viii curso de especialização em geoprocessamento...
TRANSCRIPT

UFMG Instituto de Geociências
Departamento de Cartografia Av. Antônio Carlos, 6627 – Pampulha
Belo Horizonte [email protected]
VIII Curso de Especialização em Geoprocessamento
2005
FELIPE FRÓIS DOS SANTOS DUMONT
ESTUDO DA DISTRIBUIÇÃO DE CLASSES
SÓCIO-ECONÔMICAS EM ÁREA URBANA DE
BOCAIÚVA-MG UTILIZANDO IMAGEM DE
ALTA RESOLUÇÃO

FELIPE FROIS DOS SANTOS DUMONT
Estudo da Distribuição de Classes Sócio-Econômicas na Área
Urbana do Município de Bocaiúva-MG Utilizando Imagem de
Alta Resolução
Monografia apresentada ao Curso de Pós-Graduação em Geoprocessamento, Departamento de Cartografia, Instituto de Geociências, Universidade Federal de Minas Gerais, como requisito parcial à obtenção do título de especialista em Geoprocessamento.
Orientador: Prof. Luciano Vieira Dutra
Belo Horizonte, 22 de Dezembro de 2005.

DUMONT, Felipe frois Estudo da distribuição de classes sócio-econômicas na área urbana do município de Bocaiúva-MG utilizando imagem de alta resolução/ Felipe Fróis Dumont. Belo Horizonte, 2005. v, 32 f.: il. Monografia (Especialização) – Universidade Federal de Minas Gerais, Instituto de Geociências, Geoprocessamento, 2005. Orientador: Luciano Vieira Dutra. 1. Geoprocessamento. 2. Sensoriamento Remoto 3. Processamento Digital de Imagem . I. Título.

AGRADECIMENTOS
Agradeço a todo o pessoal do departamento de cartografia da UFMG;
ao professor Dutra;
aos monitores Christian e Charles pelas sugestões;
à Ana Clara pelo apoio;
à Giovana Mira e equipe da Intersat pelo fornecimento da imagem;
e à Sophia pela colaboração no desenvolvimento de todo o trabalho.

SUMÁRIO
1 INTRODUÇÃO....................................................................................................... 6
2 OBJETIVOS........................................................................................................... 8
2.1 Objetivo Geral.................................................................................................... 8
2.2 Objetivos Específicos......................................................................................... 8
3 FUNDAMENTOS TEÓRICOS............................................................................. 9
3.1 Conhecimento da Incerteza.............................................................................. 9
3.2 Sensoriamento Remoto...................................................................................... 9
3.3 Sistemas Orbitais............................................................................................... 10
3.4 Sistema Orbital QuickBird............................................................................... 11
3.6 Imagens de Sensoriamento Remoto................................................................. 13
3.7 Processamento Digital de Imagem de Sensoriamento Remoto...................... 13
3.8 Classificação de Imagem de Sensoriamento Remoto..................................... 14
3.9 Classificação Supervisionada............................................................................ 14
3.10 Segmentação..................................................................................................... 15
3.11 Classificação por Regiões................................................................................ 15
4 METODOLOGIA................................................................................................... 16
5 RESULTADOS E DISCUSSÕES......................................................................... 20
5.1 Classe Baixa........................................................................................................ 20
5.2 Classe Média....................................................................................................... 23
5.3 Classe Alta.......................................................................................................... 26
6 CONCLUSÃO......................................................................................................... 30
REFERÊNCIAS BIBLIOGRÁFICAS..................................................................... 31
LISTA DE TABELAS E GRÁFICOS
Tabela 1 Informações Técnicas do Satélite.......................................................... 12
Tabela 2 Características do Satélite...................................................................... 12
Tabela 3 Matriz de Classificação da Classe Baixa.............................................. 21
Tabela 4 Medidas das Classes da Classe Baixa................................................... 22
Tabela 5 Matriz de Classificação da Classe Média............................................. 24
Tabela 6 Medidas de Classes da Classe Média.................................................... 25
Tabela 7 Matriz de Classificação da Classe Alta................................................. 27

