identificação de velocidades críticas em rotores utilizando simulador
TRANSCRIPT

IDENTIFICAÇÃO DE VELOCIDADES CRÍTICAS
SIMULADOR DE MÁQUINAS ROTATIVAS
IDENTIFICAÇÃO DE VELOCIDADES CRÍTICAS EM ROTORES UTILIZANDO
SIMULADOR DE MÁQUINAS ROTATIVAS
Aline Coelho de Assis
Projeto de Graduação apresentadoEngenharia Naval e Oceânica Politécnica, Universidade Federal Janeiro, como parte dos requisitos obtenção do título de Engenheiro. Orientador: Ulisses Admar B. V. Monteiro
Rio de Janeiro
Março de 2014
EM ROTORES UTILIZANDO O
apresentado no Curso de nica da Escola
Universidade Federal do Rio de equisitos necessários à
Ulisses Admar B. V. Monteiro

iii
Coelho de Assis, Aline
Medição de Fase no Simulador de Máquinas Rotativas/
Aline Coelho de Assis. - Rio de Janeiro: UFRJ/ Escola Politécnica,
2014.
VIII, 55 p.: il.; 29,7 cm.
Orientador: Ulisses Admar Barbosa Vicente Monteiro
Projeto de Graduação – UFRJ/ Escola Politécnica/ Curso de
Engenharia Naval e Oceânica, 2014
Referências Bibliográficas: p. 54.
1. Velocidade Crítica. 2. Vibração. 3. Técnicas de Processamento.
4. Simulação de Máquinas Rotativas. I. Barbosa Vicente Monteiro,
Ulisses Admar. II. Universidade Federal do Rio de Janeiro, Escola
Politécnica, Curso de Engenharia Naval e Oceânica. III.
Identificação de Velocidades Críticas em Rotores Utilizando o
Simulador de Máquinas Rotativas.

iv
DEDICATÓRIA
.
Aos meus pais Laura e Einar, que são a essência e a matéria de tudo isso. São o
investimento e o suor, são as lágrimas, as angústias, a perseverança. São o sorriso, a
alegria, o alívio, o júbilo pela vitória e o sentimento de dever cumprido. São meus
alicerces, as fundações profundas que me mantêm de pé e firme, mas, ao mesmo tempo,
são as asas que me permitem sonhar, alçar voos mais altos e alcançar novos horizontes.
Ao querido amigo João Botelho da Cunha (in memoriam). Saudades eternas...

v
AGRADECIMENTOS
Primeiramente, a Deus. Sem Ele a me guiar tenho certeza de que o caminho
seria impossível para mim.
À minha família: meus pais e meus irmãos, Karine e Pedro Ivo. Seu amor,
dedicação, cuidado, zelo e carinho são o combustível essencial na minha formação tanto
acadêmica quanto como pessoa.
À minha melhor amiga Camila, pela paciência e companheirismo e pelo apoio
incondicional em todas as horas que precisei. Obrigada pela sua amizade.
Ao meu namorado, Rafael que, antes de qualquer coisa, foi um amigo de
conversas infinitamente longas. Obrigada por ser tão atencioso e solidário.
Aos outros familiares que direta ou indiretamente tiveram alguma
responsabilidade na minha trajetória até aqui. Em especial às minhas duas madrinhas
Daniela e Daisy.
Aos professores que passaram pela minha vida acadêmica, principalmente a
quatro professores em particular: Severino Fonseca, que mais que um professor, é um
amigo, um conselheiro dos alunos; Marta Tapia Cecília Reis, que é uma das professoras
que mais faz pelos alunos dentro e fora da sala de aula; Annelise Zeemann que, mesmo
com o pouco tempo de convivência, me mostrou a emoção do ato de ensinar, o amor
pelo que se faz e a satisfação de partilhar seu conhecimento. E, por fim Ulisses, Admar
Barbosa Vicente Monteiro, sem o qual esse projeto não estaria pronto. Agradeço a
paciência, disponibilidade e toda a ajuda dispensada a mim para que esse projeto viesse
à luz.
Agradeço também a toda a equipe do LEME/LEDAV por sempre estarem à
disposição para ajudar, sobretudo na parte prática desse projeto.
Finalmente, aos meus amigos da faculdade Julio Cesar Costa, Raphael Panizzi,
Roni Conceição, Clara Maria Pereira, Vitor De Santis Tavares, Gelder Guerreiro da
Costa, Rodrigo Figueiredo Chapouto, Igor Caballero, entre outros. Cada um de vocês
foi essencial para essa conquista. Eu agradeço muitíssimo toda a ajuda dispensada.

vi
Resumo do Projeto de Graduação apresentado à Escola Politécnica/ UFRJ como parte
dos requisitos necessários para a obtenção do grau de Engenheiro Naval e Oceânico.
Identificação de Velocidades Críticas em Rotores Utilizando o Simulador de Máquinas
Rotativas (Rotor Kit)
Aline Coelho de Assis
Março/2014
Orientador: Ulisses Admar B. V. Monteiro Curso: Engenharia Naval e Oceânica
O projeto atual visa à identificação de condições de ressonância ou velocidades
críticas a partir de testes utilizando um simulador de máquinas rotativas.
Para isso, foi feito uso de uma das falhas mais comuns observadas nessas
máquinas, o desbalanceamento. Este será propositalmente introduzido no simulador de
máquinas, a partir da instalação de massas de desbalanceamento pré-estabalecidas, com
o objetivo que aumentar a amplitude de vibração e facilitar a identificação das
ressonâncias.
Os experimentos foram feitos à partir do rotor kit (ABVT - Alignment/Balance
Vibration Trainer) da Spectra Quest, a aquisição dos sinais será feita com hardware
desenvolvido no LEDAV (Laboratório de Ensaios Dinâmicos e Análise de Vibração) e
a identificação das ressonâncias foi feita utilizando-se um software desenvolvido no
ambiente LabVIEW.

vii
Palavras-chave: Vibração, Velocidade Crítica, Ressonância. Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulfillment of
the requirements for the degree of Engineer.
Identification of Critical Speeds using a Rotating Machinery Simulator
Aline Coelho de Assis
March/2014
Advisor: Ulisses Admar B. V. Monteiro Course: Ocean Engineering
The current project aims to identify resonance conditions or critical speed values
from tests using a rotating machines simulator.
For this purpose, it will be used one of the most common flaws observed in these
machines, the unbalance. It will be purposely introduced into the machine simulator
fixed value masses of unbalance, with the objective to increase the amplitude of
vibration and to facilitate the identification of the resonances.
The experiments will be made using the rotor kit (ABVT - Alignment / Balance
Trainer Vibration) of Spectra Quest. The signal acquisition will be done with hardware
developed in LEDAV (Dynamic Experiment and Vibration Analysis Laboratory) and
the identification of resonances will be done using a software developed in LabVIEW
environment.
Keywords: Vibration, Critical Speed, Resonance.

viii
ÍNDICE
ÍNDICE .......................................................................................................................... viii 1- INTRODUÇÃO ........................................................................................................... 1
1.1- Objetivo do Projeto Final ...................................................................................... 2
2 – FUNDAMENTOS TEÓRICOS ................................................................................. 3
2.1 - Frequência Natural e Velocidade Crítica ............................................................. 3
2.3 – Vibração do Sistema Rotor - Eixo - Mancal ....................................................... 3
2.3.1 - A Resposta do Sistema ................................................................................ 4 3 – TÉCNICAS DE IDENTIFICAÇÃO DE VELOCIDADES CRÍTICAS EM ROTORES ........................................................................................................................ 6
3.1 - Medição de Fase ................................................................................................... 6
3.1.1 - Convenção e Conversão da Escala da Fase ................................................. 7
3.1.2 - A Importância da Medição de Fase ............................................................. 8
3.2 - Gráfico de Bodé ................................................................................................... 9
3.3 - Gráfico Polar ...................................................................................................... 10
3.4 - Diagrama de Campbell ....................................................................................... 11
3.5 - Gráfico Cascata .................................................................................................. 12
3.6 – Análise da Forma de Onda x(t).......................................................................... 14
3.7 – Utilização das Técnicas para Identificação de Falhas em Máquinas Rotativas 16
3.8 – Testes para a Detecção de Ressonância ............................................................. 16 4 – ESTUDO DE CASO ................................................................................................ 18
4.1 – Análise Numérica .............................................................................................. 18
4.2 – Procedimento Experimental .............................................................................. 22
4.3 – Detalhes do Aparato Experimental e dos Experimentos Realizados ................. 24 5 – ANÁLISE DOS RESULTADOS ............................................................................. 26
5.1 - Aquisição e Tratamento de Dados ..................................................................... 26
5.2 - Análise dos Resultados Apresentados a Partir do Software ............................... 27 6- CONCLUSÕES .......................................................................................................... 53 7- REFERÊNCIAS BIBLIOGRÁFICAS ....................................................................... 54 8 – ANEXO .................................................................................................................... 55

