aspectos matem aticos e hist oricos pertinentes ao ... · coe ciente de lyapunov l1 para todo ......
TRANSCRIPT

Aspectos Matematicos e
Historicos Pertinentes ao
Regulador Centrıfugo de Watt
para a Maquina de Vapor
Jorge Sotomayor
Universidade de Sao Paulo
http://www.ime.usp.br/˜sotp/
Goiania, Novembro, 2006

Programa para esta Palestra
• Alguns Marcos de Referencia.
• Equacoes Diferenciais do Regulador.
• Revisitando Maxwell e Vishnegradskii
com Pontryagin .
• Alem da Primeira Bifurcacao
• Bifurcacoes e Fatos Novos.
• Recap. e Comentarios: O Futuro?
• Referencias Bibliograficas
1

I. Alguns Marcos de Referencia
• O trabalho nos tempos antigos baseava-se
na:
- forca muscular
- rodas movidas pelas aguas
- moinhos de vento
Estes controlados pela intervencao HUMA-
NA.
• Um evento NOTAVEL aconteceu com a
invencao do instrumental para o CONTRO-
LE AUTOMATICO — A AUTO REGU-
LACAO— da forca do vapor, um passo
fundamental para o sucesso economico da
REVOLUCAO INDUSTRIAL NO SECULO
XVIII, na Inglaterra.
2

Forca Muscular e do Vento
————————————————–
Controle pela Mao Humana
3

Moinho Hidraulico, Fonte Wikipedia
4

Moinho de Vento com Controle Direcional
5

Moinho de Vento, Diagrama Interno
6

O regulador centrıfugo de Watt e um dispo-
sitivo que controla automaticamente a veloci-
dade de rotacao de uma maquina a vapor.
Sua invencao data de 1788 e pode ser tomada
como ponto de partida para a TEORIA DE
CONTROLE AUTOMATICO, i.e., sem a in-
tervencao direta da mao humana.
Sistema Maquina de Vapor - Regulador de
Watt
7

Escultura
Maquina de de Watt
Aprimoramentos na arquitetura e desenho do
regulador, ocorridos na primeira metade do sec.
XIX, levaram a produtos menos confiaveis cujo
desempenho passou a ser OSCILATORIO ou
mesmo ERRATICO em lugar do ideal de ve-
locidade CONSTANTE.
8

Marcos de Referencia e Contemporaneos
• Watt, 1788
Adam Smith e a Teoria Economica
• Maxwell, 1868
Airy
Routh e a Estabilidade
• Vyshnegradskii, 1877
Stodola, Hurwitz
• Pontryagin, 1962
Andronov,
Estabilidade Estrutural,
Bifurcacoes
9

II. Equacoes Diferenciais de Pontryagin
d ϕ
dτ= ψ
d ψ
dτ= c2 Ω2 sinϕ cosϕ− g
lsinϕ− b
mψ
d Ω
dτ=
1
I(µ cosϕ− F )
ϕ ∈(0, π2
)— angulo de abertura dos bracos do
regulador a partir de seu eixo vertical S1,
Ω ∈ [0,∞) — velocidade angular de rotacao
do volante D, com momento de inercia I,
τ — tempo, ψ = dϕ/dτ ,
θ — velocidade angular de S1,
θ = cΩ, c > 0 — razao de transmissao,
10

H — camisa mecanica que suporta os bracos
do regulador e pode deslizar ao longo de S1,
T — conjunto de engrenagens,
V — valvula que determina a quantidade de
vapor para a maquina,
l — comprimento dos bracos do regulador,
m — massa de cada contrapeso esferico,
g — aceleracao da gravidade,
b > 0 — constante da forca atrito,
F — torque equivalente da carga mecanica,
µ > 0 — uma constante de proporcionalidade.
11

