f. salzedas - paginas.fe.up.ptpaginas.fe.up.pt/~fsal/eic0010/2007fisica1.pdf · física 1...
TRANSCRIPT
Física 1
transcrição das transparências
usadas na aula teórica
F. Salzedas
Física I 2007
FEUP
MIEIC
2 de Julho de 2007
As transparências aqui transcritas servem de apoio à aula teó-rica. Como tal e por serem apenas um resumo, a sua consulta nãodispensa a consulta da bibliograa principal da disciplina.
ii
Conteúdo
1 Introdução 11.1 Sistemas Dinâmicos . . . . . . . . . . . . . . . . . . . . . . . 11.2 Alguma terminologia . . . . . . . . . . . . . . . . . . . . . . . 21.3 Programa da disciplina . . . . . . . . . . . . . . . . . . . . . 21.4 Introdução ao Maxima . . . . . . . . . . . . . . . . . . . . . . 3
2 continuação 7
3 Sistemas Dinâmicos Discretos 113.1 Sistemas dinâmicos discretos 1D . . . . . . . . . . . . . . . . 113.2 Representação gráca da evolução de SDD1D . . . . . . . . . 12
4 continuação 174.1 Pontos Fixos . . . . . . . . . . . . . . . . . . . . . . . . . . . 174.2 Pontos periódicos . . . . . . . . . . . . . . . . . . . . . . . . . 204.3 Resolução numérica de equações por métodos iterativos . . . 214.4 Método de Newton . . . . . . . . . . . . . . . . . . . . . . . . 21
5 Sistemas Dinâmicos Contínuos 235.1 Equações diferenciais de 1a ordem . . . . . . . . . . . . . . . 235.2 Resolução analítica de EDO1 . . . . . . . . . . . . . . . . . . 24
5.2.1 Equações de variáveis separáveis . . . . . . . . . . . . 255.2.2 Equações lineares . . . . . . . . . . . . . . . . . . . . 265.2.3 Equação de Bernoulli . . . . . . . . . . . . . . . . . . 265.2.4 Equação de Riccati . . . . . . . . . . . . . . . . . . . 275.2.5 Equações exactas . . . . . . . . . . . . . . . . . . . . . 275.2.6 Equações homogéneas . . . . . . . . . . . . . . . . . . 28
6 continuação 296.1 Resolução numérica . . . . . . . . . . . . . . . . . . . . . . . 29
6.1.1 Método de Euler . . . . . . . . . . . . . . . . . . . . . 306.1.2 Campo de direcções de EDO1 . . . . . . . . . . . . . . 33
iii

CONTEÚDO
7 Sistemas dinâmicos contínuos de 2a ordem 37
7.1 Resolução analítica de EDO2 . . . . . . . . . . . . . . . . . . 377.2 Equações autónomas de segunda ordem . . . . . . . . . . . . 39
8 continuação 45
8.1 Equações não autónomos e derivadas de ordem superior . . . 458.2 Método de Euler para EDOn . . . . . . . . . . . . . . . . . . 478.3 Plotdf para EDO2 . . . . . . . . . . . . . . . . . . . . . . . . 478.4 Eliminação de singularidades . . . . . . . . . . . . . . . . . . 53
9 Sistemas lineares 55
9.1 Osciladores lineares . . . . . . . . . . . . . . . . . . . . . . . 559.2 Sistemas lineares . . . . . . . . . . . . . . . . . . . . . . . . . 589.3 Pontos xos - Equilíbrio . . . . . . . . . . . . . . . . . . . . . 59
10 Analise de sistemas lineares autónomos 61
10.1 A solução básica . . . . . . . . . . . . . . . . . . . . . . . . . 6110.2 Vectores e valores próprios . . . . . . . . . . . . . . . . . . . 6210.3 Valores próprios e estabilidade . . . . . . . . . . . . . . . . . 64
11 Oscilador harmónico 67
11.1 Estabilidade do OHS . . . . . . . . . . . . . . . . . . . . . . 6711.2 Estabilidade do OH amortecido . . . . . . . . . . . . . . . . 69
12 continuação 73
12.1 Oscilador harmónico forçado . . . . . . . . . . . . . . . . . . 7312.1.1 Ressonância de amplitude . . . . . . . . . . . . . . . 7512.1.2 Ressonância de energia . . . . . . . . . . . . . . . . . 7712.1.3 Impedância . . . . . . . . . . . . . . . . . . . . . . . 7912.1.4 Potência transferida para o oscilador . . . . . . . . . 80
13 Sistemas não lineares 83
13.1 Sistemas não lineares . . . . . . . . . . . . . . . . . . . . . . 8313.2 Série de Taylor . . . . . . . . . . . . . . . . . . . . . . . . . . 8413.3 Linearização . . . . . . . . . . . . . . . . . . . . . . . . . . . 8613.4 Método de Ruge-Kutta de 4a ordem . . . . . . . . . . . . . . 87
14 continuação 91
14.1 O pêndulo simples . . . . . . . . . . . . . . . . . . . . . . . . 91
iv

CONTEÚDO
15 Ciclos limite 9915.1 Bola que escorrega num poço duplo . . . . . . . . . . . . . . 9915.2 Atractores e ciclos limite . . . . . . . . . . . . . . . . . . . . 107
16 Bifurcações 11116.1 Bifurcação num pêndulo . . . . . . . . . . . . . . . . . . . . . 11116.2 Três tipos de bifurcações . . . . . . . . . . . . . . . . . . . . 117
16.2.1 Bifurcação de forquilha . . . . . . . . . . . . . . . . . 11716.2.2 Bifurcação sela-nó . . . . . . . . . . . . . . . . . . . . 11716.2.3 Bifurcação transcrítica . . . . . . . . . . . . . . . . . . 119
17 Caos 12117.1 Caos em sistemas contínuos . . . . . . . . . . . . . . . . . . . 121
17.1.1 Teorema de Poincaré-Bendixon . . . . . . . . . . . . . 12317.1.2 Equações de Lorenz . . . . . . . . . . . . . . . . . . . 12417.1.3 Equações de Rössler . . . . . . . . . . . . . . . . . . . 127
18 Mapa de Poincarré 12918.0.4 Secções e mapas de Poincarré . . . . . . . . . . . . . . 12918.0.5 Mapa de Poincarré do sistema de Rössler . . . . . . . 13018.0.6 Mapa de Poincarré do ONLF . . . . . . . . . . . . . . 132
19 Caos em sistemas discretos 13519.1 Bifurcações e caos em sistemas discretos . . . . . . . . . . . . 13519.2 Dinâmica de populações . . . . . . . . . . . . . . . . . . . . . 138
20 Fractais 14120.1 Conjunto de Cantor . . . . . . . . . . . . . . . . . . . . . . . 14120.2 Dimensão de fractais auto semelhantes . . . . . . . . . . . . . 14220.3 Dimensão de homotetia . . . . . . . . . . . . . . . . . . . . . 14420.4 Dimensão de caixa . . . . . . . . . . . . . . . . . . . . . . . 145
21 continuação 14921.1 Sistemas discretos de segunda ordem . . . . . . . . . . . . . . 14921.2 O mapa de Hénon . . . . . . . . . . . . . . . . . . . . . . . . 15021.3 Construção probabilística de fractais . . . . . . . . . . . . . . 152
21.3.1 O Pente de Cantor . . . . . . . . . . . . . . . . . . . . 15221.3.2 O triângulo de Sierpinski . . . . . . . . . . . . . . . . 153
21.4 Sistemas iterativos de funções . . . . . . . . . . . . . . . . . . 154
v

CONTEÚDO
vi
Aula 1
Introdução
Sumário:
- Sistemas Dinâmicos
- Alguma terminologia
- Programa da disciplina
- Introdução ao Maxima
1.1 Sistemas Dinâmicos
•Nesta disciplina vamos estudar a modelação da dinâmica de sistemas.•Um sistema será um qualquer grupo de entidades ou suas componentes
que de alguma forma interagem entre si. No domínio da física essas exemplosde entidades são partículas ou sólidos que se movem num campo de forças,como um veiculo espacial que entra na atmosfera, elementos de um circuitoeléctrico, como uma resistência, um condensador, uma fonte de alimentação.•As ferramentas que vamos estudar aplicam-se também fora da esfera
da física como à, economia, química, biologia. Por exemplo, no caso dabiologia um sistema pode simplesmente ser constituído por duas espécies queinteragem entre si, como coelhos e raposas, ou uma colónia de bactérias.•Em geral as propriedades dum sistema dinâmico variam com o tempo.
Um dos nossos principais objectivos será o estudo da forma dessa variação.Contudo muitos sistemas dinâmicos exibem um comportamento estático, cujacaracterização também faz parte dos nossos objectivos.•Os trabalhos de Newton e Leibnitz deram um contributo fundamental
para o uso de equações diferenciais na modelação matemática da dinâmicade sistemas.•A equação diferencial caracteriza um sistema localmente, estando nela
contidas as regras que denem a dinâmica do sistema, ou seja a equação dife-rencial dene como é que o sistema evolui entre dois instantes arbitrariamentepróximos.
1

1.2. ALGUMA TERMINOLOGIA
•Os modelos que estudaremos consistirão em geral numa ou mais equa-ções diferenciais ordinárias (EDO). O tempo t será em geral a variável in-dependente e as variáveis dependentes corresponderão às quantidades quedescreverão o comportamento dinâmico do sistema. Estas serão conhecidasapós a resolução da equação diferencial.
1.2 Alguma terminologia
•A ordem de uma equação diferencial é a ordem da derivada mais ele-vada da equação. Assim as seguintes equações diferenciais onde os ai e bi sãoconstantes e f(t) é uma determinada função do tempo,
a1d2x
dt2+ a2
dx
dt+ a3x = a4y, (1.1)
b1dy
dt+ b2y = f(t) + b3x, (1.2)
são, respectivamente, de segunda ordem (eq.1.1) e de primeira ordem (eq.1.2).
•A ordem dum sistema dinâmico modelado por um determinado nú-mero de EDO é a soma da ordem de cada EDO. Assim um sistema que sejamodelado pelas EDO anteriores (eq.1.1 e eq.1.2) seria um sistema terceiraordem.•Se nas EDO do sistema não aparecer explicitamente a variável inde-
pendente t, então o sistema chama-se autónomo. Caso contrário o sistemadiz-se não autónomo. No exemplo anterior devido à presença da funçãof(t) na eq.1.2 o sistema é não autónomo.•As constantes ai e bi que guram nas equações 1.1 e 1.2, são os parâ-
metros do sistema. Se algum dos parâmetros variar no tempo diz-se que osistema varia no tempo e nesse caso será um sistema não autónomo.
1.3 Programa da disciplina
Sistemas dinâmicos discretos de primeira ordemSistemas contínuos de primeira ordem.Sistemas de ordem superior.Sistemas lineares.Sistemas não-lineares.Sistemas com muitos graus de liberdade.Ciclos limite.Coexistência entre espécies.Bifurcações e sistemas caóticosSistemas discretos de segunda ordem, fractais
2

1.4. INTRODUÇÃO AO MAXIMA
1.4 Introdução ao Maxima
•O Maxima é um sistema de software na categoria dos sistemas designadosde CAS (Computer Algebra System), nomeadamente, sistemas que para alémde números, permitem manipular equações algébricas com variáveis indeter-minadas.•O Maxima pode realizar muitas operações com funções, tais como de-
rivar, integrar, expandir em série de Taylor, resolução de EDO, resoluçãode sistemas de equações lineares, representar grácos em duas e três dimen-sões. Permite também trabalhar com matrizes e vectores. O Maxima podetambém ser usado para resolver problemas numéricos, e escrever programas,como uma linguagem de programação tradicional.•Vamos ilustrar o funcionamento do Maxima com o seguinte exemplo:
Um gerador liga-se a uma resistência externa R, e a diferença depotencial produzida na resistência é medida com um voltímetro V.Para calcular o valor da força electromotriz E e da resistência internado gerador, r, usaram-se duas resistências externas de 1.13 kΩ e 17.4kΩ. As diferenças de potencial nos dois casos foram 6.26 V e 6.28 V.Calcule a corrente no circuito, em cada caso. Calcule os valores daE e de r. Desenhe o gráco da potência dissipada em R, em funçãode R, quando R varia de 0 a 5r.
ε r
R
I
gerador
- +
V
/*_________________________________________________*//*Exemplo 1.1*/
/*corrente com resistência de 1.13kOhm*/6.26/1.13e3;/*corrente com resistência de 17.4kOhm*/
3

1.4. INTRODUÇÃO AO MAXIMA
6.28/17.4e3;
/*eq. característica do gerador caso 1*/eq1: 6.26 = fem - r*%o1;
/*eq. característica do gerador caso 2*/eq2: 6.28 = fem - r*%o2;
/*solução do sistema para encontrar fem e r*/solve([eq1=0,eq2=0]);
%,numer;
/*Potência dissipada na resistência externa, em *//*função da resistência externa*/plot2d(R*(6.2814/(R+3.8618))^2, [R, 0, 5*3.8618]);
/*Potência dissipada na resistência externa, em *//*função da resistência externa normalizada à *//*resis. interna*/plot2d(R*3.8618*(6.2814/(R*3.8618+3.8618))^2,[R, 0, 5]);
/*Outra forma alternativa de resolução*/
/*corrente com resistência de 1.13kOhm*/i1:6.26/1.13e3;
/*corrente com resistência de 17.4kOhm*/i2:6.28/17.4e3;
/*eq. característica do gerador caso 1*/eq1: 6.26 = fem - r*i1;
/*eq. característica do gerador caso 2*/eq2: 6.28 = fem - r*i2;
/*solução do sistema para encontrar fem e r*/sol: solve([eq1,eq2]), numer;
4

1.4. INTRODUÇÃO AO MAXIMA
/*A solução anterior é dada em função duma lista de *//*dois elementos, embebida dentro de outra lista só *//*com um elemento*//*[[r = 3.861821352953423, fem = 6.281393806787158]]*//*para aceder ao lado direito do primeiro elemento da*//*2a lista usamos a função rhs() do inglês RightHandSide*/r:rhs(sol[1][1]);
/*para aceder ao lado direito do segundo elemento da 2a*//*lista usamos*/fem:rhs(sol[1][2]);
/*o gráfico da Potência dissipada (P) na resistência *//*externa, em função da resistência externa *//*normalizada à resis. interna (R/r) a potência é *//*máxima quando a resistência externa é *//*igual à resistência interna da fonte de tensão*/plot2d(R*r*(fem/(R*r+r))^2, [R, 0, 5]);
5

1.4. INTRODUÇÃO AO MAXIMA
6
Aula 2
continuação
Sumário:
- Introdução ao Maxima (continuação)
O vector posição de uma partícula, em função do tempo t, é dadopela equação:
~r =(
5− t2 e−t/5)ı +
(3− e−t/12
)
em unidades SI. Calcule os vectores posição, velocidade e aceleraçãonos instantes t = 0, t = 15 s, e quando o tempo se aproximar parainnito. Desenhe a trajectória da partícula durante os primeiros 60segundos do movimento.
/*_________________________________________________*//*Exemplo 1.2*/
/* Dado o vector posição de uma partícula, em *//*função do tempo, calcule os vectores posição, *//*velocidade e aceleração nos instantes t=0, *//*t=15 s, e quando o tempo se aproximar para *//*infinito. Desenhe a trajectória da partícula *//*durante os primeiros 60 segundos do movimento.*/
r(t):= [5-t^2*exp(-t/5),3-exp(-t/12)];
/*o vector velocidade é igual à derivada do vector *//*posição e o vector aceleração é a derivada do */
7

/*vector velocidade.*/define(v(t), diff(r(t),t));define(a(t), diff(v(t),t));
/*Para calcular a posição, velocidade e aceleração *//*no instante $t=0$*/r(0), numer;v(0), numer;a(0), numer;
/*Para t=15 s fazemos os cálculos de forma análoga */r(15), numer;v(15), numer;a(15), numer;
/*Os limites quando o tempo se aproximar para *//*infinito podem ser calculados com o comando limit.*//*O símbolo utilizado em Maxima para representar o *//*infinito é inf */limit(r(t),t,inf);limit(v(t),t,inf);limit(a(t),t,inf);
/*conclui-se que a partícula se aproxima do ponto *//*(5,3) onde fica em repouso. Para traçar o gráfico*//*da trajectória, será preciso usar a opção*//*parametric. As componentes x e y do vector*//*posição deverão ser dadas separadamente*/plot2d([parametric,r(t)[1],r(t)[2],[t,0,60],[nticks,100]]);
/*Uma trajectória r1(t) diferente. Influência de *//*t^2 na componente x do vector posição r.*/r1(t):= [5-t*exp(-t/5),3-exp(-t/12)];
/*o vector velocidade é igual à derivada do vector*//*posição e o vector aceleração é a derivada do*//*vector velocidade.*/define(v1(t), diff(r1(t),t));
8

define(a1(t), diff(v1(t),t));
/*gráfico da trajectória, será*/plot2d([parametric,r1(t)[1],r1(t)[2],[t,0,60],[nticks,100]]);
/*As duas trajectórias sobrepostas para facilitar*//*a comparação.*/plot2d([[parametric,r(t)[1],r(t)[2]],[parametric,r1(t)[1],r1(t)[2]]],[t,0,60],[nticks,100]);
9

10
Aula 3
Sistemas Dinâmicos Discretos
Sumário:
- Sistemas dinâmicos discretos 1D
- Representação gráca da evolução de SDD1D: evolution e staircase
3.1 Sistemas dinâmicos discretos 1D
•Um sistema dinâmico discreto, é um sistema em que o seu estado sómuda durante os instantes t0, t1, t2, . . ., ti, . . .. No intervalo de tempoentre dois desses instantes, o estado permanece constante.•A variação no tempo não é contínua.•O intervalo de tempo ∆t = tn+1− tn entre dois instantes sucessivos tn e
tn+1 pode variar.•O estado de um sistema discreto em uma dimensão é determinado com-
pletamente por uma variável, e.g. y, a que se chama variável de estado.•Os valores da variável de estado nos instantes t0, t1, t2, . . . formam
uma sequência y0, y1, y2, . . . a que se costuma chamar órbita do sistema.•Um sistema dinâmico discreto 1D é caracterizado por uma equação de
evolução ou equação de diferenças que permite calcular iterativamente oestado yn+1, num instante n + 1, a partir do estado yn, no instante anteriorn:
yn+1 = F (yn) (3.1)
onde F (y) é uma função conhecida. Dado um estado inicial y0, aplicaçõessucessivas de função F permitem obter facilmente a sequência de estados yn.•Por exemplo seja F (y) = cos(yn) e y0 = π/2, então os primeiros 5 estados
são,yn+1 = cos(yn)
[π/2, 0, 1, cos(1), cos(cos(1))]
11
3.2. REPRESENTAÇÃO GRÁFICA DA EVOLUÇÃO DE SDD1D
[1.571, 0.000, 1.000, 0.540, 0.858]
•Qualquer estado da sequência anterior pode ser obtido no Maxima doseguinte modo,y[0]:%pi/2;y[n]:=cos(y[n-1]);onde y[n] é uma função matricial cujo argumento n é um número inteiro.
•Chama-se à atenção que quando se pede ao Maxima o elemento n dumafunção matricial automaticamente todos os n+1 elementos que o precedem sãotambém calculados, sendo guardados internamente na memória do Maxima.Deste modo antes de redenir a função devemos limpar esses elementos damemória (usando o comando kill(y)) para evitar elementos esquecidos dedenições anteriores.
•A visualização dos 5 primeiros elementos da função matricial (ou os 5primeiros estados do sistema dinâmico discreto exemplicado) obtém-se comos comandos,makelist(y[i],i,0,4);makelist(ev(y[i],numer),i,0,4)
•A diferença entre os dois comandos anteriores está no uso da funçãoev(expr, arg1, ..., argn) que calcula a expressão no ambiente determi-nado pelos argumentos arg1, ..., argn.
•ev já foi usada anteriormente mas usando sintaxe de alto nível e.g.,r(15),numer; é equivalente a ev(r(15),numer);.
3.2 Representação gráca da evolução de SDD1D
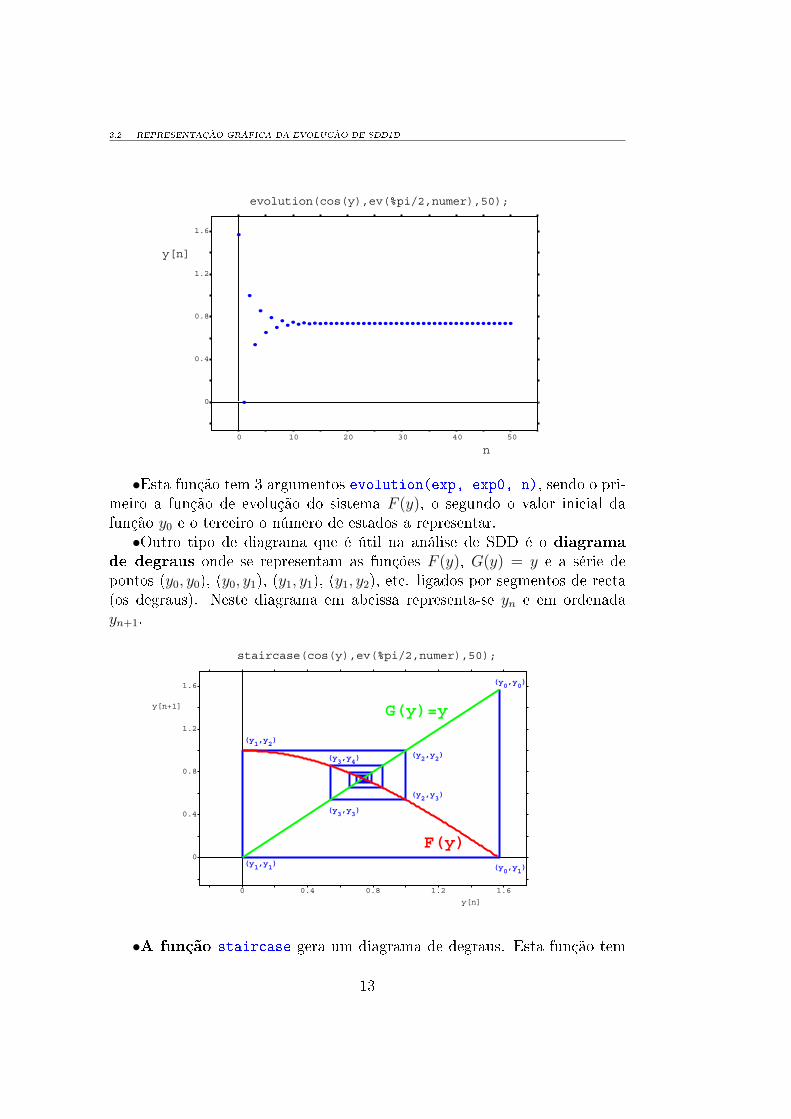
•A evolução do sistema dinâmico discreto unidimensional (SDD1D) y[n]pode ser representada gracamente marcando num gráco os pontos(n, y[n]) para um dado intervalo [ni, nf ].
•A função evolution cria este tipo de diagrama,load("dynamics");evolution(cos(y),ev(%pi/2,numer),50);
•O comando load("dynamics") carrega para o Maxima um conjunto defunções entre as quais está a função evolution.
12
3.2. REPRESENTAÇÃO GRÁFICA DA EVOLUÇÃO DE SDD1D
0
0.4
0.8
1.2
1.6
n
y[n]
4020100 30 50
evolution(cos(y),ev(%pi/2,numer),50);
•Esta função tem 3 argumentos evolution(exp, exp0, n), sendo o pri-meiro a função de evolução do sistema F (y), o segundo o valor inicial dafunção y0 e o terceiro o número de estados a representar.•Outro tipo de diagrama que é útil na análise de SDD é o diagrama
de degraus onde se representam as funções F (y), G(y) = y e a série depontos (y0, y0), (y0, y1), (y1, y1), (y1, y2), etc. ligados por segmentos de recta(os degraus). Neste diagrama em abcissa representa-se yn e em ordenadayn+1.
0 0.4 0.8 1.2 1.6
0
0.4
0.8
1.2
1.6
y[n]
y[n+1] G(y)=y
F(y)
(y0,y0)
(y0,y1)(y1,y1)
(y1,y2)
(y2,y2)
(y2,y3)
(y3,y3)
(y3,y4)
staircase(cos(y),ev(%pi/2,numer),50);
•A função staircase gera um diagrama de degraus. Esta função tem
13

3.2. REPRESENTAÇÃO GRÁFICA DA EVOLUÇÃO DE SDD1D
os mesmos 3 argumentos da função evolution e também faz parte do módulodynamics.mac.•Na construção gráca dos degraus, começa-se por representar o estado
inicial y0 na recta G(y) = y, prolongando-se em seguida na vertical até inter-ceptar a curva F (y). Encontramos assim o estado seguinte y1. Prolongandona horizontal até interceptar a recta G(y) = y dispomos do mesmo valor nahorizontal y1 que será usado na iteração seguinte, onde o processo anterior érepetido.
Recapitulemos todos os comandos usados para descrever o SDD1Dcos(y).
/*_________________________________________________*//*Exemplo 1.3*/
/* Sistemas Dinâmicos Discretos em 1 Dimensão*/
/* Consideremos o SDD1D definido pela equação de *//*evolução y_n+1=cos(y_n) com estado inicial */
/*y_0=cos(pi/2)*/y[0]:%pi/2;y[n]:=cos(y[n-1]);
/*A visualização dos 5 primeiros elementos da função*//*matricial (ou os 5 primeiros estados do sistema *//*dinâmico discreto exemplificado)*/makelist(y[i],i,0,4);makelist(ev(y[i],numer),i,0,4);
/*A evolução gráfica deste SDD pode ser representada*//*com a função evolution() onde se vê que o sistema*//*converge para o estado 0.73908... . Em abcissa *//*representa-se n, em ordenada representa-se y[n].*/load("dynamics");evolution(cos(y),ev(%pi/2,numer),50,[xaxislabel,"n"],[yaxislabel,"y[n]"],[xcenter,25],[ycenter,0.73908],[xradius,30],[yradius,1]);
14

3.2. REPRESENTAÇÃO GRÁFICA DA EVOLUÇÃO DE SDD1D
/*A evolução gráfica deste SDD pode também ser *//*representada com a função staircase() onde *//*também se vê que o sistema converge para o *//*estado 0.73908...em abcissa representa-se y[n],*//*em ordenada representa-se y[n+1]*/staircase(cos(y),ev(%pi/2,numer),50,[xaxislabel,"y[n]"],[yaxislabel,"y[n+1]"],[xcenter,0.73908],[ycenter,0.73908],[xradius,1],[yradius,1]);
15

3.2. REPRESENTAÇÃO GRÁFICA DA EVOLUÇÃO DE SDD1D
16

Aula 4
continuação
Sumário:
- Pontos xos
- Pontos periódicos
- Resolução numérica de equações por métodos iterativos
- Método de Newton
4.1 Pontos Fixos
•Quando na evolução dum sistema dinâmico discreto o estado seguinte éigual ao estado anterior, o SDD não mais evolui. Diz-se que o ponto yf ondeo estado do sistema permanece constante é um ponto xo,
F (yf ) = yf . (4.1)
•Gracamente podemos identicar pontos xos procurando a intercepçãodas curvas F (y) e G(y).•Para encontrar pontos xos algebricamente resolvemos a equação,
F (y) = y. (4.2)
•Por exemplo, para saber se o SDD1D F (y) = y3 − y tem pontos xos,podemos usar a função solve do Máxima,solve(y 3-y=y,y);que devolve três pontos [y = −
√2, y =
√2, y = 0].
•A derivada de F (y) no ponto xo F ′(yf ) = dF (yf )/dy vai determinar ocomportamento do SDD na vizinhança de yf .•Se F ′(yf ) < 0 a órbita do SDD evolui em torno de yf , chamando-se a
este ponto xo um foco. O foco será atractivo se −1 < F ′(yf ) < 0 erepulsivo se F ′(yf ) ≤ −1.
17

4.1. PONTOS FIXOS
•Se F ′(yf ) ≥ 0 o ponto xo yf chama-se um nó. O nó será atractivose 0 ≤ F ′(yf ) < 1 e repulsivo se F ′(yf ) ≥ 1.
Foco Nó
Atractivo AtractivoRepulsivo Repulsivo
F'(yf)0 1-1
Estabilidade dum ponto fixo
Estabilidade do SDD1D F (y) = y3 − y.
/*_________________________________________________*//*Exemplo 1.4*/
/* Sistemas Dinâmicos Discretos em 1 Dimensão*/
/* Consideremos o SDD1D definido pela equação de *//*evolução y_n+1=y^3-y com estado inicial *//*y_0=0.9*/y[0]:0.9;y[n]:=y[n-1]^3-y[n-1];
/*Determinação de pontos fixos */F(y):=y^3-y;pf:solve(F(y)=y,y);
/*Há 3 pontos fixos*//*[y = - sqrt(2), y = sqrt(2), y = 0]*/pf1:rhs(pf[1]);pf2:rhs(pf[2]);pf3:rhs(pf[3]);
18
4.1. PONTOS FIXOS
/*Caracterização dos pontos fixos, analisando *//*a derivada de F(y) em cada ponto fixo*/define(dF(y),diff(F(y),y));dF(pf1);dF(pf2);dF(pf3);
/* dF(pf1)=dF(pf2)=5 e dF(pf3)=-1 *//*Logo pf1 e pF2 são nós repulsivos*//*e pF3 foco atractivo*/
/*Estes resultados podem ser confirmados *//*graficamente com a função evolution() e*//*staircase() usando pontos iniciais perto*//*dos pontos fixos*/evolution(F(y),.9,40,[xaxislabel,"n"],[yaxislabel,"y[n]"],[xcenter,20],[ycenter,0],[xradius,22],[yradius,1]);
evolution(F(y),1.5,3,[xaxislabel,"n"],[yaxislabel,"y[n]"],[xcenter,2],[ycenter,50],[xradius,3],[yradius,150]);
evolution(F(y),-1.5,3,[xaxislabel,"n"],[yaxislabel,"y[n]"],[xcenter,2],[ycenter,-50],[xradius,3],[yradius,150]);
/*Dado o crescimento explosivo deste SDD para*//*abs(y0)>pf2 é necessário manter o valor de n*//*baixo nas regiões repulsivas. Na opção *//*domain é indicado ymin e ymax de F(y) e G(y).*/staircase(F(y),.9,10,[xaxislabel,"y[n]"],[yaxislabel,"y[n+1]"],[xcenter,0],[ycenter,0],[xradius,2],[yradius,2],[domain,-1.5,1.5]);
staircase(F(y),1.5,3,[xaxislabel,"y[n]"],[yaxislabel,"y[n+1]"],[xcenter,1.5],[ycenter,50],[xradius,4],[yradius,70],[domain,-1.5,5]);
19

