education line - knobloch-gmbh.de · com o robo pro control software os alunos podem criar sequêda...
TRANSCRIPT

education line
CrossRoads
Controle de semáforos Ligue & aprenda
Conexão via USB Desenvolvido na prática Instruções e exemplos Baixo custo – alta qualidade
Um projeto de processamento de dados
e du c at ion l in e
2 Antje Bertsch Ricardo Martins 2014
Introdução Atualmente processamento de dados é um tópico muito presente em escolas. Em vista disso, desenvolvemos o CrossRoads como um projeto de ensino de processamento de dados para uso em escolas. CrossRoads possui uma série de características interessantes, entre elas o seu tamanho portátil e a possibilidade de conectá-lo ao PC via USB e sem necessidade de uma interface adicional externa ou uma fonte de energia. Verdadeiramente Ligue a Aprenda! Os programas apresentados neste material são o resultado de de experiências práticas em ensino. Ao longo da leitura, você deve perceber as variadas possibilidades que o CrossRoads pode oferecer a alunos de diferentes idades e níveis de aprendizado. Recomendamos o uso do CrossRoads para alunos entre 13 e 16 anos. O módulo representa um curzamento de ruas com um conjunto de semáforos composto de 4 semáforos de tráfego e 8 semáforos de pedestres. Sensores permitem detectar veículos acima do limite de velocidade ou veículos que cruzarem o sinal vermelho. Um sensor de claridade controla a iluminação das ruas e permite a mudança para a operação noturna dos semáforos. Com o ROBO Pro control software da Fischertechnik, os alunos podem criar sequências de programação na interface gráfica e vê-los na tela do computador. Esses programas são então testados no módulo e os alunos imediamente atestam o seu sucesso na programação. Programação com Java, Delphi ou outras linguagens de programação para ensino em séries mais elevadas de alunos é possível, pois os correspondentes drivers e instruções estão disponíveis. Mais informações disponíveis em http://www.ftcommunity.de/ftComputingFinis/ Nós estamos atualmente considerando controlar o módulo com uma linguagem de programação livre, orientada por objetos. Atualmente a programação do CrossRoads também é possível pela linguagem BlueJ, uma linguagem de programação orientada a objetos. Mais informações disponíveis em http://did.inf.uni-bayreuth.de/?id=2995 Ficaremos felizes em receber propostas e ideias resultantes do seu trabalho com ROBO Pro. Novembro de 2014 Antje Bertsch Ralf Knobloch www.anberit.de Knobloch GmbH Índice Página 1. O software ROBO Pro …...............…………………………..….………….…………… 3 2. Configurações da interface para o módulo CrossRoads ……..…..……………… 5 3. Introdução ao controle dos semáforos ………..……….…………………………….. 7 4. Dicas para o trabalho com o ROBO Pro ……..............……………………………… 8 5. Semáforos de pedestres ………................….........…………………………………… 12 6. Mudança para operação noturna …….........…….....…………….………….….…….. 16 7. Controle de semáforos e radares de velocidade ……...………………………….… 17 8. Produtos da educ at ion l ine …..........………………….…..………………............ 19

e du c at ion l in e
2014 Antje Bertsch Ricardo Martins 3
1. O software ROBO Pro 1.1. Instalando ROBO Pro e o driver para a interface ROBO
• Para usar o ROBO Pro em casa ou na escola, há diferentes licenças disponíveis em http://www.knobloch-gmbh.de/wbc.php?sid=49617ef2daa&pid=210&tpl=pr1510detail.html
• A instalação do ROBO Pro é bastante simples, no entanto é necessário que o usuário
possua direitos de administrador para o PC em que será instalado • Desde meados de 2011, uma nova versão (Versão 3) do ROBO Pro está disponível,
incluindo os drivers para Windows 7. O ROBO Pro pode ser utilizado nos seguintes sistemas operacionais:
o Windows XP (32 e 64-Bit) o Windows Vista (32 e 64-Bit) o Windows 7 (32 e 64-Bit)
• Em meados de 2012 foi lançada uma atualização do ROBO Pro (Update 3.1.3), que permite
mudar o idioma do ROBO Pro, através de um menu na interface do programa. Esta atualização está disponível em http://www.fischertechnik.de/home/downloads/Computing.aspx
• Se você não conseguir obter a última versão do programa com o seu revendedor,
simplesmente instale a versão antiga e baixe e instale em seguida a atualização disponível no link acima.
• Conecte o módulo CrossRoads no seu PC. Nos sistemas operacionais Windows XP e
Windows Vista os drivers serão instalados automaticamente. • Para instalação em outros sistemas operacionais, consulte primeiro o manual. O diretório
padrão para os drivers USB é: C:\Arquivos de Programa\ROBOPro\USB Driver Install. Recomendamos selecionas “instalação definida pelo usuário” e escolher este caminho para encontrar os drivers.
• Os drivers para versões mais antigas do Windos não possuem a assinatura digital da
Microsoft, logo o usuário precisa ter status de administrador para executar a instalação.
1.2. Versão de teste para estudantes Sob http://www.fischertechnik.de/home/downloads/Computing.aspx uma versão teste do ROBO Pro está disponível. Mude o idioma para inglês clicando no botão na parte superior da tela. Selecione Computing e em seguida Download para obter a versão teste. A versão teste inclui as funções mais importantes do programa. Os alunos podem usá-lo para programar em casa, porém a versão teste não permite controlar hardware. Eles também podem usar o programa para colocar entradas no modo de simulação e testar as funções básicas do ROBO Pro. As saídas são então mostradas na janela teste. Atenção A nova versão do ROBO Pro não é compatível com as versões anteriores! Programas realizados com a nova versão não podem mais ser abertos com a versão anterior.

e du c at ion l in e
4 Antje Bertsch Ricardo Martins 2014
A ilustração mostra um programa do ROBO Pro controlando uma sequência simples.
Janela do programa
Here you must switch to Robo IF
1.3 Janelas do programa ROBO Pro e elementos do programa Para iniciar o ROBO Pro, clique no botão Iniciar na barra de ferramentas e então selecione Programas. No menu haverá um ícone chamado ROBO Pro. Você também encontrará os seguintes ícones nesta pasta: Para você se familiarizar com a interface do ROBO Pro, abriremos primeiro um programa já pronto. Selecione o Nível 2 para controlar os dados de entrada e de saída do módulo, uma vez que alguns elementos não estão disponiveis no Nível 1. Voce encontrará os elementos básicos para criar um programa na seguinte pasta:
Elementos do programa Para criar a sequência de programação, os elementos do programa podem ser movidos da parte esquerda da janela para o campo de programação. A sequência final de programa pode ser verificada e testada usando um módulo CrossRoads conectado ao PC.
carros duração Luz vermelha Luz amarela Luz verde
Luz amarela

e du c at ion l in e
2014 Antje Bertsch Ricardo Martins 5
2. Configurações da interface para o módulo CrossRoads
Antes de testar o ROBO Pro com um módulo CrossRoads, as configurações necessárias devem ser feitas. Clique sobre o ícone para abrir a seguinte janela. Aqui você pode selecionar as configurações para a porta USB e para a interface. Dica: Se uma mensagem de erro („nenhuma Interface encontrada“) aparecer na tela após você selecionar a porta USB, abra o controle do sistema (Controle do sistema / Sistema / Hardware / Administrador de Dispositivos) e verifique se o driver foi configurado corretamente. Para transmitir os comandos do programa ao módulo, uma interface é necessária. Quatro interfaces já estão inseridas no módulo CrossRoads, cada um controla um conjunto de semáforos.
