descrição de funcionamento do pld e adm - cópia.pdf
TRANSCRIPT

Descrição de funcionamento dos módulos PLD e ADM
Global Training. 1
'HVFULomR�GH�IXQFLRQDPHQWR�GRV�PyGXORV�3/'�H�$'0

Descrição de funcionamento dos módulos PLD e ADM
Global Training.2
Descrição de funcionamento dos módulos PLD e ADM
Global Training. 3
Conteúdo
Módulo de Gerenciamento do Motor - PLD ................................................................................................................. 4Funções do módulo de controle do motor ( PLD ou MR ) ........................................................................................... 5Localização dos pistões (durante a partida) ............................................................................................................... 7Localização dos pistões (após a partida) .................................................................................................................... 8Funcionamento com falha no sensor de comando ..................................................................................................... 8Funcionamento com falha no sensor do volante ......................................................................................................... 9Determinação do início e tempo de injeção ................................................................................................................ 9Temperatura do motor ...............................................................................................................................................10Proteção do turbo ......................................................................................................................................................10Proteção do motor ( pressão do óleo ) ....................................................................................................................... 11Proteção do motor ( temperatura do líquido de arrefecimento ) ................................................................................ 11Proteção do motor ( baixo nível de óleo ) ................................................................................................................... 12Avd ( teste de compressão ) ...................................................................................................................................... 12Lrr ( desvio de rotação em marcha lenta ) ................................................................................................................. 13Sensor de temperatura do motor ( estrutura ) ........................................................................................................... 14Sensor de temperatura do motor ( tarefa ) ................................................................................................................ 14Sensores indutivos do volante e do comando ( estrutura ) ........................................................................................ 15Sensor de temperatura do ar de admissão ( estrutura ) ............................................................................................. 18Gráfico de resposta do sensor de temperatura ......................................................................................................... 18Sensor de temperatura do combustível ( estrutura ) ................................................................................................. 20Sensor de temperatura do óleo do motor ( estrutura ) ............................................................................................... 21Sensor de pressão do óleo do motor ( estrutura ) .................................................................................................... 22Sensor de temperatura e pressão do óleo do motor ( localização ) ......................................................................... 23Sensor de nível do óleo do motor ( estrutura ) .......................................................................................................... 23Unidades Injetoras .................................................................................................................................................... 24Circulação do combustível no cabeçote da unidade injetora .................................................................................... 25Representação esquemática das posições de alimentação de uma unidade injetora ............................................... 26Regulagem do volume de injeção ............................................................................................................................. 29Ângulo de injeção ..................................................................................................................................................... 29Conceito de funcioamento do ADM ........................................................................................................................... 31Pedal do acelerador ................................................................................................................................................... 31Indicador de rotações ............................................................................................................................................... 35Indicador de pressão ................................................................................................................................................ 37Indicador de temperatura ......................................................................................................................................... 39Lâmpada indicadora de falhas no ADM ou PLD ........................................................................................................ 39Lâmpada indicadora de baixo nível de óleo .............................................................................................................. 40Bloqueio da partida do motor .................................................................................................................................... 41Bloqueio do pedal do acelerador ............................................................................................................................... 41Limitador de velocidade ( Tacógrafo ) ....................................................................................................................... 42Freio motor ............................................................................................................................................................... 43Transmissão automática ........................................................................................................................................... 44Ar Condicionado ....................................................................................................................................................... 45ADR - Controle de rotação para serviços especiais .................................................................................................. 46Saída de sinal para reles IWK ................................................................................................................................... 48Parâmetros do ADM ................................................................................................................................................. 49Tabelas das conexões do ADM ................................................................................................................................. 64

Descrição de funcionamento dos módulos PLD e ADM
Global Training.4
Módulo de Gerenciamento do Motor - PLD
Conceito
O motor com gerenciamento eletrônico visa atender as leis mais rígidas de emissão de poluentes.Para que esses novos limites sejam alcançados, foram necessárias modificações mecânicas, e aimplantação de um sistema com gerenciamento eletrônico, para controle do regime defuncionamento do motor.
Modificações mecânicas
As modificações mecânicas foram feitas com intuito de melhorar a queima do combustível.
• Alta pressão de injeção, reduz o tempo de injeção e aumenta a pulverização docombustível.
• Maior quantidade de furos no bico e furos de diametros reduzidos, ajudam a pulverizarmelhor o combustível.
• Bico posicionado de tal forma que o jato de combustível é uniforme em toda a regiãoda câmara de combustão.
Bico injetor com oitofuros na posição verti-cal e no centro dacamara de combustão.
Tubo de ligaçãode curta distância, permitealta pressão de injeção
Formato permite ótimadistribuição de forçassobre a cabeça dopistão.
Controle eletrônico de inje-ção de combustível
Bomba injetora individualacionada pelo eixo de co-mando de válvulas
Descrição de funcionamento dos módulos PLD e ADM
Global Training. 5
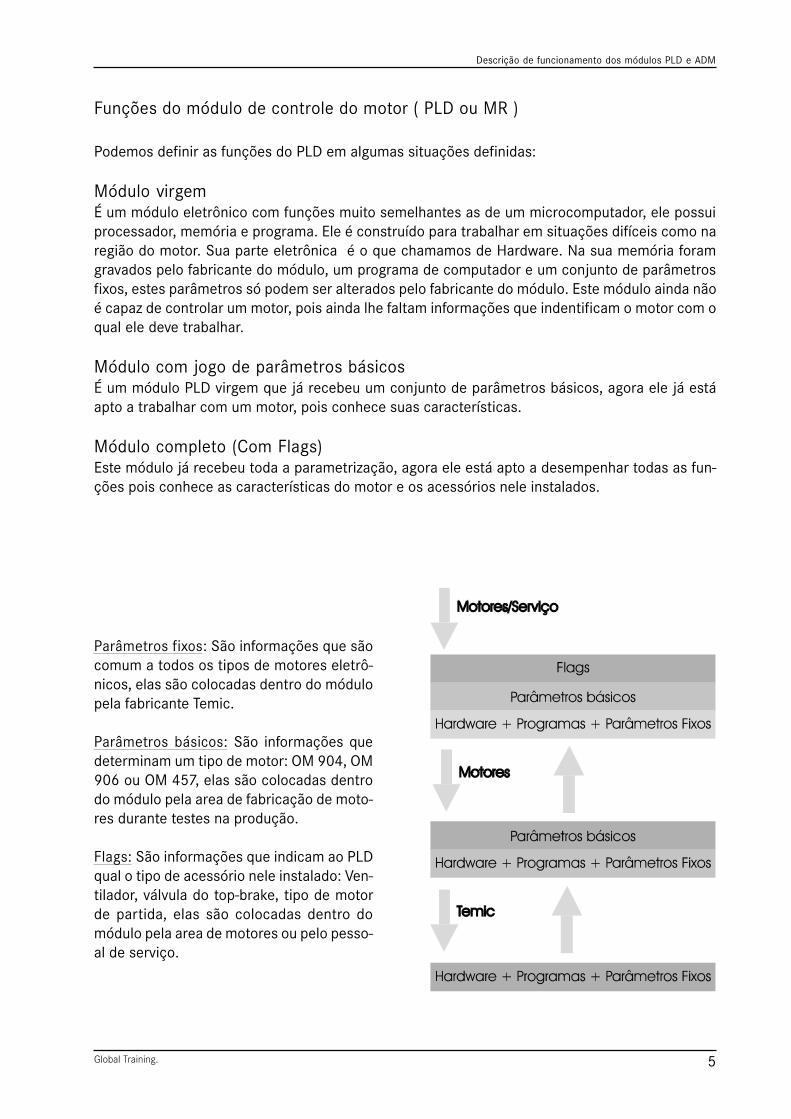
Parâmetros fixos: São informações que sãocomum a todos os tipos de motores eletrô-nicos, elas são colocadas dentro do módulopela fabricante Temic.
Parâmetros básicos: São informações quedeterminam um tipo de motor: OM 904, OM906 ou OM 457, elas são colocadas dentrodo módulo pela area de fabricação de moto-res durante testes na produção.
Flags: São informações que indicam ao PLDqual o tipo de acessório nele instalado: Ven-tilador, válvula do top-brake, tipo de motorde partida, elas são colocadas dentro domódulo pela area de motores ou pelo pesso-al de serviço.
Funções do módulo de controle do motor ( PLD ou MR )
Podemos definir as funções do PLD em algumas situações definidas:
Módulo virgemÉ um módulo eletrônico com funções muito semelhantes as de um microcomputador, ele possuiprocessador, memória e programa. Ele é construído para trabalhar em situações difíceis como naregião do motor. Sua parte eletrônica é o que chamamos de Hardware. Na sua memória foramgravados pelo fabricante do módulo, um programa de computador e um conjunto de parâmetrosfixos, estes parâmetros só podem ser alterados pelo fabricante do módulo. Este módulo ainda nãoé capaz de controlar um motor, pois ainda lhe faltam informações que indentificam o motor com oqual ele deve trabalhar.
Módulo com jogo de parâmetros básicosÉ um módulo PLD virgem que já recebeu um conjunto de parâmetros básicos, agora ele já estáapto a trabalhar com um motor, pois conhece suas características.
Módulo completo (Com Flags)Este módulo já recebeu toda a parametrização, agora ele está apto a desempenhar todas as fun-ções pois conhece as características do motor e os acessórios nele instalados.
Descrição de funcionamento dos módulos PLD e ADM
Global Training.6
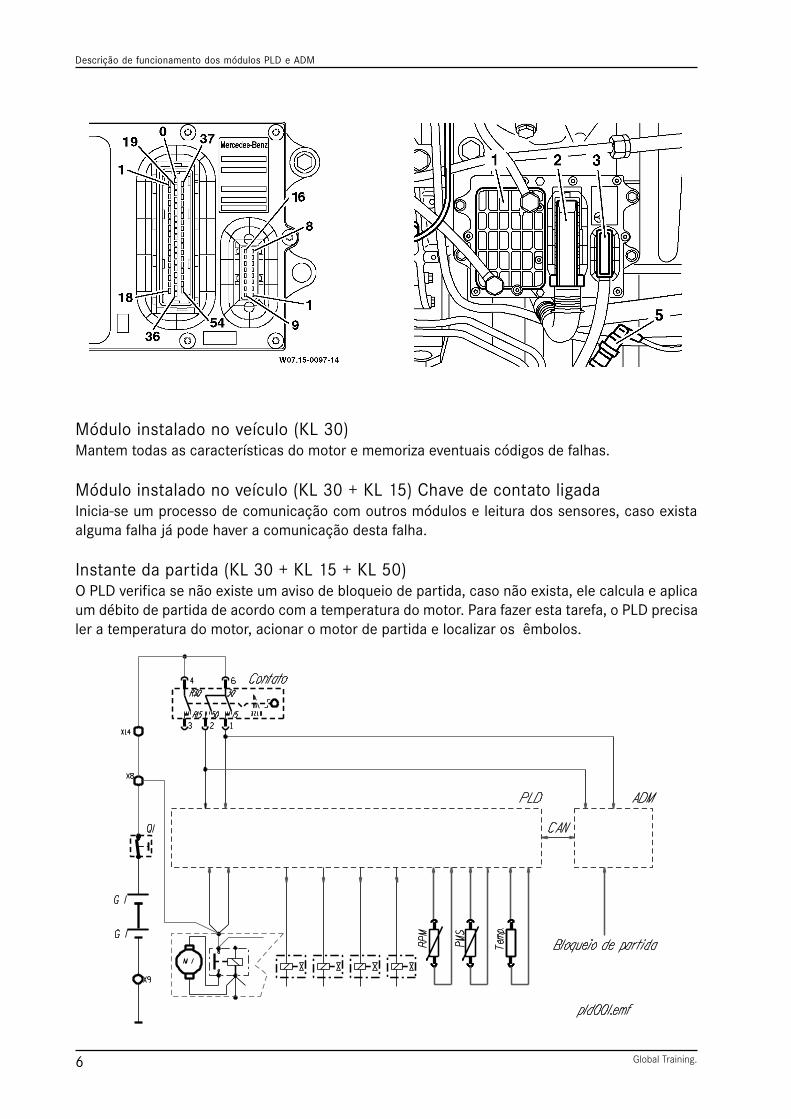
Módulo instalado no veículo (KL 30)Mantem todas as características do motor e memoriza eventuais códigos de falhas.
Módulo instalado no veículo (KL 30 + KL 15) Chave de contato ligadaInicia-se um processo de comunicação com outros módulos e leitura dos sensores, caso existaalguma falha já pode haver a comunicação desta falha.
Instante da partida (KL 30 + KL 15 + KL 50)O PLD verifica se não existe um aviso de bloqueio de partida, caso não exista, ele calcula e aplicaum débito de partida de acordo com a temperatura do motor. Para fazer esta tarefa, o PLD precisaler a temperatura do motor, acionar o motor de partida e localizar os êmbolos.
Descrição de funcionamento dos módulos PLD e ADM
Global Training. 7
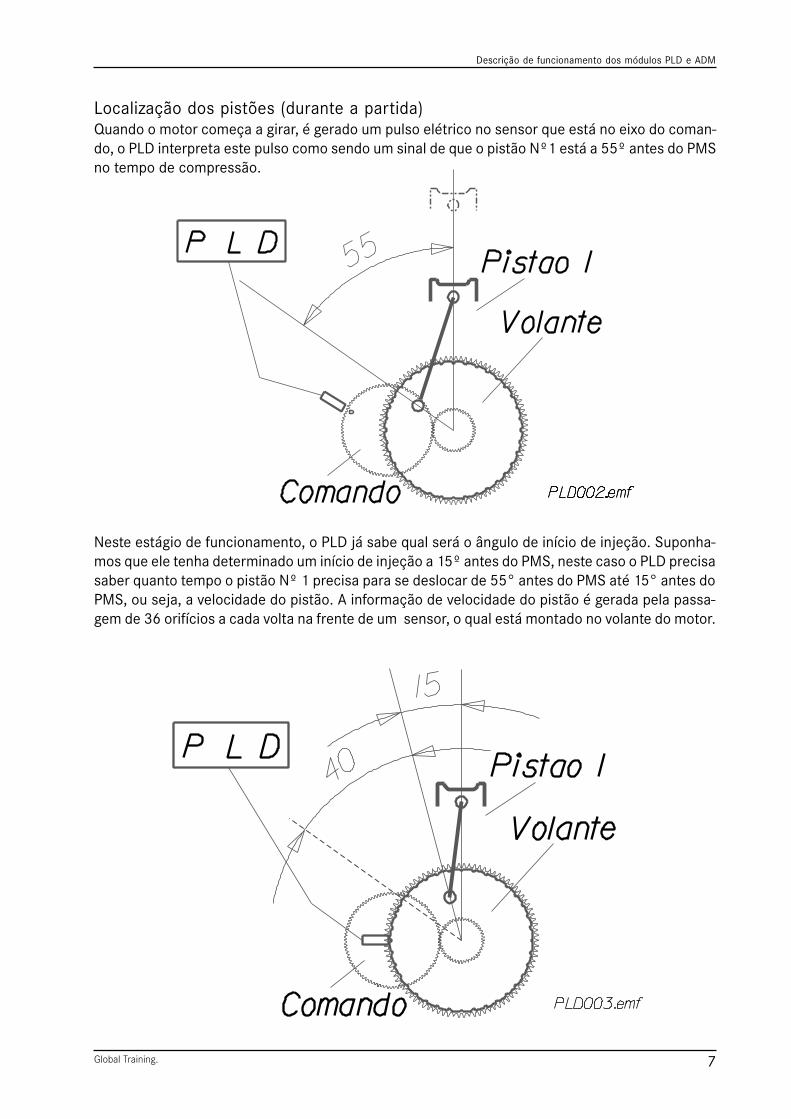
Neste estágio de funcionamento, o PLD já sabe qual será o ângulo de início de injeção. Suponha-mos que ele tenha determinado um início de injeção a 15º antes do PMS, neste caso o PLD precisasaber quanto tempo o pistão Nº 1 precisa para se deslocar de 55° antes do PMS até 15° antes doPMS, ou seja, a velocidade do pistão. A informação de velocidade do pistão é gerada pela passa-gem de 36 orifícios a cada volta na frente de um sensor, o qual está montado no volante do motor.
Localização dos pistões (durante a partida)Quando o motor começa a girar, é gerado um pulso elétrico no sensor que está no eixo do coman-do, o PLD interpreta este pulso como sendo um sinal de que o pistão Nº1 está a 55º antes do PMSno tempo de compressão.
Descrição de funcionamento dos módulos PLD e ADM
Global Training.8
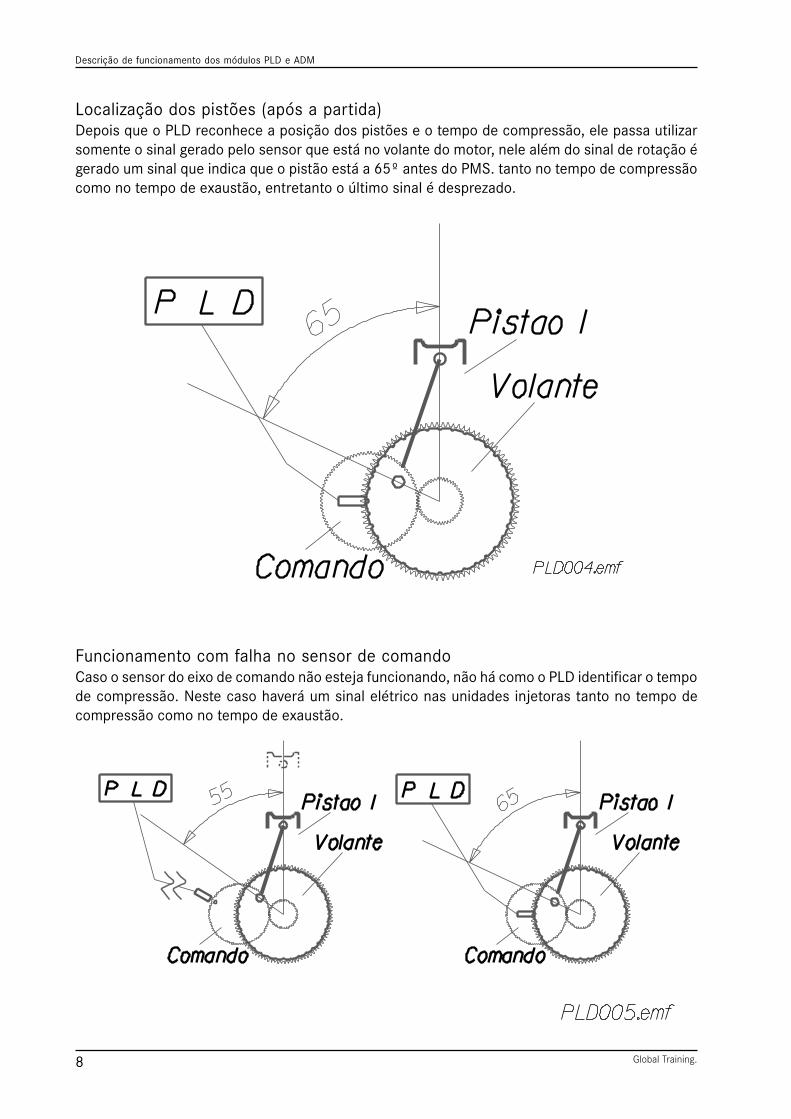
Localização dos pistões (após a partida)Depois que o PLD reconhece a posição dos pistões e o tempo de compressão, ele passa utilizarsomente o sinal gerado pelo sensor que está no volante do motor, nele além do sinal de rotação égerado um sinal que indica que o pistão está a 65º antes do PMS. tanto no tempo de compressãocomo no tempo de exaustão, entretanto o último sinal é desprezado.
Funcionamento com falha no sensor de comandoCaso o sensor do eixo de comando não esteja funcionando, não há como o PLD identificar o tempode compressão. Neste caso haverá um sinal elétrico nas unidades injetoras tanto no tempo decompressão como no tempo de exaustão.
Descrição de funcionamento dos módulos PLD e ADM
Global Training. 9
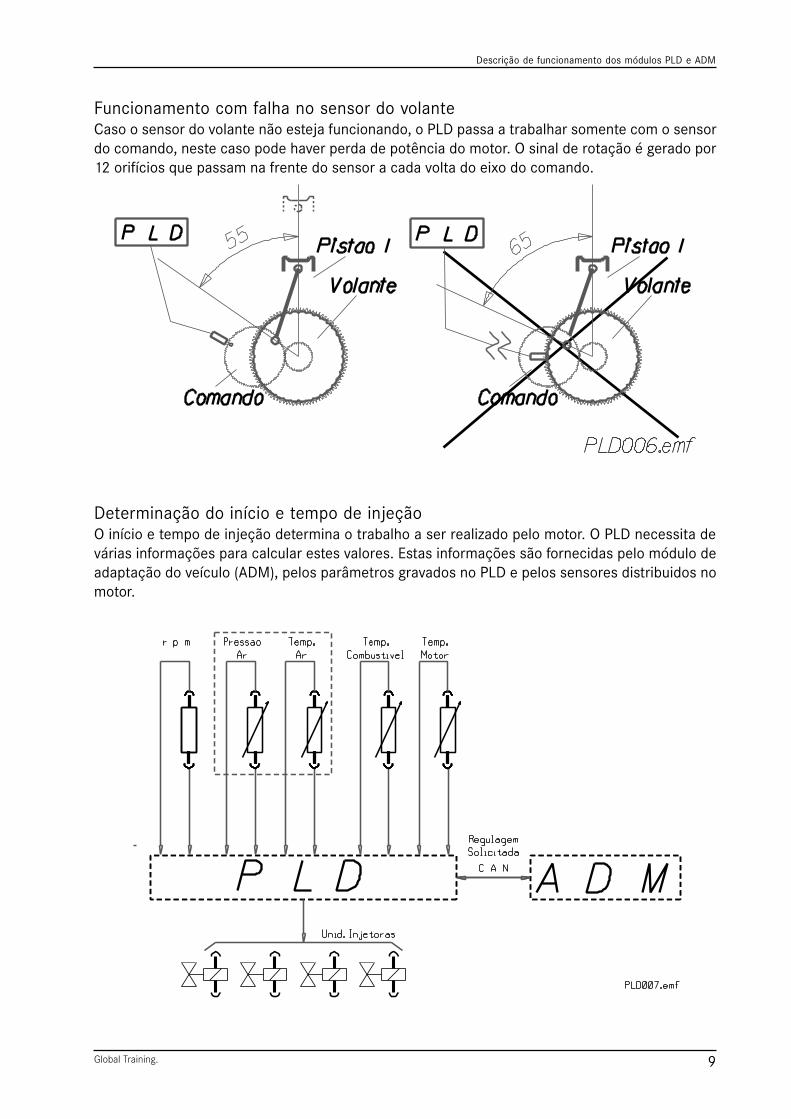
Determinação do início e tempo de injeçãoO início e tempo de injeção determina o trabalho a ser realizado pelo motor. O PLD necessita devárias informações para calcular estes valores. Estas informações são fornecidas pelo módulo deadaptação do veículo (ADM), pelos parâmetros gravados no PLD e pelos sensores distribuidos nomotor.
Funcionamento com falha no sensor do volanteCaso o sensor do volante não esteja funcionando, o PLD passa a trabalhar somente com o sensordo comando, neste caso pode haver perda de potência do motor. O sinal de rotação é gerado por12 orifícios que passam na frente do sensor a cada volta do eixo do comando.
Descrição de funcionamento dos módulos PLD e ADM
Global Training.10
Temperatura do motorEsta informação é utilizada para o PLD determinar a quantidade de combustível a ser injetado emfunção da facilidade que o motor terá de queimar o combustível. Um exemplo de quantidade erra-da de combustível injetada, é de quando o motor está frio e é injetado uma maior quantidade decombustível, a qual o motor não tem capacidade de queimar devido a baixas temperaturas, libe-rando então fumaça branca pelo escapamento.
Temperatura e pressão do arEsta informação é utilizada para o PLD determinar a quantidade de combustível a ser injetado emfunção da quantidade de oxigênio disponível para a sua queima. Quando o ar está frio e pressurizado,ele está mais denso e portanto contem mais oxigênio. Esta informação é muito importante, poisexiste uma proporção correta de oxigênio x combustível que quando não é respeitada, pode gerarproblemas de potência, fumaça e até mesmo desgaste prematuro do motor.
Rotação do motorEsta informação é utilizada para o PLD determinar a quantidade de combustível a ser injetado emfunção da rotação do motor, esta informação é importante por estar relacionada com a potênciado motor, e o tempo disponível para a queima do combustível.
Proteção do turboO PLD protege o turbo diminuindo a potência máxima do motor em caso do veículo estar traba-lhando em uma condição onde a pressão atmosférica é baixa. Para isso, o PLD utiliza a informaçãode pressão atmosférica gerada internamente por um sensor e um jogo de parâmetros, que indicaqual o turbo instalado no motor. Por isso na troca de um turbo ou de um PLD, deve se cuidarpara qual versão do PLD seja compatível, caso não seja é preciso trocar os parâmetros do PLD emum procedimento que se chama “Down Load”, só é possível faze-lo com o Star Diagnosis.
Descrição de funcionamento dos módulos PLD e ADM
Global Training. 11
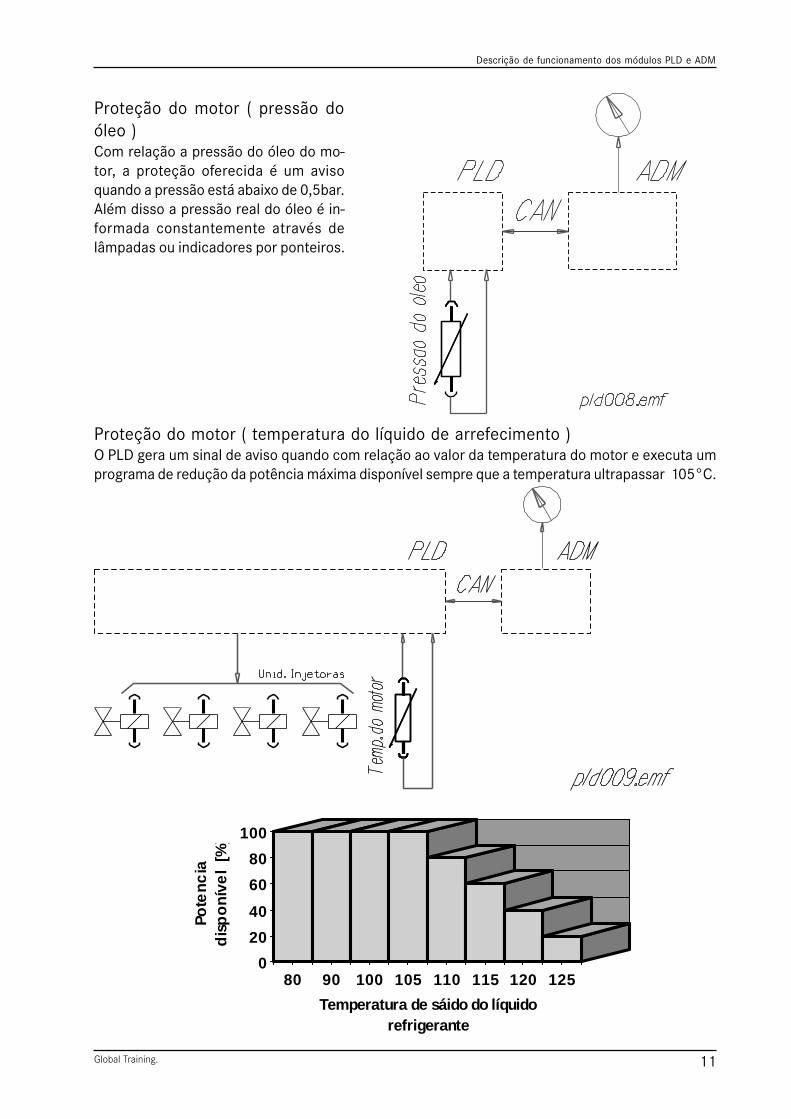
Proteção do motor ( pressão doóleo )Com relação a pressão do óleo do mo-tor, a proteção oferecida é um avisoquando a pressão está abaixo de 0,5bar.Além disso a pressão real do óleo é in-formada constantemente através delâmpadas ou indicadores por ponteiros.
Proteção do motor ( temperatura do líquido de arrefecimento )O PLD gera um sinal de aviso quando com relação ao valor da temperatura do motor e executa umprograma de redução da potência máxima disponível sempre que a temperatura ultrapassar 105°C.
0
20
40
60
80
100
Pote
ncia
d
isp
oní
vel
[%]
80 90 100 105 110 115 120 125
Temperatura de sáido do líquido refrigerante
Descrição de funcionamento dos módulos PLD e ADM
Global Training.12
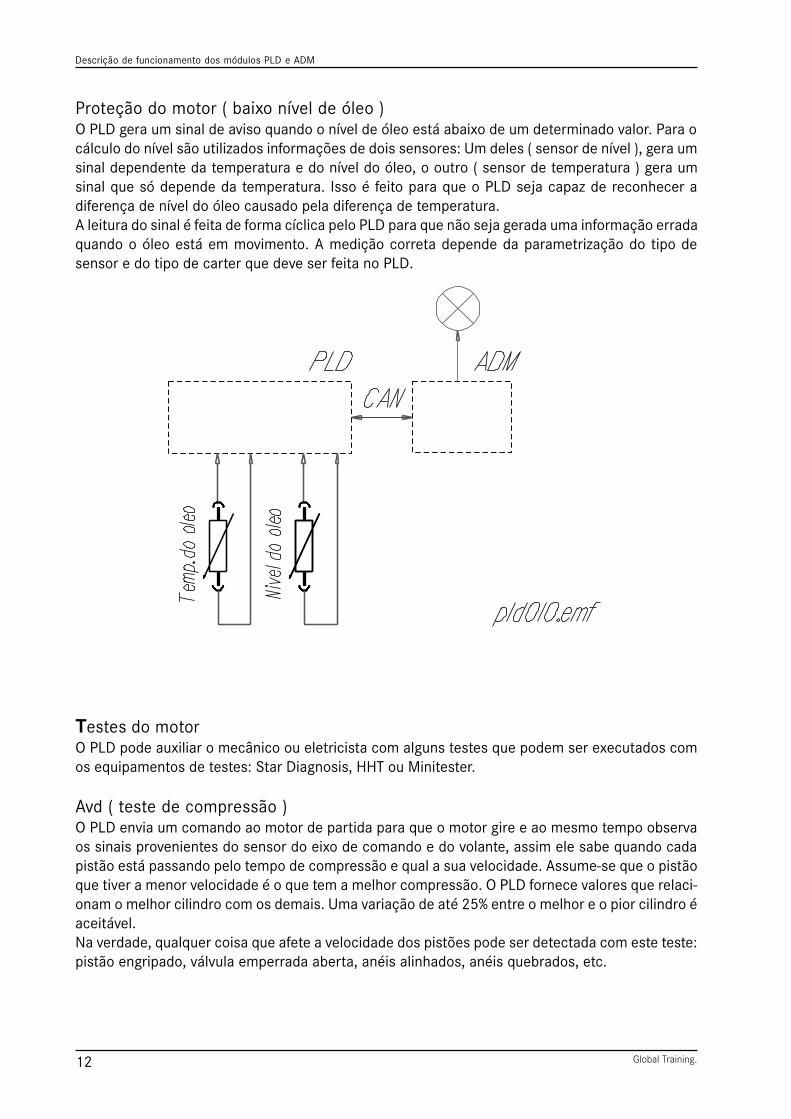
Proteção do motor ( baixo nível de óleo )O PLD gera um sinal de aviso quando o nível de óleo está abaixo de um determinado valor. Para ocálculo do nível são utilizados informações de dois sensores: Um deles ( sensor de nível ), gera umsinal dependente da temperatura e do nível do óleo, o outro ( sensor de temperatura ) gera umsinal que só depende da temperatura. Isso é feito para que o PLD seja capaz de reconhecer adiferença de nível do óleo causado pela diferença de temperatura.A leitura do sinal é feita de forma cíclica pelo PLD para que não seja gerada uma informação erradaquando o óleo está em movimento. A medição correta depende da parametrização do tipo desensor e do tipo de carter que deve ser feita no PLD.
Testes do motorO PLD pode auxiliar o mecânico ou eletricista com alguns testes que podem ser executados comos equipamentos de testes: Star Diagnosis, HHT ou Minitester.
Avd ( teste de compressão )O PLD envia um comando ao motor de partida para que o motor gire e ao mesmo tempo observaos sinais provenientes do sensor do eixo de comando e do volante, assim ele sabe quando cadapistão está passando pelo tempo de compressão e qual a sua velocidade. Assume-se que o pistãoque tiver a menor velocidade é o que tem a melhor compressão. O PLD fornece valores que relaci-onam o melhor cilindro com os demais. Uma variação de até 25% entre o melhor e o pior cilindro éaceitável.Na verdade, qualquer coisa que afete a velocidade dos pistões pode ser detectada com este teste:pistão engripado, válvula emperrada aberta, anéis alinhados, anéis quebrados, etc.
Descrição de funcionamento dos módulos PLD e ADM
Global Training. 13
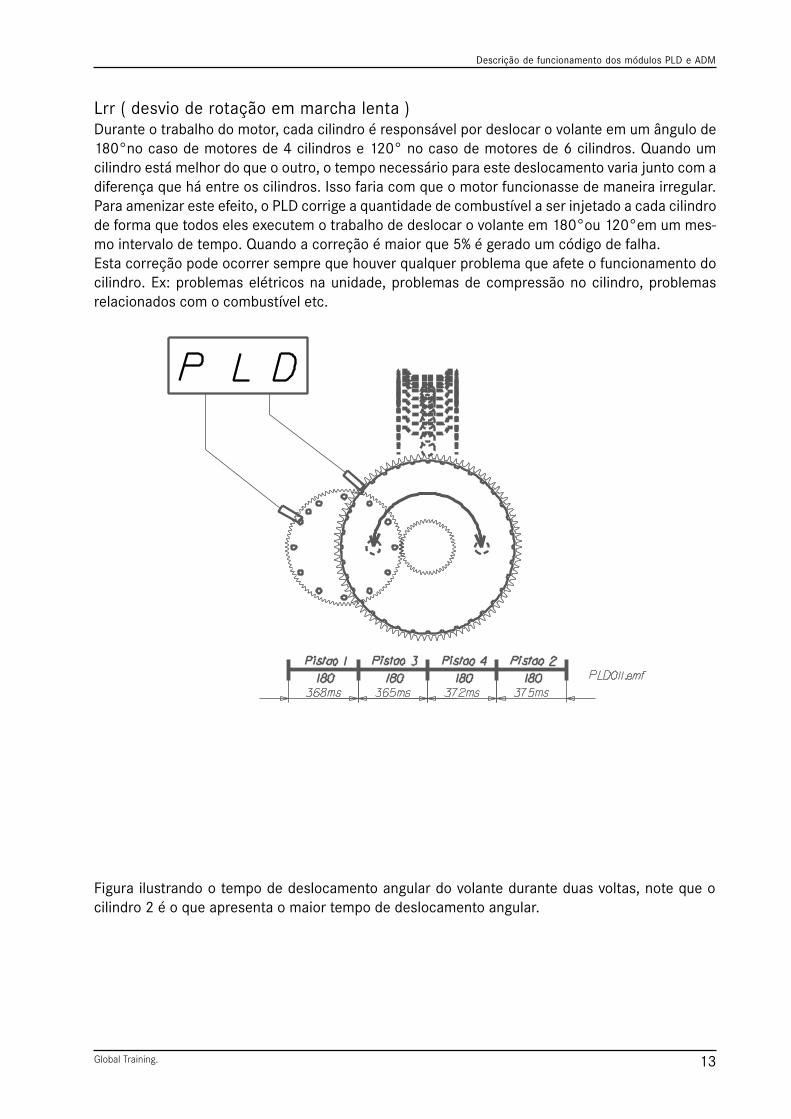
Lrr ( desvio de rotação em marcha lenta )Durante o trabalho do motor, cada cilindro é responsável por deslocar o volante em um ângulo de180°no caso de motores de 4 cilindros e 120° no caso de motores de 6 cilindros. Quando umcilindro está melhor do que o outro, o tempo necessário para este deslocamento varia junto com adiferença que há entre os cilindros. Isso faria com que o motor funcionasse de maneira irregular.Para amenizar este efeito, o PLD corrige a quantidade de combustível a ser injetado a cada cilindrode forma que todos eles executem o trabalho de deslocar o volante em 180°ou 120°em um mes-mo intervalo de tempo. Quando a correção é maior que 5% é gerado um código de falha.Esta correção pode ocorrer sempre que houver qualquer problema que afete o funcionamento docilindro. Ex: problemas elétricos na unidade, problemas de compressão no cilindro, problemasrelacionados com o combustível etc.
Figura ilustrando o tempo de deslocamento angular do volante durante duas voltas, note que ocilindro 2 é o que apresenta o maior tempo de deslocamento angular.

