elementos de engenharia civil módulo de mecânica ... · de fabrico influenciem significativamente...
TRANSCRIPT

DEPARTAMENTO DE ENGENHARIA CIVIL, ARQUITECTURA E GEORRECURSOS
SECÇÃO DE MECÂNICA ESTRUTURAL E ESTRUTURAS
1
Elementos de Engenharia Civil
Módulo de Mecânica Estrutural (1º módulo)
Apontamentos das aulas (T/P)
Parte 3: Conceitos de Resistência dos Materiais, Dimensionamento, Acções,
Combinações de Acções e Verificação de Segurança
2014-2015
Jorge Miguel Proença

2
CONCEITOS DE RESISTÊNCIA DOS MATERIAIS E DIMENSIONAMENTO
Definição de Tensão
Admita-se uma estrutura reticulada articulada (barras sujeitas apenas a esforços normais),
coloca-se questão de saber se as barras correm ou não o risco de rotura (por tracção ou
compressão).
Para tal deve comparar-se a tensão aplicada (tensão normal, 𝜎33, ou simplesmente 𝜎)
𝜎 =𝑁
𝐴
com a tensão resistente, que depende do material (determinada por ensaios, por exemplo).
Essa tensão corresponde a um valor médio (admite-se uma distribuição uniforme na secção).
Vejam-se os exemplos seguintes (secção circular e rectangular).
Distribuição uniforme de tensões normais: secção circular (esqª) e prismática (dirª). BEER, 4ª Edição.
Em rigor a tensão (pontual) é definida pelo seguinte limite:
𝜎 = lim∆𝐴→0
∆𝑁
∆𝐴
podendo o seu valor variar ao longo da secção.
Habitualmente adopta-se a mesma convenção de sinais do esforço normal, ou seja, a tensão
(normal) é positiva quando de tracção.

3
Distribuição não uniforme de tensões normais. BEER, 4ª Edição.
Pode, pelo processo inverso, relacionar-se o esforço normal com a tensão:
𝑁 = ∫ 𝜎 𝑑𝐴𝐴
Ou seja, o esforço normal numa determinada secção é a resultante das tensões normais na
mesma secção.
A tensão constitui assim uma medida alternativa dos esforços, correspondente à força por
unidade de superfície. A unidade de tensão no Sistema Internacional é o Pascal, ou seja, N/m2,
sendo comuns os seguintes múltiplos:
1 𝑃𝑎 = 1 𝑁/𝑚2
1 𝑘𝑃𝑎 = 103 𝑁/𝑚2
1 𝑀𝑃𝑎 = 106 𝑁/𝑚2
1 𝐺𝑃𝑎 = 109 𝑁/𝑚2
P: Considere-se uma barra tubular (ext=60mm, int=50mm) de aço com uma tensão admissível
de 235 MPa, sujeita a um esforço normal de 150 kN (tracção). Verifique se esta sofre rotura.
Determine o esforço axial máximo a que essa barra pode estar sujeita.
R: Não, o esforço normal máximo é de 203 kN.

4
Valores típicos de tensão resistente:
Aço A235 – 204 MPa Aço A500- 435 MPa
Betão C12/15 – 8 MPa (c)/0.73 MPa(t) Betão C45/55 – 30 MPa (c) / 1.84 MPa(t)
De forma igual à estabelecida anteriormente (tensão normal versus esforço normal) pode
introduzir-se o conceito de tensão tangencial média, .
𝜏 =𝑉
𝐴
Por vezes esta componente do tensor das tensões1 (desenvolver) é referida por 𝜎32 ou 𝜎31.
Também aqui se poderia fazer uma distinção entre o valor da tensão tangencial pontual.
A distribuição de tensões tangenciais na secção é relevante para barras sujeitas a esforços
transversos ou momentos torsores. Também é relevante para a verificação de segurança de
ligações de corte.
Tensões tangenciais (corte simples). BEER, 4ª Edição.
Tensões tangenciais (corte duplo) [].
1 O termos genérico 𝜎𝑚𝑛desse tensor tem o significado de componente segundo a direcção n na faceta elementar cuja normal é segundo m

