atividade 5 - ma211- calculo ii - unicampmarcio/ps2015/nbooks/atv5matheus160925.pdf · de que a...
TRANSCRIPT

Atividade 5 - MA211- Calculo II -
Unicamp Desenvolvimento
Questão 1 e 2 : Matheus Rufino 160925
Questão 3: Leticia Martins Marreiro 146925
Apoio:
Professor Márcio Antônio de Faria Rosa
Wesley Henrique 140986
Eduardo Silva 155208
Vanessa Teixeira 139201
Gabriel Vieira 155482
Phillipe Oliveira 157020
Isabela G. Fernandes 159753
A priori, Ávila, nos elucida o conceito de que “ f é diferenciável num ponto (x0, y0) seΔf = ⅆ f +rη, onde η → 0 com r → 0”. Ou seja, há existência de um plano tangente a origem
de f em que a distância das perpendiculares do plano tangente ao plano Oxy tende a zero mais
depressa do que r.
Portanto, para que f da forma z = f(x,y) seja diferenciável num dado ponto
(x0, y0) a diferenciável assume a forma
ⅆz = ⅆf = fx (x0, y0) (x - x0) + fy (x0, y0) (y - y0).Sendo os acréscimos Δx e Δy
variáveis independentes ∀ n ϵ ℝ.
Printed by Wolfram Mathematica Student Edition

Caso f seja f(x,y) = x então fx = 1 e fx = 0 portanto ⅆf = Δx ou ⅆx = Δx ; ⅆy = Δy. Logo a expressão
da diferencial de f fica: ⅆf = fx ⅆx + fy ⅆy = ∂f ⅆx∂x
+ ∂f ⅆy∂y
. Onde ⅆx e ⅆy são agora as vars indepe-
dentes ∀ ⅆx,ⅆy ϵ ℝ.
Com isso, Ávila enuncia a condição de diferenciabilidade formulada em termos de ⅆf mais o incre-
mento. Denotando da forma como demonstrado anteriormente: rη + Δf = ⅆf. Juntamente a condição
de que a distância entre a superfície e o plano de equação π =
f (x0, y0) + fx(x0, y0) (x - x0) + fy(x0, y0) (y - y0)medida ao longo de perpendiculares ao plano Oxy tende
a zero mais depressa que r.
Mas, isso não é tudo, Ávila atenta ao fato de que NÃO basta que f tenha derivadas parciais uma
vez que funções não contínuas - logo não diferenciáveis - vez em quando possuem
∂z∂x
, ∂z∂y. Para que a função seja de fato diferenciável é condição necessária
e imprescindível que f seja contínua em todos e qualquer ponto (x0, y0).
Tendo em argumento o exemplo de uma função que possui tanto derivadas parciais como um
ponto contínuo mas não sendo diferenciável. Provando pelo absurdo o teorema “Toda função
diferenciável necessita abarcar tanto a condição de de ser derivável ∀ (x0, y0) ϵ ℝ e ser contínua
em todos os seus pontos e ter limite com r → 0”
Podemos com o auxílio do Mathematica verificar graficamente que f(x,y) = x y entra nesse
caso, tem derivadas parciais, continuidade em (0,0) mas não é diferenciável.
f[x_, y_] = Abs[x y] ;
2 Atv 5 - Calc II - Marcio FINAL.nb
Printed by Wolfram Mathematica Student Edition

aa = Plot3D Abs[x y] , {x, -8, 8}, {y, -8, 8}, AxesLabel → {"x", "y", "z"},
AxesStyle → Thick, Boxed → False, AxesOrigin → {0, 0, 0}
Como queríamos demonstrar, não existe um plano tangente a origem dessa f, portanto, não há
limite com r → 0. E a expressão fx(0, 0)ⅆx + fy(0, 0)ⅆy = 0 não engloba o conceito de uma
expressão diferencial.
Sendo assim, Ávila nos elucida uma nova condição necessária e prática para que a função seja de
fato diferenciável. Uma vez que os testes anteriores eram ou falhos ou complicados demais. “Para
que uma função seja diferenciável é suficiente que ela tenha derivadas parciais de primeira
ordem contínuas em toda uma vizinhança do ponto.”
Ora, mas isso não é nada mais nem nada menos que o TEOREMA DO VALOR MÉDIO (também
conhecido como Teorema de Lagrange). Teorema que afirma que dada uma função contínua,
geometricamente, isto significa que a tangente ao gráfico de f no ponto de abcissa c é paralela à
secante que passa pelos pontos de abcissas a e b.
Atv 5 - Calc II - Marcio FINAL.nb 3
Printed by Wolfram Mathematica Student Edition

