augusto de souza pippi - ufsmcoral.ufsm.br/engcivil/images/pdf/1_2016/tcc_augusto de... · 2016. 9....
TRANSCRIPT
UNIVERSIDADE FEDERAL DE SANTA MARIA
CENTRO DE TECNOLOGIA
CURSO DE ENGENHARIA CIVIL
Augusto de Souza Pippi
AVALIAÇÃO DAS CARACTERÍSTICAS DINÂMICAS DE UMA
TORRE METÁLICA TRELIÇADA DE LINHA DE TRANSMISSÃO
TRABALHO DE CONCLUSÃO DE CURSO
Santa Maria, RS
2016

Augusto de Souza Pippi
AVALIAÇÃO DAS CARACTERÍSTICAS DINÂMICAS DE UMA TORRE
METÁLICA TRELIÇADA DE LINHA DE TRANSMISSÃO
Trabalho de conclusão de curso apresentado ao
Curso de Engenharia Civil da Universidade
Federal de Santa Maria (UFSM, RS), como
requisito parcial para obtenção do grau de
Engenheiro Civil.
Orientador: Prof. Dr. João Kaminski Junior (UFSM)
Santa Maria, RS
2016
UNIVERSIDADE FEDERAL DE SANTA MARIA
CENTRO DE TECNOLOGIA
CURSO DE ENGENHARIA CIVIL
A Comissão Examinadora, abaixo assinada,
aprova o trabalho de conclusão de curso
AVALIAÇÃO DAS CARACTERÍSTICAS DINÂMICAS DE UMA TORRE
METÁLICA TRELIÇADA DE LINHA DE TRANSMISSÃO
Elaborado por
Augusto de Souza Pippi
Aprovado em 15 de Julho de 2016
Como requisito parcial para obtenção do grau de
Engenheiro Civil
COMISSÃO EXAMINADORA:
__________________________________
Prof. Dr. João Kaminski Junior (Presidente/Orientador)
__________________________________
Prof. Dr. Marco Antônio Silva Pinheiro
(Avaliador, UFSM)
__________________________________
Prof. Dr. Eduardo Pasquetti
(Avaliador, UFSM/Cachoeira do Sul)
Santa Maria, RS.
2016

DEDICATÓRIA
Dedico este trabalho aos meus avós, Lenir Lorenzen Pippi, Bruno Antonio Lorenzen
Pippi e Ana Júlia Magalhães de Souza (In memorian), que sempre deram todo amor e carinho
aos seus netos.
Aos meus pais e amigos pelo incentivo à sempre erguer a cabeça e continuar firme em
busca dos meus objetivos.

AGRADECIMENTOS
Agradeço à Universidade Federal de Santa Maria pelo acolhimento e experiência
adquirida nesses cincos anos de curso.
Aos meus pais, Ana E. Magalhães de Souza e Cezar Augusto Lorenzen Pippi, que me
deram uma excelente educação, ensinaram-me a ser responsável, e fizeram o possível e o
impossível para me incentivar nesta difícil trajetória que escolhi.
Ao meu irmão, Sandro de Souza Ineu, cunhada, Rochelli Pacheco e sobrinho Bernardo
Pacheco Ineu que me acolheram durante os primeiros anos de faculdade.
Aos meus Amigos, Ana Paula Saquetti, Anderson José Figueira, Gabriel Formento
Ruediger, Júlia de Moraes Costa, Junior Luiz Saquetti, Leonardo Borges Vargas, Marcelo
Luiz Funez e Thiago Borin Ramos, pela paciência, por me fazerem sorrir e por tornarem essa
etapa da minha vida mais agradável.
Ao mestrando Rubens Matheus Corrêa, pelas horas de conversas, risadas e
conhecimentos compartilhados.
Ao grupo PET da Engenharia Civil da UFSM, em especial para Marielén Andreolla e
Gerson Severo da Trindade, pelos 3 semestres de convívio e aprendizagem, que levarei para a
vida toda.
À Empresa Junior de Engenharia Civil, Base Junior, pelo tempo de amizade, carinho,
convívio e aprendizagem. Agradeço muito a vocês, em especial à Betina Einsfield e ao Ivan
Beuter Nazaroff.
Ao professor João Kaminski Jr., meu professor em quatro disciplinas, meu tutor no
grupo PET durante 1 ano e 6 meses, meu coordenador de monitoria durante 1 ano e meu
orientador nesse trabalho. Agradeço toda atenção, paciência, respeito e conhecimento
transmitido.
À todo o corpo docente do curso, que se empenham em fazer de um aluno, um
profissional competente, ético e responsável.
À todos os servidores e funcionários da UFSM que tive o prazer de conhecer e
compartilhar ideias.
Aos tios, tias, primos e primas, pelo convívio e palavras de apoio.
À todas as pessoas que conheci durante a graduação, que fizeram de alguma forma,
parte da pessoa e profissional que me tornei, meus sinceros agradecimentos.

