formulação relativista do electromagnetismo através da
TRANSCRIPT

Formulação Relativista do Electromagnetismo através da
Álgebra Geométrica do Espaço-Tempo de Minkowski
Rafael Antunes Ferreira
Dissertação para obtenção do Grau de Mestre em
Engenharia Electrotécnica e de Computadores
Júri
Presidente: Professor Doutor José Bioucas Dias
Orientador: Professor Doutor Carlos Paiva
Co-Orientador: Professor Doutor António Topa
Vogal: Professora Doutora Maria Hermínia Caeiro Costa Marçal
Julho 2010

II

III
Agradecimentos
Embora uma dissertação seja, pelo seu objectivo académico, um trabalho individual, existem
sempre contributos de natureza diversa que não podem nem devem deixar de ser realçados.
Em especial, gostaria de expressar o meu agradecimento ao meu orientador, Professor Carlos
Paiva, e co-orientador Professor António Topa, pelo apoio e disponibilidade sempre
demonstradas, com os seus conhecimentos nos mais diversos momentos, esclarecendo as
dúvidas existentes e atribuindo novas tarefas que permitiram uma evolução favorável do
trabalho.
Aos meus pais, irmã, família e amigos pelo apoio incondicional, compreensão e grande
sacrifício que fizeram para me possibilitarem a realização deste curso.
Às pessoas que conheci ao longo deste percurso que foram fundamentais não só na minha
formação académica, como também, na minha formação enquanto pessoa.
A todos eles deixo aqui o meu agradecimento.

IV
Abstract
The study moving media in relativistic electrodynamics is a very important topic in
electromagnetics research. Any subject studied within this field must be addressed using a
four-dimensional space, where the regular cross product is no longer valid. Therefore, this
study is done, in general, using algebraic manipulation with tensors. To avoid the use of this
complicated tensor algebra, a new mathematical formalism, called geometric algebra or
Clifford algebra, is addressed in this thesis.
The geometric algebra has given its first steps in the late nineteenth century, although it
remained almost forgotten in the years that followed. In 1963, the geometric algebra retrieves
its prominence with the work developed by David Hestenes, who reformulated it and gave it
the modern consistency. Since then, it has been gaining importance, and its strength is
recognized by the way one structure can serve as a basis for such unrelated topics in physics
and mathematics, in a clear and concise way.
This thesis begins with the fundamental properties of geometric algebra and its application to
the three-dimensional space with Euclidean metric.
Gradually, in a comprehensive way, one shifts into the Minkowski´s space-time, and its
application in relativistic electrodynamics which is the core of this dissertation.
The study of Minkowski´s space-time becomes more simpler due to the use of certain tools
such as the boost (or active Lorentz transformation) and vacuum form reduction.
In space-time algebra, Maxwell equation´s are reduced to only two, the homogeneous and the
inhomogeneous equations and; in vacuum, they can be written as a single equation.
In vacuum, as in other isotropic medium, the space-time constitutive relation, written in terms
of the Faraday and Maxwell bivectors, is the same either in the lab frame as in the proper
frame, since these two bivectors are not relative.
By itself, the theoretical formulation of geometric algebra proofs that this kind of algebra can
become, in the future, the unified language of modern physics.
Keywords: Geometric algebra; Bivector; Relativistic electrodynamics; Boost; Maxwell
bivector; Faraday bivector; Vacuum form reduction; Minkowski´s space-time; Moving
media.

V
Resumo
O estudo dos meios em movimento na electrodinâmica relativista é um ponto com muita
relevância no electromagnetismo. Quando se pretende estudar matérias nestes campos da
electrodinâmica relativista, e se passa para quatro dimensões, o produto externo deixa de ser
válido, e recorre-se à manipulação algébrica com tensores. Para evitar o uso desta complicada
álgebra tensorial, nesta dissertação é apresentado um novo formalismo matemático,
designado por álgebra geométrica ou de Clifford.
A álgebra geométrica deu os primeiros passos no final do século XIX, apesar de ter
permanecido no esquecimento nos anos que se seguiram. Em 1963 recupera o seu destaque
com os trabalhos desenvolvidos pelo professor David Hestenes que a reformulou e lhe deu a
consistência moderna. Desde então, tem ganho crescente importância, sendo a sua força
reconhecida pela forma como consegue numa única estrutura servir de base a temas tão
díspares da física e da matemática, de forma clara e concisa.
Nesta dissertação começa-se por estudar as propriedades fundamentais da álgebra
geométrica e a sua aplicação no espaço tridimensional da métrica euclidiana.
Progressivamente e de uma forma natural passa-se para o espaço-tempo de Minkowski, e a
sua aplicação na electrodinâmica relativista sendo esta o cerne desta dissertação. O estudo
deste espaço-tempo de Minkowski torna-se menos complexo devido ao uso de ferramentas
como o boost (ou transformação de Lorentz activa) e a redução à forma do vácuo.
Através da aplicação da álgebra do espaço-tempo reescrevem-se as equações de
Maxwell em apenas duas, a homogénea e a não homogénea, onde no vácuo se conseguem
integrar numa única. No vácuo a relação constitutiva do espaço-tempo, em termos dos seus
bivectores, é a mesma no referencial próprio e no de laboratório, pelo facto dos bivectores de
Faraday e de Maxwell serem não relativos. A formulação teórica da álgebra geométrica
potencia o facto desta álgebra se poder vir a tornar numa linguagem unificada da física
moderna.
Palavras-chave: Álgebra geométrica; Bivector; Trivector; Produto exterior; Produto
geométrico. Boost; Álgebra espaço-tempo de Minkowski; Lorentz; Electrodinâmica
relativista; Meios em movimento; Bivector Faraday; Bivector Maxwell; Redução à forma
vácuo.

VI
Índice
Lista de Figuras ...................................................................................................................... VIII
Lista de Símbolos ....................................................................................................................... X
Lista de Tabelas ...................................................................................................................... XV
1.Introdução ................................................................................................................................ 1
1.1 Enquadramento histórico................................................................................................... 2
1.2 Objectivos.......................................................................................................................... 6
1.3 Organização e estrutura ..................................................................................................... 6
1.4 Contribuições .................................................................................................................... 8
2.Alguns Aspectos da Álgebra Geométrica .............................................................................. 10
2.1 Produto Geométrico ou de Clifford ................................................................................. 11
2.2 Estrutura da Álgebra Geométrica 3C ............................................................................ 16
2.3 Contracções ..................................................................................................................... 20
2.4 Reflexões e rotações no plano ......................................................................................... 28
2.5 Reflexões e rotações no espaço ....................................................................................... 28
2.6 Conclusões ...................................................................................................................... 31
3.Álgebra Geométrica Aplicada ao Espaço-Tempo de Minkowski.......................................... 34
3.1 Contradicções da Métrica Euclidiana .............................................................................. 35
3.2 Estrutura da Álgebra Geométrica 1,3C .......................................................................... 39
3.3 Transformações de Lorentz................................................................................................. 44
3.3.1 Transformação de Lorentz activa ou Boost .............................................................. 44
3.3.2 Transformação de Lorentz passiva ........................................................................... 48
VII
3.4 Dilatação do tempo.......................................................................................................... 52
3.5 Contracção do espaço ...................................................................................................... 55
3.6 Adição de velocidades colineares ................................................................................... 57
3.7 Conclusões ...................................................................................................................... 60
4.Óptica Relativista ................................................................................................................... 63
4.1 Efeito Doppler Relativista ............................................................................................... 64
4.2 Efeito Doppler Relativista num plasma .......................................................................... 67
4.3 Conclusões ...................................................................................................................... 68
5.Electrodinâmica Relativista ................................................................................................... 69
5.1 Equação de Maxwell em 3C ......................................................................................... 70
5.1.1 Equações de Maxwell-Boffi em 3C ....................................................................... 71
5.2 Equações de Maxwell na álgebra 1,3C ......................................................................... 74
5.3 Meios em movimento ..................................................................................................... 77
5.4 Redução à Forma do Vácuo ........................................................................................... 81
5.5 Conclusões ..................................................................................................................... 90
6.Conclusões ............................................................................................................................. 93
6.1Conclusão final ................................................................................................................. 94
Referências ................................................................................................................................ 97
Créditos de Figuras ................................................................................................................... 98
Apêndice A-Paradoxo dos Gémeos .......................................................................................... 99
Apêndice B- Aplicação de um Boost ...................................................................................... 105
VIII
Lista de Figuras
Figura 1.1 - William Rowan Hamilton (1805-1865), [1]............................................................ 2
Figura 1.2 - Hermann G. Grassmann (1809-1877), [2] .............................................................. 3
Figura 1.3 - William Kingdom Clifford (1845-1879), [3] .......................................................... 3
Figura 1.4 - Josiah Willard Gibbs (1839-1903), [4] ................................................................... 4
Figura 1.5 - David Orlin Hestenes (1933-), [5] .......................................................................... 5
Figura 2.1 – Base ortonormada em 3C ................................................................................... 12
Figura 2.2 – Representação do produto exterior entre dois vectores ........................................ 14
Figura 2.3 - Representação do subespaço, 2
, dos bivectores que fazem parte de 3C ........ 14
Figura 2.4 – Representação do trivector unitário 123 1 2 3ˆ i V e e e e .............................. 15
Figura 2.5 – Dualidade entre o produto externo de Gibbs e o produto exterior de Grassmann 18
Figura 2.6 – Representação do produto geométrico de um vector a por um bivector B .......... 24
Figura 2.7 – Interpretação geométrica da contracção a B ..................................................... 25
Figura 2.8 – Reflexões do vector r em relação ao eixo caracterizado pelo vector a ................ 26
Figura 2.9 – Rotação de um vector r rcomo resultado de duas reflexões sucessivas. ....... 27
Figura 2.10 – Reflexões do vector r em relação ao eixo caracterizado pelo vector a ( r r ) e
em relação ao plano caracterizado pelo bivector 123A ae ( r r )......................................... 29
Figura 2.11 – Rotação do vector 3Ca de um ângulo no plano do bivector unitário B .. ......... 31
Figura 3.1 – Representação de 1vs para 2 0.5 ........................................................ 38
Figura 3.2 – Cone de luz ........................................................................................................... 42
Figura 3.3 – Representações paramétricas do vector u igual a -1. ............................................ 46
Figura 3.4 – Representações paramétricas do vector u igual a 1. ............................................. 46
Figura 3.5 – Diagrama de Minkowski ...................................................................................... 50

IX
Figura 3.6 – Linha de simultaneidade em ............................................................................. 51
Figura 3.7 – Linha de simultaneidade em ............................................................................. 52
Figura 3.8 – Diagrama de Minkowski onde os acontecimentos O e B são simultâneos para o
referencial , mas não o são para S. .......................................................................................... 53
Figura 3.9 – Diagrama de Minkowski, a dilatação do tempo ................................................... 54
Figura 3.10 – Diagrama de Minkowski, a dilatação do tempo ................................................. 54
Figura 3.11 – Diagrama de Minkowski, a contracção do espaço ............................................. 56
Figura 3.12 – Diagrama de Minkowski, a contracção do espaço. ............................................ 57
Figura 4.1 – Esquema representativo da relação entre o emissor e o receptor através de uma
rotação e um boost. ................................................................................................................... 65
Figura 4.2 – Efeito de Doppler no caso de um plasma estacionário em relação ao observador69
Figura 4.3 – Vista de uma rua a uma velocidade de 0.99c[6] ................................................... 71
Figura 5.1 – Relação constitutiva de um meio isotrópico visto de diferentes referenciais ....... 81
Figura 5.2 – Velocidade de fase normalizada para 0 4, 0n ............................................. 87
Figura 5.3 – Velocidade de fase normalizada para 0 4, 1n .............................................. 88
Figura 5.4 – Velocidade de fase normalizada para 0
0
14,n
n . .......................................... 89
Figura 5.5 – Velocidade de fase normalizada para 0
10,75
n ........................................... 90
Figura A.1 – Diagrama de Minkowski a evidenciar o percurso dos gémeos A e B do paradoxo
dos gémeos, encontrando-se o gémeo A sobre o referencial inercial ..................................... 100
Figura A.2 – Quebra do triângulo [ODC] em dois triângulos rectângulos [OEC] e [EDC]. .. 101
Figura A.3 – Diagrama de Minkowski do percurso dos gémeos A e B do paradoxo dos
gémeos, encontrando-se a primeira parte do movimento do gémeo B sobre o referencial
inercial (Situação 1). ............................................................................................................... 103

X
Lista de Símbolos
0e Vector unitário da álgebra geométrica associado à componente temporal;
1e Vector unitário da álgebra geométrica associado à componente espacial;
2e Vector unitário da álgebra geométrica associado à componente espacial;
3e Vector unitário da álgebra geométrica associado à componente espacial;
ij Delta de Kronecker;
Base ortonormada de um espaço;
F Bivector unitário;
F Bivector;
Produto interno;
Produto externo;
Produto exterior;
Produto geométrico;
, ,a b c Vector no espaço;
u Elemento genérico da álgebra: multivector;
nu Projecção de u em relação ao grau n ;
u Involução de grau;
u Dual de Clifford;
u Conjugação de Clifford;
23 Bivectores no espaço tridimensional;
33 Trivectores no espaço tridimensional;
XI
21,3 Bivectores no espaço-tempo de Minkowski;
31,3 Trivectores no espaço-tempo de Minkowski;
41,3 Quadrivectores no espaço-tempo de Minkowski;
Espaço unidimensional;
2 Espaço bidimensional;
3 Espaço tridimensional;
4 Espaço quadrimensional;
1,1 Espaço-tempo de Minkowski no espacial unidimensional;
1,3 Espaço-tempo de Minkowski;
V Trivector álgebra;
V Trivector unitário da álgebra;
Soma graduada;
2C Álgebra de Clifford do plano;
3C Álgebra de Clifford do espaço;
4C Álgebra de Clifford do espaço quadrimensional;
1,3C Álgebra de Clifford do espaço-tempo de Minkowski;
1,1C Álgebra de Clifford do espaço-tempo de Minkowski no espaço unidimensional;
C Parte par de uma álgebra de Clifford;
C Parte ímpar de uma álgebra de Clifford;
Cen() Centro de uma álgebra;
Contracção à esquerda;
Contracção à direita;
Componente paralela de um vector
XII
Componente perpendicular de um vector
R Rotor;
,n m Vectores unitários;
v Ângulo associado ao vector v;
u Ângulo associado ao vector u;
u Comprimento vector u;
v Comprimento vector v;
Ângulo entre dois vectores;
Factor das transformações de Lorentz;
r Acontecimento no espaço-tempo de Minkowski;
r Componente espacial do acontecimento r;
0x ct Coeficiente do versor temporal no referencial próprio;
1x Coeficiente do primeiro versor espacial no referencial próprio;
2x Coeficiente do segundo versor espacial no referencial próprio;
3x Coeficiente do terceiro versor espacial no referencial próprio;
0U Bivector;
0x ct Coeficiente do versor temporal no referencial relativo;
1x Coeficiente do primeiro versor espacial no referencial relativo;
2x Coeficiente do segundo versor espacial no referencial relativo;
3x Coeficiente do terceiro versor espacial no referencial relativo;
c Velocidade da luz no vácuo;
u Vector no espaço-tempo de Minkowski;
1u Vector no espaço-tempo de Minkowski;
2u Vector no espaço-tempo de Minkowski;

XIII
u Componente espacial do vector u;
1u Componente espacial do vector 1u ;
2u Componente espacial do vector 2u ;
1 Ângulo do vector 1u ;
2 Ângulo do vector 2u ;
Componentes do tensor correspondente à métrica do espaço quadrático;
Escalar;
T Trivector;
S Referencial próprio;
S Referencial relativo;
I Pseudo-escalar no espaço-tempo de Minkowski;
e Bivector unitário e e ;
Intensidade de um boost;
1 Intensidade de um boost;
2 Intensidade de um boost;
Ângulo associado a um vector;
L Distância no referencial próprio;
0L Distância no referencial relativo;
T Tempo decorrido no referencial próprio;
0T Tempo decorrido no referencial relativo;
k Vector de onda no espaço-tempo de Minkowski;
0k Componente temporal associada ao vector de onda;
k Componente espacial associada ao vector de onda;
n Índice de refracção do meio de propagação;
Frequência angular;
XIV
0n Índice refracção no vácuo;
e Frequência do emissor;
r Frequência do receptor;
rs Componente espacial do fotão no receptor;
es Componente espacial do fotão no emissor;
s Componente espacial do fotão na transmissão;
ˆeB Bivector no emissor;
ˆrB Bivector no receptor;
E Intensidade do campo eléctrico;
B Intensidade do campo magnético;
P Vector polarização eléctrica;
M Vector polarização magnética;
t Densidade total de carga eléctrica;
Densidade de carga eléctrica;
p Densidade de carga associada à polarização;
tJ Densidade total de corrente;
pJ Densidade de corrente associada à polarização;
mJ Densidade de corrente associada à magnetização;
J Densidade de corrente;
D Excitação eléctrica;
H Excitação magnética;
Permitividade eléctrica;
0 Permitividade eléctrica no vácuo;
r Permitividade eléctrica relativa;
XV
Permiabilidade magnética;
0 Permiabilidade magnética no vácuo;
r Permiabilidade magnética relativa;
0 Impedância no vácuo;
0E Intensidade do campo eléctrico numa região sem fontes;
0H Excitação magnética numa região sem fontes;
0D Excitação eléctrica numa região sem fontes;
0B Intensidade do campo magnético numa região sem fontes;
Operador de Dirac;
E Intensidade do campo eléctrico no espaço quadrático 0,3 ;
B Intensidade do campo magnético no espaço quadrático 0,3 ;
D Excitação eléctrica no espaço quadrático 0,3 ;
H Excitação magnética no espaço quadrático 0,3 ;
F Bivector de Faraday;
G Bivector de Maxwell;
vr Operador do espaço-tempo de Minkowski;
ur Operador do espaço-tempo de Minkowski;
0F Bivector de Faraday numa região sem fontes;
0G Bivector de Maxwell numa região sem fontes;
pv Velocidade de fase.

1
Capítulo 1
Introdução
Neste primeiro capítulo é inicialmente realizado um enquadramento histórico relativo à
álgebra geométrica. São especificados os objectivos, os contributos, assim como a estrutura e
organização desta dissertação.

2
1.1 Enquadramento histórico
A escrita de relações geométricas de uma forma algébrica teve o seu início na Grécia Antiga
onde Euclides ([1] e [2]) fundou a álgebra. Foi o uso destas entidades matemáticas que
permitiu a compreensão de certos fenómenos naturais. O conceito de vector foi criado
justamente para descrever grandezas que possuem propriedades geométricas tais como
direcção e sentido, e que por este motivo, não podiam ser completamente descritas por
números. A velocidade de um corpo, a força que nele actua, e o campo eléctrico gerado por
electrão, são alguns exemplos de grandezas vectoriais.
No início do século XIX a representação matemática de rotações a três dimensões
permanecia ainda um problema por resolver. Contudo o Sir William Rowan Hamilton (1805-
1865) [3] em 1843, que visava estender o conceito de números complexos a outras
dimensões, consegui-o apresentando os quaterniões de Hamilton, que representavam com
sucesso as rotações a três dimensões. Estes quaterniões de Hamilton são utilizados hoje em
dia para modelar problemas na maioria das ciências aplicadas: visão por computador,
robótica, realidade virtual, navegação, programação orientada por objectos [5].
Figura 1.1 - William Rowan Hamilton (1805-1865) [1].
Na mesma altura que Hamilton apresentou os seus quaterniões, outro matemático se
destacava, o alemão Hermann G. Grassmann (1809-1877) [6]. Este desenvolveu a sua própria
álgebra e apresentou em 1844 o produto exterior, sendo este a operação chave na álgebra que
hoje se conhece como “álgebra externa”. Importa ainda salientar, que o produto exterior de

3
Grassmann, existe em qualquer dimensão, com a vantagem adicional de não depender de
qualquer métrica adoptada.
Figura 1.2 - Hermann G. Grassmann (1809-1877) [2].
A álgebra geométrica de Clifford, ou simplesmente álgebra geométrica, como é
frequentemente designada, surge no século XIX, em 1878, pelo matemático e filósofo
William Kingdom Clifford (1845-1879) [8]. Com base nas descobertas de Hamilton e
Grassmann, Clifford unificou as referidas descobertas numa estrutura algébrica, formando
assim a álgebra geométrica. Nesta álgebra foi introduzido um novo produto entre estruturas
algébricas, o produto geométrico. Neste produto geométrico estão simultaneamente presentes
o produto interno (ou escalar) e o produto exterior. O produto geométrico goza de
propriedades como a associatividade e a invertibilidade, provenientes do produto exterior de
Grassmann e dos produtos da álgebra Hamiltoniana, respectivamente.
Figura 1.3 - William Kingdom Clifford (1845-1879) [3].
4
No final do século XIX surgiu o cálculo vectorial, introduzido por Josiah Willard
Gibbs (1839-1903) [10]. Esta ferramenta matemática tornava a teoria do electromagnetismo
mais simples de ser tratada, sendo utilizada até aos dias de hoje, dado que, seja essa talvez a
forma mais indicada de iniciar o estudo das equações de Maxwell. O facto acima
mencionado, a grande reputação de Gibbs, e a morte prematura de Clifford, foram tudo
factores que contribuíram para que os trabalhos de Clifford caíssem no esquecimento.
Figura 1.4 - Josiah Willard Gibbs (1839-1903) [4].
As descobertas apresentadas por Clifford foram subordinadas durante um longo
período de tempo pelo produto externo de Gibbs, que teve grande notoriedade face ao
produto exterior durante vários anos. Contudo o produto externo de Gibbs está confinado a
três dimensões, daí que seja limitado. O produto externo de Gibbs só existe em três
dimensões, uma vez que, em duas dimensões não é possível sair do plano para definir um
vector perpendicular ao mesmo, e em quatro dimensões a direcção ortogonal ao plano não
está univocamente determinada [7]. Todas estas dificuldades podem ser superadas se, em vez
da álgebra de Lie associada ao produto externo, se adoptar a álgebra proposta por Clifford.
Apenas quando no inicio do século XX, Einstein publica a teoria da relatividade
restrita (1905) e surge a necessidade de se trabalhar em quatro dimensões (uma temporal e
três espaciais), se coloca em causa a validade do produto externo de Gibbs para esta nova
métrica e consequentemente se levanta a questão da utilidade dos trabalhos anteriormente
desenvolvidos por Clifford. A álgebra geométrica restabelece de forma mais natural a

