comportamento do navio no mar - técnico lisboa · a sua missão relativamente à situação de...
TRANSCRIPT

1
COMPORTAMENTO DO NAVIO NO MAR
NUNO FONSECA
Apontamentos de
ANÁLISE AVANÇADA DE DINÂMICA DO NAVIO
Mestrado em Eng. e Arquitetura Naval
Secção Autónoma de Eng. Naval
Abril de 2004

2
1 Introdução...............................................................................................................4
1.1 Dinâmica do Navio em Ondas.............................................................................4
1.2 Resumo dos Apontamentos.................................................................................6
2 métodos para o cálculo de comportamento do navio em ondas.....................................7
2.1 Problema Hidrodinâmico....................................................................................7
2.2 Teoria do Navio Fino (Thin Ship Theory) ............................................................9
2.3 Teoria de Corpo Esbelto (Slender Body Theory).................................................10
2.4 Teoria Unificada de Corpo Esbelto....................................................................11
2.5 Teoria de faixas ...............................................................................................12
2.5.1 Métodos das Faixas no Domínio da Frequência ............................................13
2.5.2 Métodos das Faixas no Domínio do Tempo .................................................16
2.6 Teoria 2,5D.....................................................................................................19
2.7 Métodos dos Painéis ........................................................................................20
2.7.1 Métodos dos Painéis com Funções de Green no Domínio da Frequência.........21
2.7.2 Métodos dos Painéis com Fontes de Rankine no Domínio da Frequência........24
2.7.3 Métodos dos Painéis com Funções de Green no Domínio do Tempo ..............26
2.7.4 Métodos dos Painéis com Fontes de Rankine no Domínio do Tempo..............28
2.8 Classificação dos Métodos Não-Lineares ...........................................................30
2.8 Observações Finais ..........................................................................................34
3 Teoria de Escoamento Potencial..............................................................................36
3.1 Introdução ......................................................................................................36
3.2 Hipóteses de Fluido Ideal.................................................................................36
3.3 Sistemas de Coordenadas .................................................................................38
3.4 Formulação do Problema Hidrodinâmico...........................................................40

3
3.4.1 Condição Fronteira no Corpo .....................................................................41
3.4.2 Condição Fronteira na Superfície Livre.......................................................41
3.4.3 Condição no Fundo ...................................................................................42
3.4.4 Condição de Radiação para Infinito.............................................................43
3.5 Linearização do Problema Hidrodinâmico..........................................................44
3.5.1 Método de Pequenas Perturbações ..............................................................45
3.5.2 Condição Fronteira na Superfície Livre Linear .............................................47
3.5.3 Condição Fronteira Linear no Corpo ...........................................................51
3.5.4 Descomposição do Potencial de Velocidade.................................................53
3.5.5 Problema de Condição Fronteira Linear.......................................................55
3.5.6 Pressão e Forças Hidrodinâmicas ................................................................56
3.6 Observações Finais ..........................................................................................59
4 solução no domínio da frequência............................................................................60
4.1 Introdução ......................................................................................................60
4.2 Forças de Radiação..........................................................................................60
4.2.1 Simplificação do Problema de Condição Fronteira........................................60
4.2.2 Cálculo das Forças de Radiação..................................................................64
4.3 Forças de Excitação .........................................................................................69
4.3.1 Força de Froude-Krilov .............................................................................70
4.3.2 Forças de Difracção...................................................................................72
4.4 Forças de Restituição .......................................................................................74
4.5 Equações do Movimento ..................................................................................76
4.6 Esforços Dinâmicos .........................................................................................78
4.7 Comentários Finais ..........................................................................................83
Referências ..............................................................................................................85

4
1 INTRODUÇÃO
1.1 DINÂMICA DO NAVIO EM ONDAS
A prática mais comum no projecto de navios convencionais de carga é dar importância
principalmente ao desempenho do navio em águas tranquilas. No entanto é possível e
vantajoso considerar o comportamento em ondas desde a fase inicial do projecto. De facto
a maior parte dos navios navega durante uma grande parte do tempo em estados do mar
que lhes induzem movimentos e esforços estruturais, e um navio com boas características
de comportamento no mar é mais seguro e económico, ou seja, mais eficiente. O
comportamento em ondas pode ser considerado na fase de projecto utilizando resultados
experimentais ou numéricos.
Já no caso de navios para aplicações especiais tais como; cascos rápidos, navios de
passageiros, militares, de investigação, etc., é essencial estudar o seu comportamento em
ondas e se necessário optimizá-lo, para garantir que o navio é capaz de desempenhar a sua
missão.
Existem vários fenómenos dinâmicos que degradam da capacidade do navio desempenhar
a sua missão relativamente à situação de águas tranquilas. Exemplos destes problemas são:
• Os movimentos induzidos pelas ondas aumentam a resistência ao avanço e reduzem a
eficiência do hélice, o que pode pôr em causa a viabilidade económica do navio.
• Os movimentos relativos de grande amplitude entre o navio e as ondas, que podem
causar danos na estrutura devido ao caturrar, ou em equipamentos no convés devido ao
embarque de água. Outro problema associado aos movimentos relativos de grande
amplitude é a saída do hélice da água o que origina sobrecargas na máquina e veio
propulsores.
• As acelerações, para além de induzirem um esforço extra na carga e equipamentos,
podem causar enjoo na tripulação (ou passageiros) degradando a sua capacidade para
executar as tarefas.
• O balanço excessivo impede que pessoas se mantenham em pé, e em certas situações
pode mesmo por em causa a segurança do navio.
• Em navios de grandes dimensões, os esforços induzidos na estrutura por ondas de
grande amplitude podem ser excessivamente elevados.

5
Os problemas descritos acima podem ser identificados e corrigidos (ou pelo menos
minimizados) durante o projecto do navio, idealmente durante a fase inicial do projecto. O
projecto segue os seguintes três fases:
Definição das características principais, onde se conhece apenas as dimensões principais
do navio.
Projecto preliminar, onde se obtém uma descrição mais detalhada do casco e os métodos
de cálculo de comportamento no mar podem ser utilizados para avaliar e melhorar a
performance do navio. Esta é a fase onde normalmente se fazem os ensaios de resistência e
propulsão e por vezes também os ensaios de comportamento em ondas.
Projecto detalhado, onde a forma do casco e todos os parâmetros principais são definidos e
a análise de comportamento em ondas se concentra em aspectos específicos tais como a
inclinação das amuras para reduzir o embarque de água no convés, ou em alternativa
reduzir o caturrar, bordo livre na proa, possibilidade de instalar sistemas de controle de
balanço, etc.
Pelo descrito é evidente que a aplicação dos métodos de previsão de comportamento no
mar deve-se concentrar durante o projecto preliminar. Se estes métodos forem utilizados
juntamente com resultados de ensaios com modelos, então podem ser também muito úteis
para melhorar características específicas durante o projecto detalhado.
Adicionalmente ao projecto das formas do casco, é necessário fazer o dimensionamento da
estrutura, para o qual o procedimento normal é seguir as regras de uma Sociedade de
Classificação de Navios. Estas regras são em grande parte resultado da experiência
acumulada ao longo dos anos e os resultados são dados em termos de expressões semi-
empíricas relativamente simples. Isto basicamente quer dizer que os modelos de cálculo
ainda não atingiram a maturidade, fiabilidade e facilidade de utilização suficientes para se
tornarem ferramentas de apoio ao projecto universalmente aceites.
Por um lado as expressões dadas pelas regras, sendo simples, são relativamente gerais o
que quer dizer que os resultados não são optimizados para cada navio em particular. Por
outro lado, como são em parte baseadas na experiência, isto quer dizer que são mais
indicadas para o tipo de navios que existem, ou seja os projectos de novos conceitos de
navios não são bem servidos pelas regras actuais.
Por reconhecer as lacunas das actuais regras, as Sociedades Classificadoras têm os seus
departamentos de Investigação e Desenvolvimento a investir no desenvolvimento e
6
aperfeiçoamento de métodos racionais para o dimensionamento da estrutura dos navios.
Estes métodos incluem o cálculo dos esforços globais e locais induzidos pelas ondas no
casco e o pós-processamento destes resultados para o cálculo do módulo das secções
transversais ou das tensões máximas na estrutura. De facto a tendência no futuro será usar
mais o cálculo directo das solicitações na estrutura do navio com procedimentos de cálculo
hidrodinâmico complexos, mas também teoricamente mais consistentes. Algumas
Sociedades Classificadoras começam mesmo a incentivar os projectistas a utilizar estes
métodos.
1.2 RESUMO DOS APONTAMENTOS
O capítulo 2 começa por apresentar o problema hidrodinâmico do comportamento do navio
em ondas e classificar as várias soluções que existem para resolve-lo. Depois faz-se uma
revisão do trabalho de investigação desenvolvido nesta área. É feita também uma descrição
dos métodos actualmente em uso ou desenvolvimento, juntamente com uma análise das
vantagens e desvantagens de cada um. Finalmente classificam-se de forma sistemática os
vários procedimentos para o cálculo não-linear das respostas de navios em ondas.
No capítulo 3 o problema hidrodinâmico de condição fronteira é estabelecido e a sua
solução simplificada pela aplicação sistemática dum método de pequenas perturbações.
No capítulo 4 apresenta-se a solução linear no domínio da frequência para o problema
hidrodinâmico de condição fronteira. A solução é baseada numa teoria de faixas.

7
2 MÉTODOS PARA O CÁLCULO DE COMPORTAMENTO DO NAVIO EM
ONDAS
2.1 PROBLEMA HIDRODINÂMICO
O desenvolvimento de um método teórico para a previsão das respostas dos navios em
ondas começa pela formulação do problema de condição fronteira apropriado. Geralmente
(quase sempre) é assumido que o fluido é ideal, ou seja, invíscido e irrotacional, de modo a
poder-se utilizar a teoria dos escoamentos potenciais. Esta hipótese pode ser justificada
porque o problema é essencialmente dependente de forças gravíticas e as forças viscosas
têm um papel de menor importância. No seguimento do texto ir-se-à ver que em alguns
casos particulares os efeitos viscosos têm que ser considerados.
A formulação exacta do problema de condição fronteira conduz ao problema de superfície
livre não-linear, com as condições cinemática e dinâmica aplicadas nas fronteiras
(superfície livre e do casco) nas suas posições instantâneas e as condições apropriadas a
distâncias infinitas. O escoamento é governado pela equação de Laplace tridimensional a
qual descreve a conservação de massa para escoamentos potenciais.
Este problema é muito complexo e tem de ser simplificado até ao ponto em que tenha
solução numérica possível com um esforço computacional razoável. Existem alguns modos
de fazer esta simplificação e a escolha depende das hipóteses iniciais que se pretende
assumir. Estas hipóteses geralmente envolvem restrições nos parâmetros que governam a
solução, que são:
• A amplitude de oscilação das fronteiras, ζ ξa a,
• Frequência de oscilação das fronteiras, ω
• Velocidade de avanço do navio, U
• Esbeltez do casco, ( )ε = B T L, / , onde B é a boca e T a imersão média
As simplificações envolvem remover as não-linearidades das condições fronteira e
simplificar os aspectos tri-dimensionais do problema. Deste modo, com o objectivo de
linearizar o problema, assume-se que as amplitudes de oscilação das fronteiras são
suficientemente pequenas e o navio deve ser esbelto. Existem diversos modos de trabalhar
estas simplificações, o que resulta em diferentes soluções para o problema dos movimentos
de navios em ondas. No entanto, devido às simplificações há alguns efeitos físicos do
problema que deixam de ser contabilizados pelas formulações, o que pode afectar de forma

8
significativa os resultados em certas situações e assim reduzir a gama de aplicação dos
métodos.
Na figura 2.1 estão classificados em termos do domínio de aplicabilidade (teórica), os
métodos mais conhecidos no âmbito da teoria linear dos movimentos de navios. Na
classificação foram utilizados dois parâmetros, a frequência de oscilação das fronteiras
(movimentos do navio e da superfície livre) e esbeltez do casco. O diagrama deve ser lido
do seguinte modo, por exemplo: os métodos das faixas são válidos para frequências
elevadas e cascos muito esbeltos.
Em termos gerais pode-se dizer que os métodos válidos para domínios de aplicabilidade
mais alargados, são também os que exigem maior esforço computacional e estão sujeitos a
maiores problemas numéricos. Então necessitam por um lado de computadores mais
potentes e por outro lado são menos acessíveis a pessoal não especialista. Deste modo, ao
desenvolver um novo método há que ter em conta os objectivos, o que inclui o tipo de
utilização que vai ser dada e as gamas de parâmetros em que vai ser utilizado.
t e o r i ao r d i n á r i a d e
c o r p o - e s b e l t o
t e o r i ad a s
f a i x a s
t e o r i a u n i f i c a d at e o r i a r a c i o n a l
d a s f a i x a s
M é t o d o s d o s p a i n e i st r i - d i m e n s i o n a i s
ω
ε
Figura 2.1 Classificação dos métodos de cálculo de comportamento de navios em ondas

9
As características, vantagens e desvantagens dos vários métodos serão apresentadas nas
próximas secções, onde se faz uma revisão histórica e apresenta-se o estado da arte, nesta
área da teoria dos movimentos de navios em ondas.
2.2 TEORIA DO NAVIO FINO (THIN SHIP THEORY)
O estudo dos movimentos do navio em ondas começou com William Froude (1861)
durante os primeiros anos dos navios a vapor. Enquanto os navios à vela têm um eficiente
amortecedor de balanço que são as velas, os navios a vapor apresentavam problemas com
este movimento. Por esta razão Froude estudou o movimento de balanço. Alguns anos
mais tarde Krilov (1896) investigou os movimentos de arfagem e cabeceio.
Froude e Krilov derivaram equações diferenciais do movimento que incluem forças de
inércia e de restituição a actuar no navio. No cálculo das forças de excitação pelas ondas,
apenas foi considerada a pressão do campo de ondas incidente não perturbado pela
presença do navio. Esta componente das forças de excitação passou a ser conhecida como
"forças de excitação de Froude-Krilov".
No entanto, os primeiros desenvolvimentos da teoria hidrodinâmica surgiram com a
investigação do problema da resistência de onda, logo para modelar a perturbação
estacionária de navios a avançar com velocidade constante sem ondas incidentes. Michell
(1898) assumiu restrições geométricas para obter uma solução para o problema de
condição fronteira com superfície livre. A hipótese foi que a boca é pequena comparada
com o comprimento e imersão. Deste modo a condição fronteira é aplicada na linha de
mediania do navio.
Apesar dos resultados não compararem bem com dados experimentais, a contribuição de
Michell para o desenvolvimento da teoria hidrodinâmica é notável ao introduzir a Teoria
do Navio Fino.
Haskind (1946) estudou os movimentos de arfagem e cabeceio utilizando pela primeira vez
o teorema de Green para calcular o potencial de velocidade associado aos movimentos
oscilatórios. A função de Green que foi derivada representa o potencial de uma fonte
oscilatória localizada sob a superfície livre. O escoamento oscilatório em torno do casco
pode ser representado por uma distribuição adequada destas funções. As simplificações da
teoria do navio fino foram utilizadas para resolver a equação integral resultante da
aplicação do teorema de Green.

10
Haskind foi também o primeiro a separar o potencial de velocidade em contribuições de
radiação e de difracção. Na prática isto quer dizer que o problema hidrodinâmico global
dos movimentos do navio em ondas é, no âmbito da aproximação linear, separado em
vários problemas independentes, nomeadamente:
• Problema da radiação, que tem a ver com os movimentos oscilatórios do navio, e onde
o navio avança com velocidade constante e movimento oscilatório forçado na ausência
de ondas incidentes.
• Problema das forças de excitação, onde o navio avança com velocidade constante e
restringido na sua posição média, através de um campo de ondas incidentes. Estas
forças foram calculadas por Froude (1861) e Krilov (1896) considerando apenas a
pressão da onda incidente não perturbada pela presença do navio. Na realidade existe
uma perturbação na onda incidente originada pela presença do navio que deve, no
âmbito de uma aproximação linear, ser tomada em conta. Haskind formulou e resolveu
o problema de condição fronteira de difracção para calcular as forças de difracção que
têm a ver com esta perturbação.
• Às forças descritas há que acrescentar as forças hidrostáticas.
Peters e Stoker (1957) e Newman (1961) aplicaram métodos de pequenas perturbações à
teoria do navio fino, assumindo que a boca do navio e a amplitude dos movimentos são da
mesma ordem de grandeza. As comparações entre resultados numéricos e experimentais
dos coeficientes de amortecimento mostraram que a correlação não é boa.
Este método do navio fino foi aplicado para o cálculo do movimento de navios em ondas
de proa / popa, no entanto existem alguns problemas fundamentais inerentes que limitam a
aplicabilidade do método, tais como; as formas do navios não são finas mas sim esbeltas,
ou seja, a imersão é da mesma ordem de grandeza da boca e não do comprimento. Por
outro lado a teoria desenvolvida até à primeira ordem induz ressonâncias muito elevadas
em arfagem e cabeceio enquanto a teoria de segunda ordem é muito complexa. Apesar da
importância histórica do método por representar o início, não existem aplicações práticas.
2.3 TEORIA DE CORPO ESBELTO (SLENDER BODY THEORY)
Assumindo o navio com boca e imersão pequenos comparados com o seu comprimento, a
teoria de corpo esbelto tridimensional da aerodinâmica foi adaptada para a teoria de corpo
esbelto em hidrodinâmica. Outra hipótese fundamental desta teoria é de que o
11
comprimento de onda é da ordem do comprimento do navio, uma vez que a condição
fronteira na superfície livre é muito simplificada. Este método pode ser interpretado do
seguinte modo: a boca e imersão reduzem-se de tal modo que o navio se reduz a uma
“linha” representada por uma distribuição de singularidades. A velocidade de avanço deve
ser no máximo moderada.
Maruo (1962) aplicou este método directamente ao problema da resistência de onda. Os
resultados são fracos para números de Froude baixos mas razoáveis para números de
Froude mais altos. Ursell (1962) por sua vez aplicou o método ao problema dos
movimentos oscilatórios sem velocidade de avanço. Outros autores que trabalharam com a
teoria de corpo esbelto são Joosen (1964) e Newman (1964).
Com o objectivo de resolver o problema da aplicação da condição fronteira cinemática no
casco usando singularidades tri-dimensionais, Tuck (1964) aplicou a teoria de corpo
esbelto de um modo diferente. O potencial de velocidade é deduzido de modo a satisfazer
dois domínios diferentes, um na vizinhança do casco e o outro afastado do casco. Na
vizinhança do casco o escoamento é assumido bidimensional e o potencial deve satisfazer
a condição fronteira na sua posição média e uma condição fronteira na superfície livre
muito simples do tipo “parede rígida”. Esta “parede rígida” significa que não há efeitos de
ondas na vizinhança do casco, o que é válido para ondas longas.
No campo afastado do casco os efeitos tri-dimensionais são considerados na equação de
Laplace e na condição fronteira na superfície livre linearizada. O potencial é representado
por uma distribuição de singularidades tri-dimensionais ao longo do eixo longitudinal do
navio. Uma vez que a condição fronteira cinemática no corpo não existe no campo
afastado do casco, então a função de Green a ser calculada não é muito complexa. As duas
soluções separadas, na vizinhança e afastado do corpo, são forçadas a coincidir numa
região de sobreposição por um método de expansões assimptóticas.
2.4 TEORIA UNIFICADA DE CORPO ESBELTO
A teoria de corpo esbelto é válida para frequências baixas e velocidade de avanço
moderada. Com o objectivo de alargar a gama de validade para as altas frequências
Newman e Sclavounos (1980) e Sclavounos (1984) assumem que o escoamento na
vizinhança do casco é essencialmente bidimensional e utilizam nesta zona uma condição
fronteira na superfície livre que representa as suas oscilações. Existem componentes na
solução que contabilizam as interacções ao longo do comprimento do casco. De novo, no

12
campo afastado do casco os efeitos tri-dimensionais são considerados na equação de
Laplace e na condição fronteira na superfície livre linearizada e o potencial nesta zona é
representado por uma distribuição de singularidades tri-dimensionais ao longo do eixo
longitudinal do navio. Este método válido para toda a gama de frequências é conhecido por
Teoria Unificada de Corpo Esbelto.
Segundo os mesmos autores, as previsões das forças de excitação pela teoria unificada de
corpo esbelto comparam melhor com resultados experimentais do que as teorias das faixas
(apresentadas mais adiante). No entanto as amplitudes de arfagem são superiores aos dados
experimentais e às previstas pelas teorias das faixas. Os termos de acoplamento das massas
acrescentadas também não são melhor previstos pela teoria unificada de corpo esbelto do
que pelas teorias das faixas.
Por outro lado, para corpos sem velocidade de avanço, Mays (1978) apresentou resultados
dos coeficientes associados à arfagem e cabeceio de esferóides esbeltos que comparam
muito bem com os resultados “exactos” de cálculos tri-dimensionais. Maruo e Takura
(1978) compararam resultados de massa acrescentada e coeficientes de amortecimento,
sem velocidade de avanço, com resultados experimentais e o ajustamento é bom. Os
resultados apresentam melhorias em relação à teoria de corpo esbelto e teoria de faixas.
2.5 TEORIA DE FAIXAS
Nas teorias das faixas os efeitos da velocidade de avanço no escoamento oscilatório são
representados de forma simplista. Inclusivamente o sistema de ondas estacionário à volta
do navio é desprezado. O problema tridimensional é reduzido a uma sucessão de
problemas bidimensionais associados a secções transversais ao longo do comprimento do
navio. Em cada secção é assumido que o escoamento tem apenas as direcções vertical e
transversal, ou seja as ondas geradas propagam-se perpendicularmente ao eixo longitudinal
do navio. Esta hipótese implica que o navio deve ser esbelto, a velocidade de avanço
pequena e o comprimento das ondas curto relativamente ao comprimento do navio. De
facto, no caso das ondas serem curtas as interferências tri-dimensionais da proa e popa
(onde a forma do casco é 3D) são desprezáveis ao longo da maior parte do casco.
Apesar destas limitações teóricas, Ogilvie (1974) demonstra que o comprimento das ondas
geradas pode ter quase o comprimento do navio. Na prática, no caso dos movimentos
verticais e para baixas frequências a que correspondem ondas longas, as forças
hidrodinâmicas são dominadas pelas componentes de impulsão (hidrostáticas e Froude-

13
Krilov). Por esta razão a imprecisão no cálculo dos coeficientes hidrodinâmicos e
componente de difracção têm uma influência muito pequena no cálculo dos movimentos.
Já para frequências baixas associadas às ondas de popa as teorias das faixas dão resultados
divergentes e sem realidade física.
É universalmente aceite que as teorias das faixas dão resultados bastante razoáveis para os
movimentos de arfagem e cabeceio. Para os restantes movimentos as previsões são piores,
mas podem ser melhoradas introduzindo nas equações do movimento, de forma empírica,
alguns efeitos viscosos.
2.5.1 Métodos das Faixas no Domínio da Frequência
As métodos das faixas baseiam-se na solução do problema bidimensional. O problema do
escoamento oscilatório em torno de um cilindro semicircular com movimento vertical
oscilatório na superfície livre sem velocidade foi resolvido por Ursell (1949). O potencial
de velocidade é representado por uma soma de fontes, cada uma satisfazendo a condição
fronteira na superfície livre e sendo multiplicada por um coeficiente de modo a satisfazer a
condição fronteira na superfície do corpo.
Mais tarde Grim (1953), Tasai (1959) e Porter (1960) aplicaram a transformação conforme
de secções arbitrárias no circulo, juntamente com o método de Ursell, para calcular os
coeficientes hidrodinâmicos de cilindros com secção não circular.
Frank (1967) representou o potencial de velocidade por uma distribuição de fontes sobre a
superfície submersa média de secções com formas arbitrárias. São utilizadas funções de
Green, que satisfazem a condição fronteira linear e 2D na superfície livre, para representar
o potencial de velocidade através da aplicação do teorema de Green. A densidade das
fontes é uma função incógnita dependente da posição ao longo do contorno, a ser
determinada pela aplicação da condição fronteira na superfície do corpo. A solução
numérica obtém-se pela representação do contorno da secção por um número finito de
segmentos. Em cada segmento a densidade das fontes é constante.
A massa acrescentada em arfagem calculada por métodos bidimensionais tende
assimptóticamente para infinito para a frequência zero. Para corrigir este efeito é
necessário introduzir alguns efeitos tri-dimensionais na formulação.
Korvin-Kroukovsky (1955) foi o primeiro a aplicar os resultados bidimensionais numa
teoria de faixas para prever os movimentos de arfagem e cabeceio. Mais tarde Korvin-

