATA/ref
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Impacto
2º Modo - Método SSI-DATA/ref
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Impacto
3º Modo - Método SSI-DATA/ref
-1,20
-0,80
-0,40
0,00
0,40
0,80
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Impacto
Figura 6.9 – Três primeiros modos de vibração da viga identificados pelo método SSI-
DATA/ref, considerando N = 4000 e excitação do tipo impacto.

84
4º Modo - Método SSI-DATA/ref
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Impacto
5º Modo - Método SSI-DATA/ref
-1,20
-0,80
-0,40
0,00
0,40
0,80
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Impacto
6º Modo - Método SSI-DATA/ref
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Impacto
Figura 6.10 – 4º, 5º e 6º modos de vibração identificados pelo método SSI-DATA/ref,
considerando N = 4000 e excitação do tipo impacto.
Como pode ser observado, por meio dos valores apresentados nas tabelas 6.2 e 6.3, as seis
primeiras freqüências de vibração da viga puderam ser identificadas corretamente pelos
dois métodos considerados, pois, se comparadas aos valores teóricos, apresentam-se
próximos a estes. No caso das freqüências identificadas pelo método SSI-COV/ref,
verifica-se que os valores obtidos foram idênticos quando foram consideradas as respostas
com N = 4000 e N = 16000.
No caso da aplicação do método SSI-DATA/ref, foram consideradas apenas as respostas
obtidas com N = 4000, ou um tempo final de simulação de 1s. Uma vez que foi possível

85
identificar as freqüências e os modos de vibração da viga a partir dessas respostas, optou-
se por não aplicá-lo às respostas obtidas com N = 16000. Isto porque o método SSI-
DATA/ref requer um grande esforço computacional, resultando em um tempo de
processamento muito superior ao requerido pelo SSI-COV/ref.
Embora os métodos tenham sido desenvolvidos considerando N tendendo a infinito, as
mesmas freqüências foram identificadas a partir das respostas com N = 4000 ou N =
16000. O mesmo aconteceu para os modos de vibração, como pode ser visto nas figuras
6.7 a 6.10.
Como foi visto anteriormente, os métodos estocásticos de identificação de sistemas são
desenvolvidos partindo da hipótese de que a entrada ou excitação possa ser considerada um
ruído branco. Isto não acontece com o impacto. Porém, segundo Peeters (2000), o uso de
excitação do tipo impacto não introduz erros no processo de identificação por estes
métodos. No entanto, o autor afirma que é importante incluir zeros suficientes nos registros
de resposta da estrutura antes de ter sido dado o impacto e sugere ainda que este número de
zeros deva ser pelo menos o número de linhas bloco (block rows) da matriz Hankel (4.2).
Isto se deve ao fato de que sem uma quantidade de zeros suficientes as últimas linhas da
matriz Hankel conteriam dados da resposta que só iniciou depois do impacto e por isso
teriam um nível de energia muito baixo.
Neste sentido, decidiu-se comparar os resultados dos métodos tendo sido acrescentados 20
zeros (i = 20 – número de linhas blocos) no início das respostas de aceleração obtidas
anteriormente, e ainda comparar os resultados quanto à aplicação de impacto e excitação
tipo ruído branco. A tabela 6.4 apresenta os valores das freqüências naturais da viga
identificados pelo método SSI-COV/ref tendo sido incluídos zeros ao início das respostas
de aceleração, obtidas a partir da excitação de impacto. As figuras 6.11 a 6.14 apresentam
os modos correspondentes identificados para os casos considerados na tabela 6.4.
A partir dos resultados indicados na tabela 6.4 verifica-se que as freqüências identificadas
apresentaram os mesmos valores para os casos considerados, ou seja, acrescentando ou não
zeros ao início de cada resposta obtida para N = 4000 e N = 16000. Observando as figuras
6.11 a 6.14, verifica-se que as formas modais foram identificadas corretamente para todos
os casos analisados.

86
Tabela 6.4 - Comparação entre as freqüências obtidas acrescentando zeros às respostas de aceleração e sem acrescentá-los – Impacto - SSI-COV/ref.
SSI-COV/ref - N = 16000 SSI-COV /ref- N = 4000 Freqüência
(Hz) Teórica
Sem zeros Com zeros Sem zeros Com zeros 1ª 43,6557 43,6366 43,6366 43,6366 43,6366 2ª 120,1035 119,7478 119,7478 119,7478 119,7478 3ª 235,0019 232,3839 232,3839 232,3839 232,3839 4ª 387,7275 376,3611 376,3611 376,3611 376,3611 5ª 578,0880 542,6395 542,6395 542,6395 542,6395 6ª 805,8569 718,4341 718,4341 718,4341 718,4341
1º Modo - Método SSI-COV/ref - N = 16000
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Sem zeros Com zeros
2º Modo - Método SSI-COV/ref - N =16000
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Sem zeros Com zeros
3º Modo - Método SSI-COV/ref - N = 16000
-1,20
-0,80
-0,40
0,00
0,40
0,80
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Sem zeros Com zeros
Figura 6.11 – Comparação entre os três primeiros modos de vibração identificados pelo método SSI-COV/ref quando acrescentados zeros no início dos registros. N = 16000.
Excitação do tipo impacto.

87
4º Modo - Método SSI-COV/ref - N = 16000
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Sem zeros Com zeros
5º Modo - Método SSI-COV/ref - N = 16000
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Sem zeros Com zeros
6º Modo - Método SSI-COV/ref - N = 16000
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Sem zeros Com zeros
Figura 6.12 – Comparação entre o 4º, 5º e 6º modos de vibração identificados pelo método SSI-COV/ref quando acrescentados zeros no início dos registros. N = 16000. Excitação do
tipo impacto.

88
1º Modo - Método SSI-COV/ref - N = 4000
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Sem zeros Com zeros
2º Modo - Método SSI-COV/ref - N = 4000
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Sem zeros Com zeros
3º Modo - Método SSI-COV/ref - N = 4000
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Sem zeros Com zeros
Figura 6.13 - Comparação entre os três primeiros modos de vibração identificados pelo método SSI-COV/ref quando acrescentados zeros no início dos registros - N = 4000.
Excitação do tipo impacto.
A tabela 6.5 apresenta os resultados obtidos, a partir do SSI-COV/ref, para as freqüências
da viga quando foi aplicada a excitação ruído branco. As figuras 6.15 e 6.16 apresentam,
como forma de comparação, os modos de vibração identificados quando foram aplicadas
excitações do tipo impacto e ruído branco. A excitação do tipo ruído branco aplicada é
aquela representada pela figura 6.2. Tal excitação apresenta média zero e desvio padrão (σ)
igual a 1,12.

89
4º Modo - Método SSI-COV/ref - N = 4000
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Sem zeros Com zeros
5º Modo - Método SSI-COV/ref - N = 4000
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Sem zeros Com zeros
6º Modo - Método SSI-COV/ref - N = 4000
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Sem zeros Com zeros
Figura 6.14 - Comparação entre o 4º, 5º e 6º modos de vibração identificados pelo método SSI-COV/ref quando acrescentados zeros no início dos registros. N = 4000. Excitação tipo
impacto.
Quanto aos resultados indicados na tabela 6.5 verifica-se que as freqüências identificadas
apresentaram valores bem próximos para os casos considerados, ou seja, quando foram
simuladas excitações do tipo impacto e ruído branco. Observando as figuras 6.15 e 6.16,
verifica-se que as formas modais foram identificadas corretamente, porém, percebe-se
pequenas diferenças entre os modos identificados a partir da excitação tipo ruído branco
em relação aos modos obtidos considerando um impacto como entrada.

90
Tabela 6.5 - Comparação entre as freqüências obtidas com excitação tipo impacto e ruído branco – SSI-COV/ref.
Freqüências
(Hz) Teórica Impacto
Ruído
Branco
1ª 43,6557 43,6366 43,8839 2ª 120,1035 119,7478 120,0090 3ª 235,0019 232,3839 232,2940 4ª 387,7275 376,3611 375,5065 5ª 578,0880 542,6395 543,5641 6ª 805,8569 718,4341 717,2918
1º Modo - Método SSI-COV/ref - N = 16000
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Ruído branco Impacto
2º Modo - Método SSI-COV/ref - N =16000
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Ruído branco Impacto
3º Modo - Método SSI-COV/ref - N = 16000
-1,20
-0,80
-0,40
0,00
0,40
0,80
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Ruído branco Impacto
Figura 6.15 - Comparação entre os três primeiros modos de vibração identificados pelo
método SSI-COV/ref com excitação do tipo impacto e ruído branco.

91
4º Modo - Método SSI-COV/ref - N = 16000
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Ruído branco Impacto
5º Modo - Método SSI-COV/ref - N = 16000
-1,20
-0,80
-0,40
0,00
0,40
0,80
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Ruído branco Impacto
6º Modo - Método SSI-COV/ref - N = 16000
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Ruído branco Impacto
Figura 6.16 - Comparação entre o 4º, 5º e 6º modos de vibração identificados pelo método
SSI-COV/ref com excitação do tipo impacto e ruído branco.
A tabela 6.6 apresenta os resultados obtidos pelo SSI-DATA/ref quando foi aplicado o
ruído branco, representado pela figura 6.2, para excitar a viga. Neste caso, verifica-se,
também, que as freqüências puderam ser identificadas satisfatoriamente. Verifica-se, ainda,
que os valores das freqüências apresentaram uma pequena diferença em relação àqueles
identificados a partir do impacto. As figuras 6.17 e 6.18 apresentam os modos de vibração
identificados pelo SSI-DATA/ref quando a viga foi submetida a impacto e ruído branco
como forma de comparação. Novamente verifica-se pequenas diferenças entre as formas
modais identificadas, principalmente para o 6º modo.

92
Tabela 6.6 - Comparação entre as freqüências obtidas com excitação tipo impacto e ruído branco – SSI-DATA/ref.
Freqüências
(Hz) Teórica Impacto
Ruído
Branco
1ª 43,6557 43,6366 42,0124 2ª 120,1035 119,7478 117,2921 3ª 235,0019 232,3839 233,7376 4ª 387,7275 376,3611 376,4752 5ª 578,0880 542,6395 539,2156 6ª 805,8569 718,4341 715,4858
1º Modo - Método SSI-DATA/ref
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Impacto Ruído branco
2º Modo - Método SSI-DATA/ref
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Impacto Ruído branco
3º Modo - Método SSI-DATA/ref
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Impacto Ruído branco
Figura 6.17 - Comparação entre os três primeiros modos de vibração identificados pelo
método SSI-DATA/ref com excitação do tipo impacto e ruído branco.

93
4º Modo - Método SSI-DATA/ref
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Impacto Ruído branco
5º Modo - Método SSI-DATA/ref
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Impacto Ruído branco
6º Modo - Método SSI-DATA/ref
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Impacto Ruído branco
Figura 6.18 - Comparação entre o 4º, 5º e 6º modos de vibração identificados pelo método
SSI-DATA/ref com excitação do tipo impacto e ruído branco.
6.1.2 Método de detecção de pico
O método de detecção de pico foi escolhido por sua simplicidade e rapidez de
processamento. Neste caso, as simulações foram feitas considerando os dois tipos de
excitação abordados anteriormente. As respostas obtidas nos pontos da viga, utilizadas na
identificação pelo método de detecção de pico, foram as mesmas consideradas nas análises
anteriores.

94
As figuras 6.19 e 6.20 e a tabela 6.7 apresentam os resultados obtidos considerando
respostas de aceleração com N = 4000 e considerando os dois tipos de excitação, impacto e
ruído branco.
Os resultados apresentados na tabela 6.6 indicam que as seis primeiras freqüências de
vibração da viga puderam ser identificadas corretamente pelo método de detecção de pico.
Assim como nos métodos SSI-COV/ref e SSI-DATA/ref, as freqüências identificadas pelo
método de detecção de pico, quando foi aplicado à viga um impacto ou um ruído branco,
apresentaram valores bem próximos.
Quanto aos modos de vibração, apresentados nas figuras 6.19 e 6.20, verifica-se que, para
os dois tipos de excitação aplicados, os modos também puderam ser identificados
corretamente pelo método de detecção de pico.
Tabela 6.7 - Comparação entre as freqüências obtidas com excitação tipo impacto e ruído branco – método de detecção de pico.
Freqüências
(Hz) Teórica Impacto
Ruído
Branco
1ª 43,6557 43,9780 43,9780 2ª 120,1035 119,9400 118,9405 3ª 235,0019 231,8841 232,8836 4ª 387,7275 375,8121 376,8116 5ª 578,0880 542,7286 541,7291 6ª 805,8569 718,6407 718,6407
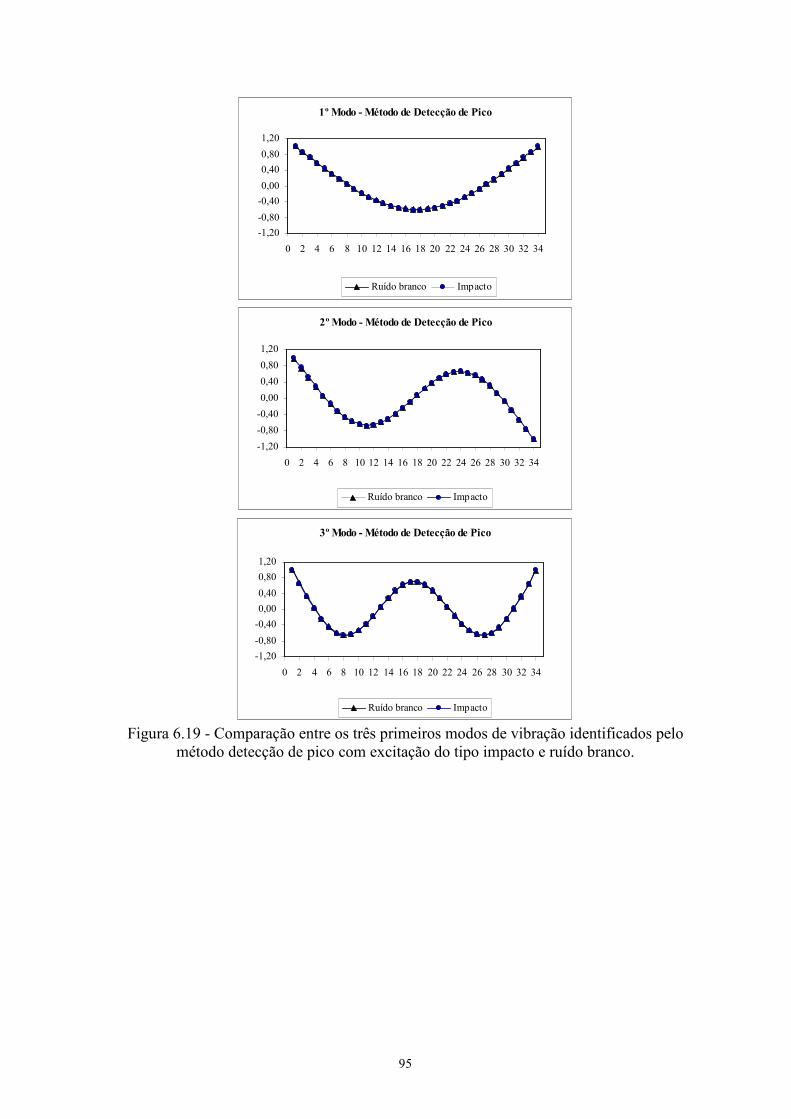
95
1º Modo - Método de Detecção de Pico
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Ruído branco Impacto
2º Modo - Método de Detecção de Pico
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Ruído branco Impacto
3º Modo - Método de Detecção de Pico
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Ruído branco Impacto
Figura 6.19 - Comparação entre os três primeiros modos de vibração identificados pelo método detecção de pico com excitação do tipo impacto e ruído branco.

96
4º Modo - Método de Detecção de Pico
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Ruído Branco Impacto
5º Modo - Método de Detecção de Pico
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Ruído branco Impacto
6º Modo - Método de Detecção de Pico
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Ruído branco Impacto
Figura 6.20 - Comparação entre o 4º, 5º e 6º modos de vibração identificados pelo método
detecção de pico com excitação do tipo impacto e ruído branco.
6.2 ATUALIZAÇÃO DE MODELOS DE ELEMENTOS FINITOS EM DINÂMICA
ESTRUTURAL
Com relação aos métodos de atualização de modelos, foram aplicados aqueles descritos
pelas equações (5.9), (5.12) e (5.22) e o método de adição de massa esquematizado na
figura 5.1. A fim de aferir a implementação destes algoritmos, serão apresentados alguns
exemplos numéricos simples.

97
O primeiro exemplo consiste de uma viga de alumínio com uma de suas extremidades
presa a uma junta flexível, conforme pode ser visto na figura 6.21. A seção transversal da
viga é retangular e com dimensões 50 mm x 25 mm e seu módulo de elasticidade
longitudinal é igual a 210 mN 10 x 7 .
0,70 m
EIkt
kr
Figura 6.21 – Modelo de elementos finitos da viga analisada.
Neste exemplo serão considerados apenas três parâmetros como desconhecidos, sendo
estes: a rigidez à flexão da viga, EI, a rigidez de translação da mola, tk e a rigidez
rotacional da mola, rk . O modelo analítico da viga que será atualizado consiste de 7
elementos com comprimentos iguais e 16 graus de liberdade (2 graus de liberdade por nó).
Primeiramente, foi considerado um modelo idêntico ao modelo analítico para se obter os
dados de simulação. Em seguida foi considerado um modelo com 14 elementos e 30 graus
de liberdade a fim de introduzir um erro, ou uma diferença, entre os dados “medidos” e os
do modelo de elementos finitos. Na tabela 6.8 podem ser vistos os parâmetros iniciais e das
simulações consideradas.
Tabela 6.8 – Parâmetros iniciais e de simulação para a viga em balanço (figura 6.21).
Valores
iniciais
Valores da 1ª
Simulação
Valores da 2ª
Simulação
Graus de liberdade 16 16 30 Unidades
EI (θ1) 4500 4560 4560 Nm2
tk (θ2) 2,0 x 107 4,0x 107 4,0 x 107 Nm-1
rk (θ3) 5,0 x 104 10,0 x 104 10,0 x 104 Nm rad-1
O vetor de parâmetros θθθθ é então formado por EI, tk e rk . Foram usadas as quatro
primeiras freqüências de vibração no algoritmo de atualização e, portanto, teve-se um
problema onde o número de medidas era maior que o número de parâmetros

98
desconhecidos. Sendo assim, o modelo foi atualizado a partir da equação (5.9), reproduzida
abaixo, e a matriz de sensibilidade dos autovalores S, foi calculada por meio da equação
(5.2).
[ ] ( )jmTj
1Tjj1j zzWSSWSθθ −+=
−
+ εεεεεεεεεεεεεεεε
Para calcular a matriz εεW foi considerado um desvio padrão para cada freqüência de
0,25% do seu valor simulado logo, para cada autovalor o desvio padrão considerado foi de
aproximadamente 0,50% do seu valor simulado. Assim, a matriz εεW é uma matriz
diagonal cujos elementos são o inverso da variância de cada autovalor “medido” ou
simulado, usado no algoritmo. Obteve-se então:
=−
−
11-
10-
9
5
εε
1,2301x1000001,5628x10000010x8,8737000010x3581,1
W
As tabelas 6.9 e 6.10 apresentam os valores dos parâmetros atualizados e as freqüências,
obtidas do modelo atualizado, em algumas iterações, para o caso em que os modelos,
inicial e de simulação, foram idênticos, ou seja, consistiam de 7 elementos e 16 graus de
liberdade. As tabelas 6.11 e 6.12 apresentam os resultados obtidos quando foi considerado
um modelo de simulação diferente do analítico.
Tabela 6.9 – Valores dos parâmetros em algumas iterações considerando a 1ª simulação.
Número de iterações Parâmetros
1 3 5 7 10 Valores de
simulação
EI (θ1) 4685,622 4561,278 4560,000 4560,000 4560,000 4560
tk (θ2) 107 3,1285 3,9870 4,0000 4,0000 4,0000 4,0
rk (θ3) 104 7,8096 9,9609 10,0000 10,0000 10,0000 10,0

99
Tabela 6.10 – Valores das freqüências em algumas iterações considerando a 1ª simulação.
Iterações Freq.
(Hz)
Freq. Mod.
Inicial 1 5 7 10 Freqüências
"medidas"
F1 33,2753 32,8409 37,0766 37,0766 37,0766 37,0766
F2 208,6312 205,1394 231,9045 231,9045 231,9045 231,9045
F3 560,2811 562,2926 636,5893 636,5893 636,5893 636,5893
F4 1023,6075 1059,4529 1201,8518 1201,8518 1201,8518 1201,8518
F5 1527,5698 1658,1047 1884,8577 1884,8577 1884,8577 1884,8577
F6 2021,3419 2340,5364 2661,0271 2661,0271 2661,0271 2661,0271 Tabela 6.11 – Valores dos parâmetros em algumas iterações considerando a 2ª simulação.
Número de iterações Parâmetros
1 3 5 7 10 Valores de
simulação
EI (θ1) 5237,382 5105,489 5211,211 5208,948 5208,948 4560
tk (θ2) 108 0,4474 1,9895 0,6285 0,6285 0,6285 0,4
rk (θ3) 104 6,8875 7,4674 7,0202 7,0829 7,0829 10,0
Tabela 6.12 – Valores das freqüências em algumas iterações considerando a 2ª simulação.
Iterações Freq.
(Hz)
Freq. Mod.
Inicial 1 5 7 10 Freqüências
"medidas"
F1 33,2753 36,2519 36,4325 36,3241 36,3241 37,0766
F2 208,6312 230,6043 231,8221 231,7792 231,7792 231,9045
F3 560,2811 628,1986 636,0152 636,6075 636,6075 636,5893
F4 1023,6075 1171,5842 1200,0069 1201,8500 1201,8500 1201,8518
F5 1527,5698 1809,5906 1893,5628 1897,1385 1897,1385 1884,8577
F6 2021,3419 2422,2994 2681,9394 2687,6125 2687,6125 2661,0271
Considerando o primeiro caso analisado, em que os modelos de simulação e o analítico
eram idênticos, verifica-se que o modelo atualizado permitiu identificar os parâmetros
utilizados na primeira simulação com bastante precisão. Como pode ser observado na
tabela 6.9, os valores dos parâmetros convergiram para os valores de simulação a partir da
5ª iteração. Quanto às freqüências obtidas do modelo atualizado, verifica-se que seus
valores também convergiram para os valores de simulação, que representam as freqüências
medidas, com bastante precisão.

100
Para o caso em que foram considerados modelos diferentes (2ª simulação), o procedimento
de atualização aplicado não permitiu identificar, com a mesma precisão, os parâmetros do
modelo de simulação, tabela 6.11. Da mesma forma, observa-se que as freqüências obtidas
do modelo atualizado se aproximam das freqüências de simulação, porém não apresentam
a mesma precisão do exemplo anterior, em que não havia diferenças entre os modelos
analíticos e de simulação.
O segundo exemplo a ser apresentado é similar ao primeiro considerando os valores da 2ª
simulação, porém, o modelo analítico que foi atualizado passou a ser o de uma viga
engastada em uma de suas extremidades. A figura 6.22 mostra o modelo de elementos
finitos adotado bem como os parâmetros que passaram a ser considerados desconhecidos.
Os dados “medidos” consistiram das quatro primeiras freqüências naturais obtidas no
exemplo anterior e apresentadas na tabela 6.12.
0,70 m
EI-1 EI-2 EI-3 EI-4 EI-5 EI-6 EI-7
Figura 6.22 – Modelo de elementos finitos a ser atualizado.
O número de parâmetros a serem atualizados aumentou em relação ao exemplo anterior,
pois foi considerado que a rigidez à flexão em cada elemento poderia variar
independentemente. O vetor de parâmetros θθθθ foi então formado pela rigidez à flexão de
cada elemento: 1EI , 2EI , 3EI , 4EI , 5EI , 6EI e 7EI , e neste caso passou-se a ter um
problema onde o número de parâmetros desconhecidos era maior que o número de
freqüências “medidas”. O algoritmo utilizado foi, então, dado pela equação (5.14).
Para calcular a matriz θθθθθθθθW foi considerado o mesmo desvio padrão para o EI de todos os
elementos. Na realidade, apenas o valor relativo do desvio padrão interessa neste caso
devido à forma do problema de otimização dado em (5.13) (Friswell e Mottershead, 1995),
porém, foi adotado um valor de 150 Nm2 para o cálculo de θθθθθθθθW . As tabelas 6.13 e 6.14

101
apresentam os valores dos parâmetros, em Nm2, e as freqüências, em Hz, obtidas do
modelo atualizado, em algumas iterações.
Tabela 6.13 – Valores dos parâmetros considerando modelo analítico engastado e dados da 2ª simulação do exemplo anterior.
Número de iterações Parâmetros
1 3 5 7 10
Valores
de
simul.
1EI 4149,822 4132,856 4132,619 4132,616 4132,616 4560
2EI 4353,797 4368,516 4368,709 4368,712 4368,712 4560
3EI 4389,734 4396,529 4396,594 4396,595 4396,595 4560
4EI 4456,034 4463,240 4463,275 4463,275 4463,275 4560
5EI 4466,134 4470,315 4470,340 4470,340 4470,340 4560
6EI 4581,646 4581,300 4581,307 4581,307 4581,307 4560
7EI 4544,242 4542,674 4542,675 4542,675 4542,675 4560
Tabela 6.14 – Valores das freqüências obtidas do modelo atualizado em algumas iterações – 2ª Simulação.
Iterações Freq.
(Hz)
Freq. Mod.
Inicial 1 5 7 10 Freqüências
"medidas"
F1 41,0023 39,9520 39,9389 39,9388 39,9388 37,0766
F2 245,9266 242,5493 242,5280 242,5278 242,5278 231,9045
F3 655,2559 649,3973 649,4571 649,4571 649,4571 636,5893
F4 1213,8731 1205,2510 1205,5839 1205,5842 1205,5842 1201,8518
F5 1891,6218 1875,3561 1875,8134 1875,8138 1875,8138 1884,8577
F6 2652,6556 2629,5001 2629,9293 2629,9295 2629,9295 2661,0271
A partir dos resultados obtidos, verifica-se que os parâmetros atualizados não são idênticos
aos parâmetros de simulação, o que indica que quando existem diferenças entre o modelo a
ser atualizado e o modelo de simulação, irão existir também diferenças entre os parâmetros
correspondentes. Quanto às freqüências de vibração, observa-se que os valores obtidos do
modelo atualizado se aproximam dos valores de simulação, com exceção da 6ª freqüência,
em que o modelo inicial apresentou valor mais próximo do de simulação.
O terceiro exemplo trata do método de adição de massa, também conhecido como
Perturbed Boundary Condition Method. O modelo escolhido para aferir a implementação
deste algoritmo foi de um sistema simples massa-mola com 4 graus de liberdade, e pode
ser visto na figura 6.23. Os resultados da atualização deste modelo podem ser encontrados

102
em Friswell e Mottershead (1995) e Nalitolela et al. (1992) e serviram de referência para a
aferição do método. Neste caso o vetor de parâmetros θθθθ é formado pelas rigidezes das
molas e pelas massas, resultando em 10 parâmetros a serem atualizados. A tabela 6.15
apresenta os valores iniciais dos parâmetros utilizados pelos autores e neste trabalho.
M1
K1
M2
M3
M4
K2
K3 K4
K6K5
Figura 6.23 – Sistema massa-mola com 4 graus de liberdade.
Tabela 6.15 – Valores iniciais dos parâmetros do sistema massa-mola.
Parâmetros Valores iniciais
k1 1,20 x 106 N/m k2 1,20 x 106 N/m k3 1,20 x 106 N/m k4 0,95 x 106 N/m k5 0,96 x 106 N/m k6 0,60 x 106 N/m m1 9,70 Kg m2 9,70 Kg m3 4,70 Kg m4 4,70 Kg
Como foi visto no capítulo 5, o primeiro passo antes de iniciar o método é escolher as
coordenadas a serem perturbadas assim como o valor da massa a ser adicionada. Para isso,
procura-se obter um número de condição da matriz SST baixo e seu rank igual ao número
de parâmetros a serem atualizados. Nalitolela et al. (1992) realizaram este estudo e
decidiram por adicionar uma massa de 0,35 Kg nas coordenadas 1, 2 e 4, correspondentes
aos deslocamentos horizontais das massas M1, M2 e M4, do sistema e utilizar apenas as três
primeiras freqüências naturais. Esta configuração forneceu um número de condição de
SST igual a 1,51 x 108 e rank igual a 10.
As tabelas 6.16 e 6.17 apresentam os resultados obtidos por Nalitolela et al. (1992) e
aqueles obtidos neste trabalho, respectivamente. Tais resultados foram obtidos quando no
algoritmo foram utilizadas as três primeiras freqüências de vibração e foi adicionada uma