Clique neste ícone na barra de ferramentas para a abrir a seguinte janela. Nela você pode verificar os nomes para os vários semáforos e suas correspondentes interfaces no diagrama na próxima página.
A interface padrão é chamada IF1. EM1 EM2 EM3
são os módulos de extensão. Ajuste a interface EM2, clique nas caixas O1 a O8 uma após a outra e verifique quais semáforos se acendem.
Voce encontrará este ícone no centro da barra de ferramentas do programa.

e du c at ion l in e
6 Antje Bertsch Ricardo Martins 2014
Disposição das entradas e saídas
Inputs O8 O7 O6 O5 O4 O3 O2 O1 Byte 0 - Interface: D7 D6 D5 D4 D3 D2 D1 D0 (Robo-Interface) rua principal direita rua principal esquerda verde amarelo vermelho verde amarelo vermelho Byte 1 (EM1): D7 D6 D5 D4 D3 D2 D1 D0
Semáforo câmera rua perpendicular (parte de
cima) rua perpendicular (parte de
baixo) radar verde Amarelo vermelho verde amarelo vermelho Byte 2 (EM2): D7 D6 D5 D4 D3 D2 D1 D0
Semáforo para pedestres rua perpendicular
(parte de cima rua perpendicular (parte de baixo
rua principal (parte de cima
rua principal (parte de baixo
(junto ao correspondente semáforo de carros) à esquerda) à direita) à direita) à esquerda) verde vermelho verde vermelho verde vermelho verde Vermelho Byte 3 (EM3): D7 D6 D5 D4 D3 D2 D1 D0
Semáforo para pedestres rua perpendicular
(parte de cima rua perpendicular (parte de baixo
rua principal (parte de baixo
rua principal (parte de cima
(oposto ao correspondente semáforo de carros) à direita) à esquerda) à direita) à esquerda) verde vermelho verde vermelho verde vermelho verde vermelho Inputs I8 I7 I6 I5 I4 I3 I2 I1 Byte 0 - Interface: sensors activating D7 D6 D5 D4 D3 D2 D1 D0 pedestrian lights (Robo-Interface) rua perpendicular main road parte de cima parte de baixo right left direita esquerda direita esquerda direita esquerda direita esquerda Byte 1 (EM1): sensores magnéticos D7 D6 D5 D4 D3 D2 D1 D0 (tampa do bueiro) centro rua perpendicular rua principal
em
cima embaixo em cima embaixo direita esquerda
e du c at ion l in e
2014 Antje Bertsch Ricardo Martins 7
3. Introdução ao controle dos semáforos 3.1. Semáforo simples A sequência de programação na página 4 mostra uma sequência simples de semáforos para carros, começando com a luz vermelha.
Crie o programa P1_semaforo_simples de acordo com o exemplo na página 4. Conecte CrossRoads ao seu computador e verifique as configurações da interface.
Inicie o programa P1_semaforo_simples e verifique se está tudo certo.
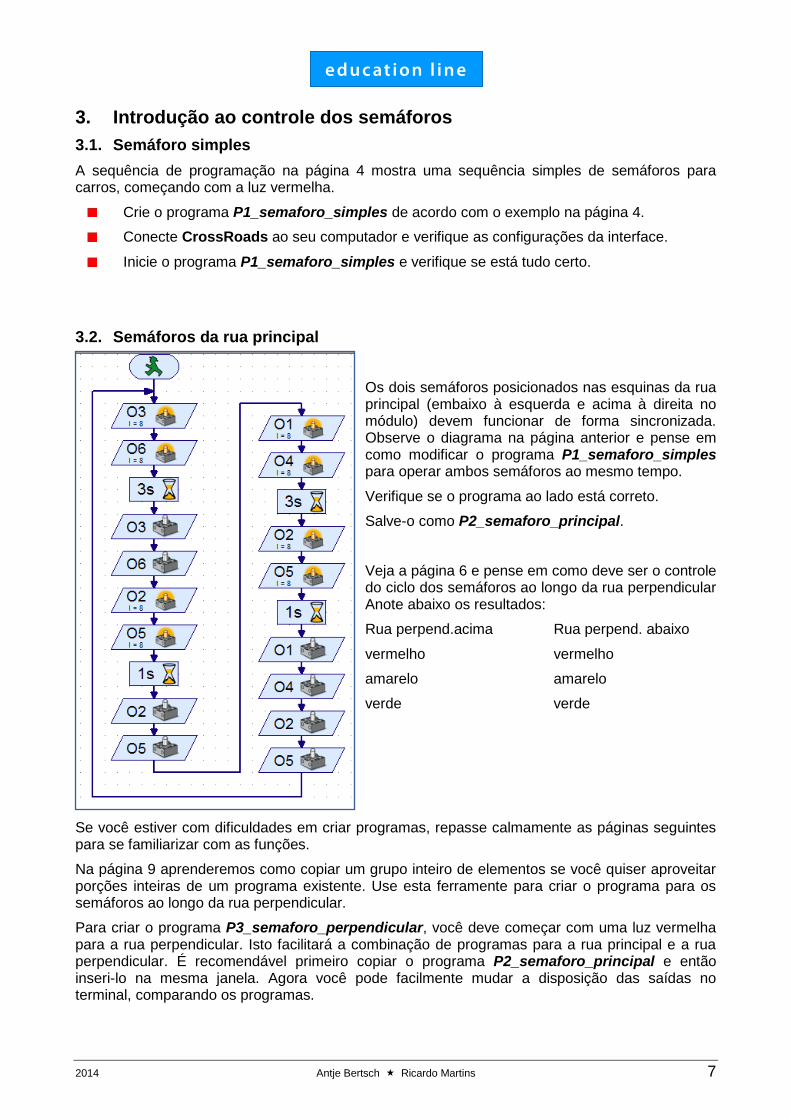
3.2. Semáforos da rua principal Os dois semáforos posicionados nas esquinas da rua principal (embaixo à esquerda e acima à direita no módulo) devem funcionar de forma sincronizada. Observe o diagrama na página anterior e pense em como modificar o programa P1_semaforo_simples para operar ambos semáforos ao mesmo tempo. Verifique se o programa ao lado está correto. Salve-o como P2_semaforo_principal. Veja a página 6 e pense em como deve ser o controle do ciclo dos semáforos ao longo da rua perpendicular Anote abaixo os resultados: Rua perpend.acima Rua perpend. abaixo vermelho vermelho amarelo amarelo verde verde
Se você estiver com dificuldades em criar programas, repasse calmamente as páginas seguintes para se familiarizar com as funções. Na página 9 aprenderemos como copiar um grupo inteiro de elementos se você quiser aproveitar porções inteiras de um programa existente. Use esta ferramente para criar o programa para os semáforos ao longo da rua perpendicular. Para criar o programa P3_semaforo_perpendicular, você deve começar com uma luz vermelha para a rua perpendicular. Isto facilitará a combinação de programas para a rua principal e a rua perpendicular. É recomendável primeiro copiar o programa P2_semaforo_principal e então inseri-lo na mesma janela. Agora você pode facilmente mudar a disposição das saídas no terminal, comparando os programas.

