“fundamentos de sistemas de informaÇÕes … · de sistema de informação: os sistemas de...
TRANSCRIPT

PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA CIVIL
“FUNDAMENTOS DE SISTEMAS DE INFORMAÇÕES GEOGRÁFICAS”
Maria Lúcia Calijuri Juliana Ferreira Lorentz
Março/2003

2
Sumário ......................................................................................................................................................
APRESENTAÇÃO............................................................ERRO! INDICADOR NÃO DEFINIDO.
1. INTRODUÇÃO....................................................................................................................... 4
2. SISTEMAS DE INFORMAÇÕES GEOGRÁFICAS............................................................... 5
2.1. VISÃO GERAL........................................................................................................................ 6 2.2. HISTÓRICO............................................................................................................................ 8 2.3. SIG’S E OUTROS SISTEMAS DE INFORMAÇÃO ...................................................................... 10 2.4. ESTRUTURA ORGANIZACIONAL........................................................................................... 12 2.5. CARACTERÍSTICAS GERAIS E SUB-SISTEMAS ....................................................................... 14 2.6. TENDÊNCIA TECNOLÓGICA ................................................................................................. 16 2.7. PRINCIPAIS SIG’S E SUAS CARACTERÍSTICAS ....................................................................... 17
3. CONCEITOS SOBRE INFORMAÇÕES ESPACIAIS.......................................................... 18
3.1. AMOSTRAGEM DO MUNDO – REPRESENTAÇÃO DA REALIDADE ........................................... 18 3.2. CARACTERÍSTICAS BÁSICAS DE DADOS ESPACIAIS E SUA MANIPULAÇÃO ............................ 19 3.3. TIPOS DE DADOS GEOGRÁFICOS E SUA REPRESENTAÇÃO EM SIGS ...................................... 21
4. REPRESENTAÇÃO DE DADOS DE MAPAS...................................................................... 26
4.1. A REPRESENTAÇÃO VETORIAL............................................................................................ 27 4.2. A REPRESENTAÇÃO MATRICIAL.......................................................................................... 27 4.3. RASTER & VECTOR............................................................................................................ 28
5. CONCEITOS DE BANCO DE DADOS GEOGRÁFICOS.................................................... 33
5.1. ORGANIZAÇÃO .................................................................................................................... 33 5.2. GEOREFERENCIAMENTO ..................................................................................................... 34 5.3. TOPOLOGIA......................................................................................................................... 35 5.4. PRECISÃO E EXATIDÃO DE BANCOS DE DADOS ESPACIAIS ................................................... 36
6. CARTOGRAFIA DIGITAL.................................................................................................. 39
6.1. ESCALAS ............................................................................................................................. 39 6.2. PROJEÇÕES DE MAPAS ......................................................................................................... 40 6.3. A CARTOGRAFIA DIGITAL E OS SISTEMAS DE INFORMAÇÕES GEOGRÁFICAS ....................... 42

3
7. CONVERSÃO DIGITAL DE DADOS.................................................................................. 43
7.1. DIGITALIZAÇÃO .................................................................................................................. 43 7.1.1. Preparação dos Mapas.........................................................................................................44 7.1.2. Projeto de Arquivos Digitais ................................................................................................45 7.1.3. Digitalização......................................................................................................................45 7.1.4. Verificação e Edição...........................................................................................................46 7.2. RASTERIZAÇÃO ................................................................................................................... 47 7.2.1. PREPARAÇÃO DO MAPA.......................................................................................................47 7.2.2. AJUSTE DO SCANNER ..........................................................................................................48 7.2.3. EDIÇÃO RASTER .................................................................................................................49 7.2.4. COMPRESSÃO DE DADOS.....................................................................................................50 7.3. TÉCNICAS PARA A CONVERSÃO RASTER/VECTOR................................................................ 50 7.3.1. VETORIZAÇÃO MANUAL......................................................................................................51 7.3.2. VETORIZAÇÃO SEMI-AUTOMÁTICA ......................................................................................51 7.3.3. VETORIZAÇÃO AUTOMÁTICA...............................................................................................53
8. REFERÊNCIAS BIBLIOGRÁFICAS................................................................................... 55
9. SUGESTÕES BIBLIOGRÁFICAS....................................................................................... 55
4
1. Introdução
A visão globalizada das questões ambientais tem contribuído para uma crescente demanda por informações cartográficas, obtidas em ritmo cada vez mais intenso graças ao desenvolvimento de técnicas apoiadas no uso de computadores e às imagens obtidas por sensores instalados a bordo de satélites espaciais. Tais imagens, com suas características de repetitividade e periodicidade, tornaram-se também ferramentas indispensáveis na análise e monitoramento multitemáticos e multitemporais de fenômenos naturais ou decorrentes de ações antrópicas em nosso planeta. Além disso, o extraordinário avanço da informática nos últimos anos, tem permitido a integração das informações coletadas com o seu suporte geográfico por intermédio dos Sistemas de Informações Geográficas (SIGs).
Em suma, o Geoprocessamento, que nada mais é do que o resultado de uma forte interação dessas tecnologias, constitui-se no grande fator de universalização e compartilhamento de informações que, por sua vez, são a matéria prima responsável pela qualidade das decisões tomadas pelos administradores.
Na prática, tudo se passa para os usuários dessas ferramentas, como se o nosso planeta tivesse ficado menor e, por isso, a capacidade do homem em tomar decisões, com índices cada vez maiores de sucesso, tivesse sido potencializada em função de poder contar, em tempo hábil, com informações antes muito mais difíceis, restritas e privilegiadas.
No gerenciamento de recursos naturais, em especial dos recursos hídricos, os SIG’s podem ser utilizados como uma ferramenta de inventário além de permitir um melhoramento do gerenciamento desses recursos, da proteção contra o desenvolvimento especulativo e modelagem da complexa interação entre o fenômeno e a tomada de decisões.
A implementação de um SIG que vise diagnosticar e gerenciar estudos hidrológicos e hidrogeológicos, bem como, dar suporte a estudos de planejamento de uso e ocupação do solo, exige a obtenção e manipulação de uma grande variedade de informações, tais como, parâmetros hidrológicos básicos, geologia, cobertura vegetal, climatologia, uso da água, dentre outras. Este banco de dados deve incluir características como, rede de transportes; limites municipais; erosão; escoamento de água subterrânea; produtividade de culturas, etc. Para o sucesso da implementação destes é importante considerar as características fundamentais de um Banco de Dados Ambientais que são, a natureza normalmente estatística dos dados, processo de atualização pouco frequente e resolução espacial relativamente baixa. Estes estudos normalmente cobrem grandes áreas a custos razoáveis e os requisitos de hardware são modestos para implementação. Por outro lado, Bancos de Dados Cadastrais devem ser incluidos no contexto do sistema. Estes dados, em função do grau de detalhamento e precisão, podem exigir grandes esforços por parte do usuário de SIG por envolver maior montante de recursos e maior tempo de

5
execução. Além disso, exige-se uma equipe dedicada visando uma atualização mais frequente da base de dados.
Apresenta-se no desenvolvimento deste módulo toda a conceituação fundamental relativa a tecnologia dos Sistemas de Informação Geográfica (SIG’s) e exemplifica-se o uso desse ferramental em estudos relativos ao planejamento e manejo de recursos hídricos. A perfeita assimilação desta base conceitual e metodológica apresentada é imprescindível para que se possa iniciar o processo de implementação do Geoprocessamento no contexto municipal.
2. Sistemas de Informações Geográficas
O SIG é uma forma particular de Sistema de Informação aplicado a dados geográficos. Um Sistema de Informação é um conjunto de processos, executados no dado natural, produzindo informações úteis na tomada de decisões.
Sistemas de informações geográficas são ferramentas que permitem armazenar, analisar, recuperar, manipular e manejar grandes quantidades de dados espaciais. Os SIGs são técnicas de manipulação de bancos de dados variáveis espacialmente. Originalmente estas ferramentas foram desenvolvidas para facilitar trabalhos cartográficos, mas estão sendo atualmente utilizadas para inventários, estimativas, planejamento e modelagem.
Os Sistemas de Informações Geográficas – SIG’s utilizam dados geograficamente referenciados (georreferenciados) e dados não espaciais, incluindo operações que dão suporte as análises espaciais.
No SIG, o principal objetivo é o suporte à tomada de decisões, para gerenciamento de uso do solo, recursos hídricos, ecossistemas aquáticos e terrestres, ou qualquer entidade distribuída espacialmente.
A conexão entre os elementos do sistema é a geografia, isto é, a localização, a proximidade e a distribuição espacial.
O termo Sistema de Informação Geográfica - SIG é freqüentemente aplicado à tecnologia computacional orientada geograficamente. Os SIG’s são sistemas computacionais utilizados para armazenar e manipular informações geográficas.
Embora existam debates sobre a origem do tema e a data de início dos trabalhos neste campo, está claro que o SIG é um fenômeno recente.
Ao longo dos últimos trinta anos ( a partir da década de 1960), o campo do SIG apresentou um rápido desenvolvimento teórico, tecnológico e organizacional, culminando com um período de intensa atividade nos últimos cinco anos.
6
Atualmente o SIG é aceito como uma ferramenta essencial para o uso efetivo da informação geográfica.
O campo de aplicações dos SIG’s é amplo e diversificado, incluindo a geografia, agricultura, hidrologia, geologia, geotecnia, meio ambiente, computação, economia, fotogrametria, agrimensura, planejamentos urbano e regional, engenharia florestal e outros.
2.1. Visão Geral
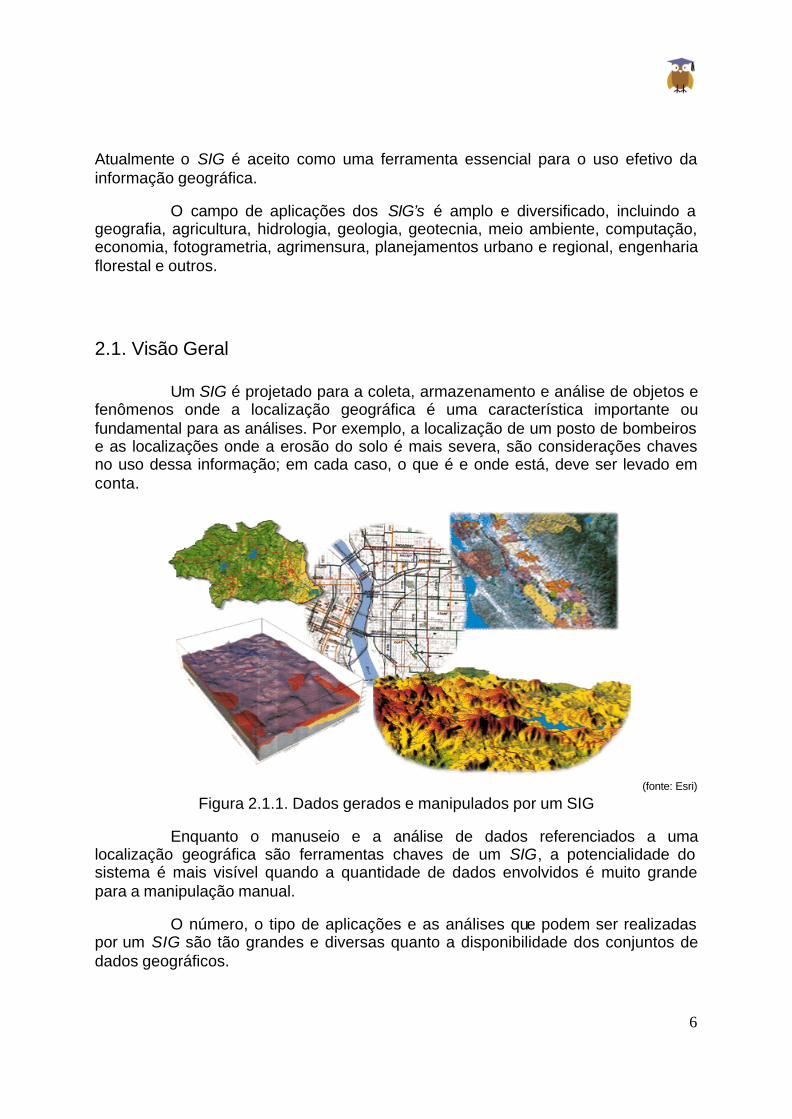
Um SIG é projetado para a coleta, armazenamento e análise de objetos e fenômenos onde a localização geográfica é uma característica importante ou fundamental para as análises. Por exemplo, a localização de um posto de bombeiros e as localizações onde a erosão do solo é mais severa, são considerações chaves no uso dessa informação; em cada caso, o que é e onde está, deve ser levado em conta.
(fonte: Esri)
Figura 2.1.1. Dados gerados e manipulados por um SIG
Enquanto o manuseio e a análise de dados referenciados a uma localização geográfica são ferramentas chaves de um SIG, a potencialidade do sistema é mais visível quando a quantidade de dados envolvidos é muito grande para a manipulação manual.
O número, o tipo de aplicações e as análises que podem ser realizadas por um SIG são tão grandes e diversas quanto a disponibilidade dos conjuntos de dados geográficos.

