erros de estado estacionário carlos alexandre mellocin.ufpe.br/~cabm/servo/aula06.pdf · carlos...
TRANSCRIPT
2Carlos Alexandre Mello – [email protected]
Introdução
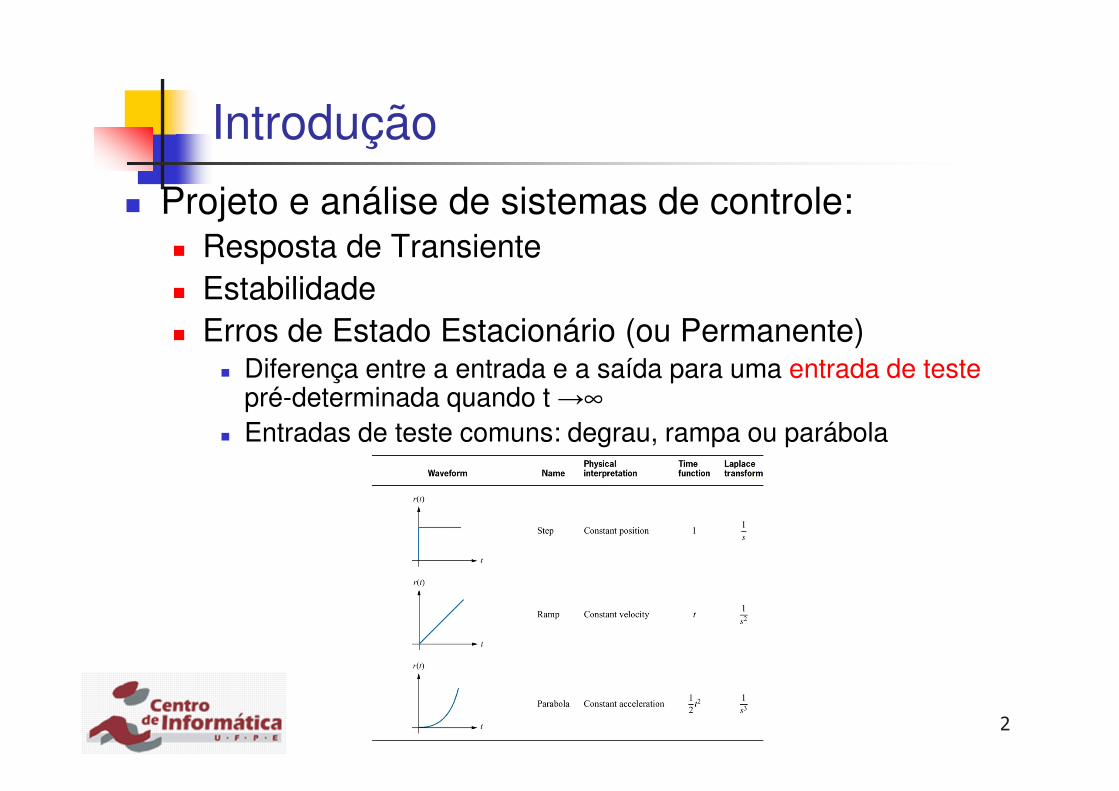
� Projeto e análise de sistemas de controle:� Resposta de Transiente
� Estabilidade
� Erros de Estado Estacionário (ou Permanente)� Diferença entre a entrada e a saída para uma entrada de teste
pré-determinada quando t →∞
� Entradas de teste comuns: degrau, rampa ou parábola
3Carlos Alexandre Mello – [email protected]
Introdução
� Como estamos preocupados com a diferença entre a entrada e saída de um sistema de controle com re-alimentação depois de alcançar o estado estacionário, vamos nos limitar a estudar sistemas estáveis, onde a resposta natural tende a zero quando t →∞
� Considere os exemplos a seguir....
4Carlos Alexandre Mello – [email protected]
Introdução
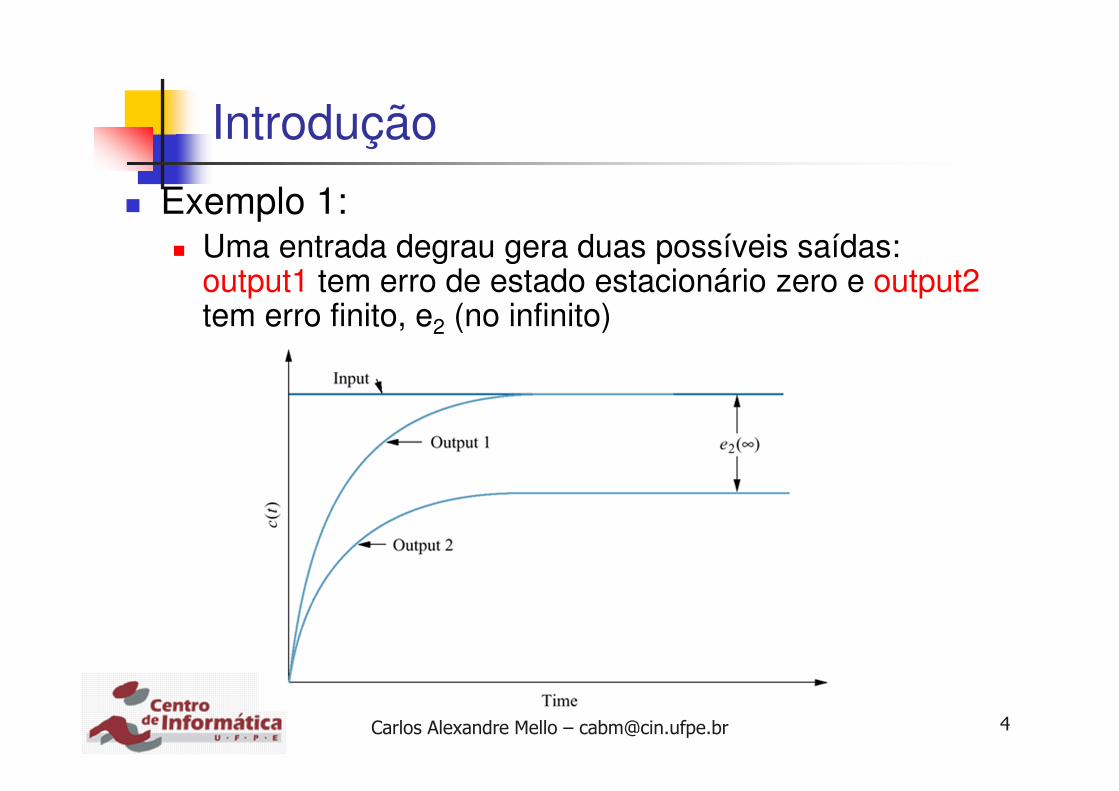
� Exemplo 1:� Uma entrada degrau gera duas possíveis saídas:
output1 tem erro de estado estacionário zero e output2tem erro finito, e2 (no infinito)
5Carlos Alexandre Mello – [email protected]
Introdução
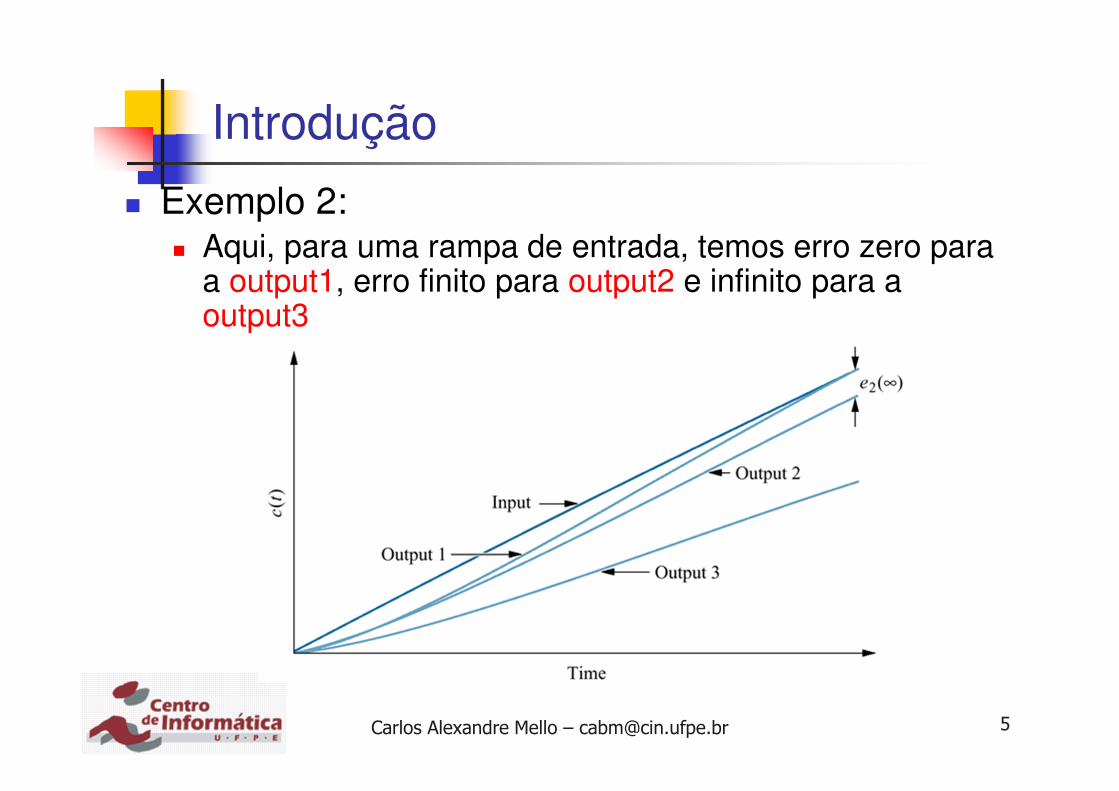
� Exemplo 2:� Aqui, para uma rampa de entrada, temos erro zero para
a output1, erro finito para output2 e infinito para a output3
6Carlos Alexandre Mello – [email protected]
Introdução
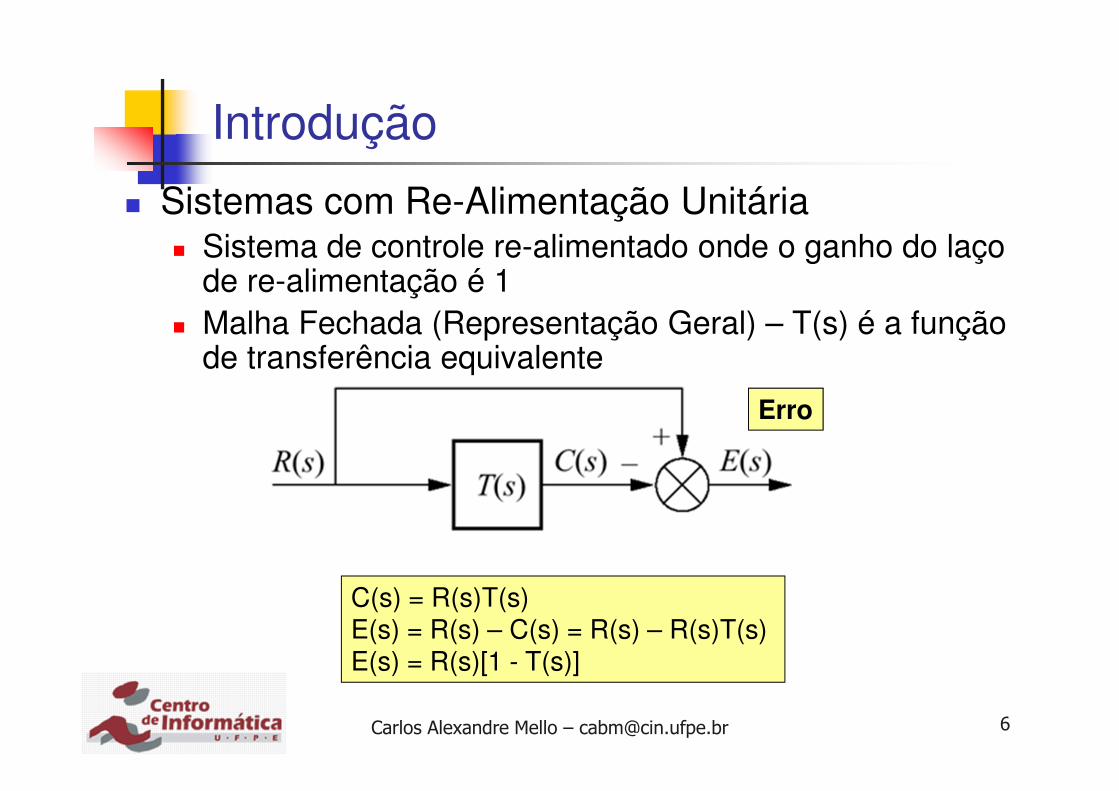
� Sistemas com Re-Alimentação Unitária� Sistema de controle re-alimentado onde o ganho do laço
de re-alimentação é 1
� Malha Fechada (Representação Geral) – T(s) é a função de transferência equivalente
Erro
C(s) = R(s)T(s)E(s) = R(s) – C(s) = R(s) – R(s)T(s)E(s) = R(s)[1 - T(s)]
7Carlos Alexandre Mello – [email protected]
Erro de Estado Estacionário para Sistemas com Re-Alimentação Unitária
� O erro de estado estacionário pode ser calculado a partir da função de transferência de um sistema de malha fechada (T(s)) ou aberta (G(s)) para sistemas com re-alimentação unitária
