estabilidade carlos alexandre mello - cin.ufpe.brcabm/servo/aula05.pdf · carlos alexandremello...
TRANSCRIPT

2Carlos Alexandre Mello – [email protected]
Introdução
� Já vimos que existem três requisitos fundamentais para projetar um sistema de controle:� Resposta Transiente
� Estabilidade
� Erros de Estado Estacionário
� Estabilidade é a mais importante especificação de sistema
� Se o sistema é instável, a resposta em transiente e os erros de estado estacionário são irrelevantes

3Carlos Alexandre Mello – [email protected]
Introdução
� Um sistema linear e invariante no tempo é estávelse a resposta natural se aproxima de zero quando o tempo tende a infinito
� Um sistema linear e invariante no tempo é instávelse a resposta natural cresce sem limites quando o tempo tende a infinito
� Um sistema linear e invariante no tempo é marginalmente estável se a resposta natural nem cai e nem cresce mas permanece constante ou oscila quando o tempo tende a infinito

4Carlos Alexandre Mello – [email protected]
Introdução
� Assim, a definição de estabilidade implica que apenas a resposta forçada permanece à medida que a resposta natural se aproxima de zero
� Um sistema é dito estável se toda entrada limitada leva a uma saída limitada� BIBO – Bounded-Input, Bounded-Output
� Ou, um sistema é instável se qualquer entrada limitada leva a uma saída ilimitada
� Um sistema é marginalmente estável se o sistema for estável para algumas entradas limitadas e instável para outras

5Carlos Alexandre Mello – [email protected]
Introdução
� Lembrando nosso estudo sobre polos, polos no semi-plano esquerdo produzem respostas naturais de decaimento exponencial puro ou senóides amortecidas
� Essas respostas naturais tendem a zero à medida que o tempo tende a infinito
� Assim, se os polos de um sistema de malha fechada estiverem no semi-plano esquerdo (ou seja, têm parte real negativa), o sistema será estável

6Carlos Alexandre Mello – [email protected]
Introdução
� Assim, sistemas estáveis possuem funções de transferência em malha fechada com polos apenas no semi-plano da esquerda
� Polos no semi-plano direito produzem respostas naturais na forma de exponenciais crescentes ou senóides exponencialmente crescentes� Essas respostas naturais tendem a infinito quando o
tempo tende a infinito também
� Também, polos com multiplicidade maior que 1 no eixo imaginário levam à soma de respostas da forma Atncos(ωt+ φ), onde n = 1, 2, ..., que também tendem a infinito quando o tempo tende a infinito

7Carlos Alexandre Mello – [email protected]
Introdução
� Logo, sistemas instáveis possuem funções de transferência em malha fechada com pelo menos um polo no semi-plano da direita ou polos com multiplicidade maior que 1 no eixo imaginário
� Por último, sistemas que têm polos no eixo imaginário com multiplicidade 1 geram oscilações senoidais puras como resposta natural
� Assim, sistemas marginalmente estáveis possuem funções de transferência em malha fechada com apenas polos no eixo imaginário com multiplicidade 1 e polos no semi-plano esquerdo

8Carlos Alexandre Mello – [email protected]
Introdução
� Exemplo 1:Observe que
são os polos
do sistema
completo!


