controle robusto de suspensÃo semi-ativa para ... · controle robusto de suspensão semi-ativa...
TRANSCRIPT

CLÁUDIO CRIVELLARO
CONTROLE ROBUSTO DE SUSPENSÃO SEMI-ATIVA PARA
CAMINHONETES UTILIZANDO AMORTECEDORES
MAGNETO-REOLÓGICOS
Tese apresentada à Escola Politécnica da
Universidade de São Paulo para obtenção
do Título de Doutor em Engenharia.
v.2
São Paulo
2008

2

173
CLÁUDIO CRIVELLARO
CONTROLE ROBUSTO DE SUSPENSÃO SEMI-ATIVA PARA
CAMINHONETES UTILIZANDO AMORTECEDORES
MAGNETO-REOLÓGICOS
Tese apresentada à Escola Politécnica da Universidade de São Paulo para obtenção do Título de Doutor em Engenharia. Área de Concentração: Engenharia Mecânica Orientador: Prof. Dr. Décio Crisol Donha Co-orientador: Prof. Dr. Edilson Hiroshi Tamai
v.2
São Paulo
2008

174
Este exemplar foi revisado e alterado em relação à versão original, sob responsabilidade única do autor e com a anuência de seu orientador. São Paulo, 17 de dezembro de 2008. Assinatura do autor __________________________ Assinatura do orientador _________________________
FICHA CATALOGRÁFICA
Crivellaro, Cláudio
Controle robusto de suspensão semi-ativa para caminhone- tes utilizando amortecedores magneto-reológicos / C. Crivellaro. -- ed.rev. -- São Paulo, 2008.
439 p.
Tese (Doutorado) - Escola Politécnica da Universidade de São Paulo. Departamento de Engenharia Mecânica.
1.Mecânica automotiva 2.Amortecedores 3.Suspensão mecâ- nica I.Universidade de São Paulo. Escola Politécnica. Departa-mento de Engenharia Mecânica II.t.

175
Dedico este trabalho aos meus pais, à minha esposa Regiane
e ao meu filho Enzo.

176
AGRADECIMENTOS Agradeço primeiramente a Deus, por ter me dado inspiração, coragem, otimismo e disposição para conduzir e finalizar este trabalho, com qual eu aprendi muito mais do que podia imaginar.
À minha esposa, Regiane, pelo apoio e incentivo, e principalmente pela sua paciência e cumplicidade. Também ao meu filho, Enzo, que com sua alegria e criatividade é uma grande fonte de inspiração para mim.
Aos meus pais, pelo apoio, pelo suporte, e, sem dúvida, pela educação que me proporcionaram.
Ao meu orientador Prof. Dr. Décio Crisol Donha, pela sua perspicácia nas correções, pela críticas enriquecedoras, e pelo apoio e orientação neste trabalho.
Ao meu co-orientador Prof. Dr. Edilson Hiroshi Tamai, por contribuir com materiais imprescindíveis à execução deste trabalho, e pelo suporte no laboratório de dinâmica.
Ao Prof. Dr. Antônio Bombard da UNIFEI de Itajubá, MG, primeiramente pela amizade que construímos, pelos conselhos e dicas, e também por fornecer o fluido magneto-reológico para os protótipos, e pelos artigos e patentes sobre o assunto.
Ao Prof. Dr. José Roberto Cardoso, pela utilização do software Flux2D® no laboratório LMAG do departamento de Engenharia Elétrica da Escola Politécnica da USP, e pela sua orientação nas análises de elementos finitos magnetostática da válvula do amortecedor magneto-reológico.
Ao Prof. Dr. Jaime da Cruz, pela amizade, pelo incentivo e pelas dicas que me foram muito úteis.
À Prof. Doutora Denise Consonni, pela utilização do seu laboratório para testes do circuito eletrônico de acionamento do amortecedor magneto-reológico.
À Silvia Della Torre, pelas orientações e dicas quanto à organização do texto, organização da bibliografia e às normas e procedimentos das bibliotecas da USP.
Ao Eng.º e Mestre Núncio Perrella, pelo valiosíssimo suporte em relação ao “hardware” do DSP da Texas Instruments, e pela amizade que iniciamos.
À DANA por proporcionar a oportunidade da construção e testes do amortecedor magneto-reológico.
Ao Eng.º Eduardo Carlos Alves e Eng.º Hideo Matsuzaki da Affinia Automotive Group, pelo apoio na construção dos protótipos do amortecedor magneto-reológico.
Ao Eng.º Eduardo Prelog, pela ajuda nos trabalhos de instalação dos equipamentos no veículo e auxílio nos testes experimentais, e pelos finais de semana que deixou de estar com a família para me ajudar montagem e nos testes. E ao seu pai, Sr. Slavko Prelog, por ceder gentilmente a garagem de sua casa para ser nossa oficina.
Ao futuro Eng.º Ricardo dos Santos Lima, pelo seu excepcional trabalho de ferramentaria na construção dos componentes mais importantes dos amortecedores magneto-reológicos, e também pelos seus conselhos e dicas.
A todos os colegas da DANA, da Affinia e da USP que direta ou indiretamente colaboraram na execução deste trabalho.

177
"Não creias impossível o que apenas improvável parece". (Shakespeare)

178
RESUMO
A utilização de sistemas semi-ativos no controle de movimento e vibração vem crescendo muito nos últimos anos, e está se firmando como a opção mais econômica em muitas aplicações. Os sistemas de controle semi-ativos baseados em fluidos magneto-reológicos (MR) já são empregados no controle de vibrações desde máquinas de lavar a grandes pontes suspensas, e até mesmo no controle de vibração de edifícios sujeitos a abalos sísmicos. No controle de movimento, eles têm sido aplicados em aparelhos de fisioterapia, próteses de joelho humano e embreagens. No setor automobilístico, os sistemas semi-ativos são empregados em sistemas de controle da suspensão e sistemas anti-rolagem, e também no controle de sistemas de torque e tração. Visto a crescente importância dos sistemas de controle semi-ativo, este trabalho aborda este assunto dividindo-o em duas partes: a primeira, apresentada no volume 1, trata do projeto de atuadores magneto-reológicos e do seu modelamento dinâmico voltado para projetos de controle; e a segunda parte, apresentada no volume 2, trata de projeto de controladores para sistemas semi-ativos, mais especificamente voltados para o controle de suspensão veicular semi-ativa, buscando a melhoria do desempenho em conforto, segurança e dirigibilidade do veículo. Na primeira parte, a maior contribuição deste trabalho está em preencher uma lacuna na literatura no que diz respeito a uma técnica sistemática de projeto de atuadores magneto-reológicos e da forma mais adequada de sua representação dinâmica para projetos de controle, que é feita a partir de dados experimentais. Na segunda parte deste trabalho buscou-se desenvolver um sistema de controle economicamente viável para veículos utilitários (caminhonetes principalmente). Estes são os veículos que mais carecem de sistemas de suspensão capazes de atender a uma grande variedade de situações (variação de pista, variação de carga), e cujo mercado exige uma relação custo/benefício melhor que aquela dos mercados de carros de luxo, onde estes sistemas são empregados atualmente. Como resultados mais importantes deste trabalho têm-se: uma proposição para o uso da lei de controle LQG/LTR em sistemas não estritamente próprios; um modelo de um veículo utilitário completo com sete graus de liberdade e capaz de representar as situações mais importantes do comportamento dinâmico deste tipo de veículo; o desenvolvimento de uma estratégia de controle robusto baseado na técnica LQG/LTR, adequada para trabalhar com atuadores semi-ativos, e que utiliza sensores de custo compatível com a aplicação. O sistema de controle proposto foi capaz de melhorar o desempenho em conforto e segurança, evitando situações de perda de aderência dos pneus e comportamentos dinâmicos indesejáveis destes veículos, que foi verificado experimentalmente e através de simulações em computador. Palavras chave: suspensão veicular, caminhonetes, magneto-reológico, controle robusto, LQG/LTR, semi-ativo, modelo Bouc-Wen discreto.

179
ABSTRACT The application of semi-active systems to motion and vibration control has significantly grown during the last years, and it is becoming an economically viable option for several applications. Semi-active systems based on magneto-rheological (MR) fluids were applied to vibration control ranging from washing machines to suspended bridges, and also in vibration control of buildings under seismic tremors. Regarding the movement control, they have been used in gym apparati, human knee prosthesis and clutches. More specifically in the automotive industry, semi-active systems have been applied in suspension and anti-roll systems, and also in torque and traction control systems. This work treats this subject dividing it into two parts: the first one, presented in volume 1, deals with the design of semi-active actuators based on magneto-rheological fluids and dynamic modeling; and the second one, presented in volume 2, deals with the design of semi-active control for vehicular suspension systems. The control main objective is the performance improvement in comfort, safety and handling features of a vehicle. In the first part, the main contribution of this work is to fulfill a literature gap regarding a systematic procedure for design of magneto-rheological actuators and to find a better representation for the dynamic behavior regarding the control system development, which is done based on experimental data analysis. The second part of this work leaded with the development of a vehicular suspension system for utility vehicles (for SUVs, and mainly for light trucks), which need suspension systems able to face a great number of situations (road variation, load variation, etc.), and which present stability problems due to its high gravity center height. Important results of this work are: the development of a robust control strategy based on LQG/LTR techniques for non-strictly proper systems, the development of a dynamic model for light trucks and SUVs with seven degrees of freedom; the development of a robust control strategy based on the LQG/LTR synthesis, suit to work with semi-active actuators, and using sensors with costs compatible to the application. The proposed control system was able to improve the performance of comfort and safety, avoiding the loss of adherence between tires and the ground and other undesirable dynamic behaviors of these vehicles, that was verified experimentally and through computer simulations. Key words: car suspension, pickup trucks, magneto-rheological, robust control, LQG/LTR, semi-active, Bouc-Wen discrete-time model. .

180
LISTA DE FIGURAS
Figura 1.1 – Veículos que já utilizam suspensão semi-ativa e amortecedores MR.............. 197 Figura 2.1 – Densidade espectral de potência de vários terrenos (SEVIN e PILKEY, 1971).
........................................................................................................................... 216 Figura 2.2 – (a) Comparação do modelo dado pela equação (2.1) com n=-2,02 e a medida das
irregularidades de um trecho da “Rochester road” conforme Smith (1982 op. cit.). ................................................................................................................... 217
Figura 2.3 – Direções de medida da vibração no corpo humano.......................................... 218 Figura 2.4 – Limite de exposição, fadiga e conforto para 1 minuto e 24 horas de exposição à
vibração no corpo humano, conforme ISO-2631 (GRIFFIN, 1990)................. 218 Figura 2.5 – Curvas de aceleração com o mesmo valor eficaz. ............................................ 219 Figura 2.6 – Descontinuidade no sinal “força” gerado por um sistema semi-ativo.............. 220 Figura 2.7 – Histerese na relação força versus velocidade nos amortecedores MR. ............ 221 Figura 2.8 – Modelo com um grau de liberdade (1 DOF). ................................................... 222 Figura 2.9 – Desempenho ótimo para modelo de 1 DOF – SkyHook. .................................. 224 Figura 2.10 – Modelo de um controlador ativo baseado na regra SkyHook. ........................ 225 Figura 2.11 – Diagrama de bode de V2(s)/V1(s). ................................................................... 226 Figura 2.12 – Modelo com dois graus de liberdade (2 DOF). .............................................. 227 Figura 2.13 – Acelerômetro baseado na tecnologia MEMS. ................................................ 231 Figura 2.14 – Sensor de deslocamento da suspensão dianteir do Corvette (Halverson, 2003).
........................................................................................................................... 232 Figura 2.15 – Sistema de coordenadas de referência. ........................................................... 233 Figura 2.16 – Desenho do chassi de uma caminhonete em CAD 3D. .................................. 235 Figura 2.17 – Suspensão com feixes de mola, tipo Hotchkiss. ............................................. 237 Figura 2.18 – Variação lateral na região de contato em função da excitação vertical do lado
oposto. ............................................................................................................... 239 Figura 3.1 – Modelo físico do veículo com sete graus de liberdade..................................... 244 Figura 3.2 – Detalhe do modelo físico mostrando os movimentos da carroceria................. 245 Figura 3.3 – Posição do atuador no modelo físico................................................................ 249 Figura 3.4 - Diagrama de Blocos do sistema do modelo do veículo. ................................... 251 Figura 3.5 - Diagrama de Blocos do modelo com separação dos modos de movimentação do
corpo rígido e torção da massa suspensa do veículo......................................... 254 Figura 3.6 - Diagrama de Blocos do sistema de controle em malha fechada. ...................... 257 Figura 3.7 - Diagrama de Blocos do sistema de controle em malha fechada. ...................... 259 Figura 3.8 - Diagrama de Bode para estabilidade e desempenho robustos. ......................... 261 Figura 3.9 - Diagrama de blocos do sistema ativo com o controlador. ................................ 263 Figura 3.10 – Descrição do sistema com o efeito da perturbação na saída da planta.. ......... 264 Figura 3.11 – Novas barreiras de desempenho e estabilidade. ............................................. 265 Figura 3.12 – Diagrama de blocos da estrutura interna do controlador H(s). ...................... 267 Figura 3.13 - Diagrama de blocos do sistema controlado..................................................... 277 Figura 3.14 – Diagrama de blocos da estrutura interna do controlador H(s). ...................... 278 Figura 3.15 – Diagrama de blocos equivalente do controlador H(s). ................................... 279 Figura 4.1 – Dimensões do veículo....................................................................................... 286 Figura 4.2 – Dimensões da suspensão. ................................................................................. 287 Figura 4.3 – Cálculo da rigidez da mola dianteira. ............................................................... 288 Figura 4.4 – Cálculo da rigidez da mola traseira. ................................................................. 289 Figura 4.5 – Modelo 3D em CAD e a massa de cada componente. ..................................... 290 Figura 4.6 – Exemplos de equipamentos de teste “four-post” e “multi-axis”. ..................... 292

181
Figura 4.7 – Forma construtiva de um acelerômetro MEMS da Freescale™. ......................293 Figura 4.8 – Instalação dos acelerômetro na carroceria na posição acima de cada roda.. ....294 Figura 4.9 – Instalação dos sensores acelerômetros nas rodas. .............................................295 Figura 4.10 – Instalação dos sensores de deslocamento no veículo......................................295 Figura 4.11 – Diagrama dos recursos e IO do DSP TMS320F2812. ....................................296 Figura 4.12 – Placa do Kit eZdsp F2812 e seus conectores. .................................................297 Figura 4.13 – Diagrama de blocos em Simulink para aquisição dos dados via RTDX. .......298 Figura 4.14 – Diagrama de blocos para condicionamento dos sinais vindos do bloco ADC.
...........................................................................................................................299 Figura 4.15 – Lombadas utilizadas como obstáculos nos experimentos...............................300 Figura 4.16 – Caminhonete parada com os obstáculos à frente. ...........................................301 Figura 4.17 – Fotos mostrando a seqüencia do experimento com lombadas alternadas. ......301 Figura 4.18 – Placa do Kit eZdsp F2812 montada no veículo e o PC conectado à placa. ....302 Figura 4.19 – Gráfico da integral dos sinais de velocidade ue estimados. ............................306 Figura 4.20 – Janelas identificando as lombadas. .................................................................306 Figura 4.21 – Curvas dos polinômios interpolando o sinal fora das janelas. ........................307 Figura 4.22 – Resultado final da estimação dos contornos dos obstáculos...........................308 Figura 4.23 – Sinais de velocidade vertical impostos pelos obstáculos a cada roda do veículo.
...........................................................................................................................308 Figura 4.24 – Comparação entre os sinais experimentais e simulados da aceleração vertical
da carroceria do veículo.....................................................................................312 Figura 4.25 – Comparação entre os sinais experimentais e simulados do deslocamento
relativo entre roda e carroceria do veículo. .......................................................313 Figura 4.26 – Comparação entre os sinais experimentais e simulados da aceleração vertical
das rodas do veículo. .........................................................................................314 Figura 4.27 – Curvas velocidade versus força dos amortecedores originais do veículo. ......316 Figura 4.28 – Modelo CAD em 3D dos amortecedores MR.................................................322 Figura 4.29 – Detalhamento em CAD 2D dos amortecedores MR dianteiros. .....................323 Figura 4.30 – Detalhamento em CAD 2D dos amortecedores MR traseiros. .......................324 Figura 4.31 – Protótipos dos amortecedores MR. .................................................................325 Figura 4.32 – Resultado do 1º experimento para o atuador dianteiro MR1. .........................326 Figura 4.33 – Resultado do 1º experimento para o atuador dianteiro MR2. .........................326 Figura 4.34 – Resultado do 1º experimento para o atuador traseiro MR3. ...........................327 Figura 4.35 – Resultado do 1º experimento para o atuador traseiro MR4. ...........................327 Figura 4.36 – Gráficos de calibração dos atuadores..............................................................329 Figura 4.37 – Diagrama de blocos em Simulink® do modelo do atuador MR1....................331 Figura 4.38 – Comparação das simulações do Simulink com os sinais de força experimentais.
...........................................................................................................................332 Figura 4.39 – Efeito de atrito de Coulomb do atuador MR1 sem excitação elétrica. ...........333 Figura 4.40 – Efeito de atrito de Coulomb do atuador MR1 sem excitação elétrica e após o
processo de magnetização do núcleo da válvula. ..............................................334 Figura 4.41 – Atuadores MR instalados na caminhonete......................................................335 Figura 4.42 – Comparação entre os sinais para tensão de controle igual a zero volts. .........337 Figura 4.43 – Comparação entre os sinais para tensão de controle igual a 3 volts. ..............338 Figura 4.44 - Diagrama de blocos do sistema de controle em malha fechada. .....................342 Figura 4.45 - Diagrama de blocos do sistema de controle em malha fechada. .....................343 Figura 4.46 – Bode multivariável do sinal D(s) em relação a perturbação W(s)...................344 Figura 4.47 - Bode multivariável do sinal Yo(s) em relação ao sinal de controle U(s). ........344 Figura 4.48 - Bode multivariável GN(s), mostrando todos os valores singulares. ................346 Figura 4.49 - Bode multivariável Gst(s), mostrando todos os valores singulares..................347

182
Figura 4.50 - Bode multivariável Gst(s) com as saídas de deslocamento multiplicadas por 20............................................................................................................................ 349
Figura 4.51 - Bode multivariável Go(s), cuja saída é a soma ponderada das saídas de aceleração e deslocamento (cor preta, traçado grosso). .................................... 350
Figura 4.52 – Comparação dos diagramas de Bode multivariável Go(s) e Gor(s). ............... 352 Figura 4.53 – Valores singulares de Hankel do sistema Gor(s)............................................. 353 Figura 4.54 – Comparação dos diagramas de Bode multivariável Go(s) e Gorb(s). .............. 354 Figura 4.55 – Diagramas de Bode multivariável de Gorbn(s). ............................................... 355 Figura 4.56 – Valores singulares de Hankel do sistema Gorbn(s).......................................... 356 Figura 4.57 – Barreiras de robustez. ..................................................................................... 358 Figura 4.58 – Função objetivo gerada por 1pL e µ =25....................................................... 359
Figura 4.59 – Função objetivo gerada por 2pL e µ =2 x 10-4. ............................................. 360
Figura 4.60 – Função objetivo gerada por 3pL e µ =0,002. ................................................ 360
Figura 4.61 – Função objetivo gerada por 3pL e µ =5 x10-4. .............................................. 361
Figura 4.62 – Resposta em freqüência da MFT )( ωjKFG gerado 3pL , com µ =0,002
(gráfico da esquerda) e µ =5 x10-4 (gráfico da direita). ................................... 362
Figura 4.63 – Resposta em freqüência da MFT )()( R ωω jj HG N ⋅ , com µ =0,002 (gráfico da
esquerda) e µ =5 x10-4 (gráfico da direita). ...................................................... 364
Figura 4.64 – Mapa de pólos e zeros e resposta em freqüência da MFT )(R ωjH , com µ =0,002 (gráfico da esquerda) e µ =5 x10-4 (gráfico da direita). ................... 366
Figura 4.65 – Diagrama de blocos do controlador )(R sH em malha fechada. ..................... 367 Figura 4.66 – Comparação do desempenho entre o controle ativo em malha fechada e a
planta passiva, com µ =0,002 (gráficos da esquerda) e µ =5 x10-4 (gráficos da direita). .............................................................................................................. 368
Figura 4.67 – Variação da deformação dos pneus nos sistemas ativos em relação ao passivo............................................................................................................................ 369
Figura 4.68 – Diagrama de blocos do compensador............................................................. 372 Figura 4.69 – Resultados de simulações do atuador com o compensador “avanço-atraso”. 373 Figura 4.70 – Sinais de velocidade vertical da pista não pavimentada................................. 376 Figura 4.71 – Sinais de aceleração vertical da carroceria sobre as rodas. ............................ 381 Figura 4.72 – Sinais de deslocamento relativo entre roda e carroceria (“stroke”). .............. 382 Figura 4.73 – Sinais de deformação dos pneus..................................................................... 383 Figura 4.74 – Sinais de aceleração vertical da carroceria sobre as rodas e “stroke”. ........... 385 Figura 4.75 – Sinais de deformação dos pneus e perdas de contato entre o pneu e o solo... 386 Figura 4.76 – Sinais de aceleração vertical da carroceria sobre as rodas. ............................ 391 Figura 4.77 – Sinais do “stroke” e de deformação dos pneus............................................... 391 Figura 4.78 – Sinais de aceleração vertical da carroceria sobre as rodas e “stroke”. ........... 392 Figura 4.79 – Sinais de deformação dos pneus e perdas de contato entre o pneu e o solo... 392 Figura 4.80 – Sinais de força de controle: grampeamento convencional (curva em vermelho)
versus proposto (curva em preto)...................................................................... 393 Figura 4.81 – Comparação da força do sistema ativo (vermelho) com o semi-ativo (preto).396 Figura 4.82 – Gráfico “radar” com os índices de desempenho............................................. 400 Figura 4.83 – Módulos de potência prontos para serem instalados no veículo. ................... 402 Figura 4.84 – Diagrama em blocos do sistema de controle implementado no Simulink®.... 403 Figura 4.85 – Gráficos com o resultado do teste ANOVA. .................................................. 405 Figura 4.86 – Gráfico “radar” com os indicadores dos testes experimentais. ...................... 406 Figura A.1 – Modelo com um grau de liberdade(1DOF). .................................................... 424
183
Figura C.1 – Diagrama elétrico do circuito dos acelerômetros.............................................429 Figura C.2 – Diagrama elétrico do circuito dos sensores de deslocamento. .........................429 Figura C.3 – Circuito de interface entre os sensores e as entradas do ADC.........................430 Figura C.4 – Sensores acelerômetros e de deslocamento encapsulados e prontos para
instalação no veículo. ........................................................................................430 Figura C.5 – Gráficos de calibração dos acelerômetros da carroceria. .................................431 Figura C.6 – Gráficos de calibração dos acelerômetros das rodas........................................432 Figura C.7 – Gráficos de calibração dos sensores de deslocamento dianteiros. ...................434 Figura C.8 – Gráfico de calibração do sensor de deslocamento traseiro esquerdo...............436 Figura C.9 – Gráfico de calibração do sensor de deslocamento traseiro direito...................436

184
LISTA DE SÍMBOLOS
Dα requisito de desempenho para acompanhamento de sinal referência;
Nα requisito de desempenho para rejeição ao erro e ruído de medida;
Rα requisito de desempenho para rejeição à perturbações;
∂α requisito de desempenho para insensibilidade a variações da planta;
cβ coeficiente do modelo do amortecedor convencional na compressão;
tβ coeficiente do modelo do amortecedor convencional na tração;
)(sεM erro de modelagem;
ji ,ε medida do erro do sinal i (i = 2,3 ou 4) com a roda j (j = 1,2,3 ou 4);
ζ vetor dos erros;
fη constante de alavancagem da suspensão frontal;
rη constante de alavancagem da suspensão traseira;
)(tθ ângulo do movimento rolamento; λ′ vetor dos multiplicadores de Lagrange;
)(tξ vetor com os movimentos de translação e rotação da massa suspensa;
Mσ maior valor singular;
mσ menor valor singular;
minσ menor valor singular;
maxσ maior valor singular;
RLτ constante de tempo de um circuito elétrico RL;
)(tϕ ângulo do movimento arfagem; ψ parcela do funcional de custo que depende do tempo final;
∆G(s) classe de incertezas aditivas;
Nω freqüência um pouco acima da freqüência de corte do sistema;
oω maior freqüência de interesse para o projeto do controlador;
Ω freqüência espacial (ou número de onda) [rad/m];
b coeficiente de amortecimento viscoso [N.s/m];
cb coeficiente de amortecimento viscoso de compressão [N.s/m];
tb coeficiente de amortecimento viscoso de tração [N.s/m];
SHb coeficiente de amortecimento viscoso do ”Sky Hook” [N.s/m];
afc coeficiente de amortecimento residuais da suspensão dianteira [N.s/m];
arc coeficiente de amortecimento residuais da suspensão traseira [N.s/m];
cf coeficiente de amortecimento dos amortecedores dianteiros [N.s/m];
foc coeficiente de amortecimento residuais da suspensão dianteira [N.s/m].;
cr coeficiente de amortecimento dos amortecedores traseiros [N.s/m];
roc coeficiente de amortecimento residuais da suspensão traseira [N.s/m];
ct coeficiente de amortecimento dos pneus [N.s/m]; d distância entre centro de massa e a conexão dos elementos da suspensão (m);

185
dse comprimento do semi-eixo do eixo diferencial [m];
Me valor escalar proporcional ao erro de modelagem; f índice que significa “front” ou frente; k coeficiente de rigidez da mola [N/m]; kar coeficiente de rigidez da barra anti-rolamento no modelo do veículo [N/m]; kbe coeficiente de rigidez da barra anti-rolamento real [N/m]; kf coeficiente de rigidez das molas dianteiras [N/m]; kr coeficiente de rigidez das molas traseiras [N/m]; kt coeficiente de rigidez dos pneus [N/m];
12k coeficiente de rigidez entre a massa suspensa e a massa não suspensa [N/m]; l1 distância entre o centro de massa suspensa do veículo e o eixo dianteiro [m]; l2 distância entre o centro de massa suspensa do veículo e o eixo traseiro [m]; lwb distância entre eixos do veículo, é a soma de l1 e l2 ; m1 massa da roda (massa não-suspensa) [kg]; m2 massa do corpo do veículo (massa suspensa) [kg]; m3 massa do eixo diferencial (massa não-suspensa) [kg]; n parâmetro exponencial da fórmula de Thompson;
)(ωp barreira de robustez do desempenho; r índice que significa “rear” ou traseira; ui força do atuador i;
LQu força solução de um problema LQ para um sistema de 1º de liberdade;
u(t) vetor de entrada de controle; v velocidade de movimentação do pistão do amortecedor;
)(tw vetor de distúrbios de entrada; x , x (t) vetor de variáveis de estado;
)(tx& vetor das derivadas das variáveis de estado;
1x deflexão do pneu;
2x& aceleração vertical da massa suspensa;
3x deflexão da suspensão;
)(1 ty vetor dos deslocamentos relativos entre a pista e o centro das rodas;
)(2 ty vetor das acelerações nos quatro pontos do corpo do veículo sobre cada roda;
)(3 ty vetor dos deslocamentos relativos entre as rodas e a carroceria;
( )t4y vetor das acelerações verticais das rodas;
( )t5y vetor das velocidades relativas entre roda e carroceria;
iy5 elementos do vetor ( )t5y ;
ijy , elemento i do vetor de saída j;
)(01 tz vetor dos deslocamentos relativos entre o solo e o centro das rodas do veículo;
)(12 tz vetor dos deslocamentos relativos entre a roda e a carroceria do veículo;
)(0 tz& vetor das velocidades verticais imposta pelas irregularidades da via;
)(01 tz& velocidades relativas;
)(1 tz& vetor de velocidades verticais de cada uma das rodas frontais, a velocidade vertical do centro de massa do eixo diferencial traseiro, e também a sua velocidade angular;
)(12 tz& velocidades relativas entre rodas e carroceria;
)(tzCG movimento vertical do centro de massa do corpo suspenso;

186
A constante de proporcionalidade da fórmula de Thompson; A matriz que relaciona as variáveis de estado às suas derivadas; B matriz que relaciona as entradas )(tu a )(tx& ;
nB matriz B normalizada; mn
C× espaço das matrizes n x m de números complexos;
nC espaço dos vetores números complexos de dimensão n;. C matriz que relaciona as variáveis de estado )(tx às saídas )(ty ;
iC submatrizes da matriz C, i = 1,2,3,4 ou 5;
01C matriz do coeficientes de amortecimento dos pneus;
12C matriz do coeficientes de amortecimento dos amortecedores do veículo; D matriz que relaciona as entradas )(tu as saídas )(ty de uma planta;
ijD submatrizes da matriz D, i = 1,2,3 ou 4 e j = 1 ou 2;
nD matriz D normalizada; DD índice que significa “dianteiro direito”; DE índice que significa “dianteiro esquerdo”; D(s) vetor de sinais de perturbações exógenas;
)(sE vetor de sinais de erro; )(vF força do amortecedor convencional em função da velocidade v;
AF Força aplicada pelo atuador referente à roda dianteira esquerda;
BF Força aplicada pelo atuador referente à roda dianteira direita;
CF Força aplicada pelo atuador referente à roda traseira esquerda;
DF Força aplicada pelo atuador referente à roda traseira direita;
KFG matriz de transferência da identidade de Kalman;
NG matriz de transferência da planta nominal;
)(sG matriz de transferência da planta.; H matriz Hamiltoniana.;
H matriz de transferência do controlador;
nH matriz de transferência do controlador normalizada;
I matriz identidade; J funcional de custo; J3 momento de inércia do eixo diferencial em relação ao eixo ‘x’ [kg.m2];
Jθ momento de inércia da massa do veículo no movimento de rolamento [kg.m2]; Jϕ momento de inércia da massa do veículo no movimento de arfagem [kg.m2];
cK matriz de ganho do controlador;
oK matriz de ganho do observador;
01K matriz de coeficientes de rigidez dos pneus;
12K matriz de coeficientes de rigidez das molas; L matriz Lagrangeana;
1L matriz que relaciona o vetor )(1 tz& às quatro velocidades verticais das rodas;
2L matriz que relaciona os deslocamentos dos movimentos de arfagem, caturro e rolamento com os quatro deslocamentos verticais do corpo suspenso do veículo sob os quatro pontos de conexão da suspensão;
187
1M matriz de inércia composta pelas massas das duas rodas dianteiras, e a massa e o momento de inércia do eixo traseiro;
2M matriz de inércia composta pela massa e pelos momentos de inércia de rotação do corpo rígido que representa a massa suspensa do veículo;
sM massa suspensa do modelo de 1 DOF do veículo [kg];
N(s) vetor dos sinais de erro e ruídos de medida; 0 matriz de zeros;
cP matriz solução da equação de Riccati para o ganho do controlador;
oP matriz solução da equação de Riccati para o ganho do observador;
R2 índice r-quadrado que mede a linearidade; R(s) vetor de sinais de referência;
uS matriz de normalização da planta; TS base de um subespaço vetorial nas dimensões: vertical, rolamento e arfagem;
Ta período de amostragem; TD índice que significa “traseiro direito”; TE índice que significa “traseiro esquerdo”; U força entre solo e massa suspensa no modelo de 1 DOF; U(s) vetor de sinais de controle (ou de entrada); V velocidade do veículo; V1 velocidade relativa entre solo e massa suspensa no modelo de 1 DOF; V2 velocidade vertical da massa suspensa no modelo de 1 DOF;
)(sY vetor de sinais de saída;
Operadores
( )T• operação de transposição de matriz;
( ) 1−• operação de inversão de matriz;
( )⊥• operação de pseudo inversão de matriz;
•& operação de derivada em relação ao tempo; •∂ operador variacional;
•E valor esperado de variável estocástica;
• indica estimativa de variável;
1• norma 1;
2• norma 2;
F• norma de Frobenius;
( )•+→0
limρ
limite de uma função de ρ, com ρ tendendo a zero positivo;

188
LISTA DE ABREVIATURAS E SIGLAS
ADC “analogic to digital converter” CAD “computer aided design” CAE “computer aided engineering” CCS “code composer studio” CI circuito integrado CPU “central processing unit” DAC “digital to analogic converter” DOF “degree of freedom” DSP “digital signal processor” DVS decomposição em valores singulares EAR equação algébrica de Riccati ER “electro-rheological” ou eletro-reológico FK filtro de Kalman FRF função de resposta em freqüência GNV gás natural veicular JTAG “joint test action group” (vide norma IEEE 1149.1) LPV “linear parameter varying” LQG “linear quadratic gaussian” LQR “linear quadratic regulator” LTR “loop transfer recovery” MR magneto-reológico MEF método dos elementos finitos MEMS “micro-electro-mechanical system” MFT matriz de funções de transferência MIMO “multi-inpu-multi-output MIPS “milhon of instructions per second” MMA “micro-machined accelerator” PC “personal computer” PQS programação quadrática sequencial PSD “power spectral density” PTFE poli-tetrafluoroetileno PWM “pulse width modulation” RAM “random access memory” RISC “reduced instruction set code” RK4 “Runge-Kuta fourth order” RLQ regulador linear quadrático RMS “root mean square” RTDX “real-time data exchange” RTB realização balanceada e truncada RTOS “real-time operating system” SA semi-ativo SISO “single-input-single-output” SPD semi-plano direito SPE semi-plano esquerdo SQP “sequential quadratic programming” SUV “sport utility vehicle”

189
SUMÁRIO
PARTE 1 PROJETO DO AMORTECEDOR MAGNETO-REOLÓGICO.............19
190
PARTE 2 PROJETO DO SISTEMA DE SUSPENSÃO SEMI-ATIVO................193 1 INTRODUÇÃO............................................................................................................ 195
1.1 JUSTIFICATIVA................................................................................................... 195 1.2 OBJETIVO............................................................................................................. 198 1.3 METODOLOGIA .................................................................................................. 199 1.4 CONTRIBUIÇÕES................................................................................................ 200
2 REVISÃO DA LITERATURA................................................................................... 201
2.1 SISTEMAS DE SUSPENSÃO VEICULAR......................................................... 201 2.1.1 PERCEPÇÃO DO CONFORTO ................................................................... 202 2.1.2 SISTEMA DE SUSPENSÃO PASSIVO....................................................... 204
2.2 SISTEMAS DE CONTROLE DA SUSPENSÃO................................................. 205 2.2.1 SISTEMA DE SUSPENSÃO ATIVO........................................................... 206 2.2.2 SISTEMA DE SUSPENSÃO SEMI-ATIVO................................................ 208 2.2.3 HISTÓRICO DA EVOLUÇÃO DOS SISTEMAS SEMI-ATIVOS............. 209
2.3 ESTIMAÇÃO DE ESTADOS E ROBUSTEZ...................................................... 213 2.4 CONSIDERAÇÕES PRÁTICAS .......................................................................... 215
2.4.1 REPRESENTAÇÃO APROPRIADA DOS DISTÚBIOS EXÓGENOS...... 215 2.4.2 CRITÉRIOS DE CONFORTO E O “TRANCO”.......................................... 217 2.4.3 OS CRITÉRIOS PARA PROJETO DO CONTROLADOR ......................... 222

191
2.4.4 REFERÊNCIA PARA COMPARAÇÃO DE DESEMPENHO ....................229 2.4.5 TIPOS DE SENSORES PARA SISTEMAS MECÂNICOS .........................230 2.4.6 POSIÇÃO DOS SENSORES NO VEÍCULO................................................232 2.4.7 AS NÃO-LINEARIDADES DOS ATUADORES.........................................234 2.4.8 FLEXIBILIDADE DO CHASSI DE CAMINHONETES .............................234 2.4.9 AMORTECIMENTOS INERENTES À SUSPENSÃO ................................236 2.4.10 RESSONÂNCIA NO EIXO TRASEIRO E SEUS EFEITOS .......................238
2.5 COMENTÁRIOS GERAIS....................................................................................240 3 DESENVOLVIMENTO TEÓRICO...........................................................................243
3.1 INTRODUÇÃO......................................................................................................243 3.2 MODELO COMPLETO DO VEÍCULO ...............................................................243
3.2.1 MODELO MATEMÁTICO...........................................................................244 3.2.2 DEFINIÇÃO DAS ENTRADAS DE CONTROLE.......................................248 3.2.3 REPRESENTAÇÃO EM ESPAÇO DE ESTADOS......................................250 3.2.4 SEPARAÇÃO DOS MODOS DE CORPO RÍGIDO E TORÇÃO ...............252
3.3 APERFEIÇOAMENTO DA TÉCNICA LQG/LTR ..............................................255 3.3.1 FORMA CONVENCIONAL DA TÉCNICA LQG/LTR ..............................256 3.3.2 TÉCNICA LQG/LTR ADAPTADA AO CONTROLE SA...........................263 3.3.3 RLQ EM SISTEMAS NÃO-ESTRITAMENTE PRÓPRIOS .......................269 3.3.4 TEOREMA FUNDAMENTAL “LTR” ESTENDIDO..................................276 3.3.5 GENERALIZAÇÃO TEOREMA ESTENDIDO...........................................283 3.3.6 REGULADOR ...............................................................................................284
4 DESENVOLVIMENTO EXPERIMENTAL.............................................................285
4.1 IDENTIFICAÇÃO DO MODELO DO VEÍCULO ...............................................285 4.1.1 ESTIMATIVA INICIAL DOS PARÂMETROS FÍSICOS ...........................285 4.1.2 SENSORES ....................................................................................................292 4.1.3 EQUIPAMENTO PARA AQUISIÇÃO DE DADOS E CONTROLE..........296 4.1.4 APLICATIVOS PARA AQUISIÇÃO DE DADOS ......................................298 4.1.5 DESCRIÇÃO DO EXPERIMENTO .............................................................300 4.1.6 ANÁLISE DOS DADOS E IDENTIFICAÇÃO DO MODELO ...................302 4.1.7 RESUMO DOS RESULTADOS – IDENTIFICAÇÃO DO MODELO........320
4.2 ATUADORES MAGNETO REOLÓGICOS.........................................................321 4.2.1 ATRITO DE COULOMB E MAGNETIZAÇÃO DA VÁLVULA MR .......333 4.2.2 INSTALAÇÃO DOS ATUADORES NO VEÍCULO ...................................335 4.2.3 MODELO DO VEÍCULO COM OS ATUADORES ....................................336 4.2.4 RESUMO DOS RESULTADOS – ATUADORES MAGNETO REOLÓGICOS...............................................................................................................339
4.3 PROJETO DO CONTROLADOR ROBUSTO .....................................................341 4.3.1 CONSIDERAÇÕES PRELIMINARES.........................................................341 4.3.2 AVALIAÇÃO DAS INCERTEZAS DO MODELO .....................................342 4.3.3 PÓLOS, ZEROS DE TRANSMISSÃO E OBSERVABILIDADE ...............345 4.3.4 ELIMINAÇÃO DO MODO DE TORÇÃO ...................................................346 4.3.5 CRITÉRIOS DE DESEMPENHO E PONDERAÇÃO DAS SAÍDAS .........348 4.3.6 REDUÇÃO, BALANCEAMENTO E NORMALIZAÇÃO DO MODELO .351 4.3.7 SÍNTESE LQG/LTR ......................................................................................357 4.3.8 GRAMPEADOR DE SINAL PARA O ATUADOR SEMI-ATIVO.............370 4.3.9 REDUÇÃO DO TEMPO DE RESPOSTA DO ATUADOR SEMI-ATIVO 372
4.4 SIMULAÇÕES.......................................................................................................374

192
4.4.1 OBJETIVO..................................................................................................... 374 4.4.2 DEFINIÇÃO DO MODELO PARA SIMULAÇÃO..................................... 374 4.4.3 DEFINIÇÃO DOS SINAIS DE ENTRADA PARA SIMULAÇÃO ............ 375 4.4.4 DEFINIÇÃO DOS RUÍDOS DE MEDIDA PARA SIMULAÇÃO ............. 377 4.4.5 AVALIAÇÃO DO “TRANCO” E DO DESEMPENHO EM SEGURANÇA 377 4.4.6 SIMULAÇÃO DO CONTROLADOR ATIVO ............................................ 378 4.4.7 EFEITO DOS RUÍDOS DE MEDIDA.......................................................... 387 4.4.8 SIMULAÇÃO DO CONTROLADOR SEMI-ATIVO.................................. 388 4.4.9 TESTE DAS PROPOSTAS PARA MELHORIA DE DESEMPENHO....... 393 4.4.10 ESCOLHA DA MELHOR CONFIGURAÇÃO DO CONTROLADOR...... 397 4.4.11 DEFINIÇÃO DOS EXPERIMENTOS E INDICADORES .......................... 398
4.5 TESTES EXPERIMENTAIS DA SUSPENSÃO SEMI-ATIVA.......................... 401 4.5.1 ELETRÔNICA DE POTÊNCIA ................................................................... 401 4.5.2 ALGORITMO DE CONTROLE NO SIMULINK........................................ 402 4.5.3 DESCRIÇÃO DO EXPERIMENTO............................................................. 403
4.6 ANÁLISE DOS DADOS....................................................................................... 405 5 CONCLUSÕES ............................................................................................................ 407
5.1 SUGESTÕES PARA TRABALHOS FUTUROS ................................................. 409 REFERÊNCIAS................................................................................................................... 410 APÊNDICE A – SOLUÇÃO RLQ PARA SISTEMA DE 1 GRAU DE LIBERDADE. 424 APÊNDICE B – IDENTIDADES DE ÁLGEBRA MATRICIAL ................................... 428
B.1 – LEMA 1 (LEMA DA INVERSÃO MATRICIAL-LIM)......................................... 428 B.2 – LEMA 2 (DECORRENTE DO LEMA 1) ............................................................... 428
APÊNDICE C – CONSTRUÇÃO E CALIBRAÇÃO DOS SENSORES ....................... 429 APÊNDICE D – PROGRAMA MATLAB PARA USO DO RTDX................................ 437 ANEXO A – CÁLCULO DE R-QUADRADO.................................................................. 438

193
PARTE 2
PROJETO DO SISTEMA DE
SUSPENSÃO SEMI-ATIVO

194

195
1 INTRODUÇÃO
O propósito desta introdução é apresentar a justificativa e os objetivos desta segunda
parte do trabalho, e também apresentar uma breve descrição da metodologia utilizada, como
esta parte do trabalho está organizada e quais são as suas principais contribuições.
1.1 JUSTIFICATIVA
Os primeiros trabalhos expressivos relacionados ao controle ativo e semi-ativo de
sistemas de suspensão veicular datam do início da década de 70 (BENDER, 1968;
THOMPSON, 1971; KARNOPP et al., 1974; CROSBY e KARNOPP, 1973; MARGOLIS e
HROVAT, 1976). Desde então muita pesquisa foi realizada nesta área nos últimos trinta anos.
Contudo os sistemas ativos ou semi-ativos, apesar de suas vantagens ainda não foram capazes
de substituir os sistemas passivos, estando restritos atualmente a alguns carros de luxo,
veículos fora de série, e carros de competição.
Os sistemas ativos de suspensão, ainda que em teoria sejam bastante eficientes,
apresentam muitas desvantagens quando se analisa a sua aplicação em veículos de uma forma
mais ampla. Um veículo automotor é um sistema cujos requisitos mais importantes são o
transporte de passageiros e carga com segurança e boa autonomia. Além disso, este sistema
deve apresentar custos de aquisição e manutenção relativamente baixos, comparado a outros
sistemas de transporte. Os sistemas ativos de suspensão são muito mais caros que os sistemas
passivos, e a sua complexidade reflete-se em maiores custos de manutenção e menor
confiabilidade. O fator segurança está muito ligado à confiabilidade do sistema, uma vez que
um sistema ativo pode desestabilizar um veículo no caso de uma falha, e conseqüentemente
ser responsável por graves acidentes. Por outro lado, dado o crescente aumento no custo do
petróleo e a necessidade cada vez maior de se encontrar fontes de energia alternativas, o
consumo de combustível atualmente é um fator crítico para os veículos automotores. Sob esta
ótica, torna-se inconcebível a inclusão de sistemas que aumentem significativamente o
consumo de energia dos veículos, que é o caso dos sistemas ativos de suspensão.
Os sistemas de suspensão semi-ativos, por outro lado, mostram-se mais compatíveis
com a aplicação veicular. Estes sistemas são mais confiáveis, uma vez que utilizam bem
menos componentes e são mais robustos que os sistemas ativos. Além disso, a probabilidade

196
de uma pane neste sistema levar a uma desestabilização do veículo é muito baixa, pois o
atuador semi-ativo não deixa de ser um componente puramente dissipativo. Estes sistemas
utilizam atuadores que em geral requerem algo em torno de 20 watts de potência para o seu
funcionamento, o que pode facilmente ser suportado pela bateria do veículo, e com um
impacto muito pequeno no consumo de combustível. Entre os atuadores semi-ativos
destacam-se aqueles baseados em fluidos magneto-reológicos (MR), os quais não utilizam
válvulas mecânicas e, portanto, são mais confiáveis. Adicionalmente, o fluido MR responde
em mili-segundos a uma variação do campo magnético, o que permite o desenvolvimento de
sistemas de suspensão semi-ativos em geral mais rápidos que os sistemas ativos baseados em
atuadores hidráulicos.
Apesar destes vários pontos a favor dos sistemas de suspensão semi-ativos, eles
também apresentam suas desvantagens. Como os atuadores destes sistemas são capazes
apenas de exercer forças dissipativas, eles apresentam descontinuidades no sinal de força
quando são solicitados a gerar os esforços necessários para reduzir a transmissão de vibração
para a carroceria; quando solicitados pelo controlador para a produção de força ativa (a favor
do movimento), estes atuadores ficam desligados para que não gerem forças no sentido
contrário. Estas interrupções no sinal de força são responsáveis por gerar excitações em
freqüências mais elevadas, que se manifestam como pequenos solavancos, que acabam por
causar desconforto aos usuários do veículo, indo contra a principal finalidade do sistema de
controle. Um dos desafios do uso deste tipo de sistema é conseguir melhorar o desempenho
em conforto mesmo com os inconvenientes causados por esta característica dos atuadores.
Atualmente as aplicações comerciais de sistemas de suspensão semi-ativos restringem-
se ao mercado de automóveis de alto-luxo. Entre eles destacam-se o Corvette (HALVERSON,
2003), o Cadillac Seville STS (GILBERT e JACKSON, 2002; GEHM, 2001), e mais
recentemente o Audi TT (BIRCH, 2007) e a Ferrari 599 GTB Fiorano que utilizam
amortecedores MR (HALL, 2006), os quais são apresentados na figura 1.1. A razão para a
restrição a este pequeno nicho ainda é o custo elevado deste sistema, se comparado ao preço
dos veículos populares.

197
Figura 1.1 – Veículos que já utilizam suspensão semi-ativa e amortecedores MR.
Por outro lado, um novo nicho que pode ser explorado por estes sistemas de suspensão
é o Mercado das caminhonetes (“pickups”) e dos utilitários esportivos (“SUVs - Sport Utility
Vehicles” e “Crossovers”), que são veículos cujo nível de preço também pode absorver o
custo destes sistemas. No entanto, as dificuldades de engenharia envolvidas nesta aplicação
são maiores que nas aplicações atuais. Enquanto que os veículos de alto luxo em geral são
utilizados apenas em vias asfaltadas e com pouca variação de carga, os SUV e caminhonetes
são utilizados em condições de terreno mais variadas e podem transportar cargas maiores. São
também mais pesados e apresentam em geral centro de massa mais elevado que os carros de
luxo.
Com estas características, os SUVs e caminhonetes necessitam atuadores mais
robustos e com maior capacidade de força, e maior curso de movimentação. Como foi
apresentado na primeira parte deste trabalho, à medida que se aumenta a força dos atuadores
MR, aumenta-se também a indutância do seu circuito magnético, o que resulta em atuadores
mais lentos. O volume ativo de fluido é maior o que aumenta o seu efeito de histerese. Tanto a
lentidão de resposta dos atuadores, como a sua maior histerese, contribuem para degradar a
qualidade de conforto que um sistema semi-ativo é capaz de gerar.
No caso das caminhonetes há outro fator a se considerar. A maioria dos sistemas semi-
ativos aplicados em sistemas se suspensão veicular utilizam a estratégia de controle Sky-hook,
diretamente ou como modelo de referência. O Sky-hook é em geral aplicado de forma
descentralizada, ou seja, quatro sistemas de controle independentes, um para cada roda.
198
Contudo, como as caminhonetes apresentam flexibilidade torcional maior que outros veículos,
faz-se necessário uma estratégia de controle que integre os quatro atuadores. Com a ação
integrada dos quatro atuadores é possível se evitar a geração de forças que excitem o modo de
vibração torcional deste veículo. No caso de controles independentes é difícil fazer isto, e por
isso a utilização de um controlador centralizado e multivariável pode ser uma boa alternativa.
A viabilidade para a aplicação de sistemas semi-ativos em caminhonetes e SUVs está
no desenvolvimento de sistemas de controle mais baratos e mais voltados para as
necessidades específicas dos usuários deste tipo de veículos.
1.2 OBJETIVO
O objetivo deste trabalho é o desenvolvimento de um sistema de suspensão semi-ativo
para caminhonetes visando à melhoria do conforto, redução da excitação do modo de torção
do chassi, e redução da amplitude de oscilação do eixo traseiro nas freqüências de
ressonância, melhorando assim a tração e aderência à pista.
A estratégia para atingir estes objetivos é o uso do controle multivariável (“MIMO –
multiple input multiple output”) robusto, utilizando como atuadores de força os amortecedores
baseados em fluidos MR.
Os desafios que precisam ser vencidos para o sucesso deste trabalho são:
• O desenvolvimento de um modelo matemático do veículo, capaz de representá-lo
satisfatoriamente e ao mesmo tempo ser adequado ao projeto de controle robusto baseado
na técnica LQG/LTR;
• A adequação do projeto de controle LQG/LTR às necessidades e contingências de um
sistema semi-ativo;
• A defesa da tese de que um controlador robusto LQG/LTR também pode ser aplicado às
plantas com função de transferência não estritamente própria;
• A redução das excitações do modo de torção do chassi da caminhonete, causadas por
forças geradas pela suspensão;
• A redução dos efeitos de desconforto (solavancos) gerados pelos atuadores semi-ativos,
principalmente pelo fenômeno de histerese que é intrínseco ao seu princípio de
funcionamento e construção física;
• A redução das oscilações do eixo traseiro da caminhonete na ressonância, mesmo
considerando-se as limitações de banda de resposta em freqüência dos atuadores.

199
1.3 METODOLOGIA
O desenvolvimento de um sistema semi-ativo de suspensão inicia-se por uma pesquisa
da literatura para a identificação das tendências atuais de desenvolvimento nesta área, e dos
principais problemas de engenharia que se colocam à frente da implementação de um sistema
de suspensão semi-ativa em caminhonetes.
Adicionalmente, realiza-se o desenvolvimento teórico do modelo matemático do
veículo e da adequação da técnica LQG/LTR para aplicação em sistemas com função de
transferência não estritamente própria, através de análises e deduções de álgebra linear.
Os parâmetros do modelo do veículo são identificados experimentalmente utilizando-
se um método de otimização com restrições baseado em programação quadrática seqüencial
(PQS). As verificações da representatividade do modelo são feitas através da comparação de
dados experimentais com dados obtidos por simulação numérica e também através da
animação em 3D gerada a partir de simulações computacionais do modelo com um filme de
eventos reais com o veículo.
O processo de síntese do controlador inicia-se com o projeto do controlador
multivariável (MIMO) robusto utilizando a técnica LQG/LTR, que utilizam critérios
específicos para as barreiras de desempenho. Sub-malhas de controle são definidas para o
controle da força de cada atuador, que é feito de forma indireta a partir de modelos
matemáticos discretos dos atuadores. O projeto do sistema de controle é conduzido levando-se
em consideração todos os aspectos práticos da sua implementação, o que inclui o
comportamento dinâmico do atuador e a discretização no tempo do algoritmo de controle para
a utilização de um controlador digital.
O desempenho do controlador é então analisado através de simulação numérica, e
avaliado segundo critérios de conforto e segurança.
A implementação física do sistema semi-ativo é realizada a partir do projeto,
construção e instalação dos quatro atuadores (amortecedores MR); construção e instalação dos
sensores eletrônicos; da instalação elétrica no veículo (cabos de sinais e cabos de
alimentação), e do uso de um “hardware” da empresa Spectrum baseado no DSP
TMS320F2812 da Texas Instruments (TI). Todo o “software” para o DSP é gerado pelos
aplicativos Matlab® / Simulink® da Mathworks e Codecomposer® da TI, a partir de um
diagrama de blocos criado no Simulink®.

200
A aquisição de dados para análise e identificação do modelo matemático do veículo é
feita a partir do mesmo “hardware” utilizado para o controlador. Os dados lidos através dos
conversores A/D do próprio DSP são transferidos para um computador PC através da porta
paralela, utilizando a ferramenta RTDX (“Real Time Data Exchange”) do Matlab®.
1.4 CONTRIBUIÇÕES
• Modelagem de um veículo completo com 7 graus de liberdade capaz de boa
representatividade do comportamento dinâmico de uma caminhonete e adequado para
projeto de controle robusto multivariáveis.
• Desenvolvimento teórico para o procedimento LQG/LTR aplicado a sistemas com
função de transferência não estritamente própria.
• Metodologia para identificação de modelo via otimização por Programação Quadrática
Seqüencial (PQS), utilizando dados experimentais.
• Procedimento para tornar a matriz da transferência do modelo melhor condicionada,
reduzida e balanceada em termos dos gramianos de controlabilidade e observabilidade.
• Procedimento para reduzir as excitações do modo dinâmico de torção do chassi da
caminhonete.
• Solução de controle para melhorar o contato do pneu com o solo nas freqüências de
ressonância da roda, reduzindo conseqüentemente os efeitos de movimentos laterais
indesejáveis da traseira do veículo.

201
2 REVISÃO DA LITERATURA
2.1 SISTEMAS DE SUSPENSÃO VEICULAR
As suspensões veiculares existem desde os primórdios da indústria automobilística,
antes mesmo do primeiro veículo automotor. No principio, a suspensão era basicamente uma
mola, porém, ao longo do tempo, foi adicionado um elemento amortecedor. Na década de 30,
foram adotados sistemas com baixo amortecimento, que garantiam uma excelente sensação de
conforto; contudo, conforme foram surgindo veículos cada vez mais potentes e rápidos, o
número de acidentes começou a aumentar muito na década de 40. A partir daí, os projetos de
sistemas de suspensão veicular passaram a não se preocupar apenas com o conforto, mas
também com a segurança e estabilidade do veículo. Atualmente, é consenso que um sistema
de suspensão veicular deve apresentar três funções principais (STONE e BALL, 2004):
1. Isolar os passageiros e a carga de vibrações e choques. É desejável deixar os
passageiros tão confortáveis quanto possível; assim, o sistema de suspensão deve ser
capaz de absorver choques e amortecer vibrações causadas por irregularidades da
superfície da via1.
2. Garantir e aprimorar a mobilidade. A suspensão provê a sustentação do peso do
veículo, garantindo o espaço entre a via e a parte de baixo do veículo. Ela também garante
a estabilidade lateral e longitudinal, e a resistência ao rolamento.
3. Prover o controle do veículo. A suspensão reage às forças dos pneus, incluindo as forças
devidas à aceleração, frenagem, mudanças de direção. Além disso, o sistema de suspensão
é incumbido de garantir os ângulos corretos2 de direção e “camber”3 em relação à
superfície da via, bem como manter os quatro pneus em contato com a via enquanto em
manobra.
A segunda função é comum a todos os veículos onde a mola deve sempre ser capaz de
sustentar todo o peso estático do veículo, e as restrições cinemáticas são desenhadas para
1 Entende-se por via a superfície por onde o veículo está transitando, podendo ser uma estrada ou rua
pavimentada, ou um terreno irregular sem pavimento. 2 O ângulo correto de direção é aquele que o motorista do veículo deseja que este desempenhe. 3 “Camber” é o nome dado à inclinação lateral das rodas.

202
garantir boa estabilidade lateral e longitudinal, e resistência ao rolamento. Por outro lado,
apresentar melhor desempenho na terceira função é característica de veículos esportivos,
bastante manobráveis e com boa aderência à pista. Trata-se, portanto, de uma suspensão
“dura”, com alta freqüência de corte e com um curso pequeno. Entretanto, apresentar bom
desempenho na primeira função em detrimento à terceira, caracteriza veículos que
proporcionam mais conforto; porém com menor desempenho em manobras bruscas, por
exemplo. Trata-se de uma suspensão “mole”, com baixa freqüência de corte, e apresentando
maiores excursões da suspensão, segundo Tamai (1995). Verifica-se, portanto, que as duas
situações exigem requisitos conflitantes, e é esta solução de compromisso que deve ser
resolvida pelos engenheiros projetistas de sistemas de suspensão veicular, buscando sempre o
melhor compromisso com a aplicação final do veículo.
2.1.1 PERCEPÇÃO DO CONFORTO
A opinião dos passageiros quanto ao que significa uma boa qualidade no conforto ao
dirigir obviamente é muito subjetiva. O que uma pessoa considera bom, pode ser inaceitável
para outra. A pessoa que prefere carros esportivos sentirá muita insegurança ao dirigir um
carro grande de luxo, enquanto que proprietários de veículos de grandes de luxo ou clássicos
se sentirão insatisfeitos com o conforto ao dirigirem um carro esporte.
Outros fatores também devem ser considerados quando as pessoas avaliam o conforto ao
dirigir um veículo. Segundo Stone e Ball (2004), a qualidade acústica certamente é um destes
fatores, e embora não seja um resultado direto da suspensão, as pessoas costumam observar os
ruídos, pancadas (“rattles”), e grunhidos (“squeaks”) do seu veículo. Até o controle de clima
no veículo, apesar de não estar relacionado com a suspensão, também influencia na sensação
de conforto. Se uma pessoa estiver desconfortável por causa da temperatura, sua avaliação
subjetiva do conforto ao dirigir será afetada. “Desta forma, um dos desafios que afronta os
engenheiros de suspensão é ter que tratar com avaliações altamente subjetivas, e tentar
convertê-las em padrões quantitativos passíveis de uma análise objetiva” (DATA e
FRIGERIO, 2002).
Algum debate existe para definir qual característica do movimento as pessoas acham
desagradável. Deslocamento não é um problema. Se fosse, a sensação de subir degraus
produziria desconforto, o que não ocorre, muito embora o esforço para isso seja

203
desconfortável. Da mesma forma, a velocidade não é desconfortável, como evidenciada por
pilotos que operam jatos a velocidades superiores a Mach 1, com nenhum efeito danoso. A
aceleração constante é sentida como uma força constante, e numa intensidade moderada
também não gera grande desconforto. Contudo, a taxa de variação da aceleração, chamada de
“jerk” (HROVAT e HUBBARD, 1981), pode produzir desconforto.
Para o motorista, o “jerk” é sentido como variações bruscas de intensidade e direção das
forças (solavancos) que estão agindo sobre seu corpo, e por isso também pode ser descrito
como “tranco”. Mas o “jerk” (ou “tranco”) não é o único elemento que produz desconforto, a
freqüência de oscilação da aceleração e a sua direção também influenciam o conforto.
Veículos cujos movimentos de arfagem4 e rolamento são muito acentuados são vistos como
menos confortáveis do que aqueles que na mesma situação balançam verticalmente sem
tombar para frente ou para os lados, mantendo um movimento plano da carroceria.
Existe muita literatura a respeito da qualidade do conforto ao dirigir e sobre a
percepção humana deste conforto, no sentido de se obter parâmetros mais objetivos para esta
avaliação. Normas como a ISO2631 e a SAE J1490 visam atender a essa necessidade de
avaliação do conforto. Gillespie (1994) apresenta uma visão geral sucinta da literatura sobre
este assunto. Embora as fontes sejam numerosas, Gillespie (op. cit.) conclui que não há um
padrão universalmente aceito para o julgamento do conforto ao dirigir devido a variáveis tais
como a posição do acento, entradas com freqüências simples ou múltiplas, entradas com
direções múltiplas, diferentes períodos de exposição, entradas audíveis e visuais, que muito
interferem na sensação de conforto.
Em resumo, toda a pesquisa e todas as curvas de conforto são apenas pontos de partida
para o engenheiro de suspensão. Ainda não há substituto para a avaliação subjetiva provida
por um teste de campo. Pode-se concluir que o engenheiro de suspensão deveria eliminar toda
a vibração do veículo, contudo esta tarefa tende a não ter fim. Conforme as vibrações são
removidas, os ocupantes do veículo tomam consciência de outra vibração que antes passava
despercebida. Portanto, todo novo trabalho em sistemas de suspensão deve ser encarado como
um aperfeiçoamento e não como uma solução definitiva para o conforto.
4 Termo emprestado da engenharia aeronáutica para descrever o movimento do veículo em torno de seu eixo
transversal (fonte: dicionário Aurélio).

