2.4 - técnicas de controle
DESCRIPTION
2.4 - Técnicas de ControleTRANSCRIPT

TÉCNICAS DE CONTROLE
ATUALIZAÇÃO TECNOLÓGICA EM MECATRÔNICA

TÉCNICAS DE CONTROLE
ATUALIZAÇÃO TECNOLÓGICA EM MECATRÔNICA
CONFEDERAÇÃO NACIONAL DA INDÚSTRIA – CNIRobson Braga de AndradePresidente
DIRETORIA DE EDUCAÇÃO E TECNOLOGIARafael Esmeraldo Lucchesi RamacciottiDiretor de Educação e Tecnologia
SENAI-DN – SERVIÇO NACIONAL DE APRENDIZAGEM INDUSTRIAL
Conselho Nacional
Robson Braga de AndradePresidente
SENAI – DEPARTAMENTO NACIONALRafael Esmeraldo Lucchesi RamacciottiDiretor-Geral
Gustavo Leal Sales FilhoDiretor de Operações
TÉCNICAS DE CONTROLE
ATUALIZAÇÃO TECNOLÓGICA EM MECATRÔNICA
SENAIServiço Nacional de Aprendizagem Industrial Departamento Nacional
SedeSetor Bancário Norte . Quadra 1 . Bloco C . Edifício Roberto Simonsen . 70040-903 . Brasília – DF . Tel.: (0xx61)3317-9190 http://www.senai.br
© 2015. SENAI – Departamento Nacional
© 2015. SENAI – Departamento Regional do Rio Grande do Sul
A reprodução total ou parcial desta publicação por quaisquer meios, seja eletrônico, mecânico, fotocópia, de gravação ou outros, somente será permitida com prévia autorização, por escrito, do SENAI – Departamento Regional do Rio Grande do Sul.
Esta publicação foi elaborada pela equipe da Gerência de Desenvolvimento Educacional – GDE/Núcleo de Educação a Distância – NEAD, do SENAI do Rio Grande do Sul, com a coordenação do SENAI Departamento Nacional, para ser utilizada por todos os Departamentos Regionais do SENAI nos cursos presenciais e a distância.
SENAI Departamento NacionalUnidade de Educação Profissional e Tecnológica – UNIEP
SENAI Departamento Regional do Rio Grande do SulGerência de Desenvolvimento Educacional – GDE/Núcleo de Educação a Distância – NEAD
S491 Serviço Nacional de Aprendizagem Industrial. Departamento Nacional Técnicas de controle / Serviço Nacional de Aprendizagem Industrial. Departamento Nacional; Serviço Nacional de Aprendizagem Industrial. Departamento Regional do Rio Grande do Sul. – Porto Alegre: SENAI-RS, 2015. 36. p.: il. (Atualização Tecnológica em Mecatrônica).
1. Mecatrônica. 2. Sistema de controle. 3. Controle de máquinas. I. Serviço Nacional de Aprendizagem Industrial - Departamento Regional do Rio Grande do Sul. II. Título. III. Série.
CDU – 62-5
Responsável pela Catalogação na Fonte: Lidiane Marques Gomes– CRB-10/2257
1 Introdução ........................................................................................................................................................................6
2 Chave Eletrônica (Soft-Starter) ...................................................................................................................................72.1 Descrição do Soft-Starter ............................................................................................................................72.2 Princípio de Funcionamento ....................................................................................................................82.3 Instalação do Soft-Starter ...........................................................................................................................9
3 Inversor de Frequência ...............................................................................................................................................113.1 Descrição do Inversor de Frequência ..................................................................................................113.2. Princípio de Funcionamento ................................................................................................................12
3.2.1 Módulo de potência .................................................................................................................143.2.2 Módulo de controle .................................................................................................................16
3.3 Controle do Inversor de Frequência .....................................................................................................183.4 Aplicações dos Inversores ........................................................................................................................193.5 Instalação de um Inversor de Frequência ..........................................................................................203.6 Parametrização de Drives ........................................................................................................................22
4 Controle por Servoacionamentos ..........................................................................................................................244.1 Descrição do Servoacionamento ..........................................................................................................244.2 Princípio de Funcionamento ..................................................................................................................254.3 Servodrives ....................................................................................................................................................254.4 Servomotores ...............................................................................................................................................27
4.4.1 Partes de um Servomotor ......................................................................................................274.4.2 Encoders, Resolvers e Tacogeradores ................................................................................28
4.5 Instalação de Servoacionamentos ........................................................................................................31
Referências ...........................................................................................................................................................................36
Sumário
Introdução
1
Neste livro, estudaremos as principais técnicas de controle presentes nos sistemas automatizados. Veremos a chave eletrônica, mais conhecida como soft-starter, o inversor de frequência e os servoacionamentos. A nossa meta, com esse estudo, é fornecer subsídios para integração desses elementos em um sistema automatizado de manufatura.
No primeiro capítulo, vamos conhecer o soft-starter, descrever suas vantagens, funções, princípio de funcionamento e sua instalação por meio de diagramas de circuitos de ligação. Analisaremos a viabilidade de obtenção desse equipamento para determinados tipos de acionamentos.
Abordaremos, no capítulo seguinte, as funcionalidades do inversor de frequência, que é um equipamento muito utilizado dentro de um ambiente industrial. Vamos analisar os seus princípios de funcionamento e suas funções. De acordo com a aplicação, você vai aprender a escolher o melhor tipo e modelo de inversor; tipos de controle escalar e vetorial, seus módulos de controle e de potência. Também estudaremos a importância e os cuidados de uma correta montagem e instalação, assim como a descrição dos principais parâmetros utilizados conforme a necessidade produtiva dos sistemas automatizados.
No último capítulo, conheceremos os servoacionamentos, que são equipamentos utilizados, principalmente, em máquinas à CNC industriais, como centros de torneamento, centros de usinagem, retificadoras, máquinas de corte e solda. Também são usados em sistemas automatizados, como sistemas de posicionamentos, retrofitting, mesas giratórias, esteiras com paradas programadas, máquinas de embalagens, alimentador de prensas, máquinas têxteis, entre outras.
Chave Eletrônica (Soft-Starter)
2
Neste capítulo, veremos que, devido ao avanço da eletrônica, foram desenvolvidos vários equipamentos para os sistemas automatizados; entre eles, a chave eletrônica de partida, soft-starter, que é utilizada principalmente para controle do tempo de aceleração e desaceleração de um motor elétrico. Assim sendo, passamos agora para a descrição, após estudaremos seu princípio de funcionamento e suas formas de ligação.
2.1 DESCRIÇÃO DO SOFT-STARTER
A chave eletrônica (soft-starter) é um conjunto de pares de tiristores (SCR) (ou combinações de tiristores/diodos), um em cada borne de potência do motor. Para aplicar uma tensão variável aos terminais do motor, durante a aceleração e a desaceleração, controla-se eletronicamente o ângulo de disparo de cada par de tiristores. Ao final do período de partida ou parada, geralmente ajustável entre 2 e 30 segundos, após uma aceleração em rampa controlada, a tensão atinge seu valor pleno. Ao invés de ser submetida a incrementos ou saltos repentinos, como acontece em outros equipamentos, no final do processo, sua desaceleração é suave e também controlada.
Com esse controle conseguimos manter a corrente de partida (na linha) próxima da nominal e com suave variação. Essa chave eletrônica apresenta as seguintes vantagens:
• controle da tensão (corrente) durante a partida;
• não possui partes móveis que geram arco, como nas chaves mecânicas, tornando sua vida útil mais longa.
Destacamos algumas funções do soft-starter:
• controle do tempo de aceleração e desaceleração do motor;
• limitação de corrente;
• conjugado de partida;
• frenagem por corrente contínua;
• proteção do acionamento por sobrecarga;
• proteção contra aquecimento do motor;
• detecção de falta de fase ou desequilíbrio do motor.
MECATRÔNICA INDUSTRIAL8
2.2 PRINCÍPIO DE FUNCIONAMENTO
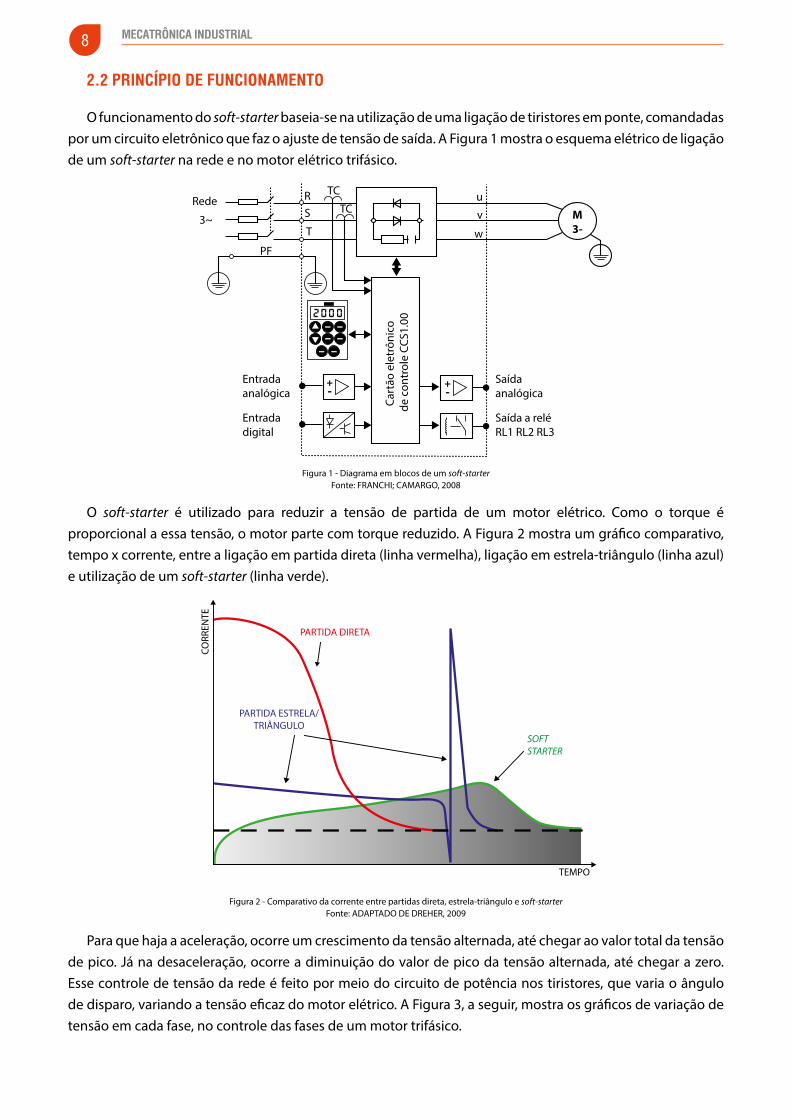
O funcionamento do soft-starter baseia-se na utilização de uma ligação de tiristores em ponte, comandadas por um circuito eletrônico que faz o ajuste de tensão de saída. A Figura 1 mostra o esquema elétrico de ligação de um soft-starter na rede e no motor elétrico trifásico.
u
v
w
M3-
+-
+-
Cart
ão e
letr
ônic
o d
e co
ntro
le C
CS1.
00Entradadigital
Entradaanalógica
Saída a reléRL1 RL2 RL3
Saídaanalógica
PF
Rede
3~ S
T
RTC
TC
Figura 1 - Diagrama em blocos de um soft-starterFonte: FRANCHI; CAMARGO, 2008
O soft-starter é utilizado para reduzir a tensão de partida de um motor elétrico. Como o torque é proporcional a essa tensão, o motor parte com torque reduzido. A Figura 2 mostra um gráfico comparativo, tempo x corrente, entre a ligação em partida direta (linha vermelha), ligação em estrela-triângulo (linha azul) e utilização de um soft-starter (linha verde).