Descrição de funcionamento dos módulos PLD e ADM
Global Training.14
Sensor de temperatura do motor ( estrutura )Dentro do conjunto sensor está montado um termistor que nada mais é do que uma resistênciaelétrica cujo valor depende de sua temperatura. No caso deste sensor, quanto maior a sua tempe-ratura, menor o valor da resistência, por isso este sensor é chamado de NTC ( Termistor de Coefi-ciente Negativo ).
Vista em corte do sensor de temperatura Gráfico de resposta do sensor de temperatura
Sensor de temperatura do motor ( tarefa )Envia ao PLD uma tensão elétrica que depende da temperatura do líquido de arrefecimento. O PLDutiliza esta informação para o cálculo do débito de partida e início e tempo de injeção.
Sensor de temperatura do motor ( loca-lização )Está montado perto da válvula termostática.

Descrição de funcionamento dos módulos PLD e ADM
Global Training. 15
Sensores indutivos do volante e do comando ( estrutura )Este sensor é composto de uma bobina enrolada num pequeno imã. Naturalmente ao redor destesensor existe um campo magnético de uma determinada intensidade. Este campo magnético podeser representado por linhas que cortam o núcleo do sensor e o ar que está ao redor dele. O ar é ummau condutor, por isso o campo magnético formado tem pouca densidade. Se aproximarmos des-te sensor um pedaço de ferro, que é um bom condutor de campo magnético, haverá um adensamentodo campo. Sempre que houver uma variação na densidade do campo magnético, surgirá umatensão elétrica nos terminais do sensor. A amplitude da tensão elétrica gerada depende da inten-sidade e da velocidade da variação da densidade do campo magnético.
Sensor de indutivo do volante ( tarefa )Informa ao PLD a rotação do motor, gerando 36 pulsos elétricos a cada volta do volante e tambéma localização dos pistãos, gerando um sinal elétrico quando o pistão 1 está a 65º do PMS nostempos de compressão e escape.
1 - Fios de ligação2 - Corpo do sensor3 - Bucha elástica de fixação4 - Núcleo5 - Núcleo6 - Bobina7 - Furo ou rasgoA - Folga de ajuste. Encoste o sensor na roda estando o motor parado. A distância será ajustada automáticamente.
Sinal de rotação
Sinal de localização do PMS
Descrição de funcionamento dos módulos PLD e ADM
Global Training.16
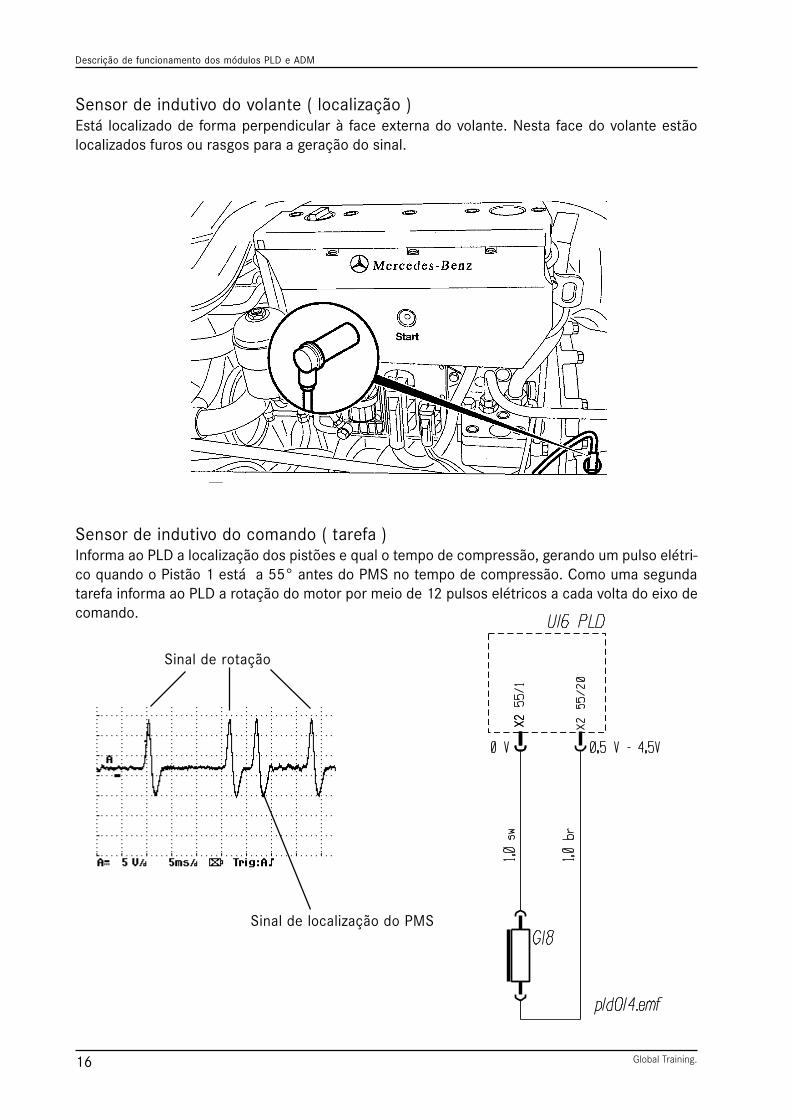
Sensor de indutivo do volante ( localização )Está localizado de forma perpendicular à face externa do volante. Nesta face do volante estãolocalizados furos ou rasgos para a geração do sinal.
Sensor de indutivo do comando ( tarefa )Informa ao PLD a localização dos pistões e qual o tempo de compressão, gerando um pulso elétri-co quando o Pistão 1 está a 55° antes do PMS no tempo de compressão. Como uma segundatarefa informa ao PLD a rotação do motor por meio de 12 pulsos elétricos a cada volta do eixo decomando.
Sinal de rotação
Sinal de localização do PMS

Descrição de funcionamento dos módulos PLD e ADM
Global Training. 17
Sensor de indutivo do comando ( localização )Está localizado de forma perpendicular a face lateral da engrenagem do comando. Nesta faceestão localizados furos para a geração do sinal.
Descrição de funcionamento dos módulos PLD e ADM
Global Training.18
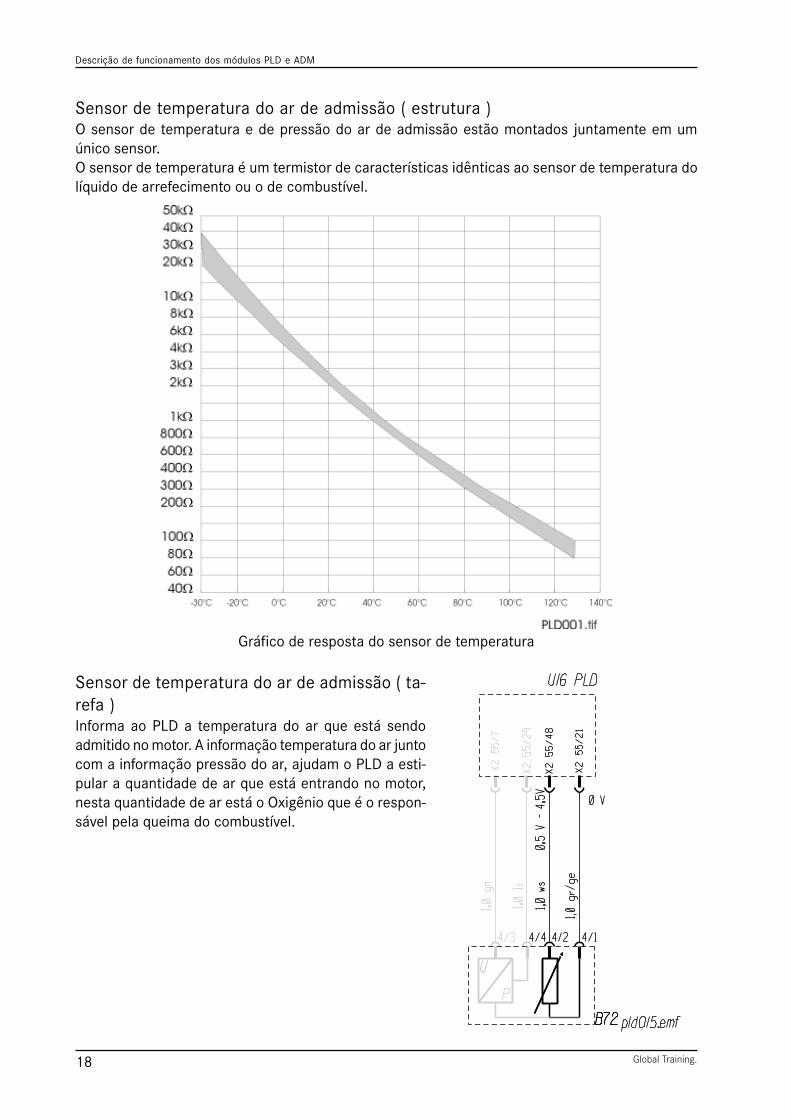
Sensor de temperatura do ar de admissão ( estrutura )O sensor de temperatura e de pressão do ar de admissão estão montados juntamente em umúnico sensor.O sensor de temperatura é um termistor de características idênticas ao sensor de temperatura dolíquido de arrefecimento ou o de combustível.
Sensor de temperatura do ar de admissão ( ta-refa )Informa ao PLD a temperatura do ar que está sendoadmitido no motor. A informação temperatura do ar juntocom a informação pressão do ar, ajudam o PLD a esti-pular a quantidade de ar que está entrando no motor,nesta quantidade de ar está o Oxigênio que é o respon-sável pela queima do combustível.
Gráfico de resposta do sensor de temperatura
Descrição de funcionamento dos módulos PLD e ADM
Global Training. 19
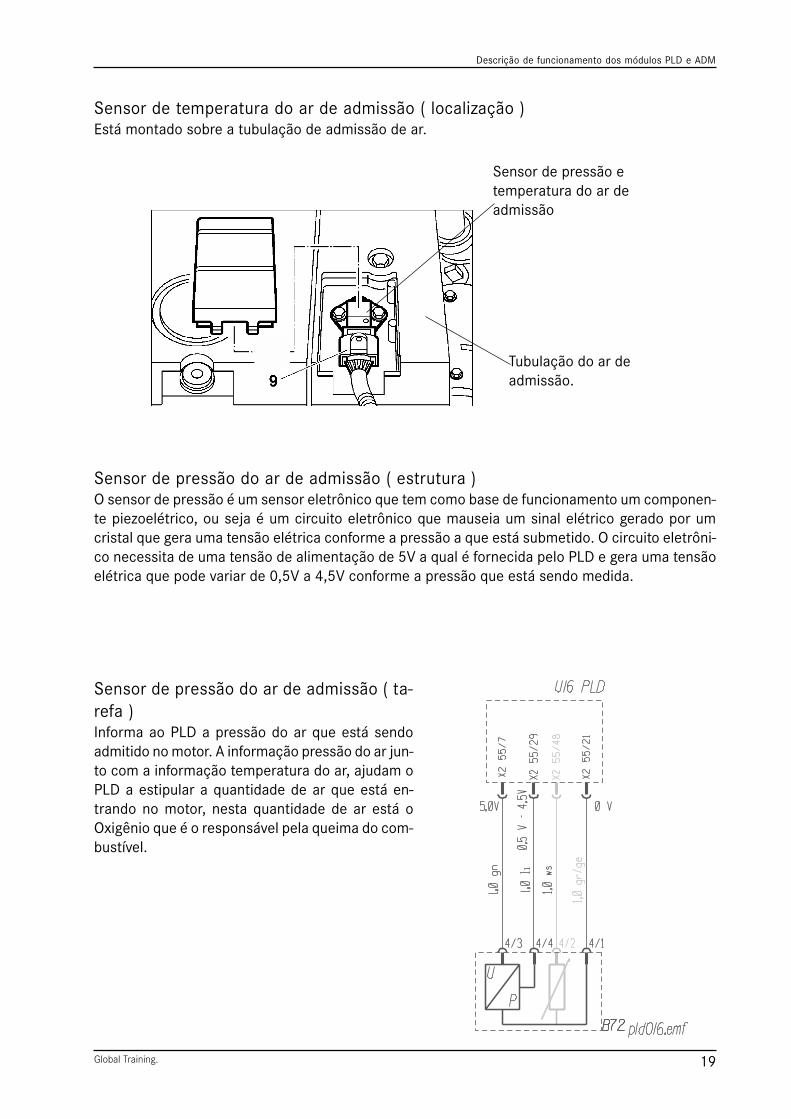
Sensor de pressão do ar de admissão ( estrutura )O sensor de pressão é um sensor eletrônico que tem como base de funcionamento um componen-te piezoelétrico, ou seja é um circuito eletrônico que mauseia um sinal elétrico gerado por umcristal que gera uma tensão elétrica conforme a pressão a que está submetido. O circuito eletrôni-co necessita de uma tensão de alimentação de 5V a qual é fornecida pelo PLD e gera uma tensãoelétrica que pode variar de 0,5V a 4,5V conforme a pressão que está sendo medida.
Sensor de temperatura do ar de admissão ( localização )Está montado sobre a tubulação de admissão de ar.
Sensor de pressão etemperatura do ar deadmissão
Tubulação do ar deadmissão.
Sensor de pressão do ar de admissão ( ta-refa )Informa ao PLD a pressão do ar que está sendoadmitido no motor. A informação pressão do ar jun-to com a informação temperatura do ar, ajudam oPLD a estipular a quantidade de ar que está en-trando no motor, nesta quantidade de ar está oOxigênio que é o responsável pela queima do com-bustível.

