combate de robots - robocore
TRANSCRIPT
COMBATE DE ROBOTS
Responsável do Projecto:
Guilherme Ferreira (Estudante do Curso
de Formação Profissional de Mecatrónica)
2009
Equipa X-BOT
2
ÍNDICE
I - Introdução………………………………………………....p.3
II – Fundamentos da concepção do robot X-BOT …….p.5-11
III- Anexos………………………………….……….…...p.11-14
IV-Fontes/Bibliografia…………………………………...p.15

Equipa X-BOT
3
I - INTRODUÇÃO
O combate de robots é uma actividade consagrada em várias partes do mundo,
sendo considerada por muitos um desporto, que envolve conhecimentos nas
áreas da tecnologia, engenharias (mecânica, electrónica e computação) e
máquinas. Neste sentido, é uma actividade onde a tecnologia está aliada à
diversão.
A primeira competição envolvendo confronto entre robots foi a Design 2.007,
que ocorre anualmente desde 1970 no Massachusetts Institute of Technology
(MIT). O sucesso desta competição inspirou a criação da primeira competição
de robots, organizada pela fundação For Inspiration and Rcognition of Science and
Technology (FIRST), no ano de 1992.
Actualmente, é uma actividade consagrada nos Estados Unidos da América e
no mundo, já com duas competições principais exibidas ao vivo em programas
de TV norte-americana e britânica: a BattleBotz e a Robot Wars, ambas com seis
anos de existência.
Foram veiculadas, ainda, diversas matérias na imprensa sobre o assunto, em
revistas e jornais, tais como: World Magazine´s, Wired, Digital World, NYTimes e
National Geographic.
As tecnologias envolvidas na construção de robôs de combate são aplicáveis em
diversos sectores, tais como: indústria de energia e petróleo, medicina, robôs de
busca e salvamento, sistemas para deficientes físicos e robôs anti-bombas.
De uma forma geral, competições como estas estimulam a criatividade e
permitem que membros participantes apliquem na prática conhecimentos de
matemática, física, mecânica, electrónica e computação.
Equipa X-BOT
4
Em Portugal, este desporto só à relativamente pouco tempo começou a ser
divulgado e a ganhar adeptos. Contudo, existe a necessidade de transmitir mais
informação para que se adquira ou aprimore as técnicas inerentes à construção
de robots bem como estimular a criação de um maior número de equipas de
competição. Para além disso, a tecnologia é fundamental para o
desenvolvimento de qualquer país e, como já foi referido anteriormente, esta
actividade conjuga o lazer com o saber técnico.
Neste contexto, surge a equipa – X-BOT, voltada directamente para os
combates de robots, que tem como ambição contribuir para a divulgação e
implementação desta actividade aplicando as novas tecnologias, à semelhança
do que se faz já noutros países há vários anos.
Acreditamos que tal iniciativa promova o conhecimento e desenvolvimento das
tecnologias, em Portugal e que envolva os estudantes e técnicos do ramo das
engenharias (sobretudo nas áreas da electrónica, mecânica e computação) numa
actividade que facilite o desenvolvimento das suas competências e que sirva
para divulgar e dignificar a - Era dos Robots, junto das instituições e empresas
que abracem este projecto.
Seguidamente, serão descritos os fundamentos da concepção de um robot pela
equipa X-BOT.

Equipa X-BOT
5
II- Fundamentos da concepção do robot X-BOT
A organização de uma competição de robots implica, necessariamente, como
em qualquer outro desporto, o estabelecimento de regras bem definidas ao
nível da concepção dos robots.
Classe de peso
A primeira etapa na concepção de um robot, passa por se definir a classe de
peso, sendo que oficialmente existem cerca de 15 categorias de peso (desde as
35g até 176,9Kg).
Entre todas as categorias, as que mais se destacam pela competividade são:
hobbyweight (5,44Kg), featherweight (13,6Kg), lightweight (27,2Kg) e a middleweight
(54.4Kg).
A equipa X-BOT seleccionou a categoria featherweigh, para a concepção do seu
robot, uma vez que os materiais utilizados estão a melhor alcance quer físico
quer financeiro.
Tipo de robot
O robot X-BOT será do tipo vertical spinner, que é um tipo de robot que ataca os
adversários com uma barra ou disco de grande diâmetro (que gira a alta
velocidade, num plano vertical).

