repositorio.unicamp.brrepositorio.unicamp.br/jspui/bitstream/reposip/265124/1/pizzirani... · fx,...
TRANSCRIPT









3.3.3 AIgoritmoFinal. . . . . . . . . . . . . . . . . . . . . . . . . . 42
4 Implementação Computacional 44
4.1 Introdução 444.2 Programação Orientada a Objetos para Problemas de Otimização
Evolutiva 44
4.3 Obtendoum Modelode Objeto. . . . . . . . . . . . . . . . . . . . . 464.3.1 AnáliseOrientada a Objetos. . . . . . . . . . . . . . . . . . . 464.3.2 Projeto Orientadoa Objetos. . . . . . . . . . . . . . . . .. 50
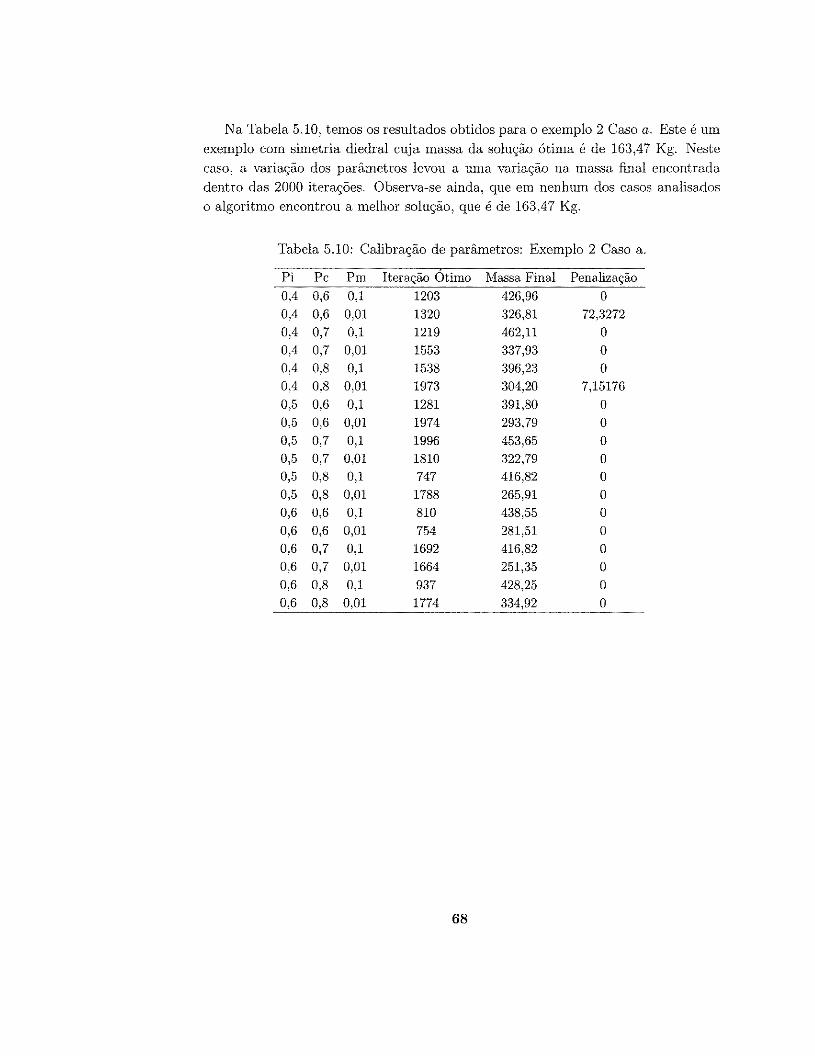
5 Resultados Numéricos e Análise de Desempenho 565.1 Exemplos estudados. . . . . . . . . . . . . . . . . . . . . . . . . .. 565.2 Repetibilidade e Aspectos Estatísticos do AIgoritmo Genético. . . .. 625.3 Calibração de Parâmetros . . . . . . . . . . . . . .. 655.4 Resultados Numéricos. . . . . . . . . . . . . . . . . . . . . . . . . . 72
5.4.1 Estruturas Reticuladas . . . . . . . . . . . . . . . . . . . . .. 72
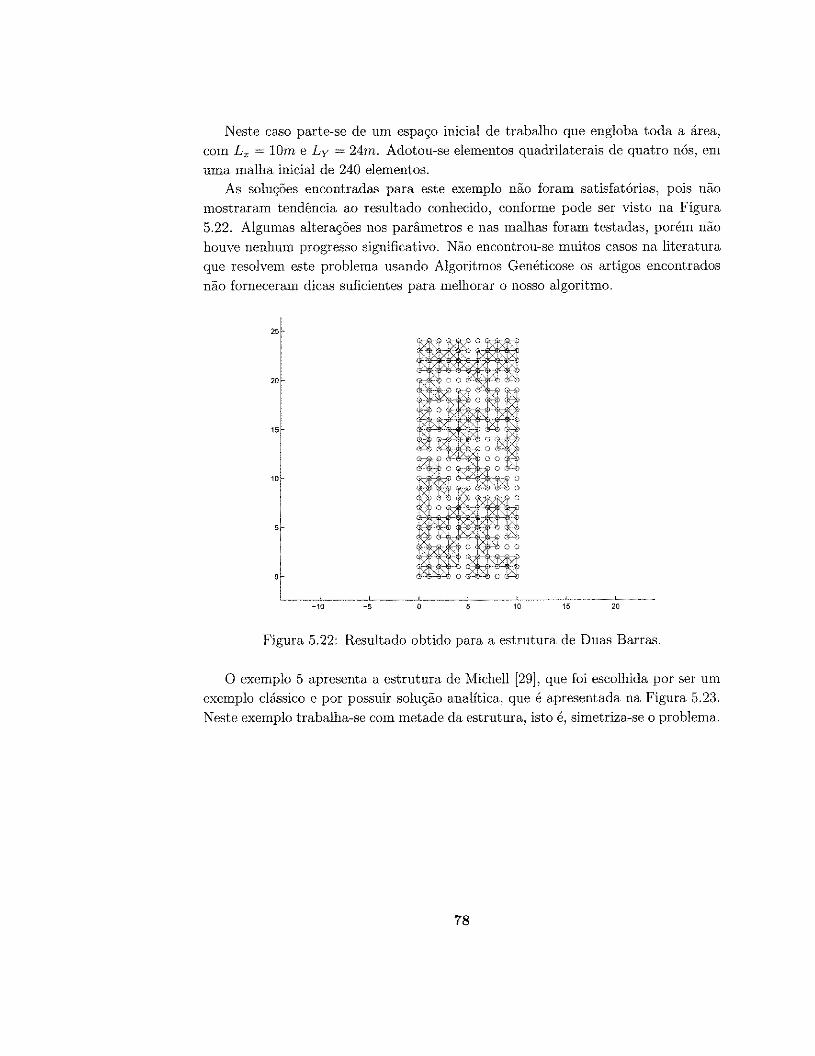
5.4.2 Problemas em estado plano de tensões. . . . . . . . . . . .. 77
6 Conclusões 80
Referências Bibliográficas 83
A A Teoria dos Esquemas 86
B Exemplo de um Arquivo de Entrada do Programa MefLab++ 89
