4 fluxo de carga em redes ca - gsep.ene.unb.br · gas a fim de restabelecer o ... em problemas de...
TRANSCRIPT
4
FLUXO DE CARGA EM REDES CA
4.1 INTRODUÇÃO
Neste capítulo será abordado o problema de fluxo de carga em regime permanente. Narepresentação do sistema nesse tipo de problema, supõe-se,em geral, que a rede seja mod-elada pela matriz Ybus. Adicionalmente, as cargas do sistema são conhecidas. Emboraseja uma abordagem determinística, a precisão dos resultados é aceitável.
Na realidade, a carga no sistema apresenta variação aleatória e por essa razão o quese conhece são seus valores estimados médios para determinadas horas do dia. Por essarazão, tais elementos podem ser interpretados como perturbações para o sistema.
As unidades geradoras fornecem potência para suprir as cargas e as perdas no sis-tema. São, assim, elementos que atuam no sentido de assegurar o equilíbrio de potênciaem cada barramento. Quando isso não é possível, torna-se necessário desconectar car-gas a fim de restabelecer o equilíbrio. Em função dessas características, equipamentosassociados à geração de energia exercem a função de controleno sistema.
As tensões no sistema dependem de uma série de fatores e devemser mantidas próx-imas aos valores nominais a fim de manter o adequado funcionamento dos equipamentos,em geral. Portanto, o controle das tensões, bem como o fluxo pelos equipamentos, devemser observados como parte fundamental na análise de um sistema em regime permanente.A magnitude e a fase da tensão devem ser ajustadas, em cada barramento com a finalidadede tornar possível a operação do sistema dentro de parâmetros satisfatórios. Essas duasvariáveis são os denominados estados do sistema, sendo essas grandezas objeto de ajusteem problemas de fluxo de carga, considerando essencialmente
• o balanço de potência em cada barra;
• as restrições e a disponibilidade operacional dos equipamentos;
• o tipo de elemento conectado à barra (carga ou geração).
51
52 4. FLUXO DE CARGA EM REDES CA
4.2 DETERMINAÇÃO DAS EQUAÇÕES DO FLUXO DE CARGA
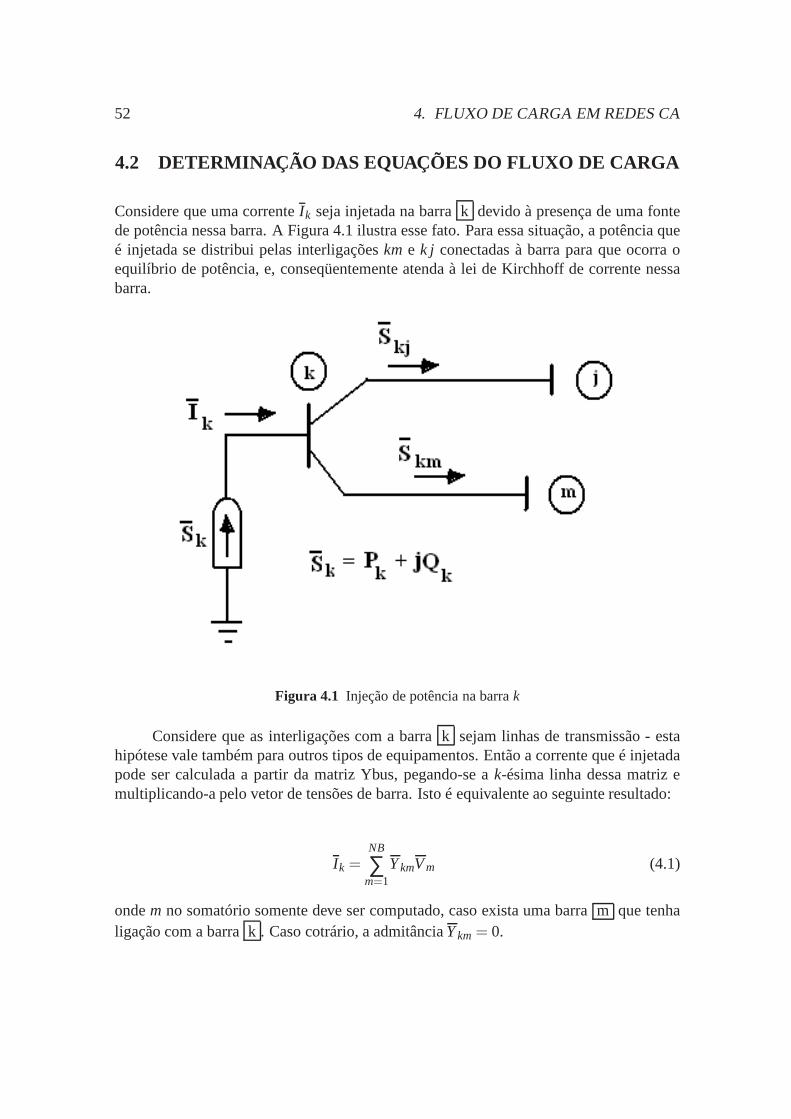
Considere que uma correnteIk seja injetada na barrak devido à presença de uma fontede potência nessa barra. A Figura 4.1 ilustra esse fato. Paraessa situação, a potência queé injetada se distribui pelas interligaçõeskm e k j conectadas à barra para que ocorra oequilíbrio de potência, e, conseqüentemente atenda à lei deKirchhoff de corrente nessabarra.
Figura 4.1 Injeção de potência na barrak
Considere que as interligações com a barrak sejam linhas de transmissão - estahipótese vale também para outros tipos de equipamentos. Então a corrente que é injetadapode ser calculada a partir da matriz Ybus, pegando-se ak-ésima linha dessa matriz emultiplicando-a pelo vetor de tensões de barra. Isto é equivalente ao seguinte resultado:
Ik =NB
∑m=1
YkmVm (4.1)
ondem no somatório somente deve ser computado, caso exista uma barra m que tenhaligação com a barrak . Caso cotrário, a admitânciaYkm = 0.

4.2. DETERMINAÇÃO DAS EQUAÇÕES DO FLUXO DE CARGA 53
A equação (4.1) pode ser colocada em uma outra forma, a qual é mais adequadapara ser utilizada no cálculo da potência injetada na barra.Ou seja:
Ik =NB
∑m=1
(Gkm+ jBkm)Vm∠θm (4.2)
ondeYkm foi desmembrado nas suas respectivas componentes real e imaginária e a tensãode barra foi colocada na sua forma complexa polarVm∠θm.
A injeção de potência na barrak é:
Sk = VkI∗k = Vk
NB
∑m=1
(Gkm− jBkm)Vm∠−θm, k = 1, . . . ,NB (4.3)
A expressão anterior pode ser rearranjada, ficando:
Sk = Vk
NB
∑m=1
(Gkm− jBkm)Vm∠(θk−θm), k = 1, . . . ,NB (4.4)
resultando em
Sk = Vk
NB
∑m=1
Vm[Gkmcosθkm+Bkmsenθkm]+ jVk
NB
∑m=1
Vm[Gkmsenθkm−Bkmcosθkm] (4.5)
ondeθkm = θk−θm é a abertura angular entre as barrask e m .
Da expressão (4.5), separando as partes real e imaginária deSk = Pk + jQk, tem-seas seguintes parcelas das potências ativa e reativa:
Pk = Vk
NB
∑m=1
Vm[Gkmcosθkm+Bkmsenθkm] (4.6)
Qk = Vk
NB
∑m=1
Vm[Gkmsenθkm−Bkmcosθkm] (4.7)
A potência injetadaSk é a composição de uma demanda de carga na barra,SCk,e/ou de geração,SGk, tendo como resultado, então, a potência líquidaSk = SGk−SCk, jácomentada antes.
Essa relação com a potência injetada na barra é importante para o entendimento arespeito dos tipos de barras que será visto a seguir.
54 4. FLUXO DE CARGA EM REDES CA
4.3 TIPOS DE BARRAS
As injeções de potência em uma barrak podem ser explicadas pela introdução de duasvariáveisPk e Qk, que dependem das tensões das barrak e daquelas as quais essa barraapresenta conexão. Em uma barrak pode haver tanto geração, quanto carga. Então, acomposição das potências pode ser interpretada como contribuições desses dois tipos deinjeção de potência. Para o caso de geração, a potência é convencionada como positiva.Ao contrário, para a carga, que é um elemento que sempre absorve potência ativa, ainjeção é considerada negativa. Assim, na situação de uma barra que apresenta geração ecarga, a potência injetada na barrak éPk = PGk−PCk, ondePGk é a potência ativa gerada ePCk é a potência ativa absorvida pela carga. Por exemplo, se em uma barra dessa naturezahá geração de 50 MW e uma carga de 30 MW, a potência injetada na barra é +20 MW. Omesmo raciocínio é aplicado ao caso da potência reativa. Ou seja,Qk = QGk−QCk, ondeQGk é a potência reativa gerada eQCk é a potência reativa absorvida pela carga (no casoda carga ser capacitiva, ela fornece potência reativa para abarra e neste casoQCk < 0).
As equações básicas para o fluxo de carga são aquelas definidasem (4.6) e (4.7).
Como para cada barra só é possível tirar duas equações e o número de incógnitasé superior a esse limite, algumas incógnitas na barra são fixadas, deixando evidente anecessidade de caracterizar cada barra do sistema, conforme será definido mais adiante.
Para análise de um sistema elétrico de potência em regime permanente, são necessáriosalguns dados básicos.
• Dados da rede - parâmetros de linhas de transmissão e de transformadores (R, X,bsh, tap, potência nominal de transformadores e topologia da rede).
• Dados de carga - potência ativa e reativa de cargas em todos os barramentos (quandonão há carga, esses parrâmetros são nulos).
• Dados de geração - despacho de geração e tensão que se estabelece para o controleda tensão da barra onde está o gerador ou outra indicada pelo usuário.
• Dados de barra - tensões nominais de todas as barras e outrasinformações de inter-esse.
Para caracterizar a topologia da rede é necessário apresentar apenas os dados de se-qüência positiva, pois tem-se interesse nos resultados considerando uma rede equilibrada.
A solução das equações básicas do fluxo de carga permite obter:
4.3. TIPOS DE BARRAS 55
• Tensões em toda a rede.
• Ajuste de taps dos transformadores.
• Carregamentos dos equipamentos e interligações.
• Perdas ativa e reativa.
• Potência reativa fornecida ou absorvida pelos geradores.
É usual em um sistema elétrico de potência se dividir as barras em três tipos, emfunção de duas das variáveis que devem ser especificadas.
BARRA tipo 1 ou de carga ou PQ - são fixadas a potência ativa e reativa da carga. Sãocalculadas a magnitude da tensão de barra e a fase. Em cada barra de carga sãoobtidas duas equações.
BARRA tipo 2 ou de geração ou PV- são fixads a potência ativa do gerador e a magni-tude da tensão. A fase da tensão é a incógnita que se calcula. Nesse tipo de barra éobtida uma única equação.
BARRA tipo 3 ou swing ou Vθ - são fixadas a magnitude da tensão e a fase. Assim,nenhuma equação deve ser utilizada para fins de cálculo das tensões de barra.Adota-se uma única barraswingem um sistema síncrono. É o gerador localizadonessa barra que absorve os desvios de potência necessários para atender a rede.Por isso, essa barra deve ser escolhida de modo que nela haja uma usina que tenhaelevada disponibilidade de potência.
Seja o caso em que um sistema elétrico apresente 100 barras, das quais 70 são decarga. Neste caso, a quantidade de equações necessárias para calcular todas as tensões nosistema será 2×70+29= 169.
Caso em uma mesma barra do sistema houver geração e carga, e a tensão nessa barraé controlada pelo gerador (magnitude constante), então essa barra é caracterizada comode geração. Os valores da potência ativa e reativa da carga devem ser convenientementeagregados aos respectivos valores de potência de geração.
56 4. FLUXO DE CARGA EM REDES CA
4.3.1 Aplicação ao Problema de Fluxo de carga
considere o exemplo descrito a seguir.
EEMPLO 4.5.1
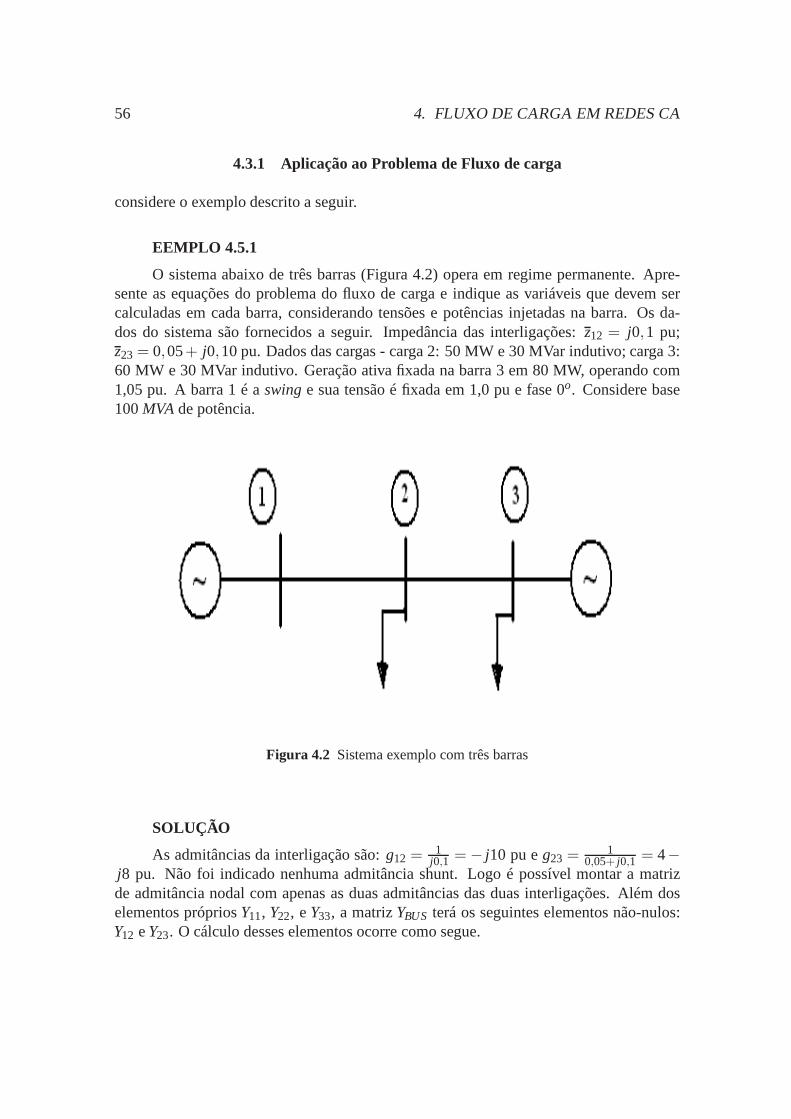
O sistema abaixo de três barras (Figura 4.2) opera em regime permanente. Apre-sente as equações do problema do fluxo de carga e indique as variáveis que devem sercalculadas em cada barra, considerando tensões e potênciasinjetadas na barra. Os da-dos do sistema são fornecidos a seguir. Impedância das interligações: z12 = j0,1 pu;z23 = 0,05+ j0,10 pu. Dados das cargas - carga 2: 50 MW e 30 MVar indutivo; carga 3:60 MW e 30 MVar indutivo. Geração ativa fixada na barra 3 em 80 MW, operando com1,05 pu. A barra 1 é aswinge sua tensão é fixada em 1,0 pu e fase 0o. Considere base100MVA de potência.
Figura 4.2 Sistema exemplo com três barras
SOLUÇÃO
As admitâncias da interligação são:g12 = 1j0,1 = − j10 pu eg23 = 1
0,05+ j0,1 = 4−j8 pu. Não foi indicado nenhuma admitância shunt. Logo é possível montar a matrizde admitância nodal com apenas as duas admitâncias das duas interligações. Além doselementos própriosY11, Y22, eY33, a matrizYBUS terá os seguintes elementos não-nulos:Y12 eY23. O cálculo desses elementos ocorre como segue.
4.3. TIPOS DE BARRAS 57
Y11 = − j10 pu; Y22 = − j10+(4− j8) = 4− j18 pu; Y33 = 4− j8 pu
Y12 = j10 pu; Y23 = −4+ j8 pu
Descreve-se agora o procedimento para obtenção das equações e incógnitas de in-teresse. Inicialmente, o objetivo é calcular amagnitude e a fase da tensão, em cada barrado sistema, a menos daquelas grandezas já fixadas.
Barra 1: é a barraswingdo sistema. Por essa razão devemos especificar a magni-tude e fase da tensão. Neste caso,V1 = 1,0∠0o. Portanto, nenhuma equação precisa sergerada para fins de cálculo de tensão.
Barra 2: é uma barra de carga. É especificada tanto a potência ativa, quanto apotência reativa da carga. Precisa ser gerado um conjunto deduas equações de balançode potência. A barra contribui com as incógnitas magnitude da tensãoV2 e a faseθ2.
Barra 3: é uma barra de geração. Neste caso, é especificada a potênciaativa e amagnitude da tensãoV3. Embora uma carga esteja ligada na barra, a tensão nessa barraé controlada pelo gerador, caracterizando assim uma barra de geração. A injeção depotência ativa na barra éP3 = PG3−PC3. Como a magnitude da tensão nesse tipo de barraé fixada, a única incógnita a ser determinada é o ânguloθ3 da tensão. Desse modo, umaúnica equação nessa barra é formada.
As equações para o sistema do exemplo são as seguintes:
Barra 2
−PC2 = V2V2(G22)+V2V1(G21cosθ21+B21senθ21)+V2V3(G23cosθ23+B23senθ23)(4.8)
−QC2 = V2V2(−B22)+V2V1(G21senθ21−B21cosθ21)+V2V3(G23senθ23−B23cosθ23)(4.9)
Barra 3
PG3−PC3 = V3V3(G33)+V3V2(G32cosθ32+B32senθ32) (4.10)
Para a situação dos dados fornecidos no exemplo, temos as seguintes equações:
Barra 2
−0,5 = 4V22 +V2×1,05(−4cosθ23+8senθ23)+V2×1(0×cosθ2+10senθ2) (4.11)
−0,3 = 18V22 +V2×1,05(−4senθ23−8cosθ23)+V2×1(0×senθ2−10cosθ2) (4.12)