204
2.1.2 SISTEMA DE SUSPENSÃO PASSIVO
As suspensões passivas são simples, de baixo custo, bastante confiáveis, e até hoje têm
sido a melhor relação entre o custo do sistema e a satisfação dos anseios de conforto e
segurança dos condutores de veículos e seus passageiros. Além disso, na prática, um projeto
convencional de suspensão passiva utiliza não-linearidades nas molas e amortecedores, de
forma a melhorar o desempenho do sistema e minimizar suas deficiências (MOTTA e
ZAMPIERI, 2005).
A principal não-linearidade associada aos sistemas de suspensão passivos está nos
amortecedores, que apresentam, em geral, coeficientes de amortecimento diferentes para as
situações de compressão e distensão. Quando se adota um coeficiente de amortecimento
pequeno (“soft” ou macio) na compressão do amortecedor, cria-se uma condição para que um
movimento brusco da roda para cima tenha um menor efeito sobre o corpo do veículo. Por
outro lado, fazendo-se o coeficiente de amortecimento grande (“firm” ou duro) na distensão
do amortecedor, o movimento de descida da roda é que sofrerá a maior resistência do
amortecedor, gerando a maior dissipação da energia, onde somente a massa da roda em
movimento tenta puxar para baixo o corpo do veículo. Como a massa do corpo do veículo é
bem maior que a das rodas, os efeitos na carroceria serão menores. Este procedimento tende a
melhorar o conforto para os ocupantes do veículo.
Além das diferenças entre a compressão e a distensão, os amortecedores apresentam
valores de coeficiente de amortecimento que variam com a velocidade. Estas curvas de
amortecimento são em geral obtidas experimentalmente e seguem características específicas
para cada veículo, no entanto os coeficientes de amortecimento são maiores para baixas
freqüências e diminuem conforme a freqüência de movimentação do amortecedor aumenta.
Outra não-linearidade é normalmente aplicada às molas, que passam a ter sua rigidez
não mais constante, mas dependente da intensidade da sua compressão. Esta prática tem o
objetivo de manter constante a freqüência natural da suspensão (normalmente entre 1,2 e 2,0
Hz). Uma vez que a freqüência natural é proporcional à raiz quadrada da razão entre a
constante de mola e massa, nada mais lógico do que fazer a constante de mola aumentar
quando a massa aumenta, deixando esta razão invariável, ou com variação desprezível. Outra
razão para se utilizar não-linearidade no comportamento das molas é o pequeno curso máximo
da suspensão, principalmente em carros de passeio (±60 mm na posição do amortecedor); e
assim quando a roda do veículo atinge um grande obstáculo de forma abrupta (uma guia de
rua ou uma lombada, por exemplo), a suspensão tenderia facilmente a atingir seu fim de curso

205
e perder totalmente a sua função. Por outro lado, fazendo com que a mola se enrijeça à
medida que a suspensão vai se aproximando do fim de curso, leva a uma situação de transição
menos descontínua e com menor efeito sobre os ocupantes do veículo.
Os feixes de mola ainda apresentam outra não-linearidade indesejável, causada pelo
atrito entre as lâminas. Esta não-linearidade manifesta-se como uma histerese na resposta
dinâmica de força da mola em relação ao seu deslocamento. Para se minimizar esse efeito,
caminhonetes, pequenos caminhões e ônibus costumam utilizar feixes de molas parabólicas,
que apresentam menor contato entre as lâminas, e conseqüentemente menor atrito.
2.2 SISTEMAS DE CONTROLE DA SUSPENSÃO
Os sistemas de controle de suspensão, sejam eles ativos ou semi-ativos, baseiam-se no
princípio de que as forças entre as massas suspensa e não-suspensa do veículo podem ser
geradas segundo um padrão que não mais depende exclusivamente da variação relativa da
distância entre a roda e corpo do veículo. Sendo assim, um dado sistema ativo pode gerar uma
força entre a massa suspensa e a não-suspensa proporcional à velocidade absoluta da massa
suspensa, por exemplo, uma estratégia de controle conhecida por Skyhook (KARNOPP e
CROSBY, 1974, U.S. Patent).
São vários os fatores que podem ser considerados no projeto de sistemas de controle
para suspensões veiculares. Um dos elementos centrais é o requisito de desempenho na
isolação de vibrações em compromisso com o desempenho de contato dos pneus com a via.
Apesar dos sistemas ativos e semi-ativos serem potencialmente superiores aos sistemas
passivos no atendimento deste requisito, o compromisso entre o conforto e a aderência ainda é
um desafio significativo de projeto.
Outro fator importante é o espaço de trabalho (“rattlespace”), que é o deslocamento
relativo máximo permitido entre o chassi do veículo e as rodas. Como as forças do sistema de
suspensão não estão mais vinculadas exclusivamente ao movimento relativo entre massa
suspensa e massa não-suspensa, a tendência é que a excursão da suspensão aumente,
principalmente em sistemas ativos.
Outros fatores a serem considerados são: a estabilidade geral do veículo, a
confiabilidade e os requisitos de dirigibilidade e segurança, que não são influenciados apenas
pela força gerada ente o chassi e a roda, mas também pela geometria da suspensão (sistemas

206
anti-rolagem – ou “anti-roll” – e anti-mergulho – ou “anti-dive”), e pelo sistema de direção do
veículo (STONE e BALL, 2004). Por fim, há a restrição econômica ou de custo financeiro,
que é um fator altamente limitante para a entrada de novas tecnologias, uma vez que não é
possível se saber de antemão se o Mercado será capaz de aceitá-la, valorizando a sua relação
custo/benefício, e dando o retorno necessário ao investimento.
Diferentes tipos de sistemas de suspensão são capazes de satisfazer, em maior ou
menor grau, os requisitos acima. Embora melhorias significativas possam resultar da
capacidade inventiva do projetista, em geral, o desempenho da suspensão depende de se
utilizar um sistema passivo, semi-ativo ou ativo (HROVAT, 1997).
Os sistemas passivos de suspensão, encontrados na maioria dos veículos atualmente,
são caracterizados por não utilizar fontes de energia, pois se compõem exclusivamente de
elementos passivos (molas e amortecedores) ajustados para uma faixa limitada de situações.
Por esta razão este sistema é relativamente barato e confiável. Os sistemas ativos, por outro
lado, requerem fontes de energia (tais como compressores ou bombas) que lhes dão a
capacidade de gerar forças ativas para conseguir um bom desempenho de isolação da vibração
em uma faixa ampla de situações. Contudo, a melhoria de desempenho dos sistemas ativos é
acompanhada de um aumento da complexidade do sistema, custos maiores e redução da
confiabilidade.
O sistema de suspensão semi-ativo (SA), como seu nome sugere, preenche uma lacuna
entre os sistemas puramente passivos e os totalmente ativos. Ele representa um compromisso
entre a melhoria de desempenho e a simplicidade de implantação. Desde sua introdução
(KARNOPP et al., 1974), o conceito SA vem sendo aplicado a uma ampla classe de
problemas de isolação de vibrações.
2.2.1 SISTEMA DE SUSPENSÃO ATIVO
Suspensões ativas são aquelas onde entre a massa suspensa e a massa não suspensa é
acrescentado um atuador capaz de injetar ou retirar energia do sistema. Este atuador é capaz
de gerar esforços continuamente variáveis, e é em geral comandado por controladores
eletrônicos. Estes controladores fecham a malha de controle a partir de medições de sinais
provenientes da carroceria do veículo ou da própria suspensão, como deslocamentos ou
acelerações, por exemplo.

207
A diferença fundamental dos sistemas ativos em relação à suspensão passiva foi bem
descrito por Tamai (1995, p.41):
“Neste tipo de suspensão a força entre a massa suspensa e a massa não
suspensa pode não depender mais apenas de movimentos relativos entre
pontos ligados pela suspensão, mas também de outras variáveis, às vezes
medidas em outros pontos do veículo. Desta forma é possível se obter uma
freqüência natural baixa sem que a deflexão estática seja excessiva, e escolher
a resposta dinâmica da suspensão”.
Entretanto as limitações das suspensões ativas começam pelos aspectos práticos da sua
construção física nos veículos. Considerando-se que a suspensão de um veículo de passeio de
porte pequeno exija potências da ordem de 2kW para a suspensão de cada roda, a dificuldade
de se pôr em prática uma suspensão ativa fica mais evidente. Para esta situação de carga um
atuador pneumático não teria tempo de resposta suficientemente rápido para a tarefa,
considerando-se um compressor e cilindros com porte compatível com o tamanho do veículo.
No caso de um atuador eletromagnético tem-se picos de corrente elétrica da ordem de 200A,
considerando-se tensões de 12V nas baterias, ou 60A, pressupondo a tendência do uso de
tensão de 42V em veículos (SILVA e PAULA, 2002), que seriam correntes muito elevadas
para o conjunto de baterias dos veículos em geral. Restam apenas os sistemas hidráulicos
trabalhando com pressões da ordem de 200 bar (WATTON et al., 2001), sistema que
consumiria até 20% da potência de um motor de 60hp, supondo um rendimento de 80%.
Supondo que um sistema de suspensão ativa com atuador hidráulico (como o citado
acima) fosse instalado em um veículo, ter-se-ía ainda uma série de desvantagens a salientar:
♦ os custos de um compressor hidráulico e de todos os componentes de um circuito
hidráulico (mangueiras, conexões, válvulas, etc.) para pressões de trabalho de 200 bar
são bastante elevados;
♦ altos custos de produção de um sistema deste porte;
♦ o peso que este sistema adicionaria ao veículo também seria elevado, resultando em
maior consumo de combustível;
♦ a complexidade do sistema impõe custo de manutenção também elevado e a
necessidade de revisões preventivas mais freqüentes, em função da grande quantidade

208
de componentes e de peças móveis sujeitas ao desgaste, e do maior risco devido às
pressões elevadas;
♦ o sistema apresenta menor confiabilidade, pois depende do funcionamento constante
do motor para poder atuar, além da sua alta vulnerabilidade em função da
complexidade do sistema (muitos cabos, muitas mangueiras e muitas conexões que
podem acidentalmente se romper).
Em função desta última desvantagem, alguns projetos consideram manter em paralelo
com o atuador ativo, elementos passivos como molas e amortecedores, o que além de
deteriorar a capacidade do controle ativo, aumentam o custo total do sistema.
2.2.2 SISTEMA DE SUSPENSÃO SEMI-ATIVO
Diferentemente do sistema ativo, a suspensão semi-ativa é incapaz de injetar energia no
sistema. Nesta concepção de sistema, a capacidade de controle vem da propriedade de se
conseguir controlar a taxa de dissipação da energia introduzida e armazenada no sistema.
Conseqüentemente este tipo de suspensão é incapaz de atingir os níveis de conforto
proporcionados por um sistema de controle ativo, porém pode alcançar resultados superiores
às suspensões passivas (KARNOPP, 1986).
A base de uma suspensão semi-ativa é um atuador capaz de gerar forças dissipativas
continuamente variáveis. Claro que também é possível se ter suspensões semi-ativas com
atuadores de dois estados (“on-off”), ou de múltiplos estados, porém sem variação contínua
dos valores de força. Estes dispositivos não serão considerados por apresentarem um
desempenho inferior aos continuamente variáveis, além de gerar maiores problemas de
“harshness” (MILLER e NOBLES5, 1990 apud HAC et al., 1996b), ou seja, contribuírem para
a degradação do conforto vibro-acústico, uma vez que geram esforços de forma sempre
descontínua. Os atuadores continuamente variáveis também apresentam problemas de
“harshness”, porém em menor grau e ainda com a possibilidade de que sejam reduzidos,
modificando-se alguns aspectos do controlador (CRIVELLARO, 2003a) ou da própria
construção do atuador (LISENKER et al., 2005).
5 MILLER, L. R.; NOBLES, C. M.; Methods for Eliminacing Jerk and Noise in Semi-Active Suspensions,
SAE Transactions, paper 902284, pp. 943-951, 1990.

209
Em geral, o elemento que assume esta função de atuador semi-ativo é o próprio
amortecedor. Isto pode ser conseguido através de válvulas eletromecânicas (VANNUCCI,
1992), ou se utilizando fluído magneto-reológico e válvulas magnéticas. As válvulas
eletromecânicas além de serem um pouco mais lentas que os sistemas magneto-reológicos,
apresentam uma construção menos robusta e mais suscetível ao desgaste e a falhas. Além
disso, a válvula eletromecânica age aumentando ou diminuindo o coeficiente de
amortecimento viscoso através da variação da restrição à passagem do fluxo de fluido, porém
a força no amortecedor ainda é dependente da velocidade relativa entre massa suspensa e
massa não-suspensa. No caso dos amortecedores magneto-reológicos as variações na força
controlável são menos dependentes da velocidade, havendo apenas uma parcela da força total
que segue uma curva de amortecimento viscoso com coeficiente praticamente fixo e
relativamente baixo.
2.2.3 HISTÓRICO DA EVOLUÇÃO DOS SISTEMAS SEMI-ATIVOS
O conceito de suspensão Semi-ativa (SA) foi introduzido no início dos anos 70
(CROSBY e KARNOPP, 1973; KARNOPP e CROSBY, 1974; KARNOP et al., 1974) na
forma de um amortecimento variável e controlado. Desde então, amortecedores semi-ativos
vem sendo considerados em diversas aplicações, como já foi descrito no Volume 1 deste
trabalho. Aplicações comerciais de alguns conceitos elementares de sistemas SA iniciaram no
início dos anos 80, com o lançamento do primeiro amortecedor variável. Estes amortecedores
variáveis tipicamente alteravam seu coeficiente de amortecimento, entre valores baixos
(“soft”) e altos (“hard”), através de controles manuais ou automáticos, porém lentamente
ajustados, os quais representavam uma forma muito rudimentar de sistema SA. As melhorias
no desempenho do conforto ou dirigibilidade eram mínimas e freqüentemente imperceptíveis
pelos usuários dos veículos.
Uma estratégia um pouco mais sofisticada, chamada de sistema SA “on-off” (liga-
desliga), foi proposta pela primeira vez por MARGOLIS et al. (1975). De forma simples, o
amortecedor permanece desligado (isto é, aplicando forças pequenas ou próximas de zero)
sempre que as massas suspensa e não-suspensa moverem-se na mesma direção e a massa não
suspensa tiver a maior velocidade. Em qualquer outra situação o amortecedor é ligado, de
forma a produzir o máximo de força. A idéia principal de tal estratégia é reduzir a aceleração
e o movimento da massa suspensa, o que foi bem demonstrado em simulações preliminares e

210
estudos experimentais (MARGOLIS et al., 1975; MARGOLIS e HROVAT, 1976; HROVAT
e MARGOLIS, 1981; KRASNICKI, 1981).
No final da década de 80 houve um interesse considerável no conceito SA “on-off” na
Indústria. Como resultados, surgiram melhorias e refinamentos deste conceito (MILLER,
1988; IVERS e MILLER, 1989), que aparentemente trouxeram algum benefício tangível no
conforto e na manobrabilidade.
A proposta original de SA continuamente variável (CROSBY e KARNOPP, 1973;
KARNOPP e CROSBY, 1974; KARNOP et al., 1974) representou o passo seguinte na
sofisticação e na complexidade da implementação prática. Este conceito requer que o atuador
SA reproduza continuamente a força de um sistema ativo sempre que isso for possível do
ponto de vista da restrição de passividade. Quando não for possível, o amortecedor
simplesmente é desligado. Esta estratégia de limitar (“grampear”) a força do atuador SA em
determinadas condições foi chamada de controle SA “clipped” ou “clipped-optimal”
(HROVAT6, 1979, apud HROVAT, 1997; HROVAT et al., 1988; BUTSUEN e HEDRICK,
1989).
A questão do controle ótimo SA foi abordada desde a década de 80, onde se destacam os
trabalhos de HROVAT (1979, op. cit.), HROVAT et al. (1980, 1988), e subseqüentemente
BUTSUEN e HEDRIK (1989) que concluiram que a abordagem SA “clipped” é também
ótima para modelos de um quarto de veículo. Desafortunadamente, esta conclusão não foi
inteiramente correta (conforme, por exemplo, TSENG e HEDRICK, 1993), embora, na
prática, a abordagem SA “clipped” possa se aproximar da solução ótima. Tanto sistemas
lineares como bi-lineares7 foram considerados nestes estudos; de forma que, na abordagem bi-
linear da ação de controle SA, a restrição de passividade8 é obtida apenas limitando-se as
variáveis de controle a valores não-negativos. Esta estratégia, adotada em Hrovat et al. (1988),
foi também utilizada para provar que sob condições relativamente brandas a solução para o
problema não-linear, estocástico de controle ótimo existe; e, mais importante, é dada na forma
de realimentação de estados. De forma geral foi possível alcançar uma solução sub-ótima
aproximada, através de métodos numéricos. Os resultados preliminares indicaram que tal
solução sub-ótima não é significativamente melhor em desempenho que a abordagem SA
“clipped”.
6 HROVAT, D.; Optimal Passive Vehicle Suspensions, Ph.D. Thesis, University of California, Davis, CA,
1979. 7 Na abordagem bi-linear, cada sinal de controle é formado pela soma ponderada de dois estados. No caso da
suspensão, utiliza-se um sinal de controle proporcional à diferença das velocidades da massa suspensa e não-suspensa, o que corresponde a um coeficiente de amortecimento ajustável.
8 A restrição de passividade limita o atuador a gerar apenas forças contrárias ao sentido do movimento.

211
Outra abordagem no sentido de incrementar o desempenho do controle SA foi
introduzido por Kimbrough (1986), baseada na equação de Lyapunov. Apesar de apresentar
desempenho equivalente à abordagem “clipped-optimal”, ou em alguns casos até superior
(JANSEN e DYKE, 2000), o desafio em utilizar esta abordagem está na necessidade de se
escolher uma matriz positiva definida pQ apropriada9.
O uso de atuadores baseados em fluidos eletro-reológicos (ER) e magneto-reológicos
(MR) foi proposto como alternativa para os amortecedores hidráulicos com orifício variável
(PINKOS et al., 1994; STURK et al., 1995). O conceito MR desde então passou a ser o mais
estudado por trabalhar com níveis de tensão elétrica compatível com a dos sistemas elétricos
veículares (12V).
Hubbard e Margolis (197610, apud HROVAT, 1997) introduziram o conceito que
adiciona uma mola semi-ativa, que é colocada em prática por meio de um controle adicional
do tipo “liga e desliga” nos acumuladores de molas a gás (suspensões hidro-pneumáticas, por
exemplo). Esta abordagem é promissora em aplicações práticas de controles SA, visto que,
segundo Hrovat (1997), tanto o amortecimento quanto a rigidez devem ser alterados para uma
adaptação mais eficiente a diferentes condições de pista e velocidade do veículo. Segundo
resultados de Tseng e Hrovat (1989), a rigidez da suspensão tem uma influência significativa
sobre a qualidade do conforto, porém, como nos sistemas puramente ativos, uma suspensão
mais macia leva a um maior conforto, mas também a uma maior excursão da suspensão.
O conceito de controle SA ground-hook surgiu na década de 90, sendo introduzido por
Novak e Valasek (1996) para minimizar a amplitude da deflexão dos pneus. Em trabalhos
mais recentes, como Goncalves e Ahmadian (2002), tem sido estudado o conceito híbrido,
que combina as abordagens skyhook e groundhook em um único controlador. Um
detalhamento maior desta abordagem com resultados experimentais pode ser encontrado em
Goncalves (2001).
Visando uma solução para um controle da suspensão capaz de considerar as não-
linearidades, tanto do sistema como dos atuadores SA, outras técnicas alternativas têm sido
aplicadas. Neste sentido, pode-se citar um controle SA utilizando algoritmo genético (YEH et
al., 1994; BOURMISTROVA et al., 2005); controles SA usando redes neurais (MORAN,
1994; GUO et al., 2004); e utilizando lógica nebulosa ou “fuzzy logic” (RAO e PRAHLAD,
9 A matriz
pQ corresponde ao coeficiente do termo quadrático na derivada da função de Lyapunov, e é utilizado
como termo independente na equação de Riccati. 10 HUBBARD, M.; MARGOLIS, D.; The Semi-active Spring: Is it a Viable Concept? Intersociety Conf. on
Transportation. Los Angeles, 1976.

212
1997; CRAFT, 2003). Contudo nenhum destes trabalhos apresenta um resultado excepcional
com relação ao desempenho.
O trabalho de Mailat et al. (2004), destaca-se por utilizar “Haar wavelets” para
representar as não linearidades das molas e dos atuadores SA, e por buscar uma solução ótima
simultânea da identificação de estados e do valor do índice de desempenho.
Outro trabalho recente e promissor, que foi apresentado por Giorgetti et al. (2005),
apresenta um controle de modelo preditivo (“model predictive control” –MPC) de um sistema
dinâmico híbrido, que é descrito como uma classe de sistemas mistos de dinâmicos e lógica
(“mixed logical dynamical” – MLD systems). Estes sistemas se caracterizam por apresentar
comportamentos distintos em diferentes regiões do espaço de estados; sendo tal setorização
do espaço de estado gerada por regras lógicas. Este trabalho apresenta resultados
interessantes, que foram obtidos a partir de um processo de otimização utilizando
programação quadrática inteira mista (“mixed-integer quadratic programming”).
No Brasil, temos as dissertações de mestrado de Sanchez (1997) e Moura (2003), que
fizeram estudos comparativos entre os tipos de suspensão passivo, semi-ativo e ativo. Ambos
os trabalhos utilizaram apenas modelos matemáticos e simulações para suas conclusões, no
entanto, o trabalho de Sanchez (op. cit.) destaca-se por uma revisão bibliográfica bastante rica
e pelo uso de um modelo completo e mais realista do veículo, e o uso do aplicativo ADAMS®
para realização das simulações. Por outro lado, o trabalho de Moura (op. cit.), apesar de
utilizar um modelo com apenas quatro graus de liberdade, aplicou um atuador MR e
apresentou uma maior preocupação com o mapeamento das relações entre força, velocidade e
corrente de excitação do atuador semi-ativo. Destaca-se também a dissertação de Picado
(1998), que além da comparação entre sistemas passivos, semi-ativos e ativos, também
apresentou outras estratégias de controle semi-ativo, assim como abordou algumas questões
práticas como o tempo de processamento, a quantidade de sensores e dificuldades no
tratamento de sinais. Os três trabalhos mostram resultados similares quanto aos benefícios e
limitações dos sistemas ativos e semi-ativos, contudo não demonstraram muita preocupação
com o “jerk” nos sistemas semi-ativos (apesar deste ter sido abordado na revisão da
literatura), nem com a estimação dos estados que não são mensuráveis diretamente, muito
menos com a sensibilidade aos erros e ruídos de medição.

213
2.3 ESTIMAÇÃO DE ESTADOS E ROBUSTEZ
A hipótese fundamental que precede muitos estudos sobre controle de suspensão, ativos
ou SA, é que todos os estados do sistema são exatamente conhecidos, o que dá as melhores
possibilidades de desempenho para estes sistemas. Na prática, alguns estados podem não ser
facilmente acessíveis, ou não estão disponíveis, como a deflexão dos pneus, por exemplo; ou
não podem ser medidos diretamente, como as velocidades verticais das rodas.
Práticas de integração direta de sinais de aceleração, algumas vezes empregadas em
controles Skyhook não são recomendáveis (RIBEIRO11, 1997, apud PICADO, 1998), o sinal
originário do acelerômetro sofre distorções que após uma integração dupla pode gerar erros de
até 20%.
Para uma aplicação real das abordagens de controle da suspensão, há duas opções.
Uma delas é a realimentação direta e parcial dos estados (HAC, 1996a; BARBIERI, COSTA
NETO e BARROS, 2005), que apresenta desvantagens quanto à sua condição sub-ótima da
solução de controle, a falta de robustez quanto à sensibilidade aos erros de medição, e a
dificuldade de implementação digital do controlador, em razão deste resultar em funções de
transferência não-estritamente próprias. Controladores digitais precisam ser estritamente
próprios, porque existe a restrição de atraso mínimo da ordem de um período de amostragem
entre o sinal de entrada e o de saída, ou seja, não é possível para um sistema digital amostrar o
sinal de entrada e ao mesmo tempo atualizar sua saída. O sinal de saída só pode ser atualizado
no próximo ciclo de amostragem.
Outra possibilidade é a utilização de um filtro de Kalman, que pode ser utilizado até
em abordagens diferentes da LQG (“linear-quadratic-gaussian”), como é o caso da abordagem
Skyhook, por exemplo. Em ambos os casos há uma perda de desempenho a se considerar, que
ocorre em função do atraso e de eventuais erros impostos pelo filtro, apesar de se poder
reduzir bastante o número de sensores. Por outro lado, apesar de várias aplicações de controle
de suspensão utilizarem unicamente a medida do deslocamento relativo entre roda e
carroceria (curso dos amortecedores) como entrada do controlador (YUE et al., 1988), foi
mostrado por Ulsoy et al. (1994) que a abordagem LQG pode aumentar em até 80% o custo
linear-quadrático (LQ) do índice de desempenho. Em outras palavras, isto significa que o
observador pode falsear os critérios de otimização do controlador. Além disso, o controle
11 RIBEIRO, F. J.; Some Comments on Displacement Measurement Using Accelerometers. Technical Report T93/641, Materials in Mechanical Engineering Departement, IME and Mechanical Department PUC RJ, 1997.

214
LQG, em geral, é pouco robusto quanto aos erros de modelagem. Foi mostrado por Ulsoy et
al. (op. cit.) que, para um conjunto “típico” de ganhos de realimentação, a margem de ganho
do regulador LQG “stroke-based” da suspensão pode ser de apenas 0,2 dB, e a margem de
fase de 18º. Apesar desta falta de robustez em controles semi-ativos não gerar instabilidade,
ela pode resultar em uma grande perda de desempenho.
De forma geral, o trabalho de Ulsoy et al. (1994) mostra que é importante se considerar
a robustez do sistema em malha-fechada com respeito aos estados não medidos, às mudanças
estruturais, às incertezas paramétricas, aos modos não modelados, aos erros de medida, e às
simplificações de modelagem dos atuadores. No caso de medições parciais dos estados, é
possível se recorrer a abordagens robustas de controle como LGQ/LTR e ∞H .
Em particular, DeJager (1991) investigou potenciais aplicações da abordagem ∞H no
projeto de suspensões ativas. Baseado no índice de desempenho que considera a deflexão dos
pneus, a deflexão da suspensão e a aceleração vertical da massa não suspensa; foi verificado
que o controlador resultante introduz um amortecimento excessivo no modo de ressonância
das rodas, visto que a técnica ∞H tende a minimizar os picos nas curvas de resposta em
freqüência. Como foi mostrado em Hrovat (1997), o amortecimento excessivo em geral leva à
deterioração do desempenho em conforto. Esta mesma situação havia sido descrita por Kiriczi
e Kashani (1990). Para contornar este problema Yamashita et al. (1990) desprezaram a
deflexão nos pneus no índice de desempenho, justificando já haver suficiente nível de
amortecimento inerente ao seu protótipo. Em vista destas questões, Tran12 e Hrovat (1992,
apud HROVAT, 1997) sugerem que seja utilizada a métrica mista ∞HH /2 , que seria uma
forma de combinar as desejáveis propriedades de robustez da abordagem ∞H com o melhor
desempenho da abordagem 2H . Outra idéia seria utilizar a síntese µ (“ µ synthesis”) que
evita o excesso de robustez do controle ∞H , e baseia-se na adição de incertezas através de
valores singulares estruturados, conceito introduzido por Packard, Fan and Doyle (1988).
12 TRAN, M.; HROVAT, D.; Feasibility Study of Mixed ∞HH /2 Active Suspension Control Design, Ford
Motor Company Internal Memo, Dearborn, MI, 1992.

215
2.4 CONSIDERAÇÕES PRÁTICAS
Esta seção apresenta uma síntese dos muitos aspectos práticos relacionados a sistemas
de suspensão semi-ativos e sua aplicação. Como o foco deste trabalho está na aplicação destes
sistemas em caminhonetes e SUVs, algumas características destes veículos também são
destacadas.
2.4.1 REPRESENTAÇÃO APROPRIADA DOS DISTÚBIOS EXÓGENOS
A descrição apropriada dos distúrbios aplicados ao veículo é o primeiro passo para o
estudo de sistemas de suspensão. Os movimentos e atitudes do veículo são influenciados
basicamente por dois tipos de distúrbios: o primeiro é causado pela rugosidade ou imperfeição
do pavimento onde o veículo transita, e o outro é causado por diferentes forças e momentos
gerados em situações de frenagem, mudança de direção, ou mesmo por efeitos aerodinâmicos
devido a rajadas de vento, por exemplo. Para estudos de conforto, o distúrbio gerado pelo
pavimento é o mais importante, e o único que está no escopo deste trabalho.
Assim sendo, o objetivo da melhoria do conforto pode ser visto como uma equivalente
melhoria no processo de filtragem dos efeitos da vibração gerada pelo pavimento. No
contexto das vibrações, a rugosidade da via é tipicamente especificada como um processo
estocástico de uma dada densidade espectral de potência (“P.S.D. – Power Spectral Density”)
de um sinal de deslocamento vertical. Há nestes últimos 40 anos muita pesquisa sobre
aproximações destas curvas de gráficos PSD do perfil da via, entre eles podem-se citar os
modelos de Hać (1987), Hrovat (1993) e Gillespie (1994); contudo, por simplicidade, neste
estudo será utilizado o modelo de Thompson (1979), formalmente dado por:
nAS Ω=Ω)( (2.1)
onde Ω é a freqüência espacial (ou número de onda), tipicamente em unidades “radianos por
comprimento”, e A e n são constantes apropriadas.

216
Figura 2.1 – Densidade espectral de potência de vários terrenos (SEVIN13 e PILKEY, 1971).
Conforme resultados de Sevin e Pilkey13 (1971 apud HROVAT, 1997), apresentados na
figura 2.1, e Smith14 (1982 apud HROVAT, 1997), apresentados na figura 2.2, a curva da
densidade espectral de potência de vários tipos de terrenos tende a se aproximar de uma reta,
se analisada num gráfico bi-logaritmico. A inclinação negativa da reta que aproxima a curva
da densidade espectral apresenta uma relação de 2 para 1, o que leva o parâmetro ‘n’ da
equação (2.1) ser muito próximo de -2. Este valor de espectro de deslocamento dado pela
equação (2.1) implica que o sinal de velocidade vertical aplicado às rodas pelo contato com o
solo pode ser aproximado por um ruído branco. Isto é bastante conveniente para aplicação de
técnicas como o LQG (“Linear-Quadratic-Gaussian”), que apresenta a mesma hipótese para
os ruídos de processo. Assim sendo, o modelo matemático mais adequado para representar o
veículo é aquele cujas entradas de perturbações exógenas são os sinais de velocidades
verticais que o solo ou pavimento aplicam às rodas do veículo. Na equação (2.1) o parâmetro
‘A’ está relacionado à severidade das imperfeições da via, ou seja, quanto mais irregular for a
superfície da via, maior será o valor do parâmetro ‘A’.
13 SEVIN, E.; PILKEY, W. D. Optimum shock and vibration isolation. The Shock and Vibration Information Center, United States Department of Defense, 1971. 14 SMITH, R. E. Amplitude characteristics of Dearborn test track roadways. Ford Motor Company Technical Memorandum, SRM-82-26, Dearborn, MI, 1982.

217
Figura 2.2 – (a) Comparação do modelo dado pela equação (2.1) com n=-2,02 e a medida das irregularidades de um trecho da “Rochester road” conforme Smith (1982 op. cit.).
(b) Comparação do modelo dado pela equação (2.1) com n=-1,99 e a medida das irregularidades de um trecho entre “Broken road” e“Rochester Road” conforme Smith (idem).
Padrões de curvas de densidade espectral de potência para diferentes tipos de
pavimentos de estradas estão normatizados na ISO-8608 (1984).
2.4.2 CRITÉRIOS DE CONFORTO E O “TRANCO”
Há muitas formas para se qualificar objetivamente o conforto. A forma mais simples é
através do valor eficaz ou RMS (“Root-Mean-Square”) das acelerações a que os ocupantes do
veículo ficam expostos. Segundo Regazzi e Ximenes (2000), o valor eficaz da aceleração é
uma medida importante porque leva em conta tanto a cronologia de um sinal de vibração,
como também considera um valor de amplitude proporcional à energia contida no sinal, e, por
conseguinte, indica o poder agressivo da vibração.
Normalmente a aceleração total que uma pessoa sofre dentro de um veículo pode ser
dividida em três componentes lineares nas direções “x”, “y” e “z” (vide figura 2.3). A
componente na direção “z” é resultante do movimento linear do habitáculo do veículo
identificado como “bounce” ou “heave”. Por outro lado, as componentes lineares nas direções
“x” e “y” são resultantes de movimentos de rotação do corpo suspenso do veículo: rolamento
e arfagem (“roll” e “pitch”). Isto na verdade é uma aproximação, visto que uma pessoa dentro
de veículo não tem em geral seu centro de massa coincidente com o centro da rotação do
corpo suspenso do veículo, e como as variações angulares são pequenas, estes movimentos
podem ser aproximados por translações do corpo dessa pessoa.

218
Figura 2.3 – Direções de medida da vibração no corpo humano.
Sob o ponto de vista da fadiga sentida pelo corpo humano exposta a vibrações é
importante considerar também a freqüência da vibração e o tempo de exposição. Existem
várias padronizações internacionais voltadas a esse assunto, das quais se destacam a ISO-2631
(1978, 1997), a BS-6841 (1987) e a SAE J1490 (1987). De forma geral, estas padronizações
mostram que a faixa de freqüências mais crítica para vibrações no eixo z vai de 4 a 8 Hz, e
para os eixos x e y, vai de 1 a 2 Hz, conforme apresentado no gráfico da figura 2.4.
Figura 2.4 – Limite de exposição, fadiga e conforto para 1 minuto e 24 horas de exposição à vibração no corpo humano, conforme ISO-2631 (GRIFFIN, 1990).

219
A norma SAE J1490 apresenta fórmulas matemáticas de curvas de ponderação para
serem aplicadas ao espectro de potência (PSD) das acelerações nos eixos x, y e z, enfatizando
as faixas de freqüências descritas acima nos seus respectivos eixos. Estas curvas têm uma
relação com a potência absorvida pelo corpo humano para cada freqüência de vibração, e
servem como um meio prático de se obter um índice de desempenho objetivo para o conforto.
Para isso, basta obter-se o PSD do sinal de aceleração, ponderar o resultado ponto-a-ponto
utilizando a função de ponderação adequada, e fazer o somatório da “potência” em todas as
raias de freqüência. Assim se obtém a medita da potência total absorvida pelo corpo humano
exposto àquele sinal de aceleração.
Contudo há outra característica do conforto a se considerar. Esta característica é
sentida pelos usuários dos veículos como pequenos solavancos (“jerk” ou “tranco”), e está
associado a um aspecto do conforto chamado de “harshness”. Em língua portuguesa o
”harshness” pode ser traduzido como “aspereza”, porém as palavras da língua inglesa “jerk” e
“harshness” são bastante comuns no jargão da indústria automobilística internacional. O
“tranco” pode passar despercebido quando se calcula apenas o valor eficaz da aceleração. Os
dois gráficos de aceleração mostrados na figura 2.5 apresentam exatamente o mesmo valor
eficaz, contudo pode-se perceber intuitivamente que a situação no gráfico “b” é muito mais
desconfortável.
Figura 2.5 – Curvas de aceleração com o mesmo valor eficaz.

220
A diferença dos dois gráficos pode ser caracterizada pelo “tranco”, que corresponderia
aos solavancos causados pelas mudanças bruscas no sentido da aceleração. Desta forma,
“tranco” pode ser medido através do valor eficaz da derivada do sinal de aceleração, ou pela
presença de harmônicos de freqüência elevada no PSD do sinal de aceleração.
No caso do uso de sistemas de suspensão semi-ativos, é comum ocorrer um aumento
do “tranco” e conseqüentemente gerar uma degradação do conforto, contrariando o objetivo
principal do sistema. Uma das razões para o aumento do “tranco” é o fato das forças aplicadas
pelos amortecedores semi-ativos apresentarem descontinuidades, que são impostas pela regra
de controle. Tomando como exemplo um controle do tipo Skyhook, conforme o diagrama de
blocos apresentado na figura 2.6, tem-se a situação em que a força que o atuador aplica na
massa suspensa deve ser proporcional à sua velocidade vertical, porém em sentido oposto.
Isto seria possível para um sistema ativo, contudo, no caso semi-ativo, o atuador apenas é
capaz de realizar forças dissipativas, ou seja, forças contrárias ao seu movimento relativo.
Figura 2.6 – Descontinuidade no sinal “força” gerado por um sistema semi-ativo.
Como o movimento vertical das massas suspensa e não-suspensa nem sempre estão
sincronizados e também em geral não são de mesma freqüência, conforme mostrado nos
gráficos da figura 2.6, existem situações onde a força solicitada pelo algoritmo Skyhook
deveria ser ativa. Nestes casos adota-se uma regra de controle semi-ativo que “desliga” o
atuador nestas situações, gerando as descontinuidades no sinal de força, como mostra o
gráfico “c” da figura 2.6.

221
Os sistemas semi-ativos também podem apresentar outras descontinuidades da força
devido à histerese presente na relação entre força e velocidade no atuador. A figura 2.7 ilustra
bem este fenômeno da histerese.
Figura 2.7 – Histerese na relação força versus velocidade nos amortecedores MR.
Como os algoritmos de controle semi-ativo chaveiam o sinal de controle do atuador
exatamente quando a sua velocidade relativa passa por zero, e como nesta situação a força não
é nula, sempre ocorre uma variação abrupta da força. Para contornar este problema existem
outras propostas construtivas da válvula magnética dos amortecedores MR para se reduzir o
efeito de histerese, como é o caso da Patente de Lisenker et al. (2005) que acrescenta uma
passagem do fluido pela válvula que não fica exposto ao campo magnético. Em velocidades
baixas de movimentação da haste, ou seja, em pequenas vazões, este canal oferece pouca
resistência à passagem do fluido, reduzindo assim a força que o atuador é capaz de aplicar
nesta situação. No entanto, este tipo de solução tende a reduzir o desempenho geral do
atuador, pois interfere no circuito magnético da válvula, cujo espaço físico é limitado.
O “tranco” pode ocorrer também devido às descontinuidades de força relativas às não
linearidades da suspensão, como fim-de-curso, batentes, e o repique dos pneus em colisão
com o solo. Apesar das inúmeras técnicas de controle já estudadas para aplicações de controle
de suspensão veicular SA, o problema do “tranco” excessivo ainda persiste.
Nesta pesquisa foram identificados alguns trabalhos preocupados com a questão do
“tranco”, como é o caso de Song et al. (2002), que propõe funções alternativas para o Skyhook

222
semi-ativo, chamada de No-Jerk Skyhook. Outro artigo de Bourmistrova et al. (2005) também
busca a redução do “tranco”, porém utilizando um algoritmo evolucionário (algoritmo
genético) com um função multi-objetivo que, entre outras variáveis, penaliza o “tranco”.
2.4.3 OS CRITÉRIOS PARA PROJETO DO CONTROLADOR
Segundo HROVAT (1997), a definição de critérios para se projetar controladores de
sistemas de suspensão ativa ou SA tem sido objeto de investigações nos último 40 anos. De
maneira geral, os critérios utilizados para o projeto destes sistemas são: a redução da
amplitude a aceleração vertical da massa suspensa; a limitação da amplitude do deslocamento
relativo entre a massa suspensa e não-suspensa, chamado de “stroke”; e a limitação da
amplitude relativa de vibração entre massa não-suspensa e o ponto de contato entre o pneu e o
solo.
Figura 2.8 – Modelo com um grau de liberdade (1 DOF).
Partindo-se do modelo mais simples possível de um sistema de suspensão veicular, com
apenas um grau de liberdade (1 DOF – “Degree Of Freedom”) apresentado na figura 2.8, e
aplicando-se os conceitos descritos acima, pode-se chegar a conclusões interessantes. Como
este modelo simples despreza a massa das rodas, o critério de manutenção da amplitude entre
roda e solo também é desprezado. Neste caso, o objetivo passa a ser descobrir que força é
necessária entre a roda e a massa suspensa, representado na figura 2.8 pelo símbolo de
interrogação, para que ocorra a minimização da seguinte função de custo:

223
( )
+= ∫ dtxrxEJ ft
0
22
21 & (2.2)
Na equação (2.2), tem-se os valores r.m.s. do “stroke”, 1x , e da aceleração vertical da
massa suspensa, 2x& , que é ponderada por uma constante r. O segundo termo, 2x& , tem relação
com o conforto, que é melhorado com a redução da amplitude média desta aceleração. O
“stroke” está relacionado com o espaço de trabalho da suspensão, chamado também de
“rattlespace”, e é considerado na função de custo para prevenir que a suspensão atinja os seus
limites físicos de curso, o que traz uma grande degradação do conforto. Na função de custo
considera-se o valor esperado, dado pela função •E , que é necessária devido à consideração
de uma entrada de natureza estocástica para a perturbação que a pista aplica aos pneus. Este
problema de otimização está sujeito a restrições que são dadas pelas seguintes equações de
estado:
wxx −= 21& (2.3)
sM
Uux ==2& (2.4)
Conforme apresentado na seção 2.4.1, a entrada de velocidade vertical que o pavimento
aplica ao pneu, w, é resultante da rugosidade da pista e da velocidade, V, do veículo; e é
tipicamente modelada como um ruído-branco.
É interessante observar que o problema acima tem a forma de um regulador linear-
quadrático (LQR –“Linear Quadratic Regulator”), que também pode ser aplicado a problemas
de sistemas lineares e variantes no tempo. Apesar de haver técnicas numéricas bem-
desenvolvidas para sua solução, este exemplo simples pode ser resolvido analiticamente (vide
APÊNDICE A), e seu resultado é o seguinte:
241
121 2 xrxruLQ
−− ⋅−−= (2.5)

224
Do resultado da equação (2.5), é possível deduzir uma estrutura ótima para o sistema de
suspensão, que consiste da massa suspensa ligada a roda por uma mola de constante elástica
2112
−⋅= rMk s , e ligada a um referencial inercial por meio de um amortecedor de coeficiente
de amortecimento 412 −⋅⋅= rMb sSH , chamado de amortecedor SkyHook, conforme
ilustrado pela figura 2.9.
Figura 2.9 – Desempenho ótimo para modelo de 1 DOF – SkyHook.
Percebe-se que o controle de suspensão chamado de SkyHook tem origem do resultado
do LQR aplicado a um sistema de apenas 1 DOF, e portanto é bastante limitado, visto que os
sistemas reais são bem mais complexos. No entanto, trata-se da estratégia de controle mais
adotada na prática, principalmente em sistemas semi-ativos.
Apesar do fenômeno do “tranco” também ser uma característica importante na
percepção do conforto, ele é difícil de ser considerado diretamente em técnicas convencionais
de controle por realimentação baseados em modelos dinâmicos de veículos. Apesar de que, de
forma bastante simplificada, o “tranco” possa ser avaliado como a derivada da aceleração da
massa suspensa do veículo, esta não é uma grandeza física, e por conseqüência não está
explicitamente disponível em modelos dinâmicos dos veículos em geral. Além disso, o
”tranco” não pode ser medido diretamente através de sensores, visto que derivar o sinal de
acelerômetros não é uma boa prática.
No caso de sistemas SA, a questão do “tranco” é ainda mais complexa, visto que ele é
também gerado por características inerentes à não-linearidade própria dos atuadores semi-
ativos, e também devido às descontinuidades do sinal de força, conforme já descrito na seção
2.4.2. Na prática, como o “tranco” não é realimentado diretamente no controlador, podem

225
ser utilizados caminhos indiretos para reduzi-lo. Por exemplo, no caso do “tranco” gerado
pelo fenômeno de histerese do atuador, pode-se utilizar um modelo matemático fiel do
atuador para orientar o controlador no melhor momento de se comutar a força.
Figura 2.10 – Modelo de um controlador ativo baseado na regra SkyHook.
Por outro lado, no caso do “tranco” gerado pela descontinuidade do sinal de força, uma
possibilidade de melhoria do conforto é a redução do ganho de realimentação relacionado à
velocidade V2. Apesar disso parecer um contra-senso, visto que a redução do coeficiente de
amortecimento SkyHook faz com que as amplitudes da aceleração vertical da massa suspensa
aumentem, a defasagem entre as velocidades V1 e V2 tendem a diminuir nesta situação. Como
as descontinuidades são menores quanto menor for esta defasagem, verifica-se uma possível
redução do “tranco”. Para exemplificar, partindo-se do modelo descrito na figura 2.10, onde
um atuador de força ativo é colocado ao lado da mola exercendo força entre as massas
suspensa e não-suspensa com amplitude proporcional a velocidade da massa suspensa, chega-
se a função de transferência apresentada na equação a seguir:
SHs bsMs
kbs
sV
sV
⋅+⋅
+⋅−=
21
2
)(
)( (2.6)

226
Analisando-se o diagrama de Bode desta função de transferência é possível avaliar a
defasagem que vai existir entre a velocidade vertical da massa suspensa, V2(s), e a velocidade
relativa da suspensão, V1(s), que é proporcional à força aplicada por um atuador semi-ativo
(força dissipativa). A defasagem entre os dois sinais corresponde ao intervalo de tempo que o
atuador semi-ativo teria que ficar desativado; e o valor de 90° de defasagem corresponde à
maior amplitude possível da descontinuidade da força aplicada, e o maior nível de “tranco”.
Tomando-se um exemplo numérico, com k=20 kN/m, b=600 N.s/m, Ms=200kg, e
comparando-se dois diagramas de Bode: um com bSH=2828,4 Ns/m que é o valor ótimo dado
pelo LQR, e outro com bSH=1414,2 Ns/m que equivale à situação do atuador aplicando
metade da intensidade de força “ótima”, chega-se ao gráfico da figura 2.11. Pode-se verificar
que valores menores do coeficiente de amortecimento do SkyHook (bSH) levam a defasagens
menores, principalmente na faixa de freqüência onde tanto V1 como V2 tendem a ter as
maiores amplitudes. Sendo assim, definir ganhos menores do que os definidos como ótimos
segundo procedimentos LQR, pode contribuir para uma melhoria do “tranco”, e
conseqüentemente ser mais um ponto a se considerar como critério de projeto de um
controlador para um sistema de suspensão semi-ativo. O importante é considerar que deve
haver um equilíbrio entre o “tranco” e a amplitude da velocidade vertical da massa suspensa
para que a melhor situação de conforto seja alcançada.
Figura 2.11 – Diagrama de bode de V2(s)/V1(s).
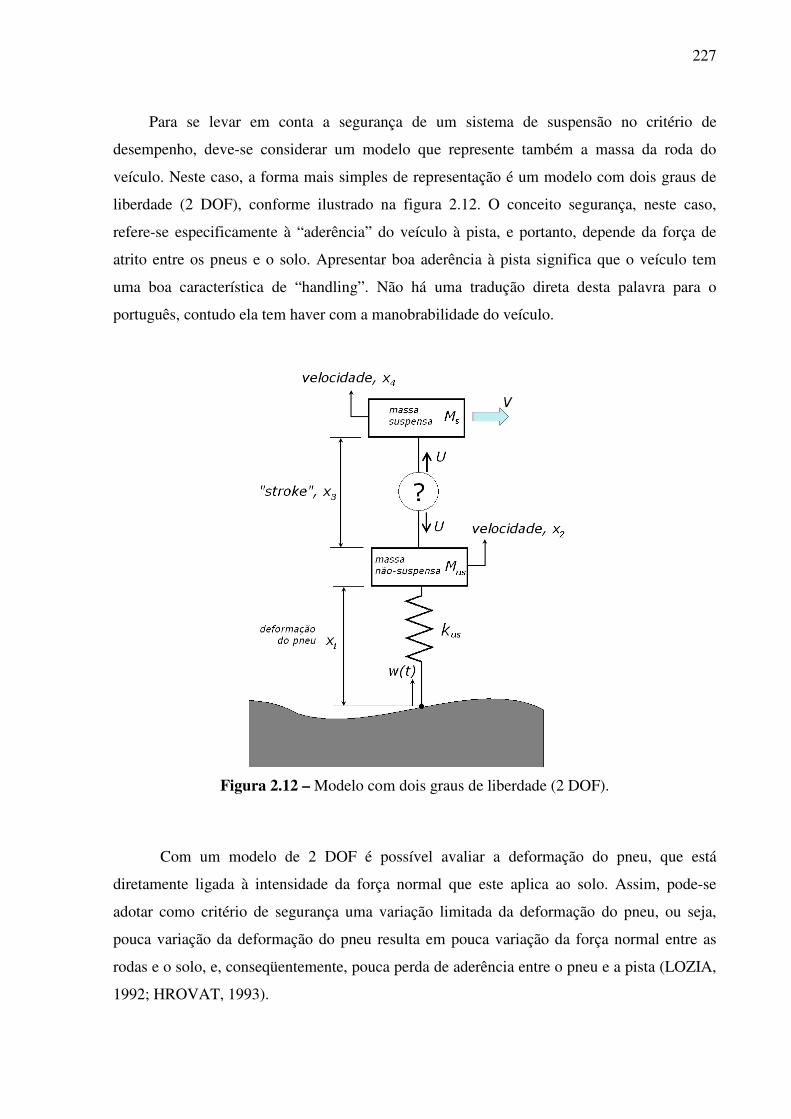
227
Para se levar em conta a segurança de um sistema de suspensão no critério de
desempenho, deve-se considerar um modelo que represente também a massa da roda do
veículo. Neste caso, a forma mais simples de representação é um modelo com dois graus de
liberdade (2 DOF), conforme ilustrado na figura 2.12. O conceito segurança, neste caso,
refere-se especificamente à “aderência” do veículo à pista, e portanto, depende da força de
atrito entre os pneus e o solo. Apresentar boa aderência à pista significa que o veículo tem
uma boa característica de “handling”. Não há uma tradução direta desta palavra para o
português, contudo ela tem haver com a manobrabilidade do veículo.
Figura 2.12 – Modelo com dois graus de liberdade (2 DOF).
Com um modelo de 2 DOF é possível avaliar a deformação do pneu, que está
diretamente ligada à intensidade da força normal que este aplica ao solo. Assim, pode-se
adotar como critério de segurança uma variação limitada da deformação do pneu, ou seja,
pouca variação da deformação do pneu resulta em pouca variação da força normal entre as
rodas e o solo, e, conseqüentemente, pouca perda de aderência entre o pneu e a pista (LOZIA,
1992; HROVAT, 1993).

228
A função de custo que deve ser minimizada para se encontrar os elementos do sistema
de suspensão que resultem no melhor desempenho do sistema quanto aos critérios de
conforto, “rattlespace” e segurança é dada a seguir:
( )
++= ∫ dtxxrxrEJ ft
0
24
232
211 & (2.7)
Nesta equação, 1x e 3x são os estados que representam as deflexões do pneu e da
suspensão, respectivamente, e 4x& é a aceleração vertical da massa suspensa, conforme a
figura 2.12. Os parâmetros 1r e 2r são fatores de ponderação dos diferentes critérios de
desempenho.
Com o acréscimo de uma nova restrição, é natural que o desempenho, em termos das
variáveis aceleração e “rattlespace” (em valores RMS), seja um pouco deteriorado. Em
exemplos numéricos desse estudo, percebe-se que a solução ótima para a realimentação dos
estados ( 4321 e ,, xxxx ) caminha sempre para uma realimentação positiva do estado
2x (velocidade vertical da roda), que corresponde na prática a uma redução do coeficiente de
amortecimento dos pneus. Os critérios de conforto e segurança influenciam a realimentação
deste estado de forma oposta, indicando que a solução ótima para o controle da suspensão
deve ser uma solução de compromisso entre os três critérios.
Já há vinte anos, algumas pesquisas nesta área levaram a conclusões que apontam para
uma degradação de desempenho em conforto relativamente grande devido a consideração do
critério de segurança. Trabalhos, como os de Kawagoe e Iguchi (1985) e Karnopp (1986),
colocaram este assunto com um tom bastante pessimista. Eles afirmaram que, para um mesmo
nível de deflexão do pneu e da suspensão comparável a de sistemas passivos, um controle de
suspensão ativo pode reduzir o valor RMS da aceleração da massa suspensa em apenas 18%.
Esta afirmação foi um tanto desapontadora, dado que uma redução de apenas 18% (que
equivale a apenas -2 dB) pode não ser percebida como uma melhora significativa do conforto
para a maioria dos motoristas e ocupantes de veículos.
Contudo, dado que as conclusões destes trabalhos foram alcançadas baseadas apenas
num ponto singular de otimização (apenas um conjunto de pesos 1r e 2r foi utilizado), seria
interessante verificar em que extensão a conclusão acima pode ser generalizada. Esta proposta
se concretizou nos estudos de Hrovat (1988), onde a otimização foi desenvolvida para uma
229
faixa de valores de 1r e 2r com significância prática. O trabalho de Hrovat (op. cit.)
corroborou os resultados de Kawagoe e Iguchi (op. cit.), porém mostrou uma visão mais
ampla do assunto e indicou novas direções para o desenvolvimento de sistemas ativos de
suspensão.
Em síntese, foi mostrado que uma das possibilidades de melhoria seria a adoção de
sistemas adaptativos, visto que a necessidade de se manter níveis de deflexão de pneus e
suspensão equivalentes ao de sistemas passivos ocorre principalmente quando o veículo está
em manobras (por exemplo, curvas, frenagens, mudanças de pista, etc.). Dessa forma, em
situações em que o veículo se encontra em velocidade constante e em linha reta, podem-se
adotar critérios mais relaxados para as deflexões, principalmente a dos pneus, e assim se obter
melhorias mais significativas no desempenho da aceleração RMS da massa suspensa. O
controle adaptativo monitora outros estados de veículo, identificando se ele está realizando
manobras ou está trafegando em linha reta e velocidade constante, e assim ajusta os ganhos do
controlador conforme a situação.
Outra possibilidade é a adoção de absorvedores dinâmicos junto à massa das rodas,
sintonizados para se reduzir a amplitude de sua movimentação, e assim permitir o
relaxamento do critério de deflexão dos pneus, sem a perda do desempenho em segurança.
No caso dos sistemas de suspensão semi-ativos, a redução do amortecimento dos
movimentos da massa não-suspensa ocorre em menor intensidade, uma vez que os atuadores
semi-ativos apenas dissipam a energia do sistema. Neste caso, portanto, é possível relaxar em
maior grau o critério de segurança.
2.4.4 REFERÊNCIA PARA COMPARAÇÃO DE DESEMPENHO
Os trabalhos sobre sistemas ativos ou semi-ativos de suspensão em geral usam sistemas
passivos lineares como referência para comprovar a sua melhoria no desempenho em
conforto, como é o caso de Elbeheiry e Karnopp (1996), Hać et al. (1996b), Rao e Prahlad
(1997), Guo et al. (2004), e Stutz e Rochinha (2005), por exemplo. No entanto, na prática,
nenhum veículo utiliza elementos puramente lineares nos sistemas passivos de suspensão.
Como foi apresentado na seção 2.1.2, a utilização de amortecedores e molas não lineares pode
melhorar muito o desempenho de um sistema passivo. Por esta razão, outros trabalhos, como
o de Motta e Zampieri (2005), enfatizam a importância das não-linearidades dos sistemas
230
convencionais passivos, utilizando estes sistemas passivos como referência para verificação
de resultados satisfatórios de sistemas semi-ativos de suspensão.
Enquanto é comum se obterem ganhos em relação a um sistema passivo linear, suplantar
o desempenho de sistemas passivos não-lineares com o uso de sistemas semi-ativo não é uma
tarefa tão simples. Isto ocorre fundamentalmente por dois motivos: primeiro, porque na
utilização de sistemas semi-ativos há uma perda de características importantes do amortecedor
passivo não-linear, que não são substituídas pelo atuador semi-ativo; e segundo, porque o
atuador semi-ativo apresenta atrasos e efeitos de histerese, como é o caso dos atuadores
magneto-reológicos, que contribuem para a deterioração do conforto.
2.4.5 TIPOS DE SENSORES PARA SISTEMAS MECÂNICOS
A melhor situação para um projeto de controlador por realimentação de estados é que
todos os estados pudessem ser medidos através de sensores. Entretanto o custo do sistema de
controle aumenta muito com a adição de sensores. Além disso, sensores também são fontes de
geração de erros, devido a ruídos de medida, ou por causa das quantizações do sinal resultante
das conversões analógicas para digital dos sinais medidos, ou ainda pela adição de um viés
contínuo no sinal (“nível DC”), que podem ser influenciados por variações de temperatura.
Outra restrição é que pode haver estados cuja medição é tecnicamente difícil de ser realizada,
como a variação da distância entre o centro da roda e o ponto de contato entre pneu e solo, por
exemplo, no caso de um sistema de suspensão.
Para o sensoriamento de movimentos em sistemas mecânicos, os sensores mais comuns
são os acelerômetros, e os sensores de deslocamento. Entre estes dois sensores, os
acelerômetros são mais fáceis de instalar e mais robustos.
Os acelerômetros, apesar de serem bastante utilizados em análise de vibração em
estruturas ou mecanismos, são em geral identificados como sensores caros, devido ao alto
custo da sua versão baseada em cristais piezelétricos de alta precisão. Por outro lado,
atualmente estão sendo muito disseminados os sensores chamados de “micro-machined
accelerometers - MMA”, que são acelerômetros inseridos dentro de circuitos integrados
eletrônicos, também chamados de MEMS (“Micro-Electro-Mechanical Systems”), conforme
apresentado na figura 2.13. Estes sensores podem custar até dez vezes menos que um
acelerômetro piezelétrico convencional (~US$15 cada, cotado em 2008), e apesar da sua
banda de freqüência mais restrita, os acelerômetros MEMS apresentam uma resposta rápida o

231
suficiente para a maioria das aplicações em sistemas mecânicos, e em particular nos sistemas
de suspensão veiculares. Sua maior aplicação no setor automobilístico atualmente é a medição
de aceleração para acionamento de “air-bags”, o que comprova a sua grande confiabilidade.
Figura 2.13 – Acelerômetro baseado na tecnologia MEMS.
Com relação aos sensores de deslocamento, os mais comuns são os encoders lineares ou
rotacionais. Há encoders baseados em princípios ópticos e magnéticos, e em ambos não
ocorre contato físico entre as partes que apresentam movimento relativo entre si, o que dá
características de alta durabilidade e robustez a este sensor. Há outros sensores de medida de
deslocamento linear, chamados de magneto-indutivos15 ou magneto-estritivos16, que são
capazes de fazer medições lineares com bastante precisão, e sua instalação é bem mais
simples, pois em uma das partes móveis precisa ter apenas um imã. Outra vantagem destes
sensores é que eles são menos sensíveis a pequenos movimentos perpendiculares à direção
principal de medição.
Uma opção bem mais barata para medição de deslocamento são os potenciômetros.
Estes componentes eletrônicos são em geral rotacionais e sua concepção é a de um contato
elétrico que desliza sobre uma resistência de filme de carbono ou fio, cujo movimento varia a
resistência elétrica entre seus terminais. A grande desvantagem do uso do potenciômetro para
medições de deslocamento em sistemas mecânicos é que mesmo os mais robustos deles
apresentam um desgaste muito rápido, dado que existe contato mecânico e atrito entre as
partes que apresentam movimento relativo entre si. Contudo sua simplicidade e baixo custo
podem ser muito interessantes nas fases preliminares do desenvolvimento de um sistema de
controle.
15 BALLUF, <http://www.balluff.com.br>. Acesso em: 11 jul. 2008. 16 “magnetostrictive”, Novotechnik Stiftung & Co.,<http://www.novotechnik.de>. Acesso em: 11 jul. 2008

232
Para medições de força podem ser utilizadas células de carga, contudo elas são sensores
bastante caros. Além disso, sua massa elevada pode interferir nas medições feitas em sistemas
de pequeno porte. Uma opção são os extensômetros (“strain gages”), usados para medir
deformações e que de forma indireta podem ser utilizados para medir forças, uma vez que se
conheça a relação força versus deformação no ponto onde os extensômetros sejam instalados.
Entretanto, os extensômetros são sensores pouco robustos, e sua utilização restringe-se ao
ensaio de componentes e testes de veículos em campo. Nos sistemas de suspensão veicular, as
medições diretas de força são inviáveis, principalmente porque encarecem muito o sistema,
inviabilizando-o economicamente. Como alternativa, os sinais de força precisam ser
estimados, e isto pode ser feito utilizando-se filtros de Kalman, por exemplo.
2.4.6 POSIÇÃO DOS SENSORES NO VEÍCULO
Em geral, os sistemas de controle de suspensão contam com pelo menos quatro sensores
de deslocamento entre cada roda e a carroceria. Conforme exemplo apresentado na figura
2.14, o Corvette utiliza um “encoder” angular, que é conectado ao braço de controle superior
da suspensão através de um pequeno tirante (em destaque na foto).
Figura 2.14 – Sensor de deslocamento da suspensão dianteir do Corvette (Halverson, 2003).

233
Com relação aos sensores inerciais, pode-se utilizar um único sensor próximo do centro
de massa do veículo, que seja capaz de medir a aceleração linear na direção “z” e acelerações
angulares em torno do eixo “x”, e do eixo “y” (sistema de coordenadas conforme descrito na
figura 2.15). Contudo, no caso de veículos com carroceria mais flexível, e em que o centro de
massa pode variar de posição, esta forma de sensoriamento da aceleração não é adequada,
pois pode levar a erros significativos.
Figura 2.15 – Sistema de coordenadas de referência.
Assim, a melhor forma de sensoriamento de acelerações da carroceria de uma
caminhonete é através da utilização de quatro acelerômetros posicionados sobre cada uma das
rodas. Considerando-se que as variações angulares no rolamento e na arfagem são pequenas
(menores que 6º), as acelerações verticais destes quatro sensores podem ser facilmente
transformadas num vetor contendo a aceleração vertical do centro de massa e das acelerações
angulares de rolamento e arfagem. Isto pode ser feito através de uma transformação linear.
No caso de ocorrer uma torção significativa do chassi num determinado momento, os
sensores se movimentam de forma a não estarem mais posicionado num mesmo plano.
Contudo a transformação linear aplicada age implicitamente como se traçasse um plano
médio, dando uma informação mais real da aceleração da massa suspensa do veículo como
um todo. Outro resultado da utilização dos quatro acelerômetros na carroceria é a
possibilidade de se medir a intensidade de sua torção.

234
2.4.7 AS NÃO-LINEARIDADES DOS ATUADORES
Apesar da importância da dinâmica e das não-linearidades dos atuadores SA, são poucos
os trabalhos que não as negligenciam. Entre os trabalhos que consideram estas características
dos atuadores, destacam-se: Gonçalves e Meirelles (2005), que utiliza modelos não-lineares
de atuadores hidro-pneumáticos semi-ativos; Liu et al. (2004), que apresenta uma função de
transferência para gerar o sinal de tensão elétrica de excitação do atuador concebida a partir
de um modelo fenomenológico do atuador; e Jansen e Dyke (2000), em seu estudo
comparativo de várias estratégias de controle semi-ativo, onde consideram um atraso de
primeira ordem para representar a resposta dinâmica do atuador e dos comandos eletrônicos
da malha de controle.
Hrovat (1997) enfatiza em seu trabalho a importância da consideração dos atritos secos
ou de Coulomb. Segundo ele, a presença do atrito seco nos atuadores é provavelmente a razão
principal do desempenho menor que aquele previsto pelos cálculos teóricos, pois sua
influência pode ser de até 3,3% (RMS) na aceleração da massa suspensa do veículo. Ele
também cita a importância da banda de resposta dos atuadores que deve ser superiores a 20
Hz.
Trabalhos como o de Dyke et al. (1996), Chantranuwathana e Peng (2000) e DeMan et
al. (2007) sugerem sub-malhas de controle para melhorar a resposta de força dos atuadores
semi-ativos.
2.4.8 FLEXIBILIDADE DO CHASSI DE CAMINHONETES
As caminhonetes apresentam um chassi mais flexível que os carros de passeio. Isto
ocorre porque a estrutura em monobloco dos veículos de passeio é bem mais rígida, porém
apresenta custos inviáveis para veículos maiores, tais como caminhonetes e SUVs, que
utilizam quadros em forma de escada (“ladder frames”). Apesar do quadro de chassi
proporcionar um melhor isolamento de vibrações para a carroceria, a forma de construção das
caminhonetes em que a caçamba fica separada da cabine, implica em uma menor rigidez
torcional e de flexão vertical do corpo suspenso do veículo.
Perseguim (2005) descreve alguns fatores que contribuem para que esta flexibilidade do
chassi influencie na deterioração da sensação de conforto. Entre eles podem-se citar:

235
a) o amortecimento estrutural do quadro de chassi é de apenas 1% em média;
b) os amortecedores da suspensão em geral não contribuem para a dissipação da energia
das vibrações da estrutura do chassi, porque é comum a vibração das rodas acompanhar
o movimento do chassi, de tal forma que os deslocamentos relativos entre os dois sejam
de amplitude insuficiente para gerar trabalho significativo nos amortecedores;
c) os elementos elásticos que trabalham em conjunto com o quadro de chassi, como os
coxins (de cabine e motor) e os pneus, apresentam baixos coeficientes de
amortecimento, e portanto não contribuem significativamente para a redução dos modos
de vibrar do quadro de chassi.
Para se identificar qual modo de flexão de um chassi de caminhonete é o mais
importante a ser considerado no projeto de um sistema de suspensão, foi realizado um estudo
orientativo dos modos de vibrar do quadro de chassi de uma caminhonete Ford Ranger. Para
isso, foi utilizando um modelo em CAD aproximado do quadro de chassi real, conforme a
figura 2.16.
Figura 2.16 – Desenho do chassi de uma caminhonete em CAD 3D.
A partir deste modelo em CAD foi criada uma malha de elementos finitos utilizando o
aplicativo I-DEAS versão 9.2. Nesta malha foram utilizados elementos tipo casca (“shell”)
com 24 graus de liberdade, e como resultado deste processo foi obtido uma malha com 24.347
nós e 23.840 elementos. Através da análise modal do chassi, também realizada utilizando-se
aplicativo I-DEAS, foram obtidos os seguintes modos e freqüências naturais, conforme os
eixos x, y e z descritos na figura 2.16. Estes resultados estão na tabela 2.1:

236
Tabela 2.1: Modos de vibrar e freqüências naturais aproximados do chassi.
Modo Freqüência (Hz) Descrição
1 13,0 1º modo de torção em torno do eixo X.
2 25,9 1º modo de flexão da parte traseira na direção Y.
3 26,3 1º modo de flexão do chassi na direção Z (“bending”)
Como conclusão, verificou-se que a torção em torno do eixo “x” é o modo de flexão
mais importante do chassi de caminhonetes, visto que é aquele que apresenta maiores
amplitudes e cuja freqüência natural, em torno de 13 Hz, pode se aproximar bastante das
freqüências de ressonância do sistema de suspensão (~10 Hz), quando consideradas as massas
do motor e carroceria.
Portanto, um sistema de suspensão ativo ou SA voltado para a aplicação em
caminhonetes deve levar em consideração formas de se evitar que o modo de torção de chassi
seja excitado na ação do controlador, visto que isso pode contribuir de forma significativa
para a degradação do conforto. Também se verifica que os controladores de suspensão do tipo
Skyhook agindo de forma independente em cada roda, como quatro sistemas SISO, são
incapazes de gerar ações de controle coordenadas de forma a se evitar problemas com a torção
do chassi.
2.4.9 AMORTECIMENTOS INERENTES À SUSPENSÃO
A principal função do amortecedor em suspensões convencionais passiva é dissipar a
energia cinética da massa, reduzindo a amplitude das oscilações após o veículo ter passado
por um obstáculo. Segundo Perseguim (2005), além dos amortecedores, existem também
outros componentes que dissipam energia cinética, como por exemplo: o amortecimento das
buchas das articulações de suspensão, o atrito entre os componentes, e até mesmo o
escorregamento entre pneu e pavimento que ocorre na movimentação da suspensão devido às
restrições cinemáticas impostas pela sua geometria (efeito anti-rolamento, por exemplo). Sem
a presença dos amortecedores, estes efeitos proporcionam fatores de amortecimento entre 5 e
15% para os modos de vibrar de massa suspensa.

