apêndice a identificação de sistemas via teoria de...
TRANSCRIPT

183
Apêndice A
Identificação de Sistemas Via Teoria de Realização
A.1 Introdução
Segundo a teoria de realizações de sistemas, existem várias formas de representar um
sistema sem que sejam alteradas suas propriedades básicas. Dentre elas, são de fundamental
importância:
• a relação entre entrada e saída (Função de transferência) e
• a covariância de saída.
Estas propriedades são de grande utilidade na determinação de um modelo para um dado
sistema a partir de dados experimentais. Tratando-se de realizações de sistemas, ou modelos
na forma de espaço de estados, entretanto, não existe uma realização única para um dado
sistema. Assim, a realização obtida pode vir a ter uma representação interna sem qualquer
significado físico, mas sempre preservando propriedades relacionadas à entrada e à saída.
Algum sentido físico pode ser obtido, realizando uma transformação de estados para a forma
canônica modal, Skelton 1988.
Para fins de controle, ao se obter um modelo de um sistema, o interesse está em
preservar as propriedades referentes à relação entrada/saída. Portanto, não há qualquer
restrição quanto ao comportamento dos estados internos do sistema. Assim sendo, o fato do
sistema não ter uma realização única não é relevante e qualquer realização estimada, que
preserve as propriedades de interesse, pode ser usada para se projetar um controlador. Este
fato contém uma informação importante: a de que esta teoria permite que se obtenha modelos

184
indiferentes a comportamentos internos do sistema, tais como pequenas não-linearidades. O
modelo obtido caracteriza-se por ser linear, invariante no tempo e a parâmetros concentrados.
Para estruturas flexíveis, onde os sistemas são considerados infinito-dimensionais e a
parâmetros distribuídos, a teoria de realização propicia um ferramental poderoso para
determinação de modelos. Os sistemas estruturais, do ponto de vista de controle, representam
um tipo de sistema muito peculiar e de difícil tratamento devido a estas suas características.
Entretanto, um modelo finito-dimensional a parâmetros concentrados pode ser estimado em
função das propriedades acima apresentadas. Especificamente, pode-se determinar uma
realização de ordem mínima (contendo um número finito de modos de vibração) que preserva
estas propriedades.
Posto isto, são tratados aqui dois métodos de identificação para obtenção de uma
realização de mínima ordem de um sistema estrutural (infinito-dimensional a parâmetros
distribuídos). O primeiro, denominado ERA, “Eingensystem Realization Algorithm”, (Juang,
1987) procura reproduzir a propriedade de entrada/saída do sistema. O segundo, denominado
Q-Markov COVER, “COVariance Equivalent Realization”, (Liu and Skelton, 1993), procura
reproduzir tanto a propriedade de entrada/saída como, adicionalmente, a propriedade de
covariância de saída do sistema.
Para tanto, este apêndice é divido como se segue. Inicialmente, é feita uma revisão em
teoria de realização. É dado um significado aos parâmetros de Markov e à covariância de
saída, relacionando-os às propriedades do sistema. Na sequência, os fundamentos de
controlabilidade e observabilidade de sistemas são apresentados. Em seguida os dois métodos,
embasados na teoria exposta, são deduzidos. Os algoritmos de identificação são apresentados,
descrevendo os procedimentos para tratamento dos dados provenientes de experimentos. Um
exemplo é apresentado ao final para ilustrar o procedimento a ser seguido para a identificação
de uma realização de um sistema qualquer.

185
A.2 Realização de sistemas
Realização é uma forma de representar um sistema dinâmico linear e invariante no
tempo preservando propriedades básicas deste sistema (Skelton, 1988). Um sistema dinâmico
pode ter assim várias realizações equivalentes, em diferentes formas. Entre elas, a mais
importante, do ponto de vista de controle, é a realização em forma de espaço de estados. Este
tipo de realização permite não só obter informações sobre a relação entre os sinais de entrada
e saída do sistema, como também sobre o comportamento de seus estados internos (embora
nem sempre estes tenham um sentido físico).
A forma geral de uma realização em espaço de estados é
x = x + u
y = x + u
A B
C D(A-1)
A.3 Propriedades da realização em forma de espaço de estados
A.3.1 Função de transferência
Considere um sistema cujo sinal de entrada é u(s) e o sinal de saída é y(s). Atendo-se
somente à relação entrada/saída, a realização na forma de espaço de estados pode ser
convertida em uma função de transferência, relacionando a entrada à saída, segundo a seguinte
forma
( ) ( )( ) ( )G C A I B Ds - s= = +−y s
u s1
(A-2)
Em um caso mais geral, considerando um sistema de múltiplas entradas e múltiplas
saídas, em vez de função de transferência, tem-se uma matriz de funções de transferência do
sistema.
Embora existam várias realizações do sistema em forma de espaço de estados, a relação
entrada/saída é a mesma, independente da realização. Assim, aplicando-se uma transformação
de coordenadas na equação de estados original

186
x = x + u
y = x + u
z = z + u
y = z + ux= zA B
C D
A B
C DT
→
(A-3)
onde∗
A T AT C CT
B T B D D
= =
= =
−
−
1
1
A função de transferência (matriz função de transferência) é preservada visto que, de
(A-2),
( ) ( )( ) ( )
( )
G C A I B D
C A I B D
s - s
= - s
= = +
+
−
−
y s
u s1
1
A.3.2 Parâmetros de Markov
Dada a realização (A-1), sabe-se que sua matriz de transição de estados é definida como
( )φ τ τt e t, ( )= −A
(A-4)
que pode ser expandida em forma de série de potências da seguinte forma
( ) ( )φ τ
τt
t
i
i i
i
,!
=−
=
∞
∑ A
0
(A-5)
A resposta no tempo para este sistema, em função da matriz de transição de estados, é
dada por
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
x t x t t u d
y t x t t u d + u
0to
0to
t t
t t t
t
t
= +
= +
∫
∫
φ φ τ τ τ
φ φ τ τ τ
, ,
, ,
0 0
0 0
B
C C B D
(A-6)
∗ D =D simplesmente porque u e y não se alteram com a mudança de coordenadas de x para z

187
Considerando o sistema inicialmente em equilíbrio e aplicando-lhe uma entrada
impulsiva, x(0)=0 e u(t)=δ(0), a resposta do sistema é dada por
( ) ( ) ( ) ( )y t d + uto
t tt
= ∫C B Dφ τ δ τ, 0 0
substituindo (A-4) e integrando, tem-se
( )
( )
y
y + , > 0
0
0
=
==
∞
∑
D
CA B Dtt
iti
i
i !
(A-7)
Assim sendo, a resposta impulsiva do sistema pode ser descrita em termos de uma série
de potência onde os parâmetros desta série são definidos como
M CA Bii i= ∞ = 0,1,2,3,...,,
(A-8)
e denominados Parâmetros de Markov. Os parâmetros de Markov são considerados como
uma das propriedades básicas de um sistema, e em vista disso, são independentes da
realização assumida para este sistema. Portanto, tem-se que
M CA B
CA Bi
i
i
=
=
para ambas as realizações dadas em(A-3).
A.3.3 Covariância no tempo
Seja a covariância no tempo entre dois vetores definida como
( ) ( ) ( )& vw t v t w= *
d+∞
∫ τ τ τ0
(A-9)
assumindo-se, sem perda de generalidade, um sinal com média nula♣.
♣ w* denota-se transposto conjugado.

188
Principalmente em casos de sinais onde o ruído é relevante, a covariância no tempo
pode fornecer mais informações sobre o sistema do que o próprio sinal medido.
Considere um sistema onde se aplica uma entrada impulsiva, u(t)= δ(t). O vetor de
estados tem como solução
[ ]x( ) = x(0) + , > 0t e ttA B
(A-10)
Assim, a covariância no tempo do vetor de estados é dada por
( ) ( ) ( )
( ) ( )
( ) ( )
& xx = x x*
d
= x x*
d
x x*
d
t t
e
e
t
t
+
=
∞
∞
∞
∫
∫
∫
τ τ τ
τ τ τ
τ τ τ
0
0
0
A
A
onde, de (A-9), obtém-se
( ) ( )& &xx xx= t e tA 0
(A-11)
Para a covariância do vetor de saída, tem-se
( ) ( ) ( )y( ) =
y x = x , > 0
0 D
C C At t e tt= τ
(A-12)
de onde pode-se escrever, para t>0,
( ) ( ) ( )
( ) ( )
( ) ( )
& yy = y y*
d
= x x*
d
x x*
d
t t
e
e
t
t
+
=
∞
∞
∞
∫
∫
∫
τ τ τ
τ τ τ
τ τ τ
0
0
0
C C
C C
A
A
*
*
(A-13)
Assim sendo, define-se a covariância de saída como

189
( ) ( )& &yy xx= t e tC CA 0 *
(A-14)
Considerando-se um sistema linear, multi-entrada e multi-saída, tem-se que matriz de
covariância da saída dada por
( ) ( ) ( )R C C
C X C
A
A
t t e
e
i
ut
ii
u
t
= =
yyi
n
xx
n
& &= =∑ ∑
=
1 1
0 *
*
(A-15)
e que a matriz de covariância do vetor de estados é dada por
( ) ( )
( )
X = x x*
d
=
n
xx
n
i ii
u
ii
u
τ τ τ01
1
0
∞
=
=
∫∑
∑
&
(A-16)
Substituindo
( )e
t
it
i i
i
A A=
=
∞
∑ !0
(A-17)
tem-se
( )R Rtt
iti
i
i
= , > 0=
∞
∑0 !
(A-18)
onde o parâmetro
R C A X Cii = *
(A-19)
é denominado Parâmetro de Covariância. Este parâmetro define a terceira propriedade básica
de um sistema que se preserva independentemente da realização assumida para o sistema.

190
A.4 Realizações equivalentes
Resumidamente, das propriedades de um sistema dinâmico (linear e invariante no
tempo) acima apresentadas, pode-se determinar uma realização para este sistema. Esta
realização é determinada de tal forma a preservar uma ou mais destas propriedades. A esta
realização dá-se o nome de Realização Equivalente.
Assim, tem-se a realização equivalente à função de transferência que preserva a relação
entrada/saída, que para o caso de uma entrada impulsiva é
( )
( )
y
y , t > 0
0
0
=
==
∞
∑
D
Mtt
ii
i
i !
onde M i é definida em (A-8). Neste caso, o conjunto (A,B,C,D) representa uma realização que
procura reproduzir os parâmetros de Markov do sistema. Por este motivo, esta realização é
também denominada realização de Markov. Outra denominação para esta realização é
Realização de Auto-sistema (“Eigensystem Realization”).
Em outros casos, a realização é escolhida de tal forma a reproduzir a propriedade de
covariância do sistema. Desta forma, para uma entrada impulsiva tem-se
( )R Rtt
iii
i
= , t > 0=
∞
∑0 !
Tal realização é denominada Realização Equivalente em Covariância (COVER -
“Covariance Equivalent Realization”).
Reunindo estas duas propriedades, M e R, a realização que procura reproduzir os
primeiros q parâmetros M i e Ri (i=1,2,...,q) do sistema é então denominada q-Markov
COVER.
Estes parâmetros, M i e Ri, têm o seguinte significado físico. Sendo

191
( ) ( )u = , i =1,2,..., ni ut δ 0
tem-se, para t>0,
( ) ( ) ( )[ ]( ) ( ) ( )[ ]
y y y D
y y y C B MA
1 2
1 20
0 0 0 ... =
... = = , > 0
n
n
u
u
ti
i
i
t t t et
it
!=
∞
∑
(A-20)
( ) ( ) ( )R
C X C D D
R D D
A
t
e
t
i
i
t
ii
u
t
i
i
i
u
= y y*
d
= +
= +
n
n
τ τ τ01
1
∫∑
∑
=
=
* *
!*
(A-21)
onde yi(t) é a saída associada à i-ésima entrada impulsiva.
A.5 Controlabilidade e observabilidade
Controlabilidade e observabilidade são dois importantes conceitos, dos quais se fará uso
mais à frente para deduzir os algoritmos de identificação. Controlabilidade está ligada à
existência de uma função de controle que consiga levar a saída do sistema a um valor
desejado. Observabilidade se relaciona com a possibilidade de determinar o comportamento
interno do sistema (de todos os seus estados), dados somente os sinais de entrada e saída do
sistema.
Uma vez que o princípio básico de um sistema de controle é fazer o que se deseja que
seja feito, ou seja, fazer com que a saída do sistema controlado tenha um determinado
comportamento, é necessário:
1) determinar um modelo matemático para o sistema;
2) estabelecer um conjunto de especificações de desempenho, e
3) determinar se existe uma função de controle tal que o sistema satisfaça as especificações.