5
Conceito de Extensão
Considerando uma barra com uma secção A e comprimento (inicial) L0 constituída por um
determinado material, sujeita a um esforço normal de tracção N, esta barra sofre um
alongamento . Pode observar-se que se, porventura, a barra tivesse o dobro da secção (2A), o
mesmo comprimento inicial (L0) e estivesse sujeita ao dobro do esforço normal (2N), o
alongamento seria igual.
Introduz-se então o conceito de deformação média, ou extensão média, como sendo a
seguinte grandeza adimensional:
휀 =𝛿
𝐿0
Para um corpo de prova (amostra ou provete) sujeito a um ensaio de tracção o diagrama 𝜎 − 휀
é uma característica do material que o constitui, não sendo dependente das dimensões
(comprimento, secção) do corpo de prova.
Também se poderia definir a extensão pontual através do seguinte limite:
휀 = lim∆𝑥→0
∆𝛿
∆𝑥
ou, inversamente, calcular o alongamento total de uma barra.
𝛿 = ∫ 휀 𝑑𝑥𝐿
0
Como referido a deformação média é uma grandeza adimensional, não dependente do
sistema de unidades. Por vezes utiliza-se uma unidade convencional chamada mícron () que
corresponde a 10-6 (m/m, mm/mm, pol/pol, etc).
À semelhança do verificado com as tensões, pode também definir-se um tensor de
deformações, em que os termos diagonais indicam a extensão segundo as 3 direcções e os
termos não diagonais indicam a distorção (variação de ângulo) entre os vários pares de eixos
principais.
P: Considere a mesma barra tubular da pergunta anterior com um comprimento de 3m.
Admita que essa barra sofre um alongamento de 6 mm. Determine a extensão média.
R: 0.002 (ou 2000).

6
Diagramas tensão-deformação
Como referido o diagrama tensão-deformação constitui uma característica única do material,
não sendo afectado pelas dimensões do corpo de prova (com algumas reservas).
Estes ensaios são realizados sujeitando o corpo de prova (amostra ou provete) a uma história
incremental de tensões, até se observar a rotura.
Corpo de prova e instalação de ensaio de tracção. BEER, 4ª Edição.
Diagrama tensão-deformação típico de provete de aço macio[].