Descrição de funcionamento dos módulos PLD e ADM
Global Training.20
Sensor de temperatura do combustível ( estrutura )Dentro do conjunto sensor está montado um termistor que nada mais é do que uma resistênciaelétrica cujo valor depende de sua temperatura. No caso deste sensor, quanto maior a sua tempe-ratura, menor o valor da resistência, por isso este sensor é chamado de NTC ( Termistor de Coefi-ciente Negativo ).
Vista em corte do sensor de temperatura Gráfico de resposta do sensor de temperatura
Sensor de temperatura do combustível ( tarefa )Envia ao PLD uma tensão elétrica que depende da temperatura docombustível. Esta informação é importante para a correção do volu-me de combutível a ser injetado. Nos motores eletrônicos a tempe-ratura do combustível varia muito: o combustível é utilizado pararefrigeração das unidades injetoras e do PLD e além disso os seuscanais são construídos no próprio bloco do motor.
Sensor de temperatura do combustível ( localização )Está montado próximo a unidade injetora Nº 1.
Descrição de funcionamento dos módulos PLD e ADM
Global Training. 21
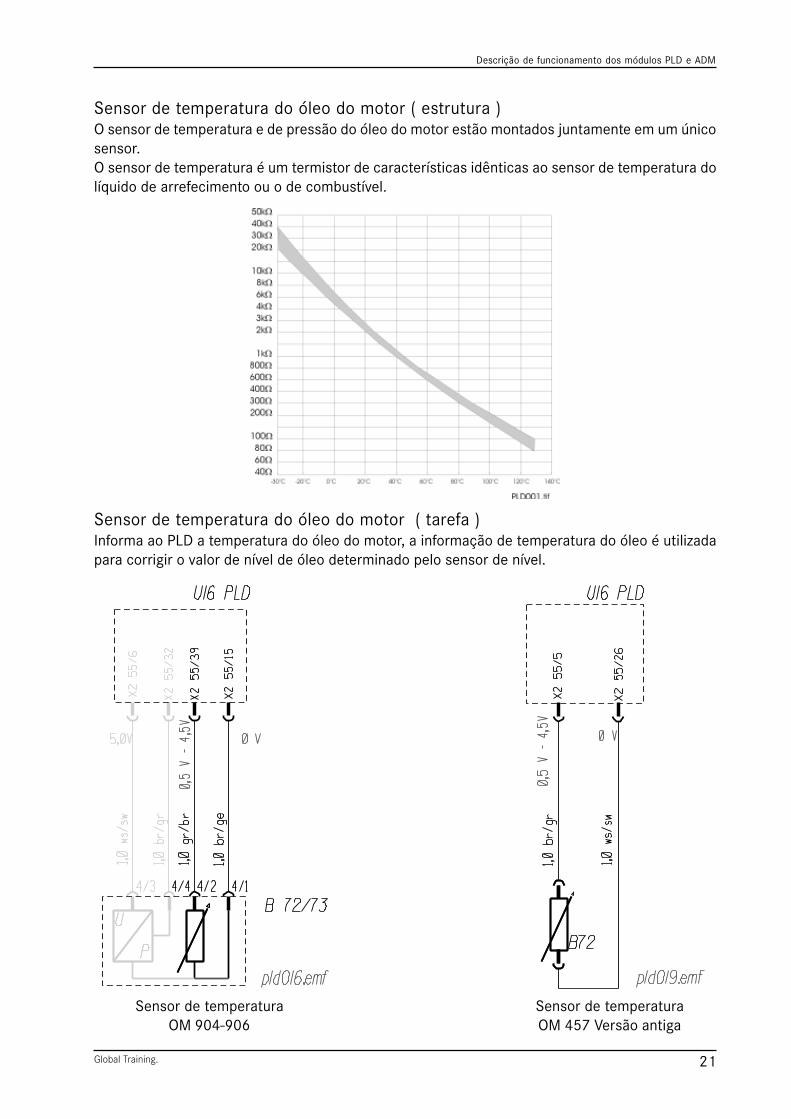
Sensor de temperatura do óleo do motor ( estrutura )O sensor de temperatura e de pressão do óleo do motor estão montados juntamente em um únicosensor.O sensor de temperatura é um termistor de características idênticas ao sensor de temperatura dolíquido de arrefecimento ou o de combustível.
Sensor de temperatura do óleo do motor ( tarefa )Informa ao PLD a temperatura do óleo do motor, a informação de temperatura do óleo é utilizadapara corrigir o valor de nível de óleo determinado pelo sensor de nível.
Sensor de temperaturaOM 904-906
Sensor de temperaturaOM 457 Versão antiga
Descrição de funcionamento dos módulos PLD e ADM
Global Training.22
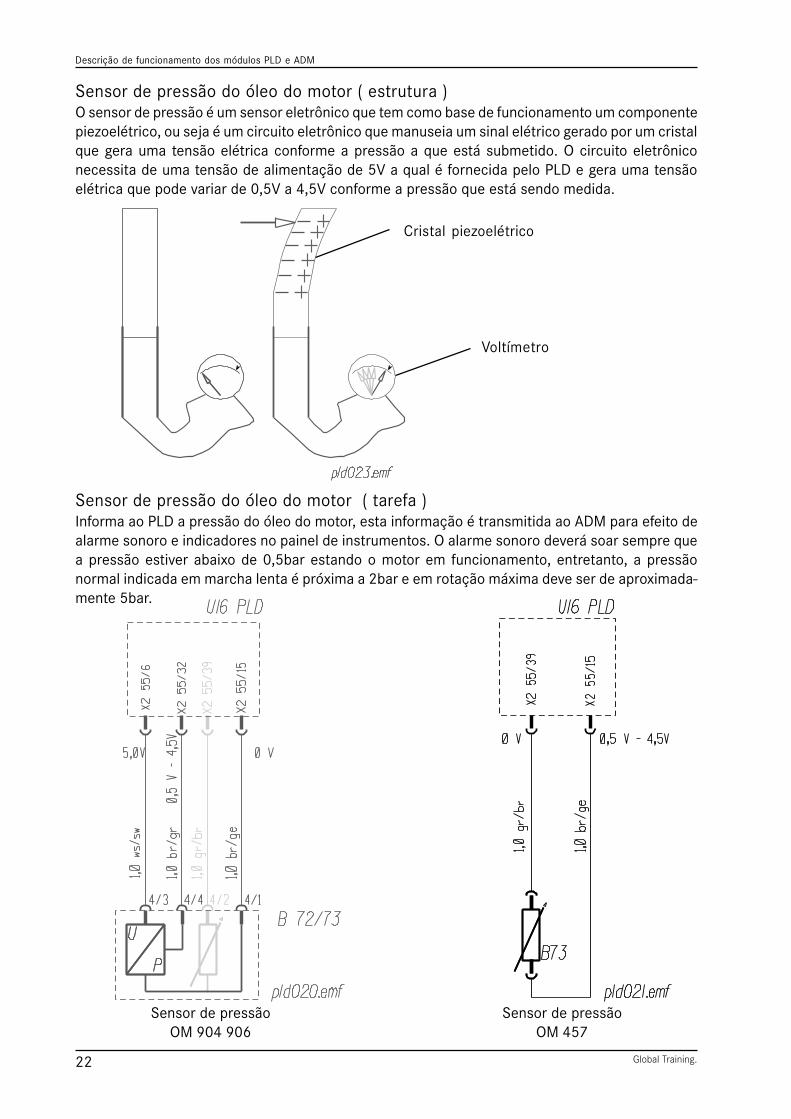
Sensor de pressão do óleo do motor ( estrutura )O sensor de pressão é um sensor eletrônico que tem como base de funcionamento um componentepiezoelétrico, ou seja é um circuito eletrônico que manuseia um sinal elétrico gerado por um cristalque gera uma tensão elétrica conforme a pressão a que está submetido. O circuito eletrôniconecessita de uma tensão de alimentação de 5V a qual é fornecida pelo PLD e gera uma tensãoelétrica que pode variar de 0,5V a 4,5V conforme a pressão que está sendo medida.
Sensor de pressão do óleo do motor ( tarefa )Informa ao PLD a pressão do óleo do motor, esta informação é transmitida ao ADM para efeito dealarme sonoro e indicadores no painel de instrumentos. O alarme sonoro deverá soar sempre quea pressão estiver abaixo de 0,5bar estando o motor em funcionamento, entretanto, a pressãonormal indicada em marcha lenta é próxima a 2bar e em rotação máxima deve ser de aproximada-mente 5bar.
Cristal piezoelétrico
Sensor de pressãoOM 904 906
Sensor de pressãoOM 457
Voltímetro
Descrição de funcionamento dos módulos PLD e ADM
Global Training. 23
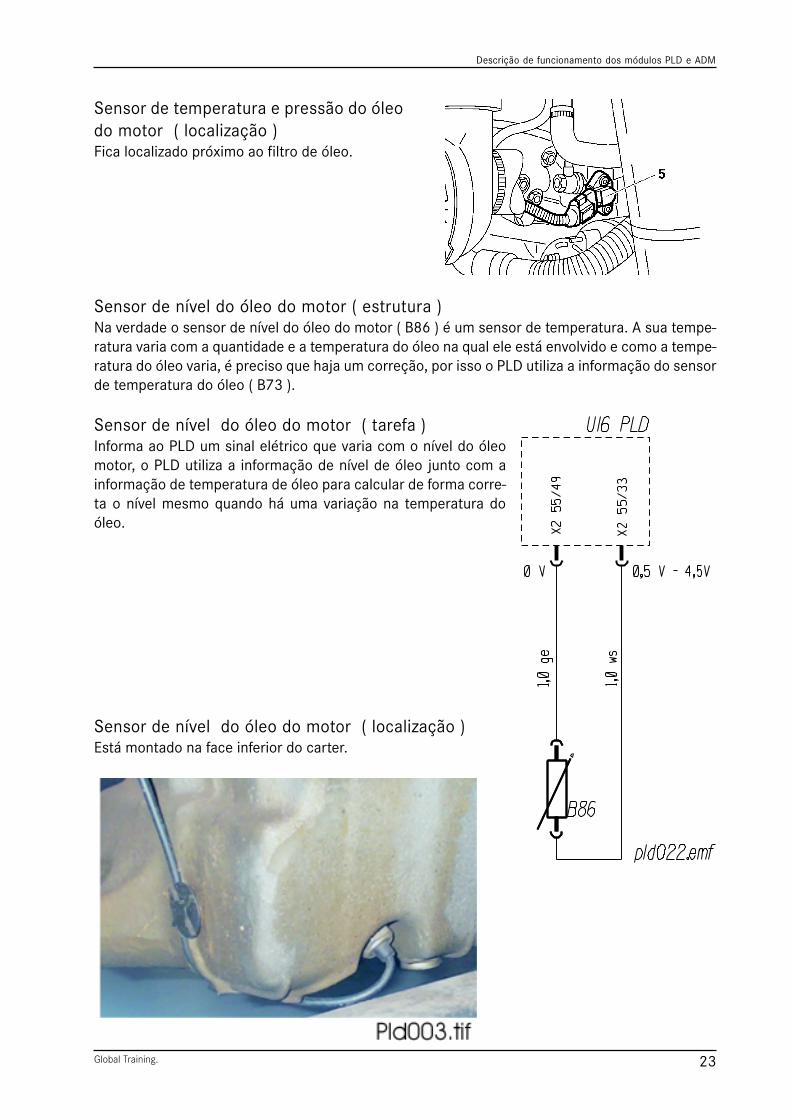
Sensor de nível do óleo do motor ( localização )Está montado na face inferior do carter.
Sensor de temperatura e pressão do óleodo motor ( localização )Fica localizado próximo ao filtro de óleo.
Sensor de nível do óleo do motor ( estrutura )Na verdade o sensor de nível do óleo do motor ( B86 ) é um sensor de temperatura. A sua tempe-ratura varia com a quantidade e a temperatura do óleo na qual ele está envolvido e como a tempe-ratura do óleo varia, é preciso que haja um correção, por isso o PLD utiliza a informação do sensorde temperatura do óleo ( B73 ).
Sensor de nível do óleo do motor ( tarefa )Informa ao PLD um sinal elétrico que varia com o nível do óleomotor, o PLD utiliza a informação de nível de óleo junto com ainformação de temperatura de óleo para calcular de forma corre-ta o nível mesmo quando há uma variação na temperatura doóleo.
Descrição de funcionamento dos módulos PLD e ADM
Global Training.24
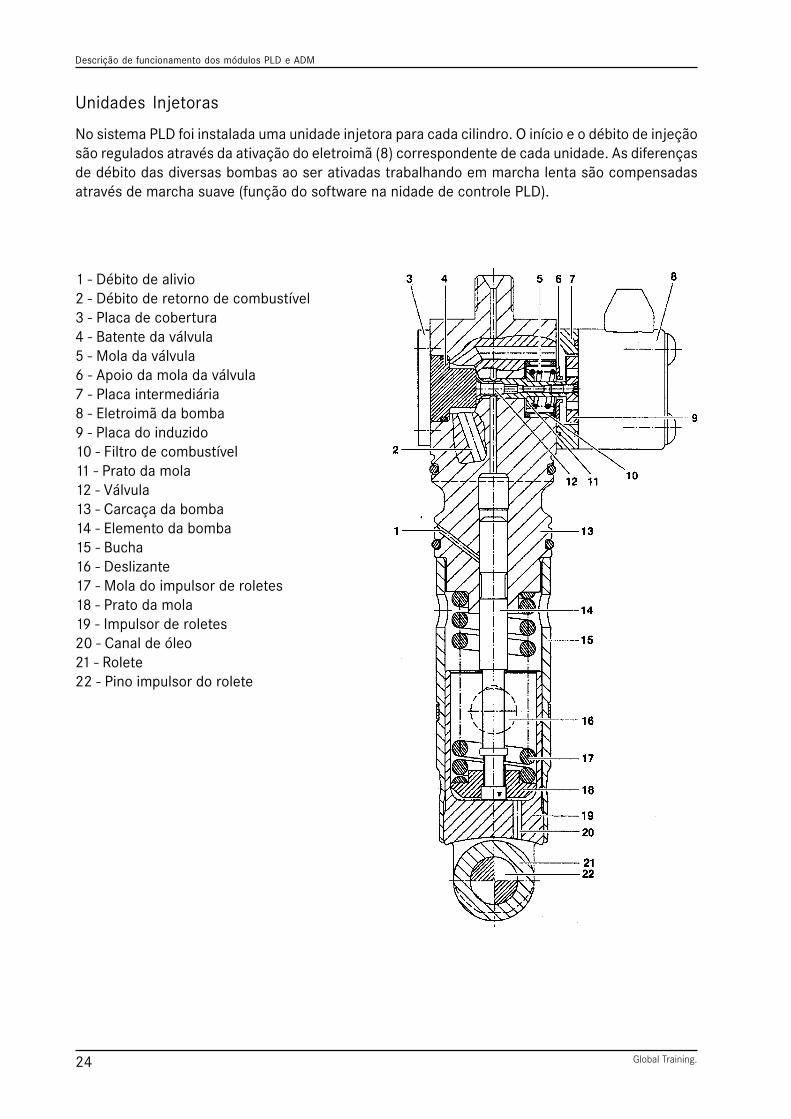
Unidades Injetoras
No sistema PLD foi instalada uma unidade injetora para cada cilindro. O início e o débito de injeçãosão regulados através da ativação do eletroimã (8) correspondente de cada unidade. As diferençasde débito das diversas bombas ao ser ativadas trabalhando em marcha lenta são compensadasatravés de marcha suave (função do software na nidade de controle PLD).
1 - Débito de alivio2 - Débito de retorno de combustível3 - Placa de cobertura4 - Batente da válvula5 - Mola da válvula6 - Apoio da mola da válvula7 - Placa intermediária8 - Eletroimã da bomba9 - Placa do induzido10 - Filtro de combustível11 - Prato da mola12 - Válvula13 - Carcaça da bomba14 - Elemento da bomba15 - Bucha16 - Deslizante17 - Mola do impulsor de roletes18 - Prato da mola19 - Impulsor de roletes20 - Canal de óleo21 - Rolete22 - Pino impulsor do rolete
Descrição de funcionamento dos módulos PLD e ADM
Global Training. 25
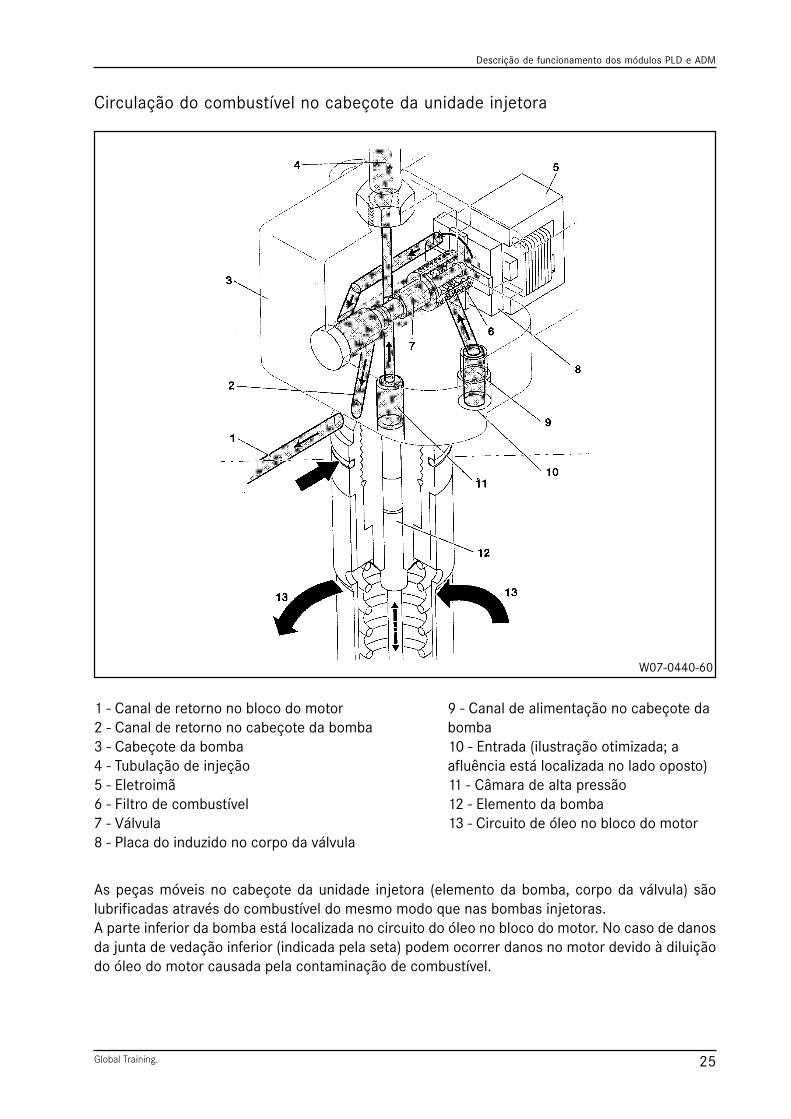
Circulação do combustível no cabeçote da unidade injetora
As peças móveis no cabeçote da unidade injetora (elemento da bomba, corpo da válvula) sãolubrificadas através do combustível do mesmo modo que nas bombas injetoras.A parte inferior da bomba está localizada no circuito do óleo no bloco do motor. No caso de danosda junta de vedação inferior (indicada pela seta) podem ocorrer danos no motor devido à diluiçãodo óleo do motor causada pela contaminação de combustível.
1 - Canal de retorno no bloco do motor2 - Canal de retorno no cabeçote da bomba3 - Cabeçote da bomba4 - Tubulação de injeção5 - Eletroimã6 - Filtro de combustível7 - Válvula8 - Placa do induzido no corpo da válvula
9 - Canal de alimentação no cabeçote dabomba10 - Entrada (ilustração otimizada; aafluência está localizada no lado oposto)11 - Câmara de alta pressão12 - Elemento da bomba13 - Circuito de óleo no bloco do motor
W07-0440-60
Descrição de funcionamento dos módulos PLD e ADM
Global Training.26
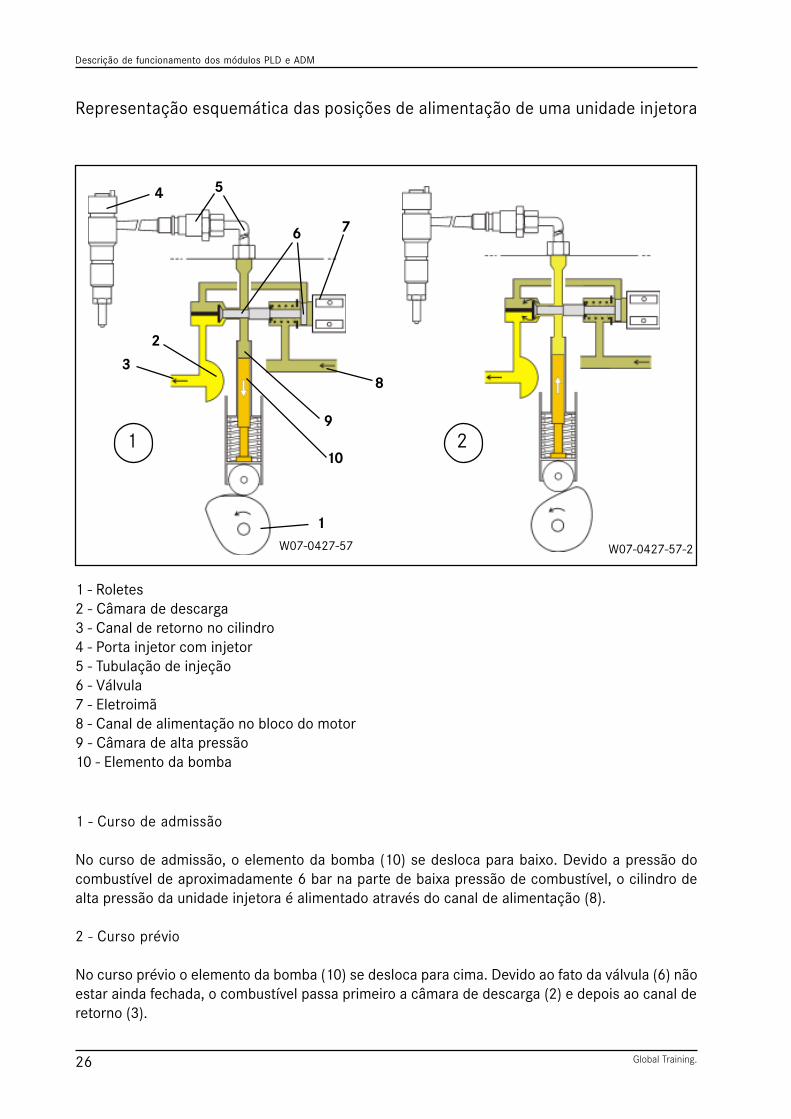
Representação esquemática das posições de alimentação de uma unidade injetora
1 - Curso de admissão
No curso de admissão, o elemento da bomba (10) se desloca para baixo. Devido a pressão docombustível de aproximadamente 6 bar na parte de baixa pressão de combustível, o cilindro dealta pressão da unidade injetora é alimentado através do canal de alimentação (8).
2 - Curso prévio
No curso prévio o elemento da bomba (10) se desloca para cima. Devido ao fato da válvula (6) nãoestar ainda fechada, o combustível passa primeiro a câmara de descarga (2) e depois ao canal deretorno (3).
1 - Roletes2 - Câmara de descarga3 - Canal de retorno no cilindro4 - Porta injetor com injetor5 - Tubulação de injeção6 - Válvula7 - Eletroimã8 - Canal de alimentação no bloco do motor9 - Câmara de alta pressão10 - Elemento da bomba
W07-0427-57-2
4 5
6 7
8
9
10
1
2
3
W07-0427-57
1 2
Descrição de funcionamento dos módulos PLD e ADM
Global Training. 27
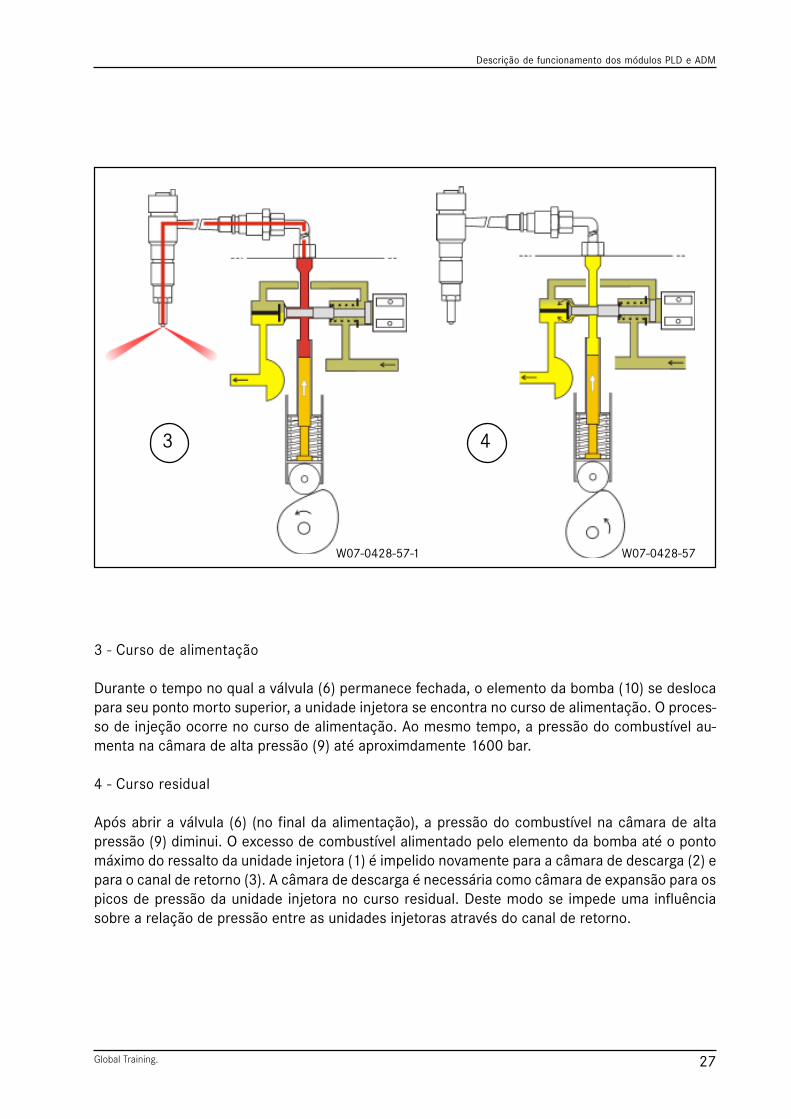
3 - Curso de alimentação
Durante o tempo no qual a válvula (6) permanece fechada, o elemento da bomba (10) se deslocapara seu ponto morto superior, a unidade injetora se encontra no curso de alimentação. O proces-so de injeção ocorre no curso de alimentação. Ao mesmo tempo, a pressão do combustível au-menta na câmara de alta pressão (9) até aproximdamente 1600 bar.
4 - Curso residual
Após abrir a válvula (6) (no final da alimentação), a pressão do combustível na câmara de altapressão (9) diminui. O excesso de combustível alimentado pelo elemento da bomba até o pontomáximo do ressalto da unidade injetora (1) é impelido novamente para a câmara de descarga (2) epara o canal de retorno (3). A câmara de descarga é necessária como câmara de expansão para ospicos de pressão da unidade injetora no curso residual. Deste modo se impede uma influênciasobre a relação de pressão entre as unidades injetoras através do canal de retorno.
3 4
W07-0428-57W07-0428-57-1
Descrição de funcionamento dos módulos PLD e ADM
Global Training.28
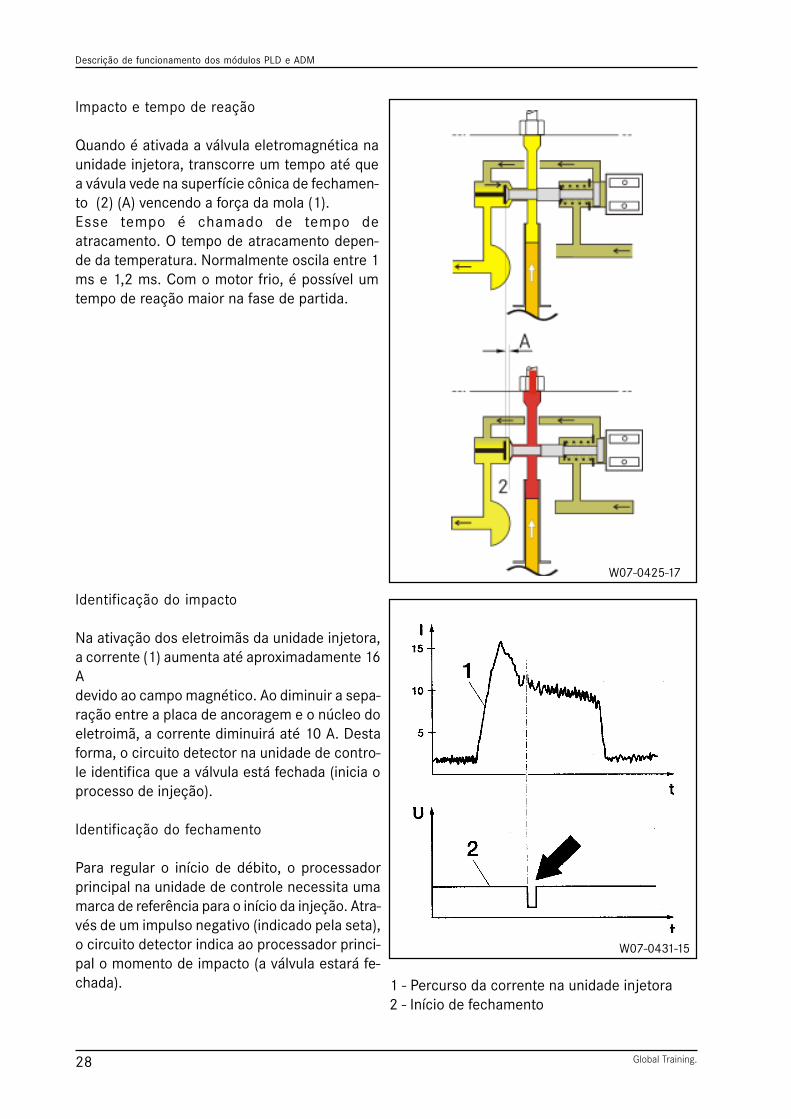
Impacto e tempo de reação
Quando é ativada a válvula eletromagnética naunidade injetora, transcorre um tempo até quea vávula vede na superfície cônica de fechamen-to (2) (A) vencendo a força da mola (1).Esse tempo é chamado de tempo deatracamento. O tempo de atracamento depen-de da temperatura. Normalmente oscila entre 1ms e 1,2 ms. Com o motor frio, é possível umtempo de reação maior na fase de partida.
Identificação do impacto
Na ativação dos eletroimãs da unidade injetora,a corrente (1) aumenta até aproximadamente 16Adevido ao campo magnético. Ao diminuir a sepa-ração entre a placa de ancoragem e o núcleo doeletroimã, a corrente diminuirá até 10 A. Destaforma, o circuito detector na unidade de contro-le identifica que a válvula está fechada (inicia oprocesso de injeção).
Identificação do fechamento
Para regular o início de débito, o processadorprincipal na unidade de controle necessita umamarca de referência para o início da injeção. Atra-vés de um impulso negativo (indicado pela seta),o circuito detector indica ao processador princi-pal o momento de impacto (a válvula estará fe-chada).
W07-0431-15
1 - Percurso da corrente na unidade injetora2 - Início de fechamento
W07-0425-17