192
Para que o objetivo seja alcançado, um modelo apropriado deve ser escolhido, pois, para
um dado requerimento de saída, existem diferentes modelos de um mesmo sistema associados
a diferentes conjuntos de especificações. Por essa razão, é conveniente estudar as propriedades
de controlabilidade e observabilidade de um modelo para verificar se este modelo representa
uma boa escolha para o projeto do sistema de controle.
A.6 Controlabilidade de saída
Seja um sistema
x = x + u
y = x
A B
C
(A-22)
onde é inicialmente assumido que D=0. Deve-se notar que desenvolvimento semelhante leva a
resultados iguais para o caso em que D≠0. Este caso é omitido aqui por questões de
complexidade . A intenção aqui é somente dar um sentido físico aos termos definidos, para
maiores detalhes veja Chen (1984).
Em um instante tf, a solução deste sistema é
( ) ( ) ( ) ( ) ( )x = x + u df f 0 0 f
0
f
t t t t tt
t
φ φ τ τ τ, , B∫
(A-23)
( ) ( ) ( ) ( ) ( )y = x + u df f 0 0 f
0
f
t t t t tt
t
C C Bφ φ τ τ τ, ,∫
(A-24)
onde x(to) é um valor inicial arbitrário, φ é a matriz de transição de estados definida em (A-4)
e u(t) um sinal de entrada qualquer.
Se o sistema é controlável, então existe um u(t) tal que a saída é levada de seu valor
inicial y(to) para o valor final desejado y(tf). Assim, para controlar o sistema, é necessário
achar um sinal de controle u(t) que satisfaça à integral

193
( ) ( ) ( ) ( ) ( )C B C u d = y - x f f f 0 0
0
f
φ τ τ τ φt t t t tt
t
, ,∫
(A-25)
onde y(to)= C x(to).
A solução desta integral fornece
( ) ( ) ( ) ( ) ( )u = * d yf
ft t tt
t
< < <ξ ξ ξ*
0
1
∫
−
(A-26)
onde
( ) ( )< σ φ σ = fC Bt ,
(A-27)
Note que, para que o sinal de controle exista, a matriz
( ) ( ) ( )Y tt
t
f = df
< <ξ ξ ξ*
0
1
∫
−
(A-28)
deve ter inversa.
Definindo
( ) ( ) ( )Ψ t t t tt
t
f 0 f f = df
, , * ,*φ ξ φ ξ ξB B
0
∫
(A-29)
tal que
( ) ( )Y C Ct t ,tf 0 f = *Ψ
(A-30)
a equação (A-28) possui inversa se Y(tf) > 0 para tf > t0.

194
Substituindo (A-4) em (A-29) tem-se
( ) ( ) ( )Ψ t e et t
t
t
= d0 0
f
A AB Bξ ξ ξ, * ,*
0
∫
(A-31)
que deve ser positiva definida.
Fazendo tf=∞ e t0=0, pode-se escrever
( )Ψ Ψ = = d00
, * *∞
∞
∫ e eA AB Bξ ξ ξ
(A-32)
Usando a expansão em série da matriz de transição de estados para escrever
( ) ( ) ( ) ( )e
t
it t
t
it
i i
i
ii i
i
i
AA
A= = ==
∞
=
∞
∑ ∑! !0 0
α α ,
(A-33)
tem-se de (A-32)
( ) ( ) ( )
( ) ( ) ( ) ( )
Ψ =
=
=
∞ ∞∞
∞ ∞∞
∑ ∑∫
∑ ∑∫
d
d
i
=0
i
=0
i
=0 =0
i
A B B A
A B A B
α ξ α ξ ξ
α ξ α ξ ξ
ii
ii
ii
ii
* *
*0
0
& & %
(A-34)
onde
( )
( )( ) ( )[ ]% =
∞
∞
∞
∫ du
u
u u
α ξ
α ξα ξ α ξ ξ
0
0
0
I
I
I In
n
n n
(A-35)e
[ ]& = ∞ 1 2B A B A B A B
(A-36)

195
Desta forma (A-30) fica
( )Y C Ct f = * & &% *
(A-37)
Assim, a condição de inversão de Y(tf) equivale a
( )Y C Ct f = * > 0& &% *
Sabendo que, de (A-35), % >0, para que a desigualdade seja satisfeita deve-se ter C&≠0.
Isto implica em ter C e & linearmente independentes, o que ocorre quando
rank(C &) = ny
onde ny=dim(y).
Do teorema de Caley-Hamilton tem-se que An pode ser representada por uma
combinação linear de I , A, ..., An-1. Assim sendo, as colunas de AmB com m≥n são
linearmente dependentes de [ B AB ... An-1B ]. Consequentemente,
[ ]( ) [ ]( )rank( ) rank rank1 2 1 2C C B A B A B A B C B A B A B A B& = =∞ −
nx 1
(A-38)
A condição de controlabilidade pode então ser assim definida
Definição 1: Controlabilidade de saída
A condição necessária e suficiente para que para que o sistema
x = x + u
y = x
A B
Cseja controlável na saída é que a covariância de saída seja positiva definida
R0>0, R C X C0 = * , X B BA A=∞
∫ e eξ ξ ξ d* *
0
ou equivalentemente se
rank(C&) = ny, [ ]C C B A B A B A B& = − 1 2 xn 1

196
A.7 Controlabilidade de estado
Define-se controlabilidade de estado como sendo a capacidade de se determinar um
sinal de controle u(t), para um intervalo de tempo t0<t<tf, tal que um conjunto arbitrário de
estados x(tf) possa ser alcançado partindo-se de um conjunto arbitrário de estados iniciais
x(t0).
Do equacionamento deduzido acima, sendo ny=rank(C), pode-se dizer que o sistema é
controlável nos estados segundo a seguinte definição
Definição 2: Controlabilidade de estado
O sistema
x = x + uA B
é controlável nos estados, ou seja, permite que seus estados sejam levados a um valor
especificado se, e somente se, a matriz de covariância dos estados for positiva definida
X X B BA A> =∞
∫00
, de eξ ξ ξ* *
ou equivalentemente se
rank(&) = nx, [ ]& = −B A B A B A B1 2 xn 1
A.8 Observabilidade
Dado o sistema definido em (A-1), sendo o sinal de resposta determinado por (A-24),
para uma entrada nula, u(t)=0, tem-se que a resposta não forçada do sistema é dada por
( ) ( ) ( )y = x0 0t t t tC φ ,
(A-39)
Multiplicando (A-39) por [C φ(t,t0) ]*e integrando, obtém-se
( ) ( ) ( ) ( ) ( )φ φ φt t t t t t t t t tt
t
t
t
, , ,0 0 0 0* * y d = * * d x
0
f
0
f
C C C∫ ∫
(A-40)

197
Assim sendo, x(t0) pode ser determinado pela seguinte equação
( ) ( ) ( ) ( ) ( )x = *
* d *
* y d 0 0 0
-1
0
0
f
0
f
t t t t t t t t t tt
t
t
t
φ φ φ, , ,C C C∫ ∫
(A-41)
e a solução existe se
( ) ( ) ( )Γ t t t t t t tt
t
0 f 0 0 = *
* d 0
f
, , ,φ φC C∫
(A-42)
possui inversa.
Substituindo (A-4) e (A-33) em (A-42) obtém-se
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
Γ τ α ξ α ξ ξ
α ξ α ξ ξ
τ
=
=
=
∞ ∞
∞ ∞∞
∑ ∑∫
∑ ∑∫
d
d
=0
i i
=0
i
=0 =0
i
ii
ii
ii
ii
A C C A
CA CA
* *
*0
0
2 2 &
(A-43)
onde
( )
( )( ) ( )[ ]& =
∞
∞
∞
∫ dy
y
y y
α ξ
α ξα ξ α ξ ξ
0
0
0
I
I
I In
n
n n
(A-44)
De forma análoga à dedução da controlabilidade de saída no Item A.6, (A-42) tem
inversa se ela for positiva definida, o que equivale a ter
rank(2)=nx
onde

198
2 =
−
1
2
x
C
CA
CA
CA
n 1
(A-45)
Desta forma, tem-se a seguinte definição para observabilidade.
Definição 3: Observabilidade
O sistema
x = x + u
y = x
A B
Cé observável se e somente se
Γ Γ > 0 , = * d e e tt tA AC C*
0
τ
∫
ou equivalentemente se
rank(2)=nx , 2 =
−
1
2
x
C
CA
CA
CA
n 1
A.9 Identificação via realização de auto-sistema - ERA (“Eigensystem Realization
Algorithm”)
O algoritmo de identificação de sistemas multi-entradas e multi-saídas, ERA, baseia-se
na decomposição em valores singulares de uma matriz Hermitiana associada aos parâmetros
de Markov de um dado sistema, denominada Matriz de Markov (Juang, 1987). Conforme
visto no Item A.3.2, estes parâmetros estão relacionados à resposta impulsiva do sistema,
descrita por (A-7).