III. Os aspectos Matematicos desta palestrareferem-se a um relato de nosso estudo, de-senvolvido em colaboracao com L.F. Mello eD. Braga, da Estabilidade e Bifurcacoes dospontos de equilıbrio das Equacoes Diferenciaisde Pontryagin
Realizando as seguintes mudancas nas coorde-nadas e no tempo
x = ϕ, y =
√l
gψ, z = c
√l
gΩ, τ =
√l
gt,
as equacoes de Pontryagin —SRW— se es-crevem como
x′ = dx
dt= y
y′ = dy
dt= z2 sinx cosx− sinx− ε y
z′ = dz
dt= α (cosx− β)
12

dependendo dos parametros normalizados
ε > 0, α > 0, 0 < β < 1,
dados por
ε =b
m
√l
g, α =
c l µ
g I, β =
F
µ.
SRW e uma famılia a 3 parametros de equacoes
diferenciais
x′ = f(x, ζ),
f(x, ζ) =(y, z2 sinx cosx− sinx− εy, α (cosx− β)
),
x = (x, y, z) ∈(
0,π
2
)× R× [0,∞),
ζ = (β, α, ε) ∈ (0,1)× (0,∞)× (0,∞) .
13
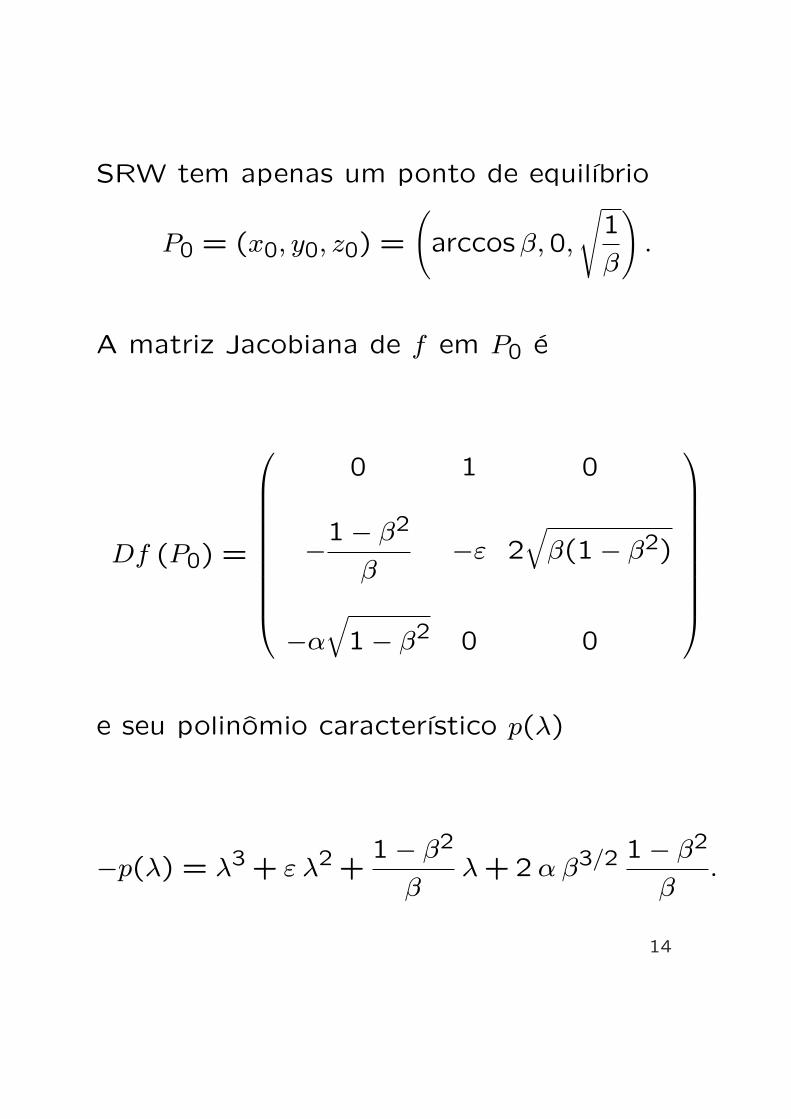
SRW tem apenas um ponto de equilıbrio
P0 = (x0, y0, z0) =
(arccosβ,0,
√1
β
).
A matriz Jacobiana de f em P0 e
Df (P0) =
0 1 0
−1− β2
β−ε 2
√β(1− β2)
−α√
1− β2 0 0
e seu polinomio caracterıstico p(λ)
−p(λ) = λ3 + ε λ2 +1− β2
βλ+ 2 α β3/2 1− β2
β.
14

IV. Teorema do livro de Pontryagin e Primeiro
Coeficiente de Lyapunov l1
Para todo
ε > 2 α β3/2
SRW tem P0 como um ponto de equilıbrio as-
sintoticamente estavel.
Para 0 < ε < 2 α β3/2, P0 e instavel (sela).
A superfıcie de parametros crıticos — superfıcie
de bifurcacao — Σ1 e
εc = ε(β, α) = 2 α β3/2.
15