7
Características específicas do aço macio (baixo teor de carbono):
Regime elástico;
Cedência;
Patamar de cedência (escoamento);
Endurecimento (encruamento);
Resistência convencional máxima;
Rotura
Há materiais (não isotrópicos, anisotrópicos) que apresentam características diferentes
dependentemente da direcção de carregamento. Por vezes apresentam duas direcções
ortogonais completamente distintas (ortotrópicos). Dê-se o exemplo da madeira (paralelo ao
fio ou perpendicular ao fio).
Lei de Hooke: Módulo de Elasticidade
Em alguns materiais existe uma gama de deformações para a qual as tensões são
proporcionais (regime elástico). O declive do diagrama tensão-deformação é constante e o seu
valor é designado de módulo de elasticidade (ou de Young) do material, sendo representado
por E. Valores típicos do módulo de elasticidade: betão 30 GPa (dependente da resistência à
compressão), aço 200 GPa (mais ou menos invariável).
No regime elástico
𝜎 = 𝐸 휀
É curioso notar-se que embora os tratamentos térmicos, inclusão de ligas tenham e processo
de fabrico influenciem significativamente as características de resistência e ductilidade dos
aços, o seu módulo de elasticidade permanece praticamente inalterado (200-210 GPa).
Nota-se também que em alguns materiais (por exemplo o aço) as descargas e recargas se
realizam de forma elástica (lineares, com um declive - idêntico ao declive da fase elástica da
carga).
Ainda no caso dos aços, refere-se que os aços com elevado teor de carbono tendem a não
apresentar uma cedência nítida, razão pela qual se define o conceito (equivalente) de tensão
limite convencional de proporcionalidade a 0,2%.
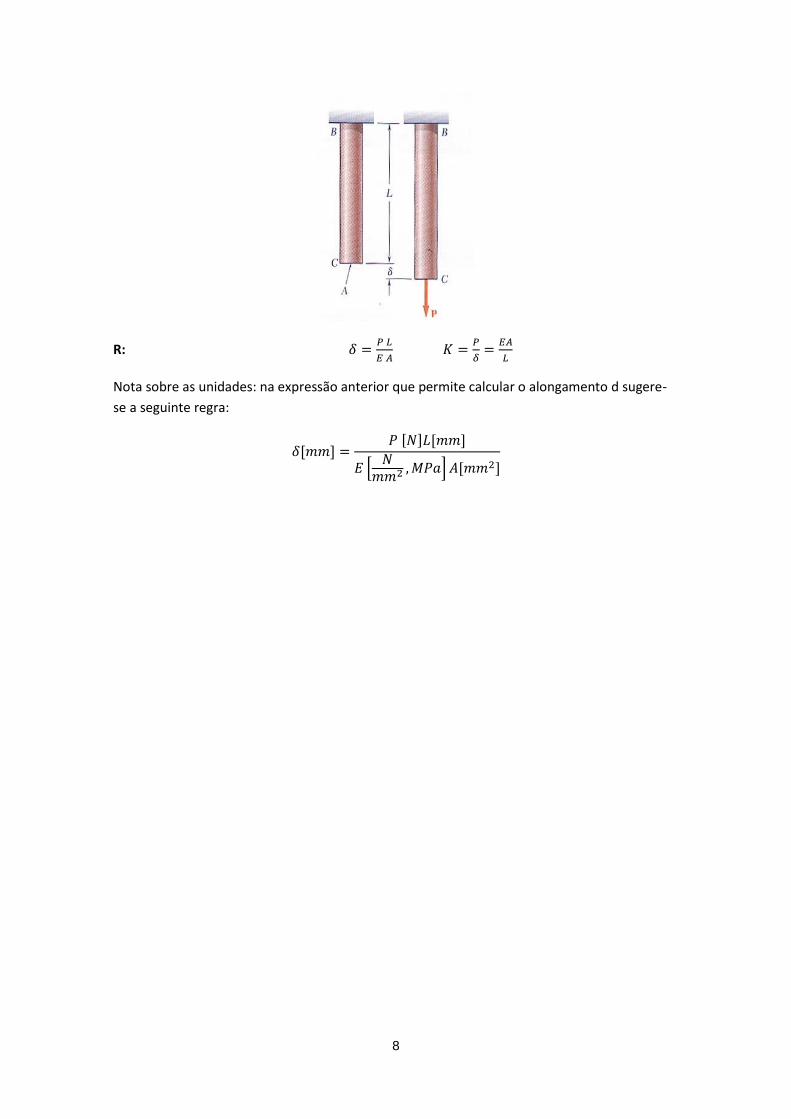
P: Para uma barra prismática de secção A, comprimento L, apoiada superiormente e livre
inferiormente, constituída pelo material com um módulo de elasticidade de E, determine a
expressão para o seu alongamento quando sujeito a uma força descendente (tracção) de valor
P. Explorando a analogia com uma mola, determine a expressão para a constante de rigidez da
mesma (K).
8
R: 𝛿 =𝑃 𝐿
𝐸 𝐴 𝐾 =
𝑃
𝛿=
𝐸𝐴
𝐿
Nota sobre as unidades: na expressão anterior que permite calcular o alongamento d sugere-
se a seguinte regra:
𝛿[𝑚𝑚] =𝑃 [𝑁]𝐿[𝑚𝑚]
𝐸 [𝑁
𝑚𝑚2 , 𝑀𝑃𝑎] 𝐴[𝑚𝑚2]