199
Normalmente, os dados referentes a um dado experimento, com um sistema dinâmico
qualquer, são adquiridos de uma forma discretizada no tempo. Assim sendo, a formulação que
descreve este método de identificação permite estimar uma realização na forma de espaço de
estados discreto no tempo. Entretanto, uma vez conhecida a freqüência de amostragem de
aquisição dos sinais, um modelo contínuo no tempo pode ser determinado.
O procedimento normal de identificação necessita da resposta impulsiva do sistema. Em
experimentos reais, dois processos de aquisição podem ser executados para obter tal resposta:
• sendo disponível um sistema de aquisição e análise de sinais, os dados da função
resposta em freqüência (FRF) são obtidos de um ensaio e então são computadas as
respostas impulsivas relacionando cada entrada a cada saída do sistema; e
• caso os sinais de entrada e saída sejam obtidos diretamente do ensaio, a resposta
impulsiva pode ser processada posteriormente, via convolução.
Em ambos os casos, a obtenção da FRF se faz necessária para comparar as propriedades de
entrada e saída do sistema identificado com o sistema real.
Considera-se um sistema contínuo genérico:
( ) ( ) ( )( ) ( ) ( )x = x + u
y = x + u
t t t
t t t
A B
C D(A-46)
amostrado a um intervalo de tempo ∆t.
A equação de diferença deste sistema é dada por
( ) ( ) ( )( ) ( ) ( )
x = x + u
y = x + u
k k k
k k k
+1 A B
C D
(A-47)
onde
( )
A
B B
A
A
= e
= e u
∆
∆
t
t
dτ τ τ0∫
Para uma resposta impulsiva, u(t)=δ(0), sabe-se que

200
( )e u = 1Aτ τ τdt
0
∆
∫
que significa que, para uma reposta impulsiva
A
B B
A = e
=
∆t
(A-48)
Assumindo x(0)=0 tem-se para k=0,1,...,n
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( )
( ) ( )
k
k
k
k
=
=
=
=
01 0 0
0 0 0
12 1 1
1 1 1
23 2 2
2 2 2
34 3
2
x = x + u =
y = x + u =
x = x + u =
y = x + u =
x = x + u =
y = x + u =
x = x +
A B B
C D D
A B A B
C D C B
A B A B
C D C A B
A ( )( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( )
u =
y = x + u =
x = x + u =
y = x + u =
B A B
C D C A B
A B A B
C D C A B
3
3 3 3
1
3
2
1
1
=+
+
−
k nn n n
n n n
n
n
Tem-se assim
( )( )
y 0 =
y = =
D
C A B Mk kk
−−
11
(A-49)
Sendo yij a saída i associada à entrada j, pode-se compor a matriz de sinais de saída da
seguinte forma
( )
( ) ( ) ( )( ) ( ) ( )
( ) ( ) ( )
y k =
y k y k y k
y k y k y k
y k y k y k
nu
nu
ny ny ny nu
1 1 1 2 1
2 1 2 2 2
1 2
, , ,
, , ,
, , ,
(A-50)
Assim sendo, define-se a matriz de Hankel como

201
( )
( ) ( ) ( )( ) ( ) ( )
( ) ( ) ( )
H k =
y y y
y y y
y y y
k k k s
k k k s
r k r k r s
+ ++ + + +
+ + + +
1
1 2 1
1
(A-51)
onde r> n e s> n, com n=rank(A).
De (A-49) tem-se que
( )H
C A B C A B C A B
C A B C A B C A B
C A B C A B C A B
k =
k k k s
k k k s
k r k r k r s
− + −
+ +
+ − + + + −
1 1
1
1 1
(A-52)
ou ainda
( ) [ ]H
C
C A
C A
C A
A B A B A B A Bk =
2 1 2
r
k s
−
(A-53)
Da definição de Controlabilidade e Observabilidade, (A-36) e (A-45), pode-se rescrever (A-
53) como
( )H Ak = 2 &k−1
(A-54)
Disto se conclui que a matriz de Hankel, dada em (A-51), construída a partir da resposta
do sistema, está relacionada às matrizes de controlabilidade e observabilidade do sistema (A-
54).
Dada uma seqüência de parâmetros de Markov, obtida da resposta impulsiva, e montada
a matriz de Hankel, a realização mínima de um sistema tem a ordem do rank da matriz H(k)
(Juang e Pappa, 1985). Isto é fácil de verificar uma vez que & e 2 têm rank n, bem como A.
Assim, realizando uma decomposição em valores singulares de H(k) obtém-se

202
( ) [ ]H U UU
Uk =
T
T
~~
Σ 0
0 0
(A-55)
onde Σ contém os autovalores da matriz A e
( )H U Uk = TΣ
(A-56)
representa a matriz de Hankel associada à realização mínima do sistema, sendo Σ ∈ 5nxn, U ∈
5(nuxr)x n.
No entanto, na prática, devido a ruídos de medição, a Eq. (A-55) fica
( ) [ ]H U UU
Uk =
T
T
~~ ~
ΣΣ0
0
(A-57)
onde o par ~
,~
U Σ está associado à parte não significativa, ou residual, da decomposição em
valores singulares. Geralmente, quando o ruído não possui amplitude apreciável, a parte
residual apresenta autovalores com ordem de grandeza bem inferior à dos autovalores da
realização mínima.
Considerando apenas a parte significativa da decomposição tem-se, de (A-54) e (A-56),
que
( )H U U
U U
1 =
T
T
r s
Σ
Σ Σ==
1 2 1 2/ /
2 &
(A-58)
de onde, para uma dada realização, se conclui que
2
&6
r
T
=
= U
U
Σ
Σ
1 2
1 2
/
/
(A-59)

203
Como
( )( )
H A
H U A U
2 =
2 = r s
T
2 &
⇒ Σ Σ1 2 1 2/ /
(A-60)
Das propriedades da decomposição em valores singulares, UTU=UUT=I . Pré-
multiplicando H(2) por UT e pós-multiplicando por U chega-se a
( )U H U AT 2 = Σ Σ1 2 1 2/ /
(A-61)
de onde se obtém a matriz A estimada, definida como
( ) / /A U H U= − −Σ Σ1 2 1 2 2 T
(A-62)
Sendo ny o número de saídas do sistema e nu o número de entradas do sistema, define-
se
[ ][ ]
E
E
ny ny ny ny x rxnu
nu nu nu nu x sxny
= I 0
= I 0T
( ) ( )
( ) ( )
(A-63)
de tal forma que
[ ]C I
C
C A
C A
= E = 0 0
ny r2
r
(A-64)
e
[ ]B B BA BA
I
= E = s nus
&1
0
0
(A-65)
De (A-59), tem-se as matrizes B e C estimadas do sistema, dadas por

204
/C = E U ny Σ1 2
(A-66)
e
B U = E TnuΣ
(A-67)
Reunindo tudo, tem-se o seguinte conjunto de equações para se estimar as matrizes da
realização que representa o sistema
( )
A U H U
B U E
C E U
D
=
=
=
= y(0)
-1/2 T -1/2
1/2 T
1/2
Σ Σ
Σ
Σ
2
nu
ny
(A-68)
Por fim, a matriz A contínua estimada para o sistema é dada por
( )A A =
1
∆tln
(A-69)
A.10 Identificação via parâmetros de covariância e Markov - Q-Markov COVER (“Q-
Markov Covariance Equivalent Realization”)
O algoritmo de identificação Q-Markov COVER, ou simplesmente Q-Markov, tal como
o método, anterior se aplica a sistemas multi-entradas e multi-saídas. Valem, assim, as
mesmas observações feitas no início do capítulo anterior. Também este método baseia-se na
decomposição em valores singulares, sendo, neste caso, aplicado a uma matriz associada aos
parâmetros de Markov e de Covariância de um dado sistema (Anderson e Skelton, 1988). A
realização estimada se encontra na forma de espaço de estados a tempo discreto. A
identificação necessita da resposta impulsiva do sistema e a FRF se faz necessária para
comparar as propriedades de entrada e saída do sistema identificado com o sistema real.
Considerando o sistema contínuo genérico dado em (A-46), a equação de diferença
deste sistema é também expressa por (A-47), ou seja

205
( ) ( ) ( )( ) ( ) ( )
x = x + u
y = x + u
k k k
k k k
+1 A B
C D
(A-70)Da teoria de realizações, sabe-se que, para t>0,
( ) ( )R t ti
u
= yyi
n
&=∑
1
(A-71)e que
( ) ( ) ( )& yy = y y*
dt t +∞
∫ τ τ τ0
(A-72)Para um sistema amostrado no tempo onde
y(k)=y(t)δ(t-nk), n=0,1,2,...
tem-se que
( ) ( ) ( )& yy=0
d
= y y*
k k l ll
+∑
(A-73)
ficando (A-71) assim definida para o caso discreto
( ) ( )R k j j=0
d
j=1
nu
= y y*
k l ll
+∑∑
(A-74)sendo yj o vetor de saída associado à entrada j, dado por
( )
( )( )( )
( )
y = j k
y k
y k
y k
y k
j
j
j
ny
1
2
3
1
,
,
,
,
(A-75)
Para uma entrada impulsiva, u(t)= δ(0), substituindo (A-7) em (A-74), obtém-se

206
( ) ( )
( ) ( )
R C C
C A C
C A X C
k j j=0
d
j=1
nu
kj j
=0
d
j=1
nu
k
= 1
d x k x
*
1
d x x
*
+
=
=
∑∑
∑∑
l l
l l
l
l
*
*
*
(A-76)
Assumindo que a realização do sistema se encontra na forma de Hessenberg, tem-se,
[ ]C c
A B
b
b
b
b
b
=
=
a a 0 0 0
a a a 0 0
a a a a 0
a a a a a
a a a a a
, =
11 12
21 22 23
31 32 33 34
(n-1)1 (n-1)2 (n-1)3 (n-1)4 (n-1)n
n1 n2 n3 n4 nn
1
1
2
3
4
0 0 0
n
(A-77)
Sabe-se que a equação contínua da covariância, (A-16), admite como solução uma matriz X>0
que satisfaz a equação de Lyapunov
A X X A B B + + = 0T T
(A-78)
No caso discreto tem-se
A X A B B I + = T T
(A-79)
Para o sistema na forma de Hessenberg, tem-se que X=I , ficando (A-79) da seguinte
forma
A A B B I + = T T
(A-80)
Pré e pós multiplicando a equação acima por A i-1 e (A T)j-1, com i ≥ j ≥ 0,
( ) ( ) ( )( ) ( ) ( )
A A A A A A A B B A
A A A A A B B A
i 1 T T j-1 i 1 T j-1 i 1 T T j-1
i T j i 1 T j-1 i 1 T T j-1
= -
= -
− − −
− −⇒
(A-81)

207
Substituindo ( ) ( ) ( )A A A A A B B Ai-1 T j-1 i T j-2 i 2 T T j-2 = - − −2
( ) ( ) ( ) ( )[ ]A A A A A B B A A B B Ai T j i 2 T j-2 i 1 T T j-1 i 2 T T j-2 = - + − − −
(A-82)
e assim sucessivamente, chega-se a
( ) ( ) ( ) ( ) ( )[ ]A A A A A B B A A B B A A B B Ai T j i j T j- j i 1 T T j-1 i 2 T T j-2 i j T T j- j= - + + + − − − −
(A-83)
ou ainda
( ) ( )A A A A B B Ai T j i j i T T j-
=1
j
= - − −∑ α α
α
(A-84)
Pré e pós-multipilcando por C e CT obtém-se
( ) ( )C A A C C A C C A B B A C = - i T j T i j T i T T j- T
=1
j− −∑ α α
α
(A-85)
Para a forma normalizada de Hessenberg, com X=I , substituindo (A-8) e (A-76) na
equação acima, obtém-se
( )C A A C R M M = - i T j Ti j i i-
T
=1
j
− −∑ α αα
(A-86)
Sendo a matriz de observabilidade dada por (A-45), tem-se que
( )( )
( )2 2q q
T
T T T T q-1 T
T T T T q-1 T
q-1 T q-1 T T q-1 T q-1 T
=
C C C A C C A C
C A C C A A C C A A C
C A C C A A C C A A C
(A-87)
De (A-86) e (A-87) chega-se à seguinte equação relacionando matrizes de
observabilidade, de Markov e de covariância

