controlo de parques - autenticação · parquímetros de lisboa, pensemos também no centro...
TRANSCRIPT

Instituto Superior Técnico Mestrado em Engenharia e Gestão Industrial Dispositivos e Sistemas de Redes Logísticos
Controlo de Parques
Realizado por:
Bruno Meireles nº 54510

Gestão de Parques Pág. 2
Índice Pág.
1. Resumo 3 2. Introdução 3 3. Necessidade 3 4. Mercados 4 5. Factores chave do problema 4
5.1. Identificação 5 5.2. Localização 5 5.3. Acesso ao Sistema de Informação/Base de Dados 5
6. Tecnologia 6 6.1. Câmeras com software de reconhecimento da matricula 6 6.2. GPS conjugado com GSM 7 6.3. GSM 9 6.4. RFID 11 6.5. USID 14 6.6 WiFi 15
7. Aplicações 16 7.1. Parques Automóveis 16
7.1.1. Estacionamento na Rua 17 7.1.2. Estacionamento Indoor 19
7.2. Parques Industriais 20 8. Conclusões 22 9. Ética 23 10. Referências 24 11. Anexos 25

Gestão de Parques Pág. 3
1. Resumo
Este trabalho tem por objectivo estudar e avaliar quais as soluções disponíveis para o problema da
gestão de parques. São estudadas várias opções, desde o GPS à triangulação com o WiFi. No entanto
verificamos que diferentes tipos de parques exigem diferentes soluções. Após o seu estudo decidimos
que para o estacionamento de rua a melhor opção disponível seria o USID, ultrasound identification. Para
o estacionamento indoor a melhor opção do ponto de vista técnico-económica seria a triangulação de
sinais RFID. E finalmente para parques industriais a melhor opção seria a opção RFID com uma
antena/sensor por cada lugar de estacionamento.
2. Introdução
Este trabalho tem por objectivo proporcionar um estudo sobre as alternativas que poderão proporcionar
uma resposta adequada ao problema da gestão de parques.
Começou-se por encontrar quais os diferentes mercados que existem, saber quais são as suas
necessidades e requisitos para um sistema como este. Após isso, foram estudados os factores chaves
para a resolução deste problema, ou seja que aspectos teriam que ser resolvidos para um sistema como
este possa funcionar correctamente.
Foram estudadas várias tecnologias, o objectivo era proporcionar um “overview” daquilo que havia
disponível para solucionar este problema. Após isso foi feito uma análise a como essas tecnologias
seriam usadas para a gestão de parques.
Por fim, na conclusão tenta-se recomendar a solução que melhor se adequa a cada problema em
particular sempre através de uma análise técnico-económica.
3. Necessidade
A busca pela vantagem competitiva é o que faz o mercado funcionar. Empresas investem em novas
tecnologias ou em departamentos de investigação e desenvolvimento com a finalidade de obterem a
vantagem competitiva sobre os seus concorrentes.
Este trabalho tenta abordar uma questão que muitas vezes é descurada pelo desconhecimento da sua
importância, o Controlo de Parques. A Logística é responsável por uma parte significativa dos custos de
algumas empresas, como tal todos os esforços para minimizar os custos e maximizar os retornos de uma
gestão do parque adequada, reduzirão os custos logísticos e por consequência aumentaram o lucro da
empresa.
Este trabalho visa abordar algo que pode dar uma vantagem de custos e de alocação de recursos,
resolvendo as necessidades que as empresas hoje sentem com a questão do controlo de parques.

Gestão de Parques Pág. 4
4. Mercados
Hoje em dia várias empresas sentem necessidade deste tipo de aplicações afim de melhor controlar os
seus parques. Não pensemos só nas empresas municipais como a EMEL, que gere grande parte dos
parquímetros de Lisboa, pensemos também no centro comercial Colombo que tem um parque automóvel
cujo acesso é pago, numa empresa de distribuição como a Luís Simões Lda., ou ainda numa empresa
que tenha grande fluxo de entrada e saída de camiões e precise carregar e descarregar de forma mais
eficiente. Como vemos as oportunidades para a instalação de sistemas de controlo de parques são
diversas, no entanto há diferenças entre os requisitos para as diferentes aplicações. Como tal vamos
dividir o mercado em dois segmentos:
1. Parques Automóveis
2. Parque Industriais
Dentro do primeiro mercado temos dois casos em particular. Estacionamento na rua e estacionamento
indoor, como por exemplo o do centro comercial Colombo.
No segundo, vamos assumir que o que é pedido à gestão de parque numa empresa é semelhante quer
seja num centro de distribuição ou numa indústria manufactureira que exporte da fábrica para o elo
abaixo na cadeia logística.
5. Factores chave do problema
Para encontrar a melhor solução possível para este problema da gestão de parques, o problema foi
decomposto, identificando quais os pontos essenciais que terão que ser resolvidos afim de determinado
sistema funcionar eficientemente.
Após investigar os requisitos que o sistema seria obrigado a ter chegamos a três factores chave
Identificação
Localização
Acesso ao Sistema de Informação/Base de Dados