103
massa de 0,35 kg nas coordenadas 1, 2 e 4. É importante ressaltar que a massa foi
adicionada a uma coordenada por vez.
Tabela 6.16 – Parâmetros atualizados a cada iteração. Unidades: k (106 N/m) e m (kg). (Nalitolela et al. (1992)).
Número de Iterações
Valores
de
simulação
Valores
iniciais 1 2 3 4
k1 1,00 1,20 0,9258 0,9978 1,0000 1,0000 k2 1,00 1,20 1,0217 1,0007 1,0000 1,0000 k3 1,00 1,20 1,0346 0,9952 1,0000 1,0000 k4 1,00 0,95 1,0572 1,0063 1,0000 1,0000 k5 1,00 0,96 0,9981 0,9996 1,0000 1,0000 k6 0,50 0,60 0,4672 0,4984 0,5000 0,5000 m1 10,00 9,70 9,8027 9,9959 10,0000 10,0000 m2 10,00 9,70 9,7228 10,0224 10,0001 10,0000 m3 5,00 4,70 5,1634 5,0086 4,9999 5,0000 m4 5,00 4,70 4,9098 4,9945 5,0000 5,0000
Tabela 6.17 – Parâmetros atualizados a cada iteração. Unidades: k (106 N/m) e m (kg).
Número de Iterações
Valores
de
simulação
Valores
iniciais 1 2 3 4
k1 1,00 1,20 0,9258 0,9978 1,0000 1,0000 k2 1,00 1,20 1,0217 1,0007 1,0000 1,0000 k3 1,00 1,20 1,0346 0,9952 1,0000 1,0000 k4 1,00 0,95 1,0572 1,0063 1,0000 1,0000 k5 1,00 0,96 0,9981 0,9996 1,0000 1,0000 k6 0,50 0,60 0,4672 0,4984 0,5000 0,5000 m1 10,00 9,70 9,8027 9,9959 10,0000 10,0000 m2 10,00 9,70 9,7228 10,0224 10,0001 10,0000 m3 5,00 4,70 5,1634 5,0086 4,9999 5,0000 m4 5,00 4,70 4,9098 4,9945 5,0000 5,0000
Como pode ser observado nas tabelas acima, os resultados obtidos neste trabalho foram os
mesmos obtidos pelos autores. Isto indica, portanto, que a implementação do algoritmo de
atualização foi realizada corretamente e pode ser aplicada a outros exemplos. Outros testes
foram feitos, nos quais, por exemplo, partiu-se de outros valores iniciais dos parâmetros e
foi adicionada uma massa de 0,50 kg às coordenadas 1, 2, 3 e 4. Neste caso, esta
configuração forneceu um número de condição da matriz de sensibilidade igual a 1,07 x
108 e rank igual a 10. A tabela 6.18 apresenta os resultados obtidos em algumas iterações,
assim como os valores iniciais dos parâmetros e os de simulação. Novamente observa-se

104
que os valores finais dos parâmetros atualizados convergiram para os valores de simulação
dos quais foram obtidas as freqüências ou autovalores “medidos”.
Tabela 6.18 – Parâmetros atualizados a cada iteração considerando o caso que foi adicionada massa às coordenadas 1, 2, 3 e 4 do sistema. Unidades: k (106 N/m) e m (Kg).
Número de Iterações
Valores
de
simulação
Valores
iniciais 1 2 3 4
k1 1,00 1,30 0,8432 0,9885 0,9999 1,0000 k2 1,00 1,20 1,0526 1,0019 1,0000 1,0000 k3 1,00 1,35 1,1715 0,9774 0,9997 1,0000 k4 1,00 0,95 1,0031 1,0042 0,9999 1,0000 k5 1,00 0,90 0,9902 1,0017 1,0001 1,0000 k6 0,50 0,57 0,4165 0,4895 0,4999 0,5000 m1 10,00 9,50 9,5524 9,9684 9,9998 10,0000 m2 10,00 9,50 8,8748 10,0088 10,0003 10,0000 m3 5,00 4,60 5,2528 4,9747 4,9994 5,0000 m4 5,00 4,40 4,7806 4,9804 5,0001 5,0000
Com relação à análise numérica realizada, verificou-se que, a partir dos resultados obtidos,
que os métodos de identificação das propriedades dinâmicas assim como os métodos de
atualização de modelos de elementos finitos aplicados, foram implementados
corretamente, podendo ser aplicados aos exemplos experimentais com segurança.

105
7. ANÁLISE EXPERIMENTAL
Neste capítulo, serão apresentados os resultados obtidos a partir da aplicação dos métodos
de identificação de sistemas e de atualização de modelos, descritos nos capítulos 4 e 5, a
dados experimentais.
Na análise experimental, foram realizados ensaios de vibração em um pórtico plano
simples e em vigas metálicas com condições de apoio livre-livre. Os métodos de
identificação das propriedades dinâmicas (SSI-COV/ref, SSI-DATA/ref e o Método de
Detecção de Pico) foram aplicados a registros de aceleração obtidos das estruturas
ensaiadas. No pórtico, foram realizados ensaios considerando três tipos de excitação
diferentes, aplicados em pontos diferentes. Apenas o método de atualização de modelos
sem adição de massa foi aplicado ao pórtico.
Na viga foram realizados dois ensaios diferentes, porém, em ambos, a viga foi excitada em
único ponto por meio de impacto produzido com auxílio de um martelo. No primeiro
ensaio, foram obtidos registros em todos os pontos da viga a fim de serem identificados os
modos e as freqüências de vibração da estrutura considerada. No segundo ensaio, foi
adicionada uma massa a diferentes pontos da viga, a fim de obter as freqüências para
vários sistemas perturbados e assim aplicar o método de atualização de modelos
considerando o procedimento de adição de massa nas coordenadas do modelo numérico e
experimental.
7.1 PÓRTICO PLANO
O pórtico ensaiado foi construído a partir de 4 barras de alumínio e 2 réguas de aço,
conforme pode ser observado na figura 7.1, e cujos valores das massas encontram-se na
tabela 7.1. No modelo experimental considerado havia, ainda, um pequeno motor, fixo em
um dos pavimentos, e um suporte metálico, fixo no pavimento superior. A figura 7.1
apresenta um esquema de sua configuração, bem como suas dimensões e as coordenadas
consideradas.

106
Figura 7.1 – Configuração do pórtico ensaiado.
A matriz de massa é definida em (7.1) e leva em consideração, além das massas das barras
e das réguas, as massas dos acelerômetros usados no ensaio, a massa do motor, do suporte
metálico e dos parafusos que fixavam as barras às réguas. Os valores das massas
consideradas no cálculo encontram-se na tabela 7.1.
=
2677009,00004196357,00003500402,0
M kg (7.1)
Para o cálculo da matriz de rigidez, o pórtico foi considerado do tipo shear building, uma
vez que a rigidez das barras, que constituem os pavimentos, pode ser considerada infinita
em relação à rigidez das réguas, que representam os pilares do modelo experimental. A
matriz de rigidez do pórtico é definida pela equação (7.2), e as propriedades físicas dos
pilares do pórtico (réguas de aço) podem ser encontradas na tabela 7.2.

107
+−
−
+−
−
=
33
32
32
32
32
31
31
31
31
l
EI24
l
EI24
l
EI240
l
EI24
l
EI24
l
EI24
l
EI24
0l
EI24
l
EI24
K N/m (7.2)
Tabela 7.1 – Massas das peças consideradas no cálculo da matriz de massa do pórtico.
Peças Massas (kg) Barra 1 0,15941 Barra 2 0,15938 Barra 3 0,15903 Barra 4 0,15892 Régua 1 0,10503 Régua 2 0,10469 Motor 0,15300 Suporte 0,11880 Parafuso 0,00242 Acelerômetro 0,02814
Tabela 7.2 – Propriedades físicas dos pilares do pórtico.
Propriedades Valores Módulo de Elasticidade, E (N/m2) 2,06 x 1011 Momento de Inércia, I (m4) 3,219 x 10-12
Para a realização do ensaio, o pórtico foi fixado, por meio de parafusos, a um bloco de
concreto de aproximadamente 50 kg colocado sobre uma borracha a fim de evitar a
vibração da base. Foram utilizados três acelerômetros piezoelétricos fixados às
coordenadas 1, 2 e 3 do pórtico, conforme pode ser visto na figura 7.1. Estes acelerômetros
foram ligados a três amplificadores de sinais que por sua vez estavam ligados a um
equipamento de aquisição de dados.
Os sinais provenientes dos acelerômetros instalados no pórtico foram adquiridos por meio
de um equipamento da Lynx Tecnologia Eletrônica, composto de quatro placas do tipo AI
2164 contendo oito canais de aquisição cada, como pode ser visto na figura 7.2-a. Como
parte da aquisição dos dados, foi utilizado o software AqDados 7, instalado no notebook,
que permitiu a configuração dos ensaios, assim como a visualização dos sinais à medida
que estes eram adquiridos. Os acelerômetros utilizados eram piezoelétricos do tipo 4366 da

108
Brüel & Kjaer. A massa de cada acelerômetro era de aproximadamente 28,14 g e sua
sensibilidade de 4,80 pC/ms-2.
(a) (b) Figura 7.2 – (a) Equipamento utilizado para a aquisição dos sinais provenientes dos
acelerômetros. (b) Pórtico ensaiado.
Foram realizados cinco ensaios no pórtico, sendo quatro destes de vibração livre e um de
vibração forçada. Nos ensaios de vibração livre o pórtico foi excitado por meio de impacto
ou de um deslocamento inicial em dois pontos diferentes. No ensaio de vibração forçada, o
pórtico foi excitado por meio do motor fixo no segundo pavimento. Neste caso, a
freqüência de excitação do motor foi correspondente à 1ª freqüência natural do pórtico. A
tabela 7.3 apresenta a descrição de cada ensaio, indicando o tipo e ponto de aplicação da
excitação. O equipamento de aquisição foi configurado para adquirir os registros
provenientes de três canais, correspondentes aos três acelerômetros fixados nas
coordenadas 1, 2 e 3 do pórtico, em instantes de tempo de 5x10-3 s resultando numa
freqüência de amostragem de 200 Hz (∆t
1). Neste caso, a freqüência de corte ou
freqüência de Nyquist foi de 100 Hz (t2∆
1) e a duração de cada ensaio foi de 25 s.

109
Tabela 7.3 – Descrição dos ensaios realizados no pórtico.
Ensaio Descrição 1 Vibração livre com impacto no ponto 2 2 Vibração livre com deslocamento inicial do ponto 3 1A Vibração livre com impacto no ponto 1 2A Vibração livre com deslocamento inicial no ponto 1 3 Vibração forçada
7.1.1 Identificação das propriedades dinâmicas do pórtico
A partir dos registros de aceleração, adquiridos nas três coordenadas indicadas na figura
7.1, foram identificadas as propriedades dinâmicas da estrutura, freqüências naturais e
modos de vibração. Esta identificação foi feita por meio dos três métodos já citados: o
método de detecção de pico, o SSI-COV/ref e o SSI-DATA/ref. Os resultados obtidos por
cada método para as freqüências, assim como para os modos de vibração, encontram-se
nas tabelas 7.4 a 7.8 e nas figuras 7.3 a 7.7, respectivamente. Assim como na análise
numérica, os resultados referidos neste capítulo como teóricos correspondem a resultados
obtidos a partir da solução do problema de autovalores representado pela equação (6.1).
Os registros de aceleração obtidos nos três pavimentos do pórtico, para todos os ensaios,
assim como os espectros de potência utilizados no método de detecção de pico podem ser
vistos no apêndice A. A figura 7.3 apresenta as formas modais identificadas para o ensaio
1, onde pode-se observar que, com exceção do 1º modo identificado pelo SSI-COV/ref, os
outros foram identificados corretamente. Neste ensaio, observa-se ainda que, os modos
obtidos pelo método de detecção de pico apresentaram-se mais próximos dos modos
teóricos. Para o ensaio 2, figura 7.4, o mesmo pode ser observado, porém, neste caso, os
três métodos apresentaram resultados mais precisos, em relação ao modo teórico, para o 2º
modo.
Quando o impacto ou o deslocamento inicial foi aplicado à coordenada 1 do pórtico,
ensaios 1A e 2A, o 1º modo de vibração pôde ser identificado corretamente por todos os
métodos. Em ambos os casos, os resultados obtidos pelos métodos SSI-COV/ref e de
detecção de pico, apresentaram-se mais próximos da forma modal teórica, para o 1º e 3º
modos. Isto pode ser observado nas figuras 7.5 e 7.6.

110
Tabela 7.4 – Freqüências naturais de vibração identificadas pelos métodos de detecção de pico, SSI-COV/ref e SSI-DATA/ref para o ensaio 1.
Ensaio 1 Freqüência
Detecção de Pico SSI-COV/ref SSI-DATA/ref Teórico 1ª 7,272 7,258 7,253 7,158 2ª 23,280 21,257 23,236 22,219 3ª 32,016 32,024 32,025 30,524
1º Modo
0
1
2
3
-1.50 -1.00 -0.50 0.00 0.50 1.00 1.50
Deslocamento
Nós
Pórtico Pico SSI-COV SSI-DATA Teórico
2º Modo
0
1
2
3
-1.50 -1.00 -0.50 0.00 0.50 1.00 1.50
Deslocamento
Nós
Pórtico Pico SSI-COV SSI-DATA Teórico
3º Modo
0
1
2
3
-1.50 -1.00 -0.50 0.00 0.50 1.00 1.50
Deslocamento
Nós
Pórtico Pico SSI-COV SSI-DATA Teórico
Figura 7.3 – Modos de vibração identificados pelos métodos de detecção de pico, SSI-COV/ref e SSI-DATA/ref – Ensaio 1.

111
Tabela 7.5 – Freqüências naturais de vibração identificadas pelos métodos de detecção de pico, SSI-COV/ref e SSI-DATA/ref para o ensaio 2.
Ensaio 2 Freqüência
Detecção de Pico SSI-COV/ref SSI-DATA/ref Teórico 1ª 7,223 7,232 7,234 7,158 2ª 23,231 23,203 23,211 22,219 3ª 31,918 31,914 31,936 30,524
1º Modo
0
1
2
3
-1.50 -1.00 -0.50 0.00 0.50 1.00 1.50
Deslocamento
Nós
Pórtico Pico SSI-COV SSI-DATA Teórico
2º Modo
0
1
2
3
-1.50 -1.00 -0.50 0.00 0.50 1.00 1.50
Deslocamento
Nós
Pórtico Pico SSI-COV SSI-DATA Teórico
3º Modo
0
1
2
3
-1.50 -1.00 -0.50 0.00 0.50 1.00 1.50
Deslocamento
Nós
Pórtico Pico SSI-COV SSI-DATA Teórico
Figura 7.4 – Modos de vibração identificados pelos métodos de detecção de pico, SSI-COV/ref e SSI-DATA/ref para o Ensaio 2.

112
Tabela 7.6 – Freqüências naturais de vibração identificadas pelos métodos de detecção de pico, SSI-COV/ref e SSI-DATA/ref para o ensaio 1A.
Ensaio 1A Freqüência
Detecção de Pico SSI-COV/ref SSI-DATA/ref Teórico 1ª 7,223 7,231 7,230 7,158 2ª 23,231 23,207 23,183 22,219 3ª 31,967 31,869 31,868 30,524
1º Modo
0
1
2
3
-1.50 -1.00 -0.50 0.00 0.50 1.00 1.50
Deslocamento
Nós
Pórtico Pico SSI-COV SSI-DATA Teórico
2º Modo
0
1
2
3
-1.50 -1.00 -0.50 0.00 0.50 1.00 1.50
Deslocamento
Nós
Pórtico Pico SSI-COV SSI-DATA Teórico
3º Modo
0
1
2
3
-1.50 -1.00 -0.50 0.00 0.50 1.00 1.50
Deslocamento
Nós
Pórtico Pico SSI-COV SSI-DATA Teórico
Figura 7.5 – Modos de vibração identificados pelos métodos de detecção de pico, SSI-COV/ref e SSI-DATA/ref para o Ensaio 1A.

113
Tabela 7.7 – Freqüências naturais de vibração identificadas pelos métodos de detecção de pico, SSI-COV/ref e SSI-DATA/ref para o ensaio 2A.
Ensaio 2A Freqüência
Detecção de Pico SSI-COV/ref SSI-DATA/ref Teórico 1ª 7,223 7,225 7,222 7,158 2ª 23,231 23,181 23,179 22,219 3ª 31,918 31,861 31,859 30,524
1º Modo
0
1
2
3
-1.50 -1.00 -0.50 0.00 0.50 1.00 1.50
Deslocamento
Nós
Pórtico Pico SSI-COV SSI-DATA Teórico
2º Modo
0
1
2
3
-1.50 -1.00 -0.50 0.00 0.50 1.00 1.50
Deslocamento
Nós
Pórtico Pico SSI-COV SSI-DATA Teórico
3º Modo
0
1
2
3
-1.50 -1.00 -0.50 0.00 0.50 1.00 1.50
Deslocamento
Nós
Pórtico Pico SSI-COV SSI-DATA Teórico
Figura 7.6 – Modos de vibração identificados pelos métodos de detecção de pico, SSI-
COV/ref e SSI-DATA/ref para o Ensaio 2A.

114
Tabela 7.8 – Freqüências naturais de vibração identificadas pelos métodos de detecção de pico, SSI-COV/ref e SSI-DATA/ref para o ensaio 3.
Ensaio 3 Freqüência
Detecção de Pico SSI-COV/ref SSI-DATA/ref Teórico 1ª 7,174 7,666 6,983 7,158 2ª 20,937 23,989 21,176 22,219 3ª 31,723 32,924 32,730 30,524
1º Modo
0
1
2
3
-1.50 -1.00 -0.50 0.00 0.50 1.00 1.50
Deslocamento
Nós
Pórtico Pico SSI-COV SSI-DATA Teórico
2º Modo
0
1
2
3
-1.50 -1.00 -0.50 0.00 0.50 1.00 1.50
Deslocamento
Nós
Pórtico Pico SSI-COV SSI-DATA Teórico
3º Modo
0
1
2
3
-1.50 -1.00 -0.50 0.00 0.50 1.00 1.50
Deslocamento
Nós
Pórtico Pico SSI-COV SSI-DATA Teórico
Figura 7.7 – Modos de vibração identificados pelos métodos de detecção de pico, SSI-COV/ref e SSI-DATA/ref para o Ensaio 3.

115
Considerando o ensaio 3, de vibração forçada, pode-se verificar, observando a figura 7.7,
que o 1º e 2º modos apresentaram uma forma diferente daquelas correspondentes aos
modos teóricos, principalmente quando foram identificados pelo método de detecção de
pico e pelo SSI-COV/ref. Neste caso, como o pórtico foi excitado na 1ª freqüência pelo
motor fixo ao 2º pavimento, este fato pode ter comprometido a identificação dos dois
primeiros modos. Quanto às freqüências, observando-se os valores apresentados nas
tabelas 7.4 a 7.8, verifica-se que todos os métodos permitiram identificar corretamente esta
propriedade modal.
É importante relembrar que este trabalho está direcionado para a identificação das
propriedades modais de estruturas submetidas a excitações ambientes e, portanto, os
métodos de identificação aplicados utilizam apenas a resposta da estrutura, ou seja,
nenhuma informação sobre a excitação é requerida. Como já fora comentado no capítulo 4,
os métodos de identificação de sistemas estocásticos consideram a hipótese de que a
entrada ou excitação possa ser representada por um ruído branco. No entanto, apesar desta
hipótese ter sido violada quando foram aplicados ao pórtico os tipos de excitação descritos
na tabela 7.3, as propriedades dinâmicas da estrutura foram identificadas satisfatoriamente.
A concordância entre os modos de vibração obtidos experimentalmente e os modos
teóricos foi medida por meio do índice MAC - Modal Assurance Criterion (Allemang e
Brown, 1988). Este índice serve para medir a concordância entre dois modos de vibração e
é definido pela seguinte equação:
( )j
Tjk
Tk
2
jT
k
jk
,
yyxx
yxyxMAC rrrr
rrrr
= (7.3)
onde kxr
representa os conjuntos de modos de vibração k identificados, ou experimentais e
jyrrepresenta os conjuntos de modos de vibração j teóricos. Seu resultado é uma matriz
cujos valores variam entre 0 e 1 e cujos valores da diagonal indicam a concordância entre
modos correspondentes. Dessa forma, quanto mais próximos de 1 forem estes valores
maior a concordância entre os modos analisados.

116
A figura 7.8 apresenta uma comparação entre os modos de vibração, identificados a partir
de cada ensaio realizado, pelo método de detecção de pico. As tabelas 7.9 a 7.13
apresentam o índice MAC calculado entre os modos experimentais, identificados pelo
método de detecção de pico, obtidos em cada ensaio realizado, e os teóricos.
Método de Detecção de Pico - 1º Modo
0
1
2
3
-1.50 -1.00 -0.50 0.00 0.50 1.00 1.50
Deslocamento
Nós
Pórtico Teórico Ensaio 1 Ensaio 2
Ensaio 3 Ensaio 1A Ensaio 2A
Método de Detecção de Pico - 2º Modo
0
1
2
3
-1.50 -1.00 -0.50 0.00 0.50 1.00 1.50
Deslocamento
Nós
Pórtico Teórico Ensaio 1 Ensaio 2
Ensaio 3 Ensaio 1A Ensaio 2A
Método de Detecção de Pico - 3º Modo
0
1
2
3
-1.50 -1.00 -0.50 0.00 0.50 1.00 1.50
Deslocamento
Nós
Pórtico Teórico Ensaio 1 Ensaio 2
Ensaio 3 Ensaio 1A Ensaio 2A
Figura 7.8 – Modos de vibração identificados pelo método de detecção de pico, para cada ensaio realizado.

117
Tabela 7.9 – MAC calculado entre os modos experimentais identificados pelo método de detecção de pico e os teóricos – Ensaio 1.
Ensaio 1 Modos
1º 2º 3º 1º 0,9998 0,0003 0,0212 2º 0,0001 0,9996 0,0416 3º 0,0128 0,0244 0,9984
Tabela 7.10 – MAC calculado entre os modos experimentais identificados pelo método de detecção de pico e os teóricos – Ensaio 2.
Ensaio 2 Modos
1º 2º 3º 1º 0,9997 0,0000 0,0183 2º 0,0002 0,9999 0,0343 3º 0,0130 0,0267 0,9996
Tabela 7.11 – MAC calculado entre os modos experimentais identificados pelo método de detecção de pico e os teóricos – Ensaio 3.
Ensaio 3 Modos
1º 2º 3º 1º 0,9950 0,2636 0,0183 2º 0,0001 0,6565 0,0322 3º 0,0033 0,0391 0,9998
Tabela 7.12 – MAC calculado entre os modos experimentais identificados pelo método de detecção de pico e os teóricos – Ensaio 1A.
Ensaio 1A Modos
1º 2º 3º 1º 0,9995 0,0006 0,0309 2º 0,0002 0,9991 0,0282 3º 0,0188 0,0301 0,9975
Tabela 7.13 – MAC calculado entre os modos experimentais identificados pelo método de detecção de pico e os teóricos – Ensaio 2A.
Ensaio 2A Modos
1º 2º 3º 1º 0,9995 0,0006 0,0331 2º 0,0002 0,9990 0,0331 3º 0,0189 0,0311 0,9966

118
Ensaio 2 Ensaio 3
MAC
Modos
Modos Modos
Ensaio 1A Ensaio 2A
Método de Detecção de Pico
0 1 2 30
0.2
0.4
0.6
0.8
1
MAC
Ensaio 1
Modos
1 2 30
0.2
0.4
0.6
0.8
1
Modos
1 2 30
0.2
0.4
0.6
0.8
1
1 2 30
0.2
0.4
0.6
0.8
1
1 2 30
0.2
0.4
0.6
0.8
1
Figura 7.9 – Diagonal do índice MAC calculado entre os modos experimentais,
identificados pelo método de detecção de pico, e os teóricos, para cada ensaio realizado.
No caso dos modos identificados pelo método de detecção de pico, a partir dos valores
encontrados, verifica-se que há uma concordância satisfatória entre os modos
experimentais e os teóricos, com exceção do 2º modo identificado a partir do ensaio 3
(tabela 7.11) que forneceu um valor muito inferior a 1, indicando uma correlação, entre os
modos em questão, de apenas 65,65%. Esta correlação pode ser verificada observando os
valores da diagonal apresentados na tabela 7.11.
Os valores fora da diagonal deveriam ser iguais ou bem próximos a 0, no entanto, foram
obtidos valores indicando uma correlação de aproximadamente 27% entre o 1º e o 2º modo
experimental e teórico, para o ensaio 3. A figura 7.9, que apresenta os valores da diagonal
do MAC calculado considerando os modos identificados a partir dos ensaios realizados,
permite uma melhor visualização do nível de concordância entre os modos
correspondentes.
A figura 7.10 apresenta a comparação entre os modos de vibração, identificados a partir de
cada ensaio realizado, pelo método SSI-COV/ref. As tabelas 7.14 a 7.18 apresentam o
índice MAC calculado entre os modos experimentais, identificados pelo método SSI-
COV/ref, obtidos em cada ensaio realizado, e os teóricos.

119
Método SSI-COV/ref - 1º Modo
0
1
2
3
-1,50 -1,00 -0,50 0,00 0,50 1,00 1,50
DeslocamentoNós
Pórtico Teórico Ensaio 1 Ensaio 2
Ensaio 3 Ensaio 1A Ensaio 2A
Método SSI-COV/ref - 2º Modo
0
1
2
3
-1,50 -1,00 -0,50 0,00 0,50 1,00 1,50
Deslocamento
Nós
Pórtico Teórico Ensaio 1 Ensaio 2
Ensaio 3 Ensaio 1A Ensaio 2A
Método SSI-COV/ref - 3º Modo
0
1
2
3
-1,50 -1,00 -0,50 0,00 0,50 1,00 1,50
Deslocamento
Nós
Pórtico Teórico Ensaio 1 Ensaio 2
Ensaio 3 Ensaio 1A Ensaio 2A
Figura 7.10 – Modos de vibração identificados pelo SSI-COV/ref, para cada ensaio realizado.

120
Tabela 7.14 – MAC calculado entre os modos experimentais identificados pelo SSI-COV/ref e os teóricos – Ensaio 1.
Ensaio 1 Modos
1º 2º 3º 1º 0,0020 0,0410 0,0199 2º 0,8436 0,9573 0,0348 3º 0,0500 0,0228 0,9995
Tabela 7.15 – MAC calculado entre os modos experimentais identificados pelo SSI-COV/ref e os teóricos – Ensaio 2.
Ensaio 2 Modos
1º 2º 3º 1º 0,0023 0,0000 0,0195 2º 0,8360 0,9999 0,0327 3º 0,0543 0,0252 0,9997
Tabela 7.16 – MAC calculado entre os modos experimentais identificados pelo SSI-COV/ref e os teóricos – Ensaio 3.
Ensaio 3 Modos
1º 2º 3º 1º 0,9985 0,0011 0,0247 2º 0,0008 0,9986 0,0350 3º 0,0203 0,0287 0,9987
Tabela 7.17 – MAC calculado entre os modos experimentais identificados pelo SSI-COV/ref e os teóricos – Ensaio 1A.
Ensaio 1A Modos
1º 2º 3º 1º 0,9984 0,0005 0,0252 2º 0,0009 0,9993 0,0382 3º 0,0201 0,0369 0,9982
Tabela 7.18 – MAC calculado entre os modos experimentais identificados pelo SSI-COV/ref e os teóricos – Ensaio 2A.
Ensaio 2A Modos
1º 2º 3º 1º 0,9985 0,0011 0,0247 2º 0,0008 0,9986 0,0350 3º 0,0203 0,0287 0,9987
Quanto ao índice MAC calculado considerando os modos experimentais identificados pelo
método SSI-COV/ref, pode-se verificar, por meio dos valores apresentados nas tabelas

121
7.14 a 7.18, que existe uma boa concordância entre os modos experimentais e os teóricos,
com exceção do 1º modo identificado a partir dos ensaios 1 e 2. A figura 7.11, em que
encontram-se representadas a diagonal do MAC, permite uma melhor visualização da
concordância entre os modos correspondentes.
Figura 7.11 – Diagonal do índice MAC calculado entre os modos experimentais, identificados pelo método SSI-COV/ref, e os teóricos, para cada ensaio realizado.
Quanto aos modos identificados pelo método SSI-DATA/ref, a figura 7.12 apresenta a
comparação entre estes, para cada ensaio realizado. O índice MAC calculado entre os
modos experimentais, identificados pelo método SSI-COV/ref, obtidos em cada ensaio
realizado, e os teóricos encontram-se apresentados nas tabelas 7.19 a 7.23.
Observando a figura 7.12 e os valores do MAC apresentados nas tabelas 7.19 a 7.23,
verifica-se que os modos experimentais do pórtico, foram identificados de maneira mais
uniforme entre os vários ensaios realizados. Comparando as figuras 7.9, 7.11 e 7.13,
verifica-se que o método SSI-DATA/ref identificou modos experimentais com maior
correlação entre estes e os teóricos.
A figura 7.13, em que se encontra representada a diagonal do MAC, permite uma melhor
visualização da concordância entre os modos correspondentes.

