arquitecturas de controlo de robôs móveis -...
TRANSCRIPT
1
2003 Eugénio Oliveira
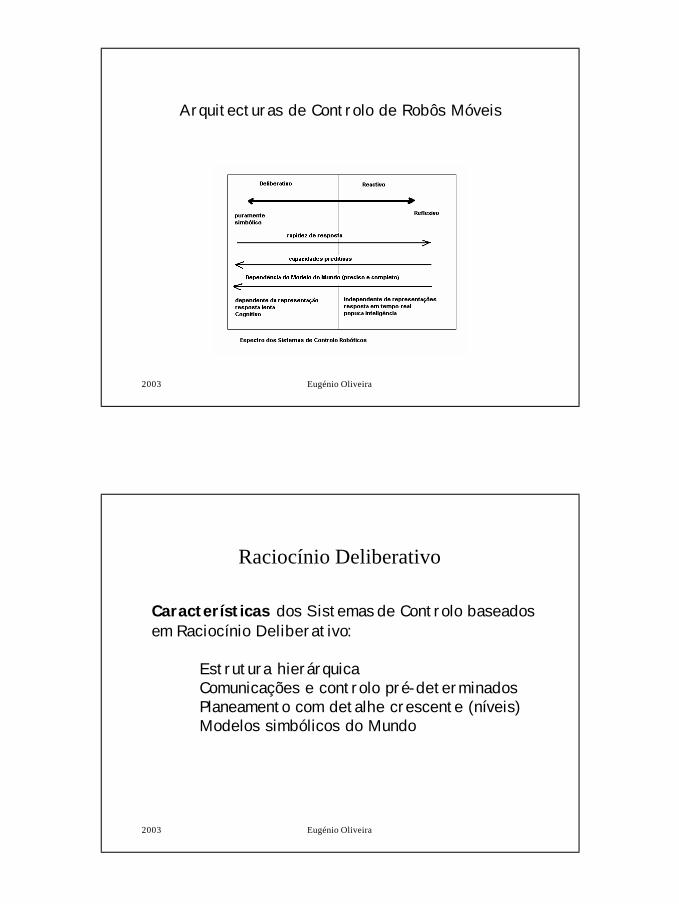
Arquitecturas de Controlo de Robôs Móveis
2003 Eugénio Oliveira
Raciocínio Deliberativo
Características dos Sistemas de Controlo baseadosem Raciocínio Deliberativo:
Estrutura hierárquicaComunicações e controlo pré-determinadosPlaneamento com detalhe crescente (níveis)Modelos simbólicos do Mundo
2
2003 Eugénio OliveiraSist
ema
de C
ontr
olo
em R
obô
Móv
el
2003 Eugénio Oliveira
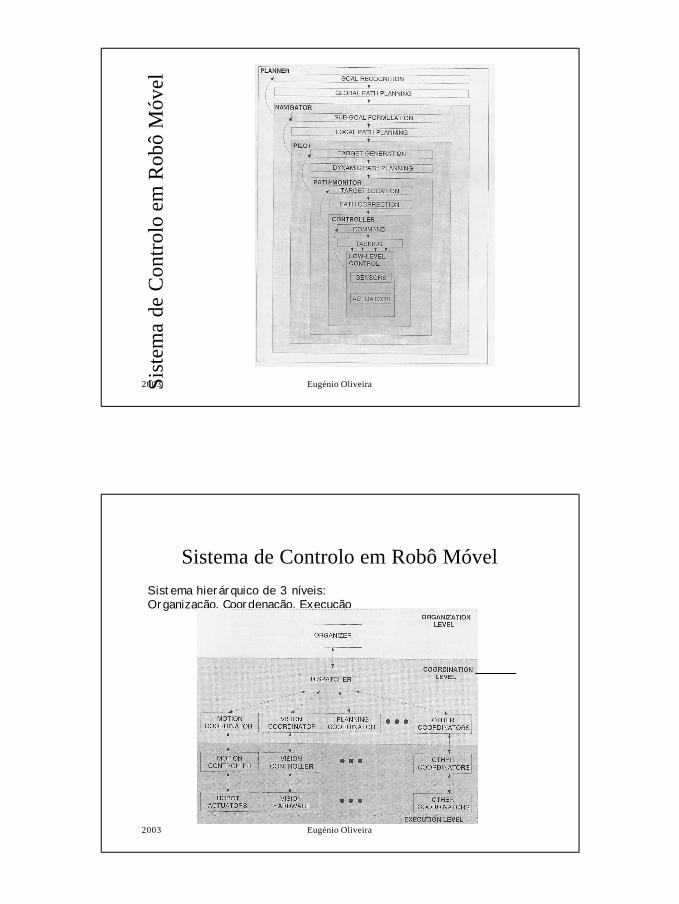
Sistema de Controlo em Robô MóvelSistema hierárquico de 3 níveis: Organização, Coordenação, Execução
3
2003 Eugénio Oliveira
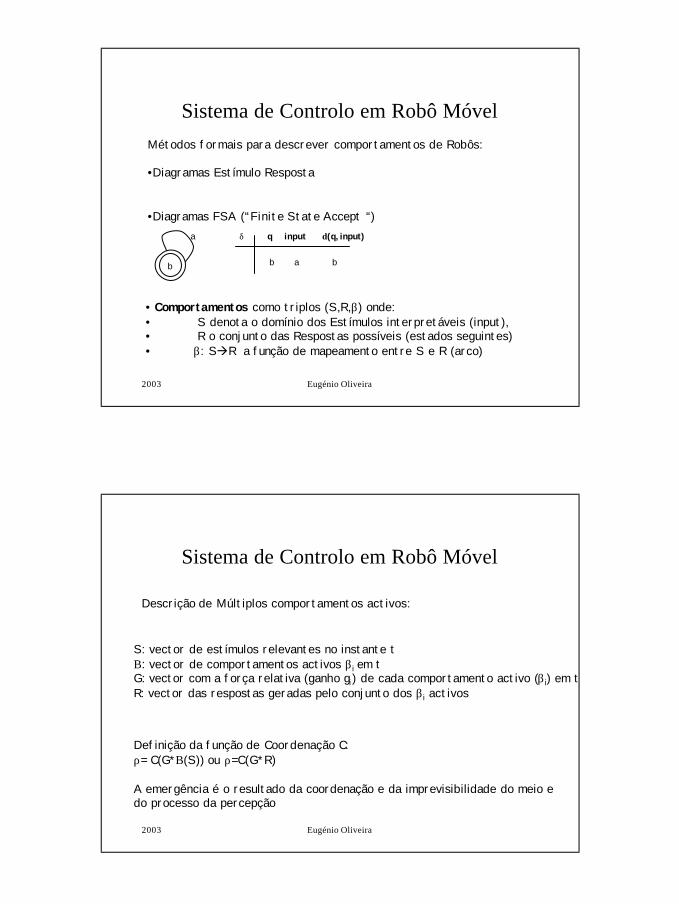
Sistema de Controlo em Robô MóvelMétodos formais para descrever comportamentos de Robôs:
•Diagramas Estímulo Resposta
•Diagramas FSA (“Finite State Accept “) δ q input δ(q,input)
b a bb
a
• Comportamentos como triplos (S,R,β) onde:• S denota o domínio dos Estímulos interpretáveis (input),• R o conjunto das Respostas possíveis (estados seguintes)• β: SàR a função de mapeamento entre S e R (arco)
2003 Eugénio Oliveira
Sistema de Controlo em Robô Móvel
Descrição de Múltiplos comportamentos activos:
S: vector de estímulos relevantes no instante tΒ: vector de comportamentos activos βi em tG: vector com a força relativa (ganho gi) de cada comportamento activo (βi) em tR: vector das respostas geradas pelo conjunto dos βi activos
Definição da função de Coordenação C:ρ= C(G*Β(S)) ou ρ=C(G*R)
A emergência é o resultado da coordenação e da imprevisibilidade do meio e do processo da percepção
4
2003 Eugénio Oliveira
Sistema de Controlo em Robô Móvel
S= (coordenadas_sala, 1.0)(objecto_detectado, 0.2) Si=(s,λ)(estudante_detectado, 0.8) s: estímulo; (passo_detectado, 1.0) λ percentagem da força máxima(idoso_detectado, 1.0)
Neste exemplo, embora exista o estímulo objecto_detectado ele é fraco por o objecto estar ainda longe.
Exemplo de um Robô em uma sala no instante t:
Resposta comportamental: Comportamentos activados:B(S) = βmove_sala (s1)
βevita_objecto (s2)βfoje_estudante (s3)βvai-direita (s4)βaproxima_idoso (S5)
2003 Eugénio Oliveira
Sistema de Controlo em Robô Móvel
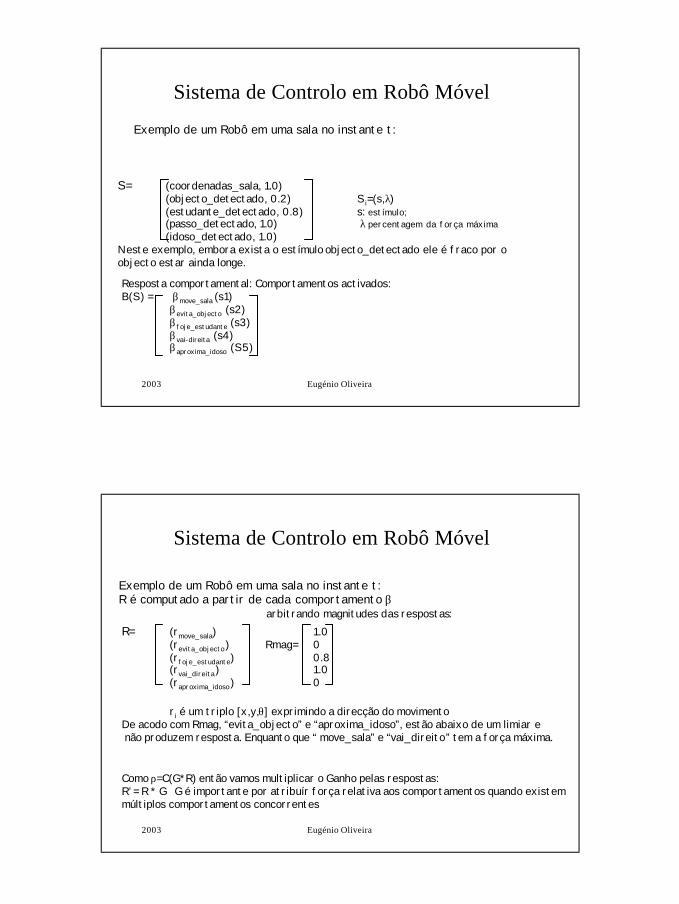
Exemplo de um Robô em uma sala no instante t:R é computado a partir de cada comportamento β
arbitrando magnitudes das respostas:R= (rmove_sala) 1.0
(revita_objecto) Rmag= 0(rfoje_estudante) 0.8(rvai_direita) 1.0(raproxima_idoso) 0
ri é um triplo [x,y,θ] exprimindo a direcção do movimentoDe acodo com Rmag, “evita_objecto” e “aproxima_idoso”, estão abaixo de um limiar e não produzem resposta. Enquanto que “ move_sala” e “vai_direito” tem a força máxima.