CORR
ENTE
PARTIDA DIRETA
SOFTSTARTER
TEMPO
PARTIDA ESTRELA/TRIÂNGULO
Figura 2 - Comparativo da corrente entre partidas direta, estrela-triângulo e soft-starterFonte: ADAPTADO DE DREHER, 2009
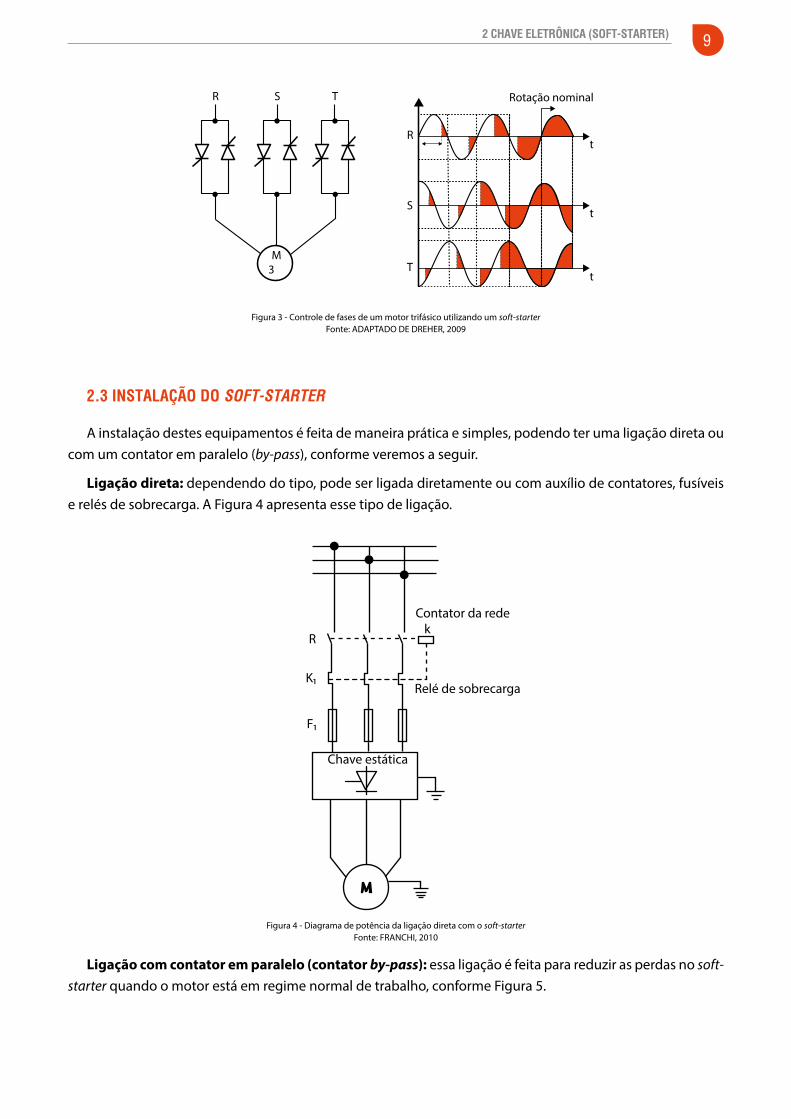
Para que haja a aceleração, ocorre um crescimento da tensão alternada, até chegar ao valor total da tensão de pico. Já na desaceleração, ocorre a diminuição do valor de pico da tensão alternada, até chegar a zero. Esse controle de tensão da rede é feito por meio do circuito de potência nos tiristores, que varia o ângulo de disparo, variando a tensão eficaz do motor elétrico. A Figura 3, a seguir, mostra os gráficos de variação de tensão em cada fase, no controle das fases de um motor trifásico.
2 CHAVE ELETRÔNICA (SOFT-STARTER) 9
M3
R
R
S
S
T
T Rotação nominal
t
t
t
Figura 3 - Controle de fases de um motor trifásico utilizando um soft-starterFonte: ADAPTADO DE DREHER, 2009
2.3 INSTALAÇÃO DO SOFT-STARTER
A instalação destes equipamentos é feita de maneira prática e simples, podendo ter uma ligação direta ou com um contator em paralelo (by-pass), conforme veremos a seguir.
Ligação direta: dependendo do tipo, pode ser ligada diretamente ou com auxílio de contatores, fusíveis e relés de sobrecarga. A Figura 4 apresenta esse tipo de ligação.
Chave estática
M
R
K1
F1
kContator da rede
Relé de sobrecarga
Figura 4 - Diagrama de potência da ligação direta com o soft-starterFonte: FRANCHI, 2010
Ligação com contator em paralelo (contator by-pass): essa ligação é feita para reduzir as perdas no soft-starter quando o motor está em regime normal de trabalho, conforme Figura 5.

MECATRÔNICA INDUSTRIAL10
Chave estática
M
R Contator da redek
Relé de sobrecarga
F1
K1
F2
Fusíveis NH
Cond
utor
em
para
lelo
Figura 5 - Diagrama de potência da ligação com contator by-passFonte: FRANCHI, 2010
O soft-starter possui um determinado número de entradas e saídas digitais e analógicas. As saídas podem ser parametrizadas para comando, controle e sinalização. As tensões de operação podem ser de 24 Vcc, 110 Vca ou 220 Vca, dependendo do fabricante. A Figura 6 ilustra o diagrama de comandos do soft-starter.
S1
ABCNPE
S4 151413121110
987654321
Interligaçãonecessária
Partida concluída
Falha
Contato para freio
AC 380 - 415vAC 200 - 240vAC 100 - 120vN/L DCL + 24vDCL + 24vLigarDesligarResetar
U <
M
Figura 6 - Diagrama de comando do soft-starterFonte: FRANCHI, 2010
Inversor de Frequência
3
Nesse capítulo, conheceremos um equipamento eletroeletrônico de grande utilização nas indústrias, o inversor de frequência. Esse componente é aplicado em máquinas, equipamentos e processos industriais, no controle da velocidade e do torque.
Vamos estudar seus princípios de funcionamento, suas funções e como escolher um inversor de acordo com sua aplicação. Veremos os tipos de controle, escalar e vetorial, os módulos, montagem e instalação e, para finalizar, a parametrização de drives.
Enquanto o soft-starter é capaz, apenas, de controlar sua partida e frenagem, o inversor é projetado para controlar a velocidade e o torque de um motor durante seu funcionamento.
SAIBA MAIS
3.1 DESCRIÇÃO DO INVERSOR DE FREQUÊNCIA
O inversor de frequência também é conhecido como conversor de frequência ou inversor CA, popularmente é chamado de inversora de frequência. É um equipamento eletroeletrônico capaz de converter a tensão alternada de entrada, com frequências constantes, em tensão contínua, modulando a tensão e gerando, em sua saída, uma tensão novamente alterada. Dessa forma, a tensão deve possuir uma frequência controlada e variável, permitindo o controle da velocidade e do torque dos motores de indução trifásicos. Essas duas características propiciam uma infinita gama de possibilidades, sendo aplicadas em máquinas, equipamentos e processos industriais. A Figura 7 ilustra um inversor de frequência.
PP
PP PP
Figura 7 - Inversor de frequência Fonte: SENAI-RS

MECATRÔNICA INDUSTRIAL12
O inversor é um dos componentes internos do conversor de frequência. Ele é composto basicamente por quatro blocos de circuitos, conforme descrevemos no Quadro 1, a seguir.
BLOCOS DE CIRCUITOS DESCRIÇÃO
Circuito de entrada Composto por diodos retificadores, para converter a tensão alternada em contínua.
Circuito intermediário Inclui um banco de capacitores eletrolíticos e circuito de filtragem de alta frequência, que suaviza as variações de tensão e gera em sua saída uma tensão CC fixa.
Circuito inversor Compreendido por transistores Insulated Gate Bipolar Transistor (IGBT) que chaveiam a tensão CC proveniente do circuito intermediário e geram uma saída PWM para a carga, aproximando sua forma de onda à senoidal.
Circuito de controle São controlados os disparos dos pulsos que acionam os IGBTs e geram as formas de ondas necessárias para o controle de velocidade e torque dos motores, além de armazenar a parametrização do inversor de frequência.
Quadro 1 - Blocos de circuitos de um inversor Fonte: SENAI-RS
Os inversores de frequência são utilizados na indústria para substituir equipamentos rústicos de variação de velocidade, tais como variadores mecânicos por polias ou engrenagens e os variadores hidráulicos, que tinham uma forma muito ineficiente de controlar a velocidade, além, é claro, do grande espaço que era necessário nas máquinas e processos para sua instalação.
VOCÊ SABIA?
3.2. PRINCÍPIO DE FUNCIONAMENTO
O funcionamento de um inversor de frequência consiste em receber uma tensão alternada e retificar esse sinal por meio de diodos, gerando uma tensão contínua. A seguir, ele filtra a tensão contínua, resultante da retificação, e utiliza essa tensão como entrada do circuito de inversão que, por sua vez converte-a para alternada por meio do chaveamento de transistores. Esse chaveamento vai gerar uma série de pulsos com largura controlada e variável (PWM).
Na estrutura básica de um inversor de frequência, a rede CA é retificada por um capacitor (filtro), logo na entrada, passando por um barramento de tensão contínua (barramento CC), ou circuito intermediário. A tensão de entrada nas redes trifásicas pode variar de 220 VCA até 660 VCA, para alimentação de seis IGBTs (transistor bipolar de gate isolado), conforme se observa na Figura 8, a seguir:
R
Reticador Filtro Inversor
ST
T1
T2
T3
T4
T5
T6
M
Figura 8 - Estrutura básica de um inversor de frequênciaFonte: SENAI-RS
Os IGBTs são chaveados três a três, formando uma tensão alternada na saída U, V e W defasadas de 120º elétricos, exatamente como a rede. A única diferença é que, ao invés de uma senóide, temos uma forma de onda quadrada. Portanto, o motor elétrico CA, alimentado por um inversor, tem em seus terminais uma onda quadrada de tensão.
3 INVERSOR DE FREQUÊNCIA 13
O circuito que comanda os IGBTs é o elemento responsável pela geração dos pulsos de controle dos transistores de potência. Atuando sobre a taxa de variação do chaveamento dos transistores, controlamos a tensão e a frequência do sinal gerado. Isso permite ao conversor até ultrapassar a frequência da rede. O método de modulação Pulse With Modulation (PWM) fornece ao motor uma corrente senoidal a partir de chaveamentos na faixa de 2 KHz.
Quando desejamos uma frequência de 5 Hz, na saída do inversor de frequência, dividimos 1 segundo por 360 graus, resultando em 0.0027 segundo/grau. É importante considerar que 5 Hz significam cinco ciclos de 360 graus em um segundo. Assim, como desejamos obter 5 Hz na saída do inversor, será necessário dividir 0.0027 segundo/grau por cinco. Logo, teremos 0,00055 segundo/grau para ter, na saída do inversor, uma frequência de 5 Hz. Mas, o que quer dizer 0,00055 segundo/grau? O número 0.00055 segundo/grau corresponde ao tempo máximo em que o IGBT pode ficar acionado em cada grau. Consequentemente, esse valor será uma constante que será multiplicada pelo valor do módulo seno do ângulo que está sendo considerado no momento. A cada 0.00055 s, o valor do grau é incrementado em uma unidade até chegar em 360 graus. Quando o valor mudar de 360 para 361, ele é zerado novamente, e o ciclo recomeçará.
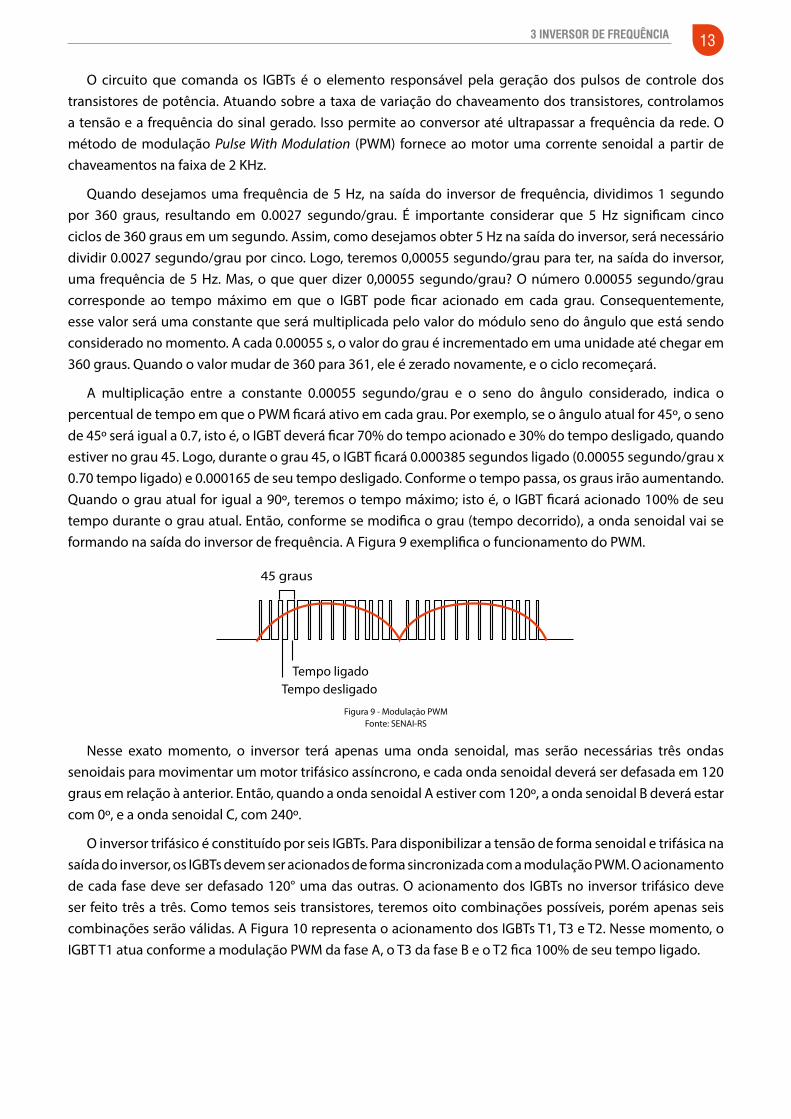
A multiplicação entre a constante 0.00055 segundo/grau e o seno do ângulo considerado, indica o percentual de tempo em que o PWM ficará ativo em cada grau. Por exemplo, se o ângulo atual for 45º, o seno de 45º será igual a 0.7, isto é, o IGBT deverá ficar 70% do tempo acionado e 30% do tempo desligado, quando estiver no grau 45. Logo, durante o grau 45, o IGBT ficará 0.000385 segundos ligado (0.00055 segundo/grau x 0.70 tempo ligado) e 0.000165 de seu tempo desligado. Conforme o tempo passa, os graus irão aumentando. Quando o grau atual for igual a 90º, teremos o tempo máximo; isto é, o IGBT ficará acionado 100% de seu tempo durante o grau atual. Então, conforme se modifica o grau (tempo decorrido), a onda senoidal vai se formando na saída do inversor de frequência. A Figura 9 exemplifica o funcionamento do PWM.