5
indissociável ligação do electromagnetismo à teoria da relatividade face a formulação
clássica do cálculo tensorial.
Desde o final do século XIX até meados do século XX, o avanço desta álgebra
permaneceu um pouco estagnado. Os estudos sobre esta matéria começaram a surgir com
mais frequência e aplicados a vários temas a partir do final do século XX, essencialmente a
partir de 1970 pelo matemático David Hestenes (1933-). Este a partir dos seus estudos no
campo da mecânica quântica apercebe-se do real potencial da álgebra geométrica,
recuperando as álgebras de Dirac e de Pauli [4]. Com efeito, David Hestenes com uma visão
mais abrangente da estrutura das álgebras mostrou que a álgebra geométrica ao ser
devidamente utilizada, podia ser utilizada para unificar várias áreas da mecânica quântica.
Figura 1.5 - David Orlin Hestenes (1933-) [5].
A álgebra geométrica é uma ferramenta matemática muito interessante, pois o produto
geométrico, definição essencial nesta álgebra, é a soma do produto interno com o produto
exterior e a sua aplicação não depende de qualquer métrica. É ainda importante salientar a
aplicação desta álgebra aos meios anisotrópicos, pois permite que se faça uma abordagem
livre de um sistema de coordenadas, a fácil e elegante apresentação de resultados que vão
desde a mecânica clássica até ao electromagnetismo, assim como a sua aplicação na mecânica
quântica, robótica, processamento de sinal, mecânica relativista, cristalografia, relatividade
restrita, relatividade geral, etc.
A álgebra geométrica tem vindo a desempenhar um papel fulcral na uniformização da
linguagem matemática, contribuindo para o avanço científico em várias áreas distintas, o que
6
torna a álgebra geométrica em algo mais do que um mero formalismo matemático. Toda esta
aplicabilidade da álgebra geométrica tem alimentado nos últimos anos a investigação,
destacando-se entre outros David Hestenes, Pertti Lounesto, Chris Doran and Anthony
Lasenby, Leo Dorst, Daniel Fontijne e Stephen Mann [1], [3], [6], [14].
No entanto a álgebra geométrica continua a ser uma ferramenta pouco conhecida no
seio da comunidade científica em geral, visto que muitos dos estudos nas várias áreas
anteriormente mencionadas ainda se encontram em fase inicial, não possibilitando por isso
que a aplicação da álgebra geométrica a essas áreas seja uma referência de destaque.
1.2 Objectivos
Como foi referido anteriormente, são diversas as aplicações da álgebra geométrica de
Clifford, quer seja em problemas de carácter científico ou de engenharia.
A realização desta dissertação de mestrado tem como objectivo principal estudar os
princípios base envolvidos nesta álgebra assim como algumas das aplicações, focando-se na
álgebra do espaço, e na álgebra do espaço-tempo de Minkowski.
É também o objectivo desta dissertação, o de compreender de que forma pode a
álgebra geométrica ser usada no estudo de matérias como, a óptica relativista, a
electrodinâmica relativista e a sua aplicação aos meios em movimento, abordando a
formulação teórica desta nova álgebra e estudando as suas principais vantagens.
Esta tese tem também como objectivo a obtenção do grau de mestre em engenharia
electrotécnica e de computadores no ramo de telecomunicações.
1.3 Organização e estrutura
Esta dissertação encontra-se estruturada em seis capítulos de forma a expor os conteúdos de
forma organizada e clara.
7
O primeiro capítulo, a Introdução, apresenta um enquadramento histórico da álgebra
geométrica onde seguidamente são apresentados os objectivos principais desta dissertação,
bem como as contribuições que resultam da mesma.
O segundo capítulo, Alguns Aspectos de Álgebra Geométrica, aborda as bases e
aspectos essenciais da álgebra geométrica, particularizando para a álgebra geométrica do
espaço. É inicialmente caracterizado o produto geométrico ou de Clifford assim como o
produto exterior ou de Grassmann. Surgem através do produto exterior novos objectos
geométricos, o bivector (segmento de plano orientado), resultado do produto exterior de 2
vectores, e o trivector (volume orientado), resultado do produto exterior de 3 vectores. Será
ainda dado destaque a conceitos de extrema relevância, tais como, rotores e contracções.
O terceiro capítulo, Álgebra Geométrica aplicada ao Espaço-Tempo de Minkowski,
permite a passagem da métrica euclidiana para uma métrica de Lorentz. Neste capítulo
caracteriza-se a álgebra do espaço-tempo de Minkowski, mostrando as suas vantagens
perante outras álgebras consideradas. Serão abordados conceitos bastante importantes, tais
como, boosts, diagramas de Minkowski, que por sua vez permitem demonstrar de uma forma
menos complexa a contracção do espaço, adição colinear de velocidades e dilatação do
tempo.
O quarto capítulo, Óptica Relativista, apresenta o efeito de Doppler Relativista, onde
se apresentam as vantagens do mesmo, particularizando-se com a aplicação deste efeito de
Doppler num meio plasma e abordando-se o fenómeno de aberração.
O quinto capítulo, Electrodinâmica Relativista, aborda as equações de Maxwell e
Maxwell-Boffi escritas na álgebra do espaço, e a sua passagem para uma equação. Na álgebra
do espaço-tempo de Minkowski, onde a componente temporal se relaciona com a
componente espacial, surgem os bivectores relativos E, B, D, H. Estes bivectores passam a
desempenhar um papel secundário com o aparecimento de dois novos bivectores (não
relativos): o bivector de Maxwell e o bivector de Faraday. É possível com o surgimento
destes novos bivectores, reescreverem-se as novas equações de Maxwell, em apenas duas, a
homogénea e a não homogénea. Neste capítulo são também estudados os meios em
movimento em meios isotrópicos.
A dissertação encerra com o capítulo da Conclusão, onde se sintetizam as principais
ideias desta tese e é ainda apresentada uma perspectiva de trabalhos futuros com a aplicação
da álgebra geométrica.

8
1.4 Contribuições
A álgebra geométrica, poderosa ferramenta matemática encontra-se em franca expansão,
ainda assim, tem tido uma aceitação lenta por parte da comunidade científica, quer em parte
por conformismo com modelos já existentes, quer por desconhecimento das suas
potencialidades e aplicações. Esta dissertação, pretende contribuir para a divulgação da
álgebra geométrica e da sua estrutura matemática, assim como da sua potencialidade em
particular no estudo da óptica e electrodinâmica relativista.
Para além da demonstração da dilatação do tempo, contracção do espaço, efeito de
Doppler relativista e adição relativista de velocidades, destaca-se o aspecto geométrico
atribuído ao electromagnetismo, quando tratado com a álgebra do espaço-tempo de
Minkowski, que possibilita a integração das equações de Maxwell em apenas uma no vácuo.
Ao nível de fundamentos apresentados nos conceitos demonstrados, felizmente, vários
autores têm contribuído para a sua consolidação e aperfeiçoamento, pelo que, a nível pessoal
apresento os resultados que obtive de uma vasta leitura e estudo de autores, apresentando-os
segundo a minha perspectiva crítica.

9
Equation Chapter (Next) Section 2
Capítulo 2
Alguns Aspectos de Álgebra Geométrica
Neste capítulo começa-se por abordar de forma sucinta a álgebra geométrica do espaço
ordinário tridimensional radicada no espaço linear , denominada por 3C . Esta álgebra do
espaço apresenta uma métrica euclidiana. O objectivo passa por caracterizar a estrutura
algébrica de 3C , e também por apresentar alguns dos seus conceitos fundamentais, tais
como produto geométrico, produto exterior, contracção, rotação, todos estes essenciais para
uma melhor compreensão desta álgebra. Será ainda feita a introdução de um novo objecto
geométrico, o bivector.

10
2.1 Produto geométrico ou de Clifford
O produto geométrico (ou de Clifford) entre vectores, faz parte do essencial quando se
pretende definir uma álgebra geométrica. Considere-se, então, o espaço linear com a
métrica euclidiana onde a base ortonormada deste espaço é 1 2 3{ , , }e e e , i.e.,
j
1,, {1, 2, 3}
0,k j k
j kj k
j ke e (2.1)
Onde 1 2 3| | | | | | 1e e e . Dado um vector 1 2 3x y zr e e e , o seu comprimento é
dado por:
2 2 2| | 0.x y z r r r (2.2)
Define-se agora o axioma fundamental de 3C onde se considera um produto entre vectores
(produto geométrico ou de Clifford), tal que, ao multiplicar o vector r por ele próprio, se
obtenha o quadrado do seu comprimento, isto é,
2 2| | .r r (2.3)
Particularizando, obtém-se 2 2 2 2 2 2
1 1 2 2 2 2| | 1, | | 1, | | 1 e e e e e e .
Se não se considerar, á partida, que este produto é (necessariamente) comutativo, tem-se,
2 2 2 2 2
1 2 3 1 2 3| | ( ) ( )x y z x y z x y z r r e e e e e e (2.4)
2 2
1 2 2 1 1 3 3 1 2 3 3 2| | ( ) ( ) ( )x y x z y z r r e e e e e e e e e e e e (2.5)
2 1 1 2
2 2
3 1 1 3
3 2 2 3
| | .
e e e e
r r e e e e
e e e e
(2.6)
Constata-se então que o produto geométrico não pode ser comutativo no caso geral, ainda
assim admite-se que é associativo, ou seja:
3( ) ( ), com , , ab c a bc a b c (2.7)

11
Obtém-se então
2 2 2
1 2 1 2 1 2 1 2 1 2 1 1 2 2 1 1 2 2 1 2( ) ( )( ) ( ) ( ) ( )( ) 1. e e e e e e e e e e e e e e e e e e e e (2.8)
2
1 2( ) 1. e e (2.9)
Ao analisar-se cuidadosamente o resultado da equação (2.8), este mostra-nos que o objecto
geométrico 1 2e e não pode ser nem um escalar nem um vector, uma vez que o quadrado de
1 2e e é um número negativo. Dado isto, existiu necessidade de se introduzir um novo objecto
geométrico cujo nome é bivector. Um bivector é definido como um segmento de plano
orientado. Para uma melhor compreensão encontra-se abaixo representado o quadrado
orientado correspondente ao bivector unitário 12 1 2ˆ F e e e com o sentido de e1 para e2.
Figura 2.1 – Representação do bivector unitário F .
De modo análogo podemos definir os bivectores unitários 31 3 1e e e e 23 2 3e e e . Tendo em
conta os dois vectores a, b 3, a = a1e1 + a2e2 + a3e3 e b = b1e1 + b2e2 + b3e3 o produto
geométrico vem dado por:
. ab a b a b (2.10)
1 1 2 2 3 3 produto interno a b a b a b a b (2.11)
12 1 2ˆ F e e e
2e
1e

12
23 31 12
1 2 3
1 2 3
produto exterior ou de Grassmanna a a
b b b
e e e
F a b (2.12)
Analisando a expressão (2.10) apresentada para a definição do produto geométrico verifica-se
que o primeiro termo associado ao produto interno é conhecido ( a b ), tratando-se de
um escalar pertencente ao corpo onde o espaço linear 3 está definido. O segundo termo,
resulta de uma nova operação, designada produto exterior que é usado para definir o produto
geométrico. Este é anti-simétrico e associativo, e gera um bivector .baF
2
3
2 3 3 2 23 3 1 1 3 31 1 2 2 1 12( ) ( ) ( ) a b a b a b a b a b a b F a b e e e (2.13)
Importa salientar, que o produto exterior não é apenas válido em 3, como acontece no
produto externo. No entanto é possível relacioná-los no espaço euclidiano em 3 como
123( ) . a b a b e (2.14)
Conclui-se portanto que o objecto, u ab representa a soma graduada de um escalar com
um bivector F :
2
3 ab a b a b . (2.15)
Considerando a propriedade de simetria do produto interno e de anti-simetria do produto
exterior temos que:
a b b a
a b b a (2.16)
Pode-se escrever:
2 2 2 2
1( )
2( ) ( ) .
1( )
2
a b ab baab a b a b
a b a b a bba a b a b
a b ab ba
(2.17)
Sendo produto interno dado como | || | cos a b a b , onde ( , ), a b conclui-se que:
Simetria
Anti-simetria
13
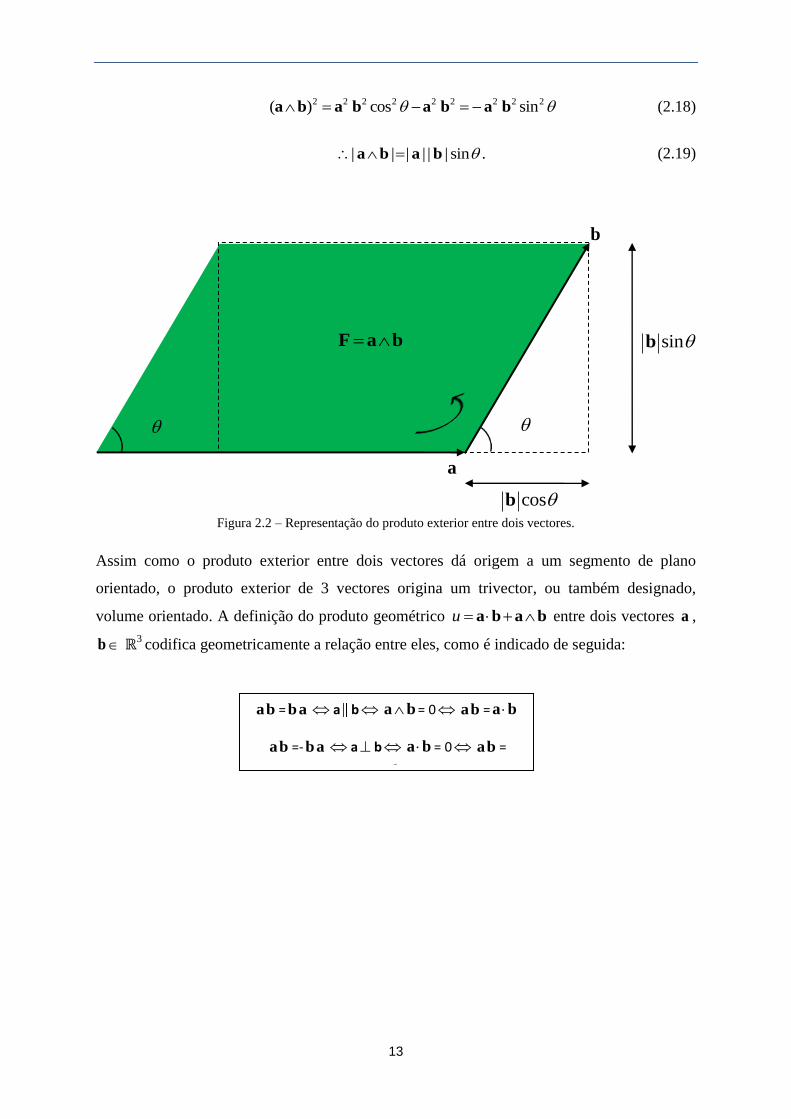
2 2 2 2 2 2 2 2 2( ) cos sin a b a b a b a b (2.18)
| | | | | | sin . a b a b (2.19)
Figura 2.2 – Representação do produto exterior entre dois vectores.
Assim como o produto exterior entre dois vectores dá origem a um segmento de plano
orientado, o produto exterior de 3 vectores origina um trivector, ou também designado,
volume orientado. A definição do produto geométrico u a b a b entre dois vectores a ,
b 3 codifica geometricamente a relação entre eles, como é indicado de seguida:
F a b
a
b
sinb
cosb
ab = ba a b a b = 0 ab = a b
ab =- ba a b a b = 0 ab =
a b

14
Figura 2.3 - Representação do subespaço, 2
3, dos bivectores de 3C
O subespaço 2
3 dos bivectores tem uma base 23 12 31, , e e e pelo que tem dimensão 3,
ou seja,
2
3dim 3 (2.20)
Em relação ao produto exterior o produto geométrico tem a enorme vantagem de ser
invertível. Contudo, ao contrário do produto exterior de Grassmann, o produto geométrico
depende de uma métrica.
Dependência de uma métrica 2 2 3| | para a a aa a a a
11
1
1 1 1 1
Invertibilidade
u
u u
u
2
2
aa ba
aab b a
bb b a
b
(2.21)
23 2 3e e e
12 1 2e e e
31 3 1e e e
3e
1e
2e

15
A invertibilidade é uma propriedade que não se encontra presente, nem no produto interno
nem no produto exterior, uma vez que para ambos não é possível obter uma caracterização
unívoca para ambos, ou seja, não é possível determinar apenas uma única solução, mas sim
um conjunto de soluções (no caso de 3 , um plano e uma linha, respectivamente).
O produto exterior de três vectores dá origem ao objecto geométrico denominado por
trivector, ou volume orientado, como foi dito previamente. Nesta álgebra tem-se que, o
trivector unitário é, 123 1 2 3ˆ i V e e e e , e tal como acontece no caso do bivector o seu
quadrado é negativo.
Figura 2.4 – Representação do trivector unitário 123 1 2 3ˆ i V e e e e .
Considerando deste modo a, b, c 3 o produto exterior entre os três vectores vem dado por,
1e
2e
3e
123 1 2 3 1 2 3ˆ i V e e e e e e e

16
1 2 33
3
1 2 3 123
1 2 3
ˆTrivector ou pseudoescalar
a a a
b b b
c c c
V a b c e V i (2.22)
2 2 2 2 2( ) ( ) . V a b c i (2.23)
O produto exterior é associativo, quer isto dizer:
( ) ( ) . a b c a b c a b c (2.24)
É importante salientar que o trivector ( ) V a b c é o dual do (pseudo)escalar na álgebra
de Gibbs, a que se dá o nome de triplo produto escalar (ou produto misto) a b c tal que:
1 2 3
1 2 3
1 2 3
a a a
b b b
c c c
a b c (2.25)
que, como é sabido, observa permutação cíclica
( )= . a b c b c a c a b (2.26)
2.2 Estrutura da Álgebra Geométrica 3C
A álgebra geométrica 3C encontra-se definida no espaço tridimensional euclidiano 3 . Esta
álgebra compreende quatro subespaços, cujos mesmos, fazem dela uma soma graduada.
Subespaços de 3C
Escalares Vectores Bivectores Trivectores
3 2
3 3
3

17
2 3
3 33
3C
Recorrendo ao triângulo de pascal é possível concluir que esta álgebra tem uma dimensão de
8.
dim( 3C ) = 1 3 3 1 8
1 escalar
3 vectores
3 bivectores
1 trivector
.
Base de 3C 1 2 3 12 23 31 123{1, , , , , , , }. e e e e e e e
Multivector – Dá-se o nome de multivector a um elemento genérico u da álgebra. É habitual
chamar-se pseudoescalar a qualquer multivector homogéneo da álgebra com o maior grau
possível.
0
13
2
3
escalar
vectormultivector: .
bivector
trivector
u
uu C
u
u
aa F V
F
V
(2.27)
Notação: Representa-se por k
u a projecção de u em relação ao grau k (i.e., a dimensão do
subespaço 3K
).
Dualidade – Dado um multivector genérico 3u C define-se o correspondente dual de
Clifford como sendo o novo multivector 123 3v u C e tal que
123 123 123 123 123 .u v u a be e e b ae e (2.28)
Constata-se então que, o dual de um escalar é um pseudoescalar e vice-versa. O dual de um
vector é um bivector e vice-versa, como de resto é possível ver em (2.29).
A introdução do conceito de dualidade permite estabelecer de que forma é que o
conhecido produto externo de Gibbs se relaciona com a álgebra geométrica 3C . Apenas em
1
1 1
1 2 1
1 3 3 1

18
3 é que é possível definir produto externo, como já foi referido no capítulo anterior,
contrariamente ao que acontece com o produto exterior de Grassmann. A dualidade destes
dois produtos pode ser observada na figura 2.5, e nas equações (2.30) e (2.31).
Figura 2.5 – Dualidade entre o produto externo de Gibbs e o produto exterior de Grassmann
1 2 3 23 31 12
1 2 3 1 2 3 123 123
1 2 3 1 2 3
( )a a a a a a
b b b b b b
e e e e e e
c a b e a b e (2.29)
123 123( ) ( ) . a b a b e a b a b e (2.30)
Reverso123 123 3 2 1 1 3 2 1 2 3 123
.u u
e e e e e e e e e e e e
ab ba (2.31)
Lâmina- k : Uma lâmina-k da álgebra 3C é um elemento ku tal que k k ku u , onde
k ku é um elemento homogéneo de grau k e resulta do produto exterior de um ou
mais vectores.
Grau máximo: Em 3C não podem existir lâminas-4, ou seja, dados quatro vectores a, b,
c, d 3 tem-se necessariamente 0. a b c d Significando então, que só três
a
b
123 c a b Fe
123 F a b ce
Produto
externo
de Gibbs

19
vectores é que podem ser linearmente independentes, se existir um quarto vector este é
necessariamente uma combinação linear dos outros três. O grau máximo de uma lâmina
3C é, portanto, o grau 3.
Involução de grau
0 1 2 3
u u u u u (2.32)
Conjugação de Clifford
0 1 2 3
.u u u u u (2.33)
A álgebra 3C compreende várias estruturas algébricas dentro de si. Deste modo pode-se
definir a parte par da álgebra, 3C , como sendo a parte composta pelos elementos de 3C
que resultam do produto geométrico de um número par de vectores de 3 . Analogamente
define-se a parte ímpar, 3C , como a parte composta pelos elementos de 3C que
resultam do produto geométrico de um número ímpar de vectores de 3 , isto é,
23
3
33 3
3
C
C
(2.34)
Um conceito bastante importante neste âmbito é o conceito de centro da álgebra. O centro de
uma álgebra constitui o conjunto dos elementos que comutam com todos os elementos dessa
álgebra. Assim sendo, no caso particular de 3C o centro é,
3
3
3Cen( )C (2.35)
Apenas a parte par 3C e o centro da álgebra constituem duas subálgebras de 3C , a parte
ímpar como não é fechada em relação ao seu produto geométrico não constitui.
Por fim, é possível verificar-se a existência de um isomorfismo da parte par 3C e do centro
da álgebra 3Cen( )C com o anel de divisão dos quaterniões de Hamilton e com o corpo dos
complexos, respectivamente.

