desenvolvimento de um software para a aquisição de dados
TRANSCRIPT

UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE
CENTRO DE TECNOLOGIA
GRADUAÇÃO EM ENGENHARIA MECÂNICA
Desenvolvimento de um software para a aquisição
de dados de sensores usados em ensaios
tribológicos
PEDRO VICTOR DANTAS DE MENDONÇA
NATAL- RN, 2018

UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE
CENTRO DE TECNOLOGIA
GRADUAÇÃO EM ENGENHARIA MECÂNICA
Desenvolvimento de um software para a aquisição
de dados de sensores usados em ensaios
tribológicos
PEDRO VICTOR DANTAS DE MENDONÇA
Trabalho de Conclusão de Curso
apresentado ao curso de Engenharia
Mecânica da Universidade Federal do
Rio Grande do Norte como parte dos
requisitos para a obtenção do título de
Engenheiro Mecânico, orientado pela
Profª. Juliana Ricardo de Souza.
NATAL - RN
2018

UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE
CENTRO DE TECNOLOGIA
GRADUAÇÃO EM ENGENHARIA MECÂNICA
Desenvolvimento de um software para a aquisição
de dados de sensores usados em ensaios
tribológicos
PEDRO VICTOR DANTAS DE MENDONÇA
Banca Examinadora do Trabalho de Conclusão de Curso
Profª. Dra. Juliana Ricardo de Souza
Universidade Federal do Rio Grande do Norte - Orientador
Prof. Dr. Jarbas Santos Medeiros
Instituto Federal da Paraíba - Avaliador externo
Engº. Antônio Paulino de Araújo Neto
Avaliador externo
NATAL, 28 de junho de 2018

Agradecimentos
Este trabalho não poderia ser concluído sem a ajuda de diversas
pessoas as quais presto minha homenagem:
Meus pais Zacarias e Silvia, que deram todo o suporte possível para
que eu seguisse o curso que escolhi.
Minha namorada Thaís, por sempre estar ao meu lado e me dando
apoio para seguir em frente.
Minha orientadora, que aceitou me ajudar a realizar esse trabalho e
que também foi uma ótima professora nas matérias que tive o prazer de ser
ensinado por ela.
Meus colegas de turma e amigos da universidade, que estiveram
comigo durante toda a jornada e me ajudaram em diversas dificuldades. Em
especial ao amigo Antônio Paulino, pelos conselhos e apoio na realização
deste trabalho.
A banca de avaliação, pela disponibilidade e atenção.
Ao Grupo de Estudos de Tribologia e Integridade Estrutural (GET) pela
estrutura oferecida, orientações e materiais necessários para a realização
deste projeto.
A UFRN, pela estrutura e oportunidades dados no decorrer de minha
formação para que ela fosse realizada adequadamente.

Mendonça, P.V.D. Desenvolvimento de um software para a aquisição de dados
de sensores usados em ensaios tribológicos. 2018. 40 f. Trabalho de Conclusão
de Curso (Graduação em Engenharia Mecânica) - Universidade Federal do Rio
Grande do Norte, Natal-RN, 2018.
Resumo
O presente trabalho tem como objetivo o desenvolvimento de um software
programável para aquisição de dados de sensores, para a aplicação em ensaios
tribológicos. O sistema desenvolvido na plataforma LabVIEW foi feito com
ferramentas que recebem as informações dos sensores para o usuário de modo que
ele tenha a liberdade de controlar seu funcionamento, escolher parâmetros de
entrada que influenciam em como os dados serão aquisitados e visualizar os
resultados recebidos de diferentes formas. Para a validação do programa, foi
realizada uma calibração dos sensores utilizados no ensaio e depois, nas mesmas
condições, o programa foi inicializado, visando realizar comparações e análises de
erros entre os valores obtidos e os esperados. A comparação entre os dados foi feita
com o intuito de verificar a precisão do sistema desenvolvido em LabVIEW, bem
como suas demais funcionalidades. Como resultado foi possível determinar a
eficiência do sistema desenvolvido com o modulo de aquisição utilizado.
Palavras-chave: Aquisição de dados, Sensores, LabVIEW

Mendonça, P.V.D. Development of software for the acquisition of sensor data
used in tribological tests. 2018. 40 p. Conclusion work project (Graduate in
Mechanical Engineering) - Federal University of Rio Grande do Norte, Natal-RN,
2018.
Abstract
The present work has the objective of developing programmable software for
the acquisition of sensor data for the application in tribological tests. The system
developed in the LabVIEW platform was made with tools that receive information from
the sensors to the user so that he is free to control its operation, choosing input
parameters of how the data will be acquired and visualize the results received in
different ways. For the validation of the program, a calibration of the sensors used in
the test was performed and then, under the same conditions, the program was
started, aiming to make comparisons and analysis of errors between the values
obtained and those expected. The comparison between the data was done in order to
verify the accuracy of the system developed in LabVIEW, as well as its other
functionalities. As a result it was possible to determine the good efficacy of the system
developed with the acquisition module used.
.
Keywords: Data aquisition, Sensors, LabVIEW

Sumário
Agradecimentos
Resumo
Abstract
Sumário
1 Introdução ......................................................................................... 1
1.1 Objetivo ....................................................................................... 3
1.2 Hipótese ...................................................................................... 3
2 Revisão bibliográfica ......................................................................... 4
2.1 Ensaios tribológicos .................................................................... 4
2.2 Termopar .................................................................................... 7
2.3 Célula de carga ......................................................................... 10
2.4 LVDT ......................................................................................... 11
2.5 Aquisição de dados ................................................................... 13
2.5.1 Software de driver ......................................................... 15
2.5.2 Software de aplicação ................................................... 16
2.6 LabVIEW ................................................................................... 16
3 Materiais e metodologia ................................................................... 20
3.1 Materiais utilizados .................................................................... 20
3.1.1 Tribômetro Pino-Disco ................................................... 20
3.1.2 Termopar ...................................................................... 22
3.1.3 Célula de carga ............................................................. 22
3.1.4 Sensor LVDT................................................................. 23
3.1.5 Hardware de aquisição de dados .................................. 24
3.1.6 Software de driver ......................................................... 25
3.1.7 Software de aquisição de dados ................................... 26
3.2 Metodologia .............................................................................. 26

4 Resultados e discussões ................................................................. 31
5 Conclusões ...................................................................................... 37
6 Referências ..................................................................................... 38
7 Anexos ............................................................................................ 41

1
1 Introdução
Segundo Fraden (2010), sensor é frequentemente definido como um
dispositivo que recebe e responde a um sinal ou estímulo e também como “um
dispositivo que converte um fenômeno físico em um sinal elétrico” (WILSON,
2005, p.1). Para Wilson (2005), a primeira década do século XXI vem sendo
rotulada por alguns como a “década do sensor”, com um dramático aumento
em psquisa e desenvolvimento (P&D) de sensores e aplicativos relacionadas a
eles nos últimos anos, e com muitos avanços a serem ainda alcançados.
Isso não vem ocorrendo a toa, pois os processos industriais, que são
variados e abrangem muitos tipos de produtos, exigem um rigoroso controle em
sua fabricação, como, por exemplo, a fabricação dos derivados do petróleo,
produtos alimentícios, a indústria de papel e celulose, etc. Em todos estes
processos é absolutamente necessário controlar e manter constantes algumas
variáveis, tais como: pressão, vazão, temperatura, nível, pH, condutividade,
velocidade, umidade, etc. Os instrumentos de medição e controle, os sensores,
permitem manter constantes as variáveis do processo, objetivando a melhoria
em qualidade, o aumento em quantidade do produto e a segurança. (SENAI,
2003).
Também, para Balbinot e Brusamarello (2007), nos mais diversos
campos de pesquisas em ciências e engenharias, procedimentos de controle,
medições e automação de processos dos mais variados experimentos
tradicionalmente utilizam uma grande gama de sensores, como os de
temperatura, pressão, posição, nível, vazão.