Descrição de funcionamento dos módulos PLD e ADM
Global Training. 29
Regulagem do volume de injeção
Nos motores anteriores, o volume de injeção era regulado na bomba injetora através de um preci-so e complexo mecanismo. No caso de falhas deste mecanismo, por exemplo no caso de falta depotência, eram necessários métodos e aparelhos de testes para executar os trabalhos de diagnós-tico e regulagens.No PLD, a unidade injetora determina somente a margem limite na qual pode-se efetuar a regulagemeletrônica. A margem máxima de regulagem é determinada pelo curso do ressalto da unidadeinjetora (aproximadamente 65,5°) e a margem máxima do fluxo através do volume impelido nocilindro de alta pressão.
Ângulo de injeção
O ângulo no qual se deslocou a árvore de manivelas, com o motor em funcionamento, desde oinício (S=identificação do fechamento) até o final de um curso de injeção (a válvula abre), é oângulo de injeção (A). A árvore do comando de válvulas gira somente a metade do ângulo deinjeção da árvore de manivelas.Com a ajuda do ângulo de injeção (amplitude de impulso), a unidade de controle PLD determina aduração da injeção e, portanto, o volume de injeção.No esquema 1, o início elétrico de injeção acontece com a identificação do fechamento (S) 5°APMS. Com um ângulo de injeção de 10° da árvore de manivelas, o curso de alimentação finaliza-se depois do PMS (esquema 2).
W07-0439-57
Descrição de funcionamento dos módulos PLD e ADM
Global Training.30
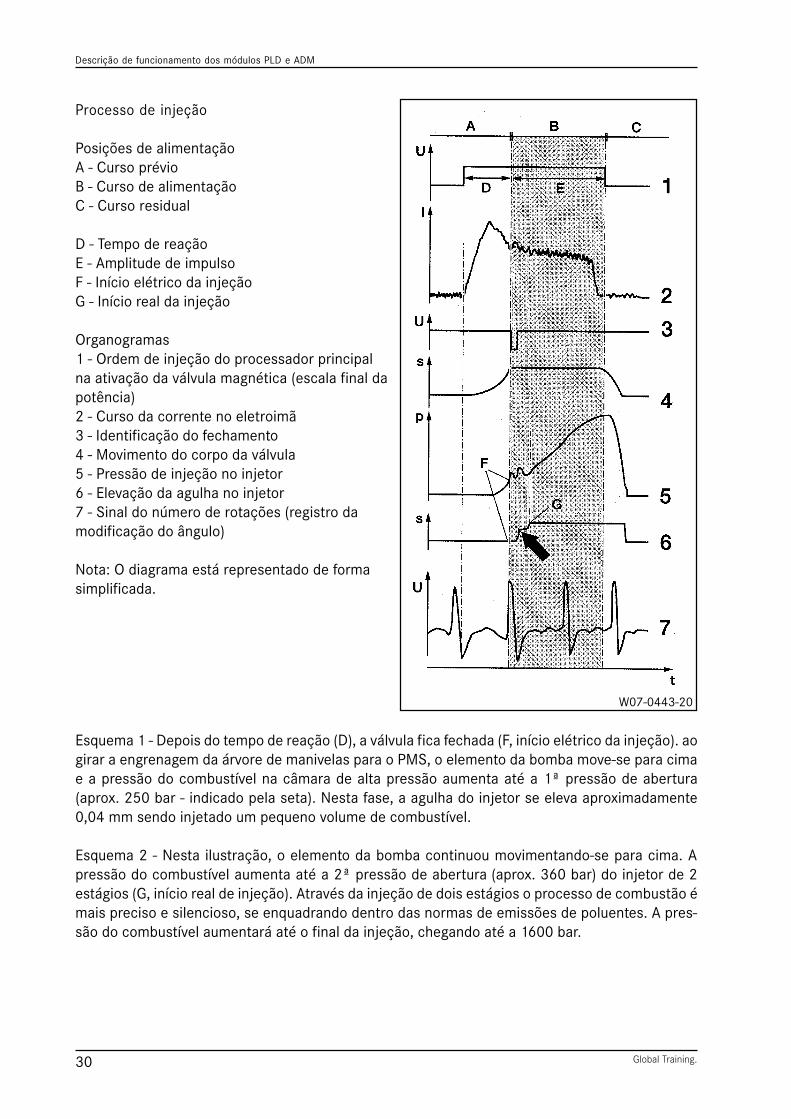
Esquema 1 - Depois do tempo de reação (D), a válvula fica fechada (F, início elétrico da injeção). aogirar a engrenagem da árvore de manivelas para o PMS, o elemento da bomba move-se para cimae a pressão do combustível na câmara de alta pressão aumenta até a 1ª pressão de abertura(aprox. 250 bar - indicado pela seta). Nesta fase, a agulha do injetor se eleva aproximadamente0,04 mm sendo injetado um pequeno volume de combustível.
Esquema 2 - Nesta ilustração, o elemento da bomba continuou movimentando-se para cima. Apressão do combustível aumenta até a 2ª pressão de abertura (aprox. 360 bar) do injetor de 2estágios (G, início real de injeção). Através da injeção de dois estágios o processo de combustão émais preciso e silencioso, se enquadrando dentro das normas de emissões de poluentes. A pres-são do combustível aumentará até o final da injeção, chegando até a 1600 bar.
W07-0443-20
Processo de injeção
Posições de alimentaçãoA - Curso prévioB - Curso de alimentaçãoC - Curso residual
D - Tempo de reaçãoE - Amplitude de impulsoF - Início elétrico da injeçãoG - Início real da injeção
Organogramas1 - Ordem de injeção do processador principalna ativação da válvula magnética (escala final dapotência)2 - Curso da corrente no eletroimã3 - Identificação do fechamento4 - Movimento do corpo da válvula5 - Pressão de injeção no injetor6 - Elevação da agulha no injetor7 - Sinal do número de rotações (registro damodificação do ângulo)
Nota: O diagrama está representado de formasimplificada.
Descrição de funcionamento dos módulos PLD e ADM
Global Training. 31
A. D. M
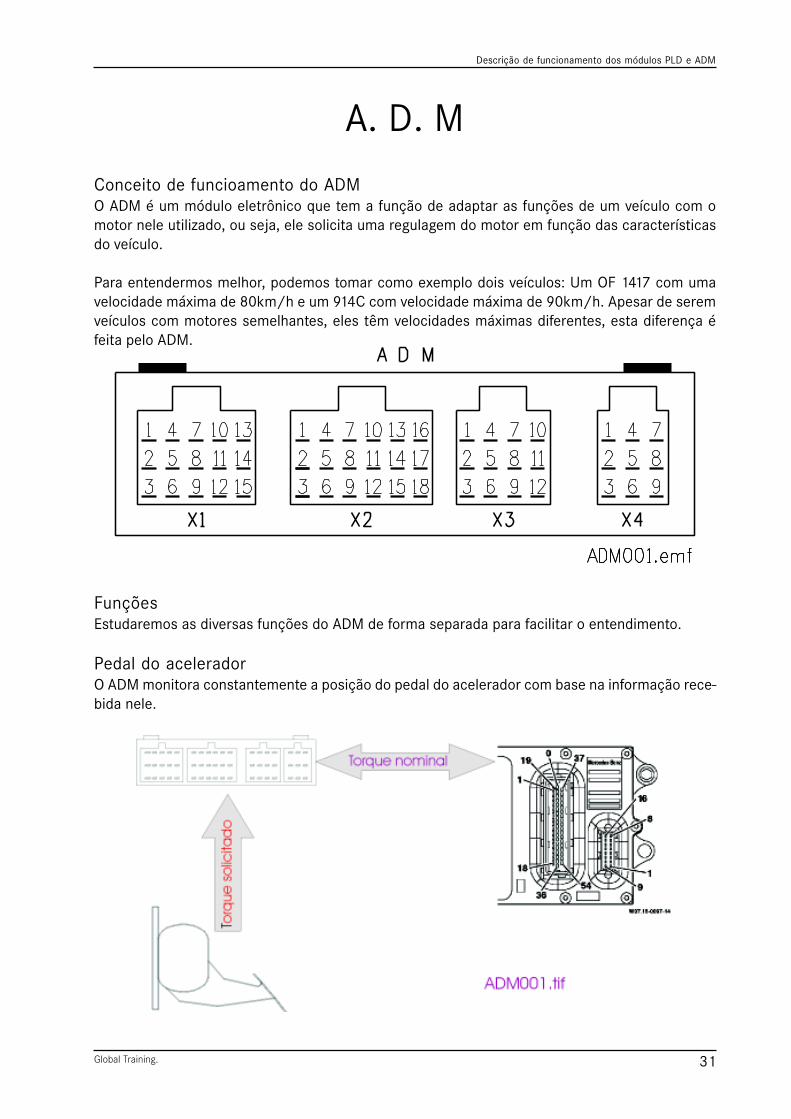
Conceito de funcioamento do ADMO ADM é um módulo eletrônico que tem a função de adaptar as funções de um veículo com omotor nele utilizado, ou seja, ele solicita uma regulagem do motor em função das característicasdo veículo.
Para entendermos melhor, podemos tomar como exemplo dois veículos: Um OF 1417 com umavelocidade máxima de 80km/h e um 914C com velocidade máxima de 90km/h. Apesar de seremveículos com motores semelhantes, eles têm velocidades máximas diferentes, esta diferença éfeita pelo ADM.
FunçõesEstudaremos as diversas funções do ADM de forma separada para facilitar o entendimento.
Pedal do aceleradorO ADM monitora constantemente a posição do pedal do acelerador com base na informação rece-bida nele.
Descrição de funcionamento dos módulos PLD e ADM
Global Training.32
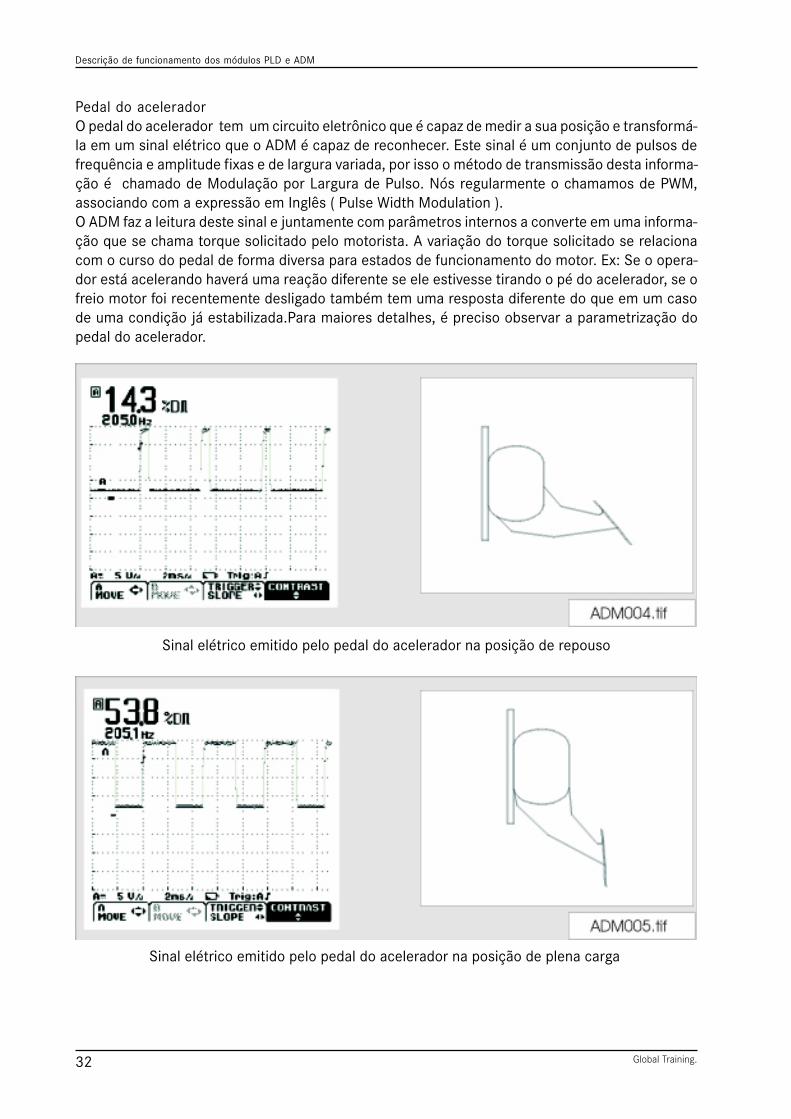
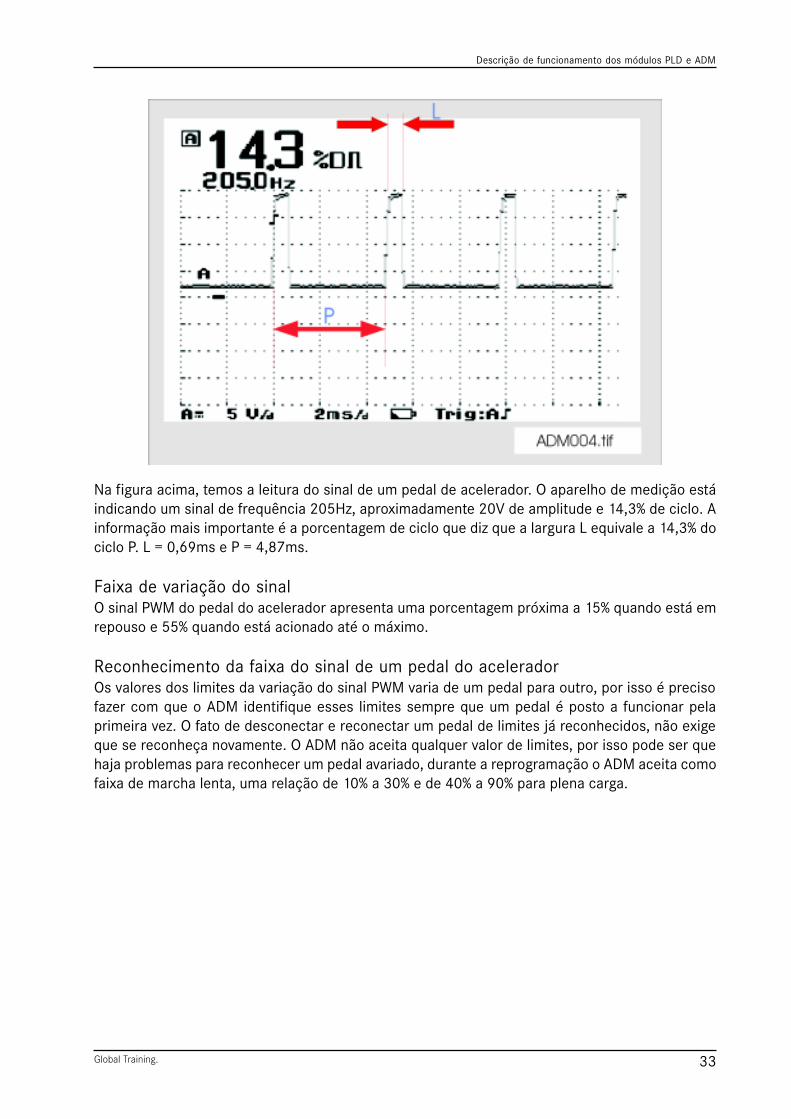
Pedal do aceleradorO pedal do acelerador tem um circuito eletrônico que é capaz de medir a sua posição e transformá-la em um sinal elétrico que o ADM é capaz de reconhecer. Este sinal é um conjunto de pulsos defrequência e amplitude fixas e de largura variada, por isso o método de transmissão desta informa-ção é chamado de Modulação por Largura de Pulso. Nós regularmente o chamamos de PWM,associando com a expressão em Inglês ( Pulse Width Modulation ).O ADM faz a leitura deste sinal e juntamente com parâmetros internos a converte em uma informa-ção que se chama torque solicitado pelo motorista. A variação do torque solicitado se relacionacom o curso do pedal de forma diversa para estados de funcionamento do motor. Ex: Se o opera-dor está acelerando haverá uma reação diferente se ele estivesse tirando o pé do acelerador, se ofreio motor foi recentemente desligado também tem uma resposta diferente do que em um casode uma condição já estabilizada.Para maiores detalhes, é preciso observar a parametrização dopedal do acelerador.
Sinal elétrico emitido pelo pedal do acelerador na posição de repouso
Sinal elétrico emitido pelo pedal do acelerador na posição de plena carga
Descrição de funcionamento dos módulos PLD e ADM
Global Training. 33
Na figura acima, temos a leitura do sinal de um pedal de acelerador. O aparelho de medição estáindicando um sinal de frequência 205Hz, aproximadamente 20V de amplitude e 14,3% de ciclo. Ainformação mais importante é a porcentagem de ciclo que diz que a largura L equivale a 14,3% dociclo P. L = 0,69ms e P = 4,87ms.
Faixa de variação do sinalO sinal PWM do pedal do acelerador apresenta uma porcentagem próxima a 15% quando está emrepouso e 55% quando está acionado até o máximo.
Reconhecimento da faixa do sinal de um pedal do aceleradorOs valores dos limites da variação do sinal PWM varia de um pedal para outro, por isso é precisofazer com que o ADM identifique esses limites sempre que um pedal é posto a funcionar pelaprimeira vez. O fato de desconectar e reconectar um pedal de limites já reconhecidos, não exigeque se reconheça novamente. O ADM não aceita qualquer valor de limites, por isso pode ser quehaja problemas para reconhecer um pedal avariado, durante a reprogramação o ADM aceita comofaixa de marcha lenta, uma relação de 10% a 30% e de 40% a 90% para plena carga.