Gestão de Parques Pág. 5
5.1. Identificação
Em qualquer um dos dois mercados identificados, a identificação é fundamental. Teremos que identificar
univocamente o veículo para decidir se é autorizado a entrar ou se tem que ser chamada as autoridades
a fim de o remover entre outras opções disponíveis.
Para a identificação temos dois tipos de solução, ou usamos a infra-estrutura tecnológica já em uso ou
desenvolvemos uma absolutamente nova. É claro que esta última será muito provavelmente mais
dispendiosa em termos de custos monetários. Do ponto de vista económico faz todo o sentido aproveitar
a infra-estrutura tecnológica já existente, menos investimento inicial.
5.2. Localização
Localizar é identificar de forma unívoca e com um certo grau de certeza a posição. Para uma solução
adequada do nosso problema deveremos conseguir identificar a posição do veículo.
Ligada a localização também estará outra vertente que será interessante abordar nesta temática da
gestão de parques. Esta é a questão da localização não dos veículos mas dos lugares livres, facilitando
assim, o estacionamento aos utilizadores.
5.3. Acesso ao Sistema de Informação/Base de Dados
Uma correcta gestão da informação permite às empresas reduções de custos e a desburocratização das
organizações. A capacidade de gerir informação é nos dias de hoje uma capacidade que poucas
empresas utilizam na sua extensão total.
Para este problema é essencial que haja um sistema de informação ou base de dados ligada a uma
tecnologia que for escolhida. Pois só com esta base conseguiremos associar determinado identificador à
entidade. Por exemplo, só com a base poderemos dizer que o camião com a matricula XX-88-99 é um
camião de 18 rodas que tem que ser carregado na doca 1 ou que o carro com a matricula ZZ-77-66 tem
indexada uma conta bancária com autorização para débitos directos.
No entanto, este é também o ponto que menos preocupação causa em termos de tecnologia, porque está
neste momento saturado com alternativas. Caso uma empresa não tenha sistemas de informação
teremos que criar uma base de dados específica à qual o sistema possa aceder. Caso, de facto, exista
teremos que pensar numa solução para integrar tecnologias. A vantagem é que grande parte dos
sistemas de informação são modulares e como tal permitem a integração de outros novos módulos no
sistema.
Gestão de Parques Pág. 6
6. Tecnologias
Neste capítulo será abordado uma variedade de tecnologias com vista à resolução ou melhoramento da
gestão de parques. Tentando sempre evidenciar as vantagens e desvantagens de cada uma para este
tipo de aplicação.
6.1. Câmeras e software de reconhecimento da matrícula.
Este sistema é muito usado pelo mundo fora, mas para outros fins. Quer pela polícia para identificar
veículos em excesso de velocidade, quer em Londres para os condutores terem que pagar uma tarifa
pela entrada do carro no centro da cidade.
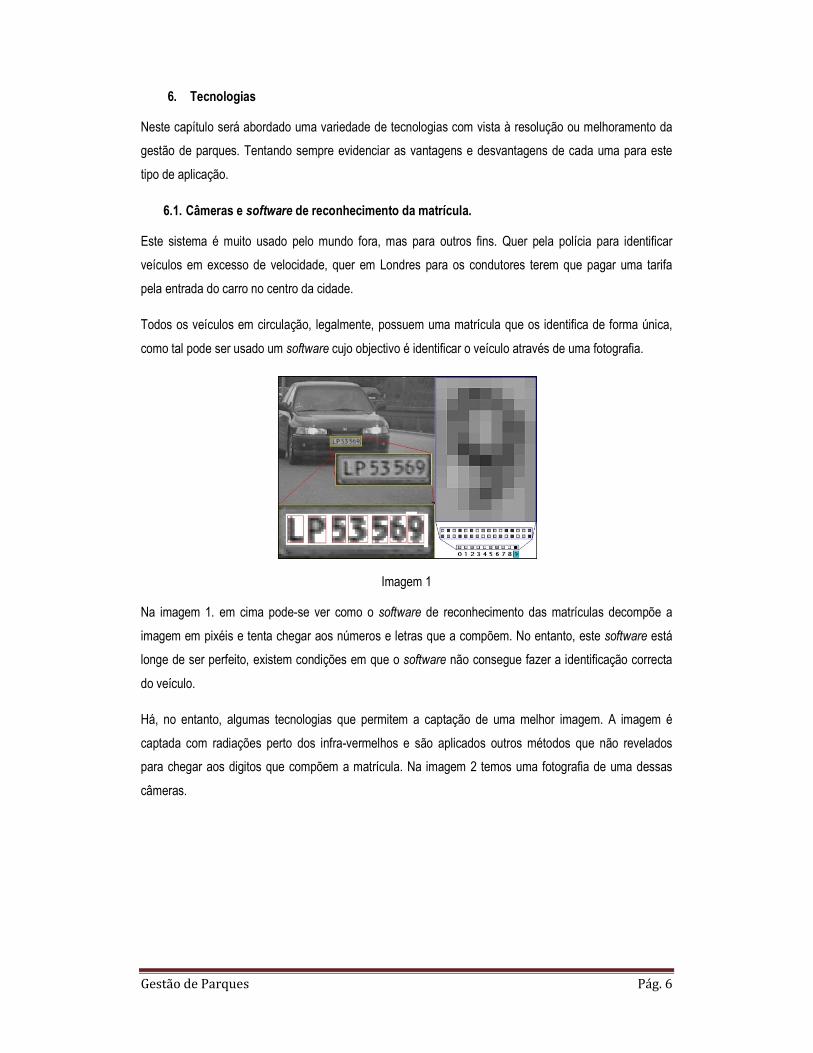
Todos os veículos em circulação, legalmente, possuem uma matrícula que os identifica de forma única,
como tal pode ser usado um software cujo objectivo é identificar o veículo através de uma fotografia.
Imagem 1
Na imagem 1. em cima pode-se ver como o software de reconhecimento das matrículas decompõe a
imagem em pixéis e tenta chegar aos números e letras que a compõem. No entanto, este software está
longe de ser perfeito, existem condições em que o software não consegue fazer a identificação correcta
do veículo.
Há, no entanto, algumas tecnologias que permitem a captação de uma melhor imagem. A imagem é
captada com radiações perto dos infra-vermelhos e são aplicados outros métodos que não revelados
para chegar aos digitos que compõem a matrícula. Na imagem 2 temos uma fotografia de uma dessas
câmeras.

Gestão de Parques Pág. 7
Imagem 2 Imagem 3
Na imagem 3. é possível ver a imagem captada sem as radiações infra-vermelhas e em baixo com as
radiações infra-vermelhas. É notório que o sistema de infravermelhos trás um aumento da capacidade de
visualização da imagem, aumentando assim as possibilidades de se conseguir identificar o veículo.
6.2. GPS conjugado com o GSM
O Global Positioning System, é um sistema que consiste em 24 satélites com um relógio atómico, de
resolução de 1 ns. Estes satélites enviam para o planeta sinais microondas com informação,
nomeadamente a hora.
Imagem 4.
No planeta os equipamentos recebem vários sinais, pelo menos quatro, e fazem o que se chama de
quadrangulação. Conseguindo-se assim a latitude, longitude e altitude a que está o equipamento. A
quadrangulação referida anteriormente é em tudo semelhante a triangulação, simplesmente usa mais
uma medida de cálculo para obter a altura. Para mais informação sobre estes cálculos consultar os
anexos com a informação da triangulação (capítulo 11.1.).

