
Modelagem Matematica de Sistemas
1. + de modelagem com Circuitos Eletricos
2. Sistematica para Obtencao de Equacoes de Estado
c©Reinaldo M. Palharespag.1 Teoria de Sistemas Lineares – Aula 4
Descricao Matematica de Sistemas
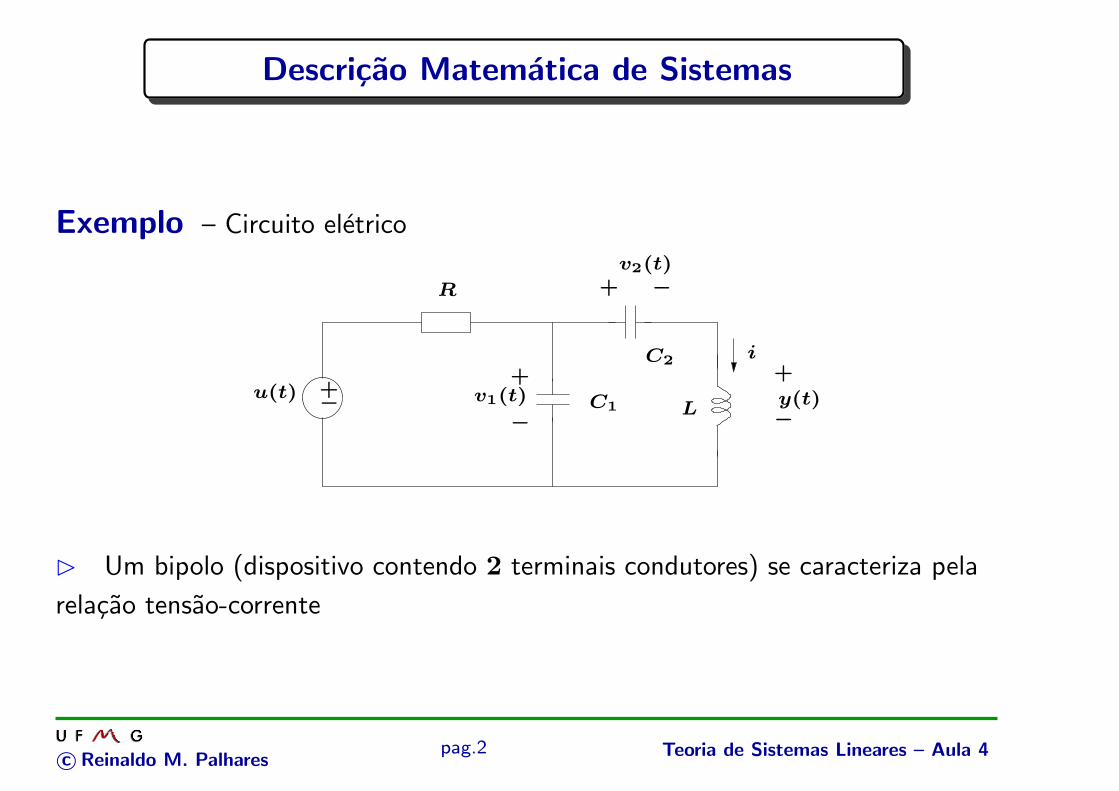
Exemplo – Circuito eletrico
u(t)
R
i
LC1
C2
v1(t)
v2(t)+
+ ++
−
−−
−y(t)
B Um bipolo (dispositivo contendo 2 terminais condutores) se caracteriza pela
relacao tensao-corrente
c©Reinaldo M. Palharespag.2 Teoria de Sistemas Lineares – Aula 4

Circuito eletrico
B Resistor, Capacitor e Indutor lineares (convencao de receptor):
iRiC
iL
++ +
−−
−
vRvC vLR L
C
vR = RiR vL = LdiL
dtiC = C
dvC
dt
c©Reinaldo M. Palharespag.3 Teoria de Sistemas Lineares – Aula 4
Circuito eletrico
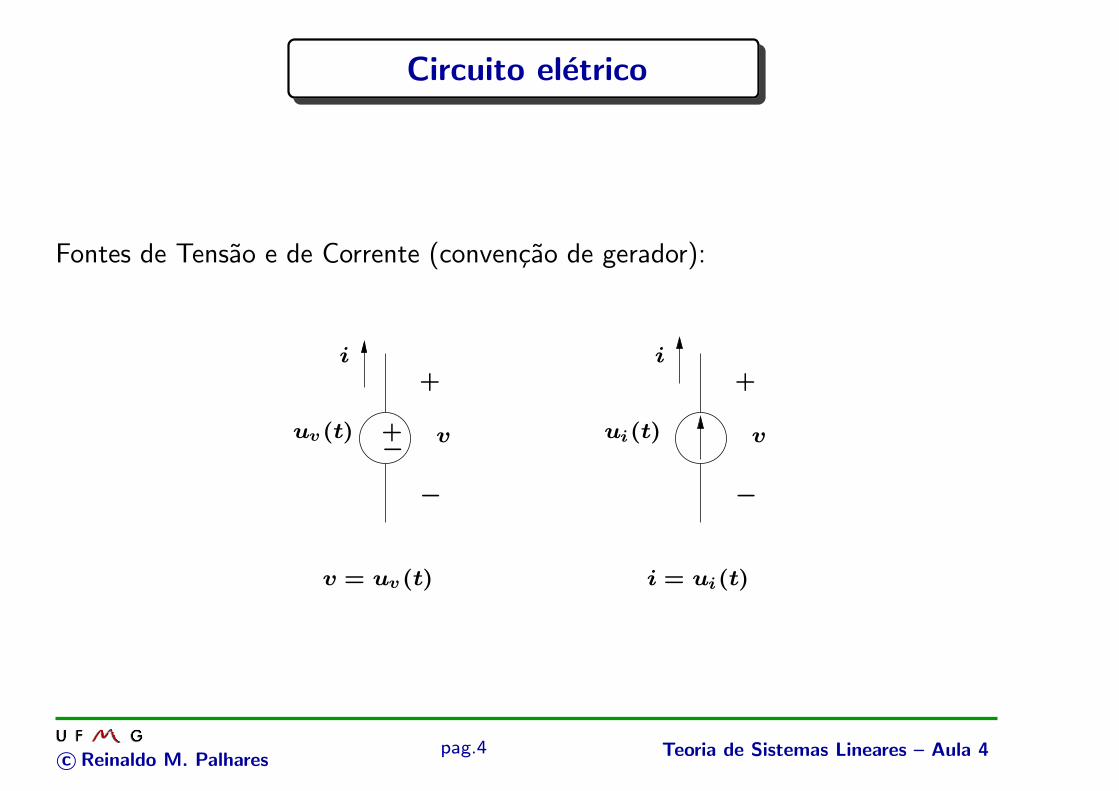
Fontes de Tensao e de Corrente (convencao de gerador):
ii
v v
+
+
+
−
−
−
uv(t) ui(t)
v = uv(t) i = ui(t)
c©Reinaldo M. Palharespag.4 Teoria de Sistemas Lineares – Aula 4
Circuito eletrico
Convencao – em geral, a convencao de receptor e utilizada para os bipolos passivos e a
de gerador para as fontes
No: Um ponto de ligacao entre 2 ou mais bipolos
I Lei das Correntes ou 1a Lei de Kirchhoff: a soma algebrica das correntes que saem
de um no e nula
Laco: Qualquer percurso fechado formado por bipolos que nao passe duas vezes pelo
mesmo no
I Lei das Tensoes ou 2a Lei de Kirchhoff: a soma algebrica das tensoes nos bipolos
pertencentes a um laco e nula