e du c at ion l in e
8 Antje Bertsch Ricardo Martins 2014
4. Dicas para o trabalho com o Robo Pro Muitas das funções do ROBO Pro são conhecidas por alunos que estão acostumados a usar um computador. As funções mais importantes serão explicadas nos próximos capítulos.
4.1 A barra de ferramentos do Robo Pro
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 Para se familiarizar com ROBO Pro, mova o mouse sobre os ícones na barra de ferramentas e observe as funções correspondentes (ajuste para Nível 2!)
1 Abrir o campo de programação para um novo programa Robo Pro
2 ................................................................................................................................................
3 ................................................................................................................................................
4 ................................................................................................................................................
5 ................................................................................................................................................
6 ................................................................................................................................................
7 ................................................................................................................................................
8 ................................................................................................................................................
9 ................................................................................................................................................
10 ................................................................................................................................................
11 ................................................................................................................................................
12 ................................................................................................................................................
13 ................................................................................................................................................
14 ................................................................................................................................................
15 Executar programa ROBO Pro no depurador..........................
16 Interromper o programa no depurador ....................................
17 Executar um único passo do programa no depurador ............
18 ...............................................................................................................................................
19 ................................................................................................................................................
"Debugger" é uma ferramente
para localizar e diagnosticar
erros nos programas.
e du c at ion l in e
2014 Antje Bertsch Ricardo Martins 9
4.2 Inserindo elementos de programa e selecionando as suas propriedades Fischertechnik publicou um manual muito bom, em que todas as funções são bem explicadas, no entanto sempre com base nos modelos da própria Fischertechnik. Os componentes necessários especialmente para o trabalho com CrossRoads serão explicados nesta seção e as questões remanescentes podem ser esclarecidas no manual. ROBO Pro auxilia a criar as sequências de programação que você precisa para controlar os semáforos de CrossRoads. Um programa sempre se inicia com um elemento de início. O elemento de início do ROBO Pro
mostra um homem caminhando. Seguindo esta lógica, você usará um elemento de fim para finalizar o programa e evitar um circuito infinito. O elemento de fim mostra um homem parado de pé.
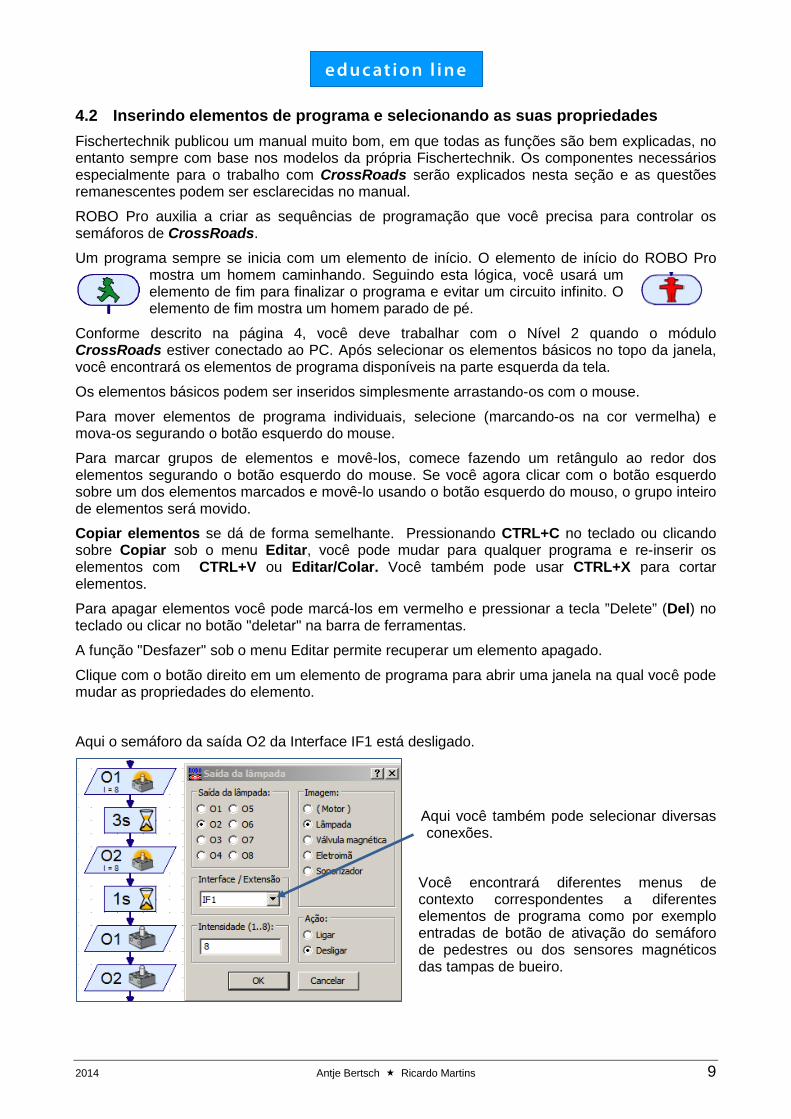
Conforme descrito na página 4, você deve trabalhar com o Nível 2 quando o módulo CrossRoads estiver conectado ao PC. Após selecionar os elementos básicos no topo da janela, você encontrará os elementos de programa disponíveis na parte esquerda da tela. Os elementos básicos podem ser inseridos simplesmente arrastando-os com o mouse. Para mover elementos de programa individuais, selecione (marcando-os na cor vermelha) e mova-os segurando o botão esquerdo do mouse. Para marcar grupos de elementos e movê-los, comece fazendo um retângulo ao redor dos elementos segurando o botão esquerdo do mouse. Se você agora clicar com o botão esquerdo sobre um dos elementos marcados e movê-lo usando o botão esquerdo do mouso, o grupo inteiro de elementos será movido. Copiar elementos se dá de forma semelhante. Pressionando CTRL+C no teclado ou clicando sobre Copiar sob o menu Editar, você pode mudar para qualquer programa e re-inserir os elementos com CTRL+V ou Editar/Colar. Você também pode usar CTRL+X para cortar elementos. Para apagar elementos você pode marcá-los em vermelho e pressionar a tecla ”Delete” (Del) no teclado ou clicar no botão "deletar" na barra de ferramentas. A função "Desfazer" sob o menu Editar permite recuperar um elemento apagado. Clique com o botão direito em um elemento de programa para abrir uma janela na qual você pode mudar as propriedades do elemento. Aqui o semáforo da saída O2 da Interface IF1 está desligado.