122
Método SSI-DATA/ref - 1º Modo
0
1
2
3
-1,50 -1,00 -0,50 0,00 0,50 1,00 1,50
Deslocamento
Nós
Pórtico Teórico Ensaio 1 Ensaio 2
Ensaio 3 Ensaio 1A Ensaio 2A
Método SSI-DATA/ref - 2º Modo
0
1
2
3
-1,50 -1,00 -0,50 0,00 0,50 1,00 1,50
Deslocamento
Nós
Pórtico Teórico Ensaio 1 Ensaio 2
Ensaio 3 Ensaio 1A Ensaio 2A
Método SSI-DATA/ref - 3º Modo
0
1
2
3
-1,50 -1,00 -0,50 0,00 0,50 1,00 1,50
Deslocamento
Nós
Pórtico Teórico Ensaio 1 Ensaio 2
Ensaio 3 Ensaio 1A Ensaio 2A
Figura 7.12 – Modos de vibração identificados pelo SSI-DATA/ref, para cada ensaio realizado.
Tabela 7.19 – MAC calculado entre os modos experimentais identificados pelo SSI-DATA/ref e os teóricos – Ensaio 1.
Ensaio 1 Modos
1º 2º 3º 1º 0,9917 0,0005 0,0251 2º 0,0068 0,9991 0,0235 3º 0,0189 0,0229 0,9987

123
Tabela 7.20 – MAC calculado entre os modos experimentais identificados pelo SSI-DATA/ref e os teóricos – Ensaio 2.
Ensaio 2 Modos
1º 2º 3º 1º 0,9905 0,0004 0,0183 2º 0,0079 0,9994 0,0338 3º 0,0193 0,0249 0,9997
Tabela 7.21 – MAC calculado entre os modos experimentais identificados pelo SSI-DATA/ref e os teóricos – Ensaio 3.
Ensaio 3 Modos
1º 2º 3º 1º 0,9857 0,0008 0,0134 2º 0,0118 0,9972 0,0040 3º 0,0209 0,0430 0,9884
Tabela 7.22 – MAC calculado entre os modos experimentais identificados pelo SSI-DATA/ref e os teóricos – Ensaio 1A.
Ensaio 1A Modos 1º 2º 3º 1º 0,9820 0,0016 0,0454 2º 0,0131 0,9980 0,0383 3º 0,0277 0,0255 0,9913
Tabela 7.23 – MAC calculado entre os modos experimentais identificados pelo SSI-COV/ref e os teóricos – Ensaio 2A.
Ensaio 2A Modos
1º 2º 3º 1º 0,9813 0,0023 0,0514 2º 0,0136 0,9973 0,0441 3º 0,0278 0,0261 0,9876

124
Figura 7.13 – Diagonal do índice MAC calculado entre os modos experimentais, identificados pelo método SSI-DATA/ref, e os teóricos, para cada ensaio realizado.
7.1.2 Atualização do modelo de elementos finitos do pórtico
Um modelo numérico de uma estrutura pode ser de grande utilidade na previsão (ou
predição) do comportamento desta frente a diferentes configurações, sejam estas
produzidas por diversas condições de carregamento ou por modificações sofridas ao longo
do tempo. No entanto, muitas vezes, existem discrepâncias significativas quando se
comparam as predições numéricas e os resultados experimentais, resultando numa
desconfiança quanto ao uso do modelo em questão. Assim sendo, a atualização destes
modelos se faz necessária com o propósito de modificar seus parâmetros a fim de melhorar
a concordância ou a correlação entre os resultados experimentais e os numéricos.
Neste sentido, procurou-se atualizar um modelo de elementos finitos do pórtico ensaiado a
partir das freqüências medidas experimentalmente. A atualização foi feita a partir do
modelo inicial representado na figura 7.14 e os parâmetros K1, K2, K3, M1, M2 e M3,
cujos valores iniciais encontram-se apresentados na tabela 7.24, foram atualizados. Como o
pórtico ensaiado apresentava três graus de liberdade, foram medidas suas três freqüências
naturais de vibração. Neste caso, o número de parâmetros a atualizar foi, portanto, maior
do que o número de freqüências medidas e o algoritmo utilizado neste processo foi aquele
definido pela equação (5.22), reproduzida adiante.

125
( ) ( ) ( ){ }0jjmTj
1
jTjj1j θθWzzWSWSWSθθ −−−++=
−
+ θθθθθθθθεεεεεεεεθθθθθθθθεεεεεεεε
M1
K1
K2
K3
M2
M3
coord. 1
coord. 2
coord. 3
Figura 7.14 – Modelo inicial do pórtico para atualização.
As 3 freqüências experimentais do pórtico, identificadas pelo método SSI-DATA/ref,
foram utilizadas no processo de atualização. Vale lembrar, ainda, que o algoritmo de
atualização aplicado é baseado em funções de penalidade (penalty function methods) e
consiste num processo iterativo.
Considerando a equação (5.22), o vetor de parâmetros θθθθ0 era constituído pelos valores
iniciais apresentados na segunda coluna da tabela 7.24, ( { }T0 M3 M2 M1 K3 K2 1K=θ ).
A matriz de sensibilidade dos autovalores com relação aos parâmetros do modelo,
6 x 3R∈S , foi calculada segundo a equação (5.3). Para o cálculo de εεεεεεεεW , admitiu-se um
desvio padrão de 0,25% do valor de cada freqüência experimental, o que implica que, para
os autovalores, o desvio padrão considerado foi de aproximadamente 0,50%. Para o
cálculo de θθθθθθθθW foi considerado um desvio padrão de aproximadamente 3% do valor de
cada rigidez inicial e de 20% do valor de cada massa inicial. Vale lembrar que os valores
nas matrizes θθθθθθθθW e εεεεεεεεW representam o inverso da variância (desvio padrão ao quadrado).
Dessa forma, os valores resultantes foram os seguintes:

126
=−
−
−
2
2
2
5
5
5
θθ
10x488,300000
010x420,10000
0010x040,2000
00010x765,600
000010x765,60
0000010x297,5
W
=−
−
−
5
5
3
εε
10x488,200
010x886,80
0010x391,9
W
As tabelas 7.24 e 7.25 apresentam os resultados obtidos do processo de atualização para os
parâmetros e freqüências do modelo atualizado, respectivamente. Apesar dos erros
inerentes aos dados medidos e das possíveis diferenças entre os modelos inicial e real,
pode-se verificar, observando a tabela 7.25, que a partir dos parâmetros atualizados, o
modelo consegue reproduzir com eficiência as freqüências experimentais do pórtico.
Embora seja esperado que os parâmetros atualizados tenham significado físico, já que o
processo de atualização é iterativo, é difícil afirmar se estes correspondem verdadeiramente
àqueles da estrutura real, embora os valores obtidos levem a acreditar na possibilidade de
serem representativos da realidade.
Tabela 7.24 – Valores dos parâmetros: iniciais, em algumas iterações e atualizados. Unidades: K (N/m) e M (Kg).
Número de iterações Parâm. Iniciais 3 10 19 28 35
Parâmetros Atualizados
K1 4176,163 4217,984 4220,946 4220,971 4220,971 4220,971 4220,971 K2 3695,382 3623,679 3614,025 3613,947 3613,947 3613,947 3613,947 K3 3695,382 3687,678 3685,842 3685,828 3685,828 3685,828 3685,828 M1 0,350 0,326 0,327 0,327 0,327 0,327 0,327 M2 0,420 0,433 0,436 0,436 0,436 0,436 0,436 M3 0,268 0,226 0,225 0,225 0,225 0,225 0,225

127
Tabela 7.25 – Valores de freqüências: do modelo inicial, em algumas iterações, do modelo atualizado e experimental. Unidades: Freqüência (Hz).
Número de iterações
Freq. Mod. Inic. 2 7 10 20 35
Freq. Modelo
Atualizado
Freqüência Exp.
1ª 7,158 7,310 7,234 7,232 7,231 7,231 7,231 7,230 2ª 22,219 23,260 23,180 23,179 23,178 23,178 23,178 23,182 3ª 30,524 32,131 31,867 31,868 31,868 31,868 31,868 31,868
As figuras 7.15 e 7.16 apresentam a convergência dos parâmetros e das freqüências
respectivamente. Nelas, verifica-se que a convergência acontece de forma relativamente
rápida, por volta da 10ª iteração. No entanto, uma vez que o problema consiste em
minimizar o vetor δθδθδθδθ , quanto mais próximo de zero for este vetor, o modelo reproduzirá
com maior precisão as freqüências experimentais. A tabela 7.26 mostra alguns valores de
δθδθδθδθ em algumas iterações.
Tabela 7.26 – Valores de δθδθδθδθ em algumas iterações.
Número de iterações δθδθδθδθ
1 6 10 25 35 δK1 3,218 x 101 3,812 x 10-1 2,475 x 10-2 8,296 x 10-7 8,612 x 10-10 δK2 -3,944 x 101 -1,210 x 100 -7,747 x 10-2 -2,597 x 10-6 -2,698 x 10-9 δK3 -5,022 x 10-1 -2,195 x 10-1 -1,383 x 10-2 -4,637 x 10-7 -4,818 x 10-10 δM1 -2,278 x 10-2 1,091 x 10-4 7,033 x 10-6 2,358 x 10-10 2,456 x 10-13 δM2 3,621 x 10-4 3,436 x 10-4 2,241 x 10-5 7,510 x 10-10 7,800 x 10-13 δM3 -4,251 x 10-2 -1,763 x 10-4 -1,141 x 10-5 -3,825 x 10-10 -3,975 x 10-13
Figura 7.15 – Convergência dos parâmetros atualizados para o pórtico.

128
Figura 7.16 – Convergência das freqüências do pórtico.
7.2 VIGAS COM CONDIÇÕES DE APOIO LIVRE-LIVRE
Como se sabe, o intuito deste trabalho é fornecer subsídios para que se possa estabelecer
uma metodologia para avaliação da integridade estrutural e o comportamento de estruturas
de grande porte, como pontes. Para isto, têm sido avaliados métodos de identificação das
propriedades dinâmicas que requerem apenas a resposta do sistema e métodos iterativos de
atualização de modelos baseados em freqüências de vibração medidas experimentalmente.
A fim de se obter experimentalmente as propriedades dinâmicas das vigas, foram
realizados ensaios de vibração por meio de impacto produzido por um martelo. Nesta etapa
foram ensaiadas duas vigas metálicas com condições de contorno livre-livre. As vigas de
perfis de aço com seção transversal U (Perfil U 101,6 x 4,67 - ASTM – A36), cujas
propriedades encontram-se na tabela 7.27, foram discretizadas em 33 elementos de 0,0653
m de comprimento. As acelerações foram medidas nos 34 nós das vigas de modo a
identificar suas formas modais. A primeira viga ensaiada, a qual será referida como VIGA
1, apresentava todos os elementos com mesma área e inércia, igual a 10,533 x 10-4 m2 e
13,026 x 10-8 m4, respectivamente. A seção transversal das vigas pode ser vista na figura
7.17.

129
Tabela 7.27 – Propriedades das vigas ensaiadas.
Propriedades Valores Momento de Inércia – I 1,302 x 10-7 m4 Área da Seção Transversal – A 1,053 x 10-3 m2 Módulo de Elasticidade Longitudinal – E 2,07 x 1011 N/m2 Massa Específica – ρ 7850 kg/m3
Massa por metro – ml 7,95 kg/m Comprimento – L 2,155 m
Figura 7.17 – Seção transversal das vigas ensaiadas.
Para a realização dos ensaios, as vigas foram colocadas sobre dois pilares de concreto
armado, com peso de aproximadamente 2 KN cada, e apoiadas sobre espumas a fim de
simular a condição de contorno livre-livre, como pode ser visto na figura 7.18. As vigas
foram apoiadas nos pontos correspondentes aos nodos do primeiro modo teórico.
Figura 7.18 – Esquema de ensaio das vigas.
(a) (b)
Figura 7.19 – a) Detalhe do apoio das vigas; b) Detalhe dos acelerômetros fixados nos pontos 1, 2, 3 e 4.

130
Existe a possibilidade de surgirem, ao longo do tempo, algumas modificações numa
estrutura, sejam estas produzidas por alterações de projeto provenientes de mudança na
utilização da estrutura, reforço estrutural ou o aparecimento de danos, devido ao desgaste
natural ou má utilização da estrutura. Neste sentido, optou-se por introduzir uma
modificação na VIGA 2 e, dessa forma, ser possível avaliar o seu comportamento frente à
alteração produzida em sua estrutura.
A VIGA 2 ensaiada era, portanto, um pouco diferente da VIGA 1, pois foi feito um corte
de 10 mm na seção transversal dos elementos 18 e 19, como pode ser visto na figura 7.20.
Nestes casos, a inércia e a área destes elementos foram reduzidas de 50,8% e 10,4%
respectivamente. A inércia e a área dos elementos 18 e 19 passou a ser igual a 6,406 x 10-8
m4 e 9,435 x 10-4 m2, respectivamente.
Elem. 18 e 19
30 mm
10 mm
Figura 7.20 – Vista frontal da VIGA 2 com detalhe dos elementos 18 e 19 modificados.
Para a realização dos ensaios de vibração foram utilizados 7 acelerômetros piezoelétricos
da Brüel & Kjaer com massa de aproximadamente 29 g e sensibilidade 4,8 pC/ms-2, um
equipamento de aquisição de dados, composto por 4 placas AI 2164 contendo 8 canais
cada, da Lynx Tecnologia Eletrônica, juntamente com o software AqDados 7 instalado
num notebook e um martelo para excitar as vigas. Também foram utilizados três
amplificadores de sinais com entrada para 1 canal e um amplificador digital com entrada
para 4 canais, todos da Brüel & Kjaer. Os ensaios foram configurados para adquirir os
sinais a uma freqüência de amostragem igual a 3000 Hz durante 3s, resultando em
acelerações adquiridas a cada 3,33374x10-4 s. Os amplificadores foram configurados para
fornecer um ganho de 10 mV/ms-2 aos sinais e permitir a passagem de freqüências no
seguinte intervalo: 2 Hz ≤ F ≤ 3 KHz.
As vigas foram discretizadas em 33 elementos, o que resultou em 34 pontos de medição.
Como só era possível utilizar 7 acelerômetros, em virtude da limitação imposta pelo
número de amplificadores disponíveis, o ensaio foi dividido em 10 etapas onde 4 destes

131
acelerômetros permaneciam na mesma posição em todas as etapas (acelerômetros fixos ou
de referência) e os outros 3 mudavam de posição a cada etapa, permitindo com isso, medir
a aceleração em pontos diferentes da viga (acelerômetros móveis). A excitação foi
fornecida às vigas por meio de um impacto sempre localizado entre os pontos 1 e 2 das
mesmas, conforme pode ser visto na figura 7.21. Tal impacto foi produzido com o auxílio
de um martelo.
Figura 7.21 – Vista superior da viga indicando o ponto de aplicação do impacto.
A figura 7.22 apresenta um esquema mostrando as posições nas quais os acelerômetros de
referência permaneciam fixos em todas as etapas. Na tabela 7.28 encontram-se os pontos
medidos em cada etapa pelos acelerômetros móveis. Vale lembrar que em cada etapa
foram medidas as acelerações nos pontos indicados na tabela 7.28 mais aquelas
provenientes dos pontos fixos ou de referência: 1, 16, 19 e 34.
Figura 7.22 – Vista superior da viga mostrando os pontos onde os acelerômetros de
referência permaneceram fixos em todas as etapas.
Tabela 7.28 – Pontos onde foram medidas as acelerações em cada etapa do ensaio.
Etapas Pontos medidos E1 2, 3 e 4 E2 5, 6 e 7 E3 8, 9 e 10 E4 11, 12 e 13 E5 14, 15 e 17 E6 18, 20 e 21 E7 22, 23 e 24 E8 25, 26 e 27 E9 28, 29 e 30 E10 31, 32 e 33

132
7.2.1 Identificação das propriedades dinâmicas das vigas
A partir dos registros de aceleração adquiridos nos 34 pontos das vigas foi possível
determinar suas propriedades dinâmicas como freqüências naturais e modos de vibração. A
identificação de tais propriedades foi feita a partir apenas das respostas das vigas e
nenhuma informação sobre a entrada ou excitação foi requerida. Novamente foram
utilizados os métodos de detecção de pico, SSI-COV/ref e SSI-DATA/ref para a
determinação das freqüências e modos de vibração. No apêndice A encontram-se os
registros de aceleração obtidos em alguns pontos das vigas analisadas, assim como os
respectivos espectros de potência utilizados no método de detecção de pico.
Método de Detecção de Pico
Os resultados apresentados pelo método de detecção de pico foram obtidos considerando
como referência os registros obtidos no ponto 1 das vigas, em todas as etapas. Isto quer
dizer que a equação para a obtenção da amplitude modal ficou da seguinte forma:
1PSD
PSDA
i
iji,j = (7.4)
onde ijPSD representa o pico do espectro correspondente ao modo i no ponto j e i1PSD
representa o pico do espectro correspondente ao modo i no ponto 1 da viga considerada.
Da mesma forma, para determinar o sentido de cada valor da amplitude modal foi
considerado o ângulo de fase do espectro cruzado entre cada resposta e a resposta obtida
no ponto 1 das vigas, conforme exposto no item 4.3 deste trabalho.
A tabela 7.29 apresenta os valores das freqüências identificadas pelo método do pico para a
VIGA 1, assim como, os valores teóricos obtidos a partir da solução do problema de
autovalor definido pela equação (6.1) onde a matriz de massa do elemento considerada é
dada pela equação 7.5. Os seis primeiros modos identificados, a partir apenas das respostas
da viga, encontram-se apresentados nas figuras 7.24 e 7.25.

133
A partir dos valores apresentados na tabela 7.29, verifica-se que as freqüências
experimentais identificadas pelo método de detecção de pico correspondem às freqüências
de uma viga livre-livre. Como pode ser observado, ainda nesta tabela, existe uma diferença
entre as freqüências medidas experimentalmente e aquelas fornecidas pelo modelo
numérico da viga, representado na figura 7.23. Dessa forma, fica ressaltada a importância,
ou a necessidade, de ajustar os parâmetros do modelo, a fim de que este seja melhorado e
possa reproduzir com maior precisão os dados experimentais. O mesmo pode ser
observado com relação às freqüências experimentais da VIGA 2, apresentadas na tabela
7.30.
3 5 61 63 65 67
2 4 6 8 64 66 68
1
Figura 7.23 – Modelo numérico com 68 graus de liberdade.
=
24
ALρ000
02
ALρ00
0024
ALρ0
0002
ALρ
m (7.5)
Tabela 7.29 – Freqüências naturais de vibração identificadas pelo método de detecção de pico e teóricas da VIGA 1. Método de Detecção de Pico – VIGA 1 Freqüência
(Hz) Experimental Teórica 1ª 42,9463 43,5738 2ª 118,9282 119,6105 3ª 230,9190 233,3600 4ª 378,2578 383,6388 5ª 556,3198 569,5656 6ª 760,1496 790,1103

134
1º Modo - Método de Detecção de Pico
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Teórico
2º Modo - Método de Detecção de Pico
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Teórico
3º Modo - Método de Detecção de Pico
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Teórico
Figura 7.24 – 3 primeiros modos de vibração da VIGA 1 identificados pelo método de detecção de pico.

135
4º Modo - Método de Detecção de Pico
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Teórico
5º Modo - Método de Detecção de Pico
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Teórico
6º Modo - Método de Detecção de Pico
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Teórico
Figura 7.25 – 4º, 5º e 6º modos de vibração da VIGA 1 identificados pelo método de detecção de pico.
Quanto às formas modais identificadas pelo método de detecção de pico, verifica-se que os
resultados foram bastante satisfatórios. A partir das figuras 7.24 a 7.27 pode-se observar
que os pontos experimentais obtidos, para os seis primeiros modos de vibração da VIGA 1
e da VIGA 2, praticamente coincidem com os modos teóricos.

136
Tabela 7.30 – Freqüências naturais de vibração identificadas pelo método de detecção de pico e teóricas da VIGA 2. Método de Detecção de Pico – VIGA 2 Freqüência
(Hz) Experimental Teórica 1ª 39,9731 40,7927 2ª 117,2764 118,7772 3ª 221,9994 225,6761 4ª 369,6686 377,5505 5ª 542,4448 577,5772 6ª 738,3461 771,6514
1º Modo - Método de Detecção de Pico
-1,60
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Teórico
2º Modo - Método de Detecção de Pico
-1,60
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Teórico
3º Modo - Método de Detecção de Pico
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Teórico
Figura 7.26 – 3 primeiros modos de vibração da VIGA 2 identificados pelo método de detecção de pico.

137
4º Modo - Método de Detecção de Pico
-1,60
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Teórico
5º Modo - Método de Detecção de Pico
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Teórico
6º Modo - Método de Detecção de Pico
-1,60
-1,20
-0,80
-0,40
0,00
0,40
0,80
1,20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Teórico
Figura 7.27 – 4º, 5º e 6º modos de vibração da VIGA 2 identificados pelo método de detecção de pico.
A concordância entre os modos identificados experimentalmente e àqueles provenientes do
modelo teórico pode ser avaliada por meio do índice MAC, equação (7.3). As matrizes do
MAC calculadas para os seis primeiros modos identificados, pelo método de detecção de
pico, das vigas 1 e 2 são apresentadas nas tabelas 7.31 e 7.32. A partir dos resultados
obtidos verifica-se que existe uma concordância satisfatória entre os modos analisados,
uma vez que os valores da diagonal indicaram uma correlação, entre estes, maior que 90%.

138
Tabela 7.31 – MAC para os seis primeiros modos de vibração da VIGA 1 – Método de detecção de pico.
Modos 1º 2º 3º 4º 5º 6º 1º 0,9995 0,0000 0,0092 0,0001 0,0084 0,0000 2º 0,0000 0,9989 0,0000 0,0088 0,0000 0,0072 3º 0,0107 0,0001 0,9991 0,0001 0,0081 0,0000 4º 0,0000 0,0103 0,0000 0,9982 0,0000 0,0070 5º 0,0108 0,0000 0,0094 0,0000 0,9976 0,0000 6º 0,0000 0,0093 0,0000 0,0084 0,0001 0,9954
Tabela 7.32 – MAC para os seis primeiros modos de vibração da VIGA 2 – Método de detecção de pico.
Modos 1º 2º 3º 4º 5º 6º 1º 0,9995 0,0000 0,0073 0,0000 0,0099 0,0001 2º 0,0000 0,9991 0,0000 0,0084 0,0000 0,0088 3º 0,0078 0,0000 0,9990 0,0000 0,0075 0,0004 4º 0,0002 0,0090 0,0000 0,9985 0,0000 0,0079 5º 0,0119 0,0000 0,0071 0,0000 0,9976 0,0001 6º 0,0000 0,0097 0,0002 0,0066 0,0001 0,9966
Métodos SSI-COV/ref e SSI-DATA/ref
A identificação dos modos de vibração pelos métodos SSI-COV/ref e SSI-DATA/ref foi
feita por etapas. Isto quer dizer que, o conjunto de registros adquiridos simultaneamente
em cada etapa do ensaio permitia identificar partes dos modos de vibração das vigas. Por
exemplo, com os registros adquiridos na etapa E1 do ensaio, foram identificadas as
coordenadas dos modos correspondentes aos pontos 1, 2, 3, 4, 16, 19 e 34 das vigas, sendo
aqueles referentes aos pontos 1, 16, 19 e 34, os registros de referência. Na etapa E2, foram
identificadas, além das de referência, as coordenadas 5, 6 e 7 dos modos e assim
sucessivamente.
As partes dos modos identificadas em cada etapa foram agrupadas com a ajuda dos
sensores de referência comuns a todas as etapas (acelerômetros localizados nos pontos 1,
16, 19 e 34 das vigas). Uma vez que em cada etapa a magnitude da excitação podia variar
aleatoriamente, foi necessário determinar um fator de escala para cada modo, entre duas
etapas. Este fator de escala foi determinado usando uma aproximação por mínimos
quadrados, conforme mostra a figura 7.28 (Peeters, 2000).
O gráfico representado na figura 7.28 mostra como obter o fator de escala entre duas etapas
do ensaio. Em um dos eixos deve-se marcar as amplitudes, correspondentes aos pontos de

139
referência (pontos em que os acelerômetros permaneceram fixos em todas as etapas), do
modo i identificado, na etapa E1, por exemplo. No outro eixo serão marcadas as
amplitudes do modo i identificadas a partir da outra etapa, por exemplo, E2. Os pontos de
encontro das amplitudes marcadas nos dois eixos serão aproximados por uma reta. O fator
de escala será, então, dado pela declividade dessa reta.
fator de escala
R1
R3R2
R4
R4 R2 R3 R1
Amplitude de referência do modo i na etapa E2
Amplitude de referência do modo i na etapa E1
Figura 7.28 – Uso dos sensores de referência para agrupar as partes dos modos identificadas em cada etapa do ensaio.
As tabelas 7.33 e 7.34 apresentam os valores das freqüências naturais de vibração
identificadas pelos métodos SSI-COV/ref para a VIGA 1 e a VIGA 2, respectivamente,
assim como os valores teóricos obtidos da solução do problema de autovalor. Logo em
seguida a cada tabela, são apresentados, nas figuras 7.29 e 7.30, os seis primeiros modos de
vibração identificados por este método para a VIGA 1 e nas figuras 7.31 e 7.32, os
resultados para a VIGA 2. Em cada gráfico estão apresentados os pontos experimentais
obtidos para cada modo de vibração identificado.
Com relação aos valores obtidos para as seis primeiras freqüências de vibração
identificadas pelo método SSI-COV/ref, verifica-se que há uma boa precisão nos
resultados. Pode ser observado também que, quando comparadas às freqüências numéricas,
as experimentais representam as freqüências de uma viga livre-livre. Nota-se, novamente,
uma discrepância entre os resultados numéricos e experimentais.