4.2. PONTOS PERIÓDICOS
staircase(F(y),-1.5,3,[xaxislabel,"y[n]"],[yaxislabel,"y[n+1]"],[xcenter,-1.5],[ycenter,-50],[xradius,4],[yradius,70],[domain,-5,1.5]);
4.2 Pontos periódicos
•Uma órbita ou ciclo de período 2 é uma sequência com dois valores repeti-dos: [y0, y1, y0, y1, · · · ].•Então diz-se que os pontos y0, y1 são pontos periódicos com período
igual a 2.
•Numa órbita de período 2 verica-se y2 = y0, ou seja, F (F (y0)) = y0.
•De igual modo se verica que F (F (y1)) = y1.
•Assim os pontos y0, y1 são também pontos xos da função composta,F (F (y)), dependendo a estabilidade destes pontos da derivada da funçãocomposta,
d
dy(F (F (y0))) =
d
dy(F (y1))
=dF (y1)
dy1
dy1dy
=dF (y1)
dy1
dF (y0)
dy
= F ′(y1)F′(y0) (4.3)
ou seja a derivada da função composta é igual ao produto da derivada de Fnos dois pontos.
•Generalizando, se uma função composta Fm verica
F (F (· · · (F︸ ︷︷ ︸m vezes
)(y0))) = y0 (4.4)
então existe um ciclo de período m formado pelos pontos y0, y1, · · · , ym−1,sendo todos pontos xos de Fm.
20
4.3. RESOLUÇÃO NUMÉRICA DE EQUAÇÕES POR MÉTODOS ITERATIVOS
•O ciclo pode ser, repulsivo ou atractivo consoante,
|m−1∏j=0
F ′(yj)| > 1 repulsivo
|m−1∏j=0
F ′(yj)| = 1 atractivo ou repulsivo
|m−1∏j=0
F ′(yj)| < 1 atractivo
(4.5)
4.3 Resolução numérica de equações por métodos
iterativos
•Podemos usar SDD1D para encontrar raízes de uma função real, com umavariável.•Por exemplo, se tentarmos usar o comando solve para encontrar pontos
xos do SDD F (y) = cos(y) o Maxima devolve a equação pois não consegueencontrar uma solução analítica,solve(cos(y)=y,y); [y = cos(y)]•Esta não é uma limitação do Maxima. Para encontrar os pontos xos
do SDD anterior, i.e. as soluções da eq. y = cos(y) temos de usar o cálculonumérico.•Já estudámos antes este sistema, quer gracamente, quer numericamente
e concluímos que o sistema converge para o estado 0.73908 · · · que é o seuponto xo e a raiz da equação y = cos(y),y[0]:%pi/2;y[n]:=cos(y[n-1]);y[82],numer;0.73908513321517y[83],numer;0.73908513321516y[84],numer;0.73908513321516
•Devemos repetir a iteração até não observarmos alteração do estado deacordo com a precisão necessária.
4.4 Método de Newton
•Newton desenvolveu um método para encontrar as raízes duma equaçãof(x) = 0 que consiste primeiro em supor que a raiz se encontra num ponto
21

4.4. MÉTODO DE NEWTON
x0 em seguida procura-se o ponto x1 onde a tangente em f(x0) corta o eixodos x
x1 = x0 −f(x0)
f ′(x0)
f(x)
x
f(x0)
x0x1
raiz
f'(x0)
•Podemos usar a mesma equação para calcular uma outra aproximaçãox2 a partir de x1, ou seja podemos usar a iteração,
xn+1 = xn −f(xn)
f ′(xn)(4.6)
22

Aula 5
Sistemas Dinâmicos Contínuos
Sumário:
- Equações diferenciais de 1a ordem (EDO1)
- Resolução analítica de EDO1
Equações de variáveis separáveisEquações linearesEquação de BernoulliEquação de RiccatiEquações exactasEquações homogéneas
5.1 Equações diferenciais de 1a ordem
•Como já referimos na 1a aula, muitos fenómenos físicos são descritos porfunções cujo valor num dado ponto depende do seu valor em pontos vizinhos.•Assim a equação que determina esta função tem de conter derivadas da
função como, a 1a derivada que determina o declive num ponto, a 2a derivadaque determina a curvatura no mesmo ponto, etc..•Existem dois tipos básicos de equações diferenciais que se distinguem
pelo número de variáveis independentes que fazem parte da equação.•A equação diferencial duma função com uma só variável independente
contém unicamente derivadas ordinárias dessa função sendo por isso chamadade equação diferencial ordinária ou EDO.•O outro tipo é a equação diferencial parcial que relaciona as diferen-
tes derivadas parciais duma função com duas ou mais variáveis independen-tes.•Uma equação diferencial ordinária de primeira ordem (EDO1) tem a
forma F (x, y, y′) = 0, mas geralmente por meio de simples manipulaçãoalgébrica consegue-se reescrever na forma de uma ou mais equações,
y′ = f(x, y), (5.1)
23

5.2. RESOLUÇÃO ANALÍTICA DE EDO1
•Diz-se que uma função (explícita) y(x) é uma solução da EDO,num dado intervalo, se esta função verica a equação anterior nesseintervalo.•Nem todas as EDO têm soluções explícitas. A solução duma EDO pode
também ser dada na forma de uma função implícita g(x, y), que verica aEDO.
5.2 Resolução analítica de EDO1
•Alguns tipos de EDO1 podem ser resolvidas analiticamente. Os métodosmais conhecidos de resolução de EDO1 estão implementados no Maxima, nafunção ode2. A sintaxe dessa função é,ode2(eq, var_dep, var_ind);onde eq é uma equação diferencial ordinária de ordem 1 ou 2, var_dep é avariável dependente, e var_ind é a variável independente.•Se o comando ode2 encontra a solução geral de eq o resultado tem a
forma duma função mais uma constante de integração, %c, que pode serdeterminada a partir duma condição inicial, usando a função,ic1(solucao, var_ind = x0, var_dep = y0);onde var_ind = x0 e var_dep = y0 indicam a condição inicial i.e. se asolução é uma função y(x) a condição inicial impõe que o valor de y quandox = x0 é y0.
Use ode2 e ic1 para encontrar a solução geral da equação dy(x)dx =
x+y(x) e a solução particular que verica a condição inicial y(1) = 2.
/*_________________________________________________*//*Exemplo 3.1*/
/*A variavel dependente é y e a variável *//*indepenedente é x.*//*Guardemos a equação diferencial na variável eqd*/eqd:x+y='diff(y,x);
/*Note-se o uso do apóstrofo ' no comando diff*//*cuja função é impedir a execução da derivada.*/
/*Podemos agora usar o comando ode2.*/solgeral:ode2(eqd,y,x);
24

5.2. RESOLUÇÃO ANALÍTICA DE EDO1
/*A solução geral é*//* y = ((- x - 1)*exp(-x) + %c)*exp(x) *//*Para cada valor da constante %c existe uma*//*solução particular de eqd. A solução geral*//*representa na verdade uma infindade de*//*soluções. Para determinar a solução particular*//*que verifica a condição inicial y(1)=2 temos*//*de encontrar a constante %c que verifica y(1)=2*/solparticular:ic1(solgeral,x=1,y=2);define(y(x),rhs(solparticular));
/*podemos confirmar que a solução particular *//*verifica a condição inicial*/y(1);/*e que também verifica a equação diferencial eqd*/ratsimp(diff(y(x),x)-(x+y(x)));
/*A representação gráfica de y(x) para [x,1,5] é*/plot2d(rhs(solparticular),[x,1,5]);
•Vejamos alguns métodos para obter solução analítica de EDO1.
5.2.1 Equações de variáveis separáveis
•Dizemos que uma EDO é uma equação de variáveis separáveis se se puderpôr na forma,
dy
dx=f(x)
g(y)(5.2)
•Para resolver este tipo de equação, primeiro observemos que a primitivada função g(y) pode ser calculada do modo seguinte,∫
g(y) dy =
∫g(y(x))
dy
dxdx. (5.3)
•Então escrevendo a equação diferencial como,
g(y)dy
dx= f(x) (5.4)
e integrando em ordem a x ambos os lados temos,∫g(y) dy =
∫f(x) dx+ c (5.5)
•Se conseguirmos calcular as primitivas a cada lado da equação, obtere-mos a solução analítica da equação diferencial.
25

5.2. RESOLUÇÃO ANALÍTICA DE EDO1
5.2.2 Equações lineares
•Uma equação diferencial linear, de primeira ordem, tem a forma geral
dy
dx+ p(x)y = f(x) (5.6)
onde p(x) e f(x) são quaisquer duas funções que dependem apenas de x(podem também ser constantes).•No caso particular em que a função p é uma constante a, o lado esquerdo
da eq. 5.6 é semelhante à seguinte derivada,
d
dx(yeax) = eax(y′ + ay) (5.7)
portanto, se multiplicarmos os dois lados da eq. 5.6 por eax obteremos
d
dx(yeax) = eaxf(x) (5.8)
integrando emx
yeax =
∫eaxf(x) dx+ c
•No caso geral em que p = p(x) usa-se a primitiva de p(x) em vez de ax,e o factor integrante pelo qual multiplicamos a equação é
µ(x) = e[∫p(x) dx]. (5.9)
•Logo multiplicando os dois lados da equação diferencial por µ obtém-se,
d
dx(yµ(x)) = µ(x)f(x) (5.10)
yµ =
∫µ(x)f(x) dx+ c
5.2.3 Equação de Bernoulli
•Um tipo de equação diferencial que pode ser reduzida a uma equação lineardo tipo da eq. 5.6, é a chamada equação de Bernoulli, denida por
dy
dx+ f(x)yn = p(x)y (5.11)
onde n é um número racional, diferente de 0 e de 1.•Evidentemente y = 0 é uma solução. Se y 6= 0 dividimos ambos os
membros por yn obtendo,
y−ndy
dx+ f(x) = p(x)y1−n (5.12)
26
5.2. RESOLUÇÃO ANALÍTICA DE EDO1
•Fazendo a substituição
v = y1−n −→ v′ = (1− n)y−ny′, (5.13)
podemos escrever a equação de Bernoulli como,
v′
1− n+ f(x) = p(x)v, (5.14)
que tem a forma duma equação linear (eq. 5.6) e pode ser resolvida usandoa técnica do factor integrante.
5.2.4 Equação de Riccati
•Outra equação redutível a uma equação linear é a equação de Riccati:
dy
dx= a(x) + b(x)y + c(x)y2 (5.15)
onde a(x), b(x) e c(x) são três funções que dependem de x.•Se conhecermos uma solução particular da equação, por exemplo y1, a
seguinte mudança de variável transformará a equação numa equação linear,
y = y1 +1
v−→ dy
dx=dy1dx− 1
v2dv
dx(5.16)
5.2.5 Equações exactas
•Qualquer equação de primeira ordem pode ser escrita na forma:
dy
dx=M(x, y)
N(x, y), (5.17)
ou na forma equivalente,
−M(x, y) dx+N(x, y) dy = 0. (5.18)
•Esta forma é semelhante à expressão da diferencial de uma função deduas variáveis
dF (x, y) =∂F
∂xdx+
∂F
∂ydy. (5.19)
•Tal semelhança permite admitir que existe uma função F (x, y) cujasderivadas parciais são iguais a−M(x, y) eN(x, y). Contudo como dF (x, y) =0 a segunda derivada parcial de F verica,
∂2F
∂x∂y= −∂M
∂y=∂N
∂x. (5.20)
27

5.2. RESOLUÇÃO ANALÍTICA DE EDO1
•Logo, para que a hipótese da existência da função F (x, y) seja consistenteé necessário que as funções M e N veriquem a seguinte condição,
∂N
∂x= −∂M
∂y. (5.21)
•Nesse caso diz-se que a EDO é exacta, existindo uma função F (x, y) talque a equação diferencial é equivalente à condição
dF (x, y) = 0. (5.22)
•Assim, a solução geral da equação diferencial será a família de curvas
F (x, y) = c. (5.23)
•A função F calcula-se encontrando a função cujas derivadas parciaissejam iguais a N(x, y) e −M(x, y).
5.2.6 Equações homogéneas
•Uma equação de primeira ordem diz-se homogénea se tiver a seguinteforma geral
dy
dx= f
(yx
)(5.24)
para resolver este tipo de equação usa-se a substituição
v =y
x−→ dy
dx= v + x
dv
dx(5.25)
a qual torna a equação numa equação de variáveis separáveis.•Para reconhecer facilmente se uma função racional é da forma f(y/x)
contam-se os expoentes de cada termo no numerador e no denominador,somando o expoente de x com o de y, devendo a soma ser igual.•Por exemplo, das duas funções seguintes a primeira tem a forma f(y/x)
mas a segunda não
xy2 − x3
yx2
xy + y
2 + x
28

Aula 6
continuação
Sumário:
- Resolução numérica
Método de EulerCampo de direcções
6.1 Resolução numérica
•Frequentemente é impossível encontrar soluções exactas de equações dife-renciais.•Por exemplo a EDO1 linear,
dx
dt= (1 + t)x+ 1− 3t+ t2 (6.1)
à partida, sendo linear, poderá parecer simples de resolver pela técnica dofactor integrante. Contudo após várias tentativas de resolução não foi possívelencontrar uma solução analítica.•Nestes casos para encontrar soluções destas equações diferenciais é ne-
cessário recorrer a métodos numéricos.•Os métodos de resolução numérica de equações diferenciais ordinárias
de primeira ordem
x = f(x, t) (6.2)
consistem em calcular o valor da variável de estado x(t) numa sequênciadiscreta de instantes t0, t1, t2, . . ., estimando o valor médio da derivadadurante cada intervalo de tempo [ti, ti+1], a partir da função f(x, t) que é aderivada instantânea.•Com incremento de tempo h constante (também pode ser variável) é
gerada uma sequência de instantes,
t0, t0 + h, t0 + 2h, . . . tn = t0 + nh, (6.3)
29

6.1. RESOLUÇÃO NUMÉRICA
onde é calculada a variável contínua x(t) sendo deste modo substituída poruma variável discreta
x0, x1, x2, . . . xn = x(tn) = x(t0 + nh) (6.4)
i.e. o sistema contínuo é substituído por um sistema discreto.•A equação de evolução desse sistema discreto dependerá do método nu-
mérico usado para fazer a estimativa do valor médio da derivada em cadaintervalo [tn, tn + h].
6.1.1 Método de Euler
•Possivelmente o mais simples, dos vários métodos numéricos para resolverequações é o método de Euler.•Partindo da denição de derivada x(t), no instante tn = t0 + nh,
x(tn) = limh→0
x(tn + h)− x(tn)
h= lim
h→0
xn+1 − xnh
(6.5)
•Se h for sucientemente pequeno, esta equação permite calcular aproxi-madamente xn+1 em função de xn e da derivada x(tn) no instante tn,
xn+1 ≈ xn + hx(tn) (6.6)
•O método de Euler consiste no uso do sistema dinâmico discreto,
xn+1 = xn + hf(tn, xn) (6.7)
para recursivamente calcular os valores de xn+1.•Ou seja partindo da condição inicial (t0, x0) a equação de recorrência
6.7 permite-nos calcular (t1, x1) e sucessivamente podemos calcular (t2, x2),(t3, x3),etc.•Note-se que o método de Euler admite que o valor médio da
derivada x no intervalo [tn, tn + h] é igual ao valor da derivada noinstante inicial do intervalo x(tn).•Só se h for sucientemente pequeno, ou se x(t) não variar muito
é que este método permite obter uma boa aproximação numéricado valor de x(t).
Como aplicação do método de Euler calculemos como exemploa velocidade de uma bola de golf, com um diâmetro de 43mm euma massa de 45g, que é atirada na vertical, para baixo com umavelocidade inicial de −50m/s. Considere-se o efeito da resistência do
30

6.1. RESOLUÇÃO NUMÉRICA
ar.A modelização da resistência do ar não é trivial. Podemos usar uma força de
atrito proporcional ao quadrado da velocidade, com a seguinte parametrização,
Fa = −1
2CdρA |v| v (6.8)
onde Cd é o coeciente de atrito, ρ é a massa volúmica do ar, e A é a área dasecção transversal do objecto perpendicular à direcção do movimento. O produto|v|v garante que a força de atrito é sempre oposta ao sentido do movimento.Para um corpo de forma esférica Cd tem o valor de 0.5. A massa volúmica doar varia com a temperatura, a humidade relativa e a altura sobre o nível do mar.À temperatura ambiente e alguns metros por cima do nível do mar, a massavolúmica do ar é aproximadamente 1.2 kg/m3. Para a bola em questão A =0.00145m2. Temos assim todos os parâmetros para poder escrever a equação domovimento,
~P + ~Fa = m~a (6.9)
como o movimento se dá só na direcção vertical podemos deixar a notaçãovectorial e escrever,
−mg − 1
2CdρA |v| v = m
dv
dt
−9.8− 0.00967 |v| v =dv
dt. (6.10)
Vejamos a implementação deste problema no Maxima.
/*_________________________________________________*//*Exemplo 3.2*//*Queda duma bola de golf*/kill(arrays);/*apaga todas as matrizes da memória*/h1:1; /*incremento do tempo (tstep)*/v1[0]:-50; /*valor inicial da velocidade*/
v1[n]:=v1[n-1]+ h1*(-9.8 -0.00967*abs(v1[n-1])*v1[n-1]);/*método de Euler*/
t1[0]:0; /*valor inicial do tempo*/t1[n]:=t1[n-1]+h1; /*eq. recursiva p/ calc. o tempo*/v1:makelist(v1[n],n,0,20)$/*lista com valores de v1*/t1:makelist(t1[n],n,0,20)$/*lista com valores de t1*/
31

6.1. RESOLUÇÃO NUMÉRICA
/*cálculo igual ao anterior mas com maior resolução*//*h2=h1/100*/h2:0.01;v2[0]:v1[0];v2[n]:=v2[n-1]+h2*(-9.8 -0.00967*abs(v2[n-1])*
v2[n-1]);t2[0]:0;t2[n]:=t2[n-1]+h2;v2:makelist(v2[n],n,0,1200)$t2:makelist(t2[n],n,0,1200)$
/*solução exacta da EDO1*//* dv/dt = -g +av^2, obtida com o comando ode2*/a:0.00967;g:9.8;c:-log((v1[0]*sqrt(a/g)+1)/(v1[0]*sqrt(a/g)-1))/
(2*sqrt(a*g));v(t):=-sqrt(g/a)*(1+exp(-2*sqrt(a*g)*(t+c)))/
(1-exp(-2*sqrt(a*g)*(t+c)));
v3:makelist(float(v(n*h2)),n,0,1200)$
/*visualização gráfica das três soluções,*//*v1, v2, exacta*/graph2d([xaxislabel,"t"],[yaxislabel,"v(t)"],
[xcenter,6],[xradius,7],[ycenter,-32],[yradius,60],[label,"h=1"],t1,v1,[label,"h=0.01"],t2,v2,[label,"exacta"],t2,v3);
/*visuaização gráfica do campo de direcções*//*e da mesma solução particular t0=0, v0=-50*/plotdf(-9.8 -0.00967*abs(y)*y,
[xcenter,6],[xradius,7],[ycenter,-32],[yradius,60],[direction,forward],[trajectory_at,0,-50]);
32

6.1. RESOLUÇÃO NUMÉRICA
6.1.2 Campo de direcções de EDO1
•Podemos descobrir muita informação importante sobre as soluções dumaequação EDO1,
dy
dt= f(t, y) (6.11)
com uma simples análise geométrica da função f(t, y), pois esta dene, emcada ponto do plano (t, y), o declive que deverá ter uma função y(t) que sejasolução da EDO.
plotdf(x+y,[tstep,0.2],[nstep,6],[trajectory_at,0,1.83],[direction,forward],[ycenter,4],[yradius,3],[xcenter,1],[xradius,1.2]);
[xcenter,1]
[ycenter,4]
[xradius,1.2]
[yradius,3]
[trajectory_at,0,1.83]
x
y(x)
0 0.4 0.8 1.2 1.6 21
2
3
4
5
6
7
[direction,forward]
solução particular,y(x), da EDO1dy/dx=x+ycom Y(0)=1.83,calculadanumericamenteem 6 pontos
[tstep,0.2]
θ = atan(f(x,y))
•O campo de direcções de uma EDO1 é um gráco no plano (t, y),onde em cada ponto aparece um vector com declive igual a f(t, y) e queaponta no sentido dos valores crescentes de t. O campo de direcções per-mite visualizar o comportamento da solução geral da eq. 6.11 no domínio dográco.•Para desenhar campos de direcções no Maxima, usa-se o comando
plotdf(f(x,y)),onde x é a variável independente e y é a variável dependente. Na versãoactual do Maxima é necessário escrever as variáveis independentese dependentes como x e y, respectivamente.
33

6.1. RESOLUÇÃO NUMÉRICA
•Por exemplo, para obter o campo de direcções da equação y = y + t,usa-se o comando plotdf(y + x);.•Para que seja traçada, no campo de direcções, a solução particular da
EDO1 com início no ponto (x0, y0), usa-se a opção,plotdf(y + x,[direction, forward],[trajectory_at,x0,y0]);onde a opção [direction, forward] é usada para que a solução particularseja calculada para valores crescentes da variável indpendente (x > x0).•O menu Config, na janela aberta pelo comando plotdf permite con-
gurar algumas opções como, Trajectory at onde se indica o valor de x0 ey0 que dene o início duma solução particular, tstep onde se indica o va-lor do incremento da variável independente no cálculo da solução particular(denominado h nos exemplos anteriores) e nsteps para indicar o número depontos calculados da solução particular. Depois de alterada alguma destasopções, prime-se o botão OK e em seguida o botão Replot.
/*_________________________________________________*//*Exemplo 3.3*//*x+y=diff(y,x)*//*implementação do método de Euler e plotdf para*//*obter numericamente solução particular da EDO1*//*resolvida analiticamente no exemplo 3.1*/h1:.1;x1[0]:1;x1[n]:=x1[n-1]+h1;y1[0]:2;y1[n]:=y1[n-1]+h1*(x1[n-1] +y1[n-1]);y1:makelist(y1[n],n,0,30)$x1:makelist(x1[n],n,0,30)$
h2:.01;x2[0]:1;x2[n]:=x2[n-1]+h2;y2[0]:2;y2[n]:=y2[n-1]+h2*(x2[n-1] +y2[n-1]);y2:makelist(y2[n],n,0,300)$x2:makelist(x2[n],n,0,300)$
h3:.001;x3[0]:1;x3[n]:=x3[n-1]+h3;
34
6.1. RESOLUÇÃO NUMÉRICA
y3[0]:2;y3[n]:=y3[n-1]+h3*(x3[n-1] +y3[n-1]);y3:makelist(y3[n],n,0,3000)$x3:makelist(x3[n],n,0,3000)$
y4:makelist(float(4*exp((1+n*h2) - 1) - (1+n*h2) - 1),n,0,300)$
graph2d([xaxislabel,"t"],[yaxislabel,"y(t)"],[xcenter,2],[xradius,3],[ycenter,32],[yradius,60],[label,"h=.1"],x1,y1,[label,"h=0.01"],x2,y2,[label,"h=0.001"],x3,y3,[label,"exacta"],x2,y4);
plotdf(y+x,[xaxislabel,"t"],[yaxislabel,"y(t)"],[xcenter,2],[xradius,3],[ycenter,32],[yradius,60],[direction,forward],[trajectory_at,1,2]);
35

6.1. RESOLUÇÃO NUMÉRICA
36

Aula 7
Sistemas dinâmicos contínuos de 2a ordem
Sumário:
- Resolução analítica de EDO2
- Equações autónomas de 2a ordem
7.1 Resolução analítica de EDO2
•Existem dois tipos de equações diferenciais ordinárias de segunda ordemEDO2 que podem ser resolvidas analiticamente.•O primeiro tipo são as equações lineares com coecientes constantes,
cuja forma geral é,
a y′′ + b y′ + c y = f(x) (7.1)
onde a, b e c são constantes. Se f(x) = 0 a equação diz-se homogénea, sef(x) 6= 0 diz-se não-homogénea.•O segundo tipo de equação é a equação de Euler
ax2 y′′ + bx y′ + c y = f(x) (7.2)
•O comando do Maxima ode2 pode também ser usado para resolver estetipo de equações, como se ilustra na resolução da seguinte EDO2, y′′− 2y′−15y = 0.•De modo semelhante ao caso de EDO1,
eqd:'diff(y,x,2)-2*'diff(y,x)-15*y=0;sol:ode2(eqd,y,x);•A solução geral calculada pelo máxima é,
y(x) = k1 e5x + k2 e−3x (7.3)
onde k1 e k2 representam duas constantes arbitrárias, que são determinadas,ou a partir de condições iniciais, ou a partir de condições fronteira.
37

7.1. RESOLUÇÃO ANALÍTICA DE EDO2
•Uma vez encontrados valores para k1 e k2 a solução 7.3 deixa de sergeral e passa a ser uma solução particular, para estes valores das constantes.•Condições iniciais para ODE2 consistem em dar o valor da função
y(x) e da primeira derivada y′(x), para um valor inicial da variável indepen-dente x0.•Para o exemplo anterior, podíamos encontrar uma solução particular
para as condições iniciais y(0) = 1, y′(0) = 5 usando o comando ic2, desintaxe semelhante a ic1, ic2(sol,x=0,y=1,diff(y,x)=5);•A solução particular calculada pelo máxima é,
y(x) = e5x (7.4)
onde o primeiro argumento de ic2 é a solução geral já calculada, o segundoargumento é o valor inicial da variável independente x0, o terceiro o valorda função y(x0) e o quarto o valor da primeira derivada y′(x0), não sendopreciso usar o apóstrofo na derivada.•A outra forma para encontrar uma solução particular, consiste em dar
condições fronteira, neste caso deverá ser conhecido o valor da função y(x)para dois valores diferentes de x, por exemplo y(xi) = yi e y(xf ) = yf .•Para determinar a solução particular que verica determinadas condições
fronteira usa-se o comando bc2 (do inglês boundary conditions).•Por exemplo usando y(0) = 1 e y(1) = e−3 como condições fronteira da
EDO2 anteriorbc2(sol,x=0,y=1,x=1,y=exp(-3));•A solução particular calculada pelo máxima é,
y(x) = e−3x (7.5)
onde o 1o argumento de bc2 é a solução geral da EDO2, o 2o argumento é ovalor da variável independente xi, o 3o o valor da função y(xi), o 4o é o valorda variável independente xf e o 5o o valor da função y(xf ).
/*_________________________________________________*//*Exemplo 4.1*/
/*Considere-se a seguinte EDO2*/eqd:'diff(y,x,2)-2*'diff(y,x)-15*y=0;
/*Usando o comando ode2 podemos encontrar a solução*//*geral de eqd*/solgeral:ode2(eqd,y,x);
38

7.2. EQUAÇÕES AUTÓNOMAS DE SEGUNDA ORDEM
/*Para determinar as constantes arbitrárias k1 e k2*//*podemos usar CONDIÇÔES INICIAIS, por exemplo*//*y(0)=1 e y'(0)=5 e o comando ic2 para determinar*//*a respectiva solução particular*/solparticular1:ic2(solgeral,x=0,y=1,diff(y,x)=5);
/*podemos também usar CONDIÇÔES FRONTEIRA, por exemplo*//*y(0)=1 e y(1)=exp(-3) e o comando bc2 para determinar*//*a respectiva solução particular*/solparticular2:bc2(solgeral,x=0,y=1,x=1,y=exp(-3));
•Nem todas as condições fronteira conduzem a uma solução. Algumascondições fronteira não são consistentes com a solução geral.
7.2 Equações autónomas de segunda ordem
•Uma equação diferencial de segunda ordem diz-se autónoma quandonão depende explicitamente da variável independente.•Estas equações podem ser reduzidas a duas equações independentes, de
primeira ordem.•A forma geral de uma equação autónoma de segunda ordem é,
d2x
dt2= f
(x,dx
dt
)(7.6)
•Designando por v(x) a função dx/dt, a EDO2 passa a ser de primeiraordem,
v = f(x, v) (7.7)
•Para determinar x e/ou v resolvemos esta equação juntamente com aequação dx/dt = v, i.e.,
d2x
dt2= f
(x,dx
dt
)≡
x = vv = f(x, v)
(7.8)
•Também podemos obter uma equação diferencial ordinária só com duasvariáveis, fazendo a seguinte substituição,
dv
dt=dv
dx
dx
dt= v
dv
dx(7.9)
e a eq. 7.6 reduz-se a uma EDO de primeira ordem,
vdv
dx= f(x, v) (7.10)
39
7.2. EQUAÇÕES AUTÓNOMAS DE SEGUNDA ORDEM
•Cada solução desta EDO será uma função v(x) = g(x). Para calcularx(t) é necessário resolver ainda,
dx
dt= g(x) (7.11)
que é também uma equação autónoma, mas de primeira ordem. O problemaé que em alguns casos não é fácil escrever v na forma explícita g(x).
Como exercício, considere a aceleração de uma partícula, em fun-ção do tempo x = −3x − 5x. Sabendo que no instante t = 0, apartícula parte do repouso no ponto x = 1, qual a posição e a veloci-dade da partícula em função do tempo, para t > 0? Obter tambéma solução particular para o caso com as condições fronteira em quea partícula passa pelo ponto x=1 (com uma certa velocidade) nosinstantes t=0 e t=1.
/*_________________________________________________*//*Exemplo 4.2*/eqd:v*'diff(v,x) = -3*x - 5*v;
/*A solução geral é:*/solgeral: ode2(eqd, v, x);
/*Usando a CONDIÇÃO INICIAL, v(1)=0 encontramos*//*a respectiva solução particular*/solparticular1:ic1(solgeral, x=1, v=0), radcan, numer;
/*o modificador radcan simplifica as funções *//*exponenciais e logaritmicas na expressão final*/
/*Como observa nesta expressão não é possível obter*//*v(x) explícitamente. Para calcular x(t) neste caso*//*é mais fácil resolver directamente a ODE2 inicial*/eqd:'diff(x, t, 2) = -3*x -5*'diff(x, t);solgeral: ode2(eqd, x, t);
/*Usando as CONDIÇÕES INICIAIS, x(0)=1 e v(0)=0 *//*encontramos a respectiva solução particular*/
40