Superfıcie Σ1
DESCREVER a mudanca na estabilidade do
equilıbrio P0 quando os parametros intersec-
tam a superfıcie Σ1 e o principal objetivo desta
apresentacao.
16

Bifurcacao de Hopf
17

Artigos anteriores sobre o estudo da bifurcacao
de Hopf sobre Σ1:
Estudo numerico da bifurcacao de Hopf:
B. D. Hassard, N. D. Kazarinoff and Y. H.
Wan, Theory and Applications of Hopf Bifur-
cation, Cambridge University Press, Cambridge,
1981.
Estudo analıtico da bifurcacao de Hopf mas
pouco conclusivo a respeito do sinal de l1:
A. Al-Humadi and N. D. Kazarinoff, Hopf bi-
furcation in the Watt steam engine, Bull. Inst.
Math. Appl., 21 (1985), 133-136.
18

Um estudo sobre a bifurcacao de Hopf de codi-
mensao 1 em SRW esta em:
J. Sotomayor, L. F. Mello and D. C. Braga,
Stability and Hopf bifurcation in the Watt go-
vernor system, Commun. Appl. Nonlinear Anal.,
13 (2006), 1-17.
http://arxiv.org/abs/math.DS/0606230.
Um estudo mais geral sobre a bifurcacao de
Hopf ate a codimensao 3 em SRW esta em:
J. Sotomayor, L. F. Mello and D. C. Braga,
Bifurcation analysis of the Watt governor sys-
tem, aceito para publicacao em Comp. Appl.
Math. (2006).
http://arxiv.org/abs/math.DS/0604177.
19

Encontramos uma EXPRESSAO SIMPLES pa-
ra o PRIMEIRO COEFICIENTE DE LYAPU-
NOV – l1 – sobre Σ1, seu sinal e a curva onde
ele se anula Σ2:
Teorema (Sotomayor, Mello, Braga). O pri-
meiro coeficiente de Lyapunov para P0 em um
ponto de Σ1 e dado por
l1 = −αβ3/2(1− β2)
(3 + (α2 − 5)β2 + α4β6
)
2(1− β2 + α2β4
) (1− β2 + 4α2β4
) .
Se
g(β, α) = 3 + (α2 − 5)β2 + α4β6
e diferente de zero, entao SRW tem um ponto
de Hopf transversal — H1 — em P0.
20

Se (β, α, εc) ∈ S ∪U entao SRW tem um ponto
de Hopf H1 em P0. Se (β, α, εc) ∈ S entao
o ponto H1 em P0 e assintoticamente estavel
e para cada ε < εc, mas proximo de εc, existe
uma orbita periodica estavel perto do equilıbrio
instavel P0.
Se (β, α, εc) ∈ U entao o ponto de Hopf H1 em
P0 e instavel e para cada ε > εc, mas proximo
de εc, existe uma orbita periodica instavel perto
do equilıbrio assintoticamente estavel P0.
21
Curta nota biografica sobre Pontryagin Em
1952 Pontryagin, originalmente renomado to-
pologo, comecou a estudar problemas de mate-
matica aplicada, enfocando as equacoes difer-
enciais e a teoria do controle. Esta virada nao
era inesperada. De fato, nos anos 30 Pontrya-
gin fez amizade com o fısico A. A. Andronov e
com ele passou a discutir problemas nas teo-
rias das oscilacoes e do controle automatico,
nos quais Andronov trabalhava.
L. S. Pontryagin (1908–1988)
22

Na sua vibrante autobiografia cientıfica (Rus-sian Math. Surveys, 33:6 (1978)) ele escreve :
“ Certo dia, em 1932 eu acho, um jovem fısicochamado Aleksandr Aleksandrovich Andronov,a quem eu nao conhecia ate esse momento,chegou a meu apartamento sem haver-se pre-viamente anunciado. Ele me disse que haviaouvido falar de meu interesse em trabalhar emproblemas matematicos aplicados e que gostariade contar-me algo. Foi dele que pela primeiravez ouvi dizer o que e um retrato de fase e oque sao os ciclos limite, alem de outras coisassemelhantes. Ele argumentou que tudo isto eaplicavel a varias partes da tecnologia e, emparticular, a teoria das oscilacoes. Foi assimque uma amizade solida nasceu entre Andronove eu, a qual durou por vinte anos, ate seu falec-imento. Durante todos esses anos fui consultormatematico de Andronov....”
23