à Em um circuito com b bipolos e n nos tem-se 2b variaveis (tensoes e correntes nos
bipolos)
c©Reinaldo M. Palharespag.5 Teoria de Sistemas Lineares – Aula 4
Circuito eletrico
u(t)
R
i = C2v2
(u − v1)/R
C1v1
L
N
C1
C2
v1
v2
+
+
++
−
−
−
−
y = vL = Ldi
dt
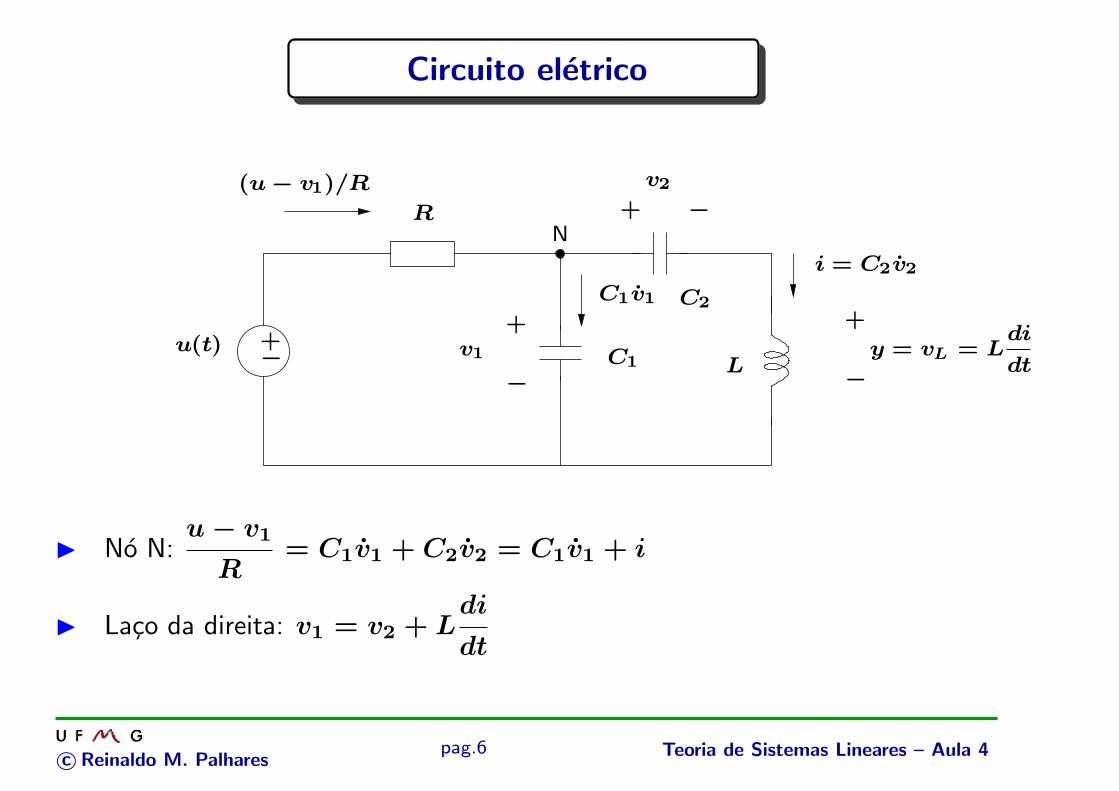
I No N:u − v1
R= C1v1 + C2v2 = C1v1 + i
I Laco da direita: v1 = v2 + Ldi
dt
c©Reinaldo M. Palharespag.6 Teoria de Sistemas Lineares – Aula 4
Circuito eletrico
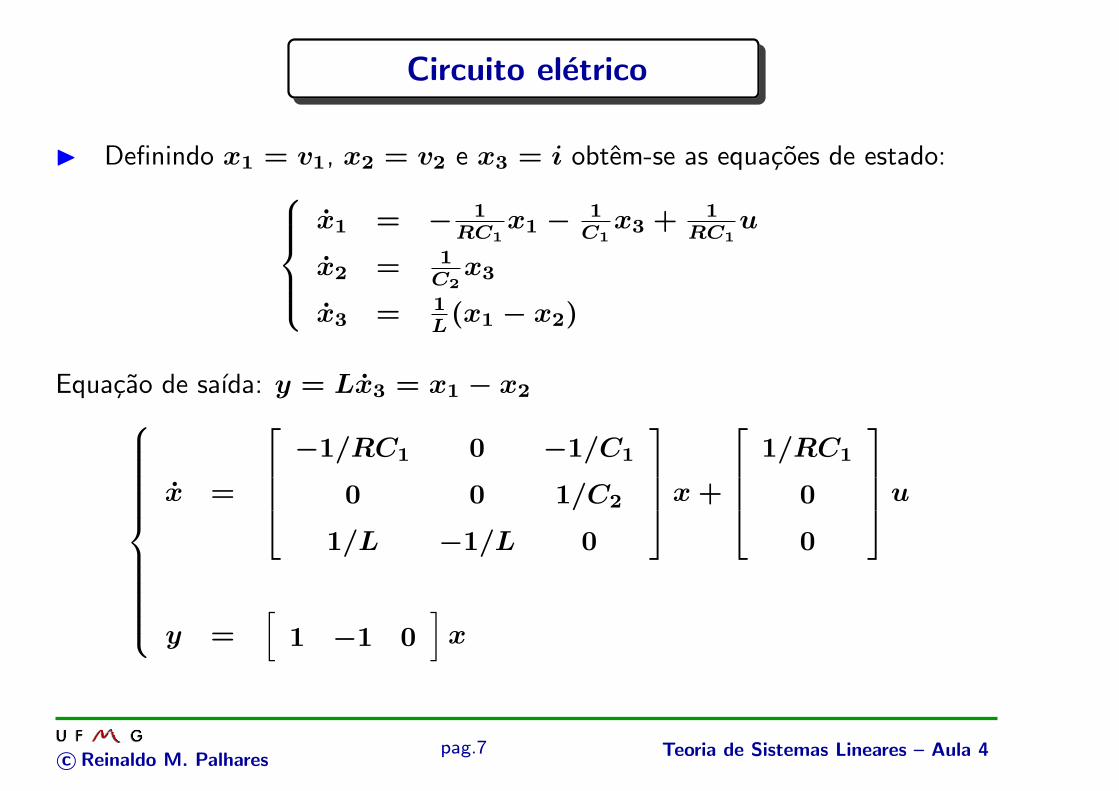
I Definindo x1 = v1, x2 = v2 e x3 = i obtem-se as equacoes de estado:
x1 = −1
RC1
x1 −1
C1
x3 + 1RC1
u
x2 = 1C2
x3
x3 = 1L(x1 − x2)
Equacao de saıda: y = Lx3 = x1 − x2
x =
−1/RC1 0 −1/C1
0 0 1/C2
1/L −1/L 0
x +
1/RC1
0
0
u
y =[
1 −1 0]
x
c©Reinaldo M. Palharespag.7 Teoria de Sistemas Lineares – Aula 4
Sistematica para Obtencao de Equacoes de Estado
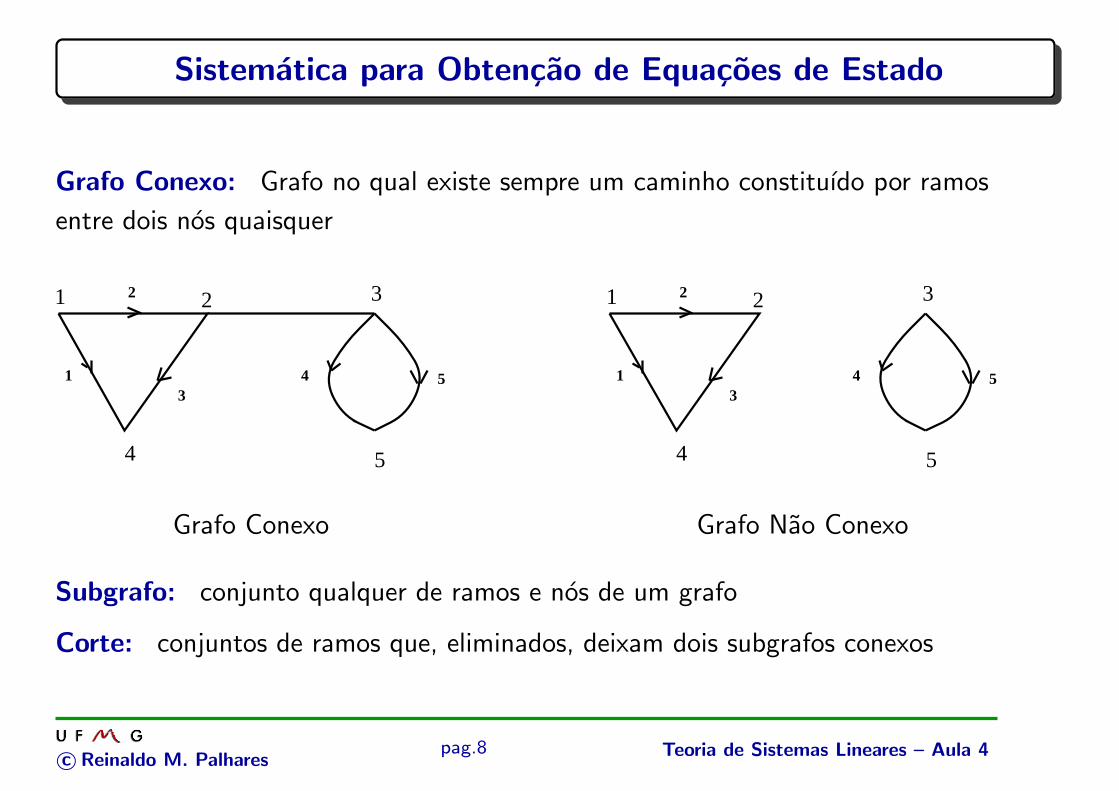
Grafo Conexo: Grafo no qual existe sempre um caminho constituıdo por ramos
entre dois nos quaisquer
1 2
4
3
5
2
31 4 5
Grafo Conexo
1 2
4
3
5
2
31 4 5
Grafo Nao Conexo
Subgrafo: conjunto qualquer de ramos e nos de um grafo
Corte: conjuntos de ramos que, eliminados, deixam dois subgrafos conexos
c©Reinaldo M. Palharespag.8 Teoria de Sistemas Lineares – Aula 4
Sistematica para Obtencao de Equacoes de Estado
Laco: caminho fechado formado por ramos e nao passando mais de uma vez por
nenhum no
Arvore: subgrafo conexo contendo todos os nos do grafo e nenhum laco.