58 4. FLUXO DE CARGA EM REDES CA
Barra 3
0,8−0,6 = 4×1,052+1,05×V2(−4cosθ32+8senθ32) (4.13)
Diante dos resultados anteriores, obtém-se um sistema de equações não-linear comtrês equações e três incógnitas. O sistema de equações é o apresentado a seguir.
−0,5 = 4V22 −4,2V2cos(θ2−θ3)+8,4V2sen(θ2−θ3)+10V2senθ2 (4.14)
−0,3 = 18V22 −4,2sen(θ2−θ3)−8,4V2cos(θ2−θ3)−10V2cosθ2) (4.15)
0,2 = 4,41−4,2V2cos(θ3−θ2)+8,4V2sen(θ3−θ2) (4.16)
Evidentemente, a solução do sistema de equações (6.1) a (6.3) não é trivial, vistoque se trata de sistema não-linear. Para solucioná-lo, são utilizados métodos iterativos,onde o mais empregado é o método de Newton-Raphson. Mesmo esse método precisade uma solução inicial adequada (ponto de partida inicial) para que o resultado convirjapara uma solução. A convergência pode vir a falhar para esse "chute"inicial. Aconte-cendo tal situação, pode-se tentar um outro ponto inicial. Não havendo convergência,ou o ponto de partida está muito distante da solução que se almeja, ou simplesmente aconvergência é inviável. Nessa situação, pode ser que o sistema esteja inadequadamenteajustado, ou parâmetros incorretos para o sistema em análise estão sendo utilizados. Porexemplo, passagem de fluxo de potência por um transformador ou linha cuja capacidadefoi exageradamente ultrapassada (sobrecarga excessiva).
Um ponto de partida usualmente adotado para as tensões nos barramentos é o queconsidera magnitude 1,0 pu nas barras de carga (flat starting ) e fase 0o. Uma outra alter-nativa utilizada é considerar algumas iterações que servemcomo refinamento do ponto departida inicial. O método utilizado nesse caso é o de Gauss-Seidel. O resultado do proced-imento iterativo do método de Gauss-Seidel é utilizado pelométodo de Newton-Raphsoncomo ponto de partida.
Na seção que se segue será vista a técnica de Newton-Raphson para a solução deum sistema não-linear de equações e em seguida a sua aplicação ao problema de fluxo decarga.
4.3. TIPOS DE BARRAS 59
EXERCÍCIOS PROPOSTOS
1) Considere um transformador trifásico com tap no lado de baixa tensão, cujapotência nominal é igual a 300 MVA e que apresenta nominalmente relação de tensõesde linha 13,8kV/500kV. A sua reatância para o tap nominal é igual a 8 % na base dotransformador. Considerando uma base de potência igual a 100 MVA e 13,8 kV no ladode baixa tensão, responda os itens a seguir.
a) Calcule o modelo equivalente do transformador, em pu da base apresentada, con-siderando que o tap foi ajustado para operar 12 % abaixo da tensão nominal. Neste caso,se o transformador operar a vazio, e for aplicada uma tensão de 13,2 kV no lado de baixatensão, determine a tensão no lado de alta.
b) No item a), calcule a corrente no lado de baixa tensão e a tensão de operaçãonecessária para alimentar uma carga conectada no lado de alta com tensão nominal, queabsorve potência ativa igual a 200 MW com fator de potência indutivo igual a 0,92.
c) Refazer os itens a) e b) considerando que o tap do transformador foi ajustado paraoperar 10 % acima do seu valor nominal.
2) Considere que três barras em um sistema que opera em 60 Hz estão interconec-tadas da seguinte forma: entre a barra 1 e 2, existe uma linha de transmissão cujosparâmetros são R=0,05 ohm/km, X=0,2 ohm/km e C=0,5 nF/km. Entre a barra 2 e a3, foi conectado o transformador descrito no problema 1, como tap ajustado em 10 %acima do valor nominal. Considerando que em todas as barras exista uma carga conec-tada, responda os itens a seguir.
a) Considere que a linha apresenta valores nominais para a tensão de 500 kV eque tem 150 km. Supondo uma base comum de tensão 13,8 kV no ladode baixa dotransformador e de potência igual a 100 MVA, determine o circuito elétrico equivalenteda rede elétrica em pu da base fornecida.
b) Considere as informações do item a) para responder os subitens que se seguem.
b.1) Determine a matriz de admitância nodal (Ybus) do sistema elétrico.
b.2) Determine a capacidade máxima de transmissão da linha de transmissão e dotransformador.
b.3) Considerando que a linha apresenta tensão nominal nas duas extremidades,calcule a potência reativa que ela gera nessas condições.
b.4) Suponha que as tensões nos barramentos são as seguintes: barra 1, 500 kV efase -35 graus; barra 2, 520 kV e fase -12 graus; barra 3, 13,4 kV e fase igual a 2 graus.Calcule as distribuições de fluxo de potência ativa e reativano transformador e na linha.
60 4. FLUXO DE CARGA EM REDES CA
Determine as correntes que saem de cada equipamento nessa condição de operação.
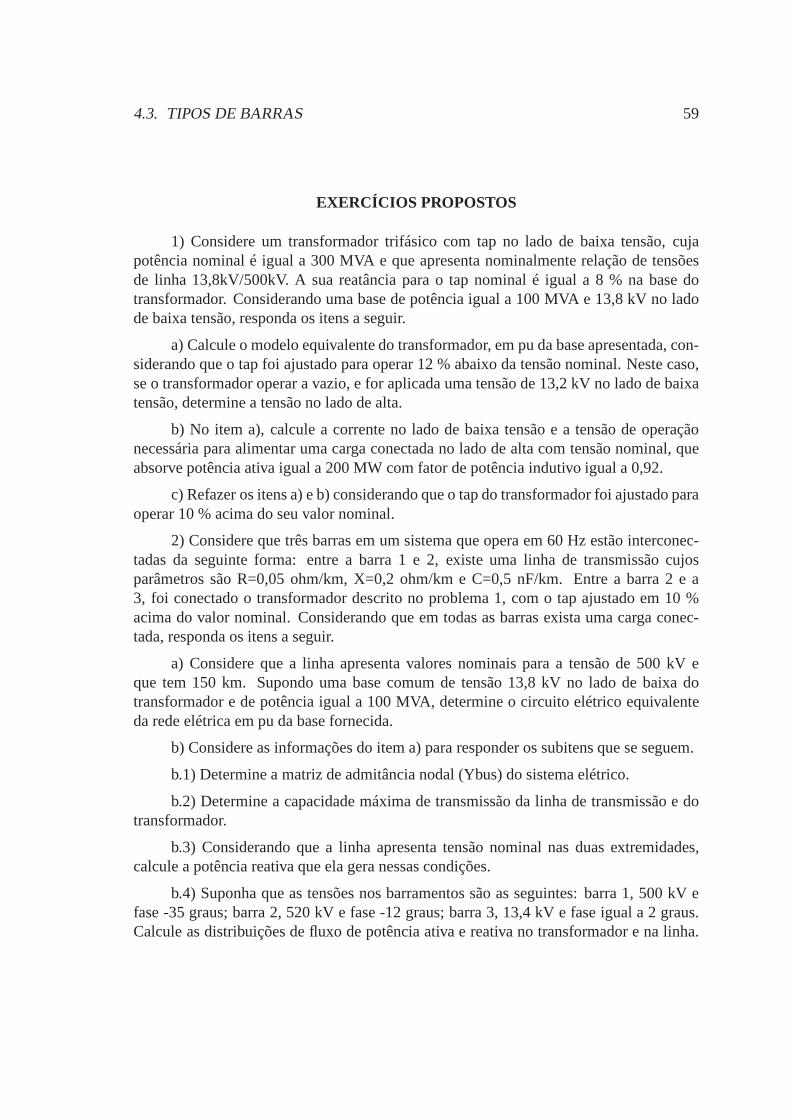
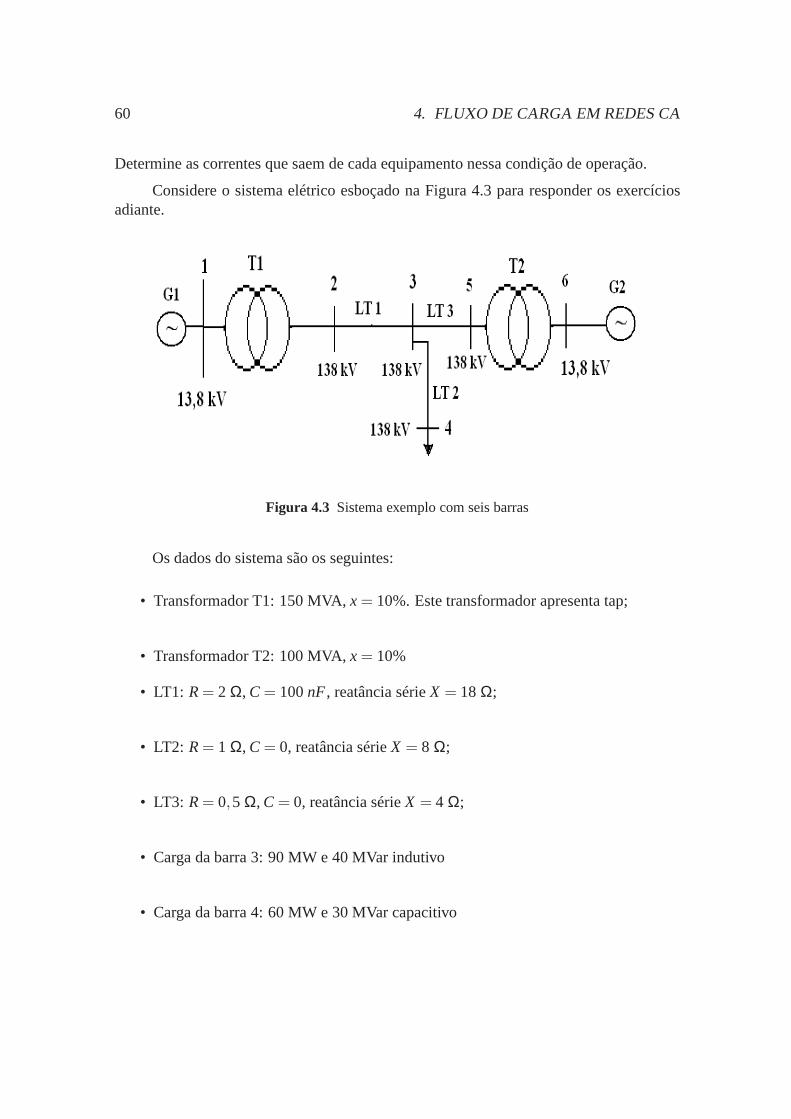
Considere o sistema elétrico esboçado na Figura 4.3 para responder os exercíciosadiante.
Figura 4.3 Sistema exemplo com seis barras
Os dados do sistema são os seguintes:
• Transformador T1: 150 MVA,x = 10%. Este transformador apresenta tap;
• Transformador T2: 100 MVA,x = 10%
• LT1: R= 2 Ω, C = 100nF, reatância sérieX = 18 Ω;
• LT2: R= 1 Ω, C = 0, reatância sérieX = 8 Ω;
• LT3: R= 0,5 Ω, C = 0, reatância sérieX = 4 Ω;
• Carga da barra 3: 90 MW e 40 MVar indutivo
• Carga da barra 4: 60 MW e 30 MVar capacitivo

