geotecnologia em aplicaÇÕes ambientais por …e3o_convenc/chapter... · face inteira do planeta....
TRANSCRIPT
GEOTECNOLOGIA EM APLICAÇÕES AMBIENTAIS/ CAPÍTULO 10 POR NIEVINSKI & MONICO
Nievinski e Monico
1
III. GPS COMO UM SENSOR REMOTO
O Sistema de Posicionamento Global (GPS) foi originalmente projetado para a
determinação da posição de antenas receptoras dos sinais transmitidos pelos satélites GPS. É possível,
porém, utilizar o mesmo sistema para determinar propriedades do meio de propagação existente entre
tais transmissores e receptores. Um desses meios é a atmosfera terrestre; outros são as superfícies da
Terra, como o chão e a água. Assim, com o GPS pode-se estimar as condições ambientais à distância,
o que denominamos de sensoriamento remoto (SR) com GPS, ou GPS-SR. Abaixo exploramos
algumas configurações de SR-GPS.
III. 1. Fundamentação
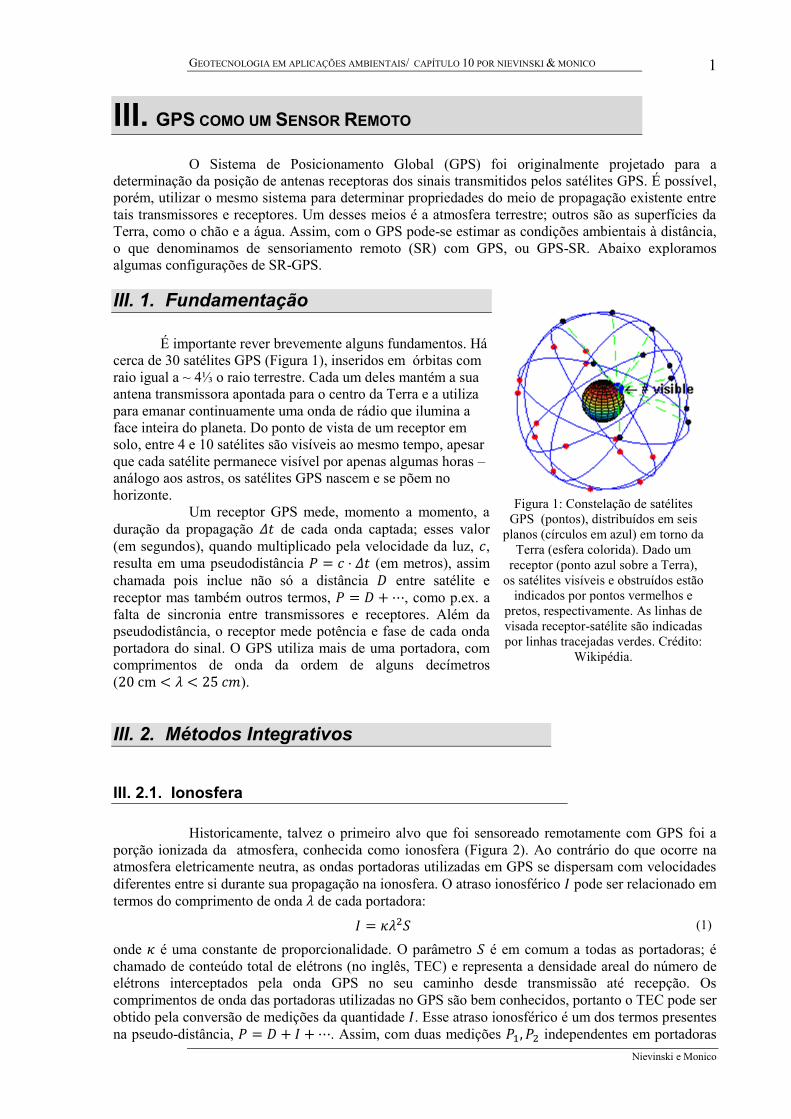
É importante rever brevemente alguns fundamentos. Há
cerca de 30 satélites GPS (Figura 1), inseridos em órbitas com
raio igual a ~ 4⅓ o raio terrestre. Cada um deles mantém a sua
antena transmissora apontada para o centro da Terra e a utiliza
para emanar continuamente uma onda de rádio que ilumina a
face inteira do planeta. Do ponto de vista de um receptor em
solo, entre 4 e 10 satélites são visíveis ao mesmo tempo, apesar
que cada satélite permanece visível por apenas algumas horas –
análogo aos astros, os satélites GPS nascem e se põem no
horizonte. Um receptor GPS mede, momento a momento, a
duração da propagação de cada onda captada; esses valor
(em segundos), quando multiplicado pela velocidade da luz, ,
resulta em uma pseudodistância (em metros), assim
chamada pois inclue não só a distância entre satélite e
receptor mas também outros termos, , como p.ex. a
falta de sincronia entre transmissores e receptores. Além da
pseudodistância, o receptor mede potência e fase de cada onda
portadora do sinal. O GPS utiliza mais de uma portadora, com
comprimentos de onda da ordem de alguns decímetros
( ).