10Carlos Alexandre Mello – [email protected]
Introdução
� Exemplo 3:Sistema original
Sistema equivalente
11Carlos Alexandre Mello – [email protected]
Introdução
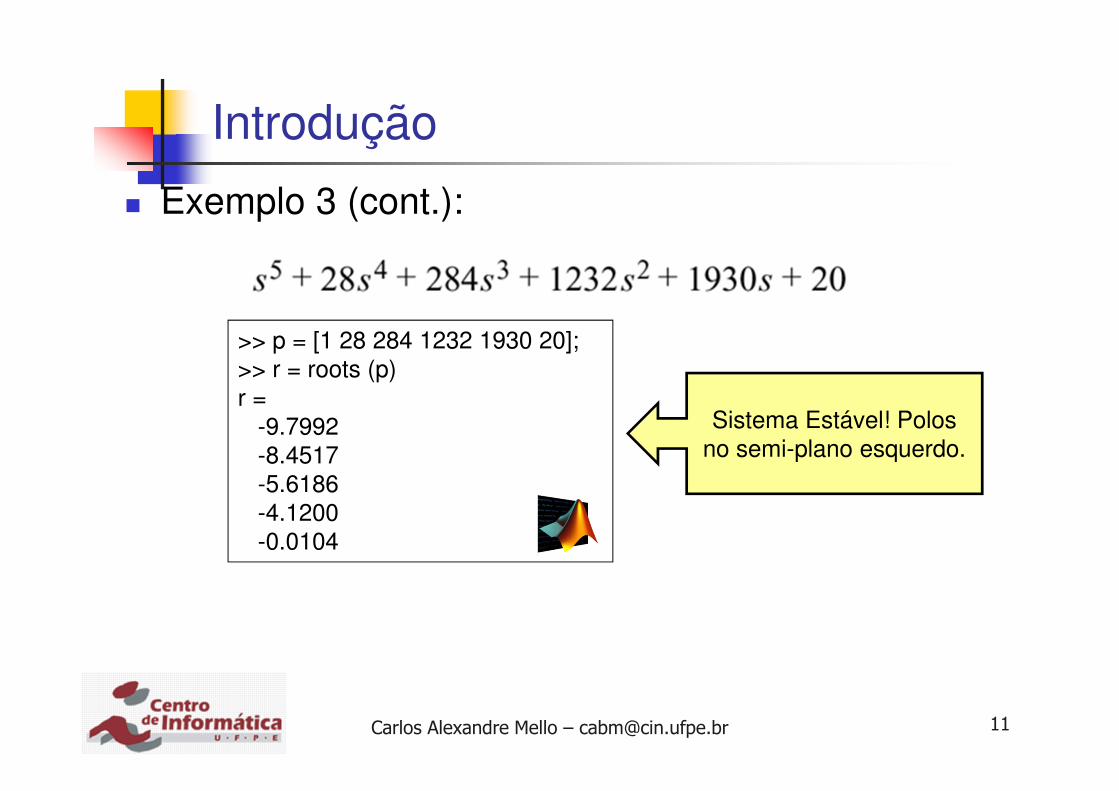
� Exemplo 3 (cont.):
>> p = [1 28 284 1232 1930 20];
>> r = roots (p)
r =
-9.7992
-8.4517
-5.6186
-4.1200
-0.0104
Sistema Estável! Polos
no semi-plano esquerdo.

12Carlos Alexandre Mello – [email protected]
Introdução
� Exemplo 3 (cont.):>> num = [10 20];>> den = [1 28 284 1232 1930 20];>> sys = tf(num, den);>> ltiview ({'pzmap'; 'step'}, sys);

13Carlos Alexandre Mello – [email protected]
Introdução
� Analisando o polinômio do denominador, algumas pistas podem dar dicas sobre a instabilidade do sistema:� Se os sinais dos coeficientes do denominador forem
diferentes (houver sinais positivos e negativos), então o sistema é instável
� Se há algum sinal negativo, ele só pode ter sido gerado por um produto do tipo (s + a)(s – a)
� Se potências de s forem perdidas (coeficiente igual a zero), o sistema é instável
� Se alguma potência tem coeficiente zero, isso quer dizer que ela foi anulada, ou seja, houve um a.sx – a.sx, o que implica que houve troca de sinal (caso anterior)

14Carlos Alexandre Mello – [email protected]
Critério de Routh-Hurwitz
� Garante informação sobre a estabilidade do sistema sem precisar encontrar os polos do sistema
� Através dele, sabemos quantos polos existem no semi-plano direito, semi-plano esquerdo e eixo imaginário
� Passos:� Gerar a Tabela de Routh
� Analisar a Tabela de Routh
O critério recebeu esse nome em homenagem a dois pesquisadores que o
descobriram de forma independente: Edward John Routh (1831-1907) e Adolf Hurwitz
(1859-1919).