237
No caso de suspensões com feixes de mola, como as do tipo Hotchkiss utilizadas em
caminhonetes (figura 2.17), o atrito entre as lâminas da mola é bastante significativo, e ainda
pode ser aumentado por outros fatores ao longo da vida do veículo, como o acúmulo de poeira
e lama entre as lâminas da mola. Devido a uma boa parcela de este atrito ser do tipo “seco”,
ou atrito de Coulomb, o atrito gera um efeito de histerese nas curvas de rigidez das molas
(STONE e BALL, 2004). Como conseqüência, ao se trafegar por pistas de boa qualidade, a
excitação pode não ser suficiente para vencer o atrito estático entre as lâminas, gerando um
valor elevado de rigidez efetiva da suspensão. Esse fenômeno eleva a freqüência dos modos
de vibrar de massa suspensa e deteriora o conforto.
Figura 2.17 – Suspensão com feixes de mola, tipo Hotchkiss.
No caso da utilização de sistemas semi-ativos de suspensão em caminhonetes, é
importante a consideração de todos estes fatores dissipativos intrínsecos à suspensão, pois
como os atuadores semi-ativos não introduzem energia no sistema, eles são incapazes de
eliminar os efeitos destes amortecimentos. Além disso, há de se considerar os amortecimentos
intrínsecos do próprio atuador semi-ativo, que se somam aos do sistema de suspensão do
veículo gerando um importante fator de limitação da melhoria do desempenho em conforto
através da aplicação de sistemas de suspensão semi-ativos.
Os sistemas semi-ativos de suspensão também são incapazes de eliminar o efeito de
histerese dos feixes de mola, e conseqüentemente mitigar os seus efeitos nocivos ao conforto.
238
2.4.10 RESSONÂNCIA NO EIXO TRASEIRO E SEUS EFEITOS
Eixos rígidos traseiros são bastante comuns em veículos utilitários e de carga, mesmo
em utilitários leves como as caminhonetes. Apesar de apresentar muitas desvantagens em
relação a um sistema de suspensão independente, o eixo diferencial rígido é bastante robusto e
de custo relativamente mais baixo; características importantes para esta classe de veículos.
Na década de 50, Bastow (1951 apud BASTOW, 1976) já havia descrito as principais
desvantagens do eixo rígido em relação à suspensão independente:
• O eixo rígido apresenta um pior “ride” em função da maior razão entre massa não-
suspensa e massa suspensa. Com a suspensão independente se obtém uma redução da
massa não-suspensa, pois a caixa de engrenagens do diferencial é fixa no chassi do
veículo. Além disso, as molas helicoidais ou barras de torção são mais leves que os
feixes de mola, e o conjunto de freios pode ser acoplado diretamente no diferencial
que está fixo no chassi.
• A suspensão independente elimina a transferência de força normal entre as rodas do
eixo de tração durante a aplicação de torque para acelerar o veículo.
• A suspensão com eixo rígido requer maior espaço para instalação.
• Com o eixo rígido, ao passar com um pneu por um obstáculo, ocorre uma
movimentação lateral na região de contato dos pneus com o solo, em ambos os lados
do veículo. Este comportamento é causado devido ao centro de rolamento estar
posicionado acima do eixo, gerando excitações laterais em situações como a descrita
acima. No caso de uma suspensão independente, pode-se reduzir a variação de atitude
do pneu que não passou pelo obstáculo, reduzindo a excitação lateral.
Esta última característica do eixo rígido, descrita por Bastow (op. cit.), já havia aparecido
em trabalhos mais antigos como o de Broulhiet17 (1933, apud PERSEGUIM, 2005), que
descreveu como ocorre esta variação significativa de força lateral no contato entre pneu e
solo; efeito que ele chamou de “side thrust” (arremetida lateral). Perseguim (2005) propõe
novos indicadores para avaliação do desempenho de “ride”, entre eles está o “side thrust” que
prejudica bastante a aderência dos pneus em determinadas situações, conforme ilustrado na
figura 2.18. 17 BROULHIET, G.; Independent Wheel Suspension, SAE Trasactions, vol. 28, 1933.

239
Figura 2.18 – Variação lateral na região de contato em função da excitação vertical do lado
oposto.
É possível verificar na figura 2.18 que quando uma roda sofre um deslocamento
vertical “H” devido ao choque com um obstáculo, o ponto de contato da outra roda com o
solo sofre um deslocamento lateral “D”. Quanto maior for a altura do centro de rolamento do
eixo, maior é a amplitude deste deslocamento lateral. Esse comportamento do eixo diferencial
gera excitações laterais que influenciam no conforto e na segurança do veículo.
De forma geral, este efeito é proeminente quando a pista aplica excitações com
freqüências próximas à ressonância do conjunto eixo e suspensão traseira, pois é nesta
situação em que as amplitudes de deslocamento vertical das rodas são bastante grandes. Além
disso, ele é acentuado em situações onde o sistema de tração está sendo bastante solicitado,
de forma que o torque transmitido pelo eixo cardan facilita a sua ocorrência no sentido de
rotação do cardan. Esta situação pode ocorrer, por exemplo, quando o veículo sobe uma via
em aclive acentuado.

240
2.5 COMENTÁRIOS GERAIS
A pesquisa realizada contribuiu para um melhor entendimento dos aspectos gerais e
práticos dos sistemas de suspensão “inteligentes”, bem como das implicações de sua aplicação
em veículos como as caminhonetes e SUVs.
Foi verificado que o sistema ativo de suspensão, apesar de apresentar alto custo e grande
complexidade, traz melhorias no conforto inferiores a 18% (-2 dB) quando se mantêm o
mesmo desempenho nos aspectos segurança e “rattlespace”, típicos dos sistemas passivos.
Portanto, para melhor aproveitar os benefícios destes sistemas, o caminho é a utilização de
estratégias de controle adaptativo que devem ser aplicadas no sentido de buscar melhores
desempenhos no conforto em detrimento ao desempenho nos aspecto segurança e
“rattlespace”, quando estes não se fazem tão importantes, como, por exemplo, ocorre nos
deslocamentos do veículo em linha reta e velocidades aproximadamente constantes. Ou então
melhorar o desempenho em segurança em detrimento ao aspecto conforto quando o veiculo de
encontra em manobra, como em situações de curva, mudança de pista, ou frenagens bruscas.
Os sistemas de suspensão SA, por outro lado, apresentam um custo e complexidade
mais condizentes com a aplicação automobilística, contudo, além de apresentar desempenhos
inferiores aos sistemas ativos, também apresentam deficiências importantes relacionados ao
fenômeno do “tranco”, principalmente. Critérios de projeto de sistemas de controle para a
redução do “tranco” levam necessariamente a controladores com ganhos menores do que
aqueles possíveis em sistemas ativos. Por outro lado, a deterioração do aspecto segurança por
um sistema SA é menor do que em sistemas ativos, permitindo que seja dada maior ênfase aos
critérios de conforto.
O “tranco” também pode ser reduzido trabalhando-se melhor a questão das não
linearidades dos atuadores SA, buscando-se evitar variações abruptas na força gerada pelos
atuadores. Este objetivo pode ser alcançado com a utilização de modelos fidedignos dos
atuadores, que podem ser utilizados para a estimação de suas forças, informando ao
controlador o momento mais adequado para desligamento do atuador. Estes modelos também
evitam a necessidade de sensoriamento de sinais de força, cujos sensores são caros e com
massas suficientemente altas a ponto de interferir nas medições.
É importante comparar o desempenho de sistemas ativos e SA com sistemas passivos
não-lineares, visto que as não linearidades utilizadas atualmente nestes sistemas melhoram
muito o seu desempenho.

241
A utilização de sistemas de controle MIMO em sistemas de suspensão de caminhonetes
pode ser interessante na busca por melhor coordenação das forças nos atuadores de forma a se
obter melhor controle de movimentos do corpo do veículo, e se evitar a excitação dos modos
de vibrar de torção do chassi. Estas observações levam à necessidade de se desenvolver
modelos matemáticos do veículo que considerem o veículo completo e que sejam adequados
ao projeto de controladores multivariáveis. Além disso, a utilização de controladores com
índices de desempenho quadrático tem melhores resultados em sistemas de suspensão,
conforme foi identificado na seção 2.3, e também se levando em consideração a importância
da utilização de um sistema de controle robusto, ficam claras as vantagens do uso de uma
técnica como a LQG/LTR, por exemplo, visto que ela apresenta estas duas características.
A pesquisa também revelou informações importantes sobre os tipos de sensores
adequados aos sistemas de suspensão, bem como qual a melhor forma de posicioná-los no
veículo.
Um fator altamente limitante no desempenho de um sistema SA, segundo esta pesquisa,
é a existência de amortecimento “residual” e intrínseco significativo nos elementos que
compõe um sistema de suspensão. Visto que um atuador SA poder ser comparado a uma
“válvula” que introduz ou retira amortecimento do sistema, o amortecimento residual diminui
o campo de ação de um atuador SA, limitando o ponto mínimo da sua escala de ação. Em
veículos com suspensão traseira que utiliza feixe de molas, como é o caso das caminhonetes, a
presença do atrito de Coulomb prejudica ainda mais a ação de sistemas SAs de suspensão.
Buscar melhores desempenhos para sistemas SAs aplicados a caminhonetes passa
necessariamente pela alteração estrutural de todo o sistema de suspensão, e não apenas pela
substituição dos amortecedores convencionais por atuadores, como é o escopo deste trabalho.
Sob o aspecto da segurança, verificou-se que um dos pontos mais críticos encontra-se no
comportamento de “side thrust”, que ocorre de forma mais efetiva na freqüência de
ressonância da massa não-suspensa da suspensão traseira tipo Hotchkiss. Um sistema de
suspensão que agregue mais valor a veículos com este tipo de suspensão traseira precisa
proporcionar alguma melhoria nesta característica.
Como conclusão desta pesquisa, verificou-se que o desenvolvimento de um sistema de
suspensão SA para caminhonetes encontra muitas barreiras técnicas, que envolve diferentes
aspectos do sistema e do veículo. A busca por uma solução definitiva para o desenvolvimento
de um sistema comercialmente viável e efetivo na melhoria de desempenho em relação ao
conforto e segurança de veículos utilitários leves exige um montante de recursos e tempo que
extrapolam as possibilidades de um trabalho acadêmico como este. Neste sentido, a

242
orientação deste trabalho foi voltada para se criar uma base sólida para futuras pesquisas nesta
área, que devem buscar o aprimoramento de cada subsistema, e o desenvolvimento de
sistemas adaptativos que sejam capazes de tirar o maior proveito desta tecnologia. O escopo
deste trabalho foi restrito ao desenvolvimento de um sistema SA completo, desde os atuadores
até a instalação física num veículo, propondo soluções para cada barreira técnica identificada,
porém sem a ambição de que estas soluções sejam as melhores, e ciente das limitações
intrínsecas a esta aplicação.

243
3 DESENVOLVIMENTO TEÓRICO
3.1 INTRODUÇÃO
Para que os objetivos deste trabalho fossem atingidos, dois desenvolvimentos teóricos
foram necessários. Primeiramente foi necessário se desenvolver um modelo matemático do
veículo que atendesse os requisitos necessários para o projeto de um controlador robusto para
uma caminhonete, e que fosse baseado em requisitos definidos a partir de tudo que foi
apurado na pesquisa da literatura. Em segundo lugar, para aplicação da técnica de controle
robusto LQG/LTR, foi necessário definir novos critérios de projeto para o controlador
baseados em requisitos de sistemas de suspensão SAs, e demonstrar que a técnica de projeto
LQG/LTR também pode ser aplicada a sistemas cuja matriz de transferência apresenta
funções não-estritamente próprias18. Na representação do modelo matemático do veículo em
espaço de estados, esta condição se manifesta pela existência de uma matriz D não nula,
conforme será apresentado na seção 3.3.
3.2 MODELO COMPLETO DO VEÍCULO
O desenvolvimento completo do veículo teve que partir de um conjunto de requisitos que
são descritos como segue:
• o modelo deve representar o veículo inteiro com as quatro rodas;
• as entradas de perturbação exógena devem ser modeladas como entradas de sinais de
velocidade vertical que a via aplica aos pneus quando o veículo está em movimento,
conforme o modelo de Thompson (1979);
• as entradas de controle devem ser modeladas como forças aplicadas entre as rodas e a
carroceria do veículo, na posição dos amortecedores convencionais;
• o modelo deve representar a barra anti-rolamento e o eixo diferencial traseiro do
veículo que são componentes que afetam muito o seu comportamento dinâmico e não
podem ser desprezados;
18 Esta situação que é gerada pela influência direta das entradas de controle nas saídas de aceleração vertical da carroceria do veículo.

244
• Como saídas, o modelo deve apresentar as acelerações nos quatro pontos da carroceria
sobre cada uma das rodas (relacionadas à avaliação do conforto), a distância relativa
entre cada roda e a carroceria (relacionada à avaliação da amplitude do “stroke”), e as
acelerações verticais das rodas; todos estes três conjuntos de saídas medidos
diretamente a partir de 12 sensores (8 acelerômetros e 4 potenciômetros). Além disso, o
modelo deve apresentar também quatro saídas referentes aos deslocamentos relativos
entre o centro das rodas e os seus respectivos pontos de contato do pneu com o solo,
que apesar de não serem medidas diretamente, estão relacionadas à avaliação da
segurança, ou aderência dos pneus ao pavimento;
• O modelo deve descrever a ação coordenada dos quatro atuadores sobre os modos de
movimentação de corpo rígido da massa suspensa e do modo de torção da carroceria,
de forma que cada um dos modos possa ser controlado separadamente por ações
coordenadas de forças nos atuadores.
Para atender a todos estes requisitos foi proposto um modelo físico com sete graus de
liberdade, ilustrado na figura 3.1.
Figura 3.1 – Modelo físico do veículo com sete graus de liberdade.
3.2.1 MODELO MATEMÁTICO
Conforme a figura 3.1, definem-se as variáveis )(01 tz e )(12 tz como vetores contendo os
quatro deslocamentos relativos entre o solo e o centro das rodas do veículo, e entre cada roda

245
e os quatro pontos na carroceria do veículo onde cada suspensão está conectada. Da mesma
forma )(01 tz& e )(12 tz& são respectivamente as velocidades relativas. Também há )(0 tz& , que é o
vetor das velocidades verticais que as irregularidades do solo aplicam a cada roda quando o
veículo está em movimento, e )(1 tz& é um vetor de velocidades verticais de cada uma das rodas
frontais, a velocidade vertical do centro de massa do eixo diferencial traseiro, e também a sua
velocidade angular.
As variáveis que descrevem a posição do corpo rígido do veículo são )(tzCG, )(tϕ e )(tθ ,
para movimentos: vertical, arfagem e rolamento, respectivamente, conforme a figura 3.2. E
assim define-se o vetor [ ]T
CG tttzt )()()()( θϕ=ξ .
Figura 3.2 – Detalhe do modelo físico mostrando os movimentos da carroceria.
As forças que o sistema de suspensão aplica ao corpo suspenso do veículo são
representadas na equação (3.1):
)()()( 121212122 ttt zCzKF &+= (3.1)
Nesta equação, 12K representa os coeficientes de rigidez das molas e a rigidez da barra anti-
rolamento:
+−
−+
=
r
r
arfar
ararf
k
k
kkk
kkk
000
000
00
00
12K (3.2)

246
e ),,,(12 rrff ccccdiag=C representa os coeficientes de amortecimento. O índice “f”
significa “front” ou frente, e o índice “r” significa “rear” ou traseira. A aproximação do
comportamento dos amortecedores e das molas por relações lineares constitui a primeira
simplificação do modelo.
A força resultante nas rodas está representada na equação (3.3):
)()()()()( 0011101010121 ttttt zCzLCzKFF && +−+−= (3.3)
onde ),,,(01 tttt kkkkdiag=K representa a rigidez em cada uma dos quatro pneus, e
),,,(01 tttt ccccdiag=C representa os seus respectivos coeficientes de amortecimento (o
índice “t” significa “tire” ou pneu). Os pneus também são elementos de comportamento
bastante não-linear, sendo que a sua aproximação por relações lineares é a segunda
simplificação importante do modelo. A matriz 1L é a transformação linear que relaciona o
vetor )(1 tz& às quatro velocidades verticais das rodas, conforme abaixo:
−
=
se
se
d
d
100
100
0010
0001
1L (3.4)
onde o parâmetro dse representa o comprimento do semi-eixo do eixo diferencial.
Assim a dinâmica do veículo pode ser escrita por duas equações matriciais, conforme
segue:
)()( 1111 tt T FLzM ⋅=&& (3.5)
)()( 222 tt T FLξM ⋅=&& (3.6)
onde ),,( 22 θϕ JJmdiag=M corresponde à matriz de inércia composta pela massa e pelos
momentos de inércia de rotação do corpo rígido que representa a massa suspensa do veículo,
),,,( 33111 Jmmmdiag=M é a matriz de inércia composta pelas massas das duas rodas

247
dianteiras, e a massa e o momento de inércia do eixo traseiro. A matriz 2L é a transformação
linear que relaciona os deslocamentos dos movimentos de arfagem, caturro e rolamento com
os quatro deslocamentos verticais do corpo suspenso do veículo sob os quatro pontos de
conexão da suspensão, conforme mostrado a seguir:
−
−−
−
=
dl
dl
dl
dl
2
2
1
1
2
1
1
1
1
L (3.7)
As matrizes 1L e 2L já levam em conta as linearizações do modelo, que podem ser
consideradas válidas para movimentos de rotação do corpo suspenso com pequenas
amplitudes (< 6º). O parâmetro d é a distância entre o eixo longitudinal central do chassi e os
pontos onde os elementos de suspensão se conectam com o chassi. A distância entre o centro
de massa do corpo suspenso do veículo e o eixo dianteiro é dada por l1 e a distância entre o
centro de massa e o eixo traseiro é dada por l2. A soma de l1 e l2 é a distância entre eixos (lwb).
Definindo-se os distúrbios de entrada como )()( 0 tt zw &= e as variáveis de estado
conforme equação (3.8), é possível reescrever as equações (3.5) e (3.6) na forma apresentada
a seguir nas equações (3.9) e (3.10), respectivamente.
( )
=
)(
)(
)(
)(
1
12
01
t
t
t
t
t
ξ
z
z
z
x
&
& (3.8)
( ) )()( 0111 ttt wCxRF += (3.9)
( )tt xRF 22 )( = (3.10)
( )[ ]2121120112011 LCLCCKKR +−−= (3.11)
[ ]21211212442 LCLCK0R −= x (3.12)

248
Os parâmetros do modelo e suas respectivas unidades são mostrados na tabela 3.1. Ao
todo são dezessete parâmetros.
Tabela 3.1. Parâmetros do modelo do veículo.
PARÂMETRO DESCRIÇÃO UNIDADE
m1 Massa da roda (massa não-suspensa) kg m2 Massa do corpo do veículo (massa suspensa) kg m3 Massa do eixo diferencial (massa não-suspensa) kg J3 Momento de inércia do eixo diferencial em relação ao eixo ‘x’ kg.m2 Jθ Momento de inércia da massa do veículo no movimento de rolamento kg.m2 Jϕ Momento de inércia da massa do veículo no movimento de arfagem kg.m2 kt Coeficiente de rigidez dos pneus N/m kf Coeficiente de rigidez das molas dianteiras N/m kr Coeficiente de rigidez das molas traseiras N/m kar Coeficiente de rigidez da barra anti-rolamento N/m cf Coeficiente de amortecimento dos amortecedores dianteiros N.s/m cr Coeficiente de amortecimento dos amortecedores traseiros N.s/m ct Coeficiente de amortecimento dos pneus N.s/m l1 Distância do eixo dianteiro ao centro de massa m l2 Distância do eixo traseiro ao centro de massa m d Distância do centro de massa à lateral do veículo m
dse Comprimento do semi-eixo na traseira m
3.2.2 DEFINIÇÃO DAS ENTRADAS DE CONTROLE
A definição das entradas de controle está relacionada com a forma que os atuadores de
força serão montados fisicamente no veículo. Partindo-se do princípio que os atuadores SA
substituem os amortecedores convencionais, então as entradas de controle do sistema são
necessariamente as forças relativas que estes dispositivos geram entre os seus terminais.
Entretanto, como foi descrito na revisão da literatura, os sistemas de suspensão
apresentam outros amortecimentos além daqueles proporcionados pelos amortecedores
convencionais. No modelo simplificado do veículo, todos estes amortecimentos são
concentrados no componente chamado amortecedor. Na prática, os atuadores substituem os
amortecedores convencionais, contudo para não se perder a representação descrita acima, há a
necessidade de se manter um elemento amortecedor no modelo, contendo apenas os
amortecimentos residuais da suspensão e do próprio atuador, seja ele ativo ou SA. Esta
situação está ilustrada na figura 3.3.

249
Figura 3.3 – Posição do atuador no modelo físico.
Nesta nova representação, a força de cada atuador (ui) é aplicada ao mesmo tempo nas
massas suspensa (chassi) e não-suspensas (rodas), como forças de ação e reação; isto é, se a
força na massa suspensa é positiva então haverá uma força de reação de mesma intensidade
agindo sobre a massa não-suspensa, contudo em sentido oposto.
Conforme mostrado na figura 3.3, para passar do sistema de suspensão passiva para o
ativo (ou SA) a matriz ),,,(12 rrff ccccdiag=C deverá ser substituída por
),,,(12 ararafaf ccccdiag=C , que contém apenas os coeficientes de amortecimento residuais do
sistema.
Define-se, então, um vetor u(t) de entrada composto pelas entradas de força de cada
atuador, conforme a equação (3.13). O índice ”A” refere-se a roda dianteira esquerda, “B”,
dianteira direita, “C”, traseira esquerda e “D”, traseira direita.
( )
=
)(
)(
)(
)(
tu
tu
tu
tu
t
D
C
B
A
u (3.13)
As equações (3.9) e (3.10) devem levar em conta estes sinais de entrada, passando a ser
descritas como segue:
( ) )()( 22 ttt uxRF += (3.14)
( ) )()()( 0111 tttt uwCxRF −+= (3.15)

250
3.2.3 REPRESENTAÇÃO EM ESPAÇO DE ESTADOS
Para utilização do modelo na síntese do controlador é preciso que este esteja na
representação no espaço de estados. Esta forma de representação está descrita nas equações
que se seguem.
( ) ( ) )()( 21 tttt uBwBAxx ++=& (3.16)
( ) ( ) )()( 121111 tttt uDwDxCy ++= (3.17)
( ) ( ) )()( 222122 tttt uDwDxCy ++= (3.18)
( ) ( ) )()( 323133 tttt uDwDxCy ++= (3.19)
A saída )()( 011 tt zy = é o deslocamento relativo entre a pista e o centro das rodas. A
saída )(2 ty é o vetor das acelerações nos quatro pontos do corpo do veículo sobre cada roda;
)()( 123 tt zy = , que é o vetor dos deslocamentos relativos entre as rodas e a carroceria. Como
y1(t) não pode ser medido facilmente, este sinal não foi utilizado na realimentação do sistema;
porém foi considerado para mostrar o comportamento do pneu sob as ações do controlador
comparado com a situação no sistema passivo. Por outro lado, os demais são facilmente
medidos por acelerômetros e sensores de deslocamento.
Definem-se as matrizes como segue:
⋅⋅
⋅⋅
−
−
=
−
−
221
2
111
1
214444
3414444
RLM
RLM
LL00
0L00
A
T
T
xx
xxx
(3.20)
⋅⋅=
−
43
0111
1
44
44
1
x
T
x
x
0
CLM
0
I
B (3.21)

251
⋅
⋅−=
−
−
T
T
x
x
21
2
11
1
44
44
2
LM
LM
0
0
B (3.22)
[ ]114441 xx 0IC = (3.23)
[ ]221
222 RLMLC ⋅⋅⋅= − T (3.24)
[ ]4x74x44x43 0I0C = (3.25)
443212312111 x0DDDDD ===== (3.26)
[ ]T
21
2222 LMLD ⋅⋅= − (3.27)
A figura 3.4 apresenta uma representação do modelo no domínio da freqüência, onde as
matrizes aparecem em diagramas de bloco, como segue:
Figura 3.4 - Diagrama de Blocos do sistema do modelo do veículo.
As matrizes C e D que aparecem no diagrama de blocos da figura 3.4 consolidam o
conjunto das saídas medidas por sensores, e são descritas conforme segue:
=
3
2
C
CC (3.28)
=
=
44
22
32
22
x0
D
D
DD (3.29)

252
3.2.4 SEPARAÇÃO DOS MODOS DE CORPO RÍGIDO E TORÇÃO
Como o veículo utiliza quatro atuadores, existe a possibilidade de que eles excitem o
modo de torção do chassi numa ação em conjunto. Isto ocorre quando o par de atuadores da
dianteira aplica um conjugado de força oposto ao par de atuadores da traseira. Contudo, esta
combinação de força dos atuadores não é muito efetiva para se atingir os objetivos do sistema,
visto que o controle dos movimento da massa suspensa são mais influenciados pelos esforços
coordenados dos atuadores nos modos de rolamento, arfagem e movimento vertical do centro
de massa.
A ação em conjunto dos atuadores no modo de torção seria interessante se o modelo
considerasse o veículo como um corpo flexível, e se os atuadores tivessem uma banda de
resposta em freqüência suficientemente larga para atuar nas freqüências naturais de vibração
da estrutura do chassi do veículo. Como esta não é a forma mais eficaz de se controlar a
vibração da estrutura do veículo, e como os atuadores dificilmente atingem um banda de
resposta em freqüência tão larga, optou-se por não se considerar este tipo de controle no
escopo deste trabalho.
O fato de se considerar as forças dos atuadores como esforços coordendados segundo
um certo modo de movimentação sugere que é mais útil se pensar nos atuadores como um
grupo de forças (ou um vetor de forças) do que como unidades de força individuais.
O quadro da tabela 3.2 apresenta uma relação de como é a contribuição de cada atuador
individual nos grupo de forças coordenadas indetificado. O sinal “+” indica força vertical para
cima, e o sinal “-“ indica força vertical para baixo, com relação às forças que os atuadores
aplicam ao chassi. Este mesmo quadro com a inversão de todos os sinais também é
verdadeiro.
Tabela 3.2 – Ações coordenadas das forças dos quatro atuadores.
Ações coordenadas
Atuador DE Atuador DD Atuador TE Atuador TD
Vertical + + + + Rolamento + - + - Arfagem - - + + Torção - + + -
253
Pode-se criar um paralelo entre os valores de força dos atuadores e um espaço de
coordenadas com quatro dimensões. Neste caso, a relação entre as forças individuais e as
forças coordenadas é dada por uma simples transformação linear. A matriz ortogonal a seguir
pode ser utilizada para esta relação de transformação:
−−−
−
−
−
⋅=
1111
1111
1111
1111
2
1S (3.30)
Aplicando-se esta transformação na saída do controlador pode-se fazer com este gere
apenas comandos de forças coordenadas em quatro situações: força vertical, conjugado de
rolamento, conjugado de arfagem, e conjugados de torção. Esta matriz de transformação
linear traduz os comandos de força para movimentação do corpo do veículo em intensidade de
força individual de cada atuador. Nesta nova configuração do atuador, é possível se eliminar o
modo torção apenas eliminando uma das dimensões da saída do controlador.
Da mesma forma, esta transformação linear pode ser aplicada na saída da planta (ou
entrada do controlador), pois o que foi verificado para os quatro atuadores também ocorre
com relação aos quatro acelerômetros colocados na carroceria sobre cada roda, ou ainda, com
relação aos quatro sensores de deslocamento entre as rodas e a carroceria. Neste caso, a
tranformação linear é utilizada na sua forma transposta e pode ter sua última linha eliminada.
Assim, os sinais dos sensores que estão num espaço quadridimencional são projetados para
um espaço de três dimensões, ou seja, TS é uma base de um subespaço vetorial nas
dimensões: vertical, rolamento e arfagem.
A transformação S deve ser aplicada da seguinte forma:
44
44#
44
44#
2#2
SDS0
0SD
CS0
0SC
SBB
⋅⋅
=
⋅
=
⋅=
T
x
x
T
T
x
x
T
(3.31)

254
Eliminando se a i-ésima coluna da matriz #2B , a i-ésima linha da matriz #C , e as i-
ésima coluna e i-ésima linha da matriz #D pode-se fazer com que um determinado modo não
seja excitado na entrada e nem percebido na saída do modelo. Neste caso a i-ésima coluna da
matriz S também deve ser eliminada para manter o casamento das dimensões para
multiplicação das matrizes.
Para fins de projeto de controle, a nova configuração da planta pode ser descrita
conforme a figura 3.5, como segue:
Figura 3.5 - Diagrama de Blocos do modelo com separação dos modos de movimentação do
corpo rígido e torção da massa suspensa do veículo.
É claro que na apresentação final do sistema, a matriz S e sua transposta farão parte do
próprio controlador.
Conforme foi apresentado na seção 2.4.8, a flexibilidade em torção do chassi de
caminhonetes é um complicador no projeto de um sistema de controle para a suspensão. Nem
sempre o atuador é rápido o suficiente para controlar estas vibrações, pelo contrário, os
atuadores numa ação conjunta, mas não coordenada, eventualmente são capazes de excitar as
vibrações de torção do chassi em sua tarefa de conter os movimentos de corpo rígido.
A excitação do modo de torção pelo controlador pode resultar na geração de vibrações
que irão contribuir para a degradação da sensação de conforto, e por isso é uma situação que
deve ser evitada. Além disso, considerar este modo de vibrar no modelo leva a problemas
como o aumento da competição entre os critérios de conforto e segurança. Portanto, a escolha
por eliminar o modo de torção, com relação tanto aos atuadores como aos sensores, é um fator
a ser considerado na síntese de um controlador para o sistema de suspensão de veículos com
quatro rodas.
255
3.3 APERFEIÇOAMENTO DA TÉCNICA LQG/LTR
Da mesma forma que o desenvolvimento do modelo do veículo, a síntese do controlador
partiu de uma série de requisitos identificados através da pesquisa, os quais são descritos a
seguir:
• o controlador deve incorporar os conceitos de estabilidade robusta e desempenho
robusto, ou seja, deve ser realizado de tal forma a manter a estabilidade e o
desempenho, mesmo sob condições adversas;
• o controlador deve ser multivariável para possibilitar o controle de atitude do veículo
de forma global, ao invés da utilização de quatro controladores independentes,
permitindo assim uma atuação mais eficiente nos movimentos de rolamento e
arfagem;
• o índice de desempenho do controlador deve ser baseado na norma 2;
• os ruídos de medida devem ser atenuados (pelo menos -20dB) pelo controlador;
• a malha aberta deve apresentar um ganho restrito na faixa de freqüência de ressonância
da massa suspensa do veículo, para se reduzir o efeito de “tranco” causado pela
defasagem excessiva entre a velocidade vertical da massa suspensa e a velocidade
relativa entre roda e carroceria;
• por se tratar de um sistema de suspensão, o ganho do controlador deve ser baixo em
baixas freqüências (freqüências abaixo de 0,5 Hz) para se evitar que ocorra saturação
das saídas do controlador com excitações quase constantes, como ocorre quando o
veículo está se movendo em aclives ou declives, por exemplo;
• o controlador deve promover a atenuação de vibrações da massa suspensa na faixa de
freqüência entre 1 e 5 Hz;
• a Matriz de Funções de Transferência (MFT) do controlador não pode apresentar pólos
na origem, pois podem haver sinais dos sensores com média diferente de zero, o que
levaria a uma saturação da saída do controlador se ocorresse a integração destes sinais;
• a malha aberta deve ter restrição de ganho em freqüências entre 9 e 12 Hz, onde ocorre
a ressonância do movimento vertical das rodas (“wheel hop”). Ganhos restritos nesta
faixa, apesar de degradar um pouco o conforto, evitam que a oscilação vertical das
rodas seja muito intensa prejudicando o seu contato com o solo. Esta característica do
controlador está ligada com o desempenho em segurança.

256
Entre as diversas técnicas de controle robusto existentes, verificou-se que a técnica
LQG/LTR introduzida por Doyle e Stein (1981) tem condições de atender vários dos
requisitos acima citados. Pela sua forma de projeto, ela proporciona a introdução
relativamente simples de outras condições de projeto que permitem o atendimento a todos
estes requisitos listados.
A técnica LQG/LTR apresenta as seguintes características mais importantes, conforme
Cruz (1996):
• a robustez do controlador em face de uma ampla classe de erros de modelagem é
garantida pelo procedimento;
• a técnica foi concebida para aplicação a sistemas multivariáveis;
• procedimento de projeto é de natureza sistemática;
• a metodologia se baseia numa abordagem freqüencial, aplicando-se assim a sistemas
lineares e invariantes no tempo.
• número de parâmetros de projeto é relativamente pequeno;
• existe software de apoio ao projeto disponível comercialmente.
Além disso, esta técnica utiliza um índice de desempenho quadrático para determinação
do ganho do controlador, o que leva a resultados menos conservadores do que os da
técnica ∞H . A síntese consiste no ajuste de parâmetros de projeto para que os valores
singulares da MFT se enquadrem entre barreiras de desempenho e estabilidade. O
atendimento a requisitos adicionais ao projeto convencional pode ser obtido simplesmente
pela introdução de barreiras adicionais, conforme será descrito na seção 3.3.2. A seguir
apresenta-se uma breve introdução sobre a forma convencional da técnica LQG/LTR.
3.3.1 FORMA CONVENCIONAL DA TÉCNICA LQG/LTR
Os instrumentos mais importantes utilizados para o desenvolvimento da metodologia
LQG/LTR são o Regulador Linear Quadrático (RLQ) e o Filtro de Kalman (FK), de onde se
justifica a parte “LQG” (Linear Quadrático Gaussiano) da sigla que a identifica (CRUZ, op.
cit.). No entanto, tais ferramentas são consideradas de um ponto de vista não ortodoxo na
aplicação desta técnica, ou seja, elas não são interpretadas da forma usual em controle ótimo
estocástico, mas utilizadas em razão de algumas de suas propriedades.

257
Para se conseguir esta condição de forma sistemática, esta técnica utiliza a Identidade de
Kalman e o procedimento de recuperação da matriz de transferência de malha (LTR – “Loop
Transfer Recovery”). Devido à aplicação destes procedimentos surgem limitações da técnica
LQG/LTR, que são:
1. o sistema (planta) descrito no espaço de estados deve ser controlável e observável, ou
no mínimo, estabilizável e detectável (ou seja, as partes não controláveis e/ou não
observáveis devem ser estáveis); e
2. os zeros de transmissão do sistema (planta) devem estar localizados no semi-plano
esquerdo (SPE) aberto do plano cartesiano dos números complexos, ou seja, a parte
real destes zeros deve ser negativa e não nula19.
Com relação à robustez de desempenho, esta técnica considera os seguintes objetivos a
serem atendidos pelo sistema real (vide figura 3.6):
a) acompanhamento de sinais de referência, R(s);
b) rejeição de perturbações externas, D(s);
c) insensibilidade a variações na planta, )(sG∂ ;
d) rejeição do erro e ruídos de medida, N(s).
Figura 3.6 - Diagrama de Blocos do sistema de controle em malha fechada.
A partir do diagrama da figura 3.6 podem ser extraídas as seguintes igualdades:
19 Os zeros de transmissão com parte real positiva não são tolerados no LQG/LTR devido ao procedimento de síntese do controlador buscar a uma inversão da planta, o que não pode ocorrer na presença destes zeros. Vide Kwakernaak e Sivan (1972b) para uma explicação mais aprofundada.

258
[ ]( )[ ]( )[ ]( ) )()()()()(
)()()(
)()()()()()(
1
1
1
sNssss
sDss
sRsssssY
⋅+−
−⋅++
+⋅+=
−
−
−
HGHGI
HGI
HGHGI
(3.32)
[ ]( )[ ]( )[ ]( ) )()()(
)()()(
)()()()(
1
1
1
sNss
sDss
sRsssE
⋅+−
−⋅+−
−⋅+=
−
−
−
HGI
HGI
HGI
(3.33)
Analisando-se as equações (3.32) e (3.33) é possível gerar medidas objetivas para cada
um dos requisitos de desempenho:
• Acompanhamento do sinal referência
( ) ( )R
mR jjjjjR
jE
αωωσαωω
ω
ω 1)()()()(
)(
)( 1≥+⇒≤+≤
− HGIHGI (3.34)
onde Rα é definido para freqüências de sinais de interesse (baixas em geral).
• Rejeição à perturbações
( ) ( )D
mD jjjjjD
jY
αωωσαωω
ω
ω 1)()()()(
)(
)( 1≥+⇒≤+≤
− HGIHGI (3.35)
onde Dα é definido para freqüências de sinais de interesse (baixas em geral).
• Insensibilidade a variações da planta
( ) ( )∂
∂
−
−≥+⇒≤+≤
⋅∂
∂
αωωσαωω
1)()()()(
/ 1
1jjjj
YYm HGIHGI
GG (3.36)
onde ∂α é definido para freqüências de sinais de interesse (baixas em geral).
• Rejeição ao erro e ruído de medida
( ) ( ) 1)()(1)(
)( 1<<≤⇒<<⋅⋅⋅+≤
−
NM jjjN
jYαωωσ
ω
ωHGHGHGI (3.37)
onde Nα é definido para freqüências altas, acima da freqüência de corte.
Estas medidas de desempenho podem ser utilizadas como barreiras de projeto. As
referências ∂ααα e , DR podem ser agrupadas numa única barreira )(ωp , de tal forma que:
=
∂αααω
1,
1,
1max)(
DR
p (3.38)

259
Com relação à estabilidade, o controlador deve ser tal que toda uma classe de sistemas
“reais” bem definidos resulte estável. A representação desta classe de sistemas “reais” é feita
a partir da adoção de uma classe de incertezas aditivas, denominadas ∆G(s), que é adicionado
à MFT da planta nominal, ou seja, ao próprio modelo da planta. Esta nova representação
acrescentada ao sistema de controle em malha fechada está descrita na figura 3.7.
Figura 3.7 - Diagrama de Blocos do sistema de controle em malha fechada.
A partir da incerteza aditiva é possível definir uma MFT do erro de modelagem, que
pode ser entendida como a diferença proporcional entre a planta real e o modelo, também
chamada de planta nominal, )(sNG . A MFT do erro de modelagem é definida como segue:
( ) )()()()( ssssεM
1NN GGG −⋅−= (3.39)
Também se pode definir uma função escalar )(ωMe , tal que:
[ ])()( ωεσω je MMM ≥ (3.40)
Esta função )(ωMe é útil na simplificação do procedimento de projeto do controlador. A
partir da aplicação do critério de Nyquist multivariável chega-se ao seguinte resultado para a
condição de robustez da estabilidade:
( )[ ] ωω
σ ∀<+⋅− ,
)(
1)()()()( 1
M
Me
ssss HGIHG NN (3.41)

260
O reflexo da condição de robustez de estabilidade na robustez de desempenho ocorre
através da consideração da função )(ωMe nas barreiras de desempenho e rejeição do erro e
ruído de medida, de forma que:
( ) ( ) o , )(1
)()()()()( ωω
ω
ωωωσωωσ ≤∀
−≥≥+
M
mme
pjjjj HGHGI NN (3.42)
( ) N , )(1
)()( ωωω
αωωσ ≥∀
+≤
M
N
Me
jj HG N (3.43)
Repara-se que tanto a equação (3.42) como a equação (3.43) representam uma
comparação da resposta em freqüência em malha aberta com referências de desempenho e
estabilidade robustos. A equação (3.42) corresponde às barreiras de desempenho, que se
aplicam à faixa de freqüência relativamente baixa, onde oω é a maior freqüência de interesse
para o controle. Por outro lado, a equação (3.43) corresponde à barreira de estabilidade
robusta e rejeição aos ruídos e erros de medida dos sensores, onde Nω é a uma freqüência um
pouco acima da freqüência de corte do sistema, em que o erro de modelagem já passa a ser
significativo, e acima do qual ocorre a maior intensidade dos erros e ruídos de medida.
O projeto de um controlador robusto, portanto, é feito através do ajuste da matriz função
de transferência (MFT) em malha aberta do sistema nominal entre as barreiras de robustez do
desempenho e robustez da estabilidade, conforme pode ser observado na figura 3.8. No caso
de sistemas multivariáveis, o diagrama da razão de amplitude de Bode da MFT é feita a partir
dos gráficos gerados pelas curvas dos valores singulares máximo ( maxσ ou Mσ ) e mínimo
( minσ ou mσ ) da MFT, em função de ω.

261
Figura 3.8 - Diagrama de Bode para estabilidade e desempenho robustos.
Para isso, a técnica LQG/LTR apresenta um procedimento relativamente simples e
com poucos parâmetros.
Apesar de ser uma técnica desenvolvida no domínio da freqüência, ela parte da
especificação do sistema em espaço de estados, como apresentado a seguir:
=
=+=
)()(
)0( ),()()( 0
tt
ttt
Cxy
xxBuAxx& (3.44)
E, portanto, no domínio da freqüência tem-se:
( ) 0 ),()( 01
=⋅⋅−⋅=− xBAIC sUssY (3.45)
O procedimento de projeto compõe-se das seguintes etapas:
i. modelagem matemática da dinâmica da planta;
ii. avaliação do erro de modelagem;
iii. mudança de escala das variáveis de entrada e/ou saída quando necessário;
iv. obtenção das barreiras de desempenho e estabilidade a partir das especificações do
sistema e do erro de modelagem;

262
v. inclusão de integradores ou outros tipos de compensadores na entrada da planta,
quando necessário;
vi. escolher os parâmetros µ e L de maneira que os valores singulares
( )
−
− LAIC 11si
µσ (3.46)
obedeçam às barreiras de desempenho e estabilidade;
vii. resolver a equação algébrica de Riccati (EAR)
01
=−++ oooo CPC'PLL'A'PAPµ
(3.47)
para calcular a matriz de ganho do observador de estados
'1
CPK ooµ
= (3.48)
viii. Dado: ( ) oKF KAICG 1)( −−= ωω jj (3.49)
verificar se os seus valores singulares continuam a respeitar as barreiras como
resultado da Identidade de Kalman;
ix. resolver a EAR, escolhendo para ρ um valor pequeno (< 10-3)
0'1
' =+−−− cccc PBBPCC'PAAPρ
(3.50)
Para calcular a matriz de ganho do controlador
cc PB'Kρ
1= (3.51)
x. calcular a matriz de transferência do controlador
oo KCKBKAIKH 1)()( −++−= cc ss (3.52)
xi. verificar se os valores singulares de )()( ωω jj HG N obedecem às barreiras e tendem a
se aproximar de )( ωjKFG , o que corresponde ao processo de recuperação da matriz
de transferência (LTR);
xii. caso )()( ωω jj HG N ainda não se enquadre entre as barreiras, deve-se voltar à etapa
ix, e recalcular a matriz de ganho do controlador a partir de valores menores para ρ .
Assim se obtém um controlador robusto H(s) capaz de atender a todos os requisitos de
robustez de desempenho e estabilidade. Uma apresentação mais completa da técnica
LQG/LTR é encontrada em Cruz (1996).

263
3.3.2 TÉCNICA LQG/LTR ADAPTADA AO CONTROLE SA
A aplicação da técnica LQG/LTR no projeto de controladores robustos aplicados em
sistemas de suspensão veicular SA requer uma série de adaptações, além de algum
desenvolvimento teórico. A seguir são apresentadas as propostas para adaptação desta técnica,
bem como é mostrada a necessidade de um desenvolvimento teórico para demonstração da
propriedade de recuperação da matriz de transferência em sistemas não estritamente próprios,
que será feita nas seções subseqüentes.
Por se tratar da síntese de um sistema de controle SA, é importante, a princípio, definir
qual a estratégia de trabalho do sistema com relação aos atuadores SA. A estratégia escolhida
neste trabalho foi similar àquele utilizada no controle “clipped optimal”, ou seja, projeta-se o
controlador como se o sistema fosse ativo e “grampeia-se” o sinal do atuador SA nos
momentos em que o controle solicita uma força ativa. A diferença é que ao invés de um
projeto de controle ótimo, será empregada a técnica LQG/LTR com algumas adaptações.
Figura 3.9 - Diagrama de blocos do sistema ativo com o controlador.
Antes de se iniciar os procedimentos de projeto do LQG/LTR, o primeiro passo é
descrever o diagrama de blocos do sistema completo. A figura 3.9 apresenta o diagrama do
sistema em malha fechada, tomando como ponto de partida o diagrama de blocos do modelo
do veículo da figura 3.5.
Na prática, as matrizes S e ST são implementadas dentro do controlador. Além disso, o
sinal de perturbação )(sD precisa ser representado na saída da planta. Por isso o diagrama foi
redesenhado na forma apresentada na figura 3.10:

264
Figura 3.10 – Descrição do sistema com o efeito da perturbação na saída da planta..
A partir da figura 3.10 pode-se verificar que a entrada de referência )(sR não é mais
considerada, pois, para o sistema de suspensão, o controle funciona como um regulador,
evitando que as perturbações introduzidas pelas irregularidades da pista gerem reflexos nas
saídas.
Uma vez definido o modelo, suas entradas e saídas, faz-se necessário a verificação da
adequação deste sistema às limitações da técnica LQG/LTR:
• o sistema de suspensão (planta) descrito no espaço de estados é no mínimo
estabilizável e detectável, ou seja, que os pólos que não são observáveis e/ou
controláveis são em geral estáveis, visto que o atrito está sempre presente nestes
sistemas;
• os zeros de transmissão do sistema (planta), no caso do modelo completo de um
veículo, em geral estão localizados no semi-plano esquerdo (SPE) fechado, ou seja,
podem existir zeros sobre o eixo imaginários do plano cartesiano dos números
complexos; portanto, caso existam zeros de transmissão com parte real nula, o
requisito não é atendido.
A presença de zeros de transmissão sobre o eixo imaginário acaba ocorrendo em
sistemas de suspensão principalmente quando as saídas são sinais de aceleração da carroceria.
Isto é um fator limitante para a técnica LQG/LTR, pois o seu procedimento de projeto leva o
controlador a apresentar pólos muito próximos destes zeros; e se estes zeros estiverem já
próximos do semi-plano direito (SPD), as margens de ganho e de fase do sistema tendem a ser

265
muito baixas, resultando em baixa robustez. Além disso, o procedimento de recuperação pode
não ser viável. Para se evitar esta situação podem ser consideradas as seguintes ações:
1. Considerar outras saídas além dos sinais de aceleração da carroceria. Uma excelente
alternativa são os sinais de deslocamento relativo entre roda e carroceria;
2. Reduzir os sistemas eliminando as partes não controláveis e não observáveis;
3. Obter uma representação balanceada da planta em termos dos gramianos de
observabilidade e controlabilidade.
O passo seguinte é a definição das barreiras de robustez. Porém as barreiras de robustez
tradicionais não contemplam as novas necessidades impostas pela utilização do controlador
com atuadores SA, e nem algumas que surgem devido à aplicação em sistema de suspensão
veicular.
Pode-se afirmar que a maior adaptação da técnica LQG/LTR a esta aplicação se
encontra na introdução de novos requisitos de projeto. Esta adaptação se dá através da
consideração de novas barreiras de robustez, tanto de estabilidade quanto desempenho. Na
figura 3.11 são apresentadas seis barreiras que cobrem todo o espectro de freqüências (baixas,
médias e altas) de interesse para o projeto, as quais limitam os ganhos do sistema em malha
aberta tanto em relação aos valores máximos como em relação aos valores mínimos.
Figura 3.11 – Novas barreiras de desempenho e estabilidade.

266
A primeira barreira adicionada, ar, está associada ao requisito de desempenho de
limitação do “rattlespace”. Em sistemas de suspensão ativos é preciso limitar o ganho do
controlador em freqüências abaixo de 0,5 Hz, pois, caso contrário, as amplitudes de
deslocamento entre roda e carroceria tendem a ficar muito grandes. Isto é válido também para
sistemas SA. Como o espaço de trabalho é limitado, o movimento entre roda e carroceria
acaba por atingir suas limitações mecânicas, gerando choques entre as partes e muito
desconforto. Além disso, ganhos altos em baixa freqüência estão muitas vezes associados a
integradores, o que não é bom para sistemas cujos sinais de entrada do controlador são
oriundos de acelerômetros. Os acelerômetros podem apresentar um nível médio de sinal
diferente de zero, que se for integrado vai levar a saturação dos atuadores, sejam eles ativos
ou SA.
Outra barreira, ac, que está associada a barreira tradicional de rejeição às perturbações
da saída e a insensibilidade às variações na planta, também está relacionado ao desempenho
em conforto. Conforme apresentado na seção 2.4.2, as freqüências mais críticas com relação
ao limite de exposição, sensação de fadiga e conforto estão entre 1 e 8 Hz. Também se
encontram nesta faixa de freqüência a maior intensidade do sinal perturbações externas,
)(sD , e a maior intensidade das variações da planta devido a alterações da massa suspensa
(diferentes situações de carga de uma caminhonete, por exemplo).
Uma terceira barreira, aj, está associada a uma limitação do ganho de malha aberta
para se reduzir o “tranco” de forma indireta. Como foi visto na seção 2.4.3, ganhos muito
altos tendem a aumentar a defasagem entre a velocidade relativa entre roda e carroceria e a
velocidade vertical da carroceria. Como a força do atuador tende a ser proporcional a
velocidade vertical da carroceria – lembrar que a técnica LQG/LTR também usa a solução
RLQ para o ganho do controlador o que leva a uma solução similar ao SkyHook – uma
limitação do ganho de malha aberta, e conseqüentemente a limitação de ganho do controlador,
pode limitar os efeitos do “tranco” devido a descontinuidade do sinal de força que será
“grampeado”.
Como a característica mais importante do desempenho em segurança é a manutenção
do contato dos pneus com o solo, foi definida uma quarta barreira, as, que limita o ganho de
malha aberta para a freqüência de ressonância da massa não-suspensa (“wheel-rop”). Quando
o controlador age tentando frear os movimentos da massa suspensa nesta freqüência (entre 9 e
12 Hz), a amplitude de movimentação das rodas aumenta, fazendo com que a força de contato

267
entre pneu e solo oscile muito, reduzindo a aderência do veículo à pista. Com o ganho
limitado, este efeito tende a ser reduzido.
Para freqüências acima da ressonância da massa não suspensa, começam a ser
significativas as amplitudes de vibração da estrutura do veículo. Como estes modos de vibrar
não fazem parte do modelo, o erro de modelagem nesta faixa de freqüências cresce, e daí
surge a necessidade de uma quinta barreira, ae, que limita o ganho em malha aberta em seu
valor máximo. Definida uma função )(ωMe , conforme descrito na seção 3.3.1, esta barreira
fica determinada pela curva )(/1 ωMe , com ω entre 30 Hz e 200 Hz.
Por fim, a sexta barreira, am, tem relação com o erro de medida. Na verdade, o
conjunto das barreiras ae e am equivalem á barreira )(1 ω
α
M
N
e+. Apesar de se estar
descrevendo um sistema em tempo contínuo, a implementação real do sistema de controle se
dá por meio de um circuito eletrônico digital, e, portanto, o controlador deve ser discretizado.
Neste caso, a freqüência dos erros e ruídos de medida é igual à taxa de amostragem dos sinais
dos sensores. Sendo assim, esta barreira tem a função de restringir o ganho do controlador a
valores significativamente baixos (-30 dB, por exemplo), de forma que os ruídos e erros de
medida sejam filtrados pelo próprio controlador.
Definidas as barreiras e antes que seja dada continuidade ao procedimento de projeto,
é preciso estabelecer de forma clara a estrutura interna do controlador, que se compõe
basicamente por um filtro de Kalman e uma matriz de ganho de realimentação de estados,
conforme pode ser observado na figura 3.12.
Figura 3.12 – Diagrama de blocos da estrutura interna do controlador H(s).

268
O diagrama de blocos da figura 3.12 mostra o controlador H(s), conforme apresentado
na figura 3.10, acrescido das matrizes S e ST. Uma peculiaridade desta aplicação é que os
sensores na saída da planta são influenciados diretamente pela força dos atuadores, o que
caracteriza um sistema não-estritamente próprio, e que portanto apresenta uma matriz D não
nula. A existência desta matriz D interfere na arquitetura do controlador, conforme é
apresentado na figura 3.12, no ramo de realimentação que passa por (B - Ko D).
Esta situação sempre ocorre em sistemas cujas saídas são acelerações e as entradas são
sinais de força relacionados a uma mesma massa, visto que a relação entre força e aceleração
é uma constante que depende apenas da massa inercial do sistema em questão. Portanto,
cessados os transitórios gerados por uma excitação degrau, por exemplo, a relação entre a
entrada e a saída tende uma constante.
Uma dificuldade encontrada na técnica LQG/LTR para aplicação no controle de
suspensão, cujas forças do atuador interferem diretamente nas acelerações da saída do
sistema, é a presença desta matriz D na descrição do sistema em espaço de estados. Como o
tratamento deste problema não foi encontrado na literatura consultada, um dos objetivos deste
trabalho foi demonstrar que o procedimento de recuperação da matriz de transferência de
malha também ocorre para esta situação sob certas restrições. Esta demonstração está
apresentada nas seções a seguir.
Sob uma ótica mais simplista, pode-se dizer que seria mais fácil se considerar uma
saída )(ˆ ty de tal forma que:
)()()(ˆ ttt uDyy ⋅−= (3.53)
uma vez que u(t) é conhecido; porém isto levaria a alguns problemas como:
• o modelo é apenas uma representação limitada do veículo real, portanto a matriz D do
modelo apresenta de forma intrínseca um certo grau de incertezas;
• mesmo que o sinal de controle u(t) seja calculado, o atuador também apresenta
dinâmicas não modeladas que podem gerar alguma distorção neste sinal.
Portanto, a subtração do sinal )(tuD ⋅ do sinal medido, pode ser considerada uma
arbitrariedade incompatível com o objetivo de se obter um controlador robusto. A melhor
solução, neste caso, é fazer com que a matriz D seja considerada no projeto de controle de
forma explícita.

269
3.3.3 RLQ EM SISTEMAS NÃO-ESTRITAMENTE PRÓPRIOS
O primeiro passo para se demonstrar que o procedimento de recuperação da Matriz de
Transferência do procedimento LQG/LTR também ocorre em sistemas com a matriz D não-
nula é analisar o comportamento da solução de um problema RLQ para esta situação. Assim é
possível verificar o que ocorre com a matriz de realimentação de estados quando se reduz
significativamente o peso das entradas de controle na função de custo (ou índice de
desempenho), pois é esta a estratégia adotada na técnica LQG/LTR para se obter a
recuperação da matriz de transferência.
Neste sentido, chegou-se ao resultado da proposição 1, que é demonstrada na seqüência.
Proposição 1
Dado um sistema de equações diferenciais ordinárias, numa representação em espaço de
estados, com vetor de estados x(t) e saída y(t), tal que:
00 )( ),()()( xxBuAxx =+= tttt& (3.54a)
0 ),()()( ttttt ≥+= DuCxy (3.54b)
e supondo as seguintes considerações:
i. (A,B) é controlável (ou, ao menos, estabilizável);
ii. (A,C) é observável (ou, ao menos, detectável);
iii. a matriz D é não nula e ortogonal.
Existe uma realimentação )()( tt c xKu ⋅−= , onde Kc é a matriz que minimiza o índice
de desempenho:
∫∞
⋅⋅+⋅⋅=0
dtJ TT uRuyQy . (3.55)
Considerando-se que IQ = (matriz identidade) e a matriz R da forma
IR ⋅= ρ , (3.56)

270
quando +→ 0ρ , o problema é denominado RLQ “cheap control”, pois assim se reduz a
importância do sinal de controle no índice de desempenho, pressupondo portanto que os
recursos de controle são ilimitados e “baratos”.
Nesta condição afirma-se que [ ] CDK T
c =+→
)(lim0
ρρ
.
Demonstração 1
Parte-se de um problema geral de otimização de funções multivariáveis com restrições
lineares, descrito conforme segue:
Funcional de custo (ou índice de desempenho):
[ ] ∞<+= ∫ f
t
f ttdttLJ
f
,)( 0
xψ)u,(x, (3.57)
Restrições de igualdade lineares:
0)0( ),,( xxux,x == tf& (3.58)
Este problema pode ser resolvido pelo método de Lagrange. Introduzindo-se as
restrições no funcional de custo através de multiplicadores de Lagrange, representados pelo
vetor λ , resultando na equação (3.59).
( ) ( )[ ]
[ ]∫
∫
′−+=
−′++=
f
f
t
t
f
dtH
dtfLtJ
0
0
)(
xλψ
xλxψ
&
&
, (3.59)
onde o Hamiltoniano H é definido por:
fLH λ′+= . (3.60)

271
Integrando o último termo da equação (3.60) por partes, para eliminar x& , tem-se
[ ]∫ ′++′+=f
f
t
tdtHJ
0
0 xλxλψ & . (3.61)
Calculando o variacional de J, tem-se:
∫
∂
∂+
′+
∂
∂+′+
′−
∂
∂=
f
f
t
tdt
HHJ
00
uu
xλx
xλxλxψ
δδδδδ & , (3.62)
onde x∂∂H denota um vetor linha, cujo i-ésimo componente é i
H x∂∂ . Nota-se que
0 0
=xδ já que x(0) é especificado. Uma escolha conveniente para o vetor de multiplicadores
de Lagrange é agora evidente, admitindo-se:
xλ
∂
∂−=′
H& , ft
ftxψ
λ∂
∂=′ )( (3.63)
A expressão (3.62) fica:
∫ ∂
∂=
ft
dtH
δJ0
δuu
. (3.64)
A condição necessária para que 0=δJ dado um uδ arbitrário é então
0=∂
∂
uH
. (3.65)
As equações (3.63) e (3.65) são as famosas equações de Euler-Lagrange, dando as
condições necessárias para )(•u minimizar o funcional J.
Especificamente para o problema em questão, tem-se:
BuAx +=f (3.66)

272
( ))( ftxψψ = (3.67)
Onde o Lagrangeano (L) do funcional de custo é calculado como segue:
( )( )
( ) ( )
( )RuuQDuDuQCxDuQDuCxQCxCx
RuuDuCxQDuCxDuCxy
RuuQyy
Ruuux,yQux,yux,
'''''''''
''
')()'(),(
++++=⇒
⇒
′++⋅⋅
′+=⇒
+=
+=
⇒+⋅⋅=
L
LL
tL
(3.68a)
( )uRuxNuNuxxQx
QDCN
QDDRR
QCCQ
′+′′+′+′=⇒
′=
′+=
′=
L (3.68b)
Conseqüentemente o Hamiltoniano (H) resulta em:
( ) )( BuAxλuRuxNuNuxxQx +′+′+′′+′+′=H (3.69)
Calculam-se as derivadas parciais de H em relação à x(t) e u(t):
λANuxQx
'++=∂
∂H (3.70a)
λBuRxNu
'' ++=∂
∂H (3.70b)
As equações de Euler-Lagrange podem ser obtidas a partir de (3.69) e (3.70):
ft
fttxψ
λ Nu,xQλAλ∂
∂=′−−′−= )( )(& (3.71a)
( ))()()( ttt λBxNRu 1 ′+′−= − (3.71b)
Lembrando que
0)0( ),()()( xxBuAxx =+= ttt& (3.72)

273
pode-se obter o seguinte sistema com 2n equações diferenciais lineares:
⋅
′−−
′−=
−
)(
)(
)(
)(
t
t
t
t
λ
x
AQ
BRBA
λ
x 1
&
& (3.73a)
onde
NRBAA 1 ′−= − (3.73b)
NRNQQ 1 ′−= − (3.73c)
porém com dupla condição de contorno
ft
ftxxψ
λx∂
∂=′= )( e )0( 0 (3.74)
Devido a estas condições de contorno, a equação (3.73a) necessita de outras
considerações para poder ser resolvida. Se for considerado o limite de ∞→ft , sob a hipótese
de que o par A, B seja controlável (ou ao menos estabilizável) e o par C,A seja
observável (ou ao menos detectável), pode-se admitir a existência de uma matriz P
(KAILATH, 1980, p. 228, e KWAKERNAAK e SIVAN, 1972a), de dimensão nn × , que
relaciona as soluções )( e )( •• xλ da seguinte forma:
0 )()( ≥∀⋅= ttt xPλ (3.75)
Partindo-se da hipótese de que a matriz P é simétrica e definida-positiva, tem-se:
)()(' ff tt xPxψ ⋅⋅= (3.76)
)()( ff tt xPλ ⋅= (3.77)
Então, o funcional de custo pode ser escrito da forma:

274
[ ] [ ]∫∫ ++⋅⋅=′−+=ff t
ff
t
dtttdtHJ00
'')()(' RuuQyyxPxxλψ & (3.78)
Sob o ponto de vista prático, é natural e freqüente se considerar períodos de controles
longos, ou seja, tf muito grande. Portanto, levando em conta o comportamento assintótico da
solução deste problema, considera-se o limite de ∞→ft . Sob as considerações de
controlabilidade do par A, B e observabilidade do par C, A, pode-se admitir a condição
assintótica de x(t) ir para zero conforme ∞→ft , então o funcional de custo fica:
[ ] [ ]∫∫∞
∞→
+=
++⋅⋅=00
'' '')()('lim dtdtttJ
f
f
t
ff
t
RuuQyyRuuQyyxPx (3.79)
E o problema de otimização assim posto passa a ter as condições de contorno a seguir,
podendo então ser resolvido da forma apresentada na seqüência:
00 )0( e )0( xPλxx ⋅== (3.80)
Então, substituindo (3.75) em (3.73), tem-se
)()()()( tttt λBRPBxAPxPλ 1 ′−=⋅= −&&
( ) )(txPBRPBAP 1 ⋅′−= −
( ) )(txPAQ ⋅′−−= (3.81)
Pode-se notar que a equação (3.81) pode ser satisfeita escolhendo-se P como uma
solução da seguinte equação algébrica de Riccati (EAR)
PAQPBRPBAP 1 ′−−=′− − (3.82a)
isto é,
0=+′−+′ − QPBRPBAPPA 1 (3.82b)

275
Tomando-se o transposto da matriz P, verifica-se que se P é solução da equação
(3.82b), então P’ também é, portanto confirma-se a hipótese de que P é simétrica. Uma vez
conhecida a matriz P, pode-se introduzi-la na equação (3.71b), conjuntamente com a relação à
equação (3.75), obtendo-se:
( ) )()( tt xPBNRu 1 ′+′−= − (3.83)
Desta forma, conclui-se que:
( )PBNRK ''1 += −c (3.84)
Considerando-se que IQ = (matriz identidade) e a matriz IR ⋅= ρ , e que a matriz D é
ortogonal, segue que:
DCN
IDDIQDDRR
CCQ
'
)1(''
'
=
⋅+=+⋅=+=
=
ρρ (3.85)
E, portanto, a equação (3.84) pode ser escrita da seguinte forma:
( )PBCDI
K '')1(
++
=ρ
c (3.86)
E as equações (3.73b) e (3.73c) podem ser reescritas assim:
CDBAA ′+
−=1
1
ρ (3.87a)
1
1CCCCQ ′
+−′=
ρ (3.87b)
A equação (3.82b) pode ser trabalhada algebricamente, considerando-se a equação
(3.84), e colocada na forma da equação de Lyapunov:
QAPPA~~~
−=+′ (3.88a)

276
onde
cBKAA −=~
(3.88b)
QPBRPBQ 1 +′= −~ (3.88c)
Como A~
é Hurwitz, pois neste caso cK é resultado de um problema RLQ de um
sistema controlável e observável (ou, pelo menos, estabilizável e detectável), e Q~
é definida-
positiva e simétrica, já que Q e Q também são, a equação (3.88a) apresenta uma única
solução P definida-positiva, real e simétrica.
Quando se faz +→ 0ρ , tem-se como resultado que +→ 0Q , e então PBPBQ ′→~
.
Portanto a equação (3.88a) tende a:
PBPBAPPA ′−=+′~~
(3.89)
Uma solução para a equação (3.89) é a solução trivial (P é uma matriz nula). Segundo
Lyapunov, como a matriz A~
é Hurwitz, a solução da equação (3.89) é única para qualquer Q~
(KAILATH, 1980, pág. 179). Portanto, conforme +→ 0ρ , tem-se que a matriz P tende para a
solução trivial, ou seja, 0→P .
Sendo assim, a matriz de realimentação cK [equação (3.86)], resulta em:
( )[ ] ( ) CDPBCDPBNRK ′=
+
+=+=
+++ →
−
→→
'')1(
1'')( limlimlim 1
ρρ
ρρρ oo
c
o
(3.90)
3.3.4 TEOREMA FUNDAMENTAL “LTR” ESTENDIDO
O segundo passo para se demonstrar que o processo de recuperação da matriz de
transferência ainda ocorre, mesmo para sistemas com matriz D não nula, é comprovar que a
MFT da malha principal de controle tende para a MFT resultante da Identidade de Kalman,
quando o critério de otimização do problema LQG caminha para a situação de “Cheap
Control”.
Desta forma, chegou-se ao resultado da proposição 2, que é demonstrada na seqüência.