1
1- INTRODUÇÃO
As máquinas rotativas constituem importantes ferramentas para o
desenvolvimento da sociedade como um todo, desde a utilização de moinhos e
máquinas movidas a tração animal. Entender seu funcionamento é essencial para
garantir que se extraia o máximo potencial delas, de forma segura, sem que ocorram
danos a elas e a possíveis pessoas trabalhando próximo a elas.
Porém, no mundo real, é muito difícil garantir que a máquina opere de forma
teoricamente perfeita, ou que não influencie negativamente no ambiente onde está
inserido, especialmente por sua natureza rotativa, que origina vibração. Esta pode causar
muitos danos à qualidade de vida de pessoas que estejam constantemente expostas a
essa vibração, e também problemas de deterioração de equipamentos e estruturas
próximas, pela ocorrência de fadiga em decorrência de condições de ressonância. Além
disso, ainda existe a possibilidade de ocorrer desalinhamento, desbalanceamento e
outras falhas que podem aumentar a intensidade dessa vibração.
Por isso, é de suma importância a manutenção e, caso necessário, o diagnóstico
rápido desses problemas. Antigamente, durante os anos em que a revolução industrial se
espalhou pelo mundo, era comum cada máquina ter um operador correspondente, que
não só sabia operá-la com eficiência, como também detinha conhecimento e vivência
suficientes para diagnosticar as principais falhas apenas pela diferença de ruído emitido
quando ela operava normalmente e quando operava em algum outro estado. Mas, com a
crescente automação, os operadores foram sendo substituídos por máquinas cada vez
mais modernas e a presença humana no ambiente industrial foi sendo condicionada a
uma sala de comando e supervisão. Com isso, o diagnóstico se tornou dependente de
sistemas remotos de monitoração. E a capacitação de profissionais que entendam os
resultados desses sistemas se tornou imprescindível. Para efeitos didáticos, ou seja, para
treinar esses profissionais, a utilização de rotores que simulem o funcionamento e os
defeitos mais comuns em máquinas rotativas se tornou uma grande aliada, pois os
problemas são enfrentados em laboratório, com todos os riscos controlados e os
profissionais se familiarizam com os diagnósticos dados pelos sistemas de monitoração
antes de se deparar com uma situação real em seu ambiente de trabalho.

2
1.1- Objetivo do Projeto Final
O objetivo do presente projeto é a identificação das frequências em que ocorre
ressonância em um rotor-kit (simulador de máquinas rotativas) a partir de experimentos
com desbalanceamento previamente introduzido nos discos do sistema do rotor.
A aquisição dos sinais foi feita com um hardware desenvolvido no LEDAV e a
identificação da ressonância será feita utilizando-se um software desenvolvido em
ambiente LabVIEW.
A análise dos resultados abordou também uma breve comparação entre os
resultados obtidos com e sem desbalanceamento e, para os experimentos com
desbalanceamento, ainda foi realizada uma comparação entre os dados tomados em uma
medição mais rápida (em aproximadamente 30 segundos por passo) e os dados tomados
em uma medição mais lenta (aproximadamente 1 minuto por passo). Isso foi feito com o
intuito de obter uma melhor qualidade de dados tomados para facilitar a análise dos
resultados.

3
2 – FUNDAMENTOS TEÓRICOS
2.1 - Frequência Natural e Velocidade Crítica
A frequência natural é definida como a frequência na qual um corpo vibra após
ser excitado por uma força que pode ser externa ou interna (no caso de uma máquina
rotativa, a força que a excita é sua própria velocidade de rotação). Ela é função da massa
desse corpo e de sua rigidez e pode ser definida de forma simples como:
�������� = � (Eq. 2.1)
Sendo: K = rigidez do corpo;
M = massa do corpo
É importante ressaltar que a equação acima é uma forma simplificada, utilizada
para o cálculo do valor de frequência natural para sistemas de apenas um grau de
liberdade.
Quando um corpo sofre rotação, a velocidade de rotação que o excita a ponto de
atingir sua frequência natural é denominada velocidade crítica. Ou seja, a velocidade
crítica é a frequência natural do sistema do rotor (em termos de rotações por minuto).
Se a frequência de excitação à qual um corpo é submetido for igual (ou muito
próxima) à sua frequência natural, ele pode entrar em ressonância (o corpo adquire
vibração de amplitudes tão altas que pode entrar em colapso).
A ressonância em máquinas rotativas ocorre quando a rotação coincide com a
frequência natural ou velocidade crítica do rotor. Por isso, sob condições ideais de
balanceamento e concentricidade, torna-se possível evitar operar um rotor fora da sua
velocidade crítica sem problema algum.
2.3 – Vibração do Sistema Rotor - Eixo - Mancal
O sistema do rotor consiste no próprio rotor, nos mancais, nas características da
lâmina de óleo que lubrifica o rotor, no motor, na fundação e na plataforma que suporta

4
o motor. As características de rigidez e amortecimento de cada um desses componentes
combinadas resultam no sistema do rotor, que é responsável pela resposta do sistema à
excitação de uma força externa.
Essa força externa pode ser causada pela própria velocidade de rotação,
combinada com o desbalanceamento e/ou desalinhamento. O termo velocidade crítica é
usado para designar a rotação que coincide com uma frequência natural do sistema.
A frequência natural num sistema rotor-eixo-mancais pode ser:
• Lateral (horizontal e vertical)
• Torcional
Um dos objetivos principais da simulação do funcionamento de uma máquina
rotativa através de simuladores em laboratório é justamente determinar suas velocidades
críticas. Para isso devem ser considerados: a rigidez do sistema, as massas envolvidas e
o amortecimento.
Uma vez que o sistema de rotor está adequadamente modelado, para o caso de
um rotor desbalanceado, o parâmetro de entrada restante é a intensidade e a localização
do desbalanceamento. Como o objetivo do estudo de resposta do rotor é de prever com
precisão os valores de velocidade críticas e as respostas, um valor para a intensidade e
uma localização do desbalanceamento devem ser definidos, pois o desbalanceamento
será utilizado para excitar os diferentes valores de velocidades críticas. Não há maneira
de prever com precisão a intensidade e a localização do desbalanceamento residual no
rotor, mas, tipicamente, as massas de desequilíbrio são colocadas no meio do vão para
excitar a velocidade crítica.
Uma das maiores causas para uma discrepância entre os valores previstos e os
reais para as velocidades críticas é justamente a equívoca localização e estimativa da
intensidade do desbalanceamento.
2.3.1 - A Resposta do Sistema
O estudo da resposta do rotor produz como resultados:
• As formas modais do rotor;
• A resposta do rotor para um dado desbalanceamento.

5
Determinar as formas modais do rotor é importante para o designer, pois permite
a determinação de modificações com a finalidade de alterar os valores das velocidades
críticas.
Durante o desligamento do rotor, a taxa de diminuição da velocidade não pode
ser controlada. Ela depende da inércia do rotor, da carga no componente acionado
(compressor, bomba, etc.), das características do sistema de processamento e do sistema
de controle e proteção. O gráfico de resposta do rotor deve apresentar a amplitude de
vibração (medida nos sensores) em função da velocidade do eixo para os sensores
horizontais e verticais utilizados na medição. Uma curva de resposta diferente deve ser
determinada para cada configuração de desbalanceamento utilizada nas medições.
Figura 2.1 - Exemplo do gráfico da resposta de um rotor
Na figura, a curva mais acima representa a resposta do rotor para os dados
adquiridos pelos sensores horizontais e a curva mais abaixo representa a resposta para
os dados adquiridos pelos sensores verticais.
Durante os testes, a resposta do rotor é medida durante a aceleração até a
velocidade máxima e/ou durante a desaceleração até a velocidade mínima. O gráfico de
vibração do eixo e ângulo de fase de desbalanceamento em função da velocidade do
eixo é conhecido como Gráfico de Bodé.
Esse diagrama representa a assinatura real (resposta) de um rotor para uma
determinada condição de desbalanceamento e rigidez de suporte. Eles indicam a

6
localização das velocidades críticas, a mudança de vibração do eixo com a velocidade e
o ângulo de fase em qualquer velocidade. Essas medições devem ser registradas durante
todo o experimento, desde a velocidade máxima até a parada do equipamento
(desaceleração), ou do repouso até a velocidade máxima (aceleração). Logo, esse
diagrama irá fornecer informações valiosas sobre a vibração do eixo e o ângulo de fase
em qualquer velocidade do eixo.
3 – TÉCNICAS DE IDENTIFICAÇÃO DE VELOCIDADES CRÍTICAS EM
ROTORES
3.1 - Medição de Fase
Fase é a medida do tempo relativo entre dois sinais. O ângulo de fase (medido
em graus ou radianos) é a diferença entre a medição de fase em um ponto qualquer e um
ponto de referência predeterminado, em termos de uma fração de ciclo, em relação a
uma dada frequência. O ciclo completo tem ângulo de fase de 360° (ou 2π radianos). O
ângulo de fase é definido como a posição nesse ciclo em que ocorre o maior pico no
sinal relativo ao ponto de referência.
Para máquinas chamadas rígidas a relação entre as fases de uma extremidade da
máquina comparada com a outra extremidade é muito útil em diagnósticos.
Vibrações em fase são aquelas que se movem na mesma direção no mesmo
instante de tempo, ou seja, dois pontos distintos na máquina que medem o mesmo
ângulo de fase estão transladando pelo espaço sem rotação relativa.
Vibrações fora de fase são aquelas em que o movimento de translação puro
desses dois pontos não existe. Há algum componente de rotação entre eles, um dos
pontos tem uma velocidade de rotação maior que o outro, ou ainda as velocidades de
rotação tem sentidos opostos. Nesses casos, podem ser colocados dois transdutores, um
em cada extremidade, para medir a fase entre esses pontos. Se as duas extremidades se
moverem em direções opostas, esses transdutores medirão ângulos de fase com uma
diferença de 180°. Essa medição pode dar uma ideia da dimensão da força de excitação
e ajudar a visualizar o movimento interno entre os pontos.