7.2. EQUAÇÕES AUTÓNOMAS DE SEGUNDA ORDEM
solparticular1:ic2(solgeral, t=0, x=1, diff(x,t)=0);
/*Usando as CONDIÇÔES FRONTEIRA, x(0)=1 e x(1)=1*//*a respectiva solução particular é*/solparticular2:bc2(solgeral, t=0, x=1, t=1, x=1), numer;
/*Podemos visualizar as duas soluções particulares*//*calculadas*/define(x1(t),rhs(solparticular1));define(x2(t),rhs(solparticular2));plot2d([x1(t),x2(t),1],[t,-.1,1.1]);
Outro exercício, considere-se uma partícula de massa m = 1/3que está ligada a uma mola linear com constante elástica k = 1.No instante t = 0 a partícula parte do repouso no ponto x = 1.Calcular a posição e a velocidade da partícula em função do tempo,para t > 0.Consideremos que a mola oscila na direcção do eixo X. Segundo a lei de Hookea força de uma mola linear com constante elástica k é dada por ~Fe = −kx ı.Aplicando a lei de Newton na direcção do deslocamento da mola temos,
~Fe = m~a (7.12)
−kx ı = mdv
dtı (7.13)
uma vez que o movimento se dá sempre na mesma direcção podemos omitir anotação vectorial,
− kx = mdv
dt(7.14)
−kx = mdv
dx
dx
dt
−kx = mdv
dxv.
Esta é uma equação de variáveis separáveis logo podemos integrar em x,∫−kxdx =
∫mv
dv
dxdx (7.15)
−kx2
2dx = m
v2
2+ c. (7.16)
41

7.2. EQUAÇÕES AUTÓNOMAS DE SEGUNDA ORDEM
Esta solução geral é a soma da energia cinética, Ec, com a soma da energiapotencial, Ep, elástica da mola,
mv2
2+ k
x2
2= constante, (7.17)
onde a constante é a energia mecânica total, ET , do sistema. A equação anteriordiz que a energia total deste sistema se conserva, o que era de esperar visto nãoexistirem forças dissipadoras de energia no sistema. Podemos encontrar o valorde ET a parir das condições iniciais dadas. Usemos o Maxima para fazer todosos cálculos:
/*_________________________________________________*//*Exemplo 4.3*/
/*Uma partícula de massa m=1/3 está ligada a uma *//*mola com constante elástica k=1. No instante t=0*//*a partícula parte do repouso no ponto x=1. *//*Calcular a posição e a velocidade da partícula *//*em função do tempo, para t>0.*/
eqd: v*'diff(v,x) = -3*x;solgeral: ode2(eqd, v, x);solparticular:ic1(solgeral, x=1, v=0);
/*A equação solparticular é a lei da conservação *//*da energia mecânica. */
velocidade: solve(solparticular,v);
/*Obtivemos duas soluções para a velocidade. */
/*A EDO1 para a posição em função da velocidade é*/eqd: 'diff(x,t) = v;
/*podemos substituir uma das expressões obtidas*//*para a velocidade, e resolver a equação com a *//*condição inicial dada*/solgeral: ode2(ev(eqd, velocidade[1]), x, t);solpart2: solve(ic1(solgeral, t=0, x=1), x);
/*se usarmos a segunda expressão obtida para a */
42
7.2. EQUAÇÕES AUTÓNOMAS DE SEGUNDA ORDEM
/*velocidade, obtém-se a mesma resposta para x *//*em função de t.*//*Podemos representar gráficamente a posição e *//*a velocidade bem como a Ecinética e Epotencial*/
/*posição*/define(x(t),rhs(solpart2[1]));/*velocidade*/define(v(t),diff(x(t),t));/*energia cinética*/ec(t):=v(t)^2/6;/*energia potencial*/ep(t):=x(t)^2/2;
plot2d([v(t),x(t)],[t,0,5]);plot2d([ec(t),ep(t)],[t,0,5]);
/*conservação da energia mecânica*//*representar Ec(x) e Ep(x)*/define(v(x),rhs(velocidade[1]));plot2d([v(x)^2/6,x^2/2,v(x)^2/6+x^2/2],[x,-1,1]);
43

7.2. EQUAÇÕES AUTÓNOMAS DE SEGUNDA ORDEM
44

Aula 8
continuação
Sumário:
- Equações não-autónomas e derivadas de ordem superior
- Método de Euler para EDOn
- Plotdf para EDO2
- Eliminação de singularidades
8.1 Equações não autónomos e derivadas de ordem
superior
•Qualquer EDO não autónoma, i.e. onde a variável independente guraexplicitamente, pode ser convertida num sistema de EDO autónomo.•Para tal considera-se o tempo como mais uma variável de dependente, e
introduz-se uma equação diferencial trivial para a derivada de t,
dt
dt= 1 (8.1)
•Por exemplo, transformar o seguinte sistema num sistema autónomo,x = 3x− y2ty = 5x2y
•Se t fosse também uma variável de estado, o sistema seria autónomo;mas deveria haver uma equação de evolução para esta nova variável de estado.Assim, introduzindo mais uma equação (trivial),
t = 1,
45

8.1. EQUAÇÕES NÃO AUTÓNOMOS E DERIVADAS DE ORDEM SUPERIOR
o sistema é equivalente a um sistema autónomo de terceira ordem,x = 3x− y2ty = 5x2yt = 1
•Em geral EDO com derivadas de ordem n superior a 1 podem ser redu-zidas a EDO de primeira ordem, introduzindo mais variáveis e formando umsistema autónomo de ordem n
x1 = f1(x1, . . . , xn) (8.2)
x2 = f2(x1, . . . , xn)...
xn = fn(x1, . . . , xn)
•Ou numa forma mais compacta podemos escrever,
xi = fi(x1, . . . , xn) i = 1, ·, n (8.3)
•Suponhamos que dado um conjunto de condições iniciais conseguimosresolver 8.3, encontrando um conjunto de soluções para xi(t) i = 1, ·, n quedenem o estado do sistema para um determinado instante t.•Num sistema mecânico o conjunto das coordenadas espaciais e das ve-
locidades pertencem a xi.•Como podemos representar a evolução do sistema no tempo? Há varias
formas de representar esta evolução. Podemos representar simplesmente ngrácos com cada um dos n xi(t). Podemos também, representar a evolução,no tempo das coordenadas espaciais do sistema, num só gráco. Diz-se queesta representação se faz no espaço de conguração do sistema.•A trajectória do sistema no espaço de conguração, é igual à que um ob-
servador vê quando olha para o sistema. Embora esta trajectória seja muitofamiliar, ela não contém toda a informação do sistema. Além do mais ascondições iniciais podem ser quaisquer. Portanto se for necessário represen-tar diferente trajectórias (representativas de diferentes condições iniciais) emsimultâneo estas podem se iniciar num mesmo ponto em várias direcções.Depressa o gráco cará muito confuso.•Outra forma de representar a evolução no tempo do sistema é represen-
tando pontos (x1(t), · · · , xn(t)) num espaço de n-dimensões. Este é o cha-mado espaço de fase do sistema. Um ponto no espaço de fase denecompletamente o sistema, num determinado instante t, pois contémtoda a informação conhecida do sistema para esse instante.
46

8.2. MÉTODO DE EULER PARA EDON
•Outra vantagem é que as trajectórias no espaço de fase nunca secruzam o que facilita a comparação da evolução do sistema para diferentescondições iniciais.•À representação simultânea de várias trajectórias no espaço de fase cos-
tuma chamar-se retrato de fase do sistema.•Nos exemplos que se seguem ilustraremos melhor estes conceitos im-
portantes. Antes contudo, vejamos como se aplica o método de Euler pararesolver um sistema de ordem n.
8.2 Método de Euler para EDOn
•Podendo reduzir uma equação diferencial de ordem n a um sistema de nequações diferencias de 1a ordem, ver eq. 8.3 então podemos aplicar o métodode Euler, a cada uma das n EDO1, calculando o elemento m de xi em funçãodo elemento m− 1,
x1m = x1m−1 + h ∗ f1(x1m−1 , . . . , xnm−1) (8.4)
x2m = x2m−1 + h ∗ f2(x1m−1 , . . . , xnm−1)...
xnm = xnm−1 + h ∗ fn(x1m−1 , . . . , xnm−1)
8.3 Plotdf para EDO2
•Na secção 6.1.2 vimos o signicado do campo de direcções de uma EDO1que representa um sistema dinâmico de primeira ordem.•Um sistema autónomo de segunda ordem com duas variáveis x e y que
dependem do tempo, pode-se reduzir a um sistema de duas EDO1, indepen-dentes do tempo:
x = g(x, y)y = f(x, y).
(8.5)
•O campo de direcções deste sistema de segunda ordem é um gráco noplano xy, onde em cada ponto aparece um vector com declive iguala f(x, y)/g(x, y) e que aponta no sentido dos valores crescentes de t.O campo de direcções permite visualizar o comportamento da solução geralno domínio do gráco.•O espaço de fase deste sistema é o plano xy. Deste modo o comando
plotdf representa automaticamente o espaço de fase dum sistema autónomode segunda ordem.
47

8.3. PLOTDF PARA EDO2
•Que o declive dos vectores do campo de direcções no espaço de fase éigual a f/g pode ver-se rapidamente escrevendo o sistema 8.5 como uma sóEDO1,
dy
dx=f(x, y)
g(x, y). (8.6)
•Fazendo x = t implica que g(x, y) = 1 logo a equação anteriror reduz-seà eq. 6.11,
dy
dt= f(t, y). (8.7)
Voltemos ao problema da queda duma bola de golf e estudemosa trajectória no espaço de fase e no espaço de conguração destemovimento unidimensional.
/*_________________________________________________*//*Exemplo 4.4*/kill(arrays);h1:0.5;v1[0]:-50;v1[n]:=v1[n-1]+h1*(-9.8 -0.00967*abs(v1[n-1])*
v1[n-1]);y1[0]:100;y1[n]:=y1[n-1]+h1*v1[n-1];t1[0]:0;t1[n]:=t1[n-1]+h1;v1:makelist(v1[n],n,0,5)$y1:makelist(y1[n],n,0,5)$t1:makelist(t1[n],n,0,5)$
h2:0.005;v2[0]:v1[0];v2[n]:=v2[n-1]+h2*(-9.8 -0.00967*abs(v2[n-1])*
v2[n-1]);y2[0]:y1[0];y2[n]:=y2[n-1]+h2*v2[n-1];t2[0]:0;t2[n]:=t2[n-1]+h2;v2:makelist(v2[n],n,0,500)$
48
8.3. PLOTDF PARA EDO2
y2:makelist(y2[n],n,0,500)$t2:makelist(t2[n],n,0,500)$
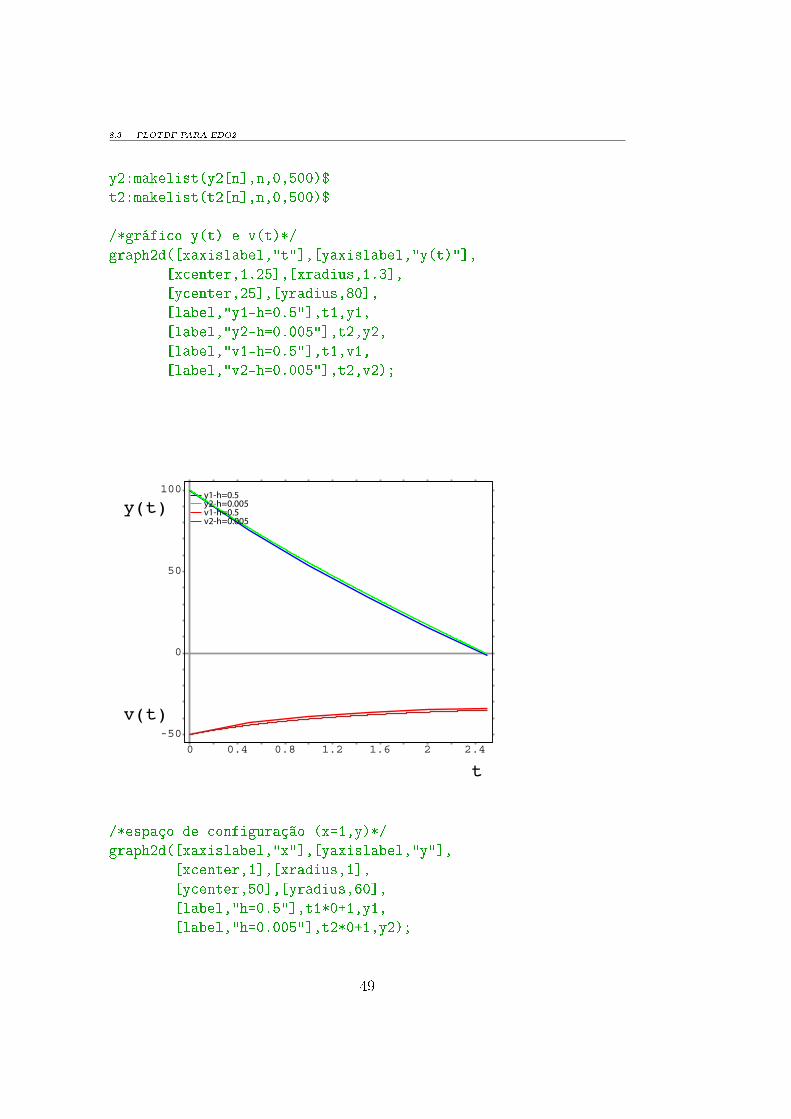
/*gráfico y(t) e v(t)*/graph2d([xaxislabel,"t"],[yaxislabel,"y(t)"],
[xcenter,1.25],[xradius,1.3],[ycenter,25],[yradius,80],[label,"y1-h=0.5"],t1,y1,[label,"y2-h=0.005"],t2,y2,[label,"v1-h=0.5"],t1,v1,[label,"v2-h=0.005"],t2,v2);
y1-h=0.5y2-h=0.005v1-h=0.5v2-h=0.005
0 0.4 0.8 1.2 1.6 2 2.4
-50
0
50
100
t
y(t)
v(t)
/*espaço de configuração (x=1,y)*/graph2d([xaxislabel,"x"],[yaxislabel,"y"],
[xcenter,1],[xradius,1],[ycenter,50],[yradius,60],[label,"h=0.5"],t1*0+1,y1,[label,"h=0.005"],t2*0+1,y2);
49

8.3. PLOTDF PARA EDO2
h=0.5h=0.005
0.4 0.8 1.2 1.6 2
0
20
40
60
80
100
y(x)
x
/*espaço de fase (y,v(y))*/graph2d([xaxislabel,"y"],[yaxislabel,"v(y)"],
[xcenter,50],[xradius,60],[ycenter,-35],[yradius,25],[label,"h=0.5"],y1,v1,[label,"h=0.005"],y2,v2);
h=0.5h=0.005
0 20 40 60 80 100
-50
-40
-30
-20
-10
v(y)
y
50

8.3. PLOTDF PARA EDO2
/*espaço de fase (y,v(y)) e campo de direcções*/plotdf([y,-9.8 -0.00967*abs(y)*y],
[xcenter,50],[xradius,60],[ycenter,-35],[yradius,25],[direction,forward],[trajectory_at,100,-50],[tstep,0.05],[nsteps,50]);
0 20 40 60 80 100
-50
-40
-30
-20
-10
y(x)
x
Considere-se agora o lançamento da bola de golf no plano(x,y).Calcular a trajectória bidimensional usando o método de Euler e com-parar o movimento com e sem atrito. Discutir também a diferençaobservada entre as duas trajectórias, no caso em que a velocidadeinicial é baixa e no caso em que é elevada.
/*_________________________________________________*//*Exemplo 4.5*/kill(arrays);h:0.005;vi:50;/*velocidade inicial em m/s*/
/*COM ATRITO*//*condições iniciais*/x[0]:0;
51

8.3. PLOTDF PARA EDO2
y[0]:0;vx[0]:vi*cos(%pi/4),numer;vy[0]:vi*sin(%pi/4),numer;
/*cálculo do valor seguinte*/vx[n]:=vx[n-1]+h*(-0.00967*abs(vy[n-1])*vy[n-1]);vy[n]:=vy[n-1]+h*(-9.8 -0.00967*abs(vy[n-1])*vy[n-1]);x[n]:=x[n-1]+h*vx[n-1];y[n]:=y[n-1]+h*vy[n-1];/*criação de listas de valores [x,y]]*/r:[[x[0],y[0]]]$for i: 1 unless y[i] < 0 do r:append(r,[[x[i],y[i]]]);
/*SEM ATRITO*/kill(arrays);/*condições iniciais*/x[0]:0;y[0]:0;vx[0]:vi*cos(%pi/4),numer;vy[0]:vi*sin(%pi/4),numer;
/*cálculo do valor seguinte*/vx[n]:=vx[n-1]+h*0;/*instrução desnecessária*/vy[n]:=vy[n-1]+h*(-9.8);x[n]:=x[n-1]+h*vx[n-1];y[n]:=y[n-1]+h*vy[n-1];/*criação de listas de valores [x,y]]*/rs:[[x[0],y[0]]]$for i: 1 unless y[i] < 0 do rs:append(rs,[[x[i],y[i]]]);
/*trajectória da partícula*/graph2d([xaxislabel,"x"],[yaxislabel,"y"],
[label,"com atrito"],r,[label,"sem atrito"],rs);
52

8.4. ELIMINAÇÃO DE SINGULARIDADES
com atritosem atrito
40 80 120 160 200 240
10
20
30
40
50
60y(x)
x
8.4 Eliminação de singularidades
•Os métodos para resolver equações diferenciais estudados nas secções ante-riores calculam o valor da solução a partir do valor da derivada num pontoinicial.•Se a derivada no ponto inicial for innita, o método falha.•Quando o diagrama do campo de direcções dum sistema, no plano xy,
apresentar pontos onde o declive for vertical, os métodos numéricos falhamnesses pontos.•O problema pode ser resolvido introduzindo um parâmetro adicional,
como é feito no exemplo seguinte.•Por exemplo, para encontrar a solução do sistema,
dy
dx= −x
yy(3) = 0 (8.8)
no estado inicial, x = 3, y = 0, a derivada é innita. Não será possívelrepresentar o campo de direcções nesse ponto, e os métodos numéricos nãopoderão ser usados para calcular a solução.•Introduzindo um parâmetro adicional, t, admitimos que as duas va-
riáveis, x e y dependem de t. A equação 8.8 é equivalente ao sistema deequações,
dx
dt= y (8.9)
dy
dt= −x (8.10)
53

8.4. ELIMINAÇÃO DE SINGULARIDADES
•O campo de direcções e a solução deste sistema, podem ser obtidos com,plotdf([y,-x ], [trajectory_at,3,0 ],[versus_t,1 ], [xradius,4 ], [yradius,4 ],[direction,forward ], [nsteps,300 ]);•O campo seria idêntico se tivesse sido denido pela equação 8.8. Neste
caso se tentássemos obter a curva integral que passa por (3, 0) não teríamossucesso.
Vejamos as instruções no Maxima
/*_________________________________________________*//*Exemplo 4.6*/
/*Com singularidade*/plotdf(-x/y, [trajectory_at,3,0], [versus_t,1],
[xradius,4],[yradius,4],[direction,forward], [nsteps,300]);
/*Sem singularidade*/plotdf([y,-x], [trajectory_at,3,0], [versus_t,1],
[xradius,4],[yradius,4],[direction,forward], [nsteps,300]);
54

Aula 9
Sistemas lineares
Sumário:
- Oscilador linear
- Sistemas lineares
- Pontos xos
9.1 Osciladores lineares
•Consideremos novamente o oscilador mecânico constituído por uma massam presa a uma mola de constante k que pode oscilar na vertical.
d
P = m g
Fe = - k d
•Como a mola tem um extremo xo ao pendurar a massa no outro ex-tremo, a mola estica-se uma distância d, cando numa posição de equilíbrioonde o peso da esfera é igual e oposto à força que exercida pela mola, i.e.,
mg = kd
logo a distância d é igual a mg/k.
55

9.1. OSCILADORES LINEARES
•Se y medir a posição do extremo livre da mola, com origem na posiçãode equilíbrio, a elongação da mola será dada por (d− y).•A força resultante do peso e da força da mola é linear em y,
Fr = k(d− y)−mg = −ky. (9.1)
•A aceleração da massa, y, obtém-se a partir da segunda lei de Newton,utilizando a eq. 9.1 para a força resultante.
y = − kmy. (9.2)
•Usando
ω =
√k
m, (9.3)
podemos escrever a equação na forma,
y = −ω2y. (9.4)
•O espaço de fase é formado pela posição y e a velocidade v = y.•Transformando a velocidade para, u = v/ω criamos uma nova variá-
vel proporcional à velocidade, mas com unidades de distância. Deste modopodemos usar as mesmas unidades nos dois eixos do espaço de fase.•Nestas novas variáveis u e y, o sistema autónomo de primeira ordem,
equivalente à equação 9.4 é,y = ω uu = −ω y (9.5)
•Num ponto do espaço de fase com vector posição dado por,
~r = u~eu + y ~ey (9.6)
a velocidade de fase é igual a
~u = −ω y ~eu + ω u~ey (9.7)
logo, a velocidade de fase é sempre perpendicular ao vector posição, e terámódulo |~u| = r ω, onde r é a distância à origem.•Sendo r constante a evolução do estado, no espaço de fase, descreve um
movimento circular uniforme, com velocidade angular igual a ω.•Derivando em ordem ao tempo a primeira equação do sistema 9.5 e
usando a segunda equação obtemos,
u = −ω2 u (9.8)
56

9.1. OSCILADORES LINEARES
de igual modo podemos re-obter a eq. 9.4 para y,
y = −ω2 y. (9.9)
•Por substituição podemos concluir que as seguintes funções são soluçõesdestas EDO2,
y(t) = A sin(ω t+ ϕ0) (9.10)
u(t) = A cos(ω t+ ϕ0) (9.11)
onde A é amplitude da oscilação (também a distância entre o estado e aorigem no espaço de fase), ϕ0 é o ângulo entre a posição inicial, no espaço defase, e o semieixo positivo dos u e ω é a frequência angular em unidades deradianos por segundo (denida pela eq. 9.3).•A velocidade (real) v do oscilador é igual a ω u; isto é
v = ω A cos(ω t+ ϕ0). (9.12)
•As funções obtidas para o deslocamento y(t) e a velocidade v(t) cor-respondem a um movimento harmónico simples com amplitude A,frequência angular ω e fase inicial ϕ0.•A amplitude e a fase inicial dependem das condições iniciais do problema,
i.e. do ponto onde se encontra o estado inicial no espaço de fase.•Para um dado ω, é fácil ver que a função y(t) (eq. 9.10) descreve uma
oscilação completa quando ωt = 2π, logo o período P , que é o tempo que amassa demora voltar à mesma posição, é dado por,
P =2π
ω. (9.13)
y(t)
u(t)
ty
u
A
A
Período
u0
ϕ0
Espaço de fase
y0
57

9.2. SISTEMAS LINEARES
•Do sistema 9.5 podemos escrever,
u
y= −ω y
ω u(9.14)
du
dy= −y
u
obtendo uma equação diferencial de variáveis separáveis. Integrando vem,
u2
2+y2
2= constante (9.15)
usando as eq. 9.10 e 9.11 rapidamente se concluí que a equação da trajectóriada massa no espaço de fase é a equação dum círculo com raio igual a A,
u2 + y2 = A2 (9.16)
•Substituindo u = v/ω e ω =√
km
obtemos a equação da conservação
da energia mecânica:
1
2mv2 +
1
2ky2 =
1
2kA2 (9.17)
Ec + Ep = ET (9.18)
(9.19)
9.2 Sistemas lineares
•As equações 9.5 do oscilador linear são um exemplo de um sistema dinâ-mico linear. Um sistema linear de segunda ordem, é um sistema de duasvariáveis de estado, x e y, com derivadas que são combinações lineares dessasduas variáveis:
x = a x+ b yy = c x+ d y
(9.20)
onde a, b, c e d são constantes.•A forma mais geral de um sistema linear, com variáveis u e v é,
u = a u+ b v + ev = c u+ d v + f
. (9.21)
•Mas com a substituição de variáveis u = x − h, v = y − k, o sistemareduz-se ao sistema 9.20, se as variáveis h e k forem solução das equações:
a h+ b k = ec h+ d k = f
(9.22)
58

9.3. PONTOS FIXOS - EQUILÍBRIO
•O sistema 9.20 pode ser escrito numa forma mais compacta como umaúnica equação matricial,
X = AX (9.23)
onde X representa as coordenadas de um vector no plano xy, escritas emforma de coluna,
X =
[xy
](9.24)
e A é a matriz do sistema,
A =
[a bc d
](9.25)
•Num instante qualquer, o estado do sistema é representado por um vec-tor X que dene a posição de um ponto no espaço de fase e o produto AXé outro vector que dene a velocidade de fase nesse ponto.
9.3 Pontos xos - Equilíbrio
•Quando as forças em cada prato duma balança são iguais, a balança pára.Os pratos estão em equilíbrio estático. Esta é provavelmente a noção maiscomum de equilíbrio.•Num sistema dinâmico como denido na eq. 8.3, o equilíbrio é
denido como o estado no qual nenhum dos xi varia no tempo, i.e.xi = 0, com i = 1, · · · , n.•Como tal no espaço de fase, o estado de equilíbrio é representado
por um ponto com a propriedade, que qualquer órbita iniciadaexactamente nesse ponto, permanecerá para sempre nesse ponto.O sistema cará xo nesse ponto.•Portanto os pontos xos dum sistema linear como o dado pela eq.9.23
são os pontos onde todas as derivadas são nulas, i.e. são solução do sistemalinear homogéneo,
AX = 0. (9.26)
•Podemos colocar a pergunta, o que acontece se o sistema for ligeiramenteafastado do equilíbrio? Ou por outras palavras qual a orbita do sistema noespaço de fase, se as condições iniciais forem ligeiramente afastadas dumponto xo? A orbita afasta-se do ponto xo? Aproxima-se do ponto xo?Como?•Estas perguntas são importantes pois as respostas caracterizam o equi-
líbrio do sistema, por exemplo se ele é estável ou instável.
59

9.3. PONTOS FIXOS - EQUILÍBRIO
60

Aula 10
Analise de sistemas lineares autónomos
Sumário:
- A solução básica
- Vectores e valores próprios
- Valores próprios e estabilidade
10.1 A solução básica
•O objectivo é resolver as equações lineares no sistema 9.23,
X = AX
para conhecer o movimento perto do equilíbrio, bem como a estabilidade doequilíbrio.•Vamos desenvolver um método sistemático para determinar a estabi-
lidade do equilíbrio do sistema anterior, mas antes vamos considerar umsistema linear de 1 dimensão,
x = ax, (10.1)
com a condição inicial x(0) = x0, onde a é um escalar.•A equação anterior é linear e com variáveis separáveis, como tal podemos
ver que a função exponencial é uma solução,
x(t) = C eλt, (10.2)
onde C e λ são constantes a determinar.•Substituindo 10.2 na eq. 10.1 vem,
λC eλt = aC eλt (10.3)
C eλt(λa) = 0
61