Equipa X-BOT
6
Etapas na construção do robot X-BOT
A concepção do presente projecto, com início no ano de 2008, teve
aproximadamente a duração de doze semanas, colocando em prática os saberes
adquiridos ao nível das novas tecnologias e acompanhando a evolução ao nível
dos materiais que vão sendo implementados no mercado, essenciais na
construção do robot. No entanto, considera-se que não é um projecto acabado,
uma vez que o objectivo é aperfeiçoar quer as técnicas quer os materiais
utilizadas na sua construção. A equipa X-BOT, está apta à mudança e inovação.
- Primeira Etapa - Esboço:
Foi desenhado e esboço do robot X-BOT em 3D e definidos os parâmetros: Peso
(13,6Kg), Comprimento (350mm), Largura (440mm), Altura (70mm, com
diâmetro das rodas 100mm) e Barra (200mmX60mmX30mm).
Esboço do robot X-BOT
Equipa X-BOT
7
- Segunda Etapa - Mecânica:
Selecção dos Materiais
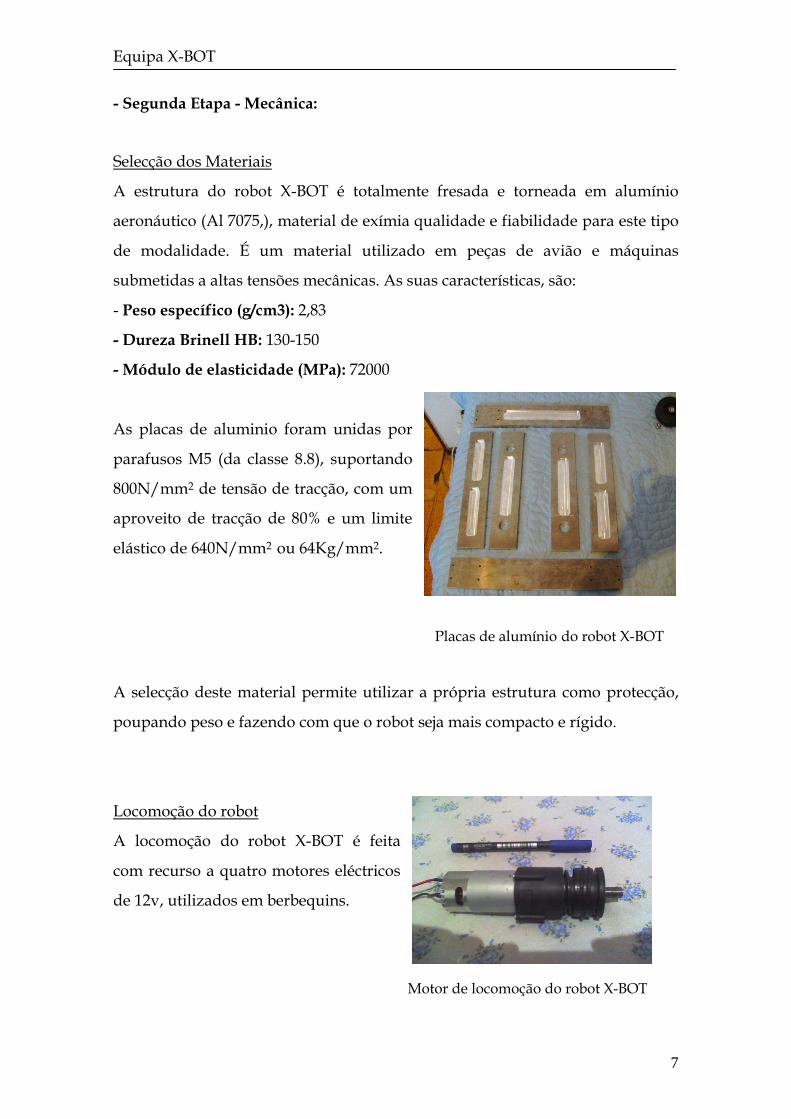
A estrutura do robot X-BOT é totalmente fresada e torneada em alumínio
aeronáutico (Al 7075,), material de exímia qualidade e fiabilidade para este tipo
de modalidade. É um material utilizado em peças de avião e máquinas
submetidas a altas tensões mecânicas. As suas características, são:
- Peso específico (g/cm3): 2,83
- Dureza Brinell HB: 130-150
- Módulo de elasticidade (MPa): 72000
As placas de aluminio foram unidas por
parafusos M5 (da classe 8.8), suportando
800N/mm2 de tensão de tracção, com um
aproveito de tracção de 80% e um limite
elástico de 640N/mm2 ou 64Kg/mm2.
Placas de alumínio do robot X-BOT
A selecção deste material permite utilizar a própria estrutura como protecção,
poupando peso e fazendo com que o robot seja mais compacto e rígido.
Locomoção do robot
A locomoção do robot X-BOT é feita
com recurso a quatro motores eléctricos
de 12v, utilizados em berbequins.
Motor de locomoção do robot X-BOT