9
Momentos de Inércia
Como visto anteriormente quando uma barra está apenas sujeita ao esforço normal, a
distribuições de tensões (normais) é uniforme na secção, sendo esta estaticamente
equivalente ao esforço normal, considerado aplicado no centróide da secção.
O centróide da secção, cuja posição é identificada por �̅� e �̅� na figura anterior é uma
característica geométrica da secção. Exemplificando com a coordenada x do centróide, ter-se-
ia:
�̅� =∫ 𝑥 𝑑𝐴
∫𝑑𝐴=
𝑆𝑦
𝐴
em que Sy representa o momento estático da secção relativamente ao eixo y representado e 𝐴
a área.
Considere-se agora o caso em que os esforços internos na secção são todos nulos, excepto o
momento flector Mx (simplificadamente identificado por M).
Mais à frente, no estudo da flexão, vai concluir-se que este momento flector origina uma
distribuição de tensões normais linear na secção (as tensões aumentam linearmente com a
distância y ao eixo de flexão x de acordo com uma constante, kx ou k, proporcional à
curvatura).

10
Pode de novo estabelecer a equivalência estática entre o momento flector (M) e a distribuição
de tensões na secção, ou seja:
𝑀 = ∫𝜎 × 𝑦 𝑑𝐴 = ∫𝑘 𝑦 × 𝑦 𝑑𝐴 = 𝑘 ∫𝑦2𝑑𝐴
O resultado do integral da expressão anterior é uma característica da secção (como a área e a
posição do centróide) sendo designado por momento de inércia (em relação ao eixo x), ou
seja:
𝐼𝑥 = ∫𝑦2𝑑𝐴
Chama-se à atenção que essa nova característica da secção relaciona a constante proporcional
à curvatura com o momento flector, ou seja:
𝐼𝑥 =𝑀𝑥
𝑘𝑥
O que significa que quanto maior for o momento de inércia menor será a curvatura (para um
mesmo valor do momento flector).
A característica anterior também pode ser definida para a flexão em torno do eixo y, obtendo-
se o momento de inércia (e curvatura), relativamente a esse eixo.
𝐼𝑦 = ∫𝑥2𝑑𝐴
𝐼𝑦 =𝑀𝑦
𝑘𝑦
P: Determine os valores dos momentos de inércia em relação aos eixos principais
(baricêntricos) de um rectângulo de base b e altura h.
R: 𝐼𝑥 =𝑏 ℎ3
12, 𝐼𝑦 =
ℎ 𝑏3
12

11
Tabela de momentos de inércia de formas geométricas elementares
Note-se que as expressões anteriores se refere ao momento de inércia relativamente aos eixos
que contêm o centróide, não podendo ser aplicados relativamente a qualquer outro eixo.

12
Flexão
Flexão elástica recta
Define-se barra ou peça linear como todo o corpo cujo material se confina à vizinhança de uma
linha do espaço a que se chama eixo. Segundo o Vocabulário de Teoria das Estruturas trata-se
dum corpo que se pode considerar gerado por uma figura plana, de forma e dimensões não
necessariamente constantes, cujo centro de gravidade se desloca ao longo de uma linha de
grande raio de curvatura à qual a figura se mantém perpendicular e cujo deslocamento é
largamente superior às dimensões da figura. O eixo da peça linear é pois a trajectória do
centro de gravidade da sua figura geradora, denominando-se fibra a trajectória percorrida por
qualquer ponto da figura. Por outro lado a secção resultante da intersecção da peça linear por
um plano normal ao seu eixo denomina-se secção transversal da peça linear.
A peça linear é pois uma estrutura redutível a um modelo unidimensional (o eixo).
BP
Os esforços, �⃗⃗� e �⃗⃗⃗� , determinados no centróide da secção são estaticamente equivalentes à
distribuição de tensões na mesma secção, ou seja:
BP
Admitindo com válido o princípio da sobreposição dos efeitos pode calcular-se separadamente
o efeito de cada um dos esforços anteriores. Neste momento já concluímos o estudo das peças