Escolhida uma arvore para um grafo, os demais ramos (nao pertencentes a arvore)
sao chamados de ramos de ligacao
Corte Fundamental: constituıdo por um unico ramo da arvore e ramos de
ligacao
Laco Fundamental: constituıdo por um unico ramo de ligacao e ramos da
arvore
c©Reinaldo M. Palharespag.9 Teoria de Sistemas Lineares – Aula 4
Sistematica para Obtencao de Equacoes de Estado
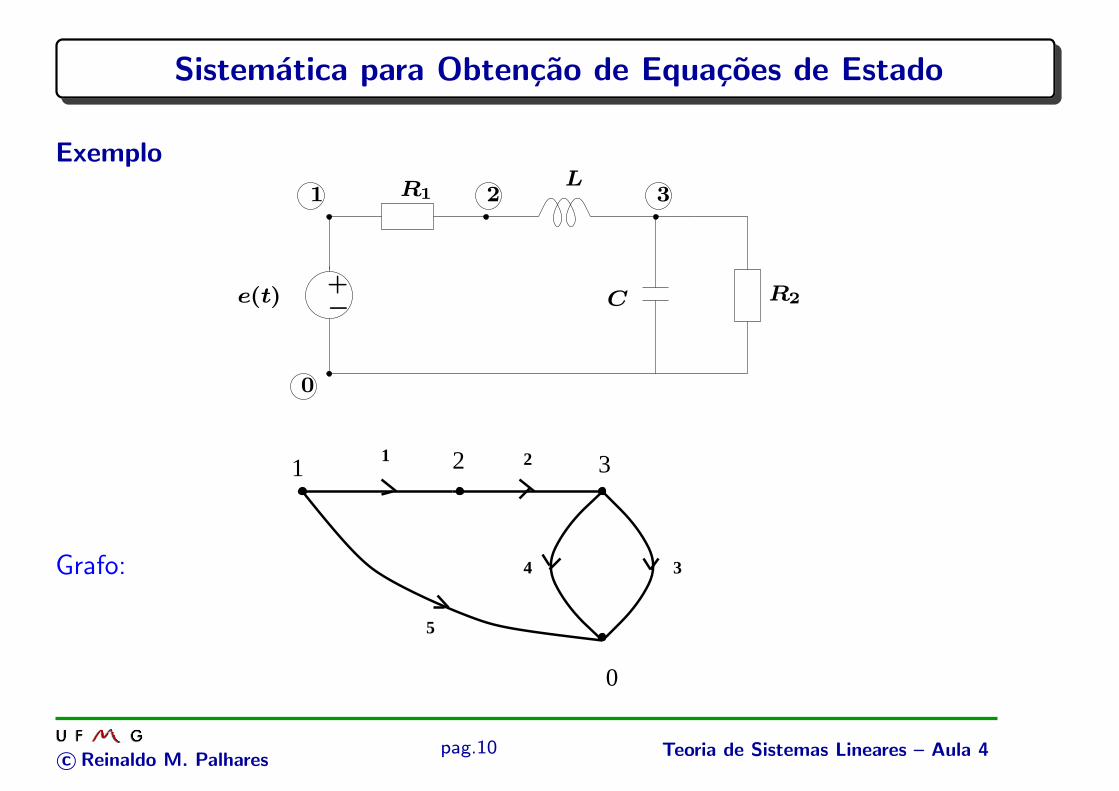
Exemplo
R2
R1
0
1 2 3
C
L
+−
e(t)
Grafo:
1 2
34
5
1 2 3
0
c©Reinaldo M. Palharespag.10 Teoria de Sistemas Lineares – Aula 4
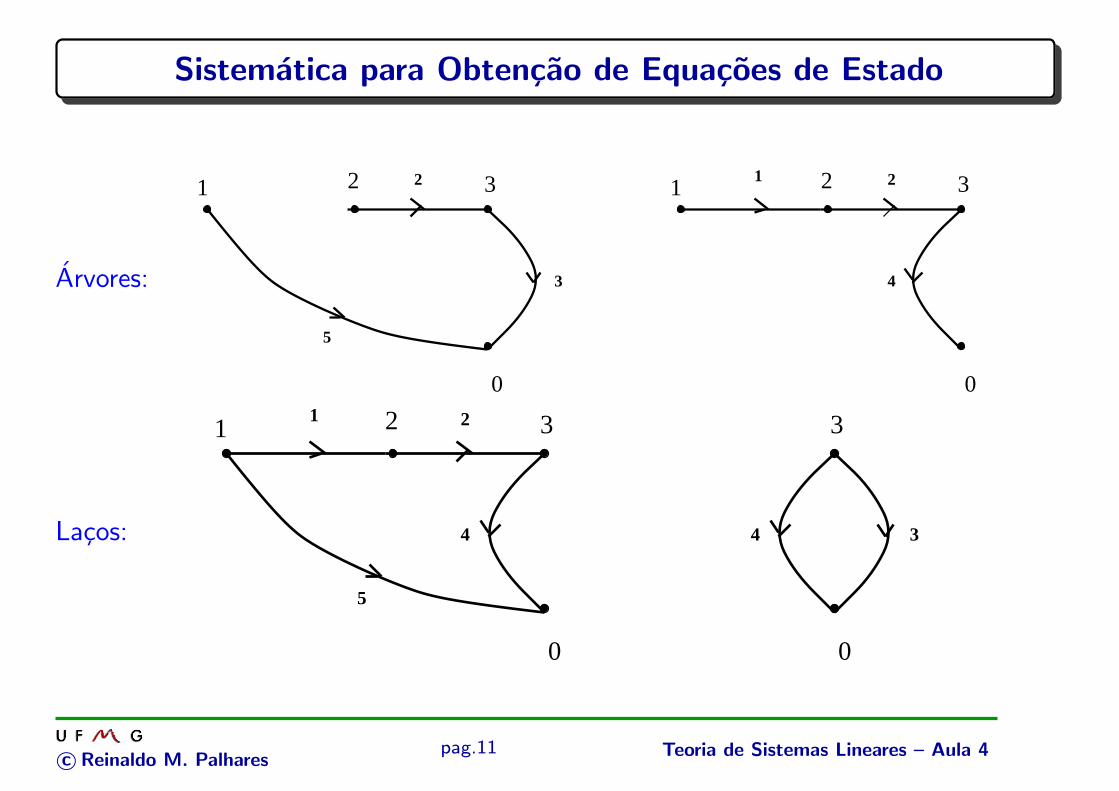
Sistematica para Obtencao de Equacoes de Estado
Arvores:
2
3
5
1 2 3
0
1 2
4
1 2 3
0
Lacos:
1 2
4
5
1 2 3
0
34
3
0
c©Reinaldo M. Palharespag.11 Teoria de Sistemas Lineares – Aula 4

Sistematica para Obtencao de Equacoes de Estado
Arvore Propria: e uma arvore com todos os capacitores e fontes de tensao do
circuito, sem indutores e sem fontes de corrente
e(t)
R1
R2
i
L
C++
−
−
v
1
4
5
1 2 3
0
B Cada capacitor define um corte fundamental, constituıdo pelo capacitor e por
ramos de ligacao
B Cada indutor define um laco fundamental, constituıdo pelo indutor e ramos da
arvore
c©Reinaldo M. Palharespag.12 Teoria de Sistemas Lineares – Aula 4
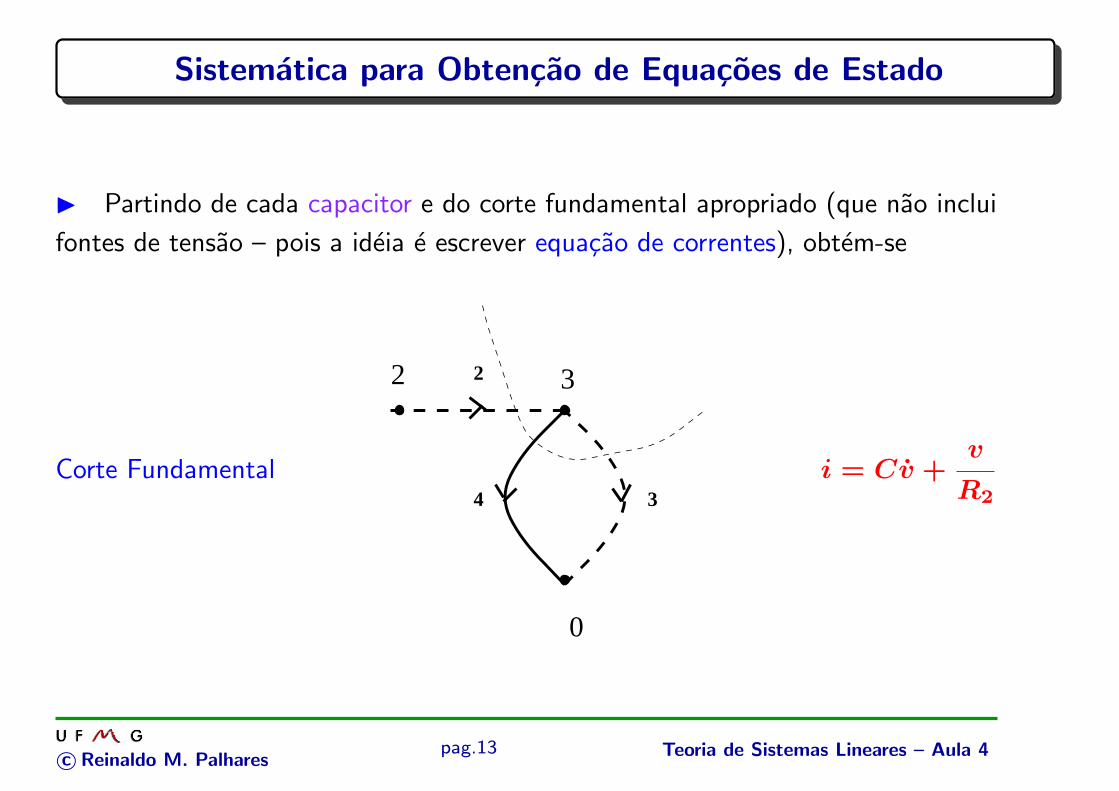