15Carlos Alexandre Mello – [email protected]
Critério de Routh-Hurwitz
� Geração da Tabela de Routh Básica� Considere o sistema abaixo, um sistema equivalente a
função de transferência de um sistema de malha fechada:
� Com estamos interessados nos polos, vamos nos concentrar no polinômio do denominador e vamos criando a tabela...

16Carlos Alexandre Mello – [email protected]
Critério de Routh-Hurwitz
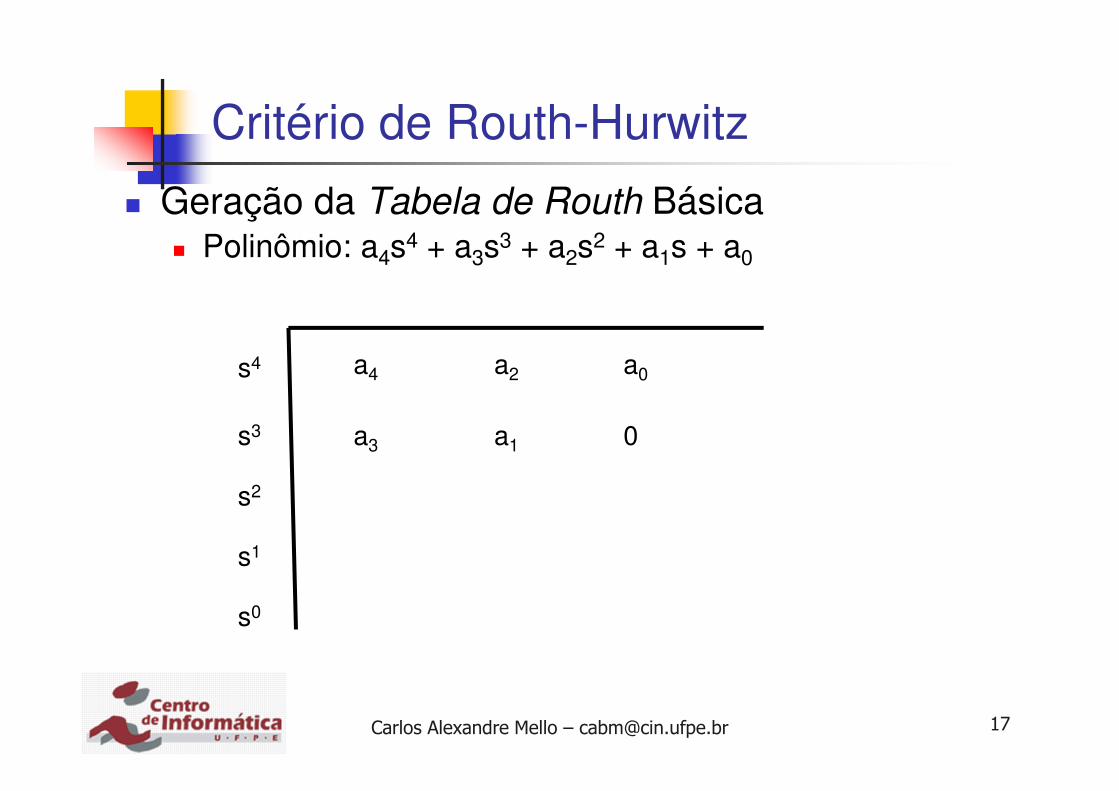
� Geração da Tabela de Routh Básica� Polinômio: a4s
4 + a3s3 + a2s
2 + a1s + a0
� Começamos legendando as linhas com as potências de s da maior para a menor
� Em seguida, comece com o coeficiente da maior potência de s e atribua ele à primeira posição da tabela (posição onde está sua potência correspondente)
� A próxima linha recebe o segundo maior coeficiente e as colunas vão sendo completadas alternando assim entre linhas....
� Adicione zero na última posição, se necessário
17Carlos Alexandre Mello – [email protected]
Critério de Routh-Hurwitz
� Geração da Tabela de Routh Básica� Polinômio: a4s
4 + a3s3 + a2s
2 + a1s + a0
s4
s3
s2
s1
s0
a4
a3
a2
a1
a0
0