C Principais Funções do Código Fonte 92

Lista de Tabelas
5.1 Casos estudados no Exemplo 1. . . . . . . . . . . . . . . . . . . . .. 575.2 Casos estudados no Exemplo 2. . . . . . . . . . . . . . . . . . . . .. 585.3 Casos estudados no Exemplo3. . . . . . . . . . . . . . . . . . . . .. 595.4 Propriedades do exemplo 4. 605.5 Propriedades do exemplo 5. 615.6 Parâmetros - Exemplo 1 Caso b. . . . . . . . . . . . . . . . . . . . . . 625.7 Variação utilizada para os parâmetros. . . . . . . . . . . . . . . . .. 655.8 Calibração de parâmetros: Exemplo 1 Caso a. . . . . . . . . . . . . . 665.9 Calibração de parâmetros: Exemplo 1 Caso b. . . . . . . . . . . . .. 675.10 Calibração de parâmetros: Exemplo 2 Caso a. . . . . . . . . . . . . . 685.11 Calibração de parâmetros: Exemplo 2 Caso b. . . . . . . . . . . . . . 695.12 Calibração de parâmetros: Exemplo 3. . . . . . . . . . . . . . . . . . 70

Lista de Figuras
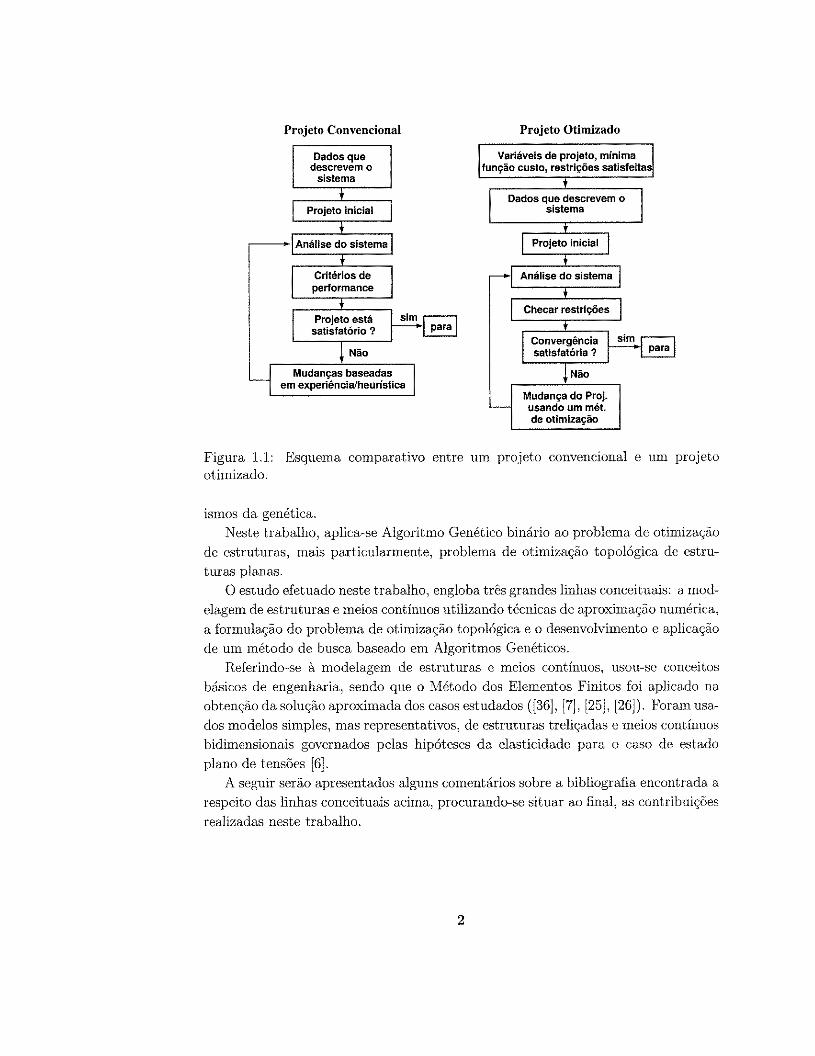
1.1 Esquema comparativo entre um projeto convencional e um projetootimizado. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
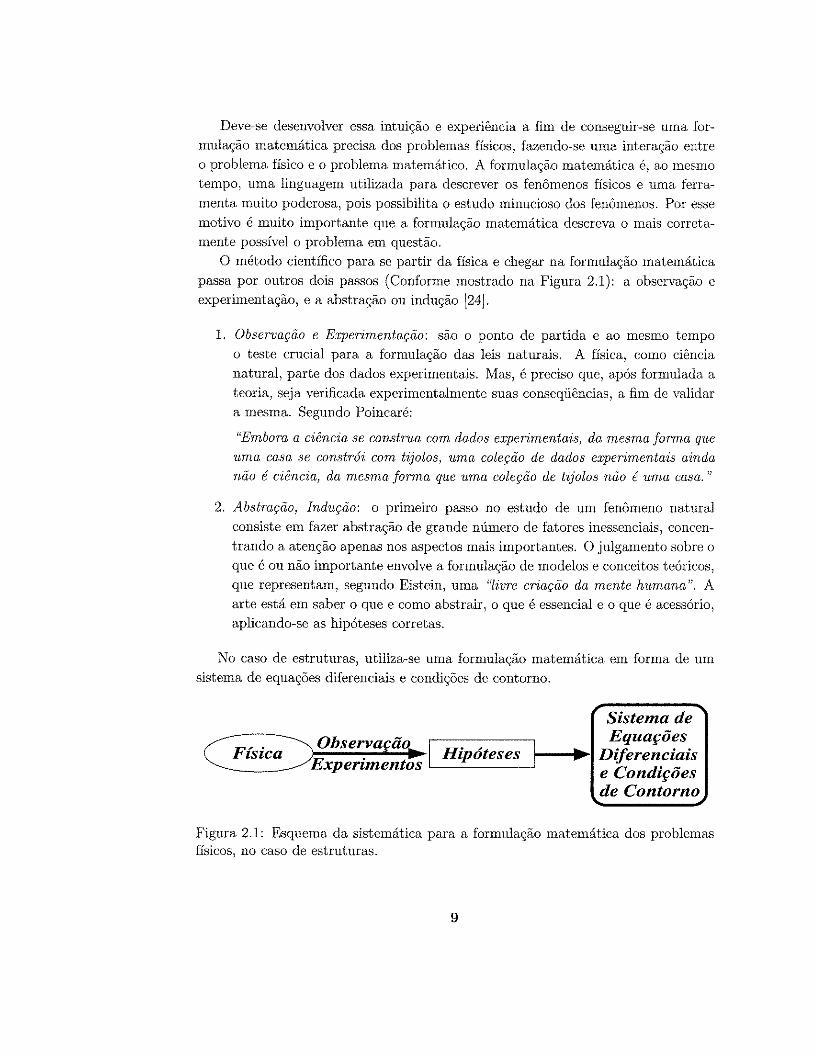
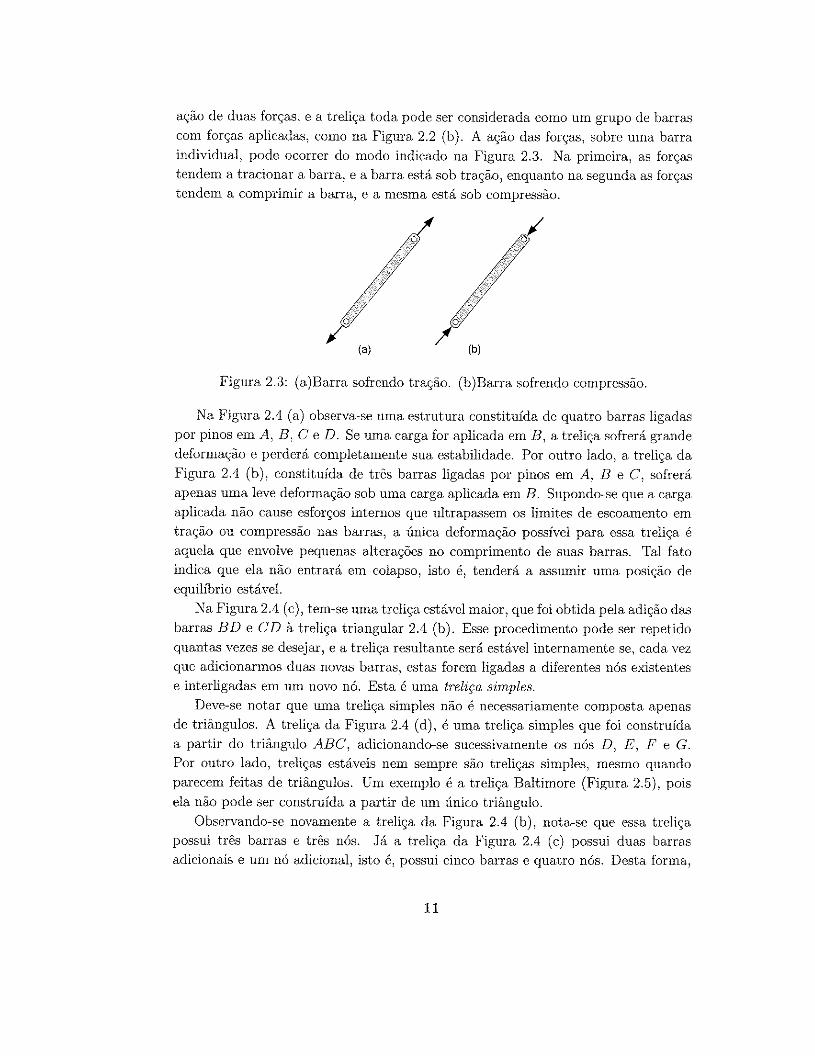