� Vamos começar analisando o erro em relação à função de transferência de malha fechada T(s)
� Depois, analisaremos o sistema em malha aberta G(s), introduzindo a re-alimentação unitária
8Carlos Alexandre Mello – [email protected]
Erro de Estado Estacionário para Sistemas com Re-Alimentação Unitária
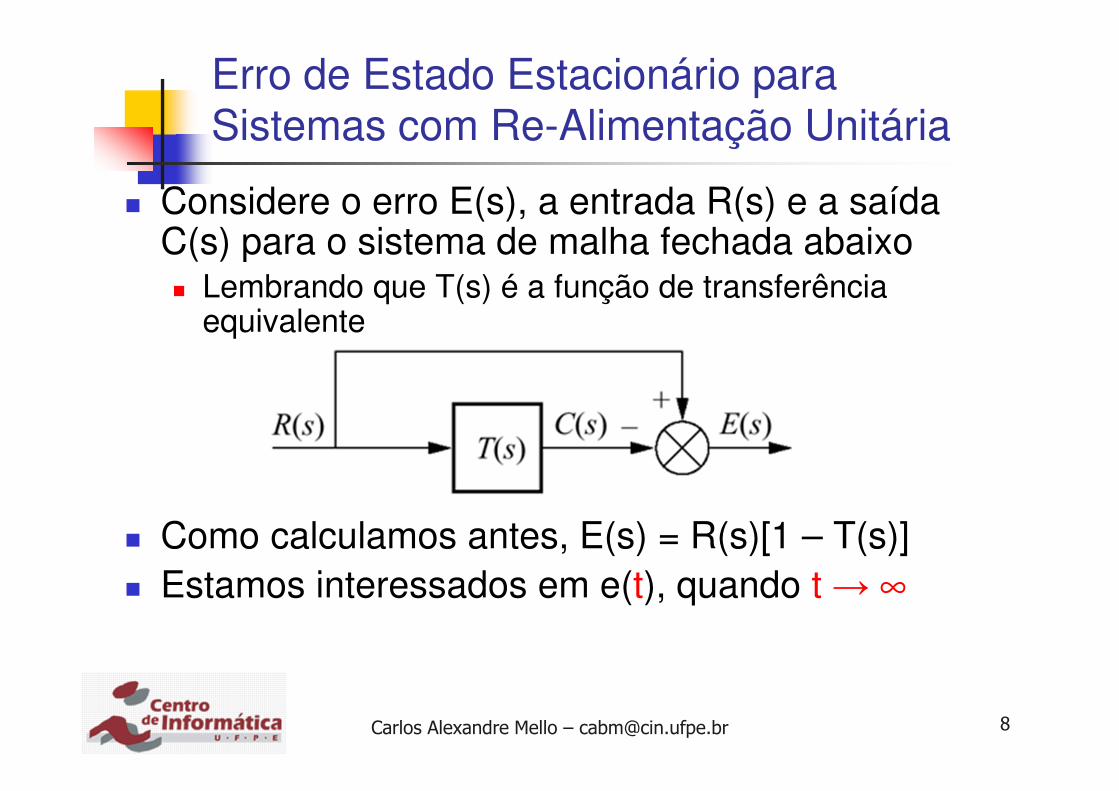
� Considere o erro E(s), a entrada R(s) e a saída C(s) para o sistema de malha fechada abaixo� Lembrando que T(s) é a função de transferência
equivalente
� Como calculamos antes, E(s) = R(s)[1 – T(s)]
� Estamos interessados em e(t), quando t → ∞
9Carlos Alexandre Mello – [email protected]
Erro de Estado Estacionário para Sistemas com Re-Alimentação Unitária
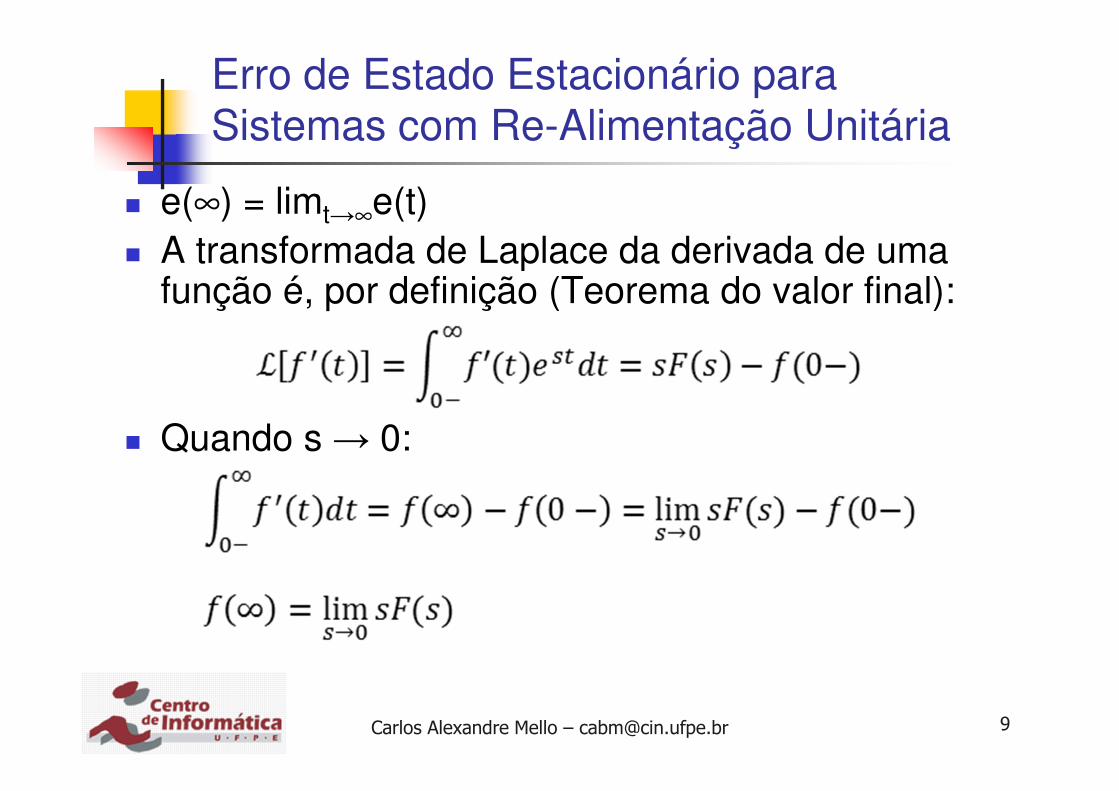
� e(∞) = limt→∞e(t)
� A transformada de Laplace da derivada de uma função é, por definição (Teorema do valor final):
� Quando s → 0:
10Carlos Alexandre Mello – [email protected]
Erro de Estado Estacionário para Sistemas com Re-Alimentação Unitária
� Assim:
� e(∞) = limt→∞e(t) = lims→0sE(s)
� Com isso:
� e(∞) = lims→0s{R(s)[1 – T(s)]}
11Carlos Alexandre Mello – [email protected]
Erro de Estado Estacionário para Sistemas com Re-Alimentação Unitária
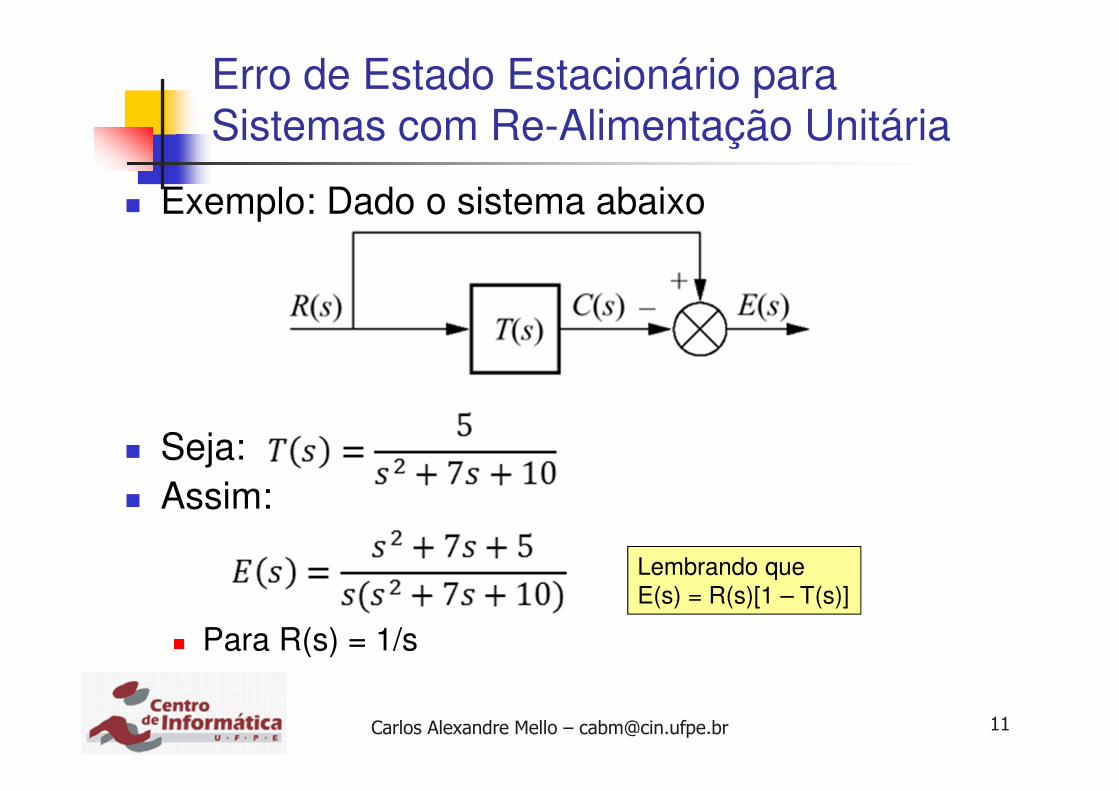
� Exemplo: Dado o sistema abaixo
� Seja:
� Assim:
� Para R(s) = 1/s
Lembrando que
E(s) = R(s)[1 – T(s)]
12Carlos Alexandre Mello – [email protected]
Erro de Estado Estacionário para Sistemas com Re-Alimentação Unitária
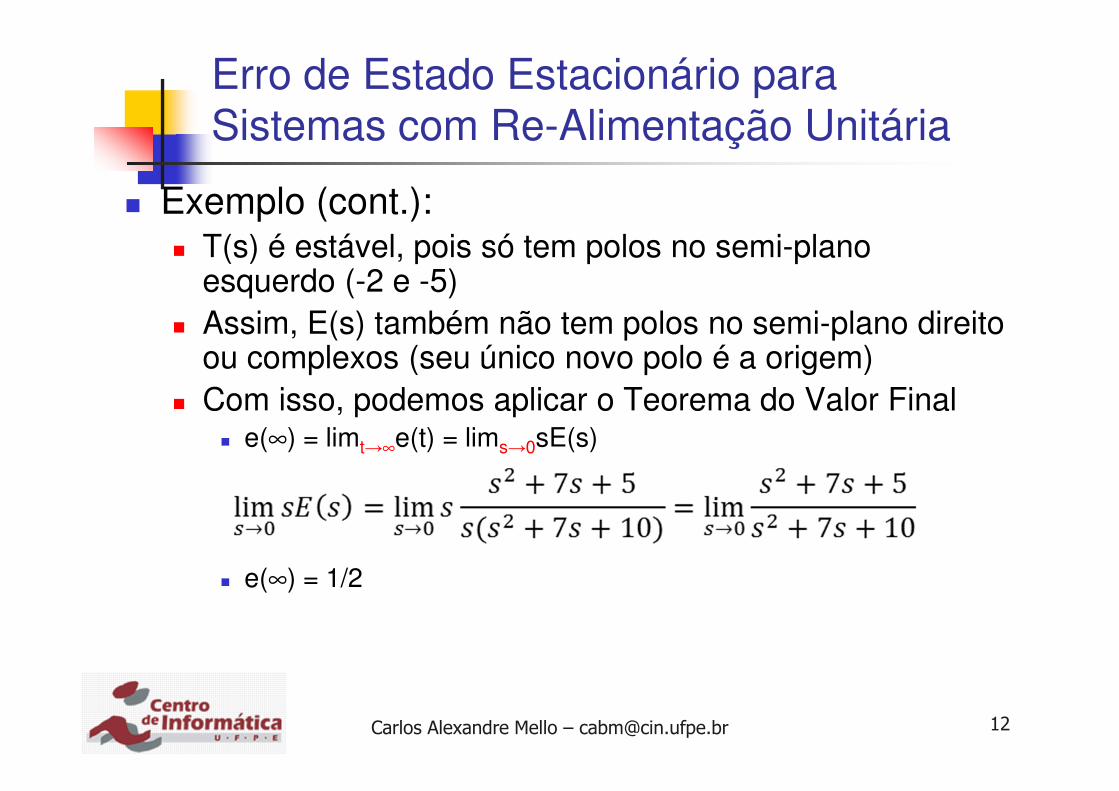
� Exemplo (cont.):� T(s) é estável, pois só tem polos no semi-plano
esquerdo (-2 e -5)
� Assim, E(s) também não tem polos no semi-plano direito ou complexos (seu único novo polo é a origem)
� Com isso, podemos aplicar o Teorema do Valor Final� e(∞) = limt→∞
e(t) = lims→0sE(s)
� e(∞) = 1/2
13Carlos Alexandre Mello – [email protected]
Erro de Estado Estacionário para Sistemas com Re-Alimentação Unitária
