cetc2011 pierre ghislain - v5 apresentacao mt04
TRANSCRIPT
R
ISELINSTITUTO SUPERIOR DE ENGENHARIA DE LISBOA SERVIÇO DE DOCUMENTAÇÃO E PUBLICAÇÕES
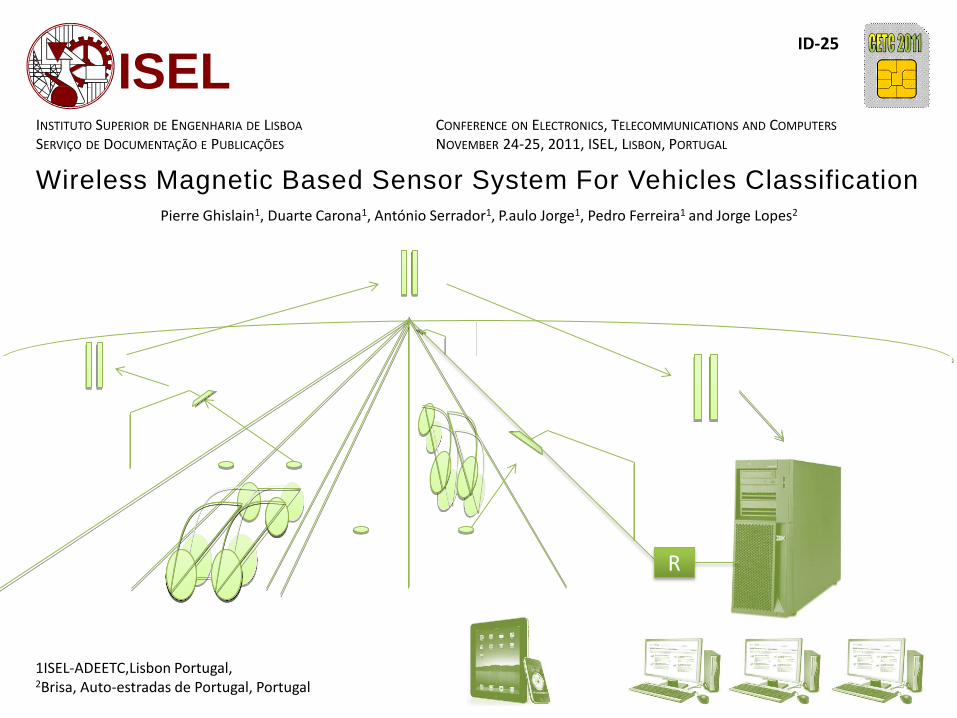
Wireless Magnetic Based Sensor System For Vehicles Classification
Pierre Ghislain1, Duarte Carona1, António Serrador1, P.aulo Jorge1, Pedro Ferreira1 and Jorge Lopes2
ID-25
CONFERENCE ON ELECTRONICS, TELECOMMUNICATIONS AND COMPUTERS NOVEMBER 24-25, 2011, ISEL, LISBON, PORTUGAL
1ISEL-ADEETC,Lisbon Portugal, 2Brisa, Auto-estradas de Portugal, Portugal
Outline
• Introduction, Motivation and Objectives
• State of the Art
• Solution
• Implementation
• Results
• Conclusions
• Acknowledgments
INTRODUCTION,
MOTIVATION AND
OBJECTIVES
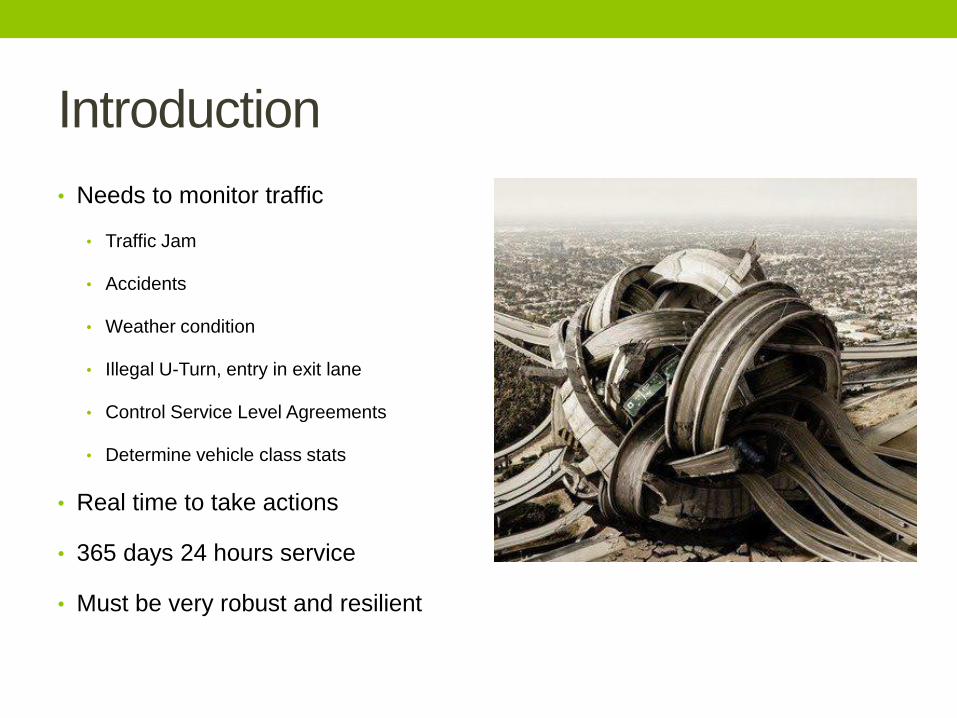
Introduction
• Needs to monitor traffic
• Traffic Jam
• Accidents
• Weather condition
• Illegal U-Turn, entry in exit lane
• Control Service Level Agreements