7
3.1.1 - Convenção e Conversão da Escala da Fase
Um mapeamento da vibração da máquina em funcionamento pode ser feito para
visualizar como ela está se comportando, se levarmos em consideração as leituras dos
transdutores nas direções vertical, horizontal e axial na velocidade de rotação. Devem
ser registradas a amplitude e a fase em cada ponto. Para o registro da fase certa
precaução deve ser tomada, pois a orientação escolhida em relação a uma referência
deve estar consistente para que a comparação das fases seja válida.
Existem três tipos de escalas mais comumente usadas para a medição de fase: a
escala 0° a 360° (phase lag scale), mais utilizada em vibração de máquinas, geometria
plana e na indústria de energia elétrica; a escala ±180°, mais utilizada na área de
comunicação e tecnologia eletrônica; e a escala 0° a -360°.
É muito importante entender as conversões entre as escalas a fim de se
minimizar enganos e falhas de interpretação, pois a escala deve ser a mais consistente
para os propósitos da medição. Essa escala de referência relaciona o sistema de
coordenadas de rotação da máquina com o sistema de coordenadas estacionário do
sensor de vibração.
O diagrama a seguir mostra um sinal de vibração e uma referência de fase
associada:
Figura 3.1 - Sinal de vibração e a referência de fase associada
Os pontos em destaque no eixo zero são os pontos de referência da fase. O outro
ponto em destaque é a amplitude máxima do sinal. Sendo assim, há duas possibilidades
de medição da fase, dependendo se o pico do sinal é considerado precedendo (leading)
ou sucedendo (lagging) a posição de referência. Como o tempo cresce ao longo do eixo
x no gráfico, um ponto que está à esquerda de determinado ponto de referência ocorre

8
antes, então “lidera” esse ponto de referência. Já um ponto que esteja à direita desse
ponto de referência ocorre depois, logo, está atrasado em relação a essa referência.
No exemplo apresentado acima, o pico do sinal ocorre a � de ciclo, ou seja, 90°
depois da referência, se a tomarmos como sendo o primeiro ponto em destaque. Se
tomarmos a referência como o segundo ponto em destaque no eixo zero, o pico ocorre a � de ciclo, ou 270° antes da referência. Devemos ter em mente que o ângulo de fase é
cíclico, isto é, +90° corresponde a -270° e -90° corresponde a +270°. Sendo assim,
ainda para esse exemplo, temos as seguintes possibilidades para expressar o ângulo de
fase:
Tabela 3.1 - Conversão de escalas
Phase lag (o sinal depois do ponto de referência) Phase lead (o sinal antes do ponto de referência)
+90 graus +270 graus
-270 graus -90 graus
3.1.2 - A Importância da Medição de Fase
A diferença de fase entre dois pontos de uma máquina pode revelar informações
úteis para o diagnóstico de problemas como o desbalanceamento e o desalinhamento. O
desbalanceamento de um rotor causa vibração vertical e lateral, em fase com a direção
do eixo de rotação. O desalinhamento causa vibração axial fora de fase em relação à
direção do eixo de rotação.
Por exemplo, no balanceamento dinâmico, a vibração da máquina rotativa é
registrada com um sinal de tacômetro (ou fasor). Esse sinal serve como o ponto zero.
Durante o processo, a taxa de rotação é registrada e a diferença de fase entre o ponto da
máquina que se quer analisar e o ponto zero pode ser registrada. Depois, adicionando
massas de teste com valores conhecidos em ângulos (relativos ao ponto zero)
predeterminados, e registrando-se os resultados da amplitude de vibração e da diferença
de fase, um programa computacional pode indicar onde uma massa de balanceamento
deve ser colocada para minimizar a vibração causada pelo desbalanceamento.

9
3.2 - Gráfico de Bodé
É um gráfico que ilustra as relações de amplitude de vibração e fase em função
da rotação do eixo, com a última ocupando a abscissa do gráfico. Em geral a amplitude
e a fase partilham o mesmo eixo horizontal, porém a amplitude normalmente é plotada
em escala logarítmica
Figura 3.2 - Exemplo de Gráfico de Bodé.
Um filtro de rastreamento (também conhecido como filtro perseguidor) é
necessário para a obtenção dos dados sem aliasing nas diversas rotações. Dessa forma, é
possível registrarem-se a amplitude e a fase sem problemas de aliasing nas diferentes
velocidades de teste. Isso é muito útil quando se quer encontrar as ressonâncias do eixo
quando a amplitude chega a um pico e a fase muda. A freqüência pode então ser lida do
eixo horizontal do gráfico traçado e a velocidade crítica pode ser identificada.
Figura 3.3 – Filtro de rastreamento
Aplicação:
• Uma das ferramentas mais usadas em análise de vibração, principalmente em
partidas e paradas de máquinas rotativas;
• Determinação de velocidades críticas;
• Usado em ensaios de aceitação de equipamentos;

10
Uso:
• Possui a informação da fase, que pode não estar incluída em outras formas de
apresentação de dados. Isso fornece uma verificação adicional nas frequências
que são suspeitas de ressonância. Portanto, se num gráfico de Bodé, em uma
determinada freqüência, ocorre um pico de resposta sem uma variação
significativa de fase, esta freqüência pode ser descartada como uma frequência
de ressonância. Somente quando ocorre uma variação de aproximadamente 180º
na fase correspondente a um pico de resposta, temos uma ressonância.
• A interpretação do gráfico de Bodé requer alguma experiência e atenção, pois os
sensores podem captar, além das ressonâncias do sistema principal, frequências
de ressonância de equipamentos auxiliares ou estruturas agregadas.
3.3 - Gráfico Polar
É um gráfico de amplitude versus fase utilizando coordenadas polares. Essas
coordenadas identificam um ponto no plano através de um vetor partindo da origem.
Dois números são necessários para essa identificação: o módulo e o ângulo do vetor.
Figura 3.4 - Relação entre coordenadas cartesianas e polares
Esse tipo de gráfico também exige que seja utilizado um filtro de rastreamento
para colher os dados e é usado frequentemente para o balanceamento de rotores
flexíveis de grande porte, tipicamente para turbinas. Uma desvantagem é que a
frequência não é um dos eixos, mas cresce ao longo da curva. Em geral são colocadas
indicações da freqüência correspondentes a pontos da curva. Em compensação
apresenta como vantagem a ênfase nas partes da curva que estão associadas a variações
de fase. Quando o gráfico faz uma volta completa, podemos dizer que há grandes
chances de ter ocorrido uma ressonância naquela faixa de velocidade de rotação.

11
Ele permite também que o balanceamento seja feito na velocidade crítica (ou
próximo dela), onde o objetivo é a redução da amplitude.
Exemplo de gráfico polar:
Figura 3.5 – Gráfico Polar
3.4 - Diagrama de Campbell
É um gráfico tridimensional que tem a velocidade de rotação no eixo x, a
frequência de vibração no eixo y e a amplitude de vibração no eixo z (ou círculo cujo
diâmetro define o nível de vibração, ou polígono cujo tamanho define o nível de
vibração).
Aplicação
• Identificação da interação entre frequências de ressonância e frequências de
excitação;
• Permite observar quando uma frequência de ressonância está sendo excitada por
algum múltiplo de velocidade de rotação;

12
• Usado para identificar velocidades críticas apesar da fase não ser representada,
ou para observar vibração não-harmônica que aparecerá claramente como
polígonos ou círculos entre as ordens harmônicas do gráfico;
Uso:
• Permite que se veja a atividade vibratória em torno de vários múltiplos da
velocidade de rotação sem que picos cubram picos vizinhos;
• O nível mínimo abaixo do qual os picos não são traçados deve ser escolhido
pelo analista para evitar o mascaramento pelo ruído;
• É usado para representar graficamente a previsão de influência da velocidade de
rotação nas frequências características de rotores modelados levando-se em
conta o efeito giroscópio.
Figure 3.6 - Diagrama de Campbell
3.5 - Gráfico Cascata
É um gráfico tridimensional constituído de uma série de espectros traçados em
sequência, sendo a distância entre esses espectros relacionada com o intervalo de tempo
entre as medições ou com a rotação da máquina no instante da aquisição do espectro.
Esse tipo de gráfico, ao contrário do Gráfico de Bodé e do Gráfico Polar, se
reporta a todas as frequências simultaneamente, assim nenhuma informação é perdida.

13
• Cascata no Tempo
Apresenta a frequência (Hz ou RPM) no eixo x, amplitude de vibração no eixo y
e o tempo no eixo z.
Aplicação:
• Muito comum em análise de vibração;
• Usado quando alguma parte da vibração varia com o tempo;
• Não fornece informação sobre fase;
• São usados para comparar espectros de vibração de uma máquina medidos
periodicamente.
• A maior parte da informação sobre a vibração é apresentada de forma gráfica de
fácil visualização.
Uso:
• A maior parte dos analisadores digitais de freqüência atuais fornece gráficos
deste tipo.
Figura 3.7 - Gráfico Cascata no Tempo

14
• Cascata na Rotação (RPM)
Apresenta a frequência no eixo x, a amplitude de vibração no eixo y e a rotação
(em RPM) no eixo z.
Aplicação:
• Usados para determinar as variações no espectro de vibração em função das
mudanças na rotação da máquina;
• Muito útil para diagnóstico da maioria dos defeitos de máquinas, incluindo
desbalanceamento, ressonância, folga, etc.
Uso:
• Usado somente quando ocorre variação da velocidade de rotação da máquina;
• Partida e parada de máquinas em geral.
Figura 3.8 - Cascata na Rotação
3.6 – Análise de Forma de Onda x(t)
3.6.1 - Forma de Onda Analógica
Caracteriza-se pela imagem (como em um osciloscópio) do sinal x(t). Tem
aplicação na avaliação e diagnóstico de vários problemas como desbalanceamento,

