UNIVERSIDADE ESTADUAL DE CAMPINAS
Faculdade de Engenharia Mecânica
LUIS FILIPE DO VALE LIMA
Resposta Dinâmica de Placas Interagindo
com Solo e Estaca
CAMPINAS
2017
LUIS FILIPE DO VALE LIMA
Resposta Dinâmica de Placas Interagindo
Com Solo e Estaca
Orientador: Prof. Dr. Euclides de Mesquita Neto
CAMPINAS
2017
Dissertação de Mestrado apresentada à
Faculdade de Engenharia Mecânica da
Universidade Estadual de Campinas como parte dos
requisitos exigidos para obtenção do título de
Mestre em Engenharia Mecânica, na Área de
Mecânica dos Sólidos e Projeto Mecânico.
ESTE EXEMPLAR CORRESPONDE À VERSÃO
FINAL DA DISSERTAÇÃO DEFENDIDA PELO
ALUNO LUIS FILIPE DO VALE LIMA, E
ORIENTADA PELO PROF. DR EUCLIDES DE
MESQUITA NETO.
......................................................................
ASSINATURA DO(A) ORIENTADOR(A)
.......................................................................
ASSINATURA DO(A)
ORIENTADOR(A)
Agência(s) de fomento e nº(s) de processo(s): CNPq, 132719/2015-0
Ficha catalográficaUniversidade Estadual de Campinas
Biblioteca da Área de Engenharia e ArquiteturaLuciana Pietrosanto Milla - CRB 8/8129
Lima, Luis Filipe do Vale, 1991- L628r LimResposta dinâmica de placas interagindo com solo e estaca / Luis Filipe do
Vale Lima. – Campinas, SP : [s.n.], 2017.
LimOrientador: Euclides de Mesquita de Neto. LimDissertação (mestrado) – Universidade Estadual de Campinas, Faculdade
de Engenharia Mecânica.
Lim1. Interação solo-estrutura. 2. Dinâmica do solo. 3. Fundações
(Engenharia). 4. Estaca (Engenharia civil). I. Mesquita Neto, Euclides de,1956-.II. Universidade Estadual de Campinas. Faculdade de Engenharia Mecânica.III. Título.
Informações para Biblioteca Digital
Título em outro idioma: Dynamic response of plates interacting with soil and stakePalavras-chave em inglês:Soil-structure interactionSoil dynamicsFoundations (Engineering)Stake (Civil Engineering)Área de concentração: Mecânica dos Sólidos e Projeto MecânicoTitulação: Mestre em Engenharia MecânicaBanca examinadora:Euclides de Mesquita NetoPablo Siqueira MeirellesDavid de CarvalhoData de defesa: 23-02-2017Programa de Pós-Graduação: Engenharia Mecânica
Powered by TCPDF (www.tcpdf.org)
UNIVERSIDADE ESTADUAL DE CAMPINAS
FACULDADE DE ENGENHARIA MECÂNICA
COMISSÃO DE PÓS-GRADUAÇÃO EM ENGENHARIA
MECÂNICA
DEPARTAMENTO DE MECÂNICA COMPUTACIONAL
DISSERTAÇÃO DE MESTRADO ACADÊMICO
Resposta Dinâmica de Placas Interagindo
com Solo e Estaca
Autor: Luis Filipe do Vale Lima
Orientador: Euclides de Mesquita Neto
A Banca Examinadora composta pelos membros abaixo aprovou esta Dissertação:
________________________________
Prof. Dr. Euclides de Mesquita Neto, Presidente
DMC/FEM/UNICAMP
________________________________
Prof. Dr. Pablo Siqueira Meirelles
DMC/FEM/UNICAMP
________________________________
Prof. Dr. David de Carvalho
FEAGRI/UNICAMP
A Ata da defesa com as respectivas assinaturas dos membros encontra-se no processo
de vida acadêmica do aluno.
Campinas, 23 de fevereiro de 2017.

Dedicatória
Dedico esse trabalho aos meus pais, pelo suporte incondicional que sempre me
ofereceram. E a todos que contribuíram para minha formação pessoal e acadêmica.
Agradecimentos
Primeiramente agradeço a Deus pelo dom da vida, pelas oportunidades e por tudo que
tenho na minha vida.
A minha família, especialmente a minha mãe e ao pai (in memoriam), pelo amor e apoio
incondicional que recebi em todos os momentos da minha vida e por abrir mão de várias coisas
para investir na minha formação.
Aos professores, funcionários e companheiros de jornada na pós-graduação de
Engenharia Mecânica da Unicamp. Em especial ao professor Euclides de Mesquita Neto pela
oportunidade, orientação e dedicação dada a mim ao longo de toda essa jornada.
Aos companheiros de laboratório, em especial ao Josue Labaki e Daniela Damasceno pelo
suporte e colaboração.
Ao Conselho Nacional de Desenvolvimento Científico e Tecnológico (CNPq) pelo apoio
financeiro.
Finalmente, a todos aqueles que contribuíram, de forma direta ou indireta, para a
realização desse trabalho.

“A verdadeira motivação vem de realização, desenvolvimento
pessoal, satisfação no trabalho e reconhecimento. ”
Frederick Herzberg

Resumo
Esse trabalho investiga a resposta vertical estacionária e transiente de uma fundação
circular rígida interagindo com a superfície do solo e também suportado por uma estaca inserida
em um solo tridimensional e transversalmente isotrópico. A fundação interage com o solo
através de dois mecanismos. No primeiro caso, a fundação superficial é suportada pelo solo
através da interface solo-fundação. No segundo caso, um bloco está apoiado em uma estaca
flexível, sendo que nesse caso não há tensão na interface solo-bloco. Esse trabalho estuda a
mudança na resposta dinâmica de blocos rígidos quando o mecanismo de suporte passa da
fundação superficial para o bloco suportado pela estaca. O estudo é baseado em dois problemas
resolvidos previamente; a interação de uma fundação superficial rígida com um solo
transversalmente isotrópico (Labaki, Mesquita e Rajapakse, 2014) e a resposta de uma estaca
flexível inserida em um solo transversalmente isotrópico (Labaki, Mesquita e Rajapakse, 2015).
Os dois problemas são complexos e as suas soluções são obtidas numericamente. A fonte de
excitação atuando sobre as estruturas sendo analisadas, pode ser uma excitação externa ou uma
onda incidente. O trabalho também apresenta a resposta dinâmica do bloco no regime
transiente, obtida através da resposta estacionaria e do algoritmo da transformada inversa de
Fourier (IFFT). Os resultados numéricos apresentados nesse trabalho investigam o papel da
massa do bloco, da massa e geometria da estaca bem como da rigidez relativa entre a estaca e
o solo. Os resultados numéricos são expressos em termo do deslocamento vertical do bloco em
função dos diversos parâmetros estudados.
Palavras-chave: Interação Dinâmica Solo-Estrutura, Dinâmica de Fundações, Dinâmica de
Estacas, Dinâmica de Solos, Funções de Green.

Abstract
This work investigates the vertical stationary and transient response of a rigid circular
foundation interacting with the soil surface and also supported by a pile inserted in a three-
dimensional and transversely isotropic soil. The foundation interacts with the soil through two
mechanisms. In the first case, the surface foundation is supported by the soil through the soil-
foundation interface. In the second case, a block is supported by a flexible pile, in which case
there are no stresses at the soil-block interface. This work studies the change in the dynamic
response of rigid blocks when the support mechanism passes from the surface foundation to the
block supported by the pile. The study is based on two previously solved problems; interaction
of a rigid foundation with a transversely isotropic soil (Labaki, Mesquita and Rajapakse, 2014)
and the response of a flexible pile embedded in the transversely isotropic soil (Labaki, Mesquita
and Rajapakse, 2015). The two problems are complex and their solutions are obtained
numerically. The source of excitation acting on the structures being analyzed may be an external
excitation or an incident wave. The work also presents the dynamic response of the block in the
transient regime, obtained through the stationary response and the Fourier transform algorithm
(IFFT). The numerical results presented in this paper investigate the role of block mass, mass
and geometry of the pile as well as relative stiffness between pile and soil. The numerical results
are expressed in term of the vertical displacement of the block in function of the studied
parameters.
Keywords: Dynamic Soil-structure Interaction, Foundations Dynamics, Pile Dynamics, Soil
Dynamics, Green’s Function.
Lista de figuras
Figura 1.1.a) Área de dissipação do bloco submetido a uma força externa para as configurações
em estudo. b) Área de contato do bloco submetido a uma onda incidente para as configurações
em estudo.. ............................................................................................................................... 27
Figura 2.1 (a) Bloco interagindo com o solo e a estaca e (b) equilíbrio de forças.. ................ 30
Figura 2.2. (a)Bloco interagindo com o solo e (b) forças de equilíbrio.. ................................ 32
Figura 2.3. Resposta de um bloco rígido interagindo com o solo ........................................... 33
Figura 2.4. (a) Bloco interagindo com a estaca e (b) forças de equilíbrio............................... 35
Figura 2.5. Resposta de uma estaca submetida a uma força externa ....................................... 36
Figura 2.6. Deslocamento do bloco para B=0, suportado somente pelo solo. ........................ 40
Figura 2.7. Deslocamento do bloco para B=50, suportado somente pelo solo.. ..................... 41
Figura 2.8. Deslocamento do bloco para B=0 (E’=10 e 50), suportado somente pela estaca. 42
Figura 2.9. Deslocamento do bloco para B=0 (E’=100 e 150), suportado somente pela estaca.
................................................................................................................................................. 43
Figura 2.10. Comparação do deslocamento do bloco para B=0 e B=50 (E’=10 e 50), suportado
somente pela estaca.. ............................................................................................................... 44
Figura 2.11. Deslocamento do bloco para B=50 (E’=10 e 50), suportado somente pela estaca.
................................................................................................................................................. 45
Figura 2.12. Parte real, imaginária e absoluta do deslocamento do bloco (E´=10 e 50) para B=0
................................................................................................................................................. 47
Figura 2.13. Parte real, imaginária e absoluta do deslocamento do bloco (E´=100 e 150) para
B=0 .......................................................................................................................................... 48
Figura 2.14. Parte real, imaginária e absoluta do deslocamento do bloco (E´=10 e 50) para B=50
................................................................................................................................................. 49
Figura 2.15. Parte real, imaginária e absoluta do deslocamento do bloco (E´=100 e 150) para
B=50 ........................................................................................................................................ 50
Figura 2.16. Influência da razão do modulo de elasticidade E’ no deslocamento do bloco .... 51
Figura 2.17. Influência da razão do módulo de elasticidade na frequência de ressonância do
sistema .................................................................................................................................. 52
Figura 3.1 (a) Bloco interagindo com o solo (b) bloco interagindo com a estaca. .................. 54
Figura 3.2. Campo incidente atingindo uma superfície livre .................................................. 55
Figura 3.3. (a) Bloco interagindo com o solo e (b) forças de equilíbrio.. ............................... 56
Figura 3.4. (a) Bloco interagindo com a estaca e (b) forças de equilíbrio............................... 58
Figura 3.5. Campo incidente atingindo uma superfície livre .................................................. 59
Figura 3.6. Deslocamento do bloco para B=0, suportado somente pelo solo ......................... 61
Figura 3.7. Deslocamento do bloco para B=50, suportado somente pelo solo ....................... 62
Figura 3.8. Comparação das respostas do bloco submetido a uma onda incidente e a uma força
externa, suportado somente pelo solo ...................................................................................... 63
Figura 3.9. Deslocamento do bloco para B=50, suportado somente pela estaca (E’=10) ...... 64
Figura 3.10. Deslocamento do bloco para B=50, suportado somente pela estaca (E’=50) .... 65
Figura 3.11. Deslocamento do bloco para B=50, suportado somente pela estaca (E’=100) .. 66
Figura 3.12. Deslocamento do bloco para B=50, suportado somente pela estaca (E’=150) .. 67
Figura 3.13. Comparação das respostas do bloco submetido a uma onde incidente e a uma força
externa ..................................................................................................................................... 68
Figura 3.14. Comparação da resposta do bloco para diferentes E’ ......................................... 69
Figura 4.1. Sistema massa-mola-amortecedor com 1 grau de liberdade ................................. 72
Figura 4.2 (a) Resposta em escala linear (b) resposta em escala semilogarítmica.. ................ 74
Figura 4.3 (a) Erro relativo em escala linear (b) erro percentual em escala semilogarítmica.74
Figura 4.4 (a) Erro percentual absoluto para n=10 (b) Erro percentual absoluto para n=20 ... 75
Figura 4.5 (a) Erro percentual absoluto para n=30 (b) Erro percentual absoluto para n=40. .. 76
Figura 4.6 (a) Erro percentual absoluto para n=50 (b) Erro percentual absoluto para n=100. 76
Figura 4.7. Comparação entre os erros absoluto percentual para os diferentes “n” ................ 77
Figura 4.8. Exemplificação da estratégia utilizada .................................................................. 78
Figura 4.9 (a) Suavização da curva até o valor 0 (b) curva final com adição dos zeros ......... 79
Figura 4.10(a) Comparação das respostas obtidas (b) Zoom da figura 5.10a ......................... 79
Figura 4.11 Erro relativo ......................................................................................................... 80
Figura 4.12 (a) Deslocamento da fundação interagindo com o solo ....................................... 81
Figura 4.13 (a) Deslocamento da fundação interagindo com a estaca (E’=10) ...................... 81
Figura 4.14 (a) Deslocamento da fundação interagindo com a estaca (E’=50) ...................... 82
Figura 4.15 (a) Deslocamento da fundação interagindo com a estaca (E’=100) .................... 82
Figura 4.16 (a) Deslocamento da fundação interagindo com a estaca (E’=150) .................... 83
Figura 4.17 Comparação do deslocamento da fundação submetida a uma força externa ....... 83
Figura 4.18 (a) Deslocamento da fundação interagindo com o solo e a estaca (E’=10) ........ 84
Figura 4.19 (a) Deslocamento da fundação interagindo com o solo e a estaca (E’=50) ........ 84
Figura 4.20 (a) Deslocamento da fundação interagindo com o solo e a estaca (E’=100) ...... 85
Figura 4.21 (a) Deslocamento da fundação interagindo com o solo e a estaca (E’=150) ...... 85
Figura 4.22 (a) Deslocamento da fundação interagindo com o solo ou com a estaca ............. 86
Figura A.1- Comparação da resposta do bloco suportado somente pelo solo ou pela estaca
submetido a uma excitação externa, a estaca tem as mesmas propriedades do solo ............... 95
Figura A.2- Comparação da resposta do bloco suportado somente pelo solo ou pela estaca
submetido a uma onda incidente, a estaca tem as mesmas propriedades do solo ................... 96
Figura B.1- Comparação da resposta do bloco suportado somente pela estaca submetido a uma
excitação externa, sendo que a estaca tem diferentes relações entre a altura e o raio da estaca
(H/a) ........................................................................................................................................ 97
Figura C.1 - Resposta do bloco suportado pela estaca submetido a uma excitação externa, com
densidade da estaca variável e E’=10 ...................................................................................... 98
Figura C.2 - Resposta do bloco suportado pela estaca submetido a uma excitação externa, com
densidade da estaca variável e E’=50 .................................................................................. .....99
Figura C.3 - Resposta do bloco suportado pela estaca submetido a uma excitação externa, com
densidade da estaca variável e E’=100 ................................................................................ .....99
Figura D.1 - Resposta do bloco suportado somente pelo solo submetido a uma excitação
externa, com B=0.. ............................................................................................................... ...101
Figura D.2 - Resposta do bloco suportado somente pelo solo submetido a uma excitação
externa, com B=50.. ............................................................................................................. ...102
Figura E.1 - Resposta do bloco suportado somente pelo solo submetido a uma excitação externa,
com diferentes suavizações. ................................................................................................ ...103
Figura E.2 – Zoom da figura E.1 ......................................................................................... ...104
Figura E.3 - Resposta do bloco suportado somente pelo solo submetida a uma excitação externa,
com diferentes suavizações, no domínio transiente............................................................. ...104
Figura E.4- Resposta do bloco suportado somente pela estaca submetida a uma excitação
externa, com diferentes suavizações. ................................................................................... ...105
Figura E.5 – Zoom da figura E.4 ......................................................................................... ...106
Figura E.6 - Resposta do bloco suportado somente pelo solo submetida a uma excitação externa,
com diferentes suavizações, no domínio transiente............................................................. ...106
Figura F.1 Deslocamento da fundação para respostas calculadas com diferentes a0 .......... ...108
Figura F.2 Zoom da figura F.1 ............................................................................................ ...109
Lista de tabelas
Tabela 4.1- Propiedades do Sistema .............................................................................. 73
Tabela 4.2- Propiedades do Sistema .............................................................................. 75
Tabela 4.3- Propiedades do Sistema .............................................................................. 78
Lista de abreviaturas e siglas
Abreviações
FEM – Método dos Elementos Finitos
FFT- Transformada Rápida de Fourier
IFFT – Transformada Rápida de Fourier Inversa
FFT- Transformada Rápida de Fourier
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Subscritos
f – Fundação
hs – Solo
p – Estaca
s - Scatter
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Letras Latinas
a0 – Frequência adimensional
B – Razão de massa
c – Amortecimento [kg/s]
cf – Fator de correção
E’- Relação do módulo de elasticidade
Ehs – Módulo de Elasticidade do Solo [Pa]
Ep – Módulo de Elasticidade da Estaca [Pa]
Fext – Força externa [N]
Fhs – Força do solo [N]
Fi – Força incidente [N]
Fp – Força da estaca [N]
Frea – Força de reação [N]
k – Rigidez [N/m]
m – Massa [kg]
mf – Massa da fundação [kg]
mhs – Massa do solo [kg]
Szzhs – Matriz de Flexibilidade do solo
Szzp – Matriz de Flexibilidade da estaca
t – tempo [s]
Uf – Deslocamento da fundação [m]
Uhs – Deslocamento do solo [m]
Ui – Campo de onda incidente
Up – Deslocamento da estaca [m]
Us – Campo de espalhamento
Ut – Deslocamento total [m]
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Letras Gregas
α – Fator adimensional α
ζ – Fator de amortecimento
ρhs – Densidade do solo [kg/m³]
ρp – Densidade da estaca [kg/m³]
ηhs – Coeficiente de amortecimento do solo
νhs – Coeficiente de Poisson do solo
ω – Frequência [rad/s]
ωd – Frequência natural amortecida [rad/s]
ωf – Frequência final [rad/s]
ωi – Frequência inicial [rad/s]
ωn – Frequência natural [rad/s]
Δω – Passo de frequência [rad/s]
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
SUMÁRIO
Resumo ........................................................................................................................... vii
Abstract ....................................................................................................................... xix
Lista de figuras .......................................................................................................... xix
Lista de tabelas .......................................................................................................... xix
Lista de abreviaturas e siglas ................................................................................ xix
1 INTRODUÇÃO .......................................................................................................... 20
1.1 Revisão Bibliográfica ............................................................................................ 22
1.2 Objetivos do trabalho ............................................................................................ 26
1.3 Organização do trabalho ....................................................................................... 27
2 BLOCO CIRCULAR RÍGIDO PARCIALMENTE SUPORTADO PELO SOLO
E PELA ESTACA SUBMETIDO A UMA EXCITAÇÃO EXTERNA ............................. 29
2.2 Formulação ............................................................................................................ 31
2.2.1 Interação Solo-Bloco ...................................................................................... 32
2.2.2 Interação bloco-estaca .................................................................................... 34
2.2.3 Interação solo-estaca-bloco ............................................................................ 37
2.3 Resultados numéricos ........................................................................................... 38
2.3.1 Interação solo-bloco (α=0): validação............................................................ 39
2.3.2 Interação estaca-bloco (α=1): validação ........................................................ 42
2.3.3 Interação estaca-bloco (α=1): resultados........................................................ 44
2.3.4 Interação solo-estaca-bloco: resultados.......................................................... 46
3 BLOCO CIRCULAR RÍGIDO PARCIALMENTE SUPORTADO PELO SOLO
E PELA ESTACA SUBMETIDO A UMA ONDA INCIDENTE VERTICAL ................ 53
3.1 Apresentação do problema .................................................................................... 53
3.2 Formulação ............................................................................................................ 55
3.2.1 Interação Solo-Bloco ...................................................................................... 55
3.2.2 Interação estaca-bloco .................................................................................... 58
3.3 Resultados numéricos ........................................................................................... 60
3.3.1Bloco interagindo somente com o solo ........................................................... 61
3.3.2 Bloco interagindo somente com a estaca ....................................................... 63
4 ANÁLISE TRANSIENTE ......................................................................................... 70
4.1 Validação do algoritmo desenvolvido ................................................................... 72
4.2 Resposta transiente do bloco submetido a uma força externa............................... 80
4.3 Resposta transiente do bloco submetido a uma onda incidente vertical ............... 86
5 CONCLUSÃO E SUGESTÃO PARA TRABALHOS FUTUROS ....................... 88
5.1 Sugestões para trabalhos futuros ........................................................................... 89
REFERÊNCIA BIBLIOGRÁFICA .......................................................................... 90
APÊNDICE A – Estaca com propriedades iguais a do solo ....................................... 94
A.1 – Bloco submetido a uma excitação externa ........................................................ 94
A.2 – Bloco submetido a uma onda incidente vertical................................................ 95
APÊNDICE B – Influência da relação entre a altura e o raio da estaca (H/a) na resposta
vibratória do bloco ................................................................................................................ 97
APÊNDICE C – Influência da densidade na resposta vibratória da estaca ................ 98
APÊNDICE D – Influência do fator de amortecimento do solo na resposta vibratória
do bloco .............................................................................................................................. 101
APÊNDICE E – Influência da spline na resposta transiente do bloco ...................... 103
APÊNDICE F – Comparação da resposta transiente para diferentes valores de a0 .. 108
20
1 INTRODUÇÃO
A Dinâmica dos Solos é um dos ramos da Mecânica dos Solos que estuda o
comportamento de solos sujeitos a cargas dinâmicas. O surgimento dessa matéria de estudo se
deve pela necessidade de compreensão e diminuição de vibrações em fundações ou estruturas
devidos a diferentes fatores, tal como o funcionamento de máquinas pesadas.
A interação dinâmica entre solo e estruturas, sejam elas flexíveis ou rígidas, tem obtido
uma grande atenção de estudiosos nas últimas décadas. Segundo Barros (2007), o interesse dos
pesquisadores se deve a dois fatores principais: as crescentes exigências dos níveis máximos de
perturbação permitidas para as estruturas de máquinas industriais que causem esforços
dinâmicos e também a evolução dos computadores, que possibilitou o desenvolvimento de
soluções numéricas de problemas complexos, que antigamente não podiam ser solucionados.
Com o avanço tecnológico dos computadores, diversos métodos numéricos foram
desenvolvidos para resolver problemas físicos e/ou matemáticos com soluções analíticas
complexas. Entre os métodos desenvolvidos, os que mais são utilizados, atualmente, são o
Método dos Elementos Finitos (MEF), Método de Diferenças Finitas (MDF) e o Método dos
Elementos de Contorno (MEC).
Quando a interação dinâmica entre o solo e a estrutura é estudado, o solo, por apresentar
um domínio ilimitado é melhor modelado pelo MEC, por causa que esse método leva em
consideração o amortecimento geométrico associado ao domínio ilimitado. Além disso, se
compararmos o MEC ao MEF, a grande vantagem do MEC é que ele reduz o sistema algébrico
a ser resolvido, uma vez que se tratando de um método de fronteira, apenas a região do contorno
precisa ser discretizada. O grupo de pesquisa, do qual o autor do trabalho faz parte, possui
grande experiência no estudo da interação dinâmica solo-estrutura utilizando do método dos
elementos de contorno.
De acordo com Di Laora (2009), quando ações externas, como, por exemplo, terremotos,
agem sobre sistemas, nem os deslocamentos estruturais nem os deslocamentos do solo são
independentes uns dos outros. O processo no qual a resposta do solo influencia o
comportamento da estrutura e o comportamento da estrutura influencia a resposta do solo é
denominado como interação solo-estrutura (SSI).
21
Uma das preocupações quando se estuda a interação solo-estrutura é o controle de
vibrações da estrutura. As vibrações em estruturas acontecem devido à força externa aplicada
na estrutura ou devido a ondas que se propagam no solo e atingem a fundação. A origem dessas
ondas incidentes podem ser terremotos, atividades industriais, obras de construção, entre outros.
No último século, diferentes modelos de solo foram apresentados. Entre eles podem ser
mencionados, os modelos que consideram o solo como semi-espaço, o espaço completo e o
solo estratificado.
A resposta de uma estaca a uma onda vertical incidente tem sido estudada por diversos
pesquisadores. Segundo Gazetas (1984), apesar do relevante progresso no entendimento do
comportamento de uma estaca, várias questões possuem respostas de complexo entendimento,
principalmente no que se refere à avaliação prática da influência da estaca na excitação sísmica
de uma estrutura. Por exemplo, foi sugerido que, uma vez que estacas flexíveis seguem o
movimento do solo, não há necessidade de modificar a excitação de entrada.
De acordo com Kavvadas e Gazetas (1994), as estacas devem ser projetadas para suportar
as seguintes condições de carga: a força de inércia da estrutura transmitida para a cabeça da
estaca e as deformações do solo decorrentes da passagem das ondas sísmicas que geram uma
tensão lateral sobre as estacas ao longo de todo o seu comprimento.
Conforme Rajapakse e Shah (1989), a análise da resposta dinâmica de um bloco
sustentado por estacas tem três grandes dificuldades, que são: a necessidade de levar em
consideração fatores de como a estaca vai ser fixa no solo, a flexibilidade da estaca e no caso
em que existem um grupo de estaca, os efeitos de interação entre as estacas.
A estaca é utilizada para transferir cargas da estrutura para um solo mais profundo, que
possui uma melhor capacidade de carga. As estacas são mais comumente submetidas a cargas
verticais, mas também podem ser submetidos a outros tipos de cargas, tais como cargas
horizontais e também a momento.
A introdução de uma ou de um grupo de estaca em um solo, torna o sistema do solo mais
rígido. Por conta disso, tanto a frequência natural, quanto a amplitude de vibração do bloco são
afetados. Em todos os problemas relacionados com a vibração, a ressonância precisa ser evitada.
Por conta disso, a frequência natural do sistema solo-estaca-bloco deve ser estudada em análise
e projeto.
22
O solo representa um elemento muito importante no estudo das estruturas, pois todas as
forças atuantes na estrutura vão ser transferidas para ele. Por conta disso, comportamento da
estaca depende do tipo e características do solo na qual ela está inserida.
O entendimento da interação solo-estaca-bloco nos projetos é um dos grandes desafios da
engenharia de fundações; pois estas devem ter garantia de funcionalidade e estabilidade durante
toda sua vida útil.
1.1 Revisão Bibliográfica
Este trabalho faz parte de um grupo de pesquisa do Departamento de Mecânica
Computacional (DMC), da Faculdade de Engenharia Mecânica (FEM) da Unicamp. Entre as
pesquisas desenvolvidas por esse grupo estão o desenvolvimento de estado auxiliares através
de métodos numéricos e analíticos onde se utiliza de alguma transformação analítica,
normalmente utiliza-se das transformada de Hankel e Fourier, sendo que a sua transformada
inversa é feita numericamente.
Outra linha de pesquisa do grupo, no qual este trabalho está incluído, se dedica a aplicar
estes estados auxiliares para a solução de problemas da física e/ou matemática.
Problemas de interação entre o solo e a estrutura são problemas de sistemas acoplados,
onde o estado de deformação e de tensão da estrutura depende das pressões e dos movimentos
do solo, e ao mesmo tempo, as pressões no solo também dependem do carregamento e das
deformações da estrutura. Por conta disso, tais análises necessitam de uma modelagem
simultânea da estrutura e do solo, utilizando técnicas precisas computacionalmente (Jahromi,
2009).
O solo é modelado em diversos estudos como um meio elástico, viscoelástico ou plástico.
Outros modelos de como o solo é modelado podem ser encontrados em Gazetas, (1983). Na
modelagem do solo, considera-se que o solo possui inércia, rigidez e amortecimento, e é
23
possível que ele se deforme ou se desloque. Considerando que há uma interação solo-estrutura,
a estrutura também irá se deformar ou deslocar.
O grupo de pesquisa, no qual o autor desse trabalho está incluído, tem feito um grande
esforço para modelar diferentes perfis de solo, sejam eles bidimensioal ou tridimensional, tanto
no domínio da frequência quanto no domínio do tempo. O primeiro trabalho desenvolvido por
esse grupo de pesquisa foi desenvolvido por Mesquita (1989) e o propósito do trabalho era
elaborar um estado auxiliar não singular para semi-espaços bi e tridimensionais, sendo que os
carregamentos eram de intensidades constantes e eram aplicados na superfície do semi-espaço.
Outros trabalhos também foram desenvolvidos por esse grupo de pesquisa, sendo que
alguns deles vão ser citados a seguir. Pontes (1992), comparou os resultados do Método de
Superposição com o Método dos Elementos de Contorno de problemas dinâmicos da interação
solo-estrutura no domínio da frequência, enquanto que Sousa (1992) comparou os resultados
entre os Métodos dos Elementos Finitos e o Métodos do Elementos de Contorno para problemas
dinâmicos da interação solo-estrutura no domínio da frequência.
Romanini (1995) desenvolveu uma metodologia para a síntese de funções de influência e
Green para solos viscoelásticos lineares que tem estratificações horizontais. O objetivo do
trabalho foi a viabilização da análise da interação dinâmica solo-estrutura para estruturas na
superfície e no interior dos solos, sendo que os problemas foram formulados no domínio da
frequência para o estado plano de deformação.
Carvalho (1995) utilizou a versão direta do Método de Elementos de Contorno (MEC),
que é baseada na solução fundamental dos operadores de Cauchy/Navier e de Laplace, para a
modelagem de problemas tanto da interação dinâmica de fluido-estrutura e solo-fluido-
estrutura.
Daros (1995) estudou a solução numérica da equação da onda escalar em duas dimensões,
utilizando a representação integral de Volterra. O Método dos Elementos de Contorno (MEC)
foi utilizado na obtenção da solução no estado transiente, onde as condições iniciais de
deslocamento e velocidade no domínio são incluídas.
Barros (1997) apresentou a dedução das funções de Green e da influência das cargas
dinâmicas harmônicas no tempo, para o estado plano de deformação, aplicadas em meios
elásticos homogêneos transversalmente isotrópicos. Soluções para os casos de cargas aplicadas,
tanto na superfície quanto no interior de meio elástico semi-infinito, em uma camada elástica
24
apoiada em uma base rígida e para cargas aplicadas no interior do espaço infinito foram
analisadas.
Carrion (2002) apresentou uma formulação, baseada no Método dos Elementos de
Contorno (MEC), para o estudo de problemas viscoelásticos estacionários tridimensionais em
domínios abertos e fechados. Dois artifícios foram utilizados na formulação: a regularização da
integral singular, que torna possível o tratamento da singularidade em problemas dinâmicos, e
os chamados "enclosing elements", que torna possível o tratamento da singularidade para
domínios abertos.
Adolph (2002) desenvolveu uma metodologia para obtenção de Funções de Green e
Influência para os problemas visco-elastodinâmicos no estado transiente.
Thomazzo (2004) apresentou uma metodologia para a realização de análises dinâmicas,
tanto estacionarias quanto transientes, em domínios visco-elásticos limitados ou ilimitados,
utilizando-se o Método dos Elementos de Contorno (MEC). Sendo que os estados auxiliares
utilizados foram soluções não-singulares de problemas do semi-espaço e do espaço completo
para meios visco-elásticos.
Labaki (2012) apresentou modelos para descrever o comportamento harmônico de placas
rígidas e flexíveis incrustadas em meios estratificados.
Damasceno (2013) desenvolveu uma metodologia para análise transiente de sistemas
dinâmicos que apresentam acoplamento solo-estrutura, sendo que a metodologia desenvolvida
é baseada em um método de acoplamento iterativo entre subsistemas, podendo os subsistemas
ter domínio limitado ou ilimitado.
Nos últimos anos, vários estudos têm abordado o problema da resposta estacionária
dinâmica de placas circulares sob o solo usando diferentes tipos de métodos numéricos. Alguns
desses estudos foram motivados por aplicações práticas, tais como controle de vibração em
usinas nucleares e em nano-instalações. O caso de uma placa apoiada na superfície de um solo
transversalmente isotrópico é de especial interesse para a análise de fundações sensíveis a
vibrações, tais como fontes de luz sincrotron (Labaki, Mesquita e Rajapakse, 2014).
Pesquisadores também tem se dedicado ao estudo de diferentes modelos para a
deformação de placas. Segundo Van de Heijden (1976), o modelo de placa de Kirchhoff é
amplamente utilizado, e ele se baseia em três hipóteses básicas, que são: existe uma superfície
no centro da placa que não sofre deformação; as linhas que são normais a superfície media da
25
placa, permanecem normais a superfície dobrada e o estado normal de tensão na superfície não
pode ser desconsiderada. Outro método que é utilizado para modelar placas é o princípio do
trabalho virtual.
Outro ramo de pesquisa utiliza da teoria das placas e dos modelos do meio elásticos para
analisar o comportamento de placas na superfície ou no interior dos solos. Sendo que as placas
podem ser modeladas de diferentes maneiras: elas podem ser rígidas ou flexíveis; podem ser
circulares, retangulares ou possuir um formato aleatório; podem ter massa ou não; entre outros.
Já foram apresentadas soluções para a vibração, utilizando diferentes métodos, de placas
rígidas e flexíveis, apoiada na superfície do solo ou no seu interior para diferentes tipos de
cargas (vertical, horizontal, torsional, entre outros).
Outro ramo de pesquisa estuda o comportamento das estacas. Rajapakse e Shah (1987)
apresentam uma formulação para o estudo do comportamento dinâmico para uma estaca contida
no solo e fazem uma breve apresentação dos modelos que foram desenvolvidos para o estudo
desse problema. Barros (2003), também apresenta uma formulação para a resposta dinâmica
para uma estaca em um solo transversalmente isotrópico.
Se a capacidade de suporte do solo é inadequada para a carga estrutural da fundação, a
introdução de uma estaca ou de um grupo de estacas pode aumentar a capacidade de suporte do
solo. A ideia de usar estacas para apoiar fundações e outra estruturas no solo é a de transferir a
carga para o solo com uma capacidade maior de suporte (Nazir e Azzam, 2010). Uma questão
a ser investigada é, se esse aumento na capacidade de suporte, devido a utilização de estacas,
vai acarretar em uma diminuição no nível de vibração da fundação. Sabe-se que a introdução
de estacas no solo, faz com que este fique mais rígido e, consequentemente, a resposta de
vibração do solo vai ser afetada (Rangwala et al., 2012).
Segundo Kaynia e Kausel (1991), já se tem formulações para a análise dinâmica de uma
estaca ou de um grupo de estaca, para cargas verticais, horizontais ou torcionais. Também é
possível se controlar vários parâmetros da estaca, tais como, a sua altura, a sua densidade, o seu
modulo de elasticidade e o diâmetro da estaca.
Segundo Peiris (2014), fundações em estacas são parte de um sistema estrutural que é
utilizado para transportar e transferir as cargas da estrutura para um solo mais profundo com
uma maior capacidade de suporte.