140
Tabela 7.33 – Freqüências naturais de vibração identificadas pelo método SSI-COV/ref e teóricas da VIGA 1.
SSI-COV/ref – VIGA 1 Freqüência (Hz) Experimental Teórica 1ª 43,1898 43,5738 2ª 119,0225 119,6105 3ª 230,7398 233,3600 4ª 377,8290 383,6388 5ª 555,9206 569,5656 6ª 759,8688 790,1103
Figura 7.29 – 3 primeiros modos de vibração da VIGA 1 identificados pelo método SSI-COV/ref.
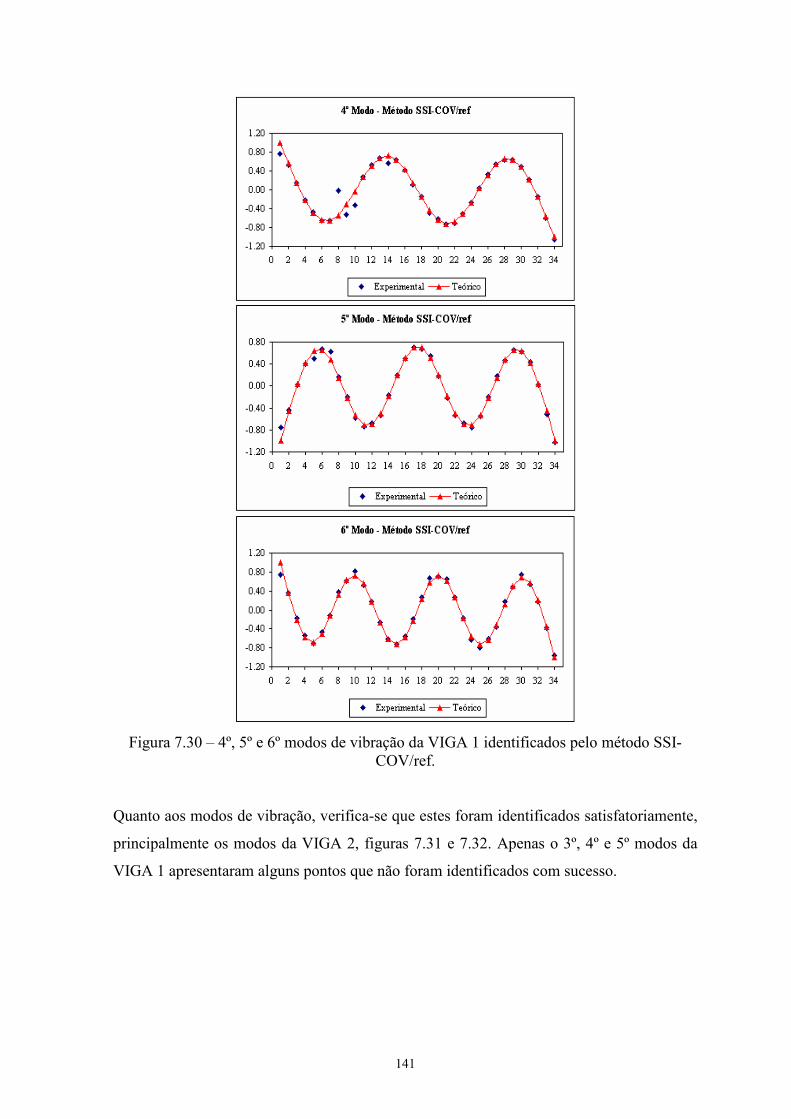
141
Figura 7.30 – 4º, 5º e 6º modos de vibração da VIGA 1 identificados pelo método SSI-COV/ref.
Quanto aos modos de vibração, verifica-se que estes foram identificados satisfatoriamente,
principalmente os modos da VIGA 2, figuras 7.31 e 7.32. Apenas o 3º, 4º e 5º modos da
VIGA 1 apresentaram alguns pontos que não foram identificados com sucesso.

142
Tabela 7.34 – Freqüências naturais de vibração identificadas pelo método SSI-COV/ref e teóricas da VIGA 2.
SSI-COV/ref – VIGA 2 Freqüência (Hz) Experimental Teórica 1ª 40,1419 40,7927 2ª 117,4535 118,7772 3ª 221,4414 225,6761 4ª 369,3117 377,5505 5ª 542,3437 577,5772 6ª 737,8949 771,6514
Figura 7.31 – 3 primeiros modos de vibração da VIGA 2 identificados pelo método SSI-COV/ref.

143
Figura 7.32 – 4º, 5º e 6º modos de vibração da VIGA 2 identificados pelo método SSI-COV/ref.
A concordância entre os modos experimentais e os numéricos foi verificada por meio do
índice MAC apresentado nas tabelas 7.37 e 7.38 para as duas vigas analisadas. Os valores
da diagonal do MAC indicam uma correlação maior que 90%, portanto, satisfatória, entre
os modos analisados, tanto para a VIGA 1 quanto para a VIGA 2.
As tabelas 7.35 e 7.36 apresentam os valores das freqüências identificadas pelo método
SSI-DATA/ref, para as duas vigas analisadas. Os modos experimentais das vigas 1 e 2
encontram-se apresentados nas figuras 7.33 a 7.36.

144
Tabela 7.35 – Freqüências naturais de vibração identificadas pelo método SSI-DATA/ref e teóricas da VIGA 1.
SSI-DATA/ref – VIGA 1 Freqüência (Hz) Experimental Teórica 1ª 43,1889 43,5738 2ª 119,0213 119,6105 3ª 230,7397 233,3600 4ª 377,8292 383,6388 5ª 556,1677 569,5656 6ª 760,5735 790,1103
Figura 7.33 – 3 primeiros modos de vibração da VIGA 1 identificados pelo método SSI-DATA/ref.

145
Figura 7.34 – 4º, 5º, e 6º modos de vibração da VIGA 1 identificados pelo método SSI-DATA/ref.
Quanto aos resultados obtidos pelo SSI-DATA/ref, verifica-se que estes também foram
bastante satisfatórios, considerando as freqüências apresentadas nas tabelas 7.35 e 7.36 e
os modos apresentados nas figuras 7.34 e 7.35. Apenas o 5º modo de vibração da VIGA 1
não pôde ser identificado corretamente, figura 7.34.
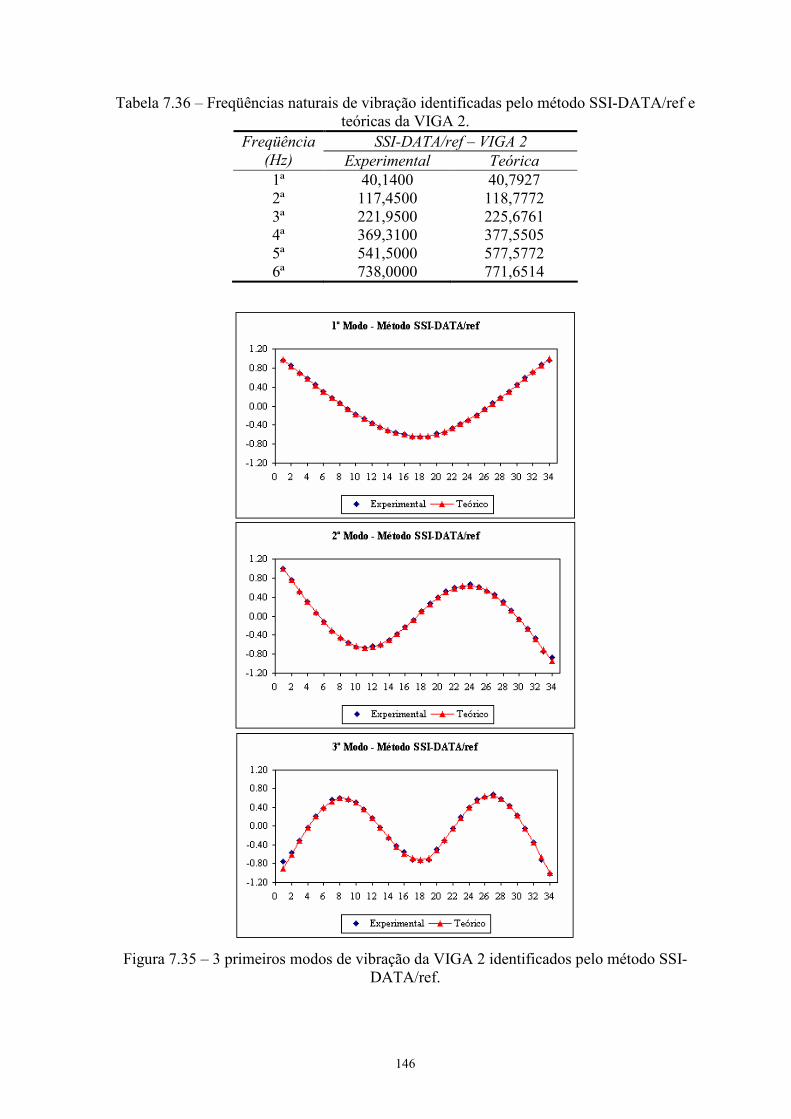
146
Tabela 7.36 – Freqüências naturais de vibração identificadas pelo método SSI-DATA/ref e teóricas da VIGA 2.
SSI-DATA/ref – VIGA 2 Freqüência (Hz) Experimental Teórica 1ª 40,1400 40,7927 2ª 117,4500 118,7772 3ª 221,9500 225,6761 4ª 369,3100 377,5505 5ª 541,5000 577,5772 6ª 738,0000 771,6514
Figura 7.35 – 3 primeiros modos de vibração da VIGA 2 identificados pelo método SSI-DATA/ref.

147
Figura 7.36 – 4º, 5º, e 6º modos de vibração da VIGA 2 identificados pelo método SSI-DATA/ref.
As tabelas 7.39 e 7.40 apresentam o índice MAC calculado entre os modos experimentais
identificados pelo SSI-DATA/ref e os teóricos, para as vigas 1 e 2 respectivamente. Neste
caso, o índice MAC calculado, relacionando o 5º modo experimental e o teórico, foi de
0,7826 indicando uma correlação insatisfatória entre os modos analisados (tabela 7.39). As
figuras 7.37 e 7.38 apresentam gráficos de barra representando a diagonal do MAC para os
seis primeiros modos de vibração, das vigas 1 e 2, identificados pelos métodos de detecção
de pico, SSI-COV/ref e SSI-DATA/ref. Considerando os resultados da VIGA 1, verifica-se
que os modos foram identificados satisfatoriamente, pois apresentaram valores de MAC

148
superiores a 0,90, com exceção do 5º modo identificado pelo SSI-DATA/ref. Observando a
figura 7.37 verifica-se que o método de detecção de pico apresentou melhores resultados.
Já para a VIGA 2, figura 7.38, todos os métodos foram bastante eficientes na identificação
dos modos.
Tabela 7.37 – MAC para os seis primeiros modos de vibração da VIGA 1 – SSI-COV/ref.
Modos 1º 2º 3º 4º 5º 6º 1º 0,9987 0,0010 0,0036 0,0001 0,0073 0,0010 2º 0,0000 0,9957 0,0024 0,0099 0,0006 0,0049 3º 0,0096 0,0001 0,9839 0,0031 0,0077 0,0003 4º 0,0000 0,0113 0,0007 0,9486 0,0010 0,0055 5º 0,0098 0,0002 0,0053 0,0036 0,9874 0,0020 6º 0,0000 0,0104 0,0022 0,0050 0,0011 0,9886
Tabela 7.38 – MAC para os seis primeiros modos de vibração da VIGA 2 – SSI-COV/ref.
Modos 1º 2º 3º 4º 5º 6º 1º 0,9994 0,0001 0,0076 0,0002 0,0110 0,0010 2º 0,0000 0,9973 0,0004 0,0089 0,0000 0,0077 3º 0,0074 0,0001 0,9973 0,0000 0,0099 0,0007 4º 0,0002 0,0110 0,0002 0,9974 0,0004 0,0069 5º 0,0103 0,0000 0,0069 0,0003 0,9958 0,0002 6º 0,0000 0,0104 0,0000 0,0058 0,0003 0,9905
Tabela 7.39 – MAC para os seis primeiros modos de vibração da VIGA 1 – SSI-DATA/ref.
Modos 1º 2º 3º 4º 5º 6º 1º 0,9995 0,0000 0,0092 0,0017 0,1171 0,0008 2º 0,0000 0,9987 0,0003 0,0103 0,0003 0,0070 3º 0,0103 0,0001 0,9699 0,0025 0,0637 0,0000 4º 0,0000 0,0100 0,0008 0,9871 0,0002 0,0065 5º 0,0102 0,0000 0,0123 0,0003 0,7826 0,0012 6º 0,0000 0,0092 0,0005 0,0070 0,0000 0,9928
Tabela 7.40 – MAC para os seis primeiros modos de vibração da VIGA 2 – SSI-DATA/ref.
Modos 1º 2º 3º 4º 5º 6º 1º 0,9995 0,0000 0,0055 0,0001 0,0203 0,0004 2º 0,0000 0,9988 0,0009 0,0074 0,0034 0,0058 3º 0,0074 0,0001 0,9956 0,0010 0,0143 0,0000 4º 0,0001 0,0088 0,0009 0,9967 0,0015 0,0052 5º 0,0113 0,0000 0,0062 0,0001 0,9778 0,0010 6º 0,0000 0,0094 0,0000 0,0055 0,0032 0,9916

149
1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
Modos
1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
Modos
SSI - COV/ref SSI - DATA/ref
1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
Modos
MAC - VIGA 1
Detecção de Pico
Figura 7.37 – Diagonal do MAC calculado entre os modos experimentais da VIGA 1 e os teóricos.
1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
SSI-COV/ref
1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
SSI-DATA/ref
MAC - VIGA 2
Modos Modos1 2 3 4 5 6
0
0.2
0.4
0.6
0.8
1
Modos
Detecção de Pico
Figura 7.38 – Diagonal do MAC calculado entre os modos experimentais da VIGA 2 e os teóricos.
7.2.2 Atualização dos modelos numéricos das vigas 1 e 2 a partir das freqüências
identificadas
Observando os resultados da etapa anterior, em que as propriedades modais das vigas
foram identificadas, verificou-se, em todos os casos analisados, existir uma discrepância
entre os resultados experimentais e àqueles fornecidos por um modelo numérico. Devido à
importância de se ter um modelo que possa representar o comportamento dinâmico de uma
estrutura com confiança, surgiu a necessidade de corrigir seus parâmetros, a partir dos
dados medidos experimentalmente, como freqüências e modos de vibração. Dessa forma, o
modelo numérico passaria a reproduzir, com maior precisão, os resultados experimentais.
Nesta etapa, foram aplicados os métodos baseados em funções de penalidade, descritos no
capítulo 5, definidos pela equação (5.22). O segundo método aplicado também é baseado
em funções de penalidade, porém consiste em perturbar a estrutura por meio de adição de
massa em suas coordenadas e assim obter as freqüências para várias configurações de

150
sistemas perturbados. Este procedimento é chamado de Perturbed Boundary Condition
Testing e encontra-se representado, esquematicamente, na figura 5.1. Serão apresentados,
primeiramente, os resultados obtidos a partir do método sem adição de massa.
Viga 1
O modelo numérico que foi atualizado e que forneceu os resultados apresentados na etapa
anterior, representado pela figura 7.23. O modelo consiste de 33 elementos com dois graus
de liberdade por nó, resultando em 68 graus de liberdade. Assim como no modelo
experimental, cada elemento possui 0,0653m de comprimento. As matrizes de rigidez e de
massa dos elementos, do modelo numérico, são definidas pelas equações (6.2) e (7.5),
respectivamente.
Neste modelo, foi considerado que a rigidez à flexão EI de cada elemento pudesse variar
independentemente. Dessa forma, os parâmetros atualizados foram as rigidezes EI dos 33
elementos do modelo. No processo de atualização foram consideradas as 4 primeiras
freqüências de vibração da viga, resultando, portanto, numa matriz de sensibilidade, S,
com 4 linhas e 33 colunas. Os elementos da matriz S foram calculados segundo a equação
(5.2) e, novamente, admitiu-se um desvio padrão de 0,5% para os autovalores
correspondentes às freqüências medidas experimentalmente, no cálculo da matriz εεW .
Para o cálculo de θθW foram considerados diferentes valores de desvios padrão (σ), para
cada parâmetro inicial EI, a fim de verificar a influência dessa escolha nos resultados finais
do modelo atualizado. É importante lembrar que as matrizes εεW e θθW são diagonais e
que seus valores devem ser o inverso da variância (σ2). As freqüências consideradas no
processo de atualização foram àquelas identificadas pelo método SSI-DATA/ref.
A tabela 7.41 apresenta os valores dos parâmetros atualizados em algumas iterações,
considerando um desvio padrão de 40% para cada parâmetro inicial EI. Observando tais
valores e a figura 7.39, verifica-se que o problema converge rapidamente, com uma
precisão de 4 casas decimais a partir da 8ª iteração. Na tabela 7.42 podem ser encontrados
os parâmetros atualizados considerando diferentes desvios padrão: 20%, 40%, 60% e 80%.
Pode ser observado que não existe muita diferença entre os parâmetros encontrados para

151
cada desvio padrão de EI considerado. Verifica-se ainda que as alterações nos parâmetros
atualizados, comparados aos iniciais, não correspondem aos desvios padrão considerados.
Tabela 7.41 – Valores dos parâmetros atualizados, obtidos em algumas iterações,
considerando um desvio padrão de 40% para os valores iniciais dos parâmetros do modelo numérico – VIGA 1.
Parâmetros atualizados (Nm2) - σ = 40% θ
I1 I4 I8 I10 Parâmetros iniciais
(Nm2)
EI-1 26944,2879 26944,7662 26944,7662 26944,7662 26954,1000
EI-2 26854,0998 26860,1184 26860,1187 26860,1187 26954,1000
EI-3 26555,0482 26571,8384 26571,8404 26571,8404 26954,1000
EI-4 26080,8315 26088,3920 26088,4003 26088,4003 26954,1000
EI-5 25671,0687 25643,8278 25643,8130 25643,8130 26954,1000
EI-6 25606,2110 25584,7014 25584,6911 25584,6911 26954,1000
EI-7 25992,7122 26034,1336 26034,1541 26034,1541 26954,1000
EI-8 26664,6381 26729,7493 26729,7487 26729,7487 26954,1000
EI-9 27272,7572 27293,9022 27293,8995 27293,8995 26954,1000
EI-10 27499,7572 27486,0942 27486,0918 27486,0918 26954,1000
EI-11 27255,3211 27259,9048 27259,9018 27259,9018 26954,1000
EI-12 26721,2536 26751,3880 26751,3861 26751,3861 26954,1000
EI-13 26220,6507 26237,0917 26237,0962 26237,0962 26954,1000
EI-14 26004,1075 25997,9411 25997,9432 25997,9432 26954,1000
EI-15 26099,1054 26096,6736 26096,6740 26096,6739 26954,1000
EI-16 26321,0952 26329,1422 26329,1408 26329,1408 26954,1000
EI-17 26430,7770 26441,3315 26441,3290 26441,3290 26954,1000
EI-18 26321,0952 26329,1422 26329,1408 26329,1408 26954,1000
EI-19 26099,1054 26096,6736 26096,6740 26096,6739 26954,1000
EI-20 26004,1075 25997,9411 25997,9432 25997,9432 26954,1000
EI-21 26220,6507 26237,0917 26237,0962 26237,0962 26954,1000
EI-22 26721,2536 26751,3880 26751,3861 26751,3861 26954,1000
EI-23 27255,3211 27259,9048 27259,9018 27259,9018 26954,1000
EI-24 27499,7572 27486,0942 27486,0918 27486,0918 26954,1000
EI-25 27272,7572 27293,9022 27293,8995 27293,8995 26954,1000
EI-26 26664,6381 26729,7493 26729,7487 26729,7487 26954,1000
EI-27 25992,7122 26034,1336 26034,1541 26034,1541 26954,1000
EI-28 25606,2110 25584,7014 25584,6911 25584,6911 26954,1000
EI-29 25671,0687 25643,8278 25643,8130 25643,8130 26954,1000
EI-30 26080,8315 26088,3920 26088,4003 26088,4003 26954,1000
EI-31 26555,0482 26571,8384 26571,8404 26571,8404 26954,1000
EI-32 26854,0998 26860,1184 26860,1187 26860,1187 26954,1000
EI-33 26944,2879 26944,7662 26944,7662 26944,7662 26954,1000

152
Tabela 7.42 – Valores dos parâmetros atualizados, obtidos em algumas iterações, considerando diferentes desvios padrão para os valores iniciais dos parâmetros do modelo
numérico – VIGA 1.
Parâmetros atualizados (Nm2) θ
σ = 20 % σ = 40 % σ = 60 % σ = 80 %
Parâmetros iniciais (Nm2)
EI-1 26944,8857 26944,7662 26944,7434 26944,7354 26954,1000
EI-2 26861,7399 26860,1187 26859,8097 26859,7009 26954,1000
EI-3 26578,5362 26571,8404 26570,5642 26570,1147 26954,1000
EI-4 26103,5164 26088,4003 26085,5186 26084,5037 26954,1000
EI-5 25665,6850 25643,8130 25639,6451 25638,1774 26954,1000
EI-6 25603,6184 25584,6911 25581,0964 25579,8315 26954,1000
EI-7 26039,3276 26034,1541 26033,1955 26032,8601 26954,1000
EI-8 26718,9774 26729,7487 26731,8309 26732,5665 26954,1000
EI-9 27272,6000 27293,8995 27297,9816 27299,4208 26954,1000
EI-10 27462,4287 27486,0918 27490,6180 27492,2132 26954,1000
EI-11 27241,8969 27259,9018 27263,3463 27264,5603 26954,1000
EI-12 26744,8307 26751,3861 26752,6447 26753,0886 26954,1000
EI-13 26242,8231 26237,0962 26236,0065 26235,6229 26954,1000
EI-14 26010,1988 25997,9432 25995,6027 25994,7780 26954,1000
EI-15 26107,4236 26096,6739 26094,6209 26093,8975 26954,1000
EI-16 26335,0915 26329,1408 26328,0056 26327,6057 26954,1000
EI-17 26444,9570 26441,3290 26440,6377 26440,3942 26954,1000
EI-18 26335,0915 26329,1408 26328,0056 26327,6057 26954,1000
EI-19 26107,4236 26096,6739 26094,6209 26093,8975 26954,1000
EI-20 26010,1988 25997,9432 25995,6027 25994,7780 26954,1000
EI-21 26242,8231 26237,0962 26236,0065 26235,6229 26954,1000
EI-22 26744,8307 26751,3861 26752,6447 26753,0886 26954,1000
EI-23 27241,8969 27259,9018 27263,3463 27264,5603 26954,1000
EI-24 27462,4287 27486,0918 27490,6180 27492,2132 26954,1000
EI-25 27272,6000 27293,8995 27297,9816 27299,4208 26954,1000
EI-26 26718,9774 26729,7487 26731,8309 26732,5665 26954,1000
EI-27 26039,3276 26034,1541 26033,1955 26032,8601 26954,1000
EI-28 25603,6184 25584,6911 25581,0964 25579,8315 26954,1000
EI-29 25665,6850 25643,8130 25639,6451 25638,1774 26954,1000
EI-30 26103,5164 26088,4003 26085,5186 26084,5037 26954,1000
EI-31 26578,5362 26571,8404 26570,5642 26570,1147 26954,1000
EI-32 26861,7399 26860,1187 26859,8097 26859,7009 26954,1000
EI-33 26944,8857 26944,7662 26944,7434 26944,7354 26954,1000

153
5 10 15 202.6944
2.6944
2.6945
2.6945
2.6945x 10
4
Iterações
EI - 1
5 10 15 202.563
2.564
2.565
2.566
2.567
2.568x 10
4
Iterações
EI - 2
5 10 15 202.748
2.7485
2.749
2.7495
2.75x 10
4
Iterações
EI - 10
5 10 15 202.5995
2.6
2.6005x 10
4
Iterações
EI - 20
Figura 7.39 – Convergência de alguns parâmetros no processo de atualização – VIGA 1.
Na tabela 7.43 encontram-se apresentados os valores das freqüências medidas
experimentalmente e aquelas resultantes do modelo numérico inicial. As freqüências, em
Hz, resultantes do modelo atualizado, considerando um desvio padrão de 40% para os
parâmetros iniciais, podem ser encontradas na tabela 7.44. De acordo com os valores
apresentados, verifica-se que o modelo é melhorado e os resultados numéricos, atualizados,
se aproximam mais dos experimentais (comparar com valores fornecidos pelo modelo
numérico inicial, tabela 7.43).
Tabela 7.43 – Freqüências naturais de vibração experimentais e numéricas, resultante do
modelo inicial, da VIGA 1. Freqüências (Hz) Experimental Numérica
1ª 43,1889 43,5738 2ª 119,0213 119,6105 3ª 230,7397 233,3600 4ª 377,8292 383,6388 5ª 556,1677 569,5656 6ª 760,5735 790,1103

154
Tabela 7.44 – Freqüências obtidas a partir do modelo atualizado, quando foi considerado um desvio padrão de 40% para os parâmetros iniciais do modelo numérico – VIGA 1.
Freqüências atualizadas - Fupd (Hz) - σ = 40 %
I1 I4 I8 I10 Experimental
Fupd1 43,5738 43,1891 43,1891 43,1891 43,1889
Fupd2 119,6105 119,0171 119,0171 119,0171 119,0213
Fupd3 233,3600 230,7437 230,7437 230,7437 230,7397
Fupd4 383,6388 377,8500 377,8500 377,8500 377,8292
Fupd5 569,5656 564,0158 564,0155 564,0155 556,1677
Fupd6 790,1103 782,7079 782,7078 782,7078 760,5735
Com relação aos autovalores, verifica-se, por meio da tabela 7.45 e da figura 7.40, que
estes se aproximam mais dos resultados experimentais à medida que o desvio padrão
considerado para os parâmetros iniciais é aumentado. Isto também pode ser observado na
tabela 7.46 que apresenta os valores percentuais da diferença entre cada autovalor
atualizado e o experimental correspondente.
Tabela 7.45 – Autovalores resultantes do modelo atualizado, quando foram considerados desvios padrão diferentes para os parâmetros iniciais do modelo numérico – VIGA 1.
Autovalores atualizados - λupd σ = 20 % σ = 40 % σ = 60 % σ = 80 %
Experimental
λ1 (x104) 7,3641 7,3639 7,3639 7,3638 7,3638
λ2(x105) 5,5910 5,5921 5,5924 5,5924 5,5925
λ3 (x106) 2,1022 2,1019 2,1019 2,1019 2,1019
λ4 (x106) 5,6382 5,6364 5,6360 5,6359 5,6357
λ5 (x107) 1,2560 1,2559 1,2558 1,2558 1,2212
λ6 (x107) 2,4188 2,4186 2,4185 2,4185 2,2837
Tabela 7.46 – Diferenças percentuais entre os autovalores atualizados, considerando diferentes desvios padrão para os parâmetros iniciais, e os experimentais.
Diferença entre autovalores atualizados e experimentais (%) σ = 20 % σ = 40 % σ = 60 % σ = 80 %
∆λ1 0,0043 0,0011 0,0005 0,0003
∆λ2 0,0278 0,0072 0,0032 0,0018
∆λ3 0,0139 0,0035 0,0016 0,0009
∆λ4 0,0432 0,0110 0,0049 0,0028
∆λ5 2,8542 2,8420 2,8397 2,8389
∆λ6 5,9165 5,9051 5,9030 5,9022

155
20 40 60 807.3636
7.3638
7.364
7.3642x 10
4
Desvio Padrão (%)
1º Autovalor
atualizado
experimental
20 40 60 805.59
5.591
5.592
5.593
x 105
Desvio Padrão (%)
2º Autovalor
atualizado
experimental
20 40 60 802.1018
2.1019
2.102
2.1021
2.1022x 10
6
Desvio Padrão (%)
3º Autovalor
atualizado
experimental
20 40 60 805.635
5.636
5.637
5.638
5.639x 10
6
Desvio Padrão (%)
4º Autovalor
atualizado
experimental
Figura 7.40 – Convergência dos autovalores para os diferentes desvios padrão
considerados.
A tabela 7.47 apresenta os valores das freqüências resultantes do modelo atualizado
quando foram considerados diferentes desvios padrão para os parâmetros iniciais do
modelo numérico da VIGA 1. Pode ser observado, por meio dos valores apresentados
nessa tabela, que, embora tenham sido consideradas apenas as 4 primeiras freqüências no
processo de atualização, a 5ª e 6ª freqüências resultantes do modelo atualizado também se
aproximaram das experimentais. Isto pode ser verificado comparando os valores
atualizados, tabela 7.47, com os resultados numéricos apresentados na tabela 7.43 que
correspondem ao modelo inicial. A figura 7.41 mostra como a convergência dos
autovalores ocorre de forma rápida.
Tabela 7.47 – Freqüências resultantes do modelo atualizado considerando diferentes desvios padrão para os parâmetros iniciais do modelo numérico da VIGA 1.
Freqüências atualizadas - Fupd (Hz)
σ = 20 % σ = 40 % σ = 60 % σ = 80 % Experimental
Fupd1 43,1898 43,1891 43,1890 43,1889 43,1889
Fupd2 119,0048 119,0171 119,0194 119,0203 119,0213
Fupd3 230,7557 230,7437 230,7415 230,7407 230,7397
Fupd4 377,9108 377,8500 377,8385 377,8344 377,8292
Fupd5 564,0488 564,0155 564,0093 564,0070 556,1677
Fupd6 782,7500 782,7078 782,6998 782,6970 760,5735

156
1 5 10 15 20
7.35
7.4
7.45
7.5x 10
4
Iterações
1º Autovalor
5 10 15 205.56
5.58
5.6
5.62
5.64
5.66x 10
5
Iterações
2º Autovalor
5 10 15 201
2.1
2.12
2.14
2.16
2.081
x 106
Iterações
3º Autovalor
5 10 15 2015.5
5.6
5.7
5.8
5.9x 10
6
Iterações
4º Autovalor
Figura 7.41 – Convergência dos quatro primeiros autovalores no processo de atualização.
Considerando que o método de atualização aplicado parte de um problema em que
θWθ δδδδδδδδ θθθθθθθθ
T é minimizado, sujeito a restrição θSz δδδδδδδδ = , a tabela 7.48 apresenta os valores
de δθ obtidos em algumas iterações, quando foi considerado um desvio padrão de 40%
para os parâmetros iniciais. Como pode ser observado, esses valores são minimizados
estando bem próximos de zero na última iteração. O mesmo comportamento pôde ser
verificado para os outros casos considerados.
Apesar de não ter sido considerada a sensibilidade dos modos de vibração com relação aos
parâmetros, no processo de atualização, decidiu-se verificar se havia ocorrido alguma
melhora nos resultados numéricos, relativos aos modos de vibração, do modelo atualizado.
As figuras 7.42 e 7.43 apresentam os seis primeiros modos de vibração experimentais
comparados com os modos numéricos resultantes do modelo atualizado, quando foi
considerado um desvio padrão de 40% para os parâmetros iniciais no cálculo de θθW .