Tempo ligadoTempo desligado
45 graus
Figura 9 - Modulação PWMFonte: SENAI-RS
Nesse exato momento, o inversor terá apenas uma onda senoidal, mas serão necessárias três ondas senoidais para movimentar um motor trifásico assíncrono, e cada onda senoidal deverá ser defasada em 120 graus em relação à anterior. Então, quando a onda senoidal A estiver com 120º, a onda senoidal B deverá estar com 0º, e a onda senoidal C, com 240º.
O inversor trifásico é constituído por seis IGBTs. Para disponibilizar a tensão de forma senoidal e trifásica na saída do inversor, os IGBTs devem ser acionados de forma sincronizada com a modulação PWM. O acionamento de cada fase deve ser defasado 120° uma das outras. O acionamento dos IGBTs no inversor trifásico deve ser feito três a três. Como temos seis transistores, teremos oito combinações possíveis, porém apenas seis combinações serão válidas. A Figura 10 representa o acionamento dos IGBTs T1, T3 e T2. Nesse momento, o IGBT T1 atua conforme a modulação PWM da fase A, o T3 da fase B e o T2 fica 100% de seu tempo ligado.

MECATRÔNICA INDUSTRIAL14
SR T
V2
0V
V2
T1 T3
T5
T4T6
T2
+
M3N
Figura 10 - Acionamentos dos IGBTs em um inversor trifásicoFonte: FAATESP, [20--?]
Os inversores de frequência apresentam construções similares, independentemente do fabricante ou do modelo. Basicamente, os inversores são constituídos por dois módulos: o módulo de potência e o módulo de controle.
3.2.1 MÓDULO DE POTÊNCIA
O módulo de potência é geralmente constituído por uma fonte retificadora, um barramento CC e uma seção inversora. A Figura 11 mostra uma visão geral do módulo de potência de um inversor de frequência.
Motor
Filtro
Reator do link CC
Ponte inversora de IGBT
Entr
ada
CA
Reticador
Figura 11 - Módulo de potênciaFonte: ADAPTADO DE FAATESP, [20--?]
A seguir, apresentaremos uma descrição de cada uma das partes principais do módulo de potência.
Fonte retificadora
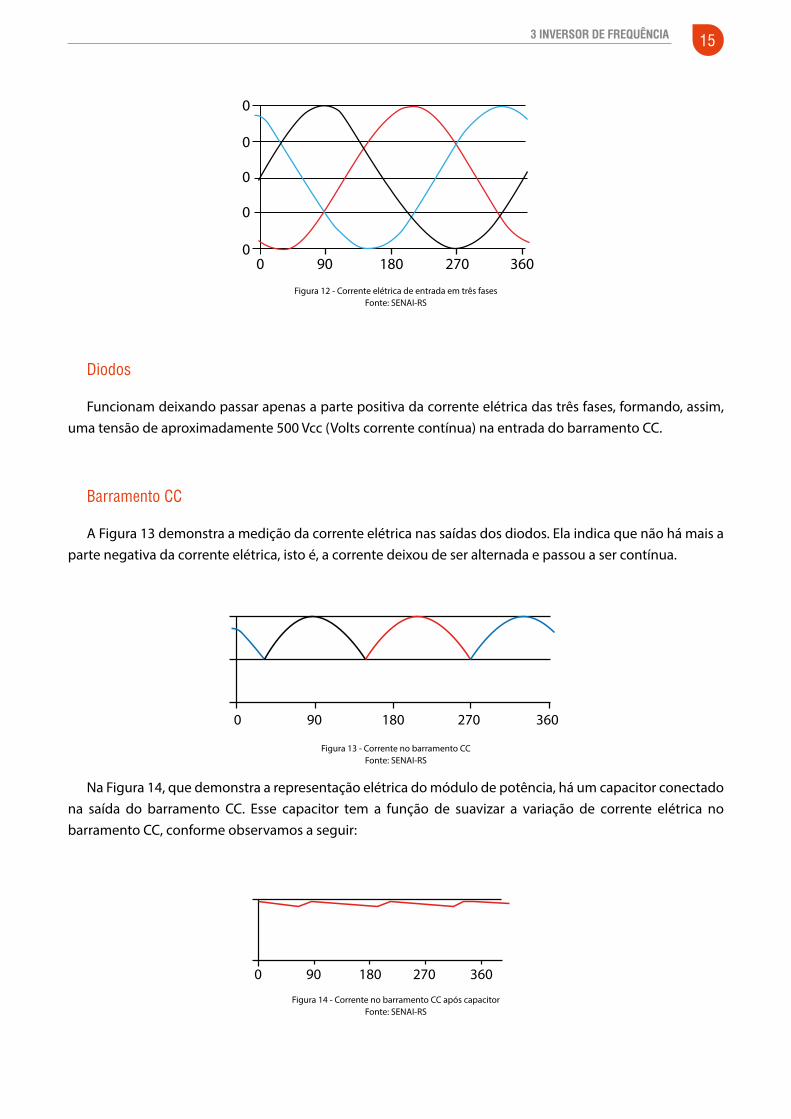
Nos bornes L1, L2 e L3 são conectados os cabos de alimentação externa. A alimentação é geralmente de 220 Vac ou 380 Vac. No desenho anterior, aparece a representação elétrica de seis diodos. A Figura 12, a seguir, representa a corrente elétrica de cada fase R, S, e T, que circula entre a entrada do inversor (alimentação do inversor) e os diodos da parte retificadora do inversor.
3 INVERSOR DE FREQUÊNCIA 15
0
0
0
0
00 90 180 270 360
Figura 12 - Corrente elétrica de entrada em três fasesFonte: SENAI-RS
Diodos
Funcionam deixando passar apenas a parte positiva da corrente elétrica das três fases, formando, assim, uma tensão de aproximadamente 500 Vcc (Volts corrente contínua) na entrada do barramento CC.
Barramento CC
A Figura 13 demonstra a medição da corrente elétrica nas saídas dos diodos. Ela indica que não há mais a parte negativa da corrente elétrica, isto é, a corrente deixou de ser alternada e passou a ser contínua.
0 90 180 270 360
Figura 13 - Corrente no barramento CCFonte: SENAI-RS
Na Figura 14, que demonstra a representação elétrica do módulo de potência, há um capacitor conectado na saída do barramento CC. Esse capacitor tem a função de suavizar a variação de corrente elétrica no barramento CC, conforme observamos a seguir:
0 90 180 270 360
Figura 14 - Corrente no barramento CC após capacitorFonte: SENAI-RS
MECATRÔNICA INDUSTRIAL16
Seção inversora
Na seção inversora, a tensão CC é convertida novamente em tensão trifásica CA. Por meio do controle PWM (Controle por largura de pulso), os IGBTs são acionados, isto é, são excitados ou chaveados várias vezes por ciclo. O tempo em que o IGBT permanece acionado é sempre dado por uma função senoidal. A onda senoidal é composta por um ciclo de 360 graus, conforme a Figura 15, a seguir. Após completar esse ciclo, ela se repete infinitamente.
0 180 360 T
V
Figura 15 - Onda senoidalFonte: SENAI-RS
3.2.2 MÓDULO DE CONTROLE
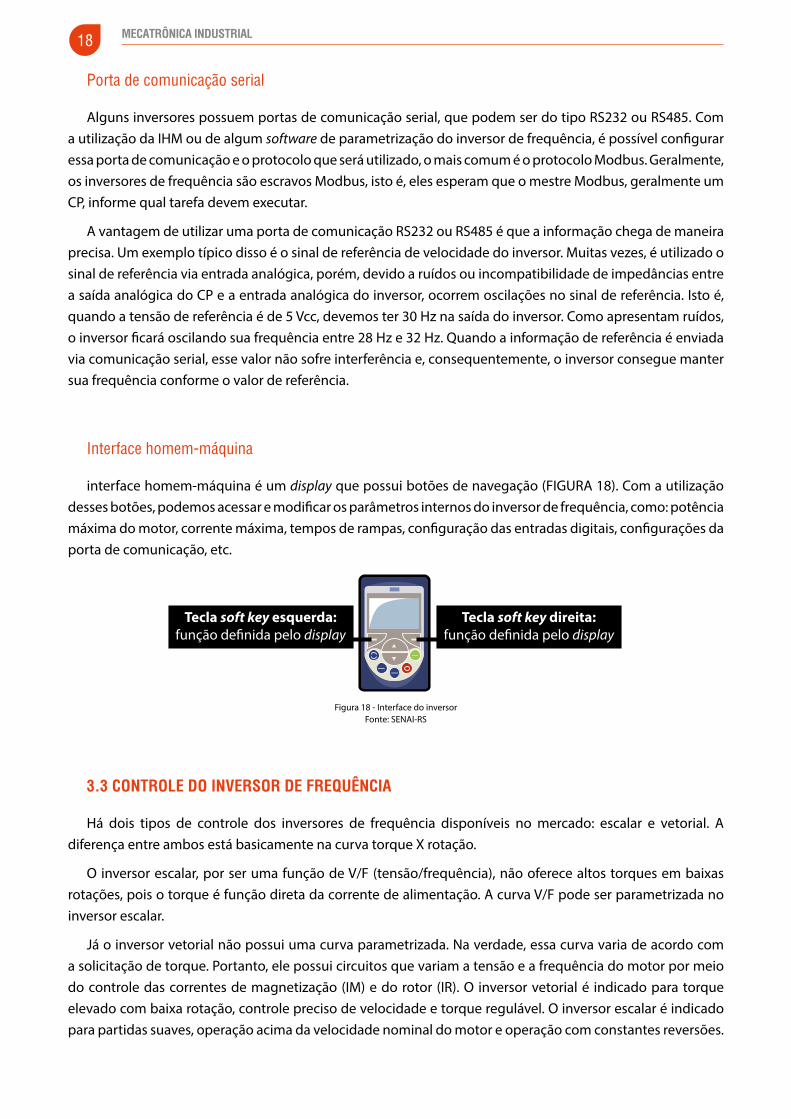
O módulo de controle é composto basicamente pela Central Processing Unit (CPU), por blocos de interface digital e blocos de interface analógica, por uma interface de comunicação RS232/ RS485 e por um módulo de interface homem-máquina (IHM), conforme Figura 16.
InterfaceSerial
0.10 Voc
Analógico
UNIDADEDE
CONTROLE
IHM
CPU
PWM
RS - 485
ConvA’D CXA
E,SDigital
( REDE )RST
U V WM
3
(10 - 20 nA)
E,SDigital
UNIDADE DEPOTÊNCIA
IGBT
Figura 16 - Módulo de controle de um inversor de frequênciaFonte: SENAI-RS
O módulo de controle recebe sinais de entradas digitais, analógicas ou bus, das quais são retiradas informações como: momento em que deve ocorrer a partida e a parada do inversor, sentido de giro do motor, valor de referência e parâmetros (como rampas de aceleração, desaceleração, tensão máxima e outros dados). A partir dessas informações de entrada, a CPU executa os cálculos para identificar o percentual de tempo que o PWM deverá permanecer ligado ou desligado em cada grau. É a CPU que controla quando cada IBGT deve, ou não, ser acionado.

3 INVERSOR DE FREQUÊNCIA 17
O módulo de controle dos inversores possui interfaces nas quais ocorre a troca de informações entre o operador e a CPU. Essas interfaces são os blocos de entradas e saídas digitais e analógicas, a porta de comunicação serial e de comunicação com a IHM. Quando conectados ao inversor, os acessórios são automaticamente configurados, garantindo mais rapidez e simplicidade, conforme observamos na Figura 17.
1
2
43
1
5
1) slot 5 - módulo de memória FLASH incorporado (1MB)
2) slot 1 - expansão de I/Os (entradas e saídas)
3) slot 2 - interface de encoder
4) slot 3 - comunicação 1: DeviceNet, CANopen, RS-232C e RS-485
5) slot 4 - comunicação: 2 Probus, DeviceNet,RS-232, RS-485 e EtherNet/IP
Figura 17 - Módulos do inversorFonte: ADAPTADO DE WEG, 2015
Agora, descreveremos as principais interfaces do módulo de controle.
Blocos de interface analógica
Os inversores mais simples são geralmente comandados por dois tipos de sinais, os sinais analógicos e os digitais. Normalmente, quando desejamos controlar a rotação de um motor CA, utilizamos uma tensão analógica para indicar a rotação de referência. Na maioria das vezes, a tensão é de 0 a 10 Vcc.
A velocidade de rotação na saída do inversor será proporcional ao valor de tensão referente à entrada analógica.
Exemplo: considerando que 10 Vcc na entrada analógica corresponderão a 60 Hz na saída do inversor, quando o potenciômetro, isto é, o equipamento divisor de tensão estiver em 50%, a entrada analógica terá 5 Vcc e o inversor terá uma frequência de 30 Hz.