• Determine vehicle class stats
• Real time to take actions
• 365 days 24 hours service
• Must be very robust and resilient
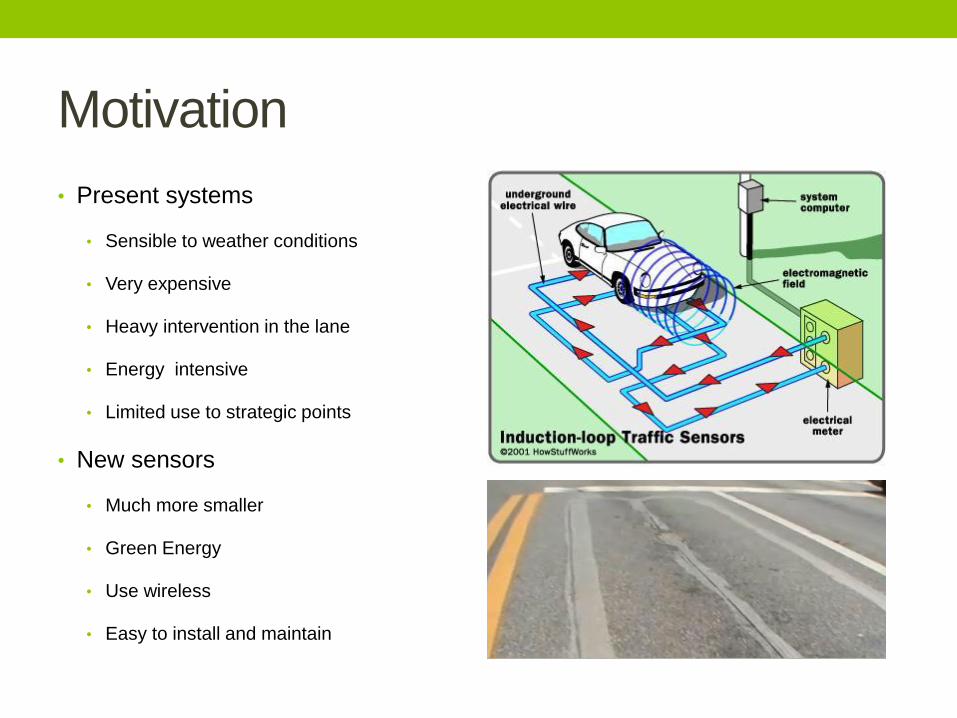
Motivation
• Present systems
• Sensible to weather conditions
• Very expensive
• Heavy intervention in the lane
• Energy intensive
• Limited use to strategic points
• New sensors
• Much more smaller
• Green Energy
• Use wireless
• Easy to install and maintain
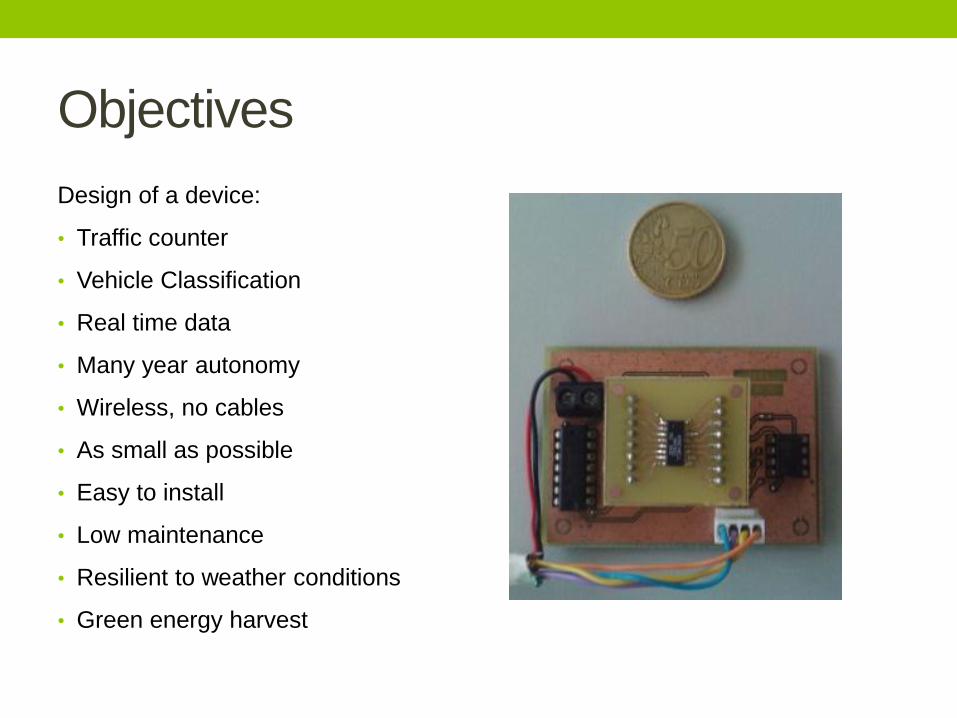
Objectives
Design of a device:
• Traffic counter
• Vehicle Classification
• Real time data
• Many year autonomy
• Wireless, no cables
• As small as possible
• Easy to install
• Low maintenance
• Resilient to weather conditions
• Green energy harvest
STATE OF THE ART
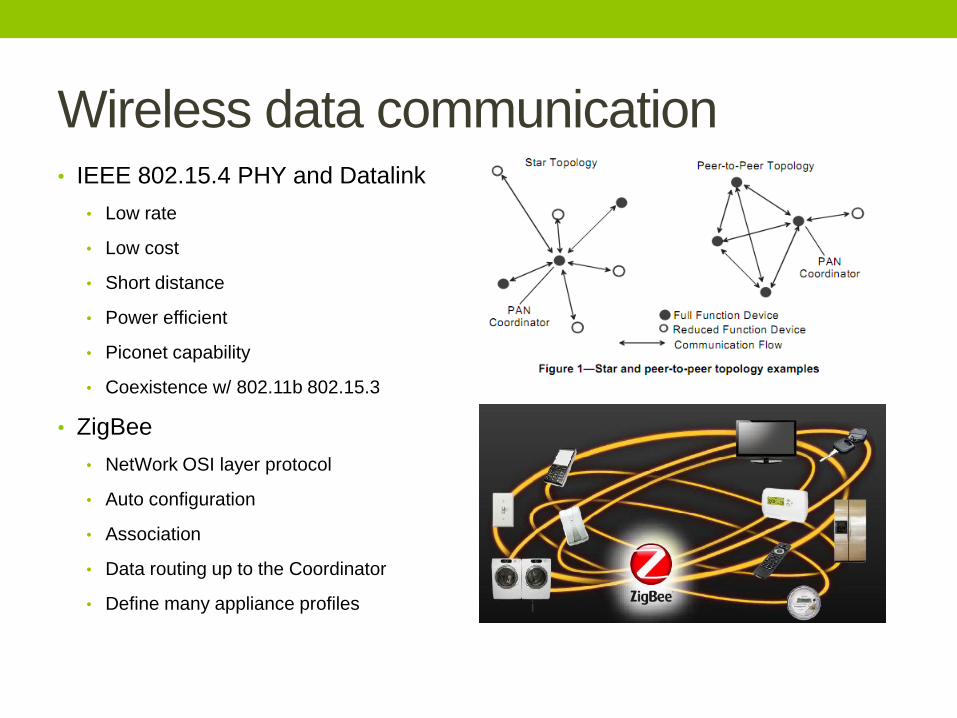
Wireless data communication • IEEE 802.15.4 PHY and Datalink
• Low rate
• Low cost
• Short distance
• Power efficient