157
Tabela 7.48 – Valores de δθ , obtidos em algumas iterações, no processo de atualização.
δθ - σ = 40% δθ
I1 I4 I8 I10
δEI-1 -7,1121E+00 2,5918E-04 1,1786E-08 7,9206E-09
δEI-2 -9,7300E+01 3,9788E-03 1,7034E-07 1,1289E-07
δEI-3 -3,9635E+02 3,1045E-02 9,3688E-07 4,9599E-07
δEI-4 -8,7057E+02 8,0217E-02 5,2904E-06 1,2430E-06
δEI-5 -1,2803E+03 -1,6578E-01 -7,4517E-06 2,0116E-06
δEI-6 -1,3452E+03 -1,2227E-01 -3,7189E-06 2,6297E-06
δEI-7 -9,5869E+02 2,3708E-01 1,0158E-05 2,7081E-06
δEI-8 -2,8676E+02 -5,2446E-04 1,6046E-07 2,1697E-06
δEI-9 3,2136E+02 -2,0571E-02 -1,0151E-06 1,5203E-06
δEI-10 5,4836E+02 -5,1933E-02 -1,6001E-06 8,7852E-07
δEI-11 3,0392E+02 -3,3527E-02 -1,7619E-06 2,1161E-07
δEI-12 -2,3015E+02 -1,4323E-02 -1,5244E-06 -6,6868E-07
δEI-13 -7,3075E+02 6,8712E-02 4,1466E-07 -1,9444E-06
δEI-14 -9,4729E+02 7,2525E-03 1,3920E-06 -3,5714E-06
δEI-15 -8,5229E+02 -3,0795E-03 -5,5274E-07 -5,2086E-06
δEI-16 -6,3030E+02 -1,0237E-02 -2,2796E-06 -6,3778E-06
δEI-17 -5,2062E+02 -2,3479E-02 -2,7382E-06 -6,7931E-06
δEI-18 -6,3030E+02 -1,0237E-02 -2,2631E-06 -6,3722E-06
δEI-19 -8,5229E+02 -3,0795E-03 -5,2476E-07 -5,1962E-06
δEI-20 -9,4729E+02 7,2525E-03 1,4233E-06 -3,5495E-06
δEI-21 -7,3075E+02 6,8712E-02 4,3832E-07 -1,9146E-06
δEI-22 -2,3015E+02 -1,4323E-02 -1,5166E-06 -6,3561E-07
δEI-23 3,0392E+02 -3,3527E-02 -1,7732E-06 2,4332E-07
δEI-24 5,4836E+02 -5,1933E-02 -1,6299E-06 9,0490E-07
δEI-25 3,2136E+02 -2,0571E-02 -1,0585E-06 1,5392E-06
δEI-26 -2,8676E+02 -5,2446E-04 1,1250E-07 2,1805E-06
δEI-27 -9,5869E+02 2,3708E-01 1,0111E-05 2,7119E-06
δEI-28 -1,3452E+03 -1,2227E-01 -3,7581E-06 2,6297E-06
δEI-29 -1,2803E+03 -1,6578E-01 -7,4798E-06 2,0104E-06
δEI-30 -8,7057E+02 8,0217E-02 5,2740E-06 1,2421E-06
δEI-31 -3,9635E+02 3,1045E-02 9,3033E-07 4,9529E-07
δEI-32 -9,7300E+01 3,9788E-03 1,6900E-07 1,1279E-07
δEI-33 -7,1121E+00 2,5918E-04 1,1477E-08 7,8206E-09

158
1º Modo
-0,60
-0,30
0,00
0,30
0,60
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Atualizado
2º Modo
-0,60
-0,30
0,00
0,30
0,60
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Atualizado
3º Modo
-0,80
-0,40
0,00
0,40
0,80
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Atualizado
Figura 7.42 – Comparação entre os três primeiros modos experimentais e numéricos
obtidos a partir do modelo atualizado – VIGA 1.

159
4º Modo
-0,60
-0,30
0,00
0,30
0,60
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Atualizado
5º Modo
-0,80
-0,40
0,00
0,40
0,80
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Atualizado
6º Modo
-0,60
-0,30
0,00
0,30
0,60
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Atualizado
Figura 7.43 – Comparação entre o 4º, 5º e 6º modos de vibração experimentais e numéricos
obtidos a partir do modelo atualizado – VIGA 1.
Embora, visualmente, os modos atualizados pareçam ter se aproximado mais dos pontos
experimentais (comparar com figuras 7.33 e 7.34), essa aparente melhora não foi percebida
quando calculado o índice MAC entre os modos em questão, tabela 7.49. A tabela 7.50
apresenta os valores da diagonal do MAC calculados, entre os modos experimentais e os
numéricos resultantes do modelo atualizado quando foram considerados diferentes desvios
padrão para os parâmetros iniciais. A tabela 7.50 apresenta os valores da diagonal do MAC
calculados para os modos resultantes do modelo atualizado considerando diferentes

160
desvios padrão para os parâmetros iniciais. Neste caso, verifica-se que a variação do desvio
padrão não influenciou os resultados.
Tabela 7.49 – Índice MAC calculado entre os modos experimentais e os numéricos resultantes do modelo atualizado, apresentados nas figuras 7.42 e 7.43.
MAC - σ = 40% Modos
1º 2º 3º 4º 5º 6º
1º 0,9995 0,0000 0,0089 0,0017 0,1174 0,0008 2º 0,0000 0,9987 0,0003 0,0108 0,0003 0,0075 3º 0,0101 0,0001 0,9699 0,0025 0,0668 0,0000 4º 0,0000 0,0087 0,0008 0,9871 0,0002 0,0070 5º 0,0094 0,0000 0,0096 0,0003 0,7785 0,0012 6º 0,0000 0,0078 0,0005 0,0053 0,0000 0,9931
Tabela 7.50 – Diagonal do MAC entre os modos experimentais e os numéricos resultantes do modelo atualizado, considerando diferentes desvios padrão para os parâmetros iniciais.
Diagonal do MAC Modos
σ = 20% σ = 40% σ = 60% σ = 80%
1º 0,9995 0,9995 0,9995 0,9995 2º 0,9987 0,9987 0,9987 0,9987 3º 0,9699 0,9699 0,9699 0,9699 4º 0,9871 0,9871 0,9871 0,9871 5º 0,7786 0,7785 0,7785 0,7785 6º 0,9931 0,9931 0,9931 0,9931
VIGA 2 – Modelo inicial sem modificações (VIGA 1)
No processo de atualização deve-se partir de um modelo de elementos finitos que
apresente um comportamento mais próximo possível daquele medido experimentalmente.
Isto implica que o modelo a ser atualizado deva apresentar o máximo de detalhes possível,
de modo que represente a geometria e os aspectos estruturais do sistema físico de interesse.
Os métodos de atualização baseados em funções de penalidade, de um modo geral, partem
de uma expansão em série de Taylor dos dados modais, truncada no segundo termo,
produzindo a aproximação linear definida pela equação (5.1). Brownjohn et al. (2001)
comentam que ao existirem grandes diferenças entre os modelos experimentais e os
numéricos, a serem atualizados, a validade desse truncamento é diminuída e o processo
iterativo de atualização fica propenso a divergir.

161
Considerando que os locais das modificações estruturais representadas na VIGA 2, por
meio da alteração nos elementos 18 e 19, fossem desconhecidos a princípio, decidiu-se
partir de um modelo inicial idêntico ao da VIGA 1, utilizando as quatro primeiras
freqüências medidas experimentalmente da VIGA 2, a fim de verificar se seria possível
corrigir os parâmetros do modelo inicial de tal forma que estes pudessem representar o
modelo experimental ou físico da VIGA 2. Isto sendo possível permitiria identificar, por
exemplo, regiões danificadas desconhecidas presentes numa estrutura.
Portanto, a atualização dos parâmetros da VIGA 2 a partir de suas freqüências medidas
experimentalmente foi feita partindo do modelo inicial da VIGA 1, ou seja, sem considerar
as modificações nos elementos 18 e 19, sendo considerados como parâmetros iniciais
aqueles apresentados na tabela 7.41. Para o cálculo de θθW foram considerados dois
casos: no primeiro, o desvio padrão foi de 40% para todos os parâmetros iniciais. No
segundo caso, admitiu-se um desvio padrão maior para os parâmetros iniciais dos
elementos 18 e 19 (σ = 70%).
As tabelas 7.51 e 7.52 apresentam os valores dos parâmetros atualizados considerando os
dois casos analisados. A partir dos resultados obtidos, verifica-se que os parâmetros
convergiram, apesar das diferenças entre os modelos experimental e numérico. No entanto,
a convergência dos parâmetros, com uma precisão de três casas decimais, só aconteceu
com um grande número de iterações. O mesmo comportamento pode ser verificado quando
foi considerado m desvio padrão maior para os parâmetros iniciais dos elementos 18 e 19,
tabela 7.52.
Embora todos os casos tenham convergido, verifica-se, por meio dos valores apresentados
nas tabelas 7.51 e 7.52, que os parâmetros corrigidos ou atualizados dos elementos 18 e 19
não representam fisicamente os parâmetros, desses elementos, no modelo real ou
experimental cujo valor de rigidez, EI, é igual a 13260,0888 Nm2.

162
Tabela 7.51 – Valores dos parâmetros atualizados, considerando um desvio padrão de 40% para os valores iniciais dos parâmetros (modelo inicial sem modificações) – VIGA 2.
Parâmetros atualizados (Nm2) θ
I1 I75 I195 I200
Parâmetros iniciais (Nm2)
EI-1 26947,8819 26944,7344 26944,7275 26944,7275 26954,1000
EI-2 26900,3258 26859,2074 26859,1161 26859,1161 26954,1000
EI-3 26728,4458 26565,6451 26565,2828 26565,2828 26954,1000
EI-4 26418,0177 26067,1655 26066,3955 26066,3955 26954,1000
EI-5 26076,3927 25597,9763 25596,9817 25596,9817 26954,1000
EI-6 25886,9655 25521,5096 25520,8842 25520,8842 26954,1000
EI-7 26001,8495 25982,1751 25982,3916 25982,3916 26954,1000
EI-8 26433,5064 26709,6367 26710,5384 26710,5384 26954,1000
EI-9 27003,3211 27289,8879 27290,9217 27290,9217 26954,1000
EI-10 27379,2636 27427,3289 27427,8942 27427,8942 26954,1000
EI-11 27195,0807 26992,7462 26992,3796 26992,3796 26954,1000
EI-12 26205,9671 25999,1876 25997,7246 25997,7246 26954,1000
EI-13 24416,2585 24579,8275 24577,6909 24577,6909 26954,1000
EI-14 22122,1103 22974,2385 22973,0339 22973,0339 26954,1000
EI-15 19844,0633 21508,4384 21511,9226 21511,9226 26954,1000
EI-16 18168,1662 20522,9646 20536,1476 20536,1478 26954,1000
EI-17 17552,0351 15530,3761 15514,7602 15514,7600 26954,1000
EI-18 18168,1662 20522,9646 20536,1476 20536,1478 26954,1000
EI-19 19844,0633 21508,4384 21511,9226 21511,9226 26954,1000
EI-20 22122,1103 22974,2385 22973,0339 22973,0339 26954,1000
EI-21 24416,2585 24579,8275 24577,6909 24577,6909 26954,1000
EI-22 26205,9671 25999,1876 25997,7246 25997,7246 26954,1000
EI-23 27195,0807 26992,7462 26992,3796 26992,3796 26954,1000
EI-24 27379,2636 27427,3289 27427,8942 27427,8942 26954,1000
EI-25 27003,3211 27289,8879 27290,9217 27290,9217 26954,1000
EI-26 26433,5064 26709,6367 26710,5384 26710,5384 26954,1000
EI-27 26001,8495 25982,1751 25982,3916 25982,3916 26954,1000
EI-28 25886,9655 25521,5096 25520,8842 25520,8842 26954,1000
EI-29 26076,3927 25597,9763 25596,9817 25596,9817 26954,1000
EI-30 26418,0177 26067,1655 26066,3955 26066,3955 26954,1000
EI-31 26728,4458 26565,6451 26565,2828 26565,2828 26954,1000
EI-32 26900,3258 26859,2074 26859,1161 26859,1161 26954,1000
EI-33 26947,8819 26944,7344 26944,7275 26944,7275 26954,1000

163
Tabela 7.52 – Valores dos parâmetros atualizados, considerando um desvio padrão de 70% para os valores iniciais dos parâmetros dos elementos 18 e 19 (modelo inicial sem
modificações) – VIGA 2.
Parâmetros atualizados (Nm2) Parâmetros iniciais θ
I1 I45 I90 I200 (Nm2)
EI-1 26946,2740 26948,6643 26948,6643 26948,6643 26954,1000
EI-2 26880,2853 26911,5551 26911,5551 26911,5551 26954,1000
EI-3 26656,7597 26775,0891 26775,0891 26775,0891 26954,1000
EI-4 26289,8698 26517,3962 26517,3962 26517,3962 26954,1000
EI-5 25949,0369 26207,1521 26207,1521 26207,1521 26954,1000
EI-6 25851,2354 25988,6368 25988,6368 25988,6368 26954,1000
EI-7 26103,5594 26003,2622 26003,2622 26003,2622 26954,1000
EI-8 26609,1328 26282,7573 26282,7573 26282,7573 26954,1000
EI-9 27097,2267 26719,3595 26719,3595 26719,3595 26954,1000
EI-10 27257,0100 27144,0050 27144,0050 27144,0050 26954,1000
EI-11 26892,8403 27414,6442 27414,6442 27414,6442 26954,1000
EI-12 26012,7289 27454,1712 27454,1712 27454,1712 26954,1000
EI-13 24809,5258 27253,8362 27253,8362 27253,8362 26954,1000
EI-14 23561,4066 26866,9597 26866,9597 26866,9597 26954,1000
EI-15 22520,0363 26401,7207 26401,7207 26401,7207 26954,1000
EI-16 21847,4369 26006,8523 26006,8523 26006,8523 26954,1000
EI-17 21617,1132 25831,7218 25831,7218 25831,7218 26954,1000
EI-18 11320,5130 23094,6006 23094,6006 23094,6006 26954,1000
EI-19 13380,3486 8475,7512 8475,7512 8475,7512 26954,1000
EI-20 23561,4066 26790,7946 26790,7946 26790,7946 26954,1000
EI-21 24809,5258 27158,4998 27158,4998 27158,4998 26954,1000
EI-22 26012,7289 27295,3450 27295,3450 27295,3450 26954,1000
EI-23 26892,8403 27147,1067 27147,1067 27147,1067 26954,1000
EI-24 27257,0100 26741,3582 26741,3582 26741,3582 26954,1000
EI-25 27097,2267 26191,3939 26191,3939 26191,3939 26954,1000
EI-26 26609,1328 25689,9458 25689,9458 25689,9458 26954,1000
EI-27 26103,5594 25450,0127 25450,0127 25450,0127 26954,1000
EI-28 25851,2354 25571,2711 25571,2711 25571,2711 26954,1000
EI-29 25949,0369 25955,6546 25955,6546 25955,6546 26954,1000
EI-30 26289,8698 26398,6638 26398,6638 26398,6638 26954,1000
EI-31 26656,7597 26734,5445 26734,5445 26734,5445 26954,1000
EI-32 26880,2853 26903,6059 26903,6059 26903,6059 26954,1000
EI-33 26946,2740 26948,1825 26948,1825 26948,1825 26954,1000
A tabela 7.53 apresenta os valores das freqüências experimentais da VIGA 2 e os valores
das freqüências numéricas resultantes do modelo inicial considerado. Quanto às
freqüências do modelo numérico atualizado, pode-se verificar, por meio das tabelas 7.54 e

164
7.55, que os resultados se aproximaram dos experimentais. Observando os valores
apresentados na tabela 7.55, verifica-se que os resultados foram melhores quando foi
considerado um desvio padrão maior para os parâmetros dos elementos 18 e 19 (σ = 70%),
com exceção da 5ª freqüência.
Tabela 7.53 – Freqüências naturais de vibração experimentais da VIGA 2 e numéricas resultantes do modelo inicial.
Freqüências (Hz) Experimental Numérica 1ª 40,1400 43,5738 2ª 117,4500 119,6105 3ª 221,9500 233,3600 4ª 369,3100 383,6388 5ª 541,5000 569,5656 6ª 738,0000 790,1103
Tabela 7.54 – Freqüências resultantes do modelo atualizado, quando foi considerado o mesmo desvio padrão (σ = 40 %) para todos os parâmetros iniciais (modelo inicial sem
modificações) – VIGA 2. Freqüências atualizadas (Hz)
I1 I75 I195 I200
Experimental
1ª 43,5738 40,1466 40,1466 40,1466 40,1409
2ª 119,6105 117,4400 117,4400 117,4400 117,4523
3ª 233,3600 221,9567 221,9567 221,9567 221,9477
4ª 383,6388 369,3306 369,3307 369,3307 369,3098
5ª 569,5656 545,0701 545,0586 545,0586 541,4959
6ª 790,1103 763,3968 763,4112 763,4112 737,9987
Tabela 7.55 – Freqüências resultantes do modelo atualizado quando foi considerado um desvio padrão maior (σ = 70%) para os parâmetros iniciais dos elementos 18 e 19 (modelo
inicial sem modificações) – VIGA 2. Freqüências atualizadas (Hz)
I1 I45 I90 I200
Experimental
1ª 43,5738 40,1411 40,1411 40,1411 40,1409
2ª 119,6105 117,4481 117,4481 117,4481 117,4523
3ª 233,3600 221,9620 221,9620 221,9620 221,9477
4ª 383,6388 369,3127 369,3127 369,3127 369,3098
5ª 569,5656 556,1365 556,1365 556,1365 541,4959
6ª 790,1103 753,3063 753,3063 753,3063 737,9987
Quanto aos modos de vibração fornecidos pelo modelo atualizado, embora estes não
tenham sido considerados no processo de atualização, encontram-se apresentados nas

165
figuras 7.44 e 7.45 juntamente com os modos experimentais. A tabela 7.56 apresenta os
valores do índice MAC calculado entre os modos experimentais da VIGA 2 e os modos
numéricos do modelo inicial considerado no processo de atualização. As tabelas 7.57 e
7.58 apresentam os valores do índice MAC calculado entre os modos experimentais da
VIGA 2 e os modos numéricos do modelo atualizado, para os casos estudados.
Tabela 7.56 – Índice MAC calculado entre os modos experimentais da VIGA 2 e os numéricos resultantes do modelo inicial considerado no processo de atualização.
MAC Modos
1º 2º 3º 4º 5º 6º 1º 0,9983 0,0002 0,0087 0,0002 0,0082 0,0003 2º 0,0002 0,9978 0,0027 0,0090 0,0128 0,0054 3º 0,0058 0,0008 0,9888 0,0001 0,0092 0,0003 4º 0,0001 0,0073 0,0043 0,9946 0,0183 0,0100 5º 0,0104 0,0000 0,0029 0,0007 0,9202 0,0007 6º 0,0000 0,0089 0,0000 0,0024 0,0248 0,9866
Tabela 7.57 – Índice MAC calculado entre os modos experimentais da VIGA 2 e os numéricos resultantes do modelo atualizado considerando um desvio padrão de 40% para
os parâmetros iniciais. MAC
Modos 1º 2º 3º 4º 5º 6º
1º 0,9990 0,0002 0,0054 0,0002 0,0090 0,0003 2º 0,0002 0,9979 0,0026 0,0074 0,0127 0,0063 3º 0,0090 0,0008 0,9895 0,0001 0,0055 0,0003 4º 0,0001 0,0086 0,0044 0,9962 0,0175 0,0057 5º 0,0089 0,0000 0,0058 0,0007 0,9212 0,0006 6º 0,0000 0,0075 0,0000 0,0051 0,0254 0,9911
Tabela 7.58 – Índice MAC calculado entre os modos experimentais da VIGA 2 e os numéricos resultantes do modelo atualizado considerando um desvio padrão de 70% para
os parâmetros iniciais dos elementos 18 e 19. MAC
Modos 1º 2º 3º 4º 5º 6º
1º 0,9992 0,0001 0,0056 0,0000 0,0094 0,0005 2º 0,0001 0,9986 0,0006 0,0075 0,0128 0,0062 3º 0,0088 0,0000 0,9956 0,0026 0,0074 0,0000 4º 0,0000 0,0084 0,0000 0,9946 0,0076 0,0035 5º 0,0092 0,0000 0,0054 0,0003 0,9458 0,0024 6º 0,0001 0,0073 0,0004 0,0075 0,0078 0,9888

166
1º Modo - Modelo inicial sem dano
-0,60
-0,30
0,00
0,30
0,60
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Atualizado
2º Modo - Modelo inicial sem dano
-0,60
-0,30
0,00
0,30
0,60
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Atualizado
3º Modo - Modelo inicial sem dano
-0,60
-0,30
0,00
0,30
0,60
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Atualizado
Figura 7.44 – Comparação entre os três primeiros modos de vibração experimentais da
VIGA 2 e numéricos resultantes do modelo atualizado considerando um desvio padrão de 40% para os parâmetros iniciais.

167
4º Modo - Modelo inicial sem dano
-0,60
-0,30
0,00
0,30
0,60
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Atualizado
5º Modo - Modelo inicial sem dano
-0,60
-0,30
0,00
0,30
0,60
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Atualizado
6º Modo - Modelo inicial sem dano
-0,60
-0,30
0,00
0,30
0,60
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Atualizado
Figura 7.45 – Comparação entre os modos de vibração experimentais da VIGA 2 e numéricos resultantes do modelo atualizado considerando um desvio padrão de 40% para
os parâmetros iniciais.
Comparando os valores apresentados nas tabelas 7.57 e 7.58 com os valores da tabela 7.56,
verifica-se que houve um aumento na correlação entre os resultados experimentais e
numéricos do modelo atualizado, indicando que o modelo atualizado permitiu reproduzir
os dados experimentais com maior precisão. Assim como nas freqüências, os resultados
dos modos quando foi considerado um desvio padrão maior para os parâmetros iniciais dos
elementos 18 e 19 mostraram-se melhores, com exceção do 4º e 6º modos, tabela 7.58.

168
VIGA 2 – Modelo Inicial com modificações nos elementos 18 e 19
Considerando que o modelo de elementos finitos a ser atualizado devesse apresentar o
máximo de detalhes possível de modo que seu comportamento fosse o mais próximo do
comportamento do modelo experimental, partiu-se para atualização de um modelo
considerando as regiões modificadas na VIGA 2. Neste caso, duas hipóteses poderiam ser
consideradas: as modificações na estrutura seriam visíveis e, portanto, sua existência e
localização seriam conhecidas; ou tais modificações poderiam ser consideradas como
danos e sua localização poderia ser desconhecida. Na segunda hipótese a existência das
modificações seria identificada a partir da diminuição das freqüências de vibração da
estrutura (VIGA 2) em relação às freqüências da estrutura original (VIGA 1).
Supondo que a existência das modificações na VIGA 2 tivesse sido detectada, por meio da
diminuição em suas freqüências naturais em relação à VIGA 1, seria necessário localizá-
las de modo que o modelo de elementos finitos a ser atualizado apresentasse os detalhes
suficientes para poder representar mais precisamente o comportamento real da estrutura.
Tendo sido verificada, portanto, uma diminuição nas freqüências naturais de vibração da
VIGA 2 em relação à VIGA 1 e supondo que a posição das modificações existentes na
VIGA 2 fosse desconhecida, decidiu-se tentar localizá-las a partir do método do erro
residual (Genovese, 2000) que utiliza os modos e as freqüências de vibração da estrutura
modificada e as matrizes de rigidez e de massa da estrutura original. Este método encontra-
se descrito no apêndice B.
Utilizando as freqüências e os modos de vibração experimentais identificados pelo método
SSI-DATA/ref, obteve-se os resultados apresentados nas figuras 7.46 e 7.47 para o método
do erro residual. O que se observa nos gráficos apresentados é que para cada modo está
representado um erro em cada nó da viga. Esse erro deveria ser maior nas regiões
modificadas, no caso da VIGA 2, na região definida pelos nós 18, 19 e 20. A partir da
multiplicação do erro para cada modo e do erro para o 3º, 4º e 5º modos, verifica-se que a
localização dos elementos modificados é feita com sucesso, pois apresenta picos nos nós
18, 19 e 20 que definem os elementos 18 e 19.

169
0 5 10 15 20 25 30 35-1
-0.5
0
0.5
1
Erro -Modo1
Método do Erro Residual
0 5 10 15 20 25 30 35-1
-0.5
0
0.5
1
Erro -Modo2
0 5 10 15 20 25 30 35-1
-0.5
0
0.5
1
Erro -Modo3
Nós Figura 7.46 – Localização das regiões modificadas na VIGA 2, por meio do método do
erro residual para os três primeiros modos de vibração.
0 5 10 15 20 25 30 35-1
-0.5
0
0.5
1
Erro -Modo4
Método do Erro Residual
0 5 10 15 20 25 30 35-1
-0.5
0
0.5
1
Erro -Modo5
0 5 10 15 20 25 30 35-1
-0.5
0
0.5
1
Mult. do Erro
Nós
Figura 7.47 – Localização das regiões modificadas na VIGA 2, por meio do método do erro residual para o 4º e 5º modos de vibração e multiplicação do erro para todos os modos.
Identificada a posição dos elementos modificados na VIGA 2 pode-se descrever com
maiores detalhes o modelo numérico a ser atualizado. Este modelo encontra-se
representado na figura 7.48.

170
O processo de atualização aplicado foi o mesmo utilizado na atualização do modelo
numérico da VIGA 1. Assim como na VIGA 1, foram atualizados os parâmetros EI de
cada elemento do modelo considerando desvios padrão diferentes para os parâmetros
iniciais no cálculo da matriz θθW . Apenas as 4 primeiras freqüências de vibração da VIGA
2, medidas experimentalmente e identificadas pelo método SSI-DATA/ref, foram
utilizadas no procedimento de atualização. No cálculo da matriz εεW , admitiu-se um
desvio padrão de 0,5% para os autovalores experimentais.
642 3634
531 3533 37 39 41
38 40 42
676563
686664
elem.18 elem.19
Figura 7.48 – Modelo numérico inicial da VIGA 2 com modificações.
A tabela 7.59 apresenta os valores dos parâmetros atualizados considerando diferentes
desvios padrão para os parâmetros iniciais do modelo. Novamente, não se verificou
diferenças significativas entre os resultados obtidos. Na tabela 7.60 encontram-se
apresentados os valores dos parâmetros atualizados quando foi considerado um desvio
padrão maior (σ = 60%; σ = 70%; σ = 80%) para os parâmetros iniciais dos elementos 18 e
19. Neste caso, o desvio padrão considerado para os parâmetros iniciais dos outros
elementos do modelo foi de 40%. Assim como no caso anterior, não se verificam
diferenças significativas nos valores dos parâmetros identificados para os vários casos.