Sistematica para Obtencao de Equacoes de Estado
I Partindo de cada capacitor e do corte fundamental apropriado (que nao inclui
fontes de tensao – pois a ideia e escrever equacao de correntes), obtem-se
Corte Fundamental
2
34
2 3
0
i = Cv +v
R2
c©Reinaldo M. Palharespag.13 Teoria de Sistemas Lineares – Aula 4
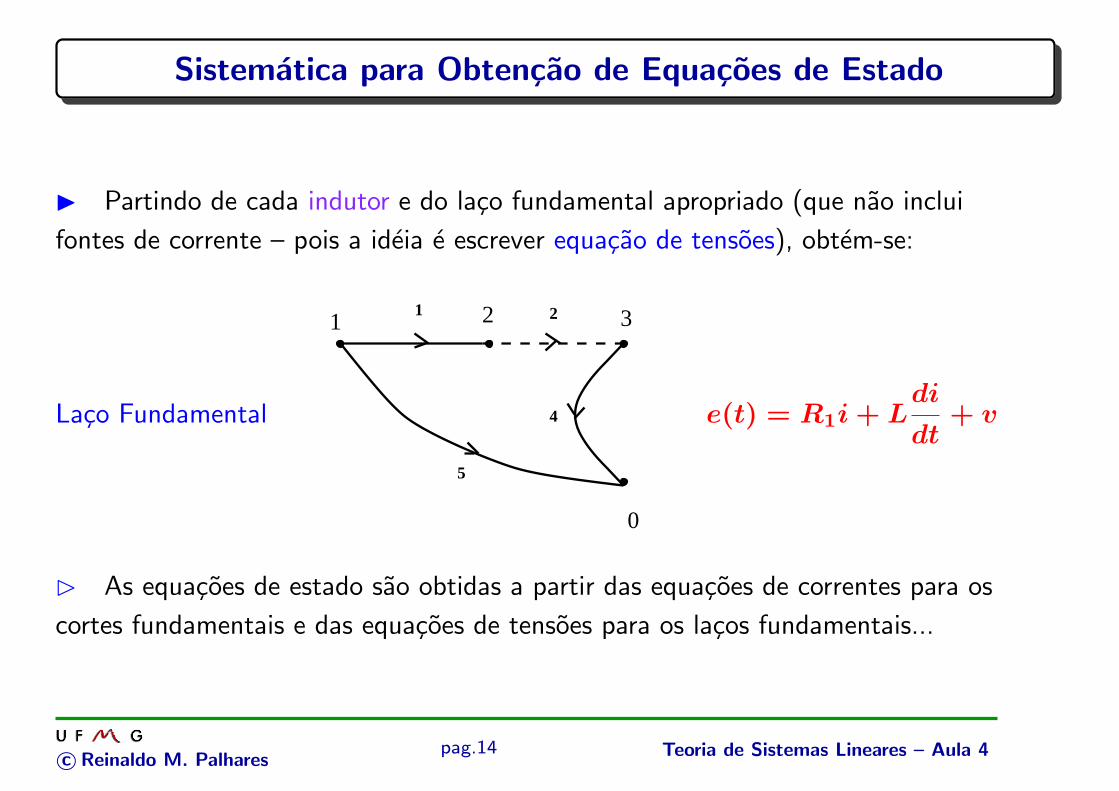
Sistematica para Obtencao de Equacoes de Estado
I Partindo de cada indutor e do laco fundamental apropriado (que nao inclui
fontes de corrente – pois a ideia e escrever equacao de tensoes), obtem-se:
Laco Fundamental
1 2
4
5
1 2 3
0
e(t) = R1i + Ldi
dt+ v
B As equacoes de estado sao obtidas a partir das equacoes de correntes para os
cortes fundamentais e das equacoes de tensoes para os lacos fundamentais...
c©Reinaldo M. Palharespag.14 Teoria de Sistemas Lineares – Aula 4
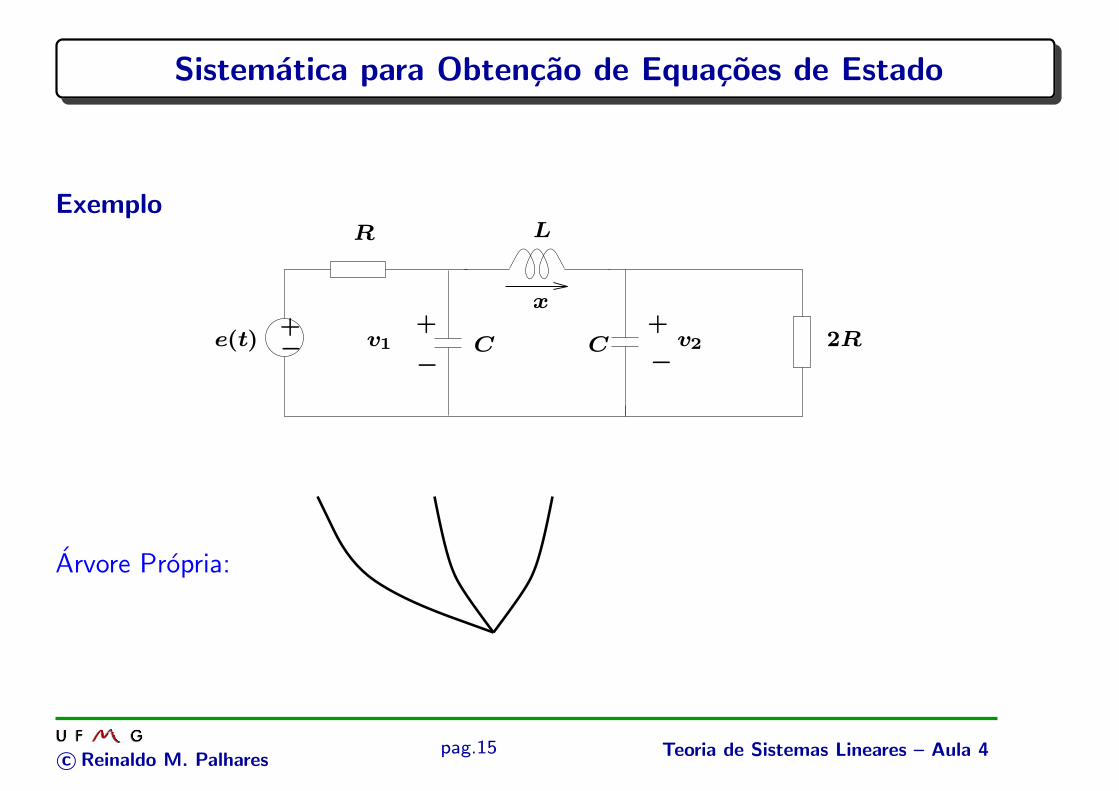
Sistematica para Obtencao de Equacoes de Estado
Exemplo
rep
R
2RCC+++
L
−−
−
x
v1 v2e(t)
Arvore Propria:
c©Reinaldo M. Palharespag.15 Teoria de Sistemas Lineares – Aula 4
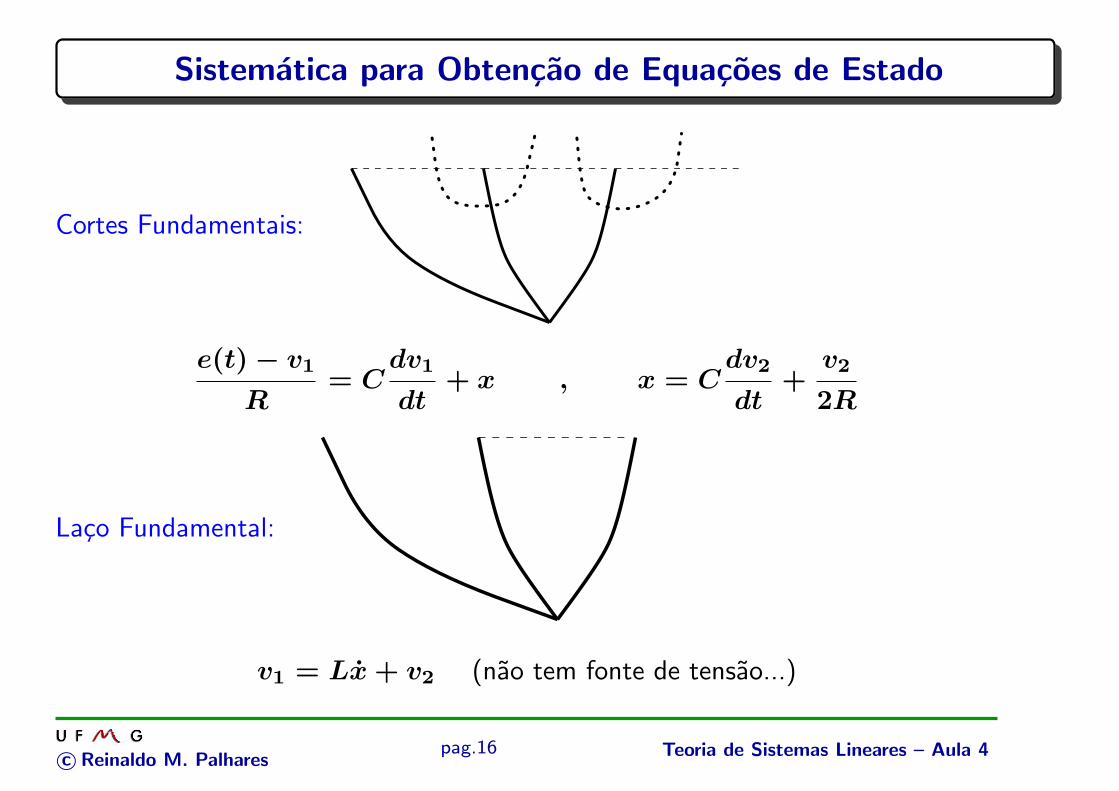
Sistematica para Obtencao de Equacoes de Estado
Cortes Fundamentais:
e(t) − v1
R= C
dv1
dt+ x , x = C
dv2
dt+
v2
2R
Laco Fundamental:
v1 = Lx + v2 (nao tem fonte de tensao...)