III. 2. Métodos Integrativos
III. 2.1. Ionosfera
Historicamente, talvez o primeiro alvo que foi sensoreado remotamente com GPS foi a
porção ionizada da atmosfera, conhecida como ionosfera (Figura 2). Ao contrário do que ocorre na
atmosfera eletricamente neutra, as ondas portadoras utilizadas em GPS se dispersam com velocidades
diferentes entre si durante sua propagação na ionosfera. O atraso ionosférico pode ser relacionado em
termos do comprimento de onda de cada portadora:
(1)
onde é uma constante de proporcionalidade. O parâmetro é em comum a todas as portadoras; é
chamado de conteúdo total de elétrons (no inglês, TEC) e representa a densidade areal do número de
elétrons interceptados pela onda GPS no seu caminho desde transmissão até recepção. Os
comprimentos de onda das portadoras utilizadas no GPS são bem conhecidos, portanto o TEC pode ser
obtido pela conversão de medições da quantidade . Esse atraso ionosférico é um dos termos presentes
na pseudo-distância, . Assim, com duas medições independentes em portadoras
Figura 1: Constelação de satélites
GPS (pontos), distribuídos em seis
planos (círculos em azul) em torno da
Terra (esfera colorida). Dado um
receptor (ponto azul sobre a Terra),
os satélites visíveis e obstruídos estão
indicados por pontos vermelhos e
pretos, respectivamente. As linhas de
visada receptor-satélite são indicadas
por linhas tracejadas verdes. Crédito:
Wikipédia.

GEOTECNOLOGIA EM APLICAÇÕES AMBIENTAIS/ CAPÍTULO 10 POR NIEVINSKI & MONICO
Nievinski e Monico
2
diferentes é possível cancelar os termos
aditivos iguais e isolar a incógnita
multiplicativa, fazendo isso a cada época e para
cada satélite:
(2)
A densidade volumétrica de
elétrons não é uniforme ao longo da altitude; a
maior concentração encontra-se a cerca de 300
km do solo. Assim se quisermos atribuir TEC a
um ponto, ele seria o chamado ponto
ionosférico (Figura 4), encontrado na
intersecção da linha de visada receptor-satélite
com uma superfície ou concha esférica
imaginária que envolve a Terra àquela altitude.
Esses pontos rodeiam uma estação receptora até
um raio horizontal de centenas de quilômetros,
se dispersando e concentrando à medida que os
satélites nascem e se põem.
Não é difícil de imaginar que o TEC
medido nessa nuvem de pontos espalhados seja
interpolado para formar uma grade uniforme. É
preciso, porém, dar conta das diferenças na
obliquidade da incidência, desde vertical para uma
estação exatamente abaixo do ponto, até incidência
rasante para o caso de uma onda tangente à Terra.
Utilizando a chamada função de mapeamento, ,
obtemos um TEC vertical, , convertendo cada
atraso inclinado, ; veja a Figura 3.
A obtenção de TEC possibilita o
monitoramento do tempo e clima espaciais, o qual
tem ciclos diários, sazonais, e de 11 anos,
conforme as variações na iluminação solar. Mapas
de TEC são usados para corrigir o efeito
ionosférico em receptores GPS que rastreiam uma
única onda portadora e que são, portanto,
incapazes de formar a combinação de observações
que cancelaria o atraso ionosférico. Esse é o caso
de receptores usados na aviação, os quais
dispensam a utilização da segunda portadora GPS
pois sua frequência está localizada em uma banda
desprotegida. Mais recentemente, como parte da
modernização do GPS, a sua constelação vem
sendo reposta com satélites que transmitem uma
terceira onda portadora, essa sim em banda
regulamentada pela União Internacional de
Telecomunicações para serviços de rádio-
navegação aérea que requerem garantias para
salvaguarda da vida humana.