“ ... a influencia que Andronov teve em mim
redirecionaram meus interesses matematicos.
Como resultado abandonei meu trabalho em
problemas de matematica abstrata.
... Estudei sistemas dinamicos proximos de
Hamiltonianos e participei de seu trabalho so-
bre Sistemas Estruturalmente Estaveis.”
Este trabalho foi publicado in 1937.
Em 1961 juntamente com seus estudantes V.
G. Boltyanskii, R. V. Gamkrelidze e E. F. Mish-
chenko escreveu o livro classico A Teoria Ma-
tematica dos Processos Otimos.
O livro Ordinary Differential Equations, ja ci-
tado, foi traduzido para o Ingles em 1962.
Andronov, Lefschetz, Peixoto, Thom, ....
24

V. IDEIAS GERAIS SOBRE AS BIFURCA-
COES E FATOS NOVOS SOBRA A DINA-
MICA DO REGULADOR
PONTOS DE EQUILIBRIO
x′ = f(x, u, v, w, ...)
x, variavel dinamica, estado;
u, v, w, .., parametros de controle.
ORBITAS PERIODICAS, HOMOCLINICAS
DIAGRAMA DE BIFURCACAO E SUA COM-
PLEXIDADE CRESCENTE COM O NUMERO
DE PARAMETROS – MULTIPLICIDADE – A
DIMENSAO DE x.
DOIS DIAGRAMAS PARA EQUILIBRIOS, x
DIMENSAO 1: CUSPIDES, ANDORINHAS
25

Cuspide , Wolfram MathWorld
f(x, u, v) = x3 + vx+ u
26

Secao da Andorinha, Wolfram MathWorld
f(x, u, v, w) = x4 + vx2 + ux+ w, v = −1
27

Em IV ficou determinado o conjunto Σ2 ⊂ Σ1
onde o primeiro coeficiente de Lyapunov se an-
ula, definido por g(β, α) = 0.
Teorema (Sotomayor, Mello, Braga). O se-
gundo coeficiente de Lyapunov para P0 em um
ponto de Σ2 e dado por
l2(β, α, εc) =α β3/2 h(β, α)
36(9− 9β2 + 4α2β4)h1(β, α),
onde
h1(β, α) = (1− β2 + α2β4)3(1− β2 + 4α2β4)3
28