4.3. TIPOS DE BARRAS 61
• O gerador G1 está conectado à barra swing e apresenta tensãoV = 1 pue fase zerograus. O gerador G2 opera comV = 1,02 pu e fornece potência ativa de 70 MW.
Suponha que o sistema funcione à freqüência de 60 Hz e considere base de potênciaigual a 100 MVA para conversão dos dados em pu.
3) Considerando o transformador T1 operando com tap nominal, determinar:
a) as grandezas e parâmetros em pu da rede. Adote tensão base igual a nominal emtodas as barras.
b) a matriz de admitância de barra (Ybus) para o sistema.
c) as tensões de operação (magnitude e fase) em cada barra do sistema;
d) as potências ativa e reativa fornecidas pelos geradores,bem como os fluxos ativoe reativo na entrada de cada linha e de cada transformador.
Considerar a representação em pu do sistema obtida no item a)para desenvolvi-mento dos cálculos.
4) Repetir os cálculos do exercício 3), mas agora considerando outras duas situaçõesde operação do transformador T1 (supostas dentro da faixa detaps mínimos e máximo):
a) tap ajustado em 0,95 pu;
b) tap ajustado em 1,03 pu.
5) Calcular a capacidade máxima de transmissão da linha 2, considerando apenassua reatância e tensões nominais nas suas duas extremidades.
62 4. FLUXO DE CARGA EM REDES CA
4.4 O MÉTODO DE NEWTON-RAPHSON
Considere um conjunto de equações do tipo:
f1(x1,x2, ...,xn) = 0f2(x1,x2, ...,xn) = 0...fn(x1,x2, ...,xn) = 0
O mesmo conjunto de equações pode ser colocado em uma forma matricial como:
f (x) = 0 (4.17)
A expressão def (x) na equação (4.17) pode ser expandida em uma série de Taylorem torno de um ponto de operaçãox(0). Considere nessa aproximação apenas a partelinear, sendo, portanto, desprezados os termos de ordem superior da série. Assim, aexpressão (4.17) é apresentada como:
f (x(0) +∆x) ≈ f (x(0))+∂ f (x)
∂x|x(0)∆x = 0 (4.18)
O termo ∂ f (x)∂x |x(0) na equação (4.18), quandof (x) é uma função multivariável, é
uma matriz quadradan×n denominadamatriz Jacobiana.
Calcular as raízes da equação (4.17) consiste em se determinar incrementos∆x naequação linear (4.18), em um processo iterativo, cujo pontode partida éx(0).
O método de Newton-Raphson possibilita o cálculo das raízesdo conjunto de equações,a partir do pontox(0), que é inicialmente estipulado pelo usuário. Caso a função em x(0)
seja nula, o pontox(0) é o próprio conjunto solução de (4.17). No entanto, tal chutedi-ficilmente acontece dessa forma. O mais provável é quef (x(0)) seja diferente de zero.O valor f (x(0)) é chamado deresíduo(mismatch). Se ele for diferente de zero, pode serutilizado para o cálculo futuro do desvio∆x da raiz em relação ao pontox(0), supostoanteriormente como raiz. Então, uma raíz atualizada é calculada em um novo ponto deoperação, designado comox(1), a partir do cálculo dex(1) = x(0) + ∆x(0). Caso nova-mente o valor absoluto do resíduof (x(1)) resulte não-nulo, e uma determinada tolerânciafoi alcançada, nova iteração deve ser efetuada. Agora, considerandox(1) como pontode operação. Desse modo, um novo ponto de operaçãox(2) seria buscado através dex(2) = x(1) + ∆x(1). O procedimento continua até que uma soluçaõ seja encontrada ou ométodo divirja, mediante observação de critéiro de parada do algoritmo, o qual pode sermonitorado através do valor absoluto do resíduo do maior elemento def (x), durante a

4.4. O MÉTODO DE NEWTON-RAPHSON 63
iteração. Ou monitorando-se a convergência por meio do valor absoluto do desvio∆x,também em cada iteração.
Em resumo, o método de Newton-Rapson consiste em se efetuar os seguintes pas-sos:
i) estabelecer um ponto de operação inicialx(0), fixark= 0 (k é um contadorde iterações) e definir uma tolerância de convergênciaε > 0, suficiente-mente pequena;
ii) calcular o valor da funçãof (x(k)) da iteraçãok;iii) caso a norma def (x(k)) seja inferior a uma tolerânciaε, o processo con-
vergiu ex(k) representa a solução de (4.17) e o processo iterativo é con-cluído. Caso contrário, ir para o passo iv).
iv) calcular o incremento∆x(k) por meio da expressão (4.18) da seguinteforma:
∆x(k) = −
[∂ f∂x
|x(k)
]−1
f (x(k))
e determinarx(k+1) como
x(k+1) = x(k) +∆x(k)
v) verificar seδ = ||x(k+1) − x(k)|| < ε. Caso isto ocorra,x(k) é admitidacomo raíz e o processo iterativo pára. Senão, incrementark e retornarao passo ii), se o número de iterações estabelecido pelo usuário não foiultrapassado.
A norma euclidiana de um vetor de dimensãon (ou seja,x =[
x(k)1 x(k)
2 ... x(k)n
]T,
ondex(k)i é um elemento do vetor) é dada por||x||2 =
√
(x(k)1 )2+(x(k)
2 )2+ ...+(x(k)n )2.
Antes da aplicação do método de Newton-Raphson ao problema de fluxo de carga,considere um exemplo que consiste em se determinar a soluçãode um sistema não-linearde equações que é representado pelas equações a seguir.
f1(x1,x2) = 10x21−10x1cos(x2)+0,5 = 0
f2(x1,x2) = 10x1sen(x2)+0,3 = 0
Para esse sistema de equações, supõe-se como ponto de partida para o método de
Newton-Rapsonx(0)1 = 1 ex(0)
2 = 0. O valor dex2, para efeito de cálculo, deve ser con-siderado em radianos. Ou seja o vetor inicial éx(0) = [1 0]T . Os valores das funções nopontox(0) são f1(x(0)) = 0,5 e f2(x(0)) = 0,3. Logo, o resíduof (x(0)) é diferente de zero.

64 4. FLUXO DE CARGA EM REDES CA
Deve-se buscar uma nova aproximação para a raíz, utilizandoa equação (4.18). Paraessa finalidade, é necessário calcular a matriz Jacobiana. Essa matriz para as equaçõesreferentes af1(x) e f2(x) é:
J =
[∂ f (x)
∂x
]
=
[ ∂ f1(x)∂x1
∂ f1(x)∂x2
∂ f2(x)∂x1
∂ f2(x)∂x2
]
Considerando o exposto, a matriz Jacobiana para o nosso exemplo será:
[∂ f (x)
∂x
]
=
[20x1−10cos(x2) 10x1sen(x2)
10sen(x2) 10x1cos(x2)
]
A avaliação deJ no ponto inicialx(0),
J =
[∂ f (x)
∂x
]
=
[10 00 10
]
Diante desse resultado,∆x(0) = −J−1 f (x(0)). Então
[∆x1
∆x2
]
= −
[10 00 10
]−1[ 0,50,3
]
=
[−0,05−0,03
]
Assim, encontra-sex(1)1 = 1,0+(−0,05) = 0,95. A outra variável seráx(1)
2 = 0,0+(−0,03) =−0,03. Busca-se então reavaliar a funçãof (x) nesse novo ponto de operação.
Verifica-se que nessa nova condição,f1(x(1)1 ) = 0,0293 e f2(x
(1)1 ) = 0,015. Esses dois
valores são diferentes de zero. Desse modo, o processo iterativo deve continuar, porque atolerância esperada não foi atingida.
Deve-se calcular a nova Jacobiana, considerando agora o pontox= [0,95 −0,03]T .A nova matriz Jacobiana é:
J =
[9,0045 −0,2850−0,3000 9,4957
]
O incremento emx para essa iteração será:
[∆x1∆x2
]
= −
[9,0045 −0,2850−0,3000 9,4957
]−1[0,02930,0150
]
=
[−0,0033−0,0017
]