13
lineares sujeitas a esforços normais (tracção ou compressão), iniciando-se agora o estudo das
mesmas peças sujeitas a esforços de flexão.
São muitos os exemplos de peças lineares sujeitas a esforços de flexão. O mais comum – a viga
– é uma peça linear sujeita predominantemente a momento flector e esforço transverso.
Referem-se como exemplos as vigas que fazem parte da estrutura de piso dos edifícios, as
vigas que constituem (com as lajes) o tabuleiro das pontes, etc.
Vamos estudar inicialmente a designada flexão pura ou circular (flexão sem esforço
transverso). Embora seja relativamente pouco frequente encontrar casos deste tipo, os
resultados obtidos podem ser parcialmente utilizados no estudo da flexão simples (flexão com
esforço transverso).
Considere-se então o caso da flexão pura, exemplificado com um segmento finito de uma
barra sujeita a momentos (iguais) nas suas extremidades (eixo 2, eixo transversal
relativamente ao qual a secção é simétrica, eixo 1, eixo que define fibras que sofrem um
alongamento/encurtamento comum, e eixo 3, eixo da barra):
BP
A primeira observação é de que a viga flecte, transformando-se qualquer uma das suas fibras
(originalmente rectas) num arco de circunferência. Haverá fibras, do lado côncavo, cujo
comprimento diminui, assim como outras fibras, do lado convexo, cujo comprimento aumenta.
Entre estas existirão fibras (fibras neutras), cujo comprimento permanece inalterado. Pode
ainda introduzir-se o conceito de superfície neutra como sendo constituído por todas as fibras
cujo comprimento permanece inalterado.
Por conveniência considerou-se que o eixo x1 define a superfície neutra (ou seja, as fibras x2=0
não sofrem alongamento ou encurtamento).

14
Analise-se agora a deformada de um segmento infinitesimal (comprimento dx3).
BP
Admita-se – hipótese de Bernoulli (J. Bernoulli, 1705) – que as secções planas se mantêm
planas, de tal forma que as secções AA´ e BB´ originalmente paralelas, se transformam nas
secções CC´ e DD´ (já não paralelas, fazendo entre si um ângulo d).
Se considerarmos uma fibra genérica PP´ (à distância x2 da origem do referencial) esta irá
apresentar um comprimento final
𝑑𝑥3 + 𝑥2 𝑑𝜃
Ou seja, irá sofrer uma deformação 33
휀33 =𝑑𝑥3 + 𝑥2 𝑑𝜃 − 𝑑𝑥3
𝑑𝑥3= 𝑥2
𝑑𝜃
𝑑𝑥3
Em que 𝑑𝜃
𝑑𝑥3 representa a curvatura da barra, ou seja o inverso do raio de curvatura R
휀33 =𝑥2
𝑅
Introduzindo agora as relações de elasticidade, as tensões normais 33 na secção são dadas
por:
𝜎33 = 𝐸𝑥2
𝑅
sendo E o módulo de elasticidade (ou de Young) do material.
Poder-se-ia ainda conclui que
휀11 = 휀22 = −𝜈𝑥2
𝑅

15
sendo nulas todas as restantes componentes de deformação (휀12 = 휀13 = 휀23 = 0).
Quanto ao campo de tensões, este terá todos os termos nulos, com a excepção de 33.
Recuperando as relações entre os esforços e as componentes do campo de tensões, tem-se:
Esforço normal (N)
𝑁 = ∫ 𝜎33𝑑Ω
Ω =𝐸
𝑅∫ 𝑥2𝑑Ω
Ω =𝐸
𝑅 𝑆𝑥1 = 0
Em que Sx1 é o momento estático da secção relativamente ao eixo x1, pelo que se conclui que o
eixo neutro (x1) contém o centróide da secção, ou seja as fibras situadas “à cota” do centróide
não sofrem alongamento ou encurtamento. Dito de outra forma o eixo neutro da secção (eixo
x1) contém o centróide da mesma.
Momento flector (M1)
𝑀1 = ∫ 𝜎33 𝑥2𝑑Ω
Ω =𝐸
𝑅∫ 𝑥2
2𝑑Ω
Ω =𝐸
𝑅 𝐼1
Em que I1 é o momento de inércia da secção relativamente ao eixo x1. Da equação anterior
conclui-se que a curvatura (1/R) é dada por:
1
𝑅=
𝑀1
𝐸 𝐼1
A equação anterior é conhecida por lei de Euler-Bernoulli e ao denominador (EI1) por rigidez de
flexão.
Pode ainda concluir-se que as tensões normais variam linearmente em relação ao eixo neutro,
sendo determinadas por:
𝜎33(𝑥2) =𝑀1
𝐼1𝑥2
designada por equação de Navier.