10.2. VECTORES E VALORES PRÓPRIOS
esta igualdade só pode ser nula para qualquer t se,
C(λa) = 0. (10.4)
•A solução trivial da equação anterior é C = 0, na qual o sistema está emequilíbrio. Soluções não triviais requerem, λ = a, logo a solução da eq. 10.1ca,
x(t) = C eat, (10.5)
sendo esta solução válida para qualquer valor de C.•Se quisermos que esta solução obedeça à condição inicial, x(0) = x0,
temos de fazer o cálculo para t = 0,
x(0) = x0 = C,
determinando assim uma solução particular da eq. 10.1,
x(t) = x0 eat. (10.6)
•Rapidamente se conclui que se a > 0 a solução cresce exponencialmente,se a < 0 a solução decai exponencialmente para zero e nalmente se a = 0 asolução permanece no seu estado inicial x0 para sempre.•A estabilidade do equilíbrio é assim somente determinada pela constante
a, a > 0 equilibrio instavel; x(t)→∞ ∀ x0 6= 0
a < 0 equilibrio assimptoticamente estavel; x(t)→ 0 ∀ x0 6= 0
a = 0 equilibrio estavel; x(t) = x0 ∀ x0
10.2 Vectores e valores próprios
•Voltando ao sistema linear bidimensional 9.23,
X = AX,
sendo este constituído por duas equações lineares de 1a ordem, o resultadoanterior sugere que tentemos também uma solução da forma exponencialpara cada equação,
x(t) = c1 eλt (10.7)
y(t) = c2 eλt,
note-se que o mesmo valor de λ é comum, i.e. assume-se que ambas assoluções são múltiplas da mesma função do tempo eλt.
62
10.2. VECTORES E VALORES PRÓPRIOS
•Numa forma mais compacta podemos escrever,
X = Ceλt, (10.8)
onde C é uma matriz coluna,
C =
[c1c2
].
•Inserindo esta solução no sistema 9.23 vem,
λCeλt = ACeλt, (10.9)
repare-se que esta equação é a equação de valores próprios da matriz A, poistem a forma,
λX = AX, (10.10)
onde λ é um valor próprio da matriz A associado ao vector próprio X.•Voltando à eq. 10.9, cancelando as exponenciais, transpondo e inserindo
a matriz identidade I entre λ e C obtemos,
(A− λI)C = 0 (10.11)
ou explicitamente, expandindo as matrizes,[a− λ bc d− λ
] [c1c2
]=
[00
]. (10.12)
•Uma solução trivial da equação anterior é C = 0, na qual o sistema estáem equilíbrio.•Recordando a teoria das equações lineares algébricas, soluções não tri-
viais dum sistema de equações homogéneas requerem que o determinante damatriz de coecientes se anule,
|A− λI| = 0 (10.13)∣∣∣∣ a− λ bc d− λ
∣∣∣∣ = 0 (10.14)
λ2 − (a+ d)λ+ ad− bc = 0 (10.15)
esta equação é a chamada equação característica do sistema, e o lado esquerdoé o chamado polinómio característico. Já voltaremos a esta equação.
63
10.3. VALORES PRÓPRIOS E ESTABILIDADE
•Determinados os diferentes valores próprios, λ1 e λ2 (resolvendo a equa-ção anterior) temos de encontrar os correspondentes vectores próprios C1 eC2 através da equação,
λiCi = ACi i = 1, 2, (10.16)
repare-se que multiplicando esta equação por uma constante α a igualdademantém-se. Assim se Ci é um vector próprio αCi também o será.•Cada par, vector, valor próprio dene assim uma solução do sistema
inicial 9.23 que de acordo com a eq. 10.8 se pode escrever,
Xi = Cieλit i = 1, 2. (10.17)
•Contudo a solução mais geral do sistema inicial 9.23 será uma combina-ção linear das soluções 10.17,
X(t) = α1C1eλ1t + α2C2e
λ2t (10.18)
onde as constantes α1 e α2 são determinadas pelas condições iniciais.•Os valores próprios, que podem ser reais ou complexos, denem a vari-
ação temporal da evolução do sistema.
10.3 Valores próprios e estabilidade
•Para caracterizar a estabilidade do sistema temos de conhecer os valorespróprios.•Voltando à equação característica 10.15, esta pode ser escrita na forma,
λ2 − Tλ+D = 0 (10.19)
onde T = a+d é o traço e D = ad− bc o determinante da matriz do sistema.•As raízes desta equação são os valores próprios,
λ =T
2±√T 2
4−D (10.20)
•A estabilidade dum sistema linear de segunda ordem pode ser resumidano seguinte gráco do determinante em função do traço, onde se representam,pontos xos (círculos azuis) com algumas trajectórias no espaço de fase. Onome de cada ponto xo está indicado,
64

10.3. VALORES PRÓPRIOS E ESTABILIDADE
Estável Instável
Não hiperbólico
Ponto de sela
Não hiperbólico
Centro
Nó impróprio
Nó próprio
Nó
Foco
Nó impróprio
Nó próprioFoco
Nó
D = ad - bc 4 D = T2
T / 2λ com
plexo
λ real λ com
plexo
λ rea
l
Diagrama de estabilidade
65

10.3. VALORES PRÓPRIOS E ESTABILIDADE
66

Aula 11
Oscilador harmónico
Sumário:
- Análise da estabilidade do OH
Oscilador harmónico simplesOscilador harmónico amortecido
11.1 Estabilidade do OHS
•Já estudámos na aula anterior o oscilador harmónico simples. Como exer-cício vamos analisar a matriz deste sistema dinâmico para caracterizar aestabilidade do seu ponto xo e encontrar a solução usando a eq. 10.18.•O OHS é descrito pelo sistema 9.5 que aqui repetimos,
y = ω uu = −ω y
onde y é a amplitude e u = v/ω é a velocidade renormalizada.•Na forma matricial podemos escrever,[
yu
]=
[0 ω−ω 0
] [yu
]≡ X = AX (11.1)
•O ponto xo deste sistema é (y = 0, u = 0) que é a origem no espaço defase.•Para analisar a estabilidade temos que encontrar os valores próprios da
matriz A. Usando o comando eigenvectors do Maxima, obtemos logo osvalores e vectores próprios de A,A:matrix([0,w],[-w,0]);eigenvectors(A);o resultado é uma lista com dois elementos,[[[- %i w, %i w], [1, 1]], [1, - %i], [1, %i]],o 1o elemento é outra lista com dois elementos, sendo o 1o os valores próprios
67

11.1. ESTABILIDADE DO OHS
iω e −iω e o 2o a multiplicidade [1, 1], (1 indica que o valor próprio sóaparece uma vez, 2 aparece duas vezes, etc.). O 2o elemento da primeiralista contém os vectores próprios associados aos valores próprios, [1, - %i]e [1, %i].•Os dois valores próprios são imaginários puros. O traço da matriz é zero
e o determinante é positivo, logo o ponto xo diz-se um centro.•Analisemos a solução geral eq. 10.18 com os dados obtidos,
X(t) = α1C1eλ1t + α2C2e
λ2t (11.2)[yu
]= α1
[1−i
]eiωt + α2
[1i
]e−iωt (11.3)
ou escrevendo sob a forma dum sistema de equações,y = α1e
−iωt + α2eiωt
u = −iα1e−iωt + iα2e
iωt (11.4)
•Usando a formula de Euler eiθ = cos(θ) + i sin(θ) o sistema anterior ca,
y = (α1 + α2) cos(ωt) + i(−α1 + α2) sin(ωt)u = −(α1 + α2) sin(ωt) + i(−α1 + α2) cos(ωt)
(11.5)
só importa a parte real das expressões anteriores, e escrevendo a velocidadeem unidades SI,
y = (α1 + α2) cos(ωt)v = −ω(α1 + α2) sin(ωt)
(11.6)
recuperamos a solução na forma da eq. 9.10.
Concretizemos o exemplo anterior usando os mesmos dados doexemplo 4.3, nomeadamente, massa m = 1/3 e uma constante elás-tica da mola k = 1. As condições iniciais são, no instante t=0a partícula parte do repouso no ponto y=1. A frequência angulardeste oscilador é: ω =
√k/m =
√3.
Para as condições iniciais dadas as soluções particulares são,y(0) = 1v(0) = 0
≡ α1 = α2 = 0.5 ⇒y(t) = cos(
√3t)
v(t) = −ω sin(√
3t)
Segue-se a lista de comandos Maxima.
68

11.2. ESTABILIDADE DO OH AMORTECIDO
/*_________________________________________________*//*Exemplo 6.1*//* A matriz do sistema é */m:matrix([0,sqrt(3)],[-sqrt(3),0]);
/*Os valores e vectores próprios são: */eigenvectors(m);
/* valores pro. [- sqrt(3) %i, sqrt(3) %i] *//* vectores pro. [1, - %i] e [1, %i]] */
/*Sendo os valores prop. imaginários puros o ponto*//*fixo na origem (y=0,u=0) é um centro. *//*No espaço de fase a trajectória correspondentente*//*às c.i. dadas é:*/plotdf([sqrt(3)*y,- sqrt(3)*x],[trajectory_at,1,0],[versus_t,1]);
11.2 Estabilidade do OH amortecido
•Vamos agora estudar o efeito do atrito num oscilador harmónico. Para talconsideremos uma força de atrito proporcional à velocidade, Fa = −av, quevai dissipar energia do oscilador.•A equação do movimento ca então,
m~a = ~Fe + ~Fa (11.7)
md2~y
dt2= −k~y − ad~y
dt(11.8)
deixando a notação vectorial, uma vez que o movimento é unidimensional, edividindo tudo por m obtemos,
d2y
dt2+a
m
dy
dt+k
my = 0 (11.9)
•Fazendo b = a/m e usando a velocidade normalizada u = v/ω, o sistemade EDO1 equivalente a esta EDO2 é,
y = ω uu = −ω y − b u (11.10)
•O ponto xo deste sistema é também (y = 0, u = 0) que é a origem noespaço de fase.
69

11.2. ESTABILIDADE DO OH AMORTECIDO
•Para analisar a estabilidade temos mais uma vez que encontrar os valorespróprios da matriz do sistema. Usando o Maxima,A:matrix([0,w],[-w,-b]);eigenvectors(A);obtemos os valores próprios, λ1 = − b
2−√
(b2−4ω2)
2
λ2 = − b2
+
√(b2−4ω2)
2
(11.11)
•Se b < 2ω os dois valores próprios são números complexos com parte realnegativa. O traço da matriz é negativo e o determinante é positivo, logo oponto xo diz-se um foco estável. O caso em que b = 0 reduz-se ao exemploanterior dum OHS.•Se b > 2ω os dois valores próprios são números reais. O traço da matriz
é negativo e o determinante é positivo, logo o ponto xo diz-se um nó estável.•Quando b = 2ω o ponto xo é um nó impróprio estável. A este amor-
tecimento dá-se o nome de amortecimento crítico. A interpretação físicapara este ponto xo, é que quando deixa de ser um foco signica que o os-cilador deixa de efectuar qualquer oscilação entre o ponto inicial e o pontode equilíbrio, i.e. largando o oscilador da posição inicial, este desloca-se logopara a posição de equilíbrio, sem nunca a ultrapassar. O oscilador perde todaa energia potencial elástica entre estes dois pontos.•O amortecimento inferior ao crítico chama-se amortecimento fraco e se
for superior, amortecimento forte.
Concretizemos o exemplo anterior usando os mesmos dados doexemplo 4.3, nomeadamente, massa m = 1/3 e uma constante elás-tica da mola k = 1. As condições iniciais são, no instante t=0 apartícula parte do repouso no ponto y=1.Segue-se a lista de comandos Maxima.
/*_________________________________________________*//*Exemplo 6.2*/
/*Oscilador harmónico amortecido*//* A matriz do sistema é */A:matrix([0,sqrt(3)],[-sqrt(3),-b]);
/*Os valores e vectores próprios são: */
70

11.2. ESTABILIDADE DO OH AMORTECIDO
eigenvectors(A);
/*amortecimento fraco b=sqrt(3) < 2 sqrt(3)*/plotdf([sqrt(3)*y,- sqrt(3)*x-sqrt(3)*y],[trajectory_at,1,0],[versus_t,1],[direction,forward],[xradius,1.2],[yradius,1.2],[tstep,0.1]);
-1.2 -0.8 -0.4 0 0.4 0.8
-0.8
-0.4
0
0.4
0.8
1.2
u
y
Foco estável
y(t)u(t)
0 2.5 7.5
-0.8
-0.4
0
0.4
0.8
1.2
5
/*amortecimento crítico b= 2 sqrt(3)*/plotdf([sqrt(3)*y,- sqrt(3)*x-2*sqrt(3)*y],[trajectory_at,1,0],[versus_t,1],[direction,forward],[xradius,1.2],[yradius,1.2],[tstep,0.1],[xfun,"-x"]);
-1.2 -0.8 -0.4 0 0.4 0.8
-0.8
-0.4
0
0.4
0.8
1.2
-x
Nó impróprio estável
u
y
y(t)u(t)
0 2.5 7.5
-0.8
-0.4
0
0.4
0.8
1.2
5
/*amortecimento forte b= 3 sqrt(3)>2 sqrt(3)*/plotdf([sqrt(3)*y,- sqrt(3)*x-3*sqrt(3)*y],[trajectory_at,1,0],[versus_t,1],[direction,forward],[xradius,1.2],[yradius,1.2],[tstep,0.1],[xfun,"-2.618*x;-0.3819*x"]);
71

11.2. ESTABILIDADE DO OH AMORTECIDO
-1.2 -0.8 -0.4 0 0.4 0.8
-0.8
-0.4
0
0.4
0.8
1.2
(-2.618 * x)(-0.3819 * x)
Nó estávelu
y
y(t)u(t)
0 2.5 7.5
-0.8
-0.4
0
0.4
0.8
1.2
5
•Para obter a solução geral do oscilador harmónico amortecido, pode-mos optar por substituir os vectores e valores próprios obtidos (ver 11.11)em 10.18, ou calcular a solução aplicando o comando ode2 à EDO2 11.9. Osdois processos são equivalentes.•Utilizando o segundo processo,
eqd:'diff(y,t,2)+b*'diff(y,t)+w*w*y=0;e escolhendo um caso com amortecimento fraco,solgeral:ode2(eqd,y,t);positive;a solução geral obtida é,
y(t) = e−b2t(
%k1 sin(t√ω2 − b2/4
)+ %k2 cos
(t√ω2 − b2/4
)),
(11.12)
a parte entre parêntesis descreve uma oscilação sinusoidal com uma frequên-cia angular amortecida ωa =
√ω2 − b2/4 que é inferior à frequência angular
natural do oscilador harmónico simples ω. A amplitude desta oscilação decaiexponencialmente com o tempo, devido ao factor e−bt/2.•A solução particular que descreve o exemplo anterior (ω = b =
√3 e c.i.
y(0) = 1, y′(0) = 0), é obtida com,ic2(ev(solg,b=sqrt(3),w=sqrt(3)),t=0,y=1,diff(y,t)=0);
y(t) = e−b2t 2√
3sin(ωa t+
π
3
)(11.13)
onde ωa = 3/2 é a frequência angular amortecida.
72
Aula 12
continuação
Sumário:
- Oscilador harmónico forçado
Ressonância de amplitudeRessonância de energiaImpedânciaPotência transferida para o oscilador
12.1 Oscilador harmónico forçado
•Outro problema de grande importância prática são as vibrações forçadasque ocorrem quando um oscilador é forçado a oscilar por uma força externaque também oscila no tempo.•Exemplos de oscilações forçadas são: a oscilação forçada dum edifício
quando o solo onde ele está assente também oscila, a oscilação dum osciladoreléctrico (que existem nas televisões, nos telemóveis, nos rádios, etc.) for-çada pela acção duma onda electromagnética captada pela antena do circuitoeléctrico, etc.•Consideremos uma força sinusoidal externa com a forma,
Fext(t) = F0 cos(ωf t), (12.1)
sendo F0 a amplitude máxima da força e ωf a sua frequência angular.•Se a força anterior actua na massa m do oscilador harmónico amorte-
cido, considerado anteriormente, então a equação do movimento 11.7 altera-separa,
ma = Fe + Fa + Fext(t) (12.2)d2y
dt2+ b
dy
dt+ ω2
0 y = f cos(ωf t), (12.3)
73

12.1. OSCILADOR HARMÓNICO FORÇADO
onde f = F0/m e a frequência angular natural do oscilador harmónico semamortecimento foi denominada por ω0 =
√k/m para a distinguir das outras
duas frequências ωa e ωf .•Voltando a considerar mais uma vez o caso do amortecimento fraco (b <
2ω0) podemos obter a solução geral deste oscilador forçado unidimensional,com o comando ode2,eqd:'diff(y,t,2)+b*'diff(y,t)+wo 2*y=f*cos(wf*t);solgeral:ode2(eqd,y,t);positive;•A solução geral obtida é,
y = e−b t2
(%k1 sin
(t√
4ω02 − b2
2
)+ %k2 cos
(t√
4ω02 − b2
2
))+
f cos (t ωf ) ω02 + b f ωf sin (t ωf )− f ωf
2 cos (t ωf )
ω04 − 2ωf
2 ω02 + ωf
4 + b2 ωf2
(12.4)
o segundo termo desta equação pode ser simplicado da seguinte forma,
f(ω2
0 − ω2f ) cos(ωf t) + b ωf sin(ωf t)(ω20 − ω2
f
)+ b2 ω2
f
fazendo A = ω20 − ω2
f e B = b ωf a expressão anterior ca,
fA cos(ωf t) +B sin(ωf t)
A2 +B2,
repare-se que fazendo sinα = A/√A2 +B2 e cosα = B/
√A2 +B2 se verica
que cos2 α + sin2 α = 1 logo podemos escrever o segundo termo da soluçãogeral como,
fsinα cos(ωf t) + cosα sin(ωf t)√
A2 +B2= f
sin(ωf t+ α)√A2 +B2
,
depois de todas estas contas, obtemos uma expressão muito mais simplescompensando o nosso trabalho. Então usando a frequência angular de amor-tecimento ωa =
√ω20 − b2 e a simplicação obtida do segundo termo, pode-
mos reescrever a solução geral do oscilador forçado como,
y(t) = e−b2t ( %k1 sin(ωa t) + %k2 cos(ωa t)) +
f√A2 +B2
sin(ωf t+ α). (12.5)
•A interpretação da expressão anterior é muito mais fácil. Visualiza-serapidamente que a solução geral do oscilador forçado é composta da solução
74

12.1. OSCILADOR HARMÓNICO FORÇADO
geral do oscilador amortecido 11.12 mais um termo sinusoidal com frequênciaigual a ωf e amplitude f/
√A2 +B2.
•Ou seja, à medida que o tempo passa o primeiro termo decai oscilandoexponencialmente para zero, restando o segundo termo devido à força ex-terna. O oscilador ca a oscilar com frequência igual à da força externa ωf eamplitude f/
√A2 +B2.
•A força externa fornece a energia necessária para manter a oscilação.
•Como se comporta a amplitude do oscilador?
12.1.1 Ressonância de amplitude
•Expandindo a expressão da amplitude obtemos,
f√A2 +B2
=f√(
ω20 − ω2
f
)2+ b2 ω2
f
(12.6)
onde se observa que se ωf varia a amplitude é máxima quando o denominadortiver o valor mínimo, o que ocorre quando a frequência da força externa tivero valor,
ωr =
√ω20 −
b2
2(12.7)
=
√k
m− a2
2m2, (12.8)
esta frequência ωr é chamada frequência de ressonância da amplitude.
•Se o amortecimento a for nulo a frequência de ressonância é igual àfrequência natural do oscilador. Quando ωf → ω0 a amplitude do osciladortende para innito. Na prática esta situação nunca ocorre pois todos os osci-ladores são amortecidos. Contudo se o amortecimento for baixo, a amplitudede ressonância pode ser muito elevada como ilustra a gura seguinte paratrês amortecimentos diferentes, a, a/2 e a/3.
75

12.1. OSCILADOR HARMÓNICO FORÇADO
2ω0
F0/k
ω0
a
a/2
a/3
ωf
amplitude
Considere-se o mesmo oscilador amortecido do Exemplo 6.2 quandosujeito a uma força externa Fext(t) = cos(ωf t). Calcular a frequên-cia de ressonância de amplitude e a solução particular que verica asc.i. dadas, quando o amortecimento é fraco b =
√3/100. Visuali-
zar o comportamento desta solução para diferentes valores de ωf eidenticar a frequência de ressonância.Segue-se a lista de comandos Maxima.
/*_________________________________________________*/
eq:'diff(y,t,2)+b*'diff(y,t)+Wo^2*y=f*cos(Wf*t);
sol:ode2(eq,y,t);positive;/*positive->amortecimento fraco*/
/*frequência de ressonância Wr=sqrt(Wo^2-b^2/2)*//*Usando os dados do problema anterior Wo=sqrt(3)*//*com b=wo/100*/wr:sqrt(3-3/200);/*wr=1.7277*/
/*A solução particular para as C.I. anteriores é:*/
solp:ic2(ev(sol,b=sqrt(3)/100,f=1,Wo=sqrt(3)),t=0,y=1,diff(y,t)=0)$
76

12.1. OSCILADOR HARMÓNICO FORÇADO
define(y1(t,Wf),rhs(solp))$
plot3d(y1(t,Wf),[t,0,30],[Wf,0,3],[grid,40,40],[plot_format,gnuplot]);
-8-6-4-2 0 2 4 6 8 0
5
10
15
20
25
30 0 0.5 1 1.5 2 2.5 3 3.5
Tem
po
ω f
y1
ω r = 1.727
/*A amplitude mais elevada corresponde à região *//*amarela que ocorre para wf=wr=1.73*//*Este aumento de amplitude é mais visível quando *//*se representa o módulo da amplitude */plot3d(abs(y1(t,Wf)),[t,0,30],[Wf,0,3],[grid,40,40],[plot_format,gnuplot]);
0 1 2 3 4 5 6 7 8 0
5
10
15
20
25
30 0 0.5 1 1.5 2 2.5 3 3.5
Tem
po
ω f
|y1|
ω r = 1.727
•Como se comporta a amplitude da velocidade dum oscilador forçado?
12.1.2 Ressonância de energia
•Passados 10/b segundos, o primeiro termo da solução geral 12.5 é inferiora 1% do seu valor inicial. Com o passar do tempo é o segundo termo quecaracteriza o movimento do oscilador forçado.
77

12.1. OSCILADOR HARMÓNICO FORÇADO
•Desprezando o primeiro termo da solução geral 12.5 pelas razões atrásindicadas, a velocidade do oscilador forçado é dada por,
v(t) =dy(t)
dt
=fωf√(
ω20 − ω2
f
)2+ b2 ω2
f
cos(ωf t+ α) (12.9)
=F0√
(k/ωf −mωf )2 + a2cos(ωf t+ α) (12.10)
= v0 cos(ωf t+ α) (12.11)
•A amplitude da velocidade v0 varia com ωf e tem um valor máximoquando k/ωf −mωf = 0, ou
ωf =
√k
m= ω0. (12.12)
•Recordemos que,
sinα =ω20 − ω2
f√(ω20 − ω2
f
)2+ b2 ω2
f
logo quando ωf = ω0 implica que α = 0.•Comparando 12.11 com a expressão F = F0 cos(ωf t), para a força ex-
terna vemos que as duas estão desfasadas de α.•Resumindo, quando ωf = ω0 a velocidade, e consequentemente a
energia cinética do oscilador, são máximas. Diz-se que há ressonân-cia de energia. O facto de nesse caso α = 0 signica que quando ocorreressonância de energia a força está em fase com a velocidade.•O trabalho efectuado sobre o oscilador pela força externa, por unidade
de tempo é ~Fext · ~v e é sempre positivo quando ~Fext e ~v estão em fase.•Portanto em ressonância de energia é máxima a transferência
de energia da força externa para o oscilador.•Se o amortecimento é muito pequeno, não há grande diferença entre as
frequências de ressonância de amplitude e de ressonância de energia.•Note-se que na ressonância de amplitude é máxima a amplitude de os-
cilação do oscilador, enquanto que na ressonância de energia é máxima aamplitude da velocidade do oscilador ou equivalentemente é máxima a ener-gia cinética do oscilador.
78

12.1. OSCILADOR HARMÓNICO FORÇADO
•Chama-se a atenção que quando a amplitude do movimento é muitoelevada, a equação do movimento pode já não ser válida. Aliás o sistemapode mesmo sofrer alterações drásticas que levam à sua alteração, ou mesmodestruição.•Em seguida são indicados dois exemplos que ilustram a destruição de
sistemas físicos, pelo facto de estes serem forçados a oscilar na sua frequênciade ressonância. O primeiro exemplo é a destruição de um copo, que é forçadoa oscilar, por uma onda sonora, numa das suas frequências de ressonância.Pode descarregar o video em http://paginas.fe.up.pt/ fsal/demoExp/partircoposom.avi. O segundo exemplo ocorreu em 7 de Novembro de 1940 quandoo tabuleiro da ponte de Tacoma Narrows, solidamente construida, perto seSeattle nos EUA foi forçado a oscilar, por ventos moderados, numa das suasfrequências de ressonância, tendo a amplitude das oscilações crescido tantoque levou à destruição da ponte. Pode descarregar um dos múltiplos vídeosdisponíveis na internet em http://paginas.fe.up.pt/fsal/eic0010/TacomaNarrows.mpeg .•A ressonância tem vastas aplicações. Por exemplo é possível o uso de
osciladores eléctricos para captar apenas ondas electromagnéticas com a suafrequência de ressonância. Este processo é usado na sintonia de canais derádio ou televisão, ou em geral qualquer transmissor (como o telemóvel).
12.1.3 Impedância
•A grandeza que surge no denominador da amplitude da velocidade, v0, em12.10 é chamada de impedância e designada por Z,
Z =
√(k/ωf −mωf )2 + a2 (12.13)
•O primeiro termo dentro da raiz é a reactância do oscilador, X, e osegundo termo é a resistência do oscilador, R,
X = k/ωf −mωf R = a (12.14)
•Ou seja,
Z =√X2 +R2 (12.15)
•No estudo da corrente alternada encontraremos circuitos osciladores eléc-tricos que são descritos por equações diferenciais análogas às aqui estudadas.Todos os conceitos aqui denidos têm correspondente análogo nesses circui-tos.
79

12.1. OSCILADOR HARMÓNICO FORÇADO
•Podemos então escrever a velocidade do oscilador numa forma mais com-pacta,
v =F0
Zcos(ωf t+ α) (12.16)
12.1.4 Potência transferida para o oscilador
•Voltando ao trabalho por unidade de tempo realizado pela força externasobre o oscilador, ou seja a potência, P , transferida para o oscilador, estapode se escrever como,
P = Fextv =F 20
Zcos(ωf t+ α) cos(ωf t), (12.17)
esta é a potência instantânea.•Como a força oscila no tempo, é importante saber qual o valor médio da
potência que denimos assim,
P =1
T
T∫0
Pdt (12.18)
introduzindo o valor de P vem,
P =1
T
T∫0
Fext v dt (12.19)
=F 20
ZT
T∫0
cos(ωf t+ α) cos(ωf t) dt
=F 20
ZT
T∫0
(cos(ωf t) cos(α)− sin(ωf t) sin(α)) cos(ωf t) dt
=F 20
ZT
cos(α)
T∫0
cos2(ωf t) dt︸ ︷︷ ︸T2
− sin(α)
T∫0
sin(ωf t) cos(ωf t) dt︸ ︷︷ ︸0
=
F 20
2Zcos(α)
80

12.1. OSCILADOR HARMÓNICO FORÇADO
•Notando que cosα = RZ, podemos escrever a potência média numa forma
equivalente à anterior,
P =F 20
2Zcos(α) =
F 20R
2Z2=
1
2Rv20 (12.20)
como R é xa a transferência máxima de energia ocorre quando v0 é máximo,ou seja quando α = 0 ou ωf = ω0 ou Z = R,
Pmax =F 20
2R(12.21)
81

12.1. OSCILADOR HARMÓNICO FORÇADO
82

Aula 13
Sistemas não lineares
Sumário:
- Sistemas não lineares
- Série de Taylor
- Linearização
- Método de Ruge-Kutta
13.1 Sistemas não lineares
•Como vimos anteriormente numa equação diferencial linear a variável de-pendente e as suas derivadas, surgem apenas em combinações lineares, comopor exemplo,
dy
dt= ay + b, (13.1)
onde a e b são constantes. Mesmo se a e b fossem funções complicadas de t(a variável independente) a equação continuava a ser linear.•Se numa equação diferencial surgem combinações não lineares da variável
independente ou suas derivadas, a equação diz-se não linear.•Alguns exemplos de equações diferenciais não lineares são,
dy
dt= ay2 + b (13.2)
dy
dt= a sin(y)
d2y
dt2+
(dy
dt
)3
= ay
•Não existem técnicas analíticas gerais para resolver equações diferenciaisnão lineares e os métodos numéricos apresentam mais problemas do que nocaso das equações lineares.
83