Tabela 8 Medidas de Classes da Classe Alta........................................................ 28
Gráfico 1 Percentuais da Classe Baixa.................................................................. 22
Gráfico 2 Percentuais da Classe Média................................................................. 25
Gráfico 3 Percentuais da Classe Alta..................................................................... 28
Gráfico 4 Percentual das Classes............................................................................ 29
LISTA DE FIGURAS
Figura 1 Interação da Radiação Eletromagnética.............................................. 10
Figura 2 Satélite QuickBird.................................................................................. 11
Figura 3 Raio-x de uma Imagem Digital.............................................................. 13
Figura 4 Mapa de localização do Município de Bocaiúva-MG.......................... 16
Figura 5 Quicklook da Cena com Destaque da Imagem fornecida................... 17
Figura 6 Amostra 1................................................................................................ 20
Figura 7 Segmentação da Classe Baixa................................................................ 20
Figura 8 Classificação da Classe Baixa................................................................ 21
Figura 9 Amostra 2................................................................................................ 23
Figura 10 Segmentação da Classe Média............................................................... 23
Figura 11 Classificação da Classe Média............................................................... 24
Figura 12 Amostra 3................................................................................................ 26
Figura 13 Segmentação da Classe Alta.................................................................. 26
Figura 14 Classificação da Classe Alta................................................................... 27

RESUMO
O presente trabalho tem como objetivo estudar a relação entre proporção de classes
notáveis dentro do espaço urbano e o padrão sócio-econômico presumido de áreas na
cidade de Bocaiúva-MG. Para isso, definiu-se quais seriam as classes notáveis (variáveis) a
serem trabalhadas, realizou-se uma classificação supervisionada para estabelecer a
proporcionalidade das variáveis em cada amostra selecionada e posteriormente verificou-se
a proporção das variáveis nas amostras para classificar o padrão sócio-econômico das
mesmas. Utilizou-se como material uma imagem de alta resolução da sede municipal de
Bocaiúva-MG. Concluiu-se que a utilização de imagens de sensoriamento remoto, junto a
técnicas de processamento digital, possibilita de forma econômica e eficiente o
levantamento de dados, análise e monitoramento de áreas urbanas.

1 INTRODUÇÃO
A população da Terra não é apenas enorme; é também mal distribuída, existindo regiões
densamente povoadas e áreas praticamente vazias. Outro aspecto importante é a grande
diferença de riquezas: de cada quatro moradores da Terra, apenas um é saudável, bem
alimentado, possui bom nível cultural e habita casas com higiene e conforto (ANTUNES,
1991).
Para compreendermos as transformações do espaço geográfico, temos de desvendar de que
forma os homens, organizados em sociedade, atuam sobre a configuração territorial,
modelando as paisagens (SENE & MOREIRA, 2000).
Segundo Paes (2003), face à dinâmica do crescimento da ocupação urbana, torna-se
necessário à criação e o aprimoramento de mecanismos que permitam melhor caracterizar
e monitorar estas áreas, possibilitando avaliar as mudanças que, na maioria dos casos,
ocorrem de maneira rápida e desordenada.
Até a disponibilização de imagens de alta resolução obtidas por satélites, no fim da década
de 90, este monitoramento era realizado através da utilização de fotografias aéreas obtidas
por levantamentos aerofotogramétricos, realizados à baixa altitude. Entretanto, estes
aerolevantamentos não são realizados sistematicamente devido ao seu alto custo
operacional e conseqüentemente não são economicamente acessíveis para a maioria das
prefeituras dos municípios brasileiros. Nos últimos dois anos, empresas internacionais,
passaram a oferecer, em bases comerciais, imagens de alta resolução, obtidas por satélites,
as quais vem se constituindo em importante ferramenta para o estudo temático dos setores
intra-urbanos (PAES, 2003).
Uma imagem nada mais é, do que uma série de valores resultantes da resposta de um
sensor, a uma fonte de excitação externa, em geral eletromagnética (refletida,
retroespalhada e emitida). É a nossa perícia em interpretar essas transformações, que nos
permite transformar esses valores, em informações úteis (MAILLARD, 2000).