2
Com toda a possibilidade de obtenção de informações, a aquisição de
dados deve ser realizada de forma análoga ao que acontece biologicamente.
Afinal, além dos sensores feitos pelo homem também existem os sensores
naturais, como aqueles encontrados em organismos vivos, que geralmente
respondem com sinais de caráter eletroquímico, isto é, sua natureza física é
baseada no transporte de íons, como nas fibras nervosas (como um nervo
óptico). Nos dispositivos feitos pelo homem, a informação também é
transmitida e processada em forma elétrica, no entanto, através do transporte
de elétrons. Sensores que são usados em sistemas artificiais devem falar a
mesma linguagem que os dispositivos com os quais são interligados (FRADEN,
2010).
Esta linguagem é elétrica em sua natureza e um sensor feito pelo
homem deve ser capaz de responder com sinais onde a informação é
transportada pelo deslocamento de elétrons, ao invés de íons. Assim, deve ser
possível conectar um sensor a um sistema eletrônico através de fios elétricos,
em vez de através de uma solução eletroquímica ou uma fibra nervosa.
(FRADEN, 2010)
Após a aquisição de dados realizada eletronicamente, por meio de um
hardware adequado, é preciso que eles sejam expostos e registrados em
tempo real, para que o operador ou monitor dos processos ou experimentos
possa analisar seu andamento e estudar as causas de diversos fenômenos.
Nesse contexto, o presente trabalho se trata do desenvolvimento de um
software para a aquisição de dados de sensores usados em ensaios
tribológicos. Em comparação com os sistemas tradicionais de medição
analógica, os sistemas de aquisição de dados com base em computadores
pessoais exploram a capacidade de processamento, produtividade, sistemas
de visualização e recursos de conectividades dos computadores padrão da
indústria (NATIONAL INSTRUMENTS, 201-?a). Com isso, segundo National
Instruments (201-?a), se tem um sistema de medição mais poderoso, flexível e
de melhor custo-benefício.

3
1.1 Objetivo
O objetivo deste trabalho é o desenvolvimento de um software para
aquisição de dados de sensores de temperatura, posição e força, que ofereça
para o usuário uma interface interativa para a definição de parâmetros
desejados e diferentes modos de visualização e registro de seus resultados,
para a aplicação em ensaios tribológicos.
1.2 Hipótese
O programa desenvolvido neste trabalho apresentará resultados de
medições condizentes com a realidade e de fácil visualização e interação do
usuário.
4
2 Revisão bibliográfica
Neste capítulo, são descritos as características mais relevantes que
envolvem o projeto. Primeiramente, apresentam-se as principais características
dos tribômetros e seu campo de estudo; em seguida, a definição e a explicação
do funcionamento dos sensores utilizados. Na sequência, são retratados os
aspectos mais importantes no que diz respeito a conexão e transmissão de
dados para o software. Por fim, apresenta-se o programa utilizado para a
produção do aplicativo a que se refere o trabalho.
2.1 Ensaios tribológicos
Na definição de Radi et al. (2007): “o tribômetro é um equipamento
versátil para medição de propriedades de atrito e desgaste de combinações de
materiais e lubrificantes sob condições específicas de carga, velocidade,
temperatura e atmosfera”. Como diz Seabra et al. (2015), para se fazer a
caracterização tribológica de pares de materiais usando um tribômetro, é
necessário controlar variáveis do ensaio como a carga normal aplicada, a
velocidade de deslocamento, as condições ambientais, de lubrificação, e outras
que sejam relevantes e que influenciam a interação entre as superfícies. Em
suma, os tribômetros são os dispositivos usados para a realização de ensaios
tribológicos.
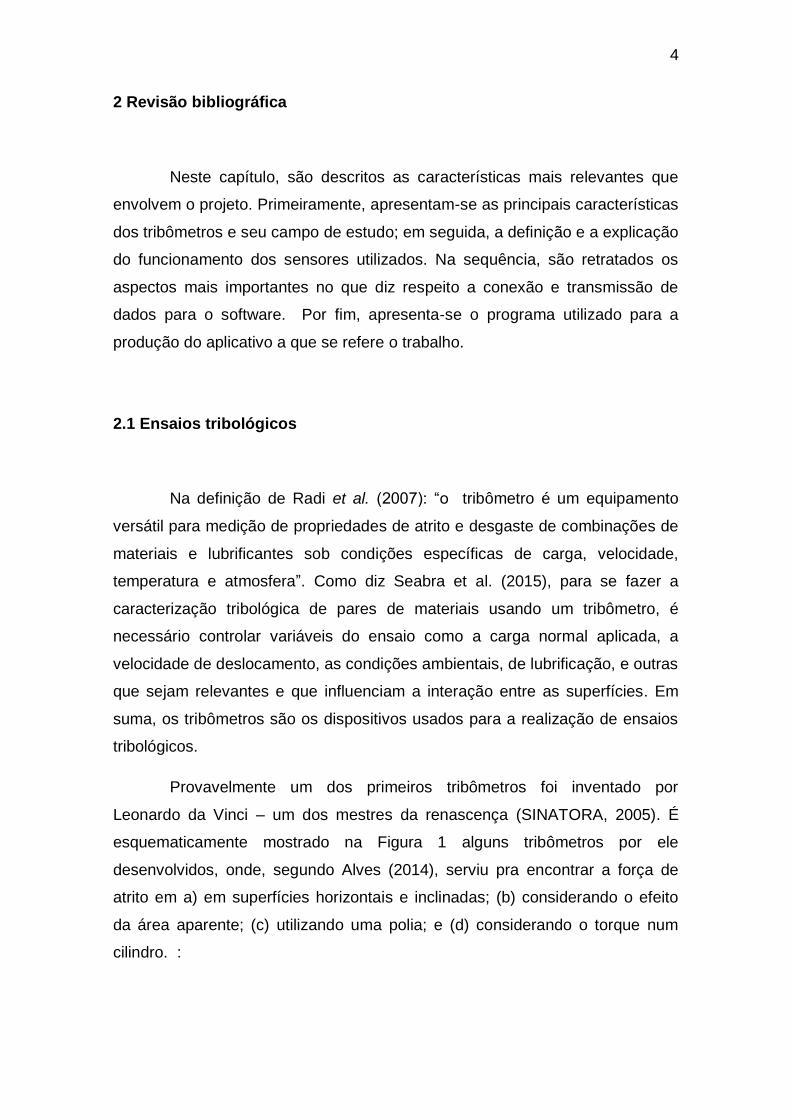
Provavelmente um dos primeiros tribômetros foi inventado por
Leonardo da Vinci – um dos mestres da renascença (SINATORA, 2005). É
esquematicamente mostrado na Figura 1 alguns tribômetros por ele
desenvolvidos, onde, segundo Alves (2014), serviu pra encontrar a força de
atrito em a) em superfícies horizontais e inclinadas; (b) considerando o efeito
da área aparente; (c) utilizando uma polia; e (d) considerando o torque num
cilindro. :
5
Figura 1 - Tribômetro de Da Vinci
Fonte: Sinatora (2005)
Leonardo da Vinci mostrou com seus tribômetros que a força de
atrito era proporcional à forma de reação normal (força de atrito é o produto do
coeficiente de atrito pela força normal), bem como independente da área de
contato, conforme sabemos nos dias de hoje. Como consequências de seus
estudos, conseguiu estabelecer a importância de lubrificantes para diminuir a
força de atrito (SINATORA, 2005)
Dentre os vários tipos de arranjos de tribômetros que existem na
atualidade, como os mostrados na Figura 2, dois dos métodos mais usados
para ensaios tribológicos são, segundo Seabra et al. (2015), os métodos linear
e o rotativo. O linear consiste em deslizar um apalpador sobre uma amostra, ou
vice-versa, em linha reta e consequentemente é gerada uma força de atrito. E o
rotativo consiste em usar corpo de contato em forma de anel que se faz rodar
em torno de seu eixo e em que é aplicada uma pressão de contato P sobre a
amostra.
.