171
Tabela 7.59 – Valores dos parâmetros atualizados, considerando desvios padrão diferentes para os valores iniciais dos parâmetros (modelo inicial com modificações) – VIGA 2.
Parâmetros atualizados (Nm2) θ
σ = 20 % σ = 40 % σ = 60 % σ = 80 %
Parâmetros iniciais (Nm2)
EI-1 26943,1813 26944,6170 26944,5974 26944,5905 26954,1000
EI-2 26837,5050 26857,5364 26857,2696 26857,1757 26954,1000
EI-3 26471,4915 26557,7981 26556,6917 26556,3021 26954,1000
EI-4 25835,0223 26043,7560 26041,2351 26040,3475 26954,1000
EI-5 25202,8055 25541,1376 25537,4252 25536,1180 26954,1000
EI-6 25042,9625 25404,1308 25400,8111 25399,6427 26954,1000
EI-7 25555,8947 25780,2651 25779,1893 25778,8118 26954,1000
EI-8 26391,0486 26415,1548 26416,7071 26417,2550 26954,1000
EI-9 27057,7428 26916,9352 26920,1589 26921,2950 26954,1000
EI-10 27264,5627 27029,6106 27033,0559 27034,2700 26954,1000
EI-11 26958,5138 26702,0674 26704,2848 26705,0667 26954,1000
EI-12 26307,6688 26088,4767 26088,4034 26088,3789 26954,1000
EI-13 25678,1459 25522,4883 25520,0950 25519,2534 26954,1000
EI-14 25472,3455 25356,1570 25352,9301 25351,7946 26954,1000
EI-15 25767,4498 25640,7966 25638,5805 25637,8011 26954,1000
EI-16 26236,7347 26076,1172 26075,4381 26075,1998 26954,1000
EI-17 26517,3991 26333,7085 26333,8604 26333,9147 26954,1000
EI-18 12760,9262 12556,0258 12555,9236 12555,8885 13264,5600
EI-19 12460,5153 12255,3175 12254,0560 12253,6126 13264,5600
EI-20 26001,6365 25827,7929 25826,0585 25825,4486 26954,1000
EI-21 26124,3930 25923,9100 25922,6901 25922,2616 26954,1000
EI-22 26541,6650 26307,7055 26308,1113 26308,2553 26954,1000
EI-23 26977,2822 26737,6420 26739,7817 26740,5361 26954,1000
EI-24 27152,6161 26959,2116 26962,3346 26963,4352 26954,1000
EI-25 26934,8819 26848,4032 26851,3680 26852,4129 26954,1000
EI-26 26380,5611 26452,2462 26453,9103 26454,4974 26954,1000
EI-27 25742,5553 25981,3089 25980,9814 25980,8673 26954,1000
EI-28 25394,8871 25727,0644 25725,0598 25724,3547 26954,1000
EI-29 25557,8925 25853,9577 25851,5378 25850,6859 26954,1000
EI-30 26064,5747 26245,9681 26244,2460 26243,6398 26954,1000
EI-31 26569,5565 26644,7142 26643,9335 26643,6587 26954,1000
EI-32 26860,8146 26878,2208 26878,0292 26877,9617 26954,1000
EI-33 26944,8832 26946,1220 26946,1078 26946,1028 26954,1000

172
Tabela 7.60 – Valores dos parâmetros atualizados, considerando desvios padrão maiores para os parâmetros iniciais dos elementos 18 e 19 e um desvio padrão de 40% para os
outros elementos (modelo inicial com modificações) – VIGA 2.
Parâmetros atualizados (Nm2) θ
σ = 40%-60% σ = 40%-70% σ = 40%-80%
Parâmetros iniciais (Nm2)
EI-1 26942,9487 26942,9997 26943,0845 26954,1000
EI-2 26834,2922 26834,9521 26836,0661 26954,1000
EI-3 26457,7340 26460,2876 26464,7190 26954,1000
EI-4 25801,6964 25806,8469 25816,3135 26954,1000
EI-5 25148,0764 25153,5975 25165,6214 26954,1000
EI-6 24982,3419 24982,2812 24988,3453 26954,1000
EI-7 25511,4256 25501,8652 25495,3715 26954,1000
EI-8 26367,7661 26351,3408 26335,2538 26954,1000
EI-9 27047,2395 27030,0463 27012,7562 26954,1000
EI-10 27257,8259 27247,0649 27238,1478 26954,1000
EI-11 26954,5566 26958,2697 26967,0614 26954,1000
EI-12 26321,7066 26348,1100 26381,6813 26954,1000
EI-13 25745,9597 25799,3249 25857,0191 26954,1000
EI-14 25630,3593 25704,0623 25772,6480 26954,1000
EI-15 26015,7743 26096,2115 26159,8948 26954,1000
EI-16 26544,4114 26624,0506 26678,5109 26954,1000
EI-17 26848,6352 26927,7087 26978,3317 26954,1000
EI-18 12882,8059 13008,1377 13156,7467 13264,5600
EI-19 12014,3107 11799,1895 11590,7080 13264,5600
EI-20 26209,2138 26286,3396 26352,5707 26954,1000
EI-21 26252,5737 26312,3291 26369,3289 26954,1000
EI-22 26609,5616 26644,0506 26679,4177 26954,1000
EI-23 27013,2397 27024,0326 27035,0209 26954,1000
EI-24 27176,2659 27170,6179 27162,5723 26954,1000
EI-25 26954,4387 26941,0954 26922,9715 26954,1000
EI-26 26396,4108 26383,7425 26365,3739 26954,1000
EI-27 25751,5096 25746,0267 25735,8687 26954,1000
EI-28 25395,1601 25398,5797 25399,7137 26954,1000
EI-29 25552,8229 25560,5790 25568,1488 26954,1000
EI-30 26059,4753 26065,8832 26072,8709 26954,1000
EI-31 26566,8797 26569,9746 26573,5042 26954,1000
EI-32 26860,0966 26860,8866 26861,8102 26954,1000
EI-33 26944,8264 26944,8868 26944,9586 26954,1000
Para todos os casos analisados, a convergência dos parâmetros aconteceu de forma rápida,
com uma precisão de 4 casas decimais a partir da 8ª iteração. A tabela 7.61 apresenta os
valores das freqüências experimentais da VIGA 2, assim como os valores das freqüências

173
numéricas obtidas do modelo inicial. As freqüências, em Hz, obtidas a partir do modelo
numérico atualizado encontram-se apresentadas nas tabelas 7.62 e 7.63.
Tabela 7.61 – Freqüências naturais de vibração experimentais da VIGA 2 e numéricas resultantes do modelo inicial.
Freqüências (Hz) Experimental Numérica 1ª 40,1400 40,7927 2ª 117,4500 118,7772 3ª 221,9500 225,6761 4ª 369,3100 377,5505 5ª 541,5000 577,5772 6ª 738,0000 771,6514
Tabela 7.62 – Freqüências de vibração do modelo atualizado, quando foram considerados desvios padrão diferentes para os parâmetros iniciais (modelo inicial com modificações) –
VIGA 2.
Freqüências atualizadas - Fupd (Hz)
σ = 20 % σ = 40 % σ = 60 % σ = 80 % Experimental
Fupd1 40,1421 40,1412 40,1410 40,1410 40,1409
Fupd2 117,4408 117,4493 117,4509 117,4515 117,4523
Fupd3 221,9618 221,9513 221,9493 221,9486 221,9477
Fupd4 369,4073 369,3346 369,3209 369,3161 369,3098
Fupd5 549,4617 549,4250 549,4181 549,4156 541,4959
Fupd6 760,3127 760,2574 760,2470 760,2433 737,9987
Tabela 7.63 – Freqüências de vibração do modelo atualizado, quando foram considerados desvios padrão maiores para os parâmetros iniciais dos elementos 18 e 19 (modelo inicial
com modificações) – VIGA 2.
Freqüências atualizadas - Fupd (Hz)
σ = 40%-60% σ = 40%-70% σ = 40%-80% Experimental
Fupd1 40,1421 40,1412 40,1410 40,1409
Fupd2 117,4408 117,4493 117,4509 117,4523
Fupd3 221,9618 221,9513 221,9493 221,9477
Fupd4 369,4073 369,3346 369,3209 369,3098
Fupd5 549,4617 549,4250 549,4181 541,4959
Fupd6 760,3127 760,2574 760,2470 737,9987
A partir dos resultados obtidos, verifica-se que o modelo numérico, para todos os casos
analisados, foi melhorado passando a fornecer freqüências bem mais próximas das
experimentais. Inclusive a 5ª e a 6ª freqüências, que não entraram no processo de

174
atualização, se aproximaram dos resultados experimentais. A figura 7.49 mostra o
comportamento dos autovalores, resultantes do modelo atualizado, à medida que o desvio
padrão considerado no cálculo de εεW era aumentado.
20 40 60 806.361
6.3612
6.3614
6.3616x 10
4
Desvio Padrão (%)
1º Autovalor
20 40 60 805.4445
5.445
5.4455
5.446
5.4465
Desvio Padrão (%)
2º Autovalor
atualizado
experimental
atualizado
experimental
20 40 60 801.9447
1.9448
1.9449
1.945x 10
6
Desvio Padrão (%)
3º Autovalor
20 40 60 805.384
5.385
5.386
5.387
5.388x 10
6
Desvio Padrão (%)
4º Autovalor
atualizado
experimental
atualizado
experimental
Figura 7.49 – Autovalores atualizados para diferentes desvios padrão.
Quanto aos modos de vibração, apresentados nas figuras 7.50 e 7.51, não parece ter havido
melhoras na atualização em relação ao modelo inicial. Isto pode ser verificado comparando
os valores das tabelas 7.64 e 7.65, que apresentam o índice MAC entre os modos
experimentais e os atualizados considerando os dois casos analisados, com os valores do
MAC entre os modos experimentais e os numéricos do modelo inicial apresentados na
tabela 7.40.

175
1º Modo - Modelo inicial com dano
-0,60
-0,30
0,00
0,30
0,60
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Atualizado
2º Modo - Modelo inicial com dano
-0,60
-0,30
0,00
0,30
0,60
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Atualizado
3º Modo - Modelo inicial com dano
-0,60
-0,30
0,00
0,30
0,60
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Atualizado
Figura 7.50 – Comparação entre os três primeiros modos de vibração experimentais da
VIGA 2 e numéricos resultantes do modelo atualizado considerando um desvio padrão de 40% para os parâmetros iniciais.

176
4º Modo - Modelo inicial com dano
-0,60
-0,30
0,00
0,30
0,60
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Atualizado
5º Modo - Modelo inicial com dano
-0,60
-0,30
0,00
0,30
0,60
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Atualizado
6º Modo - Modelo inicial com dano
-0,60
-0,30
0,00
0,30
0,60
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Atualizado
Figura 7.51 – Comparação entre o 4º, 5º e 6º modos de vibração experimentais da VIGA 2 e numéricos resultantes do modelo atualizado considerando um desvio padrão de 40% para
os parâmetros iniciais.
Tabela 7.64 – MAC entre os modos experimentais da VIGA 2 e os numéricos do modelo atualizado considerando um desvio padrão de 40% para os parâmetros iniciais.
MAC - Viga 2 - EI (40%) Modos
1º 2º 3º 4º 5º 6º 1º 0,9995 0,0000 0,0053 0,0000 0,0093 0,0004 2º 0,0000 0,9988 0,0008 0,0078 0,0130 0,0063 3º 0,0073 0,0001 0,9954 0,0009 0,0066 0,0000 4º 0,0002 0,0076 0,0009 0,9968 0,0078 0,0054 5º 0,0103 0,0000 0,0043 0,0002 0,9441 0,0011 6º 0,0000 0,0079 0,0001 0,0043 0,0118 0,9916

177
Tabela 7.65 – MAC entre os modos experimentais da VIGA 2 e os numéricos do modelo atualizado considerando um desvio padrão de 70% para os parâmetros iniciais dos
elementos 18 e 19. MAC - Viga 2 - EI (40%) 70%
Modos 1º 2º 3º 4º 5º 6º
1º 0,9995 0,0000 0,0053 0,0000 0,0093 0,0005 2º 0,0000 0,9988 0,0007 0,0078 0,0130 0,0063 3º 0,0073 0,0000 0,9956 0,0010 0,0067 0,0000 4º 0,0001 0,0076 0,0008 0,9966 0,0074 0,0053 5º 0,0103 0,0000 0,0043 0,0003 0,9449 0,0013 6º 0,0000 0,0079 0,0001 0,0043 0,0113 0,9914
Novamente verificou-se não haver diferenças entre os casos em que foram considerados
desvios padrão diferentes no cálculo da matriz θθW , quanto aos modos de vibração.
7.2.2.1 Procedimento de atualização de modelos numéricos com adição de massa –
Perturbed Boundary Conditions
Os dados medidos experimentalmente, em geral, não são obtidos em quantidade suficiente
para estimar parâmetros únicos. Como alternativa para aumentar a quantidade de dados
disponíveis aplicou-se o procedimento apresentado por Nalitolela et al. (1992) em que a
estrutura é perturbada por meio de adição de massa em suas coordenadas.
Neste caso, as vigas foram ensaiadas da seguinte forma: foi adicionada uma massa de
0,7936 kg a diferentes coordenadas das vigas, uma por vez, e medidas as freqüências
correspondentes a cada sistema perturbado. Antes disso, foi feito um estudo para saber em
quais coordenadas a massa poderia ser adicionada de modo que houvesse uma
independência linear entre as equações usadas para atualizar os parâmetros. Esta análise
prévia foi feita numericamente adicionando-se a massa a diferentes coordenadas do
modelo numérico, calculando-se a matriz de sensibilidade S (equação 5.3) e o número de
condição e o rank dessa matriz. O número de condição deveria ser pequeno e o rank igual
ao número de parâmetros a ser atualizado.
A massa foi então adicionada às coordenadas 3, 5, 9, 13, 17, 21, 25, 29, 33, 37, 41, 45, 49,
53, 57, 61 e 65 dos modelos numéricos, representados pelas figuras 7.23 e 7.48,
correspondentes a VIGA 1 e a VIGA 2 respectivamente, que correspondem aos nós 2, 3,

178
5, 7, 9, 11, 13, 15, 17, 19, 21, 23, 25, 27, 29, 31 e 33 das vigas 1 e 2. Para esta
configuração obteve-se a condição da matriz S de 5,3204 x 1010 e rank igual a 33. Dessa
forma, foram considerados 18 sistemas, sendo 1 original, sem adição de massa, e 17
sistemas perturbados.
Para este procedimento, as freqüências da viga com a massa adicionada foram
identificadas pelo método de detecção de pico. O método conseguiu identificar apenas as
quatro primeiras freqüências de vibração das vigas e todas foram consideradas no
procedimento de atualização. Novamente, chegou-se a um problema com mais parâmetros
a atualizar do que dados medidos e, portanto, foi utilizada a equação (5.22) na atualização.
Considerando o número de sistemas perturbados mais o sistema original e o número de
freqüências consideradas no processo de atualização, obteve-se 72 equações e a matriz de
sensibilidade S foi composta por 72 linhas (18 sistemas x 4 freqüências) e 33 colunas (nº.
de parâmetros a atualizar).
VIGA 1
A partir do modelo numérico inicial representado pela figura 7.23 e dos parâmetros iniciais
da VIGA 1 considerados anteriormente, o procedimento de atualização descrito acima foi
aplicado. Para o cálculo da matriz εεW foi considerado o desvio padrão de 0,5% para os
autovalores experimentais de todos os sistemas. Novamente foram considerados desvios
padrão diferentes para os parâmetros iniciais do modelo numérico, no cálculo da
matriz θθW , a fim de verificar a influência dessa escolha nos resultados finais do
procedimento de atualização analisado.
A tabela 7.66 apresenta os valores dos parâmetros atualizados considerando desvios padrão
(σ) de 20%, 40%, 60% e 80% para os parâmetros iniciais do modelo de elementos finitos a
atualizar. Segundo o procedimento adotado (coordenadas perturbadas por adição de
massa), verifica-se uma maior variação entre os parâmetros identificados com os diferentes
desvios padrão considerados, no caso dos elementos 8, 11, 14, 18, 20, 30 e 31.
A tabela 7.67 apresenta os valores dos parâmetros atualizados considerando um desvio
padrão de 40% para os parâmetros iniciais, em que se verifica que a convergência, com

179
uma precisão de 4 casas decimais, ocorre a partir da 14ª iteração. Nos outros casos
estudados (σ = 20%; σ = 60%; σ = 80%), o mesmo comportamento pôde ser observado.
Tabela 7.66 – Valores dos parâmetros atualizados pelo procedimento de adição de massa,
considerando desvios padrão diferentes para os parâmetros iniciais – VIGA 1.
Parâmetros atualizados (Nm2) θ
σ = 20 % σ = 40 % σ = 60 % σ = 80 %
Parâmetros iniciais (Nm2)
EI-1 26923,4832 26843,5310 26700,3293 26488,7520 26954,1000
EI-2 26868,4078 26629,5966 26080,4636 25122,4973 26954,1000
EI-3 27135,6189 27680,5838 28151,5200 28573,7656 26954,1000
EI-4 27255,0543 28087,3429 28738,6774 29353,7947 26954,1000
EI-5 26842,1390 27218,7545 27297,1314 27261,0518 26954,1000
EI-6 26033,9587 25309,2220 24477,2755 23683,2837 26954,1000
EI-7 26434,5923 26163,1673 26154,9339 26372,7746 26954,1000
EI-8 27870,7532 29123,0320 30555,5036 31967,8587 26954,1000
EI-9 28225,0498 28311,8851 28234,4195 28145,2600 26954,1000
EI-10 28291,8044 27396,5018 25942,6250 24384,0313 26954,1000
EI-11 28502,8626 29179,5483 30304,9882 31956,6101 26954,1000
EI-12 27364,3776 27821,5952 28330,7390 28923,5055 26954,1000
EI-13 25610,1196 25843,9850 26121,8780 26238,7726 26954,1000
EI-14 23361,6744 21810,0961 20536,9710 19361,4925 26954,1000
EI-15 24003,1563 23596,4992 24007,0686 24873,4732 26954,1000
EI-16 26434,6873 27788,1354 29455,1988 31246,2791 26954,1000
EI-17 27019,7330 26819,9063 26178,6319 25443,7371 26954,1000
EI-18 27301,2326 26639,5785 25368,1415 23948,2803 26954,1000
EI-19 27831,8329 28923,0236 30461,1075 32467,3142 26954,1000
EI-20 27292,4425 27903,0637 28779,9172 30136,7050 26954,1000
EI-21 26767,8500 26331,5759 25304,9642 23941,9316 26954,1000
EI-22 27148,8054 27399,8612 27468,5383 27529,5403 26954,1000
EI-23 27372,8544 27855,2279 28439,2038 29181,3356 26954,1000
EI-24 27103,5245 27033,4348 26969,2806 26997,0039 26954,1000
EI-25 26560,1680 26246,9716 25850,0708 25315,9231 26954,1000
EI-26 25854,5622 26164,2086 26870,8318 27635,9817 26954,1000
EI-27 24869,0158 24713,4184 25023,6746 25365,2781 26954,1000
EI-28 24355,9966 22796,5932 21296,5862 20183,4720 26954,1000
EI-29 25544,8849 25715,8107 26071,0112 26462,7574 26954,1000
EI-30 27494,5672 29926,6387 32143,7356 33999,7627 26954,1000
EI-31 27649,6260 29581,8122 31421,8323 33014,5662 26954,1000
EI-32 27197,8207 27965,9763 28898,1320 29884,3120 26954,1000
EI-33 26983,7392 27098,8678 27279,6531 27518,2395 26954,1000

180
Tabela 7.67 – Valores dos parâmetros atualizados pelo procedimento de adição de massa, considerando um desvio padrão de 40% para os parâmetros iniciais – VIGA 1.
Parâmetros atualizados (Nm2) - σ = 40% θ
I1 I6 I14 I20
Parâmetros iniciais (Nm2)
EI-1 26838,7406 26843,5306 26843,5310 26843,5310 26954,1000
EI-2 26656,8152 26629,5943 26629,5966 26629,5966 26954,1000
EI-3 27851,2204 27680,5821 27680,5838 27680,5838 26954,1000
EI-4 28154,2322 28087,3422 28087,3429 28087,3429 26954,1000
EI-5 27054,4198 27218,7503 27218,7545 27218,7545 26954,1000
EI-6 25285,4441 25309,2044 25309,2220 25309,2220 26954,1000
EI-7 26039,6160 26163,1747 26163,1673 26163,1673 26954,1000
EI-8 29413,9084 29123,0361 29123,0320 29123,0320 26954,1000
EI-9 28239,6498 28311,9357 28311,8851 28311,8851 26954,1000
EI-10 27232,2599 27396,5665 27396,5018 27396,5018 26954,1000
EI-11 29370,6367 29179,5177 29179,5483 29179,5483 26954,1000
EI-12 27422,5111 27821,4461 27821,5952 27821,5952 26954,1000
EI-13 24972,3299 25843,4903 25843,9850 25843,9850 26954,1000
EI-14 21977,4678 21811,2377 21810,0962 21810,0961 26954,1000
EI-15 23050,8948 23595,3498 23596,4991 23596,4992 26954,1000
EI-16 27470,3023 27788,3252 27788,1354 27788,1354 26954,1000
EI-17 26862,2849 26820,1668 26819,9064 26819,9063 26954,1000
EI-18 26588,2659 26639,6294 26639,5785 26639,5785 26954,1000
EI-19 29062,0075 28922,9538 28923,0236 28923,0236 26954,1000
EI-20 27806,7380 27903,0073 27903,0637 27903,0637 26954,1000
EI-21 26133,6144 26331,5526 26331,5759 26331,5759 26954,1000
EI-22 27242,0958 27399,8681 27399,8612 27399,8612 26954,1000
EI-23 27877,8085 27855,2398 27855,2279 27855,2279 26954,1000
EI-24 26895,2192 27033,4383 27033,4348 27033,4348 26954,1000
EI-25 26111,7581 26246,9771 26246,9716 26246,9716 26954,1000
EI-26 26009,1746 26164,2153 26164,2086 26164,2086 26954,1000
EI-27 24467,7516 24713,2943 24713,4184 24713,4184 26954,1000
EI-28 22878,7671 22796,7754 22796,5932 22796,5932 26954,1000
EI-29 24771,2327 25715,6865 25715,8107 25715,8107 26954,1000
EI-30 30116,9414 29926,5836 29926,6387 29926,6387 26954,1000
EI-31 29995,9866 29581,7113 29581,8122 29581,8122 26954,1000
EI-32 28051,5706 27965,9696 27965,9763 27965,9763 26954,1000
EI-33 27110,6741 27098,8667 27098,8678 27098,8678 26954,1000
As tabelas 7.68 e 7.69 apresentam as freqüências, em Hz, medidas experimentalmente e às
do modelo numérico inicial, respectivamente. As tabelas 7.70 a 7.73 apresentam as
freqüências, obtidas do modelo atualizado considerando os diferentes desvios padrão para
os parâmetros inicias do modelo numérico.

181
Com relação aos resultados apresentados nas tabelas 7.70 a 7.73, que correspondem às
freqüências do modelo atualizado considerando um desvio padrão de 20%, 40%, 60% e
80% para os parâmetros iniciais do modelo numérico, verifica-se que estes se aproximaram
mais dos resultados experimentais, quando comparados aos resultados do modelo inicial.
Pode-se observar ainda que, à medida que o desvio padrão considerado aumentou, não
houve diferenças significativas nos resultados obtidos do modelo atualizado, porém os
melhores resultados foram obtidos para um desvio padrão de 20% dos parâmetros iniciais,
tabela 7.70. No método aplicado anteriormente, sem adição de massa, os resultados eram
melhorados à medida que o desvio padrão considerado aumentava.
Tabela 7.68 – Freqüências de vibração medidas experimentalmente para todos os sistemas,
perturbado e original – VIGA 1. Freqüências experimentais - Fm (Hz) 0,7936 kg
adicionado à coordenada Fm1 Fm2 Fm3 Fm4
----- 43,1889 119,0213 230,7397 377,8292 3 40,8059 115,2166 225,0324 372,6537 5 41,4060 117,0169 229,8331 378,6545 9 42,6061 119,4172 230,4332 371,4535 13 43,2062 118,2170 225,0324 366,6528 17 43,2062 116,4168 224,4323 376,2542 21 43,2062 115,2166 228,6329 376,8543 25 42,6061 115,8167 231,0333 365,4526 29 42,0060 117,6169 226,8327 366,6528 33 42,0060 119,4172 222,6321 378,6545 37 42,0060 118,8171 223,8322 373,8538 41 42,6061 117,0169 229,8331 363,6524 45 42,6061 115,2166 231,0333 370,2533 49 43,2062 115,2166 226,2326 379,2546 53 43,2062 117,0169 223,8322 370,2533 57 43,2062 118,8171 227,4328 366,0527 61 42,0060 118,8171 231,0333 378,0544 65 40,8059 114,6165 225,6325 371,4535

182
Tabela 7.69 – Freqüências de vibração obtidas, a partir do modelo numérico inicial, para todos os sistemas, perturbado e original – VIGA 1.
Freqüências modelo inicial - F (Hz) 0,7936 kg adicionado
à coordenada F1 F2 F3 F4
----- 43,5738 119,6105 233,3600 383,6388 3 41,2904 115,1797 227,3574 377,0682 5 41,9324 117,3925 231,6937 383,1448 9 42,9241 119,5661 232,2559 376,5741 13 43,4689 118,6858 226,8692 372,3564 17 43,5553 116,5436 226,4346 381,0421 21 43,2852 115,5002 230,9495 381,5450 25 42,8540 116,3218 233,2819 370,8586 29 42,4684 118,2152 229,0985 373,0448 33 42,2764 119,5462 224,6435 382,9969 37 42,3422 119,0589 226,3351 378,6355 41 42,6444 117,2267 231,8163 369,7612 45 43,0760 115,6990 232,8796 375,8992 49 43,4540 115,7922 228,4502 383,6192 53 43,5659 117,6012 225,7570 376,2073 57 43,2553 119,4449 229,4791 372,1736 61 42,4803 118,8837 233,3520 382,2565 65 41,2904 115,1797 227,3574 377,0682

183
Tabela 7.70 – Freqüências de vibração obtidas, a partir do modelo atualizado, para todos os sistemas, perturbado e original – VIGA 1. (σ = 20%)
Freqüências atualizadas – Fupd (Hz) - σ = 20% 0,7936 kg adicionada
à coordenada Fupd1 Fupd2 Fupd3 Fupd4
----- 43,2398 119,2335 231,2205 378,3380 3 40,9790 114,9272 224,9706 372,0112 5 41,6130 117,0755 229,4562 377,8279 9 42,5935 119,1880 230,1283 371,7354 13 43,1340 118,3546 224,6130 367,4588 17 43,2225 116,3123 224,1826 375,7290 21 42,9560 115,2672 228,6989 376,5351 25 42,5181 115,9504 231,1679 365,9822 29 42,1229 117,7634 227,0925 367,4699 33 41,9439 119,1506 222,7542 377,6571 37 42,0231 118,7246 224,3227 373,4430 41 42,3268 116,9000 229,5872 364,5177 45 42,7526 115,3247 230,8526 370,4146 49 43,1226 115,3360 226,6782 378,3310 53 43,2321 117,1076 223,7815 370,9295 57 42,9258 119,0411 227,2833 366,7188 61 42,1569 118,5011 231,2153 376,9860 65 40,9750 114,6622 225,4507 371,9195

184
Tabela 7.71 – Freqüências de vibração obtidas, a partir do modelo atualizado, para todos os sistemas, perturbado e original – VIGA 1. (σ = 40%)
Freqüências atualizadas - Fupd (Hz) - σ = 40% 0,7936 kg adicionado
à coordenada Fupd1 Fupd2 Fupd3 Fupd4
----- 43,2399 119,2338 231,2226 378,3405 3 40,9770 114,9591 224,9275 372,0486 5 41,6114 117,0896 229,4353 377,8202 9 42,5929 119,1879 230,1375 371,8399 13 43,1341 118,3616 224,5606 367,4318 17 43,2226 116,3381 224,1501 375,7305 21 42,9549 115,2862 228,6646 376,5721 25 42,5151 115,9567 231,1719 366,0023 29 42,1174 117,7510 227,0837 367,3261 33 41,9438 119,1491 222,7930 377,6820 37 42,0261 118,7296 224,3305 373,3918 41 42,3307 116,9050 229,5759 364,4525 45 42,7552 115,3226 230,8711 370,4033 49 43,1233 115,3162 226,7249 378,3322 53 43,2322 117,0852 223,7941 370,8314 57 42,9264 119,0364 227,2692 366,6514 61 42,1577 118,4930 231,2160 377,0932 65 40,9774 114,6330 225,5199 372,0013

185
Tabela 7.72 – Freqüências de vibração obtidas, a partir do modelo atualizado, para todos os sistemas, perturbado e original – VIGA 1. (σ = 60%)
Freqüências atualizadas - Fupd (Hz) - σ = 60% 0,7936 kg adicionado
à coordenada Fupd1 Fupd2 Fupd3 Fupd4
----- 43,2399 119,2338 231,2239 378,3445 3 40,9762 114,9664 224,9196 372,0608 5 41,6107 117,0926 229,4303 377,8196 9 42,5928 119,1880 230,1391 371,8639 13 43,1342 118,3618 224,5365 367,3844 17 43,2225 116,3455 224,1607 375,7588 21 42,9545 115,2873 228,6519 376,5858 25 42,5143 115,9614 231,1722 366,0127 29 42,1156 117,7467 227,0794 367,2495 33 41,9442 119,1495 222,8105 377,7091 37 42,0267 118,7304 224,3265 373,3845 41 42,3318 116,9036 229,5804 364,4270 45 42,7560 115,3229 230,8764 370,4063 49 43,1235 115,3129 226,7347 378,3351 53 43,2322 117,0829 223,8005 370,7880 57 42,9268 119,0340 227,2449 366,5826 61 42,1578 118,4884 231,2155 377,1793 65 40,9784 114,6276 225,5439 372,0603

186
Tabela 7.73 – Freqüências de vibração obtidas, a partir do modelo atualizado, para todos os sistemas, perturbado e original – VIGA 1. (σ = 80%)
Freqüências atualizadas - Fupd (Hz) - σ = 80% 0,7936 kg adicionado
à coordenada Fupd1 Fupd2 Fupd3 Fupd4
----- 43,2399 119,2337 231,2246 378,3474 3 40,9756 114,9688 224,9175 372,0670 5 41,6103 117,0937 229,4292 377,8213 9 42,5927 119,1881 230,1381 371,8655 13 43,1343 118,3611 224,5224 367,3471 17 43,2225 116,3488 224,1764 375,7915 21 42,9542 115,2856 228,6426 376,5976 25 42,5140 115,9654 231,1713 366,0138 29 42,1147 117,7440 227,0786 367,1925 33 41,9445 119,1503 222,8196 377,7360 37 42,0268 118,7309 224,3188 373,3930 41 42,3323 116,9009 229,5892 364,4072 45 42,7564 115,3240 230,8792 370,4077 49 43,1237 115,3123 226,7355 378,3367 53 43,2321 117,0841 223,8064 370,7604 57 42,9270 119,0325 227,2253 366,5277 61 42,1578 118,4851 231,2148 377,2436 65 40,9791 114,6268 225,5575 372,1027
Quanto aos modos de vibração resultantes do modelo atualizado, percebe-se que ocorreu
um afastamento dos pontos medidos experimentalmente, principalmente no 1º e 2º modos
da VIGA 1 apresentados na figura 7.52. Este comportamento pode ser observado, ainda,
por meio do índice MAC cuja diagonal encontra-se apresentada na tabela 7.74 para todos
os casos analisados.
Comparando os valores apresentados na tabela 7.74 com os valores do MAC apresentados
na tabela 7.39, que foram calculados entre os modos experimentais da VIGA 1 e os modos
do modelo numérico inicial, verifica-se que houve uma diminuição na correlação entre os
modos experimentais e os modos numéricos do modelo atualizado. Os valores da tabela
7.74 também podem ser comparados àqueles apresentados na tabela 7.50, os quais foram
calculados entre os modos experimentais e os numéricos do modelo atualizado pelo
método aplicado anteriormente, sem adição de massa. Nesse caso, também se observa uma
diminuição na correlação entre os modos em questão.