4.4. O MÉTODO DE NEWTON-RAPHSON 65
Assim, os valores atualizados das variáveis são:x(2)1 = 0,95+(−0,033) = 0,9467
e x(2)2 = −0,03+(−0,0017) = −0,0317. Recalculando os valores def (x) nesses novos
valores, são encontrados:f1(x) = 1,21×10−4 e f2(x) = 5,62×10−5. Observe-se queesses valores já são inferiores em relação a uma tolerânciaε = 10−3, mesmo considerando-se o pior resíduo. Por outro lado, efetuando-se nova iteração, será obtido um refinamentoque resulta em∆x =
[−0,13×10−4 −0,064×10−5
]T, que leva a um valor dex com
maior precisão.
Seja novamente o conjunto de equações não-lineares resultante do fluxo de carga nosistema de três barras abordado antes, considerando o despacho de geração dos geradorese das cargas.
As funçõesf (x) associadas ao sistema de três barras são:
f1(x) = 4V22 −4,2V2cos(θ2−θ3)+8,4V2sen(θ2−θ3)+10V2senθ2+0,5
f2(x) = 18V22 −4,2V2sen(θ2−θ3)−8,4V2cos(θ2−θ3)−10V2cosθ2+0,3
f3(x) = −4,2V2cos(θ3−θ2)+8,4V2sen(θ3−θ2)+(4,41−0,2)
Resta agora calcular a matriz Jacobiana associada ao sistema, matriz essa que seráutilizada no processo iterativo.
As derivadas parciais para o sistema são as seguintes:
∂ f1(x)∂V2
= 8V2−4,2cos(θ2−θ3)+8,4sen(θ2−θ3)+10sen(θ2)∂ f1(x)
∂θ2= 4,2V2sen(θ2−θ3)+8,4V2cos(θ2−θ3)+10V2cos(θ2)
∂ f1(x)∂θ3
= −4,2V2sen(θ2−θ3)−8,4V2cos(θ2−θ3)
∂ f2(x)∂V2
= 36V2−4,2sen(θ2−θ3)−8,4cos(θ2−θ3)−10cos(θ2)∂ f2(x)
∂θ2= −4,2V2cos(θ2−θ3)+8,4V2sen(θ2−θ3)+10V2sen(θ2)
∂ f2(x)∂θ3
= 4,2V2cos(θ2−θ3)−8,4V2sen(θ2−θ3)
∂ f3(x)∂V2
= −4,2cos(θ3−θ2)+8,4sen(θ3−θ2)∂ f3(x)
∂θ2= −4,2V2sen(θ3−θ2)−8,4V2cos(θ3−θ2)
∂ f3(x)∂θ3
= 4,2V2sen(θ3−θ2)+8,4V2cos(θ3−θ2)
Seja o vetorx definido comox = [V2 θ2 θ3]T . Seja também o vetor correspon-
dente ao valor das funções em um determinado ponto de operação x da seguinte forma

66 4. FLUXO DE CARGA EM REDES CA
f = [ f1 f2 f3]T . Para o vetorx(0) da iteração inicial, "chuta-se"os seguintes valores:
V(0)2 = 1,0 pu;θ (0)
2 = 0o e θ (0)3 = 0o. Enfatiza-se que os valores dos ângulos, para efeito
de cálculo, devem ser considerados em radianos (transformar um valor de graus para radi-anos, consiste em se multiplicar o valor em graus pelo fatorπ
180. No caso da transformaçãoinversa, que é mais adequada para a apresentação dos resultados, basta multiplicar o valorem radianos por180
π .
Para efeito de apresentação dos resultados, será mostrado aseguir um programa emMatlabpara realizar os cálculos referentes à resolução do sistemanão-linear de equações.Os resultados são exibidos de modo seqüencial, tal como elessurgem na execução darotina numérica descrita a seguir.
% Rotina para cálculo da solução de um sistema não-linear% pelo método de Newton-Raphsonclear allx1 = 1.0; x2 = 0.0; x3 = 0.0; % ponto de operação de partida (chutado)x0 = [x1;x2;x3];% Estamos chamandox1 = V2; x2 = teta2; ex3 = teta3;epson= 1.0e−4; % tolerância para convergênciadelta= 1; % parâmetro para controle da convergênciamaxiteracoes= 10; % número máximo de iterações admitidasiteracao= 0;while delta > epson%——– calcular as funções f1 f2 e f3 com relação ao pontox = [x1;x2;x3]x1 = x0(1); x2 = x0(2); x3 = x0(3);disp(’iteração’)iteracaof 1 = 4∗ x1(2)− 4.2∗ x1∗ cos(x2− x3) + 8.4∗ x1∗ sin(x2− x3) + 10∗ x1∗
sin(x2)+0.5;f 2 = 18∗ x1(2)−4.2∗ x1∗ sin(x2−x3)−8.4∗ x1∗ cos(x2−x3)−10∗ x1∗
cos(x2)+0.3;f 3 = −4.2∗x1∗cos(x3−x2)+8.4∗x1∗sin(x3−x2)+4.21;f = [ f 1; f 2; f 3] % vetor f, que guarda os valores da função%——– calcular a matriz Jacobiana Jdisp(’Matriz Jacobiana da iteração’)J11= 8∗x1−4.2∗cos(x2−x3)+8.4∗sin(x2−x3)+10∗sin(x2);J12= 4.2∗x1∗sin(x2−x3)+8.4∗x1∗cos(x2−x3)+10∗x1∗cos(x2);J13= −4.2∗x1∗sin(x2−x3)−8.4∗x1∗cos(x2−x3);J21= 36∗x1−4.2∗sin(x2−x3)−8.4∗cos(x2−x3)−10∗cos(x2);J22= −4.2∗x1∗cos(x2−x3)+8.4∗x1∗sin(x2−x3)+10∗x1∗sin(x2);J23= 4.2∗x1∗cos(x2−x3)−8.4∗x1∗sin(x2−x3);
4.4. O MÉTODO DE NEWTON-RAPHSON 67
J31= −4.2∗cos(x3−x2)+8.4∗sin(x3−x2);J32= −4.2∗x1∗sin(x3−x2)−8.4∗x1∗cos(x3−x2);J33= 4.2∗x1∗sin(x3−x2)+8.4∗x1∗cos(x3−x2);J = [J11J12J13; J21 J22J23; J31J32J33]pause%———- cálculo do incremento do valor de x fixado na iteraçãoDx = −inv(J)∗ f%———- atualização do valor de xdisp(’Valor atualizado de x devido ao cálculo deDeltax’)x = x0+Dx%———- armazena os valores de x em x0 para efetuar nova iteraçãodelta= norm(Dx); % calcula a norma do vetor diferençax−x0x0 = x;disp(’delta - controle de convergência e de iterações’)deltaiteracao=iteracao+1pauseif iteracao > maxiteracoesdisp(’Não houve convergência para o numero de iterações fixado’)breakendend % fim do loop while
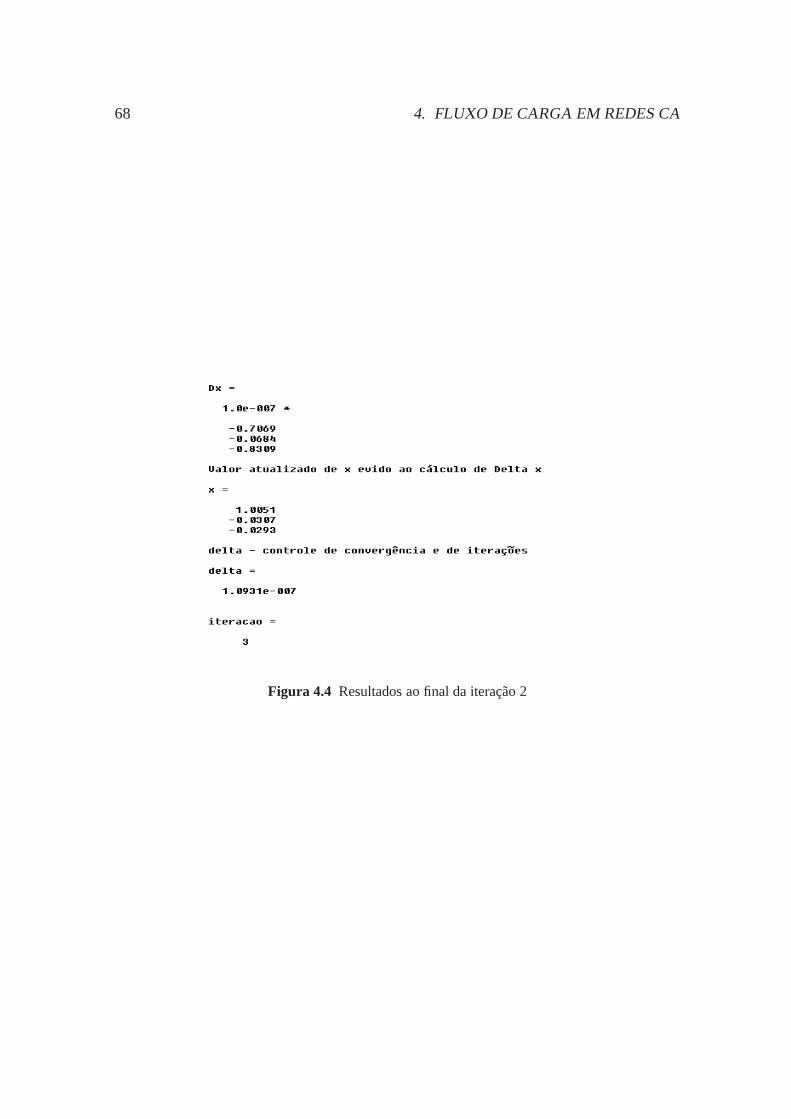
A seguir é apresentado o resultado obtido pelo programa. Foiestabelecido tolerân-cia de convergênciaε = 10−4 para a norma dos desvios dex. A Figura 4.4 mostra umasíntese dos resultados ao final do processo de convergência.
Houve convergência do processo iterativo já na segunda iteração, não sendo necessáriaa terceira.
Observa-se ao final que a convergência para a tolerância estabelecida ocorre comapenas três iterações.
68 4. FLUXO DE CARGA EM REDES CA
Figura 4.4 Resultados ao final da iteração 2
4.5. MATRIZ JACOBIANA NO PROBLEMA DE FLUXO DE CARGA 69
4.5 MATRIZ JACOBIANA NO PROBLEMA DE FLUXO DECARGA
No problema de fluxo de carga, o objetivo inicial é calcular osestados do sistema -mag-nitude das tensões de barra Vi e faseθi , resolvendo o sistema não-linear de equaçõesdefinido a seguir.
0 = −Pk−esp+
Pk(V,θ )︷ ︸︸ ︷
Vk
NB
∑m=1
Vm(Gkmcos(θkm)+Bkmsen(θkm)) = ∆Pk(V,θ) (4.19)
0 = −Qk−esp+Vk
NB
∑m=1
Vm(Gkmsen(θkm)−Bkmcos(θkm))
︸ ︷︷ ︸
Qk(V,θ )
= ∆Qk(V,θ) (4.20)
Observe-se que em (4.19) e (4.20)∆Pk(V,θ) e ∆Qk(V,θ) correspondem aos resí-duos da solução, a cada iteração, das equações não-lineares. As duas equações (4.19) e(4.20) estão presentes em barras de carga (tipo PQ). Contudo, nas barras de geração (tipoPV) são necessárias apenas equações na forma indicada por (4.19).
Note-se que∆Pk(V,θ) e ∆Qk(V,θ) são calculados como:
∆Pk(V,θ) = −Pk−esp+Pk(V,θ) (4.21)
∆Qk(V,θ) = −Qk−esp+Qk(V,θ) (4.22)
ondePk−espeQk−espsão a potência ativa e reativa injetada na barra, respectivamente.
Pk−esp e Qk−esp são termos constantes, pois são valores especificados. Parares-olução do sistema de equações (4.19) e (4.20), fazemos uso damatriz jacobiana, que seráinserida no problema adiante.
Para compreensão do processo de resolução do problema de equações não-lineares,considere que se queira calcular as raízes associadas às equações não-lineares, a partir deuma solução inicial desconhecida, obtida por meio de uma estimativa; e por meio de umaaproximação linear, na iteração (i). Desta forma, é possível escrever o novo sistema deequações da seguinte forma:

70 4. FLUXO DE CARGA EM REDES CA
∆Pk(V(i),θ (i)) =
NB
∑m=1,m6=swing
∂Pk(V,θ)
∂θm∆θm+
NB
∑j=1, j∈barra PQ
∂Pk(V,θ)
∂θ j∆Vj (4.23)
∆Qk(V(i),θ (i)) =
NB
∑m=1,m6=swing
∂Qk(V,θ)
∂θm∆θm+
NB
∑j=1, j∈barra PQ
∂Qk(V,θ)
∂θ j∆Vj (4.24)
Os mismatches (desvios) do valor exato em relação ao valor aproximado na iter-ação(i) são definidos de acordo com as expressões (4.21) e (4.22) paraas potências ativae reativa, respectivamente. Quando o número de iteração é incrementado, havendo con-vergência, os valores absolutos dos mismatches tendem a zero. Como buscam-se raízes
numéricas, aceita-se que em uma determinada iteração, quandomáximo(|∆P(i)k |, |∆Q(i)
k |) <
ε, sendoε > 0 e suficientemente pequeno, por exemplo, 10−3, as raízes(V(i),θ (i)) satis-façam a solução do problema.
Portanto, para cada iteração(i), e um ponto de operação(V(i),θ (i)), deve-se calcularos desvios∆V(i) e ∆θ (i) como segue.
[∆θ (i)
∆V(i)
]
= −
[∂P(V,θ )
∂θ∂P(V,θ )
∂V∂Q(V,θ )
∂θ∂Q(V,θ )
∂V
]−1[∆P(i)
∆Q(i)
]
= −
[H NM L
]−1[ ∆P(i)
∆Q(i)
]
ondeH, N, M e L são submatrizes da matriz Jacobiana; o vetorθ (i) (deve-se excluir abarra swing) é
∆θ (i) =[
∆θ (i)1 ∆θ (i)
2 . . .∆θ (i)NB
]T
o vetor de tensões (somente barras PQ) é
∆V(i) =[
∆V(i)1 ∆V(i)
2 . . .∆V(i)NB
]T
∆P(i) é o vetor dos mismatches em cada barra de carga e de geração; e∆Q(i)k é o vetor dos
mismatches em cada barra de geração.
As submatrizesH, N, M e L dependem das derivadas dePk(V,θ) e Qk(V,θ) comrelação às variáveis de estado.
Por fim, para a iteração(i +1) as raízes são atualizadas da seguinte forma:
θ (i+1) = θ (i) +∆θ (i)
V(i+1) = V(i) +∆V(i)
O cálculo das matrizesH, N, M eL deve ser considerado para a iteração(i).

4.5. MATRIZ JACOBIANA NO PROBLEMA DE FLUXO DE CARGA 71
4.5.1 Obtenção da Matriz H
A matriz H é obtida a partir de derivadas dePk(Vk,θk com relação aθm. A derivadaindica a sensibilidade das potências ativa nas barras de carga e de geração em relação àsvariações dos ângulos das tensões de barra.
As derivadas devem ser calculadas, a cada iteraçãoi, para barrasPQ e PV. Assim,se um sistema tiver 10 barras, sendo que em cinco delas há geração, a dimensão da matrizH seránH × nH , ondenH = nPQ+nPV = 5+(5−1) = 9. Note-se que uma das barrasonde há geração deve ser considerada comoswing.
As derivadas dePk com relação aθm devem ser consideradas a partir da expressão(4.19) levando-se em conta as situações quandom= k e quandom 6= k de formas distin-tas. Isto facilita o entendimento, porque as fases aparecemnas expressões na forma deabertura angular entre barras. No entanto, as derivadas sãocalculadas em relação a umdeterminado ângulo de fase, a cada vez.
Situação em quem= k
A potênciaPk, nesta situação, pode ser desmembrada da seguinte forma:
Pk(V,θ) = V2k Gkk+Vk
NB
∑m=1,m6=k
Vm(Gkmcos(θk−θm)+Bkmsen(θk−θm)) (4.25)
Observe-se que dentro do somatório que aparece na expressão(4.25), não é incluídoo termo no qualm= k. A expressão nessa forma é mais apropriada para se determinar asderivadas∂Pk
∂θke ∂Pk
∂Vk.
A derivada dePk com relação à faseθk é:
∂Pk(V,θ)
∂θk= Vk
NB
∑m=1,m6=k
Vm(−Gkmsen(θk−θm)+Bkmcos(θk−θm)) =
= −Vk
NB
∑m=1,m6=k
Vm(Gkmsen(θkm)−Bkmcos(θkm)) =
= −[V2
k Bkk+Qk(V,θ)]
(4.26)
Portanto Hkk = −V2k Bkk−Qk(V,θ) .
72 4. FLUXO DE CARGA EM REDES CA
Situação em quem 6= k
Nessa situação, pode ser mostrado que:
∂Pk(V,θ)
∂θm= VkVm(Gkmsen(θkm)−Bkmcos(θkm)) (4.27)
Portanto,Hkm = VkVm[Gkmsen(θkm)−Bkmcos(θkm)] .
4.5.2 Matrizes N, M e L
As demais submatrizes da Jacobiana são obtidas de modo semelhante ao procedimentoadotado para se calcularH.
Elementos da matrizN
Nkm =∂Pk(V,θ)
∂Vm= Vk [Gkmcos(θkm)+Bkmsen(θkm)] (4.28)
Nkk =∂Pk(V,θ)
∂Vk= VkGkk+
Pk(V,θ)
Vk(4.29)
A matriz N tem o mesmo número de linhas da matrizH. Mas, o seu número decolunas é igual ao número de barrasPQ. Isto se deve ao fato dessa matriz descrever asensibilidade das potências ativas em relação às variaçõesdas magnitudes das tensões debarra, que naturalmente só variam nas barras de carga.
Elementos da matrizM
Mkm =∂Qk(V,θ)
∂θm= −VkVm[Gkmcos(θkm)+Bkmsen(θkm)] (4.30)
Mkk =∂Qk(V,θ)
∂θk= −V2
k Gkk+Pk(V,θ) (4.31)
A matriz M descreve a sensibilidade das potências reativas nas barrasde carga emrelação aos ângulos das tensões de barra.
Elementos da matrizL
4.5. MATRIZ JACOBIANA NO PROBLEMA DE FLUXO DE CARGA 73
Lkm =∂Qk(V,θ)
∂Vm= Vk [Gkmsen(θkm)−Bkmcos(θkm)] (4.32)
Lkk =∂Qk(V,θ)
∂Vk= −VkBkk+
Qk(V,θ)
Vk(4.33)
A matriz L descreve a sensibilidade das potências reativas nas barrasde carga emrelação às magnitudes das tensões nas barras de carga.
EXEMPLO 4.5.1
Apresente a estrutura das submatrizes H, N, M e L que formam a matriz Jacobianado sistema caracterizado pelo diagrama unifilar da Figura 4.5. Indique porX o provávelelemento não-nulo em cada matriz; e por 0 o elemento que for nulo. Considere que abarra 1 seja aswing.
Figura 4.5 Sistema com quatro barras
SOLUÇÃO
Matriz H

74 4. FLUXO DE CARGA EM REDES CA
A matriz H será calculada considerando a sensibilidade das potênciasativas nasbarras 2, 3 e 4 em relação aθ2 (coluna 1),θ3 (coluna 2) eθ4 (coluna 4). Dessa forma
H =
X X XX X 0X 0 X
Matriz N
A matriz N será calculada considerando a sensibilidade das potênciasativas nasbarras 2, 3 e 4 em relação aV2 (coluna 1) eV4 (coluna 2). Assim
N =
X XX 0X X
Matriz M
A matriz M será calculada considerando a sensibilidade das potênciasreativas nasbarras de carga (barras 2 e 4) em relação aθ2, θ3 e θ4. Dessa forma
M =
[X X XX 0 X
]
Matriz L
A matriz L será calculada considerando a sensibilidade das potênciasreativas nasbarras 2 e 4 em relação aV2 eV4. Assim
L =
[X XX X
]
No total, a matriz Jacobiana do problema de fluxo de carga é umamatriz quadrada,apresentandoN = 2NPQ + NPV linhas e colunas. A matriz Jacobiana é não-singular,porque precisa ser invertida durante o processo iterativo para resolução do problema defluxo de carga pelo método de Newton-Raphson.
Portanto, calculada a matriz JacobianaJ, é possível calcular os incrementos∆θ (i) e∆V(i). Esses incrementos são então utilizados para atualização dos valoresV(i) e θ (i) nométodo de Newton-Raphson, conforme algoritmo descrito a seguir.
ALGORITMO 1
i) Definir um ponto de operação inicialV(0), θ (0) e fazeri = 0;

4.5. MATRIZ JACOBIANA NO PROBLEMA DE FLUXO DE CARGA 75
ii) calcular os desvios∆P(V(i),θ (i)) e ∆Q(V(i),θ (i));
iii) verificar se os desvios absolutos calculados em ii) são inferiores a umatolerânciaε > 0. Caso afirmativo, parar: a convergência foi alcançada; casocontrário, prosseguir para o passo iv);
iv) montar a matriz JacobianaJ a partir do cálculo das submatrizes H, N, Me L;
v) calcular os incrementos∆V(i) e ∆θ (i)) por meio de
[∆θ (i)
∆V(i)
]
= −
[H NM L
]−1[ ∆P(i)
∆Q(i)
]
= −J−1[
∆P(i)
∆Q(i)
]
vi) atualizar as tensões e fases por meio de
V(i+1) = V(i) +∆V(i)
θ (i+1) = θ (i) +∆θ (i)
incrementar o contadori e retornar ao passo ii).
EXEMPLO 4.5.2
Considere um sistema de duas barras, no qual na barra 1, está conectado um gerador.Esta barra é aswingdo sistema, apresentando magnitude de tensão igual a 1 pu e fasezero. À barra 2 é conectado um motor que absorve 0,3 pu de potência ativa. Essa barra écontrolada (tipo PV), sendo a tensão controlada em 1,0 pu. A interligação entre as duasbarras é realizada por meio de uma linha de transmissão cujosparâmetros são:R= 0,1 pu,X = 0,8 pu e carregamento igual a 0,05 pu. Determine o ângulo da tensão na barra 2,considerando uma tolerância de 0,001 para o desvio máximo doerro de potência após aconvergência do problema de fluxo de carga. Após isso, calcule a potência injetada nabarraswing, a potência reativa injetada na barra 2, e as perdas no sistema.
SOLUÇÃO
Inicialmente é necessário montar a matriz de admitância de barra (matrizYBUS). Apartir das informações fornecidas, a impedância série da linha éZ12 = 0,1+ j0,8 pu.Portanto, a admitância do ramo 1-2 é ¯y12 = 1
Z12= 1
0,1+ j0,8 = 0,1538− j1,2308 pu.

76 4. FLUXO DE CARGA EM REDES CA
Ao circuito equivalente da linha, no seu modelo emπ , deve-se acrescentar as ad-mitâncias ¯ysh= j bsh
2 = j0,025 pu às duas extremidades da linha, devido ao carregamento.
Com as informações anteriores, a matriz de admitância de barra do sistema é
YBUS=
[0,1538 - j1,2058 -0,1538 + j1,2308
-0,1538 + j1,2308 0,1538 - j1,2058
]
Desta forma, desmembrandoYBUS na forma de matriz de condutânciaG e de sus-ceptânciaB, tem-se:
G =
[0,1538 -0,1538-0,1538 0,1538
]
B =
[-1,2058 1,23081,2308 - 1,2058
]
O sistema apresenta apenas uma incógnita a ser determinada,que é o ângulo dabarra 2, porque no global há apenas uma barraswing(cujo módulo da tensão e fase já sãoconhecidos) e uma barra PV, onde se tem apenas a magnitude da tensão conhecida.
Para aplicar oAlgoritmo 1, considere queP2−esp= −0,3 e suponhaθ (0)2 = 0 radi-
anos. Façai = 0 e realize o processo iterativo para determinar o ângulo final. Lembre-sequeV1 = 1 pu,θ1 = 0 radianos eV2 = 1 pu.
iteração 0 - primeira iteração
Calcular inicialmente o mismatch∆P(0)2 . Para isto, torna-se necessário calcular
P2(V(0),θ (0)).
Para qualquer iteração tem-se:
P2(V,θ) = V2V1[G(21)cosθ21+B(21)senθ21]+V22 G(22) =
= −0,1538cosθ2+1,2308senθ2+0,1538
Assim, comθ (0)2 = 0, tem-se:
P2(V(0),θ (0)) = −0,1538cosθ (0)
2 +1,2308senθ (0)2 +0,1538= 0
Desta forma, obtém-se o mismatch:
∆P2(V(0),θ (0)) = −(−0,3)−0 = 0,3 pu ⇒ |∆P2(V
(0),θ (0))| > ε
Assim, a iteração deve prosseguir.