7
Um SIG, como qualquer outro sistema, não pode existir por si próprio, ele deve existir num contexto. Deve existir uma organização de pessoas, de certas facilidades e de equipamentos responsáveis pela implementação e manutenção do SIG.
Para que um SIG reuna as necessidades de uma organização, o fluxo de informações dentro da organização deve estar explicitamente definido.
O valor da informação depende de alguns fatores, tais como o contexto em que é aplicada, o custo da coleção, armazenamento e apresentação. A informação e sua transmissão são a chave do desenvolvimento de processos e características das sociedades contemporâneas.
Considerando as tarefas executadas, podem ser identificados dois tipos de sistema de informação: os sistemas de processamento de operações e os sistemas de suporte a decisões.
Os sistemas de processamento de operações privilegiam a ocorrência das operações, registro e manutenção, como os sistemas de transações bancárias e reservas de passagens aéreas. Estes sistemas podem operar no modo “on-line” ou “batch” e são baseados em procedimentos bem definidos.
Nos sistemas de suporte às decisões, a ênfase está na manipulação, na análise e, particularmente, na modelagem para propiciar suporte aos profissionais envolvidos na tomada de decisões.
A informação no sistema deve ser organizada de forma a ter utilidade quando recuperada; o acesso à informação deve ser cuidadosamente administrado; a manutenção, o suporte e a tecnologia devem ser constantes no tempo.
Algumas definições para os sistemas de informações geográficas, são listadas abaixo:
- “um sistema para captura, armazenamento, checagem, manipulação, análise e apresentação de dados que são espacialmente referenciados à Terra” (DOE, 1988);
- “um sistema em que a maioria dos dados são espacialmente indexados e sobre o qual operam um conjunto de procedimentos afim de responder questões sobre entidades espaciais do banco de dados” (SMITH et al., 1987);
- “um poderoso conjunto de ferramentas para coleção, armazenamento, recuperação, transformação e apresentação de dados espaciais do mundo real” (BURROUGH, 1994);
- “um sistema de suporte a decisões envolvendo a integração de dados espacialmente referenciados na solução de problemas ambientais” (COWEN, 1988).

8
Em SIG a realidade é representada como uma série de características geográficas definidas de acordo com dois elementos de dados. O elemento de dado geográfico (também denominado localizacional) é usado para fornecer uma referência para o elemento de dado atributo (também chamado descritivo ou não localizacional).
Figura 2.1.2. Elementos de Dados manipulados por um SIG
Uma das características chaves que diferencia o SIG de outros sistemas de informações é que, em SIG, o elemento geográfico é mais importante do que o elemento atributo.
O termo espacial refere-se a qualquer tipo de informação sobre localização e pode incluir informações de engenharia, cartografia, sensoriamento remoto,etc. O termo geográfico refere-se somente a localização da informação sobre a superfície da terra ou próxima dela em escalas do mundo real e no espaço do mundo real.
O termo Geoprocessamento é um conceito mais global, relacionado às atividades de sensoreamento remoto, cadastros e outros tipos de pesquisa e investigações de campo para capturar dados. SIG é a manipulação desta informação conectada a um banco de dados geográficos, que possui dados espaciais e de atributos. O Geoprocessamento pode ser usado para montar o banco de dados; para manipular, organizar e atualizar as informações usamos SIG. Na grande maioria dos países o SIG é considerado como parte final do Geoprocessamento.
2.2. Histórico
O desenvolvimento dos SIGs foi iniciado no início da década de 1960 nos Estados Unidos da América do Norte e Canadá, por iniciativa de alguns pesquisadores, destacando-se Howard Fisher, R. Tomlinson e Jack Dangermond.
DDAADDOOSS DDEESSCCRRIITT IIVVOOSS
DDAADDOOSS GGRRÁÁFFIICCOOSS

9
Fisher começou a trabalhar com sistema de mapeamento computadorizado em 1963 no North Western Technical Institute. Em 1965, fundou o Laboratório de Computação Gráfica na Escola de Graduação da Universidade de Harvard e, em conjunto com um grupo de programadores, desenvolveu um pacote de mapeamento denominado SYMAP. A importância do SYMAP é atribuída ao fato de ter sido este o primeiro pacote de mapeamento largamente distribuído para manipulação de dados geográficos.
Fonte: Gis Timeline (University of Toronto)
Figura 2.2.1. Exemplo de mapa produzido em impressora matricial pelo SYMAP
Ao mesmo tempo em que Fisher estava desenvolvendo suas idéias em mapeamento computadorizado em Harvard, R. Tomlinson estava envolvido na criação do primeiro e verdadeiro SIG, e certamente o primeiro a ser desta forma intitulado. Tomlinson é considerado o pai do SIG por ter desenvolvido o Canada Geographic Information System- CGIS, em 1966, para o governo canadense.
A origem do trabalho de Tomlinson remonta a 1960 quando atuou junto a Spartan Air Services desenvolvendo uma pesquisa florestal no leste da África.
Tomlinson tornou-se consultor independente em 1969 e promoveu, as duas primeiras conferências internacionais sobre SIG, em 1970 e 1972, em Ottawa - Canadá.
Em 1969 Jack Dangermond fundou a Environmental Systems Research Institute - ESRI, que posteriormente veio a lançar o ARC/INFO em 1982.
Fonte: ESRI

10
Figura 2.2.2. Equipe do Environmental Systems Research Institute (ESRI) fundado por Jack e Laura Dangermond.
A ESRI, pode ser considerada um exemplo de sucesso empresarial; embora houvesse outras empresas como Intergraph, ComputerVision e Synercon, todas elas, exceto a ESRI, entraram para a área do SIG a partir da área de CAD/CAM Computer-Aided-Design / Computer-Aided-Machine.
O campo do SIG adquiriu reconhecimento científico no estabelecimento
do (National Center for Geographic Information and Analysis – NCGIA), fundado pela National Science Foundation em 1987 como um empreendimento cooperativo entre as Universidades da California, Maine e New York.
O desenvolvimento dos SIGs ocorreu em diferentes épocas e em diversas partes do mundo, podendo ser subdividido em quatro fases:
- a primeira, caracterizada pela iniciativa individual de alguns profissionais, aconteceu no período compreendido entre o início da década de 1960 e meados de 1973;
- a segunda, de 1973 até o inicio da década de 1980, foi caracterizada pela forte utilização de SIGs em agências governamentais;
- a terceira fase, onde predominou o domínio comercial, ocorreu de 1982 até o final da década de 1980;
- a quarta fase e atual é caracterizada pelo domínio do usuário e é facilitada; pela competição entre vendedores, a padronização embrionária na abertura de sistemas e maior conscientização dos usuários sobre o que o SIG pode e parece fazer.
Foi predominante a contribuição da América do Norte no desenvolvimento e implementação de SIGs até meados da década de 1980, em função do poder de persuasão de indivíduos pioneiros, do tamanho do market interno, do papel de destaque dos Estados Unidos no desenvolvimento de hardwares e softwares e, acima de tudo, na crescente apreciação dos usuários deste país da necessidade de eficiência, velocidade e rentabilidade para a manipulação de grandes quantidades de dados geográficos.
Foi esta percepção da necessidade que levou usuários potenciais a procurar soluções em SIG, encorajando as empresas a desenvolverem sistemas que atendessem às necessidades dos usuários.
2.3. SIG’s e outros Sistemas de Informação