A utilização de sensores remotos em aeronaves e satélites tem se constituído num recurso
fundamental para a obtenção de informações sobre alvos na superfície terrestre, inclusive
na área militar (DUTRA, 2003)
Nos dias atuais existe um grande consenso de que a informação é um dos recursos mais
estratégicos e mais valiosos para a condução de qualquer tipo de negócio ou projeto, seja
de natureza pública ou privada, seja de abrangência global, nacional, regional, local e até
mesmo pessoal. Nenhum País, Estado ou Município atingirá seu pleno desenvolvimento se
não dispuser de informações atualizadas, precisas e sinópticas sobre a natureza, a
quantidade e a distribuição geográfica dos seus recursos naturais e das riquezas geradas
pelo seu povo (ELMIRO, 2004).
O sensoriamento remoto é o processo de capturar informação sobre alguma coisa sem estar
em contato físico com ela: aprendendo sem tocar. O tipo mais comum de sensoriamento
remoto é o uso dos olhos pra detectar a luz. Observar os objetos ao nosso redor, ouvir o
barulho das ondas do mar, da buzina do carro e sentir o calor do sol é sensoriamento
remoto. Os satélites carregam sensores que observam a superfície da terra, os oceanos, o
ar, etc. Os satélites ajudam a predizer a temperatura, acompanhar o crescimento das
diversas culturas agrícolas, planejar cidade, predizer fenômenos (terremoto, erupção de
vulcões, inundações, furacões, etc), encontrar ruínas arqueológicas, etc ( DUTRA, 2003).
Um dos principais objetivos do sensoriamento remoto é o de distinguir e identificar as
composições de diferentes materiais superficiais, sejam eles tipos de vegetação, padrões de
uso do solo, rochas e outros. Essa distinção e identificação torna-se possível devido ao fato
dos materiais superficiais terem comportamentos específicos ao longo do espectro
eletromagnético, comportamentos esses que podem portanto ser usados para identifica-los
(CROSTA, 1992).
O presente trabalho tem como objetivo utilizar da técnica de classificação supervisionada,
que envolve sensores remotos, imagens digitais, processamento de dados e interpretações
empíricas e subjetivas, para identificar possíveis variáveis que possuam relação com
fenômenos de caráter social, intimamente associados à ocupação do espaço geográfico.

2 OBJETIVO
2.1 Geral
Estudar a relação entre proporção de classes notáveis dentro do espaço urbano e o padrão
sócio-econômico presumido de áreas na cidade de Bocaiúva-MG.
2.2 Específicos
- Definir variáveis que possuem relação com determinados tipos de padrão de ocupação
dentro do espaço intra-urbano;
- Utilizar método de classificação supervisionada para estabelecer a proporcionalidade das
variáveis em relação ao padrão sócio-econômico das amostras;
- Verificar as proporcionalidades em função do padrão de cada amostra.

3 FUNDAMENTOS TEÓRICOS
3.1 Conhecimento da Incerteza
Tudo o que se mede ou se modela está sujeito a erros e esses erros respondem pela
qualidade de mapa ou da base de dados num SIG (TIMBÓ, 2000).
O componente de erro mais explorado, que é motivo de preocupação constante tanto em
Cartografia como em Geoprocessamento, é a incerteza quanto à localização. A exatidão de
posicionamento é dada pelo erro na posição ou na localização, com relação ao sistema de
referência da base de dados, de pontos bem definidos. O usuário de SIG deve se preocupar,
por exemplo, com o erro na medição das coordenadas dos pontos de controle com GPS ou
então com o erro planimétrico associado à escala dos mapas (TIMBÓ, 2000).
Outro componente de erro muito importante é a incerteza na atribuição de valores ou
classes aos objetos que compõem a base de dados. A exatidão de atributos questiona a
correção com que os atributos são associados aos objetos. No caso de variáveis
representadas por campos numéricos como o relevo, o erro é expresso por um valor
numérico, um número real. Pode-se dizer que a altitude de um ponto tem um erro de 20
metros. Já para variáveis representadas por campos temáticos, como o solo, o erro reduz-se
a certo ou errado. Pode-se dizer que um polígono classificado como floresta ombrófila
densa está errado porque está na área de floresta ombrófila aberta (TIMBÓ, 2000).
3.2 Sensoriamento Remoto
Uma definição para Sensoriamento Remoto (SR) pode ser: “É a utilização de sensores para
aquisição de informações sobre objetos ou fenômenos sem que haja contato direto com
eles” (INPE, 2003).
Uma definição mais específica define o sensoriamento remoto como: “O conjunto de
técnicas de aquisição, processamento e interpretação de imagens obtidas desde aviões a
satélites, nas quais é registrado algum aspecto da interação entre a matéria e a energia
eletromagnética” (INTERSAT, 2005), ver figura 1.