13.2. SÉRIE DE TAYLOR
•Contudo os problemas físicos mais realistas são quase sempre governadospor equações diferenciais não lineares.•A análise gráca, em particular o campo de direcções, pode fornecer in-
formação importante para caracterizar as soluções duma equação diferencialnão linear.•Também se pode obter informação muito importante sobre o comporta-
mento da solução duma equação diferencial não linear, analisando o compor-tamento da solução numa vizinhança dos pontos xos da equação diferencial.•Quando essa vizinhança é muito próxima do ponto xo, podemos reduzir
a equação diferencial não linear, nessa vizinhança, a uma equação linear. Esteprocesso chama-se linearização da equação da equação não linear.•Antes de prosseguir com a linearização, vamos introduzir (rever) a série
de Taylor.
13.2 Série de Taylor
•Muitas vezes necessitamos duma aproximação a uma função f(x) para va-lores de x perto de um determinado ponto x = a.•Expandindo a função f(x) em torno de x = a em série de Taylor obte-
mos,
f(x) = f(a) + (x− a)f ′(a) +(x− a)2
2!f ′′(a) +
(x− a)3
3!f ′′′(a) + · · · (13.3)
•Repare-se que o 1o termo da série de Taylor é um ponto f(a), o 1o + o2o termo é uma recta que passa por esse ponto com declive f ′(a), o 1o + o2o + o 3o termo é uma parábola que passa também pelo mesmo ponto, etc..•No Maxima a expansão em série (truncada) de Taylor até ordem n
obtém-se com o comando taylor(f(x),x,a,n). Por exemplo, calculemosos 3 primeiros termos da expansão da função sinx em torno de x = π/4,Taylor(sin(x),x,%pi/4,3)o resultado é,
sin(x) = sin a+ cos a (x− a) +
−sin a (x− a)2
2− cos a (x− a)3
6+ · · · (13.4)
=
√2
2+
√2
2
(x− π
4
)+
−√
2
4
(x− π
4
)2−√
2
12
(x− π
4
)3+ · · · (13.5)
podemos visualizar gracamente esta expansão sobrepondo os grácos de
84
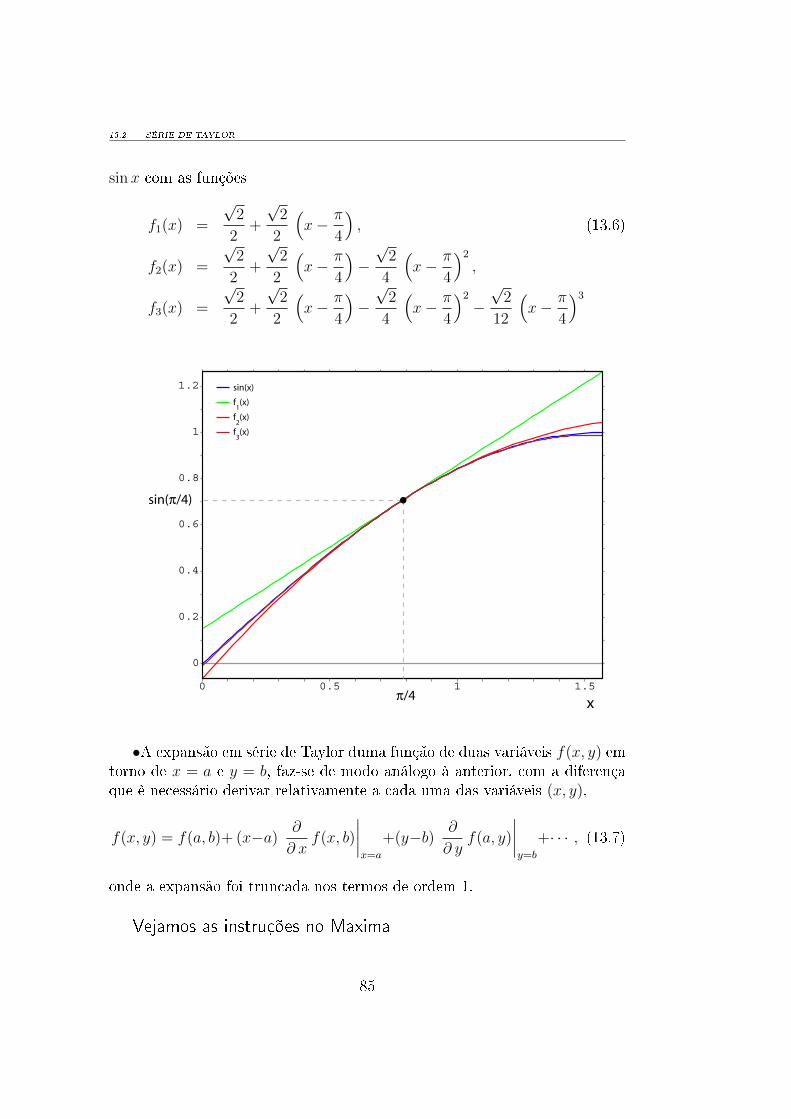
13.2. SÉRIE DE TAYLOR
sinx com as funções
f1(x) =
√2
2+
√2
2
(x− π
4
), (13.6)
f2(x) =
√2
2+
√2
2
(x− π
4
)−√
2
4
(x− π
4
)2,
f3(x) =
√2
2+
√2
2
(x− π
4
)−√
2
4
(x− π
4
)2−√
2
12
(x− π
4
)3
0 0.5 1 1.5
0
0.2
0.4
0.6
0.8
1
1.2 sin(x)
f1(x)
f2(x)
f3(x)
sin(π/4)
π/4 x
•A expansão em série de Taylor duma função de duas variáveis f(x, y) emtorno de x = a e y = b, faz-se de modo análogo à anterior, com a diferençaque è necessário derivar relativamente a cada uma das variáveis (x, y),
f(x, y) = f(a, b)+ (x−a)∂
∂ xf(x, b)
∣∣∣∣x=a
+(y−b) ∂
∂ yf(a, y)
∣∣∣∣y=b
+· · · , (13.7)
onde a expansão foi truncada nos termos de ordem 1.
Vejamos as instruções no Maxima
85

13.3. LINEARIZAÇÃO
/*_________________________________________________*//*Exemplo 7.1*/
/* 1os termos da expanção em série de Taylor de *//* sin(x) em torno do ponto x=pi/4 */
taylor(sin(x),x,a,3);taylor(sin(x),x,%pi/4,3);
plot2d([sin(x),sqrt(2)/2+sqrt(2)*(x-%pi/4)/2,sqrt(2)/2+sqrt(2)*(x-%pi/4)/2+sqrt(2)*(x-%pi/4)^2/4,sqrt(2)/2+sqrt(2)*(x-%pi/4)/2+sqrt(2)*(x-%pi/4)^2/4+sqrt(2)*(x-%pi/4)^3/12,],[x,0,%pi/2]);
13.3 Linearização
•Linearizar uma função não linear, consiste em expandir essa função numasérie de Taylor retendo apenas os termos lineares, i.e. de primeira ordem.•Por exemplo a linearização da função sinx em torno do ponto x = π/4,
consiste em usar apenas,
sin(x) ≈√
2
2+
√2(x− π
4
)2
(13.8)
reportando-nos à gura anterior, a linearização consiste em usar apenas arecta f1 que passa no ponto π/4 em vez de usar a função sin(x).•Note-se que só faz sentido usar a função linearizada numa pe-
quena vizinhança em torno de π/4, pois como se vê na gura anterior,só nessa vizinhança é que as duas curvas são aproximadamente iguais.•Consideremos então que um sistema autónomo, não linear, de segunda
ordem é denido por duas equações diferenciais de primeira ordem,x = f(x, y)y = g(x, y)
(13.9)
•Sejam (xf , yf ) as coordenadas dum ponto xo deste sistema dinâmico.•Para analisar a estabilidade deste sistema não linear, numa vizinhança
muito próxima do ponto xo vamos linearizar as funções f(x, y) e g(x, y) eem seguida fazer a análise do sistema linear(izado), que é idêntica à feita nasecção 10.
86
13.4. MÉTODO DE RUGE-KUTTA DE 4a ORDEM
•Então expandindo em série de Taylor, f e g em torno de x = xf e y = yfe retendo apenas os termos até primeira ordem vem,
f(x, y) = f(xf , yf ) + (x− xf )∂f
∂x
∣∣∣∣(xf ,yf )
+ (y − yf )∂f
∂y
∣∣∣∣(xf ,yf )
+ . . .
g(x, y) = g(xf , yf ) + (x− xf )∂g
∂x
∣∣∣∣(xf ,yf )
+ (y − yf )∂g
∂y
∣∣∣∣(xf ,yf )
+ . . .
•Por denição de ponto xo, f(xf , yf ) = g(xf , yf ) = 0 logo o sistema 13.9linearizado ca,
x = (x− xf ) ∂f∂x
∣∣(xf ,yf )
+ (y − yf ) ∂f∂y
∣∣∣(xf ,yf )
y = (x− xf ) ∂g∂x
∣∣(xf ,yf )
+ (y − yf ) ∂g∂y
∣∣∣(xf ,yf )
(13.10)
•Mudando a origem do referencial de (0, 0) para o ponto xo (xf , yf ) osistema linear anterior reduz-se a,
x = x ∂f∂x
∣∣(xf ,yf )
+ y ∂f∂y
∣∣∣(xf ,yf )
y = x ∂g∂x
∣∣(xf ,yf )
+ y ∂g∂y
∣∣∣(xf ,yf )
(13.11)
que escrito numa forma matricial vem,
[xy
]=
∂f
∂x
∂f
∂y
∂g
∂x
∂g
∂y
(xf ,yf )
[xy
](13.12)
onde a matriz que contém as derivadas de f e g se chama amatriz jacobianado sistema.•Resumindo, a análise da estabilidade dum sistema dinâmico não linear
numa vizinhança próxima dum ponto xo (xf , yf ) resume-se à análise damatriz jacobiana (calculando o seu determinante, o seu traço, os seus valorespróprios, etc.).
13.4 Método de Ruge-Kutta de 4a ordem
•Para calcular soluções particulares de equações diferenciais não lineares énecessário salvo raras excepções, recorrer ao cálculo numérico.•Em seguida vamos abordar o método de Runge-Kutta, substancialmente
mais robusto e preciso do que o método de Euler.
87

13.4. MÉTODO DE RUGE-KUTTA DE 4a ORDEM
•Pretendemos resolver a equação diferencial x = f(t, x), no intervalo[ti, tf ], a partir da condição inicial x(ti) = x0.•No método de Euler, o valor da função no instante tn+1 é calculado a
partir da derivada no instante tn.•No método de Runge-Kutta de 4a ordem, a derivada é calculada em 4
pontos do intervalo [tn, tn+h] e em seguida é usada uma média pesada destasderivadas para calcular o valor da função no instante tn+1.•Os passos no método de Runge-Kutta são os seguintes. Primeiro, calcula-
se a derivada no ponto inicial (ponto 1 na gura),
d1 = f(tn, xn), (13.13)
em seguida incrementa-se, em h/2 a variável independente e em h/2 d1 afunção xn e calcula-se nesse ponto (ponto 2 na gura) um segundo valor daderivada,
d2 = f(tn + h/2, xn + (h/2)d1). (13.14)
•Voltando ao ponto inicial, usa-se o valor d2 para novamente, se incre-mentar, em h/2 a variável independente e em h/2 d2 a função e calcula-senesse ponto (ponto 3 na gura) um terceiro valor da derivada,
d3 = f(tn + h/2, xn + (h/2)d2). (13.15)
•Voltando outra vez ao ponto inicial, usa-se o valor d3 para se incrementarem h a variável independente e em h d3 a função, obtendo-se nesse ponto(ponto 4 na gura) um quarto valor da derivada,
d4 = f(tn + h, xn + hd3) (13.16)
•Pode mostrar-se que o valor da derivada que conduz a um erro mínimoé a combinação linear,
d =1
6(d1 + 2d2 + 2d3 + d4) (13.17)
nalmente, com este valor médio da derivada d, volta-se outra vez ao pontoinicial, incrementa-se em h a variável independente tn e em h d a função xn,obtendo-se o valor de xn+1 (ponto 5 na gura), que está bastante próximoda solução exacta da equação (curva a azul).
88

13.4. MÉTODO DE RUGE-KUTTA DE 4a ORDEM
xn
tn
xn+hd
1/2
d1
tn+h/2 t
n+h = t
n+1
xn+hd
2/2
xn+hd
3/2
xn+1
= xn+hd
d2
d3
d4
2
1
3
4
Método de Runge-Kutta de 4ª ordem
5
•O processo repete-se em cada ponto (tn, xn), calculando-se o valor médioda derivada d, e com esse valor médio, d, obtém-se o ponto seguinte na formahabitual,
tn+1 = tn + h xn+1 = xn + hd (13.18)
•Na pakage dynamics está implementado o método de Runge-Kutta nocomando rk(f, x, x0, [t, ti, tf, h]);
89

13.4. MÉTODO DE RUGE-KUTTA DE 4a ORDEM
90

Aula 14
continuação
Sumário:
- O pêndulo simples
14.1 O pêndulo simples
•Um pêndulo simples consiste numa partícula de massa m que oscila emtorno dum ponto a que está presa por um o de comprimento l e massadesprezível, como indicado na gura.
θ
θ
T
P
P cosθ
P sinθ
l
Ponto fixo metaestável(ponto sela)
θ = ± π
Ponto fixo estável(centro)
θ = 0
•As forças que actuam na massa m são o peso ~P e a tensão no o ~T , logoa equação do movimento da massa é,
m~a = ~P + ~T (14.1)
91

14.1. O PÊNDULO SIMPLES
decompondo a aceleração nas componentes tangencial e normal vem,mat = −P sin θman = −P cos θ + T,
(14.2)
o movimento é essencialmente descrito pela primeira equação.•Se a massa percorrer um arco de comprimento s verica-se que s = θl.
Com esta relação podemos escrever a primeira equação do sistema anteriorcomo,
md2θ l
dt2= −mg sin θ
ld2θ
dt2= −g sin θ
d2θ
dt2= −g
lsin θ. (14.3)
•Conhecendo θ em qualquer instante t conhecemos a posição da massam nesse mesmo instante, para tal é necessário resolver a equação diferencialnão linear, de segunda ordem 14.3.•Não podendo determinar uma solução algébrica para a eq. 14.3 vamos
analisar esta equação para melhor estudar o movimento do pêndulo simplescomeçando por a reduzir a duas EDO1,
dθ
dt= ω
dω
dt= −g
lsin θ
(14.4)
•Os pontos xos deste sistema são os pontos no espaço de fase que veri-cam θ = 0, ω = 0. Conclui-se rapidamente que qualquer dos pontos,
(θ = 0± n2π, ω = 0) n = 1, 2, 3, · · · (14.5)
(θ = ±π ± n2π, ω = 0) n = 1, 2, 3, · · · (14.6)
São pontos xos. Os primeiros pontos xos indicados em 14.5 correspondemà posição do pêndulo parado na vertical com θ = 0 ou qualquer múltiplode 2π, enquanto os segundos pontos xos indicados em 14.6 correspondem àposição do pêndulo parado na vertical com θ = ±π ou qualquer múltiplo de2π.•Intuitivamente vemos que o primeiro ponto xo é estável enquanto o
segundo é metaestavél, pois parando o pêndulo na vertical com a massaacima do eixo de rotação (θ = ±π), qualquer perturbação afasta o pêndulodessa posição.
92
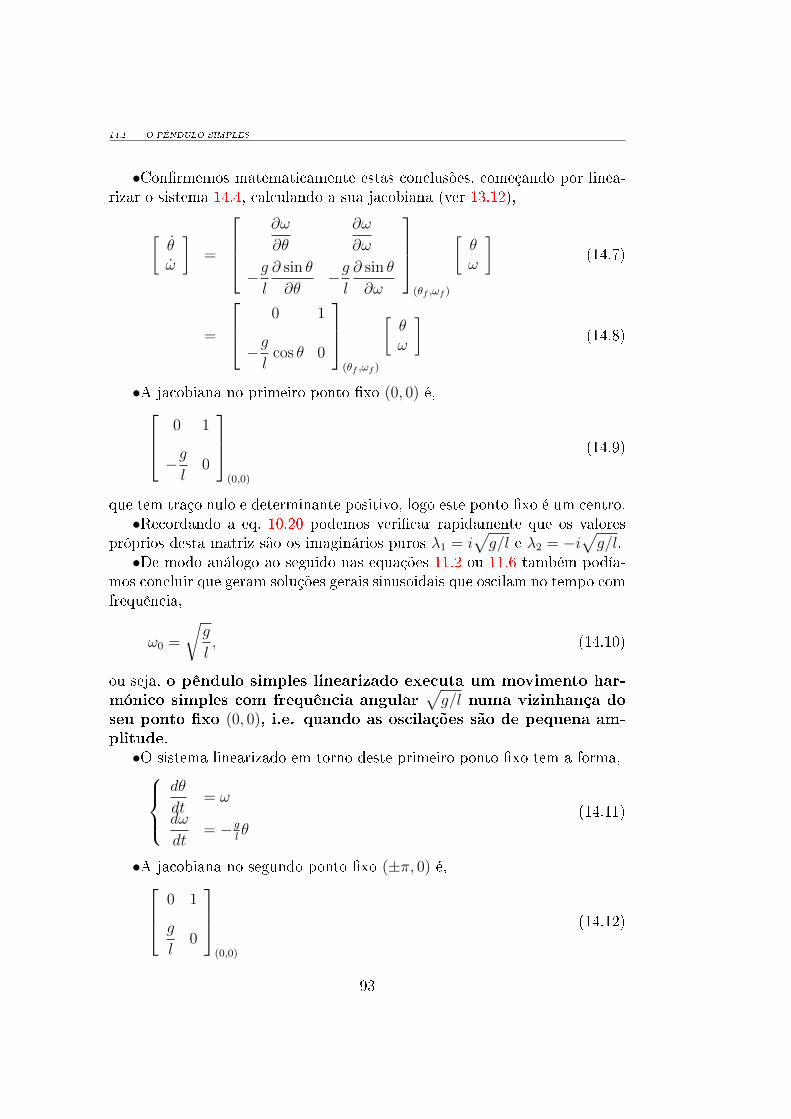
14.1. O PÊNDULO SIMPLES
•Conrmemos matematicamente estas conclusões, começando por linea-rizar o sistema 14.4, calculando a sua jacobiana (ver 13.12),
[θω
]=
∂ω
∂θ
∂ω
∂ω
−gl
∂ sin θ
∂θ−gl
∂ sin θ
∂ω
(θf ,ωf )
[θω
](14.7)
=
0 1
−gl
cos θ 0
(θf ,ωf )
[θω
](14.8)
•A jacobiana no primeiro ponto xo (0, 0) é, 0 1
−gl
0
(0,0)
(14.9)
que tem traço nulo e determinante positivo, logo este ponto xo é um centro.•Recordando a eq. 10.20 podemos vericar rapidamente que os valores
próprios desta matriz são os imaginários puros λ1 = i√g/l e λ2 = −i
√g/l.
•De modo análogo ao seguido nas equações 11.2 ou 11.6 também podía-mos concluir que geram soluções gerais sinusoidais que oscilam no tempo comfrequência,
ω0 =
√g
l, (14.10)
ou seja, o pêndulo simples linearizado executa um movimento har-mónico simples com frequência angular
√g/l numa vizinhança do
seu ponto xo (0, 0), i.e. quando as oscilações são de pequena am-plitude.•O sistema linearizado em torno deste primeiro ponto xo tem a forma,
dθ
dt= ω
dω
dt= −g
lθ
(14.11)
•A jacobiana no segundo ponto xo (±π, 0) é, 0 1
g
l0
(0,0)
(14.12)
93
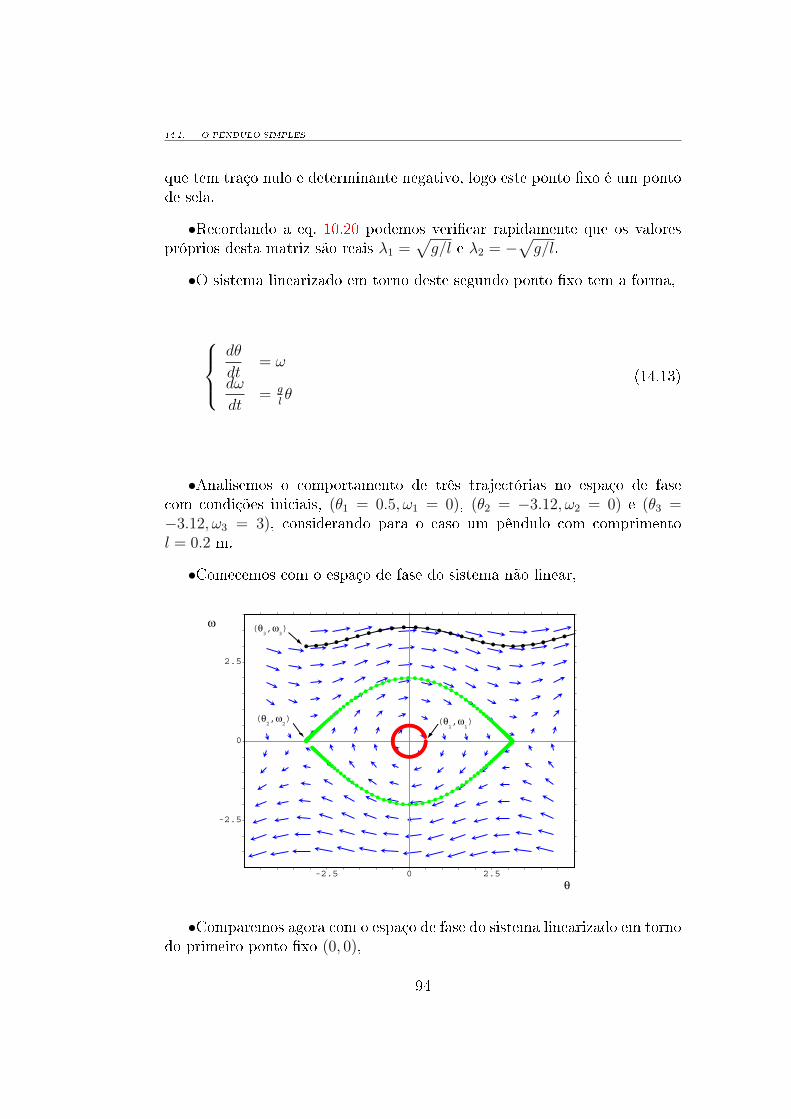
14.1. O PÊNDULO SIMPLES
que tem traço nulo e determinante negativo, logo este ponto xo é um pontode sela.
•Recordando a eq. 10.20 podemos vericar rapidamente que os valorespróprios desta matriz são reais λ1 =
√g/l e λ2 = −
√g/l.
•O sistema linearizado em torno deste segundo ponto xo tem a forma,
dθ
dt= ω
dω
dt= g
lθ
(14.13)
•Analisemos o comportamento de três trajectórias no espaço de fasecom condições iniciais, (θ1 = 0.5, ω1 = 0), (θ2 = −3.12, ω2 = 0) e (θ3 =−3.12, ω3 = 3), considerando para o caso um pêndulo com comprimentol = 0.2 m.
•Comecemos com o espaço de fase do sistema não linear,
-2.5 0 2.5
-2.5
0
2.5
(θ1,ω
1)(θ
2,ω
2)
(θ3,ω
3)ω
θ
•Comparemos agora com o espaço de fase do sistema linearizado em tornodo primeiro ponto xo (0, 0),
94

14.1. O PÊNDULO SIMPLES
-2.5 0 2.5
-20
-10
0
10
20
ω
θ
(θ1,ω
1)(θ
2,ω
2) (θ
3,ω
3)
•E com o espaço de fase do sistema linearizado em torno do segundoponto xo (π, 0),
-2.5 0 2.5
-8
-4
0
4
8
ω
θ
(θ2,ω
2)
(θ3,ω
3)
•Vamos nalmente calcular com o método de Runge-Kutta, as soluçõesparticulares usada na visualização do campo de direcções do sistema não-linear e do sistema linearizado, e comparar as duas soluções.
95

14.1. O PÊNDULO SIMPLES
não-linearlinear
-2.5 0 2.5
-20
-10
0
10
20
θ
ωnão-linearlinear
-2.5 0 2.5
-20
-10
0
10
20
θ
ω
•Verica-se que a solução particular com c.i. (θ1 = 0.5, ω1 = 0), dosistema não-linear é idêntica à do sistema linear. Porquê?•Já a solução particular com c.i. (θ2 = −3.12, ω2 = 0), do sistema não-
linear só coincide com a solução do sistema linear, numa região muito próximado ponto xo. Porquê?
Vejamos as instruções no Maxima usadas no estudo anterior dopêndulo simples.
/*_________________________________________________*//*Exemplo 8.1*/
/*pêndulo simples*/g0:9.8;l0:0.2;/*Sistem Nao Linear*/snl:[y,-g/l*sin(x)];
/*Pontos fixos*//*Ocorrem quando o pêndulo está na horizontal*//*ou quando o pêndulo está na vertical */pf:[[y=0,x=0],[y=0,x=%pi]];
/*Linearizacao do Sistema*/v:[x,y]$j[n,m]:=diff(snl[n],v[m]);jacobiana: genmatrix(j,2,2);
/* o primeiro ponto fixo é um centro *//* pois o traço da jacobiana é nulo *//* e o determinante é positivo. *//* Os valores próprios são imaginários */
96
14.1. O PÊNDULO SIMPLES
/* puros */
lpf1:jacobiana,pf[1];determinant(lpf1);load(functs);tracematrix(lpf1);eigenvectors(lpf1);
/* o segundo ponto fixo é um ponto de sela*//* pois o traço da jacobiana é nulo *//* e o determinante é negativo. *//* Os valores próprios são 2 reais um + *//* o outro - */
lpf2:jacobiana,pf[2];determinant(lpf2);tracematrix(lpf2);eigenvectors(lpf2);
/*Sistema linear no primeiro ponto fixo*/sl1:transpose(lpf1.v)[1];
/*Sistema linear no segundo ponto fixo*/sl2:transpose(lpf2.v)[1];
/*Visualização do espaço de fase*//*sistema nao linear*/plotdf(ev(snl,g=g0,l=g0),[direction,forward],[yradius,4],[xradius,5],[tstep,.1],[trajectory_at,-3.12,0],[nsteps,210]);
/*sistema linearizado, primeiro ponto fixo*/plotdf(ev(sl1,g=g0,l=l0),[direction,forward],[yradius,25],[xradius,4],[tstep,.03],[nsteps,29],[trajectory_at,.5,0]);
/*sistema linearizado, segundo ponto fixo*/plotdf(ev(sl2,g=g0,l=l0),[direction,forward],[yradius,10],[xradius,5],[tstep,.01],[nsteps,70],[trajectory_at,0.02159,0]);
/*cálculo da solucao particular usada no *//*plotdf de snl com o método de Runge-Kutta */
97

14.1. O PÊNDULO SIMPLES
load(dynamics);sp:rk(ev(snl,g=g0,l=l0),v,[-3.12,0],[t,0,3.1,0.01])$/* cálculo de solucao particular linear *//* com o método de Runge-Kutta */spl:rk(ev(sl2,g=g0,l=l0),v,[0.02159,0],[t,0,.83,0.01])$/* Comparação das duas soluções */graph2d([xradius,4],[yradius,25],[label,"Não-Linear"],makelist([sp[i][2],sp[i][3]],i,1,length(sp)),[label,"Linear"],makelist([-3.14159+spl[i][2],spl[i][3]],i,1,length(spl)));
/*cálculo da solucao particular usada no *//*plotdf de snl com o método de Runge-Kutta */sp:rk(ev(snl,g=g0,l=l0),v,[0.5,0],[t,0,0.87,0.03])$/* cálculo de solucao particular linear *//* com o método de Runge-Kutta */spl:rk(ev(sl1,g=g0,l=l0),v,[0.5,0],[t,0,0.87,0.03])$/* Comparação das duas soluções */graph2d([xradius,4],[yradius,25],[label,"Não-Linear"],makelist([sp[i][2],sp[i][3]],i,1,length(sp)),[label,"Linear"],makelist([spl[i][2],spl[i][3]],i,1,length(spl)));
98

Aula 15
Ciclos limite
Sumário:
- Bola que escorrega num poço duplo
- Atractores e ciclos limite
15.1 Bola que escorrega num poço duplo
•Consideremos uma bola de massa m que desliza sem atrito num poço duplo,como indicado na gura.
- x2/2 + x4/4
-1
0
10
N
P
θθ
y
x
Pontos fixosestáveis
Ponto fixometaestável
•A forma do poço é dada por,
y(x) = −x2
2+x4
4, (15.1)
e consideramos aqui apenas o caso em que a bola desliza sempre em contactocom a superfície do poço duplo.
99

15.1. BOLA QUE ESCORREGA NUM POÇO DUPLO
•As forças que actuam na bola m são o peso ~P e a normal ~N , logo a suaequação do movimento é,
m~a = ~P + ~N (15.2)
decompondo a aceleração nas componentes x e y vem,max = −N sin θmay = −P +N cos θ,
(15.3)
•O movimento da bola não é só limitado pela equação do movimento.A bola também está obrigada a estar sempre em contacto com a superfície(15.1) do poço, e por uma simples análise geométrica conclui-se que,
tan θ =dy
dx= −x+ x3. (15.4)
•Rearranjando a equação do movimento temos,mx = −N cos θ tan θ
N cos θ = m(y + g),
combinando estas duas equações e usando a eq. 15.4 vem,
x = −(y + g) tan θ
= −(y + g)(−x+ x3)
(15.5)
podemos eliminar a dependência em y derivando duas vezes a eq. 15.1 emordem ao tempo,
y = (3x2 − 1)x2 + (x3 − x)x
substituindo então na expressão para x e rearranjando obtemos,
x (1 + (x3 − x)2) + x2 (3x2 − 1) (x3 − x) + g (x3 − x) = 0⇔x = α(x, x)
(15.6)
onde,
α(x, x) = − x2 (3x2 − 1) + g
1 + (x3 − x)2(x3 − x
)repare-se que a variável y foi eliminada da equação 15.6, contudo esta equaçãoé equivalente à equação do movimento 15.3.
100

15.1. BOLA QUE ESCORREGA NUM POÇO DUPLO
•Podemos ainda substituir esta ODE2 por duas ODE1,x = vv = α(x, v)
⇔
x = v
v = −v2(3x2−1)+g1+(x3−x)2 (x3 − x)
(15.7)
•Os pontos xos deste sistema são os pontos no espaço de fase que veri-cam x = 0, v = 0. Da 1a eq. conclui-se rapidamente que vf = 0 e da 2a eq.que x3f − xf = 0 logo há 3 pontos xos,
(xf 1 = 0, vf 1 = 0), (xf 2 = −1, vf 2 = 0), (xf 2 = 1, vf 3 = 0) (15.8)
Estes pontos xos coincidem com os mínimos e máximo, locais, assinaladosna gura anterior.•Intuitivamente vemos que o primeiro ponto xo é metaestavél enquanto
os outros dois são estáveis, pois parando a bola no ponto x = 0, qualquerperturbação afasta a bola dessa posição, enquanto que fazendo o mesmo parax = −1 ou x = 1 a bola cará a oscilar em torno desses pontos.•Justiquemos algebricamente estas conclusões, começando por linearizar
o sistema 15.7, calculando a sua jacobiana (ver 13.12), x
v
=
∂v
∂x
∂v
∂v
∂α(x, v)
∂x
∂α(x, v)
∂v
(xf ,vf )
x
v
=
0 1
∂α(x, v)
∂x
∂α(x, v)
∂v
(xf ,vf )
x
v
(15.9)
onde
∂α(x, v)
∂x= −6 v2 x (x3 − x) + (3 x2 − 1) (v2 (3x2 − 1) + g)
(x3 − x)2 + 1
−2 (3 x2 − 1) (−v2 (3x2 − 1)− g) (x3 − x)2(
(x3 − x)2 + 1)2
∂α(x, v)
∂v= −2v (3x2 − 1) (x3 − x)
1 + (x3 − x)2
•Em contraste com a complexidade da expressão geral da jacobiana, noprimeiro ponto xo (0, 0) a jacobiana é simplesmente,[
0 1g 0
](0,0)
(15.10)
101