Figura 2: Ionosfera terrestre observada por satélite GPS e
receptor terrestre. As superfícies em azul correspondem
aproximadamente a parte superior e inferior da camada
ionosférica. Os perfis em vermelho representam a
distribuição vertical da densidade de elétrons. Na altura
aonde a densidade é máxima é traçada uma casca
ionosférica de espessura infinitesimal (em amarelo). O
furo ionosférico encontra-se na intersecção dessa casca
com a linha de visada receptor-satélite. Crédito:
KOMJATHY; LANGLEY (1996).
Figura 3: Mapa de TEC sobre o Brasil. Crédito:
INPE/EMBRACE.
Figura 4: Distribuição de pontos ionosféricos
observados no período de 24 h no entorno de uma
única estação receptora. Crédito: VANI (com. pessoal).

GEOTECNOLOGIA EM APLICAÇÕES AMBIENTAIS/ CAPÍTULO 10 POR NIEVINSKI & MONICO
Nievinski e Monico
3
III. 2.2. Troposfera
A atmosfera neutra, muitas vezes
chamada simplesmente de troposfera, causa um
atraso de propagação do sinal que também está
presente na pseudodistância, Como a troposfera é um meio não-dispersivo
eletromagneticamente, não é possível isolar
com as pseudodistâncias em múltiplas portadoras,
e por isso a determinação de não é feita
isoladamente para cada satélite e época, como no
caso de . Ao invés disso, observações coletadas
ao longo do tempo são combinadas para
extrair um fator em comum por trás de todos os
atrasos troposféricos,
Aqui o fator é outra função de
mapeamento ou fator de obliquidade, que varia
para cada par satélite-receptor; seu valor obtido
de fontes externas ao GPS. Já , chamado de
atraso zenital, é um parâmetro em comum entre
todos os satélites observados a partir do mesmo
receptor; assim ele pode ser estimado como uma
incógnita a partir das observações de pseudo-
distância e fase da portadora, de forma similar às
coordenadas da posição da estação receptora.
O atraso troposférico zenital
(Figura 6) tem semelhanças com o atraso ionosférico ou TEC vertical , porém com uma distinção
importante: enquanto que é atribuido a pontos ionosféricos na vizinhança da antena e à altitude da
casca ionosférica, depende predominantemente das condições atmosféricas na própria estação de
recepção, próxima ao solo. Portanto, uma mesma rede de estações de rastreio terrestre resulta na
interpolação de um mapa ionosférico com maior resolução espacial (i.e., conseguem resolver detalhes
menores), comparado com mapas troposféricos (os quais aparecem mais suavizados).
O atraso troposférico resulta da
integração das condições atmosféricas ao
longo do caminho de propagação da onda
rádio. Portanto a obtenção de pode ajudar
na previsão do tempo e no monitoramento do
clima terrestre, contribuindo com informação
principalmente a respeito da umidade do ar, e
secundariamente de pressão e temperatura
atmosféricas (Figura 5).
III. 3. Métodos Ocultativos
Até agora supomos que os receptores estão instalados próximos ao solo. Na verdade, eles
podem estar a qualquer altitude, até mesmo serem aéreos ou orbitais (Figura 7). Nesses casos, o atraso
recuperado com um receptor mais alto corresponderia apenas a uma fração daquele que seria
recuperado por um mais abaixo. De fato, abordo de um avião o atraso troposférico zenital sofre pouca
influência da umidade do ar, uma vez que o vapor d’água está presente predominantemente próximo
ao solo; mais ainda, para um receptor no espaço exterior, o atraso troposférico se torna desprezível
para a maioria dos satélites. Em contraste, o atraso ionosférico permanece inalterado desde o solo até
em aviões, e começa a diminuir apenas na altitude orbital em que a ionosfera tem início. Isso tudo
considerando satélites visíveis acima do horizonte.
Figura 5: Localização dos receptores GPS utilizados
para estimação da umidade do ar (pontos em
vermelho). Fundo: mapa do vapor d’água integrado por
satélites NOAA (imagem em azul). Crédito: SAPUCCI
et al. (2008).
Figura 6: Atraso troposférico em uma única localidade ao
longo dos anos. Crédito: LEANDRO; SANTOS;
LANGLEY (2006).