277
Proposição 2
Dada uma representação do sistema de controle conforme figura 3.13.
Figura 3.13 - Diagrama de blocos do sistema controlado.
Definindo mC como o conjunto dos vetores complexos de dimensão m e mm
C× como o
conjunto das matrizes complexas mm × .
Os sinais, representados na figura 3.13 através de suas respectivas transformadas de
Laplace, são os seguintes:
• R(s) ∈ mC é o vetor de sinais de referência;
• E(s) ∈ mC é o vetor de sinais de erro;
• U(s) ∈ mC é o vetor de sinais de controle (ou de entrada);
• Y(s) ∈ mC é o vetor de sinais de saída.
Além disso, definem-se as seguintes matrizes de funções de transferência:
• H(s) ∈ mmC
× é a matriz de funções de transferência do controlador;
• G(s) ∈ mmC
× é a matriz de funções de transferência da planta;
• G(s)H(s) ∈ mmC
× é a matriz de funções de transferência de malha para abertura da
malha na saída da planta (“loop transfer function”) ou matriz de funções de
transferência do ramo direto;
• I+G(s)H(s) ∈ mmC
× é a matriz de funções de transferência diferença de retorno;
• [I+G(s)H(s)]-1 ∈ mmC
× é a matriz de sensibilidade;
• C(s)= [I+G(s)H(s)]-1 G(s)H(s) ∈ mmC
× é a matriz de funções de transferência de
malha fechada ou matriz de sensibilidade complementar.

278
Conforme se depreende das relações acima, admitir-se-á sempre que a matriz de funções
de transferência da planta seja quadrada, isto é, a planta apresenta o mesmo número de
entradas e saídas. Essa restrição visa apenas simplificar a apresentação, podendo, contudo, ser
removida, conforme Doyle e Stein (1981) e em concordância com as proposições de
Kwakernaak e Sivan (1972b).
A partir do sistema de controle apresentado na figura 3.13, toma-se apenas o bloco
representativo da planta que é representada no domínio do tempo pelas equações de estados a
seguir:
+=
=+=
)()()(
)0( ),()()( 0
ttt
ttt
DuCxy
xxBuAxx& (3.91)
cuja transformada de Laplace com condições iniciais nulas, chamada de G(s), é apresentada a
seguir:
0 ,)()( 01 =+⋅−⋅= − xDBAICG ss (3.92)
onde a matriz D no caso deste estudo é não nula, ou seja, os sinais da entrada u(t) influenciam
diretamente a saída y(t). Por outro lado, o bloco do controlador, H(s), tem uma estrutura tal
que é constituído por um observador de estados assintótico, com matriz de ganho Ko, e uma
realimentação dos estados estimados através de uma matriz de ganho Kc, conforme
apresentado na figura 3.14.
Figura 3.14 – Diagrama de blocos da estrutura interna do controlador H(s).

279
Os ramos de realimentação podem ser reposicionados gerando-se um diagrama de
blocos equivalente, figura 3.15:
Figura 3.15 – Diagrama de blocos equivalente do controlador H(s).
A MFT H(s) relaciona o sinal de controle U(s) com o sinal E(s), é obtida da seguinte
forma:
( ) )()()( 21 sWsEsW cco ⋅−+−⋅−= DKKCKBKK oo (3.93)
)()()( 11
2 sWssW ⋅−= −AI (3.94)
)()( 2 sWsU c ⋅−= K (3.95)
Substituindo a equação (3.94) em (3.93), obtém-se:
( )[ ] )()()(11
1 sEssW occ ⋅⋅−⋅−++−=−− KAIDKKCKBKI oo (3.96)
Substituindo a equação (3.94) em (3.95), obtém-se:
)()()( 11
sWssU c ⋅−⋅−= −AIK (3.97)
Substituindo a equação (3.96) em (3.97), obtém-se:
( )[ ] )()()()(111
sEsssU occc ⋅⋅−⋅−++⋅−⋅=−−− KAIDKKCKBKIAIK oo
( )[ ] ( ) )()(1
1 sEss occc ⋅⋅−⋅−⋅−++⋅=−
− KAIAIDKKCKBKIK oo
( ) ( )[ ] )(1sEs occc ⋅⋅−++−⋅=
− KDKKCKBKAIK oo (3.98)

280
que resulta na seguinte expressão no domínio da freqüência :
ooo KDKKCKBKAIKH 1)()( −−++−= ccc ss (3.99)
onde a matriz de ganho Kc é obtida a partir da solução de um problema do tipo LQG
convenientemente definido, cuja expressão é dada pela equação (3.84).
Definindo-se:
3.49) equação , ( s(s)
e
3.13) figura aberta, (Malha (s)(s)(s)
1(ii)
(i)
KalmandeeIndentidadoKA)IC(W
HGW
−−−≡
⋅−≡
(3.100)
Afirma-se, por hipótese, que W(i)(s) tende a W(ii)(s), quando a matriz de ganho de
realimentação de estados, Kc, é obtida como solução de um problema do tipo LQG baseada na
situação de “Cheap Control”.
A situação de “Cheap Control” pode ser alcançada, definindo-se IQ = e IR ⋅= ρ , e
fazendo +→ 0ρ . Deste modo, verifica-se o seguinte resultado:
( ) [ ] oKA)IC(DBA)IC(H 111
0
ss)(lim −−−
→
−⋅+−=+
sρ
(3.101)
Considerando-se que:
i. A,B é controlável (ou ao menos estabilizável);
ii. A,C é observável (ou ao menos detectável);
iii. G(s) é quadrada;
iv. Os zeros de transmissão de G(s) se localizam no semi-plano esquerdo (SPE) aberto da
representação cartesiana do plano dos números complexos;
v. A matriz D é não nula e ortogonal.
Demonstração 2
Definindo-se:
1)()( −−≡ AIφ ss (3.102)
1)()( −+−≡ CKAIφ oss (3.103)

281
Pode-se reescrever a eq. (3.99) da seguinte forma:
[ ] ococs KKD)KBφKH ⋅⋅⋅−+⋅=−− 11 ()( (3.104)
Aplicando-se o Lema 1 do Apêndice B, com
=
=
=⋅−=
= −
c
o
V
B
U
A
K
I
BDKB
φ
""
""
""
"" 1
( )[ ] occcs KφKBφKIBφφKH ⋅⋅⋅⋅⋅+⋅⋅−⋅=−1
)(
( )[ ] occc KφKBφKIBφKI ⋅⋅⋅⋅⋅+⋅⋅⋅−=−1
(3.105)
Aplicando-se o Lema 1 do Apêndice B novamente, com
=
=
⋅⋅=
=
I
I
BφK
I
""
""
""
""
V
B
U
A
c
[ ] occs KφKBφKIH ⋅⋅⋅⋅⋅+=⇒−1
)( (3.106)
Considerando-se que CDK ⋅→⇒→ + T
c0ρ , que é resultado da proposição 1, e lembrando
que D é ortogonal, tem-se:
[ ] o
TTs KφCDBφCDIH ⋅⋅⋅⋅⋅⋅⋅+=
−
→ +
1
0)(lim
ρ
( )[ ] o
T KφCBφCDID ⋅⋅⋅⋅⋅⋅+⋅=−1
[ ] oKφCBφCD ⋅⋅⋅⋅⋅+=−1
(3.107)
Aplicando-se o Lema 2 do Apêndice B apenas no φ do primeiro fator do segundo membro
da equação (3.107), tem-se:

282
[ ] ooos KφCBφC)KφC(IKφCBφCDH ⋅⋅⋅⋅⋅⋅⋅⋅+⋅⋅⋅−⋅⋅+=−−
→ +
11
0)(lim
ρ
[ ][ ] ooo KφCBφC)KφC(IKφCID ⋅⋅⋅⋅⋅⋅⋅⋅+⋅⋅⋅−+=−− 11
( )[ ][ ] oooo KφCBφC)KφC(IKφCKφCID ⋅⋅⋅⋅⋅⋅⋅⋅+⋅⋅⋅−⋅⋅++=−− 11
[ ] oo KφCBφC)KφC(ID ⋅⋅⋅⋅⋅⋅⋅⋅++=−− 11 (3.108)
Agora, aplicando-se o Lema 2 novamente, desta vez no φ da equação (3.108), tem-se:
[ ] [ ] oooos KφC)KφC(IKφCIBφC)KφC(IDH ⋅⋅⋅⋅⋅+⋅⋅⋅−⋅⋅⋅⋅⋅⋅++= −−−
→ +
111
0)(lim
ρ
(3.109)
Aplicando-se o Lema 1 do Apêndice B novamente, com
=
=
⋅⋅=
=
I
I
KφC
I
""
""
""
""
V
B
U
A
o
[ ] =⋅⋅⋅⋅⋅+⋅⋅⋅⋅⋅⋅++= −−−
→ + ooos KφC)KφC(IBφC)KφC(IDH 111
0)(lim
ρ
( )[ ] =⋅⋅⋅⋅⋅+⋅⋅⋅⋅+⋅⋅⋅+⋅⋅+= −−−oooo KφC)KφC(IBφCD)KφC(I)KφC(I 111
[ ] =⋅⋅⋅⋅⋅+⋅⋅⋅+⋅⋅⋅⋅+⋅⋅⋅+= −−
oooo KφC)KφC(I)KφC(IBφCD)KφC(I 11
[ ] oo KφCBφCDKφCD ⋅⋅⋅⋅⋅⋅+⋅⋅⋅+=−1
(3.110)
Considerando-se que DKBB ⋅−= o , tem-se:
[ ] ooos KφCDKφCDKφCBφCDH ⋅⋅⋅⋅⋅⋅−⋅⋅⋅+⋅⋅+=−
→ +
1
0)(lim
ρ (3.111)
E simplificando, tem-se:
[ ] os KφCDBφCH ⋅⋅⋅+⋅⋅=−
→ +
1
0)(lim
ρ (3.112)
Portanto
[ ] osss KA)ICDBA)ICH ⋅−⋅⋅+⋅−⋅= −−−
→ +
111
0(()(lim
ρ (3.113)

283
3.3.5 GENERALIZAÇÃO TEOREMA ESTENDIDO
Como a restrição da matriz D ser ortogonal restringe em demasia a aplicação do
resultado das proposições 1 e 2, apresenta-se a seguir um recurso que permite a extensão dos
resultados obtidos até aqui para qualquer sistema não estritamente próprio em que a matriz D
tenha posto completo. Ainda, caso a matriz D não seja quadrada, o seu posto deve ser pelo
menos igual a sua menor dimensão.
Proposição 3
Caso a matriz D não seja ortogonal, porém tenha posto (“rank”) de coluna completo,
pode-se adotar a seguinte normalização:
un
un
u
SDD
SBB
D)(DS
⋅=
⋅=
⋅= − 21/T
(3.114)
Calculam-se as matrizes de ganho Ko e Kc, no sistema
n
n
DC
BA
M
LL
M
, obtendo-se
assim o compensador:
ooo KKDKCKKBAIKH 1)()( −−++−= cncncn ss (3.115)
Afirma-se que nesta situação vale a igualdade:
)(lim)(lim0
1
0ss un HSH
++ →
−
→⋅=
ρρ (3.116)
onde )(lim0
sH+→ρ
é conforme a equação (3.113).
A equação (3.116) generaliza, portanto, o procedimento LTR para sistemas não
estritamente próprios em que a matriz D não é ortogonal.

284
Demonstração 3
Partindo-se do resultado da proposição 2, tem-se:
[ ] onnn sss KA)ICDBA)ICH ⋅−⋅⋅+⋅−⋅= −−−
→ +
111
0(()(lim
ρ
[ ] ouu ss KA)ICSDSBA)IC ⋅−⋅⋅⋅+⋅⋅−⋅= −−− 111 ((
( )[ ] ou ss KA)ICSDBA)IC ⋅−⋅⋅⋅+⋅−⋅= −−− 111 ((
[ ] ou ss KA)ICDBA)ICS ⋅−⋅⋅+⋅−⋅⋅= −−−− 1111 (( (3.117)
Portanto:
)(lim)(lim0
1
0ss un HSH
++ →
−
→⋅=
ρρ (3.118)
3.3.6 REGULADOR
Quando não há sinal de referência, que é o caso de um sistema de suspensão
automotivo, pode-se eliminar o somador da entrada da planta. Como este somador inverte a
saída (subtração), com a sua eliminação, a inversão do sinal na malha de controle passa para
H(s), de forma que:
ooo KDKKCKBKAIKH 1)()( −−++−−= ccc ss (3.119)
Conseqüentemente passam a valer as seguintes definições (vide equação (3.100)):
3.49) equação , ( s(s)
e
3.13) figura aberta, (Malha (s)(s)(s)
1(ii)
(i)
KalmandeeIndentidadoKA)IC(W
HGW
−−≡
⋅≡
(3.120)
Deste modo, o resultado da proposição 2 passa a ser o seguinte:
( ) [ ] oKA)IC(DBA)IC(H 111
0
ss)(lim −−−
→
−⋅+−−=+
sρ
(3.121)

285
4 DESENVOLVIMENTO EXPERIMENTAL
4.1 IDENTIFICAÇÃO DO MODELO DO VEÍCULO
Como a estratégia de controle a ser adotada para o sistema de suspensão baseia-se num
modelo do veículo, o primeiro passo para o projeto do controlador é a identificação do
modelo, que está dividido em três fases:
• definição preliminar de parâmetros do modelo a partir de cálculos, medições
geométricas, e informações técnicas do veículo e de seus principais componentes, com
a finalidade de se obter uma estimativa aproximada do valor de cada parâmetro;
• construção, calibração e instalação dos sensores no veículo;
• descrição dos testes realizados e coleta dos dados experimentais;
• análise dos dados coletados.
4.1.1 ESTIMATIVA INICIAL DOS PARÂMETROS FÍSICOS
A escolha dos parâmetros físicos do modelo está diretamente ligada à
representatividade do veículo real pelo modelo matemático. Segundo o trabalho de Kim et al.
(1999), quando se utiliza um modelo a parâmetros concentrados, por mais precisos que sejam
os valores de cada parâmetro obtido de forma isolada, o modelo dificilmente apresentará um
comportamento fiel do veículo que está sendo representado. Isto ocorre porque a utilização de
massas concentradas, molas e amortecedores ideais, e a adoção de linearizações destes
elementos e dos movimentos do veículo geram distorções, que dificultam a obtenção de uma
boa representação do veículo real. Daí a necessidade de se ajustar os parâmetros a partir de
dados experimentais, que compensam em certa forma estas distorções, permitindo
representações bastante satisfatórias dentro de certos limites.
De qualquer forma, o melhor ponto de partida para o processo de identificação é a
análise isolada dos diversos componentes que compõe o modelo do veículo. Os valores
“reais” de massas, momentos de inércia, constantes de mola, etc., são a melhor aproximação
para o valor destes parâmetros que se tem a princípio, sejam eles medidos a partir de
experimentos simples, ou calculados a partir de medições indiretas, ou simplesmente
estimados.

286
Além disso, os algoritmos existentes para se fazer um ajuste experimental destes
parâmetros apresentam melhores resultados quando o processo se inicia com boas
aproximações para os parâmetros, de forma a gerar uma convergência mais rápida e segura
destes valores.
Nesta seção é apresentada a forma como foram obtidos todos os valores de grandezas
físicas utilizadas como parâmetros das equações diferenciais da dinâmica do modelo. O
veículo utilizado em todos os experimentos é uma caminhonete Ford Ranger modelo 1998,
cabine simples, com motor de quatro cilindros e barra estabilizadora apenas no eixo dianteiro.
A figura 4.1 mostra as principais dimensões do veículo.
Figura 4.1 – Dimensões do veículo.
Esta caminhonete apresenta suspensão independente nas rodas dianteiras, do tipo duplo
“A”, sendo utilizadas barras de torção como molas. Na traseira, o veículo apresenta suspensão
tipo Hotchkiss, com eixo diferencial rígido e feixes de molas com três lâminas. As posições
aproximadas das molas e amortecedores são apresentadas na figura 4.2.
A tabela 4.1 apresenta uma relação de características técnicas do veículo. Algumas
características apresentam valores máximos e mínimos que serão utilizados como limites no
processo de identificação dos parâmetros do modelo.

287
Figura 4.2 – Dimensões da suspensão.
Tabela 4.1 – Características técnicas do veículo.

288
Como a caminhonete estudada está convertida para o combustível GNV, contando
com um cilindro de 25m3 na caçamba, o veículo foi pesado para se conhecer a sua massa total
(com motorista) com maior precisão. A massa total medida foi de mT=1630 ±5 kg. Todo o
estudo apresentado neste trabalho considerou o veículo em sua situação sem carga, que para
as caminhonetes consiste na situação de menor conforto e segurança, visto que todo o sistema
de molas da suspensão foram projetados para suportar 750 kg de massa adicional, que é a
carga útil do veículo.
Figura 4.3 – Cálculo da rigidez da mola dianteira.
Os valores de constante de mola apresentados na tabela 4.1 foram estimados por
fórmulas simples conforme apresentado nas figuras 4.3 e 4.4. O valor estimado é assumido
como nominal, e limites inferiores e superiores também são estabelecidos. A definição destes
limites é importante porque o valor nominal pode variar em razão das não-linearidades que as
molas apresentam (principalmente o feixe de mola na traseira), e também pela existência de
alavancagens20 na aplicação das forças que dependem dos pontos de apoio e do pivotamento
do sistema de suspensão.
Na figura 4.3 tem-se o cálculo da mola dianteira que no caso é uma barra de torção
que conecta a bandeja inferior da suspensão a um ponto fixo na segunda travessa do quadro
de chassi. Neste caso, como não há alavancagem, o próprio valor da mola foi utilizado como
estimativa inicial, portanto =fk 35 kN/m. O cálculo da barra de reação, ou barra
estabilizadora é o mesmo, porém com dimensões diferentes: d = 29 mm, r = 250 mm e l = 750
mm. Neste caso a rigidez nominal da barra estabilizadora é kN/m 120≅bek , ou seja, para
20 efeito alavanca devido às diferenças da posição do ponto de apoio entre mola e roda em relação à articulação

289
cada milímetro de diferença da distância entre roda e carroceria entre os lados direito e
esquerdo, a barra aplica 120N de forma a reduzir esta diferença. Como a barra esta conectada
a meia distância entre roda e articulação, adotou-se para rigidez de estabilização a constante
kN/m 602 ≅= bear kk como uma estimativa preliminar do parâmetro.
Figura 4.4 – Cálculo da rigidez da mola traseira.
Na figura 4.4 é apresentado o cálculo para a mola traseira. Devido à distância de
aproximadamente 0,23m entre o centro de contado da roda com o solo e o centro do apoio do
feixe de molas sobre o eixo (figura 4.2), foi considerado uma alavancagem que reduz cerca de
20% o valor nominal de rigidez da mola, o que resultou em =rk 50 kN/m como estimativa
preliminar para o modelo.
Os parâmetros mais difíceis de estimar são os momentos de inércia de rolamento (giro
em torno do eixo ‘x’) e arfagem (giro em torno do eixo ‘y’) da massa suspensa do veículo.
Esta dificuldade vem do fato de que não se tem (neste caso em particular) o modelo em CAD

290
exato e detalhado de veículo, que permitiria avaliar os momentos de inércia com relação aos
eixos principais com razoável precisão, além de possibilitar a avaliação dos efeitos das
restrições cinemáticas da suspensão. Como não se dispõe destes dados, foram feitos modelos
3D simplificados em CAD, utilizando o aplicativo Inventor® da Autodesk, onde foi atribuída
massa a cada volume introduzido ao modelo de forma a aproximar o máximo a construção do
veículo real. A descrição desta montagem em CAD é apresentada na figura 4.5.
Figura 4.5 – Modelo 3D em CAD e a massa de cada componente.
Além das massas apresentadas na figura 4.5, adicionou-se uma massa de 80kg
representado o motorista sentado em frente à direção do veículo, e uma massa de 150kg
representado o cilindro de 25m3 de GNV localizado na caçamba próximo à cabine. Como
resultados, foram obtidos momentos de inércia em torno de 2100kg.m2 para a arfagem e
420kg.m2 para o rolamento, ambos referenciados ao centro de massa do corpo suspenso do
veículo. Como em geral, para caminhonetes e SUVs, o centro de giro está mais baixo que o
centro de massa do corpo suspenso, os valores de momento de inércia reais devem ser um
pouco maiores. Dada a incerteza na estimativa dos momentos de inércia e o desconhecimento
dos centros de giro dos movimentos de rolamento e arfagem, foram adotados os resultados do
CAD adicionados de 20% como estimativa inicial dos parâmetros do modelo. Portanto tem-
se: =ϕJ 2500 kg.m2 e =θJ 500 kg.m2.
Com relação às constantes de mola dos pneus (kt), foi adotado um valor de 200 kN/m,
baseado no tipo de pneu, na pressão do ar. Apesar da expressiva não-linearidade do pneu, os
limites para o valor da sua rigidez foram mantidos em ±20%. Para valores de coeficiente de
amortecimento para os pneus (ct) o desconhecimento é ainda maior, por isso foi definido um

291
valor preliminar de 1500 N.s/m, que resulta em um sistema sub-amortecido. Os limites de
variação adotados para o coeficiente de amortecimento foram de ±70%.
Para os amortecedores da suspensão a situação não é muito diferente. Na prática, a
curva força versus velocidade que estes amortecedores apresentam é bastante não linear, além
disso, varia também entre as situações de compressão e tração dos amortecedores (vide tabela
4.1). Apesar destas não-linearidades, neste modelo o coeficiente de amortecimento foi
considerado constante. O valor do coeficiente de amortecimento na traseira foi considerado
maior por causa do feixe de molas já apresentar um amortecimento significativo. Para ambos
os valores foram adotados limites de ±70%, tendo em vista as não-linearidades.
Para tornar o processo de identificação dos parâmetros mais estável e garantir a
convergência para uma solução viável, alguns parâmetros foram definidos como variáveis
dependentes de outros parâmetros e de constantes conhecidas do veículo real. Como
constantes conhecidas têm-se o peso total do veículo (medido por uma balança) e o
comprimento do entre-eixos, que consta do manual do próprio veículo. Outros parâmetros,
que têm características geométricas e seus valores puderam ser facilmente medidos, foram
definidos como constantes.
Os valores preliminares dos parâmetros e seus respectivos limites estão apresentados na
tabela 4.2.
Tabela 4.2. Valores preliminares dos parâmetros do modelo.
PARÂMETRO VALOR TIPO LIMITES UNIDADE
m1 35 Variável ±20% Kg m2 mT -2m1 -m3 Dependente --- kg m3 150 Variável ±20% kg J3 25 Variável ±20% kg.m2 Jθ 500 Variável ±50% kg.m2 Jϕ 2.500 Variável ±50% kg.m2 kt 200.000 Variável ±20% N/m kf 35.000 Variável ±20% N/m kr 50.000 Variável ±20% N/m kar 60.000 Variável ±20% N/m cf 2.000 Variável ±70% N.s/m cr 3.000 Variável ±70% N.s/m ct 1.500 Variável ±70% N.s/m l1 1,0 Variável 0,8 - 2,0 m l2 lWB -l1 Dependente --- m d 0,5 Fixa --- m
dse 0,7 Fixa --- m

292
4.1.2 SENSORES
Para realização de um experimento para aquisição de dados com o objetivo de
identificar o modelo do veículo, a situação ideal seria utilizar um equipamento capaz de
aplicar sinais conhecidos para excitação do movimento das rodas do veículo, como um “four
post”, por exemplo, apresentado na figura 4.6. Porém, como não se dispunha de tal
equipamento, foi necessário buscar alternativas. Neste sentido foram acrescentados mais
quatro acelerômetros, um em cada roda, além daqueles que já haviam sido definidos no
modelo teórico do veículo.
Figura 4.6 – Exemplos de equipamentos de teste “four-post” e “multi-axis”.
Desta forma, tem-se um novo conjunto de saídas do sistema, cujo vetor chamou-se de
)(4 ty , descrito conforme as equações (4.1) a (4.4), dadas a seguir:
( ) ( ) )()( 424144 tttt uDwDxCy ++= (4.1)
[ ]111
114 RLMLC ⋅⋅⋅= − T (4.2)
[ ]0111
1141 CLMLD ⋅⋅⋅= − T (4.3)
[ ]T
11
1142 LMLD ⋅⋅−= − (4.4)
A colocação de sensores nas rodas permite a estimação dos sinais de excitação a partir
de uma simples inversão da planta. Desta forma, quando o veículo transita sobre um obstáculo
conhecido, é possível determinar os instantes exatos em que cada roda passou pelos
obstáculos.
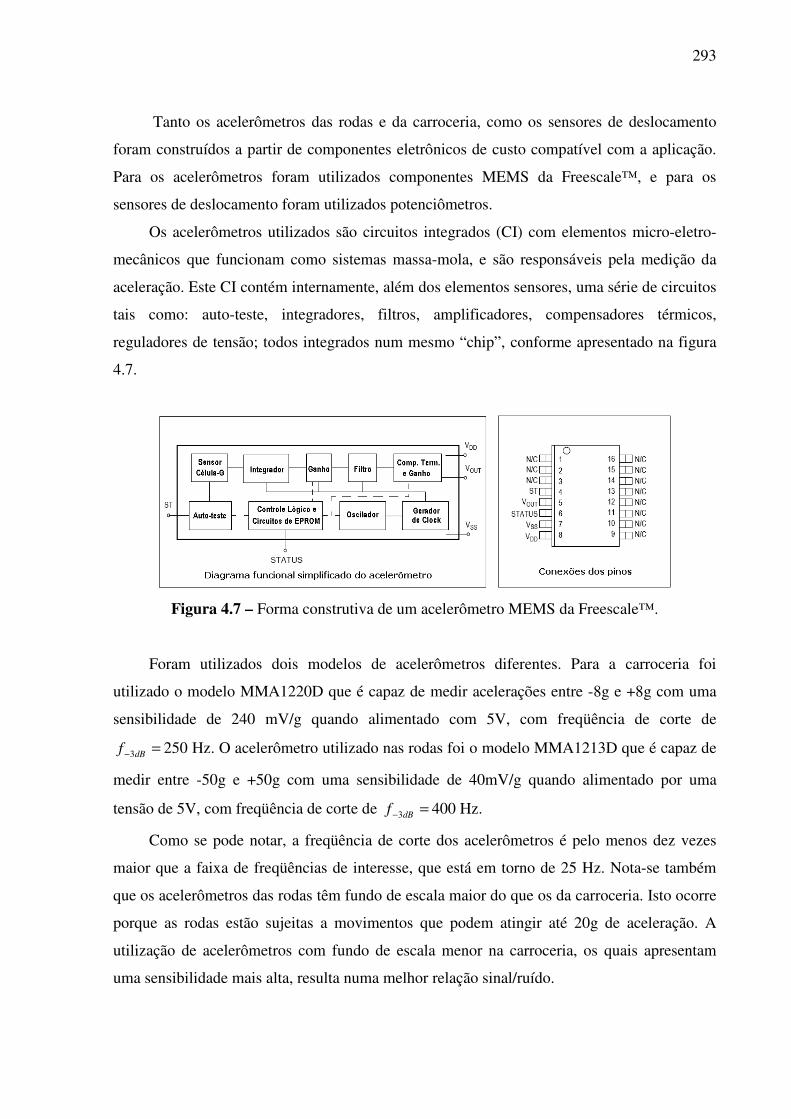
293
Tanto os acelerômetros das rodas e da carroceria, como os sensores de deslocamento
foram construídos a partir de componentes eletrônicos de custo compatível com a aplicação.
Para os acelerômetros foram utilizados componentes MEMS da Freescale™, e para os
sensores de deslocamento foram utilizados potenciômetros.
Os acelerômetros utilizados são circuitos integrados (CI) com elementos micro-eletro-
mecânicos que funcionam como sistemas massa-mola, e são responsáveis pela medição da
aceleração. Este CI contém internamente, além dos elementos sensores, uma série de circuitos
tais como: auto-teste, integradores, filtros, amplificadores, compensadores térmicos,
reguladores de tensão; todos integrados num mesmo “chip”, conforme apresentado na figura
4.7.
Figura 4.7 – Forma construtiva de um acelerômetro MEMS da Freescale™.
Foram utilizados dois modelos de acelerômetros diferentes. Para a carroceria foi
utilizado o modelo MMA1220D que é capaz de medir acelerações entre -8g e +8g com uma
sensibilidade de 240 mV/g quando alimentado com 5V, com freqüência de corte de
=− dBf 3 250 Hz. O acelerômetro utilizado nas rodas foi o modelo MMA1213D que é capaz de
medir entre -50g e +50g com uma sensibilidade de 40mV/g quando alimentado por uma
tensão de 5V, com freqüência de corte de =− dBf 3 400 Hz.
Como se pode notar, a freqüência de corte dos acelerômetros é pelo menos dez vezes
maior que a faixa de freqüências de interesse, que está em torno de 25 Hz. Nota-se também
que os acelerômetros das rodas têm fundo de escala maior do que os da carroceria. Isto ocorre
porque as rodas estão sujeitas a movimentos que podem atingir até 20g de aceleração. A
utilização de acelerômetros com fundo de escala menor na carroceria, os quais apresentam
uma sensibilidade mais alta, resulta numa melhor relação sinal/ruído.

294
A descrição de como os sensores foram construídos e calibrados, e como foi feita a sua
interface com as entradas dos conversores analógico/digital (ADC) do DSP está detalhada no
Apêndice C.
A figura 4.8 mostra como foram instalados os acelerômetros na carroceria. Cada um
destes acelerômetros foi fixado em um ponto da massa suspensa do veículo logo acima de
cada uma das rodas do veículo.
Figura 4.8 – Instalação dos acelerômetro na carroceria na posição acima de cada roda..
Na figura 4.9 podem ser observados os acelerômetros das rodas. Cada um destes
sensores foi posicionado o mais próximo possível do centro de massa de cada roda.
Os sensores de deslocamento, conforme é apresentado na figura 4.10, estão fixados
nas longarinas do quadro de chassi da caminhonete. No eixo de cada potenciômetro é preso
um braço de alavanca que se conecta a parte móvel da suspensão por meio de um tirante. Na
parte dianteira do veículo os tirantes estão fixados na extremidade da barra estabilizadora, e
na traseira, no suporte central dos feixes de mola.

295
Figura 4.9 – Instalação dos sensores acelerômetros nas rodas.
Figura 4.10 – Instalação dos sensores de deslocamento no veículo.

296
4.1.3 EQUIPAMENTO PARA AQUISIÇÃO DE DADOS E CONTROLE
O elemento principal do “hardware” de controle é o DSP (“Digital Signal Processor”)
TMS320F2812 da Texas Instruments21. Esta unidade central de processamento (CPU) é
altamente otimizada para códigos C/C++ com excelentes recursos de interrupção, salvamento
de contexto e capacidade de restauração, o que faz dela uma escolha perfeita para sistemas
operacionais em tempo real (RTOS – “Real Time Operating System”)
O DSP TMS320F2812 é um processador de 32 bits de ponto fixo, com capacidade de
processamento de 150 Milhões de Instruções por Segundo (MIPS). Baseado em arquitetura
Harvard modificada, este processador é uma máquina RISC (“Reduced Instructuion Set
Code”), capaz de realizar operações de multiplicação e soma em um único ciclo de máquina.
A arquitetura deste DSP é composta de três módulos: unidade de processamento, memória e
periféricos. Um diagrama que mostra todos os recursos deste DSP e suas entradas e saídas
(IO) é apresentado na figura 4.11.
Figura 4.11 – Diagrama dos recursos e IO do DSP TMS320F2812.
Neste trabalho foi utilizado um “kit” de desenvolvimento da empresa Spectrum
Digital22, que permite acesso a todas as funcionalidades do DSP TMS320F2812 através de
uma conexão com um micro-computador PC via interface paralela. A figura 4.12 apresenta a
placa do circuito eletrônico e os seus conectores. Esta placa conta com um controlador JTAG
(padrão IEEE 1149.1) que controla o conector P1 e faz a interface entre o JTAG com a porta
21 Site na Internet <www.ti.com >, acesso em 17/jul/2008. 22 Site na Internet <www.spectrumdigital.com >, acesso em 30/ago/2008.

297
paralela P3 para conexão com o PC. A placa da Spectrum Digital também é dotada de uma
memória estática de 65.536 (64K) palavras de 16 bits, que pode ser utilizada para carga de
programas no modo de depuração.
Figura 4.12 – Placa do Kit eZdsp F2812 e seus conectores.
O conector P2 é uma expansão dos barramentos de dados, endereços e controles do
DSP. Os conectores P4, P7 e P8 são para os sinais de entrada e saída digitais, incluindo as
saídas de PWM para controle de atuadores. As entradas analógicas dos ADC são acessadas
pelos conectores P5 e P9. A alimentação de tensão de 5Vcc é inserida através do conector P6.
Para a aquisição de dados dos sensores instalados no veículo, foram utilizadas 12
entradas analógicas, oito do bloco B (pinos 1 até 8 do conector P5) e quatro do bloco A (pinos
2, 4, 6 e 8 do conector P9). Todos os sensores foram conectados a estas entradas via circuito
de interface mostrado na figura C.3 (Apêndice C), que garante um nível de tensão adequado
aos padrões destas entradas. Também foi utilizado o conector P3, que foi acoplado à porta
paralela de um Notebook Dell modelo Latitude D520 via um cabo apropriado.
Este “hardware” proporcionou a vantagem de poder se utilizar a mesma instalação
elétrica realizada no veículo tanto no processo de aquisição de dados para ajuste do modelo do
veículo, como na malha de controle. Além de simplificar o trabalho, o modelo foi identificado
a partir de dados que terão as mesmas características daqueles da operação do controlador. Ou
seja, foram utilizados sinais com os mesmos níveis de tensão, com o mesmo nível de ruído, e
com os mesmos atrasos de fase, e com os sensores colocados exatamente na mesma posição e
com as mesmas interfaces mecânicas e eletrônicas. Isto garantiu uma maior fidelidade do
modelo para seu uso na síntese de controlador.
Para o acionamento dos atuadores foram utilizadas quatro saídas PWM do conector P8,
que serão detalhadas na seção 4.5.1 deste trabalho (pág. 401).

298
4.1.4 APLICATIVOS PARA AQUISIÇÃO DE DADOS
O “kit” de desenvolvimento eZdsp F2812 conta com o aplicativo Code Compose
Studior® (CCS) que é um compilador de código de programação em linguagem C/C++ para a
linguagem de máquina do DSP. Além disso, o CCS tem acesso a todos os recursos da placa
de circuitos eZdsp F2812, sendo capaz de instalar o programa compilado na memória do
processador e colocá-lo no ciclo de trabalho independente do PC onde o CCS é executado.
O CCS também conta com uma interface com o aplicativo Matlab®, que é capaz de
transformar diagramas de blocos criados no Simulink® em códigos em C que podem ser
interpretados pelo CCS e compilados. O aplicativo Matlab apresenta um procedimento
bastante automatizado para esta tarefa, de forma que o usuário nem se dá conta da existência
do aplicativo CCS, que é chamado e executado de forma automática pelo Matlab.
A placa de circuitos eZdsp F2812 é reconhecida pelo Matlab como um ‘target” que é
identificada por um bloco do Simulink conforme é apresentado na figura 4.13.
Figura 4.13 – Diagrama de blocos em Simulink para aquisição dos dados via RTDX.

299
O diagrama criado no Simulink define o algoritmo que será implementado
automaticamente no “target”. Como pode ser visto na figura 4.13, os dados lidos pelas
entradas analógicas a uma taxa de 250 Hz e convertidos para a forma digital ficam disponíveis
através do bloco C28xADC1. Estes sinais passam por um bloco de condicionamento de sinal,
que é detalhado na figura 4.14. Em seguida, passam um conjunto de blocos que realiza uma
média móvel do sinal a cada 5 amostras, passando por um segurador de ordem zero e
reduzindo a freqüência de amostragem para 50 Hz, que é transferido ao PC através do RTDX.
Figura 4.14 – Diagrama de blocos para condicionamento dos sinais vindos do bloco ADC.
Este processo de transformação dos blocos do Simulink em código em linguagem C a
ser compilado pelo CCS é iniciado por um botão (indicado na figura 4.13) que chama uma
rotina de programação do Matlab (m-file). Esta rotina, além de disparar o processo de
compilação e carregamento, faz também a leitura de 1000 amostras de cada sinal através do
recurso RTDX ( “Real-Time Data eXchange”). A rotina m-file é apresentada no Apêndice D.

300
4.1.5 DESCRIÇÃO DO EXPERIMENTO
Para haver um bom ajuste dos parâmetros do modelo do veículo, foi necessário elaborar
um experimento que gerasse movimento em todos os sete graus de liberdade do modelo, e que
fosse capaz de excitar os principais modos de vibrar do veículo. A solução encontrada foi a
utilização de um obstáculo com duas lombadas, posicionadas de tal forma que uma ficasse
mais adiantada do que a outra. O experimento foi variado, ora deixando que a roda da direita
atingisse o obstáculo primeiro, e ora a roda esquerda. Outra variação foi a utilização de apenas
uma lombada, considerando que somente as rodas de uma das laterais do veículo passassem
sobre ela; ora pela direita, ora pela esquerda.
As dimensões dos obstáculos construídos para o experimento estão apresentadas na
figura 4.15 a seguir:
Figura 4.15 – Lombadas utilizadas como obstáculos nos experimentos.
O local do experimento foi um pátio pavimentado com concreto, plano e com
irregularidades superficiais de pequenas amplitudes que puderam ser desprezadas, conforme
apresentado na figura 4.16.

301
Figura 4.16 – Caminhonete parada com os obstáculos à frente.
O procedimento do experimento consistiu em passar com o veículo em velocidade
aproximadamente constante sobre os obstáculos apenas uma vez, evitando acelerações e
frenagens, e continuar na mesma velocidade até que todos os movimentos de oscilação das
massas do veículo estivessem totalmente cessados. O tempo total de amostragem de 20
segundos foi suficiente para isto.
Na figura 4.17 é apresentado um conjunto de fotos que mostra a seqüência de eventos da
passagem do veículo pelos obstáculos, em um dos experimentos.
Figura 4.17 – Fotos mostrando a seqüencia do experimento com lombadas alternadas.
Foram realizados seis experimentos com o amortecedor convencional: dois com
lombadas alternadas e com o lado direito adiantado, dois com o lado esquerdo adiantado, um
com uma lombada apenas do lado direito e outro também com uma lombada, porém
posicionada no lado esquerdo do veículo.
Para cada experimento foram coletadas cerca de mil amostras dos doze sensores do
veículo, numa taxa de 50 Hz. Em todos os experimentos o veículo atingiu os obstáculos
sempre num tempo superior a dois segundos, visto que este primeiro intervalo de amostragem
é utilizado para anular o nível DC dos sensores. Estes primeiros dois segundos foram
descartados em todos os sinais, e em seguida os dados foram armazenados em arquivos de
dados do Matlab (*.dat) para posterior análise.
302
4.1.6 ANÁLISE DOS DADOS E IDENTIFICAÇÃO DO MODELO
Para a análise dos dados foi utilizado o mesmo equipamento que serviu para armazenar
os dados dos experimentos, que é um notebook PC, conforme apresentado na figura 4.18, no
lado direito. Esta mesma figura mostra à esquerda a placa de circuitos eletrônicos com o DSP
montada no veículo, que foi o equipamento utilizado para a aquisição dos dados e conectado
ao PC via interface paralela.
Figura 4.18 – Placa do Kit eZdsp F2812 montada no veículo e o PC conectado à placa.
A análise dos dados dividiu-se em quatro fases:
• a primeira consistiu em se analisar os níveis de ruídos do sinal e a distorção por
quantização gerada pelo ADC;
• a segunda fase teve como objetivo a reprodução dos contornos dos obstáculos
(altura medida no eixo “z”) a partir dos dados coletados de todos os sensores;
• a terceira foi o ajuste dos parâmetros do modelo linear para ajustá-lo aos
resultados experimentais;
• e a quarta fase foi o ajuste de um modelo do veículo contendo modelos não
lineares do amortecedor convencional, e teve como objetivo estimar os
amortecimentos residuais (isto é, amortecimento que não são gerados pelos
amortecedores) e a alavancagem de força dos amortecedores.
Na primeira fase, para a determinação dos níveis de ruído dos sinais foram utilizadas
duas coletas de dados realizadas com o veículo parado em duas situações: uma com o motor
do veículo desligado, e outra com o motor em funcionamento. Para os doze sinais coletados
em cada situação foram calculados os valores RMS e identificados os maiores valores de pico

303
(maior amplitude) dos ruídos presentes nestes sinais, cujos resultados são apresentados na
tabela 4.3:
Tabela 4.3 – Níveis de ruído e quantização dos sinais medidos dos sensores.
Percebe-se, a partir dos dados da tabela 4.3, que na situação com o motor ligado os
níveis de ruído são maiores, principalmente no sinal dos acelerômetros instalados na parte
dianteira da carroceria do veículo, próximo a região do motor. Isto já era esperado, visto que o
motor em movimento gera vibração em várias harmônicas da sua freqüência de rotação, as
quais excitam as estruturas e partes do veículo que acabam por interferir nos sensores,
principalmente nos acelerômetros. O motor a gasolina, que é o caso, também gera
interferências eletromagnéticas relacionadas ao acionamento das velas, feito com alta tensão.
Esta interferência também contribuiu em parte com a geração de ruídos nos sinais.
A tabela 4.3 também apresenta a unidade de quantização dos sinais, que é calculada
dividindo-se a máxima amplitude da escala do sinal medido por 4096, que é o “range”23 da
entrada do ADC. A unidade de quantização, portanto, é a menor quantidade de cada sinal que
pode ser representada na forma digital dentro do processador. Pode-se notar que a quantização
dos sinais é muito pequena, muito menor que o valor RMS do ruído de medida, portanto seus
efeitos podem ser desprezados.
Na segunda fase foram utilizados os valores preliminares da tabela 4.2 (final da seção
4.1.1) e o modelo formado pelas equações (3.16), (3.18), (3.19) e (4.1), onde a matriz A é 23 Maior número inteiro que se consegue representar com 12 bits, que é a capacidade dos ADC.
Sensor Posição Valor RMS Valor de pico Valor RMS Valor de pico
dianteiro esquerdo 0,23 0,52 0,29 0,66 0,010
dianteiro direito 0,32 0,71 0,33 0,85 0,010
traseiro esquerdo 0,23 0,62 0,27 0,67 0,010
traseiro direito 0,25 0,67 0,27 0,72 0,010
dianteiro esquerdo 0,06 0,18 0,23 0,48 0,004
dianteiro direito 0,08 0,20 0,16 0,40 0,004
traseiro esquerdo 0,14 0,30 0,15 0,39 0,004
traseiro direito 0,07 0,25 0,09 0,26 0,004
dianteiro esquerdo 0,08 0,16 0,09 0,21 0,015
dianteiro direito 0,06 0,16 0,07 0,17 0,015
traseiro esquerdo 0,21 0,51 0,24 1,34 0,044
traseiro direito 0,09 0,27 0,12 0,40 0,044
m/s2
mm
Níveis de ruído dos sinaisSinais medidos
Unidade de quantização
do ADC
unidade de
medida
Ace
lera
ção
vert
ical
da
carr
ocer
ia s
obre
cad
a ro
da
Des
loca
men
to r
elat
ivo
entr
e ro
da e
ca
rroc
eria
Motor desligado Motor ligado
Ace
lera
ção
vert
ical
da
s ro
das

304
dada pela equação (3.20) e a matriz B pela equação (3.21), e foram definidas as matrizes C e
D como a seguir:
=
4
3
2
C
C
C
C (4.5)
=
=
41
44
44
41
31
21
D
0
0
D
D
D
D x
x
(4.6)
Na equação (4.5), C2, C3 e C4 referem-se respectivamente às saídas de deslocamento
relativo entre roda e carroceria, acelerações verticais na carroceria e acelerações verticais das
rodas, conforme mostram as equações (3.24), (3.25) e (4.2). Vale a mesma relação para D21,
D31 e D41, com a diferença que o algarismo “1” do índice refere-se à entrada correspondente
às perturbações exógenas que a pista aplica às rodas. As matrizes D21 e D31 são nulas
conforme a equação (3.26), e a matriz D41 é definida pela equação (4.3).
O modelo foi então discretizado através da função “c2d(A,B,Ta)” do Matlab, onde Ta é o
período de amostragem de 0,02 segundos, de forma que se passou a ter o seguinte sistema em
tempo discreto:
kkk uΓxΦx ⋅+⋅=+1 (4.7)
kkk uDxCy ⋅+⋅= (4.8)
onde
aTe
AΦ = (4.9)
BΓ A ⋅
⋅= ∫
aT
tdte
0
(4.10)
A equação (4.10) considera a hipótese de que o vetor de entradas u(t) é constante no
intervalo considerado. Para uma velocidade do veículo de aproximadamente 2 m/s, no período
da amostragem o deslocamento do veículo é de apenas 0,04 m, e portanto, a aproximação
considerada é bastante razoável.
O passo seguinte foi calcular a pseudo-inversa da matriz D, cuja definição é dada pela
equação 4.11. Contudo o cálculo pela definição tem uma precisão numérica ruim, e na prática

305
utiliza-se algum método baseado na decomposição em valores singulares (SVD). Neste caso
fui utilizado a função “pinv(D)” do Matlab, que se baseia na função svd(D).
( ) TT DDDD ⋅⋅=−⊥ 1
(4.11)
Uma estimativa do sinal de entrada pode ser calculada de seguinte forma:
( )111,
1,11
++⊥
+
+++
⋅−⋅=⇒
⋅+⋅=
kkke
kekk
xCyDu
uDxCy (4.12)
Numa seqüência de n amostras correspondentes a um subconjunto do total de amostras
num período de tempo restrito à passagem do veículo sobre os obstáculos, as estimativas para
as entradas foram calculadas na seqüência apresentada a seguir:
( )
( )
( )nnne
nenn
e
e
e
e
e
xCyDu
uxx
xCyDu
uxx
xCyDu
uxx
yDu
x
⋅−⋅=
⋅Γ+⋅Φ=
⋅−⋅=
⋅Γ+⋅Φ=
⋅−⋅=
⋅Γ+⋅Φ=
⋅=
=
⊥
−−
⊥
⊥
⊥
,
1,1
333,
2,23
222,
1,12
11,
1
0
M
(4.13)
Em seguida, o sinal de velocidades ue foi integrado numericamente utilizando-se a
função “cumtrapz” do Matlab. Como exemplo, a figura 4.19 apresenta os resultados da
estimativa destes sinais de deslocamento obtidos a partir dos dados de um dos experimentos.
No sinal de deslocamento resultante da integração dos sinais de velocidade, apesar de
apresentar certo desvio (“drift”) devido à integração de níveis médios de sinal introduzidos
pelos ruídos (ilustrado na figura 4.19 pela tendência das curvas em direção a valores
negativos), ainda é possível se identificar os contornos referentes às lombadas sobre as quais o
veículo passou.

306
Nas quatro curvas apresentadas no gráfico da figura 4.19, que correspondem a cada uma
das rodas do veículo, é possível identificar claramente o contorno das lombadas. Neste
exemplo, a seqüência das rodas na passagem pelos obstáculos foi: dianteira direita, dianteira
esquerda, traseira direita e traseira esquerda. No caso de alguma confusão gerada por uma
ondulação excessiva de uma destas curvas, a informação da seqüência das rodas que passaram
pelos obstáculos, associada ao fato de que o obstáculo da roda esquerda inicia imediatamente
depois que o da roda direita termina, ajuda na identificação correta dos contornos.
Figura 4.19 – Gráfico da integral dos sinais de velocidade ue estimados.
Depois de identificados os contornos das lombadas, foram definidas “janelas”
delimitando o período de tempo de cada obstáculo, conforme a figura 4.20, a seguir:
Figura 4.20 – Janelas identificando as lombadas.
5.5 6 6.5 7 7.5 8 8.5-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1Perfil estimado dos obstáculos
Altu
ra d
o pe
rfil
(mm
)
Tempo (s)

307
Cada sinal estimado foi aproximado por um polinômio de grau nove. Neste processo de
interpolação foram excluídos os dados dentro dos períodos de tempo delimitados pelas
janelas. As curvas definidas por estes polinômios estão apresentadas na figura 4.21 na cor
verde (traçado mais grosso).
Figura 4.21 – Curvas dos polinômios interpolando o sinal fora das janelas.
O sinal estimado e integrado referente às entradas do modelo foi subtraído pelo seu
respectivo polinômio resultando num sinal bem mais próximo do contorno real dos
obstáculos. Por fim, a amplitude do sinal é ajustada para que o pico máximo seja de 0,08 m
que é a altura da lombada.
O mais importante desse processo é identificar em que instante cada lombada foi
percorrida pelas rodas do veículo, já que este sofre variações da sua velocidade de avanço por
uma série de razões, sendo a principal delas a resistência oferecida pelo próprio obstáculo.
Um exemplo do resultado final deste processo de estimação é apresentado na figura
4.22. Nesta figura observa-se que o intervalo de tempo médio que o veículo levou para passar
cada obstáculo foi de 0,5 s, e os obstáculos têm comprimento de 1m, portanto, a velocidade
média do veículo neste experimento foi de aproximadamente 2 m/s ou 7,2 km/h.
5.5 6 6.5 7 7.5 8 8.5-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1Perfil estimado dos obstáculos
Altu
ra d
o pe
rfil
(mm
)
Tempo (s)
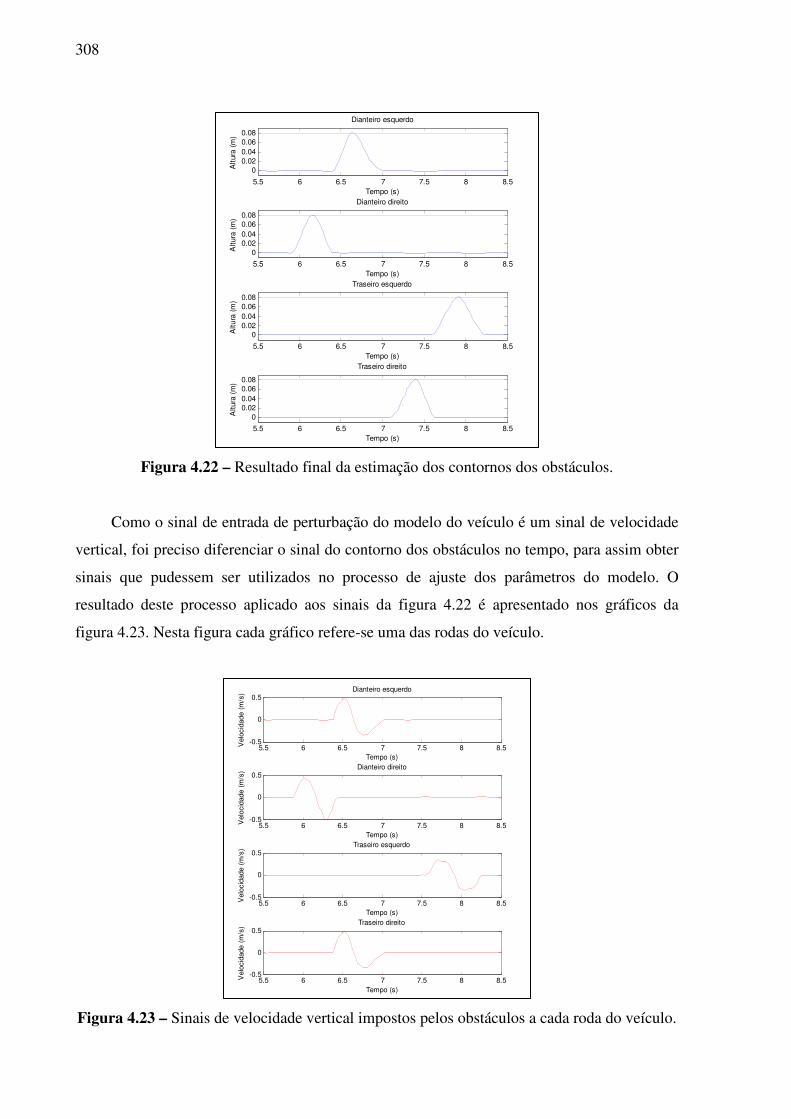
308
Figura 4.22 – Resultado final da estimação dos contornos dos obstáculos.
Como o sinal de entrada de perturbação do modelo do veículo é um sinal de velocidade
vertical, foi preciso diferenciar o sinal do contorno dos obstáculos no tempo, para assim obter
sinais que pudessem ser utilizados no processo de ajuste dos parâmetros do modelo. O
resultado deste processo aplicado aos sinais da figura 4.22 é apresentado nos gráficos da
figura 4.23. Nesta figura cada gráfico refere-se uma das rodas do veículo.
Figura 4.23 – Sinais de velocidade vertical impostos pelos obstáculos a cada roda do veículo.
5.5 6 6.5 7 7.5 8 8.5-0.5
0
0.5Dianteiro esquerdo
Vel
ocid
ade
(m/s
)
Tempo (s)
5.5 6 6.5 7 7.5 8 8.5-0.5
0
0.5Dianteiro direito
Vel
ocid
ade
(m/s
)
Tempo (s)
5.5 6 6.5 7 7.5 8 8.5-0.5
0
0.5Traseiro esquerdo
Vel
ocid
ade
(m/s
)
Tempo (s)
5.5 6 6.5 7 7.5 8 8.5-0.5
0
0.5Traseiro direito
Vel
ocid
ade
(m/s
)
Tempo (s)
5.5 6 6.5 7 7.5 8 8.5
00.020.040.060.08
Dianteiro esquerdo
Altu
ra (
m)
Tempo (s)
5.5 6 6.5 7 7.5 8 8.5
00.020.040.060.08
Dianteiro direito
Altu
ra (
m)
Tempo (s)
5.5 6 6.5 7 7.5 8 8.5
00.020.040.060.08
Traseiro esquerdo
Altu
ra (
m)
Tempo (s)
5.5 6 6.5 7 7.5 8 8.5
00.020.040.060.08
Traseiro direito
Altu
ra (
m)
Tempo (s)

309
Na terceira fase da análise dos dados, foi realizada a identificação do modelo do veículo.
Para isso utilizou-se praticamente o mesmo processo apresentado no Volume 1 deste trabalho
(seção 7.3) na identificação do modelo discreto do amortecedor MR. Porém, como neste caso
foi necessário estimar os parâmetros de um modelo no tempo contínuo, algumas adaptações
tiveram que ser feitas no processo de identificação.
Da mesma forma que na identificação do modelo do amortecedor MR, foi utilizado um
processo de otimização baseada num algoritmo de programação quadrática seqüencial (PQS),
para minimizar erros entre o sinal medido e o sinal simulado pelo modelo através do ajuste
dos seus parâmetros. O problema de otimização é descrito a seguir:
( ) λλλλ
funcMaxMinmaxmin <<
(4.14)
Conforme a equação (4.14), o vetor de parâmetros λ é limitado pelos vetores de valores
mínimo e máximo de cada parâmetro, e o problema de identificação dos parâmetros consiste
em se minimizar o maior valor do vetor de custos resultante da função “func( λ )”.
Os treze parâmetros que compõe o vetor λ são aqueles apresentados na tabela 4.2 e
descritos como tipo “variável”. Os limites mínimo e máximo são calculados a partir dos
percentuais apresentados na mesma tabela.
A função “func” é uma rotina escrita em linguagem de programação do Matlab que
realiza automaticamente as seguintes tarefas:
1. calcula as matrizes de estado a partir dos valores dos parâmetros;
2. transforma o sistema de estados em tempo contínuo em tempo discreto
utilizando a função “c2d” do Matlab, resultando num sistema de equações de
diferenças;
3. calcula de forma iterativa as equações de diferenças, considerando os sinais de
velocidade vertical da figura 4.23 como entradas, gerando uma matriz Y como
estimativa das doze saídas da planta (quatro acelerações da carroceria, quatro
acelerações verticais das rodas e quatro deslocamentos relativos) ao longo de 5
segundos numa taxa de amostragem de 50 Hz;
4. Por fim, ela calcula as normas dos vetores de erros entre os sinais gerados pelas
equações de diferenças e os sinais obtidos das medições feitas no veículo.

310
A forma como é gerado o vetor de custos a partir das normas dos erros é um fator
importante para a convergência e estabilidade do processo de identificação. Esta forma de
cálculo é descrita a seguir:
( )∑=
−⋅=−⋅=n
k
iiiii kykyyy1
2,2,22,2,2,2 )()(ˆ50ˆ50ε (4.15)
( )∑=
−⋅=−⋅=n
k
iiiii kykyyy1
2,3,32,3,3,3 )()(ˆ2ˆ2ε (4.16)
( )∑=
−=−=n
k
iiiii kykyyy1
2,4,42,4,4,4 )()(ˆˆε (4.17)
[ ]4,43,42,41,44,33,32,31,34,23,22,21,2 ,,,,,,,,,,, εεεεεεεεεεεε=ζ (4.18)
Nas equações (4.15) a (4.17) os valores de 2y , 3y e 4y são as saídas da planta,
respectivamente os vetores deslocamento relativo, acelerações da carroceria, e acelerações das
rodas, e que correspondem no modelo às equações (3.18), (3.19) e (4.1). Cada vetor tem
quatro componentes, referente a cada uma das quatro rodas e identificados pelo índice “i”.
Cada componente é composto por n amostras, coletadas em intervalos de 0,02 segundos. Os
valores das saídas estimados pelo modelo são identificados por um acento circunflexo. O
vetor custo, ζ , corresponde ao conjunto de todas as normas dos erros entre os sinais medidos
e os estimados, que são ponderados respectivamente pelos pesos 50, 2 e 1. Os pesos têm as
funções de equalizar a grandeza das unidades, visto que i,2ε é medido em metros e i,3ε e i,4ε
são medidos em m/s2, e também de dar maior importância aos sinais de aceleração da
carroceria e dos deslocamentos, pois são sinais com menores interferências externas, e
conseqüentemente mais “limpos” e confiáveis. Além disso, a grande não linearidade dos
pneus faz com que os erros sejam maiores entre os sinais experimentais e estimados das
acelerações verticais das rodas.
O processo de otimização foi implementado em Matlab utilizando a função “fminmax”
que a cada iteração executa a função “func”, calcula a sensibilidade em relação a variação dos
parâmetros, define limites móveis, aproxima o problema original por um de Programação
Quadrática (PQ), e calcula o ponto de mínimo, oλ . Num novo ciclo, a função “func” é

311
novamente executada, porém desta vez com os parâmetros oλ , com um novo cálculo da
sensibilidade paramétrica e a definição de novos limites móveis, e assim por diante, até que o
ponto de mínimo global seja encontrado, ou que o número máximo de iterações seja atingido.
A importância de se utilizar um algoritmo de otimização do tipo min-max é que a norma
dos erros de cada sinal é avaliada separadamente, e os parâmetros são ajustados de forma a
sempre buscar a redução da maior entre estas normas. Caso o custo fosse formado pelo
somatório de todas as normas de erros dos sinais das diferentes saídas, o processo de
otimização poderia levar a uma redução do custo, porém não garantiria o balanceamento
(considerando-se as ponderações) entre as normas de erros de cada sinal medido que tem
origem em várias posições no veículo.
O processo de ajuste dos parâmetros levou em torno de cinco segundos para aproximar
o comportamento do modelo a cada conjunto de dados obtidos nos seis experimentos
realizados. O processo rodou num micro-computador PC com processador Intel™ Centrino™
Duo Core™ T2300, 1,66 GHz de freqüência de clock, e 1Gbytes de RAM.
Os parâmetros do modelo foram ajustados de forma independente para os dados de cada
experimento com a finalidade de se avaliar a variabilidade de cada parâmetro e assim se obter
uma referência para a incerteza a respeito do seu valor. A tabela 4.4 mostra o valor médio de
cada parâmetro considerando todos os experimentos e o percentual de incerteza de cada
parâmetro.
Tabela 4.4 – Valores médios dos parâmetros ajustados e suas incertezas.
PARÂMETRO VALOR TIPO INCERTEZA UNIDADE
m1 37 Variável ±20% kg m2 1420 Dependente ±3%24 kg m3 136 Variável ±15% kg J3 32 Variável ±25% kg.m2 Jθ 617 Variável ±10% kg.m2 Jϕ 2.060 Variável ±5% kg.m2 kt 187.000 Variável ±20% N/m kf 39.100 Variável ±10% N/m kr 56.500 Variável ±10% N/m kar 48.000 Variável ±5% N/m cf 1.240 Variável ±20% N.s/m cr 3.817 Variável ±20% N.s/m ct 1.938 Variável ±40% N.s/m l1 1,64 Variável ±10% m l2 1,19 Dependente ±14% m
24 Os valores da incerteza dos parâmetros dependentes são apenas ilustrativos, pois são resultado da composição das incertezas dos outros parâmetros utilizados no cálculo do parâmetro dependente.