11
A relação entre SIG e projeto auxiliado por computador, por cartografia computadorizada, por gerenciamento de banco de dados e por informações de sensoreamento remoto é importante no estabelecimento de uma definição de SIG.
Sistemas CAD, Computer-Aided Design, foram desenvolvidos para projeto e desenho de novos objetos. São baseados em gráficos e utilizam símbolos para representar características no processo interativo do projeto. Os sistemas CAD têm lincagem rudimentar com o banco de dados, que poderia conter listagens ou armazenar números de referência; utilizam relações topológicas simples e, no geral, manipulam quantidade relativamente pequena de dados.
Usualmente os sistemas de cartografia computadorizada possuem muitas facilidades para desenho de mapas e impressões de alta qualidade no formato vetorial.
Os sistemas de gerenciamento de banco de dados (DBMS) são softwares bem desenvolvidos, otimizados para armazenagem e recuperação de atributos não-gráficos. Possuem capacidade limitada para recuperação e apresentação de gráficos, e para implementação de operações analíticas espaciais.
Os sistemas de sensoriamento remoto são projetados para colecionar, armazenar, manipular e apresentar dados raster; usualmente possuem capacidade limitada para manuseio de dados de atributos e pobre lincagem com o DBMS.
A principal característica de um SIG é enfatizar operações analíticas. Segundo GOODCHILD (1988) apud MAGUIRE (1991), a habilidade de um SIG para analisar dados espaciais é vista frequentemente como elemento chave em sua definição e tem sido utilizado como uma característica que distingue o SIG de sistemas cujo objetivo primário é a produção de mapas.
Em termos funcionais, COWEN (1988) afirma que as consultas espaciais e overlays são operações únicas do SIG. A análise espacial é definida por GOODCHILD (1988) apud MAGUIRE (1991) como um conjunto de métodos analíticos que requerem acesso aos atributos dos objetos em estudo e sua informação localizacional.
As várias idéias sobre SIG podem ser sintetizadas e apresentadas na forma de três visões distintas que entretanto se superpõem, e são denominadas mapas, banco de dados e análise espacial.
A visão de mapa enfoca os aspectos cartográficos do SIG e teve origem no trabalho de McHARG (1969) apud MAGUIRE (1991); atualmente é representada por BERRY (1987) e TOMLIN (1990,1991) apud MAGUIRE (1991).
12
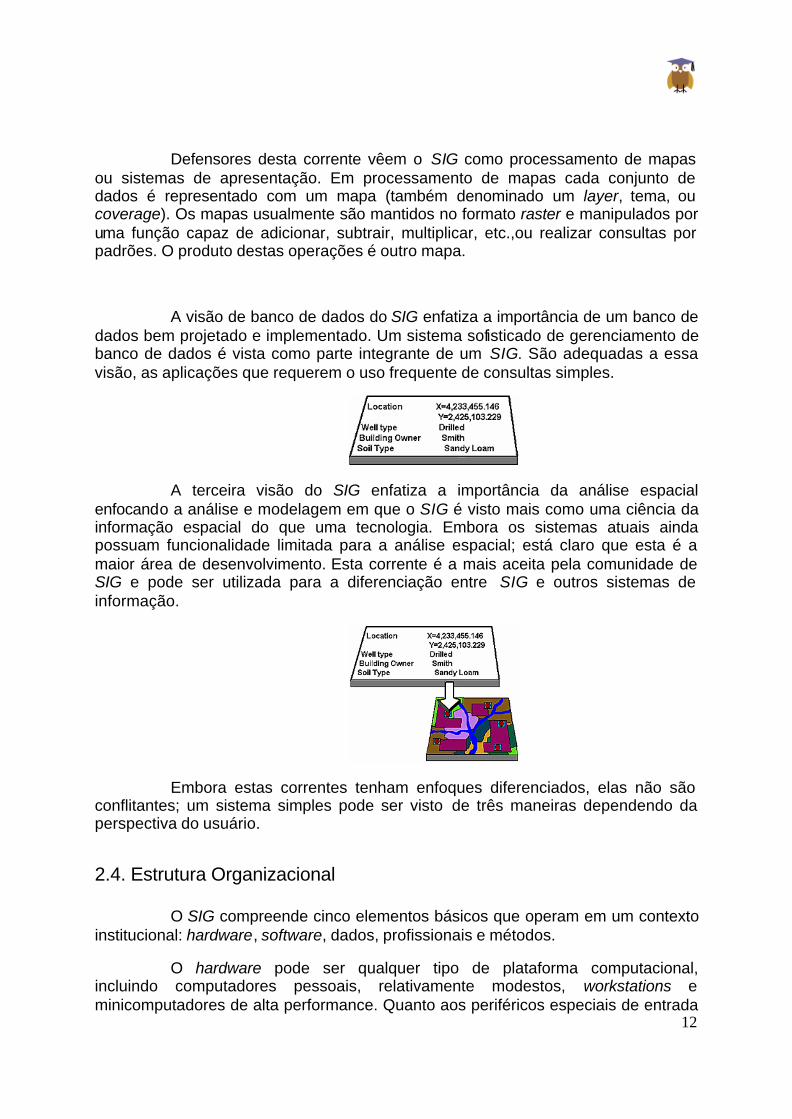
Defensores desta corrente vêem o SIG como processamento de mapas ou sistemas de apresentação. Em processamento de mapas cada conjunto de dados é representado com um mapa (também denominado um layer, tema, ou coverage). Os mapas usualmente são mantidos no formato raster e manipulados por uma função capaz de adicionar, subtrair, multiplicar, etc.,ou realizar consultas por padrões. O produto destas operações é outro mapa.
A visão de banco de dados do SIG enfatiza a importância de um banco de dados bem projetado e implementado. Um sistema sofisticado de gerenciamento de banco de dados é vista como parte integrante de um SIG. São adequadas a essa visão, as aplicações que requerem o uso frequente de consultas simples.
A terceira visão do SIG enfatiza a importância da análise espacial enfocando a análise e modelagem em que o SIG é visto mais como uma ciência da informação espacial do que uma tecnologia. Embora os sistemas atuais ainda possuam funcionalidade limitada para a análise espacial; está claro que esta é a maior área de desenvolvimento. Esta corrente é a mais aceita pela comunidade de SIG e pode ser utilizada para a diferenciação entre SIG e outros sistemas de informação.
Embora estas correntes tenham enfoques diferenciados, elas não são conflitantes; um sistema simples pode ser visto de três maneiras dependendo da perspectiva do usuário.
2.4. Estrutura Organizacional
O SIG compreende cinco elementos básicos que operam em um contexto institucional: hardware, software, dados, profissionais e métodos.
O hardware pode ser qualquer tipo de plataforma computacional, incluindo computadores pessoais, relativamente modestos, workstations e minicomputadores de alta performance. Quanto aos periféricos especiais de entrada

13
são utilizados mesas digitalizadoras, scanners, drivers de fita, etc. No que se refere a periféricos de saída, são utilizados traçadores gráficos e impressoras especiais.
O software de SIG é desenvolvido em níveis sofisticados, constituído de módulos que executam as mais variadas funções. Existem muitos softwares de SIG disponíveis no mercado, sendo que alguns deles são consagrados pela eficiência comprovada na sua grande base instalada e no número de usuários.
O dado é um elemento fundamental para o SIG. Os dados geográficos são muito dispendiosos para coleta, armazenamento e manipulação, pois são necessários grandes volumes para solucionar importantes problemas geográficos. Segundo estimativas de ROWLEY e GILBERT (1989) apud MAGUIRE (1991), a coleção de dados representa 70% do custo total da implantação de um SIG.
O elemento mais importante do SIG é o profissional, a pessoa
responsável pelo projeto, implementação e uso do SIG. Sem pessoas adequadamente treinadas e com visão do contexto global, dificilmente um projeto de SIG terá sucesso.
Por fim, os métodos, técnicas, critérios e experiências irão nortear o uso do SIG na solução dos problemas apresentados.

14
2.5. Características Gerais e Sub-Sistemas
“Um SIG é um sistema assistido por computador para aquisição, armazenamento, análise e apresentação de dados geográficos”, (EASTMAN, 1997).
Atualmente existe um grande número de softwares adequados para SIG que, entretanto, podem ter diferenças significativas principalmente na maneira como representam e trabalham com dados geográficos e a ênfase dada nas várias operações.
O SIG é constituído de vários módulos, sendo os principais mostrados na Figura 2.5.1.
FIGURA 2.5.1 - Principais Módulos de um SIG
Nem todos os sistemas possuem todos os módulos mostrados na figura
acima, mas devem ser compostos por um grupo essencial para ser considerado um verdadeiro SIG.
Os principais componentes de um SIG são:
a. Banco de Dados Espaciais e de Atributos; b. Sistema de Apresentação Cartográfica; c. Sistema de Digitalização de Mapas;

15
d. Sistema de Gerenciamento de Banco de Dados; e. Sistema de Análise Geográfica; f. Sistema de Processamento de Imagens; g. Sistema de Análises Estatísticas.
A descrição sucinta de cada um dos módulos é feita a seguir:
a. Banco de Dados Espaciais e de Atributos
O banco de dados é o núcleo do sistema e pode ser entendido como uma coleção de mapas e informações associadas na forma digital. O banco de dados é composto por dois elementos, um banco de dados espaciais descrevendo a geografia (forma e posição) das características da superfície do terreno , e um banco de dados de atributos descrevendo as características ou qualidades destas características. Em alguns sistemas o banco de dados espaciais e o de atributos são rigidamente distintos e em outros são integrados em uma entidade simples.
b. Sistema de Apresentação Cartográfica
O sistema de apresentação cartográfica é um dos módulos mais básicos do SIG; permite a extração de elementos selecionados do banco de dados e a produção de mapas no monitor de vídeo, ou cópia impressa utilizando impressora ou plotter.
c. Sistema de Digitalização de Mapas
O sistema de digitalização de mapas permite que mapas existentes, em papel, sejam convertidos para a forma digital. Este sistema além de conter módulos para a digitalização é provido de ferramentas para a edição de mapas.
d. Sistema de Gerenciamento de Banco de Dados
Um SIG incorpora não somente um tradicional sistema gerenciador de banco de dados mas também uma variedade de utilitários para gerenciar os componentes espaciais e de atributos do dado geográfico armazenado.
e. Sistema de Análise Geográfica
Com o sistema de análise geográfica é ampliada a capacidade de consultas tradicionais ao banco de dados, incluindo a potencialidade da análise de dados baseada em sua localização. A componente geográfica dá ao SIG sua verdadeira identidade sendo uma função denominada overlay a marca registrada do SIG.
f. Sistema de Processamento de Imagens

16
O sistema de processamento de imagens possibilita a análise de imagens de sensoreamento remoto, tais como Landsat e Spot, através da conversão dessas imagens em dados de mapas, interpretados de acordo com vários processos de classificação.
g. Sistema de Análises Estatísticas
Este sistema oferece procedimentos estatísticos tradicionais e rotinas especializadas para a análise estatística do dado espacial.
Um SIG armazena dois tipos de dados que são encontrados em um mapa, as definições geográficas das características da superfície da terra e os atributos ou qualidades que estas características possuem.
2.6. Tendência Tecnológica
Recordando as três décadas de desenvolvimento do SIG, verifica-se que esta aplicação impõe requisitos específicos, que precisaram ser reunidos antes que o SIG pudesse realmente florescer e consolidar-se.
Embora os desenvolvimentos, como o CGIS - Canada Geographic Information System, tenham acontecido, quando muitos dos requisitos não estavam disponíveis, ou se estavam, mas a um custo muito alto, os ambientes tecnológicos primitivos certamente apresentaram enormes problemas a quem os desenvolveu.
A natureza exigente da aplicação do SIG está apresentada resumidamente nos tópicos que se seguem:
-interativo: o usuário deve ser capaz de interagir com o sistema computacional, expedindo instruções continuamente e recebendo respostas;
-multiusuário: muitos usuários devem poder acessar o banco de dados geográficos simultaneamente;
-gráfico: o sistema deve ser capaz de permitir a entrada e a saída de dados graficamente, caso contrário seria muito difícil para o usuário trabalhar com informações geográficas;
-volume e velocidade: os conjuntos de dados geográficos frequentemente são grandes e complexos, necessitando de grandes dispositivos de armazenamento digital; ao mesmo tempo o sistema deve ser capaz de processar rapidamente grandes volumes e fornecer imediatamente respostas às consultas;
-memória virtual: até recentemente a memória de acesso randômico (RAM) dos sistemas computacionais era muito cara; o desenvolvimento dos sistemas de operação virtual, no final da década de 1970, possibilitou aplicações para processar grandes volumes de dados utilizando comparativamente pouca memória central;

17
-sistemas de gerenciamento de banco de dados: os SIGs são sistemas de softwares muito complexos e a maioria dos mais poderosos SIGs contemporâneos são projetados para contar com um sistema de gerenciamento de banco de dados (DBMS); os SIGs requerem a rápida apresentação de grande quantidade de dados e acesso às informações através de localizações e atributos e tem havido dificuldades para a natureza multidimensional do dado geográfico (duas ou três dimensões de localização mais os atributos) dentro da estrutura de muitos DBMS;
-custo: a explosão do interesse em SIG na década de 1980 é devido, pelo menos em parte, à queda constante e significativa no custo da tecnologia computacional nas três últimas décadas.
2.7. Principais SIG’s e suas características
Como exemplo apresenta-se, a título ilustrativo, um quadro contendo algumas informações sobre quatro Sistemas de Informações Geográficas comerciais: o ArcInfo, o ArcView, o Idrisi e o Erdas Imagine.
Sistemas ARCINFO ARCVIEW IDRISI ** ERDAS Características ) Processa ' Com limitações ( Não processa
Edição Vetorial ) ) ) '
Geração de Topologia ) ( ) (
Junção de Mapas ) ( ) (
Conversão Raster-Vector ) ) ) '
Superposição Vetorial ) ( ) (
Análise Multicritério ( ( ) (
MNT por gradesregulares ) ) ) )
MNT por triangulação ) ) ) (
Operações sobre MNT ) ) ) )
Consulta a bancos de dados ) ) ) (
Quadro 2.7.1. Potencialidade de alguns SIG’s em “Análises Geográficas” (ênfase em análises vetoriais)
** No caso do IDRISI o processamento de dados vetoriais (topologia, junção de cartas, etc.) pode ser feito pelo software CartaLinx.

