comando numÉrico computadorizado j. t ... - lab usinagem · campo de aplicaÇÃo – alguns...
TRANSCRIPT

COMANDO NUMÉRICO COMPUTADORIZADO
HIS
TÓ
RIC
O
Proposta de um método
para usinagem de curvas
J. T. Parsons
1940
Desenvolvimento do
primeiro CN (Comando Numérico)
baseado no método proposto por Parsons
M.I.T
1952
Aplicação em ambiente fabril
Surgimento da linguagem
APT (Automatically Programmed Tools)
Cincinat/M.I.T
1960
Surgimento do CNC
(Comando Numérico Computadorizado) Feira de Chicago
1976

O QUE É CNC ?
É UM SISTEMA QUE PODE INTERPRETAR UMA SEQUENCIA DE
INSTRUÇÕES EM UM FORMATO SIMBÓLICO
E UTILIZÁ-LAS PARA CONTROLAR A VELOCIDADE E POSIÇÃO
DOS EIXOS DE UMA MÁQUINA
O CNC NÃO É UM TIPO DE MÁQUINA MAS SIM UMA
TÉCNICA PARA CONTROLAR UMA VARIEDADE DE MÁQUINAS
Pressman e Williams, 1977
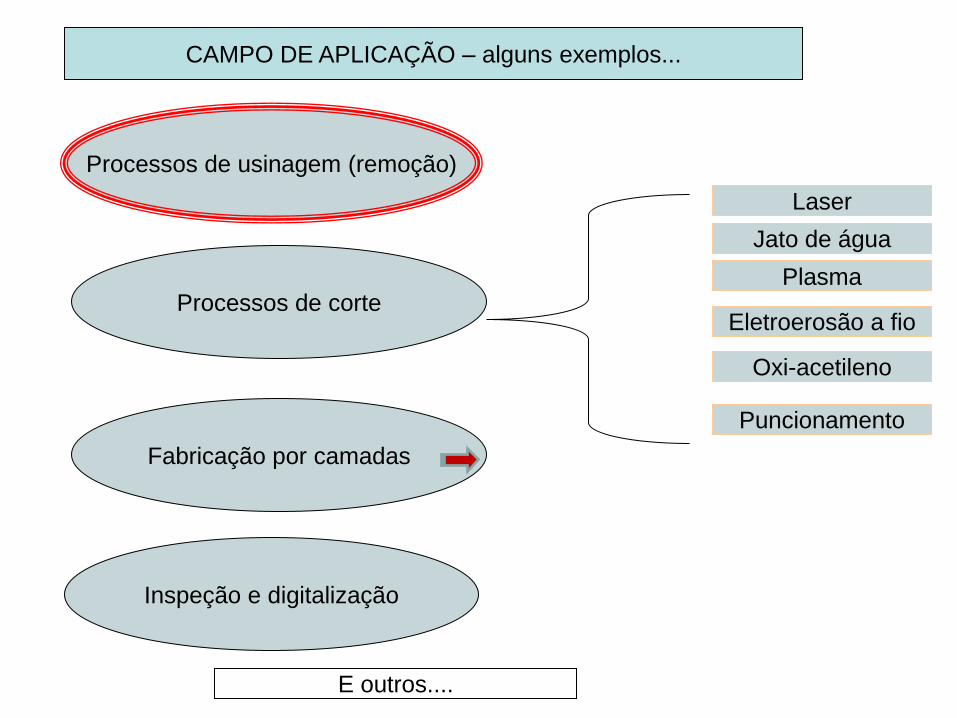
CAMPO DE APLICAÇÃO – alguns exemplos...
Processos de usinagem (remoção)
Processos de corte
Laser
Jato de água
Plasma
Eletroerosão a fio
Oxi-acetileno
Puncionamento
Fabricação por camadas
Inspeção e digitalização
E outros....