312
Um exemplo de comparação entre os sinais medidos e os sinais resultantes do modelo
ajustado é apresentado nos gráficos das figuras 4.24, 4.25 e 4.26.
Figura 4.24 – Comparação entre os sinais experimentais e simulados da aceleração vertical da carroceria do veículo.
A curva em azul (traçado grosso) corresponde ao sinal estimado pelo modelo e a curva
em vermelho (traçado fino) corresponde ao sinal medido. A curva em verde corresponde ao
sinal de entrada da roda respectiva, porém está fora de escala, e foi introduzida no gráfico
apenas para ilustrar os momentos em que cada roda passou pelos obstáculos.
Os gráficos da aceleração da carroceria da figura 4.24 apresentaram erros médios (RMS)
entre 0,7 e 0,8 m/s2, o que mostra um ajuste muito bom dos valores da simulação do modelo
ajustado com os dados experimentais. Considerando-se que estes sensores apresentam um
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-5
0
5
Dianteiro esquerdo eRMS = 0.7 m/s2
Ace
lera
ção
(m/s
2 )
Tempo (s)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-5
0
5
Dianteiro direito eRMS = 0.8 m/s2
Ace
lera
ção
(m/s
2 )
Tempo (s)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-5
0
5
Traseiro esquerdo eRMS = 0.8 m/s2
Ace
lera
ção
(m/s
2 )
Tempo (s)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-5
0
5
Traseiro direito eRMS = 0.8 m/s2
Ace
lera
ção
(m/s
2 )
Tempo (s)

313
nível de ruído entre 0,1 e 0,2 m/s2, pode-se admitir que o resultado é ainda melhor, ou seja, as
diferenças (RMS) entre o experimental e o simulado encontra-se na faixa de 0,5 a 0,7 m/s2.
Figura 4.25 – Comparação entre os sinais experimentais e simulados do deslocamento relativo entre roda e carroceria do veículo.
Os gráficos da figura 4.25 apresentam a comparação relacionada aos sinais de
deslocamento relativo entre a carroceria e as rodas. Estes gráficos também mostram uma
aderência bastante boa entre os resultados experimentais e as saídas do modelo.
Também é interessante notar nos dois primeiros gráficos da figura 4.25, referente aos
sensores das rodas dianteiras, que apesar de ter havido saturação destes sensores, isto não
interferiu no bom desempenho do processo de identificação do modelo. Melhor ainda é o fato
de que as trajetórias do sinal gerado pelo modelo seguem o caminho provável que o sinal
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-50
0
50
Dianteiro esquerdo eRMS = 6 mm
Des
loca
men
to (
mm
)
Tempo (s)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-50
0
50
Dianteiro direito eRMS = 5 mm
Des
loca
men
to (
mm
)
Tempo (s)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-50
0
50
Traseiro esquerdo eRMS = 5 mm
Des
loca
men
to (
mm
)
Tempo (s)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-50
0
50
Traseiro direito eRMS = 4 mm
Des
loca
men
to (
mm
)
Tempo (s)

314
experimental seguiria se não tivesse havido saturação, o que mostra a boa capacidade de
generalização do modelo e do método de identificação.
Figura 4.26 – Comparação entre os sinais experimentais e simulados da aceleração vertical das rodas do veículo.
Os gráficos da figura 4.26 mostram a comparação dos sinais de aceleração vertical das
rodas do veículo. Percebe-se que é válida a justificativa de dar um peso menor a estes sinais
no processo de ajuste dos parâmetros, visto que eles apresentam uma série de interferências
resultantes de pequenas irregularidades do pavimento, as quais não foram consideradas nos
sinais de entrada. Mesmo assim os sinais gerados pelo modelo mostraram coerência com os
sinais medidos, apresentando erros RMS na faixa de 1,5 m/s2.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-10
0
10
Dianteiro esquerdo eRMS = 1.5 m/s2
Ace
lera
ção
(m/s
2 )
Tempo (s)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-10
0
10
Dianteiro direito eRMS = 1.6 m/s2
Ace
lera
ção
(m/s
2 )
Tempo (s)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-10
0
10
Traseiro esquerdo eRMS = 1.5 m/s2
Ace
lera
ção
(m/s
2 )
Tempo (s)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-10
0
10
Traseiro direito eRMS
= 1.6 m/s2
Ace
lera
ção
(m/s
2 )
Tempo (s)

315
O modelo com valor médio de cada parâmetro foi simulado com as entradas dos seis
experimentos e suas saídas foram comparadas com os sinais dos respectivos experimentos.
Este modelo “médio” mostrou uma generalidade bastante boa no conjunto das diferentes
situações experimentadas, apesar de apresentar um erro RMS um pouco maior do que aquele
que foi ajustado de forma específica para cada conjunto de dados, O resultado do erro RMS
destas comparações está apresentado na tabela 4.5, a seguir:
Tabela 4.5 – Resultado das comparações das saídas do modelo “médio” com as medições de
cada experimento realizado, através do valor eficaz do erro entre os sinais.
O principal objetivo desta terceira fase da análise foi o de comprovar que um modelo
linear com apenas 7 DOF é capaz de aproximar a dinâmica complexa de um veículo real. Esta
fase também foi importante para validar o processo de identificação proposto. Contudo, a
utilização do modelo na síntese do controlador não pode ser feita apenas com a eliminação
dos coeficientes de amortecimentos correspondentes aos amortecedores (supostos lineares),
visto que existem amortecimentos residuais que não podem ser desprezados. Além disso, é
preciso ter uma medida da alavancagem dos amortecedores em função das condições de
pivotamento da suspensão. O passo seguinte do processo de análise visa resolver estas
questões.
Na quarta fase, foi realizado um processo de identificação do modelo do veículo similar
ao da terceira fase, porém substituindo os amortecedores lineares (coeficientes de atrito
viscoso) por amortecedores com características não-lineares conforme apresentadas na tabela
4.1 que mostra as características técnicas do veículo. Para isso o primeiro passo foi encontrar
curvas contínuas que pudessem aproximar a relação força x velocidade descrita na tabela 4.1.
Foi utilizada uma função similar àquela proposta no trabalho de Motta e Zampieri (2005),
Sensor Posição exper. 1 exper. 2 exper. 3 exper. 4 exper. 5 exper. 6 Média
dianteiro esquerdo 1,3 1,1 0,9 1,0 0,7 0,9
dianteiro direito 1,2 0,8 0,8 0,9 0,8 0,8
traseiro esquerdo 1,4 0,8 0,8 0,9 0,8 0,8
traseiro direito 1,0 0,9 0,7 0,8 0,8 0,9
dianteiro esquerdo 9 8 7 7 5 6
dianteiro direito 6 5 6 6 4 5
traseiro esquerdo 10 5 6 6 6 4
traseiro direito 4 7 5 5 5 5
Sinais medidosunidade
de medida
Ace
lera
ção
vert
ical
da
carr
ocer
ia s
obre
cad
a ro
da
Des
loca
men
to r
elat
ivo
entr
e ro
da e
ca
rroc
eria
Valores RMS dos erros
0,91
5,9
m/s2
mm

316
porém descontínua em zero. A função utilizada para relacionar velocidade e força do
amortecedor é apresentada a seguir:
<⋅−
⋅
≥⋅+
⋅
=
0 para 1
0 para 1
)(v
v
vb
vv
vb
vF
t
t
c
c
β
β (4.19)
Na equação (4.19), F(v) é a força que se manifesta entre os terminais do amortecedor e v
é a velocidade relativa entre os terminais do amortecedor. Por convenção, na compressão do
amortecedor, tanto F quanto v são positivos, na tração são ambos negativos.
Através da utilização do método dos mínimos quadrados (MMQ), os parâmetros da
função foram ajustados para aproximar ao máximo os pontos da tabela 4.1. Os parâmetros
obtidos são apresentados na tabela 4.6 e os gráficos são apresentados na figura 4.27.
Tabela 4.6 – Parâmetros da relação não-linear entre força e velocidade dos amortecedores.
Amortecedor cb cβ tb tβ
Dianteiro 1706 0,8482 7236 1,4643 Traseiro 2004 0,7898 5954 1,4233
Figura 4.27 – Curvas velocidade versus força dos amortecedores originais do veículo.

317
Foram mantidos no modelo os coeficientes de amortecimento lineares, que serviram
para representar o amortecimento residual. Apesar de parte deste amortecimento no veículo
real ter a característica de atrito de Coulomb, este fato foi ignorado sob pena de não se ter a
representação exata das forças de atrito residuais, pois caso os dois efeitos fossem
considerados simultaneamente não haveria garantia de que a separação entre os efeitos do
atrito viscoso e do atrito seco realizada pelo processo de identificação fosse confiável. Como
o modelo da terceira fase da análise teve uma representação bastante satisfatória, foi
considerado que esta aproximação continuaria sendo válida.
Outro fator acrescido ao modelo foi o ganho da alavancagem. A amplitude do
movimento entre a roda e a carroceria não é a mesma que ocorre entre os terminais dos
amortecedores, já que estes se movimentam num curso menor devido à forma da estrutura
cinemática da suspensão. Como a variável considerada no modelo é a velocidade relativa
entre roda e carroceria, deve-se levar em conta um fator que ajuste este valor de velocidade
para que ele seja utilizado no cálculo das forças do amortecedor. Por outro lado, a força dos
amortecedores não é aplicada exatamente na roda, mas no braço articulado da suspensão,
portanto seu efeito também é reduzido por um efeito de alavanca. Admitindo o modelo do
amortecedor conforme a função descrita pela equação (4.19), a alavancagem foi definida
como um parâmetro multiplicativo acrescido tanto na entrada quanto na saída desta função. A
partir das dimensões da suspensão apresentadas na figura 4.2, admitiu a alavancagem na
suspensão dianteira como sendo %205,0 ±=fη , e na traseira como %2075,0 ±=rη .
Comparando-se os resultados dos coeficientes de amortecimento obtidos na fase anterior
com as curvas dos gráficos da figura 4.27 acrescidos do efeito da alavancagem, foi possível
verificar que o amortecimento residual na traseira tende a ser bem maior que na dianteira.
Assim, foram definidos os coeficientes de amortecimento residuais da suspensão dianteira
como %50 N.s/m 150 ±=foc , e da traseira como %50 N.s/m 1000 ±=roc .
Com a utilização deste modelo não-linear dos amortecedores, foi acrescentada uma nova
saída na planta de forma que a estrutura interna das equações do modelo não precisasse ser
alterada. Foram acrescentadas como saídas os quatro sinais de velocidade relativa entre roda e
carroceria, conforme as equações a seguir:
( ) ( )tt xCy 55 = (4.20)
[ ]21845 ),,,( LL0C −⋅= xrrffdiag ηηηη (4.21)

318
O vetor u(t) de entrada composto pela força de cada atuador, apresentado
anteriormente na equação (3.13), é redefinido como segue:
( )
⋅=
=
)(
)(
)(
)(
),,,(
)(
)(
)(
)(
5
5
5
5
DD
CC
BB
AA
rrff
D
C
B
A
yF
yF
yF
yF
diag
tu
tu
tu
tu
t ηηηηu (4.22)
Onde Fi é a função descrita pela equação (4.19) e o índice ”A” refere-se à roda dianteira
esquerda, “B”, dianteira direita, “C”, traseira esquerda e “D”, traseira direita.
Para se resolver o novo sistema de equações diferenciais não foi possível transformá-lo
no sistema de equações de diferenças, portanto foi necessário programar uma solução
numérica do sistema de equações diferenciais, o que foi feito através de um algoritmo Runge-
Kutta de quarta ordem (RK4). Para isso foi preciso reduzir o passo de integração pela metade,
passando de 0,02 para 0,01 segundos, e a entrada do sinal w(t) foi interpolada linearmente
entre duas amostras consecutivas.
O processo de ajuste dos parâmetros levou bem mais tempo, ficando em torno de seis
minutos para cada experimento. Da mesma forma que na terceira fase, os parâmetros do
modelo foram ajustados de forma independente para os dados de cada experimento. A tabela
4.9 mostra o valor médio de cada parâmetro considerando todos os experimentos e respectivo
percentual de incerteza.
Analisando-se a tabela 4.6 percebe-se que os novos valores dos parâmetros ficam dentro
da incerteza dos parâmetros da tabela 4.4. Além disso, com o modelo é não-linear a variação
do valor dos parâmetros em relação aos seis diferentes experimentos diminuiu, e portando a
incerteza sobre o valor da cada parâmetro também reduziu.
Através desta análise foi possível se conhecer os valores das alavancagens, que se
mantiveram razoavelmente próximas dos valores iniciais e apresentaram pouca incerteza.
Também foi possível se ter uma boa idéia sobre o valor dos coeficientes de amortecimento
residual. Apesar das incertezas destes valores terem ficado relativamente grandes, os valores
ficaram coerentes com o que era esperado.
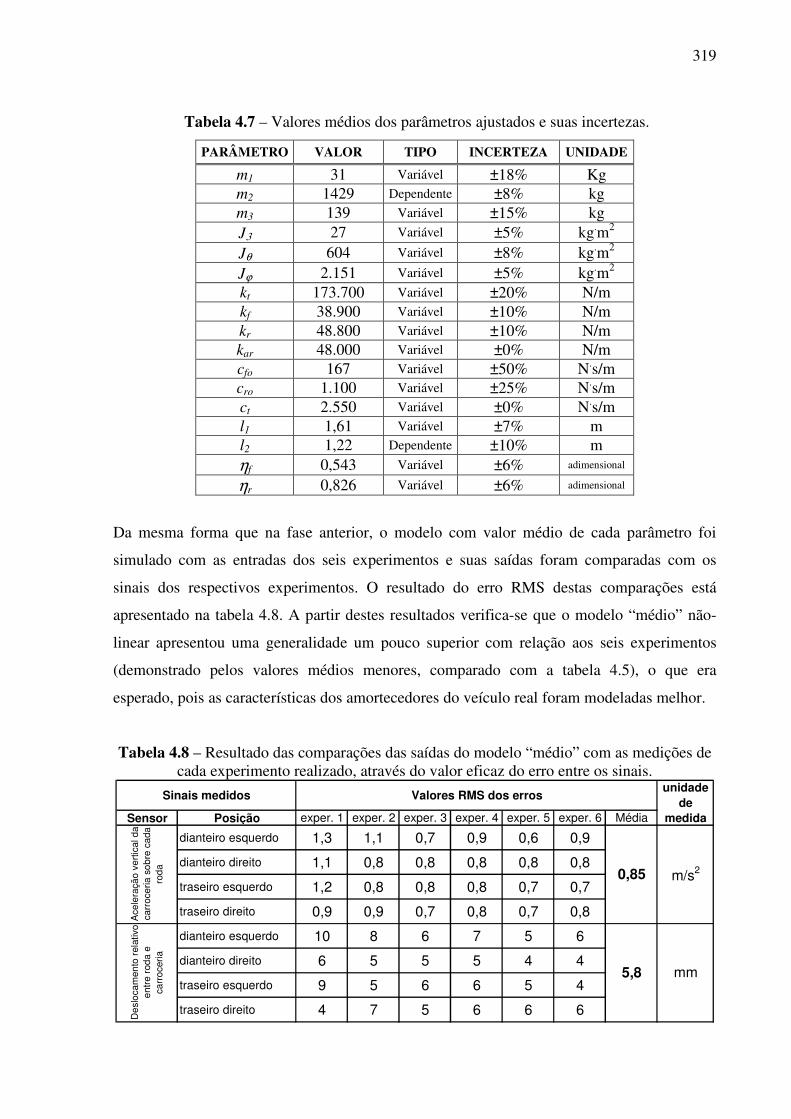
319
Tabela 4.7 – Valores médios dos parâmetros ajustados e suas incertezas.
PARÂMETRO VALOR TIPO INCERTEZA UNIDADE
m1 31 Variável ±18% Kg m2 1429 Dependente ±8% kg m3 139 Variável ±15% kg J3 27 Variável ±5% kg.m2 Jθ 604 Variável ±8% kg.m2 Jϕ 2.151 Variável ±5% kg.m2 kt 173.700 Variável ±20% N/m kf 38.900 Variável ±10% N/m kr 48.800 Variável ±10% N/m kar 48.000 Variável ±0% N/m cfo 167 Variável ±50% N.s/m cro 1.100 Variável ±25% N.s/m ct 2.550 Variável ±0% N.s/m l1 1,61 Variável ±7% m l2 1,22 Dependente ±10% m ηf 0,543 Variável ±6% adimensional
ηr 0,826 Variável ±6% adimensional
Da mesma forma que na fase anterior, o modelo com valor médio de cada parâmetro foi
simulado com as entradas dos seis experimentos e suas saídas foram comparadas com os
sinais dos respectivos experimentos. O resultado do erro RMS destas comparações está
apresentado na tabela 4.8. A partir destes resultados verifica-se que o modelo “médio” não-
linear apresentou uma generalidade um pouco superior com relação aos seis experimentos
(demonstrado pelos valores médios menores, comparado com a tabela 4.5), o que era
esperado, pois as características dos amortecedores do veículo real foram modeladas melhor.
Tabela 4.8 – Resultado das comparações das saídas do modelo “médio” com as medições de cada experimento realizado, através do valor eficaz do erro entre os sinais.
Sensor Posição exper. 1 exper. 2 exper. 3 exper. 4 exper. 5 exper. 6 Média
dianteiro esquerdo 1,3 1,1 0,7 0,9 0,6 0,9
dianteiro direito 1,1 0,8 0,8 0,8 0,8 0,8
traseiro esquerdo 1,2 0,8 0,8 0,8 0,7 0,7
traseiro direito 0,9 0,9 0,7 0,8 0,7 0,8
dianteiro esquerdo 10 8 6 7 5 6
dianteiro direito 6 5 5 5 4 4
traseiro esquerdo 9 5 6 6 5 4
traseiro direito 4 7 5 6 6 6
Ace
lera
ção
vert
ical
da
carr
ocer
ia s
obre
cad
a ro
da
Des
loca
men
to r
elat
ivo
entr
e ro
da e
ca
rroc
eria
Sinais medidosunidade
de medida
0,85
5,8
Valores RMS dos erros
m/s2
mm

320
4.1.7 RESUMO DOS RESULTADOS – IDENTIFICAÇÃO DO MODELO
Abaixo está uma relação dos principais resultados obtidos a partir do processo de
identificação do modelo do veículo:
• O modelo do veículo com 7 DOF é efetivo na representação da dinâmica da
movimentação do veículo na faixa de freqüências de interesse para o projeto de um
sistema de suspensão ativo ou SA.
• O método proposto para identificação do modelo mostrou-se eficiente no ajustes dos
parâmetros para aproximar o modelo do veículo real.
• Além disso, o método de identificação proposto apresenta as seguintes vantagens:
o os parâmetros identificados tem significado físico, o que permite uma
avaliação sobre a validade e generalidade dos resultados obtidos;
o quando o método é aplicado a modelos lineares em tempo contínuo, ele
permite que o modelo seja discretizado a cada passo do ajuste dos parâmetros,
obtendo-se assim um processamento bastante rápido (poucos segundos) do
processo de identificação do modelo;
o a flexibilidade do método permite a inclusão de não-linearidades no modelo, e
que parâmetros relacionados a estas não-linearidades também sejam ajustados.
• A limitação do método proposto é que ele necessita de um bom ponto de partida, ou
seja, precisa-se ter “a priori” uma boa estimativa do valor de cada parâmetro. É
importante que pelo menos metade dos parâmetros esteja dentro de uma faixa de
variação de ±20%, podendo outros parâmetros apresentar variações de até ±90%.
• A aplicação deste método de identificação nos dados de diversos experimentos
independentes permite uma avaliação da variação dos parâmetros para o ajuste do
modelo em diferentes situações. Este resultado é interessante, pois revela o grau de
incerteza em relação a cada parâmetro na tentativa de aproximar problemas físicos
complexos por um modelo limitado, e muitas vezes linear. Este tipo de incerteza dos
parâmetros, também chamada de incertezas estruturadas, é uma informação útil no
projeto de controladores robustos, pois permite reduzir o grau de conservadorismo no
processo de síntese do controlador.
• O processo de identificação aplicado ao modelo não-linear do veículo permitiu
conhecer os valores aproximados das alavancagens e dos coeficientes de
amortecimentos residuais da suspensão do veículo.

321
4.2 ATUADORES MAGNETO REOLÓGICOS
Para a implementação prática do sistema do controle foi necessário desenvolver e
construir os atuadores. Foram escolhidos como atuadores os amortecedores MR cuja teoria e
técnicas de projeto e modelamento foram detalhados no volume 1 deste trabalho. Como o
sistema foi aplicado em um veículo vendido comercialmente, cujas características não podiam
ser modificadas, foi necessário projetar e construir atuadores que se adaptassem ao espaço
pré-existente no veículo dedicado aos amortecedores convencionais. Portanto, o primeiro
requisito dos atuadores foi ter que apresentar as mesmas características dimensionais dos
amortecedores originais do veículo, que estão relacionadas na tabela 4.9.
Tabela 4.9 – Dimensões dos amortecedores convencionais do veículo.
Posição Diâmetro
externo (mm) Comprimento aberto (mm)
Comprimento fechado (mm)
Curso (mm)
Dianteiro 52 474 350 124
Traseiro 52 691 421 270
Outros requisitos básicos para o projeto são:
• Força máxima – que é a força que o atuador deve ser capaz de resistir em sua
máxima entrada de tensão elétrica. A meta adotada para o projeto foi de 2800 N,
que é uma força possível de ser atingida por dispositivos com as dimensões
requeridas e que é capaz de controlar os movimentos de um veículo de 1600 kg.
• Tempo de resposta – que é o valor da constante de tempo de um atraso de 1ª
ordem que aproxima a curva de resposta do amortecedor. A meta adotada foi de
10 ms, que possibilita um banda de resposta em freqüência de 16Hz.
• Atrito viscoso residual – que é o coeficiente do atrito viscoso que o atuador
apresenta em seu estado livre de excitação. A meta adotada foi 400 N/m.s.
• Tensão de 12 V – que é a tensão disponível no veículo para acionamento do
atuador.
• Corrente de pico de 3 A – que é a corrente máxima suportada pela bobina da
válvula MR e pelos amplificadores de acionamento.
• Temperatura interna máxima – que é a temperatura máxima suportada pelo
fluido e pelos elementos de vedação. Foi limitada em 125ºC.

322
A partir das metas de “força máxima” e de “atrito viscoso residual”, e tomando como
referência os terminais do atuador movendo-se relativamente a 1m/s, chegou-se a um alcance
dinâmico de 6 como meta de projeto.
Neste projeto foi utilizado um fluido MR desenvolvido na Universidade Federal de
Itajubá, em MG, com propriedades um pouco melhores que as do fluido MRF-132AD da
Lord, como segue:
• 0τ = 27 kPa para um campo magnético (H) em torno de 85 kA/m;
• η = 0,04 (+/-0,02) Pa.s
O projeto dos atuadores MR seguiu o procedimento apresentado na seção 4.3 do volume
1 deste trabalho. O conceito utilizado foi o de amortecedores mono-tubulares conforme o
projeto desenvolvido no aplicativo de CAD Inventor® apresentado na figura 4.28, a seguir:
Figura 4.28 – Modelo CAD em 3D dos amortecedores MR.
Um dos amortecedores frontais já havia sido projetado e construído, e o detalhamento
deste processo foi descrito na seção 6 do volume 1 deste trabalho. Para esta fase, o projeto foi
reavaliado com a utilização do novo fluido MR que possibilitou uma melhoria das
características de força máxima, redução atrito viscoso residual do amortecedor MR, e maior
linearidade de resposta entre a entrada de tensão e a força do atuador.
A figura 4.29 mostra as principais dimensões dos amortecedores MR dianteiros.

323
Figura 4.29 – Detalhamento em CAD 2D dos amortecedores MR dianteiros.
Conforme pode ser observado na tabela 4.10, todos os requisitos dimensionais foram
atendidos, ou seja, diâmetro externo menor, comprimento aberto maior e fechado menor, e
curso maior.
Tabela 4.10 – Comparação das dimensões dos amortecedores convencional e MR dianteiros.
Componente Diâmetro
externo (mm) Comprimento aberto (mm)
Comprimento fechado (mm)
Curso (mm)
Amortecedor Original
52 474 350 124
Amortecedor MR
51 479 347 132
Um novo projeto da válvula MR foi necessário no caso dos amortecedores traseiros.
Como os requisitos dimensionais do amortecedor traseiros exigem um curso bem maior do
pistão, os comprimentos da válvula MR e da câmara de ar tiveram que ser reduzidos. No
novo projeto a câmara de ar teve seu comprimento reduzido de 67 mm para 53 mm, sendo que
os diâmetros internos foram aumentados para reduzir a perda de volume. A nova válvula MR

324
teve redução de 10 mm no seu comprimento total, porém isso acarretou uma redução da
espessura dos isolantes magnéticos e o estreitamento do canal de passagem do fluido MR.
Mesmo assim, os requisitos de máximo comprimento fechado e de mínio curso não puderam
ser atendidos, conforme apresentado na tabela 4.11. Como o curso do amortecedor MR
traseiro 25 mm menor no curso só causaria problemas em situações muito severas, esta
condição foi aceita para o escopo deste trabalho, visto que estas situações não seriam
atingidas nos testes propostos.
Tabela 4.11 – Comparação das dimensões dos amortecedores convencional e MR traseiros.
Componente Diâmetro
externo (mm) Comprimento aberto (mm)
Comprimento fechado (mm)
Curso (mm)
Amortecedor Original
52 691 421 270
Amortecedor MR
51 696 451 245
A figura 4.30 mostra as principais dimensões dos amortecedores MR traseiros.
Figura 4.30 – Detalhamento em CAD 2D dos amortecedores MR traseiros.
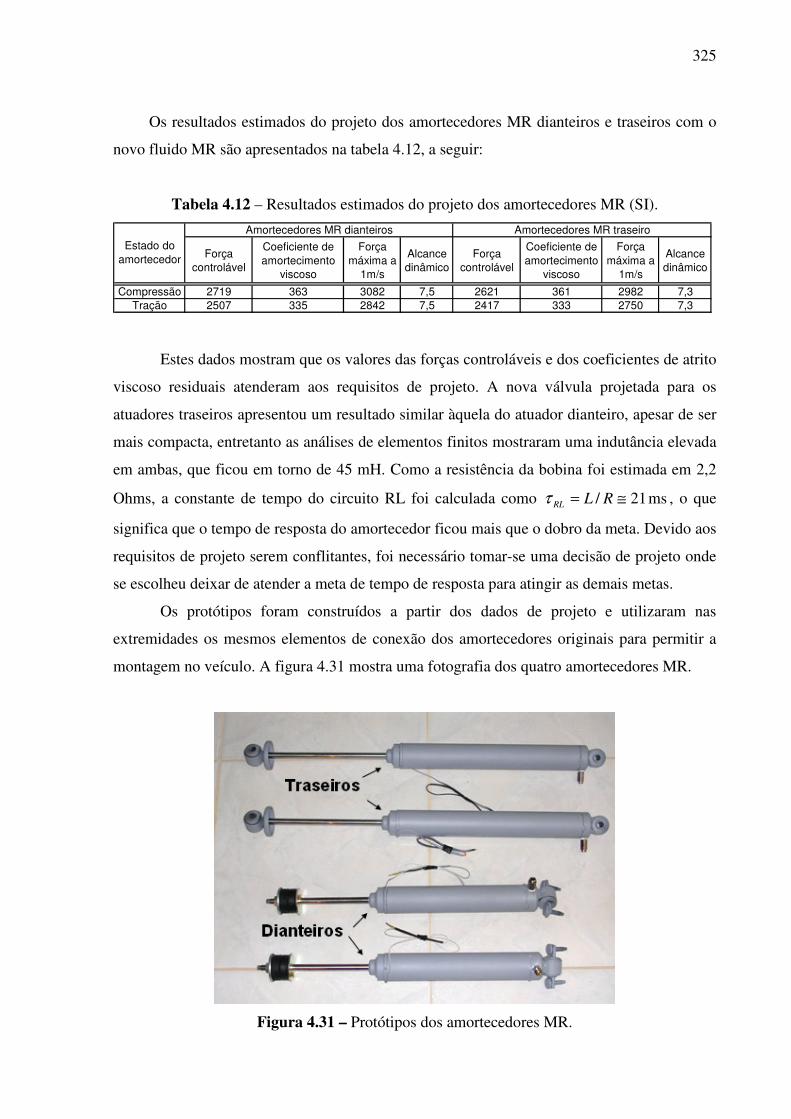
325
Os resultados estimados do projeto dos amortecedores MR dianteiros e traseiros com o
novo fluido MR são apresentados na tabela 4.12, a seguir:
Tabela 4.12 – Resultados estimados do projeto dos amortecedores MR (SI).
Estes dados mostram que os valores das forças controláveis e dos coeficientes de atrito
viscoso residuais atenderam aos requisitos de projeto. A nova válvula projetada para os
atuadores traseiros apresentou um resultado similar àquela do atuador dianteiro, apesar de ser
mais compacta, entretanto as análises de elementos finitos mostraram uma indutância elevada
em ambas, que ficou em torno de 45 mH. Como a resistência da bobina foi estimada em 2,2
Ohms, a constante de tempo do circuito RL foi calculada como ms 21/ ≅= RLRLτ , o que
significa que o tempo de resposta do amortecedor ficou mais que o dobro da meta. Devido aos
requisitos de projeto serem conflitantes, foi necessário tomar-se uma decisão de projeto onde
se escolheu deixar de atender a meta de tempo de resposta para atingir as demais metas.
Os protótipos foram construídos a partir dos dados de projeto e utilizaram nas
extremidades os mesmos elementos de conexão dos amortecedores originais para permitir a
montagem no veículo. A figura 4.31 mostra uma fotografia dos quatro amortecedores MR.
Figura 4.31 – Protótipos dos amortecedores MR.
Força controlável
Coeficiente de amortecimento
viscoso
Força máxima a
1m/s
Alcance dinâmico
Força controlável
Coeficiente de amortecimento
viscoso
Força máxima a
1m/s
Alcance dinâmico
Compressão 2719 363 3082 7,5 2621 361 2982 7,3Tração 2507 335 2842 7,5 2417 333 2750 7,3
Estado do amortecedor
Amortecedores MR traseiroAmortecedores MR dianteiros

326
Os quatro protótipos foram testados no mesmo laboratório e com os mesmos recursos já
descritos na seção 8.1 da parte 1 deste trabalho.
Foram realizados os mesmos três experimentos em cada um dos protótipos, com apenas
uma diferença em relação ao primeiro experimento. Ao invés de aplicar somente seis níveis
de tensão espaçados de 2 em 2 volts, utilizou treze níveis (0; 0,5; 1; 1,5; 2; 3; 4; 5; 6; 7; 8; 9;
10 volts). Isto permitiu melhorar a precisão na identificação da relação entre a tensão de
entrada e a força na saída do atuador. Para cada degrau de tensão, o pistão dos protótipos foi
movimentado dois ciclos senoidais com freqüência de 5 Hz e amplitude de 30 mm para os
dianteiros e 50 mm para os traseiros. Também foi tomado o cuidado para que a montagem dos
protótipos com os outros elementos do experimento fossem o mais próximo possível da
montagem do amortecedor no veículo, visando reproduzir o seu comportamento real. As
figuras 4.32 até 4.35 mostram os gráficos das curvas força versus deslocamento (à esquerda) e
força versus velocidade (à direita) do primeiro experimento para cada um dos atuadores.
Figura 4.32 – Resultado do 1º experimento para o atuador dianteiro MR1.
Figura 4.33 – Resultado do 1º experimento para o atuador dianteiro MR2.

327
Figura 4.34 – Resultado do 1º experimento para o atuador traseiro MR3.
Figura 4.35 – Resultado do 1º experimento para o atuador traseiro MR4.
A partir destes gráficos foi possível verificar os seguintes pontos:
• as respostas da força em relação aos degraus de tensão mostraram-se bem lineares, o
que demonstra não ter havido saturação magnética nem do núcleo da válvula e nem do
fluido MR;
• em teoria, os gráficos de força versus deslocamento deveriam formar retângulos
perfeitos, porém, conforme verificado nos gráficos acima, os retângulos sofreram
deformações no seus cantos superior esquerdo e inferior direito devido à deformação
dos elementos de borracha dos elementos conexão originais que permitem montar o
amortecedor no veículo (a partir do gráfico dos amortecedores dianteiros é possível
estimar que a rigidez da borracha da extremidade superior do amortecedor é de
aproximadamente 750 kN/m);
• a deformação das borrachas interfere também no resultado das curvas de força versus
velocidade, fato que é verificado nos gráficos relativos aos amortecedores traseiros,

328
onde a região da curva de histerese sofreu deformações devido à borracha das
conexões destes amortecedores serem não-lineares e bem menos rígidas.
• a rigidez relativamente baixa dos elementos de borracha nas conexões dos
amortecedores MR contribuiu para aumentar o efeito de histerese já característico do
funcionamento da válvula MR, porém com conseqüências negativas para o conforto.
Os resultados do primeiro experimento também permitiram se extrair informações para
a confirmação das expectativas de resposta de força obtidas no projeto. A tabela 4.13
apresenta uma comparação das expectativas de projeto com os resultados desempenhados
pelos protótipos, onde é possível observar que os valores alcançados pelos protótipos estão
bastante próximos dos valores previstos no projeto.
Tabela 4.13 – Comparação das expectativas de projeto com os resultados do 1º experimento (SI).
Também na tabela 4.13 pode ser observada a similaridade de desempenho entre as duas
versões da válvula MR. Pode-se dizer que o projeto da válvula dos amortecedores traseiros foi
inovador uma vez que apresenta volume e massa cerca de 18% menores.
O primeiro experimento também forneceu informações para levantamento das curvas de
calibração dos atuadores, ou seja, a determinação da função linear que aproxima a relação
entre força e tensão elétrica de excitação do atuador. O conhecimento desta relação é
necessário, pois a saída do controlador é um sinal de força que precisa ser convertido para um
sinal de tensão elétrica que é utilizado para acionar os atuadores. Os gráficos da figura 4.36
mostram estes resultados.
Estimativas de projeto
Atuador MR1 Atuador MR2 Observações
Compressão 2719 2684 2597 Medidos à velocidade de 0,18m/s.
Tração 2507 2621 2507 Medidos à velocidade de 0,18m/s.
Compressão 363 360 399Medidos entre as velocidades 0,16 e 0,18 m/s e
tensão de excitação de 1,0 V.
Tração 335 355 341Medidos entre as velocidades 0,16 e 0,18 m/s e
tensão de excitação de 1,0 V.
Estimativas de projeto
Atuador MR3 Atuador MR4 Observações
Compressão 2621 2754 2564 Medidos à velocidade de 0,3m/s.
Tração 2417 2645 2464 Medidos à velocidade de 0,3m/s.
Compressão 361 360 373Medidos entre as velocidades 0,2 e 0,3 m/s e
tensão de excitação de 1,5 V.
Tração 333 312 348Medidos entre as velocidades 0,2 e 0,3 m/s e
tensão de excitação de 1,5 V.
Força controlável
Amortecedores MR dianteiros
Coeficientes de amortecimento
residual
Força controlável
Coeficientes de amortecimento
residual
Amortecedores MR traseiros

329
Figura 4.36 – Gráficos de calibração dos atuadores.
Estes gráficos mostram um “ganho” bastante similar dos quatro atuadores. Verifica-se
também que a aproximação por funções lineares foi satisfatório, o que é comprovado pelo
indicador R2 > 99%.
Apesar da aparente linearidade da relação tensão versus força, o atuador MR é bastante
não linear. O usual é se separar os efeitos da força controlável e do coeficiente de atrito
viscoso residual, contudo este coeficiente também sofre influência da tensão elétrica aplicada
à válvula do atuador MR. Como conseqüência as calibrações apresentadas na figura 4.36, que
foram realizadas numa velocidade específica, sofrem variações para outras velocidades. Além
disso, essa relação linear também não leva em conta os efeitos de histerese que aparecem nos
gráficos que relacionam a força com a velocidade do pistão destes dispositivos, que têm um
efeito importante na mudança de sentido da velocidade. Resulta destes fatos, portanto, a
importância de se considerar um modelo não-linear e dinâmico para representar o atuador
MR, conforme foi citado na seção 2.4.7 da revisão da literatura.
Neste sentido, foi utilizado o modelo discreto desenvolvido na seção 6 do primeiro
volume deste trabalho para se conseguir uma representação mais fidedigna do atuador MR,
considerando todas as não-linearidades e o seu comportamento de histerese.

330
A partir dos dados dos três experimentos foi aplicado o procedimento de identificação
dos parâmetros do modelo discreto do atuador MR conforme já foi descrito na seção 8.3 do
volume 1. Como resultado, foram ajustados os 21 parâmetros para os quatro modelos, os
quais são apresentados na tabela 4.14:
Tabela 4.14 – Parâmetros ajustados para os quatro modelos dos atuadores MR protótipos.
A partir dos dados desta tabela foi verificado que os dados mostraram coerência de um
modelo para outro, apresentando valores de parâmetros com ordens de grandeza semelhantes.
As maiores diferenças ficaram para os parâmetros de variáveis de ordem maior que dois,
como era esperado. Foi possível também verificar a parir do parâmetro η que a constante de
mm6,911,018,39,1xo
N/mm23,917,113,423,7ko
N.s/(m.V2)-45,0-56,3-46,9-76,5coc
N.s/(m.V)244,0263,2618,9184,5cob
N.s/m270,9347,4235,0336,0coa
N/(m.V5)10,826,630,74-12,50αf
N/(m.V4)156,914,8153,871,8αe
N/(m.V3)-1915-3489-7276-5797αd
N/(m.V2)35988464482792126822αc
N/(m.V)115961699844767937αb
N/m131890610611537αa
--1,0221,0141,0151,045ξ
1/V25,103,8420,1615,05Ac
1/V-22,86-17,63-91,77-75,95Ab
--28,4922,77119,94106,23Aa
1/(m2.V2)761,9241,7782,053,1βb
1/m2-28077-24822-11338-28655βa
1/(m2.V3)-9,5-2,4-308,2-361,2γc
1/(m2.V2)-3108-2271-7712-9448γb
1/m243627429483839259228γa
rad/s45,343,137,640,4η
UnidadeAtuador MR 4
Atuador MR 3
Atuador MR 2
Atuador MR 1
Parâmetros
mm6,911,018,39,1xo
N/mm23,917,113,423,7ko
N.s/(m.V2)-45,0-56,3-46,9-76,5coc
N.s/(m.V)244,0263,2618,9184,5cob
N.s/m270,9347,4235,0336,0coa
N/(m.V5)10,826,630,74-12,50αf
N/(m.V4)156,914,8153,871,8αe
N/(m.V3)-1915-3489-7276-5797αd
N/(m.V2)35988464482792126822αc
N/(m.V)115961699844767937αb
N/m131890610611537αa
--1,0221,0141,0151,045ξ
1/V25,103,8420,1615,05Ac
1/V-22,86-17,63-91,77-75,95Ab
--28,4922,77119,94106,23Aa
1/(m2.V2)761,9241,7782,053,1βb
1/m2-28077-24822-11338-28655βa
1/(m2.V3)-9,5-2,4-308,2-361,2γc
1/(m2.V2)-3108-2271-7712-9448γb
1/m243627429483839259228γa
rad/s45,343,137,640,4η
UnidadeAtuador MR 4
Atuador MR 3
Atuador MR 2
Atuador MR 1
Parâmetros

331
tempo de resposta ficou até mais alta do que era esperado, resultando em valores em torno de
25 ms. Nesta condição a banda de resposta dos atuadores ficou bastante limitada, respondendo
com atenuações inferiores a 3 dB apenas para freqüências até 6,4 Hz.
Para se obter melhores resultados no processo de ajuste dos parâmetros o sinal de
excitação que varia de 0 a 10V foi dividido por cinco, fazendo com que o modelo
internamente trabalhasse com valores entre 0 e 2.
Os modelos discretos dos atuadores MR foram implementados no Simulink, cujo
diagrama de blocos é apresentado a seguir:
Figura 4.37 – Diagrama de blocos em Simulink® do modelo do atuador MR1.
O diagrama da figura 4.37 apresenta três entradas (velocidade, deslocamento, tensão
elétrica) e uma saída (força) e pode ser simulado utilizando como entradas os dados
experimentais. Isto foi feito para se obter uma comparação entre os resultados de força do
modelo com os resultados medidos experimentalmente. Os gráficos da figura 4.38 mostram a
comparação destes sinais para os quatro modelos dos atuadores MR.
Para cada gráfico foi calculado o valor eficaz do erro entre o sinal de força do modelo e
o sinal de força experimental. O maior erro foi apresentado pelo modelo do atuador MR4 que
ficou em 115 N, o que é um valor pequeno comparado aos 3000 N de força que estes
atuadores alcançaram no experimento.

332
Figura 4.38 – Comparação das simulações do Simulink com os sinais de força experimentais.
Como as velocidades de movimentação do pistão dos atuadores nos experimentos não
superaram 0,32 m/s, e como na prática estas velocidades podem chegar a 2 m/s em situações
severas, foram feitas simulações com os modelos atingindo esta situação de velocidade para
verificar se o comportamento dos modelos se mantinha coerente. O resultado desta análise
mostrou que os modelos demonstraram boa generalização do seu comportamento para
velocidades mais altas.
0 5 10 15 20 25
-2000
0
2000
Modelo do atuador MR1 eRMS = 79.3 N
For
ça (
N)
0 5 10 15 20 25
-2000
0
2000
Modelo do atuador MR2 eRMS = 67.6 N
For
ça (
N)
0 5 10 15 20 25
-2000
0
2000
Modelo do atuador MR3 eRMS = 90.0 N
For
ça (
N)
0 5 10 15 20 25
-2000
0
2000
Modelo do atuador MR4 eRMS
= 115.0 N
Tempo (s)
For
ça (
N)

333
4.2.1 ATRITO DE COULOMB E MAGNETIZAÇÃO DA VÁLVULA MR
Os valores de coeficiente de amortecimento residual do atuador MR apresentados na
tabela 4.13 são definidos pela inclinação das curvas do gráfico de força versus velocidade. No
entanto, em velocidades inferiores a 0,03 m/s, mesmo sem nenhuma excitação elétrica nos
terminais da válvula de controle do fluido, ocorre um efeito similar ao atrito de Coulomb
conforme é apresentado na figura 4.39, que mostra o gráfico de força versus velocidade do
atuador com zero volt na sua entrada de controle.
Figura 4.39 – Efeito de atrito de Coulomb do atuador MR1 sem excitação elétrica.
Este efeito tem basicamente duas causas: uma gerada pelo atrito entre as partes móveis
do atuador e outra devido a uma característica do fluido MR.
A primeira delas corresponde ao atrito seco da haste com o seu mancal na extremidade
do tubo do atuador, ao atrito do pistão com a parede interna do tubo, e ao atrito do êmbolo
flutuante com a parede interna do tubo do atuador. Estes atritos são inerentes à forma
construtiva do amortecedor MR e podem ser atenuados com a utilização de materiais
especiais, como PTFE e Viton®, porém isso resulta num custo mais elevado do atuador.
Apesar dos atritos entre as partes móveis contribuir para o efeito de “atrito de
Coulomb”, o comportamento do fluido MR é o principal responsável por este efeito. Da
mesma forma que outros fluidos pseudo-plásticos ou plástico de Bingham, o fluido MR
apresenta uma tensão de cisalhamento mínima a partir da qual o seu escoamento passa a ser
efetivo. Esta tensão de cisalhamento está entre 10 e 20 Pa em geral, e é responsável pelo
comportamento quasi-newtoniano do fluido MR. Portanto, este efeito será tanto menor quanto
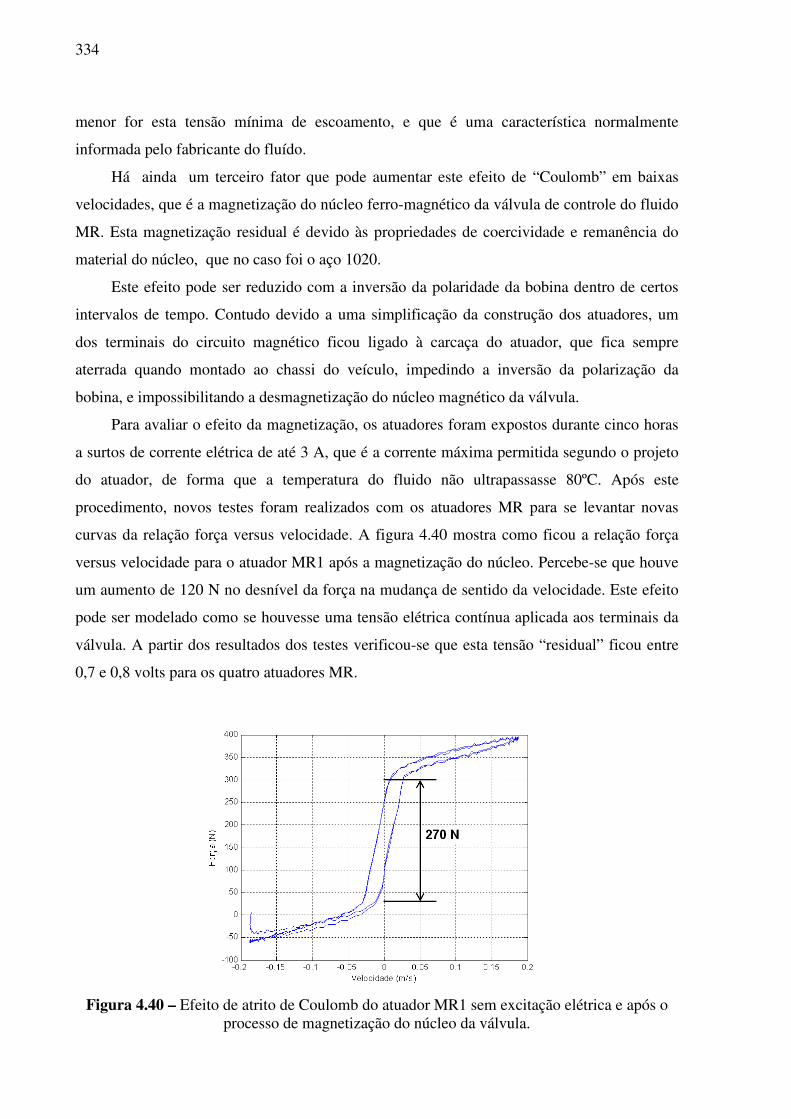
334
menor for esta tensão mínima de escoamento, e que é uma característica normalmente
informada pelo fabricante do fluído.
Há ainda um terceiro fator que pode aumentar este efeito de “Coulomb” em baixas
velocidades, que é a magnetização do núcleo ferro-magnético da válvula de controle do fluido
MR. Esta magnetização residual é devido às propriedades de coercividade e remanência do
material do núcleo, que no caso foi o aço 1020.
Este efeito pode ser reduzido com a inversão da polaridade da bobina dentro de certos
intervalos de tempo. Contudo devido a uma simplificação da construção dos atuadores, um
dos terminais do circuito magnético ficou ligado à carcaça do atuador, que fica sempre
aterrada quando montado ao chassi do veículo, impedindo a inversão da polarização da
bobina, e impossibilitando a desmagnetização do núcleo magnético da válvula.
Para avaliar o efeito da magnetização, os atuadores foram expostos durante cinco horas
a surtos de corrente elétrica de até 3 A, que é a corrente máxima permitida segundo o projeto
do atuador, de forma que a temperatura do fluido não ultrapassasse 80ºC. Após este
procedimento, novos testes foram realizados com os atuadores MR para se levantar novas
curvas da relação força versus velocidade. A figura 4.40 mostra como ficou a relação força
versus velocidade para o atuador MR1 após a magnetização do núcleo. Percebe-se que houve
um aumento de 120 N no desnível da força na mudança de sentido da velocidade. Este efeito
pode ser modelado como se houvesse uma tensão elétrica contínua aplicada aos terminais da
válvula. A partir dos resultados dos testes verificou-se que esta tensão “residual” ficou entre
0,7 e 0,8 volts para os quatro atuadores MR.
Figura 4.40 – Efeito de atrito de Coulomb do atuador MR1 sem excitação elétrica e após o
processo de magnetização do núcleo da válvula.

335
4.2.2 INSTALAÇÃO DOS ATUADORES NO VEÍCULO
A instalação dos atuadores MR na caminhonete foi uma tarefa simples, uma vez que
foram projetados com dimensões similares e com conectores idênticos dos amortecedores
originais do veículo. A figura 4.41 mostra os quatro atuadores instalados no veículo. Os
atuadores foram instalados sem pressurização para facilitar esta tarefa. A pressurização dos
mesmos foi feita em seguida utilizando-se um cilindro de gás nitrogênio dotado de uma
válvula reguladora de pressão. As pressões nos atuadores ficaram entre 14 e 16 bar.
Figura 4.41 – Atuadores MR instalados na caminhonete.

336
4.2.3 MODELO DO VEÍCULO COM OS ATUADORES
Uma vez obtidos os atuadores e conhecidas as suas características e modelamento
dinâmico, o passo seguinte foi a validação do modelo do veículo considerando o atuador no
lugar dos amortecedores convencionais.
Para isso, foram realizados mais três experimentos do veículo montado com os
atuadores no lugar dos amortecedores convencionais e passando sobre obstáculos. Os dois
primeiros experimentos foram realizados sem aplicação de tensão elétrica nos terminais de
controle das válvulas, e o terceiro foi realizado com a aplicação de 3 V contínuos em cada um
dos quatro atuadores MR. Em todos os experimentos foram aquisitados os 12 sinais já
descritos na seção 4.1.
Na análise dos dados foi seguido o mesmo procedimento da quarta fase de análise
descrita na seção 4.1.6, porém no lugar das funções não lineares dos amortecedores
convencionais foram utilizados os modelos discretos dos atuadores MR. Foi acrescentado um
novo parâmetro que corresponde à tensão elétrica de excitação dos quatro atuadores, todos os
demais parâmetros foram fixados com os valores descritos na tabela 4.7. O processo de
identificação consistiu em se ajustar apenas o parâmetro tensão elétrica para validar o modelo
previamente ajustado com os amortecedores convencionais.
Para simplificação, a entrada de deslocamento do modelo dos atuadores foi eliminada
juntamente com os parâmetros ko e xo, pois eles servem apenas para modelar o efeito mola da
pressurização do atuador MR. Como o valor da força gerada por estes elementos não passa de
250 N, considerou-se que o seu efeito ficou incorporado às molas da suspensão do veículo.
Assim, com as entradas de velocidade e tensão elétrica nulas, a força do atuador MR também
é zero. Na prática o efeito desta força no veículo é apenas a variação de alguns milímetros na
distância entre roda e carroceria no equilíbrio estático, portanto os efeitos desta simplificação
são desprezíveis.
Assim, o modelo dos atuadores ficou apenas com duas entradas: velocidade e tensão
elétrica. E do mesmo modo que ocorreu com os amortecedores convencionais, o fator de
alavancagem foi multiplicado na entrada de velocidade e na saída de força dos modelos dos
atuadores. A entrada de tensão elétrica recebeu o único parâmetro variável do modelo que foi
ajustado no processo de identificação. Os quatro atuadores receberam o mesmo sinal de
entrada, cujos limites foram definidos entre 0 e 5 volts.
Devido aos modelos discretos dos atuadores terem sido estimados para intervalos de
amostragem de 4 ms, foi utilizado este período no passo de integração do algoritmo de RK4.

337
Como resultado do processo de identificação, era esperado que o valor de tensão
ajustado para o modelo se aproximasse do valor de tensão realmente aplicado na entrada dos
atuadores. E, devido à magnetização do núcleo da válvula do atuador, também se esperava
que o valor identificado estivesse aproximadamente 0,8 volts maior que a tensão real.
Conforme os resultados apresentados na tabela 4.15, os valores de tensão ficaram bem
próximos do esperado, o que valida o modelo do veículo com os quatro atuadores MR.
Tabela 4.15 – Resultado do processo de ajuste da tensão de entrada dos atuadores.
A seguir são apresentados os gráficos comparativos do segundo experimento:
Figura 4.42 – Comparação entre os sinais para tensão de controle igual a zero volts.
Sensor Posição exper. 1 exper. 2 exper. 3 Médiadianteiro esquerdo 1,1 0,9 0,9dianteiro direito 0,9 0,9 0,8traseiro esquerdo 0,8 0,7 1,0traseiro direito 0,8 0,9 1,2dianteiro esquerdo 9 8 5dianteiro direito 7 6 4traseiro esquerdo 6 5 6traseiro direito 6 7 5
0,71 1,06 3,83
mm
Tensão estimada (V)
unidade de
medida
Valores RMS dos errosSinais medidos
Ace
lera
ção
vert
ical
da
carr
ocer
ia
sobr
e ca
da
roda 0,91 m/s2
Des
loca
men
to
rela
tivo
entr
e ro
da e
ca
rroc
eria
6,2
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-50
0
50
Dianteiro esquerdo eRMS = 8 mm
Des
loca
men
to (
mm
)
Tempo (s)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-50
0
50
Dianteiro direito eRMS = 6 mm
Des
loca
men
to (
mm
)
Tempo (s)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-50
0
50
Traseiro esquerdo eRMS = 5 mm
Des
loca
men
to (
mm
)
Tempo (s)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-50
0
50
Traseiro direito eRMS = 7 mm
Des
loca
men
to (
mm
)
Tempo (s)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-5
0
5
Dianteiro esquerdo eRMS = 0.9 m/s2
Ace
lera
ção
(m/s
2 )
Tempo (s)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-5
0
5
Dianteiro direito eRMS = 0.9 m/s2
Ace
lera
ção
(m/s
2 )
Tempo (s)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-5
0
5
Traseiro esquerdo eRMS = 0.7 m/s2
Ace
lera
ção
(m/s
2 )
Tempo (s)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-5
0
5
Traseiro direito eRMS = 0.9 m/s2
Ace
lera
ção
(m/s
2 )
Tempo (s)

338
Os gráficos da figura 4.42 apresentam dados experimentais na cor vermelha (traçado
fino) e os dados da simulação em azul (traçado grosso). Nestes gráficos é possível observar
uma grande similaridade entre o comportamento do modelo e do veículo real equipado com
os atuadores MR, o que é demonstrado pelos baixos valores do erro RMS entre os sinais. Na
figura 4.43 são apresentados gráficos referentes ao terceiro experimento, onde a tensão
elétrica aplicada aos atuadores foi de três volts contínuos. Estes gráficos também mostraram
uma boa correspondência entre os sinais experimentais e simulados.
Figura 4.43 – Comparação entre os sinais para tensão de controle igual a 3 volts.
O objetivo deste procedimento foi verificar se a força gerada pelos modelos dos
atuadores estava de acordo com a força real aplicada pelos atuadores instalados no veículo. O
procedimento reverso (ou seja, encontrar o valor de tensão aplicada ao modelo a partir da
comparação entre os dados experimentais e simulados) mostrou que a forma de interação
entre o veículo e os atuadores estão corretamente modelados e parametrizados.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-50
0
50
Dianteiro esquerdo eRMS = 5 mm
Des
loca
men
to (
mm
)
Tempo (s)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-50
0
50
Dianteiro direito eRMS = 4 mm
Des
loca
men
to (
mm
)
Tempo (s)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-50
0
50
Traseiro esquerdo eRMS = 6 mm
Des
loca
men
to (
mm
)
Tempo (s)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-50
0
50
Traseiro direito eRMS = 5 mm
Des
loca
men
to (
mm
)
Tempo (s)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-5
0
5
Dianteiro esquerdo eRMS = 0.9 m/s2
Ace
lera
ção
(m/s
2 )
Tempo (s)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-5
0
5
Dianteiro direito eRMS = 0.8 m/s2
Ace
lera
ção
(m/s
2 )
Tempo (s)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-5
0
5
Traseiro esquerdo eRMS = 1.0 m/s2
Ace
lera
ção
(m/s
2 )
Tempo (s)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-5
0
5
Traseiro direito eRMS = 1.2 m/s2
Ace
lera
ção
(m/s
2 )
Tempo (s)

339
4.2.4 RESUMO DOS RESULTADOS – ATUADORES MAGNETO REOLÓGICOS
O desenvolvimento do projeto e construção dos atuadores MR trouxe várias
contribuições sobre aspectos relativos aos próprios atuadores e outros relativos à sua
aplicação em controle. O resumo destes resultados é apresentado a seguir.
• Mais uma vez, a técnica de projeto desenvolvida no volume 1 deste trabalho mostrou-se
eficaz no projeto de dispositivos baseados em fluido MR.
• Foi verificado que os requisitos de força, velocidade de resposta e alcance dinâmico para
atuadores voltados ao controle de caminhonetes são bastante severos e difíceis de
alcançar. À medida que se buscou atingir forças maiores e ao mesmo tempo garantir uma
boa vazão para o fluido na válvula desligada, foi necessário aumentar muito a capacidade
de magnetização da válvula, acarretando indutâncias muito elevadas e conseqüentemente
velocidades de resposta mais lentas.
• Os atuadores MR mostraram uma boa linearidade na relação força versus tensão elétrica
de controle, o que mostra que houve pouca saturação do núcleo magnético e das partículas
de ferro carbonilo do fluido MR. Foi uma evolução em relação ao segundo protótipo
apresentado na seção 7 do volume 1 deste trabalho, que apresentou variações decrescentes
de força em função de variações constantes da tensão elétrica nos gráficos de força x
deslocamento e força x velocidade. A melhoria se deu pela utilização de partículas de
ferro carbonilo mais duras no novo fluido que resultarem numa saturação menor.
• O modelo discreto proposto para modelagem do atuador na seção 6 do volume 1 mostrou-
se mais uma vez eficaz na representação do atuador MR real. Este modelo foi facilmente
implementado no Simulink, que é o primeiro passo antes de poder ser transformado em
código de máquina para ser executado por um microcontrolador ou DSP.
• Foi verificado que o aço 1020 utilizado na construção do núcleo magnético das válvulas
apresenta coercividade suficiente para alterar o comportamento do atuador. O efeito da
magnetização pode ser modelado como uma tensão elétrica constante aplicada aos
terminais da bobina magnética da válvula. Para estes protótipos, está tensão ficou entre
0,7 e 0,8 V.
• O efeito da magnetização do núcleo da válvula, associado ao efeito dos atritos entre as
partes móveis do atuador, e também ao comportamento não-newtoniano do fluido MR são
os fatores responsáveis pelo considerável desnível de força dos atuadores na inversão da

340
velocidade do pistão. Este comportamento indesejável contribui com a redução da
eficiência do atuador MR, fazendo com que seu desempenho quanto ao conforto seja
reduzido e ainda seja uma fonte para intensificar o “tranco”.
• O mesmo processo de identificação utilizado para ajustar os parâmetros do modelo do
veículo também serviu para validar a combinação do modelo do veículo com o modelo
dos atuadores MR para representação do veículo utilizando os atuadores no lugar dos
amortecedores convencionais.
• O modelo linear do veículo com os parâmetros descritos na tabela 4.7 (que considera
apenas os amortecimentos residuais da suspensão e os fatores de alavancagem) é o modelo
mais apropriado para utilização na síntese do controlador. Contudo, com a utilização dos
amortecedores MR, é necessário adicionar amortecimentos residuais a estes atuadores.
Apesar destes amortecimentos não serem puramente viscosos devido à presença de outros
efeitos que se aproximam do atrito de Coulomb, a aproximação por coeficientes de
amortecimento viscoso é a alternativa mais simples de modelamento que mantém a forma
linear, e que é necessária na síntese de controle LQG/LTR.
• Outro resultado importante é que os parâmetros ko e xo do modelo do atuador MR, que
servem para modelar o efeito mola da pressurização do mesmo, são necessários no
processo de identificação, porém são dispensáveis na utilização do modelo do atuador
acoplado ao modelo do veículo. Esta aproximação é aceitável, pois a força deste efeito
mola pode ser incorporada a força da mola da própria suspensão do veículo que é bem
maior. Os últimos resultados desta seção comprovam este fato.

341
4.3 PROJETO DO CONTROLADOR ROBUSTO
Nesta seção foi colocada em prática a metodologia da síntese de controlador robusto via
LQG/LTR adaptada para o projeto de sistemas de controle de suspensão veicular.
Este desenvolvimento começa pela análise do modelo, avaliando as suas incertezas
(estruturadas e não-estruturadas), sua estabilidade e condicionamento da sua matriz de
tranferência. Ainda antes da síntese do controlador, o modelo da planta passa por
transformações que visam eliminar a parte não controlável, reduzir a ordem do sistema, e
torná-lo internamente balanceado com relação aos seus gramianos de controlabilidade e
observabilidade. Estes procedimentos visaram conduzir a um modelo reduzido em relação ao
modelo original da planta, e que apresentasse um melhor condicionamento numérico nos
procedimentos computacionais utilizados para a síntese do controlador.
4.3.1 CONSIDERAÇÕES PRELIMINARES
Para a síntese do controlador robusto foi adotado o modelo linear cujos parâmetros estão
descritos na tabela 4.7, que considera os fatores de alavancagem da suspensão conforme as
equações (4.21) e (4.22).
Foram adicionados aos coeficientes de atrito residuais da suspensão do modelo os
valores relativos ao atrito residual nos atuadores MR. Apesar do coeficiente atrito viscoso
destes atuadores ser de aproximadamente 350 N.s/m, foi adicionado ao modelo o valor de 500
N.s/m com uma incerteza da ±20%, devido ao efeito de “atrito de Coulomb” descrito na seção
4.2.1.
Apesar da constante de tempo do atraso de primeira ordem do sinal de tensão de
controle dos atuadores MR ser de aproximadamente 25 ms, esta dinâmica não foi considerada
na síntese do controlador. As razões para isso foram duas: em primeiro lugar pelo controlador
estar focando a atuação sobre a faixa de freqüência de vibração da massa suspensa, e em
segundo, pela intenção de se utilizar uma sub-malha de controle no atuador, de forma a
reduzir seu tempo de resposta para aproximadamente 8 ms. Este erro de modelagem foi
considerado na formação das barreiras de projeto.
Toda a síntese do controlador foi feita no tempo contínuo, apesar da implementação
final do controlador ser em um circuito eletrônico digital (DSP). As matrizes de estado do
controlador no final do projeto foram discretizadas para sua aplicação real.