c©Reinaldo M. Palharespag.16 Teoria de Sistemas Lineares – Aula 4
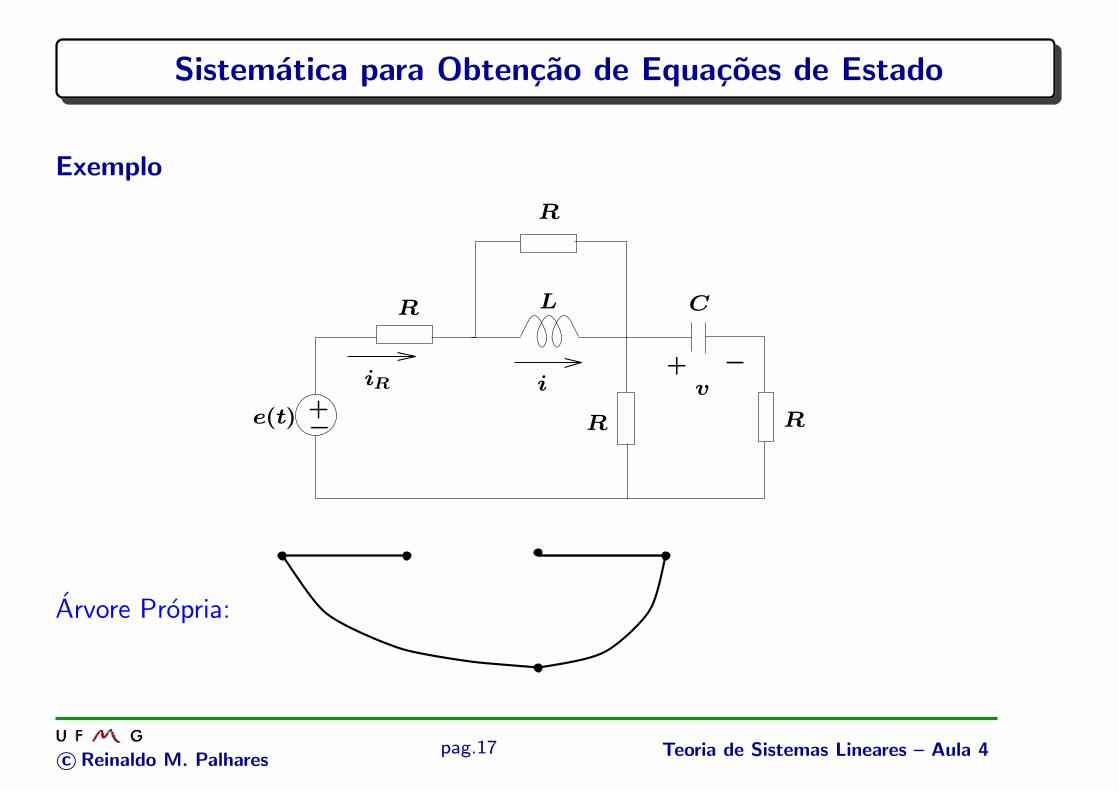
Sistematica para Obtencao de Equacoes de Estado
Exemplo
e(t)
R
R
R
R
i
L C
+
+−
−
viR
Arvore Propria:
c©Reinaldo M. Palharespag.17 Teoria de Sistemas Lineares – Aula 4
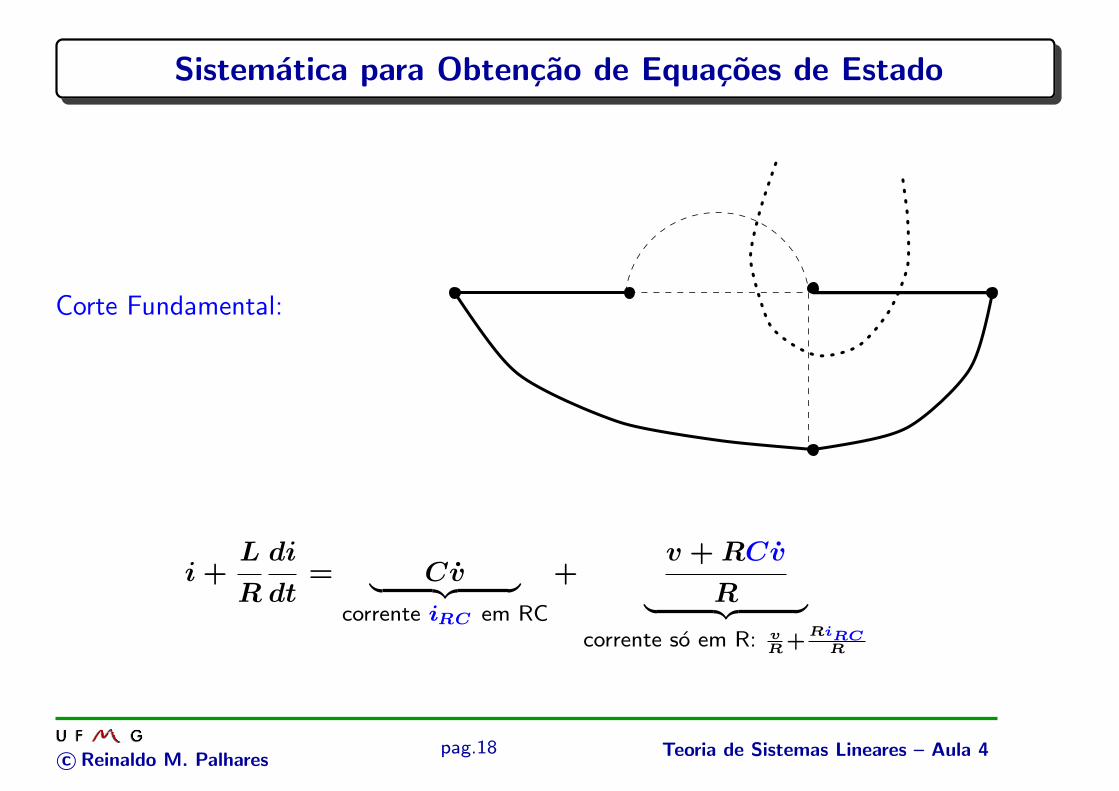
Sistematica para Obtencao de Equacoes de Estado
Corte Fundamental:
i +L
R
di
dt= Cv
︸ ︷︷ ︸
corrente iRC em RC
+v + RCv
R︸ ︷︷ ︸
corrente so em R: v
R+
RiRC
R
c©Reinaldo M. Palharespag.18 Teoria de Sistemas Lineares – Aula 4
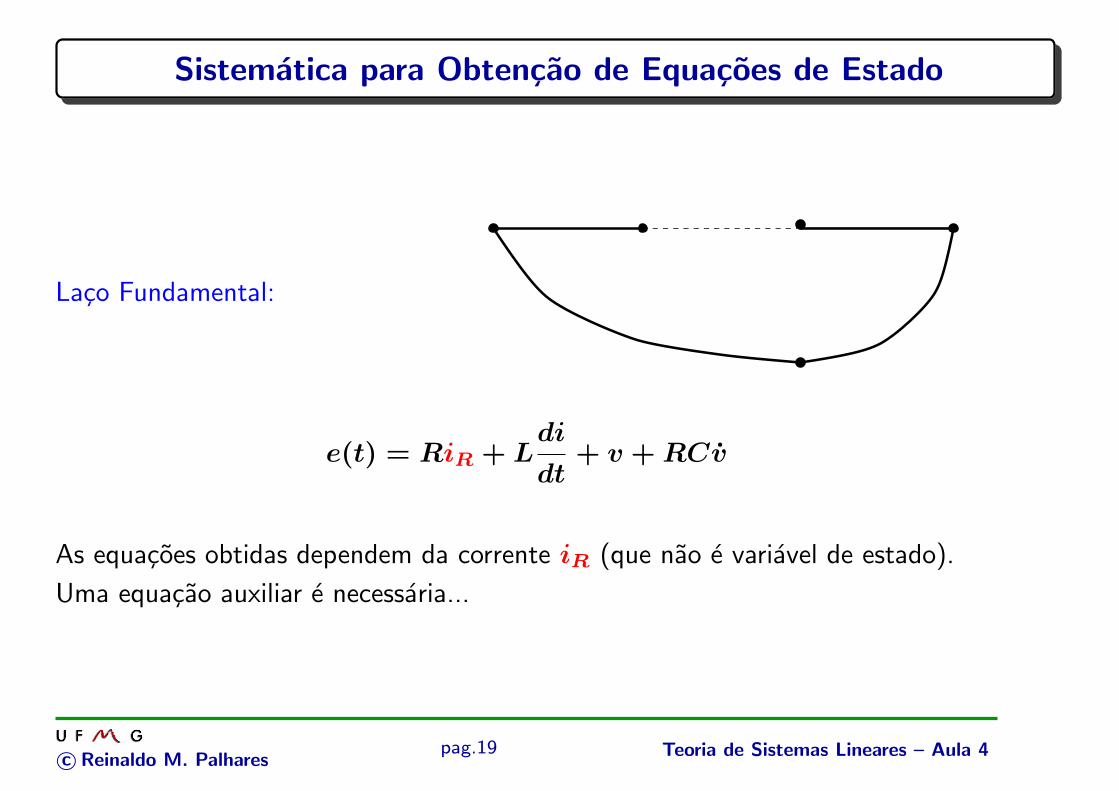
Sistematica para Obtencao de Equacoes de Estado
Laco Fundamental:
e(t) = RiR + Ldi
dt+ v + RCv
As equacoes obtidas dependem da corrente iR (que nao e variavel de estado).