GEOTECNOLOGIA EM APLICAÇÕES AMBIENTAIS/ CAPÍTULO 10 POR NIEVINSKI & MONICO
Nievinski e Monico
4
Figura 8: Distribuição dos eventos de ocultação durante o período de um 6 h, com base na constelação
receptora COSMIC/FORMOSAT de seis satélites, mais três outros independentes. Crédito: HAND (2012).
Figura 7: (a) Progressão do ponto de aproximação durante uma ocultação: receptor orbital, pontos de
aproximação em branco (crédito: COSMIC/UCAR); (b): receptor aéreo, pontos de aproximação em vermelho
(crédito: HAASE et al., [s.d.]).
(b)
(a)

GEOTECNOLOGIA EM APLICAÇÕES AMBIENTAIS/ CAPÍTULO 10 POR NIEVINSKI & MONICO
Nievinski e Monico
5
Porém a partir de plataformas muito elevadas – como em montanhas, balões, aviões, e
satélites receptores –, é possível rastrear satélites localizados abaixo do plano horizontal (indicado pelo
instante na Figura 7b). Claro que eventualmente o satélite transmissor GPS desaparece quando se
põe atrás da Terra; devido a curvatura da mesma, o horizonte (instante na Figura 7b) localiza-se
abaixo do plano horizontal a partir desse ponto de vista elevado. Esse tipo de ocorrência é chamada de
uma radio-ocultação do GPS pela Terra (GPS-RO). A geometria de propagação é excepcional: ao
longo do tempo, a onda ou raio intercepta a atmosfera de forma que o seu ponto de aproximação
máxima com relação à Terra – o chamado perigeu do raio –, descende verticalmente cada vez mais
fundo (além de deslizar horizontalmente). Isso permite recuperar as condições em cada um desses
pontos, amostrando dessa forma um perfil atmosférico (inclinado). Medições de ocultação, por
resolverem a distribuição vertical de temperatura ou umidade, fornecem muito mais informação do
que as medições integrativas que vimos anteriormente. Em contraste, a recuperação de estruturas
verticais a partir de medidas integrativas, através de técnicas tomográficas, em geral é mal
determinada. A aplicação da ocultação por GPS teve muito sucesso a partir da constelação américo-
taiwanesa COSMIC/FORMOSAT. Com a distribuição planetária dos seis micro-satélites de recepção,
regiões esparsas ou sem estações meteorológicas, como os oceanos, puderam receber uma cobertura de
observações mais adequada, veja Figura 8 (HOLZSCHUH; SAPUCCI; MONICO, 2010).
Figura 9: Ocorrência de reflexões do sinal GPS na superfície terrestre e registradas por um receptor em órbita
baixa, o qual também recebe o sinal diretamente pela linha de visada aos satélites GPS. Crédito: JIN; FENG;
GLEASON (2011).
Figura 10: Várias configurações e cenários possíveis em reflectometria por GPS. Triângulos pretos, brancos, e
cinzas representam antenas para recepção do sinal direto, refletido, e combinado, respectivamente. Crédito: próprio.
soil
snow
near-
surface
water
cliffairborne
tower
vegetation
spaceborne
up-looking
down-looking
single
antenna

GEOTECNOLOGIA EM APLICAÇÕES AMBIENTAIS/ CAPÍTULO 10 POR NIEVINSKI & MONICO
Nievinski e Monico
6
III. 4. Métodos Reflectométricos
Nos métodos de ocultação, às
vezes acontece do raio penetrar tão
profundamente na atmosfera que ele toca na
superfície terrestre, com a possibilidade de
ocorrência de uma reflexão do GPS (Figura
10). Sinais refletidos como esse são
observáveis provenientes abaixo do plano
horizontal, não apenas próximo do horizonte,
mas também em outras direções, até o nadir.
Obviamente isso requer uma antena com
recepção para baixo, ao contrário de recepção
apenas para cima, como no caso dos métodos
integrativos, ou para o lado, como nos
ocultativos. A plataforma de recepção pode
estar a qualquer altitude (Figura 11).
A exploração do sinal refletido de
GPS para fins de sensoriamento remoto leva o
nome de reflectometria (GPS-R). Uma forma
de categorização de GPS-R é conforme a
propriedade do alvo a ser medido.