18
Sistemas ARCINFO ARCVIEW IDRISI ERDAS
Características ) Processa ' Com limitações ( Não processa
Realce ) ) ) )
Mosaico de imagens ( ( ) )
Filtragem espacial ( ) ) )
Conversão Raster-Vector ( ( ) )
Classificação por pixels ( ( ) )
Segmentação ( ( ( (
Classificação por regiões ( ( ( (
Ortoretificação ( ( ( )
Geração de mapas ( ( ( )
Restituição ( ( ( )
Quadro 2.7.2. Potencialidade de alguns SIG’s em “Processamento Digital de Imagens”
O mercado de SIG’s oferece um vasto conjunto de ferramentas que variam muito em potencialidade e aplicabilidade bem como em custos. Os sistemas comerciais podem variar de US$300,00 a US$60.000,00, ou até mais.
3. Conceitos sobre Informações Espaciais
3.1. Amostragem do Mundo – Representação da Realidade
A amostragem do mundo real deve considerar:
§ Que o mundo é infinitamente complexo; § Que o conteúdo do banco de dados espaciais representa uma
visão particular do mundo real; § Que o usuário vê o mundo real através do banco de dados; § Que os dados contidos no banco de dados devem apresentar
uma visão o mais completa e precisa possível do mundo real; § Que o conteúdo do banco de dados deve ser relevante em
termos de: - Temas e características armazenadas; - Período de tempo coberto; - A área de estudo;

19
A figura 3.1.1 mostra esquematicamente a representação temática de dados reais em SIG’s.
Adaptado de www.esri.com
Figura 3.1.1: Amostragem e representação de dados reais em SIG’s
No processo de representação da realidade deve-se observar que o
banco de dados consiste de representações digitais de objetos discretos. O conteúdo dos mapas é armazenado no banco de dados, transformando suas características em objetos desse banco de dados. Muitas das características mostradas no mapa são fictícias e não existem no mundo real (os contornos não existem mas, casas e lagos são objetos do mundo real). Desta forma mostra-se que o conteúdo do banco de dados espaciais pode incluir: a versão digital de objetos reais; a versão digital de características artificiais do mapa (ex: curvas de nível) ou objetos artificiais criados para propósito do banco de dados (ex: pixels).
3.2. Características Básicas de Dados Espaciais e sua Manipulação
As informações geográficas têm três características básicas (DANGERMOND et al, 1990):
o fenômeno, ou característica propriamente dita, como uma variável, sua classificação, seu valor, seu nome,etc.; sua localização espacial ou seja, a localização do fenômeno no espaço geográfico;

20
o tempo.
Os fenômenos no mundo real podem ser observados sob estes 3 aspectos, isto é, temático, espacial e temporal. O modo espacial trata da variação geográfica; o modo temporal trata da variação em intervalos de tempo e o modo temático trata da variação de características.
Todas as propriedades quantitativas ou qualitativas de qualquer fenômeno do mundo real podem ser tratados em um destes aspectos: tema, lugar e tempo.
Os modos de armazenamento das informações no banco de dados influenciam a solução dos problemas.
O Modo espacial da informação é também chamado de localizacional. Os atributos armazenados no modo temático definem as diferentes
características dos objetos. A tabela de atributos associada mostra os atributos dos objetos, onde cada objeto corresponde a uma linha da tabela e cada característica ou tema corresponde a uma coluna da tabela.
O modo temporal pode ser armazenado de várias maneiras:
• Especificando o intervalo de tempo em que os objetos existem; • Armazenando as informações em determinados pontos, no tempo; • Especificando a variação no movimento dos objetos.
Dependendo de como o modo temporal é armazenado, pode-se incluir uma
tabela de atributos simples ou representar, para um mesmo objeto, uma série de tabelas de atributos.
Para a amostragem da realidade os valores numéricos podem ser definidos com relação a escalas de medidas: nominais, ordinais, intervalos, etc.
É importante reconhecer as escalas de medidas utilizadas para os dados do SIG pois isto determina as várias operações matemáticas que podem ser realizadas com os mesmos.
Como pode ser observado na Figura 3.2.1, as três variáveis, anteriormente mencionadas, relacionam-se entre si. Contudo, a manipulação de dados espaciais pode tornar-se complexa uma vez que os atributos e a localização espacial sofrem mudanças individuais ao longo do tempo. Conseqüentemente, a manipulação efetiva de dados espaciais requer que dados de localização e descritivos sejam variáveis independentes umas das outras. Isso quer dizer que características podem ter mudado seus atributos e não a sua localização espacial e vice-versa.
Portanto, dados geográficos são complicados pelo fato de que devem incluir informações sobre posição, possíveis conexões topológicas e atributos dos objetos armazenados. As duas primeiras características distinguem os verdadeiros SIGs dos sistemas úteis na elaboração de inventários (BURROUGH, 1994).

21
FIGURA 3.2.1. - Componentes conceituais de um SIG (DANGERMOND, 1990)
3.3. Tipos de Dados Geográficos e sua Representação em SIGs
Qualquer fenômeno gráfico pode ser reduzido a um dos três conceitos topológicos básicos: pontos, linhas e polígonos.
A Figura 3.3.1. apresenta sete tipos de técnicas de representação espacial de dados geográficos para cada um dos três conceitos anteriormente mencionados (DANGERMOND, 1990):
feição do dado; informação da área da unidade; dados topológicos em rede; dados de amostragem; informações de superfície; informação do texto; dados de símbolos gráficos.
Pontos, linhas e polígonos são comumente definidos, nos mapas, usando-se um sistema de coordenadas cartesianas X,Y, como latitude e longitude, baseado nos princípios da geometria euclidiana. Esse sistema de coordenadas cartesianas é o mais utilizado como ferramenta para medir localizações espaciais e analisar suas várias propriedades, como distâncias. Na Figura 3.3.2 pode-se ver como esses elementos são representados no sistema de coordenadas cartesianas e subseqüentemente como são transferidos para um sistema de coordenadas X,Y em um arquivo SIG (DANGERMOND, 1990).

22
Portanto, todo fenômeno geográfico pode, a princípio, ser representado por um desses três objetos e um rótulo. Por exemplo: uma árvore de jacarandá pode ser representada por um ponto com um único par de coordenadas X,Y e um rótulo "jacarandá". Já uma secção de ferrovia será representada por dois pares de coordenadas X,Y (um inicial e outro final) e um rótulo "ferrovia". Similarmente, uma planície de inundação será representada por uma área cobrindo um conjunto de coordenadas X,Y (com coordenadas de início e fim idênticas) mais um rótulo "planície de inundação".
FIGURA 3.3.1 - Decomposição de tipos de dados geográficos e métodos de representação.

23
Figura 3.3.2 - Arquivo com coordenadas X,Y (DANGERMOND, 1990)
Além do sistema de coordenadas cartesianas, fenômenos geográficos
podem ser expressos usando-se a teoria gráfica e envolvendo relações topológicas para expressar a localização relativa de vários elementos do mapa. A Figura 3.3.3 apresenta um típico mapa de polígonos em rede, que pode ser abstraído em 7 nós e 11 elos (ou segmentos de linhas ou arcos) que conectam 5 polígonos básicos. Pode ser construído um mapa-base numerando os arcos e associando-os a nós e aos polígonos da esquerda e direita que estes definem. Adicionando as coordenadas X,Y de cada nó, tem-se um sistema duplo para identificar cada elemento do mapa. O sistema que primeiro utilizou este método foi o Dual Independent Map Encoding (DIME/Bureau of Census/USA ), sendo que o TOSCA (input de dados, via digitalização, para o IDRISI) baseia-se no mesmo princípio. Esse sistema apresenta a vantagem de eliminar os defeitos causados pela compartilhação das mesmas fronteiras entre polígonos vizinhos distintos.

24
Figura 3.3.3 - Polígonos em rede
Outra técnica muito utilizada envolve o uso de uma grade para definir uma "moldura" regular, porém arbitrária, de polígonos que contêm os dados geográficos. Essa técnica em grade é, necessariamente, uma associação com um sistema de coordenadas, mas não uma associação precisa. Nesse sistema, uma matriz representa as variações geográficas para o computador em linhas e colunas (Figura 3.3.4).

25
Figura 3.3.4- Matriz de linhas e colunas
Existem dois métodos para identificar espacialmente estas informações. O primeiro usa as medidas reais na forma de coordenadas X,Y, enquanto o segundo envolve a definição de fenômenos geográficos por relações entre pontos e linhas, redes, polígonos adjacentes e células contíguas vistas na Figura 3.3.4.

26
4. Representação de Dados de Mapas
Um SIG armazena dois tipos de dados que são encontrados em um mapa:
a) as definições geográficas das características da superfície da terra; e
b) os atributos ou as qualidades que estas características possuem.
Existem duas técnicas de representação em SIG: vector e raster.
Na representação vector, os limites das características são definidos por uma série de pontos, que, quando interligados com retas, formam a representação gráfica daquela característica. Os pontos são codificados com um par de números que dão as coordenadas x e y no sistema (latitude/longitude, coordenadas UTM , etc.), Figura 4.1.
A segunda principal forma de representação é a raster. Neste sistema a representação gráfica das características e dos atributos que elas possuem é armazenada em arquivos de dados unificados, Figura 4.1.
Fonte: ESRI
ÿ Representação Matricial
ÿ Representação Vetorial
ÿ Realidade Modelada
Figura 4.1 - Representação Vetorial e Matricial

27
4.1. A Representação Vetorial
Com a representação vetorial, os limites das características são definidas por uma série de pontos interligados com linhas retas formando a representação gráfica daquela característica. Os pontos são codificados com um par de números, representando as coordenadas (X,Y) nos sistemas de coordenadas Latitude/Longitude, Universal Transverse Mercator - UTM, etc. Os atributos das características são armazenados em um tradicional sistema gerenciador de banco de dados (DBMS).
Figura 4.1.1 - Representação Vetorial com tabelas de atributos
4.2. A Representação Matricial
A segunda principal forma de representação é a raster ou matricial. O termo raster por ser amplamente difundido e corriqueiramente utilizado será adotado para este texto. Com o sistema raster, a representação gráfica das características e atributos que elas possuem são armazenados em arquivos de dados unificados.
A área estudada é subdividida em uma fina malha de células onde são registradas a condição ou atributo da superfície do terreno naquele ponto.

28
A cada célula é atribuído um valor numérico que pode representar uma característica identificadora, um código de atributo qualitativo ou um valor quantitativo de atributo.
Em uma apresentação raster, tal como no monitor de vídeo do computador, existe também uma malha de pequenas células denominadas pixels (pixel é a contração do termo picture element).
Figura 4.2.1 - Representação Vetorial com tabelas de atributos
O pixel pode ser variado em sua forma, cor ou tonalidade de cinza. Para compor uma imagem, os valores nas células da malha de dados são utilizados para regular diretamente a aparência do gráfico de seus pixels correspondentes. Em um sistema matricial o dado controla diretamente a forma visível no monitor de vídeo.
4.3. Raster & Vector
A vantagem do sistema raster é que o espaço geográfico é uniformemente definido em um simples e previsível uso. Como resultado, o sistema raster tem substancialmente mais poder analítico do que o vetorial em análises do espaço contínuo e são adequados para o estudo de dados que variam continuamente sobre o espaço como solo, biomassa vegeta l, chuva, etc.