2.1 Esquema da sistemática para a formulação matemática dos problemasfísicos, no caso de estruturas. 9Exemplo de uma treliça típica. . . . . . . . . . . . . . . . . . . . . .. 10(a)Barra sofrendo tração. (b)Barra sofrendo compressão. . . . . . .. 11(a)Treliça em colapso. (b )Treliça rígida. (c)Treliça Simples. (d)Treliçaconstituída não só de triângulos. . . . . . . . . . . . . . . . . . . . .. 12
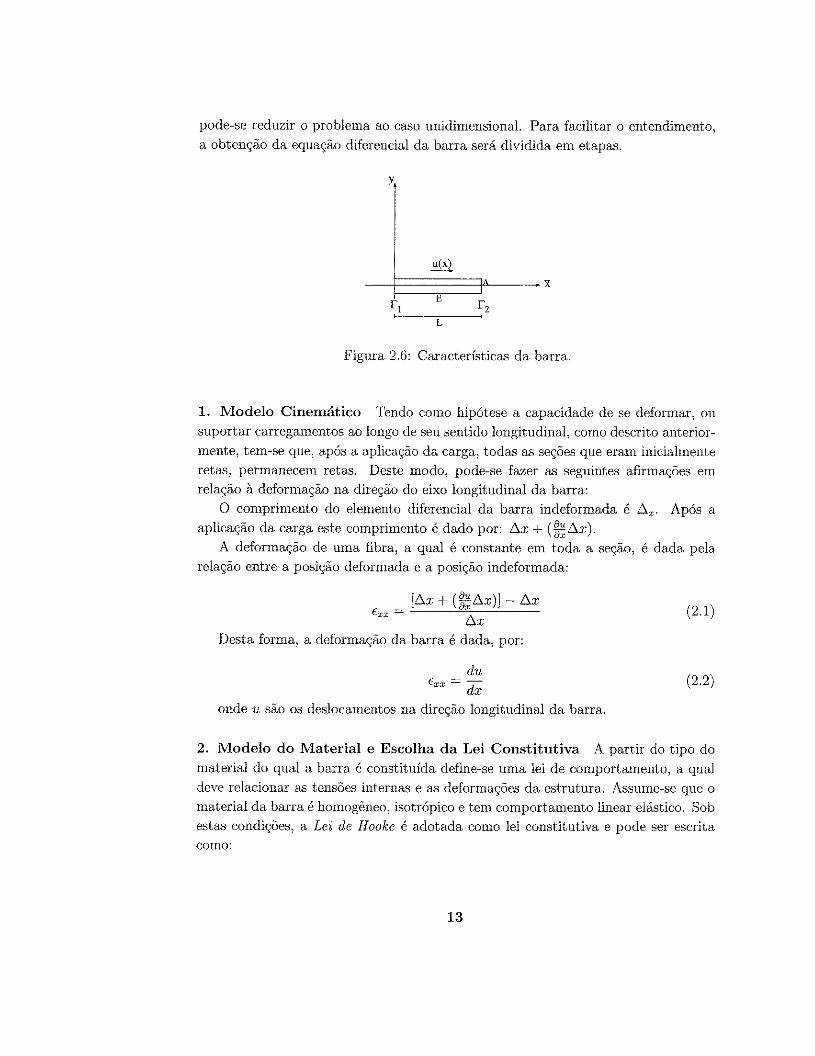
2.5 Treliça de Baltimore. . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.6 Características da barra. . . . . . . . . . . . . . . . . . . . . . . . .. 13
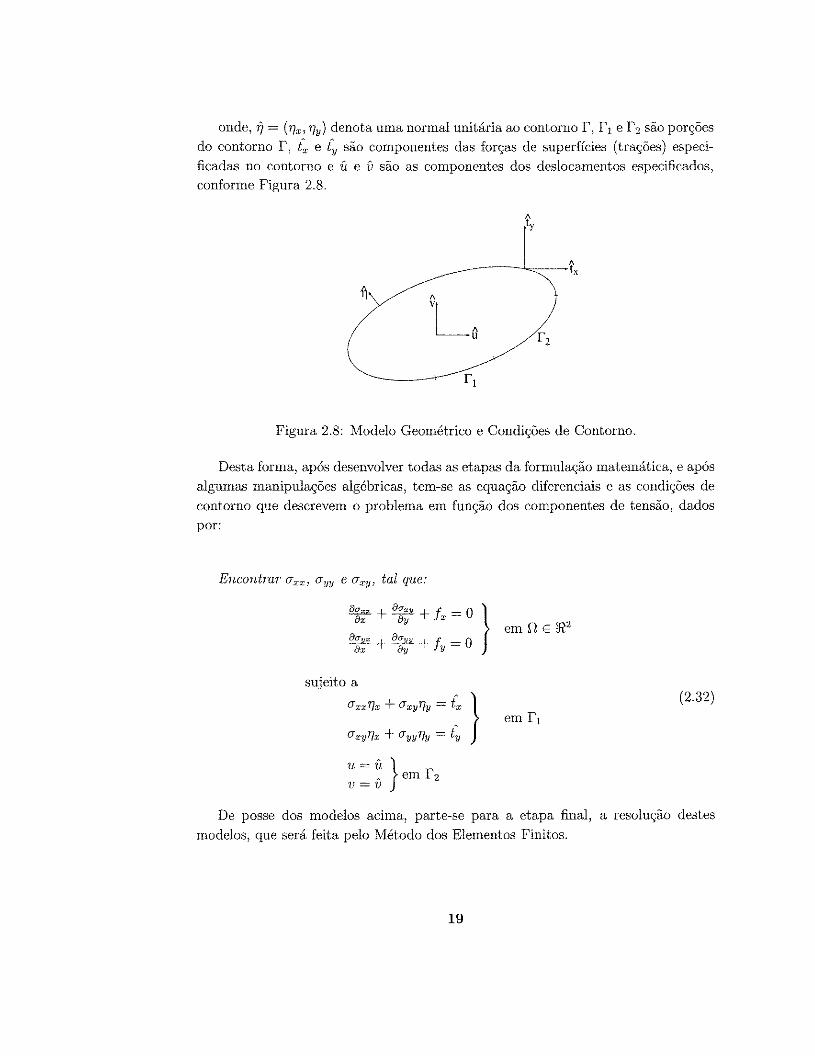
2.7 Modelo Físico para Problemas de Estado Plano de Tensões. . . . . .. 152.8 Modelo Geométrico e Condições de Contorno. . . . . . . . . . . . .. 192.9 Esquema explicativo de uma barra. . . . . . . . . . . . . . . . . . .. 242.10 Sistema de referência para um elemento de barra. . . . . . . . . . . . 262.11 Elemento de referência isoparamétrico e elemento real. 28
2.22.32.4
3.13.23.33.43.53.63.73.8
Taxionomia dos Sistemas Computacionais Naturais. . . . . . . . . . . 33Fluxograma de um Algoritmo Evolutivo. . . . . . . . . . . . . . . .. 34Cromossomo binário. . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
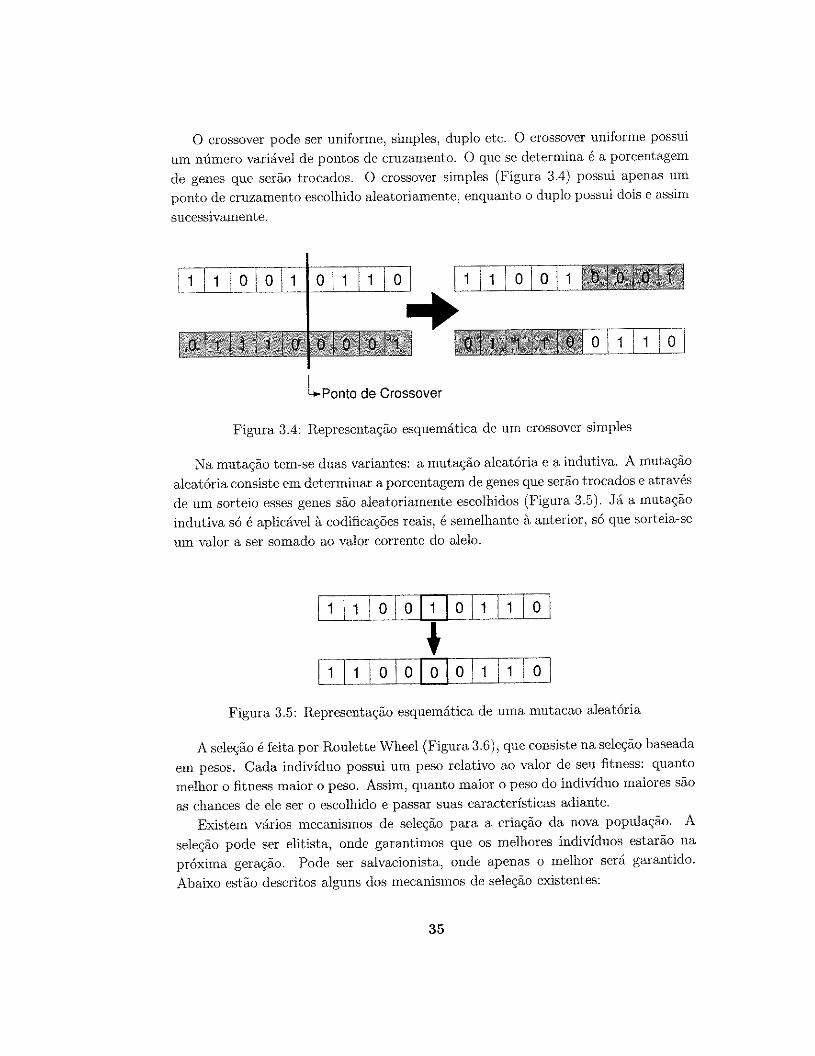