342
4.3.2 AVALIAÇÃO DAS INCERTEZAS DO MODELO
As incertezas do modelo foram divididas em incertezas estruturais e incertezas não-
estruturais. As incertezas estruturais estão relacionadas às incertezas nos parâmetros do
modelo e foram modeladas segundo os valores de incerteza descritos na tabela 4.7, que são
resultantes do processo de identificação do modelo. Por outro lado, as incertezas não-
estruturais tem relação com as dinâmicas não modeladas e com discontinuidades como:
saturação, histerese, efeito de Coulomb, zona morta, etc. Estas incertezas foram representadas
pela adoção de uma classe de incertezas aditivas, denominadas ∆ G(s), conforme apresentado
na figura 4.44.
Figura 4.44 - Diagrama de blocos do sistema de controle em malha fechada.
Conforme descrito na seção 3.3.1, pode ser definida uma função escalar )(ωMe que deve
ser sempre maior que o maior valor singular da MFT do erro de modelagem para qualquer ω .
Neste projeto esta função escalar foi definida como:
ωω ⋅= 005,0)(Me (4.23)
Esta função mostra que o erro de modelagem em 200 rad/s é 1 ou 100%, e que ele
aumenta 20 dB a cada década.
Segundo a representação do sistema na figura 4.44, considera-se uma perturbação
exógena D(s) na saída da planta. Apesar de algumas perturbações externas afetarem
diretamente as saídas, como ocorre com ações de frenagem e aceleração do veículo, ou
acelerações laterais geradas por mudanças de direção do veículo, por exemplo, a maior fonte

343
de perturbações tem origem nos movimentos verticais que o perfil da pista impõe às rodas do
veículo. A forma de transferir estas perturbações para a saída está descrita no diagrama da
figura 4.45, onde o vetor de sinais de velocidades verticais impostos pela pista, W(s), é
introduzido na entrada do modelo do veículo através da matriz B1, gerando a contribuição
desta perturbação ao vetor de sinais de perturbação exógena D(s).
Figura 4.45 - Diagrama de blocos do sistema de controle em malha fechada.
O conhecimento da intensidade do sinal D(s) dentro do espectro de freqüências de
interesse para este projeto é importante para definição da barreira de desempenho a ser
utilizada na síntese do controlador. Para isso foi feito um gráfico de Bode multivariável25 da
função de transferência com entrada W(s) e saída D(s). Com a intenção de se obter uma
análise mais completa, as incertezas estruturais também foram consideradas. Isto foi feito
através da sobreposição de 15 diagramas de Bode multivariável gerados a partir de uma
simulação Monte-Carlo das incertezas do modelo do veículo. Como D(s) corresponde a oito
sinais: quatro sinais de aceleração vertical da carroceria e outros quatro de deslocamento
relativo entre roda e carroceria, o resultado foi dividido em dois gráficos a fim de facilitar a
análise. Estes gráficos são apresentados na figura 4.46.
A partir de uma análise no gráfico da figura 4.46 é possível verificar que a faixa mais
crítica para a perturbação D(s) está compreendida entre as freqüências 5 e 25 rad/s com
relação aos sinais de aceleração vertical da carroceria. E também abaixo de 1 rad/s para os
sinais de deslocamento relativo entre rodas e carroceria, além de apresentar também um
pequeno pico na mesma faixa de freqüência da aceleração vertical. Percebe-se também que as
25 O gráfico de Bode multivariável é feito a partir da representação da variação dos valores singulares da matriz de transferência ao longo do eixo das freqüências.
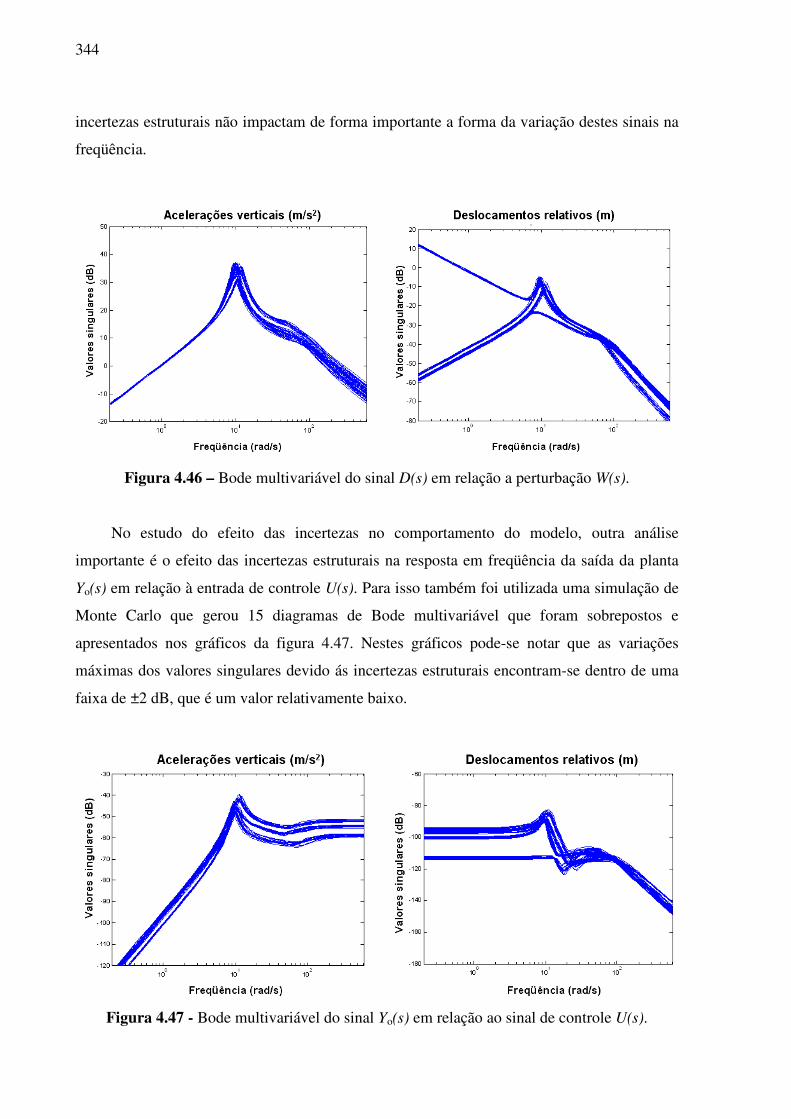
344
incertezas estruturais não impactam de forma importante a forma da variação destes sinais na
freqüência.
Figura 4.46 – Bode multivariável do sinal D(s) em relação a perturbação W(s).
No estudo do efeito das incertezas no comportamento do modelo, outra análise
importante é o efeito das incertezas estruturais na resposta em freqüência da saída da planta
Yo(s) em relação à entrada de controle U(s). Para isso também foi utilizada uma simulação de
Monte Carlo que gerou 15 diagramas de Bode multivariável que foram sobrepostos e
apresentados nos gráficos da figura 4.47. Nestes gráficos pode-se notar que as variações
máximas dos valores singulares devido ás incertezas estruturais encontram-se dentro de uma
faixa de ±2 dB, que é um valor relativamente baixo.
Figura 4.47 - Bode multivariável do sinal Yo(s) em relação ao sinal de controle U(s).

345
4.3.3 PÓLOS, ZEROS DE TRANSMISSÃO E OBSERVABILIDADE
Antes da síntese do controlador é preciso analisar a matriz de transferência GN(s) para
verificar se ela se enquadra nos requisitos necessários para aplicação da técnica LQG/LTR.
O primeiro passo foi encontrar os pólos e zeros de GN(s). A Tabela 4.16 apresenta este
resultado. Através destes resultados, é possível observar que todos os pólos são estáveis e não
há zeros de transmissão de fase não-mínima. Apesar de o sistema apresentar um pólo na
origem, não se trata de um sistema com estabilidade crítica ou marginal, visto que o zero na
origem cancela este pólo do sistema. No entanto, este cancelamento de pólo e zero mostra
uma condição de falta de controlabilidade, ou seja, uma parte da dinâmica interna do sistema
não é afetada pela entrada de controle.
Tabela 4.16 – Pólos e zeros de transmissão do sistema
-51,88 ±85,43i
-52,15 ±64,54i
-75,52 ±48,65i
Pólos relacionados aos movimentos verticais das rodas dianteiras e ao movimento de translação e rotação do eixo
traseiro da caminhonete.
-30,58 ±47,71i
Pólo na origem. 0,0
-1,28 ±11,25i
-0,74 ± 9,67i
Pólos relacionados aos movimentos de arfagem,
rolamento e vertical da massa suspensa.
-1,23 ± 9,81i
Zero de transmissão na origem 0,0
Para completar a análise, foram verificadas a controlabilidade e observabilidade na
forma do sistema GN em espaço de estados, ou seja, na sua representação no tempo. Para ser
totalmente controlável e observável, o posto dos gramianos de controlabilidade e
observabilidade deveriam ser quinze, que é a ordem da matriz de transferência. Como o posto
do gramiano de controlabilidade resultou em apenas quatorze, significa que há uma parte não-
controlável do sistema com ordem igual a 1, o que já era esperado, dado o cancelamento de
pólo e zero. Como todos os pólos são estáveis, a parte não controlável do sistema é estável,

346
então o sistema pode ser considerado estabilizável, o que é suficiente para a aplicação da
técnica LQG/LTR. Por outro lado, o posto do gramiano de observabilidade resultou em
quinze, o que sinaliza que o sistema é totalmente observável. Entretanto, o número de
condicionamento do gramiano de observabilidade resultou muito grande (>1012),
demonstrando um mau-condicionamento. Esta característica do gramiano de observabilidade
indica que pode haver problemas numéricos nos algoritmos utilizados na síntese do
controlador.
Estes resultados mostram que antes da síntese do controlador é importante que o sistema
seja reduzido para eliminar a parte não controlável, e balanceado e truncado para melhorar o
seu condicionamento numérico no processo de síntese do controlador.
4.3.4 ELIMINAÇÃO DO MODO DE TORÇÃO
No gráfico das acelerações verticais da figura 4.47, que foi apresentado na seção 4.3.2,
um dos valores singulares da matriz de transferência GN(s) foi ignorado, pois ele apresentou
valores próximos de zero. No gráfico da figura 4.48, onde se juntou os diagramas de Bode
multivariável das acelerações verticais da carroceria (cor azul) com o Bode dos
deslocamentos relativos entre roda e carroceria (cor magenta), pode-se verificar de fato esta
situação.
Figura 4.48 - Bode multivariável GN(s), mostrando todos os valores singulares.
100
101
102
-400
-350
-300
-250
-200
-150
-100
-50
FRF Yo(s) = GN(s).U(s) (Modelo original)
Freqüência (Hz)
Val
ores
sin
gula
res
(dB
)

347
A razão pela qual um valor singular da matriz é praticamente nulo é que existe uma
situação onde os atuadores exercem uma força coordenada no sentido de torcer o chassi do
veículo, a qual não altera o valor da saída (acelerações da carroceria). Isto ocorre devido ao
modelo considerar que o corpo suspenso do veículo é rígido. Como o ganho da matriz GN(s) é
nulo para esta dimensão do vetor de entrada de forças em qualquer freqüência, no diagrama
de Bode multivariável aparecerá uma linha mostrando valores muito próximos de zeros,
conforme pode ser observado na figura 4.48.
Para eliminar este problema, foi aplicada a transformação linear S nas entradas e saídas
da planta nominal GN(s), conforme foi descrito na seção 3.2.4. Assim se obteve uma nova
matriz de transferência Gst(s) dada por:
( ) ( ) ##21
#
43
432
1
43
43st )( DBAICSD
S0
0SSBAIC
S0
0SG +⋅−⋅=⋅⋅
+⋅⋅−⋅⋅
=
−−sss
T
x
x
T
T
x
x
T
(4.24)
Nesta transformação foi utilizada a matriz S da equação (3.30), porém sem a última
coluna que se refere ao modo de torção, assim as dimensões de GN(s) que eram 8x4 passaram
a ser 6x3 em Gst(s). Um novo diagrama de Bode multivariável foi traçado para esta nova
matriz de transferência, o qual é apresentado na figura 4.49. Este gráfico mostra que o valor
singular próximo de zero desapareceu, conforme era esperado.
Figura 4.49 - Bode multivariável Gst(s), mostrando todos os valores singulares.
100
101
102
-180
-160
-140
-120
-100
-80
-60
-40
FRF Y#(s) = Gst
(s).U#(s) (Modelo sem torção)
Freqüência (Hz)
Val
ores
sin
gula
res
(dB
)

348
4.3.5 CRITÉRIOS DE DESEMPENHO E PONDERAÇÃO DAS SAÍDAS
O modelo do veículo na condição atual apresenta três saídas de aceleração, cuja unidade
é [m/s2], três saídas de deslocamento, cuja unidade é [m], e três entradas de controle, cuja
unidade é [N]. O que se propõe ao controlador é que os seis sinais de saída sejam
realimentados de forma a gerar o sinal de entrada “ótimo” para melhorar o desempenho do
sistema em conforto, “rattlespace”, e segurança. As saídas de acelerações do corpo suspenso
do veículo podem ser utilizadas como indicador para avaliação do conforto, e as saídas de
deslocamento relativo da suspensão podem ser utilizadas como indicador para avaliação do
“rattlespace”. Contudo o sistema carece de uma medição objetiva da deformação dos pneus,
que seria um bom indicador para o critério de segurança, pois teria uma relação direta com a
força normal que cada roda aplica à pista.
Diferentemente de outras técnicas de controle avançado como ∞H , a técnica LQG/LTR
não considera critérios de desempenho sobre sinais que não estejam nas saídas da planta. Na
prática, isto não significa uma grande desvantagem para esta aplicação, pois o sinal de
deformação que um controlador ∞H acaba utilizando “internamente”26 não é fidedigno. Isto
decorre do fato de que o pneu é um elemento extremamente não linear, e a entrada de
perturbação gerada pelo pavimento nem sempre pode ser aproximada por um ruído gaussiano
de média zero.
Sendo assim, a estratégia de projeto foi tratar o desempenho em segurança de forma
indireta na síntese do controlador LQG/LTR. Neste trabalho a proposta foi explorar este
problema a partir da escolha da matriz L que define a malha objetivo27. A desvantagem desta
estratégia e que a matriz L não é definida a partir de um processo de síntese, porém de
tentativa e erro. A vantagem é que uma vez definida a forma de cálculo da matriz L, a mesma
forma de cálculo poder ser utilizada em outros projetos de controle para suspensão veicular.
Quanto aos demais critérios de desempenho, cujos sinais estão presentes na saída da
planta, ainda é preciso reanalisar o gráfico da figura 4.49. Neste gráfico percebe-se que o
ganho da planta com relação ao sinal de aceleração da massa suspensa é bem superior ao
ganho relativo ao sinal de deslocamento entre roda e carroceria. Se não for utilizada uma
constante de ponderação que potencialize o efeito das saídas de deslocamento, haverá o
predomínio do desempenho sobre o conforto na ação do controlador. Porém, além do efeito
26 O uso da palavra “internamente” tem o sentido de que o controlador utiliza uma realimentação de estados que são estimados por um observador, e que estes estados só estão disponíveis dentro do controlador. 27 A matriz L é um dos parâmetros de projeto da técnica LQG/LTR, conforme descrito na seção 3.3.1 da parte 2 deste trabalho.

349
de que o curso da suspensão possa alcançar amplitudes elevadas, a pior conseqüência é que o
controlador resultante deste projeto apresentaria pólos muito próximos da origem. Para um
controle de suspensão não é bom que o controlador apresente pólos próximos da origem, pois
é comum os sinais de sensores de aceleração apresentarem certo viés, e em função do atrito de
Coulomb, a suspensão nem sempre pára na mesma posição, ou seja, existe uma zona morta
cujo efeito resulta também num viés dos sensores de deslocamento. Pólos próximos da origem
podem amplificar o efeito destes vieses e levar os atuadores à saturação.
Para solucionar este problema, o sinal de deslocamento foi multiplicado por 20, que
permitiu aumentar a importância do sinal de deslocamento, porém ainda mantê-lo inferior ao
sinal de aceleração para freqüências superiores a 1 Hz. Este resultado é apresentado no gráfico
da figura 4.50. A curva na cor vermelha representa o sinal de deslocamento relativo
multiplicado por 20. Pode-se verificar que para freqüências abaixo 0,7Hz, este sinal já supera
o de aceleração da massa suspensa. Esta condição garante que o pólo do controlador mais
próximo da origem apresente parte real mais negativa que -2,5.
Figura 4.50 - Bode multivariável Gst(s) com as saídas de deslocamento multiplicadas por 20.
Foi criada uma mova matriz de transferência quadrada (3x3) resultante da matriz de
transferência Gst(s) com a soma ponderada da sua saída, conforme apresentado pela equação
(4.25).

350
[ ] [ ] ( ) [ ] #3333#21
#3333st3333o 2020)(20)( DIIBAICIIGIIG ⋅⋅+⋅−⋅⋅⋅=⋅⋅=−
xxxxxx sss (4.25)
O diagrama de Bode multivariável desta nova matriz de transferência Go(s) é
apresentado na figura 4.51, representado pela curva em traçado grosso e na cor preta.
Figura 4.51 - Bode multivariável Go(s), cuja saída é a soma ponderada das saídas de aceleração e deslocamento (cor preta, traçado grosso).
A matriz de transferência Go(s) passa a ser então a referência para a síntese do
controlador, contudo ela ainda passará por transformações visando a eliminação a parte não
controlável, e seu balanceamento e truncamento. É importante salientar que as transformações
que serão descritas a seguir foram aplicadas a partir das matrizes C# e D#, visto que elas
precisam manter a sua dimensão (6x3) para serem utilizadas na síntese do controlador. A
multiplicação pela matriz de ponderação [ ]333320 xx II⋅ só ocorre em pontos específicos do
processo de síntese, que será descrito adiante.
100
101
102
-140
-120
-100
-80
-60
-40
-20
FRF Y#o(s) = Go(s).U#(s) (Modelo sem torção)
Freqüência (Hz)
Val
ores
sin
gula
res
(dB
)

351
4.3.6 REDUÇÃO, BALANCEAMENTO E NORMALIZAÇÃO DO MODELO
Antes de se iniciar o processo de síntese do controlador foi realizada uma redução do
modelo, com balanceamento dos gramianos de controlabilidade e observabilidade. Além
disso, o modelo foi normalizado segundo o critério definido na seção 3.3.5 da parte 2 deste
trabalho, através da proposição 3.
Para avaliar a condição do sistema foram plotados os diagramas de Bode multivariável a
cada fase deste processo, a fim de verificar se o modelo manteve a mesma resposta em
freqüência após consecutivas transformações de similaridade e truncamento.
Para avaliar melhoria no condicionamento do sistema foram calculados os valores
singulares de Hankel28 ( Hσ ), que são os valores singulares da matriz resultante do produto
dos gramianos de controlabilidade (Wc) e observabilidade (Wo). Os valores singulares de
Hankel estão relacionados com a “energia” de cada estado do sistema. O ideal é que esta
“energia” esteja distribuida de forma equilibrada em todos os estados. O objetivo é que a
redução, o balanceamento e a normalização levem a uma condição mais equilibrada da
“energia” no sistema.
4.3.6.1 Redução de Ordem do Sistema
Como o posto do gramiano de controlabilidade Wc resultou em quatorze, significa que
existe uma dimensão do sistema (A,B,C,D) que não é controlável. A primeira etapa deste
processo consiste em obter uma transformação de similaridade To, de forma que seja possível
separar a parte controlável da não-controlável. O algoritmo usado para obter a matriz To foi o
“Staircase Algorithm” (Rosenbrock, 1970)29, implementado no Matlab® no comando “ctrbf”.
A transformação de similaridade To, foi então aplicada da seguinte forma:
TT
o##2o2oo ; ; TCCBTBTATA ⋅=⋅=⋅⋅= (4.26)
28 Por definição, para sistemas estáveis os valores singulares de Hankel são calculados por: )( oc WW ⋅= eigHσ 29 Rosenbrock, M. M., State-Space and Multivariable Theory, John Wiley, 1970.

352
O sistema transformado passou a ter a forma apresentada na equação (4.27), mostrando
claramente a separação entre a parte controlável (identificada pelo índice ”nc”) e a não-
controlável (identificada pelo índice “c”):
[ ]cnc2c
2c21
nc ; ; CCCB
0B
AA
0AA =
=
= (4.27)
A última operação é separar somente a parte controlável para ser utilizada na síntese do
controlador. O sistema resultante é:
( ) [ ] ( ) [ ] #33332c1
cc3333or 2020 DIIBAICIIG ⋅⋅+⋅−⋅⋅⋅=−
xxxx ss (4.28)
A figura 4.52 mostra dois diagramas de Bode multivariável das MFT Go(s) e Gor(s)
respectivamente. Percebe-se que praticamente não houve nenhuma alteração na resposta em
freqüência, o já que era esperado.
Figura 4.52 – Comparação dos diagramas de Bode multivariável Go(s) e Gor(s).
Com a eliminação da parte não controlável é então possível calcular os valores
singulares de Hankel. Como a MFT Gor(s) tem ordem quatorze, existem quatorze valores
singulares de Hankel. Este resultado é apresentado na figura 4.53. Neste gráfico é possível
observar que os dois últimos valores singulares são tão pequenos que nem aparecem no
gráfico. Isto sugere que o sistema pode ser truncado em doze estados apenas30.
30 A queda brusca do sexto para o sétimo valor singular também sugere um truncamento neste ponto, contudo isto elimina demasiadamente a quantidade de graus de liberdade do sistema, que passa a não ser mais adequado.

353
Figura 4.53 – Valores singulares de Hankel do sistema Gor(s).
4.3.6.2 Realização Balanceada e Truncada (RBT)
O procedimento RBT, apresentado pela primeira vez por Moore (1981), baseia-se na
informação obtida a partir dos gramianos de controlabilidade (Wc) e observabilidade (Wo),
que podem ser obtidos a partir da solução das duas equações de Lyapunov apresentadas na
equação (4.29):
cccooc2c2ccccc ; CCAWWABBAWWA TTTT −=+−=+ (4.29)
Uma vez resolvidos os gramianos este procedimento consiste em mais seis passos:
1. Calcular os fatores de Cholesky: Wc = LcLc
T, Wo = LoLoT;
2. Calcular a decomposição em valores singulares (DVS) do produto de Cholesky UΣΣΣΣV
= LoTLc, onde ΣΣΣΣ é uma matriz diagonal e positiva e U, V têm colunas ortogonais;
3. Computar a transformação de balanceamento, conforme as equações (4.30):
TT
o1
c
21
21
LUΣT
ΣVLT
⋅⋅=
⋅⋅=−−
−
(4.30)

354
4. Colocar na forma da realização balanceada, conforme as equações (4.31):
1cb
c2b
1cb
−
−
⋅=
⋅=
⋅⋅=
TCC
BTB
TATA
(4.31)
5. Ordenar a matriz ΣΣΣΣ na ordem decrescente dos valores singulares de Hankel e colocar
as matrizes Ab, Bb e Cb organizadas na mesma ordem;
6. Truncar as matrizes Ab, Bb e Cb para formar uma realização reduzida do sistema a
partir da eliminação de linhas e colunas relacionadas aos valores singulares com valor
desprezível.
Este procedimento foi aplicado às matrizes de espaço de estados do sistema Gor(s), que
originalmente tinha ordem quatorze e foi truncado resultando no sistema Gorb(s) de ordem
doze, descrito conforme segue:
( ) [ ] ( ) [ ] #3333b1
bb3333orb 2020 DIIBAICIIG ⋅⋅+⋅−⋅⋅⋅=−
xxxx ss (4.32)
A figura 4.54 mostra dois diagramas de Bode multivariável das MFT Go(s) e Gorb(s)
respectivamente. Percebe-se que praticamente não houve nenhuma alteração na resposta em
freqüência, mesmo com a eliminação de mais dois estados.
Figura 4.54 – Comparação dos diagramas de Bode multivariável Go(s) e Gorb(s).

355
4.3.6.3 Normalização
A normalização tem basicamente dois objetivos: obter uma matriz de ganhos que
deixe o sistema com ganho próximo de 1, e fazer a ortogonalização da matriz D# segundo a
proposição 3 da seção 3.3.5 da parte 2 deste trabalho.
Como a matriz D# tem posto de coluna completo, pode-se adotar a seguinte
normalização:
un
un
u
SDD
SBB
)D(DS
⋅=
⋅=
⋅= −
#
b
21##
/T
(4.33)
Com esta normalização o sistema resultante é:
( ) [ ] ( ) [ ] n3333n1
bb3333orbn 2020 DIIBAICIIG ⋅⋅+⋅−⋅⋅⋅=−
xxxx ss (4.34)
A figura 4.55 mostra o diagrama de Bode multivariável da MFT Gorbn(s). Através
deste gráfico percebe-se que a normalização cumpriu o seu papel, deixando o ganho do
sistema em torno de 1, e aproximando os valores singulares da MFT, que é a situação ideal
para o início do processo de síntese do controlador.
Figura 4.55 – Diagramas de Bode multivariável de Gorbn(s).
100
101
102
-20
-15
-10
-5
0
5
10
15
FRF Gorbn(s) (Realização balanceada e normalizada)
Freqüência (Hz)
Val
ores
sin
gula
res
(dB
)

356
Com a finalização do processo de redução, balanceamento, truncamento, e
normalização foram calculados novamente os valores singulares de Hankel. Como a MFT
Gorbn(s) tem ordem doze, existem doze valores singulares de Hankel. Este resultado é
apresentado na figura 4.56. Neste gráfico pode-se observar que a distribuição da “energia”
entre os estados do sistema melhorou, pelo menos em relação aos seis estados mais
importantes. A eliminação dos dois estados com energia desprezível melhorou bastante o
condicionamento do sistema para a síntese do controlador.
Figura 4.56 – Valores singulares de Hankel do sistema Gorbn(s).
O sistema resultante Gorbn(s) não apresenta mais o pólo e o zero de transmissão na
origem. Os pólos do sistema com relação a entrada U(s) são apresentados na tabela 4.17.
Tabela 4.17 – Pólos do sistema
-58,33 ±60,36i
-52,15 ±64,54i
Pólos relacionados aos movimentos verticais das rodas dianteiras e ao movimento de translação e rotação do eixo
traseiro da caminhonete. -30,58 ±47,71i
-1,28 ±11,25i
-0,74 ± 9,67i
Pólos relacionados aos movimentos de arfagem,
rolamento e vertical da massa suspensa. -1,23 ± 9,81i

357
4.3.7 SÍNTESE LQG/LTR
O processo de síntese do controlador LQG/LTR segue basicamente o roteiro descrito na
seção 3.3.1 desta parte do trabalho. Como já se tem o modelo da planta bem condicionado e
normalizado, e já foi feita a avaliação dos erros de modelagens e das incertezas estruturais e
não-estruturais, o passo seguinte é a definição das barreiras de desempenho e robustez.
4.3.7.1 Definição das Barreiras de Projeto
As barreiras de desempenho e estabilidade foram definidas conforme descrito na seção
3.3.2 desta parte do trabalho. Os parâmetros e funções que as definem são apresentados a
seguir:
ar)(1
1
feM+= para 0,03 < f ≤ 0.1 Hz
aj)(1
10
feM+= para 0,1 < f ≤ 10 Hz
ac)(1
2
feM−= para 1 < f ≤ 3 Hz
as)(1
1
feM+= para 10 < f ≤ 20 Hz
ae)(1
316,0
feM+= para 20 < f ≤ 200 Hz
am)(1
1,0
feM+= para f > 200 Hz
onde )( feM resulta da equação (4.23) como segue:
fffeM ⋅=⋅⋅⋅= ππ 01,02005,0)( (4.35)
As barreiras de robustez foram representadas no gráfico 4.57, que mostra seus valores
em dB com relação ao eixo das freqüências. Esta representação gráfica é que orientou o
posicionamento da resposta em freqüência da MTF de malha aberta na seqüencia deste
procedimento de síntese do controlador.
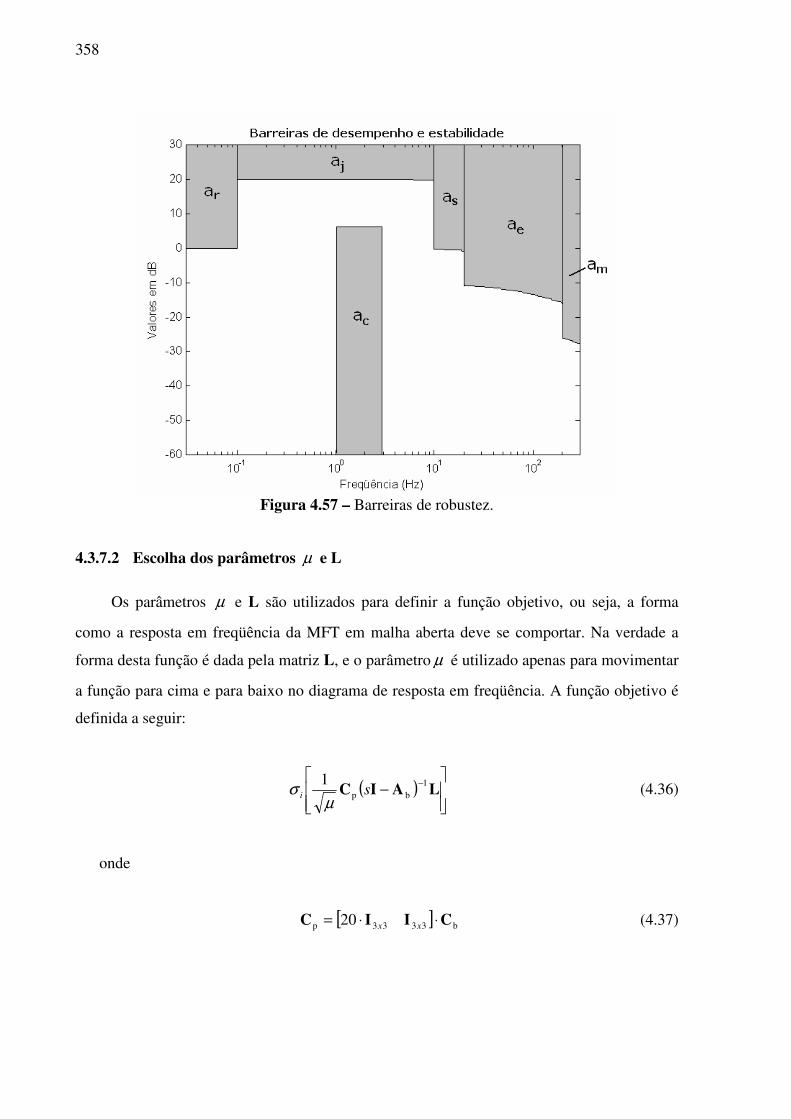
358
Figura 4.57 – Barreiras de robustez.
4.3.7.2 Escolha dos parâmetros µ e L
Os parâmetros µ e L são utilizados para definir a função objetivo, ou seja, a forma
como a resposta em freqüência da MFT em malha aberta deve se comportar. Na verdade a
forma desta função é dada pela matriz L, e o parâmetro µ é utilizado apenas para movimentar
a função para cima e para baixo no diagrama de resposta em freqüência. A função objetivo é
definida a seguir:
( )
−
− LAIC 1bp
1si
µσ (4.36)
onde
[ ] b3333p 20 CIIC ⋅⋅= xx (4.37)

359
Conforme foi mencionado na seção 4.3.5, a matriz L foi o parâmetro utilizado para
melhorar o critério de segurança. Neste sentido foram propostas três matrizes L, identificadas
por 321 e , ppp LLL , e definidas como segue:
SBTTL ⋅⋅⋅= 1o1p (4.38)
( ) 1
ppp2
−⋅⋅= TT
p CCCL (4.39)
( ) 1
ppp3
−⋅⋅⋅⋅= TT
p CNCCNL (4.40)
A matriz 3pL segue uma proposta apresentada em Cruz (1996), onde a matriz N pode
ser qualquer matriz simétrica com dimensões 12x12 (já que o sistema reduzido tem ordem
12). Para esta aplicação, escolheu-se a seguinte forma para a matriz N:
( ) 1
bb
−⋅= TAAN (4.41)
A seguir, nas figuras 4.58, 4.59 e 4.60, são apresentados três diagramas mostrando as
funções objetivo geradas por cada uma das três propostas para a matriz L. Nestes diagramas
as curvas em traçado fino representam a função com µ =1, e as curvas em traçado grosso
representam as curvas com o valor de µ ajustado para posicionar as funções objetivo entre as
barreiras de desempenho e estabilidade.
Figura 4.58 – Função objetivo gerada por 1pL e µ =25.

360
Figura 4.59 – Função objetivo gerada por 2pL e µ =2 x 10-4.
Figura 4.60 – Função objetivo gerada por 3pL e µ =0,002.
Como é possível observar nos diagramas das figuras 4.58, 4.59 e 4.60, a função
objetivo gerada por 3pL e µ =0,002 é a que apresenta a melhor forma para se encaixar entre
as barreiras. Esta é uma das razões pela qual ela foi escolhida para a síntese do controlador. A
outra razão foi porque esta é a proposta que apresenta melhor resultado quanto ao critério de
segurança medido pela amplitude máxima de deformação dos pneus, conforme é apresentado
na seção 4.3.7.7.

361
Neste trabalho é apresentada a síntese de dois controladores, ambos partindo de funções
objetivo definidas pela matriz 3pL , porém utilizando valores diferentes para parâmetro µ .
Como se pode observar na figura 4.60, a função objetivo gerada por µ =0,002 intercepta um
pouco as barreira “aj” e “ac”, ou seja, ela busca um melhor compromisso entre o desempenho
com relação ao “tranco”, à filtragem das excitações exógenas impostas pela pista onde o
veículo transita, e à insensibilidade em relação às variações da planta.
Foi também utilizada uma função objetivo com µ =5 x10-4 que resultou na função
apresentada na figura 4.61.
Figura 4.61 – Função objetivo gerada por 3pL e µ =5 x10-4.
A partir da figura 4.61, observa-se que a nova função objetivo respeita a barreira “ac”
porém intercepta em maior grau a barreira “aj”. O objetivo de se realizar a síntese de dois
controladores a partir destas duas funções objetivo é o de demonstrar a eficácia da barreira
“aj” no sentido de redução do “tranco”, o que será mostrado a partir de simulações e
resultados experimentais.
A seqüência do procedimento da síntese do controlador mostra a partir deste ponto os
resultados parciais obtidos a partir de cada um dos parâmetros µ .
4.3.7.3 Cálculo da matriz de ganhos do observador
O passo seguinte da síntese do controlador é o cálculo da matriz de ganhos do
observador e a verificação da Identidade de Kalman.

362
A matriz de ganho do observador foi calculada a partir da matriz Po que é a solução da
seguinte EAR:
01
qq33bb =−++ oooo PCCPLLAPPA TT
pp
T
µ (4.42)
onde
b3333
3333q
20C
I0
0IC ⋅
⋅=
xx
xx (4.43)
O ganho do observador foi então calculado por:
T
q
1CPK oo
µ= (4.44)
Com o resultado obtido para o ganho do observador, calculou-se a seguinte MFT:
( ) oKF KAICG 1bp)( −
−= ωω jj (4.45)
A resposta em freqüência desta MFT foi desenhada e verificou-se uma boa aderência à
curva da função objetivo, comprovando-se o resultado da Identidade de Kalman. Este
resultado é apresentado nos gráficos da figura 4.62.
Figura 4.62 – Resposta em freqüência da MFT )( ωjKFG gerado 3pL , com µ =0,002
(gráfico da esquerda) e µ =5 x10-4 (gráfico da direita).

363
4.3.7.4 Cálculo da matriz de ganhos do controlador
Para o cálculo da matriz de ganhos do controlador foi resolvida a seguinte EAR:
01
1cnnccc =
+−++ PBBPQAPPA TT
ρ (4.46)
onde
qqnb 1
1CDBAA T
+−=
ρ (4.47)
1
1qq CCCCQ TT
+−=
ρ (4.48)
n3333
3333q
20D
I0
0ID ⋅
⋅=
xx
xx (4.49)
Para a recuperação da matriz de transferência (resultado LTR), é necessário fazer o
parâmetro ρ ser um número muito pequeno. Neste projeto foi utilizado ρ =10-10.
A matriz de ganhos do controlador foi calculada da seguinte forma:
( )cnqq)1(
1PBCDK TT
c ++
=ρ
(4.50)
Como a matriz de ganhos do controlador não depende de µ , apenas um resultado foi
calculado e serviu para os dois controladores.
4.3.7.5 Cálculo da MFT do controlador
A partir dos resultados obtidos para as matrizes de ganhos do observador e do
controlador ( cKK e o ) foi obtida a MFT do controlador conforme descrito na seção 3.3.4 da
parte 2 do trabalho, porém com o sinal negativo, pois se trata de um regulador. A seguir
apresenta-se a expressão da MFT do controlador com as matrizes consideradas no projeto:
ooo KKDKCKKBAIKH 1qqnb )()( −−++−−= ccc ss (4.51)

364
Contudo as matrizes S e Su utilizadas nos processos de eliminação do modo de torção e
normalização da planta, não fazem parte da planta nominal )(sNG . Sendo assim estas
matrizes têm que fazer parte do controlador, que passa a se chamar controlador real, )(R sH , e
é definido a seguir:
⋅−++−⋅⋅−= −
T
x
x
T
ccc ssS0
0SKKDKCKKBAIKSSH ooo
43
431qqnbuR )()( (4.52)
Uma vez determinada a MFT do controlador é preciso verificar se os valores singulares
da MFT )()( R ωω jj HG N ⋅ obedecem às barreiras e tendem a se aproximar de )( ωjKFG , o
que corresponde ao processo de recuperação da matriz de transferência (LTR). Os gráficos da
figura 4.63 apresentam estes resultados para os dois controladores que foram sintetizados a
partir parâmetros µ diferentes.
Figura 4.63 – Resposta em freqüência da MFT )()( R ωω jj HG N ⋅ , com µ =0,002 (gráfico da
esquerda) e µ =5 x10-4 (gráfico da direita).
A partir dos gráficos da figura 4.63 percebe-se que houve uma boa aproximação da
resposta em freqüência da MFT )()( R ωω jj HG N ⋅ com relação à resposta da MFT )( ωjKFG ,
e respeitando da melhor forma possível as barreiras de desempenho e estabilidade,
comprovando os resultados teóricos das seções 3.3.4 e 3.3.5 da parte 2 deste trabalho.

365
4.3.7.6 Avaliação das margens de ganho e margens de fase
Para uma avaliação mais completa da robustez destes controladores pode-se fazer uma
avaliação estimada das suas margens de ganho e de fase. Em sistemas MIMO estas margens
podem ser estimadas a partir da função de sensibilidade, dada por:
( )[ ]1R88 )()()( −
⋅+= ωωσω jjS xM HGI N (4.53)
E definindo-se:
( ) Ω∈= ωω domínio no )(max SM s (4.54)
Os valores mínimos das margens de ganho GM e de fase FM podem ser calculados
através das seguintes equações (ǺSTÖM, 2002, capítulo 7, página 254):
1−=
S
SG
M
MM (4.55)
⋅⋅=
S
FM
arcsenM2
12 (4.56)
Considerando-se o domínio Ω a faixa de freqüência entre 0,03 e 300 Hz, os resultados
para os controladores obtidos neste projeto foram:
GM >4,46 e FM >45,6º para µ =0,002
GM >4,42 e FM >45,5º para µ =5 x10-4
Como valores de margem de ganho entre 2 e 5 e margem de fase entre 30º e 60º
caracterizam sistemas com boa robustez, pode-se considerar que os controladores obtidos por
este processo de síntese apresentam uma robustez satisfatória.
Os controladores )(R sH foram também analisados a partir do seu mapa de pólos e
zeros e da sua resposta em freqüência. Estes resultados são apresentados na figura 4.64.

366
Através destes gráficos verifica-se que os controladores não apresentam zeros de transmissão
e nenhum integrador. Os pólos mais próximos da origem apresentam parte real menor do que
-2, que é um bom resultado, pois evita que a saída do controlador sature caso algum sensor
apresentar viés.
Figura 4.64 – Mapa de pólos e zeros e resposta em freqüência da MFT )(R ωjH , com µ =0,002 (gráfico da esquerda) e µ =5 x10-4 (gráfico da direita).
Nos gráficos de resposta em freqüência dos controladores (figura 4.64), verifica-se um
ganho abaixo de 30 dB em freqüências acima de 200 Hz. Como a saída do controlador é um
sinal de força medido em [N] e as entradas são acelerações medidas em [m/s2] e
deslocamentos medidos em [m], este ganho significa que ruídos com amplitude de 0,5 m/s2
nas entradas de aceleração irão gerar perturbações de apenas 16 N na saída. No caso das
entradas de deslocamento a sensibilidade aos sinais de nesta faixa de freqüência são ainda
menores.
4.3.7.7 Avaliação do desempenho
Para se analisar o comportamento do controlador em malha fechada, tomou-se como
planta o modelo completo desenvolvido na seção 3.2. Neste modelo as saídas são os sinais de
deformação dos pneus (Y1(s)), que não são medidos, e os sinais de deslocamento relativo entre
roda e carroceria e de aceleração vertical da carroceria em quatro pontos posicionados acima
das rodas (Y(s)). Os sinais do vetor Y(s) são medidos pelos sensores já mencionados na seção
4.1.2 da parte 2. O diagrama da planta em malha fechada com o controlador é apresentado na
figura 4.65.
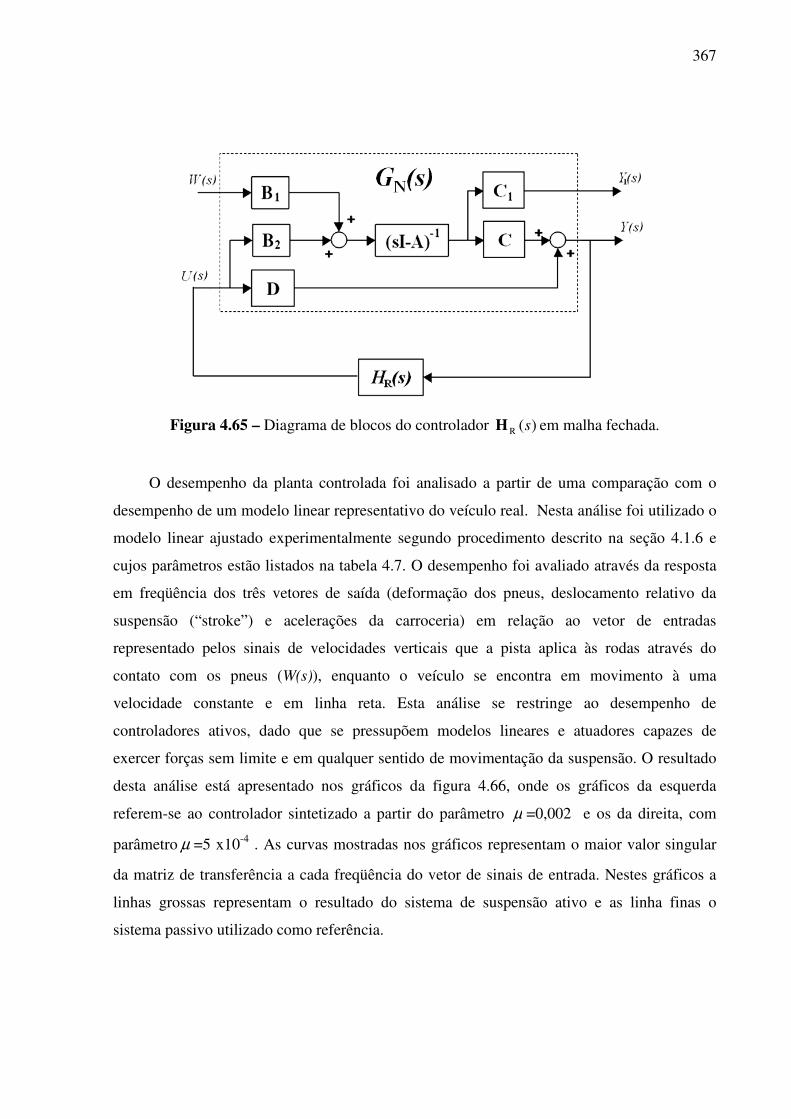
367
Figura 4.65 – Diagrama de blocos do controlador )(R sH em malha fechada.
O desempenho da planta controlada foi analisado a partir de uma comparação com o
desempenho de um modelo linear representativo do veículo real. Nesta análise foi utilizado o
modelo linear ajustado experimentalmente segundo procedimento descrito na seção 4.1.6 e
cujos parâmetros estão listados na tabela 4.7. O desempenho foi avaliado através da resposta
em freqüência dos três vetores de saída (deformação dos pneus, deslocamento relativo da
suspensão (“stroke”) e acelerações da carroceria) em relação ao vetor de entradas
representado pelos sinais de velocidades verticais que a pista aplica às rodas através do
contato com os pneus (W(s)), enquanto o veículo se encontra em movimento à uma
velocidade constante e em linha reta. Esta análise se restringe ao desempenho de
controladores ativos, dado que se pressupõem modelos lineares e atuadores capazes de
exercer forças sem limite e em qualquer sentido de movimentação da suspensão. O resultado
desta análise está apresentado nos gráficos da figura 4.66, onde os gráficos da esquerda
referem-se ao controlador sintetizado a partir do parâmetro µ =0,002 e os da direita, com
parâmetro µ =5 x10-4 . As curvas mostradas nos gráficos representam o maior valor singular
da matriz de transferência a cada freqüência do vetor de sinais de entrada. Nestes gráficos a
linhas grossas representam o resultado do sistema de suspensão ativo e as linha finas o
sistema passivo utilizado como referência.

368
Figura 4.66 – Comparação do desempenho entre o controle ativo em malha fechada e a planta passiva, com µ =0,002 (gráficos da esquerda) e µ =5 x10-4 (gráficos da direita).
Como resultado da análise dos gráficos da figura 4.66, verifica-se que os dois
controladores foram capazes de atenuar a amplitude das acelerações na carroceria do veículo
(1º gráfico, linhas na cor azul), o que é um indicador de melhoria do conforto. O controlador
com µ =5 x10-4 apresentou melhor desempenho na faixa de freqüência entre 1 e 6 Hz, o que
era esperado, em razão do posicionamento da resposta em malha aberta deste controlador ter
se posicionado melhor em relação à barreira de desempenho.
Com relação ao “stroke” (2º gráfico, linhas na cor magenta), verifica-se que os sistemas
controlados aumentaram um pouco a amplitude dos deslocamentos relativos entre roda e
carroceria nas faixas de freqüência entre 0,6 e 1,2 Hz e acima de 20 Hz. Porém, não houve
aumento para freqüências abaixo de 0,5 Hz que seria uma situação indesejável. O controlador
com µ =0,002 foi o que apresentou menores amplitudes de ‘stroke”, sendo neste caso a
melhor opção. Os dois controladores reduziram a amplitude do “stroke” na faixa entre 1,2 e
3,0 Hz.
A faixa de freqüência mais crítica para a deformação dos pneus está ente 8 e 12 Hz,
onde em geral ocorre a ressonância de vibração vertical da massa das rodas. Os gráficos da
figura 4.66 (3º gráfico, linhas na cor vermelha) mostram que apenas o controlador com µ =5

369
x10-4 apresentou uma amplitude significativamente maior que o sistema passivo. Mesmo com
esse resultado, estas amplitudes se mantiveram em níveis aceitáveis, o que demonstra que o
critério de segurança foi levado em conta de forma implícita na síntese destes controladores.
Para demonstrar que o critério de segurança está ligado à escolha da matriz L, foram
sintetizados outros dois controladores utilizando as matrizes 1pL e 2pL . Os valores de µ
foram ajustados de forma que a amplitude máxima da resposta em freqüência dos sinais de
aceleração31 fosse 15 dB. Nesta situação, as respostas em freqüência dos sinais de deformação
dos pneus foram comparadas com as mesmas respostas do sistema passivo, sendo calculada a
sua variação percentual. Este resultado é apresentado no gráfico da figura 4.67, onde o nível
zero significa que a amplitude resultante do sistema ativo é igual ao do passivo, e acima de
zero significa que a amplitude do sistema ativo e maior do que o do sistema passivo. A curva
em azul é o resultado do controlador sintetizado a partir de 3pL , a curva em magenta é o
resultado da síntese com 1pL , e a curva em vermelho é resultado da síntese com 2pL .
Analisando-se o gráfico da figura 4.67, concluiu-se que o controlador sintetizado a partir
de matriz 3pL foi o que apresentou a menor variação da amplitude da deformação dos pneus
ao longo de todo o espectro analisado, mas principalmente na faixa de freqüência mais crítica
que se encontra entre 8 e 12 Hz. Isto demonstra que a matriz 3pL é realmente a melhor opção
para a síntese de controladores para sistemas de suspensão.
Figura 4.67 – Variação da deformação dos pneus nos sistemas ativos em relação ao passivo.
31 Equivalente aos gráficos da aceleração, com linhas azuis, no topo da figura 4.66.
10-1
100
101
102
-80
-60
-40
-20
0
20
40
60
Freqüência(Hz)
Var
iaçã
o em
rel
ação
ao
sist
ema
pass
ivo
(%)
Deformações dos pneus - Comparação de três versões da matriz L

370
4.3.7.8 Discretização do controlador
Colocando-se a MTF dos controladores na forma de espaço de estados, as matrizes A, B
e C ficaram assim:
ccc KDKCKKBAA oo qqnb −++= (4.57)
⋅=
T
x
x
T
c S0
0SKB o
43
43 (4.58)
cc KSSC ⋅⋅−= u (4.59)
Neste caso a matriz D é nula.
Os controladores foram discretizados através da função “c2d(Ac,Bc,Ta)” do Matlab,
onde Ta é o período de amostragem de 4 ms, de forma que se passou a ter o seguinte sistema
em tempo discreto:
kcdkcdk yBxAx ⋅+⋅=+1 (4.60)
kck xCu ⋅= (4.61)
onde
acT
cd eAA = (4.62)
c
T
t
cd
a
c dte BB A ⋅
⋅= ∫
0
(4.63)
4.3.8 GRAMPEADOR DE SINAL PARA O ATUADOR SEMI-ATIVO
Como o atuador SA só é capaz de gerar forças dissipativas, o seu sinal de controle deve
ser levado a zero quando o controlador solicitar a ação de uma força ativa. As variáveis que
mostram se a força é ativa ou dissipativa é a própria força solicitada pelo controlador e a
velocidade relativa entre roda e carroceria ( 12z& ).
Assim a regra usual utilizada para o grampeamento do sinal de força é definida como:

371
( )( ) ( ) ( )
( ) ( )
≤⋅
>⋅=
0 se 0
0 se
12
12
iik
iikik
iSA zu
zuuf
&
& (4.63)
onde ku é o vetor das forças solicitadas pelo controlador discretizado no período “k” , o
índice “i” representa o i-ésimo elemento dos vetores que têm 4 elementos (cada um
relacionado com um das rodas do veículo). E a variável SAf é o sinal de força grampeado para
o atuador SA.
Entretanto, como foi verificado na parte 1 deste trabalho, os atuadores baseados em
fluidos MR apresentam um comportamento de histerese na sua relação força versus
velocidade de movimentação do pistão. Este comportamento faz com que a força gerada pelo
atuador seja diferente de zero no instante em que velocidade do pistão passa por zero. Neste
caso, a regra de grampeamento descrita na equação (4.63) torna-se inadequada, pois nos
instantes próximos às mudanças de sentido da velocidade do pistão, o atuador poderá estar
gerando forças no sentido oposto ao solicitado pelo controlador.
Para resolver este problema, propõe-se a utilização do sinal de força gerado pelo atuador
SA no lugar das velocidades 12z& na regra que define o grampeamento. Porém, para não se ter
a necessidade da medição do sinal de força, visto que células de carga para medição de forças
na faixa dos 5 kN tem um custo muito elevado para a aplicação, propõe-se a utilização de uma
estimativa da força gerada por um modelo do atuador MR. Desta forma a equação (4.63) pode
ser reescrita como:
( )( ) ( ) ( )
( ) ( )
≤⋅
>⋅=
0 se 0
0 se
iSAik
iSAikik
iSA fu
fuuf )
)
(4.64)
Uma vez definida a força que se deseja que o atuador SA aplique ao veículo, é
necessário transformar este valor em uma tensão elétrica de excitação do atuador. Para isso, as
aproximações lineares das relações entre força e tensão elétrica de excitação descritas nos
gráficos de calibração dos atuadores da figura 4.36 são utilizadas para fazer esta
transformação. Assim, o valor absoluto de cada elemento do vetor SAf passa por uma
transformação linear que inverte as funções apresentadas da figura 4.36.

372
4.3.9 REDUÇÃO DO TEMPO DE RESPOSTA DO ATUADOR SEMI-ATIVO
Conforme foi verificado a partir dos experimentos com os atuadores, a constante de
tempo de resposta dos atuadores MR ficou em torno de 25 ms, que é relativamente alta para
esta aplicação, de forma que a banda de resposta em freqüência do atuador não seja larga o
bastante para o controle de vibração das rodas, cuja ressonância ocorre em torno dos 10 Hz.
Portanto, qualquer medida que resulte numa redução do tempo de resposta traz benefícios ao
desempenho do sistema como um todo.
Por outro lado, sabe-se também que a maior parcela deste atraso (>80%) é causada pela
alta indutância do circuito eletromagnético da válvula de controle do fluido MR. Como o
controle efetivo da força do atuador se dá pela intensidade da corrente elétrica que percorre a
bobina da válvula MR, pode-se controlar a intensidade da tensão de excitação do atuador de
forma a corrente atinja mais rapidamente os valores desejados.
Assim, foi desenvolvido o compensador “avanço-atraso” cujo diagrama de blocos é
apresentado na figura 4.68. Nesta figura Ta é o período de amostragem do sinal e ηo tem um
valor de cinco vezes o parâmetro η atuadores MR. O último bloco, denominado saturação,
limita a saída entre +10 V e -10 V que é a capacidade da fonte de energia elétrica disponível
no veículo.
Figura 4.68 – Diagrama de blocos do compensador
A ação deste compensador é ilustrada nos gráficos da figura 4.69. Neste exemplo são
aplicados degraus de tensão de amplitude 3 V na entrada do atuador. No primeiro gráfico da
figura 4.69 observa-se que o compensador gera um pulso de tensão com amplitude 2,5 vezes a
tensão aplicada na entrada (curvas na cor azul), forçando a corrente elétrica no circuito RL
atingir mais rapidamente o valor desejado. A mesma coisa acontece quando o sinal de entrada
vai para zero, onde o compensador gera um pulso de tensão negativo para vencer a inércia da
corrente elétrica no circuito indutivo. Esta estratégia fica limitada quando as solicitações de

373
tensão se aproximam dos 10 V, visto que a saturação da saída impede que o pulso atinja a sua
máxima intensidade.
Figura 4.69 – Resultados de simulações do atuador com o compensador “avanço-atraso”.
A partir do resultado do terceiro gráfico da figura 4.69 verifica-se que a resposta do
atuador ficou mais rápida. Estimou-se que a constante de tempo do atraso reduziu de 25 ms
para 8 ms, o que já é satisfatório para a aplicação.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-10
-5
0
5
10Tensão de entrada: normal(vermelho) e gerada pelo compensador (azul)
Ten
são
elét
rica
(V)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-1
-0.5
0
0.5
1Velocidade do pistão do atuador
Vel
ocid
ade
(m/s
)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-1000
-500
0
500
1000Resposta do atuador: normal (magenta) e compensada (preto)
For
ça (
N)
Tempo (s)

374
4.4 SIMULAÇÕES
A partir dos modelos dinâmicos já ajustados para representar de forma bem aproximada
o desempenho dos sistemas reais, foi possível desenvolver uma série de análises a partir de
simulações numéricas destes modelos. Destas análises foram extraídas conclusões sobre as
proposições realizadas ao longo deste trabalho, e foi definido o procedimento mais conciso e
objetivo para realização dos testes experimentais.
4.4.1 OBJETIVO
Os objetivos das simulações foram:
1. comparar o desempenho do controlador ativo e SA com o sistema de suspensão passivo;
2. correlacionar índices de desempenho do sistema com os parâmetros de projeto;
3. verificar a eficácia das proposições para a nova forma de grampeamento do sinal do
atuador e para a redução do tempo de resposta dos atuadores;
4. avaliar os efeitos do ruído de medida e viés dos sensores no desempenho do sistema;
5. definir os índices de desempenho mais adequados para a análise dos dados experimentais;
6. restringir os experimentos ao mínimo de testes necessários para as validações dos
resultados teóricos e de simulação, visto que os testes experimentais são sempre
dispendiosos no seu custo e no tempo necessário apara sua realização;
4.4.2 DEFINIÇÃO DO MODELO PARA SIMULAÇÃO
Conforme resultado da pesquisa (seção 2.4.4 da parte 2) é importante utilizar modelos
não-lineares como referência para comparação de desempenho entre os sistemas
convencionais e os sistemas SA de suspensão. Neste sentido foi utilizado como modelo de
referência o mais completo modelo da caminhonete, identificado na seção 4.1.6 (parte 2),
cujos parâmetros estão listados na tabela 4.7.
Este modelo conta com uma entrada que já considera as alavancagens da suspensão e
pode ser utilizado com os amortecedores convencionais não-lineares, e também com os
modelos dos atuadores MR (vide seção 4.2.3, parte 2).

375
Porém, como as simulações visam uma avaliação do desempenho em segurança, que
neste caso está relacionado com as forças de contato dos pneus com o solo, foi acrescentada
uma não linearidade de contato que pode representar a perda do contato entre o pneu e o solo.
Para isso, o modelo sofreu as seguintes modificações:
• o efeito da gravidade, assim as molas e o pneu passaram a apresentar uma deformação no
equilíbrio estático do modelo, que antes era zero;
• o efeito da cessão da força que o pneu exerce na roda, quando este perde contato com o
solo e não apresenta mais deformação;
• a introdução de uma curva não-linear de força versus deformação dos pneus;
• e o efeito da interrupção do sinal de entrada quando o pneu perde contato com o solo.
O modelo com esta nova configuração foi validado através dos dados experimentais e os
resultados foram equivalente àqueles apresentados na tabela 4.8, com uma variação de no
máximo 5% dos valores RMS dos erros.
O modelo da caminhonete foi simulado em tempo contínuo no aplicativo Simulink
utilizando o algoritmo Runge-Kutta quarta/quinta ordem32 (RK45). Como o controlador e o
modelo do atuador MR foram implementados no modo discreto e precisaram interagir com o
modelo em tempo contínuo, foram utilizados blocos “segurador de ordem zero” (“zero order
hold” - ZOH) para adequação ao uso do algoritmo RK45.
4.4.3 DEFINIÇÃO DOS SINAIS DE ENTRADA PARA SIMULAÇÃO
Para simular o modelo do veículo é necessário ter à disposição dados sobre as
perturbações exógenas, que neste caso são as velocidades verticais que o contorno da
superfície do terreno aplica às quatro rodas do veículo. Estes dados podem ser sintetizados a
partir da definição de uma curva de densidade espectral de potência, ou obtidos por meio de
experimentos. Neste trabalho deu-se preferência por dados obtidos experimentalmente,
explorando o veículo em duas situações bem definidas: primeiro passando lentamente (~2m/s)
por um obstáculo, no caso a lombada utilizada no processo de identificação do modelo, e
32 Dormand, J. R. and P. J. Prince, A family of embedded Runge-Kutta formulae, J. Comp. Appl. Math., Vol. 6, 1980, pp 19-26.

376
segundo, trafegando a aproximadamente 14 m/s numa pista não pavimentada em que ocorre o
efeito denominado “side thrust”, descrito na seção 2.4.10 (parte 2).
Assim, foram selecionados dois conjuntos de sinais de entrada:
• Lombadas alternadas, conforme a figura 4.23 (seção 4.1.6, parte 2), que
correspondem a 6 segundos de dados coletados a uma freqüência de 50 Hz;
• Pista não pavimentada, onde as “ondulações” da superfície foram capazes de
gerar o efeito “side thrust” no veículo, e que correspondem a 12 segundos de
dados coletados a uma freqüência de 50 Hz.
A figura 4.70 apresenta os sinais de entrada relativos à pista não pavimentada.
Figura 4.70 – Sinais de velocidade vertical da pista não pavimentada.
1 2 3 4 5 6 7 8 9 10 11 12-4
-2
0
2
4Posição dianteira esquerda
Vel
ocid
ade
m/s
1 2 3 4 5 6 7 8 9 10 11 12-4
-2
0
2
4Posição dianteira direita
Vel
ocid
ade
m/s
1 2 3 4 5 6 7 8 9 10 11 12-4
-2
0
2
4Posição traseira esquerda
Vel
ocid
ade
m/s
1 2 3 4 5 6 7 8 9 10 11 12-4
-2
0
2
4Posição traseira direita
Vel
ocid
ade
m/s
Tempo (s)

377
4.4.4 DEFINIÇÃO DOS RUÍDOS DE MEDIDA PARA SIMULAÇÃO
Os ruídos de medida foram simulados a partir de sinais aleatórios com distribuição
gaussiana com média e variância definidas conforme a tabela 4.18
Tabela 4.18 – Média e variância dos sinais de ruído gaussiano.
As médias diferentes de zeros visaram representar o viés de cada sensor. As variâncias
foram definidas a partir da análise dos sinais reais dos sensores.
4.4.5 AVALIAÇÃO DO “TRANCO” E DO DESEMPENHO EM SEGURANÇA
O desempenho em segurança é medido através da avaliação das forças normais do
contato entre cada roda e o solo. Esta avaliação é feita através de um índice que é definido
como o valor RMS do sinal correspondente às deformações dos pneus menores do que 10
mm. Este sinal é zero quando a deformação é maior que 10 mm, e igual a 10 mm menos a
deformação do pneu quando esta é menor do que 10 mm. Este índice representa um valor
proporcional ao tempo que o pneu permaneceu com deformação menor do que 10 mm, e
também à intensidade da redução das forças normais.
O “tranco” é medido de duas formas: a primeira é através do valor RMS dos sinais
resultantes da derivada das acelerações verticais da carroceria, a outra é através do maior
valor absoluto que cada sinal da derivada das acelerações apresentou durante a simulação. O
primeiro avalia o “tranco” como a média da “energia” dos solavancos ao longo de toda a
simulação. O segundo avalia a intensidade do maior solavanco que ocorreu durante a
simulação.
Média Variânciadianteiro esquerdo +0,30 m/s2 0,25 m2/s4
dianteiro direito -0,10 m/s2 0,25 m2/s4
traseiro esquerdo -0,20 m/s2 0,25 m2/s4
traseiro direito +0,05 m/s2 0,25 m2/s4
dianteiro esquerdo -0,003 m 10-6 m2
dianteiro direito -0,001 m 10-6 m2
traseiro esquerdo +0,004 m 10-6 m2
traseiro direito -0,002 m 10-6 m2
Ace
lerô
met
roP
oten
ciôm
etro
Sensor

378
4.4.6 SIMULAÇÃO DO CONTROLADOR ATIVO
O controlador ativo foi simulado substituindo o modelo do amortecedor convencional
pelos sinais de força calculados pelo controlador na sua forma discreta. Entre as saídas do
controlador e as entradas de força de suspensão do modelo do veículo foram acrescentados
atrasos de 1ª ordem com constante de tempo de 5 ms com a finalidade de representar o tempo
de resposta estimado de um atuador ativo. Na entrada do controlador foram aplicados os
quatro sinais de aceleração vertical da carroceria e os quatro sinais de deslocamento relativo
entre roda e carroceria.
Foram simuladas três versões do controlador para cada sinal de pista descrito na seção
4.4.3. Dois controladores foram projetados com os parâmetros 002,0=µ e 4105 −⋅=µ
descritos na seção 4.3.7, e foi feito um novo projeto com 4102 −⋅=µ . O objetivo de se
simular este terceiro controlador, dado que ele não respeita as barreiras de robustez, foi
apenas de criar um terceiro ponto para análise da variação dos índices de desempenho em
relação ao parâmetro de projeto µ . Este terceiro ponto permite identificar uma curva de
tendência da variação.
Seis índices de desempenho foram definidos para se avaliar o desempenho dos
sistemas ativo e SA em comparação com o sistema passivo:
1. Valor RMS da “aceleração vertical da carroceria sobre cada roda” (conforto 1): trata-
se de uma medida indireta das acelerações a que os ocupantes do veículo ficam
expostos. O valor RMS é valor proporcional à energia contida no sinal, e que indica o
poder agressivo da vibração. Quanto menor for este indicador, menor é a “agressão”
aos ocupantes do veículo, e portanto, melhor é o conforto.
2. Valor RMS da “derivada da aceleração vertical da carroceria sobre cada roda”
(conforto 2): a derivada da aceleração da carroceria é o “tranco”, ou seja, o indicador
de solavancos percebidos pelos ocupantes do veículo. Quanto menor for este
indicador, menor é a incidência de solavancos, e portanto, melhor é o conforto.
3. Valor RMS do “deslocamento relativo entre roda e carroceria” (“rattlespace”): é um
indicador do uso do espaço de trabalho da suspensão. Quanto maior for este valor
significa que os movimentos da suspensão estão mais próximos dos seus limites, e o
risco de se atingir um batente é maior. Quando a suspensão atinge um batente (ou fim-
de-curso) ocorre um solavanco, que gera desconforto. Quanto menor o valor deste
indicador, melhor é o desempenho relativo ao “rattlespace”.