Expressao de h numa pagina
− 216− 54(−16 + 37α2)β2 − 3α2(389
+ 180α2)β4 − 36(150− 1709α2 + 564α4)β6
+ (11880− 220113α2 + 111026α4 − 5533α6)β8
− 6(1944− 59747α2 + 36063α4 + 5186α6)β10
+ (5616− 310545α2 + 189480α4 + 279290α6
− 16022α8)β12 + 2(−540 + 69732α2
− 32266α4 − 369482α6 + 9347α8)β14
− α2(25647 + 3390α2 − 960987α4 − 151080α6
+ 21205α8)β16
+ 2α4(2319 + 4α2(−79183− 58517α2
+ 8384α4))β18 − 2α6(−84400− 251671α2
+ 31277α4 + 7208α6)β20
+ 2α8(−94479− 6748α2 + 23208α4)β22
− α10(−31463 + 58672α2 + 4880α4)β24
+ 16α12(1627 + 718α2)β26
− 16α14(453 + 40α2)β28 + 640α16β30.
29
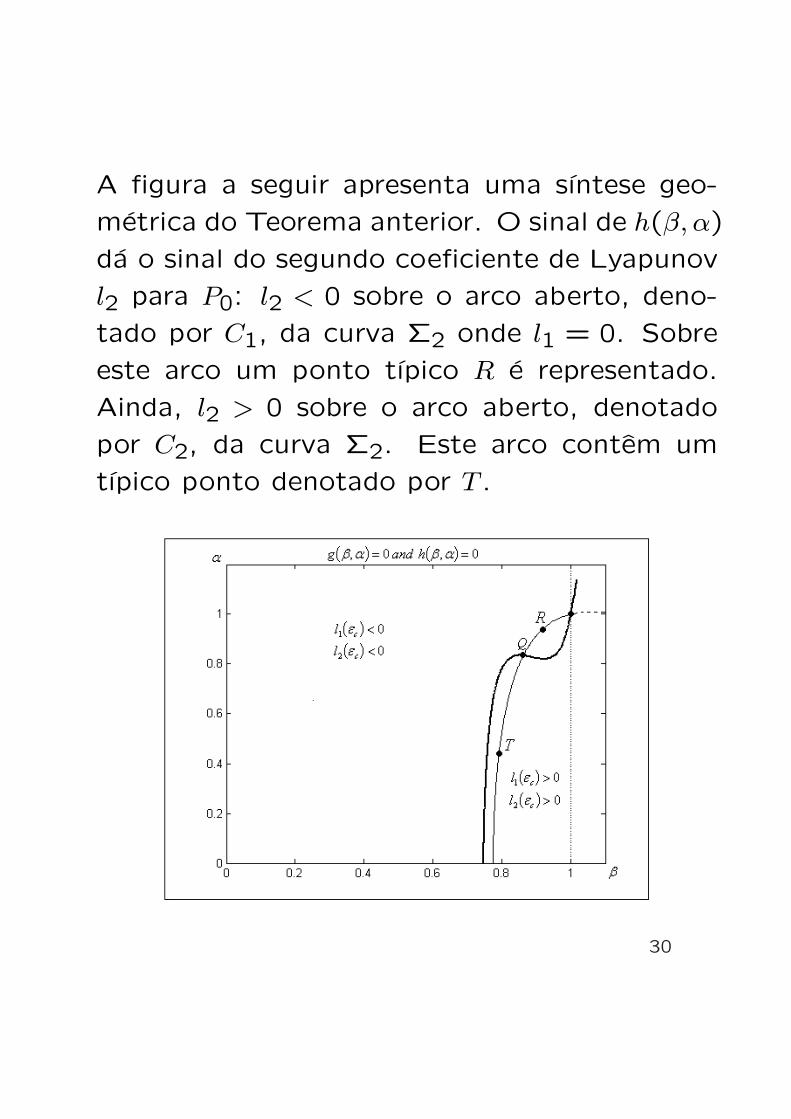
A figura a seguir apresenta uma sıntese geo-
metrica do Teorema anterior. O sinal de h(β, α)
da o sinal do segundo coeficiente de Lyapunov
l2 para P0: l2 < 0 sobre o arco aberto, deno-
tado por C1, da curva Σ2 onde l1 = 0. Sobre
este arco um ponto tıpico R e representado.
Ainda, l2 > 0 sobre o arco aberto, denotado
por C2, da curva Σ2. Este arco contem um
tıpico ponto denotado por T .
30

Teorema. Se (β, α, εc) ∈ C1 ∪ C2 entao SRW
tem um ponto de Hopf transversal de codi-
mensao 2 –H2– em P0. Se (β, α, εc) ∈ C2
entao P0 e instavel e o diagrama de bifurcacao
e como no ponto T abaixo. Se (β, α, εc) ∈ C1
entao P0 e assintoticamente estavel e o dia-
grama de bifurcacao e como no ponto R.
31

Diagrama de bifurcacao em T
32

Diagrama de bifurcacao em R
33

Teorema. (Sotomayor, Mello, Braga). Para
SRW existe um UNICO ponto Q = (β, α, εc),
com coordenadas
β = 0.86828033997971281542...,
α = 0.85050048430685017856...
e
εc = 1.37624106484659953171...
onde as curvas Σ2 (l1 = 0) and l2 = 0, sobre a
superfıcie crıtica Σ1, se intersectam e o fazem
transversalmente.
Alem disto, para os valores dos parametros
em Σ3 = Q SRW tem um ponto de Hopf
transversal de codimensao 3 –H3– em P0 o
qual e instavel, pois l3(Q) > 0. O diagrama
de bifurcacao em Q esta ilustrado nas figuras
a seguir.
34

