analise linear de sistemas´ - dt - home pagegeromel/alin_disc.pdf · cap´ıtulo ii - fundamentos...
TRANSCRIPT
Capıtulo II - Fundamentos de Dinamica Discreta
ANALISE LINEAR DE SISTEMAS
JOSE C. GEROMEL
DSCE / Faculdade de Engenharia Eletrica e de ComputacaoUNICAMP, CP 6101, 13083 - 970, Campinas, SP, Brasil,
Campinas, Novembro de 2006
1 / 80

Capıtulo II - Fundamentos de Dinamica Discreta
NOTA AO LEITOR
Este material foi preparado como suporte as aulas e einteiramente baseado no livro texto :
Jose C. Geromel e Alvaro G. B. Palhares, Analise Linear de
Sistemas Dinamicos : Teoria, Ensaios Praticos e Exercıcios,ISBN 85-212-0335-7, Editora Edgard Blucher Ltda, Sao Paulo,SP, 2004.
onde o leitor podera encontrar maiores informacoes e detalhesa respeito dos topicos aqui abordados.
2 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Conteudo
1 Capıtulo II - Fundamentos de Dinamica DiscretaSistemas linearesEquacoes a diferencas lineares
Solucao temporalTransformada Z
Solucao via transformada Z
Representacao de estado
Sistemas dinamicos linearesFuncao de transferenciaResposta em frequencia
DiscretizacaoFuncao de transferencia pulsada
3 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Consideracoes iniciais
Como o leitor podera verificar no decorrer da leitura destecapıtulo, os conceitos matematicos que permitem analisarsistemas dinamicos a tempo discreto sao bastante similaresaqueles introduzidos no capıtulo anterior, no ambito doestudo de sistemas dinamicos a tempo contınuo.A diferenca fundamental e que para os sistemas dinamicos atempo contınuo a variavel independente e real (t ∈ R),enquanto que para os sistemas dinamicos a tempo discreto elae inteira (k ∈ Z). Esta diferenca requer o uso de ferramentasmatematicas adequadas para manipular os diversos conceitose propriedades basicas.Por este motivo este capıtulo tenta trilhar, da maneira maisproxima possıvel, o mesmo caminho adotado no capıtuloanterior.
4 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Sistemas lineares
Sistemas lineares
Um sistema dinamico a tempo discreto definido para todok ∈ Z e um dispositivo que converte um sinal de entrada g(k)(definido para todo k ∈ Z) em um sinal de saıda y(k)(definido para todo k ∈ Z), atraves da relacao
y = S[g ]
onde S[·] indica um ente matematico que associa sinais deentrada com sinais de saıda. Por exemplo :
S [g ] = 3g → y(k) depende apenas de g(k).
S [g ] =∑k
i=−∞ g(i) → y(k) depende de g(i),−∞ ≤ i ≤ k .
S [g ] =∑∞
i=−∞ g(k − i)2 → y(k) depende deg(i),−∞ ≤ i ≤ ∞.
5 / 80

Capıtulo II - Fundamentos de Dinamica Discreta
Sistemas lineares
Sistemas lineares
Um sistema dinamico pode ser qualificado como :
Causal quando y(k) depende de g(i) apenas para i ≤ k . Ouseja, em qualquer instante a saıda depende apenas da entradaocorrida no passado e no presente.Linear quando y(k) =
∑
i αiyi (k) for a saıda correspondente aentrada g(k) =
∑
i αigi (k) para todo escalar αi .Invariante no tempo quando y(t − i) for a saıdacorrespondente a entrada g(t − i) para todo i ∈ Z.
⇓
Sistemas inteiramente definidos atraves de sua resposta a umaentrada particular, o impulso unitario discreto g(k) = δ(k) :
δ(k) :=
{1 k = 00 k 6= 1
6 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Sistemas lineares
Sistemas lineares
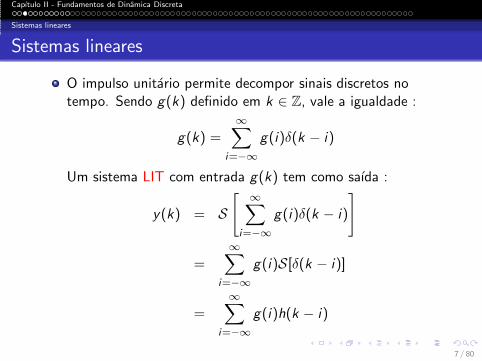
O impulso unitario permite decompor sinais discretos notempo. Sendo g(k) definido em k ∈ Z, vale a igualdade :
g(k) =
∞∑
i=−∞
g(i)δ(k − i)
Um sistema LIT com entrada g(k) tem como saıda :
y(k) = S
[∞∑
i=−∞
g(i)δ(k − i)
]
=
∞∑
i=−∞
g(i)S[δ(k − i)]
=
∞∑
i=−∞
g(i)h(k − i)
7 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Sistemas lineares
Sistemas lineares
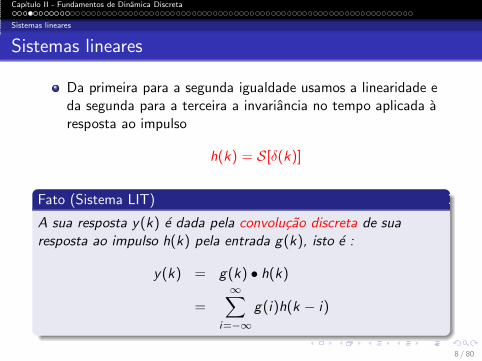
Da primeira para a segunda igualdade usamos a linearidade eda segunda para a terceira a invariancia no tempo aplicada aresposta ao impulso
h(k) = S[δ(k)]
Fato (Sistema LIT)
A sua resposta y(k) e dada pela convolucao discreta de sua
resposta ao impulso h(k) pela entrada g(k), isto e :
y(k) = g(k) • h(k)
=
∞∑
i=−∞
g(i)h(k − i)
8 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Sistemas lineares
Sistemas lineares
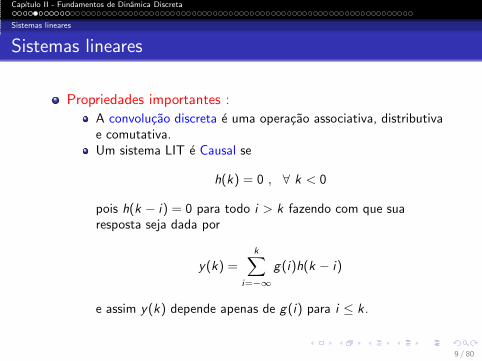
Propriedades importantes :
A convolucao discreta e uma operacao associativa, distributivae comutativa.Um sistema LIT e Causal se
h(k) = 0 , ∀ k < 0
pois h(k − i) = 0 para todo i > k fazendo com que suaresposta seja dada por
y(k) =k∑
i=−∞
g(i)h(k − i)
e assim y(k) depende apenas de g(i) para i ≤ k .
9 / 80