Como ρ=C(G*R) então vamos multiplicar o Ganho pelas respostas: R’ = R * G G é importante por atribuír força relativa aos comportamentos quando existemmúltiplos comportamentos concorrentes
5
2003 Eugénio Oliveira
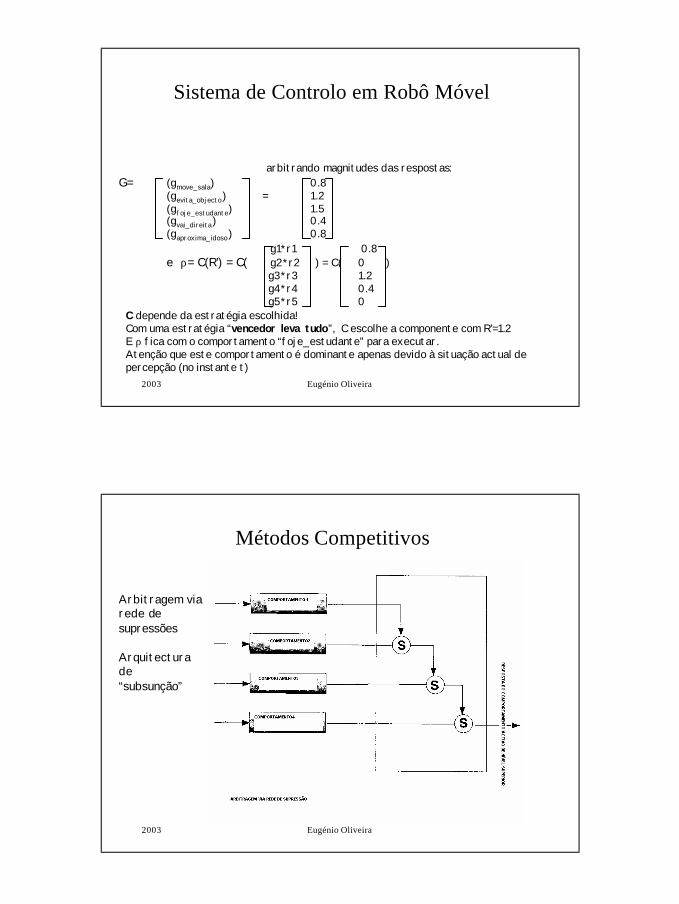
Sistema de Controlo em Robô Móvel
arbitrando magnitudes das respostas:G= (gmove_sala) 0.8
(gevita_objecto) = 1.2(gfoje_estudante) 1.5(gvai_direita) 0.4(gaproxima_idoso) 0.8
g1*r1 0.8e ρ= C(R’) = C( g2*r2 ) = C( 0 )
g3*r3 1.2g4*r4 0.4g5*r5 0
C depende da estratégia escolhida!Com uma estratégia “vencedor leva tudo”, C escolhe a componente com R’=1.2E ρ fica com o comportamento “foje_estudante” para executar.Atenção que este comportamento é dominante apenas devido à situação actual depercepção (no instante t)
2003 Eugénio Oliveira
Métodos Competitivos
Arbitragem via rede de supressões
Arquitecturade“subsunção”
6
2003 Eugénio Oliveira
Agentes Reactivos
GAgentes Reactivos (Reflexivos):
2003 Eugénio Oliveira
Arquitectura de AgentesReactivos
GAgentes Reactivos (Reflexivos):GNão tem Estado internoG see mapeia Estados do ambiente em Percepções: S --> PG action mapeia sequencias de percepções em Acções: P*-->A
G Arquitectura de “Sub-assunção” (subordinação) (R.Brooks)G Comportamentos como RegrasG Emergência de Comportamento Social InteligenteG Racionalidade
7
2003 Eugénio Oliveira
Agentes Reactivos
Agentes Reactivos na Robótica:
Domínio privilegiado e exigente relativamente à IA.
Robôs inteligentes mostram limitações da IA clássica
Brooks (MIT) propôs arquitecturas de agentes mais flexíveis, simples autónomose interactivos.
Modelo do Mundo implicarepresentação do estado interno eplaneamento moroso.
Modelo da IA clássica para o controlo do Robô inteligente na página seguinte:
2003 Eugénio Oliveira
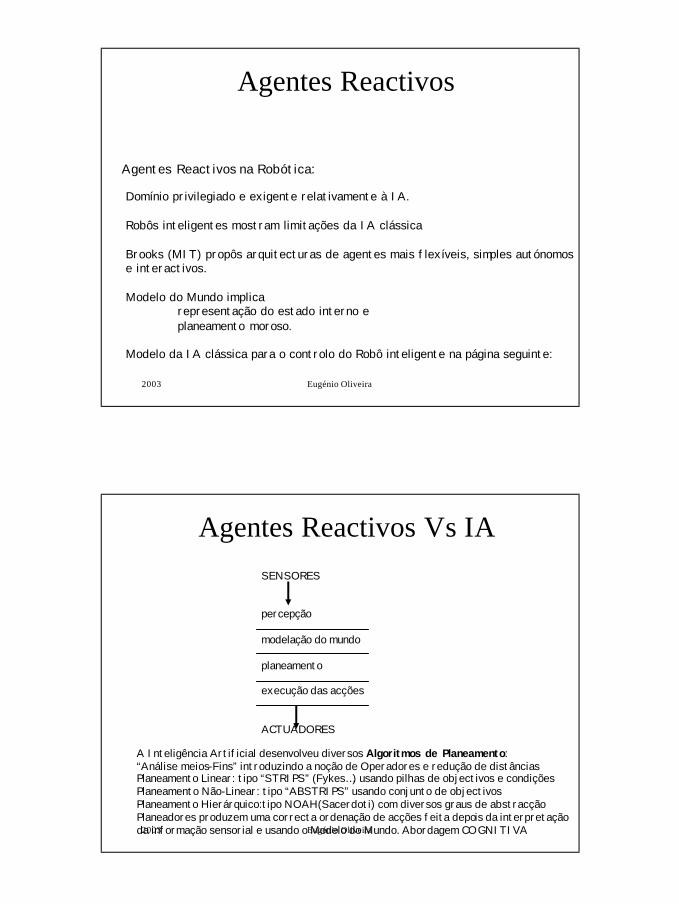
Agentes Reactivos Vs IASENSORES
percepção
modelação do mundo
planeamento
execução das acções
ACTUADORES
A Inteligência Artificial desenvolveu diversos Algoritmos de Planeamento:“Análise meios-Fins” introduzindo a noção de Operadores e redução de distânciasPlaneamento Linear: tipo “STRIPS” (Fykes…) usando pilhas de objectivos e condiçõesPlaneamento Não-Linear: tipo “ABSTRIPS” usando conjunto de objectivosPlaneamento Hierárquico:tipo NOAH(Sacerdoti) com diversos graus de abstracçãoPlaneadores produzem uma correcta ordenação de acções feita depois da interpretaçãoda informação sensorial e usando o Modelo do Mundo. Abordagem COGNITIVA
8
2003 Eugénio Oliveira
Agentes Reactivos Vs IA
Desvantagens:• Tempo de Computação• Representação complexa da Informação• Difícil ter uma representação adequada do mundoquando o ambiente é dinâmico ou os sensores não são
totalmente fiáveis
Há domínios onde são relevantes características como:Rapidez de actuaçãoSimplicidade de RepresentaçãoFlexibilidade na composição das acçõesComunicação simplificada
Arquitecturas Reactivas são adequadas para estas característicasDomínios: Robótica, pesquisa na internet, Controlo de tráfego
2003 Eugénio Oliveira
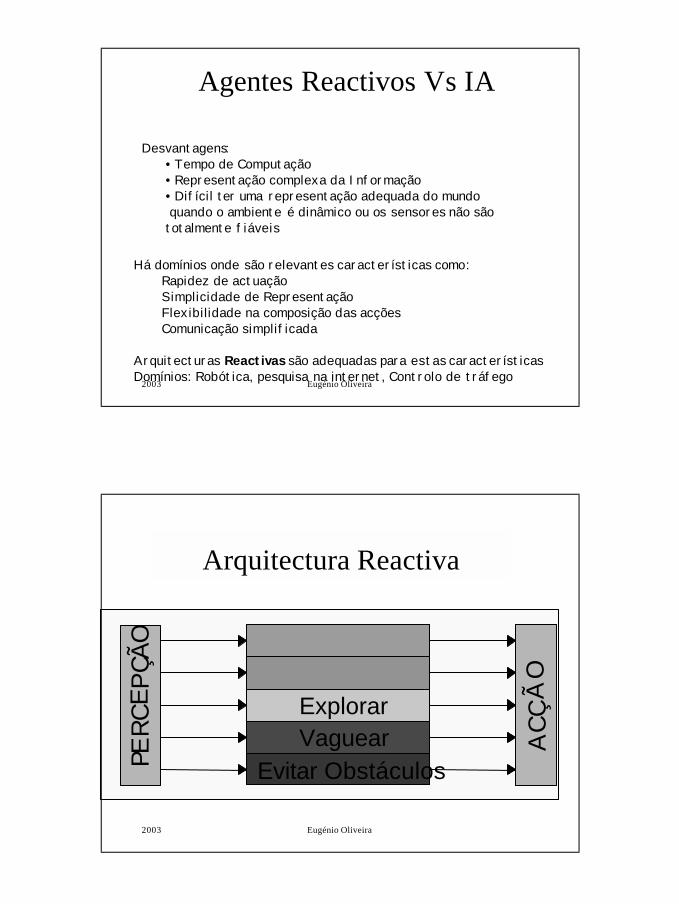
Arquitectura Reactiva
Evitar ObstáculosVaguearExplorar
AC
ÇÃ
O
PER
CE
PÇÃ
O
9
2003 Eugénio Oliveira
Agentes reactivos: ideias chave
G decomposição de tarefasG propriedades emergentesG operações sobre representações simples
(próximas dos dados)
2003 Eugénio Oliveira
Decomposição de Tarefas