“Os que se encantam com a prática sem
a ciência são como os timoneiros que
entram no navio sem timão nem
bússola, nunca tendo certeza do seu
destino.” (Leonardo Da Vinci)
RESUMO
Trabalho de Conclusão de Curso
Curso de Engenharia Civil
Universidade Federal de Santa Maria
AVALIAÇÃO DAS CARACTERÍSTICAS DINÂMICAS DE UMA TORRE
METÁLICA TRELIÇADA DE LINHA DE TRANSMISSÃO
AUTOR: Augusto de Souza Pippi
ORIENTADOR: Prof. Dr. João Kaminski Junior
O presente trabalho apresenta algumas análises numéricas estruturais, estáticas e dinâmicas,
de uma torre metálica treliçada autoportante de linha transmissão (LT), a fim de comparar os
resultados com aqueles obtidos em uma análise dinâmica experimental de um protótipo da
torre. O principal objetivo deste trabalho consiste em calibrar o amortecimento estrutural (𝑐)
no modelo numérico até que a razão de amortecimento (𝜁) resulte a mesma da análise
experimental, uma vez que o amortecimento é um parâmetro fundamental na análise
numérica, o qual pode alterar significativamente a resposta da estrutura, principalmente em
termos de amplificação dinâmica. Cabe salientar que nesse tipo de estrutura é fundamental
realizar uma análise estrutural mais precisa possível, uma vez que em uma LT são construídas
centenas de torres iguais e o colapso de uma pode levar a um efeito cascata ao longo da linha.
As características dinâmicas, tais como as frequências e os modos de vibração, foram
avaliados através do programa ANSYS© v. 15.0 e também através do método de integração
direta, de forma explícita, utilizando diferenças finitas centrais. A torre experimental foi
ensaiada utilizando cargas impulsivas, as quais foram reproduzidas nos modelos numéricos
para permitir a comparação com os resultados experimentais. Foram empregados modelos
usualmente utilizados em projetos reais. A consideração do amortecimento foi feita da forma
mais simples, ou seja, proporcional à massa. Por fim, os valores numéricos encontrados
resultaram muito próximos da resposta experimental, definindo o valor do amortecimento
estrutural para a utilização em projetos desse tipo de torre.
Palavras-chave: Torres metálicas treliçadas. Torres de linha de transmissão. Análise
dinâmica. Método de integração direta. Amortecimento estrutural.
LISTA DE FIGURAS
Figura 1 – Sistema Elétrico ...................................................................................................... 10 Figura 2 – Principais elementos das linhas de transmissão ...................................................... 14 Figura 3 – Estruturas de torres autoportantes ........................................................................... 17 Figura 4 – Estruturas de torres estaiadas .................................................................................. 17
Figura 5 – Carregamento típico em torres de LT do tipo tangente (suspensão) ....................... 18 Figura 6 – Sistema Massa – mola – amortecedor ..................................................................... 19 Figura 7 – Equilíbrio dinâmico das forças que atuam sobre um corpo .................................... 20 Figura 8 – Movimentos criticamente amortecidos e superamortecidos ................................... 27 Figura 9 – Vibrações livres de um sistema com amortecimento viscoso sub-crítico ............... 29
Figura 10 – Vibração livre de um sistema com amortecimento viscoso sub-crítico ................ 30
Figura 11 – Esquema estrutural da torre DFS .......................................................................... 37
Figura 12 – Parte do projeto original da torre .......................................................................... 38 Figura 13 – Perfil cantoneira de abas iguais ............................................................................. 39 Figura 14 – Elementos de pórtico e elementos de treliça espacial do modelo A ..................... 40 Figura 15 – Esquema do ensaio da torre DFS .......................................................................... 43
Figura 16 – Barras fictícias introduzidas no modelo B ............................................................ 44 Figura 17 – Deformada do modelo B para a carga de peso próprio ......................................... 46
Figura 18 – Deformada do modelo B para forças na direção 𝑥 ................................................ 47
Figura 19 – Deformada do modelo B para forças na direção 𝑧 ................................................ 49 Figura 20 – Vibração na 1ª frequência (1º modo em torno do eixo x) ..................................... 50 Figura 21 – Vibração na 2ª frequência (1º modo em torno do eixo z) ..................................... 50
Figura 22 – Comparação entre os intervalos de integração ...................................................... 54
Figura 23 – Representação das forças aplicadas no modelo B para análise no MID (Direção 𝑥)
.................................................................................................................................................. 55
Figura 24 – Representação das forças aplicadas no modelo B para análise no MID (Direção 𝑧) .................................................................................................................................................. 57
Figura 25 – Resultados de deslocamento x tempo da torre experimental na direção 𝑥 ........... 60
Figura 26 – Resultados de deslocamento x tempo da torre experimental na direção 𝑧 ............ 62
LISTA DE TABELAS
Tabela 1 – Classificação das Linhas de Transmissão ............................................................... 16 Tabela 2 – Medidas e características dos perfis adotados ........................................................ 39 Tabela 3 – Resultados dos ensaios na torre DFS ...................................................................... 42 Tabela 4 – Resultados das frequências naturais ....................................................................... 51
Tabela 5 – Comparação da 2ª frequência entre os programas .................................................. 56 Tabela 6 – Comparação da 1ª frequência entre os programas .................................................. 58 Tabela 7 – Comparação entre o deslocamento máximo no topo .............................................. 59
Tabela 8 – Razão de amortecimento na direção 𝑥 .................................................................... 61
Tabela 9 – Razão de amortecimento na direção 𝑧 .................................................................... 62
Tabela 10 – Valores de 𝑐𝑚 e razão de amortecimento do modelo B ....................................... 63 Tabela 11 – Tabela resumo dos resultados ............................................................................... 64
SUMÁRIO
1 INTRODUÇÃO .................................................................................................................. 10
2 OBJETIVOS ....................................................................................................................... 12
2.1 OBJETIVOS GERAIS ................................................................................................... 12
2.2 OBJETIVOS ESPECÍFICOS ......................................................................................... 12
3 JUSTIFICATIVA ............................................................................................................... 13
4 CONCEITOS FUNDAMENTAIS .................................................................................... 14
4.1 LINHAS DE TRANSMISSÃO ...................................................................................... 14
4.2 TIPOS DE TORRES DE LT .......................................................................................... 15
4.3 AÇÕES ........................................................................................................................... 18
4.4 ANÁLISE DINÂMICA DE ESTRUTURAS ................................................................ 18
4.5 AMORTECIMENTO ..................................................................................................... 24
4.5.1 Equações para vibração livre amortecida ........................................................... 25
4.5.2 Decremento Logarítmico ...................................................................................... 30
4.6 MÉTODO DA INTEGRAÇÃO DIRETA ...................................................................... 32
5 METODOLOGIA ............................................................................................................... 37
6 DESCRIÇÃO DO ENSAIO NA TORRE DFS ................................................................ 42
7 AJUSTE DO MODELO B ................................................................................................. 44
7.1 PESO PRÓPRIO (DIREÇÃO 𝑦) .................................................................................... 45
7.2 FORÇA NA DIREÇÃO 𝑥 (SEM PESO PRÓPRIO) ..................................................... 46
7.3 FORÇA NA DIREÇÃO 𝑧 (SEM PESO PRÓPRIO) ...................................................... 48
8 ANÁLISE MODAL NO ANSYS ....................................................................................... 50
9 ANÁLISE PELO MÉTODO DA INTEGRAÇÃO DIRETA (MODELO B) ................ 52
9.1 CÁLCULO DO INTERVALO DE INTEGRAÇÃO CRÍTICO (∆𝑡𝑐𝑟𝑖𝑡) ...................... 52
9.2 VERIFICAÇÃO DO MODELO B NA DIREÇÃO 𝑥 .................................................... 55
9.3 VERIFICAÇÃO DO MODELO B NA DIREÇÃO 𝑧 .................................................... 57
9.4 VERIFICAÇÃO DO DESLOCAMENTO NO TOPO ................................................... 59
10 RAZÃO DE AMORTECIMENTO DA TORRE EXPERIMENTAL ......................... 60
11 RAZÃO DE AMORTECIMENTO NO MODELO B ................................................... 63
12 CONCLUSÃO ................................................................................................................... 64
13 BIBLIOGRAFIA .............................................................................................................. 66
10
1 INTRODUÇÃO
Cada vez mais o consumo de energia elétrica aumenta no Brasil. Esse fato se deve às
modificações do perfil demográfico visto no crescimento populacional e no rápido processo
de urbanização e industrialização. Essa energia é gerada através de usinas hidrelétricas,
termoelétricas, nucleoelétricas e sistemas eólicos e solares.
Sendo o sistema mais utilizado o de hidrogeração, Azevedo (2007, p. 1) comenta “o
Brasil possui alto potencial hidráulico; entretanto, o aumento da distância dos pontos de
geração aos centros consumidores é verificado [...]”. Logo, houve uma ampliação das linhas
de transmissão, que culminou em estudos mais avançados das características dos
componentes e também da sua configuração geométrica para um melhor desempenho elétrico
e economia.
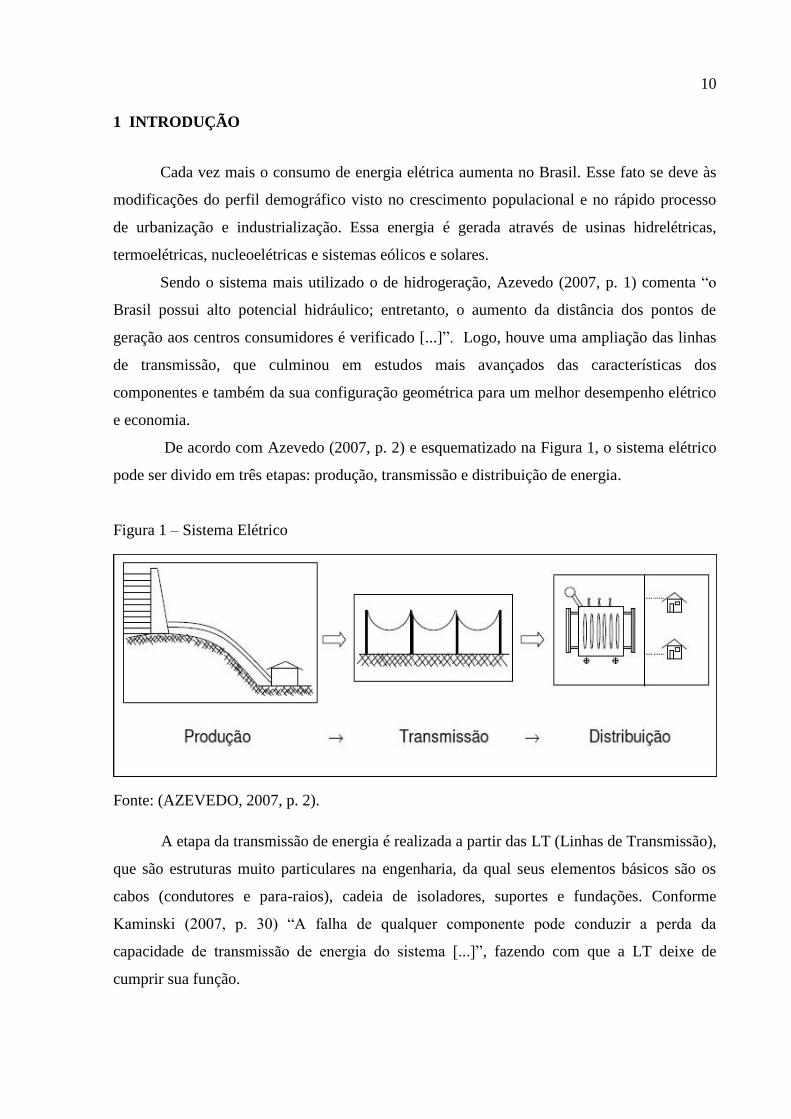
De acordo com Azevedo (2007, p. 2) e esquematizado na Figura 1, o sistema elétrico
pode ser divido em três etapas: produção, transmissão e distribuição de energia.
Figura 1 – Sistema Elétrico
Fonte: (AZEVEDO, 2007, p. 2).
A etapa da transmissão de energia é realizada a partir das LT (Linhas de Transmissão),
que são estruturas muito particulares na engenharia, da qual seus elementos básicos são os
cabos (condutores e para-raios), cadeia de isoladores, suportes e fundações. Conforme
Kaminski (2007, p. 30) “A falha de qualquer componente pode conduzir a perda da
capacidade de transmissão de energia do sistema [...]”, fazendo com que a LT deixe de
cumprir sua função.
11
O presente projeto tem como enfoque os suportes, cujas estruturas predominantes são
as torres metálicas que podem ser do tipo autoportantes ou estaiadas e possuem a função de
suspender ou ancorar os cabos e os isoladores.
Os projetos dessas torres metálicas dependem das solicitações elétricas, mecânicas e
do terreno onde serão implantadas. O dimensionamento deve garantir sua segurança geral, ou
seja, assegurar um mínimo risco de falhas com o máximo de economia. Inicialmente, como
em qualquer problema relacionado a estruturas em geral, deve-se entender as solicitações a
qual a estrutura estará submetida. No caso das torres, as solicitações mais comuns são de
caráter dinâmico (variam no tempo), como a ação do vento e a ruptura de cabos. Essas ações
são consideradas nos modelos simplificados como “ações estáticas equivalentes”. Ainda,
Kaminski (2007, p. 33) comenta “[...] o modelo mecânico usualmente adotado para o projeto
de torres metálicas treliçadas é bastante simples, utilizando-se elementos de treliça e/ou
pórtico espacial, resolvido através de uma análise estática e linear”.
Essas simplificações deixam muitas dúvidas sobre a segurança e confiabilidade dessas
estruturas. Nos últimos anos a confiabilidade está sendo estudada cada vez mais e
frequentemente é usada como parâmetro de medida da segurança, uma vez que nos
computadores há mais poder de processamento e softwares cada vez mais completos que
levam em conta as diversas variáveis aleatórias dos problemas estruturais.
Sendo uma torre de LT um conjunto de barras ligadas, seu colapso pode se dar de
diversas formas, cujas possíveis causas muitas vezes não são consideradas por essas
simplificações, e também, devido a mecanismos muitas vezes negligenciados, como exemplo:
Deslizamento e flexibilidade das ligações parafusadas;
Interação solo-estrutura;
Excentricidade nas conexões;
Não consideração das características dinâmicas das torres;
Não-linearidade física e geométrica.
Conforme Kaminski (2007) o colapso de torres acontece com uma frequência maior
que em outros tipos de estruturas. Foi observada uma taxa de falha anual na ordem de 10-2 a
10-3, indicados por Menezes (1992). Caso o colapso ocorra, gerará enormes prejuízos
financeiros para as companhias, o que justifica os elevados investimentos em estudos das suas
12
características para projetos e em sua execução. Uma análise mais precisa de confiabilidade
seria obtida se, por exemplo, as ações dinâmicas fossem consideradas como tal, o que levaria
a uma maior complexidade dos projetos, porém, geraria economia em sua execução, pois em
um projeto de LT são construídas dezenas ou mesmo centenas de torres idênticas.
2 OBJETIVOS
2.1 OBJETIVOS GERAIS
O principal objetivo deste trabalho consiste em calibrar o amortecimento estrutural (𝑐)
no modelo numérico até que a razão de amortecimento (𝜁) resulte a mesma da análise
experimental, uma vez que o amortecimento é um parâmetro fundamental na análise
numérica, o qual pode alterar significativamente a resposta da estrutura, principalmente em
termos de amplificação dinâmica.
2.2 OBJETIVOS ESPECÍFICOS
Para o desenvolvimento deste trabalho são necessários os seguintes objetivos
específicos:
Reunir bibliografia disponível para o entendimento e desenvolvimento do estudo;
Fazer a análise modal de uma torre metálica treliçada de LT com diferentes modelos;
Utilização do programa de elementos finitos, ANSYS© v. 15, para a definição do
modelo de uma torre de LT, utilizando apenas elementos de treliça espacial, com a
introdução de barras fictícias;
Utilizar o método da integração direta para determinar as propriedades dinâmicas da
torre;
Comparar os resultados com aqueles obtidos experimentalmente;
Determinar o valor do amortecimento (𝑐), proporcional a massa (𝑐𝑚 = 𝑐/𝑚), que faz
com que a razão de amortecimento (𝜁) obtida numericamente resulte igual ao valor
experimental
13
3 JUSTIFICATIVA
As inúmeras simplificações nos modelos empregados nos projetos de torres
metálicas de LT, fazem com que as incertezas nos resultados numéricos de uma análise
estrutural sejam muito grandes. Como já mencionado, quando se constrói uma LT, são
projetadas muitas torres de suspensão idênticas. Portanto, modelos mais próximos da
realidade podem gerar economia significativa, além de uma maior confiabilidade nas
estruturas, o que é imprescindível em razão da sua importância financeira.
Assim, esse estudo deverá contribuir para o aprimoramento dos projetos deste tipo
de estrutura.
14
4 CONCEITOS FUNDAMENTAIS
4.1 LINHAS DE TRANSMISSÃO
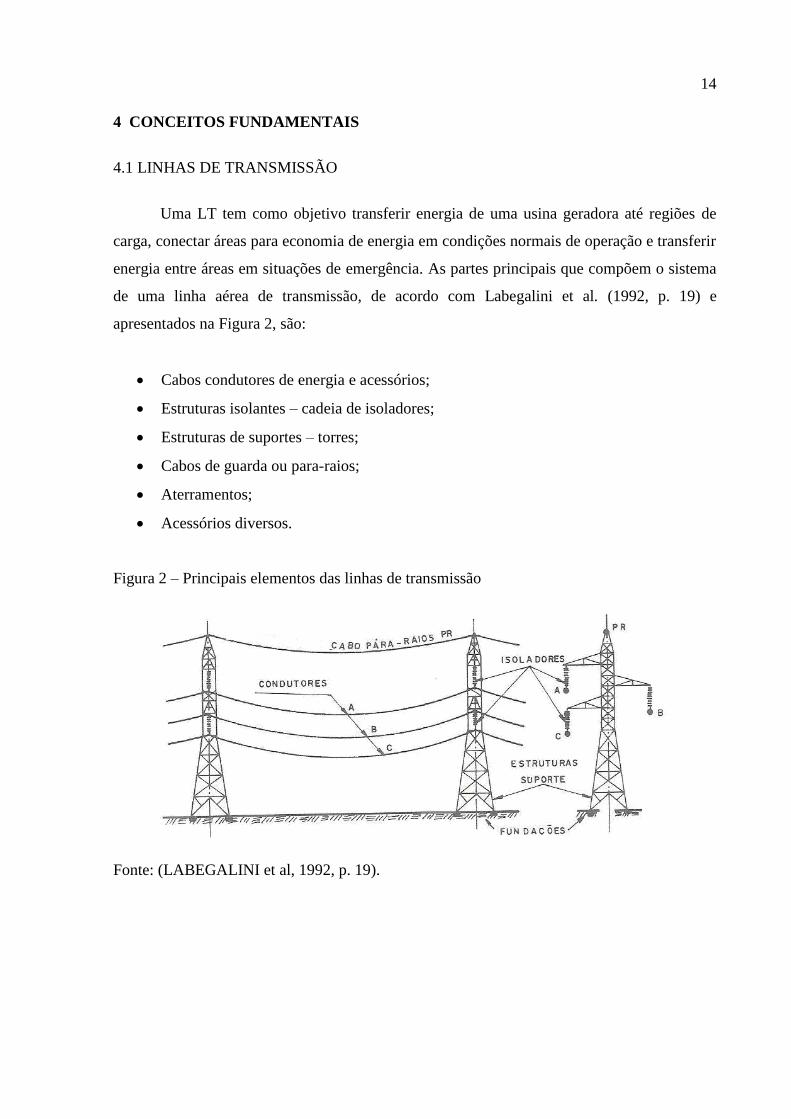
Uma LT tem como objetivo transferir energia de uma usina geradora até regiões de
carga, conectar áreas para economia de energia em condições normais de operação e transferir
energia entre áreas em situações de emergência. As partes principais que compõem o sistema
de uma linha aérea de transmissão, de acordo com Labegalini et al. (1992, p. 19) e
apresentados na Figura 2, são:
Cabos condutores de energia e acessórios;
Estruturas isolantes – cadeia de isoladores;
Estruturas de suportes – torres;
Cabos de guarda ou para-raios;
Aterramentos;
Acessórios diversos.
Figura 2 – Principais elementos das linhas de transmissão
Fonte: (LABEGALINI et al, 1992, p. 19).
15
4.2 TIPOS DE TORRES DE LT
Segundo Gontijo (1994) e Kaminski (2007), as torres metálicas para linhas de
transmissão podem ser classificadas da seguinte maneira:
Quanto ao número de circuitos que conduzem:
- Circuito simples (um grupo de fases);
- Circuito duplo (dois grupos de fases).
Quanto à disposição dos condutores:
- Triangular: quando os condutores estão dispostos segundo os vértices de um
triângulo equilátero a disposição é dita simétrica, caso contrário, é assimétrica;
- Vertical: os condutores de um mesmo circuito são montados em um plano vertical.
É a disposição preferida em linhas de circuito duplo;
- Horizontal: é a disposição preferida em linhas de circuito simples, onde os
condutores são fixados em um mesmo plano horizontal.
Quanto à função na linha de transmissão:
- Estruturas de suspensão: têm a função de sustentar os cabos condutores, suspensos
através das cadeias de isoladores, e também os cabos para-raios. São usadas em
alinhamento ou pequeno ângulo e são as que predominam nas LT’s;
- Estruturas de ancoragem: são utilizadas para ancoragem dos cabos, podendo ser
classificadas como terminal, quando usadas nas extremidades da LT, ou de
ancoragem intermediária, quando colocadas entre as estruturas de suspensão.
Servem como ponto de tensionamento e evitam o efeito cascata (colapso em
sequência de torres de suspensão);
- Estruturas em ângulo: são utilizadas em locais onde existe a necessidade de
variação da direção da linha de transmissão;
16
- Estruturas de derivação: são utilizadas quando se faz necessário uma derivação em
um ponto da linha;
- Estruturas de transposição: têm a função de assegurar a simetria elétrica de uma
linha devido à rotação de fases.
Quanto ao formato:
- Tronco-Piramidal de circuito simples;
- Tronco-Piramidal de circuito duplo;
- Delta;
- Delta (Cara de Gato);
- Estaiada.
Quanto a voltagem da linha, conforme a Tabela 1:
Tabela 1 – Classificação das Linhas de Transmissão
Nível de Tensão Classificação
≤ 230 kV AT = Alta tensão
Entre 230 kV e 700 kV EAT = Extra alta tensão
> 700 kV UAT = Ultra alta tensão
Fonte: (GONTIJO, 1994, p. 5).
Quanto a forma de resistência:
- Autoportantes: a sua estabilidade é garantida por quatro pés, ou montantes, sendo
eles conectados a uma fundação a fim de transferir os esforços para o solo. Alguns
exemplos dessas estruturas são mostrados na Figura 3;
17
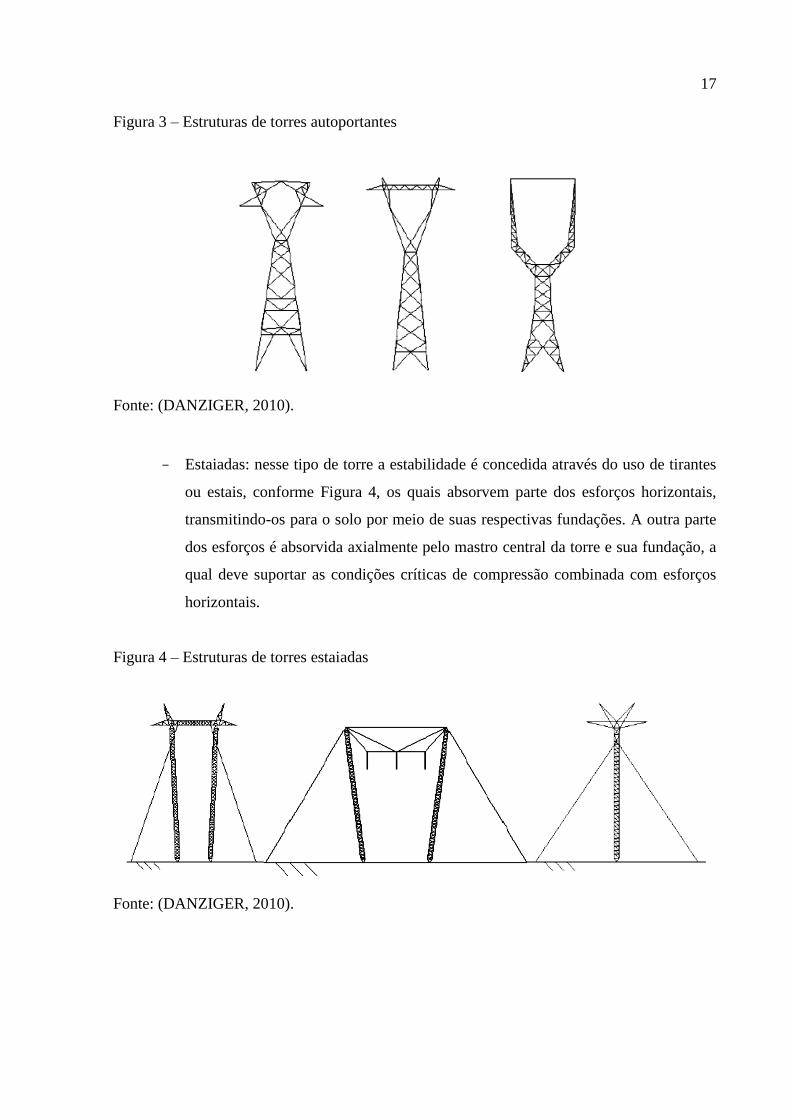
Figura 3 – Estruturas de torres autoportantes
Fonte: (DANZIGER, 2010).
- Estaiadas: nesse tipo de torre a estabilidade é concedida através do uso de tirantes
ou estais, conforme Figura 4, os quais absorvem parte dos esforços horizontais,
transmitindo-os para o solo por meio de suas respectivas fundações. A outra parte
dos esforços é absorvida axialmente pelo mastro central da torre e sua fundação, a
qual deve suportar as condições críticas de compressão combinada com esforços
horizontais.
Figura 4 – Estruturas de torres estaiadas
Fonte: (DANZIGER, 2010).
18
4.3 AÇÕES
Como em qualquer projeto de estruturas, precisam-se determinar os tipos de ações que
estarão solicitando a torre. Para isso, deve haver um estudo das hipóteses de cargas que
atuarão durante toda sua vida útil. Dentre as ações mais comuns, pode-se citar: peso próprio,
peso dos cabos e interfaces, peso dos isoladores, força do vento na torre e nos cabos e o peso
dos para-raios. Ainda, pode haver ruptura repentina dos cabos condutores, que solicitam a
torre de uma forma mais particular e, no caso de torres estaiadas, a protensão dos estais.
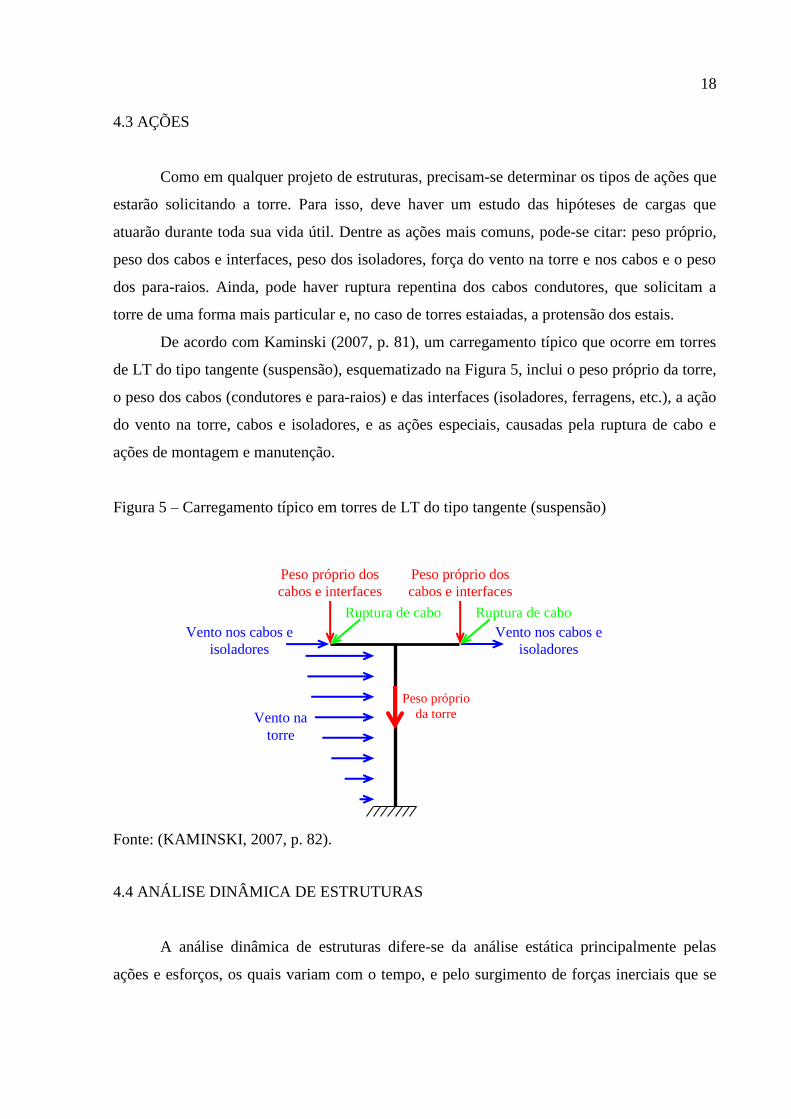
De acordo com Kaminski (2007, p. 81), um carregamento típico que ocorre em torres
de LT do tipo tangente (suspensão), esquematizado na Figura 5, inclui o peso próprio da torre,
o peso dos cabos (condutores e para-raios) e das interfaces (isoladores, ferragens, etc.), a ação
do vento na torre, cabos e isoladores, e as ações especiais, causadas pela ruptura de cabo e
ações de montagem e manutenção.
Figura 5 – Carregamento típico em torres de LT do tipo tangente (suspensão)
4.4 ANÁLISE DINÂMICA DE ESTRUTURAS
A análise dinâmica de estruturas difere-se da análise estática principalmente pelas
ações e esforços, os quais variam com o tempo, e pelo surgimento de forças inerciais que se
Ruptura de cabo
Peso próprio
da torre
Peso próprio dos
cabos e interfaces
Peso próprio dos
cabos e interfaces
Vento nos cabos e
isoladores
Vento nos cabos e
isoladores
Vento na
torre
Ruptura de cabo
Fonte: (KAMINSKI, 2007, p. 82).
19
𝒎 𝒇(𝒕)
𝒌
𝒄
𝒙(𝒕)
opõem aos deslocamentos e as forças de amortecimento. Ações dinâmicas como o vento,
sismos e frenagem geram nas estruturas deslocamentos alternados, chamados de vibrações.
Uma estrutura ao vibrar, oscila em torno de uma posição de equilíbrio, ou seja, em torno de
sua deformada estática. Essa vibração é indesejável na maioria das estruturas, pois causam
aumento de tensões nos seus componentes, portanto, deve ser reduzida ao máximo.
Durante muito tempo analisava-se e dimensionava as estruturas civis considerando
apenas a ação estática. Esse fato decorria da inexistência ou da fraca capacidade
computacional para resolver os algoritmos da análise dinâmica, que são mais complexos. Nos
tempos atuais a análise dinâmica é necessária para realização de projetos correntes, pois se
obtém assim, soluções mais realistas, consequentemente mais confiáveis.
Um sistema vibratório inclui um elemento que armazena energia potencial (mola ou
elasticidade dos materiais), energia cinética (massa ou inércia) e um meio para dissipar essa
energia (amortecedor ou atrito).
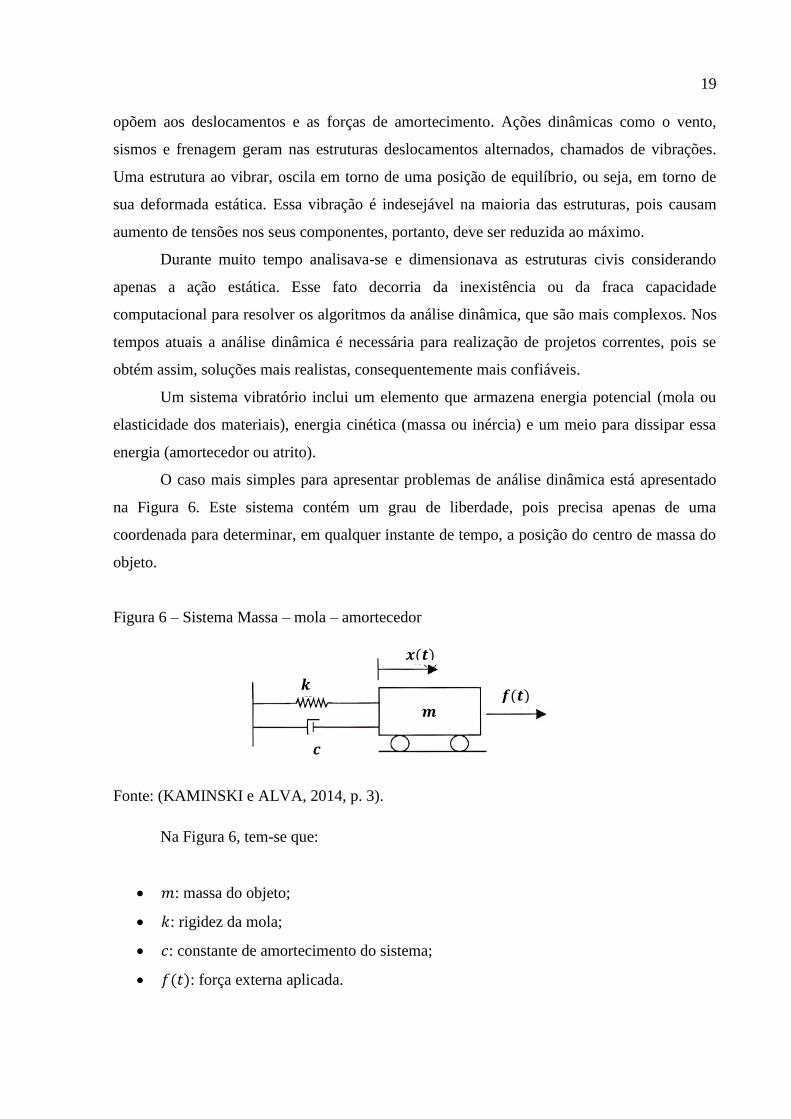
O caso mais simples para apresentar problemas de análise dinâmica está apresentado
na Figura 6. Este sistema contém um grau de liberdade, pois precisa apenas de uma
coordenada para determinar, em qualquer instante de tempo, a posição do centro de massa do
objeto.
Figura 6 – Sistema Massa – mola – amortecedor
Fonte: (KAMINSKI e ALVA, 2014, p. 3).
Na Figura 6, tem-se que:
𝑚: massa do objeto;
𝑘: rigidez da mola;
𝑐: constante de amortecimento do sistema;
𝑓(𝑡): força externa aplicada.

20
𝑭𝒆(𝒕)
𝑭𝒂(𝒕) 𝒇(𝒕)
𝒖(𝒕)
𝑭𝒊(𝒕)
O Princípio de D’Alembert rege o equilíbrio dinâmico de um sistema, através da
adição de uma força fictícia que se opõe à aceleração, chamada força de inércia, que está
representada na Figura 7 como 𝐹𝑖(𝑡) da qual é proporcional a massa do corpo.
Figura 7 – Equilíbrio dinâmico das forças que atuam sobre um corpo
Fonte: (MENDES, 2012, p. 19).
Na Figura 7, tem-se que:
𝐹𝑒(𝑡): forças elásticas;
𝐹𝑎(𝑡): forças de amortecimento;
𝐹𝑖(𝑡): forças de inércia;
𝑓(𝑡): forças externas;
𝑢(𝑡): deslocamentos originados pela aplicação dessas forças.
Sendo assim, o equilíbrio de forças desse sistema fica:
𝐹𝑒(𝑡) + 𝐹𝑎(𝑡) + 𝐹𝑖(𝑡) = 𝑓(𝑡) (1)
As forças elásticas são proporcionais aos deslocamentos, as de amortecimento
proporcionais a velocidade e as de inércia proporcionais a aceleração. Assim, chega-se a
equação diferencial que representa o equilíbrio dinâmico:
𝑘 𝑢(𝑡) + 𝑐 �̇�(𝑡) + 𝑚 �̈�(𝑡) = 𝑓(𝑡) (2)
na qual

21
�̇�(𝑡): derivada primeira da posição (velocidade);
�̈�(𝑡): derivada segunda da posição (aceleração).
Quando um sistema vibra apenas por condições iniciais (𝑡 = 0), ou seja, sem forças
externas aplicadas sobre ele, acontece uma transformação de energia cinética em potencial e
vice-versa alternadamente e chama-se de vibração livre, a partir da qual pode-se identificar o
que se chama de frequência natural. Considerando esse tipo de sistema como conservativo,
isto é, sem amortecimento obtém-se a equação 3:
𝑚 �̈�(𝑡) + 𝑘 𝑢(𝑡) = 0 (3)
A solução dessa equação diferencial é uma forma de prever a resposta do movimento
vibratório de um sistema com essas condições. A solução para 𝑢(𝑡) é dada pela seguinte
função:
𝑢(𝑡) = 𝐴 cos(𝜔 𝑡 −𝜙) (4)
na qual
A: amplitude (valor máximo da função 𝑢(𝑡));
𝜔: frequência natural circular (𝜔 = √𝑘
𝑚);
𝜙: ângulo de fase.
Cabe salientar que a solução poderia ser dada pela função seno, pois ambas descrevem
movimentos periódicos de oscilação.
Para constatar que a solução é a procurada, derivando a equação 4 e substituindo na
equação 3, obtém-se:
�̇�(𝑡) = −𝐴 𝑠𝑒𝑛(𝜔 𝑡 − 𝜙) 𝜔 (5)
�̈�(𝑡) = −𝐴 𝑐𝑜𝑠(𝜔 𝑡 − 𝜙) 𝜔2 = −𝜔2 𝑢(𝑡) (6)
22
𝑚 [–𝜔2 𝑢(𝑡)] + 𝑘 𝑢(𝑡) = 0
𝑢(𝑡) [−𝑚 𝜔2 + 𝑘] = 0 (7)
Como 𝑢(𝑡) não pode ser zero, para não representar uma solução trivial, tem-se:
−𝑚 𝜔2 + 𝑘 = 0
𝜔 = √𝑘
𝑚 (8)
Assim, a frequência natural do sistema massa-mola depende apenas da rigidez da mola
e da massa.
Porém, em estruturas usuais existem um número considerável de graus de liberdade. O
exemplo que se mostrou apresenta uma análise modal de forma discreta em um sistema com
um grau de liberdade, onde a massa do sistema está concentrada em um único ponto. No caso
da existência de vários graus de liberdade, pode-se optar por utilizar modelos discretos ou
contínuos que se utiliza de uma distribuição contínua de massas.
Para uma análise modal de um sistema com vários graus de liberdade de forma
discreta, pode-se escrever a equação do equilíbrio dinâmico da seguinte forma:
𝐾 �⃑� (𝑡) + 𝐶 �⃑̇� (𝑡) + 𝑀 �⃑̈� (𝑡) = 𝑓 (𝑡) (9)
na qual
�⃑� (𝑡): é o vetor de coordenadas nodais no instante de tempo 𝑡;
�⃑̇� (𝑡): é o vetor de velocidades nodais no instante de tempo 𝑡;
�⃑̈� (𝑡): é o vetor de acelerações nodais no instante de tempo 𝑡;
𝐾, 𝐶 e 𝑀: são matrizes de rigidez, amortecimento e massa da estrutura,
respectivamente;
𝑓 (𝑡): vetor de forças externas nodais aplicadas no instante de tempo 𝑡.