26
O projeto de fundações apoiadas em estacas é de alta complexidade, especialmente pela
falta de compreensão de seu comportamento sob excitações sísmicas.
De acordo com Peiris (2014), a análise da interação solo-estrutura vem se tornando, ao
longo dos últimos anos, uma importante área de estudo da engenharia; uma vez que alguns
terremotos vêm causando danos em edifícios e em outras infraestruturas. Por conta disso, o
interesse na resposta de fundações apoiadas em estaca sujeitas a cargas dinâmicas vem
aumentando.
1.2 Objetivos do trabalho
O objetivo deste trabalho é introduzir um método de estudo da resposta acoplada de um
bloco na superfície do solo, parcialmente suportado pelo solo e parcialmente suportado por uma
estaca; investigar como a mudança contínua de um mecanismo de suporte para outro influencia
a resposta dinâmica do bloco.
Também é de interesse fazer uma comparação entre a resposta da fundação para as
diferentes excitações (externa ou onda incidente) e analisar a resposta da fundação no estado
estacionário e transiente.
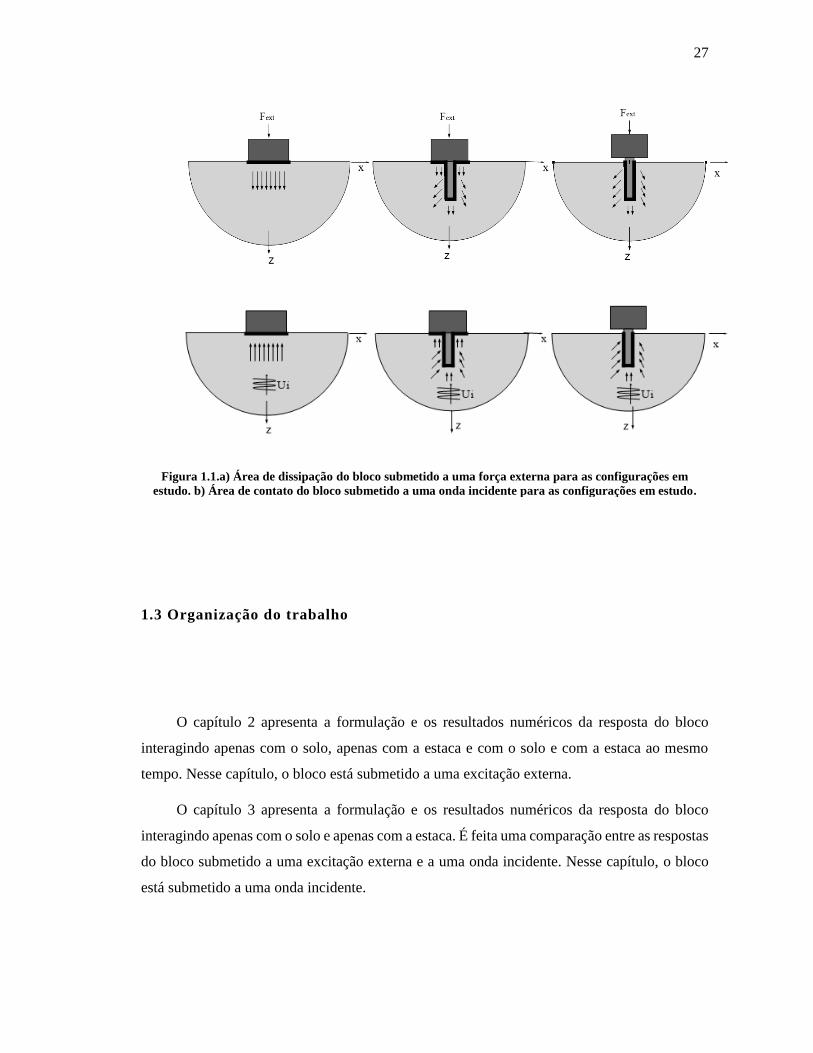
Outro objetivo deste trabalho é fazer uma comparação dos resultados da vibração do bloco
quando submetida a uma excitação externa e quando submetida a uma onda incidente,
suportado somente pelo solo ou suportado apenas pela estaca. Sendo que quando o bloco for
suportado somente pelo solo submetido a uma excitação externa, a área de dissipação vai ser
bem menor do que se comparado com a área de dissipação do bloco suportado pela estaca.
Entretanto, quando a excitação for uma onda incidente a área de contato entre a excitação e
bloco suportado pela estaca vai ser bem maior do que a área do bloco apoiado no solo, como
pode ser visto na figura 1.1. A figura 1.1 também ilustra o caso intermediário quando o bloco é
suportado tanto pela estaca quanto pelo solo.
27
Figura 1.1.a) Área de dissipação do bloco submetido a uma força externa para as configurações em
estudo. b) Área de contato do bloco submetido a uma onda incidente para as configurações em estudo.
1.3 Organização do trabalho
O capítulo 2 apresenta a formulação e os resultados numéricos da resposta do bloco
interagindo apenas com o solo, apenas com a estaca e com o solo e com a estaca ao mesmo
tempo. Nesse capítulo, o bloco está submetido a uma excitação externa.
O capítulo 3 apresenta a formulação e os resultados numéricos da resposta do bloco
interagindo apenas com o solo e apenas com a estaca. É feita uma comparação entre as respostas
do bloco submetido a uma excitação externa e a uma onda incidente. Nesse capítulo, o bloco
está submetido a uma onda incidente.
28
O capítulo 4 apresenta os resultados da resposta do bloco submetido a uma onda incidente
ou a uma excitação externa no estado transiente, sendo que o bloco pode estar suportado apenas
pelo solo, apenas pela estaca ou pelo solo e pela estaca.
No capítulo 5 apresentam-se as conclusões e sugestões para trabalhos futuros.
O trabalho também apresenta alguns anexos que mostram a influência de alguns
parâmetros no deslocamento do bloco.
29
2 BLOCO CIRCULAR RÍGIDO PARCIALMENTE
SUPORTADO PELO SOLO E PELA ESTACA
SUBMETIDO A UMA EXCITAÇÃO EXTERNA
O presente capítulo apresenta um método para estudar a resposta acoplada de um bloco
na superfície do solo, parcialmente suportado por uma estaca e parcialmente suportado pelo
solo. O método de acoplamento requer a determinação dos deslocamentos e das forças que
atuam na interface bloco-solo-estaca devido a uma excitação externa. Os deslocamentos e as
forças da estaca e do solo são determinadas e devem satisfazer os critérios de compatibilidade
cinemática e o equilibro de forças na interface. Este capítulo investiga a resposta do bloco
suportado apenas pelo solo, bem como a resposta do bloco suportado somente pela estaca. Para
estudar casos intermediários, onde o bloco é parcialmente suportado pelo solo e parcialmente
suportado pela estaca, introduz-se uma estratégia que torna essa análise possível. A seção de
resultados numéricos considera diferentes inércias do bloco, diferentes propriedades
constitutivas do solo e diferentes geometrias e rigidez da estaca.
2.1 Apresentação do problema
Considere o problema da interação estacionária dinâmica solo-bloco-estaca submetida a
uma carga vertical Fext, que é mostrado na figura 2.1. O índice “hs” está relacionado ao solo,
modelado aqui como semi-espaço homogêneo, transversalmente isotrópico, com módulo de
elasticidade Ehs, coeficiente de Poisson νhs, densidade de massa ρhs e coeficiente de
amortecimento ηhs. O índice “p” está relacionado com a estaca, com modulo de elasticidade Ep,
densidade de massa ρp, raio ap e altura hp. O índice “f” está relacionado com o bloco com raio
af, altura hf e densidade de massa ρf. O sistema de coordenadas é adotado de tal modo que o
30
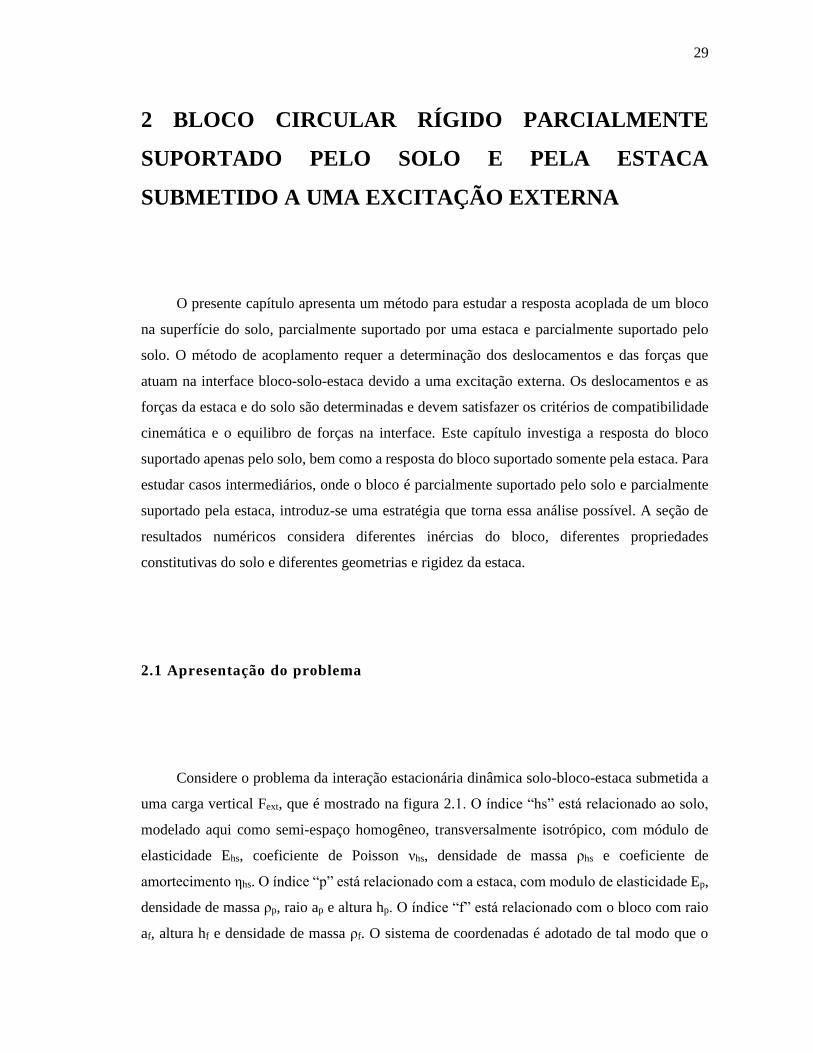
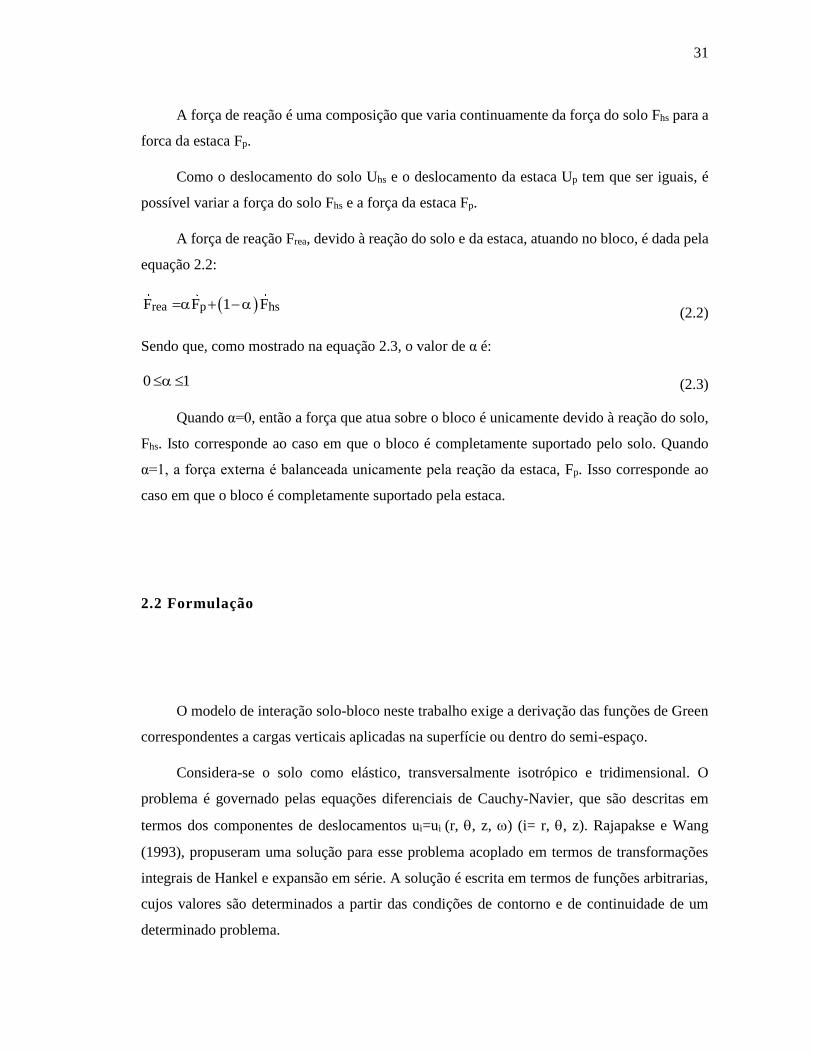
plano x-y está alinhado com a superfície do solo, e a estaca está alinhada ao longo do eixo “z”.
O centro do bloco coincide com a origem do sistema de coordenadas (figura 2.1a).
(a) (b)
Figura 2.1 (a) Bloco interagindo com o solo e a estaca e (b) equilíbrio de forças.
O bloco interage com o solo e com a estaca e o estudo só é realizado na vertical (direção
“z”). Em outras palavras, trata-se de um problema unidimensional.
Em um caso particular, considera-se que o bloco está perfeitamente ligado a superfície
do solo. Em outro caso, o bloco só é suportado pela estaca. No segundo caso, toda a
transferência do carregamento da força externa para o solo ocorre através da estaca. Este
capítulo investiga como a mudança contínua de um suporte de mecanismo para o outro
mecanismo de suporte influencia a resposta dinâmica do bloco. Em cada configuração,
diferentes quantidades da força externa são diretamente transmitidas para o solo, através da
interface solo-bloco, ou do bloco para o solo através da estaca.
A figura 2.1b mostra as forças atuando no bloco. A força de reação (Frea), como mostrada
na equação 2.1, é parcialmente causada devido à resistência da estaca e parcialmente gerado
pelas forças que atuam na interface solo-bloco.
(2.1) rea hs pF F F
31
A força de reação é uma composição que varia continuamente da força do solo Fhs para a
forca da estaca Fp.
Como o deslocamento do solo Uhs e o deslocamento da estaca Up tem que ser iguais, é
possível variar a força do solo Fhs e a força da estaca Fp.
A força de reação Frea, devido à reação do solo e da estaca, atuando no bloco, é dada pela
equação 2.2:
(2.2)
Sendo que, como mostrado na equação 2.3, o valor de α é:
(2.3)
Quando α=0, então a força que atua sobre o bloco é unicamente devido à reação do solo,
Fhs. Isto corresponde ao caso em que o bloco é completamente suportado pelo solo. Quando
α=1, a força externa é balanceada unicamente pela reação da estaca, Fp. Isso corresponde ao
caso em que o bloco é completamente suportado pela estaca.
2.2 Formulação
O modelo de interação solo-bloco neste trabalho exige a derivação das funções de Green
correspondentes a cargas verticais aplicadas na superfície ou dentro do semi-espaço.
Considera-se o solo como elástico, transversalmente isotrópico e tridimensional. O
problema é governado pelas equações diferenciais de Cauchy-Navier, que são descritas em
termos dos componentes de deslocamentos ui=ui (r, , z, ) (i= r, , z). Rajapakse e Wang
(1993), propuseram uma solução para esse problema acoplado em termos de transformações
integrais de Hankel e expansão em série. A solução é escrita em termos de funções arbitrarias,
cujos valores são determinados a partir das condições de contorno e de continuidade de um
determinado problema.
rea p hsF F 1 F
0 1
32
2.2.1 Interação Solo-Bloco
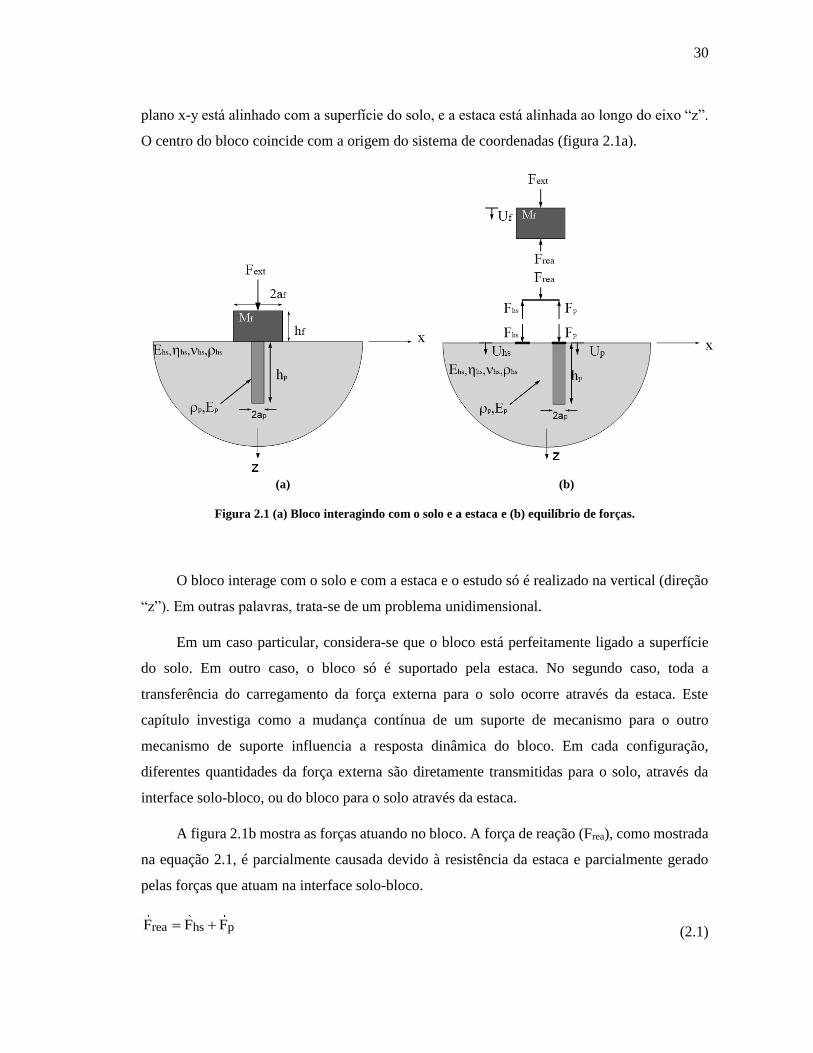
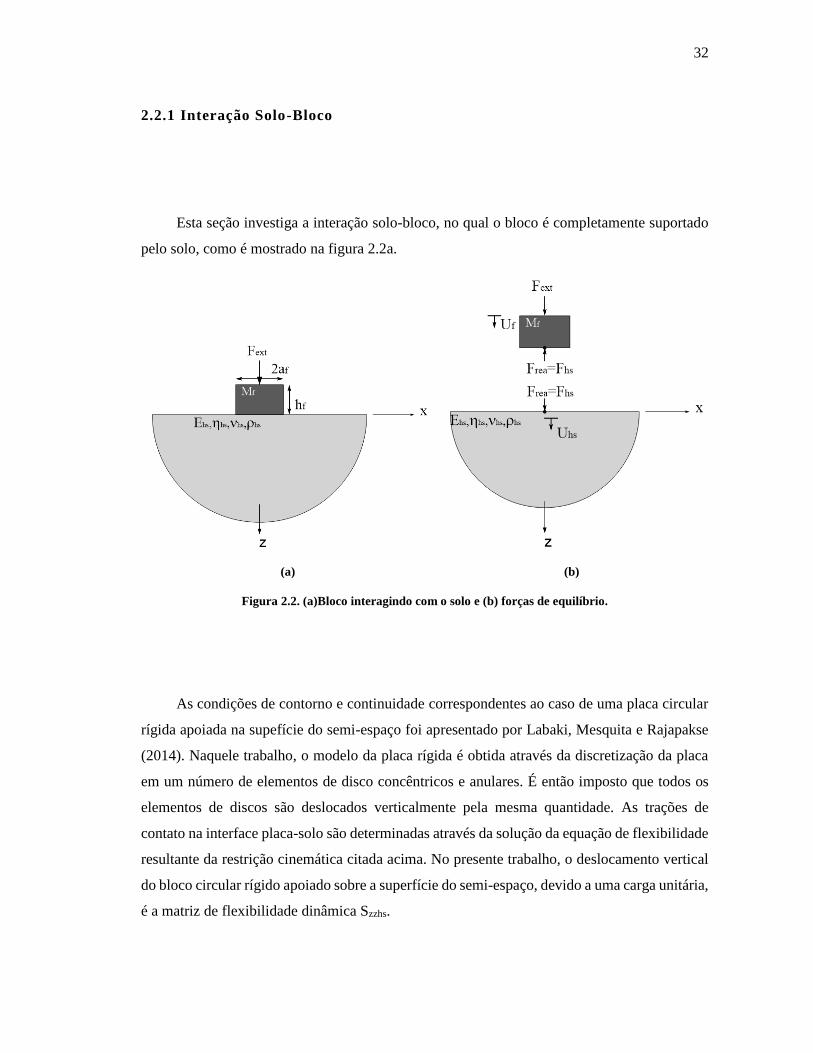
Esta seção investiga a interação solo-bloco, no qual o bloco é completamente suportado
pelo solo, como é mostrado na figura 2.2a.
(a) (b)
Figura 2.2. (a)Bloco interagindo com o solo e (b) forças de equilíbrio.
As condições de contorno e continuidade correspondentes ao caso de uma placa circular
rígida apoiada na supefície do semi-espaço foi apresentado por Labaki, Mesquita e Rajapakse
(2014). Naquele trabalho, o modelo da placa rígida é obtida através da discretização da placa
em um número de elementos de disco concêntricos e anulares. É então imposto que todos os
elementos de discos são deslocados verticalmente pela mesma quantidade. As trações de
contato na interface placa-solo são determinadas através da solução da equação de flexibilidade
resultante da restrição cinemática citada acima. No presente trabalho, o deslocamento vertical
do bloco circular rígido apoiado sobre a superfície do semi-espaço, devido a uma carga unitária,
é a matriz de flexibilidade dinâmica Szzhs.

33
A figura 2.3 mostra um exemplo de uma resposta de uma placa rígida obtida em Labaki,
Mesquita e Rajapakse (2014). Este caso considera uma placa com af=1m, ρf =10kg/m³ e
hf=0.01m, e um semi-espaço com Ehs=2.5Pa, hs=0.25, ρhs=1kg/m³e ηhs=0.01. A placa está
submetida a uma força distribuída unitária. A frequência normalizada a0 é definida pela equação
2.4.
a0=af(hs/Ghs)1/2 (2.4)
Figura 2.3. Resposta de um bloco rígido interagindo com o solo
A figura 2.3 mostra uma resposta padrão de uma placa apoiada na superfície de um semi-
espaço. Como pode-se ver nesta figura, a resposta desse tipo de problema é uma resposta
complexa.
A figura 2.2b mostra as forças que atuam na estrutura. A equação de equilíbrio da
estrutura, como mostrado na equação 2.5, é:
(2.5)
A resposta do solo a excitações externas é determinada através da matriz de flexibilidade,
Szzhs, como mostrado na equação 2.6:
(2.6)
Ainda analisando a figura 2.2b, percebe-se que a única força atuando na superfície do
solo é Frea, neste caso, como mostra a equação 2.7:
F⃗ rea = F⃗ hs (2.7)
1 2 3 40
0.05
0.1
0.15
Frequency a0
Vert
ical C
om
plian
ce S
zz
hs (
m)
Real part
-Imaginary part
2ext hs f fF F = M U
hshs zzhsU S F

34
A única força que atua na superfície do solo é Fhs. Então, ela é responsável pelo
deslocamento do solo Uhs.
Substituindo a equação 2.5 na equação 2.6, é possível encontrar uma equação que
relaciona o deslocamento do solo e do bloco, como é mostrado na equação 2.8:
(2.8)
Em ordem de satisfazer o critério de compatibilidade cinemática, o deslocamento do solo
tem que ser igual ao deslocamento do bloco rígido, como mostrado na equação 2.9:
(2.9)
Aplicando a equação 2.9 na equação 2.8 e isolando Uf, a seguinte equação é encontrada:
(2.10)
A equação 2.10 fornece o deslocamento do bloco rígido que está perfeitamente ligado ao
solo e que está submetido a uma força externa Fext.
2.2.2 Interação bloco-estaca
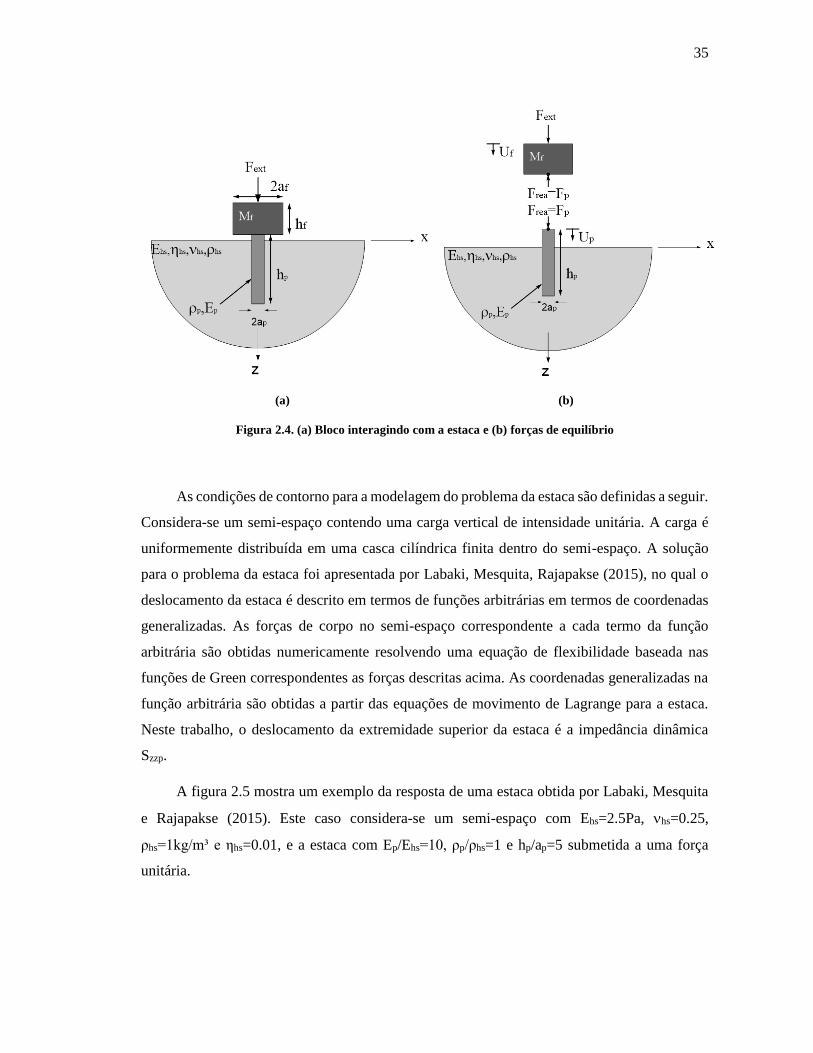
Esta seção considera o caso da interação bloco-estaca. Neste caso, a força externa é
transferida para o solo através da estaca. Como pode ser visto na figura 2.4a, o bloco não está
em contato com o solo.
zzhs zzhs
2exths f fU = M U S S F
hs fU = U
extzzhsf 2
zzhs f
S FU =
1 S M
35
(a) (b)
Figura 2.4. (a) Bloco interagindo com a estaca e (b) forças de equilíbrio
As condições de contorno para a modelagem do problema da estaca são definidas a seguir.
Considera-se um semi-espaço contendo uma carga vertical de intensidade unitária. A carga é
uniformemente distribuída em uma casca cilíndrica finita dentro do semi-espaço. A solução
para o problema da estaca foi apresentada por Labaki, Mesquita, Rajapakse (2015), no qual o
deslocamento da estaca é descrito em termos de funções arbitrárias em termos de coordenadas
generalizadas. As forças de corpo no semi-espaço correspondente a cada termo da função
arbitrária são obtidas numericamente resolvendo uma equação de flexibilidade baseada nas
funções de Green correspondentes as forças descritas acima. As coordenadas generalizadas na
função arbitrária são obtidas a partir das equações de movimento de Lagrange para a estaca.
Neste trabalho, o deslocamento da extremidade superior da estaca é a impedância dinâmica
Szzp.
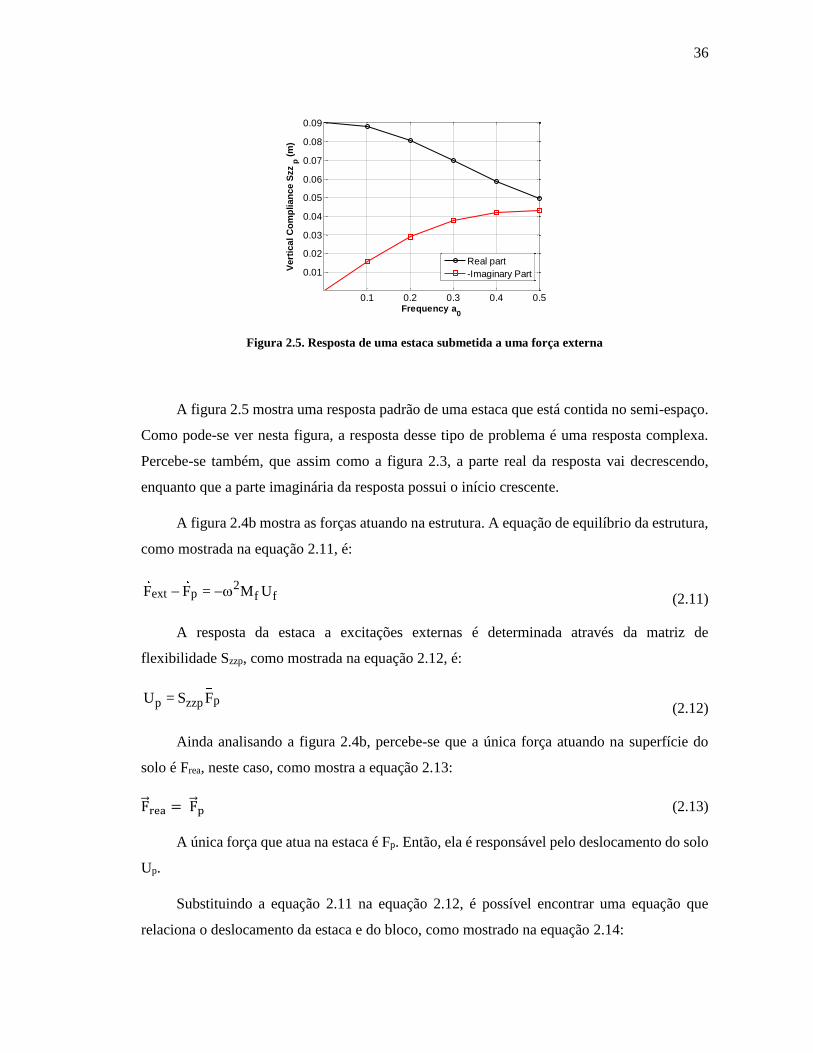
A figura 2.5 mostra um exemplo da resposta de uma estaca obtida por Labaki, Mesquita
e Rajapakse (2015). Este caso considera-se um semi-espaço com Ehs=2.5Pa, hs=0.25,
ρhs=1kg/m³ e ηhs=0.01, e a estaca com Ep/Ehs=10, ρp/ρhs=1 e hp/ap=5 submetida a uma força
unitária.
36
Figura 2.5. Resposta de uma estaca submetida a uma força externa
A figura 2.5 mostra uma resposta padrão de uma estaca que está contida no semi-espaço.
Como pode-se ver nesta figura, a resposta desse tipo de problema é uma resposta complexa.
Percebe-se também, que assim como a figura 2.3, a parte real da resposta vai decrescendo,
enquanto que a parte imaginária da resposta possui o início crescente.
A figura 2.4b mostra as forças atuando na estrutura. A equação de equilíbrio da estrutura,
como mostrada na equação 2.11, é:
(2.11)
A resposta da estaca a excitações externas é determinada através da matriz de
flexibilidade Szzp, como mostrada na equação 2.12, é:
(2.12)
Ainda analisando a figura 2.4b, percebe-se que a única força atuando na superfície do
solo é Frea, neste caso, como mostra a equação 2.13:
F⃗ rea = F⃗ p (2.13)
A única força que atua na estaca é Fp. Então, ela é responsável pelo deslocamento do solo
Up.
Substituindo a equação 2.11 na equação 2.12, é possível encontrar uma equação que
relaciona o deslocamento da estaca e do bloco, como mostrado na equação 2.14:
0.1 0.2 0.3 0.4 0.5
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
Frequency a0
Vert
ical C
om
plian
ce S
zz
p (
m)
Real part
-Imaginary Part
2ext p f fF F = M U
pp zzpU = S F
37
(2.14)
Em ordem de satisfazer o critério de compatibilidade cinemática, o deslocamento da
estaca tem que ser igual ao deslocamento do bloco rígido, como mostrado na equação 2.15:
(2.15)
Aplicando a equação 2.15 na equação 2.14 e isolando Uf, a seguinte equação é encontrada:
(2.16)
A equação 2.16 fornece o deslocamento de um bloco rígido que é completamente
suportado por uma estaca.
Nota-se que a equação 2.16 é similar a equação 2.10, sendo que em uma equação a matriz
de flexibilidade corresponde ao solo, e na outra corresponde à estaca interagindo com o solo.
2.2.3 Interação solo-estaca-bloco
Nesta seção, a interação solo-estaca-bloco é investigada. Neste caso, o bloco interage, ao
mesmo tempo, com o solo e com a estaca, como mostrado na figura 2.1a.
A figura 2.1b mostra as forças que estão atuando na estrutura. A equação de equilíbrio da
estrutura, como mostrado na equação 2.17, é:
(2.17)
A força de reação Frea é a soma da força do solo Fhs e da força da estaca Fp, como mostrado
na equação 2.2.
Substituindo a equação 2.2 na equação 2.17, encontra-se uma equação que relaciona o
deslocamento do bloco com as forças da estaca e do solo, como mostrado na equação 2.18:
2f extp f zzp zzpU = M U S S F
p fU = U
extzzpf 2
zzp f
S FU =
1 S M
2ext rea f fF F = M U
38
2ext p hsf fF M U F 1 F (2.18)
Substituindo as equações 2.6 e 2.12 na equação 2.17, é possível encontrar uma equação
que relaciona os deslocamentos do bloco, do solo e da estaca, como mostrado na equação 2.19:
(2.19)
O sistema deve satisfazer o critério de compatibilidade cinemática, que afirma que o
deslocamento do bloco tem que ser igual ao deslocamento da estaca e igual ao deslocamento
do solo, como mostrado na equação 2.20:
(2.20)
Aplicando a equação 2.20 na equação 2.21, e isolando Uf, encontramos a seguinte
equação:
(2.21)
A equação 2.21 fornece a resposta do bloco rígido que está parcialmente suportado pela
estaca e pelo solo.