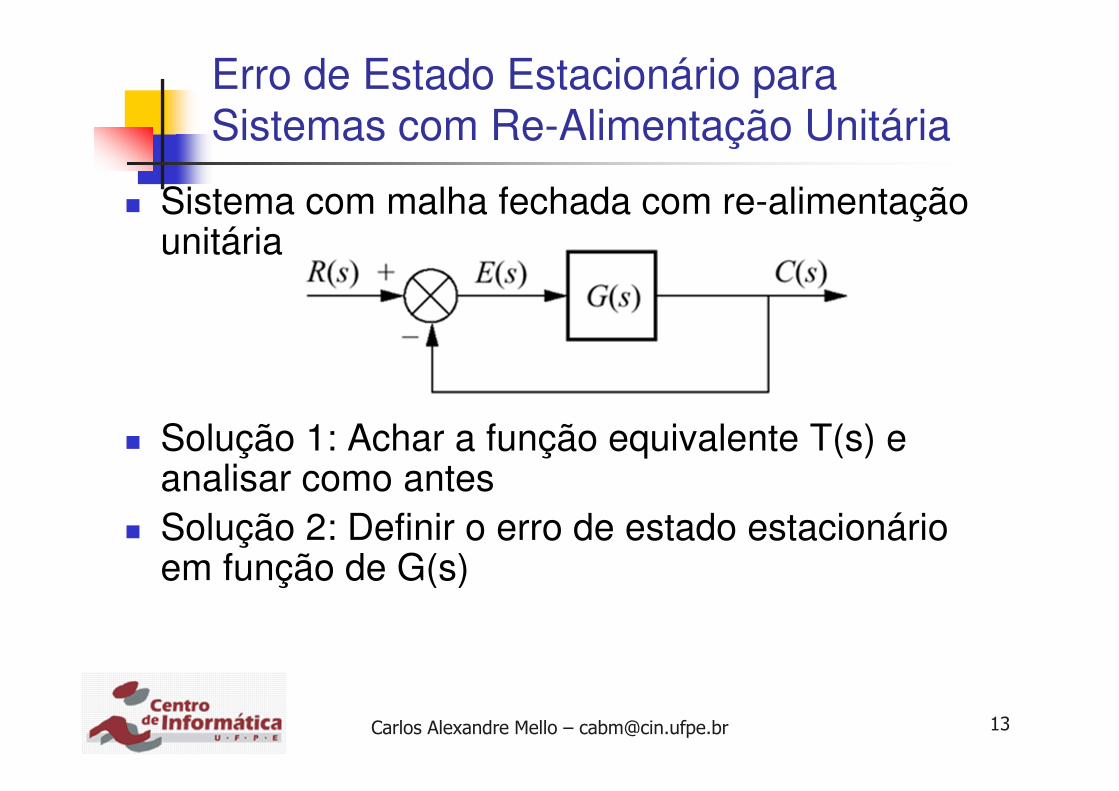
� Sistema com malha fechada com re-alimentação unitária
� Solução 1: Achar a função equivalente T(s) e analisar como antes
� Solução 2: Definir o erro de estado estacionário em função de G(s)
14Carlos Alexandre Mello – [email protected]
Erro de Estado Estacionário para Sistemas com Re-Alimentação Unitária
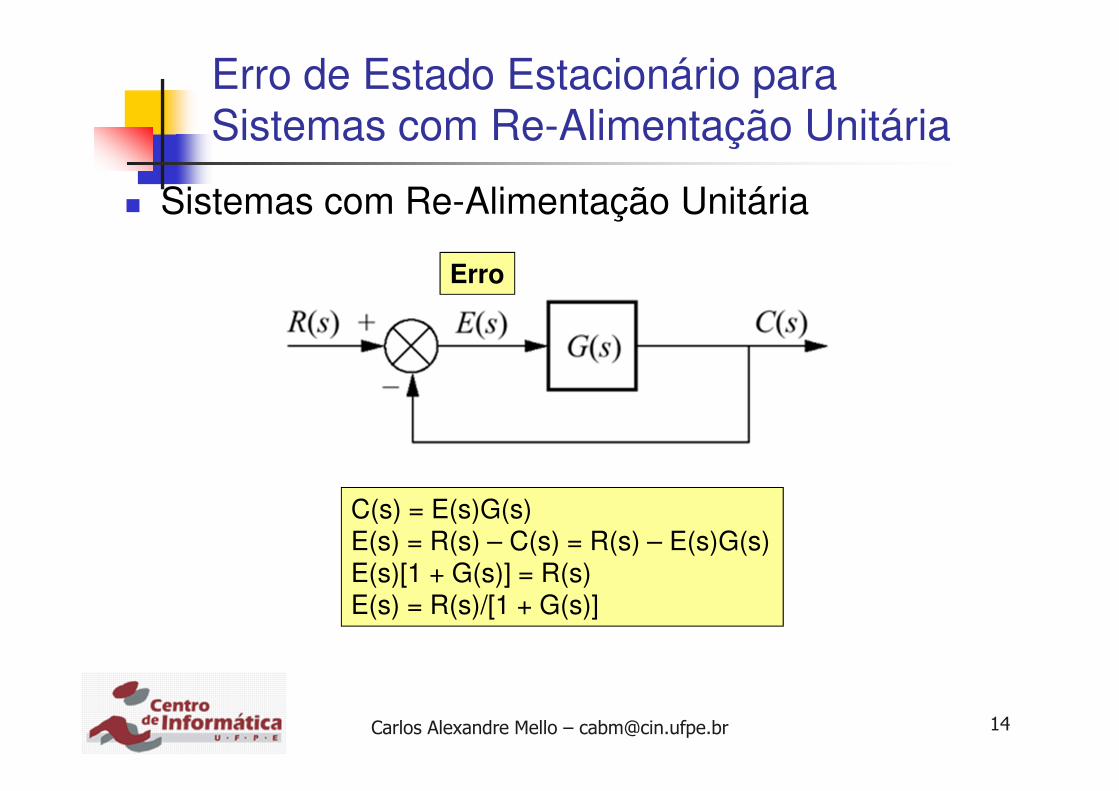
� Sistemas com Re-Alimentação Unitária
Erro
C(s) = E(s)G(s)E(s) = R(s) – C(s) = R(s) – E(s)G(s)E(s)[1 + G(s)] = R(s)E(s) = R(s)/[1 + G(s)]
15Carlos Alexandre Mello – [email protected]
Erro de Estado Estacionário para Sistemas com Re-Alimentação Unitária
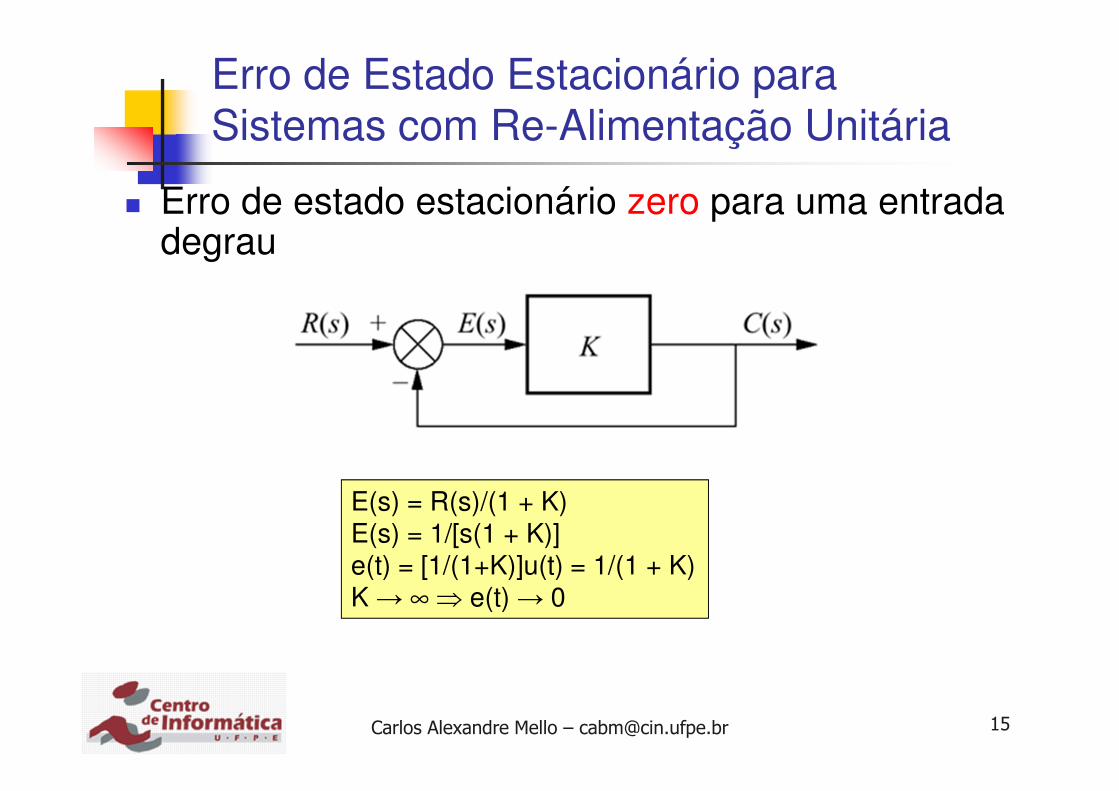
� Erro de estado estacionário zero para uma entrada degrau
E(s) = R(s)/(1 + K)E(s) = 1/[s(1 + K)]e(t) = [1/(1+K)]u(t) = 1/(1 + K)K → ∞ ⇒ e(t) → 0
16Carlos Alexandre Mello – [email protected]
Erro de Estado Estacionário para Sistemas com Re-Alimentação Unitária
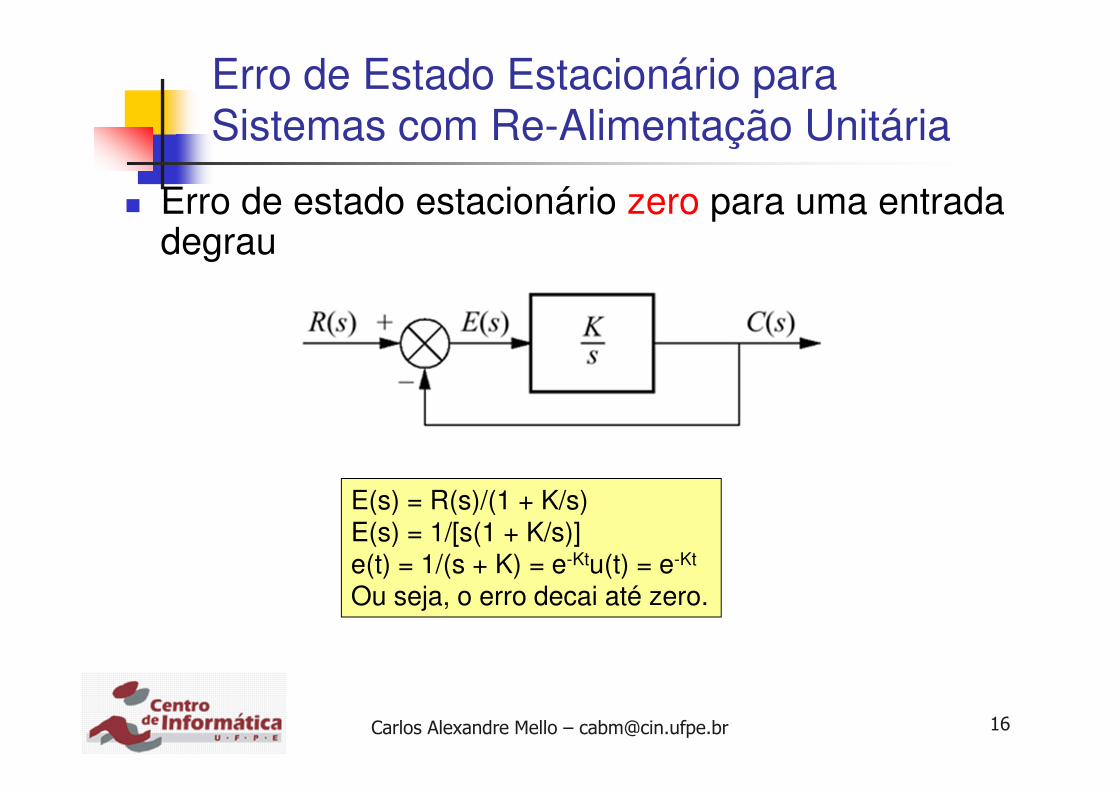
� Erro de estado estacionário zero para uma entrada degrau
E(s) = R(s)/(1 + K/s)E(s) = 1/[s(1 + K/s)]e(t) = 1/(s + K) = e-Ktu(t) = e-Kt
Ou seja, o erro decai até zero.
17Carlos Alexandre Mello – [email protected]
Erro de Estado Estacionário para Sistemas com Re-Alimentação Unitária
� Aplicando o Teorema do Valor Final� E(s) = R(s)/[1 + G(s)]
� e(∞) = lims→0 sR(s)/[1 + G(s)]
� Essa expressão calcula o erro de estado estacionário, e(∞), dada a entrada R(s) e o sistema G(s)
� Vamos analisar o erro para três tipos diferentes de entrada....
18Carlos Alexandre Mello – [email protected]
Erro de Estado Estacionário para Sistemas com Re-Alimentação Unitária
� Entrada Degrau: R(s) = 1/s� edegrau(∞) = lims→0 s(1/s)/[1 + G(s)]
� edegrau(∞) = 1/[1 + lims→0 G(s)]
� O termo lims→0G(s) é o termo dc da função de transferência já que s, a variável de frequência, se aproxima de zero
� Para ter erro estacionário zero devemos ter lims→0G(s) → ∞