23
No caso de vibrações livres sem amortecimento, a equação 9 fica da seguinte forma:
𝑀 �⃑̈� (𝑡) + 𝐾 �⃑� (𝑡) = 0 (10)
A solução dessa equação é uma função harmônica do tipo:
�⃑� (𝑡) = 𝜑𝑚 cos(𝜔𝑚 𝑡) (11)
na qual
𝜔𝑚: frequência modal natural circular (𝜔𝑚 = √𝑘
𝑚);
𝜑𝑚: vetor constante que fisicamente representa a deformada (um modo de vibração).
Derivando a equação 11 e substituindo na equação 10, obtém-se:
−𝑀 𝜑𝑚 cos(𝜔𝑚 𝑡) 𝜔𝑚² + 𝐾 𝜑𝑚 cos(𝜔𝑚 𝑡) = 0
𝜑𝑚 (–𝑀 𝜔𝑚2 + 𝐾) = 0 (12)
Sabendo que 𝜑𝑚 = 0 implica na ausência de movimento, então, para obter uma
solução diferente da trivial o determinante da matriz resultante de (–𝑀 𝜔𝑚2 + 𝐾) deve ser
nulo, logo:
det | − 𝑀 𝜔𝑚2 + 𝐾| = 0 (13)
Chega-se assim em um problema de autovalores e autovetores. O desenvolvimento da
equação 13 resulta em um polinômio, chamado de polinômio característico, de grau “N”,
sendo “N” o número de graus de liberdade correspondentes aos deslocamentos livres. Assim,
cada autovalor 𝜔𝑚 resultará em um autovetor 𝜑𝑚, que é um modo de vibração da estrutura,
ou seja, uma forma geométrica que a estrutura vibrará. Isso mostra que a estrutura poderá
entrar em ressonância com “N” frequências diferentes.
24
Em problemas correntes na engenharia civil, é comum levar em consideração apenas
os modos de vibração associados a frequências mais baixas, pois abrangem mais elementos da
estrutura e apresentam maiores amplitudes de deslocamento. Também, leva-se em conta que
ações dinâmicas de vento e atividades humanas são da ordem de 2 Hz ou menos.
4.5 AMORTECIMENTO
Nos sistemas usuais, a energia de vibração é gradativamente convertida em som, calor
ou outros tipos de energia. Assim, há uma dissipação de energia que reduz os deslocamentos
gradativamente. Isto ocorre devido a um mecanismo chamado de amortecimento, que faz com
o que o sistema seja não conservativo. É o amortecimento que determina a amplitude de
vibração na ressonância e o tempo de persistência da vibração depois de cessada a excitação.
O amortecimento pode ser classificado em três formas principais: interno, estrutural e
fluídico. Segundo Cossolino e Pereira (2010), os exemplos de cada classificação podem ser
explicados como:
O interno está associado aos defeitos na microestrutura, granularidade e impurezas
do material e a efeitos termoelásticos causados por gradientes locais de temperatura.
Já o estrutural está associado a perdas de energia por atrito em juntas, parafusos e
articulações semi-rígidas. Por último, o fluídico ocorre por resistência ao arraste em
meio fluídico, por exemplo, a conversão de energia cinética de um pêndulo em
energia térmica para o ar. (COSSOLINO e PEREIRA, 2010, p. 3).
Conforme Singiresu (2012, p. 18), admite-se que o amortecedor não tenha massa nem
elasticidade, e que só existirá força de amortecimento se houver uma velocidade relativa entre
suas extremidades.
É difícil determinar as causas do amortecimento em sistemas práticos. Assim, existem
vários modelos de amortecimento como:
Amortecimento viscoso;
Amortecimento Coulomb ou por atrito seco;
Amortecimento material ou sólido ou por histerese.
Segundo Nabarrete (2005, p. 9) “o amortecimento viscoso é a forma mais comum de
incluir a dissipação de energia nos sistemas mecânicos”. Além disso, Kaminski e Alva (2014,
p. 24) comentam que o tratamento matemático para esse tipo de amortecimento é mais

25
simples, sendo a hipótese preferida no estudo da dinâmica das estruturas. Nesse tipo de
amortecimento os sistemas vibram em um meio fluido como: o ar, gás, água e óleo. São esses
fluídos que oferecem resistência ao movimento do corpo e que fazem com que a sua energia
seja dissipada. No amortecimento viscoso a velocidade do corpo que oscila é proporcional a
força de amortecimento.
4.5.1 Equações para vibração livre amortecida
Considerando o mesmo sistema da Figura 6 para um grau de liberdade, e a equação do
equilíbrio dinâmico considerando a vibração livre e um sistema dissipador:
𝑘 𝑢(𝑡) + 𝑅 + 𝑚 �̈�(𝑡) = 0 (14)
Na qual 𝑅 varia de acordo com o tipo de modelo utilizado para o amortecimento.
Considerando o amortecimento do tipo viscoso, a força reativa é dada por:
𝑅 = 𝑐 �̇�(𝑡) (15)
Assim, a equação do movimento fica:
𝑘 𝑢(𝑡) + 𝑐 �̇�(𝑡) + 𝑚 �̈�(𝑡) = 0 (16)
Trata-se de uma equação diferencial com solução homogênea que, fisicamente,
representa uma resposta transiente de movimento. Assim, a equação característica fica:
𝑚 𝜆2 + 𝑐 𝜆1 + 𝑘 𝜆𝑜 = 0 (17)
ou
𝑚
2 𝑚 𝜆2 +
𝑐
2 𝑚 𝜆1 +
𝑘
2 𝑚 𝜆𝑜 =
0
2 𝑚 (18)
Cujas as raízes são:
26
𝜆1,2 = −𝑐
2 𝑚± √(
𝑐
2 𝑚 )2
−𝑘
𝑚 (19)
Admite-se que a solução geral da equação 16 seja uma expressão do tipo:
𝑢(𝑡) = 𝛼 𝑒𝜆1 𝑡 + 𝛽 𝑒𝜆2 𝑡 (20)
Em que 𝛼 e 𝛽 são constantes que dependem das condições iniciais do movimento.
Pode-se observar que se a solução da expressão 18 for um número real, então a
equação 19 resultará em uma função exponencial, o que não demonstra um comportamento
oscilatório. Assim, o movimento harmônico ocorre quando:
(𝑐
2 𝑚 )2
−𝑘
𝑚< 0 (21)
Portanto, o coeficiente de amortecimento que faz a expressão 21 se anular é chamado
de coeficiente de amortecimento crítico (𝑐𝑐𝑟), dado por:
(𝑐𝑐𝑟
2 𝑚 )2
−𝑘
𝑚= 0
𝑐𝑐𝑟 = 2 𝑚 √𝑘
𝑚= 2 𝑚 𝜔 (22)
Conforme Kaminski e Alva (2014, p. 18), trabalhar diretamente com o valor de
amortecimento 𝑐 nem sempre é viável. É preferível usar um fator adimensional relacionado ao
amortecimento. Ainda Nabarrete (2005, p. 11) diz que “na prática, costuma-se orientar as
faixas de valores para o fator de amortecimento que melhor atendem esta ou aquela aplicação,
independente do porte do sistema”, por isso define-se a razão entre o valor real da constante
de amortecimento e o valor do amortecimento crítico, chamada de fator de amortecimento ou
razão de amortecimento (𝜁):
27
𝜁 =𝑐
𝑐𝑐𝑟 (23)
Com a expressão 23, pode-se classificar os movimentos em três tipos:
𝜁 < 1: movimento sub-amortecido e amortecimento sub-crítico;
𝜁 = 1: movimento criticamente amortecido e amortecimento crítico;
𝜁 > 1: movimento superamortecido e amortecimento supercrítico.
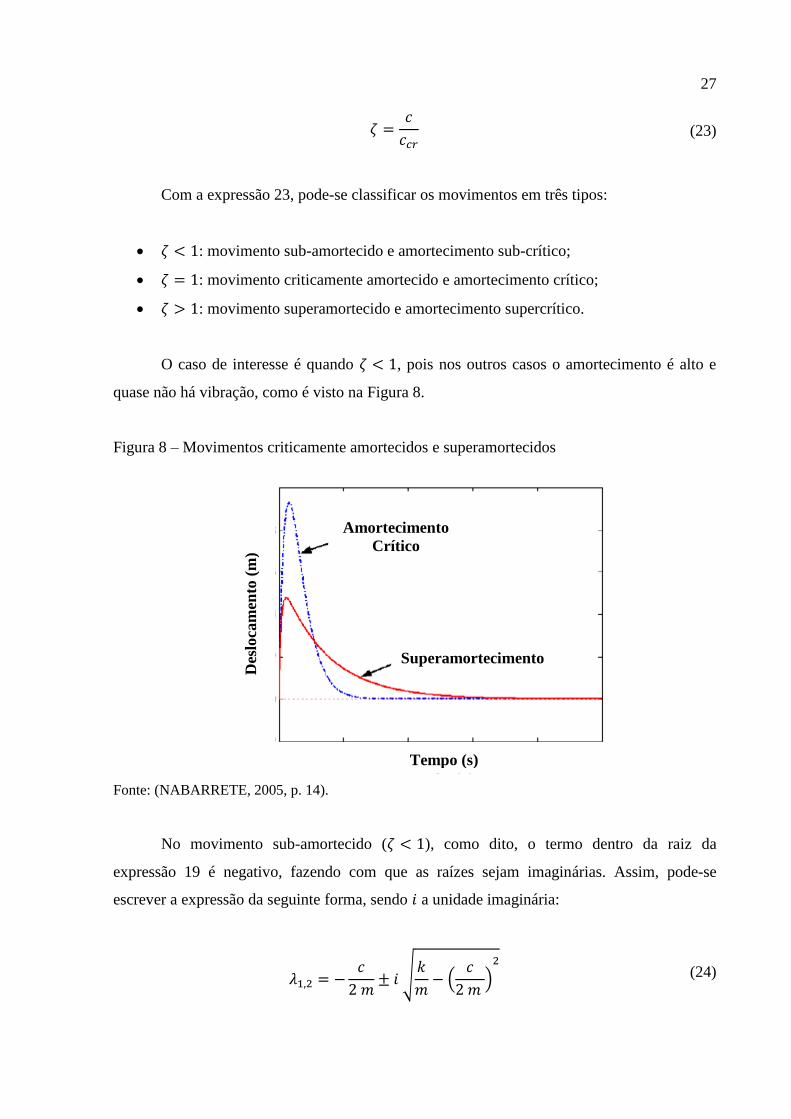
O caso de interesse é quando 𝜁 < 1, pois nos outros casos o amortecimento é alto e
quase não há vibração, como é visto na Figura 8.
Figura 8 – Movimentos criticamente amortecidos e superamortecidos
Fonte: (NABARRETE, 2005, p. 14).
No movimento sub-amortecido (𝜁 < 1), como dito, o termo dentro da raiz da
expressão 19 é negativo, fazendo com que as raízes sejam imaginárias. Assim, pode-se
escrever a expressão da seguinte forma, sendo 𝑖 a unidade imaginária:
𝜆1,2 = −𝑐
2 𝑚± 𝑖 √
𝑘
𝑚− (
𝑐
2 𝑚 )2
(24)
Amortecimento
Crítico
Superamortecimento
Tempo (s)
Des
loca
men
to (
m)

28
Substituindo a equação 24 na equação 20 e aplicando as equações de Euler dadas por:
𝑒𝑖 𝜃 = cos 𝜃 + 𝑖 𝑠𝑒𝑛 𝜃 (25)
𝑒−𝑖 𝜃 = cos 𝜃 − 𝑖 𝑠𝑒𝑛 𝜃 (26)
Obtém-se a equação para o movimento sub-amortecido:
𝑢(𝑡) = 𝑒−𝑐
2 𝑚 𝑡 [𝐶1 cos(𝜔𝑎 𝑡) + 𝐶2 𝑠𝑒𝑛(𝜔𝑎 𝑡)] (27)
na qual
𝐶1 e 𝐶2: são constantes de integração determinadas a partir das condições iniciais;
𝜔𝑎: frequência natural amortecida (√𝑘
𝑚− (
𝑐
2 𝑚 )2
).
Pode-se escrever a frequência natural amortecida 𝜔𝑎 em função do fator de
amortecimento (ou razão de amortecimento) e da frequência natural da seguinte forma:
𝜔𝑎 = 𝜔 √1 − 𝜁2 (28)
Finalmente, estabelecendo-se as condições iniciais como 𝑢(0) = 𝑢0 e �̇�(0) = 𝑢0̇, 𝐶1 e
𝐶2 são dadas por:
𝐶1 = 𝑢0 (29)
𝐶2 =𝑢0̇ + 𝜁 𝜔 𝑢0
𝜔𝑎 (30)
E a equação 27 fica da forma:
29
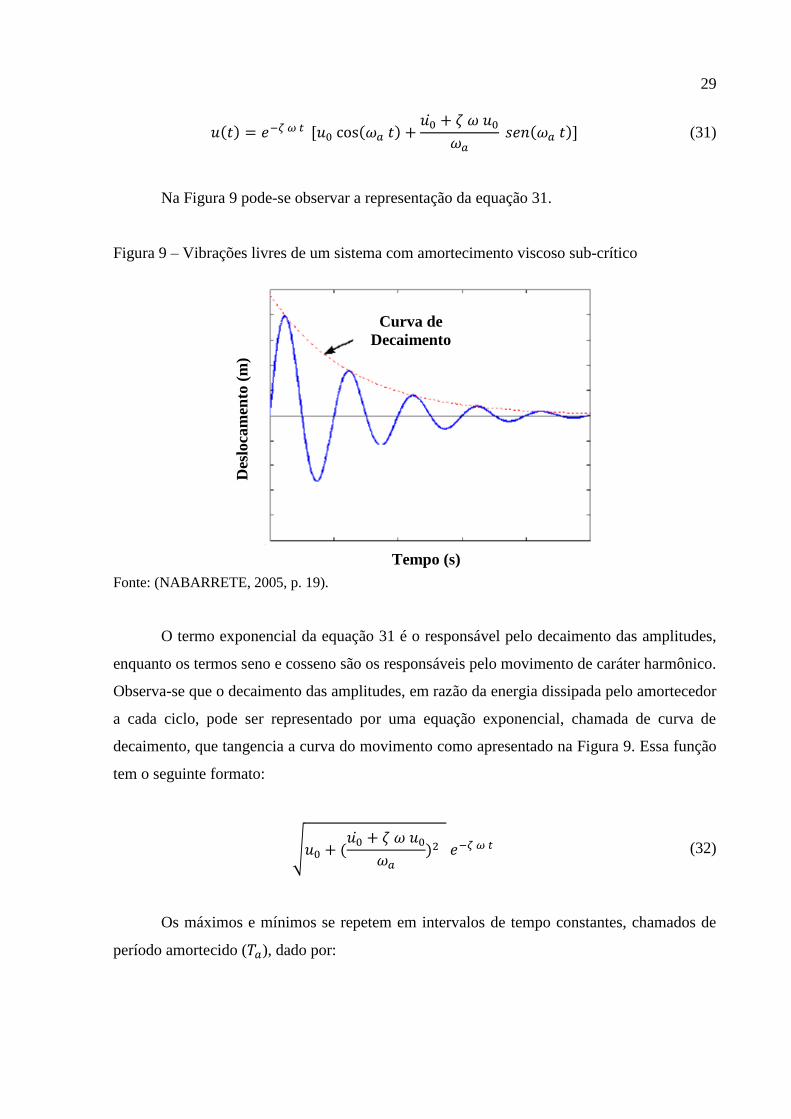
𝑢(𝑡) = 𝑒−𝜁 𝜔 𝑡 [𝑢0 cos(𝜔𝑎 𝑡) +𝑢0̇ + 𝜁 𝜔 𝑢0
𝜔𝑎 𝑠𝑒𝑛(𝜔𝑎 𝑡)] (31)
Na Figura 9 pode-se observar a representação da equação 31.
Figura 9 – Vibrações livres de um sistema com amortecimento viscoso sub-crítico
Fonte: (NABARRETE, 2005, p. 19).
O termo exponencial da equação 31 é o responsável pelo decaimento das amplitudes,
enquanto os termos seno e cosseno são os responsáveis pelo movimento de caráter harmônico.
Observa-se que o decaimento das amplitudes, em razão da energia dissipada pelo amortecedor
a cada ciclo, pode ser representado por uma equação exponencial, chamada de curva de
decaimento, que tangencia a curva do movimento como apresentado na Figura 9. Essa função
tem o seguinte formato:
√𝑢0 + (𝑢0̇ + 𝜁 𝜔 𝑢0
𝜔𝑎)2 𝑒−𝜁 𝜔 𝑡 (32)
Os máximos e mínimos se repetem em intervalos de tempo constantes, chamados de
período amortecido (𝑇𝑎), dado por:
Curva de
Decaimento
Tempo (s)
Des
loca
men
to (
m)
30
𝑇𝑎 =2 𝜋
𝜔𝑎 (33)
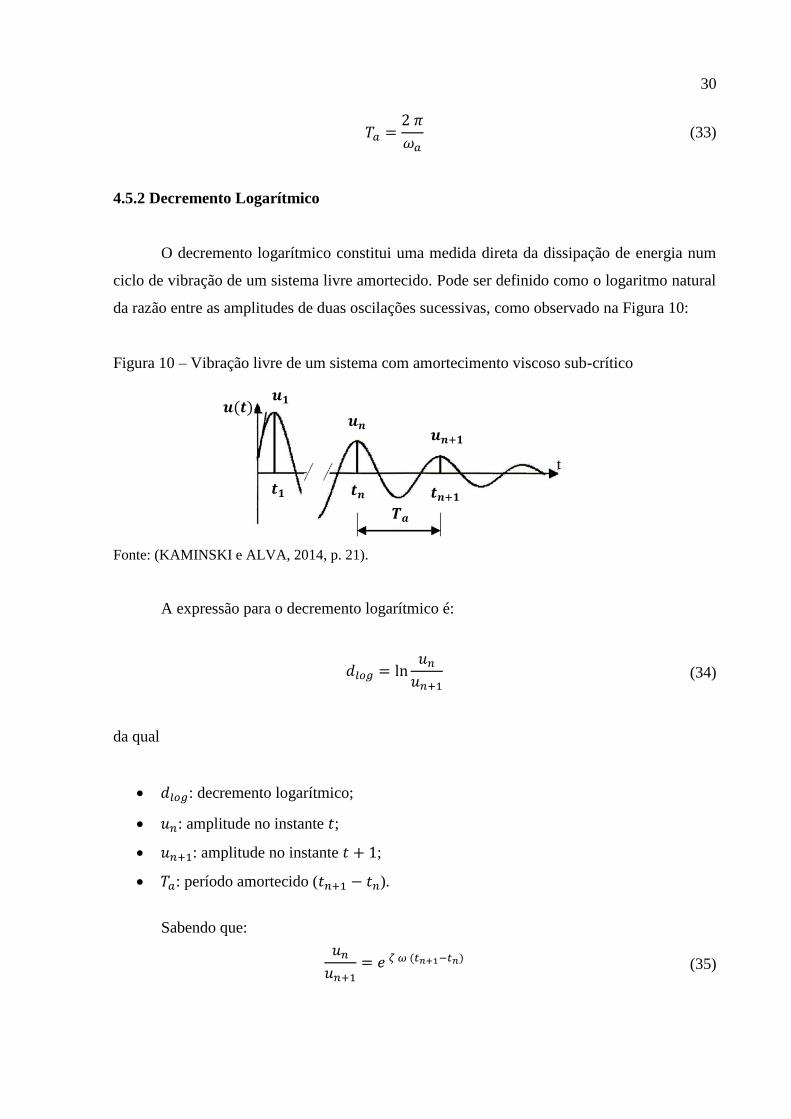
4.5.2 Decremento Logarítmico
O decremento logarítmico constitui uma medida direta da dissipação de energia num
ciclo de vibração de um sistema livre amortecido. Pode ser definido como o logaritmo natural
da razão entre as amplitudes de duas oscilações sucessivas, como observado na Figura 10:
Figura 10 – Vibração livre de um sistema com amortecimento viscoso sub-crítico
Fonte: (KAMINSKI e ALVA, 2014, p. 21).
A expressão para o decremento logarítmico é:
𝑑𝑙𝑜𝑔 = ln𝑢𝑛
𝑢𝑛+1 (34)
da qual
𝑑𝑙𝑜𝑔: decremento logarítmico;
𝑢𝑛: amplitude no instante 𝑡;
𝑢𝑛+1: amplitude no instante 𝑡 + 1;
𝑇𝑎: período amortecido (𝑡𝑛+1 − 𝑡𝑛).
Sabendo que:
𝑢𝑛
𝑢𝑛+1= 𝑒 𝜁 𝜔 (𝑡𝑛+1−𝑡𝑛) (35)
𝒖(𝒕) 𝒖𝟏
𝒕𝟏
𝒖𝒏
𝒖𝒏+𝟏
𝒕𝒏 𝒕𝒏+𝟏
𝑻𝒂