6
Figura 2 – Diferentes tipos de tribômetros
Fonte: Farias (2005)
Neste trabalho, foram usados sensores acoplados a um tribômetro
pino-disco, que usa o método rotativo. Sobre seu funcionamento, para
Nanovea (2013, p.3) pode ser descrito como:
[...] um indentador plano ou esferico que é colocado na amostra de teste com um força precisamente conhecida. O penetrador (um pino ou uma bola) é montado em uma alavanca rígida, projetada como um transdutor de força sem atrito. À medida que a placa se move em movimento rotacional, as forças friccionais resultantes atuando entre a esfera ou pino e a placa são medidas por deflexões muito pequenas do braço, usando um sensor de strain gage. Os valores da taxa de desgaste para o pino e a amostra também podem ser calculado a partir do volume de material perdido durante uma corrida de fricção específica. Este método simples facilita a determinação e estudo do comportamento de atrito e desgaste de quase todos os estados sólidos combinação de materiais, com tempo variável, pressão de contato, velocidade, temperatura, umidade, lubrificação, etc.

7
Figura 3 – Tribômetro Pino-Disco
Fonte: Nanovea (2013)
A escolha do uso desse tipo de tribômetro se relaciona com os
sensores que neles estão inseridos: o sensor de temperatura termopar, o
sensor de posição LVDT e o sensor de força célula de carga.
2.2 Termopar
Um termopar é um dispositivo para medir a temperatura com base em
efeitos termoelétricos. É um circuito formado por dois condutores de metal
diferentes, unidos por seus extremos e entre cujas uniões há uma diferença de
temperatura, o que provoca uma força eletromotriz. (ALZATE RODRÍGUEZ;
MONTES OCAMPO; SILVA ORTEGA, 2007).

8
O funcionamento de um termopar ocorre a partir de três efeitos físicos,
como diz Beckwith, Marangoni e Lienhard V (2006): O primeiro é o efeito
Seebeck, que consiste no fato de que quando dois metais diferentes de unem
por meio de duas junções, uma força eletromotriz é gerada entre elas, força
cuja quantidade varia conforme os diferentes metais. O segundo é o efeito
Peltier, que causa aquecimento ou resfriamento nas juntas entre dois metais
quando uma corrente elétrica (gerada pela força eletromotriz) flui através delas.
E o terceiro é o efeito Thomson, que diz que existe uma tensão elétrica entre
dois pontos que estão em temperaturas diferentes em um condutor (no caso,
nas extremidades dos dois metais diferentes).
A Figura 4 mostra o esquema de medição da temperatura T1 de uma
chama, com um termopar de dois condutores diferentes (ferro e constantan,
uma liga metálica), tendo uma temperatura de referencia T2, sendo
representada como a temperatura de gelo. Dessa forma, percebe-se que a
temperatura é deduzida da tensão gerada V1.
Figura 4 – Esquema de medição de temperatura com um termopar
Fonte: Alzato Rodríguez; Montes Ocampo e Silva Ortega (2007)

9
Segundo Silva (2006), os termopares são extremamente atrativos
devido ao seu baixo custo e a amplitude de temperaturas que é capaz de
medir, além do fato de que, pela sua simplicidade, pode trabahar em diversas
condições de temperatura e pressão. Sua maior dificuldade seria a exatidão,
pois são difíceis obter diferenças de temperatura inferiores a 1ºC. Com base na
utilização e nos conhecimentos mais comuns dos dias de hoje, existem 8 tipos
de termopares: S, R, B , J, K, N, T, E, com cada tipo sendo formado por metais
diferentes e com aplicações diferentes.
Tabela 1 - Tipos de termopares e suas faixas de utilização
Tipo de Termopar Faixa de utilização (°C)
T -200 a 350
J -40 a 750
E -200 a 900
K -200 a 900
S 0 a 1600
R 0 a 1600
B 600 a 1700
N -200 a 1200
Fonte: Thomazini e Albuquerque (2011)
De acordo com Thomazini e Albuquerque (2011), nas últimas décadas
foram realizados muitos esforços para o desenvolvimento das técnicas de
medição de temperatura utilizando termopares, com a introdução de muitos
materiais de termoelementos novos para temperaturas mais altas.

10
2.3 Célula de carga
Células de carga são, na visão de Thomazini e Albuquerque (2011),
estruturas mecânicas, planejadas para receber esforços e deforma-se dentro
do regime elástico para que foram planejadas. Essa deformação é capaz de
gerar um sinal de saída linear e compatível com a carga aplicada. De acordo
com Muller et al. (2010), células de carga são utilizadas para mensurar carga,
força e torque e que, quando usadas adequadamente, são sensores confiáveis
e precisos. São amplamente utilizadas na industria médica, automotiva, de
manufatura, farmacêutica, robótica e em laboratórios de pesquisas.
Segundo Barbosa et al. (2004), o funcionamento de um célula de carga
é baseada na variação ôhmica (variação da resistência) sofrida por um
extensômetro elétrico de resistência ou strain gauges, quando este é
submetido a deformações. Essa variação da resistência elétrica decorre do
estreitamento da seção transversal do extensômetro. Uma vez identificada a
variação ôhmica dos extensômetros, é possível, por meio de relações de
calibração e/ou dados fornecidos pelo fabricante da célula de carga, avaliar as
tensões e/ou forças a que a mesma está submetida.
Para Muller et al. (2010), essa variação ôhmica por vezes trazem
problemas por serem muito pequenas e de difícil medição. Objetivando
minimizar esses efeitos, os extensômetros de uma célula de carga de strain
gauges são colocados num circuito de ponte de Wheatstone, como exposto na
Figura 5. A medida dessa variação é indireta e realizada através da diferença
de voltagem no centro da ponte. A ponte de Wheatstone pode ser formada por
1, 2 ou 4 extensômetros, e no último caso é chamada de ponte completa ou
full-bridge.

11
Figura 5 – Circuito formando uma ponte de wheatstone completa
Fonte – Tacuna System (201-?)
Desenvolvimentos futuros dentro de células de carga e outros sensores
de força provavelmente incluirão tecnologia sem fio para transmissão de dados
digitalizados em distâncias curtas (WILSON, 2005). Segundo Tacuna Systems
(201-?), também espera-se o desenvolvimento das células de cargas em
miniatura, mais precisas, portáteis e leves, de forma que possam ser
incorporadas dentro de materiais e até mesmo do corpo humano. Elas podem
ajudar a melhorar a medicina moderna sendo utilizadas em membros artificiais
robóticos, por exemplo, que podem criar dedos que possam sentir a pressão e
enviar esses dados para o cérebro para que o usuário possa responder.
2.4 LVDT
Segundo Wilson (2005), um Transdutor de Deslocamento Variável
Linear, comumente conhecido como LVDT (Linear Variable Differential
Transformer) é um confiável e preciso equipamento eletromecânico usado para
mensurar distancias lineares, muito usado em indústrias como robótica,
aviação e manufatura computadorizada.