2.3 Resultados numéricos
Esta seção apresenta os resultados numéricos para analisar o deslocamento do bloco
rígido, mostrada na figura 2.1a e estudar a influência do α (equação 2.21). Para a apresentação
dos resultados numéricos, duas variáveis vão ser definidas, como mostram as equações 2.22 e
2.23.
E’=Ep/Ehs (2.22)
B=mf/mhs (2.23)
2 1 1ext f f p zzp hs zzhsF M U U S 1 U S
f p hsU U U
extf 1 1 2
zzp zzhs f
FU =
S 1 S M
39
A equação 2.22 mostra a relação entre os módulos de elasticidade da estaca Ep e do solo
Ehs, enquanto que a equação 2.23 mostra a razão de massa entre a massa do bloco mf e a massa
do solo mhs; sendo que a massa do solo mhs é definida como a massa composta por um volume
formado pela área da interface solo-bloco que possui uma altura unitária.
O sistema solo-estaca-bloco é submetido a uma força axial Fext=1N. Nesta seção, os
seguintes parâmetros são considerados: para o semi-espaço, Ehs=2.5Pa, ηhs=0.01, υhs=0.25,
ρhs=1kg/m³; para o bloco, af=1m e para a estaca: hp/ap=35, ρp=1kg/m³. A formulação proposta,
na qual o bloco interage somente com o solo (figura 2.2a), e o caso em que o bloco interage
somente com a estaca (figura 2.3a), foram comparados com a solução proposta por Labaki,
Mesquita e Rajapakse (2014) e Labaki, Mesquita e Rajapakse (2015), respectivamente.
2.3.1 Interação solo-bloco (α=0): validação
Na figura 2.6, a parte real, imaginária e absoluta do deslocamento do bloco Uf (equação
2.10) são mostrados para B=0 (bloco sem massa). A figura 2.7 mostra os resultados
correspondentes para o caso com B=50. Ambos os casos são comparados com a solução
proposta por Labaki, Mesquita e Rajapakse (2014).
40
Figura 2.6. Deslocamento do bloco para B=0, suportado somente pelo solo.
0.1 0.2 0.3 0.4 0.5
0.17
0.175
0.18
0.185
B=0
Frequency a0
Real[
Uf](
m)
Labaki
Present
0.1 0.2 0.3 0.4 0.5
0.01
0.02
0.03
0.04
0.05
0.06
B=0
Frequency a0
-Im
ag
[Uf](
m)
Labaki
Present
0.1 0.2 0.3 0.4 0.5
0.181
0.182
0.183
0.184
0.185
0.186
0.187
0.188
0.189
B=0
Frequency a0
Ab
s[U
f](m
)
Labaki
Present
41
Figura 2.7. Deslocamento do bloco para B=50, suportado somente pelo solo.
Analisando as figuras 2.6 e 2.7, percebe-se que os resultados apresentados nesse trabalho
estão de acordo com os resultados que foram comparados. Percebe-se também, que para B=50
ocorre a presença de uma ressonância, fenômeno que não está presente quando B é igual a zero.
0.1 0.2 0.3 0.4 0.5-0.6
-0.4
-0.2
0
0.2
0.4
0.6
B=50
Frequency a0
Real[
Uf](
m)
Labaki
Present
0.1 0.2 0.3 0.4 0.5
0.2
0.4
0.6
0.8
1
1.2
B=50
Frequency a0
-Im
ag
[Uf](
m)
Labaki
Present
0.1 0.2 0.3 0.4 0.5
0.2
0.4
0.6
0.8
1
1.2
B=50
Frequency a0
Ab
s[U
f](m
)
Labaki
Present
42
2.3.2 Interação estaca-bloco (α=1): validação
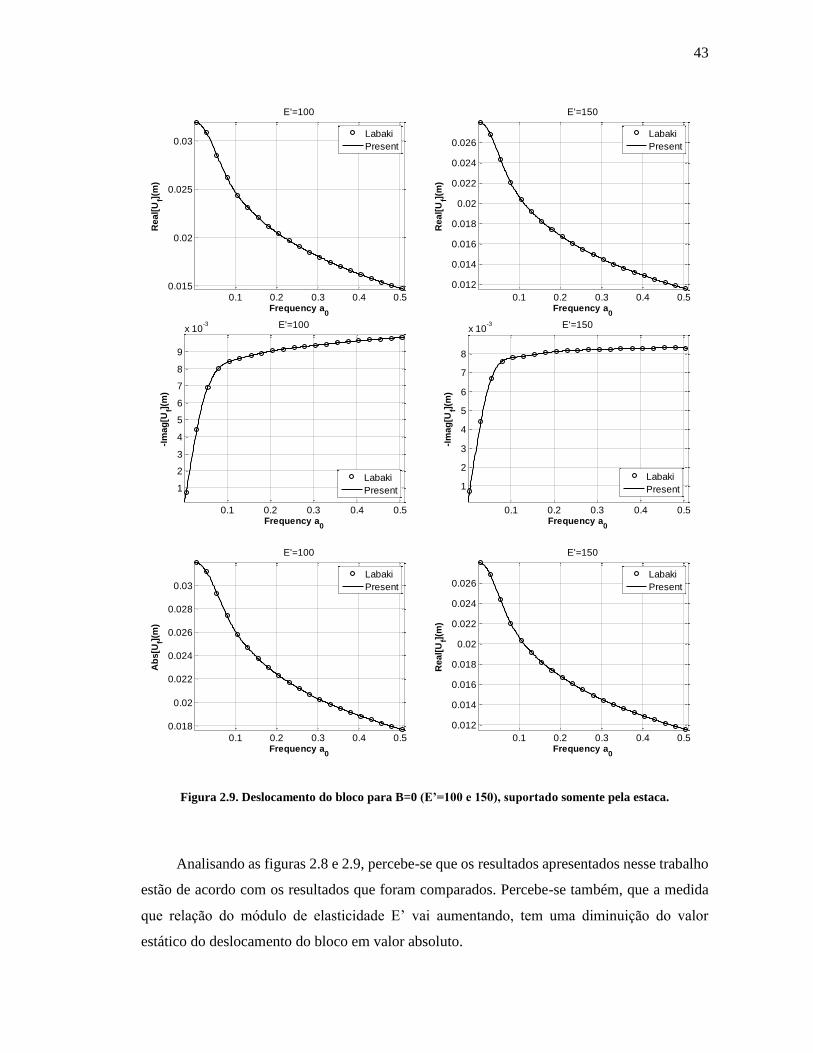
As figuras 2.8 e 2.9 mostram a parte real, imaginária e o valor absoluto do deslocamento
do bloco Uf (equação 2.16) para B=0 e diferentes valores de E’ (equação 2.22). Os resultados
apresentados são comparados com a solução proposta por Labaki, Mesquita e Rajapakse (2015).
Figura 2.8. Deslocamento do bloco para B=0 (E’=10 e 50), suportado somente pela estaca.
0.1 0.2 0.3 0.4 0.50.05
0.055
0.06
0.065
0.07
0.075
E'=10
Frequency a0
Re
al[
Uf](
m)
Labaki
Present
0.1 0.2 0.3 0.4 0.5
0.025
0.03
0.035
0.04
E'=50
Frequency a0
Re
al[
Uf](
m)
Labaki
Present
0.1 0.2 0.3 0.4 0.5
0.005
0.01
0.015
0.02
0.025
0.03
E'=10
Frequency a0
-Im
ag
[Uf](
m)
Labaki
Present
0.1 0.2 0.3 0.4 0.5
2
4
6
8
10
12
14x 10
-3 E'=50
Frequency a0
-Im
ag
[Uf](
m)
Labaki
Present
0.1 0.2 0.3 0.4 0.5
0.06
0.065
0.07
0.075
E'=10
Frequency a0
Ab
s[U
f](m
)
Labaki
Present
0.1 0.2 0.3 0.4 0.50.026
0.028
0.03
0.032
0.034
0.036
0.038
0.04
E'=50
Frequency a0
Ab
s[U
f](m
)
Labaki
Present
43
Figura 2.9. Deslocamento do bloco para B=0 (E’=100 e 150), suportado somente pela estaca.
Analisando as figuras 2.8 e 2.9, percebe-se que os resultados apresentados nesse trabalho
estão de acordo com os resultados que foram comparados. Percebe-se também, que a medida
que relação do módulo de elasticidade E’ vai aumentando, tem uma diminuição do valor
estático do deslocamento do bloco em valor absoluto.
0.1 0.2 0.3 0.4 0.50.015
0.02
0.025
0.03
E'=100
Frequency a0
Real[
Uf](
m)
Labaki
Present
0.1 0.2 0.3 0.4 0.5
0.012
0.014
0.016
0.018
0.02
0.022
0.024
0.026
E'=150
Frequency a0
Real[
Uf](
m)
Labaki
Present
0.1 0.2 0.3 0.4 0.5
1
2
3
4
5
6
7
8
9
x 10-3 E'=100
Frequency a0
-Im
ag
[Uf](
m)
Labaki
Present
0.1 0.2 0.3 0.4 0.5
1
2
3
4
5
6
7
8
x 10-3 E'=150
Frequency a0
-Im
ag
[Uf](
m)
Labaki
Present
0.1 0.2 0.3 0.4 0.5
0.018
0.02
0.022
0.024
0.026
0.028
0.03
E'=100
Frequency a0
Ab
s[U
f](m
)
Labaki
Present
0.1 0.2 0.3 0.4 0.5
0.012
0.014
0.016
0.018
0.02
0.022
0.024
0.026
E'=150
Frequency a0
Real[
Uf](
m)
Labaki
Present
44
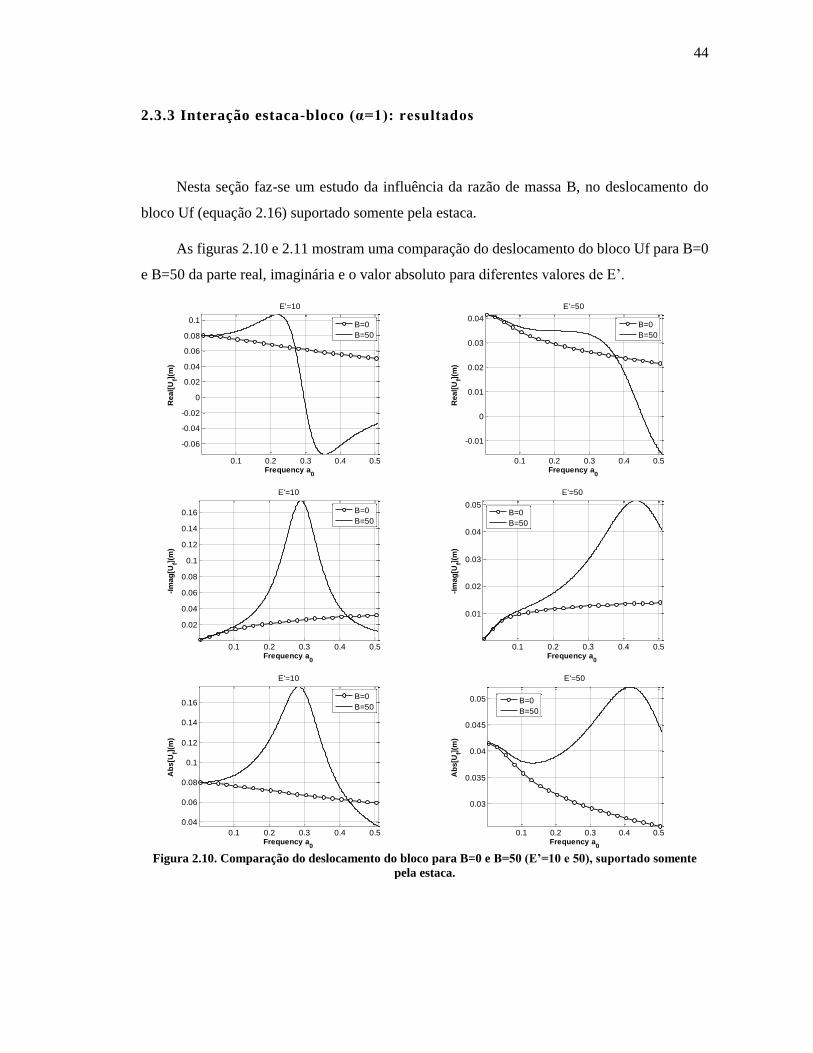
2.3.3 Interação estaca-bloco (α=1): resultados
Nesta seção faz-se um estudo da influência da razão de massa B, no deslocamento do
bloco Uf (equação 2.16) suportado somente pela estaca.
As figuras 2.10 e 2.11 mostram uma comparação do deslocamento do bloco Uf para B=0
e B=50 da parte real, imaginária e o valor absoluto para diferentes valores de E’.
Figura 2.10. Comparação do deslocamento do bloco para B=0 e B=50 (E’=10 e 50), suportado somente
pela estaca.
0.1 0.2 0.3 0.4 0.5
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
E'=10
Frequency a0
Re
al[
Uf](
m)
B=0
B=50
0.1 0.2 0.3 0.4 0.5
-0.01
0
0.01
0.02
0.03
0.04
E'=50
Frequency a0
Re
al[
Uf](
m)
B=0
B=50
0.1 0.2 0.3 0.4 0.5
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
E'=10
Frequency a0
-Im
ag
[Uf](
m)
B=0
B=50
0.1 0.2 0.3 0.4 0.5
0.01
0.02
0.03
0.04
0.05
E'=50
Frequency a0
-Im
ag
[Uf](
m)
B=0
B=50
0.1 0.2 0.3 0.4 0.5
0.04
0.06
0.08
0.1
0.12
0.14
0.16
E'=10
Frequency a0
Ab
s[U
f](m
)
B=0
B=50
0.1 0.2 0.3 0.4 0.5
0.03
0.035
0.04
0.045
0.05
E'=50
Frequency a0
Ab
s[U
f](m
)
B=0
B=50
45
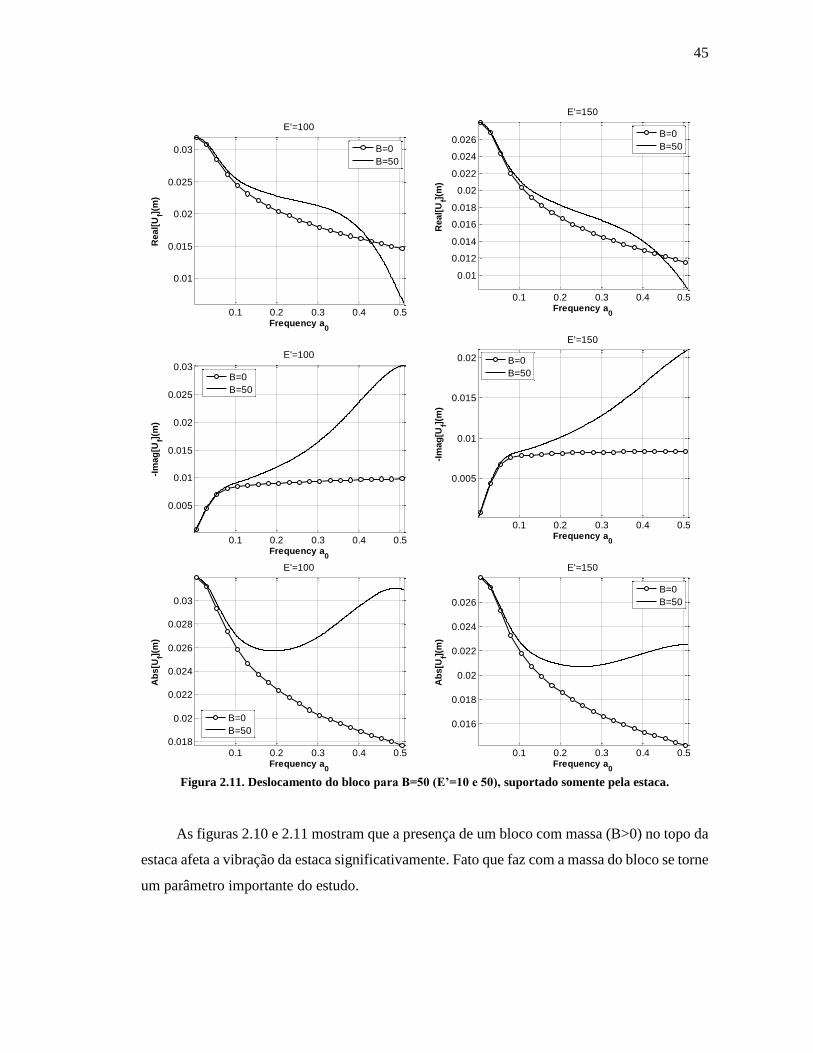
Figura 2.11. Deslocamento do bloco para B=50 (E’=10 e 50), suportado somente pela estaca.
As figuras 2.10 e 2.11 mostram que a presença de um bloco com massa (B>0) no topo da
estaca afeta a vibração da estaca significativamente. Fato que faz com a massa do bloco se torne
um parâmetro importante do estudo.
0.1 0.2 0.3 0.4 0.5
0.01
0.015
0.02
0.025
0.03
E'=100
Frequency a0
Real[
Uf](
m)
B=0
B=50
0.1 0.2 0.3 0.4 0.5
0.01
0.012
0.014
0.016
0.018
0.02
0.022
0.024
0.026
E'=150
Frequency a0
Real[
Uf](
m)
B=0
B=50
0.1 0.2 0.3 0.4 0.5
0.005
0.01
0.015
0.02
0.025
0.03
E'=100
Frequency a0
-Im
ag
[Uf](
m)
B=0
B=50
0.1 0.2 0.3 0.4 0.5
0.005
0.01
0.015
0.02
E'=150
Frequency a0
-Im
ag
[Uf](
m)
B=0
B=50
0.1 0.2 0.3 0.4 0.50.018
0.02
0.022
0.024
0.026
0.028
0.03
E'=100
Frequency a0
Ab
s[U
f](m
)
B=0
B=50
0.1 0.2 0.3 0.4 0.5
0.016
0.018
0.02
0.022
0.024
0.026
E'=150
Frequency a0
Ab
s[U
f](m
)
B=0
B=50

46
2.3.4 Interação solo-estaca-bloco: resultados
Analisando as figuras 2.6 a 2.11, percebe-se que o valor estático do deslocamento do
bloco interagindo somente com o solo é diferente do valor estático do deslocamento do bloco
interagindo somente com a estaca.
Para modelar o acoplamento do bloco com estaca e com o solo será utilizado o fator de
amplificação para cada um dos casos estudados. Dessa maneira, a resposta do solo e a resposta
da estaca que vão ser utilizados para gerar os próximos gráficos, como mostrado na equação
2.24, é a seguinte:
zzhs zzhs zzhs
zzp zzp zzp
S =S ( ) / S ( 0)
S =S ( ) / S ( 0)
(2.24)
Essa é uma alternativa que se utiliza para se fazer uma análise do fator de amplificação
do deslocamento do bloco quando suportado pelo solo ou pela estaca.
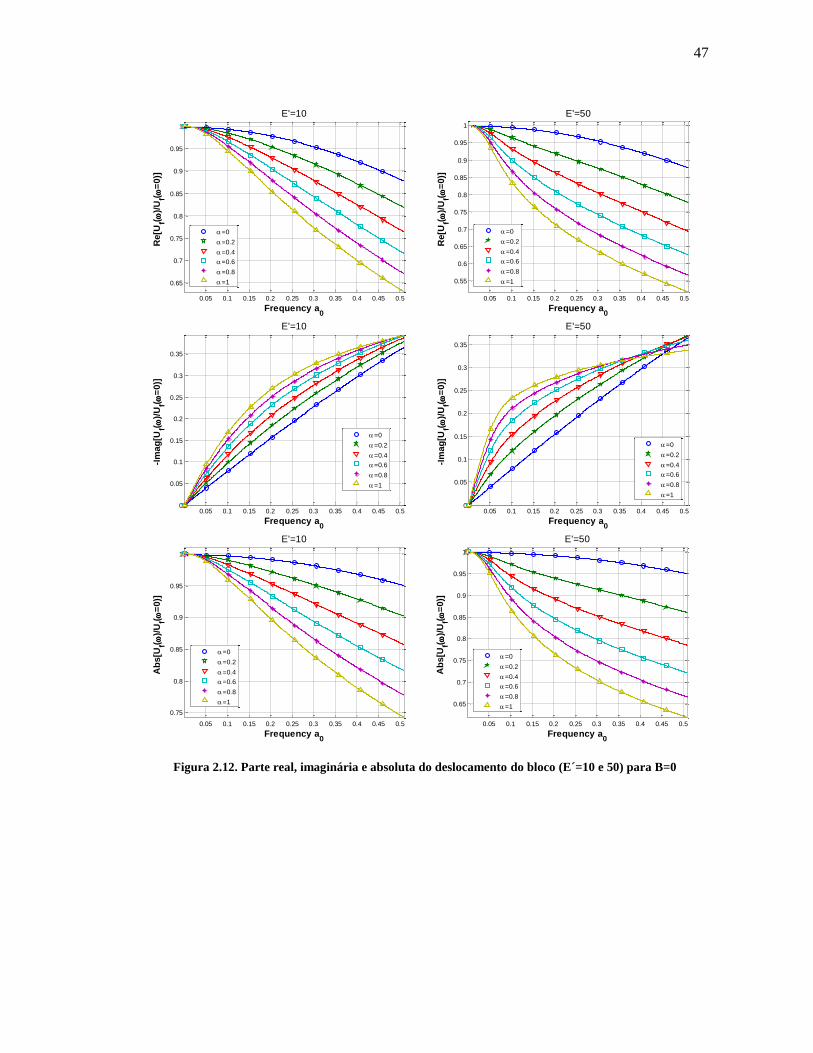
As figuras 2.12 e 2.13 mostram o deslocamento do bloco Uf (equação 2.21) para o caso
de um bloco sem massa (B=0). Diferentes valores de E’ são considerados.
Quando α=0, isso significa que a força externa é transferida pelo bloco diretamente para
o solo (figura 2.2a). De maneira análoga, quando α=1, a força externa é transferida do bloco
para o solo através da estaca, ou seja, não há carregamento transferido do bloco para o solo
(figura 2.4a).
47
Figura 2.12. Parte real, imaginária e absoluta do deslocamento do bloco (E´=10 e 50) para B=0
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
Re[U
f( )/
Uf(
=0)]
Frequency a0
E'=10
=0
=0.2
=0.4
=0.6
=0.8
=1
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
0.55
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
Re[U
f( )/
Uf(
=0)]
Frequency a0
E'=50
=0
=0.2
=0.4
=0.6
=0.8
=1
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
-Im
ag
[Uf(
)/U
f( =
0)]
Frequency a0
E'=10
=0
=0.2
=0.4
=0.6
=0.8
=1
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
-Im
ag
[Uf(
)/U
f( =
0)]
Frequency a0
E'=50
=0
=0.2
=0.4
=0.6
=0.8
=1
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
0.75
0.8
0.85
0.9
0.95
1
Ab
s[U
f( )/
Uf(
=0)]
Frequency a0
E'=10
=0
=0.2
=0.4
=0.6
=0.8
=1
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
Ab
s[U
f( )/
Uf(
=0)]
Frequency a0
E'=50
=0
=0.2
=0.4
=0.6
=0.8
=1
48
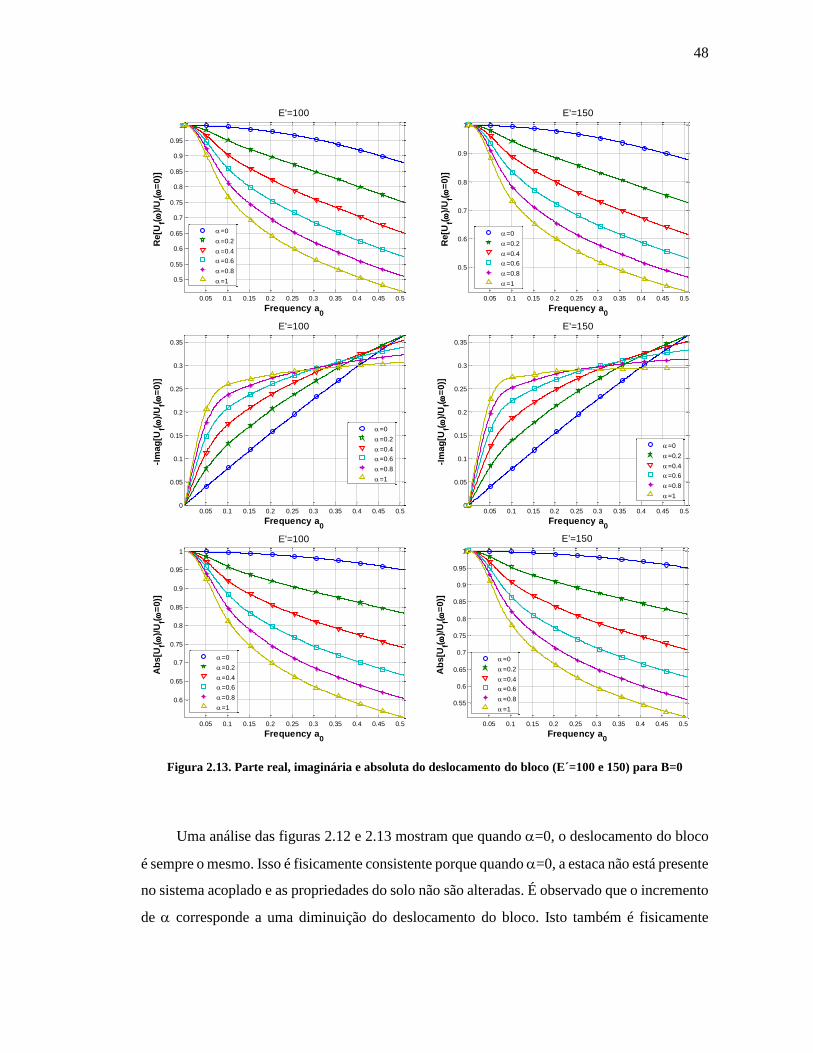
Figura 2.13. Parte real, imaginária e absoluta do deslocamento do bloco (E´=100 e 150) para B=0
Uma análise das figuras 2.12 e 2.13 mostram que quando =0, o deslocamento do bloco
é sempre o mesmo. Isso é fisicamente consistente porque quando =0, a estaca não está presente
no sistema acoplado e as propriedades do solo não são alteradas. É observado que o incremento
de corresponde a uma diminuição do deslocamento do bloco. Isto também é fisicamente
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
0.5
0.55
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
Re[U
f( )/
Uf(
=0)]
Frequency a0
E'=100
=0
=0.2
=0.4
=0.6
=0.8
=1
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
0.5
0.6
0.7
0.8
0.9
1
Re[U
f( )/
Uf(
=0)]
Frequency a0
E'=150
=0
=0.2
=0.4
=0.6
=0.8
=1
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
-Im
ag
[Uf(
)/U
f( =
0)]
Frequency a0
E'=100
=0
=0.2
=0.4
=0.6
=0.8
=1
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
-Im
ag
[Uf(
)/U
f( =
0)]
Frequency a0
E'=150
=0
=0.2
=0.4
=0.6
=0.8
=1
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
Ab
s[U
f( )/
Uf(
=0)]
Frequency a0
E'=100
=0
=0.2
=0.4
=0.6
=0.8
=1
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
0.55
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
Ab
s[U
f( )/
Uf(
=0)]
Frequency a0
E'=150
=0
=0.2
=0.4
=0.6
=0.8
=1
49
consistente, uma vez que a presença da estaca no sistema, aumenta a capacidade de carga do
solo. (Rangwala et al., 2012).
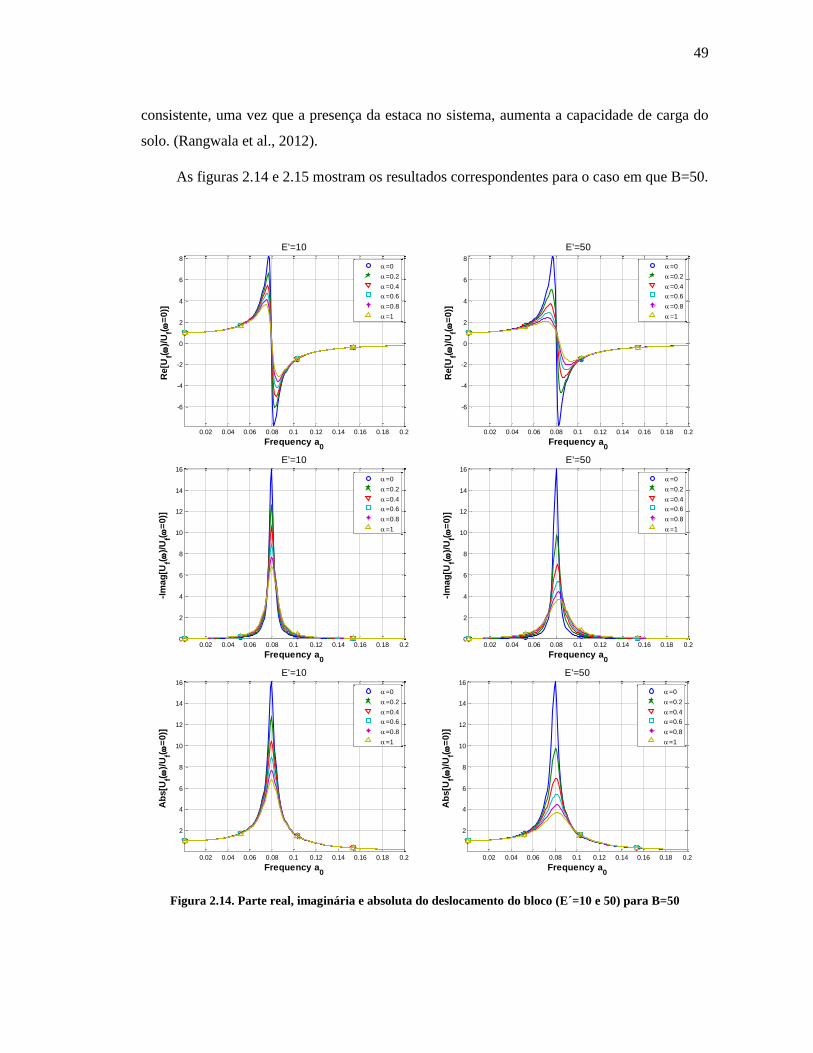
As figuras 2.14 e 2.15 mostram os resultados correspondentes para o caso em que B=50.
Figura 2.14. Parte real, imaginária e absoluta do deslocamento do bloco (E´=10 e 50) para B=50
0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2
-6
-4
-2
0
2
4
6
8
Re[U
f( )/
Uf(
=0)]
Frequency a0
E'=10
=0
=0.2
=0.4
=0.6
=0.8
=1
0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2
-6
-4
-2
0
2
4
6
8
Re[U
f( )/
Uf(
=0)]
Frequency a
0
E'=50
=0
=0.2
=0.4
=0.6
=0.8
=1
0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20
2
4
6
8
10
12
14
16
-Im
ag
[Uf(
)/U
f( =
0)]
Frequency a0
E'=10
=0
=0.2
=0.4
=0.6
=0.8
=1
0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20
2
4
6
8
10
12
14
16
-Im
ag
[Uf(
)/U
f( =
0)]
Frequency a0
E'=50
=0
=0.2
=0.4
=0.6
=0.8
=1
0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2
2
4
6
8
10
12
14
16
Ab
s[U
f( )/
Uf(
=0)]
Frequency a0
E'=10
=0
=0.2
=0.4
=0.6
=0.8
=1
0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2
2
4
6
8
10
12
14
16
Ab
s[U
f( )/
Uf(
=0)]
Frequency a0
E'=50
=0
=0.2
=0.4
=0.6
=0.8
=1
50
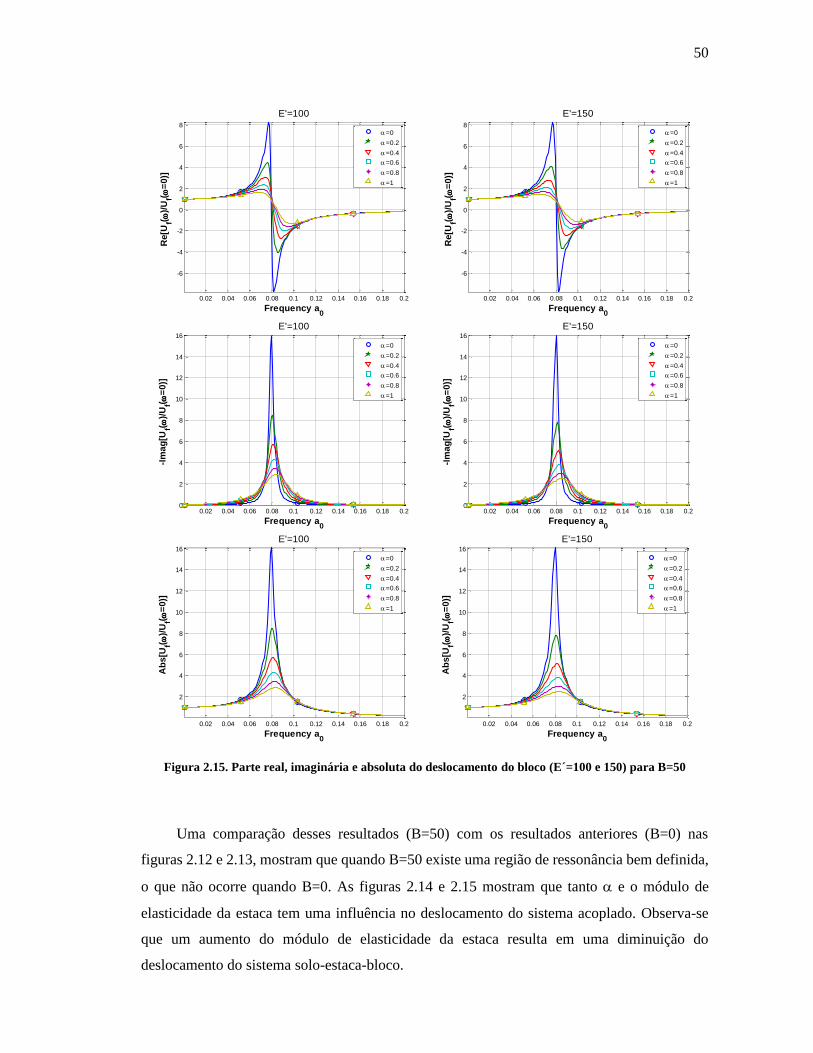
Figura 2.15. Parte real, imaginária e absoluta do deslocamento do bloco (E´=100 e 150) para B=50
Uma comparação desses resultados (B=50) com os resultados anteriores (B=0) nas
figuras 2.12 e 2.13, mostram que quando B=50 existe uma região de ressonância bem definida,
o que não ocorre quando B=0. As figuras 2.14 e 2.15 mostram que tanto e o módulo de
elasticidade da estaca tem uma influência no deslocamento do sistema acoplado. Observa-se
que um aumento do módulo de elasticidade da estaca resulta em uma diminuição do
deslocamento do sistema solo-estaca-bloco.