Blocos de interface digital
As funções básicas para a maioria dos inversores de frequência são as funções de partida e parada, o sentido de giro e a emergência, conhecida como habilita inversor. Quando o inversor estiver devidamente alimentado e o motor estiver conectado corretamente em sua saída, nos bornes U, V, W, a entrada analógica estará com uma tensão de 5 Vcc. Nessas condições, o motor deveria estar girando a uma frequência de 30 Hz, mas ele estará parado. Provavelmente, isso estará ocorrendo por falta de energização, com uma tensão de 24 Vcc, dos bornes “habilita inversor” e “partir inversor”.
MECATRÔNICA INDUSTRIAL18
Porta de comunicação serial
Alguns inversores possuem portas de comunicação serial, que podem ser do tipo RS232 ou RS485. Com a utilização da IHM ou de algum software de parametrização do inversor de frequência, é possível configurar essa porta de comunicação e o protocolo que será utilizado, o mais comum é o protocolo Modbus. Geralmente, os inversores de frequência são escravos Modbus, isto é, eles esperam que o mestre Modbus, geralmente um CP, informe qual tarefa devem executar.
A vantagem de utilizar uma porta de comunicação RS232 ou RS485 é que a informação chega de maneira precisa. Um exemplo típico disso é o sinal de referência de velocidade do inversor. Muitas vezes, é utilizado o sinal de referência via entrada analógica, porém, devido a ruídos ou incompatibilidade de impedâncias entre a saída analógica do CP e a entrada analógica do inversor, ocorrem oscilações no sinal de referência. Isto é, quando a tensão de referência é de 5 Vcc, devemos ter 30 Hz na saída do inversor. Como apresentam ruídos, o inversor ficará oscilando sua frequência entre 28 Hz e 32 Hz. Quando a informação de referência é enviada via comunicação serial, esse valor não sofre interferência e, consequentemente, o inversor consegue manter sua frequência conforme o valor de referência.
Interface homem-máquina
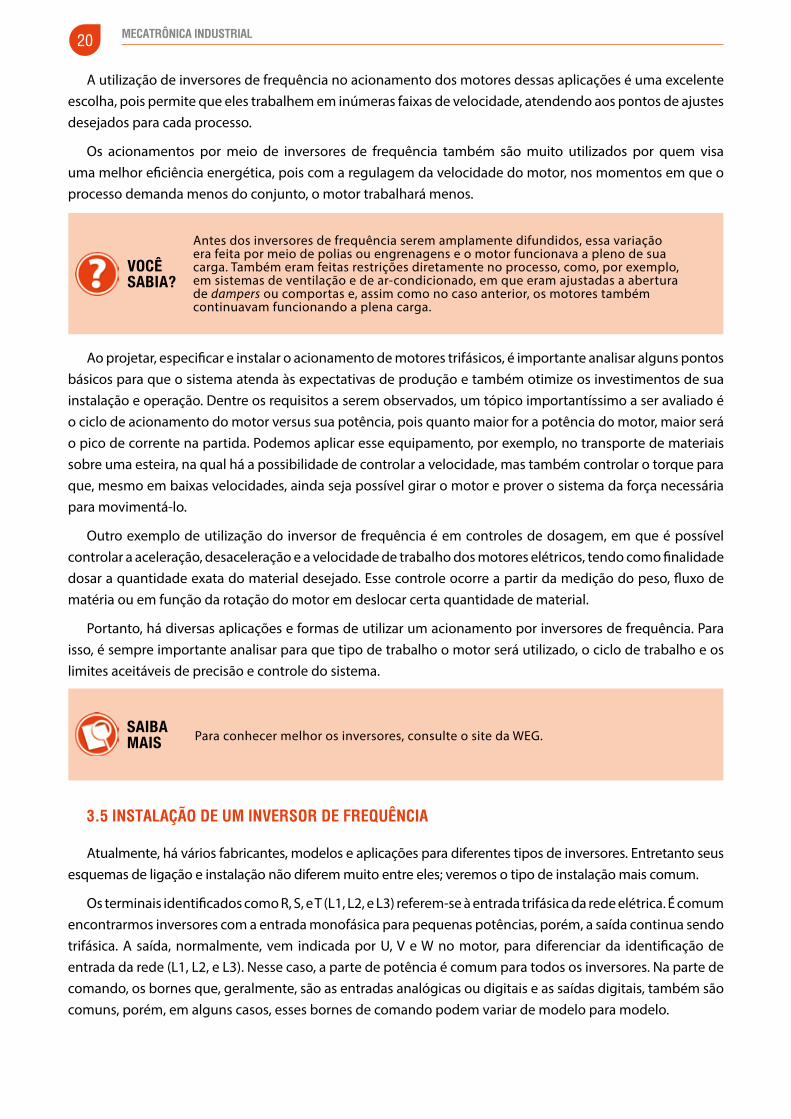
interface homem-máquina é um display que possui botões de navegação (FIGURA 18). Com a utilização desses botões, podemos acessar e modificar os parâmetros internos do inversor de frequência, como: potência máxima do motor, corrente máxima, tempos de rampas, configuração das entradas digitais, configurações da porta de comunicação, etc.
Tecla soft key esquerda:função denida pelo display
Tecla soft key direita:função denida pelo display
Figura 18 - Interface do inversorFonte: SENAI-RS
3.3 CONTROLE DO INVERSOR DE FREQUÊNCIA
Há dois tipos de controle dos inversores de frequência disponíveis no mercado: escalar e vetorial. A diferença entre ambos está basicamente na curva torque X rotação.
O inversor escalar, por ser uma função de V/F (tensão/frequência), não oferece altos torques em baixas rotações, pois o torque é função direta da corrente de alimentação. A curva V/F pode ser parametrizada no inversor escalar.
Já o inversor vetorial não possui uma curva parametrizada. Na verdade, essa curva varia de acordo com a solicitação de torque. Portanto, ele possui circuitos que variam a tensão e a frequência do motor por meio do controle das correntes de magnetização (IM) e do rotor (IR). O inversor vetorial é indicado para torque elevado com baixa rotação, controle preciso de velocidade e torque regulável. O inversor escalar é indicado para partidas suaves, operação acima da velocidade nominal do motor e operação com constantes reversões.
3 INVERSOR DE FREQUÊNCIA 19
Atualmente os inversores, conforme configuração, podem trabalhar tanto no modo vetorial (VVW) quanto no modo escalar (V/F), dependendo de sua utilização. No modo vetorial (VVW) a operação é otimizada para o motor em uso, obtendo-se um melhor desempenho em termos de regulação de velocidade. O modo escalar (V/F) é recomendado para aplicações mais simples, como o acionamento da maioria das bombas e ventiladores. Nesses casos, é possível reduzir as perdas no motor e no inversor utilizando a opção “V/F Quadrática”, o que resulta em economia de energia. O modo V/F também é utilizado quando mais de um motor é acionado por um inversor simultaneamente (aplicações multimotores).
Para facilitar o setup, alguns inversores dispõem de sistemas de ajustes automáticos, também conhecidos como auto-tunning, não sendo necessária a pesquisa de dados sobre o motor.
A capacidade dos inversores vetoriais de impor torque necessário ao motor, de forma precisa e rápida, elevando a velocidade de resposta dinâmica a variações bruscas de carga, é a principal diferença em relação aos inversores escalares.
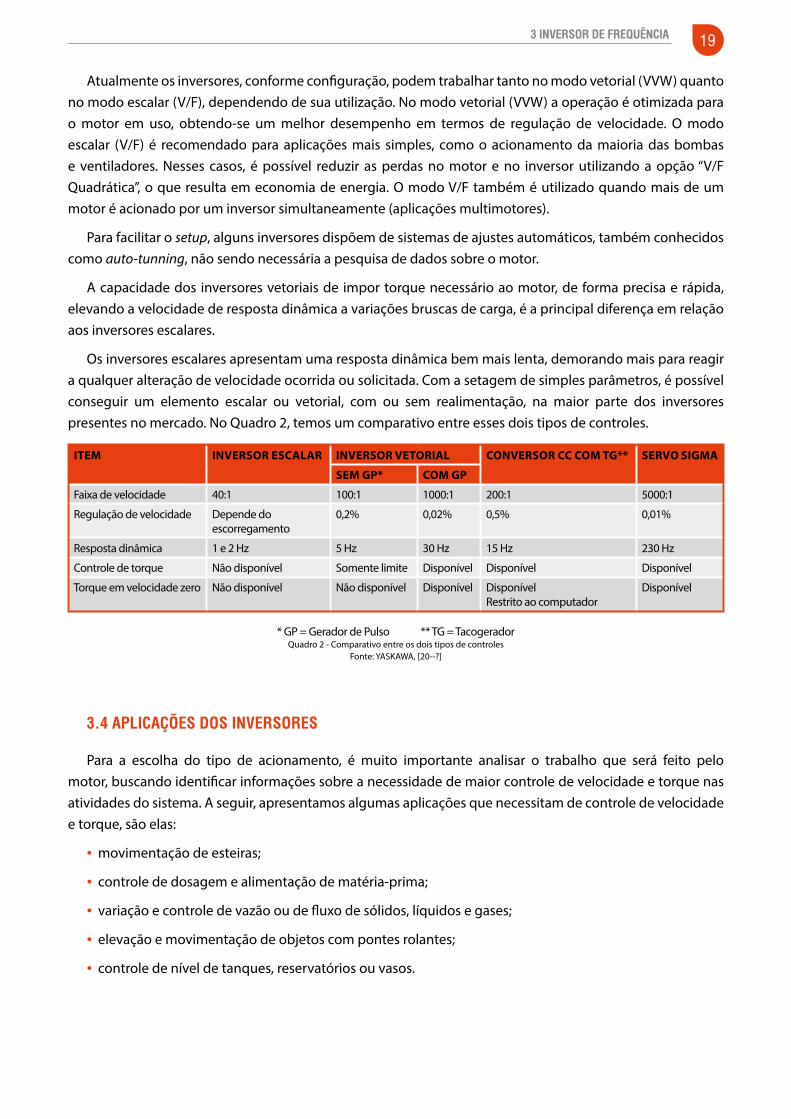
Os inversores escalares apresentam uma resposta dinâmica bem mais lenta, demorando mais para reagir a qualquer alteração de velocidade ocorrida ou solicitada. Com a setagem de simples parâmetros, é possível conseguir um elemento escalar ou vetorial, com ou sem realimentação, na maior parte dos inversores presentes no mercado. No Quadro 2, temos um comparativo entre esses dois tipos de controles.
ITEM INVERSOR ESCALAR INVERSOR VETORIAL CONVERSOR CC COM TG** SERVO SIGMA
SEM GP* COM GP
Faixa de velocidade 40:1 100:1 1000:1 200:1 5000:1
Regulação de velocidade Depende do escorregamento
0,2% 0,02% 0,5% 0,01%
Resposta dinâmica 1 e 2 Hz 5 Hz 30 Hz 15 Hz 230 Hz
Controle de torque Não disponível Somente limite Disponível Disponível Disponível
Torque em velocidade zero Não disponível Não disponível Disponível Disponível Restrito ao computador
Disponível
* GP = Gerador de Pulso ** TG = TacogeradorQuadro 2 - Comparativo entre os dois tipos de controles
Fonte: YASKAWA, [20--?]
3.4 APLICAÇÕES DOS INVERSORES
Para a escolha do tipo de acionamento, é muito importante analisar o trabalho que será feito pelo motor, buscando identificar informações sobre a necessidade de maior controle de velocidade e torque nas atividades do sistema. A seguir, apresentamos algumas aplicações que necessitam de controle de velocidade e torque, são elas:
• movimentação de esteiras;
• controle de dosagem e alimentação de matéria-prima;
• variação e controle de vazão ou de fluxo de sólidos, líquidos e gases;
• elevação e movimentação de objetos com pontes rolantes;
• controle de nível de tanques, reservatórios ou vasos.
MECATRÔNICA INDUSTRIAL20
A utilização de inversores de frequência no acionamento dos motores dessas aplicações é uma excelente escolha, pois permite que eles trabalhem em inúmeras faixas de velocidade, atendendo aos pontos de ajustes desejados para cada processo.
Os acionamentos por meio de inversores de frequência também são muito utilizados por quem visa uma melhor eficiência energética, pois com a regulagem da velocidade do motor, nos momentos em que o processo demanda menos do conjunto, o motor trabalhará menos.
Antes dos inversores de frequência serem amplamente difundidos, essa variação era feita por meio de polias ou engrenagens e o motor funcionava a pleno de sua carga. Também eram feitas restrições diretamente no processo, como, por exemplo, em sistemas de ventilação e de ar-condicionado, em que eram ajustadas a abertura de dampers ou comportas e, assim como no caso anterior, os motores também continuavam funcionando a plena carga.
VOCÊ SABIA?
Ao projetar, especificar e instalar o acionamento de motores trifásicos, é importante analisar alguns pontos básicos para que o sistema atenda às expectativas de produção e também otimize os investimentos de sua instalação e operação. Dentre os requisitos a serem observados, um tópico importantíssimo a ser avaliado é o ciclo de acionamento do motor versus sua potência, pois quanto maior for a potência do motor, maior será o pico de corrente na partida. Podemos aplicar esse equipamento, por exemplo, no transporte de materiais sobre uma esteira, na qual há a possibilidade de controlar a velocidade, mas também controlar o torque para que, mesmo em baixas velocidades, ainda seja possível girar o motor e prover o sistema da força necessária para movimentá-lo.