14
Kroukovsky e Jacobs (1957) apresentaram alguns refinamentos no método e comparações
extensivas com resultados experimentais. Apesar de ser o primeiro método com aplicação
prática no calculo dos movimentos de navios em ondas, há alguns aspectos que mereceram
a crítica de outros investigadores. Nomeadamente, os termos que contabilizam os efeitos
da velocidade do navio foram deduzidos de forma intuitiva e, por exemplo, os termos de
acoplamento não verificam as relações simetria de Timman-Newman (1962), como deve
acontecer em formulações lineares consistentes. Por outro lado Korvin-Kroukovsky usou
um conceito de velocidade relativa entre o corpo e superfície livre, deduzido também de
forma intuitiva, para calcular tanto as forças de excitação como as de radiação.
Timman e Newman (1962) derivaram a condição fronteira na superfície do corpo de modo
a considerar de forma consistente e no âmbito da aproximação linear, os efeitos da
interacção entre os escoamentos oscilatório e estacionário. Como resultado da aplicação
desta condição fronteira os coeficientes de acoplamento entre a arfagem e cabeceio têm
que ser simétricos.
Ogilvie e Tuck (1969) desenvolveram a “Teoria Racional das Faixas” para os movimentos
verticais, cuja formulação é baseada numa análise sistemática de pequenas perturbações
assumindo que a frequência de encontro é elevada. Foram usados dois parâmetros na
análise de perturbações, a esbeltez e a amplitude dos movimentos. Assim a linearização do
problema foi feita em relação à amplitude dos movimentos sem introduzir grandes
restrições na esbeltez do corpo. Os termos de ordem superior relacionados com a esbeltez
foram sistematicamente retidos. Deste modo algumas interacções com o escoamento
estacionário são incluídas na solução, o que tem efeitos na condição fronteira no corpo, na
condição fronteira na superfície livre e no modo como as pressões são integradas.
Para representar a condição fronteira no corpo Ogilvie e Tuck deduziram os conhecidos
termos m j , que incluem segundas derivadas do potencial do escoamento estacionário.
Estes termos são difíceis de calcular directamente, por isso foi utilizado o teorema de
Stokes para calcular o seu efeito de forma indirecta. Esta forma de representar os efeitos da
velocidade do navio passou a ser utilizada por praticamente todas as formulações que
utilizam a condição fronteira no corpo linearizada. Apesar deste método das faixas ser do
ponto de vista teórico aquele que é válido para uma gama mais larga dos parâmetros
(frequência, esbeltez, velocidade), a sua implementação numérica deve ter sido muito

15
escassa, porque quase não existem resultados publicados, e a aplicação na prática é
aparentemente inexistente.
Salvesen, Tuck e Faltinsen (1970) desenvolveram uma formulação para o cálculo dos
movimentos e esforços em ondas, baseada no problema de condição fronteira
tridimensional e as aproximações da teoria de faixas são introduzidas apenas nas fórmulas
finais e de uma forma matematicamente justificada. A condição fronteira no corpo é
representada em termos dos termos m j e, tal como em Ogilvie e Tuck (1969), o teorema
de Stokes é utilizado para simplificar o cálculo destes termos. Os termos m j , na sua forma
completa envolvem segundas derivadas dos potenciais, são simplificados assumindo que o
navio é esbelto e a velocidade tende para zero. Isto quer dizer que a grande parte dos
efeitos do escoamento estacionário são desprezados. Esta é talvez a teoria de faixas mais
utilizada em aplicações.
Outros métodos das faixas foram desenvolvidos e propostos e basicamente o que diferencia
uns dos outros é a forma como introduzem os efeitos da velocidade do navio nos
coeficientes hidrodinâmicos e forças de difracção. Gerritsma e Beukelman (1967), Ogilvie
e Tuck (1969) e Salvesen, Tuck e Faltinsen (1970) são exemplos de três formulações para
os coeficientes dos movimentos verticais. Kaplan, Sargent e Raff (1969) e Salvesen, Tuck
e Faltinsen (1970) representam duas soluções diferentes para os coeficientes associados
aos movimentos laterais (deriva, balanço e guinada). Das formulações apresentadas apenas
os métodos de Ogilvie e Tuck (1969) e Salvesen, Tuck e Faltinsen (1970) satisfazem as
relações de simetria de Timman - Newman.
Os métodos lineares têm um largo campo de aplicação, especialmente quando o objectivo é
estudar ou optimizar o casco em termos de comportamento no mar ou resistência
adicionada em ondas, pois nestas situações não se está interessado em respostas de grande
amplitude. No entanto muitas vezes há interesse em estudar respostas não-lineares, seja
para prever respostas extremas em estados do mar severos, ou para estudar problemas
específicos tais como o balanço não-linear e seu acoplamento com a estabilidade
direccional em mares de popa, ou os esforços verticais induzidos na estrutura de navios
com os costados não verticais.
Jensen e Pedersen (1979) desenvolveram uma teoria quadrática no domínio da frequência
para calcular os movimentos verticais não-lineares e o momento flector vertical não-linear
induzido pelas ondas. É utilizado um método de pequenas perturbações para representar as

16
forças hidrodinâmicas por termos lineares e quadráticos em ordem ao movimento relativo
entre o casco e as ondas. O procedimento de pequenas perturbações é aplicado não ao
problema hidrodinâmico fundamental (tal como Ogilvie e Tuck, 1969) mas de forma semi-
empírica aos resultados dos coeficientes bidimensionais para cada secção. Deste modo os
coeficientes seccionais dependem da imersão e são representados por uma expansão dos
coeficientes lineares.
Os termos lineares são semelhantes aos da teoria de faixas linear e os termos quadráticos
são originados pela não-linearidade das forças de excitação e pelos costados não verticais
do navio. São apresentados resultados do momento flector vertical para um porta-
contentores e é clara a assimetria do momento flector.
Uma solução prática baseada na teoria de faixas para calcular os esforços estruturais
induzidos por ondas em navios incluindo os efeitos do caturrar foi proposta por Belik,
Bishop e Price (1980). Os movimentos e esforços na frequência da onda são calculados
linearmente no domínio da frequência. As não-linearidades devido às forças de caturrar são
transientes e desacopladas dos termos lineares. O momento flector vertical transiente e
não-linear devido às forças de impacto, é calculado no domínio do tempo e sobreposto à
resposta linear para obter a resposta total. Este método assume que os movimentos
verticais, que podem incluir a saída da proa da água, são correctamente estimados pela
teoria linear. Assume também que os movimentos relativos de grande amplitude na proa
resultam em esforços verticais na frequência da onda linerares.
Guedes Soares (1989) aplicou uma teoria de faixas linear para prever os movimentos
relativos entre o navio e as ondas, enquanto as forças de impacto associadas ao caturrar são
dadas pela taxa de variação da quantidade de movimento do fluido. O casco do navio é
representado por um modelo de elementos finitos de uma viga de Timoshenko
bidimensional. A resposta vibratória do casco é calculada por este modelo e o
correspondente momento flector é sobreposto ao momento flector linear induzido na
frequência de encontro.
2.5.2 Métodos das Faixas no Domínio do Tempo
Uma vantagem de resolver o problema hidrodinâmico no domínio do tempo é de que é
possível adicionar efeitos não-lineares às equações que representam o equilíbrio dinâmico
do corpo. Exemplos destes efeitos podem ser as forças de impulsão não-lineares, forças de
caturrar, efeitos da água no convés, controlo direccional pelo leme, etc. Num primeiro

17
nível de complexidade do problema mantém-se a radiação e difracção linear, o que quer
dizer que as condições fronteira no corpo e superfície livre são lineares, e introduz-se os
referidos efeitos não-lineares nas equações do movimento a serem resolvidas no domínio
do tempo. Esta é uma hipótese, por um lado necessária actualmente para obter
procedimentos de cálculo práticos, mas que por outro lado em muitas situações é
perfeitamente válida (mais à frente volta-se a este assunto).
Num segundo nível de complexidade, a amplitude de oscilação das fronteiras é
suficientemente grande para ser necessário considerar as condições fronteira na superfície
livre e no corpo na sua forma não-linear. Não existem presentemente teorias das faixas
baseadas na solução não-linear do problema hidrodinâmico, tendo os desenvolvimentos
neste sentido concentrado-se principalmente em métodos dos painéis. Pode-se dizer que o
trabalho de investigação neste sentido está a dar os primeiros passos e as soluções que
existem têm, por enquanto, apenas interesse académico.
Outra solução prática para estudar os movimentos e esforços de grande amplitude é
considerar as forças de radiação e difracção lineares e representadas por coeficientes
dependentes da frequência, portanto calculados por uma teoria de faixas convencional, e
calcular as forças de Froude-Krilov e hidrostáticas não-lineares e dependentes da superfície
molhada do casco sob a onda incidente em cada instante de tempo. As equações do
movimento são integradas numericamente no domínio do tempo.
Paulling e Wood (1974) utilizaram este método para estudar os movimentos de grande
amplitude em navios com ondas pela popa e alheta. A hipótese para utilizar a simplificação
descrita é a de que as forças de impulsão são dominantes, logo um erro no cálculo da
forças de radiação e difracção não afecta significativamente os resultados.
Outros autores utilizaram métodos semelhantes mas onde os coeficientes hidrodinâmicos
dependem da imersão (Elsimillawy e Miller, 1986 e Tao e Incecik, 1998). Neste caso faz-
se um pré-processamento dos coeficientes seccionais no domínio da frequência para várias
imersões e cria-se uma tabela. Durante a simulação em cada instante de tempo os
coeficientes do navio são integrados utilizando os coeficientes seccionais correspondentes
à imersão instantânea em cada secção. O resultado são “coeficientes não-lineares”, que no
entanto são obtidos sem uma justificação teórica racional.
Os métodos das faixas “parcialmente não-lineares” apresentados, embora sejam soluções
práticas, são inconsistentes no sentido em que as equações do movimento não-lineares a

18
serem resolvidas no domínio do tempo incluem coeficientes dependentes da frequência.
Ora estes coeficientes representam forças hidrodinâmicas para escoamentos puramente
harmónicos. No caso de movimentos não-harmónicos e especialmente no caso de
movimentos irregulares em estados do mar reais, os coeficientes dependentes da frequência
não devem ser utilizados. Quando as equações do movimento são resolvidas no domínio do
tempo, então o problema hidrodinâmico de condição fronteira deve também ser formulado
e resolvido no domínio do tempo.
Xia e Wang (1997) apresentaram uma teoria de faixas no domínio do tempo para as
respostas verticais, que resolve o problema hidrodinâmico e estrutural acopladamente
(problema da hidroelasticidade). As forças de impulsão são não-lineares e calculadas de
forma precisa em cada instante de tempo, enquanto as forças de radiação e difracção são
lineares.
As forças hidrodinâmicas seccionais são representadas por massas acrescentadas
correspondentes ao limite de frequência infinita e integrais de convolução de funções
resposta a um impulso. Estas funções são obtidas através da transformada de Fourier dos
coeficientes bidimensionais no domínio da frequência. Deste modo as forças são
representadas por funções e coeficientes independentes da frequência.
Uma evolução do método anterior foi proposta por Xia, Wang e Jensen (1998), onde os
efeitos de memória devido às oscilações da superfície livre são aproximados por um
conjunto de equações diferenciais ordinárias de ordem superior. As forças hidrodinâmicas
de inércia e hidrostáticas são calculadas exactamente na superfície do casco molhada.
A formulação desenvolvida no âmbito desta dissertação é em alguns aspectos semelhante à
proposta por Xia e Wang (1997). É também uma teoria de faixas formulada no domínio do
tempo, onde as forças de radiação são lineares e as componentes hidrostática e de Froude-
Krilov são não-lineares. As forças de radiação globais representam-se por massas
acrescentadas para frequências infinitas, integrais de convolução de funções de memória e
coeficientes de restituição de radiação. Deste modo os efeitos da velocidade de avanço são
incluídos de uma forma consistente (embora simplificada no âmbito da teoria de faixas). A
formulação em ondas regulares foi apresentada em Fonseca e Guedes Soares (1998a) e a
generalização para ondas irregulares em Fonseca e Guedes Soares (1998b).
A principal diferença relativamente a Xia e Wang (1997) é que estes autores representam
as forças de radiação no domínio do tempo desde uma fase anterior da formulação do

19
problema pelo método das faixas, ou seja, as forças seccionais são representadas no
domínio do tempo. Deste modo não é claro como é que os efeitos da velocidade do navio
são considerados aquando da integração dos resultados bidimensionais (excepto aqueles
que têm a ver com a alteração da frequência de encontro).
Watanabe e Guedes Soares (1999) apresentaram os resultados de um estudo comparativo
do cálculo do momento flector vertical a meio-navio num porta-contentores a avançar em
ondas com vários declives. Foram utilizadas várias teorias de faixas no domínio do tempo
e parcialmente não-lineares e também um método dos painéis. Os resultados dos vários
métodos são parecidos para ondas de pequena amplitude e ajustam-se bem às previsões
lineares. No entanto à medida que a amplitude de onda aumenta, por um lado os efeitos
não-lineares nas respostas simuladas tornam-se significativos, e por outro lado nota-se uma
grande dispersão entre os resultados dos diferentes métodos.
2.6 TEORIA 2,5D
Nas teorias das faixas assume-se que a velocidade de avanço é pequena. Embora possa ser
discutível o que significa velocidade pequena neste contexto, provavelmente o limite
superior será para números de Froude até 0.3. Evidentemente isto é uma limitação para
certo tipo de navios que navegam com números de Froude bastante superiores. Com o
objectivo de incluir de forma mais completa os efeitos da velocidade do navio na
formulação foi desenvolvida a teoria 2,5D, que sob certo aspecto do ponto de vista teórico
pode ser considerada entre as teorias das faixas essencialmente 2D e os métodos dos
painéis 3D.
Esta formulação é baseada na equação de Laplace bidimensional, mas condição fronteira
na superfície livre é tridimensional. A justificação para utilizar a equação de Laplace
bidimensional é que para velocidades elevadas os navios de deslocamento são geralmente
esbeltos e as ondas geradas em cada secção propagam-se na direcção da popa e não da
proa. Deste modo o problema pode ser resolvido começando por determinar a solução na
proa e depois ir determinando a solução passo a passa na direcção da popa.
A condição para que não haja ondas a propagarem-se na direcção da proa do navio é:
τ ω= >eU g/ .0 25 , onde ω e é a frequência de encontro entre o navio e as ondas, U é a
velocidade do navio e g a aceleração da gravidade.
20
Este método foi aplicado por Ogilvie (1972) para estudar o escoamento em redor de proas
esbeltas em navios com velocidade constante. Mais tarde foi generalizado para estudar os
movimentos do navio no domínio da frequência por Yeung e Kim (1981), Ohkusu e
Faltinsen (1990) e Faltinsen e Zhao (1991a,b), no entanto a interacção entre os
escoamentos estacionário e não-estacionário é representada de uma forma simplista. Zhao
(1994) apresentou uma solução completa no domínio do tempo, que incluí a interacção
entre os escoamentos estacionário e não-estacionário.
2.7 MÉTODOS DOS PAINÉIS
Os métodos mais usados para calcular os movimentos, esforços seccionais e resistência
adicionada em ondas continuam a ser baseados em teorias das faixas. De facto estes
métodos são rápidos, envolvem poucos recursos informáticos e em grande parte dos casos
os resultados são bons. A razão é que grande parte dos casos são adequados às limitações
das teorias das faixas; os navios são lentos, esbeltos e as repostas mais severas acontecem
para frequências relativamente elevadas.
No entanto os métodos das faixas não funcionam bem para velocidades elevadas (O'Dea e
Jones, 1983), navio bojudos, ou seja com relação L/B pequena, e em geral para frequências
de encontro baixas que ocorrem com mares de popa. Os métodos das faixas também não
são capazes de considerar os efeitos tri-dimensionais da difracção (de ondas) em proas
bojudas, de navios tanque por exemplo, que contribuem de forma significativa para a
resistência adicionada ao avanço (Fujii e Takahashi, 1975).
As formulações tri-dimensionais (ou métodos dos painéis) foram desenvolvidas com o
objectivo de melhorar estas limitações na solução do problema hidrodinâmico dos navios
em ondas, nomeadamente devem incluir de uma forma mais correcta:
• Os efeitos tri-dimensionais da geometria do casco no escoamento, ou seja, o
escoamento numa secção transversal deve afectar o escoamento nas secções vizinhas.
• Os efeitos da velocidade do navio que influenciam o problema hidrodinâmico, ou seja
interagem com o escoamento oscilatório, nomeadamente: o campo de escoamento
estacionário em redor do navio (com o sistema de ondas estacionário associado) e a
alteração da forma da carena devido à sobreimersão e caimento dinâmicos.
As formulações tri-dimensionais podem ser divididas em dois grupos: as que são baseadas
na função de Green e métodos baseados nas fontes de Rankine. Ambos os métodos podem

21
ser resolvidos de modo a determinar directamente o potencial de velocidade, ou determinar
indirectamente primeiro a densidade das fontes e depois o potencial de velocidade.
2.7.1 Métodos dos Painéis com Funções de Green no Domínio da Frequência
Nos métodos que utilizam a função de Green o potencial de velocidade é descrito por uma
distribuição de fontes sobre uma superfície de controle. Esta é normalmente a superfície
molhada média do casco, ou superfície molhada no equilíbrio estático (no entanto a
superfície pode ser dependente do tempo, como será descrito à frente na revisão dos
métodos não-lineares). As fontes satisfazem automaticamente uma condição fronteira na
superfície livre e a condição de radiação em infinito. A condição fronteira na superfície
livre pode ter a forma utilizada na teorias da faixas por Salvesen, Tuck e Faltinsen (1970)
que é bidimensional, ou uma forma mais completa e tridimensional, mas que no entanto
não inclui de uma forma completa toda a interacção linear entre os escoamentos
estacionário e oscilatório.
Existem várias formas da função de Green que diferem nos detalhes matemáticos. As
funções de Green normalmente envolvem duas fontes de Rankine (1/r) (uma sob a
superfície livre calma e outra imagem reflectida sobre a superfície livre) e uma expressão
complicada que representa as oscilações da superfície livre. Esta expressão contém
integrais que tendem a oscilar fortemente para velocidades de avanço elevadas, daí a
grande dificuldade em calcular com precisão estas funções de Green. De facto as
simplificações na condição fronteira na superfície livre têm a ver com estas dificuldades
numéricas.
O potencial de velocidade é representado por uma equação integral válida na superfície do
casco e na intersecção do casco com a superfície livre, obtida pela aplicação da segunda
identidade de Green. A solução numérica é obtida representando o casco por um número
finito de painéis, e assumindo a densidade das fontes (ou o potencial) constante em cada
painel.
O trabalho pioneiro de Hess e Smith (1964, 1967) provou a aplicabilidade do método dos
painéis. Foram utilizados painéis planos de quatro lados e em cada painel a intensidade das
fontes é constante. A intensidade das fontes é a incógnita a determinar pela aplicação da
condição fronteira no corpo.

22
As funções de Green, que representam singularidades oscilatórias e com velocidade de
avanço, são numericamente complicadas de calcular no domínio da frequência. Uma
alternativa é utilizar funções de Green transientes e resolver o problema no domínio do
tempo.
Sem a velocidade de avanço ou com pequenas velocidades (correntes por exemplo), as
funções de Green são bastante mais simples de calcular, e de facto os programas
informáticos desenvolvidos baseados neste método, já são usados à alguns anos para o
apoio ao estudo e projecto de plataformas offshore (Faltinsen e Michelsen, 1974, Garrison,
1978, Eatock Taylor e Waite, 1978, Newman e Sclavounos, 1988). A aplicação para os
navios tem sido mais lenta e ainda há algum trabalho a fazer para tornar os métodos
atractivos para aplicações práticas.
A complexidade da solução do método tridimensional tem a ver principalmente com a
interacção entre o escoamento estacionário associado à velocidade do navio e o
escoamento oscilatório associado à difracção da onda incidente e aos movimentos
forçados. Esta interacção é incluída nas condições fronteira no corpo e na superfície livre.
Diferentes simplificações nestas condições conduzem a diferentes formulações do
problema.
Chang (1977) foi o primeiro a apresentar resultados numéricos para o problema dos
movimentos de navios com velocidade de avanço, utilizando um método dos painéis no
domínio da frequência. A condição fronteira na superfície livre é simplificada assumindo
que a perturbação no escoamento estacionário devido à presença do navio pode ser
desprezada. O termo de acoplamento entre os potenciais estacionário e oscilatório também
é desprezado. Relativamente a efeitos tri-dimensionais, esta condição fronteira contém
apenas a derivada na direcção longitudinal do potencial oscilatório. Este efeito da
velocidade de avanço é representado por uma linha de singularidades distribuídas ao longo
da intersecção do casco com a superfície livre (na condição estática).
Os termos m j na condição fronteira no corpo são simplificados assumindo que as
derivadas espaciais do potencial que representa a perturbação no escoamento estacionário
podem ser desprezadas. Esta simplificação é semelhante à assumida por Salvesen, Tuck e
Faltinsen (1970) na sua teoria de faixas.
Utilizando o teorema de Green o potencial de velocidade do fluido é representado por uma
distribuição de fontes no casco molhado (médio) e uma linha de fontes na intersecção da

23
superfície livre com o casco. A intensidade das fontes é determinada pela aplicação da
condição fronteira no casco.
Chang apresentou resultados da resistência de onda para um casco Wigley e dos
coeficientes hidrodinâmicos e forças de excitação para um casco da série 60. As massas
acrescentadas para velocidade zero calculadas pelo método 3D comparam melhor com os
dados experimentais do que a teoria de faixas. As diferenças entre os dois métodos não são
significativas para os coeficientes de amortecimento e forças de excitação. Quanto aos
resultados com velocidade de avanço, concluiu-se que comparam bastante melhor com os
dados experimentais quando a condição fronteira na superfície livre inclui o termo da
velocidade de avanço.
Inglis e Price (1981a,1981b) implementaram um método com funções de Green tri-
dimensionais para calcular os coeficientes hidrodinâmicos e forças de excitação num navio
da série 60 com velocidade de avanço. O método é semelhante ao de Chang (1977),
resolvendo o problema em ordem à intensidade das fontes incógnita e a distribuição do
potencial é calculada num segundo passo. No entanto as condições fronteira são mais
gerais, incluindo mais efeitos do escoamento estacionário. A condição fronteira linear na
superfície livre é também simplificada assumindo que a perturbação no potencial
estacionário pode ser desprezada, mas o produto entre as derivada no tempo e no espaço do
escoamento oscilatório é incluída. A condição fronteira no corpo é calculada considerando
a perturbação no potencial estacionário nos termos m j .
Os resultados com o método dos painéis foram comparados com resultados experimentais
e teoria de faixas. Foram utilizadas três versões do método dos painéis: a IP3 segue a
formulação descrita e é o mais completo, na IP2 a perturbação no escoamento estacionário
devido à velocidade do navio é desprezada na condição de fronteira no corpo (termos m j
semelhantes aos de Salvesen, Tuck e Faltinsen, 1970), na IP1 para além da simplificação
anterior, os efeitos tri-dimensionais são desprezados na condição fronteira na superfície
livre.
Os resultados comparam todos bem para os coeficientes hidrodinâmicos em arfagem, mas
pior para os coefic ientes em cabeceio. Para velocidade superior as discrepâncias com os
dados experimentais acentuam-se. Quanto às forças de excitação, os resultados das três
versões do método tridimensional comparam bem com os dados experimentais e melhor

24
que os da teoria de faixas. Com a velocidade de avanço as diferenças entre os métodos
acentuam-se.
Em geral o método IP2 dá os melhores resultados, mas é sugerido que a prazo a
implementação do método IP3 poderá tornar-se mais eficiente e os resultados
ultrapassarem os anteriores. O método IP1 em geral mostra descrepâncias um pouco
superiores aos outros, mas o tempo de computação é muito inferior.
2.7.2 Métodos dos Painéis com Fontes de Rankine no Domínio da Frequência
A alternativa mais conhecida ao uso das funções de Green é a utilização de fontes de
Rankine. Estas funções são mais simples de calcular e permitem a implementação de
condições de fronteira na superfície livre mais gerais e deste modo incluir mais efeitos da
velocidade de avanço que os métodos das funções de Green. O potencial de velocidade é
descrito por uma distribuição de fontes de Rankine sobre o corpo e a superfície livre à
volta do corpo. As singularidades de Rankine não satisfazem automaticamente a condição
fronteira na superfície livre, por esta razão é necessário estender a distribuição de fontes à
superfície livre.
Como a superfície livre é modelada apenas parcialmente (número finito de painéis), isto
introduz uma fronteira artificial no domínio de cálculo. As ondas criadas pelo navio devem
passar esta fronteira sem reflexão. As ondas geradas pelo navio devem também satisfazer a
condição de radiação em infinito. As dificuldades na implementação numérica deste
método no domínio da frequência estão relacionadas com estas duas condições. A solução
obtém-se pela aplicação das condições fronteira e pela discretização do casco e superfície
livre em painéis.
Nakos e Sclavounos (1990a,b) aplicaram o método das fontes de Rankine para calcular os
movimentos de arfagem e cabeceio de navios no domínio da frequência. A formulação usa
um método directo para o cálculo do potencial. Os efeitos do escoamento estacionário são
aproximados por um modelo de escoamento de corpo-duplo. A condição de fronteira no
casco é representada pelos termos m j , no entanto é feita uma simplificação nestes termos
semelhante ao métodos das faixas de Salvesen, Tuck e Faltinsen (1970). A condição
fronteira na superfície livre é linear mas inclui os efeitos tri-dimensionais. Os resultados
dos movimentos de dois cascos foram comparados com dados experimentais e teoria de
faixas e em geral o método das faixas apresenta melhores resultados. O programa

25
informático desenvolvido com base neste método é conhecido por SWAN (Ship Wave
Analysis) e posteriormente a esta fase inicial foram desenvolvidas novas versões
sucessivamente mais evoluídas.
Este método de Rankine foi também utilizado para estudar os movimentos de Catamarans
(Veer, 1997a,b) e navios com efeito de superfície (Moulijn, 1997).
Bertram (1990a,b) e Bertram e Söding (1990) distribuem fontes discretas na superfície
livre e painéis com distribuição de fontes de intensidade constante na superfície do casco.
O escoamento estacionário devido à velocidade do navio, na sua forma não-linear e
completa, é determinado num primeiro passo. As condições fronteira para o escoamento
oscilatório são linearizadas em torno do potencial estacionário e da elevação de onda. A
condição fronteira no casco exige o cálculo de derivadas de segunda ordem do potencial
estacionário. Estas derivadas são estimadas assumindo as hipóteses da teoria de corpo
esbelto, uma vez que a distribuição de fontes de intensidade constante nos painéis permite
apenas o cálculo de derivadas de primeira ordem.
Hughes (1996) generalizou este método ao utilizar painéis de ordem superior para calcular
as segundas derivadas do potencial estacionário no casco. Utilizando o mesmo princípio
Bertram (1997, 1998) apresentou resultados adicionais para cascos reais. Uma das
conclusões de Bertram é a de que o escoamento estacionário influencia de forma
significativa os movimentos verticais de navios. A solução clássica onde as condições
fronteira são linearizadas em torno do escoamento de corpo-duplo e os termos m j são
simplificados pela teoria de corpo esbelto, resulta em diferenças de 20% nos picos de
ressonância de arfagem e cabeceio em relação à solução tridimensional completa.
Este método no domínio da frequência é “completamente tridimensional” uma vez que
tanto a contribuição do escoamento estacionário como do escoamento oscilatório são
representadas de forma 3D. No entanto, presentemente o problema está resolvido apenas
para τ > 025. . Para velocidades baixas existem dificuldades em satisfazer a condição de
radiação e a condição de não-reflexão na fronteira do domínio de cálculo.
Os métodos do painéis, que começaram por ser desenvolvidos no domínio da frequência,
foram generalizados para o domínio do tempo. De novo podem ser agrupados naqueles que
usam funções de Green 3D e os que usam as fontes de Rankine. A investigação e
desenvolvimento nesta área começou à cerca de dez anos e tem sido impulsionada
principalmente por grupos de trabalho associados a Universidades nos Estados Unidos.