19Carlos Alexandre Mello – [email protected]
Erro de Estado Estacionário para Sistemas com Re-Alimentação Unitária
� Entrada Degrau:
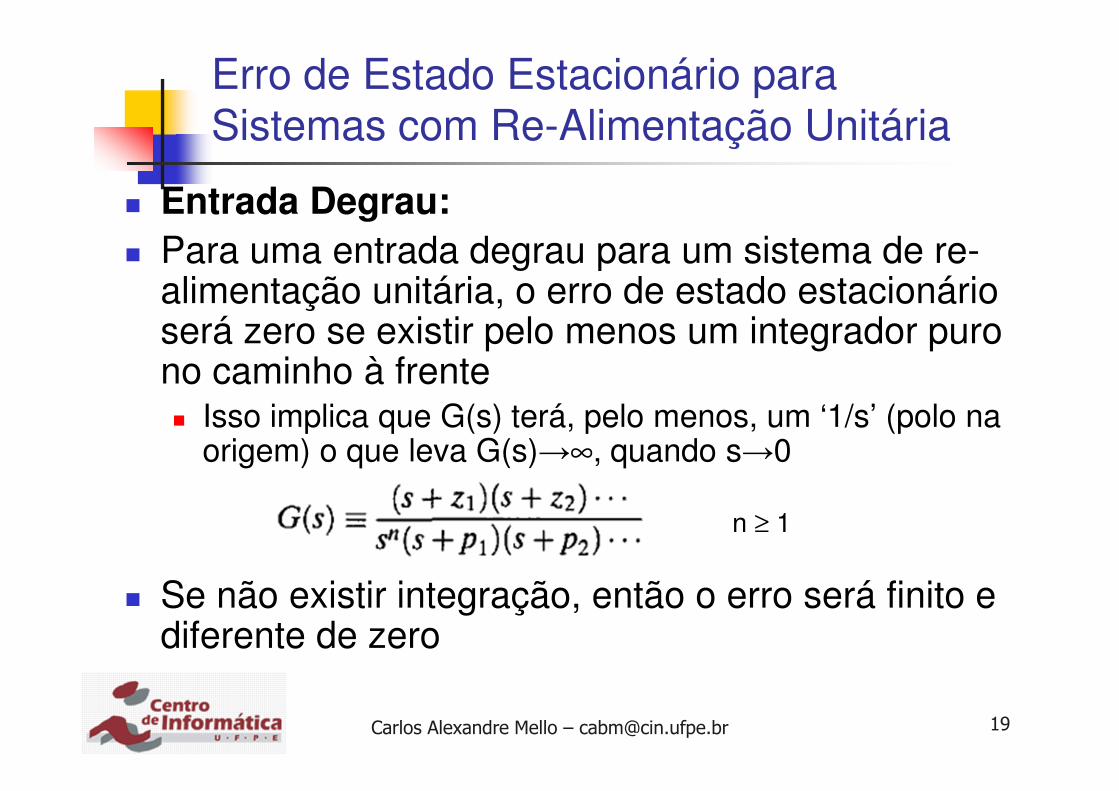
� Para uma entrada degrau para um sistema de re-alimentação unitária, o erro de estado estacionário será zero se existir pelo menos um integrador puro no caminho à frente� Isso implica que G(s) terá, pelo menos, um ‘1/s’ (polo na
origem) o que leva G(s)→∞, quando s→0
� Se não existir integração, então o erro será finito e diferente de zero
n ≥ 1
20Carlos Alexandre Mello – [email protected]
Erro de Estado Estacionário para Sistemas com Re-Alimentação Unitária
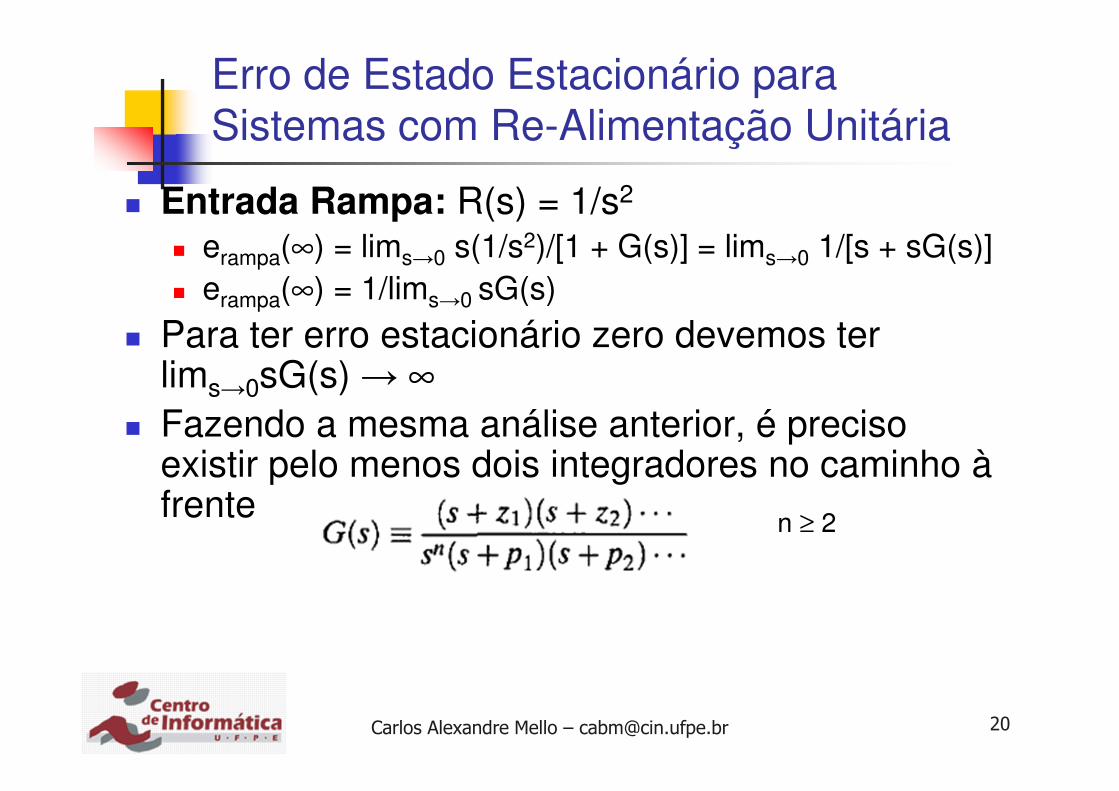
� Entrada Rampa: R(s) = 1/s2
� erampa(∞) = lims→0 s(1/s2)/[1 + G(s)] = lims→0 1/[s + sG(s)]
� erampa(∞) = 1/lims→0 sG(s)
� Para ter erro estacionário zero devemos ter lims→0sG(s) → ∞
� Fazendo a mesma análise anterior, é preciso existir pelo menos dois integradores no caminho à frente
n ≥ 2
21Carlos Alexandre Mello – [email protected]
Erro de Estado Estacionário para Sistemas com Re-Alimentação Unitária
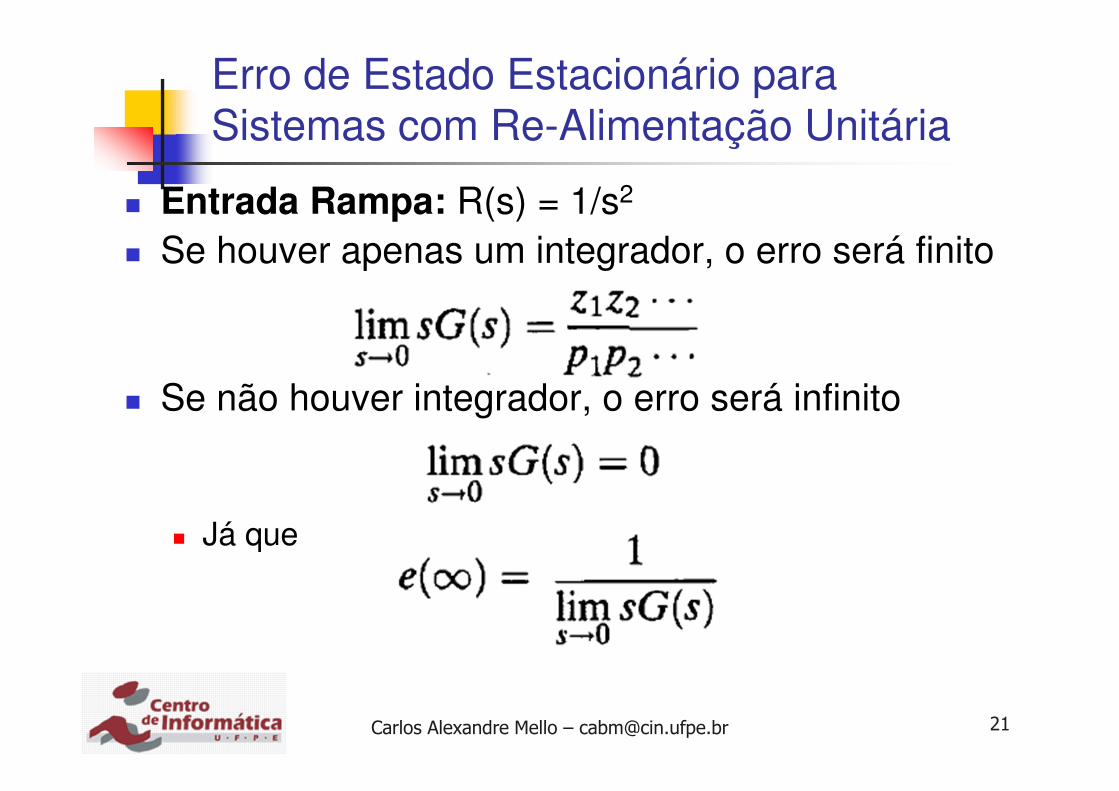
� Entrada Rampa: R(s) = 1/s2
� Se houver apenas um integrador, o erro será finito
� Se não houver integrador, o erro será infinito
� Já que
22Carlos Alexandre Mello – [email protected]
Erro de Estado Estacionário para Sistemas com Re-Alimentação Unitária
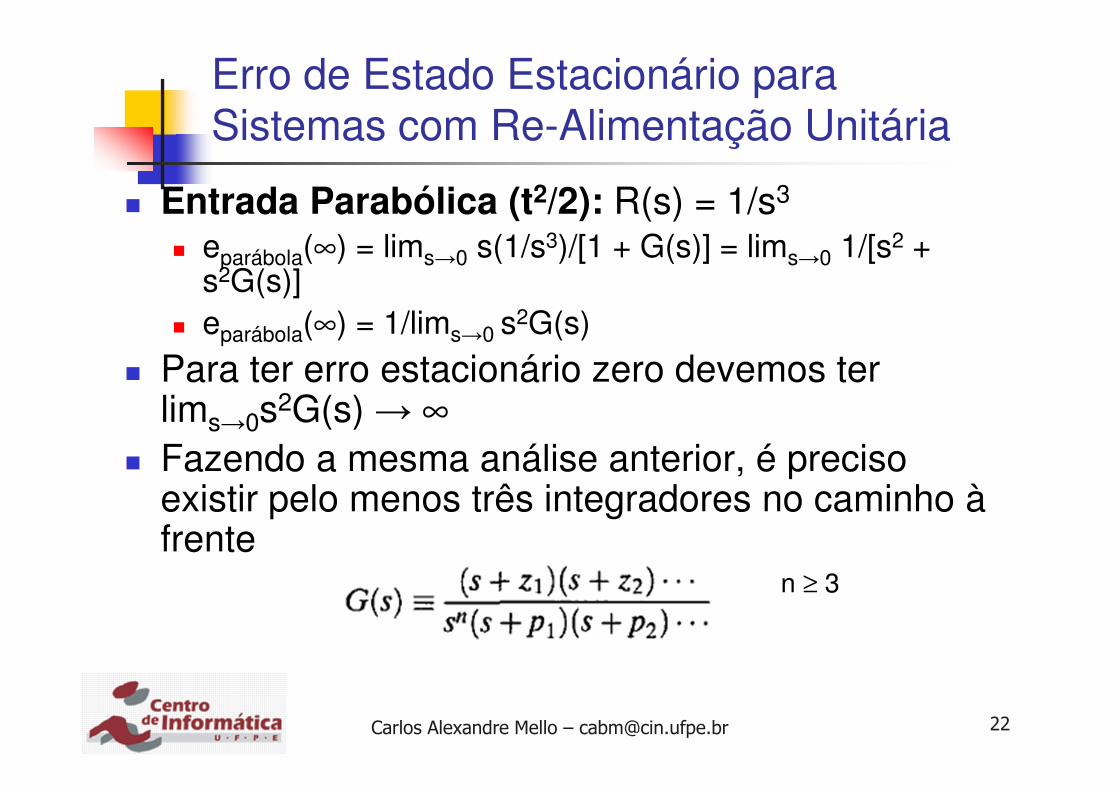
� Entrada Parabólica (t2/2): R(s) = 1/s3
� eparábola(∞) = lims→0 s(1/s3)/[1 + G(s)] = lims→0 1/[s2 + s2G(s)]
� eparábola(∞) = 1/lims→0 s2G(s)
� Para ter erro estacionário zero devemos ter lims→0s
2G(s) → ∞
� Fazendo a mesma análise anterior, é preciso existir pelo menos três integradores no caminho à frente
n ≥ 3
23Carlos Alexandre Mello – [email protected]
Erro de Estado Estacionário para Sistemas com Re-Alimentação Unitária
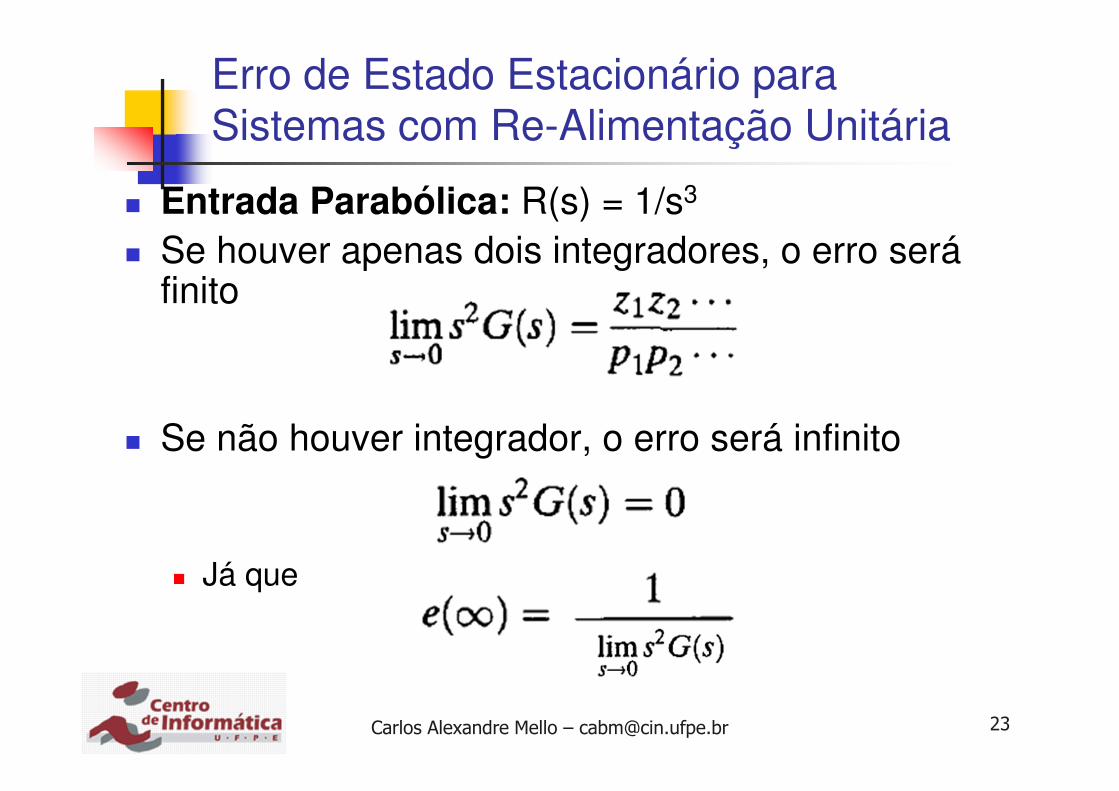
� Entrada Parabólica: R(s) = 1/s3