Outro exemplo de utilização do inversor de frequência é em controles de dosagem, em que é possível controlar a aceleração, desaceleração e a velocidade de trabalho dos motores elétricos, tendo como finalidade dosar a quantidade exata do material desejado. Esse controle ocorre a partir da medição do peso, fluxo de matéria ou em função da rotação do motor em deslocar certa quantidade de material.
Portanto, há diversas aplicações e formas de utilizar um acionamento por inversores de frequência. Para isso, é sempre importante analisar para que tipo de trabalho o motor será utilizado, o ciclo de trabalho e os limites aceitáveis de precisão e controle do sistema.
Para conhecer melhor os inversores, consulte o site da WEG. SAIBA MAIS
3.5 INSTALAÇÃO DE UM INVERSOR DE FREQUÊNCIA
Atualmente, há vários fabricantes, modelos e aplicações para diferentes tipos de inversores. Entretanto seus esquemas de ligação e instalação não diferem muito entre eles; veremos o tipo de instalação mais comum.
Os terminais identificados como R, S, e T (L1, L2, e L3) referem-se à entrada trifásica da rede elétrica. É comum encontrarmos inversores com a entrada monofásica para pequenas potências, porém, a saída continua sendo trifásica. A saída, normalmente, vem indicada por U, V e W no motor, para diferenciar da identificação de entrada da rede (L1, L2, e L3). Nesse caso, a parte de potência é comum para todos os inversores. Na parte de comando, os bornes que, geralmente, são as entradas analógicas ou digitais e as saídas digitais, também são comuns, porém, em alguns casos, esses bornes de comando podem variar de modelo para modelo.
3 INVERSOR DE FREQUÊNCIA 21
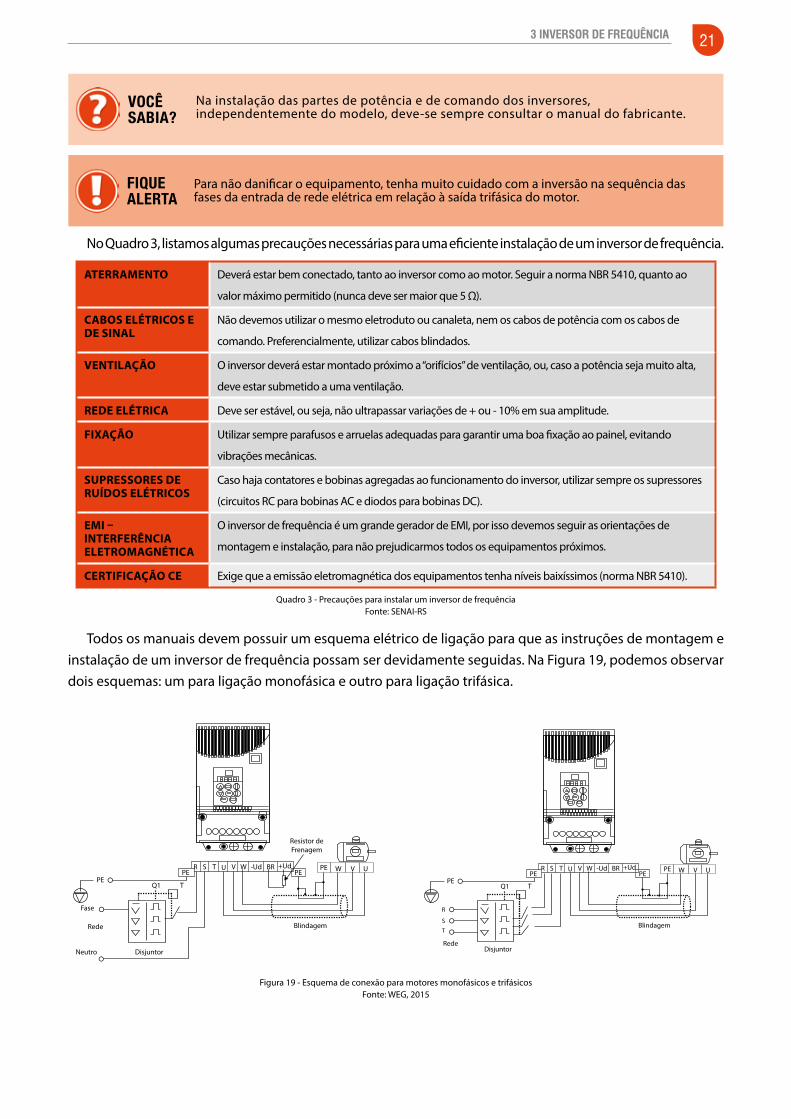
Na instalação das partes de potência e de comando dos inversores, independentemente do modelo, deve-se sempre consultar o manual do fabricante.
VOCÊ SABIA?
FIQUE ALERTA
Para não danificar o equipamento, tenha muito cuidado com a inversão na sequência das fases da entrada de rede elétrica em relação à saída trifásica do motor.
No Quadro 3, listamos algumas precauções necessárias para uma eficiente instalação de um inversor de frequência.
ATERRAMENTO Deverá estar bem conectado, tanto ao inversor como ao motor. Seguir a norma NBR 5410, quanto ao
valor máximo permitido (nunca deve ser maior que 5 Ω).
CABOS ELÉTRICOS E DE SINAL
Não devemos utilizar o mesmo eletroduto ou canaleta, nem os cabos de potência com os cabos de
comando. Preferencialmente, utilizar cabos blindados.
VENTILAÇÃO O inversor deverá estar montado próximo a “orifícios” de ventilação, ou, caso a potência seja muito alta,
deve estar submetido a uma ventilação.
REDE ELÉTRICA Deve ser estável, ou seja, não ultrapassar variações de + ou - 10% em sua amplitude.
FIXAÇÃO Utilizar sempre parafusos e arruelas adequadas para garantir uma boa fixação ao painel, evitando
vibrações mecânicas.
SUPRESSORES DE RUÍDOS ELÉTRICOS
Caso haja contatores e bobinas agregadas ao funcionamento do inversor, utilizar sempre os supressores
(circuitos RC para bobinas AC e diodos para bobinas DC).
EMI – INTERFERÊNCIA ELETROMAGNÉTICA
O inversor de frequência é um grande gerador de EMI, por isso devemos seguir as orientações de
montagem e instalação, para não prejudicarmos todos os equipamentos próximos.
CERTIFICAÇÃO CE Exige que a emissão eletromagnética dos equipamentos tenha níveis baixíssimos (norma NBR 5410).
Quadro 3 - Precauções para instalar um inversor de frequência Fonte: SENAI-RS
Todos os manuais devem possuir um esquema elétrico de ligação para que as instruções de montagem e instalação de um inversor de frequência possam ser devidamente seguidas. Na Figura 19, podemos observar dois esquemas: um para ligação monofásica e outro para ligação trifásica.
Resistor deFrenagem
R S T U UV VW W-Ud BR +UdPE
PE
TPE
Fase
Rede
Neutro Disjuntor
Blindagem
Q1
PE R S T U UV VW W-Ud BR +UdPE
PE
TPE
RedeDisjuntor
Blindagem
Q1
PE
R
ST
Figura 19 - Esquema de conexão para motores monofásicos e trifásicosFonte: WEG, 2015

MECATRÔNICA INDUSTRIAL22
Para entender melhor a instalação de um inversor, consulte o site da WEG. SAIBA MAIS
3.6 PARAMETRIZAÇÃO DE DRIVES
Para que um inversor funcione corretamente, não basta somente montá-lo e instalá-lo corretamente; também necessitamos informar a esse equipamento suas condições de trabalho para a operação, ou seja, sua parametrização.
Há um parâmetro que carrega as configurações originais de fábrica. Os parâmetros são escolhidos de modo a atender o maior número de aplicações, reduzindo ao máximo a necessidade de reprogramação durante a colocação em funcionamento.
VOCÊ SABIA?
Quanto maior for o número de recursos que o drive oferecer, maior será o número de parâmetros disponíveis. No Quadro 4, descrevemos os principais parâmetros utilizados.
PARÂMETROS DESCRIÇÃO
Frequência máxima Esse parâmetro determina a velocidade máxima do motor.
Frequência mínima Esse parâmetro determina a velocidade mínima do motor.
Frequência de JOG A tecla JOG é um recurso que faz o motor girar em velocidade baixa, facilitando o posicionamento de peças antes de a máquina funcionar em seu regime normal.
Tempo de partida (rampa de subida)
Estando o motor parado, esse parâmetro indica em quanto tempo desejamos que ele chegue à velocidade programada.
Tempo de parada (rampa de descida)
O inversor pode produzir uma parada gradativa do motor. Essa facilidade pode ser parametrizada e deve levar em consideração a massa (inércia) da carga acoplada.
Tipo de frenagem Normalmente, esse recurso é utilizado para cargas mecânicas pequenas (leves) e que necessitam de resposta rápida.
Liberação alteração de parâmetros Esse parâmetro é um tipo de proteção para impedir que alguém, inadvertidamente, altere algum parâmetro da máquina.
Tipo de entrada Pode ser uma entrada analógica (0 a 10 Vcc) ou digital. Indica como controlar a velocidade do motor.
Frequência de PWM Esse parâmetro determina a frequência de PWM do drive. Para evitar perdas no motor e EMI, quanto menor for essa frequência, melhor. O único inconveniente de parametrizar o PWM com frequências baixas é a geração de ruídos.
Pulso de tensão de partida Alguns drives possuem uma função chamada pulso de tensão de partida (kick start) com um valor ajustável. É aplicado em cargas de elevada inércia que, no momento da partida, exigem um esforço extra no acionamento.
Função do alto conjugado O valor dessa tensão deverá ser o suficiente para obtermos um conjugado que possa vencer o conjugado resistente da carga.
Limitação de corrente Essa função é utilizada quando a carga apresenta uma inércia elevada, porque faz o sistema rede/soft-starter fornecer ao motor somente a corrente necessária para que seja executada a aceleração da carga, garantindo um acionamento suave.
Proteções As proteções garantem ao motor toda a ajuda necessária. Assim, quando uma proteção atua, aparece uma mensagem de erro para visualização do usuário.
Sobrecorrente na saída Ajusta o máximo valor de corrente que o drive permite conduzir para o motor por período de tempo pré-ajustado.
Subcorrente imediata Ajusta o mínimo valor de corrente que o drive permite conduzir para o motor por período de tempo pré-ajustado.
Quadro 4 - Parâmetros para a utilização de drivesFonte: SENAI-RS
3 INVERSOR DE FREQUÊNCIA 23
Além dos parâmetros descritos no Quadro 4, o drive possui diversas proteções, dependendo do fabricante do equipamento, como por exemplo:
• economia de energia elétrica;
• parâmetros de leitura: são as variáveis que podem ser visualizadas no display, mas não podem ser alteradas pelo usuário, tais como tensão, corrente, potência ativa;
• parâmetros de regulação: são os valores ajustáveis a serem utilizados pelas funções do drive, como tensão inicial, tempo de rampa de aceleração e desaceleração;
• parâmetros de configuração: definem as características do drive, as funções a serem executadas e as entradas e saídas, tais como parâmetros dos relés de saída, entradas analógicas e digitais;
• parâmetros do motor: definem as características nominais do motor, como ajuste da corrente do motor e fator de serviço.
FIQUE ALERTA
Na prática, só faz sentido ativar a função de economia de energia quando a carga for menor do que 50% da carga nominal e durante um período de operação superior a 50% do tempo de funcionamento do motor.
CASOS E RELATOS
A escolha do componente adequado
No desenvolvimento de um novo projeto, em uma indústria de peças plásticas, um técnico verificou que uma determinada estação de trabalho possuía um motor elétrico que necessitaria de vários acionamentos, considerando o tempo de aceleração e desaceleração e o custo benefício. Ele determinou que a melhor opção para essa estação seria utilizar um inversor de frequência. Entretanto, em outra estação de trabalho desse mesmo projeto, os tempos de acionamentos teriam que ser extremamente curtos e precisos. Nesse caso, esse técnico utilizou servomotores, pois eles conseguem acelerar e desacelerar rapidamente e com muita precisão, independentemente da inércia do conjunto mecânico no qual o motor está inserido.
Já em outra estação de trabalho, o ciclo de acionamento tinha como função apenas reduzir o consumo de corrente na partida, sem a necessidade de controle de velocidade, e a solução mais indicada por esse profissional foi a utilização do acionamento por meio do soft-starter (partida suave), que, sendo um equipamento de baixo custo, cumpriria bem sua função, fazendo o controle da partida para otimizar o consumo nesse momento.
Em resumo, para cada tipo de aplicação temos um tipo de controle e, para que a decisão seja assertiva, devemos conhecer muito bem cada tipo e função dos inúmeros drives de acionamentos presentes no mercado. Para isso, devemos buscar informações, constantemente, em cursos, feiras, palestras, revistas, entre outros.
Controle por Servoacionamentos
4
Agora que já conhecemos o soft-starter e o inversor de frequência, que são muito utilizados na indústria em geral, vamos estudar, neste capítulo, outro tipo de drive de controle: os servoacionamentos. Aprenderemos sobre um equipamento cujas principais características são a repetitividade e a precisão em seus posicionamentos. Esse controlador é formado por dois componentes, um servomotor e um servodrive, que juntos constituem um dos equipamentos mais precisos e dinâmicos para controle de máquinas e sistemas automatizados.