G Agentes reactivos como uma colecção de módulosG Módulos operam autonomamenteG Módulos responsáveis por tarefas
específicasG Ex: Sentir, controlo do motor, cálculo de
valor de função, etc.G Comunicação entre módulos limitada e de
baixo nível
10
2003 Eugénio Oliveira
Emergência
G agentes são relativamente simples (e numerosos)
G interagem de modo básico
G padrões complexos de comportamentoemergem das interacções quando o sistema é visto na globalidadeG nenhuma especificação a priori (ou plano) do
comportamento do sistema reactivo
2003 Eugénio Oliveira
Virtudes
G Elimina a necessidade de representaçõessimbólicas ou Modelo pois: O Mundo é o seu própriomelhor modelo
G Tal “modelo” está sempre actualizado
G O sistema está ligado ao mundo via sensores e actuadores
11
2003 Eugénio Oliveira
G robustos e tolerantes às falhas: ex: um agente pode perder-se sem efeitoscatastróficos
G flexibilidadeG adaptaçãoG tempos de resposta rápidos
Virtudes
2003 Eugénio Oliveira
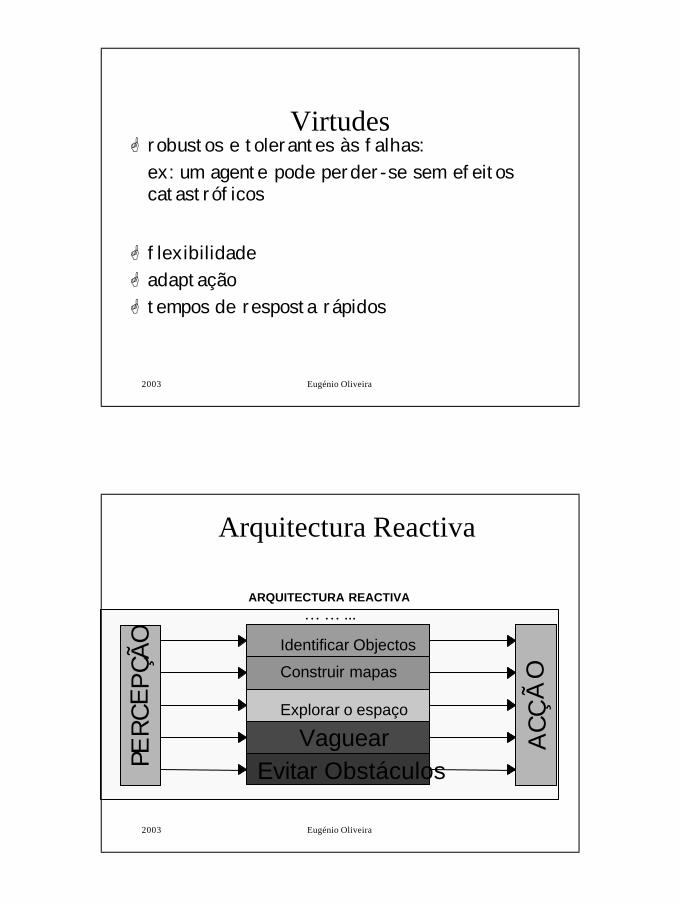
ARQUITECTURA REACTIVA
Arquitectura Reactiva
Evitar ObstáculosVaguear
Explorar o espaço
AC
ÇÃ
O
PER
CE
PÇÃ
O
Construir mapas
Identificar Objectos
… … ...
12
2003 Eugénio Oliveira
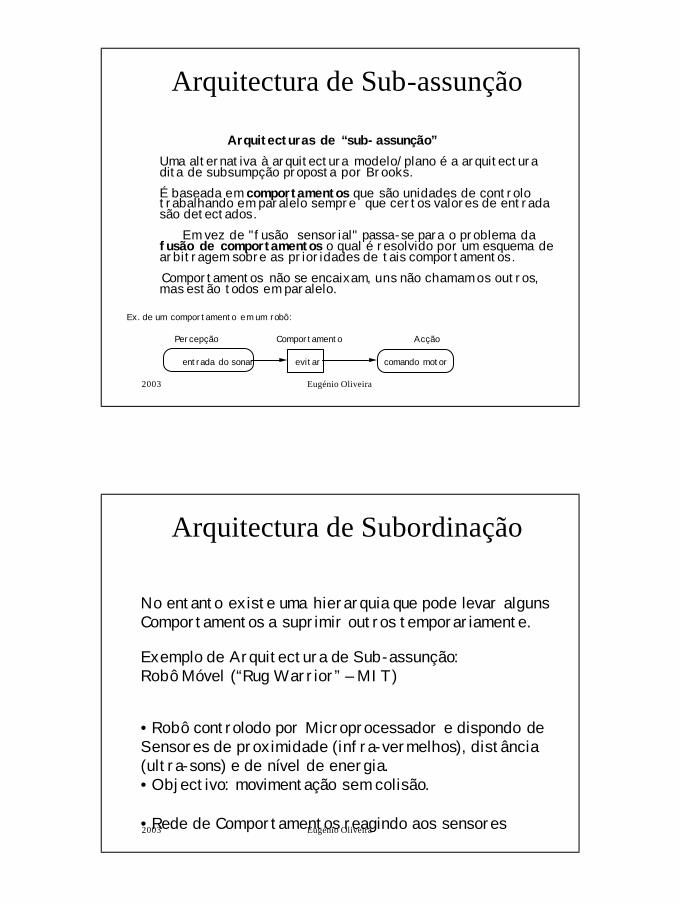
Arquitecturas de “sub-assunção”Uma alternativa à arquitectura modelo/plano é a arquitecturadita de subsumpção proposta por Brooks.É baseada em comportamentos que são unidades de controlotrabalhando em paralelo sempre que certos valores de entradasão detectados.
Em vez de "fusão sensorial" passa-se para o problema dafusão de comportamentos o qual é resolvido por um esquema de arbitragem sobre as prioridades de tais comportamentos.Comportamentos não se encaixam, uns não chamam os outros,mas estão todos em paralelo.
Ex. de um comportamento em um robô:
Percepção Comportamento Acção
entrada do sonar evitar comando motor
Arquitectura de Sub-assunção
2003 Eugénio Oliveira .
Arquitectura de Subordinação
No entanto existe uma hierarquia que pode levar algunsComportamentos a suprimir outros temporariamente.
Exemplo de Arquitectura de Sub-assunção: Robô Móvel (“Rug Warrior” – MIT)
• Robô controlodo por Microprocessador e dispondo de Sensores de proximidade (infra-vermelhos), distância(ultra-sons) e de nível de energia.• Objectivo: movimentação sem colisão.
• Rede de Comportamentos reagindo aos sensores
13
2003 Eugénio Oliveira
Arquitectura de Sub-assunção
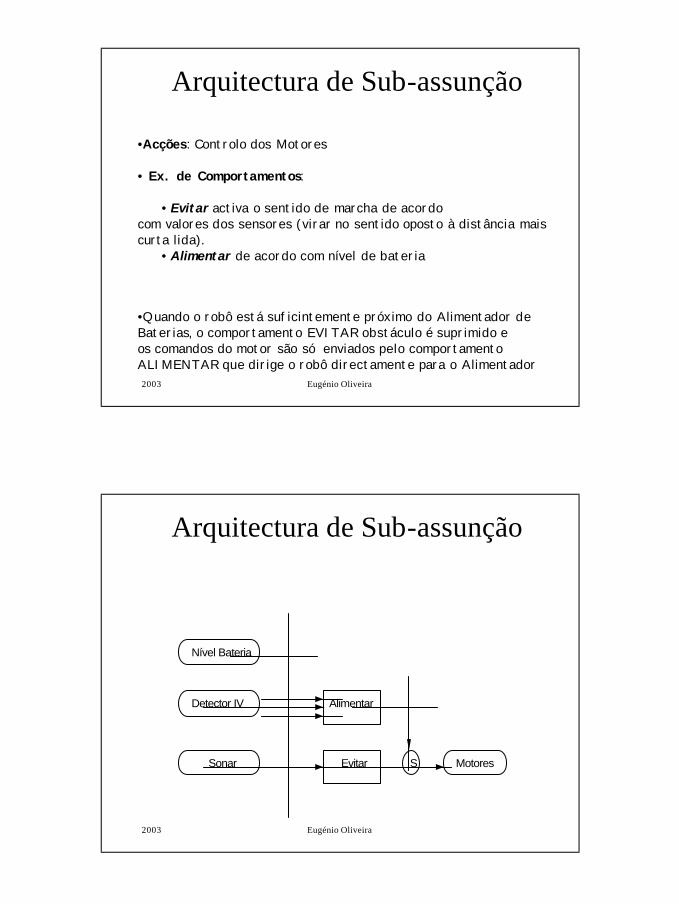
•Quando o robô está suficintemente próximo do Alimentador de Baterias, o comportamento EVITAR obstáculo é suprimido eos comandos do motor são só enviados pelo comportamentoALIMENTAR que dirige o robô directamente para o Alimentador
•Acções: Controlo dos Motores
• Ex. de Comportamentos:
• Evitar activa o sentido de marcha de acordocom valores dos sensores (virar no sentido oposto à distância maiscurta lida).
• Alimentar de acordo com nível de bateria
2003 Eugénio Oliveira
Nível Bateria
Detector IV
Sonar
Alimentar
Evitar S Motores
Arquitectura de Sub-assunção
14
2003 Eugénio Oliveira
Arquitectura de Sub-assunção
• O potencial conflito entre os dois comportamentos é resolvidopelo nó S (Supressão) cujo significado é:
O comando “Evitar” passa, a não ser que chegue ao nó S um comando em simultâneo na linha com seta (comportamentohierarquicamente superior.
• O comportamento “Alimentar” produz uma competência de maisAlto nível e subsume o comportamento “Evitar”.