� Se houver apenas dois integradores, o erro será finito
� Se não houver integrador, o erro será infinito
� Já que
24Carlos Alexandre Mello – [email protected]
Erro de Estado Estacionário para Sistemas com Re-Alimentação Unitária
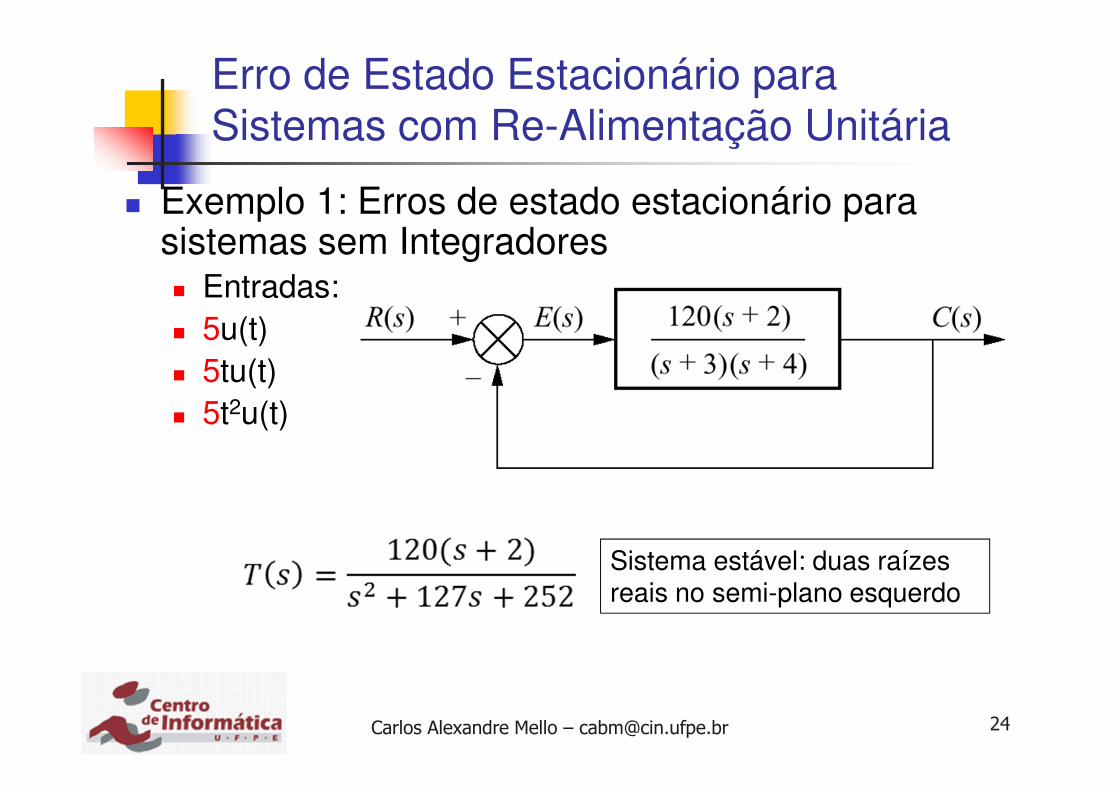
� Exemplo 1: Erros de estado estacionário para sistemas sem Integradores� Entradas:
� 5u(t)
� 5tu(t)
� 5t2u(t)
Sistema estável: duas raízes reais no semi-plano esquerdo
25Carlos Alexandre Mello – [email protected]
Erro de Estado Estacionário para Sistemas com Re-Alimentação Unitária
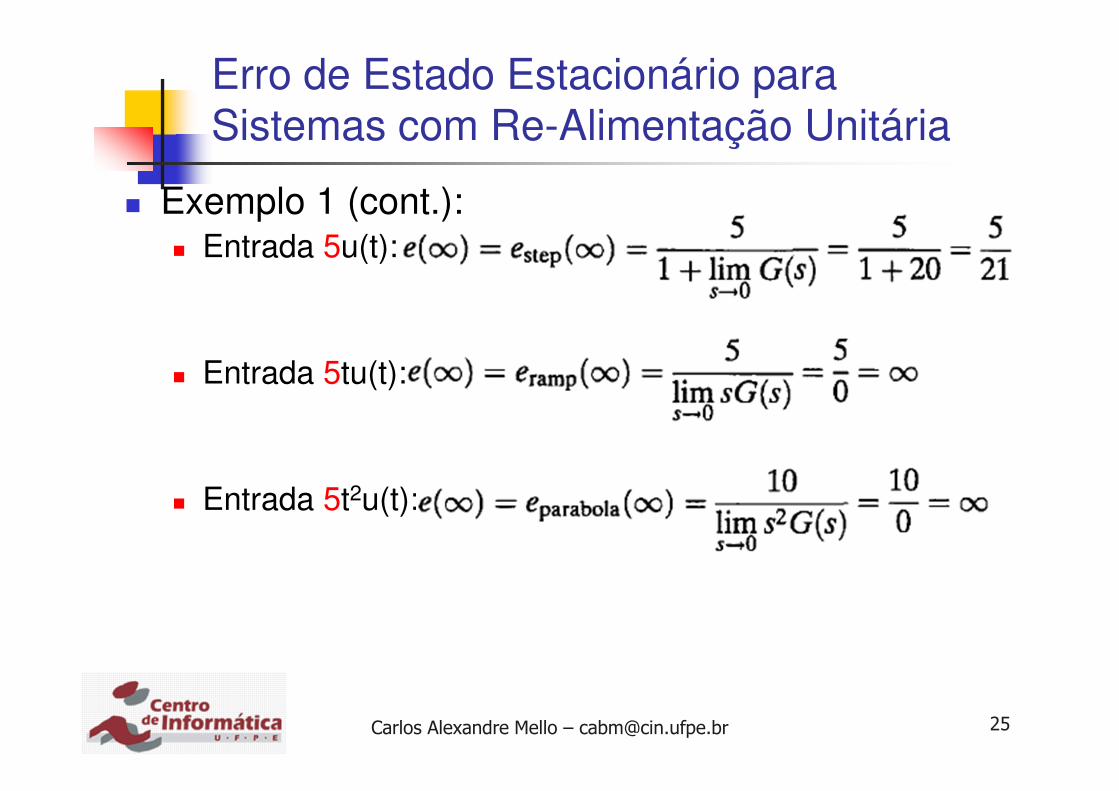
� Exemplo 1 (cont.):� Entrada 5u(t):
� Entrada 5tu(t):
� Entrada 5t2u(t):
26Carlos Alexandre Mello – [email protected]
Erro de Estado Estacionário para Sistemas com Re-Alimentação Unitária
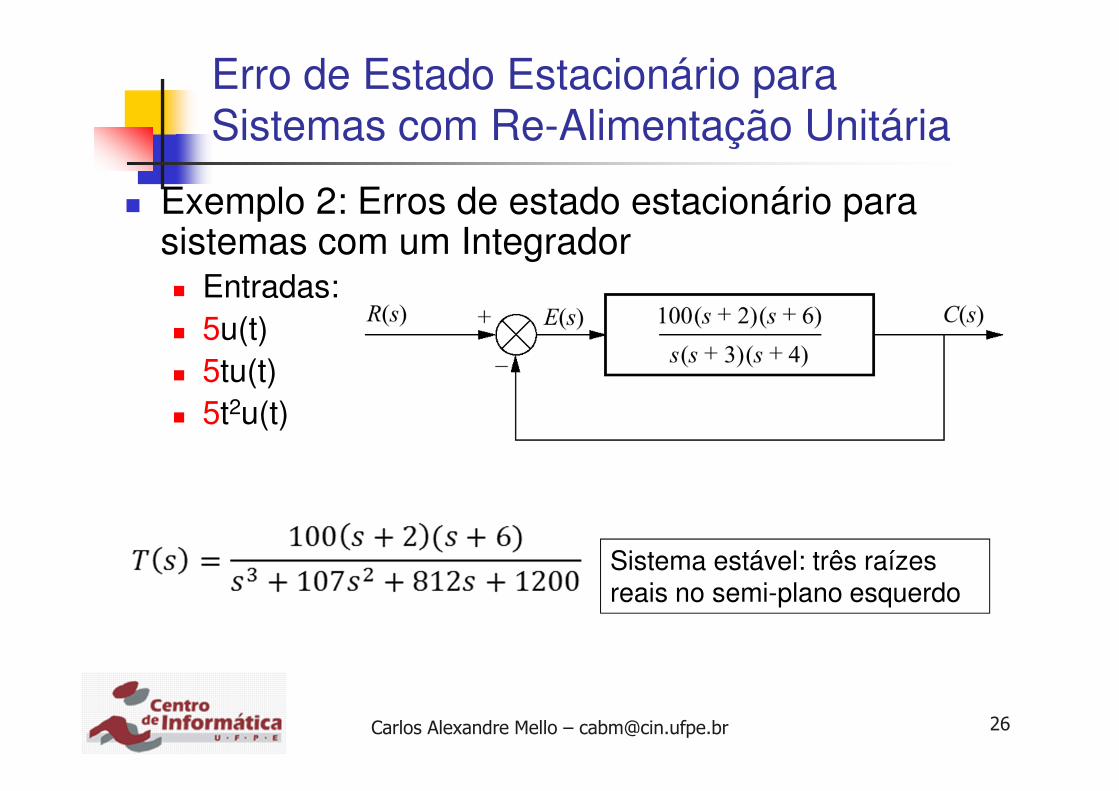
� Exemplo 2: Erros de estado estacionário para sistemas com um Integrador� Entradas:
� 5u(t)
� 5tu(t)
� 5t2u(t)
Sistema estável: três raízes reais no semi-plano esquerdo
27Carlos Alexandre Mello – [email protected]
Erro de Estado Estacionário para Sistemas com Re-Alimentação Unitária
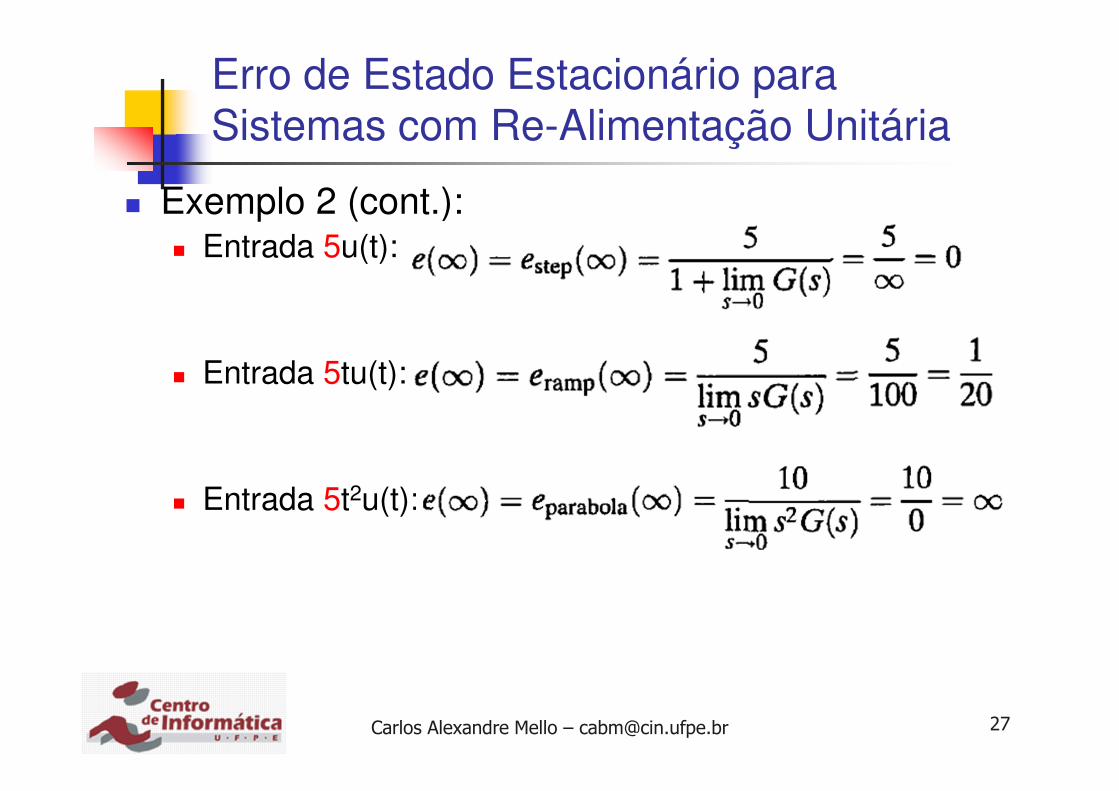
� Exemplo 2 (cont.):� Entrada 5u(t):
� Entrada 5tu(t):
� Entrada 5t2u(t):
28Carlos Alexandre Mello – [email protected]
Erro de Estado Estacionário para Sistemas com Re-Alimentação Unitária
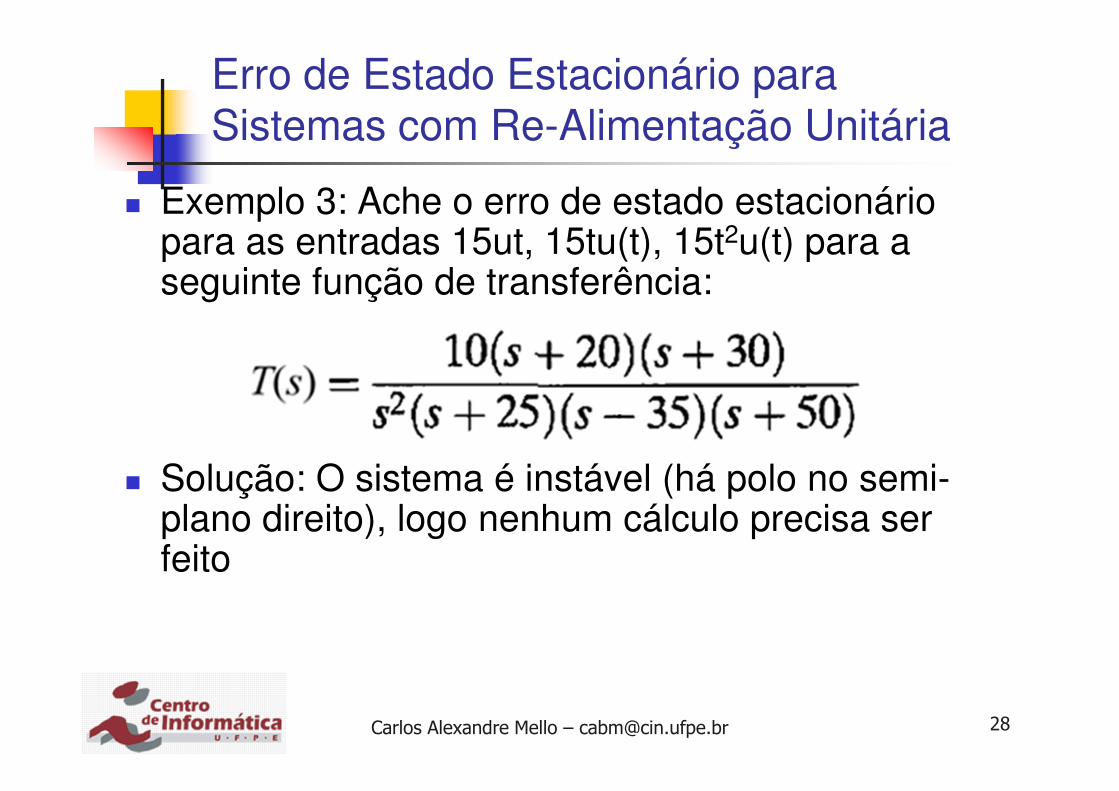
� Exemplo 3: Ache o erro de estado estacionário para as entradas 15ut, 15tu(t), 15t2u(t) para a seguinte função de transferência:
� Solução: O sistema é instável (há polo no semi-plano direito), logo nenhum cálculo precisa ser feito
29Carlos Alexandre Mello – [email protected]
Constantes de Erro Estático e Tipo do Sistema
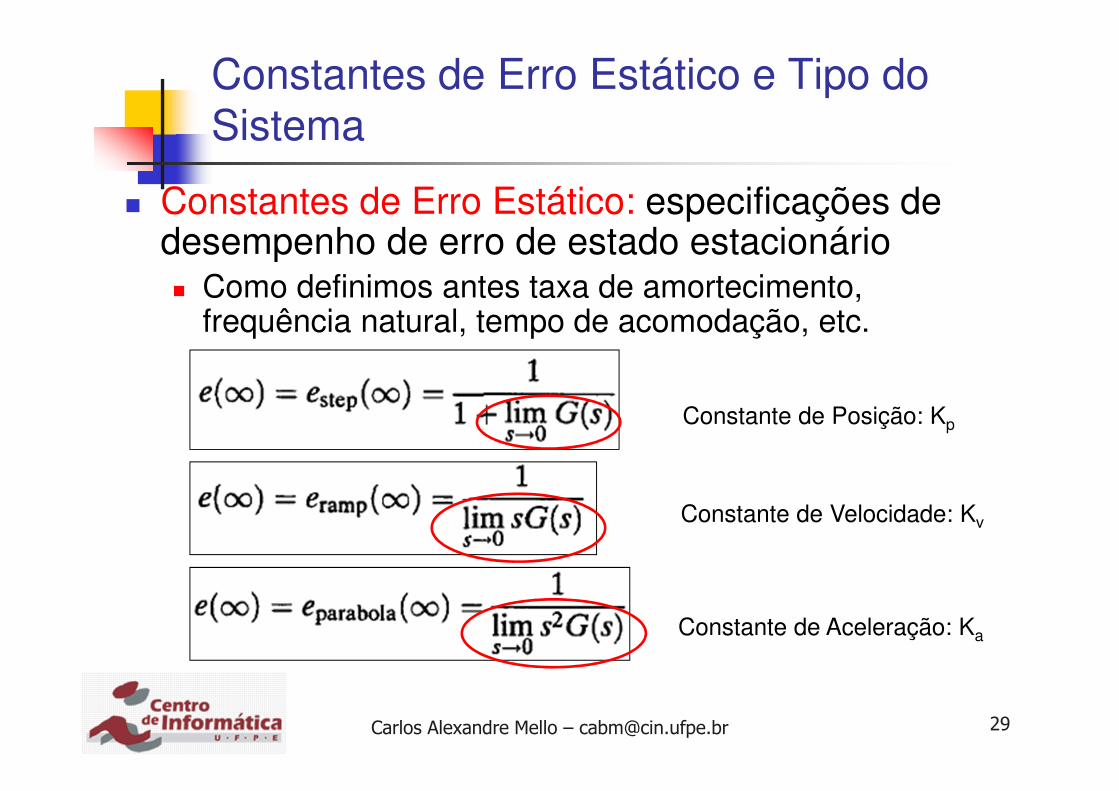
� Constantes de Erro Estático: especificações de desempenho de erro de estado estacionário� Como definimos antes taxa de amortecimento,
frequência natural, tempo de acomodação, etc.