12
Para Vemuri e Sullivan (2016, p. 1): “os sensores de posição LVDT
são comumente usados para medir posição dos componentes móveis em uma
máquina, como válvulas de controle em sistemas hidráulicos e superfícies de
controle de aeronaves”. LVDTs são populares por seu design robusto e
internamente sem atrito, o que torna esses transformadores um ótimo ajuste
para medição de posição em condições ambientais diversas. Para Balbinot e
Brusamarello (2010) eles também são conhecidos por terem boa precisão,
linearidade, alta resolução e durabilidade aproximadamente ilimitada.
A construção física de um LVDT consiste em um núcleo de material
magnético móvel que está envolto por três bobinas que compreendem o
transformador estático, como exposto na Figura 6a. Uma das bobinas é o
enrolamento primário e as outras duas são as bobinas secundárias, estando os
três enrolamentos envolvidos por um mesmo tubo isolante (THOMAZINI;
ALBUQUERQUE, 2011).
Figura 6 – Estrutura de um LVDT
Fonte – Maître (2015)

13
Como explica Balbinot e Brusamarello (2010), o seu princípio de
funcionamento baseia-se na variação da indutância mútua entre o primário e
cada um dos secundários quando o núcleo se move. Quando o primário é
alimentado por uma tensão AC, cria-se um campo magnético, que, segundo a
lei de Faraday, produz um fluxo magnético entre a bobina primária e as
secundárias. Esse fluxo promove tensões induzidas que, na posição central,
em cada secundário são iguais. Quando o núcleo se move dessa posição,
muda-se o fluxo magnético e também as tensões induzidas, de modo que a
tensão de uma bobina secundária aumenta e a outra diminui do mesmo valor.
O resultado é uma saída de tensão diferencial Vo, como exposto na Figura 6b,
que varia linearmente com a posição do núcleo. O LVDT, portanto, é um sensor
que detecta deslocamentos pelo movimento do núcleo magnético.
2.5 Aquisição de dados
“Sistemas de aquisição é o processo de medição de um fenômeno
elétrico ou físico, como tensão, corrente, temperatura, pressão ou som, com o
uso de um computador” (NATIONAL INSTRUMENTS, 201-?a). Segundo
Instrumatic (2011), esses sistemas vêm sendo desenvolvidos para muitos
campos de atuação, tanto industriais como científicos. O seu objetivo é
apresentar ao observador os valores das variáveis ou parâmetros que estão
sendo medidos. Eles são importantes para alcançar níveis maiores de
qualidade, redução dos custos, maior desempenho de produção e promover a
excelência operacional.
Um sistema de aquisição de dados deve, portanto, medir, analisar e
validar as informações adquiridas do mundo real. Dessa forma, esses sistemas
devem apresentar uma arquitetura onde os elementos se comunicam, se
entendem e interajam entre si. Essa arquitetura é basicamente dividida em três
partes: sensor, dispositivo DAQ (Data Aquisition) e computador, como se pode
observar na Figura 7:

14
Figura 7 – Sistema de aquisição de dados
Fonte – National Instruments (201-?a)
Os sensores transformam um fenômeno físico em sinais elétricos que
uma vez detectados variam de acordo com os parâmetros físicos que estão
sendo monitorados, e devem ser acondicionados para fornecer sinais
apropriados ao hardware de aquisição de dados (INSTRUMATIC, 2011).
Segundo Instrumatic (2011), os circuitos e ou elementos de
acondicionamento de sinais tratam e otimizam os sinais para que eles se
tornem apropriados aos hardwares de aquisição. Neste trabalho, o hardware
DAQ atua como a interface entre um computador e sinais do mundo exterior.
Ele funciona basicamente como um dispositivo que digitaliza sinais analógicos
de entrada de forma que um computador possa interpretá-los. Como mostra
National Instruments (201-?b), os elementos de condicionamento de sinais
presentes no dispositivo DAQ usado neste trabalho, o NI-USB 6009 são:
multiplexagem, uma técnica para poder ler diversos sinais utilizando um único
equipamento de medição, de forma que ele lê os sinais de uma entrada
analógica por vez; amplificação, para aumentar a resolução de sinais de baixa
intensidade, como os dos termopares; conversor analógico/digital ou conversor
AD, que tem como função converter o sinal de entrada de natureza analógica
vinda do sensor para um valor digital, para que possa ser lida pelo computador;
e a entrada analógica first-in-first-out (FIFO), que permite a conversão e
armazenamento de múltiplos sinais para que nenhum dos dados se percam em
leituras de um número inifinito de amostras.

15
Figura 8 – Estrutura de condicionameto de sinais do NI-USB 6009
Fonte – National Instruments (201-?b)
Uma vez acondicionados e trabalhados na forma desejada, de acordo
com National Instruments (201-?a), um computador com software programável
controla a operação do dispositivo DAQ, sendo usado para o processamento,
visualização e armazenamento de dados de medição. Num sistema DAQ, há
dois tipos de softwares:
2.5.1 Software de driver
O software de driver permite que o software de aplicação interaja com
um dispositivo DAQ. Ele simplifica a comunicação com o dispositivo DAQ,
abstraindo comandos de hardware de baixo nível e a programação no nível do
registro (NATIONAL INSTRUMENTS, 201-?a).

16
2.5.2 Software de aplicação
O software de aplicação ou o software do ambiente de
desenvolvimento é aquele que promove a interação entre o usuário e o
computador na aquisição, análise e apresentação dos dados da medição. Ele é
um programa pré-construído, com funções predefinidas, ou um ambiente
destinado ao desenvolvimento de aplicações com funções variadas. Aplicações
produzidas são muitas vezes usadas para automatizar diversas funções de um
dispositivo DAQ, executar algoritmos de processamento de sinais e exibir
interfaces de usuário customizadas. (NATIONAL INSTRUMENTS, 201-?a) Este
software, que é o objeto deste trabalho, foi desenvolvido com o programa
LabVIEW da National Instruments.
2.6 LabVIEW
Segundo Lopes (2007), o software de aplicação ou software do
ambiente de desenvolvimento é uma ferramenta que permite eficientemente
gerar suas próprias aplicações e projetar e integrar as rotinas de um processo
particular. Ele permite criar uma interface para um usuário apropriado, com o
melhor conjunto de programas para os elementos que interagem com ela,
permitindo a aquisição de dados de um dispositivo para que se processem,
manipulem e apresentem da maneira desejada.
O software deste trabalho é o LabVIEW (Laboratory Virtual Instrument
Engineering Workbench) que é uma linguagem de programação gráfica
originária da National Instruments, cuja primeira versão surgiu em 1986. A
programação é feita de acordo com o modelo de fluxo de dados, o que oferece
a esta linguagem vantagens para a aquisição de dados e para a sua
manipulação. Para National Instruments (201-?c), seus principais campos de
aplicação são para aplicações que requerem teste, medição e controle, com
rápido acesso ao hardware.