15
desalinhamento e roçamento, além da distinção entre falhas mecânicas e elétricas de
motores e geradores.
3.6.2 - Série Temporal - Forma de Onda Temporal Digitalizada
A importância da análise de forma temporal de onda está na habilidade de se
interpretar condições transientes, em comparação com a análise em frequência aplicável
em regime estacionário, ou seja, essa análise permite perceber o que acontece com o
sinal durante determinado período de tempo.
É muito útil na identificação de ocorrências de ressonâncias, como se observa na
figura 3.9. Claramente podem-se observar duas situações de ressonância entre os
tempos 0 e 3,5 segundos e 4,5 e 6,5 segundos, pois a amplitude da aceleração nesses
intervalos é bem mais alta que nos outros intervalos da série. Na região entre 6,5 e 7,5
segundos também há a possibilidade de a máquina ter passado por uma ressonância,
mas essa situação não está tão clara, necessitando do complemento de outras formas de
análise para haver certeza.
Figure 3.9 - Série temporal em teste de parada

16
3.7 – Utilização das Técnicas para Identificação de Falhas em Máquinas Rotativas
Apesar de não ser o objeto de estudo desse projeto, existem outras falhas que
podem ser identificadas utilizando-se essas técnicas de processamento. O quadro abaixo
mostra uma relação entre as falhas, suas descrições, suas características e suas possíveis
causas, além das técnicas de processamento para a sua identificação:
Tabela 3.2 - Falhas x Técnicas de Processamento
3.8 – Testes para a Detecção de Ressonância
Como a ressonância é um modo de vibração bastante comum e pode causar
sérios danos, é muito útil realizarem-se alguns testes para identificá-la. Os gráficos de
Bodé e Polar são dois dos métodos que podem ser utilizados com esse fim. Porém, os
dois exigem o uso de um filtro de rastreamento. Na ausência deste tipo de filtro, pode-se
usar um analisador de espectro para obter informações similares utilizando-se uma
função de valor de pico (peak-hold averaging function). O método consiste na
programação do analisador para registrar um grande número de picos de amplitude, dar
a partida e depois desligar o acionador da máquina, deixando-a desacelerar até parar. Os
picos registrados durante essa desaceleração são ressonâncias.
Falha Descrição Características Causas Técnicas de Processamento
Desbalanceamento
Desalinhamento
Velocidade Crítica
("Ressonância")
Distribuição desigual de cargas em
torno da linha central do eixo. O
centro de gravidade desloca-se do
centro geométrico do eixo.
Deslocamento angular ou paralelo
dos eixos de duas máquinas
acopladas. Angular - eixos na
mesma direção, porém
desalinhados de um certo ângulo.
Paralelo - Eixos na mesma direção,
porém desalinhados paralelamente
(lado a lado).
Angular - alta vibração axial
(medida no sentido
longitudinal do eixo). Paralelo
- alta vibração radial (medida
no sentido do raio do eixo).
Predomínio de uma alta
amplitude em um ciclo de
rotação.
Força de excitação (velocidade
rotacional) coincidindo com a
frequência natural (velocidade
crítica) do rotor.
Vibração atingindo
amplitudes muito altas,
podendo causar danos
estruturais à máquina.
Desconhecimento ou falta de
informação sobre a velocidade
crítica da máquina, levando-a a
operar numa velocidade
rotacional igual à sua
velocidade crítica.
Gráfico de Bodé, Gráficos de
Cascata no Tempo, Cascata na
rotação, Diagrama de
Campbell, FFT Análise de
Ordem espectro linear
Amplitude e fase 1x
(transitória).
Gráfico Polar, Cascata no
Tempo, Cascata na Rotação,
Forma de onda analógica x(t),
FFT Análise de ordem espectro
linear 1x amplitude e fase
estacionárias.
FFT Análise de ordem espectro
linear Amplitude e fase 1x
estacionária, Forma de onda
analógica x(t)
Massas desequilibradas em
relação ao eixo de inércia
Erros na montagem, dilatação
térmica, recalque de
fundações ou travamento de
acoplamento.

17
Há outros dois testes muito utilizados para se detectar a ressonância: o Bump
Test e o Variable-Speed Shaker.
O Bump Test é utilizado na detecção da frequência natural de sistemas
estacionários, por exemplo, estruturas e tubulações. Uma vez que a estrutura é excitada,
é preciso medir e registrar a frequência de vibração. Isso pode ser feito com um
analisador de filtro sintonizável, mas um método mais conveniente é utilizar a função de
valor de pico do analisador de espectro. A técnica para se detectar a ressonância é
acoplar um sensor à porção da peça a ser verificada, iniciar a função peak-hold
averaging e depois aplicar uma leve batida na peça com um martelo. As frequências de
ressonância são registradas como picos. Esses passos devem ser repetidos para outras
partes da peça em questão. Essa técnica deve ser realizada com a máquina em repouso.
Outra técnica para a detecção da ressonância é realizar-se um teste com um
variable-speed shaker (excitador de velocidade variável). Esse teste também deve ser
feito com a máquina em repouso. A técnica consiste em excitar a parte a ser testada com
um excitador enquanto a vibração é monitorada. A frequência do excitador é variada a
fim de se encontrar o ponto onde a vibração apresenta maior amplitude. Uma varredura
de uma extremidade a outra da peça testada pode ser feita para se encontrar as
ressonâncias. A frequência de ressonância pode ser obtida através de um gerador de
sinal ou de instrumentos de medição de vibração.
• Análise
Os dados podem ser analisados através de vários métodos. Além da análise dos
gráficos de Bodé e dos gráficos Polares, nesse projeto serão utilizados mais dois tipos
de análise: Gráfico de Cascata e Série Temporal.
A análise por Gráfico de Cascata consiste em introduzir os dados obtidos num
analisador de Transformada Rápida de Fourier (FFT) para uma variedade de
velocidades de operação assumidas em cada ensaio respectivo. Os resultados são então
deslocados verticalmente, de acordo com a velocidade de funcionamento, para
proporcionar os diagramas de cascata.
Para a análise por Série Temporal, as formas de onda completa (dados não
tratados) são obtidas no entorno da velocidade crítica para mostrar a variação de

18
frequência e as flutuações de amplitude resultantes. Este último método de análise foi
concebido principalmente para fornecer uma visão do movimento real do rotor.
4 – ESTUDO DE CASO
4.1 – Análise Numérica
Para efeitos de comparação de resultados, foi utilizada uma simulação em
elementos finitos realizada pelo engenheiro Ricardo Homero Ramírez Gutiérrez no
Laboratório de Ensaios Dinâmicos e Análise de Vibrações (LEDAV). Foram simulados
o primeiro e o segundo modos de vibração, tanto para o caso dos discos próximos
quanto para o caso de discos separados.
Esquema:
Figura 4.1 - Esquema do sistema com discos separados

19
Figura 4.2 - Esquema do sistema com discos próximos
Modelação em Elementos Finitos e Resultados Obtitos
1) Discos Próximos:
Figura 4.3 – Modelagem em elementos finitos do sistema com discos próximos
• Primeiro Modo de Vibração:
Figura 4.4 - Primeiro modo de vibração do sistema com discos próximos

20
Podemos observar que, para o primeiro modo de vibração, no sistema com
discos próximos, a frequência natural do sistema é de 24,142 Hz, ou 1448,52 RPM.
• Segundo Modo de Vibração:
Figura 4.5 - Segundo modo de vibração do sistema com discos próximos
Podemos observar que, para o segundo modo de vibração, no sistema com
discos próximos a frequência natural do sistema é de 468,58 Hz, ou 28114,8 RPM,
resultado totalmente fora da realidade da velocidade de operação do rotor kit do
LEDAV.
2) Discos Separados:
Figura 4.6 - Modelagem em elementos finitos do sistema com discos separados

21
• Primeiro Modo de Vibração
Figura 4.7 - Primeiro modo de vibração do sistema com discos separados
Podemos observar que, para o primeiro modo de vibração, no sistema com
discos separados a frequência natural do sistema é de 27,954 Hz, ou 1677,24 RPM.
• Segundo Modo de Vibração
Figura 4.8 - Segundo modo de vibração do sistema com discos separados
Podemos observar que, para o segundo modo de vibração, no sistema com
discos separados a frequência natural do sistema é de 135,94 Hz, ou 8156,4 RPM,
também totalmente fora da realidade da velocidade de operação do rotor kit do LEDAV.
Portanto, o modo de vibração de interesse para esse projeto a ser utilizado nas
comparações é o primeiro modo.