Representação esquemática de um crossover simples. . . . . . . . . . 35Representação esquemática de uma mutacao aleatória. . . . . . . .. 35Representação de um Roulette Wheel . . . . . . . . . . . . . . . . . . 36Fluxograma do Algoritmo Genético. . . . . . . . . . . . . . . . . . . . 37Exemplo: Treliça com 6 nós e 10 barras. Os nós básicos são 1, 4,5 e 6, pois as forças P são aplicadas em 5 e 6 e os nós 1 e 4 estãoengastados. 38Esquematização de um cromos somo binário. . . . . . . . . . . . . . . 393.9
4.14.24.34.4
Diagrama de classe genérica na notação Booch. . . . . . . . . . . . . . 47Diagrama inicial do MefLab++. . . . . . . . . . . . . . . . . . . . . . 47Diagrama de classes utilizado pelo MefLab++. . . . . . . . . . . . . . 48Diagrama reoresentando as classes filhas da classe GeneticAlgorithm. 51

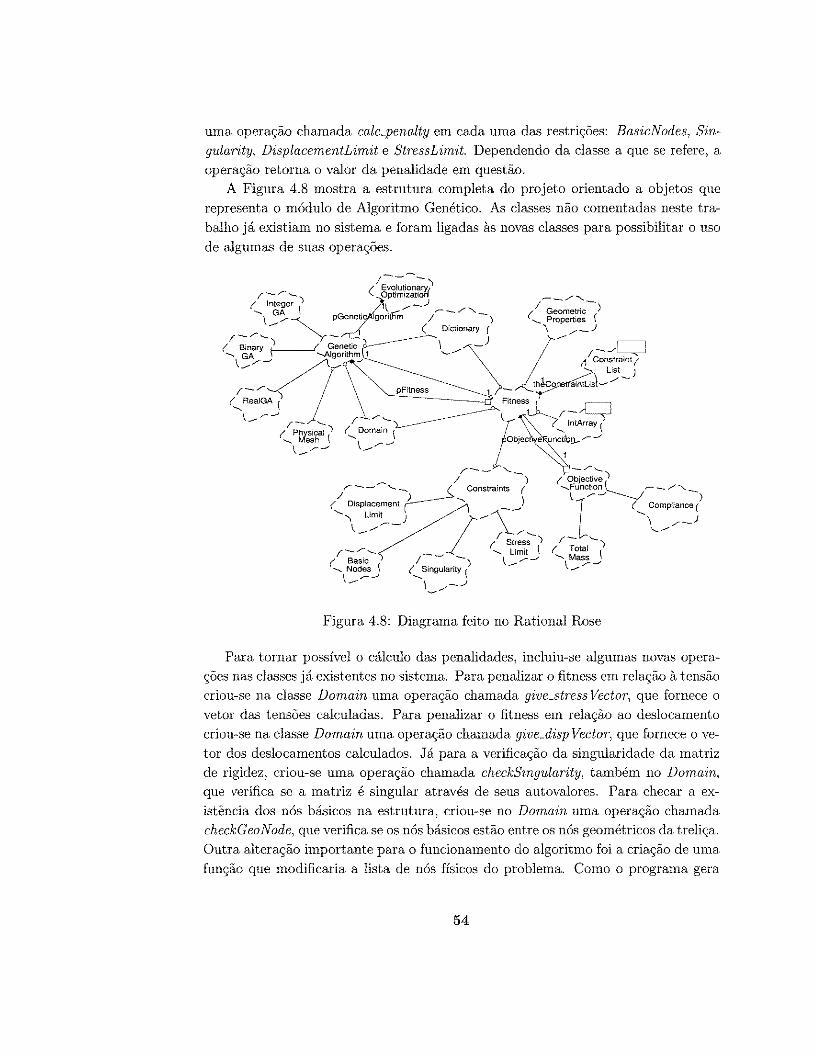
4.6 Diagrama representando as classes filhas da classe Fitness. . . . . .. 524.7 Janela do Rational Rase. . . . . . . . . . . . . . . . . . . . . . . .. 534.8 Diagrama feito no Rational Rose 54
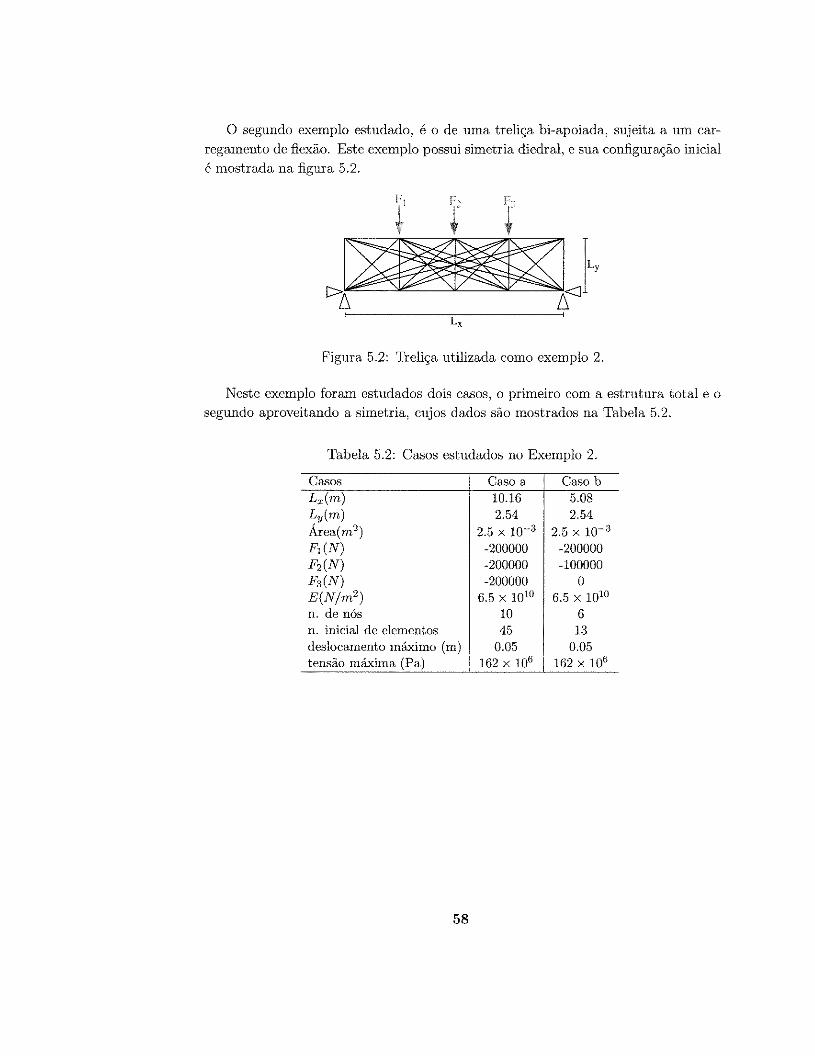
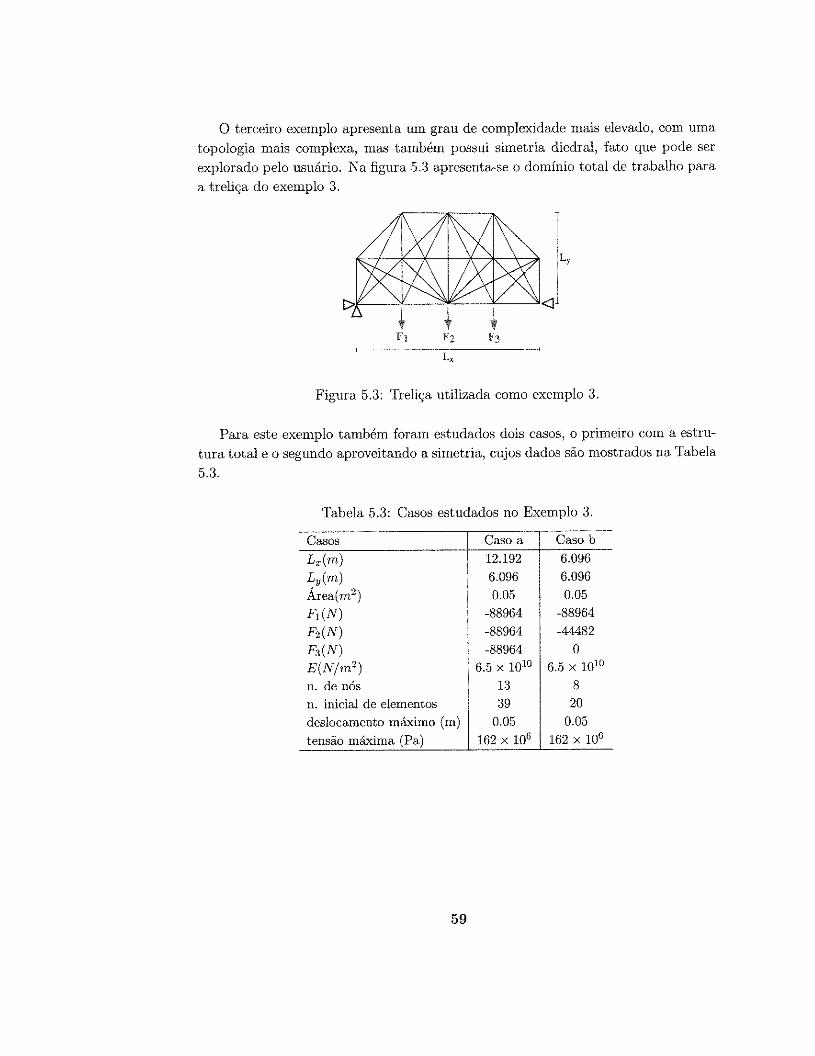
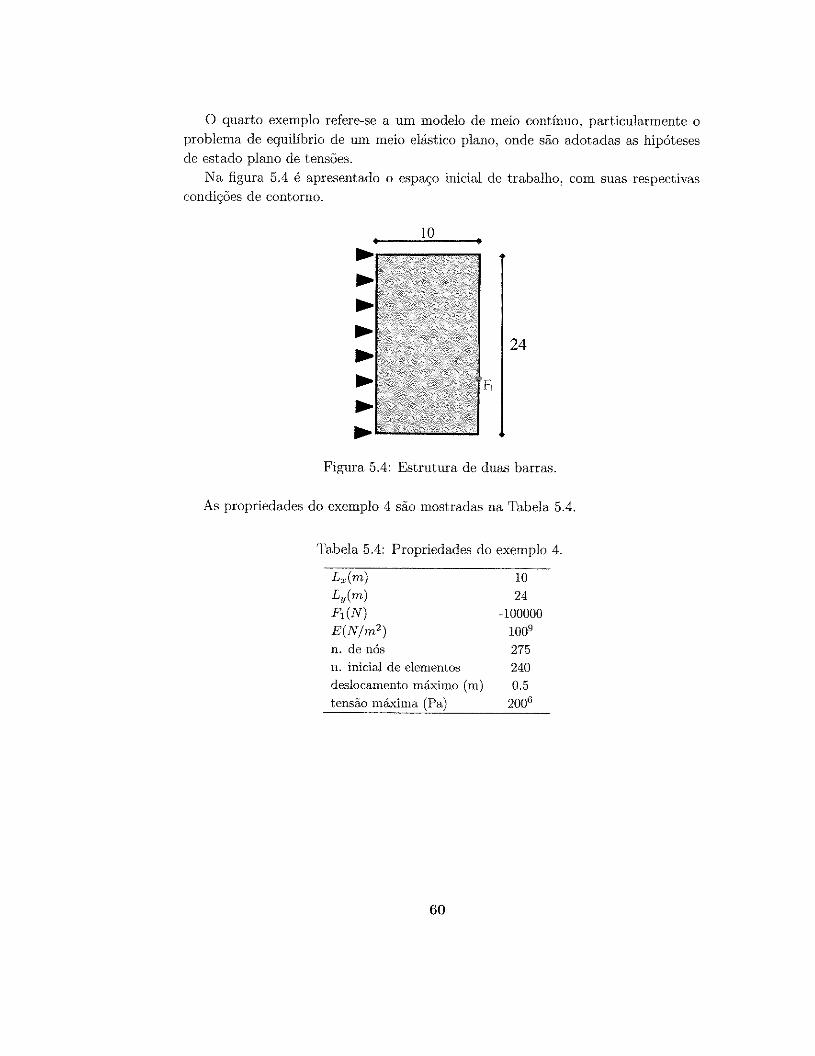
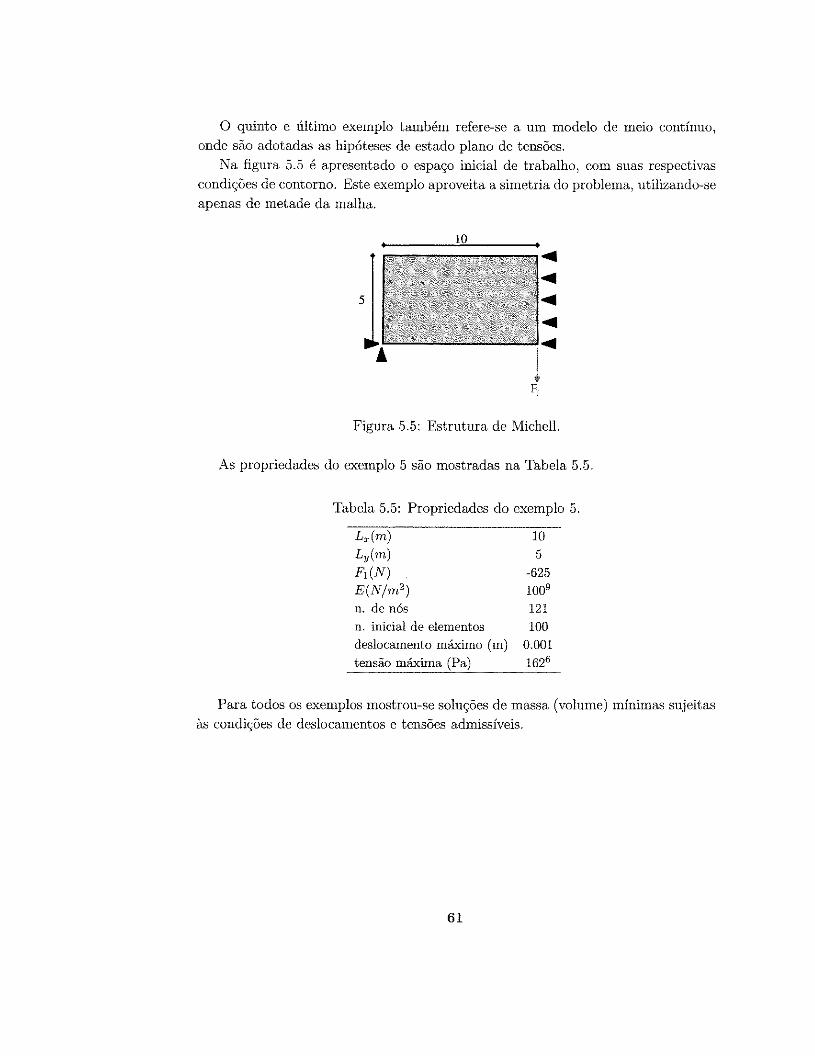
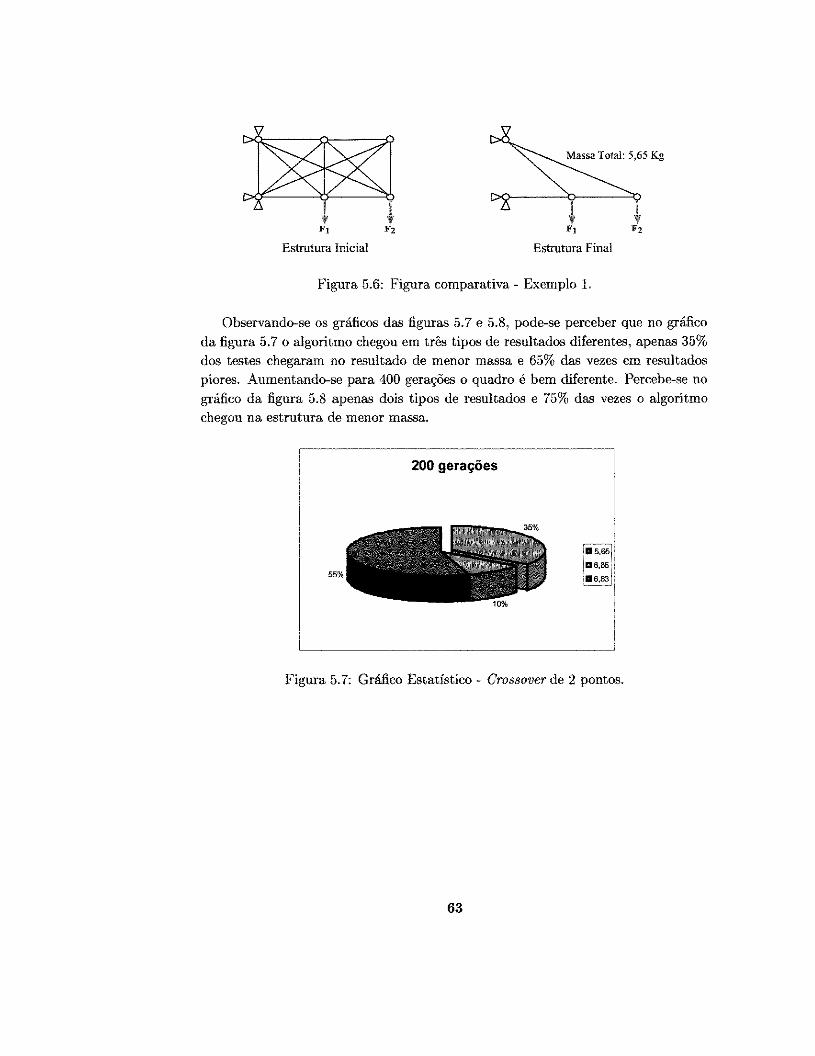