Capıtulo II - Fundamentos de Dinamica Discreta
Sistemas lineares
Sistemas lineares
Resposta ao degrau unitario g(k) = υ(k) de um sistema LTI :
y(k) =
∞∑
i=−∞
υ(i)h(k − i)
=
∞∑
i=0
h(k − i)
=
k∑
r=−∞
h(r)
Para sistemas LIT causais
y(k) =
k∑
i=0
h(i)
e a soma parcial da resposta ao impulso unitario.10 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Sistemas lineares
Sistemas lineares
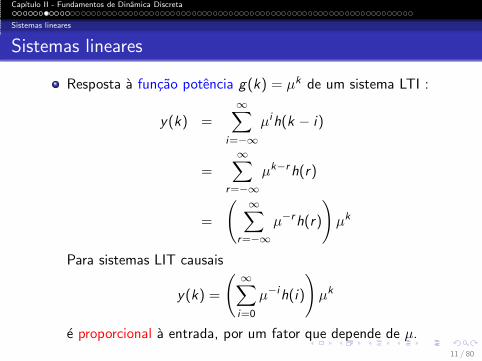
Resposta a funcao potencia g(k) = µk de um sistema LTI :
y(k) =∞∑
i=−∞
µih(k − i)
=∞∑
r=−∞
µk−rh(r)
=
(∞∑
r=−∞
µ−rh(r)
)
µk
Para sistemas LIT causais
y(k) =
(∞∑
i=0
µ−ih(i)
)
µk
e proporcional a entrada, por um fator que depende de µ.
11 / 80

Capıtulo II - Fundamentos de Dinamica Discreta
Sistemas lineares
Sistemas lineares
Sistemas LIT causais de grande interesse sao descritos porequacoes a diferencas do tipo
n∑
i=0
aiy(k + i) =m∑
i=0
eig(k + i) , k ∈ Z
onde ai e ei sao escalares e n ≥ m. Note que especificar afuncao de entrada g(k) nao e condicao suficiente para que aresposta y(k) correspondente seja unica. Dentre muitas, umasolucao especıfica pode ser individualizada impondo-sealgumas condicoes suplementares sobre y(k). Por exemplo, oseu valor em alguns instantes de tempo previamenteselecionados.
12 / 80

Capıtulo II - Fundamentos de Dinamica Discreta
Sistemas lineares
Sistemas lineares
Sendo k = 0 adotado como instante inicial a funcao deentrada so e definida para k ≥ 0. Para selecionar uma solucaoespecıfica pode-se impor os valores de
y(0), y(1), · · · , y(n − 1)
que caracterizam as condicoes iniciais do sistema.
Uma resposta especıfica y(k) correspondente a uma entradag(k) dada, pode ser determinada observando que se y(k)satisfaz a equacao a diferencas entao h0(k) + y(k) onde
n∑
i=0
aih0(k + i) = 0
tambem a satisfaz.
13 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Sistemas lineares
Sistemas lineares
O seguinte resultado e fundamental no presente contexto :
Fato (Solucao geral)
Qualquer solucao da equacao a diferencas em estudo, definida para
todo k ≥ 0, pode ser unicamente individualizada pela escolha
adequada de h0(k) e e dada por
y(k) = h0(k) +
k∑
i=0
h(k − i)g(i)
As funcoes h0(k) e h(k), definidas para todo k ≥ 0, precisamser determinadas com o devido cuidado. Este aspecto seraabordado em seguida.
14 / 80

Capıtulo II - Fundamentos de Dinamica Discreta
Sistemas lineares
Sistemas lineares
Exemplo : A figura abaixo mostra um pendulo oscilando nointerior de uma caixa
x
ℓ
M
mθ
κ
A determinacao do modelo matematico que descreve o seucomportamento dinamico nos instantes t = kT , e um dosobjetivos deste curso. Para pequenos deslocamentos, trata-sede um sistema a tempo discreto LIT causal.
15 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Solucao temporal
Considere a equacao a diferencas com coeficientes constantes
n∑
i=0
aiy(k + i) = g(k) , ∀ k ≥ 0
onde g(k) e uma funcao dada e ai ∈ R para i = 0, · · · , n saoescalares, com an 6= 0. Adotamos a notacao mais compactaD[y ] = g onde D[·] denota o operador avanco
D[y ] =
n∑
i=0
aiy(k + i)
com polinomio caracterıstico
∆D(µ) =
n∑
i=0
aiµi
16 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Solucao temporal
Os seguintes aspectos sao relevantes :
O operador D[·] e linear.Para a funcao potencia verifica-se que
D[µk]
=n∑
i=0
aiµiµk
= ∆D(µ)µk
ou seja D[µk]
e µk sao colineares. Por este motivo, µk edenominada auto funcao do operador D[·].A equacao algebrica ∆D(µ) = 0 e denominada equacaocaracterıstica. Tem grau n e todos os seus coeficientes saoreais. Assim sendo, ela admite n raızes em pares complexosconjugados.
17 / 80

Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Solucao temporal
O seguinte resultado e fundamental no estudo de equacoes adiferencas lineares :
Teorema (Existencia e unicidade)
Seja g(k) uma funcao definida para todo k ≥ 0. A equacao a
diferencas D[y ] = g sujeita as condicoes iniciais
y(0), y(1), · · · , y(n − 1)
admite uma unica solucao y(k) para todo k ≥ 0.
Observe que para qualquer conjunto de condicoes iniciais asolucao existe e e unica. Portanto, sem especificar ascondicoes iniciais a unicidade deixa de ocorrer.
18 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Solucao temporal
Fato (Independencia Linear)
O conjunto de funcoes f1(k), · · · , fm(k), definidas para todo k ≥ 0,e linearmente independente - LI se a igualdade
fα(k) :=m∑
i=1
αi fi(k) = 0 ,∀ k ≥ 0
for satisfeita apenas com todos os escalares α1, · · · , αm nulos.
Caso contario o conjunto e dito linearmente dependente - LD.
E preciso estabelecer um teste para classificar conjuntos comoLI ou LD. Ao contrario do ocorrido no estudo de funcoes atempo contınuo nao faremos nenhuma hipotese, como porexemplo continuidade, a respeito das funcoes em estudo.
19 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Solucao temporal
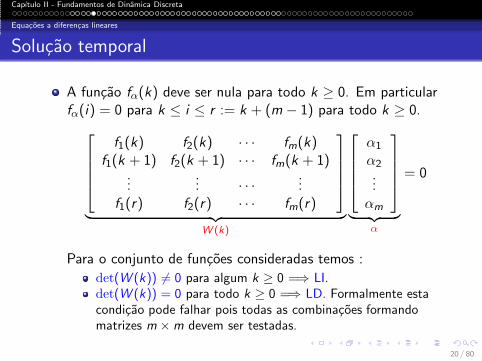
A funcao fα(k) deve ser nula para todo k ≥ 0. Em particularfα(i) = 0 para k ≤ i ≤ r := k + (m − 1) para todo k ≥ 0.
f1(k) f2(k) · · · fm(k)f1(k + 1) f2(k + 1) · · · fm(k + 1)
...... · · ·
...f1(r) f2(r) · · · fm(r)
︸ ︷︷ ︸
W (k)
α1
α2...
αm
︸ ︷︷ ︸
α
= 0
Para o conjunto de funcoes consideradas temos :
det(W (k)) 6= 0 para algum k ≥ 0 =⇒ LI.det(W (k)) = 0 para todo k ≥ 0 =⇒ LD. Formalmente estacondicao pode falhar pois todas as combinacoes formandomatrizes m × m devem ser testadas.
20 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Solucao temporal
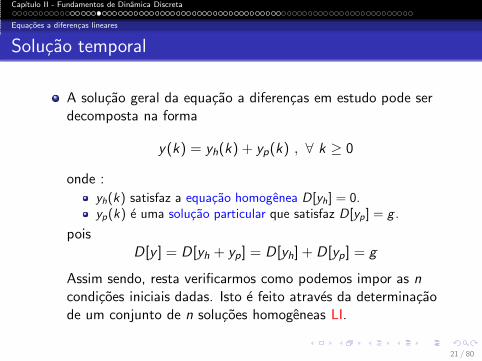
A solucao geral da equacao a diferencas em estudo pode serdecomposta na forma
y(k) = yh(k) + yp(k) , ∀ k ≥ 0
onde :
yh(k) satisfaz a equacao homogenea D[yh] = 0.yp(k) e uma solucao particular que satisfaz D[yp] = g .
poisD[y ] = D[yh + yp] = D[yh] + D[yp] = g
Assim sendo, resta verificarmos como podemos impor as n
condicoes iniciais dadas. Isto e feito atraves da determinacaode um conjunto de n solucoes homogeneas LI.
21 / 80

Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Solucao temporal
Equacao homogenea : Sao obtidas a partir da relacao
D[µk ] = ∆D(µ)µk , ∀ k ≥ 0
a qual indica que todas as fucoes do tipo µki , definidas para
todo k ≥ 0, com µi sendo uma das raızes de ∆D(µ) = 0, saosolucoes da equacao homogenea. Como ∆D(µ) e umpolinomio de grau n, com coeficientes reais, ele admite n
raızes em C em pares complexos conjugados. Supondo que asn raızes sejam distintas, as funcoes
µki , ∀ k ≥ 0 , i = 1, · · · , n
formam um conjunto LI.
22 / 80

Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Solucao temporal
De fato, a matriz W (k) e dada por
W (k) =
1 · · · 1... · · ·
...
µn−11 · · · µn−1
n
︸ ︷︷ ︸
W0
µk1 · · · 0... · · ·
...0 · · · µk
n
onde W0 e uma matriz de Vandermonde cujo determinante ediferente de zero tendo em vista que todos os µi , i = 1, · · · , nsao diferentes entre si. Consequentemente, det(W (k)) 6= 0para k = 0. A solucao geral e dada por
y(k) =
n∑
i=1
ciµki + yp(k)
onde ci , i = 1, · · · , n sao constantes determinadas com as n
condicoes iniciais.23 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Solucao temporal
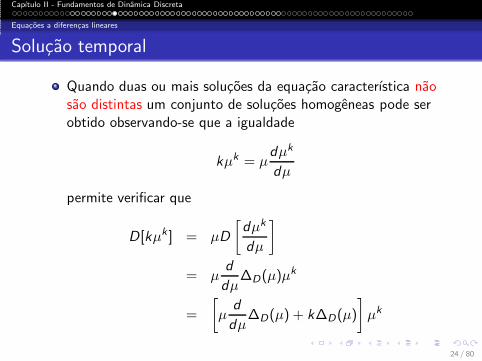
Quando duas ou mais solucoes da equacao caracterıstica naosao distintas um conjunto de solucoes homogeneas pode serobtido observando-se que a igualdade
kµk = µdµk
dµ
permite verificar que
D[kµk ] = µD
[dµk
dµ
]
= µd
dµ∆D(µ)µk
=
[
µd
dµ∆D(µ) + k∆D(µ)
]
µk
24 / 80

Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Solucao temporal
Por exemplo, considerando que µj seja uma raiz commultiplicidade dois da equacao caracterıstica entao∆D(µ) = (µ − µj)
2d(µ) para algum polinomio d(µ) de ordemn − 2. Portanto
∆D(µj) = 0 ,d
dµ∆D(µj) = 0
fazem com que as funcoes µkj e kµk
j , definidas para todok ≥ 0 sejam solucoes da equacao homogenea. Alem disso,calculando-se a matriz W (k) verificamos que o conjunto defuncoes µk
1 , · · · , µkj , kµk
j , · · · , µkn e LI se µj 6= 0. Neste caso,
y(k) =
n∑
i 6=j=1
ciµki + cjkµk
j
+ yp(k)
25 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Solucao temporal
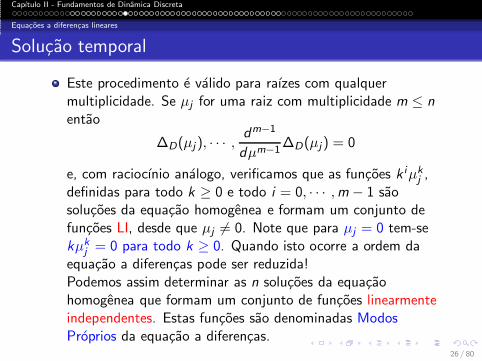
Este procedimento e valido para raızes com qualquermultiplicidade. Se µj for uma raiz com multiplicidade m ≤ n
entao
∆D(µj ), · · · ,dm−1
dµm−1∆D(µj) = 0
e, com raciocınio analogo, verificamos que as funcoes k iµkj ,
definidas para todo k ≥ 0 e todo i = 0, · · · ,m − 1 saosolucoes da equacao homogenea e formam um conjunto defuncoes LI, desde que µj 6= 0. Note que para µj = 0 tem-sekµk
j = 0 para todo k ≥ 0. Quando isto ocorre a ordem daequacao a diferencas pode ser reduzida!Podemos assim determinar as n solucoes da equacaohomogenea que formam um conjunto de funcoes linearmenteindependentes. Estas funcoes sao denominadas ModosProprios da equacao a diferencas.
26 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Solucao temporal
Solucao particular : O chamado Metodo dos Coeficientes aDeterminar se aplica para a classe de funcoes g(k) que emconjunto com seus valores em instantes sucessivos, ate umcerto valor m, formam um conjunto LD. Portanto, existe umoperador avanco com polinomio caracterıstico ∆N(µ) deordem m tal que
N[g ] = 0
Neste caso, uma solucao particular de D[y ] = g pode sercalculada atraves da equacao homogenea definida pelooperador composto
N[D[y ]] = 0
que nada mais e que uma equacao a diferencas homogenea deordem n + m.
27 / 80

Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Solucao temporal
Verificando que
N[D[µk ]] = ∆D(µ)∆N(µ)µk
a sua equacao caracterıstica e dada por ∆D(µ)∆N(µ) = 0 ecomo ja sabemos (supondo que todas as raızes sejamdistintas)
y(k) =
n∑
i=1
ciµki
︸ ︷︷ ︸
∆D(µ)=0=⇒yh(k)
+
m∑
i=1
diµki
︸ ︷︷ ︸
∆N(µ)=0=⇒yp(k)
sendo que os coeficientes d1, · · · , dm sao determinadosimpondo-se D[yp] = g . No caso da eventual ocorrencia deraızes multiplas o tratamento anterior deve ser adotado.
28 / 80

Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Exemplos
A equacao a diferencas y(k + 1) + y(k) = (−2)k comy(0) = 1 admite ∆D(µ) = µ + 1 e ∆N(µ) = µ + 2. Portanto
y(k) = c1(−1)k︸ ︷︷ ︸
yh(k)
+ d1(−2)k︸ ︷︷ ︸
yp(k)
substituindo yp(k) obtem-se d1 = −1 e, em seguida, com acondicao inicial obtem-se c1 = 2. A solucao geral e
y(k) = 2(−1)k − (−2)k , ∀ k ≥ 0
A equacao a diferencas y(k + 1) + y(k) = (−1)k comy(0) = 1 admite ∆D(µ) = µ + 1 e ∆N(µ) = µ + 1. Portanto
y(k) = c1(−1)k︸ ︷︷ ︸
yh(k)
+ d1k(−1)k︸ ︷︷ ︸
yp(k)
substituindo yp(k) obtem-se d1 = −1 e, em seguida, com acondicao inicial obtem-se c1 = 1.
29 / 80

Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Exemplos
A equacao a diferencas y(k + 2) + y(k) = sen((π/2)k) e talque ∆D(µ) = µ2 + 1 e ∆N(µ) = µ2 + 1. Portanto
y(k) = c1ej(π/2)k + c2e
−j(π/2)k
︸ ︷︷ ︸
yh(k)
+ d1kej(π/2)k + d2ke
−j(π/2)k
︸ ︷︷ ︸
yp(k)
Uma equacao a diferencas com ∆D(µ) = (µ + 1)(µ − 1) eentrada tal que ∆N(µ) = µ + 1 tem a solucao geral
y(k) = c1(−1)k + c2︸ ︷︷ ︸
yh(k)
+ d1k(−1)k︸ ︷︷ ︸
yp(k)
Uma equacao a diferencas com ∆D(µ) = (µ + 1)2 e entradatal que ∆N(µ) = µ − 1 tem a solucao geral
y(k) = c1(−1)k + c2k(−1)k︸ ︷︷ ︸
yh(k)
+ d1︸︷︷︸
yp(k)
30 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Transformada Z
A transformada Z de uma funcao f (k) definida para todok ∈ Z, denotada por f (z) ou Z(f (k)), e uma funcao devariavel complexa
f (z) : D(f ) → C
onde D(f ) e o seu domınio e
f (z) :=
∞∑
k=−∞
f (k)z−k
D(f ) := {z ∈ C : f (z) existe}
E importante ressaltar que f (z) existe indica que a soma acimaconverge e e finita.
31 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Transformada Z
Geralmente D(f ) nao coincide com C. Nestes casos existem
pontos z ∈ C tais que z /∈ D(f ) e, portanto, torna-seessencial a determinacao do domınio da transformada Z.
Importante : O domınio D(f ) da transformada Z dependefortemente do domınio da funcao f (k). Como verificaremosem seguida :
k ∈ [0, +∞) =⇒ |z| ∈ (α, +∞)
k ∈ (−∞, 0] =⇒ |z| ∈ (0, β)
k ∈ (−∞, +∞) =⇒ |z| ∈ (β, α)
para valores adequados de α, β ∈ R. Quanto maior o domıniode f (k), menor o domınio de f (z) e vice-versa.
32 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Transformada Z
Os calculos envolvendo a transformada Z dependem, emgrande medida, da seguinte propriedade da serie geometricacom razao complexa z ∈ C
z0, z1, z2, · · · , zk , · · ·
Lema (Convergencia da serie geometrica)
Considere z ∈ C. A igualdade
∞∑
k=0
zk =1
1 − z
se verifica e e finita se e somente se |z | < 1.
33 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Transformada Z
Os seguintes exemplos ilustram os domınios da transformadaZ de algumas funcoes :
f (k) = ak : Z → C e D(f ) = ∅.f (k) = ak : [0, +∞) → C e
f (z) =z
z − a, D(f ) = {z ∈ C : |z| > |a|}
f (k) = ak : (−∞, 0] → C e
f (z) = −a
z − a, D(f ) = {z ∈ C : |z| < |a|}
f (k) = a|k| : (−∞, +∞) → C e
f (z) =z2 + 1
(z − a)(z − 1/a), D(f ) = {z ∈ C : |a| < |z| < 1/|a|}
34 / 80

Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Transformada Z
A funcao potencia µk : Z → C com µ ∈ C qualquer naoadmite a transformada Z. Portanto, para funcoes definidasem todo k ∈ Z a transformada Z e muito restritiva. Paracontornar esta dificuldade vamos restringir nosso interesse afuncoes definidas no intervalo k ∈ N := [0,+∞) e assim :
f (z) :=∞∑
k=0
f (k)z−k
que admite o domınio na forma generica
D(f ) := {z ∈ C : |z | > α}
para algum α ∈ R a ser adequadamente determinado.
35 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Transformada Z
Classe importante : Definida pela existencia de zf ∈ C talque o limite
limi→∞
i∑
k=0
|f (k)|z−kf
existe e e finito.
Lema (Domınio)
Para as funcoes da classe acima, e valido que :
Qualquer z ∈ C satisfazendo |z| ≥ |zf | pertence a D(f ).
Existe M finito tal que |f (z)| ≤ M para todo s ∈ D(f ).
36 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Transformada Z
Forma geral : Para funcoes definidas para todo k ≥ 0 :
D(f ) := {z ∈ C : |z | > α}
Determinacao do domınio : Para a funcao f (k) dadadetermine o menor valor de α ∈ R tal que
limi→∞
i∑
k=0
|f (k)α−k | < ∞
Determinacao do domınio : Para a funcao f (z) dadadetermine o menor valor de α ∈ R tal que ela permanecaanalıtica e portanto finita em todo z ∈ D(f ).
37 / 80

Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Transformada Z
A funcao f (z) = z−1 nao e analıtica em z = 0. Note que
f (k) = δ(k − 1) = {0, 1, 0, · · · }
e portantoD(f ) := {z ∈ C : |z | > 0}
e todo o plano complexo C com excecao da origem.
A funcao f (z) = z/(z2 − 1) nao e analıtica em z = 1 ez = −1. Note que
f (k) = {0, 1, 0, 1, 0, 1, · · · }
e portantoD(f ) := {z ∈ C : |z | > 1}
38 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Transformada Z
Uma funcao racional e da forma
f (z) :=N(z)
D(z)=
∑mi=0 eiz
i
∑ni=0 aiz i
onde m ≤ n, ei ∈ R para todo i = 1, · · · ,m e ai ∈ R paratodo i = 1, · · · , n. Se n = m ela e chamada propria, casocontrario ela e dita estritamente propria. Ela deixa de seranalıtica nos seus polos, raızes de D(z) = 0. Assim sendo
α = maxi=1,··· ,n
|pi |
O impulso unitario discreto (Kronecker) :
δ(z) = 1 , D(δ) = C
39 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Transformada Z
Varios calculos envolvendo a transformada Z dependem dadeterminacao correta do seu domınio :
Soma : A soma de uma funcao em todo o seu domınio e dadapor
∞∑
k=0
f (k) = f (1)
desde que 1 ∈ D(f ).Limite : O limite de uma funcao definida em k ≥ 0 satisfaz
limk→∞
f (k) = limz→1
(z − 1)f (z)
desde que 1 ∈ D((z − 1)f ).
40 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Transformada Z
No estudo de equacoes a diferencas via transformada Z, asseguintes propriedades sao importantes para funcoes definidasem k ≥ 0 e escalares θ1, θ2, · · ·
Combinacao linear :
Z
(∑
i
θi fi (k)
)
=∑
i
θi fi (z)
Convolucao a tempo discreto :
Z(f (k) • g(k)) = f (z)g (z)
Deslocamento no tempo :
Z(f (k + 1)) = zf (z) − zf (0)
41 / 80

Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Transformada Z
Para funcoes racionais, a inversa da transformada Z pode serobtida via Decomposicao em Fracoes Parciais com a qualdeterminamos os escalares αi tais que
∑mi=0 eiz
i
∑ni=0 aiz i
= α0 +M∑
i=1
αiz
(z − pi )ni
onde pi sao seus polos e∑M
i=1 ni = n. Observe que estamosconsiderando que cada polo pi tenha multiplicidade ni paratodo i = 1, · · · ,M. A inversa e determinada com a relacao
Z−1
(z
(z − p)r+1
)
=1
r !
d r
dprpk =
(k
r
)
pk−r , ∀ k ≥ 0
valida para todo r ≥ 0.
42 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Solucao via transformada Z
Considere a equacao a diferencas anterior dada na forma
n∑
i=0
aiy(k + i) =m∑
i=0
eig(k + i) , ∀k ≥ 0
com condicoes iniciais y(i), para todo i = 0, · · · , n − 1.Aplicando a transformada Z em ambos os membros obtemos
y(z) = H0(z)︸ ︷︷ ︸
cond. iniciais
+ H(z)g(z)
onde devemos notar que H0(z) depende dos valores iniciais dasolucao y(0), · · · , y(n − 1) e tambem dos valores iniciais daentrada g(0), · · · , g(m − 1).
43 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Solucao via transformada Z
Os aspectos mais importantes sao :
h0(k) := Z−1(H0(z)) e a parte da solucao que dependeexclusivamente das condicoes iniciais e dos valores iniciais daentrada.h(k) := Z−1(H(z)) e a resposta ao impulso (obtida a partir decondicoes iniciais que anulam H0(z)). A funcao h(k) • g(k)obtida pela transformada Z inversa e a parte da solucao quedepende exclusivamente da funcao de entrada.
⇓
y(k) = h0(k) +
k∑
i=0
h(k − i)g(i) , ∀ k ≥ 0
44 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Exemplo
Aplicando a transformada Z na equacao a diferencasy(k + 2) + 3y(k + 1) + 2y(k) = g(k + 1) − 3g(k) comcondicoes iniciais y(0) = 0 e y(1) = 0 determinamos
H0(z) =−zg(0)
(z + 2)(z + 1), H(s) =
z − 3
(z + 2)(z + 1)
Sendo g(k) = δ(k) o impulso unitario temos :
y(z) =−3
(z + 2)(z + 1)= −3/2 − 3/2
z
z + 2+ 3
z
z + 1
ou seja
y(k) =
{0 k = 0
3(−2)k−1 − 3(−1)k−1 k ≥ 1
45 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Exemplo
Aplicando a transformada Z na mesma equacao a diferencasanterior mas com condicoes iniciais y(0) = 0 e y(1) = g(0)determinamos
H0(z) = 0 , H(s) =z − 3
(z + 2)(z + 1)
Sendo g(k) = δ(k) o impulso unitario temos :
y(z) =z − 3
(z + 2)(z + 1)= −3/2 − 5/2
z
z + 2+ 4
z
z + 1
ou seja
y(k) =
{0 k = 0
5(−2)k−1 − 4(−1)k−1 k ≥ 1
46 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Representacao de estado
Qualquer equacao a diferencas linear de ordem n pode serconvertida em um sistema de n equacoes a diferencas deprimeira ordem. Este sistema de equacoes a diferencas,geralmente acoplado, denominado representacao de estado daequacao original e expresso na forma matricial:
x(k + 1) = Ax(k) + Bg(k) , x(0) = x0
y(k) = Cx(k) + Dg(k)
onde A ∈ Rn×n, B ∈ R
n×1, C ∈ R1×n e D ∈ R
1×1.As matrizes (A,B ,C ,D) e a condicao inicial x0 ∈ R
n devemser determinadas de tal forma que a funcao produzida pelarepresentacao de estado y(k) coincida com a solucao daequacao a diferencas em estudo para todo k ≥ 0.
47 / 80

Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Representacao de estado
Para a equacao D[y ] = g com an = 1, definimos as variaveisde estado
x(k) =
x1(k)...
xn(k)
, xi(k) := y(k + i − 1), i = 1, · · · , n
e obtemos
A =
0 1 0 · · · 00 0 1 · · · 0...
...... · · ·
...−a0 −a1 −a2 · · · −an−1
, B =
00...01
C =[
1 0 0 · · · 0]
, D =[
0]
48 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Representacao de estado
A equacao D[y ] = E [g ] com an = 1 e E [·] sendo um operadorde ordem m ≤ n − 1 pode ser reescrita na forma
D[ξ] = g , y = E [ξ]
Definindo como no caso anterior as variaveis de estado
x(k) =
x1(k)...
xn(k)
, xi(k) := ξ(k + i − 1), i = 1, · · · , n
as matrizes A e B nao se alteram. Ademais
y(k) = E [ξ] =
m∑
j=0
ejξ(k + j) =
m∑
j=0
ejxj+1(k)
permite determinar as matrizes restantes
C =[
e0 e1 e2 · · · 0]
, D =[
0]
49 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Representacao de estado
A equacao D[y ] = E [g ] com an = 1 e E [·] sendo um operadorde ordem m = n pode ser reescrita na forma
D[ξ] = g , y = E [ξ] + eng
onde E [ξ] := E [ξ] − enD[ξ] com coeficientes ei = ei − enai
para i = 0, · · · , n − 1 e um operador de ordem n − 1.Definindo as mesmas variaveis de estado do caso anterior, asmatrizes A e B nao se alteram. Ademais
y(k) = E [ξ] + eng =n−1∑
j=0
ejxj+1(k) + eng
permite determinar as matrizes restantes
C =[
e0 e1 e2 · · · en−1
], D =
[en
]
50 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Representacao de estado
Para qualquer matriz quadrada A ∈ Rn×n define-se a funcao
potencia de matriz:
F (k) := Ak , ∀k ∈ N
Lema (Transformada Z)
A transformada Z da funcao F (k) = Ak definida para todo k ≥ 0e dada por
F (z) = z(zI − A)−1 , D = {z ∈ C : |z | > max |λi |}
onde λi , i = 1, · · · , n sao os autovalores de A.
51 / 80

Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Representacao de estado
Aplicando a transformada Z nas equacoes de estadodeterminamos
H0(z) = C (zI − A)−1zx0 , H(z) = C (zI − A)−1B + D
e, com o lema anterior, as funcoes
h0(k) = CAkx0 , h(k) =
{D k = 0
CAk−1B k ≥ 1
Teorema (Solucao da equacao de estado)
A solucao da equacao de estado e dada por
x(k) = Akx0 +k−1∑
i=0
Ak−1−iBg(i) , ∀ k ≥ 1
y(k) = Cx(k) + Dg(k) , ∀ k ≥ 0
52 / 80

Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Representacao de estado
Neste ponto, resta determinarmos o vetor de condicoes iniciaisx0 ∈ R
n. Para tanto, calculando sucessivamente a parte dasolucao que depende das condicoes iniciais
y(k) = CAkx0
para k = 0, 1, · · · , n − 1 obtemos
ymod(0)ymod(1)
...ymod(n − 1)
= Ox0 , O :=
C
CA...
CAn−1
onde ymod(·) sao as condicoes iniciais modificadas pelosvalores iniciais da entrada e O ∈ R
n×n e a Matriz deObservabilidade que e inversıvel sempre que o sistema for deordem mınima.
53 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Representacao de estado
Finalmente, deve ser notado que a representacao de estadonao e unica. Unica e a funcao H(z) e, dada as condicoesiniciais, unica tambem e a funcao H0(z). Com umarepresentacao de estado (A,B ,C ,D) e uma matriz naosingular T ∈ R
n×n, a chamada Transformacao de Similaridadepermite obter uma nova representacao de estado(T−1AT ,T−1B ,CT ,D) mas ambas representando a mesmafuncao H(z). De fato, simples calculos levam a
H(z) = C (zI − A)−1B + D
= CT (zI − T−1AT )−1T−1B + D
Ademais, observe que det(zI − A) = det(zI − T−1AT ).
54 / 80

Capıtulo II - Fundamentos de Dinamica Discreta
Equacoes a diferencas lineares
Exemplo
A funcao de transferencia do deslocamento angular do elorotacional de uma junta robotica, apos discretizacao e
H(z) =z2 − 1.044z + 0.0678
z2 − 0.074z + 0.9418
A representacao de estado aqui considerada e dada por
x(k + 1) =
[0 1
−0.9418 0.074
]
︸ ︷︷ ︸
A
x(k) +
[01
]
︸ ︷︷ ︸
B
g(k)
y(k) =[−0.8740 −0.9700
]
︸ ︷︷ ︸
C
x(k) + [1]︸︷︷︸
D
g(k)
Note que os autovalores de A sao iguais aos polos de H(z).Isto e sempre verdade!
55 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Sistemas dinamicos lineares
Funcao de transferencia
De maneira generica, um sistema dinamico LIT a tempodiscreto e caracterizado por ter seu comportamento, nodecorrer do tempo, descrito por uma equacao a diferencaslinear com coeficientes constantes. A partir das condicoesiniciais definidas em k = 0, · · · n − 1 e de uma funcao deentrada g(k) definida para todo k ≥ 0, sua saıda e dada por
y(z) = H0(z) + H(z)g(z)
onde
Definicao (Funcao de transferencia)
A funcao H(z) e denominada funcao de transferencia do sistema e
h(k) = Z−1(H(z)) definida para todo k ≥ 0 e a sua resposta ao
impulso.
56 / 80

Capıtulo II - Fundamentos de Dinamica Discreta
Sistemas dinamicos lineares
Funcao de transferencia
A funcao de transferencia de um sistema torna explıcito comoa entrada influencia a saıda. Para condicoes iniciaisadequadas, nao necessariamente nulas, H0(s) = 0 e a relacaoentrada / saıda torna-se :
y(z) = H(z)g(z)⇐⇒y(k) = h(k) • g(k)
Definicao (Estabilidade)
A funcao de transferencia H(z) e denominada assintoticamente
estavel se ela for analıtica em todos os pontos da regiao |z | ≥ 1.
Como consequencia :
Todos os polos de H(z) estao localizados na regiao |z| < 1.limk→+∞h(k) = 0.
57 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Sistemas dinamicos lineares
Resposta em frequencia
A resposta em frequencia de um sistema com funcao detransferencia H(z) e simplesmente dada por H(ejω) para todoω ∈ R. Isto exige que todos os pontos do cırculo unitario doplano complexo estejam no domınio de H(z), isto e
z = ejω ∈ D(H) , ∀ ω ∈ R
Desta forma, devemos nos restringir ao calculo da respostaem frequencia apenas para sistemas assintoticamente estaveis.Para esta classe de sistemas, o efeito das condicoes iniciaisdesaparece no decorrer do tempo pois H0(z) e H(z) tem osmesmos polos e portanto limk→+∞h0(k) = 0. A sua saıdatende a uma funcao que depende exclusivamente da entrada,denominada solucao de regime permanente.
58 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Sistemas dinamicos lineares
Resposta em frequencia
Considerando a entrada g(k) = ejωk para k ≥ 0 temos comoresposta
y(z) = H0(z) + H(z)z
(z − ejω)
cuja decomposicao em fracoes parciais resulta em
y(z) = H0(z) + R(z) +H(ejω)z
(z − ejω)
onde R(z) denota os demais termos da decomposicao. Comoos polos de R(z) sao aqueles de H(z) tem-selimk→+∞r(k) = 0 de tal forma que para k suficientementegrande
y(k) ≈ H(ejω)ejωk := yperm(k)
59 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Sistemas dinamicos lineares
Resposta em frequencia
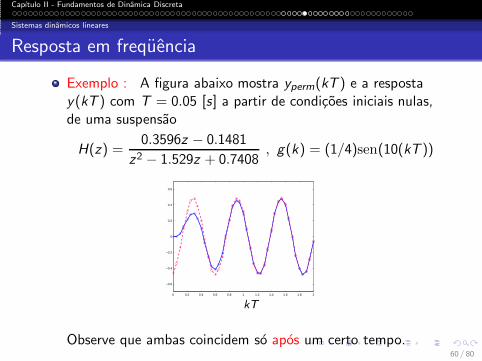
Exemplo : A figura abaixo mostra yperm(kT ) e a respostay(kT ) com T = 0.05 [s] a partir de condicoes iniciais nulas,de uma suspensao
H(z) =0.3596z − 0.1481
z2 − 1.529z + 0.7408, g(k) = (1/4)sen(10(kT ))
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
kT
Observe que ambas coincidem so apos um certo tempo.60 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Sistemas dinamicos lineares
Resposta em frequencia
A resposta em frequencia de um sistema a tempo discretotambem pode ser representada graficamente atraves dosDiagramas de Bode de Modulo e de Fase, definidosrespectivamente por
A(ω)dB × log(ω) , ∀ ω ∈ (0, π)
φ(ω) × log(ω) , ∀ ω ∈ (0, π)
onde A(ω)dB e o modulo de H(ejω) expresso em decibeis eφ(ω) e a fase de H(ejω) expressa em graus ou radianos.
Fato (Periodicidade)
A funcao z = ejω e periodica com perıodo 2π. O mesmo ocorre
com H(ejω). Como H(e−jω) = H(ejω)∗, basta representa-la em
meio perıodo.
61 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Sistemas dinamicos lineares
Resposta em frequencia
Os diagramas de Bode sao calculados numericamente semgrandes dificuldades. Diferentemente do caso contınuo, por setratar de funcoes periodicas, eles nao admitem assıntotaslineares. Para contornar esta dificuldade notamos que aigualdade
ejω =1 + s
1 − s
∣∣∣∣s=jtan(ω/2)
, ∀ ω ∈ (0, π)
permite determinar o valor de ejω atraves de uma fracaoracional calculada em s = jw onde
w = tan(ω/2) ∈ (0,+∞)
62 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Sistemas dinamicos lineares
Resposta em frequencia
A partir da funcao de transferencia H(z) podemos determinara funcao de transferencia modificada
Hmod(s) = H
(1 + s
1 − s
)
que e racional sempre que H(z) for racional. Construindo osdiagramas de Bode (inclusive os assintoticos) para Hmod(jw)com w ∈ (0,+∞) da maneira como tratamos os sistemas atempo contınuo, obtemos H(ejω) para
ω = 2arctan(w)
pois w ∈ (0,+∞) fornece ω ∈ (0, π).
63 / 80