Diagrama de bifurcacao em Q

Diagrama de bifurcacao em R1
35

Teorema. Suponha que o sistema
x′ = f(x, ζ), x = (x, y, z), ζ = (β, α, ε)
tenha equilıbrio x = 0 para ζ = 0 com auto-valores λ2,3(ζ) = η(ζ)± iω(ζ) e ω(0) = ω0 > 0,η(0) = 0, l1(0) = 0, l2(0) = 0, onde l1(ζ) el2(ζ) sao o primeiro e segundo coeficientes deLyapunov, respectivamente. Assuma que
l3(0) 6= 0, onde l3(0) e o terceiro coeficientede Lyapunov;
a aplicacao ζ → (η(ζ), l1(ζ), l2(ζ)) e regular emζ = 0.
Entao, pela introducao de uma variavel com-plexa, o sistema acima, reduzido a famılia para-metro dependente de variedades centrais, etopologicamente equivalente a
w′ = (η + iω0)w + τw|w|2 + νw|w|4 + l3w|w|6
onde η, τ e ν sao parametros de desdobra-mento.
36

VI. Recapitulacao e Conclusoes
Para a famılia a 3 parametros de E.D.O. SRW,
que modela o acoplamento do Regulador de
Watt com uma maquina a vapor, foi encon-
trada uma estratificacao Σ1 ⊃ Σ2 ⊃ Σ3 =
Q do espaco de parametros, de acordo com
a codimensao e o carater da estabilidade do
equilıbrio P0 como um ponto de Hopf.
Cada estrato e determinado implicitamente e
o carater da estabilidade e determinado pelo
sinal do coeficiente de Lyapunov.
O ponto Q tem coordenadas β = 0.8682..., α =
0.8505..., ε = 1.3762..., com terceiro coeficiente
de Lyapunov POSITIVO.
No interior de uma lıngua cuspidal solida, “do
lado de cima” da superfıcie Σ1, com vertice
em Q, um equilıbrio atrator e uma orbita pe-
riodica atratora coexistem.37

—VOLTANDO AO PASSADO—
Para se ter uma ideia da repercussao e aplica-
bilidade da ideia de Watt, podemos citar que
existiam 75000 unidades construıdas, somente
na Inglaterra, nos 80 primeiros anos apos sua
invencao. Dado de MacFarlane. (Referencias
no final)
Maquina com regulador – Museu do Vapor,
Londres
38

Regulador de Watt – Museu do Vapor,Londres
A IDEIA DE AUTO-REGULACAO POR RE-ALIMENTACAO —FEEDBACK— E BEM AN-TERIOR A WATT. VER OBRA DE O. MAYR.
SUA IMPLEMENTACAO NO PROGRESSODA TECNOLOGIA TEM SIDO ESTIMULADOPOR DESAFIOS ECONOMICOS, INDUSTRI-AIS E DE DEFESA.
39

Scientific American, setembro 1952
O PRESENTE – COMPUTADORES E CHIPS
O FUTURO? – DESAFIOS TECNOLOGICOS?
– MAIS GLOBAL E MATEMATICO!
Poincare, Hilbert.
40
VII. Referencias Pertinentes
A. A. Andronov, E. A. Leontovich et al., The-ory of Bifurcations of Dynamic Systems on aPlane, Halsted Press, J. Wiley & Sons, NewYork, 1973.
M. Denny, Watt steam governor stability, Eur.J. Phys., 23 (2002), 339-351.
Y. A. Kuznetsov, Elements of Applied Bifurca-tion Theory, Springer-Verlag, New York, 2004.
Y. A. Kuznetsov, Numerical normalization tech-niques for all codim 2 bifurcations of equilibriain ODE’s, SIAM J. Numer. Anal., 36 (1999),1104-1124.
A. G. J. MacFarlane, The development of fre-quency - response methods in automatic con-trol, IEEE T. Automat. Contr., AC-24 (1979),250-265.
J. C. Maxwell, On governors, Proc. R. Soc.London, 16 (1868), 270-283.
41
O. Mayr, The Origins of Feedback Control,
MIT Press, Cambridge, MA, 1970.
L. S. Pontryagin, Ordinary Differential Equa-
tions, Addison-Wesley Publishing Company Inc.,
Reading, 1962.
F. Takens, Unfoldings of certain singularities
of vectorfields: Generalized Hopf bifurcations,
J. Diff. Equat., 14 (1973), 476-493.
I. A. Vyshnegradskii, Sur la theorie generale
des regulateurs, C. R. Acad. Sci. Paris, 83
(1876), 318-321.
Pagina de L. F. Mello contendo arquivos usa-
dos na prova com auxilio computacional:
http://www.ici.unifei.edu.br/luisfernando/wgs
42