187
1º Modo
-1,20
-0,80
-0,40
0,00
0,40
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Atualizado
2º Modo
-1,20
-0,80
-0,40
0,00
0,40
0,80
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Atualizado
3º Modo
-1,40
-1,00
-0,60
-0,20
0,20
0,60
1,00
1,40
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Atualizado
4º Modo
-1,20
-0,80
-0,40
0,00
0,40
0,80
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Atualizado
Figura 7.52 – Comparação entre os modos experimentais, do sistema original, e numéricos resultantes do modelo atualizado pelo procedimento de adição de massa, considerando um
desvio padrão de 40% para os parâmetros iniciais.

188
Tabela 7.74 – Diagonal do MAC calculado entre os modos experimentais e numéricos resultantes do modelo atualizado pelo procedimento de adição de massa.
Diagonal do MAC Modos
σ = 20% σ = 40% σ = 60% σ = 80%
1º 0,9843 0,9843 0,9843 0,9841 2º 0,9788 0,9786 0,9786 0,9785 3º 0,9495 0,9486 0,9483 0,9482 4º 0,9601 0,9600 0,9598 0,9597
VIGA 2 - MODELO INICIAL COM MODIFICAÇÕES NOS ELEMENTOS 18 E 19
O modelo numérico da VIGA 2 que foi atualizado é aquele representado pela figura 7.48.
O ensaio realizado para a obtenção dos autovalores ou freqüências da VIGA 2 foi
semelhante ao realizado na VIGA 1, em que foi adicionada uma massa de 0,7936 kg a
diferentes coordenadas do modelo numérico, representadas pelos nós do modelo
experimental da VIGA 2. Neste caso, as coordenadas perturbadas foram as mesmas da
VIGA 1.
Assim como na VIGA 1, só foram identificadas, pelo método de detecção de pico, as 4
primeiras freqüências de vibração da VIGA 2 e todas foram utilizadas no processo de
atualização. Novamente, no cálculo da matriz εεW , admitiu-se um desvio padrão de 0,5%
para os autovalores correspondentes às freqüências medidas experimentalmente. Para o
cálculo da matriz θθW foram considerados desvios padrão de 20% e 40% para os
parâmetros iniciais do modelo. Foi observado que para desvios padrão maiores que 40% o
problema não convergia e, portanto o modelo numérico da VIGA 2 não podia ser
atualizado.
A tabela 7.75 apresenta os valores dos parâmetros atualizados para os diferentes casos
analisados. A terceira coluna dessa tabela representa o caso no qual foi considerado um
desvio padrão de 40% para os parâmetros iniciais dos elementos 18 e 19 e de 20% para os
parâmetros iniciais dos outros elementos. Variações significativas podem ser observadas
entre os parâmetros iniciais de alguns elementos e os atualizados. Os parâmetros
atualizados apresentados na primeira coluna da tabela 7.75 apresentaram menores
variações em relação aos parâmetros iniciais, com exceção daquele correspondente ao
elemento 14 que apresentou uma variação significativa de aproximadamente 40% do seu

189
valor inicial. Em todos os casos, os parâmetros convergiram de forma rápida, com uma
precisão de 4 casas decimais a partir da 3ª iteração.
As tabelas 7.76 e 7.77 apresentam os autovalores e suas freqüências correspondentes, em
Hz, medidos experimentalmente e do modelo numérico inicial, respectivamente, para o
sistema original e todos os sistemas perturbados. As tabelas 7.78 a 7.80 apresentam os
autovalores e freqüências correspondentes, obtidos do modelo atualizado considerando os
diferentes desvios padrão para os parâmetros inicias do modelo numérico.
Comparando as freqüências do modelo atualizado com àquelas do modelo inicial verifica-
se que ocorreu uma melhora considerável, principalmente na 2ª, 3ª e 4ª freqüências, de
todos os sistemas considerados, que se aproximaram mais dos resultados experimentais,
tabelas 7.78 a 7.80. No entanto, para esse procedimento de atualização em que diferentes
coordenadas dos modelos numérico e experimental foram perturbadas, o aumento do
desvio padrão considerado para os parâmetros iniciais no cálculo da matriz θθW não
implicou em melhores resultados. Nesse caso, resultados mais próximos dos experimentais
foram obtidos para um desvio padrão de 20%, para os parâmetros iniciais do modelo
numérico.
Quanto aos modos de vibração, novamente não se verificou nenhuma melhora nos
resultados do modelo atualizado em relação aos modos obtidos do modelo inicial. As
figuras 7.53 e 7.54 apresentam uma comparação entre os modos experimentais e os
numéricos obtidos do modelo atualizado pelo procedimento de adição de massa, para dois
dos casos analisados.
Assim como aconteceu na atualização do modelo da VIGA 1, os modos do modelo
atualizado da VIGA 2 se afastam dos pontos experimentais. A diagonal do índice MAC,
apresentada na tabela 7.81 para os casos considerados, se comparada ao MAC calculado
entre os modos experimentais do sistema original e os modos obtidos do modelo inicial
(tabela 7.40), verifica-se uma diminuição da correlação entre os modos experimentais e os
modos do modelo atualizado pelo procedimento de adição de massa.

190
Tabela 7.75 – Valores dos parâmetros atualizados pelo procedimento de adição de massa, considerando desvios padrão diferentes para os parâmetros iniciais – VIGA 2.
Parâmetros atualizados (Nm2) θ
σ = 20 % σ = 40 % σ = 20%-40 %
Parâmetros iniciais (Nm2)
EI-1 26949,9832 26941,9425 26950,5911 26954,1000
EI-2 27127,5020 27236,6458 27134,7694 26954,1000
EI-3 27979,2387 28848,1867 28006,1737 26954,1000
EI-4 28785,4291 29537,0974 28838,8037 26954,1000
EI-5 28991,3344 29627,1665 29055,4809 26954,1000
EI-6 28100,3211 27964,2865 28148,1781 26954,1000
EI-7 26534,8592 26320,0658 26481,9493 26954,1000
EI-8 25836,1232 28729,9278 25670,4250 26954,1000
EI-9 23902,5752 20951,1723 23766,1456 26954,1000
EI-10 25619,1730 22776,8436 25784,0601 26954,1000
EI-11 29744,8558 34221,0257 30003,4357 26954,1000
EI-12 31293,3841 37713,6111 31551,0359 26954,1000
EI-13 29880,0248 36541,8136 30078,0628 26954,1000
EI-14 15523,8288 11872,5899 16050,2703 26954,1000
EI-15 26925,5369 32170,3857 26263,9921 26954,1000
EI-16 32870,3412 40324,3453 32419,7002 26954,1000
EI-17 31621,0058 36676,1053 31322,0218 26954,1000
EI-18 13478,7899 13437,1726 15128,0622 13264,5600
EI-19 10754,7096 9290,4904 9675,0180 13264,5600
EI-20 30430,4606 37259,9059 31265,3824 26954,1000
EI-21 31259,7307 38146,5559 31828,7727 26954,1000
EI-22 27375,8566 27782,0475 27685,2265 26954,1000
EI-23 26668,3276 22875,9908 26458,2874 26954,1000
EI-24 27855,0965 28392,9983 27536,4040 26954,1000
EI-25 28016,2257 29988,4940 27802,9094 26954,1000
EI-26 26915,6570 28956,7913 26888,7714 26954,1000
EI-27 24595,3810 25151,3171 24744,4560 26954,1000
EI-28 22077,8931 19048,1732 22157,3375 26954,1000
EI-29 23815,0415 24886,7619 23802,3910 26954,1000
EI-30 27141,7551 30685,3320 27173,0640 26954,1000
EI-31 27616,8765 30271,8109 27638,4053 26954,1000
EI-32 27096,1239 27820,2267 27106,8025 26954,1000
EI-33 26949,7956 26976,4720 26951,3748 26954,1000

191
Tabela 7.76 – Freqüências de vibração obtidas experimentalmente para todos os sistemas, perturbado e original – VIGA 2.
Freqüências experimentais - Fm (Hz) 0,7936 kg adicionado
à coordenada Fm1 Fm2 Fm3 Fm4
----- 40,1409 117,4523 221,9477 369,3098 3 38,3287 112,9862 216,9735 363,2890 5 38,6619 115,3193 220,6397 370,2882 9 39,6618 117,6523 221,9729 362,6224 13 40,3284 116,6524 216,9735 357,2897 17 40,3284 114,6527 216,3069 367,6218 21 39,9951 113,3195 220,3065 368,9550 25 39,6618 114,3194 222,9728 356,2899 29 39,3285 116,3191 218,9733 350,6239 33 38,9952 117,6523 213,9739 369,9549 37 38,9952 116,9857 213,6406 362,6224 41 39,3285 115,3193 220,9730 359,9561 45 39,6618 113,9861 221,9729 361,2893 49 40,3284 113,9861 216,9735 370,2882 53 40,3284 115,6526 214,6405 362,2891 57 39,9951 117,6523 218,6400 358,2896 61 39,3285 116,9857 221,9729 369,6216 65 38,3287 113,6528 215,6404 364,6222

192
Tabela 7.77 – Freqüências de vibração obtidas a partir do modelo numérico inicial para todos os sistemas, perturbado e original – VIGA 2.
Freqüências modelo inicial - F (Hz) 0,7936 kg adicionado
à coordenada F1 F2 F3 F4
----- 40,7927 118,7772 225,6761 377,5505 3 38,7456 114,1078 220,3353 370,2796 5 39,3109 116,4278 224,1169 376,9607 9 40,1904 118,7245 224,8521 370,0959 13 40,6857 117,8471 220,2357 365,0874 17 40,7816 115,6389 219,5665 374,3713 21 40,5526 114,5411 223,3172 375,6966 25 40,1543 115,3787 225,6585 364,3713 29 39,7607 117,3488 222,1473 365,8745 33 39,5056 118,7224 217,1763 376,7807 37 39,4889 118,1281 217,4730 371,6861 41 39,8421 116,3595 224,0736 364,3860 45 40,3041 114,9991 225,0649 370,9659 49 40,6796 115,1520 220,3902 377,5115 53 40,7844 116,8895 217,9577 371,1069 57 40,4891 118,6216 221,9626 367,8715 61 39,7663 118,1090 225,6480 376,4760 65 38,6682 114,6584 219,2253 371,8931

193
Tabela 7.78 – Freqüências de vibração obtidas a partir do modelo atualizado para todos os sistemas, perturbado e original – VIGA 2. (σ = 20%)
Freqüências atualizadas - Fupd (Hz) – σ = 20% 0,7936 kg adicionado
à coordenada Fupd1 Fupd2 Fupd3 Fupd4
----- 40,2933 117,6530 222,3100 369,4107 3 38,2620 113,1658 217,0855 362,5537 5 38,8217 115,3827 220,7279 368,7418 9 39,6944 117,5972 221,6074 363,1605 13 40,1875 116,7621 217,0765 357,5648 17 40,2817 114,5708 216,0826 365,6270 21 40,0526 113,5418 219,8619 368,2587 25 39,6509 114,3266 222,2987 356,9512 29 39,2476 116,1690 218,9206 356,0002 33 39,0250 117,5998 214,4440 368,5069 37 39,0063 116,9827 214,1185 363,5391 41 39,3696 115,2730 220,5501 356,8419 45 39,8245 113,9378 221,8464 362,7285 49 40,1869 114,0566 217,4233 369,4067 53 40,2847 115,7083 214,5788 363,4240 57 39,9957 117,4723 218,2548 359,6375 61 39,2863 116,9819 222,2916 368,3311 65 38,2071 113,4049 215,8213 364,0884

194
Tabela 7.79 – Freqüências de vibração obtidas a partir do modelo atualizado para todos os sistemas, perturbado e original – VIGA 2. (σ = 40%)
Freqüências atualizadas - Fupd (Hz) – σ = 40% 0,7936 kg adicionado
à coordenada Fupd1 Fupd2 Fupd3 Fupd4
----- 40,2939 117,6526 222,3122 369,4184 3 38,2612 113,1545 217,1618 362,6898 5 38,8212 115,3738 220,7425 368,7401 9 39,6947 117,5963 221,6304 363,3981 13 40,1883 116,7538 217,1289 357,7222 17 40,2819 114,5222 216,0423 365,5322 21 40,0533 113,5314 219,8592 368,4343 25 39,6535 114,3715 222,2932 357,1349 29 39,2433 116,1493 218,8563 355,0201 33 39,0324 117,6043 214,6505 368,5843 37 38,9993 116,9561 213,9835 363,1238 41 39,3727 115,2909 220,5641 357,2501 45 39,8248 113,9273 221,8163 362,7954 49 40,1879 114,0844 217,4248 369,4157 53 40,2851 115,7330 214,5761 363,4240 57 39,9965 117,4709 218,1711 359,5180 61 39,2868 116,9775 222,2881 368,4543 65 38,2094 113,4239 215,7904 364,1778

195
Tabela 7.80 – Freqüências de vibração obtidas a partir do modelo atualizado para todos os sistemas, perturbado e original – VIGA 2. (σ = 20% - 40%)
Freqüências atualizadas - Fupd (Hz) – σ = 20% - 40%
0,7936 kg adicionado
à coordenada Fupd1 Fupd2 Fupd3 Fupd4
----- 40,2932 117,6533 222,3112 369,4071 3 38,2675 113,1340 217,1215 362,5463 5 38,8254 115,3653 220,7395 368,7372 9 39,6953 117,5966 221,6127 363,1550 13 40,1872 116,7587 217,1017 357,5267 17 40,2819 114,5570 216,1111 365,5918 21 40,0550 113,5336 219,8834 368,2670 25 39,6559 114,3238 222,2998 356,9762 29 39,2528 116,1647 218,9391 355,9118 33 39,0274 117,5981 214,4918 368,4450 37 39,0016 116,9835 214,0979 363,4933 41 39,3631 115,2811 220,5192 356,8374 45 39,8207 113,9530 221,8467 362,7828 49 40,1853 114,0648 217,3822 369,4026 53 40,2848 115,7153 214,5417 363,4685 57 39,9955 117,4730 218,2441 359,7230 61 39,2840 116,9883 222,2924 368,3400 65 38,2013 113,4368 215,7894 364,1223
Tabela 7.81 – Diagonal do MAC calculado entre os modos experimentais e numéricos do modelo atualizado pelo procedimento de adição de massa – VIGA 2.
Diagonal do MAC Modos
σ = 20% σ = 40% σ = 20%-40%
1º 0,9846 0,9846 0,9846 2º 0,9816 0,9819 0,9813 3º 0,9661 0,9668 0,9663 4º 0,9738 0,9724 0,9735

196
1º Modo
-0,60
-0,30
0,00
0,30
0,60
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Atualizado
2º Modo
-0,60
-0,30
0,00
0,30
0,60
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Atualizado
3º Modo
-0,60
-0,30
0,00
0,30
0,60
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Atualizado
4º Modo
-0,60
-0,30
0,00
0,30
0,60
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Atualizado
Figura 7.53 – Comparação entre os modos experimentais, do sistema original, e numéricos do modelo atualizado pelo procedimento de adição de massa, considerando um desvio
padrão de 20% para os parâmetros iniciais.

197
1º Modo
-0,60
-0,30
0,00
0,30
0,60
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Atualizado
2º Modo
-0,60
-0,30
0,00
0,30
0,60
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Atualizado
3º Modo
-0,60
-0,30
0,00
0,30
0,60
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Atualizado
4º Modo
-0,60
-0,30
0,00
0,30
0,60
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34
Experimental Atualizado
Figura 7.54 – Comparação entre os modos experimentais, do sistema original, e numéricos do modelo atualizado, pelo procedimento de adição de massa, considerando um desvio
padrão de 40% para os parâmetros iniciais dos elementos 18 e 19.

198
8. CONCLUSÕES E SUGESTÕES PARA TRABALHOS FUTUROS
8.1 CONCLUSÕES
8.1.1 Análise numérica
Quanto à análise numérica realizada neste trabalho, pôde-se concluir, a partir dos
resultados apresentados, que os métodos de identificação das propriedades modais e os
métodos de atualização de modelos de elementos finitos aplicados, foram implementados
corretamente. Foi possível verificar, ainda, a eficiência dos métodos mediante diferentes
situações.
8.1.1.1 Identificação das propriedades modais
Métodos SSI-COV/ref e SSI-DATA/ref
Apesar das hipóteses consideradas no desenvolvimento dos métodos de identificação de
subespaços estocásticos, SSI-COV/ref e SSI-DATA/ref, de que a entrada ou excitação
deva ser um ruído branco, verificou-se que esses métodos permitiram identificar
corretamente as propriedades modais da viga quando submetida a uma excitação do tipo
impacto.
O mesmo comportamento foi verificado quando foi aplicada uma excitação tipo ruído
branco, indicando, portanto que o tipo de excitação não influenciou na obtenção desses
valores. Embora não tenham sido apresentados alguns dos resultados obtidos pelo SSI-
DATA/ref, observou-se que seu comportamento foi similar ao do SSI-COV/ref
apresentando resultados muito próximos àqueles obtidos pelo SSI-COV/ref. Portanto, os
métodos citados podem ser aplicados, com segurança, a registros obtidos a partir de uma
excitação do tipo impacto. Isto se deve, provavelmente, ao fato de que o impacto e um
ruído branco apresentam funções densidade espectral de potência semelhantes, ou seja,
apresentam componentes em todas as freqüências.

199
Considerando a aplicação dos métodos a registros de respostas com tamanhos diferentes (N
= 4000 e N = 16000), verificou-se que os resultados obtidos para os dois casos foram
exatamente iguais. Portanto, a eficiência dos métodos não foi comprometida quando
aplicados a registros de respostas relativamente pequenos.
Segundo recomendações apresentadas por Peeters (2000), ao se aplicar métodos de
identificação de subespaços estocásticos a registros de respostas obtidos por meio de
excitação do tipo impacto, deve-se antes introduzir um número de zeros igual ao número
de linhas bloco da matriz Hankel (equação 4.2) no início de cada resposta obtida. Foram
então consideradas respostas em que foram incluídos zeros ao início de cada uma. Os
resultados, no entanto, foram idênticos àqueles obtidos sem incluir zeros nas respostas.
Apesar de terem sido violadas algumas hipóteses dos métodos de identificação de
subespaços estocásticos, como o tipo de excitação aplicada e o tamanho da resposta
considerada, os resultados indicaram que a eficiência desses métodos não foi
comprometida em nenhum dos casos apresentados. Quanto ao método SSI-DATA/ref, este
exige um grande esforço computacional resultando num tempo de processamento bem
maior do que o requerido pelo SSI-COV/ref ou pelo método de detecção de pico.
Método de detecção de pico
Quanto ao método de detecção de pico, os resultados indicaram que as freqüências e os
modos de vibração foram identificados corretamente quando a viga foi submetida a um
impacto. Aplicando o método de detecção de pico às respostas obtidas a partir de uma
excitação tipo ruído branco, também foi possível identificar os modos e as freqüências de
vibração da viga analisada.
Os três métodos aplicados se mostraram eficientes na identificação das propriedades
modais da viga submetida à excitação tipo impacto ou ruído branco.
8.1.1.2 Atualização de modelos de elementos finitos em dinâmica estrutural
Os métodos de atualização de modelos numéricos apresentaram resultados bastante
satisfatórios, nos quais se verificou que a diferença entre as freqüências obtidas do modelo

200
numérico atualizado e aquelas que simulavam freqüências medidas experimentalmente foi
diminuída em todos os casos considerados. Verificou-se ainda que, quanto menos
diferenças houvesse entre os modelos numéricos a serem atualizados e aqueles que
simulavam os modelos experimentais, melhores resultados eram obtidos. Em alguns casos,
os resultados obtidos a partir do modelo atualizado convergiram exatamente para os
valores de simulação, isto é, o modelo numérico atualizado passou a representar com
precisão o modelo “experimental” ou de simulação.
8.1.2 Análise experimental
8.1.2.1 Identificação das propriedades modais das estruturas analisadas
Pórtico
No caso do pórtico foram realizados cinco ensaios em que variou-se o tipo de excitação
aplicada e seu ponto de aplicação. Quatro ensaios corresponderam à vibração livre nos
quais foram aplicados um deslocamento inicial ou um impacto em coordenadas diferentes
do pórtico. Um ensaio correspondeu à vibração forçada produzida por um motor fixo em
um dos pavimentos do pórtico. Aos registros de acelerações, obtidos em todos os ensaios,
foram aplicados os três métodos de identificação: o método de detecção de pico, o SSI-
COV/ref e o SSI-DATA/ref.
Considerando os ensaios de vibração livre, os três métodos permitiram identificar
satisfatoriamente as freqüências de vibração do pórtico, apresentando valores muito
próximos entre si. No entanto, quando as excitações foram aplicadas ao 1º e 2º pavimentos
do pórtico (ver figura 7.1), o primeiro modo não pôde ser identificado pelo método SSI-
COV/ref. Os métodos de detecção de pico e SSI-DATA/ref forneceram resultados
satisfatórios quanto a todos os modos de vibração da estrutura em questão, entretanto, o
método de detecção de pico apresentou melhores resultados quando comparados aos
modos teóricos do pórtico, isto é, aqueles obtidos a partir da solução do problema de
autovalor definido pela equação 6.1.
Quanto aos resultados obtidos a partir dos ensaios de vibração forçada, os três métodos
identificaram valores de freqüências bem diferentes entre si, principalmente na 1ª e 2ª

201
freqüência do pórtico. Os três modos de vibração foram identificados satisfatoriamente
pelo método SSI-DATA/ref. Os métodos de detecção de pico e o SSI-COV/ref não
permitiram identificar o 2º modo de vibração do pórtico. Isto se deve, provavelmente, ao
fato de que o pórtico foi excitado apenas na 1ª freqüência, pelo motor localizado no 2º
pavimento.
Com relação ao 1º modo, o método SSI-COV/ref apresentou melhores resultados,
entretanto, o método SSI-DATA/ref apresentou melhores resultados quanto à identificação
do 2º modo. Diante disso, fica difícil concluir sobre qual método se mostrou mais
adequado na identificação das propriedades modais do pórtico submetido à vibração
forçada.
De modo geral, o método SSI-DATA/ref parece ter apresentado melhores resultados para
os casos analisados.
Vigas 1 e 2
Os três métodos considerados permitiram identificar satisfatoriamente as freqüências e os
modos de vibração das vigas ensaiadas, apresentando valores muito próximos entre si.
Quanto aos modos de vibração, os métodos SSI-COV/ref, SSI-DATA/ref e o método de
detecção de pico permitiram identificar muito satisfatoriamente os modos de vibração das
vigas ensaiadas, com exceção do 5º modo da VIGA 1 identificado pelo SSI-DATA/ref.
De modo geral, os três métodos avaliados mostraram-se adequados para a identificação das
propriedades modais das estruturas consideradas. Entretanto, o método SSI-COV/ref e o
método de detecção de pico apresentaram melhores resultados quanto à identificação dos
modos de vibração.
O método de detecção de pico, no entanto, apresenta maior simplicidade em sua
implementação e fornece resultados de forma mais rápida, entretanto, o processo de
identificação das freqüências é praticamente manual, pois é necessário procurar os picos
correspondentes aos auto-espectros de cada resposta adquirida. Já os métodos SSI-COV/ref
e SSI-DATA/ref não apresentam a mesma simplicidade em sua implementação, e, além

202
disso, o SSI-DATA/ref requer um tempo de processamento bem superior aos outros
métodos aplicados.
Para escolher o método de identificação mais adequado deve-se, portanto, considerar suas
vantagens e desvantagens com relação a diferentes aspectos tais como, esforço
computacional, tempo de processamento, viabilidade de aplicação e precisão dos
resultados. Além disso, deve-se considerar a precisão requerida para as propriedades
modais de modo que, em qualquer análise subseqüente, não venham a produzir resultados
imprecisos. Por exemplo, a detecção de danos em estruturas a partir de suas características
dinâmicas, ou a atualização de modelos numéricos baseados nos dados modais medidos
experimentalmente.
8.1.2.2 Atualização dos modelos numéricos a partir das freqüências medidas
experimentalmente
Pórtico
Com relação à atualização do modelo de elementos finitos considerado para o pórtico,
verificou-se que o procedimento adotado, descrito no item 5.1, permitiu obter um modelo
atualizado o qual reproduziu com precisão os dados experimentais medidos. Isto quer dizer
que as diferenças entre as freqüências resultantes do modelo numérico e as freqüências
experimentais foram minimizadas chegando a valores muito próximos de zero.
Quanto aos parâmetros identificados, seus valores parecem ser representativos do modelo
experimental. O método aplicado apresentou um processamento rápido e os parâmetros e
freqüências convergiram também de forma relativamente rápida, mostrando-se, portanto,
bastante adequado para o problema considerado.
Vigas 1 e 2
Com relação aos métodos de atualização aplicados aos modelos numéricos das vigas
analisadas, verificou-se que ambos forneceram resultados satisfatórios no sentido de que
permitiram minimizar as diferenças entre as freqüências numéricas e experimentais. No
entanto, o método no qual foi usada a equação (5.22) considerando apenas o sistema

203
original, ou seja, sem adicionar massas às coordenadas dos modelos numérico e
experimental, apresentou melhores resultados, inclusive para a 5ª e 6ª freqüências que não
foram consideradas no processo de atualização.
Foi verificado ainda que a escolha do desvio padrão para os parâmetros iniciais do modelo
numérico a ser atualizado, teve influência na qualidade dos resultados finais fornecidos
pelo modelo atualizado. Vale lembrar que o desvio padrão (σ) ou a variância (σ2)
considerada no processo de atualização representa o grau de incerteza dos valores dos
parâmetros iniciais do modelo numérico. Foi observado que as freqüências obtidas do
modelo atualizado se aproximavam mais das experimentais, à medida que o desvio padrão
considerado era aumentado.
Para os resultados obtidos quando foi aplicado o procedimento de adição de massa, a
escolha do desvio padrão considerado praticamente não teve influência nos resultados
finais do modelo atualizado, podendo ser observado até um comportamento contrário em
que as freqüências fornecidas pelo modelo atualizado se afastavam das experimentais à
medida que o desvio padrão considerado para os parâmetros iniciais era aumentado.
Os modos de vibração obtidos pelo modelo atualizado considerando o primeiro método
aplicado, não apresentaram nenhuma melhora em relação aos modos obtidos a partir do
modelo numérico inicial. Esse resultado poderia ser esperado uma vez que a diferença
entre os modos numéricos e experimentais não foram minimizadas no processo de
atualização. No entanto, os modos de vibração obtidos pelo modelo atualizado
considerando o procedimento de adição de massa apresentaram um afastamento dos modos
experimentais em relação àqueles obtidos do modelo numérico inicial.
A partir dos resultados obtidos para a VIGA 2, quando foi considerado um modelo
numérico inicial sem as modificações existentes nos elementos 18 e 19 da referida viga,
pôde-se verificar que apesar das grandes diferenças entre os modelos numérico e
experimental, foi possível obter um modelo atualizado que reproduzisse os dados modais
experimentais satisfatoriamente. Entretanto, os parâmetros EI identificados não
representaram os parâmetros do modelo real ou experimental.