17
Os programas do LabVIEW são chamados de Instrumentos Virtuais, ou
Vis e são para isso que ele foi originalmente criado – gerar versões de
instrumentos que você pode encontrar em um laboratório em forma de software
(MIHURA, 2001). Como explica Bishop (2015), LabVIEW é diferente das
linguagens de programação baseadas em texto (como Fortran e C) pois usa
uma linguagem de programação gráfica, conhecida como a linguagem de
programação G, para criar programas baseados em símbolos gráficos para
descrever ações de programação, sendo uma terminologia familiar aos
cientistas e engenheiros e facilmente identificados por inspeção visual.
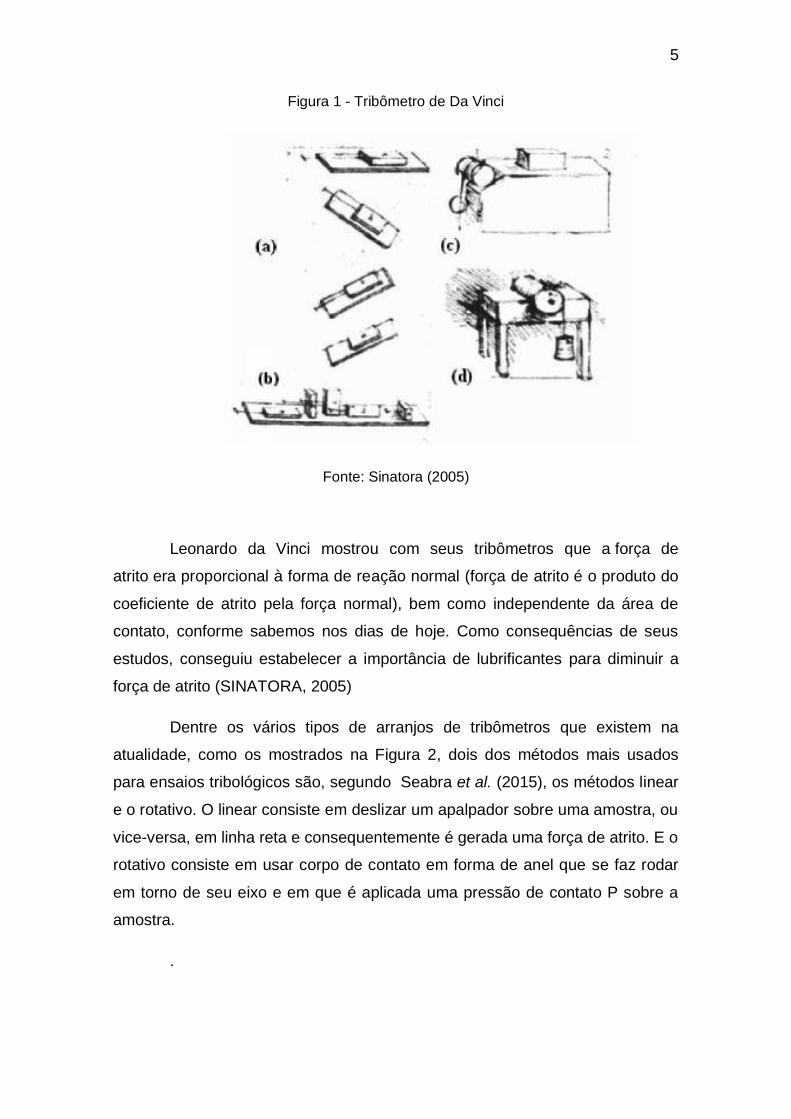
Segundo Travis e Kring (2006), os VIs podem ser divididos em duas
partes: o painel frontal e o diagrama de blocos. O painel frontal é a interface de
usuário interativa de um VI, assim chamado porque simula a frente painel de
um instrumento físico (ver Figura 9). O painel frontal pode conter botões,
interruptores, gráficos e muitos outros controles (que são entradas do usuário)
e indicadores (que são saídas do programa). Pode-se inserir dados usando um
mouse e teclado e, em seguida, exibir os resultados produzido pelo programa
na tela. Simplificando, o painel frontal é a janela através da qual o usuário
interage com o programa.
18
Figura 9 – Exemplo de painel frontal do LabVIEW
Fonte – Travis e Kring (2006)
Travis e Kring (2006) também discorrem sobre o diagrama de blocos
que é o código-fonte do VI, construído na linguagem de programação gráfica
do LabVIEW, G, e corresponde às linhas de texto encontradas em uma
linguagem mais convencional como C ou Fortran. O diagrama de blocos é o
programa executável real. Os componentes de um diagrama de blocos são VIs
de nível inferior, funções internas, constantes e estruturas de controle de
execução de programa. Nas Figuras 10 e 11, são expostos exemplos de um
diagrama de blocos e seu correspondente no painel frontal.

19
Figura 10 – Exemplo de Diagrama de blocos do LabVIEW
Fonte – Mihura (2001)
Figura 11 - Exemplo de painel frontal do LabVIEW
Fonte – Mihura (2001)
Desenham-se os fios para conectar os objetos apropriados para definir
o fluxo de dados entre eles e executar funções específicas. Os objetos do
painel frontal têm terminais correspondentes no diagrama de blocos, para que
os dados possam passar do usuário para o programa e de volta para o usuário,
de modo que, quando se coloca um controle ou indicador no painel frontal, o
LabVIEW cria automaticamente um terminal correspondente no diagrama de
blocos.

20
3 Materiais e metodologia
Neste capítulo serão descritos os materiais e métodos utilizados para a
aquisição dos dados.
3.1 Materiais utilizados
Os materiais e equipamentos utilizados para a coleta de dados são
descritos nos itens a seguir.
3.1.1 Tribômetro Pino-Disco
O tribômetro pino-disco usado no trabalho é do modelo TE-165-SPOD
e tem as seguintes especificações técnicas segundo o fabricante Magnum
Engineers (201-?):

21
Figura 12 – Dispositivo Pino-Disco usado no trabalho
Fonte: Magnum Engineers (201-?)
Faixa de carga normal - até 200 N
Faixa de força de atrito - Até 200 N com resolução de 1N com
facilidade de tara
Faixa de medição de desgaste - ± 2 mm com facilidade de tara
Velocidade do disco - 100 a 2000 rpm
Faixa de temporizador predefinida - até 99 horas: 59 minutos: 59
segundos
Diâmetro do disco de desgaste - 165 mm, espessura de 8 mm
(EN 31 Mtrl, disco 58 - 60 HRC)
Diâmetro da faixa do disco de desgaste - 10 a 140 mm
Diâmetro do pino da amostra / diagonal - dia. 3 mm a 12 mm
Comprimento do Pino - 25 a 30mm

22
3.1.2 Termopar
Neste trabalho foi utilizado um sensor termopar do tipo K, que é
encontrado no tribômetro pino-disco cujo projeto foi baseado.
3.1.3 Célula de carga
O sensor célula de carga utilizado neste trabalho é a célula de carga
modelo BR-021 HO da IPA com modelo binocular (ver Figura 13) e com
precisão e eficiência adequados para cargas leves.
Figura 13 – Sensor célula de carga utilizado
Fonte – IPA (201-?)

23
Suas especificações técnicas podem ser conferidas abaixo, segundo
IPA (201-?):
Capacidade: 0 – 20 kg
Saída nominal (mV/V): 1,5
Erro combinado (% saída nominal): 0,05
Repetibilidade (% saída nominal): 0,05
Resistência de entrada (ohms): 390
Resistência de saída (ohms): 350
Temperatura de operação (ºC): 5-70
Sobrecarga segura (%): 200
Sobrecarga última (%): 300
Voltagem de excitação (V): 10
Razão de entrada (mv/V): 1,5
3.1.4 Sensor LVDT
O sensor LVDT utilizado neste trabalho é do modelo SI-706 da
SYSCON, e, segundo seu fabricante Syscon Instruments (201-?) e também
segundo o fabricante do tribômetro pino-disco usado nesse trabalho, Magnum
Engineers (2014), ele tem um alcance de ± 2 mm, uma excitação de 1 V R.M.S
pra uma frequência de 4 kHz seinoidal. Sua temperatura de operação varia
aproximadamente de 10 ºC a 50 ºC.