Gestão de Parques Pág. 8
No entanto convém referir que o GPS só por si é extremamente limitado. Porque apesar de conseguir
obter uma boa localização na maioria dos casos, essa localização será obtida só por esse equipamento
específico, como tal é necessária outra tecnologia de comunicação que permita a transferência de
informação. Aqui entra a rede GSM.
A rede GSM é actualmente usada para as nossas comunicações móveis, mais recentemente tem sido
usada para aplicações deste género. Para uma melhor compreensão mostramos o seguinte esquemático.
Imagem 5.
Os quatros satélites permitem ao equipamento que está no veículo localizar o mesmo. Após isso apenas
quem está no veículo sabe a sua localização, como tal é preciso comunicar essa posição. Esta é enviada
pela rede GSM, uma mensagem com a localização do veículo. É importante perceber que neste esquema
a rede GSM não é usada como forma de localização mas como forma de comunicação. A mensagem é
passada o longo da rede, até que chega ao destino, onde algo faz a sua leitura e informa da localização
do veículo.
Gestão de Parques Pág. 9
Como vemos este sistema teria imensas vantagens, com um telemóvel conseguiríamos saber com
relativa certeza qual a posição do veículo num parque, no entanto tem desvantagens. Entre elas estão, as
possíveis interferências que impedem a transmissão do sinal. Estas fontes de interferência podem ser as
árvores, tempestades solares, interferências electromagnéticas, entre outras.
Outra desvantagem é a precisão da localização, o GPS garante que o equipamento esta num raio de 100
metros da posição indicada. Mas quando se quer precisão para saber um lugar de estacionamento em
particular, esta tecnologia está muito limitada.
Nota: Neste trabalho apenas foi abordado o GPS, poder-se-ia, também, ter abordado o Galileu, no
entanto o sistema é semelhante ao GPS apenas com mais umas funcionalidades que não pareciam ser
relevantes para a resolução do problema. Além do mais o projecto Galileu ainda não está concluido.
6.3. Localização pela rede GSM
Ao contrário da tecnologia apresentada anteriormente, GPS conjugado com GSM, esta aplica a rede
GSM para efeitos de localização.
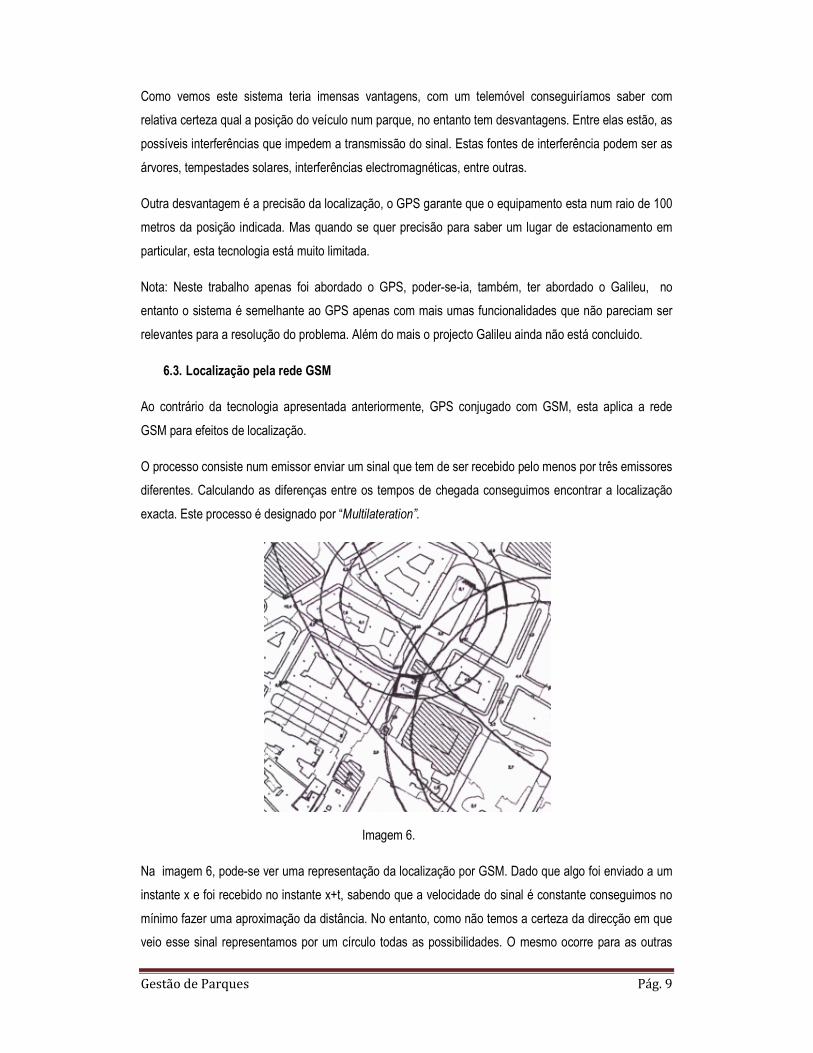
O processo consiste num emissor enviar um sinal que tem de ser recebido pelo menos por três emissores
diferentes. Calculando as diferenças entre os tempos de chegada conseguimos encontrar a localização
exacta. Este processo é designado por “Multilateration”.
Imagem 6.
Na imagem 6, pode-se ver uma representação da localização por GSM. Dado que algo foi enviado a um
instante x e foi recebido no instante x+t, sabendo que a velocidade do sinal é constante conseguimos no
mínimo fazer uma aproximação da distância. No entanto, como não temos a certeza da direcção em que
veio esse sinal representamos por um círculo todas as possibilidades. O mesmo ocorre para as outras
Gestão de Parques Pág. 10
duas antenas. Dado que existem algumas variações, representaremos por intervalo em vez da posição
absoluta. A localização será representada pela reunião das áreas dos sinais sobrepostas.
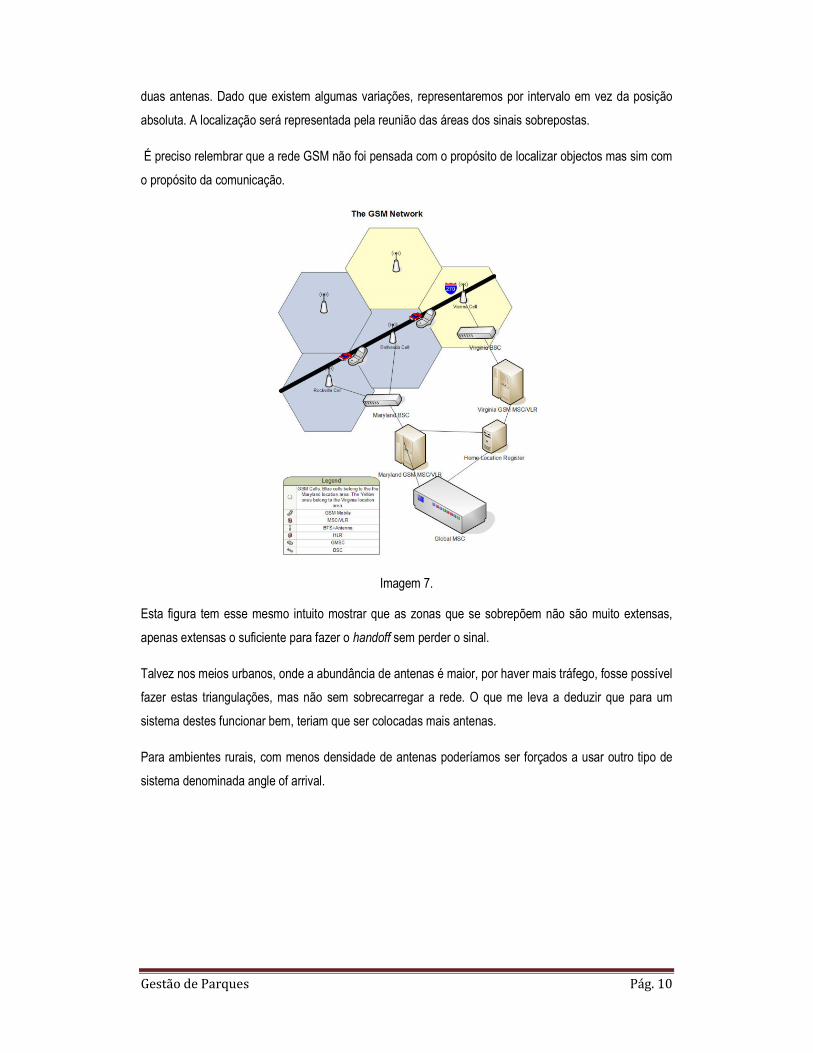
É preciso relembrar que a rede GSM não foi pensada com o propósito de localizar objectos mas sim com
o propósito da comunicação.
Imagem 7.
Esta figura tem esse mesmo intuito mostrar que as zonas que se sobrepõem não são muito extensas,
apenas extensas o suficiente para fazer o handoff sem perder o sinal.
Talvez nos meios urbanos, onde a abundância de antenas é maior, por haver mais tráfego, fosse possível
fazer estas triangulações, mas não sem sobrecarregar a rede. O que me leva a deduzir que para um
sistema destes funcionar bem, teriam que ser colocadas mais antenas.
Para ambientes rurais, com menos densidade de antenas poderíamos ser forçados a usar outro tipo de
sistema denominada angle of arrival.
Gestão de Parques Pág. 11
6.4. RFID
O RFID, Radio Frequency IDentification, é nos dias de hoje muito usado na identificação de carros,
identificação de mercadorias, entre muitas outras. O que significa que já é uma tecnologia madura, sendo
muito bem conhecidas as suas vantagens e desvantagens.
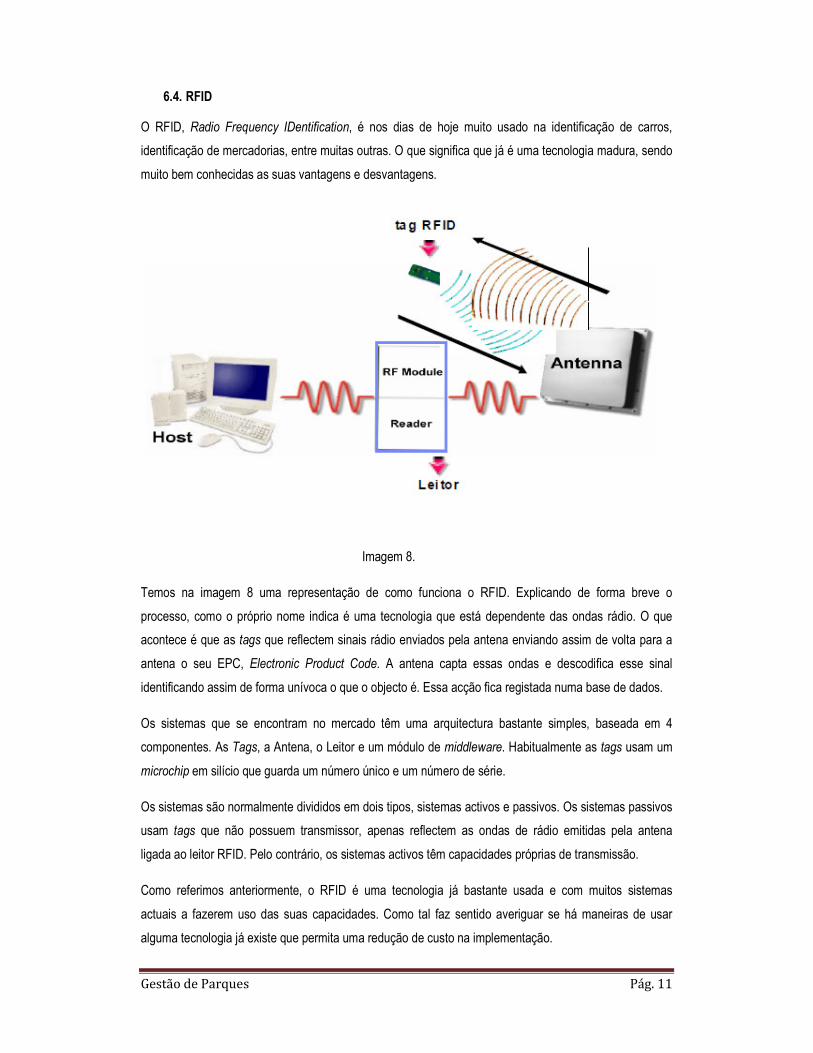
Imagem 8.
Temos na imagem 8 uma representação de como funciona o RFID. Explicando de forma breve o
processo, como o próprio nome indica é uma tecnologia que está dependente das ondas rádio. O que
acontece é que as tags que reflectem sinais rádio enviados pela antena enviando assim de volta para a
antena o seu EPC, Electronic Product Code. A antena capta essas ondas e descodifica esse sinal
identificando assim de forma unívoca o que o objecto é. Essa acção fica registada numa base de dados.
Os sistemas que se encontram no mercado têm uma arquitectura bastante simples, baseada em 4
componentes. As Tags, a Antena, o Leitor e um módulo de middleware. Habitualmente as tags usam um
microchip em silício que guarda um número único e um número de série.
Os sistemas são normalmente divididos em dois tipos, sistemas activos e passivos. Os sistemas passivos
usam tags que não possuem transmissor, apenas reflectem as ondas de rádio emitidas pela antena
ligada ao leitor RFID. Pelo contrário, os sistemas activos têm capacidades próprias de transmissão.
Como referimos anteriormente, o RFID é uma tecnologia já bastante usada e com muitos sistemas
actuais a fazerem uso das suas capacidades. Como tal faz sentido averiguar se há maneiras de usar
alguma tecnologia já existe que permita uma redução de custo na implementação.
Gestão de Parques Pág. 12
Um exemplo é a Via Verde, o sistema de pagamentos automáticos da Brisa. A caixa que nos é pedida
para colocar no veiculo na adesão à Via Verde não é nada mais do que uma tag RFID passiva.
Imagem 9.
Assim, reduzimos o nosso custo e evitamos ter que convencer o consumidor a ter mais um objecto
idêntico nos seus veículos.
Numa perspectiva mais voltada para o futuro, a utilização da futura matricula electrónica também será
como forma de identificar os veículos.
Imagem 10.
A matrícula electrónica tem exactamente o mesmo tipo de layout que uma matrícula normal a única
diferença é que tem uma tag RFID que torna mais fácil a identificação dos veículos.
Convém também referir que caso venha a ser implementada permitirá aos condutores dos seus veículos
uma série de novos produtos, entre eles, não necessitar de ir fazer o pagamento na bomba de gasolina,
não precisar de pagar portagem e também obviamente não precisar de pagar o estacionamento. Dado a
importância que esta tag poderá vir a ter existem medidas de segurança para impedir ou que alguém a
roube e use noutros veículos ou mesmo impedir adulteração por parte do dono a fim de se escapar de
algumas contas.
No entanto não há informação de quando vai passar a ser obrigatória usar esta matrícula.
Caso não se opte por nenhuma das opções acima podemos sempre usar o nosso próprio padrão, as tags
RFID têm um preço cada vez mais baixo no mercado.