22
4.2 – Procedimento Experimental
Para que os objetivos propostos nesse trabalho sejam atingidos, os testes para a
detecção da ressonância e medição de fase devem ser feitos a partir de um rotor real.
Utilizando as instalações do LEDAV (Laboratório de Ensaios Dinâmicos e
Análise de Vibração), onde está localizado o rotor kit, foi possível realizar ensaios de
vibração para 2 casos distintos utilizando dois discos: discos próximos e discos
separados por 11 centímetros. Para cada caso, foram realizados testes de detecção de
ressonância em partida e parada, sendo os testes de partida com passo de 200 RPM e
faixa de aquisição de 800 RPM a 3600 RPM. Os experimentos foram realizados com e
sem desbalanceamento, cujas medições nos testes de partida dos experimentos sem
desbalanceamento duraram 30 segundos por passo, e nos testes de partida dos
experimentos com desbalanceamento duraram 30 segundos por passo numa primeira
medição e 1 minuto por passo numa segunda medição. Foi utilizada uma massa de
desbalanceamento de 7 gramas no disco mais próximo do lado não acoplado.
Primeiramente foi certificado que o equipamento estava todo alinhado e todos os
elementos de fixação (como parafusos) estavam devidamente apertados. Depois, seguiu-
se os seguintes passos:
Passo 1: Instalação de um transdutor de vibração em cada mancal, um trigger e conexão
dos cabos de sinais ao analisador;
Passo 2: Instalação de todo o aparato necessário para a medição de fase;
Passo 3: Certificação da não existência de massa de desbalanceamento instalada nos
discos do rotor;
Passo 4: Ajuste dos discos ao longo do comprimento do eixo para uma distância de
cerca de 11 cm um do outro.
Passo 5: Inicialização do ABVT (Alignment/Balance Vibration Trainer) e variação da
velocidade de forma lenta até o início de um ronco audível e a percepção do aumento da
vibração. Aumento da velocidade de forma lenta até a percepção de que a vibração
atinja um pico de amplitude. Aumento adicional da velocidade até uma diminuição

23
rápida da vibração. Neste ponto é provável que a primeira velocidade crítica seja
atingida, cujo valor deve ser anotado. A lenta redução da velocidade deve levar o rotor a
passar pela velocidade crítica novamente. Parada do rotor.
Passo 6: Teste de Partida: Partindo da velocidade zero, aumentou-se lentamente a
velocidade de rotação, com passos de 200 RPM e medir a fase. Observou-se que, em
determinadas rotações, a intensidade da vibração aumentou e tornou a cair, como no
passo 4. A cada pico de vibração foram anotados os valores das rotações. Para
confirmar essas velocidades críticas, uma análise mais detalhada foi feita. A velocidade
foi aumentada até a velocidade máxima do rotor e a máquina foi desligada.
Passo 7: Teste de Parada: Programou-se o analisador para a opção coast down (teste de
parada da máquina). Iniciou-se o rotor, aumentando a velocidade até atingir o máximo.
A potência foi desligada e o coast down test foi iniciado, sempre realizando-se a
medição da fase. Observou-se a ocorrência de velocidades com picos de amplitude da
vibração. Essas podem ser velocidades críticas.
Passo 8: Instalou-se um parafuso de 7 gramas na circunferência do rotor mais próximo
do lado não acoplado, como o especificado anteriormente. Repetiram-se os passos 6 e 7,
verificando-se um aumento da força de excitação. A ressonância ficou mais acentuada
devido ao desbalanceamento. Parou-se a máquina e o excesso de pesos foi removido.
Passo 9: Reposicionaram-se os discos ao longo do comprimento do eixo, para que
ficassem juntos o máximo possível, no meio do eixo e repetiram-se os passos 6 a 8.
Observou-se que a velocidade de cada condição de ressonância decai conforme os
discos são movidos em direção ao ponto médio do eixo onde a rigidez do sistema é
menor. Parou-se a máquina.

24
4.3 – Detalhes do Aparato Experimental e dos Experimentos Realizados
• Experimento 1 (30 segundos/passo)
2 discos separados por 11 centímetros, sem desbalanceamento
Teste 1: Partida, taxa de aquisição = 2 kHz
Teste 2: Parada, taxa de aquisição = 10 kHz
Figura 4.9 - Configuração do Experimento 1
• Experimento 2:
� Situação 1 (30 segundos/passo):
2 discos separados por 11 centímetros, com desbalanceamento (7
gramas)
Teste 3: Partida, taxa de aquisição = 2 kHz
Teste 4: Parada, taxa de aquisição = 10 kHz
� Situação 2 (1 minuto/passo):
2 discos separados por 11 centímetros, com desbalanceamento (7
gramas)
Teste 5: Partida, taxa de aquisição = 2 kHz
Teste 6: Parada, taxa de aquisição = 10 kHz

25
Figura 4.10 - Configuração do Experimento 2
• Experimento 3 (30 segundos/passo):
2 discos juntos, sem desbalanceamento
Teste 7: Partida, taxa de aquisição = 2 kHz
Teste 8: Parada, taxa de aquisição = 10 kHz
Figura 4.11 - Configuração do Experimento 3
• Experimento 4:
� Situação 1 (30 segundos/passo):
2 discos juntos, com desbalanceamento (7 gramas)
Teste 9: Partida, taxa de aquisição = 2 kHz

26
Teste 10: Parada, taxa de aquisição = 10 kHz
� Situação 2 (1 minutos/passo):
2 discos juntos, com desbalanceamento (7 gramas)
Teste 11: Partida, taxa de aquisição = 2 kHz
Teste 12: Parada, taxa de aquisição = 10 kHz
Figura 4.12 - Configuração do Experimento 4
5 – ANÁLISE DOS RESULTADOS
5.1 - Aquisição e Tratamento de Dados
Experimentalmente, podemos perceber as faixas em que provavelmente a
frequência de rotação do rotor coincide com a frequência natural deste. Porém, essa
observação não é precisa o suficiente para se afirmar, com certeza, que as velocidades
críticas do rotor estão mapeadas. Para tanto, torna-se necessária a aquisição, o
tratamento e a manipulação dos dados do experimento, possibilitando a implementação
de técnicas de processamento para a detecção das condições de ressonância. A aquisição
dos sinais foi feita com um hardware desenvolvido no LEDAV e a identificação das
velocidades críticas foi feita utilizando-se um software desenvolvido em ambiente
LabVIEW.

27
O LabVIEW é uma linguagem de programação gráfica cujos campos de atuação
são a realização de medições e a automação. A programação é feita de acordo com o
modelo de fluxo de dados, o que oferece ao usuário vantagens e facilidades na aquisição
de dados e na sua manipulação. Esse ambiente já fornece comandos inteiramente
prontos para a visualização de gráficos como o de Bodé e o Polar.
O programa que foi compilado conta com rotinas chamadas VI's. Conectando
VI's de entrada, tratamento e saída de dados com VI's de exposição gráfica no Block
Diagram (ambiente onde a programação é efetivamente realizada) e adicionando-se
botões e comandos ao Front Panel (interface), foi montado um programa simples, de
utilização fácil, porém muito útil, uma vez que a identificação das ressonâncias pode ser
feita comparando-se várias técnicas de processamento e apresentação da resposta do
rotor. A figura 5.1 mostra a interface do programa.
Figura 5.1 - Interface do programa desenvolvido
5.2 - Análise dos Resultados Apresentados a Partir do Software
Serão apresentados agora os resultados obtidos e apresentados pelo software
desenvolvido. Foram rodados os quatro experimentos apresentados anteriormente e
serão analisados o Perfil de Rotação, a Série Temporal de Aceleração, o Gráfico de
Bodé, o Diagrama Polar e O Gráfico de Cascata para cada teste (partida ou parada) de

28
cada caso (30 segundos/passo ou 1 minuto/passo) dos experimentos com
desbalanceamento, ou seja, Experimentos 2 (discos próximos) e 4 (discos separados).
Os experimentos sem desbalanceamento, Experimentos 1 (discos próximos) e 3
(discos separados) também foram rodados, porém, em virtude da menor amplitude de
vibração, serão desconsiderados. Os experimentos com desbalanceamento se mostraram
muito melhores em relação à detecção de ressonâncias, como era o esperado, pois a
massa de desbalanceamento amplia a magnitude da vibração. Abaixo temos um
exemplo:
Figura 5.2 - Comparação entre Experimentos 1 e 2
A figura acima mostra a comparação entre a série temporal de aceleração (em
azul) do Experimento 1 com amplitude de aceleração variando entre +6000 mm/s² e -
6000 mm/s², com a do Experimento 2, com amplitude de aceleração variando entre
+15000 mm/s² e -20000 mm/s². Em verde, temos destacada a primeira ordem de
vibração. Logo, para o mesmo caso de discos próximos, o Experimento 2 é o mais
indicado para a análise de detecção de ressonância.
Da mesma forma, o Experimento 4 é mais indicado para a análise de detecção de
ressonância que o Experimento 3.
Observa-se ainda que, para os Experimentos com desbalanceamento, os
melhores resultados são os obtidos utilizando uma tomada de dados de 1 minuto por
passo ao invés de apenas 30 segundos, ou seja, o sistema precisa de tempo para se
estabilizar a cada passo de 200 RPM. Um teste mais longo significa maior estabilização
e melhor qualidade dos dados adquiridos. Por isso, foram analisados apenas os