Aqui você também pode selecionar diversas conexões.
Você encontrará diferentes menus de contexto correspondentes a diferentes elementos de programa como por exemplo entradas de botão de ativação do semáforo de pedestres ou dos sensores magnéticos das tampas de bueiro.

e du c at ion l in e
10 Antje Bertsch Ricardo Martins 2014
4.3 Conectando os elmentos de programa Normalmente os elementos de programa podem ser unidos diretamente quando são inseridos. Para fazer isso, os elementos inseridos devem ser aproximados uns dos outros em menos de dois pontos entre si. Assim, as setas de programação aparecerão auomaticamente. Se uma linha de conexão não estiver unida corretamente a um ponto de conexão ou a uma outra linha, um retângulo verde na ponta da seta aparecerá. Neste caso você deverá criar a conexão movendo um pouco a linha ou apagando-a e desenhando uma nova linha. De outra forma, o programa não funcionará neste ponto. Testes e ramificações, como no caso dos semáforos de pedestres, requerem conexões adicionais. Você pode desenhar linhas de conexão clicando no botão esquerdo do mouse e segurando-o. Assim fazendo, uma pequena mão aparecerá na tela. Passo 1 Passo 2 Passo 3 Passo 4 Comece desenhando Desenhe Clique com o mouse Pare na entrada a linha na saída a linha para mudar a direção As linhas de conexão podem ser mudadas posteriormente: clique com o botão esquerdo do mouse e mova a linha segurando mesmo botão. Os seguintes casos podem ocorrer:
Se o mouse estiver sobre uma linha vertical, você pode movê-la inteira segurando o botão esquerdo do mouse.
Se o mouse estiver sobre uma linha horizontal, você pode movê-la inteira segurando o botão esquerdo do mouse.
Se o mouse estiver sobre uma linha oblíqua, um novo ponto é inserido na linha de conexão quando você clicar com o botão esquerdo. Você deve segurar o botão esquerdo pressionado e mover o mouse para o local onde o ponto deve ser colocado.
Se o mouse estiver próximo a um ponto final ou a um canto de uma linha de conexão, você pode mover este ponto segurando o botão esquerdo pressionado. Você somente poderá mover um ponto final de uma linha para o ponto de conexão de um outro elemento de programa.
e du c at ion l in e
2014 Antje Bertsch Ricardo Martins 11
4.4 Subprogramas Quanto mais funções e condições um programa contiver, mais confuso ele tornar-se-á. Por isso, passos individuais podem ser reunidos em um subprograma, permitindo uma visão geral. O processo de reunir comandos em um subprograma é útil para funções que são repetidas em diferentes contextos. Agora pratique a função "Inserir supgrama" usando o exemplo da mudança para vermelho dos semáforos da rua principal após o semáforo de pedestres ter sido ativado. Tome o já familiar programa P2_semaforo_principal como o seu ponto de partida. Subprogramas podem ser inseridos em um programa existente clicando sobre este ícone da barra de ferramentas. Você pode nomear o subprograma como desejar na janela que aparecerá.
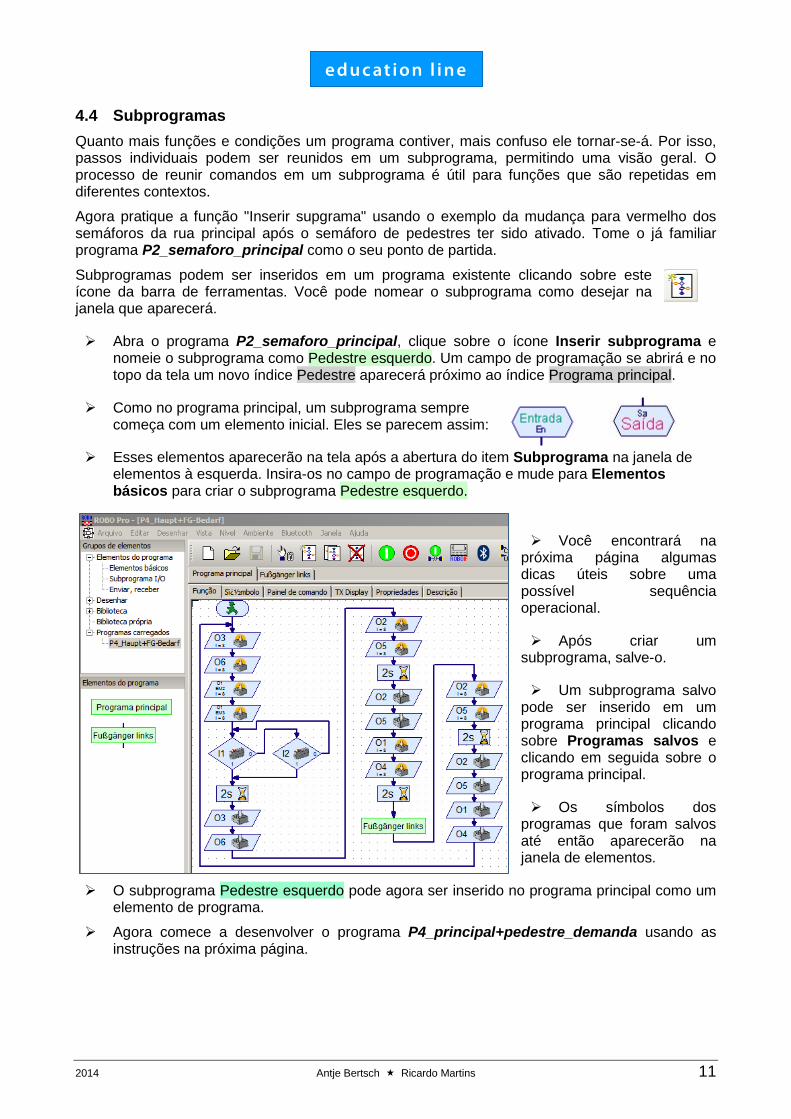
Abra o programa P2_semaforo_principal, clique sobre o ícone Inserir subprograma e nomeie o subprograma como Pedestre esquerdo. Um campo de programação se abrirá e no topo da tela um novo índice Pedestre aparecerá próximo ao índice Programa principal.
Como no programa principal, um subprograma sempre começa com um elemento inicial. Eles se parecem assim:
Esses elementos aparecerão na tela após a abertura do item Subprograma na janela de elementos à esquerda. Insira-os no campo de programação e mude para Elementos básicos para criar o subprograma Pedestre esquerdo.
Você encontrará na próxima página algumas dicas úteis sobre uma possível sequência operacional.
Após criar um subprograma, salve-o.
Um subprograma salvo pode ser inserido em um programa principal clicando sobre Programas salvos e clicando em seguida sobre o programa principal.
Os símbolos dos programas que foram salvos até então aparecerão na janela de elementos.
O subprograma Pedestre esquerdo pode agora ser inserido no programa principal como um elemento de programa.