208
2 2 5 0 0q qT
q q qT = -
(A-88)
onde
2 5
0
q
q 1
q
0 1T
q-1T
1 0 q-2T
q-1 q-2 0
q
0
1 0
q-2 q-3 0
= , =
=
0 0 0 0 0
0
0
0
0
C
CA
CA
R R R
R R R
R R R
M
M M
M M M
−
0 0
0
(A-89)
Definindo
' 5 0 0q q q qT = -
(A-90)
e particionando 'q como
' q q qT = P P
(A-91)
onde
P
P
P
P
q
0
1
q-1
=
(A-92)
obtém-se uma nova partição, onde se define
P
P
P
P
P
P
P
P
= , =
0
1
q-2
1
2
q-1
(A-93)
209
De (A-88) e (A-91) sabe-se que
2 2q qT
q qT = P P
(A-94)
o que implica em
P
P
P
P
C
CA
CA
P
P
P
P
CA
CA
CA
C
CA
CA
A = = , = = =
0
1
q-2q-2
1
2
q-1q-1 q-2
2
(A-95)
Assim, sendo P de rank cheio, rank(P)=rank(A)=n, tem-se que
P P A =
(A-96)
Desta forma a matriz A estimada é dada por
A P P = +
(A-97)
Observando que
P B
C
CA
CA
B
C B
CA B
CA B
M
M
M
m = =
= =
0
1
q-2
q
q q− −
2 2
(A-98)
pode-se afirmar que
m P Bq =
(A-99)
de onde tem-se a matriz B estimada dada por
B P m = +q
(A-100)
e da definição de P, Eq. (A-95),

210
C P = 0
(A-101)
Por fim,
D = y(0)
(A-102)
A.11 Algoritmos de identificação
Os algoritmos ERA e Q-Markov encontram-se implementados em um pacote para o
ambiente MATLAB, cujo procedimento de utilização é descrito a seguir.
Inicialmente faz-se necessário um tratamento dos dados provenientes de um
experimento. Estes dados devem ser gravados em um arquivo para MATLAB, extensão MAT,
em uma forma padronizada, para que possam ser utilizados pelos algoritmos de identificação.
Após formatados os dados, a identificação pode ser então executada utilizando um dos
programas em questão:
• ERAID.M Æ programa de identificação usando ERA
• QMKID.M Æ programa de identificação usando Q-Makov
A.12 Preparação de dados
Para executar os programas de identificação, ERA ou Q-Markov, é necessário
inicialmente tratar dados provenientes de algum tipo de aquisição do experimento em questão.
Os dados a serem usados pelo programa de identificação devem ser gravados em um arquivo
com extensão MAT ( arquivo de dados do MATLAB) em um formato pré-definido.
Os dados necessários para a identificação são os seguintes:
1. a resposta impulsiva, IRT, para cada entrada e saída do experimento;
2. o vetor de tempo associado à resposta impulsiva;
3. a resposta em freqüência, FRF, para cada entrada e saída do experimento; e

211
4. o vetor de freqüência associado à resposta em freqüência.
Os dados referentes à resposta impulsiva e à resposta em freqüência devem ser
rearranjados de tal forma a representar matrizes contendo as FRFs e IRTs relacionando todas
as entrada a todas as saídas do sistema.
Assim, considere um dado experimento, com nu entradas e ny saídas, onde se realiza
uma aquisição, amostrando M pontos para cada relação entrada/saída. Para cada função Hij,
relacionando a i-ésima saída à j-ésima entrada, tem-se um vetor de dados para a FRF e um
outro para a IRT, respectivamente definidos como
Y ij(jω), yij(t) ∈ RM
A partir destes vetores, definem-se as matrizes de dados da resposta em freqüência e
resposta impulsiva da seguinte forma
IRT =
y y y 0 y 0
y y y 1 y 1
y M y M y M y M
XFREQ =
Y Y Y 0 Y 0
Y Y Y 1 Y 1
11 ny1 1nu nynu
11 ny1 1nu nynu
11 ny1 1nu nynu
11 1nu ny1 nynu
11 1nu ny1 nynu
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
0 0
1 1
0 0
1 1
k k k k
Y M Y M Y M Y M11 1nu ny1 nynu( ) ( ) ( ) ( )ϖ ϖ ϖ ϖ
(A-103)
onde k representa o tempo de amostragem e ϖ o incremento de freqüência.
O arquivo a ser usado pelo programa de identificação, deve, então, conter
necessariamente os seguintes dados
1. ny, o número de saídas do sistema
2. nu, o número de entradas do sistema
3. IRT, matriz com dados da resposta impulsiva

212
4. XFREQ, matriz com dados da resposta em freqüência
5. Freq, o vetor com intervalo de freqüência correspondente a XFREQ
6. t, o vetor com intervalo de tempo correspondente a IRT
A função doirt.m mostra o formato do arquivo de dados de entrada para a identificação.
Através do comando help doirt no MATLAB pode-se também verificar este formato.
A.13 Programa ERAID.M
O Programa de identificação ERAID.M é dividido nos seguintes módulos
• lê dados;
• monta matriz de Hankel;
• varre um intervalo de ordem para o modelo;
• executa a identificação para a ordem selecionada;
• compara respostas em freqüência;
• elimina modos fictícios; e
• salva o modelo identificado.
A execução do algoritmo de identificação inicia-se com a montagem das matrizes de
Hankel para k=1 e k=2. Assim, de(A-51), tem-se
( )
( ) ( ) ( )( ) ( ) ( )
( ) ( ) ( )
( )
( ) ( ) ( )( ) ( ) ( )
( ) ( ) ( )
H
H
1 =
y y y
y y y
y y y
2 =
y y y
y y y
y y y
1 2
2 3 1
1
2 3 1
3 4 2
1 2 1
s
s
r r r s
s
s
r r r s
+
+ +
++
+ + + +
onde y(k) é dado pela eq. (A-50).
Para a montagem de H(1) e H(2) é necessário selecionar r e s. Intuitivamente, deve-se
escolher r e s tal que y(r+s+1) corresponda ao sistema já em regime, i. e., r+s deve
corresponder a um passo de amostragem superior ao tempo de acomodação do sistema (Juang,
1987).

213
O passo seguinte é a decomposição de H(1)
( ) [ ]H U UU
U1
0
0 =
T
T
~~ ~
ΣΣ
onde as matrizes U e Σ são determinadas a partir da estimativa da ordem da realização do
sistema. Portanto, estabelecida uma ordem n para o modelo estimado tem-se que
Σ ∈ Rnxn
Para um sistema ideal, onde dados do ensaio não se mostram corrompidos por ruídos,
ter-se-ia uma decomposição tal que
( )σ ε~Σ ≤
ou seja, os valores singular de ~Σ seriam de ordem de grandeza igual ou inferior ao erro
numérico da decomposição. Na realidade, a determinação de n obedece a critérios não muito
objetivos. Devido a presença de ruídos nos sinais provenientes de ensaio, ε pode ter de ordem
de grandeza não muito inferior aos valores singulares de Σ.
Um primeiro critério para determinar a ordem do modelo é verificar a distribuição de
valores singulares da matriz de Hankel. Intervalos onde se apresentam grandes
descontinuidades nesta distribuição são indícios de vizinhança entre autovalores associados ao
sistema e autovalores associados ao ruído. Um segundo critério consiste em averiguar o erro
entre a resposta impulsiva real e a reposta do modelo, para um dado intervalo de variação da
ordem deste modelo. Estipulando como critério de erro a soma do erro absoluto entre as
respostas, obviamente, o modelo que apresentar menor valor para este critério será aquele que
melhor reproduz da resposta do sistema real. Consequentemente, este pode ser o modelo
escolhido para a realização do sistema. A verificação final sobre a acuracidade deste modelo
faz-se comparando as respostas em freqüência do modelo e do sistema real.
Na realidade, existe um compromisso entre a escolha dos parâmetros r e s e a
determinação da ordem da realização. Isto significa que, tomando um conjunto de amostras do
ensaio menor ou maior do que o necessário, o valor do limiar de erro, ε, pode variar. Assim

214
sendo, não se pode afirmar que existe um critério objetivo para se determinar a ordem de uma
realização para um dado sistema.
Determinada a ordem da realização, considerando-se apenas a parte significativa da
decomposição em valores singulares de H(1), as matrizes do modelo são então dada por
( )
A U H U
B U E
C E U
D
=
=
=
= y(0)
-1/2 T -1/2
1/2 T
1/2
Σ Σ
Σ
Σ
2
nu
ny
onde Enu e Enu são definidos em (A-63).
Por fim, a matriz A contínua é dada por
( )A A =
1
∆tln
Em alguns casos, o critério da soma do erro absoluto nos leva a uma realização onde
modos fictícios são adicionados ao modelo. Estes modos fictícios correspondem a modos cuja
influência na resposta dinâmica é desprezível. Neste caso, estes modos podem ser removidos,
se for o caso de se ter alguma restrição quanto à ordem do modelo do sistema. De outra forma,
a realização identificada pode conviver com estes modos. Quando se tem uma idéia precisa do
número de modos (ou da ordem) do sistema, não há problema em se executar uma eliminação
dos modos fictícios. Em outros casos, sem haver segurança quanto à ordem do sistema,
nenhuma eliminação deve ser realizada.
A.14 Programa QMKID.M
O Programa de identificação QMKID.M é similar ao programa anterior, com a
diferença de considerar a decomposição da matriz Dq dada por (A-90). O programa apresenta
os seguintes módulos
• lê dados;
• monta matriz 'q;
• varre um intervalo de ordem para o modelo;

215
• executa a identificação para a ordem selecionada;
• compara respostas em freqüência;
• elimina modos fictícios; e
• salva o modelo identificado.
A identificação se inicia com a montagem das matrizes de Hankel e de Covariância
dadas por
( )( ) ( )
( ) ( ) ( )
0 q =
y
y y
y y y
0 0 0 0
0 1 0 0
0 2 1 0
0 1 2 1
q q− −
5 q
0 1T
q-1T
1 0 q-2T
q-1 q-2 0
=
R R R
R R R
R R R
m q =
y
y
y
( )
( )
( )
1
2
1
q −
onde y(k) é dado pela eq. (A-52) e Rj dados por (A-74).
Para construir 0q e 5q é necessário selecionar q e d. Um critério de ajuda para escolha
destes parâmetros é o seguinte (Lui e Skelton, 1993).
• q não deve ser muito pequeno para reduzir efeitos do ruído na identificação;
• q deve ser maior que o número de passos correspondente a um período do modo mais
lento do sistema; e
• d>>q , assegurando-se que para o tempo de amostragem superior a d o sistema se
encontra em regime.