Constante de Posição: Kp
Constante de Velocidade: Kv
Constante de Aceleração: Ka
30Carlos Alexandre Mello – [email protected]
Constantes de Erro Estático e Tipo do Sistema
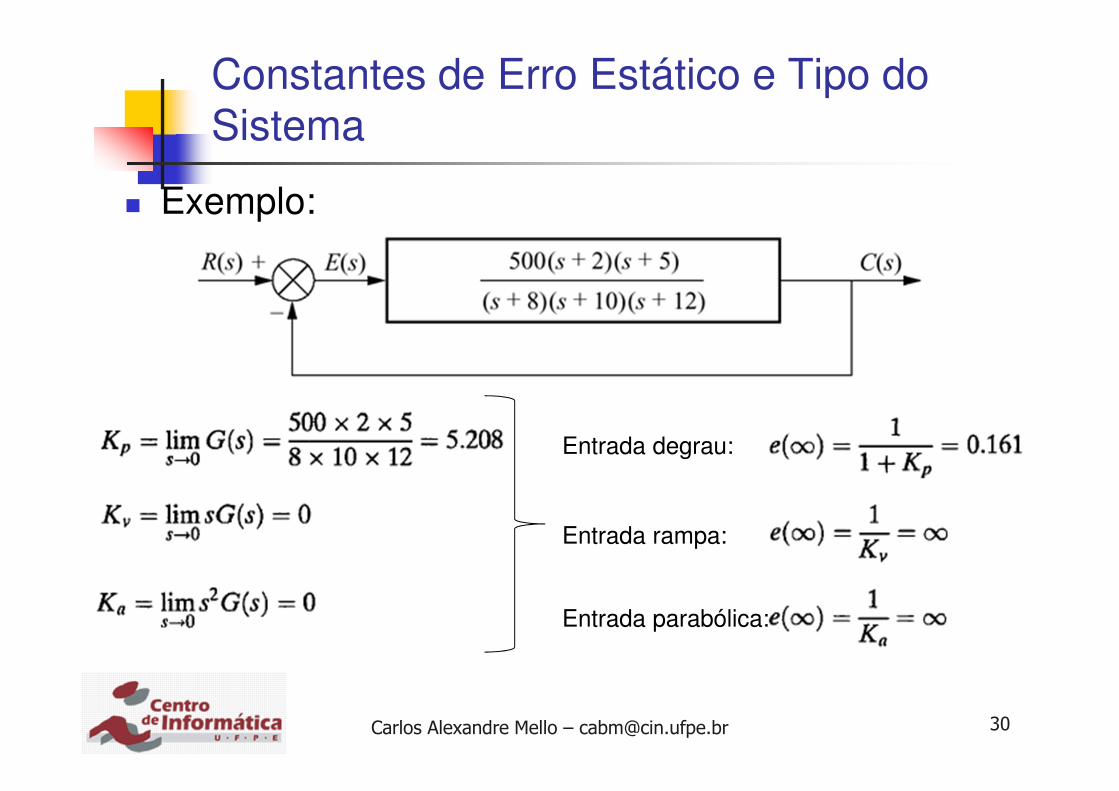
� Exemplo:
Entrada degrau:
Entrada rampa:
Entrada parabólica:
31Carlos Alexandre Mello – [email protected]
Constantes de Erro Estático e Tipo do Sistema
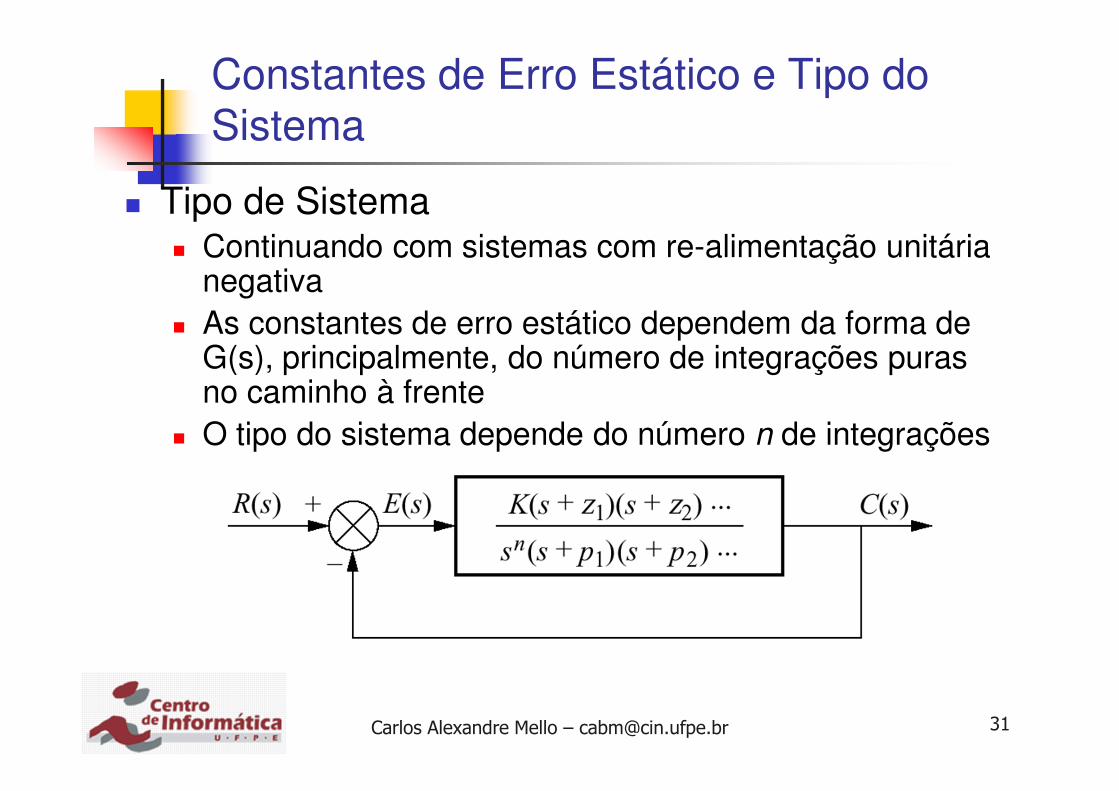
� Tipo de Sistema� Continuando com sistemas com re-alimentação unitária
negativa
� As constantes de erro estático dependem da forma de G(s), principalmente, do número de integrações puras no caminho à frente
� O tipo do sistema depende do número n de integrações
32Carlos Alexandre Mello – [email protected]
Constantes de Erro Estático e Tipo do Sistema
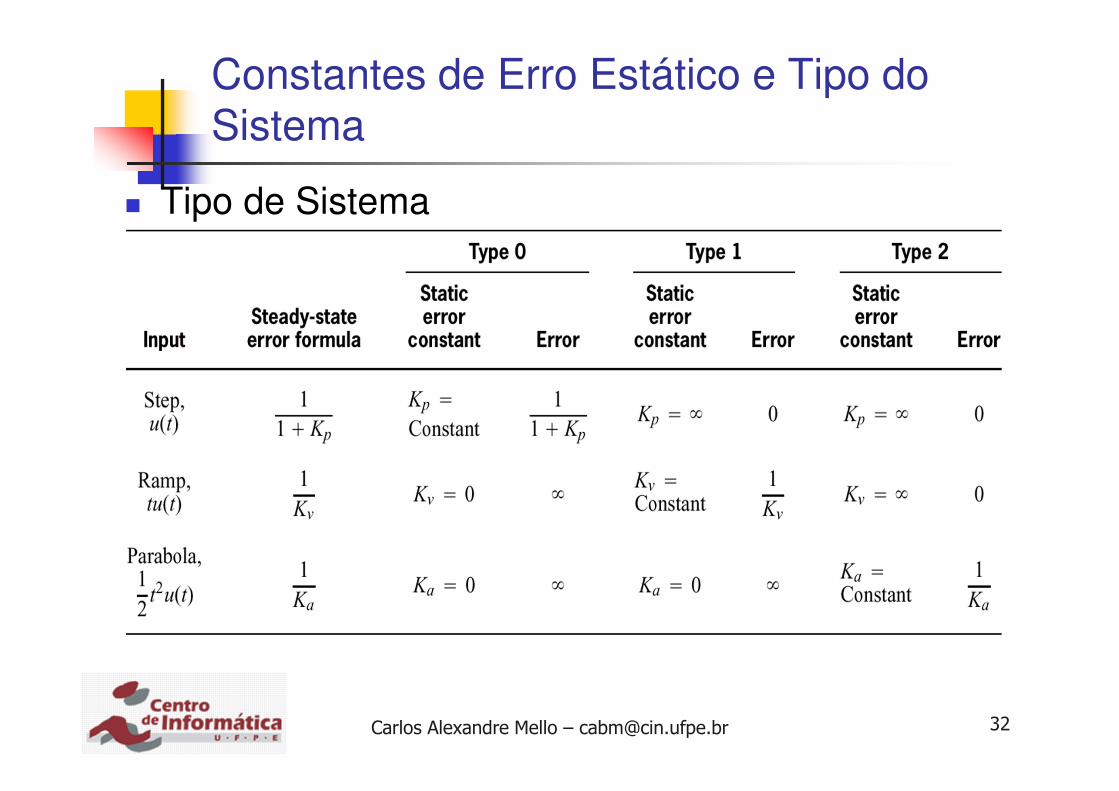
� Tipo de Sistema
33Carlos Alexandre Mello – [email protected]
Constantes de Erro Estático e Tipo do Sistema
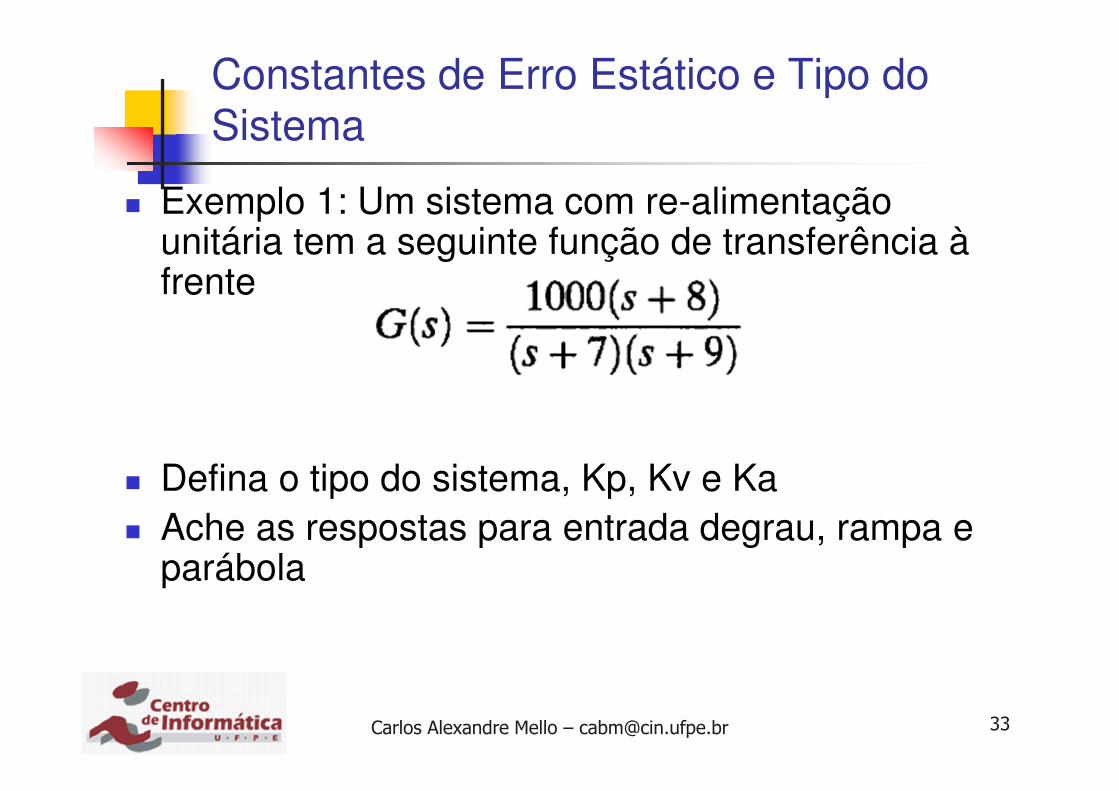
� Exemplo 1: Um sistema com re-alimentação unitária tem a seguinte função de transferência à frente
� Defina o tipo do sistema, Kp, Kv e Ka
� Ache as respostas para entrada degrau, rampa e parábola
34Carlos Alexandre Mello – [email protected]
Constantes de Erro Estático e Tipo do Sistema
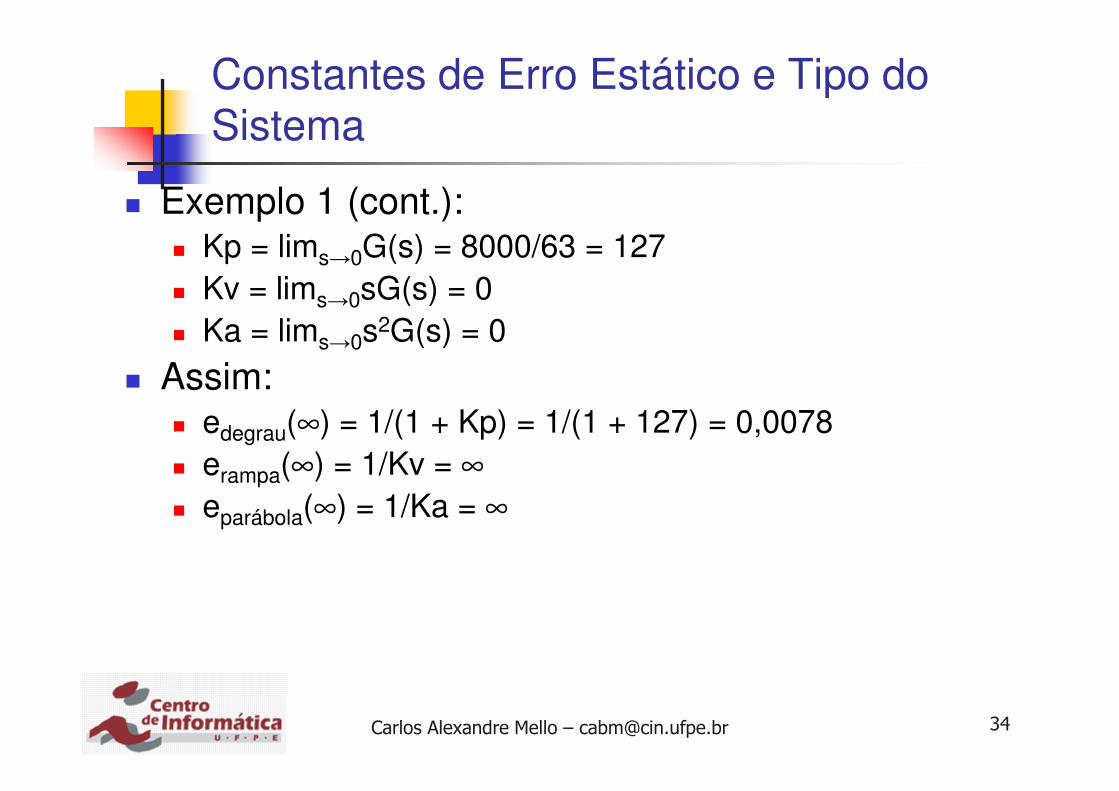
� Exemplo 1 (cont.):� Kp = lims→0G(s) = 8000/63 = 127
� Kv = lims→0sG(s) = 0
� Ka = lims→0s2G(s) = 0
� Assim:� edegrau(∞) = 1/(1 + Kp) = 1/(1 + 127) = 0,0078
� erampa(∞) = 1/Kv = ∞
� eparábola(∞) = 1/Ka = ∞
35Carlos Alexandre Mello – [email protected]
Constantes de Erro Estático e Tipo do Sistema
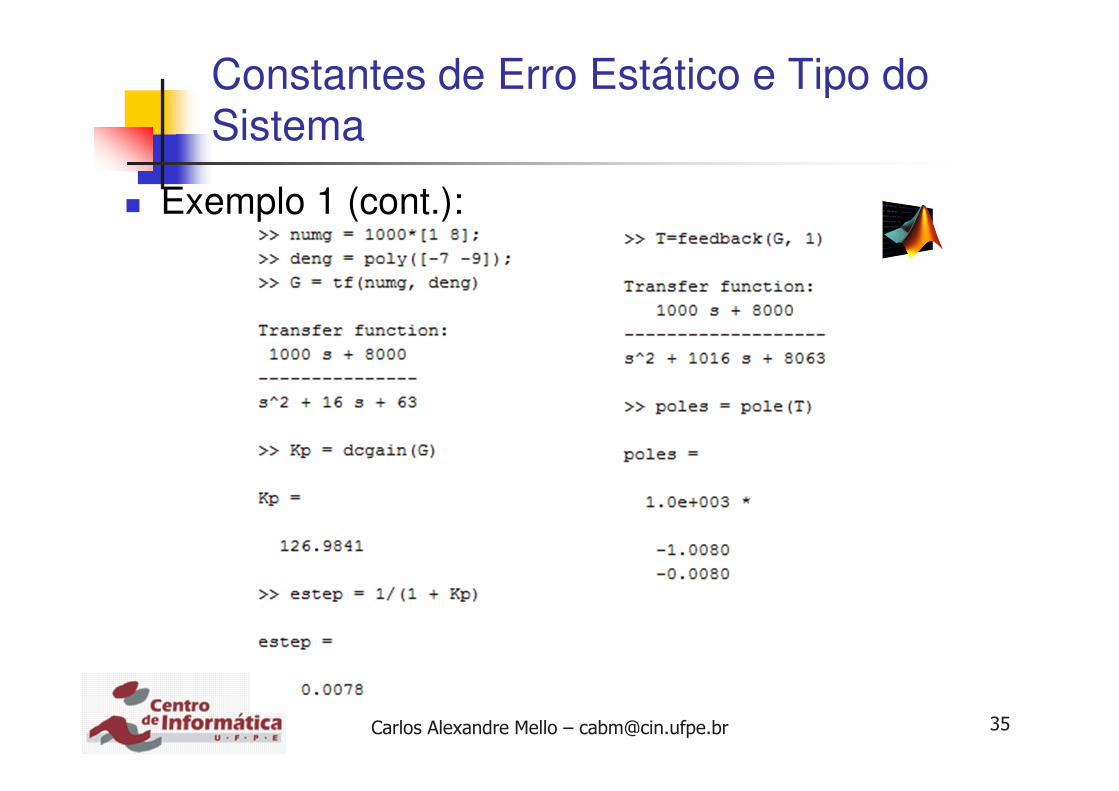
� Exemplo 1 (cont.):
36Carlos Alexandre Mello – [email protected]
Constantes de Erro Estático e Tipo do Sistema
� Exemplo 2: Que informações as constantes de erro estático podem trazer:
� Suponha um sistema com Kv = 1000:� O sistema é estável
� O sistema é do Tipo 1, já que Kv é constante� Kv = 0 para Tipo 0 e Kv = ∞ para Tipo 2