4.1 DESCRIÇÃO DO SERVOACIONAMENTO
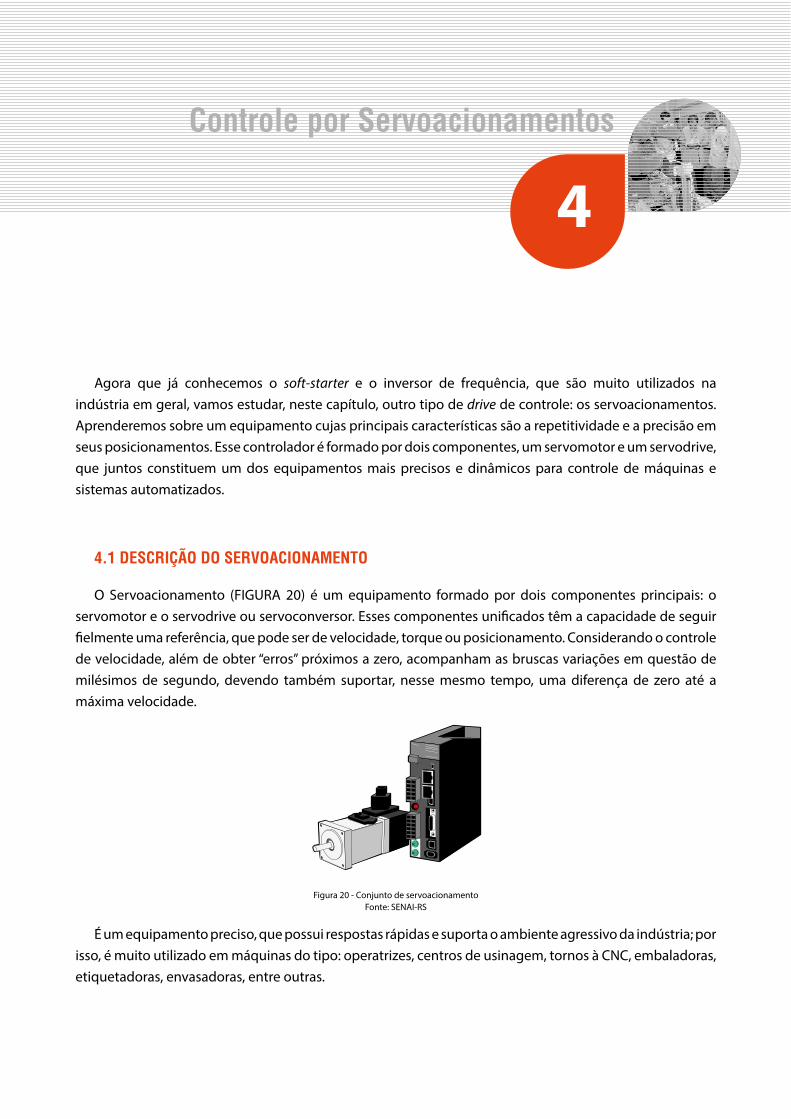
O Servoacionamento (FIGURA 20) é um equipamento formado por dois componentes principais: o servomotor e o servodrive ou servoconversor. Esses componentes unificados têm a capacidade de seguir fielmente uma referência, que pode ser de velocidade, torque ou posicionamento. Considerando o controle de velocidade, além de obter “erros” próximos a zero, acompanham as bruscas variações em questão de milésimos de segundo, devendo também suportar, nesse mesmo tempo, uma diferença de zero até a máxima velocidade.
Figura 20 - Conjunto de servoacionamentoFonte: SENAI-RS
É um equipamento preciso, que possui respostas rápidas e suporta o ambiente agressivo da indústria; por isso, é muito utilizado em máquinas do tipo: operatrizes, centros de usinagem, tornos à CNC, embaladoras, etiquetadoras, envasadoras, entre outras.
4 CONTROLE POR SERVOACIONAMENTOS 25
Para aumentar a capacidade de produção de uma empresa, agilizando o processo com confiabilidade e repetitividade, mesmo com equipamentos desatualizados, é possível utilizar o recurso do retrofitting, em que os servoacionamentos têm sido uma das opções mais utilizadas.
VOCÊ SABIA?
4.2 PRINCÍPIO DE FUNCIONAMENTO
O servodrive é um amplificador eletrônico especial utilizado para energizar servomecanismos. Ele monitora o sinal de retorno do servomecanismo e ajusta continuamente os desvios esperados do sistema. Simplificadamente, o servodrive recebe um sinal de comando de um sistema de controle, amplifica-o e transmite, em ordem, uma corrente elétrica para o servomotor, a fim de produzir movimentos proporcionais ao sinal de comando. Tipicamente, o sinal de comando representa a velocidade desejada, porém pode representar também o torque ou a posição. Com um sensor, que pode ser do tipo encoder absoluto, encoder incremental ou resolver acoplado ao servomotor, ele devolve o estado atual para o servodrive. O drive, então, compara o estado atual do motor com o estado em que deveria estar e, posteriormente, altera a tensão ou a largura de pulsos do motor para corrigir o desvio necessário ao solicitado.
Para uma configuração de controle de velocidade, o motor gira a uma velocidade muito próxima ao sinal recebido do servodrive. Muitos parâmetros podem ser utilizados para melhorar o desempenho do motor. O grande problema do drive é que, em 95% dos casos, o fabricante do servodrive fabrica seu equipamento somente para utilização com o seu servomotor.
A grande maioria dos sistemas de servoacionamento (servodrive + servomotor) é utilizada nas máquinas CNC e na robótica, entre outros usos. A maior vantagem desse sistema sobre os motores CA e CC é a adição dos sinais de retorno do motor. A grande funcionalidade desse retorno de campo é a detecção do movimento indesejado, ou também para aumentar a precisão do movimento desejado.
O retorno de campo geralmente é feito por meio de um encoder. Os servomotores que são utilizados com a tarefa de modulação de velocidade constante possuem um ciclo de vida bem mais elevado do que os motores CA comuns. Os servomotores também podem atuar como freios, desligando a energia transmitida pelo próprio motor.
4.3 SERVODRIVES
O servodrive (FIGURA 21), conhecido também como circuito de controle, é formado por componentes eletrônicos ou circuitos integrados, responsáveis por executar as lógicas de controle internamente, por meio da recepção do sinal de retorno do campo, atuando diretamente no servomotor e mandando esse sinal para a posição desejada.
Figura 21 - ServodriveFonte: SENAI-RS
MECATRÔNICA INDUSTRIAL26
O controle de determinados processos atualmente está mais simples, pois há funcionalidades desenvolvidas ao longo do tempo que podem ser executadas durante a operação normal do equipamento, sem a necessidade de seleção de modo. Além disso, podemos alterar os ganhos do servoacionamento durante a mudança de cargas ou em plena operação.
Nos modos de controle dos servodrives, podemos citar algumas funcionalidades disponíveis:
• controle de velocidade;
• controle de posicionamento;
• controle de torque.
As funcionalidades citadas permitem que utilizemos o servodrive para muitas aplicações.
O servodrive geralmente possui um display, disponibilizando para o usuário as informações de velocidade do campo, como:
• comandos de velocidade;
• comandos de torque;
• número de pulsos a partir da origem;
• ângulo elétrico;
• sinais de entradas e saídas (I/O);
• comando de pulsos de velocidade;
• desvio de posição;
• taxa de carga do motor;
• taxa da carga regenerativa;
• da carga resistiva dinâmica;
• do encoder de entrada;
• retorno de campo da contagem de pulsos.
Para reduzir o tempo de ação dos equipamentos periféricos, interligados ao sistema ou à máquina, a informação de posicionamento completa também pode ser encontrada em grande parte dos servodrives. O sentido de giro do motor também pode ser controlado por meio de uma entrada para a escolha dele, não sendo necessário alterar a fiação do equipamento. A sinalização dos temporizadores intertrava os freios dos servomotores para manter o motor na posição desejada, mesmo com comandos indevidos. Há alguns métodos de desaceleração que podem ser programados, entre eles o freio de desaceleração dinâmica, a desaceleração livre e a parada de emergência para desaceleração de torque.
Também é possível fazer a programação, por meio de um computador, utilizando um canal de comunicação serial ou USB. Com um software proprietário, é possível acessar todos os parâmetros e alterá-los em tempo real. Durante a operação do equipamento é possível monitorar seus valores conforme Figura 22, a seguir.

4 CONTROLE POR SERVOACIONAMENTOS 27
JOG
LOCREM
O
PROG
JOG
LOCREM
O
PROG
Via IHM remota
*** ****** ***
Via PC
Figura 22 - Tipos de comunicação do servodriveFonte: SENAI-RS
Finalmente, é possível ainda utilizar placas de comunicação de dados para protocolos de comunicação específicos, bem como Profibus-DP, DeviceNet, Modbus, entre outros.
4.4 SERVOMOTORES
O servomotor é um equipamento mecânico ou eletromecânico que apresenta movimentação proporcional referente a certo comando. Ao invés de girar livremente, sem controle de posicionamento, assim como a maioria dos motores, esse dispositivo utiliza uma malha fechada com um sinal de controle para verificar a posição atual e atuar no motor para posicioná-lo. Na Figura 23, apresentamos um servomotor.
Figura 23 - ServomotorFonte: SENAI-RS
Em comparação com os motores de corrente contínua (CC), o eixo dos servomotores possui liberdade de aproximadamente 180°, tornando-os mais precisos quanto ao posicionamento.
4.4.1 PARTES DE UM SERVOMOTOR
O servomotor é do tipo síncrono, composto pelo estator (parte fixa), rotor (parte móvel), e sensor, conforme descreveremos a seguir.
Estator
É bobinado exatamente como nos motores elétricos de corrente alternada (CA) comuns. Apesar de suas semelhanças e de utilizar a mesma alimentação trifásica, não podemos ligá-lo diretamente na rede, pois sua bobinagem é especialmente construída para proporcionar alta dinâmica e durabilidade ao sistema.
MECATRÔNICA INDUSTRIAL28
Rotor
É confeccionado por meio de ímãs dispostos em linha e também um encoder/resolver, acoplados para fornecer sinais de posicionamento e velocidade. De um servomotor são exigidos o torque constante e a rotação em altas velocidades (faixa de 4500 RPM).
Sensor
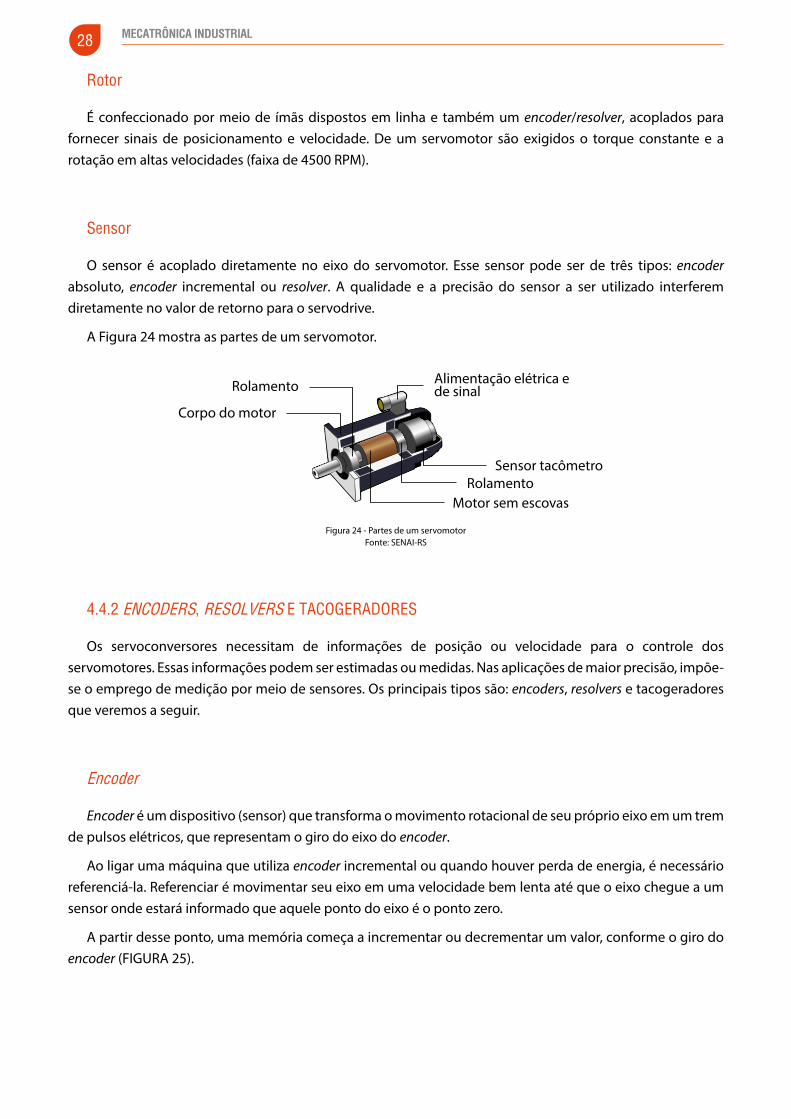
O sensor é acoplado diretamente no eixo do servomotor. Esse sensor pode ser de três tipos: encoder absoluto, encoder incremental ou resolver. A qualidade e a precisão do sensor a ser utilizado interferem diretamente no valor de retorno para o servodrive.