• Piconet capability
• Coexistence w/ 802.11b 802.15.3
• ZigBee
• NetWork OSI layer protocol
• Auto configuration
• Association
• Data routing up to the Coordinator
• Define many appliance profiles
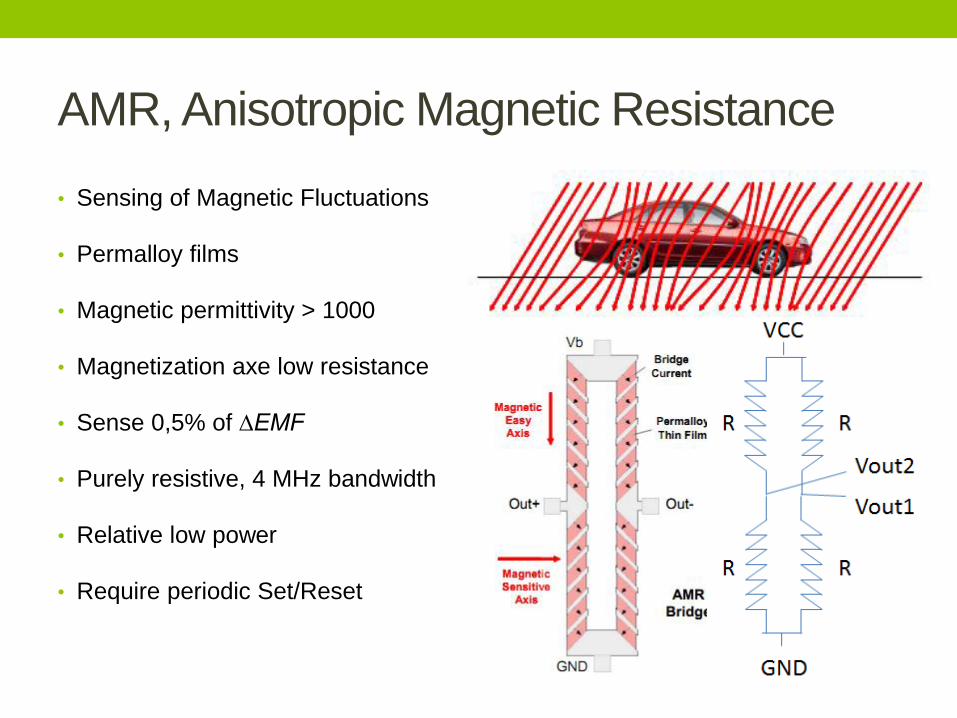
AMR, Anisotropic Magnetic Resistance
• Sensing of Magnetic Fluctuations
• Permalloy films
• Magnetic permittivity > 1000
• Magnetization axe low resistance
• Sense 0,5% of ∆EMF
• Purely resistive, 4 MHz bandwidth
• Relative low power
• Require periodic Set/Reset
Energy harvest – Green sensors
• Low power devices
• DC-DC optimization
• Solar energy Cells
• None rechargeable Battery
• Rechargeable battery
• Hypercondensator
THE SOLUTION
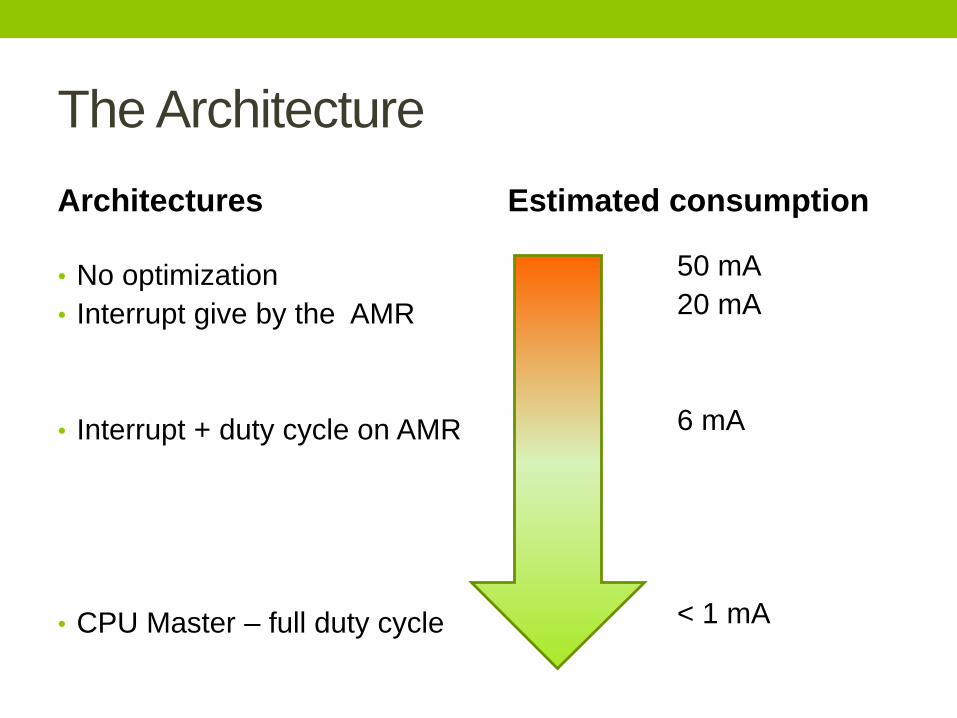
The Architecture
Architectures
• No optimization
• Interrupt give by the AMR
• Interrupt + duty cycle on AMR
• CPU Master – full duty cycle
Estimated consumption
50 mA
20 mA