Descrição de funcionamento dos módulos PLD e ADM
Global Training.34
Verificação do pedal do aceleradorCaso o pedal do acelerador apresente alguma falha, deve se fazer a checagens na ordem a seguir:
Código de falhas: verificar se há algum armazenado que se relacione com o problema.
Posição do pedal do acelerador: verifique a função ADM ANA1 e ANA2 no ADM, que deveráindicar uma variação dentro dos limites esperados Próximo de 15% na marcha lenta a próxi-mo de 55% em plena carga. Caso não indique, verifique a tensão de alimentação do pedal doacelerador e meça o sinal elétrico com um voltímetro.
Torque solicitado: verfique a função ADM ANA 4 que deverá indicar uma variação de 0 aotorque máximo especificado para o motor. Caso não indique, verifique a tensão de alimenta-ção do pedal do acelerador e meça o sinal elétrico com um voltímetro.
Verificação do pedal com um voltímetroMeça a tensão de alimentação dos dois circuitos do pedal, no conector do pedal, que deverá ser deaproximadamente 21V. Esta tensão é fornecida pelo ADM.Meça os dois sinais gerados pelos dois circuitos do pedal, no conector do ADM.
Esquema genérico da ligação de um pedal do acelerador
Descrição de funcionamento dos módulos PLD e ADM
Global Training. 35
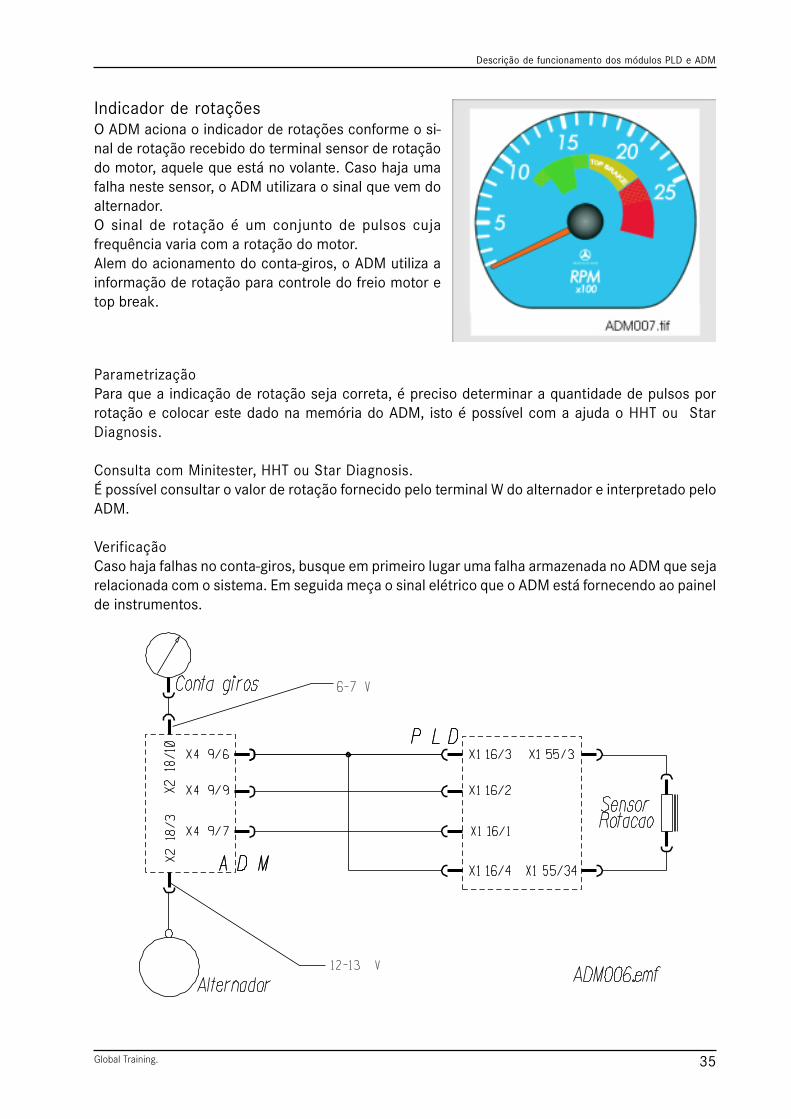
Indicador de rotaçõesO ADM aciona o indicador de rotações conforme o si-nal de rotação recebido do terminal sensor de rotaçãodo motor, aquele que está no volante. Caso haja umafalha neste sensor, o ADM utilizara o sinal que vem doalternador.O sinal de rotação é um conjunto de pulsos cujafrequência varia com a rotação do motor.Alem do acionamento do conta-giros, o ADM utiliza ainformação de rotação para controle do freio motor etop break.
ParametrizaçãoPara que a indicação de rotação seja correta, é preciso determinar a quantidade de pulsos porrotação e colocar este dado na memória do ADM, isto é possível com a ajuda o HHT ou StarDiagnosis.
Consulta com Minitester, HHT ou Star Diagnosis.É possível consultar o valor de rotação fornecido pelo terminal W do alternador e interpretado peloADM.
VerificaçãoCaso haja falhas no conta-giros, busque em primeiro lugar uma falha armazenada no ADM que sejarelacionada com o sistema. Em seguida meça o sinal elétrico que o ADM está fornecendo ao painelde instrumentos.
Descrição de funcionamento dos módulos PLD e ADM
Global Training.36
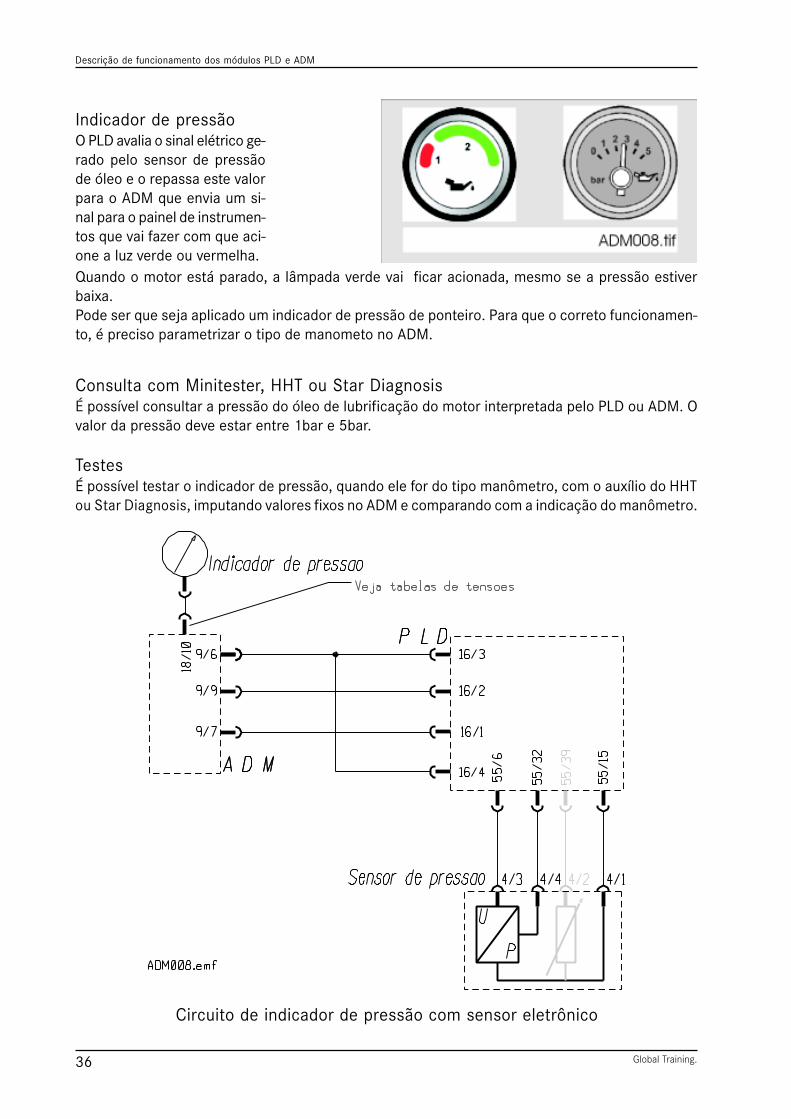
Consulta com Minitester, HHT ou Star DiagnosisÉ possível consultar a pressão do óleo de lubrificação do motor interpretada pelo PLD ou ADM. Ovalor da pressão deve estar entre 1bar e 5bar.
TestesÉ possível testar o indicador de pressão, quando ele for do tipo manômetro, com o auxílio do HHTou Star Diagnosis, imputando valores fixos no ADM e comparando com a indicação do manômetro.
Circuito de indicador de pressão com sensor eletrônico
Indicador de pressãoO PLD avalia o sinal elétrico ge-rado pelo sensor de pressãode óleo e o repassa este valorpara o ADM que envia um si-nal para o painel de instrumen-tos que vai fazer com que aci-one a luz verde ou vermelha.Quando o motor está parado, a lâmpada verde vai ficar acionada, mesmo se a pressão estiverbaixa.Pode ser que seja aplicado um indicador de pressão de ponteiro. Para que o correto funcionamen-to, é preciso parametrizar o tipo de manometo no ADM.
Descrição de funcionamento dos módulos PLD e ADM
Global Training. 37
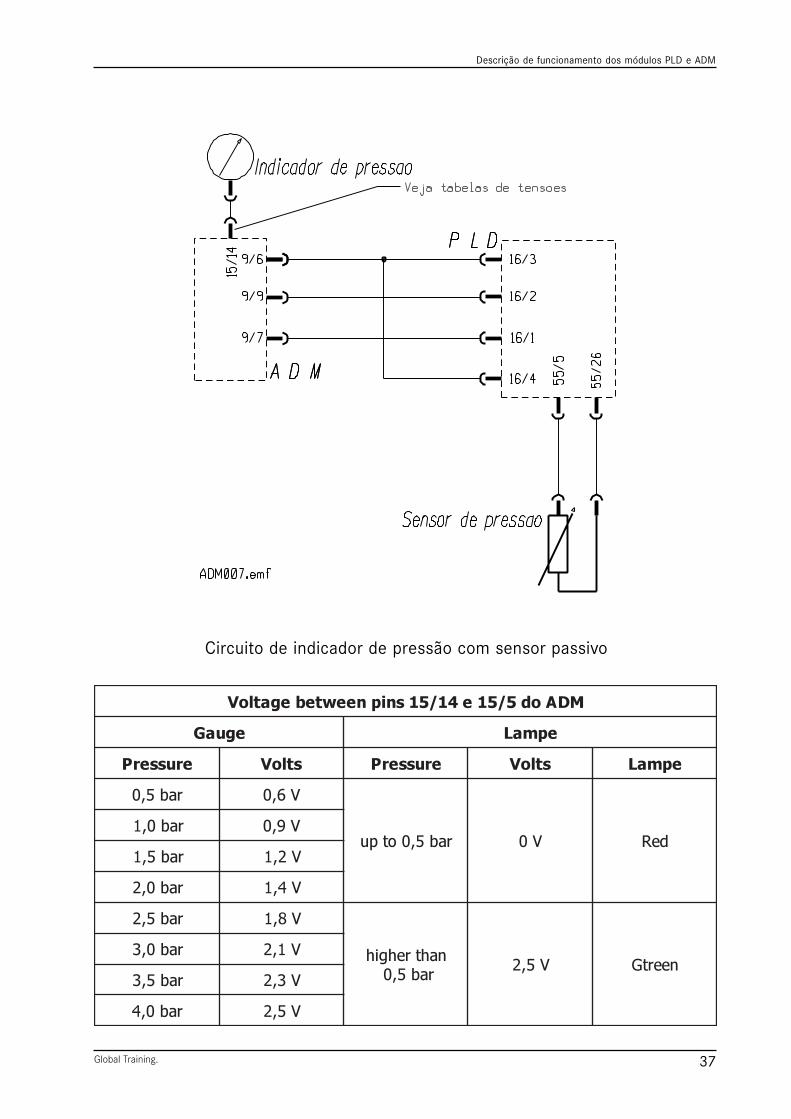
Circuito de indicador de pressão com sensor passivo
MDAod5/51e41/51snipneewtebegatloV
eguaG epmaL
erusserP stloV erusserP stloV epmaL
rab5,0 V6,0
rab5,0otpu V0 deRrab0,1 V9,0
rab5,1 V2,1
rab0,2 V4,1
rab5,2 V8,1
nahtrehgihrab5,0 V5,2 neertG
rab0,3 V1,2
rab5,3 V3,2
rab0,4 V5,2
Descrição de funcionamento dos módulos PLD e ADM
Global Training.38
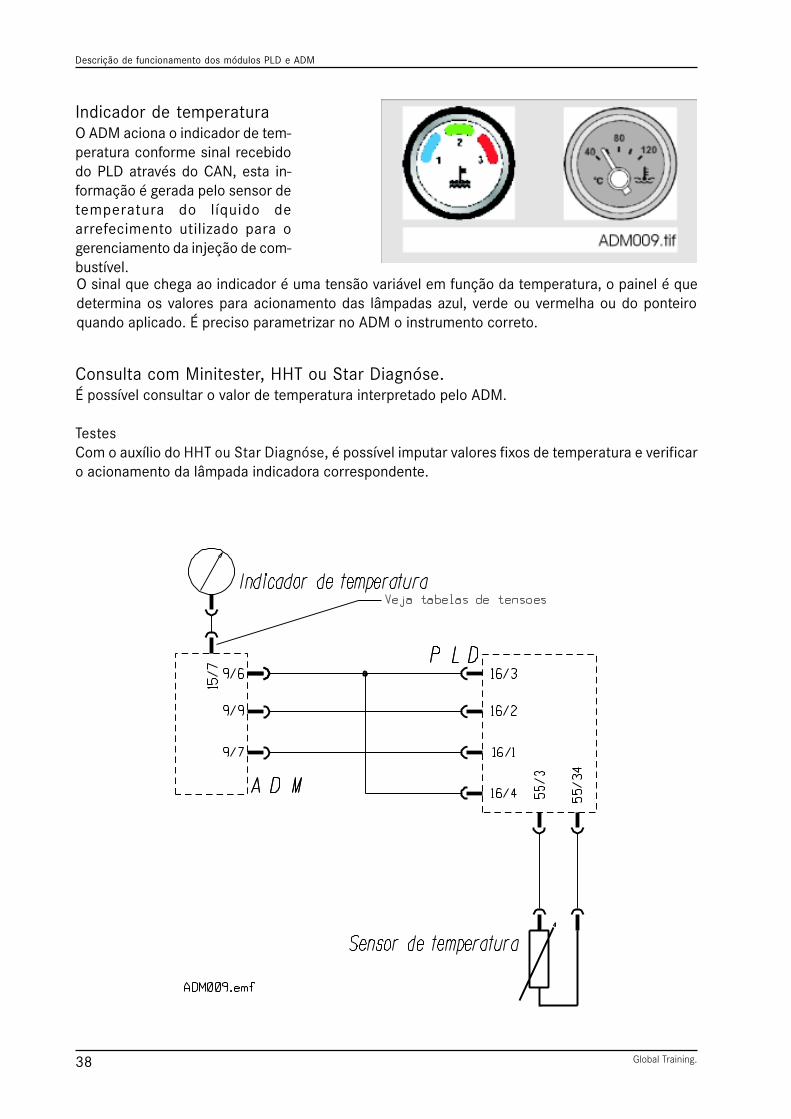
Consulta com Minitester, HHT ou Star Diagnóse.É possível consultar o valor de temperatura interpretado pelo ADM.
TestesCom o auxílio do HHT ou Star Diagnóse, é possível imputar valores fixos de temperatura e verificaro acionamento da lâmpada indicadora correspondente.
Indicador de temperaturaO ADM aciona o indicador de tem-peratura conforme sinal recebidodo PLD através do CAN, esta in-formação é gerada pelo sensor detemperatura do líquido dearrefecimento utilizado para ogerenciamento da injeção de com-bustível.O sinal que chega ao indicador é uma tensão variável em função da temperatura, o painel é quedetermina os valores para acionamento das lâmpadas azul, verde ou vermelha ou do ponteiroquando aplicado. É preciso parametrizar no ADM o instrumento correto.