20
3
3
Cen( )C
C
(2.36)
Define-se spinor ou rotor a um elemento u da parte par da álgebra 3C , tal que:
3spin(3) : 1C u uu (2.37)
Este elemento spin(3) é responsável pelas rotações no espaço, que serão analisadas
detalhadamente mais à frente.
2.3 Contracções
A contracção é uma operação bastante importante na álgebra geométrica. Podem-se definir
dois tipos de contracções, a contracção à esquerda e a contracção à direita.
Começando pela contracção à esquerda, começa-se por analisar o produto geométrico de um
vector a por um bivector B b c .
3( ) .u C aB a b c (2.38)
1 1 1
( ) ( ) ( ) ( )2 2 2
a b c a bc cb ab c ac b (2.39)
1 1
[2( ) ] [2( ) ]2 2
a b ba c a c ca b (2.40)
1
( ) ( ) ( ).2
a b c a c b bac cab (2.41)
Sendo que
1
( ) ( ) ( ) ( ) ,2
bac cab a c b a b c b c a (2.42)
Pode-se escrever
21
( ) ( ) ( ) [( ) ( ) ( ) ] a b c a b c a c b a c b a b c b c a (2.43)
( ) ( ) 2( ) 2( ) . a b c b c a a b c a c b (2.44)
Conclui-se então
32( ) 2( ) aB Ba a b c a c b (2.45)
Define-se, então, a contracção à esquerda:
1
( ).2
a B aB Ba (2.46)
Desta definição resulta imediatamente a regra fundamental da contracção à esquerda
( ) ( ) ( ) . a b c a b c a c b (2.47)
A referida operação a B faz com que o grau 2 do bivector B se reduza ao grau 1 do vector
a. Analogamente temos a contracção à direita:
1
( )2
B a Ba aB (2.48)
É possível notar através das expressões da contracção direita (2.49) e da contracção esquerda
(2.47), que existe anti-simetria entre as duas, isto é,
a B B a (2.49)
Abaixo estão representados alguns casos particulares de contracções:
( ) ( ) ( ) ( ) ( ) ( )
.( ) ( ) ( ) ( ) ( ) ( ) ( )
a b c d a d b c a c b d
a b c d a b c d a c b d a d b c (2.50)
Definidas que estão as contracções será interessante falar mais detalhadamente do produto
geométrico entre um vector e um bivector (ou vice-versa), uma vez que envolve a noção de
contracção à esquerda (ou à direita resp.) como de resto já foi visto. Para isso escreve-se o
produto geométrico de um vector por um bivector como resultado da soma da parte ímpar
com a parte par:

22
1 1
( ) ( )2 2
u aB aB Ba aB Ba
(2.51)
O produto geométrico de um vector a por um bivector B é, em geral, a soma (graduada) de
um vector com um trivector. Para compreender melhor esta afirmação considere-se a
decomposição do vector a na sua componente paralela e perpendicular, em que a se
encontra no plano definido por B :
a a a (2.52)
Considerando um vector b perpendicular a a 0 a b localizado também em B , tal que
B a b a b , vem 2a B a b , que é um vector.
Por outro lado, ( ) a B a a b a a b é o produto de três vectores ortogonais entre si,
ou seja, é um trivector, obtendo-se consequentemente:
3
2 3 3( ) . aB a a B a b a a b (2.53)
Concluí-se, deste modo, que o produto geométrico de um vector por um bivector origina de
facto a soma graduada de um vector com um trivector.
Figura 2.6 – Representação do produto geométrico de um vector a por um bivector B.
Simetricamente se define o produto geométrico de um bivector por um vector, ou seja, Ba .
B a b a b
a a a
a
a
b

23
Posto isto e recapitulando tem-se o seguinte:
3
3 31 1( ) ( ) .
2 2u aB aB Ba aB Ba (2.54)
vector trivector
Conclui-se que,
3
3
31( ) Parte ímpar é um vector
2.
1( ) Parte par é um trivector
2
aB Ba a B
aB Ba a B
(2.55)
Note-se que,
( ) ( ) ( ) ( ) a B a b c a b c b a c b c a B a (2.56)
a B B a (2.57)
.
aB a B a B
Ba B a B a (2.58)
Para interpretar geometricamente a operação contracção considere-se
1 1 1 1( ) ( ) ( ) ( ) .
a a B B aB B a B B a B B
a a
(2.59)
1
1
ˆ ˆ( ) ( ).ˆ ˆˆ ˆ( ) ( )
ˆ ˆ
a B a B
a B a Ba a B B a B B
a B a Ba a B B a B B
a B a B
(2.60)
Simetria do produto exterior de
um vector com um bivector
Produto geométrico de um vector
por um bivector

24
Na figura representada abaixo encontra-se o vector a 3 decomposto nas suas duas
componentes paralelas e perpendiculares. Sendo que a componente paralela esta contida no
plano B e a perpendicular é perpendicular a esse mesmo plano. O vector b a é a contracção
à esquerda de a B a B , que é diametralmente oposta à contracção à direita B a a B .
Figura 2.7 – Interpretação geométrica da contracção a B .
2.4 Reflexões e rotações no plano
Os rotores são os operadores da álgebra geométrica responsáveis pela geração de rotações.
Estas rotações podem ser rotações no plano (no caso de 2C ), rotações espaciais (no caso de
3C ), ou rotações espaciais e transformações de Lorentz activas ou boosts (no caso de 1,3C ).
A álgebra geométrica do 2C permite tratar de forma simples reflexões e rotações no plano
2 . Comece-se por determinar a reflexão de um vector r em relação a um dado vector
: a r r , em que os vectores r, a e r pertencem ao mesmo plano.
b a B a B
1
2
a
aa
a
a
a
1 1 B a b a b

25
Figura 2.8 - Reflexões do vector r em relação ao eixo caracterizado pelo vector a.
1 1
2
1, r r a a a a
a (2.61)
1 1( )
r r r ra r a a r a a (2.62)
1 1 1( )
r r r r a r a a a r a r a ara (2.63)
Pelo que, tem-se para a reflexão do vector r em relação ao vector a:
1 r r ara (2.64)
De seguida, representar-se-á uma rotação de um vector r r como o resultado de duas
reflexões sucessivas: primeiro em relação ao vector a, 1
r r ara , depois em relação ao
vector b, 1
r r br b .
r
r
r
r
ar

26
Figura 2.9 – Rotação de um vector r r como resultado de duas reflexões sucessivas.
Note-se que 2 cos(2 )r r r e 2 cos(2 )r r r , por conseguinte, fazendo
cos2
a b a b
, vem 2
. Infere-se deste modo, que o ângulo entre r e r é o
dobro do ângulo entre a e b :
22 cos(2 2 ) cos( ). r r r r (2.65)
A rotação r rde um ângulo , em que ( , )2
a b , é:
1 1 r r ara r br b (2.66)
Uma vez que 1 1 1( )ba a b
tem-se:
1 1 1( ) ( ) ( ) r b ara b ba r ba (2.67)
Se os vectores a e b forem unitários, ou seja, ˆa a e ˆb b com 2 2ˆˆ 1a b , tem-se 1ˆ ˆa a
e 1ˆ ˆb b .
Posto isto, está-se em condições de caracterizar devidamente um rotor em 2C .
a
b
r
r
r
P
P
P
O

27
ˆ ˆ
ˆˆ
RR R
R
bar r r
ab (2.68)
ˆ ˆ ˆˆ ˆcos , sin2 2
a b a b B (2.69)
ˆˆˆ ˆ ˆ ˆ ˆ ˆˆ ˆ ˆ cos sin expˆ 2 2 2ˆ
a bB ab a b a b B B
a b (2.70)
12
ˆ ˆ ˆ ˆˆ ˆexp cos sin exp2 2 2 2
R ab e B R ba B (2.71)
Ao multivector R, tal que 1R R e que permite determinar r a partir de r , dá-se o nome de
rotor.
Rotação de r para r através do rotor ˆ ˆbaR .
R R r r r (2.72)
Verifique-se ainda que como o vector r se encontra no plano definido pelo bivector B ,
constata-se que r anti-comuta com B , logo ˆ ˆrB Br .
R R r r (2.73)
Pode-se ainda escrever:
2 ˆexp( )R r r r B r (2.74)
28
2.5 Reflexões e rotações no espaço
Na secção anterior determinou-se a reflexão de um vector em relação a um eixo (vector), no
entanto, também é possível determinar a reflexão de um vector em relação a um plano
(bivector).
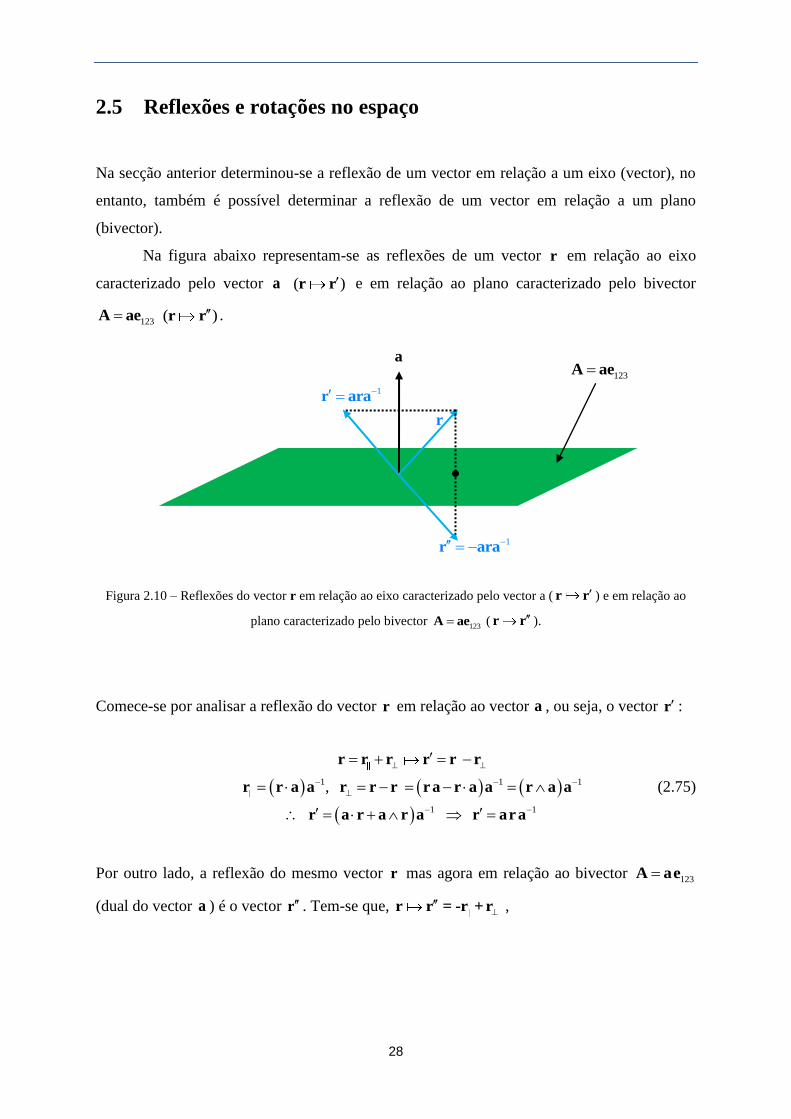
Na figura abaixo representam-se as reflexões de um vector r em relação ao eixo
caracterizado pelo vector a ( )r r e em relação ao plano caracterizado pelo bivector
123A ae ( )r r .
Figura 2.10 – Reflexões do vector r em relação ao eixo caracterizado pelo vector a ( r r ) e em relação ao
plano caracterizado pelo bivector 123A ae ( r r ).
Comece-se por analisar a reflexão do vector r em relação ao vector a , ou seja, o vector r :
1 1 1
1 1
,
r r r r r r
r r a a r r r r a r a a r a a
r a r a r a r ar a
(2.75)
Por outro lado, a reflexão do mesmo vector r mas agora em relação ao bivector 123A ae
(dual do vector a ) é o vector r . Tem-se que, r r = -r +r ,
a
r
1 r ara
1 r ara
123A ae
29
1 1
123 123
1 1 1 1
123 123 123 123
1
( ) ( )
( ) ( ) ( ) ( )
r r r r
r ar a Ae r Ae
Ae r e A Ae r e A
r ArA
(2.76)
Supondo que a seja um vector unitário, ou seja, 2 1a .
O resultado das sucessivas reflexões é correspondente a rodar 2 no plano do bivector, ou
seja, no plano n m onde cos n m . Considerando-se n, m 3 dois vectores unitários,
i.e., tais que 122 mn , define-se por rotor como sendo o produto geométrico,
.R nm (2.77)
O grupo de spin que gera rotações espaciais é escrito como 3spin (3) { : 1}R C R R
e o
rotor R verifica:
2 2( )( ) 1 1.RR RR nm mn n m (2.78)
É possível escrever-se o multivector R 3C como a soma de um escalar com um bivector,
ou seja, 20
RRR onde
0
2
cos .
ˆ sin
R
R
n m
n m B (2.79)
Anteriormente foi demonstrado que nesta álgebra o quadrado do bivector unitário é 1ˆ 2 B ,
logo obtém-se a generalização da forma de Euler para a álgebra geométrica:
ˆ ˆexp( ) cos sin B B (2.80)
3ˆrotor em exp( ).C R nm B (2.81)
Segue-se a demonstração da forma de Euler em 3C , tendo em consideração que:
2
12ˆ 1 B 2ˆ 1k k B 2 1ˆ ˆ1 .
kk B B

30
2 2 1
0 0 0
ˆ ˆ ˆ( ) ( ) ( )ˆexp( )! ( 2 )! (2 1)!
k k k
k k kk k k
B B B
B (2.82)
2 2 1
0 0
ˆ ˆ ˆexp( ) 1 1 cos sin .(2 )! (2 1)!
k kkk
k kk k
B B B (2.83)
É fundamental a compreensão da acção de um rotor sobre um vector, para tal faz-se
ˆ sin2
m n B , e considere-se
ζ ζˆ( , ) cos sin
2 2 2
θR n m nm n m m n B (2.84)
ˆ, exp( ).2
R R R
a a a B (2.85)
O rotor ˆexp2
B
R descreve a rotação directamente em termos do plano e do ângulo,
especificamente, a expressão (2.82) corresponde a uma rotação do vector 3Ca de um
ângulo no plano do bivector unitário B , tal que, 2 2ˆ , 1
sin2
m nB m n . O sentido da
rotação é dado pela orientação deste bivector, ou seja, de m para n.
31
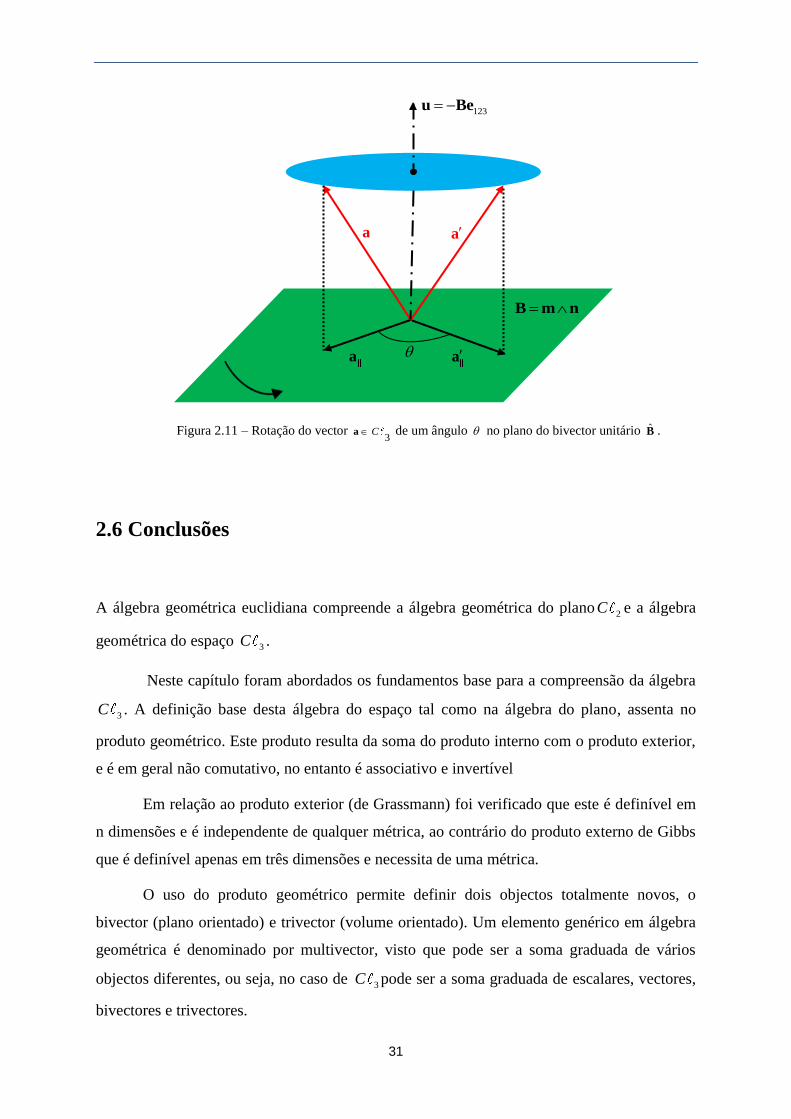
2.6 Conclusões
A álgebra geométrica euclidiana compreende a álgebra geométrica do plano 2C e a álgebra
geométrica do espaço 3C .
Neste capítulo foram abordados os fundamentos base para a compreensão da álgebra
3C . A definição base desta álgebra do espaço tal como na álgebra do plano, assenta no
produto geométrico. Este produto resulta da soma do produto interno com o produto exterior,
e é em geral não comutativo, no entanto é associativo e invertível
Em relação ao produto exterior (de Grassmann) foi verificado que este é definível em
n dimensões e é independente de qualquer métrica, ao contrário do produto externo de Gibbs
que é definível apenas em três dimensões e necessita de uma métrica.
O uso do produto geométrico permite definir dois objectos totalmente novos, o
bivector (plano orientado) e trivector (volume orientado). Um elemento genérico em álgebra
geométrica é denominado por multivector, visto que pode ser a soma graduada de vários
objectos diferentes, ou seja, no caso de 3C pode ser a soma graduada de escalares, vectores,
bivectores e trivectores.
a a
a a
123 u Be
B m n
Figura 2.11 – Rotação do vector 3
Ca de um ângulo no plano do bivector unitário B .
32
Como foi visto, os rotores e as contracções são dois operadores de extrema
importância em álgebra geométrica. Os rotores permitem que se façam rotações espaciais e
rotações planares de vectores, já as contracções por sua vez, são úteis para definir o produto
geométrico de vectores por bivectores e vice-versa.
33
Capítulo 3
Álgebra Geométrica Aplicada ao Espaço-
Tempo de Minkowski
Neste primeiro capítulo sobre o espaço-tempo de Minkowski, aborda-se a Álgebra
Geométrica aplicada ao espaço-tempo de Minkowski nos seus aspectos fundamentais,
permitindo assim construir a ponte para que nos capítulos futuros, esta seja uma ferramenta
bastante importante na electrodinâmica relativista.
O capítulo inicia-se com a análise da métrica euclidiana a quatro dimensões e da sua
inviabilidade para uma correcta caracterização do espaço-tempo, onde é apresentada como
solução a métrica de Lorentz. Daí parte-se para a análise do espaço de Minkowski e a sua útil
representação em diagramas. Serão também analisadas as transformações de Lorentz na
forma activa – boosts – e na sua forma passiva. Analisa-se a acção do operador boost sobre
um vector e demonstra-se a contracção do espaço, a dilatação do tempo, e a adição de
velocidades.Equation Chapter (Next) Section 3
34
3.1 Contradições da Métrica Euclidiana
As leis de newton consideram que o tempo e o espaço são os mesmos para os diferentes
observadores dum mesmo fenómeno físico. No entanto Hendrik Lorentz e outros
investigadores verificaram que as leis do electromagnetismo não respeitavam a física
newtoniana, já que observações do fenómeno podiam diferir para duas pessoas que se
estivessem movimentando, uma em relação à outra, próxima da velocidade da luz. Assim
sendo, enquanto uma pessoa observa um campo magnético, a outra interpreta aquele como
um campo eléctrico.
Lorentz sugeriu a teoria do éter onde afirmava que os objectos e os observadores
estariam imersos num fluido imaginário, designado por éter, dando-se assim um
encurtamento físico (hipótese da contracção de Lorentz) e mudanças na duração do tempo
(dilatação no tempo). Esta teoria, embora permitisse manter intactas as leis de Newton, não se
conseguiu impor no mundo da fisica.
Einstein resolve este aparente problema com a teoria relatividade restrita, onde se
afasta a ideia de espaço e tempo independentes, pela ideia de interdependência entre espaço-
tempo, sendo esta vista como uma entidade geométrica. A teoria da relatividade baseia-se em
dois postulados:
A velocidade da luz c é constante em todos os referenciais de inércia.
Todos os referenciais de inércia são equivalentes.
A esta interdependência entre o espaço e tempo designa-se espaço-tempo de Minkowski e é
assim que se consegue superar a aparente contradição entre a mecânica newtoniana e as leis
do electromagnetismo.
O espaço linear de base para a construção da álgebra geométrica do espaço tempo de
Minkowski terá de ser, assim, não o espaço linear 3 mas o espaço linear 4 , uma vez que a
métrica euclidiana não é aceitável para a descrição do espaço-tempo, sendo três das
componentes são espaciais e uma é a componente temporal.
Ao definir-se um espaço linear para esta álgebra, a primeira ideia remete para a
continuação do uso da álgebra geométrica com métrica euclidiana, 4C , tendo como base

35
0 1 2 3{ , , , } e e e e em que, 2 2 2 2
0 1 2 3 1 e e e e . Porém, esta métrica conduz a problemas
físicos inadmissíveis, logo, a utilização de uma relatividade euclidiana não é válida.
Para melhor compreensão dos problemas da “relatividade euclidiana” comece-se por
considerar a trajectória (comummente designada por linha de universo)
4
0( ) ( ) ( )t k t r t r e , com 3
1 2 3( ) ( ) ( ) ( )r t x t y t z t e e e no espaço descrito por
4C . A constante k é uma constante com dimensões de velocidade, e uma constante
universal, caso contrário haveria diferentes factores de conversão conforme o referencial de
inércia em análise. Uma partícula pode ser descrita no seu referencial próprio, 0( ) ( )t kr f ,
ou por outro referencial, 0( ) ( ) ( ).t k t r t r e
Sendo
Velocidade
Própria
d d dt
d dt d
r ru (3.1)
Fazendo
0 0
( )
( ) ( ) .
dtt
dt k u k
d ru
dt
u e f (3.2)
Ficamos com u em função de cada um dos referenciais, de laboratório e próprio. Assim
temos que em 4C
2 2 2 2 2( )
| |
k u k
u u
v
k
u
(3.3)
Conclui-se
2
1
1
(3.4)

36
É necessário a escolha da raiz positiva de modo a que quando 0 se tenha 1. Ao fazer
cos
tansin
(3.5)
0
02
0
cos sin ( ).
( ) 1
u k uk u
u
u v (3.6)
Seja U0 um bivector, tal que, 0 0 0 0 0u u U e e conclui-se que numa álgebra euclidiana a
velocidade de uma partícula vista de um dado referencial resulta da aplicação de uma rotação
0exp( ) U à velocidade própria dessa mesma partícula, i.e,
0 0cos sin ( ) (cos sin )U u v U v v (3.7)
0 exp( ) . u U v (3.8)
Ao considerar-se as duas partículas com velocidades próprias
1 1 0
2 2 0 1 0 0
2 2 0 1 0
exp( ) exp( )exp( ) exp( )
exp( ) exp( )
u U vu U U v U v
u U u U v(3.9)
Analisando as equações anteriores é possível concluir que a velocidade vista do referencial de
laboratório, 2u , é o resultado da aplicação de duas rotações sucessivas a uma partícula com
velocidade própria v.
1 2 0 0exp[( ) ] exp( ) U U (3.10)
1 2 (3.11)
Recorrendo a simples manipulações algébricas tem-se que
1 2 1 21 2
1 2 1 2
tan tantan( )
1 tan tan 1
(3.12)

37
1 21 1 1
1 2
22 2 2
u| | u ..
1| |
| |
u
ku
u ku u
u kk
u k
u
u
u
(3.13)
De forma a compreender melhor as expressões anteriormente referidas, está representado na
figura 3.1 a variação de β com 1 para
2 1/ 2 .
Figura 3.1 – Representação de 1vs para
2 0.5 .
Estes resultados são fisicamente inaceitáveis e levam a questionar esta relatividade
euclidiana. Analisando o gráfico acima, a composição de duas velocidades positivas pode
originar uma velocidade resultante negativa, e não obedece a nenhum limite máximo para a
velocidade resultante desta composição, ou seja, os resultados entram em contradição com a
física actual, que oferece provas muito fidedignas para a velocidade máxima da luz no vácuo.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 -20
-15
-10
-5
0
5
10
15
20
1
1/2
-1/2