• Este sistema não usa modelo do mundo e é reactivo.• É extensível uma vez que pode ser incrementado com novas camadasde comportamentos
2003 Eugénio Oliveira
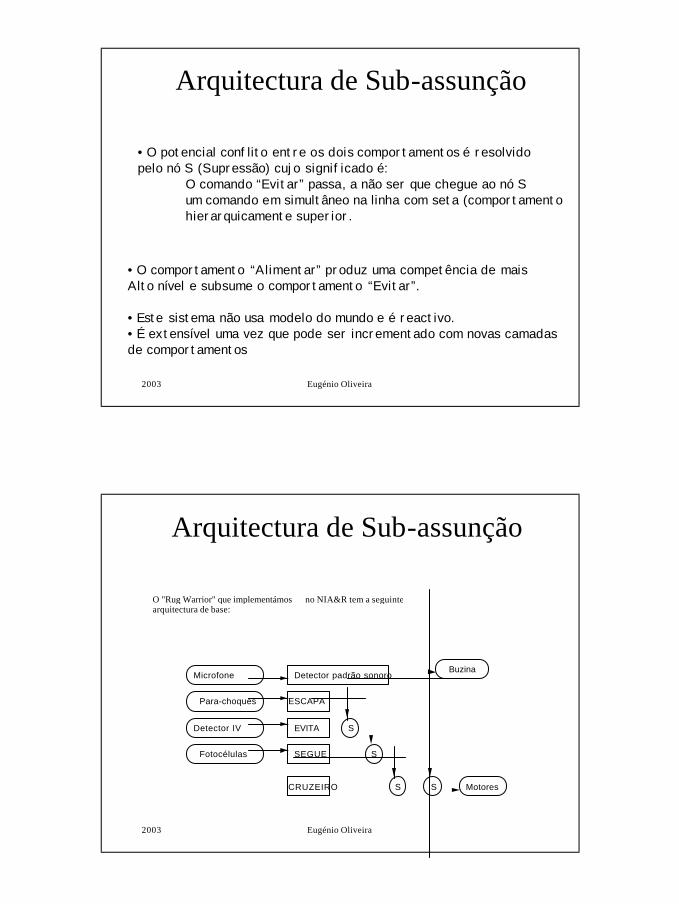
O "Rug Warrior" que implementámos no NIA&R tem a seguintearquitectura de base:
Microfone
Para-choques
Detector IV
Fotocélulas
Detector padrão sonoro
ESCAPA
S
S
S S
EVITA
SEGUE
CRUZEIRO
Buzina
Motores
Arquitectura de Sub-assunção
15
2003 Eugénio Oliveira
Arquitectura de Sub-assunção
Cada comportamento pode funcionar “em paralelo”, de acordo com as entradas.O comportamento “CRUZEIRO” apenas comanda os motores para movimento em frente.
Duas fotocélulas comparam a intensidade luminosa e, detectando uma diferença, geramum comando que subsume o anterior, dirigindo o robô para a fonte de luz.
O comportamento “EVITA” é superior aqueles na hierarquia.Recebe do sensor IVum sinal de proximidade. Havendo obstáculo (p.ex. à direita) o robô vira à esquerda.Se este sensor falha e o robô colidir com obstáculo, então o comportamento“ESCAPA” suprime as ordens dos anteriores e envia outro comando (recua).
O detector de som (batimento de palmas, p.ex.) activa uma buzina parando os motores.
A implementação desta arquitectura em um processador simples, implica ter um programa com um Ciclo que partilhava o tempo entre cada um dos comportamentos, simulando o efeito dos comportamentos actuando em paralelo.
2003 Eugénio Oliveira
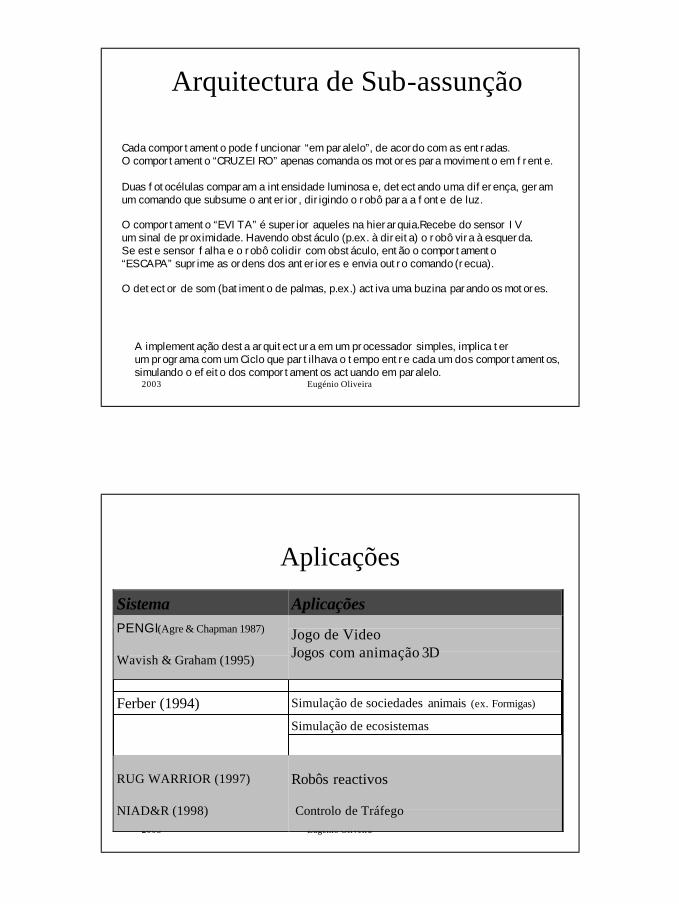
Aplicações
Sistema Aplicações
Ferber (1994) Simulação de sociedades animais (ex. Formigas)
Simulação de ecosistemas
RUG WARRIOR (1997) Robôs reactivos
PENGI(Agre & Chapman 1987)
Wavish & Graham (1995)
Jogo de VideoJogos com animação 3D
NIAD&R (1998) Controlo de Tráfego
16
2003 Eugénio Oliveira
CríticasG Âmbito da aplicabilidade limitada
sobretudo a jogos e simulações
G Não é clara a forma de projectar estessistemas tal que o comportamentopretendido se torne emergente
G Como se poderá tornar estes sistemasextensíveis, escaláveis e fáceis de corrigir?G O que acontece quando o ambiente é
dinâmico?
2003 Eugénio Oliveira
CONCLUSÕES:A Arquitectura de “Sub-assunção” baseada em comportamentossimples permite a criação de agentes reactivos.
Evitam-se Agentes cognitivos o que em domínios como a Robóticapode ser essencial.
Robôs reactivos deixam de ter necessidade do modelo do mundoe de raciocinar antes de agir. Em situações muito dinâmicas comona Robótica móvel esta abordagem pode ser preferível.
As interacções entre agentes reactivos devem ser elementares
Arquitectura de Sub-assunção
17
2003 Eugénio Oliveira
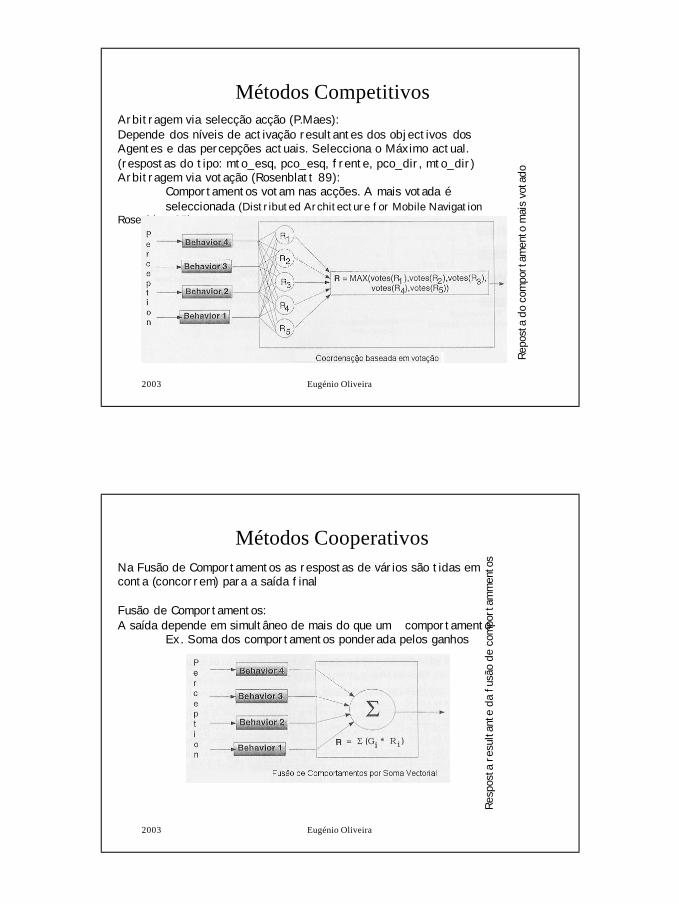
Métodos CompetitivosArbitragem via selecção acção (P.Maes):Depende dos níveis de activação resultantes dos objectivos dos Agentes e das percepções actuais. Selecciona o Máximo actual.(respostas do tipo: mto_esq, pco_esq, frente, pco_dir, mto_dir)Arbitragem via votação (Rosenblatt 89):
Comportamentos votam nas acções. A mais votada é seleccionada (Distributed Architecture for Mobile Navigation
Rosenblatt 95)
Repo
sta
do c
ompo
rtam
ento
mai
s vo
tado
2003 Eugénio Oliveira
Métodos CooperativosNa Fusão de Comportamentos as respostas de vários são tidas em conta (concorrem) para a saída final