26
Basicamente existem três grupos associados ao MIT e um grupo da Universidade de
Michigan, a desenvolver e testar diferentes formulações. Duas delas utilizam funções de
Green transientes (LAMP e TiMIT) e duas utilizam fontes de Rankine (SWAN e
UMDELTA).
2.7.3 Métodos dos Painéis com Funções de Green no Domínio do Tempo
Existem funções de Green tridimensionais próprias no domínio do tempo, que são as
mesmas para os problemas com e sem velocidade de avanço. Com velocidade de avanço as
funções de Green no domínio do tempo são mais simples de calcular do que as
equivalentes no domínio da frequência. Para obter a solução, aplica-se o teorema de Green
ao volume de fluido do que resulta uma equação integral a ser resolvida. As singularidades
são distribuídas pela superfície submersa do corpo e a solução é integrada no tempo e
também na superfície do corpo.
Como foi referido anteriormente, nas formulações com funções de Green é necessário
distribuir singularidades apenas no casco, no entanto as soluções estão limitadas a
problemas com escoamentos de superfície livre lineares. Para considerar condições
fronteira não lineares na superfície é necessário usar singularidades mais simples
distribuídas no corpo e na superfície livre.
Lin e Yue (1990, 1993) desenvolveram um método baseado na função de Green transiente
e tridimensional para estudar os movimentos nos seis graus de liberdade de navios a
navegar em ondas (LAMP). A condição fronteira na superfície livre é linear, mas a
condição fronteira no corpo é satisfeita em cada instante de tempo na superfície molhada
do casco sob a superfície livre média. Esta hipótese pode querer dizer que os movimentos
do navio podem ser de grande amplitude, mas as ondas geradas pelo movimento mantêm-
se lineares.
Neste caso não se utilizam os termos mj (não faz sentido nesta formulação), mas os efeitos
correspondentes do escoamento estacionário são automaticamente incluídos na solução. As
pressões hidrostáticas e de Froude-Krilov são integradas na superfície molhada sob a onda
incidente em cada instante. Este método requer a solução do problema hidrodinâmico em
cada instante de tempo assim como a convolução ao longo da história passada do
movimento, por isso o esforço computacional é enorme. As poucas comparações feitas,
parecem indicar que a utilização da condição fronteira no corpo exacta resulta em
melhoramentos muito pequenos nos resultados.

27
Em Lin et al. (1994, 1996) o método foi generalizado para o cálculo dos movimentos e
esforços de grande amplitude utilizando a hipótese de “pequenas reflexões” proposto por
Pawlowski (1992). Este autor propõe a hipótese de “pequenas reflexões” (weak scattering)
assumindo que um navio a navegar em ondas perturba pouco o campo de onda incidente e
o seu escoamento oscilatório perturba pouco o escoamento estacionário. Deste modo a
condição fronteira na superfície livre pode ser linearizada utilizando os escoamentos
incidente e estacionário como escoamento de base. Os potenciais incidente e estacionário
satisfazem as condições fronteira na superfície livre não-lineares, enquanto a condição
fronteira no corpo para o escoamento de base e o escoamento oscilatório é satisfeita
exactamente na superfície molhada do corpo. Deste modo pode-se resolver o problema das
ondas e movimentos de grande amplitude.
Em Lin et al. (1994, 1996) o método não é tão geral como o proposto por Palowski (1992),
porque a condição fronteira na superfície livre é linearizada em torno da onda incidente e
não em torno da onda incidente mais a estacionária. A condição fronteira no corpo em vez
de ser satisfeita sob a superfície livre média é satisfeita sob o perfil da onda incidente. Os
resultados em dois navios de formas finas mostram que as diferenças entre simulações
lineares e não-lineares para os movimentos verticais são pequenas enquanto que para o
momento flector a meio navio as diferenças são grandes. Esta versão pode ser aplicada
apenas em supercomputadores.
Em Weems et al. (1998) utiliza-se uma nova versão do LAMP para calcular os
movimentos verticais e momento flector vertical para um cruzador da marinha de guerra e
um monocasco rápido. Enquanto para navios convencionais o método com as funções de
Green transientes funciona bem, para navios com os costados inclinados na proa existem
problemas numéricos. Por esta razão foi utilizado um método de cálculo híbrido, que
combina as funções de Green transientes com as fontes de Rankine.
Assim o domínio do fluido é dividido em duas zonas, uma na proximidade do casco e a
outra inclui o restante. As funções de Green são distribuídas sobre a superfície de
sobreposição entre os dois domínios e o escoamento na domínio exterior é resolvido com
esta distribuição. No domínio interior utilizam-se fontes de Rankine distribuídas sobre o
casco, a superfície de sobreposição e a superfície livre entre o casco e a superfície de
sobreposição. A vantagem deste método híbrido é que as fontes de Rankine têm um
comportamento muito robusto na zona de intersecção entre o casco e a superfície livre.

28
Outra formulação baseada em funções de Green transientes foi proposta por Bingham et al.
(1993, 1994). Estes autores resolvem o problema da radiação e difracção calculando a
resposta a impulsos forçados (TiMIT). No caso da radiação determina-se o potencial de
velocidade, ou distribuição de fontes, forçado por um deslocamento impulsivo do casco
com velocidade de avanço. Resolver o problema da difracção significa determinar o
potencial de velocidade, ou distribuição de fontes, forçado por um deslocamento impulsivo
da onda que actua sobre o casco na sua posição média. A condição fronteira no corpo pode
ser linear, ou aplicada na posição instantânea do casco em cada instante de tempo. No
entanto a segunda solução tem solução numérica muitíssimo mais morosa.
A resistência de onda em águas tranquilas, sobreimersão e caimento resultam do caso
limite do problema da radiação quando a frequência e amplitude dos movimentos forçados
tendem para zero. Os problemas de condição fronteira de valor inicial são representados
por equações integrais utilizando o teorema de Green e funções de Green transientes. A
solução numérica obtém-se discretizando a equação integral em painéis. Os potenciais
depois de integrados resultam em funções resposta a impulsos, que no caso do problema da
radiação estão relacionados com os coeficientes de massa acrescentada e amortecimento do
domínio da frequência, e no caso do problema da difracção estão relacionadas as mesmas
forças no domínio da frequência. A vantagem deste método utilizando a condição fronteira
no corpo linear, é que uma vez determinadas as funções de resposta a um impulso, podem
ser feitas simulações no domínio do tempo de forma muito rápida, em diferentes condições
e incluindo alguns efeitos não-lineares.
2.7.4 Métodos dos Painéis com Fontes de Rankine no Domínio do Tempo
O programa SWAN, baseado no método dos painéis com fontes de Rankine, foi aplicado
no domínio do tempo e melhorado sucessivamente por Nakos et al. (1993), Sclavounos et
al. (1993), Sclavounos e Nakos (1993) e Kring (1998). O escoamento estacionário é
representado por uma aproximação de corpo-duplo, o que quer dizer que o problema do
escoamento estacionário não é resolvido de forma completamente não-linear. Kring et al.
(1996) e Huang e Sclavounos (1998) generalizaram o método para o cálculo dos
movimentos do navio em ondas de grande amplitude utilizando a hipótese de “pequenas
reflexões”.
O programa UMDELTA utiliza o método de Euler-Lagrange juntamente com uma
representação das fronteiras por fontes de Rankine não-singulares, para resolver o

29
problema totalmente não-linear (no âmbito do escoamento potencial) do comportamento
do navio em ondas.
O método de Euler-Lagrange foi aplicado inicialmente por Longuet-Higgins e Cokelet
(1976) para estudar ondas bidimensionais e não-lineares próximo da situação de quebrar.
Faltinsen (1977) utilizou um método semelhante para estudar as forças hidrodinâmicas
num cilindro em arfagem e para estudar os movimentos de não-lineares de um fluido
dentro de um tanque rectangular (sloshing).
A solução é desenvolvida no domínio do tempo e em cada instante de tempo o problema é
resolvido em duas fases: na fase de Lagrange, são deslocados na superfície livre nós
individuais integrando no tempo as condições de Fronteira não-lineares na superfície livre.
Deste modo obtém-se a localização da superfície livre e o valor do potencial na superfície
livre. Na fase de Euler, resolve-se o problema de condição fronteira que resulta do valor do
potencial na superfície livre, que é conhecido, e pretende-se determinar a derivada normal
do potencial na superfície molhada do corpo. Como resultado obtêm-se as velocidades na
superfície livre utilizadas para deslocar esta superfície, e as pressões no corpo usadas para
determinar as forças hidrodinâmicas.
A aplicação desta técnica ao problema do navio tem vindo a ser testada desde à alguns
anos pela Universidade de Michigan, no entanto até agora apenas resultados parciais foram
apresentados e os progressos têm sido lentos. Beck et al. (1994) e Scorpio et al. (1996)
utilizam fontes de Rankine não-singulares localizadas sobre a superfície livre e dentro do
casco para resolver o problema completamente não-linear da radiação em arfagem e
cabeceio. A superfície de integração é ligeiramente afastada da superfície de controlo,
resultando em kernels não-singulares e mais fáceis de resolver. Os resultados limitam-se a
formas de cascos matemáticas. Em Subramani et al. (1998) o método é aplicado a um
casco da série 60, mas apenas para resolver o problema do escoamento estacionário em
águas tranquilas.
Basicamente o método exige um enorme esforço computacional devido ao grande número
de incógnitas que têm de ser determinadas em cada instante de tempo e existem problemas
numéricos de difícil solução. Um dos grandes problemas deste método são as ondas que
quebram. Resumidamente, o método simula a onda até a situação em que quebra, mas este
fenómeno faz com que o cálculo termine. Deste modo pequenas ondas que quebrem, tais
como as ondas de proa ou popa, fazem terminar a simulação. O problema torna-se ainda

30
mais complicado para o caso das ondas de grande amplitude que se tornam instáveis e
quebram. Este problema ainda não foi resolvido. O método descrito ainda está em
desenvolvimento e não se prevê que no futuro próximo possa ser utilizado em aplicações
práticas.
2.8 CLASSIFICAÇÃO DOS MÉTODOS NÃO-LINEARES
A solução não-linear completa para o problema do escoamento viscoso oscilatório em
torno do navio, utilizando as equações de Navier-Stokes tri-dimensionais, é impraticável e
não se prevê que no futuro próximo ou de médio prazo seja possível. A solução utilizando
o método de Navier Stokes com médias de Reynolds (Reynolds Averaged Navier-Stokes -
RANS) foi testada por Wilson et al. (1998), no estudo dos efeitos de uma onda regular
incidente sobre um casco Wigley e num modelo do DTMB (David Taylor Model Basin).
São apresentados resultados da elevação da superfície livre em torno do casco.
Nos métodos RANS as equações de Navier-Stokes são deduzidas assumindo que todos os
termos de velocidade podem ser aproximados por um termo médio mais uma componente
altamente oscilatória, de pequena amplitude e com média zero, que representa a
turbulência.
Neste trabalho foram relatados alguns problemas numéricos e principalmente os associados
ao esforço computacional que limitam a aplicabilidade do método. É reconhecido que para
a utilização das equações de Navier-Stokes para resolver problemas realistas de
comportamento de navios em ondas, ainda se tem um muito longo caminho a percorrer.
Desprezando a viscosidade, existem algumas técnicas para resolver problemas de
escoamento potencial não-linear. Estas técnicas são baseadas em formulações no domínio
do tempo, e requerem a solução da equação de Laplace no domínio do fluido, sujeito a
condições fronteira em todas as fronteira que o rodeiam. A condição fronteira cinemática
no corpo deve ser satisfeita na sua superfície molhada instantânea e a condição fronteira na
superfície livre deve ser satisfeita na elevação não-linear e instantânea da onda. As formas
e posições destas fronteiras são desconhecidas à partida, o que dificulta muito a resolução.
Foram feitas algumas tentativas com elementos finitos e diferenças finitas, mas as técnicas
mais utilizadas baseiam-se na discretização da fronteira num número finito de elementos,
sobre os quais as incógnitas são determinadas. As condições fronteira são satisfeitas em
pontos discretos ou sobre os elementos de fronteira. O método mais utilizado para resolver
31
o problema do escoamento oscilatório e não-linear em navios é o chamado método de
Euler-Lagrange.
As simulações totalmente não-lineares são de facto muito complicadas e estão além do
estado actual dos conhecimentos. Uma alternativa poderá ser a utilização de formulações
de segunda ordem no domínio da frequência baseadas em métodos de perturbações.
Métodos deste tipo foram aplicados a estruturas offshore, no entanto aparentemente não
existem estudos completos para o caso de navios, onde os efeitos de velocidade de avanço
sejam consistentemente considerados. Por outro lado estas formulações são válidas para
navios com os costados do navio verticais na linha de água e em termos gerais um método
de pequenas perturbações assume que o sistema em estudo é fracamente não-linear. Esta
não parece ser uma alternativa para o estudo das respostas extremas em navios.
Porque se reconhece que para algumas aplicações particulares é necessário incluir efeitos
não-lineares, alguns investigadores desenvolveram formulações parcialmente não-lineares.
Este tipo de soluções permite seleccionar e incluir na formulação diferentes efeitos não-
lineares.
A solução mais simples para resolver o problema de forma parcialmente não-linear, é
combinar as contribuições hidrostáticas e de Froude-Krilov não-lineares com coeficientes
de massa acrescentada, amortecimento e forças de difracção lineares. Embora não exista
justificação teórica para adoptar esta hipótese, aparentemente as contribuições não-lineares
dominantes para as respostas verticais de navios vêm dos termos hidrostáticos e de Froude-
Krilov. De facto foi escrito por vários autores que os resultados que se obtêm com
formulações deste tipo são razoáveis (Weems et al., 1998). Efeitos de caturrar e água no
convés podem ser facilmente adicionados.
A linearidade das forças de radiação e difracção é mantida, resolvendo o problema de
condição fronteira com a condição fronteira na superfície livre linear válida na superfície
livre média e a condição fronteira no corpo representada na superfície molhada média.
Podem ser utilizados métodos das faixas ou dos painéis para resolver o problema de
condição fronteira.
Questionável é o facto de alguns métodos representarem as forças de radiação utilizando
coeficientes de massa acrescentada e amortecimento associados a uma frequência média.
Esta frequência média pode ser a frequência da primeira harmónica da resposta não-linear,
no caso da excitação ser provocada por ondas regulares, ou pode ser para ondas irregulares,

32
a frequência de pico do espectro do estado do mar. Existem no entanto alguns métodos
onde os efeitos de memória são adequadamente tratados no âmbito de uma formulação
consistente no domínio do tempo.
A não-linearidade seguinte a introduzir e acrescentar às forças hidrostáticas e de Froude-
Krilov não-lineares, resulta de considerar a variação da posição do casco e da sua
superfície molhada na condição fronteira no corpo. A condição fronteira na superfície livre
é mantida linear. Neste caso a condição fronteira no corpo é satisfeita na sua posição
exacta. Este método requer a solução do problema hidrodinâmico em cada instante de
tempo assim como a convolução ao longo da história passada do movimento, por isso o
esforço computacional é enorme.
O próximo nível de complexidade a introduzir tem a ver com a condição fronteira na
superfície livre. A maior parte dos métodos dos painéis que utilizam funções de Green tri-
dimensionais com velocidade de avanço, baseiam-se na condição fronteira na superfície
livre linearizada em torno de 0=z (equação 3.36). Esta equação é deduzida assumindo
que se pode desprezar a perturbação ao potencial uniforme -Ux, provocada pela presença
do casco, o que quer dizer que a interacção entre os escoamentos estacionário e oscilatório
é muito simplificada.
Para considerar estes efeitos é necessário acoplar os escoamentos estacionário e oscilatório,
nomeadamente através da condição fronteira na superfície livre. A solução é expandir a
condição fronteira na superfície livre em torno da elevação de onda estacionária. Deste
modo obtém-se uma condição fronteira que é linear no potencial oscilatório, mas envolve
produtos de termos que contêm o potencial estacionário. Aparentemente não é possível
resolver este problema com funções de Green pois é demasiado complexo. É no entanto
possível utilizando fontes de Rankine.
Um passo mais foi proposto por Pawlowski (1992) a partir da hipótese de que um navio a
navegar em ondas perturba pouco o campo de onda incidente e o seu escoamento
oscilatório perturba pouco o escoamento estacionário. Deste modo a condição fronteira na
superfície livre pode ser linearizada utilizando os escoamentos incidente e estacionário
como escoamento de base. Os potenciais incidente e estacionário satisfazem as condições
fronteira na superfície livre não-lineares, enquanto a condição fronteira no corpo para o
escoamento de base e o escoamento oscilatório é satisfeita exactamente na superfície
molhada do corpo.

33
Como observações finais pode-se dizer que os métodos totalmente não-lineares, baseados
em escoamentos viscosos ou invíscidos, estão ainda em fase de exploração e demorará
bastante tempo até que estejam disponíveis para aplicações realistas (Guedes Soares et al.,
1997). A solução é então utilizar formulações parcialmente não-lineares, ou seja, apenas
alguns aspectos não-lineares são incluídos nas formulações.
Seguindo esta via mais prática, foram implementadas soluções com vários graus de
complexidade e claramente aquelas que utilizam as condições fronteira não-lineares ou
parcialmente não-lineares, se por um lado são teoricamente mais interessantes, por outro
lado exigem enorme esforço computacional. Os poucos resultados numéricos que existem
levam a crer que se ganha pouco ao considerar as condições fronteira não-lineares (no caso
das respostas verticais). O que também transparece para fora dos grupos de trabalho que as
têm desenvolvido ao longo de muitos anos, é que ainda existem grandes problemas
numéricos a resolver.
Finalmente, existe uma classe de formulações mais simples onde os problema
hidrodinâmicos são totalmente lineares e as não-linearidades vêm das forças hidrostáticas e
de Froude-Krilov calculadas exactamente na superfície molhada do casco.
Nesta classe de soluções as diferenças entre os métodos de faixas (consistentes) e os
métodos dos painéis não são do ponto de vista teórico muito grande, pois o nível de
simplificação das condições fronteira no corpo e na superfície livre em ambos os casos é
semelhante. Na prática as comparações dos dois tipos de métodos com resultados
experimentais, não mostram melhoramentos significativos para os métodos dos painéis
relativamente às teorias de faixas. Como exemplo, Schellin et al. (1996) apresentaram
resultados das funções de transferência dos movimentos e esforços de um porta-
contentores. Foram comparados os resultados de três métodos de faixas diferentes e um
método dos painéis com dados experimentais. Os autores referem que não encontraram
uma tendência clara de que o método dos painéis comparam melhor com os dados
experimentais do que os métodos de faixas.
Por outro lado os métodos de faixas têm a vantagem das soluções serem muito mais
robustas e os tempos de computação muito inferiores.
Há mais um factor que é necessário ter presente e que tem a ver com o esforço
computacional. Uma vez que o grande interesse dos métodos não-lineares tem a ver com as
previsões de respostas extremas em estados do mar reais, é de esperar que seja necessário

34
fazer simulações bastante longas em estados do mar irregulares. As formulações onde o
problema hidrodinâmico tem de ser resolvido em cada instante de tempo, nomeadamente
aquelas que utilizam condições fronteira não-lineares ou parcialmente não-lineares, não
podem actualmente ser usadas para fazer simulações longas em estados do mar reais.
O que actualmente parece ser o caminho sensato para desenvolver um procedimento para o
cálculo das respostas extremas em navios, inclui o desenvolvimento de um modelo
hidrodinâmico simplificado, mas que represente correctamente o comportamento do navio
em estados do mar severos considerando os principais efeitos não-lineares. O resultado
pode ser um modelo hidrodinâmico que do ponto de vista teórico é válido numa gama de
condições restrita, mas na prática os resultados são bons numa gama de condições muito
mais larga.
Neste trabalho optou-se por desenvolver uma teoria de faixas, onde as forças de radiação e
difracção são lineares e as hidrostáticas e Froude-Krilov são calculadas na superfície
molhada do casco em cada instante de tempo. As forças de radiação são correctamente
representadas no tempo considerando os efeitos de memória associados.
Finalmente será bom referir que num possível futuro em que os métodos totalmente não-
lineares estejam desenvolvidos, validados e prontos a usar, as várias formulações (lineares,
parcialmente não-lineares e totalmente não-lineares) vão provavelmente coexistir num
cenário em que cada uma terá o seu campo de aplicações.
2.8 OBSERVAÇÕES FINAIS
Este capítulo começa por apresentar o problema hidrodinâmico de comportamento do
navio em ondas e classificar as várias soluções que existem para resolve-lo. Depois faz-se
uma revisão histórica do trabalho de investigação nesta área e dos métodos actualmente em
uso ou desenvolvimento, juntamente com uma análise das vantagens e desvantagens de
cada um.
Os métodos de previsão de comportamento no mar que se utilizam para apoio ao projecto
de navios, resultam na maior parte dos casos de formulações lineares baseadas em métodos
das faixas. Os métodos dos painéis também já começam a ser utilizados para aplicações
práticas, no entanto a sua aplicação está mais generalizada para estudar problemas de
estruturas flutuantes sem velocidade de avanço, nomeadamente no campo da industria
offshore. A principal razão é que a solução numérica tridimensional com velocidade de
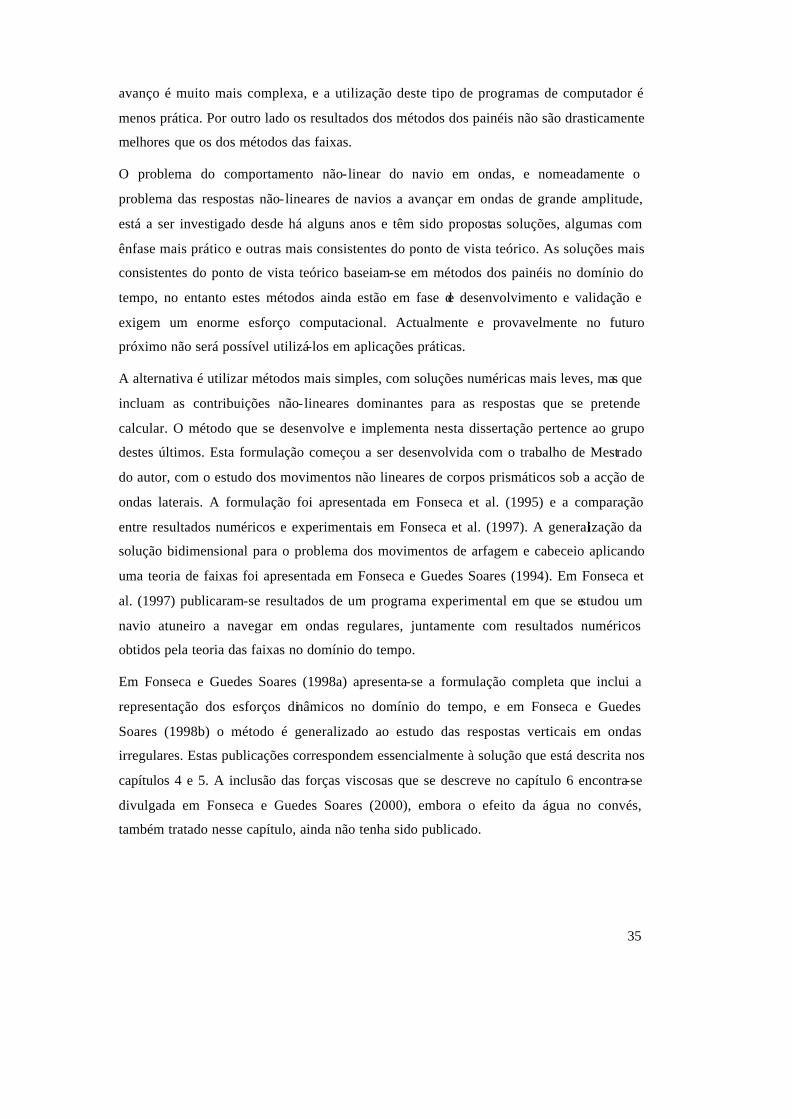
35
avanço é muito mais complexa, e a utilização deste tipo de programas de computador é
menos prática. Por outro lado os resultados dos métodos dos painéis não são drasticamente
melhores que os dos métodos das faixas.
O problema do comportamento não-linear do navio em ondas, e nomeadamente o
problema das respostas não-lineares de navios a avançar em ondas de grande amplitude,
está a ser investigado desde há alguns anos e têm sido propostas soluções, algumas com
ênfase mais prático e outras mais consistentes do ponto de vista teórico. As soluções mais
consistentes do ponto de vista teórico baseiam-se em métodos dos painéis no domínio do
tempo, no entanto estes métodos ainda estão em fase de desenvolvimento e validação e
exigem um enorme esforço computacional. Actualmente e provavelmente no futuro
próximo não será possível utilizá-los em aplicações práticas.
A alternativa é utilizar métodos mais simples, com soluções numéricas mais leves, mas que
incluam as contribuições não-lineares dominantes para as respostas que se pretende
calcular. O método que se desenvolve e implementa nesta dissertação pertence ao grupo
destes últimos. Esta formulação começou a ser desenvolvida com o trabalho de Mestrado
do autor, com o estudo dos movimentos não lineares de corpos prismáticos sob a acção de
ondas laterais. A formulação foi apresentada em Fonseca et al. (1995) e a comparação
entre resultados numéricos e experimentais em Fonseca et al. (1997). A generalização da
solução bidimensional para o problema dos movimentos de arfagem e cabeceio aplicando
uma teoria de faixas foi apresentada em Fonseca e Guedes Soares (1994). Em Fonseca et
al. (1997) publicaram-se resultados de um programa experimental em que se estudou um
navio atuneiro a navegar em ondas regulares, juntamente com resultados numéricos
obtidos pela teoria das faixas no domínio do tempo.
Em Fonseca e Guedes Soares (1998a) apresenta-se a formulação completa que inclui a
representação dos esforços dinâmicos no domínio do tempo, e em Fonseca e Guedes
Soares (1998b) o método é generalizado ao estudo das respostas verticais em ondas
irregulares. Estas publicações correspondem essencialmente à solução que está descrita nos
capítulos 4 e 5. A inclusão das forças viscosas que se descreve no capítulo 6 encontra-se
divulgada em Fonseca e Guedes Soares (2000), embora o efeito da água no convés,
também tratado nesse capítulo, ainda não tenha sido publicado.