0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2
-6
-4
-2
0
2
4
6
8
Re[U
f( )/
Uf(
=0)]
Frequency a0
E'=100
=0
=0.2
=0.4
=0.6
=0.8
=1
0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2
-6
-4
-2
0
2
4
6
8
Re[U
f( )/
Uf(
=0)]
Frequency a0
E'=150
=0
=0.2
=0.4
=0.6
=0.8
=1
0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20
2
4
6
8
10
12
14
16
-Im
ag
[Uf(
)/U
f( =
0)]
Frequency a0
E'=100
=0
=0.2
=0.4
=0.6
=0.8
=1
0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20
2
4
6
8
10
12
14
16
-Im
ag
[Uf(
)/U
f( =
0)]
Frequency a0
E'=150
=0
=0.2
=0.4
=0.6
=0.8
=1
0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2
2
4
6
8
10
12
14
16
Ab
s[U
f( )/
Uf(
=0)]
Frequency a0
E'=100
=0
=0.2
=0.4
=0.6
=0.8
=1
0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2
2
4
6
8
10
12
14
16
Ab
s[U
f( )/
Uf(
=0)]
Frequency a0
E'=150
=0
=0.2
=0.4
=0.6
=0.8
=1
51
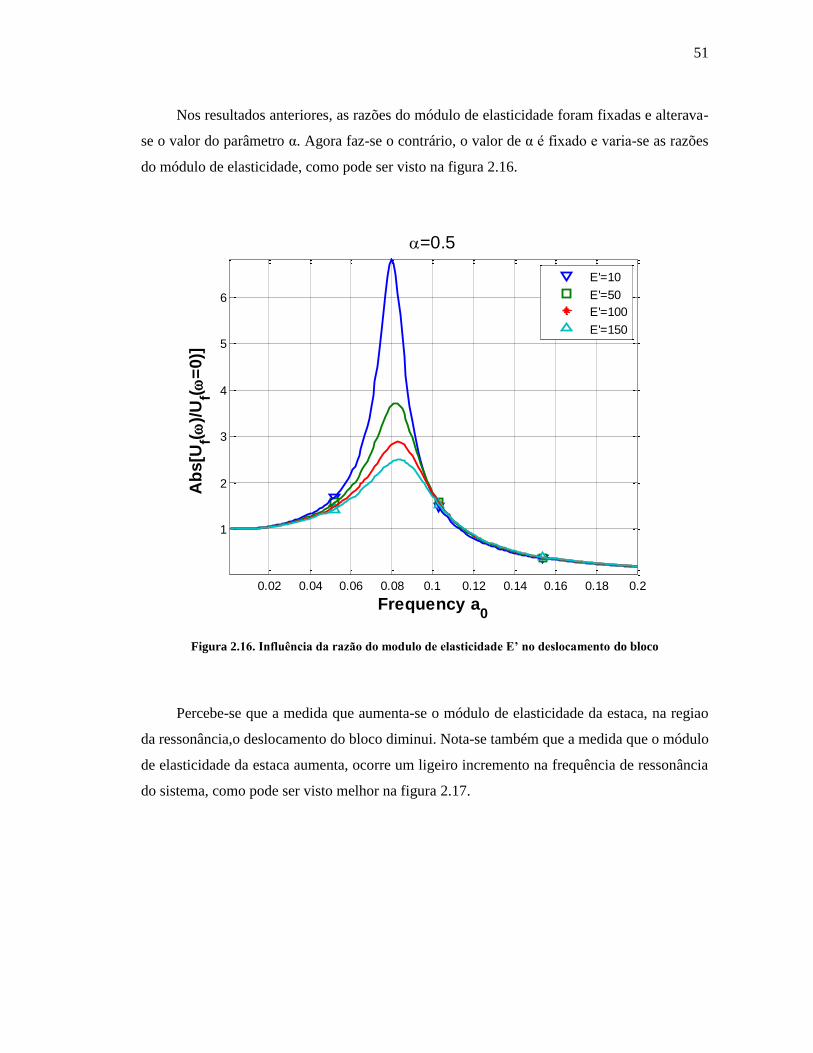
Nos resultados anteriores, as razões do módulo de elasticidade foram fixadas e alterava-
se o valor do parâmetro α. Agora faz-se o contrário, o valor de α é fixado e varia-se as razões
do módulo de elasticidade, como pode ser visto na figura 2.16.
Figura 2.16. Influência da razão do modulo de elasticidade E’ no deslocamento do bloco
Percebe-se que a medida que aumenta-se o módulo de elasticidade da estaca, na regiao
da ressonância,o deslocamento do bloco diminui. Nota-se também que a medida que o módulo
de elasticidade da estaca aumenta, ocorre um ligeiro incremento na frequência de ressonância
do sistema, como pode ser visto melhor na figura 2.17.
0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2
1
2
3
4
5
6
Ab
s[U
f( )/
Uf(
=0)]
Frequency a0
=0.5
E'=10
E'=50
E'=100
E'=150
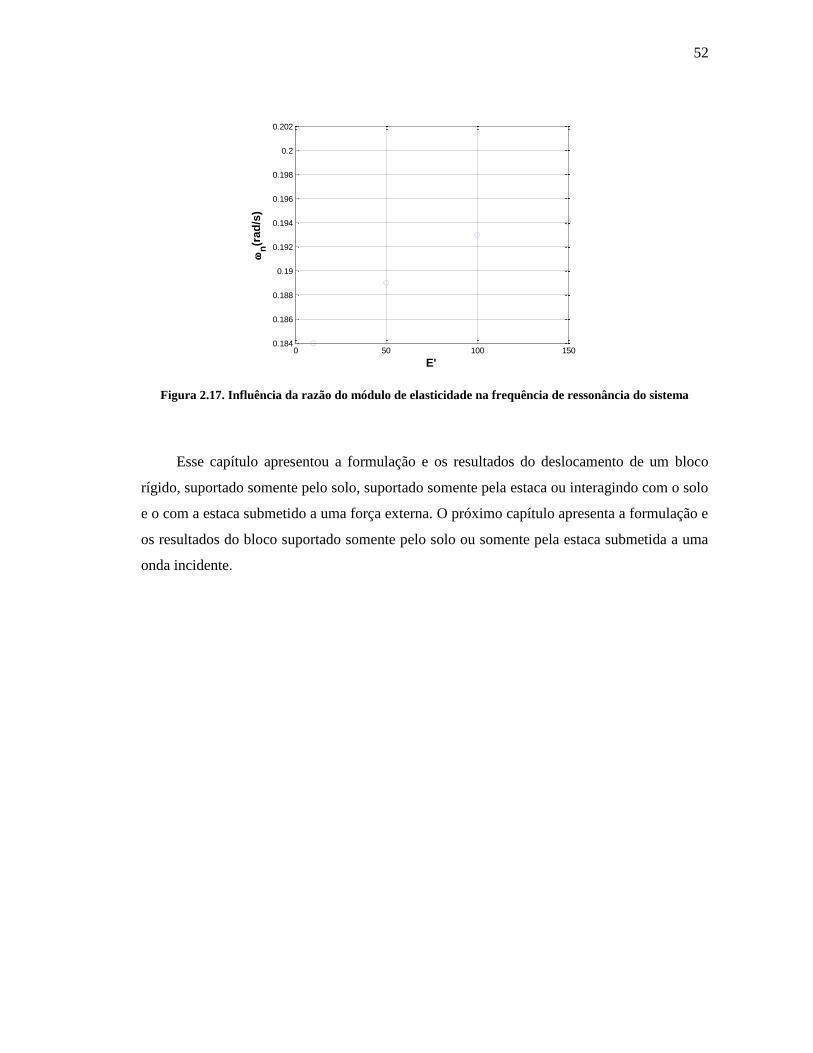
52
Figura 2.17. Influência da razão do módulo de elasticidade na frequência de ressonância do sistema
Esse capítulo apresentou a formulação e os resultados do deslocamento de um bloco
rígido, suportado somente pelo solo, suportado somente pela estaca ou interagindo com o solo
e o com a estaca submetido a uma força externa. O próximo capítulo apresenta a formulação e
os resultados do bloco suportado somente pelo solo ou somente pela estaca submetida a uma
onda incidente.
0 50 100 1500.184
0.186
0.188
0.19
0.192
0.194
0.196
0.198
0.2
0.202
n(r
ad
/s)
E'
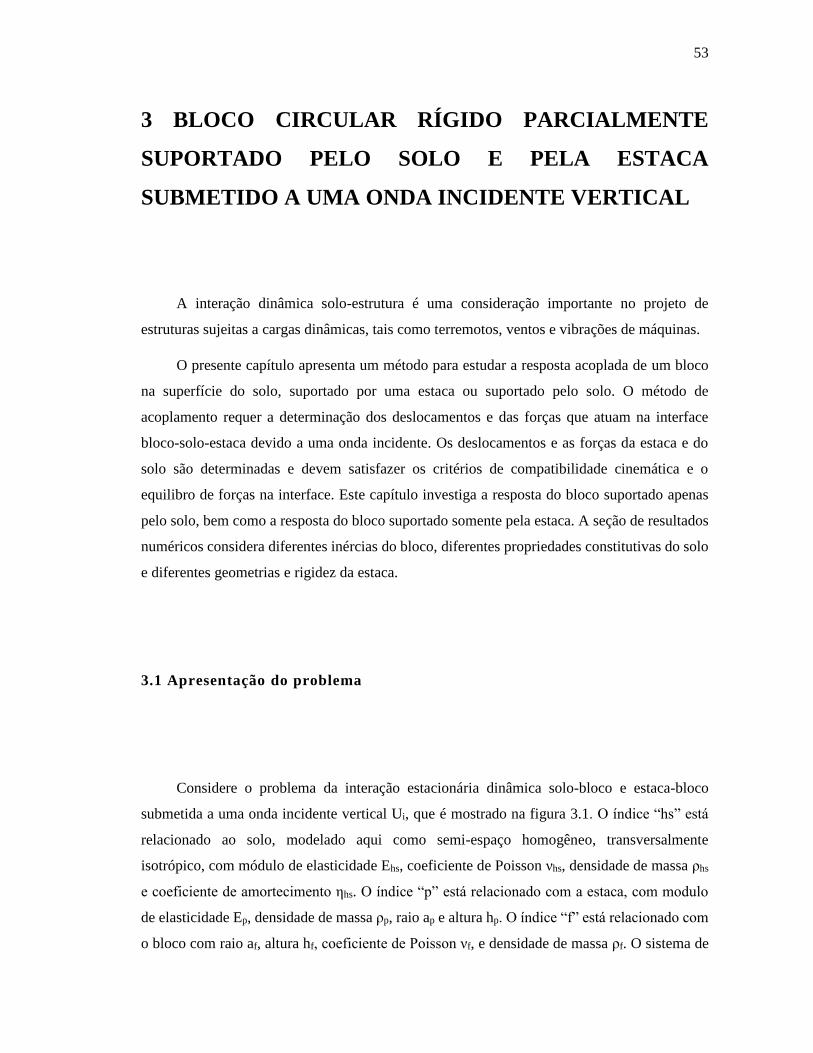
53
3 BLOCO CIRCULAR RÍGIDO PARCIALMENTE
SUPORTADO PELO SOLO E PELA ESTACA
SUBMETIDO A UMA ONDA INCIDENTE VERTICAL
A interação dinâmica solo-estrutura é uma consideração importante no projeto de
estruturas sujeitas a cargas dinâmicas, tais como terremotos, ventos e vibrações de máquinas.
O presente capítulo apresenta um método para estudar a resposta acoplada de um bloco
na superfície do solo, suportado por uma estaca ou suportado pelo solo. O método de
acoplamento requer a determinação dos deslocamentos e das forças que atuam na interface
bloco-solo-estaca devido a uma onda incidente. Os deslocamentos e as forças da estaca e do
solo são determinadas e devem satisfazer os critérios de compatibilidade cinemática e o
equilibro de forças na interface. Este capítulo investiga a resposta do bloco suportado apenas
pelo solo, bem como a resposta do bloco suportado somente pela estaca. A seção de resultados
numéricos considera diferentes inércias do bloco, diferentes propriedades constitutivas do solo
e diferentes geometrias e rigidez da estaca.
3.1 Apresentação do problema
Considere o problema da interação estacionária dinâmica solo-bloco e estaca-bloco
submetida a uma onda incidente vertical Ui, que é mostrado na figura 3.1. O índice “hs” está
relacionado ao solo, modelado aqui como semi-espaço homogêneo, transversalmente
isotrópico, com módulo de elasticidade Ehs, coeficiente de Poisson νhs, densidade de massa ρhs
e coeficiente de amortecimento ηhs. O índice “p” está relacionado com a estaca, com modulo
de elasticidade Ep, densidade de massa ρp, raio ap e altura hp. O índice “f” está relacionado com
o bloco com raio af, altura hf, coeficiente de Poisson νf, e densidade de massa ρf. O sistema de
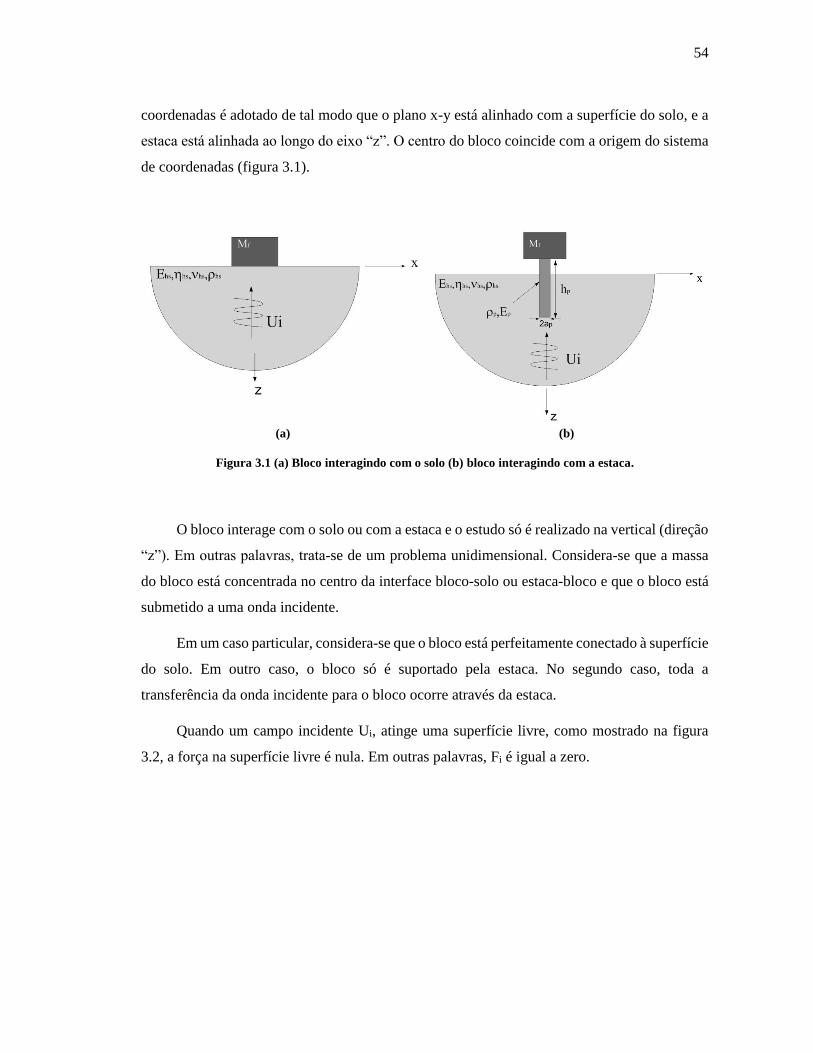
54
coordenadas é adotado de tal modo que o plano x-y está alinhado com a superfície do solo, e a
estaca está alinhada ao longo do eixo “z”. O centro do bloco coincide com a origem do sistema
de coordenadas (figura 3.1).
(a) (b)
Figura 3.1 (a) Bloco interagindo com o solo (b) bloco interagindo com a estaca.
O bloco interage com o solo ou com a estaca e o estudo só é realizado na vertical (direção
“z”). Em outras palavras, trata-se de um problema unidimensional. Considera-se que a massa
do bloco está concentrada no centro da interface bloco-solo ou estaca-bloco e que o bloco está
submetido a uma onda incidente.
Em um caso particular, considera-se que o bloco está perfeitamente conectado à superfície
do solo. Em outro caso, o bloco só é suportado pela estaca. No segundo caso, toda a
transferência da onda incidente para o bloco ocorre através da estaca.
Quando um campo incidente Ui, atinge uma superfície livre, como mostrado na figura
3.2, a força na superfície livre é nula. Em outras palavras, Fi é igual a zero.
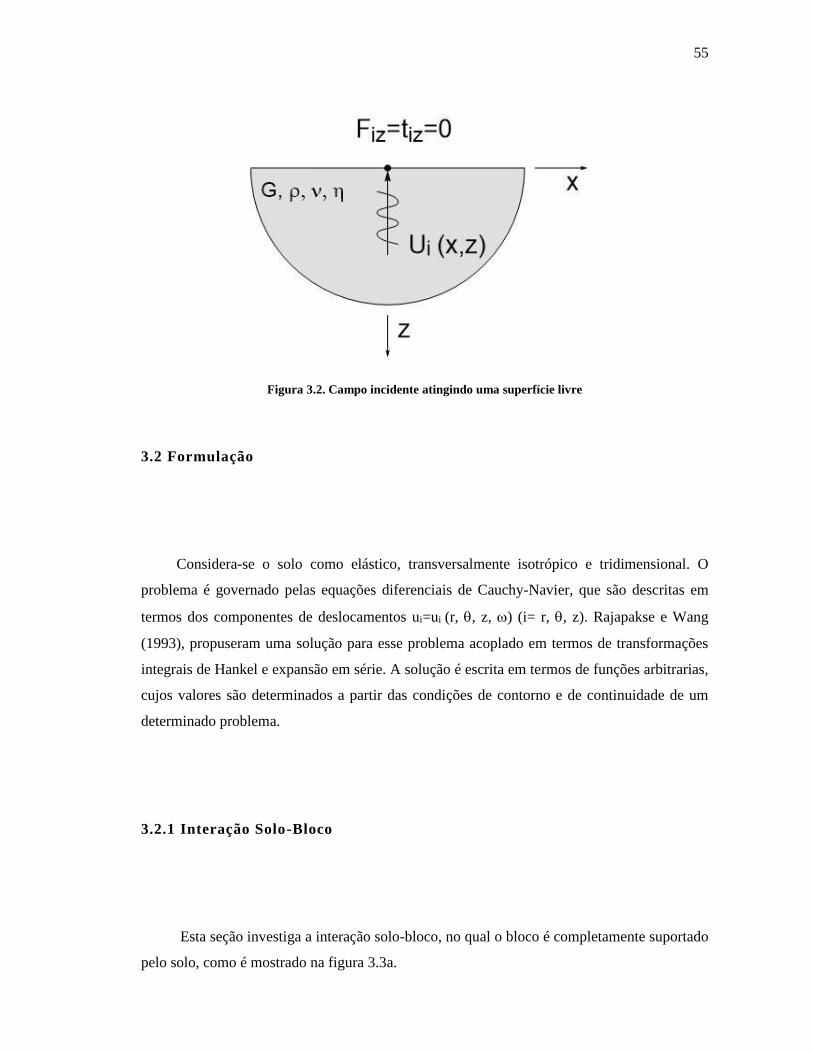
55
Figura 3.2. Campo incidente atingindo uma superfície livre
3.2 Formulação
Considera-se o solo como elástico, transversalmente isotrópico e tridimensional. O
problema é governado pelas equações diferenciais de Cauchy-Navier, que são descritas em
termos dos componentes de deslocamentos ui=ui (r, , z, ) (i= r, , z). Rajapakse e Wang
(1993), propuseram uma solução para esse problema acoplado em termos de transformações
integrais de Hankel e expansão em série. A solução é escrita em termos de funções arbitrarias,
cujos valores são determinados a partir das condições de contorno e de continuidade de um
determinado problema.
3.2.1 Interação Solo-Bloco
Esta seção investiga a interação solo-bloco, no qual o bloco é completamente suportado
pelo solo, como é mostrado na figura 3.3a.

56
(a) (b)
Figura 3.3. (a) Bloco interagindo com o solo e (b) forças de equilíbrio.
A figura 3.3b mostra as forças que atuam na estrutura. A equação de equilíbrio da
estrutura, como mostrado na equação 3.1, é:
2hsF
f fM U (3.1)
Ainda analisando a figura 3.3b, percebe-se que a única força atuando na superfície do
solo é Frea, neste caso, como mostra a equação 3.2:
F⃗ rea = F⃗ hs (3.2)
O campo de deslocamento total Ut é a soma dos campos incidentes Ui e do campo
espalhado (scattered) Us, como pode ser visto na equação 3.3:
t i sU U U (3.3)
Como foi mostrado na figura 3.2, quando um campo incidente atinge uma superfície livre,
a força nessa superfície, na direção vertical, é nula. Logo, a força total agindo na superfície do
solo vai ser igual a força da scatter, como mostrado na equação 3.4:
t sF F (3.4)
Observando a figura 3.3a, pode-se ver que a única força atuando na interface solo-bloco
é a força designada por Fhs, mas que segundo a equação 3.4 também é força total atuando na
superfície do solo, logo ela vai ser igual a força de scatter, como pode ser visto na equação 3.5:
57
t s hsF F F (3.5)
A resposta do solo é determinada através de uma matriz de flexibilidade do solo Szzhs.
Como Fi é igual a zero devido a ocorrência de um campo incidente Ui em uma superfície livre,
então toda a força que atua na superfície irá causar o campo de espalhamento (scatter) Us, como
pode ser visto na equação 3.6:
ss zzhs
U S F (3.6)
Substituindo a equação 3.6 e a equação 3.3 na equação 3.1, é possível encontrar uma
equação que relaciona o deslocamento do bloco com o deslocamento total do sistema, como
pode ser visto na equação 3.7:
2f ft i zzhs
U U S M U (3.7)
Em ordem de satisfazer o critério de compatibilidade cinemática, o deslocamento total do
sistema tem que ser igual ao deslocamento do bloco, como mostrado na equação 3.8:
t fU U (3.8)
Aplicando a equação 3.8 na equação 3.7 e isolando Uf a seguinte equação é encontrada:
2
1
1f izzhs f
U US M
(3.9)
A equação 3.9 fornece o deslocamento de um bloco rígido que é completamente
suportado pelo solo submetida a uma onda incidente.
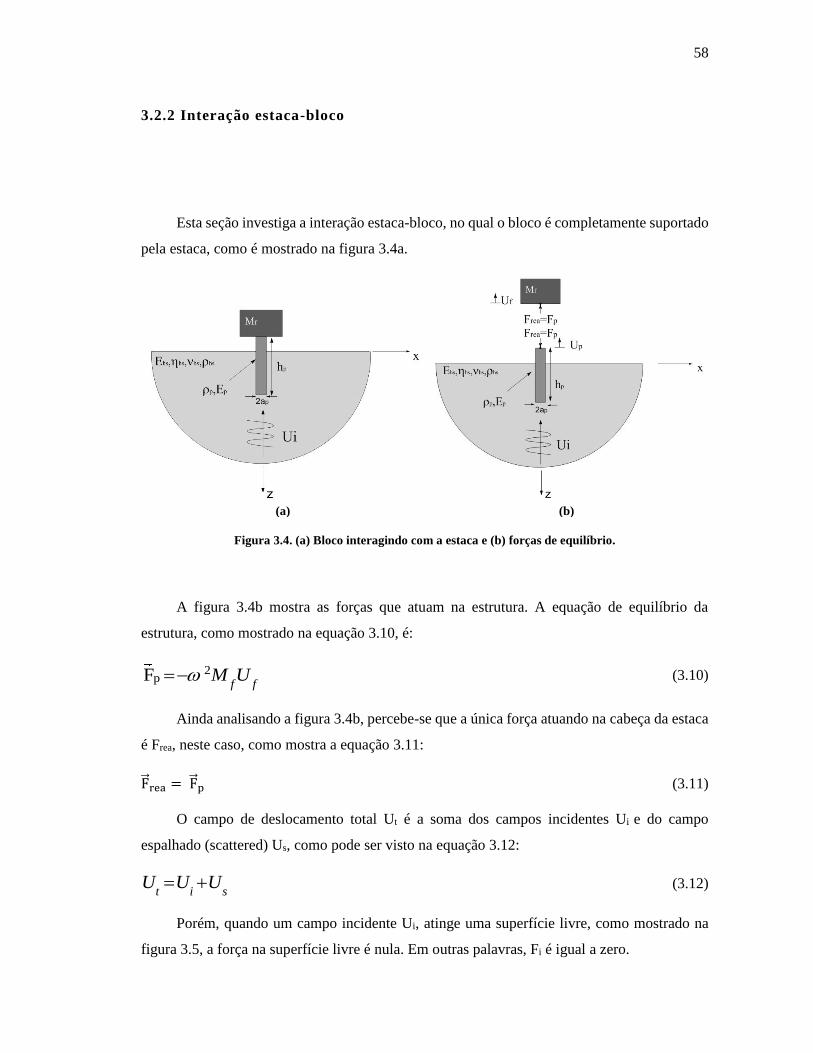
58
3.2.2 Interação estaca-bloco
Esta seção investiga a interação estaca-bloco, no qual o bloco é completamente suportado
pela estaca, como é mostrado na figura 3.4a.
(a) (b)
Figura 3.4. (a) Bloco interagindo com a estaca e (b) forças de equilíbrio.
A figura 3.4b mostra as forças que atuam na estrutura. A equação de equilíbrio da
estrutura, como mostrado na equação 3.10, é:
2pF
f fM U (3.10)
Ainda analisando a figura 3.4b, percebe-se que a única força atuando na cabeça da estaca
é Frea, neste caso, como mostra a equação 3.11:
F⃗ rea = F⃗ p (3.11)
O campo de deslocamento total Ut é a soma dos campos incidentes Ui e do campo
espalhado (scattered) Us, como pode ser visto na equação 3.12:
t i sU U U (3.12)
Porém, quando um campo incidente Ui, atinge uma superfície livre, como mostrado na
figura 3.5, a força na superfície livre é nula. Em outras palavras, Fi é igual a zero.

59
Figura 3.5. Campo incidente atingindo uma superfície livre
Como foi mostrado na figura 3.5, quando um campo incidente atinge uma superfície livre,
a força nessa superfície, na direção vertical, é nula. Logo, a força total agindo na extremidade
livre da estaca vai ser igual a força da scatter, como mostrado na equação 3.13:
t sF F (3.13)
Observando a figura 3.4b, pode-se ver que a única força atuando na extremidade livre da
estaca é a força designada por Fp, mas que segundo a equação 3.14 também é a força total
atuando na extremidade livre da estaca. Logo, ela vai ser igual a força de scatter, como pode
ser visto na equação 3.14:
t s pF F F (3.14)
A resposta da estaca é determinada através de uma matriz de flexibilidade da estaca Szzp.
Como Fi é igual a zero devido à ocorrência de um campo incidente Ui em uma superfície livre,
então toda a força que atua na superfície irá causar o campo de espalhamento (scatter) Us, como
pode ser visto na equação 3.15:
ss zzp
U S F (3.15)
Substituindo a equação 3.15 e a equação 3.12 na equação 3.10, é possível encontrar uma
equação que relaciona o deslocamento do bloco com o deslocamento total do sistema, como ser
visto na equação 3.16:
60
2f ft i zzp
U U S M U (3.16)
Em ordem de satisfazer o critério de compatibilidade cinemática, o deslocamento total do
sistema tem que ser igual ao deslocamento do bloco, como mostrado na equação 3.17:
t fU U (3.17)
Aplicando a equação 3.17 na equação 3.16 e isolando Uf a seguinte equação é encontrada:
2
1
1f izzp f
U US M
(3.18)
A equação 3.18 fornece o deslocamento de um bloco rígido que é completamente
suportado pela estaca submetida a uma onda incidente.
Nota-se que a equação 3.18 é similar a equação 3.9, sendo que em uma equação a matriz
de flexibilidade corresponde ao solo, e na outra corresponde à estaca.
3.3 Resultados numéricos
Esta seção apresenta os resultados numéricos para analisar o deslocamento do bloco
rígido submetido a um campo de ondas incidentes, suportado somente pelo solo (como
mostrada na figura 3.3a) e suportado somente pela estaca (como mostrada na figura 3.4a).
Para a apresentação dos resultados numéricos, duas variáveis vão ser definidas, como
mostram as equações 3.19 e 3.20.
E’=Ep/Ehs (3.19)
B=mf/mhs (3.20)
A equação 3.19 mostra a relação entre os módulos de elasticidade da estaca Ep e do solo
Ehs, enquanto que a equação 3.20 mostra a razão de massa entre a massa do bloco mf e a massa
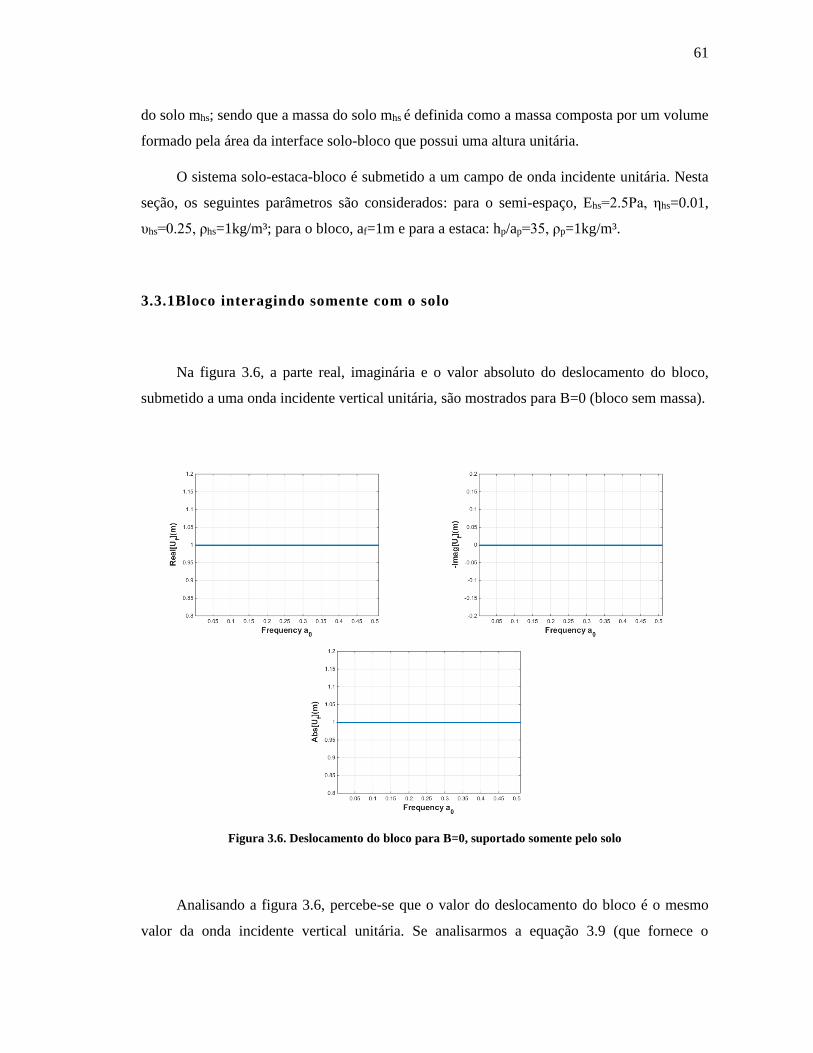
61
do solo mhs; sendo que a massa do solo mhs é definida como a massa composta por um volume
formado pela área da interface solo-bloco que possui uma altura unitária.
O sistema solo-estaca-bloco é submetido a um campo de onda incidente unitária. Nesta
seção, os seguintes parâmetros são considerados: para o semi-espaço, Ehs=2.5Pa, ηhs=0.01,
υhs=0.25, ρhs=1kg/m³; para o bloco, af=1m e para a estaca: hp/ap=35, ρp=1kg/m³.
3.3.1Bloco interagindo somente com o solo
Na figura 3.6, a parte real, imaginária e o valor absoluto do deslocamento do bloco,
submetido a uma onda incidente vertical unitária, são mostrados para B=0 (bloco sem massa).
Figura 3.6. Deslocamento do bloco para B=0, suportado somente pelo solo
Analisando a figura 3.6, percebe-se que o valor do deslocamento do bloco é o mesmo
valor da onda incidente vertical unitária. Se analisarmos a equação 3.9 (que fornece o
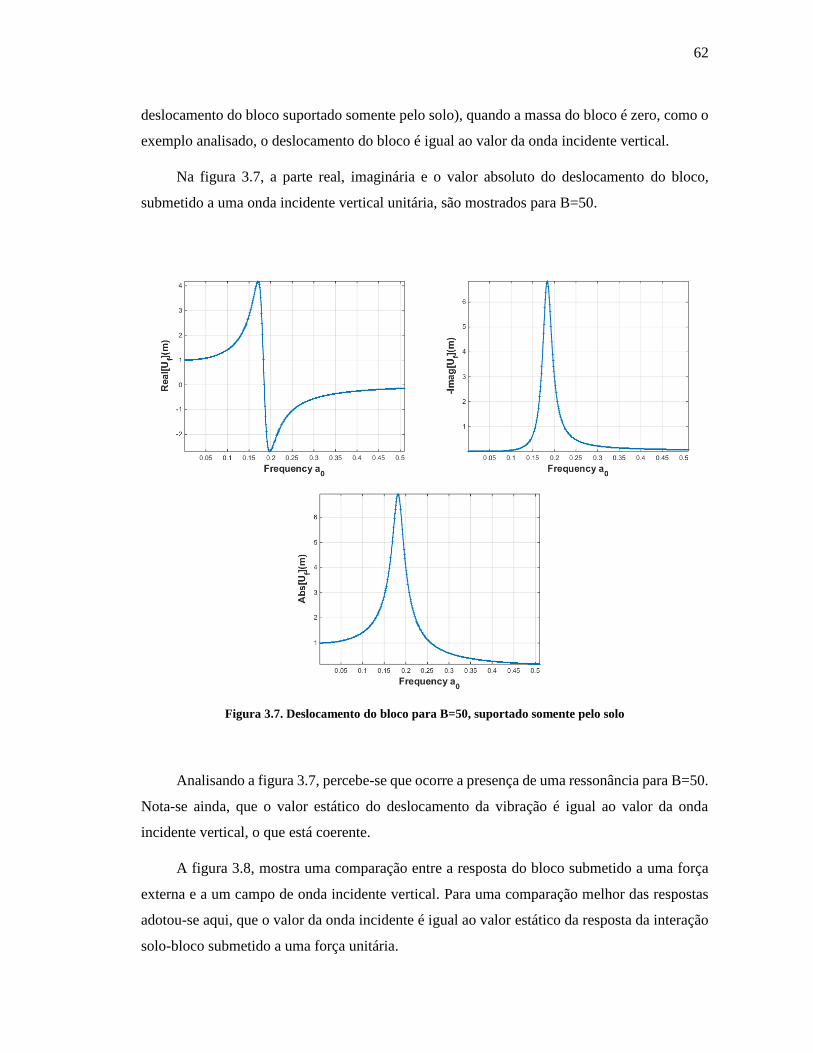
62
deslocamento do bloco suportado somente pelo solo), quando a massa do bloco é zero, como o
exemplo analisado, o deslocamento do bloco é igual ao valor da onda incidente vertical.