Equipa X-BOT
8
Uma das vantagens desta aquisição, é que na compra de uma peça única se
adquire, em simultâneo, o motor, a caixa redutora, a bateria e o carregador.
Rodas e junções
As rodas utilizadas no robot X-BOT possuem de diâmetro 100mm e o robot X-
BOT tem de altura 70mm, tendo em conta que estão posicionadas a 35mm de
altura (a partir da zona inferior do robot, com uma margem de 15mm de altura
do solo, que é a altura
recomendada).
Um robot quanto mais altura
possuir mais vulnerável fica em
combate, uma vez que tem uma
maior probabilidade de voo e
consequentemente, queda.
Rodas e junções do robot X-BOT
É de salientar, que no solo podem estar presentes irregularidades, o que impede
o robot de se fixar eficazmente no solo, como se pretende.
Como as condições de combate podem ser adversas, o tipo de roda tem de ser
cuidadosamente seleccionado, já que o atrito é crucial em qualquer tentativa de
movimento. A aquisição das rodas, foi uma das maiores preocupações da
equipa X-BOT, uma vez que estas são cruciais na locomoção adequada e eficaz
do robot.
Foram, igualmente, confeccionadas quatro junções em alumínio (com o intuito
de optimizar a relação pesoXresistencia), para acoplamento das rodas nos eixos
dos motores.
Equipa X-BOT
9
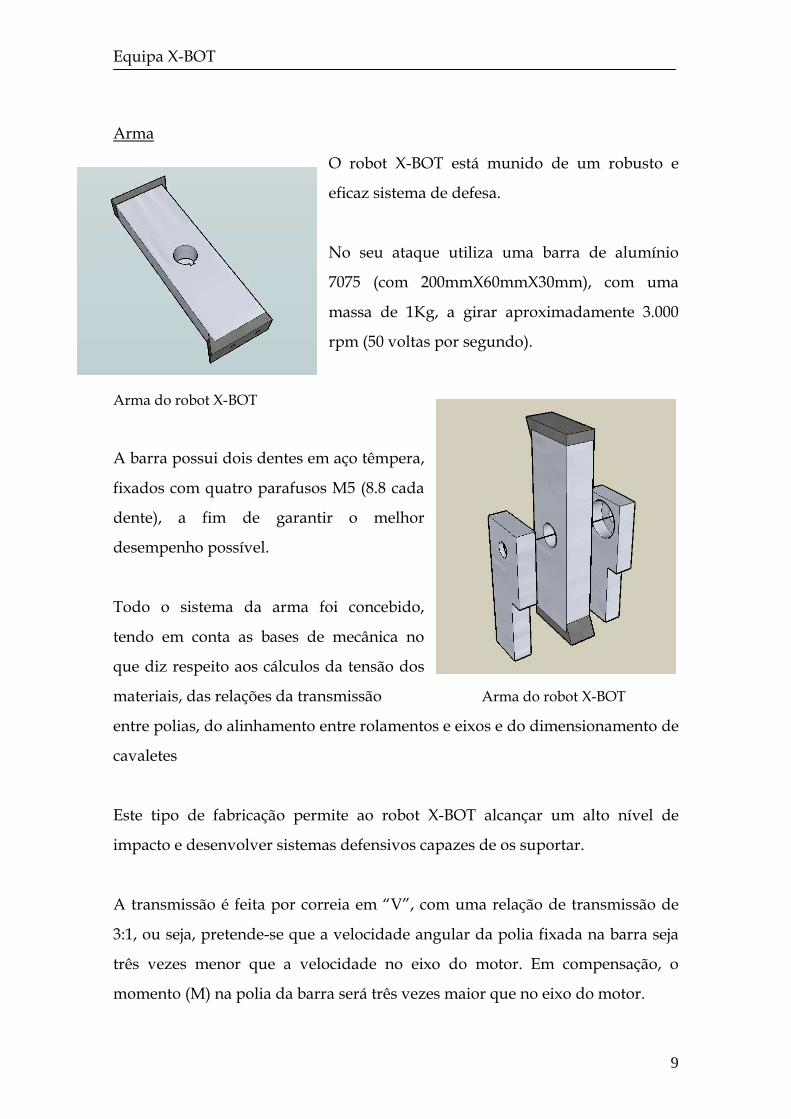
Arma
O robot X-BOT está munido de um robusto e
eficaz sistema de defesa.
No seu ataque utiliza uma barra de alumínio
7075 (com 200mmX60mmX30mm), com uma
massa de 1Kg, a girar aproximadamente 3.000
rpm (50 voltas por segundo).
Arma do robot X-BOT
A barra possui dois dentes em aço têmpera,
fixados com quatro parafusos M5 (8.8 cada
dente), a fim de garantir o melhor
desempenho possível.