29
resultados obtidos nos Experimentos 2 e 4 na situação 2, quando o tempo total do teste
de partida dura aproximadamente 900 segundos, ou 15 minutos.
A seguir tem-se uma comparação entre os perfis de rotação do experimento 2
(discos próximos) com 30 segundos por passo e com 1 minuto por passo, para o teste de
partida. Neste caso, observa-se claramente os degraus de rotação que se formam quando
o sistema tem tempo de se estabilizar, o que não acontece na situação 1.
Figura 5.3 - Comparação entre perfis de rotação do Experimento 2 nas Situações 1 e 2
A seguir foram comparadas as séries temporais de aceleração do Experimento 2
nas duas situações. Percebe-se que a série onde são melhor detectados os picos que
podem ser ressonâncias é a relativa à situação 2 (1 minuto/passo):
Figura 5.4 - Comparação das séries temporais do experimento 2, nas Situações 1 e 2
30
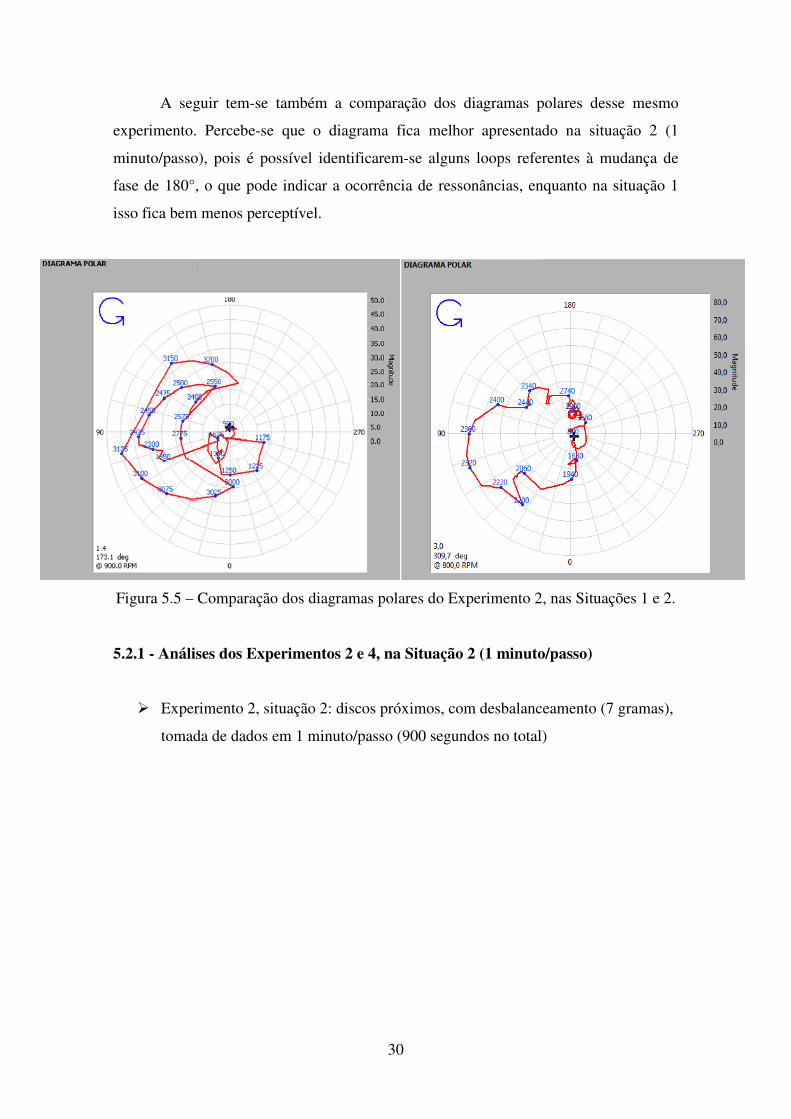
A seguir tem-se também a comparação dos diagramas polares desse mesmo
experimento. Percebe-se que o diagrama fica melhor apresentado na situação 2 (1
minuto/passo), pois é possível identificarem-se alguns loops referentes à mudança de
fase de 180°, o que pode indicar a ocorrência de ressonâncias, enquanto na situação 1
isso fica bem menos perceptível.
Figura 5.5 – Comparação dos diagramas polares do Experimento 2, nas Situações 1 e 2.
5.2.1 - Análises dos Experimentos 2 e 4, na Situação 2 (1 minuto/passo)
� Experimento 2, situação 2: discos próximos, com desbalanceamento (7 gramas),
tomada de dados em 1 minuto/passo (900 segundos no total)

31
• Teste de Partida
o Perfil de rotação:
Figura 5.6 - Perfil de rotação do Experimento 2, Situação 1 (900 segundos)
Conforme mencionado anteriormente, pode-se ver de forma clara os degraus de
rotação que se formam quando o sistema tem tempo de se estabilizar antes de um novo
aumento na velocidade de rotação.

32
o Série temporal de aceleração:
Figura 5.7 - Série temporal do Experimento 2, Situação 2 (900 segundos)
Analisando-se a série temporal, pode-se perceber um pico de aceleração entre
400 e 600 segundos. Esse pico pode ser uma ressonância. Sua amplitude de aceleração
varia entre 35000 mm/s² e -37000 mm/s². Porém, apenas analisando-se a série temporal,
não é possível afirmar-se que a ressonância tenha sido encontrada. São necessárias
outras técnicas de medição, cujas análises podem confirmar a detecção.

33
o Gráfico de Bodé:
Figura 5.8 – Gráfico de Bodé, Experimento 2, Situação 2 (900 segundos)
Analisando o Gráfico de Bodé pode-se perceber que existe um grande pico entre
1800 e 2600 RPM, que, aliado a uma variação significativa de fase (180° de variação),
evidencia tratar-se de uma condição de ressonância.
Existe uma elevação entre 1700 e 1800 RPM, também ligada a uma variação
significativa de fase.
Ainda entre 1000 e 1400 RPM tem-se outra elevação de amplitude de rotação
com variação de fase de 180º.
De acordo com Bodé, esses picos são condições de ressonância. Outras técnicas
de processamento são necessárias para confirmar esta afirmação.

34
o Diagrama Polar:
Figura 5.9 - Gráfico polar, Experiência 2, Situação 2 (900 segundos)
A análise do diagrama polar mostra mudanças de fase significativas entre 1000 e
1400 RPM e também entre 1600 e 1800 RPM, pois é possível identificar-se um loop, ou
seja, uma volta inteira próxima a essas faixas de rotação, o que caracteriza a mudança
de fase em 180º. Outra mudança de fase significativa aconteceu entre 1800 e 2600
RPM. Nessas faixas de rotação podem ter ocorrido ressonâncias, mas torna-se
necessário avaliar se essa mudança de fase vem acompanhada de um pico de amplitude
na vibração.

35
o Gráfico de Cascata:
Figura 5.10 - Gráfico de cascata, Experimento 2, Situação 2 (900 segundos)
Na análise do gráfico de cascata, observamos picos de amplitude de vibração de
5 mm/s entre 1000 e 1400 RPM. Outro pico de amplitude é observado entre 1400 e
1800 RPM, com valor máximo de 20 mm/s. Por último, identifica-se um pico de
amplitude de vibração de 55 mm/s entre 1800 e 2600 RPM. Comparando-se esses
intervalos com os intervalos de mudança significativa de fase encontrados no diagrama
polar, confirma-se que realmente existem três condições de ressonância.

36
• Teste de Parada:
o Perfil de Rotação:
Figura 5.11 - Perfil de rotação, Experimento 2, Situação 2 (900 segundos)
No teste de parada não é possível controlar a desaceleração, logo, o perfil de
rotação caracteriza-se por uma curva semelhante a uma exponencial decrescente.

37
o Série Temporal de Aceleração:
Figura 5.12 - Série temporal de aceleração, Experimento 2, Situação 2 (900 segundos)
Analisando-se a série temporal, pode-se perceber pelo menos 4 picos de
aceleração: entre 1 e 2 segundos (com amplitude variando entre +55000 e -55000
mm/s²), entre 2,5 e 3,5 segundos (com amplitude variando entre +40000 e -35000
mm/s²), entre 4,5 e 6 segundos (com amplitude variando entre +35000 e -35000 mm/s²)
e um pico menor entre 9 e 10 segundos (com amplitude variando entre +10000 e -5000
mm/s²). Esses picos podem ser condições de ressonância. Porém, apenas analisando-se a
série temporal, não se pode afirmar que as ressonâncias tenham sido detectadas.

38
o Gráfico de Bodé:
Figura 5.13 - Gráfico de Bodé, Experimento 2, Situação 2 (900 segundos)
Analisando-se o gráfico de Bodé pode-se perceber que existe um grande pico
entre 1800 e 2400 RPM, que, aliado a uma variação significativa de fase (180° de
variação), evidencia que se trata de uma condição de ressonância.
Já a região entre 1000 e 1500 RPM, com 2 picos bem menores, estes não estão
associados a variações significativas de fase de acordo com Bodé, portanto, esses dois
picos podem não ser considerados ressonâncias. Porém, nesse caso, somente uma
análise mais completa do diagrama polar poderá indicar com certeza se são ou não
ressonâncias. Mesmo caso da região entre 2900 e 3200 RPM, em que não há variação
significativa de fase.