Na figura 3.7, a parte real, imaginária e o valor absoluto do deslocamento do bloco,
submetido a uma onda incidente vertical unitária, são mostrados para B=50.
Figura 3.7. Deslocamento do bloco para B=50, suportado somente pelo solo
Analisando a figura 3.7, percebe-se que ocorre a presença de uma ressonância para B=50.
Nota-se ainda, que o valor estático do deslocamento da vibração é igual ao valor da onda
incidente vertical, o que está coerente.
A figura 3.8, mostra uma comparação entre a resposta do bloco submetido a uma força
externa e a um campo de onda incidente vertical. Para uma comparação melhor das respostas
adotou-se aqui, que o valor da onda incidente é igual ao valor estático da resposta da interação
solo-bloco submetido a uma força unitária.
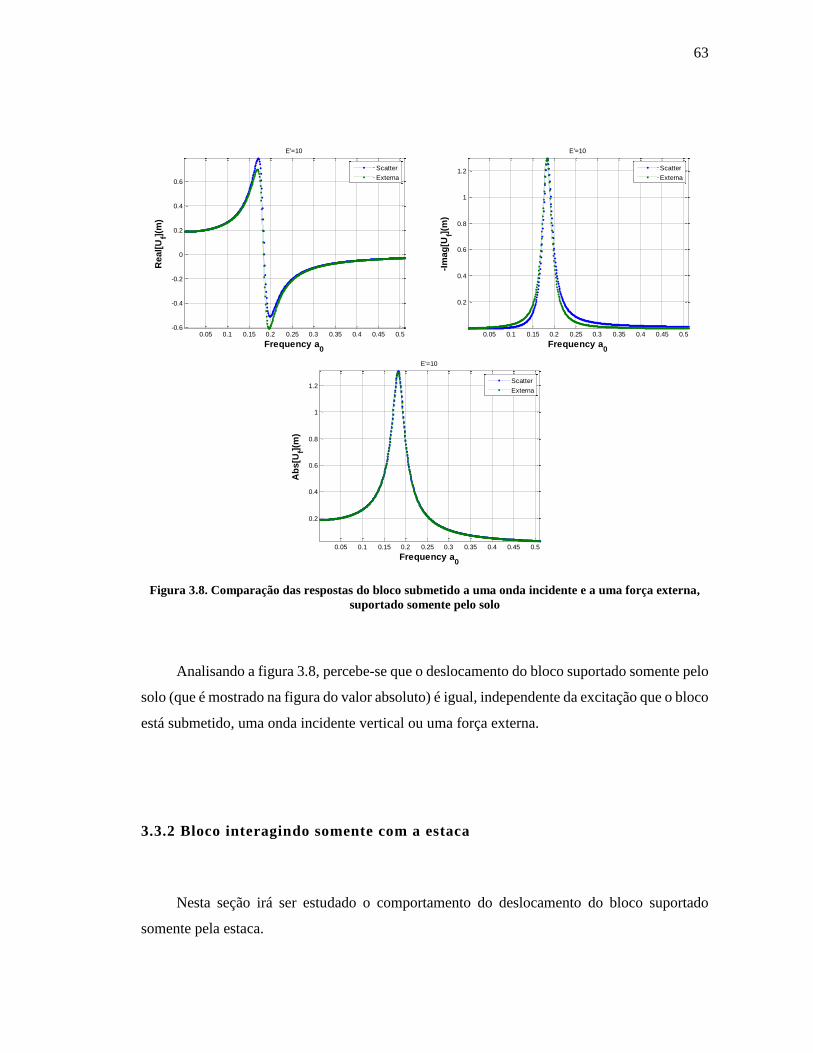
63
Figura 3.8. Comparação das respostas do bloco submetido a uma onda incidente e a uma força externa,
suportado somente pelo solo
Analisando a figura 3.8, percebe-se que o deslocamento do bloco suportado somente pelo
solo (que é mostrado na figura do valor absoluto) é igual, independente da excitação que o bloco
está submetido, uma onda incidente vertical ou uma força externa.
3.3.2 Bloco interagindo somente com a estaca
Nesta seção irá ser estudado o comportamento do deslocamento do bloco suportado
somente pela estaca.
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-0.6
-0.4
-0.2
0
0.2
0.4
0.6
Real[
Uf](
m)
Frequency a0
E'=10
Scatter
Externa
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
0.2
0.4
0.6
0.8
1
1.2
-Im
ag
[Uf](
m)
Frequency a0
E'=10
Scatter
Externa
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
0.2
0.4
0.6
0.8
1
1.2
Ab
s[U
f](m
)
Frequency a0
E'=10
Scatter
Externa
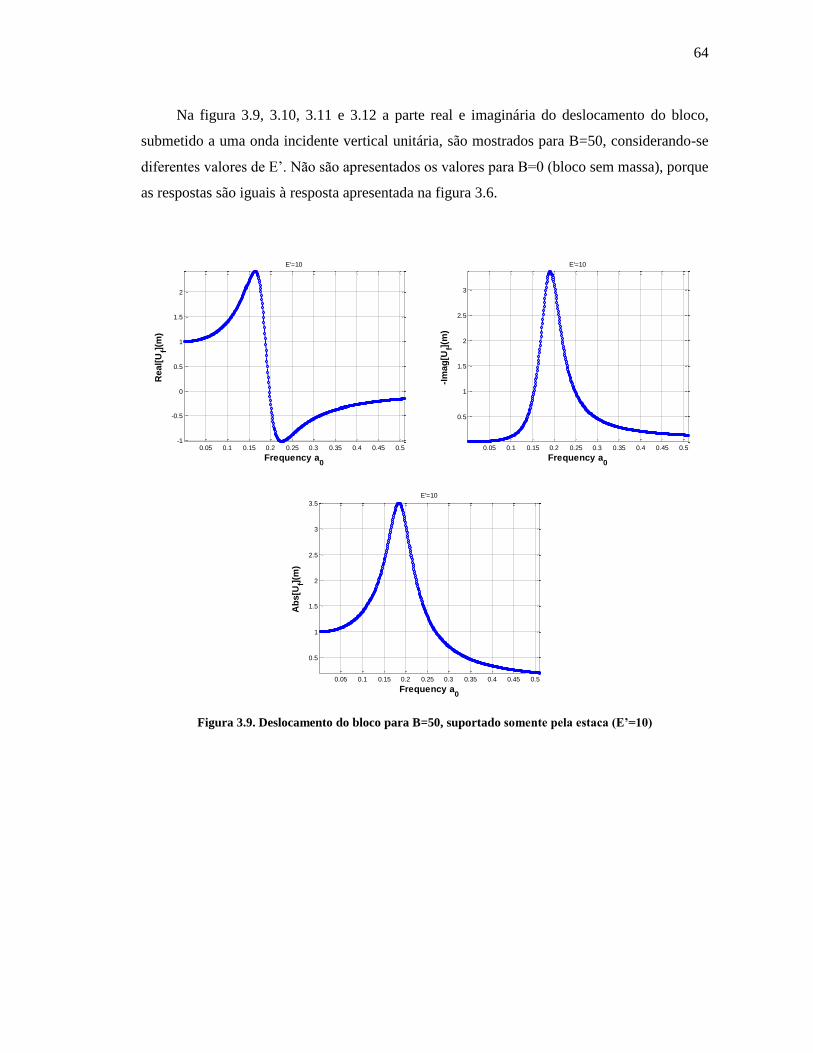
64
Na figura 3.9, 3.10, 3.11 e 3.12 a parte real e imaginária do deslocamento do bloco,
submetido a uma onda incidente vertical unitária, são mostrados para B=50, considerando-se
diferentes valores de E’. Não são apresentados os valores para B=0 (bloco sem massa), porque
as respostas são iguais à resposta apresentada na figura 3.6.
Figura 3.9. Deslocamento do bloco para B=50, suportado somente pela estaca (E’=10)
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-1
-0.5
0
0.5
1
1.5
2
Real[
Uf](
m)
Frequency a0
E'=10
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
0.5
1
1.5
2
2.5
3
-Im
ag
[Uf](
m)
Frequency a0
E'=10
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
0.5
1
1.5
2
2.5
3
3.5
Ab
s[U
f](m
)
Frequency a0
E'=10
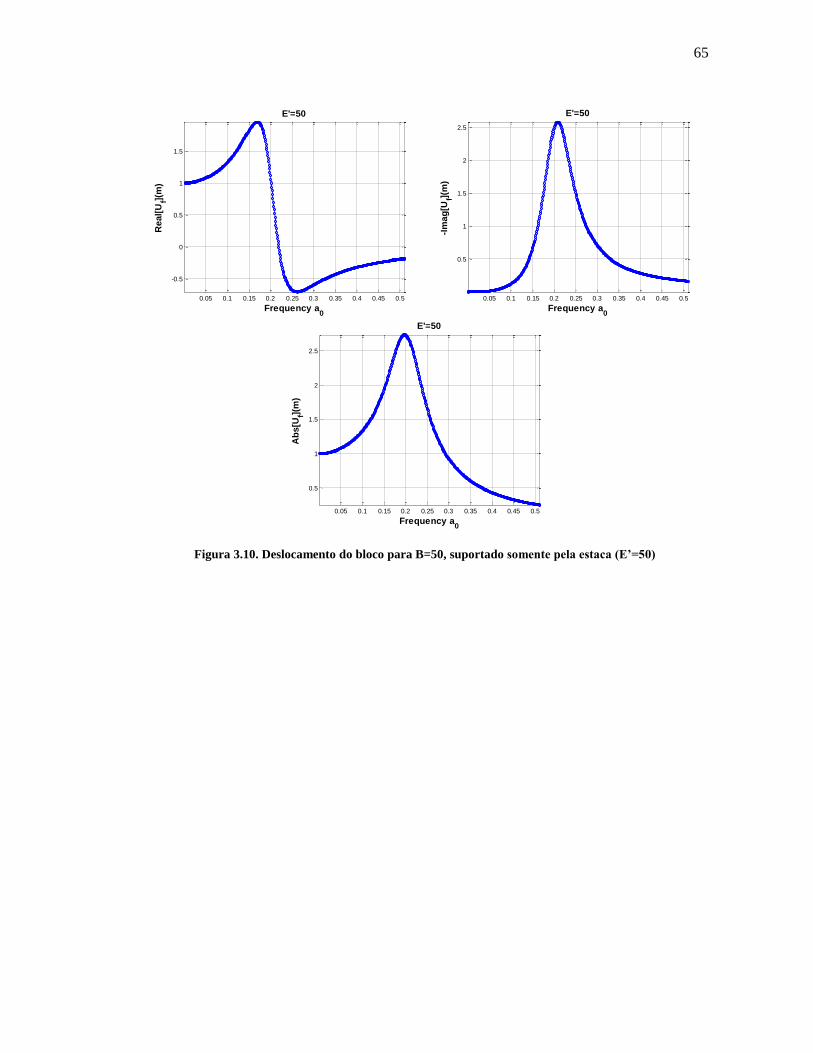
65
Figura 3.10. Deslocamento do bloco para B=50, suportado somente pela estaca (E’=50)
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
-0.5
0
0.5
1
1.5R
eal[
Uf](
m)
Frequency a0
E'=50
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
0.5
1
1.5
2
2.5
-Im
ag
[Uf](
m)
Frequency a0
E'=50
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
0.5
1
1.5
2
2.5
Ab
s[U
f](m
)
Frequency a0
E'=50
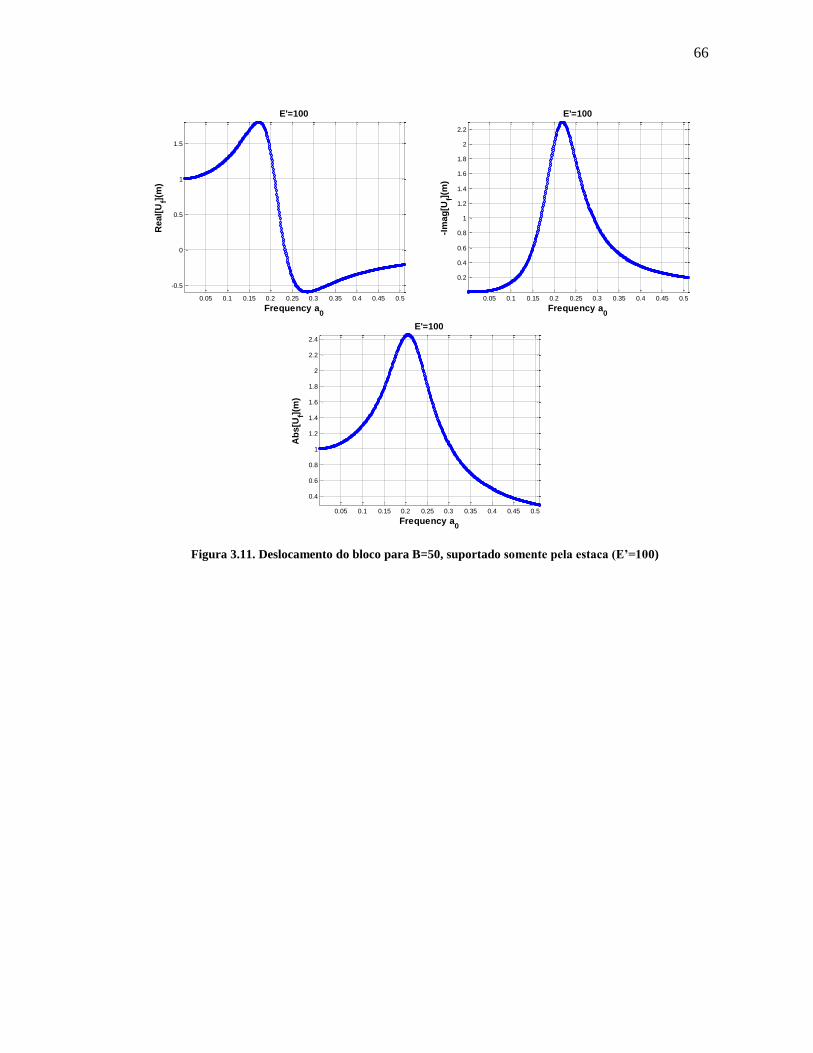
66
Figura 3.11. Deslocamento do bloco para B=50, suportado somente pela estaca (E’=100)
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
-0.5
0
0.5
1
1.5
Real[
Uf](
m)
Frequency a0
E'=100
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
2.2
-Im
ag
[Uf](
m)
Frequency a0
E'=100
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
2.2
2.4
Ab
s[U
f](m
)
Frequency a0
E'=100
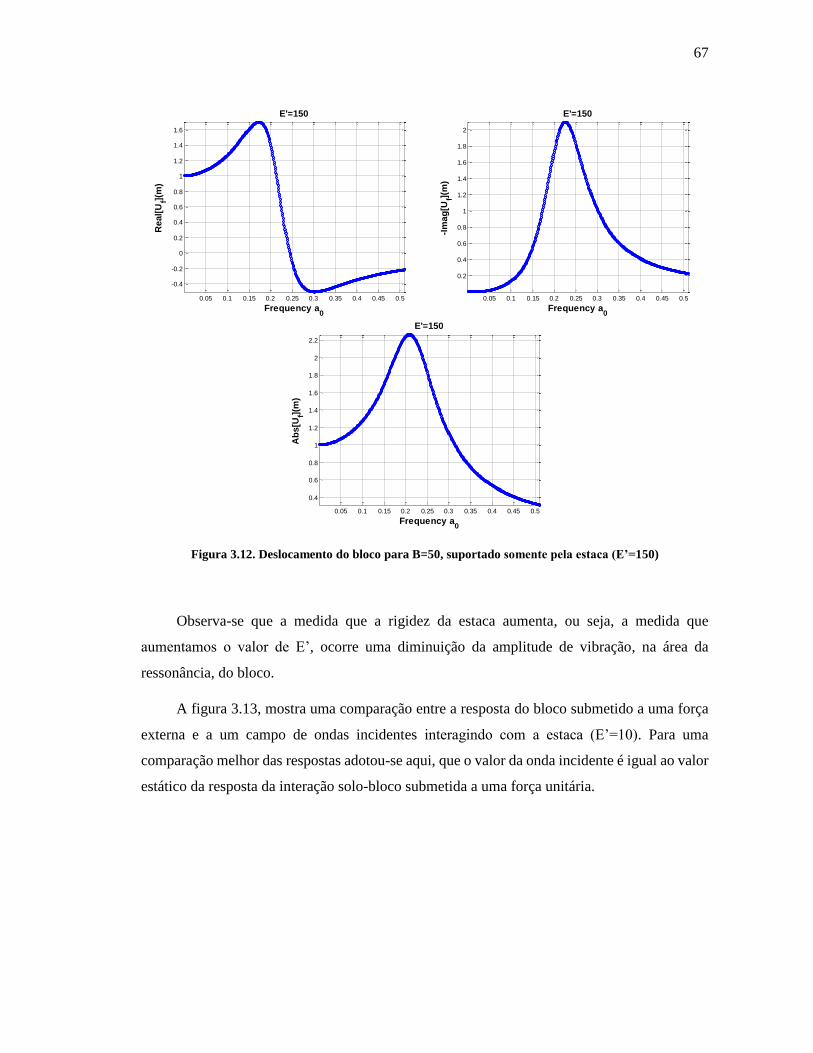
67
Figura 3.12. Deslocamento do bloco para B=50, suportado somente pela estaca (E’=150)
Observa-se que a medida que a rigidez da estaca aumenta, ou seja, a medida que
aumentamos o valor de E’, ocorre uma diminuição da amplitude de vibração, na área da
ressonância, do bloco.
A figura 3.13, mostra uma comparação entre a resposta do bloco submetido a uma força
externa e a um campo de ondas incidentes interagindo com a estaca (E’=10). Para uma
comparação melhor das respostas adotou-se aqui, que o valor da onda incidente é igual ao valor
estático da resposta da interação solo-bloco submetida a uma força unitária.
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Real[
Uf](
m)
Frequency a0
E'=150
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
-Im
ag
[Uf](
m)
Frequency a0
E'=150
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
2.2
Ab
s[U
f](m
)
Frequency a0
E'=150
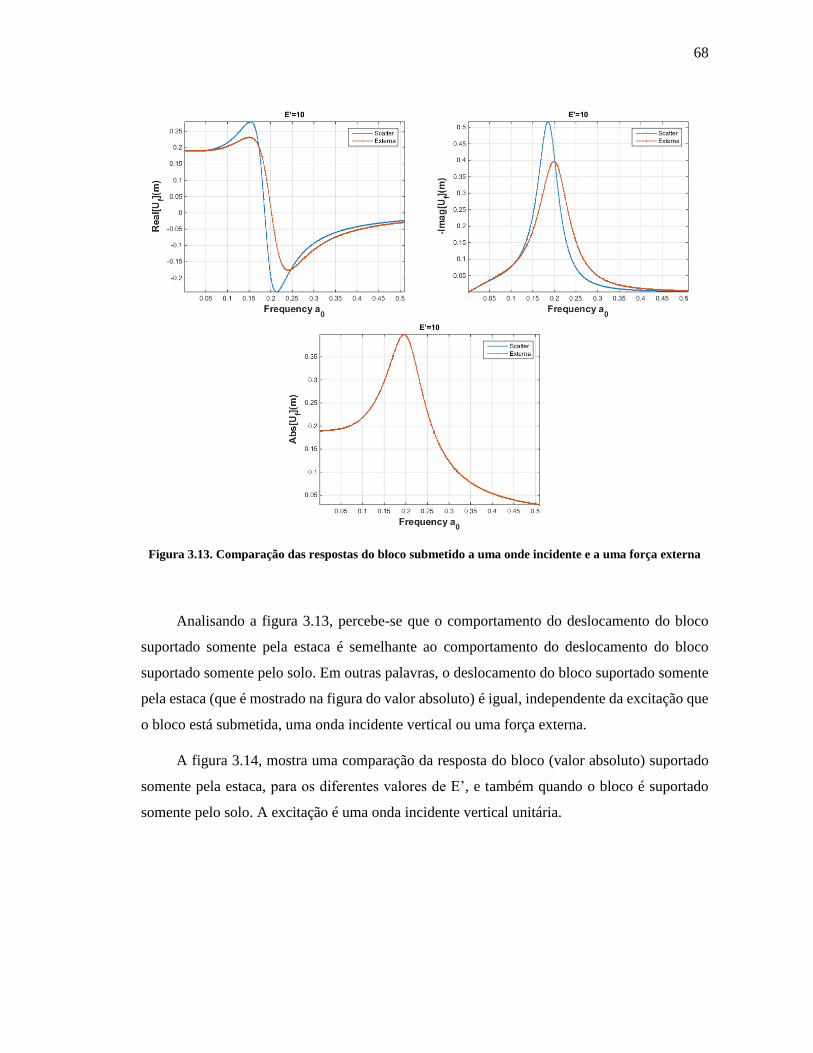
68
Figura 3.13. Comparação das respostas do bloco submetido a uma onde incidente e a uma força externa
Analisando a figura 3.13, percebe-se que o comportamento do deslocamento do bloco
suportado somente pela estaca é semelhante ao comportamento do deslocamento do bloco
suportado somente pelo solo. Em outras palavras, o deslocamento do bloco suportado somente
pela estaca (que é mostrado na figura do valor absoluto) é igual, independente da excitação que
o bloco está submetida, uma onda incidente vertical ou uma força externa.
A figura 3.14, mostra uma comparação da resposta do bloco (valor absoluto) suportado
somente pela estaca, para os diferentes valores de E’, e também quando o bloco é suportado
somente pelo solo. A excitação é uma onda incidente vertical unitária.
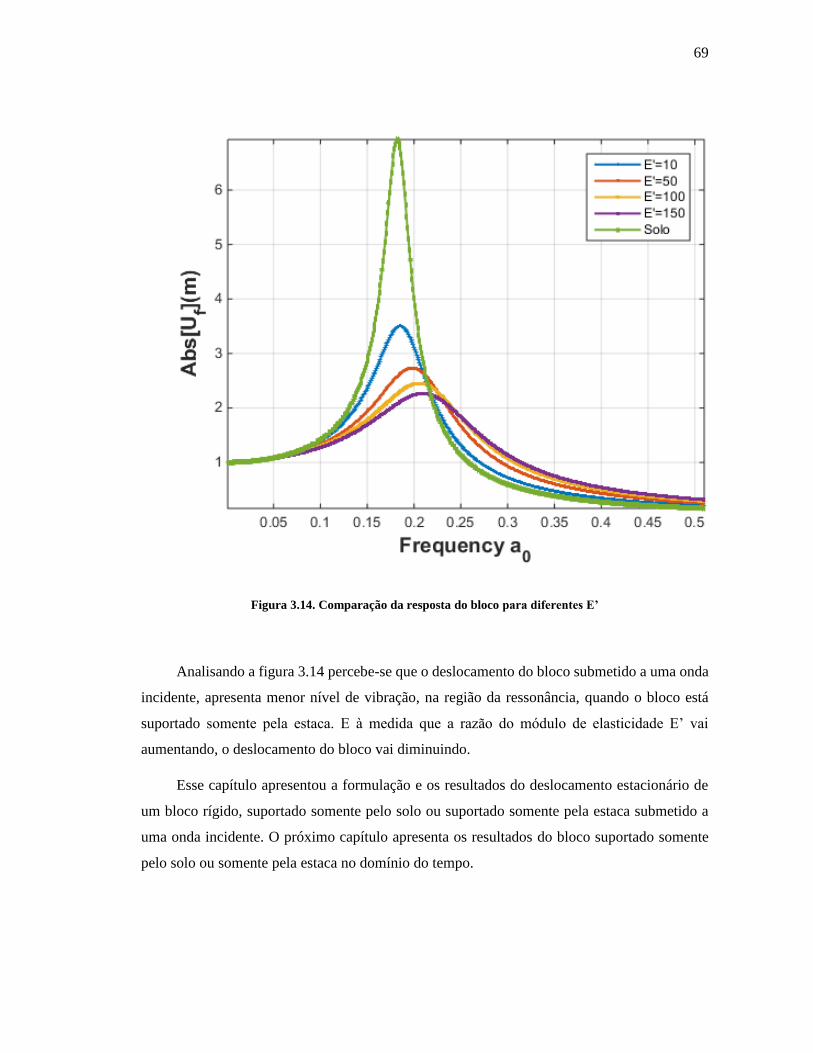
69
Figura 3.14. Comparação da resposta do bloco para diferentes E’
Analisando a figura 3.14 percebe-se que o deslocamento do bloco submetido a uma onda
incidente, apresenta menor nível de vibração, na região da ressonância, quando o bloco está
suportado somente pela estaca. E à medida que a razão do módulo de elasticidade E’ vai
aumentando, o deslocamento do bloco vai diminuindo.
Esse capítulo apresentou a formulação e os resultados do deslocamento estacionário de
um bloco rígido, suportado somente pelo solo ou suportado somente pela estaca submetido a
uma onda incidente. O próximo capítulo apresenta os resultados do bloco suportado somente
pelo solo ou somente pela estaca no domínio do tempo.
70
4 ANÁLISE TRANSIENTE
Uma formulação dos métodos dos elementos de contorno (MEC), na qual apenas os
limites do domínio sob consideração têm que ser discretizada, requer um estado auxiliar
conhecido com mesma característica, ou seja, o mesmo operador diferencial do domínio a ser
resolvido. Esses estados auxiliares são conhecidos como funções de Green (ADOLPH,
MESQUITA e ROMANINI, 2001).
Existem muitos esforços para se formular, numericamente ou analiticamente, estados
eletrodinâmicos auxiliares para o contínuo anisotrópico dinâmico estacionário (Rajapakse &
Sentjuntichai, 1993) e para outros meios.
Dessa maneira, a análise transitória de um problema viscoelástico pelo Método dos
Elementos de Contorno (MEC), necessita de uma função de Green viscoelástica transitória
(ADOLPH, MESQUITA e ROMANINI, 2001). Porém, não existe uma função transiente geral
de uma função de Green (Beskos, 1987, Beskos, 1997).
Alguns resultados da análise transiente elastodinâmica podem ser encontrados em Codas
e Venturine (1996) e Codas e Venturine (1999).
As funções de Green foram incorporadas nas versões diretas e indiretas dos Métodos dos
Elementos de Contorno (MEC) para analisar a resposta estacionária dinâmica de uma fundação
rígida na superfície ou enterrada em diferentes perfis de solo (Romanini, 1995, Barros, 1997 e
Barros & Mesquita, 1999).
Matrizes de conformidade dinâmica estacionária para blocos rígidos interagindo com o
solo têm sido obtidas numericamente com precisão para altas frequências (ADOLPH,
MESQUITA e ROMANINI, 2001). Dessa maneira, é possível utilizar as respostas no domínio
da frequência, e através dela utilizar a transformada rápida de Fourier (FFT) para se obter a
resposta transiente para estruturas rígidas interagindo com o solo.
Quando se deseja passar do domínio do tempo para o domínio da frequência, utiliza-se a
transformada rápida de Fourier (FFT). Entretanto, quando se deseja passar do domínio da
frequência para o domínio do tempo utiliza-se da transformada rápida inversa de Fourier
(IFFT).
71
Quando se utiliza a transformada discreta de Fourier é importante se atentar a relação
entre o passo de frequência e o tempo máximo utilizado na análise transiente. Segundo Adolph
(2002), essa relação é mostrada na equação 4.1:
2 /max
t (4.1)
De uma maneira análoga, também existe uma relação entre a frequência máxima e o passo
de tempo utilizado na análise transiente. Essa relação, de acordo com Adolph (2002), é
mostrada na equação 4.2:
2 /max
t (4.2)
Analisando as equações 4.1 e 4.2, percebe-se que quanto maior for a frequência máxima
adota no domínio estacionário, menor vai ser o passo de tempo no domínio transiente. De
maneira análoga, percebe-se que quanto menor o passo de frequência, maior vai ser o tempo
máximo no domínio transiente.
A resposta numérica precisa da interação solo-bloco é computacionalmente cara.
Entretanto, segundo Gazetas (1983) os problemas de interação dinâmica solo-estrutura ocorrem
entre o intervalo 0<a0<10.
Segundo Adolph, Mesquita e Romanini (2001), o valor absoluto da resposta dinâmica da
interação solo-estrutura é uma função decrescente em função da frequência a0, como é possível
ver na figura 2.6.
Como o problema da interação solo-estaca-bloco não possui resposta analítica no domínio
do tempo, irá se adotar o problema de um sistema mecânico de 1 grau de liberdade massa-mola-
amortecedor para se validar o algoritmo desenvolvido; uma vez que o sistema mecânico de 1
grau de liberdade possui resposta analítica, tanto no domínio da frequência, quanto no domínio
do tempo.
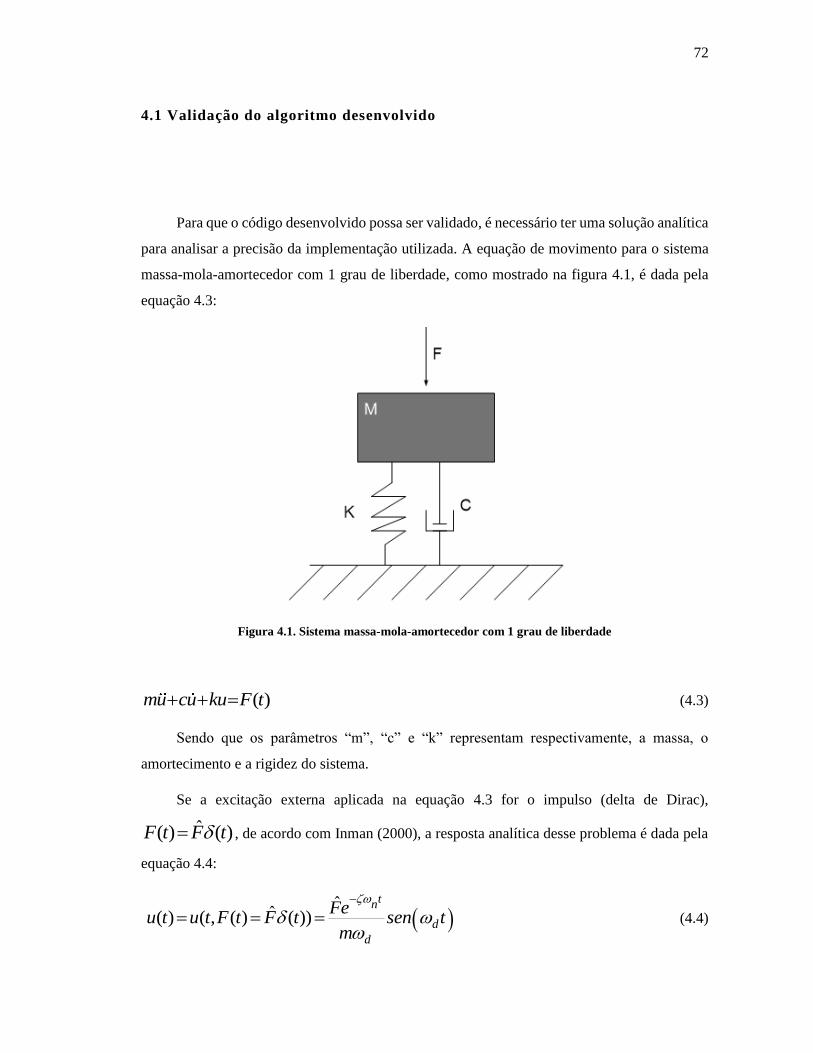
72
4.1 Validação do algoritmo desenvolvido
Para que o código desenvolvido possa ser validado, é necessário ter uma solução analítica
para analisar a precisão da implementação utilizada. A equação de movimento para o sistema
massa-mola-amortecedor com 1 grau de liberdade, como mostrado na figura 4.1, é dada pela
equação 4.3:
Figura 4.1. Sistema massa-mola-amortecedor com 1 grau de liberdade
( )mu cu ku F t (4.3)
Sendo que os parâmetros “m”, “c” e “k” representam respectivamente, a massa, o
amortecimento e a rigidez do sistema.
Se a excitação externa aplicada na equação 4.3 for o impulso (delta de Dirac),
ˆ( ) ( )F t F t , de acordo com Inman (2000), a resposta analítica desse problema é dada pela
equação 4.4:
ˆ
ˆ( ) ( , ( ) ( ))tn
d
d
Feu t u t F t F t sen t
m
(4.4)
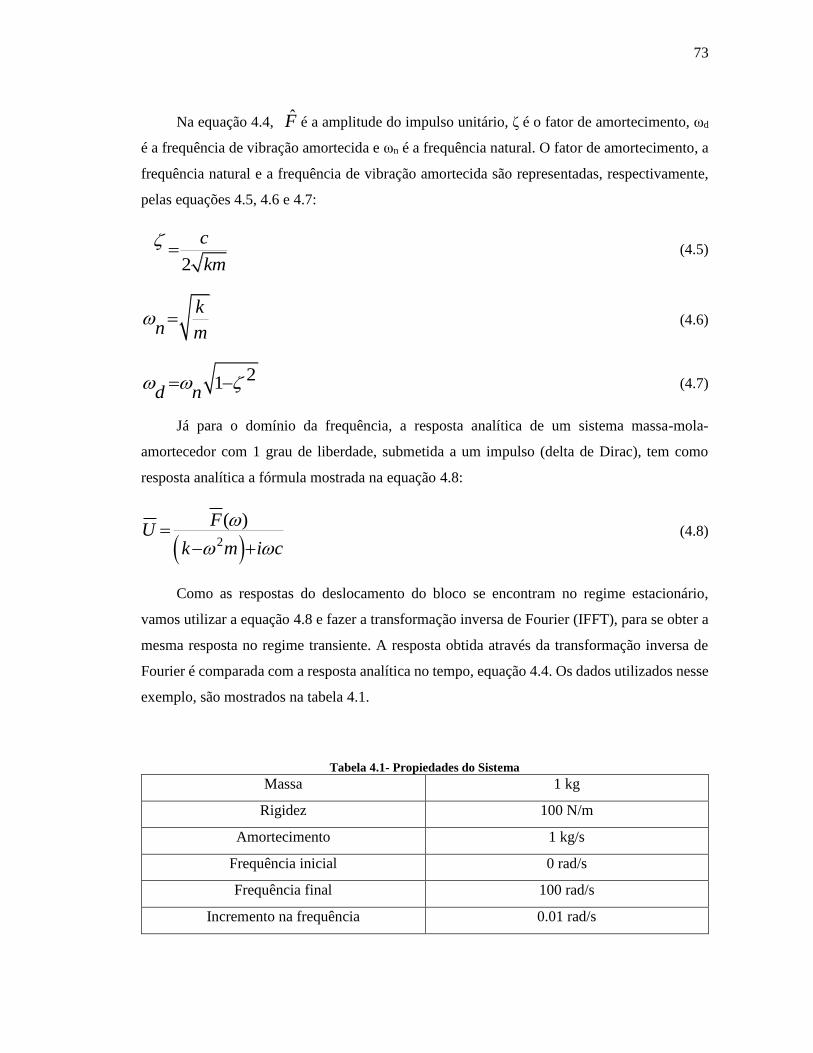
73
Na equação 4.4, F̂ é a amplitude do impulso unitário, ζ é o fator de amortecimento, ωd
é a frequência de vibração amortecida e ωn é a frequência natural. O fator de amortecimento, a
frequência natural e a frequência de vibração amortecida são representadas, respectivamente,
pelas equações 4.5, 4.6 e 4.7:
2
c
km
(4.5)
kn m
(4.6)
21d n
(4.7)
Já para o domínio da frequência, a resposta analítica de um sistema massa-mola-
amortecedor com 1 grau de liberdade, submetida a um impulso (delta de Dirac), tem como
resposta analítica a fórmula mostrada na equação 4.8:
2
( )FU
k m i c
(4.8)
Como as respostas do deslocamento do bloco se encontram no regime estacionário,
vamos utilizar a equação 4.8 e fazer a transformação inversa de Fourier (IFFT), para se obter a
mesma resposta no regime transiente. A resposta obtida através da transformação inversa de
Fourier é comparada com a resposta analítica no tempo, equação 4.4. Os dados utilizados nesse
exemplo, são mostrados na tabela 4.1.