216
Na seqüência, monta-se 'q
' 5 0 0q q q qT = -
e realiza-se a decomposição em valores singulares
[ ]' q
T
T = U U
U
U~
~ ~Σ
Σ0
0
onde as matrizes U e Σ são determinadas a partir da ordem n do modelo estimado, segundo os
mesmos critérios usado em A.3.
Determinada a ordem da realização, determina-se Pq
Pq = U Σ1/2
Dado Pq, obtém-se
P
P
P
P
P
P
P
P
= , =
0
1
q-2
1
2
q-1
onde
P
P
P
P
q
0
1
q-1
=
As matrizes do modelo são então dados por
A P P
B P m
C P
D
=
=
=
= y(0)
+
+−q 1
0
e a matriz A contínua e dada por
( )A A =
1
∆tln

217
A.15 Exemplo
Para ilustrar o procedimento dos programas de identificação, um problema simples é
tratado aqui. Tanto para o programa ERAID.M como para o QMKID.M, segue-se os
mesmos passos no processo de identificação:
1. adquire dados;
2. monta as matrizes associadas ao problema;
3. executa decomposição em valores singulares;
4. varre um intervalo de ordem para o modelo;
5. identifica o modelo para a ordem selecionada;
6. compara respostas em freqüência;
7. elimina modos computacionais (se necessário); e
8. salva modelo identificado.
Estes passos são apresentados na tela em forma de menu pelo programa. A seqüência de
1 a 3 deve sempre ser executada na ordem dada. O passo 4 tem o único objetivo de investigar
o erro entre a resposta real e a estimada associado a uma dada ordem do sistema identificado.
Isto introduz um primeiro critério para a escolha da ordem do modelo. O passo 5 realiza a
identificação propriamente dita. O passo 6 introduz o outro critério para a escolha do modelo.
Uma boa concordância entre a função de transferência obtida do ensaio com a função de
transferência do modelo confirma a escolha da ordem baseada no resultado do passo 5. Caso
contrário, una nova ordem deve ser selecionada, repetindo-se os passos 5 e 6 até que um
modelo adequado seja obtido. Após o processo de seleção da ordem do modelo sugere-se que
os parâmetros deste modelo sejam gravados.
Caso existam modos computacionais no modelo obtido, pode-se tentar eliminar estes
modos reduzindo sua ordem. No entanto, nem sempre é possível eliminar estes modos. Pode
ocorrer que alguns modos computacionais não sejam irrelevantes para o modelo identificado
como também pode ocorrer que um modo real seja representado por dois modos próximos,
entre outras coisas. Portanto, qualquer processo de eliminação de modos de ser seguido de
uma nova comparação da resposta em freqüência. Caso não ocorram alterações significativas

218
na função resposta em freqüência, a eliminação pode ser processada e o modelo originalmente
identificado substituído pelo novo modelo.
O exemplo aqui tratado consiste de um sistema massa-mola amortecido com três graus
de liberdade, o que equivale a um sistema de ordem seis. Conforme ilustra a Figura A.1, uma
força aplicada à massa 1 corresponde à entrada do sistema e os deslocamentos das massas 1 e
2 são as saídas medidas. Este sistema é simulado pelo programa sis_3d.m que gera o arquivo
de dados sis_3d.mat para a identificação, no formato definido na seção A.12. Para tornar a
simulação próxima do caso de um experimento real, os sinais adquiridos da simulação deste
sistema são acrescidos de ruído.
m m m
k k k k
c c c cx1 X2
F
Figura A.1: Sistema massa-mola amortecido.
A.16 Identificação ERA
Ao executar do programa eraid.m, um menu de opções com os passos do algoritmo,
como mostrado na Figura A.2, é apresentado na tela.
A opção [JHWGDWD@ lê o arquivo de dados do sistema simulado. Após selecioná-la na
janela correspondente, os gráficos da resposta em freqüência e da resposta impulsiva do
sistema são apresentados, como mostra a Figura A.3.

219
Figura A.2: Menu de opções do programa ERAID.
0 0.2 0.4 0.6 0.8 110
-1
100
101
G11
Frequence response magnitude plot
0 0.2 0.4 0.6 0.8 110
-3
10-2
10-1
100
101
G21
Freq - Hz
0 50 100 150 200 250-1
-0.5
0
0.5
1
G11
Impulsive response plot
0 50 100 150 200 250-0.5
0
0.5
G21
Sample
Figura A.3: Resposta em freqüência e resposta impulsiva do sistema
A opção seguinte >GR+DQNHOPDWUL[@ gera as matrizes de Hankel a partir dos dados
do ensaio. Na janela do MATLAB surge uma mensagem e o programa pede valores para r e s,
conforme definidos na seção A.3. Os parâmetros r e s irão definir a dimensão da matriz H.
Vale lembrar que r+s deve corresponder a um número de passo de amostragem superior ao
número de passo correspondente ao tempo de acomodação do sistema e inferior ao número de
passo correspondente ao tempo final do sinal. Neste caso escolheu-se r=s=90 (r+s<200). A
tela do programa ,apresentada no MATLAB, é a seguinte:

220
######################################################### DOHANKEL.M form the Hankel matrix with the impulse response, IRT, of the system. #########################################################
size of data matrix =201 ( OBS.: r+s < size )Enter row number : r = 90Enter column number : s = 90
Após montar a matriz, o programa realiza a decomposição em valores singulares e
apresenta o gráfico do logaritmo dos valores singulares em função do número de valores
singulares, como mostra a Figura A.4.
0 20 40 60 80 100-4
-3
-2
-1
0
1
2
number of singular values
log(sigma) Singular Values Plot
Figura A.4: Gráfico dos valores singulares de H(1).
Como pode-se ver, a decomposição apresenta 90 valores singulares para a matriz de
Hankel, H(1). Isto porque a matriz montada a partir dos dados tem tamanho (r+n_o)x(s+n_i),
já que n_o=n_i=1 e r=s=90, tem-se H(1) ∈ R90x90. Entretanto, destes 90 autovalores, somente
os 6 primeiros são relevantes. Como dito na seção A.9, no caso hipotético onde o sinal
experimental não apresentasse ruído, os valores singulares da matriz de Hankel não

221
relevantes seriam nulos como em (A-55). Entretanto, devido à presença de ruído no sinal do
sistema, surgem modos residuais não nulos na decomposição em valores singulares.
A partir do sexto modo, observando da direita para a esquerda, nota-se uma
considerável descontinuidade nos valores singulares da matriz, o que demonstra indícios de
que os valores singulares superiores a seis se devem a modos residuais, denominados modos
computacionais. Os valores singulares associados a estes modos computacionais apresentaram
ordem de grandeza inferior aos modos reais, neste caso σ<10-1.
Estas observações sugerem que modos computacionais podem ser identificados a partir
de descontinuidades no gráfico da Figura A.4, da direita para a esquerda, e pela ordem de
grandeza dos valores singulares.
É importante ressaltar que a magnitude dos valores singulares dos modos
computacionais cresce à medida que o nível de ruído presente no sinais medidos aumenta.
Assim sendo, para um sinal com uma baixa relação sinal-ruído, ou seja, com níveis de ruído
de mesma magnitude do sinal, torna-se difícil visualizar, no gráfico dos valores singulares,
esta separação entre modos reais e modos computacionais.
Ao apresentar o gráfico da Figura A.4, o programa pede que seja selecionado um
intervalo onde, aproximadamente, se encontram os modos reais do sistema. Isto é feito
posicionando no gráfico o cursor em uma posição onde haja um certa descontinuidade, ou
onde se considera que , devido a sua magnitude, os valores singulares são desprezíveis.
O parâmetro r_max representa o índice do valor singular onde o cursor foi posicionado e
log_sigma apresenta o valor de log10(σr_max). O índice apresentado sugere que a ordem do
sistema real se encontra próxima a este valor. A tela correspondente, apresentada na janela do
MATLAB, é a seguinte:
######################################################### H0DECOMP.M do the singular value decomposition of the Hankel matrix #########################################################
select the interval to search

222
with the mouse PRESS ENTER to finish
r_max = 6.2356log_sigma = 0.3812
Após a avaliação inicial da ordem do sistema, a opção seguinte >VFDQPRGHORUGHU
LQWHUYDO@ faz uma varredura em um intervalo de ordem para o sistema. O programa pede
então que seja selecionado o intervalo para que seja analisado o erro entre as respostas real e
simulada como descrito na seção A.13. Como o valor obtido na opção anterior está em torno
de 6, seleciona-se o intervalo e 2 a 12 para investigar a ordem do sistema.
Na janela do MATLAB a seguinte mensagem é apresentada
######################################################### ERASCAN.M scan a order interval to find one with mininal IAE (Integral of Absolute Error) input/output model of a system using the Eigensystem Realization Algorithm#########################################################
select the interval to search ( equal to the number of most... significants singular values )
A multiple of 2. [min max ] -> [2 12]
Após a execução da varredura, uma tabela do erro em função da ordem selecionada é
apresentada na janela do MATLAB, tal como mostrado a seguir
IAE =2.0000e+000 4.0000e+000 6.0000e+000 8.0000e+000 1.0000e+001 1.2000e+0017.7545e+000 2.6964e+000 9.5790e-014 3.3496e-013 1.9334e-012 1.9809e-0124.0412e+000 2.7006e+000 1.7904e-013 4.8282e-013 2.4162e-012 2.8586e-012
A primeira coluna refere-se à ordem do sistema identificado e as colunas 2 e 3 referem-
se ao erro entre as respostas real e simulada para as funções de transferência relacionando a
entrada e as duas saídas do sistema. Um gráfico com o erro máximo verso a ordem é também
apresentado na Figura A.5 para auxiliar na escolha da ordem para o sistema identificado.

223
2 4 6 8 10 121
2
3
4
5
6
7
8
9Order evaluation
max
(sum
_of_
Abs
_err
or)
Estimated order
Figura A.5: Gráfico erro x ordem estimada.
Como pode ser visto, o erro máximo tende a um valor constante para uma ordem igual e
superior a seis. Assim, fica claro que a ordem mínima do modelo é seis, que é exatamente a
ordem do sistema real.
Selecionada a ordem do modelo estimado para o sistema, o passo seguinte é executar a
opção >GR HUD LGHQWLILFDWLRQ@. Nesta opção, as matrizes do modelo são calculadas e a
resposta impulsiva real comparada à resposta do sistema identificado, como mostra a Figura
A.6.
RealEstimated
0 20 40 60 80 100-1
0
1input : 1 output : 1
0 20 40 60 80 100-0.05
0
0.05Estimation error
Time (s)
RealEstimated
0 20 40 60 80 100-0.5
0
0.5input : 1 output : 2
0 20 40 60 80 100-0.02
0
0.02Estimation error
Time (s)
Figura A.6: Comparação entre sistema real e identificado.
Por fim, para confirmar se o modelo identificado pode ser considerado uma realização
de ordem mínima do sistema a opção >FRPSDUH IUHT UHVSRQVH@ mostra o gráfico da
função resposta em freqüência, FRF, do sistema real e do modelo identificado. O gráfico das