18Carlos Alexandre Mello – [email protected]
Critério de Routh-Hurwitz
� Geração da Tabela de Routh Básica� Polinômio: a4s
4 + a3s3 + a2s
2 + a1s + a0
� A terceira linha deve ter o mesmo número de elementos que a linha anterior
� Cada elemento será uma divisão onde:� O denominador é o primeiro elemento da linha anterior (fixo para
todos os elementos dessa linha)
� O numerador é o determinante das entradas das linhas anteriores, onde a primeira coluna é sempre a primeira coluna anterior; as próximas colunas seguem a sequência:
� Acrescentando zeros se necessário....

19Carlos Alexandre Mello – [email protected]
Critério de Routh-Hurwitz
� Geração da Tabela de Routh Básica� Polinômio: a4s
4 + a3s3 + a2s
2 + a1s + a0
s4
s3
s2
s1
s0
a4
a3
a2
a1
a0
0
= 0

20Carlos Alexandre Mello – [email protected]
Critério de Routh-Hurwitz
� Geração da Tabela de Routh Básica� Polinômio: a4s
4 + a3s3 + a2s
2 + a1s + a0
� E assim por diante....
s4
s3
s2
s1
s0
a4
a3
a2
a1
a0
0
= 0

21Carlos Alexandre Mello – [email protected]
Critério de Routh-Hurwitz
� Geração da Tabela de Routh Básica� Exemplo 1:
Linhas podem ser
simplificadas, mas
com cuidado.....
Uma linha pode ser
toda multiplicada por
uma constante
(nesse caso, 1/10).
MAS preserve o
sinal do elemento
da primeira
coluna!

22Carlos Alexandre Mello – [email protected]
Critério de Routh-Hurwitz
� Geração da Tabela de Routh Básica� Exemplo 1 (cont.): Observação:
Observe que essa
coluna foi necessária
para podermos montar
a segunda matriz da
linha 3.
Observe que esse elemento é
necessário porque temos que
ter o mesmo número de
elementos em todas as linhas.

23Carlos Alexandre Mello – [email protected]
Critério de Routh-Hurwitz
� Interpretando a Tabela de Routh Básica� Exemplo 1 (cont.):
O número de raízes do
polinômio que estão no
semi-plano direito é igual
ao número de mudanças
de sinal da primeira
coluna da tabela de
Routh. Neste exemplo,
temos duas mudanças
(de 1 para -72 e de -72
para 103), assim, o
sistema é instável já que
existem polos no semi-
plano direito.

24Carlos Alexandre Mello – [email protected]
Critério de Routh-Hurwitz
� Interpretando a Tabela de Routh Básica� Exemplo 2:
� P(s) = 3s7 + 9s6 + 6s5 + 4s4 + 7s3 + 8s2 + 2s + 6

25Carlos Alexandre Mello – [email protected]
Critério de Routh-Hurwitz
� Interpretando a Tabela de Routh Básica� Exemplo 2 (cont.):
Ex:-det[3 9; 6 4]/9