29
Outra vantagem do sistema raster é que sua estrutura esta mais próxima da arquitetura dos computadores digitais. Como resultado o sistema raster tende a ser mais rápido na estimativa de problemas que envolvem combinações matemáticas de dados em células múltiplas.
Os sistemas raster são excelentes para avaliar modelos ambientais tais como potencial erosivo do solo, cartas de uso e ocupação do solo, adequabilidade ao manejo de solos, bacias hidrográficas, pastagens, florestas, etc. Além disso, como as imagens de satélites utilizam a estrutura raster, a maioria dos sistemas raster podem facilmente incorporar estes dados e realizar o processamento de imagens.
Enquanto sistemas raster são predominantemente análises orientadas, os sistemas vetoriais tendem a ser gerenciamento de banco de dados orientado. Os sistemas vetoriais são mais eficientes no armazenamento de dados de mapas porque eles armazenam somente os contornos das características e não o que está dentro destes contornos.
Comparado com os sistemas raster, os sistemas vetoriais não têm grande capacidade para análise sobre o espaço contínuo; seu principal atrativo são as funções de gerenciamento de banco de dados.
Os vetores funcionam bem quando as condições espaciais do mundo real podem ser precisamente definidas como linhas ou limites. A representação de qualquer fenômeno espacial linear é, quase sempre, desenvolvida de modo grosseiro no formato raster. Essa representação torna-se um problema ainda mais acentuado com relação ao ângulo. Para representar um plano inclinado, este sistema utiliza uma verdadeira escada de pixel.
A abordagem vetorial permite ao usuário obter informações topológicas importantes, difíceis de atingir no formato raster. Se, por exemplo, uma rede hidrográfica fosse representada como vetores, a estrutura topológica resultante poderia ser usada para descrever a contribuição de cada tributário na drenagem geral do sistema.
Quando se analisam imagens de uma região, muitas vezes nota-se que as fronteiras entre os objetos representados não são bem definidas. Quando são impostas linhas, ou seja, vetores, à imagem para delimitar tais fenômenos, introduz-se um elemento interpretativo altamente preciso nos dados, o que é errôneo. Nesse caso, o formato raster é a melhor alternativa .
Por outro lado, a principal limitação no uso do formato vetorial está nas operações que envolvem álgebra booleana e sobreposição de mapas. Nessas operações, fundamentais em estudo do ambiente, o formato raster é mais recomendado. O formato vetorial se aplica melhor às áreas de cartografia e engenharia pela sua precisão na representação do mundo real.

30
Esses dois formatos não são necessariamente exclusivos, podendo ser utilizados de acordo com as operações que serão definidas pelo usuário.
O olho humano é altamente eficiente no reconhecimento de contornos e formas, mas o computador necessita ser instruído, com exatidão, sobre a manipulação e a apresentação dos padrões espaciais. Existem, essencialmente, duas maneiras contrastantes, porém complementares, de representar dados espaciais no computador, uma explícita (ou raster) e outra implícita (ou vetorial).
A Figura 4.3.1 apresenta as duas maneiras de representar dados no computador. Na primeira, as formas do objeto são construídas a partir de um conjunto de pontos sobre uma grade ou raster. O computador reconhece que este conjunto de pontos representa um objeto determinado por meio de um código numérico que será equivalente a um conjunto de cores ou de níveis de cinza.
No modo implícito, a representação é efetuada por um conjunto de linhas, definidas por pontos de início e fim e alguma forma de conexão. Os pontos de início e fim das linhas definem os vetores que representam o objeto desejado. Os indicadores, entre as linhas, mostram ao computador como acontece a conexão entre elas para se formar o objeto.
Figura 4.3.1. - Representações raster e vector
Existem várias diferenças entre os dois sistemas. Primeira: a representação implícita requer menos números, o que implica menor espaço de armazenamento. Segunda: a representação vetorial é esteticamente melhor do que

31
a representação raster. Terceira: as informações de conexão possibilitam buscas espaciais diretas nos objetos representados. Por outro lado, se a forma, ou o tamanho, do objeto deve ser mudada, isto pode ser realizado mais rápido e mais facilmente na representação raster. Nesse tipo de representação, a atualização de dados ocorre apenas substituindo certos valores por novos. No módulo vetorial, além da atualização das coordenadas, é necessario reconstruir a conectividade.
Em suma, a representação raster é um conjunto de células localizadas por coordenadas; cada célula é endereçada independentemente com o valor de um atributo. Na representação vetorial, existem três entidades geográficas principais: pontos, linhas e áreas, que têm conectividade e atributos.
A estrutura de dados raster é a mais simples desse sistema. Consiste de um array de células em forma de malha ou grade. Essas células são chamadas com freqüência, de elementos pictóricos (picture elements) ou pixels e representam a menor unidade possível encontrada. Cada pixel é referenciado pelos números da linha e da coluna que ocupa na malha, além de outro número representando o tipo ou o valor do atributo mapeado. Na estrutura raster, um ponto é representado por uma única célula; uma linha, por um conjunto de células vizinhas que se estendem em dada direção; uma área é o aglomerado de células vizinhas, conforme visto anteriormente na Figura 4.3.1. Essa estrutura, em forma de malha, significa que a superfície bidimensional, na qual os dados são representados, não é contínua, mas quantizada. Este fato tem importância vital no cálculo de distâncias e áreas, principalmente quando o tamanho do pixel é grande em relação ao objeto representado (Figura 4.3.2a e b).
A Figura 4.3.2a mostra que a distância euclidiana entre a e c é de cinco unidades, enquanto na Figura 4.3.2b poderia ser de sete ou quatro unidades, se forem quantificadas apenas as células da extremidade ou se todas as células forem atravessadas.
FIGURA 4.3.2 - A representação raster pode afetar a estimativa de distância e área,
dependendo da quantificação das células
Na representação raster, o espaço geográfico pode ser tratado como se fosse uma superfície cartesiana achatada. Cada pixel está associado a uma parcela

32
quadrada da superfície da Terra. Portanto, a resolução, ou escala dos dados raster, está na relação entre o tamanho do pixel no banco de dados e o da célula no solo.
Na estrutura vetorial, o espaço é contínuo, ao contrário de quantizado como na representação raster. Isso permite definir com precisão posições, comprimentos e dimensões. Os dados geográficos são representados na forma de pontos, linhas e áreas.
Os pontos são representados por apenas um par de coordenadas X,Y. A cada ponto estão associadas informações sobre orientação, atributo, símbolo, etc.
As linhas são segmentos de reta construídos com duas ou mais coordenadas. Cada linha tem os mesmos tipos de informações associadas aos pontos. Um arco é um conjunto de pares de coordenadas que descrevem uma linha contínua complexa. Quanto menor o segmento e maior o número de pares de coordenadas X,Y, mais se aproxima de uma curva.
As áreas de polígonos podem ser representadas de várias maneiras em um banco de dados vetorial. O objetivo dos dados estruturados em polígonos é o de descrever as propriedades topológicas de áreas, isto é, contornos, vizinhança e hierarquia, de tal maneira que as propriedades associadas a esses blocos espacialmente construídos possam ser apresentadas e manipuladas como um mapa temático. Cada componente de um polígono terá uma forma única, um perímetro e uma área. Não existe, como na representação raster, uma unidade básica. A análise geográfica requer que a estrutura dos dados seja capaz de armazenar os dados vizinhos.
Fonte: ESRI
FIGURA 4.3.3 – Feições cartográficas representadas pelos formatos matricial e vetorial

33
5. Conceitos de Banco de Dados Geográficos
5.1. Organização
Do ponto de vista da lógica usada na representação espacial, raster ou vector, pode-se notar que o banco de dados geográficos está organizado de maneira similar a uma coleção de mapas.
Fonte: ESRI
FIGURA 5.1.1 – Organização de temas cartográficos em SIG
Os sistemas vetoriais estão muito perto desta lógica com as coverages, entendidas como coleções de mapas que contém definições geográficas de um conjunto de características e sua tabela de atributos associados. As coverages diferem dos mapas de duas maneiras: elas conterão um tipo simples de característica e, podem conter um conjunto de atributos que pertencem àquelas características.
O sistema raster também utiliza a lógica de mapa, mas usualmente divide um conjunto de dados em layers unitários. Um layer contém todos os dados para um atributo simples, por exemplo, layer solo, layer estrada, e layer uso do solo. O sistema raster pode lincar um layer identificador da característica com tabelas de atributos.
Geralmente existirão layers separados para cada atributo e serão produzidos mapas interpretativos a partir de uma combinação de layers de mapas.

34
A diferença básica entre raster layers e vector coverages está na organização do banco de dados em temas elementares de mapas.
5.2. Georeferenciamento
Todos os arquivos de dados em um SIG são georeferenciados. Georeferenciamento refere-se a localização de um layer ou coverage no espaço pelo sistema de coordenadas.
Sistema geográfico Sistema cartesiano
Fonte: ESRI
FIGURA 5.2.1 – Georeferenciamento de dados em SIG
Com imagens raster, uma forma comum de georeferenciamento é a indicação do sistema de coordenadas (latitude/longitude, UTM, etc.), as unidades de referência e as posições das coordenadas: esquerda, direita, topo e fundo da imagem.
O mesmo acontece com arquivos de dados vetoriais, embora esquerda, direita, topo e fundo referem-se agora ao retângulo de contorno da coverage, um retângulo que define os limites da área mapeada.

35
5.3. Topologia
Para a elaboração de alguns tipos de análises os SIG’s necessitam conhecer, além da representação gráfica das entidades mapeadas (pontos, linhas e polígonos), o relacionamento espacial entre estas entidades. Em mapas digitais, os relacionamentos espaciais são descritos usando-se a topologia.
Segundo PAREDES (1994), a topologia é um processo matemático que define explicitamente os relacionamentos espaciais tais como, conectividade, circunscrividade, contigüidade e orientação.
A conectividade permite que arcos sejam ligados um a outro por nós; a circunscrividade permite que arcos possam circunscrever uma área, definindo um polígono; a contigüidade permite que arcos possuam direção e lados como esquerda e direita; e a orientação permite a orientação do fluxo de identificação dos atributos, como “de-nó” e “para-nó”.
O uso dos conceitos topológicos, além de permitir um armazenamento mais eficiente (com manipulação mais rápida de grandes quantidades de dados), é fundamental na execução de funções de análise tais como: modelagem de fluxo através de linhas conectadas numa rede; combinação de polígonos adjacentes com características similares e recobrimento de diferentes entidades geográficas (PAREDES, 1994).
Adaptado de ESRI
FIGURA 5.3.1 – Uso de conceitos topológicos para o armazenamento eficiente de feições (polígonos adjacentes com arcos comuns)

36
5.4. Precisão e Exatidão de Bancos de Dados Espaciais Segundo CHRISMAN (1991), dentre os mais diversos assuntos técnicos
em GIS, exatidão é talvez o mais importante, cobrindo preocupações sobre a qualidade de dados, erro, incerteza, escala, resolução e precisão em dados espaciais e afetando os modos nos quais os dados poderão ser usados e interpretados.
De modo geral pode-se afirmar que todos os dados espaciais são, até
certo ponto, inexatos, mas geralmente são representados no computador a altas precisões.
Para entendimento dessa afirmação é importante conceituar os termos exatidão e precisão.
A exatidão é definida como a proximidade dos resultados, cálculos ou estimativas para valores verdadeiros. Uma vez que dados espaciais normalmente são uma generalização do mundo real, é geralmente difícil identificar um valor verdadeiro, e trabalha-se, ao invés disso, com valores que são aceitos como verdadeiros. Por exemplo, medindo a exatidão de um contorno em um banco de dados digitais, nós comparamos o contorno com o desenhado no mapa fonte, uma vez que o contorno não existe como uma linha real na superfície da terra (CHRISMAN,1991).
A precisão é definida como o número de casas decimais ou dígitos significativos em uma medida (CHRISMAN,1991).
Obviamente precisão é diferente de exatidão, isto é, um grande número de dígitos significativos não necessariamente indica que a medida é exata. Um SIG trabalha a alta precisão, muito mais alta do que a própria exatidão de seus dados.
Uma vez que todos os dados espaciais são de limitada exatidão, inexatos
até certo ponto, perguntas importantes a serem feitas são: - como medir precisão ? - como localizar os modos de propagação de erros por operações de
SIG? - como assegurar que os usuários não atribuem maior exatidão a que os
dados merecem? Vários modelos ou padrões de controle de qualidade estão sendo
discutidos e aplicados a nível internacional. Segundo CHRISMAN (1991), foi desenvolvido nos E.U.A. um modelo padrão para descrever exatidão de dados digitais considerando os seguintes componentes de qualidade:
- exatidão posicional; - exatidão de atributo; - consistência lógica; - perfeição; - linhagem;