6 mA
< 1 mA
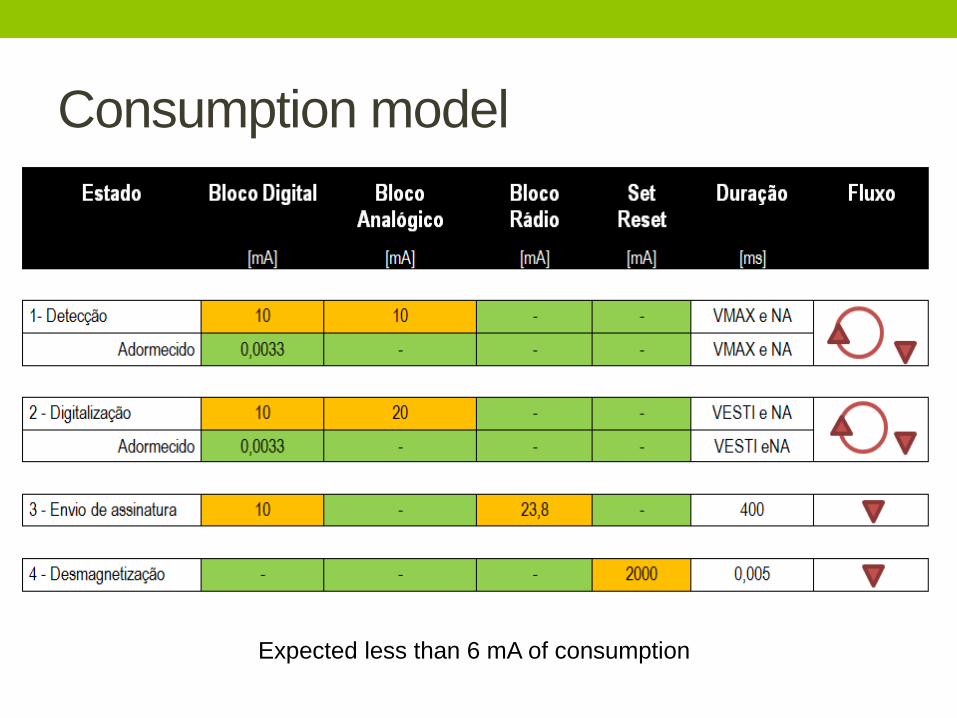
Consumption model
Expected less than 6 mA of consumption
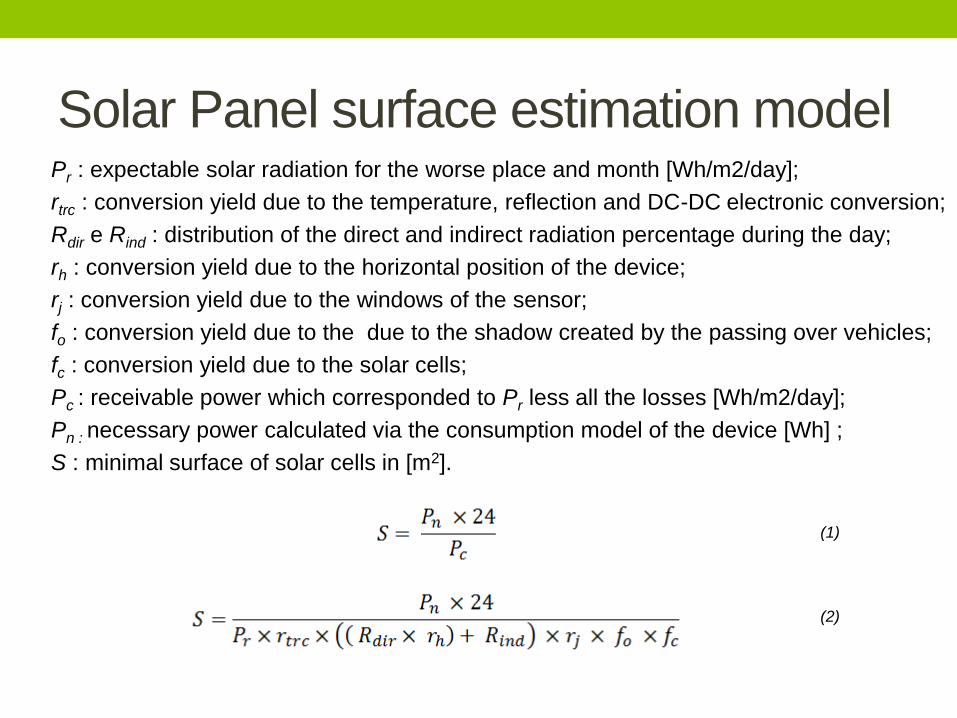
Solar Panel surface estimation model Pr : expectable solar radiation for the worse place and month [Wh/m2/day];
rtrc : conversion yield due to the temperature, reflection and DC-DC electronic conversion;
Rdir e Rind : distribution of the direct and indirect radiation percentage during the day;
rh : conversion yield due to the horizontal position of the device;
rj : conversion yield due to the windows of the sensor;
fo : conversion yield due to the due to the shadow created by the passing over vehicles;
fc : conversion yield due to the solar cells;
Pc : receivable power which corresponded to Pr less all the losses [Wh/m2/day];
Pn : necessary power calculated via the consumption model of the device [Wh] ;
S : minimal surface of solar cells in [m2].