379
4. Valor RMS do “índice de falta de perda de aderência no contato entre roda e solo”
(segurança): Este é o índice de segurança descrito na seção 4.4.5. Um valor zero neste
índice indica que em nenhum momento na simulação a deformação do pneu foi menor
que 10 mm, ou seja, a força normal do contato foi sempre superior a 1700 N.
5. Valor RMS da “força de torção aplicada ao chassi” (conforto e segurança): Este
indicador mede o quanto as forças geradas pelos atuadores (sistema ativo ou SA) ou os
amortecedores (sistema passivo) atuam no sentido de torcer o chassi do veículo. As
vibrações de torção do chassi levam tanto a aspectos de desconforto como também de
insegurança. Quanto menor este indicador, melhor é o desempenho neste quesito.
6. Valor de pico da “derivada da aceleração vertical da carroceria sobre cada roda”
(conforto 3): Este indicador é uma variação do indicador descrito no item 2, que ao
invés de medir a quantidade de solavancos, mede a intensidade do maior deles. Quanto
menor o valor deste indicador, melhor é o desempenho em conforto.
A tabela 4.19 mostra os resultados destes seis indicadores relacionados às simulações
dos sistemas ativo e passivo, com o veículo passando sobre as lombadas, com velocidade
média de aproximadamente 2 m/s.
Tabela 4.19 – Resultados da simulação do veículo passando sobre obstáculos: ativo em comparação com o sistema passivo.
Descrição Posição Passivo µ=0,002 µ=0,0005 µ=0,0002
dianteiro esquerdo 2,00 0,58 0,38 0,32dianteiro direito 1,78 0,60 0,39 0,31traseiro esquerdo 1,48 0,53 0,36 0,31traseiro direito 1,61 0,55 0,37 0,32dianteiro esquerdo 23,3 6,7 4,1 3,3dianteiro direito 21,0 7,0 4,4 3,4traseiro esquerdo 16,3 5,9 3,9 3,2traseiro direito 18,8 6,4 4,3 3,5dianteiro esquerdo 12,94 10,03 10,47 10,83dianteiro direito 11,80 9,70 10,68 11,24traseiro esquerdo 13,48 11,97 12,26 12,42traseiro direito 14,76 12,61 14,08 14,78dianteiro esquerdo 0,77 0,03 0,08 0,11dianteiro direito 0,73 0,01 0,32 0,46traseiro esquerdo 0,00 0,00 0,00 0,00traseiro direito 0,00 0,00 0,00 0,00
439 0 0 0 N
Descrição Posição Passivo µ=0,002 µ=0,0005 µ=0,0002
dianteiro esquerdo 92 39 26 20dianteiro direito 93 37 25 20traseiro esquerdo 61 32 24 20traseiro direito 92 42 31 25
mm
Des
loca
men
to
rela
tivo
entr
e ro
da e
ca
rroc
eria
mm
Sinais avaliadosunidade
de medida
Ace
lera
ção
vert
ical
da
carr
ocer
ia
sobr
e ca
da
roda m/s2
Valores RMS
m/s3
"JE
RK
" de
rivad
a da
s ac
eler
açõe
s ve
rtic
ais
da
carr
ocer
ia
Torção
Índi
ce d
e ad
erên
cia
dos
pneu
s ao
sol
o (s
egur
ança
)
m/s3
Sinais avaliados Valores de picounidade
de medida
"JE
RK
" de
rivad
a da
s ac
eler
açõe
s ve
rtic
ais
da
carr
ocer
ia

380
Analisando os resultados da tabela 4.19, pode-se observar que os três indicadores de
conforto melhoram a medida que o parâmetro µ diminui, o que faz sentido, uma vez que a
diminuição do parâmetro µ leva a um aumento do ganho em malha aberta. Os três
indicadores de conforto dos sistemas ativos são bem melhores que o indicador do sistema
passivo, o que também está coerente, pois as vibrações geradas pela passagem sobre as
lombadas estão na faixa de freqüência de maior ganho da malha de controle.
Os dois indicadores relacionados ao “tranco” também melhoram a medida que o
parâmetro µ diminui. No entanto, o “tranco” é um problema mais importante nos sistemas
semi-ativos.
O indicador de desempenho no “rattlespace” tende a piorar um pouco conforme µ
diminui, porém permaneceu menor que o valor do sistema passivo para os três controladores
ativos.
Conforme o que ocorre com o “rattlespace”, o indicador de segurança também
aumenta seu valor na proporção que µ diminui, porém os três sistemas ativos apresentam
valores bem melhores que o sistema passivo. De fato, a diminuição de µ leva a função de
transferência de malha aberta a interceptar a barreira “as”, a qual se refere ao requisito de
segurança.
O valor RMS das forças de torção ficou nulo para os sistemas ativos, o que mostra a
eficácia da ação de se eliminar o modo de torção da ação do controlador. Como o chassi do
veículo não sofre menos estímulos de torção vindo da suspensão (ele ainda recebe esforços
das molas), ele tende a vibrar menos neste modo de vibração, gerando benefícios tanto para o
conforto como para a segurança.
Os valores de pico das derivadas das acelerações da carroceria também apresentam
redução conforme o parâmetro µ diminui, reforçando que o “tranco” não é um problema tão
importante para sistemas ativos.
Os gráficos das figuras 4.71, 4.72 e 4.73 mostram as saídas dos sensores de aceleração
da carroceria e deslocamento relativo da suspensão, e também do sinal de deformação dos
pneus que não é medido. Através destes gráficos é possível se comparar o comportamento dos
sistemas ativos ( 002,0=µ , 4105 −⋅=µ e 4102 −⋅=µ ) com o sistema passivo. Nestes
gráficos, as curvas em vermelho representam o sistema passivo, as curvas em azul
representam o sistema ativo com 002,0=µ , em verde, 4105 −⋅=µ , e em preto, 4102 −⋅=µ .

381
Figura 4.71 – Sinais de aceleração vertical da carroceria sobre as rodas.
Nos gráficos da figura 4.71, é possível observar que a amplitude dos sinais de
aceleração da carroceria dos sistemas ativos foi reduzida significativamente se comparada
com a amplitude dos sinais do sistema passivo. Embora existam diferenças de desempenho
entre os sistemas ativos, estas diferenças são pequenas se comparadas à melhoria que ocorreu
entre o sistema passivo e o sistema ativo com 002,0=µ . Verifica-se também que os sinais de
aceleração dos sistemas ativos não apresentaram transições abruptas de amplitude, mantendo
oscilações suaves ao longo de todo o período da simulação.
0 1 2 3 4 5 6-10
0
10Dianteiro Esquerdo
Ace
lera
ção
(m/s
2 )
0 1 2 3 4 5 6-10
0
10Dianteiro Direito
Ace
lera
ção
(m/s
2 )
0 1 2 3 4 5 6-5
0
5Traseiro Esquerdo
Ace
lera
ção
(m/s
2 )
0 1 2 3 4 5 6-10
0
10Traseiro Direito
Ace
lera
ção
(m/s
2 )
Tempo (s)

382
Figura 4.72 – Sinais de deslocamento relativo entre roda e carroceria (“stroke”).
Os gráficos da figura 4.72 apresentam os sinais de deslocamento relativo entre cada
uma das rodas e a carroceria (“stroke”). Nestes gráficos percebe-se que também há pouca
variação de desempenho entre os sistemas ativos, e que os sinais dos sistemas ativos não
ultrapassaram significativamente na amplitude os sinais de “stroke” do sistema passivo,
mostrando que a consideração deste sinal no critério de desempenho do controlador foi eficaz.
Verifica-se também que os picos de amplitude dos sinais de “stroke” dos sistemas ativos
ocorrem exatamente no momento em que as rodas passam pelo obstáculo (sobre a lombada).
0 1 2 3 4 5 6
-50
0
50
Dianteiro Esquerdo"S
trok
e" (
mm
)
0 1 2 3 4 5 6
-50
0
50
Dianteiro Direito
"Str
oke"
(m
m)
0 1 2 3 4 5 6
-50
0
50
Traseiro Esquerdo
"Str
oke"
(m
m)
0 1 2 3 4 5 6
-50
0
50
Traseiro Direito
"Str
oke"
(m
m)
Tempo (s)

383
Figura 4.73 – Sinais de deformação dos pneus.
Os gráficos da figura 4.73 apresentam os sinais de deformação dos pneus. Estes sinais
são bastante úteis para se avaliar o desempenho destes sistemas em relação ao critério
“segurança”. As forças normais de contato entre a roda e o solo são diretamente proporcionais
a estas deformações, e as forças laterais que os pneus podem gerar dependem da intensidade
das suas forças normais. Nestes gráficos foi desenhada uma faixa entre 0 e 10mm
representando uma área crítica para a o critério segurança, dado que nesta faixa as forças
normais entre a roda e o solo são inferiores a aproximadamente 1700N. Percebe-se, através
dos gráficos, que no caso do sistema passivo a deformação dos pneus dianteiros entra na área
crítica. No caso dos sistemas ativos, isto ocorre apenas com o caso de 4102 −⋅=µ , o que era
de se esperar, visto que este projeto extrapolou a barreira relativa ao critério de segurança. De
forma geral, os sistemas ativos apresentaram melhora no desempenho em relação ao critério
“segurança”.

384
A tabela 4.20 mostra os resultados dos seis indicadores relacionados às simulações dos
sistemas ativo e passivo, com o veículo trafegando numa via não pavimentada a uma
velocidade de aproximadamente 14 m/s. Como já foi mencionado, este trajeto apresenta
irregularidades capazes de gerar o efeito “side thrust”, que corresponde a um escorregamento
lateral da parte traseira do veículo devido a um movimento do eixo diferencial, onde uma das
rodas perde contato com o solo em movimentos oscilantes. O objetivo desta simulação foi o
de verificar o comportamento dos sistemas ativos para sinais de entrada exógena com
freqüências próximas às ressonâncias das massas das rodas, e de reproduzir os
comportamentos dinâmicos que lavam à ocorrência do “side thrust”.
Tabela 4.20 – Resultados da simulação do veículo na pista não pavimentada: ativo x passivo.
Analisando os resultados da tabela 4.20, verifica-se que não há, neste caso, uma
melhoria dos três indicadores de conforto à medida que o parâmetro µ diminui, e pode-se
dizer até que em conjunto estes indicadores pioraram um pouco. Isto mostra que houve uma
consideração intrínseca do critério “segurança” na síntese do controlador, pois é característica
de sistemas ativos de suspensão que consideram este critério no seu projeto, a perda de
conforto em freqüências próximas de 10 Hz, para se conseguir manter amplitudes mais baixas
na deformação dos pneus. Mesmo assim, os três indicadores de conforto dos sistemas ativos
foram melhores que os indicadores do sistema passivo.
Descrição Posição Passivo µ=0,002 µ=0,0005 µ=0,0002
dianteiro esquerdo 2,21 1,61 1,70 1,65dianteiro direito 1,82 1,27 1,31 1,22traseiro esquerdo 1,92 1,43 1,48 1,41traseiro direito 2,33 1,85 1,94 1,85dianteiro esquerdo 135,3 104,8 112,9 111,2dianteiro direito 106,6 80,1 84,0 80,0traseiro esquerdo 106,0 80,2 85,1 83,2traseiro direito 132,4 107,8 115,1 112,9dianteiro esquerdo 10,78 8,71 8,61 8,56dianteiro direito 10,51 8,70 8,70 8,75traseiro esquerdo 9,56 9,56 10,06 10,93traseiro direito 12,08 11,51 11,04 11,97dianteiro esquerdo 0,63 0,41 0,45 0,69dianteiro direito 0,59 0,38 0,45 0,64traseiro esquerdo 0,77 0,61 0,88 1,05traseiro direito 0,69 0,65 0,98 1,24
1634 0 0 0 N
Descrição Posição Passivo µ=0,002 µ=0,0005 µ=0,0002
dianteiro esquerdo 726 521 574 595dianteiro direito 554 405 398 385traseiro esquerdo 572 455 494 475traseiro direito 790 523 562 556
"JE
RK
" de
rivad
a da
s ac
eler
açõe
s ve
rtic
ais
da
carr
ocer
ia
m/s3
Sinais avaliados Valores de picounidade
de medida
Sinais avaliados Valores RMS unidade
de medida
Ace
lera
ção
vert
ical
da
carr
ocer
ia
sobr
e ca
da
roda m/s2
"JE
RK
" de
rivad
a da
s ac
eler
açõe
s ve
rtic
ais
da
carr
ocer
ia
m/s3
Des
loca
men
to
rela
tivo
entr
e ro
da e
ca
rroc
eria
mm
Torção
Índi
ce d
e ad
erên
cia
dos
pneu
s ao
sol
o (s
egu
ranç
a)
mm

385
O indicador de desempenho no “rattlespace” não varia significativamente conforme µ
diminui, e mostrou uma pequena melhora dos sistemas ativos em relação ao sistema passivo.
O indicador de segurança, neste caso, também aumenta seu valor na proporção que µ
diminui, porém a melhoria em relação ao sistema passivo não é mais tão evidente, e no caso
de 4102 −⋅=µ , o resultado do sistema ativo ficou pior que o do sistema passivo. De fato, este
valor de µ levou a função de transferência de malha aberta a interceptar a barreira “as”, que
se refere ao requisito de segurança, portanto, trata-se de um resultado coerente.
O valor RMS das forças de torção manteve-se nulo, conforme esperado.
Os valores de pico das derivadas das acelerações da carroceria apresentam aumento
conforme o parâmetro µ diminui, porém ficando bem abaixo dos valores apresentados pelo
sistema passivo, confirmando que o “tranco” não é um problema para sistemas ativos.
Os gráficos da figura 4.74 mostram as saídas dos sensores de aceleração da carroceria
e deslocamento relativo da suspensão. Nestes gráficos, as curvas em vermelho representam o
sistema passivo, as curvas em azul representam o sistema ativo com 002,0=µ , e as curvas
em preto representam o sistema ativo com 4105 −⋅=µ . Apesar da simulação ter sido rodada
sobre 12 segundos de dados de entrada, apenas o trecho entre 8 e 10 segundos foi apresentado
nos gráficos, que se refere à parte mais crítica da via onde supostamente ocorre o efeito de
“side thrust”.
Figura 4.74 – Sinais de aceleração vertical da carroceria sobre as rodas e “stroke”.

386
Através dos gráficos da figura 4.74 verifica-se que as amplitudes das acelerações na
carroceria reduziram-se apenas um pouco no caso dos sistemas ativos. O mesmo ocorre com o
“stroke”. Isso mostra a tendência do controlador em priorizar o critério “segurança” nessa
faixa de freqüência das perturbações que entram através das rodas.
Os gráficos da figura 4.75 mostram os sinais de deformação dos pneus (gráficos à
esquerda) e os pontos onde ocorreram as perdas de contato entre o pneu e o solo (gráficos à
direita). Representaram-se graficamente apenas os sinais de deformação dos pneus resultantes
da simulação do sistema passivo (curvas em vermelho) e da simulação do controlados ativo
com 002,0=µ (curvas em preto), que apresentou o melhor desempenho nesta análise.
Percebe-se através dos gráficos, que o sistema ativo reduziu a amplitude de variação da
deformação dos pneus evitando a perda de contato.
Os instantes em que ocorreram as perdas de contato são mais bem definidos a partir
dos gráficos da direita (figura 4.75). Apesar do eixo vertical destes gráficos não apresentar
uma escala definida, a amplitude significa um valor proporcional à intensidade com que a
roda se separou da pista. A partir destes gráficos, verifica-se que o sistema ativo com
002,0=µ evitou quase por completo a perda de contato entre pneus e o solo, o que não
ocorreu com o sistema ativo com 4105 −⋅=µ . Dado que estas perdas de contado nas rodas
traseiras poderiam ter resultado num efeito “side thrust”, é possível afirmar que o sistema
ativo com 002,0=µ seria capaz de mitigar este efeito indesejável da suspensão de
caminhonetes.
Figura 4.75 – Sinais de deformação dos pneus e perdas de contato entre o pneu e o solo.

387
4.4.7 EFEITO DOS RUÍDOS DE MEDIDA
Um dos aspectos analisados através das simulações foi a sensibilidade do sistema aos
erros e aos ruídos de medida. Foi uma premissa do projeto do controlador que os ruídos na
faixa de freqüência de amostragem do sinal deveriam ser bastante atenuados (> 20 dB), e que
algum viés presente nos sinais dos sensores não levasse os atuadores à saturação.
Através de uma simulação, adicionando-se aos sinais medidos os ruídos com média e
variância definidos na seção 4.4.4, chegou-se aos resultados apresentados na tabela 4.21:
Tabela 4.21 – Resultados do desempenho dos sistemas ativos com e sem o ruído de medida.
Analisando-se estes resultados, verifica-se que os ruídos e erros de medida contribuíram
para uma pequena piora do desempenho dos dois sistemas ativos analisados. O sistema ativo
sintetizado a partir de 002,0=µ , foi o que apresentou a menor sensibilidade a esta
característica dos sinais medidos, sendo a conseqüência dos seus efeitos desprezível do ponto
de vista prático. O viés dos sensores, principalmente dos acelerômetros, resultaram num viés
dos sinais de força na saída do controlador. Nestes sistemas, a força residual do atuador foi
contrabalançada pelas molas da suspensão e o sistema alterou em alguns milímetros seu ponto
de equilíbrio estático.
Descrição Posição Sem ruído Com ruído Sem ruído Com ruído
dianteiro esquerdo 0,58 0,59 0,38 0,40dianteiro direito 0,60 0,60 0,39 0,39traseiro esquerdo 0,53 0,52 0,36 0,36traseiro direito 0,55 0,54 0,37 0,37dianteiro esquerdo 6,7 7,3 4,1 7,3dianteiro direito 7,0 7,5 4,4 7,2traseiro esquerdo 5,9 6,3 3,9 6,5traseiro direito 6,4 6,7 4,3 6,4dianteiro esquerdo 10,03 11,47 10,47 14,60dianteiro direito 9,70 10,10 10,68 11,71traseiro esquerdo 11,97 11,63 12,26 11,86traseiro direito 12,61 14,76 14,08 16,10dianteiro esquerdo 0,03 0,00 0,08 0,01dianteiro direito 0,01 0,03 0,32 0,40traseiro esquerdo 0,00 0,00 0,00 0,00traseiro direito 0,00 0,00 0,00 0,00
Descrição Posição Sem ruído Com ruído Sem ruído Com ruído
dianteiro esquerdo 39 39 26 33dianteiro direito 37 40 25 38traseiro esquerdo 32 39 24 39traseiro direito 42 39 31 29
µ=0,002Valores RMS
µ=0,0005
Ace
lera
ção
vert
ical
da
carr
ocer
ia
sobr
e ca
da
roda m/s2
Sinais avaliadosunidade
de medida
"JE
RK
" de
rivad
a da
s ac
eler
açõe
s ve
rtic
ais
da
carr
ocer
ia
m/s3
Des
loca
men
to
rela
tivo
entr
e ro
da e
ca
rroc
eria
mm
Índi
ce d
e ad
erên
cia
dos
pneu
s ao
sol
o (s
egur
ança
)
mm
Sinais avaliadosunidade
de medida
Valores de pico
µ=0,002 µ=0,0005
"JE
RK
" de
rivad
a da
s ac
eler
açõe
s ve
rtic
ais
da
carr
ocer
ia
m/s3

388
4.4.8 SIMULAÇÃO DO CONTROLADOR SEMI-ATIVO
O controlador semi-ativo foi simulado sob as mesmas condições do controlador ativo.
Os atrasos de 1ª ordem, utilizados para representar a dinâmica do atuador ativo, foram
substituídos pelo modelo dinâmico em tempo discreto dos atuadores MR. Foram utilizados
quatro modelos, cada um com o conjunto de parâmetros ajustados especificamente para cada
atuador real, conforme descrito na seção 4.2 (parte 2). O controlador semi-ativo foi
implementado em três versões: uma versão chamada de “Controlador SA Básico”, outra
chamada “Controlador Proposta 1”, e a terceira versão chamada “Controlador Proposta 1 e 2”.
A versão “Controlador SA Básico” utilizou a regra definida pela equação 4.63 para
fazer o “grampeamento” do sinal, que é a forma mais tradicional segundo a literatura
consultada. Como a saída desta regra de “grampeamento” ainda é um sinal de força, e a
entrada do modelo dinâmico do atuador é uma tensão elétrica, foi utilizada a função inversa
da calibração do atuador (vide figura 4.36, parte 2) para se converter um sinal em newtons
para um sinal em volts. As tabelas 4.22 e 4.23, e os gráficos das figuras 4.76, 4.77, 4.78 e
4.79 foram gerados a partir da simulação deste modelo.
As versões “Controlador Proposta 1” e “Controlador Proposta 1 e 2” utilizaram as
propostas introduzidas nas seções 4.3.8 e 4.3.9 (parte 2), e serão analisadas na seção 4.4.9.
Na simulação do veículo passando por obstáculos também foram utilizadas três
versões do controlador ( 002,0=µ , 4105 −⋅=µ e 4102 −⋅=µ ), com o objetivo de se
identificar as tendências de variação dos indicadores em função do parâmetro µ . Os
resultados desta simulação são apresentados na tabela 4.22. A partir da análise destes
resultados verificou-se que existe uma tendência de redução do valor RMS das acelerações da
carroceria à medida que µ diminui. Em média este indicador de conforto melhorou acima de
30% em relação ao sistema passivo.
Por outro lado, os outros indicadores de conforto baseados no “tranco” mostraram um
desempenho ruim. O valor RMS do “tranco” ficou apenas 7% melhor que o respectivo
resultado do sistema passivo, mostrando um tendência de leve piora a medida que µ diminui.
Porém o valor de pico do “tranco” piorou cerca de 95% em relação ao resultado do sistema
passivo, e não mostrou uma tendência clara de variação em relação ao parâmetro µ .
Em relação ao “stroke” e ao índice de segurança, as melhoras foram em média de 30%
e 75% respectivamente, onde só o índice de segurança mostrou uma tendência de piora com a

389
diminuição de µ . A força de torção foi o índice que mais piorou, mostrando uma forte
tendência de piora na proporção que µ diminui.
Tabela 4.22 – Resultados da simulação do veículo passando sobre obstáculos: semi-ativo em
comparação com o sistema passivo.
Na simulação do veículo trafegando por uma via não pavimentada foram utilizadas
apenas duas versões do controlador ( 002,0=µ e 4105 −⋅=µ ). Os resultados desta simulação
são apresentados na tabela 4.23.
A partir da análise destes resultados verificou-se que existe uma tendência de variação
do valor RMS das acelerações da carroceria mudou. Nesta simulação este indicador aumentou
conforme µ diminuiu. A melhora em relação ao sistema passivo foi menor que aquela
apresentada na tabela 4.22. O “tranco” não apresentou um resultado tão ruim, mas mostrou
uma tendência de piora a medida que µ diminuiu.
Os indicadores dos “rattlespace” e segurança melhoraram numa taxa menor que na
simulação com obstáculos, porém as tendências se mantiveram.
A força de torção curiosamente melhorou em relação ao desempenho do sistema
passivo, e mostrou uma tendência de piorar na proporção que µ diminuiu.
Descrição Posição Passivo µ=0,002 µ=0,0005 µ=0,0002
dianteiro esquerdo 2,00 1,22 1,13 1,11dianteiro direito 1,78 1,21 1,13 1,11traseiro esquerdo 1,48 1,09 1,02 1,01traseiro direito 1,61 1,12 1,04 1,02dianteiro esquerdo 23,3 18,4 18,8 19,1dianteiro direito 21,0 19,1 19,3 19,7traseiro esquerdo 16,3 16,5 17,0 17,4traseiro direito 18,8 19,1 18,3 18,4dianteiro esquerdo 12,94 8,44 8,25 8,38dianteiro direito 11,80 7,50 7,57 7,78traseiro esquerdo 13,48 10,48 9,85 9,90traseiro direito 14,76 10,21 9,83 9,90dianteiro esquerdo 0,77 0,15 0,28 0,34dianteiro direito 0,73 0,21 0,29 0,26traseiro esquerdo 0,00 0,00 0,00 0,00traseiro direito 0,00 0,00 0,00 0,00
439 791 1072 1121 N
Descrição Posição Passivo µ=0,002 µ=0,0005 µ=0,0002
dianteiro esquerdo 92 182 174 166dianteiro direito 93 168 144 148traseiro esquerdo 61 115 133 128traseiro direito 92 204 202 193
mm
Des
loca
men
to
rela
tivo
entr
e ro
da e
ca
rroc
eria
Sinais avaliadosunidade
de medida
Ace
lera
ção
vert
ical
da
carr
ocer
ia
sobr
e ca
da
roda m/s2
Valores RMS
Índi
ce d
e ad
erên
cia
dos
pneu
s ao
sol
o (s
egur
ança
)
mm
"JE
RK
" de
rivad
a da
s ac
eler
açõe
s ve
rtic
ais
da
carr
ocer
ia
m/s3
Torção
"JE
RK
" de
rivad
a da
s ac
eler
açõe
s ve
rtic
ais
da
carr
ocer
ia
m/s3
Sinais avaliados Valores de pico unidade
de medida

390
Tabela 4.23 – Resultados da simulação do veículo na pista não pavimentada: semi-ativo em comparação com o sistema passivo.
Os gráficos das figuras 4.76 e 4.77 mostram as saídas dos sensores de aceleração da
carroceria e deslocamento relativo da suspensão, e do sinal de deformação dos pneus.
Através destes gráficos foi comparado o comportamento dos sistemas semi-ativos
( 002,0=µ , 4105 −⋅=µ e 4102 −⋅=µ ) com o sistema passivo. Nestes gráficos, as curvas em
vermelho representam o sistema passivo, as curvas em azul representam o sistema semi-ativo
com 002,0=µ , em verde, o sistema ativo com 4105 −⋅=µ , e em preto, 4102 −⋅=µ .
A primeira constatação que pode ser feita através dos gráficos da figura 4.76 é que os
sinais de aceleração da carroceria nos sistemas SA apesar de apresentarem amplitudes
menores que no caso do sistema passivo, mostram um sinal irregular, com variações menos
suaves. Verifica-se também pouca diferença no desempenho entre os diferentes controladores
avaliados. A partir da análise dos sinais de força constatou-se que nos três casos ocorreram
saturações na força dos atuadores MR, pois estes atingiram o máximo da sua capacidade. Isto
pode ser uma causa importante do desempenho similar dos três controladores.
Por outro lado, os gráficos da figura 4.77, não apresentam diferenças importantes com
relação aos gráficos das figuras 4.72 e 4.73, a não ser pelos sinais dos sistemas semi-ativos
apresentarem amplitude um pouco maior.
Descrição Posição Passivo µ=0,002 µ=0,0005
dianteiro esquerdo 2,21 1,83 2,02dianteiro direito 1,82 1,43 1,59traseiro esquerdo 1,92 1,61 1,81traseiro direito 2,33 2,06 2,26dianteiro esquerdo 135,3 118,6 137,0dianteiro direito 106,6 89,1 106,1traseiro esquerdo 106,0 87,7 102,3traseiro direito 132,4 116,9 130,7dianteiro esquerdo 10,78 8,76 8,32dianteiro direito 10,51 8,73 8,25traseiro esquerdo 9,56 9,32 8,98traseiro direito 12,08 11,12 10,71dianteiro esquerdo 0,63 0,50 0,54dianteiro direito 0,59 0,43 0,40traseiro esquerdo 0,77 0,54 0,59traseiro direito 0,69 0,56 0,64
1634 712 1045 N
Descrição Posição Passivo µ=0,002 µ=0,0005
dianteiro esquerdo 726 1136 1157dianteiro direito 554 675 1111traseiro esquerdo 572 565 895traseiro direito 790 878 930
"JE
RK
" de
rivad
a da
s ac
eler
açõe
s ve
rtic
ais
da
carr
ocer
ia
m/s3
Sinais avaliados
Sinais avaliados
Ace
lera
ção
vert
ical
da
carr
ocer
ia
sobr
e ca
da
roda m/s2
"JE
RK
" de
rivad
a da
s ac
eler
açõe
s ve
rtic
ais
da
carr
ocer
ia
m/s3
Des
loca
men
to
rela
tivo
entr
e ro
da e
ca
rroc
eria
mm
Torção
Índi
ce d
e ad
erên
cia
dos
pneu
s ao
sol
o (s
egur
ança
)
Valores RMS
Valores de pico
mm
unidade de
medida
unidade de
medida

391
Figura 4.76 – Sinais de aceleração vertical da carroceria sobre as rodas.
Figura 4.77 – Sinais do “stroke” e de deformação dos pneus.

392
Os gráficos das figuras 4.78 e 4.79 seguiram o mesmo padrão dos gráficos das figuras
4.74 e 4.75. Nos gráficos de aceleração da carroceria da figura 4.78 (lado esquerdo), as
atenuações na amplitude foram menores que o resultado mostrado pelos sistemas ativos, o que
era esperado. Com relação ao “stroke” (lado direito) não houve diferença significativa.
Conforme os gráficos de deformação dos pneus da figura 4.79 (lado esquerdo), os
sistemas semi-ativos apresentaram um resultado superior aos sistemas ativos, o que é
confirmado pelos gráficos da perda de contado entre os pneus e o solo (lado direito).
Figura 4.78 – Sinais de aceleração vertical da carroceria sobre as rodas e “stroke”.
Figura 4.79 – Sinais de deformação dos pneus e perdas de contato entre o pneu e o solo.

393
4.4.9 TESTE DAS PROPOSTAS PARA MELHORIA DE DESEMPENHO
As propostas de melhoria definidas nas seções 4.3.8 e 4.3.9 foram testadas em
simulações para se avaliar a efetividade da sua ação sobre o desempenho do sistema como um
todo. A melhoria proposta na seção 4.3.8 visa evitar que o sinal de força mude conforme a
transição da velocidade pelo zero, momento em que a força ainda não é nula (histerese)
gerando um pico de força em sentido contrário. Os resultados de simulação das duas regras de
grampeamento são apresentados no gráfico da figura 4.80. Neste gráfico é possível observar
claramente o efeito descrito acima, notando se os pequenos transientes do sinal em vermelho
quando a força está próxima de zero. No sinal de força resultante da regra de grampeamento
proposta (linha a cor preta), estes transientes deixam de existir.
Figura 4.80 – Sinais de força de controle: grampeamento convencional (curva em vermelho)
versus proposto (curva em preto).
Nas simulações realizadas comparou-se o desempenho os sistemas SA básico (sem
nenhuma das propostas) com um sistema SA com a proposta da nova regra de grampeamento,
chamada, “proposta 1”, e com outro sistema SA dotado das duas propostas, chamado de
“propostas 1 e 2”. Estas três situações foram simuladas utilizando-se os dois projetos de
controlador ativo, um sintetizado a partir de 002,0=µ , e outro a partir de 4105 −⋅=µ . A
tabela 4.24 mostra o resultado destas simulações com o sinal da pista com obstáculos
(lombadas).

394
Tabela 4.24 – Resultados da simulação com obstáculos: controle SA básico x propostas.
Neste primeiro resultado não é possível se perceber uma melhora significativa no
desempenho geral do veículo, inclusive alguns indicadores até pioraram seu resultado. Mesmo
assim, pode-se considerar que, de forma geral, as duas propostas trabalhando em conjunto
lavam a resultados um pouco melhores.
A tabela 4.25 mostra o resultado com a pista não pavimentada.
Tabela 4.25 – Simulação do veículo na pista não pavimentada: SA básico x propostas.
Descrição Posição SA básico Prop. 1 Prop. 1 e 2 SA básico Prop. 1 Prop. 1 e 2
dianteiro esquerdo 1,83 1,84 1,77 2,02 2,02 1,94dianteiro direito 1,43 1,45 1,38 1,59 1,59 1,51traseiro esquerdo 1,61 1,60 1,57 1,81 1,77 1,65traseiro direito 2,06 2,04 1,99 2,26 2,21 2,13dianteiro esquerdo 118,6 119,3 114,8 137,0 136,3 130,0dianteiro direito 89,1 89,9 86,1 106,1 105,1 99,0traseiro esquerdo 87,7 86,9 87,1 102,3 99,1 96,0traseiro direito 116,9 115,6 114,0 130,7 126,6 123,0dianteiro esquerdo 8,76 8,83 8,60 8,32 8,38 8,34dianteiro direito 8,73 8,81 8,57 8,25 8,30 8,26traseiro esquerdo 9,32 9,34 9,34 8,98 9,01 9,08traseiro direito 11,12 11,17 11,21 10,71 10,83 10,95dianteiro esquerdo 0,50 0,50 0,48 0,54 0,54 0,53dianteiro direito 0,43 0,44 0,41 0,40 0,41 0,41traseiro esquerdo 0,54 0,53 0,56 0,59 0,56 0,59traseiro direito 0,56 0,53 0,54 0,64 0,60 0,60
712 721 633 1045 1029 917 N
Descrição Posição SA básico Prop. 1 Prop. 1 e 2 SA básico Prop. 1 Prop. 1 e 2
dianteiro esquerdo 1136 1140 747 1157 1260 1010dianteiro direito 675 702 620 1111 982 730traseiro esquerdo 565 543 575 895 790 834traseiro direito 878 879 901 930 821 861
Valores RMS µ=0,0005
Valores de pico µ=0,002Valores de pico µ=0,002
Valores RMS µ=0,002
unidade de
medida
"JE
RK
" de
rivad
a da
s ac
eler
açõe
s ve
rtic
ais
da
carr
ocer
ia
m/s3
Torção
Sinais avaliados
Índi
ce d
e ad
erên
cia
dos
pneu
s ao
sol
o (s
egur
ança
)
mm
Des
loca
men
to
rela
tivo
entr
e ro
da e
ca
rroc
eria
mm
"JE
RK
" de
rivad
a da
s ac
eler
açõe
s ve
rtic
ais
da
carr
ocer
ia
m/s3
unidade de
medida
Ace
lera
ção
vert
ical
da
carr
ocer
ia
sobr
e ca
da
roda m/s2
Sinais avaliados
Descrição Posição SA básico Prop. 1 Prop. 1 e 2 SA básico Prop. 1 Prop. 1 e 2
dianteiro esquerdo 1,22 1,22 1,21 1,13 1,10 1,11dianteiro direito 1,21 1,20 1,20 1,13 1,10 1,10traseiro esquerdo 1,09 1,04 1,04 1,02 0,95 0,97traseiro direito 1,12 1,10 1,09 1,04 1,00 1,00dianteiro esquerdo 18,4 18,1 18,0 18,8 18,2 18,2dianteiro direito 19,1 18,6 18,6 19,3 18,4 18,6traseiro esquerdo 16,5 15,4 15,4 17,0 15,2 15,6traseiro direito 19,1 17,5 17,3 18,3 17,0 17,0dianteiro esquerdo 8,44 8,61 8,71 8,25 8,62 9,10dianteiro direito 7,50 7,51 7,61 7,57 7,54 7,88traseiro esquerdo 10,48 10,54 10,62 9,85 9,92 10,27traseiro direito 10,21 10,18 10,26 9,83 9,75 10,07dianteiro esquerdo 0,15 0,14 0,16 0,28 0,27 0,28dianteiro direito 0,21 0,20 0,22 0,29 0,33 0,31traseiro esquerdo 0,00 0,00 0,00 0,00 0,00 0,00traseiro direito 0,00 0,00 0,00 0,00 0,00 0,00
791 783 791 1072 1126 1038 N
Descrição Posição SA básico Prop. 1 Prop. 1 e 2 SA básico Prop. 1 Prop. 1 e 2
dianteiro esquerdo 182 185 185 174 209 212dianteiro direito 168 171 170 144 184 182traseiro esquerdo 115 125 125 133 119 128traseiro direito 204 221 221 202 216 223
unidade de
medida
"JE
RK
" de
rivad
a da
s ac
eler
açõe
s ve
rtic
ais
da
carr
ocer
ia
m/s3
Valores de pico µ=0,002 Valores de pico µ=0,002
Torção
Sinais avaliados
Índ
ice
de
ader
ênci
a do
s p
neus
ao
sol
o (s
egur
ança
)
mm
Des
loca
men
to
rela
tivo
entr
e ro
da e
ca
rroc
eria
mm
"JE
RK
" de
rivad
a da
s ac
eler
açõ
es
vert
icai
s da
ca
rroc
eria
m/s3
unidade de
medidaA
cele
raçã
o ve
rtic
al d
a ca
rroc
eria
so
bre
cad
a ro
da m/s2
Valores RMS µ=0,002 Valores RMS µ=0,0005Sinais avaliados

395
Analisando-se os resultados da tabela 4.25, nota-se que as melhorias proporcionadas
pelas duas propostas são mais evidentes. Mostra também que as melhorias proporcionadas
neste teste com pista não pavimentada superaram as pequenas perdas de desempenho que
ocorreram no teste com os obstáculos, confirmando que a aplicação da nova regra para o
grampeamento do sinal de força em conjunto com o compensador “avanço/atraso” é a melhor
opção.
Para evidenciar melhor este resultado foi feita uma síntese dos dados das simulações,
considerando a média dos resultados dentro de cada índice de desempenho. Nesta análise
considerou-se apenas o sistema SA básico, chamado apenas de “básico” e o sistema SA com
as duas propostas juntas, chamado de “proposto”. A síntese destes resultados comparados
com os resultados do sistema passivo é apresentada nas tabelas 4.26 e 4.27. A partir da análise
dos dados destas tabelas, percebe-se que o sistema “proposto” além de melhorar o resultado
de alguns índices de desempenho, tornou menos desfavorável o resultado negativo de outros
índices, como ocorre com o “conforto 3” que está relacionado com os valores de pico do
“tranco”. O índice “conforto 1” é o valor RMS da aceleração da carroceria, e o “conforto 2” é
o valor RMS do “tranco”.
Tabela 4.26 – Resultados da simulação do veículo passando sobre obstáculos: ativo x passivo.
Tabela 4.27 – Resultados da simulação do veículo passando sobre obstáculos: ativo x passivo.
Básico Proposto Básico Proposto
Conforto 1 32% 33% 37% 39%Conforto 2 7% 12% 7% 12%Conforto 3 -98% -107% -95% -120%
Torção -80% -80% -144% -137%"Rattlespace" 31% 30% 33% 30%
Segurança 76% 75% 62% 61%
µµµµ=0,002 µµµµ=0,0005Critério
Básico Proposto Básico Proposto
Conforto 1 17% 19% 7% 13%Conforto 2 14% 17% 1% 7%Conforto 3 -22% -7% -59% -31%
Torção 56% 61% 36% 44%"Rattlespace" 12% 12% 15% 15%
Segurança 25% 26% 20% 20%
µµµµ=0,002 µµµµ=0,0005Critério

396
Uma vez verificada o vantagem das propostas, foi realizada uma nova simulação com
o objetivo de comparar o sinal de força gerada pelo controlador ativo com o sinal de força
gerado pelo controlador SA proposto. Este resultado obtido a partir da simulação com o
veículo passando pelos obstáculos, e é apresentado nos gráficos da figura 4.81.
Figura 4.81 – Comparação da força do sistema ativo (vermelho) com o semi-ativo (preto).
Estes gráficos mostram o que o sinal de força do controlador ativo é muito mais suave
que o sinal de força do controlador semi-ativo, o que explica o pior resultado no “tranco”
verificado neste último. É importante notar também, que apesar do controle semi-ativo não
conseguir perfeitamente o sinal do controle ativo, ele faz uma aproximação bastante coerente.

397
4.4.10 ESCOLHA DA MELHOR CONFIGURAÇÃO DO CONTROLADOR
O objetivo desta seção foi a escolha da configuração do controlador que seria
implementado num sistema real. Para isso foram definidos pesos para cada um dos critérios
de desempenho, e a partir dos resultados das simulações obtido até aqui, foi calculada uma
pontuação para cada proposta. Foram analisadas quatro propostas:
• Controlador ativo com 002,0=µ e grampeamento convencional (básico);
• Controlador ativo com 002,0=µ , nova regra de grampeamento e
compensador (proposto);
• Controlador ativo com 4105 −⋅=µ e grampeamento convencional (básico);
• Controlador ativo com 4105 −⋅=µ , nova regra de grampeamento e
compensador (proposto);
Os índices de desempenho receberam pesos de 1 até 3, proporcionais a sua participação no
desempenho geral do veículo segundo a minha percepção pessoal, como usuário de
caminhonetes. Estes resultados são apresentados na tabela 4.25:
Tabela 4.28 – Avaliação ponderada dos resultados das simulações.
Como pode ser observado, o sistema que obteve a melhor nota foi o controlador ativo
com 002,0=µ , e com a nova regra de grampeamento e compensação (propostos). Portanto,
este foi o sistema escolhido para ser experimentado em testes reais com uma caminhonete.
Básico Proposto Básico PropostoConforto 1 1 0,2 0,2 0,1 0,1Conforto 2 3 0,4 0,5 0,0 0,2Conforto 3 2 -0,4 -0,1 -1,2 -0,6
Torção 1 0,6 0,6 0,4 0,4"Rattlespace" 2 0,2 0,2 0,3 0,3
Segurança 3 0,8 0,8 0,6 0,6Conforto 1 1 0,3 0,3 0,4 0,4Conforto 2 3 0,2 0,4 0,2 0,4Conforto 3 2 -2,0 -2,1 -1,9 -2,4
Torção 1 -0,8 -0,8 -1,4 -1,4"Rattlespace" 2 0,6 0,6 0,7 0,6
Segurança 3 2,3 2,3 1,9 1,8
2,4 2,8 -0,1 0,5
Sim
ulaç
ões
com
o
veíc
ulo
tran
sita
ndo
em v
ia n
ão
pavi
men
tada
.
Critério µµµµ=0,002 µµµµ=0,0005Pesos
Sim
ulaç
ões
com
o
veíc
ulo
pass
ando
po
r ob
stác
ulos
(lo
mba
das)
.

398
4.4.11 DEFINIÇÃO DOS EXPERIMENTOS E INDICADORES
Para definição dos experimentos com o sistema semi-ativo real, foram realizados alguns
testes preliminares do sistema. Nestes testes foi verificado que a taxa de aquisição dos dados
via interface RTDX é de apenas 25 Hz, quando o processador de dados (DSP) está rodando o
algoritmo completo de controle. Nesta condição, os sinais aquisitados só poderiam ser
analisados até uma freqüência de 12,5 Hz.
Para se calcular os novos índices foi definida uma matriz 3L , conforme segue:
−−
−−
−−
=
1//1
1//1
1//1
1//1
2
2
1
1
3
dhlh
dhlh
dhlh
dhlh
L (4.65)
onde l1, l2 e d são as mesmas constantes utilizadas no cálculo da matriz 2L na equação (3.7), e
h é a medida da altura do tórax de uma pessoa dentro da cabide do veículo em relação ao
centro de giro dos movimentos de rolamento e de arfagem. Admitiu-se h = 1m.
O objetivo de se utilizar a matriz 3L é de transformar os sinais de aceleração medidos
verticalmente em quatro cantos da carroceria em três sinais de aceleração agindo sobre a
pessoa dentro da cabine, segundo os eixos x, y e z definidos conforme a figura 2.3. E mais um
sinal de aceleração do modo de torção do chassi. Para isso, é feita uma multiplicação da
transposta de 3L pelos sinais de aceleração provenientes dos acelerômetros presos à
carroceria.
Foram então definidos novos índices de desempenho e novas formas de cálculos para
estes índices, de forma a se avaliar mais adequadamente os resultados segundo esta limitação
imposta pela tecnologia aplicada no experimento.
Os novos índices e sua descrição estão listados a seguir:
• Índice a2: este índice é calculado tomando-se o valor máximo do vetor composto
pelos valores RMS dos sinais dos acelerômetros presos à carroceria do veículo.
• Índice d12: este índice é calculado tomando-se o valor máximo do vetor
composto pelos valores RMS dos sinais dos potenciômetros presos entre as rodas
e a carroceria do veículo.

399
• Índice Torção: este índice é calculado a partir do somatório do valor absoluto de
todas as raias de freqüência (entre 0 e 12,5 Hz) do PSD do sinal de aceleração do
modo de torção.
• Índice az: este índice é calculado a partir do somatório do valor ponderado de
todas as raias de freqüência (entre 0 e 12,5 Hz) do PSD do sinal de aceleração na
direção z (vertical) que afeta a pessoa dentro da cabine. A função de ponderação
foi definida conforme a norma SAE J1490.
• Índice ay: este índice é calculado a partir do somatório do valor ponderado de
todas as raias de freqüência (entre 0 e 12,5 Hz) do PSD do sinal de aceleração na
direção y (lateral) que afeta a pessoa dentro da cabine. A função de ponderação
foi definida conforme a norma SAE J1490.
• Índice “jerk”: este índice é calculado a partir do somatório do valor absoluto de
todas as raias de freqüência (entre 0 e 12,5 Hz) do PSD multiplicada pela
respectiva freqüência de cada raia. Este cálculo é feito sobre os sinais de
aceleração vertical da carroceria. A multiplicação do valor absoluto de cada raia
pela sua freqüência tem o objetivo de se calcular a derivada temporal destes
sinais de aceleração, a fim de se ter um valor representativo do “tranco”. Para o
indicador toma-se o maior valor dos quatro valores calculados a partir dos quatro
sinais de aceleração.
Uma simulação foi realizada com a configuração do controlador escolhida para o teste
experimental. Nesta simulação os dados dos sensores foram amostrados numa taxa de apenas
25 Hz, conforme a limitação do sistema real. A simulação foi rodada sobre os dados da pista
não pavimentada, visto que na prática o experimento de passagem sobre as lombadas é difícil
de ser repetido com precisão, tornando impossível uma comparação entre o sistema passivo e
o semi-ativo. Como o sinal da via não pavimentada é mais rico, ou seja, apresenta um
espectro de freqüências mais amplo, ele tende a se aproximar de um ruído branco, criando
uma condição mais satisfatória para comparação estatística dos resultados dos sistemas
passivo e semi-ativo.
Os índices calculados a partir dos dados destas simulações são apresentados na tabela
4.29. Como os modelos não apresentam liberdade na torção, os resultados deste índice foram
nulos para os dois sistemas simulados.

400
Tabela 4.29 – Resultado dos novos índices calculados a partir de sinais simulados.
A partir dos dados da tabela 4.29 é possível desenhar um gráfico do tipo “radar” com o
valor de resultados relativos. Conforme apresentado na figura 4.82, a linha em vermelho que
passa pelos seis indicadores com valor 1, representa a referência dada pelos resultados do
sistema passivo. Os valores relativos dos resultados do sistema semi-ativos são desenhados
com a linha na cor azul. Com exceção do sinal de torção, do qual não se pode tirar nenhuma
conclusão, os demais índices apresentaram uma melhoria significativa nos seus resultados e
que tem coerência com as demais análises realizada anteriormente. Isto demonstra que este
procedimento é confiável para ser aplicado nos experimentos reais.
Figura 4.82 – Gráfico “radar” com os índices de desempenho.
a2 d12 Torção az ay "Jerk"
m/s2 m m/s2"energia" "energia" m/s3
Passivo 1,9877 0,0088 0,0000 0,1758 0,6229 35,4474
SA 1,6931 0,0086 0,0000 0,1165 0,3679 29,7694
Sistema

401
4.5 TESTES EXPERIMENTAIS DA SUSPENSÃO SEMI-ATIVA
A parte final do trabalho foi o teste experimental do sistema semi-ativo. O sistema
passivo foi também testado nas mesmas condições para que fosse possível ser realizada uma
comparação entre os dois sistemas. Para colocar em funcionamento o sistema de controle
semi-ativo, outros circuitos eletrônicos foram acrescentados para interconectar o módulo de
controle digital com os atuadores. Também foi preparado um diagrama de blocos do
controlador completo no Simulink®, para se programar o DSP através dos aplicativos Matlab®
e Code Composer Studio® (CCS) trabalhando em conjunto. O trabalho de Perrella (2005) é
uma boa referência para aplicações de controle que utilizam “kits target” baseado em DSP e o
aplicativo CCS, e foi utilizado para orientar implementação nesta aplicação.
4.5.1 ELETRÔNICA DE POTÊNCIA
Um circuito eletrônico de potência foi desenvolvido para conectar o módulo de controle
digital aos atuadores. Este circuito foi chamado “módulo de potência” e foi construído com
componentes de baixo custo e facilmente encontrados no mercado.
Como os sinais de saídas do modulo de controle são digitais do tipo modulação por
largura de pulso (“PWM”), foi necessário acrescentar um filtro passa-baixas na entrada do
módulo de potência. A freqüência dos sinais de saída foi configurada para a faixa de 20 kHz,
e o filtro passa-baixas para freqüência de corte em 5kHz, o que praticamente não interfere em
nada na faixa de freqüências de trabalho do sistema de controle.
O módulo de potência foi projetado para fornecer os atuadores tensões entre -10V e
+10V. Para tensões positivas o módulo tem capacidade para fornecer corrente elétrica até 3 A
em regime permanente, e 15 A de pico em transitórios de curta duração (menor que 1
segundo). Para tensões negativas a corrente em regime permanente é de apenas 400 mA e a de
pico de 3 A. Apesar das corrente em tensões negativa serem menores, elas são suficientes para
esta aplicação, visto que as tensões negativas ocorrem apenas de forma transitória para
acelerar o processo de redução da corrente no indutor da válvula magnética. O módulo de
potência foi alimentado apenas com a bateria de 12V disponível no veículo.
Foram construídos quatro módulos de potência idênticos. A figura 4.83 mostra uma
fotografia dos módulos prontos para serem instalados no veículo. Cada módulo de potência

402
foi instalado o mais próximo possível do seu respectivo atuador para se evitar cabos muito
longos que pudessem ocasionar redução na tensão máxima durante surtos altos de corrente.
Figura 4.83 – Módulos de potência prontos para serem instalados no veículo.
4.5.2 ALGORITMO DE CONTROLE NO SIMULINK
O algoritmo de controle foi implementado no Simulink conforme o diagrama de
blocos da figura 4.84. Como se pode observar neste diagrama, os sinais oriundos dos
conversores analógico/digital (ADC) passam por um condicionamento de sinal similar ao
descrito na seção 4.1.4 (parte 2). Os sinais condicionados são levados a entrado do
controlador implementado na sua forma discreta em espaço de estados. Em paralelo os sinais
de deslocamento relativo entre roda e carroceria são filtrados por um filtro passa baixas, com
freqüência de corte superior a do sistema de controle. Estes sinais filtrados passam por um
derivador discreto, resultando em sinais de velocidade relativa entre rodas e carroceria, os
quais são aplicados nas entradas dos modelos dos quatro atuadores MR (após os devido
ajustes de alavancagem). A saída do controlador entra no bloco que calcula a regra de
grampeamento a partir da realimentação dos sinais de força da saída dos modelos dos
atuadores MR. Os sinais da saída do bloco grampeador são aplicados nas entradas dos
compensadores “avanço-atraso” que por sua vez, injetam sinais nas entradas de controle dos
modelos dos atuadores. Estes mesmos sinais são levados às saídas tipo PWM do sistema, que
por sua vez irão alimentar os módulos de potência e acionar os atuadores reais.

403
Figura 4.84 – Diagrama em blocos do sistema de controle implementado no Simulink®.
4.5.3 DESCRIÇÃO DO EXPERIMENTO
Os testes experimentais foram realizados baseados nos resultados das simulações. Como
a passagem pelas lombadas não é um procedimento fácil de ser repetido devido à variação da
velocidade do veículo, decidiu-se restringir o teste comparativo entre o sistema passivo e o
sistema semi-ativo a um trecho de pista não pavimentada. O veículo percorreu este trajeto em
18 segundos, com velocidade aproximadamente constante. Este teste focou apenas a coleta de
informações relacionadas ao conforto, à amplitude do deslocamento entre roda e carroceria, e
ao “tranco”.
Conforme foi verificado nos testes preliminares do sistema, a taxa de aquisição dos
dados via interface RTDX é de apenas 25 Hz quando o processador de dados (DSP) está
rodando o algoritmo completo de controle. Contudo, esta situação já foi testada nas

404
simulações, e os novos índices de desempenho definidos na seção 4.4.11 foram capazes de
uma avaliação satisfatória do desempenho dos sistemas passivo e semi-ativo.
Foram realizados ao todo 15 experimentos, 10 com a suspensão passiva e 5 com a
suspensão semi-ativa. Todos os experimentos foram realizados em uma pista não
pavimentada e plana, representando um sinal “rico” que pode ser aproximado por um ruído
branco. Nesta pista, o veículo transitou em linha reta, sempre na mesma velocidade, e
percorrendo (com erro de no máximo 0,5 m) o mesmo caminho. O percurso de
aproximadamente 100 m foi percorrido a aproximadamente 20 km/h, onde foram amostrados
20 segundos de dados à taxa de 25 Hz.
As tabelas 4.30 e 4.31 apresentam os índices calculados a partir dos dados amostrados,
respectivamente a partir do sistema passivo e do sistema semi-ativo.
Tabela 4.30 – Índices calculados a partir dos dados dos testes da suspensão passiva.
Tabela 4.31 – Índices calculados a partir dos dados dos testes da suspensão semi-ativa.
a2 d12 Torção az ay "Jerk"
m/s2 m m/s2"energia" "energia" m/s3
1 2,251553 0,019357 2,471275 0,334324 0,661833 20,14192 2,22608 0,016648 3,124217 0,258192 0,616482 20,771023 2,196444 0,017048 2,666179 0,311337 0,509946 19,858154 2,590968 0,022639 2,935117 0,354763 0,497908 20,541785 2,253748 0,01861 2,999528 0,25147 0,430778 18,62899
amostra
a2 d12 Torção az ay "Jerk"
m/s2 m m/s2"energia" "energia" m/s3
1 2,44611 0,01806 3,59058 0,44588 0,58826 24,592822 2,71548 0,01854 4,21160 0,53690 0,69359 24,362143 2,60162 0,01784 3,56642 0,49577 0,60424 23,550474 2,45854 0,01872 3,97592 0,38104 0,52187 21,384665 2,63007 0,01814 4,41520 0,46133 0,53008 25,294916 2,65456 0,01734 4,66218 0,49738 0,56236 26,287627 2,51372 0,01714 3,55531 0,41716 0,54091 24,283148 2,48189 0,01733 3,69672 0,45841 0,65723 23,793359 2,63706 0,01769 3,59231 0,39302 0,75085 23,3546010 2,49185 0,01767 4,99339 0,41174 0,56751 26,00323
amostra

405
4.6 ANÁLISE DOS DADOS
Cada um dos índices de desempenho calculados a partir dos dados coletados nos 15
experimentos foi analisado estatisticamente através de um teste ANOVA “one way”. Este
teste leva em conta a variância das amostras para identificar com que confiança pode-se
afirmar que se trata de resultados de médias distintas. Os gráficos da figura 4.85 mostram os
resultados nesta análise. Como resultado pode-se afirmar com certeza superior a 99,8% que os
indicadores a2, Torção, az e “jerk” do testes com a suspensão semi-ativa correspondem a
médias diferentes dos mesmos indicadores referentes à suspensão passiva. Com relação aos
índices d12 e ay não se pode afirmar que correspondem a médias diferentes, pois poderia se
cometer um erro nesta afirmação com uma probabilidade superior a 20%.
Figura 4.85 – Gráficos com o resultado do teste ANOVA.

406
Os indicadores e as suas incertezas foram desenhados num gráfico tipo “radar” e são
apresentados na figura 4.86. Por meio deste gráfico é possível verificar melhorias nos quatro
indicadores onde se pode afirmar que os resultados do sistema semi-ativo são diferentes dos
resultados do sistema passivo. Isto comprova o sucesso da implantação prática do controlador
e de toda a teoria desenvolvida ao seu respeito.
Figura 4.86 – Gráfico “radar” com os indicadores dos testes experimentais.
Infelizmente os recursos técnicos não foram suficientes para se realizar testes objetivos
para avaliação experimental do desempenho em situações que geram o “side thrust”, que é um
dos principais fatores de segurança que afetam as caminhonetes.

407
5 CONCLUSÕES
Os sistemas de suspensão “inteligentes”, sejam eles sistemas ativos ou semi-ativos,
podem trazer benefícios de conforto e segurança aos usuários de veículos em geral. Devido à
busca por veículos mais econômicos, mais baratos, robustos, e com baixo custo de
manutenção, o Mercado automobilístico não vê com bons olhos os sistemas ativos, que são
caros, consomem mais energia e apresentam maiores custos de manutenção. Por isso, os
sistemas semi-ativos são o caminho mais provável para a disseminação dos sistemas de
suspensão inteligente para além dos limites do Mercado dos veículos de luxo.
Na aplicação destes sistemas em caminhonetes encontrou-se uma série de desafios
técnicos que precisaram ser suplantados para o sucesso deste trabalho. Como a premissa foi
desenvolver um controlador multivariável robusto e semi-ativo, visto que esta estratégia
poderia trazer benefícios em relação aos tradicionais sistemas de controle “Sky-hook”, vários
desenvolvimentos precisaram ocorrer para tornar possível a execução deste objetivo.
O primeiro desafio foi o desenvolvimento de um modelo matemático do veículo com
sete graus de liberdade e capaz de representar de forma satisfatória as principais dinâmicas do
corpo suspenso do veículo e de suas rodas. Além disso, o modelo precisava ter seus
parâmetros ajustados para uma representação mais fiel possível dos comportamentos reais do
veículo, e assim também foi desenvolvida com sucesso uma metodologia para identificação
dos parâmetros. Essa metodologia, além de identificar parâmetros com significado físico, o
que ajuda ao engenheiro a identificar possíveis erros no modelamento e poder fazer uma
análise crítica dos resultados do processo de identificação, permite também a identificação do
modelo do veículo acrescido de algumas não-linearidades importantes para sua utilização
prática.
O segundo desafio foi a adequação da síntese de controle LQG/LTR às necessidades e
contingências de sistemas de suspensão e com o uso de atuadores semi-ativos. Foi necessário
o desenvolvimento teórico no sentido de se mostrar que o procedimento LTR também ocorre
em aplicações onde as plantas apresentam funções de transferência não estritamente próprias,
que foi um resultado importante para esta classe de sistemas de controle. Também foi
necessária a inclusão de novas barreiras de projeto que considerassem situações peculiares
dos sistemas de suspensão. Como benefício de se utilizar um controlador multivariável,
buscou-se também a coordenação das forças de controle para se evitar a excitação do modo de
torção do chassi, o que foi conseguido e verificado através de dados experimentais.

408
Para se buscar a redução dos efeitos de solavancos (“tranco”), característicos de
sistemas de suspensão semi-ativos, foram propostas soluções como a nova regra para o
grampeamento do sinal de força realimentado por uma modelo dinâmico do atuador. O uso
deste conceito evitou a ocorrência indesejável de transientes no sinal de força devido à
histerese da relação força “versus” velocidade nos atuadores MR. O modelo dinâmico do
amortecedor MR, que foi um dos resultados da parte 1 deste trabalho, foi fundamental para a
aplicação desta idéia, visto que uma realimentação direta de sinais de força seria inviável em
razão dos custos e dimensões dos sensores.
A preocupação de melhorar o conforto sem prejuízo da questão segurança foi uma das
premissas deste trabalho. Neste sentido, o foco foi tentar mitigar a ocorrência da dinâmica
conhecida por “side thrust”, em que a traseira da caminhonete desloca-se lateralmente, em
razão do eixo diferencial ter uma de suas rodas oscilando com amplitude maior do que a
outra. A redução do “side thrust” foi verificada a partir da análise de resultados de simulações,
onde se constatou que os sistemas semi-ativos geraram uma redução das perdas de contato
entre o pneu e o solo, atuando no sentido de reduzir as amplitudes de oscilação das rodas.
Infelizmente esta constatação não pode ser evidenciada de forma experimental por deficiência
de recursos técnicos disponíveis.
A implementação prática do sistema também foi outro desafio, que começou com o
projeto e construção dos quatro atuadores baseado na teoria estudada na parte 1 deste
trabalho. Foi necessário se desenvolver atuadores que pudessem atingir forças até 3kN e ao
mesmo tempo permitir rápidas movimentações do pistão com baixas resistências à este
movimento, e com amplitudes de movimentação grandes. Também foi necessário aprender a
trabalhar com circuitos eletrônicos de controle baseados em “chips” DSP, e desenvolver os
circuitos eletrônicos para as interfaces entre sensores, unidade de controle e atuadores.
O trabalho utilizou técnicas de simulação para testar as soluções de controle em várias
situações de forma a reduzir a quantidade de testes experimentais para validação do sistema, e
também para testar situações impostas pela própria limitação dos recursos experimentais, tal
como a limitação da taxa de amostragem do sinal.
Apesar do resultado do experimento real ter sido satisfatório para um trabalho
acadêmico, ainda há um bom caminho a se percorrer para se chegar a um produto comercial.
No entanto, a maior contribuição deste trabalho foi criar uma base sólida para futuras
pesquisas nesta área, propondo soluções que poderão ser bastante úteis em trabalhos futuros
sobre sistemas de suspensão, bem como outros trabalhos que vierem a utilizar sistemas semi-
ativos e atuadores magneto-reológicos.

409
5.1 SUGESTÕES PARA TRABALHOS FUTUROS
Seguem algumas sugestões para trabalhos futuros.
♦ Estudar a utilização de controle semi-ativo em sistemas de suspensão com amortecedores
hidro-pneumáticos. Este tipo de amortecedor utiliza um sistema pneumático como “mola”,
além da parte hidráulica que faz a função de dissipação de energia. Um amortecedor MR
com esta característica pode levar a varias melhorias construtivas e a um melhor
desempenho em conforto.
♦ Estudar o desempenho do controlador proposto neste trabalho em relação a variação de
carga de uma caminhonete.
♦ Aumentar os graus de liberdade do modelo do veículo, considerando movimentos de
“yaw”, e modelos mais sofisticados para os pneus que considerem as forças laterais e
longitudinais destes. Assim é possível se analisar o desempenho de sistemas ativos
durante manobras e em condições de aceleração e frenagem do veículo. Além disso, a
consideração do torque do motor sobre o eixo traseiro ajuda melhorar a representação dos
efeitos de “side thrust”, visto que estes torques influem bastante no comportamento
dinâmico do eixo.
♦ Estudar o acionamento de atuadores semi-ativos na transferência de forças entre rodas
direitas e esquerdas, numa manobra de curva, com o objetivo de se controlar o
comportmento do veículo no sentido de torná-lo “understeer” ou “oversteer”.
♦ Incorporação de um sensor no atuador magneto-reológico com o objetivo de se medir
diretamente a velocidade de movimentação do pistão. Além da velocidade do pistão poder
ser medida com mais precisão, medir a diretamente o sinal de velocidade é uma
alternativa melhor em relação a se medir o deslocamento e então calcular a derivada deste
sinal.
♦ Estudar a síntese H∞ para sistemas lineares com dependência paramétrica (LPV) com o
objetivo de se projetar um controlador considerando a característica semi-ativa do atuador,
ao invés de se fazer um projeto de um controlador ativo e grampear o sinal do atuador.
Uma boa referência para este estudo é o trabalho de Poussot-Vassal et al. (2006).
♦ Considerar um re-projeto da suspensão (molas, articulações e restrições cinemáticas),
reduzindo-se o seu atrito residual e levando-se em conta a existência de atuadores semi-
ativos.

410
REFERÊNCIAS ANFLOR, C. T. M. Estudo da transmissibilidade da vibração no corpo humano na direção vertical e desenvolvimento de um modelo biodinâmico de quatro graus de liberdade. 1998. 105 p. Dissertação (Mestrado)- Escola de Engenharia da Universidade Federal do Rio Grande do Sul, Porto Alegre, 1998. ǺSTRÖM, K. J. Control System Design. Lecture notes for ME 155 A, Department of Mechanical and Environmental Engineering. University of California, Santa Barbara, 2002. Disponível em: <http://www.cds.caltech.edu/~murray/courses/cds101/fa02/caltech/astrom.html>. Acesso em 12 out. 2008. BARBIERI, F. A. A.; COSTA NETO, A.; BARROS, R. M. Virtual prototyping: a vehicle model for integrated motion control studies. In: INTERNATIONAL CONGRESS OF MECHANICAL ENGINEERING, 18., 2005, Ouro Preto. Proceedings of COBEM 2005. Rio de Janeiro: ABCM, 2005. BARBOSA, R. S. Aplicação de sistemas multicorpos na dinâmica de veículos guiados. 1999. 273 p. Tese (Doutorado)- Escola de Engenharia de São Carlos, São Carlos, 1999. BASTOW, D. Aspects of car rear suspension. Proceedings of the Institution of Mechanical Engineers. Part D. Journal of automobile engineering, London , v. 190, p. 53-76, 1976. BENDER, E. K. Optimum linear preview control with application to vehicle suspension. Journal of Basic Engineering, New York, v. 90, n. 2, p. 213-221, Jun. 1968. BIGGS, M.C. Constrained minimization using recursive quadratic programming. In: Dixon, L.C.W.; Szergo, G.P. (Ed) Towards global optimization. Amsterdam: North-Holland, 1975. p. 341-349. BIRCH, S. Audi TT Roadster, soft-top is given harder edge by Audi. Times on Line, Mar. 2th, 2007. Disponível em: <http://driving.timesonline.co.uk/tol/life_and_style/driving/new_car_reviews/article1459321.ece> . Acesso em 28 jun. 2008. BODIE, M. O.; HAC, A. Closed loop yaw control of vehicles using magneto-rheological dampers. In: WORLD CONGRESS, Detroit, 2000. SAE 2000 [S.l.: s.n] , 2000. BOKOR, J.; PALKOVICS, L. Modern control theory applies to vehicle dynamics. In: MINI CONFERENCE ON VEHICLE SYSTEM DYNAMICS, 4., 1994, Budapest. Proceedings. Budapest: Technical University of Budapest, 1994. p. 74-87. BOMBARD, A. J. F. Fluidos eletroreológicos: suspensão de IVA em óleo de milho. 1996. 74 p. Dissertação (Mestrado) - Instituto de Química da Universidade Estadual de Campinas, Campinas, SP, 1996.