39
o Diagrama Polar:
Figura 5.14 - Diagrama polar, Experimento 2, Situação 2 (900 segundos)
Pela análise do diagrama polar, observa-se que há mudança de fase de 180º entre
1100 e 1400 RPM e entre 2000 e 2400 RPM. Mas só se pode afirmar que se trata de
ressonâncias se essas mudanças de fase estiverem associadas com picos de vibração.
De acordo com o gráfico de Bodé, as faixas de detecção de possíveis
ressonâncias estão próximas das faixas de mudança significativa de fase observadas no
diagrama polar. Logo, pode-se afirmar que foram detectadas duas condições de
ressonância nesse teste, uma entre 1800 e 2400 RPM aproximadamente e outra entre
1000 e 1500 RPM.
Já entre 2900 e 3200 RPM, não houve mudança de fase de 180º. Logo, não foi
detectada ressonância nesta faixa de rotação.
40
o Gráfico de Cascata:
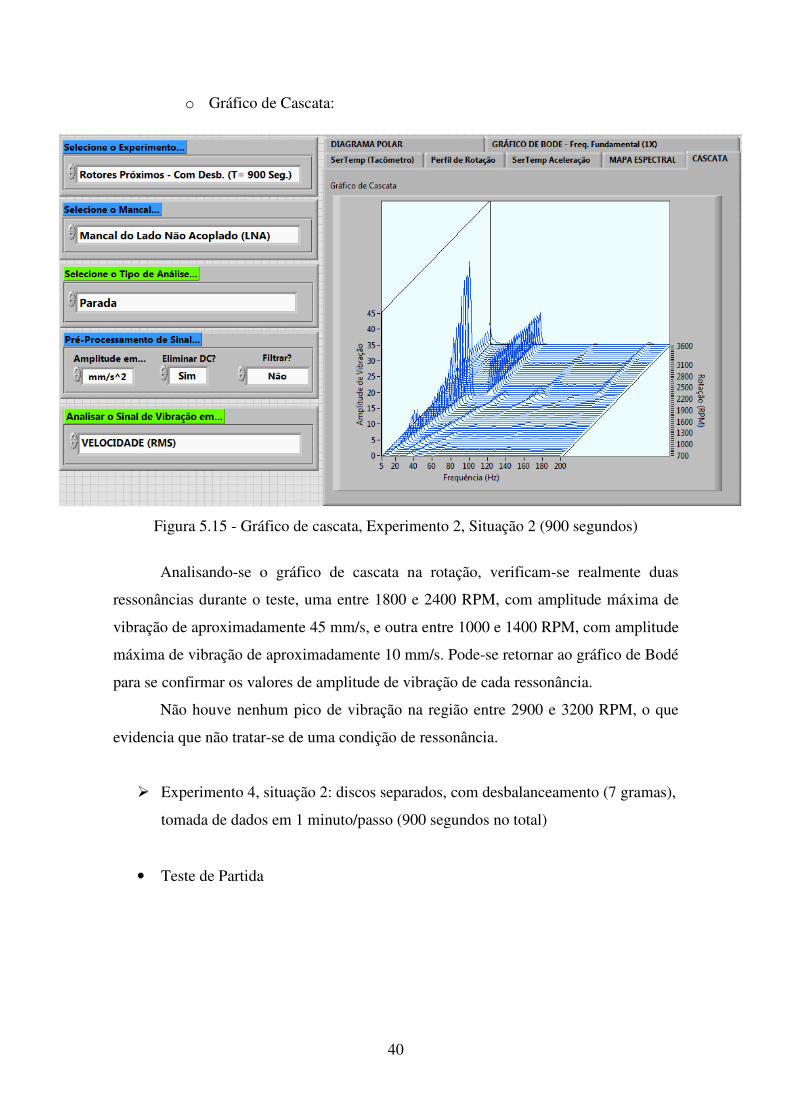
Figura 5.15 - Gráfico de cascata, Experimento 2, Situação 2 (900 segundos)
Analisando-se o gráfico de cascata na rotação, verificam-se realmente duas
ressonâncias durante o teste, uma entre 1800 e 2400 RPM, com amplitude máxima de
vibração de aproximadamente 45 mm/s, e outra entre 1000 e 1400 RPM, com amplitude
máxima de vibração de aproximadamente 10 mm/s. Pode-se retornar ao gráfico de Bodé
para se confirmar os valores de amplitude de vibração de cada ressonância.
Não houve nenhum pico de vibração na região entre 2900 e 3200 RPM, o que
evidencia que não tratar-se de uma condição de ressonância.
� Experimento 4, situação 2: discos separados, com desbalanceamento (7 gramas),
tomada de dados em 1 minuto/passo (900 segundos no total)
• Teste de Partida
41
o Perfil de Rotação:
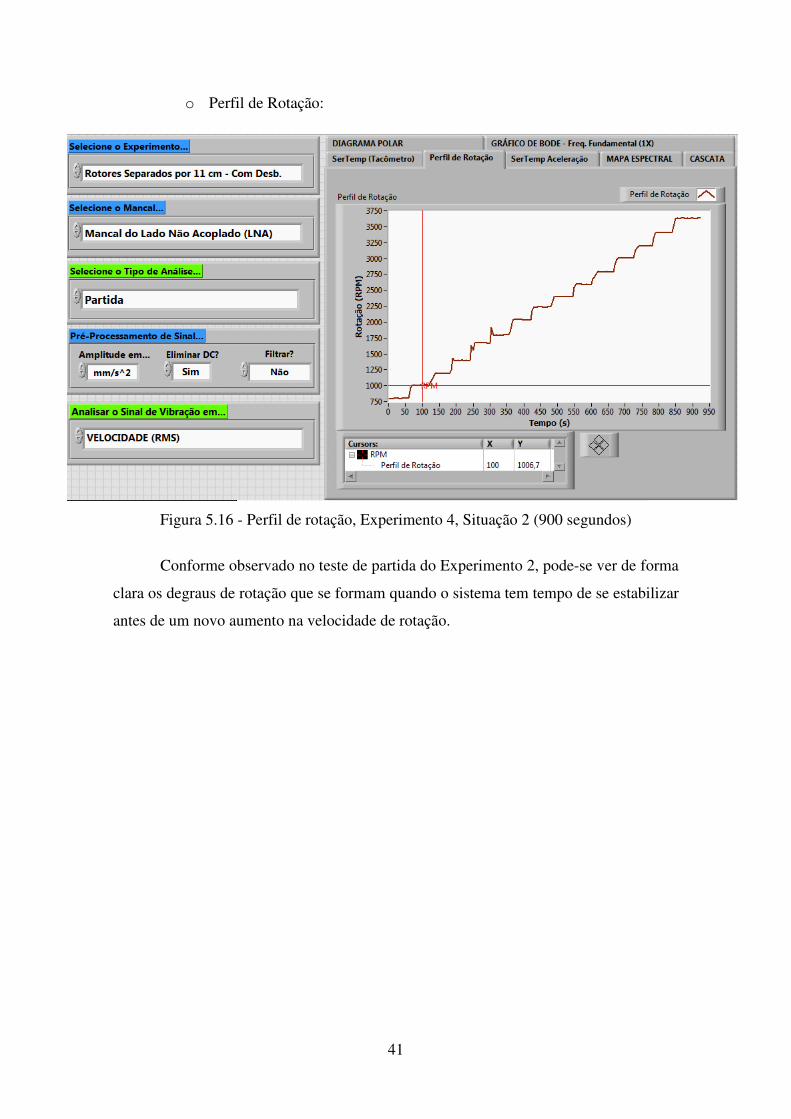
Figura 5.16 - Perfil de rotação, Experimento 4, Situação 2 (900 segundos)
Conforme observado no teste de partida do Experimento 2, pode-se ver de forma
clara os degraus de rotação que se formam quando o sistema tem tempo de se estabilizar
antes de um novo aumento na velocidade de rotação.

42
o Série Temporal de Aceleração:
Figura 5.17 - Série temporal de aceleração, Experimento 4, Situação 2 (900 segundos)
Analisando-se a série temporal, pode-se perceber um pico de aceleração entre
500 e 600 segundos e outro entre 750 e 800 segundos. Esses picos podem ser
ressonâncias. A amplitude de aceleração do primeiro pico varia entre +55000 mm/s² e -
55000 mm/s², enquanto que a amplitude de aceleração do segundo pico varia entre
+18000 mm/s² e -18000 mm/s². Porém, a análise da série temporal isolada não permite
confirmar uma condição de ressonância encontrada. Isto requer outras técnicas de
medição.

43
o Gráfico de Bodé:
Figura 5.18 - Gráfico de Bodé , Experimento 4, Situação 2 (900 segundos)
Analisando-se o gráfico de Bodé, observam-se elevações na amplitude de
rotação nas faixas de rotação de 1200 a 1400 RPM e de 1900 e 2200 RPM, com
amplitude de vibração de 10 mm/s e 26 mm/s, respectivamente. Como existe uma
variação de fase significativa (mais de 180°) em cada uma delas, há evidências de que
se trata de condições de ressonância.
Pode-se ainda perceber que existe um grande pico entre 2590 e 2700 RPM não
associado com a uma variação significativa de fase (180° de variação). Essa poderia não
ser considerada uma ressonância, porém, somente uma análise mais completa do
diagrama polar dirá com certeza se são ou não condições de ressonância.

44
o Diagrama Polar:
Figura 5.19 - Diagrama Polar, Experimento 4, Situação 2 (900 segundos)
Pela análise do diagrama polar, observa-se que há mudança de fase de 180º entre
1000 e 1400 RPM, entre 2000 e 2200 RPM, e entre 2680 e 2800 RPM. Mas só é
possível afirmar que se trata de condições de ressonância se junto com essas mudanças
de fase existirem também picos ou aumentos de vibração seguidos de uma diminuição.
Como se observa no gráfico de Bodé, as faixas de detecção de possíveis
ressonâncias estão próximas dos intervamos de mudança significativa de fase
observados no diagrama polar. Logo, pode-se dizer que foram detectadas três
ressonâncias nesse teste. Uma entre 1000 e 1400 RPM, outra entre 1900 e 2200 RPM
aproximadamente e uma última entre 2600 e 2800 RPM.

45
o Gráfico de Cascata:
Figura 5.20 - Gráfico de cascata, Experimento 4, Situação 2 (900 segundos)
Analisando-se o gráfico de cascata na rotação, é possível afirmar que realmente
existam três condições de ressonância, sendo a primeira entre 1000 e 1400 RPM, com
amplitude máxima de vibração igual a 10 mm/s; a segunda entre 1900 e 2200 RPM,
com amplitude máxima de vibração de aproximadamente 26 mm/s; e a terceira entre
2600 e 2800 RPM, com amplitude máxima de vibração igual a 100 mm/s.

46
• Teste de Parada
o Perfil de Rotação:
Figura 5.21 - Perfil de Rotação, Experimento 4, Situação 2 (900 segundos)
Neste teste de parada, como não foi possível controlar-se a desaceleração, o
perfil de rotação se caracteriza por algo próximo de uma exponencial decrescente.