38
Estes resultados conduzem à impossibilidade de aplicar uma métrica euclidiana no
espaço-tempo de Minkowski, sendo portanto necessário entrar com uma métrica não
euclidiana, onde a velocidade apresenta a velocidade da luz como limite máximo.
3.2 Estrutura da Álgebra Geométrica 1,3C
Na secção anterior, foi visto que a relatividade euclidiana conduz a problemas inadmissíveis,
mesmo usando métricas como a definida positiva e negativa, esses problemas levam a
contradições físicas.
4,0 2 2 2 2
4,0 4 0 1 2 3
4,0 2 2 2 2
4,0 0,4 0 1 2 3
1
1
Cl Cl
Cl Cl
e e e e
e e e e (3.14)
Os modelos físicos que levam a obter conclusões físicas aceitáveis são os espaços quadráticos
com métricas semi-definidas positivas e negativas. Com estas métricas podemos aplicar a
física da relatividade restrita de Einstein sem quaisquer problemas.
3,1 2 2 2 2
3,1 0 1 2 3
1,3 2 2 2 2
1,3 0 1 2 3
1, 1
1, 1
Cl
Cl
e e e e
e e e e (3.15)
Como nada existe do ponto de vista físico que permita fazer umas distinção entre 1,3C e
3,1C , assume-se a convenção e usa-se a métrica semi-definida negativa como modelo
matemático para a relatividade restrita de Einstein, ou seja, para o espaço-tempo Minkowski.
A álgebra 1,3C está definida no espaço quadrático 1,3 e a sua métrica corresponde ao tensor
cujas componentes são onde }3 ,2 ,1 ,0{, .
0 1 2 3
Base{ , , , }
ortonormada e e e e
ee
⇒
1000
0100
0010
0001
Esta álgebra compreende cinco subespaços que origina entre si uma soma graduada.
Métricas definidas
(positivas e negativas)
Métricas semi-definidas
(positivas e negativas)

39
1,3
2 2 3 41,3 1,3 1,3 1,3 1,3
1,3
3 Soma directa graduada1,3
41,3
escalares
vectores
Subespa os bivectores
trivectores
quadrivectores
ç Cl
(3.16)
Base de 1,3Cl 0 1 2 3 01 02 03 12 13 23 012 013 023 123 0123{1, , , , , , , , , , , , , , , } e e e e e e e e e e e e e e e (3.17)
Esta álgebra é composta por 1 escalar, 4 vectores, 6 bivectores, 4
trivectores e 1 quadrivector ou pseudoescalar, num total de 16 elementos
como podemos ver pelo triângulo de pascal.
4
3dim( ) 1 4 6 4 1 2 16Cl (3.18)
01,3
01,3
21,3
1,3
31,3
41,3
multivectoru C
a
F a F T V
T
V
(3.19)
O pseudoescalar representa-se normalmente pela letra 0123I e
Importa agora salientar algumas regras e definições desta álgebra não euclidiana, para uma
melhor compreensão.
Em 1,3C os vectores anti-comutam com o pseudoescalar unitário I e os bivectores
comutam com I.
Quadrado
2 2 2 2 2
0 1 2 3 0 1 2 3 0 1 2 3( )( ) 1 I I I I I e e e e e e e e e e e e (3.20)
1
1 1
1 2 1
3 1 1 3
1 4 6 4 1

40
Reverso
123 3 2 1 1 2 3 123 e e e e e e e e (3.21)
3 2 1 0 0 3 2 1 0 1 3 2 0 1 2 3 I e e e e e e e e e e e e e e e e I ; (3.22)
.u u a F bI I a F bI I (3.23)
Dualidade: Dado um multivector genérico 1,3u C define-se o dual de Clifford como
sendo o novo multivector 0123 1,3v u u C e I .
u v u a F bI I I b FI aI I (3.24)
Involução de grau:
0 1 2 3 4
u u u u u u (3.25)
Conjugação de Clifford:
0 1 2 3 4
u u u u u u (3.26)
A algébra do espaço-tempo de Minkowski também se associa uma parte par e uma parte
ímpar.
Parte par: 2 4
1,3 1,3
1,3C
Parte ímpar: 3
1,31,3
1,3C
Um acontecimento no espaço-tempo de Minkowski é descrito por
1,3
0 1 2 3 0 0 1 1 2 2 3 3
3 2 2 2 2 2
0 1 2 3
( , , , )
( )
x x x x x x x xC
x x x x
r e e e e
r (3.27)
Sabe-se que 0x ct representa a componente temporal ao passo que 1 1 2 2 3 3r x x x e e e
representa a componente espacial, logo é possível escrever
41
0(c )t r r e . (3.28)
tem-se que
2 22
2 2
c
r | |
t r
r
r. (3.29)
Deste modo o quadrado dos vectores no espaço-tempo de Minkowski pode ser positivo, zero
ou negativo, ou seja, existem as seguintes três possibilidades de classificação dos vectores:
2 2 20 (c ) ( )t r r ↦ vector parabólico (ou do tipo luz);
2 2 20 (c ) ( )t r r ↦ vector hiperbólico (ou do tipo tempo);
2 2 20 ( ) ( )ct r r ↦ vector elíptico (ou do tipo espaço);
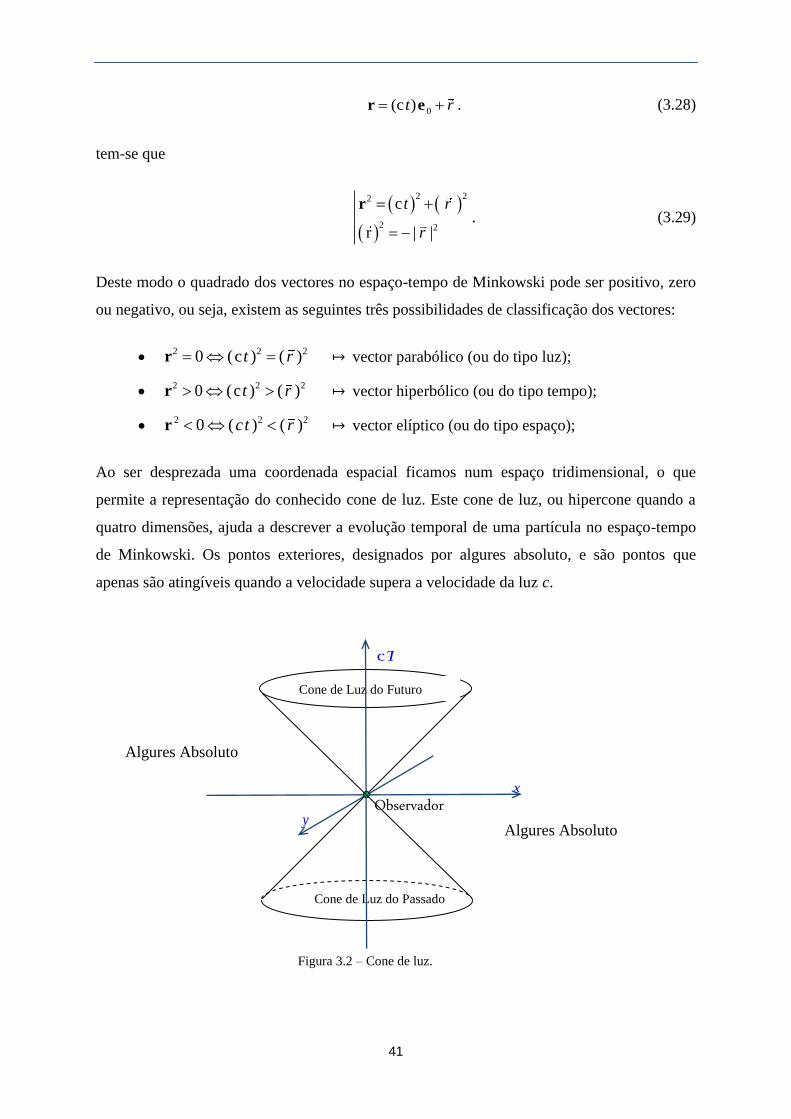
Ao ser desprezada uma coordenada espacial ficamos num espaço tridimensional, o que
permite a representação do conhecido cone de luz. Este cone de luz, ou hipercone quando a
quatro dimensões, ajuda a descrever a evolução temporal de uma partícula no espaço-tempo
de Minkowski. Os pontos exteriores, designados por algures absoluto, e são pontos que
apenas são atingíveis quando a velocidade supera a velocidade da luz c.
Algures Absoluto y
cT
x
Observador
Cone de Luz do Futuro
Cone de Luz do Passado
Algures Absoluto
Figura 3.2 – Cone de luz.
42
Os intervalos do tipo luz dividem o espaço-tempo em três regiões: o cone do passado, o cone
do futuro e o algures absoluto tal como está representado na figura anterior. O cone do futuro
tem uma relação causalista com o cone do passado e ambos são formados por intervalos do
tipo tempo (intervalos com velocidade inferior à da luz e em que consequentemente 2 0r ).
No algures absoluto residem todos os intervalos do tipo tempo (2 0r ), sem qualquer
conexão causal com o observador, uma vez que tal implicaria a existência de sinais supra
luminosos.
Ao contrário de 3C em que todos os bivectores são simples, (correspondem a
lâminas com um quadrado negativo), em 1,3C nem todos os bivectores são simples.
Considere-se a título de exemplo o seguinte bivector:
0 1 2 3 F e e e e (3.30)
2 2 2 2
01 23 01 0123 2301 232 2 2
01 0 1 0 1 0 1
2 2 2
23 2 3 2 3 2 3 2 4 1,3
( )( )( ) 1
1 1( )( ) 1
2 .
F e e e e e ee e e e e e e
I Ie e e e e e e
F I
(3.31)
⇒ 2 4 1,32 F I ⇒ bivector não simples. (3.32)
Os bivectores simples podem ser, tal como os vectores, classificados como
2Parabólicos 0; F (3.32)
23 23Elípticos geram rotações exp( ) cos sin . e e (3.32)
10 10Hiperbólicos geram boosts exp( ) cosh sinh . e e (3.32)
A grande diferença entres os bivectores elípticos e hiperbólicos reside no facto dos primeiros
gerarem rotações, ao passo que os segundos geram “boosts”(ou transformações activas de
Lorentz).

43
3.3 Transformações de Lorentz
As transformações de Lorentz, são um grupo de transformações que assegura a covariância
(numa mudança de referencial) das equações da mecânica e do electromagnetismo. Os
membros de uma igualdade entre uma força mecânica e electromagnética transformam-se
então da mesma maneira, subsistindo o significado que anteriormente possuíam.
As transformações de Lorentz diferem das rotações, porque enquanto as primeiras são
funções lineares que mantêm constante o intervalo entre eventos do espaço-tempo
(desenrolam-se em 1,3C ), as rotações mantêm invariante a distância entre pontos no espaço
(acontecem em 3C ).
As transformações de Lorentz organizam-se em dois grupos: transformação de
Lorentz passiva e transformação de Lorentz activa ou Boost. A transformação passiva, refere-
se à transformação de um acontecimento ao ser registado por diferentes observadores,
enquanto na transformação activa, um vector é transformado noutro. De seguida trata-se de
forma mais pormenorizada cada uma das transformações de Lorentz.
3.3.1 Transformação de Lorentz activa ou Boost
Como foi referido na secção anterior, na álgebra do espaço-tempo de Minkowski os
bivectores simples podem ser parabólicos, elípticos ou hiperbólicos, estes dois últimos vão
gerar rotações e boosts, respectivamente. A acção de um rotor sobre um vector já foi estudada
na álgebra euclidiana 3C .
De forma a facilitar a compreensão da acção de um boost, a análise é feita recorrendo
à álgebra 1,1C , uma vez que é mais perceptível e é equivalente ao usar a álgebra 1,3C .
Em 1,1C tem-se
0 1 10{1, , , } e e e
2
0
2
1
1
1
e
e 2
10 1e (3.32)
Sejam u e v dois vectores tais que

44
0 0 1 1
0 0 1 1
.u u
v v
u e e
v e e (3.32)
Analisa-se o boost
10exp( )δu v e u (3.32)
Onde 0 c u t é a componente temporal e 1 xu é a componente espacial. Nesta análise
considere-se que o vector u é unitário, i.e.,
2 2 2
0 1| | 1u u u (3.33)
Uma vez que esta métrica é indefinida do tipo 1, 1 1 1 é necessária a normalização
das componentes do vector u, de modo a que seja sempre unitário. Tem-se que
02 2
0
11
2 2
sin
| sin cos |tan
cos
| sin cos |
uu
uu
(3.34)
Como o bivector 2
10 1e , implica uma geometria hiperbólica, logo
2 2cosh sinh 1. (3.35)
Recorrendo às seguintes representações paramétricas, é possível descrever o vector unitário
u, no âmbito de uma transformação passiva. Considere-se , ,
0 2 2 2 2
1
c coshc 1
sinh
u tt x
u x
u (3.36)
0 2 2 2 2
1
c coshc 1
sinh
u tt x
u x
u (3.37)
0 2 2 2 2
1
c sinhc 1
cosh
u tt x
u x
u (3.38)
45
0 2 2 2 2
1
c sinhc 1
cosh
u tt x
u x
u (3.39)
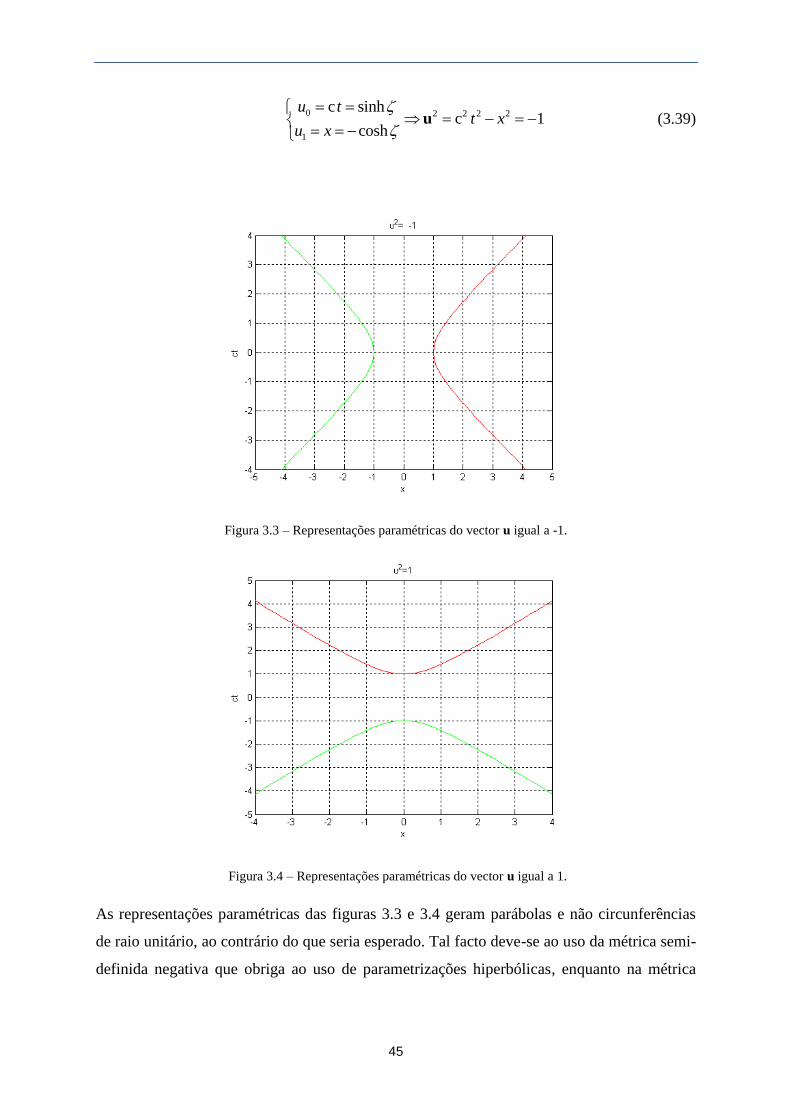
Figura 3.3 – Representações paramétricas do vector u igual a -1.
Figura 3.4 – Representações paramétricas do vector u igual a 1.
As representações paramétricas das figuras 3.3 e 3.4 geram parábolas e não circunferências
de raio unitário, ao contrário do que seria esperado. Tal facto deve-se ao uso da métrica semi-
definida negativa que obriga ao uso de parametrizações hiperbólicas, enquanto na métrica

46
euclidiana essas parametrizações seriam elípticas. Se o espaço fosse quadrimensional eram
obtidos os hipercones.
Note-se que o comprimento do vector u é unitário entre a origem e qualquer ponto da
parábola.
A aplicação do boost
10 10exp( ) cosh sinh e e (3.40)
Dá origem a um vector v, tal que
0 0 0 10
1 1 0 11
cosh sinh cosh sinh.
sinh cosh sinh cosh
v v u uu
v v u uu
(3.41)
Demonstração:
Como 2
10 1e , tem-se 2
10 1k e e 2 1
10 10
k e e , pelo que
2 2 1
10 10 10
10
0 0 0
( ) ( ) ( )exp( )
! (2 !) ( 2 1)!
k k k
k k kk k k
e e e
e (3.42)
2 2 1
10 10 10
0 0
exp( ) cosh sinh(2 !) (2 1)!
k k
k kk k
e e e (3.43)
Sendo o ângulo do vector v, tem-se
0
1
v tan tanh δtan .
v 1 tanh δ tan
(3.44)
Em suma tem-se que, ao aplicar um boost de intensidade a um vector unitário u com um
ângulo irá originar um novo vector unitário v com um ângulo .O comprimento deste
referido vector v é igual ao comprimento do vector u, ou seja, têm ambos comprimentos
unitários.
2 2 2 2
0 1 0 1| | | | 1.v uv v u u (3.45)

47
Importa referir os casos em que o comprimento não se mantém unitário. Para 4/ tem-
se 0u , logo, não é possível definir a direcção de um vector nulo. Saliente-se ainda que se
considera , e 0, . Quando 0 obtém-se a transformação identidade e
quando tem-se 4/ .
A acção de um boost é facilmente interpretada por um Diagrama de Minkowski. A
título de exemplo considere-se o caso particular em que 0eu , ou seja, 2/ , ou quando
1u e onde 0 , aplicando sobre estes vectores o boost 10exp( ) e obtém-se
0 0 1 0
1 0 1 1
cosh sinh .
sinh cosh
u e v e e f
u e v e e f (3.46)
Pode-se ainda escrever
0 0 0 0
1 1 1 1
cosh sinh cosh sinh
sinh cosh sinh cosh
f e e f
f e e f (3.47)
0 0
0 1 0 1
1 1
cosh sinh
sinh coshv v v v
e fv
e f (3.48)
0
0 1 0 0 1 1
1
u u u u
fv v f f
f (3.49)
No Apêndice B1 representa-se a aplicação de um boost de intensidade 2/1 a um vector
unitário u com ângulos: (i) º180 ; (ii) º150 ; (iii) º120 ; (iv) º90 ; (v)
º60 ; (vi) º30 ; (vii) º0 ; (viii) º30 ; (ix) º60 ; (x) º90 ; (xi)
º120 ; (xii) º150 ; (xiii) º180 .
3.3.2 Transformação Lorentz passiva
A transformação passiva refere-se à transformação de um acontecimento ao ser registado por
diferentes observadores. A compreensão da transformação de Lorentz passiva, baseia-se no
princípio da relatividade, ou seja, usando-se o primeiro postulado de Einstein.