15.1. BOLA QUE ESCORREGA NUM POÇO DUPLO
que tem traço nulo e determinante negativo, logo este ponto xo é um pontode sela.•Recordando a eq. 10.20 podemos vericar rapidamente que os valores
próprios desta matriz são reais λ1 =√g e λ2 = −√g.
•O sistema linearizado em torno deste primeiro ponto xo tem a forma,x = vv = g x
(15.11)
•A jacobiana no segundo ponto xo (−1, 0) é,[0 1−2g 0
](−1,0)
(15.12)
que tem traço nulo e determinante positivo, logo este ponto xo é um centro.•Recordando a eq. 10.20 podemos vericar rapidamente que os valores
próprios desta matriz são imaginários puros λ1 = i√
2g e λ2 = −i√
2g.•O sistema linearizado em torno deste segundo ponto xo tem a forma,
x = vy = −2gx
(15.13)
note-se que a segunda equação deste sistema indica que a força linearizadaresultante (−2mgx) é proporcional (e com sentido contrário) ao deslocamentox, como se fosse uma força elástica, com constante de elasticidade k = 2mg.Isto signica que a bola descreve oscilações harmónicas na vizinhança desteponto xo (−1, 0) com frequência angular,
ω0 =√
2g, (15.14)
este comportamento só é observado para oscilações de pequenaamplitude.•Quando a amplitude é grande as oscilações dizem-se não-lineares ou
anarmónicas.•Conrme que para o terceiro ponto xo (1, 0) a análise da estabilidade
conduz ao mesmo resultado obtido para o ponto xo (−1, 0).•De modo a visualizarmos as conclusões atrás obtidas, analisemos o com-
portamento de quatro trajectórias no espaço de fase com condições ini-ciais, (x1 = −0.01, v1 = 0), (x2 = −1.2, v2 = 0), (x3 = 1.2, v3 = 0),(x4 = 0, v1 = 0.1).•Comecemos com o espaço de fase do sistema não linear,
102

15.1. BOLA QUE ESCORREGA NUM POÇO DUPLO
-2 -1 0 1
-2.5
0
2.5
(x1,v
1)(x
2,v
2)
(x3,v
3)
(x4,v
4)
v
x
•Comparemos agora com o espaço de fase do sistema linearizado em tornodo primeiro ponto xo (0, 0),
-2 -1 0 1
-2.5
0
2.5
(x1,v
1)
v
x
•E com o espaço de fase do sistema linearizado em torno do segundoponto xo (−1, 0),
103

15.1. BOLA QUE ESCORREGA NUM POÇO DUPLO
-0.8 -0.4 0 0.4 0.8
-2.5
0
2.5
(x2,v
2)
(x3,v
3)
(x4,v
4)
v
x
•Vamos nalmente calcular com o método de Runge-Kutta, as soluçõesparticulares usada na visualização do campo de direcções do sistema não-linear e do sistema linearizado, e comparar as duas soluções.
não-linearlinear
-2 -1 0 1
-3
-2
-1
0
1
2
x
v não-linearlinear
-1.08 -1.04 -1 -0.96 -0.92
-0.2
-0.1
0
0.1
0.2
x
v
•Verica-se que a solução particular com c.i. (x1 = −0.01, v1 = 0), dosistema não-linear só coincide com a solução do sistema linear, numa regiãomuito próxima do ponto xo. Porquê?•Quanto à solução particular com c.i. (x2 = −0.95, v2 = 0), calculada
usando o sistema não-linear não é exactamente igual à calculada com o sis-tema linear. A velocidade da bola, quando se considera a força linear, éligeiramente superior na maior parte da trajectória levando a que a bola des-creva uma oscilação com amplitude ligeiramente superior à descrita quandosujeita à força não-linear. Porquê?•Compare estes resultados com os obtidos para o pêndulo simples.
Vejamos as instruções no Maxima usadas no estudo anterior dabola que desliza num poço duplo.
104
15.1. BOLA QUE ESCORREGA NUM POÇO DUPLO
/*_________________________________________________*//*Exemplo 8.2*/
/* partícula que escorrega num poço duplo *//* definido pela eq. h(x)=-x^2/2+x^4/4 */g0:9.8;snl:[y,-(x^3-x)*(y^2*(3*x^2-1)+g)/(1+(x^3-x)^2)];
/*Pontos fixos*//*Estão nos extremos locais da função h(x) */pf:solve(snl,[x,y]);/*pf=[[x =0,y =0],[x =1,y =0],[x =-1,y =0]]*/
/*Linearizacao do Sistema*/v:[x,y]$j[n,m]:=diff(snl[n],v[m]);jacobiana: genmatrix(j,2,2);
/* o primeiro ponto fixo é um ponto de cela *//* pois o traço da jacobiana é nulo *//* e o determinante é negativo. *//* Os valores próprios são reais + e - *//* [[[- sqrt(g), sqrt(g)], [1, 1]], *//*[1, - sqrt(g)], [1, sqrt(g)]] */
lpf1:jacobiana,pf[1];determinant(lpf1);load(functs);tracematrix(lpf1);eigenvectors(lpf1);
/* o segundo ponto fixo é um centro *//* pois o traço da jacobiana é nulo *//* e o determinante é positivo. *//* Os valores próprios são imaginários *//* puros *//* [[[- %isqrt(2 g), %isqrt(2 g)], [1, 1]],*//* [1, - %isqrt(2 g)], [1, %isqrt(2 g)]] */
105
15.1. BOLA QUE ESCORREGA NUM POÇO DUPLO
lpf2:jacobiana,pf[2];determinant(lpf2);tracematrix(lpf2);eigenvectors(lpf2);
/* o terceiro ponto fixo é um centro *//* pois o traço da jacobiana é nulo *//* e o determinante é positivo. *//* Os valores próprios são imaginários *//* puros *//* [[[- %isqrt(2 g), %isqrt(2 g)], [1, 1]],*//* [1, - %isqrt(2 g)], [1, %isqrt(2 g)]] */
lpf3:jacobiana,pf[3];determinant(lpf3);tracematrix(lpf3);eigenvectors(lpf3);
/*Sistema linear no primeiro ponto fixo*/sl1:transpose(lpf1.v)[1];
/*Sistema linear no segundo ponto fixo*/sl2:transpose(lpf2.v)[1];
/*Sistema linear no terceiro ponto fixo*/sl3:transpose(lpf3.v)[1];
/*Visualização do espaço de fase*//*sistema nao linear*/plotdf(ev(snl,g=g0),[direction,forward],[yradius,4],[xradius,2],[tstep,.02],[trajectory_at,-0.01,0],[nsteps,180]);/*[tstep,.1],[trajectory_at,-0.95,0],[nsteps,14]);*//*[tstep,.1],[trajectory_at,1.2,0],[nsteps,15]);*//*[tstep,.02],[trajectory_at,1.5,0],[nsteps,175]);*/
/*sistema linearizado, primeiro ponto fixo*/plotdf(ev(sl1,g=g0),[direction,forward],[yradius,4],[xradius,2],[tstep,.05],[nsteps,35],[trajectory_at,-0.01,0]);
/*sistema linearizado, 2o e 3o ponto fixo*/
106

15.2. ATRACTORES E CICLOS LIMITE
plotdf(ev(sl2,g=g0),[direction,forward],[yradius,4],[xradius,1],[tstep,.02],[nsteps,70],[trajectory_at,0.05,0]);/*[trajectory_at,.2,0]*//*[trajectory_at,.5,0]*/
/* cálculo de solucao particular não linear *//* com o método de Runge-Kutta */load(dynamics);sp:rk(ev(snl,g=g0),v,[-0.01,0],[t,0,3.6,0.02])$/* cálculo de solucao particular linear *//* com o método de Runge-Kutta */spl:rk(ev(sl1,g=g0),v,[-0.01,0],[t,0,1.75,0.05])$/* Comparação das duas soluções */graph2d([xradius,2],[label,"Não-Linear"],makelist([sp[i][2],sp[i][3]],i,1,length(sp)),[label,"Linear"],makelist([spl[i][2],spl[i][3]],i,1,length(spl)));
/* cálculo de solucao particular não linear *//* com o método de Runge-Kutta */sp:rk(ev(snl,g=g0),v,[-0.95,0],[t,0,1.4,0.02])$/* cálculo de solucao particular linear *//* com o método de Runge-Kutta */spl:rk(ev(sl2,g=g0),v,[0.05,0],[t,0,1.4,0.02])$/* Comparação das duas soluções */graph2d([xcenter,-1],[xradius,0.1],[label,"Não-Linear"],makelist([sp[i][2],sp[i][3]],i,1,length(sp)),[label,"Linear"],makelist([-1+spl[i][2],spl[i][3]],i,1,length(spl)));
15.2 Atractores e ciclos limite
•Vamos estudar em seguida comportamentos de sistemas não lineares semcorrespondência em sistemas lineares.•Como foi mostrado anteriormente, se a trajectória do sistema no es-
paço de fase, se encontra sucientemente afastada do ponto de equilíbrio énecessário entrar em conta com os efeitos não lineares.•Estas situações podem ocorrer quer porque as condições iniciais pro-
vocam o início do movimento longe do equilíbrio, quer porque uma força
107

15.2. ATRACTORES E CICLOS LIMITE
externa força o sistema a afastar-se do equilíbrio, ou quer ainda porque omovimento se inicia perto dum ponto instável que atira o sistema para umaorbita longe do equilíbrio.•O conceito de atractor é muito importante na análise da dinâmica não
linear.•Um atractor é um conjunto de pontos no espaço de fase, quer
seja um só ponto ou uma curva fechada, para os quais todas astrajectórias vizinhas tendem quando t→∞.•Qualquer movimento iniciado na região de atracção aproximar-se-á do
atractor.•Os focos estáveis são atractores.•Outro tipo de atractor é o ciclo limite, que ocorre em sistemas que
possuem mecanismos de estabilidade concorrentes: um mecanismolinear instável que domina perto do equilíbrio e um amortecimentonão linear que domina longe do equilíbrio e acaba por limitar omovimento.•Um fenómeno não linear interessante, que não pode ocorrer em sistemas
lineares, é a possibilidade de diferentes atractores poderem coexistir, cada umcom a sua região de atracção. Então o atractor para o qual uma trajectóriano espaço de fase se dirige, dependerá das c.i. dessa trajectória.•Um ciclo limite surge em sistemas autónomos com:
pontos de equilíbrio caracterizados por valores próprios complexos oureais com parte real positiva, de modo a que o equilíbrio seja instávellevando as trajectórias iniciadas na sua vizinhança a afastarem-se.
amortecimento não linear, que se manifesta longe do equilíbrio ondelimita o movimento.
•Vamos ilustrar o conceito de ciclo limite, analisando a chamada equa-ção de van der Pol, que originariamente descrevia um circuito eléctrico quecontinha um tríodo de vácuo responsável pelo comportamento não linear dosistema.•Contudo esta equação diferencial é geral, e pode por exemplo descrever
um sistema mecânico com amortecimento não linear.
x+ 2ε(x2 − 1)x+ x = 0 (15.15)
onde ε é um parâmetro positivo.•Assim, se x2 for maior que 1, o segundo termo é semelhante ao termo de
atrito no oscilador mecânico e implica diminuição da amplitude de oscilação.
108

15.2. ATRACTORES E CICLOS LIMITE
•Se x2 for menor que 1, o segundo termo faz aumentar a amplitude da os-cilação. Assim, espera-se que, independentemente do estado inicial o sistematermine oscilando com amplitude perto de 1.•O sistema autónomo equivalente é:
x = yy = −x− 2ε(x2 − 1)y
(15.16)
•Existe um único ponto xo, na origem. A matriz jacobiana nesse pontoé [
0 1−1 2ε
](15.17)
com valores próprios
λ = ε±√ε2 − 1 (15.18)
•A origem é um ponto repulsivo, que poderá ser um foco (ε < 1), um nó(ε > 1), ou um nó impróprio (ε = 1).
109

15.2. ATRACTORES E CICLOS LIMITE
110
Aula 16
Bifurcações
Sumário:
- Bifurcação num pêndulo
- Três tipos de bifurcações
Bifurcação de forquilhaBifurcação sela-nóBifurcação transcrítica
16.1 Bifurcação num pêndulo
•Um outro fenómeno só observado em sistemas não lineares é a bifurcação.
•Uma bifurcação num sistema dinâmico é uma mudança na natu-reza de um ponto de equilíbrio, devida à mudança de um parâmetrodo sistema.
•Vamos ilustrar o conceito de bifurcação estudando o comportamento doseguinte sistema (ilustrado na gura seguinte) que consiste num pêndulo sim-ples de massa m e comprimento l, ligado a uma mola elástica com constanteelástica k e comprimento em repouso também l.
111

16.1. BIFURCAÇÃO NUM PÊNDULO
θ
θ
T
P
P cosθ
P sinθ
l Fe
α
α
β
Ο
Α
Β
•Antes de escrever a equação do movimento deste sistema observe-se queθ + β = π e como o triângulo OAB é isósceles vem que, 2α + β = π, logoα = θ/2.•Observe-se ainda que o comprimento da mola é igual à distância AB,
que é o comprimento da base do triângulo e é igual a 2l cos(θ/2), logo oalongamento da mola, x, além do comprimento de equilíbrio é dado por,
x = AB − l
= l(2 cos(θ
2)− 1) (16.1)
então o módulo da força elástica Fe é dado por,
Fe = kx
= kl(2 cos(θ
2)− 1) (16.2)
•Comparando com o problema do pêndulo simples, neste caso a massaestá sujeita à acção da força elástica ~Fe, além da tensão no o ~T e do peso~P .•Assim basta acrescentar a força elástica à equação 14.2 obtendo,
mat = −P sin θ + Fe sin( θ2)
man = −P cos θ + T + Fe cos( θ2),
(16.3)
112

16.1. BIFURCAÇÃO NUM PÊNDULO
sendo an = 0 a dinâmica do movimento é essencialmente descrita pela pri-meira equação que, usando as mesmas coordenadas usadas no caso do pên-dulo simples, pode ser escrita como,
md2θ l
dt2= kl sin(
θ
2)(2 cos(
θ
2)− 1)−mg sin θ
d2θ
dt2=
k
msin(
θ
2)(2 cos(
θ
2)− 1)− g
lsin θ. (16.4)
•Esta equação pode ser escrita numa forma mais compacta se substituir-mos o tempo pela variável adimensional u,
u = t
√g
l→ d2
dt2=l
g
d2
du2
obtendo,
d2θ
du2=
kl
mgsin(
θ
2)
(2 cos(
θ
2)− 1
)− sin θ
θ = S sin(θ
2)
(2 cos(
θ
2)− 1
)− sin θ
= S sin(θ
2)
(2 cos(
θ
2)− 1
)− 2 cos(
θ
2) sin(
θ
2)
=
[2(S − 1) cos
θ
2− S
]sin
θ
2(16.5)
onde foi introduzido o parâmetro S,
S =kl
mg, (16.6)
que mede a relação entre a força destabilizadora da mola e força estabilizadorada gravidade.•O sistema estará em equilíbrio nos pontos onde a aceleração tangencial
for nula, ou seja quando θ = 0.•Para que tal se verique resulta da equação16.5 que ou sin(θ/2) = 0 ou
é nula a expressão dentro dos parêntesis quadrados em 16.5.•Consideremos o primeiro caso, sin(θ/2) = 0. O ponto de equilíbrio
encontra-se em θ = 0, i.e. na posição mais baixa do pêndulo.•Qual a estabilidade deste ponto xo?•Linearizando a aceleração angular (ou seja, expandindo θ em série de
Taylor, em torno de θ = 0 e retendo só o termo linear) obtemos
θ =
(S
2− 1
)θ (16.7)
113

16.1. BIFURCAÇÃO NUM PÊNDULO
•A forma da solução desta equação vai depender do valor de S. No casode uma constante elástica fraca, S < 2, e a equação 16.7 é a equação de umoscilador harmónico simples:
θ = −p2θ p =
√1− S
2(16.8)
cuja solução geral é uma combinação de funções sinusoidais, que descrevem,um movimento oscilatório, em torno do ponto de equilíbrio θ = 0,
θ = C1 cos(pu) + C2 sin(pu) (16.9)
portanto, o ponto θ = 0 é um ponto de equilíbrio estável.•Quando o sistema estiver perto do ponto de equilíbrio, a sua tendência
será regressar ao ponto de equilíbrio, devido à acção do peso que neste casoé maior do que a força elástica.•No caso de uma constante elástica forte, S > 2, a equação 16.7 já não é
a equação de um oscilador harmónico simples
θ = p2θ p =
√S
2− 1 (16.10)
•As soluções desta equação são funções exponenciais
θ =
(θ02
+ω0
2p
)epu +
(θ02− ω0
2p
)e−pu (16.11)
onde o primeiro termo cresce rapidamente e implica que o pêndulo se afastada posição de equilíbrio. Logo este ponto xo será um ponto de equilíbrioinstável.•Quando o sistema é afastado ligeiramente da posição de equilíbrio θ = 0,
a força elástica puxa o pêndulo para cima.•Consideremos agora o segundo ponto de equilíbrio, correspondente ao
ponto em que a expressão entre parêntesis rectos, na equação 16.5, é nula:
2(S − 1) cosθ
2− S = 0
cosθ
2=
S
2(S − 1)(16.12)
repare-se que −π < θ < π e por denição S > 0, logo só existem soluçõesdesta equação se,
S
2(S − 1)< 1 ⇔ 2(S − 1) > S ⇔ S > 2 (16.13)
114

16.1. BIFURCAÇÃO NUM PÊNDULO
•Assim a solução da eq. 16.12 é,
θ = ±2 arccos
(S
2(S − 1)
)se S > 2 (16.14)
•Se a constante elástica não for sucientemente forte, S < 2, só existeo primeiro ponto de equilíbrio θ = 0, e esse ponto de equilíbrio é estável.Se S for maior que 2, o ponto de equilíbrio estável bifurca-se emdois ângulos, um positivo o outro negativo, com o mesmo valorabsoluto.
•Curiosamente os novos pontos de equilíbrio previstos pela eq. 16.12 sur-gem precisamente quando a mola é sucientemente forte para que o pontoxo θ = 0 deixe de ser estável.
•Esta bifurcação é chamada uma bifurcação de forquilha.
•No limite S → ∞, os pontos de equilíbrio tendem para ±2π/3, corres-pondendo à situação em que a mola tem o seu comprimento normal l.
•Na gura seguinte ilustra-se a posição do ponto de equilíbrio estável(curva contínua) e do ponto de equilíbrio instável (curva tracejada) em funçãodo parâmetro S.
S
θ
2
2π/3
−2π/3
0
θ1
−θ1
S1θ1−θ1
para S = S1 > 2, θ = 0 torna-se um ponto fixo instável e ocorrem dois novos pontos fixos estáveis, θ = θ1 ou θ = -θ1
•Os pontos de equilíbrio estável correspondem aos vales da função daenergia potencial, que é igual ao trabalho realizado contra a força tangencialresultante (mat),
∆Ep ∝ −∫ ([
2(S − 1) cosθ
2− S
]sin
θ
2
)dθ
∝(2 (S − 1) cos
(θ2
)− S
)22 (S − 1)
(16.15)
115
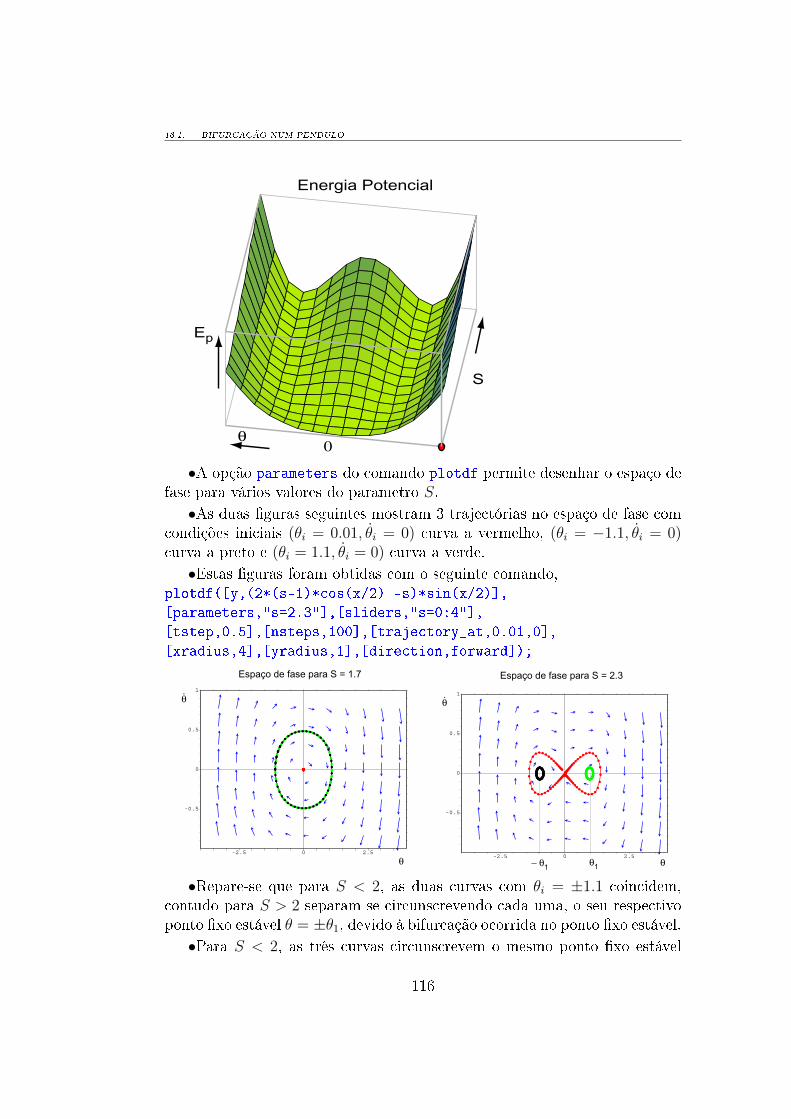
16.1. BIFURCAÇÃO NUM PÊNDULO
Energia Potencial
S
θ0
Ep
•A opção parameters do comando plotdf permite desenhar o espaço defase para vários valores do parâmetro S.•As duas guras seguintes mostram 3 trajectórias no espaço de fase com
condições iniciais (θi = 0.01, θi = 0) curva a vermelho, (θi = −1.1, θi = 0)curva a preto e (θi = 1.1, θi = 0) curva a verde.•Estas guras foram obtidas com o seguinte comando,
plotdf([y,(2*(s-1)*cos(x/2) -s)*sin(x/2)],[parameters,"s=2.3"],[sliders,"s=0:4"],[tstep,0.5],[nsteps,100],[trajectory_at,0.01,0],[xradius,4],[yradius,1],[direction,forward]);
-2.5 0 2.5
-0.5
0
0.5
1
Espaço de fase para S = 1.7
θ
θ.
-2.5 0 2.5
-0.5
0
0.5
1
Espaço de fase para S = 2.3
θθ1− θ1
θ.
•Repare-se que para S < 2, as duas curvas com θi = ±1.1 coincidem,contudo para S > 2 separam-se circunscrevendo cada uma, o seu respectivoponto xo estável θ = ±θ1, devido à bifurcação ocorrida no ponto xo estável.•Para S < 2, as três curvas circunscrevem o mesmo ponto xo estável
116

16.2. TRÊS TIPOS DE BIFURCAÇÕES
θ = 0. Para S > 2, θ = 0 torna-se um ponto xo metaestável (ponto de sela).
16.2 Três tipos de bifurcações
•Ilustremos três tipos de bifurcações comuns, a bifurcação sela-nó, a bi-furcação transcrítica e a bifurcação de forquilha, começando pela bi-furcação de forquilha, anteriormente exemplicada.
16.2.1 Bifurcação de forquilha
•Na bifurcação de forquilha, existe um ponto xo estável que se torna instá-vel, dando origem a dois novos pontos xos estáveis.•Por exemplo, na família de sistemas:
x = µx− x3y = −y (16.16)
se o parâmetro µ for negativo, o único ponto xo é um nó estável na origem.•Quando o parâmetro µ é nulo, o ponto xo na origem torna-se não-
hiperbólico e estável.•Para valores positivos do parâmetro, existem 3 pontos xos:
(−√µ, 0) (0, 0) (√µ, 0)
•A origem torna-se instável (ponto de sela). Os outros dois pontos xossão nós estáveis.•O diagrama de bifurcação na gura seguinte ilustra este comportamento,
onde a verde se indicam os pontos xos estáveis e a vermelho os instáveis.
estávelinstável
-20 -10 0 10
-2.5
0
2.5
x
µ
Bifurcação de forquilha
16.2.2 Bifurcação sela-nó
•Neste tipo de bifurcação, o sistema não tem nenhum ponto xo, mas quandoaumenta um parâmetro do sistema, aparece um ponto xo não-hiperbólicoque depois se separa em dois pontos xos: um ponto de sela e um nó.
117

16.2. TRÊS TIPOS DE BIFURCAÇÕES
•Por exemplo, consideremos a seguinte família de sistemas dinâmicos:x = µ− x2y = −y (16.17)
que depende de um parâmetro real µ.•Os pontos xos para qualquer valor de µ são,
[[x = −sqrt(mu), y = 0], [x = sqrt(mu), y = 0]]
podem existir 0, 1 ou 2 pontos xos, segundo o valor de µ.•Se µ for negativo, não existirão pontos xos no plano real xy.•Se µ for igual a zero, existe um único ponto xo, na origem, [x = 0, y =
0].•A matriz jacobiana nesse ponto é: 0 0
0 −1
(0,0)
(16.18)
é singular (a aproximação linear na vizinhança do ponto xo já não é válida).O ponto xo é designado por não-hiperbólico.•Finalmente, se µ for positivo, existirão dois pontos xos com coordena-
das(−√µ, 0) (
õ, 0)
•O primeiro ponto é um ponto de sela: 2√µ 0
0 −1
(−√µ,0)
(16.19)
•E o segundo é um nó estável: −2√µ 0
0 −1
(õ,0)
(16.20)
•Resumindo, se o parâmetro µ for negativo, não existem pontos xos. Àmedida que o parâmetro aumenta, aparece um ponto xo não-hiperbólico,que depois se bifurca em dois: um ponto de sela e um nó estável.•O diagrama de bifurcação na gura seguinte ilustra este comportamento,
onde a verde se indicam os pontos xos estáveis e a vermelho os instáveis.
118

16.2. TRÊS TIPOS DE BIFURCAÇÕES
estávelinstável
-20 -10 0 10
-2.5
0
2.5
x
µ
Bifurcação sela-nó
16.2.3 Bifurcação transcrítica
•Numa bifurcação transcrítica, dois pontos xos aproximam-se, combinando-se num único ponto xo, que depois se separa novamente nos dois pontos.
•Por exemplo, na família de sistemas
x = µx− x2y = −y (16.21)
•Se o parâmetro µ for diferente de zero, existirão dois pontos xos,
(0, 0) (µ, 0)
•E se o parâmetro for nulo, o único ponto xo é a origem.
•Se o parâmetro for negativo, a origem é um nó estável e o ponto (µ, 0)é um ponto de sela.
•Quando o parâmetro µ é nulo, a origem é o único ponto xo e trata-sede um ponto não-hiperbólico.
•Se o parâmetro for positivo, a origem passa a ser um ponto de sela, e oponto (µ, 0) um nó estável.
•O diagrama de bifurcação na gura seguinte ilustra este comportamento,onde a verde se indicam os pontos xos estáveis e a vermelho os instáveis.
119