16
Representação das tensões normais numa secção sujeita à flexão [].
Em particular os valores extremos (mínimo e máximo) da tensão normal irão ocorrer nos
pontos mais afastados da linha neutra, ou seja:
𝜎33𝑚𝑎𝑥 =
𝑀1
𝐼1 𝑣 =
𝑀
𝑊
Sendo W designado por módulo de flexão (da secção) e tem as dimensões [L3].
Módulo de flexão
Genericamente o módulo de flexão (W) é uma característica geométrica da secção que
determina o valor máximo da tensão normal para um dado valor do momento flector.
Recupere-se para o efeito a equação anterior.
𝜎33𝑚𝑎𝑥 =
𝑀1
𝐼1 𝑣 =
𝑀
𝑊
Em que v designa a distância da fibra mais afastada do centróide (fibra na qual a tensão é
máxima) relativamente ao mesmo centróide.
Chama-se à atenção de que para secções não simétricas em relação à linha neutra (eixo x1,
contendo o centróide) há a considerar dois módulos de flexão distintos.
𝑊+ =𝐼1𝑣+
𝑊− =𝐼1𝑣−
Sendo v+ e v- as distâncias a que situam a fibra mais afastada para baixo do centróide ou para
cima do centróide, respectivamente.

17

18
Flexão Composta
A flexão composta corresponde à actuação simultânea de esforço normal N e momento flector
M.
Admitindo o princípio da sobreposição dos efeitos (válido no regime linear) ter-se-ia que a
distribuição de tensões normais na secção é descrita por:
𝜎 =𝑁
𝐴+
𝑀
𝐼 𝑥2
A distribuição de tensões continua a ser linear na altura da secção (coordenada x2), mas a linha
neutra deixa de conter o centróide da secção. Neste caso a linha neutra situa-se na posição:
𝜎 =𝑁
𝐴+
𝑀
𝐼 𝑥2 = 0 ⇒ 𝑥2 = −
𝑁
𝑀 𝐼
𝐴
Por exemplo no caso de uma secção rectangular (bXh) ter-se-ia que a linha neutra está situada
à seguinte distância do centróide:
𝑥2 = −𝑁
𝑀 ℎ2
12