Figura 1 – Interação da Radiação Eletromagnética
Fonte: INTERSAT, 2005.
3.3 Sistemas Orbitais
Os sistemas sensores são equipamentos que estão a bordo dos satélites e sua função é
captar e registrar a energia eletromagnética proveniente dos objetos na superfície terrestre.
Sem eles não seria possível para o satélite obter imagens, ele estaria literalmente “cego” .
Da mesma forma como nós captamos as cores dos objetos através dos nossos olhos, os
sensores a bordo dos satélites captam a energia eletromagnética que é refletida ou emitida
pelos objetos da superfície terrestre (INTERSAT, 2005).
Plataformas orbitais são naves tripuladas ou não que se deslocam em volta à Terra e que
usam a as forças gravitacionais e centrífugas para se manter em órbita (MAILLARD,
2000).
Existem basicamente três tipos de órbitas usadas em sensoriamento remoto:
1. Uma órbita heliossíncrona é caracterizada pelo fato de que o plano da órbita do satélite
forma um ângulo constante com o plano orbital da Terra em volta ao sol. Essas órbitas são
possíveis entre 300 a 1500 quilômetros de altitude e nuca passam pelos pólos.

2. Uma órbita é chamada de geoestacionária quando o satélite fica constantemente em cima
do mesmo ponto geográfico.Esse tipo de órbita envolve grandes altitudes na ordem de
36000 quilômetros.
3. A órbita circular oferece a vantagem de sempre sobrevoar a superfície terrestre à mesma
altitude. Este tipo de órbita faz o satélite sobrevoar a qualquer hora do dia e da noite.Os
satélites orbitam em altitudes relativamente baixas ( abaixo de 1000 km) (MAILLARD,
2000).
3.4 Sistema Orbital QuickBird
Figura 2 - Satélite QuickBird
Fonte: INTERSAT, 2005.
O Quickbird (figura 2) é um satélite de alta precisão desenvolvido pela Digital Globe, que
oferece imagens comerciais de alta resolução da Terra. As imagens pancromáticas e
multiespectrais são planejadas para dar suporte nas aplicações em gerenciamento de
avaliação de riscos e publicações de mapas com ênfase nas áreas urbanas (EMBRAPA,
2005). Informações sobre as características do satélite estão na tabela 1 e informações
técnicas sobre o mesmo estão na tabela 2.

Tabela 1 – Informações Técnicas do Satélite
Data de lançamento Outubro de 2001
Veículo de lançamento Boeing Delta II
Local de lançamento Vandenberg Air Force Base, Califórnia
Capacidade de armazenamento de dados 128 Gbytes, aproximadamente 57 áreas imagens simples
Altitude da órbita 450 Km
Inclinação da órbita 98 graus, em sincronismo com o Sol
Velocidade 7.1 Km/segundo
Horário de Passagem 10:30 h
Duração da órbita 98 minutos
Capacidade de envio de dados 320Mpbs em banda x
Fonte: INTERSAT, 2005.
Tabela 2 – Características do Satélite
Largura do Imageamento 16,5 x 16,5 km, no nadir
Tempo de revisita 1 a 3,5 dias dependendo da latitude (30° off-nadir)
Precisão Métrica Horizontal: 23metros (CE90%)
Vertical: 17 metros(LE 90%)
Resolução Pan: 61 cm (nadir) até 72 cm (25° off-nadir)
Multiespectral: de 2.44m (nadir) até 2.88 m (25° off-
nadir)
Bandas Pancromática: 450 – 900 nm
Azul: 450 – 520 nm
Vermelho: 630 – 690 nm
Infravermelho Próximo: 760 – 900 nm
Máximo Aquisição Simples 1x 10,1 par estéreo
Fonte: INTERSAT, 2005.

3.6 Imagens de Sensoriamento Remoto
As imagens de Sensoriamento Remoto são uma representação, em formato digital ou
analógico, de uma parte da superfície terrestre. As imagens adquiridas por sensores
satélites têm geralmente formatos digitais, já as fotografias aéreas são tradicionalmente
imagens analógicas. Uma imagem digital (figura 3) é a composição de um conjunto de
elementos denominados pixels (picture elements) ordenados na forma de uma matriz
bidimensional. Para cada um destes elementos de imagem existe uma única posição na
matriz, indicada pela intersecção de uma linha e uma coluna (figura 4). Cada pixel ou
elemento da matriz representa uma área definida da superfície terrestre, assim a área total
do conjunto de todos os pixels da matriz corresponde à área total coberta pela imagem
sobre a superfície (INTERSAT, 2005).
Figura 3 – Raio-x de uma Imagem Digital
Fonte: INTERSAT, 2005.
3.7 Processamento Digital de Imagem de Sensoriamento Remoto
O processamento digital de imagens de sensoriamento remoto trata especificamente das
técnicas utilizadas para identificar, extrair, condensar e realçar a informação de interesse
para determinados fins, a partir de uma enorme quantidade de dados que usualmente
compõem essas imagens (CROSTA, 1992).