Reflectometria altimétrica mede a altura do
alvo (como p.ex. nível dos mares ou altura da
neve). Reflectometria por espalhamento mede
a rugosidade da superfície (p.ex.,
desenvolvimento das ondas do mar – entre
calmo a revolto; ou p.ex. solo exposto versus
coberto com vegetação). Um terceiro modo
explora a composição material do alvo (p.ex., a
umidade do solo ou a densidade da neve). Um
aspecto chave em todas as técnicas é a
comparação do sinal refletido com o direto,
para isolar o papel do alvo nas medições
(Figura 12). Outra forma de categorizar GPS-
R é com base no regime de espalhamento do
sinal eletromagnético. Observações ditas
coerentes mantém uma relação estável na fase
da portadora, comparando o sinal recebido
diretamente através da linha de visada ao
satélite com aquele rebatido pelo alvo. Em
contraste, observações incoerentes têm fase
aleatória. Na realidade, esses dois regimes
puros são extremos de um contínuo de
situações em que ambos estão presentes,
porém em proporções variáveis. De fato, a
coerência da reflexão em p.ex. um lago
degrada à medida que turbulência se
desenvolve na lâmina d’água; ou que o
receptor acelera a varredura sobre superfície;
ou que a direção de incidência oblíqua se
aproxima da normal. As teorias que preveem
as observações em termos das propriedades do
Figura 11: Reflexões do sinal GPS no oceano coletadas a
partir de um avião, o qual transporta duas antenas, uma
apontada para cima e outra para baixo; o sinal origina no
oceano na vizinhança do chamado ponto especular. Crédito:
CARDELLACH et al., (2011).
Figura 12: Exemplo de resultado do rastreio do GPS; o pico à
esquerda corresponde a recepção direta pela linha de visada; a
curva à direita corresponde a reflexão. O eixo horizontal
corresponde ao tempo de propagação do sinal refletido, com
relação ao direto; esse atraso de propagação permite estimar a
altura do avião até o mar. A rugosidade da água (indicativo das
ondas) pode ser inferida pelo decaimento da cauda presente no
sinal refletido. Crédito: GLEASON; LOWE; ZAVOROTNY
(2009).

GEOTECNOLOGIA EM APLICAÇÕES AMBIENTAIS/ CAPÍTULO 10 POR NIEVINSKI & MONICO
Nievinski e Monico
7
alvo são muito diferentes para os
dois regimes, portanto a
interpretação é facilitada quando
um deles predomina. P.ex., uma
antena montada em um tripé a
poucos metros da neve observa
predominantemente de forma
coerente. Já para um avião voando
sobre o mar, a mistura dos dois
regimes pode ser purificada –
aumentando a contribuição
incoerente e anulando a
componente coerente –, através de
uma randomização das condições
de reflexão; no caso do avião, isso
pode ser alcançado calculando a
média de observações coletadas
em vários momentos.
Uma terceira forma
de categorizar GPS-R é em
termos dos equipamentos
utilizados. Comumente empregam-se duas antenas, uma apontada para cima e outra para baixo ou para
o horizonte, para rastrear separadamente os sinais direto e refletido. Essa configuração funciona bem
quando há boa separação da direção de chegada dos sinais, como p.ex. para um satélite próximo ao
zênite, cuja reflexão é proveniente de nadir na superfície. É possível também utilizar uma única antena
para receber ambos os sinais (Figura 13); internamente ao receptor, os dois podem ser rastreados
individualmente, se houver uma boa separação em termos de tempo de propagação, como p.ex. para
uma instalação no alto de uma torre. Alternativamente, os dois sinais podem ser rastreados como um
só; nesse caso a potência registrada é composta das duas potências contribuintes – direta e
refletida –, acrescidas de um termo trigonométrico ditado pela diferença de fase entre as duas, :
(3)
À medida que sinais direto e refletido entram e
saem de fase, a potência registra interferências
construtivas e destrutivas (Figura 14). Esse
fenômeno é idêntico às franjas coloridas
observadas com p.ex. mancha de óleo sobre
lâmina d’água. Tal modalidade é chamada de
reflectometria por multicaminho (GPS-MR), e
tem a vantagem de não exigir equipamento
especializado, além de poder compartilhar a
antena instalada para outros propósitos, como
p.ex. levantamentos, meteorologia, etc.
III. 5. Conclusão
Vimos que há vários modos de
medir as condições ambientais à distância
usando GPS. Em termos dos tipos de alvos
sensoreados remotamente com GPS, há os
gasosos ou atmosféricos (neutros assim como
ionizados, i.e., troposfera e ionosfera); há
também os alvos terrestres, tanto líquidos
(mares, oceanos, e corpos d’água) quanto
sólidos (solo, neve, vegetação). A plataforma
Figura 14: Configuração reflectométrica para medição da altura da neve.