48
1º Postulado – Princípio da relatividade restrita – As leis da física são equivalentes em todos
os referenciais de inércia. Por referencial de inércia entende-se um sistema de coordenadas
(kt,x,y,z) 4 onde, de acordo com a primeira lei de Newton, uma partícula continua o seu
estado de movimento com velocidade constante, ou seja, estes mesmos referenciais não se
encontram sujeitos a qualquer tipo de aceleração.
Para simplificar considere-se y=z=0. Escreve-se
0 1
0 1
(c ) Referencial S
(c ) Referencial S
t x
t x
r e e
r f f (3.50)
Foi visto anteriormente que a acção de um boost 0 1 0 1e e f f vem dada por:
0 0 1
1 01
cosh sinh
cosh sinh
f e e
f e (3.51)
Pelo que considerando
cosh
tanh
sinh
(3.52)
Vem que
0 1 0 1
0 0
0 1 1 0
1 1
0 1
( ) (c )1
(c ) ( ) ( )1
γ (c ) (c )
c t x t xβ
γ γ t β γ x ββ
t β x γ x β t
e e f ff e
e e e ef e
e e
(3.53)
Infere-se, deste modo, que a transformação de Lorentz passiva será
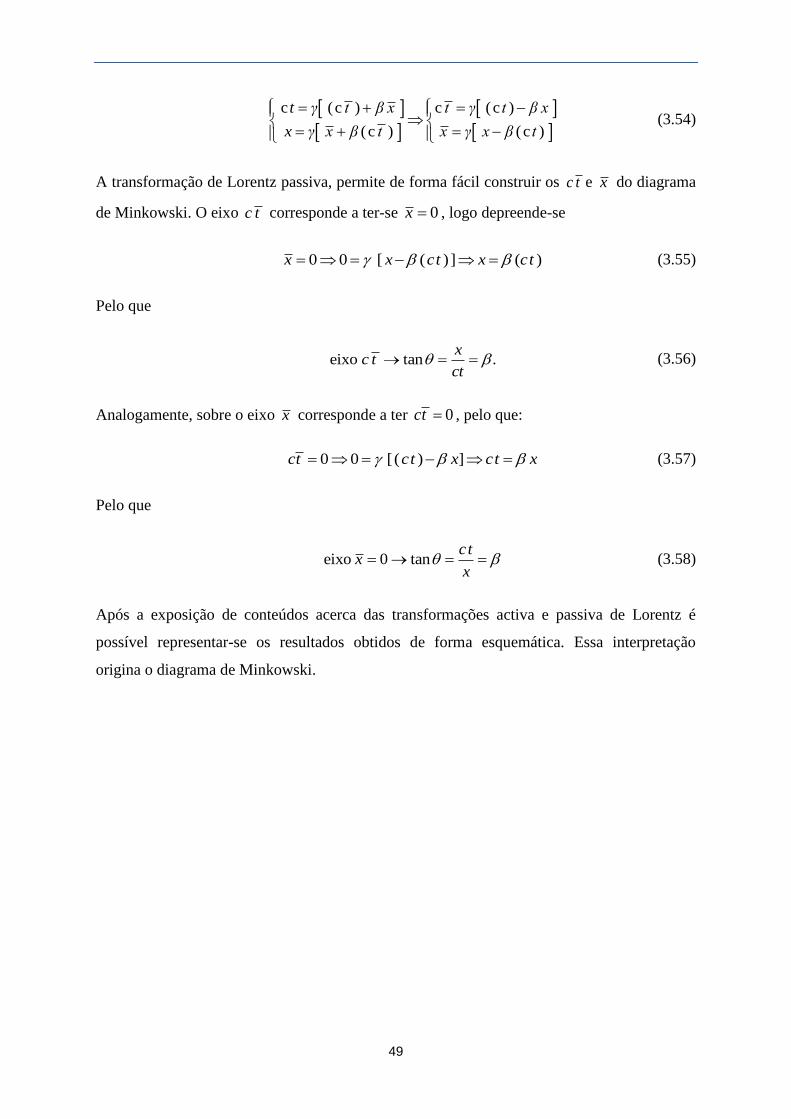
49
c (c ) c (c )
(c ) (c )
t γ t β x t γ t β x
x γ x β t x γ x β t
(3.54)
A transformação de Lorentz passiva, permite de forma fácil construir os c t e x do diagrama
de Minkowski. O eixo c t corresponde a ter-se 0x , logo depreende-se
0 0 [ ( )] ( )x x ct x ct (3.55)
Pelo que
eixo tan .x
c tct
(3.56)
Analogamente, sobre o eixo x corresponde a ter 0ct , pelo que:
0 0 [( ) ]ct ct x ct x (3.57)
Pelo que
eixo 0 tanct
xx
(3.58)
Após a exposição de conteúdos acerca das transformações activa e passiva de Lorentz é
possível representar-se os resultados obtidos de forma esquemática. Essa interpretação
origina o diagrama de Minkowski.
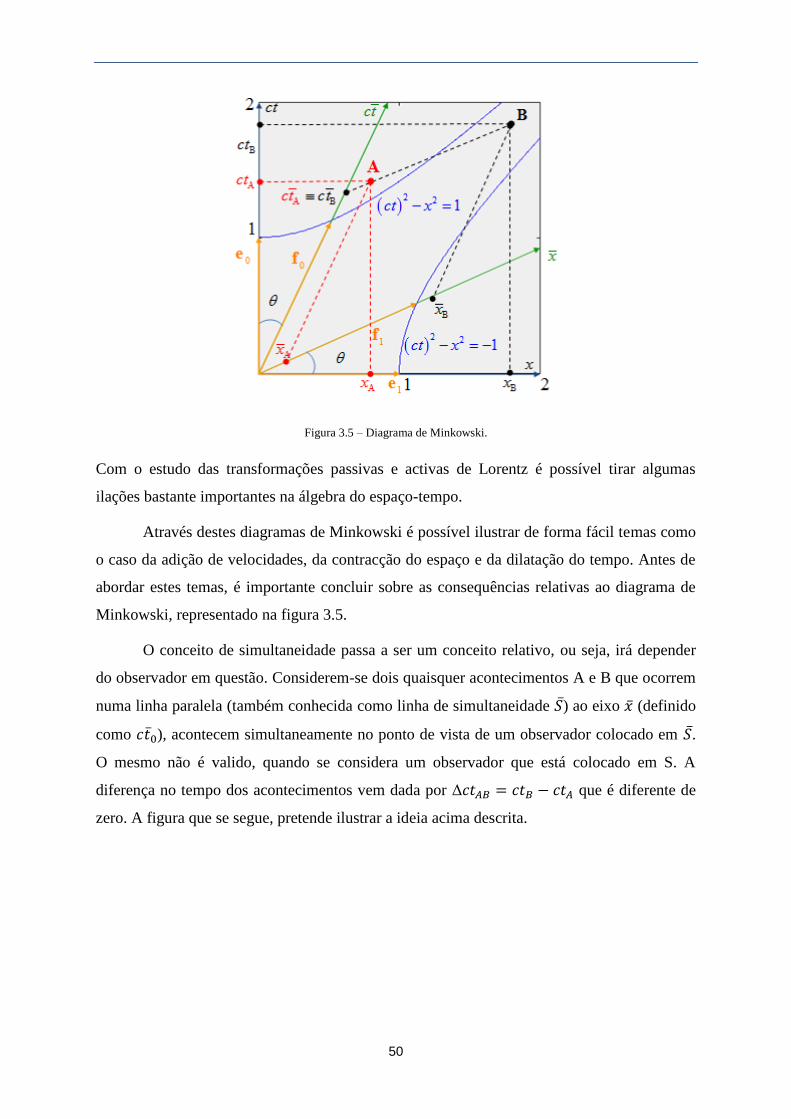
50
Figura 3.5 – Diagrama de Minkowski.
Com o estudo das transformações passivas e activas de Lorentz é possível tirar algumas
ilações bastante importantes na álgebra do espaço-tempo.
Através destes diagramas de Minkowski é possível ilustrar de forma fácil temas como
o caso da adição de velocidades, da contracção do espaço e da dilatação do tempo. Antes de
abordar estes temas, é importante concluir sobre as consequências relativas ao diagrama de
Minkowski, representado na figura 3.5.
O conceito de simultaneidade passa a ser um conceito relativo, ou seja, irá depender
do observador em questão. Considerem-se dois quaisquer acontecimentos A e B que ocorrem
numa linha paralela (também conhecida como linha de simultaneidade ) ao eixo (definido
como ), acontecem simultaneamente no ponto de vista de um observador colocado em .
O mesmo não é valido, quando se considera um observador que está colocado em S. A
diferença no tempo dos acontecimentos vem dada por que é diferente de
zero. A figura que se segue, pretende ilustrar a ideia acima descrita.
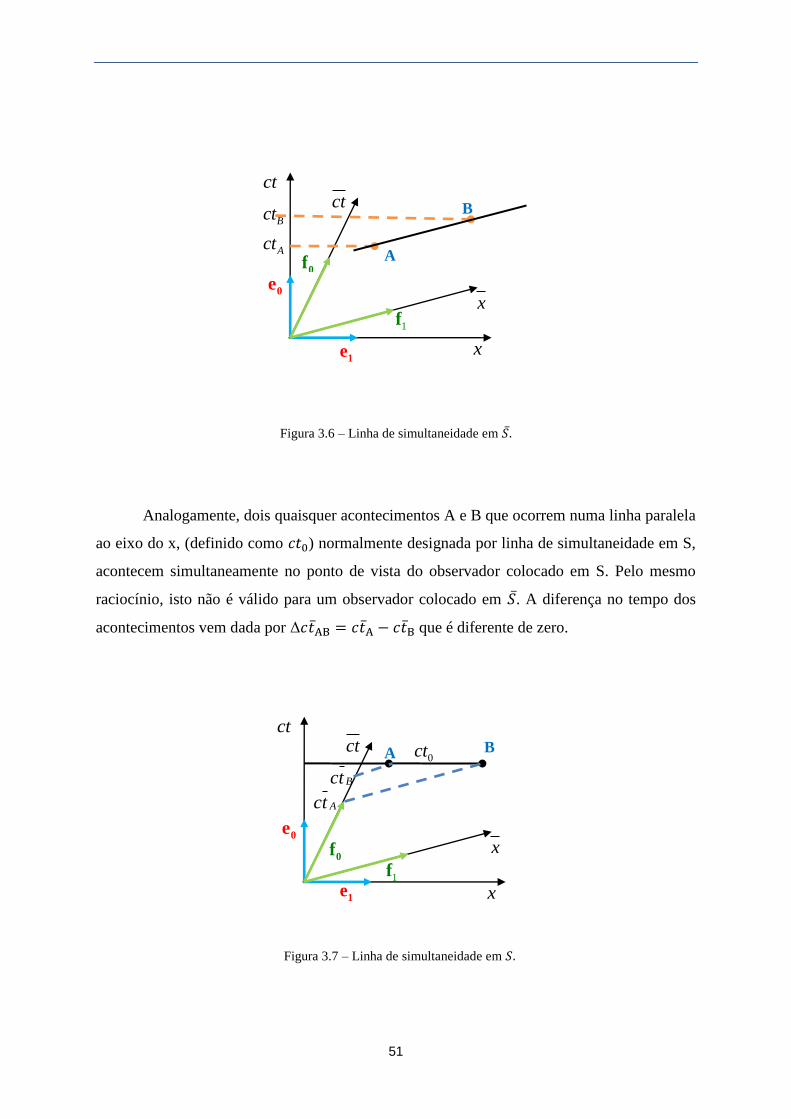
51
Figura 3.6 – Linha de simultaneidade em
Analogamente, dois quaisquer acontecimentos A e B que ocorrem numa linha paralela
ao eixo do x, (definido como ) normalmente designada por linha de simultaneidade em S,
acontecem simultaneamente no ponto de vista do observador colocado em S. Pelo mesmo
raciocínio, isto não é válido para um observador colocado em . A diferença no tempo dos
acontecimentos vem dada por que é diferente de zero.
Figura 3.7 – Linha de simultaneidade em
x
1e
x
ct
ct
Act
Bct
0f
1f
0e
0ct B A
1e
x
ct
ct
x
Act
Bct B
A
0f
1f
0e
52
Com a nova métrica não euclidiana, adoptada no espaço-tempo de Minkowski, surge uma
inclinação entre os eixos como se observa no diagrama de Minkowski da figura 3.5, no
entanto os referenciais continuam ortogonais. Apenas não são rectangulares, uma vez que, os
seus eixos formam um ângulo de 90º. Considerem-se dois casos particulares:
0 - Acontece quando a velocidade relativa entre os referenciais é nula, ou seja,
0.
4
- Acontece quando a velocidade relativa entre os referenciais se aproxima de
c, ou seja, 1 .
3.4 Dilatação do tempo
A interdependência entre espaço e tempo e consequentemente a existência de um limite
superior de velocidade, resulta em conclusões que não são expectáveis e compreensíveis do
ponto de vista do senso comum. A contracção do espaço e a dilatação do tempo, são dois
exemplos disso mesmo, embora sejam contra intuitivas, tornam-se evidentes quando
analisadas sob ponto de vista do diagrama de Minkowski.
Comece-se pela dilatação do tempo. A dilatação do tempo na relatividade restrita da teoria de
Einstein, é um fenómeno descrito pela transformação de Lorentz, em que referenciais com
movimento relativo uniforme, apresentam desacordo no intervalo de tempo registado entre
dois acontecimentos.
Tomando dois acontecimentos aleatórios O e B (representados na figura 3.8) e
relembrando que acontecimentos simultâneos a S se encontram sobre linhas paralelas ao eixo
x e que acontecimentos simultâneos a se encontram em linhas paralelas a , conclui-se que
enquanto o acontecimento O é simultâneo aos dois referenciais, o acontecimento B é
simultâneo a O para o referencial , mas acontece posteriormente a O quando visto de S.
Torna-se então evidente que ⇒ ⇒
. O intervalo de tempo registado pelos relógios que acompanham os
referenciais não é portanto coincidente.
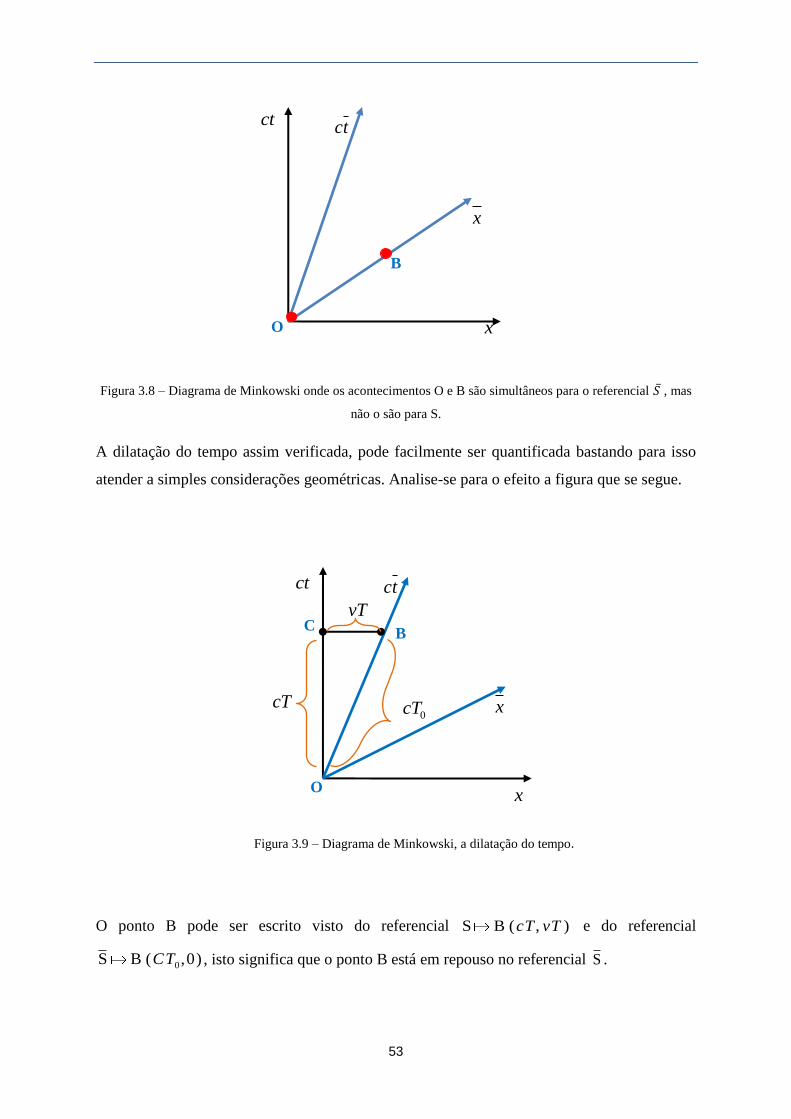
53
Figura 3.8 – Diagrama de Minkowski onde os acontecimentos O e B são simultâneos para o referencial , mas
não o são para S.
A dilatação do tempo assim verificada, pode facilmente ser quantificada bastando para isso
atender a simples considerações geométricas. Analise-se para o efeito a figura que se segue.
Figura 3.9 – Diagrama de Minkowski, a dilatação do tempo
O ponto B pode ser escrito visto do referencial S B ( , )cT vT e do referencial
0S B ( ,0)CT , isto significa que o ponto B está em repouso no referencial S .
x
ct ct
x
cT 0cT
vT
O
C B
x
ct ct
x
B
O
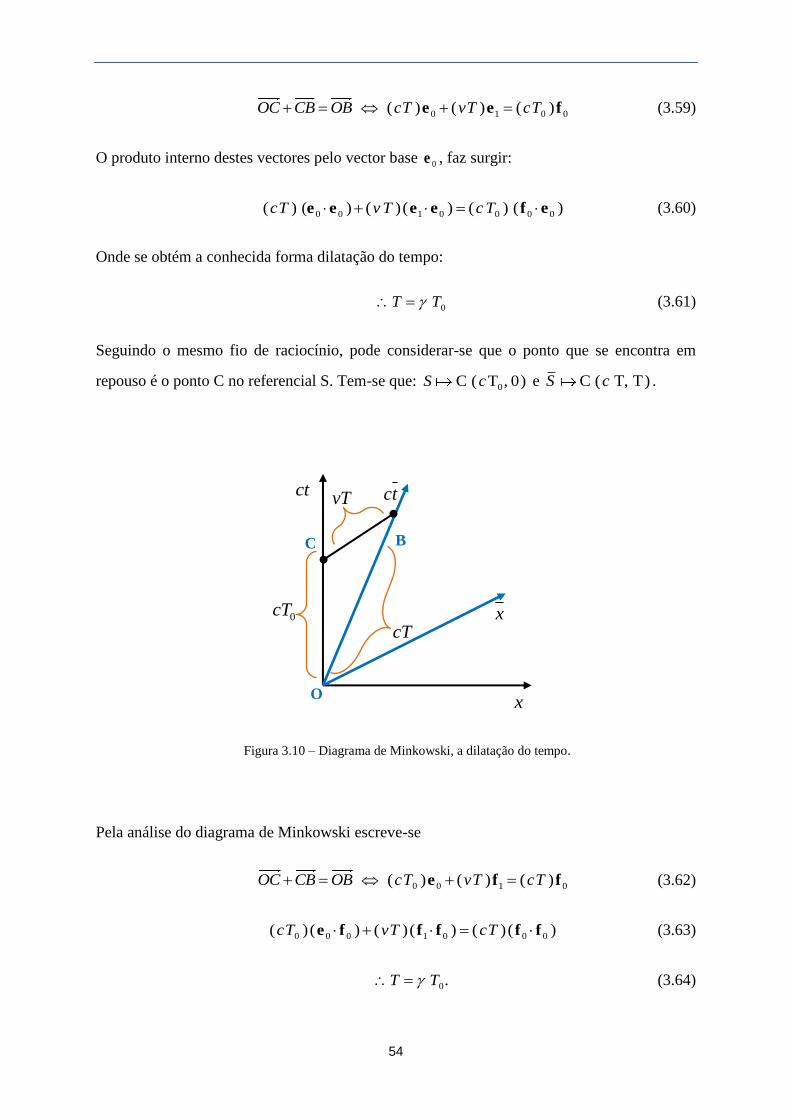
54
0 1 0 0 ( ) ( ) ( )OC CB OB cT vT cT e e f (3.59)
O produto interno destes vectores pelo vector base 0e , faz surgir:
0 0 1 0 0 0 0( ) ( ) ( )( ) ( ) ( )cT v T c T e e e e f e (3.60)
Onde se obtém a conhecida forma dilatação do tempo:
0T T (3.61)
Seguindo o mesmo fio de raciocínio, pode considerar-se que o ponto que se encontra em
repouso é o ponto C no referencial S. Tem-se que: 0C ( T , 0)S c e C ( T, T)S c .
Figura 3.10 – Diagrama de Minkowski, a dilatação do tempo
Pela análise do diagrama de Minkowski escreve-se
0 0 1 0 ( ) ( ) ( )OC CB OB cT vT cT e f f (3.62)
0 0 0 1 0 0 0( )( ) ( )( ) ( )( )cT vT cT e f f f f f (3.63)
0.T T (3.64)
x
ct ct
x
0cT
cT
vT
O
C B

55
Partindo do que foi aqui anteriormente demonstrado, é possível concluir que, se existir
velocidade relativa entre dois quaisquer referenciais, ao passar de um para o outro será
necessário ter em conta a dilatação do tempo. No apêndice A encontra-se a análise de um
caso muito conhecido no que diz respeito à dilatação do tempo, o paradoxo dos gémeos.
Importa ainda referir, ainda que saia fora do âmbito desta tese, que na Teoria da
Relatividade Geral, uma vez que a gravitação pode ser equiparada à aceleração, dois
observadores a alturas diferentes em relação a um campo gravítico concordam na dilatação
temporal verificada: relógios com baixa energia potencial andam mais lentamente [9].
3.5 Contracção do Espaço
À semelhança da análise anterior sobre a dilatação temporal, pode prever-se que também a
noção de distância deva depender do referencial observador.
Considere-se para o efeito dois referenciais S (ct, x) e S ( ct , x ) que se movem com
velocidade relativa. Sobre o referencial S (ct, x) encontra-se uma régua em repouso. Na figura
seguinte encontra-se enunciada esta situação num diagrama de Minkowski onde se pretende
comparar os registos dos dois observadores na medição do comprimento da régua.
Figura 3.11 – Diagrama de Minkowski, a contracção do espaço
x
ct ct
x
O
0L
0L
L B
C

56
Considere-se o ponto B representado no diagrama de Minkowski, este é visto do referencial
0 0S B( , )L L e do referencial S B(0, )L . Assim, pode-se escrever
0 1 0 0 1CB OB ( ) ( ) ( )OC L L L e e f (3.65)
Faz-se o produto interno de ambos os membros pelo vector de base 1e , obtém-se a conhecida
forma da contracção do espaço.
0 1 1 0 0 1 1 1( )( ) ( )( ) ( )( )L L L e e e e f e (3.66)
0LL
(3.67)
Da mesma forma, pode considerar-se que a fotografia é tirada no referencial S, tendo em
0ct um comprimento L. Temos assim: C (0, )S L e 0 0C ( , )S L L .
Figura 3.12 – Diagrama de Minkowski, a contracção do espaço.
De acordo com o diagrama de Minkowski tem-se que:
0 1 0 0 1CB OB ( ) ( ) ( )OC L L L e e f (3.68)
x
ct ct
x
O
0L
L
0L
B
C

57
0 1 1 0 0 1 1 1( )( ) ( )( ) ( )( )L L L e e e e f e (3.69)
0
F rmula da contrac o espacial
/ .
ó çã
L L (3.70)
Verifica-se portanto, que a contracção do espaço, à semelhança da dilatação do tempo, é um
efeito recíproco registado por ambos os referenciais. A contracção do espaço não é contudo
um efeito real e resulta simplesmente do conceito de simultaneidade ser definido de forma
diferente pelos dois observadores.
Pode-se concluir que em relatividade restrita não existem escalas absolutas para a
distância e para o tempo, mas escalas relativas a cada referencial de inércia.
3.6 Adição de Velocidades Colineares
Segundo Einstein, a composição de velocidades próprias, medidas por referenciais diferentes,
não segue a usual regra da adição de vectores obtida pela transformação do grupo de Galileu.
Já foi analisada a composição de velocidades segundo uma métrica euclidiana, que
como se verificou, não respeita o limite máximo para a velocidade de uma partícula e permite
que duas velocidades positivas possam dar origem a uma velocidade negativa. Faça-se agora
a mesma análise para a métrica de Minkowski.
Um acontecimento pode ser descrito no seu referencial próprio como 0( )c r f , ou
noutro referencial de laboratório, como 0(c ) rt r e composto pela soma da componente
temporal com a componente espacial.
0
0
Velocidade própria do referencial de laboratório
Velocidade própria do referencial próprio
c
c
v e
u f
Escreve-se:
0 0( ) , onde
d d dt dt dc u c u
d dt d d dt
r r ru e f (3.71)

58
Onde
2
2 2 2 2( )dt
c u cd
u (3.72)
Conclui-se que
2
1, onde
1
dt v
d c
(3.73)
Pelo que a velocidade da partícula vista de um referencial de laboratório é
0( )u c u v f (3.74)
0 0 0( 1 )( )u c u e e (3.75)
0 0 0 0 0(1 ) , onde .c u u f U v U e (3.76)
Dado que 2
0 0exp ( ) (1 )R U U , pode-se afirmar que a passagem do referencial
próprio para o de laboratório se faz através de um boost.
Considerem-se duas velocidades em que, a velocidade 1u pode ser exposta como um boost
aplicado ao referencial de laboratório, enquanto, a velocidade 2u pode ser considerada como
um boost aplicada ao referencial 1S .
1 1 10
2 2 10 1
exp( ).
exp( )
u e v
u e u (3.77)
Por outro lado
2 0 10(c ) exp( ) .u u e e v (3.78)
Tem-se portanto
2 2 10 1 10 10exp( ) exp( ) exp ( ) u e e v e v (3.79)
2 1 2 10 10exp ( ) exp ( ) u e v e v (3.80)

59
21 . (3.81)
Estas equações que levaram ao resultado da equação 1 , permitem mostrar
que, ao aplicar um boost com intensidade 1 seguido de outro com intensidade 2 é o mesmo
a aplicar um boost com intensidade 21 .
É de notar que estes resultados apenas são válidos, quando se consideram velocidades
que estão segundo a mesma direcção, ou seja, quando os dois boost são colineares.
Quando se aplicam sucessivamente dois boosts não colineares obtém-se uma
transformação que combina uma rotação com um único boost, a chamada rotação de Thomas
[10].
Uma vez que
tanh ( )v
c (3.82)
pode escrever-se
1 21 2
1 2
tanh tanhtanh tanh ( )
1 tanh tanh
. (3.83)
Sendo 1 1 1 2
2 2 1 2
tanh.
tanh 1
(3.84)
1 2
1 2
2
.
1
v vv
v v
c
(3.85)
Chega-se assim, à conhecida fórmula de adição relativista de velocidades usando uma
métrica semi-euclidiana. Como foi possível verificar a adição colinear de velocidades excede
a simples soma vectorial de Newton e é caracterizada pela adição dos ângulos hiperbólicos,
resultando a soma de velocidades relativistas numa rotação no espaço hiperbólico. Na
equação obtida, a composição das velocidades tende para o valor limite c (quando pelo
menos uma das velocidades é igual a c) e que, ao contrário da composição obtida pela
métrica euclidiana, duas velocidades positivas originam sempre uma velocidade também ela
positiva, caracterizando-se por existir um limite superior de velocidade, a velocidade da luz.
60
3.7 Conclusões
Este capítulo apresentou ideias fulcrais, necessárias na compreensão desta dissertação de
mestrado. Começou-se por concluir que a álgebra geométrica com o uso da métrica de
Lorentz resolveu os problemas anteriormente impostos pela métrica euclidiana. A álgebra
1,3C tal como a 3C , é caracterizada pela soma graduada dos seus subespaços. Esta álgebra
1,3C não possui uma métrica euclidiana, e tem-se que os vectores podem ser do tipo espaço,
tempo e luz. Para além disso os bivectores, para lá das habituais rotações, permitem gerar
boosts, ou também designados por transformações activas de Lorentz.
Os diagramas de Minkowski, facilitam a compreensão dos efeitos relativistas mais
simples como os que acabámos de referir e portanto neste caso a álgebra geométrica, serve de
reforço ajudando à quantificação do fenómeno.
Constatou-se que os sinais não se propagam instantaneamente, diferentes
observadores registam de maneira diferente a sequencialidade entre eventos. A discrepância
nas linhas de simultaneidade, de referenciais diferentes, abre espaço para fenómenos como a
dilatação temporal e a contracção do espaço.
A contracção do espaço, à semelhança da dilatação temporal, é um efeito recíproco
registado por ambos os referenciais. A contracção do espaço, não é contudo um efeito real e
resulta simplesmente do facto do conceito de simultaneidade ser definido de maneira
diferente pelos dois observadores. Reforça-se que, a relatividade restrita veio demonstrar não
existir escalas absolutas para a distância e para o tempo, mas escalas relativas a cada
referencial de inércia.
Na adição de velocidades relativistas, usando uma métrica semi-euclidiana, a
composição das velocidades tende para o valor limite c (quando pelo menos uma das
velocidades é igual a c) e duas velocidades positivas, originam sempre uma velocidade
também ela positiva.