Capıtulo II - Fundamentos de Dinamica Discreta
Sistemas dinamicos lineares
Resposta em frequencia
A transformacao
z =1 + s
1 − s
e denominada bilinear. Ela mapeia todos os pontos dosemiplano Re(s) < 0 em todos os pontos do cırculo unitario|z | < 1 e vice-versa.
Como consequencia :
Sistemas discretos estaveis sao mapeados em sistemascontınuos estaveis e vice-versa.
Hmod(s)︸ ︷︷ ︸
Re(s)<0
⇐⇒ H(z)︸ ︷︷ ︸
|z|<1
64 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Sistemas dinamicos lineares
Resposta em frequencia
Uma maneira de calcular Hmod(s) e fatorar H(z) na forma
H(z) = KΠm
i=1(z − qi )
Πni=1(z − pi )
e por substituicao obtemos
Hmod(s) = KΠm
i=1((1 + qi )s + (1 − qi ))
Πni=1((1 + pi )s + (1 − pi ))
︸ ︷︷ ︸
I
(1 − s)n−m
︸ ︷︷ ︸
II
onde notamos que Hmod(s) e sempre propria.
A parte I e de fase mınima desde que H(z) tambem seja.Os diagramas de Bode da parte II sao bastante simples deserem obtidos. O modulo e igual ao de (1 + s)n−m e a fasetem sinal contrario.
65 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Sistemas dinamicos lineares
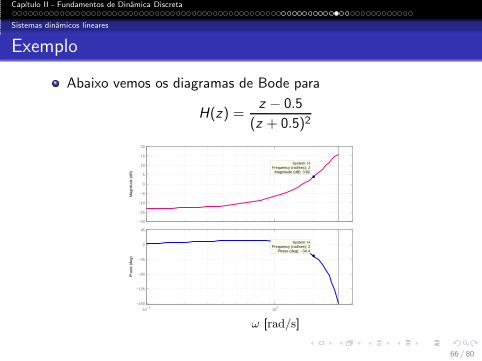
Exemplo
Abaixo vemos os diagramas de Bode para
H(z) =z − 0.5
(z + 0.5)2
Bode Diagram
Pha
se (
deg)
Mag
nitu
de (
dB)
10−1
100
−180
−135
−90
−45
0
45
System: H Frequency (rad/sec): 2
Phase (deg): −34.4
−20
−15
−10
−5
0
5
10
15
20
System: H Frequency (rad/sec): 2
Magnitude (dB): 3.82
ω [rad/s]
66 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Sistemas dinamicos lineares
Exemplo
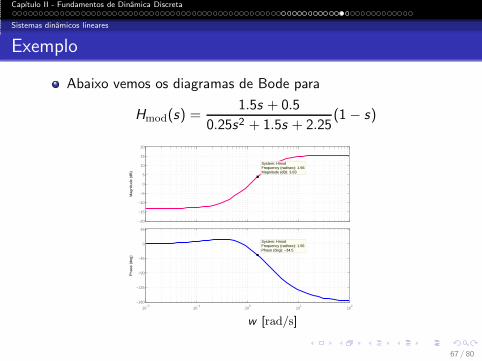
Abaixo vemos os diagramas de Bode para
Hmod(s) =1.5s + 0.5
0.25s2 + 1.5s + 2.25(1 − s)
Bode Diagram
Pha
se (
deg)
Mag
nitu
de (
dB)
−20
−15
−10
−5
0
5
10
15
20
System: Hmod Frequency (rad/sec): 1.56 Magnitude (dB): 3.83
10−2
10−1
100
101
102
−180
−135
−90
−45
0
45
System: Hmod Frequency (rad/sec): 1.56 Phase (deg): −34.5
w [rad/s]
67 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Sistemas dinamicos lineares
Exemplo
Nas figuras anteriores colocamos em evidencia os valores demagnitude e de fase obtidos com a transformacao bilinearatraves da relacao
ω = 2 [rad/s] ⇐⇒ w = tan(1) = 1.56 [rad/s]
Os seguintes pontos sao importantes :
Para Hmod(s) as assıntotas podem ser calculadas. Observe quea sua resposta em frequencia e calculada para s = jw onde,como e usual no caso contınuo no tempo, w ∈ (0, +∞).Se H(z) for uma funcao de fase mınima, o mesmo se dara comHmod(s) desde que n = m. Nos demais casos, Hmod(s) seraigual ao produto de uma funcao de fase mınima por(1 − s)n−m, fazendo com que n − m zeros ocorram em s = 1.Este termo adicional deve ser manipulado com o devidocuidado.
68 / 80