Descrição de funcionamento dos módulos PLD e ADM
Global Training. 39
MDAod5/51e7/51neewtebegatloV
eguaG epmaL
erutarepmeT egatloV erutarepmeT egatloV epmaL
C°02 V2,3C°04éta V0,3 eulb
C°03 V1,3
C°04 V9,2C°06-C°04 V5,2 neerG+eulB
C°05 V3,2
C°06 V9,1C°79-C°06 V5,1 neerG
C°07 V6,1
C°08 V3,1 nahtrehgihC°79
V0 deRC°09 V0,1
Lâmpada indicadora de falhas no ADM ou PLDO ADM é o responsável por acionar a lâmpada indicadora de falha tantoem sua própria instalação como na instalação do PLD. Quando existeuma falha no PLD, este solicita ao ADM, via CAN, que avise o motoristaatravés desta lâmpada.A lâmpada acesa deve ser considerada como aviso de falha somente se omotor estiver funcionando. Algumas falhas de gravidade baixa (códigosiniciados com 0), não farão com que o ADM acione a lâmpada de aviso.
Descrição de funcionamento dos módulos PLD e ADM
Global Training.40
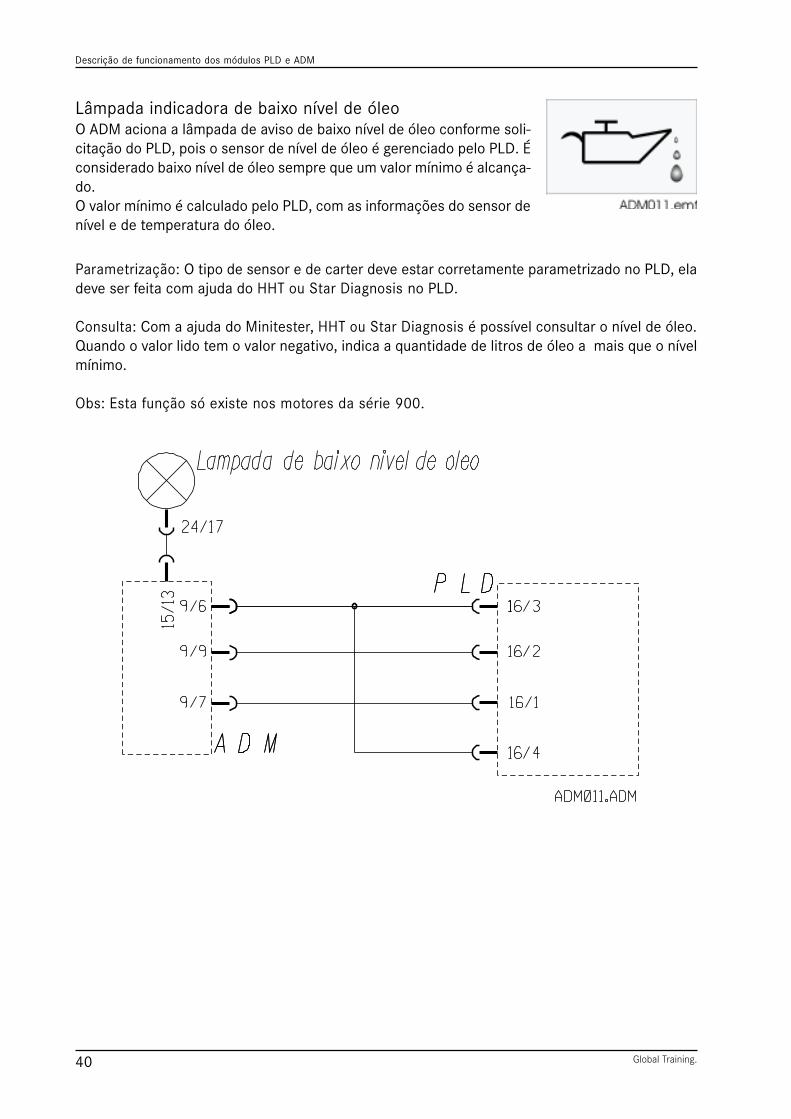
Lâmpada indicadora de baixo nível de óleoO ADM aciona a lâmpada de aviso de baixo nível de óleo conforme soli-citação do PLD, pois o sensor de nível de óleo é gerenciado pelo PLD. Éconsiderado baixo nível de óleo sempre que um valor mínimo é alcança-do.O valor mínimo é calculado pelo PLD, com as informações do sensor denível e de temperatura do óleo.
Parametrização: O tipo de sensor e de carter deve estar corretamente parametrizado no PLD, eladeve ser feita com ajuda do HHT ou Star Diagnosis no PLD.
Consulta: Com a ajuda do Minitester, HHT ou Star Diagnosis é possível consultar o nível de óleo.Quando o valor lido tem o valor negativo, indica a quantidade de litros de óleo a mais que o nívelmínimo.
Obs: Esta função só existe nos motores da série 900.
Descrição de funcionamento dos módulos PLD e ADM
Global Training. 41
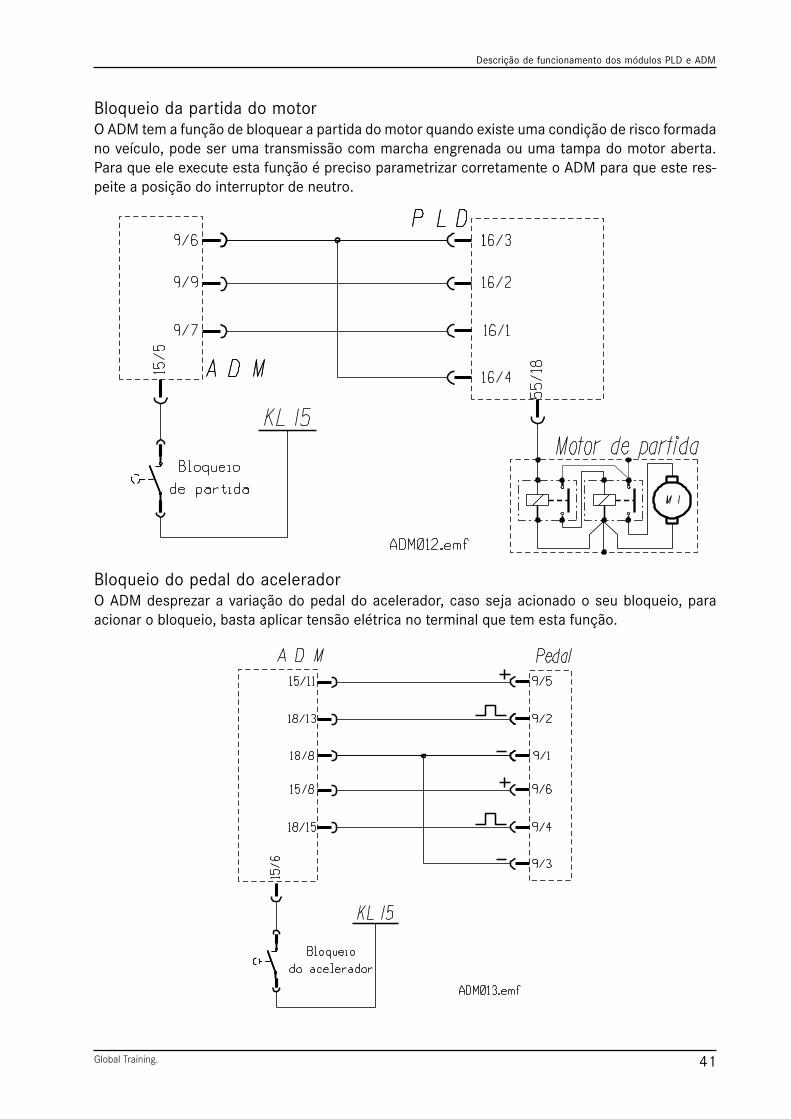
Bloqueio da partida do motorO ADM tem a função de bloquear a partida do motor quando existe uma condição de risco formadano veículo, pode ser uma transmissão com marcha engrenada ou uma tampa do motor aberta.Para que ele execute esta função é preciso parametrizar corretamente o ADM para que este res-peite a posição do interruptor de neutro.
Bloqueio do pedal do aceleradorO ADM desprezar a variação do pedal do acelerador, caso seja acionado o seu bloqueio, paraacionar o bloqueio, basta aplicar tensão elétrica no terminal que tem esta função.
Descrição de funcionamento dos módulos PLD e ADM
Global Training.42
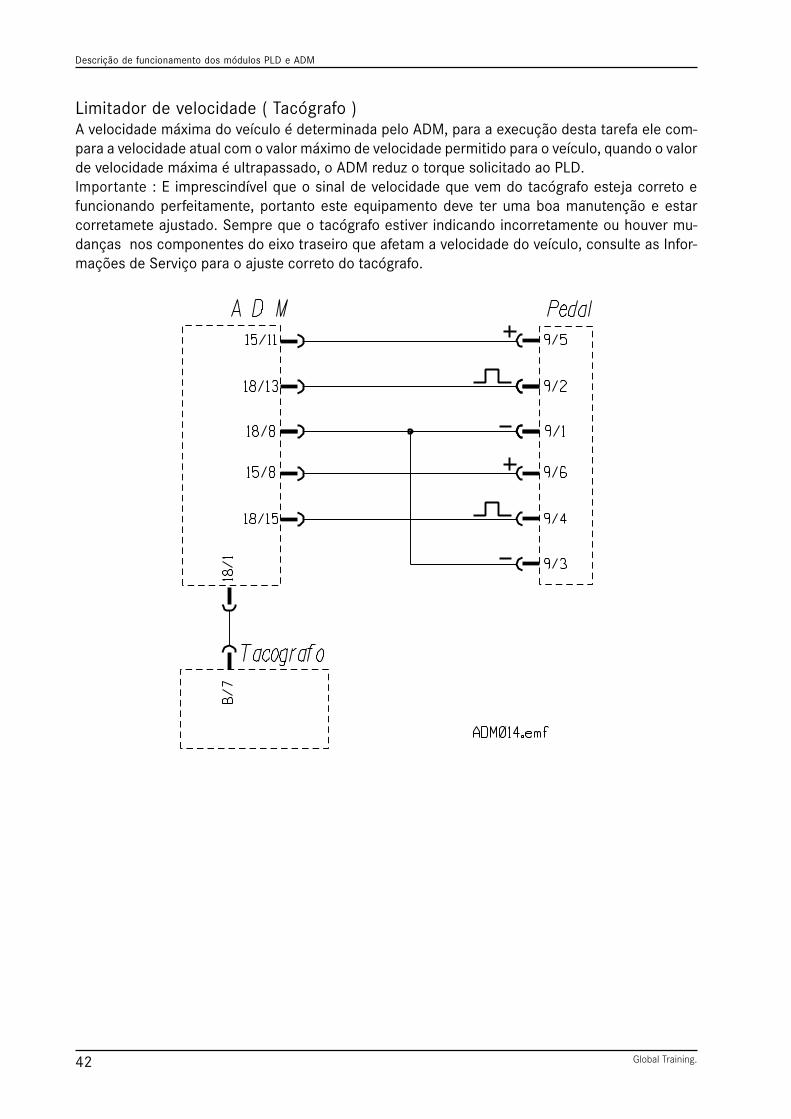
Limitador de velocidade ( Tacógrafo )A velocidade máxima do veículo é determinada pelo ADM, para a execução desta tarefa ele com-para a velocidade atual com o valor máximo de velocidade permitido para o veículo, quando o valorde velocidade máxima é ultrapassado, o ADM reduz o torque solicitado ao PLD.Importante : E imprescindível que o sinal de velocidade que vem do tacógrafo esteja correto efuncionando perfeitamente, portanto este equipamento deve ter uma boa manutenção e estarcorretamete ajustado. Sempre que o tacógrafo estiver indicando incorretamente ou houver mu-danças nos componentes do eixo traseiro que afetam a velocidade do veículo, consulte as Infor-mações de Serviço para o ajuste correto do tacógrafo.
Descrição de funcionamento dos módulos PLD e ADM
Global Training. 43
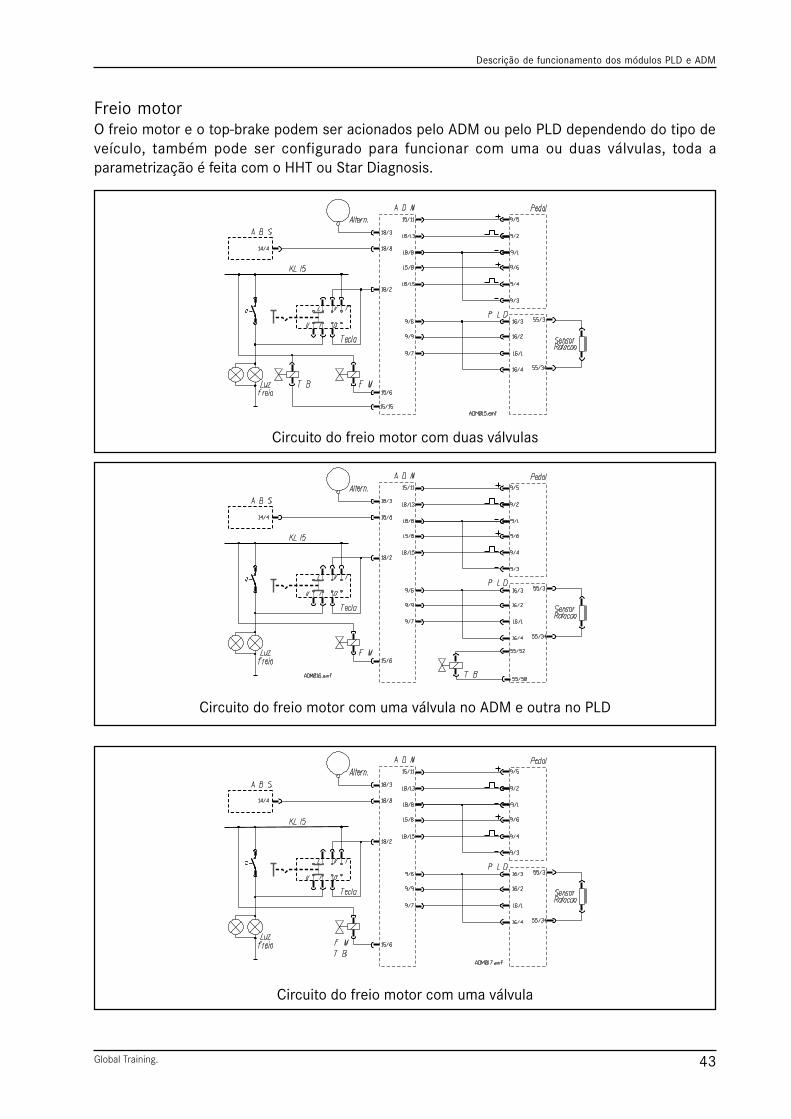
Freio motorO freio motor e o top-brake podem ser acionados pelo ADM ou pelo PLD dependendo do tipo deveículo, também pode ser configurado para funcionar com uma ou duas válvulas, toda aparametrização é feita com o HHT ou Star Diagnosis.
Circuito do freio motor com uma válvula no ADM e outra no PLD
Circuito do freio motor com uma válvula
Circuito do freio motor com duas válvulas
Descrição de funcionamento dos módulos PLD e ADM
Global Training.44
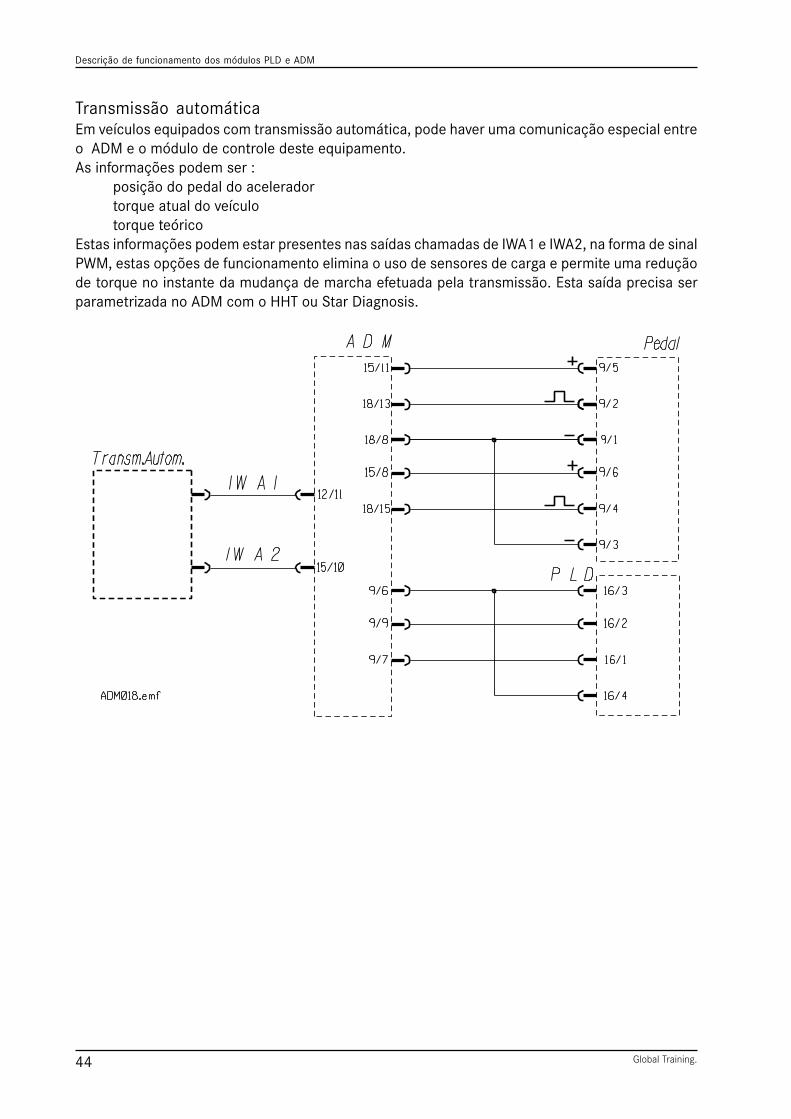
Transmissão automáticaEm veículos equipados com transmissão automática, pode haver uma comunicação especial entreo ADM e o módulo de controle deste equipamento.As informações podem ser :
posição do pedal do aceleradortorque atual do veículotorque teórico
Estas informações podem estar presentes nas saídas chamadas de IWA1 e IWA2, na forma de sinalPWM, estas opções de funcionamento elimina o uso de sensores de carga e permite uma reduçãode torque no instante da mudança de marcha efetuada pela transmissão. Esta saída precisa serparametrizada no ADM com o HHT ou Star Diagnosis.
Descrição de funcionamento dos módulos PLD e ADM
Global Training. 45
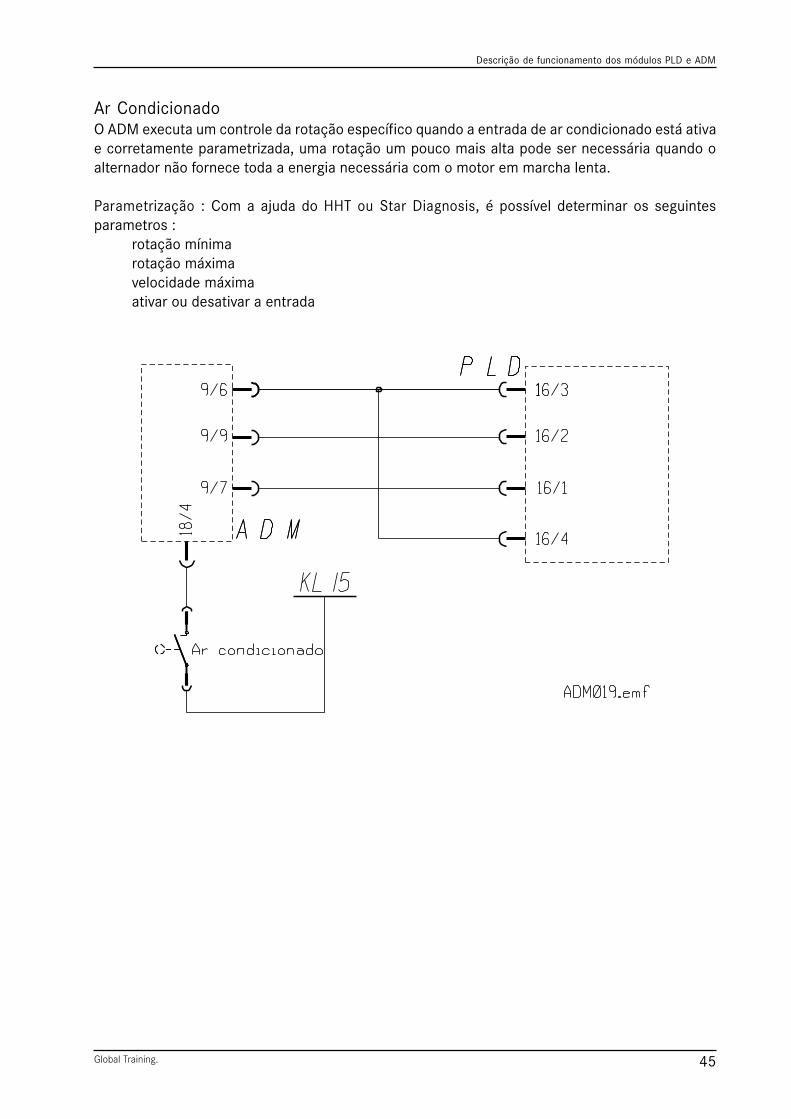
Ar CondicionadoO ADM executa um controle da rotação específico quando a entrada de ar condicionado está ativae corretamente parametrizada, uma rotação um pouco mais alta pode ser necessária quando oalternador não fornece toda a energia necessária com o motor em marcha lenta.
Parametrização : Com a ajuda do HHT ou Star Diagnosis, é possível determinar os seguintesparametros :
rotação mínimarotação máximavelocidade máximaativar ou desativar a entrada
Descrição de funcionamento dos módulos PLD e ADM
Global Training.46
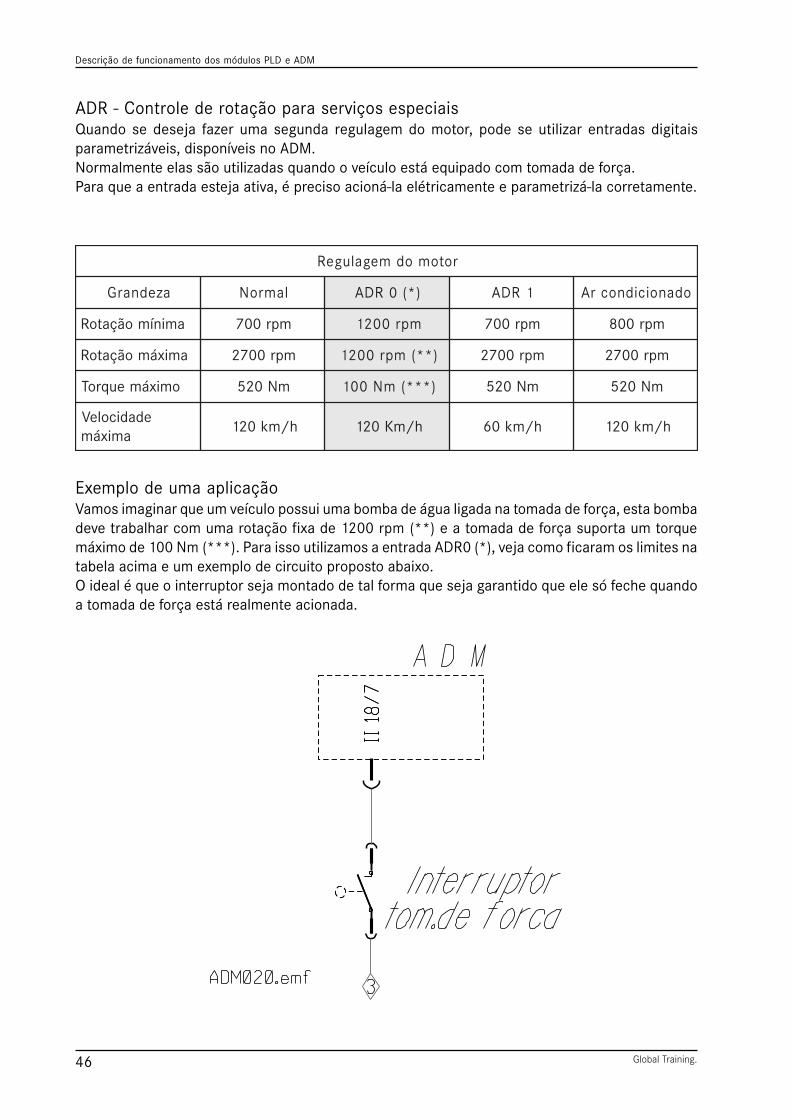
ADR - Controle de rotação para serviços especiaisQuando se deseja fazer uma segunda regulagem do motor, pode se utilizar entradas digitaisparametrizáveis, disponíveis no ADM.Normalmente elas são utilizadas quando o veículo está equipado com tomada de força.Para que a entrada esteja ativa, é preciso acioná-la elétricamente e parametrizá-la corretamente.
rotomodmegalugeR
azednarG lamroN )*(0RDA 1RDA odanoicidnocrA
aminímoãçatoR mpr007 mpr0021 mpr007 mpr008
amixámoãçatoR mpr0072 )**(mpr0021 mpr0072 mpr0072
omixámeuqroT mN025 )***(mN001 mN025 mN025
edadicoleVamixám
h/mk021 h/mK021 h/mk06 h/mk021
Exemplo de uma aplicaçãoVamos imaginar que um veículo possui uma bomba de água ligada na tomada de força, esta bombadeve trabalhar com uma rotação fixa de 1200 rpm (**) e a tomada de força suporta um torquemáximo de 100 Nm (***). Para isso utilizamos a entrada ADR0 (*), veja como ficaram os limites natabela acima e um exemplo de circuito proposto abaixo.O ideal é que o interruptor seja montado de tal forma que seja garantido que ele só feche quandoa tomada de força está realmente acionada.
Descrição de funcionamento dos módulos PLD e ADM
Global Training. 47
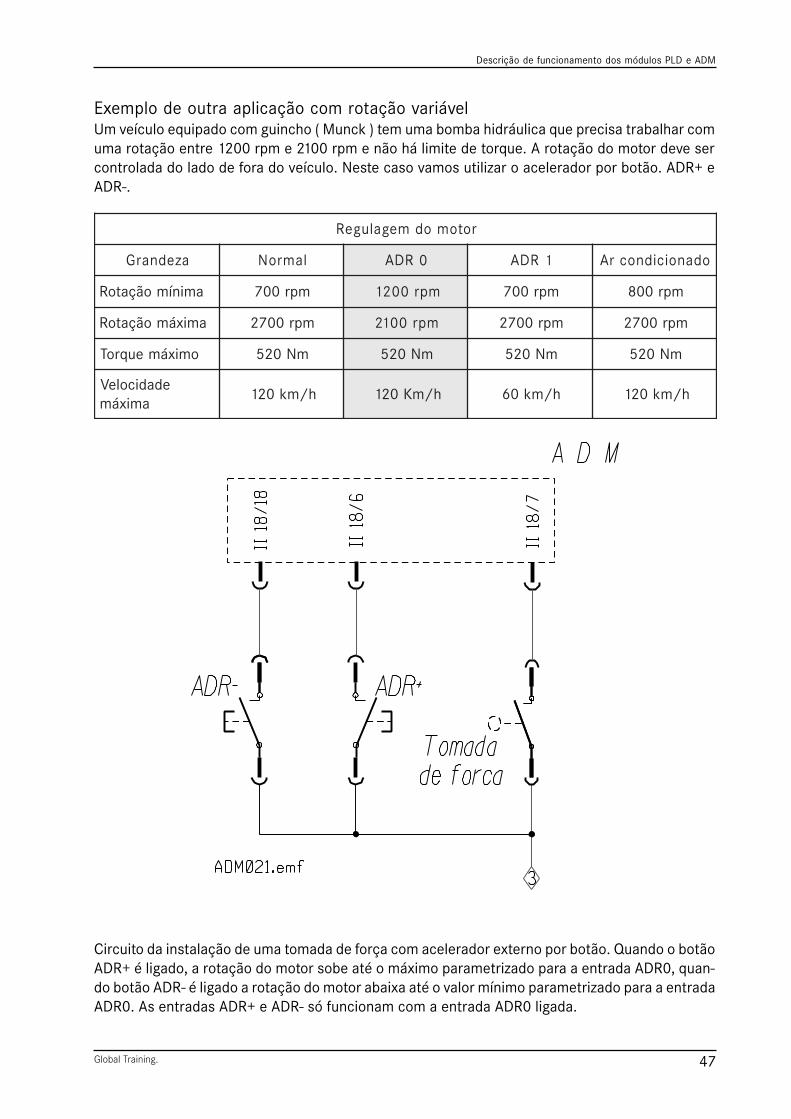
Exemplo de outra aplicação com rotação variávelUm veículo equipado com guincho ( Munck ) tem uma bomba hidráulica que precisa trabalhar comuma rotação entre 1200 rpm e 2100 rpm e não há limite de torque. A rotação do motor deve sercontrolada do lado de fora do veículo. Neste caso vamos utilizar o acelerador por botão. ADR+ eADR-.
rotomodmegalugeR
azednarG lamroN 0RDA 1RDA odanoicidnocrA
aminímoãçatoR mpr007 mpr0021 mpr007 mpr008
amixámoãçatoR mpr0072 mpr0012 mpr0072 mpr0072
omixámeuqroT mN025 mN025 mN025 mN025
edadicoleVamixám
h/mk021 h/mK021 h/mk06 h/mk021
Circuito da instalação de uma tomada de força com acelerador externo por botão. Quando o botãoADR+ é ligado, a rotação do motor sobe até o máximo parametrizado para a entrada ADR0, quan-do botão ADR- é ligado a rotação do motor abaixa até o valor mínimo parametrizado para a entradaADR0. As entradas ADR+ e ADR- só funcionam com a entrada ADR0 ligada.
Descrição de funcionamento dos módulos PLD e ADM
Global Training.48
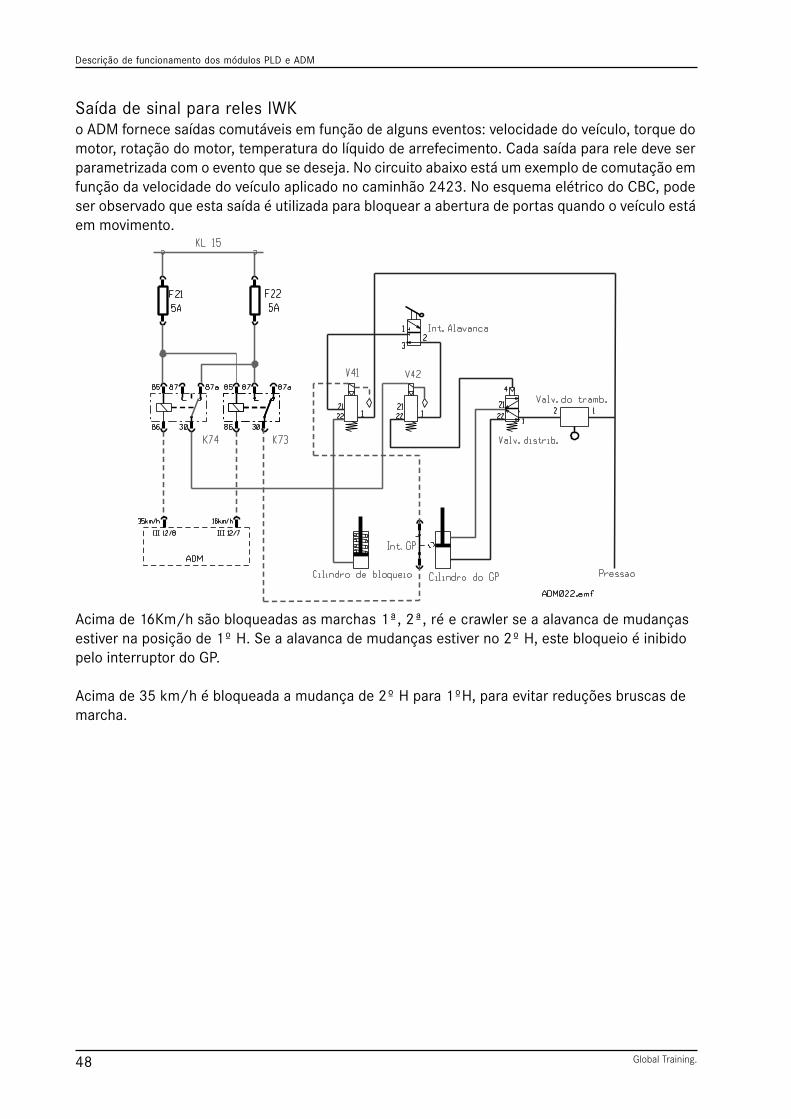
Acima de 16Km/h são bloqueadas as marchas 1ª, 2ª, ré e crawler se a alavanca de mudançasestiver na posição de 1º H. Se a alavanca de mudanças estiver no 2º H, este bloqueio é inibidopelo interruptor do GP.
Acima de 35 km/h é bloqueada a mudança de 2º H para 1ºH, para evitar reduções bruscas demarcha.
Saída de sinal para reles IWKo ADM fornece saídas comutáveis em função de alguns eventos: velocidade do veículo, torque domotor, rotação do motor, temperatura do líquido de arrefecimento. Cada saída para rele deve serparametrizada com o evento que se deseja. No circuito abaixo está um exemplo de comutação emfunção da velocidade do veículo aplicado no caminhão 2423. No esquema elétrico do CBC, podeser observado que esta saída é utilizada para bloquear a abertura de portas quando o veículo estáem movimento.
Descrição de funcionamento dos módulos PLD e ADM
Global Training. 49
Parâmetros do ADMParâmetros são informações que permitem ao ADM adaptar as informações recebidas as necessi-dades do veículo no qual ele está instalado. Por exemplo: permitir uma velocidade máxima, umarotação de marcha lenta, uma rotação máxima etç. Alguns parâmetros não são tão simples de seentender mas ter uma idéia geral sobre eles ajuda a entender como o ADM reage a determinadasinformações e consequentemente ajuda a diagnosticar eventuais falhas. Alguns parâmetros inter-ferem no comportamento do motor, eles são definidos durante testes e não devem ser alteradossob pena de haver problemas de perda de potência, excesso de consumo e até danos ao motor.Caso seja necessário alterá-los, é preciso que seja feito com o acompanhamento de um represen-tante da Daimler Chrysler ou com Informação apropriada.
Lista de parâmetrosEste é um menu principal de opçoes de parametrização, cada item contém subitens que serãodescrito nas próximas páginas.
1.0 Configuração do CAN2.0 Configurações básicas de marcha do veículo3.0 Limitações de validades gerais4.0 Limitações comutáveis N°05.0 Limitações comutáveis N°16.0 Limitações para funcionamento com ar condicionado7.0 Configurações de regulagem de rotações8.0 Avaliação do sinal B79.0 IWA ( Saída de valores analógicos10.0 Configurações do freio motor11.0 Configurações do pedal do acelerador12.0 Proteção para caixa de mudanças13.0 Entradas analógicas
1.0 Conexão do CAN1.0 Capacidade para trabalhar com um fio. ( Ajusta sempre para Sim )
Sim - habilita a comunicação no CAN mesmo quando umas das linhas está com problemas.Não - não habilita a comunicação no CAN quando umas das linhas está com problemas.
2.0 Configuração básica de marcha do veículo1.0 Freio motor
0 - Deve ser escolhida quando não há freio motor no veículo1 - Deve ser escolhido quando existir Top Brake e freio motor acionados por uma única válvula2 - Somente freio motor acionado pelo ADM3 - Somente top brake acionado pelo ADM4 - Freio motor acionado por uma válvula e top brake por outra
Descrição de funcionamento dos módulos PLD e ADM
Global Training.50
02 Retardador ativoCom esta informação o ADM desliga o retardador nas seguintes condições: ABS modulamdo ou pedal do acelerador acionado ou tomada de força ligada, ele faz isso através de umrele ligado na saída X1 15/4.
Sim - Habilita o ADM para trabalhar com retardadorNão - Não habilita o ADM para trabalhar com o retardador
03 Transmissão automática ativaEsta informação faz com que o ADM considere a entrada de Neutro e só permita a partidaquando haver sinal positivo neste terminal.
Sim - sempre que haver interruptor de Neutro ligado no terminal X2 18/9.Não - sempre que não haver interruptor de Neutro ligado no terminal X2 18/9.
04 Ativar ADR+/-Faz com que o ADM leve em consideração a entrada de sinal dos aceleradores por interruptores.
Sim - sempre que haver interruptores aceleradores ligados nos terminais X2 18/6 e X2 18/18.Não - sempre que não haver interruptores aceleradores ligados nos terminais X2 18/
6 e X2 18/18.
05 Pedal do acelerador ativoFaz com que o ADM leve em consideração o sinal do pedal do acelerador, esta parâmetrotambém pode ser ativado na parametrização da tomada de força.
06 Acelerador manual ativoFaz com que o ADM reconheça o sinal de um acelerador manual que poderá ser instalado noterminal X2 18/17.
07 Reconhecimento do acelerador manualInforma ao ADM se o acelerador manual tem limites que devem ser reconhecidos ou se játem valores fixos para estes limites ( 10% a 90% ), não necessitando de reconhecimento.
08 Configuração 12V / 24VHabilita o ADM para trabalhar com 12V ou 24V levando em consideração os valores detensões e corrente permitidos nas entradas e saídas comutáveis.
3.0 Limitações de validades gerais
01 Máxima rotação com o veículo paradoDetermina ao ADM qual deve ser a máxima rotação para quando não sinal há de velocida
de.
02 Marcha lenta nominalDetermina ao ADM qual deve ser a marcha lenta do veículo
03 Valor máximo permitido para marcha lentaDetermina o valor máximo de marcha lenta, é prioritário com relação a outras limitaçõespor exemplo uma ADR qualquer.
Descrição de funcionamento dos módulos PLD e ADM
Global Training. 51
04 Máxima rotação do motorDetermina ao ADM qual deve ser a máxima rotação do motor.
05 Velocidade máxima do veículoDetermina qual deve ser a velocidade máxima do veículo, este parâmetro só é modificadopela DCB.
06 Torque máximo do motor do veículoDetermina o valor máximo para o torque do motor, deve se parametrizar o torque máximo domotor que está gravado no PLD.
07 Seleção do regulador de rotação
0 - 5 tipos de reguladoresFaz com que o ADM solicite ao PLD um tipo de regulagem especifica da rotação domotor. Estes tipos de reguladores estáo configurados dentro do PLD. Ex: RQ, RQV etc.
08 Incremento da limitação de rotaçãoDetermina uma limitação suavisada para que a rotação não seja cortada bruscamente
09 Incremento da limitação de torqueDetermina uma limitação suavizada do torque para que não haja cortes bruscos
4.0 Limitadores comutáveis N°0 ( ADR0 )Determina limites a serem levados em consideração quando houver massa no terminal X2 18/7( ADR0).
01 Rotação mínima ADR0Fornece um valor de rotação de marcha lenta a ser comparado com outras limitações, omaior valor será aplicado no motor.
02 Rotação máxima ADR0Fornece um valor de rotação de plena carga a ser comparado com outras limitações, omenor valor será aplicado no motor.
03 Velocidade máxima do veículo ADR0Fornece um valor de velocidade máxima para o veículo a ser comparado com outras limitações o valor menor será aplicado no veículo.
04 Torque máximo do veículoFornece um valor de torque máximo para o motor a ser comparado com outras limitações o valor menor será aplicado no veículo.
05 Seleção do regulador de rotação 0 a 5Faz com que seja solicitado ao PLD um tipo de regulador de rotação dentro de uma lista deopções que está gravada no PLD, para cada regulador da lista é feito um tipo de controle darotação em uma maneira análoga aos reguladores convencionais RQ, RQV etc.
Descrição de funcionamento dos módulos PLD e ADM
Global Training.52
5.0 Limitadores comutáveis N°0 ( ADR1 )Determina limites a serem levados em cosideração quando houver positivo no terminal X2 18/14( ADR1).
01 Rotação mínima ADR1Fornece um valor de rotação de marcha lenta a ser comparado com outras limitações, omaior valor será aplicado no motor.
02 Rotação máxima ADR1Fornece um valor de rotação de plena carga a ser comparado com outras limitações, omenor valor será aplicado no motor.
03 Velocidade máxima do veículo ADR1Fornece um valor de velocidade máxima para o veículo a ser comparado com outras limitações o valor menor será aplicado no veículo.
04 Torque máximo do veículoFornece um valor de torque máximo para o motor a ser comparado com outras limitações o valor menor será aplicado no veículo.
05 Seleção do regulador de rotação 0 a 5Faz com que seja solicitado ao PLD um tipo de regulador de rotação dentro de uma lista deopções que está gravada no PLD, para cada regulador da lista é feito um tipo de controle darotação em uma maneira análoga aos reguladores convencionais RQ, RQV etc.
6.0 Limitadores comutáveis ( Ar condicionado )Determina limites a serem levados em consideração quando houver massa no terminal X2 18/4( ADR0).
01 Rotação mínima Ar condicionadoFornece um valor de rotação de marcha lenta a ser comparado com outras limitações, omaior valor será aplicado no motor.
02 Rotação máxima Ar condicionadoFornece um valor de rotação de plena carga a ser comparado com outras limitações, omenor valor será aplicado no motor.
03 Velocidade máxima do veículo Ar condicionadoFornece um valor de velocidade máxima para o veículo a ser comparado com outras limitações o valor menor será aplicado no veículo.
04 Torque máximo do veículo para Ar condicionadoFornece um valor de torque máximo para o motor a ser comparado com outras limitações o valor menor será aplicado no veículo.
05 Seleção do regulador de rotação 0 a 5Faz com que seja solicitado ao PLD um tipo de regulador de rotação dentro de uma lista deopções que está gravada no PLD, para cada regulador da lista é feito um tipo de controle darotação em uma maneira análoga aos reguladores convencionais RQ, RQV etc.