61
Capítulo 4
Óptica Relativista
A álgebra geométrica do espaço-tempo de Minkowski na óptica relativista, evita o uso de
uma matemática tensorial bastante complexa. O uso desta ciência, apesar de recente,
demonstra notórias vantagens, no que diz respeito à simplicidade matemática envolvida. O
efeito de Doppler é um exemplo clássico onde podemos aplicar a álgebra do espaço-tempo
para reduzir a complexidade do problema, relacionando este mesmo efeito de Doppler com o
fenómeno da aberração. Define-se um novo objecto geométrico: o quadrivector 1,3k , que
representa o vector de onda correspondente a uma harmónica temporal de uma onda
electromagnética
Equation Chapter (Next) Section 4

62
4.1 Efeito Doppler Relativista
O objecto geométrico k pode ser descrito como 0 0k k k e , onde c
k 0
w é a
componente temporal e k k s a componente espacial. Pode escrever-se 0k nk , onde n é o
índice de refracção do meio onde a onda se propaga.
Atendendo ao facto de que a álgebra do espaço-tempo de Minkowski tem uma métrica semi-
definida negativa tem-se que
2 2 2 2 2
0 0 0( ) ( )k k k nk k (4.1)
Como será feito no exemplo que se segue o efeito de Doppler relativista surge naturalmente
quando utilizada a álgebra do espaço-tempo. Para tal, considere-se um acontecimento em
1,3C como 0( )ct r r e 1,3
e que o vector de onda é
1,3
0( )w c k k e (4.2)
No vácuo 0kk pelo que o vector 02 k é o vector nulo, ou seja, reside no cone de luz.
Considere-se a propagação de ondas planas com a forma:
exp[ ( )]i k r , onde wt k r k r . (4.3)
Se por hipótese se estivesse perante um meio estacionário caracterizado por um índice de
refracção 0n em que 0 0 0 0 0( / )k k s n k s n w c s tinha-se que:
0 0 0( / ) ( )w c n s k e . (4.4)
Onde 0s 0,3 é um vector unitário, tal que,
2
0( ) 1s .
Considere-se a emissão de uma onda plana entre dois observadores, os quais se designam por
receptor e emissor. Os vectores de onda associados a cada referencial são:
Emissor → 0( )c
e
e
ws k e , (4.5)
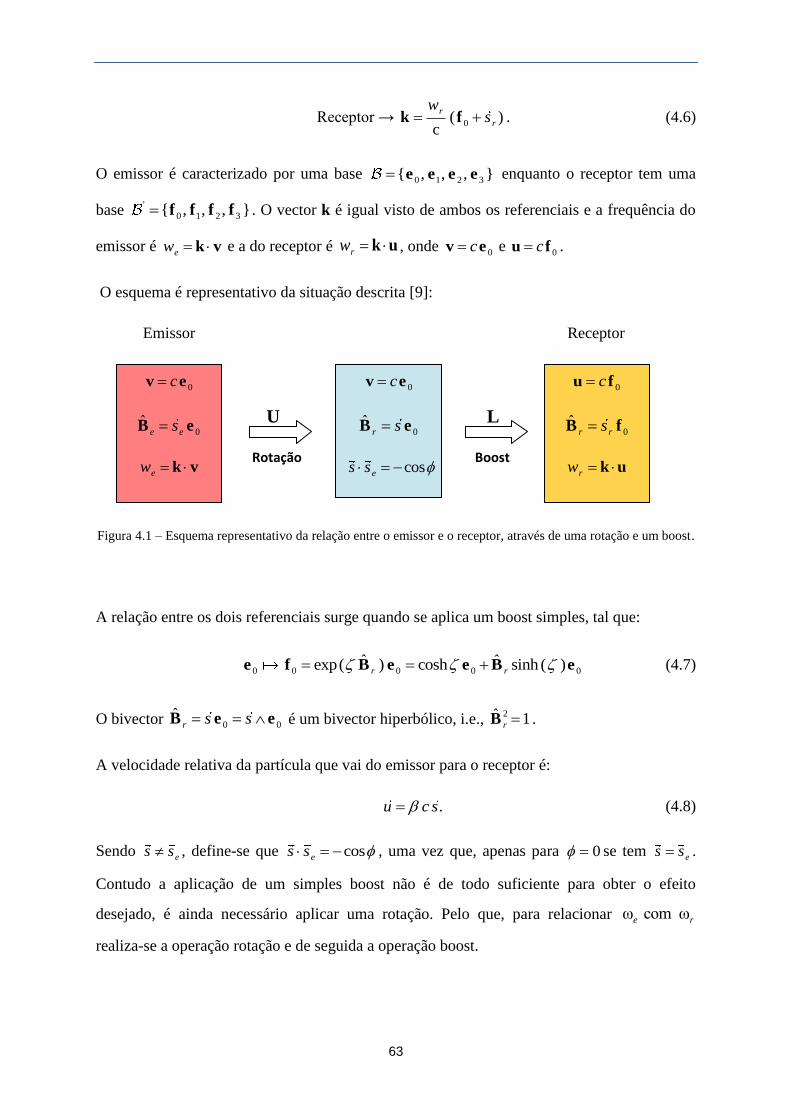
63
Receptor → 0( )c
r
r
ws k f . (4.6)
O emissor é caracterizado por uma base 0 1 2 3{ , , , } e e e e enquanto o receptor tem uma
base '
0 1 2 3{ , , , } f f f f . O vector k é igual visto de ambos os referenciais e a frequência do
emissor é ew k v e a do receptor é rw k u , onde
0cv e e 0cu f .
O esquema é representativo da situação descrita [9]:
Emissor Receptor
U L
Figura 4.1 – Esquema representativo da relação entre o emissor e o receptor, através de uma rotação e um boost.
A relação entre os dois referenciais surge quando se aplica um boost simples, tal que:
0 0 0 0 0ˆ ˆexp( ) cosh sinh ( )r r e f B e e B e (4.7)
O bivector 0 0ˆ
r s s B e e é um bivector hiperbólico, i.e., 2ˆ 1r B .
A velocidade relativa da partícula que vai do emissor para o receptor é:
.u c s (4.8)
Sendo es s , define-se que coses s , uma vez que, apenas para 0 se tem es s .
Contudo a aplicação de um simples boost não é de todo suficiente para obter o efeito
desejado, é ainda necessário aplicar uma rotação. Pelo que, para relacionar ω com ωe r
realiza-se a operação rotação e de seguida a operação boost.
0cv e
0ˆ
e esB e
ew k v
0cv e
0ˆ
r sB e
coses s
0cu f
0ˆ
r rsB f
rw k u Rotação Boost

64
2
0
2
2
2
0 0
ˆ ˆ ˆ ˆRotação:
ˆ ˆcos sin exp( )
ˆ ˆ ˆ ( ) ( )
e e r e e
e e e e e
e e e
e r e e e
s U U U
s s s s s U s U U s
U s s s s s s
U s s s s
B e B B B
B B
B B B e e
(4.9)
2
0 0 0 0 0 0 0 0
2
0 0
0 0 0 0
0 0
Boost : ( )
ˆ ˆcosh sinh exp( )
ˆ ˆ ( ) ( ) ( )
ˆ
r r
r r r
r r
L L L
L
s L s L L L L s L s
s s
e f f e e e e e
f e B B
B f B e e e
B f e
L
(4.10)
Conclui-se que a rotação espacial transforma o bivector ˆ eB no vector ˆ rB . O boost por sua
vez transforma 0 0e f .
Assim, escreve-se
0 0c c ( ).s u f u e (4.11)
Portanto
0 0
ω[c ( ) ] [ ( ) ] ω (1 cos )
c
ee es s k u e e (4.12)
e como ω r k uconclui-se que a relação entre as frequências é
r
2e
ω 1 cos(1 cos )
ω 1
. (4.13)
No caso particular de termos 0 , ou seja, os vectores são colineares, ess
, obtém-se a
conhecida forma do efeito Doppler longitudinal [9]:
r
e
ω 1
ω 1
. (4.14)

65
4.2 Efeito Doppler Relativista num plasma
Considere-se um referencial S no qual um plasma de índice de refracção
2
2
ω(ω) 1
ω
pn ,(
pω é a frequência do plasma) e um observador se encontram em repouso. Seja ainda S um
referencial que se move em relação a S com velocidade v e no qual uma fonte
monocromática emite um sinal de frequência sω .
Considerando novamente o quadrivector de onda (ω , )ck k onde ω é a frequência e k o
vector de onda. No caso das ondas electromagnéticas propagando-se num meio de índice de
refracção (ω)n n , tem-se
(ω)
(ω)=ω
kn c (4.15)
onde a dependência de k com ω se deve à natureza dispersiva do meio considerado neste
caso homogéneo e isotrópico. Assim tem-se
ω ˆ= (1, (ω) )k nc
k (4.16)
Numa transformação de Lorentz S S , em que S se desloca com velocidade
ˆc c v v em relação a S , pode-se escrever
ω ω
. .ˆ ˆ ( 1)
c c
β
β I vvkk
(4.17)
Pelo que, para um observador em repouso em relação ao meio de índice de refracção
(ω)n n , vem em particular
ω= ω 1 (ω)cosn (4.18)
onde é o ângulo entre a velocidade relativa v e a constante de propagação k, quer isto dizer,

66
ω ωˆˆβ (ω) β (ω)cosn nc c
β k vk (4.19)
Quando o meio é um plasma frio sem colisões em que
2
2
ω(ω) 1
ω
pn (4.20)
sendo ω p a frequência do plasma, obtém-se então das equações (4.18) e (4.20) que
2 2ω ω β ω ω cos .p (4.21)
A fonte monocromática emite um sinal de frequência ωs no referencial S , é ω ωs pelo
que
2 2ω ω β ω ω cos .s p (4.22)
Quando a fonte (em S ) se aproxima do observador (em S) é 0 e aω=ω ;
Quando a fonte (em S ) se afasta do observador (em S) é e rω=ω ;
Logo, da equação (4.22) resulta
2
ω ω ω0 β 1
ω ω ω
s
p p p
(4.23)
2
ω ω ω +β 1
ω ω ω
s
p p p
(4.24)
As equações (4.23) e (4.24) são o efeito de Doppler para o caso dum plasma estacionário em
relação ao observador para um emissor de frequência ωs que se aproxima ( 0 ) ou que se
afasta ( ).
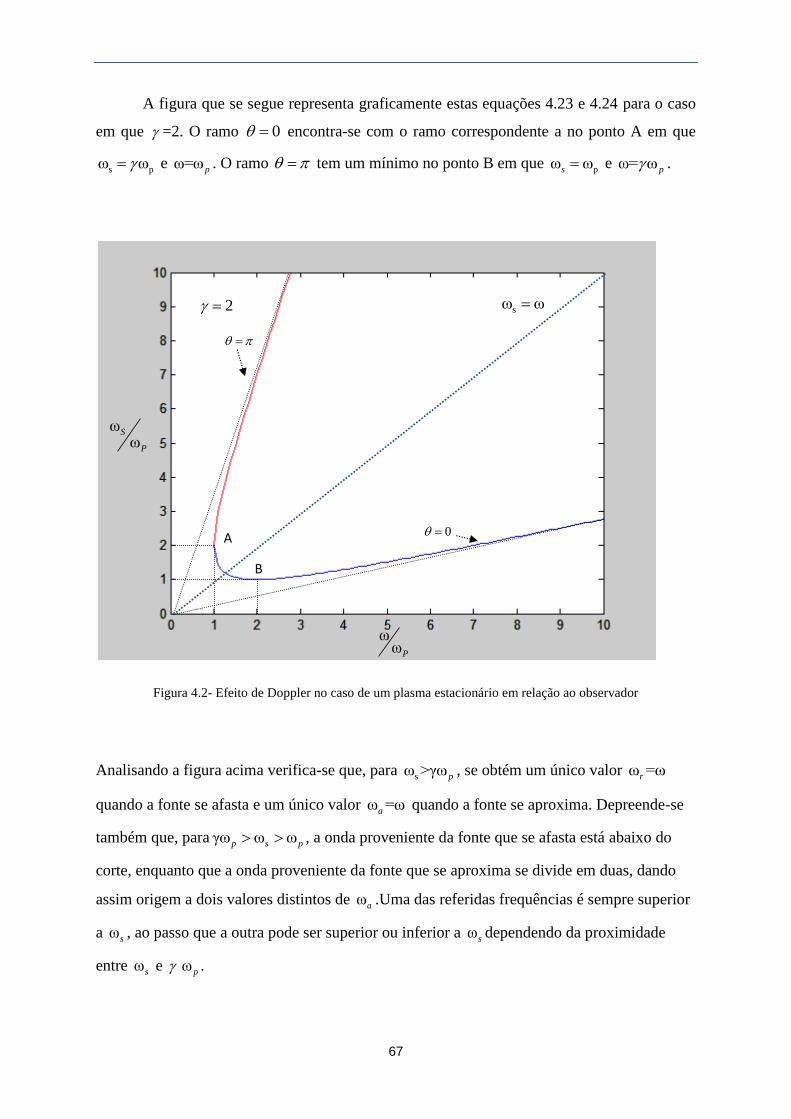
67
A figura que se segue representa graficamente estas equações 4.23 e 4.24 para o caso
em que =2. O ramo 0 encontra-se com o ramo correspondente a no ponto A em que
s pω ω e ω=ωp. O ramo tem um mínimo no ponto B em que
pω ωs e ω= ωp .
Figura 4.2- Efeito de Doppler no caso de um plasma estacionário em relação ao observador
Analisando a figura acima verifica-se que, para sω >γωp
, se obtém um único valor ω =ωr
quando a fonte se afasta e um único valor ω =ωa quando a fonte se aproxima. Depreende-se
também que, para γω ω ωp s p , a onda proveniente da fonte que se afasta está abaixo do
corte, enquanto que a onda proveniente da fonte que se aproxima se divide em duas, dando
assim origem a dois valores distintos de ωa .Uma das referidas frequências é sempre superior
a ωs , ao passo que a outra pode ser superior ou inferior a ωs dependendo da proximidade
entre ωs e ω p .
A
B
0
ωωP
ωω
S
P
2 sω ω
68
4.4 Conclusões
Neste capítulo a álgebra geométrica voltou a demonstrar grande importância para chegar a
conclusões de forma eficaz. Analisando a óptica relativista em particular, nomeadamente no
efeito de Doppler relativista, concluiu-se que a relação entre frequências entre um emissor e
um receptor colocados em referenciais diferentes se obtém aplicando uma rotação simples, U,
seguida de um boost, L e é dada por 2
ω 1 cos(1 cos )
ω 1
r
e
69
Capítulo 5
Electrodinâmica Relativista
Como comprovado, a álgebra geométrica possui inúmeras técnicas para estudar problemas de
electrodinâmica e electromagnetismo. Neste capítulo serão aplicadas as ferramentas das
álgebras aplicadas ao plano, espaço e espaço-tempo de Minkowski, às leis do
electromagnetismo, mais especificamente às equações de Maxwell, de forma a enfatizar as
enormes vantagens destas álgebras face a outras álgebras tradicionais.
Começa-se por reescrever as equações de Maxwell nas álgebras 3C e 1,3C . São definidos
os dois bivectores fundamentais do campo electromagnético, o bivector de Maxwell e o
bivector de Faraday. Através destes, é possível reescrever as quatro equações de Maxwell
iniciais para apenas duas equações, a homogénea e a não homogénea, e no vácuo integrar as
quatro equações de Maxwell em apenas uma equação. São estudadas as relações constitutivas
dos meios, vistas de referenciais diferentes e por fim recorre-se a ferramenta da redução à
forma do vácuo, para completar esse estudo e facilitar a análise dos meios em movimento.

70
5.1 Equações de Maxwell em 3C
As equações de Maxwell, assim designadas em honra de James Clerk Maxwell, descrevem o
comportamento dos campos eléctricos e magnéticos, bem como as suas interacções com
matéria.
Antes de escrever as equações de Maxwell é importante apresentar algumas
considerações matemáticas que facilitam a sua escrita. Comece-se por definir , conhecido
por operador nabla. Este operador nabla está presente em todas as equações de Maxwell mas
possui uma acção específica sobre cada uma delas. A equação que se segue caracteriza o
operador mencionado.
Equation Chapter 5 Section 5
0,3
1 2 3
1 2 3
.x x x
e e e (5.1)
Seguem-se duas operações matemáticas, divergência e o rotacional, cujo as mesmas usam o
operador nabla, e quando aplicadas sobre um dado vector 3F vêm escritas como:
ˆ ˆ ˆ
Rotacional .
x y z
x y z
F F F
x y z
F (5.2)
Divergência yx z
FF F
x y z
F (5.3)
Dá-se atenção agora a algumas grandezas que a partir deste momento passaram a ser de uso
comum, como tal, de seguida são feitas algumas considerações sobre essas grandezas.
Note-se que:
E 3 – representa a intensidade do campo eléctrico;
B 3 – representa a intensidade do campo magnético;
P 3 – representa o vector polarização eléctrica;
M 3 – representa o vector polarização magnética;

71
A densidade total de carga eléctrica é t p , e a densidade total de corrente é
t p m J J J J 3, onde são válidas as seguintes relações:
p
p
m
t
P
PJ
J M
(5.4)
De recordar que as equações de Maxwell são aquelas que contem não só os campos de
grandeza intensiva ( E , B ) mas também os campos de grandeza extensiva ( D , H ).
Os vectores H e D representam a excitação eléctrica e a excitação magnética
respectivamente,
0 . D E P (5.5)
0
1.
H B M (5.6)
As equações de Maxwell escritas na linguagem vectorial comum no espaço linear 3 usando
o produto externo de Gibbs são as seguintes:
Lei de Gauss
Lei de Gauss Magnética 0
Equação de Maxwell-Faraday
Equação de Maxwell-Ampère
t
t
D
B
BE
EH J
(5.7)
5.1.1 Equações de Maxwell-Boffi em 3C
Note-se que é possível escrever as equações de Maxwell como sendo as equações de
Maxwell-Boffi. Nestas equações especificamente não entram os campos D e H, ou seja,
ignoram a quantidade de excitação dos meios materiais. É dada uma perspectiva reducionista
onde o único meio a ter em conta é o vácuo. Importa referir que num meio reducionista, o

72
meio mantém-se invariável, onde a única variação observável é a quantidade de cargas que lá
existem.
123
123
equação de Maxwell-Faraday 0
lei de Gauss magnética 0
equação de Maxwell-Ampère
lei de Gauss
t
t
Be E
B
DHe J
D
(5.8)
Reescrevendo-se as equações de Maxwell-Boffi no âmbito da álgebra do espaço, considere-se
o vácuo e que:
123 123( ) ( ) E E e B e B (5.9)
1 2 3
0 0
1c .
x y z
e e e (5.10)
Aplicam-se estas equações acima às equações de Maxwell e obtêm-se as chamadas equações
de Maxwell-Boffi em 3C :
0
123 0
123
123
10
1 11
1 12 0
3 0
t
t
c
Jc t c
c t c
E
E B e
B e E
B e
(5.11)
Cada uma das quatro equações de Maxwell-Boffi em 3C representadas em 5.11 apresentam
um grau distinto, de zero a três, ou seja, será escalar, vector, bivector e trivector
respectivamente. Deste modo, e graças às propriedades da álgebra geométrica, é possível
fazer-se a soma graduada das quatro equações, e integrar numa única equação para
representar as equações de Maxwell-Boffi em 3C .

73
Temos que a impedância do vácuo é:
00
0
(5.12)
Por isso as seguintes equações podem ser obtidas
0
0
00
1ε
εμ
c
c
(5.13)
123 0
1 1 1t t
c t c c
E B e J (5.14)
Esta nova equação, está escrita na forma mais compacta usando álgebra 3C . Com esta nova
notação é possível reescrever as equações de Maxwell como é mostrado de seguida:
123equação de Maxwell-Faraday 0
.
lei de Gauss magnética 0
t
B e E
B
(5.15)
123equação de Maxwell-Ampère ( )
.
lei de Gauss
t
DHe J
D
(5.16)

74
5.2 Equações de Maxwell na álgebra 1,3C
A álgebra geométrica aplicada ao espaço-tempo de Minkowski permite estudar as equações
de Maxwell aplicadas à relatividade restrita com uma complexidade menor, apresentando-as
de forma clara e sucinta.
Comece-se por escrever as equações vectoriais na álgebra do espaço, onde se considera o
espaço quadrático 0,3 , onde as grandezas vectoriais eE, B, D, H J pertencem a esse espaço
e temos:
0,3
1 2 3
1 2 3
.x x x
e e e (5.17)
2 2 2
2
2 2 2
1 2 3
.x x x
(5.18)
Pelo que, as quatro equações de Maxwell no espaço 0,3 são na forma:
grupo de Faraday
0
BE
t
B
(5.19)
grupo de Maxwell
DH J
t
D
(5.20)
Para escrever as equações de Maxwell em 1,3C há que começar por introduzir os
correspondentes vectores relativos (que, como foi visto anteriormente, são tecnicamente
bivectores hiperbólicos ou do tipo tempo) e definir o operador de Dirac.