24
3.1.5 Hardware de aquisição de dados
O hardware utilizado no projeto, o NI USB-6009 (ver Figura 14), é,
segundo National Instruments (201-?d), um dispositivo que oferece funções
básicas para aquisição de dados em medições portáteis e experimentos de
laboratórios acadêmicos, com conexão com o computador por meio de USB e
conexão com sensores usando terminais de parafusos.
Figura 14 – Módulo NI USB-6009
Fonte - National Instruments (201-?d)

25
Possui como principais características, segundo National Instruments
(2017):
8 entradas analógicas (14 bits, 48 kS/s), 2 saídas analógicas, e 13
canais que podem ser usados como entrada e saída de sinais
digitais.
Um contador de 32 bits.
Dimensões sem conectores: 63.5 mm × 85.1 mm × 23.2 mm
Dimensões com conectores: 81.8 mm × 85.1 mm × 23.2 mm
Peso sem conectores: 54g
Peso com conectores: 84g
Conector: USB serie B receptáculo
Temperatura de operação: 0ºC a 55ºC
Impedância da entrada analógica: 144 kΩ
Impedância da saída analógica: 50 Ω
Tensão de operação: ± 10 V
3.1.6 Software de driver
Neste trabalho, o software de driver usado é o NI-DAQmx versão
16.0.0 instalado num computador de sistema operacional Windows 7. É o
software de driver padrão para comunicação com hardwares de aquisição de
dados da National Instruments.

26
3.1.7 Software de aquisição de dados
O software de aplicação para o desenvolvimento do programa é o
LabVIEW 2014, versão estudantil, da National Instruments, instalado num
computador de sistema operacional Windows 7.
3.2 Metodologia
O projeto consiste no desenvolvimento de um programa para a
aquisição de dados de sensores (termopar, célula de carga e LVDT) de um
tribômetro pino-disco localizado no Laboratório de Triblogia e Dinâmica da
UFRN. O programa foi desenvolvido em LabVIEW o usuário modifica os
parâmetros, visualiza os resultados e controla os funcionamento do sistema por
meio do painel frontal do programa, como pode ser visualizado na Figura 15.
Figura 15 - Aba de início do programa

27
Na Figura 14, é exibido a tela inicial do programa, com a aba de início
falando sobre o que são os parâmetros de operação a esquerda. O usuário
deve colocar as informações necessárias para o correto funcionamento,
conforme informado na aba inicial, e tem também a possibilidade de
interromper o programa quando desejar e de salvar os dados aquisitados de
todos os sensores numa planilha do Microsoft Excel ou em formato txt, salva
num diretório a sua escolha.
Nas abas Temperatura, Força e Deslocamento, são exibidos os dados
de aquisição do termopar, com um indicador da última medição realizada, e um
indicador da média das últimas X medições realizadas. Esse valor X é
escolhido pelo usuário, conforme a conveniência, para que possa facilitar a
análise dos dados com uma análise da média aritmética, pois por diversas
razões os valores podem variar na medição. Também é perceptível a
existência de um gráfico da unidade da aba em função do tempo desde o início
da execução do programa. Na aba Temperatura, como visto na Figura 16, há
uma barra indicadora da temperatura que ajuda a visualização, simulando um
termômetro de mercúrio.
Figura 16 – Aba de medição de temperatura

28
Nas abas Força e Deslocamento, além dos elementos já mencionados,
existe o botão “Tarar medição”, que serve para indicar a situação de 0 N e
0mm, respectivamente, para que a medição aconteça em cima de um valor de
referência. As abas podem ser vistas nas Figuras 17 e 18.
Figura 17 – Aba de medição de força
Figura 18 – Aba de medição de deslocamento linear
29
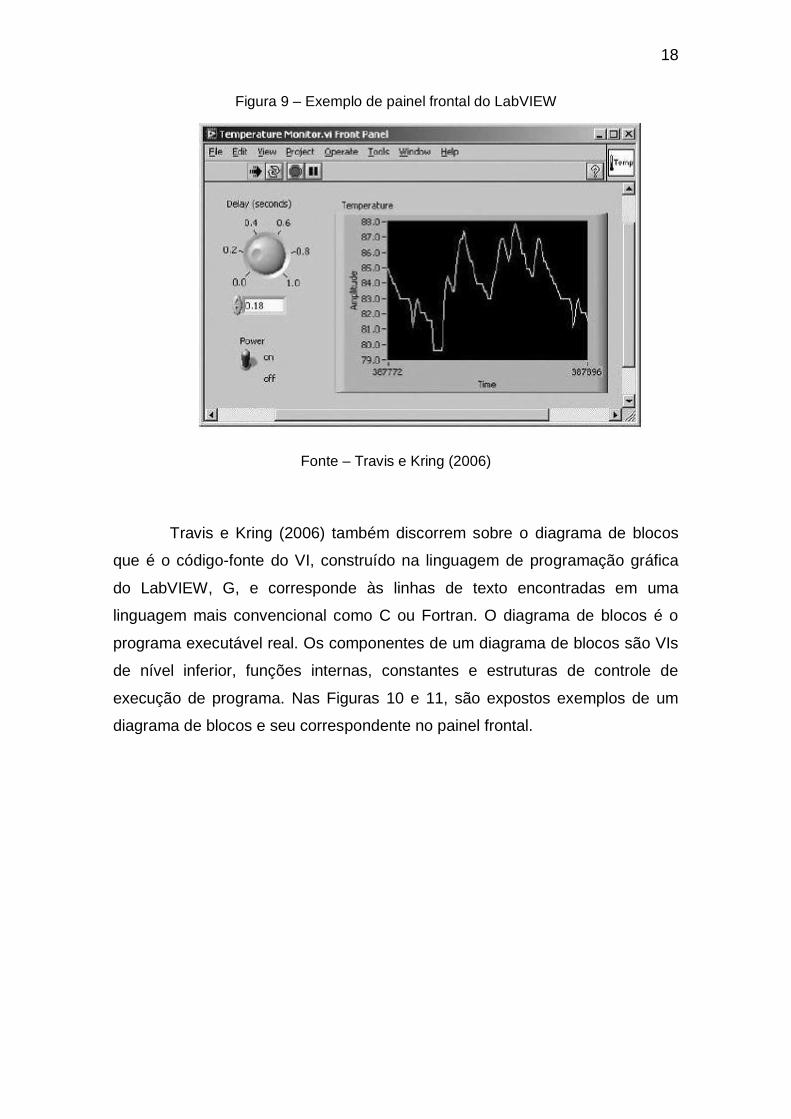
Também existe a aba “Todos os sensores”, que serve para que o
usuário possa visualizar todos os dados aquisitados de uma só vez,
representados em gráficos apontando cada uma das medições em função do
tempo e um indicador da média das últimas X medições.
Figura 19 – Aba de exibição da medição de todos os sensores
O diagrama de blocos, o código do programa propriamente dito na
linguagem G, foi criado usando uma estrutura de repetição principal While, que
faz com que o programa rode até que a condição de parada seja atingida,
sendo ela o tempo máximo atingido ser alcançado ou o botão Parar ser
pressionado pelo usuário.
Figura 20 – Estrutura de repetição While

30
O programa também fez uso de shift registres, que armazenam um
determinado valor para que possa ser utilizado posteriormente, no ato de tarar,
de modo que o valor correspondente a 0 seja usado sempre como referência.
Também foi utilizada estruturas case, para quando se faz necessário que o
usuário escolha quando determinado comando será necessário ser acionado
ou não.
Figura 21 – Estrutura Shift Register
Figura 22 – Estrutura Case
Essas estruturas de repetição aliadas com elementos com outras
funções e constantes foram a base para a montagem do projeto. A visão
completa do diagrama de blocos desenvolvido se encontra em Anexos.