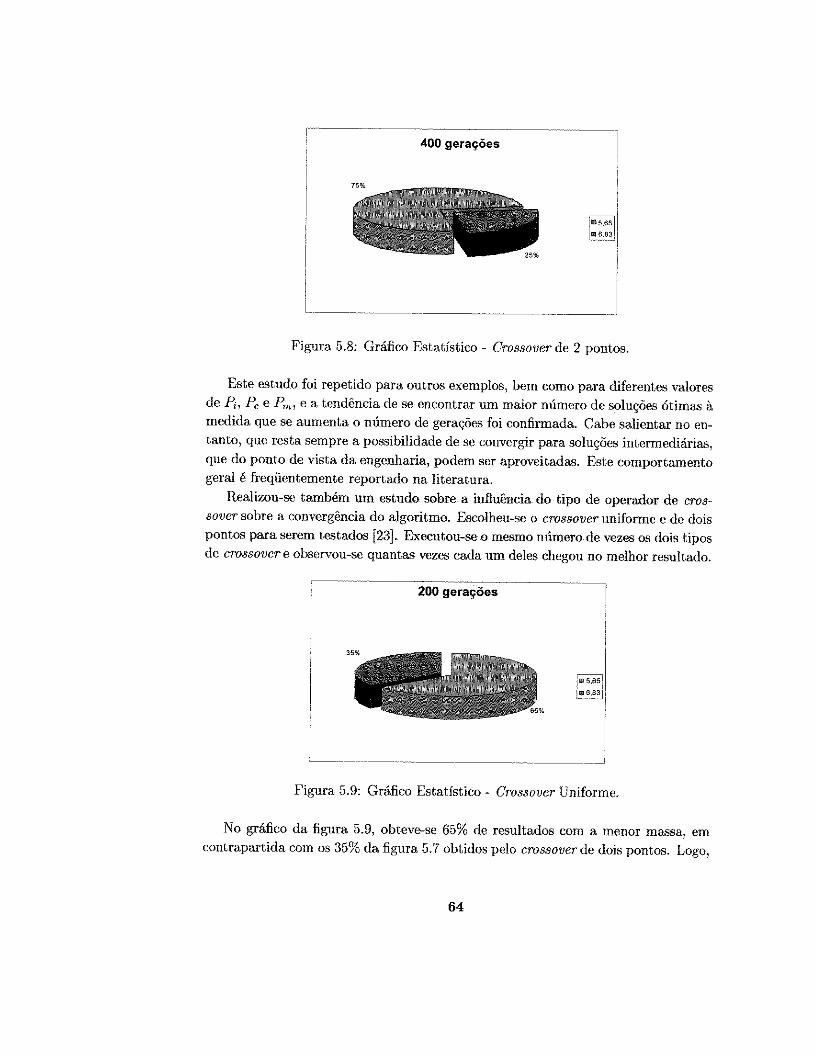
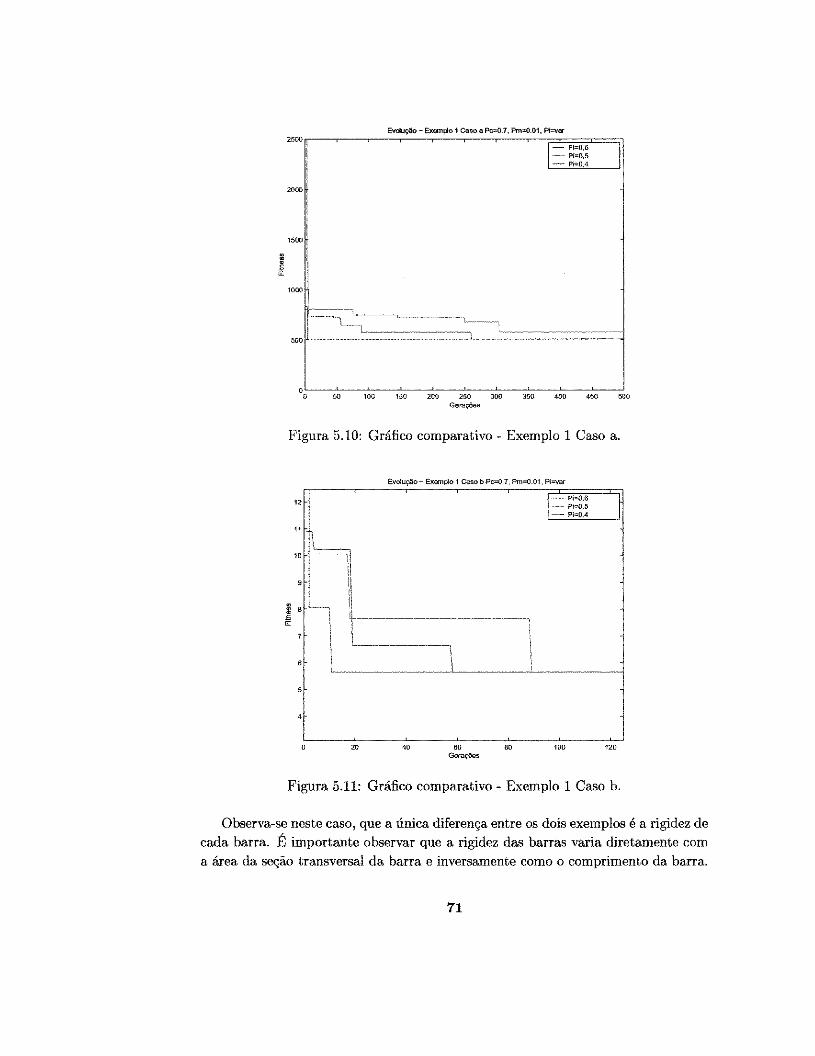
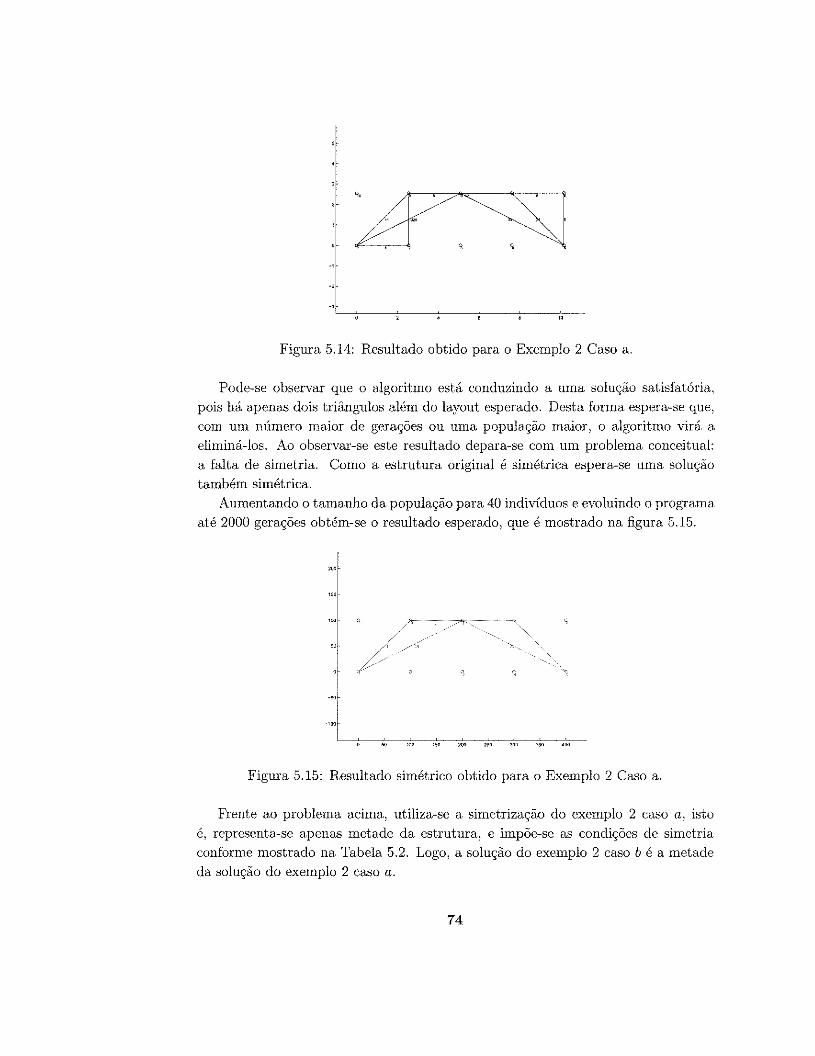
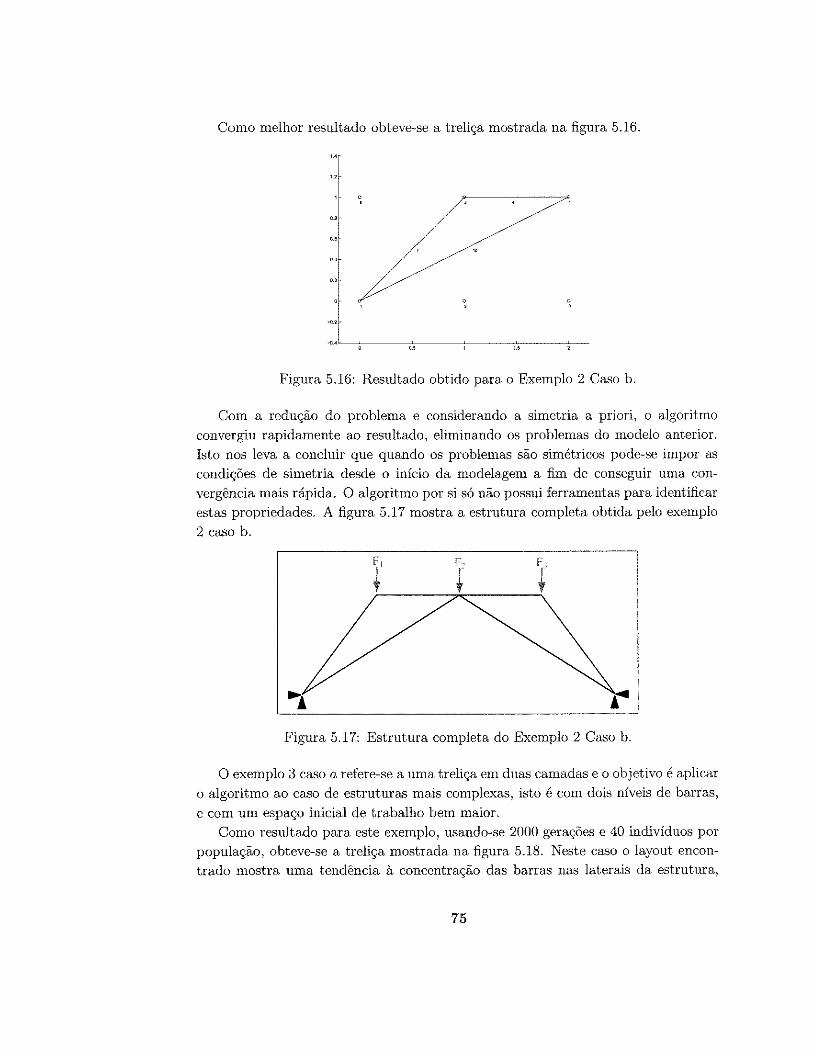
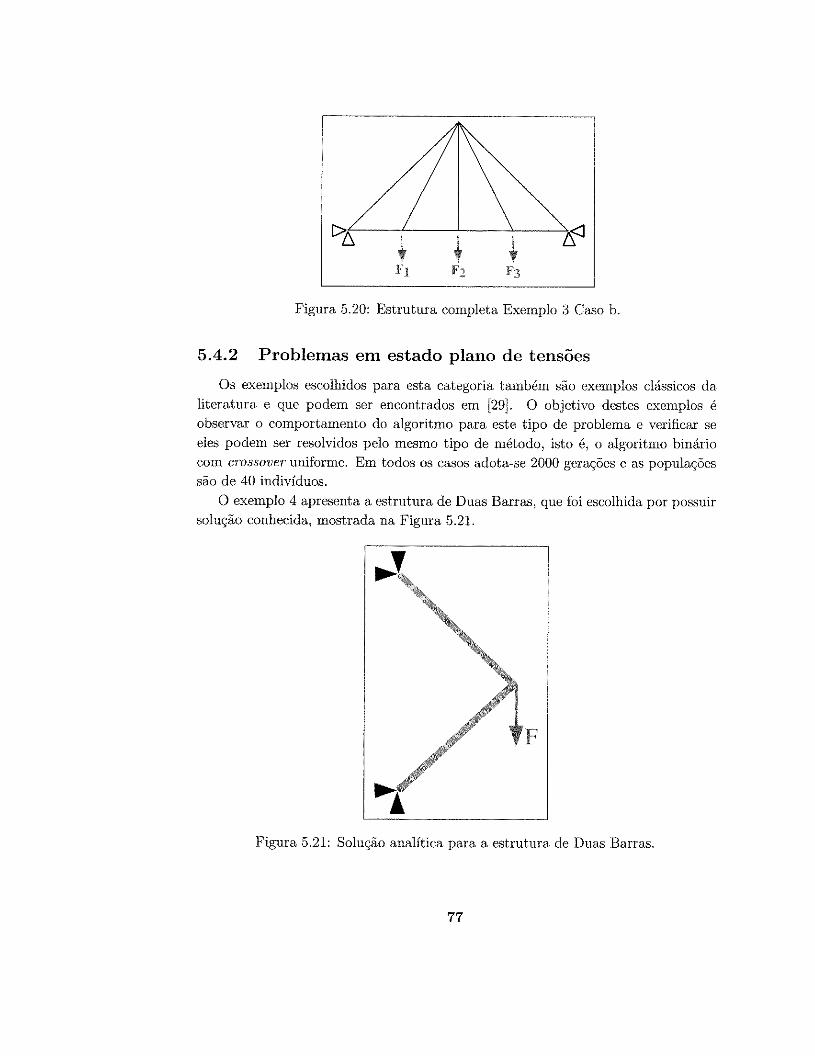
5.1 Treliça utilizada como exemplo 1. . . . . . . . . . . . . . . . . . . .. 575.2 Treliça utilizada como exemplo 2. . . . . . . . . . . . . . . . . . . . . 585.3 Treliça utilizada como exemplo 3. . . . . . . . . . . . . . . . . . . .. 595.4 Estrutura de duas barras. 605.5 Estrutura de Michell. . . . . . . . . . . . . . . . . . . . . . . . . . .. 615.6 Figura comparativa - Exemplo 1. , . . .. 635.7 Gráfico Estatístico - Crossoverde 2 pontos. 635.8 Gráfico Estatístico - Crossover de 2 pontos. 645.9 Gráfico Estatístico - CrossoverUniforme.. . . . . . . . . . . . . . .. 645.10 Gráfico comparativo - Exemplo1 Casoa. . . . . . . . . . . . . . . .. 715.11 Gráfico comparativo - Exemplo 1 Caso b. . . . . . . . . . . . . . . . . 715.12 Resultado obtido para o Exemplo 1 Caso a. 725.13 Resultado obtido para o Exemplo 1 Caso b. 735.14 Resultado obtido para o Exemplo 2 Caso a. ,. 745.15 Resultado simétrico obtido para o Exemplo 2 Caso a. . . . . . . . .. 745.16 Resultado obtido para o Exemplo 2 Caso b. 755.17 Estrutura completa do Exemplo 2 Caso b. ... . . . . . . . . . . .. 