� A entrada de teste foi uma rampa
� O erro de estado estacionário é 1/Kv
37Carlos Alexandre Mello – [email protected]
Constantes de Erro Estático e Tipo do Sistema
� Exemplo 3: Que informações temos de um sistema com especificação Kp = 1000?� O sistema é estável
� O sistema é do Tipo 0� Kp = ∞ para sistemas Tipo 1 e 2
� A entrada de teste é um degrau
� edegrau(∞) = 1/(1 + Kp) = 1/1001 ≈ 0,001
38Carlos Alexandre Mello – [email protected]
Constantes de Erro Estático e Tipo do Sistema
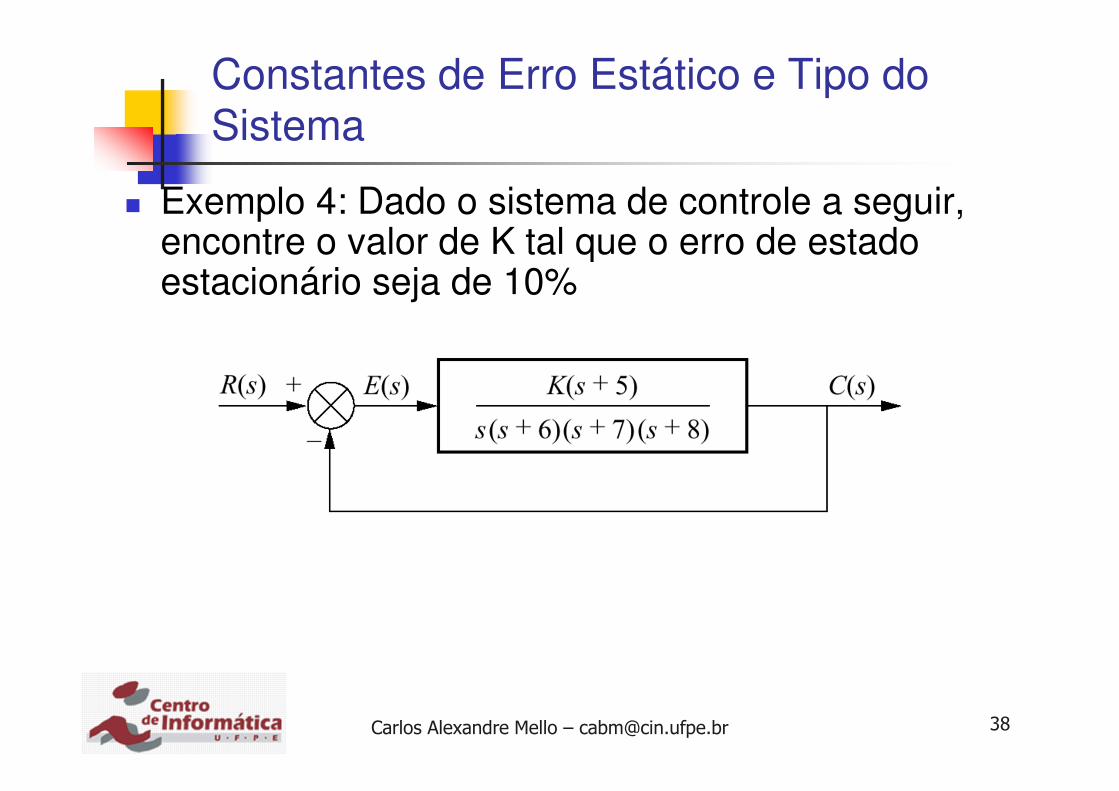
� Exemplo 4: Dado o sistema de controle a seguir, encontre o valor de K tal que o erro de estado estacionário seja de 10%
39Carlos Alexandre Mello – [email protected]
Constantes de Erro Estático e Tipo do Sistema
� Exemplo 4 (cont.):� Primeiro: Definir tipo do sistema
� Kp = lims→0 G(s) = ∞
� Kv = lims→0 sG(s) = 5K/336
� Ka = lims→0 s2G(s) = 0
� Logo, o sistema é do Tipo 1
� Usando a especificação dada no problema:� e(∞) = 1/Kv = 0,1 ⇒ Kv = 10
� Assim, K = 672
� Podemos aplicar o critério de Routh-Hurwitz para confirmar a estabilidade para esse valor de K
40Carlos Alexandre Mello – [email protected]
Erro de Estado Estacionário para Sistemas de
Re-Alimentação Não-Unitária
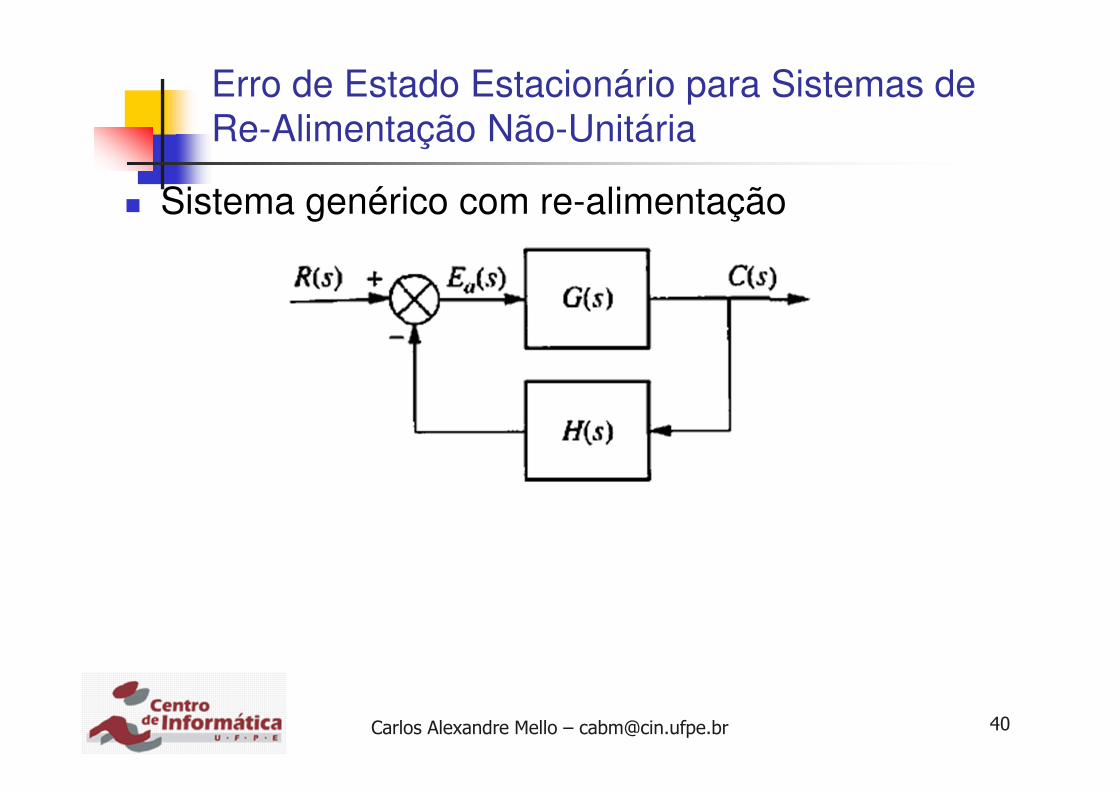
� Sistema genérico com re-alimentação
41Carlos Alexandre Mello – [email protected]
Erro de Estado Estacionário para Sistemas de
Re-Alimentação Não-Unitária
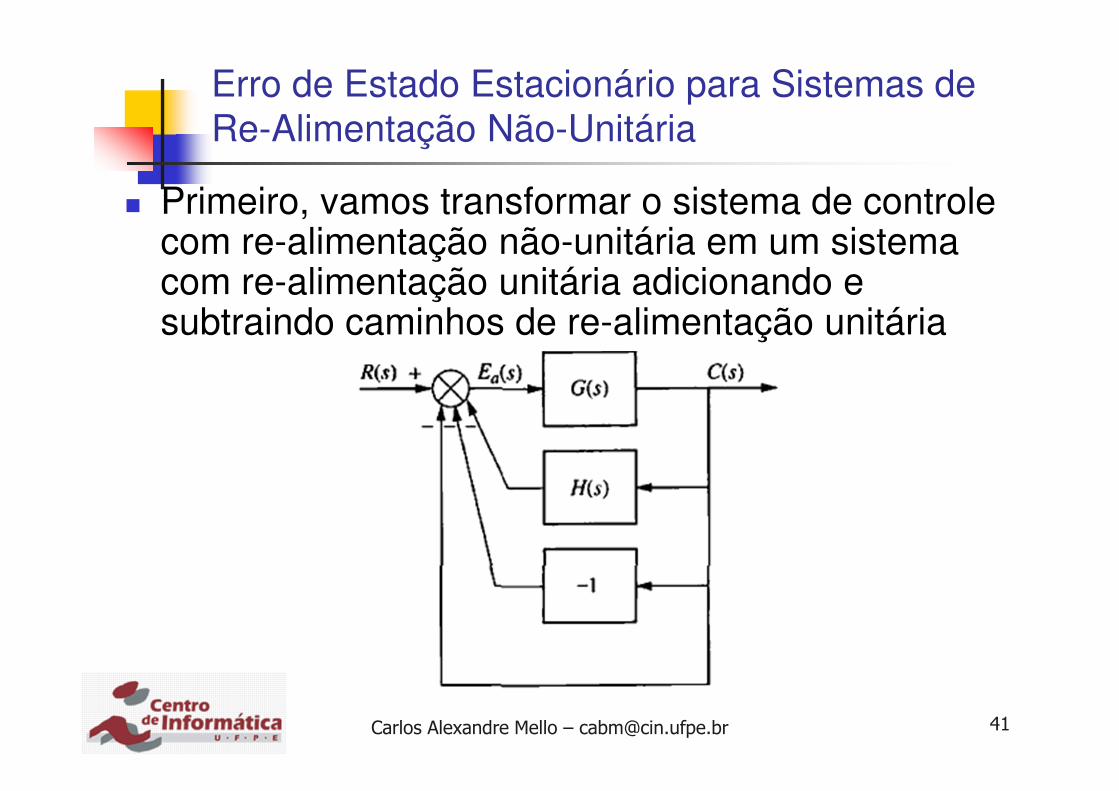
� Primeiro, vamos transformar o sistema de controle com re-alimentação não-unitária em um sistema com re-alimentação unitária adicionando e subtraindo caminhos de re-alimentação unitária
42Carlos Alexandre Mello – [email protected]
Erro de Estado Estacionário para Sistemas de
Re-Alimentação Não-Unitária
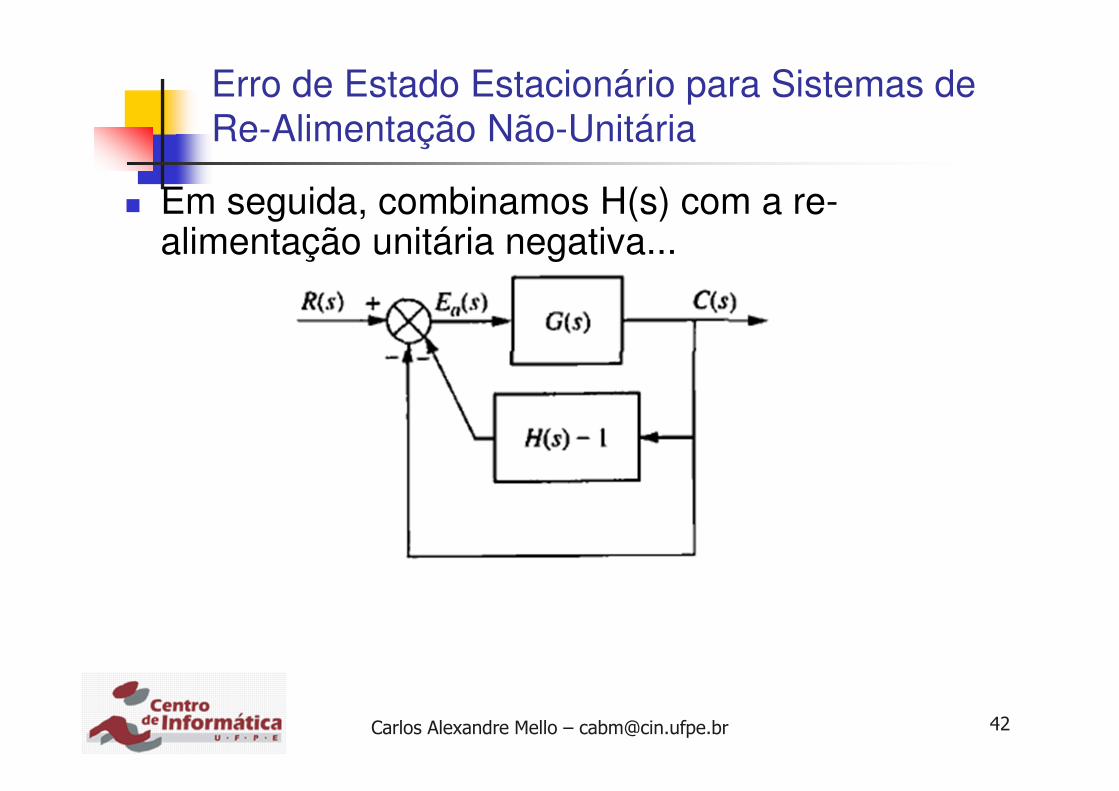
� Em seguida, combinamos H(s) com a re-alimentação unitária negativa...