36
3 TEORIA DE ESCOAMENTO POTENCIAL
3.1 INTRODUÇÃO
Neste capítulo apresenta-se a formulação do escoamento potencial em torno do casco de
um navio com velocidade de avanço e movimentos oscilatórios induzidos por ondas
incidentes. Esta formulação serve de base à solução do problema de condição fronteira. A
solução do escoamento em torno do casco resulta no cálculo do potencial de velocidade do
escoamento, ou seja, assume-se que o fluido é incompressível, invíscido e irrotacional.
Deste modo o campo de velocidades do fluido pode ser expresso por uma função escalar
Φ , que é o potencial de velocidade, e que deve satisfazer a equação da continuidade e as
condições de fronteira próprias do problema. Na primeira parte do capítulo apresenta-se a
formulação exacta (dentro da hipótese de fluido ideal), o que resulta num problema não-
linear sem solução prática. Na segunda parte faz-se a linearização do problema de condição
fronteira utilizando uma expansão do potencial de velocidade.
3.2 HIPÓTESES DE FLUIDO IDEAL
O primeiro passo para resolver o problema de condição fronteira é estabelecer equações
diferenciais que descrevam o escoamento do fluido. O grau de complexidade destas
equações depende da descrição matemática das propriedades do fluido e do escoamento.
No caso mais geral o escoamento é descrito pelas equações de Navier-Stokes, que
representam o escoamento de fluidos com densidade constante e Newtonianos. No entanto
estas equações diferenciais não-lineares são muito complexas de resolver, excepto para
alguns casos simples. É então necessário introduzir algumas simplificações de modo a
tornar a análise do problema mais tratável.
Deste modo assume-se que existe uma função escalar que satisfaz a equação de
continuidade em todo o domínio do fluido (excepto em pontos singulares). Esta função
escalar é o potencial de velocidade que existe se se assumir as seguintes hipóteses: o fluido
é homogéneo, incompressível, invíscido e as tensões superficiais podem ser desprezadas.
Embora a densidade da água do mar varie no tempo e de local para local, estas variações
são muito pequenas e na prática pode-se assumir que a densidade da água é constante. A
água pode também ser considerada incompressível pois o seu módulo de compressibilidade
é muito elevado. Além disso no mar as ondas geradas pelo vento ou pelo navio e os efeitos

37
de gravidade não produzem acelerações extremamente elevadas, como em outras situações
onde é necessário considerar os efeitos da compressibilidade da água. No caso de um
fluido homogéneo e incompressível a equação de conservação de massa reduz-se à
equação de continuidade.
No caso geral o escoamento é representado de forma vectorial pelo vector de velocidade
das partículas. Para que o vector de velocidade possa ser representado pelo gradiente de
uma função escalar (potencial de velocidade) é necessário que o escoamento não tenha
vorticidade, logo o fluido deve ser irrotacional. A representação não vectorial do
escoamento simplifica bastante a análise do problema. A vorticidade no fluido pode ser
alterada apenas pela acção da viscosidade, daí o requisito de o fluido ser invíscido. Esta
hipótese pode ser assumida pois a viscosidade da água é muito pequena e no problema que
se pretende formular grande parte do escoamento mantém-se irrotacional. A equação da
continuidade juntamente com as características de fluido invíscido e irrotacional conduzem
à equação de Laplace.
O potencial de velocidade é determinado resolvendo o problema de condição fronteira
apropriado. Com o potencial de velocidade pode-se determinar o campo de velocidades do
fluido e finalmente as pressões obtêm-se pela aplicação da equação de Bernoulli.
Dentro das hipóteses assumidas aquela que talvez induza algumas restrições, ou limitações,
é a de escoamento invíscido. De facto as forças viscosas podem ser desprezadas, na maior
parte dos casos, para os movimentos de arfagem e cabeceio. Nestes casos os efeitos
inérciais associados ás flutuações da superfície livre são dominantes. Por outro lado para os
movimentos no plano horizontal (avanço, abatimento e guinada) os efeitos viscosos
podem-se tornar importantes.
No caso do balanço, o amortecimento invíscido devido à geração de ondas é pequeno e por
outro lado é normal haver grande amplificação dinâmica na gama de frequências à volta da
ressonância. Por estas razões os efeitos viscosos são importantes no estudo do movimento
de balanço. Actualmente não existem métodos teóricos satisfatórios para estimar o
amortecimento viscoso em balanço.
No caso de cascos rápidos tais como os SWATHs (Small Water-plane Area Twin Hull), o
amortecimento gerado pela radiação de ondas é relativamente pequeno, e os efeitos
viscosos tornam-se importantes também para os movimentos verticais.

38
Neste casos, na prática a solução é decompor as forças hidrodinâmicas em viscosas e
inviscidas, calcular as componentes viscosas recorrendo a procedimentos empíricos e
finalmente combiná-las nas equações do movimento para obter as respostas do navio.
Quando ondas muito curtas, tais como as ondas capilares, deformam a superfície da água,
as tensões superficiais tendem a contrariar as deformações e aplanar a superfície de novo.
No entanto as ondas capilares têm períodos muito pequenos e não têm qualquer interesse
do ponto de vista da engenharia. Para as ondas de períodos maiores que interessa
considerar, a força que tende a aplanar a superfície livre é a gravítica. Então é possível
desprezar o efeito das tensões superficiais no estudo da hidrodinâmica de navios.
3.3 SISTEMAS DE COORDENADAS
É conveniente utilizar três sistemas de coordenadas para estudar o escoamento em torno do
casco e os movimentos do navio a navegar com velocidade de avanço através de um
campo de ondas incidentes. Os sistemas de coordenadas são ortogonais e direitos (right
handed), um deles é fixo no espaço, ( )X x y z0 0 0 0= , , , o segundo avança com a velocidade
média do navio, ( )X x y z= , , e o terceiro está fixo no navio logo tem a velocidade média e
os movimentos oscilatórios do navio, ( )′ = ′ ′ ′X x y z, , . A figura 3.1 representa os três
sistemas de referência.
Ω
x
y0
x
yz
z
y
x
r
n
η
SW
z0
0O0 O
O
U
Figura 3.1 Relação entre os três sistemas de coordenadas

39
O sistema de referência fixo no espaço ( )X 0 tem a origem e os eixos x0 e y0 sobre o plano
da superfície livre calma, o eixo- x0 aponta na direcção da velocidade do navio e o eixo- z0
é vertical positivo para cima. Este sistema de coordenadas será utilizado para representar a
condição fronteira na superfície livre. O sistema de referência que avança com a
velocidade média do navio ( )X é inércial, tem os eixos paralelos ao sistema fixo e a
origem sobre a superfície livre calma e na vertical do centro de gravidade do navio. A
relação entre os dois sistemas de coordenadas é dada pela seguinte transformação linear:
( ) ( )rx x y z x Ut y z= = −, , , ,0 0 0 (3.1)
onde U é a velocidade de avanço do navio e a variável t representa o tempo. Em todo o
texto as variáveis vectoriais serão representadas com uma seta por cima.
O sistema de referência de inércia que avança com o navio será utilizado para representar
os movimentos oscilatórios do navio (depois de assumir que os movimentos angulares são
de pequena amplitude). O navio como corpo rígido oscila com três translações e três
rotações. As translações nas direcções dos eixos x, y e z denominam-se respectivamente
por avanço, abatimento e arfagem e serão representadas por ξ ξ ξ1 2, e 3 . As rotações em
torno dos eixos x, y e z denominam-se respectivamente por balanço, cabeceio e guinada e
serão representadas por ξ ξ ξ4 5, e 6 . A figura 3.2 representa este sistema de coordenadas e
as convenções para os movimentos oscilatórios.
z y
xO
ξ1
2ξ
ξ3
ξ4
ξ5
ξ6
1ξ
ξ2
ξ3
5ξ
6ξ
ξ4
= avanço= deriva
= arfagem
= balanço= cabeceio
= guinada
Figura 3.2 Sistema de coordenadas inércial e convenção para os deslocamentos

40
O vector que representa o deslocamento αr
de um ponto na superfície do corpo WS no
sistema de referência que avança com velocidade constante U, é definido por:
xx ′−=rrr
α (3.2a)
rrrrr
×Ω+= ηα (3.2b)
onde ( )321 ,, ξξξη =r
e ( )654 ,, ξξξ=Ωr
são os vectores dos deslocamentos oscilatórios de
translação e rotação, rr
é o vector de posição de um ponto na superfície WS relativamente
ao sistema de referência fixo no corpo ( )′ = ′ ′ ′X x y z, , e '× ' representa o produto vectorial.
Os sistemas de coordenadas e os vectores são representados na figura 3.1. Numa condição
de equilíbrio estacionário o vector αr
é constante.
3.4 FORMULAÇÃO DO PROBLEMA HIDRODINÂMICO
Assumindo que o fluido é homogéneo, incompressível e invíscido, então o problema
hidrodinâmico pode ser formulado pela teoria de escoamentos potenciais. Isto quer dizer
que o vector de velocidade das partículas do fluido, ( )t,xV 0rr
, pode se representado pelo
gradiente de um potencial de velocidade ( )tx ,0r
Φ , ou seja Φ∇=Vr
.
O operador gradiente é ∇ =
∂∂
∂∂
∂∂x y z
, , . O potencial de velocidade por sua vez satisfaz a
equação de Laplace no domínio do fluido:
∇ =2 0Φ (3.3)
Conhecido o potencial de velocidade a pressão no fluido, ( )p x tr
0 , , pode ser determinada
pela equação de Bernoulli:
+Φ∇+
∂Φ
−= 0
2
21
gzt
p∂
ρ (3.4)
onde ρ é a densidade do fluido e g a aceleração da gravidade.
Integrando a pressão no casco obtêm-se as forças hidrodinâmicas. A dificuldade está na
determinação da solução da equação de Laplace. A equação de Laplace tem muitas
soluções, logo é necessário definir condições fronteira no domínio do fluido de modo a
obter a solução exacta para o problema em estudo. Neste caso estudam-se os movimentos

41
de um corpo rígido a avançar na superfície livre da água, que se assume ser infinita em
todas as direcções horizontais. As fronteiras que delimitam o domínio do fluido são a
superfície molhada do corpo, a superfície livre, o fundo do mar e uma superfície de
controlo afastada do corpo. É necessário estabelecer condições para estas fronteiras, o que
será discutido nas próximas secções.
3.4.1 Condição Fronteira no Corpo
Quando o fluido está em contacto com a fronteira de um corpo rígido, a condição
cinemática requer que o fluido não penetre a fronteira e que não se criem espaços vazios
entre o fluido e a fronteira. Então no caso de um corpo em movimento, a velocidade do
fluido adjacente e normal à fronteira do corpo deve ser igual à componente de velocidade
da fronteira normal a ela mesma:
WwwS SnVnV em rrrr
⋅=⋅ (3.5)
onde WS é a superfície molhada do corpo, α&r
=SV é a velocidade da superfície molhada do
corpo e o ponto sobre o vector de deslocamentos significa derivada em ordem ao tempo, r
V
é a velocidade do fluido e wnr
é o vector unitário normal a superfície do corpo e
direccionado para o fluido.
A condição fronteira no corpo deve ser satisfeita na superfície molhada exacta do corpo a
oscilar, o que torna o problema matematicamente intratável (de acordo com a solução que
aqui vai ser escolhida). Por esta razão vai ser necessário expandir a condição fronteira no
corpo em torno da superfície molhada média de um modo sistemático, para se considerar a
interacção linear entre os escoamentos estacionário e oscilatório. Isto será discutido na
secção 3.5.3.
3.4.2 Condição Fronteira na Superfície Livre
A superfície livre do fluido é definida pela sua elevação:
( )z x y t0 0 0= ζ , ; (3.6)
As condições fronteira cinemática e dinâmica devem ser satisfeitas na superfície livre. A
condição fronteira cinemática implica que sobre esta superfície a velocidade vertical do
fluido deve ser igual a velocidade vertical da própria fronteira. A condição fronteira

42
dinâmica diz que a pressão na superfície livre é dada pela equação de Bernoulli. As
condições cinemática e dinâmica são representadas respectivamente por:
( )DDt
zζ − =0 0 em z0 = ζ (3.7)
Φ t gz+ ∇Φ + =12
02
0 em z0 = ζ (3.8)
onde a derivada total no sistema de referência fixo em terra é:
DDt t
V= + ⋅ ∇∂∂
r (3.9)
A pressão sobre a superfície livre é considerada zero e o índice t indica diferenciação em
ordem ao tempo. Em todo o texto que se segue, as variáveis em índice indicam
diferenciação em relação a essa variável.
Substituindo a equação (3.8) em (3.7) com z 0 = ζ obtém-se:
∂∂t
V gzt+ ⋅ ∇
+ ∇Φ +
=r
Φ12
020 em z0 = ζ (3.10)
Desenvolvendo a expressão anterior chega-se à condição fronteira na superfície livre
exacta:
( )Φ Φtt z tg+ + ∇Φ ⋅∇Φ + ∇Φ ⋅ ∇ ∇Φ ⋅ ∇Φ =0
212
0 em z0 = ζ (3.11)
Esta condição fronteira é não-linear devido aos termos quadráticos. Por outro lado a
posição da superfície livre não é conhecida à partida. Por estas duas razões é muito difícil
resolver o problema hidrodinâmico satisfazendo a expressão (3.11), portanto vai ser
deduzida na secção 3.5.2 uma condição fronteira na superfície livre linear.
3.4.3 Condição no Fundo
Assume-se que o fundo do mar está a uma distancia do corpo suficientemente grande para
que as perturbações no fluido originadas pelo corpo e pelas ondas incidentes não se sintam.
Teoricamente diz-se que é uma situação de águas profundas e na prática a distancia vertical
ao fundo tende para infinito.
A condição fronteira no fundo em águas profundas indica que o fluido está em repouso
nesta zona. Para um fundo horizontal:

43
∂∂Φz
= 0 em z → ∞ (3.12a)
No caso do fundo do mar se encontrar a uma distância finita da superfície, h, então a
condição cinemática indica a velocidade das partículas de fluido sobre o fundo e normal ao
fundo deve ser igual à componente normal da velocidade do fundo, ou seja zero:
∂∂Φz
= 0 em z h→ − (3.12b)
3.4.4 Condição de Radiação para Infinito
No caso do problema hidrodinâmico ser formulado e resolvido no domínio do tempo, os
movimentos do fluido causados pelo navio tendem para zero quando a distancia à origem
da perturbação tende para infinito (para um intervalo de tempo finito):
∞<∞→→Φ∇ t para ,r ,0 (3.13)
onde r é a distancia horizontal do navio a um ponto no fluido.
Neste caso não é necessário a solução satisfazer uma condição de radiação em infinito.
Quando o problema é resolvido no domínio da frequência, as condições fronteira definidas
em todas as fronteiras físicas, nomeadamente na superfície livre, na superfície molhada do
corpo e no fundo do mar, não são suficientes para assegurar uma solução única em
problemas onde o domínio do fluido ocupa uma região infinita. Uma vez que se assume
que o oceano é infinito em todas as direcções horizontais, há que definir mais uma
condição fronteira no fluido em infinito. Esta condição conhecida como “condição de
radiação para infinito” é descrita numa superfície fictícia no infinito, S∞ , que se estende da
superfície livre ao fundo do mar.
A condição de radiação para infinito pode ser facilmente entendida para alguns casos de
problemas físicos. Observando o movimento do fluido produzido por um corpo a oscilar na
superfície livre, as ondas geradas parecem radiar para infinito em todas as direcções
horizontais e desaparecerem em infinito. Este tipo de condição de radiação foi
originalmente utilizada por Sommerfeld (1949) no estudo da acústica e é frequentemente
designada por condição de Sommerfeld:
limr
rr
ik→∞
−
=∂∂Φ
Φ 0 (3.14)

44
onde k é o número de onda. A condição de Sommerfeld é definida para ondas cilíndricas e
indica que as ondas geradas pelo corpo devem-se comportar em infinito como ondas
progressivas afastando-se da fonte da perturbação.
No caso das ondas de Kelvin geradas pelo navio a avançar em águas tranquilas com
velocidade constante na direcção positiva do eixo-x, as perturbações na superfície livre
propagam-se apenas na direcção de jusante do escoamento. Então a condição de radiação
em infinito para a onda de Kelvin é:
limx→+∞
=Φ 0 (3.15)
Como a onda de Kelvin não tem uma forma cilíndrica, a expressão (3.15) não pode ser
descrita pela condição de Sommerfeld.
No caso mais complexo do navio ter simultaneamente velocidade de avanço e movimentos
oscilatórios induzidos por um campo de ondas incidentes, a condição de radiação em
infinito é muito mais difícil de definir. Nesta situação a propagação das ondas geradas pelo
navio depende de dois parâmetros, a velocidade do navio e a frequência de oscilação. O
sistema de ondas estacionário interage com os sistemas de ondas oscilatórios devidos aos
movimentos do navio e difracção da onda incidente. Como consequência, se a velocidade
do navio for inferior à velocidade de grupo das ondas radiadas e difractadas, estas ondas
propagam-se em todas as direcções. Se a velocidade do navio for superior à velocidade de
grupo, então as ondas geradas propagam-se apenas na direcção de jusante do escoamento.
3.5 LINEARIZAÇÃO DO PROBLEMA HIDRODINÂMICO
Na secção anterior apresentou-se o problema de condição fronteira que deve ser resolvido,
com o objectivo de determinar o potencial de velocidade do escoamento em torno do navio
a avançar em mar ondoso. O problema “exacto” (exacto no âmbito das limitações de fluído
incompressível e invíscido) envolve a determinação do potencial de velocidade que
satisfaz a equação de Laplace no domínio do fluído, a condição de fronteira não-linear na
superfície livre e a condição fronteira na superfície oscilatória do corpo.
A formulação “exacta” conduz à condição fronteira não linear válida na superfície livre do
fluido e à condição fronteira cinemática na superfície oscilatória do corpo. Estas condições
fronteira tornam o problema muito complexo, devido não só à não-linearidade da
superfície livre, mas também ao facto de haver interacção entre a superfície livre e a
superfície do corpo cujas formas e posições não são conhecidas à partida. Para resolver o

45
problema é necessário linearizar as condições fronteira, o que quer dizer que os efeitos de
ordem superior são desprezados. Nas próximas secções as condições fronteira são
linearizadas utilizando um método de pequenas perturbações.
3.5.1 Método de Pequenas Perturbações
Se os efeitos não-lineares no problema hidrodinâmico tiverem uma importância
relativamente pequena, então os termos não-lineares podem ser tratados como perturbações
ao comportamento essencialmente linear. Estas perturbações são geralmente identificadas
por um parâmetro pequeno ε. Se o sistema for “aproximadamente” linear, então a solução
pode ser representada por uma expansão em série de potências no parâmetro ε. Os métodos
para obter soluções dependentes do tempo são conhecidos por “métodos das pequenas
perturbações”.
No caso do problema hidrodinâmico, o potencial de velocidade do fluido e todas as outras
quantidades derivadas, tais como a velocidade do fluido, elevação da superfície livre,
pressões e forças hidrodinâmicas e os movimentos do navio, podem ser representadas por
séries de potências de um parâmetro ε adimensional. Por exemplo o potencial de
velocidade será:
( ) ( ) ( ) ( ) ...;, 22100 +Φ+Φ+Φ=Φ εεεtx
r (3.16)
onde o índice representa a ordem dos vários termos.
Os termos de ordem zero representam os valores na condição estacionária associados com
t=0. As séries são introduzidas nas equações que governam o problema, incluindo as
condições fronteira, e os termos são agrupados de acordo com a ordem da sua potência em
ε. Os coeficientes de cada potência resultam numa sequência de equações e condições
fronteira, onde os coeficientes de ε estão associados à solução de primeira ordem, os
coeficientes de ε2 estão associados à solução de segunda ordem, etc. Deste modo, o método
das pequenas perturbações resolve o problema sistematicamente passo a passo até à ordem
da solução desejada.
As diferenças entre o problema simplificado deste modo e o problema na sua forma não-
linear completa, tendem a desaparecer se a ordem da solução for suficientemente elevada.
No entanto quanto mais alta a ordem do problema, mais complexa é a solução e mais
exigente em termos de esforço computacional.