75
2 1,3
0 0
2 1,3
0 0
2 1,3
0 0
2 1,3
0 0
vectores relativos
E E
B B
D D
H H
E e e
B e e
D e e
H e e
(5.21)
a densidade de carga-corrente
1,3
0
1.J
c J e (5.22)
e o operador de Dirac
1,3
0
1.
c t
e (5.23)
Introduzem-se, por fim, os dois bivectores fundamentais do campo electromagnético, F e G.
O bivector F é designado por Faraday (ou da intensidade electromagnética) e o G designado
de bivector de Maxwell (ou da excitação electromagnética):
1
1
c
c
F E I B
G D I H
(5.24)
Tendo em conta que:
0 1 10 2 20 3 30
0 1 10 2 20 3 30
E E E E
B B B B
E e e e e
B e e e e (5.25)
10 23
20 31
30 12
I e e
Ie e
Ie e
(5.26)

76
Estamos então em condições de escrever os bivectores de Faraday e de Maxwell como
1 10 2 20 3 30 1 23 2 31 3 12
1 10 2 20 3 30 1 23 2 31 3 12
1( ) ( )
1( ) ( )
E E E B B Bc
D D D H H Hc
F e e e e e e
G e e e e e e
(5.27)
Os dois bivectores F e G representativos das equações de Maxwell são fundamentais no
campo electromagnético, uma vez que, ao contrário dos outros quatro envolvidos na sua
constituição (E, B, D e H), estes não são relativos, quer isto dizer, que não dependem do
observador. Dois observadores distintos vêm os mesmos valores de F e G, no entanto a
decomposição destes em função dos seus vectores relativos é diferente [7].
Após apresentados todos os elementos importantes, é agora possível escrever as duas
equações de Maxwell da relatividade restrita:
1,3
(i) Equação homogénea 0
(ii) Equação não-homogénea C
F
G J (5.28)
A equação homogénea apresentada anteriormente descreve a conservação do fluxo magnético
ao passo que a equação não-homogénea descreve a conservação da carga eléctrica.
A relação constitutiva do vácuo em 1,3 C :
0
1.
G F (5.29)
Dado que é possível escrever o produto geométrico
F F F (5.30)
77
As duas equações de Maxwell passam a uma única equação no vácuo em 1,3 C :
0 . F J (5.31)
5.3 Meios em movimento
Fazendo aqui um ponto da situação tem-se que, até ao momento descreveram-se as equações
de Maxwell no espaço-tempo de Minkowski recorrendo a dois novos bivectores, o bivector
de Faraday e o bivector de Maxwell. Estes permitiram escrever as quatro equações de
Maxwell iniciais, mas apenas com recurso a duas, designadas por, homogénea e não-
homogénea. Particularizando para a propagação no vácuo, consegue-se representar as duas
referidas equações em apenas uma única, ou seja, a equação de Maxwell no vácuo.
Para dar continuação ao estudo das equações de Maxwell no espaço-tempo de Minkowski,
abordar-se-à um problema clássico da electrodinâmica: os meios em movimento.
Comece-se por considerar um meio isotrópico simples, ou seja, um meio ilimitado, linear e
sem perdas onde não existe acoplamento electromagnético ( 0M ), logo, D E .
O meio isotrópico simples, em termos de 1,3 C , apresenta as seguintes relações
constitutivas
0
0
meio isotrópico simples .D E
B H
(5.32)
Em termos dos vectores relativos, obtém-se então sucessivamente
0
0
0
0
1 11
c
D E
D I H E I BH B
(5.33)

78
1
10
2
2
0
1.
1 c c
G D I H E I B (5.34)
Ao considerar 0cv e o referencial próprio do meio, ou seja, onde este se encontra em
repouso, tem-se que
0 0 0 0 0 0 0 0
1 1E B
c c
-1
vF v F v e Fe e E I B e e e I e e (5.35)
0 0
1 1.E B
c c vF e I e E I B (5.36)
Pelo que, para uma combinação linear de F com vF , surge
1 2 1 2 1 2 1 2
1 1 1( ) ( )
c c c
vF F I B E I B E I B (5.37)
logo, fazendo
1 1 2
01 2 1
1 2 2
2 1 2
1 1 1( )
2 2
1 1( )
2
. (5.38)
Desta forma obteve-se a chamada relação constitutiva do espaço-tempo de Minkowski, que
permite relacionar o bivector de Faraday com o bivector de Maxwell utilizando as relações
constitutivas do meio:
0 0
1 1 1 1.
2 2
vG F F (5.39)

79
É no entanto possível dar a esta relação constitutiva uma forma mais elegante fazendo
2
0
2 2
0
200
0
11 1cosh
2 2 cosh sinh 1 .
cosh sinh exp( )11 1sinh
2 2
n
n
nn
n
(5.40)
Onde 0n é o índice de refracção do meio, isto é,
0ln ( ).n (5.41)
Nestas condições infere-se que 0
0
0
e ( ) -1
vF F v F vvr pode-se
simplificar a forma local da relação constitutiva universal:
0 0
1 1 1 1
2 2
1 ( cosh sinh )
1 ( cosh sinh )
1 exp( )
v
v
G F F
F F
F
F
v
v
r
r
(5.42)
forma local da relação 1
exp( ) . constitutiva universal
G Fvr (5.43)
A equação (5.43) é designada por forma invariante da relação constitutiva e permite passar de
forma imediata do referencial próprio do meio para o referencial de laboratório onde todas as
partículas se deslocam com uma velocidade própria u, tal que:
0 0 0 0 0 0exp( ) ( ) .u v u U e f u U v v (5.44)

80
Ao fazer-se a substituição v u obtém-se a relação constitutiva do meio em estudo mas
agora no referencial do laboratório.
forma geral da relação 1
exp( ) constitutiva universal
G Fur (5.45)
Onde, neste caso, se tem
( )u u -1F F v Fur (5.46)
e em que
1 1
0 0 02
1exp( ) exp(-δ ) exp( )
c u U v u v U U v (5.47)
u 2
1( ) u u
c F Fr . (5.48)
Os bivectores de Faraday e de Maxwell não são relativos, logo a relação constitutiva é vista
do mesmo modo por ambos os referenciais, a diferença reside na velocidade que têm. No
referencial próprio a velocidade vem dada por 0cv e , ao passo que no referencial de
laboratório a velocidade é vista como 0( )c v v f .
Para se obter a velocidade vista do referencial de laboratório, basta para isso aplicar uma
transformação de Lorentz passiva, onde, à velocidade é adicionada a componente relativa v ,
e de um boost que transforma 0 0e f .
Na figura que se segue é possível analisar a relação constitutiva de um meio isotrópico visto
de diferentes referenciais.
Figura 5.1 – Relação constitutiva de um meio isotrópico visto de diferentes referenciais
Referencial próprio
do meio
0cv e
1exp ( )
vG Fr
Referencial de
laboratório
0( )c v v f
1exp( )
vG Fr
81
A relação constitutiva no referencial de laboratório ( )G FG , do espaço-tempo de
Minkowski, é possível de ser decomposta em duas relações constitutivas:
( , )
( , )
D D E B
H H E B
(5.49)
Constata-se observando estas duas relações constitutivas que se está na presença de um meio
bianisotrópico, pois ambos os campos e D H dependem simultaneamente de e E B .
Infere-se deste modo que um meio isotrópico simples no seu referencial é visto como um
meio bianisotrópico no referencial de laboratório, ou seja, onde o mesmo é visto em
movimento [9].
5.4 Redução à Forma do Vácuo
Para auxiliar o estudo dos meios em movimento não será necessário trabalhar de forma
explícita com as relações constitutivas ( , ) e ( , )D D E B H H E B caso se utilize um novo
método: a redução à forma de vácuo.
De modo, a escrever as relações constitutivas do meio de forma análoga às do vácuo são
realizadas as seguintes transformações:
exp exp2 2
exp exp2 2
F F' F' F
G G' G' G
u u
u u
r r
r r
(5.50)
daqui obtém-se
1
exp exp( ) exp2 2
G' F'u u ur r r (5.51)

82
1
G' F' (5.52)
Aplicando as transformações indicadas em que e F F G G , obtém-se uma relação
constitutiva que tem a mesma forma que a relação constitutiva do vácuo. É por esta razão que
se designou essa transformação por redução à forma do vácuo.
É importante referir que ao proceder a esta alteração, se alterou a própria estrutura do espaço-
tempo de Minkowski, que agora passa a ser um espaço fictício, diferente do original. Perante
isto, importa perceber o que acontece às equações de Maxwell.
Neste novo espaço-tempo fictício tem-se que
0 1 2 3 0 1 2 3{ , , , } { , , , } e e e e e e e e (5.53)
0 0
1 1.
c t c t
e e (5.54)
Tem-se neste novo espaço fictício,
1,3
0C
F FF
G GG J
J J
. (5.55)
Devido ao facto da estrutura graduada da álgebra geométrica e a aplicação da nova relação
constitutiva às duas equações de Maxwell obtém-se uma única equação.
equa homogénea 0
equaç o não homogénea
ção
ã
F
F J
F F J F J . (5.56)

83
Para o caso em que há ausência de fontes do campo, vem simplesmente
0 F . (5.57)
Considere-se que o estudo da propagação de ondas planas monocromáticas neste meio é
realizado recorrendo a uma onda do tipo:
0{ exp [ ( )]}i F F k r . (5.58)
Para uma zona sem fontes as equações de Maxwell surgem na forma
0 0
0
0 0
0 00
0 0
k F k Fk F
k G k F, (5.59)
o o vector de onda resulta da transformação, exp2
k kur . Ao multiplicar ambos os
membros da equação pelo vector de onda, k , obtém-se
2
0( ) 0 k F . (5.60)
Como tal, para soluções diferentes do bivector de Faraday ser nulo, obtemos um resultado
extremamente importante:
2( ) 0 k . (5.61)
Através da análise do resultado da equação (4.59) conclui-se que no espaço-tempo de
Minkowski equivalente o vector de onda é nulo. Este resultado é igual ao que se verifica no
vácuo, no entanto, é importante referir que apesar de o vector de onda ser nulo não estamos
no vácuo.
Para concluir mais acerca do vector de onda nulo, faz-se
exp 2 cosh 2 sinh 2 .u k k k k kur (5.62)
Atendendo à forma anterior e ao definir

84
0
0
0
0
1cosh 1cosh
2 2 2
1cosh 1sinh
2 2 2
n
n
n
n
, escreve-se 0 0
0
1[( 1) ( 1) ]
2un n
n k k k . (5.63)
Como o vector de onda é nulo tem-se 2( ) 0 k , pelo que
2
2
0 0
0
1( ) [( 1) ( 1) ] 0
2un n
n
k k k (5.64)
2 2 2 2 2
0 0 0( 1) ( 1) 2( 1)( ) 0u un n n k k k k . (5.65)
De modo a retirar a dependência de uk , sabe-se que:
2 2 2
2 2
2 2
2
1 1 1( ) ( ) ( )
1 1 [ ( ) ( ) ] [ ( ) ( ) ]
1 2 [ ( ) ( ) ( ) ] ( )
2 ( )
uc c c
c c
c c
c
k k uk u u k u u k u k u
k u u u k u k u u u k u
k u u u k u u u k u k u k
u k u k
ur
(5.66)
2 1 1 2
2 2
2 2
( ) ( )
2 2( ) ( )
u
uc c
k u k u u k u k
k k k u k u k u k k. (5.67)
Logo, fazer 2( ) 0 k é o mesmo que:
2 2 2 2
02
1( ) 0 ( 1) ( ) 0.n
c k k u k (5.68)
É importante realçar que esta equação se aplica a uma onda plana monocromática no espaço-
tempo de Minkowski equivalente, ou seja, quando se faz a redução à forma do vácuo.

85
Assim no referencial de laboratório u e k podem ser vistos como:
2 2 2
00
22 2 2 2
0 0 0
(1 ) ( ).
( ) ( ) 1
k nc
k n c k n
ku e
k e u k (5.69)
onde
2 2
0
( , )
( 1)
n
n
, (5.70)
e como cosn n temos
2 2 2cos 1 2 cos (1 ) 0.n n (5.71)
Resolve-se a equação em ordem ao índice de refracção do meio no referencial do laboratório,
n , são obtidas duas soluções
2 2
2 2
cos 1 (1 cos ).
cos 1n
(5.72)
Nota: As soluções desta equação quadrática não são independentes. Como se tem
( ) ( )n n
as duas soluções correspondem, de facto, a uma única solução.
Quando no referencial de laboratório a velocidade do meio em análise em relação ao
laboratório é nula, então está-se na presença de um caso particular em que 0 . Neste caso
o índice de refracção efectivo do meio no referencial de laboratório é igual ao índice de
refracção do meio no seu referencial próprio, ou seja, 0nn . Será portanto necessário
escolher a parte negativa da raiz, logo
2 2
2 2
1 (1 cos ) cos( ) .
1 cosn
(5.73)

86
Simplificando,
2 21 (1 cos ) 1
( ) 1cos
a a b
nb
, (5.74)
A velocidade de fase normalizada sendo o seu vector relativo correspondente
00 sn
cs
k
wv p
, onde 2
0( ) 1s , vem dada por:
2 2( ) 1 (1 cos ) cos
1
pv
c
. (5.75)
De seguida apresentam-se as figuras correspondentes a diagramas polares para valores
diferentes de que representam a variação de pv
cem função do ângulo
i. 0
( ) 10
pv
c n
.Observa-se a situação estacionária como seria previsível.
Figura5.2 – Velocidade de fase normalizada para 0 4, 0.n

87
ii. ( )
1 cospv
c
. Neste caso tal como acontecia no caso anterior a sua
representação em função de resulta numa esfera.
Figura 5.3 – Velocidade de fase normalizada para 0 4, 1.n
iii. 2 2
0 0
2
0 0
( ) sin cos1
1
pv n n
n c n
. Nesta situação a velocidade do meio, em
relação ao laboratório, tem o mesmo valor que a velocidade de fase da onda no seu
referencial próprio do meio, 0n
cv p .

88
Figura 5.4 – Velocidade de fase normalizada para 0
0
14, .n
n
Quando a velocidade vista do referencial de laboratório é superior à velocidade de fase da
onda no referencial próprio do meio, entra-se numa zona designada zona de Cerenkov,
0
1
n , onde existe uma superfície de velocidade dupla que se auto-intersecta na origem.
Um quarto caso também importante acontece quando a velocidade vista do referencial de
laboratório é superior à velocidade de fase da onda no referencial próprio do meio, 0
1
n ,
entra-se na chamada zona de Cerenkov, onde passa a existir uma superfície de velocidade
dupla que se auto-intersecta na origem.

89
Figura 5.5 – Velocidade de fase normalizada para 0
10.75 .
n

90
5.5 Conclusões
Pode-se afirmar que a equação de Maxwell na álgebra geométrica do espaço-tempo de
Minkowski, F J , constitui a forma mais inovadora para se expressar. Não só pela
simplicidade, mas também pela quantidade de informação que apreende.
Na álgebra do espaço as equações Maxwell-Boffi foram reescritas e devido à soma graduada
característica da álgebra geométrica, as quatro equações podem agregar-se numa só:
123 0
1 1 1.t t
c t c c
E Be J
Através da algebra espaço-tempo de Minkowski foi possível reescrever as equações de
Maxwell e torná-las mais gerais. Foram definidos dois novos bivectores, F e G, fundamentais
do campo electromagnético. Estes bivectores são não relativos, que possibilitaram a escrita
das equações em apenas duas e no vácuo apenas uma. Deste modo, reduziu-se as equações de
Maxwell da relatividade restrita a apenas duas: A equação homogénea, 0 F , e a equação
não-homogénea, G J . A equação homogénea expressa a conservação do fluxo
magnético enquanto a não-homogénea expressa a conservação das cargas eléctricas. No caso
particular do vácuo foi simples relacionar-se os bivectores F e G através da relação
constitutiva do vácuo em 1,3C : 0(1/ )G F . Uma vez que F e G são bivectores não
relativos, estes tornam-se independentes do observador, isto é, diferentes observadores vêem
os mesmos bivectores.
Quanto ao estudo dos meios em movimento, foi demonstrada a relação constitutiva de um
meio isotrópico simples, e é dada por (1/ ) exp( ) G Fvr . Foi possível concluir, que
esta relação constitutiva é a mesma quer seja vista do referencial próprio do meio ou do
referencial de laboratório, devido aos bivectores de Faraday e Maxwell serem não relativos.
Neste caso apenas a velocidade difere, sendo que, a velocidade no referencial de laboratório é
vista como 0( )c v v f , resultado de uma transformação passiva de Lorentz e de um
boost.
No que concerne à decomposição nos seus bivectores relativos, um meio isotrópico simples
no seu referencial próprio é visto como um meio bianisotrópico no referencial de laboratório.
Com o intuito de simplificar a complexidade apresentada nos cálculos a álgebra geométrica

91
permitiu apresentar uma solução: redução à forma do vácuo. Esta ferramenta enunciada
possibilitou a escrita de uma relação constitutiva de um meio isotrópico como se
estivéssemos no vácuo: (1/ )G' F' .
Esta transformação altera o espaço-tempo de Minkowski, para um espaço-tempo fictício, pelo
que foram reescritas novamente as equações de Maxwell, que vêm dadas por: ' ' 0 F e
' ' ' G J . Atendendo à nova relação constitutiva entre ' ' e F G essas equações reduzem-se
a apenas uma: ' ' ' F J .
Quanto ao estudo da equação de Maxwell para um meio isotrópico com ausência de fontes do
campo: ' ' 0 F , obteve-se para uma onda plana e monocromática que a solução do campo
corresponde a um vector de onda nulo, isto é, 2( ) 0 k . Por manipulação algébrica vimos
que um observador colocado no referencial de laboratório vê o índice de refracção efectivo
do meio como 2 2
2 2
1 (1 cos ) cos( )
1 cosn
e uma velocidade de fase
normalizada dada por
2 2( ) 1 (1 cos ) cos
1
pv
c
.

92

93
Capítulo 6
Conclusões
Este sexto e último capítulo apresenta as conclusões essenciais referentes à dissertação de
mestrado, fazendo uma sinopse face aos objectivos iniciais e sugerindo possíveis trabalhos
futuros.

94
6.1 Conclusão final
Esta dissertação permitiu compreender de que forma a álgebra geométrica se tornou numa
ferramenta matemática elegante e eficaz no estudo do electromagnetismo. Concluiu-se que
esta álgebra compreende uma métrica euclidiana e uma métrica não euclidiana (métrica de
Lorentz). Na métrica euclidiana analisou-se a álgebra do espaço, ao passo que, na métrica não
euclidiana, foi abordada a álgebra do espaço-tempo de Minkowski, sendo esta álgebra, uma
ferramenta ideal para clarificar a relação entre a mecânica e o electromagnetismo.
A definição essencial destas álgebras reside no produto geométrico ou de Clifford
entre vectores, que representa a soma do produto interno com um novo produto, o produto
exterior. Ao contrário do produto externo de Gibbs, o produto exterior é definível em n
dimensões, e gera novos objectos geométricos tais como, o bivector e o trivector.
Na teoria da Relatividade Restrita a álgebra geométrica mostrou destacar-se da
álgebra tensorial pela sua independência de qualquer sistema de coordenadas, muito
importante no mundo da física, e principalmente vantajoso no electromagnetismo.
Concluiu-se que a álgebra do espaço-tempo de Minkowski serve de ferramenta
unificadora da matemática, uma vez que, não separa o tempo do espaço. Através da álgebra
do espaço-tempo de Minkowski a complexidade inerente no estudo da electrodinâmica
relativista foi reduzida. A álgebra geométrica viabilizou a escrita das equações de Maxwell de
uma forma mais geral e simplificada.
Os meios em movimento constituem um tema clássico da teoria electromagnética,
onde se conclui que, ao invés de se usar cálculos tensoriais, que são bastante complexos,
recorre-se à Redução à Forma do Vácuo, obtendo-se os mesmos resultados, mas de forma
mais simples. Importa ainda salientar que aplicando-se estes resultados a uma onda
propagando-se num meio isotrópico (no seu referencial), este pode ser considerado como um
meio bianisotrópico num referencial de repouso.
Esta dissertação pretende divulgar a álgebra geométrica como estrutura clara, intuitiva
e geométrica, assim como, torna-se uma linguagem universal e unificadora para o estudo e
aplicação nas diferentes áreas da Física e da Engenharia.
A álgebra geométrica está a dar passos importantes na comunidade científica, tendo já
sido aplicada à Mecânica Quântica, Computação, Processamento de sinal, entre outras.
95
Dada a natureza do tema, e como perspectivas de trabalhos futuros esta tese deixa em aberto
um sem número de áreas por explorar. Salientam-se algumas delas:
Rotação de Thomas pois permite calcular a composição da velocidade de referenciais
não colineares.
Utilização da álgebra geométrica no estudo dos meios em movimento para meios não
isotrópicos.
Paradoxo dos gémeos através do Efeito Doppler.
Utilização da álgebra geométrica no estudo dos meios em movimento para meios não
isotrópicos.
Teoria da Relatividade Geral

96
97
Referências
[1] D. Hestenes, New Foundations for Classical Mechanics. Dordrecht: Kluwer Academic
Publishers, 2nd ed., 1999.
[2] C. Doran and A. Lasenby, Geometric Algebra for Physicists. Cambridge: Cambridge
University Press, 2003.
[3] L. Dorst, D. Fontijne and S. Mann, Geometric Algebra for Computer Science. San
Francisco, CA: Morgan Kaufmann / Elsevier, 2007.
[4] http://www.springerlink.com/content/pq71607n604u5240/, 10-12-09
[5] http://repositorium.sdum.uminho.pt/handle/1822/6766, 13-12-09
[6] P. Lounesto, Clifford Algebras and Spinors. Cambridge: Cambridge University Press, 2nd
ed., 2001.
[7] C. R. Paiva, “Aspectos Geométricos do Electromagnetismo,” Departamento de
Engenharia Electrotécnica e de Computadores, Instituto Superior Técnico, 2008.
[8] C. R. Paiva, "Álgebra Geométrica do Espaço". Departamento de Engenharia
Electrotécnica e de Computadores, Instituto Superior Técnico, 2008/2009
[9] C. R. Paiva and M. A. Ribeiro, “Relativistic optics in moving media with spacetime
algebra”, Eur. Phys. J. Appl. Phys. 49, 33003 (2010)
[10] W. Rindler, Introduction to special relativity, Oxford: Oxford University Press, 2nd
ed., 1991.
[11] D. K. Cheng, Field and Wave Electromagnetics, Reading, MA: Addison-Wesley, 2nd
ed., 1989.
[12] J. D. Jackson, Classical Electrodynamics, New York: Wiley, 3rd ed., 1999.
[13] C. R. Paiva and M. A. Ribeiro, “Doppler shift from a composition of boosts with
Thomas rotation: A spacetime algebra approach”, J. Electromagn. Waves Appl. 20, 941-953,
2006.
[14] C. R. Paiva, "Lição de Síntese", Departamento de Engenharia Electrotécnica e de
Computadores, Instituto Superior Técnico

98
Créditos de Figuras
[1] http://en.wikipedia.org/wiki/File:WilliamRowanHamilton.jpeg, 24-11-09.
[2] http://en.wikipedia.org/wiki/File:Hgrassmann.jpg, 30-11-09.
[3] http://en.wikipedia.org/wiki/File:Clifford_William_Kingdon.jpg, 06-12-09.
[4] http://pt.wikipedia.org/wiki/Ficheiro:Gibbs_Josiah_Willard.jpg, 07-12-09.
[5] http://modeling.asu.edu/modeling/staff_pix/DavidHestenes.jpg, 12-12-09.