37
A exatidão posicional é definida como a proximidade da informação localizacional (usualmente coordenada) para a posição verdadeira. Convencionalmente, mapas são exatos a grosseiramente uma largura de linha ou 0,5 mm. Estes valores são equivalentes a 12 m em mapas na escala 1:24.000, ou 125 metros na escala 1:250.000.
Para testar a exatidão posicional é preciso usar uma fonte independente
de exatidão mais alta, encontrar um mapa de escala maior, usar o Sistema de Posicionamento Global (GPS), usar dados brutos de pesquisa ou usar evidência interna, isto é, polígonos abertos, linhas que excedem ou não chegam às junções, que são indicações de inexatidão (os tamanhos de intervalos, que não chegam ou ultrapassam as junções podem ser usados como uma medida de exatidão posicional).
Outra forma de avaliação da exatidão posicional é calcular seu valor a
partir do conhecimento dos erros introduzidos por diferentes fontes , por exemplo: - 1 mm no documento fonte - 0.5 mm no registro do mapa para digitalização - 0.2 mm na digitalização Se neste caso as fontes combinam-se independentemente, pode-se obter
uma estimativa da exatidão global somando-se os quadrados de cada componente e extraindo a raiz quadrada da soma:
( 12 + 0.52 + 0.22 )0.5 = 1.14 mm A exatidão de atributo é definida como a proximidade dos valores de
atributo para seus valores verdadeiros. É importante notar que enquanto a localização não varia com o tempo, atributos freqüentemente variam.
A exatidão de atributo deve ser analisada de diferentes maneiras dependendo da natureza dos dados. Por exemplo, para atributos contínuos (superfícies) como em um DEM (Digital Elevation Model) a exatidão deve ser expressa como erro de medida. Já para atributos categóricos, tais como os polígonos classificados, é importante considerar:
- São as categorias mapeadas, suficientemente definidas e detalhadas? - Erros grosseiros, como um polígono classificado como A quando deveria
ter sido como B, são simples mas indesejáveis ; - é mais provável que o polígono seja heterogêneo, por exemplo, zonas
de vegetação onde a área poderia ser 70% A e 30% B . Para teste da exatidão de atributos é preciso preparar uma matriz de
classificação, executando as seguintes atividades: - escolher randomicamente vários pontos de amostragem; - determinar a classe de acordo com o banco de dados; - determinar a classe no campo; - completar a matriz:

38
Classe no terreno Classe no
Banco de Dados
A B C D
A . . . . B . . . . C . . . . D . . . .
Se todos os pontos recairem na diagonal da matriz significa que a mesma
classe observada no terreno é registrada no banco de dados. Ocorre um erro de omissão quando a classe de um ponto no terreno é
registrada incorretamente no banco de dados. O número de pontos da classe B registrados incorretamente é a soma da coluna B linha A, coluna B linha C e coluna B linha D, i.e. o número de pontos que são B no solo mas qualquer outra coisa no banco de dados, isto é, a soma de coluna menos a celula diagonal.
Um erro de omissão acontece quando a classe registrada no banco de dados não existe no solo. Por exemplo, o número de erros de omissão para classe A é a soma da linha A coluna B, linha A coluna C, linha A coluna D, i.e. os pontos falsamente registrados como A no banco de dados ,isto é, a soma de linha menos a celula diagonal.
A consistência lógica se refere à consistência interna da estrutura de
dados, particularmente aplicada à sua consistência topológica. Desta forma procura-se identificar se o banco de dados é consistente em suas definições, se todos os polígonos mapeados são entidades gráficas fechadas, se existe um label (identificação) exatamente dentro de cada polígono, se existem nós cruzando arcos, ou arcos que se interceptam sem formar nós, etc.
Outro ítem a ser observado é a perfeição que está relacionada ao grau
em que os objetos esgotam todos os ítens possíveis do universo, isto é, se todos os possíveis objetos existentes em campo estão incluídos dentro do banco de dados. A perfeição é afetada por regras de seleção, generalização e escala.
A Linhagem é um registro das fontes de dados e das operações que
criaram o banco de dados. Neste contexto são examinados os processos de digitalização, os documentos fonte, o momento em que os dados foram coletados, a agência que levantou e colecionou os dados, os passos usados para processar os dados.

39
6. Cartografia Digital
Segundo SANTANA (1999), analisar os diversos tipos de representação da superfície terrestre, sem que a confecção de seus resultados passem pela cartografia clássica, resulta que, o observado, descrito ou visto, não conseguirá ser relatado da mesma forma ou proporções nos quais os encontramos no ambiente pesquisado. Essa ligação latente entre a cartografia e as ciências que estudam, analisam e representam o meio físico tornam os conceitos cartográficos importantes a qualquer profissional ligado à hidrologia, geologia, pedologia, geotecnia, topografia, geografia, agronomia entre outras.
Em OLIVEIRA (1993) encontramos algumas definições do termo cartografia: Dicionário Contemporâneo da Língua Portuguesa : “Arte de traçar ou gravar cartas geográficas ou topográficas”; Novo Dicionário da Língua Portuguesa, de Aurélio Buarque de Holanda Ferreira: “Arte ou ciência de compor cartas geográficas; tratado sobre mapas”; O Webster: “Arte ou prática de fazer cartas ou mapas”; O Larousse descreve mais: “Arte de desenhar os mapas de geografia: Mercátor criou a cartografia científica moderna”; Der Volks Brockhaus: Projeto e desenho de cartas geográficas, plantas de cidade, etc.”. As Nações Unidas em 1949: “A cartografia é a ciência que se ocupa da elaboração de mapas de toda espécie. Abrange todas as fases dos trabalhos, desde os primeiros levantamentos até a impressão final dos mapas”. ACI em 1964 (Associação Cartográfica Internacional): “Conjunto de estudos e operações científicas, artísticas e técnicas, baseado nos resultados de observações diretas ou de análise de documentação, com vistas à elaboração e preparação de cartas, projetos e outras formas de expressão, assim como a sua utilização”.
Para que se entenda adequadamente o processo de elaboração de um produto cartográfico é importante o conhecimento de conceitos próprios tais como escalas cartográficas, sistemas de projeções, tipos de mapas ou cartas, representações cartográficas dentre outros. A seguir apresenta -se sucintamente alguns desses conceitos.
6.1. Escalas Como definição básica pode-se dizer que escala é a relação entre a
distância de dois pontos quaisquer do mapa com a correspondente distância na superfície da Terra. É traduzida em geral por uma fração que representa a relação entre as distâncias lineares da carta e as mesmas distâncias da natureza. Além disso pode-se definir que escala é uma relação que torna uma grandeza real reduzida ou ampliada de seu tamanho natural. No caso dos levantamentos encontramos sempre o primeiro caso, ou seja, a redução do tamanho natural.
A classificação cartográfica de escalas (segundo OLIVEIRA, 1993) é:

40
Quadro 01 - Classificação cartográfica de escalas.
Escala Denominação Classificação
1:500 à 1:5.000 Grande Cadastral
1:25.000 à 1:250.000 Média Topográfica
1:500.000 ou menores Pequena Geográfica
Como regem as normas cartográficas, a escala sempre deve estar presente nos materiais produzidos, seja na forma numérica ou na forma gráfica, sendo recomendável a presença de ambas.
FIGURA 6.1.1 – Formas de representação de escalas (gráficas e descritivas)
6.2. Projeções de mapas
No processo de construção de mapas ou cartas, por menor que seja a extensão levantada, está-se representando uma superfície curva, a superfície terrestre, em uma unidade plana que é inicialmente o papel. Qualquer que seja a representação da superfície terrestre essa é uma simplificação de um modelo de maior complexidade.
As projeções cartográficas formulam matematicamente uma superfície terrestre representado-a, mas distorcendo algumas de suas características em função da projeção.
Cada projeção conserva uma propriedade encontrada em seu modelo real, a forma (ângulos), a proporção (áreas), as distâncias entre os pontos, dentre outras. Uma carta ideal seria aquela em que se pudesse encontrar todas essas propriedades. Esse modelo não é possível de ser criado, devido ao fato de que a representação espacial é feita em um plano como são os mapas ou as cartas.
No estudo das projeções e suas características, nota -se que a cartografia em si e as projeções cartográficas tem seus conceitos criados já há algum tempo, não sendo estranho nos reportarmos a bibliografias de décadas passadas ou mesmo de séculos passados com é por exemplo a projeção cônica de Lambert de 1774 ou a de Mercator de 1569. Atualmente essas projeções sofrem tratamentos

41
computacionais, mas seus princípios se conservam em suas formulações matemáticas originais.
BAKKER, citado em OLIVEIRA (1993), apresenta a seguinte classificação modificada das projeções:
Quadro 6.2.1 - Classificação das projeções cartográficas
1. Quanto ao método geométricas perspectivas pseudoperspectivas simples ou regulares modificadas ou irregulares analíticas convencionais 2. Quanto à situação do gnomônica ponto de vista estereográfica ortográfica 3. Quanto à superfície por desenvolvimento cônicas e policônicas de projeção cilíndricas poliédricas planas ou azimutais polares equatoriais ou meridianas horizontais ou oblíquas 4. Quanto à situação da cônicas e policônicas Normais superfície de projeção transversas horizontais ou oblíquas cilíndricas equatoriais transversas ou meridianas horizontais ou oblíquas 5. Quanto às eqüidistantes meridianas propriedades transversais azimutais ou ortodrômicas equivalentes conformes afiláticas

42
A noção precisa, da existência de várias projeções e suas características leva o profissional da área de levantamento, a fazer uso daquela que mais satisfaça aos objetivos do trabalho em questão.
Estereográfica polar
Cilíndrica
Cônica
Outras Fonte:ESRI
Figura 6.2.1 - Representação da superfície terrestre segundo algumas projeções.
6.3. A Cartografia Digital e os Sistemas de Informações Geográficas
Um passo inicial na transformação dos dados analógicos, como os mapas em papel, para o formato digital, surgiu com a cartografia digital. Essa tecnologia tem como meta inicial, o desenvolvimento de materiais, equipamentos e metodologias para a confecção de moldes cartográficos digitais, que possam ser armazenados, modificados e reproduzidos com maior rapidez e facilidade (SANTANA, 1999).
A diferença primordial da cartografia digital e os SIG’s, é que neste último, além da fiel reprodução dos modelos do terreno, ou seja os mapas, foi incorporado o conceito de manipulação e análise dos dados introduzidos, tornando-o uma poderosa ferramenta de estudo do meio físico. Em um conceito mais amplo dos SIG’s pode-se afirmar que estes utilizam a cartografia digital como formadora de sua base cartográfica.
Figura 6.3.1 – SIG’s tratando dados cartográficos digitais.

43
7. Conversão Digital de Dados A digitalização é o processo de conversão de feições gráficas de um mapa
convencional (pontos, linhas e polígonos) para um formato compatível para uso em computador. Este processo pode ser executado segundo duas técnicas básicas: a digitalização ou vetorização manual (com o uso de mesas digitalizadoras) e a digitalização ou vetorização automática (com o uso de scanners).
7.1. Digitalização O processo de digitalização manual tem como equipamento básico a mesa
digitalizadora, composta por três partes principais:
uma superfície plana,sobre a qual se fixa o mapa; um dispositivo que mede coordenadas; um cursor, que indica cada posição da mesa em relação ao sistema de referência adotado (sistema de coordenadas).
Figura 7.1.1 – Componentes da mesa digitalizadora.
São usados dois indicadores de exatidão para aferir a qualidade de digitalização: a resolução e a precisão.

