análise sísmica de pontes com sistema de bloqueio para ... · análise sísmica de pontes com...
TRANSCRIPT

i
Análise sísmica de pontes
com sistema de bloqueio para frenagem
Pedro Limpo Serra de Gouveia Medeiro
Dissertação para obtenção do Grau de Mestre em
Engenharia Civil
Orientador: Prof. Luís Manuel Coelho Guerreiro
Júri
Presidente: Prof. José Manuel Matos Noronha da Câmara
Orientador: Prof. Luís Manuel Coelho Guerreiro
Vogal: Prof. Mário Manuel Paisana dos Santos Lopes
Dezembro de 2014


iii
Resumo
Resumo Em pontes ou viadutos de linhas ferroviárias de alta velocidade que se localizem em zonas de elevado
risco sísmico, torna-se necessário associar aos sistemas de proteção sísmica um sistema de bloqueio
que restrinja a estrutura para cargas de serviço. Nesta dissertação testou-se a eficácia de uma solução
inovadora, constituída por uma mola pré-comprimida (MPc) associada em paralelo com um dissipador
viscoso (FVD). A MPc recentra a estrutura depois de uma ação sísmica, para além de restringir o seu
movimento para cargas de serviço até à máxima força de frenagem. O FVD dissipa energia sísmica
durante um sismo. Avalia-se o comportamento do dissipador com mola pré-comprimida (DMPc),
modelado numericamente, de duas formas: (i) mediante uma análise de sensibilidade realizada para
um caso de estudo e (ii) através da otimização da solução para cada um dos quatro casos de estudo,
numa perspetiva de dimensionamento. Conclui-se que a rigidez da MPc não é um elemento
determinante para a redução do máximo deslocamento. O uso de valores do parâmetro 𝛼 do FVD
inferiores a 1 contribui para a redução do máximo deslocamento da estrutura, influenciando pouco a
máxima força a transmitir ao encontro. A adoção de constantes características do FVD mais elevadas
provoca uma redução no máximo deslocamento da estrutura, à custa do aumento das forças
transmitidas ao encontro. O comportamento do DMPc praticamente não se altera quando incorporado
em diferentes viadutos com variações a nível de massa e frequência.
Palavras-chave
Alta Velocidade, Sistemas de Proteção Sísmica, Sistema de Bloqueio, Dissipador com Mola Pré-
Comprimida


v
Abstract
Abstract On bridges and viaducts that are part of high speed networks located in areas of high seismicity it
becomes necessary to associate a blockage system, that restricts the structure for service loads, to the
seismic protection systems. In this dissertation the effectiveness of an innovative and indicated solution
has been evaluated for these types of cases. This solution consists on a Prestressed Spring (MPc)
associated in parallel with a Fluid Viscous Damper (FVD). The MPc puts back the structure after a
seismic action and contains its movements for service loads until maximum braking force. The FVD
works by dissipating seismic energy when an earthquake occurs. The behaviour of the Prestressed
Spring Damper (DMPc), numerically modelled, was evaluated in two different ways: (i) based in a
sensitivity analysis made for a specific case study and (ii) through its optimization in a design
perspective, for different case studies. It concludes that the MPc stiffness is not a key element on the
displacement reduction. The use of smaller values of the α parameter helps increase the damping
capacity, barely influencing the maximum force transmitted to the abutment. The increasing of the
characteristic constant causes a reduction on the maximum seismic displacement with the downside of
raising the abutment forces. The DMPc’s behaviour is practically the same when incorporated in different
viaducts with mass and frequency levels variations.
Keywords
High Speed Railways, Seismic Protection Systems, Blockage System, Prestressed Spring Damper


vii
Índice Geral
Índice Geral
Índice Geral
Resumo ................................................................................................. iii
Abstract ................................................................................................... v
Índice Geral ........................................................................................... vii
Índice de Figuras ................................................................................... xi
Índice de Tabelas ................................................................................. xvii
Índice de Abreviaturas ......................................................................... xix
Índice de Variáveis ............................................................................... xxi
1 Introdução ......................................................................................... 1
1.1 Enquadramento geral .................................................................................... 2
1.2 Âmbito e objetivos ......................................................................................... 6
1.3 Estrutura da dissertação ................................................................................ 7
2 Sistemas de Bloqueio para frenagem associados a Sistemas de
Proteção Sísmica .................................................................................... 9
2.1 Introdução ................................................................................................... 11
2.2 Soluções usuais de proteção sísmica de pontes ......................................... 11
2.2.1 Sistemas de Isolamento de Base ....................................................................14
2.2.1.1 HDRB – Apoios de Borracha de Alto Amortecimento ............................................... 16
2.2.1.2 LRB – Apoios de Borracha com Núcleo de Chumbo ................................................ 18
2.2.1.3 FPB – Apoios Pendulares com Atrito ........................................................................ 19
2.2.2 Sistemas de Dissipação de Energia ................................................................21

viii
2.2.2.1 MD – Dissipadores Histeréticos ................................................................................ 23
2.2.2.2 FVD – Dissipadores Viscosos ................................................................................... 26
2.2.3 Soluções Conjugadas .....................................................................................31
2.3 Definição das condições de serviço dos comboios de alta velocidade em
pontes – EC1 ........................................................................................................ 37
2.4 Solução mista por fusíveis metálicos ........................................................... 39
2.4.1 Estudo 1 – Fusíveis metálicos e dissipadores histeréticos ..............................40
2.4.2 Estudo 2 – Fusíveis metálicos e dissipadores viscosos ...................................44
2.5 Solução mista com mola pré-comprimida (Transpec PDS) ......................... 47
3 Dissipador com Mola Pré-comprimida ............................................. 51
3.1 Estrutura do dispositivo ............................................................................... 53
3.1.1 Mola Pré-comprimida (MPc) ............................................................................53
3.1.2 Dissipador Viscoso (FVD) ...............................................................................56
3.2 Modelo de comportamento .......................................................................... 58
3.3 Modelo de análise computacional ............................................................... 62
4 Casos de Estudo ............................................................................. 65
4.1 Descrição dos Casos de Estudo ................................................................. 67
4.2 Ação sísmica e combinações de ações ....................................................... 72
4.3 Apresentação de resultados ........................................................................ 73
4.3.1 Análise de sensibilidade aos parâmetros característicos do DMPc .................73
4.3.1.1 Influência da rigidez da mola pré-comprimida - 𝑲𝟐 .................................................. 74
4.3.1.2 Influência da constante característica do dissipador viscoso – 𝑪 ............................. 78
4.3.1.3 Influência da constante 𝜶 do dissipador viscoso ....................................................... 80
4.3.2 Otimização da solução ....................................................................................84
5 Conclusões e Futuros Desenvolvimentos ....................................... 89
5.1 Conclusões .................................................................................................. 91
5.2 Futuros Desenvolvimentos .......................................................................... 93

ix
Anexo 1 – Acelerogramas artificiais .................................................... 101
Anexo 2 – Caso de Estudo 2 ............................................................... 107
Anexo 3 – Caso de Estudo 3 ............................................................... 111
Anexo 4 – Caso de Estudo 4 ............................................................... 115


xi
Índice de Figuras
Índice de Figuras Figura 1 - Comboio de alta velocidade em circulação na linha Tokaido Shinkansen, Japão (Japan Guide,
2013). ....................................................................................................................................................... 2
Figura 2 - Situação prevista para a rede europeia de alta velocidade em 2025 (UIC, 2010). ................ 3
Figura 3 – Efeito da diminuição da frequência no espetro de resposta elástica horizontal de acelerações
(A) e de deslocamentos (B). .................................................................................................................. 12
Figura 4 - Pormenor de uma junta sísmica na Ponte Rion-Antirion (Maurer, 2005). ............................ 13
Figura 5 - Efeito do aumento do amortecimento no espetro de resposta elástica horizontal de
acelerações (A) e de deslocamentos (B). ............................................................................................. 13
Figura 7 - Representação esquemática de um viaduto com frequência nula. Adaptado de Maurer (2001).
............................................................................................................................................................... 15
Figura 8 - Efeito das condições do solo na resposta da estrutura (qualitativo). Adaptado de Symans
(2013). ................................................................................................................................................... 16
Figura 9 - Representação esquemática de um viaduto cujo isolamento sísmico é feito através de
elementos deformáveis. Adaptado de Guerreiro (2004). ...................................................................... 16
Figura 10 – Apoio HDRB: (A) Constituição; (B) Aplicação dos apoios em obra. Adaptado de FIP (2012).
............................................................................................................................................................... 17
Figura 11 - Relação força-deslocamento de apoios HDRB e LDRB (gráfico qualitativo). Adaptado de
Symans (2013). ..................................................................................................................................... 18
Figura 12 - Apoio LRB: (A) Constituição. Adaptado de FIP (2012); (B) Estrutura interna. (FIB, 2005) 18
Figura 13 - Relação força-deslocamento de apoios LRB e HDRB (gráfico qualitativo). Adaptado de
Symans (2013). ..................................................................................................................................... 19
Figura 14 - Apoio FPB: (A) Constituição; (B) Exemplo de um apoio FPB (Braun, 2009). .................... 20

xii
Figura 15 - Modelo de comportamento dos apoios FPB (Maurer, 2013). ............................................. 20
Figura 17 - Relação força-deslocamento de apoios FPB: soma da restituição e atrito. Adaptado de
Symans (2013). ..................................................................................................................................... 21
Figura 18 - (A) Dissipadores instalados em edifícios. (Guerreiro, 2008); (B) Dissipadores instalados em
viadutos. Adaptado de Maurer (2001); (C) Pormenor de um dissipador viscoso na zona do encontro de
um viaduto (Guerreiro, 2008). ............................................................................................................... 22
Figura 19 - Formas típicas de dissipadores histeréticos: (A) Pin; (B) Crescent-Moon; (C) Butterfly
(Loureiro, 2008). .................................................................................................................................... 24
Figura 20 - Relação força-deslocamento de dissipadores histeréticos (gráfico qualitativo). Adaptado de
Guerreiro (2003). ................................................................................................................................... 25
Figura 21 - Dissipadores histeréticos instalados na Ponte Vasco da Gama: (A) Localização dos
dissipadores (Guerreiro, 2008); (B) Esquema dos dissipadores em planta (Guerreiro et al.,1997); (C)
Pormenor dos dissipadores na fase de construção (Guerreiro, 2008). ................................................ 26
Figura 22 - Dissipadores viscosos: (A) Dissipadores utilizados na Ponte Domovinski, Croácia (Maurer,
2011); (B) Dissipadores utilizados na Ponte Rion-Antirion, Grécia (Castellano et al., 2004). .............. 27
Figura 23 - Esquema do funcionamento de um dissipador viscoso. Adaptado de Guerreiro (2008). .. 27
Figura 25 - Relação força-deslocamento de dissipadores viscosos (gráfico qualitativo). Adaptado de
CEN (2005). ........................................................................................................................................... 30
Figura 26 - Relações força-velocidade e força-deslocamento de dissipadores viscosos para diferentes
valores de α (Guerreiro, 2003). ............................................................................................................ 30
Figura 27 - Relação força-deslocamento de dissipadores viscosos em função dos parâmetros α e C
(Guerreiro, 2003). .................................................................................................................................. 31
Figura 28 - Representação esquemática de um viaduto com uma solução conjugada de sistemas de
proteção sísmica. Adaptado de Maurer (2001). .................................................................................... 32
Figura 29 - Ponte do Rio Sado: Pormenor da parte central com os 3 arcos metálicos (Sartori, 2012).33
Figura 31 - Ponte Rion-Antirion, Grécia (FIB, 2005). ............................................................................ 34
Figura 32 - Solução conjugada utilizada na Ponte Rion-Antirion: (A) FVD em paralelo com fusíveis
metálicos; (B) Teste realizado a um FVD no laboratório FIP industriale. Adaptado de Infanti et al.
(2004). ................................................................................................................................................... 35

xiii
Figura 33 - Solução conjugada utilizada no viaduto Antirion de acesso: (A) Viaduto Antirion; (B)
Pormenor do sistema de proteção sísmica. Adaptado de Infanti et al. (2004). .................................... 35
Figura 34 - Ponte Sheikh Zayed: Desenho de arquitetura. (Infanti et al. 2007).................................... 36
Figura 36 - (A) Instalação de um fusível metálico. (Chiarotto et al. 2004); (B) Relação força-
deslocamento obtida experimentalmente para um fusível metálico. Adaptado de FIP (2013). ............ 39
Figura 37 - Modelo testado representativo da solução mista implementada nos viadutos da linha
ferroviária Caracas-Tuy Medio, Venezuela (Chiarotto et al. 2004). ...................................................... 40
Figura 38 - Tipo de apoio utilizado nos viadutos Caracas-Tuy Medio. (Chiarotto et al., 2004) ............ 41
Figura 39 - Resultados do teste 1: Aceleração no tabuleiro do viaduto ao longo do tempo. Adaptado de
Chiarotto et al. (2004) ............................................................................................................................ 41
Figura 40 - Resultados do teste 1: Relação força-deslocamento do dissipador histerético. Adaptado de
Chiarotto et al. (2004). ........................................................................................................................... 42
Figura 41 - Aceleração do tabuleiro do viaduto ao longo do tempo: Comparação entre os testes 1 e 2,
com e sem fusível metálico, respetivamente. Adaptado de Chiarotto et al. (2004). ............................. 42
Figura 42 - Resultados do teste 2: Acelerações na mesa sísmica e no tabuleiro do viaduto ao longo do
tempo. Adaptado de Chiarotto et al. (2004). ......................................................................................... 43
Figura 43 - Resultados do teste 1: Deslocamento do tabuleiro do viaduto ao longo do tempo. Adaptado
de Chiarotto et al. (2004). ...................................................................................................................... 43
Figura 45 - Deslocamento do tabuleiro do viaduto ao longo do tempo para um sinal sísmico (sinal 1) e
para diferentes rigidezes do fusível metálico (Monteiro, 2013)............................................................. 45
Figura 46 - Variação da força ao longo do tempo em fusíveis metálicos de diferentes rigidezes para um
sinal sísmico (sinal 1) (Monteiro, 2013). ................................................................................................ 46
Figura 47 - Valores médios do deslocamento máximo e médio para um sinal sísmico (sinal 1) e para
diferentes rigidezes do fusível metálico (Monteiro, 2013). .................................................................... 46
Figura 49 - Comportamento dinâmico do transpec PDS: (A) Relação força-deslocamento (gráfico
qualitativo); (B) Diferentes fases do movimento. Adaptado de Freyssinet (2010). ............................... 48
Figura 52 - Relação força-deslocamento de uma mola pré-comprimida para meio ciclo (gráfico
qualitativo). ............................................................................................................................................ 54

xiv
Figura 53 - Caso de estudo 1: Relação força-deslocamento da MPc, com a associação em paralelo do
FVD. ....................................................................................................................................................... 55
Figura 54 - Caso de estudo 1: Deslocamento da estrutura ao longo do tempo, apenas com a inclusão
do FVD (sem a MPc). ............................................................................................................................ 55
Figura 55 - Gráficos típicos de um FVD para um ciclo, traçados de forma qualitativa: (A) Relação força-
velocidade; (B) Relação força-deslocamento........................................................................................ 56
Figura 56 - Caso de estudo 1: Relação força-velocidade do FVD, com a associação em paralelo da
MPc. ....................................................................................................................................................... 57
Figura 57 - Caso de estudo 1: Relação força-deslocamento do FVD, com a associação em paralelo da
MPc. ....................................................................................................................................................... 57
Figura 58 - Caso de estudo 1: Deslocamento da estrutura ao longo do tempo, apenas com a inclusão
da MPc (sem o FVD). ............................................................................................................................ 58
Figura 59 - Movimento harmónico simples em função do deslocamento e da velocidade (gráficos
qualitativos). .......................................................................................................................................... 59
Figura 60 - Relação força-deslocamento de um DMPc: soma da MPc com o FVD (gráficos qualitativos).
............................................................................................................................................................... 59
Figura 61 - Evolução do diagrama força-deslocamento de um DMPc para as diferentes fases do
movimento, ao longo de um ciclo (gráfico qualitativo). ......................................................................... 60
Figura 62 - Caso de estudo 1: Relação força-deslocamento do conjunto DMPc/estrutura. ................. 61
Figura 63 - Caso de estudo 1: Deslocamento da estrutura ao longo do tempo, com a inclusão do DMPc.
............................................................................................................................................................... 61
Figura 64 - (A) Modelo FVD em SAP2000 (CSI, 2010); (B) Propriedades do FVD - janelas de comando
do programa SAP2000. ......................................................................................................................... 64
Figura 65 - Propriedades da MPc - janelas de comando do programa SAP2000. ............................... 64
Figura 66 - (A) Viaduto tipo dos casos de estudo 1 e 3, de frequência nula; (B) Modelo SAP2000 adotado
para representar os casos de estudo 1 e 3. .......................................................................................... 69
Figura 67 - (A) Viaduto tipo dos casos de estudo 2 e 4, de frequência 0,2 Hz; (B) Modelo SAP2000
adotado para representar os casos de estudo 2 e 4. ............................................................................ 70

xv
Figura 68 - Modelo simplificado utilizado nos casos de estudo 2 e 4, para representar o viaduto de
frequência 0,2 Hz. ................................................................................................................................. 70
Figura 69 - Espetro de resposta elástica do sismo afastado e do sismo próximo: zona 3, solo B e
amortecimento de 5%. ........................................................................................................................... 72
Figura 70 - Acelerograma artificial do sismo de referência (sismo 8). .................................................. 74
Figura 71 - Caso de estudo 1: Relação força-deslocamento da MPc para 3 tipos de rigidez K2 (10K, K
e K/10). .................................................................................................................................................. 75
Figura 72 - Caso de estudo 1: Relação força-deslocamento do FVD para 3 tipos de rigidez K2 da MPc
(10K, K e K/10) ...................................................................................................................................... 76
Figura 73 - Caso de estudo 1: Relação força-deslocamento do conjunto DMPc/estrutura para 3 tipos de
rigidez K2 da MPc (10K, K e K/10). ....................................................................................................... 76
Figura 74 – Caso de estudo 1: Deslocamento do tabuleiro do viaduto nos últimos 4 segundos para 3
tipos de rigidez K2 da MPc (10K, K e K/10). .......................................................................................... 77
Figura 75 - Caso de estudo 1: Relação força-deslocamento do FVD para 3 tipos de constante
característica C (2000, 4000 e 6000) .................................................................................................... 78
Figura 76 - Caso de estudo 1: Relação força-velocidade do FVD para 3 tipos de constante característica
C (2000, 4000 e 6000) ........................................................................................................................... 79
Figura 77 - Caso de estudo 1: Relação força-deslocamento da MPc para 3 tipos de constante
característica C do FVD (2000, 4000 e 6000). ...................................................................................... 79
Figura 78 - Caso de estudo 1: Relação força-deslocamento do conjunto DMPc/estrutura para 3 tipos de
constante característica C do FVD (2000, 4000 e 6000). ..................................................................... 80
Figura 79 - Caso de estudo 1: Relação força-deslocamento do FVD para 3 tipos de constante α (0,2,
0,4 e 1)................................................................................................................................................... 81
Figura 80 - Caso de estudo 1: Relação força-velocidade do FVD para 3 tipos de constante α (0,2, 0,4 e
1). ........................................................................................................................................................... 82
Figura 81 - Caso de estudo 1: Relação força-deslocamento da MPc para 3 tipos de constante α do FVD
(0,2, 0,4 e 1). ......................................................................................................................................... 82
Figura 82 - Caso de estudo 1: Relação força-deslocamento do conjunto DMPc/estrutura para 3 tipos de
constante α do FVD (0,2, 0,4 e 1). ........................................................................................................ 83

xvi
Figura 83 - Caso de estudo 1: Força na MPc vs Deslocamento, para 3 tipos de rigidez K2 (10K, K e
K/10) e sem a inclusão do FVD. ............................................................................................................ 84
Figura 84 - Caso de estudo 1: Influência da constante característica C na força máxima do FVD para 2
tipos de rigidez K2 da MPc (K e K/10). .................................................................................................. 85
Figura 85 - Caso de estudo 1: Influência da constante característica C no deslocamento máximo do
tabuleiro do viaduto para 2 tipos de rigidez K2 da MPc (K, K/10). ........................................................ 86
Figura 86 - Caso de estudo 1: Influência da constante característica C na força máxima da MPc para 2
tipos de rigidez K2 (K, K/10). ................................................................................................................. 87

xvii
Índice de Tabelas
Índice de Tabelas Tabela 1 - Quadro Resumo dos 4 casos de estudo .............................................................................. 68
Tabela 2 - Quadro Resumo do cálculo da secção para o caso de estudo 2 ........................................ 71
Tabela 3 - Quadro Resumo do cálculo da secção para o caso de estudo 4 ........................................ 71
Tabela 4 - Rigidezes K2 definidas para a análise de sensibilidade. ...................................................... 74
Tabela 5 - Parâmetros da solução ótima definida para o DMPc. ......................................................... 88


xix
Índice de Abreviaturas
Índice de Abreviaturas
DMPc Dissipador com Mola Pré-comprimida
EC1 Eurocódigo 1 (CEN, 2003)
EC8 Eurocódigo 8 (CEN, 2004)
FPB Apoios Pendulares com Atrito (Friction Pendulum Bearings)
FVD Dissipador Viscoso (Fluid Viscous Damper)
HDRB Apoios de Borracha de Alto Amortecimento (High Damping Rubber Bearings)
LDRB Apoios de Borracha de Baixo Amortecimento (Low Damping Rubber Bearings)
LRB Apoios de Borracha com Núcleo de Chumbo (Lead Rubber Bearings)
MD Dissipador Histerético (Metallic Damper)
MPc Mola Pré-comprimida
RAVE Rede Ferroviária de Alta Velocidade, SA
REFER Rede Ferroviária Nacional
STU Bloqueador (Shock Transmission Unit)


xxi
Índice de Variáveis
Índice de Variáveis
�̈� Aceleração
L Comprimento
𝐶 Constante característica do Dissipador Viscoso
𝐶𝑒𝑠𝑡 Constante característica da estrutura
𝛼 Constante do Dissipador Viscoso
u; d; 𝑥 Deslocamento
F Força
Fa Força de atrito
Fy Força de cedência
Fr Força de restituição
F0 Força inicial
Fmáx Força máxima
f Frequência
I Inércia
m Massa
b Medida do lado da secção
E Módulo de elasticidade
𝐾 Rigidez
𝐾2 Rigidez da Mola Pré-comprimida
𝐾1 Rigidez inicial
t Tempo
V; �̇� Velocidade

1

1
Capítulo 1
Introdução
1 Introdução
Neste capítulo é feito o enquadramento do tema da dissertação, apresentando-se o problema em torno
do qual se desenvolve o trabalho. Referem-se ainda âmbitos e objetivos da dissertação, para além da
estrutura do documento.

2
1.1 Enquadramento geral
A forte aposta no desenvolvimento e na exploração de soluções ferroviárias de alta velocidade surgiu
com o objetivo de dar resposta às necessidades de crescimento e progresso em países mais
avançados.
No contexto de globalização, as primeiras infraestruturas ferroviárias de alta velocidade assumiram-se
como mais uma opção válida ao transporte de passageiros, competindo diretamente com o transporte
rodoviário e com o transporte aéreo, sobretudo para médias distâncias fazendo a ligação entre as
principais cidades de cada país e entre países.
Desde cedo se percebeu que a alta velocidade era uma alternativa com grande margem de progresso,
quando comparada com outros meios de transporte, associando uma maior sustentabilidade a uma
elevada rapidez, segurança, conforto e facilidade de partidas e chegadas dos passageiros. De facto, e
de acordo com a União Europeia, o número de passageiros a recorrer à alta velocidade nos principais
países europeus aumentou de 15,2 mil milhões de passageiros-quilómetros em 1990, para 92,33 mil
milhões em 2008 (EC, 2010).
Em 1964, o Japão tornou-se o primeiro país a disponibilizar uma linha ferroviária de alta velocidade,
com comboios a circular acima dos 200 km/h. Numa primeira instância, esta linha chamada Tokaido
Shinkansen (Figura 1), veio resolver problemas relacionados com o forte congestionamento rodoviário
que se fazia sentir entre Tokyo e Osaka, duas das principais cidades Japonesas. Os primeiros anos
vieram comprovar as elevadas expetativas em torno deste meio de transporte, registando-se também
grande adesão por parte dos cidadãos. Desde essa altura, a rede de alta velocidade no Japão tem
crescido bastante, tendo, neste momento, uma extensão de 2388 km e comboios que circulam a
velocidades de 300 km/h.
Figura 1 - Comboio de alta velocidade em circulação na linha Tokaido Shinkansen, Japão (Japan Guide, 2013).

3
O aparecimento dos comboios de alta velocidade na Europa não tardou, uma vez que já estavam a ser
desenvolvidos estudos no sentido de avançar para a construção de redes de alta velocidade, sobretudo
nos países europeus mais desenvolvidos.
Seguindo o bom exemplo do Japão, e potenciados pela crise do petróleo em 1973, os principais países
europeus intensificaram as investigações já existentes nesta área e começaram a desenvolver as
infraestruturas ferroviárias necessárias.
Foi em Itália, em 1977, que houve a primeira tentativa de disponibilizar uma linha de alta velocidade,
com a inauguração da linha ferroviária Direttissima, que fazia a ligação entre Florença e Roma. No
entanto, foi a França quem liderou o “boom” tecnológico da alta velocidade, introduzindo em 1981 o
primeiro comboio de alta velocidade (HST – High Speed Train), conhecido por TGV (Train à Grande
Vitesse). Seguiu-se a Alemanha, no início dos anos 90, com o Intercity Express (ICE), e a Espanha
com o lançamento da rede de Alta Velocidad Española (AVE) em 1992.
De acordo com o programa TEN-T (Trans-European Network Transport), a rede de alta velocidade
europeia terá uma extensão próxima dos 22140 km em 2020 e uma extensão de 30750 km em 2030.
Estes números são muito superiores aos registados em 2008, em que a rede de alta velocidade na
Europa tinha apenas 9693 Km de linha ferroviária (EC, 2010) (Figura 2).
Figura 2 - Situação prevista para a rede europeia de alta velocidade em 2025 (UIC, 2010).

4
A ligação entre Lisboa e Madrid insere-se neste plano de alargamento da rede de alta velocidade
europeia. Inicialmente a conclusão da obra estava prevista para 2013, mas, sobretudo com o
aparecimento da crise financeira, este prazo foi adiado, sendo que ainda não é certo que se venha a
construir este eixo.
Inerente às enormes vantagens deste meio de transporte, sobretudo num panorama global, está toda
a fase da conceção que requer grandes exigências técnicas, principalmente nos troços críticos como é
o caso de pontes e viadutos.
De facto, as pontes, que resultam normalmente de condicionantes do terreno ao traçado da linha
ferroviária, merecem atenção especial no dimensionamento de uma rede de alta velocidade. No caso
de pontes relativamente grandes, com massas significativas e situadas em zonas de elevada
sismicidade, a ação sísmica constitui-se como a principal ameaça em termos da segurança estrutural,
condicionando geralmente o projeto deste tipo de estruturas.
A preocupação em projetar pontes sismicamente resistentes ganhou maior importância depois dos
sismos de Northridge em 1994, de Kobe em 1995 e mais tarde, em 1999, do sismo de Taiwan. Estas
catástrofes naturais revelaram que a maior parte das pontes e dos viadutos construídos nestes locais
apresentavam grandes deficiências estruturais e falta de capacidade para resistir a sismos de elevada
intensidade. Os danos provocados na rede de transportes foram muito significativos e traduziram-se
em grandes prejuízos económicos.
Através das investigações levadas a cabo na área da engenharia sísmica e das observações dos danos
causados por sismos em estruturas deste tipo, foi possível começar a identificar as zonas da estrutura
mais afetadas, que causavam normalmente a rotura, e melhorar os regulamentos no sentido de reforçar
estas zonas críticas. Estas ações têm contribuído para uma grande evolução nas regras de
dimensionamento sísmico de pontes nos últimos anos. De acordo com (Guerreiro, 2011), a data de
construção de uma ponte é um bom indicador para prever o nível de danos que se podem esperar no
caso da ocorrência de um sismo.
O risco sísmico é a medida que permite aferir o nível de danos registados (económicos e humanos) e
depende da perigosidade sísmica, e da exposição e vulnerabilidade da estrutura. Em estruturas que
estejam localizadas em zonas sísmicas, reduz-se o risco sísmico intervindo a nível da vulnerabilidade
das estruturas. Um projeto de estruturas que garanta uma boa capacidade resistente à ação sísmica
deve também ter em conta a função e a importância da estrutura, fatores que estão intimamente
relacionados com o risco sísmico, uma vez que os prejuízos serão tanto maiores quanto maior for o
seu grau de importância.
Devido à elevada importância de estruturas integradas em linhas ferroviárias de alta velocidade, deve-
se garantir, através de um correto dimensionamento, que os danos causados por uma ação sísmica
equivalente à regulamentada sejam reduzidos, de modo a que a estrutura esteja sempre operacional e
não seja necessário interromper a linha de alta velocidade.