Fusão de Comportamentos:A saída depende em simultâneo de mais do que um comportamento
Ex. Soma dos comportamentos ponderada pelos ganhos
Resp
osta
res
ulta
nte
da f
usão
de
com
port
amm
ento
s
18
2003 Eugénio Oliveira
Métodos Cooperativos
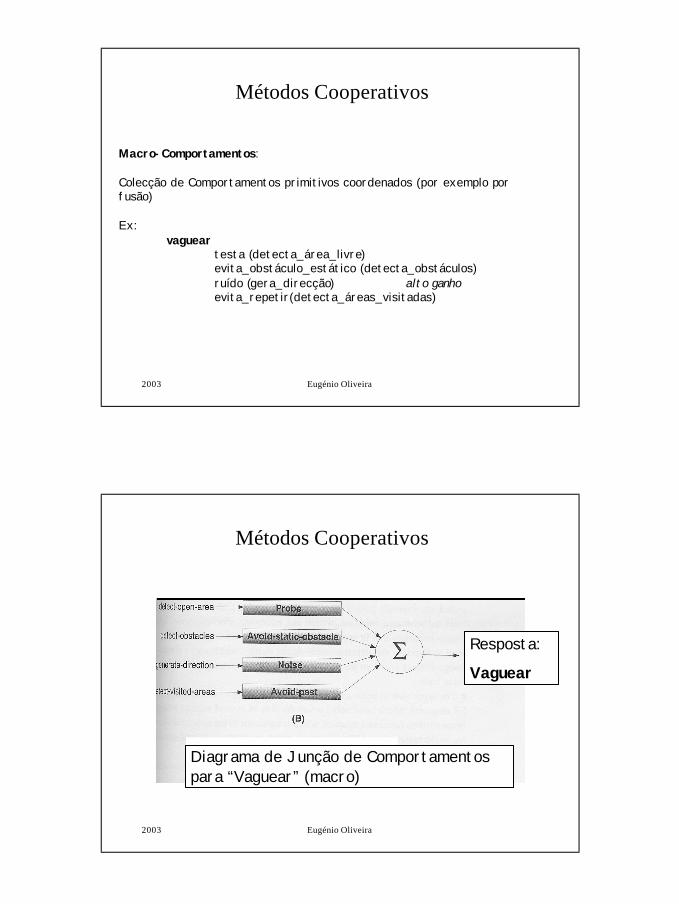
Macro-Comportamentos:
Colecção de Comportamentos primitivos coordenados (por exemplo por fusão)
Ex: vaguear
testa (detecta_área_livre)evita_obstáculo_estático (detecta_obstáculos)ruído (gera_direcção) alto ganhoevita_repetir(detecta_áreas_visitadas)
2003 Eugénio Oliveira
Métodos Cooperativos
Resposta:
Vaguear
Diagrama de Junção de Comportamentos para “Vaguear” (macro)
19
2003 Eugénio Oliveira
Métodos Cooperativos
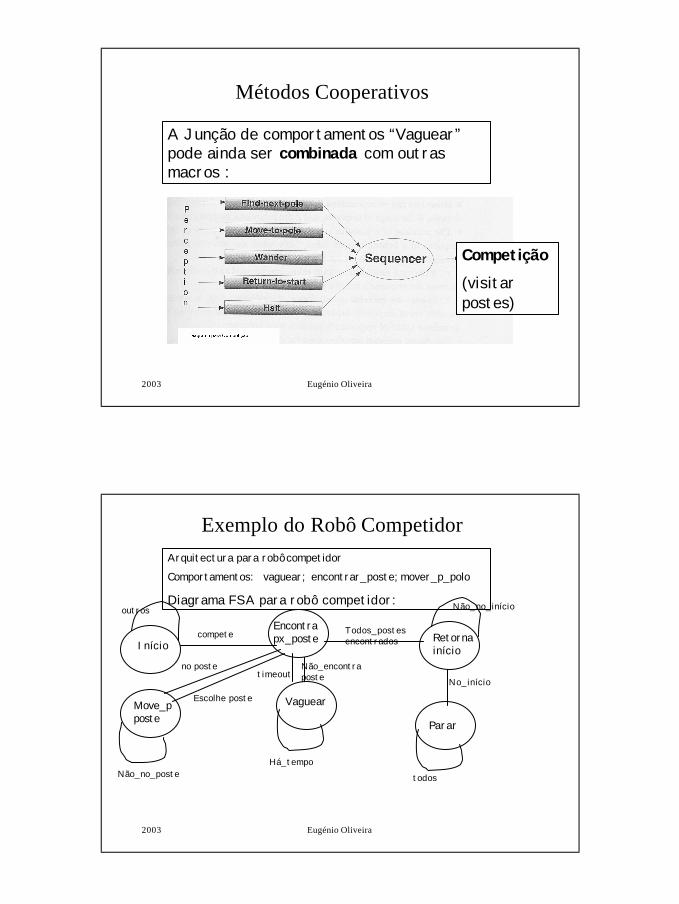
A Junção de comportamentos “Vaguear” pode ainda ser combinada com outras macros :
Competição
(visitar postes)
2003 Eugénio Oliveira
Exemplo do Robô CompetidorArquitectura para robô competidorComportamentos: vaguear; encontrar_poste; mover_p_polo
Diagrama FSA para robô competidor:
Parar
VaguearMove_pposte
Retornainício
Encontrapx_posteInício
Não_no_iníciooutros
Não_no_poste
Todos_postesencontrados
compete
Escolhe poste
no poste Não_encontrapostetimeout
Há_tempo
todos
No_início
20
2003 Eugénio Oliveira
Exemplo do Robô ColectorArquitectura para robô colectorComportamentos: vaguear; colectar; entregar
Diagrama FSA para robô colector:
2003 Eugénio Oliveira
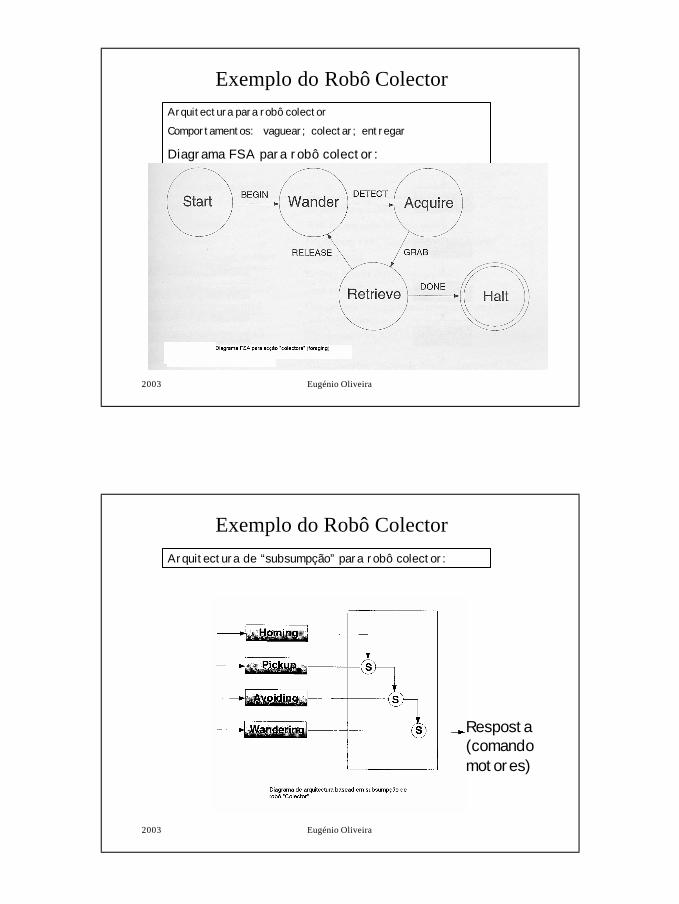
Exemplo do Robô ColectorArquitectura de “subsumpção” para robô colector:
Resposta (comando motores)
21
2003 Eugénio Oliveira
Agentes Inteligentes• Dar inteligência aos Agentes:
ex: Ele estuda porque quer passar no exameModelar intenções requer raciocínio + inteligência
• Técnicas para implementar racionalidade:•Raciocinio Simbólico•Planeamento•Satisfação de Restrições
•--> Sistemas Baseados em Conhecimento
• Qual a importância?•Comportamento mais complexo•Adaptação às condições dinâmicas•Aproximar-se do seu Objectivo•Aprender e usar Conhecimento novo
2003 Eugénio Oliveira
Agentes DeliberativosG Basedos em Lógica :GAgentes com estado internoG see mapeia estados do ambiente em Percepções: S --> PG action mapeia estados Internos em Acções: I-->AG next constrói o próximo estado Interno : I X P--> I
G Qual a representação do estado?GComo representar a função Acção?
22
2003 Eugénio Oliveira
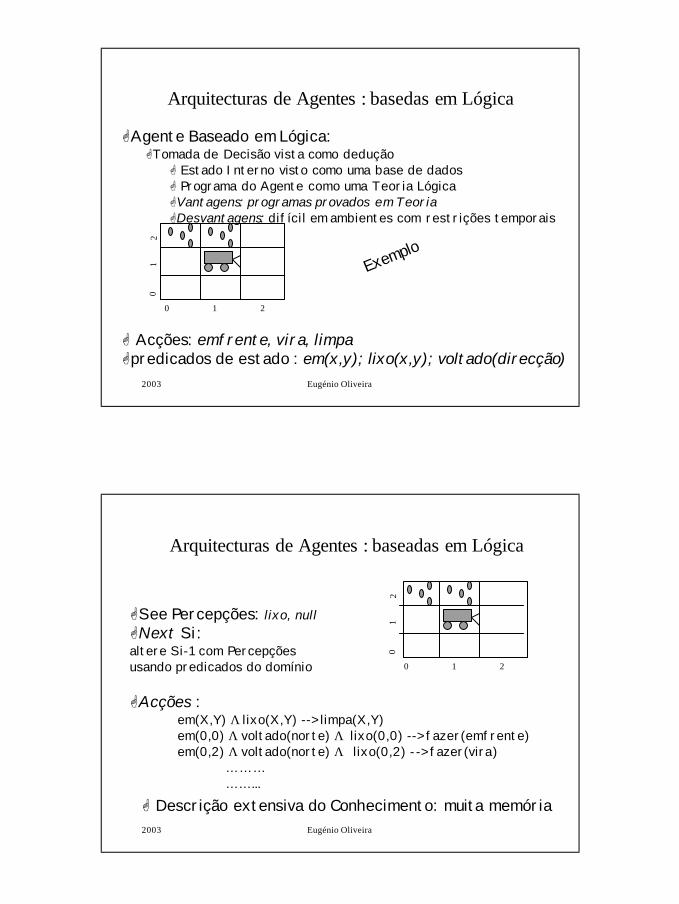
Arquitecturas de Agentes : basedas em Lógica
GAgente Baseado em Lógica:GTomada de Decisão vista como deduçãoG Estado Interno visto como uma base de dadosG Programa do Agente como uma Teoria LógicaGVantagens: programas provados em TeoriaGDesvantagens: difícil em ambientes com restrições temporais
G Acções: emfrente, vira, limpaGpredicados de estado : em(x,y); lixo(x,y); voltado(direcção)
0 1 2
0
1
2
Exemplo
2003 Eugénio Oliveira
GSee Percepções: lixo, nullGNext Si: altere Si-1 com Percepçõesusando predicados do domínio
G Descrição extensiva do Conhecimento: muita memória
0 1 2
0
1
2
GAcções : em(X,Y) Λ lixo(X,Y) --> limpa(X,Y)em(0,0) Λ voltado(norte) Λ∼lixo(0,0) --> fazer(emfrente)em(0,2) Λ voltado(norte) Λ ∼lixo(0,2) --> fazer(vira)
… … …… … ...