O teorema portanto fica elucidado da forma “Seja f uma função com derivadas parciais de
primeira ordem contínuas num domínio aberto D. Então f é diferenciável em todo ponto de
D.” Ou seja, basta que a primeira derivada parcial, tanto para x como para y, seja contínua num
dado domínio para essa função. E para saber se uma função é contínua, aplica-se o teorema do
valor médio. Caso essa condição seja respeitada, sabemos que se trata de uma função não ape-
nas contínua, como diferenciável e derivável para x e para y. A demonstração desse teorema está
explicada passo a passo nas páginas 61 e 62 no capítulo 2 do livro do Ávila.
h[x_, y_] = 15 + 3 4 y2 + 1 24 y2 - 1 32 y4 - x2;
α[t_] = t 6 Cos[t], t 6 Sin[t];
ϕ[t_] = ht 6 Cos[t], t 6 Sin[t];
β[t_] = t 6 Cos[t], t 6 Sin[t], ϕ[t];
a2 = Plot3D[h[x, y], {x, -8, 8}, {y, -8, 8},
RegionFunction → Function[{x, y, z}, h[x, y] ≥ 0]];
4 Atv 5 - Calc II - Marcio FINAL.nb
Printed by Wolfram Mathematica Student Edition
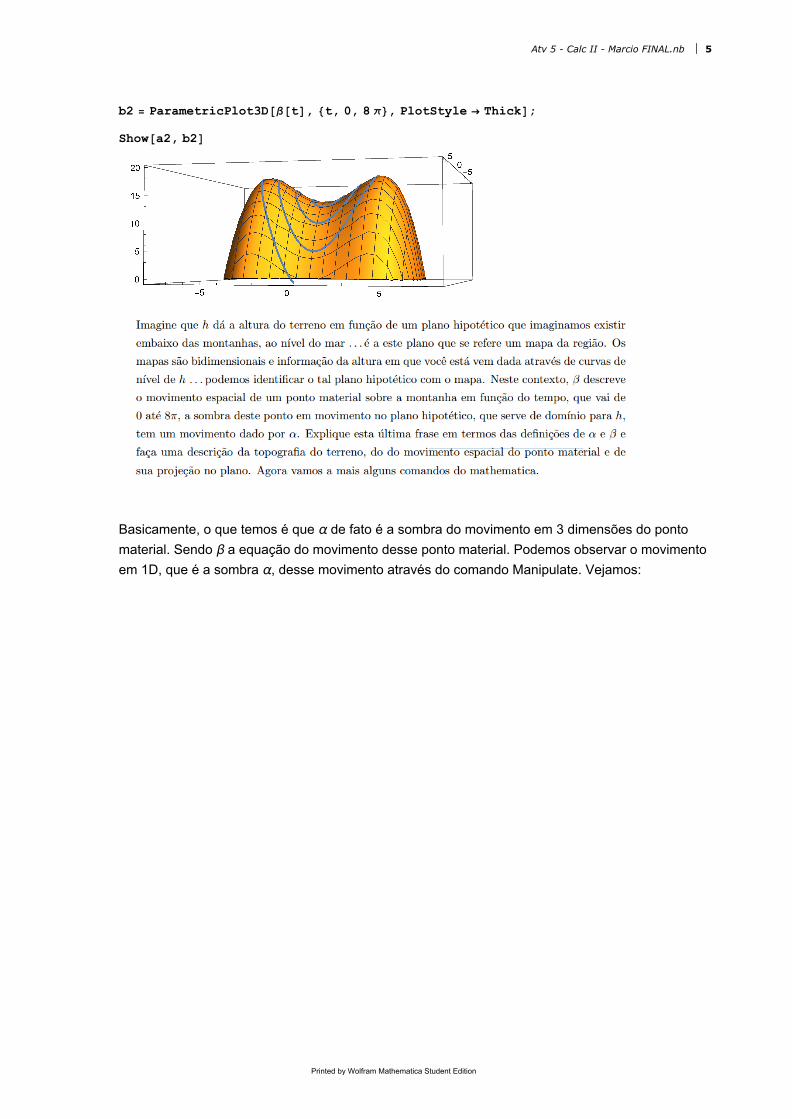
b2 = ParametricPlot3D[β[t], {t, 0, 8 π}, PlotStyle → Thick];
Show[a2, b2]