Tabela 4.1- Propiedades do Sistema
Massa 1 kg
Rigidez 100 N/m
Amortecimento 1 kg/s
Frequência inicial 0 rad/s
Frequência final 100 rad/s
Incremento na frequência 0.01 rad/s
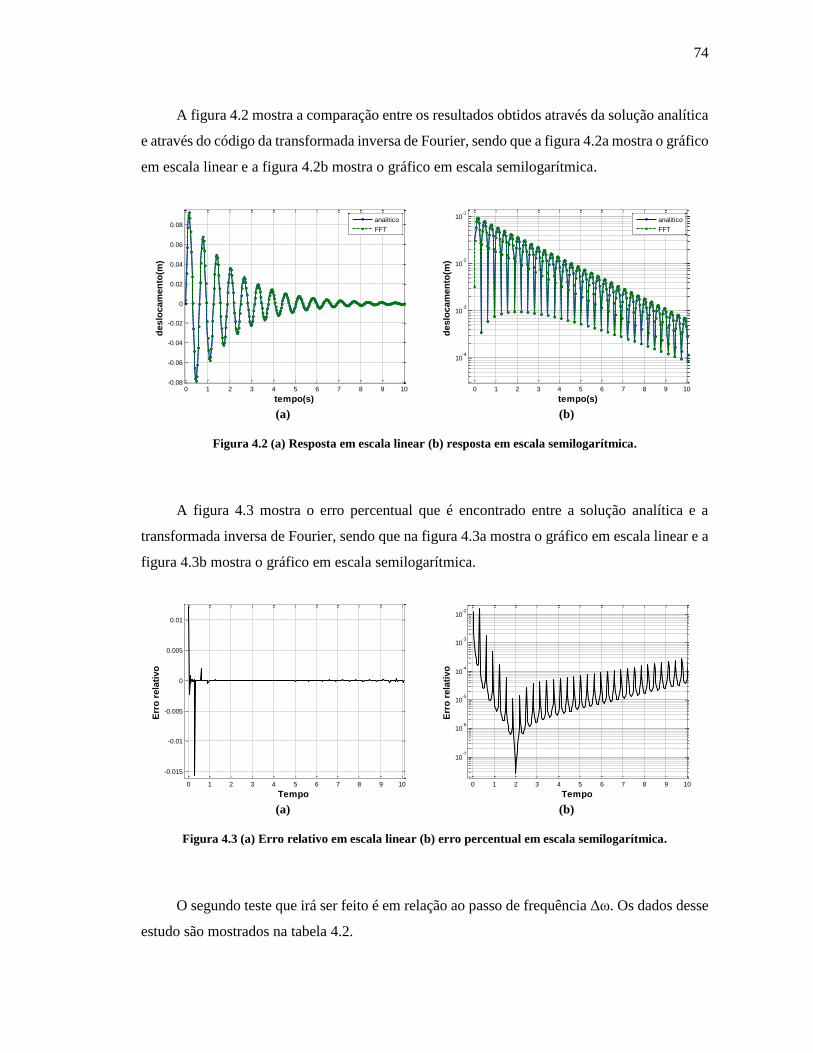
74
A figura 4.2 mostra a comparação entre os resultados obtidos através da solução analítica
e através do código da transformada inversa de Fourier, sendo que a figura 4.2a mostra o gráfico
em escala linear e a figura 4.2b mostra o gráfico em escala semilogarítmica.
(a) (b)
Figura 4.2 (a) Resposta em escala linear (b) resposta em escala semilogarítmica.
A figura 4.3 mostra o erro percentual que é encontrado entre a solução analítica e a
transformada inversa de Fourier, sendo que na figura 4.3a mostra o gráfico em escala linear e a
figura 4.3b mostra o gráfico em escala semilogarítmica.
(a) (b)
Figura 4.3 (a) Erro relativo em escala linear (b) erro percentual em escala semilogarítmica.
O segundo teste que irá ser feito é em relação ao passo de frequência Δω. Os dados desse
estudo são mostrados na tabela 4.2.
0 1 2 3 4 5 6 7 8 9 10-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
tempo(s)
deslo
cam
en
to(m
)
analitico
FFT
0 1 2 3 4 5 6 7 8 9 10
10-4
10-3
10-2
10-1
tempo(s)
deslo
cam
en
to(m
)
analitico
FFT
0 1 2 3 4 5 6 7 8 9 10
-0.015
-0.01
-0.005
0
0.005
0.01
Err
o r
ela
tivo
Tempo0 1 2 3 4 5 6 7 8 9 10
10-7
10-6
10-5
10-4
10-3
10-2
Err
o r
ela
tivo
Tempo
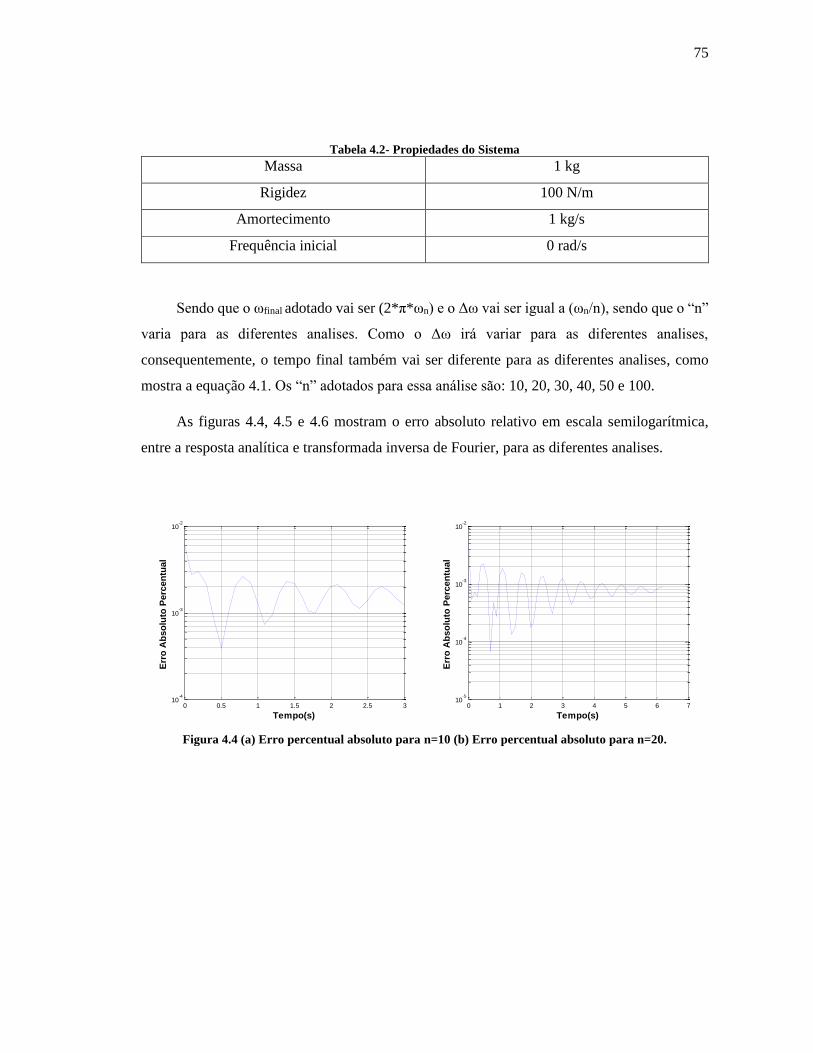
75
Tabela 4.2- Propiedades do Sistema
Massa 1 kg
Rigidez 100 N/m
Amortecimento 1 kg/s
Frequência inicial 0 rad/s
Sendo que o ωfinal adotado vai ser (2*π*ωn) e o Δω vai ser igual a (ωn/n), sendo que o “n”
varia para as diferentes analises. Como o Δω irá variar para as diferentes analises,
consequentemente, o tempo final também vai ser diferente para as diferentes analises, como
mostra a equação 4.1. Os “n” adotados para essa análise são: 10, 20, 30, 40, 50 e 100.
As figuras 4.4, 4.5 e 4.6 mostram o erro absoluto relativo em escala semilogarítmica,
entre a resposta analítica e transformada inversa de Fourier, para as diferentes analises.
Figura 4.4 (a) Erro percentual absoluto para n=10 (b) Erro percentual absoluto para n=20.
0 0.5 1 1.5 2 2.5 310
-4
10-3
10-2
Tempo(s)
Err
o A
bso
luto
Perc
en
tua
l
0 1 2 3 4 5 6 710
-5
10-4
10-3
10-2
Tempo(s)
Err
o A
bso
luto
Perc
en
tua
l

76
Figura 4.5 (a) Erro percentual absoluto para n=30 (b) Erro percentual absoluto para n=40.
Figura 4.6 (a) Erro percentual absoluto para n=50 (b) Erro percentual absoluto para n=100.
A figura 4.7 mostra um comparativo entre os erros absolutos percentuais para os
diferentes “n”, ou seja, com diferentes passos de frequência.
0 1 2 3 4 5 6 7 8 9 1010
-5
10-4
10-3
10-2
Tempo(s)
Err
o A
bso
luto
Perc
en
tua
l
0 2 4 6 8 10 12 1410
-5
10-4
10-3
10-2
Tempo(s)
Err
o A
bso
luto
Perc
en
tua
l
0 2 4 6 8 10 12 14 1610
-6
10-5
10-4
10-3
10-2
Tempo(s)
Err
o A
bso
luto
Perc
en
tua
l
0 5 10 15 20 25 30 3510
-6
10-5
10-4
10-3
10-2
Tempo(s)
Err
o A
bso
luto
Perc
en
tua
l
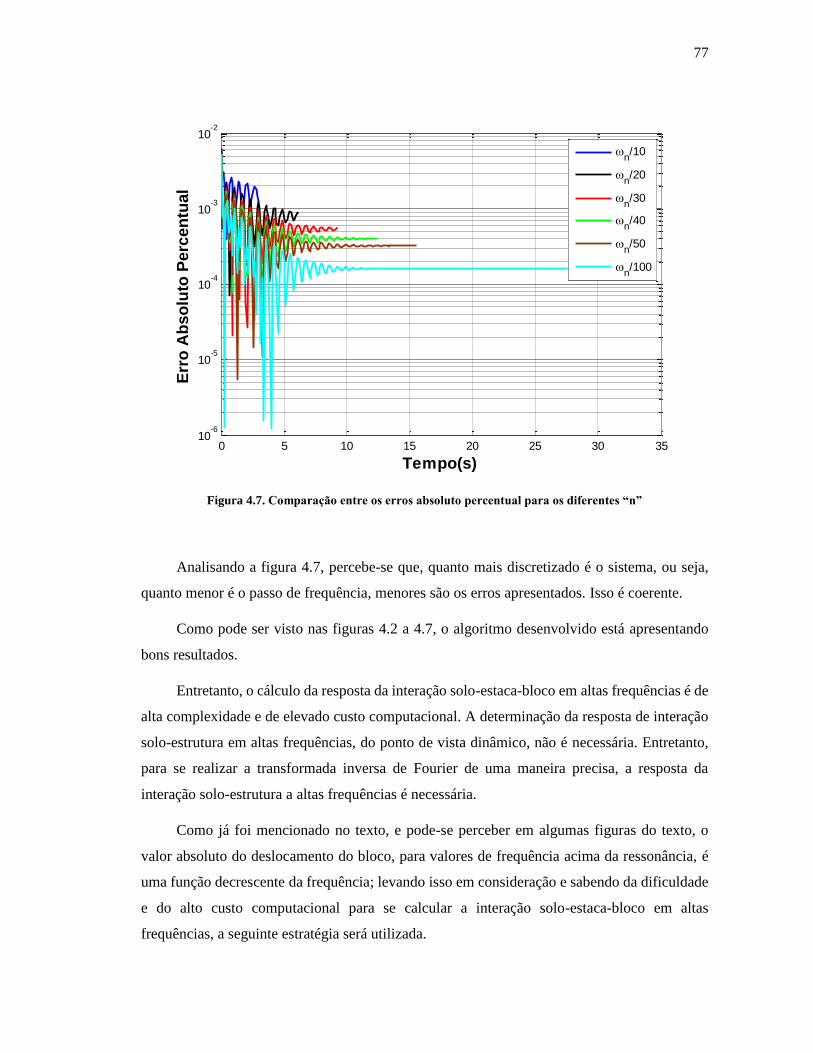
77
Figura 4.7. Comparação entre os erros absoluto percentual para os diferentes “n”
Analisando a figura 4.7, percebe-se que, quanto mais discretizado é o sistema, ou seja,
quanto menor é o passo de frequência, menores são os erros apresentados. Isso é coerente.
Como pode ser visto nas figuras 4.2 a 4.7, o algoritmo desenvolvido está apresentando
bons resultados.
Entretanto, o cálculo da resposta da interação solo-estaca-bloco em altas frequências é de
alta complexidade e de elevado custo computacional. A determinação da resposta de interação
solo-estrutura em altas frequências, do ponto de vista dinâmico, não é necessária. Entretanto,
para se realizar a transformada inversa de Fourier de uma maneira precisa, a resposta da
interação solo-estrutura a altas frequências é necessária.
Como já foi mencionado no texto, e pode-se perceber em algumas figuras do texto, o
valor absoluto do deslocamento do bloco, para valores de frequência acima da ressonância, é
uma função decrescente da frequência; levando isso em consideração e sabendo da dificuldade
e do alto custo computacional para se calcular a interação solo-estaca-bloco em altas
frequências, a seguinte estratégia será utilizada.
0 5 10 15 20 25 30 3510
-6
10-5
10-4
10-3
10-2
Tempo(s)
Err
o A
bso
luto
Perc
en
tua
l
n/10
n/20
n/30
n/40
n/50
n/100
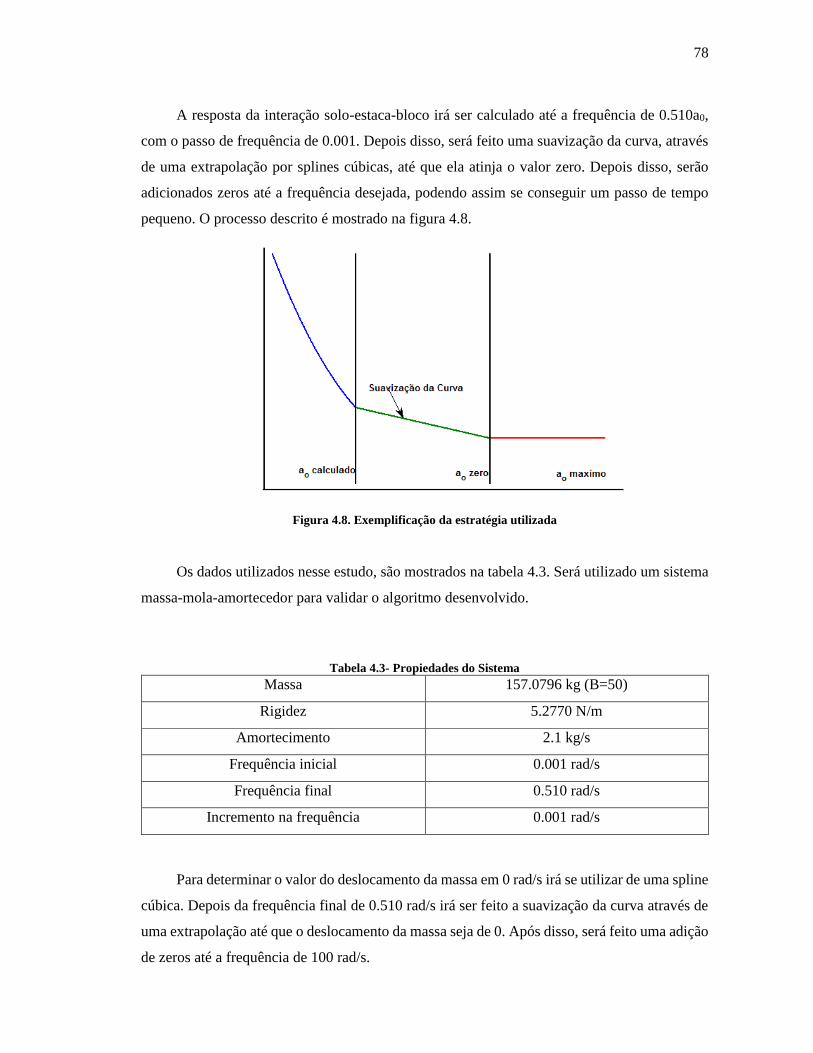
78
A resposta da interação solo-estaca-bloco irá ser calculado até a frequência de 0.510a0,
com o passo de frequência de 0.001. Depois disso, será feito uma suavização da curva, através
de uma extrapolação por splines cúbicas, até que ela atinja o valor zero. Depois disso, serão
adicionados zeros até a frequência desejada, podendo assim se conseguir um passo de tempo
pequeno. O processo descrito é mostrado na figura 4.8.
Figura 4.8. Exemplificação da estratégia utilizada
Os dados utilizados nesse estudo, são mostrados na tabela 4.3. Será utilizado um sistema
massa-mola-amortecedor para validar o algoritmo desenvolvido.
Tabela 4.3- Propiedades do Sistema
Massa 157.0796 kg (B=50)
Rigidez 5.2770 N/m
Amortecimento 2.1 kg/s
Frequência inicial 0.001 rad/s
Frequência final 0.510 rad/s
Incremento na frequência 0.001 rad/s
Para determinar o valor do deslocamento da massa em 0 rad/s irá se utilizar de uma spline
cúbica. Depois da frequência final de 0.510 rad/s irá ser feito a suavização da curva através de
uma extrapolação até que o deslocamento da massa seja de 0. Após disso, será feito uma adição
de zeros até a frequência de 100 rad/s.
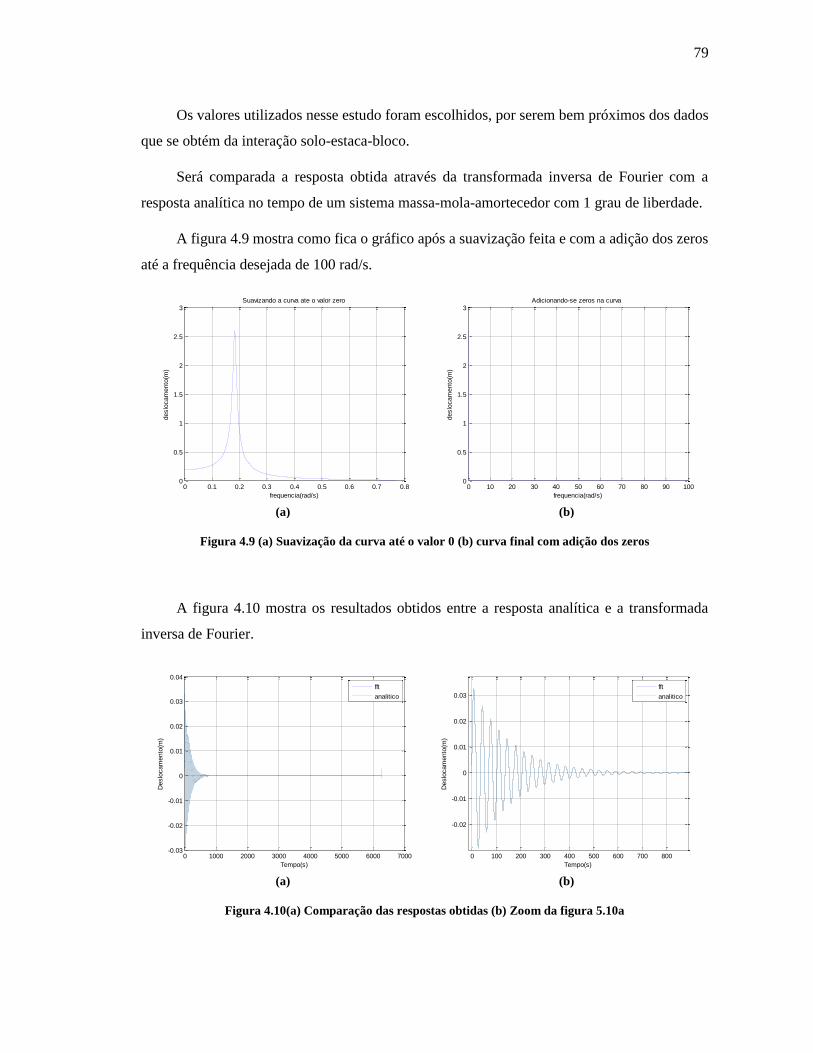
79
Os valores utilizados nesse estudo foram escolhidos, por serem bem próximos dos dados
que se obtém da interação solo-estaca-bloco.
Será comparada a resposta obtida através da transformada inversa de Fourier com a
resposta analítica no tempo de um sistema massa-mola-amortecedor com 1 grau de liberdade.
A figura 4.9 mostra como fica o gráfico após a suavização feita e com a adição dos zeros
até a frequência desejada de 100 rad/s.
(a) (b)
Figura 4.9 (a) Suavização da curva até o valor 0 (b) curva final com adição dos zeros
A figura 4.10 mostra os resultados obtidos entre a resposta analítica e a transformada
inversa de Fourier.
(a) (b)
Figura 4.10(a) Comparação das respostas obtidas (b) Zoom da figura 5.10a
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.80
0.5
1
1.5
2
2.5
3
frequencia(rad/s)
deslo
cam
ento
(m)
Suavizando a curva ate o valor zero
0 10 20 30 40 50 60 70 80 90 1000
0.5
1
1.5
2
2.5
3
frequencia(rad/s)
deslo
cam
ento
(m)
Adicionando-se zeros na curva
0 1000 2000 3000 4000 5000 6000 7000-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
Tempo(s)
Deslo
cam
ento
(m)
fft
analitico
0 100 200 300 400 500 600 700 800
-0.02
-0.01
0
0.01
0.02
0.03
Tempo(s)
Deslo
cam
ento
(m)
fft
analitico
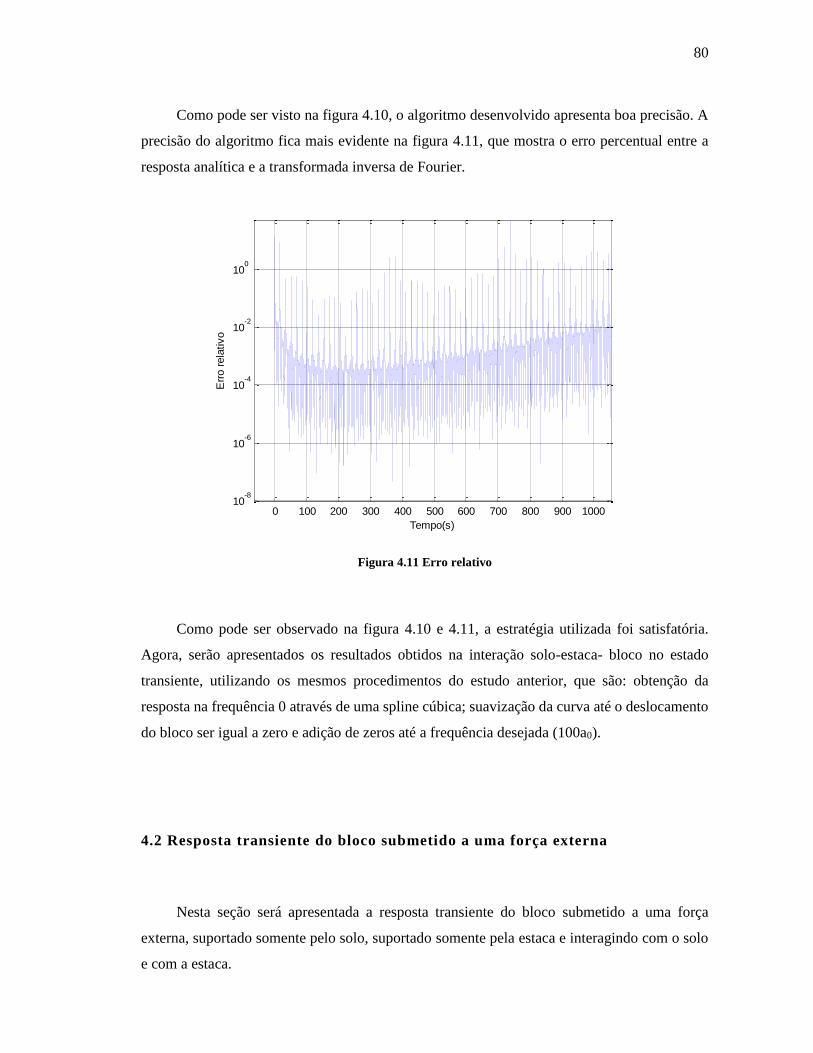
80
Como pode ser visto na figura 4.10, o algoritmo desenvolvido apresenta boa precisão. A
precisão do algoritmo fica mais evidente na figura 4.11, que mostra o erro percentual entre a
resposta analítica e a transformada inversa de Fourier.
Figura 4.11 Erro relativo
Como pode ser observado na figura 4.10 e 4.11, a estratégia utilizada foi satisfatória.
Agora, serão apresentados os resultados obtidos na interação solo-estaca- bloco no estado
transiente, utilizando os mesmos procedimentos do estudo anterior, que são: obtenção da
resposta na frequência 0 através de uma spline cúbica; suavização da curva até o deslocamento
do bloco ser igual a zero e adição de zeros até a frequência desejada (100a0).
4.2 Resposta transiente do bloco submetido a uma força externa
Nesta seção será apresentada a resposta transiente do bloco submetido a uma força
externa, suportado somente pelo solo, suportado somente pela estaca e interagindo com o solo
e com a estaca.
0 100 200 300 400 500 600 700 800 900 100010
-8
10-6
10-4
10-2
100
Tempo(s)
Err
o r
ela
tivo
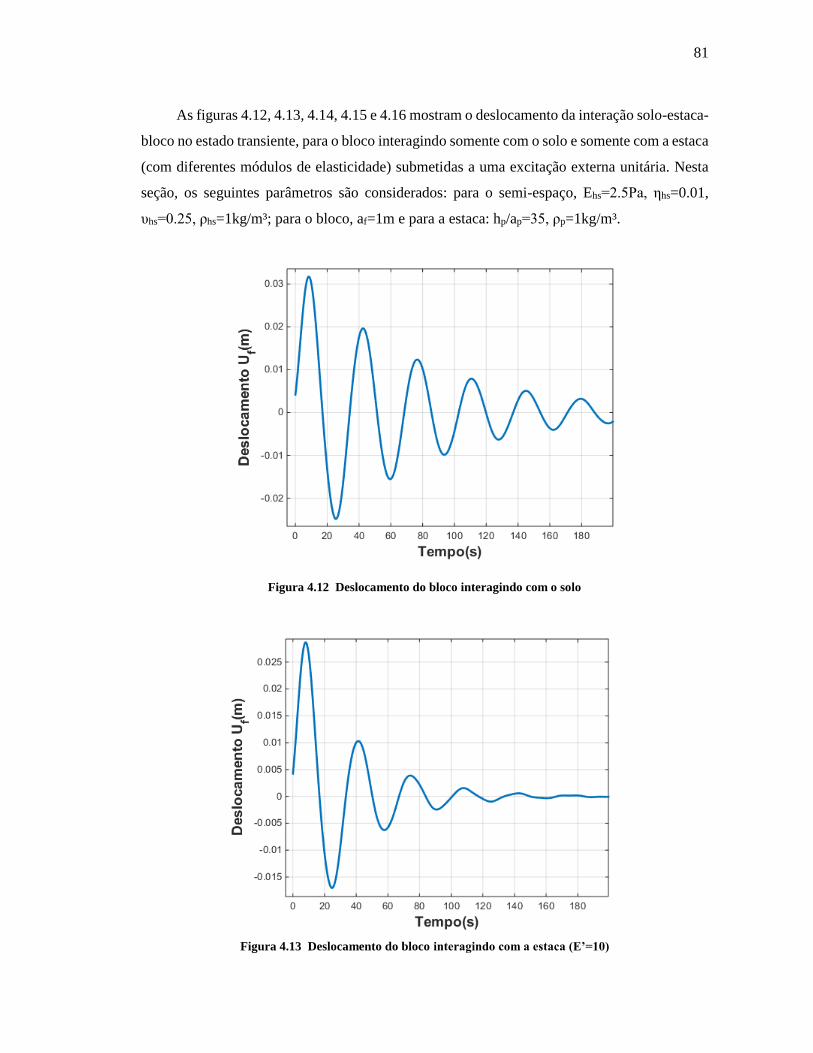
81
As figuras 4.12, 4.13, 4.14, 4.15 e 4.16 mostram o deslocamento da interação solo-estaca-
bloco no estado transiente, para o bloco interagindo somente com o solo e somente com a estaca
(com diferentes módulos de elasticidade) submetidas a uma excitação externa unitária. Nesta
seção, os seguintes parâmetros são considerados: para o semi-espaço, Ehs=2.5Pa, ηhs=0.01,
υhs=0.25, ρhs=1kg/m³; para o bloco, af=1m e para a estaca: hp/ap=35, ρp=1kg/m³.
Figura 4.12 Deslocamento do bloco interagindo com o solo
Figura 4.13 Deslocamento do bloco interagindo com a estaca (E’=10)
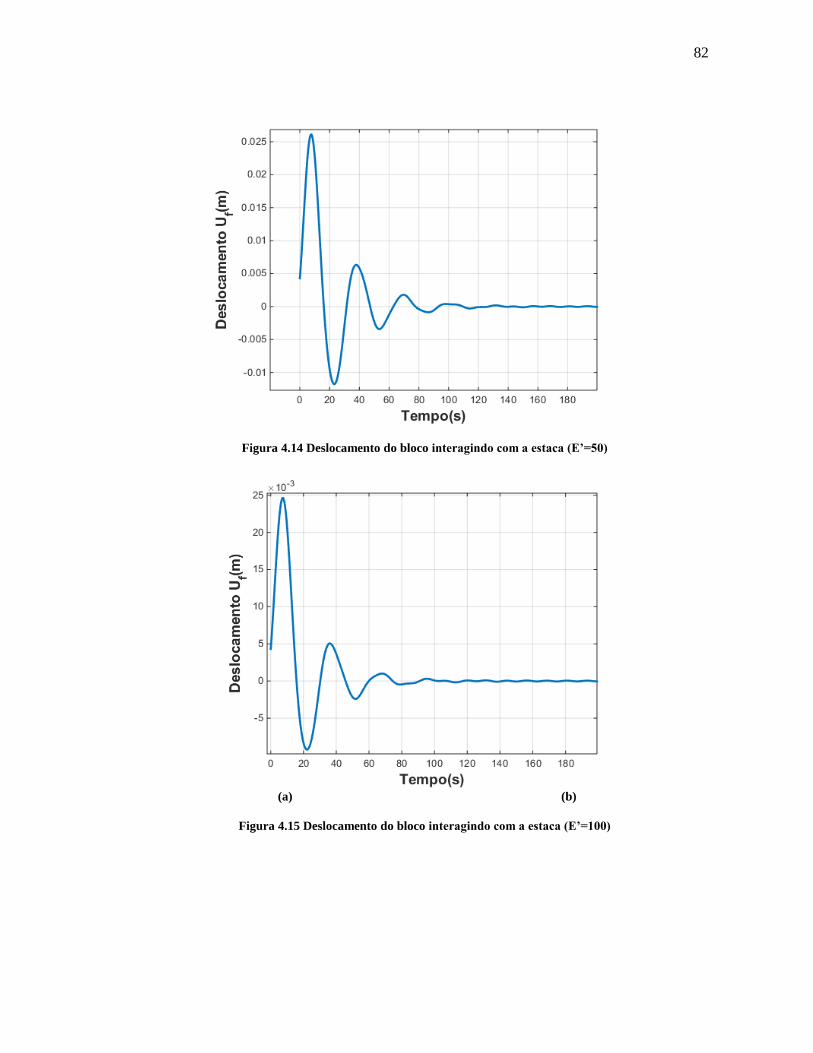
82
Figura 4.14 Deslocamento do bloco interagindo com a estaca (E’=50)
(a) (b)
Figura 4.15 Deslocamento do bloco interagindo com a estaca (E’=100)
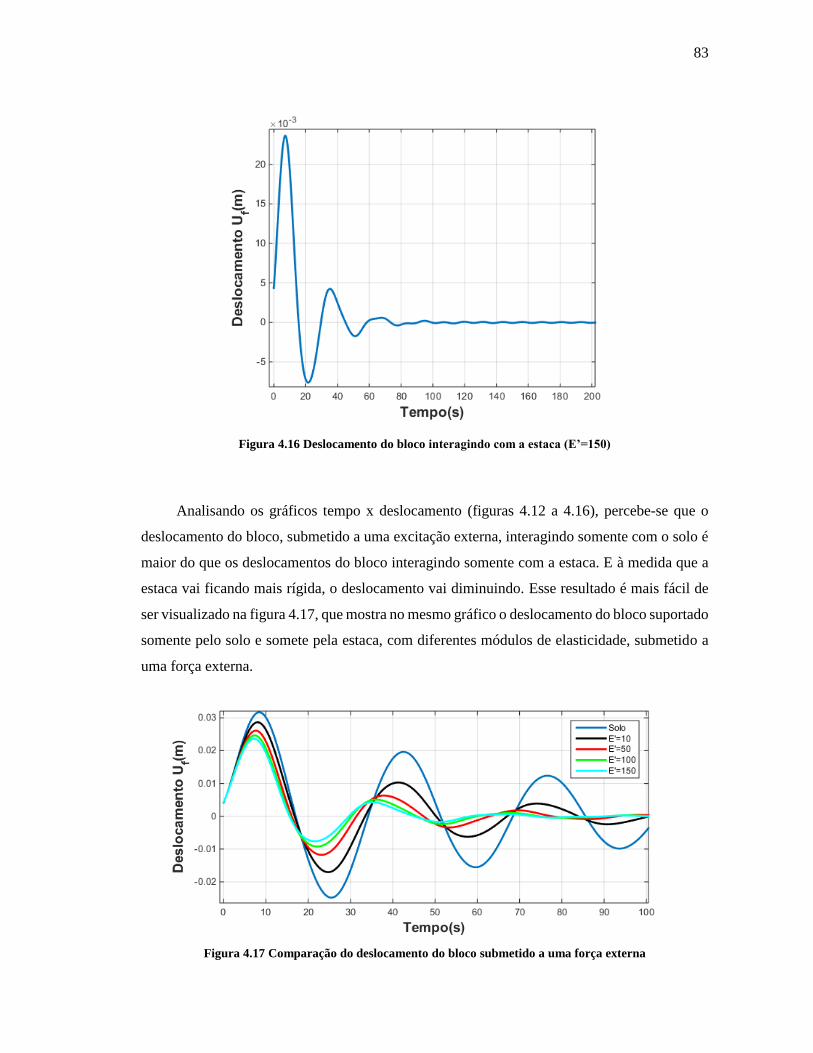
83
Figura 4.16 Deslocamento do bloco interagindo com a estaca (E’=150)
Analisando os gráficos tempo x deslocamento (figuras 4.12 a 4.16), percebe-se que o
deslocamento do bloco, submetido a uma excitação externa, interagindo somente com o solo é
maior do que os deslocamentos do bloco interagindo somente com a estaca. E à medida que a
estaca vai ficando mais rígida, o deslocamento vai diminuindo. Esse resultado é mais fácil de
ser visualizado na figura 4.17, que mostra no mesmo gráfico o deslocamento do bloco suportado
somente pelo solo e somete pela estaca, com diferentes módulos de elasticidade, submetido a
uma força externa.