Agora comece a desenvolver o programa P4_principal+pedestre_demanda usando as instruções na próxima página.

e du c at ion l in e
12 Antje Bertsch Ricardo Martins 2014
5 Semáforos de pedestres 5.1 Semáforo + botão de ativação Agora criaremos um programa concebido para controlar os semáforos em uma rua movimentada. Os semáforos somente devem ficar vermelho depois que um pedestre pressionar o botão para atravessar a rua. Na prática, pausas de segurança são inseridas. Consegue imaginar por quê? Descrição tabular dos semáforos:
rua princip. pedestres
Crie o programa para a rua principal à esquerda e a correspondente faixa de cruzamento para pedestres com seus semáforos. Observe próximo aos semáforos as interfaces de entrada e saída que você usará.
como padrão a rua principal tem a luz verde para assegurar o fluxo do tráfego - saídas O3 e O6 da interface IF1
semáforos da faixa de pedestres estão vermelhos - saídas EM2 O1 e EM3 O1
um pedestre pressiona o botão de ativação, e.g. entrada I1 (ou I2, posteriormente I3 ou I4)
os semáforos da rua principal mudam para amarelo: saídas O3 e O6 para desligar a luz verde. Saídas O2 e O5 para ligar as luzes amarelas.
os semáforos da rua principal mudam para vermelho saídas O2 e O5 para luz amarela: desligado saídas O1 e O4 para luz vermelha: ligado semáforos de pedestre ainda estão vermelhos.
os semáforos da rua principal mudam para vermelho (por 10 segundos), enquanto os pedestres têm a luz verde - saídas EM2 O2 e EM3 O2 para pedestres: ligado (por 10 segundos)
os semáforos de pedestre mudam para vermelho, os semáforos da rua principal também (pausa de segurança)
semáforos vermelho e amarelo para os carros - saídas O2 e O5 são ligadas
saídas para luzes vermelha e amarela são desligadas - retorno ao começo do programa Crie este programa no ROBO Pro, salve-o como P4_principal+pedestre_demanda e teste-o. Isto exemplifica como é útil salvar processos que são frequentemente repetidos em um subprograma e simplesmente reinseri-lo no programa principal. As instruções para fazer isso são encontradas na página anterior, por exemplo, Pedestre esquerdo.
carrros duração pedestres Sequência Verde longo 5s vermelho (até ativação) luz verde
Amarela curto 2s vermelho luz amarela Vermelho curto 2s vermelho pausa de segurança Vermelho longo 10s verde luz vermelha Vermelho curto 2s vermelho pausa de segurança Vermelho-amarelo curto 2s vermelho vemelho-amarelo
e du c at ion l in e
2014 Antje Bertsch Ricardo Martins 13
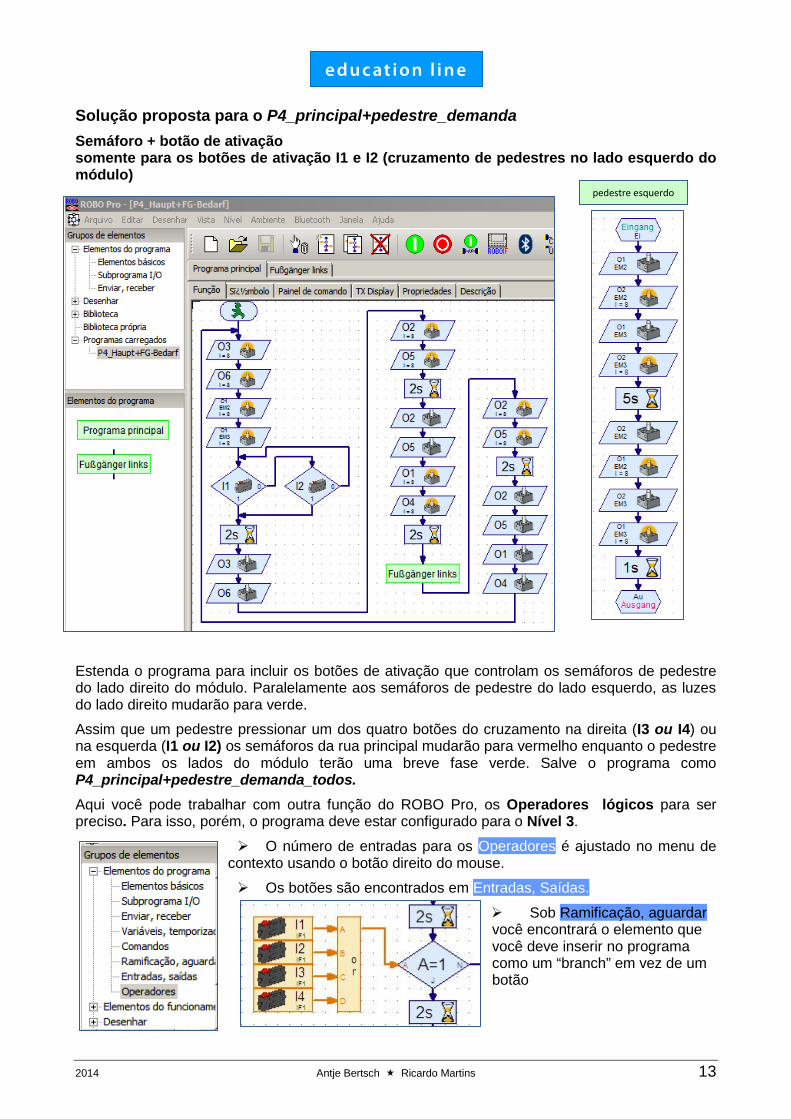
Solução proposta para o P4_principal+pedestre_demanda Semáforo + botão de ativação somente para os botões de ativação I1 e I2 (cruzamento de pedestres no lado esquerdo do módulo)
Estenda o programa para incluir os botões de ativação que controlam os semáforos de pedestre do lado direito do módulo. Paralelamente aos semáforos de pedestre do lado esquerdo, as luzes do lado direito mudarão para verde. Assim que um pedestre pressionar um dos quatro botões do cruzamento na direita (I3 ou I4) ou na esquerda (I1 ou I2) os semáforos da rua principal mudarão para vermelho enquanto o pedestre em ambos os lados do módulo terão uma breve fase verde. Salve o programa como P4_principal+pedestre_demanda_todos. Aqui você pode trabalhar com outra função do ROBO Pro, os Operadores lógicos para ser preciso. Para isso, porém, o programa deve estar configurado para o Nível 3.
O número de entradas para os Operadores é ajustado no menu de contexto usando o botão direito do mouse. Os botões são encontrados em Entradas, Saídas.