31
4 Resultados e discussões
Para a validação dos resultados, foram primeiramente realizadas
calibrações dos sensores no programa e posteriormente executadas medições
dos parâmetros medidos de cada sensor para que houvesse comparações
entre os resultados das medições previstas nas calibrações e das obtidas no
ensaio de validação.
A calibração do sensor de célula de carga foi realizada com pesos
padrões de 0,5 kg, 1 kg e 2 kg, juntamente com a bandeja de apoio de 0,24 kg,
encontrados no Laboratório de Tribologia e Dinâmica da Universidade Federal
do Rio Grande do Norte (UFRN). A calibração do sensor de deslocamento
LVDT foi executada com folhas de papel de 0,074 mm de espessura e a
calibração do sensor termopar usou um termômetro de mercúrio para auxiliar
na aferição da temperatura medida.
Figura 23 – Obtenção de resultados com o programa em funcionamento

32
É possível perceber com os resultados da Tabela 2 que o sensor de
célula de carga apresentou bons resultados em relação a aqueles previstos
pela calibração no programa. A diferença absoluta entre os valores apresentou
como valor máximo 3,17 N, numa medição de uma massa que teve um erro
percentual de apenas 2,64%. Em termos de erros percentuais, a maioria exibiu
valores inferiores a 10%, com exceção dos primeiros valores que, com a
margem da diferença absoluta girando em torno de 2, fizeram com que o erro
percentual fosse elevado em relação aos demais. Na Figura 24 foi exposto um
gráfico de valores obtidos por valores esperados, que mostrou uma linha de
tendência linear bem clara, com a equação de correção de calibração do
sensor exibida abaixo. Outro indicativo da qualidade dos resultados é o valor
elevado do r-quadrado, bem próximo de 1, como se vê na Figura 24.
Tabela 2 – Resultados célula de carga
Massa medida (kg) Valor esperado (N) Valor obtido (N) Diferença Erro (%)
0 0 0 0 0,00
0,24 2,35 4,74 2,38 101,16
0,74 7,26 9,20 1,95 26,80
1,24 12,16 12,49 0,33 2,68
1,74 17,07 16,55 0,52 3,04
2,24 21,97 23,40 1,43 6,49
2,74 26,88 25,33 1,55 5,76
3,24 31,78 30,48 1,30 4,10
3,74 36,69 36,12 0,57 1,55
4,24 41,59 40,55 1,04 2,51
4,74 46,50 45,59 0,91 1,96
5,24 51,40 51,45 0,05 0,09
6,24 61,21 62,66 1,45 2,36
7,24 71,02 72,44 1,42 1,99
8,24 80,83 81,65 0,82 1,01
9,24 90,64 92,17 1,53 1,68
10,24 100,45 101,49 1,04 1,03
12,24 120,07 123,24 3,17 2,64
14,24 139,69 141,15 1,46 1,04
16,24 159,31 160,76 1,45 0,91
18,24 178,93 180,45 1,52 0,85
20,24 198,55 201,36 2,81 1,41

33
Figura 24 – Gráfico de resultados de medição de força
É possível perceber com os resultados da Tabela 3 que o sensor de
deslocamento LVDT apresentou bons resultados em relação a aqueles
previstos pela calibração no programa. A diferença absoluta entre os valores
apresentou como valor máximo de 0,008 mm, em medições de erros
percentuais de apenas 1,54% e 1,20%. Em termos de erros percentuais, todos
exibiram valores inferiores a 7%, tendo o maior deles um erro de 6,76% e como
segundo maior apenas 1,80%.
Na Figura 25 foi exposto um gráfico de valores obtidos por valores
esperados, que mostrou uma linha de tendência linear bem definida e
homogênea, com a equação de correção de calibração do sensor exibida
abaixo na Figura. O valor de r-quadrado apresentado é aproximadamente igual
a 1, sendo outro indicativo da qualidade dos valores obtidos. Tais resultados se
mostraram muito satisfatórios, principalmente levando em consideração que o
sensor de deslocamento linear LVDT é bastante sensível a variações e exige
uma boa exatidão principalmente para a aplicação na área da tribologia, cujas
rugosidades chegam a ser microscópicas.
y = 0,9881x + 0,0505
R² = 0,9996
0
50
100
150
200
250
0 50 100 150 200 250
Val
or
esp
erad
o (
N)
Valor obtido (N)

34
Tabela 3 – Resultados sensor LVDT
Valor esperado (mm) Valor obtido (mm) Diferença Erro (%)
0,000 0,000 0 0,00
0,074 0,069 0,005 6,76
0,148 0,146 0,002 1,35
0,222 0,218 0,004 1,80
0,296 0,293 0,003 1,01
0,370 0,367 0,003 0,81
0,444 0,440 0,004 0,90
0,518 0,510 0,008 1,54
0,592 0,587 0,005 0,84
0,666 0,658 0,008 1,20
0,740 0,735 0,005 0,68
Figura 25 – Gráfico de resultados de medição de deslocamento linear
y = 1,0068x + 0,0018
R² = 1
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8
Val
or
esp
erad
o (
mm
)
Valor obtido (mm)

35
Pode-se ver com os resultados da Tabela 4 que o sensor de
temperatura termopar apresentou resultados relativamente próximos em
relação àqueles previstos pela calibração no programa. A diferença absoluta
entre os valores apresentou como valor máximo de 5°C, em medições de erros
percentuais de 25%. Em termos de erros percentuais, nos intervalos de 0°C a
5°C e de 30°C a 35°C, foram obtidos resultados iguais aos esperados, com um
erro de 0%, mas os resultados entre 5°C e 25°C apresentaram valores que
divergem consideravelmente do esperado.
As dificuldades em se conseguir resultados tão precisos no sensor
termopar do que nos outros sensores, célula de carga e LVDT, se deve, entre
outras razões, ao fato de que o módulo NI USB-6009 não é indicado
especialmente para a medição de temperaturas utilizando o termopar, já que
este apresenta uma diferença de voltagem com sua mudança de temperatura
cuja resolução do módulo não atende com grande exatidão. Apesar disso, com
resultados acima de 25°C, foram atestados valores praticamente iguais aos
esperados, o que é muito bom, pois a temperatura de operação do dispositivo
pino-disco, geralmente é numa faixa de temperatura elevada.
Tabela 4 – Resultados sensor termopar
Valor esperado (°C) Valor obtido (°C) Diferença Erro (%)
0 0 0 0,00
5 5 0 0,00
10 7 3 30,00
15 11 4 26,67
20 15 5 25,00
25 23 2 8,00
30 30 0 0,00
35 35 0 0,00

36
Figura 26 – Gráfico de resultados de medição de temperatura
Na Figura 26, foi exposto um gráfico de valores obtidos por valores
esperados, que mostrou uma linha de tendência linear não tão bem definida
como nas Figuras 24 e 25, assim como o valor do r-quadrado mais distante de
1 do que os demais. Resultado esperado, tendo em vista os resultados da
Tabela 3, com a equação de correção de calibração do sensor exibida abaixo
na Figura 26.
y = 0,9683x + 2,2487
R² = 0,9729
0
5
10
15
20
25
30
35
40
0 5 10 15 20 25 30 35 40
Val
ore
s es
per
ado
s (°
C)
Valores obtidos (°C)