Descrição de funcionamento dos módulos PLD e ADM
Global Training. 53
7.0 Configuração das rotações do serviçoDetermina ao ADM, quais as entradas digitais que deverão levadas em consideração.
01 Considerar a entrada ADR0Deve ser ajustado para sim para que o ADM considere o sinal de massa no terminalX2 18/7.
02 Condiderar a entrada ADR1Deve ser ajustado para sim para que o ADM considere o sinal positivo no terminal
X2 18/14.
03 Considerar a entrada ADR 2Deve ser ajustado para sim para que o ADM considere o sinal positivo no terminal
X2 18/6. Obs! Não há como determinar limites para esta entrada.
04 Considerar o sinal de NeutroSe ajustado Sim, a tomada de força será acionado somente quando a transmissão estiverem Neutro
05 Considerar a entrada ( Ar condicionado )Deve ser ajustado para sim para que o ADM considere o sinal positivo no terminal
X2 18/14.
06 Considerar condição de marcha lentaSe ajustado para Sim a tomada de força so será ligada em marcha lenta, depois de ligada oveículo pode ser acelerado
07 Considerar condição velocidade < 5km/hSe ajustado para Sim a tomada de força so será ligada quando o veículo estiver parado,
depois de ligada o veículo pode ser acelerado
08 Consider ADR+/-Deve ser ajustado para Sim para que o ADM considere o sinal dos interruptores de aceleração manual ligados nos terminais X2 18/6 e X2 18/18. Esta entra só será levada emconsideração se umas das entradas ADR estiver ligada e ajustada para SIM.
09 Pedal do acelerador ativoSim o pedal do acelerador funciona quando houver uma ADR ativaNão o pedal do acelerador não funciona quando houver uma ADR ativa
10 Acelerador manual ativoDeverá ser ajustado para sim quando houver um acelerador manual ligado no terminalX2 18/7
11 Ativar regulador de rotaçãoSe ajustado para Sim, ativa o regulador de rotação escolhido na parametrização de uma
das ADRs, quando esta ADR estiver ativa.
Descrição de funcionamento dos módulos PLD e ADM
Global Training.54
12 Valor de rotação onde se inicia o regulador escolhido em uma ADR
13 Tempo de estabilização do ADR+/-Tempo necessário para o ADM entender que o acelerador ADR+/- deve funcionar por rampae não por degraus. Veja 07- 14 e 07 -15
14 Incremento de rotação nas entradas ADR+/-Determina a variação da rotação a cada pulso nos interruptores ADR+/-, desde que estespulsos tenham duração menor que o tempo parametrizado no item anterior.
15 Variação do valor nominal ADR+/-Determina qual a variação da rotação por minuto quando a entrada ADR+/- é acionada porum tempo maior que o parâmetro 07 - 13
8.0 Avaliação do sinal B701 Entrada do sinal B7Determina que tipo de sinal de velocidade está sendo utilizado pelo ADM
0 DesligadoO ADM despreza a entrada sinal de velocidade no conector X2 18/1
01 Sinal B7O sinal de velocidade que vem do tacógrafo e entra no terminal X2 18/1 do ADM,
traz amesma informação em duas maneira:PPM - Modulação por quantidade de pulsosUma quantidade de pulsos por quilômetro rodado que depende das caracteristicas doeixo traseiro, do sensor de velocidade, dos pneus e da transmissão. Para que o equipamento que a recebe possa entende-la, é necessário fornecer estes dados.PWM - Modulação por largura de pulsoNeste caso o que importa é a largura do pulso que já determina a velocidade doveículo. No caso a largura do pulso foi modulada pelo tacógrafo que já tem o ajusteem função do eixo traseiro, do sensor de velocidade, dos pneus e da transmissão.
02 Gerador de pulsos HALLDetermina que o sinal vem de um sensor e não de um tacógrafo. Neste caso é precisoajustar corretamente os parâmetros 8.0 - 02 e 8.0 -03.
02 Número de impulsos por quilômetro rodadoDepende das caracteristicas do eixo traseiro, do sensor de velocidade, dos pneus e datransmissão, é o mesmo W que estamos acostumados a calcular para o tacógrafo.
03 Relação da transmissão do eixo traseiro
Descrição de funcionamento dos módulos PLD e ADM
Global Training. 55
9.0 Saida do valor atual
01 Saída do valor atual IWA1Determina que tipo de informação será transmitida por um sinal PWM que está no terminalX3 12/11
01 Nenhuma saída
02 Torque do pedal do acelerador 10% a 90%Informa que na saída haverá um sinal PWM que quando o pedal do acelerador estiverem repouso ele é 10% e quando estiver a plena carga ele é 90%. Este sinal é o sinal dopedal do acelerador mas já retrabalhado pelo ADM, ele é utilizado pela trasmissãoautomática no lugar do sensor de carga.
03 Torque do pedal do aceleradorInforma que na saída haverá um sinal PWM que quando o pedal do acelerador estiverem repouso ele é 90% e quando estiver a plena carga ele é 10%. Este sinal é o sinal dopedal do acelerador mas já retrabalhado pelo ADM, ele é utilizado pela transmissãoautomática no lugar do sensor de carga.
04 Torque atualInforma que na saída haverá um sinal PWM que quando o torque do motor é 0Nmele é 10% e quando for for torque máximo é 90%.
02 Saída do valor atual IWA2Determina que tipo de informação será transmitida por um sinal PWM que está no terminalX1 15/10
01 Nenhuma saída
02 Torque do pedal do acelerador 10% a 90%Informa que na saída haverá um sinal PWM que quando o pedal do acelerador estiverem repouso ele é 10% e quando estiver a plena carga ele é 90%. Este sinal é o sinal dopedal do acelerador mas já retrabalhado pelo ADM, ele é utilizado pela transmissãoautomática no lugar do sensor de carga.
03 Torque do pedal do aceleradorInforma que na saída haverá um sinal PWM que quando o pedal do acelerador estiverem repouso ele é 90% e quando estiver a plena carga ele é 10%. Este sinal é o sinal dopedal do acelerador mas já retrabalhado pelo ADM, ele é utilizado pela transmissãoautomática no lugar do sensor de carga.
04 Torque atualInforma que na saída haverá um sinal PWM que quando o torque do motor é 0Nmele é 10% e quando for for torque máximo é 90%.
Descrição de funcionamento dos módulos PLD e ADM
Global Training.56
10 Gerenciamento do freio motorDetermina como o freio motor deve ser gerenciado
01 Rotação de ativação do freio motorIndica a rotação abaixo da qual o freio motor deixa de funcionar
02 Tempo de bloqueio do acelerador após desligamento do freio motorDetermina um tempo em que o acelerador ficará inoperante após o desligamento do freiomotor. Este parâmetro juntamente com o seguinte faz com que não haja trancos na rotaçãodo motor.
03 Incremento do torque após o desligamento do freio motorDetermina um limite de crescimento do torque após o desligamento do freio motor. Esteparâmetro juntamente com o anterior faz com que não haja trancos na rotação do motor.
11 Pedal do acelerador
01 Reação do pedal na aceleraçãoDetermina a sensibilidade do pedal do acelerador. Pode ser desejável uma reação mais
suave, quando o veículo opera no canavial, neste caso o pé do operador balança muito epode causar solavancos no movimento do veículo. Outra coisa que pode ocorrer, é que todavez que o torque solicitado passa por “Zero” , ou seja o motorista pisa no acelerador ou tirao pé do acelerador se produz uma batida nos mancais; uma boa escolha deste parâmetroelimina este problema e oferece uma boa reação do pedal do acelerador. Veja parâmetroseguinte.
02 Reação do pedal na desaceleraçãoDetermina a sensibilidade do pedal do acelerador. Pode ser desejável uma reação mais
suave, quando o veículo opera no canavial, neste caso o pé do operador balança muito epode causar solavancos no movimento do veículo. Outra coisa que pode ocorrer, é que todavez que o torque solicitado passa por “Zero” , ou seja o motorista pisa no acelerador ou tirao pé do acelerador se produz uma batida nos mancais; uma boa escolha deste parâmetroelimina este problema e oferece uma boa reação do pedal do acelerador. Veja parâmetroanterior.
03 Ponto de comutação de marcha lentaÉ uma pequena faixa de porcentagem do sinal PWM a partir do batente de marcha lenta queaceita como posição de marcha lenta. Um ajuste incorreto deste parâmetro pode fazer comque o pedal fique inoperante em algumas situações.
04 Ponto de comutação de plena cargaÉ uma pequena faixa de porcentagem do sinal PWM, abaixo do batente de plena carga queé aceita como posição de plena carga.
05 Ponto de comutação do top brake ligadoÉ o ponto da posição do pedal do acelerador abaixo do qual o top-brake pode ser ligado.
Descrição de funcionamento dos módulos PLD e ADM
Global Training. 57
06 Ponto de comutação do top brake desligadoÉ o ponto da posição do pedal do acelerador acima do qual o top-brake será desligado.
07 Decremento do torque na partidaÉ um deslocamento da curva de resposta do pedal do acelerador para que o torque solicitado em função da posição do pedal do acelerador no momento da partida seja aumentado. Éa mesma função conhecida nas injetoras convencionais como “débito de partida”.
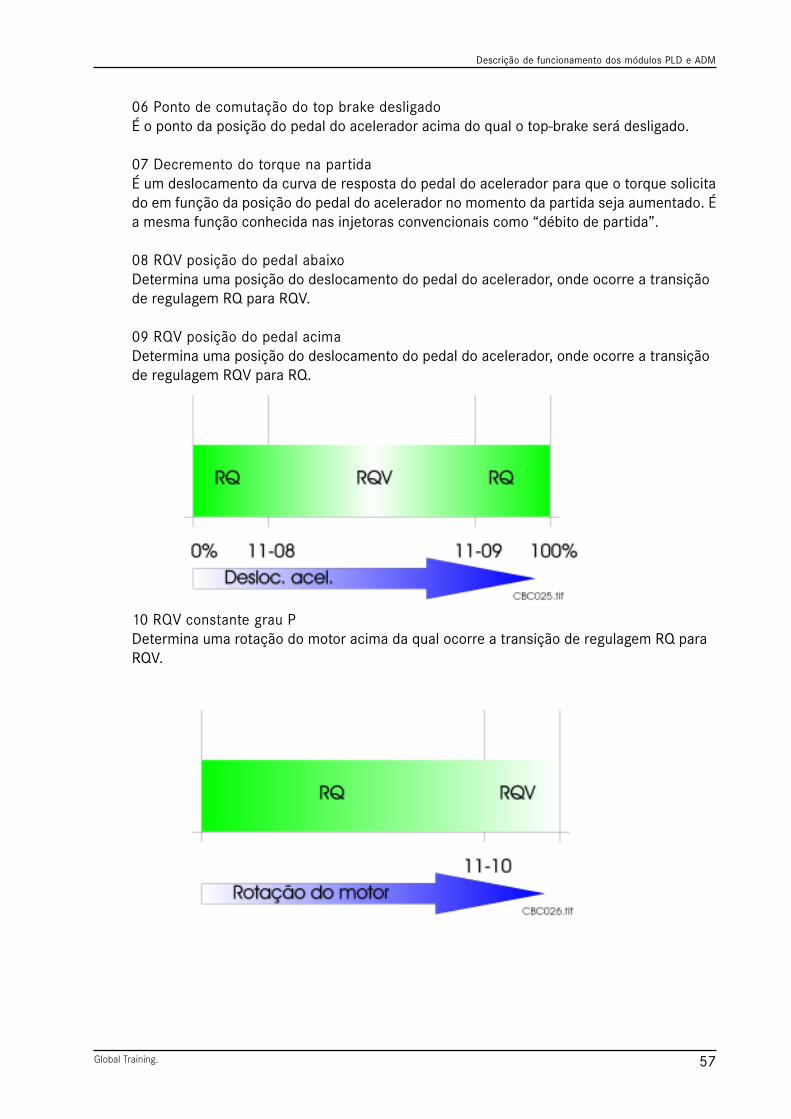
08 RQV posição do pedal abaixoDetermina uma posição do deslocamento do pedal do acelerador, onde ocorre a transiçãode regulagem RQ para RQV.
09 RQV posição do pedal acimaDetermina uma posição do deslocamento do pedal do acelerador, onde ocorre a transiçãode regulagem RQV para RQ.
10 RQV constante grau PDetermina uma rotação do motor acima da qual ocorre a transição de regulagem RQ paraRQV.
Descrição de funcionamento dos módulos PLD e ADM
Global Training.58
12 Proteção da caixa de mudança
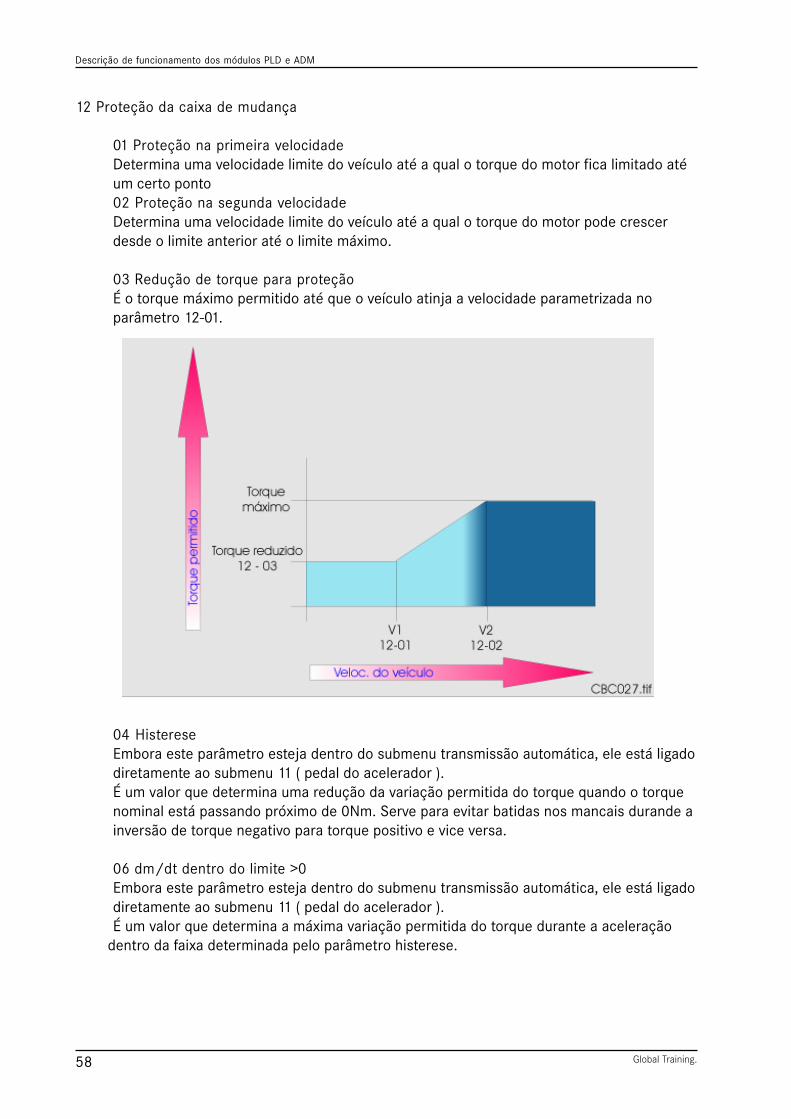
01 Proteção na primeira velocidadeDetermina uma velocidade limite do veículo até a qual o torque do motor fica limitado atéum certo ponto02 Proteção na segunda velocidadeDetermina uma velocidade limite do veículo até a qual o torque do motor pode crescerdesde o limite anterior até o limite máximo.
03 Redução de torque para proteçãoÉ o torque máximo permitido até que o veículo atinja a velocidade parametrizada noparâmetro 12-01.
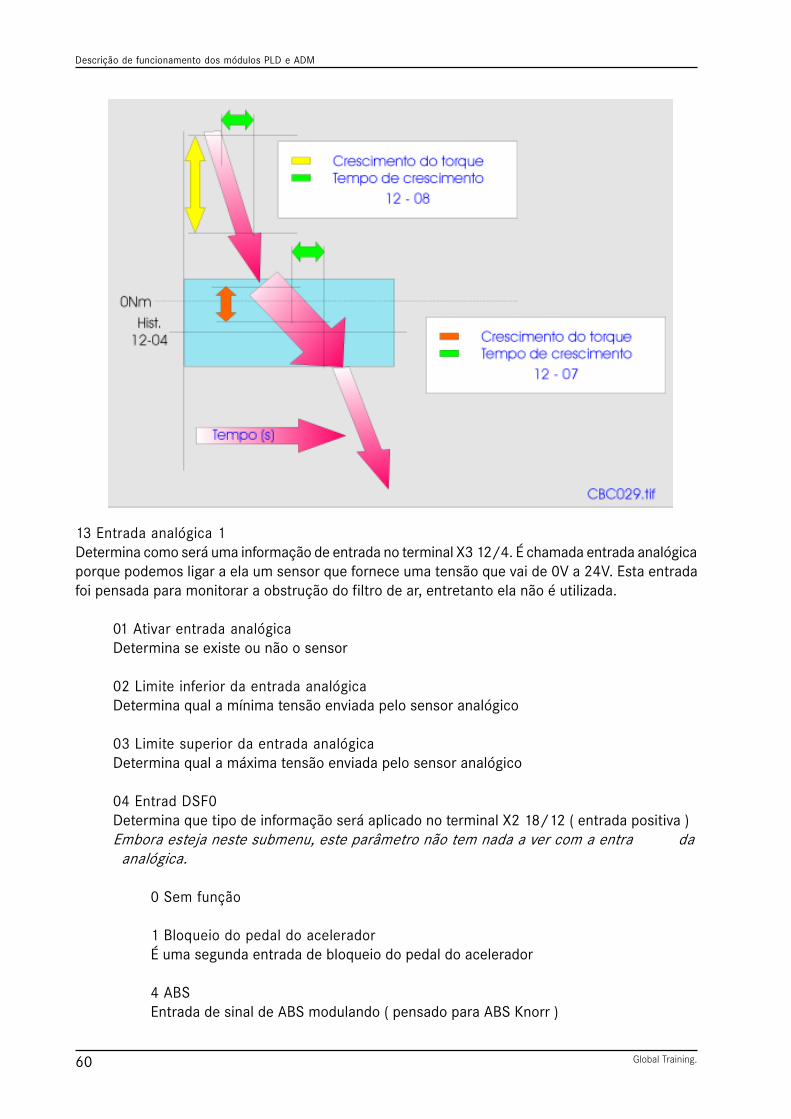
04 HistereseEmbora este parâmetro esteja dentro do submenu transmissão automática, ele está ligadodiretamente ao submenu 11 ( pedal do acelerador ).É um valor que determina uma redução da variação permitida do torque quando o torquenominal está passando próximo de 0Nm. Serve para evitar batidas nos mancais durande ainversão de torque negativo para torque positivo e vice versa.
06 dm/dt dentro do limite >0Embora este parâmetro esteja dentro do submenu transmissão automática, ele está ligadodiretamente ao submenu 11 ( pedal do acelerador ).É um valor que determina a máxima variação permitida do torque durante a aceleração
dentro da faixa determinada pelo parâmetro histerese.