Arquitecturas de Agentes : baseadas em Lógica
23
2003 Eugénio Oliveira
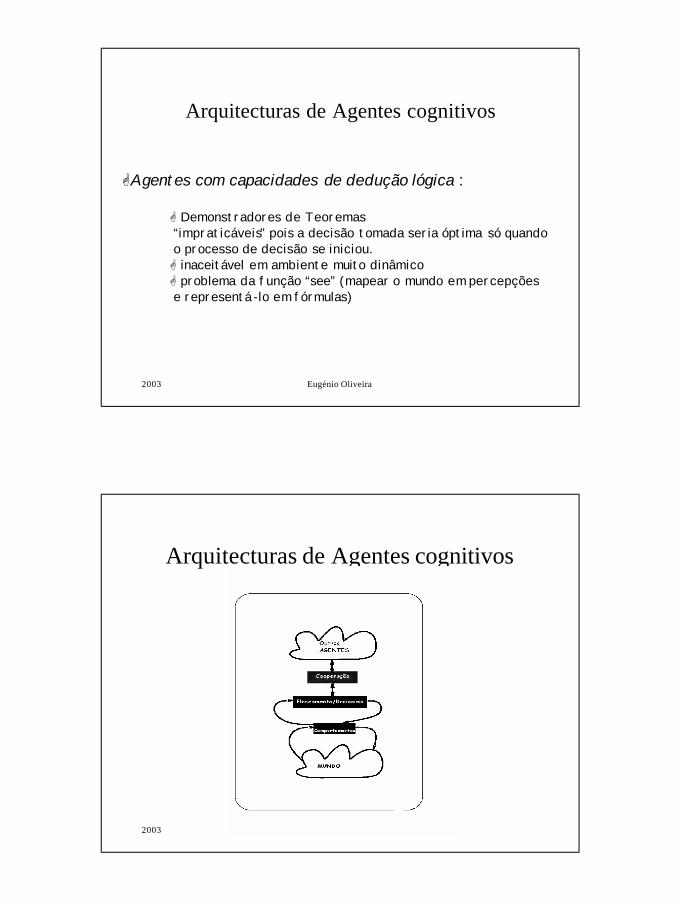
Arquitecturas de Agentes cognitivos
GAgentes com capacidades de dedução lógica :
G Demonstradores de Teoremas“impraticáveis” pois a decisão tomada seria óptima só quandoo processo de decisão se iniciou.G inaceitável em ambiente muito dinâmicoG problema da função “see” (mapear o mundo em percepçõese representá -lo em fórmulas)
2003 Eugénio Oliveira
Arquitecturas de Agentes cognitivos
24
2003 Eugénio Oliveira
Agentes ComunicativosG Programas/ObjectosG Chamadas a Procedimentos/invoca MétodosG possibilidades pré-definidas
G Agentes:G Decisão autónoma sobre resposta a pedidosG Linguagens de ComunicaçãoG Mensagens e Conteúdos não pré-fixadosG Comunicação sobre:
GCrençasGObjectivosGPlanos
GQual a importância da Comunicação:GCoordenação, Cooperação e Negociaçãoentre Agentes heterogéneos
2003 Eugénio Oliveira
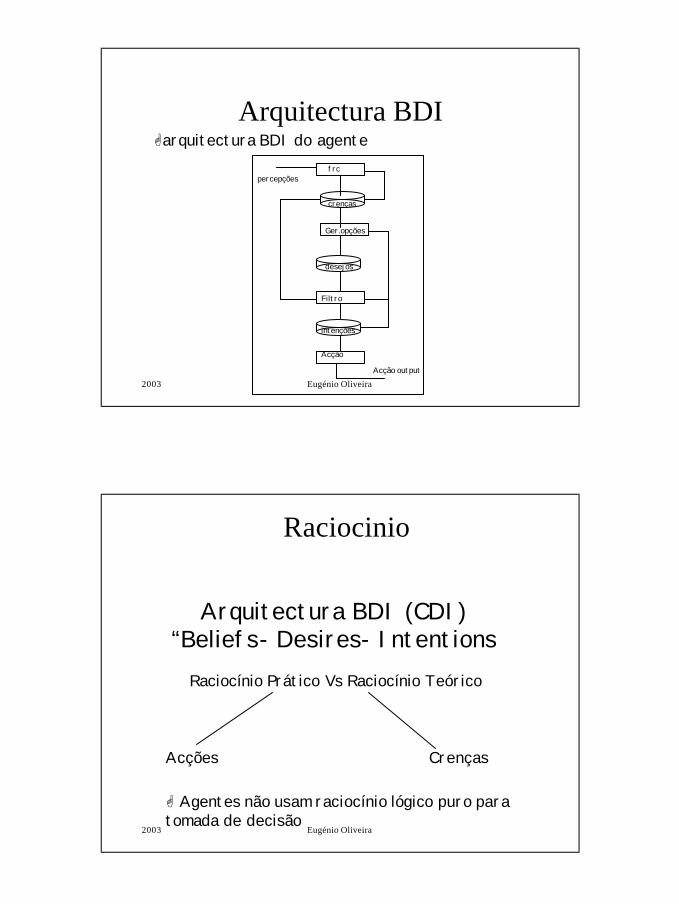
Arquitectura BDIGArquitectura de agentes BDI
GIntenções dos Agentes guiam as AcçõesGIntenções baseiam-se em Crenças
G Raciocínio prático em Agentes BDI usa:G Crenças acerca do ambienteG Função de Revisão baseada nas actuais PercepçõesG Gerador de hipóteses (Desejos)G Função de Filtragem (processo de Deliberação)G Intenções Correntes (foco)G Função de Selecção da Acção
25
2003 Eugénio Oliveira
Garquitectura BDI do agente
crenças
desejos
intenções
frc
Ger.opções
Filtro
Acção
Acção output
percepções
Arquitectura BDI
2003 Eugénio Oliveira
Arquitectura BDI (CDI)“Beliefs- Desires- Intentions
Raciocínio Prático Vs Raciocínio Teórico
Acções Crenças
Raciocinio
G Agentes não usam raciocínio lógico puro paratomada de decisão
26
2003 Eugénio Oliveira
G Raciocínio Prático:GDeliberação: O quê? (se deve fazer)
GPlaneamento: Como? (se deve fazer)
GDeliberação e Planeamento usam recursos que são limitados
G Lógica Intencional necessária para os Agentes definiremo seu comportamento (p.ex. o operador Ki φ)
G“Intenções” tem mais peso que “Desejos” (Opções)G“Intenções” são pró-atitudes levando a acções e Objectivosque foi decidido atingir.G “Intenções“ persistem e guiam o raciocíneo de planeamentorestrinjem deliberações futuras e influenciam novas crenças
Raciocínio Prático
2003 Eugénio Oliveira
GRepresentação explícita dos BDI no Agente
G deliberação é modelada por duas funções de assinaturas:
G geração de Opções opt: Φ(Bel) X Φ(Int) à Φ(Des)
G filtragem filtro: Φ(Bel) X Φ(Des) à Φ(Int)
G A Revisão de Crenças é modelada por:
G brf: Φ(Bel) X percepções à Φ(Bel)
Arquitectura BDI
27
2003 Eugénio Oliveira
• Processo de Deliberação:
– Gerar Opções– Ponderar Opções– Escolher (filtrar)– Comprometer-se com as Opções escolhidas (Intenções)
• Processo de Planeamento:
– Raciocínio por Análise-Meios-Fins (MEA)– Representação de Objectivos/Intenções (ontologia de situações)– representação do Estado do Mundo (idem)– Acções possíveis/operadores (ontologia de operações)– Representação do Plano
Arquitectura BDI
2003 Eugénio Oliveira
– Ciclo simples do Controlo do Agente BDI:
•B:=B0 % Crenças iniciais•I:=I0 % Intenções iniciais•ENQUANTO Verdade FAZER
•Busca próxima percepção P;•B:= frc(B,P); % Actualiza Crenças•D:=opções(B,I); % Das Crenças e actuais Intensões gera
opções possíveis•I:=filtro(B,D,I); % selecção de novas Intensões coerêntes
• Π:=planeamento(B,I);•Execução(Π)
•FIM ENQUANTO
28
2003 Eugénio Oliveira
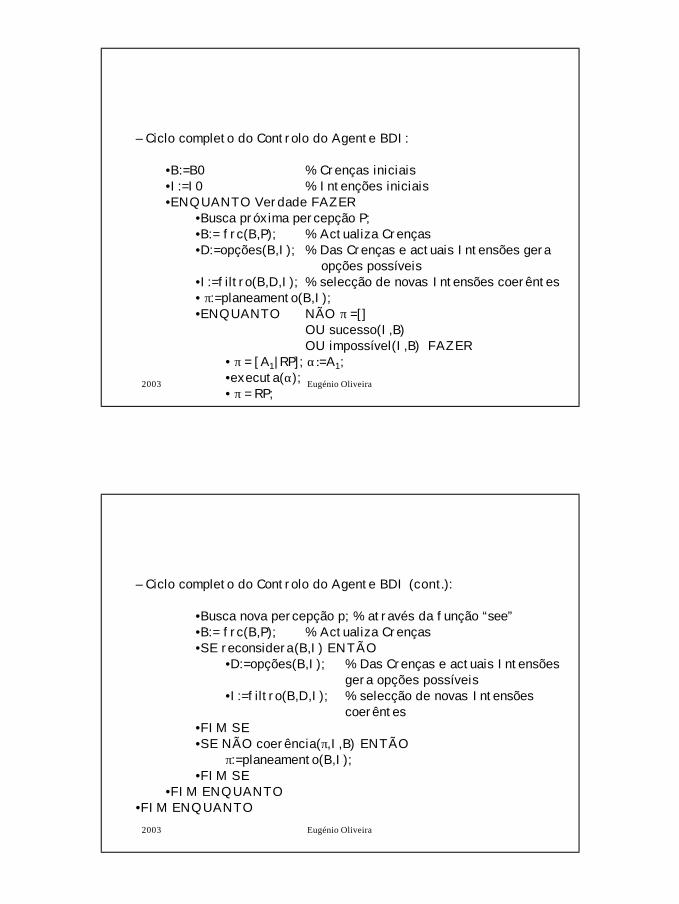
– Ciclo completo do Controlo do Agente BDI:
•B:=B0 % Crenças iniciais•I:=I0 % Intenções iniciais•ENQUANTO Verdade FAZER
•Busca próxima percepção P;•B:= frc(B,P); % Actualiza Crenças•D:=opções(B,I); % Das Crenças e actuais Intensões gera
opções possíveis•I:=filtro(B,D,I); % selecção de novas Intensões coerêntes• π:=planeamento(B,I);•ENQUANTO NÃO π =[]
OU sucesso(I,B)OU impossível(I,B) FAZER
• π = [A1|RP]; α:=A1;•executa(α);• π = RP;
2003 Eugénio Oliveira
– Ciclo completo do Controlo do Agente BDI (cont.):
•Busca nova percepção p; % através da função “see”•B:= frc(B,P); % Actualiza Crenças•SE reconsidera(B,I) ENTÃO
•D:=opções(B,I); % Das Crenças e actuais Intensõesgera opções possíveis
•I:=filtro(B,D,I); % selecção de novas Intensõescoerêntes
•FIM SE•SE NÃO coerência(π,I,B) ENTÃO
π:=planeamento(B,I);•FIM SE
•FIM ENQUANTO•FIM ENQUANTO
29
2003 Eugénio Oliveira
– Reconsiderar:
– Agentes tem estratégias diferentes para “reconsiderar”–“fanáticos”: Nunca reconsideram as suas intenções– “cautelosos”: reconsideram as suas intenções depois de cadaacção.