5
Existem duas formas de melhorar o comportamento sísmico de uma estrutura: (i) através de uma
abordagem tradicional ou (ii) recorrendo a sistemas de proteção sísmica.
A abordagem tradicional, baseada na teoria das rótulas plásticas, consiste em dotar as zonas críticas
de capacidade dúctil, recorrendo a normas e práticas regulamentares destinadas ao projeto de
estruturas sismo-resistentes (e.g. Eurocódigo 8). O facto de se dotar a estrutura de maior resistência
e, sobretudo, de maior ductilidade, permite dissipar a energia sísmica através de uma boa capacidade
de deformação em regime não linear, sem causar danos que comprometam a sua estabilidade.
Em pontes ou viadutos ferroviários de alta velocidade é cada vez mais usual recorrer-se a sistemas de
proteção sísmica; não é necessário, nestes casos, conferir ductilidade à estrutura pois a energia é
dissipada sem recorrer à sua capacidade de deformação. Esta abordagem, alternativa à abordagem
tradicional, permite reduzir o nível de danos nas estruturas, quando sujeitas a sismos de elevada
intensidade (Guerreiro, 2008).
Os sistemas de proteção sísmica mais utilizados são os sistemas passivos, que não necessitam de
fornecimento de energia para o seu funcionamento. São sistemas simples e mais eficientes do que os
sistemas ativos, que necessitam de energia para desempenharem as suas funções e do que os
sistemas semi-ativos, cujo comportamento está entre os dois acima mencionados. Dos sistemas de
proteção passivos existe cada vez mais aplicação do isolamento de base e dos dispositivos de
dissipação de energia.
Em estruturas mais flexíveis, como é o caso de algumas pontes, é costume recorrer-se a sistemas de
dissipação de energia, colocados transversalmente ou longitudinalmente, para controlar os grandes
deslocamentos sísmicos que se obtêm no tabuleiro. Estes sistemas de proteção passiva permitem
reduzir significativamente o nível de esforços nos pilares das pontes, através do controlo do movimento
do tabuleiro.
Na direção longitudinal é necessário ter em conta, para além da ação sísmica, uma força de frenagem
dos comboios de alta velocidade que circulam nestas infraestruturas. Esta força corresponde à
travagem dos comboios de alta velocidade e pode gerar uma ação horizontal significativa no tabuleiro
da ponte.
Esta questão conduz ao problema que vai ser alvo de estudo nesta dissertação, que está relacionado
com as restrições impostas pela RAVE1 relativamente aos deslocamentos permitidos para este tipo de
estruturas no seu comportamento em serviço. A RAVE define um deslocamento máximo de 5 mm, de
acordo com o EN1991 – 2 – 6.5.4.5.2 – (1) (CEN, 2003). Esta restrição é explicada pela possível perda
de estabilidade do balastro constituinte da estrutura ferroviária e pela perda de eficácia do processo de
1 RAVE (Rede Ferroviária de Alta Velocidade, SA) – Empresa pública criada com o objetivo de desenvolver e explorar a rede de alta velocidade a instalar em Portugal Continental, bem como a sua ligação a Espanha. Foi integrada em 2011 na REFER (Rede Ferroviária Nacional).

6
travagem na presença de deslocamentos do tabuleiro acima dos permitidos, originados pela força de
frenagem.
Através do estudo de uma solução inovadora para pontes de alta velocidade pretende-se dar resposta
ao problema principal deste trabalho – garantir uma estrutura muito rígida que não deforme mais de 5
mm em Estado Limite de Serviço, mas que apresente um comportamento muito flexível para vibrar
associada a dissipadores viscosos em Estado Limite Último.
1.2 Âmbito e objetivos
Num contexto de alargamento da rede de alta velocidade, surge a necessidade de se projetarem pontes
que contenham soluções que permitam responder às condicionantes já referidas, garantindo um
comportamento praticamente rígido para forças horizontais inferiores à força de frenagem
regulamentada e, ao mesmo tempo, um comportamento muito flexível à ação sísmica.
O objetivo desta dissertação é avaliar a eficácia de uma solução inovadora constituída por sistemas
viscosos de dissipação de energia sísmica, associados a sistemas de bloqueio para controlo da
frenagem em linhas de comboio de alta velocidade.
Neste sentido, pretende-se estudar o comportamento desta solução através da criação de um modelo
computacional eficiente compatível com o modelo matemático, que reproduza corretamente o
funcionamento deste sistema.
Para melhor perceber o comportamento desta solução, bem como a sua influência na resposta sísmica
de diferentes pontes e viadutos, pretende-se estudar quatro casos distintos. Cada um dos casos
representa um tipo diferente de estrutura, com variações a nível de massa ou de frequência própria de
vibração.
Recorrendo ao modelo implementado para cada caso de estudo, importa perceber o comportamento
dos vários constituintes do sistema, através de uma análise paramétrica.
Por fim, numa perspetiva de dimensionamento, com base no modelo computacional e no estudo
paramétrico, apresenta-se a solução ótima num quadro de custos controlados, para as condições
assumidas inicialmente.
Importa referir que foram introduzidas algumas simplificações, sobretudo a nível do modelo
computacional, que se julga não comprometer a qualidade dos resultados. O modelo que pretende
simular uma ponte tridimensional com a solução mista de bloqueio e proteção sísmica, foi simplificado
a um modelo computacional plano, analisando-se apenas o comportamento da ponte em conjunto com
a solução na direção longitudinal.

7
Para além disso, e admitindo o tabuleiro rígido no seu plano, modelou-se a ponte como um sistema de
um grau de liberdade. Esta simplificação só é válida para os casos em que a ponte em análise é
aproximadamente reta (Guerreiro, 2003).
Não se condicionou a análise pela possibilidade da estrutura estar a ser solicitada pela força de
frenagem e pela ação sísmica em simultâneo por ser uma combinação de eventos muito rara.
1.3 Estrutura da dissertação
A dissertação está organizada em 2 partes. A primeira parte é sobretudo de fundamentação teórica,
com conceitos considerados relevantes para a compreensão deste trabalho. Na segunda parte,
apresentam-se os resultados práticos do estudo desenvolvido. Existe ainda um capítulo anterior à
primeira parte, de cariz introdutório (Capítulo 1), que enquadra o trabalho em termos do
dimensionamento de estruturas à ação sísmica e dos requisitos para estruturas destinadas à circulação
de comboios de alta velocidade, apresentando o problema em torno do qual se desenvolve esta
dissertação. Referem-se ainda âmbitos e objetivos deste trabalho.
Nos Capítulos 2 e 3 são apresentados os conceitos teóricos que servem de base para a compreensão
do trabalho de dissertação. No segundo capítulo abordam-se as principais estratégias de redução do
risco sísmico e as soluções que permitem respeitar as exigências que existem a nível das estruturas
elevadas que compõe as redes de alta velocidade. No terceiro capítulo foca-se a atenção na solução
mista com mola pré-comprimida.
O Capítulo 2 começa por abordar os sistemas de isolamento de base e os sistemas de dissipação de
energia, enquanto estratégias de mitigação da ação sísmica. Indicam-se os conceitos e as
caraterísticas básicas, para além de vantagens e desvantagens dos sistemas mais utilizados.
Apresentam-se também exemplos de estruturas cujo risco sísmico é reduzido com base em soluções
conjugadas que tiram partido do uso simultâneo de sistemas de isolamento de base e de sistemas de
dissipação de energia. Numa segunda parte deste capítulo, faz-se o paralelo para estruturas destinadas
à circulação dos comboios de alta velocidade, onde se apresentam as exigências para estruturas deste
tipo. Ainda na segunda parte, apresentam-se duas soluções mistas que permitem cumprir as exigências
dos regulamentos, através de um sistema de bloqueio associado a sistemas de proteção sísmica,
terminando com uma análise comparativa entre essas duas soluções.
O Capítulo 3 incide na solução mista com mola pré-comprimida. Indica-se a estrutura do sistema e
analisa-se individualmente os elementos constituintes, traça-se o modelo de comportamento do
conjunto e apresenta-se o modelo de análise computacional utilizado.
No Capítulo 4 são apresentados os resultados práticos do trabalho de dissertação Inicia-se este
capítulo com a descrição dos casos de estudo. Segue-se uma parte teórica relativa à ação sísmica

8
considerada. Por fim, para um dos quatro casos de estudo, apresentam-se os resultados do trabalho,
acompanhados de comentários críticos. Esta última parte é composta por uma análise de sensibilidade
aos principais parâmetros do DMPc e por um estudo de otimização da solução num quadro de custos
controlados. A análise de sensibilidade foi realizada para um sismo de referência, enquanto o estudo
de otimização se baseou na resposta sísmica de diversas soluções mistas para a combinação de 10
ações sísmicas.
Para terminar, no quinto e último capítulo, apresentam-se as principais conclusões e propostas para
futuras linhas de desenvolvimento do tema.
Em anexo, encontra-se informação complementar ao quarto capítulo. No Anexo 1 apresentam-se os
acelerogramas utilizados na análise. O Anexo 2, o Anexo 3 e o Anexo 4, contêm gráficos que estão na
base da otimização dos casos de estudo 2, 3 e 4, respetivamente, tal como os que se encontram na
secção 4.3.2 desta dissertação, relativos à otimização do DMPc para o caso de estudo 1.

9
2 Sistemas de Bloqueio para frenagem
associados a Sistemas de Proteção
Sísmica
Capítulo 2
Sistemas de Bloqueio para
Frenagem associados a
Sistemas de Proteção Sísmica
Neste capítulo abordam-se as principais estratégias de redução do risco sísmico, apresentando-se o
conceito e as caraterísticas básicas, para além de vantagens e desvantagens dos sistemas mais
utilizados. Faz-se o paralelo para as soluções mistas, que integram sistemas de proteção sísmica e
que permitem respeitar as exigências que existem a nível das estruturas elevadas que compõe as redes
de alta velocidade. No final, faz-se uma análise comparativa entre a solução mista que é alvo de estudo
neste trabalho e uma solução alternativa.


11
2.1 Introdução
Tal como já foi referido, o problema em análise neste trabalho revela-se, principalmente, em pontes
destinadas ao tráfego de comboios de alta velocidade, construídas em zonas de elevado risco sísmico.
É nestes casos, e também nos casos em que os materiais constituintes da estrutura não têm
capacidade dúctil, que se justifica optar por um dimensionamento recorrendo a sistemas de proteção
sísmica em vez de se seguir a abordagem tradicional baseada na exploração do comportamento não
linear das estruturas. Esta decisão, que é cada vez mais comum em pontes ou viadutos construídos no
Sul e Centro de Portugal, é explicada pela necessidade de garantir um reduzido nível de danos devido
ao sismo, num quadro de custos controlados. A evolução dos regulamentos, que se tornaram mais
exigentes em termos do dimensionamento sísmico, normalizou o recurso a dispositivos de proteção
sísmica, a preços cada vez mais competitivos no mercado. A estrutura final com a inclusão destes
dispositivos torna-se uma boa alternativa em termos económicos e com grande benefício no que toca
à resposta sísmica, limitando os danos nos elementos estruturais, que passam a poder ser projetados
para “funcionarem” apenas em regime elástico.
Para pontes destinadas à circulação de comboios de alta velocidade, é necessário ter em conta a
elevada força horizontal que pode ser introduzida a nível do tabuleiro, devido ao efeito da frenagem do
comboio. Esta questão é relevante no sentido em que a força aplicada ao tabuleiro na direção
longitudinal gera deslocamentos na estrutura, que devem ser limitados a níveis relativamente baixos
de deformação, respeitando os limites impostos pela RAVE.
2.2 Soluções usuais de proteção sísmica de pontes
A aplicação de sistemas de proteção sísmica em pontes ou viadutos é cada vez mais frequente e muito
mais comum do que a sua aplicação em edifícios. Em Portugal, registam-se apenas dois edifícios
construídos com sistemas de proteção sísmica, enquanto o recurso a estes sistemas em pontes novas
ou reabilitadas é bastante significativo. Esta realidade pode ser explicada pelo facto de ser mais fácil
integrar dispositivos de proteção sísmica em pontes, que normalmente já têm juntas previstas, do que
em edifícios. Para além disso, a dificuldade na alteração do conceito de execução de edifícios
convencionais para se começar a executar edifícios com descontinuidades a nível do plano horizontal,
pode ter contribuído para esta disparidade na aplicação de sistemas de proteção sísmica entre edifícios
e pontes.
Os sistemas de proteção sísmica melhoram o comportamento sísmico das estruturas, sem ser
necessário recorrer à sua capacidade dúctil. Têm a grande vantagem de reduzir os danos em
elementos estruturais e não-estruturais, uma vez que não é necessário dissipar energia através de
grandes deformações em regime não linear. O mercado de novas soluções de proteção sísmica tem-

12
se tornado cada vez mais competitivo e acessível, sendo muitas vezes mais simples e económico optar
por uma abordagem alternativa, que pela abordagem tradicional com exploração da capacidade dúctil.
No entanto, a análise dinâmica é bastante mais complexa para estruturas com sistemas de proteção
sísmica do que para estruturas convencionais, onde o dimensionamento dos pilares de pontes ou
viadutos pode ser feito com base em análises lineares. Ao recorrer-se a estes sistemas em pontes,
torna-se imprescindível o auxílio de programas de análise estrutural para se realizar uma análise não
linear no domínio do tempo. (Guerreiro, 2003)
Facilmente se percebe que o comportamento sísmico de estruturas com a inclusão de sistemas de
proteção sísmica difere do de estruturas convencionais. Deste modo, os métodos de análise e
dimensionamento têm que ser revistos e adaptados ao tipo de solução em causa (Guerreiro, 2003).
A escolha dos dispositivos de proteção sísmica a utilizar deve ter em conta o tipo de estrutura e o
dimensionamento sísmico pretendido para a estrutura. Assim, os sistemas de proteção sísmica podem
atuar ao nível das estruturas de duas formas: (i) alterando as características dinâmicas ou (ii)
aumentando a sua capacidade de dissipar energia (Guerreiro, 2007). Muitas vezes utiliza-se uma
combinação de sistemas de proteção sísmica diferentes para se obter um melhor comportamento
dinâmico da estrutura à ação sísmica.
No caso das pontes, é comum optar-se pela alteração das características dinâmicas através de
sistemas de proteção sísmica como o isolamento de base. Incluir este tipo de sistemas nas estruturas
torna-as mais flexíveis, verificando-se uma diminuição a nível dos esforços que se instalam, devido à
redução da rigidez, o que implica uma diminuição das acelerações transmitidas pelo solo à
superestrutura (Figura 3).
Figura 3 – Efeito da diminuição da frequência no espetro de resposta elástica horizontal de acelerações (A) e de deslocamentos (B).
A contrapartida de se optar por projetar uma estrutura com este tipo de sistemas de proteção é o
aumento dos deslocamentos. Desta forma, é necessário dotar a estrutura de juntas sísmicas que terão
que ser tanto maiores, quanto maiores forem os deslocamentos máximos. Importa referir que as juntas

13
sísmicas implicam um custo adicional, tanto de instalação como de manutenção, mas são essenciais
para o bom funcionamento do isolamento de base (Figura 4).
Figura 4 - Pormenor de uma junta sísmica na Ponte Rion-Antirion (Maurer, 2005).
Existe outro tipo de sistemas de proteção sísmica, os dissipadores de energia, que incorporados na
estrutura aumentam a sua capacidade de dissipar energia. Os dispositivos de dissipação de energia
mais aplicados são os dissipadores histeréticos e os dissipadores viscosos. Estes sistemas têm como
objetivo diminuir os deslocamentos do tabuleiro ao absorverem parte da energia sísmica, contribuindo
também para a diminuição do nível de esforços (Figura 5).
Figura 5 - Efeito do aumento do amortecimento no espetro de resposta elástica horizontal de acelerações (A) e de deslocamentos (B).
Em seguida apresentam-se: (2.2.1) sistemas de isolamento de base, (2.2.2) sistemas de dissipação de
energia e (2.2.3) soluções conjugadas.

14
2.2.1 Sistemas de Isolamento de Base
Tal como o nome indica, o sistema de isolamento de base tem como objetivo isolar a base da estrutura
que está em contacto direto com o solo da parte elevada da estrutura, ou seja, a subestrutura da
superestrutura. Pretende-se com estes sistemas desacoplar, ao nível do plano horizontal, a estrutura
dos movimentos do solo, impedindo a transmissão das forças sísmicas à superestrutura (Figura 6).
Figura 6 - Resposta sísmica de uma estrutura: (A) Não isolada; (B) Isolada.
A ideia subjacente ao conceito de isolamento de base é a de que a estrutura se movimente sobre uma
superfície que não ofereça qualquer tipo de resistência horizontal, mas que apresente capacidade para
suportar as cargas verticais. Esta ideia da estrutura a deslocar-se no plano horizontal sem qualquer
oposição é uma idealização, que não existe no mundo real. Por menor que seja a rigidez horizontal, a
estrutura terá sempre alguma força que se oponha ao movimento.
A consequência imediata da interposição de uma camada deformável, é a redução da frequência
própria de vibração (Guerreiro, 2004). Na situação teórica de uma estrutura a deslocar-se livremente
sobre apoios móveis, a sua frequência de vibração será nula. Neste caso, só o facto da ação sísmica
ser cíclica (i.e. há inversão do sentido da solicitação) é que iria fazer com que a vibração da estrutura
fosse, aproximadamente, em torno da sua posição inicial. A Figura 7 apresenta a situação teórica
descrita.

15
Figura 7 - Representação esquemática de um viaduto com frequência nula. Adaptado de Maurer (2001).
No entanto, a estrutura a vibrar livremente sobre apoios móveis, ou muito deformáveis, não é,
normalmente, uma boa solução devido aos grandes deslocamentos que se originam, para além da
incapacidade de restituir o sistema à sua posição inicial. Para isso, nas estruturas em que interessa
dissipar energia sísmica, pode optar-se por dotar o sistema de isolamento de base de propriedades de
dissipação de energia, reduzindo de duas formas as forças sísmicas que passam para a superstrutura.
Noutras situações opta-se por associar em paralelo blocos de apoio de borracha ou apoios do tipo
deslizante, que isolam a base da estrutura, com dispositivos de dissipação de energia, que são
responsáveis por controlar os deslocamentos.
Um sistema de isolamento de base tem de apresentar na sua constituição as seguintes propriedades
(CEN, 2005):
Capacidade de suporte para cargas verticais e grande rigidez vertical;
Elevada flexibilidade lateral (baixa rigidez horizontal);
Capacidade de restituição à posição inicial;
Resistência horizontal para condições de serviço (rigidez elástica suficiente).
Importa esclarecer que nem sempre se justifica recorrer a sistemas de isolamento de base. Isto porque
a sua eficácia depende fortemente do tipo de solo de fundação e da rigidez da estrutura a isolar. Quanto
maior for a frequência própria de uma estrutura (i.e. maior rigidez) e quanto mais duro for o solo, maior
será a eficácia do isolamento de base na redução do esforço de corte basal (i.e. forças sísmicas
transmitidas à estrutura) (Symans, 2013).
Em solos brandos (i.e. solos deformáveis) geram-se acelerações do solo para frequências mais baixas,
o que tende a amplificar a resposta das estruturas isoladas (Symans, 2013). O gráfico da Figura 8
representa, de forma qualitativa, a variação do esforço de corte basal em função da frequência da
estrutura, para solos duros e solos brandos.

16
Figura 8 - Efeito das condições do solo na resposta da estrutura (qualitativo). Adaptado de Symans (2013).
Em pontes e viadutos, estes elementos de isolamento/dissipação costumam ser instalados no topo dos
pilares, entre os pilares e o tabuleiro, e na ligação entre os encontros e o tabuleiro (Figura 9).
Figura 9 - Representação esquemática de um viaduto cujo isolamento sísmico é feito através de elementos deformáveis. Adaptado de Guerreiro (2004).
Os dispositivos mais aplicados em estruturas deste tipo são os apoios elastoméricos e os apoios
deslizantes. Dos apoios elastoméricos destacam-se os HDRB (High Damping Rubber Bearings) e os
LRB (Lead Rubber Bearing), enquanto dos apoios do tipo deslizante destacam-se os FPB (Friction
Pendulum Bearings). De seguida, apresentam-se as principais características destes 3 tipos de
isolamento de base.
2.2.1.1 HDRB – Apoios de Borracha de Alto Amortecimento
Os apoios de borracha de alto amortecimento são semelhantes aos apoios elastoméricos normalmente
utilizados em pontes ou viadutos constituídos por lâminas de borracha e placas de aço, mas com uma
maior capacidade para dissipar energia.

17
Cada vez mais se recorre a este tipo de apoios que garantem em simultâneo isolamento e bons níveis
de dissipação de energia. No entanto, como já foi referido, podem ser preteridos por uma solução
conjugada de apoios de borracha ordinária com sistemas de dissipação de energia a atuar em paralelo.
Os apoios de borracha de alto amortecimento são compostos por camadas de elastómero
vulcanizadas, intercaladas com chapas de aço de reforço dispostas horizontalmente, sendo a adesão
entre os materiais feita durante a vulcanização (Figura 10). O recurso a aditivos apropriados no fabrico
do elastómero permite passar de um amortecimento máximo de 6 % na borracha ordinária (LDR – Low
Damping Rubber), para um amortecimento de 10 a 20 % do amortecimento crítico na borracha de alto
amortecimento (HDR – High Damping Rubber). Os apoios com amortecimento da ordem dos 15 % do
amortecimento crítico são pelo menos 90 % mais caros do que os apoios LDR (Maurer, 2003).
Figura 10 – Apoio HDRB: (A) Constituição; (B) Aplicação dos apoios em obra. Adaptado de FIP (2012).
Os HDRB têm uma grande capacidade de deformação, até duas vezes a altura do apoio, que é
conferida pelas características do elastómero, sendo que a baixa rigidez lateral não compromete o seu
funcionamento para as condições de serviço (i.e. pequenos deslocamentos horizontais), onde se
pretende alguma rigidez a forças horizontais (Hussain et al., 2001). Os apoios HDR têm também boa
capacidade de restituição à sua posição inicial.
O comportamento deste tipo de apoios às cargas cíclicas é do tipo histerético. As propriedades dos
HDRB possibilitam uma maior dissipação de energia do que com os apoios LDR. Através dos gráficos
força-deslocamento determinados a partir de ensaios de corte, pode-se observar que os apoios HDR
produzem ciclos mais altos do que os LDR, o que significa que a energia dissipada em cada ciclo é
maior. Isto porque a área interior à curva histerética de cada ciclo define a quantidade de energia que
é dissipada (Figura 11).

18
Figura 11 - Relação força-deslocamento de apoios HDRB e LDRB (gráfico qualitativo). Adaptado de Symans (2013).
2.2.1.2 LRB – Apoios de Borracha com Núcleo de Chumbo
Os apoios de borracha com núcleo de chumbo apareceram em 1975 na Nova Zelândia e desde essa
altura que são bastante usados na Nova Zelândia, no Japão e nos Estados Unidos (Symans, 2013).
Apresentam uma constituição semelhante aos apoios de borracha de baixo amortecimento, mas com
a inclusão de um núcleo de chumbo que incrementa a capacidade de dissipar energia, bem como a
rigidez inicial do sistema (Figura 12).
Figura 12 - Apoio LRB: (A) Constituição. Adaptado de FIP (2012); (B) Estrutura interna. (FIB, 2005)
Apesar do elastómero não possuir quaisquer aditivos na sua composição, o facto de se inserir um
cilindro de chumbo no interior do apoio, permite tirar partido, em simultâneo, das propriedades do
elastómero e do comportamento aproximadamente elasto-plástico do chumbo. O chumbo é um material
indicado devido à sua ductilidade, boas propriedades de fadiga para ações cíclicas de corte e boa

19
capacidade de restituição através da sua recristalização a temperaturas normais (Figueiredo, 2007;
Symans, 2013).
O comportamento dos LRB num ensaio de corte é caracterizado por uma rigidez inicial elevada,
conferida pelo comportamento elástico do núcleo de chumbo, com um segundo patamar de rigidez
bastante baixo correspondente quase exclusivamente à rigidez do elastómero (Figura 13).
Assim, os LRB conseguem maiores níveis de dissipação de energia que os HDRB e LDRB, podendo
atingir amortecimentos da ordem dos 30 % do amortecimento crítico (Hussain et al., 2001). O aumento
de temperatura nos apoios quando sujeitos a cargas cíclicas é responsável pela dissipação de energia,
sendo que este aumento se deve ao comportamento histerético do chumbo (Figueiredo, 2007).
Figura 13 - Relação força-deslocamento de apoios LRB e HDRB (gráfico qualitativo). Adaptado de Symans (2013).
2.2.1.3 FPB – Apoios Pendulares com Atrito
Os apoios pendulares com atrito são caracterizados por uma superfície côncava polida de aço
inoxidável, cujo raio de curvatura define a frequência pretendida para a estrutura. Sobre esta superfície
côncava desliza uma peça articulada com boa capacidade de suporte revestida por um material
compósito com baixo coeficiente de atrito (Guerreiro, 2004). A disposição das peças deslizantes não
tem influência no seu comportamento, sendo que, para evitar acumulação de detritos que prejudiquem
o funcionamento do sistema, a superfície côncava é normalmente instalada voltada para baixo (Figura
14) (Figueiredo, 2007).

20
Figura 14 - Apoio FPB: (A) Constituição; (B) Exemplo de um apoio FPB (Braun, 2009).
O funcionamento destes apoios tem como base o princípio do movimento de um pêndulo simples
(Figura 15 e Figura 16). A frequência da estrutura diminui devido ao deslizamento numa superfície
côncava, em que o atrito entre as superfícies permite dissipar a energia sísmica, fornecendo o
amortecimento necessário. Os apoios pendulares com atrito garantem bons níveis de amortecimento,
da ordem dos 5 a 35 % do amortecimento crítico para além do bom comportamento em serviço (Maurer,
2003). O raio de curvatura da superfície côncava define a frequência própria da estrutura, o que significa
que o seu peso praticamente não tem influência (FIP, 2010).
Figura 15 - Modelo de comportamento dos apoios FPB (Maurer, 2013).
Num evento sísmico, o atrito dinâmico permite dissipar a energia através de ciclos mais ou menos
controlados, pelo que quanto maior for o atrito entre as superfícies, maior será o amortecimento da
estrutura.
Figura 16 - Representação esquemática das duas principais fases do movimento de um apoio FPB sujeito a ações horizontais.
O recurso a sistemas de apoio pendulares garante a existência de força de restituição, ao contrário dos
apoios deslizantes puros que têm rigidez horizontal nula; através do peso da estrutura (i.e. gravidade)

21
e da superfície de deslizamento esférica dos apoios, é possível garantir uma boa capacidade de
restituição com pequenos movimentos pendulares (Figura 17).
Figura 17 - Relação força-deslocamento de apoios FPB: soma da restituição e atrito. Adaptado de Symans (2013).
O bom desempenho dos apoios pendulares com atrito despoletou algum investimento na exploração
desta solução. Já é possível encontrar no mercado soluções alternativas, que consistem na introdução
de algumas variantes nos apoios FPB convencionais, como a dissipação da energia sísmica através
de várias superfícies de atrito, o que possibilita maiores níveis de amortecimento (Amaral, 2013).
Este tipo de apoios apresenta algumas vantagens relativamente aos apoios elastoméricos. Desde logo,
a altura reduzida que favorece a sua aplicação sobretudo em intervenções de reabilitação, de modo a
produzir pouco impacto na arquitetura pré-existente. Por outro lado, os apoios FPB são pouco sensíveis
ao envelhecimento e à variação de temperatura (Figueiredo, 2007). Em relação ao seu funcionamento
para as condições sísmicas, as características de que se pretende dotar a estrutura (i.e. frequência
própria de vibração e amortecimento) são definidas a partir das propriedades geométricas dos apoios.
2.2.2 Sistemas de Dissipação de Energia
Geralmente, quando se referem sistemas de dissipação de energia no âmbito da engenharia sísmica,
abordam-se os sistemas de proteção passivos que têm unicamente a função de reduzir a resposta
sísmica das estruturas (i.e. reduzir a elevada energia sísmica que é transmitida às estruturas) e que
não implicam nenhum corte de ligação da estrutura com o exterior (Falcão, 2011). Isto porque, como já
foi referido, a maior parte dos sistemas de isolamento de base têm também propriedades de dissipação
de energia.