26Carlos Alexandre Mello – [email protected]
Critério de Routh-Hurwitz
� Interpretando a Tabela de Routh Básica� Exemplo 2 (cont.):
Ex:-det[4.667 0; -4.357 6]/(-4.357)
27Carlos Alexandre Mello – [email protected]
Critério de Routh-Hurwitz
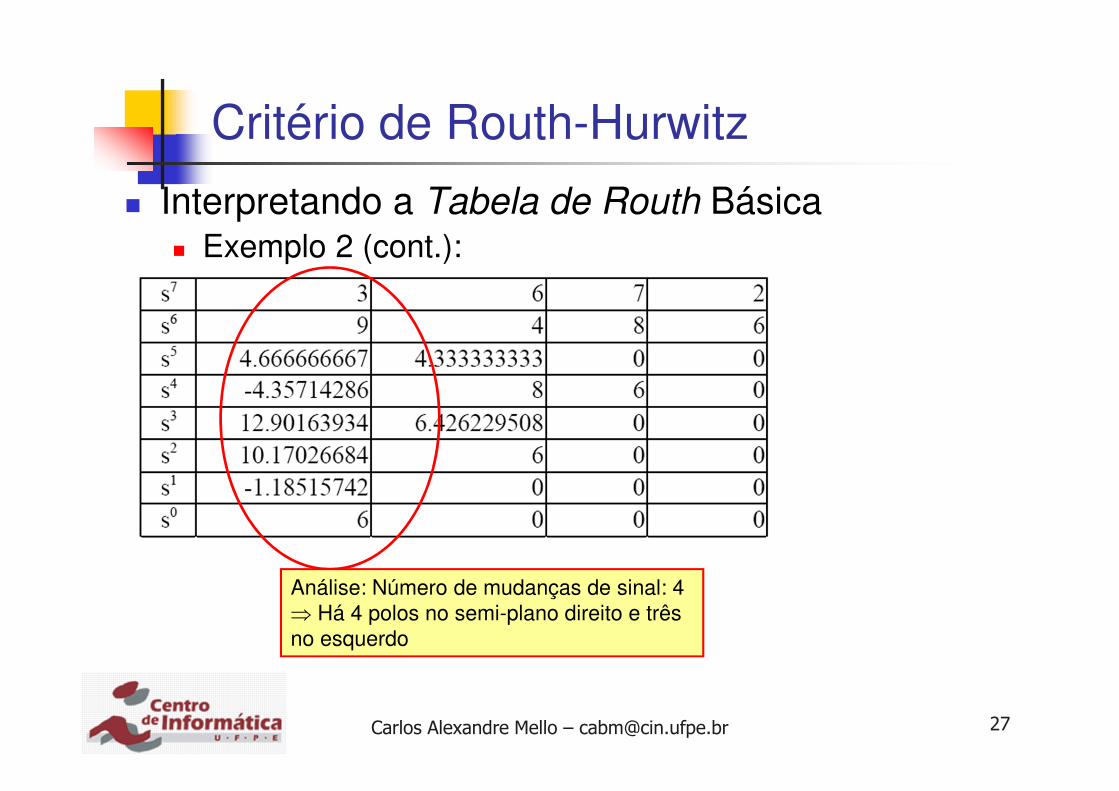
� Interpretando a Tabela de Routh Básica� Exemplo 2 (cont.):
Análise: Número de mudanças de sinal: 4
⇒ Há 4 polos no semi-plano direito e três
no esquerdo

28Carlos Alexandre Mello – [email protected]
Critério de Routh-Hurwitz
� Casos Especiais� 1) A tabela de Routh tem zero apenas na primeira
coluna de uma linha� Pode gerar uma divisão por zero na próxima linha
� Solução 1: adicionar um bias (ε): um valor muito baixo, próximo de zero, usado apenas para evitar a divisão por zero
� O sinal do bias pode ser positivo ou negativo; isso precisa ser analisado depois
� Solução 2: Uso de coeficientes reversos
Fazendo s = 1/d (as raízes de d serão recíprocas às de s):

29Carlos Alexandre Mello – [email protected]
Critério de Routh-Hurwitz
� Casos Especiais� 1) A tabela de Routh tem zero apenas na primeira
coluna de uma linha� Exemplo:

30Carlos Alexandre Mello – [email protected]
Critério de Routh-Hurwitz
� Casos Especiais� 1) A tabela de Routh tem zero apenas na primeira
coluna de uma linha� Exemplo (cont.):
Para ε positivo, temos duas mudanças de sinal, assim, o sistema tem dois polos no semi-plano direito
sendo instável; Para ε negativo, temos duas mudanças de sinal também, assim, o sistema tem dois polos no semi-plano direito sendo instável.