4.5. MATRIZ JACOBIANA NO PROBLEMA DE FLUXO DE CARGA 77
Deve-se calcular somente a matriz H para este problema, poisa a única incógnitaé a fase. Uma outra observação é que basta calcular o termo em quem= k deH, já quepretende-se calcular o próprio ângulo da barra 2. Neste caso, deve-se utilizar a expressão(4.26). Antes, deve ser calculada a potência reativa na barra. Ou seja
Q2(V,θ) = V2V1[G(21)senθ21−B(21)cosθ21]+V22 (−B(22)) =
= −0,1538senθ2−1,2308cosθ2+1,2058
na situação em queθ (0)2 = 0, Q2(V(0),θ (0)) = −0,025 pu. Desta forma
H(0)22 = −12(−1,2058)− (−0,025) = 1,2308
Então
∆θ (0)2 = −(H(0)
22 )−1×∆P(0)2 = −(0,3)/1,2308= −0,2437rad
O ângulo atualizado na barra 2 será:
θ (1)2 = θ (0)
2 +∆θ (0)2 = 0+(−0,2437) = −0,2437rad
Concluído o processo de cálculo na primeira iteração. Vamosavançar para a se-gunda iteração e fazermosi = 1.
iteração 1 - segunda iteração
Como primeiro procedimento, deve ser verificado se omismatché atendido com a
variável previamente calculada. Com o valor deθ (1)2 , tem-se:
P2(V(1),θ (1)) = −0,1538cosθ (1)
2 +1,2308senθ (1)2 +0,1538= −0,2925
Desta forma, obtém-se o mismatch:
∆P2(V,θ (1)) = −(−0,3)−0,2925= 0,0075pu ⇒ |∆P2(V,θ (1))| > ε
Novamente, a iteração deve prosseguir.
Procedendo-se de modo semelhante para os cálculos deH(1)22 e ∆θ (1)
2 , tem-se:
H(1)22 = 1,1573 ⇒ ∆θ (1) = −0,0075/1,1573= −0,0065rad

78 4. FLUXO DE CARGA EM REDES CA
O ângulo será atualizado como segue.
θ (2)2 = θ (1)
2 +∆θ (1)2 = −0,2437+(−0,0065) = −0,2502rad
É concluída, assim, a segunda iteração e parte-se para a terceira.
iteração 2 - terceira iteração
Mais uma vez, como procedimento inicial da iteração, deve ser verificado se o ân-gulo calculado na iteração anterior já atende à tolerânciaε = 0,001 estabelecida para omismatch.
Efetuando o cálculo, obtém-se:
P2(V,θ (2)) = −0,30001
Desta forma, obtém-se o mismatch:
∆P2(V,θ (2)) = −(−0,3)−0,30001= 1×10−5 pu ⇒ |∆P2(V,θ (2))| < ε
Portanto, a convergência foi alcançada na segunda iteração, encontrando-se o ân-guloθ2 de aproximadamente -0,2502 rad ou−0,2502× 180
π = −14,33o.
Nesse ponto, é possível calcular as potências injetadas nasbarras e as perdas nalinha.
As potências injetadas nas barras são:P1, P2, Q1, Q2. Para o caso da barra 2, faltacalcularQ2, que é
Q2(V,θ) = 0,0514pu.
A potência reativa injetada na barra 1 é calculada como:
Q1(V,θ) = V1V2[G(12)senθ12−B(12)cosθ12]+V21 (−B(11)) =
= −0,1538sen(−θ2)−1,2308cos(−θ2)+1,2058= −0,025 pu.
O cálculo da potência ativa injetada na barra 1 leva ao seguinte resultado:
P1(V,θ) = −0,1538cos(−θ2)+1,2308sen(−θ2)+0,1538= 0,3096pu
.
Tendo em vista as potências injetadas na barra 1, que é a swing, e que não ex-iste carga naquela barra, então a potência gerada pelo gerador é igual aSG1 = 0,3096−j0,025pu. Essa é também a potência enviada para a linha a partir do terminal do geradorna barra 1. Por outro lado, na barra 2, a potência injetada éSG2 =−0,3000+ j0,0514pu.

4.5. MATRIZ JACOBIANA NO PROBLEMA DE FLUXO DE CARGA 79
Como também não há carga nesta barra,SG2 é também a potência complexa enviada paraa linha, a partir do terminal da linha localizado na barra 2.
Somando-se as potências complexas que são enviadas em cada terminal da linha,obedecendo aos sinais adotados, obtêm-se as perdas na linha. Procedendo dessa forma,as perdas são:
Sperdas(12) = SG1+SG2 =(0,3096−0,3000)+ j(−0,025+0,0514) = 0,0096+ j0,0264pu
Assim, as perdas ativa e reativa na linha são 0,0096 pu e 0,0264 pu, respectivamente.
EXEMPLO 4.5.3
Considere que no exemplo 4.5.2 a barra onde está conectada a carga não seja maiscontrolada. A potência reativa absorvida pela carga é iguala 0,05 pu. Calcular a tensãona barra 2, bem como a potência gerada pela swing.
SOLUÇÃO
Neste exemplo, não há alteração na matrizYBUS em relação ao exemplo anterior.portanto, É possível iniciar o processo iterativo para calcular os estados do sistema.
Inicialmente, supõe-se queV(0)2 = 1 pu, θ (0)
2 = 0 rad. Lembre-se queV1 = 1 pu eθ1 = 0 rad.
iteração 0 - primeira iteração
Calcular inicialmente os mismatches∆P(0)2 e ∆Q(0)
2 . Entretanto, é preciso calcularantesP2(V(0),θ (0)) eQ2(V(0),θ (0)).
Para qualquer iteração, tem-se:
P2(V,θ) = V2V1[G(21)cosθ21+B(21)senθ21]+V22 G(22) =
= −0,1538V2cosθ2+1,2308V2senθ2+0,1538V22
Q2(V,θ) = V2V1[G(2,1)senθ21−B(2,1)cosθ21]+V22 (−B(2,2)) =
= −0,1538V2senθ2−1,2308V2cosθ2+1,2058V22
Paraθ (0)2 = 0, tem-se:
P2(V(0),θ (0)) = 0

80 4. FLUXO DE CARGA EM REDES CA
Desta forma, obtém-se o mismatch:
∆P2(V(0),θ (0)) = −(−0,3)+0 = 0,03 pu ⇒ |∆P2(V
(0),θ (0))| > ε
Q2(V(0),θ (0)) = −0,025 pu
∆Q2(V(0),θ (0)) = −(−0,05)+(−0,025) = 0,025 pu ⇒ |∆Q2(V
(0),θ (0))| > ε
Assim, a iteração deve prosseguir.
Aqui é necessário calcular as matrizes H, N, M e L na situação em quem = ksomente.
Logo
H(0)22 = −V2(0)
2 B(22) −Q(0)2 = 1,2308pu
N(0)22 = −V2G(22) +
P(0)2
V(0)2
= 0,1538pu
M(0)22 = −V2(0)
2 G(2,2) +P(0)2 = −0,1538pu
L(0)22 = −V2B(22) +
Q(0)2
V(0)2
= 1,1808pu
A matriz jacobianaJ será:
J(0) =
[1,2308 0,1538-0,1538 1,1808
]
Os incrementos serão:
[
∆θ (0)2
∆V(0)2
]
= −[
J(0)]−1[
0,300,025
]
=
[−0,2372−0,0521
]
A atualização das variáveis de estado será:
θ (1)2 = θ (0)
2 +∆θ (0)2 = 0+(−0,2372) = −0,2372rad

4.5. MATRIZ JACOBIANA NO PROBLEMA DE FLUXO DE CARGA 81
V(1)2 = V(0)
2 +∆V(0)2 = 1−0,0521= 0,9479pu
iteração 1 - segunda iteração
Para os valores das variáveis de estado determinados anteriormente, chega-se aos
seguintes desvios de potência:∆P(1)2 = 0,0223 pu e ∆Q(1)
2 = 0,0337 pu. Claramente,esses valores não atendem aomismatchfixado. Prosseguindo a iteração, são calculadosos seguintes valores na iteração para os desvios da magnitude e fase da tensão na barra
2: ∆θ (1)2 = −0,0255rad e ∆V(1)
2 = −0,0394pu. Assim, as variáveis são atualizadas daseguinte forma:
θ (2)2 = θ (1)
2 +∆θ (1)2 = −0,2628rad
V(2)2 = V(1)
2 +∆V(1)2 = 0,9085pu.
iteração 2 - terceira iteração
Na terceira iteração os desvios são:∆P(2)2 = −0,0019pu e ∆Q(2)
2 = −0,0025pu.Assim, a convergência não foi alcançada.
Na iteração seguinte a convergência é obtida, alcançando-se os seguintes mismatches:
∆P(3)2 = 7,2×10−6 pue∆Q(3)
2 = 7,1×10−6 pu. Portanto, o valor da magnitude da tensãoV2 e do ângulo foram 0,906 pu e -0,2647 rad, respectivamente.
As potências injetadas nas barras são:P1, P2, Q1, Q2. Para o caso da barra 2, são:
P2(V,θ) = −0,3000pu
.Q2(V,θ) = −0,0500pu.
A potência reativa injetada na barra 1 é calculada como:
Q1(V,θ) = 0,093 pu.
O cálculo da potência ativa injetada na barra 1 leva ao seguinte resultado:
P1(V,θ) = 0,3111pu
.
A potência injetada na barra 1, que é aswing, seráSG1 = 0,3111+ j0,093 pu. Nabarra 2, seráSG2 = −0,3000− j0,0500pu.
As perdas na linha são:

82 4. FLUXO DE CARGA EM REDES CA
Sperdas(1,2) = SG1+SG2 =(0,3111−0,3000)+ j(0,093−0,050) = 0,0111+ j0,0430pu
Assim, as perdas ativa e reativa na linha são 0,0111 pu e 0,0430 pu, respectivamente.
EXERCÍCIOS PRPOSTOS
1) Repetir o exemplo 1, considerando injeção de potência na barra 2 de -0,5 pu etensão ajustada nessa barra em 1,03 pu.
2) Repetir o exemplo 2 para dois carregamentos distintos na barra 2:
a) a carga foi ajustada de modo a absorver 0,45 pu de potência ativa e 0,10 pu depotência reativa;
b) a carga foi ajustada para absorver 0,5 pu de potência ativae gerar 0,10 pu depotência reativa.
EXEMPLO 3.4
Considere o sistema de três barras da (Figura 4.6) já apresentado em capítulo ante-rior. Os dados do sistema são os seguintes: impedância das interligações -z1−2 = j0,1pu; z2−3 = 0,05+ j0,10 pu. Dados das cargas: carga 2, de 50 MW e 30 Mvar indutivo;carga 3, de 60 MW e 30 MVar indutivo. Geração ativa fixada na barra 3 em 80 MW,operando com 1,05 pu. A barra 1 é a swing e sua tensão é fixada em 1,0 pu e fase 0o.Considere base 100 MVA de potência. Suponha uma tolerância para a convergência de0,001. Calcule os estados do sistema.
Solução:
A matriz YBUS para esse sistema já foi calculada antes, sendo os seus elementosnão-nulos repetidos a seguir, por conveniência.
Y11 = − j10 pu; Y22 = − j10+(4− j8) = 4− j18 pu; Y33 = 4− j8 pu
Y12 = j10 pu; Y23 = −4+ j8 pu
Uma vez que a base do sistema é igual a 100 MVA, as potências injetadas nas barrasdo sistema, que não seja aswing, serão:P2 = −0,5 pu, Q2 = −0,3 pu; P3 = 80−60
100 =0,2 pu. Vamos supor que as variáveis de estado desconhecidas assumam os valores de
partida:V(0)2 = 1 pu, θ (0)
2 = θ (0)3 = 0 rad. Sabe-se ainda queV1 = 1 pu, θ1 = 0 rad e
V3 = 1,05 pu. Desta forma, pode-se iniciar o processo iterativo do método de Newton-Raphson.
4.5. MATRIZ JACOBIANA NO PROBLEMA DE FLUXO DE CARGA 83
Figura 4.6 Sistema exemplo com três barras
iteração 0 - primeira iteração
Vamos calcular inicialmente os mismatches associados às barras. Devem ser calcu-lados∆P(0)
2 , ∆Q(0)2 e ∆P(0)
3 .
Para isto calculemosP2(V(0),θ (0)), Q2(V(0),θ (0)) eP3(V(0),θ (0)).
Para qualquer iteração tem-se:
Barra 2
∆P2(V,θ) =−Pesp−2+V2V2(G2,2)+V2V1(G2,1cosθ21+B21senθ21)+V2V3(G2,3cosθ23+B23senθ23)
∆Q2(V,θ) =−Qesp−2+V2V2(−B2,2)+V2V1(G2,1senθ21−B21cosθ21)+V2V3(G2,3senθ23−B23cosθ23)
Barra 3
∆P3(V,θ) = −Pesp−3+V3V3(G3,3)+V3V2(G3,2cosθ32+B32senθ32)
Com os dados do sistema, são obtidas as seguintes equações:
Barra 2
∆P2(V,θ) =−(−0,5)+4V22 +V2×1,05(−4cosθ23+8senθ23)+V2×1(0×cosθ2+10senθ2)