22
Estes sistemas de proteção sísmica apresentam grande capacidade para dissipar energia através de
um comportamento não linear, podendo conferir elevados níveis de amortecimento às estruturas onde
são instalados. O facto de através destes dispositivos se conseguir dissipar a energia de uma forma
eficaz, fiável e sem danos estruturais, torna esta tecnologia uma alternativa muito credível na proteção
sísmica de estruturas (Guerreiro, 2008).
Estes dispositivos são instalados e dimensionados de modo a tirar o máximo partido da sua capacidade
de dissipação (Falcão, 2011). Para o dimensionamento sísmico o comportamento da estrutura será um
comportamento elástico, sendo a energia sísmica dissipada pelos sistemas de amortecimento. Esta
forma de atenuar a resposta sísmica reduz a probabilidade de aparecerem danos nos elementos
estruturais na ocorrência de um sismo, uma vez que não se chega a tirar partido da deformação da
estrutura em regime não linear.
Os sistemas de dissipação de energia têm sido muito utilizados em diversas estruturas, em particular
pontes e viadutos. O grande objetivo com a inclusão destes sistemas é reduzir as forças sísmicas que
passam para a estrutura bem como os movimentos do tabuleiro, proporcionando uma solução que
minimize juntas e apoios, com uma redução de custos associada (Castellano et al., 2009).
Para otimizar o desempenho dos sistemas de dissipação de energia estes devem ser colocados na
estrutura de modo a maximizar a deformação dos dispositivos. Assim, em pontes são normalmente
colocados entre o tabuleiro e os encontros e, em edifícios, são montados de forma a minimizar os
deslocamentos relativos entre pisos (Figura 18) (Guerreiro, 2008).
Figura 18 - (A) Dissipadores instalados em edifícios. (Guerreiro, 2008); (B) Dissipadores instalados em viadutos. Adaptado de Maurer (2001); (C) Pormenor de um dissipador viscoso na zona do encontro de um viaduto
(Guerreiro, 2008).

23
Geralmente, o uso isolado dos sistemas de isolamento de base descritos nesta dissertação (i.e. HDRB,
LRB e FPB) em pontes e viadutos não é muito comum. Só se verifica nas situações em que o tabuleiro
abrange muitos apoios, ou seja quando a carga em cada apoio é pequena, e num quadro em que a
sismicidade do local não é muito elevada (Castellano et al, 2009).
Assim, a solução mais utilizada na conceção de pontes em zonas sísmicas é a aplicação de um
isolamento de base praticamente sem propriedades dissipativas, em paralelo com sistemas de
dissipação de energia de modo a reduzir a resposta sísmica da estrutura, tirando partido das vantagens
de uma estrutura flexível mas reduzindo os seus deslocamentos. Os dissipadores podem garantir um
amortecimento do tabuleiro da ordem dos 30 % do amortecimento crítico, através do seu
comportamento não linear (Castellano et al, 2009).
Os dispositivos de dissipação de energia mais utilizados em pontes e viadutos pela sua facilidade de
aplicação e eficácia são os dissipadores histeréticos (MD – Metallic Dampers) e os dissipadores
viscosos (FVD – Fluid Viscous Dampers). De seguida, apresenta-se informação mais detalhada acerca
de cada uma destas soluções.
2.2.2.1 MD – Dissipadores Histeréticos
Os dissipadores histeréticos têm esta denominação pela forma como dissipam energia através de um
comportamento histerético às ações cíclicas. Tiram partido da elevada ductilidade de elementos
metálicos (i.e. elevada capacidade de deformação plástica), normalmente do aço, podendo assumir
formas distintas de modo a obter o máximo rendimento na dissipação de energia. A deformação desses
elementos pode ser provocada por flexão, corte ou torção consoante o funcionamento pretendido para
o aparelho. (Santos, 2007)
Na Figura 19 podem observar-se dissipadores histeréticos de diversas formas e que existem já
comercializadas.
24
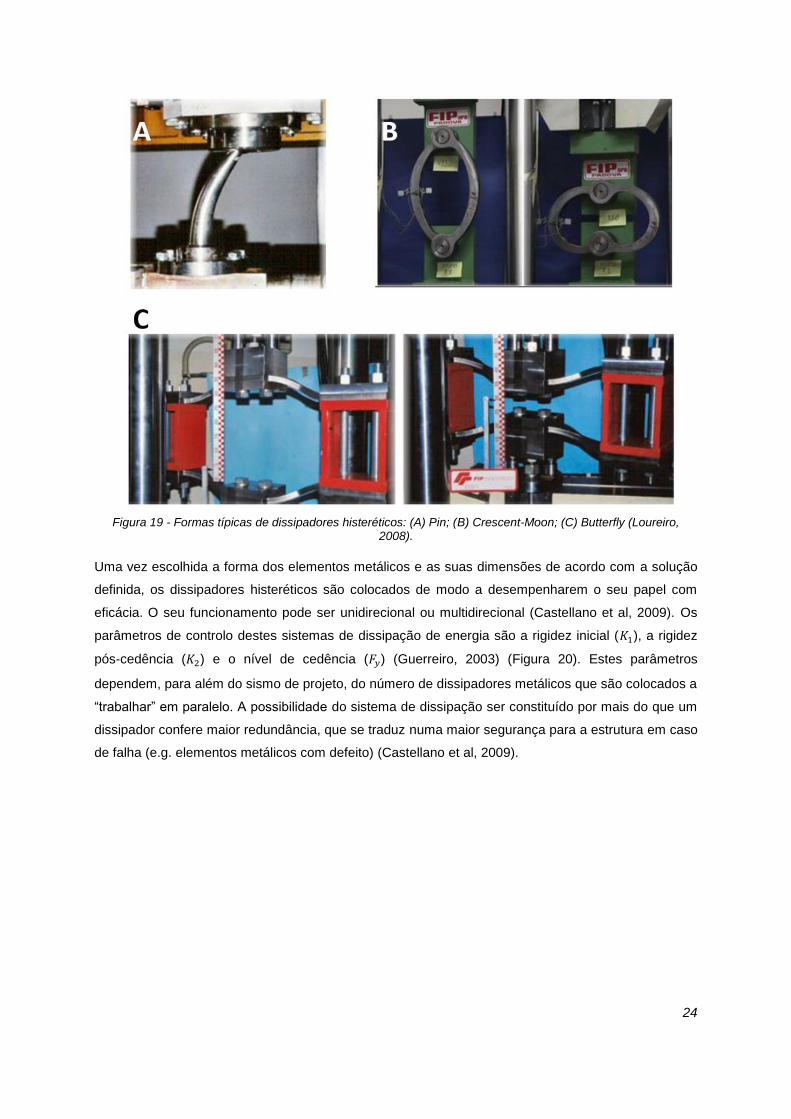
Figura 19 - Formas típicas de dissipadores histeréticos: (A) Pin; (B) Crescent-Moon; (C) Butterfly (Loureiro, 2008).
Uma vez escolhida a forma dos elementos metálicos e as suas dimensões de acordo com a solução
definida, os dissipadores histeréticos são colocados de modo a desempenharem o seu papel com
eficácia. O seu funcionamento pode ser unidirecional ou multidirecional (Castellano et al, 2009). Os
parâmetros de controlo destes sistemas de dissipação de energia são a rigidez inicial (𝐾1), a rigidez
pós-cedência (𝐾2) e o nível de cedência (𝐹𝑦) (Guerreiro, 2003) (Figura 20). Estes parâmetros
dependem, para além do sismo de projeto, do número de dissipadores metálicos que são colocados a
“trabalhar” em paralelo. A possibilidade do sistema de dissipação ser constituído por mais do que um
dissipador confere maior redundância, que se traduz numa maior segurança para a estrutura em caso
de falha (e.g. elementos metálicos com defeito) (Castellano et al, 2009).

25
Figura 20 - Relação força-deslocamento de dissipadores histeréticos (gráfico qualitativo). Adaptado de Guerreiro (2003).
Os dissipadores metálicos são acoplados à estrutura com o objetivo de absorver parte da energia
sísmica que lhe é transmitida, evitando que a estrutura se deforme em regime plástico com o
consequente aparecimento de danos em elementos estruturais. A dissipação de energia nestes
dispositivos é feita à custa de uma grande capacidade de deformação inelástica de elementos metálicos
(Falcão, 2011). Os elementos são projetados de modo a garantirem uma distribuição uniforme de
tensões durante o regime plástico, proporcionando uma capacidade de amortecimento máxima que se
reflete na “estabilidade” dos ciclos histeréticos (Loureiro, 2008).
Os dissipadores histeréticos apresentam uma boa fiabilidade ao longo da sua vida útil e têm a
“confiança” da maior parte dos projetistas. Isto porque são caracterizados por ciclos de histerese
“estáveis”, são pouco vulneráveis à fadiga e têm um bom comportamento a variações de temperatura.
São estas características que tornam os dissipadores metálicos num dos mais eficientes no que se
refere à dissipação de energia (Falcão, 2011).
Por outro lado, em relação aos dissipadores viscosos, estes apresentam a vantagem de recentrar o
sistema depois de uma ação sísmica. A sua rigidez inicial e o facto de apresentarem alguma rigidez na
fase plástica conferem ao dissipador a capacidade de recolocar o sistema na sua posição inicial depois
de uma ação cíclica.
A Ponte Vasco da Gama em Lisboa (Figura 21) é um dos exemplos em que se recorreu a dissipadores
histeréticos com o objetivo de reduzir os deslocamentos sismícos (i.e. dissipar energia sísmica). Nesse
caso, foi possível optar por uma solução estrutural flexível mas com a contrapartida de ter que se
recorrer a dissipadores histeréticos colocados na ligação entre o tabuleiro e as torres principais. Esta
solução permitiu reduzir o máximo deslocamento sísmico em cerca de 30% (Guerreiro et al., 1997).

26
Figura 21 - Dissipadores histeréticos instalados na Ponte Vasco da Gama: (A) Localização dos dissipadores (Guerreiro, 2008); (B) Esquema dos dissipadores em planta (Guerreiro et al.,1997); (C) Pormenor dos
dissipadores na fase de construção (Guerreiro, 2008).
2.2.2.2 FVD – Dissipadores Viscosos
Tal como os dissipadores histeréticos, os dissipadores viscosos são bastante aplicados em viadutos e
pontes para controlo dos deslocamentos sísmicos; devido à sua grande versatilidade é fácil integrá-los
no sistema estrutural, possibilitando ao projetista definir as suas características consoante a solução
pretendida (Guerreiro, 2008).
A aplicação destes dissipadores não é tão comum em edifícios, no entanto, em reabilitação de
estruturas históricas assume-se como uma excelente solução, novamente, devido à sua versatilidade.
Os dissipadores viscosos são também vulgarmente denominados de dissipadores hidráulicos, pelo
facto do seu funcionamento ser com base num sistema hidráulico. São muito semelhantes aos sistemas
de amortecimento de vibrações utilizados em automóveis e motociclos, embora os dissipadores
viscosos operem em intervalos de forças muito mais elevados e sejam significativamente maiores
(Arroyo, 2004) (Figura 22).

27
Figura 22 - Dissipadores viscosos: (A) Dissipadores utilizados na Ponte Domovinski, Croácia (Maurer, 2011); (B) Dissipadores utilizados na Ponte Rion-Antirion, Grécia (Castellano et al., 2004).
Os dissipadores viscosos são constituídos por um cilindro de aço inoxidável de alta resistência e por
um pistão do mesmo material com orifícios na sua cabeça (Figura 23). No interior do cilindro, o fluído
movimenta-se de uma câmara para a outra através dos orifícios do pistão consoante o movimento
deste elemento. O fluído é caracterizado por uma viscosidade constante e bem conhecida, conseguindo
manter as suas propriedades ao longo do tempo e revelando resistência ao fogo e a variações de
temperatura (Falcão, 2011). Atualmente, os fluidos que melhor desempenham esta função são os
silicones, tendo o óleo caído em desuso (Verdugo, 2007). Este tipo de dissipadores são construídos
recorrendo a materiais muito resistentes (e.g. aço inoxidável) que garantem uma vida útil de pelo menos
40 anos (Arroyo, 2004).
Figura 23 - Esquema do funcionamento de um dissipador viscoso. Adaptado de Guerreiro (2008).

28
A desconfiança que alguns projetistas tinham em relação a dissipadores com base em sistemas
hidráulicos tem sido ultrapassada, sendo cada vez mais frequente o recurso a dissipadores viscosos,
em detrimento dos dissipadores histeréticos. As desvantagens associadas aos FVD têm sobretudo a
ver com o seu custo inicial e com os requisitos de manutenção ao longo da sua vida útil (Buckle et al,
1990).
Para casos em que seja necessário garantir que o sistema onde estão incluídos regresse à posição
inicial depois de uma ação cíclica, pode fazer sentido optar por dissipadores histeréticos em alternativa
aos FVD, que não têm rigidez e, portanto, não apresentam essa capacidade. Esta é uma desvantagem
dos dissipadores viscosos em relação aos dissipadores histeréticos.
Ao contrário dos dissipadores histeréticos, os viscosos apresentam dependência da velocidade e não
diretamente do deslocamento imposto, o que é uma grande vantagem. A lei constitutiva que relaciona
a força no dissipador em função da velocidade é expressa da seguinte forma:
𝐹 = 𝐶|𝑉|𝛼𝑠𝑖𝑛𝑎𝑙(𝑉) [1]
Pode-se concluir que a força 𝐹 no dissipador é proporcional a uma potência da velocidade (𝑉𝛼). Este
facto, faz com que a força no dissipador esteja desfasada das restantes forças dependentes do
deslocamento, o que provoca a diminuição das forças resultantes da solicitação sísmica. Assim a força
é nula para o deslocamento máximo da estrutura e não há incremento na rigidez efetiva do sistema
(Jerónimo, 2001; CEN, 2005).
Os parâmetros de controlo nesta equação são a constante característica do dissipador C, dependente
das dimensões do dispositivo, e uma constante α que depende essencialmente da forma da cabeça do
pistão e do tipo de fluido. A contribuição destes parâmetros é determinante para o funcionamento do
dispositivo e para a sua eficácia em termos de dissipação de energia (Jerónimo, 2001).
A partir da relação força-velocidade é possível perceber que existem grandes diferenças
comportamentais a nível dos dissipadores, somente com a variação do parâmetro 𝛼, através da
utilização de fluidos com diferentes propriedades (i.e. relação força-velocidade depende
maioritariamente do tipo de fluido). Se este parâmetro assumir o valor 1 (𝛼 = 1), a força é diretamente
proporcional à velocidade e os dispositivos com estas características são denominados de dissipadores
viscosos lineares. No entanto, o mais normal é que o parâmetro não tenha este valor (𝛼 ≠ 1) até pelo
interesse que existe em tirar partido das vantagens do comportamento de um dissipador viscoso não
linear. Dentro dos dissipadores viscosos não lineares pode-se distinguir entre os bloqueadores (STU –
Shock Transmission Unit) onde 𝛼 toma valores superiores a 1 (𝛼 > 1) e os dissipadores viscosos
propriamente ditos (FVD – Fluid Viscous Dampers) onde 𝛼 toma valores inferiores a 1, tipicamente
0,1 < 𝛼 < 1.

29
Figura 24 - Relação força-velocidade de dissipadores viscosos, para diferentes intervalos de 𝛼 (gráfico qualitativo). Adaptado de Jerónimo (2001).
No caso de 𝜶 < 1, percebe-se facilmente a partir do gráfico da Figura 24, que a força tende para um
limite máximo. O aparelho comporta-se como um apoio fixo praticamente até atingir a sua força
máxima. Para pequenos valores da velocidade, nota-se um crescimento muito acentuado da força
(Guerreiro, 2003). Estas características definem o comportamento de um FVD, caracterizado por ter
uma grande capacidade de dissipação de energia para solicitações que atuem com velocidades
significativas (i.e. solicitação sísmica) e por restringir os deslocamentos para solicitações que atuem
variando muito pouco ao longo do tempo. (i.e. variações de temperatura, fluência e retração). O facto
de o gráfico tender para um limite máximo permite saber exatamente a força máxima que se vai gerar
no dissipador e controlar essa força no dimensionamento do aparelho. Assim, é possível controlar a
força que vai ser transmitida ao encontro no caso de o dissipador estar instalado nessa zona.
Para valores de 𝜶 > 1 que corresponde ao caso típico dos STU, o funcionamento é oposto ao dos FVD.
A força é muito pequena para velocidades baixas mas para velocidades altas há um grande incremento
da força, não havendo um limite máximo definido. Desta forma, para ações lentas como variações de
temperatura, fluência ou retração, o aparelho oferece uma reação residual de fraca intensidade
podendo essa reação ser ignorada, o que significa que se passa a comportar como um apoio móvel.
Para ações rápidas (i.e. ação sísmica) o dispositivo funciona praticamente como um apoio rígido,
transmitindo a carga à estrutura, com a desvantagem de não se conhecer o limite máximo uma vez que
a força máxima vai depender da velocidade a que for aplicada a solicitação. De acordo com a empresa
francesa Freyssinet, os STU atuam como “Safety belts” (Freyssinet, 2013).
Em termos de dissipação de energia a diminuição do parâmetro α provoca maiores níveis de
amortecimento, que se pode observar através da relação força-deslocamento representada
graficamente na Figura 25, uma vez que a área interior ao gráfico corresponde à quantidade de energia
dissipada em cada ciclo. Quanto mais “retangular” for o ciclo completo de um dissipador, maior será a
sua capacidade de dissipação de energia (Guerreiro, 2003).

30
Figura 25 - Relação força-deslocamento de dissipadores viscosos (gráfico qualitativo). Adaptado de CEN (2005).
As relações força-velocidade e força-deslocamento que definem o comportamento de um dissipador
viscoso estão representadas, para alguns valores de 𝛼, na Figura 26.
Figura 26 - Relações força-velocidade e força-deslocamento de dissipadores viscosos para diferentes valores de
𝛼 (Guerreiro, 2003).
O parâmetro 𝐶, que é a constante característica do dissipador viscoso, influencia o seu funcionamento
ao nível da quantidade de energia que é dissipada. Quanto maior for este parâmetro, maior será o ciclo
força-deformação, ou seja, maior será a quantidade de energia dissipada. No entanto, há que controlar
a constante característica 𝐶 porque, com o aumento deste parâmetro, aumenta também a força gerada
no dissipador, que terá que ser equilibrada eventualmente no encontro, caso o dissipador se encontre
instalado nesse local. A influência deste parâmetro na relação força-deslocamento dos dissipadores
viscosos está representada graficamente na Figura 27.

31
Figura 27 - Relação força-deslocamento de dissipadores viscosos em função dos parâmetros 𝛼 e 𝐶 (Guerreiro, 2003).
2.2.3 Soluções Conjugadas
Tal como já foi referido anteriormente, o mais usual é projetarem-se pontes e viadutos com o recurso a
sistemas conjugados (i.e. sistema de isolamento de base em conjunto com sistema de dissipação de
energia). As soluções conjugadas permitem obter a máxima eficácia no melhoramento do
comportamento sísmico da estrutura.
Para estruturas extremamente flexíveis, como é o caso de muitas pontes, a inclusão de sistemas de
dissipação de energia ganha especial interesse. Diminui-se a frequência da estrutura, colocando
isolamento de base entre os pilares e o tabuleiro (com propriedades de dissipação ou não) ou, em
pontes altas, a ligação rígida do tabuleiro aos pilares pode garantir que a estrutura se mantenha flexível
pelo facto dos pilares serem bastante esbeltos. Os projetistas optam muitas vezes por uma solução de
ponte flexível com os pilares centrais ligados rigidamente ao tabuleiro, já que são pilares geralmente
mais esbeltos, e com os pilares menos esbeltos “desligados” do tabuleiro (i.e. pilares isolados
sismicamente), podendo o controlo das deformações sísmicas ser efetuado por dispositivos de
dissipação do tipo viscoso (FVD) ou dissipadores histeréticos (Figura 28).
É também muito comum recorrer-se a bloqueadores para melhorar o comportamento de pontes ou
viadutos em situações de serviço. A aplicação de bloqueadores (STU) permite, com interesse para
pontes com alguma extensão em planta, criar juntas de dilatação que acomodem variações de forma
do tabuleiro sem sobrecarregar demasiado os seus pilares a nível de tensões residuais que poderiam
surgir para pontes mais extensas. Isto possibilita ligar todo o tabuleiro para uma ação sísmica mais
elevada, para que funcione praticamente como um corpo rígido como se não existissem juntas de

32
dilatação, podendo o comportamento dinâmico da ponte ser controlado através de dissipadores
instalados nos encontros.
Figura 28 - Representação esquemática de um viaduto com uma solução conjugada de sistemas de proteção sísmica. Adaptado de Maurer (2001).
De referir que os sistemas de proteção sísmica podem ser aplicados tanto na direção transversal como
na direção longitudinal, dependendo da direção em que o projetista entende que é conveniente
melhorar o comportamento dinâmico da estrutura.
Existem muitas formas de combinar os diversos tipos de sistemas de proteção sísmica por isso opta-
se, a título de exemplo, por apresentar alguns casos reais em que se aplicaram com sucesso soluções
conjugadas em pontes.
2.2.3.1 Ponte do Rio Sado, Portugal
Esta ponte em Portugal constitui um bom exemplo da aplicação de uma solução conjugada, constituída
por diversos dispositivos de proteção sísmica inovadores, colocados com o objetivo de melhorar tanto
o comportamento sísmico como o comportamento em serviço da estrutura.
A ponte é composta por viadutos de acesso de igual extensão (1114 metros) e a parte central
corresponde a uma solução de ponte em arco constituída por 3 tramos de 160 metros cada um, em
que todo o tabuleiro central está continuamente apoiado nos pilares (Figura 29). Os dispositivos de
proteção sísmica estão colocados apenas na direção longitudinal, uma vez que na direção transversal
a grande rigidez da estrutura assegura um bom comportamento sísmico. O facto de estar destinada ao
tráfego ferroviário despertou cuidados especiais de modo a garantir que os dispositivos antissísmicos
suportem cargas elevadas.

33
Figura 29 - Ponte do Rio Sado: Pormenor da parte central com os 3 arcos metálicos (Sartori, 2012).
Foram colocados apoios deslizantes do tipo “pot” em quase todas as ligações dos pilares ao tabuleiro,
caracterizados por permitirem rotações e movimentos na direção longitudinal, optando por se manter
com uma ligação rígida apenas em alguns pilares centrais. Esta opção justifica-se para assegurar
alguma rigidez do sistema para as ações de serviço. Este isolamento de base está associado a
bloqueadores e a dissipadores histeréticos. Deste modo, para ações lentas, os bloqueadores permitem
pequenos movimentos, uma vez que os apoios deslizantes são constituídos por um material inovador
que apresenta um baixo coeficiente de atrito (Sartori, 2012) (Figura 30).
Figura 30 - Solução conjugada utilizada na Ponte do Rio Sado: Apoios deslizantes do tipo "pot" com bloqueadores e dissipadores histeréticos associados (Sartori, 2012).
Para ações rápidas como solicitações sísmicas os bloqueadores impedem o movimento dos apoios
transferindo as forças sísmicas para os dissipadores histeréticos que através do seu comportamento
elasto-plástico dissipam energia.
De acordo com Sartori (2012), os dissipadores histeréticos e os bloqueadores podem ser retirados,
para inspeção e manutenção, ou substituídos sem ser necessário levantar o tabuleiro.
Para além destes dispositivos de proteção sísmica instalados nos apoios, colocaram-se 4 dissipadores
do tipo viscoso (FVD) em cada extremidade de modo a aumentar a capacidade global de
amortecimento do sistema.

34
2.2.3.2 Ponte Rion-Antirion, Grécia
Esta ponte, inaugurada em 2004, faz a ligação entre as cidades de Rion e Antirion através do Golfo de
Corinto, constituindo-se como uma referência a nível mundial tanto por ser a segunda maior ponte de
tirantes construída, como pelas grandes dimensões dos dispositivos de proteção sísmica utilizados.
Figura 31 - Ponte Rion-Antirion, Grécia (FIB, 2005).
A estrutura é constituída por um viaduto de acesso do lado Antirion com tabuleiro em betão de 228
metros, por outro viaduto de acesso de 968 metros constituído por uma estrutura mista aço-betão do
lado Rion e pela ponte principal atirantada também de estrutura mista composta por 4 torres e com
uma extensão total de 2252 metros. A inclusão de sistemas de proteção sísmica deve-se ao facto da
estrutura estar localizada numa zona de ventos fortes e de elevada sismicidade (Figura 31).
Em relação à ponte principal de tirantes, o tabuleiro suspenso e contínuo acomoda livremente, na
direção longitudinal, movimentos provocados por variações de temperatura e movimentos sísmicos. Só
na direção transversal é que se sentiu a necessidade de recorrer a uma solução conjugada de sistemas
de proteção sísmica para controlo dos movimentos sísmicos da estrutura. Optou-se por uma solução
em que a ligação do tabuleiro às torres é feita através de dissipadores viscosos (FVD), associados em
paralelo a fusíveis metálicos (Figura 32). Os fusíveis metálicos, apesar de não corresponderem
exatamente a um sistema antissísmico são muitas vezes utilizados em conjunto com este tipo de
sistemas, de modo a restringirem a estrutura até uma força pré-determinada. Interessa portanto que a
peça tenha uma rotura frágil e que permaneça rígida até atingir essa força de rotura pré-definida. Assim,
para condições de serviço, incluindo ventos fortes e sismos moderados, a estrutura possui restrições
ao seu movimento, não havendo um movimento relativo na direção transversal do tabuleiro em relação
às torres, devido à ligação rígida proporcionada pelos fusíveis metálicos. No caso de uma solicitação
sísmica violenta os fusíveis rompem e a estrutura fica a vibrar associada a dissipadores viscosos. É
importante referir que, depois de um evento sísmico, este sistema não garante que a estrutura regressa
à sua posição inicial, para além de ser necessário colocar novos fusíveis metálicos (Infanti et al., 2004).

35
Figura 32 - Solução conjugada utilizada na Ponte Rion-Antirion: (A) FVD em paralelo com fusíveis metálicos; (B) Teste realizado a um FVD no laboratório FIP industriale. Adaptado de Infanti et al. (2004).
Os viadutos de acesso, pelo facto de terem grande importância no funcionamento dinâmico da ponte
principal de tirantes, foram dimensionados para o mesmo nível de solicitação sísmica. Apesar dos
viadutos Rion e Antirion recorrerem a técnicas de construção diferentes e terem sido dimensionados
de forma distinta, o tipo de isolamento sísmico utilizado é muito semelhante (Infanti et al., 2004).
Em ambos os viadutos, optou-se por um sistema conjugado de proteção sísmica constituído por blocos
de borracha de baixo amortecimento (LDRB) na ligação dos pilares ao tabuleiro, com o objetivo de
tornar a estrutura flexível, e por dissipadores viscosos (FVD) semelhantes aos incluídos na ponte
principal, colocados tanto na direção transversal como longitudinal, para dissipar energia sísmica e
controlar as deformações do tabuleiro (Figura 33).
Figura 33 - Solução conjugada utilizada no viaduto Antirion de acesso: (A) Viaduto Antirion; (B) Pormenor do sistema de proteção sísmica. Adaptado de Infanti et al. (2004).