Crédito: NIEVINSKI; LARSON ([s.d.])
Figura 13: Potência registrada composta da interferência
construtiva e destrutiva entre sinais coerentes (direto e
refletido). O número de oscilações está associado com a
altura da antena receptora. Observações medidas,
modeladas, e residuais são apresentadas em azul,
vermelho, e verde, respectivamente. Crédito:
NIEVINSKI; LARSON ([s.d.])

GEOTECNOLOGIA EM APLICAÇÕES AMBIENTAIS/ CAPÍTULO 10 POR NIEVINSKI & MONICO
Nievinski e Monico
8
de observação pode estar localizada próxima ao
solo, ser aérea, ou até orbital. Para cada altitude
da antena receptora, o sinal do alvo pode ser
proveniente de cima, de baixo, ou de lado com
relação à antena receptora. Essas opções
formam nove combinações possíveis, conforme
a Figura 15. Dentre tais combinações estão os
métodos integrativos, os de ocultação, e os
reflectométricos. O GPS como sensor remoto é
uma inovação no monitoramento ambiental que
deve se consolidar, dado o compromisso
americano com o sustento do GPS e o
oferecimento de sistemas GNSS similares por
outras nações.
III. 6. Referências e Bibliografia
AWANGE, J. L. Environmental Monitoring using GNSS. [s.l.] Springer, 2012.
CARDELLACH, E. et al. GNSS-R ground-based and airborne campaigns for ocean, land, ice,
and snow techniques: Application to the GOLD-RTR data sets: GNSS-R
CAMPAIGNS. Radio Science, v. 46, n. 6, p. n/a–n/a, dez. 2011.
GLEASON, S.; GEBRE-EGZIABHER, D. GNSS Applications and Methods. [s.l.] Artech
House, 2009.
GLEASON, S.; LOWE, S.; ZAVOROTNY, V. Remote Sensing Using Bistatic GNSS
Reflections. In: GLEASON, S.; GEBRE-EGZIABHER, D. (Eds.). GNSS Applications
and Methods. Artech: [s.n.]. p. 399–436.
HAASE, J. S. et al. First Results from an Airborne GPS Radio Occultation System for
Atmospheric Profiling. (submetido), [s.d.].
HAND, E. Microsatellites aim to fill weather-data gap. Nature, v. 491, n. 7426, p. 650–651,
28 nov. 2012.
HOLZSCHUH, M. L.; SAPUCCI, L. F.; MONICO, J. F. G. Evaluation of atmospheric
profiles from GPS radio occultation using the CHAMP satellite over South America.
Revista Brasileira de Meteorologia, v. 25, n. 2, p. 147–155, jun. 2010.
JIN, S.; CARDELLACH, E.; XIE, F. GNSS Remote Sensing: Theory, Methods and
Applications. [s.l.] Springer Verlag, 2013.
JIN, S.; FENG, G. P.; GLEASON, S. Remote sensing using GNSS signals: Current status and
future directions. Advances in Space Research, v. 47, n. 10, p. 1645–1653, maio 2011.
KOMJATHY, A.; LANGLEY, R. B. The Effect of Shell Height on High Precision
Ionospheric Modelling Using GPSProceedings of the International GPS Service for
Geodynamics (IGS) Workshop. Anais...Silver Spring, MD: 19 mar. 1996
LEANDRO, R. F.; SANTOS, M. C.; LANGLEY, R. B. Wide Area Neutral Atmosphere
Models for GNSS ApplicationsProceedings of the 19th International Technical
Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2006).
Anais...Fort Worth, TX: 26 set. 2006
NIEVINSKI, F. G.; LARSON, K. M. Inverse modeling of GPS multipath for snow depth
estimation – Part I: Formulation and simulations. IEEE Transactions on Geoscience
and Remote Sensing, v. (aceito para publicação), [s.d.].
SAPUCCI, L. F. et al. Aplicações dos valores do IWV provenientes das redes de receptores
GPS para suporte a previsão numérica de tempo no Brasil. Boletim da Sociedade
Brasileira de Meteorologia, v. 32, n. 1, p. 49–55, 2008.
YUNCK, T. P. The promise of spaceborne GPS for earth remote sensingProceedings of
the International Workshop on GPS Meteorology. Anais...Tsukuba, Japan: 14 jan. 2003
Figura 15: Diagrama de combinações possíveis em
sensoriamento remoto com GPS. Crédito: próprio.