31Carlos Alexandre Mello – [email protected]
Critério de Routh-Hurwitz
� Casos Especiais� 1) A tabela de Routh tem zero apenas na primeira
coluna de uma linha� Exemplo (cont.):
� Por coeficientes reversos: D(s) = 3s5 + 5s4 + 6s3 + 3s2 + 2s + 1

32Carlos Alexandre Mello – [email protected]
Critério de Routh-Hurwitz
� Casos Especiais� 2) A tabela de Routh tem toda uma linha igual a zero
� Exemplo:

33Carlos Alexandre Mello – [email protected]
Critério de Routh-Hurwitz
� Casos Especiais� 2) A tabela de Routh tem toda uma linha igual a zero
� Exemplo (cont.):
Solução: Voltamos à linha anterior à linha nula e criamos um polinômio auxiliar formado por seus coeficientes apenas. No caso, P(s) = 1s4 + 6s2 + 8. Derivamos esse polinômio:dP(s)/ds = 4s3 + 12s + 0e usamos esses coeficientes como entradas da tabela. No caso, podemos simplificá-los, dividindo por 4, ficando com 1s3 + 3s + 0.Depois, prosseguimos normalmente....

34Carlos Alexandre Mello – [email protected]
Critério de Routh-Hurwitz
� Casos Especiais� 2) A tabela de Routh tem toda uma linha igual a zero
� Exemplo (cont.):
Como não há mudanças de sinal, o sistema não tem polos no semi-plano direito. Nada pode ser dito sobre a estabilidade ainda (veremos a seguir..).

35Carlos Alexandre Mello – [email protected]
Critério de Routh-Hurwitz
� Casos Especiais� 2) A tabela de Routh tem toda uma linha igual a zero
� Exemplo (cont.):
� Por que isso aconteceu? Vamos olhar novamente o primeiro passo da Tabela:
Se considerarmos a linha acima da linha nula como um polinômio, teríamos: s4 +
6s2 + 8. Esse polinômio divide o polinômio original (ou seja, é um de seus
fatores). Isso acontece porque há um polinômio que divide o polinômio original.
Nesse caso, acontece a linha nula. O polinômio da linha s4 é ainda um polinômio
par (só possui potências pares de s), enquanto o polinômio da linha s5 é dito um
polinômio ímpar (só possui potências ímpares de s).