44
Resolução é a menor distância que pode ser medida ao longo dos eixos horizontal e vertical da mesa. Depende do espaçamento entre os fios que formam a malha, em torno de 0,025 a 0,0025 mm. Precisão é o erro máximo decorrente de uma série de medidas sobre um mesmo ponto (repetibilidade), em torno de +/- 0,25 mm e +/- 0,025 mm dependendo do equipamento.
A digitalização pode ser feita de dois modos: ponto-a-ponto (point mode) ou contínuo (stream mode).
No ponto-a- ponto, as coordenadas são lidas pela mesa e enviadas ao computador cada vez que um dos botões do cursor é pressionado. O operador tem a liberdade de escolher e digitalizar os vértices que melhor definam as feições cartográficas de interesse. No modo contínuo, as coordenadas são lidas continuamente, à medida que o operador percorre uma feição com o cursor e enviadas sequencialmente ao computador. O processo só pára quando se pressiona uma tecla especial. O intervalo entre o registro de pares de coordenadas consecutivos é monitorado pelo software, que usa um algorítmo específico, baseado no incremento de distância ou tempo.
O modo contínuo é ideal para a digitalização de arcos extensos, como curvas de nível. É desaconselhável para feições poligonais, pois pode perder pontos notáveis que melhor definiriam o polígono.
Uma desvantagem do método é o volume final dos arquivos, que podem atingir tamanhos bastantes superiores aos gerados no ponto-a-ponto. Isto pode ser contornado pela suavização pós-digitalização das linhas. Outra opção seria usar um software de digitalização que altere automaticamente o incremento em função da geometria da feição digitalizada - incremento maior para uma porção retilínea de uma linha e incremento menor para uma curva.
O processo de digitalização compreende uma série de atividades preliminares que irão garantir a qualificação do processo de conversão digital.
7.1.1. Preparação dos Mapas
A fase de preparação dos mapas incorre nas seguintes sub-fases:
identificação de características cartográficas do mapa como escala, sistema de projeção e sistema geodésico; anotações de informações complementares no mapa a ser digitalizado, como o código das entidades gráficas;

45
compilação de outras informações e atualização do documento; identificação de no mínimo três pontos no mapa com coordenadas conhecidas, para a orientação da mesa digitalizadora.
Figura 7.1.1.1 – Mapa preparado para digitalização.
7.1.2. Projeto de Arquivos Digitais
A fase de projetos de arquivos digitais define todas as variáveis a serem adotadas na digitalização dos mapas:
estruturação dos níveis de informação (layers); fontes,cores e dimensões de símbolos cartográficos e textos; padrões de preenchimento,tipos de traços,etc.
7.1.3. Digitalização
A fase de digitalização propriamente dita compreende a orientação da mesa digitalizadora e a digitalização do mapa. O software destinado à digitalização deve possibilitar a orientação da mesa digitalizadora, através de transformações

46
geométricas do tipo Afim, Isogonal ou Projetiva. Deve ainda permitir análise do resultado da orientação, segundo parâmetros estatísticos. Também deve possuir algumas funções que facilitem a digitalização das feições cartográficas, como capturar pontos por proximidade, fechar polígonos automaticamente, retirar ângulos. etc.
Figura 7.1.3.1 – Módulo de orientação da mesa digitalizadora (software CartaLINX).
7.1.4. Verificação e Edição
As fases de verificação e edição são desenvolvidas após a digitalização devido à necessidade de checagem de que todas as informações foram digitalizadas e se há erros oriundos do processo. É comum fazer-se uma plotagem nesta etapa, ou ainda usar um software que identifique os erros automaticamente. Deve ser realizado um rigoroso controle de qualidade, comparando o mapa digitalizado com o original. Os erros mais cometidos são: polígonos abertos, arcos pendentes, laços, polígonos sem centróide, entidades sem código, textos e símbolos em posição errada, curvas de nível que se cruzam, cotas de curvas de nível erradas, grafia incorreta de textos, omissão de entidades e entidades em níveis incorretos.
Laços Polígonos abertos Arcos pedentes Cruzamento de isolinhas
Figura 7.1.4.1 – Erros típicos do processo de digitalização.

47
7.2. Rasterização
O processo de Digitalização Automática ou rasterização é a discretização do mapa em unidades retangulares homogêneas ou pixels através do uso de scanner. Este é um dispositivo ótico-eletrônico, composto por uma fonte de luz e um sensor ótico (fotocélula). Seu princípio de funcionamento baseia-se na emissão de um feixe de luz, refletindo pela superfície do mapa e registrado pelo sensor. Cada pixel detectado possui tamanho e cor, características que variam conforme a resolução espacial e radiométrica do sistema sensor usado.
Figura 7.2.1 – Módulo de orientação da mesa digitalizadora (software CartaLINX).
Resolução espacial é capacidade do sensor de individualizar elementos gráficos. É medida pelo número de pontos registrados num intervalo linear (pontos por polegada), podendo variar entre 25 e 2.000 ppp para scanners de grande formato.
Resolução radiométrica é o número de tons de cinza ou cores que o sensor pode distinquir. Alguns scanners monocromáticos distinguem até 256 tons de cinza. Outros, policromáticos, dife renciam até 16,7 milhões de cores.
Os scanners são classificados segundo a forma que adotam para varrer o documento: de mesa (flat bed scanner), de tambor (drum scanner) ou de rolo (pinch roller scanner).
As fases de desenvolvimento do processo de Digitalização automática são basicamente : Preparação do mapa, ajuste do scanner, edição raster, compressão de dados e conversão raster/vector.
7.2.1. Preparação do Mapa
A preparação do mapa inclui:

48
identificação de no mínimo três pontos de controle no mapa, para o georreferenciamento da imagem raster; redesenho do mapa, eliminando detalhes indesejáveis como símbolos e textos, ou apenas realçando informações que serão vetorizadas. A limpeza é um processo bastante comum quando existem polígonos temáticos desenhados na base cartográfica e se quer rasterizar/vetorizar apenas os polígonos.
Figura 7.2.1.1 – Identificação de pontos de controle para georeferenciamento.
7.2.2. Ajuste do Scanner
Para o ajuste do scanner são definidos parâmetros de rasterização (resolução espacial e radiométrica, limiar, velocidade do scanner e formato do arquivo de armazenamento). A definição da resolução espacial pode depender de fatores como:
espessura de traços a identificar; menor separação entre feições existentes no mapa, para individualizar feições muito próximas; precisão desejada: em geral, para a rasterização de documentos cartográficos usa-se como parâmetro de exatidão a metade do valor da acuidade visual (em torno de 0,1 mm). Para chegar a este valor é necessária uma resolução mínima de 300 dpi.

49
7.2.3. Edição Raster
Após a digitalização, a imagem raster sofre um processo de edição - uma limpeza para melhorar a apresentação ou mesmo prepará-la para a vetorização. Devido a complexidade do mapa e o software empregado, a edição pode ser feita por processo manual ou automático.
As seguintes operações podem fazer parte da edição raster: eliminação de ruídos (pixels isolados), suavização de linhas, eliminação de informações marginais, complementação de linhas e união (mosaico) de arquivos.
Outros tipos de operações de edição podem ser necessários (eliminação de textos, símbolos, linhas), principalmente quando o mapa raster servir como base para a vetorização semi-automática ou automática.
Figura 7.2.3.1 – Problemas típicos do processo de rasterização.

50
7.2.4. Compressão de Dados
Um software de compressão pode diminuir o volume de um arquivo raster. Outro recurso é converter o arquivo para um formato que o torne mais compacto.
7.3. Técnicas para a Conversão Raster/Vector
A utilização de técnicas para a conversão do formato raster para o vector deve-se ao fato da imagem raster apresentar restrições na manipulação, principalmente quando se quer associar feições ao banco de dados alfanuméricos. Outras restrições são o volume de arquivos, dificuldade de edição e a construção da topologia. Nestes casos o melhor é converter a imagem raster para vetorial.
A conversão raster/vector pode ser executada por método manual, semi-automático ou automático. Os dois primeiros são também conhecidos como heads-up, pois permite que o operador execute a vetorização da imagem com visualização direta no monitor, com maior controle sobre o processo e de forma menos cansativa, ao contrário da executada em mesa digitalizadora.
O processo de conversão raster/vector pode ser feito de forma gradativa, começando pelas informações que serão imediatamente conectadas ao banco de dados. Na escolha do método devem ser observados os seguintes fatores:
tipo de documento cartográfico a ser vetorizado (mapa altimétrico, planimétrico, temático ou conjunto de todos esses); estado de conservação dos documentos cartográficos, analisando o grau de limpeza, nitidez das informações; necessidade de preparação manual e edição raster antes da vetorização, em função do método escolhido; tempo a ser gasto na vetorização para cada um dos métodos, levando em consideração o documento cartográfico a ser trabalhado; grau de edição necessário após a vetorização em função do método escolhido; precisão e conformidade proporcionada por cada um dos métodos; custo dos softwares e equipamentos a serem usados em cada um dos métodos.

51
7.3.1. Vetorização Manual
A vetorização manual dispensa qualquer tipo de pré-edição raster. Em certos casos isso pode ser vantajoso em relação aos demais métodos. Este tipo de vetorização consiste basicamente em seguir cada feição raster com o cursor e escolher os pontos que a modelem melhor na estrutura vetorial.
Antes de iniciar o processo, é preciso definir o tipo de entidade gráfica que vai ser usada para modelar a feição - linha, círculo, curva - e os atributos de cada feição cartográfica - nível, cor e estilo.
Existem softwares que eliminam pixels que formam uma determinada entidade gráfica após a sua vetorização. Isto equivale a uma limpeza automática do arquivo enquanto ele é vetorizado. A vetorização de textos e símbolos pode também ser executada manualmente ou em processo posterior, através de um software de reconhecimento de padrões, tipo OCR - Optical Character Recognition.
As vantagens deste método são:
vetorização seletiva que permite definição de atributos das entidades, evitando perdas de representação gráfica; possibilidade de registrar apenas vértices principais, o que proporciona melhor modelagem das feições cartográficas e diminui o volume do arquivo; uso de software de baixo custo, que pode rodar em PC.
As principais desvantagens podem ser atribuídas ao tempo de vetorização e à dificuldade de vetorizar as entidades raster pelo centro do pixel. Isto provoca baixas produtividade e conformidade, se comparadas com os demais métodos.
7.3.2. Vetorização Semi-automática
O processo de vetorização semi-automática, também conhecido por vetorização supervisionada, conjuga o método automático com, o manual, de maneira interativa com o operador. O operador identifica manualmente o ponto inicial de uma determinada linha raster a ser vetorizada. Em seguida a linha vai sendo rastreada e vetorizada automaticamente pelo sistema, através de técnicas de processamento digital de imagens.
Quando um obstáculo, como um cruzamento de linha ou um texto sobre a linha é encontrado, o processo é automaticamente interrompido. O operador precisa intervir para reposicionar o cursor sobre a linha. A região em torno do ponto interrompido é automaticamente ampliada e mostrada numa janela auxiliar. Assim o operador pode identificar o ponto a seguir.