36
2.2.3.3 Ponte Sheikh Zayed, Emirados Árabes Unidos
A ponte Sheikh Zayed, concluída em 2010, representou um enorme desafio para os engenheiros
projetistas, no sentido de reproduzirem a geometria da obra de arte, associando a isso uma elevada
segurança estrutural. A ponte em arco, com formas orgânicas, foi desenhada pela arquiteta Zaha Hadid
e dimensionada pelos engenheiros de estruturas de modo a que as deformações estivessem limitadas
ao regime elástico (i.e. regime linear) para a ação sísmica de projeto. Para tal recorreu-se a uma
solução conjugada inovadora de sistemas de proteção sísmica. (Infanti et al. 2007)
Figura 34 - Ponte Sheikh Zayed: Desenho de arquitetura. (Infanti et al. 2007)
A estrutura foi construída com o objetivo de facilitar a entrada de tráfego rodoviário na ilha de Abu Dhabi
através do canal Maqtah. Trata-se de uma ponte em arco com uma extensão de 845 metros, em que
os 3 arcos existentes pretendem representar a ondulação das dunas no deserto, segundo a arquiteta
Zaha Hadid (Figura 34). Para esta estrutura, adotou-se uma solução conjugada de apoios do tipo “pot”
deslizantes, dissipadores viscosos (FVD), fusíveis metálicos e uma mola com comportamento elástico,
instalados na direção transversal e que mantêm as suas propriedades na presença das elevadas
temperaturas, características do local.
Os apoios do tipo “pot” deslizantes, para além de possibilitarem pequenas rotações do apoio, têm a
função de desacoplar o tabuleiro dos pilares, permitindo um movimento praticamente livre do tabuleiro.
Os fusíveis metálicos, os dissipadores viscosos e as molas são instalados na ligação do tabuleiro aos
pilares em paralelo. Tal como na ponte Rion-Antirion, o sistema de fusíveis metálicos pretende garantir
uma ligação rígida entre o tabuleiro e os pilares na direção transversal para as ações de serviço. No
caso de uma ação sísmica mais intensa em que a força sísmica seja superior à força de rotura dos
fusíveis a ligação rígida do tabuleiro aos pilares perde-se, ficando o tabuleiro a vibrar associado aos
dissipadores viscosos e às molas. Nessas condições, os dissipadores viscosos dissipam grandes
quantidades de energia, enquanto as molas têm a função de restituir a estrutura à sua posição inicial,
sendo que a frequência da estrutura fica definida através da rigidez destes dois elementos.
O facto de na ponte Sheikh Zayed terem sido incluídas molas apresenta a vantagem, relativamente à
ponte Rion-Antirion, de recolocar o tabuleiro na sua posição inicial depois de um evento sísmico. No
entanto, a desvantagem de ter que se introduzir novos fusíveis metálicos depois de ações sísmicas
violentas mantém-se igualmente no caso da ponte Sheikh Zayed.

37
2.3 Definição das condições de serviço dos
comboios de alta velocidade em pontes – EC1
O regulamento que define as ações de tráfego em pontes ou viadutos de alta velocidade é o Eurocódigo
1, parte 2 (EN1991 – 2). É através deste regulamento, em particular nos pontos 6.5.3 (1) e (2), que é
possível definir a força de frenagem utilizada no projeto de linhas de alta velocidade (CEN, 2003).
Para o caso de uma situação relativamente comum de um tabuleiro com duas vias férreas, uma em
cada sentido, a força total aplicada à ponte na direção longitudinal corresponde à soma de uma força
de frenagem com uma força de arranque, tal como está definido no ponto 6.5.3 (9) do referido
regulamento (CEN, 2003).
Esta é a situação mais condicionante e que deve ser considerada para um projeto deste tipo de
estruturas. Implica que estejam, em simultâneo, um comboio a travar num sentido e o que circula no
sentido contrário, a arrancar, sendo que a travagem é bastante mais significativa e é por esta razão
que, geralmente, se refere à força total como a força de frenagem. Neste trabalho, vai-se optar por
tratar a força total originada pela situação mais condicionante, por força de frenagem de projeto (Figura
35).
Figura 35 - Esquema representativo das forças aplicadas pelos comboios de alta velocidade a um viaduto com duas vias.
Assim, o valor da força de frenagem de projeto é 7000 kN, que resulta da combinação da força de
frenagem que está definida com um valor máximo de 6000 kN, com a força de arranque que tem um
valor máximo de 1000 kN.
Esta força vai servir de referência ao longo desta dissertação, porque marca a divisão entre 2 tipos de
comportamento muito diferentes que se pretende explorar em pontes de alta velocidade com sistemas
de proteção sísmica. Um comportamento muito rígido e com deslocamentos mínimos (i.e.
deslocamentos inferiores aos regulamentares) abaixo da força de frenagem e um outro muito flexível,
tirando partido dos sistemas de proteção sísmica, para forças superiores à força de frenagem de
projeto.

38
Uma alternativa, seria projetar uma estrutura rígida que garantisse tanto para condições de serviço
como para as condições sísmicas uma deformação muito pequena do tabuleiro, que, como já foi
referido, para zonas com uma elevada sismicidade, muitas vezes não é possível ou não é desejável.
Para além da definição da força de frenagem de projeto, o Eurocódigo 1 – parte 2 apresenta, na parte
6.5.4.5.2 (1), valores limite de deformação para estas estruturas (CEN, 2003). Mais uma vez, esses
valores de deformação são definidos para a condição em que a força horizontal máxima que é aplicada
na direção longitudinal não ultrapassa os 7000 kN. Estes valores existem para evitar a possível perda
de estabilidade do balastro constituinte da estrutura ferroviária e para evitar a perda de eficácia no
processo de travagem.
De acordo com o regulamento, é possível aceitar deslocamentos superiores a 5 mm, no entanto, nessas
condições é necessário recorrer a sistemas especiais para acomodar os movimentos dos carris (CEN,
2003).
No caso específico dos comboios de alta velocidade em Portugal, a RAVE, empresa pública que tinha
a missão de instalar a rede de alta velocidade, preferiu restringir o valor de deslocamento máximo aos
5 mm não tendo, por isso, que recorrer obrigatoriamente a aparelhos de dilatação.
Esta decisão justifica o uso de aparelhos de bloqueio que restrinjam as deformações do tabuleiro aos
5 mm para as condições de serviço, ou seja, para condições em que as forças horizontais sejam
inferiores à força de frenagem de projeto.
É necessário em situações com estas recorrer a soluções mistas, com sistemas de bloqueio associados
a sistemas de proteção sísmica, garantindo que a estrutura cumpra dois tipos de comportamento muito
diferentes, consoante o valor da solicitação horizontal que é aplicada à estrutura. O controlo da
frenagem (i.e. a restrição das deformações do tabuleiro) encontra-se assegurado através de sistemas
de bloqueio, enquanto o comportamento dinâmico a ações sísmicas é melhorado através da inclusão
de sistemas de proteção sísmica. Obviamente que estas soluções mistas aplicadas a pontes ou
viadutos destinados à circulação de comboios de alta velocidade, só se utilizam na direção longitudinal,
pois é a única direção em que se põe o problema da frenagem dos comboios.
Uma das soluções possíveis consiste num sistema composto por fusíveis metálicos dispostos em
paralelo com sistemas de proteção sísmica. Os fusíveis limitam o movimento longitudinal do tabuleiro
a pequenos deslocamentos até um valor pré-definido de força atuante. Em Portugal, esse valor
corresponde a 5 mm para forças inferiores à força de frenagem de projeto. Os sistemas de proteção
sísmica só funcionam para níveis de força superiores a essa força de frenagem. Esta solução já foi
implementada em redes de alta velocidade na Europa, nomeadamente em Espanha, estando também
prevista a sua aplicação em Portugal.
Como alternativa à solução mista por fusíveis metálicos surgiu recentemente um novo sistema que
inclui uma mola pré-comprimida com um comportamento que se traduz num efeito semelhante ao dos

39
fusíveis metálicos, mas com algumas vantagens. O funcionamento desta nova solução mista bem como
a sua eficácia quando aplicada à estrutura vai ser objeto de estudo nesta dissertação.
De seguida, apresenta-se o modo de funcionamento destes dois sistemas mistos com mais detalhe,
bem como as vantagens e desvantagens de cada um deles.
2.4 Solução mista por fusíveis metálicos
A utilização de fusíveis metálicos como sistema de bloqueio para controlo de frenagem é, hoje em dia,
uma solução já bastante implementada em pontes e viadutos em zonas sísmicas. Exemplo disso é a
sua aplicação em viadutos constituintes das linhas ferroviárias de alta velocidade em Espanha, como
no tramo Orihuela – Colada de la Buena Vida na linha Madrid – Castilla de la Mancha (Sartori, 2012).
Também em Portugal estava prevista a utilização desta solução mista para a linha de alta velocidade
Lisboa – Madrid.
O bom comportamento destes elementos como sistema de bloqueio deve-se às suas propriedades.
São caracterizados por apresentarem uma rigidez elevada e uma rotura frágil. O seu comportamento
pode ser controlado definindo o patamar de rotura e a rigidez elástica, parâmetros que são escolhidos
pelo projetista. Normalmente, essa força de rotura corresponde a um limite superior da máxima carga
de serviço horizontal projetada para a estrutura (à qual os fusíveis têm que resistir), enquanto a rigidez
é definida consoante o máximo deslocamento permitido para a estrutura em serviço. Os fusíveis
metálicos são também denominados de fusíveis de sacrifício, pela função que desempenham quando
aplicados a uma estrutura (Figura 36).
Figura 36 - (A) Instalação de um fusível metálico. (Chiarotto et al. 2004); (B) Relação força-deslocamento obtida experimentalmente para um fusível metálico. Adaptado de FIP (2013).
A sua aplicação não fica restringida a pontes destinadas à passagem de comboios. É cada vez mais
frequente recorrer-se a fusíveis metálicos que restrinjam os deslocamentos do tabuleiro de uma ponte
ou viaduto para as cargas de serviço. Sendo a sua resposta sísmica determinada pelos sistemas de
proteção sísmica introduzidos, uma vez que os elementos metálicos são concebidos para romper em
eventos sísmicos mais severos.

40
Abordando novamente as situações em que as estruturas se encontram em zonas de elevada
sismicidade, no caso de pontes ou viadutos destinados à circulação de comboios, torna-se
praticamente imprescindível o uso de um sistema de bloqueio quando se pretende dimensionar uma
estrutura flexível com a inclusão de dispositivos de proteção sísmica. Os comboios, principalmente os
comboios de alta velocidade, transmitem ao tabuleiro forças elevadas de frenagem, por isso, os fusíveis
metálicos, pelas suas características, resolvem os problemas que têm a ver com o comportamento em
serviço da estrutura (i.e. controlo das deformações).
Como forma de explicar claramente o comportamento desta solução mista, vai-se recorrer a dois
estudos que foram efetuados. Um primeiro estudo com base em resultados experimentais, levado a
cabo pela empresa FIP Industriale, e um segundo estudo, realizado no âmbito de uma dissertação de
mestrado do Instituto Superior Técnico, com base numa análise numérica. O primeiro estudo (i.e.
Estudo 1) apresenta uma solução mista por fusíveis metálicos colocados em paralelo com dissipadores
histeréticos e apoios deslizantes. O segundo estudo (i.e. Estudo 2) apresenta uma solução muito
semelhante, mas com a inclusão de dissipadores de fluido viscoso em detrimento dos dissipadores
histeréticos.
2.4.1 Estudo 1 – Fusíveis metálicos e dissipadores histeréticos
Este estudo permite tirar conclusões claras acerca do funcionamento de soluções mistas com fusíveis
metálicos como sistema de bloqueio, pelo facto de ter sido testada experimentalmente. É bastante útil
para este trabalho a análise dos resultados experimentais da simulação que foi feita pela empresa FIP
Industriale, utilizando uma mesa sísmica. Neste ensaio foi testada uma solução mista deste género que
foi implementada na Venezuela em viadutos constituintes da linha ferroviária Caracas-Tuy Medio
(Figura 37).
Figura 37 - Modelo testado representativo da solução mista implementada nos viadutos da linha ferroviária Caracas-Tuy Medio, Venezuela (Chiarotto et al. 2004).
Simulou-se um tramo representativo desses viadutos, com as mesmas condições de apoio. Os viadutos
são isolados sismicamente com apoios do tipo “pot” deslizantes na direção longitudinal. Em paralelo
com estes apoios estão colocados dissipadores histeréticos e fusíveis metálicos. Desta forma, a

41
estrutura terá uma grande rigidez para as condições de serviço, conferida pelos fusíveis, impedindo
deformações significativas do tabuleiro que possam danificar a linha ferroviária. Para cargas superiores
às cargas de serviço, os elementos metálicos estão dimensionados para romper, ficando a estrutura a
vibrar associada aos dissipadores histeréticos que dissipam grandes quantidades de energia. Foram
realizados dois testes: um primeiro teste com fusíveis metálicos (teste 1) e um segundo teste sem
fusíveis metálicos (teste 2) (Chiarotto et al., 2004) (Figura 38).
Figura 38 - Tipo de apoio utilizado nos viadutos Caracas-Tuy Medio. (Chiarotto et al., 2004)
Na Figura 39, é apresentado o gráfico de acelerações obtidas no tabuleiro ao longo de uma ação
sísmica, correspondente ao teste 1 (i.e. com fusíveis). É possível observar claramente a diferença de
comportamento da estrutura nas condições de serviço, com a transmissão de elevadas acelerações
devido à grande rigidez da estrutura, comparativamente com a fase que se segue depois de os fusíveis
romperem, em que o nível de acelerações transmitidas ao tabuleiro decresce significativamente devido
ao sistema de proteção sísmica. Nota-se também, neste caso, que os elementos de sacrifício romperam
por volta dos 3,5 segundos.
Figura 39 - Resultados do teste 1: Aceleração no tabuleiro do viaduto ao longo do tempo. Adaptado de Chiarotto et al. (2004)
O comportamento que a estrutura vai apresentar para as condições de serviço até se dar a rotura do
fusível metálico, corresponde exatamente ao comportamento desse fusível. Para cargas superiores às

42
de serviço, os fusíveis metálicos estão dimensionados para romper e é por essa razão que também
têm a denominação de fusíveis de sacrifício. Quando se dá a rotura destes elementos é, normalmente,
porque se está na presença de um sismo severo e o comportamento dinâmico da estrutura vai
depender apenas do tipo de sistemas de proteção sísmica a que se recorreu.
Os ciclos histeréticos do dissipador, representados na Figura 40, permitem demonstrar a diferença de
comportamento da estrutura, antes e depois da rotura dos elementos de sacrifício. Numa primeira fase
registam-se forças mais elevadas e uma maior rigidez, enquanto numa segunda fase é possível
observar um comportamento bi-linear típico de dissipadores histeréticos. É de referir que depois dos
fusíveis romperem os ciclos de histerese do dissipador permanecem relativamente estáveis.
Figura 40 - Resultados do teste 1: Relação força-deslocamento do dissipador histerético. Adaptado de Chiarotto et al. (2004).
Na Figura 41 são apresentadas as acelerações obtidas no tabuleiro para os testes, 1 e 2, nos primeiros
6 segundos. Pode-se observar que, depois dos fusíveis romperem no teste 1, as acelerações do
tabuleiro registadas ao longo do tempo são idênticas nos dois testes. Isto permite concluir que os
dissipadores funcionam corretamente imediatamente após a rotura dos elementos de sacrifício.
Figura 41 - Aceleração do tabuleiro do viaduto ao longo do tempo: Comparação entre os testes 1 e 2, com e sem fusível metálico, respetivamente. Adaptado de Chiarotto et al. (2004).
Este estudo permite ainda observar, em particular no teste 2, que existe uma redução significativa das
acelerações sísmicas que são transmitidas ao tabuleiro, através da inclusão de sistemas de proteção

43
sísmica. É visível na Figura 42, que a aceleração da mesa sísmica é, em média, bastante superior à
aceleração registada no tabuleiro. A aceleração de pico registada na mesa é reduzida para valores
entre um terço e metade dessa aceleração, no tabuleiro (Chiarotto et al., 2004).
Figura 42 - Resultados do teste 2: Acelerações na mesa sísmica e no tabuleiro do viaduto ao longo do tempo.
Adaptado de Chiarotto et al. (2004).
Em termos do deslocamento do tabuleiro, a energia que lhe é transmitida num determinado instante
correspondente à rotura dos fusíveis metálicos, reflete-se num grande deslocamento
comparativamente com os deslocamentos sísmicos, o que faz com que o tabuleiro fique a vibrar em
torno de um ponto que não é a sua posição de equilíbrio, mas sim a posição para onde foi “atirado”
depois dos fusíveis romperem. Assim, no fim da ação sísmica verifica-se que a estrutura fica com
deformações residuais. Nem a inclusão de dissipadores histeréticos que, ao contrário dos dissipadores
viscosos, têm alguma capacidade para recolocar o sistema na sua posição inicial, conseguem recentrar
a estrutura, apesar de contribuírem nesse sentido, reduzindo os deslocamentos residuais. Na Figura
43, que mostra o deslocamento do dissipador histerético ao longo do tempo, pode observar-se que a
estrutura fica com um deslocamento residual da ordem dos 10 mm.
Figura 43 - Resultados do teste 1: Deslocamento do tabuleiro do viaduto ao longo do tempo. Adaptado de Chiarotto et al. (2004).

44
2.4.2 Estudo 2 – Fusíveis metálicos e dissipadores viscosos
Este estudo foi realizado no âmbito de uma dissertação de mestrado do Instituto Superior Técnico
(Monteiro, 2013). É interessante analisar alguns dos resultados obtidos nesse estudo, por corresponder
a um caso bastante semelhante aos que serão analisados neste trabalho e que irão ser descritos mais
à frente.
O caso de estudo corresponde a um viaduto longo, com 8800 toneladas de massa e com frequência
nula, destinado à circulação de comboios de alta velocidade. O objetivo desse trabalho foi o de analisar
o comportamento sísmico do viaduto descrito com uma solução mista composta por fusíveis metálicos
e dissipadores viscosos. Pretende-se que os fusíveis metálicos funcionem como sistema de bloqueio
até à força de frenagem, para que a estrutura não apresente deslocamentos acima dos 5 mm. Para a
ação sísmica regulamentar esses fusíveis devem romper e os dissipadores viscosos passam a controlar
os deslocamentos longitudinais do tabuleiro. Estudou-se, com base em séries de acelerações (i.e.
acelerogramas) artificiais o comportamento sísmico do conjunto, através de uma análise paramétrica,
sendo registado o valor médio dos máximos deslocamentos obtidos no tabuleiro para cada série de
aceleração.
Numa primeira fase, até ser atingida a força de frenagem, o comportamento do conjunto será muito
semelhante ao obtido para o estudo experimental descrito no capítulo anterior (i.e. Estudo 1), uma vez
que a rigidez do conjunto é conferida maioritariamente pelos fusíveis metálicos. As grandes diferenças
entre estes dois casos de estudo surgem na segunda fase do movimento, após a rotura dos fusíveis
metálicos. Neste caso, os dissipadores viscosos instalados no encontro não têm qualquer rigidez e a
máxima força nestes elementos está desfasada das restantes forças que atuam na estrutura, devido à
dependência direta da velocidade e não do deslocamento.
A Figura 44 mostra o andamento das forças de cada elemento constituinte da solução para os primeiros
segundos de uma ação sísmica. Nesse intervalo de tempo, a estrutura experimenta as duas fases do
movimento. Na primeira fase o movimento é determinado sobretudo pelo fusível metálico restringindo
a estrutura a deslocamentos máximos de 5 mm. Esta fase termina ao fim de, aproximadamente, 1,5
segundos, altura em que se dá a rotura do fusível metálico, indicado no gráfico como “Mola” (para
efeitos deste estudo) e com um traçado a linha verde no gráfico da Figura 44. Isto significa que, por
essa altura, a força atuante atingiu a máxima força de frenagem, definida neste estudo por 7000 kN. A
partir desse momento, o viaduto apresenta um movimento com grandes deslocamentos, devido à sua
flexibilidade, vibrando associado a dissipadores viscosos colocados no encontro (Monteiro, 2013).
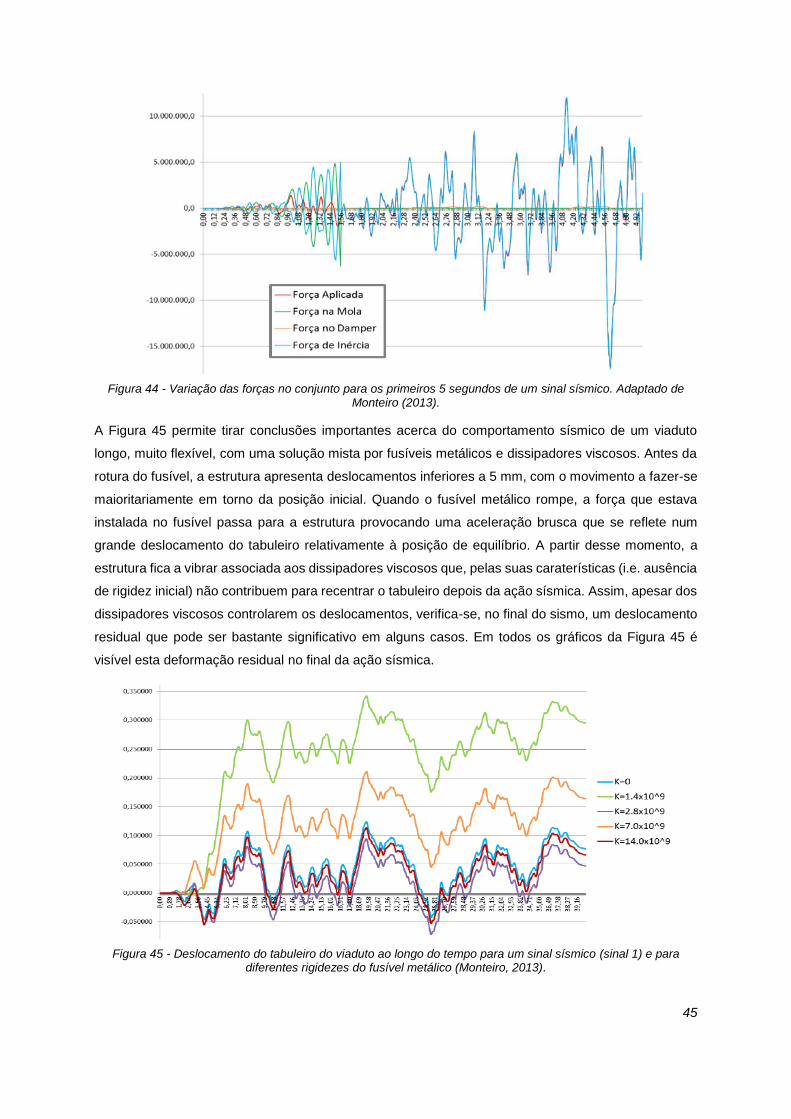
45
Figura 44 - Variação das forças no conjunto para os primeiros 5 segundos de um sinal sísmico. Adaptado de Monteiro (2013).
A Figura 45 permite tirar conclusões importantes acerca do comportamento sísmico de um viaduto
longo, muito flexível, com uma solução mista por fusíveis metálicos e dissipadores viscosos. Antes da
rotura do fusível, a estrutura apresenta deslocamentos inferiores a 5 mm, com o movimento a fazer-se
maioritariamente em torno da posição inicial. Quando o fusível metálico rompe, a força que estava
instalada no fusível passa para a estrutura provocando uma aceleração brusca que se reflete num
grande deslocamento do tabuleiro relativamente à posição de equilíbrio. A partir desse momento, a
estrutura fica a vibrar associada aos dissipadores viscosos que, pelas suas caraterísticas (i.e. ausência
de rigidez inicial) não contribuem para recentrar o tabuleiro depois da ação sísmica. Assim, apesar dos
dissipadores viscosos controlarem os deslocamentos, verifica-se, no final do sismo, um deslocamento
residual que pode ser bastante significativo em alguns casos. Em todos os gráficos da Figura 45 é
visível esta deformação residual no final da ação sísmica.
Figura 45 - Deslocamento do tabuleiro do viaduto ao longo do tempo para um sinal sísmico (sinal 1) e para diferentes rigidezes do fusível metálico (Monteiro, 2013).

46
Este estudo permitiu ainda analisar a força no fusível metálico para cada sinal sísmico, tal como está
representado na Figura 46. Até romper, este elemento é bastante rígido, verificando-se forças muito
elevadas nos primeiros segundos da ação sísmica. Após a rotura, a força no fusível passa a ser nula.
Apesar de não ser importante para este trabalho analisar a influência da rigidez do fusível, a figura
abaixo mostra que quanto maior a rigidez deste elemento mais cedo ocorre a sua rotura, uma vez que
a força de frenagem considerada é um parâmetro fixo.
Figura 46 - Variação da força ao longo do tempo em fusíveis metálicos de diferentes rigidezes para um sinal sísmico (sinal 1) (Monteiro, 2013).
O último gráfico, representado na Figura 47, permite reforçar algumas ideias já discutidas neste
capítulo. É um gráfico que mostra os valores médios dos deslocamentos máximos e médios do tabuleiro
do viaduto para um sinal sísmico. Torna-se mais uma vez evidente que esta solução mista não permite
recentrar a estrutura depois de uma ação sísmica significativa que provoque a rotura do fusível
metálico. Como já foi referido, o dissipador viscoso por si só, não tem capacidade para recolocar o
tabuleiro do viaduto depois de um sismo, contribuindo apenas para reduzir os máximos deslocamentos
da estrutura.
Figura 47 - Valores médios do deslocamento máximo e médio para um sinal sísmico (sinal 1) e para diferentes rigidezes do fusível metálico (Monteiro, 2013).