Descrição de funcionamento dos módulos PLD e ADM
Global Training. 59
07 dm/dt dentro do limite < 0Embora este parâmetro esteja dentro do submenu transmissão automática, ele está ligadodiretamente ao submenu 11 ( pedal do acelerador ).É um valor que determina a máxima variação permitida do torque durante a desaceleraçãodentro da faixa determinada pelo parâmetro histerese.
08 dm/dt fora dos limitesEmbora este parâmetro esteja dentro do submenu transmissão automática, ele está ligadodiretamente ao submenu 11 ( pedal do acelerador ).É um valor que determina a máxima variação permitida do torque durante a aceleração edesaceleração fora da faixa determinada pelo parâmetro histerese.
Descrição de funcionamento dos módulos PLD e ADM
Global Training.60
13 Entrada analógica 1Determina como será uma informação de entrada no terminal X3 12/4. É chamada entrada analógicaporque podemos ligar a ela um sensor que fornece uma tensão que vai de 0V a 24V. Esta entradafoi pensada para monitorar a obstrução do filtro de ar, entretanto ela não é utilizada.
01 Ativar entrada analógicaDetermina se existe ou não o sensor
02 Limite inferior da entrada analógicaDetermina qual a mínima tensão enviada pelo sensor analógico
03 Limite superior da entrada analógicaDetermina qual a máxima tensão enviada pelo sensor analógico
04 Entrad DSF0Determina que tipo de informação será aplicado no terminal X2 18/12 ( entrada positiva )Embora esteja neste submenu, este parâmetro não tem nada a ver com a entra da
analógica.
0 Sem função
1 Bloqueio do pedal do aceleradorÉ uma segunda entrada de bloqueio do pedal do acelerador
4 ABSEntrada de sinal de ABS modulando ( pensado para ABS Knorr )

Descrição de funcionamento dos módulos PLD e ADM
Global Training. 61
4 ABSEntrada de sinal de ABS modulando ( pensado para ABS Knorr )
5 Entrada de retardador ligado
6 Opções 1+5
04 Entrada DSF1Determina que tipo de informação será aplicado no terminal _______ ( entrada positiva )Embora esteja neste submenu, este parâmetro não tem nada a ver com a entrada
analógica.
0 Sem função
1 Bloqueio do pedal do aceleradorÉ uma segunda entrada de bloqueio do pedal do acelerador
4 ABSEntrada de sinal de ABS modulando ( pensado para ABS Knorr )
5 Entrada de retardador ligado
6 Opções 1+5
14 Função INS pressão de óleoDetermina que tipo de indicador de pressão de óleo está aplicado no veículo
0 de 0 a 5 bar
1 de 0 a 10 bar
15 Função INS temperatura do líquido de arrefecimentoDetermina que tipo de indicador de temperatura está aplicado no veículo
0 de 0°C a 120°C
1 não ligado
17 Limites de ativação dos reles 3 e 4 ( IWK3 e IWK4 )Determina qual será a informação que o ADM leva em consideração para ativar os reles que estãoligados as saídas X3 12/8 ( rele 3 ) e X3 12/7 ( rele 4 ).
01 Configuração IWK3Configura o rele 3 ligado no conector X3 12/8
0 Pedal em marcha lenta
1 Torque atual
Descrição de funcionamento dos módulos PLD e ADM
Global Training.62
17 Limites de ativação dos reles 3 e 4 ( IWK3 e IWK4 )Determina qual será a informação que o ADM leva em consideração para ativar os reles que estãoligados as saídas X3 12/8 ( rele 3 ) e X3 12/7 ( rele 4 ).
01 Configuração IWK3Configura o rele 3 ligado no conector X3 12/8
0 Pedal em marcha lenta
1 Torque atual2 Velocidade do veículoAciona o rele em função da velocidade do veículo
3 Rotação do motorAciona o rele em função da rotação do motor
4 Temperatura do líquido de arrefecimentoAciona o rele em função da temperatura do líquido de arrefecimento
5 Torque do pedal do aceleradorAciona o rele em função do torque solicitado no pedal do acelerador
02 Torque de acionamento do IWK3Determina em qual valor de torque real será ligado o rele 3
03 Histerese de torque do IWK3Determina em qual o valor de torque real o rele3 será desligado, é o valor parametrizadoanteriormente menos o valor parametrizado neste item
04 Velocidade de acionamento do IWK3Determina em qual valor de velocidade do veículo será ligado o rele 3
05 Histerese de velocidade do IWK3Determina em qual o valor de velocidade do veículo o rele3 será desligado, é o valorparametrizado anteriormente menos o valor parametrizado neste item
06 Rotação de acionamento do IWK3Determina em qual rotação do motor será ligado o rele 3
07 Histerese da rotação do IWK3Determina em qual rotação do motor o rele3 será desligado, é o valor parametrizado anteriormente menos o valor parametrizado neste item
08 Temperatura de acionamento do IWK3Determina em qual temperatura do líquido de arrefecimento será ligado o rele 3
09 Histerese da temperatura do IWK3Determina em qual temperatura do líquido de arrefecimento o rele3 será desligado, é o
valor parametrizado anteriormente menos o valor parametrizado neste item
Descrição de funcionamento dos módulos PLD e ADM
Global Training. 63
10 Configuração IWK4Configura o rele 4 ligado no conector X3 12/7
0 Pedal em marcha lenta
1 Torque atual2 Velocidade do veículoAciona o rele em função da velocidade do veículo
3 Rotação do motorAciona o rele em função da rotação do motor
4 Temperatura do líquido de arrefecimentoAciona o rele em função da temperatura do líquido de arrefecimento
5 Torque do pedal do aceleradorAciona o rele em função do torque solicitado no pedal do acelerador
11 Torque de acionamento do IWK4Determina em qual valor de torque real será ligado o rele4
12 Histerese de torque do IWK4Determina em qual o valor de torque real o rele4 será desligado, é o valor parametrizadoanteriormente menos o valor parametrizado neste item
13 Velocidade de acionamento do IWK4Determina em qual valor de velocidade do veículo será ligado o rele 4
14 Histerese de velocidade do IWK4Determina em qual o valor de velocidade do veículo o rele4 será desligado, é o valorparametrizado anteriormente menos o valor parametrizado neste item
15 Rotação de acionamento do IWK4Determina em qual rotação do motor será ligado o rele 4
16 Histerese da rotação do IWK4Determina em qual rotação do motor o rele4 será desligado, é o valor parametrizado anteriormente menos o valor parametrizado neste item
17 Temperatura de acionamento do IWK4Determina em qual temperatura do líquido de arrefecimento será ligado o rele 4
18 Histerese da temperatura do IWK4Determina em qual temperatura do líquido de arrefecimento o rele4 será desligado, é o
valor parametrizado anteriormente menos o valor parametrizado neste item
Descrição de funcionamento dos módulos PLD e ADM
Global Training.64
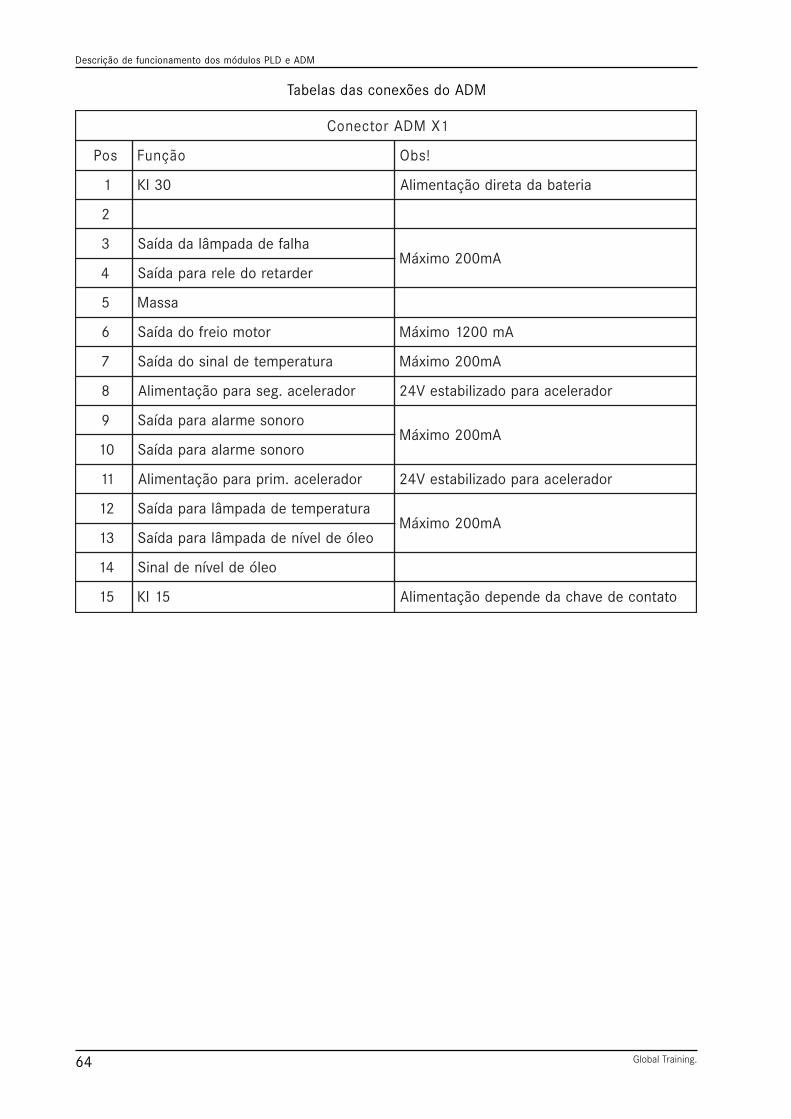
1XMDArotcenoC
soP oãçnuF !sbO
1 03lK airetabadateridoãçatnemilA
2
3 ahlafedadapmâladadíaSAm002omixáM
4 redraterodelerarapadíaS
5 assaM
6 rotomoierfodadíaS Am0021omixáM
7 arutarepmetedlanisodadíaS Am002omixáM
8 rodareleca.gesarapoãçatnemilA rodarelecaarapodazilibatseV42
9 oronosemralaarapadíaSAm002omixáM
01 oronosemralaarapadíaS
11 rodareleca.mirparapoãçatnemilA rodarelecaarapodazilibatseV42
21 arutarepmetedadapmâlarapadíaSAm002omixáM
31 oelóedlevínedadapmâlarapadíaS
41 oelóedlevínedlaniS
51 51lK otatnocedevahcadednepedoãçatnemilA
Tabelas das conexões do ADM
Descrição de funcionamento dos módulos PLD e ADM
Global Training. 65
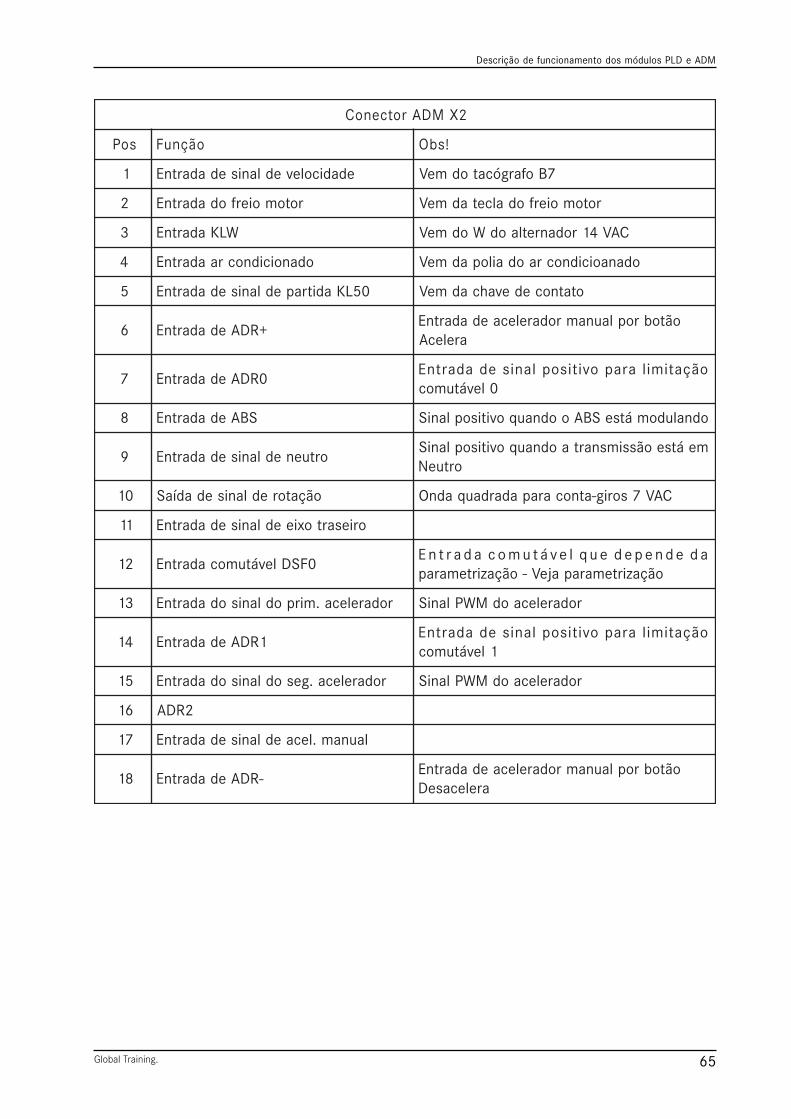
2XMDArotcenoC
soP oãçnuF !sbO
1 edadicolevedlanisedadartnE 7BofargócatodmeV
2 rotomoierfodadartnE rotomoierfodalcetadmeV
3 WLKadartnE CAV41rodanretlaodWodmeV
4 odanoicidnocraadartnE odanaoicidnocraodailopadmeV
5 05LKaditrapedlanisedadartnE otatnocedevahcadmeV
6 +RDAedadartnEoãtobroplaunamrodarelecaedadartnE
arelecA
7 0RDAedadartnEoãçatimilarapovitisoplanisedadartnE
0levátumoc
8 SBAedadartnE odnaludomátseSBAoodnauqovitisoplaniS
9 ortuenedlanisedadartnEmeátseoãssimsnartaodnauqovitisoplaniS
ortueN
01 oãçatoredlanisedadíaS CAV7sorig-atnocarapadardauqadnO
11 oriesartoxieedlanisedadartnE
21 0FSDlevátumocadartnEadednepedeuqlevátumocadartnE
oãçazirtemarapajeV-oãçazirtemarap
31 rodareleca.mirpodlanisodadartnE rodarelecaodMWPlaniS
41 1RDAedadartnEoãçatimilarapovitisoplanisedadartnE
1levátumoc
51 rodareleca.gesodlanisodadartnE rodarelecaodMWPlaniS
61 2RDA
71 launam.lecaedlanisedadartnE
81 -RDAedadartnEoãtobroplaunamrodarelecaedadartnE
arelecaseD
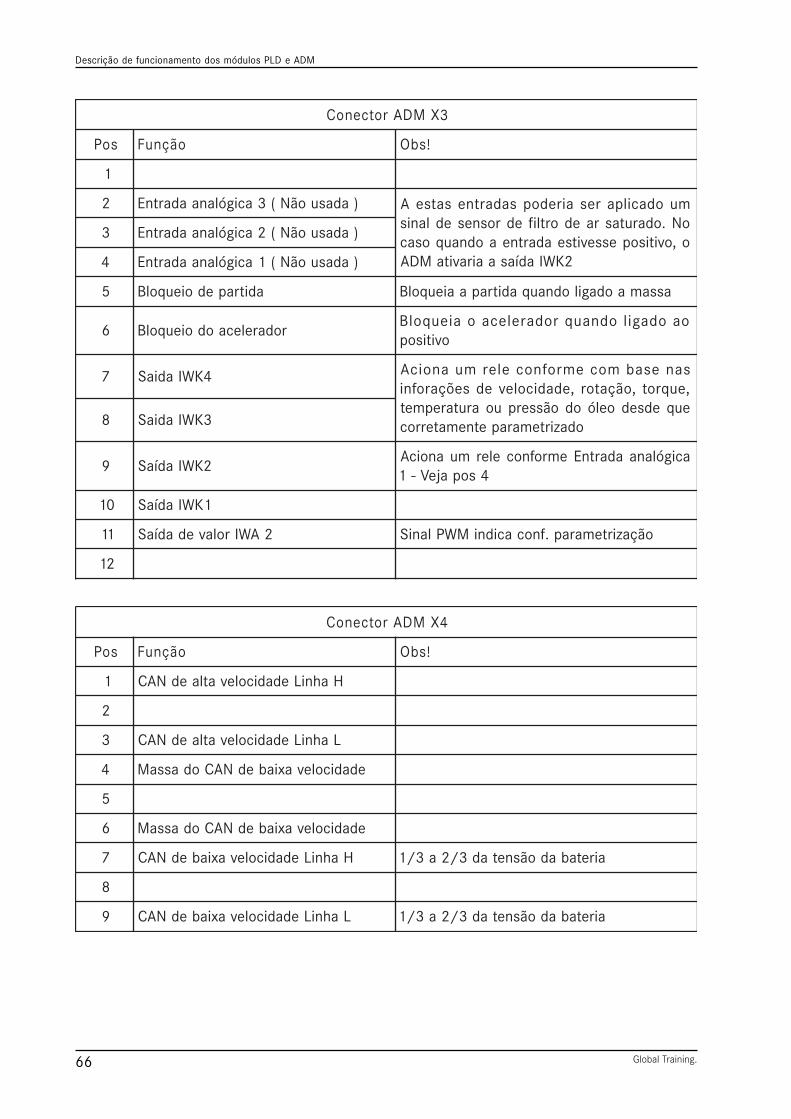
Descrição de funcionamento dos módulos PLD e ADM
Global Training.66
3XMDArotcenoC
soP oãçnuF !sbO
1
2 )adasuoãN(3acigólanaadartnE muodacilparesairedopsadartnesatseAoN.odarutasraedortlifedrosnesedlaniso,ovitisopessevitseadartneaodnauqosac
2KWIadíasaairavitaMDA
3 )adasuoãN(2acigólanaadartnE
4 )adasuoãN(1acigólanaadartnE
5 aditrapedoieuqolB assamaodagilodnauqaditrapaaieuqolB
6 rodarelecaodoieuqolBoaodagilodnauqrodarelecaoaieuqolB
ovitisop
7 4KWIadiaS sanesabmocemrofnocelermuanoicA,euqrot,oãçator,edadicolevedseõçarofnieuqedsedoelóodoãsserpuoarutarepmet
odazirtemarapetnematerroc8 3KWIadiaS
9 2KWIadíaSacigólanaadartnEemrofnocelermuanoicA
4sopajeV-1
01 1KWIadíaS
11 2AWIrolavedadíaS oãçazirtemarap.fnocacidniMWPlaniS
21
4XMDArotcenoC
soP oãçnuF !sbO
1 HahniLedadicolevatlaedNAC
2
3 LahniLedadicolevatlaedNAC
4 edadicolevaxiabedNACodassaM
5
6 edadicolevaxiabedNACodassaM
7 HahniLedadicolevaxiabedNAC airetabadoãsnetad3/2a3/1
8
9 LahniLedadicolevaxiabedNAC airetabadoãsnetad3/2a3/1

Descrição de funcionamento dos módulos PLD e ADM
Global Training. 67

Descrição de funcionamento dos módulos PLD e ADM
Global Training.68
%[[�[[[[[[