46
O escoamento em torno do casco pode ser decomposto em duas partes, sendo uma o
escoamento estacionário devido ao avanço do navio em águas tranquilas. A outra parte é o
escoamento oscilatório associado às ondas incidentes, e às ondas difractadas e radiadas
devido à presença e movimentos do casco no campo de escoamento estacionário. O
potencial de velocidade pode então ser representado do seguinte modo:
( ) ( ) ( ) ( )txxtzyUtxtx ,~
,,,,0rrr
Φ+Φ=+Φ=Φ (3.17)
onde Φ e Φ~ representam respectivamente os potenciais de velocidade estacionário e
variável. Evidentemente estes potenciais satisfazem a equação de Laplace.
Voltando às expansões em séries de potências das quantidades hidrodinâmicas, estas são
convergentes se o parâmetro de perturbação ε existe e é inferior a um. O parâmetro
adimensional ε utilizado para descrever o potencial de velocidade estacionária Φ , assume
que as deformações da superfície livre devido à velocidade do casco são pequenas. Deste
modo é necessário impor restrições nas características geométricas do casco e na
velocidade de avanço.
Se o navio que avança através da superfície livre for esbelto, então as perturbações geradas
no fluido pela sua passagem são pequenas. Neste caso o parâmetro ε pode ser definido
pela razão entre a boca e o comprimento do navio ( )LB /=ε . Por outro lado se o navio
não for esbelto, mas avançar com uma velocidade baixa, as perturbações induzidas no
fluido são também pequenas. Neste caso pode-se assumir a “hipótese de baixa velocidade”,
segundo a qual a razão entre as velocidades induzidas pela perturbação e a velocidade de
avanço é pequena. Em geral os navios rápidos são esbeltos e os navios bojudos são lentos,
sendo razoável assumir que o parâmetro ε é suficientemente pequeno para que a expansão
do potencial estacionário seja válida.
No caso do potencial oscilatório, para que os efeitos não-lineares possam ser considerados
relativamente pequenos impõe-se que o declive das ondas incidentes seja bastante inferior
a um, logo as ondas são de pequena amplitude. Consequentemente as ondas difractadas, as
ondas radiadas e os movimentos induzidos no navio são também considerados de pequena
amplitude. O parâmetro ε está relacionado com o declive das ondas incidentes.
Fica então demonstrado que dadas certas restrições geométricas, de velocidade de avanço e
de amplitude de oscilação das fronteiras, o método das pequenas perturbações pode ser
aplicado para representar o potencial de velocidade do escoamento em torno do navio a

47
avançar em mar ondoso. Todas as outras quantidades hidrodinâmicas de interesse têm
também representação por expansões do mesmo tipo, pois derivam directamente do
potencial de velocidade.
3.5.2 Condição Fronteira na Superfície Livre Linear
Foi mencionado atrás que a solução numérica da condição fronteira na superfície livre não-
linear dada pela equação (3.11) é muito difícil de obter e caso se conseguisse o esforço
computacional seria impraticável. Pode-se no entanto aplicar o método das pequenas
perturbações para linearizar a condição fronteira até à primeira ordem e usar uma expansão
em série de Taylor para expandir a condição fronteira em torno da superfície livre média
que é conhecida à partida.
Uma vez que o escoamento é a combinação entre as partes estacionária e oscilatória, será
necessário linearizar ambos os escoamentos. Começando pelo escoamento estacionário, o
potencial de velocidade devido ao avanço do casco através da superfície livre pode ser
representado por:
( ) ( )xUxx S
rrΦ+−=Φ (3.18)
onde o primeiro termo é o potencial devido a velocidade do fluido a passar pelo sistema de
referência e U é a velocidade de avanço do navio. O segundo termo, SΦ , representa a
perturbação estacionária devido à presença do casco.
O campo de velocidades do escoamento estacionário relativamente ao sistema de
referência que avança com o navio, ( )X x y z= , , , é:
( ) ( ) ( )SUxxxV Φ+−∇=Φ∇=rrr
0 (3.19)
As condições cinemática e dinâmica na elevação da superfície livre estacionária ζ são:
( ) 0=− zDtD ζ em ζ=z (3.20)
021 2
=+Φ∇+Φ
∂∂
−∂∂
gzx
Ut
SS em ζ=z (3.21)
Rearranjando a equação (3.21) e avaliando-a para ζ=z com UxS +Φ=Φ resulta:

48
( )22
21
Ug
−Φ∇−=ζ em ζ=z (3.22)
A expressão anterior dá a elevação da superfície livre estacionária. Introduzindo esta
expressão na condição cinemática (3.20) onde a derivada local em ordem ao tempo é zero,
vem:
( ) ( ) 021 22
=
+−Φ∇∇⋅Φ∇ gzU (3.24)
( ) 021 =Φ+Φ∇⋅Φ∇∇⋅Φ∇ zg em ζ=z (3.25)
Esta é a condição fronteira não linear na superfície livre, para o problema do escoamento
estacionário em torno de um casco com velocidade de avanço em águas tranquilas.
Substituindo a expressão (3.18), que dá a decomposição do potencial estacionário, na
equação (3.25) e conservando apenas os termos de primeira ordem de SΦ em ε , obtém-se
a condição fronteira linear na superfície livre para o problema do escoamento estacionário:
( ) 02 =Φ+Φ SxxS gU em z = 0 (3.26)
Note-se que esta equação é imposta na superfície livre média (z = 0) e não na elevação da
onda, porque a diferença entre o valor do potencial e suas derivadas em z = 0 ou ζ=z é
da mesma ordem de grandeza dos termos de ordem superior já desprezados.
Para o caso do problema do escoamento oscilatório, originado pelo casco a avançar com
movimento oscilatório induzido pelas ondas, a condição fronteira na superfície livre é
obtida introduzindo a decomposição do potencial (3.17) na condição fronteira geral (3.10):
( ) ( ) ( ) 0~~21~~ =
+Φ∇+Φ∇⋅Φ∇+Φ∇+Φ
∇⋅Φ∇+Φ∇+∂∂
gzt
t em ζ=z (3.27)
Desenvolvendo a expressão anterior e desprezando os termos quadráticos do potencial
oscilatório Φ~ , ou seja os termos de ( )2εO em Φ~ , obtém-se a condição fronteira na
superfície livre para o escoamento oscilatório:
( )
( ) ( ) 0~~~
21
21~2
=Φ+Φ∇⋅Φ∇∇⋅Φ∇+Φ∇⋅Φ∇∇⋅Φ∇
+Φ+Φ∇⋅Φ∇∇⋅Φ∇+Φ∇⋅Φ∇+Φ
z
zttt
g
g em ζ=z (3.28)

49
A elevação da superfície livre associada ao escoamento oscilatório é obtida sobrepondo o
potencial oscilatório Φ~ ao potencial da perturbação estacionário SΦ na condição fronteira
dinâmica na superfície livre (3.21):
( ) ( ) ( ) 0~~21~ =+Φ∇+Φ∇⋅Φ∇+Φ∇+Φ+Φ
−
∂∂
gzdxd
Ut
SSS em ζ=z (3.29)
Substituindo na equação anterior UxS +Φ=Φ e mais uma vez desprezando os termos de
( )2εO em Φ~ , chega-se à elevação da superfície livre do escoamento oscilatório:
( )
Φ∇⋅Φ∇+−Φ∇+Φ−= ~
21~1 22
Ug tζ em ζ=z (3.30)
A expressão acima é válida para ζ=z . Para representar a elevação da superfície livre em
ζ=z a equação (3.30) pode ser expandida em série de Taylor em torno de ζ=z . Os dois
primeiros termos da expansão são:
( )
( ) ( )
Φ∇⋅Φ∇+−Φ∇+Φ
∂∂
−−
Φ∇⋅Φ∇+−Φ∇+Φ−=
~21~1
~21~1
22
22
Uzg
Ug
t
t
ζζ
ζ em ζ=z (3.31)
e utilizando a expressão para a elevação da superfície livre estacionária (3.22) vem:
[ ]
( ) ( )[ ]zzzt
t
g
g
Φ∇⋅Φ∇+Φ∇⋅Φ∇+Φ−−
Φ∇⋅Φ∇+Φ−=
~~1
~~1
ζζ
ζζ em ζ=z (3.32)
Substituindo as expansões em séries de pequenas perturbações de Φ~ e ,ζζ na expressão
anterior e desprezando os termos de ordem superior a elevação da superfície livre vem:
( ) ( )( )zt ggΦ∇⋅Φ∇−−Φ∇⋅Φ∇+Φ−= ζζζζ 1
~~1 em ζ=z (3.33)
A última expressão representa a elevação da superfície livre linearizada para o problema
do escoamento criado pelo navio a avançar e a oscilar devido a ondas incidentes. A
elevação da superfície livre é linearizada em torno da elevação da onda estacionária.

50
O mesmo procedimento pode ser utilizado para expandir a condição fronteira na superfície
livre (3.28) em torno de ζ=z . Deste modo a equação (3.28) pode ser expandida em série
de Taylor e de novo Φ~ e ,ζζ expandidos em séries de pequenas perturbações do que
resulta:
( ) ( )
( ) ( ) ( ) 021~~
21
~~2~21
=
Φ+Φ∇⋅Φ∇∇⋅Φ∇
∂∂
−+Φ+Φ∇⋅Φ∇∇⋅Φ∇+
Φ∇⋅Φ∇∇⋅Φ∇+Φ∇⋅Φ∇+Φ+Φ+Φ∇⋅Φ∇∇⋅Φ∇
zz
tttz
gz
g
g
ζζem ζ=z
(3.34)
Utilizando a equação (3.25) e ( )ζζ − que pode ser dado pela equação (3.33), resulta na
condição fronteira na superfície livre linearizada em torno da elevação da onda
estacionária:
( ) ( )
( ) ( ) ( ) 0/21~~
~~21~~
2~
2=Φ∇⋅Φ∇+
Φ+Φ∇∇⋅Φ∇
∂∂
Φ∇⋅Φ∇+Φ
−Φ+Φ∇⋅Φ∇∇⋅Φ∇+Φ∇⋅Φ∇∇⋅Φ∇+Φ∇⋅Φ∇+Φ
zzzt
zttt
ggz
g em ζ=z (3.35)
Se o problema do escoamento estacionário em torno de navio a navegar em águas
tranquilas for resolvido num primeiro passo, a condição fronteira (3.35), para o problema
do escoamento oscilatório, aplicada em ζ=z resulta numa condição fronteira na
superfície livre linear. Apesar de simplificada, apenas recentemente se apresentaram
resultados numéricos com esta solução implementada (Bertram, 1998), e para a situação
em que as ondas geradas pelo casco se propagam apenas na direcção de jusante do
escoamento. De facto ainda existem grandes dificuldades numéricas na implementação
desta condição fronteira e não se prevê que nos próximos anos se atinja um grau de
maturidade que permita a sua aplicação a problemas práticos.
Para simplificar ainda mais a condição fronteira (3.35), assume-se que o termo de
perturbação no potencial estacionário, devido ao avanço do navio em águas tranquilas é
suficientemente pequeno e pode ser desprezado ( )0≅Φ S . Mais uma vez, isto significa que
o casco deve ser esbelto, ou seja B/L deve ser pequeno. De acordo com esta hipótese, todas
as parcelas associadas ao termo de perturbação do potencial estacionário são de ordem
superior e podem ser desprezados no âmbito de uma condição fronteira na superfície livre

51
de primeira ordem para o escoamento oscilatório. O campo de velocidades do escoamento
é então:
( )0,0,0 UV −=Φ∇=r
(3.36)
A equação (3.34) reduz-se a:
0~~~
2~ 2 =Φ+Φ+Φ−Φ zxxxttt gUU em z = 0 (3.37a)
0~~2
=Φ+Φ
∂∂
−∂∂
zgx
Ut
em z = 0 (3.37b)
Esta condição fronteira linearizada é imposta na superfície livre média z=0, pois é
assumido que não existe perturbação ao potencial constante -Ux, ou seja não existe
elevação da superfície livre estacionária.
O modo de lidar com a condição fronteira (3.37b) distingue as várias soluções para o
problema hidrodinâmico do comportamento do navio no mar, nomeadamente: teoria
ordinária de faixas, teoria de faixas, teoria ordinária do corpo esbelto, teoria unificada do
corpo esbelto, teoria de segunda ordem do corpo esbelto, teoria 2 1/2D e métodos dos
painéis.
3.5.3 Condição Fronteira Linear no Corpo
A condição fronteira não-linear no corpo foi apresentada pela equação (3.5). Esta condição
fronteira é aplicada na superfície molhada oscilatória WS , que não é conhecida à partida. O
objectivo da linearização é obter uma expressão para a condição fronteira, que possa ser
satisfeita na superfície molhada média do corpo 0S , conhecida à partida.
No passado alguns autores aplicaram a expressão para a condição fronteira dada pela
equação (3.5) directamente à superfície molhada média do corpo e de facto ainda hoje se
utilizam algumas teorias das faixas que resultam da aplicação desta simplificação. No
entanto, Timman e Newman (1962) demonstraram que uma teoria de primeira ordem
consistente deve incluir algumas interferências entre os escoamentos estacionário e
oscilatório, interferências estas que não podem ser representadas por esta simplificação.
A condição fronteira no corpo (3.5) pode ser representada em termos do vector de
velocidade α& resultando:

52
0=⋅+⋅− ww nVnrrr&α em WS (3.38)
Para linearizar a condição fronteira começa-se por expandir o vector de velocidade do
fluido Vr
em série de Taylor em torno da posição média do casco 0S :
( ) ( ) ( )2
00, εα OVVtxV
SS+∇⋅+=′
rrrrr (3.39)
O vector unitário e normal à superfície do corpo na sua posição exacta wnr
, pode também
ser representado em termos do vector unitário e normal à superfície média do corpo nr
. A
relação entre os dois vectores é estabelecida pela matriz de transformação que inclui os
ângulos de Euler:
[ ]nDnwrr
= (3.40)
Assumindo que os deslocamentos angulares são pequenos, a matriz de transformação que
inclui produtos de funções trigonométricas nos deslocamentos angulares definidos em
zyxo ′′′−′ , pode ser simplificada para dar uma relação linear, nos deslocamentos
angulares definidos em zyxo − , entre wnr
e nr
. De novo são desprezados os termos de
( )2εO . A matriz de transformação simplificada é:
[ ]
−−
−=
1
11
45
46
56
ξξξξ
ξξD (3.41)
Combinando (3.40) e (3.41) e assumindo a hipótese de pequenos deslocamentos, o vector
unitário normal a superfície do corpo na sua posição exacta pode ser aproximado a:
( )αrrrr∇⋅+= nnnw (3.42)
onde nr
é a normal unitária na superfície média do casco (conhecida).
A condição fronteira cinemática no corpo linearizada e aplicada em S0, obtém-se
substituindo o vector de velocidade do fluido expandido (3.39) e a normal unitária (3.42)
na equação (3.38):
( ) ( )[ ] nVVnVrrrrr&rr
⋅∇⋅−∇⋅+=⋅ ααα em 0S (3.43a)
ou em termos da derivada espacial do potencial de velocidade:
( ) ( )[ ] nVVnrrrrr& ⋅∇⋅−∇⋅+=Φ ααα em 0S (3.43b)

53
Relembrando que o potencial de velocidade foi decomposto em componentes estacionária
e oscilatória (ver equação 3.17), o vector de velocidade pode ser representado por:
10 VVVrrr
+= (3.44)
onde 0Vr
representa o campo de velocidades estacionário e 1Vr
o campo de velocidades
oscilatório.
Substituindo a expressão anterior em (3.43) resulta nas condições de fronteira a ser
satisfeitas pelos escoamentos estacionário e não-estacionário. Para o escoamento
estacionário, uma vez que existe apenas velocidade tangencial na vizinhança do corpo tem-
se:
00 =⋅ nVrr
em 0S (3.45)
Lembrando ainda que o potencial estacionário é dado por SUx Φ+−=Φ e Φ∇=0Vr
,
então a condição fronteira cinemática a ser satisfeita pela parte de perturbação do potencial
estacionário é:
1Unn
S =∂Φ∂
em 0S (3.46)
onde n1 é a componente da normal unitária na direcção do eixo-x.
Para o escoamento oscilatório a condição cinemática vem:
( ) ( )[ ] nVVn
rrrrr& ⋅∇⋅−∇⋅+=∂Φ∂
00
~ααα em 0S (3.47)
A condição fronteira (3.47) foi deduzida por Timman e Newman (1962) para contabilizar
de uma forma consistente a interacção entre os escoamentos estacionário e oscilatório
numa teoria linear de primeira ordem. Em algumas teorias dos movimentos dos navios é
utilizada uma forma mais simples desta condição fronteira, o que resulta em coeficientes
de acoplamento entre a arfagem e cabeceio que não satisfazem o requisito de simetria.
3.5.4 Descomposição do Potencial de Velocidade
No processo de linearização decompôs-se o potencial de velocidade Φ em potencial
estacionário Φ e potencial oscilatório Φ~ . A parte estacionária foi ainda separada em
escoamento uniforme Ux− e escoamento estacionário perturbado SΦ . Para a linear ização

54
das condições fronteira foi assumido que o escoamento oscilatório tal como os movimentos
induzidos são de pequena amplitude. Por esta razão o potencial oscilatório Φ~ pode ser
decomposto linearmente em componentes independentes associadas às: ondas incidentes,
ondas difractadas devido à presença do casco no campo de ondas incidente e ondas
radiadas devido aos movimentos oscilatórios do casco. Deste modo o potencial de
velocidade oscilatório vem:
RDI Φ+Φ+Φ=Φ~ (3.48)
onde IΦ é o potencial da onda incidente, DΦ é o potencial de difracção e RΦ é o
potencial de radiação. O potencial de radiação pode ainda ser decomposto em
contribuições de cada um dos seis movimentos oscilatórios:
∑=
Φ=Φ6
1j
Rj
R (3.49)
Substituindo (3.48) em (3.47) obtém-se a condição fronteira no corpo em termos das
componentes do potencial oscilatório:
( ) ( ) ( )[ ] nnn
RDI rrr& ⋅Φ∇∇⋅−∇⋅Φ∇+=
Φ+Φ+Φ
∂∂
ααα∂
∂ em S0 (3.50)
Uma vez que a condição fronteira é aplicada numa superfície não oscilatória S0 , que pode
ser considerada a superfície molhada no equilíbrio estático (ou pode incluir os efeitos
estacionários de sobreimersão e caimento associados ao escoamento estacionário), então a
condição fronteira (3.50) pode ser separada em duas condições associadas a dois
problemas independentes:
( ) ( )[ ] nn
R rrr& ⋅Φ∇∇⋅−∇⋅Φ∇+=Φ
ααα∂
∂ em S0 (3.51)
nn
ID
∂∂
∂∂ Φ
−=Φ em S0 (3.52)
A primeira condição está relacionada com o problema da radiação, onde o navio com
velocidade de avanço é forçado a oscilar na ausência de ondas incidentes. A segunda
condição está relacionada com o problema da difracção, onde o navio avança mas
restringido na sua posição média, portanto sem movimentos oscilatórios.

55
A condição fronteira (3.51) é normalmente apresentada de uma forma mais compacta
definindo os vectores n~ e m~ de um modo similar ao usado por Ogilvie e Tuck (1969):
( )( )
×=
==
nrnnn
nnnnn rr
r
654
321
,,
,,~ (3.53)
( ) ( )
( ) ( )( )
Φ∇×∇⋅−=
Φ∇∇⋅−=
=
Urn
mmm
Un
mmmm rr
r
654
321
,,
,,~ (3.54)
onde rr
é o vector de posição relativamente à origem do sistema de coordenadas.
A quantidade m~ esta relacionada com a taxa de variação, na vizinhança do casco, de um
escoamento estacionário que passa pelo casco e tem velocidade unitária em infinito. Esta
quantidade depende apenas da forma do casco.
Utilizando as expressões para os vectores n~ e m~ , a condição fronteira para o problema da
radiação dada por (3.51) pode ser representada por:
( )∑ ∑= =
+=Φ
=Φ 6
1
6
1j jjjjj
Rj
R
Umnnn
ξξ∂
∂
∂∂ & em S0 (3.55)
Os termos mr
contêm os efeitos de convecção do campo de velocidade estacionário devido
à velocidade de avanço. Se o casco for assumido esbelto então a perturbação estacionária à
volta do navio é pequena e 0≅Φ S , pelo que o campo de velocidades estacionário vem
dado por ( )0,0,0 UV −=Φ∇=r
. Neste caso os termos m~ tornam-se mais simples e as
correcções devido à velocidade estacionária na condição fronteira são devido apenas ao
ângulo de ataque com o escoamento em infinito em cabeceio e guinada. Os termos m~
reduzem-se a:
( ) ( )( ) ( )
−=
==
23654
321
,,0,,
0,0,0,,~nnmmm
mmmm (3.56)
3.5.5 Problema de Condição Fronteira Linear
De uma forma resumida, pode-se dizer que para linearizar as condições fronteira na
superfície livre e na superfície do corpo foi necessário restringir alguns parâmetros básicos

56
que governam a solução do problema hidrodinâmico dos movimentos do navio em ondas,
nomeadamente:
• O casco deve ser esbelto, ou seja B/L deve ser ( )εO .
• A amplitude das ondas incidentes deve ser pequena.
• Os movimentos oscilatórios do navio devem ser de pequena amplitude.
Com estas simplificações o problema “exacto” formulado na secção 3.4 consiste agora em
determinar o potencial de velocidade do escoamento que obedece às seguintes condições:
Equação de Laplace....................... 0=Φ+Φ+Φ zzyyxx (3.3)
Cond. front. linear na sup. Livre ..... 02 2 =Φ+Φ+Φ−Φ zxxxttt gUU em z = 0 (3.37a)
C. F. linear no corpo (radiação)....... jjjj
Rj
Umnn
ξξ∂
∂+=
Φ & , 6,...,1=j em 0S (3.55)
C. F. linear no corpo (difracção) .....nn
ID
∂∂
∂∂ Φ
−=Φ
em 0S (3.52)
Cond. de repouso no fundo............. ∞→→Φ∇ -z para 0 (3.12a)
Condição de radiação para infinito apropriada.
Estas condições devem formar a base para uma teoria linear e consistente para o estudo da
hidrodinâmica do comportamento de navios em ondas. No entanto os efeitos
tridimensionais associados à interacção entre os escoamentos estacionário e oscilatório
fazem com que mesmo o problema linear seja de solução muito complexa.
3.5.6 Pressão e Forças Hidrodinâmicas
A dinâmica do navio é governada por equações do movimento que representam o
equilíbrio dinâmico entre as forças hidrodinâmicas exteriores que actuam no casco e as
forças de inércia e gravíticas. Uma vez resolvido o problema de condição fronteira linear
formulado na subsecção anterior, ou seja, uma vez determinado o potencial de velocidade,
a pressão no casco pode ser calculada pela equação de Bernoulli. Finalmente a integração
de pressões resulta nas forças hidrodinâmicas.
A equação de Bernoulli no sistema de referência que avança com a velocidade média do
navio é:

57
++Φ∇+
∂Φ
−=− 20
2
21
21
Ugzt
pp a
∂ρ (3.57)
onde p é a pressão no fluido, ap é a pressão atmosférica e ρ é a massa específica do
fluido. Substituindo a decomposição do potencial (3.17) na equação de Bernoulli, resulta
em dois grupos de termos. Um dos grupos de termos é constante no tempo e representa a
pressão constante associada ao escoamento estacionário (equação 3.58). O outro grupo de
termos é oscilatório no tempo e representa a pressão associada ao escoamento oscilatório
(equação 3.59).
( )22
21
Upp a +Φ∇−=
−ρ
(3.58)
+Φ∇⋅Φ∇+
Φ−=
−zg
tpp a ~
~
∂∂
ρ (3.59)
Os termos de ( )2εO em Φ~ são desprezados nas equações anteriores. O termo zg tem a ver
com a pressão hidrostática e resulta numa força oscilatória pois será integrado na superfície
molhada oscilatória. A força que actua no casco resulta da integração de pressões:
∫∫
+Φ∇−=
0
~~21 22
S
dsnUF (3.60)
( )∫∫ ∫∫−
Φ∇⋅Φ∇+
Φ−=
0
~~~~ 1
S S
dsnzgdsnt
F ρ∂
∂ (3.61)
F e F~ são respectivamente as forças hidrodinâmicas estacionária e oscilatória. De aqui
para a frente interessa estudar apenas as forças dependentes do tempo. De acordo com o
problema de condição fronteira linear formulado, os potenciais de velocidade oscilatórios
são avaliados na superfície molhada média 0S .
O primeiro integral na equação (3.61) pode ainda ser simplificado aplicando uma variação
do teorema de Stokes derivada por Ogilvie e Tuck (1969):
Se ( )zyx ,,~Φ for uma função escalar diferenciavel, então a seguinte relação é válida:
( ) ( )[ ] ( )[ ]∫∫∫ Φ∇⋅Φ−=Φ∇⋅Φ∇+Φ∇∇⋅Φ−00
~~~~~1
Cz
S
dnedsnn lr (3.61)

58
onde zer
é o vector unitário na direcção do eixo-z no sistema de coordenadas 0 - x y z. C0
é a intersecção da superfície S0 com a linha de água média e o integral é seguido na
direcção contrária dos ponteiros do relógio observando o navio de cima (ver figura 3.3).
Para os movimentos de arfagem e cabeceio o integral de linha no teorema desaparece se o
navio tem os costados verticais na zona da linha de água ( 053 == nn ). Para os outros
movimentos o valor do integral de linha é desprezável se o navio for esbelto ( 0≅⋅ nexrr
).
z y
xOdl
S0n
C0
Figura 3.3 Variação ao teorema de Stokes
O objectivo de utilizar este teorema é converter o integral de superfície que inclui
derivadas espaciais do potencial oscilatório Φ~ , num integral de superfície que inclui
apenas valores de Φ~ . Deste modo evita-se o cálculo de derivadas de Φ~ em ordem às
coordenadas espaciais. Introduzindo a expressão (3.62), sem o integral de linha que foi
assumido igual a zero, na expressão (3.61) que dá a força hidrodinâmica resulta:
( )dsnzgdsmUnt
FSS∫∫∫∫ −
Φ−
Φ−= ~~~~
~~
0
ρ∂∂
ρ (3.63)
onde os vectores m~ e ~n foram definidos por (3.53) e (3.54).
Aplicando a decomposição do potencial oscilatório dado por (3.48) e (3.49) resulta em três
grupos de forças hidrodinâmicas que têm a ver com o problema da excitação de onda, o
problema da radiação e o problema hidrostático. As equações para estas forças são
respectivamente:

59
( ) ( )∫∫
Φ+Φ−
Φ+Φ−=
0
~~S
DIDI
E dsmUnt
F∂
∂ρ (3.64)
∫∫
Φ−
Φ−=
0
~~S
RR
R dsmUnt
F∂
∂ρ (3.65)
( )∫∫−=S
H dsnzgF ~ρ (3.66)
3.6 OBSERVAÇÕES FINAIS
Neste capítulo foi apresentada a formulação teórica para os problemas dos escoamentos
estacionário e oscilatório em torno de um navio a avançar em ondas. O problema
hidrodinâmico “exacto” no âmbito do escoamento potencial, é intratável devido não só às
não-linearidades das condições fronteira no corpo e superfície livre, mas também porque a
posição instantânea destas superfícies não é conhecida à partida. Assim as condições
fronteiras foram linearizadas utilizando-se sistematicamente expansões e retendo apenas os
termos de ordem 0 e 1. As linearizações assumem que o navio é esbelto e as ondas
incidentes e movimentos oscilatórios do navio são de pequena amplitude.
Foi derivada uma condição fronteira linear para a superfície livre associada à perturbação
estacionária do escoamento, no entanto também este problema ainda não tem uma solução
prática, pelo que foi necessário assumir que o potencial da perturbação estacionário é de
ordem superior e pode ser desprezado na condição fronteira linear do escoamento
oscilatório.
A condição fronteira cinemática no corpo linearizada contem os termos m~ associados ao
escoamento estacionário em torno do casco. Estes termos são simplificados assumindo de
novo que o potencial de perturbação pode ser desprezado, ficando apenas o termo da
velocidade do escoamento em infinito.
Foram também deduzidas expressões simplificadas para as forças hidrodinâmicas
utilizando uma variação do teorema de Stokes. Aqui foi assumido que o navio é esbelto e
tem os costados verticais em torno da linha de água.