755.18 Resultado para o Exemplo 3 Caso a. 765.19 Resultado para o Exemplo 3 Caso b. , 765.20 Estrutura completa Exemplo 3 Caso b. . . . . . . . . . . . . . . . .. 775.21 Solução analítica para a estrutura de Duas Barras.. . . . . . . . . .. 775.22 Resultado obtido para a estrutura de Duas Barras. 785.23 Solução analítica para a estrutura de Michell. 795.24 Resultado obtido para a estrutura de Michell com malha menos refinada. 79

Lista de AIgoritmos
1
23
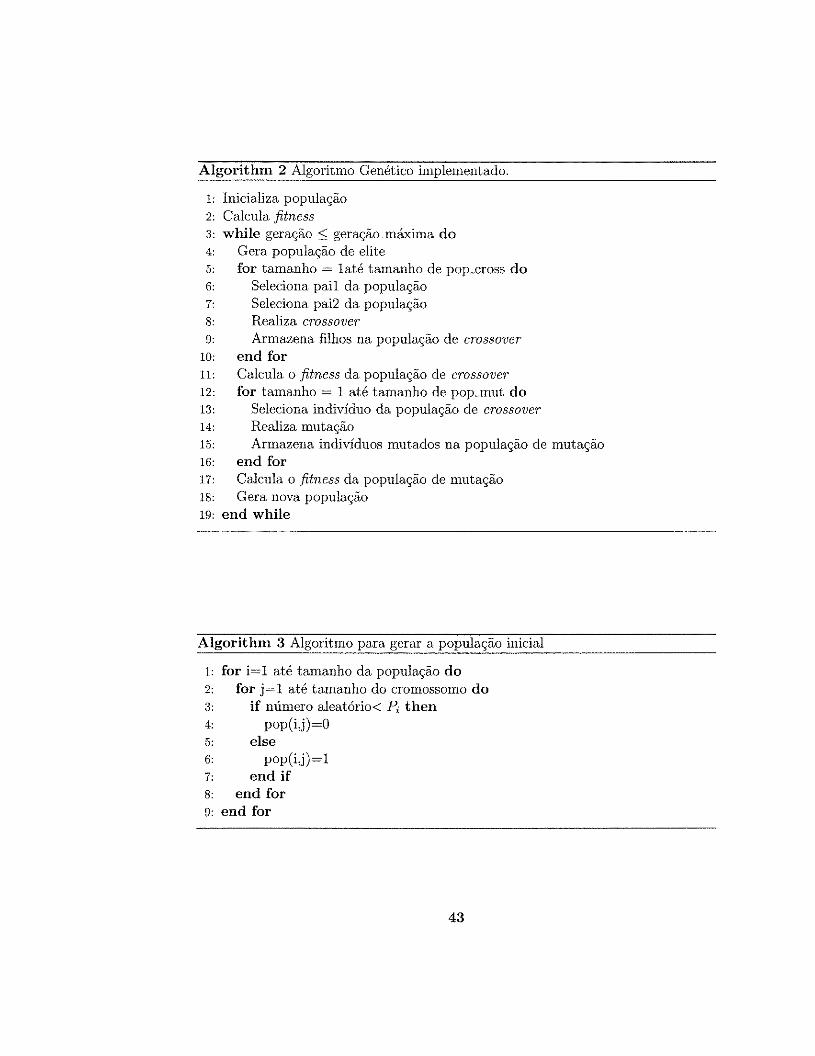
Aplicaçãodas penalidades. . . . . . . . . . . . . . . . . . . . . . . . . 40AlgoritmoGenéticoimplementado. . . . . . . . . . . . . . . . . . . . 43Algoritmopara gerar a populaçãoinicial. . . . . . . . . . . . . . . . 43
Lista de Símbolos
A,B,C,D
B',C'
b
n
~x
fxx
f
pontos de referência antes da deformação . . . . . . . . . .. 11
pontos de referência após da deformação. . . . . . . . . . . . 11
número total de barras na treliça. . . . . . . . . . . . . . .. 12
número total de nós na treliça . . . . . . . . . . . . . . . .. 12
elemento diferencial da barra indeformada . . . . . . . . . .. 13
deformação longitudinal na direção x . . . . . . . . . . . . o. 13
deformação longitudinal ou axial ... . . . . . . . . . . . .. 13