84 4. FLUXO DE CARGA EM REDES CA
∆Q2(V,θ) =−(−0,3)+18V22 +V2×1,05(−4senθ23−8cosθ23)+V2×1(0×senθ2−10cosθ2)
Barra 3
∆P3(V,θ) = −0,2+4×1,052+1,05×V2(−4cosθ32+8senθ32)
Com os valores iniciais, encontram-se:P2(V(0),θ (0)) = −0,2 pu, P3(V(0),θ (0)) =0,21 pueQ2(V(0),θ (0)) =−0,4 pu. Conseqüentemente,∆P2(V(0),θ (0)) = 0,3 pu, ∆P3(V(0),θ (0)) =0,01 pu e ∆Q2(V(0),θ (0)) = −0,1 pu. Esses valores não atendem ao mismatch estabele-cido.
Iteração 0
Deve-se calcular primeiramente a matriz JacobianaJ. As quatros matrizes compo-nentes deJ têm as estruturas apresentadas a seguir.
H =
[H2,2 H2,3
H3,2 H3,3
]
N =
[N2,2N3,2
]
M =[
M2,2 M2,3]
L =[
L2,2]
A partir das matrizes apresentadas, fica evidente os casos emquem= k em 6= k nocálculo dos elementos das matrizes.
Matriz Jacobiana da primeira iteração
Aplicando-se as expressões para cálculo das matrizes H, N, Me L na primeiraiteração são encontrados os seguintes resultados:
H =
[18,4 −8,4−8,4 8,4
]
N =
[3,8−4,2
]
M =[−4,2 4,2
]
L =[
17,6]
Tem-se então a seguinte matriz Jacobiana:

4.5. MATRIZ JACOBIANA NO PROBLEMA DE FLUXO DE CARGA 85
J(0) =
18,4 −8,4 3,8−8,4 8,4 −4,2−4,2 4,2 17,6
Então agora são calculados os desvios das variáveis de estado da seguinte forma:
∆θ (0)2
∆θ (0)3
∆V(0)2
= −
[
J(0)]−1
0,300,01−0,1
=
−0,0308−0,02930,0053
Com a atualização das variáveis, são encontrados os seguintes valores:
θ (1)2 = −0,0308rad θ (1)
3 = −0,0293rad V(1)2 = 1,0053pu
iteração 1
No início da segunda iteração, calculam-se os desvios de potência com os valoresdas variáveis de estado calculadas na primeira iteração.
Com isto, encontram-se os seguintes desvios:
∆P2(V(1),θ (1)) = −0,0015 pu, ∆P3(V(1),θ (1)) = 0,0001 pu e ∆Q2(V(1),θ (1)) =0,0053pu. Novamente, esses valores não atendem ao mismatch estabelecido. Prosseguindoentão com os cálculos da iteração, determina-se a seguinte matriz Jacobiana:
J(1) =
18,4871 −8,4385 3,5224−8,4510 8,4510 −4,1876−4,5443 4,2348 17,8028
Isto leva ao seguinte cálculo para os desvios das variáveis de estado
∆θ (1)2
∆θ (1)3
∆V(1)2
= −
[J(1)
]−1
−0,00150,00010,0053
=
0,13×10−3
−0.10×10−3
−0.26×10−3
Com a atualização das variáveis, são encontrados os seguintes valores:
θ (2)2 = −0,0307rad θ (2)
3 = −0,0293rad V(2)2 = 1,0051pu
São encontrados os seguintes mismatches:
86 4. FLUXO DE CARGA EM REDES CA
∆P2(V(2),θ (2)) =−0,03×10−5 pu, ∆P3(V(2),θ (2)) = 0,03×10−5 pue∆Q2(V(2),θ (2)) =0,16×10−5 pu.
Como se observa, a convergência foi alcançada em apenas duasiterações. Essaconvergência rápida ocorre porque o sistema está pouco carregado.
Observe-se também que a matriz Jacobiana não sofreu alterações significativas deuma iteração para outra.
As características descritas serão utilizadas posteriormente para introduzir-se apro-ximações no método de Newton-Raphson para resolução do problema de fluxo de carga.
EXERCÍCIO PROPOSTO
1) Resolva o mesmo problema de fluxo de carga variando a carga na barra 2 e odespacho da geração na barra 3, como segue:
• caso 1 Pc2 = 70MW; Qc2 = 20MVar capacitivo;PG3 = 100MW.
• caso 2 Pc2 = 80MW; Qc2 = 50MVar indutivo;PG3 = 100MW.
• caso 3 Pc2 = 90MW; Qc2 = 20MVar capacitivo;PG3 = 100MW.
• caso 4 Pc2 = 110MW; Qc2 = 50 MVar indutivo;PG3 = 100MW.
Para cada situação, determine as potências fornecidas pelogerador swing e as per-das nas duas interligações. Comente a respeito das magnitudes das tensões encontradas.
2) Considere no exercício 1 que a interligação 1-2 seja representada por um trans-formador com tap ajustado em 1,04 pu. O tap fica do lado da barra2. Nesta condição,determine os novos estados do sistema e as potências geradaspelo gerador da barra swing.Resolva o exercício apenas para o caso 4 descrito anteriormente. Comente as alteraçõesdas tensões e dos fluxos de reativo em relação ao caso do exercício 1.
5
FLUXO DE CARGA DESACOPLADO
5.1 EQUAÇÕES DE BALANÇO DA POTÊNCIA ATIVA EREATIVA
As equações de balanço da potência ativa e reativa do problema de fluxo de carga acopladosão:
Pesp−k = P(V,θ) = Vk
NB
∑m=1
Vm[Gkmcos(θkm)+Bkmsen(θkm)] (5.1)
Qesp−k = Q(V,θ) = Vk
NB
∑m=1
Vm[Gkmsen(θkm)−Bkmcos(θkm)] (5.2)
Os mismatches de potências são calculados como:
∆Pk(V,θ) = −Pesp−k +P(V,θ) = 0, k = 1, . . . ,(NB−1) (5.3)
∆Qk(V,θ) = −Qesp−k +Q(V,θ) = 0, k = 1, . . . ,NPQ (5.4)
ondeNPQ é o número de barras PQ,NBé o número de barras, e finalmentePesp−k eQesp−k
são as potências ativa e reativa injetadas na barrak, respectivamente.
Nas equações (6.3) e (6.4),considera-se que tanto Pesp−k quanto Qesp−k serãorepresentados por valores constantes. Mas no caso de cargas, esses valores poderão serrepresentados pelo modelo polinomial (modelo ZIP).
5.2 MÉTODO DE NEWTON - RAPHSON DESACOPLADO
No método desacoplado de Newton - Raphson, ocorre desacoplamento entre as malhasem função das sensibilidades das potências e das variáveis de estado. No caso da potên-cia ativa, prepondera o acoplamento na malhaP− θ e no caso da potência reativa o
87

88 5. FLUXO DE CARGA DESACOPLADO
acoplamentoQ−V . Então o problema de se determinar os estados pode ser solucionadoresolvendo-se iterativamente dois sub-problemas. O primeiro deles é o relacionado àequação (6.3). Neste caso, calcula-seθ . No segundo caso, resolve-se a equação (6.4) edetermina-seV.
De forma iterativa, são resolvidos os seguintes sistemas:
∆Pk(V(i),θ (i)) = −J(i)
θ ∆θ (i), k = 1, . . . ,(NB−1) (5.5)
∆Qk(V(i),θ (i)) = −J(i)
V ∆V(i), k = 1, . . . ,NPQ (5.6)
ondeJ(i)θ é a matriz Jacobiana associada ao problemaP− θ e J(i)
V é a matriz Jacobianaassociada ao problemaQ−V . Essas submatrizes são as mesmas calculadas no problemade fluxo de carga acoplado.
Portanto, as submatrizes JacobianasJ(i)θ e J(i)
V são, respectivamente, as submatrizesH(i) eL(i).
As matrizesH eL, genericamente, foram calculadas como:
Hkm = VkVm[Gkmsen(θkm)−Bkmcos(θkm)] , se k6= m (5.7)
Hkk = −Qk(V,θ)−V2k Bkk (5.8)
Lkm = Vk [Gkmsen(θkm)−Bkmcos(θkm)] , se k6= m (5.9)
Lkk = −Qk(V,θ)
Vk−VkBkk (5.10)
A seguinte definição é feita para as matrizesH eL:
H = [Vk]H′
(5.11)
L = [Vk]L′
(5.12)
onde[Vk] é uma matriz bloco-diagonal, apresentando na diagonal o módulo da tensãoVk
correspondente ao vetor∆Pk, o qual precisa ser calculado.
Deste modo, definem-se equações modificadas relacionando osmismatches e osdesvios das variáveis de estados, como segue.
∆Pk
Vk= −H
′
k∆θk, k = 1, . . . ,NB−1 (5.13)
∆Qk
Vk= −L
′
k∆Vk, k = 1, . . . ,NPQ (5.14)

5.3. MÉTODO DE NEWTON - RAPHSON DESACOPLADO RÁPIDO 89
ondeH′
k é a k-ésima linha da matrizH′eL
′
k é a k-ésima linha da matrizL′.
5.3 MÉTODO DE NEWTON - RAPHSON DESACOPLADORÁPIDO
Este método é uma simplificação do método de Newton - Raphson desacoplado. Nestaabordagem, as submatrizes Jacobianas são mantidas constantes durante o processo itera-tivo. As equauções (5.13) e (5.14) são colocadas agora como:
∆Pk
Vk= −B
′
k∆θk, k = 1, . . . ,NB−1 (5.15)
∆Qk
Vk= −B
′′
k∆Vk, k = 1, . . . ,NPQ (5.16)
ondeB′
k é a k-ésima linha da matrizB′
e B′′
k é a k-ésima linha da matrizB′′, que serão
definidas adiante.
Para se chegar às matrizesB′e B
′′, algumas simplificações são efetuadas nas sub-
matrizes Jacobianas do método de Newton - Raphson desacaoplado. Essas aproximaçõessão válidas para sistemas de transmissão de extra-alta tensão, para os quais as resistên-cias dos equipamentos e linhas de transmissão são desprezíveis frente às reatâncias. Assimplificações usuais são as seguintes:
1. cos(θkm) ≈ 1;
2. |Bkm| >> |Gkmsen(θkm)|;
3. |BkkV2k | >> |Qk|;
Diante das aproximações anteriores, chega-se às seguintesexpressões:
H′
km≈−VmBkm, se k6= m (5.17)
H′
kk ≈−VkBkk (5.18)
L′
km≈−Bkm, se k6= m (5.19)
L′
kk = −Bkk (5.20)

90 5. FLUXO DE CARGA DESACOPLADO
As tensões nas barras, em geral, são mantidas aproximadamente iguais a 1,0 pu.Esta aproximação sugere que cada elemento da matrizH
′pode ser aproximado como
H′
km≈ −Bkm e H′
kk ≈−Bkk. Como os elementosBkm e Bkk são as partes imaginárias doselementos da matriz Ybus,H
′= −B e L
′= −B, sendo B a parte imaginária da matriz
Ybus. Portanto,B′= −B e B
′′= −B podem ser obtidas diretamente da matrizYbus=
G+ jB. Por exemplo,B′é formada, pegando-se as linhas e colunas deB, exceto a linha e
coluna correspondente à barraswing. Por outro lado,B′′
é formada, pegando-se as linhase colunas deB correspondentes a apenas as barras de carga.
Para o caso da matrizB′, ainda é possível a seguinte aproximação:rkm≈ 0, onde
rkm é uma resitência na interligaçãok−m da rede elétrica. Desta forma, considerando-sequezkm = rkm+ jxkm é a impedância da interconexão, então a admitância correspondenteseráykm = 1
zkm= gkm+ jbkm. Neste caso,gkm = rkm
r2km+x2
kmebkm = −xkm
r2km+x2
km.
Então, fazendo-serkm = 0, tem-se:gkm = 0 e bkm = −1xkm
. Assim, o elemento damatrizYbuscorrespondente à ligaçãok−m, sem considerar a resistência na interligação,seráYbuskm = −(− j
xkm). Logo Bkm ≈ 1
xkme Bkk ≈ ∑NB
m=1−1xkm
. Conseqüentemente,B′
km =
− 1xkm
e B′
kk = ∑NBm=1
1xkm
.
As aproximações com relação arkm= 0 não são usadas para cálculo deB′′. Ou seja,
B′′
km = −Bkm eB′′
kk = −Bkk são obtidas diretamente da matrizYbus.
EXEMPLO 5.1
Considere que um gerador conectado à barra 1 alimenta uma carga conectada nabarra 2, por meio de uma linha de transmissão cujos parâmetros são:rkm= 0,2 pu, xkm=1,0 pu, e bshkm = 0,04 pu. Suponha quebshseja o carregamento total da linha, que abarra 1 seja a swing, com tensão igual a 1 pu e fase zero. A cargana barra 2 é compostade uma parte ativa de 0,3 pu e -0,07 pu de reativo. Utilize o método de Newton - Raphsondesacoplado rápido para calcularV2 e θ2. Considere tolerância para convergência iguala 0,003 aplicada aosmismatchesde potência. Considere, como partida inicial, tensão nabarra 2 igual a 1 pu e fase zero.
SOLUÇÃO
Os elementos de interesse da matrizYbussãoG(2,1) = −0,1923,B(2,1) = 0,9615,
G(2,2) = 0,1923,B(2,2) = −0,9415. Outros dados de interese são:B′
(2,2) = 1x(1,2)
= 11 = 1
eB′′
(2,2) = −B(2,2) = 0,9415.
ITERAÇÃO 0 -P−θ
As potências injetadas na barra sãoPesp−2 = −0,3 eQesp−2 = 0,07.