Sob Ramificação, aguardar você encontrará o elemento que você deve inserir no programa como um “branch” em vez de um botão
pedestre esquerdo
e du c at ion l in e
14 Antje Bertsch Ricardo Martins 2014
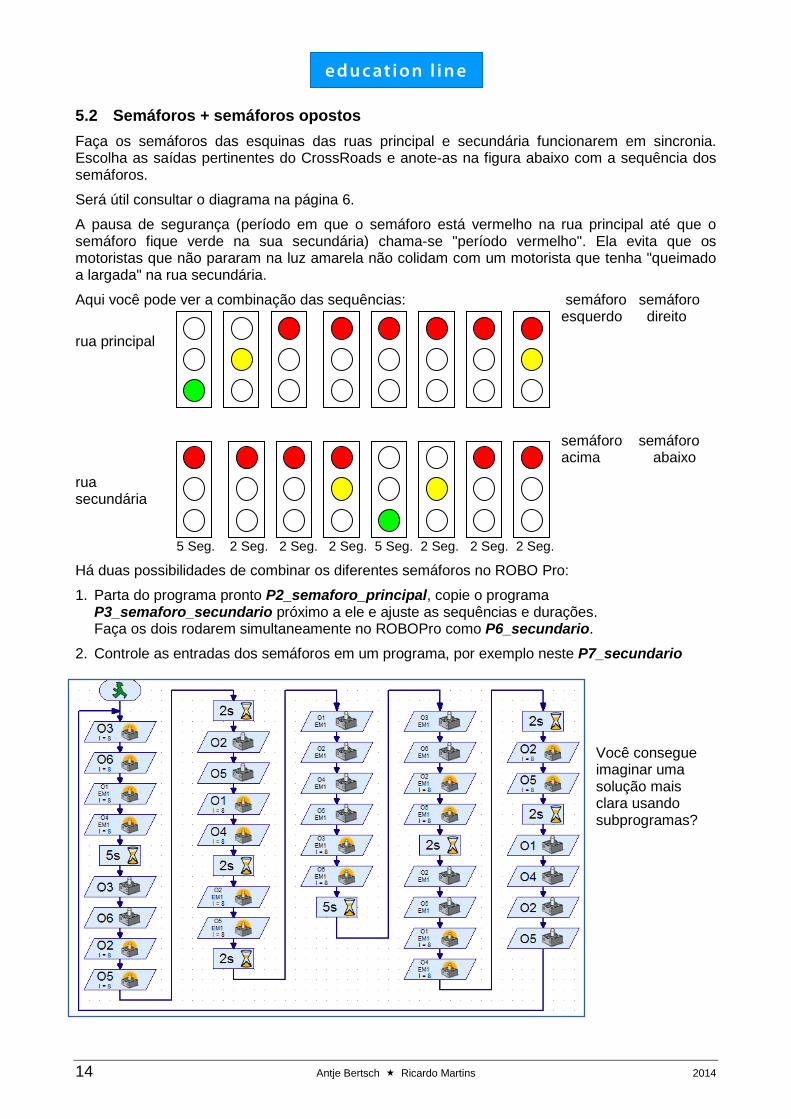
5.2 Semáforos + semáforos opostos Faça os semáforos das esquinas das ruas principal e secundária funcionarem em sincronia. Escolha as saídas pertinentes do CrossRoads e anote-as na figura abaixo com a sequência dos semáforos. Será útil consultar o diagrama na página 6. A pausa de segurança (período em que o semáforo está vermelho na rua principal até que o semáforo fique verde na sua secundária) chama-se "período vermelho". Ela evita que os motoristas que não pararam na luz amarela não colidam com um motorista que tenha "queimado a largada" na rua secundária. Aqui você pode ver a combinação das sequências: semáforo semáforo esquerdo direito rua principal semáforo semáforo acima abaixo rua secundária
5 Seg. 2 Seg. 2 Seg. 2 Seg. 5 Seg. 2 Seg. 2 Seg. 2 Seg.
Há duas possibilidades de combinar os diferentes semáforos no ROBO Pro: 1. Parta do programa pronto P2_semaforo_principal, copie o programa
P3_semaforo_secundario próximo a ele e ajuste as sequências e durações. Faça os dois rodarem simultaneamente no ROBOPro como P6_secundario.
2. Controle as entradas dos semáforos em um programa, por exemplo neste P7_secundario Você consegue imaginar uma solução mais clara usando subprogramas?
e du c at ion l in e
2014 Antje Bertsch Ricardo Martins 15
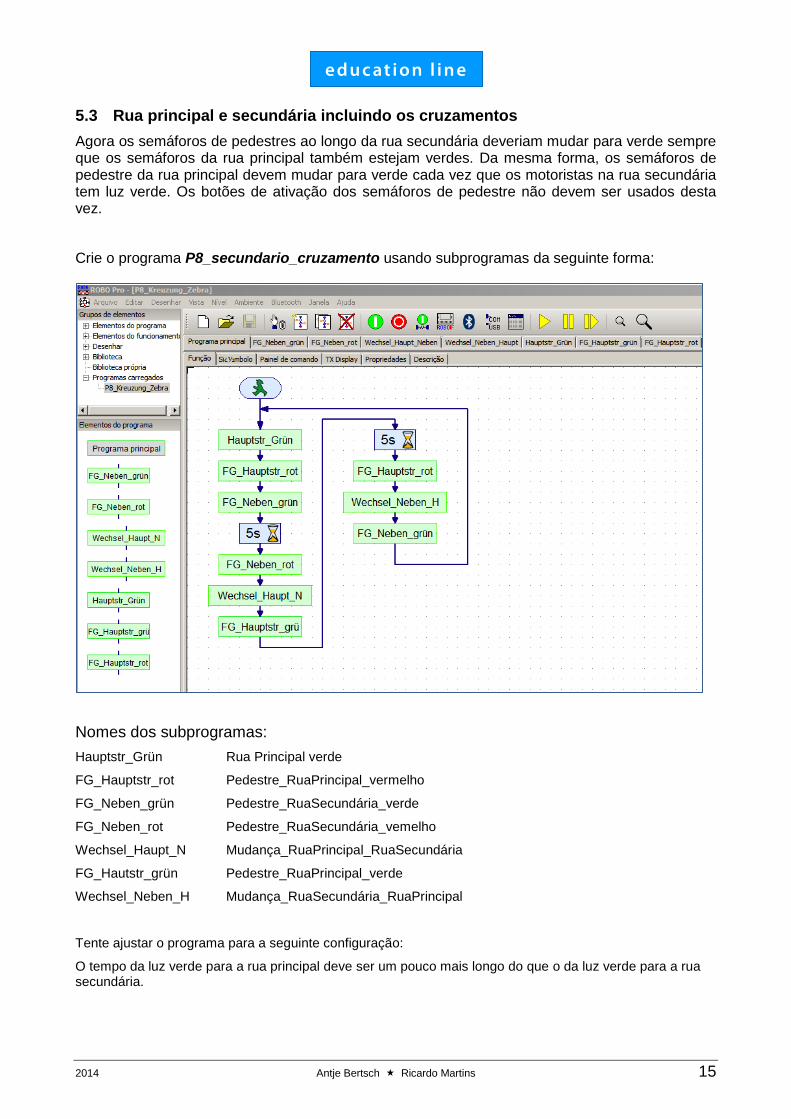
5.3 Rua principal e secundária incluindo os cruzamentos Agora os semáforos de pedestres ao longo da rua secundária deveriam mudar para verde sempre que os semáforos da rua principal também estejam verdes. Da mesma forma, os semáforos de pedestre da rua principal devem mudar para verde cada vez que os motoristas na rua secundária tem luz verde. Os botões de ativação dos semáforos de pedestre não devem ser usados desta vez. Crie o programa P8_secundario_cruzamento usando subprogramas da seguinte forma:
Nomes dos subprogramas: Hauptstr_Grün Rua Principal verde
FG_Hauptstr_rot Pedestre_RuaPrincipal_vermelho
FG_Neben_grün Pedestre_RuaSecundária_verde
FG_Neben_rot Pedestre_RuaSecundária_vemelho
Wechsel_Haupt_N Mudança_RuaPrincipal_RuaSecundária
FG_Hautstr_grün Pedestre_RuaPrincipal_verde
Wechsel_Neben_H Mudança_RuaSecundária_RuaPrincipal
Tente ajustar o programa para a seguinte configuração:
O tempo da luz verde para a rua principal deve ser um pouco mais longo do que o da luz verde para a rua secundária.