47
2.5 Solução mista com mola pré-comprimida
(Transpec PDS)
A solução apresentada nesta secção começa a ser cada vez mais comercializada por diversas
empresas fabricantes de dispositivos de proteção sísmica. Tem um funcionamento muito semelhante
à solução mista descrita com base em fusíveis metálicos mas, neste caso, com a mola a desempenhar
o papel de sistema de bloqueio. A escolha pela solução mista com mola tem algumas vantagens em
relação à solução mista por fusíveis metálicos e é por isso que as empresas estão a apostar neste
sistema. A empresa Freyssinet foi uma das primeiras empresas a apresentar uma solução mista com
a inclusão de uma mola, produto esse denominado de Transpec PDS (Transpec Prestressed Damping
Spring) (Figura 48). O nome dado pela empresa a este produto indica desde logo os principais
componentes constituintes da solução.
Figura 48 - Transpec PDS (Freyssinet, 2010).
“Transpec” é o nome técnico dado pela empresa a todos os produtos do tipo hidráulico; “Damping”
implica que esse produto possui capacidade de amortecimento por isso, neste caso, o mecanismo
hidráulico é do tipo FVD (Fluid Viscous Damper); “Prestressed Spring” refere-se ao sistema inovador
de mola pré-comprimida, que funciona como sistema de bloqueio devido à pré-carga aplicada, para
além de recolocar a estrutura na sua posição inicial depois de um sismo severo.
Como já foi referido, as boas perspetivas em relação a este tipo de produto tem impulsionado o seu
aparecimento e desenvolvimento por parte de vários fabricantes de dispositivos de proteção sísmica.
Neste momento, produtos com características e campos de aplicação muito semelhantes aos do
Transpec PDS estão já no mercado lançados por empresas como a Maurer Sohne (Maurer, 2013),
Jarret Structures (Jarret, 2013) ou FIP Industriale (FIP, 2013).
Este produto é adequado para estruturas com pouca capacidade de amortecimento e com uma
frequência muito baixa, como é o caso da maioria das pontes ou viadutos longos. A sua instalação

48
pode ser feita na direção longitudinal ou transversal, sendo que, se o objetivo é fazer com que o
aparelho funcione como sistema de bloqueio para frenagem, obviamente que terá que ser instalado
longitudinalmente que é onde se verifica o problema da frenagem. O Transpec PDS é colocado ou nas
extremidades (i.e. zona dos encontros) ou nas ligações entre o tabuleiro e os pilares. É necessário ter
em conta que a força gerada no aparelho devido a ação sísmica terá que ser transmitida ou aos
encontros ou aos pilares, consoante a sua localização. O facto de serem produtos com maior aplicação
em estruturas flexíveis faz com que sejam colocados principalmente na zona dos encontros, por terem,
em geral, maior capacidade de carga do que os seus pilares.
É importante referir que o Transpec PDS mantém as suas características desde que funcione num
intervalo de temperaturas entre os -30°C e os 50°C (Freyssinet, 2010).
A solução mista com mola vai ser alvo de estudo nesta dissertação. O modelo de comportamento deste
aparelho vai ser descrito com mais detalhe no capítulo seguinte, no entanto, em linhas gerais o
Transpec PDS apresenta 3 funções principais: conter os movimentos da estrutura para as condições
de serviço, recolocar a estrutura na sua posição inicial depois da ação sísmica e dissipar energia
durante a ação sísmica. As duas primeiras funções são conferidas pela mola: a restrição de movimentos
para as condições de serviço consegue-se através de uma pré-carga aplicada à mola que não permite
movimentos abaixo dessa força; as características da mola fazem com que a estrutura volte à posição
inicial depois de um sismo. Acima das cargas de serviço, este aparelho dissipa a energia sísmica
através de um dissipador do tipo viscoso que funciona em paralelo com a mola. Na Figura 49 pode
observar-se a relação força-deslocamento que caracteriza o comportamento deste aparelho bem como
as diferentes fases do movimento num evento sísmico.
Figura 49 - Comportamento dinâmico do transpec PDS: (A) Relação força-deslocamento (gráfico qualitativo); (B) Diferentes fases do movimento. Adaptado de Freyssinet (2010).
Um bom exemplo da aplicação dos aparelhos Transpec PDS, é o viaduto Figueras em Espanha,
destinado à passagem de comboios de alta velocidade. Neste viaduto os aparelhos foram colocados
transversalmente entre o tabuleiro e os pilares, permitindo um deslocamento máximo de 10 mm, e
longitudinalmente num dos encontros, restringindo o deslocamento do tabuleiro a um máximo de 5 mm

49
para as forças de frenagem, mas permitindo um deslocamento até 50 mm com dissipação de energia
para forças sísmicas acima da força de frenagem de projeto (Salmon, 2011) (Figura 50).
Figura 50 - Instalação do transpec PDS no viaduto Figueras, Espanha: (A) Longitudinalmente no encontro; (B) Transversalmente na ligação tabuleiro-pilar. Adaptado de Salmon (2011).
Apesar deste sistema de solução mista com mola vir a ser alvo de um estudo aprofundado mais à frente
neste trabalho, é possível identificar já algumas vantagens em relação à solução mista por fusíveis
metálicos, tendo em conta as suas características principais.
O comportamento para cargas de serviço nas duas soluções é muito semelhante. As grandes
diferenças verificam-se depois de uma ação sísmica severa que seja superior às cargas de serviço.
Nessas condições, a solução por fusível vai necessitar de que se recoloque o tabuleiro na sua posição
inicial, o que implica mover uma grande massa, e que se instalem novos fusíveis metálicos com custos
associados. A solução mista por mola garante um regresso do sistema à sua posição inicial devido às
suas propriedades, não sendo necessário levar a cabo qualquer substituição de elementos do sistema.
Em termos da modelação das duas soluções, a solução mista por mola assume-se, novamente, como
a mais interessante, uma vez que o uso de programas de cálculo automático permite transmitir o correto
funcionamento deste sistema. Pelo contrário, não é possível modelar a solução por fusíveis através de
programas de cálculo automático correntes.
Apesar das desvantagens da solução por fusíveis em relação à solução por mola, os fusíveis em
conjunto com sistemas de proteção sísmica constituem uma solução válida que continua a ser muito
utilizada.


51
Capítulo 3
Dissipador com Mola
Pré-comprimida
3 Dissipador com Mola Pré-comprimida
Este capítulo apresenta o estudo da solução mista de dissipador com mola pré-comprimida. Indica-se
a estrutura do sistema e analisa-se individualmente os elementos constituintes. Descreve-se o modelo
de comportamento do conjunto e apresenta-se o modelo de análise computacional utilizado.


53
3.1 Estrutura do dispositivo
Pelo facto de haver no mercado diversas soluções deste tipo, muito semelhantes ao Transpec PDS
mas lançadas por diferentes fabricantes, optou-se por tratar esta solução mista por DMPc (i.e.
dissipador com mola pré-comprimida).
As propriedades que tornam esta solução inovadora é o facto de conseguir conjugar, num só
dispositivo, 3 funções (Freyssinet, 2010):
Restringe os movimentos da estrutura para condições de serviço;
Dissipa energia durante a ação sísmica;
Recoloca a estrutura na sua posição inicial depois de uma ação sísmica.
As características que definem o funcionamento deste sistema são conferidas por dois elementos: a
mola pré-comprimida e o dissipador viscoso. Estes elementos constituintes do DMPc estão dispostos
de modo a funcionarem em paralelo. Na Figura 51 está representado, esquematicamente, um tipo de
DMPc.
Figura 51 - DMPc: (A) Aspeto exterior; (B) Estrutura interna. Adaptado de Jarret (2013).
Para melhor explicar o modelo de comportamento do DMPc bem como os seus elementos constituintes
vai-se recorrer, neste capítulo, a um dos casos de estudo (i.e. caso de estudo 1) desta dissertação. De
forma resumida (uma vez que este caso será rigorosamente descrito no capítulo seguinte), testou-se a
inclusão de um DMPc num viaduto com uma massa de 8800 toneladas e com frequência nula, através
da criação de um modelo simplificado através do programa de cálculo automático SAP2000. Com a
definição dos parâmetros da mola pré-comprimida e do dissipador viscoso, para um sismo de
referência, obtiveram-se os gráficos força-deslocamento e força-velocidade para a solução mista DMPc
e para os seus elementos constituintes.
3.1.1 Mola Pré-comprimida (MPc)
A mola pré-comprimida desempenha um papel muito importante no DMPc. É responsável por duas
funções essenciais desta solução: recentrar a estrutura depois de uma ação sísmica e bloquear a
estrutura para as cargas de serviço.

54
A capacidade para recolocar a estrutura na sua posição inicial depois de uma solicitação elevada é
conferida pela mola, devido ao seu comportamento elástico. A força que se gera na mola depende,
numa relação de proporcionalidade direta, de duas variáveis: a rigidez da mola (𝐾) e a sua deformação
(𝑥). Assim, a equação que traduz esta força é expressa da seguinte forma:
𝐹𝑀𝑂𝐿𝐴 = 𝐾. 𝑥 [2]
A vantagem de se conseguir recentrar a estrutura depois de uma ação sísmica é devida,
exclusivamente, ao comportamento elástico da mola. A aplicação de uma compressão inicial na mola
permite dotar este elemento do sistema de bloqueio para um determinado limite de carga.
Fase Estática (𝐹 < 𝐹0) – abaixo da força de compressão inicial, o comportamento do conjunto
DMPc/estrutura apresenta uma rigidez (𝐾1) elevada. Corresponde ao sistema de bloqueio, responsável
por restringir a estrutura. Neste intervalo de forças, praticamente não se vai verificar deformação da
mola.
Fase Dinâmica (𝐹 > 𝐹0) – para forças superiores à pré-carga de compressão, a mola vai ter um
comportamento muito flexível (𝐾2) com grandes deslocamentos associados.
Para o caso de uma mola pré-comprimida aplicada numa estrutura com alguma deformabilidade, a
equação que define a força que se gera, pode ser expressa da seguinte forma:
𝐹𝑀𝑃𝑐(𝑥) = {
𝐾1. 𝑥 , 𝐹 < 𝐹0𝑒
𝐹0 + 𝐾2. (𝑥 −𝐹𝑜
𝐾1), 𝐹 ≥ 𝐹0
[3]
O gráfico força-deslocamento da mola pré-comprimida encontra-se representado na Figura 52.
Figura 52 - Relação força-deslocamento de uma mola pré-comprimida para meio ciclo (gráfico qualitativo).
De facto, a representação gráfica dos resultados obtidos para a mola pré-comprimida no caso de estudo
1, para um sismo de referência, é bastante semelhante ao gráfico esperado, traçado qualitativamente
na Figura 52. Neste caso, a mola foi definida com uma pré-carga de 7000 𝑘𝑁, correspondente à força
total de frenagem, e permitindo um deslocamento máximo de 5 mm para este nível de carga. Acima
desta força, definiu-se uma rigidez K correspondente à passagem da máxima força de frenagem (i.e.

55
7000 kN) para uma força de 8000 kN, num intervalo de deslocamentos entre a máxima deformação
permitida nas condições de serviço (i.e. 5 mm) e 100 mm. O controlo dos deslocamentos em fase
dinâmica é feito pelo dissipador viscoso, cujo comportamento será explicado mais à frente. Na Figura
53, está representado o gráfico força-deslocamento da mola pré-comprimida para o caso de estudo 1.
Figura 53 - Caso de estudo 1: Relação força-deslocamento da MPc, com a associação em paralelo do FVD.
São visíveis, através deste gráfico, as duas fases de funcionamento (fase estática e fase dinâmica) da
mola pré-comprimida consoante o nível de carga aplicada.
Para se perceber a importância da mola pré-comprimida no DMPc, testou-se exatamente o mesmo
caso de estudo 1 para o mesmo sismo de referência, apenas com a inclusão do FVD na estrutura. O
objetivo deste teste é perceber quais seriam os deslocamentos da estrutura ao longo do tempo,
relativamente à sua posição inicial, caso não existisse a contribuição da MPc. Estes resultados estão
representados na Figura 54.
Figura 54 - Caso de estudo 1: Deslocamento da estrutura ao longo do tempo, apenas com a inclusão do FVD (sem a MPc).
-8000
-6000
-4000
-2000
0
2000
4000
6000
8000
-0,05 -0,04 -0,03 -0,02 -0,01 0 0,01 0,02 0,03 0,04 0,05
Forç
a (k
N)
Deslocamento (m)
-0,04
-0,02
0
0,02
0,04
0,06
0,08
0 5 10 15 20 25 30 35 40
De
slo
cam
en
to (
m)
Tempo (s)
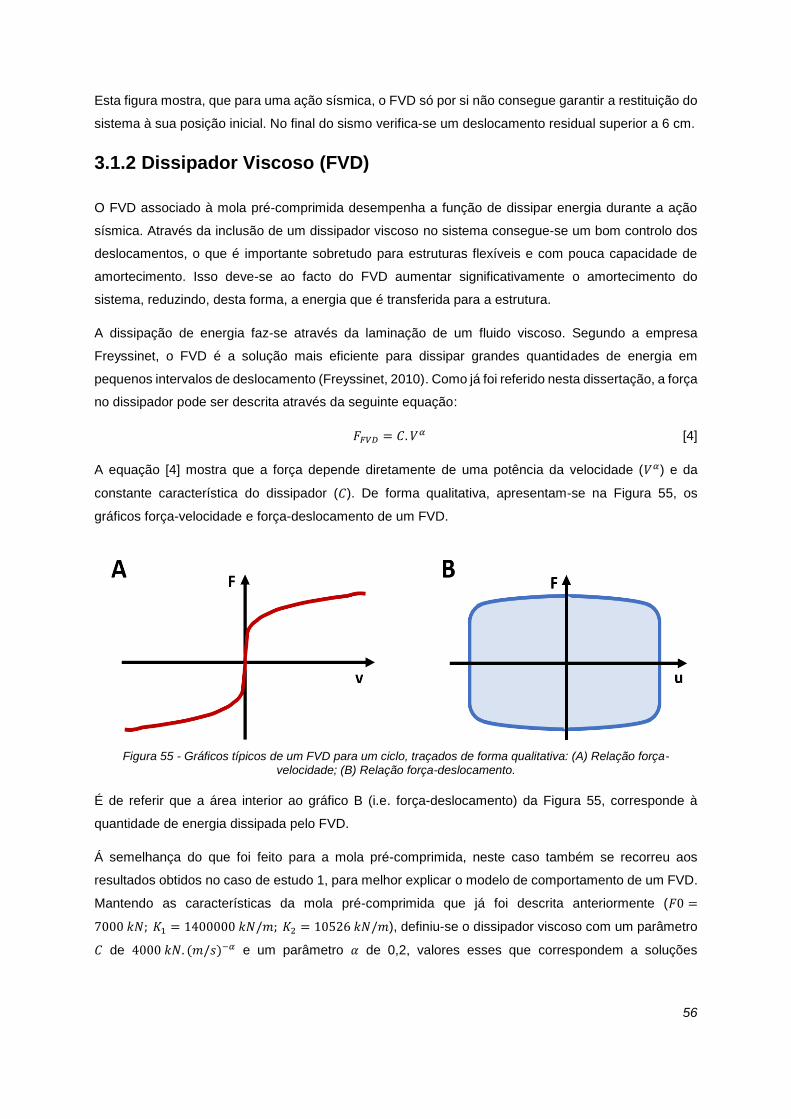
56
Esta figura mostra, que para uma ação sísmica, o FVD só por si não consegue garantir a restituição do
sistema à sua posição inicial. No final do sismo verifica-se um deslocamento residual superior a 6 cm.
3.1.2 Dissipador Viscoso (FVD)
O FVD associado à mola pré-comprimida desempenha a função de dissipar energia durante a ação
sísmica. Através da inclusão de um dissipador viscoso no sistema consegue-se um bom controlo dos
deslocamentos, o que é importante sobretudo para estruturas flexíveis e com pouca capacidade de
amortecimento. Isso deve-se ao facto do FVD aumentar significativamente o amortecimento do
sistema, reduzindo, desta forma, a energia que é transferida para a estrutura.
A dissipação de energia faz-se através da laminação de um fluido viscoso. Segundo a empresa
Freyssinet, o FVD é a solução mais eficiente para dissipar grandes quantidades de energia em
pequenos intervalos de deslocamento (Freyssinet, 2010). Como já foi referido nesta dissertação, a força
no dissipador pode ser descrita através da seguinte equação:
𝐹𝐹𝑉𝐷 = 𝐶. 𝑉𝛼 [4]
A equação [4] mostra que a força depende diretamente de uma potência da velocidade (𝑉𝛼) e da
constante característica do dissipador (𝐶). De forma qualitativa, apresentam-se na Figura 55, os
gráficos força-velocidade e força-deslocamento de um FVD.
Figura 55 - Gráficos típicos de um FVD para um ciclo, traçados de forma qualitativa: (A) Relação força-velocidade; (B) Relação força-deslocamento.
É de referir que a área interior ao gráfico B (i.e. força-deslocamento) da Figura 55, corresponde à
quantidade de energia dissipada pelo FVD.
Á semelhança do que foi feito para a mola pré-comprimida, neste caso também se recorreu aos
resultados obtidos no caso de estudo 1, para melhor explicar o modelo de comportamento de um FVD.
Mantendo as características da mola pré-comprimida que já foi descrita anteriormente (𝐹0 =
7000 𝑘𝑁; 𝐾1 = 1400000 𝑘𝑁/𝑚; 𝐾2 = 10526 𝑘𝑁/𝑚), definiu-se o dissipador viscoso com um parâmetro
𝐶 de 4000 𝑘𝑁. (𝑚/𝑠)−𝛼 e um parâmetro 𝛼 de 0,2, valores esses que correspondem a soluções

57
correntes. A relação força-velocidade obtida para este elemento, para um sismo de referência,
encontra-se representada na Figura 56.
Figura 56 - Caso de estudo 1: Relação força-velocidade do FVD, com a associação em paralelo da MPc.
A representação gráfica da relação força-deslocamento do dissipador viscoso, relativa ao caso de
estudo 1, encontra-se na Figura 57.
Figura 57 - Caso de estudo 1: Relação força-deslocamento do FVD, com a associação em paralelo da MPc.
-4000
-3000
-2000
-1000
0
1000
2000
3000
4000
-0,3 -0,2 -0,1 0 0,1 0,2 0,3
Forç
a (k
N)
Velocidade (m/s)
-4000
-3000
-2000
-1000
0
1000
2000
3000
4000
-0,05 -0,04 -0,03 -0,02 -0,01 0 0,01 0,02 0,03 0,04 0,05
Forç
a (k
N)
Deslocamento (m)
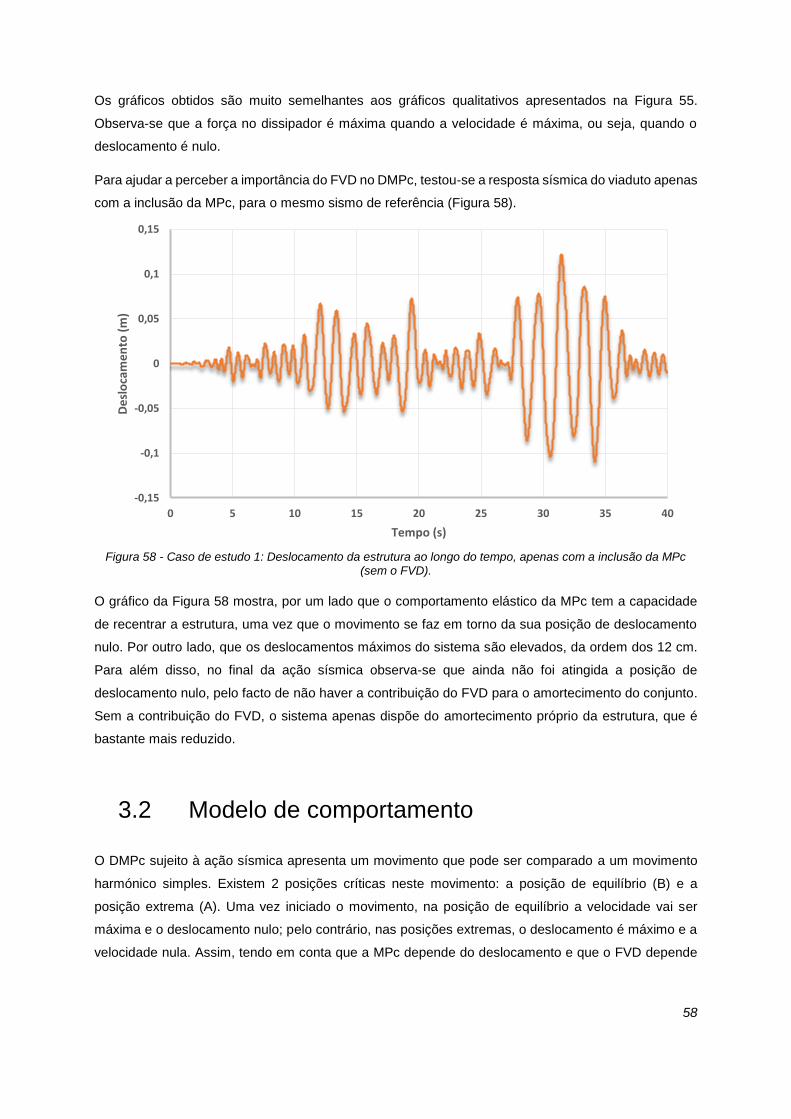
58
Os gráficos obtidos são muito semelhantes aos gráficos qualitativos apresentados na Figura 55.
Observa-se que a força no dissipador é máxima quando a velocidade é máxima, ou seja, quando o
deslocamento é nulo.
Para ajudar a perceber a importância do FVD no DMPc, testou-se a resposta sísmica do viaduto apenas
com a inclusão da MPc, para o mesmo sismo de referência (Figura 58).
Figura 58 - Caso de estudo 1: Deslocamento da estrutura ao longo do tempo, apenas com a inclusão da MPc (sem o FVD).
O gráfico da Figura 58 mostra, por um lado que o comportamento elástico da MPc tem a capacidade
de recentrar a estrutura, uma vez que o movimento se faz em torno da sua posição de deslocamento
nulo. Por outro lado, que os deslocamentos máximos do sistema são elevados, da ordem dos 12 cm.
Para além disso, no final da ação sísmica observa-se que ainda não foi atingida a posição de
deslocamento nulo, pelo facto de não haver a contribuição do FVD para o amortecimento do conjunto.
Sem a contribuição do FVD, o sistema apenas dispõe do amortecimento próprio da estrutura, que é
bastante mais reduzido.
3.2 Modelo de comportamento
O DMPc sujeito à ação sísmica apresenta um movimento que pode ser comparado a um movimento
harmónico simples. Existem 2 posições críticas neste movimento: a posição de equilíbrio (B) e a
posição extrema (A). Uma vez iniciado o movimento, na posição de equilíbrio a velocidade vai ser
máxima e o deslocamento nulo; pelo contrário, nas posições extremas, o deslocamento é máximo e a
velocidade nula. Assim, tendo em conta que a MPc depende do deslocamento e que o FVD depende
-0,15
-0,1
-0,05
0
0,05
0,1
0,15
0 5 10 15 20 25 30 35 40
De
slo
cam
en
to (
m)
Tempo (s)

59
da velocidade, as máximas forças nestes dois elementos ficam desfasadas. Na posição de equilíbrio a
força no dissipador viscoso vai ser máxima, enquanto nas posições extremas é a força na mola que vai
ser máxima. A Figura 59 mostra os gráficos de um movimento harmónico simples, bem como as suas
posições críticas.
Figura 59 - Movimento harmónico simples em função do deslocamento e da velocidade (gráficos qualitativos).
O facto de o DMPc ser constituído por uma mola pré-comprimida em paralelo com um dissipador
viscoso, implica que o seu comportamento a nível de rigidez seja definido pela mola.
O modelo de comportamento de um DMPc corresponde a uma conjugação entre um comportamento
elástico não linear da MPc, com um comportamento viscoso puro do FVD. Assim, a força no DMPc
obtém-se através da soma da equação de força da MPc com a do FVD (i.e. equações 3 e 4,
respetivamente).
Da mesma forma, somando os diagramas força-deslocamento da MPc e do FVD, obtém-se a relação
força-deslocamento do DMPc. A soma desses diagramas está representada de forma qualitativa na
Figura 60.
Figura 60 - Relação força-deslocamento de um DMPc: soma da MPc com o FVD (gráficos qualitativos).

60
A Figura 61 ilustra a evolução da relação força-deslocamento de um DMPc para as diferentes fases do
movimento, ao longo de um ciclo.
Figura 61 - Evolução do diagrama força-deslocamento de um DMPc para as diferentes fases do movimento, ao longo de um ciclo (gráfico qualitativo).
Para o mesmo caso de estudo 1, nomeadamente para um DMPc constituído pela mola pré-comprimida
e pelo dissipador viscoso já caracterizados anteriormente, desenhou-se o diagrama força-
deslocamento em função do corte basal do conjunto e do seu deslocamento. Importa referir que o corte
basal representa a máxima força que se gera em cada instante, no conjunto estrutura/DMPc devido à
ação sísmica. Por isso, para além da força que se gera no DMPc, há que ter em conta a força de inércia
da estrutura e o amortecimento intrínseco da estrutura. A força de inércia depende da massa da
estrutura (𝑚) e da sua aceleração (�̈�), enquanto o amortecimento depende da constante característica
da estrutura (𝐶𝐸𝑆𝑇) e da sua velocidade (�̇�). O corte basal pode ser obtido de acordo com a seguinte
equação:
𝐹 (𝑥) = {
𝐾1. 𝑥 + 𝐶. 𝑉𝛼 + 𝑚. �̈� + 𝐶𝐸𝑆𝑇. �̇� , 𝐹 < 𝐹0𝑒
𝐹0 + 𝐾2. (𝑥 −𝐹𝑜
𝐾1) + 𝐶. 𝑉𝛼 + 𝑚. �̈� + 𝐶𝐸𝑆𝑇. �̇� , 𝐹 ≥ 𝐹0
[5]

61
A relação força-deslocamento obtida para este caso está representada na Figura 62.
Figura 62 - Caso de estudo 1: Relação força-deslocamento do conjunto DMPc/estrutura.
Na sequência da análise dos deslocamentos ao longo do tempo para uma situação em que se
introduziu apenas o FVD na estrutura (Figura 54) e para outra situação em que só se colocou a MPc
(Figura 58), torna-se relevante apresentar o gráfico dos deslocamentos ao longo do tempo incluindo
estes dois elementos na estrutura a “trabalhar” em paralelo. Esse gráfico, que corresponde ao do DMPc
testado no caso de estudo 1 para um sismo de referência, encontra-se representado na Figura 63.
Figura 63 - Caso de estudo 1: Deslocamento da estrutura ao longo do tempo, com a inclusão do DMPc.
-12000
-10000
-8000
-6000
-4000
-2000
0
2000
4000
6000
8000
10000
12000
-0,05 -0,04 -0,03 -0,02 -0,01 0 0,01 0,02 0,03 0,04 0,05
Co
rte
Bas
al (
kN)
Deslocamento (m)
DMPc
MPc
-0,12
-0,08
-0,04
0
0,04
0,08
0,12
0 5 10 15 20 25 30 35 40
De
slo
cam
en
to (
m)
Tempo (s)
DMPc MPc

62
Realizando uma análise comparativa relativamente aos gráficos apresentados na Figura 54 e na Figura
58, que representam o deslocamento do tabuleiro da estrutura ao longo do tempo para duas situações
diferentes em que se incluiu apenas um dos elementos constituintes do DMPc, percebe-se as
vantagens de conjugar em paralelo a MPc e o FVD. Para o caso representado na Figura 63, obtêm-se
deslocamentos máximos que são menos de metade dos verificados para a situação em que não se
associou o FVD e o movimento faz-se sempre em torno da posição de equilíbrio devido à contribuição
da MPc. Para além disso, o DMPc consegue recentrar a estrutura imediatamente após a ação sísmica,
coisa que a MPc e o FVD individualmente não possibilitam.
3.3 Modelo de análise computacional
Neste estudo, avalia-se a eficácia de sistemas de bloqueio para frenagem associados a sistemas
viscosos de dissipação de energia (i.e DMPc) na proteção sísmica de pontes ou viadutos destinados à
circulação de comboios de alta velocidade.
Como já foi referido, o facto de se recorrer a sistemas de proteção sísmica em estruturas, tais como
dissipadores viscosos, torna mais complexa a análise dinâmica. Neste caso, é imprescindível o auxílio
de programas de cálculo automático que consigam realizar uma análise não linear no domínio do
tempo, de modo a determinar a resposta do viaduto (Guerreiro, 2003).
Para a realização deste trabalho recorreu-se a um desses programas, o SAP2000. Através deste
programa é possível analisar a resposta da estrutura no domínio do tempo, com a inclusão de
elementos com comportamento não linear, como é o caso da mola pré-comprimida e do dissipador
viscoso, constituintes do DMPc. Atualmente, o SAP2000 já tem incorporados modelos que traduzem o
funcionamento de um FVD e de uma MPc na sua biblioteca de elementos estruturais não lineares.
A modelação computacional do DMPc é realizada através dos elementos de ligação/suporte
(Link/Support Elements). Como não existe um elemento estrutural disponível no SAP2000 que seja
compatível com o comportamento de um DMPc, torna-se necessário modelar em paralelo os seus dois
elementos constituintes: o dissipador viscoso pode ser modelado por um Link do tipo Damper, enquanto
a mola pré-comprimida modela-se recorrendo a um Link do tipo MultiLinear Elastic.
Estes Links (i.e. Damper e MultiLinear Elastic) podem ser modelados com um ou dois nós, caso sejam
considerados elementos de suporte ou de ligação respetivamente (CSI, 2010). Neste estudo,
modelaram-se os Links como elementos de ligação, ou seja, com dois nós. Para além disso, definiu-se
o funcionamento destes elementos apenas numa direção, correspondente à direção longitudinal do
viaduto onde se pretende realizar a análise.
Para que o modelo seja compatível com o funcionamento do DMPc nos casos de estudo, importa
esclarecer que o estudo tem como objetivo analisar a eficácia deste dispositivo na ligação entre o

63
encontro e o tabuleiro. Assim, modelaram-se os dois elementos Links ligados a um nó fixo e a um nó
com livre deslocamento numa direção. O nó fixo, com restrições de deslocamentos em todas as
direções, representa o encontro. O outro nó, ao qual foram ligados os dois Links, representa o tabuleiro
do viaduto. Modelou-se este último nó com uma massa associada correspondente à massa do tabuleiro
do viaduto e com deslocamento livre segundo a mesma direção em que estão instalados os elementos
Link.
Tanto para a modelação do FVD como para a modelação da MPc é possível definir propriedades
lineares e não lineares. Foram definidas apenas as propriedades não lineares destes elementos, uma
vez que as análises serão também não lineares no domínio do tempo.
Segundo a empresa CSI, o elemento Damper é indicado para modelar dissipadores viscosos cuja
relação força-velocidade é não linear (CSI, 2010). As propriedades do Damper baseiam-se no modelo
de Maxwell da viscoelasticidade, que consiste na introdução de uma mola em série com o dissipador.
Para a modelação de um FVD têm que se definir, para além das propriedades não lineares do
dissipador, as propriedades da mola associada a este dissipador. Todas estas propriedades são
definidas segundo a direção 1, direção do desenvolvimento dos elementos Link. A relação força-
deslocamento do Damper é dada pela equação 6 (CSI, 2010).
𝑓 = 𝑘𝑑𝑘 = 𝑐�̇�𝑐𝑐𝑒𝑥𝑝
[6]
Onde 𝑘 é a rigidez da mola, 𝑐 é a constante característica do dissipador, 𝑐𝑒𝑥𝑝 é o expoente da
velocidade, 𝑑𝑘 é a deformação da mola e �̇�𝑐 é a velocidade do dissipador.
A deformação total do elemento Link (𝑑) corresponde à soma entre a deformação da mola (𝑑𝑘) e a
deformação do dissipador (𝑑𝑐), tal como mostra a equação [7] (CSI, 2010):
𝑑 = 𝑑𝑘 + 𝑑𝑐 [7]
A definição de uma mola associada ao dissipador tem como objetivo reproduzir alguma flexibilidade
elástica do aparelho FVD. Para que a contribuição da mola não seja demasiado significativa no
comportamento do FVD, definiu-se a sua rigidez de modo a que o deslocamento total (𝑑) seja 1000
vezes superior ao deslocamento da mola (𝑑𝑘). Este critério tem como objetivo limitar a deformação
elástica da mola (CSI, 2010) (Figura 64).