52
O método pode ser usado na vetorização de mapas com alta densidade de linhas. Mas é mais ágil e proporciona melhores resultados em baixa densidade de linhas. A vetorização pode ser seletiva, definindo as feições que se deseja converter e seus atributos (cor, nível e estilo), não havendo perdas na representação gráfica. Permite vetorização das entidades gráficas lineares tomando como referência o centro do pixel, proporcionando boa precisão e conformidade no resultado final.
Após a vetorização, é preciso editar o arquivo vetorial, principalmente para a resolução de problemas de arcos pendentes e fechamento de polígonos. A suavização de linhas pode também integrar o processo de edição, principalmente para reduzir o volume do arquivo.
Gastar algum tempo na preparação do documento cartográfico pode render na hora de processar a informação semi-automática e edição vetorial. Preparar um documento cartográfico é adaptá-lo às condições do processo de vetorização. Isto abrange desde um simples trabalho de ligação de traços ao redesenho de todo o mapa. Um exemplo é dos polígonos temáticos desenhados sobre uma base cartográfica, quando se quer vetorizar apenas os temas. Nesse caso, pode-se realçar os polígonos e durante a rasterização, aplicar um limiar que permita registrá-lo isoladamente.
O limiar e a resolução espacial são os principais parâmetros a serem definidos durante o processo de rasterização, principalmente se o objetivo é o registro de informações específicas.
É necessária para a eliminação de ruídos, símbolos, textos, linhas indesejadas, fechamento de polígonos e ligação de traços. É o complemento da preparação manual do documento cartográfico.
Na etapa de retificação o mapa digital raster é referenciado ao seu sistema de coordenadas, corrigindo-se as distorções causadas pelo processo de rasterização.
Antes de iniciar o processo, é preciso definir os parâmetros de vetorização. Eles dão uma certa inteligência ao método e variam com o software escolhido. Os parâmetros mais comuns a todos os softwares são:
espessura de linhas - limites mínimo e máximo para a espessura, em pixels, da linha a ser rastreada/vetorizada; parâmetros de entidades (atributos como cor, nível e estilo); fechamento de polígonos; folga entre traços - distância mínima entre segmentos de linhas, para que o software possa entender, por exemplo, linhas tracejadas como elemento único, respeitando o estilo, que também foi definido;

53
distância entre pontos - distância entre os pontos a serem capturados, em função da escala do desenho e do tipo de feição.
Usando uma porção do desenho, estes parâmetros podem ser testados e melhorados, pois variam de acordo com o documento cartográfico.
O tempo de vetorização semi-automática é aproximadamente 50% do tempo gasto para a digitalização manual do mesmo documento.
7.3.3. Vetorização Automática
Usa técnicas de processamento digital de imagens para rastrear pixels acesos (preto) de uma imagem raster binária e convertê -los para a estrutura vetorial. O processamento é feito sem a ajuda do operador, segundo regras preestabelecidas. A principal vantagem do método é o tempo gasto para a vetorização. É possível, por exemplo, vetorizar uma carta altimétrica de alta densidade de curvas de nível em tamanho A1, em apenas alguns minutos.
O método é justamente recomendado para a vetorização de linhas que não se cruzam (como curvas de nível), ou polígonos temáticos livres de textos e símbolos. Não é aconselhável para vetorização de mapas topográficos planialtimétricos. Apesar da rapidez do processo de vetorização, os erros cometidos podem retardar o processo de edição, que pode chegar a dez vezes ou mais o tempo gasto na vetorização.
O tempo gasto na preparação do documento cartográfico e na edição raster também são valiosos. As fases do processo de vetorização automática são similares ao processo semi-automático, apresentando algumas peculiaridades.
A preparação do mapa a ser rasterizado e o processo de rasterização se assemelham ao método semi-automático. A edição raster pode complementar o processo de preparação.
Todas as informações do arquivo raster que não serão vetorizadas (legenda, dados cartográficos, textos e símbolos) devem ser eliminadas. Textos e símbolos também podem ser vetorizados automaticamente através de um software específico de reconhecimento de padrões. Alguns processos manuais como a ligação de linhas podem ser automatizados. Esta fase pode abranger também a eliminação de pontos isolados (ruídos) e suavização de linhas raster. O sucesso da vetorização automática deve-se basicamente ao arquivo raster: quanto mais limpo, melhor o resultado.

54
Os parâmetros de vetorização devem ser cuidadosamente definidos e testados abrangendo:
definição de folgas entre linhas: a vetorização automática de linhas tracejadas também pode ser executada automaticamente, sem quebra do elemento gráfico em pequenos elementos. Existem duas alternativas: fazer a ligação antes da vetorização, na etapa de preparação ou edição raster ou definir uma folga entre linhas, onde todas as linhas separadas pela folga serão entendidas como contínuas. Neste caso, além de haver a perda da representação do padrão da linha (a linha tracejada passa a ser representada como contínua), a folga definida não garante o fechamento correto das linhas para todo o arquivo. É comum a união de linhas que na realidade são separadas. Quando não se faz a ligação dos traços manualmente ou não se define uma folga para sua ligação automática, o resultado é a fragmentação de uma linha de padrão tracejado - cada traço será um elemento gráfico no arquivo vetorial; definição da espessura de rastreamento: define-se um limite mínimo e máximo em pixels para as linhas a serem rastreadas/vetorizadas. Para a espessura de traço definido, também são definidos atributos como nível, cor, estilo. Isto permite por exemplo vetorizar um arquivo de curvas de nível, separado em níveis distintos, como curvas mestras e intermediárias, representadas por traços mais e menos espessos; definição de atributos de entidades (cor, estilo e nível) de acordo com a espessura da linha a ser rastreada; definição de parâmetros de reconhecimentos de símbolos e textos.
Os softwares para vetorização automática não possuem inteligência suficiente que garanta bons resultados para a vetorização conjunta de linhas, símbolos e textos. Em resumo, o método será eficiente quando os mapas forem separados por classes de informação, como altimetria, hidrografia, vegetação, vias.
Erros mais comuns cometidos na vetorização automática são perda da representação gráfica, ligação incorreta de linhas, fechamento incorreto de polígonos e entidades gráficas em níveis incorretos. O uso de softwares que permitam o reconhecimento automático de erros, como polígonos abertos e arcos pendentes, pode ajudar muito no processo de edição.
O tempo gasto na vetorização automática, com checagem e edição, pode variar entre 20 e 25% do total gasto na digitalização manual.

55
8. Referências Bibliográficas
Burrough, P.A. (1994) Principles of Geographical information systems for land resources assessment, Clarendon Press, Oxford.
Chrisman, N.R.; McGranaghan, M. (1991) Accuracy of Spatial Database. Technical Issues in GIS. NCGIA, University of California. Santa Barbara. 45-1.
Cowen, D. J. (1988) GIS versus CAD versus DBMS: what are the differences? Photogrammetric Engineering and Remote Sensing, 54 , 1551-1154.
Dangermond, J.; Harnden, E. (1990) Map Data Standardization. Environmental Systems Research Institute, Redlands, California.
Maguire, D.J.; Goodchild, M.F. & Rhind, D.W. (1991) Geographical information systems: principles and applications (2 vols), Logman, London.
Oliveira, C. (1993) Curso de Cartografia Moderna. IBGE, Rio de janeiro.152p.
Paredes, E. A. (1994) Sistema de Informação Geográfica (Geoprocessamento) Princípios e Aplicações. Editora Érica, São Paulo.
Santana, R.M. (1999) Avaliação e Análise do Uso do GPS e SIG na Cartografia Geotécnica Digital. Universidade Federal de Viçosa (Dissertação MS).
Smith, T.r. et al. (1987) Requirements and principles for the implementation and construction of large-scale geographic information systems, International Journal of GIS, 1, 13-31.
9. Sugestões Bibliográficas
Aronoff, Stan (1989) Geographic Information Systems: A Management Perspective. WDL Publications, Ottawa , Canada.
Berry, J.K. (1987) Computer-assisted map analysis: potential and pitfalls, Photogrammettic Engineering & Remote Sensing, 53, 1405-1410.
Berry, J.K. (1987) Fundamental operations in computer assisted map analysis, International Journal of GIS, 1 (2). 119-136.
Bonham-Carter, Graeme F. (1994) Geographic Information Systems for Geoscientists. Computer Methods in the Geosciences, Volume 13. Pergamon.
Bracken, I. & Webster, C. (1990) Information technology in geography and planning, Routledge, London.

56
Calijuri, M.L.; Lorentz, L.; Meira, A (1997). Treinamento em Sistema de Informação Geográfica. Núcleo SIGEO; Universidade Federal de Viçosa; 102p.
Calijuri, M.Lúcia (1988). Proposta Metodológica para Desenvolvimento e Implementação de um Banco de Dados Geotécnicos. Tese de Doutoramento, EESC - USP, 353p.
Calijuri, M.Lúcia (1995). Sistemas de Informações Geográficas II. Universidade Federal de Viçosa, publicação 355, 40p.
Calijuri, M.Lúcia; Rohm, S.A. (1994). Sistemas de Informações Geográficas. Universidade Federal de Viçosa, publicação 344, 34p.
Calijuri,M.L.; Meira, A; Lorentz, L. (1997). Sistema de Informação Geográfica. Núcleo SIGEO; Universidade Federal de Viçosa; 53p.
Calijuri,M.L. (1996). Geotecnia Ambiental: Aplicação de Sistemas de Informações Geográficas no Uso e Ocupação do Solo, Mapeamento Geotécnico e Meio Ambiente. Prova de Erudição - Concurso para Professor Titular, 74p.
Clarke, K. (1990) Analytical and Computer Cartography. Prentice Hall.
Doe (1987) Handling geographic information (The Chorley Report), HMSO, London.
Goodchid, M. & Gopal, S. (1989) Accuracy of spatial databases, Taylor & Francis, London.
Goodchid, M. (1987) A spatial analytical prespective on geographical information systems, International Journal of GIS, 1(4), 327-334.
Bonham-Carter G.F. (1994) Geographic Information System for geocientists : modelling with GIS, Pergamon.
Green, N.P.; Finch, S. & Wiggins, J. (1985) The state of the art in geographical information systems, Area, 17, 295-301.
Eastman J.R. (1997a). IDRISI for Windows Tutorial Exercises, version 2.0. Clark Labs for Cartographic Technology and Geographic Analysis; Clark University.
Eastman J.R. (1997b). IDRISI for Windows User’s Guide, version 2.0. Clark Labs for Cartographic Technology and Geographic Analysis; Clark University.
Laurini, R. and Thompson, D. (1992) Fundamentals of Spatial Information Systems, Academic Press, London.
Maguire, D.J. (1989) Computers in geography, Longman, London.
Marble, D.F.; Calkins, H.W. & Peuquet, D.J. (1984) Basic readings in geographic information systems, SPAD Systems Ltd, Williamsville New York.
57
Marble, D.F.; Peuquet, D. (1983) GIS and remote sensing, in Colwell R.N. [Ed] Manual of Remote Sensing (2nd Edition), 923-958.
Masser & Blakemore, M [Eds] (1991) Handling geographical information: methodology and potential applications, Longman, London.
Peuqet, D. & Marble, D.F. (1990) Introductory readings in geographic information systems, Taylor & Francis, London.
Rhind, D. (1981) geographical information systems in Britain, in Wringley, N. & Bennet, R.J. [Eds] Quantitative geography, 17-35.
Rhind, D. (1987) Recent developments in geographical information systems in the UK, International Journal of GIS, 1, 229-242.
Ripple, W.J. [Ed] (1987) GIS for resource management: a compendium, ASPRS, Bethesda, Md.
Ripple, W.J. [Ed] (1989) Fundamentals of geographic information systems: a compendium, ASPRS, Bethesda, Md.
Samet, H. (1990) Applications of spatial data structures: computer graphics, image processing and GIS, Addison-Wesley, Reading, Mass.
Tomlinson, R.F. (1987) Current and potential uses of GIS: the North American experience, International Journal of GIS, 1 (3), 203-218.
Worrall, L. (1990) Geographic Information Systems: Developments and Applications, Belhaven Press, London.