Capıtulo II - Fundamentos de Dinamica Discreta
Discretizacao
Funcao de transferencia pulsada
O objetivo central e representar, mesmo queaproximadamente, um sistema a tempo contınuo atraves deum sistema a tempo discreto. Isto e conseguido com umaoperacao denominada discretizacao. Seja f (t) uma funcaodefinida para todo t ≥ 0 e um escalar T > 0.
Dada f (t), os valores f (kT ) para todo k ∈ N sao denominadosamostras e T e denominado perıodo de amostragem.Dada a sequencia f (kT ) podemos determinar f (t) atraves dealguma aproximacao. A mais evidente e
f (t) ≈ f0(t) := f (kT ) , ∀ kT ≤ t < (k + 1)T
O erro entre f (t) e f0(t) pode ser controlado a partir daescolha adequada de T > 0.
69 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Discretizacao
Funcao de transferencia pulsada
A transformada de Laplace de f0(t) e
f0(s) =∞∑
k=0
f (kT )
∫ (k+1)T
kT
e−stdt
=1 − e−Ts
s︸ ︷︷ ︸
S0(s)
∞∑
k=0
f (kT )e−kTs
︸ ︷︷ ︸
f∗(s)
onde :O dispositivo com funcao de transferencia S0(s) e denominadosegurador de ordem zero - SOZ =⇒ s0(t) = υ(t) − υ(t − T ).A transformada f∗(s) define a funcao amostrada ideal
f∗(t) =
∞∑
k=0
f (kT )δ(t − kT )
70 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Discretizacao
Funcao de transferencia pulsada
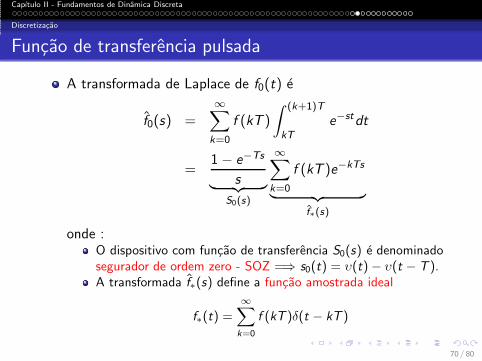
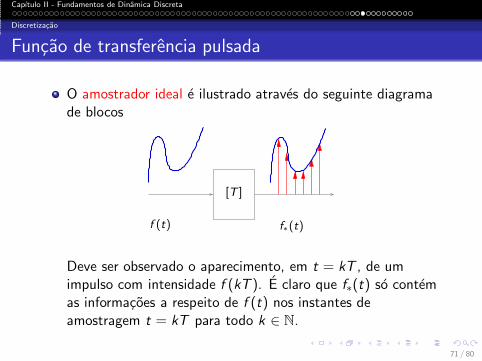
O amostrador ideal e ilustrado atraves do seguinte diagramade blocos
f (t) f∗(t)
[T ]
Deve ser observado o aparecimento, em t = kT , de umimpulso com intensidade f (kT ). E claro que f∗(t) so contemas informacoes a respeito de f (t) nos instantes deamostragem t = kT para todo k ∈ N.
71 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Discretizacao
Funcao de transferencia pulsada
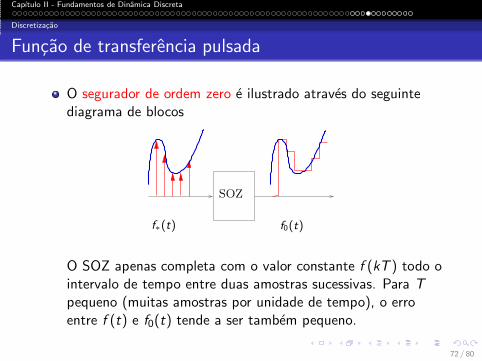
O segurador de ordem zero e ilustrado atraves do seguintediagrama de blocos
f0(t)f∗(t)
SOZ
O SOZ apenas completa com o valor constante f (kT ) todo ointervalo de tempo entre duas amostras sucessivas. Para T
pequeno (muitas amostras por unidade de tempo), o erroentre f (t) e f0(t) tende a ser tambem pequeno.
72 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Discretizacao
Funcao de transferencia pulsada
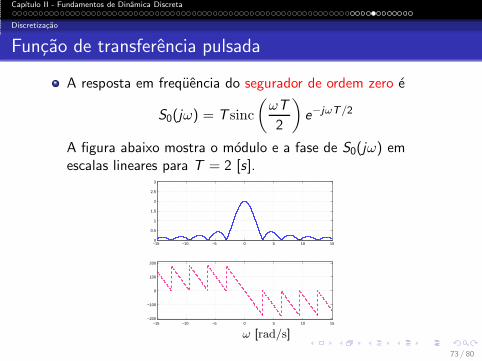
A resposta em frequencia do segurador de ordem zero e
S0(jω) = T sinc
(ωT
2
)
e−jωT/2
A figura abaixo mostra o modulo e a fase de S0(jω) emescalas lineares para T = 2 [s].
−15 −10 −5 0 5 10 150
0.5
1
1.5
2
2.5
3
−15 −10 −5 0 5 10 15−200
−100
0
100
200
ω [rad/s]
73 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Discretizacao
Funcao de transferencia pulsada
Considere um sistema contınuo no tempo com resposta aoimpulso h(t) = L−1(H(s)) definida para todo t ≥ 0. Parauma entrada g(t) qualquer obtemos a saıda h(t) ∗ g(t). Sesubstituirmos g(t) por g∗(t) temos
y(t) = h(t) ∗
(∞∑
i=0
g(iT )δ(t − iT )
)
=∞∑
k=0
g(iT )h(t − iT )
que leva a
y(kT ) =
∞∑
k=0
g(iT )h(kT − iT )
74 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Discretizacao
Funcao de transferencia pulsada
Ou, de forma equivalente
y(kT ) = h(kT ) • g(kT ) ⇐⇒ y(z) = H(z)g (z)
ondeH(z) := Z(h(kT ))
a transformada Z da sequencia formada pelas amostras daresposta ao impulso do sistema e denominada funcao detransferencia pulsada. Observe que as amostras da entradag(kT ) permitem determinar a transformada g(z) a qual,multiplicada pela funcao de transferencia pulsada, fornece atransformada das amostras da saıda.
75 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Discretizacao
Funcao de transferencia pulsada
Em varias situacoes praticas e importante fazermos oscalculos anteriores mas para a entrada g0(t) no lugar deg∗(t). Isto se deve ao fato ja mencionado de que g0(t) podese aproximar arbitrariamente de g(t) por uma escolhaconveniente do perıodo de amostragem. Notando que
y(t) = h(t) ∗ g0(t)
= h(t) ∗ (s(t) ∗ g∗(t))
= r(t) ∗ g∗(t)
obtemos y(z) = R(z)g(z) onde R(z) = Z(r(kT )) e
r(t) = h(t) ∗ s(t) ⇐⇒ r(s) =
(H(s)
s
)
− e−sT
(H(s)
s
)
76 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Discretizacao
Funcao de transferencia pulsada
Os mesmos calculos anteriores podem ser realizados a partirda representacao de estado
x(t) = Ax(t) + Bg0(t) , x(0) = x0
y(t) = Cx(t) + Dg0(t)
Com a notacao simplificada x(k) := x(t)|t=kT temos
x(k + 1) = eA(k+1)T x0 +
∫ (k+1)T
0eA((k+1)T−τ)Bg0(τ)dτ
= eAT x(k) +
∫ (k+1)T
kT
eA((k+1)T−τ)Bg0(τ)dτ
= eAT x(k) +
(∫ T
0eAξBdξ
)
g(k)
77 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Discretizacao
Funcao de transferencia pulsada
A representacao de estado da funcao de transferencia pulsadae expressa na forma
x(k + 1) = Fx(k) + Jg(k) , x(0) = x0
y(k) = Cx(k) + Dg(k)
onde as matrizes indicadas sao dadas por
F = eAT , J =
∫ T
0eAξBdξ
Felizmente estas matrizes podem ser calculadas de maneirabastante eficiente a partir da relacao
Γ :=
[A B
0 0
]
=⇒ eΓT =
[F J
0 1
]
78 / 80

Capıtulo II - Fundamentos de Dinamica Discreta
Discretizacao
Exemplo
Abaixo mostramos a funcao de transferencia pulsada com umSOZ na entrada, perıodo de amostragem T = 0.15 [s] para
H(s) =15s2 + 16s + 6
s4 + 7s3 + 15s2 + 16s + 6
0 1 2 3 4 5 6 7−0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
t, kT [s]
g(t) = υ(t)
g(t) = e−t
79 / 80
Capıtulo II - Fundamentos de Dinamica Discreta
Discretizacao
Funcao de transferencia pulsada
A resposta em frequencia da funcao de transferencia pulsada eobtida a partir da entrada g(t) = ejωt com t ≥ 0. Asamostras, colhidas com perıodo T > 0, permitem calcular
g(kT ) = ejkωT =⇒ g(z) =z
z − ejωT
e portanto
yperm(kT ) = H(ejωT )ejkωT , ∀ k ∈ N
torna aparente que e relevante representar a funcao detransferencia pulsada H(z) para z = ejωT com ω ∈ (0, π/T ).Neste caso, a transformacao bilinear se aplica com a ligeiramodificacao w = tan(ωT/2).
80 / 80