31
Aplicando o logaritmo natural em ambos os lados, tem-se:
ln𝑢𝑛
𝑢𝑛+1= 𝜁 𝜔 (𝑡𝑛+1 − 𝑡𝑛) = 𝜁 𝜔 𝑇𝑎 = 𝜁 𝜔
2 𝜋
𝜔𝑎= 𝜁 𝜔
2 𝜋
𝜔 √1 − 𝜁2 (36)
Logo:
𝑑𝑙𝑜𝑔 = 2 𝜋 𝜁
√1 − 𝜁2 (37)
assim
𝜁 = 𝑑𝑙𝑜𝑔
√(2 𝜋)2 + 𝑑𝑙𝑜𝑔2
(38)
Com essa expressão determina-se experimentalmente o valor da razão de
amortecimento, ou valor do fator de amortecimento (𝜁), medindo a diminuição de oscilações
sucessivas do sistema, através de ensaios, como por exemplo, o ensaio de vibrações livres.
Para um ensaio com “𝑝” ciclos sucessivos, admite-se:
𝜁 = 𝑑𝑙𝑜𝑔
√(2 𝜋 𝑝)2 + 𝑑𝑙𝑜𝑔2
(39)
Quando 𝜁 < 0,1 a frequência natural amortecida é praticamente igual a frequência
natural, isto é, 𝜔𝑎 ≅ 𝜔, então o fator √1 − 𝜁2 ≅ 1, e a equação 37 fica:
𝑑𝑙𝑜𝑔 = 2 𝜋 𝜁 (40)
ou
𝜁 =𝑑𝑙𝑜𝑔
2 𝜋 Para 𝜁 < 0,1 (41)

32
4.6 MÉTODO DA INTEGRAÇÃO DIRETA
Para resolver as equações de equilíbrio dinâmico de um sistema discreto para cada
instante de tempo 𝑡 e obter as coordenadas nodais da estrutura �⃑� 𝑡, nas direções 𝑥, 𝑦 e 𝑧, pode-
se utilizar o método numérico explícito das diferenças finitas centrais, utilizado dentro do
método da integração direta.
Para sistemas explícitos, escolhe-se um intervalo de tempo (∆𝑡) de integração e,
assim, o estado do sistema no instante (𝑡 + ∆𝑡) pode ser determinado em função dos instantes
anteriores do sistema 𝑡, (𝑡 − ∆𝑡), (𝑡 − 2 ∆𝑡), e assim por diante. Ainda, conforme Kaminski e
Alva (2014, p. 75) a matriz de rigidez 𝐾 não precisa ser determinada quando se utiliza
elementos de treliça bidimensional ou espacial, sendo umas das vantagens do método
explícito:
Quando são utilizados apenas elementos de treliça (plana ou espacial) no modelo,
não é sequer necessário formar a matriz de rigidez global 𝐾, pois a integração pode
ser efetuada em nível de elemento, sem a necessidade de se utilizar um processo de
solução de sistemas de equações para determinar o vetor �⃑� 𝑡+∆𝑡. Esta é a grande
vantagem do método de diferenças finitas centrais, e de todos os métodos explícitos
em relação aos implícitos. (KAMINSKI e ALVA, 2014, p. 75).
No caso de análise por método implícito é inevitável a solução de um sistema de
equações. Como exemplo desse tipo de método, pode-se citar o método de Newmark.
Para a equação 9 do equilíbrio dinâmico para sistemas com vários graus de liberdade,
em um instante de tempo 𝑡 e um intervalo de tempo ∆𝑡, a expressão das diferenças finitas
centrais é dada por:
(1
∆𝑡2 𝑀 +
1
2∆𝑡 𝐶) �⃑� 𝑡+∆𝑡 = 𝑓 𝑡 − (𝐾 −
2
∆𝑡2 𝑀) �⃑� 𝑡 − (
1
∆𝑡2 𝑀 −
1
2∆𝑡 𝐶) �⃑� 𝑡−∆𝑡 (42)
Quando se define as condições iniciais do sistema, deslocamento �⃑� 0 e velocidade �⃑̇� 0,
pode-se iniciar o processo. Resolvendo o sistema de equações algébricas lineares acima,
obtém-se o vetor de deslocamentos �⃑� 𝑡+∆𝑡, no tempo 𝑡 + ∆𝑡. E, por conseguinte o vetor de
velocidade �⃑̇� 𝑡 e o de aceleração �⃑̈� 𝑡 no tempo 𝑡, com as seguintes expressões:

33
�⃑̈� 𝑡 =( �⃑� 𝑡+∆𝑡 − 2 �⃑� 𝑡 + �⃑� 𝑡−∆𝑡)
∆𝑡² (43)
A partir das condições iniciais, isto é, para 𝑡 = 0, obtém-se:
�⃑� 0−∆𝑡 = ∆𝑡2�⃑̈� 0 + 2 �⃑� 0 – �⃑� 0+∆𝑡 (45)
e
�⃑� 0+∆𝑡 = 2 ∆𝑡 �⃑̇� 𝑜 + �⃑� 0−∆𝑡 (46)
Juntando as equações 45 e 46, tem-se:
�⃑� 0−∆𝑡 = ∆𝑡² �⃑̈� 0 + 2 �⃑� 0 – 2 ∆𝑡 �⃑̇� 𝑜 − �⃑� 0−∆𝑡 = �⃑� 0 − ∆𝑡 �⃑̇� 𝑜 +∆𝑡2
2 �⃑̈� 0 (47)
Na expressão 47, pode-se calcular o vetor �⃑̈� 0, através da equação 9 para 𝑡 = 0,
resultando em:
𝐾 �⃑� 0 + 𝐶 �⃑̇� 0 + 𝑀 �⃑̈� 0 = 𝑓 0 (48)
Logo:
�⃑̈� 0 = 𝑀−1 (𝑓 0 − 𝐶 �⃑̇� 0 − 𝐾 �⃑� 0) (49)
Como o método é discreto, a matriz de amortecimento 𝐶 é proporcional a matriz de
massa 𝑀, portanto ambas são diagonais. Assim, a matriz resultante que multiplica o vetor
�⃑� 𝑡+∆𝑡 na equação 42 será também diagonal, o problema então se reduz a “n” equações
algébricas desacopladas, sem que precise a solução de um sistema de equações, reduzindo,
portanto, o esforço computacional.
�⃑̇� 𝑡 =�⃑� 𝑡+∆𝑡 − �⃑� 𝑡−∆𝑡
2 ∆𝑡 (44)