16.2. TRÊS TIPOS DE BIFURCAÇÕES
estávelinstável
-20 -10 0 10
-10
0
10
x
µ
Bifurcação transcrítica
120
Aula 17
Caos
Sumário:
- Caos em sistemas contínuos
Caos num oscilador não linearTeorema de Poincaré-BendixonEquações de LorenzEquações de Rössler
- Caos em sistemas discretos
17.1 Caos em sistemas contínuos
•Um dos sistemas dinâmicos mais simples com comportamento caótico é oseguinte oscilador não linear forçado,
y + by + y3 = f cos(ωf t). (17.1)
•Comparando este oscilador com o descrito pela equação 12.3 verica-seque diferem na força elástica que no caso da eq. 17.1 é não linear pois dependede y3.•Usando o comando rk podemos calcular duas soluções particulares, com
c.i. (y10 = 3.0, v10 = 3) e (y20 = 3.003, v20 = 3). Note-se que diferem entre siunicamente em 3 milésimos do valor de y0,f:[v,-0.05*v-y3+7.5*cos(t)];s1:rk(f,[y,v],[3,3],[t,0,50,0.01])$s2:rk(f,[y,v],[3.003,3],[t,0,50,0.01])$onde foram usados valores, para o amortecimento b = 0.05, para a amplitudeda força externa f = 7.5 e para a frequência da força externa ωf = 1.•Estas duas soluções estão representadas na gura seguinte,
121
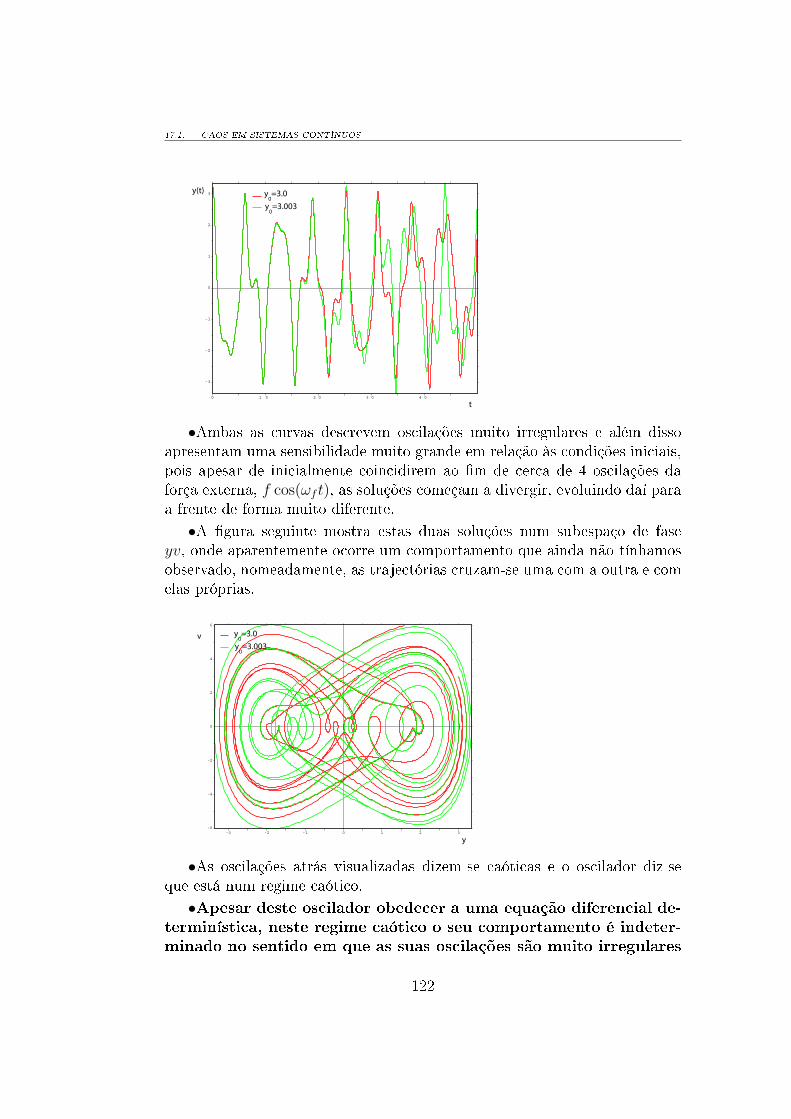
17.1. CAOS EM SISTEMAS CONTÍNUOS
y0=3.0
y0=3.003
0 1 0 2 0 3 0 4 0
-3
-2
-1
0
1
2
3
t
y(t)
•Ambas as curvas descrevem oscilações muito irregulares e além dissoapresentam uma sensibilidade muito grande em relação às condições iniciais,pois apesar de inicialmente coincidirem ao m de cerca de 4 oscilações daforça externa, f cos(ωf t), as soluções começam a divergir, evoluindo daí paraa frente de forma muito diferente.
•A gura seguinte mostra estas duas soluções num subespaço de faseyv, onde aparentemente ocorre um comportamento que ainda não tínhamosobservado, nomeadamente, as trajectórias cruzam-se uma com a outra e comelas próprias.
-3 -2 -1 0 1 2 3-6
-4
-2
0
2
4
6
y0=3.0
y0=3.003
y
v
•As oscilações atrás visualizadas dizem-se caóticas e o oscilador diz-seque está num regime caótico.
•Apesar deste oscilador obedecer a uma equação diferencial de-terminística, neste regime caótico o seu comportamento é indeter-minado no sentido em que as suas oscilações são muito irregulares
122

17.1. CAOS EM SISTEMAS CONTÍNUOS
e são muito sensíveis às condições iniciais.•Vamos ver em seguida que o espaço de fase dum sistema dinâmico con-
tínuo tem que ter pelo menos 3 dimensões para o sistema poder manifestarum comportamento caótico.
17.1.1 Teorema de Poincaré-Bendixon
•Como sabemos um sistema dinâmico autónomo bidimensional tem a formageral,
x = g(x, y)y = f(x, y).
(17.2)
•O espaço de fase deste sistema, tem duas dimensões, onde se representaa evolução de y em função de x.•Se este sistema tiver pontos xos, eles são solução de,
g(x, y) = 0f(x, y) = 0.
(17.3)
•Suponhamos que uma trajectória no espaço de fase, com certas condiçõesiniciais nunca sai duma determinada região limitada do espaço de fase.•Neste caso o teorema de Poincarré-Bendixon, arma que essa trajectória
deve eventualmente ou,
1 terminar num ponto de equilí-brio, ou
2 regressar ao ponto original, for-mando uma trajectória fechada,ou
3 aproximar-se dum ciclo limite.
(x0,y0)
(xf,yf)
(x0,y0)
(x0,y0)
1
2
3
•Como vimos quando introduzimos o conceito de campo de direcções,verica-se para o sistema dinâmico 17.2,
dy
dx=g(x, y)
f(x, y)(17.4)
ou seja, exceptuando pontos xos, a tangente de qualquer ponto duma tra-jectória do espaço de fase tem um só valor, único, dado pela equação 17.4.•Como tal uma trajectória no espaço de fase dum sistema autónomo bi-
dimensional só se pode cruzar com ela própria ou outra trajectória diferente,num ponto xo.
123

17.1. CAOS EM SISTEMAS CONTÍNUOS
•Tal proíbe um sistema com um espaço de fase bidimensional de ter umcomportamento como o ilustrado anteriormente para o oscilador forçado nãolinear denido pela equação 17.1.•Repare-se contudo que o sistema 17.1 é de segunda ordem mas não au-
tónomo. Escrevendo-o na forma dum sistema autónomo de primeira ordem,y = vv = −by − y3 + f cos(ωf t)t = 1
(17.5)
é claro que o espaço de fase é tridimensional (y, v, t) e portanto não sujeitoao teorema de Poincaré-Bendixon.•Representamos em seguida uma das trajectórias anteriores, no subespaço
de fase 2D (y, v) e no espaço de fase 3D (y, v, t), onde a evolução do tempoé indicada em tons de cinza, desde o início (a preto) até ao m do cálculo (abranco).
y
v
t
(t0,y0,v0)y
v
t
(t0,y0,v0)
•Repare-se no gráco 3D, que a trajectória caótica sobe no sentido posi-tivo do tempo sem nunca se cruzar consigo própria.
17.1.2 Equações de Lorenz
•Um sistema dinâmico 3D famoso são as equações de Lorenz, que resultamduma drástica simplicação dum modelo para estudar a convecção térmicanuma camada de uido.
x = 10(y − x)y = rx− y − zxz = −8
3z + xy
(17.6)
•Nestas equações x, relaciona-se com a velocidade do uido, y e z relacionam-se com algumas características gerais da distribuição da temperatura nouido.
124

17.1. CAOS EM SISTEMAS CONTÍNUOS
•O parâmetro r indica a diferença de temperatura entre o fundo e o topoda camada de uido, o motor da convecção.
•Para r < 1 a origem
x = 0, y = 0, z = 0
é um ponto estável, para r > 1 surgem dois novos pontos de equilíbrio
x = y = ±√
8
3(r − 1), z = r − 1
que são linearmente estáveis para 1 < r < 24.74.
•Na gura seguinte está representada, no espaço de fase 3D, uma soluçãoparticular do sistema de Lorenz, com r = 28 e um incremento da variávelindependente h = 0.005, como indicam os seguintes comandos do Maxima,f:[10*(y-x),28*x-y-z*x,-8.0/3.0*z+y*x];sol1:rk(f,[x,y,z],[5.0,5.0,5.0],[t,0,20,0.005])$a evolução do tempo é indicada com a mesma tonalidade de cinzento anteri-ormente descrita.
•Estão também assinalados na gura os 3 pontos de equilíbrio do sistema(cujas coordenadas se podem conrmar fazendo fixos:solve(f);)
PontoA → (8.5, 8.5, 27.0)
PontoB → (−8.5,−8.5, 27.0)
PontoC → (0.0, 0.0, 0.0)
•A estabilidade do sistema na vizinhança de cada um destes pontos xosé caracterizada pelos valores próprios da jacobiana,v:[x,y,z];h[i,j]:= diff(f[i],v[j]);jacobiana : genmatrix(h,3,3);mA:jacobiana,fixos[1];mB:jacobiana,fixos[2];mC:jacobiana,fixos[3];eigenvalues(mA);eigenvalues(mB);eigenvalues(mC);
125

17.1. CAOS EM SISTEMAS CONTÍNUOS
y
x
z
A
B
C
(5,5,5)
t=0
t=20
•Há 3 valores próprios para cada ponto xo que são,
PontoA → λ1 = 0.1− 10.2i, λ2 = 0.1 + 10.2i, λ3 = −13.9
PontoB → λ1 = 0.1− 10.2i, λ2 = 0.1 + 10.2i, λ3 = −13.9
PontoC → λ1 = −22.8, λ2 = 11.8, λ3 = −2.7
•Repare-se que a solução evolui numa região que não se afasta muitodos 3 pontos de equilíbrio. Sempre que a solução se aproxima do ponto A(ou B) devido a tanto λ1 como λ2 serem números complexos com parte realpositiva, a solução afasta-se em seguida do ponto, em espiral. Quando estápróxima do eixo dos Z, o efeito desestabilizador do ponto C pode atirar asolução para a vizinhança do ponto B (ou A). Este comportamento é repetidoindenidamente, sem que a trajectória alguma vez se cruze consigo própria,mantendo-se sempre na região perto dos 3 pontos, formando um chamadoatractor estranho.•Um atractor no espaço de fase sobre o qual as trajectórias nunca se
fecham mas se mantêm connadas numa dada região do espaço é informal-mente descrito como estranho se tiver dimensão não inteira (fractal) ou sehouver dependência sensível das condições iniciais.•Para mostrar a sensibilidade desta solução caótica a uma pequena per-
turbação das condições iniciais vamos integrar novamente o sistema de Lorenz
126

17.1. CAOS EM SISTEMAS CONTÍNUOS
usando desta vez um valor de x0 = 5.005, i.e. diferente em 5 milésimas doanteriormente calculado. No Maxima fazemos,sol2:rk(f,[x,y,z],[5.005,5.0,5.0],[t,0,20,0.005])$•A sol2 juntamente com a sol1, estão representadas nas duas guras se-
guintes, na da esquerda representa-se x(t) e na da direita a evolução de x, ye z no espaço de fase.•Inicialmente as duas soluções coincidem mas passados ≈ 10 s cada curva
evolui de forma distinta,
x0=5.0
x0=5.005
4 8 12 16 20
-10
0
10
t
x(t)
y
x
z
(5,5,5) ~ (5.005,5,5)
t=0
t=20
t=20
17.1.3 Equações de Rössler
•Em 1976 Otto Rössler desenvolveu um sistema dinâmico contínuo, que ti-vesse um comportamento semelhante ao sistema de Lorenz mas que fossemais fácil de analisar qualitativamente. Mais tarde o sistema de Rösslermostrou-se útil na modelação do equilíbrio de certas reacções químicas.•As equações que o denem são,
x = −(y + z)y = x+ ayz = b+ xz − cy
(17.7)
•O sistema de Rössler é de terceira ordem, tal como o de Lorenz, masapenas uma das equações (a terceira) é não linear.•As 4 guras seguintes mostram soluções particulares do sistema de Rös-
sler para a = 0.15, b = 0.2, condições iniciais (0, 4, 0) e com os seguintesvalores para o parâmetro c = 3.5, 5, 5.5 e c = 7, respectivamente, calculadascom,f:[-y-z,x+a*y,b+(x-c)*z],a=0.15,b=0.2;s:rk(ev(f,c=3.5),[x,y,z],[0,4,0],[t,0,200,0.05])$
127

17.1. CAOS EM SISTEMAS CONTÍNUOS
x
z
y
c = 3.5
z
xy
c = 5
x
z
y
c = 5.5 c = 7
•Nas 3 primeiras soluções o período duplica à medida que o valor doparâmetro c é aumentado, mas para c = 7 a solução torna-se caótica.•Na secção seguinte vamos mostrar este comportamento duma forma mais
compacta. Mas primeiro vamos introduzir o conceito de mapa de Poincarré.
128

Aula 18
Mapa de Poincarré
Sumário:
- Secções e mapas de Poincarré
- Mapa de Poincarré do sistema de Rössler
- Mapa de Poincarré do ONLF
18.0.4 Secções e mapas de Poincarré
•Como vimos anteriormente o espaço de fase dum sistema dinâmico contínuono tempo pode ser muito intricado em particular se a trajectória é caóticaao m de uma não muito longa evolução esta ca bastante emaranhada.•A ideia básica da secção de Poincarré é baseada na redução da comple-
xidade do comportamento dinâmico e pode ser considerada como um proce-dimento para seleccionar apenas alguns estados representativos duma trajec-tória no espaço de fase.•Tal selecção é geralmente feita, considerando a intercepção da trajectória
com um determinado plano do espaço de fase (ou um hiperplano se o espaçode fase for de dimensão superior a 3).•Os estados resultantes podem ser interpretados como a trajectória dum
sistema dinâmico discreto no tempo a que se chama o mapa de Poincarré.•Deste modo em vez duma trajectória contínua num espaço de fase de N
dimensões considera-se uma orbita discreta num espaço de fase com (N-1)dimensões.•Não existe uma forma genérica de denir o plano que caracteriza a secção
de Poincarré. Em seguida ilustraremos duas formas diferentes de obter mapasde Poincarré, primeiro no sistema de Rössler e segundo no oscilador não linearforçado (ONLF) denido pela equação 17.1.
129
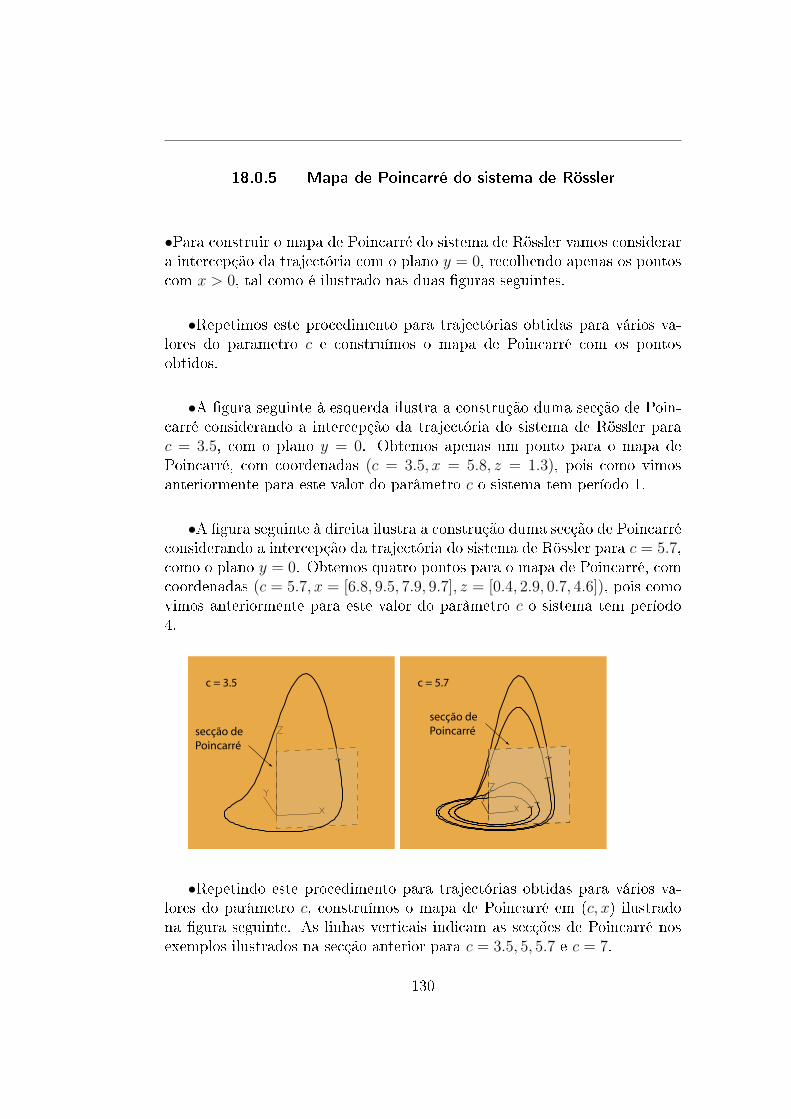
18.0.5 Mapa de Poincarré do sistema de Rössler
•Para construir o mapa de Poincarré do sistema de Rössler vamos considerara intercepção da trajectória com o plano y = 0, recolhendo apenas os pontoscom x > 0, tal como é ilustrado nas duas guras seguintes.
•Repetimos este procedimento para trajectórias obtidas para vários va-lores do parâmetro c e construímos o mapa de Poincarré com os pontosobtidos.
•A gura seguinte à esquerda ilustra a construção duma secção de Poin-carré considerando a intercepção da trajectória do sistema de Rössler parac = 3.5, com o plano y = 0. Obtemos apenas um ponto para o mapa dePoincarré, com coordenadas (c = 3.5, x = 5.8, z = 1.3), pois como vimosanteriormente para este valor do parâmetro c o sistema tem período 1.
•A gura seguinte à direita ilustra a construção duma secção de Poincarréconsiderando a intercepção da trajectória do sistema de Rössler para c = 5.7,como o plano y = 0. Obtemos quatro pontos para o mapa de Poincarré, comcoordenadas (c = 5.7, x = [6.8, 9.5, 7.9, 9.7], z = [0.4, 2.9, 0.7, 4.6]), pois comovimos anteriormente para este valor do parâmetro c o sistema tem período4.
c = 3.5
secção de Poincarré
c = 5.7
secção de Poincarré
•Repetindo este procedimento para trajectórias obtidas para vários va-lores do parâmetro c, construímos o mapa de Poincarré em (c, x) ilustradona gura seguinte. As linhas verticais indicam as secções de Poincarré nosexemplos ilustrados na secção anterior para c = 3.5, 5, 5.7 e c = 7.
130

4 6 8 10 12c
15
10
5
0
x
c=3.
5
c=5
c=5.
7
c=7
•Ou o mapa em (c, z),
4 6 8 10 12c
c=3.
5
c=5
c=5.
7
c=7
0
40
30
20
10
z
•A sequência de duplicação do período descrita na secção anterior é claranestes mapas de Poincarré. Também se podem ver os valores de c para osquais o sistema de Rössler se torna caótico. Outra observação clara é que
131

após regimes caóticos observam-se novamente regimes em que o sistema oscilacom períodos bem denidos (e.g. c = 8 e c = 10.3).
18.0.6 Mapa de Poincarré do ONLF
•Para construir o mapa de Poincarré do sistema do ONLF vamos considerara intercepção da trajectória com os planos perpendiculares ao eixo do tempotais que t = ti + 2π/ωf .
•Repare-se que 2π/ωf é o período da força externa, que força o sistemaa oscilar. O instante ti pode ser qualquer, convém no entanto que se deixempassar vários ciclos da força externa antes de começar a recolher os pontospara o mapa de Poincarré, para eliminar efeitos transientes.
•Ou seja o procedimento, ilustrado na gura seguinte, consiste em esco-lher um par de pontos (y(ti), v(ti)) num instante inicial ti esperar ∆t = 2π/ωfpara que a força externa tenha descrito uma oscilação completa e voltar arecolher o ponto (y(ti + ∆t), v(ti + ∆t)).
ti+1 = ti+∆t
ti
(y(ti+1), v(ti+1))
(y(ti), v(ti))
vy
t
secção de Poincarré
secção de Poincarré
mapa de Poincarré
•Após repetir este processo uns largos milhares de vezes obtemos o se-guinte mapa de Poincarré,
132

•Suponhamos que a trajectória do oscilador é periódica com o mesmoperíodo da força externa. Nesse caso o mesmo ponto (y(ti), v(ti)) iria repetir-se indenidamente no mapa de Poincarré. Ou seja o mapa seria constituídoapenas por um ponto.•Se a trajectória do oscilador fosse periódica com um período triplo do
da força externa, então o mapa seria constituído apenas por três pontosrepetidos, indenidamente.•Se a trajectória do oscilador fosse aleatória, então o mapa seria consti-
tuído por uma nuvem de pontos, sem estrutura discernível.•O mapa representado na gura anterior foi construído a partir duma
trajectória num regime caótico. É notável a estrutura bem denida destagura. Este mapa constitui um atractor caótico.
133

134

Aula 19
Caos em sistemas discretos
Sumário:
- Bifurcações e caos em sistemas discretos
- Dinâmica de populações
19.1 Bifurcações e caos em sistemas discretos
•Vimos que o caos só se podia manifestar em sistemas dinâmicos contínuosde terceira ordem ou de ordem superior.•Esta restrição não existe nos sistemas dinâmicos discretos. Podemos
observar um comportamento caótico quer em sistemas discretos de primeiraordem quer em sistemas discretos de segunda ordem.•Dada a simplicidade da equação de recorrência de alguns destes sistemas
é surpreendente que alguns deles possam ter evoluções tão complexas.•Como exemplo analisemos a evolução da seguinte família de sistemas
discretos de primeira ordem,
yn+1 = y2n + c, (19.1)
onde c é um parâmetro real.•Para c = 1/4 o sistema tem um ponto xo,
y = y2 +1
4
y =1
2
que é bem visível na evolução do sistema,evolution(y2+0.25,0,80,[xaxislabel,"n"], [yaxislabel,"y[n]"],[ycenter,0.3],[yradius,0.3]);
135

19.1. BIFURCAÇÕES E CAOS EM SISTEMAS DISCRETOS
10 20 30 40 50 60 700
0.1
0.2
0.3
0.4
0.5y[n]
n
evolution(y^2+0.25,0,80);
•Para c = 0 o sistema tem dois pontos xos,
y = y2
y = 0 ou y = 1,
mas só x = 0 é atractivo pois a derivada nesse ponto é nula e no ponto x = 1é superior a 1.
•Para c = −3/4 ocorre uma bifurcação. O sistema tem dois pontos xos.O ponto xo estável passa ser instável e surge um ciclo de período 2,
y = y2 − 3
4
y = −1
2ou y =
3
2,
como se observa na evolução do sistema,evolution(y2-3/4,0,80,[xaxislabel,"n"], [yaxislabel,"y[n]"],[ycenter,-0.5],[yradius,0.5]);
•Para c = −1.9 o sistema evolui erraticamente,evolution(y2-1.9,0,60);
136
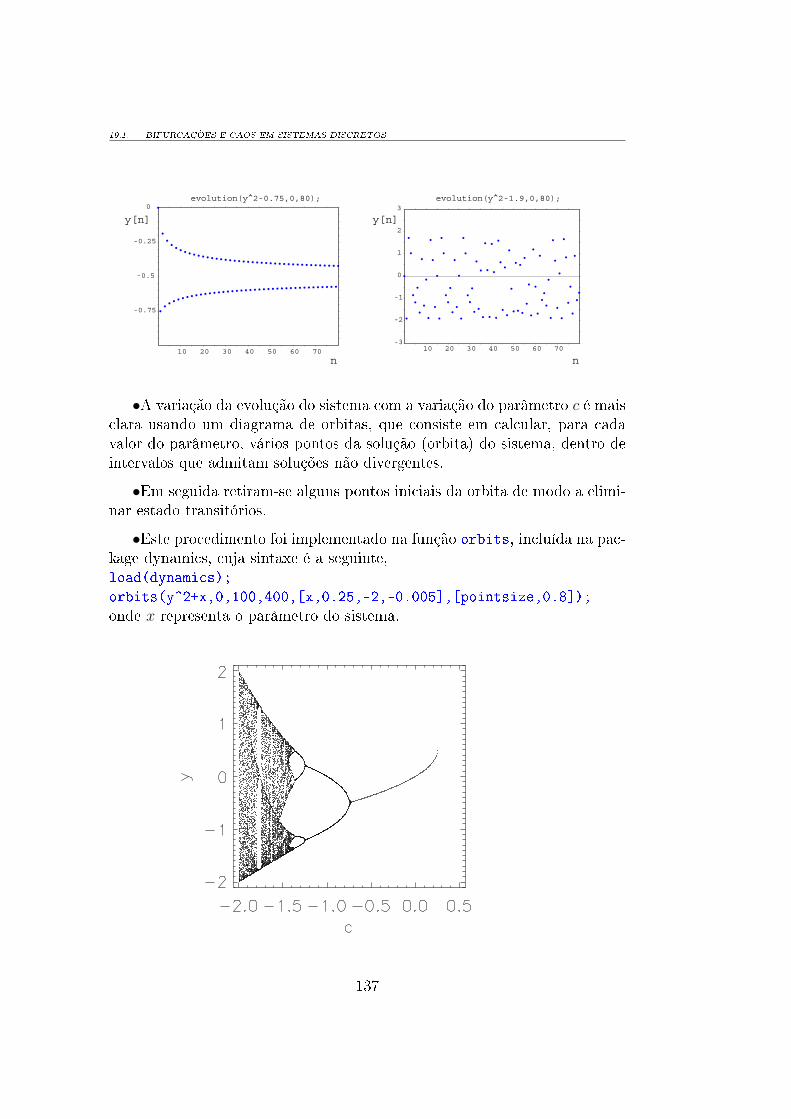
19.1. BIFURCAÇÕES E CAOS EM SISTEMAS DISCRETOS
10 20 30 40 50 60 70
-0.75
-0.5
-0.25
0
y[n]
n
evolution(y^2-0.75,0,80);
10 20 30 40 50 60 70-3
-2
-1
0
1
2
3
y[n]
n
evolution(y^2-1.9,0,80);
•A variação da evolução do sistema com a variação do parâmetro c é maisclara usando um diagrama de orbitas, que consiste em calcular, para cadavalor do parâmetro, vários pontos da solução (orbita) do sistema, dentro deintervalos que admitam soluções não divergentes.
•Em seguida retiram-se alguns pontos iniciais da orbita de modo a elimi-nar estado transitórios.
•Este procedimento foi implementado na função orbits, incluída na pac-kage dynamics, cuja sintaxe é a seguinte,load(dynamics);orbits(y2+x,0,100,400,[x,0.25,-2,-0.005],[pointsize,0.8]);onde x representa o parâmetro do sistema.
137

19.2. DINÂMICA DE POPULAÇÕES
19.2 Dinâmica de populações
•Como mencionado no início deste curso apesar do estudo dos sistemas di-nâmicos ter as suas raízes em problemas de mecânica, a sua aplicabilidade éhoje em dia mais vasta, como se ilustra em seguida numa aplicação à biologia.•A aparente estabilidade de sistemas predador-presa è um puzzle antigo.
Quando um predador come a sua presa, melhoram claramente as suas con-dições para procriar e assim aumentar o número de predadores. Podíamosentão esperar que o sistema fosse inerentemente instável.•Contudo se a população de presas diminuir, reduz-se a comida para os
predadores e a sua população também diminui.•Surge assim o conceito de oscilação da população, expresso matematica-
mente na primeira metade do Séc. XX, por Lotka e Volterra, usando sistemasdinâmicos contínuos.•Vejamos o modelo de Lotka-Volterra (LV), defenido pelas seguintes equa-
ções,
x = −ax+ bxy
y = cy − dxy (19.2)
onde x é população de predadores que decai com a taxa c na ausência depresas e y é a população de presas que cresce com uma taxa de nascimentosconstante na ausência de predadores. Os parâmetros b e d representam,respectivamente, o aumento (e diminuição) das populações de predadores(presas) devido à interacção entre as espécies. Os parâmetros a, b, c e d sãopositivos.•O sistema admite dois pontos xos, (x = 0, y = 0) que é um ponto de
sela e o ponto xo (x = c/d, y = a/b) que é um centro.•Para o conrmar analisemos matriz jacobiana em cada ponto xo. A
matriz jacobiana é,∂f
∂x
∂f
∂y
∂g
∂x
∂g
∂y
(xf ,yf )
=
[by − a bx−dy c− dx
](xf ,yf )
(19.3)
•No primeiro ponto xo (x = 0, y = 0) a jacobiana é,[−a 00 c
], (19.4)
com traço T = c − a e determinante D = −ac < 0 logo o ponto xo é umponto de cela.
138

19.2. DINÂMICA DE POPULAÇÕES
•No segundo ponto xo (x = c/d, y = a/b) a jacobiana é,[0 bc
d
−adb
0
](19.5)
com traço T = 0 e determinante D = ac > 0 logo o ponto xo é um centro.•Sem perda de generalidade podemos usar parâmetros simétricos a = b =
c = d = 1, e assim traçar as trajectórias no espaço de fase (que indicam aevolução no tempo das duas populações) com,plotdf([-x+x*y,y-x*y],[xradius,1],[xcenter,1],[yradius,1],[ycenter,1]);
0.4 0.8 1.2 1.6 2
0.4
0.8
1.2
1.6
2
x
y
•Contudo Lotka e Volterra reconheceram que as oscilações descritas pelosseus modelos não eram estáveis. A sua amplitude cresce até que uma dasespécies se extingue.
139