– Agentes “cautelosos” tem melhor desempenho que os“fanáticos” quando o ambiente é muito dinâmico. – O contrário verifica-se para ambientes pouco dinâmicos.
2003 Eugénio Oliveira
Representação de ConhecimentoRepresentação de Conhecimento em Sistemas baseados em Comportamentos:
Mapas cognitivos : apenas locais relevantes
Memória Comportamental de Curto-prazo:
orientada para a acção
baseada em grelhas
resolução variada
forma: rectangular ou radial; uniforme ou não
30
2003 Eugénio Oliveira
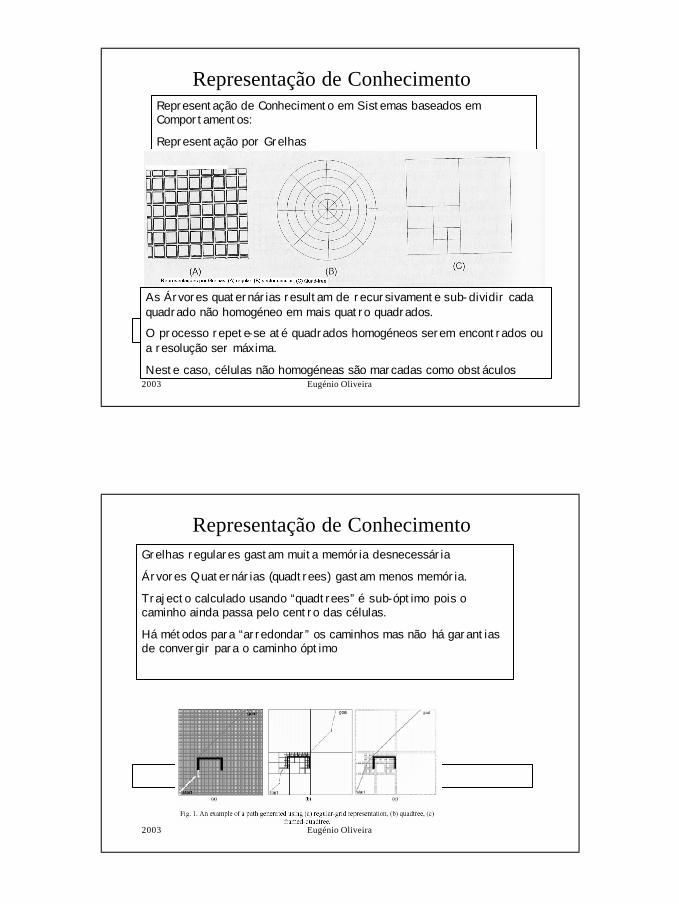
Representação de ConhecimentoRepresentação de Conhecimento em Sistemas baseados em Comportamentos:
Representação por Grelhas
Resposta (comando motores)
As Árvores quaternárias resultam de recursivamente sub-dividir cada quadrado não homogéneo em mais quatro quadrados.
O processo repete-se até quadrados homogéneos serem encontrados ou a resolução ser máxima.
Neste caso, células não homogéneas são marcadas como obstáculos
2003 Eugénio Oliveira
Representação de ConhecimentoGrelhas regulares gastam muita memória desnecessária
Árvores Quaternárias (quadtrees) gastam menos memória.
Trajecto calculado usando “quadtrees” é sub-óptimo pois o caminho ainda passa pelo centro das células.
Há métodos para “arredondar” os caminhos mas não há garantias de convergir para o caminho óptimo
31
2003 Eugénio Oliveira
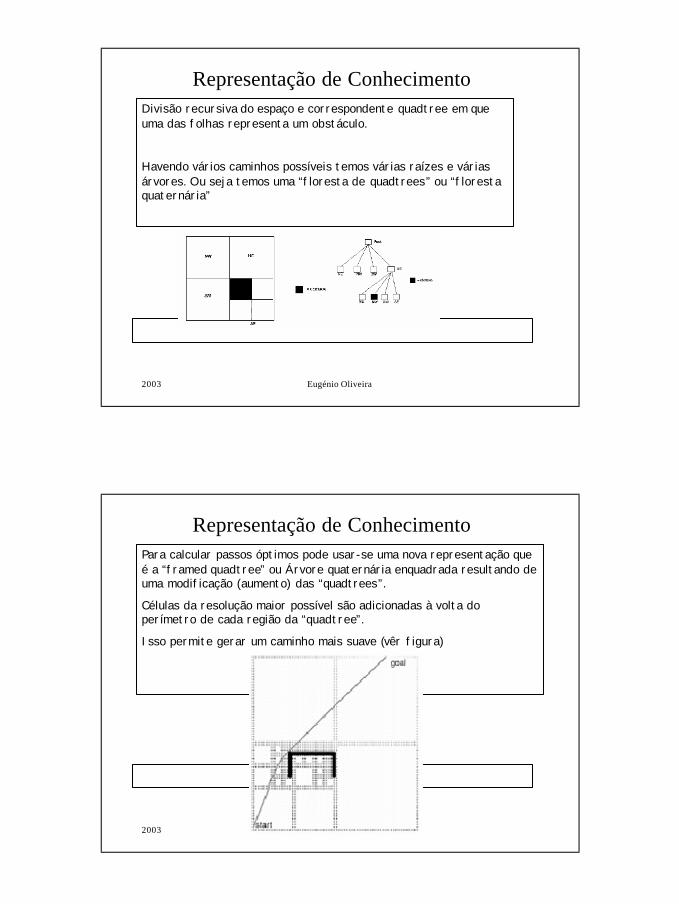
Representação de ConhecimentoDivisão recursiva do espaço e correspondente quadtree em que uma das folhas representa um obstáculo.
Havendo vários caminhos possíveis temos várias raízes e várias árvores. Ou seja temos uma “floresta de quadtrees” ou “floresta quaternária”
2003 Eugénio Oliveira
Representação de ConhecimentoPara calcular passos óptimos pode usar-se uma nova representação que é a “framed quadtree” ou Árvore quaternária enquadrada resultando de uma modificação (aumento) das “quadtrees”.
Células da resolução maior possível são adicionadas à volta do perímetro de cada região da “quadtree”.
Isso permite gerar um caminho mais suave (vêr figura)
32
2003 Eugénio Oliveira
Representação de ConhecimentoNa figura quanto mais escura a célula mais custos implica.
Como o trajecto pode passar por qualquer célula de fronteira e há muitas destas, há muitos mais angulos possíveis entre segmentos de caminho em vez dos 8 das grelhas regulares.
O caminho aproxima-se mais do óptimo mas requer mais memória em ambientes com muitos obstáculos.
Depois de construir recursivamente a “quadtree” pode alocar-se uma lista de células de fronteira à volta do perímetro de todos os terminais da “quadtree”.
Seguidamente atribui-se apontadores para células fronteiras vizinhas.
Se pertencem à mesma célula terminal são implicitamente conectáveis.
Se pertencem a terminais diferentes da “quadtree” é preciso verificar se são adjacentes ou não. Se sim haverá células fronteiras dele que são adjecentes e podem criar-se apontadores de uma para as outras
2003 Eugénio Oliveira
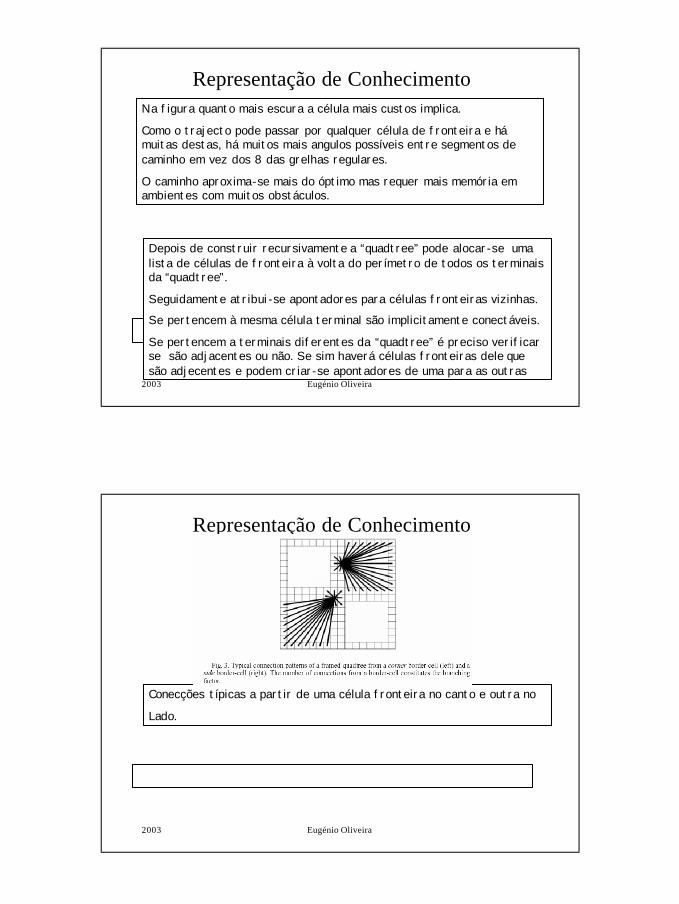
Representação de Conhecimento
Conecções típicas a partir de uma célula fronteira no canto e outra no
Lado.