34
Deste modo, chega-se na expressão das diferenças finitas centrais para calcular os
deslocamentos em qualquer nó, em um sistema discreto, nas direções 𝑥, 𝑦 e 𝑧 no instante 𝑡 +
∆𝑡:
�⃑� 𝑡+∆𝑡 =1
𝑐1 (∆𝑡2
𝑚 𝐹𝑡 + 2 �⃑� 𝑡 − 𝑐2 𝑢⃑⃑⃑ 𝑡−∆𝑡) (50)
na qual
𝑢: é o deslocamento linear (translação) do nó na direção 𝑥, 𝑦 ou 𝑧 (em m);
𝐹𝑡 = (𝑓 𝑡 − 𝑘 �⃑� 𝑡) é a componente da força nodal (em N) na direção correspondente, em
coordenadas globais no tempo 𝑡;
∆𝑡: intervalo de tempo de integração (em s);
𝑐1 = (1 +𝑐𝑚 ∆𝑡
2);
𝑐2 = (1 −𝑐𝑚 ∆𝑡
2);
𝑐𝑚 = 𝑐 𝑚⁄ é uma constante;
𝑚: massa nodal (em kg);
𝑐: coeficiente de amortecimento viscoso (em N s/m), proporcional à massa 𝑚.
A força nodal resultante 𝐹𝑡 é uma composição das forças gravitacionais 𝑓𝑔(𝑡) (peso
próprio e forças nodais externas) e pelas forças axiais 𝑓𝑎(𝑡) nos elementos de treliça, em razão
das deformações axiais. Em cada passo da integração, ou seja, da avaliação da equação 50,
para todos os nós em todas as direções, as coordenadas atualizadas levam a deformações
axiais nos elementos reagindo com forças axiais 𝑓𝑎 que se opõem aos deslocamentos.
Para um elemento de treliça em um instante de tempo 𝑡, a força axial é dada por:
𝑓𝑎 = 𝑘 𝑑𝑡 = 𝐸 𝐴 [𝐿(𝑡) − 𝐿(0)
𝐿(0)] (51)
na qual
𝐸: módulo de elasticidade longitudinal do material;
35
𝐴: área da seção transversal;
𝐿(0): comprimento do elemento de treliça no tempo 𝑡 = 0;
𝐿(𝑡): comprimento do elemento de treliça em um instante de tempo 𝑡.
Assim, para obter as componentes da força nodal resultante 𝐹𝑡, a força axial 𝑓𝑎(𝑡)
deve ser multiplicada pelos cossenos diretores do eixo do elemento no estado deformado, e
suas componentes somadas com as respectivas forças gravitacionais 𝑓𝑔(𝑡) nas direções 𝑥, 𝑦 e
𝑧 atuantes no nó considerado. Uma importante observação é que, no caso de treliças, a não-
linearidade geométrica é sempre considerada, pois as coordenadas nodais são atualizadas em
cada passo do processo.
O intervalo de tempo ∆𝑡 é o que basicamente define a exatidão e convergência do
processo de integração, logo, conforme Bathe (1982, p. 499-505) o método é estável, sendo
necessário que, segundo Humar (2005, p. 752):
∆𝑡 ≤ ∆𝑡𝑐𝑟𝑖𝑡 =2
𝜔=
2
2 𝜋 𝑓𝑛=
𝑇𝑛
𝜋 (52)
na qual
∆𝑡𝑐𝑟𝑖𝑡: tempo de integração crítico;
𝜔: maior frequência angular da estrutura com “n” graus de liberdade (rad/s);
𝑓𝑛: maior frequência natural de vibração da estrutura com n graus de liberdade (Hz);
𝑇𝑛: menor período natural de vibração da estrutura com n graus de liberdade (s).
A dificuldade da utilização da equação 52 para determinar o ∆𝑡 é calcular o 𝑇𝑛, que
corresponde ao período natural associado ao autovalor 𝜆𝑛 (maior frequência natural de
vibração 𝑓𝑛) da estrutura. No caso de estruturas com elementos de treliça, conforme Groehs
(2012, cap. 16, p. 8), o intervalo de integração pode ser obtido, considerando um elemento
isolado, com a seguinte expressão, denominada Courant-Friedrichs-Lewy:
36
∆𝑡 ≤ ∆𝑡𝑐𝑟𝑖𝑡 =𝑙𝑚𝑖𝑛
√𝐸𝜌
(53)
na qual
𝑙𝑚𝑖𝑛: comprimento inicial da menor barra da treliça (m);
𝐸: módulo de elasticidade longitudinal do material (N/m²);
𝜌: massa específica do material (kg/m³);
√𝐸
𝜌: velocidade do som no meio representado por 𝐸 e 𝜌.
Logo, o intervalo de tempo ∆𝑡 depende do comprimento inicial da menor barra da
treliça e da velocidade do som no material utilizado.
Essa expressão deve ser utilizada apenas para ter uma ideia sobre o intervalo de
integração. Para ter certeza da precisão dos resultados é necessário obter pelo menos duas
respostas iguais com dois valores diferentes de ∆𝑡 ≤ ∆𝑡𝑐𝑟𝑖𝑡.
Segundo Kaminski (2007, p. 177), para ter segurança no método, o intervalo ∆𝑡 de
tempo de integração deve ser na ordem de 10−5 a 10−6 segundos, exigindo de 100.000 até
1.000.000 passos de integração para cada segundo de análise.
37
(1) Vista Frontal
(2) Vista Isométrica
(3) Vista Lateral
(4) Vista Superior
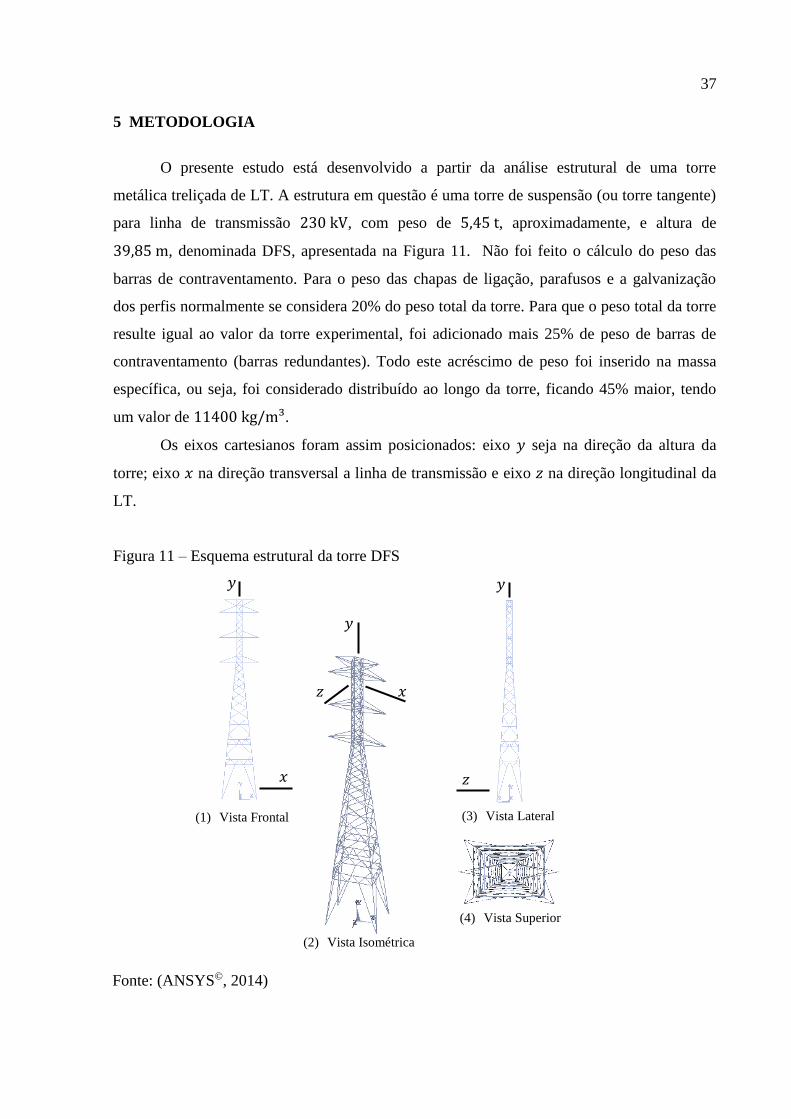
5 METODOLOGIA
O presente estudo está desenvolvido a partir da análise estrutural de uma torre
metálica treliçada de LT. A estrutura em questão é uma torre de suspensão (ou torre tangente)
para linha de transmissão 230 kV, com peso de 5,45 t, aproximadamente, e altura de
39,85 m, denominada DFS, apresentada na Figura 11. Não foi feito o cálculo do peso das
barras de contraventamento. Para o peso das chapas de ligação, parafusos e a galvanização
dos perfis normalmente se considera 20% do peso total da torre. Para que o peso total da torre
resulte igual ao valor da torre experimental, foi adicionado mais 25% de peso de barras de
contraventamento (barras redundantes). Todo este acréscimo de peso foi inserido na massa
específica, ou seja, foi considerado distribuído ao longo da torre, ficando 45% maior, tendo
um valor de 11400 kg/m³.
Os eixos cartesianos foram assim posicionados: eixo 𝑦 seja na direção da altura da
torre; eixo 𝑥 na direção transversal a linha de transmissão e eixo 𝑧 na direção longitudinal da
LT.
Figura 11 – Esquema estrutural da torre DFS
Fonte: (ANSYS©, 2014)
𝑦
𝑥 𝑧
𝑦
𝑥
𝑦
𝑧
38
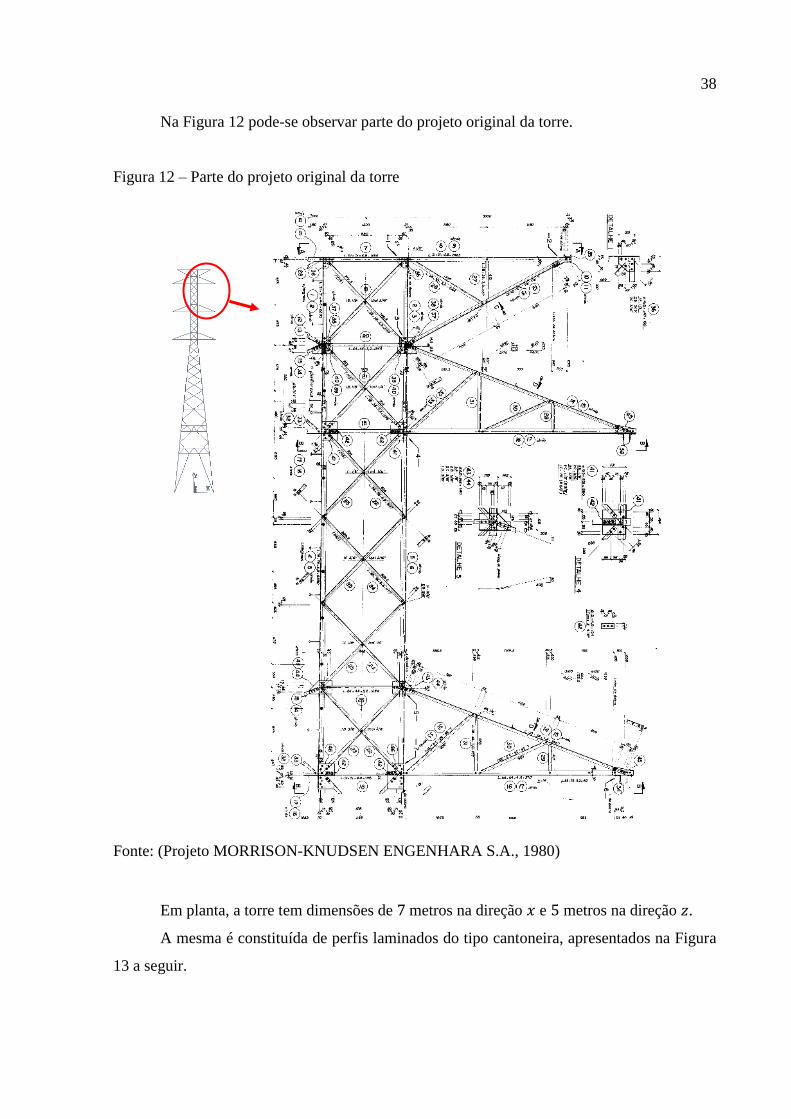
Na Figura 12 pode-se observar parte do projeto original da torre.
Figura 12 – Parte do projeto original da torre
Fonte: (Projeto MORRISON-KNUDSEN ENGENHARA S.A., 1980)
Em planta, a torre tem dimensões de 7 metros na direção 𝑥 e 5 metros na direção 𝑧.
A mesma é constituída de perfis laminados do tipo cantoneira, apresentados na Figura
13 a seguir.
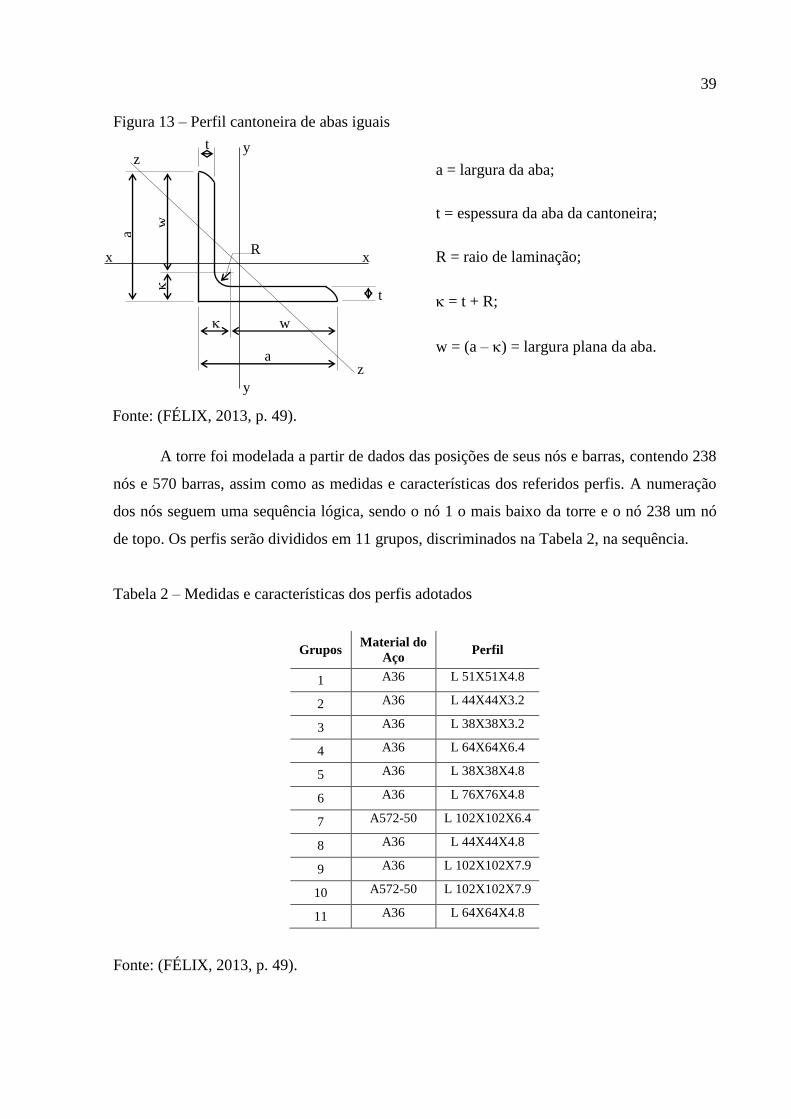
39
Figura 13 – Perfil cantoneira de abas iguais
A torre foi modelada a partir de dados das posições de seus nós e barras, contendo 238
nós e 570 barras, assim como as medidas e características dos referidos perfis. A numeração
dos nós seguem uma sequência lógica, sendo o nó 1 o mais baixo da torre e o nó 238 um nó
de topo. Os perfis serão divididos em 11 grupos, discriminados na Tabela 2, na sequência.
Tabela 2 – Medidas e características dos perfis adotados
Fonte: (FÉLIX, 2013, p. 49).
Grupos Material do
Aço Perfil
1 A36 L 51X51X4.8
2 A36 L 44X44X3.2
3 A36 L 38X38X3.2
4 A36 L 64X64X6.4
5 A36 L 38X38X4.8
6 A36 L 76X76X4.8
7 A572-50 L 102X102X6.4
8 A36 L 44X44X4.8
9 A36 L 102X102X7.9
10 A572-50 L 102X102X7.9
11 A36 L 64X64X4.8
t
a
w
R
w
a
t
x x
y
y z
z
a = largura da aba;
t = espessura da aba da cantoneira;
R = raio de laminação;
= t + R;
w = (a – ) = largura plana da aba.
Fonte: (FÉLIX, 2013, p. 49).
40
A torre DFS é modelada utilizando-se dois modelos estruturais diferentes,
denominados modelo A e modelo B, com o propósito de ajustar a área das barras fictícias
utilizadas no modelo B, necessário para utilização no método de integração direta. Os
modelos A e B são descritos a seguir.
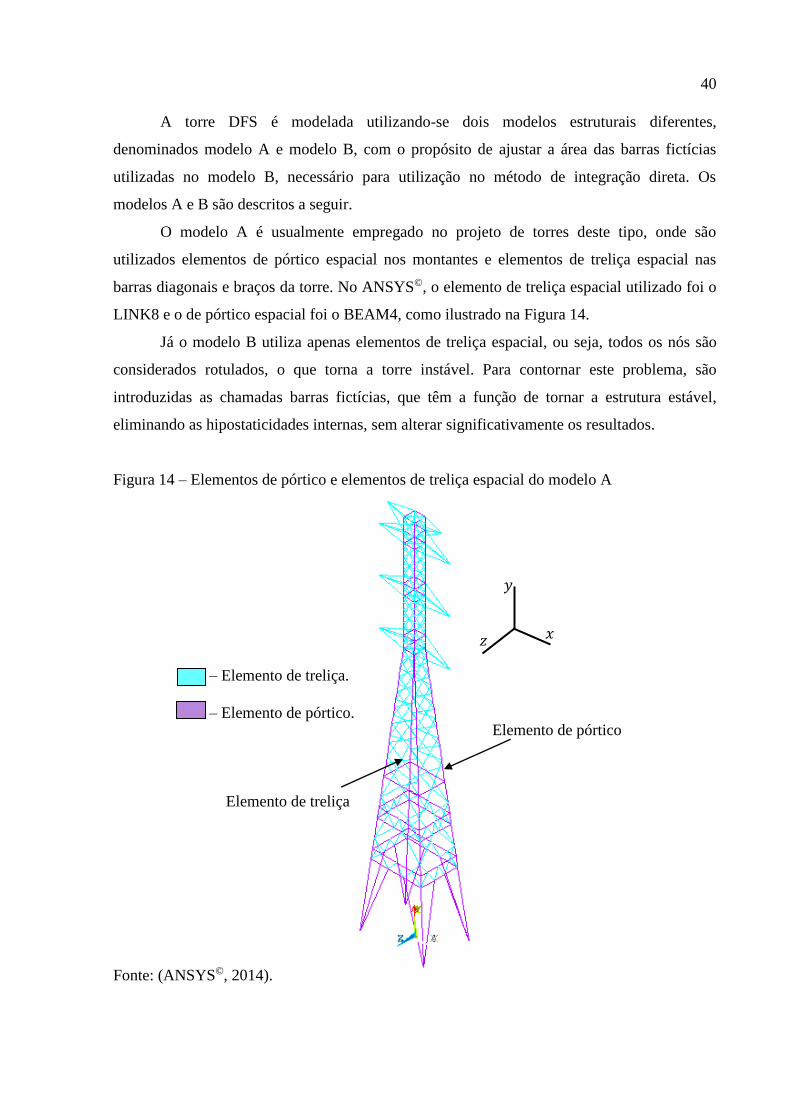
O modelo A é usualmente empregado no projeto de torres deste tipo, onde são
utilizados elementos de pórtico espacial nos montantes e elementos de treliça espacial nas
barras diagonais e braços da torre. No ANSYS©, o elemento de treliça espacial utilizado foi o
LINK8 e o de pórtico espacial foi o BEAM4, como ilustrado na Figura 14.
Já o modelo B utiliza apenas elementos de treliça espacial, ou seja, todos os nós são
considerados rotulados, o que torna a torre instável. Para contornar este problema, são
introduzidas as chamadas barras fictícias, que têm a função de tornar a estrutura estável,
eliminando as hipostaticidades internas, sem alterar significativamente os resultados.
Figura 14 – Elementos de pórtico e elementos de treliça espacial do modelo A
Fonte: (ANSYS©, 2014).
Elemento de pórtico
Elemento de treliça
– Elemento de treliça.
– Elemento de pórtico.
𝑦
𝑧 𝑥
41
O ajuste da área das barras fictícias no modelo B é feita aplicando o peso próprio e
forças iguais nos dois modelos, nas direções 𝑥 e 𝑧, e então comparam-se os resultados
(deslocamentos). Em seguida, é feita uma análise modal nos dois modelos utilizando o
programa ANSYS© v.15.0 (ANSYS©, 2014) e os resultados das primeiras duas frequências
naturais são comparados.
Após isso, faz-se uma análise dinâmica no domínio do tempo com cargas impulsivas
na torre, utilizando um programa desenvolvido em linguagem FORTRAN que emprega o