Gestão de Parques Pág. 13
Como vimos a tecnologia é extremamente versátil e está em uso em muitas indústrias, a questão é, como
a vamos aplicar ao nosso problema da gestão de parques. Há duas possibilidades distintas:
Uma seria usar a triangulação para determinar a posição, outra seria ter uma antena para cada lugar de
estacionamento. Ambas têm vantagens e desvantagens.
1. Triangulação
Para fazer triangulações será sempre preciso haver uma boa cobertura de antenas. A fim de termos a
possibilidade de conseguir ter três antenas para a triangulação. No entanto, para esta tecnologia
funcionar correctamente teremos que garantir que a potência emitida é estável. Porque de outra forma
não teremos precisão nos nossos resultados.
Isto parece ser uma opção plausível para complexo industriais, onde há um espaço relativamente
pequeno quando comparado com uma cidade. O custo para implementar um sistema de triangulações
que cobrisse toda a cidade de Lisboa, por exemplo, seria bastante alto.
2. Uma antena/Sensor para cada lugar.
Esta possibilidade parece também ser atractiva quando estamos a referir de complexos pequenos,
instalar uma antena por lugar numa cidade parece demasiado caro para poder ser concretizável.
Imagem 11.
Como vemos o RFID é de facto uma tecnologia poderosa com uma grande variabilidade de aplicações.
Apesar disso e sabendo que as pessoas fazem tudo o possível para escapar a pagar o que quer que
seja, convém referir que o RFID consegue ser iludido. O RFID usa o espectro electromagnético, como tal
é relativamente fácil bloquear os sinais usando energia com a frequência correcta.