33
2003 Eugénio Oliveira
Representação de ConhecimentoRepresentação de Conhecimento em Sistemas baseados em Comportamentos:
Memória Longo-termo para mapas:
baseados em sensores
imprecisos se o ambiente é dinâmico
on-line (sensores próprios)
off-line (ex. satélite)
codificação:
métrica (coordenadas)
qualitativa (características relacionamentos. Ex: vire na 2ª porta à direita)
2003 Eugénio Oliveira
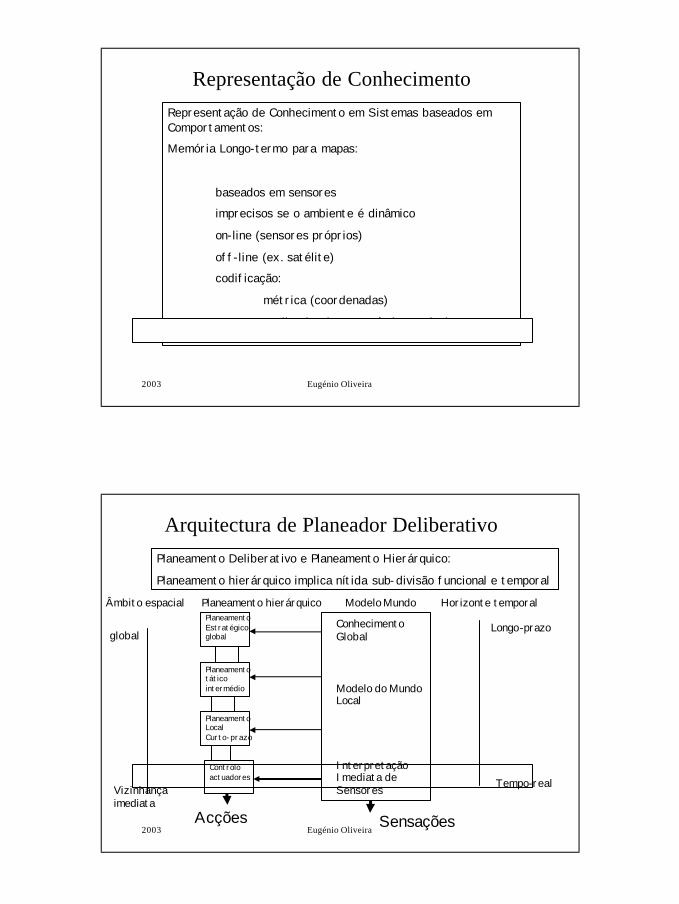
Arquitectura de Planeador DeliberativoPlaneamento Deliberativo e Planeamento Hierárquico:
Planeamento hierárquico implica nítida sub-divisão funcional e temporal
PlaneamentoEstratégicoglobal
Planeamentotáticointermédio
PlaneamentoLocalCurto-prazo
Controloactuadores
ConhecimentoGlobal
Modelo do MundoLocal
InterpretaçãoImediata deSensores
Acções Sensações
Âmbito espacial Planeamento hierárquico Modelo Mundo Horizonte temporal
global
Vizinhançaimediata
Longo-prazo
Tempo-real
34
2003 Eugénio Oliveira
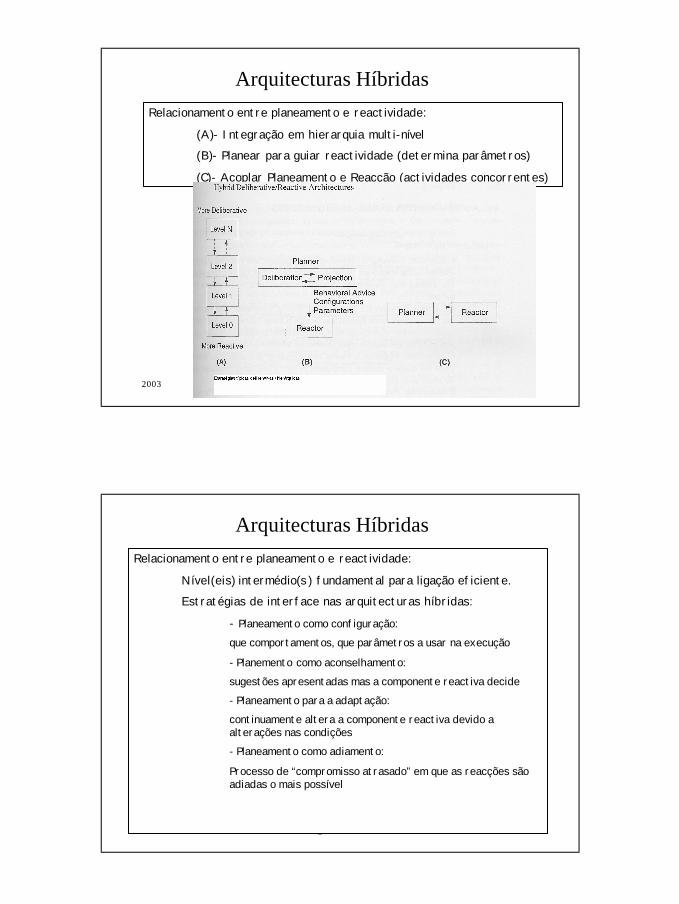
Arquitecturas HíbridasRelacionamento entre planeamento e reactividade:
(A)- Integração em hierarquia multi-nível
(B)- Planear para guiar reactividade (determina parâmetros)
(C)- Acoplar Planeamento e Reacção (actividades concorrentes)
2003 Eugénio Oliveira
Arquitecturas HíbridasRelacionamento entre planeamento e reactividade:
Nível(eis) intermédio(s ) fundamental para ligação eficiente.
Estratégias de interface nas arquitecturas híbridas:
- Planeamento como configuração: que comportamentos, que parâmetros a usar na execução
- Planemento como aconselhamento:sugestões apresentadas mas a componente reactiva decide- Planeamento para a adaptação:continuamente altera a componente reactiva devido a alterações nas condições- Planeamento como adiamento:
Processo de “compromisso atrasado” em que as reacções são adiadas o mais possível
35
2003 Eugénio Oliveira
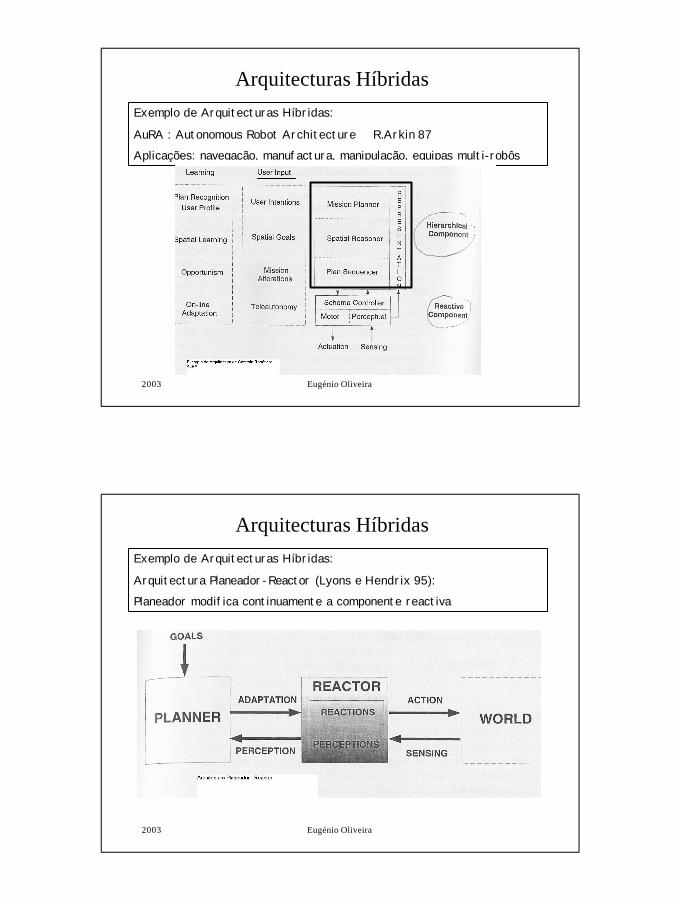
Arquitecturas HíbridasExemplo de Arquitecturas Híbridas:
AuRA : Autonomous Robot Architecture R.Arkin 87
Aplicações: navegação, manufactura, manipulação, equipas multi-robôs
2003 Eugénio Oliveira
Arquitecturas HíbridasExemplo de Arquitecturas Híbridas:
Arquitectura Planeador-Reactor (Lyons e Hendrix 95):
Planeador modifica continuamente a componente reactiva
36
2003 Eugénio Oliveira
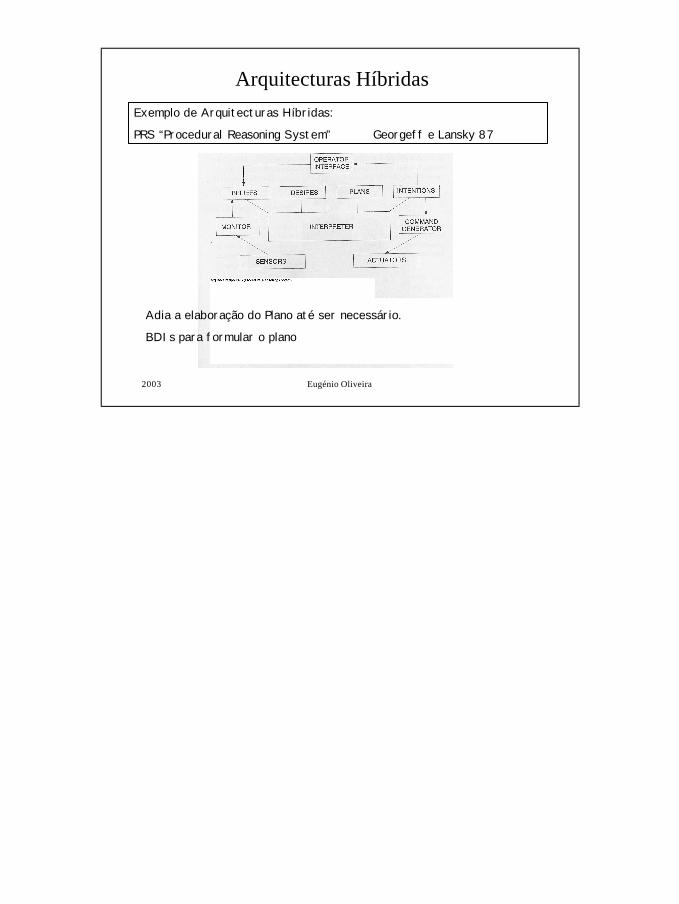
Arquitecturas HíbridasExemplo de Arquitecturas Híbridas:
PRS “Procedural Reasoning System” Georgeff e Lansky 87
Adia a elaboração do Plano até ser necessário.
BDIs para formular o plano