A Figura 24 mostra as partes de um servomotor.
Rolamento
Rolamento
Alimentação elétrica e de sinal
Sensor tacômetro
Motor sem escovas
Corpo do motor
Figura 24 - Partes de um servomotorFonte: SENAI-RS
4.4.2 ENCODERS, RESOLVERS E TACOGERADORES
Os servoconversores necessitam de informações de posição ou velocidade para o controle dos servomotores. Essas informações podem ser estimadas ou medidas. Nas aplicações de maior precisão, impõe-se o emprego de medição por meio de sensores. Os principais tipos são: encoders, resolvers e tacogeradores que veremos a seguir.
Encoder
Encoder é um dispositivo (sensor) que transforma o movimento rotacional de seu próprio eixo em um trem de pulsos elétricos, que representam o giro do eixo do encoder.
Ao ligar uma máquina que utiliza encoder incremental ou quando houver perda de energia, é necessário referenciá-la. Referenciar é movimentar seu eixo em uma velocidade bem lenta até que o eixo chegue a um sensor onde estará informado que aquele ponto do eixo é o ponto zero.
A partir desse ponto, uma memória começa a incrementar ou decrementar um valor, conforme o giro do encoder (FIGURA 25).
4 CONTROLE POR SERVOACIONAMENTOS 29
Figura 25 - Máquina que utiliza um encoder incrementalFonte: SENAI-RS
Considerando que um encoder incremental de 1024 pulsos por revolução esteja em sua posição zero e que, em seguida, seja girado em 10º, durante essa movimentação terão ocorridos 28 pulsos, ou seja, 1024 pulsos/360º x 10º = 28 pulsos.
FIQUE ALERTA
Os encoders devem ser protegidos contra sobrecarga mecânica, tal como deslocamento entre o drive e o eixo do encoder para evitar danos ao eixo e aos rolamentos ou erros de medidas. Por isso, um acoplamento flexível deve ser sempre montado entre o drive e o eixo do encoder. O eixo do encoder não deve ser atingido quando montamos o acoplamento, pois isso poderia destruir o disco codificado.
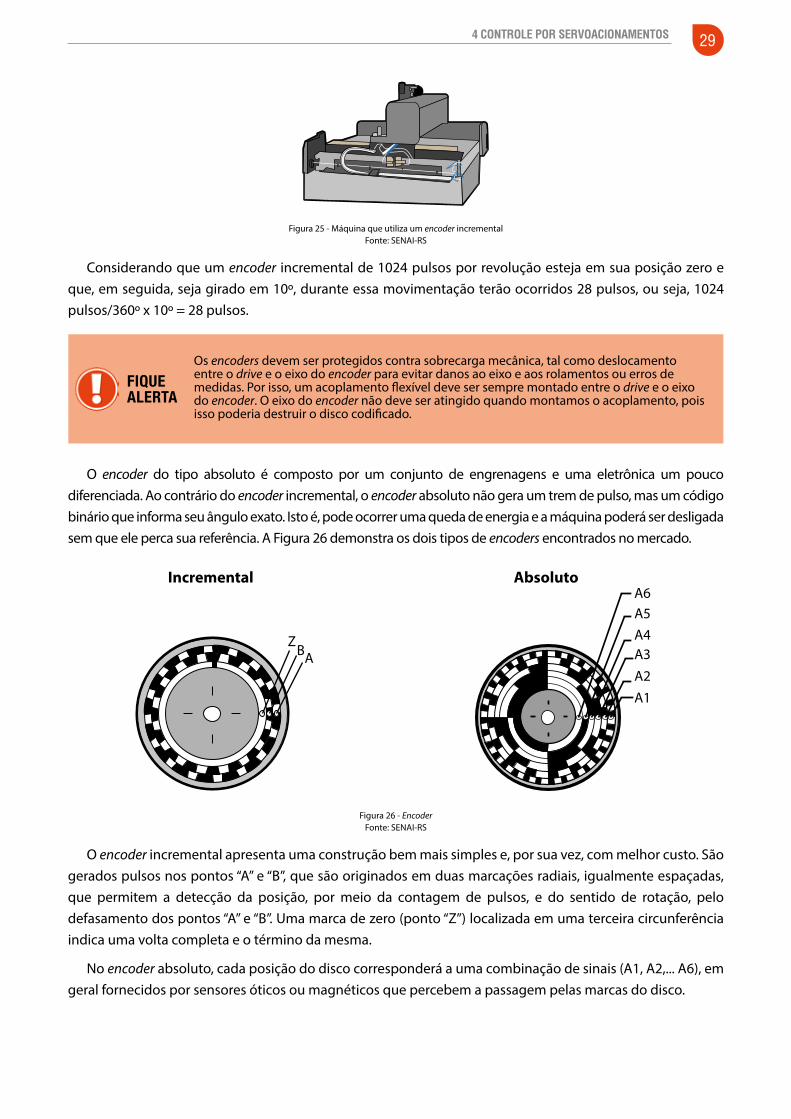
O encoder do tipo absoluto é composto por um conjunto de engrenagens e uma eletrônica um pouco diferenciada. Ao contrário do encoder incremental, o encoder absoluto não gera um trem de pulso, mas um código binário que informa seu ângulo exato. Isto é, pode ocorrer uma queda de energia e a máquina poderá ser desligada sem que ele perca sua referência. A Figura 26 demonstra os dois tipos de encoders encontrados no mercado.
ZBA
A6A5A4A3A2A1
Incremental Absoluto
Figura 26 - EncoderFonte: SENAI-RS
O encoder incremental apresenta uma construção bem mais simples e, por sua vez, com melhor custo. São gerados pulsos nos pontos “A” e “B”, que são originados em duas marcações radiais, igualmente espaçadas, que permitem a detecção da posição, por meio da contagem de pulsos, e do sentido de rotação, pelo defasamento dos pontos “A” e “B”. Uma marca de zero (ponto “Z”) localizada em uma terceira circunferência indica uma volta completa e o término da mesma.
No encoder absoluto, cada posição do disco corresponderá a uma combinação de sinais (A1, A2,... A6), em geral fornecidos por sensores óticos ou magnéticos que percebem a passagem pelas marcas do disco.
MECATRÔNICA INDUSTRIAL30
Os encoders são utilizados para fechar a malha de controle de algum sistema eletromecânico, como controle de velocidade e/ou posição de um eixo, controle de posicionamento de uma mesa rotativa e de braços robóticos.
VOCÊ SABIA?
Resolver
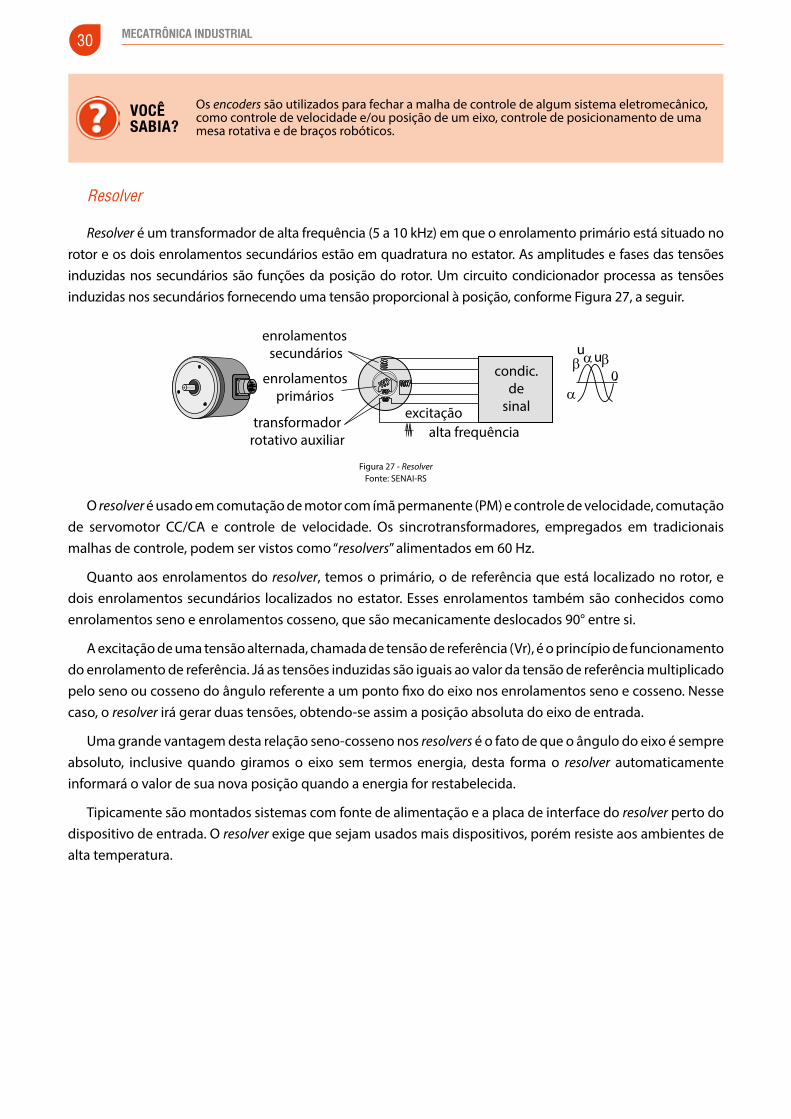
Resolver é um transformador de alta frequência (5 a 10 kHz) em que o enrolamento primário está situado no rotor e os dois enrolamentos secundários estão em quadratura no estator. As amplitudes e fases das tensões induzidas nos secundários são funções da posição do rotor. Um circuito condicionador processa as tensões induzidas nos secundários fornecendo uma tensão proporcional à posição, conforme Figura 27, a seguir.
enrolamentos secundários
enrolamentosprimários
transformadorrotativo auxiliar alta frequência
excitaçãoαu
αu uu ββ0condic.
desinal
Figura 27 - ResolverFonte: SENAI-RS
O resolver é usado em comutação de motor com ímã permanente (PM) e controle de velocidade, comutação de servomotor CC/CA e controle de velocidade. Os sincrotransformadores, empregados em tradicionais malhas de controle, podem ser vistos como “resolvers” alimentados em 60 Hz.
Quanto aos enrolamentos do resolver, temos o primário, o de referência que está localizado no rotor, e dois enrolamentos secundários localizados no estator. Esses enrolamentos também são conhecidos como enrolamentos seno e enrolamentos cosseno, que são mecanicamente deslocados 90° entre si.
A excitação de uma tensão alternada, chamada de tensão de referência (Vr), é o princípio de funcionamento do enrolamento de referência. Já as tensões induzidas são iguais ao valor da tensão de referência multiplicado pelo seno ou cosseno do ângulo referente a um ponto fixo do eixo nos enrolamentos seno e cosseno. Nesse caso, o resolver irá gerar duas tensões, obtendo-se assim a posição absoluta do eixo de entrada.
Uma grande vantagem desta relação seno-cosseno nos resolvers é o fato de que o ângulo do eixo é sempre absoluto, inclusive quando giramos o eixo sem termos energia, desta forma o resolver automaticamente informará o valor de sua nova posição quando a energia for restabelecida.
Tipicamente são montados sistemas com fonte de alimentação e a placa de interface do resolver perto do dispositivo de entrada. O resolver exige que sejam usados mais dispositivos, porém resiste aos ambientes de alta temperatura.

4 CONTROLE POR SERVOACIONAMENTOS 31
Tacogerador
É um gerador CC de ímã permanente acoplado mecanicamente no eixo em que desejamos medir a velocidade (FIGURA 28).
Figura 28 - TacogeradorFonte: SENAI-RS
Esse equipamento é muito utilizado em medições de velocidade angulares, como em máquinas rotativas e em aplicações que requerem velocidades contínuas e extremamente controladas, como máquinas industriais a CNC, centros de usinagem ou torneamento e retificadoras cilíndricas. Em menores proporções, é utilizado também para medição de velocidade linear em veículos automotores.
Algumas exigências são necessárias para que um motor CC funcione como um tacogerador, como a tensão de saída que deve ser estabilizada na faixa operacional e deve ser estável a variações de temperatura. Os tacogeradores industriais geralmente incorporam compensação de temperatura por meio de termistores e fazem uso de comutador e escovas de prata para melhorar a confiabilidade de comutação a baixas velocidades e a baixas correntes que são típicos dessa aplicação. Para combinar alto desempenho e baixo custo, alguns motores são frequentemente desenvolvidos para incorporar um tacogerador montado no eixo do motor e dentro de uma única carcaça.
O controle de velocidade em motores pode ser feito de diversas formas, dependendo de sua aplicação. O tacogerador é utilizado em aplicações que requerem velocidade contínua e extremamente controlada, o encoder é utilizado em motores CA e CC no controle de posição e velocidade e o resolver, em controle de comutação e velocidade de motores.
VOCÊ SABIA?