Gestão de Parques Pág. 14
6.5. Ultra Sons – USID, Ultrasound Identification.
Esta tecnologia tem algumas semelhanças com aquela que foi discutida anteriormente, o RFID.
Como o próprio nome sugere, a identificação por ultra sons está baseada, nas ondas sonoras de alta
frequência, frequências que estão acima do limite superior do ouvido humano. Esta tecnologia baseia-se
no envio destas e esperar pela resposta.
Este tipo de tecnologia já é aplicada em situações similares àquela que nós temos por objectivo suprir.
Nos hospitais esta tecnologia é usada como um Indoor position system, IPS, cujo objectivo é
automaticamente identificar e seguir objectos em tempo real usando apenas umas tags de baixo custo
colocadas nos objectos que queremos seguir. Estas tags transmitem um sinal ultrasom para os sensores.
Estes sensores são microfones que captam aquela gama de frequências. Os microfones podem ser
parametrizados a fim de serem mais sensíveis numa particular direcção. Além do mais os microfones
podem ser desenhados a fim de conseguirem detectar diferentes identidades.
Em baixo, na imagem 12, temos o exemplo de uma destas tags colocada num paciente. O objectivo é
conhecer a todo o momento a sua localização.
Imagem 12.
Muitos consideram esta tecnologia uma alternativa superior ao RFID para ambientes interiores
complexos. Dado que as ondas rádio que o RFID utiliza são propensas a reflectirem-se em objectos
metálicos ou em materiais cerâmicos, sendo assim comprometida a certeza na localização de
determinados objectos.
Os ultra sons são um excelente método para identificar um veículo. No entanto tem a desvantagem de
aparecerem bastante mais tarde no mercado, numa altura em que o RFID parece levar uma grande
vantagem a caminho da padronização.

Gestão de Parques Pág. 15
6.6. Localização por Wireless – WIFI
Hoje em dia, muitas empresas já têm este tipo de tecnologia disponível a fim de proporcionar aos seus
empregados um acesso móvel e rápido à internet. No entanto, é importante perceber que tal como na
rede GSM, as rede wireless não foram planeadas para fazer localização. Mas podem de facto ser
adaptadas para que se consiga fazer as triangulações desejadas para a localização.
Mas este tipo de tecnologia, tal como na localização por rede GSM e RFID, tem um grande problema.
Para funcionar correctamente a potência do sinal que o emissor emite tem que ser muito estável. Se isso
não se verificar a qualidade da localização será muito pior.
A potência do sinal é o inverso do raio do cubo (1/R3 )
Imagem 13.
Sabendo isto, e medindo a potência no receptor conseguimos saber qual o raio. Fazendo isto para vários
emissores, três no mínimo, conseguimos encontrar a localização.
É de notar também que esta potência varia consoante as condições climatéricas, como tal é de esperar
uma qualidade pior no resultado com este tipo de sistema.
Um dos factores chaves que se identifica como importante para resolver este problema de gestão de
parques é a identificação. Algo que não é claro como será feito para esta opção.
Uma solução seria aproveitar o facto de que em praticamente todos os veículos que estão a ser
comercializados estão equipados com computadores de bordo, como tal é de esperar que no futuro essas
capacidades melhorem permitindo, por exemplo, o acesso à internet.
Isto seria uma vantagem, por exemplo, para empresas de transportes, o motorista não teria que se
deslocar do camião e ir receber as novas rotas, poderia simplesmente fazer o upload.
Mas voltando ao ponto se existe a possibilidade de acesso à internet, terá que existir um IP para esse
computador. Uma ideia a explorar seria a de atribuir um endereço IPV6 fixo a cada veículo e esse IP
identificar não só na ligação para o envio de pacotes UDP e TCP mas também para identificar o próprio
veículo.

Gestão de Parques Pág. 16
Exemplo:
Tabela 1.
Matricula Endereço IPV6
AU-65-56 3ffe:1900:4545:3:200:f8ff:fe21:67cf
Sabendo esse endereço e fazendo a triangulação seria possível localizar a posição do veiculo com a
matricula AU-65-56.
Dado que uma parte substancial das empresas detêm servidores, o custo do endereço seria
relativamente baixo.
7. Aplicações
Após o estudo das tecnologias que parecem mais promissoras com vista a resolução do problema,
vamos estudar em que situações concretas cada uma delas poderia ser mais adequada.
Como foi referido no início há dois tipos de mercados, o mercado dos parques automóveis e dos parques
industriais. Ambos tem especificações e requisitos diferentes, como tal, o sucesso de determinada
tecnologia estará sempre dependente da forma como cada tecnologia se adapta às mesmas
especificações e requisitos.
7.1. Parques automóveis
Hoje em dia um dos maiores problemas que se enfrenta nas urbanizações modernas é o problema do
trânsito e da falta de estacionamento. Como tal a gestão do parque é muito importante, poupando aos
proprietários dos veículos tempo e dinheiro.
Dentro destes parques automóveis temos dois tipos de aplicação. Uma será o estacionamento de rua e
outra será o estacionamento indoor em infra-estruturas feitas de raiz para esse feito. Também é
necessário diferenciar a tecnologia a aplicar em cada um, dado que os problemas a ultrapassar são
bastante diferentes.
Algo que será comum a qualquer uma das aplicações para o mercado automóvel será a capacidade para
cobrar ao utilizador automaticamente. Isto exige que o mesmo autorize os pagamentos por débito directo
da conta bancária. Para todas as soluções vou supor que no futuro é obrigatório ter indexado ao carro
uma conta bancária, isto serviria para por exemplo o pagamento das coimas à polícia.