(1)
(2)
IMPLEMENTATION
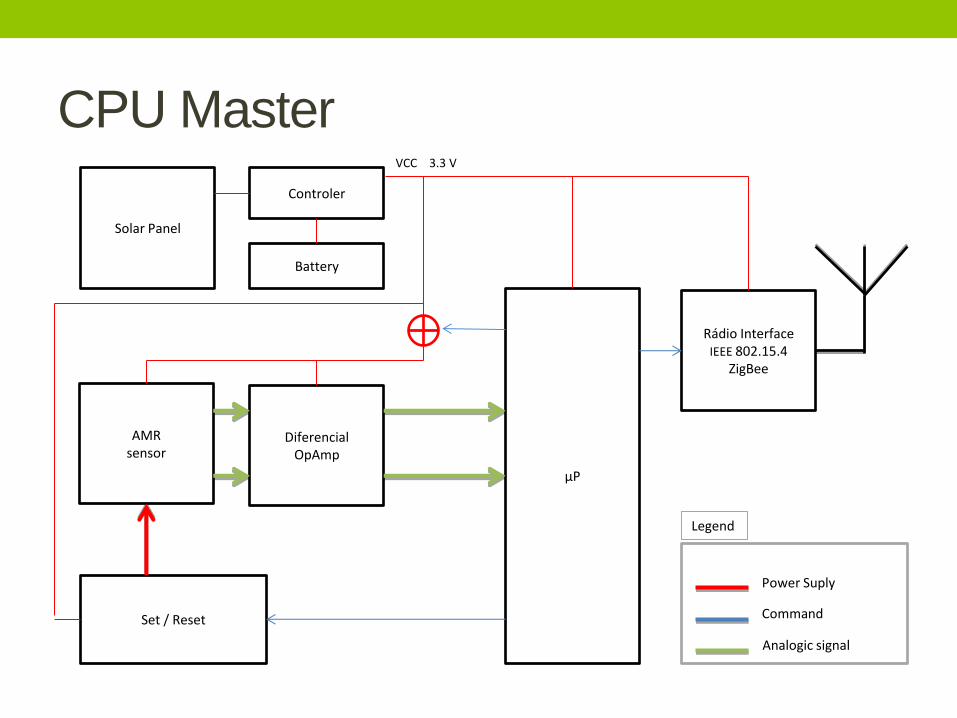
CPU Master
Solar Panel
Battery
Controler
AMR sensor
Diferencial OpAmp
µP
Rádio Interface IEEE 802.15.4
ZigBee
Set / Reset
Power Suply
Command
Analogic signal
Legend
VCC 3.3 V
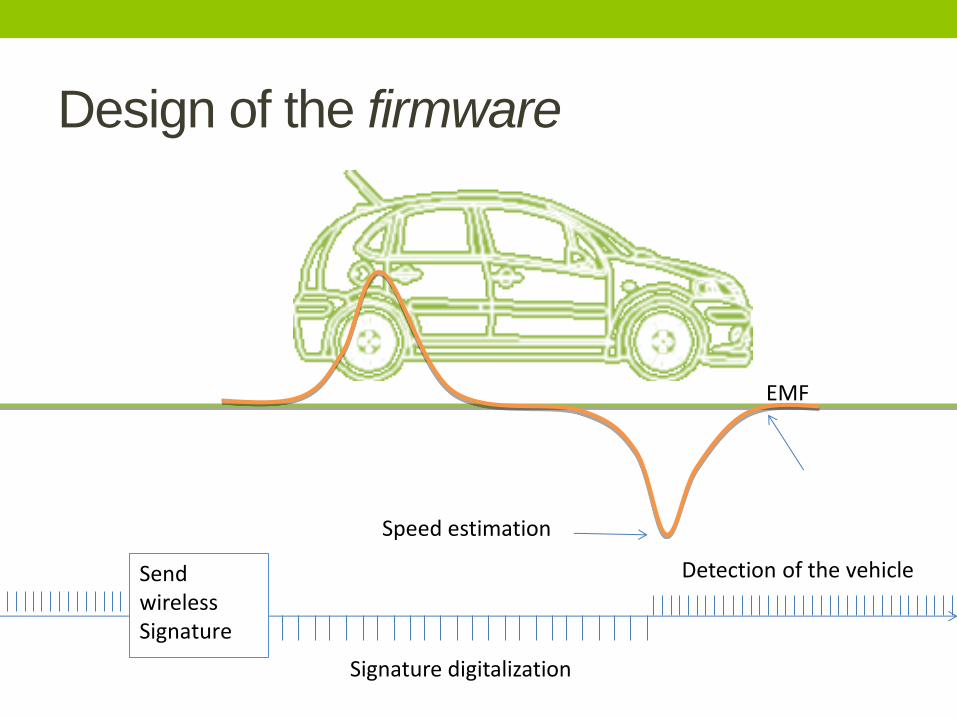
Design of the firmware
EMF
Send wireless Signature
Signature digitalization
Detection of the vehicle
Speed estimation
RESULTS
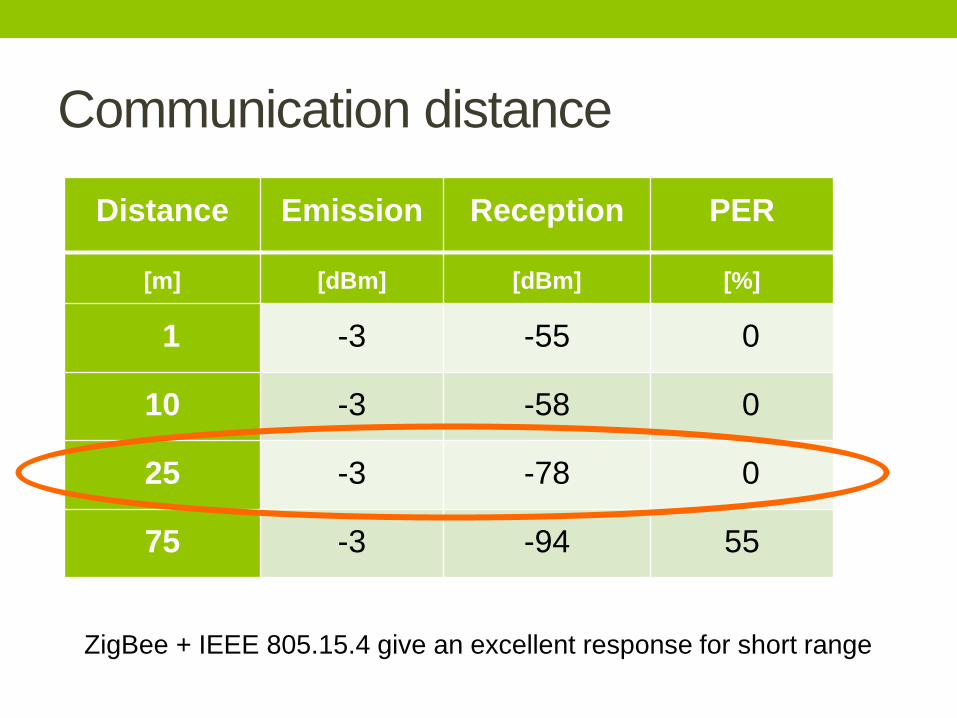
Communication distance
Distance Emission Reception PER
[m] [dBm] [dBm] [%]
1 -3 -55 0
10 -3 -58 0
25 -3 -78 0
75 -3 -94 55
ZigBee + IEEE 805.15.4 give an excellent response for short range
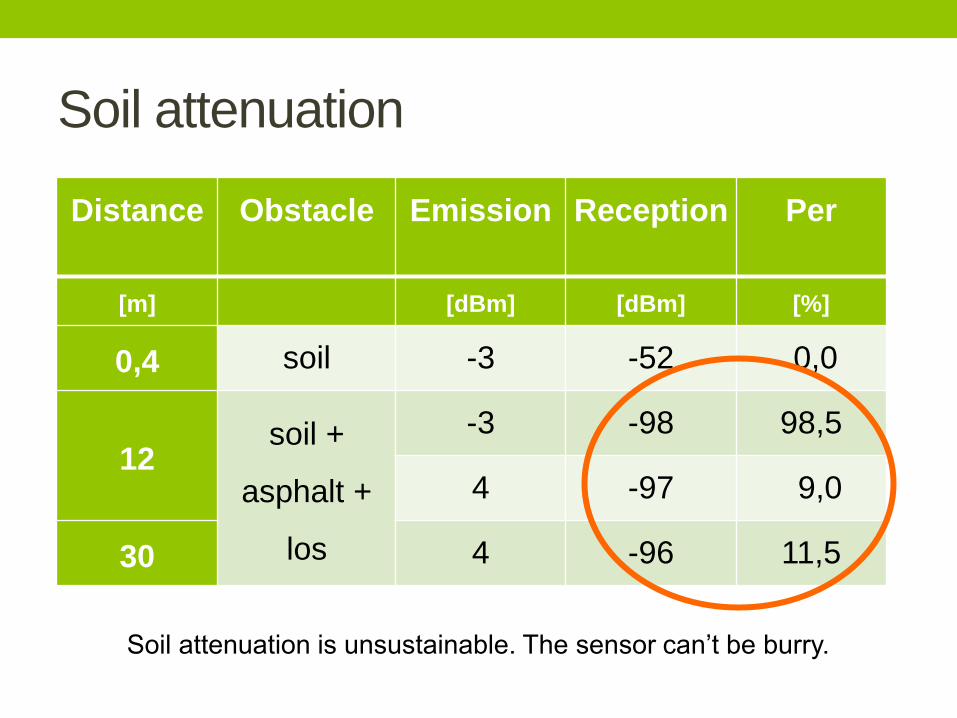
Soil attenuation
Distance Obstacle Emission Reception Per
[m] [dBm] [dBm] [%]
0,4 soil -3 -52 0,0
12 soil +
asphalt +
los
-3 -98 98,5
4 -97 9,0
30 4 -96 11,5
Soil attenuation is unsustainable. The sensor can’t be burry.