método da integração direta (MID) e que está programado apenas para elementos de treliça
espacial (modelo B), a fim de obter as duas primeiras frequências naturais e compará-las com
aquelas obtidas na análise modal no ANSYS©.
O programa do MID introduz o amortecimento estrutural da forma mais simples, isto
é, proporcional à massa e aplicado aos nós da torre, que se traduz no coeficiente 𝑐𝑚 da
equação 50 do método da integração direta.
Por fim, é feita a calibragem do valor de 𝑐𝑚 até que a razão de amortecimento (𝜁)
obtida numericamente (com o modelo B no MID) resulte igual ao 𝜁 obtido
experimentalmente. Para o cálculo do amortecimento, utilizou-se a técnica do decremento
logarítmico, descrita no item 4.5.2.
A torre experimental foi ensaiada em escala real em 1983 e está descrita em (Vilson
Renato da Silva et al., 1983) no VII Seminário Nacional de Produção e Transmissão de
Energia Elétrica.
42
6 DESCRIÇÃO DO ENSAIO NA TORRE DFS
Na torre experimental foi utilizado o Ensaio de Vibrações Livres, da qual se aplicam
cargas externas, através de cabos, até atingirem uma deformada inicial. Então, há uma
liberação abrupta da carga que induz vibrações livres na estrutura, onde no seu estado final
não há carga residual. É um ensaio adequado e muito aplicado para determinar frequências e
amortecimentos.
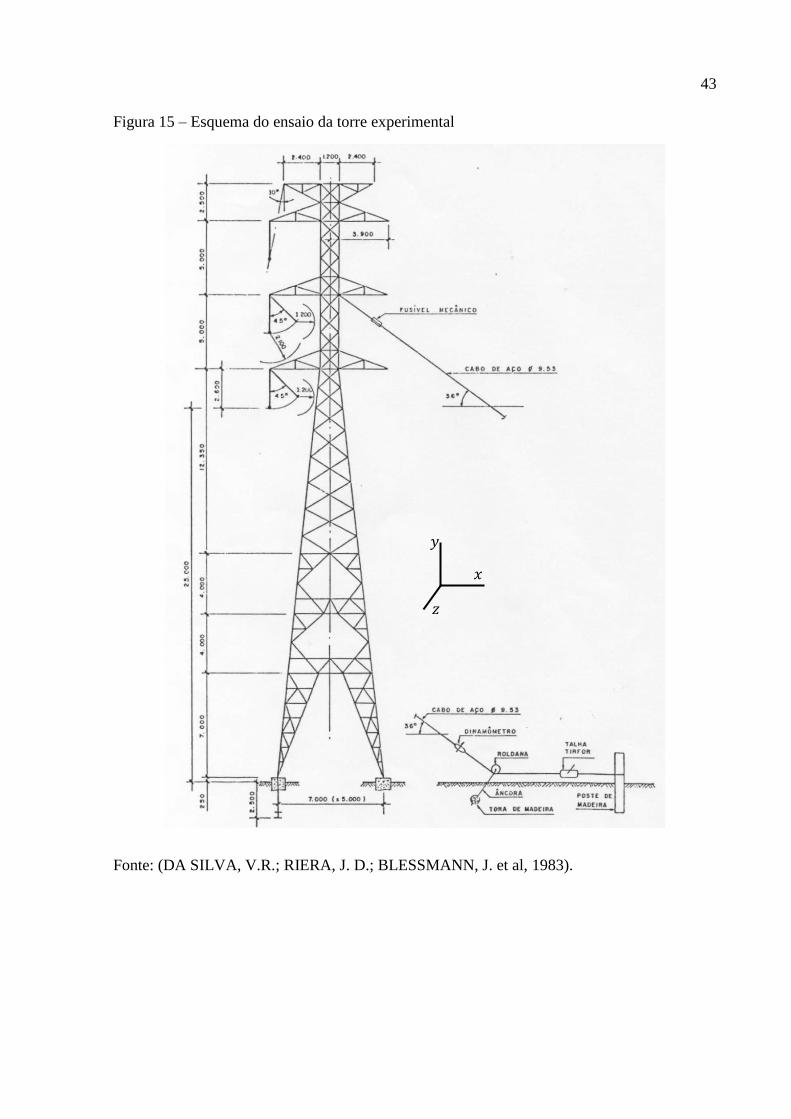
No ensaio, utilizou-se um sistema de aplicação de cargas com ruptura repentina de um
fusível mecânico. A carga de ruptura média do fusível foi de 23100 N, com componente
horizontal de 18700 N e vertical de 13562 N para baixo. O fusível foi colocado próximo a
torre, abaixo do braço intermediário, conforme Figura 15.
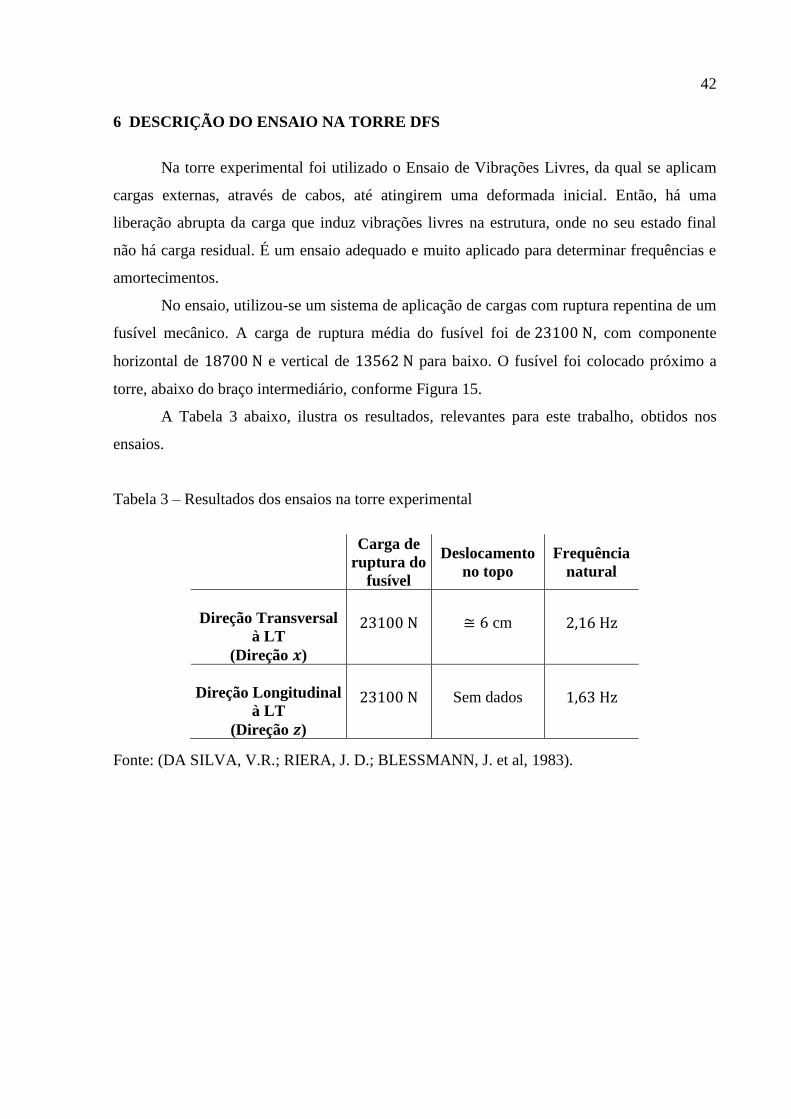
A Tabela 3 abaixo, ilustra os resultados, relevantes para este trabalho, obtidos nos
ensaios.
Tabela 3 – Resultados dos ensaios na torre experimental
Fonte: (DA SILVA, V.R.; RIERA, J. D.; BLESSMANN, J. et al, 1983).
Carga de
ruptura do
fusível
Deslocamento
no topo
Frequência
natural
Direção Transversal
à LT
(Direção 𝒙)
23100 N ≅ 6 cm 2,16 Hz
Direção Longitudinal
à LT
(Direção 𝒛)
23100 N Sem dados 1,63 Hz
43
Figura 15 – Esquema do ensaio da torre experimental
Fonte: (DA SILVA, V.R.; RIERA, J. D.; BLESSMANN, J. et al, 1983).
𝑦
𝑧
𝑥
44
7 AJUSTE DO MODELO B
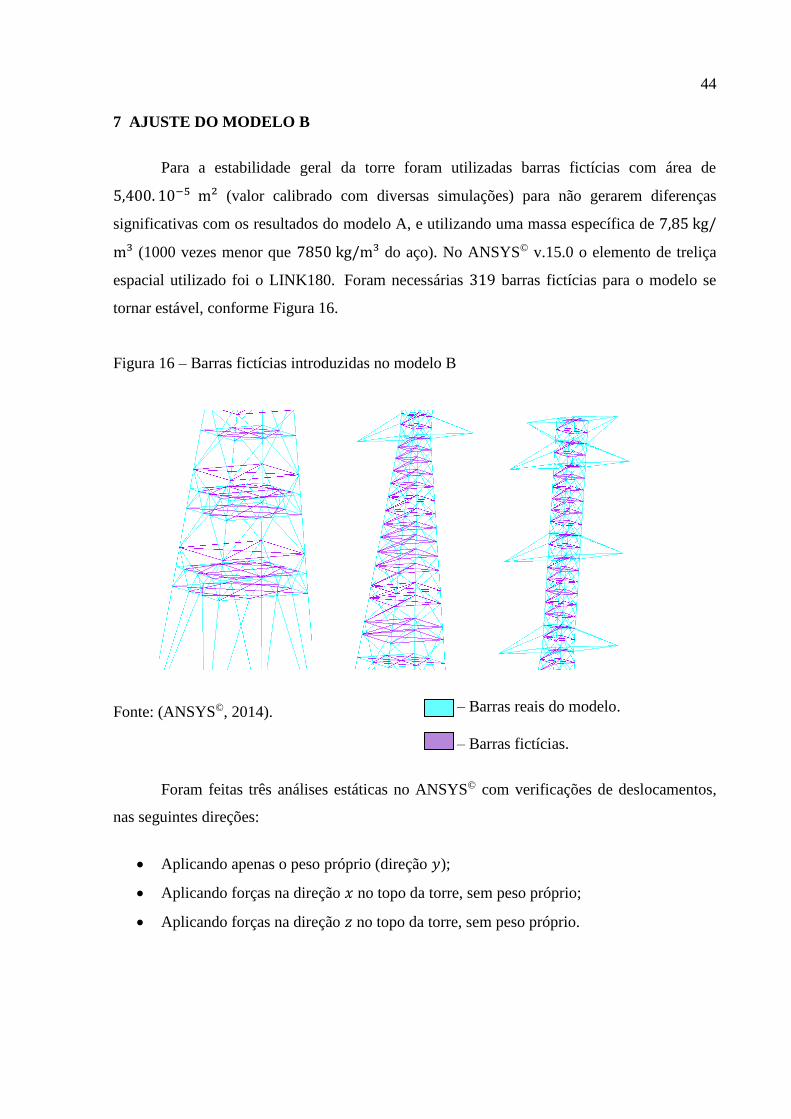
Para a estabilidade geral da torre foram utilizadas barras fictícias com área de
5,400. 10−5 m² (valor calibrado com diversas simulações) para não gerarem diferenças
significativas com os resultados do modelo A, e utilizando uma massa específica de 7,85 kg/
m³ (1000 vezes menor que 7850 kg/m³ do aço). No ANSYS© v.15.0 o elemento de treliça
espacial utilizado foi o LINK180. Foram necessárias 319 barras fictícias para o modelo se
tornar estável, conforme Figura 16.
Figura 16 – Barras fictícias introduzidas no modelo B
Fonte: (ANSYS©, 2014).
Foram feitas três análises estáticas no ANSYS© com verificações de deslocamentos,
nas seguintes direções:
Aplicando apenas o peso próprio (direção 𝑦);
Aplicando forças na direção 𝑥 no topo da torre, sem peso próprio;
Aplicando forças na direção 𝑧 no topo da torre, sem peso próprio.
– Barras reais do modelo.
– Barras fictícias.
45
-0,0012
-0,001
-0,0008
-0,0006
-0,0004
-0,0002
0
0 20 40 60 80 100 120 140 160 180 200 220 240
Des
loca
men
to (
m)
Nós
Modelo A
Modelo B
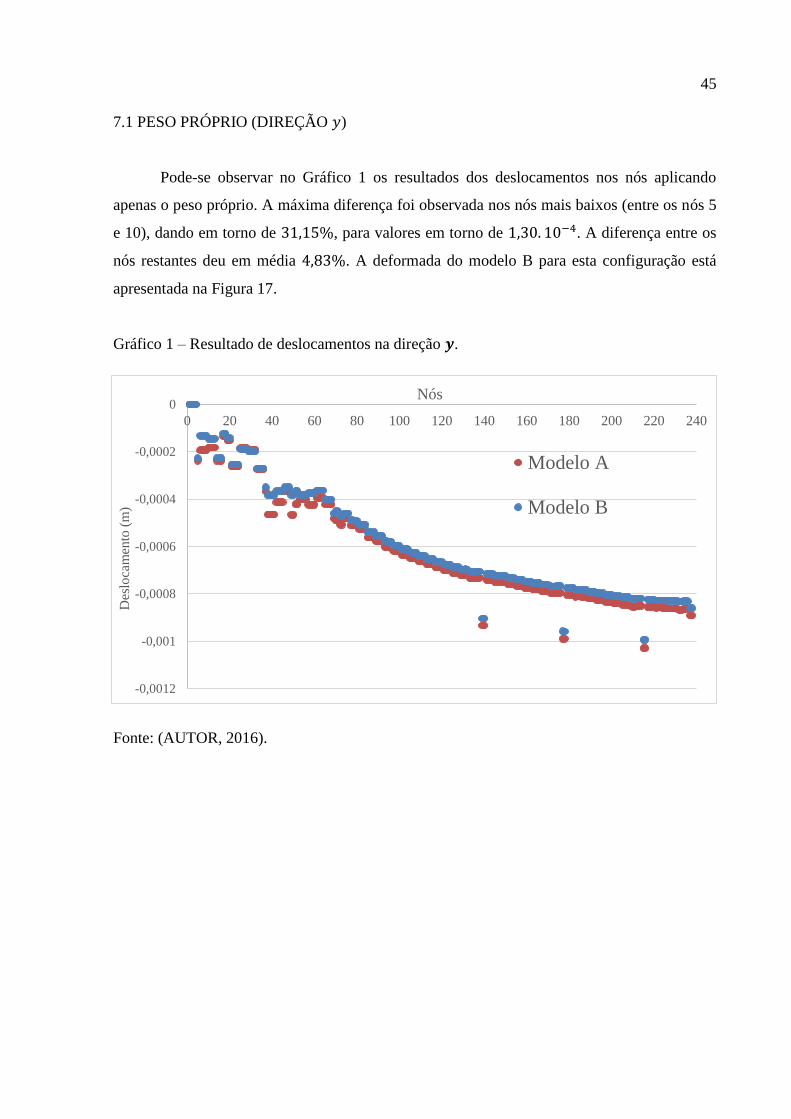
7.1 PESO PRÓPRIO (DIREÇÃO 𝑦)
Pode-se observar no Gráfico 1 os resultados dos deslocamentos nos nós aplicando
apenas o peso próprio. A máxima diferença foi observada nos nós mais baixos (entre os nós 5
e 10), dando em torno de 31,15%, para valores em torno de 1,30. 10−4. A diferença entre os
nós restantes deu em média 4,83%. A deformada do modelo B para esta configuração está
apresentada na Figura 17.
Gráfico 1 – Resultado de deslocamentos na direção 𝒚.
Fonte: (AUTOR, 2016).
46
Figura 17 – Deformada do modelo B para a carga de peso próprio
Fonte: (ANSYS©, 2014).
7.2 FORÇA NA DIREÇÃO 𝑥 (SEM PESO PRÓPRIO)
Pode-se observar os resultados aplicando forças na direção 𝑥, sem o peso próprio, no
Gráfico 2. A máxima diferença observada nos nós foi em torno de 23,79%. Em média, a
diferença foi de 2,77%.
𝑦
𝑧 𝑥
47
-0,02
0
0,02
0,04
0,06
0,08
0,1
0,12
0,14
0 20 40 60 80 100 120 140 160 180 200 220 240
Des
loca
men
to (
m)
Nós
Modelo A
Modelo B
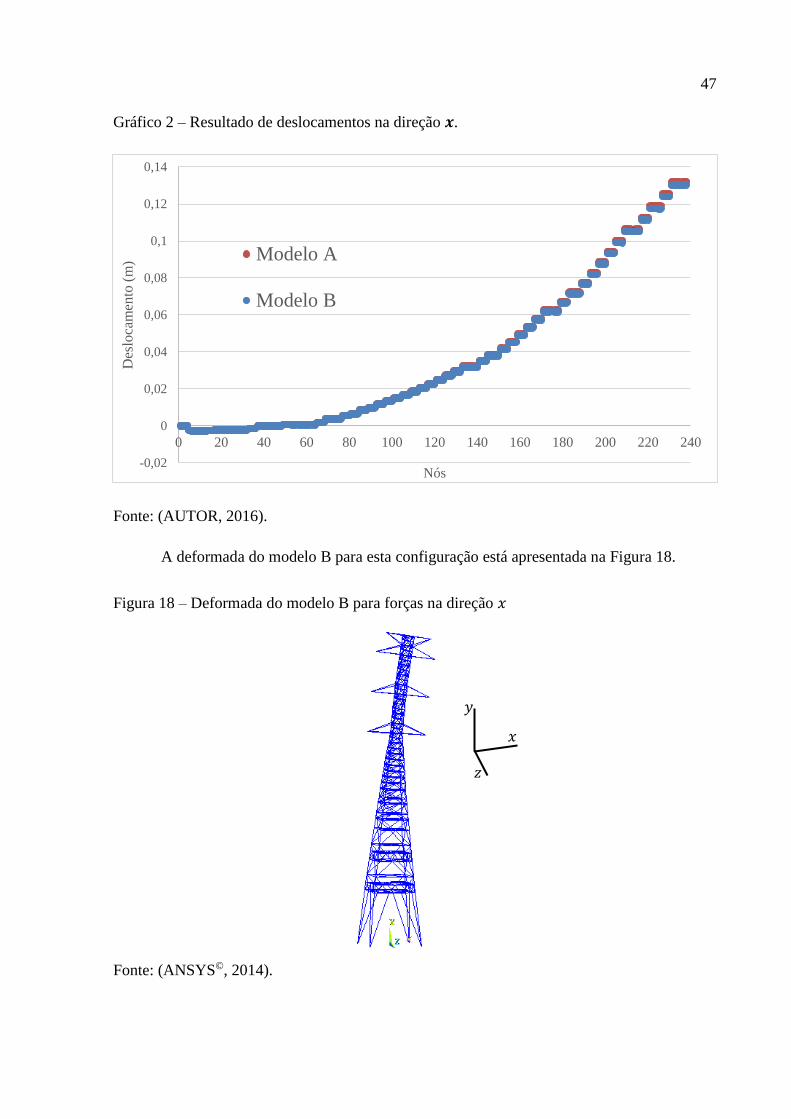
Gráfico 2 – Resultado de deslocamentos na direção 𝒙.
Fonte: (AUTOR, 2016).
A deformada do modelo B para esta configuração está apresentada na Figura 18.
Figura 18 – Deformada do modelo B para forças na direção 𝑥
Fonte: (ANSYS©, 2014).
𝑦
𝑧
𝑥
48
-0,05
0
0,05
0,1
0,15
0,2
0 20 40 60 80 100 120 140 160 180 200 220 240
Des
loca
men
to (
m)
Nós
Modelo A
Modelo B
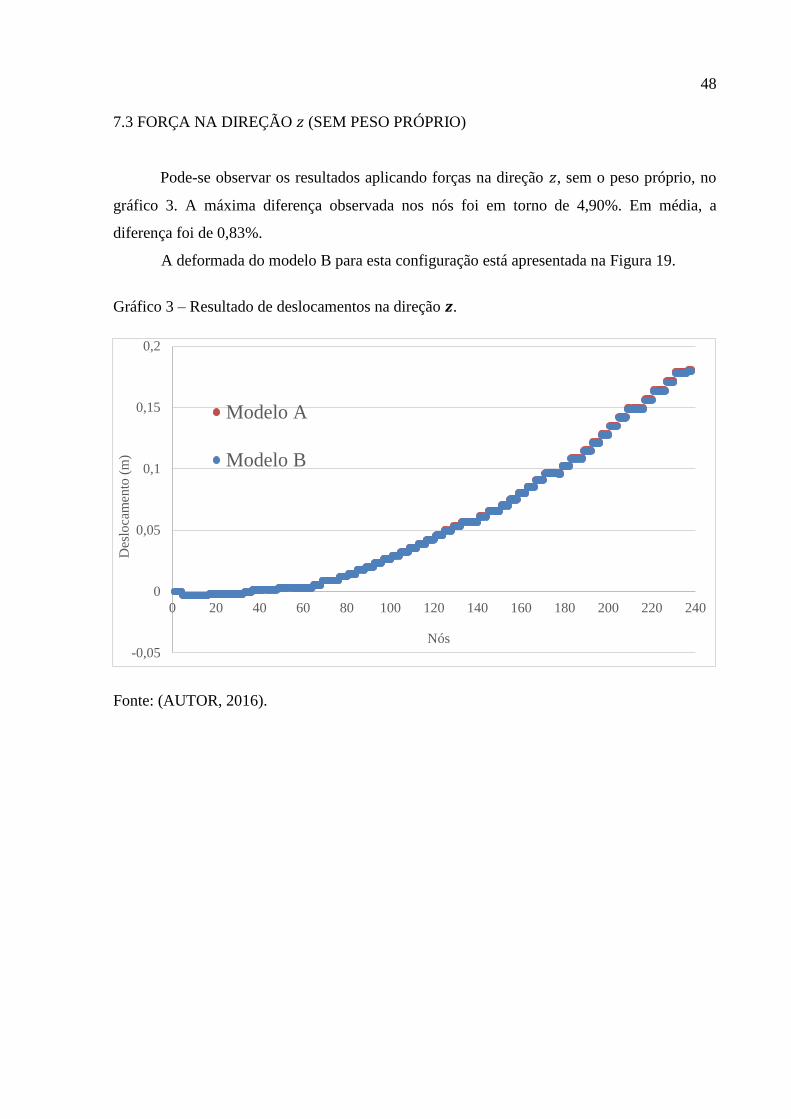
7.3 FORÇA NA DIREÇÃO 𝑧 (SEM PESO PRÓPRIO)
Pode-se observar os resultados aplicando forças na direção 𝑧, sem o peso próprio, no
gráfico 3. A máxima diferença observada nos nós foi em torno de 4,90%. Em média, a
diferença foi de 0,83%.
A deformada do modelo B para esta configuração está apresentada na Figura 19.
Gráfico 3 – Resultado de deslocamentos na direção 𝒛.
Fonte: (AUTOR, 2016).
49
Figura 19 – Deformada do modelo B para forças na direção 𝑧
Fonte: (ANSYS©, 2014).
Desta forma, verifica-se que a área das barras fictícias introduzidas no modelo B estão
ajustadas, de tal forma que, não influenciam demasiadamente os resultados de deslocamentos
em relação ao modelo A.
𝑦
𝑧 𝑥
50
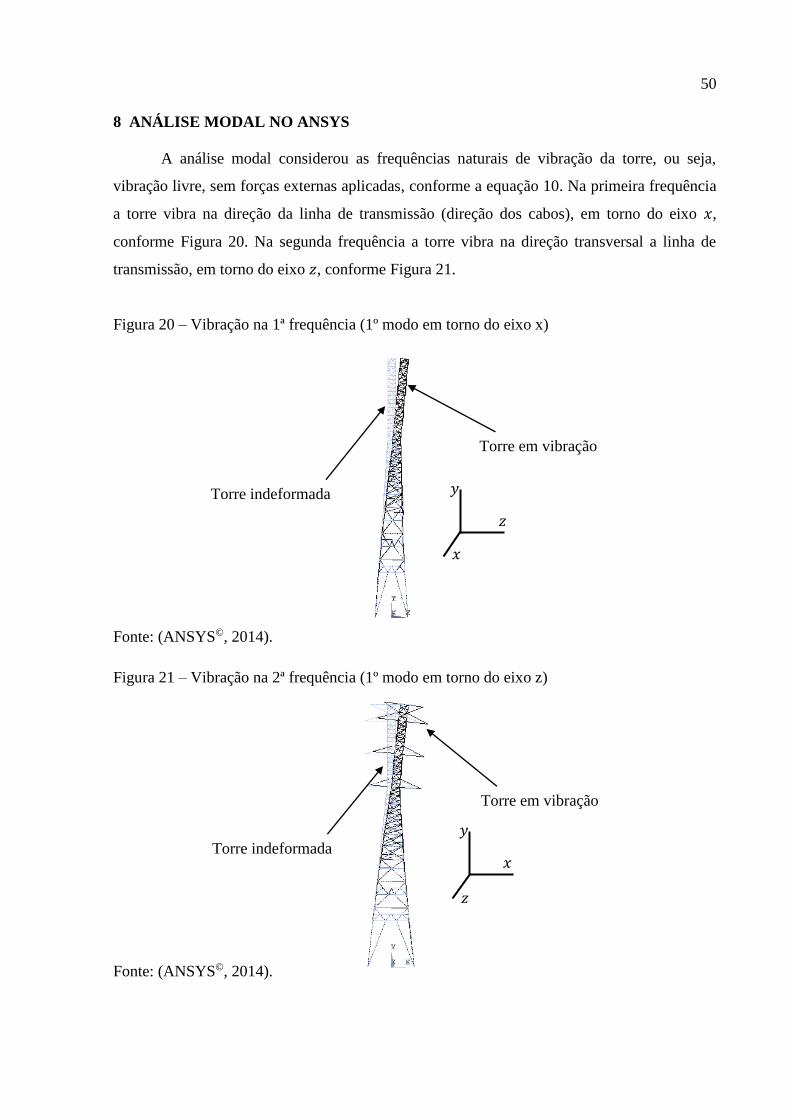
8 ANÁLISE MODAL NO ANSYS
A análise modal considerou as frequências naturais de vibração da torre, ou seja,
vibração livre, sem forças externas aplicadas, conforme a equação 10. Na primeira frequência
a torre vibra na direção da linha de transmissão (direção dos cabos), em torno do eixo 𝑥,
conforme Figura 20. Na segunda frequência a torre vibra na direção transversal a linha de
transmissão, em torno do eixo 𝑧, conforme Figura 21.
Figura 20 – Vibração na 1ª frequência (1º modo em torno do eixo x)
Fonte: (ANSYS©, 2014).
Figura 21 – Vibração na 2ª frequência (1º modo em torno do eixo z)
Fonte: (ANSYS©, 2014).
Torre em vibração
Torre indeformada
Torre em vibração
Torre indeformada
𝑦
𝑧
𝑥
𝑦
𝑧
𝑥
51
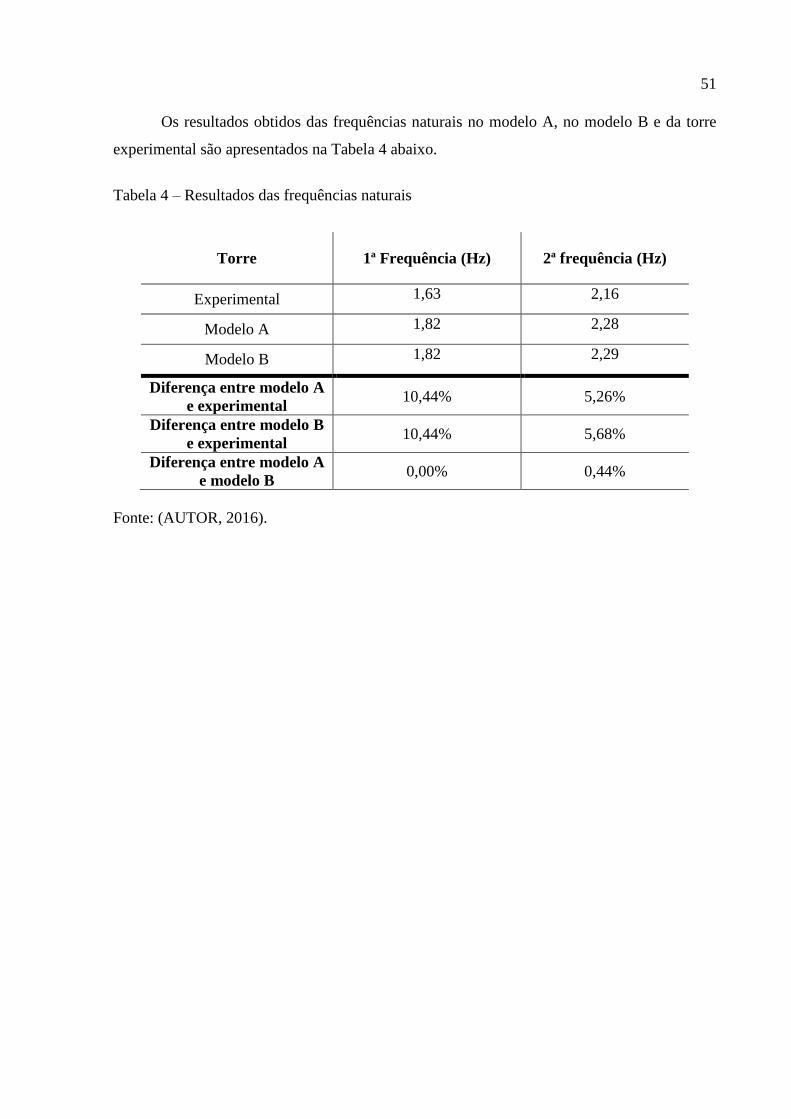
Os resultados obtidos das frequências naturais no modelo A, no modelo B e da torre
experimental são apresentados na Tabela 4 abaixo.
Tabela 4 – Resultados das frequências naturais
Fonte: (AUTOR, 2016).
Torre 1ª Frequência (Hz) 2ª frequência (Hz)
Experimental 1,63 2,16
Modelo A 1,82 2,28
Modelo B 1,82 2,29
Diferença entre modelo A
e experimental 10,44% 5,26%
Diferença entre modelo B
e experimental 10,44% 5,68%
Diferença entre modelo A
e modelo B 0,00% 0,44%
52
9 ANÁLISE PELO MÉTODO DA INTEGRAÇÃO DIRETA (MODELO B)
Para a análise com o método da integração direta foi utilizado um programa
desenvolvido pelo Professor Dr. João Kaminski Junior (2007) para resposta dinâmica de
torres de LT’s, escrito na linguagem FORTRAN, denominado MID.
Um dos primeiros passos para a integração direta é calcular o intervalo de integração
como explicado no item 4.6.
9.1 CÁLCULO DO INTERVALO DE INTEGRAÇÃO CRÍTICO (∆𝑡𝑐𝑟𝑖𝑡)
Para o cálculo do ∆𝑡𝑐𝑟𝑖𝑡 foram feitas duas verificações, considerando as barras reais e
fictícias e considerando apenas as barras reais.
Considerando apenas as barras reais, utiliza-se da equação 53, que, como comentado,
é usada para estruturas com elementos somente de treliça, como é o caso. O menor
comprimento das barras é 0,564 m, o módulo de elasticidade do aço é 2,00. 1011 N/m e a
massa específica utilizada é 11400 kg/m³, resultando em:
∆𝑡𝑐𝑟𝑖𝑡 =𝑙𝑚𝑖𝑛
√𝐸𝜌
=0,564
√2,00. 1011
11400
= 1,35. 10−4 s (54)
Com as barras fictícias e reais, foi utilizada a equação 52 (∆𝑡𝑐𝑟𝑖𝑡 =𝑇𝑛
𝜋). Para o cálculo
da frequência fundamental das barras, foi empregada a equação 55:
𝑓𝑚 =1
𝜋 𝐿 √
𝐸 𝐴
𝑝
(55)
na qual
𝑓𝑚: frequência fundamental (axial) para barra bi-rotulada (Hz);
𝐿: comprimento da barra (m);
𝐸: módulo de elasticidade longitudinal do material (N/m²);
𝑝: massa linear da barra, depende da área e massa específica do perfil (kg/m);