Todo o sistema da arma foi concebido,
tendo em conta as bases de mecânica no
que diz respeito aos cálculos da tensão dos
materiais, das relações da transmissão Arma do robot X-BOT
entre polias, do alinhamento entre rolamentos e eixos e do dimensionamento de
cavaletes
Este tipo de fabricação permite ao robot X-BOT alcançar um alto nível de
impacto e desenvolver sistemas defensivos capazes de os suportar.
A transmissão é feita por correia em “V”, com uma relação de transmissão de
3:1, ou seja, pretende-se que a velocidade angular da polia fixada na barra seja
três vezes menor que a velocidade no eixo do motor. Em compensação, o
momento (M) na polia da barra será três vezes maior que no eixo do motor.
Equipa X-BOT
10
- Terceira Etapa - Electrónica:
Sistema eléctrico
O sistema eléctrico do robot X-BOT é dividido em 2 partes: o sistema de
comando (receptor e variadores de velocidades com PWM) e sistema de
potência (baterias, interruptores e cabos).
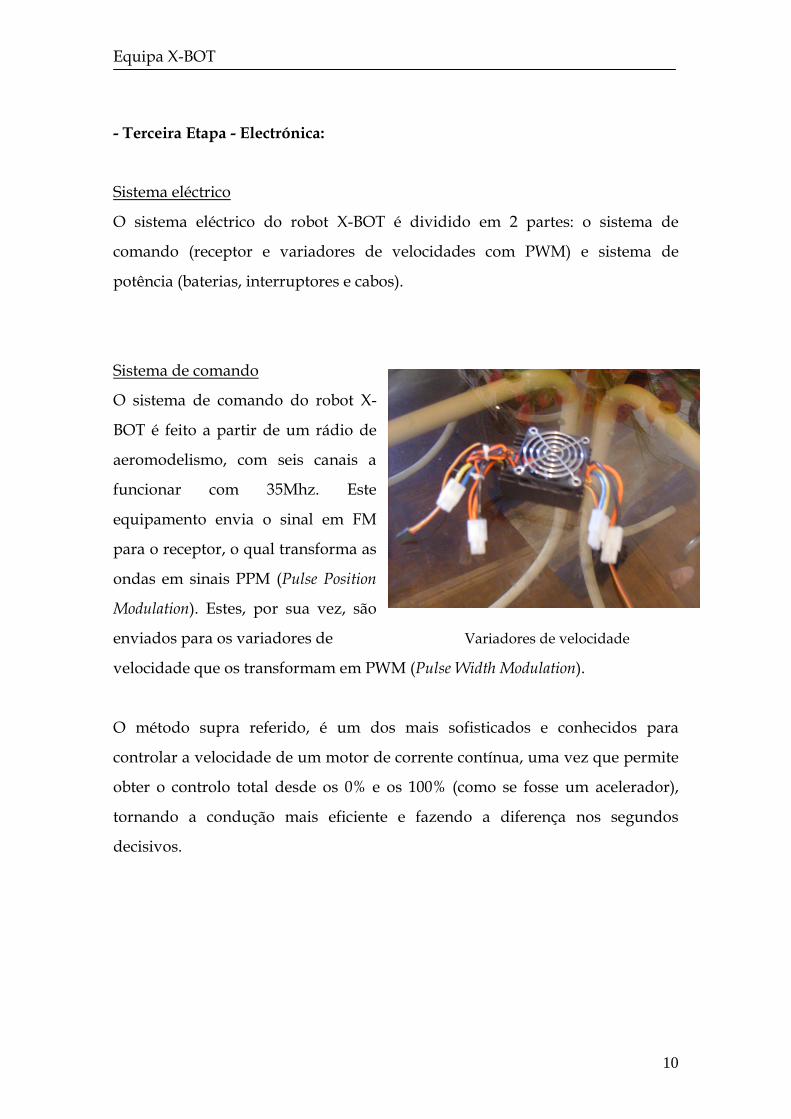
Sistema de comando
O sistema de comando do robot X-
BOT é feito a partir de um rádio de
aeromodelismo, com seis canais a
funcionar com 35Mhz. Este
equipamento envia o sinal em FM
para o receptor, o qual transforma as
ondas em sinais PPM (Pulse Position
Modulation). Estes, por sua vez, são
enviados para os variadores de Variadores de velocidade
velocidade que os transformam em PWM (Pulse Width Modulation).
O método supra referido, é um dos mais sofisticados e conhecidos para
controlar a velocidade de um motor de corrente contínua, uma vez que permite
obter o controlo total desde os 0% e os 100% (como se fosse um acelerador),
tornando a condução mais eficiente e fazendo a diferença nos segundos
decisivos.