Uma equacao auxiliar e necessaria...
c©Reinaldo M. Palharespag.19 Teoria de Sistemas Lineares – Aula 4
Sistematica para Obtencao de Equacoes de Estado
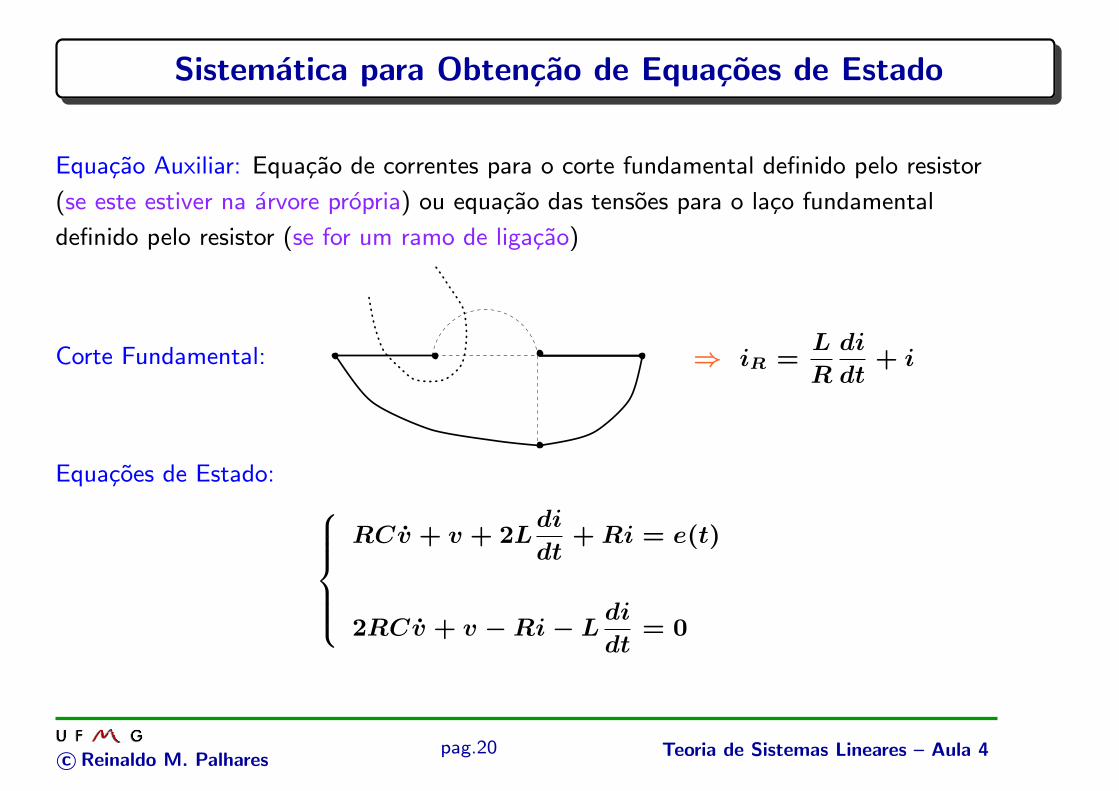
Equacao Auxiliar: Equacao de correntes para o corte fundamental definido pelo resistor
(se este estiver na arvore propria) ou equacao das tensoes para o laco fundamental
definido pelo resistor (se for um ramo de ligacao)
Corte Fundamental: ⇒ iR =L
R
di
dt+ i
Equacoes de Estado:
8
>
>
>
<
>
>
>
:
RCv + v + 2Ldi
dt+ Ri = e(t)
2RCv + v − Ri − Ldi
dt= 0
c©Reinaldo M. Palharespag.20 Teoria de Sistemas Lineares – Aula 4
Sistematica para Obtencao de Equacoes de Estado
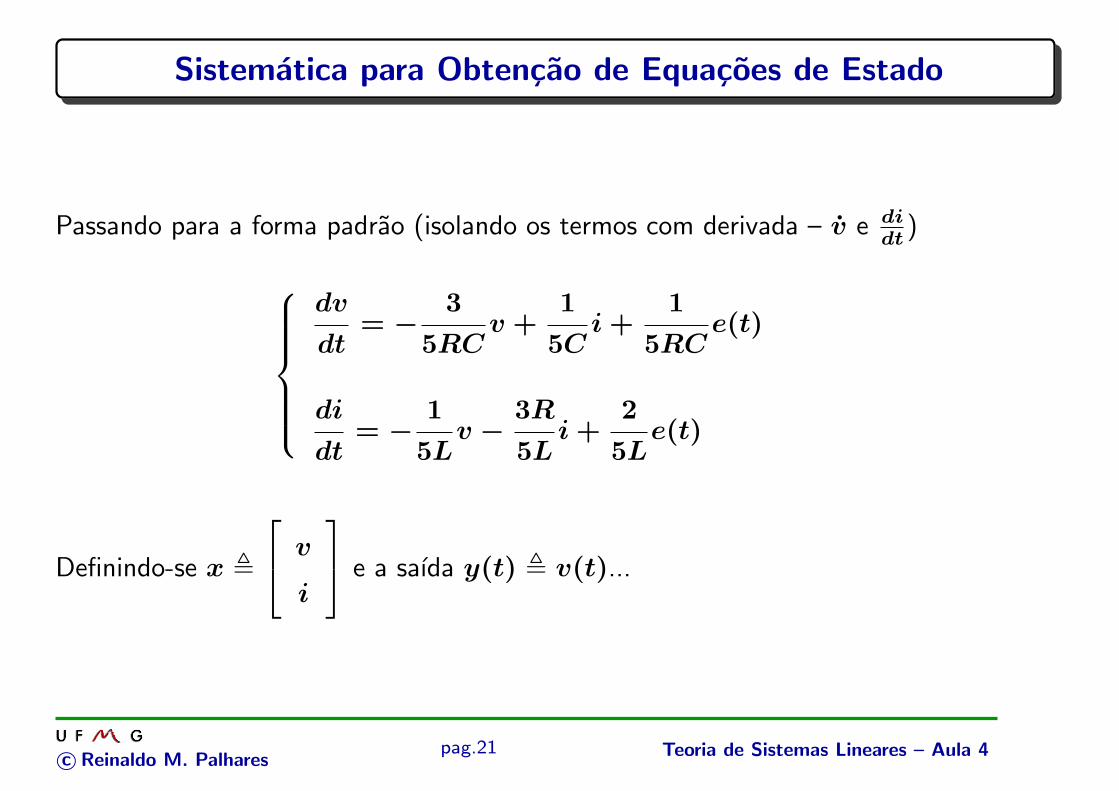
Passando para a forma padrao (isolando os termos com derivada – v e didt
)
dv
dt= −
3
5RCv +
1
5Ci +
1
5RCe(t)
di
dt= −
1
5Lv −
3R
5Li +
2
5Le(t)
Definindo-se x ,
v
i
e a saıda y(t) , v(t)...