Basicamente, o que temos é que α de fato é a sombra do movimento em 3 dimensões do ponto
material. Sendo β a equação do movimento desse ponto material. Podemos observar o movimento
em 1D, que é a sombra α, desse movimento através do comando Manipulate. Vejamos:
Atv 5 - Calc II - Marcio FINAL.nb 5
Printed by Wolfram Mathematica Student Edition
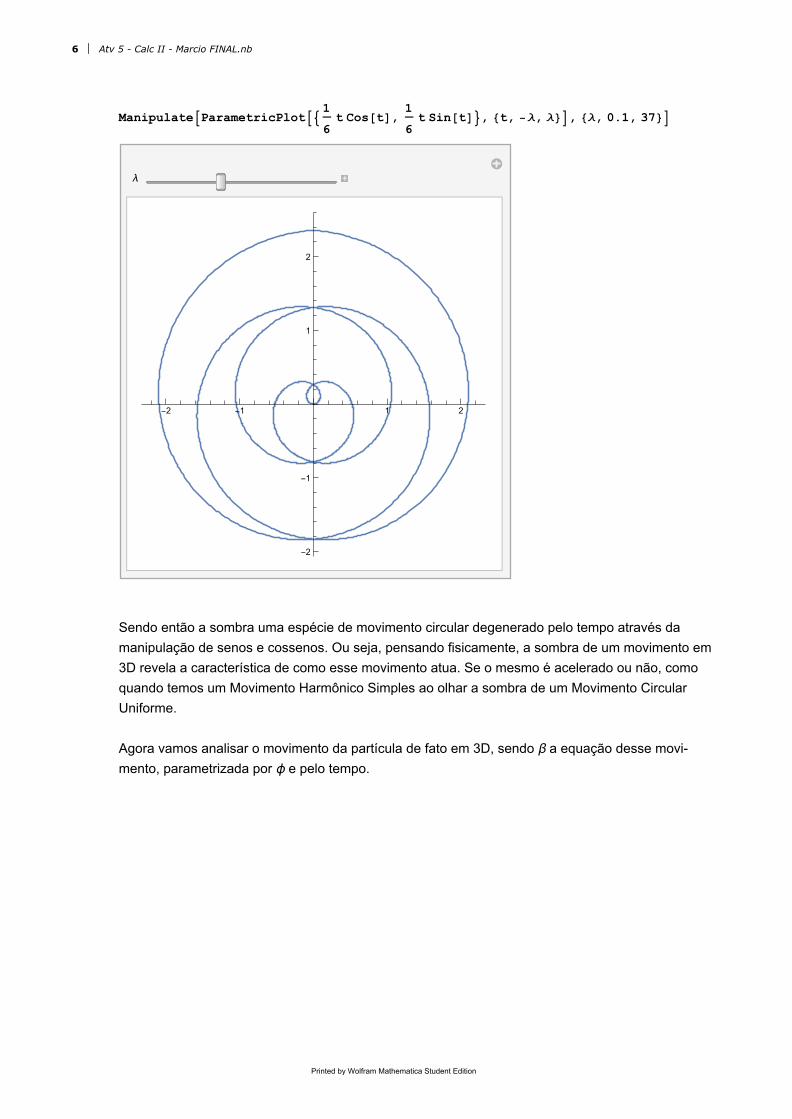
ManipulateParametricPlot1
6t Cos[t],
1
6t Sin[t], {t, -λ, λ}, {λ, 0.1, 37}
λ
-2 -1 1 2
-2
-1
1
2
Sendo então a sombra uma espécie de movimento circular degenerado pelo tempo através da
manipulação de senos e cossenos. Ou seja, pensando fisicamente, a sombra de um movimento em
3D revela a característica de como esse movimento atua. Se o mesmo é acelerado ou não, como
quando temos um Movimento Harmônico Simples ao olhar a sombra de um Movimento Circular
Uniforme.
Agora vamos analisar o movimento da partícula de fato em 3D, sendo β a equação desse movi-
mento, parametrizada por ϕ e pelo tempo.
6 Atv 5 - Calc II - Marcio FINAL.nb
Printed by Wolfram Mathematica Student Edition