Equipa X-BOT
11
Sistema de potência
A fonte de toda a energia que o
robot X-BOT precisa durante o
funcionamento é fornecida por um
pack de 10 células de NiCd
1800mAh em serie, formando 12v e
1800mAh, sendo descarregada a
10C, o qual fornece 18 amperes
contínuos por 6 minutos.
Sistema de potência do robot X-BOT
Os cabos seleccionados para a fiação do robot X-BOT possuem secção de
2.5mm2.
III- Anexos
Orçamento Como em qualquer projecto, há custos relacionados, e o que impede a equipa X-BOT a proseguir com seus projectos não somente nos robots de combate é o orçamento curto de que dispõem. Mas como o objectivo principal da tecnologia é sempre construir o melhor ao preço mais baixo, é isso que a equipa X-BOT tem feito ao longo de 3 anos.

Equipa X-BOT
12
*Envios/despesas de entrega ou levantamento.
A equipa X-BOT esta a apostar todas as cartas na evolução da robótica em Portugal, e as empresas que estiverem juntas nessa evolução com certeza terá bons resultados. A equipa conta com o apoio da empresa Robert Mauser, uma exelente empresa na área de: -Componentes para TV/ Hi-fi / video /DVD. -Telecomandos para TV /SAT /video /DVD. -Sacos para aspiradores. -Cabos / fichas /adaptadores para audio /video. -Informática. -Baterias NiCd / NiMh / Li-ion / Gel / Packs e carregadores. -Material eléctrico. -Lâmpadas. -Acessórios para TV por satélite e por cabo / repartidores / derivadores . -Amplificadores.
LISBOA Trav. Do Pote de Água 10ª 1700-317 Lisboa Tel. 218 435 990 Também em: MALVEIRA PORTELA
Material Quantidade Preço
unitário Outros* Sub-total Apoios Mecânica Al 7075 11Kg 7,20€/kg 15 € 95 € Parafuso 8.8 40 unidades 0,10 € 0 € 4 € Motor 12v 4 uni. 25 € 0 € 100 € Roda 4'' 4 uni. 7,50 € 0 € 30 € Rolamento NSK 3 uni. 0 € 0 € 0 € Motor 12v barra 1 uni. 25€ 0€ 25€ Electrónica Radio Wfly 6 canais 1 uni. 55,90 € 8,39 € 64,29 € Variador de velocidade 2 uni. 49,50 € 0 € 99 €
Pack bateria 12v NiCd 1 uni. 0 € 0 € 0 € Material disponibilizado
pela empresa Robet Mauser. Refrigeração Electrónica 1 uni. 7€ 0€ 7€
Carregador NiCd 1uni. 22€ 0€ 22€
Robert Mauser 40% desconto.
Outros - - - Total 446,29 €

Equipa X-BOT
13
Agradecimentos A equipa X-BOT tem o maior prazer em agradecer ás pessoas que tornaram a realização deste projecto possível.
Prof. Manuel Venes Porf. António Subtíl
Sr. Fernandes Sr. Gamito Maria João
Para mais informações e contacto: [email protected]
Fotos do projecto

Equipa X-BOT
14

Equipa X-BOT
15
IV- Fontes/Bibliografia
Tutorial Riobotz v1.0 Agosto 2006
http://www.uairrior.unifei.edu.br
http://www.riobotz.com.br
http://www.tritonrobos.com.br
http://www.botville.org
http://www.robocore.net