60
4 SOLUÇÃO NO DOMÍNIO DA FREQUÊNCIA
4.1 INTRODUÇÃO
Neste capítulo os problemas lineares de radiação e difracção formulados no capítulo 3, são
resolvidos utilizando uma teoria de faixas. O problema de condição fronteira geral
apresentado atrás, será restrito a escoamentos oscilatórios e harmónicos. Para o problema
da radiação isto quer dizer que os movimentos forçados e as outras respostas, tais como
pressões e forças hidrodinâmicas, são harmónicos no tempo. Para o problema da difracção,
tanto as ondas incidentes como as respostas hidrodinâmicas são lineares e harmónicas no
tempo.
As forças de radiação e difracção vão ser representadas em termos de coeficientes de
massa acrescentada, de amortecimento e de força de excitação. Todos estes coeficientes
são calculadas utilizando o método das faixas de Salvesen et al. (1970). A formulação não
vai ser apresentada aqui em detalhe, pois está muito bem explicada na publicação referida.
Faz-se no entanto a ponte entre a formulação apresentada no capítulo anterior e os
resultados desta teoria de faixas. São indicados também os passos principais na dedução do
método, pois assim permite perceber adequadamente as vantagens e principalmente as
limitações desta teoria de faixas.
Basicamente em métodos de faixas o navio é dividido num número finito de faixas
bidimensionais ao longo do seu comprimento. O casco do navio é representado de uma
forma aproximada. Os coeficientes hidrodinâmicos associados a cada faixa são calculados
resolvendo o problema de condição fronteira bidimensional para secções com a forma das
secções transversais do navio que definem as faixas. Assume-se que o escoamento numa
secção transversal não afecta o escoamento nas secções vizinhas. Os efeitos
tridimensionais no escoamento resultam apenas do ângulo de ataque com o escoamento
estacionário em infinito em cabeceio e guinada.
4.2 FORÇAS DE RADIAÇÃO
4.2.1 Simplificação do Problema de Condição Fronteira
As forças de radiação que resultam do movimento oscilatório forçado de um navio esbelto
a avançar com velocidade média constante, são dadas pela equação (3.65) e dependem do
potencial de velocidade de radiação. O problema de condição fronteira linear que é

61
necessário resolver para determinar o potencial de velocidade foi apresentado na secção
(3.5.5).
O potencial de velocidade foi decomposto em componentes independentes (equações 3.48
e 3.49). A componente de radiação é:
Rj
j
aj
R φξ∑=
=Φ6
1
(4.1)
onde ajξ é a amplitude real do movimento oscilatório no modo j e R
jφ é o potencial de
radiação para um movimento oscilatório de amplitude unitária no modo j.
Posto isto o problema de condição fronteira linear para a radiação é:
Equação de Laplace....................... 0=++ Rzz
Ryy
Rxx φφφ (4.2)
Cond. front. linear na sup. Livre ..... 02
=+
∂∂
−∂∂ R
zR g
xU
tφφ em z = 0 (4.3)
C. F. linear no corpo (radiação)....... jj
Rj
Umnin
+= ω∂
∂φ, 6,...,1=j em 0S (4.4)
Cond. de repouso no fundo............. ∞→→∇ -z para 0Rφ (4.5)
Condição de radiação para infinito .. 02
=−∂
∂ RR
gi
rφ
ωφ quando ∞→r (4.6)
onde 22 yxr += é a distância ao corpo, ω é a frequência de oscilação, e as
componentes do vector m~ são dadas por (3.56).
Dada a condição de fronteira (4.4), convém separar o potencial de radiação numa
componente independente da velocidade de avanço 0jφ e a outra dependente da velocidade
de avanço Ujφ :
Ujj
Rj
iU φω
φφ += 0 (4.7)
Esta nova representação do potencial de velocidade resulta em duas condições cinemáticas
na superfície do casco:

62
j
Uj
jj
min
nin
ω∂
∂φ
ω∂
∂φ
=
=0
em 0S (4.8)
Utilizando o vector m~ definido por (3.56) conclui-se que:
026
035
4321 para 0
φφ
φφ
φ
−=
=
=
U
U
Uj ,,,j=
(4.9)
O aspecto importante destas últimas expressões é que deste modo é possível representar os
potenciais de radiação em função de termos independentes da velocidade de avanço, ou
seja:
02
066
03
055
0 4321 para ,
φω
φφ
φω
φ
φφ
iUiU
f
,,,j=
R
R
jRj
−=
+=
=
(4.10)
Note-se que até este momento a geometria do navio foi assumida esbelta, mas ainda não
foram introduzidas simplificações próprias da teoria de faixas. De facto as simplificações
introduzidas até aqui são comuns a quase todos os métodos dos painéis para os quais são
conhecidos resultados numéricos. No âmbito deste trabalho e para evitar os problemas
numéricos e computacionais associados aos métodos dos painéis, vão ter que ser assumidas
mais simplificações no escoamento em torno do casco. Um método numérico robusto e
fiável para o cálculo dos coeficientes hidrodinâmicos do navio, vai ser essencial para a
aplicação da teoria no domínio do tempo a ser descrita no próximo capítulo.
Vão ser utilizadas duas hipóteses da teoria de faixas. Na primeira assume-se que a boca do
casco é bastante inferior ao comprimento, logo o vector unitário normal à superfície tem
uma componente na direcção longitudinal x ( 1n ) que é muito inferior às componentes nas
direcções y e z ( 32 e nn ). Se 1n for aproximadamente zero, então as componentes do vector
unitário vêm:

63
26
35
432432
1
,,,,
0
xNnxNn
NNNnnn
n
=−=
==
(4.11)
onde 432 ,, NNN são as componentes do vector unitário bidimensional e normal à secção
transversal do navio na abcissa x. Este vector está contido em planos y-z.
Deste modo a condição fronteira cinemática no corpo que os potenciais de radiação
independentes da velocidade têm que satisfazer é:
432 0
,,, jNiN
jj ==
∂ω
∂
φ em 0c (4.12)
Esta é uma condição fronteira bidimensional a ser satisfeita no contorno de cada secção
transversal 0c ao longo do comprimento do navio.
Utilizando a dependência harmónica do potencial de velocidade, a condição fronteira na
superfície livre (4.3) para os potenciais de radiação independentes da velocidade, pode ser
escrita da seguinte forma:
0 em 0002
z=z
gx
Ui jj =+
− φ
∂∂
φ∂∂
ω (4.13)
Para remover os efeitos tridimensionais desta condição fronteira, assume-se que a
frequência de encontro é elevada de tal modo que:
00 jjx
U φ∂∂
ωφ ⟩⟩ (4.14)
e assim a derivada na direcção-x pode ser desprezada. A condição fronteira bidimensional
na superfície livre vem:
0 em 0002 z=z
g jj =+− φ∂∂
φω (4.15)
A última hipótese requer que o comprimento de onda seja relativamente pequeno
comparativamente ao comprimento do navio, o que parece uma restrição muito severa. No
entanto, pelo menos para os movimentos verticais do navio, na gama de frequências baixas
as forças de impulsão são dominantes e uma previsão menos correcta das forças de
radiação não é relevante.

64
Resumindo as condições que os potências de radiação independentes da velocidade devem
satisfazer são as seguintes:
Equação de Laplace....................... 0=+ Rzz
Ryy ϕϕ (4.16)
Cond. front. linear na sup. Livre ..... 02 =+− Rj
Rj
zg ϕ
∂∂
ϕω em z = 0 (4.15)
C. F. linear no corpo (radiação)....... 432 ,,, jNiN
j
Rj == ω
∂
∂ϕ em 0C (4.12)
Cond. de repouso no fundo............. ∞→→∇ -z para 0Rϕ (4.5)
Condição de radiação para infinito .. 02
=−∂
∂ RR
gi
rϕ
ωϕ quando ∞→r (4.6)
Este é o problema de condição fronteira bidimensional para um cilindro de secção
arbitrária a oscilar na superfície livre de um fluido. O símbolo 0φ , que representa em
termos gerais um potencial com características tridimensionais e independente da
velocidade, foi substituído por Rϕ que representa o potencial de radiação bidimensional
associado a movimentos oscilatórios de amplitude unitária.
4.2.2 Cálculo das Forças de Radiação
Forças bidimensionais - Cilindro
As forças de radiação que actuam num navio esbelto a avançar com velocidade média
constante e a oscilar na superfície livre são dadas pela expressão (3.65), ou representando
separadamente as várias componentes da força de radiação dadas pelas contribuições dos
seis modos do movimento oscilatório harmónico vem:
( ) 61 , 0
6
1,...,k=dsUmniF
Skk
j
Rjj
Rk ∫∫ ∑ −−=
=
ωφξρ (4.17)
onde o índice k representa a direcção da força e Rjφ é o potencial de radiação para o
movimento oscilatório de amplitude unitária no modo j.
Para o caso do problema bidimensional das oscilações forçadas de um cilindro, a expressão
(4.17) pode ser simplificada retirando o termo dependente da velocidade e introduzindo a

65
normal bidimensional. Deste modo a força de radiação na direcção k induzida por um
movimento oscilatório na direcção j de amplitude unitária é:
432 , 0
2 ,,k,j=dsNifc
kRj
Rkj
D ∫−= ϕωρ (4.18)
onde a integração é feita ao longo do contorno da secção transversal 0c .
A força dada pela expressão (4.18) pode ser dividida em parte real e imaginária:
432 , ImRe00
2 ,,k,j=dsNidsNifc
kRj
ck
Rj
Rkj
D
−
−= ∫∫ ϕωρϕωρ (4.19)
ou de uma forma mais compacta:
432 22 ,,j=, k,bia?f kjkjR
kjD ω−= (4.20)
onde as constantes kjkj ba e , designadas respectivamente por massa acrescentada e
coeficiente de amortecimento, são dadas por:
432 , Re0
,,k,j=dsNiac
kRjkj
−= ∫ϕωρ (4.21a)
432 , Im0
,,k,j=dsNibc
kRjkj
= ∫ϕρ (4.21b)
A expressão (4.20) dá a força de radiação para movimentos oscilatórios unitários. Para
movimentos de amplitude arbitrária vem:
( ) 432 22 ,,j=, k,bia?F kjkjAj
Rkj
D ωξ −= (4.22)
onde Ajξ é a amplitude complexa do movimento no modo j.
Finalmente a descrição no tempo da força de radiação bidimensional é dada por:
( ) ( )tbtaeF jkjjkjtiR
kjD ξξω &&& −−=2Re (4.23)
onde o movimento oscilatório é:
( ) tiAjj et ωξξ Re= (4.24)
Deste modo tem-se a força de radiação dada por duas componentes. A primeira está em
fase com aceleração do movimento e é equivalente a uma inércia para os movimentos de

66
translação e a um momento de inércia para os movimentos de rotação. A interpretação
física deste termo tem a ver com a massa de fluido que é acelerada juntamente com o
corpo. O coeficiente de massa acrescentada representa uma massa de fluido “equivalente”
que tem a aceleração do corpo.
O segundo termo está em fase com a velocidade e representa uma força de amortecimento,
proporcional ao coeficiente de amortecimento. Este termo de amortecimento está
relacionado com a geração e radiação de ondas pelo facto do corpo estar a oscilar junto à
superfície livre.
Forças tridimensionais - Navio
Volta-se agora à expressão (4.17) que representa as forças de radiação que actuam num
navio esbelto, a avançar com velocidade média constante e com oscilações harmónicas na
superfície livre. A força de radiação na direcção k devido a um movimento oscilatório de
amplitude unitária na direcção j é:
61, , U 00 S
Rj ,...,j=kdsmdsnif k
Sk
Rj
Rkj ∫∫∫∫ +−= φρφωρ (4.25)
Esta expressão é semelhante à deduzida por Salvesen et al. (1970), excepto no aspecto em
que os termos relacionados com os extremos do navio (termos dos extremos) não estão
aqui incluídos. Os termos dos extremos resultam da aplicação do teorema de Stokes para
navios com painel de popa. Neste trabalho foi decidido não incluir estes termos, porque:
• A sua interpretação física não é clara.
• A sua necessidade é questionável (Newman, 1978).
• Este termo é relevante apenas em navios com painéis de popa grandes por baixo da
linha de água. Neste caso os efeitos viscosos, que são desprezados nesta formulação,
são importantes.
• Finalmente, a experiência do autor mostra que em navios onde os termos de extremos
tomam valores relevantes, os valores assimptóticos dos movimentos verticais para
frequências baixas são errados. Na restante gama de frequências, os termos de extremos
“parecem piorar” os resultados. Em relação a este último aspecto, não foi feito um
estudo sistemático que permita tirar conclusões definitivas.
Relembrando que o potencial de radiação foi representado em termos de potenciais
independentes da velocidade de avanço (equação 4.10), então as forças de radiação podem

67
também ser expressas em termos de componentes independentes da velocidade de avanço.
Estas componentes independentes da velocidade de avanço são:
61, , 0
00 ,...,j=kdsnifS
kjkj ∫∫−= φωρ (4.26)
Combinando (4.25) com (4.26), (4.10) e (3.56) consegue-se obter expressões para as forças
de radiação do navio a avançar com movimento oscilatório, em termos de componentes
independentes da velocidade. Para os movimentos de arfagem e cabeceio vem:
03333 ff R = (4.27)
033
03535 f
iU
ff R
ω+= (4.28)
033
05353 f
iU
ff R
ω−= (4.29)
0332
20
5555 fU
ff R
ω+= (4.30)
Note-se que até aqui não foram introduzidas quaisquer simplificações da teoria de faixas
na formulação das forças hidrodinâmicas. Apenas o casco foi assumido esbelto, mas esta
hipótese é admitida também por outras formulações mais gerais. Em outras teorias das
faixas, a hipótese de escoamento bidimensional é assumida logo no início do
desenvolvimento da formulação.
Nesta altura é necessário assumir que boca é bastante inferior ao comprimento do navio de
tal modo que dxdds ς≅ , onde ds é um elemento de superfície do casco, dx é ao longo do
comprimento do navio e ςd é ao longo do contorno da secção transversal 0c . Deste modo
os termos de radiação independentes da velocidade vêm:
432 , 0
00 ,,k,j=dxdnifL C
kjkj ∫ ∫−= ςφωρ (4.31)
Introduzindo as normais bidimensionais definidas pela equação (4.11) e utilizando a
condição fronteira no corpo (4.8), resulta em qualquer secção transversal a seguinte relação
entre o potencial associado ao cabeceio e potencial do cilindro em arfagem: Rx 305 ϕφ −= .
Combinando todos estes resultados, as forças de radiação independentes da velocidade
para os movimentos verticais do navio, vêm finalmente em função da força de radiação

68
associada ao movimento de arfagem de cilindros com a forma das secções transversais do
navio (equação 4.18):
∫=L
R dxff D233
033 (4.32)
∫−==L
R dxxfff D233
053
035 (4.33)
∫=L
R dxfxf D233
2055 (4.34)
ou em termos dos coeficientes de massa acrescentada 33a e amortecimento 33b
bidimensionais:
033
033
23333
2033 BiAdxbidxaf
L L
ωωωω −=−= ∫ ∫ (4.35)
053
053
2035
035
23333
2053
035 BiABiAdxxbidxxaff
L L
ωωωωωω −=−=
−−== ∫ ∫ (4.36)
055
055
233
233
22055 BiAdxbxidxaxf
L L
ωωωω −=−= ∫ ∫ (4.37)
onde 0kjA e 0
kjB são as partes independentes da velocidade de avanço dos coeficientes de
massa acrescentada e amortecimento do navio.
Introduzindo as expressões anteriores em (4.27) a (4.30) e separando os termos em fase
com a aceleração dos termos em fase com a velocidade, resulta nas forças de radiação no
navio para movimentos oscilatórios unitários, em função dos coeficientes hidrodinâmicos
do navio:
kjkjR
kj BiAf ωω −= 2 (4.38)
onde os coeficientes hidrodinâmicos são:
∫= dxaA 3333
∫= dxbB 3333
03323335 B
UdxxaA ∫ −−=
ω

69
0333335 AUdxxbB ∫ +−=
03323353 B
UdxxaA ∫ +−=
ω (4.39a-h)
0333353 AUdxxbB ∫ −−=
0332
2
332
55 AU
dxaxA ∫ +=ω
0332
2
332
55 BU
dxbxB ∫ +=ω
As integrações são executadas ao longo do comprimento do navio.
Os coeficientes de massa acrescentada e amortecimento bidimensionais, 3333 e ba , são
calculados por um método de transformação conforme utilizando multi-parâmetros. O
potencial de velocidade do movimento oscilatório vertical de cilindros é representado por
uma soma de fontes, cada uma satisfazendo a condição fronteira na superfície livre e sendo
multiplicada por um coeficiente de modo a satisfazer a condição fronteira na superfície do
corpo. Utiliza-se um método de transformação conforme de secções arbitrárias no circulo,
para calcular os coeficientes hidrodinâmicos de cilindros com secção não circular (Tasai,
1959). A transformação conforme é feita utilizando um número de parâmetros arbitrário,
pelo que se consegue uma muito boa representação matemática de qualquer forma das
secções transversais do navio (Ramos e Guedes Soares, 1997).
4.3 FORÇAS DE EXCITAÇÃO
Para obter as forças de excitação é necessário resolver o problema hidrodinâmico do navio
a avançar com velocidade constante através de um campo de ondas incidentes, estando o
navio restringido na sua posição média, portanto sem movimentos oscilatórios. De acordo
com o problema linearizado, a força de excitação é dada pela equação (3.64). Esta
expressão mostra que a força de excitação tem duas partes. Uma está associada ao
potencial de onda incidente e é geralmente denominada de força de “Froude-Krilov”, como
homenagem aos investigadores que deram os primeiros passos no cálculo dos movimentos
do navio em ondas. Esta é uma força do tipo impulsão. A outra parte das forças de
excitação tem a ver com a perturbação do potencial da onda incidente devido à presença do
navio e é chamada de força de difracção. As forças de excitação são harmónicas no tempo.

70
Utilizando as características harmónicas dos potenciais, separando as duas partes da força
de excitação e decompondo ainda em componentes nas várias direcções do sistema de
coordenadas vem:
( ) 1,...,6 , 0
k=dsUmniFS
Ikk
IK ∫∫ Φ−−= ωρ (4.40)
( ) 1,...,6 , 0
k=dsUmniFS
Dkk
Dk ∫∫ Φ−−= ωρ (4.41)
onde se relembra que DI ΦΦ e representam respectivamente os potências da onda
incidente e de difracção.
4.3.1 Força de Froude-Krilov
De acordo com a teoria das ondas lineares, o potencial de onda incidente para uma onda a
propagar-se com uma direcção arbitrária relativamente ao sistema de coordenadas é:
( ) ( )( )( )( )tizkyxikaI eeeig
tzyx ωββ
ωζ
00 sincos
0
,,, +=Φ (4.42)
onde aζ é a amplitude de onda, gk /2
00 ω= é o número de onda, 0ω é a frequência de
onda e β é ângulo entre o vector de velocidade do navio e o vector de velocidade de
propagação das ondas. A convenção para o ângulo β é de zero graus para ondas de proa
(ver figura 4.1).
x
y
Oβ
U
Figura 4.1 Convenção para o ângulo de rumo relativamente às ondas

71
A relação entre as frequências de onda e de encontro ω é dada por:
βωω cos00 Uk−= (4.43)
O potencial de velocidade pode alternativamente ser representado por:
( ) ( ) tixikIa
I eezytzyx ωβϕζ cos0,,,, =Φ (4.44)
( ) β
ωϕ sin
0
00, yikzkI eeig
zy = (4.45)
onde ( )zyI ,ϕ é a amplitude complexa do potencial de onda incidente devido a uma onda
unitária, que actua em secções transversais do casco.
Com as últimas expressões para o potencial incidente, utilizando (4.43), assumindo a
simplificação geométrica da teoria de faixas ( ςdxdds ≅ ) e utilizando as normais
bidimensionais (expressões 4.11), chega-se às equações finais para as forças de Froude-
Krilov em cada uma das direcções do sistema de coordenadas:
01 =IF (4.46)
( )∫=L
Ik
xika
Ik k=dxfeF 2,3,4 , cos0 βζ (4.47)
( )∫−=L
Ixika
I dxxfeF 3cos
50 βζ (4.48)
( )∫=L
Ixika
I dxxfeF 2cos
60 βζ (4.49)
onde Ikf representa a força de Froude-Krilov bidimensional devido a ondas de amplitude
unitária:
( ) ∫−=0
2,3,4 , ,0C
kII
k k=dNzyif ςϕρω (4.50)
Estas forças são simples de calcular pois o potencial de onda incidente é conhecido à
partida. As primeiras tentativas para o cálculo dos movimentos verticais do em ondas
(Froude, 1861 e Krilov, 1896), consideraram apenas esta componente das forças de
excitação, assumindo portanto que o navio não perturba a onda incidente. Na prática esta
hipótese é válida apenas se o comprimento das ondas for muito superior ao comprimento

72
do navio. Na gama de comprimentos de onda onde os movimentos têm geralmente
amplificação dinâmica, é necessário considerar os efeitos da perturbação do potencial
incidente, ou seja os efeitos de difracção. É também interessante notar que a amplitude das
forças de Froude-Krilov é independente da velocidade do navio.
4.3.2 Forças de Difracção
Há duas hipóteses para o cálculo das forças de difracção. Para a primeira é necessário
resolver o problema de condição fronteira formulado na secção 3.5.5 em ordem ao
potencial de difracção. O problema é semelhante ao problema da radiação, para o qual já
foi apresentada a solução, com a diferença de que a condição fronteira no corpo é agora
dada por (3.52).
Existe ainda uma dificuldade acrescida que é o facto de formalmente a equação de
Laplace, a que devem satisfazer DI ΦΦ e , não ter solução única quando as ondas
são de proa.
A alternativa ao cálculo directo do potencial de difracção é utilizar as chamadas relações
de Haskind-Newman. Newman (1962, 1965) estudou as relações de Haskind para os casos
do navio sem velocidade e com velocidade de avanço. Estas relações permitem representar
as forças de difracção em termos dos potenciais de radiação, o que é conseguido através do
teorema de Green. O teorema de Green diz o seguinte:
Se φϕ e são duas soluções da equação de Laplace num certo volume de fluido
cercado por uma superfície fechada TS , estes potenciais estão relacionados do
seguinte modo:
0=
−∫∫
TS nn ∂∂φ
ϕ∂∂ϕ
φ (4.51)
onde nr
é o vector normal à superfície e que aponta para o fluido.
Combinando as expressões (4.8) com a equação (4.41), que dá a força de difracção na
direcção-k, resulta:
1,...,6 , 0
0
k=dsiU
nF DU
kkS
Dk Φ
Φ−Φ−= ∫∫ ω∂
∂ (4.52)

73
onde se relembra que Ukk ΦΦ e 0 são respectivamente as partes do potencial de radiação
independente e dependente da velocidade de avanço.
Para utilizar o teorema de Green substitui-se na expressão (4.46):
D
Ukk
iU
Φ=
Φ−Φ=
ϕω
φ 0
(4.53)
Todos estes potenciais ( )IUkk ΦΦΦ e ,0 satisfazem a equação de Laplace, a condição
fronteira linear na superfície livre, a condição de radiação em infinito e a condição de
repouso no fundo. Aplicando o teorema de Green à superfície ∞++= SSSS FT 0 (ver
figura 4.2), para o que se substitui (4.53) em (4.51), resulta na força de difracção
representada em termos dos potenciais de radiação e da onda incidente:
1,...,6 , 0
0 k=dsni
UF
I
S
Ukk
Dk ∂
∂ω
ρΦ
Φ−Φ= ∫∫ (4.54)
O
z
x
SFS0
S
S
S
Φ = 02
S F
Figura 4.2 Aplicação do teorema de Green
No passo final para obter expressões para as forças em termos de quantidades
bidimensionais, é necessário seguir um procedimento semelhante ao utilizado na
formulação das forças de radiação. Resumidamente: utilizam-se as relações (4.9) para
representar os potenciais de radiação dependentes de U em termos de potenciais
independentes de U. De seguida usa-se a simplificação geométrica ςdxdds ≅ para

74
simplificar os integrais de superfície e representam-se as componentes do vector normal
em termos da normal bidimensional (expressões 4.11). Deste modo as forças de difracção
vêm finalmente dadas por:
01 =DF (4.55)
( )∫=L
Dk
xika
Dk k=dxfeF 2,3,4 , cos0 βζ (4.56)
dxfiU
xfeFL
DDxika
D ∫
+−= 33
cos5
0
ωζ β (4.57)
dxfiU
xfeFL
DDxika
D ∫
+= 22
cos6
0
ωζ β (4.58)
onde Dkf são as forças de difracção seccionais para ondas incidentes de amplitude unitária:
( ) 2,3,4 , sin0
00 sin230 k=dseeNiNf
C
Rk
zkyikDk ∫ −= ϕβρω β (4.59)
onde se relembra que Rkϕ é o potencial de radiação bidimensional associado a movimentos
oscilatórios de amplitude unitária e 32 , NN são as componentes da normal bidimensional
às secções transversais do casco. O cálculo do potencial de radiação bidimensional, Rkϕ , é
feito pelo método de transformação conforme descrito na secção 4.2.
A principal vantagem na utilização das relações de Haskind-Newman para calcular as
forças de difracção tem a ver com a redução do esforço computacional. A grande parte do
esforço computacional nos cálculos de comportamento do navio no mar, está associado à
solução do problema de condição fronteira, para cada frequência e modo de oscilação que
é necessário considerar. Utilizando as relações de Haskind-Newman reduz-se basicamente
o esforço de computação para metade.
4.4 FORÇAS DE RESTITUIÇÃO
As forças de restituição resultam da combinação das forças hidrostáticas com o peso do
navio. As forças hidrostáticas resultam da integração do termo hidrostático da equação de
Bernoulli na superfície molhada do casco. Por seu lado a pressão hidrostática depende
apenas da posição vertical do ponto “molhado” do casco relativamente ao sistema de
coordenadas. As forças hidrostáticas foram deduzidas na secção 3.5.6 e são dadas pela