53
𝐴: área das barras (m²).
Logo, o período fundamental é dado por:
𝑇𝑚 =1
𝑓𝑚= 𝑇𝑛
(56)
Calcula-se esse valor para cada barra e utiliza-se o menor período 𝑇𝑛, pois é derivado
da maior frequência. O menor período encontrado foi de 2,3618. 10−5 s, logo, o valor do
intervalo de integração crítico foi de:
∆𝑡𝑐𝑟𝑖𝑡 =2,3618. 10−5
𝜋= 7,52. 10−6 s (57)
Assim, para o método da integração direta ser estável, é necessário que o intervalo de
integração (∆𝑡) seja menor que o valor acima calculado, ou seja:
∆𝑡 ≤ 7,52. 10−6 s (58)
Para se ter certeza da convergência, foram testados dois intervalos de integração.
∆𝑡 = 5,0. 10−6 s;
∆𝑡 = 1,0. 10−6 s.
Foram feitos os seguintes passos:
Aplicação do peso próprio até os 5 segundos de análise;
Dos 10 segundos até 15 segundos, foi aplicada uma força de 10 kN na direção 𝑥 da
torre, em um nó de topo;
Aos 20 segundos a força foi encerrada abruptamente;
Aos 30 segundos terminam-se os cálculos.
54
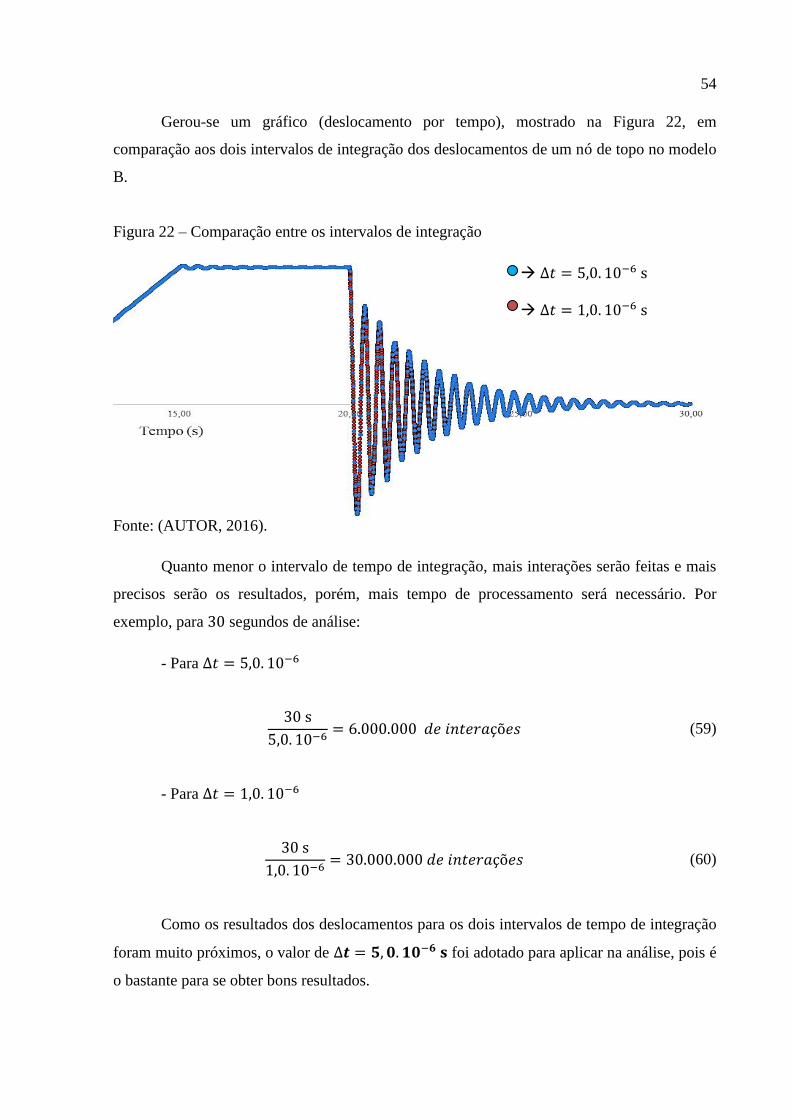
Gerou-se um gráfico (deslocamento por tempo), mostrado na Figura 22, em
comparação aos dois intervalos de integração dos deslocamentos de um nó de topo no modelo
B.
Figura 22 – Comparação entre os intervalos de integração
Fonte: (AUTOR, 2016).
Quanto menor o intervalo de tempo de integração, mais interações serão feitas e mais
precisos serão os resultados, porém, mais tempo de processamento será necessário. Por
exemplo, para 30 segundos de análise:
- Para ∆𝑡 = 5,0. 10−6
30 s
5,0. 10−6= 6.000.000 𝑑𝑒 𝑖𝑛𝑡𝑒𝑟𝑎çõ𝑒𝑠 (59)
- Para ∆𝑡 = 1,0. 10−6
30 s
1,0. 10−6= 30.000.000 𝑑𝑒 𝑖𝑛𝑡𝑒𝑟𝑎çõ𝑒𝑠 (60)
Como os resultados dos deslocamentos para os dois intervalos de tempo de integração
foram muito próximos, o valor de ∆𝒕 = 𝟓, 𝟎. 𝟏𝟎−𝟔 𝐬 foi adotado para aplicar na análise, pois é
o bastante para se obter bons resultados.
∆𝑡 = 5,0. 10−6 s
∆𝑡 = 1,0. 10−6 s
55
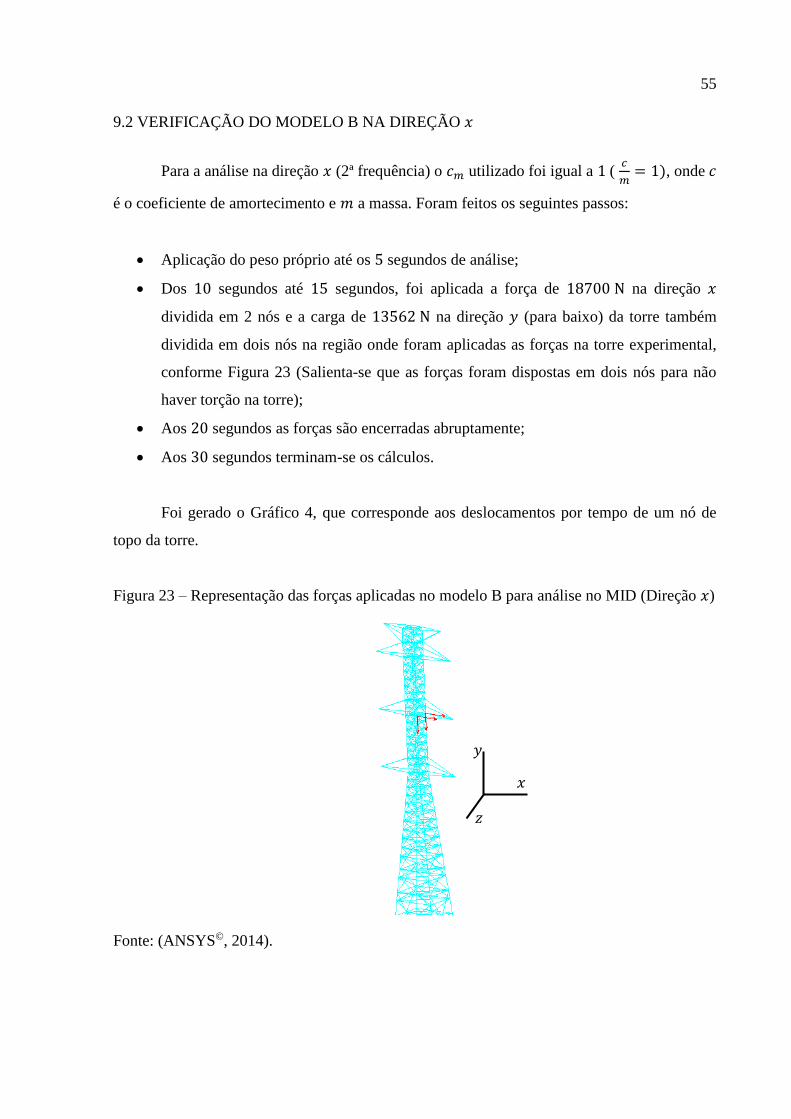
9.2 VERIFICAÇÃO DO MODELO B NA DIREÇÃO 𝑥
Para a análise na direção 𝑥 (2ª frequência) o 𝑐𝑚 utilizado foi igual a 1 ( 𝑐
𝑚= 1), onde 𝑐
é o coeficiente de amortecimento e 𝑚 a massa. Foram feitos os seguintes passos:
Aplicação do peso próprio até os 5 segundos de análise;
Dos 10 segundos até 15 segundos, foi aplicada a força de 18700 N na direção 𝑥
dividida em 2 nós e a carga de 13562 N na direção 𝑦 (para baixo) da torre também
dividida em dois nós na região onde foram aplicadas as forças na torre experimental,
conforme Figura 23 (Salienta-se que as forças foram dispostas em dois nós para não
haver torção na torre);
Aos 20 segundos as forças são encerradas abruptamente;
Aos 30 segundos terminam-se os cálculos.
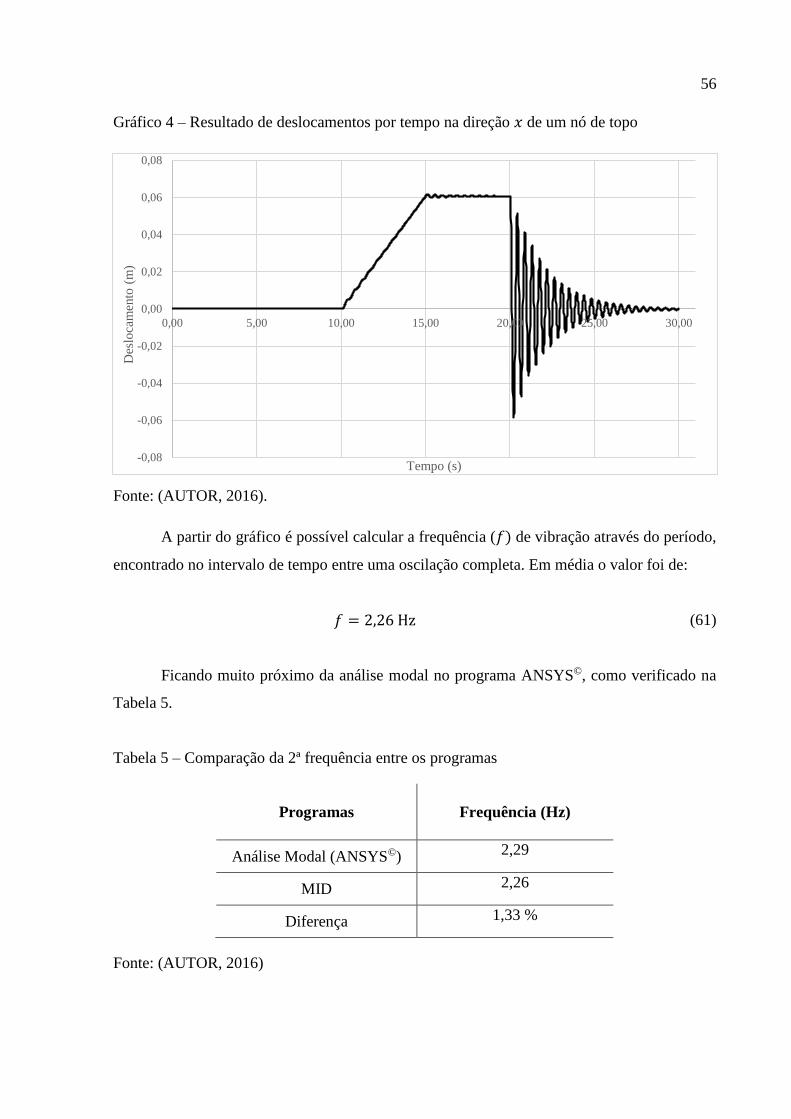
Foi gerado o Gráfico 4, que corresponde aos deslocamentos por tempo de um nó de
topo da torre.
Figura 23 – Representação das forças aplicadas no modelo B para análise no MID (Direção 𝑥)
Fonte: (ANSYS©, 2014).
𝑦
𝑧
𝑥
56
-0,08
-0,06
-0,04
-0,02
0,00
0,02
0,04
0,06
0,08
0,00 5,00 10,00 15,00 20,00 25,00 30,00
Des
loca
men
to (
m)
Tempo (s)
Gráfico 4 – Resultado de deslocamentos por tempo na direção 𝑥 de um nó de topo
Fonte: (AUTOR, 2016).
A partir do gráfico é possível calcular a frequência (𝑓) de vibração através do período,
encontrado no intervalo de tempo entre uma oscilação completa. Em média o valor foi de:
𝑓 = 2,26 Hz (61)
Ficando muito próximo da análise modal no programa ANSYS©, como verificado na
Tabela 5.
Tabela 5 – Comparação da 2ª frequência entre os programas
Fonte: (AUTOR, 2016)
Programas Frequência (Hz)
Análise Modal (ANSYS©) 2,29
MID 2,26
Diferença 1,33 %
57
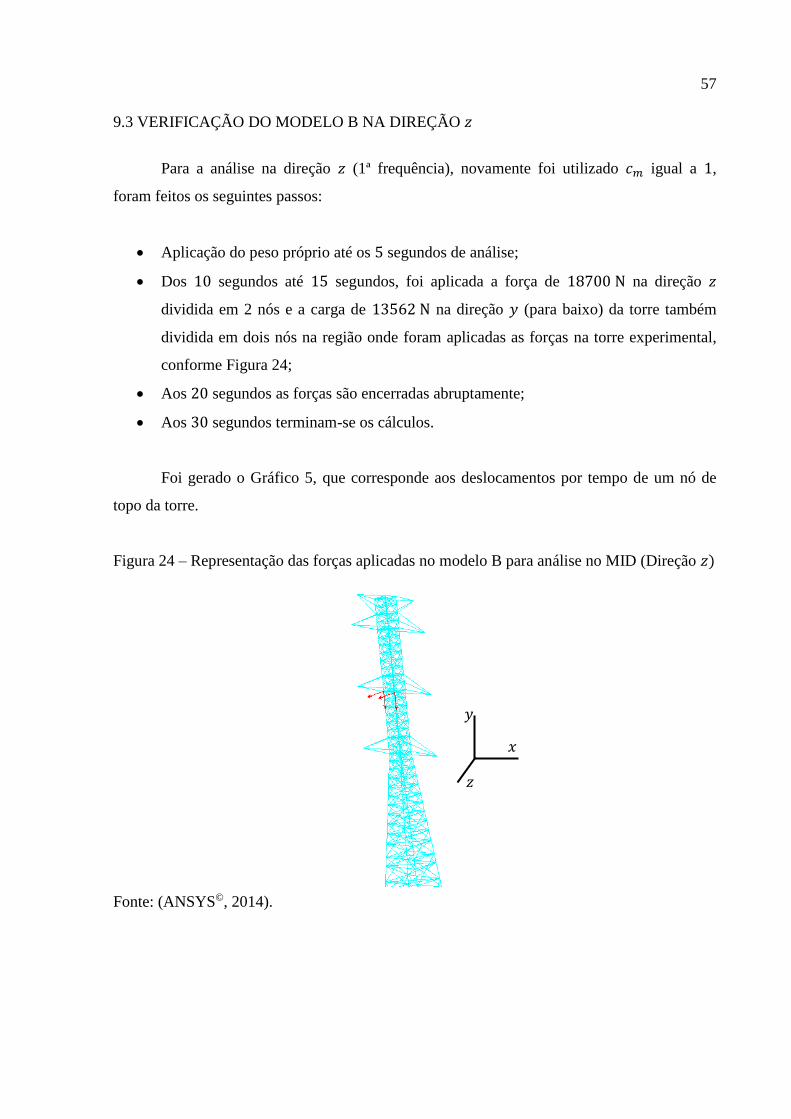
9.3 VERIFICAÇÃO DO MODELO B NA DIREÇÃO 𝑧
Para a análise na direção 𝑧 (1ª frequência), novamente foi utilizado 𝑐𝑚 igual a 1,
foram feitos os seguintes passos:
Aplicação do peso próprio até os 5 segundos de análise;
Dos 10 segundos até 15 segundos, foi aplicada a força de 18700 N na direção 𝑧
dividida em 2 nós e a carga de 13562 N na direção 𝑦 (para baixo) da torre também
dividida em dois nós na região onde foram aplicadas as forças na torre experimental,
conforme Figura 24;
Aos 20 segundos as forças são encerradas abruptamente;
Aos 30 segundos terminam-se os cálculos.
Foi gerado o Gráfico 5, que corresponde aos deslocamentos por tempo de um nó de
topo da torre.
Figura 24 – Representação das forças aplicadas no modelo B para análise no MID (Direção 𝑧)
Fonte: (ANSYS©, 2014).
𝑦
𝑧
𝑥
58
-0,10
-0,08
-0,06
-0,04
-0,02
0,00
0,02
0,04
0,06
0,08
0,10
0,12
0,00 5,00 10,00 15,00 20,00 25,00 30,00
Des
loca
men
to (
m)
Tempo (s)
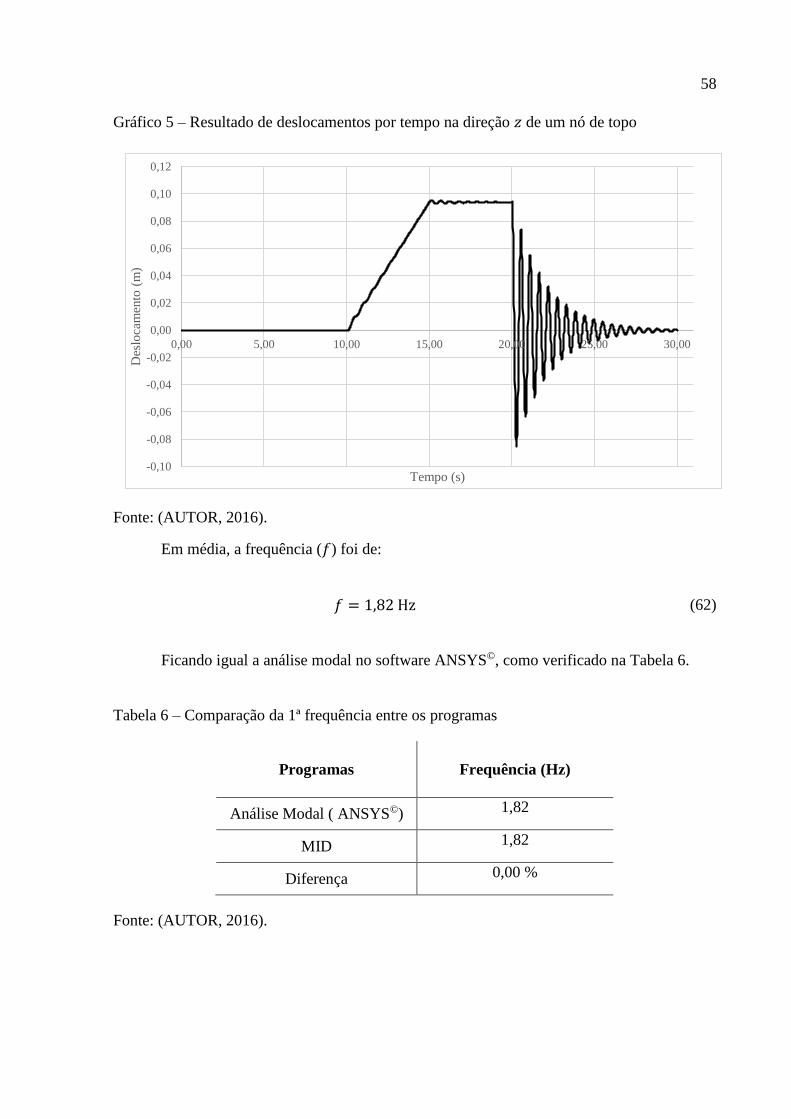
Gráfico 5 – Resultado de deslocamentos por tempo na direção 𝑧 de um nó de topo
Fonte: (AUTOR, 2016).
Em média, a frequência (𝑓) foi de:
𝑓 = 1,82 Hz (62)
Ficando igual a análise modal no software ANSYS©, como verificado na Tabela 6.
Tabela 6 – Comparação da 1ª frequência entre os programas
Fonte: (AUTOR, 2016).
Programas Frequência (Hz)
Análise Modal ( ANSYS©) 1,82
MID 1,82
Diferença 0,00 %
59
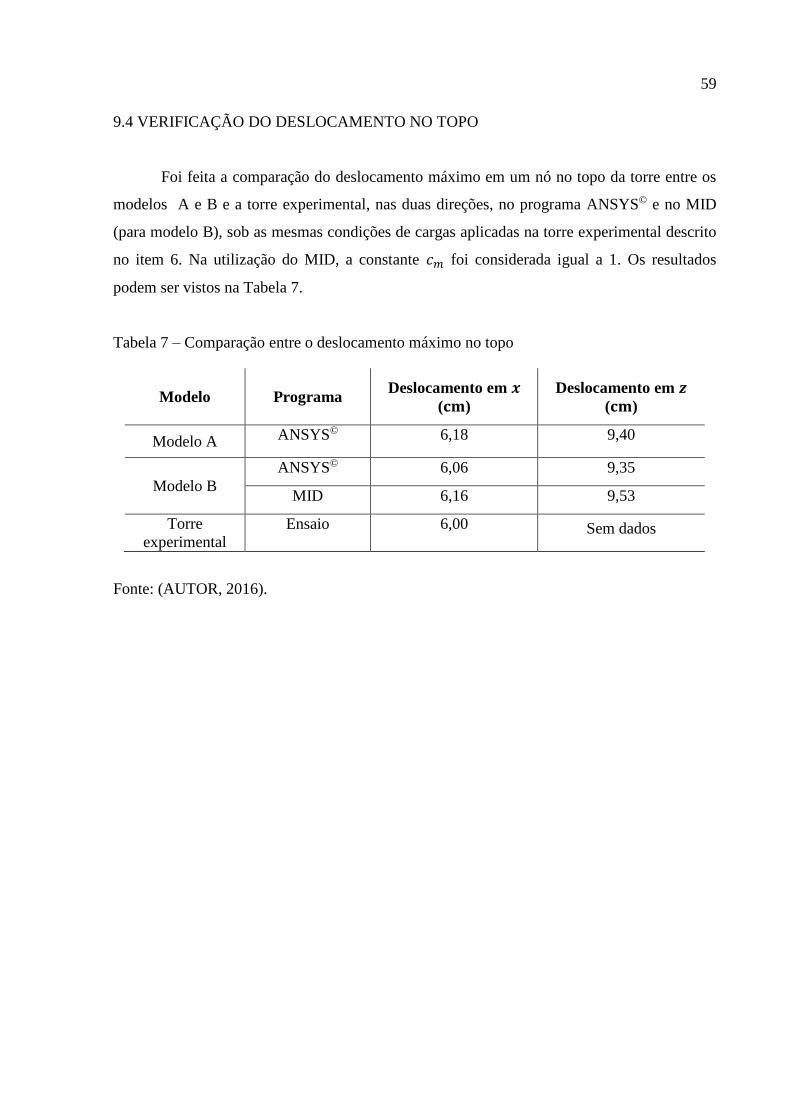
9.4 VERIFICAÇÃO DO DESLOCAMENTO NO TOPO
Foi feita a comparação do deslocamento máximo em um nó no topo da torre entre os
modelos A e B e a torre experimental, nas duas direções, no programa ANSYS© e no MID
(para modelo B), sob as mesmas condições de cargas aplicadas na torre experimental descrito
no item 6. Na utilização do MID, a constante 𝑐𝑚 foi considerada igual a 1. Os resultados
podem ser vistos na Tabela 7.
Tabela 7 – Comparação entre o deslocamento máximo no topo
Fonte: (AUTOR, 2016).
Modelo Programa Deslocamento em 𝒙
(𝐜𝐦)
Deslocamento em 𝒛
(𝐜𝐦)
Modelo A ANSYS© 6,18 9,40
Modelo B
ANSYS© 6,06 9,35
MID 6,16 9,53
Torre
experimental
Ensaio 6,00 Sem dados
60
10 RAZÃO DE AMORTECIMENTO DA TORRE EXPERIMENTAL
O cálculo da razão de amortecimento (𝜁) da torre experimental foi feito de maneira
manual, pois só se dispunha da resposta no tempo dos deslocamentos.
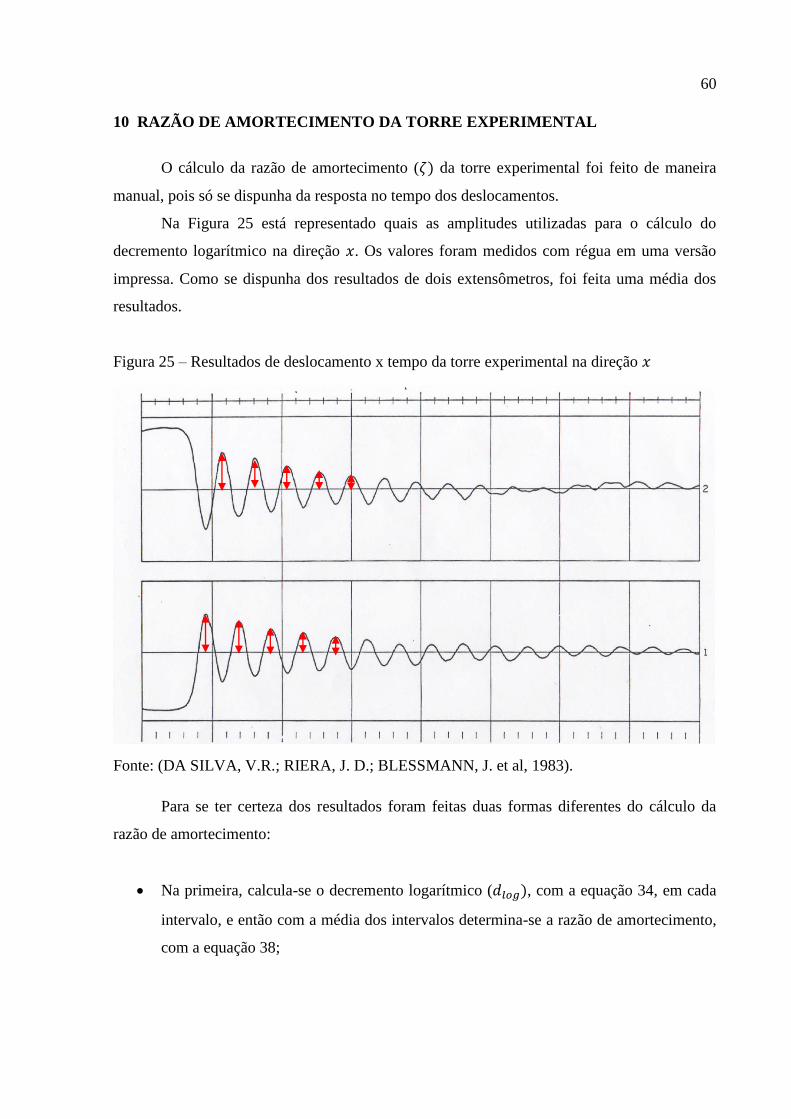
Na Figura 25 está representado quais as amplitudes utilizadas para o cálculo do
decremento logarítmico na direção 𝑥. Os valores foram medidos com régua em uma versão
impressa. Como se dispunha dos resultados de dois extensômetros, foi feita uma média dos
resultados.
Figura 25 – Resultados de deslocamento x tempo da torre experimental na direção 𝑥
Fonte: (DA SILVA, V.R.; RIERA, J. D.; BLESSMANN, J. et al, 1983).
Para se ter certeza dos resultados foram feitas duas formas diferentes do cálculo da
razão de amortecimento:
Na primeira, calcula-se o decremento logarítmico (𝑑𝑙𝑜𝑔), com a equação 34, em cada
intervalo, e então com a média dos intervalos determina-se a razão de amortecimento,
com a equação 38;
61
Na segunda, calcula-se o decremento logarítmico em um intervalo com “𝑝” ciclos,
também com a equação 34 e então determina-se a razão de amortecimento com a
equação 39.
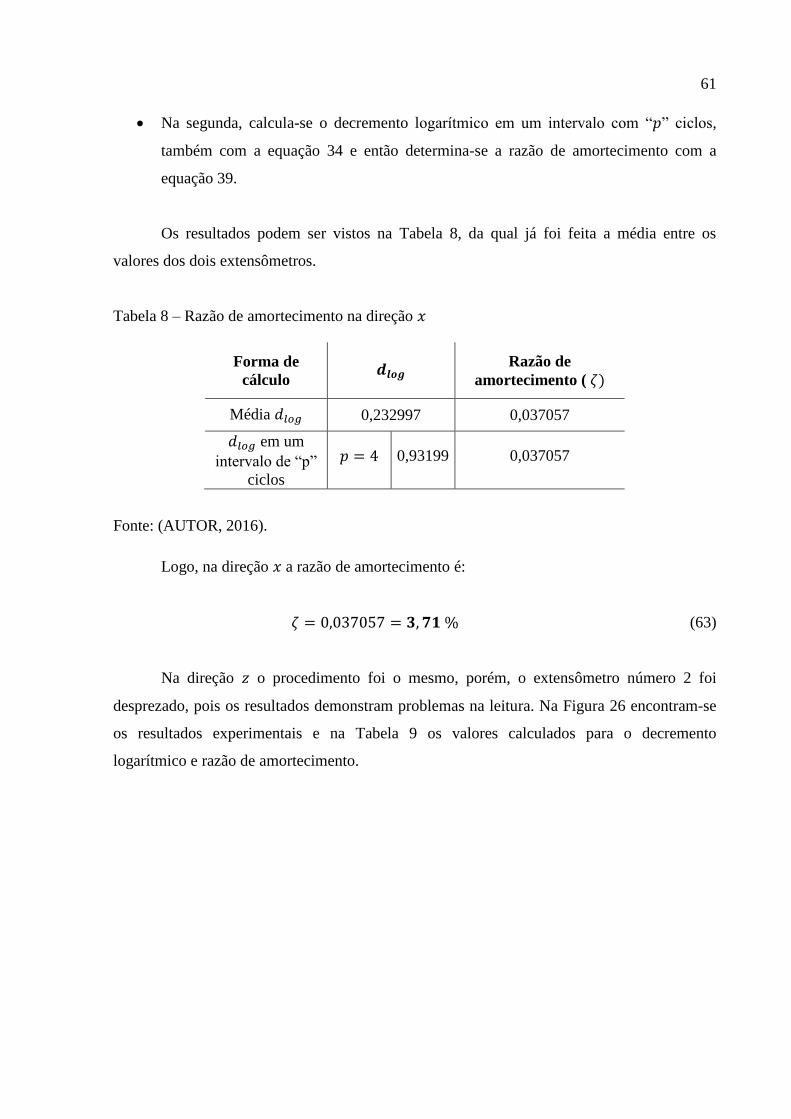
Os resultados podem ser vistos na Tabela 8, da qual já foi feita a média entre os
valores dos dois extensômetros.
Tabela 8 – Razão de amortecimento na direção 𝑥
Fonte: (AUTOR, 2016).
Logo, na direção 𝑥 a razão de amortecimento é:
𝜁 = 0,037057 = 𝟑, 𝟕𝟏 % (63)
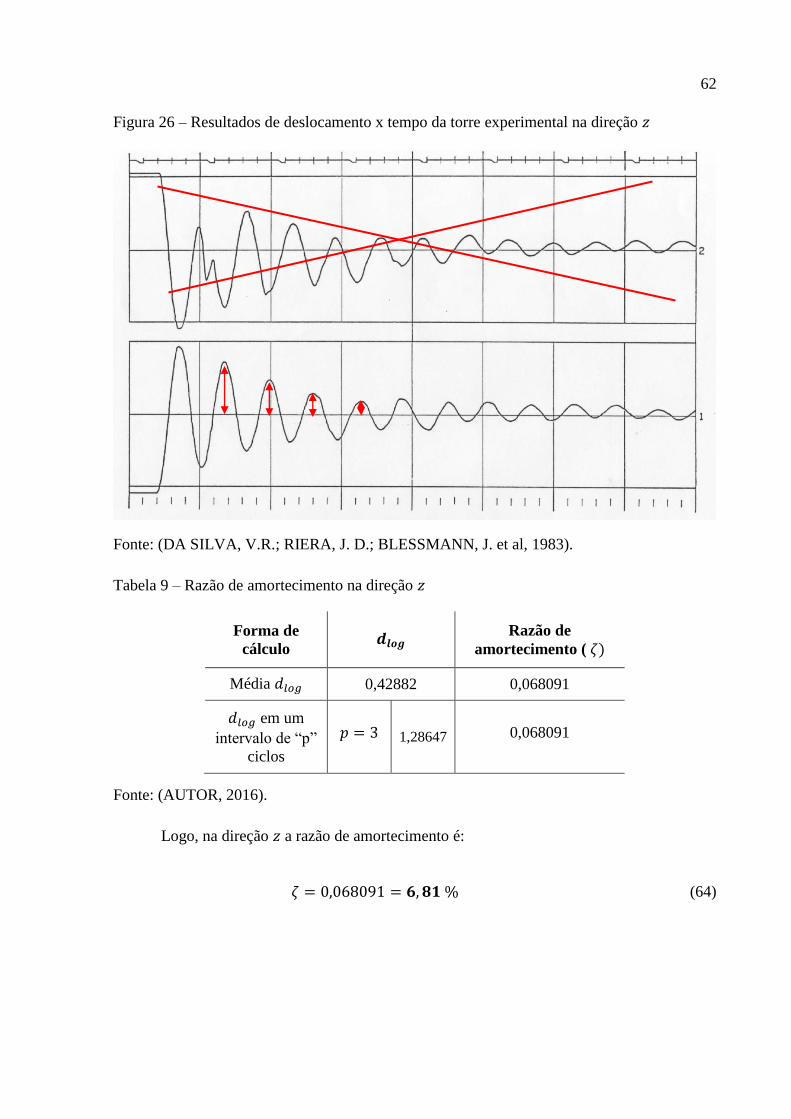
Na direção 𝑧 o procedimento foi o mesmo, porém, o extensômetro número 2 foi
desprezado, pois os resultados demonstram problemas na leitura. Na Figura 26 encontram-se
os resultados experimentais e na Tabela 9 os valores calculados para o decremento
logarítmico e razão de amortecimento.
Forma de
cálculo 𝒅𝒍𝒐𝒈
Razão de
amortecimento ( 𝜁)
Média 𝑑𝑙𝑜𝑔 0,232997 0,037057
𝑑𝑙𝑜𝑔 em um
intervalo de “p”
ciclos
𝑝 = 4 0,93199 0,037057
62
Figura 26 – Resultados de deslocamento x tempo da torre experimental na direção 𝑧
Fonte: (DA SILVA, V.R.; RIERA, J. D.; BLESSMANN, J. et al, 1983).
Tabela 9 – Razão de amortecimento na direção 𝑧
Fonte: (AUTOR, 2016).
Logo, na direção 𝑧 a razão de amortecimento é:
𝜁 = 0,068091 = 𝟔, 𝟖𝟏 % (64)
Forma de
cálculo 𝒅𝒍𝒐𝒈
Razão de
amortecimento ( 𝜁)
Média 𝑑𝑙𝑜𝑔 0,42882 0,068091
𝑑𝑙𝑜𝑔 em um
intervalo de “p”
ciclos
𝑝 = 3 1,28647 0,068091