224
FRFs são mostrados na Figura A.7, e demonstram uma considerável concordância entre o
sistema real e o modelo identificado.
EstimatedReal
0 0.2 0.4 0.6 0.8 110
-4
10-2
100
102
G11
Frequence response magnitude plot
EstimatedReal
0 0.2 0.4 0.6 0.8 110
-4
10-2
100
102
Freq - Hz
G21
Figura A.7: Resposta em freqüência do sistema real e do modelo identificado.
Apenas para ilustrar a opção >HOLPLQDWH FRPSXWDWLRQDO PRGHV@ imagine que a
ordem selecionada para o modelo tenha sido 8. Após realizar a identificação, >GR HUD
LGHQWLILFDWLRQ@, o gráfico comparativo entre a resposta impulsiva real e a resposta do sistema
identificado seria apresentado como mostra a Figura A.8. Como indicado no gráfico da Figura
A.5, o erro entre o sistema real e o modelo não é muito diferente do caso para o modelo de
ordem 6, Figura A.6.
RealEstimated
0 20 40 60 80 100-1
0
1input : 1 output : 1
0 20 40 60 80 100-0.05
0
0.05Estimation error
Time (s)
RealEstimated
0 20 40 60 80 100-0.5
0
0.5input : 1 output : 2
0 20 40 60 80 100-0.01
0
0.01
0.02Estimation error
Time (s)
Figura A.8: Comparação entre sistema real e identificado, para um modelo de ordem 8.
225
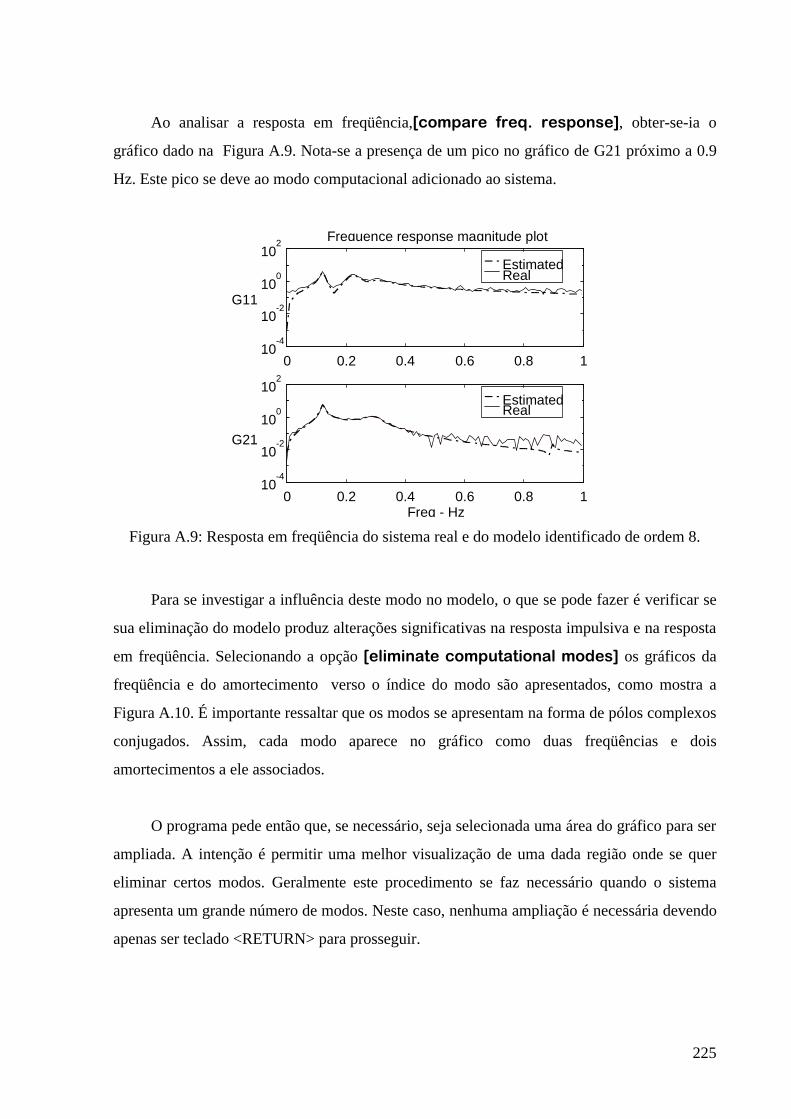
Ao analisar a resposta em freqüência,>FRPSDUH IUHT UHVSRQVH@, obter-se-ia o
gráfico dado na Figura A.9. Nota-se a presença de um pico no gráfico de G21 próximo a 0.9
Hz. Este pico se deve ao modo computacional adicionado ao sistema.
EstimatedReal
0 0.2 0.4 0.6 0.8 110
-4
10-2
100
102
G11
Frequence response magnitude plot
EstimatedReal
0 0.2 0.4 0.6 0.8 110
-4
10-2
100
102
Freq - Hz
G21
Figura A.9: Resposta em freqüência do sistema real e do modelo identificado de ordem 8.
Para se investigar a influência deste modo no modelo, o que se pode fazer é verificar se
sua eliminação do modelo produz alterações significativas na resposta impulsiva e na resposta
em freqüência. Selecionando a opção >HOLPLQDWHFRPSXWDWLRQDOPRGHV@ os gráficos da
freqüência e do amortecimento verso o índice do modo são apresentados, como mostra a
Figura A.10. É importante ressaltar que os modos se apresentam na forma de pólos complexos
conjugados. Assim, cada modo aparece no gráfico como duas freqüências e dois
amortecimentos a ele associados.
O programa pede então que, se necessário, seja selecionada uma área do gráfico para ser
ampliada. A intenção é permitir uma melhor visualização de uma dada região onde se quer
eliminar certos modos. Geralmente este procedimento se faz necessário quando o sistema
apresenta um grande número de modos. Neste caso, nenhuma ampliação é necessária devendo
apenas ser teclado <RETURN> para prosseguir.

226
0 2 4 6 80
0.5
1Frequencies
0 2 4 6 80
0.05
0.1Damping
Figura A.10: Freqüência e amortecimento x índice do modo.
O programa lista as freqüências dos modos do modelo e então pede que se selecione os
modos a serem eliminados com o mouse. Para cada modo a ser eliminado, uma freqüência
deve ser selecionada, correspondendo a um par de pontos no gráfico. Após feita a seleção,
tecla-se <RETURN> e a eliminação dos modos selecionados é realizada. O programa informa
então o número de pólos eliminados (cada par de pólos corresponde a um modo). As
mensagens apresentadas pelo programa durante este processo são mostradas abaixo:
Elimitate computational modes Select zoom area with the mouse or ... press <RETURN> to continueFrequenciesans = Columns 1 through 7 0.8931 0.8931 0.2945 0.2945 0.2249 0.2249 0.1219 Column 8 0.1219 Select values to eliminate with the mouse and ... press <RETURN> to finish2 poles eliminated
Após a eliminação, uma nova comparação é realizada. Na Figura A.11 e na Figura A.12
o modelo com o modo computacional eliminado é comparado com o sistema real. Como se
vê, a eliminação do modo computacional não ocasiona alteração significativa na resposta do
sistema. Conclui-se, assim, que o modo eliminado não apresenta nenhuma influência no
sistema. Novamente chega-se a um modelo de ordem 6 para representar o sistema.

227
RealEstimated
0 20 40 60 80 100-1
-0.5
0
0.5
1input : 1 output : 1
0 20 40 60 80 100-0.04
-0.02
0
0.02
0.04Estimation error
Time (s)
RealEstimated
0 20 40 60 80 100-0.5
0
0.5input : 1 output : 2
0 20 40 60 80 100-0.01
0
0.01
0.02Estimation error
Time (s)
Figura A.11: Comparação entre sistema real e identificado, para um modelo de ordem 6 após,
eliminação do modo computacional.
EstimatedReal
0 0.2 0.4 0.6 0.8 110
-4
10-2
100
102
G11
Frequence response magnitude plot
EstimatedReal
0 0.2 0.4 0.6 0.8 110
-4
10-2
100
102
Freq - Hz
G21
Figura A.12: Resposta em freqüência do sistema real e do modelo identificado de ordem 6
após eliminação do modo computacional.
O passo final do programa é salvar as matrizes do modelo identificado via opção >VDYH
LGHQWLILHGPDWULFHV@. Escolhido o nome e o diretório para o arquivo, as matrizes [A_e,
B_e, C_e , D_e] do modelo são então armazenadas.
228
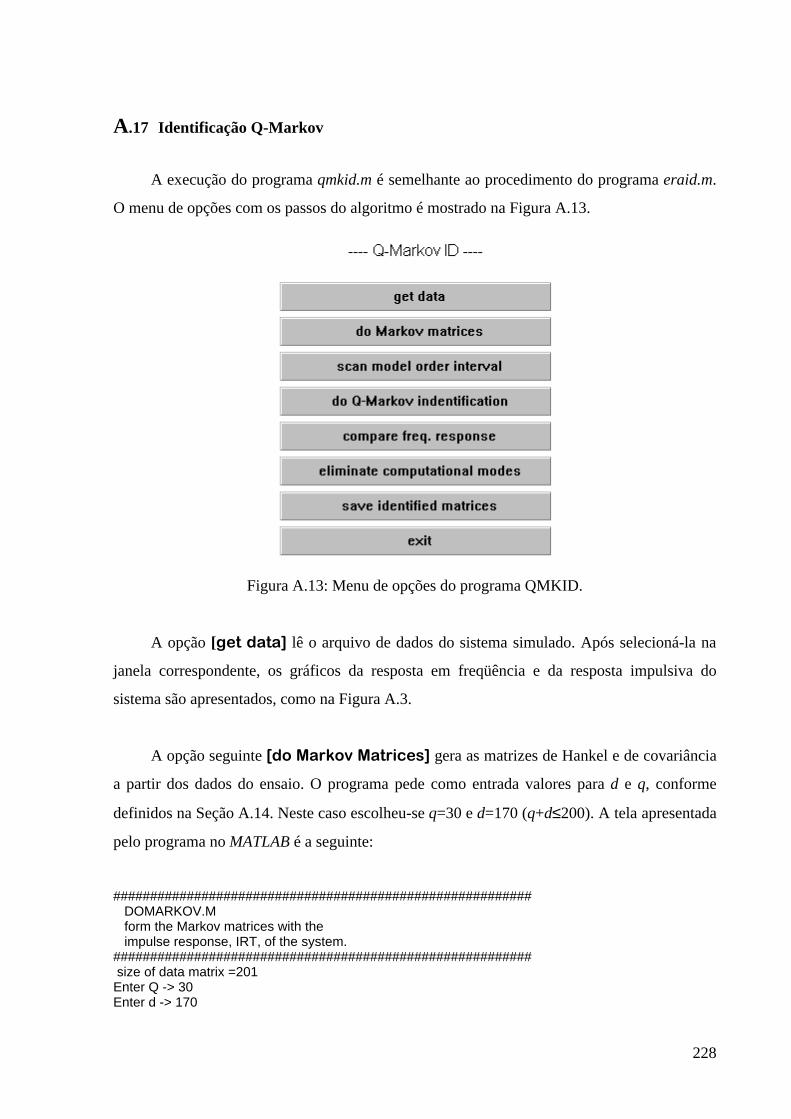
A.17 Identificação Q-Markov
A execução do programa qmkid.m é semelhante ao procedimento do programa eraid.m.
O menu de opções com os passos do algoritmo é mostrado na Figura A.13.
Figura A.13: Menu de opções do programa QMKID.
A opção [JHWGDWD@ lê o arquivo de dados do sistema simulado. Após selecioná-la na
janela correspondente, os gráficos da resposta em freqüência e da resposta impulsiva do
sistema são apresentados, como na Figura A.3.
A opção seguinte >GR0DUNRY0DWULFHV@ gera as matrizes de Hankel e de covariância
a partir dos dados do ensaio. O programa pede como entrada valores para d e q, conforme
definidos na Seção A.14. Neste caso escolheu-se q=30 e d=170 (q+d≤200). A tela apresentada
pelo programa no MATLAB é a seguinte:
######################################################### DOMARKOV.M form the Markov matrices with the impulse response, IRT, of the system.######################################################### size of data matrix =201Enter Q -> 30Enter d -> 170

229
O gráfico do logaritmo dos valores singulares verso o número de valores singulares é
mostrado na Figura A.14.
0 10 20 30 40 50 60 70-10
-8
-6
-4
-2
0
2
4
number of singular values
log(sigma) Singular Values Plot
Figura A.14: Gráfico dos valores singulares de H(1).
A decomposição apresenta 60 valores singulares, isto por que a matriz Dq tem tamanho
(q+n_o)x(q+n_o), já que n_o=2 e q=30, tem-se Dq ∈ R60x60. Destes 60 autovalores somente
os 6 primeiros são relevantes.
Após selecionar o intervalo onde, aproximadamente, se encontram os modos reais do
sistema a seguinte tela é apresentada na janela do MATLAB:
######################################################### DQDECOMP.M do the singular value decomposition of the Dq matrix#########################################################
select the interval to search with the mouse PRESS ENTER to finish
r_max = 6.4665log_sigma = -3.0616

230
Como na Seção A.16, o parâmetro r_max representa o índice do valor singular onde o
cursor foi posicionado e log_sigma apresenta o valor de log10(σr_max). O índice apresentado
sugere que a ordem do sistema real se encontra próximo a este valor.
Avaliada a ordem do sistema, a opção seguinte >VFDQPRGHO RUGHU LQWHUYDO@ faz
uma varredura do intervalo de ordem para o sistema. Na janela do MATLAB a seguinte
mensagem é apresentada
######################################################### QMKSCAN.M scan a order interval to find one with mininal IAE (Integral of Absolute Error) input/output model of a system using the Q-Markov COVER Algorithm#########################################################
select the interval to search ( equal to the number of most... significants singular values )
A multiple of 2. [min max ] -> [2 12]
A tabela do erro versos a ordem selecionada, apresentada na janela do MATLAB, é a
seguinte
IAE = 2.0000e+000 4.0000e+000 6.0000e+000 8.0000e+000 1.0000e+001 1.2000e+001 8.2251e+000 3.6015e+000 1.6222e+000 1.6257e+000 1.6326e+000 1.6096e+000 4.8393e+000 3.1750e+000 8.2650e-001 8.2199e-001 8.2265e-001 8.1814e-001
O gráfico com o erro máximo verso a ordem é apresentado na Figura A.15, para auxiliar
na escolha da ordem para o sistema identificado. Novamente, como no caso ERA, o erro
máximo tende a um valor constante para uma ordem igual e superior a seis, tornando claro
que a ordem mínima do sistema é 6.