75
expressão (3.66). Decompondo a expressão (3.66) em forças segundo cada uma das
direcções do sistema de coordenadas vem:
( )∫∫−=S
kH
k k=dszngF 1,...,6 , ρ (4.60)
Assumindo de novo pequenos deslocamentos angulares de modo a ser possível desprezar
os termos de ordem superior, obtém-se a seguinte expressão para a coordenada-z de
qualquer ponto na superfície molhada do casco:
543 ξξξ xyzz ′−′++′= (4.61)
onde ( )zyx ′′′ ,, são as coordenadas do mesmo ponto representado no sistema de referência
fixo no navio.
Introduzindo esta expressão na equação (4.60) e assumindo algumas simplificações chega-
se às forças hidrostáticas linearmente proporcionais aos deslocamentos. As simplificações
são: a pressão hidrostática é calculada até a linha de água média, os movimentos angulares
são pequenos e os costados do navio são verticais em torno da linha de água. Com estas
hipóteses o integral em (4.60) pode ser desenvolvido e finalmente as únicas forças
diferentes de zero para navios com plano longitudinal de simetria são:
5303 ξρξρρ
+−∇= ∫∫wlA
wlH xdsggAgF (4.62)
( ) 42
004 00ξρρ
+−∇−∇= ∫∫wlA
GBBH dsyzzgygF (4.63)
( ) 52
0305 00ξρξρρ
+−∇−
+∇−= ∫∫∫∫wlwl A
GBA
BH dsxzzgxdsgxgF (4.64)
onde 0∇ é o volume do casco imerso na condição de equilíbrio estático, wlA é a área de
flutuação no equilíbrio estático, e ( )000
,, BBB zyx são as coordenadas do centro deste
volume. Combinando com estas equações a força e momentos devido ao peso do navio
obtêm-se as forças de restituição:
0621 === BBB FFF (4.65)
5353333 ξξ CCF B −−= (4.66)

76
4444 ξCF B −= (4.67)
5553535 ξξ CCF B −−= (4.68)
onde kjC são os coeficientes de restituição dados por:
wlgAC ρ=33
∫∫−==wlA
xdsgCC ρ5335 (4.69a-d)
TGMgVC 044 ρ=
LGMgVC 055 ρ=
e TGM , LGM representam respectivamente as alturas metacentricas transversal e
longitudinal.
4.5 EQUAÇÕES DO MOVIMENTO
As equações do movimento resultam do equilíbrio dinâmico entre as forças exteriores
(neste caso são forças hidrodinâmicas) e as forças de inércia associadas à massa do navio.
As forças hidrodinâmicas foram representadas em termos de teoria de faixas nas secções
anteriores. As forças de inércia serão descritas agora resumidamente.
A segunda lei de Newton diz que uma força (ou momento) está associada a uma alteração
da velocidade de um corpo. Esta é a força de inércia que tem a ver com a inércia da massa.
Matematicamente, se Bρ for a massa específica do corpo, que depende da posição no
espaço, a força de inércia associada à massa é dada pela taxa de variação do momento
linear:
( )∫∫∫ ×Ω′+=BV
BM dVr
tF &&ηρ
∂∂ (4.70)
O momento de inércia é dado pela taxa de variação do momento angular:
( )∫∫∫ ×Ω′+×=BV
BM dVrr
tM &&ηρ
∂∂ (4.71)
onde a velocidade de um elemento de massa do navio no sistema de referência que avança
com a velocidade média ( )zyxX ,,= é rvr&&r ×Ω′+=η . Recorda-se que η& é a velocidade

77
de translação oscilatória representada em ( )zyxX ,,= , Ω& é a velocidade angular
representada em ( )zyxX ′′′=′ ,, e rr
é o vector de posição no sistema de referência
( )zyxX ′′′=′ ,, . As integrações são no volume do corpo BV .
A massa específica é invariável no tempo. Assumindo pequenos deslocamentos angulares,
chega-se à seguinte representação para a força de inércia na direcção-k:
[ ] 1,...,6= , j k,jMF kjM
k ξ&&= (4.72)
onde [ ]kjM é a matriz dos coeficientes de inércia ou matriz de massa do sistema e jξ&& é o
vector das acelerações. Se o navio tiver simetria lateral, ou seja em relação ao plano zx ′−′
e se o centro de gravidade estiver em ( )Gz,, ′00 , então a matriz de massa é:
[ ]
−
′−′−
′−
′
=
6664
55
4644
0000
0000000
0000000000000
II
IzmIIzm
mzmm
zmm
M
G
G
G
G
kj (4.73)
onde m é a massa do navio e os coeficientes de momento de inércia kjI são calculados por:
( )dvzyIBV
B∫∫∫ ′+′= 2244 ρ ( )∫∫∫ ′′==
BVB dvzxII ρ6446 (4.74a-d)
( )dvzxIBV
B∫∫∫ ′+′= 2255 ρ ( )dvyxI
BVB∫∫∫ ′+′= 22
66 ρ
Voltando às equações do movimento, o equilíbrio dinâmico de forças (e momentos) em
cada uma das direcções do sistema de coordenadas pode ser representado em termos dos
coeficientes de: inércia, massa acrescentada, amortecimento e restituição:
( ) 1,...,6 , 6
1
k=FCBAM Ek
jjkjjkjjkjkj =+++∑
=
ξξξ &&& (4.75)
Para navios com simetria lateral as matrizes dos coeficientes simplificam-se e em
consequência o sistema de seis equações acopladas (4.75 reduz-se a dois sistemas de três
equações desacoplados entre si. Um dos conjuntos de equações representa os movimentos
acoplados de avanço, arfagem e cabeceio e o outro representa o abatimentos, balanço e

78
guinada. De acordo com a teoria de faixas, sendo o navio esbelto não há forças oscilatórios
na direcção longitudinal, logo este movimento não existe.
As soluções das equações diferenciais lineares de segunda ordem (4.75) são movimentos
do tipo harmónico:
( ) ( )jaj
tiAjj tet θωξξξ ω −== cosRe (4.76)
onde Ajξ é a amplitude complexa do movimento, a
jξ é a amplitude real e jθ é o ângulo de
fase que representa o atraso da resposta no tempo.
Para os movimentos de arfagem e cabeceio as equações do movimento tomam a seguinte
forma:
( )[ ] ( ) ( ) ( ) ( )
( ) ( ) ( )[ ] ( ) ( )
=++++++
=++++++
tFCBAICBA
tFCBACBAME
E
555555555555353353353
3535535535333333333
ξξωξωξξωξω
ξξωξωξξωξω&&&&&&&&&&&&
(4.77)
4.6 ESFORÇOS DINÂMICOS
Nesta secção apresenta-se a formulação para os esforços dinâmicos lineares, em navios a
avançar com velocidade constante e com rumo arbitrário relativamente a ondas
harmónicas. Os esforços incluem os esforços de corte horizontal e vertical, os momentos
flectores horizontal e vertical e o momento torçor. A força axial no sentido longitudinal
não é considerada na teoria de faixas.
O esforço de corte dinâmico kV numa secção transversal do navio, é a diferença entre a
força de inércia e a soma das forças exteriores hidrodinâmicas na parte do navio para vante
da secção em estudo:
3,2 , =−−−= kBERIV kkkkk (4.78)
Do mesmo modo os momentos dinâmicos são dados pela diferença entre os momentos de
inércia e a soma dos momentos exteriores para vante da secção em estudo:
6,5,4 , =−−−= kBERIM kkkkk (4.79)
Nas equações (4.78) e (4.79) as várias contribuições para os esforços dinâmicos são: kI
para as forças (momentos) de inércia, kR para as forças (momentos) de radiação, kE para
as forças (momentos) de excitação e kB para as forças (momentos) de restituição.

79
A convenção para a nomenclatura dos esforços e seus sentidos positivos é representada na
figura 4.3. Os índices k = 2,3 estão associados respectivamente aos esforços de corte
horizontal e vertical, e k = 4,5,6 estão associados respectivamente ao momento torçor e
momentos flectores vertical e horizontal.
Embora a formulação que aqui se apresenta possa ser generalizada para todos os cinco
esforços dinâmicos mencionados, os passos principais da sua dedução e as equações finais
são apresentadas apenas para os esforços verticais, nomeadamente o esforço vertical de
corte e o momento flector vertical. Apenas os esforços verticais são investigados neste
trabalho, pois as não-linearidades estudadas estão associadas principalmente com estes
esforços.
x
yz
V3
V2
M 4
V1
= esforço de compressão
= esforço de corte horizontal= esforço de corte vertical = momento flector horizontal
= momento flector vertical
= momento torçor
MV2
3V 6M5
V1 M4
M5
M6
Figura 4.3 Convenção para os sentidos dos esforços dinâmicos
Voltando às expressões (4.78) e (4.79), para os casos do esforço de corte vertical e
momento flector vertical vêm:
33333 BERIV −−−= (4.80)
55555 BERIM −−−= (4.81)
Contribuição de Inércia
As contribuições de inércia são dadas pelo integral ao longo do comprimento do navio
( ∗L ) para vante da secção transversal em estudo ( ∗x ), das massas seccionais por unidade
de comprimento, m, multiplicadas pelas acelerações seccionais:

80
( )∫∗
−=L
dxxmI 533 ξξ &&&& (4.82)
( )( )∫∗
−−−= ∗
L
dxxxxmI 535 ξξ &&&& (4.83)
Contribuição de Radiação
Relembra-se agora a expressão que dá a força de radiação no casco devido ao movimento
oscilatório do navio nos seis graus de liberdade (4.17). Combinando as equações (4.17) e
(4.25) vem:
1,...,6 , U 6
1 S
Rj
00
k=dsmdsniFj
kS
kRjj
Rk ∑ ∫∫∫∫
=
+−= φρφωρξ (4.84)
Para o cálculo da contribuição para os esforços da força de radiação associada aos
movimentos oscilatórios do navio, considera-se na equação (4.84) apenas a superfície do
casco para vante da secção em estudo ∗0S :
1,...,6 , U 6
1 S
Rj
00
k=dsmdsniRj
k
S
kRjjk ∑ ∫∫∫∫
=
+−=∗∗
φρφωρξ (4.85)
Assumindo de novo a simplificação geométrica da teoria de faixas ςdxdds ≅ , a equação
anterior simplifica-se para:
1,...,6 , U6
1
Rj
00
k=dxdmdxdniRj L c
k
L ck
Rjjk ∑ ∫ ∫∫ ∫
=
+−=∗∗
ςφρςφωρξ (4.86)
onde ∗L é o comprimento do casco para vante da secção onde se pretende calcular os
esforços e 0c é o contorno da secção molhada média em cada posição longitudinal-x.
Agora, tal como foi feito para a simplificação das forças de radiação, pode-se usar as
hipóteses da teoria de faixas para representar as equações (4.86) em termos de quantidades
bidimensionais. Estas hipóteses resultam em potenciais de radiação Rjφ representados em
termos de potenciais de radiação bidimensionais dados pela relações (4.10) e resultam em
componentes do vector ∗n~ bidimensionais dadas por (semelhante a 4.11):

81
( )( ) 26
35
432432
1
,,,,0
Nxxn
Nxxn
NNNnnnn
∗
∗
−=
−−=
==
(4.87)
Combinando as expressões (4.10) e (4.87) com (4.86) resulta em contribuições de radiação
para o esforço de corte vertical e momento flector vertical, expressas em função de forças
de radiação seccionais e bidimensionais:
∗∗ =
+−+
+−= ∫
xx
R
L
R DD fiU
xiU
dxfiU
xR 2233553335533 ξ
ωξξ
ωξ
ωξξ (4.88)
( )( ) ∫∫∗∗
−+−+−−−= ∗
L
R
L
R dxfiU
xiU
dxfxxxR DD 223355333535 ξ
ωξξ
ωξξ (4.89)
onde a força de radiação para oscilações verticais de secções bidimensionais DRf 233 se
obtém da expressão (4.18):
∫−=0
2333
ck
RR dsNif D ϕωρ (4.90)
Estas forças de radiação podem também ser representadas em termos de coeficientes de
massa acrescentada e amortecimento bidimensionais (equação 4.20):
33332
332 bia?f DR ω−= (4.91)
os quais podem ser introduzidos em (4.88) e (4.89) para se obter finalmente as
contribuições de radiação para os esforços verticais, em função dos coeficientes
hidrodinâmicos bidimensionais associados às secções transversais do navio:
( ) ( )
( ) ( ) ( )∗
∗
=
+−−−−−
+−−+−−= ∫
xx
L
baU
xbU
xUa
dxUabU
xbxaR
5335332
2
533325333
5335332533353333
ξξω
ξξω
ξξ
ξξω
ξξξξ
&&&&&&&&&
&&&&&&&&& (4.92)
( ) ( ) ( )
( ) ( ) ( ) dxbaU
xbU
xUa
dxxbxaxxR
L
L
∫
∫
∗
∗
+−−−−+
−+−−−= ∗
5335332
2
533325333
533353335
ξξω
ξξω
ξξ
ξξξξ
&&&&&&&&&
&&&&&&
(4.93)

82
Rearranjando estas expressões, os esforços podem ser representados em termos de
contribuições separadas dos movimentos de arfagem e cabeceio, respectivamente
5,3, , =jkRkj :
( ) ( )[ ] 5,3, , 2A
j =−=
−−=∗∗
∗∗
jk BiAe
BAR
kjkjti
kjjkjjkj
ωωξ
ωξωξω
&&& (4.94)
onde os coeficientes dependentes da frequência ∗∗kjkj BA e são dados por:
∗∗ ∫∗
−= 3323333 bU
dxaAL ω
∫∗
∗∗ +=L
UadxbB 333333
∗∗∗∗ +−−−= ∫∫∗∗
xbU
aU
dxbU
xdxaALL
332332
2
333335 ωωω
∗∗∗∗ −−+−= ∫∫∗∗
332
2
33333335 bU
xUadxaUxdxbBLL ω
(4.95a-h)
( ) ∫∫∗∗
+−−= ∗∗
LL
dxbU
dxaxxA 3323353 ω
( ) ∫∫∗∗
−−−= ∗∗
LL
dxaUdxbxxB 333353
( ) ∫∫∫∗∗∗
+−−−= ∗∗∗∗
LLL
dxaU
dxbxU
dxaxxxA 332
2
3323355 ωω
( ) ∫∫∫∗∗∗
++−= ∗∗∗∗
LLL
dxbU
dxaUxdxbxxxB 332
2
333355 ω
onde as integrações são ao longo do comprimento do navio para vante da secção
transversal ∗x e ∗∗3333 e ba correspondem à secção ∗x . As expressões (4.94) e (4.95a-
h) serão utilizadas para deduzir os esforços verticais no domínio do tempo.
Contribuição de Excitação
As forças de excitação globais foram deduzidas na secção 4.3 e são decompostas em duas
partes independentes. A parte de Froude-Krilov é representada pelas equações (4.46) a

83
(4.50) e a parte de difracção pelas equações (4.55) a (4.59). A força e o momento de
excitação na parte do casco para vante da secção transversal ∗x podem ser obtidos:
somando as duas partes da força de excitação, integrando para vante de ∗x e substituindo o
braço da força seccional x por ( )∗− xx :
( ) ∫∗ ∗=
++=
L xx
Dka
Dk
Ik
xikak k=f
iU
dxffeE 2,3,4 ,cos0
ωζζ β (4.96)
( )( ) dxfiU
ffxxeEL
DDIxika ∫
∗
++−−= ∗
333cos
50
ωζ β (4.97)
( )( ) dxfiU
ffxxeEL
DDIxika ∫
∗
++−= ∗
222cos
60
ωζ β (4.98)
onde as forças seccionais de Froude-Krilov e difracção para ondas unitárias são dadas por
(4.50) e (4.59).
Contribuição de Restituição
A contribuição das forças de restituição para o esforço de corte vertical e momento flector
vertical, resulta da variação com os movimentos verticais do navio das forças hidrostáticas
para vante da secção ∗x :
( )dxxbgBL∫∗
−−= 533 ξξρ (4.99)
( )( )dxxxxbgBL∫∗
−−= ∗535 ξξρ (4.100)
onde b é a boca seccional, que se assume constante em torno da linha de água média.
4.7 COMENTÁRIOS FINAIS
Neste capítulo apresentada-se uma solução linear no domínio da frequência, para o
problema dos movimentos e esforços estruturais induzidos em navios a avançar com
velocidade constante e rumo arbitrário relativamente a ondas regulares e sinusoidais.
Enquanto no capítulo 3 foi formulado o problema hidrodinâmico linear e tridimensional,
no presente capítulo este problema foi resolvido assumindo ondas incidentes harmónicas,
logo como consequência da linearização o escoamento em torno do casco é também
harmónico.

84
Para simplificar os efeitos tridimensionais no escoamento assumiram-se duas
simplificações da teoria de faixas. Na primeira assume-se que o comprimento do navio é
bastante superior à boca e imersão, logo no cálculo das forças os integrais de superfície
podem ser decompostos em dois integrais, um ao logo dos contornos das secções
transversais e o outro ao longo do comprimento do navio. Seguindo a mesma hipótese de
navio esbelto, as seis componentes do vector n~ podem ser representadas em termos das
componentes do vector bidimensional normal aos contornos das secções transversais.
A segunda hipótese da teoria de faixas é utilizada para remover os efeitos tridimensionais
da condição fronteira na superfície livre. Neste caso assume-se que a frequência de
encontro é elevada, o que implica que as ondas devem ser de comprimento relativamente
pequeno. Esta parece uma restrição muito severa, no entanto na prática na gama de
frequências baixas, ou seja para ondas compridas, as forças hidrostáticas e de Froude-
Krilov são dominantes e alguma imprecisão no cálculo das forças de radiação ou difracção
afecta pouco os resultados finais.
De facto é reconhecido que a presente teoria de faixas faz previsões bastante boas dos
movimentos verticais para navios convencionais. Quanto ao movimento de balanço, o
amortecimento viscoso é relevante pois neste caso o amortecimento invíscido é
relativamente pequeno. A qualidade das previsões está dependente da estimativa destes
efeitos viscosos.
No caso dos movimentos no plano horizontal de abatimento e guinada não existem forças
de restituição, logo uma estimativa bastante correcta dos coeficientes hidrodinâmicos e
forças de difracção é bastante importante. Para estes modos de movimento as previsões da
teoria de faixas são menos boas.
Quanto aos esforços dinâmicos verticais, em termos gerais pode-se dizer que as previsões
são razoáveis para navios com coeficientes de finura total elevados, ou seja navios
“cheios” e com os costados verticais ao longo do comprimento do navio. Para navios com
coeficientes de finura baixos e amuras bastante inclinadas (como por exemplo os porta-
contentores), pode-se dizer que a teoria de faixas linear falha na previsão de alguns efeitos
não-lineares bastante importantes. Para melhorar este tipo de previsões apresenta-se nos
próximos capítulos uma teoria de faixas no domínio do tempo nova, onde são introduzidos
alguns efeitos não-lineares.

85
REFERÊNCIAS
Adegeest, L. J. M., 1995, Nonlinear Hull Girder Loads in Ships, PhD Thesis, Delft
University of Technology, Delft, Holland.
Adegeest, L. J. M., 1996, “Third-order Volterra modelling of ship responses based on
regular wave results”, Proceedings 21st Symposium on Naval Hydrodynamics, Trondheim, Norway.
Belik, O., Bishop, R.E.D. and Price, W. G., 1980, “On the slamming response of ships to regular head waves”, Transactions the Royal Institute of Naval Architects, Vol. 122, pp.
325-337.
Beck, R.F., Cao, Y., Scorpio, S.M. and Schultz, W.W., 1994, “Non-linear Ship Motion Computations Using the Desingularized Method”, Proceedings 20th Symposium on
Naval Hydrodynamics, Santa Barbara, CA, pp. 227-46.
Beck, R. F. and Magee, A. R., 1991, “Time-Domain Analysis for Predicting Ship
Motions”, Dynamics of Marine Vehicles and Structures in Waves, W. G. Price, P. Temarel and A. J. Keane (Editors), Elsevier Science Publishers B. V., pp. 49-64.
Bertram, V., 1990a, “A Rankine source approach to forward-speed diffraction problems”, Proceedings 5th International Workshop Water Waves and Floating Bodies,
Manchester, pp. 21-23.
Bertram, V., 1990b, “Ship motions by a Rankine source method”, Ship Technology
Research, Vol 37, No. 4, pp. 143-152.
Bertam, V., 1997, “The influence of steady flow in seakeeping computations”,
Proceedings 5th Symposium Nonlinear and Free-Surface Flows, Hiroshima.
Bertram, V., 1998, “Numerical Investigation of Steady Flow Effects in Three-Dimensional Seakeeping Computations”, Proceedings 22nd Symposium on Naval Hydrodynamics,
National Academy Press, Washington, D.C., pp. 73-86.
Bertram, V. and Söding, H., 1991, “A panel method for ship motions”, Proceedings 6th
International Workshop Water Waves and Floating Bodies, Woods Hole, pp. 9-12.
Beukelman, W., 1980, “Added Resistance and Vertical Hydrodynamic Coefficients of
Oscillating Cylinders at Speed”, Report No. 510, Ship Hydromechanics Laboratory, Delft University of Technology.

86
Beukelman, W., 1983, “Vertical Motions and Added Resistance of a Rectangular and
Triangular Cylinder in Waves”, Report No. 594, Ship Hydromechanics Laboratory, Delft University of Technology.
Bingham, H., Korsmeyer, F., Newman, J., 1993, “The simulation of ship motions”, Proceedings 6th International Conference on Numerical Ship Hydrodynamics, Iowa City, pp. 561-579.
Bingham, H., Korsmeyer, F., Newman, J., 1994, “Prediction of the Seakeeping Characteristics of Ships”, Proceedings of the 20th Symposium on Naval Hydrodynamics,
Santa Barbara, California, pp. 19-38.
Bretschneider, C. L., 1952, “The Generation and Decay of Wind Waves in Deep Water”,
Transactions American Geophysical Union, Vol. 37.
Buchner, B., 1995, “On the Impact of Green Water Loading on Ship and Offshore Unit
Design”, Proceedings 6th International Symposium on Practical Design of Ships and Mobile Units (PRADS’95), H. Kim, J. W. Lee (Editors), the Society of Naval Architects
of Korea, Vol. 1, pp 430-443.
Bunnik, T. and Hermans, A., 1998, “Two methods to simulate the propagation of an
incoming wave over a steady wave field”, Proceedings Euromech 374, Poitiers.
Centeno, R., Fonseca, N. and Guedes Soares, C., 2000, “Viscous Effects in the Prediction of Motions of Catamarans in Regular Waves”, International Shipbuilding Progress
(accepted for publication).
Chakrabarti, S. K., 1980, “Laboratory Generated Waves and Wave Theories”, Journal of
Waterway, Port Coastal and Ocean Engineering, ASCE, Vol. 106.
Chan, H. S., 1993, “Prediction of Motion and Wave Loads of Twin-Hull Ships”, Marine
Structures, Vol. 6, pp. 75-102.
Chang, M. S., 1977, “Computations of three-dimensional ship motions with forward
speed”, Proceedings 2nd International Numerical Ship Hydrodynamics, University of California, Berkeley, pp. 124-135.
Cummins, W. E., 1962, “The impulse response function and ship motions”, Ship Technology Research (Schiffstechnik), Vol. 9, pp. 101-109.
Dalzell, J. F., 1962a, “Cross-Spectral Analysis of Ship Model Motions: A Destroyer Model in Irregular Long-Crested Head Seas”, Report No. 810, Davidson Laboratory - Stevens Institute of Technology.

87
Dalzell, J. F., 1962b, “Some Further Experiments on the Application of Linear
Superposition Techniques to the Responses of a Destroyer Model in Extreme Long-Crested Head Seas”, Report No. 819, Davidson Laboratory - Stevens Institute of
Technology.
Eatock Taylor, R. and Waite, J. B., 1978, “The Dynamics of Offshore Structures Evaluated by Boundary Integral Techniques”, International Journal for Numerical Methods in
Engineering, Vol. 13, pp. 73-92.
Elsimillawy, N. and Miller, N.S., 1986, “Time Simulation of Ship Motions: A Guide to the
Factors Degrading Dynamic Stability”, Transactions Society Naval Architects and Marine Engineers, Vol. 94, pp. 215-240.
Ewing, J. A., 1974, “Some results from the Joint North Sea Wave Project of interest to engineers”, Dynamics of Marine Vehicles and Structures in Waves, R. E. D. Bishop and
W. G. Price (Editors), Institute of Mechanical Engineers, London, pp 45-50.
Faltinsen, O.M., 1977, “Numerical Solution of Transient Non-linear Free-Surface Motion
Outside or Inside Moving Bodies”, Proceedings 2nd Conference on Numerical Ship Hydrodynamics, U.C. Berkeley, University Extension Publications, pp. 347-357.
Faltinsen, O.M., 1993, “On Seakeeping of Conventional and High-Speed Vessels”, Journal of Ship Research, Vol. 37, No. 2, pp. 87-101.
Faltinsen, O. M. and Michelsen, F. C., 1974, “Motions of Large Structures in Waves at Zero Froude Number”, Dynamics of Marine Vehicles and Structures in Waves, R. E. D. Bishop and W. G. Price (Editors), Institute of Mechanical Engineers, London, pp 91-
112.
Faltinsen, O. and Zhao, R., 1991a, “Numerical Predictions of Ship Motions at High
Forward Speed”, Phil. Transactions Royal Society London, Vol. A 334, pp. 241-252.
Faltinsen, O. and Zhao, R., 1991b, “Flow prediction around high-speed ships in waves”,
Mathematical Approaches in Hydrodynamics, T. Miloh (Editor), Society Ind. Applied Mathematics (SIAM), Philadelphia, pp. 265-287.
Fang, C.C., Chan, H.S. and Incecik, A., 1996, “Investigation of Motions of Catamarans in Waves – I”, Ocean Engineering, Vol. 23, No. 1, pp. 89-105.
Fonseca, N. and Guedes Soares, C., 1994, “Time Domain Simulation of Vertical Ship Motions”, Marine Offshore and Ice Technology, T.K.S. Murthy, P.A. Wilson and P.
Wadhams (Editor), Computational Mechanics Publications, Southampton pp. 224-243.