Figura 4.17 Comparação do deslocamento do bloco submetido a uma força externa
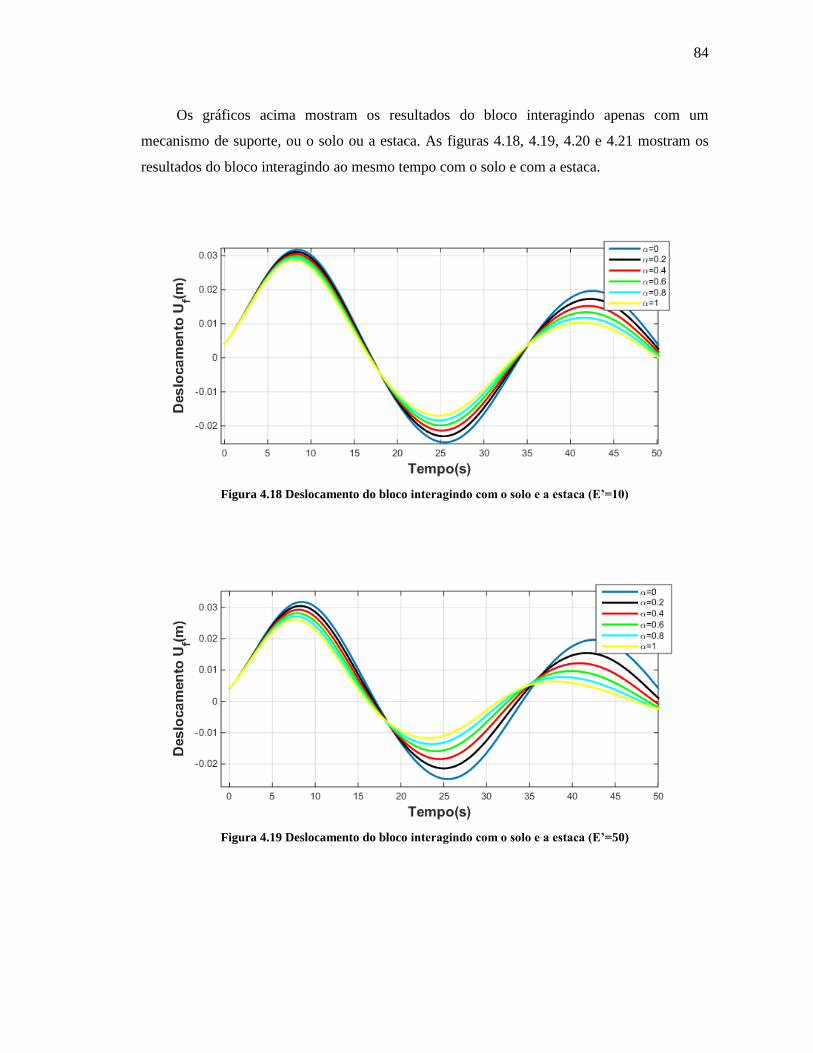
84
Os gráficos acima mostram os resultados do bloco interagindo apenas com um
mecanismo de suporte, ou o solo ou a estaca. As figuras 4.18, 4.19, 4.20 e 4.21 mostram os
resultados do bloco interagindo ao mesmo tempo com o solo e com a estaca.
Figura 4.18 Deslocamento do bloco interagindo com o solo e a estaca (E’=10)
Figura 4.19 Deslocamento do bloco interagindo com o solo e a estaca (E’=50)
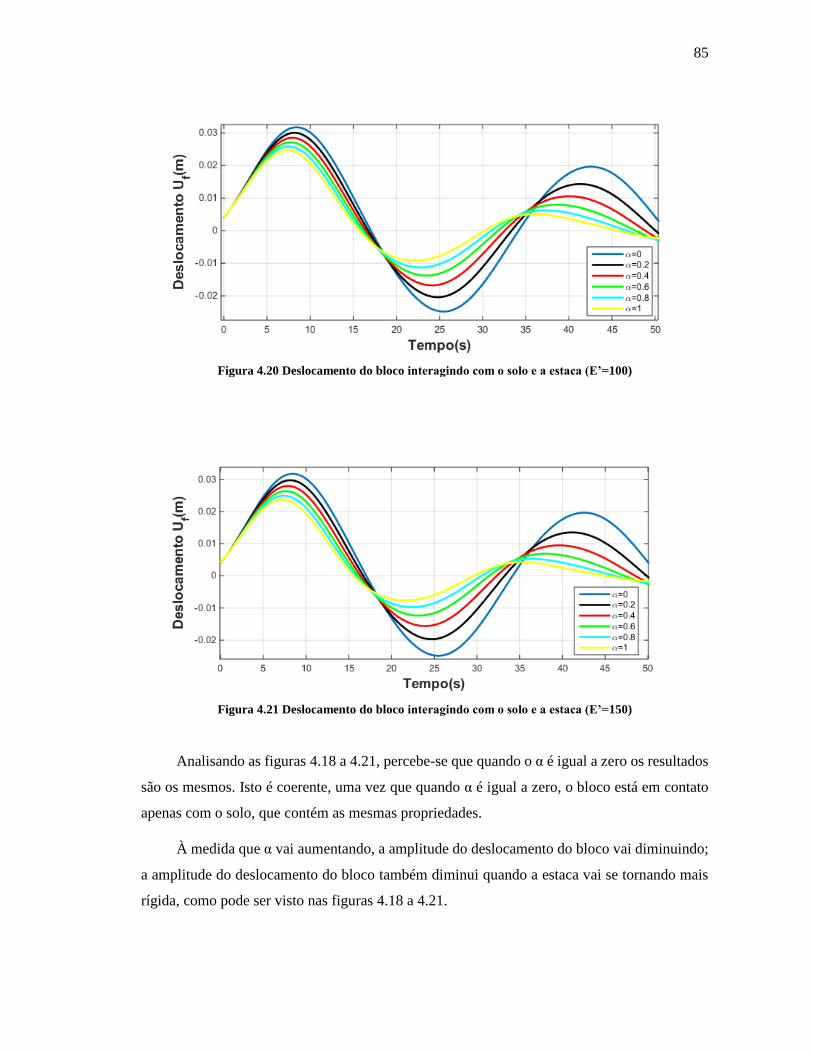
85
Figura 4.20 Deslocamento do bloco interagindo com o solo e a estaca (E’=100)
Figura 4.21 Deslocamento do bloco interagindo com o solo e a estaca (E’=150)
Analisando as figuras 4.18 a 4.21, percebe-se que quando o α é igual a zero os resultados
são os mesmos. Isto é coerente, uma vez que quando α é igual a zero, o bloco está em contato
apenas com o solo, que contém as mesmas propriedades.
À medida que α vai aumentando, a amplitude do deslocamento do bloco vai diminuindo;
a amplitude do deslocamento do bloco também diminui quando a estaca vai se tornando mais
rígida, como pode ser visto nas figuras 4.18 a 4.21.
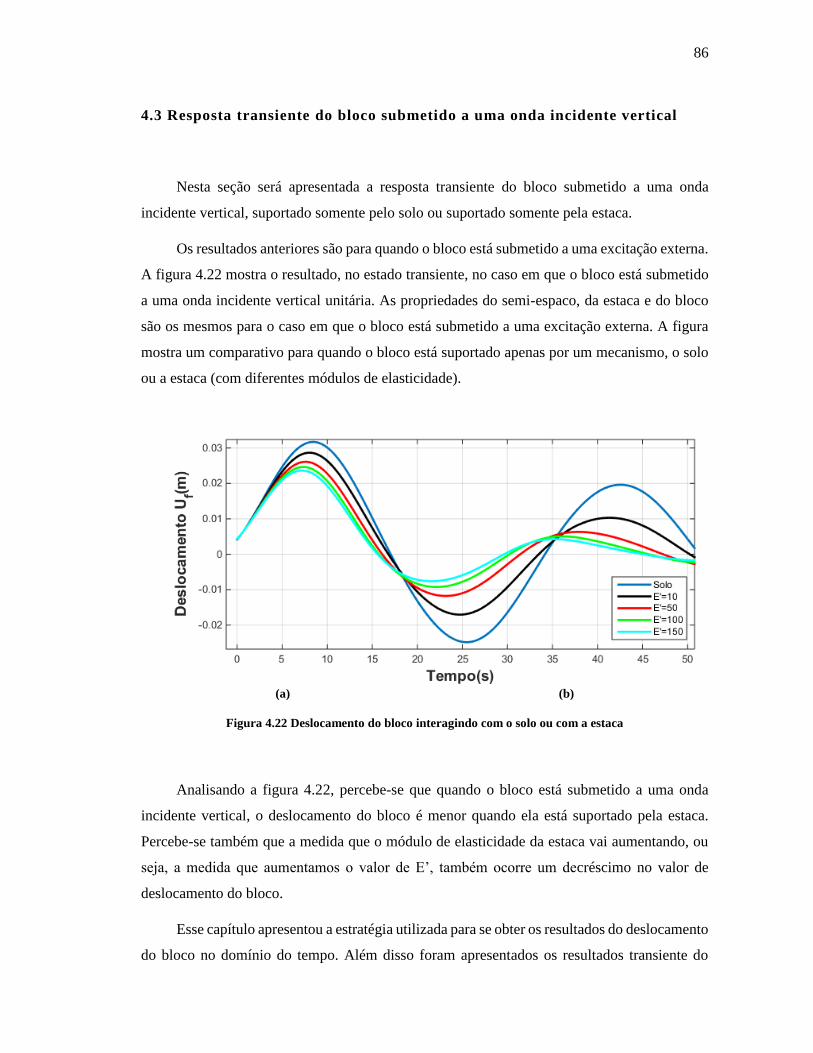
86
4.3 Resposta transiente do bloco submetido a uma onda incidente vertical
Nesta seção será apresentada a resposta transiente do bloco submetido a uma onda
incidente vertical, suportado somente pelo solo ou suportado somente pela estaca.
Os resultados anteriores são para quando o bloco está submetido a uma excitação externa.
A figura 4.22 mostra o resultado, no estado transiente, no caso em que o bloco está submetido
a uma onda incidente vertical unitária. As propriedades do semi-espaco, da estaca e do bloco
são os mesmos para o caso em que o bloco está submetido a uma excitação externa. A figura
mostra um comparativo para quando o bloco está suportado apenas por um mecanismo, o solo
ou a estaca (com diferentes módulos de elasticidade).
(a) (b)
Figura 4.22 Deslocamento do bloco interagindo com o solo ou com a estaca
Analisando a figura 4.22, percebe-se que quando o bloco está submetido a uma onda
incidente vertical, o deslocamento do bloco é menor quando ela está suportado pela estaca.
Percebe-se também que a medida que o módulo de elasticidade da estaca vai aumentando, ou
seja, a medida que aumentamos o valor de E’, também ocorre um decréscimo no valor de
deslocamento do bloco.
Esse capítulo apresentou a estratégia utilizada para se obter os resultados do deslocamento
do bloco no domínio do tempo. Além disso foram apresentados os resultados transiente do

87
deslocamento do bloco submetido a uma onda incidente vertical ou a uma força externa, sendo
que o bloco pode estar sendo suportado pelo solo ou pela estaca. O próximo capítulo apresenta
as conclusões desse trabalho e as sugestões para trabalhos futuros.
88
5 CONCLUSÃO E SUGESTÃO PARA TRABALHOS
FUTUROS
O trabalho apresentou uma formulação para análise da resposta estacionária dinâmica de
um bloco circular rígido interagindo com o solo e com uma estaca. Um parâmetro adimensional
α foi introduzido, que permite a investigação do acoplamento entre os dois casos extremos: o
caso em que o bloco é totalmente suportado pelo solo e o caso em que o bloco é totalmente
suportado pela estaca.
O estudo mostrou que a resposta do sistema acoplado depende significativamente da
quantidade de carga que é transferida do bloco para a estaca e para o solo. Esse é um resultado
importante e que não se foi encontrado na literatura.
A introdução da estaca resulta em uma diminuição da amplitude de vibração do sistema,
independentemente do tipo de excitação a que o bloco está submetido. O caso no qual o bloco
possui menor amplitude de vibração corresponde ao caso em que o sistema é suportado somente
pela estaca.
Para os casos estudados, independentemente da composição do sistema, um aumento da
rigidez da estaca provoca um ligeiro incremento na frequência de ressonância do sistema.
Percebeu-se também que à medida que a estaca fica mais rígida, ocorre um pequeno incremento
na frequência natural do sistema.
O algoritmo desenvolvido para se obter a resposta do bloco no estado transitório foi
satisfatório, uma vez que ele apresentou bons resultados quando aplicado na resposta analítica
de um sistema massa-mola-amortecedor de 1 grau de liberdade.
89
5.1 Sugestões para trabalhos futuros
Para trabalhos futuros, sugere-se fazer um estudo da resposta do bloco parcialmente
suportado pelo solo e pela estaca submetido a uma onda incidente e que a onda incidente interaja
com a estaca ao longo de seu comprimento, e não somente em um ponto da estaca. Assim será
possível estudar a influência do corpo da estaca quando o bloco está submetido a uma onda
incidente vertical.
Sugere-se também a formulação da resposta do bloco quando ele está interagindo com o
solo e a estaca (formulação com o parâmetro alfa).
Sugere-se também a formulação da resposta do bloco com a inclusão de uma camada de
material mais amortecido entre o bloco e a estaca.
Sugere-se ainda a tentativa de comparação dos resultados numéricos apresentados com
resultados experimentais do LNLS.
90
Referência Bibliográfica
ADOLPH, M. Soluções Transientes de Problemas Visco-Elastodinâmicos em Meios
Ilimitados Através da Transformada de Fourier Rápida - FFT. 2002. 188p. Dissertação
(Mestrado) — Faculdade de Engenharia Mecânica, Universidade Estadual de Campinas,
Departamento de Mecânica Computacional Campinas.
ADOLPH, M; MESQUITA, E; ROMANINI, E. A methodology to determine the transient
response of the structures interacting with visco-elastic soils using the FFT algorithm.
Proceedings XXI CILAMCE, XXI Congresso Íbero Latino Americano de Métodos
Computacionais em Engenharia. Vol. 1, pp.1-23, Campinas, SP, BRASIL, 2001.
BARROS, P. L. A. Dynamic axial response of a single pile embedded in transversely isotropic
soils. 16th ASCE Engineering Mechanics Conference. University of Washington, Seattle.
2003.
BARROS, P. L. A. Elastodinâmica de Meios Transversalmente Isotrópicos: Funções de
Green e o Método dos Elementos de Contorno na Análise da Interação Soloestrutura.
1997. 321p. Tese (Doutorado) - Faculdade de Engenharia Mecânica, Universidade Estadual de
Campinas. Campinas.
BARROS, P. L. A.; MESQUITA, E. Elastodynamic Green’s Functions for Orthotropic Plane
Strain Continua with inclined Axis of Symmetry, International Journal for Solids and
Structures, vol. 36, pp. 4767-4788. 1999.
BESKOS, D. Boundary Element Methods in Dynamics Analysis, Applied Mechanic Review,
vol. 40, n. 1, 1987.
BESKOS, D., Boundary Element Methods in Dynamics Analysis: Part II (1986-1996), Applied
Mechanic Review, vol. 50, n. 3, 1997.
CARRION, R. Uma implementação do método dos elementos de contorno para problemas
viscoelastodinâmicos estacionários tridimensionais em domínio aberto e fechado. 2002.
211p. Tese (Doutorado) — Faculdade de Engenharia Mecânica, Universidade de Campinas,
Brasil, Campinas.
CARVALHO, E. R. Analise dinâmica de sistemas solo-fluido-estrutura pelo método de
elementos de contorno. 1995. 204p. Tese (doutorado) - Faculdade de Engenharia Mecânica,
Universidade Estadual de Campinas. Campinas.
91
CODA, H. B; VENTURINI, W. S. BEM/FEM non-linear model applied to transient analysis
with viscous damping. Journal of the Brazilian Society of Mechanical Sciences. Rio de
Janeiro, vol. 21, n. 3, p. 519-536, 1999.
CODA, H. B; VENTURINI, W. S. Further improvements on three dimensional transient BEM
elastodynamic analysis. Engineering Analysis with Boundary Elements, vol. 17, pp. 231-
243, 1996.
DAMASCENO, D. A. Análise Transiente de Sistemas com Interação Solo-Estrutura
Através de Técnicas de Acoplamento Iterativo. 2013. 141p. Dissertação (Mestrado) –
Faculdade de Engenharia Mecânica, Universidade Estadual de Campinas. Campinas.
DAROS, C. H. Solução transiente da equação da onda escalar pelo Método dos Elementos
de Contorno: integração direta no tempo. 1995. 125p. Dissertação (Mestrado) - Faculdade
de Engenharia Mecânica, Universidade Estadual de Campinas. Campinas.
DI LAORA, R. Seismic soil-structure interaction for pile supported systems. 2009. 150p.
Tese (doutorado) – School of Ingegneria civile, Università degli Studi di Napoli Federico II.
Napoli.
GAZETAS, G. Analysis of Machine Foundation Vibrations: State of the Art. Soil Dynamics
and Earthquake Engineering, vol. 2, pp. 2-42. 1983
GAZETAS, George. Seismic response of end-bearing single piles. Soil Dynamics and
Earthquake Engineering, v.3, n.2, p. 82-93, 1984.
INMAN, D.J. Engineering vibration. New Jersey: Prentice-Hall, 2000. 621p.
JAHROMI, Z.Z.H. Partitioned analysis of nonlinear soil structure interaction. 2009. 331p.
Tese (Doutorado) - Department of civil and environmental engineering, Imperial College
London, London.
KAVVADAS, M.; GAZETAS, G. Kinematic seismic response and bending of free-head piles
in layered soil. Geotechnique, vol.43, No.2, 207-222. 1993
LABAKI, J. Vibração de placas flexíveis e rígidas em meios estratificados
transversalmente isotrópicos. 2012. 150p. Tese (Doutorado) — Faculdade de Engenharia
Mecânica, Universidade de Campinas, Brasil, Campinas.
92
LABAKI, J.; MESQUITA, E.; RAJAPAKSE, R. K. N. D., 2014. Vertical Vibrations of an
Elastic Foundation with Arbitrary Embedment within a Transversely Isotropic, Layered Soil.
Computer Modeling in Engineering & Sciences, v. 103, p. 281-313.
LABAKI, J., MESQUITA, E., RAJAPAKSE, R. K. N. D., 2015. Vertical Vibrations of a Pile
in a Transversely Isotropic Soil. ICGE International Conference on Geotechnical
Engineering.
MESQUITA, E. Zur Dynamischen Wechselwirkung von Fundamenten auf dem
Viskoelastischen Halbraum. (Sobre a Interação Dinâmica de Fundações sobre o
Semiespaço Viscoelástico). Hannover: Institut für Mechanik, Universität Hannover, 1989.
Tese (Doutorado).
NAZIR, A. K.; AZZAM, W. r., 2010. Improving the bearing capacity of footing on soft clay
with sand pile with/without skirts. Alexandria Engineering Journal, vol 49, pp. 371-377.
PEIRIS, Thanuia Pubudini. Soil-Pile Interaction of Pile embedded in Deep Layered Marine
Sediment under Seismic Excitation. 2014. 156p. Dissertação (Doutorado) – School of Civil
Engineering & Built Environment, Queensland University of Technology, Brisbane.
PONTES JR., B. R. Interação dinâmica de estruturas bidimensionais sobre o solo: uma
comparação entre um método semi-analítico e o método dos elementos de contorno. 1992.
110p. Dissertação (Mestrado) - Faculdade de Engenharia Mecânica, Universidade Estadual de
Campinas, Campinas.
RANGAWALA, H.; MUKERJEE, S.; & SARAN, S. 2012. Parametric analysis of pile
foundations under dynamics loads. Proceedings of Indian Geotechnical Conference, n.
H836, pp. 1005-1008.
RAJAPAKSE, R. K. N. D.; SENTJUNTICHAI, T., 1993, Fundamental Solutions for a
Poroelastic Half Space With Compressible Constituents, Journal of Applied mechanics, vol.
60, pp. 847-856.
RAJAPAKSE, R.K.N.D., SHAH, A.H. Impedance curves for an elastic pile. Soil Dynamics
and Earthquake Engineering. Vol 8, No.3, 145-152. 1989.
RAJAPAKSE, R.K.N.D., SHAH, A.H. On the longitudinal harmonic motion of an elastic bar
embedded in an elastic half-space. Solids structure. Vol.23, No. 2, 267-285, 1987.
93
RAJAPAKSE, R. K. N. D.; WANG. Y. Green’s Functions for Transversely Isotropic Elastic
Half Space. Journal of Engineering Mechanics, 119, No. 9, pp. 1724-1746, 1993.
ROMANINI, E. Síntese de funções de influência e Green para o tratamento de interação
dinâmica solo-estrutura através de equações integrais de contorno. 1995. 207p. Tese
(Doutorado) - Faculdade de Engenharia Mecânica, Universidade Estadual de Campinas,
Campinas.
SOUSA, E. A. C., Acoplamento do método dos elementos finitos e elementos de contorno
para tratamento de problemas estacionários da elastodinâmica. 1992. 114p. Dissertação
(Mestrado) - Faculdade de Engenharia Mecânica, Universidade Estadual de Campinas,
Campinas.
THOMAZO, L.H. Formulação do Método dos Elementos de Contorno Indireto para
Resposta Transiente em Meios Visco-Elásticos 2D. 2004. 144p. Dissertação (Mestrado) -
Faculdade de Engenharia Mecânica, Universidade Estadual de Campinas, Campinas.
VAN DER HEIJDEN, A. M. A. On modified boundary conditions for the free edge of a
shell. Delft University Press, 1976.
94
APÊNDICE A – Estaca com propriedades iguais a do solo
Em todas as análises apresentadas nesse trabalho, até agora, a estaca em estudo possui a
mesma densidade do solo, porém o módulo de elasticidade da estaca e do solo possuem valores
distintos.
Nesta seção apresenta-se o resultado para o caso em que a densidade e o módulo de
elasticidade da estaca são iguais às do solo, que são, respectivamente, 1kg/m³ e 2.5 Pa.
A.1 – Bloco submetido a uma excitação externa
No resultado que vai ser mostrado a seguir, na figura A.1, considerou-se que o bloco é
suportado somente pelo solo ou somente pela estaca, está submetida a uma excitação externa
unitária, que a relação de massa B é igual a 50 e a relação entre a altura e o raio da estaca (H/a)
é de 35.
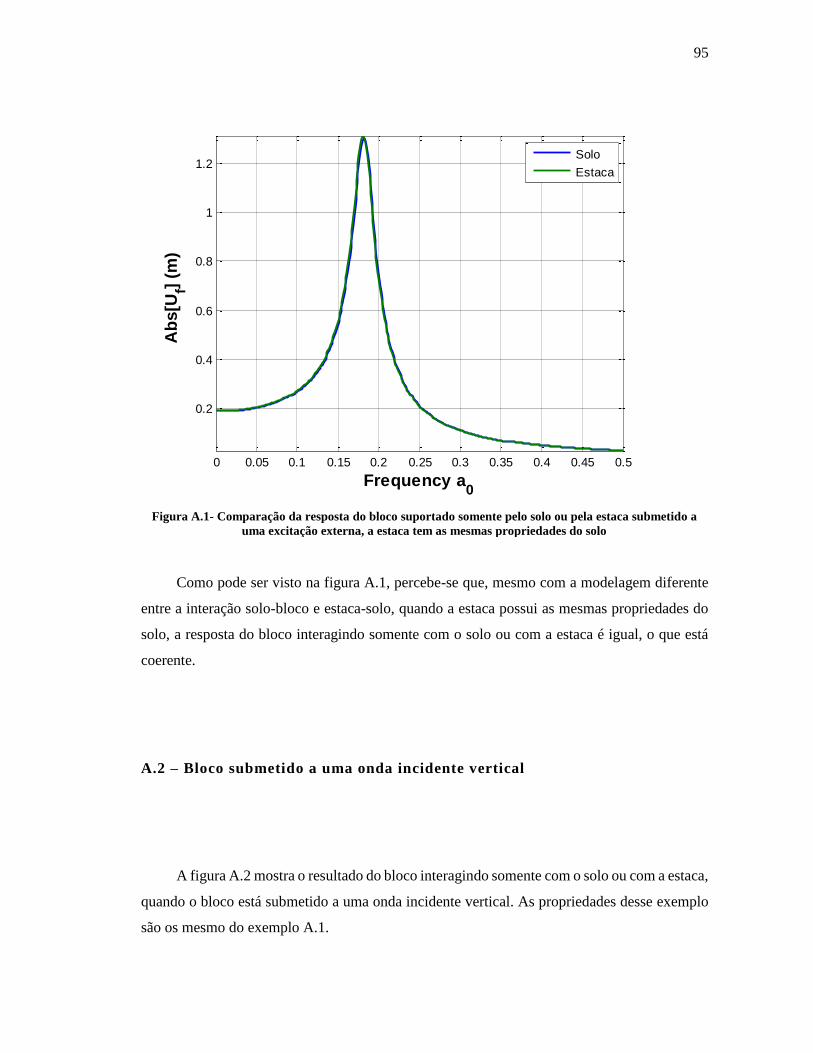
95
Figura A.1- Comparação da resposta do bloco suportado somente pelo solo ou pela estaca submetido a
uma excitação externa, a estaca tem as mesmas propriedades do solo
Como pode ser visto na figura A.1, percebe-se que, mesmo com a modelagem diferente
entre a interação solo-bloco e estaca-solo, quando a estaca possui as mesmas propriedades do
solo, a resposta do bloco interagindo somente com o solo ou com a estaca é igual, o que está
coerente.
A.2 – Bloco submetido a uma onda incidente vertical
A figura A.2 mostra o resultado do bloco interagindo somente com o solo ou com a estaca,
quando o bloco está submetido a uma onda incidente vertical. As propriedades desse exemplo
são os mesmo do exemplo A.1.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
0.2
0.4
0.6
0.8
1
1.2A
bs[U
f] (m
)
Frequency a0
Solo
Estaca
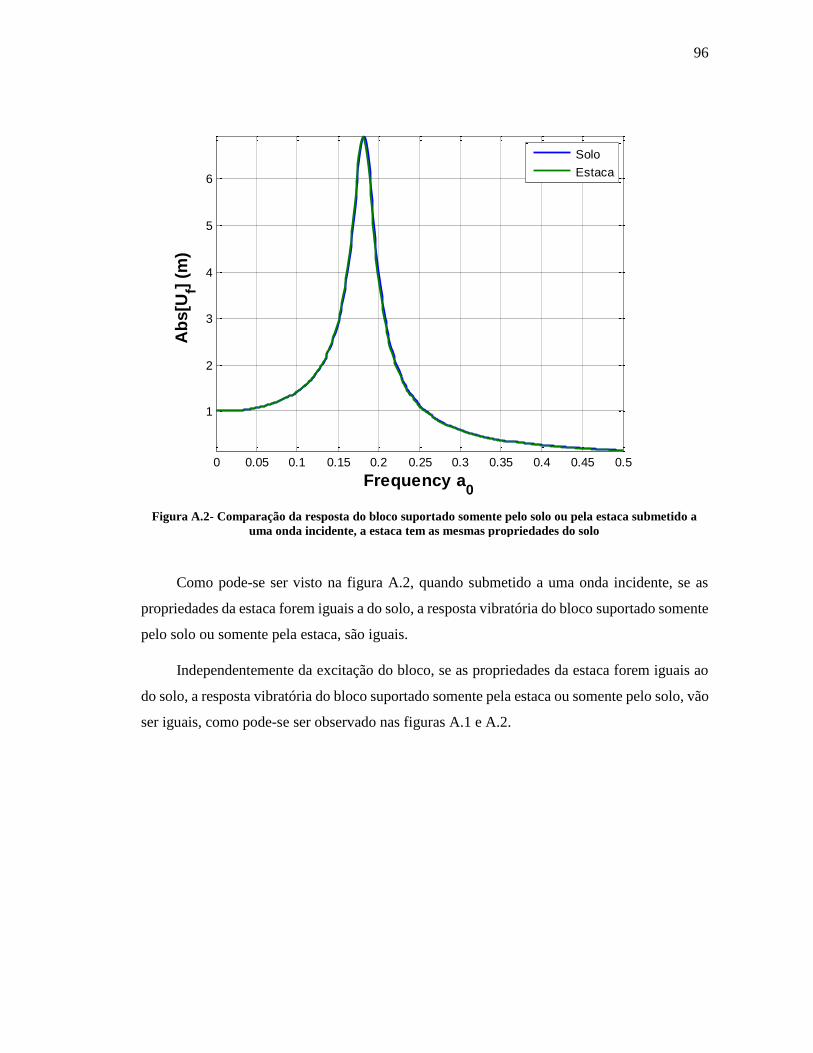
96
Figura A.2- Comparação da resposta do bloco suportado somente pelo solo ou pela estaca submetido a
uma onda incidente, a estaca tem as mesmas propriedades do solo
Como pode-se ser visto na figura A.2, quando submetido a uma onda incidente, se as
propriedades da estaca forem iguais a do solo, a resposta vibratória do bloco suportado somente
pelo solo ou somente pela estaca, são iguais.
Independentemente da excitação do bloco, se as propriedades da estaca forem iguais ao
do solo, a resposta vibratória do bloco suportado somente pela estaca ou somente pelo solo, vão
ser iguais, como pode-se ser observado nas figuras A.1 e A.2.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
1
2
3
4
5
6A
bs[U
f] (m
)
Frequency a0
Solo
Estaca
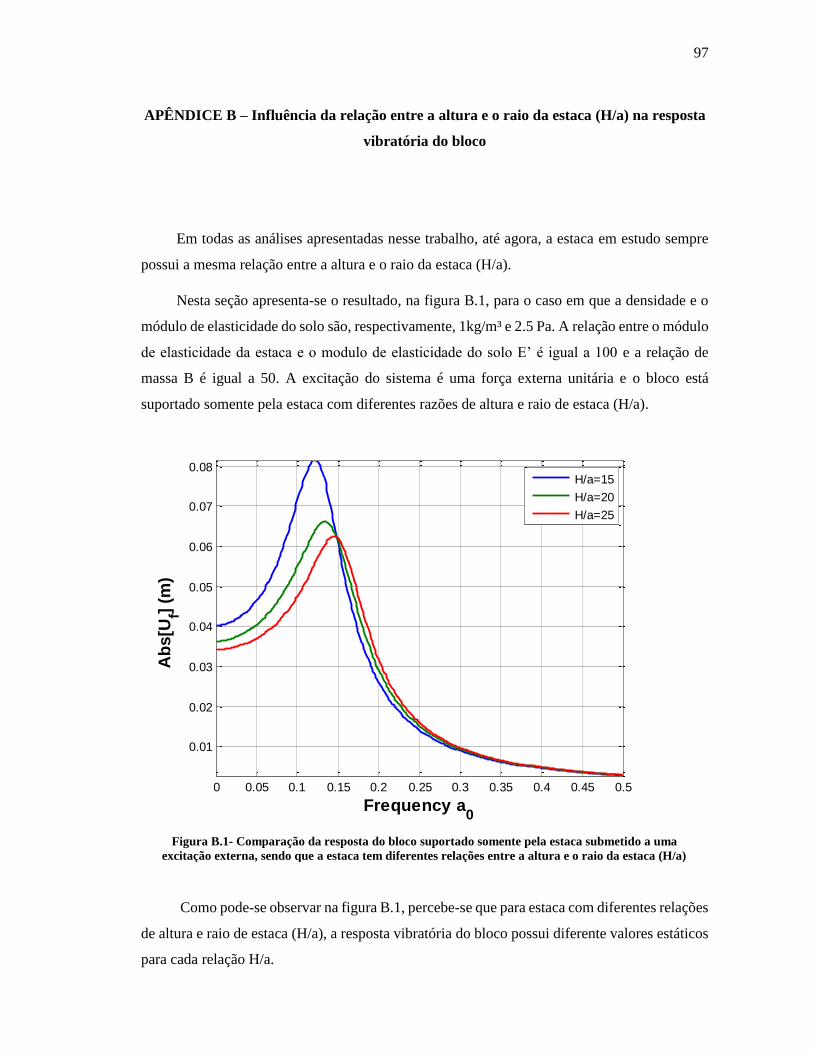
97
APÊNDICE B – Influência da relação entre a altura e o raio da estaca (H/a) na resposta
vibratória do bloco
Em todas as análises apresentadas nesse trabalho, até agora, a estaca em estudo sempre
possui a mesma relação entre a altura e o raio da estaca (H/a).
Nesta seção apresenta-se o resultado, na figura B.1, para o caso em que a densidade e o
módulo de elasticidade do solo são, respectivamente, 1kg/m³ e 2.5 Pa. A relação entre o módulo
de elasticidade da estaca e o modulo de elasticidade do solo E’ é igual a 100 e a relação de
massa B é igual a 50. A excitação do sistema é uma força externa unitária e o bloco está
suportado somente pela estaca com diferentes razões de altura e raio de estaca (H/a).