47
o Série Temporal de Aceleração:
Figura 5.22 - Série temporal de aceleração, Experimento 4, Situação 2 (900 segundos)
Analisando-se a série temporal, pode-se perceber um pico de aceleração na faixa
de 1,5 a 2,5 segundos e outro na faixa de 3 e 5,5 segundos. Esses picos podem ser
ressonâncias. A amplitude de aceleração do primeiro pico varia entre +50000 mm/s² e -
45000 mm/s², enquanto que a amplitude do segundo pico varia entre +60000 mm/s² e -
75000 mm/s². Mais uma vez a análise da série temporal isolada não pode confirmar que
a ressonância tenha sido encontrada. Torna-se necessário o uso de outras técnicas de
medição.

48
o Gráfico de Bodé:
Figura 5.23 - Gráfico de Bodé, Experimento 4, Situação 2 (900 segundos)
Analisando-se o gráfico de Bodé, percebe-se a existência de um grande pico
entre 2200 e 2400 RPM que pode ser aliado a uma variação significativa de fase, o que
evidenciaria que esse pico representa uma ressonância. Porém, no Gráfico de Bodé não
é possível afirmar que a variação de 180º ocorreu.
Pode-se ainda observar uma elevação na faixa de 1000 e 1400 RPM, com uma
variação de fase de menos de 180°. Mesmo caso da elevação da amplitude de vibração
referente ao intervalo entre 1900 e 2200 RPM. Novamente utiliza-se o diagrama polar
para uma análise mais completa em relação à detecção ressonâncias.

49
o Diagrama Polar:
Figura 5.24 - Diagrama polar, Experimento 4, Situação 2 (900 segundos)
Pela análise do diagrama polar, observa-se uma mudança de fase de 180º entre
1900 e 2200 RPM, entre 2200 e 2400 RPM e entre 1230 e 1400 RPM. Mas só se pode
afirmar que se tratam de condições de ressonância se essas faixas estiverem também
atreladas a picos de vibração.
Observando-se o gráfico de Bodé, as faixas com possíveis ressonâncias estão
próximas aos intervalos onde há mudança significativa de fase, conforme observado no
diagrama polar. Logo, pode-se afirmar que foram detectadas três ressonâncias nesse
teste. Uma entre 2200 e 2400 RPM, outra entre 1700 e 2200 RPM, e outra entre 1230 e
1400 RPM, aproximadamente.

50
o Gráfico de Cascata:
Figura 5.25 - Gráfico Cascata, Experimento 4, Situação 2 (900 segundos)
Analisando-se o gráfico de cascata na rotação, é possível afirmar que realmente
existem três ressonâncias neste teste, uma entre 1230 e 1400 RPM, com amplitude
máxima de vibração de aproximadamente 10 mm/s, outra entre 1900 e 2200 RPM, com
amplitude máxima de vibração de aproximadamente 20 mm/s, e outra entre 2200 e 2400
RPM, com amplitude máxima de vibração de 37,5 mm/s.
5.2.2 – Resumo das Ressonâncias Detectadas em Cada Teste
Para resumir e organizar os resultados encontrados de forma rápida, a seguir
apresenta-se uma tabela que identifica, por intervalo de rotação de ocorrência (faixa em
que a velocidade de rotação do sistema coincide com sua velocidade crítica) e por
intensidade, todas as ressonâncias detectadas em cada teste dos experimentos
analisados.

51
Tabela 5.1 – Identificação das Ressonâncias
5.2.3 – Comparação dos Resultados Experimentais com a Análise de Elementos
Finitos
A análise de vibração realizada pela simulação em Elementos Finitos resultou
em uma primeira frequência natural (no caso, velocidade crítica) de 1448,52 RPM para
a configuração de discos próximos, e de 1677,24 RPM para a configuração de discos
separados.
A análise de vibração realizada a partir dos experimentos resultou em primeiras
frequências naturais não muito distantes da velocidade crítica dada pela simulação em
Elementos Finitos para os testes relativos ao experimento com discos próximos, porém
existe certa discrepância. Neste caso, as velocidades críticas identificadas correspondem
aos valores de rotações em que ocorrem as ressonâncias de amplitudes mais baixas
(primeira ressonância identificada no teste de partida e última ressonância identificada
no teste de parada).
Já nos experimentos com discos separados, as primeiras ressonâncias sempre
aconteceram antes desse valor de 1677,24 RPM. Isso pode acontecer quando outros
componentes influenciam na vibração do sistema. Não há como evitar que componentes
externos, que devem ser acoplados ao sistema, como o controlador de velocidades,
também vibrem e acabem tendo influência direta na antecipação de uma ressonância,
por exemplo. Uma alternativa é tentar amortecer ao máximo esse efeito para que os

52
dados sejam limpos e que o experimento descreva o mais próximo possível a situação
teórica. As velocidades críticas detectadas experimentalmente correspondem aos valores
de rotação das segundas ressonâncias identificadas, tanto no teste de parada, quanto no
teste de partida.
A seguir apresenta-se uma tabela de comparação entre as velocidades críticas
detectadas por Elementos Finitos e experimentalmente:
Tabela 2- Comparação entre valores de velocidades críticas detectadas pela análise de
Elementos Finitos e pela análise experimental.
Cálculo das Velocidades Críticas [RPM]
Configuração Elementos Finitos
Velocidade Crítica
Experimental Discrepância
Teste Velocidade Crítica
Discos Próximos 1448,52 Partida 1250 -15,88%
Parada 1200 -20,71%
Discos Separados 1677,24 Partida 2000 16,14%
Parada 2000 16,14%

53
6- CONCLUSÕES
Dois dos principais responsáveis pela vibração excessiva em equipamentos são o
desbalanceamento e as condições de ressonância. Por isso, no presente projeto, utiliza-
se a característica do desbalanceamento para amplificar a vibração e facilitar a detecção
da ressonância.
Técnicas de processamento tais como as empregadas na análise de vibração
desse projeto, têm apresentado grande utilidade no monitoramento e identificação de
falhas em equipamentos mecânicos. Entretanto, é fundamental que as equipes de
operação dos sistemas de máquinas navais e offshore estejam capacitadas para realizar a
interpretação dos sinais de vibração e o diagnóstico das possíveis causas das falhas
mecânicas indicadas pelos sistemas especialistas. Nesse sentido, a utilização de modelos
reduzidos de rotores (rotor-kit) tem auxiliado a simulação de defeitos, possibilitando a
capacitação da equipe na aquisição de sinais através de acelerômetros instalados em
mancais e conectados a coletores de sinais para posterior processamento.
Esse projeto apresentou uma série de técnicas de processamento utilizadas para a
detecção da ressonância em um simulador. Foi realizado um experimento prático,
acompanhado por medições de vibração em mancais, permitindo a análise de seus
espectros e utilizadas técnicas para identificação de condições de ressonância do
sistema.
Para validar os resultados obtidos, foi realizada uma comparação com os
resultados advindos de uma modelagem do sistema em elementos finitos. As
ressonâncias foram detectadas através de algumas das técnicas de processamento
estudadas, que foi o objetivo central desse trabalho. Os valores das velocidades críticas
também foram encontrados para cada teste de vibração, porém, em alguns testes, esses
valores divergiram consideravelmente do valor obtido da análise com elementos finitos,
provavelmente em função da influência de componentes externos ao sistema rotor-eixo-
mancal que também vibram com o aumento ou diminuição da velocidade de rotação do
sistema.
Com isso, entende-se o quão importante é realizar os experimentos em
simuladores em condições as mais próximas possíveis das condições reais em que uma
determinada máquina irá operar, pois há influência significativa dessas condições no
resultado final da análise de vibração.

54
7- REFERÊNCIAS BIBLIOGRÁFICAS
CARVALHO, H. M. (2006), Desenvolvimento de um Modelo Matemático para
Avaliação de Desempenho de Turbinas a Gás de um Eixo, Dissertação de
Mestrado, Universidade Federal de Itajubá.
COHEN, H., ROGERS, G. F. C., SARAVANAMUTTOO, H., I., H. (1996), Gas
Turbine Theory, Fourth.
DAVIES, D. (2013), blog Prosig The Noise and Vibration Measurement blog,
Understanding Phase Measurements,
http://blog.prosig.com/2013/08/06/understanding-phase-measurements/
ERBES M., GAY R., GATE/CYCLE (1989), Predictions of the off-design Performance
of Combined-cycle Power Plants, Presented at the Winter Annual Meeting of the
American Society of Mechanical Engineers, 10-15 December, San Francisco,
CA.
HASSENPFLUG, H. L. , FLACK, R. D. , GUNTER, E. J. , Experimental Study of the
Critical Speed Response, of a Jeffcott Rotor with Acceleration, Department of
Mechanical and Aerospace Engineering, School of Engineering and Applied
Science, University of Virginia, Charlottesville, VA 22901, U.S.A.
OLIVEIRA, N. M, Aquisição e Processamento de Sinais de Vibração em Modelos
Reduzidos de Rotores na Capacitação para Diagnóstico de Problemas em
Máquinas Navais e Offshore, SOBENA 2008.
SPECTRA QUEST, Inc. (1998), User Operating Manual for Alignment/Balance
Vibration Trainer, version 1.0.
55
8 – ANEXO
Especificações do ABVT (rotor-kit) Spectra Quest:
Massa do sistema: aproximadamente 22 kg
Velocidade máxima: 4000 RPM
Faixa utilizada: 800 - 3600 RPM
• Eixo - alumínio
Diâmetro = 12 mm
Massa = 172 g
Comprimento = 485 mm
• Rotores - aço
Diâmetro = 15,24 cm
Massa disco 1 (próximo ao lado acoplado) = 1535 g
Massa disco 2 (próximo ao lado não-acoplado) = 1547g
Dois mancais de Rolamento:
• Mancal acoplado = 95 mm
• Separação entre mancais = 390 mm