37
5 Conclusões
Neste trabalho, realizou-se o desenvolvimento de um software para
aquisição de dados de sensores em ensaios tribológicos. Foi desenvolvido um
aplicativos executável usando o LabVIEW de modo que o usuário tenha
condições de interagir com o programa e escolher as condições da aquisição e
visualização dos resultados.
Como meio de validar o uso deste programa, foram realizadas
calibrações de sensores presentes num tribômetro pino-disco: o termopar, a
célula de carga e o sensor de deslocamento LVDT. Após as calibrações, foram
executados ensaios para comparar as leituras obtidas pelo programa com as
leituras esperadas, expostas em tabelas e gráficos.
Com o fim das leituras de validação, foi constatado que os resultados
obtidos têm correspondência com os esperados pela calibração, apresentando
uma pequena margem de diferença absoluta entre os valores, de modo que a
diferença percentual entre o obtido e o esperado é majoritariamente aceitável
para os três sensores experimentados.
Para trabalhos futuros, sugere-se que o programa seja testado para o
uso em outros experimentos tribológicos e em outras áreas da engenharia
mecânica, podendo ser agregadas novas funcionalidades e ferramentas ao
projeto já desenvolvido, como a geração automática de relatórios de medição
com valores de média e desvio padrão dos resultados, a exportação dos dados
aquisitados para outras plataformas além do Excel, a possibilidade do usuário
salvar a figura dos gráficos em um formato de imagem como JPEG ou PNG e a
inicialização do software por meio do hardware, bem como a possibilidade da
execução de uma calibração automática feita pelo aplicativo para qualquer
sensor, uma vez que neste trabalho foi realizada uma calibração específica dos
sensores encontrados no tribômetro utilizado.

38
6 Referências
ALVES, F. R. Desenvolvimento de um tribômetro, tipo cilindro sob disco, para
ensaios tribológicos em formulações com óleos vegetais. 2014. Dissertação de
mestrado – Universidade Estadual Paulista – Ilha Solteira.
ALZATE RODRÍGUEZ, E. J.; MONTES OCAMPO, J.W.; SILVA ORTEGA, C.A.
Medición de temperatura: sensores termoeléctricos. Scientia Et Technica, vol.
XIII, n. 34, p. 1-6, mai., 2007.
BALBINOT, A.; BRUSAMARELLO, V.J. Instrumentação e fundamentos de
medidas, v.1. 2 ed. Rio de Janeiro: LTC, 2010
BARBOSA, F. S. et al. Modelagem numérica e análise experimental aplicadas
ao projeto de uma célula de carga. In: XXV CILAMCE - Congresso Ibero-
Latino-Americano de Métodos Computacionais para Engenharia, 2004, Recife
PE. Anais do XXV CILAMCE - Congresso Ibero-Latino-Americano de Métodos
Computacionais para Engenharia, 2004.
BECKWITH, T. G.; MARANGONI, R. D.; LIENHARD V, J. H. Mechanical
Measurements. 6 ed. Pierson, 2006.
BISHOP, R. Learning with LabVIEW. 8 ed. Upper Saddle River: Pearson, 2015.
FARIAS, D. F. Utilização da geometria disco-disco para investigação da
capacidade de proteção ao desgaste de lubrificantes sob condições
elastohidrodinâmicas. 2005. Dissertação (Mestrado) – Universidade Federal do
Rio de Janeiro, Rio de Janeiro, 2005.
FRADEN, J. Handbook of Modern Sensors: Physics, Designs and Application. 4
ed. Nova York: Springer, 2010.
INSTRUMATIC. Sistemas de Supervisão e Aquisição de Dados, 2011.
Disponível em: <http://www.instrumatic.com.br/artigo/sistemas-de-supervisao-e-
aquisicao-de-dados>. Acesso em: 11 mai. 2018.

39
IPA. Binocular ring type load cell. 201-?. Disponível em:
<http://www.ipaindia.com/products/binocular-load-cell/>. Acesso em: 20 mai.
2018.
MAGNUM ENGINEERS. Pin on disc friction & wear test rig: Instruction manual
for installation, operation and maintenance. 2014.
MAGNUM ENGINEERS. Pin on disc friction & wear test rig – TE – 165 - SPOD.
201-?. Disponível em: <http://magnumengg.com/product/pin-disc-friction-wear-
test-rig-te-165-spod/>. Acesso em: 20 mai. 2018.
MAÎTRE, S. Two Wire Pressure Transmitter using Bourdon Tube Pressure
Sensor and LVDT - An Advance Pressure Transmitter. Foundation of Computer
Science. Vol.3, N.6, 2015, il.
MIHURA, B. LabVIEW for data acquisition. 1 ed. Upper Saddle River: Prentice
Hall, 2001.
MULLER, I. et al. Load Cells in Force Sensing Analysis – Theory and a Novel
Application. IEEE Instrumentation and Measurement Magazine, vol. 13, n.1,
pp. 1–16, 2010.
NANOVEA. ASTM G99 Tip’s Perspective Continuous Wear Contact, 2013.
Disponível em: <http://nanovea.com/App-Notes/astm-g99-wear-test.pdf>.
Acesso em: 11 mai. 2018
NATIONAL INSTRUMENTS. USB-6009 specifications. 2017. Disponível em: <
www.ni.com/pdf/manuals/375296c.pdf>. Acesso em: 12 mai. 2018.
NATIONAL INSTRUMENTS. O que é aquisição de dados?, 201-?a. Disponível
em: <http://www.ni.com/data-acquisition/what-is/pt/>. Acesso em: 9 mai. 2018
NATIONAL INSTRUMENTS. User guide and specifications NI USB- 6008/6009,
201-?b. Disponível em: <http://www.ni.com/pdf/manuals/371303m.pdf> .
Acesso em 12 mai. 2018.
NATIONAL INSTRUMENTS. O que é o LabVIEW?, 201-?c. Disponível em:
<http://www.ni.com/pt-br/shop/labview.html> . Acesso em: 12 mai. 2018.

40
NATIONAL INSTRUMENTS. USB-6009. 201-?d. Disponível em: <
http://www.ni.com/pt-br/support/model.usb-6009.html> . Acesso em: 12 mai.
2018.
RADI, P. et al. Tribologia, conceitos e aplicações. In: ENCONTRO DE
INICIAÇÃO CIENTÍFICA E PÓS-GRADUAÇÃO DO ITA, 13, 2007, São José
dos Campos, Anais, 1 a 4 de out. 2007, p. 4.
SEABRA, E. et al. Estudo, conceção, desenvolvimento e construção de um
tribómetro linear para testes na pela humana. In: CONGRESSO
INTERNACIONAL DE ENGENHARIA DE PROJETOS, 19, 2015, Granada,
Anais do XIX Congresso Internacional de Engenharia de Projetos, 15 a 17 jul.
2015, p. 2 - 5.
SENAI-SC. Instrumentação Industrial. Tubarão, 2003.
SILVA, H. B. Montagem de um controlador de temperatura usando termopar.
2006. Monografia – Universidade Federal de Uberlândia – Uberlândia.
SINATORA, A. Tribologia: um resgate histórico e o estado da arte. Prova de
Erudição, São Paulo, 2005.
SYSCON INSTRUMENTS. Displacement Sensors. 201-?. Disponível em:
<http://www.sysconinstruments.com/product4.html>. Acesso em: 21 mai. 2018.
THOMAZINI, D.; ALBUQUERQUE, P. U. B. Sensores Industriais: Fundamentos
e Aplicações. 8 ed. São Paulo: Érica, 2011.
TRAVIS, J.; KRING, J. LabVIEW for Everyone: Graphical Programming Made
Easy and Fun. 3 ed. Upper Saddle River: Prentice Hall, 2006.
VEMURI, A. T.; SULLIVAN, M. Ratiometric measurements in the context of
LVDT-sensor signal conditioning. Analog Applications Journal 2016, n. 3, p. 1,
2016.
WILSON, J. S. Sensor Technology Handbook. 1 ed. Boston: Elsevier, 2005.

41
7 Anexos
ANEXO A – Diagrama de blocos do programa:

42

43