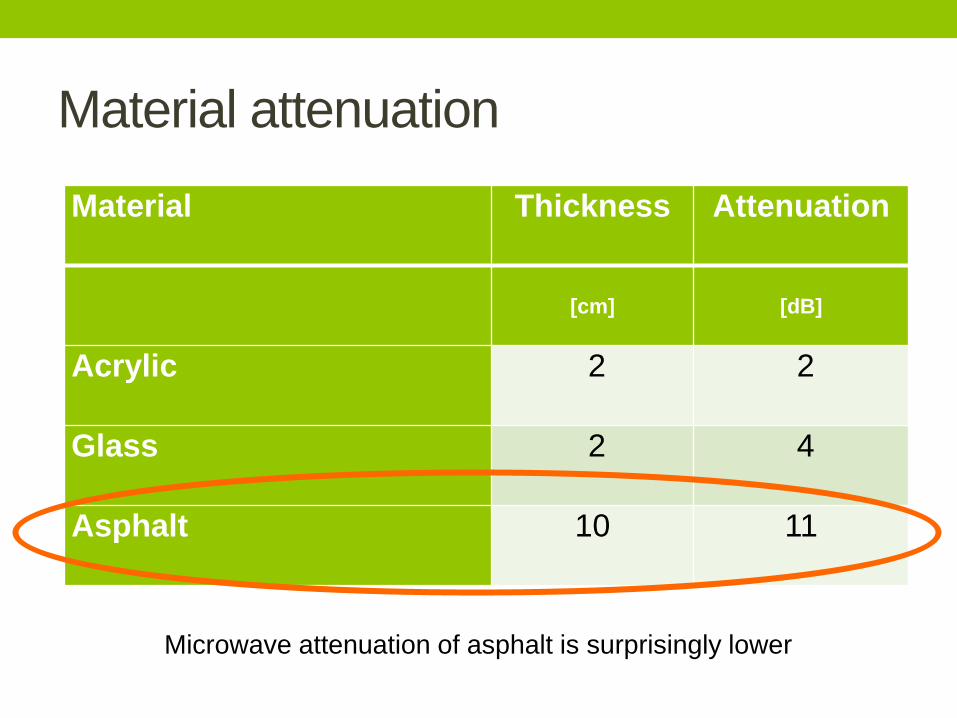
Material attenuation
Material Thickness Attenuation
[cm] [dB]
Acrylic 2 2
Glass 2 4
Asphalt 10 11
Microwave attenuation of asphalt is surprisingly lower
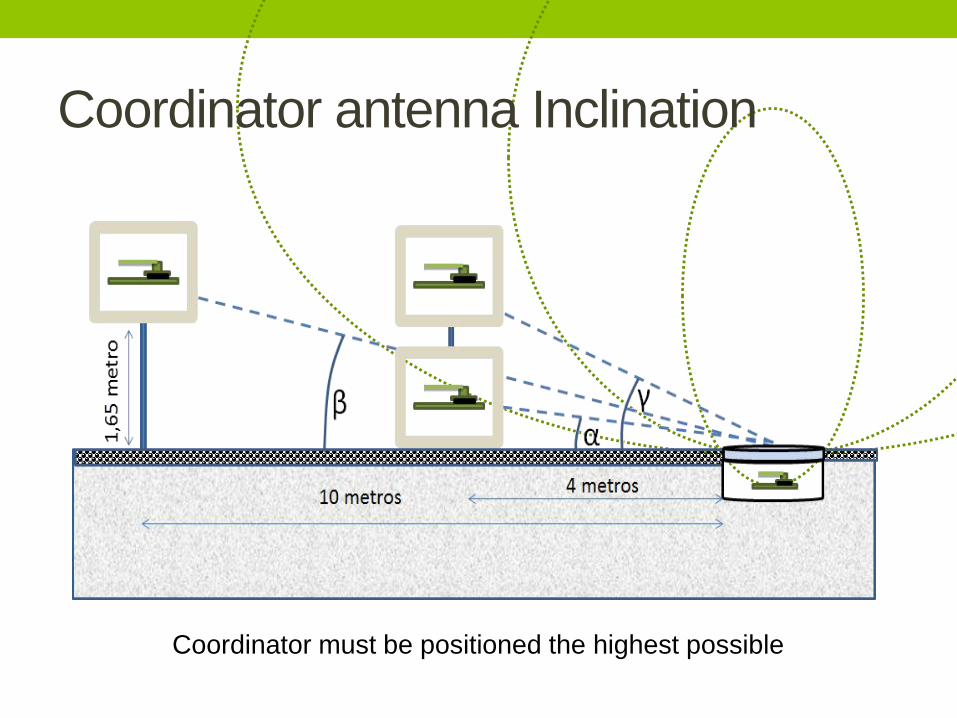
Coordinator must be positioned the highest possible
Coordinator antenna Inclination
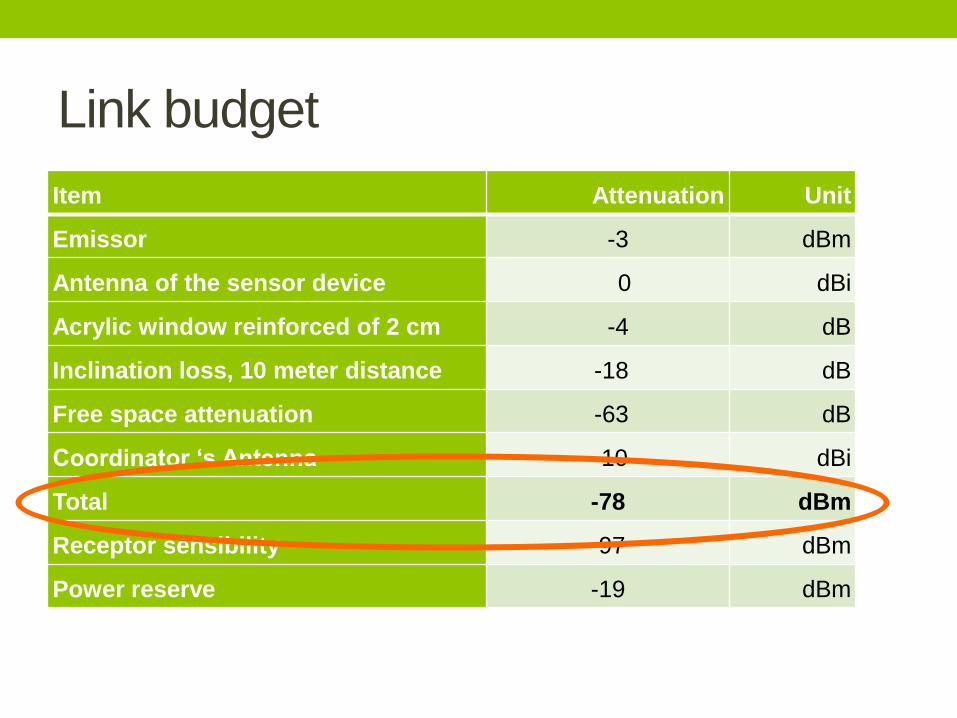
Link budget
Item Attenuation Unit
Emissor -3 dBm
Antenna of the sensor device 0 dBi
Acrylic window reinforced of 2 cm -4 dB
Inclination loss, 10 meter distance -18 dB
Free space attenuation -63 dB
Coordinator ‘s Antenna 10 dBi
Total -78 dBm
Receptor sensibility -97 dBm
Power reserve -19 dBm
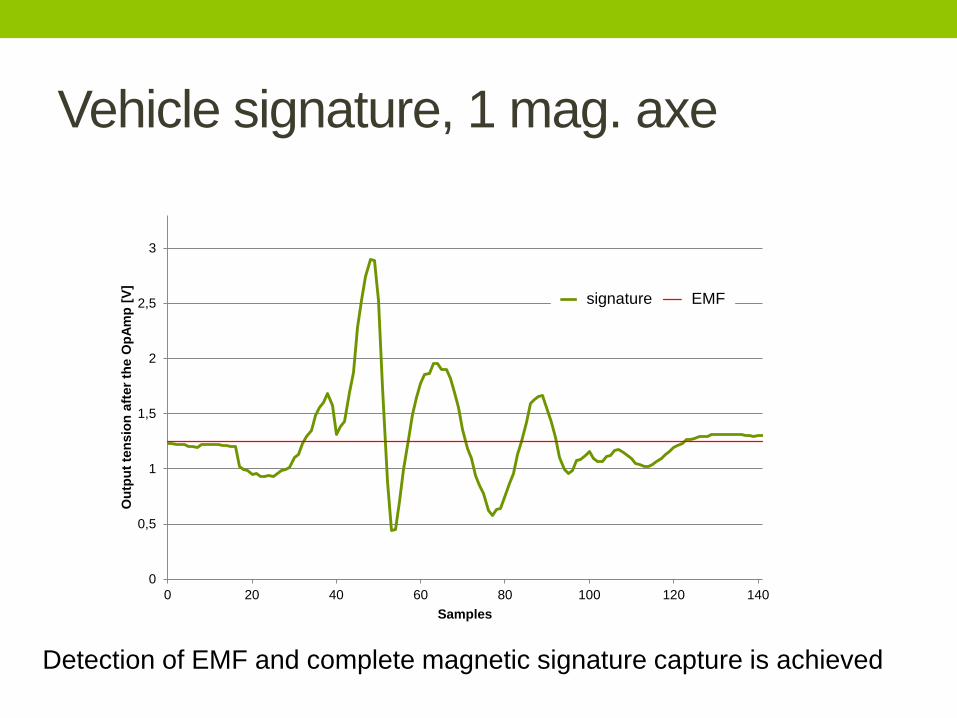
Vehicle signature, 1 mag. axe
0
0,5
1
1,5
2
2,5
3
0 20 40 60 80 100 120 140
Ou
tpu
t te
nsio
n a
fter
the O
pA
mp
[V
]
Samples
Assinatura CMTsignature EMF
Detection of EMF and complete magnetic signature capture is achieved
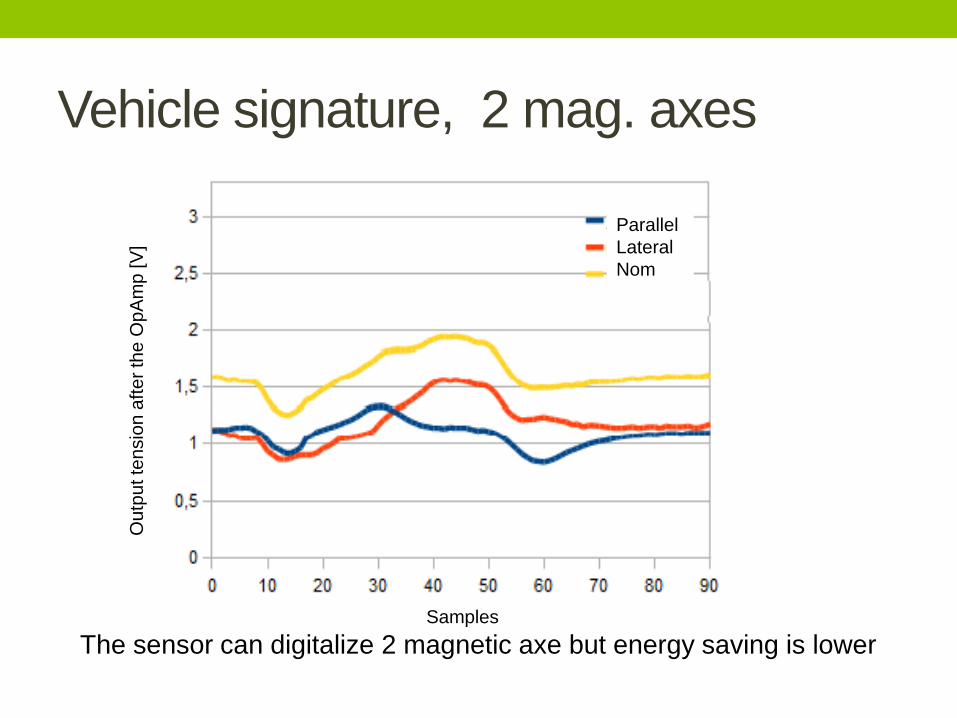