411
______. Suspensões magneto-reológicas de pós de ferro carbonilo: um estudo da influência das propriedades magnéticas e do tamanho das partículas. 2005. 144 p. Tese (Doutorado) – Instituto de Química da Universidade Estadual de Campinas, Campinas, SP, 2005. ______ ; KNOBEL, M.; ALCÂNTARA, M. R.; JOEKES, I. Evaluation of magnetorheological suspensions based on carbonil iron powders. Journal of Intelligent Material Systems and Structures, Lancaster, v. 3, jul/ago 2002. BOURMISTROVA, A.; STOREY, I.; SUBIC, A. Multiobjective optimization of active and semi-active suspension system with application of evolutionary algorithm. [S.l.]: RMIT , 2005. p. 1217-1223 (Mechanical and Aerospace Engineering Report) BREESE, D. G.; GORDANINEJAD, F. Semi-active, fail-safe magneto-rheological fluid dampers for mountain bicycles. International Journal Vehicle Design, Geneve, v. 33, n. 1/3, p. 128-138, 2003. BROGE, J.L Valveless damping suspension system. Automotive Engineering International Online, p. 4, Dec. 1999. Disponivel em <http://www.sae.org/automag/techbriefs_12-99/04.htm> Acesso em: 12 out. 2008. BS – British & International Standards. BS 6841: Guide to measurement and evaluation of human expesure to whole-body mechanical vibration and repeated shock, 1987. BUTSUEN, T.; HEDRICK, J. K. Optimal semi-active suspensions for automotive vehicles: the ¼ car model. Advanced Automotive Technology, DSC-3, p. 305-319, 1989. CANALE, A. C.; FERREIRA, H. T. Estudo de ‘ride’ de um caminhão de dois eixos usando Matlab-Simulink. In: SIMPOSIO BRASILEIRO DE ACUSTICA VEICULAR, 7., São Paulo, 2003. SIBRAV 2003. São Paulo: [s.n.], 2003. CARLSON, J. D. What makes a good MR fluid. In: INTERNATIONAL CONFERENCE ON ELECTROHREOLOGICAL FLUIDS AND MAGNETO-RHEOLOGICAL SUSPENSIONS AND THEIR APPLICATIONS, 8., 2001, Nice. Proceedings. New Jersey: World Scientific, 2002. ______; CATANZARITE, D. M.; CLAIR, K. A. St. Commercial magneto-rheological fluid devices. In: INTERNATIONAL CONFERENCE ON ELECTRORHEOLOGICAL FLUIDS AND MAGNETO-RHEOLOGICAL SUSPENSIONS AND THEIR APPLICATIONS, 5., 1995, Sheffield. Proceedings. Singapore: World Scientific, 1996. p. 20-28 CARRERA, I.M. 2nd generation MagneShock™ technical data and description. Disponível em: <http://carrerashocks.com/MSGen2TechData.htm>. Acesso em: 04 ago. 2003. CHANTRANUWATHANA, S.; PENG, H. Practical adaptive robust controllers for active suspensions. In: ASME INTERNATIONAL MECHANICAL ENGINEERING CONGRESS AND EXPOSITION (IMECE), Orlando, FL, 2000. Proceedings. New York: American Society of Mechanical Engineers, 2000.
412
CHEN, Q.; KONRAD, A. A review of finite element open boundary techniques for static and quasistatic electromagnetic field problems. IEEE Transactions on Magnetics, New York, v. 33, n. 1, p. 663-676, Jan. 1997. CHOI, S. B.; BANG, J. H.; CHO, M. S.; LEE Y. S. Sliding mode control for anti-lock brake system of passenger vehicles featuring electrorheological valves. Proceedings of the Institution of Mechanical Engineers. Part D. Journal of automobile engineering, London, v. 216, p. 897-908, 2002. CHRZAN, M.J.; CARLSON, J. D. MR fluid sponge devices and their use in vibration control of washing machines. In: ANNUAL SYMPOSIUM ON SMART STRUCTURES AND MATERIALS, 8., 2001, New Beach. Proceedings. [S.l.: s.n.] 2001. CRAFT, M. J. Design optimization of MagneShockTM magnetorheological shock absorbers and development of fuzzy logic control algorithms for semi-active vehicle suspensions. 2003. 94 p. Thesis (Degree of Master os Science) – Graduate Faculty of North Carolina State University, Raleigh, 2003. CRIVELLARO, C. Estudo do aprimoramento do conforto e dirigibilidade de caminhonetes utilizando projeto de suspensão semi-ativa baseado em dispositivos magneto-reológicos. In: CONGRESSO E EXPOSIÇÃO INTERNACIONAL DA TECNOLOGIA DA MOBILIDADE, 12., 2003, São Paulo. SAE 2003. São Paulo: SAE Brasil, 2003. (Paper Series 2003-01-46) ______; SANTOS, E. C. A. Projeto de um amortecedor magneto-reológico. In: CONGRESSO E EXPOSIÇÃO INTERNACIONAL DA TECNOLOGIA DA MOBILIDADE, 13., 2004, São Paulo. SAE Technical Paper Series. São Paulo: SAE Brasil, 2004. (Paper, 2004-01-3279) ______; TAMAI, E. H. Study of ride and handling improvement of pickup light truck vehicles using robust semi-active suspension control based on magneto-rheological dampers. In: INTERNATIONAL CONGRESS OF MECHANICAL ENGINEERING , 17., 2003, São Paulo. Proceedings of COBEM 2003. São Paulo: ABCM, 2003 . CROSBY, M.; KARNOPP. The active damper : a new concept for shock and vibration control. Shock and Vibration Bulletin, Washington, 1973. CRUZ, J. J. da. Controle robusto multivariável. São Paulo: Edusp, 1996. 163 p. ______ ; BITTAR, A.; COSTA, E. A. da; SALES, R. M. Control and optimization of the electromagnetic suspension operation of a maglev vehicle . In: INTERNATIONAL CONGRESS OF MECHANICAL ENGINEERING , 17., 2003, São Paulo. Proceedings of COBEM 2003. São Paulo: ABCM, 2003. CULLITY, B. D. Introduction to magnetic materials. Reading: Addison-Wesley, 1972. DATA, S.; FRIGERIO, F. Objective evaluation of handling quality. Proceedings of the Institution of Mechanical Engineers. Part D. Journal of automobile engineering, London, v. 216, p. 297-305, 2002.

413
DELPHI TECHNOLOGY, Inc. S. Lun, R. L. Hofmann, I. Lisenker. Magnetorheological piston and damper. Int. Cl..F61F 9/53, US Patent 6.612.409 B2. Sept. 2, 2003. DELPHI CHASSIS SYSTEMS. Thinking ahead. New Haven: Mason & Madison, 1999. v. 4, n. 2/3, 1999. DE JAGER, A. G. Comparison of two methods for the design of active suspension systems. Optimal Control Appl. & Methods, Chichester, v. 12, p. 173-188, 1991. DE MAN, P.; LEMERLE, P.; MISTROT, P.; VERSCHUEREN, J-Ph.; PREUMONT, A. An investigation of a semi-active suspension for a lift truck. Vehicle System Dynamics, Amsterdam, v. 43, n. 2, p. 107-119, Feb. 2005. DOYLE, J. C.; STEIN, G. Multivariable feedback design: concepts for a classical/modern synthesis. IEEE Transactions on Automatic Control, New York, v. AC-26, n. 1, p. 4-16, Feb. 1981. DYKE, S. J; SPENCER Jr., B. F.; CARLSON, J. D. Seismic response reduction using magneto-rheological dampers. In: IFAC WORLD CONGRESS, 1996, San Francisco. Proceedings. New York: Published for the International Federation of Automatic Control by Pergamon, 1997. EHRGOTT, R. C.; MASRI, S. F. Structural control applications of an eletrorheological device. In: INTERNATIONAL WORKSHOP ON STRUCTURAL CONTROL, 1993, Honolulu. Proceedings. Los Angeles: University of Southern California, 1994. p.115-129 ELBEHEIRY, E.; KARNOPP, D. C. Optimal control of vehicle random vibration with constrained suspension deflection. Journal of Sound and Vibration, London, v. 189, n. 5, p. 547-564, 1996. FLETCHER, R. Practical methods of optimization. Chichester: John Wiley & Sons, 1987. FOX, R. W.; MCDONALD, A. T. Introduction to fluid mechanics. New York: John Wiley & Sons, 1985. GEAR, C. W. Differential-algebraic equations. In: Haug, E. D. ed. Computer aided analysis and optimization of mechanical system dynamics. Berlin: Springer-Verlag, 1984. p. 323-334. GEHM, R. Delphi improves cadillac’s ride. Automotive Engineering International, v. 109, n. 10, p. 32-33, Oct. 2001. Disponível em: <http://www.sae.org/automag/techbriefs/10-2001> Acesso em: 28 jun. 2008. GENÇ, S. Synthesis and properties of magnetorheological (MR) fluids. 2002. 168 p. Tese (Doutorado) –School of Engineering of University of Pittsburgh, Pittsburg, 2002. GILBERT, R.; JACKSON, M. Magnetic ride control. GM Tech Link, GM Dealership Service Professionals, v. 4, n. 1, Jan. 2002.

414
GILL, P.E.; MURRAY, W.; WRIGTH , M.H. Practical optimization. London: Academic Press, 1981. GILLESPIE, T. D. Fundamentals of vehicle dynamics. Warrendale: Society of Automotive Engineers, 1994. GIORGETTI, N.; BEMPORAD, A.; TSENG, H. E.; HROVAT, D. Hybrid model predictive control application towards optimal semi-active suspension. In : PROCEEDINGS OF THE INTERNATIONAL SYMPOSIUM ON INDUSTRIAL ELECTRONICS, 2005, Dubrovnik, 2005. ISIE 2005. Zagreb: Institute of Electrical and Electronics Engineers, 2005. v. 1, p. 391-398. GIUA, A.; MELAS, M.; SEATZU, C.; USAI, G. Design of a predictive semiactive suspension system. Vehicle System Dynamics, Amsterdam, v. 41, n. 4, p. 277-300, Apr. 2004. GLOVER, K.; DOYLE, J.C. A state-space approach on H∞ optimal control. Berlin: Springer-Verlag, 1989. (Lecture Notes in Control and Information Sciences, v. 135) GONÇALVES, A. J.; MEIRELLES, P. S. Damping control in hydropneumatic suspension. In : INTERNATIONAL CONGRESS OF MECHANICAL ENGINEERING, 18., 2005, Ouro Preto. Proceedings of COBEM 2005. Rio de Janeiro: ABCM, 2005. GONÇALVES, F. D. Dynamic analysis of semi-active control techniques for vehicle applications. 2001. 180 p. Dissertação (Mestrado) - Faculty of the Virginia Polytechnic Institute and State University, Blacksburg, 2001. GONCALVES, F. D.; AHMADIAN, M. In search of a suitable control policy for intelligent vehicle suspensions, intelligent systems – III. In : ASME INTERNATIONAL MECHANICAL ENGINEERING CONGRESS AND EXPOSITION, 17., 2002, New Orleans. Proceedings. New York: American Society of Mechanical Engineers, 2002. GRIFFIN, M.J. Handbook of human vibration. London: Academic Press, 1990. GUO, D. L.; HU, H. Y.; YI, J. Q. Neural network control for a semi-active vehicle suspension with a magnetorheological damper. Journal of Vibration and Control, Thousand Oaks, v.10, p. 461-471, 2004. HAĆ, A. Adaptive control of vehicle suspension. Vehicle System Dynamics, Amsterdam, v.16, p. 57-74, 1987. HAĆ, A.; YOUN, I.; CHEN, H. H. Control of suspensions for vehicles with flexible bodies – Part I: active suspensions. Journal of Dynamic Systems Measurement and Control, New York, v. 118, n. 3, p. 508-517, 1996. HAĆ, A.; YOUN, I.; CHEN, H. H. Control of suspensions for vehicles with flexible bodies – Part II: semi-active suspensions. Journal of Dynamic Systems Measurement and Control, New York, v. 118, n. 3, p. 518-525, 1996.

415
HALL, N. Ferrari 599 GTB Fiorano. Revista Quatro Rodas, ago. 2006. Disponível em: <http://quatrorodas.abril.com.br/carros/impressoes/conteudo_166081.shtml> Acesso em: 28 jun. 2008. HALVERSON, H. Magnetic ride – star wars meets the 50th car. Disponível em: <http://www.corvetteactioncenter.com/kb/question.php?qstId=503> Acesso em: 14 set. 2003. HAN, S.P. A globally convergent method for nonlinear programming. Journal of the Optimization Theory and Applications, New York, v. 22, p. 297, 1977. HAYT Jr, W. H. Engineering eletromagnetics. 4 ed. New York: McGraw-Hill, 1981. 403 p. HENROTTE, F.; HEDIA, H.; BAMPS, N.; GENON, A.; NICOLET, A.; LEGROS, W. A new method for axisymmetric linear and nonlinear problems. IEEE Transactions on Magnetics, New York, v. 29, n. 2, p. 1352-1355, Mar. 1993.
HERR, H. M.; WILKENFELD, A. User-adaptive control of a magnetorheological prosthetic knee. Industrial Robot, Bradford, v. 30, n. 1, p. 42-55, 2003. ______; WILKENFELD, A.; BLECK, O. Speed-adaptive and patient-adaptive prosthetic knee. US Patent #6.610.101 B2 – 26 Ago. 2003. HOCK, W.; SCHITTKOWSKI, K. A comparative performance evaluation of 27 nonlinear programming codes. Computing, New York, v. 30, n. 4, p. 335-358, 1983. HROVAT, D. Applications of optimal control to advanced automotive suspension design. Journal Dynamic Systems, Measurement and Control, New York, v. 115, n. 2(B), p. 328-342, 1993. (Special Issue commemorating 50 years for the DSC division) ______. Influence of unsprung weight on vehicle ride quality. Journal of Sound and Vibration, London, v. 124, n. 4, p. 497-516, 1988. ______. Survey of advanced suspension development and related optimal control applications. Automatica, New York, v. 33, n. 10, p. 1781-1817, 1997. ______; HUBBARD, M. Optimum vehicle suspension minimizing RMS rattlespace, sprung-mass acceleration and jerk. Journal of Dynamic Systems, Measurement, and Control, New York, v. 103, n. 3, p. 228-236, Sept. 1981. ______; MARGOLIS, D. L. An experimental comparison between semi-active and passive suspension for air-cushion vehicles. International Journal of Vehicle Design, Geneve, v. 2, n. 3, p. 308-321, 1981. ISO – International Organization for Standardization. ISO 2631: Guide for the evaluation of human exposure to whole body vibration, 1978. ISO – International Organization for Standardization. ISO/DP 8608: Draft proposal: road surface profile – reporting measured data, 1984.

416
IVERS, D. E.; MILLER, L. R. Experimental comparison of passive, semi-active on/off, and semi-active continuous suspensions. Warrendale: Society of Automotive Engineers, 1989. (SAE Paper, no. 892484) JANSEN, L. M.; DYKE, S. J. Semi-active control strategies for MR dampers: a comparative study. Journal of Engineering Mechanics, New York, v. 126, n. 8 , p. 795-803, 2000. JOLLY, M. R. Pneumatic motion control using magnetorheological fluid technology. Proceedings of the SPIE, Bellingham, n. 4332, p. 300-307, 2001. _______.; BENDER, J.W.; CARLSON, J. D. Properties and applications of commercial magneto-rheological fluids. In: INTERNATIONAL SYMPOSIUM ON SMART STRUCTURES AND MATERIALS, 5., 1998, San Diego. Smart structures and materials 1998. Bellingham: SPIE, 1998. JUANG, J.; LONGMAN, R. W. Optimized system identification. Hampton: National Aeronautics and Space Administration/Langley Research Center, 1999 _______; MAGHAMI, P. G. Optimal frequency-domain system realization with. Hampton: National Aeronautics and Space Administration/Langley Research Center, 1999. KAILATH, T. Linear systems. Englewood Cliffs: Prentice-Hall, 1980. 682 p. KANE, T. R.; LEVINSON, D. A. Dynamics, theory and applications. Englewood Cliffs: Prentice-Hall, 1985. 379 p. (Series in Mechanical Engineering) KARNOPP, D. C. Theoretical limitations in active vehicle suspensions. Vehicle System Dynamics, Amsterdam, v. 15, p. 41-54, 1986. _______; CROSBY, N. J System for controlling the transmission of energy between spaced members. US Patent 3.807.678, 1974. _______; ______; HARWOOD, R. A. Vibration control using semi-active force generators. Journal of Engineering for Industry, New York, v. 96, n. 2, 1974. KAWAGOE, K.; IGUCHI, M. Semi-active control and optimum preview control applications to vehicle suspension. JSAE Review, Tokyo, n. 17, p. 24-31, Aug. 1985. KELSO, S. P. Experimental characterization of commercially practical magnetorheological fluid damper. In: PROCEEDINGS OF SPIE CONFERENCE ON SMART STRUCTURES MATERIALS, Newport Beach, 2001. Proceedings. Bellingham: The International Society for Optical Engineering, 2001. (Paper n. 4332-34) KIM, C.; RO, P. I.; KIM, H. Effect of the suspension structure on equivalent suspension parameters. Proceedings of the Institution of Mechanical Engineers. Part D. Journal of automobile engineering, London, v. 213, p. 457-470, 1999. KIMBROUGH, S. Bilinear modeling and regulator of variable component suspension. [S.l: s.n] , 1986. (ASME Monograph, AMD-80, DSC-2)

417
KIRICZI, S.; KASHANI, R. Control of active suspension with parameter uncertainty and non-white road unevenness disturbance input. Warrendale: Society of Automotive Engineers, 1990. (SAE Paper, no. 902283) KO, J. M.; NI, Y. Q.; CHEN, Z. Q.; SPENCER, B. F. Implementation of MR dampers to Dongting Lake Bridge for cable vibration mitigation. In: WORLD CONFERENCE ON STRUCTURAL CONTROL, 3., Como. Proceedings. Chichester: John Wiley & Sons, 2003. v. 3, p. 767-775. KRASNICKI, E. J. The experimental performance of an ON-OFF active damper. Shock and Vibration Bulletin, Washington, v. 51, 1981. KWAKERNAAK, H.; SIVAN, R. Linear optimal control system. New York: Wiley, 1972. KWAKERNAAK, H.; SIVAN, R. The maximally achievable accuracy of linear optimal regulators and linear optimal filters. IEEE Transactions on Automatic Control, New York, v. AC-17, n. 1, p. 79-86, Feb. 1972. LAMPE, D.; GRUNDMANN, R. Transitional and solid state behavior of a magnetorheological clutch. Dresden: Dresden University of Technology, 2000. LIM, R. K.; PHAN, M. Q.; LONGMAN, R. W. State-space system identification with identifies hankel matrix. [S.l.]: Department of Mechanical and Aerospace Engineering, 1998. (Technical Report no. 3045) LISENKER, I.; HOFMANN, R. L.; HURTT, M. W. Magnetorheological piston and damper assembly. US Patent 6.874.603, Apr. 2005. LIU, Y., MATSUHISA, H.; UTSUNO, H.; GYU, J. Controllable vibration of the car-body using magnetorheological fluid damper. Vehicle System Dynamics, Amsterdam, v. 41, p. 627-636, 2004. Suplemento LORD MATERIALS DIVISION. ENGINEERING NOTE. Designing with MR fluids. [S.l.]: Lord Corporation, 1999. _______. Magnetic circuit design. [S.l.]: Lord Corporation, Cary, NC, 1999. _______. Technical Spec.; Rheonetic™ MR Fluid – MRF 132LD. Lord Corporation, Cary, NC, 2001. _______. Technical Spec.; Rheonetic™ MR Fluid – MRF 132AD. Lord Corporation, Cary, NC, 2001. _______. Technical Spec.; Rheonetic™ MR Fluid – MRF 240BS. Lord Corporation, Cary, NC, 2001. LOZIA, Z. An analysis of vehicle behavior during lane-change maneuver on an uneven road surface. In: IAVST SYMPOSIUM, 12., 1992, Lyon. Proceedings. Lisse, Swets and Zeitlinger, 1992, p. 417-431

418
MAEDA, T.; TOYODA, H.; IGARASHI, N.; HIROSE, K.; MIMURA, K.; NISHIOKA, T.; IKEGAYA, A. Development of super low iron-loss P/M soft magnetic material. SEI Technical Review: New Materials, Sumitomo, n. 60, p. 3-9, Jun. 2005. MAILAT, F.; DONESCU, S.; CHIROIU, V. On the automotive semi-active suspensions, Proceedings of the Romanian Academy. Series A, Bucureşti, v. 5, n. 1, 2004. MARGOLIS, D. L.; HROVAT, D. Semi-active heave and pitch control of a high speed tracked air cushion vehicle. In: INTERSOCIETY CONFERENCE ON TRANSPORTATION, 4., 1976, Los Angeles. Proceedings. New York: ASME, 1976. MARGOLIS, D. L.; TYLEE, J. L.; HROVAT, D. Heave mode dynamics of a tracked air cushion vehicle with semiactive airbag secondary suspension. Journal of Dynamic Systems, Measurement, and Control, New York, v. 97, n. 4, p. 399-407, 1975. MEDICAL PRODUCT MANUFACTURING NEWS. State-of-the-art prosthetic leg incorporates magneto-rheological technology. November 2000. Disponível em: <<http://devicelink.com/mpmn/archive/00/11/profile.html>. Acesso em: 15 out. 2008. MELLO, L. F. P. Projeto de fontes chaveadas. São Paulo: Ed. Érica, 1987. 292 p. MENDES, E. S. Propriedades eletroreológicas de suspensões de sulfato de hidrazina-lítio em óleo de silicone. 1996. Tese (Doutorado) - Faculdade de Engenharia Química da Universidade de Campinas, Campinas, 1996. MILLER, L. R. The efect of hardware limitations on an on/off semi-active suspension. In: INTERNATIONAL CONFERENCE ON ADVANCED SUSPENSIONS, 1988, London. Proceedings. [S.l.]: Institution of Mechanical Engineers/Institution of Electrical Engineers, 1988. ( Paper no. C442/88) MILLMAN, J.; HALKIAS, C.C. Eletrônica – dispositivos e circuitos. São Paulo: McGraw-Hill do Brasil, 1981. 877 p. v. 2. MOORE, B. Principal component analysis in linear systems: controllability, observability, and model reduction. IEEE Transactions on Automatic Control, New York, v. 26, n.1, Feb. 1981. MOKHIAMAR, O.; ABE, M. Active wheel steering and yaw moment control combination to maximize stability as well as vehicle responsiveness during quick lane change for active vehicle handling safety. Proceedings of the Institution of Mechanical Engineers. Part D. Journal of automobile engineering, London, v. 216, p. 115-124, 2002. MORAN, A.; HASEGAWA, T.; NAGAI, M. Continuously controlled semi-active suspension using neural networks. In: INTERNATIONAL SYMPOSIUM ON ADVANCED VEHICLE CONTROL, Tsukuba. Proceedings. [S.l.:s.n.] 1994, p. 305-310 MORRISH, A. H. The physical principles of magnetism. New York: John Wiley & Sons, 1965. 411 p. MOTTA, D. da S.; ZAMPIERI, D. E. Modeling of a vehicle suspension with non-linear

419
elements and performance comparison to a semi-active. In: INTERNATIONAL CONGRESS OF MECHANICAL ENGINEERING, 18., 2005, Ouro Preto. Proceedings of COBEM 2005. Rio de Janeiro: ABCM, 2005. MOURA, E. D. A. Estudo de suspensões passiva, semi-ativa MR e ativa. 2003. 143 p. Dissertação (Mestrado) - Universidade Federal de Itajubá, Itajubá, 2003. NOVAK, M.; VALASEK, M. A new concept of semi-active control of truck’s suspension. In: INTERNATIONAL SYMPOSIUM ON ADVANCED VEHICLE CONTROL, 1996, Aachen. Proceedings. [S.l]: AVEC, 1996. p. 141-151. OGATA, K. Engenharia de controle moderno. Rio de Janeiro: Prentice Hall, 1982. 929 p. OLIVEIRA, J. de; TROFINO, A.; SOUZA, C. E. Análise e síntese H∞ para sistemas LPV. SBA: Controle & Automação, Campinas, v. 13, n. 1, p. 6-12, Jan./Abr. 2002. PACKARD, A. K.; FAN, M.; DOYLE, J. A power method for the structured singular value. IEEE CONFERENCE ON CONTROL AND DECISION, 27, 1988, Austin. Proceedings. New York, IEEE, 1988, p. 2132-2137. PERRELLA, N. Laboratório de controle utilizando processador digital de sinal (DSP). 2005. 94 p. Dissertação (Mestrado) - Escola Politécnica da Universidade de São Paulo, São Paulo, 2005. PERSEGUIM, O. T. Dinâmica veicular relativa ao ride de veículos e métricas para sua avaliação. 2005. 221 . Tese (Doutorado) - Escola de Engenharia de São Carlos da Universidade de São Paulo, São Carlos, 2005. PHILLIPS, T. Amazing magnetic fluids: uma co-produção entre “exploration systems mission directorate” e “science@NASA” publicado em 2 de abril de 2003. Disponível em: <http://exploration.nasa.gov/articles/23aug_MRfluids_lite.html>. Acesso em: 10 de set. 2006. PICADO, R. M. Controle semi-ativo em suspensões automotivas. 1998. 100 p. Dissertação (Mestrado) - Faculdade de Engenharia Mecânica da Universidade Estadual de Campinas, Campinas, 1998. PINKOS, A.; SHTARKMAN, E.; FITZGERALD, T. An actively damped passenger car suspension system with low voltage electro-rheological magnetic fluid. In: INTERNATIONAL SYMPOSIUM ON ADVANCED VEHICLE CONTROL, Tsukuba, 1994. Proceedings. Tokyo, JSAE, 1994. p. 311-317. POTTER, M.C.; WIGGERT, D.,C. Mechanics of fluids. 2.ed. Upper Saddle River: Prentice Hall, 1997. POUSSOT-VASSAL, C.; SENAME, O.; DUGARD, L.; GÁSPAR, P.; SZABÓ, Z.; BOKOR, J. A LPV/HHHH∞ semi-active suspension controller design. In: WORKSHOP ON ADVANCED CONTROL AND DIAGNOSIS, Nancy, Nov. 2006. Disponível em: <<http://www.acd-2006.cran.uhp-nancy.fr/>. Acesso em: 12 out. 2008 POWELL, M.J.D. The convergence of variable metric methods for nonlinearly constrained

420
optimization calculations. In: MANGASARIAN, O.L.; MEYER, R. R. ; ROBINSON, S.M. (Ed). Nonlinear programming 3. New York: Academic Press, 1978. __________. A fast algorithm for nonlinearly constrained optimization calculations. In: Watson, G.A. (Ed) Numerical analysis . Berlin: Springer-Verlag, 1978 . (Lecture notes in mathematics ; 630 ) __________. Variable metric methods for constrained optimization. In: KORTE, Bernhard H. ; BACHEM, Achim (Ed) Mathematical programming: the state of the art. Berlin: Springer, 1983. p. 288-311. RAO, M. V. C.; PRAHLAD, V. A tunable fuzzy logic controller for vehicle-active suspension systems. In: Fuzzy Sets and Systems 85. New York: Elsevier Science, 1997. p. 11-21 REGAZZI, R. D.; XIMENES, G. M. A importância da avaliação da vibração no corpo humano, 3R Brasil tecnologia ambiental. Rio de Janeiro: INMETRO, 2000. SANCHEZ, J. P. de A. Estudo de desempenho entre suspensões passiva, semi-ativa, e totalmente ativa utilizando modelo completo do veículo. 1997. 123 p. Dissertação (Mestrado) - Escola de Engenharia de São Carlos da Universidade de São Paulo, São Carlos, 1997. SANTOS, I. F. Dinâmica de sistemas mecânicos. São Paulo: Makron Books, 2001. SAYERS, M. W. Symbolic computer methods to automatically formulate vehicle simulation codes. 1990. 316 p. Dissertation (Doctor) - The University of Michigan, Michigan, 1990. SCHELFHOUT, G. Model reduction for control design. 1996. 294 p. Thesis (PHD) - Faculteit der Toegepast Wetenschappen. Katholieke Universiteit Leuven, Heverlee, 1996. SCHITTKOWSKI, K. NLQPL: a Fortran-subroutine solving constrained nonlinear programming problems. Annals of Operations Research, Amsterdam, v. 5, p. 485-500, 1985. SHARP, R. S. Wheelbase filtering and automobile suspension tuning for minimizing motions in pitch. Proceedings of the Institution of Mechanical Engineers. Part D. Journal of automobile engineering, London, v. 216, p. 933-946, 2002. SHIMADA, Y.; MATSUNUMA, K.; NISHIOKA, T.; IKEGAYA, A.; ITOU, Y; KOISO, T. Development of a high-magnetic performance P/M soft magnetic material. SEI Technical Review, Sumitomo, n. 56, p. 46-53, Jun. 2003. SILVA, P. F. Motor viscoso de fluxo laminar com fendas circunferenciais. 1998. 197 p. Tese (Doutorado) - Escola Politécnica da Universidade de São Paulo, São Paulo, 1998. SILVA, W. M. da; PAULA, P. P. de. 12V/14V to 36V/42V automotive system supply voltage change and the new technologies. In: CONGRESSO E EXPOSIÇÃO INTERNACIONAIS

421
DA TECNOLOGIA DA MOBILIDADE, 11., 2002, São Paulo. SAE Brasil 2002. São Paulo: SAE Brasil, 2002. SIMON, D. E.; AHMADIAN, M. An alternative semi-active control method for sport utility vehicles. Proceedings of the Institution of Mechanical Engineers. Part D. Journal of automobile engineering, London, v. 216, p. 125-139, 2002. SINNECKER, J. P. Materiais magnéticos doces e materiais ferromagnéticos amorfos. Revista Brasileira de Ensino de Física, São Paulo, v. 22, n. 3, Set. 2000. SOCIETY OF AUTOMOTIVE ENGINEERS. SAE J1490: Measurement and presentation of truck ride vibrations. Warrendale, SAE, 1987. SONG, X.; AHMADIAN, M.; SOUTHWARD, S. C. Eliminating the unwanted dynamics from the controllable suspension for vehicle applications. In: ASME INTERNATIONAL INTERNATIONAL MECHANICAL ENGINEERING CONFERENCE, New Orleans, 2002. Proceedings. New York: American Society of Mechanical Engineers, 2002. SPENCER Jr., B. F.; DYKE, S. J.; SAIN M. K.; CARLSON J. D. Phenomenological model of a magneto-rheological damper. Journal of Engineering Mechanics, New York, v. 122, n. 3, Mar. 1996. _______.; YANG, G.; CARLSON, J. D.; SAIN, M. K. “Smart” dampers for seismic protection of structures: a full-scale study. In: WORLD CONFERENCE ON STRUCTURAL CONTROL, 2., Kyoto, Japan, 1998. Proceedings. Chichester/ New York: Wiley, 1999. STONE, R.; BALL, J. K. Automotive engineering fundamentals. Warrendale: SAE INTERNATIONAL, 2004 STURK, M. ; WU, X. M., WONG, J. Y. Development and evaluation of a high voltage supply unit for eletrorheological fluid dampers. Vehicle System Dynamics, Amsterdam, v. 24, p. 101-121, 1995. STUTS, L.T.; ROCHINHA, F. A. A comparison of control strategies for magnetorheological vehicle suspension systems. In: INTERNATIONAL SYMPOSIUM ON DYNAMIC PROBLEMS OF MECHANICS, 11., Ouro Preto, 2005. Proceedings of DINAME. Ouro Preto: [s.n.], 2005 SZELAG, W. Finite element analysis of the magnetorheological fluid brake transients. In: INTERNATIONAL SYMPOSIUM ON ELETROMAGNETIC FILDS IN ELECTTICAL ENGINEERING, 11., Maribor, 2003. ISEF 2003. Bradford: Emerald Group, 2004. p. 835-840. TAMAI, E. H. Estudo do problema de controle da suspensão de trens de alta velocidade levitados magneticamente. 1995. 234 p. Tese (Doutorado) - Escola Politécnica da Universidade de São Paulo, São Paulo, 1995. THOMPSON, A. G. Design of active suspensions. Proceedings of the Institution of Mechanical Engineers, v. 185 , n. 36, p. 553-563, 1971.

422
THOMPSON, A. G. An optimal suspension for an automobile on a random road. [S.l.:s.n.], 1979. (SAE Paper No. 790478) TSAO, Y. J.; CHEN, R. The design of an active suspension force controller using genetic algorithms with maximum stroke constraints. Proceedings of the Institution of Mechanical Engineers. Part D. Journal of automobile engineering, London, v. 215, p. 317-327, 2001. TSENG, H. E.; HEDRICK, J. K. Semi-active control laws – optimal and sub-optimal. Vehicle System Dynamics, Amsterdam, v. 23, n. 7, p. 545-569, 1993. TSENG, H. E.; HROVAT, D. Some additional characteristics of optimal active suspensions for quarter-car models. Dearborn: Ford Motor Company Reserch, 1989. (Report SR-89-95) ULSOY, A. G; HROVAT, D.; TSENG, T. Stability robustness of LQ and LQG active suspensions. Journal of Dynamic Systems, Measurement and Control, New York, v. 116, n. 1, p. 123-131, 1994. VANNUCCI, S. N. Variable damping suspension with electronic control. In: FISITA CONGRESS, 26., London, 1992. The vehicle and the environment: technical papers. London: Automotive Technology Serving Society, 1992. VIEIRA, S. L. Caracterização das propriedades mecânicas e reológicas de fluidos eletroreológicos. 1996. 158p. Tese (Doutorado) - Faculdade de Engenharia Mecânica da Universidade Estadual de Campinas, Campinas, 1996. WATTON, J.; HOLFORD, K. M.; SURAWATTANAWAN, P. Electrohydraulic effects on the modeling of a vehicle active suspension. Proceedings of the Institution of Mechanical Engineers. Part D. Journal of automobile engineering, London, v. 215, p. 1077-1092, 2001. WOERNLE, C. Position and force control of multibody systems by feedback linearization. In: Flexible Mechanisms, Dynamics, and Analysis: Presented at the 1992 ASME Design Technical Conferences, 1992, Scottsdale. Proceedings. v. 47, p. 11-18, 1992. WOODBURY, M. A. Inverting modified matrices. Princeton: Princeton University, 1950. ( Memorandum Report 42, Statistical Research Group) YAMAMURA, S.; OHNISHI, K; MASADA, E. Theory of control system of electromagnetically levitated bogie truck. Electrical Engineering in Japan, New York, v. 99, n. 6, p. 62-69, 1979. YAMASHITA, M.; FUJIMOTI, K.; UHLIK, C.; KAWATANI, R.; KUMURA, H.
∞H control of an automotive active suspension. In: IEEE CONFERENCE ON DECISION CONTROL,29., 1990, Honolulu. Proceedings. New York: Institute of Electrical and Electronics Engineers, 1990. p. 2244-2250. YEH, E. C.; LU, S. H.; CHEN, C. C. A genetic algorithm based fuzzy system for semi-active suspension system design. In: INTERNATIONAL SYMPOSIUM ON ADVANCED VEHICLE CONTROL, Tsukuba. Proceedings. Tokyo, Japan: JSAE, 1994. p. 189-194.

423
YOO, J. H.; WERELEY, N. M. Design of a high efficiency magnetorheological valve. Journal of Intelligent Material Systems and Structures, Lancaster, v. 13, p. 679-685, Oct. 2002. YOSHIOKA, H.; RAMALLO, J. C.; SPENCER Jr., B. F. “Smart” base isolation strategies employing magneto-rheological dampers. Journal of Engineering Mechanics, New York, p. 540-551, May 2002. YUE, C. ; BUTSUEN, T.; HEDRICK, J. K. Alternative control laws for automotive active suspensions. In: AMERICAN CONTROL CONFERENCE, Philadelphia. Proceedings. Evanston: American Automatic Control Council, 1988. p. 2373-2376.

424
APÊNDICE A – Solução RLQ para sistema de 1 grau de liberdade
Dado o sistema de equações diferencias referente à figura A.1
==
−=
sM
tUtutx
twtxtx
)()()(
)()()(
2
21
&
&
(A.1)
Figura A.1 – Modelo com um grau de liberdade(1DOF).
onde w(t) é um sinal que pode ser aproximado por um ruído branco de média zero.
Deseja-se minimizar o funcional de custo
( )
+= ∫ dtxrxEJ ft
0
22
21 & (A.2)
A partir da hipótese de que a variável aleatória, w(t), tem média nula, pode-se afirmar que,
quando ∞→ft , vale a seguinte aproximação para o funcional de custo J:
( ) ( )dtxrxdtxrxEJft
0
22
21
t
0
22
21
f
lim ∫∫∞
∞→
+≅
+= && (A.3)
O sistema da equação (A.1) pode ser escrito na forma matricial, como segue:

425
uwx
x
x
x⋅
+⋅
−+
⋅
=
1
0
0
1
00
10
2
1
2
1
&
& (A.4)
ou ainda
uw ⋅+⋅+⋅= BLxAx& (A.5)
onde
=
−=
=
=
1
0 e ,
0
1 , ,
00
10
2
1 BLxAx
x (A.6)
Admitindo-se também a hipótese de que existe uma matriz P positiva-definida real e
simétrica, tal que:
( ) ( ) [ ]∞∞∞
−=+=+≅ ∫∫ 0
00
22
21 PxxRuuQxx TTT dtdtxrxJ & (A.7)
onde
r=
= RQ e ,
00
01 (A.8)
Considerando-se o problema de controle ótimo de determinar a matriz K de ganho de
realimentação de estados, de forma que:
)()( ttu xK ⋅−= (A.9)
A equação (A.7) pode ser desenvolvida como segue:
( ) ( )
( )( ) xBKAPxPxBKAxxRKKQx
xPxPxxRKxKxQxx
PxxRuuQxx
)()'( −−−−=+⇒
−−=+⇒
−=+
TTTT
TTTTT
TTT
dt
d
&& (A.10)
Comparando ambos os lados da equação (A.10) e notando que esta equação deve ser
verdadeira para qualquer x, impõe-se que:

426
( )RKKQBKAPPBKA T+−=−+− )()'( (A.11)
Pelo segundo método de Liapunov, se a matriz )( BKA − é Hurwitz, a matriz positiva
definida P existe e é única. Considerando-se que 0)( =∞x segundo a hipótese de
estabilidade, o índice de desempenho pode ser escrito como:
)0()0( xPx ⋅⋅= TJ (A.12)
Para se poder resolver a equação (A.11) é preciso definir K como uma função de P.
Dado que r=R , é possível então se considerar a seguinte relação:
PBK T
r⋅=
1 (A.13)
Assim, a equação (A.11) pode ser reescrita conforme segue:
01
' =+⋅−+ QPPBBPAPA T
r (A.14)
A equação (A.14) , conhecida como Equação Algébrica de Riccati (EAR), precisa ser
resolvida para se encontrar a matriz P. Como este resultado somente é válido se a matriz
)( BKA − é Hurwitz , antes é necessário verificar se o posto da matriz:
[ ]TTT SAS M (A.15)
é igual a 2, onde a matriz S é definida por
[ ]0100
01=⇒
== SQSST (A.16)
o que confirma a hipótese de que )( BKA − é estável, visto que o posto de (A.15) é de fato
igual a 2.
Desenvolvendo-se a equação (A.14), tem–se:

427
[ ]
=
+
⋅⋅
⋅
⋅−
+
⋅
+
⋅
00
00
00
0110
1
01
00
10
01
00
2212
1211
2212
1211
2212
1211
2212
1211
pp
pp
pp
pp
r
pp
pp
pp
pp
(A.17)
Que pode ser simplificada para:
=
+
⋅−
+
00
00
00
011
0
0002222212
2212212
12
11
1211 ppp
ppp
rp
p
pp (A.18)
De onde se obtém as seguintes equações:
02
0
01
122212
1221211
1212
=−
=−
=−
−
−
−
rpp
rppp
rp
(A.19)
Resolvendo este sistema de equações e impondo que P seja positiva-definida, obtém-se:
=
=
2
24
32
1
21
41
2212
1211
rr
rr
pp
ppP (A.20)
A matriz de ganho de realimentação ótima K é então obtida de:
[ ] [ ]22
210
14
12
1
43
21
21
41
−−=
⋅⋅= rr
rr
rr
rK (A.21)
Portanto o sinal de controle ótimo é:
)(2)()()( 214
12
1
txrtxrttu ⋅⋅−⋅−=⋅−= −−xK (A.22)
c.q.d.

428
APÊNDICE B – Identidades de Álgebra Matricial
B.1 – LEMA 1 (Lema da inversão Matricial-LIM) Também conhecido como Woodbury formula (WOODBURY, 1950), ou Sherman-
Morrison-Woodbury formula, esta identidade matricial é definida conforme segue:
( ) 1111111 −−−−−−−+−=+ VAU)VAU(BAAUBVA . (B.1)
onde A, U, B e V denotam matrizes de tamanho compatível. No caso mais geral A é nn × , U é
kn × , B é kk × e V é nk × . Casos especiais decorrem quando n = k, ou quando uma ou mais matrizes são matrizes identidade (I). B.2 – LEMA 2 (decorrente do Lema 1) Dadas as matrizes )(sφ e )(sφ definidas como
1)()( −−≡ AIφ ss
1)()( −+−≡ CKAIφ oss
Existe a seguinte expressão que relaciona ambas
)())(()()()( 1 sssss oo CφKCφIKφφφ −+−= (B.2)
Prova: Aplicando-se o resultado do LEMA 1 em )(sφ , de forma que
=
=
=
−=
→+−= −
C
I
K
AI
CKAIφ
""
""
""
""
)()( 1
V
B
U
sA
sso
o
O que resulta em
11111 )())(()()()( −−−−− −−+−−−= AICKAICIKAIAIφ sssss oo ,
e, portanto,
)())(()()()( 1sssss oo CφKCIKφφφ −+−= φ .

429
APÊNDICE C – Construção e Calibração dos Sensores
Os acelerômetros MEMS são montados em circuitos eletrônicos conforme o diagrama
elétrico da figura C.1. Neste diagrama podem ser observados os componentes R1 e C2 que
formam um filtro passa baixas na saída do CI acelerômetro. Por outro lado, o capacitor C1
serve para filtrar transitórios de alta freqüência presentes na alimentação do CI.
Figura C.1 – Diagrama elétrico do circuito dos acelerômetros.
Os sensores de deslocamento, baseados em potenciômetros, são montados conforme o
diagrama elétrico apresentado na figura C.2. Da mesma forma que no diagrama elétrico do
acelerômetro, o capacitor C2 associado à impedância de P1 formam um filtro passa baixa, e o
capacitor C1 tem a mesma função descrita no diagrama anterior.
Figura C.2 – Diagrama elétrico do circuito dos sensores de deslocamento.
Para adequar o sinal dos sensores às entradas dos conversores analógico/digital (ADC) e
reduzir a impedância na transmissão do sinal, foi utilizado o circuito representado pelo
diagrama elétrico da figura C.3.

430
Figura C.3 – Circuito de interface entre os sensores e as entradas do ADC.
Todos os circuitos depois de montados foram encapsulados em caixas vedadas para
impedir a entrada de poeira e umidade, conforme apresentado na figura C.4.
Figura C.4 – Sensores acelerômetros e de deslocamento encapsulados e prontos para
instalação no veículo.
Todos os sensores depois de testados foram calibrados. A calibração foi realizada com
toda eletrônica de controle montada, ou seja, com cada sensor conectado às suas respectivas
entradas do ADC. Além disso, todos os circuitos foram alimentados com tensão de 12V

431
conforme a condição no veículo, e os sensores de deslocamento montados com suas
respectivas alavancas de acionamento, também conforme a montagem final. O objetivo da
calibração não foi apenas verificar a linearidade e precisão dos sensores, mas estender esta
avaliação a possíveis não-linearidades associadas aos demais circuitos eletrônicos e ao
mecanismo de acionamento dos sensores. Daí a necessidade do experimento englobar todo o
conjunto, do sensor até a unidade de controle.
No caso dos sensores acelerômetros, que já vem calibrados de fábrica, foram realizados
experimentos mais simples, amostrando-se apenas três pontos (0g, 1g e 2g). Cada
experimento foi repetido três vezes para cada acelerômetro, de forma a reduzir pequenas
variações que poderiam ter sido introduzidas pelo processo de medição. Os valores medidos
são dados já convertidos para o padrão digital, de forma que os valores ±10 correspondem aos
limites superior e inferior de saturação dos ADC. Utilizando-se as médias das medições
foram feitas regressões lineares para obter a curva de ganho de cada sensor. Os dados e os
gráficos dos sensores acelerômetros da carroceria do veículo estão apresentados na figura C.5.
Os quatro sensores receberam uma numeração de 1 até 4 para identificá-los e relacioná-los
com a sua respectiva curva de calibração.
Figura C.5 – Gráficos de calibração dos acelerômetros da carroceria.

432
Da mesma forma, os dados e os gráficos dos sensores acelerômetros das rodas do
veículo estão apresentados na figura C.6. Embora os experimentos com os acelerômetros não
tenham alcançado o fundo de escala do sensor, a linearidade do sensor em toda a escala é
garantida pelo fabricante. O ensaio, neste caso, teve o objetivo maior de levantamento do
ganho de cada sensor e a integridade de todos os circuitos eletrônicos envolvidos. A
linearidade do circuito de interface entre os sensores e as entradas do ADC em toda faixa de
trabalho, por outro lado, será verificada no ensaio dos sensores de deslocamento, e uma vez
que se tratam do mesmo circuito, o resultado será assumido como válido para os
acelerômetros também.
Figura C.6 – Gráficos de calibração dos acelerômetros das rodas.
No caso dos sensores de deslocamento, os ensaios de calibração foram mais
detalhados porque não se dispunha de dados sobre a linearidade e precisão do potenciômetro.
Também havia uma alavanca conectada ao eixo do potenciômetro de forma a transformar
deslocamentos lineares em angulares, o que introduz certa não-linearidade que precisa ser
avaliada de forma mais precisa. Da mesma forma que nos ensaios dos acelerômetros, cada

433
experimento foi repetido três vezes em cada sensor. As tabelas C.1 e C.2 apresentam os dados
dos sensores de deslocamento da suspensão dianteira do veículo.
Tabela C.1 – Dados de calibração do sensor de deslocamento dianteiro esquerdo.
Tabela C.2 – Dados de calibração do sensor de deslocamento dianteiro direito.
A grandeza ‘z’ indicada nas tabelas corresponde à medição do deslocamento vertical em
centímetros, onde os valores positivos referem-se ao deslocamento para cima da referência
zero, e os valores negativos, para baixo. Os limites de sensibilidade dos sensores de
deslocamento dianteiros foram limitados em ±3 cm, medido a meia distância entre roda e
articulação, o que equivale a um range de ±6 cm de movimentação vertical das rodas
dianteiras, o que é bastante significativo. Os dados medidos são valores de tensão já
convertidos para o formato digital, de forma que os valores ±10 correspondem aos limites
superior e inferior de saturação dos ADC.
z (cm) valor 1 valor 2 valor 3 média Erro3,0 9,875 9,943 9,932 9,917 0,1092,5 8,419 8,417 8,423 8,420 0,0092,0 6,831 6,836 6,835 6,834 0,0091,5 5,193 5,195 5,343 5,244 0,2581,0 3,478 3,466 3,475 3,473 0,0190,5 1,772 1,810 1,804 1,795 0,0610,0 0,001 0,005 0,014 0,007 0,019-0,5 -1,721 -1,739 -1,737 -1,732 0,030-1,0 -3,536 -3,535 -3,541 -3,537 0,009-1,5 -5,449 -5,453 -5,463 -5,455 0,022-2,0 -7,475 -7,488 -7,476 -7,480 0,020-2,5 -9,416 -9,388 -9,418 -9,407 0,050-2,7 -9,945 -9,961 -9,948 -9,951 0,026
Lado Direito
z (cm) valor 1 valor 2 valor 3 média Erro2,8 9,971 9,964 9,910 9,948 0,1002,5 9,292 9,201 9,245 9,246 0,1372,0 7,630 7,576 7,515 7,574 0,1731,5 6,045 5,993 5,834 5,957 0,3301,0 3,991 3,961 4,000 3,984 0,0620,5 2,062 1,904 1,986 1,984 0,2370,0 -0,034 -0,076 -0,079 -0,063 0,076-0,5 -2,084 -2,082 -2,082 -2,083 0,003-1,0 -3,792 -3,790 -3,787 -3,790 0,008-1,5 -5,548 -5,527 -5,550 -5,541 0,038-2,0 -7,293 -7,297 -7,303 -7,298 0,016-2,5 -8,873 -8,960 -8,949 -8,927 0,143-3,0 -9,916 -9,929 -9,927 -9,924 0,021
Lado Esquerdo

434
Os dados das tabelas C.1 e C.2 foram plotados e foi feita uma regressão linear, cujas
curvas são apresentadas nos gráficos da figura C.7. Como o teste de linearidade resultou em
R-quadrado33 > 99%, foi assumida como satisfatória a aproximação da resposta dos sensores
por curvas lineares. A forma de cálculo do R-quadrado é apresentada do Anexo A.
Figura C.7 – Gráficos de calibração dos sensores de deslocamento dianteiros.
Com relação aos sensores d deslocamento da traseira, foi realizado o mesmo procedimento,
contudo, como o curso da suspensão traseira é bem maior (±13 cm), foram coletados 41
pontos em cada experimento, o qual foi repetido por três vezes para cada sensor. O alcance do
e medida do sensor foi limitado em ±10 cm, e os dados foram coletados a cada 5 mm de
deslocamento vertical da alavanca de acionamento. Os dados coletados para os dois sensores
de deslocamento traseiros estão apresentados na tabela C.3.
Como se pode observar nestes gráficos, o teste de linearidade resultou em R-quadrado
> 99,9%, mostrando que a resposta destes sensores traseiros é mais linear que a dos
dianteiros; fato justificável devido ao braço de acionamento traseiro ser mais longo. O braço
dianteiro mede 100 mm, enquanto que o traseiro mede 250 mm. Após os sensores testados e
calibrados, tendo suas curvas de resposta levantadas e aproximadas por funções lineares, foi
realizada a sua instalação no veículo.
33 O valor de R-quadrado é um número de 0 a 1 que revela o grau de correspondência entre os valores estimados para a linha de tendência e os dados reais. A linha de tendência é mais confiável quando o valor de R-quadrado é 1 ou próximo de 1. Conhecido também como coeficiente de determinação. Vide Anexo A.

435
Tabela C.3 – Dados de calibração dos sensores de deslocamento traseiros.
Os gráficos desenhados a partir destes dados, bem como a sua respectiva regressão
linear, estão apresentados nas figuras C.8 e C.9.
z (cm) valor 1 valor 2 valor 3 média Erro z (cm) valor 1 valor 2 valor 3 média Erro10,0 -9,945 -9,945 -9,949 -9,946 0,007 10,0 -9,928 -9,931 -9,922 -9,927 0,0139,5 -9,945 -9,945 -9,949 -9,946 0,007 9,5 -9,832 -9,836 -9,834 -9,834 0,0069,0 -9,945 -9,945 -9,949 -9,946 0,007 9,0 -9,370 -9,364 -9,366 -9,367 0,0098,5 -9,934 -9,932 -9,936 -9,934 0,006 8,5 -8,879 -8,873 -8,870 -8,874 0,0148,0 -9,439 -9,428 -9,431 -9,433 0,018 8,0 -8,428 -8,431 -8,431 -8,430 0,0047,5 -8,794 -8,797 -8,801 -8,797 0,009 7,5 -7,829 -7,827 -7,824 -7,827 0,0077,0 -8,305 -8,313 -8,312 -8,310 0,013 7,0 -7,327 -7,327 -7,325 -7,326 0,0046,5 -7,636 -7,635 -7,632 -7,634 0,006 6,5 -6,853 -6,842 -6,835 -6,843 0,0286,0 -7,226 -7,215 -7,217 -7,220 0,017 6,0 -6,337 -6,329 -6,323 -6,329 0,0215,5 -6,614 -6,615 -6,611 -6,613 0,007 5,5 -5,794 -5,781 -5,784 -5,786 0,0205,0 -6,133 -6,137 -6,136 -6,135 0,006 5,0 -5,316 -5,312 -5,319 -5,315 0,0104,5 -5,461 -5,457 -5,458 -5,458 0,005 4,5 -4,868 -4,858 -4,859 -4,862 0,0164,0 -4,899 -4,902 -4,896 -4,899 0,008 4,0 -4,290 -4,267 -4,257 -4,271 0,0523,5 -4,287 -4,284 -4,282 -4,284 0,009 3,5 -3,775 -3,764 -3,771 -3,770 0,0163,0 -3,695 -3,698 -3,698 -3,697 0,005 3,0 -3,250 -3,244 -3,232 -3,242 0,0282,5 -3,122 -3,112 -3,116 -3,117 0,014 2,5 -2,699 -2,698 -2,697 -2,698 0,0032,0 -2,456 -2,466 -2,462 -2,461 0,015 2,0 -2,194 -2,177 -2,172 -2,181 0,0341,5 -1,830 -1,835 -1,840 -1,835 0,015 1,5 -1,665 -1,656 -1,650 -1,657 0,0221,0 -1,283 -1,282 -1,279 -1,281 0,007 1,0 -1,048 -1,052 -1,041 -1,047 0,0160,5 -0,659 -0,664 -0,665 -0,662 0,010 0,5 -0,511 -0,512 -0,502 -0,509 0,0170,0 -0,012 -0,021 -0,014 -0,016 0,014 0,0 -0,009 -0,005 -0,004 -0,006 0,007-0,5 0,584 0,586 0,596 0,589 0,018 -0,5 0,490 0,500 0,498 0,496 0,017-1,0 1,264 1,266 1,267 1,265 0,004 -1,0 0,978 1,017 1,015 1,003 0,065-1,5 1,908 1,911 1,912 1,910 0,007 -1,5 1,557 1,573 1,580 1,570 0,035-2,0 2,530 2,526 2,534 2,530 0,012 -2,0 2,136 2,150 2,147 2,144 0,022-2,5 3,022 3,025 3,026 3,025 0,006 -2,5 2,642 2,661 2,671 2,658 0,044-3,0 3,672 3,670 3,666 3,669 0,010 -3,0 3,259 3,272 3,280 3,270 0,032-3,5 4,253 4,258 4,259 4,257 0,010 -3,5 3,671 3,686 3,699 3,685 0,041-4,0 4,741 4,745 4,743 4,743 0,006 -4,0 4,335 4,330 4,332 4,333 0,007-4,5 5,347 5,351 5,355 5,351 0,012 -4,5 4,948 4,948 4,952 4,949 0,006-5,0 5,945 5,949 5,959 5,951 0,021 -5,0 5,440 5,448 5,459 5,449 0,029-5,5 6,518 6,522 6,519 6,519 0,006 -5,5 5,908 5,923 5,910 5,914 0,025-6,0 7,116 7,109 7,114 7,113 0,011 -6,0 6,461 6,470 6,468 6,466 0,013-6,5 7,612 7,615 7,621 7,616 0,014 -6,5 7,108 7,104 7,121 7,111 0,026-7,0 8,244 8,241 8,236 8,240 0,012 -7,0 7,718 7,735 7,735 7,729 0,028-7,5 8,727 8,739 8,739 8,735 0,022 -7,5 8,136 8,141 8,143 8,140 0,011-8,0 9,143 9,159 9,164 9,156 0,033 -8,0 8,591 8,593 8,599 8,594 0,012-8,5 9,732 9,732 9,732 9,732 0,000 -8,5 9,185 9,186 9,181 9,184 0,007-9,0 9,995 9,995 9,995 9,995 0,000 -9,0 9,949 9,954 9,948 9,951 0,009-9,5 9,995 9,995 9,995 9,995 0,000 -9,5 9,995 9,995 9,995 9,995 0,000-10,0 9,995 9,995 9,995 9,995 0,000 -10,0 9,995 9,995 9,995 9,995 0,000
Lado DireitoLado Esquerdo

436
Figura C.8 – Gráfico de calibração do sensor de deslocamento traseiro esquerdo.
Figura C.9 – Gráfico de calibração do sensor de deslocamento traseiro direito.

437
APÊNDICE D – Programa Matlab para uso do RTDX
function varargout = runc2812rtd_A2(varargin) [cc, err] = PrepareTargetandLoad (); if err == 1 return end % Configura os buffers do canal, 15 buffers de 1024 bytes cada configure(cc.rtdx,1024,15); % Sinal sonoro de início do processo de aquisição de dados beep pause(0.3) beep % Abre o canal de leitura (que deve ter o mesmo nome do bloco "To RTDX" do simulink) open(cc.rtdx,'ADC_ochan','r'); % Abilita o canal de leitura enable(cc.rtdx,'ADC_ochan'); % Abilita a comunicação RTDX enable(cc.rtdx); % Compila o programa e carrega o target run(cc); % Lê valores do ADC do target via RTDX usando o comando readmsg dentro do loop NumOfSamples = 1000; r = cc.rtdx; % Inicializa a variável que irá receber os dados ydata = zeros(15,NumOfSamples); for k = 1:(NumOfSamples) % Lê os valores do canal RTDX e armazena na variável ydata numMsgs = r.msgcount('ADC_ochan'); if (numMsgs > 0), aux = readmsg(cc.rtdx,'ADC_ochan', 'double',[1 15]); ydata(:,k) = aux'; end pause(0.01); end disp('Ending demo...'); % Limpa o RTDX try r.disable('ADC_ochan'); r.disable; catch % if channels are not open, nothing to close end % Reseta o CCS (Code Composer Studio) cc.reset; % Salva a variável ydata no arquivo yA2.dat save yA2 ydata % Sinal sonoro de fim do processo de aquisição de dados beep pause(0.3) beep
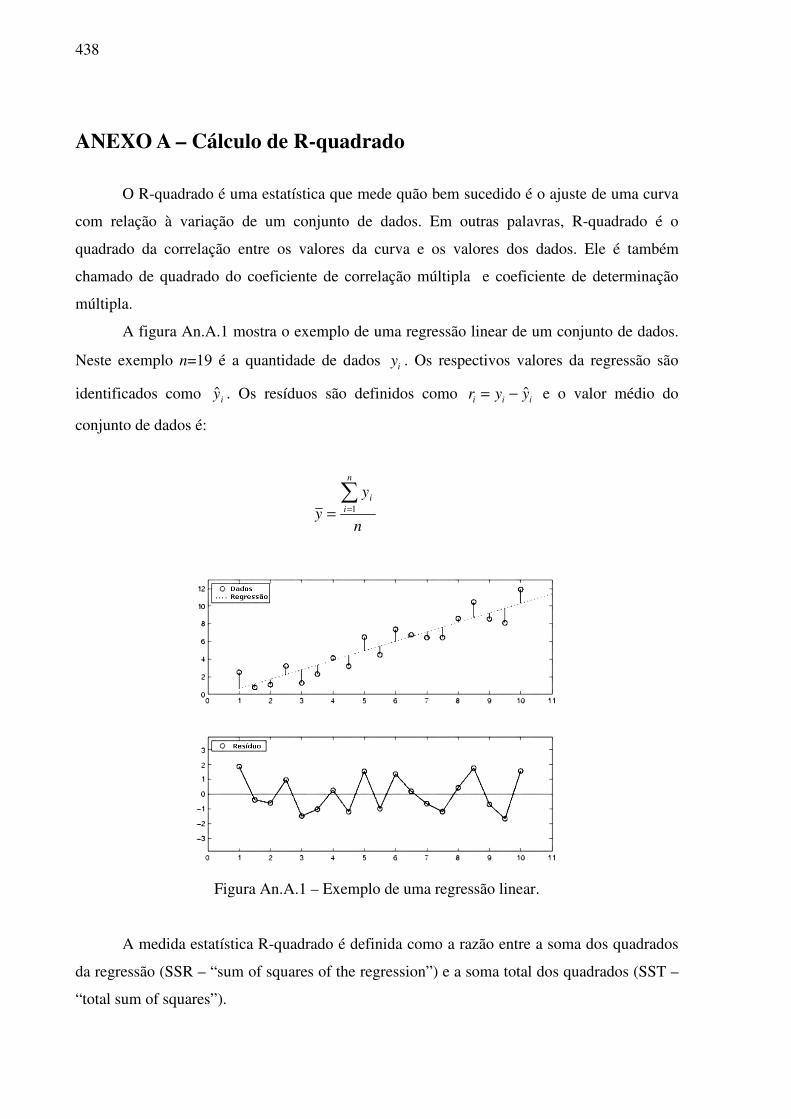
438
ANEXO A – Cálculo de R-quadrado
O R-quadrado é uma estatística que mede quão bem sucedido é o ajuste de uma curva
com relação à variação de um conjunto de dados. Em outras palavras, R-quadrado é o
quadrado da correlação entre os valores da curva e os valores dos dados. Ele é também
chamado de quadrado do coeficiente de correlação múltipla e coeficiente de determinação
múltipla.
A figura An.A.1 mostra o exemplo de uma regressão linear de um conjunto de dados.
Neste exemplo n=19 é a quantidade de dados iy . Os respectivos valores da regressão são
identificados como iy . Os resíduos são definidos como iii yyr ˆ−= e o valor médio do
conjunto de dados é:
n
y
y
n
i
i∑== 1
Figura An.A.1 – Exemplo de uma regressão linear.
A medida estatística R-quadrado é definida como a razão entre a soma dos quadrados
da regressão (SSR – “sum of squares of the regression”) e a soma total dos quadrados (SST –
“total sum of squares”).

439
SSR é definido como:
∑=
−=n
i
i yy1
2)ˆ(SSR
e SST, que também é chamado de soma dos quadrados em torno da média, é definido como:
n
y
yyy
n
i
in
i
i
n
i
i
2
1
1
2
1
2)(SST
−
=−=
∑∑∑ =
==
Outra definição importante é que SST = SSR + SSE, onde SSE é a soma do quadrado
dos erros (“sum of squares due to error”), e é definido por:
∑=
−=n
i
ii yy1
2)ˆ(SSE
Dadas estas definições, R-quadrado e calculado da seguinte forma:
SST
SSE1
SST
SSRR 2 −==
O valor de R-quadrado pode variar entre 0 e 1. O valor próximo de 1 indica que a
regressão se ajustou muito bem aos dados. Por exemplo, um valor R2 de 0,8234 significa que
o ajuste explica 82,34% da variação total dos dados em torno da média.
A estatística R-quadrado pode ser utilizada em qualquer ajuste de curvas a conjuntos
de dados, não se restringindo a regressões lineares.