ManipulateParametricPlot3D1
6t Cos[t],
1
6t Sin[t],
15 -1
36t2 Cos[t]2 +
19
864t2 Sin[t]2 -
t4 Sin[t]4
41 472, {t, -λ, λ}, {λ, 0.1, 37}
λ
Plot15 -1
36t2 Cos[t]2 +
19
864t2 Sin[t]2 -
t4 Sin[t]4
41 472,
{t, -37.69911184307752`, 37.69911184307752`}
-30 -20 -10 10 20 30
-20
-10
10
20
Finalmente podemos analisar o que de fato acontece nesse movimento ao longo do tempo. O
ponto material começa na base da montanha e tem seu movimento descrito por β parametrizado
Atv 5 - Calc II - Marcio FINAL.nb 7
Printed by Wolfram Mathematica Student Edition

tanto por ϕ como por Sin e Cos. Ou seja, ao longo do tempo o movimento elonga-se com as
funções trigonométricas e atinge os picos e vales do que é descrito por ϕ. Portanto, temos um
movimento relativamente uniforme de um ponto que começa na base da montanha e vai subindo
até um pico máximo de ϕ, como elonga-se trigonometricamente ele volta a descer um morro da
montanha, chega a base desse morro e depois sobe novamente, fazendo isso até atingir o pico
máximo dessa montanha.
c = ContourPlot[h[x, y], {x, -5, 5}, {y, -5, 5},
ContourShading → False, ContourLabels → True, Contours → 30];
gradh[x_, y_] = {D[h[x, y], x], D[h[x, y], y]};
d = StreamPlot[gradh[x, y], {x, -5, 5}, {y, -5, 5}];
e = ParametricPlot[α[t], {t, 0, 8 π}, PlotStyle → Thick];
Manipulate
Showc, d, e, GraphicsBlue, Arrowα[λ], α[λ] + 0.5 * α'[λ], {λ, 0, 8 π}
λ
6
12
18
24
30
36
42
48
54
60
66 66
66
66
72 72
72 72
78 78
78 78
84 84
84 84
90 90
90 90
96 96
96 96
102 102
102 102
108 108
108 108
114
114 114
114120 120
120 120
-5 0 5
-5
0
5
8 Atv 5 - Calc II - Marcio FINAL.nb
Printed by Wolfram Mathematica Student Edition

Plot[ϕ[t], {t, 0, 8 π}];
Em relação a interpretação das curvas e objetos podemos verificar que o comando ContourPlot nos
trouxe os contornos de nossa função h, que representa a topografia da montanha, StreamPlot nos
retorna as linhas do gradiente vetorial dessa função (obtido através das derivadas parciais) e há
clara indicação de que esses vetores estão apontando para os picos das montanhas, partindo do
plano ao nível do mar. Já o ParametricPlot, como o nome indica, parametriza através do tempo o
movimento β do ínicio da questão, sendo então a sombra do movimento do ponto material em 2
dimensões. Por fim, o comando Manipulate está a indicar o vetor tangente a curva, ou seja, a
derivada da posição que fisicamente é a interpretação da velocidade.
O movimento da sombra, como já analisamos anteriormente, é o reflexo em 2 dimensões do movi-
mento β em 3D. Ou seja, um movimento circular degenerado pelas componentes trigonométricas e
ϕ parametrizado pelo tempo. Como estamos em duas dimensões, podemos interpretar que o
movimento de subida ou descida pertencente a R3 está contemplado na expansão do Raio desse
círculo, formando vários círculos com raios cada vez maiores que indicam a degeneração em ϕ.
Sendo a degeneração curvílinea de responsabilidade trigonométrica Sin e Cos.
Por outro lado, as linhas do gradiente nos indicam na curva de nível os ponto de máximo partindo
de algum ponto do plano base da montanha. Sendo assim, o vetor da velocidade que é a derivada
em cada ponto da curva da sombra, atinge valores diferentes de aceleração, ou seja, a segunda
derivada nos retorna valores diferentes, dependendo de uma relação entre a curva de nível e o
vetor gradiente. Portanto, não se trata de uma velocidade contínua.
Plot[ϕ[t], {t, 0, 8 π}]
5 10 15 20 25
5
10
15
20
No último comando, para podermos observar esses pontos de máximo e mínimo precisamos
primeiro aumentar o número de contornos. Uma vez que o ϕ tem a função de dar os picos locais na
Atv 5 - Calc II - Marcio FINAL.nb 9
Printed by Wolfram Mathematica Student Edition