(jxx, (jyy, (jzz tensões normais nas direções x,y,z o 14
E módulo de elasticidade. . . . . . . . . . . . . . . . . . . .. 14
F força. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 14
A área da seção transversal da barra. . . . . . . . . . . . . .. 14
Fx força inercial ou de campo na direção x o 14
p
u
r!, r2
(jyz, (jxz
fyz, fxz
1/
G
fx, fy
D
~2
T/x,T/y
t:et~
carga . . . . . . . . . . . . o. 14. . . . . . . . .
deslocamento. . . . . . . . . . . . . . . . . . . . . . . . . .. 14
contornos do corpo. . . . . . . . . . . . . . . . . . . . . . .. 15
tensões de cisalhamento nos planos YZ,xz o 16
deformações angulares nos planos. . . . . . . . . . . . . . .. 16
coeficiente de Poisson o 17
módulo de cisalhamento . . . . . . . . . . . . . . . .. 17
forças de volume através das direções x e y . . . . . . . . . . 18
Domínio. . . . . . . . . . . . . . . . . . . . . . . . . . . .. 18
plano dos números reais. . . . . . . . . . . . . . . . . . . .. 18
normais unitárias ao contorno r 19
forças de contorno especificadas . . . . . . . . . . . . . . . .. 19
Xl

úev
u(x)
W1
H
N1
x
Ui, Uj
[Ke]
{ue}
{pe}7j;(x,y)
1),ç
[B]
[D]
J
p
1
S
ç6k
(J"
deslocamentos impostos. . . . . . . . . . . . . . . . . . . .. 19