19.2. DINÂMICA DE POPULAÇÕES
140

Aula 20
Fractais
Sumário:
- Conjunto de Cantor
- Dimensão fractal
20.1 Conjunto de Cantor
•Os mapas de Poincarré que construímos para o oscilador linear forçado(ONLF) (ver sec.18.0.6) ou para o sistema de Rössler, (ver sec.18.0.5) tinhamuma geometria muito peculiar.•Nesta aula vamos desenvolver os conceitos necessários para descrever
melhor essa geometria, que se diz fractal.•Os fractais são formas geométricas complexas com estrutura na em
escalas arbitrariamente pequenas, que normalmente possuem algum grau deauto semelhança.•Quando ampliado o fractal não se simplica, antes pelo contrario, des-
cobrem-se formas que são reminiscentes do todo. Por vezes a semelhança éexacta, na maioria dos casos é só aproximada.•Ao observar objectos naturais como as montanhas, as nuvens, as redes
de vasos sanguíneos ou de neurónios, mais facilmente nos recordamos defractais do que das formas geométricas mais clássicas como os quadrados,linhas, círculos ou triângulos.•Possivelmente o objecto geométrico mais simples que merece ser cha-
mado um fractal é o conjunto de Cantor, criado pelo matemático Alemão,de origem Russa, Georg Cantor no Séc. IXX.•O conjunto de Cantor, C, (também conhecido por pente de Cantor)
obtém-se do seguinte modo: Construa-se um segmento de recta com com-primento unitário. Em seguida, divida-se o segmento em 3 partes iguais, eretire-se a parte do meio. Aplicando este procedimento indenidamente aos
141
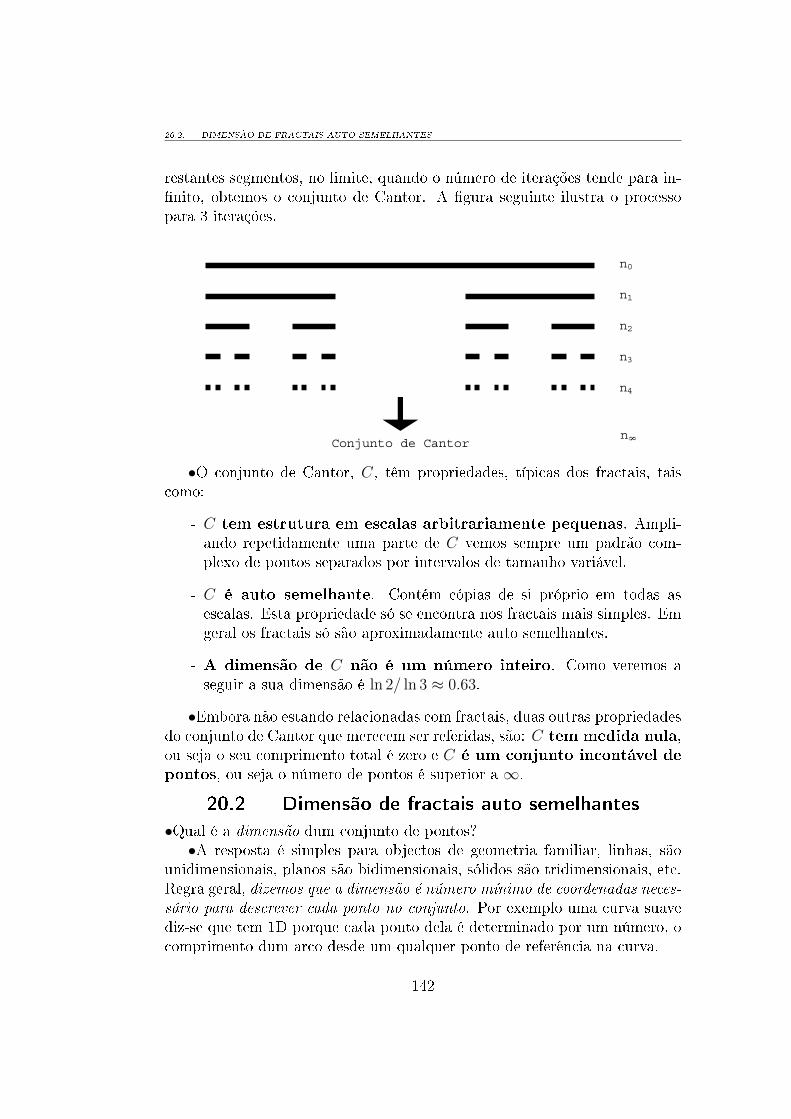
20.2. DIMENSÃO DE FRACTAIS AUTO SEMELHANTES
restantes segmentos, no limite, quando o número de iterações tende para in-nito, obtemos o conjunto de Cantor. A gura seguinte ilustra o processopara 3 iterações.
Conjunto de Cantor
n0
n1
n2
n3
n4
n 8
•O conjunto de Cantor, C, têm propriedades, típicas dos fractais, taiscomo:
- C tem estrutura em escalas arbitrariamente pequenas. Ampli-ando repetidamente uma parte de C vemos sempre um padrão com-plexo de pontos separados por intervalos de tamanho variável.
- C é auto semelhante. Contém cópias de si próprio em todas asescalas. Esta propriedade só se encontra nos fractais mais simples. Emgeral os fractais só são aproximadamente auto semelhantes.
- A dimensão de C não é um número inteiro. Como veremos aseguir a sua dimensão é ln 2/ ln 3 ≈ 0.63.
•Embora não estando relacionadas com fractais, duas outras propriedadesdo conjunto de Cantor que merecem ser referidas, são: C tem medida nula,ou seja o seu comprimento total é zero e C é um conjunto incontável depontos, ou seja o número de pontos é superior a ∞.
20.2 Dimensão de fractais auto semelhantes
•Qual é a dimensão dum conjunto de pontos?•A resposta é simples para objectos de geometria familiar, linhas, são
unidimensionais, planos são bidimensionais, sólidos são tridimensionais, etc.Regra geral, dizemos que a dimensão é número mínimo de coordenadas neces-
sário para descrever cada ponto no conjunto. Por exemplo uma curva suavediz-se que tem 1D porque cada ponto dela é determinado por um número, ocomprimento dum arco desde um qualquer ponto de referência na curva.
142
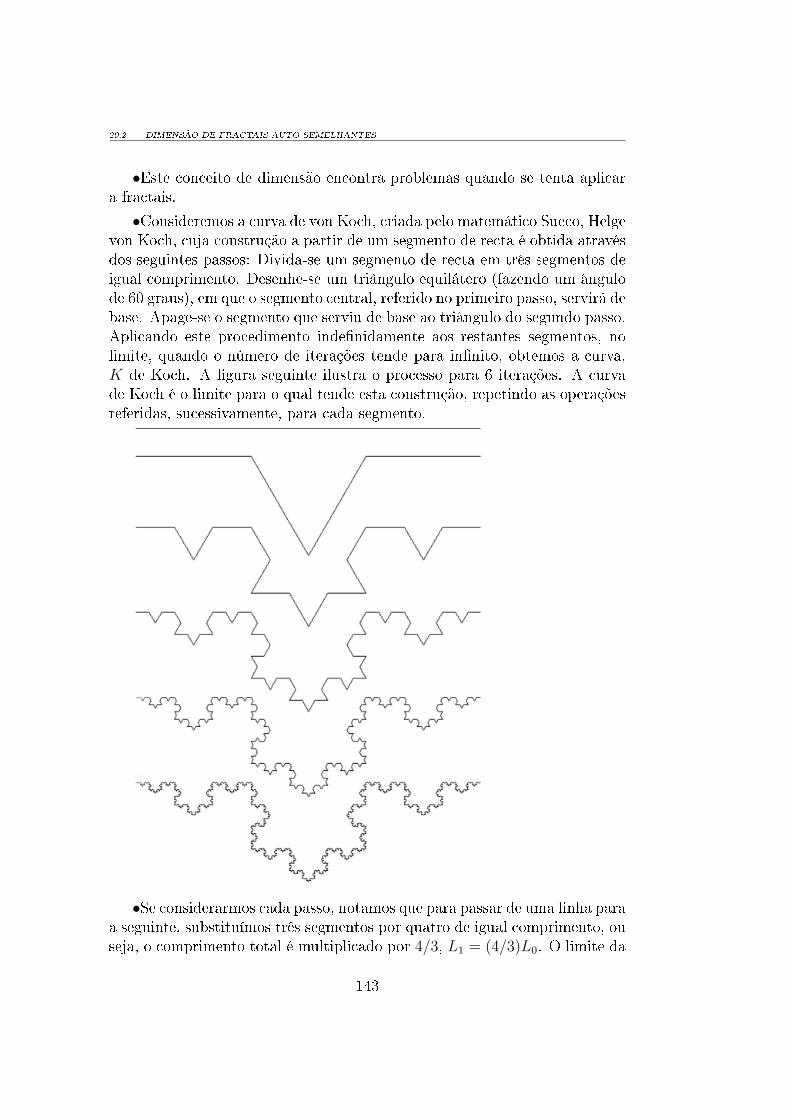
20.2. DIMENSÃO DE FRACTAIS AUTO SEMELHANTES
•Este conceito de dimensão encontra problemas quando se tenta aplicara fractais.
•Consideremos a curva de von Koch, criada pelo matemático Sueco, Helgevon Koch, cuja construção a partir de um segmento de recta é obtida atravésdos seguintes passos: Divida-se um segmento de recta em três segmentos deigual comprimento. Desenhe-se um triângulo equilátero (fazendo um ângulode 60 graus), em que o segmento central, referido no primeiro passo, servirá debase. Apage-se o segmento que serviu de base ao triângulo do segundo passo.Aplicando este procedimento indenidamente aos restantes segmentos, nolimite, quando o número de iterações tende para innito, obtemos a curva,K de Koch. A gura seguinte ilustra o processo para 6 iterações. A curvade Koch é o limite para o qual tende esta construção, repetindo as operaçõesreferidas, sucessivamente, para cada segmento.
•Se considerarmos cada passo, notamos que para passar de uma linha paraa seguinte, substituímos três segmentos por quatro de igual comprimento, ouseja, o comprimento total é multiplicado por 4/3, L1 = (4/3)L0. O limite da
143

20.3. DIMENSÃO DE HOMOTETIA
sucessão geométrica de razão 4/3 é o innito, o que signica que a curva Která um comprimento innito,
Ln =
(4
3
)nL0 →∞ quando n→∞ (20.1)
•Assim o comprimento do arco entre quaisquer dois pontos dacurva K é innito, ou seja os pontos de K não são determinados pelocomprimento dum arco a partir dum qualquer ponto de K porquecada ponto está innitamente afastado de qualquer outro.•Esta característica, típica dos fractais, acrescentada ao facto de a curva
parecer ter uma certa espessura devido às constantes mudanças de direcção,sugere que esta gura não é unidimensional (não é apenas uma linha, dotadaapenas de comprimento). Mas então qual será a dimensão? Bidimensional?Certamente que não porque a curva não tem área.
20.3 Dimensão de homotetia
•Os fractais mais simples são auto semelhantes, ou seja existe uma relação dehomotetia entre eles, pois eles são feitos de cópias reduzidas deles próprios,como a curva K ou o conjunto C.•Antes de denirmos a dimensão deste tipo de fractais, consideremos o
quadrado a seguir ilustrado,
n = 4, r = 2 n = 9, r = 3
•Reduzindo o quadrado por um factor de 2, em cada direcção, são ne-cessários 4 dos quadrados reduzidos para igualarem o quadrado inicial. Sereduzirmos o quadrado original por um factor de 3, então serão necessários9 quadrados para igualarem o original.•Em geral, se reduzirmos as dimensões lineares dum quadrado por um
factor de r são necessários r2 quadrados reduzidos para igualarem o quadradooriginal.
144

20.4. DIMENSÃO DE CAIXA
•Se em vez dum quadrado tivéssemos usado um cubo, então reduzindo umcubo por um factor de 2 , necessitamos de 8 para refazer o cubo original. Ouseja, em geral, se reduzirmos as dimensões lineares dum cubo por um factorde r são necessários r3 cubos reduzidos para igualarem o cubo original.•Os expoentes 2 e 3 reectem a dimensão 2 do quadrado e a dimensão 3
do cubo, o que sugere a seguinte denição.•Suponhamos que um conjunto auto semelhante é composto por
n cópias de si próprio, reduzidas por um factor de r, então a di-mensão de homotetia d (ou dimensão de semelhança) é o expoentedenido por n = rd ou de forma equivalente,
d =lnn
ln r(20.2)
•Para aplicar esta denição ao conjunto de Cantor C, recordemos que emcada iteração para construir C obtemos 2 cópias reduzidas por um factor de3. Assim n = 2 e r = 3 logo,
dC =ln 2
ln 3≈ 0.63 (20.3)
ou seja não tem dimensão zero (pontos), mas também não tem dimensão um(linhas).•A curva K de von Koch é feita de 4 segmentos, cada um reduzido por
um factor de 3. Assim n = 4 e r = 3 logo,
dK =ln 4
ln 3≈ 1.26 (20.4)
a sua dimensão estará entre 1 (da recta) e 2 (do plano).
20.4 Dimensão de caixa
•Só podemos calcular a dimensão de homotetia quando o conjunto é umfractal geométrico, i.e. quando o conjunto é auto semelhante em todas asescalas.•Contudo os fractais naturais são apenas estatisticamente auto semelhan-
tes. A dimensão de caixa, permite ultrapassar este obstáculo. Vejamos comose calcula.•Se pegarmos numa recta e a cobrirmos com caixas de lado ε cada vez
mais pequeno,
145

20.4. DIMENSÃO DE CAIXA
ε = 1, N(ε)=1
segmentode
recta
1
ε = 1/2, N(ε)=2
ε = 1/4, N(ε)=4
ε = 1/8, N(ε)=8
o número de caixas necessárias para cobrir a recta e o seu respectivotamanho estão relacionados pela equação,
N(ε) = (1
ε)d, com d = 1. (20.5)
•Por outro lado se pegarmos num quadrado e o cobrirmos com caixas delado ε cada vez mais pequeno,
ε = 1, N(ε)=1
ε = 1/2, N(ε)=4
ε = 1/4, N(ε)=16
ε = 1/8, N(ε)=64
quadradocom área 1
o número de caixas necessárias para cobrir o quadrado e o seu respectivotamanho estão relacionados pela equação,
N(ε) = (1
ε)d, com d = 2. (20.6)
•Vejamos o que acontece aplicando o método da contagem de caixas aoseguinte triângulo,
146

20.4. DIMENSÃO DE CAIXA
ε = 1, N(ε)=1
ε = 1/2, N(ε)=3
ε = 1/4, N(ε)=10
ε = 1/8, N(ε)=36
triângulocom
área 1/2
•Neste caso obtemos a seguinte equação:
N(ε) =n(n+ 1)
2≈ n2/2 ≈ 1
ε2, quando n→∞. (20.7)
•Ou seja, para uma curva suave de comprimento L o número de caixascom lado ε é N(ε) ≈ L/ε, enquanto que para uma superfície plana de área Ao número de caixas com lado ε necessárias para a cobrir é N(ε) ≈ A/ε2.•Destes exemplos importa realçar que a dimensão d do objecto verica
a lei de potência, N(ε) ≈ 1/εd, no limite em que ε → 0. Dene-se assim adimensão de caixa por,
d = limε→0
lnN(ε)
ln 1/ε, (20.8)
caso o limite exista.•As duas denições de dimensão, de homotetia e de caixa coincidem no
caso dos fractais geométricos. Contudo quando se calcula a dimensão decaixa nem sempre é fácil encontrar a cobertura mínima. A denição maisimportante de dimensão dum fractal é a dimensão de Hausdor, denida pelomatemático Alemão Felix Hausdor, que permite ultrapassar este obstáculousando pequenos conjuntos de caixas de dimensão variável.
147

20.4. DIMENSÃO DE CAIXA
148

Aula 21
continuação
Sumário:
- Sistemas discretos de segunda ordem
- O mapa de Hénon
- Construção probabilística de fractais
- Sistemas iterativos de funções
21.1 Sistemas discretos de segunda ordem
•Um sistema discreto de segunda ordem, ou mapa bidimensional, é um sis-tema com duas variáveis de estado, xn e yn, cuja evolução é discreta e denidapor duas equações da forma:
xn+1 = F (xn, yn)yn+1 = G(xn, yn)
(21.1)
•Em alguns sistemas dinâmicos discretos o estado do sistema num ins-tante depende do estado nos últimos dois instantes.•Por exemplo, a sucessão de Fibonacci, 1, 1, 2, 3, 5, . . ., dene-se a
partir da relação de recorrência
xn+2 = xn + xn+1 (21.2)
esta equação de segunda ordem é equivalente a um sistema de duas equaçõesde primeira ordem. Para tal denimos uma sucessão yn igual a xn+1, obtendoo sistema,
xn+1 = ynyn+1 = xn + yn
(21.3)
149

21.2. O MAPA DE HÉNON
21.2 O mapa de Hénon
•Em 1976 o astrónomo Michel Hénon desenvolveu um mapa bidimensionalpara tentar compreender a micro estrutura do atractor estranho de Lorenz.Hénon escolheu o estudo dum mapa em vez de estudar equações diferenciais,devido à maior facilidade em simular mapas e em seguir a suas soluções commaior precisão durante mais tempo.•O mapa de Hénon é denido pela equação,
xn+1 = 1 + yn − a x2nyn+1 = b xn
(21.4)
com dois parâmetros a e b ajustáveis.•Para simular as deformações (esticar e dobrar) que ocorrem no sistema
de Lorenz, Hénon considerou a seguinte sequência de transformações.
•(1) Começando com uma região rec-tangular alongada segundo X (2) do-brar, esticando o rectângulo através datransformação,
T1 : x1 = x, y1 = 1+y−a x2
o lado superior e inferior do rectângulosão transformados em parábolas. Oparâmetro a controla a dobra.
x1
y1
•(3) Em seguida dobrar a região aindamais segundo X,
T2 : x2 = b x1, y2 = y1
com −1 < b < 1.
x2
y2
•(4) Finalmente voltar à orientação se-gundo X por reexão através da rectay = x,
T3 : x3 = y2, y3 = x2.
x3
y3
•A transformação composta T = T3 T2 T1 produz o mapa de Hénon 21.4,onde foi usada a notação (xn, yn) para (x, y) e (xn+1, yn+1) para (x3, y3).
150

21.2. O MAPA DE HÉNON
•Escolhendo, após algumas considerações, os valores a = 1.4 e b = 0.3,Hénon gerou o atractor com o cálculo de 10 000 iterações, conseguindo visu-alizar pela primeira vez a estrutura fractal dum atractor estranho.•Podemos reproduzir o atractor de Hénon no Maxima usando o comando
evolution2d incluído na package dynamics, da seguinte forma,evolution2d([1+y-1.4*x2, 0.3*x], [0.2, 0.2], 10000,[pointsize, 0.2]);
•O resultado obtido está ilustrado na seguinte gura,
•Em seguida ilustram-se sucessivas ampliações que mostram a estruturafractal do mapa de Hénon,
•Para obter a segunda ampliação foi necessário correr a função evolution2d
151

21.3. CONSTRUÇÃO PROBABILÍSTICA DE FRACTAIS
com 700 000 iterações. Repare-se que qualquer uma das ampliações re-vela exactamente a mesma estrutura, 6 linhas, que se repetem indenida-mente, pois são o resultado da aplicação recorrente das sucessivas deforma-ções (T3T2T1).
21.3 Construção probabilística de fractais
•Na aula anterior descrevemos processos determinísticos para calcular frac-tais, como o pente de Cantor. Vamos em seguida vericar que é possívelobter o mesmo resultado através de um processo probabilístico.•De um modo geral este processo segue os seguintes passos:
- Escolhe-se um conjunto de pontos xos no plano.
- Em seguida desenha-se o ponto inicial (x0, y0) em qualquer parte ecalcula-se (x1, y1) deslocando o ponto inicial em direcção de um dospontos xos, escolhido aleatoriamente. O deslocamento em direcçãodo ponto xo é uma fracção β da distância; por exemplo, se β = 1/2,mede-se a distância desde (x0, y0) até o ponto xo, e desloca-se o pontometade da distância.
- Repetir o processo indenidamente, escolhendo em cada passo um dospontos xos de forma aleatória.
•Em termos matemáticos, se as coordenadas do ponto xo forem (pi, qi),o ponto (xn+1, xn) calcula-se a partir do ponto (xn, yn) por meio de
xn+1 = pi + β(xn − pi) (21.5)
yn+1 = qi + β(yn − qi) (21.6)
21.3.1 O Pente de Cantor
•Vamos exemplicar com o pente de Cantor, começando com um ponto nointervalo unitário [0, 1]. Em seguida lançar uma moeda ao ar. Se calhar caradeslocar o ponto 1/3 da distância em direcção a 1. Se calhar croa, deslocar oponto 1/3 da distância em direcção a 0. Marcar o ponto obtido. Em seguidarepetir o processo, sucessivamente.•Aparte os primeiros pontos obtidos, os restantes pontos aparentam pre-
encher o pente de Cantor. Tal deve-se ao pente de Cantor ser um atrac-tor do processo probabilístico descrito, levando os pontos represen-tados a aproximarem-se com uma taxa exponencial do atractor.•O resultado pode ser calculado no Maxima com a função chaosgame
também incluída no pacote dynamics,chaosgame([[0,0],[1,0]],[0.1,0],1/3,2000,
152

21.3. CONSTRUÇÃO PROBABILÍSTICA DE FRACTAIS
[pointsize, 0.1],[xcenter,0.5],[xradius,0.6],[yradius,.5],[ycenter,0]);que está ilustrado na gura seguinte,
0 0.2 0.4 0.6 0.8 1
0
y
x
•A gura obtida é semelhante à quarta iteração indicada na gura daSec. 20.1, pag. 142. Esta semelhança é aparente e è devida ao raio dospontos usados na gura ser bastante superior à distância entre pontos.•Podemos vericar que assim é ampliando a gura anterior entre 0 e
0.014, em torno do ponto 1/35,chaosgame([[0,0],[1,0]],[0.1,0],1/3,2000,[pointsize, 0.1],[xcenter,1.5/35],[xradius,2/(35-1)],[yradius,.5],[ycenter,0]);
0 0.005 0.01
0
y
x
•Que ilustra que a estrutura da gura é muito superior à representada.
21.3.2 O triângulo de Sierpinski
•O triângulo de Sierpinski é um fractal auto semelhante construído de formadeterminística do seguinte modo. Desenhar um triângulo. Em seguida re-mover o triângulo central e repetir o processo com todos os triângulos quesobram.•As primeiras 5 iterações estão ilustradas a seguir,
•Usando a construção probabilística podemos obter o mesmo resultadoconsiderando três pontos atractores nos vértices dum triângulo equilátero eum factor de contracção β = 1/2.•Por exemplo, tomemos os seguintes pontos, (0, 0), (1, 0) e (0.5,
√3/2)
153

21.4. SISTEMAS ITERATIVOS DE FUNÇÕES
que formam um triângulo equilátero. Começando com um ponto dentro dotriângulo, e.g., (0.1, 0.1). O comando usado para desenhar o fractal é,chaosgame([[0, 0], [1, 0], [0.5, sqrt(3)/2]],[0.1, 0.1], 1/2, 30000, [pointsize,0.2]);•O resultado obtido é,
21.4 Sistemas iterativos de funções
•As equações 21.5 e 21.6 escritas na forma matricial cam,[xn+1
yn+1
]=
[β 00 β
] [xn − piyn − qi
]+
[piqi
], (21.7)
a primeira matriz, diagonal, corresponde a uma contracção das duas coorde-nadas x e y, dum factor β.•Contudo podemos generalizar o sistema usando diferentes factores de
contracção, βx e βy para cada eixo.•Podemos ainda rodar os eixos em cada iteração, multiplicando por uma
matriz de rotação,[xn+1
yn+1
]=
[cos θ − sin θsin θ cos θ
] [β 00 β
] [xn − piyn − qi
]+
[piqi
], (21.8)
onde θ é o ângulo de rotação.•Finalmente, se quisermos incluir também deformações e reexões do
sistema de coordenadas, podemos simplesmente usar uma matriz com 4 pa-
154

21.4. SISTEMAS ITERATIVOS DE FUNÇÕES
râmetros a, b, c e d, e um vector com 2 parâmetros e e f ,[xn+1
yn+1
]=
[a bc d
] [xnyn
]+
[ef
]. (21.9)
•Podemos denir m matrizes e vectores e depois escolher um grupo deforma aleatória e aplicar a transformação 21.9.•Se o processo for repetido muitas vezes, o resultado nal será indepen-
dente do ponto inicial escolhido e produzirá um fractal.•Para controlar melhor a densidade de pontos em diferentes partes do
fractal, convém que algumas das m transformações sejam escolhidas commaior frequência, o que faz usando diferentes probabilidades para a escolhade cada transformação.•A função ifs, também incluída na package dynamics implementa este
método, designado por sistema iterativo de funções (do inglês Iterated Func-tions System, IFS).•Esta função necessita dos seguintes parâmetros: uma lista de probabili-
dades acumuladas, uma lista de m matrizes de transformação, uma lista dem pontos, um ponto inicial, e o número de iterações.•Como exemplo vamos desenhar o fractal obtido pelo método de IFS,
com as 3 matrizes e três pontos que se seguem, usando para todos a mesmaprobabilidade,
m1 =
[−0.550 −0.179−0.179 0.550
]p1 =
[−0.4380.382
]m2 =
[−0.246 0.1930.275 0.365
]p2 =
[−0.3790.538
]m3 =
[0.006 −0.014−0.147 −0.459
]p3 =
[−0.2830.490
]•Defenindo estas matrizes no Maxima vem,
m1: matrix([-0.550, -0.179], [-0.179, 0.550])$p1: matrix([-0.438], [0.382])$m2: matrix([-0.246, 0.193], [0.275, 0.365])$p2: matrix([-0.379], [0.538])$m3: matrix([0.006, -0.014], [-0.147, -0.459])$p3: matrix([-0.283], [0.490])$
•Para desenhar o fractal usamos o comando,ifs([1,2,3],[m1,m2,m3],[p1,p2,p3],[-0.3,0.2],10000);
•O resultado é a árvore fractal da gura
155

21.4. SISTEMAS ITERATIVOS DE FUNÇÕES
•Consideremos outro exemplo, desenhando o fractal gerado pelo métodoIFS com as seguintes quatro, matrizes, vectores e probabilidades,a1: matrix([0.85,0.04],[-0.04,0.85])$a2: matrix([0.2,-0.26],[0.23,0.22])$a3: matrix([-0.15,0.28],[0.26,0.24])$a4: matrix([0,0],[0,0.16])$p1: [0,1.6]$p2: [0,1.6]$p3: [0,0.44]$p4: [0,0]$prob: [85,92,99,100]
•Para desenhar o fractal usamos a função ifs,ifs(prob,[a1,a2,a3,a4],[p1,p1,p3,p4],[5,0],50000,[pointsize,0.7]);o resultado é o célebre feto de Barnsley, representado na gura seguinte,
156
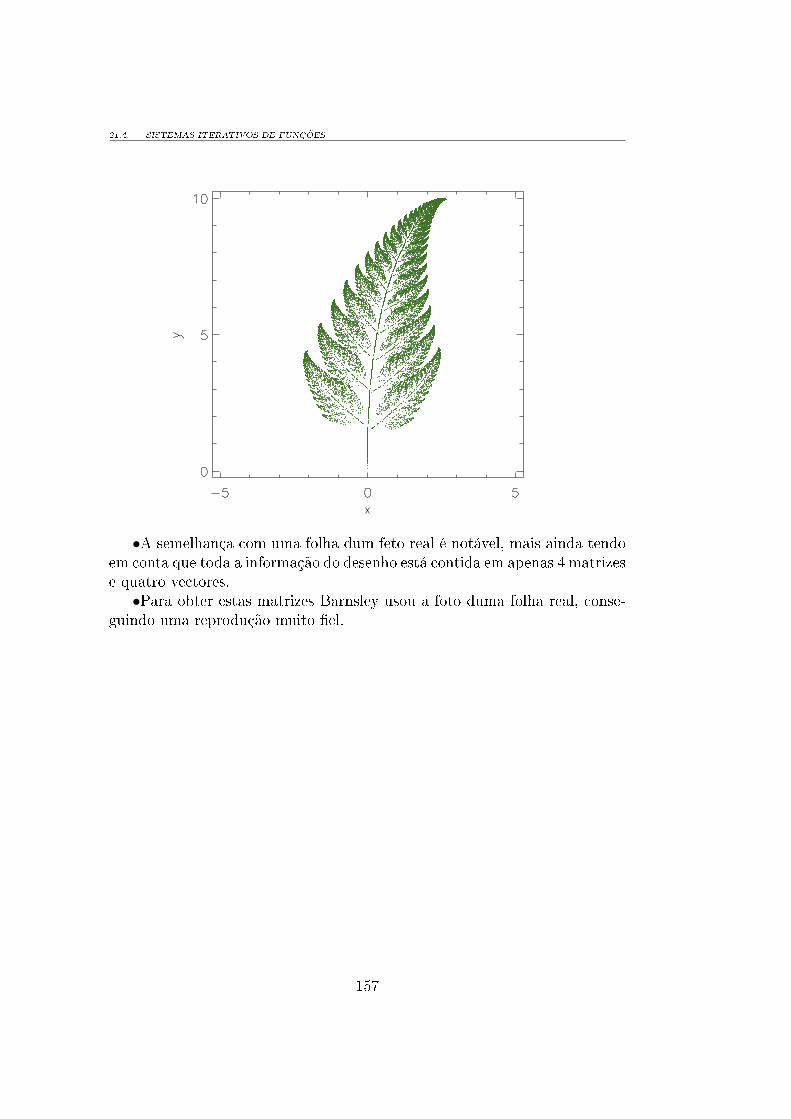
21.4. SISTEMAS ITERATIVOS DE FUNÇÕES
•A semelhança com uma folha dum feto real é notável, mais ainda tendoem conta que toda a informação do desenho está contida em apenas 4 matrizese quatro vectores.•Para obter estas matrizes Barnsley usou a foto duma folha real, conse-
guindo uma reprodução muito el.
157