19
ACÇÕES, COMBINAÇÕES DE ACÇÕES E VERIFICAÇÃO DE SEGURANÇA
Preâmbulo
As regras de quantificação e combinação de acções encontram-se indicadas nos regulamentos
estruturais, por exemplo:
RSA (Regulamento de Segurança e Acções em Estruturas de Edifícios e Pontes), 1983.
Eurocódigo 1 (EN 1991, CEN) Acções em Estruturas (NP EN 1991-1-1:2009).
Acções em Estruturas
As acções em estruturas podem ser subdivididas nos seguintes tipos:
Acções Permanentes (G) – acções que apresentam reduzida variabilidade ao longo do período
de vida da estrutura (ex.: peso próprio dos elementos estruturais e não estruturais
permanentes, pré-esforço, pressão hidrostática em alguns casos, impulsos de terras, etc.).
Acções Variáveis (Q, W) – acções que apresentam grande variabilidade ao longo do período de
vida da estrutura (ex.: sobrecarga de utilização, vento, variações térmicas, diárias ou sazonais,
neve, etc.).
Acções de Acidente (F) – acções que apresentam uma probabilidade baixa de ocorrência (ex:
sismos, explosões, choque de veículos, incêndio, etc.).
Atendendo à sua distribuição probabilística as acções são geralmente quantificadas com o seu
valor característico – Gk, Qk – (ex: no RSA considerava-se o valor característico superior, com
uma probabilidade de excedência de apenas 5%). Quando combinadas com outras acções (ou
em verificações em que a duração do estado limite é relevante), definem-se os valores
reduzidos. Referem-se os seguintes valores reduzidos:
𝜓0 – valor de combinação;
𝜓1 – valor frequente (correspondentes a períodos relativamente longos, apresentando
uma probabilidade de ser excedido em apenas 1% do período de vida da estrutura);
𝜓2 – valor quase permanente (correspondente a períodos muito longos, com a
probabilidade de ser excedido em 50% do período de vida da estrutura).
Verificação de Segurança
A verificação de segurança deve ser realizada em relação aos seguintes dois tipos de estados
limites:
Estados Limites Últimos – Estados de cuja ocorrência resultam prejuízos severos (ex.:
rotura de elementos estruturais, perda de equilíbrio de estrutura, colapso progressivo,
instabilidade, etc.).

20
Estados Limites de Utilização – Estados de cuja ocorrência resultam prejuízos menos
severos (abertura de fendas, deformação excessiva, vibração, etc.).
Em qualquer dos casos, a verificação de segurança pressupõe o cumprimento da seguinte
condição:
𝑆𝑑 ≤ 𝑅𝑑
Em que 𝑆𝑑 representa o designado valor de cálculo do efeito das acções e 𝑅𝑑 o valor de cálculo
resistente.
Nos Estados Limites Últimos as verificações anteriores são habitualmente conduzidas em
termos dos esforços (esforços actuantes e resistentes). Nesse caso na verificação da segurança
o efeito da acção é determinado da seguinte forma (RSA):
Em que os coeficientes 𝛾𝑔 e 𝛾𝑞 são os coeficientes de segurança para as acções permanentes e
variáveis (tipicamente de 1,35 ou 1,5), 𝑆𝑄1𝑘 identifica a acção variável de base e 𝑆𝑄𝑗𝑘 as
restantes acções variáveis (cujos valores de combinação são determinados afectando os
valores característicos dos factores 𝛾0𝑗 que têm em conta a redução do valor das restantes
acções variáveis quando a acção variável de base tem o seu valor característico). Note-se que o
coeficiente majorativo das acções permanentes (𝛾𝑔) deverá ser considerado unitário quando
estas tenham um efeito favorável à verificação em causa. De igual forma não deverão ser
consideradas as acções variáveis que tenham um efeito favorável à verificação. O valor de
cálculo da resistência é determinado dividindo os valores característicos (inferiores, com a
probabilidade de serem excedidos em 95% dos casos) das resistências dos materiais por um
coeficiente 𝛾𝑀 (com os valores típicos de 1,5 para o betão e de 1,15 para o aço) que reduz
ainda mais a resistência a considerar, ou seja:
𝑅𝑑 =𝑅𝑘
𝛾𝑀
Nos Estados Limites de Utilização as verificações de segurança são habitualmente conduzidas
em deformações (ou abertura de fendas ou um qualquer indicador da vibração). Nesses casos
introduz-se indirectamente o intervalo de tempo na qual é excedida a segurança, fazendo com
que o valor de cálculo do efeito das acções seja determinado em correspondência. Refira-se o
caso das verificações de deformações que apenas constituem um problema quando persistam
durante uma fracção significativa do período de vida útil da estrutura. O mesmo se passa com
a fendilhação de elementos estruturais de betão armado (os riscos para a durabilidade desses
elementos apenas são relevantes quando as fendas permanecem abertas por um período
significativo).