soluções aproximadas. . . . . . . . . . . . . . . . . . . . .. 21
funções de ponderação. . . . . . . . . . . . . . . . . . . . . . 22
subespaço de dimensão finita 22
funções de forma. . . . . . . . . . . . . . . . . . . . . . . . . 22
referencial local. . . . . . . . . . . . . . . . . . . . . . . . . 24
deslocamentos na direção x 24
matriz de rigidez de um elemento. . . . . . . . . .
vetor dos deslocamentos locais. . . . . . . . . . .
. . . 25
.. 25
vetor das forças nodais 25
funções de ponderação. . . . . . . . . . . . . . . . . . . . . . 27
coordenadas do sistema isoparamétrico . . . . . . .. 29
matriz de derivadas parciais das funções de interpolação . .. 29
matriz de propriedades do material. . . . . . . . . . . . . .. 29
J acobiano . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 29
densidade do material. . . . . . . . . . . . . . . . . . . . . . 30
comprimento da barra. . . . . . . . . . . . . . . . . . . . . . 30
tensão admissível na barra . . . . . . . . . . . . . . . . . . . 30
representação genérica das coordenadas dos nós não-básicos . 30
limite máximo admissível para os deslocamentos de qualquernó da estrutura. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
tensão normal atuando na barra . . . . . . . . . . .. 30