Controle

Centro de Usinagem Vertical
Fonte: Ind. Romi -
http://www.romi.com.br/fileadmin/Editores/MF/Catalogos/Portugues/
Cat_Romi_Linha_Romi_D_AA_140509.pdf
1 – Cabeçote vertical (eixo árvore)
2 – motor principal
3 – coluna
4 – trocador automático de ferramentas
5 – servomotor (eixo X)
6 – Base
7 - Mesa

Estrutura de um centro de usinagem horizontal – fonte: Mori Seiki
http://www.moriseiki.com/english/products/mch/01/nh_index.html

1 – cabeçote (eixo árvore)
2 – placa (acionamento hidráulico)
3 – torre (trocador de ferramentas)
4 – servomotor (eixo X)
5 – motor principal
6 – base (estrutura monobloco)
7 – mesa do carro transversal (eixo X)
8 – guias lineares (eixo Z)
Torno horizontal – fonte: Ind. Romi
http://www.romi.com.br/fileadmin/Editores/MF/Catalogos/Portugues/Cat_Romi_GL_AA_140509.pdf
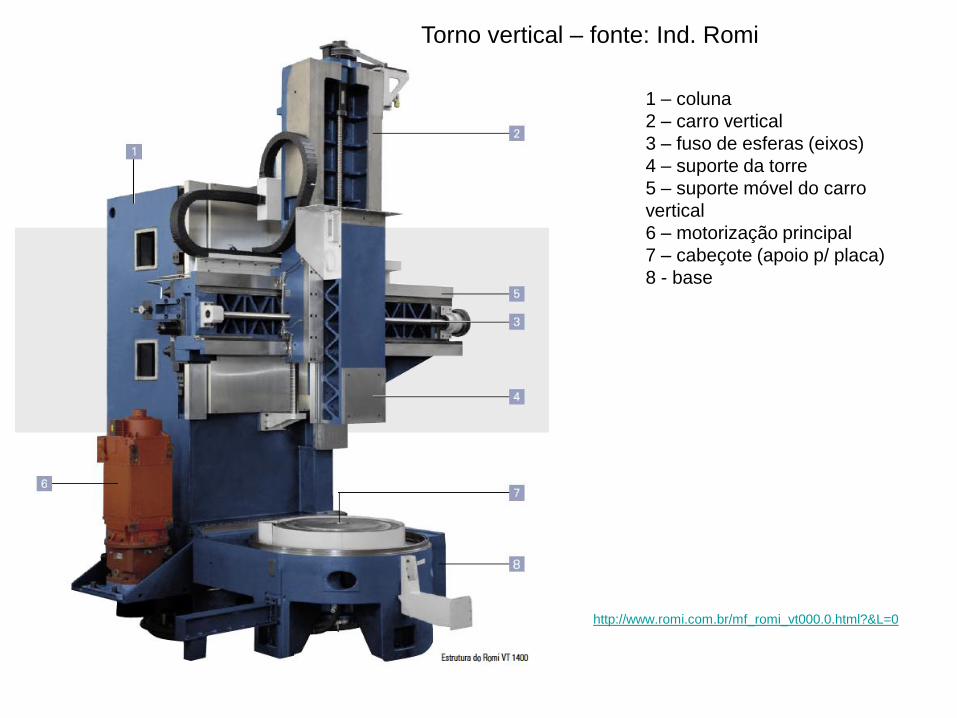
1 – coluna
2 – carro vertical
3 – fuso de esferas (eixos)
4 – suporte da torre
5 – suporte móvel do carro
vertical
6 – motorização principal
7 – cabeçote (apoio p/ placa)
8 - base
Torno vertical – fonte: Ind. Romi
http://www.romi.com.br/mf_romi_vt000.0.html?&L=0

Mesa de eixos cruzados do centro de usinagem vertical – Fonte:
Ind. Romi http://www.romi.com.br/fileadmin/Editores/MF/Catalogos/Portugues/Cat_Romi_Linha_Romi_D_AA_140509.pdf