Gestão de Parques Pág. 17
7.1.1. Estacionamento de Rua
Há vários aspectos a em ter em consideração para a resolução deste problema. Quando estamos a tentar
aplicar qualquer tecnologia como esta teremos sempre que ter algumas considerações prévias sobre o
que o sistema deve fazer. No mínimo deverá identificar correctamente o veículo, localizar a sua posição e
caso seja um lugar que é pago, o sistema deverá automaticamente cobrar o serviço.
O serviço GPS conjugado com GSM tem vários problemas para ultrapassar. O primeiro seria como
detectar se o veículo está de facto estacionado. O veículo pode estar simplesmente imobilizado devido a
por exemplo trânsito. Uma solução poderia ser detectar se o carro está ligado. Caso não esteja é
considerado como estando estacionado.
Um problema maior seria a qualidade da localização. Este sistema garante que o objecto estará no
máximo a 100 metros do local indicado. Mas 100 metros ainda é uma distância considerável, poderemos
estar a identificar um veículo como estando estacionado numa rua com pagamento de parque quando na
verdade já está na rua ao lado onde o estacionamento não é cobrado.
Outro problema seria as interferências de sinal. Como vimos o sinal de GPS que chega a terra é já fraco,
o que quer dizer que com certos obstáculos o sistema não conseguirá obter a localização. Por exemplo
as árvores que possam estar por cima do estacionamento poderão afectar a localização.
As tecnologias RFID, GSM e WiFi por triangulação também não seriam muito apropriadas para a
implementação. Estas tecnologias conseguirão prestar um melhor serviço para localizar do que o GPS,
no entanto podem ocorrer problemas semelhantes, fazendo com que a localização não seja tão precisa
quanto o desejado, devido a dificuldade em manter o sinal estável.
Outra hipótese seria colocar em cada lugar uma antena RFID. Esta hipótese parece muito dispendiosa
para ser implementada. Também teriamos que considerar o custo paisagístico de ter na cidade para cada
lugar de estacionamento um suporte para a antena RFID. No entanto, caso se optar por esta via o RFID
levaria uma vantagem, pois é já uma tecnologia presente para aplicações semelhantes, a Via Verde.
Com qualquer uma destas soluções também teríamos que ter atenção ao problema que referimos com o
GPS, detectar se o carro está de facto estacionado ou simplesmente parado no trânsito. A solução
poderia ser igual.
Outra solução possivel seria a instalação de Ultrasons, USID, no solo. Esta é, também, uma opção
bastante dispendiosa. Enquanto que para parques em construção não haveria problema, para os já feitos
seria um custo demasiado alto para colocar o sensor no solo. Isto para não falar no custo que haverá
para tentar que as pessoas adiram a este sistema dado que teríamos que instalar mais um sensor no
carro.

Gestão de Parques Pág. 18
Imagem 14.
Este sistema funcionaria da seguinte forma:
Para o sistema dizer que o carro está estacionado terá que receber o sinal de resposta num intervalo de
tempo limitado. Isto é possível porque sabemos a velocidade dos sinais. Vamos supor que sensor tenta
descobrir no instante x se está algum carro estacionado ou não. Sabemos a velocidade a que se desloca
o sinal, e sabemos também que a distância que tem que ser percorrida para o carro 1 é menor do que
para o carro 2. Vamos então achar um t que seja inferior ao tempo que demoraria o carro 2 a responder
na melhor das hipóteses e vamos dar-lhe uma margem de segurança. Caso recebamos um sinal dentro
do intervalo [x, x+t] consideramos que o carro está estacionado, caso contrário ignoramos.
Foi pesquisado a possibilidade de uma implementação de um sistema deste género com RFID no entanto
a informação encontrada era contraditória e sem validação científica, será um tema interessante a ver a
evolução.
Por fim, as câmeras que também têm várias desvantagens. A principal delas os obstáculos visuais que
existem uma cidade. Outra desvantagem grande é que por vezes as câmeras não conseguem fazer a
identificação dos veículos.
Mas aquela que é mais desvantajosa é que esta tecnologia não permite estacionamento em serie, só
estacionamento em paralelo. A razão é bastante simples, os carros bloqueiam a visibilidade para as
matrículas de outros carros.Nos anexos encontra-se mais sobre este assunto ( capítulo11.2. ).
Mas, supondo que todos os parques podem ser convertidos para só permitirem o estacionamento em
paralelo, teria de haver um número suficiente de câmeras que permitisse a visualização de cada um dos
lugares de estacionamento
Carro 1 Carro 2
Gestão de Parques Pág. 19
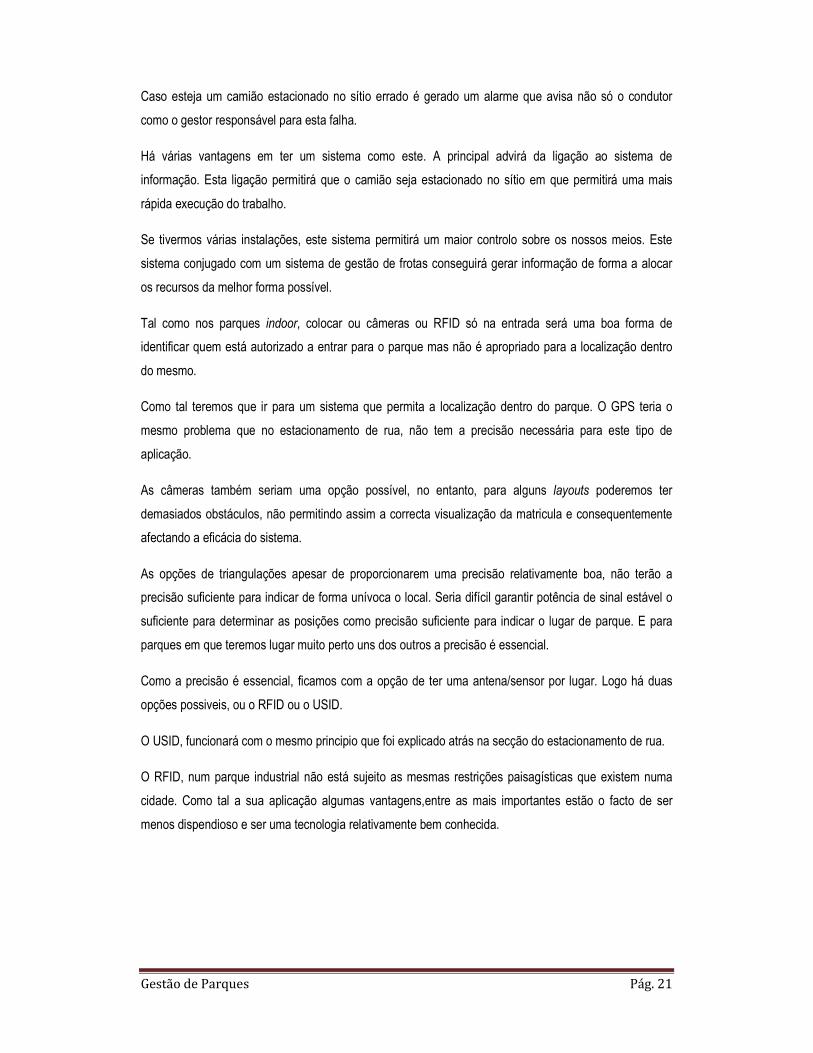
As câmeras poderiam ter um algoritmo que as varia a cada minuto, por exemplo, varrer o parque e tirava
imagens dos veículos que lá estavam. Caso a câmera detectasse o veículo, esta tentaria correr o
programa de reconhecimento caso contrário emitiria um sinal a dizer que o lugar está livre.
Em qualquer um destes sistemas caso o carro não esteja inserido na base de dados, ou seja se não tiver
aderido ao serviço, o sistema de informação passaria logo a informação para os reboques que
removeriam o veículo do local.
Outro problema que seria interessante resolver seria conseguir ter a informação de que lugares estão
disponíveis para estacionar. Qualquer que seja a solução que teremos para ter este sistema a funcionar
precisaremos sempre de enviar informação para o carro. Como tal precisaremos de uma rede e de um
objecto de leitura. Uma possibilidade seria conseguir por o GSM não só a enviar mas a receber
informação e descodifica-la e a apresentar ao condutor quais os lugares livres.
Seria bastante fácil de implementar por parque do gestor do parque seria só ter o sistema de informação
a enviar a informação dos lugares que estão vazios, ou seja dos lugares em que não identifica nada
nesse lugar.
7.1.2. Parque Indoor
Este tipo de parque é bastante diferente do anterior. Primeiro não temos o problema de identificar se o
carro está estacionado ou simplesmente de passagem pela rua. Quem entra para o parque vêm
consciente da sua opção.
Se ignorarmos também a localização dentro do parque, podemos implementar muito facilmente sistemas
que permitem fazer a gestão adequada do parque, bastando simplesmente fazer a identificação do carro
a entrada do parque, introduzir esse evento, identificar a saída, fechar o evento, fazer a cobrança. Tudo
isto de forma automática. É claro que para isto o proprietário terá que ter algo como os débitos directos.
Duas tecnologias que estão em excelentes condições para fazer isto, são ou as câmeras com o software
de reconhecimento de matrículas ou o RFID. Para o RFID poderia ser usada a Via Verde, ou futuramente
a matrícula electrónica.
Para este tipo de parque o, GPS não será opção porque sendo o parque indoor e grande parte das vezes
com vários andares, o sinal não tem força para atravessar.
Se optarmos por ter um sistema interno que faça a localização dentro do parque, o sistema de
triangulações quer de RFID, WiFi, GSM e USID, são possíveis, oferecendo uma boa precisão para a
localização. Ou seja este sistema conseguirá identificar se os carros estão ou não no parque e
conseguirá dar uma boa aproximação de onde o carro está estacionado. No não terá a precisão suficiente
para indicar com a total segurança o lugar onde está estacionado o carro.