43Carlos Alexandre Mello – [email protected]
Erro de Estado Estacionário para Sistemas de
Re-Alimentação Não-Unitária
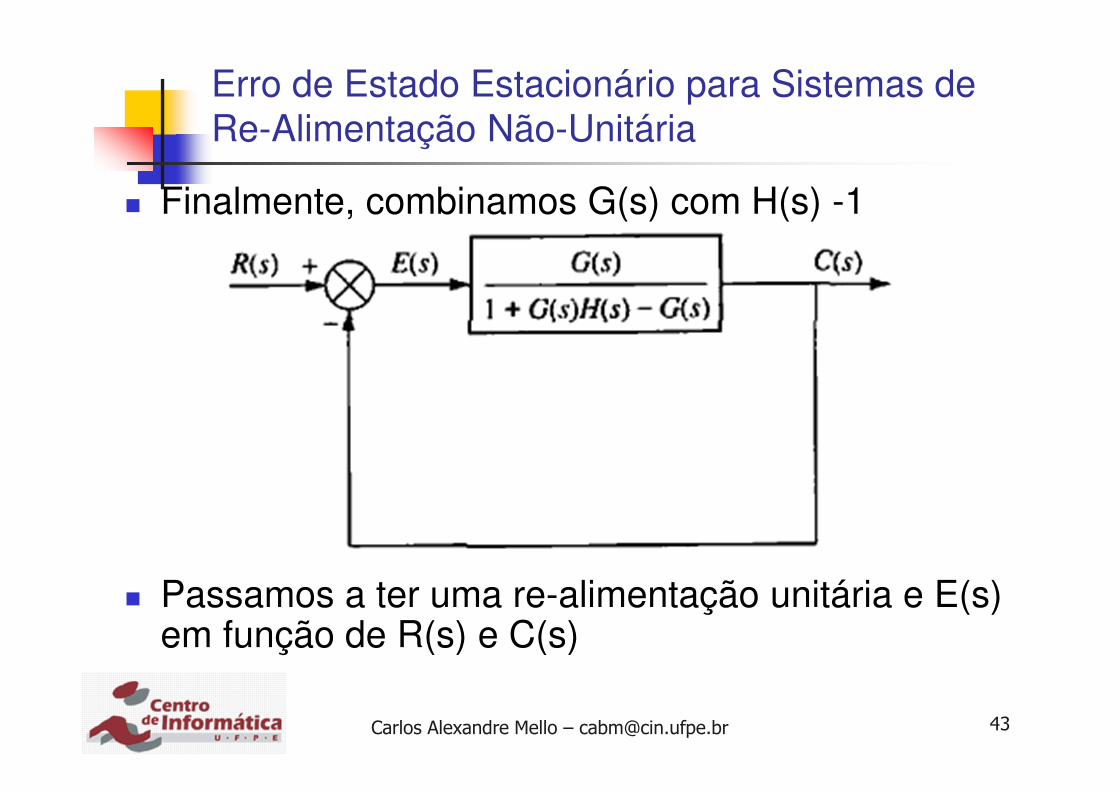
� Finalmente, combinamos G(s) com H(s) -1
� Passamos a ter uma re-alimentação unitária e E(s) em função de R(s) e C(s)
44Carlos Alexandre Mello – [email protected]
Erro de Estado Estacionário para Sistemas de
Re-Alimentação Não-Unitária
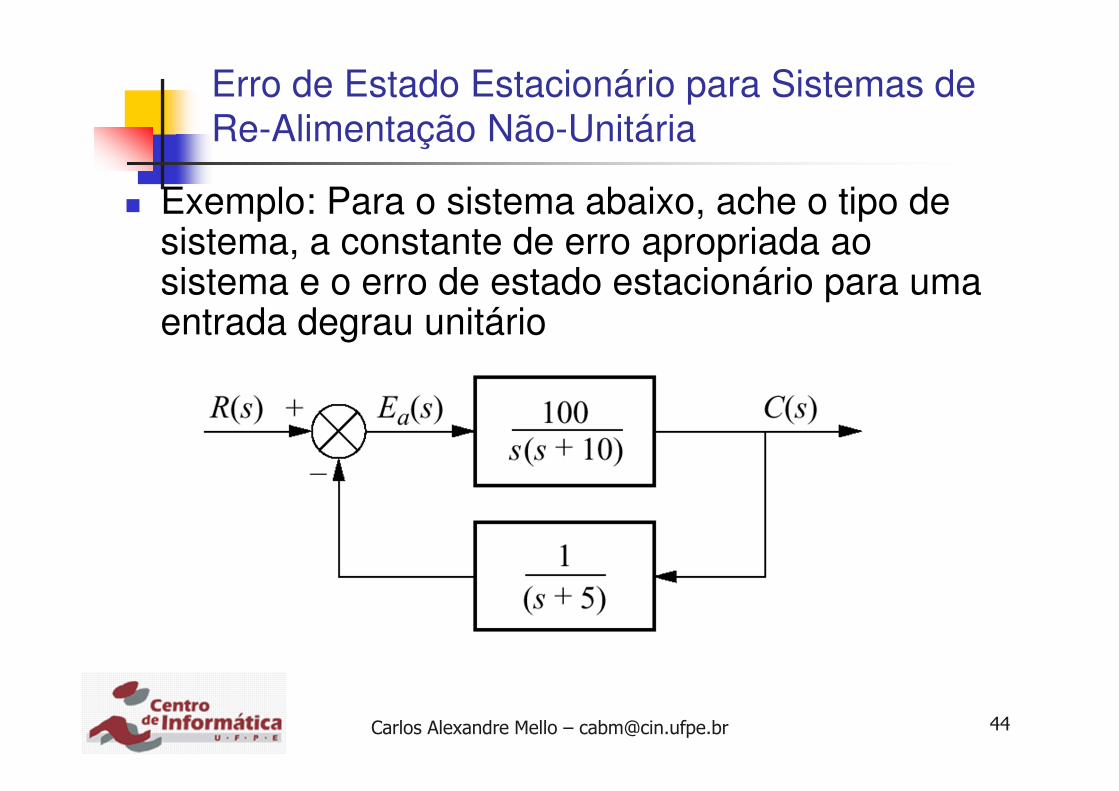
� Exemplo: Para o sistema abaixo, ache o tipo de sistema, a constante de erro apropriada ao sistema e o erro de estado estacionário para uma entrada degrau unitário
45Carlos Alexandre Mello – [email protected]
Erro de Estado Estacionário para Sistemas de
Re-Alimentação Não-Unitária
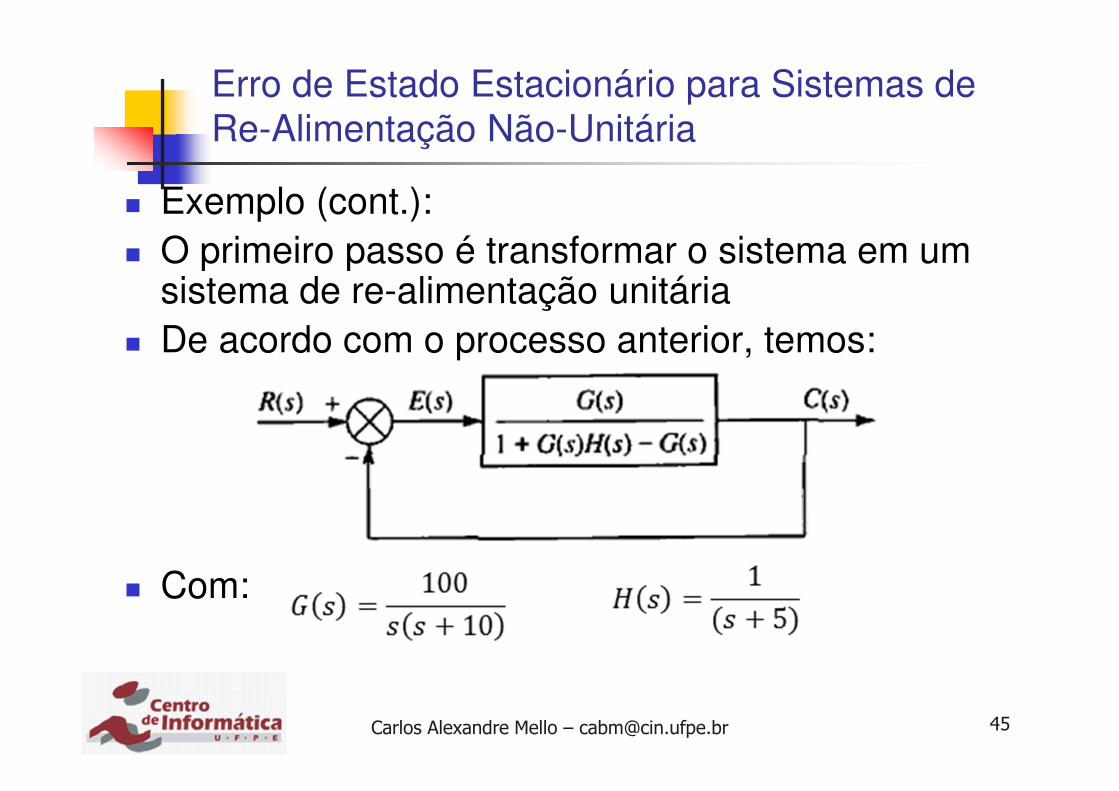
� Exemplo (cont.):
� O primeiro passo é transformar o sistema em um sistema de re-alimentação unitária
� De acordo com o processo anterior, temos:
� Com:
46Carlos Alexandre Mello – [email protected]
Erro de Estado Estacionário para Sistemas de
Re-Alimentação Não-Unitária
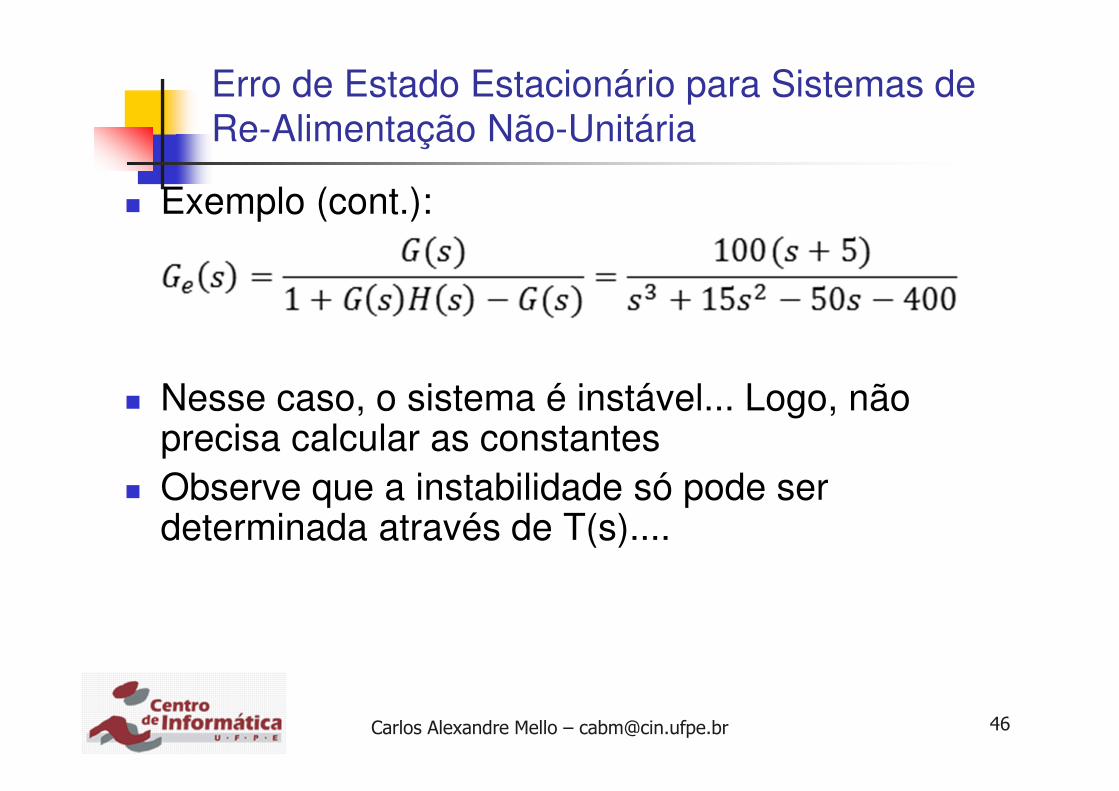
� Exemplo (cont.):
� Nesse caso, o sistema é instável... Logo, não precisa calcular as constantes
� Observe que a instabilidade só pode ser determinada através de T(s)....
47Carlos Alexandre Mello – [email protected]
Erro de Estado Estacionário para Sistemas de
Re-Alimentação Não-Unitária
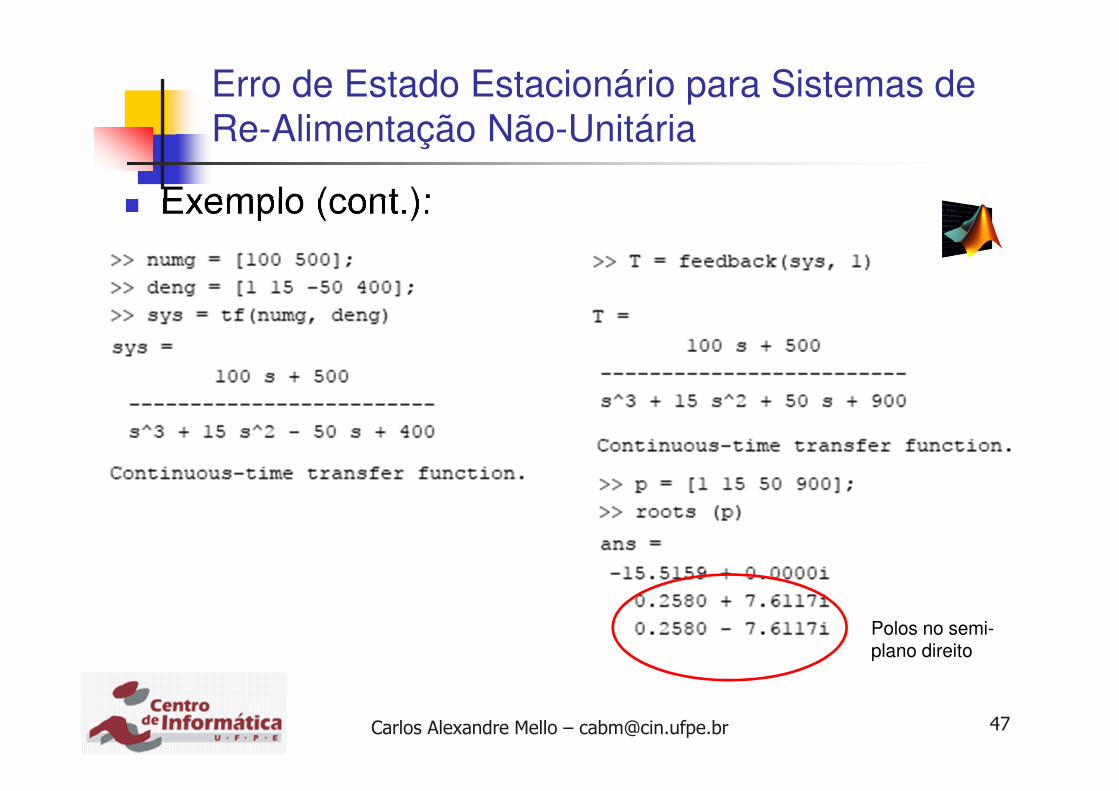
� Exemplo (cont.):
Polos no semi-plano direito
48Carlos Alexandre Mello – [email protected]
Exercícios Sugeridos (Nise)
� Cap. 7, Problemas:
� 1, 3, 4, 5, 9, 11, 13,18, 21, 23, 38, 42