64
Figura 64 - (A) Modelo FVD em SAP2000 (CSI, 2010); (B) Propriedades do FVD - janelas de comando do programa SAP2000.
A modelação da MPc em SAP2000 é bastante mais simples que a do FVD. De facto, o elemento
MultiLinear Elastic traduz exatamente o comportamento da MPc, através de um comportamento
elástico e não linear, sem dissipação de energia (CSI, 2010).
A definição das propriedades não lineares deste elemento permite criar um gráfico força-deslocamento
muito semelhante ao gráfico da Figura 52. Estas propriedades são definidas para a direção 1, a do
comprimento da mola. Para cada sentido da força é possível definir duas rigidezes diferentes, sendo
que a última rigidez é extrapolada para deslocamentos infinitos, no caso de se atingirem deslocamentos
superiores àqueles que tenham sido definidos (CSI, 2010).
Na Figura 65, estão definidas as propriedades da MPc através do elemento MultiLinear Elastic.
Figura 65 - Propriedades da MPc - janelas de comando do programa SAP2000

65
Capítulo 4
Casos de Estudo
4 Casos de Estudo
Neste capítulo apresentam-se os resultados práticos da dissertação. Começam por ser apresentados
os casos de estudo e os aspetos gerais da modelação numérica das estruturas. Segue-se uma
introdução relativa à ação sísmica considerada. A eficácia do dissipador com mola pré-comprimida
(DMPc) foi avaliada com base em dois estudos: (i) uma análise de sensibilidade realizada para um caso
de estudo específico e (ii) a otimização da solução para diferentes casos de estudo, numa perspetiva
de dimensionamento. Apresentam-se os resultados destes estudos acompanhados de uma análise
crítica.


67
4.1 Descrição dos Casos de Estudo
Este capítulo centra-se no estudo de quatro casos diferentes, que representam quatro tipos de viadutos
com diferenças a nível da sua massa ou frequência própria de vibração.
Estes quatro casos tiveram origem num estudo prévio que foi feito ao projeto da linha ferroviária de alta
velocidade Lisboa-Madrid.
O trajeto dessa linha ferroviária de alta velocidade iria incluir diversos viadutos. De modo a sistematizar
a procura de soluções a aplicar no conjunto dos viadutos, no estudo prévio ao projeto os viadutos
longos foram agrupados em dois grandes grupos, consoante a sua massa: viadutos com uma massa
aproximada de 8800 toneladas e viadutos com uma massa aproximada de 11000 toneladas. A ideia
era, desta forma, analisar dois viadutos representativos de duas escalas diferentes de viadutos longos.
Tendo em conta que esse trajeto se iria fazer por zonas com uma sismicidade elevada (centro e sul do
país) os sismos teriam uma forte influência no dimensionamento dos viadutos longos, constituindo-se,
nalguns casos, como a ação condicionante. Juntando a este facto as imposições impostas pela RAVE
em conjunto com os regulamentos do EC8, em que a força total de frenagem não podia originar um
deslocamento superior a 5 mm, foi testada neste estudo prévio uma solução mista de proteção sísmica
com fusíveis metálicos a funcionarem como sistema de bloqueio. Esta solução iria permitir dimensionar
viadutos longos com pilares muito flexíveis e que só “funcionariam” em regime elástico.
Foi com base nestas ideias, que tiveram origem no estudo prévio da linha ferroviária de alta velocidade
Lisboa-Madrid, com a definição para cada tipo de viaduto longo de duas frequências de vibração
diferentes, que resultaram os quatro casos de estudo. A solução mista que se estudou neste trabalho
não foi a solução por fusíveis, mas sim uma solução alternativa utilizando os sistemas que são alvo de
estudo neste trabalho, ou seja a solução de dissipador com mola pré-comprimida (i.e. DMPc).
Os casos de estudo correspondem a viadutos com pilares muito flexíveis e completamente isolados, o
que significa que permanecem em regime elástico em condições sísmicas (Virtuoso et al., 2000). Para
cada tipo de viaduto, estudaram-se duas frequências diferentes: 0 Hz e 0,2 Hz. A solução com
frequência nula corresponde à situação em que o tabuleiro está completamente livre de se mover no
topo dos pilares. Estas frequências têm pouca influência no comportamento real das estruturas, uma
vez que a frequência do sistema vai ser definida pela mola pré-comprimida. O objetivo é perceber se
há algum ganho ou alguma perda de eficácia do DMPc em estruturas com diferentes frequências ou
se, pelo contrário, o funcionamento deste dispositivo é aproximadamente o mesmo.
O caso em que os viadutos têm uma frequência nula é um caso difícil de obter na realidade e implica
que, longitudinalmente, o deslocamento do tabuleiro seja completamente independente do movimento
dos pilares. Neste caso, a única rigidez longitudinal é conferida pela mola pré-comprimida constituinte
do DMPc, na ligação entre o tabuleiro e o encontro. Uma frequência tão baixa pode estar próxima de
ser obtida através de uma solução por apoios deslizantes no topo dos pilares, desde que praticamente
não exista atrito.

68
Os viadutos com frequência de 0,2 Hz correspondem, normalmente, a viadutos com apoios
elastoméricos na ligação entre o tabuleiro e os pilares, ou viadutos em que o projetista tenha optado
por ligar, rigidamente, alguns pilares mais esbeltos do viaduto ao tabuleiro. As vantagens que advêm
de viadutos com essa frequência, como a rigidez inicial para cargas de serviço e alguma capacidade
de restituição elástica, não são significativas, no caso em que se inclui um DMPc, uma vez que este
dispositivo já garante por si só essas características com uma excelente eficácia.
No programa de cálculo automático SAP2000, criaram-se os modelos compatíveis com os casos de
estudo, introduzindo algumas simplificações que se julga não comprometer a qualidade dos resultados.
A análise destes casos de estudo foi feita criando modelos de um grau de liberdade para representar o
comportamento dos viadutos na direção longitudinal. Desta forma, admitiu-se que toda a massa dos
viadutos estava concentrada na zona do tabuleiro, desprezando-se a massa dos pilares. Esta
simplificação de adotar um modelo plano de um grau de liberdade só é possível no caso de se
considerar o tabuleiro dos viadutos como rígido, hipótese essa que foi admitida e que implica que a
deformação do tabuleiro seja desprezável quando comparada com o deslocamento horizontal do topo
dos pilares (Virtuoso et al., 2000). É de referir também, que este modelo só garante bons resultados
para a análise de viadutos aproximadamente retos. Para viadutos em curva, o modelo adotado não é
representativo (Guerreiro, 2003).
De modo a facilitar a organização do estudo, numeraram-se os casos de 1 a 4, sendo os dois primeiros
casos relativos ao viaduto de menor massa (i.e. 8800 toneladas) e os últimos dois casos representativos
do viaduto de maior massa (i.e. 11000 toneladas). Em relação à modelação propriamente dita, o caso
de estudo 1 (m=8800 ton; f=0 Hz) e o caso de estudo 3 (m=11000 ton; f=0 Hz) são modelados da
mesma forma, enquanto o caso de estudo 2 (m=8800 ton; f=0,2 Hz) e o caso de estudo 4 (m=11000
ton; f=0,2 Hz) também, ou seja, o modelo adotado depende da frequência de vibração da estrutura que
se pretende representar (Tabela 1).
Tabela 1 - Quadro Resumo dos 4 casos de estudo
CASO DE ESTUDO MASSA (ton.) FREQUÊNCIA (Hz)
1 8800 0
2 8800 0,2
3 11000 0
4 11000 0,2
Para os casos de estudo 1 e 3, em que a frequência própria dos viadutos é nula, correspondendo à
situação em que o tabuleiro está completamente livre, o modelo executado no SAP2000 revelou-se
bastante simples. Definiu-se um nó móvel apenas numa direção (i.e. direção longitudinal do viaduto)
ao qual se ligaram os dois elementos Link em paralelo, cuja modelação já foi explicada no capítulo
anterior. Este nó móvel pretende representar o tabuleiro livre de um viaduto de frequência nula, por
isso teve que se associar a massa correspondente. Em relação aos Link, uniu-se a extremidade oposta

69
destes elementos a nós fixos, de modo a simular o encontro do viaduto, que se considerou
perfeitamente rígido.
Estes dois casos modelam-se de forma igual, diferindo a sua modelação apenas na definição da massa
pontual, uma vez que o caso 1 representa o estudo de um viaduto de massa 8800 toneladas, enquanto
o caso 3, um viaduto de massa 11000 toneladas. A Figura 66 apresenta, esquematicamente, um
viaduto tipo de frequência nula que serviu de base para a análise dos casos 1 e 3, e a modelação
adotada no programa SAP2000.
Figura 66 - (A) Viaduto tipo dos casos de estudo 1 e 3, de frequência nula; (B) Modelo SAP2000 adotado para representar os casos de estudo 1 e 3.
A modelação dos casos de estudo 2 e 4 foi mais complexa, pelo facto de ser necessário associar uma
rigidez às estruturas representadas nesses modelos, de modo a obter-se a frequência própria de
vibração pretendida, de cerca de 0,2 Hz.
Criaram-se os modelos de um grau de liberdade compatíveis com os viadutos tipo em análise,
substituindo-se, em relação aos casos de estudo 1 e 3, o nó móvel com movimento livre unidirecional,
por um nó igualmente com uma massa associada relativa à massa do tabuleiro, mas ligado a uma barra
em consola (i.e. elemento frame), cuja função é conferir a frequência de 0,2 Hz. A opção podia passar
por se associar uma mola com uma determinada rigidez a um nó completamente móvel, de modo a
que esse sistema atingisse a frequência de 0,2 Hz, no entanto, optou-se por definir essa frequência
através da barra em consola. O nó móvel no topo da barra encastrada, correspondente ao tabuleiro do
viaduto, tal como nos casos de estudo 1 e 3, encontra-se associado a elementos Link. A modelação do
encontro foi também feita através de nós fixos, aos quais se conectaram os Link. Na Figura 67 encontra-
se representado, esquematicamente, um viaduto tipo de frequência 0,2 Hz, bem como o modelo
SAP2000 adotado para estudar a inclusão do DMPc nesse viaduto.

70
Figura 67 - (A) Viaduto tipo dos casos de estudo 2 e 4, de frequência 0,2 Hz; (B) Modelo SAP2000 adotado para representar os casos de estudo 2 e 4.
Nos casos 2 e 4, para definir a frequência da estrutura foi necessário determinar a secção que teria de
ter o elemento frame. Na Figura 68 está representado o modelo simplificado utilizado para analisar o
viaduto de frequência 0,2 Hz, bem como alguns dos parâmetros relevantes no cálculo da secção
constituinte do elemento frame.
Figura 68 - Modelo simplificado utilizado nos casos de estudo 2 e 4, para representar o viaduto de frequência 0,2 Hz.
A rigidez do elemento frame, correspondente à rigidez dos viadutos analisados nos casos 2 e 4 foi
determinada com base na massa desses viadutos e tendo em conta o objetivo final de que a estrutura
tivesse uma frequência de 0,2 Hz. Para isso, recorreu-se à equação [9]:
𝑓 =1
2𝜋× √
𝐾
𝑚 => 𝑲 [9]
Onde, 𝑓 é a frequência própria de vibração da estrutura, 𝐾, a rigidez da estrutura e 𝑚, a massa do
tabuleiro, que será 8800 toneladas para o caso 2 e 11000 toneladas para o caso 4.
Com a rigidez calculada, foi necessário definir um material para o elemento frame, de modo a
determinar a sua inércia e definir a secção. Assumiu-se então um material de referência: o betão
C30/37. De referir, que a escolha deste material não tem qualquer influência no estudo, podia-se ter
definido outro material qualquer, desde que a frequência final do elemento fosse 0,2 Hz.

71
Tendo em conta as propriedades desse material e definindo um comprimento para esse elemento frame
de 10 metros, calculou-se o momento de inércia da estrutura com base na seguinte fórmula, indicada
para o modelo em causa (equação [10]):
𝐾 =3𝐸𝐼
𝐿3 => 𝑰 [10]
Onde 𝐾, é a rigidez da estrutura, 𝐸, o módulo de elasticidade do material, 𝐿, o comprimento do elemento
e 𝐼, a sua inércia.
Com a inércia, admitiu-se uma secção quadrada para o elemento frame e determinou-se, através da
equação [11], as dimensões que teria de ter a secção desse elemento de modo a que a frequência da
estrutura fosse de 0,2 Hz.
𝐼 =𝑏4
12 => 𝒃 [11]
Na equação [11], 𝐼, é a inércia da estrutura e 𝑏, a medida do lado da secção.
Com base nestes valores realizou-se uma análise modal aos modelos criados de modo a comprovar
que a frequência era, aproximadamente, 0,2 Hz. A Tabela 2 e a Tabela 3 são os quadros resumo do
cálculo da secção a atribuir ao elemento frame para os casos de estudo 2 e 4, respetivamente.
Tabela 2 - Quadro Resumo do cálculo da secção para o caso de estudo 2
Caso de estudo 2 (f=0,2 Hz)
m (ton) 8800
K (kN/m) ≈ 13896
I (m4) ≈ 0,140
b (m) ≈ 1,138
f (Hz) ≈ 0,203 (b=1,15 m)
Tabela 3 - Quadro Resumo do cálculo da secção para o caso de estudo 4
Caso de estudo 4 (f=0,2 Hz)
m (ton) 11000
K (kN/m) ≈ 17371
I (m4) ≈ 0,175
b (m) ≈ 1,204
f (Hz) ≈ 0,197 (b=1,2 m)
Criados os 4 modelos computacionais dos casos de estudo, seguiu-se a fase de introduzir a ação
sísmica no programa SAP2000 para analisar a eficácia do DMPc em cada um destes casos. A
descrição de como se introduziu esta ação é feita na secção seguinte.

72
4.2 Ação sísmica e combinações de ações
O comportamento não linear do DMPc obriga à análise da resposta dos viadutos através do cálculo no
domínio do tempo. Para se realizar essa análise, é necessário ter a representação da ação dinâmica
através de uma série de acelerações ao longo do tempo. No caso da análise sísmica, estas séries
devem ser representativas da ação sísmica de dimensionamento a considerar (Guerreiro, 2003).
As séries de acelerações (acelerogramas) podem ser reais, de sismos históricos, ou geradas
artificialmente. Neste trabalho, recorreu-se a séries de acelerações geradas artificialmente compatíveis
com a definição da ação presente no EC8.
Devido à grande aleatoriedade na definição de ação, foi necessário recorrer a várias séries de
acelerações geradas artificialmente, pelo facto de não ser possível tirar conclusões corretas com base
na análise da resposta de um só acelerograma (Guerreiro, 2003). Estas séries foram geradas, tal como
especifica o EC8, de modo a coincidirem com o espetro de resposta elástico da zona em causa, para
um amortecimento viscoso de 5% (CEN, 2004). Também de acordo com o EC8, são necessários pelo
menos 7 acelerogramas para ser possível avaliar a resposta sísmica de uma estrutura, com base na
média dos valores absolutos desses mesmos acelerogramas (CEN, 2004). Neste trabalho, recorreu-se
a 10 acelerogramas para que a média dos máximos constituísse um valor mais fiável.
As séries de acelerações são representativas da componente horizontal da ação sísmica e foram
utilizadas apenas na direção de análise dos viadutos (i.e. direção longitudinal). Para além disso, estas
séries simulam apenas a ação sísmica de tipo 1 (i.e. sismo afastado). Não foi necessário recorrer a
acelerogramas correspondentes ao sismo de tipo 2 (i.e. sismo próximo), uma vez que as estruturas em
causa são bastante flexíveis, com períodos muito altos, o que faz com que ação sísmica afastada seja
sempre condicionante. Na Figura 69 estão representados os espetros de resposta elástica para os dois
tipos de sismos.
Figura 69 - Espetro de resposta elástica do sismo afastado e do sismo próximo: zona 3, solo B e amortecimento de 5%.
0,0
2,0
4,0
6,0
0 1 2 3 4 5
Ace
lera
ção
(m
/s2 )
Período (s)
Sismo Afastado - Tipo 1
Sismo Próximo - Tipo 2

73
Percebe-se claramente através Figura 69 que, para períodos elevados como aqueles que caracterizam
os viadutos analisados nos casos de estudo, as acelerações introduzidas pela ação sísmica de tipo 1
são sempre superiores. Isto justifica o facto de só se ter estudado a resposta ao sismo mais
condicionante (i.e. sismo de tipo 1).
Voltando ao estudo prévio do eixo de alta velocidade Lisboa-Madrid, o seu traçado iria passar,
maioritariamente, pela zona 1.3 do sismo de tipo 1, de acordo com o zonamento sísmico estabelecido
para Portugal Continental. Em relação ao solo, admitiu-se que as estruturas estariam fundadas num
solo de tipo B. Os sinais gerados artificialmente têm 40 segundos. As 10 séries de acelerações
utilizadas são apresentadas no Anexo 1.
No programa SAP2000, definiu-se uma análise não linear através de integração direta. Este tipo de
análise permite definir diferentes amortecimentos intrínsecos da estrutura, consoante a sua frequência.
Admitiu-se, para frequências de 0,1 Hz e 2,0 Hz, um amortecimento intrínseco para a estrutura de 2%,
através da estimativa das frequências que a estrutura irá ter ao longo da ação sísmica e tendo o cuidado
de garantir que essas frequências variem, maioritariamente, dentro do intervalo de frequências
definidas. Desta forma, e devido ao baixo amortecimento intrínseco definido para a estrutura (i.e. cerca
de 2%), é expectável que, durante a ação sísmica, o amortecimento do sistema seja sempre conferido
pelo FVD constituinte do DMPc, devido aos elevados amortecimentos característicos de um dissipador
viscoso. Seguindo o procedimento descrito, e tendo em conta as análises em causa neste trabalho, o
amortecimento intrínseco definido para a estrutura, por ser bastante mais pequeno do que o conferido
pelo FVD, praticamente não tem influência nos resultados obtidos.
Por fim, e numa perspetiva de dimensionamento do DMPc, combinaram-se os casos de análise em
valor absoluto. A resposta do DMPc é avaliada considerando a média dos valores máximos absolutos
obtidos para cada caso.
4.3 Apresentação de resultados
4.3.1 Análise de sensibilidade aos parâmetros característicos do
DMPc
Com o objetivo de perceber claramente a influência de cada um dos principais parâmetros
característicos do DMPc no seu comportamento, fez-se uma análise paramétrica usando somente uma

74
das séries de aceleração utilizadas no estudo. Só desta forma é possível fazer uma análise direta da
influência de cada parâmetro na resposta sísmica do conjunto ao longo do tempo. Usar nesta fase os
valores médios das respostas para o conjunto de sismos analisado pode dificultar essa interpretação.
Como critério de escolha, optou-se pelo sismo que produzia deslocamentos máximos próximos do
deslocamento máximo médio obtido para a combinação de 10 sismos. O acelerograma do sismo de
referência escolhido está representado na Figura 70.
Figura 70 - Acelerograma artificial do sismo de referência (sismo 8).
Esta análise de sensibilidade foi efetuada apenas para um dos casos de estudo, novamente para o
caso de estudo 1 (m=8800 ton; f=0 Hz). Para este caso e para o sismo de referência estudou-se a
influência do parâmetro 𝐾2, relativo à mola pré-comprimida, e a influência dos parâmetros 𝐶 e 𝛼,
relativos ao dissipador viscoso. Importa referir que esta análise de sensibilidade só tem como objetivo
mostrar a influência de cada um dos parâmetros característicos do DMPc no seu comportamento, não
sendo possível tirar conclusões numa perspetiva de dimensionamento, pelo facto de ser uma análise
realizada apenas para um sinal sísmico.
4.3.1.1 Influência da rigidez da mola pré-comprimida - 𝑲𝟐
Inicialmente estudou-se a influência da rigidez da MPc na resposta sísmica do conjunto. Definiu-se uma
rigidez K correspondente à passagem da máxima força de frenagem (i.e. 7000 kN) para uma força de
8000 kN, num intervalo de deslocamentos entre a máxima deformação permitida nas condições de
serviço (i.e. 5 mm) e 100 mm. Tomando como referência esse valor K, definiram-se mais duas rigidezes:
um valor dez vezes menor do que a rigidez de referência (i.e. K/10) e um valor dez vezes maior (i.e.
10K). Os 3 valores definidos para estudar a influência da rigidez da MPc no comportamento do conjunto
estão apresentados na Tabela 4.
Tabela 4 - Rigidezes K2 definidas para a análise de sensibilidade.
10K (kN/m) K (kN/m) K/10 (kN/m)
105263 10526,3 1052,6
-2
-1,5
-1
-0,5
0
0,5
1
1,5
2
0 5 10 15 20 25 30 35 40
Ace
lera
ção
(m
/s2 )
Tempo (s)

75
Para o caso de estudo 1 e para o sismo de referência, mantendo constantes as características do
dissipador viscoso, observou-se as principais variações a nível de deslocamento e velocidade do
tabuleiro, força na mola e força no dissipador. Definiu-se o dissipador viscoso associado com um
parâmetro 𝐶 de 4000 𝑘𝑁. (𝑚/𝑠)−𝛼 e um parâmetro 𝛼 de 0,2.
A representação gráfica força-deslocamento da mola pré-comprimida para 3 rigidezes diferentes,
encontra-se na Figura 71.
Figura 71 - Caso de estudo 1: Relação força-deslocamento da MPc para 3 tipos de rigidez K2 (10K, K e K/10).
A primeira conclusão que se pode tirar é que, quanto mais rígida for a mola maiores serão as forças
que se vão gerar. Percebe-se também, que a amplitude máxima do movimento varia muito pouco nos
3 casos em análise.
O gráfico força-deslocamento, representado na Figura 72, relativo ao dissipador, mostra que, para além
da amplitude máxima que é muito semelhante, também as forças máximas obtidas no dissipador têm
valores muito próximos, o que faz com que os gráficos nos 3 casos apresentem grandes semelhanças.
-12000
-8000
-4000
0
4000
8000
12000
-0,05 -0,04 -0,03 -0,02 -0,01 0 0,01 0,02 0,03 0,04 0,05
Forç
a (k
N)
Deslocamento (m)
10K
K
K/10

76
Figura 72 - Caso de estudo 1: Relação força-deslocamento do FVD para 3 tipos de rigidez K2 da MPc (10K, K e K/10)
De facto, e tendo em conta que a área interior aos gráficos representados na Figura 72 corresponde à
quantidade de energia dissipada pelo FVD, percebe-se que em cada um dos casos esta é
aproximadamente a mesma.
Interessa também analisar o gráfico força-deslocamento do sistema DMPc/estrutura, de modo a tirar
conclusões acerca da influência da rigidez 𝐾2 no comportamento global do conjunto. Este gráfico está
representado na Figura 73.
Figura 73 - Caso de estudo 1: Relação força-deslocamento do conjunto DMPc/estrutura para 3 tipos de rigidez K2 da MPc (10K, K e K/10).
-4000
-3000
-2000
-1000
0
1000
2000
3000
4000
-0,05 -0,04 -0,03 -0,02 -0,01 0 0,01 0,02 0,03 0,04 0,05
Forç
a (k
N)
Deslocamento (m)
10K K K/10
-14000
-10000
-6000
-2000
2000
6000
10000
14000
-0,05 -0,04 -0,03 -0,02 -0,01 0 0,01 0,02 0,03 0,04 0,05
Co
rte
Bas
al (
kN)
Deslocamento (m)
10K
K
K/10
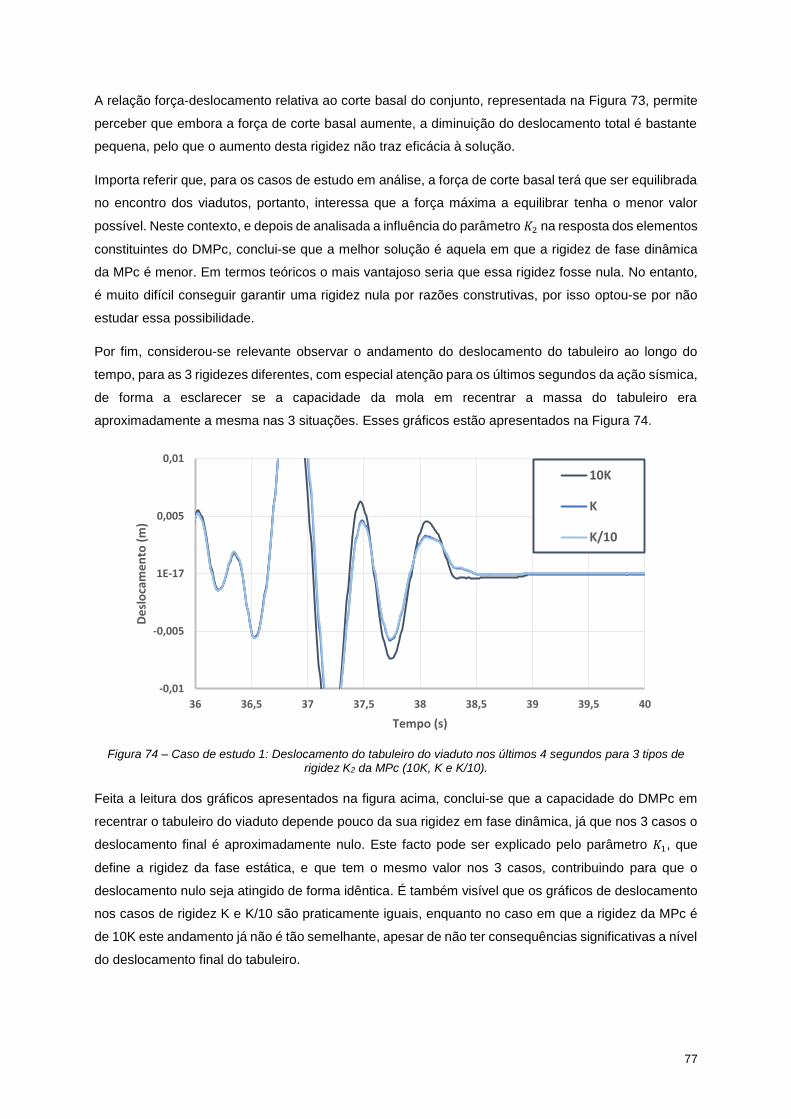
77
A relação força-deslocamento relativa ao corte basal do conjunto, representada na Figura 73, permite
perceber que embora a força de corte basal aumente, a diminuição do deslocamento total é bastante
pequena, pelo que o aumento desta rigidez não traz eficácia à solução.
Importa referir que, para os casos de estudo em análise, a força de corte basal terá que ser equilibrada
no encontro dos viadutos, portanto, interessa que a força máxima a equilibrar tenha o menor valor
possível. Neste contexto, e depois de analisada a influência do parâmetro 𝐾2 na resposta dos elementos
constituintes do DMPc, conclui-se que a melhor solução é aquela em que a rigidez de fase dinâmica
da MPc é menor. Em termos teóricos o mais vantajoso seria que essa rigidez fosse nula. No entanto,
é muito difícil conseguir garantir uma rigidez nula por razões construtivas, por isso optou-se por não
estudar essa possibilidade.
Por fim, considerou-se relevante observar o andamento do deslocamento do tabuleiro ao longo do
tempo, para as 3 rigidezes diferentes, com especial atenção para os últimos segundos da ação sísmica,
de forma a esclarecer se a capacidade da mola em recentrar a massa do tabuleiro era
aproximadamente a mesma nas 3 situações. Esses gráficos estão apresentados na Figura 74.
Figura 74 – Caso de estudo 1: Deslocamento do tabuleiro do viaduto nos últimos 4 segundos para 3 tipos de rigidez K2 da MPc (10K, K e K/10).
Feita a leitura dos gráficos apresentados na figura acima, conclui-se que a capacidade do DMPc em
recentrar o tabuleiro do viaduto depende pouco da sua rigidez em fase dinâmica, já que nos 3 casos o
deslocamento final é aproximadamente nulo. Este facto pode ser explicado pelo parâmetro 𝐾1, que
define a rigidez da fase estática, e que tem o mesmo valor nos 3 casos, contribuindo para que o
deslocamento nulo seja atingido de forma idêntica. É também visível que os gráficos de deslocamento
nos casos de rigidez K e K/10 são praticamente iguais, enquanto no caso em que a rigidez da MPc é
de 10K este andamento já não é tão semelhante, apesar de não ter consequências significativas a nível
do deslocamento final do tabuleiro.
-0,01
-0,005
1E-17
0,005
0,01
36 36,5 37 37,5 38 38,5 39 39,5 40
De
slo
cam
en
to (
m)
Tempo (s)
10K
K
K/10