Gestão de Parques Pág. 20
Poderia ser uma boa opção a instalação de um sistema de sensor por lugar. O RFID e o USID permitiram
uma aplicação deste género. No entanto, como é fácil de perceber haveria um custo bastante alto. Esta
tecnologia permitiria não só a localização dos carros mas também a informação de que lugares não estão
ocupados.
Também seria possível usar várias câmeras que teriam de conseguir cobrir todo o parque e conseguir ter
visibilidade para as matrículas. O sistema seria muito semelhante aquele que foi proposto para o
estacionamento de rua.
7.2. Parques Industriais
Para este mercado é importante perceber a importância que a gestão da cadeia logistica tem para os
custos de uma empresa. Como tal todas as opções para reduzir custos e melhorar a eficiência são
formas de ganhar margem, ganhando assim as vantagens competitivas que falamos no inicio.
Para cortar custos, a melhor forma será terminar com as ineficácias do parque. Ou seja, mal o camião
entra no parque é colocado no sítio onde vai realizar a tarefa. Recordemos que há vários tipos de
veículos que abastecem. E enquanto uns só podem ser abastecidos pelas docas outros só podem ser
abastecidos pelo empilhador.
Como tal para alocar os recursos da melhor forma vamos interligar a gestão do parque ao Sistema de
informação. Vamos calendarizar que entidades vão entrar, o tempo que terão para completar a tarefa e
sair. É quase como que adicionar um módulo de optimização ao sistema de informação em que os
sistemas de localização são os sensores. Vejamos o seguinte exemplo.
Imagem 15.
Supondo que temos um camião que vai abastecer. A mercadoria que vai ser carregada está próxima da
doca 1, como tal o camião será colocado o mais perto da doca 1 possível, a fim de minimizar o tempo que
o camião passa a ser abastecido.
Gestão de Parques Pág. 21
Caso esteja um camião estacionado no sítio errado é gerado um alarme que avisa não só o condutor
como o gestor responsável para esta falha.
Há várias vantagens em ter um sistema como este. A principal advirá da ligação ao sistema de
informação. Esta ligação permitirá que o camião seja estacionado no sítio em que permitirá uma mais
rápida execução do trabalho.
Se tivermos várias instalações, este sistema permitirá um maior controlo sobre os nossos meios. Este
sistema conjugado com um sistema de gestão de frotas conseguirá gerar informação de forma a alocar
os recursos da melhor forma possível.
Tal como nos parques indoor, colocar ou câmeras ou RFID só na entrada será uma boa forma de
identificar quem está autorizado a entrar para o parque mas não é apropriado para a localização dentro
do mesmo.
Como tal teremos que ir para um sistema que permita a localização dentro do parque. O GPS teria o
mesmo problema que no estacionamento de rua, não tem a precisão necessária para este tipo de
aplicação.
As câmeras também seriam uma opção possível, no entanto, para alguns layouts poderemos ter
demasiados obstáculos, não permitindo assim a correcta visualização da matricula e consequentemente
afectando a eficácia do sistema.
As opções de triangulações apesar de proporcionarem uma precisão relativamente boa, não terão a
precisão suficiente para indicar de forma unívoca o local. Seria difícil garantir potência de sinal estável o
suficiente para determinar as posições como precisão suficiente para indicar o lugar de parque. E para
parques em que teremos lugar muito perto uns dos outros a precisão é essencial.
Como a precisão é essencial, ficamos com a opção de ter uma antena/sensor por lugar. Logo há duas
opções possiveis, ou o RFID ou o USID.
O USID, funcionará com o mesmo principio que foi explicado atrás na secção do estacionamento de rua.
O RFID, num parque industrial não está sujeito as mesmas restrições paisagísticas que existem numa
cidade. Como tal a sua aplicação algumas vantagens,entre as mais importantes estão o facto de ser
menos dispendioso e ser uma tecnologia relativamente bem conhecida.
Gestão de Parques Pág. 22
8. Conclusões.
O mercado da localização começou a emergir nos últimos anos com várias empresas a oferecerem
serviços de gestão de frota. É de esperar que nos anos vindouros se diversifiquem para outros mercados,
sendo de esperar que a gestão de parques seja uma dessas aposta.
No entanto, como foi possível ver não há uma vantagem tecnológica absoluta de nenhuma tecnologia
sobre outra. As diferentes tecnologias têm diferentes situações em que são preferíveis.
Para o estacionamento de rua, vimos que o fundamental será a precisão da localização. As únicas
tecnologias que permitem esse tipo de localização são o USID e o RFID. No entanto a aplicação do RFID
tem várias desvantagens. Ninguém numa cidade iria gostar de ver o impacto visual de aplicar tal
tecnologia. Com antenas colocadas em postes por cima dos lugares de estacionamento. Isto porque a
sua aplicação no subsolo também não foi propriamente estudada. Resta o USID, que com a aplicação no
subsolo conseguirá uma excelente identificação. No entanto tem duas desvantagem, sendo estas a de
adicionar mais uma tag ao veículo e o investimento que é necessário. Todavia esta tecnologia também
servirá para conseguir informar de que lugares estão livres, esse serviço poderia ser cobrado
aumentando o retorno de uma aplicação como esta.
Para os parques indoor depende daquilo que pretendemos, se queremos simplesmente fazer o controlar
o acesso, as câmeras com o software de reconhecimento da matrícula ou o RFID serão as melhores
opções.
Dito isto se o objectivo for também proporcionar uma localização no parque, o USID e o RFID serão as
melhores opções. Pondo em cada lugar um sensor/antena. Esta opção no entanto é bastante
dispendiosa.
Como tal a melhor opção para este problema seria, uso das triangulações com o RFID. O sistema
conseguiria identificar se o carro esta ou não dentro do parque e conseguiria dar uma localização muito
aproximada da sua localização ao condutor. Esta será uma melhor opção do ponto de vista
técnico/económico. Sendo bastante menos dispendiosa que a de um sensor/antena por lugar.
Para os parques industriais, a precisão de localização é absolutamente fundamental como tal teremos
que aplicar a solução de um sensor/antena por lugar. Por ser uma tecnologia menos dispendiosa e mais
facilmente instalada optaremos pelo RFID para concretizar esse sistema de um sensor/antena por lugar.