231
2 4 6 8 10 121
2
3
4
5
6
7
8
9Order evaluation
max
(sum
_of_
Abs
_err
or)
Estimated order
Figura A.15: Gráfico erro x ordem estimada.
No passo seguinte, a opção >GRHUDLGHQWLILFDWLRQ@ calcula as matrizes do modelo e
compara a resposta impulsiva real e a resposta do sistema identificado, como mostra a Figura
A.16.
RealEstimated
0 20 40 60 80 100-1
-0.5
0
0.5
1input : 1 output : 1
0 20 40 60 80 100-0.04
-0.02
0
0.02
0.04Estimation error
Time (s)
RealEstimated
0 20 40 60 80 100-0.5
0
0.5input : 1 output : 2
0 20 40 60 80 100-0.02
-0.01
0
0.01
0.02Estimation error
Time (s)
Figura A.16: Comparação entre sistema real e identificado.
Por fim, a opção >FRPSDUHIUHTUHVSRQVH@ mostra o gráfico da função resposta em
freqüência do sistema real e do modelo identificado, Figura A.17. Analisando este gráfico,
conclui-se que o modelo de ordem seis reproduz com boa precisão o sistema real.

232
EstimatedReal
0 0.2 0.4 0.6 0.8 110
-3
10-2
10-1
100
101
G11
Frequence response magnitude plot
EstimatedReal
0 0.2 0.4 0.6 0.8 110
-3
10-2
10-1
100
101
Freq - Hz
G21
Figura A.17: Resposta em freqüência do sistema real e do modelo identificado.
A opção >HOLPLQDWHFRPSXWDWLRQDOPRGHV@ é idêntica ao caso ERA. Como não se
faz necessária aqui qualquer eliminação de modos, esta opção não é utilizada.
O passo final do programa é salvar as matrizes do modelo identificado via opção >VDYH
LGHQWLILHGPDWULFHV@. Escolhido o nome e o diretório para o arquivo as matrizes [A_e, B_e,
C_e , D_e] do modelo são então armazenadas.

233
Apêndice B
Ambiente de Projeto
B.1 Caracterização dos modelos
Os modelos utilizados no projeto são determinados a partir do modelo estimado, dado
pela matrizes de estados [A_e, B_e, C_e D_e]. Com o programa partmodo.m o modelo
estimado é particionado em modelo nominal, definido pelas matrizes [am, bm, cm e dm], e
modelo residual, dado pelas matrizes [ar, br, cr e dr]. O programa pede que sejam
selecionados os modos do modelo nominal e então executa a decomposição modal do sistema.
As matrizes do modelo nominal, do modelo residual e do modelo completo, agora
denominadas [A, B, C e D] são gravadas em um arquivo XXXXX_s.mat para o caso nominal e
XXXXX_pi.mat para os casos perturbados, com i=1,2,…,n. Os caracteres XXXXX são cinco
quaisquer.
O programa resuncer.m lê os dados referentes ao modelo residual e através de uma
interface gráfica permite ao usuário selecionar o limitante para a incerteza residual, definido,
na forma de função de transferência, como Gup. O modelo da incerteza residual é gravado no
arquivo XXXXX_Gr.mat,
O programa paruncer.m lê os dados referentes ao modelo nominal e também através de
uma interface gráfica permite ao usuário selecionar o limitante para a incerteza paramétrica,
definido pelas matrizes E e H. O modelo da incerteza paramétrica é gravado no arquivo
XXXXX_i.mat.

234
B.2 Projeto
O procedimento de projeto é apresentado na forma de menu pelo programa, como
mostrado na Figura B.1, e consiste nos passos descritos a seguir. A opção >FUHDWH QHZ
SURMHFW@ lê os parâmetros do sistema contido em um arquivo denominado XXXXX_s.mat ,
criando um novo projeto. Criar um projeto significa que o programa abre o SIMULINK para o
projetista gerar os modelos da planta aumentada, do sistema em malha aberta e do sistema em
malha fechada, já devidamente denominados XXXXX_ap.m , XXXXX_ol.m e
XXXXX_cl.m . Estes modelos devem ser gravados para se prosseguir. Caso o projeto já
exista, a opção >RSHQ D SURMHFW@ lê o arquivo XXXXX_s.mat e abre o diagrama do
SIMULINK XXXXX_ap.m .
Figura B.1: Menu de opções do programa projeta.m.
Na seqüência, a opção >VSHFLI\ GHVLJQ SDUDPHWHUV@ define os parâmetros do
projeto, abrindo um novo menu, mostrado na Figura B.2. Para um projeto novo deve-se:
• especificar o número de entradas de controle e de saídas medidas, nu e ny, opção
>RUGHURIXDQG\@;
• ler o modelo da incerteza paramétrica gravado, arquivo XXXXX_i.mat, opção >UHDG
SDUDPHWULFXQFHUWDLQW\@;

235
• ler o modelo da incerteza residual gravado, arquivo XXXXX_Gr.mat, opção >UHDG
UHVLGXDOXQFHUWDLQW\@;
• especificar a função de ponderação sobre a função sensibilidade (relacionada ao
desempenho) , opção >ZHLJKWVHQVLWLYLW\@;
• definir os ganhos do projeto, K2 sobre a incerteza residual, ε sobre a incerteza
paramétrica e γ sobre a função de ponderação, opção >GHVLJQJDLQV@;
• salvar os parâmetros, opção >VDYH SDUDPHWHUV@ gravados em um arquivo tipo
XXXXX_W.mat.
Para um projeto já existente, pode-se ler os parâmetros gravados, opção >UHDG
SDUDPHWHUV@ e eventualmente especificar nova função de ponderação ou ganhos do projeto,
se necessário. A opção >SORW IXQFWLRQV@ apresenta os gráficos do modelo reduzido, junto
com a ponderação sobre a função sensibilidade, e os gráficos do modelo da incerteza, junto
com o modelo residual.
Figura B.2: Menu de especificações do projeto.
Terminada a especificação dos parâmetros de projeto a opção >([LW@ retorna ao
programa principal. Prossegue-se então com a opção >V\QWKHVL]H WKH FRQWUROOHU@ que
calcula o controlador. Esta opção permite selecionar entre a solução do problema H∞ via
enfoque de Riccati ou via LMI como dito no Capítulo 4. Após o controlador ser calculado, ele

236
é gravado no arquivo XXXXX_k.mat e são apresentados os gráficos dos custos entre as
entradas do sistema e as saídas controladas. Caso já exista um controlador calculado, a opção
>UHDGFRQWUROOHU@ lê este controlador.
Tendo lido os arquivos do controlador, dos modelos do sistema e dos parâmetros de
projeto, a opção >DQDO\]HV\VWHPIUHTXHQF\UHVS@ apresenta o gráfico da resposta em
freqüência da função sensibilidade, S, para o sistema em malha aberta e malha fechada, para
verificar o desempenho e da função restrição de energia, U, para averiguar a robustez. A
opção >DQDO\]HV\VWHPLPSXOVLYHUHVS@ apresenta os gráficos da resposta impulsiva dos
sinais de saída para o sistema em malha aberta e em malha fechada, e também o gráfico do
sinal de controle. Esta opção serve para verificar o comportamento das saídas do sistema e a
magnitude do sinal de controle no tempo. Estas duas opções permitem analisar o
comportamento do sistema controlador para verificar se ele satisfaz os requisitos de
desempenho e robustez. Caso os requisitos de projeto não sejam alcançados, deve-se
especificar novos valores para os ganhos de projeto.
A opção >DQDO\]H V\VWHP XQQRPLQDO V\VWHPV@ apresenta a resposta em
freqüência e a resposta impulsiva para os casos de operação não nominal. Esta opção faz a
qualificação final do controlador, incluindo a robustez à variação nos parâmetros. O que se
espera é que o sistema controlado mantenha ou apresente uma deterioração aceitável no seu
desempenho, para os casos dispersivos. A mesma análise feita para o caso nominal é repetida
aqui, ou seja, são apresentados os gráficos da função sensibilidade, S, e da função restrição de
energia, U, juntamente com a resposta impulsiva para o sistema em malha aberta e malha
fechada, e o sinal de controle.

237
Apêndice C
Detalhes da Instrumentação
C.1 Ambiente dSPACE
O Ambiente dSPACE é um ambiente inteiramente integrado ao MATLAB/SIMULINK,
reunindo assim ferramentas de projeto e análise de sistemas de controle com um software de
implementação em tempo real. O ambiente completo é apresentado na Figura C.1.
A Arquitetura do ambiente, mostrada na Figura C.2, consiste em:
• um “Host computer“: PC onde o programa Simulink é executado
• uma placa "Processor Board" DS1003 com um DSP (Digital Signal Processor) Texas
TMS320C40 (60Mflops)
• um barramento de comunicação (entre o PC e o DSP)
• uma placa de conversores A/D, DS2103, com 32 canais, “single end“
• uma placa de conversores D/A, DS 2003, com 32 canais, “single end“
sendo que as placas dos conversores A/D e D/A se comunicam com a placa DSP por um
barramento exclusivo, sem comunicação com o “Host“.

238
Figura C.1: Ambiente integrado MATLAB/dSPACE.
PC DSP
DS2003A/D
DS2103D/A
PC Bus
Figura C.2: Arquitetura do ambiente dSPACE/MATLAB.

239
Dados referentes ao equipamento dSPACE são dados na Tabela C.1 abaixo. Maiores
referências podem ser obtidas no site do fabricante: "www.dspace.de."
Tabela C.1: Características das placas.
Características das placa de entrada e saídaDS2003 - Conversor A/D • 32 canais A/D
• 2 conversores A/D independentes com 32 entradasmultiplexadas cada
• Amostragem e retenção simultânea• resolução de 4, 8, 12, 13, 14, 15 e 16 bits• tensão ±5V e ±10V (programável)
DS2103 - Conversor D/A • 32 canais A/D paralelos• saída imediata ou atualização simultânea em grupos de
4 canais• resolução de 14 bits• tensão ±5V e ±10V (programável)
C.2 Circuito acoplador de impedância para o sensor PZT
A placa DS2003, conversor analógico para digital, é uma placa conversora de uso geral,
onde qualquer tipo de sensor pode ser conectado. Em função disso, nenhum tipo de
condicionamento de sinal é incluído na entrada do conversor. Devido ao fraco nível de
corrente fornecido pela cerâmica PZT como sensor, um circuito condicionador específico foi
projetado para tornar compatível as características elétricas do sensor PZT com as do
conversor A/D. O esquema deste condicionador é apresentado na Figura C.3.
+-
+-
R1
Rf
Rp
C
Rf
R1
Rp
Figura C.3: Circuito condicionador do sensor PZT.