c©Reinaldo M. Palharespag.21 Teoria de Sistemas Lineares – Aula 4
Sistematica para Obtencao de Equacoes de Estado
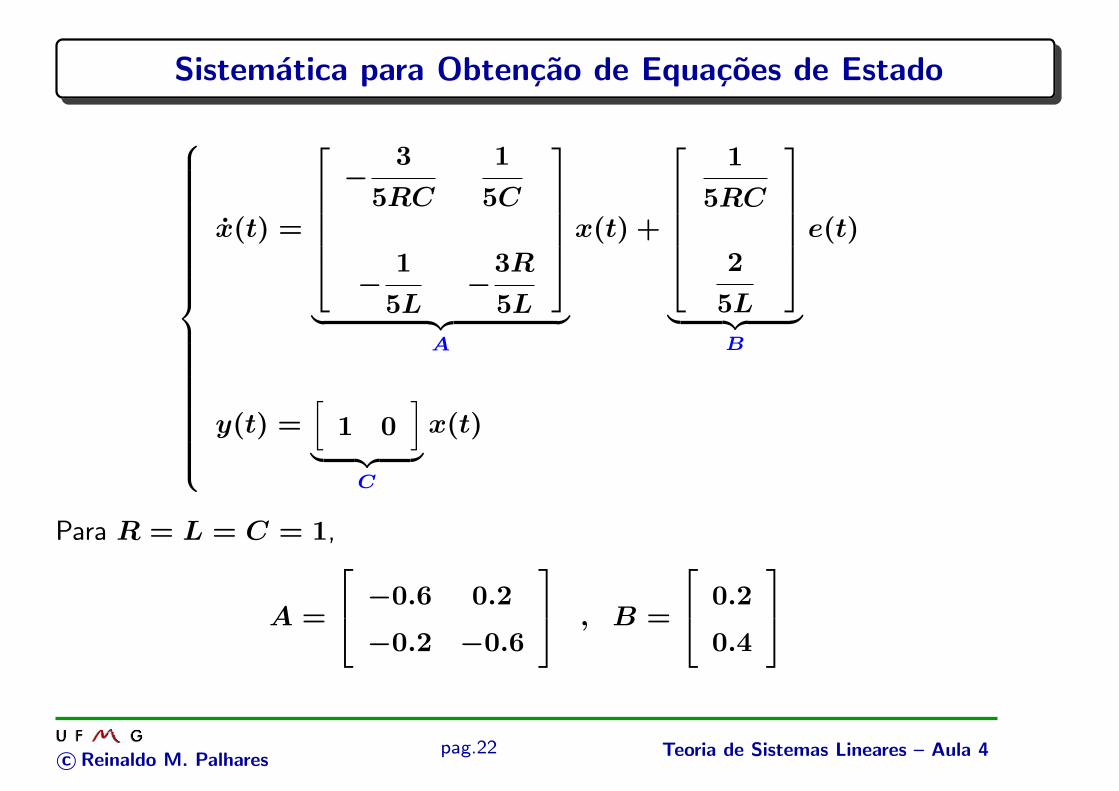
x(t) =
−
3
5RC
1
5C
−
1
5L−
3R
5L
︸ ︷︷ ︸
A
x(t) +
1
5RC
2
5L
︸ ︷︷ ︸
B
e(t)
y(t) =[
1 0]
︸ ︷︷ ︸
C
x(t)
Para R = L = C = 1,
A =
−0.6 0.2
−0.2 −0.6
, B =
0.2
0.4
c©Reinaldo M. Palharespag.22 Teoria de Sistemas Lineares – Aula 4
Sistematica para Obtencao de Equacoes de Estado
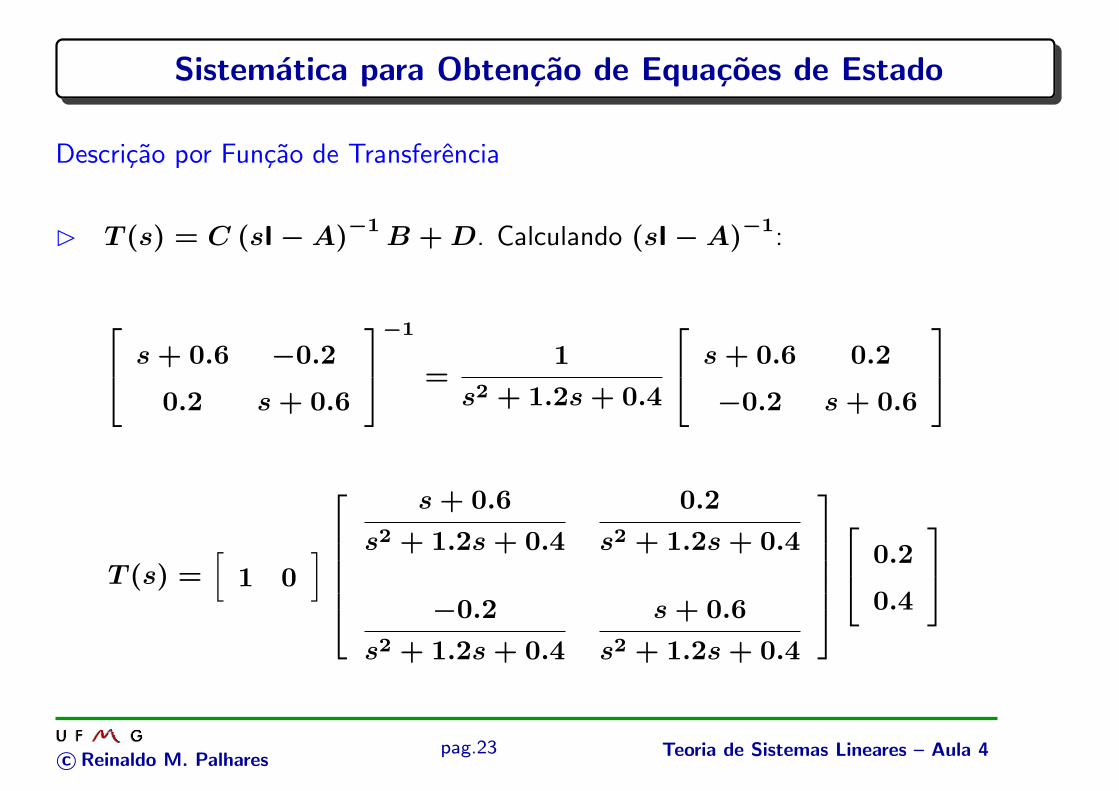
Descricao por Funcao de Transferencia
B T (s) = C (sI − A)−1
B + D. Calculando (sI − A)−1
:
s + 0.6 −0.2
0.2 s + 0.6
−1
=1
s2 + 1.2s + 0.4
s + 0.6 0.2
−0.2 s + 0.6
T (s) =[
1 0]
s + 0.6
s2 + 1.2s + 0.4
0.2
s2 + 1.2s + 0.4
−0.2
s2 + 1.2s + 0.4
s + 0.6
s2 + 1.2s + 0.4
0.2
0.4
c©Reinaldo M. Palharespag.23 Teoria de Sistemas Lineares – Aula 4
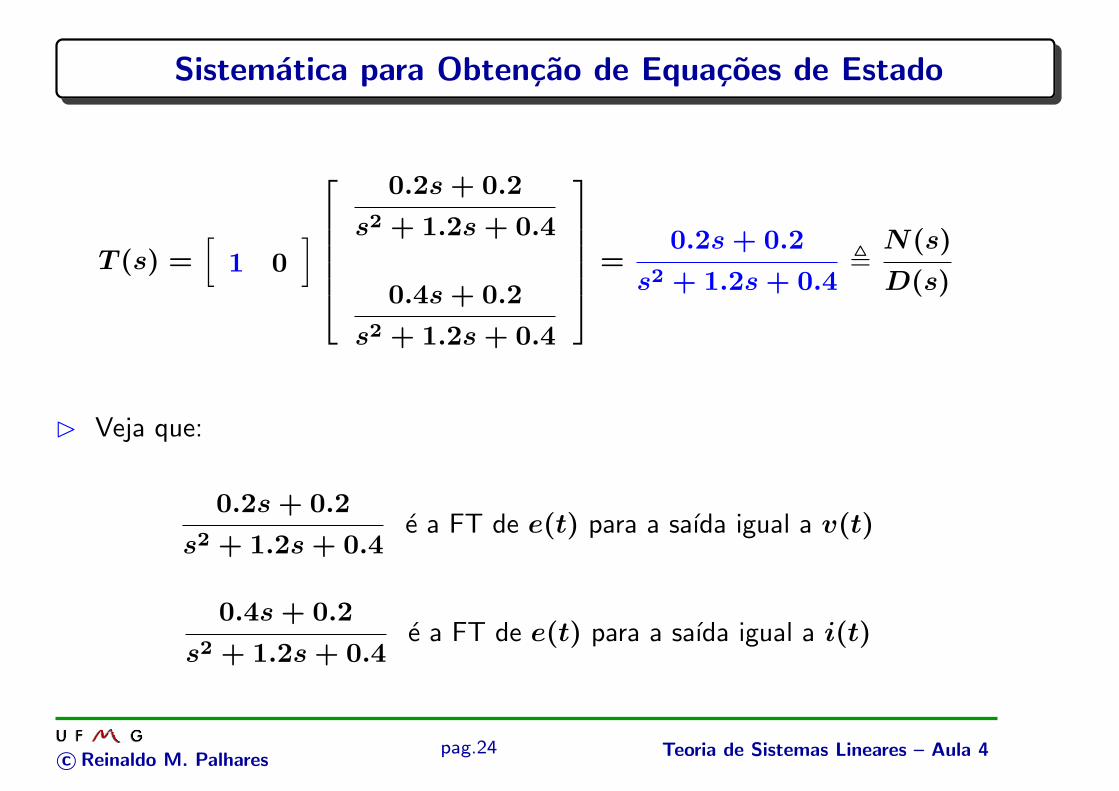
Sistematica para Obtencao de Equacoes de Estado
T (s) =[
1 0]
0.2s + 0.2
s2 + 1.2s + 0.4
0.4s + 0.2
s2 + 1.2s + 0.4
=0.2s + 0.2
s2 + 1.2s + 0.4,
N(s)
D(s)
B Veja que:
0.2s + 0.2
s2 + 1.2s + 0.4e a FT de e(t) para a saıda igual a v(t)