Gestão de Parques Pág. 23
9. Ética
Quando se trata de agrupar informação, há sempre questões do foro das liberdades individuais. Um
sistema como este permitirá uma monitorização das entidades bastante alta. Com este sistema não será
preciso seguir alguém, conseguiremos aceder aos sítios onde parou.
Como tal é preciso descrição na utilização e parâmetros que reforcem a segurança, evitando que estes
dados sejam usados por alguém de forma indevida.
Gestão de Parques Pág. 24
10. Referências
http://www.e-plate.com/
IBM Global services Integrated technology services newsletter
http://pt.wikipedia.org/wiki/Middleware
www.viaverde.pt
http://www.identecsolutions.com/electroniclicenseplate.html
http://en.wikipedia.org/wiki/Triangulation
http://en.wikipedia.org/wiki/Global_Positioning_System
http://en.wikipedia.org/wiki/Multilateration
"Location Based Services for Mobiles: Technologies and Standards“, Shu Wang, Jungwon Min and Byung
K. Yi, IEEE International Conference on Communication (ICC) 2008, Beijing, China
http://www.e-plate.com/
http://www.identecsolutions.com/electroniclicenseplate.html
http://en.wikipedia.org/wiki/Triangulation
http://en.wikipedia.org/wiki/Global_Positioning_System
http://en.wikipedia.org/wiki/Multilateration
http://www.platerecognition.info/1103.htm
http://www.trueposition.com/web/guest/homepage
http://www.rretiquetas.com.br/imagens/produtos/esquema_rfid.jpg
http://www.sciam.com/article.cfm?id=indoor-positioning-system
http://en.wikipedia.org/wiki/Ultrasound
http://en.wikipedia.org/wiki/Ultrasound_Identification
http://www.novatronica.com/engobras.html
http://www.technovelgy.com/ct/Technology-Article.asp?ArtNum=20
Gestão de Parques Pág. 25
11. Anexos
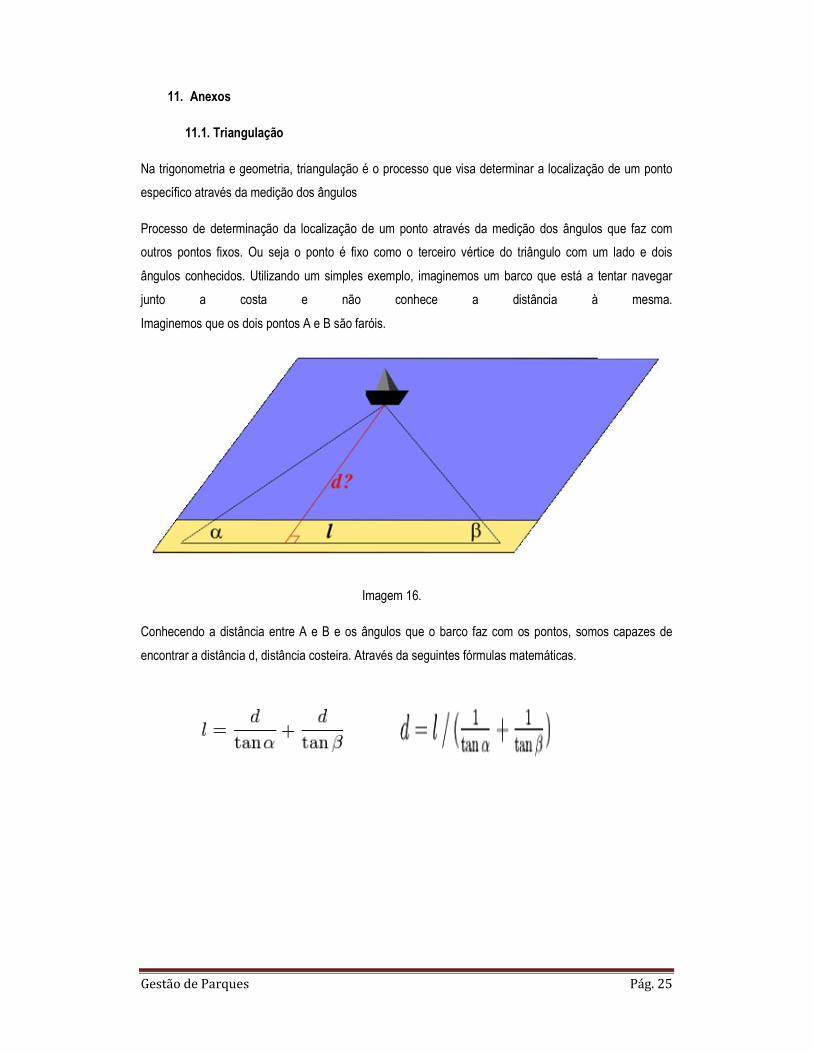
11.1. Triangulação
Na trigonometria e geometria, triangulação é o processo que visa determinar a localização de um ponto
específico através da medição dos ângulos
Processo de determinação da localização de um ponto através da medição dos ângulos que faz com
outros pontos fixos. Ou seja o ponto é fixo como o terceiro vértice do triângulo com um lado e dois
ângulos conhecidos. Utilizando um simples exemplo, imaginemos um barco que está a tentar navegar
junto a costa e não conhece a distância à mesma.
Imaginemos que os dois pontos A e B são faróis.
Imagem 16.
Conhecendo a distância entre A e B e os ângulos que o barco faz com os pontos, somos capazes de
encontrar a distância d, distância costeira. Através da seguintes fórmulas matemáticas.

Gestão de Parques Pág. 26
Imagem 17.
Para o espaço a triangulação espacial, imagine-se que os triângulos vermelho branco e amarelo são
satélites que estão em órbita por cima da terra. E que aquele ponto quer ser localizado, sabendo o tempo
que o sinal demora a chegar lá de cada um dos satélites é possível dizer com exactidão onde está
individuo ou objecto.

Gestão de Parques Pág. 27
11.2. Câmeras
A visibilidade da matricula é essencial, e como vemos pela imagem abaixo, isso não ocorre. Claro que
poderiamos variar o ângulo ou até procurar uma posição mais alta, no entanto basta pensar que um carro
que tenha a sua frente e a trás de si carrinha, impossibilitam a visibilidade da matricula desse carro por
parte de um objecto fixo.
Imagem 18.
A única possibilidade de solução para este problema seria o estacionamento em paralelo, assim como
vemos pela imagem é possível captar imagens que incluam a matrícula.
Imagem 19.