88
Fonseca, N., Tamborski, L. and Guedes Soares, C., 1995, “Time domain simulation of
non-linear motions of two dimensional floating bodies”, Marine Technology and Transportation, T. Graczyk, T. Jastrzebski, C.A. Brebbia and R. Burns (Editors),
Computational Mechanics Publications, Southampton, pp. 131-138.
Fonseca, N., Perez Rojas, L. e Guedes Soares, C., 1996, “Estudo Teórico e Experimental do Comportamento no Mar de um Atuneiro”, Ingenieria Naval, n. 733, pp.45-55.
Fonseca, N., Guedes Soares, C. and Incecik, A., 1997, “Numerical and Experimental Study of Non-Linear Motions of Prismatic Bodies in Waves”, Applied Ocean Research, Vol.
35, pp. 35-47.
Fonseca, N., and Guedes Soares, C., 1998a, “Time-Domain Analysis of Large-Amplitude
Vertical Motions and Wave Loads”, Journal of Ship Research, Vol. 42, Nº 2, pp. 100-113.
Fonseca, N. and Guedes Soares, C., 1998b, “Nonlinear Wave Induced Responses of Ships in Irregular Seas”, Proceedings 12th International Conference on Offshore Mechanics
and Arctic Engineering (OMAE’98), ASME, New York, paper 98 0446.
Fonseca, N. and Guedes Soares, C., 1998c, “Time-Domain Analysis of Large-Amplitude
Responses of Ships in Waves”, The 7th Int. Symposium on Practical Design of Ships and Mobile Units (PRADS’98), M.W.C. Oosterveld and S.G. Tan (Editores), The Hague,
495–501.
Fonseca, N. and Guedes Soares, C., 2000, “Efeitos Viscosos nos Movimentos Verticais de Navios em Ondas”, O Mar e os Desafios do Futuro, C. Guedes Soares e J. Beirão Reis
(Editores), Edições Salamandra Lda, Lisboa (em impressão).
Frank, W., 1967, “Oscillation of Cylinders in or Below the Free-Surface of Deep Fluids”,
Report 2375, Naval Ship Research and Development Center, Washington D.C.
Froud, W., 1861, “On the rolling of ships”, Transactions Institute of Naval Architects, Vol.
2, pp. 180-229.
Fujii, H. and Takahashi, T., 1975, “Experimental Study on the Resistance Increase of a
Ship in Regular Oblique Waves”, Proceedings 14th International Towing Tank Conference, Seakeeping Committee, Ottawa, pp. 351-360.
Guedes Soares, C., 1984, “Representation of Double-Peaked Sea Wave Spectra”, Ocean Engineering, Vol. 11, pp. 185-207.

89
Guedes Soares, C., 1989, “Transient Response of Ship Hulls to Wave Impact”,
International Shipbuilding Progress, Vol. 36, Nº 406, 1989, pp. 137-156.
Guedes Soares, et al., 1997, “Loads”, Proceedings 13th International Ship and Offshore Structures Congress (ISSC’97), T. Moan and S. Berge (Editors), Elsevier Science,
London, Vol. 1, 1997, pp. 59-122.
Garrison, C. I., 1978, “Hydrodynamic Loading of Large Offshore Structures: Three-
dimensional Source Distribution Methods”, Numerical Methods in Offshore Engineering, pp. 87-140.
Gerritsma, J. and Beukelman, W., 1967, “Analysis of the Modified Strip Theory for the Calculation of Ship Motions and Wave Bending Moments”, International Shipbuilding
Progress, Vol. 14, No. 156, pp. 319-337.
Goda, K., Miyamoto, T., and Yamamoto., Y., 1976, “A Study of Shipping Water Pressure
on Deck by Two-Dimensional Ship Model Test”, Journal of the Society of Naval Architects of Japan, Vol. 140.
Grim, O., 1960, “A method for a more precise computation of heaving and pitching motions both in calm water and in waves”, Proceedings 3rd Symposium Naval
Hydrodynamics, Office of Naval Research, Washington, D.C., pp. 483-524.
Hansen, P. F., 1994, Reliability Analysis of a Midship Section, Ph.D. thesis, Department of Naval Architecture and Offshore Engineering, Lyngby, Technical University of
Denmark.
Haskind, M. D., 1964, “The hydrodynamic theory of ship oscillations in rolling and
pitching”, Prikl. Mat. Mekh., Vol. 10, pp. 33-66. (English translation, Technical Research Bulletin No. 1-12, pp. 3-43, Society Naval Architects Marine Engineers, New
York, 1953.)
Hasselmann, K., et al., 1973, “Measurements of wind-wave growth and swell decay during
Joint North Sea Wave Project (JONSWAP)”, Deutsche Hydrographischen Zeitschrift, Vol. A8, No. 12, Reihe, Hamburg, Germany.
Hay, B., Bourne, J., Eagle, A. and Rubel, R., 1994, “Characteristics of hydrodynamic loads data for a naval combatent”, Hydroelasticity in Marine Hydrodynamics, O. Faltinsen
(Editor), A. A. Balkema Rotterdam, pp. 169-188.
Hess. J. L. and Smith, A. M. O., 1964, “Calculation of nonlifting potential flow about
arbitrary three-dimensional bodies”, Journal of Ship Research, No. 8, pp. 22-44.

90
Hess. J. L. and Smith, A. M. O., 1967, “Calculation of Potential Flow About Arbitrary
Bodies”, Progress in Aeronautical Sciences, Vol. 8, pp. 1-138.
Huang, Y. and Sclavounos, P. D., 1998, “Nonlinear Ship Motions”, Journal of Ship Research, Vol. 42, No. 2, pp. 120-130.
Hughes, M., 1996, “A 3-d Rankine panel method for seakeeping calculations with strong forward speed effect”, Proceedings 11th International Workshop Water Waves and
Floating Bodies, Hamburg.
Inglis, R. B., and Price W. G., 1981a, “A Three-Dimensional Ship Motion Theory --
Comparison Between Theoretical Prediction and Experimental Data of the Hydrodynamic Coefficients with Forward Speed”, Transactions Royal Institution of
Naval Architects, Vol. 124, pp. 141-157.
Inglis, R. B., and Price W. G., 1981b, “The influence of speed independent boundary
conditions in three-dimensional ship motion problems”, International Shipbuilding Progress, No. 28(318), pp. 22-29.
ITTC, 1978, 15th ITTC Seakeeping Committee Report, Proceeding of the 15th ITTC, The Hague.
ITTC, 1981, 16th ITTC Seakeeping Committee Report, Proceeding of the 16th ITTC, Leningrad.
ITTC, 1983, “Specification for a comparative study of computed ship motions in six
degrees of freedom”, 16th ITTC Seakeeping Committee Report, Report LTR SH-228.
Jensen, J.J. and Pedersen, P.T., 1979,“Wave-Induced Bending Moments in Ships - a
Quadratic Theory”, Transactions Royal Institute of Naval Archtects, Vol. 121, pp. 151-165.
Jensen, J.J., Beck, R.F., Du, S., Faltinsen, O.M., Fonseca, N., Rizzuto, E., Stredulinsky, D., Watanabe, I., 2000, “Extreme Hull Girder Loading”, Proceedings 14th International
Ship and Offshore Structures Congress (ISSC’2000), H. Ohtsubo and Y. Sumi (Editors), Elsevier Science, Vol. 2, pp. 263-320.
Joosen, W. P. A., 1964, “Oscillating Slender Ships at Forward Speed”, Publication No. 268, Netherlands Ship Model Basin, Wageningen.
Kaplan, P., Sargent, T. P. and Raff, A. I., 1969, “An Investigation of the Utility of Computer Simulation to Predict Ship Structural Response in Waves”, Report SSC-197,

91
Second Technical Progress Report from Project SR-174, Ship Computer Response to
the Ship Structures Committee, U.S. Coast Guard.
King, B. K., 1987, “Time-Domain analysis of Wave Exciting Forces on Ships and Bodies”, Report No. 306, Department of Naval Architects Marine Engineers, The University of
Michigan.
Korvin-Kroukovsky, B. V., 1955, “Investigation of ship motions in regular waves”,
Transactions Society Naval Architects Marine Engineers, Vol. 63, pp. 385-435.
Korvin-Kroukovsky, B. V., and Jacobs, W. R., 1957, “Pitching and heaving motions of a
ship in regular waves”, Transactions Society Naval Architects Marine Engineers, Vol. 65, pp. 590-632.
Kring, D., 1998, “Ship Seakeeping Through the τ =1/4 Critical Frequency”, Journal of Ship Research, Vol. 42, No. 2, pp. 113-119.
Kring, D., Huang, Y.-F, Sclavounos, P., Vada, T., and Braathen, A., 1996, “Non-linear Ship Motions and Wave-Induced Loads by a Rankine Method”, Proceedings 21st
Symposium on Naval Hydrodynamics, Trondheim, Norway, pp. 45-63.
Krylov, A., 1896, “A new theory of the pitching motion of ships on waves, and of the stresses produced by this motion”, Transactions Institute of Naval Architects, Vol. 65,
pp. 590-632.
Lee, C. M. and Curphey, R. M., 1977, “Prediction of Motion, Stability and Wave Load of
Small-Waterplane-Area-Twin-Hull Ships”, Transactions Society Naval Architects Marine Engineers, Vol. 85, pp. 94-130.
Lin, W. M. and Yue, D., 1990, “Numerical Solutions for Large-Amplitude Ship Motions in the Time Domain”, Proceedings 18th Symposium on Naval Hydrodynamics, Ann Arbor,
MI, pp. 41-66.
Lin, W. M. and Yue, D., 1993, “Time-domain analysis for floating bodies in mild-slope
waves of large amplitude”, Proceedings 8th International Workshop on Water Waves and Floating Bodies, St. Johns, Newfoundland, Canada.
Lin, W. M., Meinhold, M., Salvesen, N., and Yue, D., 1994, “Large-Amplitude Motions and Wave Loads for Ship Design”, Proceedings 20th Symposium on Naval
Hydrodynamics, Santa Barbara, CA, pp. 205-226.

92
Lin, W.M., Zhang, S., and Yue, D., 1996, “Linear and nonlinear analysis of motions and
loads of a ship with forward speed in large-amplitude waves”, Proceedings 11th International Workshop on Water Waves and Floating Bodies, Hamburg, Germany.
Longuet-Higgins, M.S., 1952, “On the Statistical Distribution of the Heights of Sea Waves”, Journal of Marine Research, Vol. 11, No. 3, pp. 245-260.
Longuet-Higgins, M.S. and Cokelet, E.D., 1976, “The Deformation of Steep Surface
Waves on Water: I. A Numerical Method Of Computation”, Proceedings Royal Society London, Vol. A350, pp. 1-26.
Lloyd, R.J.M., Salsich, J.O., Zseleczky, J.J., 1985, “The Effect og Bow Shape on Deck Wetness in Head Seas”, Transactions Royal Institute of Naval Architects, London, pp.
9-28.
Magee, A., 1997, “Applications Using a Seakeeping Simulation Code”, Proceedings 12th
International Workshop on Water Waves and Floating Bodies, Carry-le-Rouet, France, pp. 163-166.
Mays, J. H., 1978, Wave radiation and diffraction by a floating slender body, Ph.D. Thesis, Department of Ocean Engineering, Massachusetts Institute of Technology, Cambridge,
Massachusetts.
Maruo, H., 1962, “Calculation of the Wave Resistance of Ships, the Draught of Which is as Small as the Beam”, Journal Zosen Kiokai, The Society of Naval Architects of Japan,
Vol. 112, pp. 67-102.
Maruo, H. and Tokura, J., 1978, “Prediction of hydrodynamic forces and moments acting
on ships in heaving and pitching oscillations by means of an improvement of the slender ship theory”, Journal Society Naval Architects Japan, Vol. 143, pp. 111-120.
Michell, J. H., 1898, “The wave resistance of a ship”, Phil. Magazine, Vol. 45, pp. 106-123.
Miziguchi, S., 1989, “Design of Freeboard Height with the Numerical Simulation on the Shipping Water”, Proceedings 4th International Symposium on Practical Design of
Ships and Mobile Units (PRADS’89).
Moulijn, J., 1997, “Non-linear motions of surface effect ships”, Proceedings International
Conference on Air Cushion Vehicles (ACVs), Royal Institute of Naval Architects, London.

93
Murday, D. C., 1972, “An analysis of longitudinal bending moments measured on models
in head waves”, Transactions of the Royal Institute of Naval Architects, Vol. 114, pp. 221-240.
Nakos, D. and Sclavounos, P. D., 1990a, “Steady and unsteady wave patterns”, Journal of Fluid Mechanics, Vol. 215, pp. 256-288.
Nakos, D. and Sclavounos, P. D., 1990b, “Ship motions by a three-dimensional Rankine
panel method”, Proceedings 18th International Symposium Naval Hydrodynamics, Ann Arbor, Michigan, USA, pp. 21-40.
Nakos, D., Kring, D. C., and Sclavounos, P. D., 1993, “Rankine panel methods for transient free surface flows”, Proceedings 6th International Conference on Numerical
Ship Hydrodynamics, Iowa City, pp. 613-632.
Nethercote, W. C. E., 1981, “Motions and bending moments of a warship design”,
Transactions of the Royal Institute of Naval Architects, Vol. 123, pp. 352-375.
Newman, J. N., 1961, “A linearized theory for the motion of a thin ship in regular waves”,
Journal of Ship Research, Vol. 3, No. 1, pp. 1-19.
Newman, J. N., 1962, “The Exciting Forces on Fixed Bodies in Waves”, Journal of Ship Research, pp. 10-17.
Newman, J. N., 1964, “A slender-body theory for ship oscillations in waves”, Journal of Fluid Mechanics, Vol. 18, pp. 602-618.
Newman, J. N., 1965, “The Exciting Forces on a Moving Bodie in Waves”, Journal of Ship Research, pp. 190-199.
Newman, J. N. and Sclavounos, P. D., 1980, “The unified theory for ship motions”, Proceedings 13th Symposium Naval Hydrodynamics, Tokyo.
Newman, J. N. and Sclavounos, P. D., 1988, “The computation of wave loads on large offshore structures”, Proceedings International Behaviour of Offshore Structures,
(BOSS88), T. Moan, N. Janbu and O. Faltinsen (Editors), Vol. 2, pp. 605-622, Trondheim.
Newton, R.N., 1960, “Wetness Related to Free-Board and Flare”, Transactions Royal Institute of Naval Architects, Vol. 102.
O’Dea, J. and Jones, H., 1983, “Absolute and relative motion measurements on a model of
a high-speed containership”, Proceedings 20th American Towing Tank Conference.

94
O'Dea, J., Powers, E. and Zselecsky, J., 1992, “Experimental Determination of Non-
linearities in Vertical Plane Ship Motions”, Proceedings 19th Symposium on Naval Hydrodynamics, Seoul, Korea, pp. 73-91.
O’Dea, J.F., Walden, D.A., 1984, “Effect of Bow Shape and Non-Linearities on the Prediction of Large Amplitude Motions and Deck Wetness”, Proceedings 15th Symposium on Naval Hydrodynamics, Hamburg.
Ogawa, Y., 1998, “A Prediction Method for Shipping Water Height and ist Load on Deck”, Practical Design of Ships and Mobile Units (PRADS’98), M.W.C. Oosterveld
and S.G. Tan (Editors), Elsevier, pp. 535–543.
Ogilvie, T. F., 1964, “Recent progress toward the understanding and prediction of ship
motions”, Proceedings 5th Symposium on Naval Hydrodynamics, Washington D.C., pp. 3-128.
Ogilvie, T. F., 1972, “The wave generated by a fine ship bow”, Proceedings 9th Symposium Naval Hydrodynamics, Paris.
Ogilvie, T. F., 1974, “The fundamental assumptions in the ship-motion theory”, Report No. 148, Department Naval Architects Marine Engineers, University of Michigan, Ann
Arbor.
Ogilvie, T. F., and Tuck, E. O., 1969, “A Rational Strip Theory for Ship Motions”, Part 1, Report No. 013, Department Naval Architects Marine Engineers, University of
Michigan, Ann Arbor.
Ohkusu, M. and Faltinsen, O., 1990, “Prediction of radiation forces on a catamaran at high
Froude number”, Proceedings of 18th Symposium on Naval Hydrodynamics, Ann Arbor, National Academic Press, Washington, DC, pp. 5-19.
Pauling, J. R. and Wood, P. D., 1974, “Ship Motions and Capsizing in Astern Seas”, Proceedings 10th Symposium Naval Hydrodynamics, pp. 93-109.
Pawlowski, J., 1992, “A Non-linear Theory of Ship Motion in Waves”, Proceedings 19th Symposium on Naval Hydrodynamics, Seoul, Korea, pp. 33-57.
Peters, A. S., and Stoker, J. J., 1957, “The motion of a ship, as a floating rigid body, in a seaway”, Communications Pure Applied Mathematics, Vol. 10, pp. 399-490.
Pierson, W. J., and Moskowitz, L., 1964, “A Proposed Spectral Form for Fully Developed Wind Seas Based on the Similarity Theory of S.A. Kitaigorodskii”, Journal of Geophysical Research, Vol. 69, pp. 5181-5190.

95
Porter, W. R., 1960, “Pressure Distributions, Added Mass and Damping Coefficients for
Cylinders Oscillating in the Free Surface”, Report 82-16, Institute of Engineering Research, University of California, Berkeley.
Prevosto, M., Krogstad, H. E., Barstow, S. F., Guedes Soares, C., 1996, “Observations of the High-Frequency Range of the Wave Spectrum”, Journal of Offshore Mechanics and Arctic Engineering, Vol. 118, pp. 89-95.
Ramos, J., and Guedes Soares, C., 1997, “On the Assessment of Hydrodynamic Coefficients of Cylinders in Heaving”, Ocean Engineering, Vol. 24, no. 8, 1997, pp.
743-763.
Rathje, H. and Schellin, T.E., 1997,”Viscous Effects in Seakeeping Prediction of Twin-
Hull Ships”, Ship Technology Research (Schiffstechnik), Vol. 44, pp. 44-52.
Rodriguez, G. R., Guedes Soares, C., and Ocampo-Torres, F. J., 1999, “Experimental
Evidence of the Transition Between Power Law Models in the High Frequency Range of the Gravity Wave Spectrum”, Coastal Engineering, Vol. 38, pp. 249-259
Salvesen, N., Tuck, E. O., and Faltisen, O., 1970, “Ship motions and sea loads”, Transactions Society Naval Architects Marine Engineers, Vol. 78, pp 250-287.
Scorpio, S.M., Beck, R.F. and Korsmeyer, F.T., 1996, “Non-linear Water Wave Computations Using a Multipole Accelerated, Desingularized Method”, Proceedings 21st Symposium on Naval Hydrodynamics, Trondheim, Norway, pp. 69-74.
Sclavounos, P. D., 1984, “The diffraction of free surface waves by a slender ship”, Journal of Ship Research, Vol. 28.
Sclavounos, P. D., 1996, “Computation of wave ship interactions”, Advances in Marine Hydrodynamics, M. Ohkusu (Editor), Computational Mechanics Publications, pp. 233-
278.
Sclavounos, P. D., Kring, D. C., Huang, Y. F., Mantzaris, A. D., Kim, S. G., and Kim, Y.
W., 1997, “A computational method as an advanced tool for design”, Transactions Society Naval Architects Marine Engineers, Vol. 105, pp. 375-398.
Sclavounos, P. D. and Nakos, D., 1993, “Seakeeping and added resistence of IACC yacths by a three dimensional panel method”, Proceedings 11th Chesapeake Sailing Yacht
Symposium, Annapolis.

96
Sclavounos, P. D., Nakos, D. and D. C., Huang, 1993, “Seakeeping and waves induced
loads on ships with flare by a Rankine panel method”, Proceedings of 6th International Conference on Numerical Ship Hydrodynamics, Iowa City, pp. 57-76.
Schellin, T.E. and Rathje, H., 1995, “A Panel Method Applied to Hydrodynamic Analysis of Twin-Hull Ships”, Proceedings of the 3rd International Conference on Fast Ship Transportation (FAST’95), Schiffbautechnische Gesellschaft, Vol. 2, pp. 905-916.
Sommerfeld, A., 1949, “Partial Differential Equations in Physics”, Pure and Applied Mathematics, Vol. 1, Academic Press, pp. 182-200.
St. Denis, M. and Pierson, W. J., 1953, “On the Motions of Ships in Confused Seas”, Transactions Society Naval Architects Marine Engineers, Vol. 61, pp. 302-316.
Subramani, A., Beck, R., and Scorpio, S., 1998, “Fully Nonlinear Free-Surface Computations for Arbitrary and Complex Hull Forms”, Proceedings 22nd Symposium
on Naval Hydrodynamics, Washington, D.C., pp. 47-58.
Swaan, W.A, Vossers, G., 1961, “The Effect of Forebody Section Shape on Ship
Behaviour in Waves”, Transactions Royal Institute of Naval Architects, Vol. 103.
Tao, Z. and Incecik, A., 1998, “Time Domain Simulation of Vertical Ship Motions and Loads in Regular Head Waves”, Proceedings 12th International Conference on Offshore
Mechanics and Arctic Engineering (OMAE’98), ASME, New York, paper , Lisbon.
Tasai, F., 1959, “On the Damping Force and Added Mass of Ships Heaving and Pitching”,
Journal of Zosen Kiokai, Vol. 105, pp. 47-56.
Timman, R. and Newman, J. N., 1962, “The Coupled Damping Coefficients of Symmetric
Ships”, Journal of Ship Research, Vol. 5, No. 4.
Tuck, E. O., 1964, “A Systematic Asymptotic Expansion Procedure for Slender Ships”,
Journal of Ship Research, 8, pp. 15-23.
Thwaites, B., 1960, Incompressible Aerodynamics, Oxford University Press.
Ursell, F., 1949, “On the heaving motion of a circular cylinder on the surface of a fluid”, Quarterly Journal Mechanical Applied Mathematics, Vol. 2, pp. 218-231.
Ursell, F., 1962, “Slender oscillating ships at zero forward speed”, Journal Fluid
Mechanics, Vol. 19, pp. 496-516.

97
Veer, R. van’t, 1997a, “Catamaran seakeeping predictions”, Proceedings 12th International
Workshop on Water Waves and Floating Bodies, Marseille.
Veer, R. van’t, 1997b, “Analysis of motions and loads on a catamaran vessel in waves”, Proceedings of the 5rd International Conference on Fast Ship Transportation
(FAST’97), Sydney, pp. 439-446.
Wang, Z., Jensen, J. J. and Xia, J., 1998, “On the Effect of Green Water on Deck on the
Wave Bending Moment”, Practical Design of Ships and Mobile Units (PRADS’98), M.W.C. Oosterveld and S.G. Tan (Editors), Elsevier, pp. 239–245.
Warnsinck, W.H. et al., 1964, “Environmental conditions”, Report Committee 1, Proceedings 2nd International Ship Structures Congress, Oslo.
Watanabe, I., Keno, M. and Sawada, H., 1989, “Effect of bow flare on shape to wave loads of a container ship”, Journal of the Society of Naval Architects of Japan, Vol. 166, pp.
259-266.
Watanabe, I. e Guedes Soares, C., 1999, “Comparative Study on the Time-Domain
Analysis of Non-Linear Ship Motions and Loads”, Marine Structures, Vol. 12, no. 3, 1999, pp. 153-170.
Weems, K., Zhang, S., Lin, W. M. and Shin, Y. S., 1998, “Structural Dynamic Loadings Due to Impact and Whipping”, Practical Design of Ships and Mobile Units (PRADS’98), M.W.C. Oosterveld and S.G. Tan (Editors), Elsevier, pp 79-85.
Wilson, R., Paterson, E., Stern, F., 1998, “Unsteady RANS CFD Method for Naval Combatants in Waves”, Proceedings 22nd Symposium on Naval Hydrodynamics,
National Academy Press, Washington D.C., pp. 532-549.
Xia, J. and Wang, Z., 1997, “Time-domain hydro-elasticity theory of ships responding to
waves”, Journal of Ship Research, Vol. 41, No. 4, 286-300.
Xia, J., Wang, Z. and Jensen, J.J., 1998, “Non-linear Wave Loads and Ship Responses by a
Time-Domain Strip Theory”, Marine Structures, Vol. 11, No. 3, pp. 101-123.
Yeung, R. W., and Ananthakrishnan, P., 1992, “Oscillation of a Floating Body in Viscous
Fluid”, Journal of Engineering Mathematics, No. 26, 211-230.
Yeung, R. W. and Kim, S. H., 1981, “Radiation forces on ships with forward speed”, Proceedings of 3rd International Conference on Numerical Ship Hydrodynamics, Paris,
1981.

98
Zhao, R., 1997, “A complete linear time-domain analysis for predicting ship motions at
high Froude number”, International Shipbuilding Progress, 44, No. 440, pp. 341-361.