Servomotor integrado –fonte: http://www.jvluk.com/servo_motors.html
Motores de passo –fonte: http://www.motiontek.ca/StepperMotor.html
Veja também o link para kit cnc: http://www.motiontek.ca/Retrofitkit.html
Inversor de frequencia
Fonte: Yaskawa
Motor do fuso principal
Fonte: GE Fanuc
Fuso principal
Fonte: Ind. Romi
ACIONAMENTOS

FUSOS E GUIAS
Fuso de esferas recirculantes –
Fonte: Rexroth –
http://www.dctechsystems.com.br/PDF/r310en_3301_2008_07.pdf
Guia linear de esferas – Fonte: Rexroth –
http://www.dctechsystems.com.br/PDF/R310EN_2202_2009_06.pdf
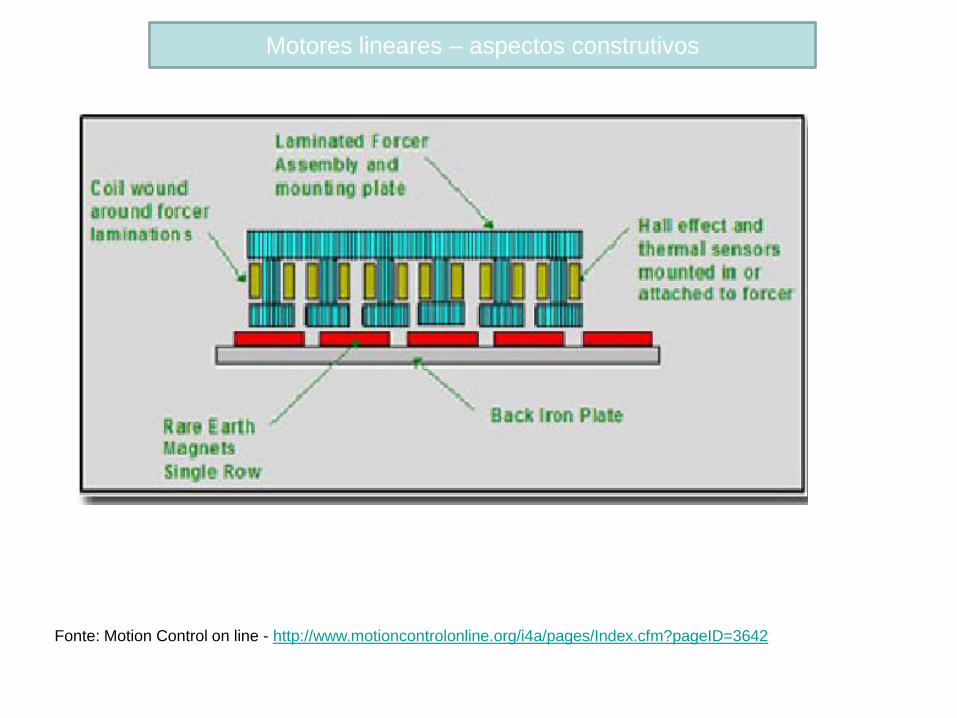
Motores lineares – aspectos construtivos
Fonte: Motion Control on line - http://www.motioncontrolonline.org/i4a/pages/Index.cfm?pageID=3642

Motores lineares – aplicação em máquina-ferramenta
Fonte: SODICK- http://www.sodick.jp/tech/img/core_linear.pdf
Motores lineares compactos:
https://www.youtube.com/watch?v=jleS4nog5UQ

PROBLEMAS RELACIONADOS AO CONTROLE
Deformação elástica (torção nos eixos)
Inércia
Aceleração/desaceleração
Atrito
Dinâmica da variação de carga
Vibrações
Desvios dimensionais de origem térmica

FABRICAÇÃO POR CAMADAS – PROTOTIPAGEM RÁPIDA
É UM PROCESSO DE DEPOSIÇÃO BIDIMENSIONAL
CAMADA POR CAMADA

SINTERIZAÇÃO SELETIVA POR LASER
Fonte: http://home.att.net/~castleisland/rp_int.htm