Figura B.1- Comparação da resposta do bloco suportado somente pela estaca submetido a uma
excitação externa, sendo que a estaca tem diferentes relações entre a altura e o raio da estaca (H/a)
Como pode-se observar na figura B.1, percebe-se que para estaca com diferentes relações
de altura e raio de estaca (H/a), a resposta vibratória do bloco possui diferente valores estáticos
para cada relação H/a.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
Ab
s[U
f] (m
)
Frequency a0
H/a=15
H/a=20
H/a=25
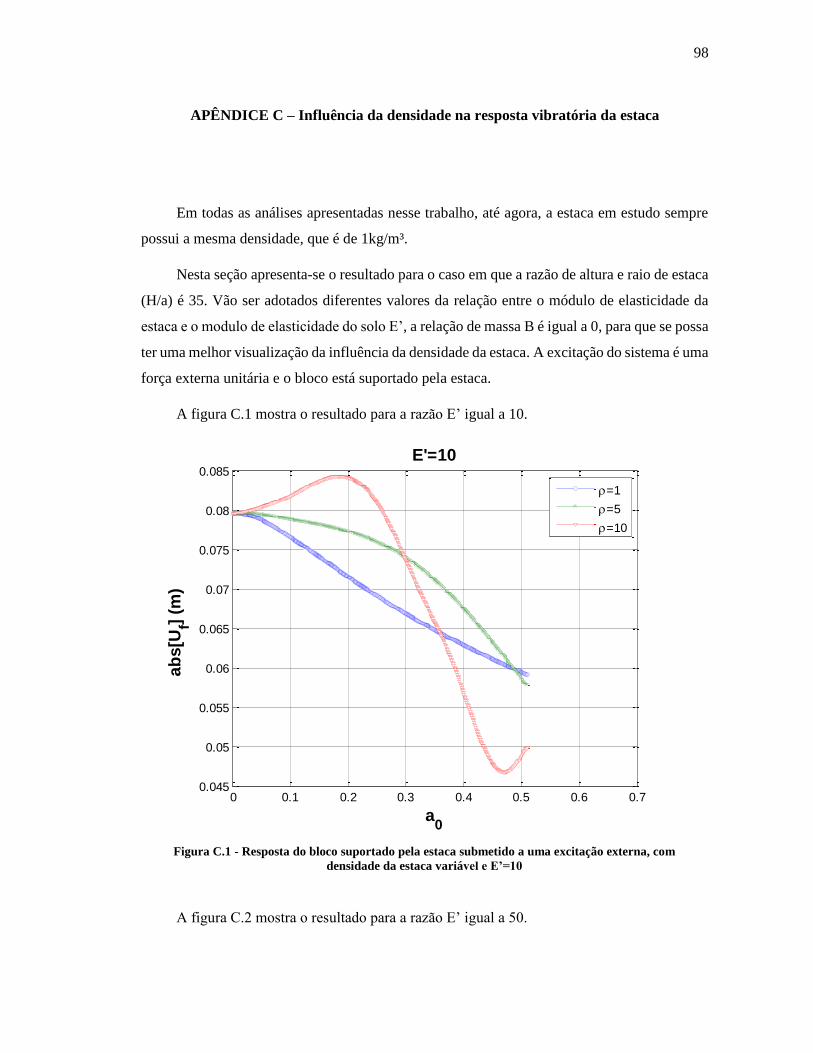
98
APÊNDICE C – Influência da densidade na resposta vibratória da estaca
Em todas as análises apresentadas nesse trabalho, até agora, a estaca em estudo sempre
possui a mesma densidade, que é de 1kg/m³.
Nesta seção apresenta-se o resultado para o caso em que a razão de altura e raio de estaca
(H/a) é 35. Vão ser adotados diferentes valores da relação entre o módulo de elasticidade da
estaca e o modulo de elasticidade do solo E’, a relação de massa B é igual a 0, para que se possa
ter uma melhor visualização da influência da densidade da estaca. A excitação do sistema é uma
força externa unitária e o bloco está suportado pela estaca.
A figura C.1 mostra o resultado para a razão E’ igual a 10.
Figura C.1 - Resposta do bloco suportado pela estaca submetido a uma excitação externa, com
densidade da estaca variável e E’=10
A figura C.2 mostra o resultado para a razão E’ igual a 50.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.70.045
0.05
0.055
0.06
0.065
0.07
0.075
0.08
0.085
ab
s[U
f] (m
)
a0
E'=10
=1
=5
=10
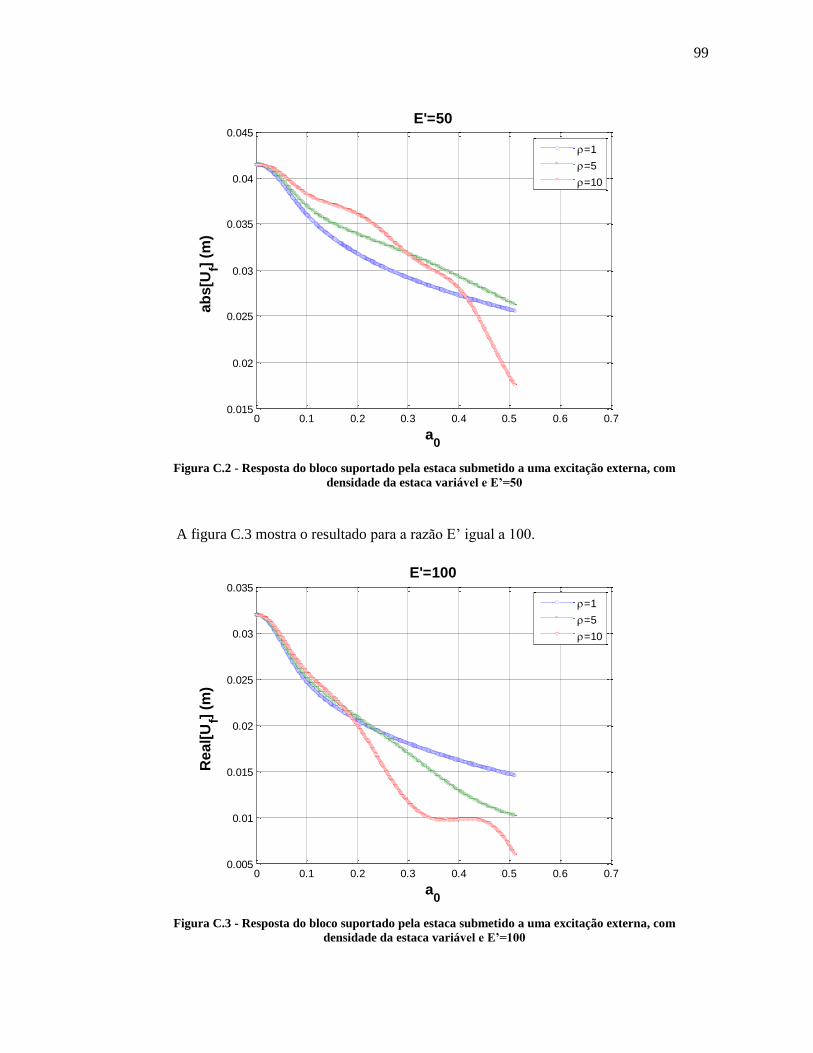
99
Figura C.2 - Resposta do bloco suportado pela estaca submetido a uma excitação externa, com
densidade da estaca variável e E’=50
A figura C.3 mostra o resultado para a razão E’ igual a 100.
Figura C.3 - Resposta do bloco suportado pela estaca submetido a uma excitação externa, com
densidade da estaca variável e E’=100
0 0.1 0.2 0.3 0.4 0.5 0.6 0.70.015
0.02
0.025
0.03
0.035
0.04
0.045
ab
s[U
f] (m
)
a0
E'=50
=1
=5
=10
0 0.1 0.2 0.3 0.4 0.5 0.6 0.70.005
0.01
0.015
0.02
0.025
0.03
0.035
Re
al[
Uf]
(m)
a0
E'=100
=1
=5
=10

100
Observando as figuras C.1, C.2 e C.3, percebe-se que estacas com diferentes valores da
razão E’ e mesmo valores de densidade possuem as mesmas respostas estáticas. Percebe-se
também que em estacas mais flexíveis (menores valores de E’) a ressonância é mais bem
definida do que em estacas mais rígidas (maiores valores de E’).
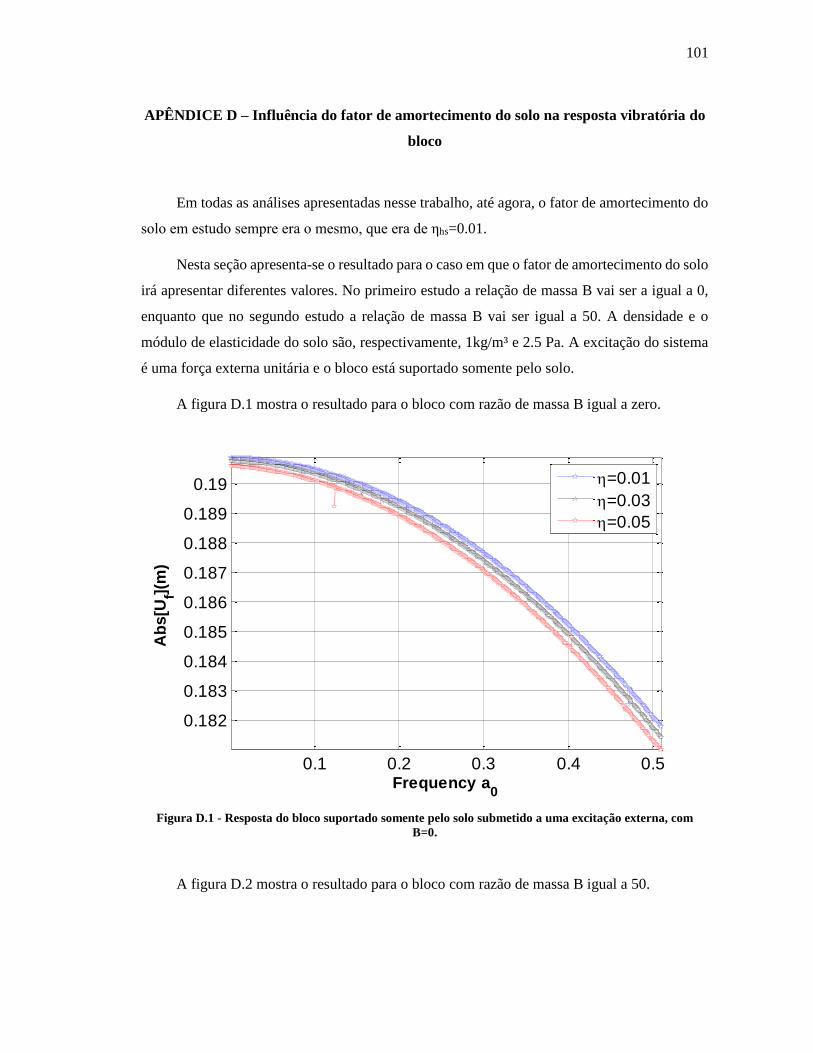
101
APÊNDICE D – Influência do fator de amortecimento do solo na resposta vibratória do
bloco
Em todas as análises apresentadas nesse trabalho, até agora, o fator de amortecimento do
solo em estudo sempre era o mesmo, que era de ηhs=0.01.
Nesta seção apresenta-se o resultado para o caso em que o fator de amortecimento do solo
irá apresentar diferentes valores. No primeiro estudo a relação de massa B vai ser a igual a 0,
enquanto que no segundo estudo a relação de massa B vai ser igual a 50. A densidade e o
módulo de elasticidade do solo são, respectivamente, 1kg/m³ e 2.5 Pa. A excitação do sistema
é uma força externa unitária e o bloco está suportado somente pelo solo.
A figura D.1 mostra o resultado para o bloco com razão de massa B igual a zero.
Figura D.1 - Resposta do bloco suportado somente pelo solo submetido a uma excitação externa, com
B=0.
A figura D.2 mostra o resultado para o bloco com razão de massa B igual a 50.
0.1 0.2 0.3 0.4 0.5
0.182
0.183
0.184
0.185
0.186
0.187
0.188
0.189
0.19
Frequency a0
Ab
s[U
f](m
)
=0.01
=0.03
=0.05
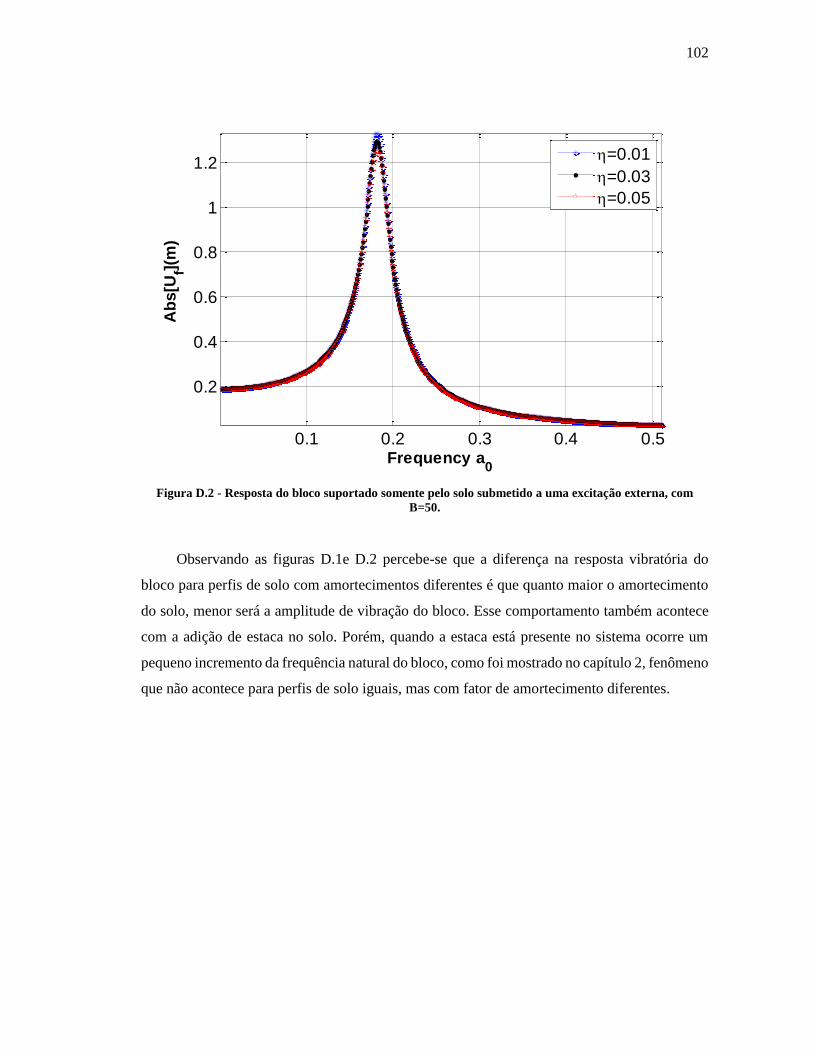
102
Figura D.2 - Resposta do bloco suportado somente pelo solo submetido a uma excitação externa, com
B=50.
Observando as figuras D.1e D.2 percebe-se que a diferença na resposta vibratória do
bloco para perfis de solo com amortecimentos diferentes é que quanto maior o amortecimento
do solo, menor será a amplitude de vibração do bloco. Esse comportamento também acontece
com a adição de estaca no solo. Porém, quando a estaca está presente no sistema ocorre um
pequeno incremento da frequência natural do bloco, como foi mostrado no capítulo 2, fenômeno
que não acontece para perfis de solo iguais, mas com fator de amortecimento diferentes.
0.1 0.2 0.3 0.4 0.5
0.2
0.4
0.6
0.8
1
1.2
Frequency a0
Ab
s[U
f](m
)
=0.01
=0.03
=0.05
103
APÊNDICE E – Influência da spline na resposta transiente do bloco
Todos as respostas mostradas nesse trabalho, foram calculadas até a frequência
adimensional a0 de 0.510. Isso se deve pelo fato do cálculo da resposta da interação solo-bloco
ou solo-estaca ser muito caro computacionalmente. Porém, para se conseguir uma resposta bem
discretizada no domínio transiente, através da IFFT, é necessário que frequência máxima seja
alta. Por conta disso, como foi mostrado no capítulo 4, fez-se uma extrapolação, através de
spline cúbica, para se conseguir a resposta dinâmica do bloco em frequências maiores.
Aqui será mostrado a influência na suavização da curva, para o bloco interagindo somente
com o solo ou somente com a estaca submetido a uma força externa com relação de massa B=0.
As propriedades do solo são os mesmos do apêndice anterior.
A figura E.1 mostra a resposta, no domínio da frequência com diferentes suavizações.
Enquanto que a figura E.2 é apenas o zoom da figura E.1. Nesse estudo o bloco está suportado
somente pelo solo.
Figura E.1 - Resposta do bloco suportado somente pelo solo submetido a uma excitação externa, com
diferentes suavizações.
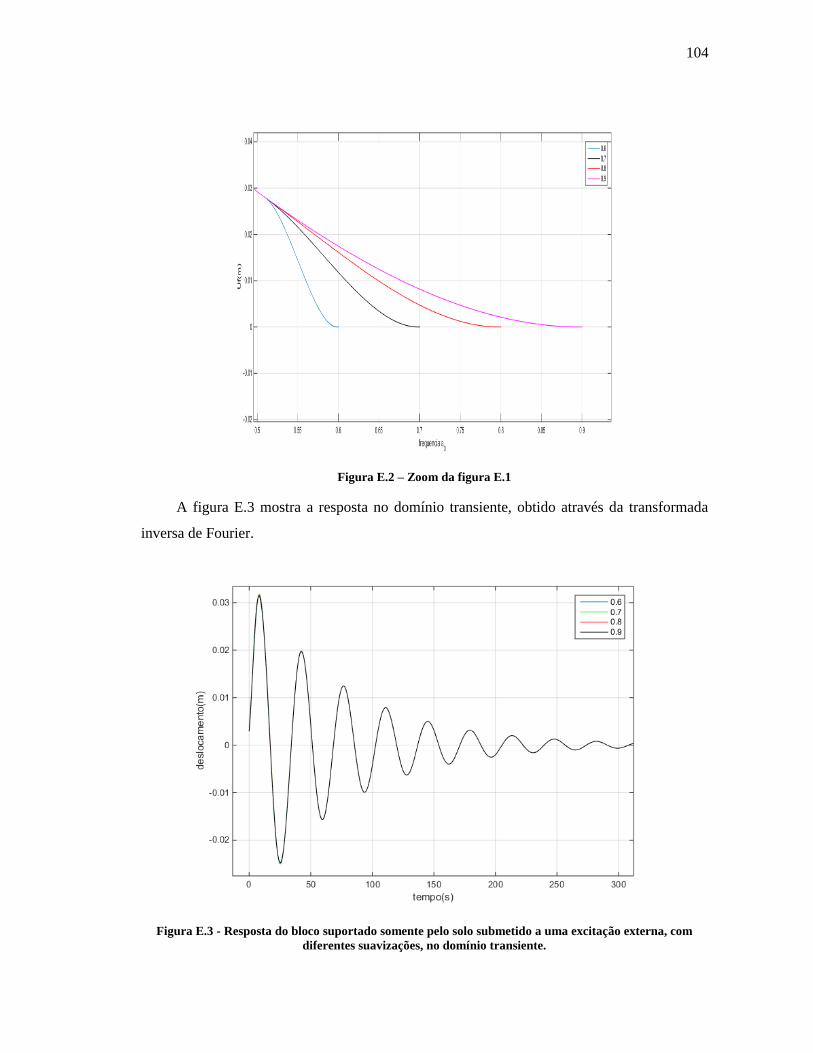
104
Figura E.2 – Zoom da figura E.1
A figura E.3 mostra a resposta no domínio transiente, obtido através da transformada
inversa de Fourier.
Figura E.3 - Resposta do bloco suportado somente pelo solo submetido a uma excitação externa, com
diferentes suavizações, no domínio transiente.
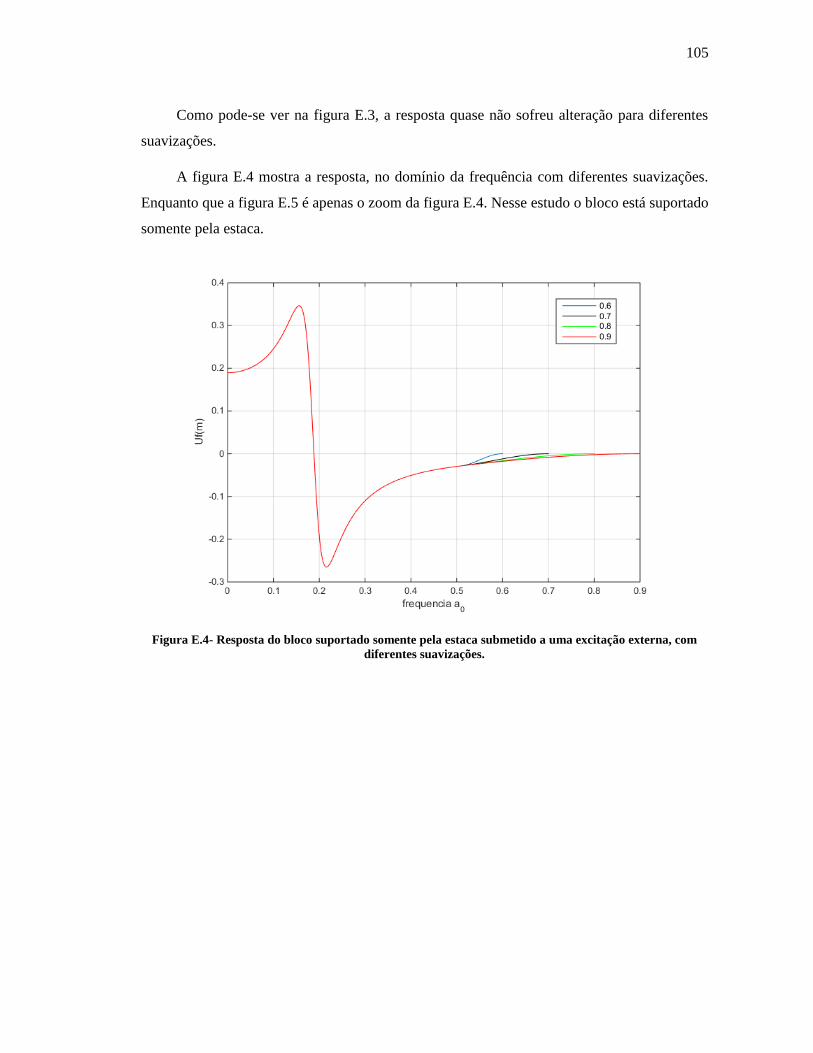
105
Como pode-se ver na figura E.3, a resposta quase não sofreu alteração para diferentes
suavizações.
A figura E.4 mostra a resposta, no domínio da frequência com diferentes suavizações.
Enquanto que a figura E.5 é apenas o zoom da figura E.4. Nesse estudo o bloco está suportado
somente pela estaca.
Figura E.4- Resposta do bloco suportado somente pela estaca submetido a uma excitação externa, com
diferentes suavizações.
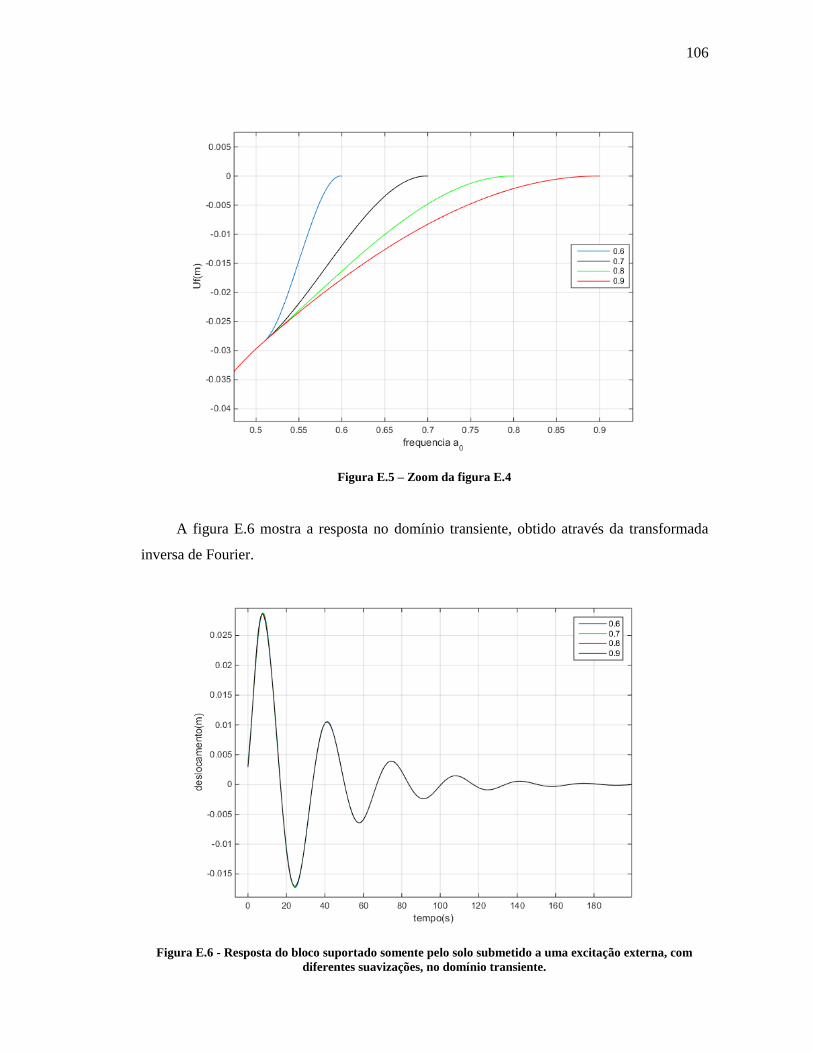
106
Figura E.5 – Zoom da figura E.4
A figura E.6 mostra a resposta no domínio transiente, obtido através da transformada
inversa de Fourier.
Figura E.6 - Resposta do bloco suportado somente pelo solo submetido a uma excitação externa, com
diferentes suavizações, no domínio transiente.
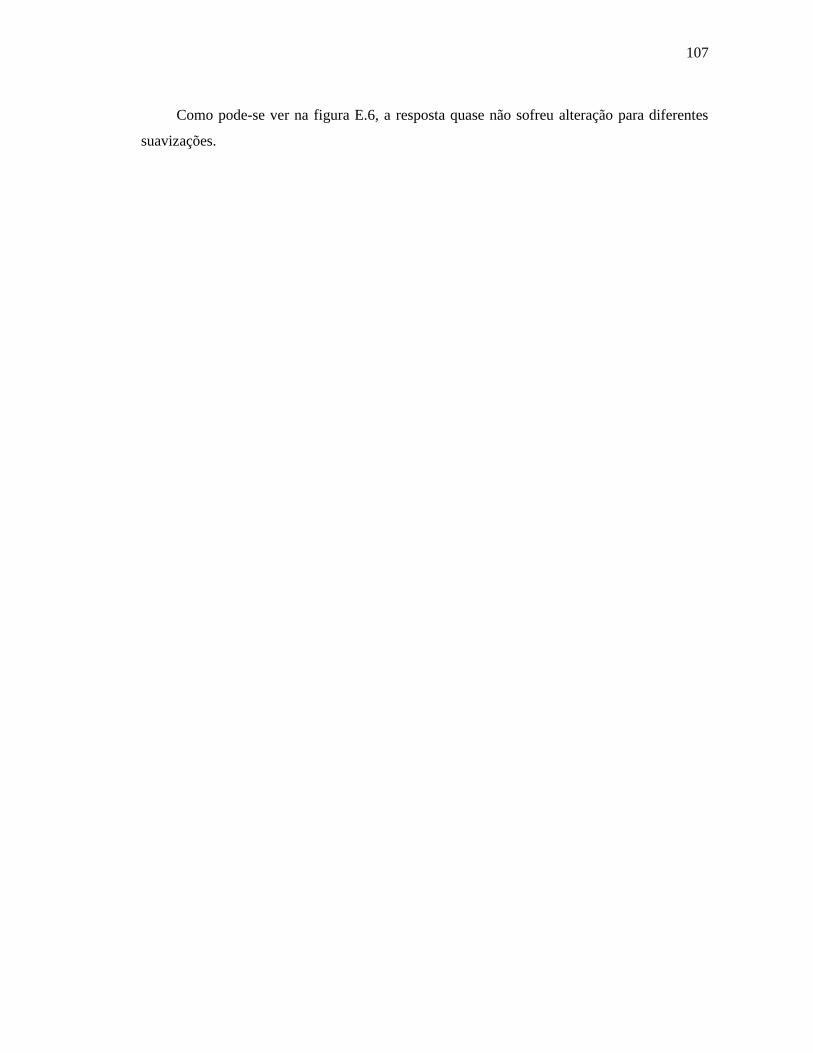
107
Como pode-se ver na figura E.6, a resposta quase não sofreu alteração para diferentes
suavizações.
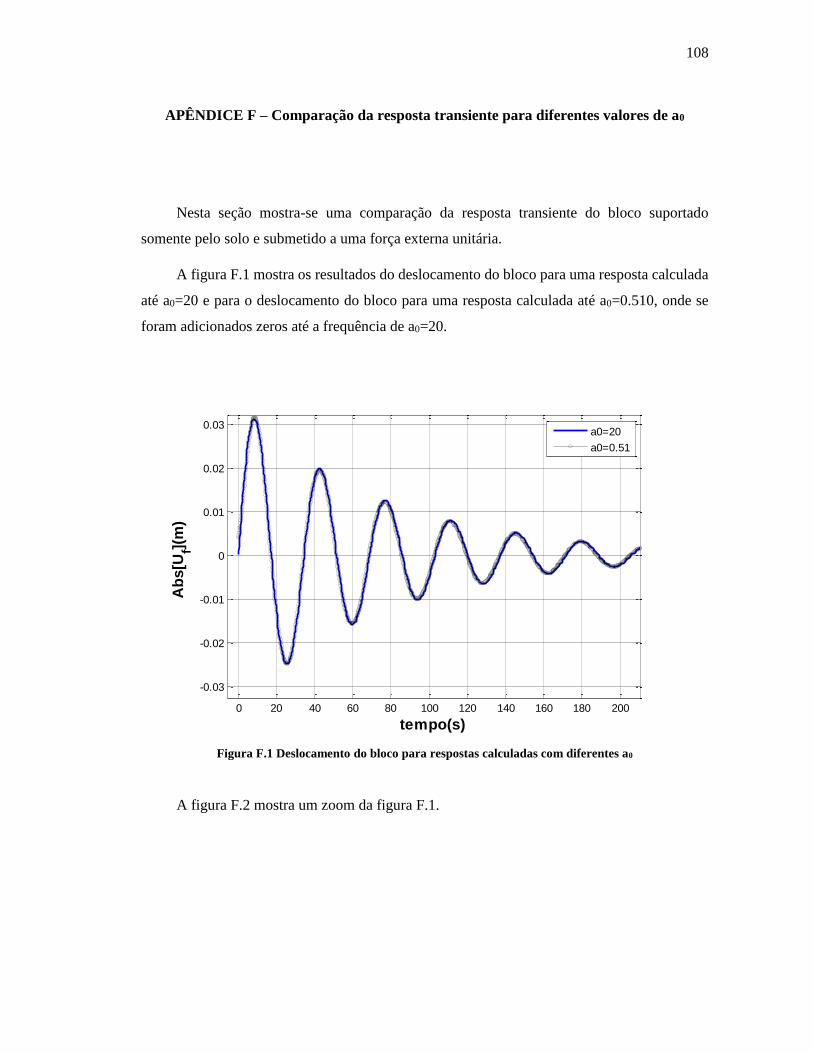
108
APÊNDICE F – Comparação da resposta transiente para diferentes valores de a0
Nesta seção mostra-se uma comparação da resposta transiente do bloco suportado
somente pelo solo e submetido a uma força externa unitária.
A figura F.1 mostra os resultados do deslocamento do bloco para uma resposta calculada
até a0=20 e para o deslocamento do bloco para uma resposta calculada até a0=0.510, onde se
foram adicionados zeros até a frequência de a0=20.
Figura F.1 Deslocamento do bloco para respostas calculadas com diferentes a0
A figura F.2 mostra um zoom da figura F.1.
0 20 40 60 80 100 120 140 160 180 200
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
tempo(s)
Ab
s[U
f](m
)
a0=20
a0=0.51
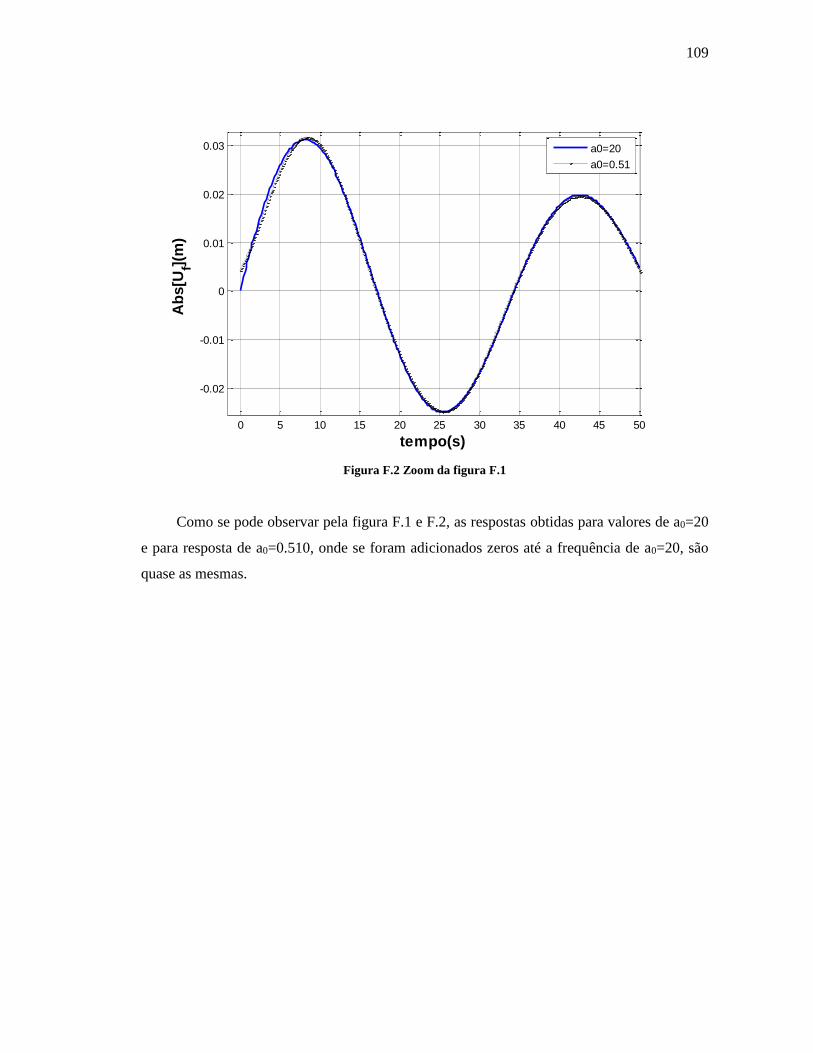
109
Figura F.2 Zoom da figura F.1
Como se pode observar pela figura F.1 e F.2, as respostas obtidas para valores de a0=20
e para resposta de a0=0.510, onde se foram adicionados zeros até a frequência de a0=20, são
quase as mesmas.
0 5 10 15 20 25 30 35 40 45 50
-0.02
-0.01
0
0.01
0.02
0.03
tempo(s)
Ab
s[U
f](m
)
a0=20
a0=0.51