e du c at ion l in e
16 Antje Bertsch Ricardo Martins 2014
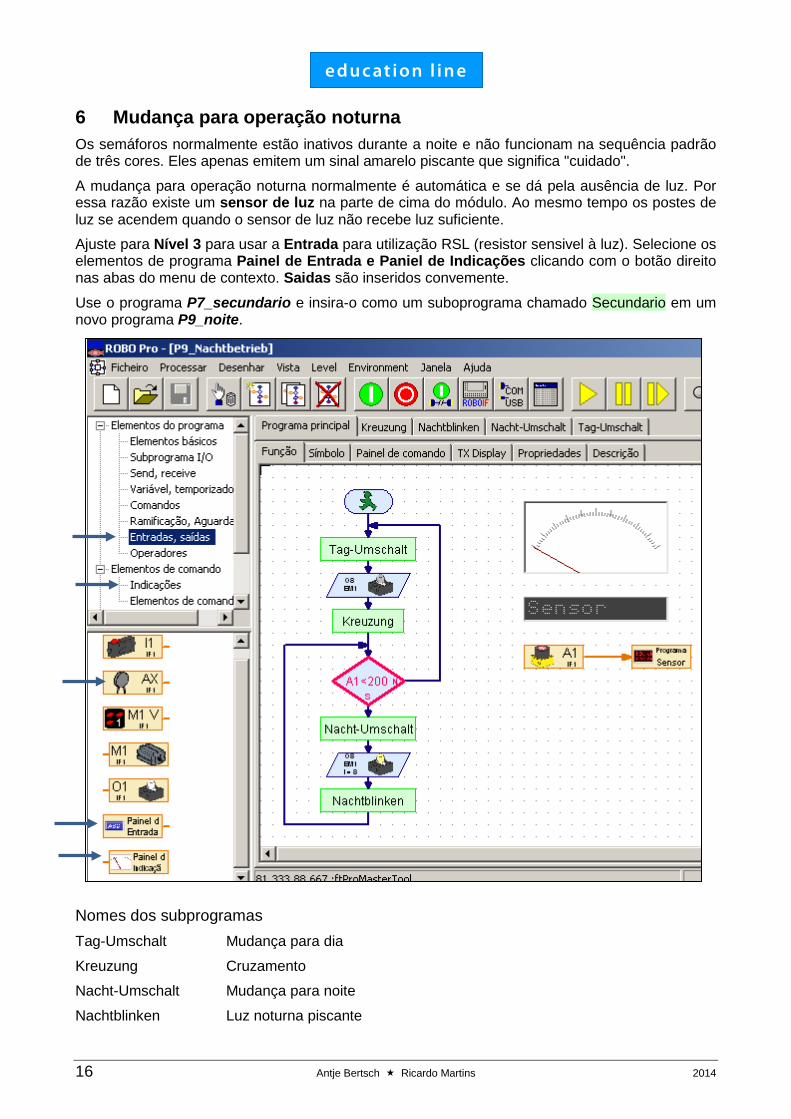
6 Mudança para operação noturna Os semáforos normalmente estão inativos durante a noite e não funcionam na sequência padrão de três cores. Eles apenas emitem um sinal amarelo piscante que significa "cuidado". A mudança para operação noturna normalmente é automática e se dá pela ausência de luz. Por essa razão existe um sensor de luz na parte de cima do módulo. Ao mesmo tempo os postes de luz se acendem quando o sensor de luz não recebe luz suficiente. Ajuste para Nível 3 para usar a Entrada para utilização RSL (resistor sensivel à luz). Selecione os elementos de programa Painel de Entrada e Paniel de Indicações clicando com o botão direito nas abas do menu de contexto. Saidas são inseridos convemente. Use o programa P7_secundario e insira-o como um suboprograma chamado Secundario em um novo programa P9_noite.
Nomes dos subprogramas Tag-Umschalt Mudança para dia Kreuzung Cruzamento Nacht-Umschalt Mudança para noite Nachtblinken Luz noturna piscante
e du c at ion l in e
2014 Antje Bertsch Ricardo Martins 17
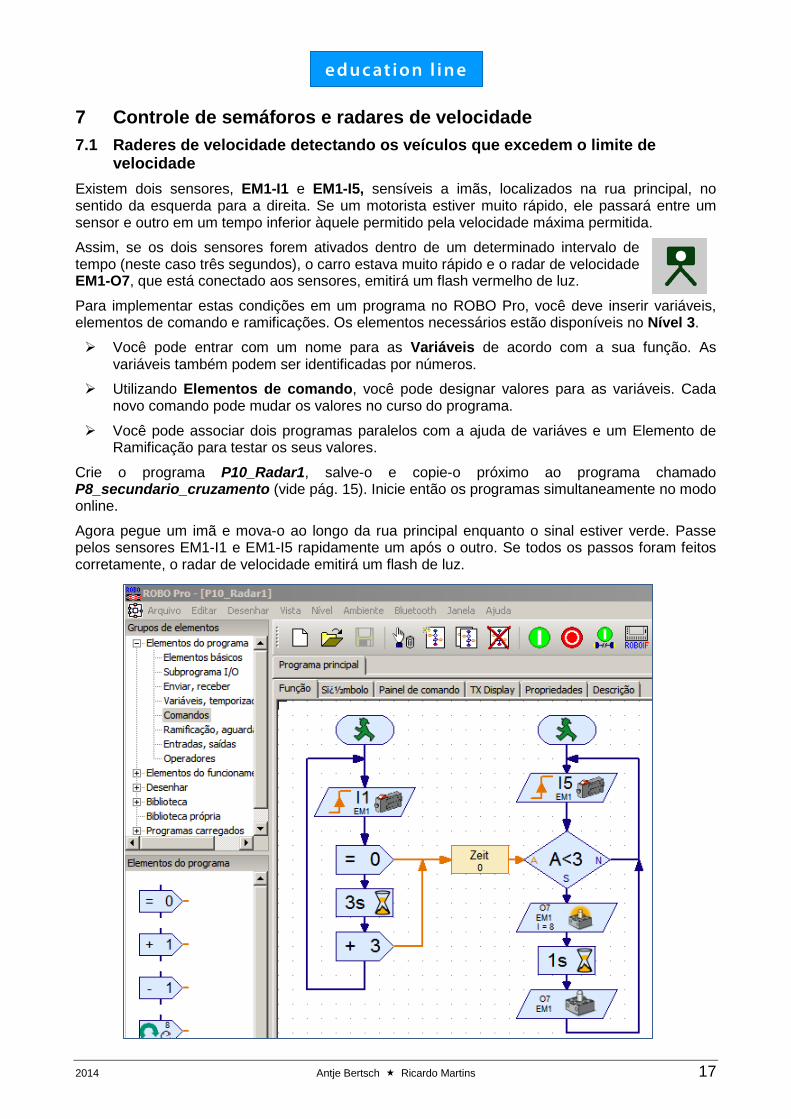
7 Controle de semáforos e radares de velocidade 7.1 Raderes de velocidade detectando os veículos que excedem o limite de
velocidade Existem dois sensores, EM1-I1 e EM1-I5, sensíveis a imãs, localizados na rua principal, no sentido da esquerda para a direita. Se um motorista estiver muito rápido, ele passará entre um sensor e outro em um tempo inferior àquele permitido pela velocidade máxima permitida. Assim, se os dois sensores forem ativados dentro de um determinado intervalo de tempo (neste caso três segundos), o carro estava muito rápido e o radar de velocidade EM1-O7, que está conectado aos sensores, emitirá um flash vermelho de luz. Para implementar estas condições em um programa no ROBO Pro, você deve inserir variáveis, elementos de comando e ramificações. Os elementos necessários estão disponíveis no Nível 3. Você pode entrar com um nome para as Variáveis de acordo com a sua função. As
variáveis também podem ser identificadas por números. Utilizando Elementos de comando, você pode designar valores para as variáveis. Cada
novo comando pode mudar os valores no curso do programa. Você pode associar dois programas paralelos com a ajuda de variáves e um Elemento de
Ramificação para testar os seus valores. Crie o programa P10_Radar1, salve-o e copie-o próximo ao programa chamado P8_secundario_cruzamento (vide pág. 15). Inicie então os programas simultaneamente no modo online. Agora pegue um imã e mova-o ao longo da rua principal enquanto o sinal estiver verde. Passe pelos sensores EM1-I1 e EM1-I5 rapidamente um após o outro. Se todos os passos foram feitos corretamente, o radar de velocidade emitirá um flash de luz.

e du c at ion l in e
18 Antje Bertsch Ricardo Martins 2014
7.2 Radares detectando veículos que cruzam o sinal vermelho ou amarelo Agora três programas rodarão simultaneamente:
1. O programa principal PR8_secundario_cruzamento (vide Seção 5.3). O elemento de comando à direita deve ser adicionado ao programa para ativar o radar somente após o semáforo sair da etapa luz verde.
2. Um programa que testa o sensor EM1-I1 no lado esquerdo do módulo e passa o valor 1 para a entrada de operação C quando um carro ativa o sensor.