240
Os parâmetros deste circuito são:
• R1 = 10 kΩ
• Rf = 10 kΩ
• Rp = 4.7 kΩ
• C = 20 µF
• Amplificador Operacional: SA1458
C.3 Sensores, atuadores e equipamentos adicionais
Entre os demais equipamentos presentes nos experimentos tem-se:
• excitador eletrodinâmico LDS, LDS LTD., modelo V201,
• Amplificador LDS, modelo PA25E, para alimentar o excitador eletrodinâmico e os
atuadores de PZT,Transdutor de força PCB, Piezotronic Inc., modelo 208-A02,
• Cerâmica PZT, Piezo Electric Inc., T110-A4E-602,
• Filme plástico PVDF, AMP Inc.
A cerâmica PZT é capaz de agir tanto como sensor quanto atuador. A relação entre a
tensão aplicada e a deformação resultante depende: das propriedades do material cerâmico, do
tamanho e forma da peça e da direção da excitação elétrica. A relação entre deformação e
tensão, denominada constante de deformação ou coeficiente “d”, define a propriedade eletro-
mecânica do material. Sua unidade é expressa em metros por Volts. Para identificar a direção,
os índices 1, 2 e 3 são usados para definir os eixos X, Y, e Z. Como utilizado nos
experimentos desta tese, a principal constante a considerar para a cerâmica PZT é dada por
d31. Esta constante se aplica no caso em que a tensão é medida na superfície normal ao eixo 3
e a força é aplicada perpendicularmente aos eixos 1 e 3, Figura C.4. Para a cerâmica utilizada
aqui tem-se:
d31=190x10-12 m/V.
Mais detalhes sobre a cerâmica PZT podem ser obtidos no site do fabricante
“www.piezo.com”.

241
Com relação ao PVDF, a relação entre tensão e deformação na direção longitudinal (de
maior comprimento) é de:
12x10-3 V/µε, e 400x10-3 V/µm .
O modelo utilizado tem dimensões (do elemento piezelétrico) de 29.93x12.19 mm.
3
1
2
+
_+
_
V
F
P
Figura C.4: Esquema da relação tensão/deformação para um PZT com d31 como propriedade
principal indicando a direção de polarização P.

242
Apêndice D
Referência de Comandos e Funções do Ambiente de
Projeto
Observação: os programas apresentados aqui se encontram disponíveis no site do
Departamento de Mecânica Computacional (endereço eletrônico: www.dmc.fem.unicamp.br).
Estes programas podem também ser adquiridos diretamente com o autor via E-mail (endereço:
[email protected]) ou endereço atualizado no site citado acima.
addinct.m% [am_a,bm_a,cm_a,dm_a]=addinct(am,bm,cm,dm,H,E,nu,ny)%% Idiciona perturbacao parametrica na planta como% entradas/saidas adicionais.%% O sistema nominal original%% dx=A x + [B1 B2] | w |% | u |%% y = C x + |D1 D2 | | w |% | u |%% torna-se%% dx=A x + |[B1 Hx B2] | | w |% | [Di] |% | u |%% | y | = | C | x + | D1 Hy D2 | | w |% | [Do] | | Ex | | Ew [0] Eu | | [Di] |% | u |%% onde:% -> [am,bm,cm,dm] e o sistma nominal% -> incerteza fatorada na forma: H I E = | am-ad bm-bd |% | cm-cd dm-dd |

243
% sendo% H=[ Hx% Hz E=[ Ex Ew Eu ]% Hy ]%% -> [Di e Do] representam os vetores de entrada% e saida adiconados ao sistema.% -> nu = numero de entradas de controle% -> ny = numero de saida medidas
addpert.m% [am,bm,cm,dm,ar,br,cr,amr,arm,] = addpert(a,b,c,d,nr)%% Determina um modelo reduzido e um modelo residual% por truncamento modal na forma de incerteza aditiva%% O sistema é decomposts na forma%% A = |Ar 0 | B = |Br| x=|xr|% |0 Am| |Bm| |xm|%% C = |Cr Cm| D=Dm% .% x = Ax + Bu, y = Cx + Du%% onde% -> xm sao os estados preservados no modelo reduzido% -> xr sao os estados incluidos no modelo residual% -> nr é a ordem do modelo reduzido
checkadd.m% checkadd(a,b,c,d,am,bm,cm,dm,ar,br,cr,dr);%% Compara modelos do sistema original,% modelo reduzido e modelo residual%
checkmul.m% [am,bm,cm,ap,bp,cp,dp] = omultsep(a,b,c,nr)%% Determina um modelo reduzido e um modelo residual% na forma de incerteza multiplicativa de saida%% O sistema é decomposts na forma%% A = | am 0 | B = |bm| x=|xm|% |bp*cm ap| |0 | |xp|%% C = |cm+cm*dp cp| D=0%% sendo% .% x = Ax + Bu, y = Cx%% onde% -> xm sao os estados preservados no modelo reduzido

244
% -> xr sao os estados incluidos no modelo residual% -> nr é a ordem do modelo reduzido
compert.m% COMPERT.M Compara desempenho do sistema controlado% para o sistema perturbado ( variação da dinâmica)
compmodo.m% compmodo(a0,b0,c0,d0,am,bm,cm,dm,ar,br,cr,dr);%% Compara modelos do sistema original,% modelo reduzido e modelo residual%%% a0 = |ar 0 | b0 = |br| x=|xr|% |0 am| |bm| |xm|%% c0 = |cr cm| d0=dm%% .% x = ax + bu, y = cx + du%% onde% -> xm sao os estados preservados no modelo reduzido% -> xr sao os estados incluidos no modelo residual% -> nr é a ordem do modelo reduzido
compresp.m% compara resposta impulsiva% do sistema estimado com resposta real
dohankel.m% forma a matriz de Hankel a partir da% resposta impulsiva, IRT, do sistema.
doirt.m% traca a resposta impulsova e a resposta em frequencia% para o processo de identificacao selecionado o% respectivo arquivo de dados.%% Os dados devem ser salvos em um arquivo .MAT% com as seguintes informacoes:% -> n_i = numero de entradas do sistema% -> n_o = numero de saidas% -> IRT = uma matriz M-por-N onde:% >> as N=(n_i x n_o) colunas representam o vetor da resposta% impulsiva da entrada i para a saida o% >> e M e o comprimento do vetor de respostas% Ex.: IRT=[Imp11 Imp12 ... Imp1n_o ... Impn_i1 ... Impn_in_o]% -> XFREQ = uma matriz M-by-N onde:% >> as N=(n_i x n_o) colunas representam o vetor da resposta% em frequencia da entrada i para a saida o% >> e M e o comprimento do vetor de respostas% Ex.: XFREQ=[Xfreq11 ... Xfreq1n_o ... Xfreqn_i1 ... Xfreqn_in_o]% -> Freq e o vetor de frequencia da resposta em frequencia% -> t e o vetor de tempo da resposta impulsiva

245
domarkov.m% form the Markov matrices with the% impulse response, IRT, of the system
dqdecomp.m% executa a decomposicao em valores singulares% ma matriz Dq
dsgspec.m% agrupa as especificacoes de projeto do controlador%% sao elas :% -> ordem de u e y% -> incertesa parametrica% -> incertesa residual% -> ponderacao sobre a funcao sensibilidade% -> ganhos de projeto
elimodo.m% [am,bm,cm,dm] = elimodo(a,b,c,d)%% Elimina modos selecionados de uma realizacao%% O sistema e decomposto na forma modal%% A = |Ar 0 | B = |Br| x=|xr|% |0 Am| |Bm| |xm|%% C = |Cr Cm| D=Dm%% .% x = Ax + Bu, y = Cx + Du%% onde% xm sao os modos preservados% xr sao os modos removidos
eraid.m% identifica uma realizacao para um sistema% usando ERA, Eigensystem Realization Algorithm.
eraiom.m% identifica uma realizacao de um sistema de uma dada ordem% usando o Eigensystem Realization Algorithm
erascan.m% varre um intervalo de ordem de realizacoes para% determinar um modelo estimado com integral% absoluta do erro minimo% (criterio IAE, Integral of Absolute Error)% usando o Eigensystem Realization Algorithm
h0decomp.m% realiza a decomposicao em valores singuares% da matriz de Hankel H0

246
hinfdsg.m% Projeta um controador H-infinito de ordem cheia% para uma dada planta aumentada usando:% # o enfoque de Riccati% # o enfoque LMI
new_pl.m% function nome=new_pl% abre um arquivo simulink para gerar o% modelo de uma nova planta aumentada% (modelo de projeto)
omulpert.m% [am,bm,cm,ap,bp,cp,dp] = omulpert(a,b,c,nr)%% determina um modelo reduzido e um modelo residual% de um dada realizacao na forma de incertesa% multiplicativa de saida%% O sistema e decomposto como%% a = | am 0 | b = |bm|x=|xm|% |bp*cm ap| |0 | |xp|%% c = |cm+dp*cm cp| d=0%% x = Ax + Bu, y = Cx%% onde% -> xm sao os estados preservados no modelo reduzido% -> xr sao os estados incluidos no modelo residual% -> nr é a ordem do modelo reduzido
open_pl.m% function nome=open_pl% abre um arquivo simulink de um modelo% de uma nova planta aumentada ja existente
partmodo.m% [am,bm,cm,dm,ar,br,cr,dr] = partmodo(a,b,c,d)%% PARTMOD1.M% Particiona um modelo de uma dada realizacao% em modelo nominal e residual% O sistema é decomposts na forma%% a = |ar 0 | b = |br| x=|xr|% |0 am| |bm| |xm|%% c = |cr cm| d=dm% .% x = Ax + Bu, y = Cx + Du%% onde% -> xm sao os estados preservados no modelo reduzido% -> xr sao os estados incluidos no modelo residual

247
paruncer.m% seleciona a incerteza parametrica% para a especificacao do projeto
pfreq.m% compara graficos de magnitude da resposta em frequencia
projeta.m% Projeta o controlador
qmkid.m% Identifica uma realizacao para um sistema usando% a tecnica "Q-Markov COVariance Equivalent Realization",% Q-Markov COVER.
qmkiom.m% identifica uma realizacao de um sistema de uma dada ordem% usando o algoritmo Q-Markov COVER
qmkscan.m% varre um intervalo de ordem de realizacoes para% determinar um modelo estimado com integral% absoluta do erro minimo% (criterio IAE, Integral of Absolute Error)% usando o algoritmo Q-Markov COVER
respimp.m% Conversao da resposta em frequencia% para resposta impulsiva
resuncer.m% Determina a incerteza residual a ser usada no% projeto do controlador
selmodo.m% [am,bm,cm,dm] = selmodo(a,b,c,d)% SELMODO.M% Determina um modelo para umaa realizacao de um sistema% que contenha certos modos selacionados
upbound.m% [a,b,c,d] = upbound(Freq,Mag)% Determina um modelo que e limitante superior% para um conjunto de funcoes respostas em frequencia
upperfun.m% [a_g,b_g,c_g,d_g] = upperfun(a1,b1,c1,d1,a2,b2,c2,d2)% Determina um modelo que e limitante superior no% dominio da frequencia para um os sistemas dados% por (a,b,c,d) e (a2,b2,c2,d2)
wsensi.m% Determina a funcao de ponderacao sobre a% funcao sensibilidade