0.4s + 0.2
s2 + 1.2s + 0.4e a FT de e(t) para a saıda igual a i(t)
c©Reinaldo M. Palharespag.24 Teoria de Sistemas Lineares – Aula 4
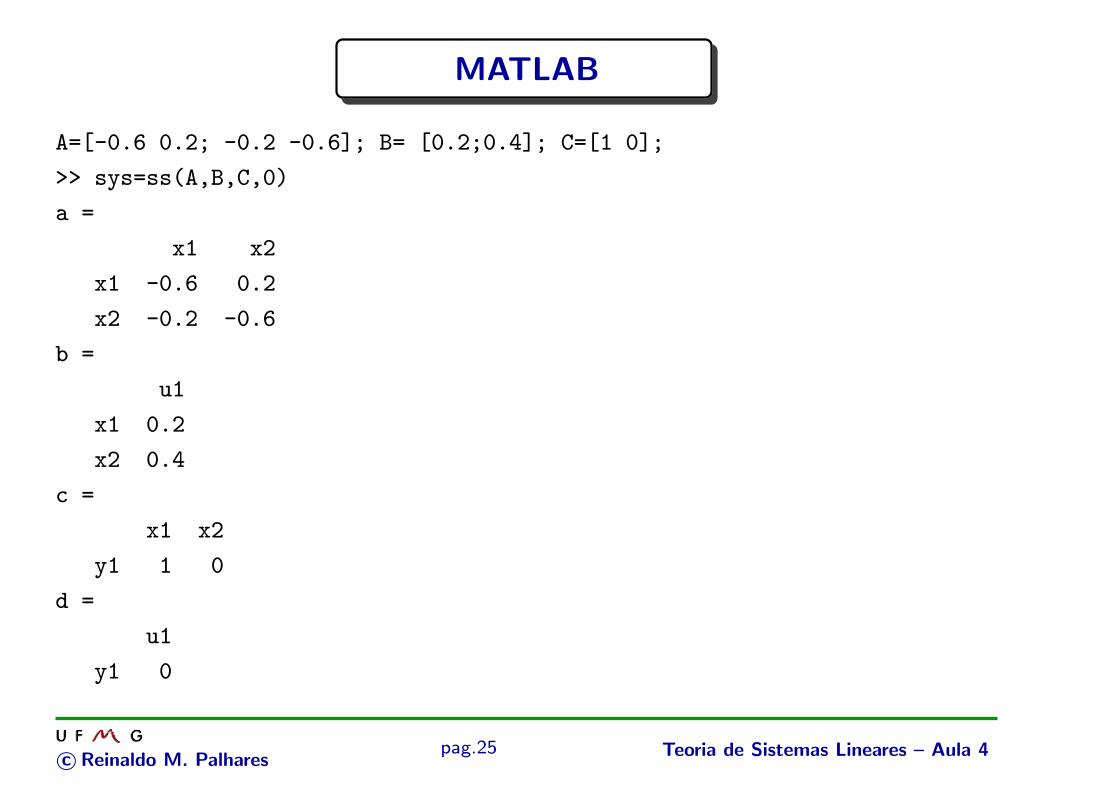
MATLAB
A=[-0.6 0.2; -0.2 -0.6]; B= [0.2;0.4]; C=[1 0];
>> sys=ss(A,B,C,0)
a =
x1 x2
x1 -0.6 0.2
x2 -0.2 -0.6
b =
u1
x1 0.2
x2 0.4
c =
x1 x2
y1 1 0
d =
u1
y1 0
c©Reinaldo M. Palharespag.25 Teoria de Sistemas Lineares – Aula 4
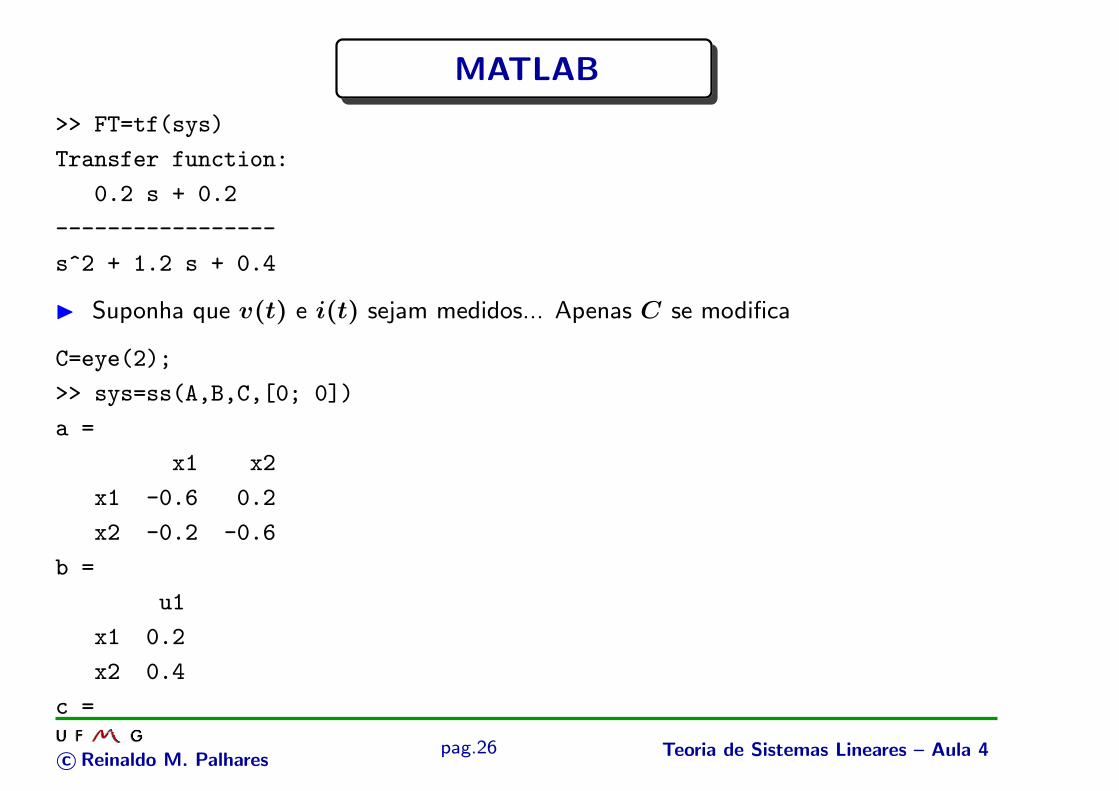
MATLAB
>> FT=tf(sys)
Transfer function:
0.2 s + 0.2
-----------------
s^2 + 1.2 s + 0.4
I Suponha que v(t) e i(t) sejam medidos... Apenas C se modifica
C=eye(2);
>> sys=ss(A,B,C,[0; 0])
a =
x1 x2
x1 -0.6 0.2
x2 -0.2 -0.6
b =
u1
x1 0.2
x2 0.4
c =
c©Reinaldo M. Palharespag.26 Teoria de Sistemas Lineares – Aula 4
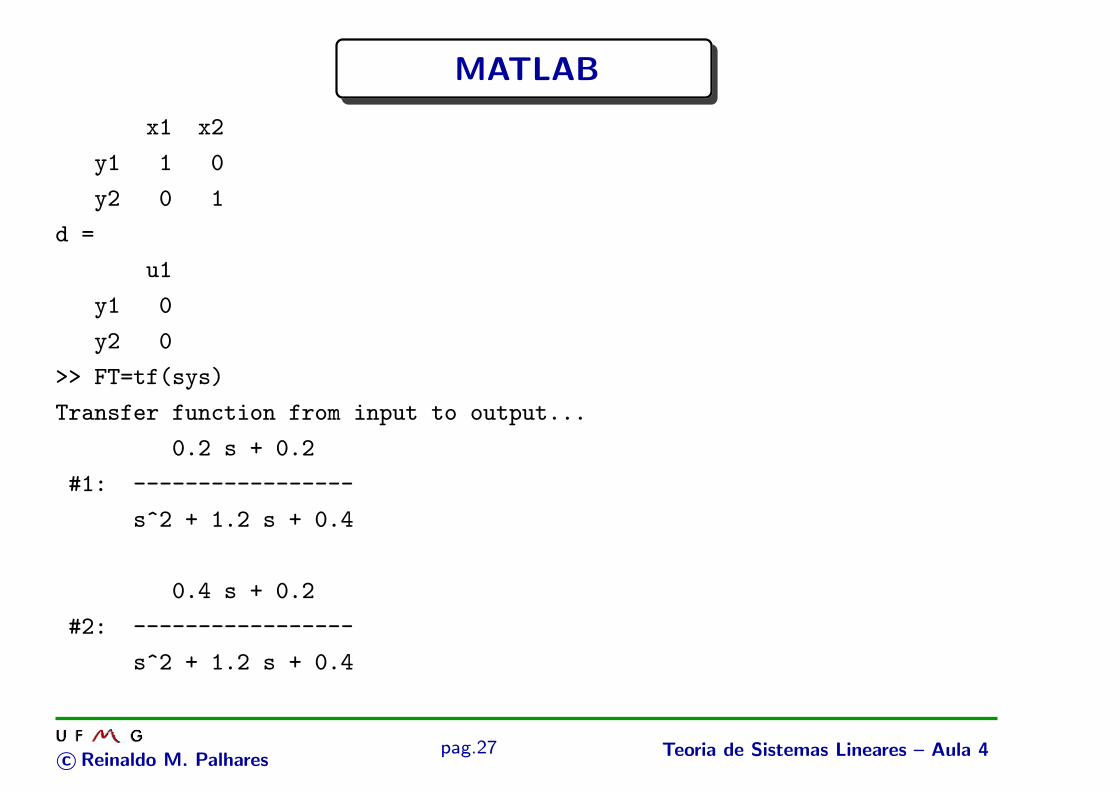
MATLAB
x1 x2
y1 1 0
y2 0 1
d =
u1
y1 0
y2 0
>> FT=tf(sys)
Transfer function from input to output...
0.2 s + 0.2
#1: -----------------
s^2 + 1.2 s + 0.4
0.4 s + 0.2
#2: -----------------
s^2 + 1.2 s + 0.4
c©Reinaldo M. Palharespag.27 Teoria de Sistemas Lineares – Aula 4