subida da função h, ou da montanha. Os pontos podem ser interpretados como estando no centro
de cada contorno máximo local do ContourPlot. Então são eles x cte = 0.00875; y = [-3.509;-0.787]
e y =[3.509;0787].
Em relação ao vetor velocidade, pode-se perceber que a segunda derivada (aceleração) será
negativa no pico positivo e positiva no pico negativo.
Para podermos entender melhor com o que estamos trabalhando, vamos definir uma função de
duas variáveis qualquer para entendimento de um caso para entender no geral.
O conceito de continuidade envolve a seguinte abordagem :
quando o Limite[f (p), p → a] = f(a) , esta função será continua. Sabe-se que a composta de duas
funções contínuas resulta em uma função contínua. No exemplo acima, temos que x² e y² são duas
funções contínuas, logo a composta das mesmas será contínua.
Agora observaremos a definição do TVI (Teorema do Valor Intermediário (TVI) (Bolzano)):
“ Se f(a, b) → R é uma função contínua então a imagem de f, Im(f) = f((a, b)), é um intervalo.
Isto é, se y ∈ R é tal que f(x1) < y < f(x2), com x1, x2 ∈ (a, b), então existe x ∈ (a, b) tal que f(x) = y. “
Portanto, este traço corta uma infinidade de conjuntos de nível da forma g(x, y) = k onde k assume
todos valores possíveis entre
x1 e x2, ou seja, qualquer ponto entre o dado intervalo está contido na curva, como apresenta o
TVI.
f[x_, y_] = x^2 + y^2;
ponto = Graphics[Point[{-1.472, -1.91}]];
c = ContourPlotx2 + y2, {x, -8, 8}, {y, -8, 8} , Axes -> True ,
ContourShading → False, ContourLabels → True, Contours → 20;
p = Plot[ 1 + 2 x , {x, -5, 5}];
10 Atv 5 - Calc II - Marcio FINAL.nb
Printed by Wolfram Mathematica Student Edition

Show[c, p, ponto]
6
12
18
24
30
36
42
48
54
60
66 66
66
66
72 72
72 72
78 78
78 78
84 84
84 84
90 90
90 90
96 96
96 96
102 102
102 102
108 108
108 108
114
114 114
114120 120
120 120
-5 0 5
-5
0
5
Agora, escolhemos 2 pontos dos contornos de f(x,y); f(x,y) = a= 24 e f(x,y)= b=18, e sabemos que
a reta é da forma a x +b → [2 x +1] , e então escolhemos um terceiro ponto P com as coordenadas
obtidas pelo mathematica {-1,472,-1,91} para comprovar o TVI.
Substituindo o x= -1,472 obtemos o y= -1,944 que é aproximadamente -1,91.
Isso comprova que na curva de nível de valor 6 [que está entre 24 e 18], existe um ponto perten-
cente a reta e aos contornos.
E isso mostra que entre o intervalo de a,b todos os pontos satisfazem a equação da reta. Ou seja,
se possuímos uma função composta de contínuas, através de um traço passando por seus con-
tornos em 2D podemos comprovar novamente que a mesma tem essa característica pelo TVI,
como queríamos demonstrar.
Atv 5 - Calc II - Marcio FINAL.nb 11
Printed by Wolfram Mathematica Student Edition