36Carlos Alexandre Mello – [email protected]
Critério de Routh-Hurwitz
� Casos Especiais� 2) A tabela de Routh tem toda uma linha igual a zero
� Exemplo 2: Denominador é
� s8 + s7 + 12s6 + 22s5 + 39s4 + 59s3 + 48s2 + 38s + 20
(s4 + 3s2 +2) divide o polinômio:
s8 + s7 + 12s6 + 22s5 + 39s4 + 59s3 + 48s2 + 38s
+ 20, gerando a linha nula.
37Carlos Alexandre Mello – [email protected]
Critério de Routh-Hurwitz
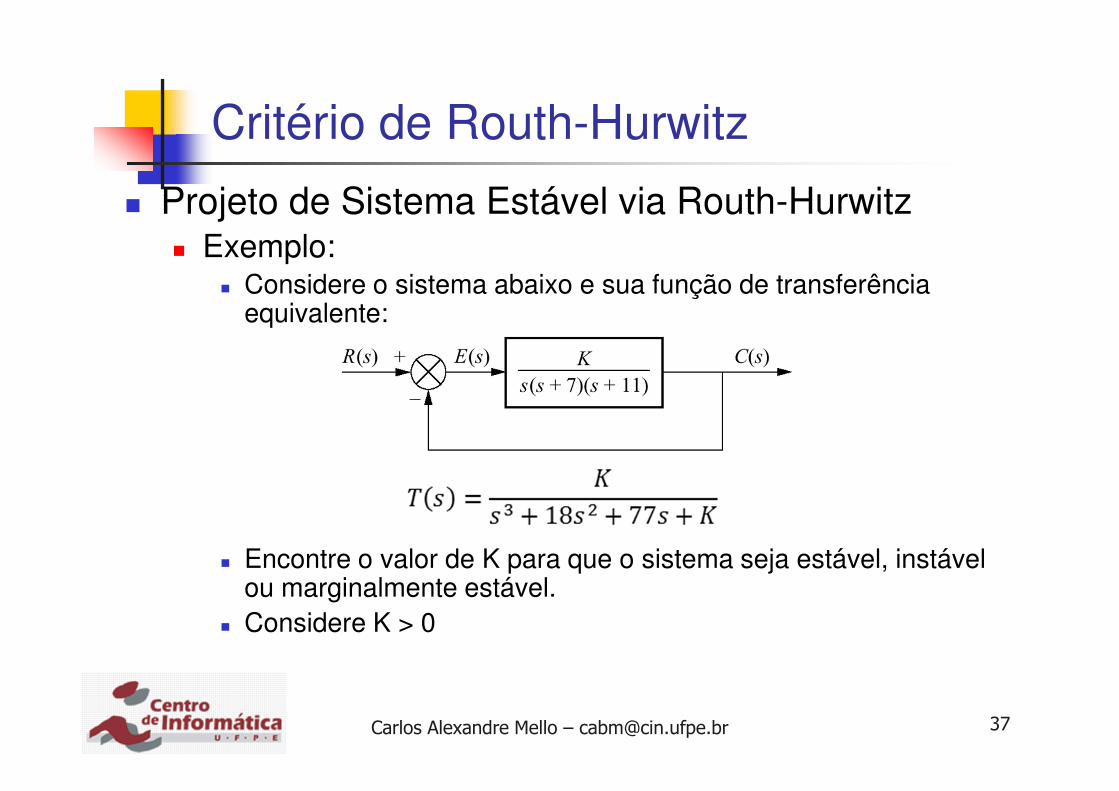
� Projeto de Sistema Estável via Routh-Hurwitz� Exemplo:
� Considere o sistema abaixo e sua função de transferência equivalente:
� Encontre o valor de K para que o sistema seja estável, instável ou marginalmente estável.
� Considere K > 0

38Carlos Alexandre Mello – [email protected]
Critério de Routh-Hurwitz
� Projeto de Sistema Estável via Routh-Hurwitz� Exemplo (cont.):
� Tabela de Routh:
• Se K > 1386, teremos uma mudança de sinal por causa da terceira linha, gerando um sistema instável;
• Se K < 1386, todos os termos da primeira coluna serão positivos, não havendo mudança de sinal. Assim, o sistema será estável;
• Se K = 1386, teremos a terceira linha como nula. Isso leva à necessidade de voltar à linha anterior, derivar seu polinômio e considerá-lo assim (considerando K=1386).