3. Um programa que ativa o radar de velocidade EM1-O7 e faz a entrada de operação C voltar para 0 após posteriormente.
Para preparar a vigilância da rua principal quando o semáforo estiver vermelho, a primeira variável, e com ela a entrada de operação A, deve estar ajustada para 1. Isto será feito com a ajuda do subprograma mudanca_principal_secundaria que controla a mudança dos semáforos de verde para vermelho. O valor 1 é necessário para o teste do operador lógico and. Somente se todos os Operadores and estiverem com suas entradas em 1 o radar será ativado. Se um carro (imã) passar pelo sensor EM1-I1 embora o semáforo da rua principal estiver passando para vermelho, a entrada do operador C assume o valor 1. A entrada do operador do meio B recebe o sinal 1 se um carro passar pelo sensor EM1-I5 logo após. O radar é ativado se todas as condições para as entradas do operador são atingidas ao mesmo tempo. Desvantagem: Como todos os sensores do módulo estão incorporados na superfície das ruas, um carro vindo pela rua secundária que passar pelo sensor EM1-I5 também poderia ativar o radar.
Programm zur Abfrage des Sensors EM1-I1 Hauptstraße links
PR8_secundario_cruzamento
radar
Programa para teste do sensor EM1-I1 rua principal lado esquerdo
- Variável princip_vermelho - Teste sensor EM1-I5 - Variável EM1-I1 ativada

e du c at ion l in e
2014 Antje Bertsch Ricardo Martins 19
8 Produtos da education l ine* 8.1 Programas do módulo CrossRoads
„CrossRoads“ * Preços sob consulta http://www.knobloch-gmbh.de education line USB-Produkte
8.2 Controle de semáforos Lique e Aprenda com módulos para alunos mais jovens
„Signal“ „TrafficLights“ Você pode similar muitos exemplos desta cartilha com o modelo reduzido TrafficLights, uma vez que ele inclui não somente dois semáforos, mas também botão de ativação para o semáforo de pedestres e um sensor de claridade para a mudança entre operação diurna e noturna. Lendo todos os exemplos para o modelo CrossRoads, você logo perceberá como é possível reproduzir estas situações com o modelo TrafficLights.
Conjunto de semáforos
♦ operação diurna e noturna com sensor de claridade
♦ LEDs adicionais no meio permitem programas aleatórios
♦ botões de ativação para os semáforos de pedestres
O1 O2 O3
O4 O5 O6
A1
O7
I1
O1 O2 O3

e du c at ion l in e
20 Antje Bertsch Ricardo Martins 2014
8.3 Extras: “Luzes corredoras” – discoteca – jogando dados Faça as luzes do modelo reduzido TrafficLights piscarem sequencialmente no sentido
horário e, após uma breve pausa, no sentido anti-horário. Desenvolva o programa de maneira a criar um loop infinito e salve-o com o nome TL_infinito.
Inicie o programa com a luz do meio – endereço O7 – e faça as luzes seguintes se acenderem quando o botão correspondente do meio for pressionado. Salve o programa com o nome TL_Push.
Você pode até mesmo jogar dados com o modelo reduzido TrafficLights!
Desenvolva subprogramas para cada número e combine com novos programas diferentes como: dado_1-6 contando para cima de 1 a 6 ou dice_6-1 contando para baixo de 6 a 1
one two three
four five six
Antje Bertsch - Realschullehrerin - E-Tutorin und ECDL-Trainerin
Alte Wiese 5 Tel.: +49 2620 301 4275 Mail: [email protected]
D 56337 Simmern / Ww Mobil: +49 173 6743 772 Web: www.anberit.de
Knobloch GmbH
Selitstraße 10 Tel.: +49 (0)6731/4962-0 [email protected] D-55234 Erbes-Büdesheim Fax: +49 (0)6731/4962-19 www.knobloch-gmbh.de