3.8 Classificação de Imagem de Sensoriamento Remoto
A classificação automática de imagens multiespectrais de sensoriamento remoto diz
respeito a associar cada pixel da imagem a um rótulo descrevendo um objeto real
(vegetação, solo, etc...). Dessa forma, os valores numéricos DNs (digital numbers)
associados à cada pixel, definidos pela reflectância dos materiais que compõem esse pixel,
são identificados em termos de um tipo de cobertura da superfície terrestre imageada
(água, tipo de vegetação, de solo, de rocha, etc.), chamadas então de temas (CROSTA,
1992).
Quando esse tipo de operação é efetuado para todos os pixels de uma determinada área, o
resultado é um mapa temático, mostrando a distribuição geográfica de um tema, tal como
vegetação ou solo. Pode-se dizer então que uma imagem de sensoriamento remoto
classificada é uma forma de mapa digital temático. Quando essa imagem é reorganizada
para se ajustar a uma dada projeção cartográfica, torna-se um importante elemento para ser
incorporado a um sistema geográfico de informações (CROSTA, 1992).
3.9 Classificação Supervisionada
Nesse tipo de classificação, é necessário que o usuário conheça alguma coisa da área a ser
classificada, antes de iniciar o processo. Idealmente, deveria haver locais específicos
dentro de área a ser classificada onde observações de campo tivessem sido efetuadas
durante a passagem do satélite para adquirir a imagem. Esse tipo de observação é
conhecida como verdade terrestre. Essas áreas podem então ser usadas como um padrão de
comparação, com a qual todos os pixels desconhecidos da imagem serão comparados para
se decidir a qual classe pertencem. Essa situação ideal na maioria das vezes não é possível,
sendo necessário fazer certas inferências sobre as classes superficiais (CROSTA, 1992).
Uma área da imagem que o usuário identifica como representando uma das classes é
chamada de área de treinamento. Uma área de treinamento é normalmente definida pelo
usuário traçando-se seus limites diretamente sobre a imagem, no monitor de vídeo do
sistema de processamento de imagens. Várias áreas de treinamento podem ser definidas

para uma mesma classe, para assegurar que os pixels a ela pertencente são realmente
representativos de dessa classe (CROSTA, 1992).
3.10 Segmentação
Neste processo, divide-se a imagem em regiões que devem corresponder às áreas de
interesse da aplicação. Entende-se por regiões um conjunto de "pixels" contíguos, que se
espalham bidirecionalmente e que apresentam uniformidade. A divisão em porções
consiste basicamente em um processo de crescimento de regiões, de detecção de bordas ou
de detecção de bacias (INPE, 2002).
3.11 Classificação por Regiões
Os classificadores por regiões utilizam, além de informação espectral de cada "pixel", a
informação espacial que envolve a relação entre os "pixels" e seus vizinhos. Estes
classificadores procuram simular o comportamento de um foto-intérprete, ao reconhecer
áreas homogêneas de imagens, baseados nas propriedades espectrais e espaciais de
imagens. A informação de borda é utilizada inicialmente para separar regiões e as
propriedades espaciais e espectrais irão unir áreas com mesma textura (INPE, 2002).