Vehicle signature, 2 mag. axes
Samples
Ou
tpu
t te
nsio
n a
fte
r th
e O
pA
mp [V
]
The sensor can digitalize 2 magnetic axe but energy saving is lower
Parallel
Lateral
Nom
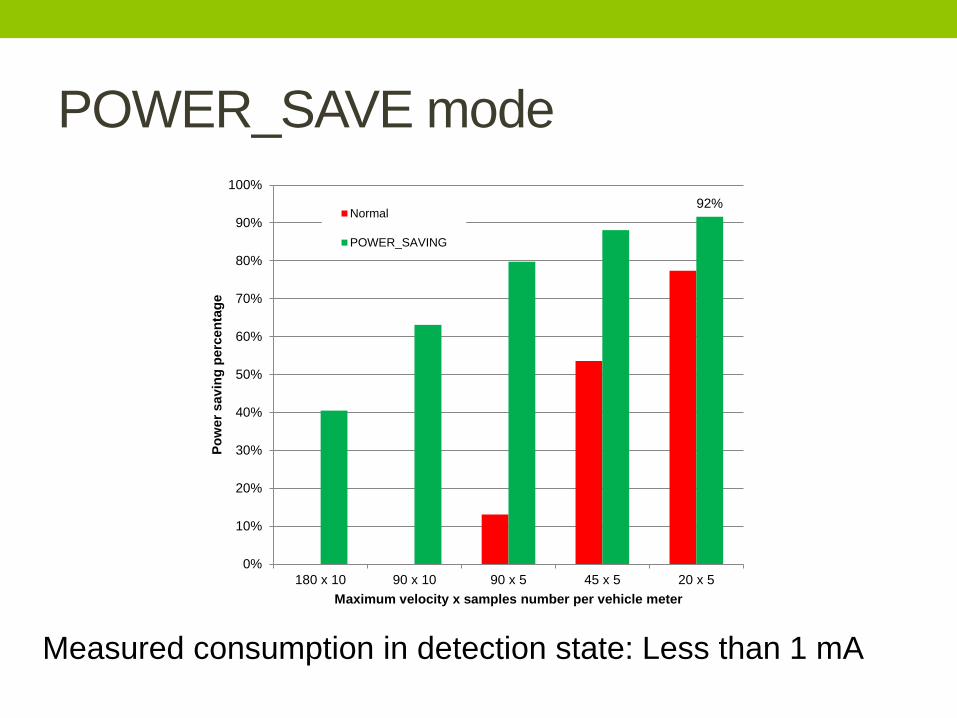
POWER_SAVE mode
Measured consumption in detection state: Less than 1 mA
92%
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
180 x 10 90 x 10 90 x 5 45 x 5 20 x 5
Po
wer
sav
ing
perc
en
tag
e
Maximum velocity x samples number per vehicle meter
Normal
POWER_SAVING
CONCLUSIONS
Conclusions
• The power consumption can be lower than 1 mA
• The algorithms of the firmware perform nicely
• The sensor network operates well
• Results shows the importance of Set/Reset
• Two options are proposed to the sponsor:
• The design of a simple and cheap sensor solution to
count and classify vehicles
• The design of a high precision sensor equipment to
be included in an array of sensor s to design a vehicle
magnetic scanner.