39Carlos Alexandre Mello – [email protected]
Critério de Routh-Hurwitz
� Projeto de Sistema Estável via Routh-Hurwitz� Exemplo (cont.):
� Nesse último caso, como não há mudanças de sinal do polinômio par (linha s2) para baixo, o polinômio par tem suas duas raízes no eixo imaginário apenas (do contrário, por simetria, haveria raízes no semi-plano direito)
� Como não há mudanças de sinal acima do polinômio par também, as raízes restantes estão no semi-plano esquerdo
� Assim, o sistema é marginalmente estável
Polinômio: s3 + 18s2 + 77s + 1386
Raízes:
-18
8,775i
- 8,775i
40Carlos Alexandre Mello – [email protected]
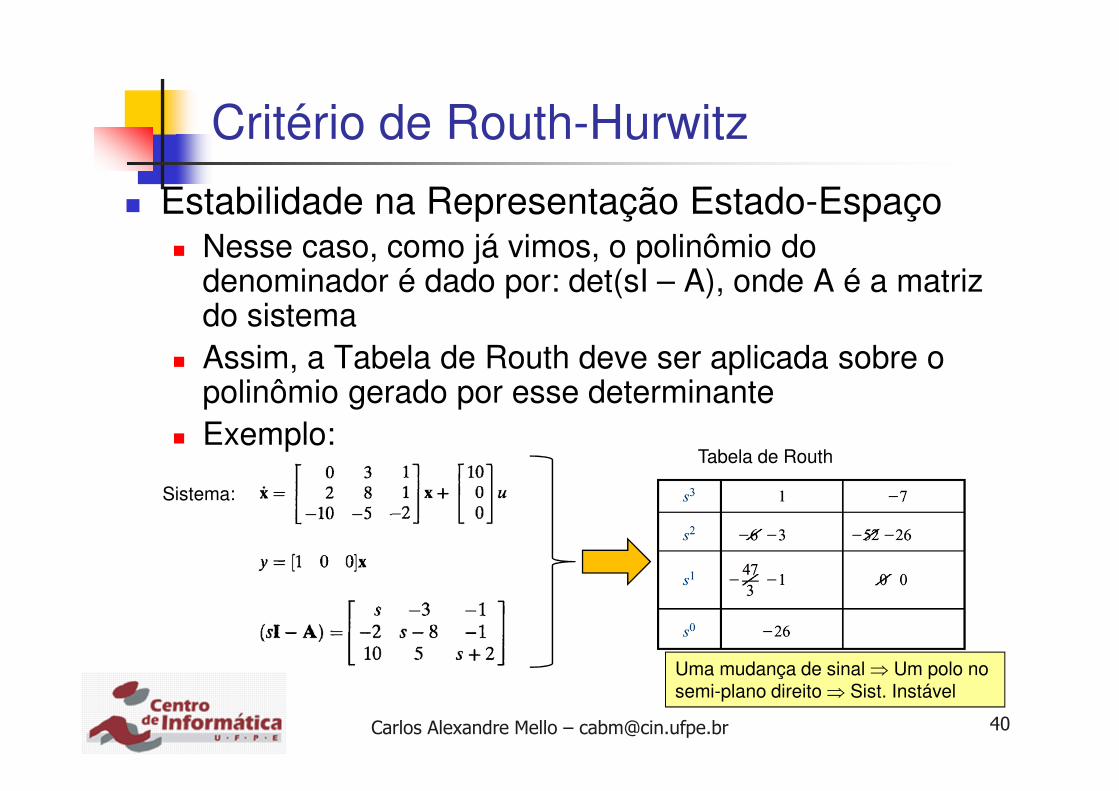
Critério de Routh-Hurwitz
� Estabilidade na Representação Estado-Espaço� Nesse caso, como já vimos, o polinômio do
denominador é dado por: det(sI – A), onde A é a matriz do sistema
� Assim, a Tabela de Routh deve ser aplicada sobre o polinômio gerado por esse determinante
� Exemplo:
Sistema:
Tabela de Routh
Uma mudança de sinal ⇒ Um polo no semi-plano direito ⇒ Sist. Instável
41Carlos Alexandre Mello – [email protected]
Exercícios Sugeridos (Nise)
� Cap. 6, Problemas:
� 1, 2, 3, 4, 5, 6, 9, 12
� No MatLab:
� 7, 10