78
4.3.1.2 Influência da constante característica do dissipador viscoso – 𝑪
A constante característica 𝐶 está relacionada com as dimensões do dissipador viscoso e com a sua
capacidade de amortecimento (Jerónimo, 2001). Influencia diretamente variáveis como o deslocamento
e a velocidade que se obtêm no tabuleiro do viaduto, bem como a força que se gera no dissipador.
Quanto maior é o valor desta constante, menores são os deslocamentos máximos e menores as
velocidades máximas. Com o aumento do parâmetro 𝐶, verifica-se um aumento da força no dissipador
viscoso.
Estas conclusões foram obtidas com base no estudo de 3 casos diferentes. Estes casos diferiram
apenas no valor que se atribuiu ao parâmetro 𝐶. Todos os outros parâmetros mantiveram-se
constantes. Definiu-se para o caso de estudo 1, um valor para o parâmetro 𝐾2 de 10526 𝑘𝑁/𝑚 e um
valor para o parâmetro 𝛼 de 0,2. Testaram-se, para o sismo de referência, 3 valores diferentes para a
constante característica do dissipador viscoso: 2000, 4000 e 6000 𝑘𝑁. (𝑚/𝑠)−𝛼.
O gráfico força-deslocamento que traduz o comportamento do dissipador viscoso nas 3 situações está
representado na Figura 75.
Figura 75 - Caso de estudo 1: Relação força-deslocamento do FVD para 3 tipos de constante característica C (2000, 4000 e 6000)
Percebe-se pela Figura 75 que quanto maior for a constante característica, menor é a amplitude
máxima do movimento, mas mais elevadas são as forças máximas no FVD. Tendo em conta que a
área interior a esta curva corresponde à quantidade de energia dissipada, torna-se difícil concluir em
qual dos 3 casos é dissipada uma maior quantidade de energia, uma vez que as áreas são muito
semelhantes.
Na Figura 76, pode-se observar a influência da variação da constante característica no comportamento
do FVD, através da representação gráfica da relação força-velocidade.
-5000
-4000
-3000
-2000
-1000
0
1000
2000
3000
4000
5000
-0,06 -0,04 -0,02 0 0,02 0,04 0,06
Forç
a (k
N)
Deslocamento (m)
C=2000 C=4000 C=6000
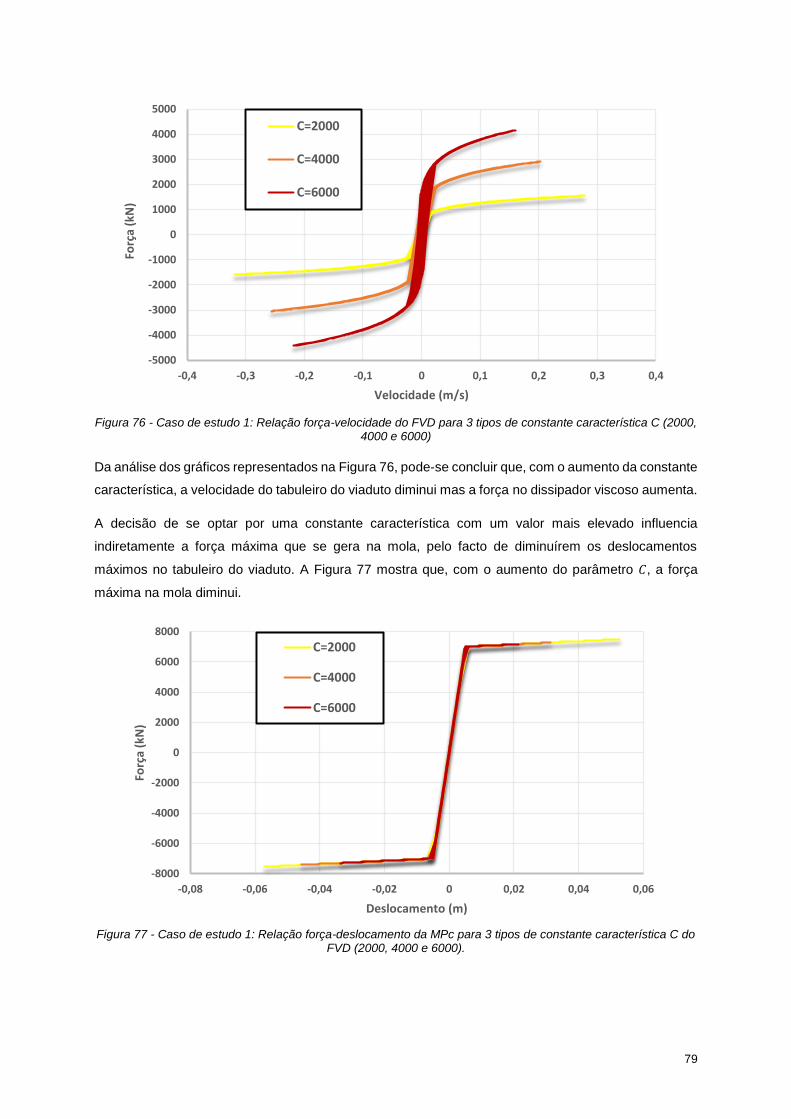
79
Figura 76 - Caso de estudo 1: Relação força-velocidade do FVD para 3 tipos de constante característica C (2000, 4000 e 6000)
Da análise dos gráficos representados na Figura 76, pode-se concluir que, com o aumento da constante
característica, a velocidade do tabuleiro do viaduto diminui mas a força no dissipador viscoso aumenta.
A decisão de se optar por uma constante característica com um valor mais elevado influencia
indiretamente a força máxima que se gera na mola, pelo facto de diminuírem os deslocamentos
máximos no tabuleiro do viaduto. A Figura 77 mostra que, com o aumento do parâmetro 𝐶, a força
máxima na mola diminui.
Figura 77 - Caso de estudo 1: Relação força-deslocamento da MPc para 3 tipos de constante característica C do FVD (2000, 4000 e 6000).
-5000
-4000
-3000
-2000
-1000
0
1000
2000
3000
4000
5000
-0,4 -0,3 -0,2 -0,1 0 0,1 0,2 0,3 0,4
Forç
a (k
N)
Velocidade (m/s)
C=2000
C=4000
C=6000
-8000
-6000
-4000
-2000
0
2000
4000
6000
8000
-0,08 -0,06 -0,04 -0,02 0 0,02 0,04 0,06
Forç
a (k
N)
Deslocamento (m)
C=2000
C=4000
C=6000

80
Por fim, interessa analisar os gráficos força-deslocamento do sistema DMPc/estrutura, a partir do corte
basal, para perceber a influência da variação da constante característica do dissipador viscoso. Esses
gráficos estão representados na Figura 78.
Figura 78 - Caso de estudo 1: Relação força-deslocamento do conjunto DMPc/estrutura para 3 tipos de constante característica C do FVD (2000, 4000 e 6000).
Através da Figura 78 percebe-se claramente que o aumento da constante característica do dissipador
viscoso provoca um aumento das forças totais do sistema, ou seja, aumenta a força máxima a equilibrar
no encontro. No entanto é visível que, para menores valores do parâmetro 𝐶, os deslocamentos
máximos são maiores, portanto as velocidades máximas do tabuleiro também serão.
Este estudo permite perceber que, com o aumento da constante característica, aumenta a capacidade
de amortecimento. A contrapartida de se optar por um dissipador com mais amortecimento é o aumento
da força que se gera no dispositivo, para além do seu custo.
Assim, tendo em conta a influência da constante característica do FVD na resposta do conjunto
DMPc/estrutura, a escolha desse parâmetro deve basear-se numa análise de custos e numa análise
aos deslocamentos máximos permitidos e às forças máximas que se pretende ou que é possível
transmitir ao encontro. É, portanto, uma decisão que deve ser tomada pelo projetista, dependendo da
estrutura em causa.
4.3.1.3 Influência da constante 𝜶 do dissipador viscoso
O último parâmetro que é relevante estudar nesta análise de sensibilidade é a constante 𝛼. É um
parâmetro relativo ao dissipador viscoso, dependente das características do fluído constituinte e da
forma da cabeça do pistão, que tem influência a nível da quantidade de energia dissipada (Jerónimo,
-12000
-8000
-4000
0
4000
8000
12000
-0,06 -0,04 -0,02 0 0,02 0,04 0,06
Co
rte
Bas
al (
kN)
Deslocamento (m)
C=2000
C=4000
C=6000

81
2001). Para esta análise, tal como para o estudo dos outros parâmetros, definiram-se 3 valores
diferentes para a constante 𝛼: 0,2, 0,4 e 1. Estudaram-se estes 3 casos para as mesmas condições e
mantiveram-se constantes os restantes parâmetros relativos ao DMPc. Definiu-se para a rigidez 𝐾2,
10526 𝑘𝑁/𝑚 e para a constante característica 𝐶, 4000 𝑘𝑁. (𝑚/𝑠)−𝛼.
Na Figura 79 estão representados os gráficos força-deslocamento do dissipador viscoso para os 3
casos definidos.
Figura 79 - Caso de estudo 1: Relação força-deslocamento do FVD para 3 tipos de constante α (0,2, 0,4 e 1).
Realizando uma análise aos gráficos força-deslocamento pode-se concluir que, para menores valores
de 𝛼, verificam-se forças máximas no dissipador, mais elevadas, mas menores amplitudes máximas de
movimento. Sendo a área interior ao gráfico correspondente à quantidade de energia dissipada, é
possível relacionar a constante 𝛼 com a capacidade de amortecimento do dissipador. A Figura 79
mostra que, quanto menor for o parâmetro 𝛼 maior é a área do gráfico, logo, maior é a capacidade de
amortecimento do FVD. O facto de os gráficos apresentarem uma forma mais “retangular” para
menores valores de 𝛼, contribui também para concluir que a capacidade de dissipação de energia
aumenta.
Analisando os gráficos que mostram a relação força-velocidade do FVD, também é possível perceber
que a sua forma depende bastante da constante 𝛼. Esses gráficos encontram-se representados na
Figura 80.
-4000
-3000
-2000
-1000
0
1000
2000
3000
4000
-0,08 -0,06 -0,04 -0,02 0 0,02 0,04 0,06 0,08
Forç
a (k
N)
Deslocamento (m)
0,2 0,4 1

82
Figura 80 - Caso de estudo 1: Relação força-velocidade do FVD para 3 tipos de constante α (0,2, 0,4 e 1).
O gráfico força-velocidade em que 𝛼 = 1, corresponde ao caso de dissipador viscoso linear. Neste
caso, a força é diretamente proporcional à velocidade do tabuleiro do viaduto. Para os casos em que 𝛼
apresenta um valor menor do que 1, a relação é não linear, e a força máxima tende para um valor limite.
Á medida que a constante 𝛼 diminui, verificam-se forças mais elevadas no dissipador e velocidades
máximas mais pequenas.
Analisaram-se também os gráficos força-deslocamento da MPc, para perceber a influência, ainda que
indireta, da constante 𝛼 na força que se gera na mola. Na Figura 81, apresentam-se estes gráficos.
Figura 81 - Caso de estudo 1: Relação força-deslocamento da MPc para 3 tipos de constante α do FVD (0,2, 0,4 e 1).
-4000
-3000
-2000
-1000
0
1000
2000
3000
4000
-0,4 -0,3 -0,2 -0,1 0 0,1 0,2 0,3 0,4
Forç
a (k
N)
Velocidade (m/s)
0,2 0,4 1
-8000
-6000
-4000
-2000
0
2000
4000
6000
8000
-0,08 -0,06 -0,04 -0,02 0 0,02 0,04 0,06 0,08
Forç
a (k
N)
Deslocamento (m)
1
0,4
0,2

83
Como já foi referido, para menores valores de 𝛼, aumenta a capacidade de amortecimento do FVD,
que se reflete numa diminuição da amplitude máxima do movimento. Este facto acaba por influenciar
as forças máximas que se geram na mola, que serão tanto menores, quanto menores forem os
deslocamentos máximos do tabuleiro do viaduto. Nos gráficos da Figura 81 observa-se isso mesmo,
para menores valores de 𝛼, verificam-se forças máximas menores na mola devido à diminuição da
amplitude máxima do movimento.
De forma a compreender a influência do parâmetro 𝛼 no conjunto DMPc/estrutura, analisou-se os
gráficos força-deslocamento obtidos para o corte basal. Esses gráficos estão representados na Figura
82.
Figura 82 - Caso de estudo 1: Relação força-deslocamento do conjunto DMPc/estrutura para 3 tipos de constante α do FVD (0,2, 0,4 e 1).
A análise dos gráficos força-deslocamento da Figura 82 permite concluir o que já tinha sido referido
acerca da influência da constante 𝛼, na MPc e no FVD. Globalmente, as forças aumentam com a
diminuição de 𝛼, enquanto a amplitude máxima do movimento diminui, devido ao facto do FVD ter maior
capacidade de dissipação de energia.
A escolha deste parâmetro deve ser feita com base numa análise de custos e tendo em conta o viaduto
em que se pretende instalar o DMPc. É importante reforçar que a vantagem de se optar por uma
constante 𝛼 com um valor baixo, que se reflete em menores deslocamentos máximos, tem a
contrapartida do custo do dispositivo e das forças que vão ter que se equilibrar no encontro. Ainda
assim, justifica-se optar por valores mais reduzidos tirando partido da não linearidade do dissipador que
permite uma excelente redução da máxima amplitude do movimento, com um aumento pequeno da
máxima força a equilibrar no encontro.
-12000
-8000
-4000
0
4000
8000
12000
-0,08 -0,06 -0,04 -0,02 0 0,02 0,04 0,06 0,08
Co
rte
Bas
al (
kN)
Deslocamento (m)
1
0,4
0,2
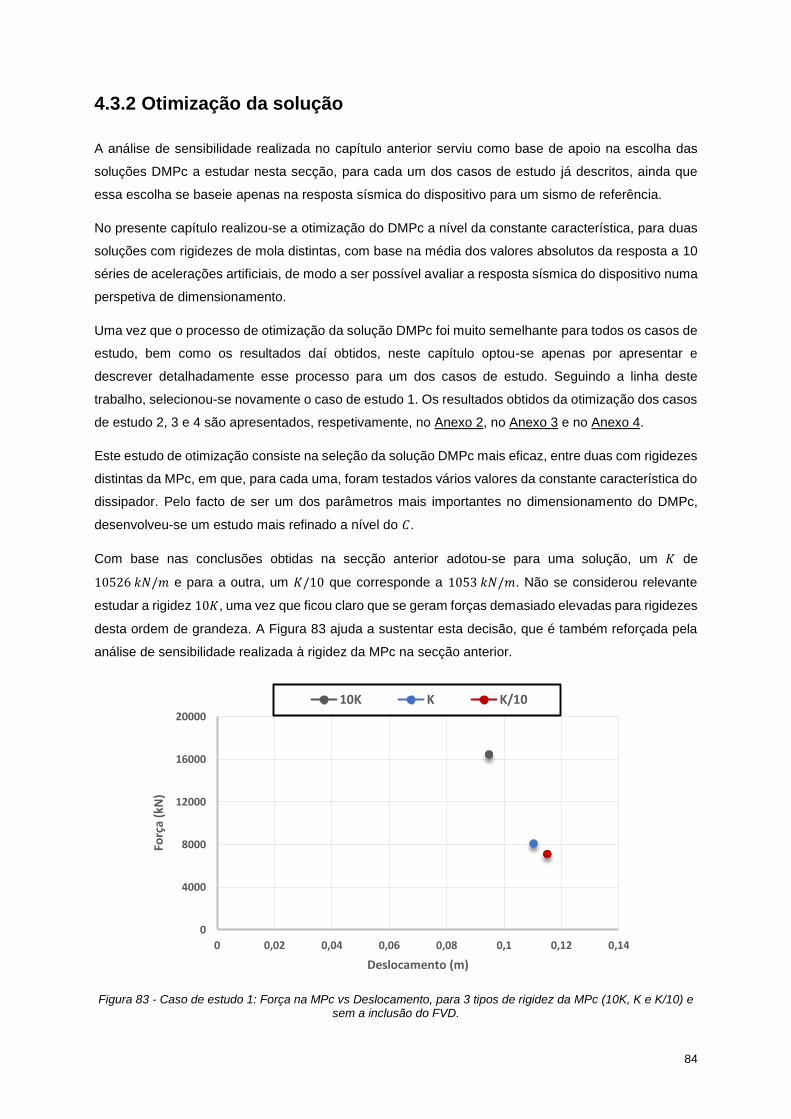
84
4.3.2 Otimização da solução
A análise de sensibilidade realizada no capítulo anterior serviu como base de apoio na escolha das
soluções DMPc a estudar nesta secção, para cada um dos casos de estudo já descritos, ainda que
essa escolha se baseie apenas na resposta sísmica do dispositivo para um sismo de referência.
No presente capítulo realizou-se a otimização do DMPc a nível da constante característica, para duas
soluções com rigidezes de mola distintas, com base na média dos valores absolutos da resposta a 10
séries de acelerações artificiais, de modo a ser possível avaliar a resposta sísmica do dispositivo numa
perspetiva de dimensionamento.
Uma vez que o processo de otimização da solução DMPc foi muito semelhante para todos os casos de
estudo, bem como os resultados daí obtidos, neste capítulo optou-se apenas por apresentar e
descrever detalhadamente esse processo para um dos casos de estudo. Seguindo a linha deste
trabalho, selecionou-se novamente o caso de estudo 1. Os resultados obtidos da otimização dos casos
de estudo 2, 3 e 4 são apresentados, respetivamente, no Anexo 2, no Anexo 3 e no Anexo 4.
Este estudo de otimização consiste na seleção da solução DMPc mais eficaz, entre duas com rigidezes
distintas da MPc, em que, para cada uma, foram testados vários valores da constante característica do
dissipador. Pelo facto de ser um dos parâmetros mais importantes no dimensionamento do DMPc,
desenvolveu-se um estudo mais refinado a nível do 𝐶.
Com base nas conclusões obtidas na secção anterior adotou-se para uma solução, um 𝐾 de
10526 𝑘𝑁/𝑚 e para a outra, um 𝐾/10 que corresponde a 1053 𝑘𝑁/𝑚. Não se considerou relevante
estudar a rigidez 10𝐾, uma vez que ficou claro que se geram forças demasiado elevadas para rigidezes
desta ordem de grandeza. A Figura 83 ajuda a sustentar esta decisão, que é também reforçada pela
análise de sensibilidade realizada à rigidez da MPc na secção anterior.
Figura 83 - Caso de estudo 1: Força na MPc vs Deslocamento, para 3 tipos de rigidez da MPc (10K, K e K/10) e sem a inclusão do FVD.
0
4000
8000
12000
16000
20000
0 0,02 0,04 0,06 0,08 0,1 0,12 0,14
Forç
a (k
N)
Deslocamento (m)
10K K K/10

85
Para as duas soluções DMPc, distintas a nível da rigidez da mola, definiu-se um mesmo parâmetro 𝛼,
com base nas conclusões obtidas na secção anterior. Concluiu-se que a capacidade de amortecimento
aumenta com a diminuição de 𝛼. Assim, optou-se por tirar partido das vantagens dos dissipadores
viscosos não lineares, definindo este parâmetro com 0,2, que é um valor relativamente comum no
mercado para dispositivos deste tipo e que otimiza as soluções, tornando-as mais eficazes.
Com o objetivo de se obter informações relevantes numa perspetiva de dimensionamento do DMPc,
avaliou-se a resposta sísmica do conjunto para diferentes valores da constante característica 𝐶 do
dissipador viscoso. Esta resposta foi avaliada com base no máximo deslocamento do tabuleiro do
viaduto, na máxima força na mola e na máxima força no dissipador.
No caso de estudo 1, para as duas soluções distintas a nível da rigidez da MPc, começou por se
estudar, em ambas as soluções, a influência da constante característica na força máxima gerada no
dissipador. Essa força máxima representa uma média dos valores máximos absolutos de força obtidos
no FVD e foi determinada para a combinação de 10 ações sísmicas. Na Figura 84 está representado o
gráfico que mostra a influência de 𝐶 na força máxima obtida no FVD.
Figura 84 - Caso de estudo 1: Influência da constante característica C na força máxima do FVD para 2 tipos de rigidez K2 da MPc (K e K/10).
Os gráficos representados na Figura 84 estão praticamente sobrepostos o que significa que a rigidez
da MPc não tem influência significativa na força máxima que se obtém no FVD. Em ambos os casos é
possível observar que a relação é aproximadamente linear, ou seja, o aumento de força máxima no
FVD para os diferentes patamares de constante 𝐶 é praticamente o mesmo. Isto seria expectável, tendo
em conta a equação 4 que define a força no dissipador viscoso.
Da mesma forma, determinou-se o máximo deslocamento relativo do tabuleiro do viaduto para o caso
de estudo 1, para diferentes constantes 𝐶 do FVD. A influência desse parâmetro no deslocamento
máximo do tabuleiro para as duas soluções definidas, encontra-se representada graficamente na Figura
85.
2000
3000
4000
5000
6000
0 1000 2000 3000 4000 5000
Co
nst
ante
car
acte
ríst
ica
(C)
Força (kN)
Força FVD vs Constante C
K
K/10

86
Figura 85 - Caso de estudo 1: Influência da constante característica C no deslocamento máximo do tabuleiro do viaduto para 2 tipos de rigidez K2 da MPc (K, K/10).
Tal como na Figura 84, também nesta Figura 85 os gráficos das duas soluções têm um andamento
muito semelhante, o que indica que o deslocamento relativo máximo do tabuleiro depende muito pouco
da rigidez da MPc.
Analisando a influência do parâmetro 𝐶 no controlo dos deslocamentos relativos do tabuleiro do viaduto,
é notório que a maior diminuição do deslocamento máximo ocorre para um 𝐶 igual a 4000 𝑘𝑁. (𝑚/𝑠)−𝛼.
Pelo contrário, para valores de 𝐶 superiores a 4000, a diminuição dos deslocamentos máximos é
pequena, quando comparada com aquelas que se obtêm para constantes características mais baixas.
Tendo em conta o facto do custo do produto aumentar no caso de se optar por DMPc definidos por
coeficientes característicos mais elevados, soluções com parâmetros 𝐶 superiores a 4000 são menos
atrativas, até porque o controlo dos deslocamentos máximos não justifica o esforço financeiro. Para o
caso em estudo soluções em que o DMPc seja definido por coeficientes característicos que estejam
entre os 2000 e os 4000, dependendo a escolha do máximo deslocamento pretendido pelo projetista
para o viaduto, constituem soluções atrativas, já que, com um custo mais baixo, revelam bom
desempenho a nível do controlo dos deslocamentos máximos.
A resposta sísmica das duas soluções de DMPc foi também analisada com base na força obtida na
MPc. Para isso, traçaram-se os gráficos representados na Figura 86, que mostram a influência da
constante característica 𝐶 na máxima força obtida na mola, para as 2 soluções definidas para o caso
de estudo 1.
2000
3000
4000
5000
6000
0 0,01 0,02 0,03 0,04 0,05 0,06 0,07
Co
nst
ante
car
acte
ríst
ica
(C)
Deslocamento (m)
Deslocamento vs Constante C
K
K/10

87
Figura 86 - Caso de estudo 1: Influência da constante característica C na força máxima da MPc para 2 tipos de rigidez K2 (K, K/10).
Pode-se relacionar estes gráficos da Figura 86 com os gráficos de deslocamento apresentados na
Figura 85. Como a máxima força na MPc depende diretamente do máximo deslocamento relativo do
tabuleiro do viaduto, as conclusões acerca da influência do parâmetro 𝐶 no deslocamento máximo, são
aplicáveis à máxima força na MPc. De facto, a diminuição de força na MPc é mais pequena para valores
de 𝐶 acima dos 4000 do que para valores abaixo deste patamar. Juntando a isto a questão do custo
do produto, que aumenta para soluções com maior capacidade de amortecimento, pode justificar-se a
opção por soluções com constantes características mais baixas, no caso de ser possível.
A Figura 86 mostra que se geram maiores forças para a solução com uma MPc mais rígida. No entanto,
entre estas duas soluções a diferença não é muito significativa e é apenas por uma questão de escala
que os dois gráficos poderão parecer tão diferentes, já que os valores de força estão relativamente
próximos. De qualquer forma, pode-se concluir que a força do DMPc aumenta com a rigidez da MPc.
Não existindo qualquer vantagem em que a MPc da solução seja mais rígida, pode-se considerar mais
eficaz uma solução DMPc cuja mola tenha a menor rigidez possível.
Como já foi referido, o processo de escolha da melhor solução, descrito para o caso de estudo 1, foi
realizado de forma idêntica para os restantes casos apresentados em anexo, tornando possível
fundamentar a escolha de uma solução que seja eficaz em viadutos com características semelhantes
aos estudados neste trabalho. Para isso foi necessário ter em conta diversos fatores. Desde logo as
variáveis utilizadas para analisar a resposta sísmica do conjunto, que são o máximo deslocamento
relativo do tabuleiro do viaduto, a máxima força na MPc e a máxima força no FVD. O outro fator
considerado na escolha da melhor solução e que já foi abordado é o custo do produto. Assumiu-se,
para efeitos deste trabalho, que o preço do produto aumenta linearmente com a constante 𝐶.
Assim, num quadro de custos controlados escolheu-se como melhor solução aquela que produzisse
melhor controlo dos deslocamentos do tabuleiro para um mesmo aumento da constante característica
2000
3000
4000
5000
6000
6900 7000 7100 7200 7300 7400 7500 7600 7700
Co
nst
ante
car
acte
ríst
ica
(C)
Força (kN)
Força MPc vs Constante C
K
K/10

88
do FVD e que transmitisse menos forças ao encontro. Essa solução é definida pelos seguintes
parâmetros (Tabela 5):
Tabela 5 - Parâmetros da solução escolhida
SOLUÇÃO ESCOLHIDA
MPc 𝐾2 [𝑘𝑁/𝑚] 𝐾/10 = 1053
FVD 𝐶 [𝑘𝑁. (𝑚/𝑠)−𝛼] 3000 𝑎 4000
𝛼 0,2

89
5 Conclusões e Futuros Desenvolvimentos
Capítulo 5
Conclusões e
Futuros Desenvolvimentos
Este capítulo final resume os resultados obtidos e apresenta propostas para futuras linhas de
desenvolvimento do tema.