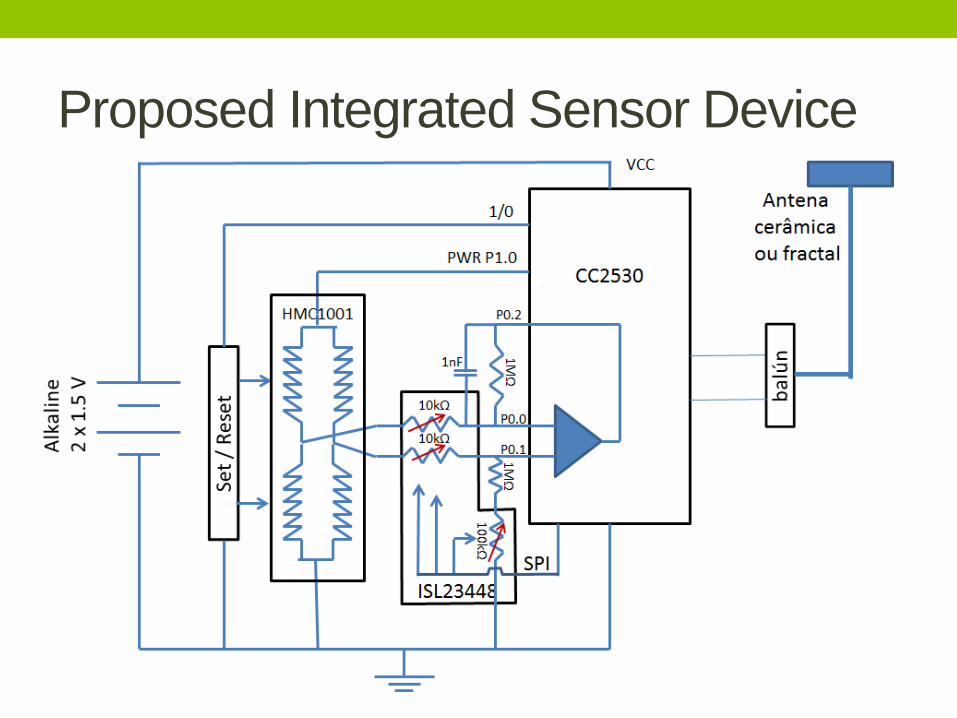
Proposed Integrated Sensor Device
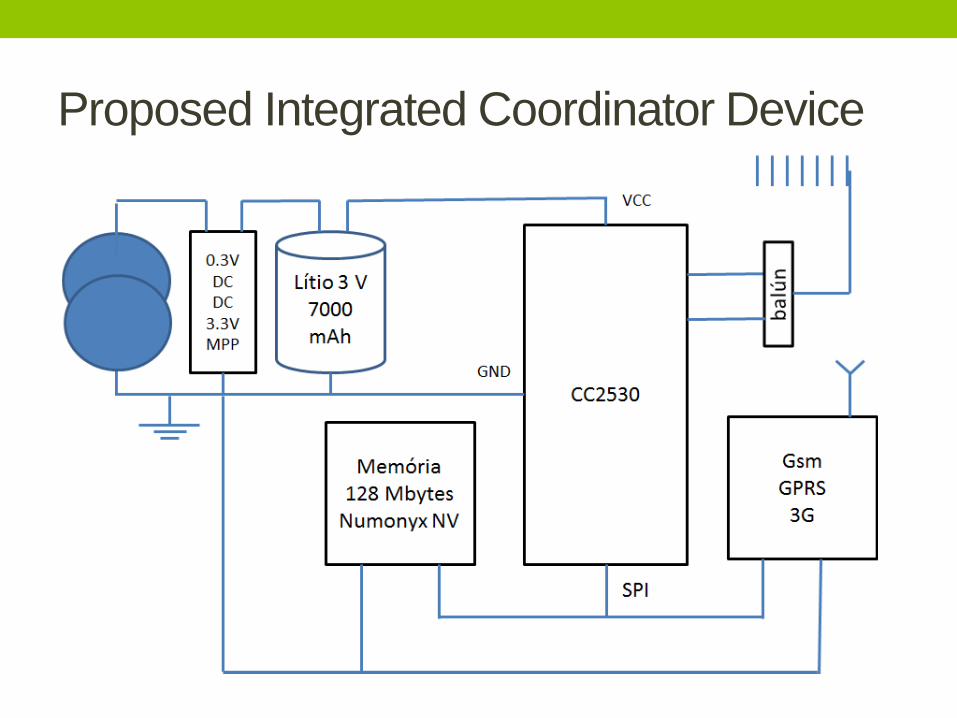
Proposed Integrated Coordinator Device
ACKNOWLEDGMENT
Acknowledgment
• A special thank to
• Prof. António Serrador, thesis orienteer
• Eng.º Duarte Carona, thesis co-orienteer
• Eng.º Jorge Lopes, Brisa Inovation representative
• Thanks also to my colleagues
• Mário Lopes, Filipe Palhinha, Pedro Ferreira for the
availability and the teamwork's.
OBRIGADO – THANK YOU Pierre Ghislain