5.3. MÉTODO DE NEWTON - RAPHSON DESACOPLADO RÁPIDO 91
A potência ativa calculada na barra 2 será:
P2(V,θ) = V2V1 [G2,1cos(θ21)+B2,1sen(θ21)]+V2G2,2
Substiutindo-se os valores de tensão e de fase dados, encontra-seP2(V,θ) = 0.Logo, omismatchde potência é∆P2 = −(−0,3)+0 = 0,3. Devemos calcular o desviodo ângulo da tensão na barra 2. Assim,
∆P2
V2= −B
′
2,2∆θ2 ⇒ ∆θ2 = −0,3
1×1= −0,3 rad
A atualização do ângulo na barra 2 terá o seguinte resultado:
θ (1)2 = θ (0)
2 +∆θ2 = 0+(−0,3) = −0,3 rad.
ITERAÇÃO 0 -Q−V
Nesta iteração, utiliza-se o valor atualizado do ânguloθ2 calculado na iteração an-terior.
A potência reativa calculada na barra será:
Q2(V,θ) = V2V1 [G2,1sen(θ21)−B2,1cos(θ21)]−V2B2,2
Q2(V,θ) = 1×1× [−0,1923sen(−0,3)−0,9615cos(−0,3)]−1×0,9415= 0,0798pu
Então∆Q2 = −(0,07)+ 0,0798= 0,0098. Este valor é maior que a tolerânciaεpara omismatch. Logo deve-se calcular a tensãoV2 atualizada.
∆Q2
V2= −B
′′
2,2∆V2 ⇒ ∆V2 = −0,0098
1×0,9415= −0,0104pu
A atualização da tensão na barra 2 terá o seguinte resultado:
V(1)2 = V(0)
2 +∆V2 = 1,0+(−0,0104) = 0,9896pu.
ITERAÇÃO 1 -P−θ
Utiliza-se agora a tensãoV2 calculada anteriormente.
A potência ativa calculada na barra 2 será:
P2(V,θ) = 0,9896×
1× [G2,1cos(−0,3)+B2,1sen(−0,3)]+0,9896G2,2
=−0,2747pu

92 5. FLUXO DE CARGA DESACOPLADO
Logo, omismatchde potência é∆P2 = −(−0,3)+(−0,2747) = 0,0253 pu. Nova-mente é calculado o desvio do ângulo da tensão na barra 2. Assim,
∆θ2 = −−0,0253
0,9896×1= −0,0256rad
A atualização do ângulo na barra 2 terá o seguinte resultado:
θ (2)2 = θ (1)
2 +∆θ2 = −0,30+(−0,0256) = −0,3256rad.
ITERAÇÃO 1 -Q−V
Nesta iteração, novamente utiliza-se o valor atualizado doânguloθ2 calculado naiteração anterior.
Seguindo procedimento semelhante ao já feito anteriormente, calcula-se:
Q2(V,θ) = 0,0814pu
e∆Q2 = 0,0114. Este valor continua superior à tolerânciaε para omismatch. Logoatualiza-seV2, resultando em
∆V2 = −0,01122pu
A atualização da tensão na barra 2 terá o seguinte resultado:
V(2)2 = V(1)
2 +∆V2 = 0,9896+(−0,0122) = 0,9774pu.
ITERAÇÃO 2 -P−θ
Utiliza-se agora a tensãoV2 calculada anteriormente.
A potência ativa calculada na barra 2 será:
P2(V,θ) = −0,295 pu
Logo, o mismatchde potência é∆P2 = −(−0,3) + (−0,295) = 0,005 pu. Essevalor ainda é superior à tolerância. Por isso, devemos prosseguir com outra iteração. Paraessa condição,
∆θ2 = −0,0051rad
A atualização do ângulo na barra 2 terá o seguinte resultado:

5.3. MÉTODO DE NEWTON - RAPHSON DESACOPLADO RÁPIDO 93
θ (3)2 = θ (2)
2 +∆θ2 = −0,3256+(−0,0051) = −0,3307rad.
ITERAÇÃO 2 -Q−V
Nesta iteração, novamente utiliza-se o valor atualizado doânguloθ2 calculado naiteração anterior.
De acordo com procedimento semelhante ao já feito anteriormente, calcula-se:
Q2(V,θ) = 0,0716pu
e ∆Q2 = 0,0016. Este valor atende aomismatch. Portanto, aceita-se que a con-vergência foi atingida para a malha Q-V. Deve-se verificar sea solução atende também aomismatchpara o caso da malhaP−θ .
ITERAÇÃO 3 -P−θ
Para esta situação,P2(V,θ) = −0,299 pu
Logo, omismatchde potência é∆P2 = −(−0,3)+(−0,299) = 0,001 pu. A con-vergência também foi atingida. Logo o resultado final será:
θ2 = −0,3307rad e V2 = 0,9774pu.

6
FLUXO DE CARGA LINEARIZADO
O fluxo de carga linearizado é baseado no acoplamento das variáveisP−θ . Esta abor-dagem não é aplicável a sistemas de distribuição, pois nesses sistemas as resistências dasinterligações têm valores comparáveis às reatâncias. Istodecorre do fato que na abor-dagem do fluxo linearizado, em termos de parâmetros da interligação, é levado em contasomente a reatância série. Outras hipóteses são: considerar as magnitudes das tensõesnodais iguais a 1,0 pu e não levar em conta as potências reativas de barra e os taps detransformadores. Por tudo isso, este método serve para calcular os ângulos iniciais dastensões de barra, apropriado como ponto de partida para os métodos de Newton - Raphsone suas variantes.
Utiliza-se o fluxo linearizado para estimar perdas ativa nasinterligações, mas sem-pre tendo em mente que essa é uma aobordagem que apresenta limitações.
Para deduzir as equações do fluxo linearizado, considere umainterligação entre asbarrask e m composta por uma linha de transmissão com parâmetrosrkm, xkm e bshkm
(susceptância total da linha) e com modelo emπ .
O interese é calcular somente as perdas ativas. No entanto, para deduzir as equaçõesdos fluxos de potência saindo de cada barra para a linha,Skm, (fluxo dek param) e Smk
(fluxo dem parak), consideram-se as seguintes equações:
Skm = Pkm+ jQkm = VkI∗km (6.1)
Smk = Pmk+ jQmk = VmI∗mk (6.2)
Por outro lado, as correntes das baras para a linha, em ambos os terminais, são:
Ikm = ykm(Vk−Vm)+jbshkm
2Vk (6.3)
Imk = ykm(Vm−Vk)+jbshkm
2Vm (6.4)
ondeykm = gkm+ jxkm = 1rkm+ jxkm
.
95

96 6. FLUXO DE CARGA LINEARIZADO
Calculando-se a parte real em (6.1) e (6.2), são determinados os seguintes fluxosativos:
Pkm = V2k gkm−VkVmgkmcos(θkm)−VkVmbkmsen(θkm) (6.5)
Pmk = V2mgkm−VkVmgkmcos(θkm)+VkVmbkmsen(θkm) (6.6)
A partir das equações (6.5) e (6.6), deduz-se que a perda ativa na linha é:
Perda ativa= Pkm+Pmk = gkm(V2k +V2
m)−2VkVmgkmcos(θkm) (6.7)
Se a condutânciagkm for desprezada na expressão (6.7), ou seja, as perdas ativassão nulas, resultam as seguintes expressões de fluxo ativo:
Pkm = −Pmk = −VkVmbkmsen(θkm) (6.8)
As seguintes simplificações são consideradas:
1. sen(θkm) ≈ θkm ;
2. bkm = − 1xkm
;
3. Vk ≈Vm ≈ 1 pu.
Diante das simplificações anteriores
Pkm = −Pmk =θkm
xkm=
θk−θm
xkm(6.9)
A expressão (6.9) apresenta o fluxo em função apenas das fasesdas tensões nasbarrask e m e da reatância da linha. Evidentemente, esse resultado só é aceitável seθkm
(abertura angular da interligação) é um valor pequeno de modo que a funçãosen(θ) ≈
θ . Isto pode ser comprovado traçando-se as curvas dePkm = sen(θkm)xkm
e dePkm = θkmxkm
.Enquanto a última curva é uma reta, que apresenta valor ilimitado, a primeira é umafunção senoidal, que claramente tem um valor máximo. Obviamente, não existe valorilimitado de potênciaPkm, o que comprova as limitações de se aplicar uma abordagemlinear para calcular os fluxos.
O modelo linearizado é também conhecido como modelo CC de fluxo de cargadevido às semelhanças envolvendo variáveis de circuitos elétricos contendo apenas resis-tores e fontes CC. Por exemplo, os fluxos ativos são semelhantes às correntes de ramo; osângulos se assemelham às tensões nodais;xkm é análogo a um resistor.
6.1. FORMULAÇÃO MATRICIAL 97
6.1 FORMULAÇÃO MATRICIAL
A injeção de potência ativaPk em cada barrak é dada por:
Pk =NB
∑m=1
x−1kmθkm, k = 1, . . . ,NB (6.10)
O somatório pode ser desmembrado como:
Pk =
(NB
∑m=1
x−1km
)
θk−NB
∑m=1
x−1kmθm = BPkkθk +
NB
∑m=1
BPkmθm, k = 1, . . . ,NB (6.11)
A expressão (6.11) pode ser posta em uma forma matricial comosegue. O so-matório pode ser apresentado em uma forma compacta como:
Pk = BPkθ (6.12)
ondeBPk é a k-ésima linha da matrizBP, cujos elementos são os seguintes:
1. BPkk = ∑NBm=1x−1
km;
2. BPkm= −x−1km
ePk é a injeção de potência ativa na barrak.
É necessário definir uma barra de referência, antes de se resolver a equação (6.12).Esta barra corresponde à barraswingdo problema de fluxo de carga. Nestas condições,fixa-se a fase dessa barra, calculando-se as demais. Como conseqüência disso, deve-seexcluir uma linha e uma coluna correspondentes à barra swingna matrizBP. Tambémnão se utiliza a injeção da barra de referência nos cálculos.
EXEMPLO
Considere um sistema composto por três barras com as seguintes características:reatncias das interligaçõesx1,2 = 1/2 pu, x1,3 = 1/5 pu, x2,3 = 1/3 pu. As injeções depotências nas barras 2 e 3 são 0,6 pu e -1,2 pu, respectivamente. Suponha que a referênciaseja fixada na barra 1 e sejaθ1 = 0o. Calcule as fases nas barras 2 e 3, bem como os fluxosativos nas interligações e a potência ativa injetada na barra 1. Considere que a reatânciaxi, j é característica da interligação entre as barrasi e j genéricas.
SOLUÇÃO
A matrizBP neste caso é de ordem 2 e seus elementos são:

98 6. FLUXO DE CARGA LINEARIZADO
[5 −3−3 8
]
O sistema resultante para o cálculo dos ângulos é:[
5 −3−3 8
][θ2
θ3
]
=
[0,6−1,2
]
A resposta do problema permite se obterθ2 = 0,0387rad eθ3 = −0,1355rad. Osfluxos na linha são:P1,2 = x−1
1,2θ1,2 = −0,0774 pu, P1,3 = x−11,3θ1,3 = 0,6774 pu, P2,3 =
x−12,3θ2,3 = 0,5226pu.
O balanço de potência total éP1 + P2 + P3 = 0. Assim, na barra de referência,P1 = −P2−P3 = −(0,6)− (−1,2) = 0,6 pu.