99
Apêndice A
Paradoxo dos Gémeos

100
O paradoxo dos gémeos surge em 1911 e foi durante algumas décadas um caso inexplicável
colocando em causa a teoria da relatividade. O paradoxo dos gémeos não só provou tratar-se
de um problema paradoxal que envolve a dilatação temporal, como veio demonstrar que as
contribuições de Einstein ultrapassam as simples considerações matemáticas de Lorentz,
revestindo toda a sua teoria de profundas implicações a nível de conceitos de espaço e tempo.
Movimento relativo uniforme
Considerem-se dois gémeos A e B, em solo terrestre, onde um dos gémeos resolve fazer uma
viagem pelo espaço com uma nave que se descola a uma velocidade constante próxima da
velocidade da luz. Num dado instante, esse mesmo gémeo inverte instantaneamente o sentido
do movimento, regressando ao ponto inicial onde o irmão o aguarda. O gémeo A, uma vez
que vê o irmão a afastar-se devido à dilatação temporal, afirmará que o tempo decorre mais
lentamente para o gémeo B. Contudo, uma vez que a velocidade é relativa e assumindo-se
que B não sofre qualquer tipo de aceleração, este gémeo B irá ver o gémeo A também a
afastar-se. A questão que se coloca é, qual a idade dos gémeos quando estes se voltam a
encontrar em solo terrestre?
Figura A.1 - Diagrama de Minkowski a evidenciar o percurso dos gémeos A e B do paradoxo dos gémeos,
encontrando-se o gémeo A sobre o referencial inercial.
O
C
D
E
ct
0T
ctO
ct
x
0T
2
T
2
T
Gémeo A Gémeo B

101
O diagrama da Figura A.1 mostra explicitamente que não existem qualquer simetria de
referenciais no deslocamento dos gémeos, ou seja, enquanto o gémeo A permanece sempre
num referencial inercial coincidente com o eixo ct, o gémeo B inverte o seu movimento no
ponto C, dando-se portanto uma mudança de referencial. Dado que a situação dos gémeos
não é simétrica, então pode-se afirmar que não existe paradoxo.
Na figura A.1 está presente o percurso dos gémeos A e B, considerando que o gémeo A se
encontra sobre um referencial inercial. Anteriormente já se calculou a dilatação temporal de
dois referenciais com movimento relativo uniforme:
v
2
21
c
T T00
TT
O 0
T é o tempo medido entre os mesmos eventos mas segundo um referencial que se afasta a
uma velocidade v do referencial inercial. O T é o tempo medido entre pares de eventos que
ocorrem no mesmo local segundo um referencial inercial. A figura que se segue esquematiza
o nosso problema em concreto:
Figura A.2 - Quebra do triângulo [ODC] em dois triângulos rectângulos [OEC] e [EDC].
Comece-se por dividir o problema em duas etapas de forma a facilitar a explicação:
A primeira etapa resume-se ao movimento representado pelo triângulo rectângulo [OEC]. A
equação (A.1) apresenta a dilatação sofrida, uma vez que os referenciais apresentam
movimento relativo uniforme. Considere-se que na origem ambos os relógios se encontram no
instante zero, logo segundo o gémeo terrestre, o gémeo viajante terá envelhecido no trajecto
[OC].
C
O
D
Gémeo A
aA
Gémeo B E
(A.1)

102
v
2
21
2 c
T0T
em que 2
Té o tempo a que o gémeo A regista o acontecimento E.
A segunda etapa definida pelo triângulo rectângulo [EDC] é idêntica à primeira. Note-se que
[EDC] = [OEC] e portanto a dilatação temporal sofrida pelo gémeo viajante no percurso total
segundo o gémeo terrestre é o dobro da primeira. O gémeo espacial envelheceu:
2
22 2 1
c T
v0 0
T' T
Para garantir que não se trata de um paradoxo, irar-se-á provar-se que ambos os gémeos estão
de acordo com a dilatação temporal que se verifica. Para tal, analise-se a mesma situação pela
perspectiva do gémeo espacial.
O gémeo espacial ao longo do seu trajecto vai sofrer aceleração ou desaceleração a
determinado momento, tal facto, não permite afirmar que o gémeo se encontra
permanentemente num referencial inercial durante todo o percurso.
Considerem-se duas situações distintas em que o gémeo espacial estará parcialmente num
referencial inercial:
Uma vez que o gémeo espacial sofre aceleração ou desaceleração a determinado
momento do seu trajecto, este não se pode considerar permanentemente num referencial
inercial durante todo o percurso. Podemos no entanto considerar uma outra situação distinta
em que o gémeo espacial estará parcialmente num referencial inercial:
Situação : O gémeo B encontra-se inicialmente num referencial inercial e observa o gémeo
terrestre a afastar-se. A dado instante, este tenta alcançar o gémeo terrestre, e para isso
acelera numa fase inicial, mantendo posteriormente uma velocidade constante. A situação
descrita encontra-se esquematizada na figura A.3.
(A.3)
(A.2)

103
Figura A3 - Diagrama de Minkowski do percurso dos gémeos A e B do paradoxo dos gémeos, encontrando-
se a primeira parte do movimento do gémeo B sobre o referencial inercial (Situação 1).
Na situação acima representada tem-se que o gémeo espacial encontra-se inicialmente no
referencial inercial e observa o gémeo terrestre que se afasta à velocidade v. Em certo
momento o gémeo espacial, tenta alcançar o outro gémeo (T0), só que para isso necessita de
uma velocidade superior que o faça alcançar quando na terra tiver passado T e no referencial
inercial tiver passado
1 2
21
c
v
TT
de forma a ter-se uma situação análoga À anterior.
Ou seja o gémeo espacial terá de percorrer uma distante d igual a
Gémeo A Gémeo B
E
T’’
0
T
x O
ct
ct'
x'
x ct
F
C’’
T1- T0
T0
(A.3)
104
1 2
21
c
v
vTd = vT
Ou seja terá de imprimir à nave uma velocidade de:
2
21
21 0 1 0
02 02
2
1c
T T T TT 1 T
c1
c
v
v
v
vT
vTd vTv' = =
TT -
até atingir o gémeo. Nesta segunda fase o gémeo espacial vai envelhecer
2
1 0 2T T 1
c
v'0
T''
No total o gémeo vai envelhecer a soma do primeiro percurso com a do segundo:
0 0 02 . 0T'' T =T' T
Verifica-se portanto que ambos os gémeos concordam com a dilatação temporal sofrida:
destronando o título de paradoxo. Independentemente do referencial inercial considerado,
ambos os gémeos concordam com a dilatação temporal.
Apesar da dilatação temporal ser um efeito registado reciprocamente por referenciais que se
afastam, o paradoxo dos gémeos não é na realidade um paradoxo, uma vez que, existe uma
quebra de simetria quando um dos referenciais inverte o movimento.
Embora classicamente se analise o paradoxo dos gémeos considerando referenciais
que se afastam a velocidade relativa uniforme, a mesma análise é possível para referenciais
uniformemente acelerados desde que se considere que a aceleração não altera o
funcionamento dos relógios ideais e que estes dependem apenas da velocidade instantânea e
não do ritmo a que essa velocidade varia.
(A.7)
(A.5)
(A.4)
(A.6)
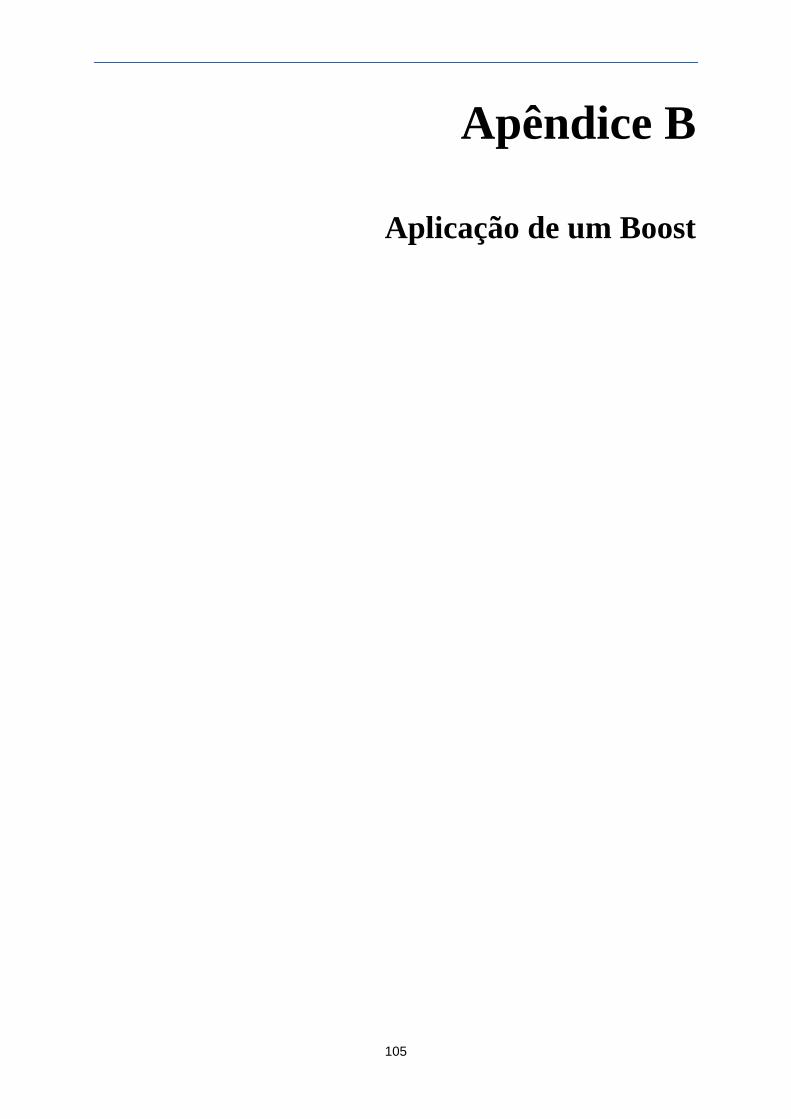
105
Apêndice B
Aplicação de um Boost

106
Apêndice B1
No Apêndice B1 representa-se a aplicação de um boost de intensidade 2/1 a um vector
unitário u com ângulos: (i) º180 ; (ii) º150 ; (iii) º120 ; (iv) º90 ; (v)
º60 ; (vi) º30 ; (vii) º0 ; (viii) º30 ; (ix) º60 ; (x) º90 ; (xi)
º120 ; (xii) º150 ; (xiii) º180 .
( ) 1/ 2, 180ºi
( ) 1/ 2, 150ºii
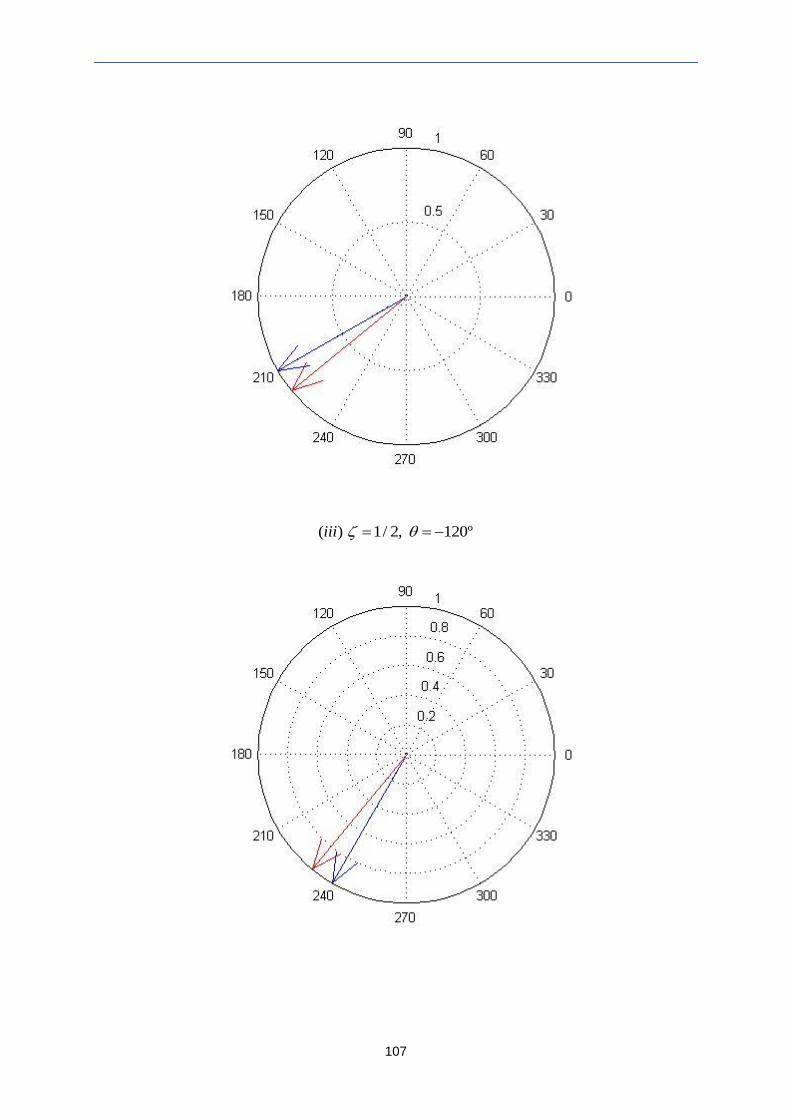
107
( ) 1/ 2, 120ºiii
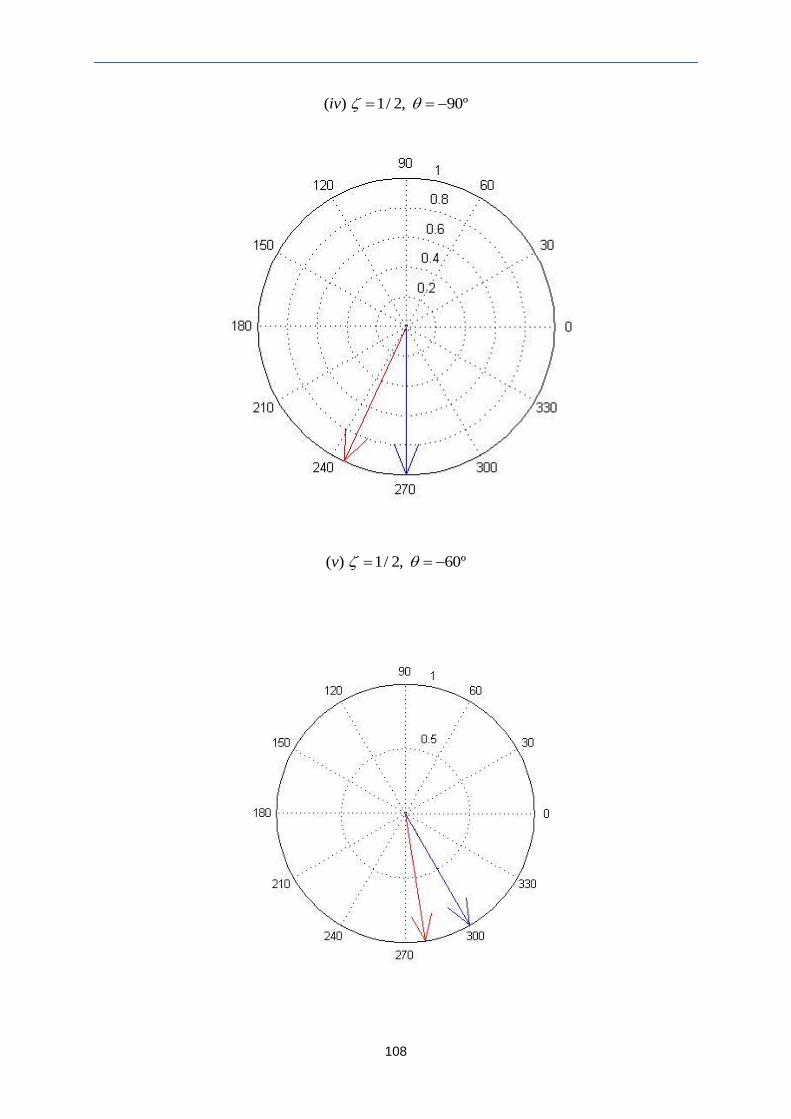
108
( ) 1/ 2, 90ºiv
( ) 1/ 2, 60ºv

109
( ) 1/ 2, 30ºvi
( ) 1/ 2, 0ºvii
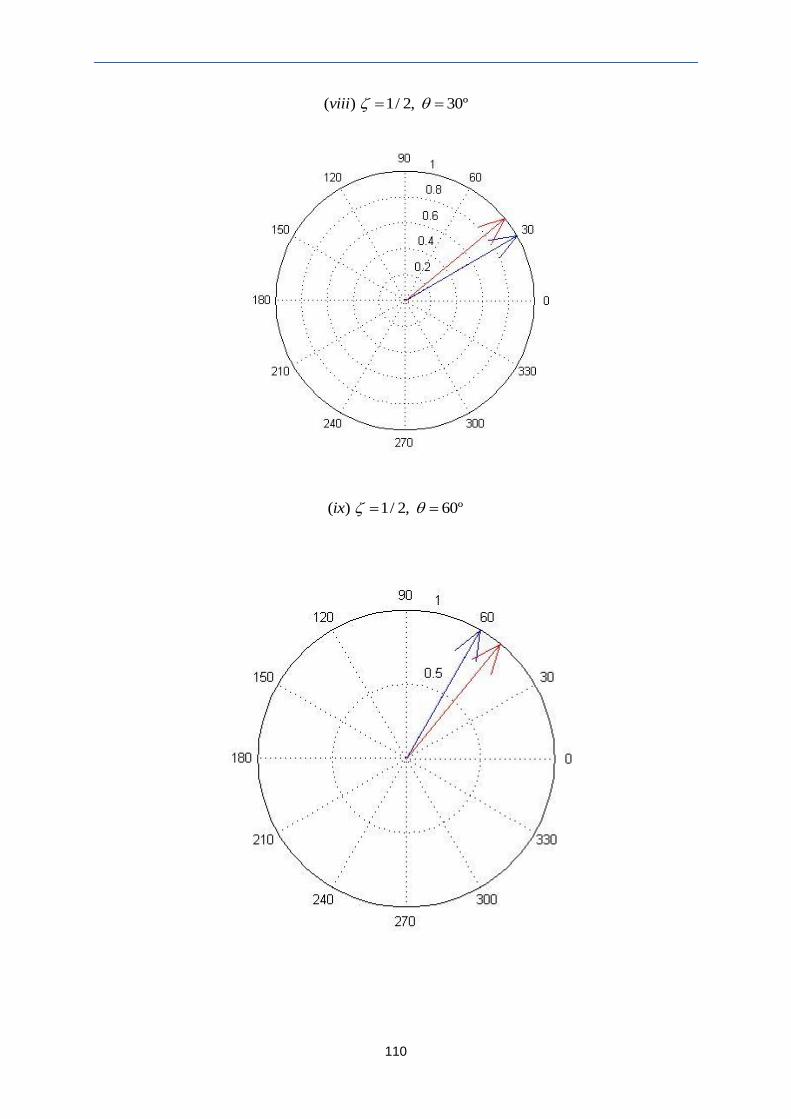
110
( ) 1/ 2, 30ºviii
( ) 1/ 2, 60ºix
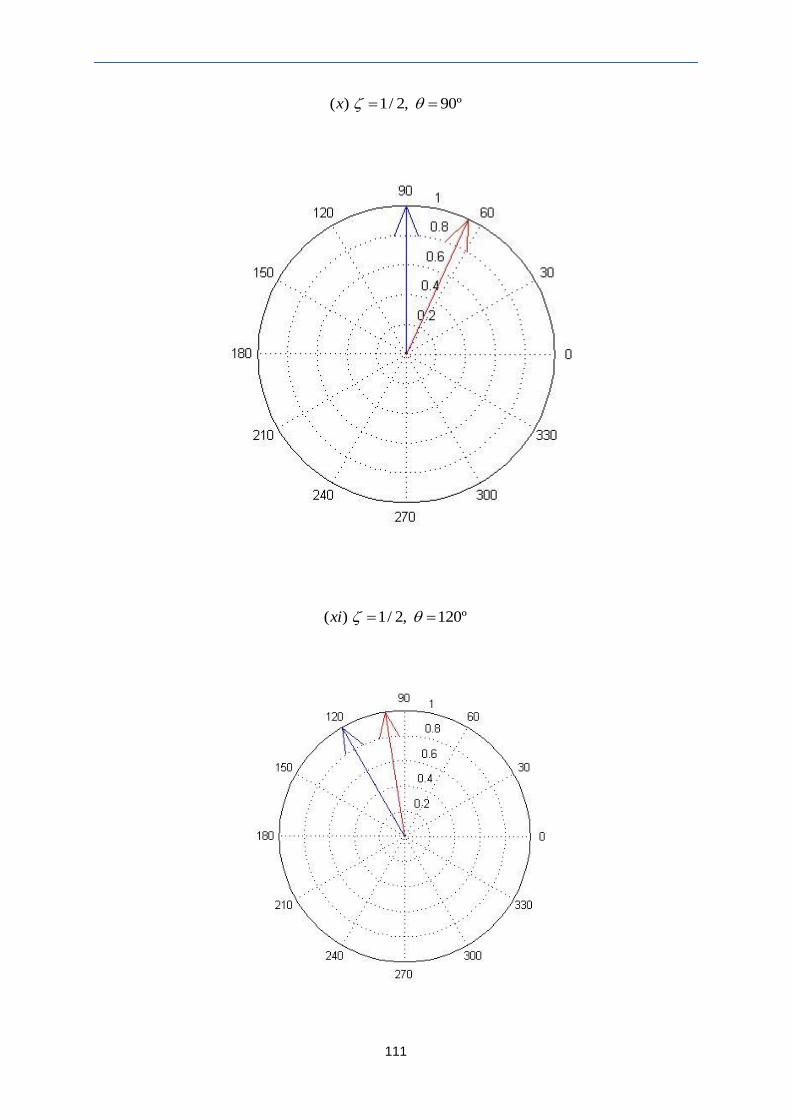
111
( ) 1/ 2, 90ºx
( ) 1/ 2, 120ºxi

112
( ) 1/ 2, 150ºxii
( ) 1/ 2, 180ºxiii