4.5 INSTALAÇÃO DE SERVOACIONAMENTOS
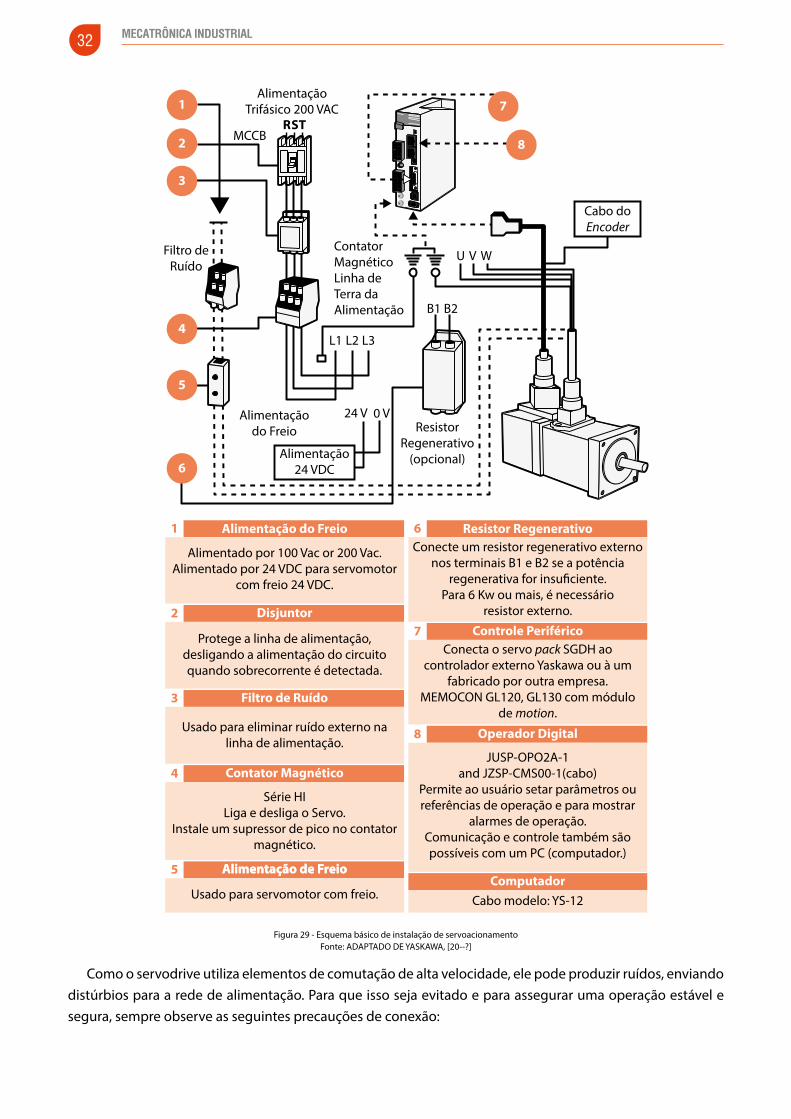
A instalação é semelhante em todos os tipos de servos e é muito importante que seja feita com bastante atenção para que o equipamento funcione corretamente. A Figura 29 apresenta um esquema da instalação do servoacionamento e de seus acessórios.
MECATRÔNICA INDUSTRIAL32
1
2
3
7
8
4
5
6
RST
L1 L2 L3
U V W
24 V 0 VAlimentação do Freio
Alimentação 24 VDC
Resistor Regenerativo
(opcional)
Alimentação Trifásico 200 VAC
MCCB
Filtro de Ruído
ContatorMagnéticoLinha deTerra da Alimentação B1 B2
Cabo do Encoder
Alimentado por 100 Vac or 200 Vac.Alimentado por 24 VDC para servomotor
com freio 24 VDC.
Alimentação do Freio
Protege a linha de alimentação, desligando a alimentação do circuito quando sobrecorrente é detectada.
Disjuntor
Usado para eliminar ruído externo na linha de alimentação.
Filtro de Ruído
Série HI Liga e desliga o Servo.
Instale um supressor de pico no contator magnético.
Contator Magnético
Alimentação de Freio
Usado para servomotor com freio.
Alimentação de Freio
Conecte um resistor regenerativo externo nos terminais B1 e B2 se a potência
regenerativa for insuciente.Para 6 Kw ou mais, é necessário
resistor externo.
Resistor Regenerativo
Conecta o servo pack SGDH ao controlador externo Yaskawa ou à um
fabricado por outra empresa.MEMOCON GL120, GL130 com módulo
de motion.
Controle Periférico
Operador Digital
Computador
JUSP-OPO2A-1and JZSP-CMS00-1(cabo)
Permite ao usuário setar parâmetros ou referências de operação e para mostrar
alarmes de operação.Comunicação e controle também são possíveis com um PC (computador.)
Cabo modelo: YS-12
1 6
7
8
2
3
4
5
Figura 29 - Esquema básico de instalação de servoacionamentoFonte: ADAPTADO DE YASKAWA, [20--?]
Como o servodrive utiliza elementos de comutação de alta velocidade, ele pode produzir ruídos, enviando distúrbios para a rede de alimentação. Para que isso seja evitado e para assegurar uma operação estável e segura, sempre observe as seguintes precauções de conexão:
4 CONTROLE POR SERVOACIONAMENTOS 33
• utilize cabos próprios, por mais similar que eles se pareçam, utilize cabos para a entrada de referência e cabeamento de encoder;
• corte a parte excedente dos cabos para minimizar seu tamanho e evitar o efeito de “antena”;
• em uma instalação que utiliza cabos multivias, aterre os cabos reservas;
• para o cabeamento de terra, utilize a fiação de maior secção possível;
• o dimensionamento de cabos deve ser feito por profissionais capacitados, obedecendo às normas vigentes;
• no aterramento de classe 3 é recomendado no máximo 100 W de potência;
• aterre em apenas um dos lados do cabeamento. Se o motor for isolado da máquina, aterre-o diretamente;
• não torça ou aplique tensão ao cabo, a não ser que ele possua as características técnicas para isso;
• utilize cabo de condução de sinal muito fino (0,2 a 0,3 mm) e manuseie os cabos com muito cuidado;
• utilize filtro de ruído para prevenir interferências. A maioria dos problemas apresentados por esse tipo de equipamento é incidente dos ruídos eletromagnéticos;
• se o equipamento for utilizado próximo de casas particulares, ou se puder receber interferência de ruídos, instale um filtro de ruído no lado de entrada da linha de alimentação. Esse filtro é também conhecido como transformador de reatância e deve ser dimensionado corretamente para a aplicação. Quando o servo é designado como um dispositivo industrial, ele não contém um mecanismo de prevenção de interferência de ruído;
• para prevenir problemas no funcionamento por motivo de ruído, posicione o dispositivo de referência de entrada e também o filtro de ruído o mais próximo possível do servo;
• sempre instale um circuito de absorção de sobretensão nos relés, solenoides e contatores eletromagnéticos;
• a distância para a passagem de cabos da linha de alimentação e da linha de sinal deve ser de no mínimo 30 cm, observando a colocação da alimentação e das linhas de sinal em dutos separados;
• nunca enrole os dois tipos de sinais, evitando, assim, a geração de campo magnético e a geração de ruídos no equipamento;
• não compartilhe, em hipótese alguma, a linha de alimentação do servodrive com equipamento de solda ou com máquinas que possam produzir descargas elétricas;
• quando o servoacionamento for colocado próximo à osciladora de alta frequência, devemos instalar filtros de ruído na entrada da linha de alimentação;
• sempre utilize disjuntores de caixa moldada, padrão UL (MCCB), pois eles protegem bem todo o circuito dos equipamentos eletrônicos. De acordo com a norma vigente no país, também podem ser utilizados fusíveis para a proteção da linha de alimentação de alta tensão;
• lembre-se de dimensionar o disjuntor ou o fusível apropriado para a aplicação, de acordo com a capacidade do servodrive e a capacidade de ruptura da proteção.
Para maiores detalhamentos sobre aterramento e filtros de ruído, consulte as normas vigentes, a NBR 14039 e a NBR 5410.
SAIBA MAIS
MECATRÔNICA INDUSTRIAL34
CASOS E RELATOS
Economia no reaproveitamento de equipamentos
Em uma grande indústria, foram substituídas algumas máquinas obsoletas, porém obteve-se um excelente reaproveitamento em diversas aplicações para os servoacionamentos como, por exemplo, em esteiras e mesas transportadoras. Por possuírem características similares quanto ao acionamento, as aplicações foram reajustadas, tendo o torque resistente constante para toda a faixa de velocidade.
A programação de operação do servoconversor pôde ser reprogramada, em função de sua nova aplicação (FIGURA 30).
Figura 30 - Substituição de inversores em processos diferentesFonte: SENAI-RS
Nessa nova condição, levou-se em consideração a sobrecarga inicial do sistema, na qual o servoconversor tende a operar com a corrente dinâmica. Para os sistemas de transportes inclinados em elevação, a atenção foi dada em sua partida, pois surgiu uma nova condição de sobrecarga do servomotor, cuja intensidade está diretamente relacionada com seu grau de inclinação. Nesse caso, quando o sistema de transporte apresentou inclinação em declive, a frenagem reostática foi mais solicitada, pois o novo equipamento necessitava de tempos muito curtos de desaceleração. Nos sistemas com inclinação vertical, foram utilizados os servomotores com freio eletromagnético, para que não haja movimentação do sistema quando houver falta de energia.
Desse modo, economizou-se uma quantia significativa ao optar por equipamentos disponíveis na própria empresa.
4 CONTROLE POR SERVOACIONAMENTOS 35
RECAPITULANDO
Estudamos, nesse livro, que, entre as várias técnicas de controle em acionamentos, destacamos o soft-starter, o inversor de frequência e o servoacionamento. Descrevemos suas vantagens e desvantagens, bem como a utilização de cada um desses equipamentos, de acordo com sua aplicação e principalmente levando em consideração seu custo/benefício.
Aprendemos que, em alguns casos, devemos utilizar um equipamento de menor custo, como o soft-starter, para aplicações que não exijam um controle maior. Vimos também que, em outros casos, devemos utilizar os servoacionamentos, pois, mesmo sendo componentes de maior custo, sua aplicação torna-se eficiente e eficaz quando é necessário rapidez e precisão nos movimentos.
Conhecemos o inversor de frequência, que pode ser considerado como um intermediário em relação ao custo/benefício. É um dos equipamentos mais utilizados atualmente em quase todos os sistemas automatizados. São considerados os mais flexíveis, com vários tipos e modelos nas suas diversas aplicações. Apresentamos como deve ser feita a montagem, instalação e parametrização desse equipamento. Por fim, esse estudo torna-se de grande valor devido à importância desses tipos de controle no desenvolvimento de sistemas automatizados.
REFERÊNCIAS
ASSOCIAÇÃO BRASILEIRA DE NORMAS TÉCNICAS. NBR 5410: instalações elétricas de baixa tensão: versão corrigida. Rio de Janeiro, 2008.
DREHER, J. R. Chaves de partida suave soft-starter e inversor de frequência. Chapecó: Instituto Federal de Educação, Ciência e Tecnologia de Santa Catarina, 2009. (Comandos Industriais; 4).
FACULDADE DA VILA MATILDE. Inversor de frequência. [20--?]. Disponível em: <http://www.faatesp.edu.br/publicacoes/Inversores_de_Frequencia.pdf>. Acesso em: 03 nov. 2014.
FRANCHI, Claiton Moro. Acionamentos elétricos. São Paulo: Érica, 2010.
FRANCHI, Claiton Moro; CAMARGO, Valter Luis Arlindo de. Controladores lógicos programáveis: sistemas discretos. São Paulo: Érica, 2008.
INTERNATIONAL ELECTROTECHNICAL COMMISSION. IEC 61140 ed. 3.1 b: protection against electric shock: commom aspects for installation and equipment. Geneva, 2009.
SERVIÇO NACIONAL DE APRENDIZAGEM INDUSTRIAL. Departamento Regional do Rio Grande do Sul. Eletricidade: instalações industriais. Sapucaia do Sul: Centro de Educação Profissional SENAI de Eletromecânica, 2001. 124 p.
WEG. Produtos e serviços: drives e inversores de frequência. Jaraguá do Sul, 2015. Disponível em: <http://www.weg.net/br/Produtos-e-Servicos/Drives/Inversores-de-Frequencia>. Acesso em: 03 mar. 2015.
YASKAWA. Servo acionamento série Sigma II: manual do usuário. [20--?]. Disponível em: <http://www.dial.com.br/manuais/Yaskawa-Manual_Portugues.pdf>. Acesso em: 03 nov. 2014.
SENAI – DEPARTAMENTO NACIONALUNIDADE DE EDUCAÇÃO PROFISSIONAL E TECNOLÓGICA – UNIEP
Felipe Esteves Pinto MorgadoGerente Executivo
Nathália Falcão MendesGestora do Programa SENAI de Capacitação Docente
SENAI – DEPARTAMENTO REGIONAL DO RIO GRANDE DO SUL
Claiton Oliveira da CostaCoordenação da Gerência de Desenvolvimento Educacional no Departamento Regional
Fernando R. G. Schirmbeck Coordenação Técnica
Marcelo Luiz de QuadrosElaboração
João Charles dos SantosRevisão Técnica
Enrique S. BlancoPatricia C. da S. RodriguesDesign Educacional
Aurélio RauberDireção de Arte
Bárbara Polidori BackesEditoração
Camila J. S. MachadoIlustrações
Roberta TriacaApoio à Normatização
Lidiane Marques GomesNormatização
DuploklickRevisão Ortográfica e Gramatical