204
O primeiro método aplicado se mostrou mais adequado uma vez que apresentou melhores
resultados, além de ser de fácil aplicação requerendo apenas informações sobre as
freqüências medidas da estrutura original. Considerando estruturas de grande porte, como
por exemplo, pontes, a aplicação do procedimento de adição de massa seria inviável, pois
provavelmente seria necessário adicionar grandes massas a fim de se obter diferentes
informações com relação às freqüências dos sistemas perturbados.
8.2 SUGESTÕES PARA TRABALHOS FUTUROS
• Avaliar a eficiência dos métodos estudados mediante sua aplicação a estruturas
mais complexas como pontes.
• Estudar a eficiência dos métodos de identificação das propriedades dinâmicas
quando estas forem utilizadas, em análises subseqüentes, por exemplo, em métodos
de detecção de danos.
• Analisar o nível de significado físico dos parâmetros identificados pelos métodos
de atualização de modelos numéricos.
• Avaliar a influência da escolha das matrizes pesos no significado físico dos
parâmetros atualizados.
• Avaliar métodos para a aplicação em estruturas específicas.
• Realizar monitoramento de estruturas reais.
• Estudar e avaliar a atualização de modelos numéricos como ferramenta para a
detecção e quantificação de danos em estruturas.
• Introduzir os modos de vibração nos procedimentos de atualização de modelos a
fim de avaliar a eficiência dos métodos na detecção de alterações em elementos
estruturais.
• Explorar as causas das falhas localizadas nos métodos de identificação de sistemas.
• Buscar otimizar a escolha da posição e o número de sensores a serem dispostos
numa estrutura para que a identificação dos parâmetros modais seja satisfatória.

205
REFERÊNCIAS BIBLIOGRÁFICAS
Adams, R. D., Cawley, P., Pye, C. J. e Stone B. J. “A vibration technique for non-
destructively assessing the integrity of structures”, Journal of Mechanical Engineering
Science, 20(2), 93-100, 1978.
Allemang, R. J. e Brown, D. L., 1982. A correlation coefficient for modal vector analysis.
Proc. 1st Int. Modal Analysis Conference, 1, 110-116.
Amani, M. G. e Riera, J. D., 2002. Determinación de las Propiedades Dinámicas de
Sistemas Sometidos a Excitaciones Ambientales Aleatorias, XXX Jornadas Sul-
Americanas de Engenharia Estrutural.
Amani, M. G., Riera, J. D. e Curadelli, O. R., 2004. Estimación de Parámetros Modales de
Estructuras Sometidas a Excitaciones Ambientales. Revista Sul-Americana de Engenharia
Estrutural, 1(2), 55-73.
Baruch, M., 1978. Optimisation Procedure to Correct Stiffness and Flexibility Matrices
Using Vibration Tests, AIAA Journal, 16, 1208-1210.
Baruch, M., 1982. Optimal Correction of Mass and Stiffness Matrices Using Measured
Modes, AIAA Journal, 20(11), 1623-1626.
Baruch, H. e Boka, J. B., 1993. Modelling and Identification of Boundary Conditions in
Flexible Structures. International Journal of Analytical and Experimental Modal Analysis,
8, 107-117.
Bennett, D., 1999. The Creation of Bridges. Quintet Publishing Limited, London.
Berman e Nagy, 1983. Improvement of a Large Analytical Model Using Test Data. AIAA
Journal, 21(8), 1168-1173.
Brownjohn, J. M. W., Xia, P-Q, Hao, H. e Xia, Y., 2001. Civil Structure Condition
Assessment by FE Model Updating: Methodology and Case Studies. Finite Element and
Analysis Design, 37, 761-775.
Chaudhary, M. T. A., Abé, M. e Fujino, Y., 2002. Investigation of Atypical Seismic
Response of a Base-Isolated Bridge, Engineering Structures, 24, 945-953.
Chen, S. Y., Ju, M. S. e Tsuei, Y. G., 1996. Estimation of Mass, Stiffness and Damping
Matrices from Frequency Response Functions. Journal of Vibration and Acoustic, 118, 78-
82.
Chen, C., 1999. Linear System Theory and Design, 3rd ed., Oxford University Press, New
York.
Clough, R. W. e Penzien, J., 1993. Dynamics of structures. McGraw-Hill, New York,
Second Edition.

206
Cottin, N. e Reetz, J., 2004. Accuracy of Multiparameter Eigenvalues Used for Dynamic
Model Updating with Measured Natural Frequencies Only, Mechanical System and Signal
Processing, Article in Press.
Collins, J. D., Hart, J. C., Hasselman, T. K. e Kennedy, B., 1974. Statistical Identification
of Structures, AIAA Journal, 12(2), 185-190.
Cremona, C., Barbosa, F. S. e Alvandi, A., 2003. Identification Modale sous Excitation
Ambiante: Application à la Surveillance des Ponts. Mécanique & Industries, 4, 259-271.
Cunha, A. J. P., Lima, N. A. e Souza, V. C. M, 1998. Acidentes Estruturais na Construção
Civil – Volume 1. Editora Pini, Brasil.
Datta, B. N., 2002. Finite-Element Model Updating, Eigenstructure, Assignment and
Eigenvalue Embedding Techniques for Vibrating Systems. Mechanical Systems and Signal
Processing, 16(1), 83-96.
Doebling, S. W., Farrar, C. R. e Prime, M. B., 1998. A summary Review of Vibration-
Based Damage Identification Methods. The Shock and Vibration Digest, 30(2), 91-105.
Farrar, C. R. e James III, G. H., 1997. System Identification from Ambient Vibration
Measurements on a Bridge. Journal of Sound and Vibration, 205(1), 1-18.
Fox, R. L. e Kapoor, M. P., 1968. Rate of Changes of Eigenvalues and Eigenvectors. AIAA
Journal, 6(12), 2426-2429.
Friswell, M. I., 1989. The adjustment of structural parameters using a minimum variance
estimator. Mechanical System and Signal Processing, 3(2), 143-155.
Friswell e Mottershead ,1995. Finite Element Model Updating in Structural Dynamics,
Kluwer Academic Publishers Group, Dordrecht, Netherlands.
Genovese, M., 2000. Localização e quantificação de danos em estruturas por meio de suas
características dinâmicas, Dissertação de Mestrado, Departamento de Engenharia Civil e
Ambiental, Universidade de Brasília , Brasília, DF, 120 p.
He, X. e De Roeck, G., 1997. System Identification of Mechanical Structures by a High-
Order Multivariate Autoregressive Model. Computers & Structures, 64(1-4), 341-351.
Hearn, G. e Testa, R. B., 1991. Modal analysis for damage detection in structures, Journal
of Structural Engineering, 117(10), 3042-3063.
Hermans, L. e Van der Auweraer, H., 1999. Modal Testing and Analysis of Structures
under Operational Conditions: Industrial Applications. Mechanical System and Signal
Processes, 13(2), 193-216.
Huang, C. S., 2001. Structural Identification from Ambient Vibration Measurement Using
the Multivariate AR Model. Journal of Sound and Vibration, 241(3), 337-359.

207
Jaksic(
, N. e Boltezar(
, M., 2002. An Approach to Parameter Identification for a Single-
Degree-Of-Freedom Dynamical System Based on Short Free Acceleration Response.
Journal of Sound and Vibration, 250(3), 465-483.
Jones, N. P., Shi, T., Ellis, J.H. e Scalan, R. H., 1995. System-Identification Procedure for
System and Input Parameters in Ambient Vibration Surveys. Journal of Wind Engineering
and Industrial Aerodynamics, 54/55, 91-99.
Juang, J-N., 1987. Mathematical Correlation of Modal-Parameter-Identification Methods
via System-Realization Theory, Journal of Modal Analysis, Jan. 1987, 1-18.
Juang, J-N. e Pappa, R. S., 1985. An Eigensystem Realization Algorithm for Modal
Parameter Identification and Modal Reduction. J. Guidance, 8(5), 620-627.
Kim, T. R., Wu, S. M. e Ehmann, K. F., 1989. Identification of Joint Parameters for a
Taper Joint, Journal of Engineering for Industry, 111, 282-287.
Koh, C. G., See, L. M. e Balendra, T., 1995. Determination of Storey Stiffness of Three-
Dimensional Frame Buildings. Engineering Structures, 17(3), 179-186.
Lee, J.W., Kim, J. D., Yun, C. B., Yi, J. H. e Shim, J. M., 2002. Health-Monitoring
Method for Bridges under Ordinary Traffic Loadings. Journal of Sound and Vibration,
257(2), 247-264.
Maalej, M., Karasaridis, A., Hatzinakos, D. e Pantazopoulou, S. J., 1999. Spectral Analysis
of Sensor Data in Civil Engineering Structures. Computers & Structures, 70, 675-689.
MATLAB 7.0.1 – The Mathworks Inc.
Meirovitch, L., 1975. Elements of Vibration Analysis, McGraw-Hill, New York.
Modak, S. V., Kundra, T. K. e Nakra, B. C., 2005. Studies in Dynamic Design Using
Updated Models, Journal of Sound and Vibration, 281, 943-964.
Mook, D.J. e Junkins, J. L., 1988. Minimum Model Error Estimation for Poorly Modeled
Dynamic Systems. AIAA Journal of Guidance, Control and Dynamics, 11(4), 367-375.
Mottershead, J. E. e Friswell, M. I., 1993. Model Updating in Structural Dynamics: A
Survey. Journal of Sound and Vibration, 167(2), 347-375.
Mottershead, J. E. e Shao, W., 1993. Correction of Joint Stiffness and Constraints for
Finite Element Models in Structural Dynamics, Journal of Applied Mechanics, 60, 117-
122.
Mottershead, J. E., Friswell, M. I, Ng, G. H. T. e Brandon, J. A., 1996. Geometric
Parameters for Finite Element Model Updating of Joint and Constraints. Mechanical
System and Signal Processing, 10(2), 171-182.

208
Nalitolela, N. G., Penny, J. E. T. e Friswell, M. I., 1992. A Mass or Stiffness Addition
Technique for Structural Parameter Updating. International Journal of Analytical and
Experimental Modal Analysis, 7(3), 157-168.
Ndambi, J. M., Peeters, B., Maeck, J., De Visscher, J., Wahab, M. A., Vantomme, J., De
Roeck, G. e De Wilde, W. P., 2000. Comparison of Techniques for Modal Analysis of
Concrete Structures. Engineering Structures, 22, 1159-1166.
Nobari, A. S., Robb, D. A. e Ewins, D. J., 1993. Model Updating and Joint Identification:
Applications, Restrictions and Overlap, International Journal of Analytical and
Experimental Modal Analysis, 8, 93-105.
Palazzo, G. L., 2001. Identificación del Daño Estructural a través del Cambio en las
Propiedades Dinámicas. Tesis de Magíster en Ingeniería Estructural. Instituto de
Estructuras. Facultad de Ciencias Exactas y Tecnología. Universidad Nacional de
Tucumán.
Peeters, B. e De Roeck, G., 1999. Reference-Based Stochastic Subspace Identification for
Output-Only Modal Analysis. Mechanical Systems and Signal Processing, 13(6), 855-878.
Peeters, B., 2000. System Identification and Damage Detection in Civil Engineering. PhD
thesis, Departement Burgerlijke Bouwkunde, Faculteit Toegepaste Wetenschappen,
Katholieke Universiteit Leuven, Belgium.
Peeters, B. e Ventura, C. E., 2003. Comparative Study of Modal Analysis Techniques For
Bridges Dynamic Characteristics. Mechanical System and Signal Processing, 17(5), 965-
988.
Prells, U. e Friswell, M. I., 1999. Application of the variable projection method for
updating models of mechanical systems. Journal of Sound and Vibration, 225(2), 307-325.
Revista Bridge – Design & Engineering, 2001.
Roemer, M. J. e Mook, D. J., 1992. Mass, Stiffness, and Damping Matrix Identification:
An Integrated Approach. Journal of Vibration and Acoustics, 114, 358-363.
Saito, T. e Yokota, H., 1996. Evaluation of Dynamic Characteristics of High-Rise
Buildings Using System Identification Techniques. Journal of Wind Engineering and
Industrial Aerodynamics, 59, 299-307.
Sinha, J. K., Friswell, M. I. e Edwards, S., 2002. Simplified Models for the Location of
Cracks in Beam Structures Using Measured Vibration Data, Journal of Sound and
Vibration, 251(1), 13-38.
Sinha, J. K., Rama Rao, A. e Sinha, R. K., 2004. Advantage of the Updated Model of
Structure: A Case Study, Nuclear Engineering and Design, 232, 1-6.
Tan, R. Y. e Weng, I. W., 1996. Identification of Dynamic Properties of Isolated
Structures. Engineering Structures, 18(3), 240-246.

209
Teughels, A., Maeck, J. e De Roeck, 2002. Damage assessment by finite element model
updating using damage functions. Computers & Structures, 80, 1869-1879.
Teughels, A. e De Roeck, 2004. Structural Damage Identification of the Highway Bridge
Z24 by Finite Element Model Updating. Journal of Sound and Vibration, 278(3), 589-610.
Wang, M. L. e Wu, F., 1995. Structural System Identification Using Least Mean Square
(LMS) Adaptive Technique. Soil Dynamics and Earthquake Engineering, 14, 409-418.
Wei, F-S, 1990a. Structural Dynamic Model Improvement using Vibration Test Data.
AIAA Journal, 28(1), 175-177.
Wei, F-S, 1990b. Mass and Stiffness Interaction Effects in Analytical Model Modification.
AIAA Journal, 28(9), 1686-1688.
Wu, J. R. e Li, Q. S., 2004. Finite Element Model Updating for a High-Rise Structure
Based on Ambient Vibration Measurements. Engineering and Structures, 26, 979-990.
Xiao, H., Bruhns, O. T., Waller, H. e Meyers, A., 2001. An Input/Output-Based Procedure
for Fully Evaluating and Monitoring Dynamic Properties of Structural Systems via a
Subspace Identification Method. Journal of Sound and Vibration, 246(4), 601-623.
Xu, L., Guo, J. J. e Jiang, J. J., 2002. Time-Frequency Analysis of a Suspension Bridge
Based on GPS. Journal of Sound and Vibration, 254(1), 105-116.
Yang, C-D. e Yeh, F-B., 1990. Identification, Reduction, and Refinement of Model
Parameters by the Eigensystem Realization Algorithm, J. Guidance, 13(6), 1051-1059.
Zapico, J. L., Gonzáles, M. P., Friswell, M. I., Taylor, C. A. e Crewe, A. J., 2003. Finite
Element Model Updating of a Small Scale Bridge. Journal of Sound and Vibration, 268,
993-1012.
Zou, Y., Tong, L. e Steven, G. P., 2000. Vibraton-Based Model-Dependent Damage
(Delamination) Identification and Health Monitoring for Composite Structures – A
Review. Journal of Sound and Vibration, 230(2), 357-378.

210
APÊNDICES

211
APÊNDICE A – GRÁFICOS DAS RESPOSTAS DE ACELERAÇÃO
NO TEMPO E DE SUAS RESPECTIVAS
DENSIDADES ESPECTRAIS DE POTÊNCIA DAS
ESTRUTURAS ENSAIADAS EM LABORATÓRIO
A.1 PÓRTICO
0 2 4 6 8 10 12 14 16 18 20-0.2
0
0.2
Pórtico - Ensaio 1
0 2 4 6 8 10 12 14 16 18 20-0.2
0
0.2
Aceleração (m/s2)
0 2 4 6 8 10 12 14 16 18 20-0.2
0
0.2
Tempo (s)
Ponto 1
Ponto 2
Ponto 3
Figura A.1 – Registros de aceleração obtidos nos três pavimentos do pórtico para o ensaio
1.
0 2 4 6 8 10 12 14 16 18 20-0.5
0
0.5
Pórtico - Ensaio 1A
0 2 4 6 8 10 12 14 16 18 20-0.2
0
0.2
Aceleração (m/s2)
0 2 4 6 8 10 12 14 16 18 20-0.5
0
0.5
Tempo (s)
Ponto 1
Ponto 2
Ponto 3
Figura A.2 – Registros de aceleração obtidos nos três pavimentos do pórtico para o ensaio
1A.

212
0 2 4 6 8 10 12 14 16 18 20-0.2
0
0.2
Pórtico - Ensaio 2
0 2 4 6 8 10 12 14 16 18 20-0.1
0
0.1
Aceleração (m/s2)
0 2 4 6 8 10 12 14 16 18 20-0.1
0
0.1
Tempo (s)
Ponto 1
Ponto 2
Ponto 3
Figura A.3 – Registros de aceleração obtidos nos três pavimentos do pórtico para o ensaio
2.
0 2 4 6 8 10 12 14 16 18 20-0.2
0
0.2
Pórtico - Ensaio 2A
0 2 4 6 8 10 12 14 16 18 20-0.2
0
0.2
Aceleração (m/s2)
0 2 4 6 8 10 12 14 16 18 20-0.2
0
0.2
Tempo (s)
Ponto 1
Ponto 2
Ponto 3
Figura A.4 – Registros de aceleração obtidos nos três pavimentos do pórtico para o ensaio
2A.

213
0 2 4 6 8 10 12 14 16 18 20-0.1
0
0.1
Pórtico - Ensaio 3
0 2 4 6 8 10 12 14 16 18 20-0.2
0
0.2
Aceleração (m/s2)
0 2 4 6 8 10 12 14 16 18 20-0.2
0
0.2
Tempo (s)
Ponto 1
Ponto 2
Ponto 3
Figura A.5 – Registros de aceleração obtidos nos três pavimentos do pórtico para o ensaio
3.
0 10 20 30 40 50 60 70 80 90 100
100
Pórtico - Ensaio 1A
0 10 20 30 40 50 60 70 80 90 10010
-10
10-5
100
Magnitude
0 10 20 30 40 50 60 70 80 90 100
100
Freqüência (Hz) Figura A.6 – Densidade espectral de potência dos registros apresentados na figura A.2.

214
0 10 20 30 40 50 60 70 80 90 10010
-10
100
Espectro de Potência - Ensaio 3
0 10 20 30 40 50 60 70 80 90 100
100
Magnitude
0 10 20 30 40 50 60 70 80 90 100
100
Freqüência (Hz)
Figura A.7 – Densidade espectral de potência dos registros apresentados na figura A.5.
A.2 VIGAS
0 1 2 3-2
-1
0
1
2
Aceleração (m/s2)
0 1 2 3-1
-0.5
0
0.5
1
0 1 2 3-1
-0.5
0
0.5
1
Tempo (s)
Aceleração (m/s2)
0 1 2 3-1
-0.5
0
0.5
1
Tempo (s)
Ponto 1 Ponto 16
Ponto 19 Ponto 34
Figura A.8 – Registros de aceleração obtidos nos pontos de referência da VIGA 1.

215
0 1 2 3-0.5
0
0.5
Aceleração (m/s2)
0 1 2 3-0.5
0
0.5
0 1 2 3-1
-0.5
0
0.5
1
Tempo (s)
Aceleração (m/s2)
0 1 2 3-0.5
0
0.5
Tempo (s)
Ponto 4 Ponto 8
Ponto 23 Ponto 27
Figura A.9 – Registros de aceleração obtidos nos pontos 4, 8, 23 e 27 da VIGA 1.
0 1 2 3-2
-1
0
1
2
Aceleração (m/s2)
0 1 2 3-1
-0.5
0
0.5
1
0 1 2 3-1
-0.5
0
0.5
1
Tempo (s)
Aceleração (m/s2)
0 1 2 3-2
-1
0
1
2
Tempo (s)
Ponto 1 Ponto 16
Ponto 19 Ponto 34
Figura A.10 – Registros de aceleração obtidos nos pontos de referência da VIGA 2.

216
0 1 2 3-1
-0.5
0
0.5
1
Aceleração (m/s2)
0 1 2 3-1
-0.5
0
0.5
1
0 1 2 3-1
-0.5
0
0.5
1
Tempo (s)
Aceleração (m/s2)
0 1 2 3-1
-0.5
0
0.5
1
Tempo (s)
Ponto 4 Ponto 8
Ponto 23 Ponto 27
Figura A.11 – Registros de aceleração obtidos nos pontos 4, 8, 23 e 27 da VIGA 2.
0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 850 900
10-10
100
Magnitude
0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 850 900
10-10
100
Freqüência (Hz)
Magnitude
Ponto 1
Ponto 19
Figura A.12 – Densidade espectral de potência dos registros obtidos nos pontos 1 e 19 da
VIGA 1 (pontos de referência).

217
0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 850 900
10-10
100
Magnitude
0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 850 900
10-10
100
Freqüência (Hz)
Magnitude
Ponto 16
Ponto 34
Figura A.13 – Densidade espectral de potência dos registros obtidos nos pontos 16 e 34 da
VIGA 1 (pontos de referência).
0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 850 900
10-10
100
Magnitude
0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 850 900
10-10
100
Freqüência (Hz)
Magnitude
Ponto 4
Ponto 23
Figura A.14 – Densidade espectral de potência dos registros obtidos nos pontos 4 e 23 da
VIGA 1.

218
0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 850 900
10-10
100
Magnitude
0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 850 900
10-10
100
Freqüência (Hz)
Magnitude
Ponto 19
Ponto 1
Figura A.15 – Densidade espectral de potência dos registros obtidos nos pontos 1 e 19 da
VIGA 2 (pontos de referência).
0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 850 90010
-10
100
Magnitude
0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 850 900
10-10
100
Freqüencia (Hz)
Magnitude
Ponto 16
Ponto 34
Figura A.16 – Densidade espectral de potência dos registros obtidos nos pontos 16 e 34 da
VIGA 2 (pontos de referência).

219
0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 850 900
10-10
100
Magnitude
0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 850 90010
-10
100
Freqüência (Hz)
Magnitude
Ponto 4
Ponto 23
Figura A.17 – Densidade espectral de potência dos registros obtidos nos pontos 4 e 23 da
VIGA 2.

220
APÊNDICE B – MÉTODO DO ERRO RESIDUAL
Este método foi proposto por Genovese (2000) em sua dissertação de mestrado, com o
objetivo de localizar e quantificar danos em estruturas simples de vigas utilizando as
alterações nas freqüências e modos de vibração produzidas pelo dano.
O método do erro residual permite identificar o dano em uma estrutura e consiste
basicamente de duas etapas, sendo estas, a localização e a quantificação do dano. Neste
trabalho, porém, só aplicou-se a etapa de localização do dano.
A localização do dano é feita observando-se o desequilíbrio ou erro na equação de
movimento da estrutura sem dano, onde este ocorre devido aos modos e freqüências de
vibração da estrutura danificada.
Considere-se a equação geral de movimento de um sistema com n graus de liberdade
descrita pela equação (B.1). Considerando que, para pequenos amortecimentos, as
freqüências e modos naturais de vibração do sistema são muito semelhantes aos
correspondentes ao sistema livre não amortecido, a equação (B.1) pode ser escrita como
(B.2), cuja solução numérica representa um problema geral de autovalores (B.3):
0y Ky Cy M =++rr
&r&& (B.1)
0y Ky M =+rr
&& (B.2)
0Φ)Λ (MKΦ =− (B.3)
onde:
K: matriz de rigidez global da estrutura
M: matriz de massa global da estrutura
C: matriz de amortecimento global da estrutura
yr&& : vetor de aceleração
yr& : vetor de velocidade

221
yr: vetor de deslocamento
ΦΦΦΦ: matriz cujas colunas representam os modos de vibração da estrutura sem dano
ΛΛΛΛ: matriz diagonal cujos valores são as freqüências de vibração da estrutura sem dano
A presença do dano na estrutura provoca alterações nas matrizes de rigidez e de massa e
consequentemente no espectro da estrutura, ou seja, as freqüências e modos de vibração
também apresentam variações. Com isso, a equação de equilíbrio (B.3) passa a ser escrita
na forma:
0ΛΦ'MΦK =− ') '(' ' (B.4)
onde:
'K : matriz de rigidez global da estrutura danificada
'M : matriz de massa global da estrutura danificada
'Φ : matriz cujas colunas representam os modos de vibração da estrutura danificada
'ΛΛΛΛ : matriz diagonal cujos valores são as freqüências de vibração da estrutura danificada
Supondo que o dano altera de forma insignificante a matriz de massa do sistema quando
comparado às alterações na matriz de rigidez (Adams et al., 1978 e Hearn e Testa, 1991),
ou seja:
M'M = (B.5)
A equação (B.4) pode ser reescrita na forma:
0ΛΦMΦK =− ')' (' ' (B.6)
Observe-se que a equação (B.6) é satisfeita, uma vez que os modos e freqüências de
vibração da estrutura danificada estão multiplicados pelas matrizes da estrutura com dano.
A equação (B.3) também é satisfeita, porém, ao substituir nessa equação os modos e
freqüências de vibração da estrutura danificada, verifica-se que surge um desequilíbrio ou
erro na equação de movimento E, como pode ser observado na equação (B.7):

222
')' (' ΛΛΛΛΦΦΦΦΦΦΦΦ MKE −= (B.7)
onde:
E: matriz cujos valores representam o erro na equação de movimento devido à presença do
dano.
n) x N(n321 ][ eeeeE K= (B.8)
n) x N(
''
3
'
2
'
1 ][' nφφφφφφφφφφφφφφφφΦΦΦΦ K= (B.9)
)nn x (
2
n
2
3
2
2
2
1
'
'
'
'
'
=
ωωωω
ωωωω
ωωωω
ωωωω
ΛΛΛΛ
L
MOMMM
L
L
L
000
000
000
000
(B.10)
Nas equações (B.8), (B.9) e (B.10) N representa o número de pontos medidos em um
ensaio de vibração, n é o número de modos identificados e '
iφφφφ é o vetor que representa o i-
ésimo modo de vibração da estrutura danificada.
Cada coluna da matriz E representa o vetor de erro correspondente a um determinado
modo de vibração. O maior valor correspondente a cada coluna indica a região da estrutura
onde ocorre o maior erro, ou seja, a região onde está presente o dano para um determinado
modo de vibração.
No caso em que os modos e freqüências de vibração do sistema sem dano fossem
introduzidos na equação (B.7), o erro seria nulo e esta equação seria satisfeita.