91
5.1 Conclusões
O recurso a sistemas de proteção sísmica na conceção de pontes e viadutos é cada vez mais frequente.
Investigações na área da engenharia sísmica e observações a nível dos danos causados por sismos
revelam uma grande eficiência deste tipo de sistemas face a ações sísmicas mais intensas.
No caso de pontes ou viadutos destinados à circulação de comboios de alta velocidade o problema da
frenagem impossibilita o uso isolado de sistemas de proteção sísmica. Torna-se necessário, nessas
situações, recorrer a elementos de bloqueio com capacidade para restringir a estrutura a níveis baixos
de deslocamento para as situações associadas a estados limite de serviço.
Apresentou-se, nesta dissertação, uma solução indicada para pontes e viadutos de linhas ferroviárias
de alta velocidade, localizados em zonas de elevado risco sísmico – o Dissipador com Mola Pré-
comprimida (DMPc).
Inicialmente comparou-se o DMPc com uma das suas soluções alternativas mais utilizadas. A solução
mista alternativa é constituída por um sistema de bloqueio por fusíveis metálicos, associado a
dissipadores viscosos. Concluiu-se que a solução por fusíveis apresenta desvantagens relativamente
ao DMPc, tais como: a necessidade de se substituir o sistema de bloqueio (i.e. fusíveis metálicos) e
recolocar o tabuleiro na sua posição inicial após um sismo severo, aliado ao facto de não ser possível
modelar esta solução através dos programas de cálculo automático comerciais.
O DMPc depende das caraterísticas dos dois elementos que o constituem: a mola pré-comprimida
(MPc) e o dissipador viscoso (FVD). O funcionamento do DMPc pode ser obtido através da
sobreposição do comportamento elástico não linear da mola pré-comprimida com o comportamento
viscoso puro do dissipador, pelo facto de estarem instalados em paralelo. Desta forma, o DMPc
apresenta uma tripla função: limita os movimentos da estrutura para cargas de serviço, dissipa energia
durante a ação sísmica e recentra a estrutura após a ação sísmica.
A Mola Pré-comprimida (MPc), pelo seu comportamento elástico, confere à estrutura capacidade de
regressar à sua posição inicial após uma ação sísmica significativa. Devido à pré-carga aplicada,
funciona também como sistema de bloqueio restringindo a estrutura a pequenos deslocamentos para
cargas de serviço.
O dissipador viscoso desempenha um papel importante sobretudo durante uma ação sísmica severa,
dissipando grande quantidade de energia que se reflete numa redução da amplitude máxima do
movimento.
Nesta dissertação, testou-se a eficácia do DMPc em quatro viadutos longos muito flexíveis com
pequenas diferenças a nível da massa do tabuleiro e da frequência própria da estrutura.
Numa primeira fase analisou-se a influência de cada um dos parâmetros característicos do DMPc na
resposta sísmica do conjunto apenas para um dos casos de estudo (i.e. caso de estudo 1) e para um

92
sismo de referência (i.e. sismo 8), o que proporcionou uma leitura do deslocamento e das forças ao
longo do tempo.
Após a análise de sensibilidade determinaram-se, numa perspetiva de dimensionamento do DMPc, os
parâmetros característicos que definem a solução mais eficaz para cada um dos casos de estudo, tendo
em conta as condições assumidas inicialmente e a relação custo-benefício. Esta otimização foi
realizada para a combinação em valor absoluto de 10 sismos, apresentando resultados bastante
representativos que são possíveis de ser utilizados para um pré-dimensionamento do dispositivo.
O DMPc é definido por 3 parâmetros principais: (i) a rigidez da mola pré-comprimida – 𝐾; (ii) a constante
característica do dissipador viscoso – 𝐶; e (iii) a constante 𝛼 do dissipador viscoso.
A resposta sísmica do conjunto foi analisada com base em 3 grandezas: (i) o máximo deslocamento da
estrutura; (ii) a máxima força na mola pré-comprimida; e (iii) a máxima força no dissipador viscoso.
Considerou-se apenas o sismo afastado (i.e. Tipo 1) para o estudo do comportamento sísmico do
conjunto. Para frequências próprias muito baixas, como as que caracterizam os viadutos analisados, o
sismo de tipo 1 é sempre condicionante.
A análise de sensibilidade realizada aos parâmetros característicos do DMPc serviu para tirar
conclusões importantes.
A rigidez da mola deve ser a menor possível. A variação da rigidez tem pouca implicação no máximo
deslocamento do tabuleiro da estrutura. Como o deslocamento é o mesmo, para uma rigidez mais
elevada, a força que se gera na mola é maior. Não existindo benefício associado, será nulo o interesse
em aumentar a máxima força a transmitir ao encontro. Em relação à capacidade para recolocar a
estrutura na sua posição inicial, a análise não indica qualquer dependência da rigidez, o que significa
que essa função se deve exclusivamente ao comportamento elástico da mola.
Verificou-se que a constante característica 𝐶 do dissipador tem grande influência na resposta sísmica
do conjunto. O aumento deste parâmetro provoca um aumento da capacidade de amortecimento do
sistema, que se reflete na diminuição dos deslocamentos máximos. Em contrapartida, a força gerada
no dissipador também aumenta, o que contribui para o aumento da máxima força a transmitir ao
encontro. Da análise conclui-se que a escolha deste parâmetro deve ter em conta a estrutura em causa
e a solução estrutural que se pretende obter.
O parâmetro característico 𝛼 deve tomar valores relativamente baixos e sempre inferiores a 1, de modo
a que seja possível tirar partido das vantagens da não linearidade de um dissipador viscoso. A
capacidade de amortecimento aumenta bastante com a redução desta constante, o que se reflete num
melhor controlo dos deslocamentos da estrutura. Apesar de aumentar também a máxima força a
transmitir ao encontro, este aumento é pequeno, pelo que se justifica uma opção por valores próximos
de 0,2 que são comuns na maioria das soluções que estão no mercado.
A otimização da solução nos quatro casos de estudo foi feita sobretudo a nível da constante
característica 𝐶 do DMPc. Como foi referido, esta constante deve ser definida de acordo com a solução

93
estrutural pretendida. Num quadro de custos controlados determinou-se, para vários valores reais deste
parâmetro a resposta sísmica das estruturas, de modo a perceber a solução mais vantajosa para cada
um dos casos de estudo analisados nesta dissertação. A conclusão a que se chega é que, a solução
que produz uma maior diminuição do máximo deslocamento apresenta contantes características com
valores entre os 3000 e os 4000 𝑘𝑁. (𝑚/𝑠)−𝛼.Esta conclusão tem em conta que existe uma
proporcionalidade direta entre a constante característica e a força que se gera no dissipador.
Deste trabalho foi ainda possível concluir que o comportamento do DMPc praticamente não se altera
quando incorporado em diferentes viadutos longos flexíveis, com variações a nível de massa e
frequência própria de vibração. De facto, os resultados obtidos para os quatro casos de estudo foram
muito semelhantes.
5.2 Futuros Desenvolvimentos
A análise da eficácia do Dissipador com Mola Pré-comprimida deverá estender-se a novos casos de
estudo.
Futuros desenvolvimentos deverão incluir casos de estudo com viadutos de maior massa e
considerando solos de pior qualidade (por exemplo solos de tipo D).
Dado que os resultados deste trabalho só são representativos para viadutos aproximadamente retos
propõe-se que seja estudado o comportamento do DMPc em viadutos curvos.
Seria ainda interessante analisar a eficácia do dispositivo quando colocado no viaduto
transversalmente, para eventuais casos em que se pretenda tirar partido das vantagens desta solução
na direção transversal.


95
Referências Bibliográficas
Referências Bibliográficas
(Amaral, 2013) Amaral, F. P. – “Análise da influência da componente vertical da acção
sísmica na resposta de Apoios Pendulares com Atrito”, Dissertação para
obtenção do Grau de Mestre em Engenharia Civil, DECIVIL, Instituto
Superior Técnico, Lisboa, Portugal, Outubro de 2013
(Arroyo, 2004) Arroyo, J. R. – “Metodología para calcular la respuesta de estruturas con
amortiguadores viscosos”, Rev. Int. de Desastres Naturales, Accidentes e
Infraestructura Civil, Vol 4(2), 2004
(Braun, 2009) Braun, Christian - “The sliding isolation pendulum – an improved recentring
bridge bearing”, Maurer Söhne, Munique, Alemanha, 2009
(Buckle et al., 1990) Buckle, Ian G.; Mayes, Ronald L.– “Seismic Isolation: History, Application,
and Performance - A World View.”, Earthquake Spectra, Vol. 6, No. 2, Maio
de 1990
(Castellano et al., 2009) Castellano, M. G.; Colato, G. P.; Infanti, S. – “ The experience of FIP
Industriale in the retrofit of bridges through seismic isolation and energy
dissipation”, Buletinul AGIR, 2009
(CEN, 2003) CEN, European Committee for Standardization - "Eurocode 1: Actions on
structures – Part 2: Traffic loads on bridges", EN 1991-2, Setembro de 2003
(CEN, 2004) CEN, European Committee for Standardization - "Eurocode 8: Design of
structures for earthquake resistance – Part 1: General rules, seismic actions
and rules for buildings", EN 1998-1, Dezembro de 2004
(CEN, 2005) CEN, European Committee for Standardization - "Eurocode 8: Design of
structures for earthquake resistance – Part 2: Bridges", EN 1998-2,
Novembro de 2005

96
(Chiarotto et al., 2004) Chiarotto D.; Tomaselli, F.; Baldo, P.; Castellano, M. G.; Infanti, S. –
“Seismic Protection of Tuy Medio Viaducts: Design and Shaking Table
Tests of the Seismic Devices”, 13ª Conferência Mundial da Engenharia
Sísmica, Vancouver, Canada, Agosto de 2004
(CSI, 2010) CSI – “Analysis Reference Manual for SAP2000, ETABS, SAFE and
CSiBridge”, Berkeley, California, EUA, Agosto de 2010
(EC, 2010) EC, European Comission – “High-speed Europe, a sustainable link between
citizens”, Publications Office of the European Union, Luxemburgo, 2010
(Falcão, 2011) Falcão, Maria João Silva – “Sistemas Passivos de Protecção Sísmica: Uma
abordagem baseada no desempenho de amortecedores de líquido
sintonizado”, LNEC, Lisboa, Portugal, 2011
(FIB, 2005) FIB, Fédération Internationale du Béton – “Structural Solutions for Bridge
Seismic Design and Retrofit – A State of The Art –Chapter 6: Design for
enhanced control of damage”, Task Group 7.4: Seismic Design and
Assessment Procedures for Bridges, 6th Encontro, Kobe, Japão, 28 de
Novembro de 2005
(FIB, 2007) FIB, Fédération Internationale du Béton – “Seismic bridge design and
retrofit – structural solutions”, bulletin 39, State-of-art report prepared by
Task Group 7.4: Seismic Design and Assessment Procedures for Bridges,
Maio de 2007
(Figueiredo, 2007) Figueiredo, F. R. – “Isolamento Sísmico de Base - Dimensionamento de
Sistemas de Isolamento de Base em Edifícios”, Dissertação para obtenção
do Grau de Mestre em Engenharia Civil, DECIVIL, Instituto Superior
Técnico, Lisboa, Portugal, Outubro de 2007
(FIP, 2012.a) FIP Industriale – “Curved Surface Sliders”, Curved Surface Sliders, S04,
Fevereiro de 2012.(a)
(FIP, 2012.b) FIP Industriale – “Elastomeric Isolators”, Elastomeric Isolators series SI,
S02, Maio de 2012.(b)
(FIP, 2012.c) FIP Industriale – “Lead Rubber Bearings”, Lead Rubber Bearings series
LRB, S03, Maio de 2012.(c)

97
(FIP, 2013) FIP Industriale – www.fipindustriale.it, consultado em Setembro de 2013
(Freyssinet, 2010) Freyssinet – “Transpec PDS (Transpec Presstressed Damping Spring)”,
Technical data sheet reference: FT En C V 5 2 3, Setembro de 2010
(Freyssinet, 2013) Freyssinet – “Seismic Devices – Connection, Isolation, Dissipation”,
www.freyssinet.com, consultado em Julho de 2013
(Guerreiro et al., 1997) Guerreiro, L.; Branco, F.; Azevedo, J. – “Seismic Displacement Control of
the Vasco da Gama Bridge”, International Conference IABSE New
Technologies in Structural Engineering, Lisboa, 1997
(Guerreiro, 2003) Guerreiro, L. – “Sistemas de Dissipação de Energia”, Dinâmica e
Engenharia Sísmica, Mestrado de Engenharia de Estruturas, Instituto
Superior Técnico, Lisboa, Portugal, Junho de 2003
(Guerreiro, 2004) Guerreiro, L. – “Isolamento de Base”, Dinâmica e Engenharia Sísmica,
Mestrado de Engenharia de Estruturas, Instituto Superior Técnico, Lisboa,
Portugal, Junho de 2004
(Guerreiro, 2007) Guerreiro, L. – “Sistemas de Protecção Sísmica de Estruturas”, Diploma de
Formação Avançada em Engenharia de Estruturas, Instituto Superior
Técnico, Lisboa, Portugal, 3 de Maio de 2007
(Guerreiro, 2008) Guerreiro, L. – “Novas técnicas de protecção sísmica” in Lopes, M. (ed)
“Sismos e Edifícios”, Portugal, Edições Orion, Setembro de 2008
(Guerreiro, 2011) Guerreiro, L. – “Danos em Pontes devido à acção sísmica”, Engenharia
Sísmica de Pontes, Mestrado em Engenharia de Estruturas, Instituto
Superior Técnico, Lisboa, Portugal, Fevereiro de 2011
(Hussain et al., 2001) Hussain, S.; Lee, D.; Retamal, E. – “Viscous Damping for Base Isolated
Structures”, 2001
(Infanti et al., 2004) Infanti, S.; Papanikolas, P.; Benzoni, G.; Castellano, M. G. – “Rion-Antirion
Bridge: design and full-scale testing of the seismic protection devices”, 13ª
Conferência Mundial da Engenharia Sísmica, Vancouver, Canada, Agosto
de 2004

98
(Infanti et al., 2007) Infanti, S.; Castellano, M. G. – “Sheikh Zayed Bridge Seismic Protection
System”, 10th World Conference on Seismic Isolation, Energy Dissipation
and Active Vibrations Control of Structures, Istambul, Turquia, Maio de
2007
(Japan Guide, 2013) Japan Guide – www.japan-guide.com, consultado em Setembro de 2013
(Jarret, 2013) Jarret Structures – www.jarretstructures.com, consultado em Setembro de
2013
(Jerónimo, 2001) Jerónimo, E. B. – “ Análise Dinâmica de Pontes com Dissipadores
Viscosos”, Dissertação para obtenção do Grau de Mestre em Engenharia
de Estruturas, Instituto Superior Técnico, Lisboa, Portugal, Novembro de
2001
(Loureiro, 2008) Loureiro, L. – “Isolamento de Base em Pontes: Análise do Efeito da Rigidez
Pós-Cedência dos Sistemas de Isolamento”, Dissertação para obtenção do
Grau de Mestre em Engenharia Civil, DECIVIL, Instituto Superior Técnico,
Lisboa, Portugal, Outubro de 2008
(Maurer, 2001) Maurer Söhne – “MAURER Seismic Protection Systems: Technical
Information and Dimensions”, Alemanha, 10 de Setembro de 2001
(Maurer, 2003) Maurer Söhne – “MAURER Seismic Isolation Systems: Products and
Technical Information”, Alemanha, 2 de Maio de 2003
(Maurer, 2005) Maurer Söhne – “Sructural Protection Systems: Bridge Rion-Antirion /
Harilaos Trikoupis Bridge”, Project Info, No. 6, VBA / 02_2005, Fevereiro de
2005
(Maurer, 2013) Maurer Söhne – www.maurer-soehne.com.br, consultado em Outubro de
2013
(Monteiro, 2013) Monteiro, J. – “ Análise Paramétrica da Oscilação Longitudinal de um
Tabuleiro de Ponte com Dissipador e Fusível”, Dissertação para obtenção
do Grau de Mestre em Engenharia de Estruturas, Instituto Superior
Técnico, Lisboa, Portugal, Novembro de 2013
(Salmon, 2011) Salmon, P. – “Les Dispositifs Parasismiques”, Lisboa, Fevereiro de 2011

99
(Symans, 2013) Symans, M. D. – “Seismic Protective Systems: Seismic Isolation”,
Rensselaer Polytechnic Institute, FEMA, consultado em Setembro de 2013
(Santos, 2009) Santos, T. – “Reforço Sísmico de Pontes”, Dissertação para obtenção do
Grau de Mestre em Engenharia Civil, DECIVIL, Instituto Superior Técnico,
Lisboa, Portugal, Outubro de 2007
(Sartori, 2012) Sartori, M. – “Seismic Protection of Railway Bridges with Special Sliding
Materials”, 15ª Conferência Mundial da Engenharia Sísmica, Lisboa,
Portugal, Setembro de 2012
(Verdugo, 2007) Verdugo, J. – “Control de la respuesta dinámica de estruturas mediante el
uso de dissipadores de energia de fluido viscoso del tipo lineal”, Tesis para
optar al título de: Ingeniero Civil en Obras Civiles, Universidad Austral de
Chile, Valdivia, Chile, 2007
(Virtuoso et al., 2000) Virtuoso, F.; Guerreiro L.; Azevedo J. – “Modelling the Seismic Behaviour
of Bridges with Viscous Dampers”, 12ª Conferência Mundial da Engenharia
Sísmica, Auckland, Nova Zelândia, 2000
(UIC, 2010) UIC, International Union of Railways – “High speed around the world –
Maps”, Paris, França, 15 de Dezembro de 2010


101
ANEXO 1
Acelerogramas artificiais utilizados
nos Casos de Estudo
Anexo 1 – Acelerogramas artificiais


103
ACELEROGRAMAS / AÇÃO SÍSMICA TIPO 1
-3
-2
-1
0
1
2
3
0 5 10 15 20 25 30 35 40
Ace
lera
ção
(m
/s2 )
Tempo (s)
ACELEROGRAMA 1
A. SÍSMICA TIPO 1 / ZONA 1.3 / SOLO B
-3
-2
-1
0
1
2
3
0 5 10 15 20 25 30 35 40
Ace
lera
ção
(m
/s2 )
Tempo (s)
ACELEROGRAMA 2
A. SÍSMICA TIPO 1 / ZONA 1.3 / SOLO B
-3
-2
-1
0
1
2
3
0 5 10 15 20 25 30 35 40
Ace
lera
ção
(m
/s2 )
Tempo (s)
ACELEROGRAMA 3
A. SÍSMICA TIPO 1 / ZONA 1.3 / SOLO B
-3
-2
-1
0
1
2
3
0 5 10 15 20 25 30 35 40
Ace
lera
ção
(m
/s2 )
Tempo (s)
ACELEROGRAMA 4
A. SÍSMICA TIPO 1 / ZONA 1.3 / SOLO B

104
-3
-2
-1
0
1
2
3
0 5 10 15 20 25 30 35 40
Ace
lera
ção
(m
/s2 )
Tempo (s)
ACELEROGRAMA 5
A. SÍSMICA TIPO 1 / ZONA 1.3 / SOLO B
-3
-2
-1
0
1
2
3
0 5 10 15 20 25 30 35 40
Ace
lera
ção
(m
/s2 )
Tempo (s)
ACELEROGRAMA 6
A. SÍSMICA TIPO 1 / ZONA 1.3 / SOLO B
-3
-2
-1
0
1
2
3
0 5 10 15 20 25 30 35 40
Ace
lera
ção
(m
/s2 )
Tempo (s)
ACELEROGRAMA 7
A. SÍSMICA TIPO 1 / ZONA 1.3 / SOLO B
-2
-1,5
-1
-0,5
0
0,5
1
1,5
2
0 5 10 15 20 25 30 35 40
Ace
lera
ção
(m
/s2 )
Tempo (s)
ACELEROGRAMA 8
A. SÍSMICA TIPO 1 / ZONA 1.3 / SOLO B

105
-3
-2
-1
0
1
2
3
0 5 10 15 20 25 30 35 40
Ace
lera
ção
(m
/s2 )
Tempo (s)
ACELEROGRAMA 9
A. SÍSMICA TIPO 1 / ZONA 1.3 / SOLO B
-3
-2
-1
0
1
2
3
0 5 10 15 20 25 30 35 40
Ace
lera
ção
(m
/s2 )
Tempo (s)
ACELEROGRAMA 10
A. SÍSMICA TIPO 1 / ZONA 1.3 / SOLO B

107
ANEXO 2
Caso de Estudo 2
Anexo 2 – Caso de Estudo 2


109
CASO DE ESTUDO 2 / 𝑚 = 8800 𝑡𝑜𝑛; 𝑓 = 0,2 𝐻𝑧
MODELO E PARÂMETROS CARACTERÍSTICOS
Caso de estudo 2
m (ton) 8800
KEST (kN/m) ≈ 13896
I (m4) ≈ 0,140
b (m) ≈ 1,138
f (Hz) ≈ 0,203 (b=1,15 m)
0
4000
8000
12000
16000
20000
0 0,05 0,1 0,15
Forç
a (k
N)
Deslocamento (m)
Força MPc vs Deslocamento
10K K K/10
2000
3000
4000
5000
6000
0 1000 2000 3000 4000 5000
Co
nst
ante
car
acte
ríst
ica
(C)
Força (kN)
Força FVD vs Constante C
K K/10
2000
3000
4000
5000
6000
0 0,02 0,04 0,06 0,08
Co
nst
ante
car
acte
ríst
ica
(C)
Deslocamento (m)
Deslocamento vs Constante C
K K/10
2000
3000
4000
5000
6000
6800 7000 7200 7400 7600 7800
Co
nst
ante
car
acte
ríst
ica
(C)
Força (kN)
Força MPc vs Constante C
K K/10


111
ANEXO 3
Caso de Estudo 3
Anexo 3 – Caso de Estudo 3

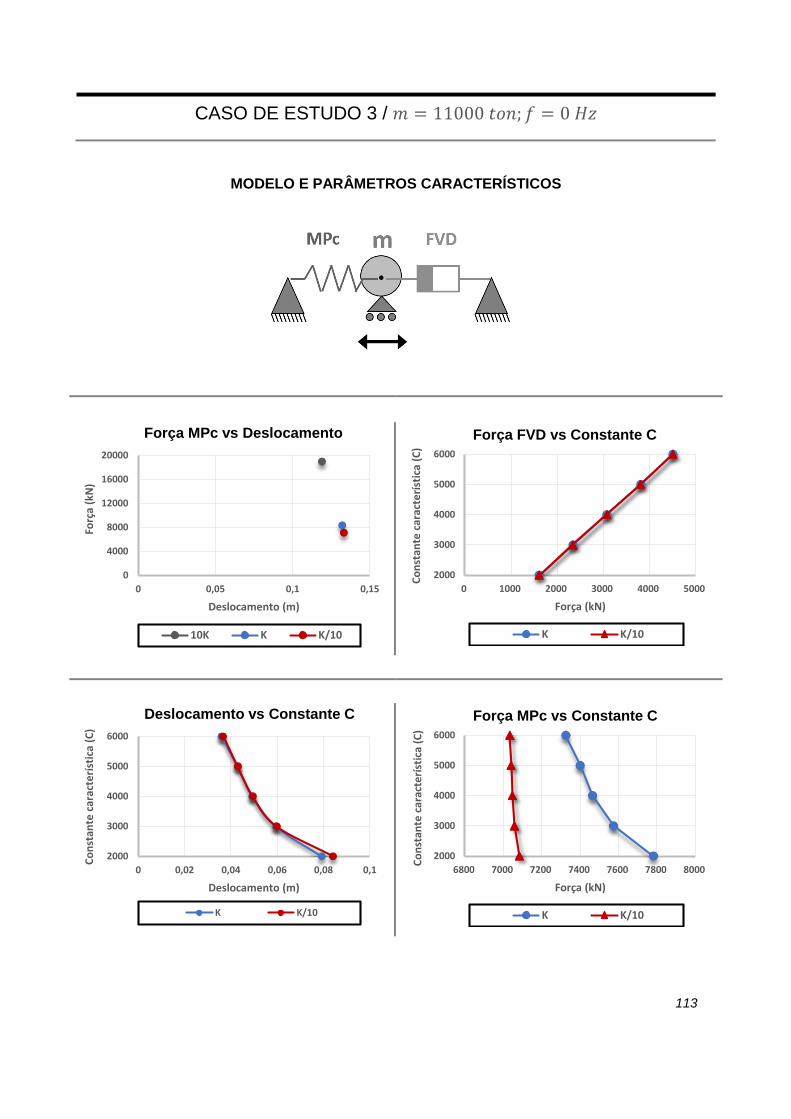
113
CASO DE ESTUDO 3 / 𝑚 = 11000 𝑡𝑜𝑛; 𝑓 = 0 𝐻𝑧
MODELO E PARÂMETROS CARACTERÍSTICOS
0
4000
8000
12000
16000
20000
0 0,05 0,1 0,15
Forç
a (k
N)
Deslocamento (m)
Força MPc vs Deslocamento
10K K K/10
2000
3000
4000
5000
6000
0 1000 2000 3000 4000 5000
Co
nst
ante
car
acte
ríst
ica
(C)
Força (kN)
Força FVD vs Constante C
K K/10
2000
3000
4000
5000
6000
0 0,02 0,04 0,06 0,08 0,1
Co
nst
ante
car
acte
ríst
ica
(C)
Deslocamento (m)
Deslocamento vs Constante C
K K/10
2000
3000
4000
5000
6000
6800 7000 7200 7400 7600 7800 8000
Co
nst
ante
car
acte
ríst
ica
(C)
Força (kN)
Força MPc vs Constante C
K K/10


115
ANEXO 4
Caso de Estudo 4
Anexo 4 – Caso de Estudo 4


117
CASO DE ESTUDO 4 / 𝑚 = 11000 𝑡𝑜𝑛; 𝑓 = 0,2 𝐻𝑧
MODELO E PARÂMETROS CARACTERÍSTICOS
Caso de estudo 4
m (ton) 11000
KEST (kN/m) ≈ 17371
I (m4) ≈ 0,175
b (m) ≈ 1,204
f (Hz) ≈ 0,197 (b=1,2 m)
0
4000
8000
12000
16000
20000
0 0,05 0,1 0,15
Forç
a (k
N)
Deslocamento (m)
Força MPc vs Deslocamento
10K K K/10
2000
3000
4000
5000
6000
0 1000 2000 3000 4000 5000
Co
nst
ante
car
acte
ríst
ica
(C)
Força (kN)
Força FVD vs Constante C
K K/10
2000
3000
4000
5000
6000
0 0,02 0,04 0,06 0,08
Co
nst
ante
car
acte
ríst
ica
(C)
Deslocamento (m)
Deslocamento vs Constante C
K K/10
2000
3000
4000
5000
6000
6800 7000 7200 7400 7600 7800
Co
nst
ante
car
acte
ríst
ica
(C)
Força (kN)
Força MPc vs Constante C
K K/10

118