63
11 RAZÃO DE AMORTECIMENTO NO MODELO B
Para o modelo B, o procedimento adotado foi o mesmo para os cálculos feitos na torre
experimental, sempre usando amplitudes de pelo menos 4 ciclos de oscilação. Foram testados
diversos valores de 𝑐𝑚 até chegar em valores de razão de amortecimento próximos ao da torre
experimental.
Começou-se verificando qual a razão de amortecimento para 𝑐𝑚 = 1 e então foi-se
testando valores, sabendo que quanto maior o 𝑐𝑚 maior será a razão de amortecimento. Os
resultados são observados na Tabela 10.
Tabela 10 – Valores de 𝑐𝑚 e razão de amortecimento do modelo B
Fonte: (AUTOR, 2016).
Logo:
- Na direção 𝑥
𝒄𝒎 = 𝟏, 𝟎𝟒 → 𝜁 = 3,69% → 𝑑𝑖𝑓𝑒𝑟𝑒𝑛ç𝑎 𝑑𝑒 0,43% 𝑐𝑜𝑚 𝑎 𝑡𝑜𝑟𝑟𝑒 𝑒𝑥𝑝𝑒𝑟𝑖𝑚𝑒𝑛𝑡𝑎𝑙
- Na direção 𝑧
𝒄𝒎 = 𝟏, 𝟓𝟒 → 𝜁 = 6,80% → 𝑑𝑖𝑓𝑒𝑟𝑒𝑛ç𝑎 𝑑𝑒 0,15% 𝑐𝑜𝑚 𝑎 𝑡𝑜𝑟𝑟𝑒 𝑒𝑥𝑝𝑒𝑟𝑖𝑚𝑒𝑛𝑡𝑎𝑙
Direção 𝒄𝒎 = 𝟏 𝒄𝒎 Calibrado
𝒙 𝜁 = 3,55% Para 𝑐𝑚 = 1,04
𝜁 = 3,69%
𝒛 𝜁 = 4,44%
Para 𝑐𝑚 = 1,540
𝜁 = 6,80%
64
12 CONCLUSÃO
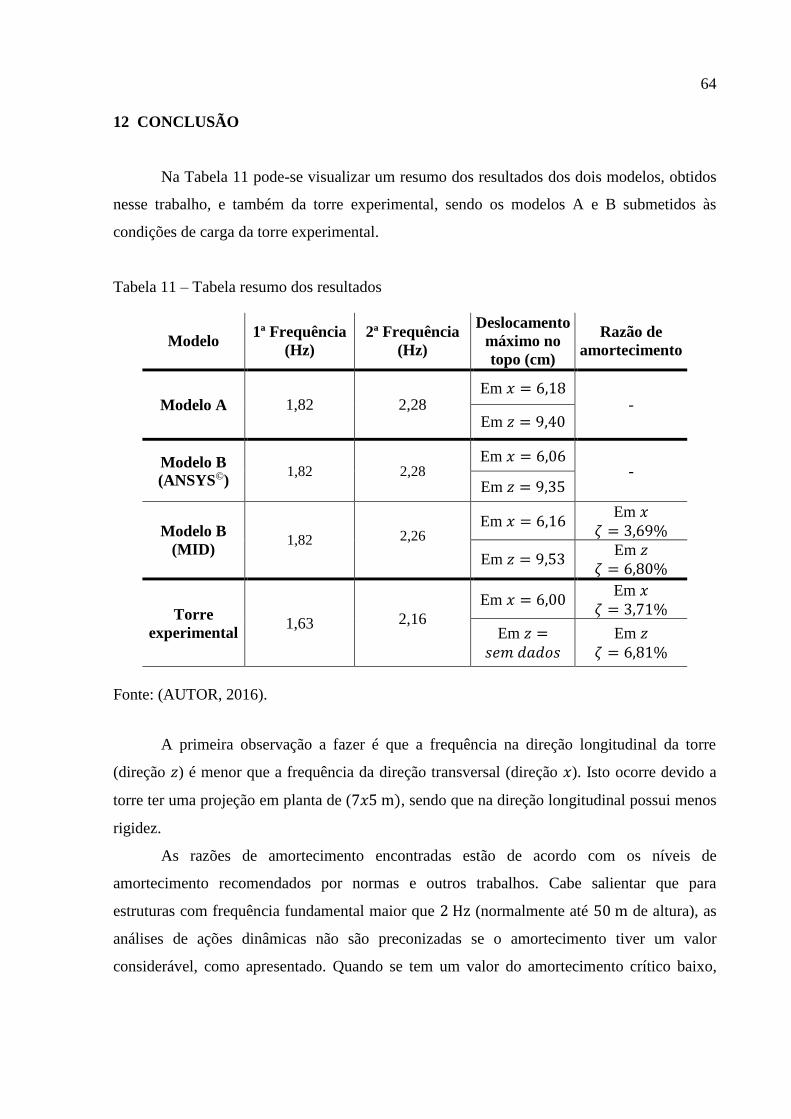
Na Tabela 11 pode-se visualizar um resumo dos resultados dos dois modelos, obtidos
nesse trabalho, e também da torre experimental, sendo os modelos A e B submetidos às
condições de carga da torre experimental.
Tabela 11 – Tabela resumo dos resultados
Fonte: (AUTOR, 2016).
A primeira observação a fazer é que a frequência na direção longitudinal da torre
(direção 𝑧) é menor que a frequência da direção transversal (direção 𝑥). Isto ocorre devido a
torre ter uma projeção em planta de (7𝑥5 m), sendo que na direção longitudinal possui menos
rigidez.
As razões de amortecimento encontradas estão de acordo com os níveis de
amortecimento recomendados por normas e outros trabalhos. Cabe salientar que para
estruturas com frequência fundamental maior que 2 Hz (normalmente até 50 m de altura), as
análises de ações dinâmicas não são preconizadas se o amortecimento tiver um valor
considerável, como apresentado. Quando se tem um valor do amortecimento crítico baixo,
Modelo 1ª Frequência
(Hz)
2ª Frequência
(Hz)
Deslocamento
máximo no
topo (cm)
Razão de
amortecimento
Modelo A 1,82 2,28 Em 𝑥 = 6,18
- Em 𝑧 = 9,40
Modelo B
(ANSYS©) 1,82 2,28
Em 𝑥 = 6,06 -
Em 𝑧 = 9,35
Modelo B
(MID) 1,82 2,26
Em 𝑥 = 6,16 Em 𝑥
𝜁 = 3,69%
Em 𝑧 = 9,53 Em 𝑧
𝜁 = 6,80%
Torre
experimental 1,63 2,16
Em 𝑥 = 6,00 Em 𝑥
𝜁 = 3,71%
Em 𝑧 =𝑠𝑒𝑚 𝑑𝑎𝑑𝑜𝑠
Em 𝑧
𝜁 = 6,81%
65
mais tempo a estrutura ficará oscilando com amplitudes que podem ser consideráveis, e
dependendo das condições externas, podem levar a estrutura ao colapso.
Como explanado, o coeficiente de amortecimento é um valor difícil de ser obtido, pois
demanda testes experimentais, que normalmente, são muito caros para serem executados.
Com este trabalho, conseguiu-se obter um valor de amortecimento proporcional a massa (𝑐𝑚)
razoável de 1,29 (média dos valores das duas direções) para ser utilizado em futuros projetos
de torres treliçadas auportantes de linha de transmissão, pois, as condições dessas análises são
correntes em projetos desse tipo.
A ausência de projetos considerando análises dinâmicas ainda são corriqueiros, porém,
nas condições atuais, devido ao alto custo de toda a LT, que normalmente são constituídas de
centenas de torres semelhantes, não se deve trabalhar com tantas incertezas.
Para trabalhos futuros, deve-se avaliar os efeitos no amortecimento quando a estrutura
está submetida ao peso dos cabos, ações dinâmicas de vento, ruptura de cabo, interação solo-
estrutura, entre outras ações. Pode-se verificar também a frequência de vibração à torção de
torres desse porte.
66
13 BIBLIOGRAFIA
ANSYS©: Engineering Analysis System, versão 15.0. ANSYS© 15.0 Documentation, 2014.
AZEVEDO, C. P. B. Avaliação da Confiabilidade de Fundações de Torres Estaiadas em
Linhas de Transmissão. 2007. 151 p. Dissertação (Mestrado em Engenharia de Estruturas)
— Universidade Federal de Minas Gerais, Belo Horizonte, MG, 2007.
BATHE K.J. Finite element procedures in engineering analysis. Englewood Cliffs, New
Jersey: Prentice-Hall, 1982. Cap. 9, p. 499-504.
COSSOLINO, L. C.; PEREIRA, A. H. A., Amortecimento: classificação e métodos de
determinação. Informativo Técnico-Científico ITC04 – Amortecimento/ATCP – Engenharia
Física, São Carlos, p. 3-10, 2010. Disponível em:
<http://www.atcp.com.br/imagens/produtos/sonelastic/artigos/ITC04-ATCP.pdf>. Acesso em:
29 março 2016.
DANZIGER, F. A. B. Curso de Introdução ao Projeto de Fundações para Linhas de
Transmissão. Rio de Janeiro: Cigré, 2010.
DA SILVA, V.R.; RIERA, J. D.; BLESSMANN, J. et al. Determinação experimental das
propriedades dinâmicas básicas de uma torre de transmissão de 230kV. VII SNPTEE,
Brasília, Brasil, 1983.
FÉLIX, C. J. M. K. Análise de uma torre metálica treliçada de linha de transmissão
submetida à ação do vento considerando a interação solo-estrutura. 2013. 97 p. Trabalho
de Conclusão de Curso (Graduação em Engenharia Civil) – Universidade Federal de Santa
Maria, Santa Maria, RS, 2013.
GONTIJO, C. R. Contribuição à Análise e Projeto de Torres Autoportantes de Linhas de
Transmissão. 1994, 129 p. Dissertação (Mestrando em Engenharia de Estruturas) –
Universidade Federal de Minas Gerais, Belo Horizonte, MG, 1994.
GROEHS, A. G. Mecânica Vibratória. 3. ed. São Leopoldo: Editora Unisinos, 2012. Cap.
16, p. 1-13.
HUMAR, J. L. Dynamics of structures. 2. ed. Amsterdam: A. A. Balkema Publishers, 2005.
Cap. 13, p. 751-752.
KAMINSKI Jr., J. Incertezas de Modelo na Análise de Torres Metálicas Treliçadas de
Linhas de Transmissão. 2007. 181 f. Tese (Doutorado em Engenharia Civil) – Universidade
Federal do Rio Grande do Sul, Porto Alegre, RS, 2007.
KAMINSKI Jr., J.; ALVA, G. M. S. ECC841 – Análise Estrutural II – Notas de Aula:
Apostila. Santa Maria: Universidade Federal de Santa Maria, 2014. 110 p.
LABEGALINI, P. R. et al. Projetos Mecânicos das Linhas Aéreas de Transmissão. 2. ed.
São Paulo: Edgard Blücher, 1992. Cap. 1, p. 19.
67
MENDES, P. Mestrado em Engenharia Civil – Dinâmica das estruturas: Apostila. Lisboa:
Instituto Superior de Engenharia de Lisboa, 2012. 183 p.
MENEZES, R. C. R. Failure-data based reliability assessment considering mechanical
model uncertainties. 1992. Ph.D. Thesis – Institut für Mechanik, Universität Innsbruck,
Austria. 1992.
MORRISON-KNUDSEN ENGENHARIA S.A. – Projeto Torre de Suspensão em
Alinhamento – Tipo DFS. 1983. Para: C.E.E.E. – Companhia Estadual de Energia elétrica.
Belo Horizonte, MG.
NABARRETE, A. Vibrações em Sistemas Mecânicos: Notas de Aula. São Bernardo do
Campo: Centro Universitário da FEI, 2005. 34 p.
SINGIRESU, S. R. Vibrações mecânicas. 4ª edição. São Paulo: Editoria Pearson Prentice
Hall, 2012. Cap. 1, p. 12-15.