4 METODOLOGIA
A área escolhida para realização da pesquisa foi o município de Bocaiúva (figura 4),
localizado no Norte do Estado de Minas Gerais (figura 4) e tem a sua sede com posição
marcada pelas coordenadas geográficas 17˚ 06’ 27”, de Latitude Sul, e 43˚º 48’ 54” de
Longitude Oeste. (PRODEMGE, 1998).
Figura 4 – Mapa de Localização do Município de Bocaiúva-MG
Fonte: Base GeoMinas
Foi adquirida através da INTERSAT uma imagem (figura 5) de 15 km², referente à área
urbana do município de Bocaiúva. A imagem de alta resolução do satélite Americano
QuickBird, tomada no dia 15 de outubro de 2004, foi fornecida em formato GEOTIFF,
composição colorida (RGB-321), com resolução espacial de 0.6 metros.
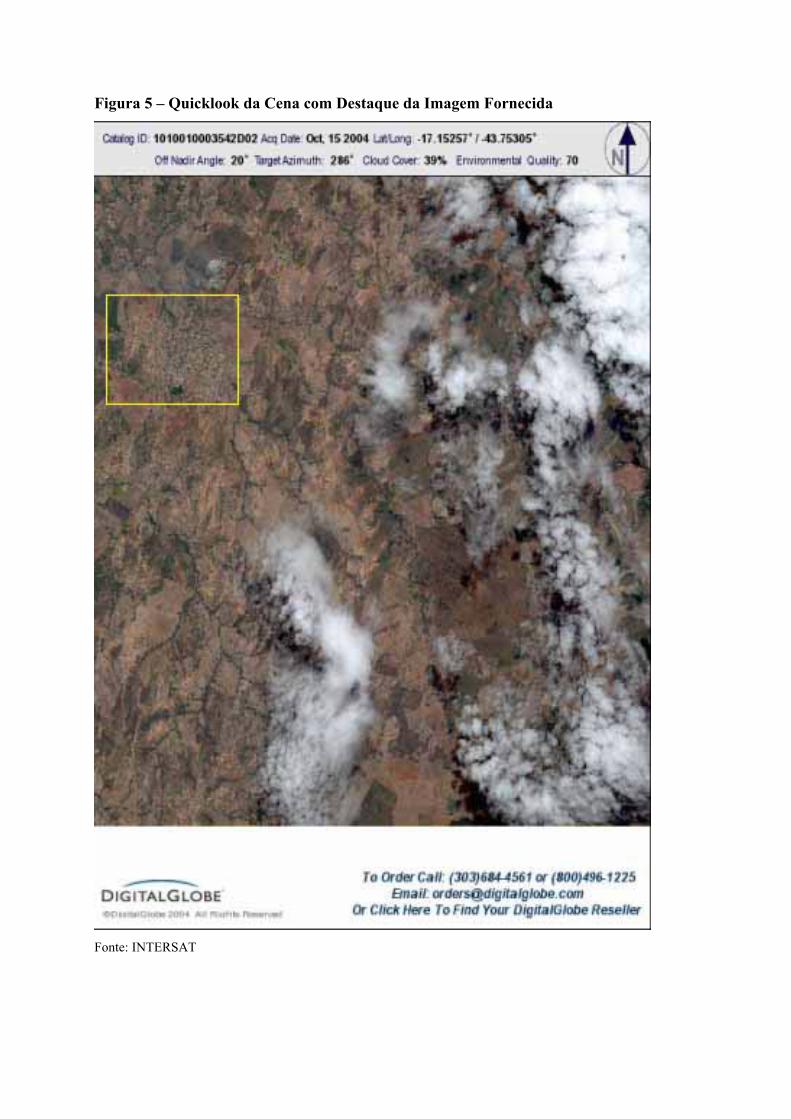
Figura 5 – Quicklook da Cena com Destaque da Imagem Fornecida
Fonte: INTERSAT

Foi necessário tratar a imagem devido ao baixo contraste apresentado pela mesma. A
técnica de realce de contraste tem por objetivo melhorar a qualidade das imagens sob os
critérios subjetivos do olho humano. Para tratamento da imagem, utilizou-se o software de
livre domínio SPRING (sistema de processamento de imagens georeferenciadas),
disponibilizado pelo INPE.
As áreas (quadras) selecionadas como amostra, foram definidas aleatoriamente, não
levando em consideração limites oficiais. Foram definidas 3 amostras para o estudo. Para
realizar o recorte destas áreas utilizou-se o software ERDAS IMAGINE 8.6.
As variáveis que possuem relação com determinados tipos de padrão de ocupação dentro
do espaço intra-urbano foram separadas em:
-Pavimentação:
- asfalto
- solo exposto
- Vegetação:
- árvores, arbustos e gramíneas
- Cobertura das edificações:
- cerâmica
- cimentada
- metálica
- Água
Foram consideradas três categorias sócio-econômicas para classificação das quadras:
- classe baixa;
- classe média;
- classe alta.
Nos procedimentos de classificação digital, empregou-se o método de segmentação,
utilizando valores 5 de similaridade e 8 de área de pixels para gerar uma imagem, separada
em regiões com base na análise dos níveis de cinza. Logo após foi criado o arquivo de
contexto, que armazena quais as bandas farão parte do processo de classificação por
regiões. Em seguida foi realizado o procedimento de extração de regiões, onde o algoritmo

extrai informações estatísticas de média e variância de cada região, considerando as bandas
indicadas no contexto.
Outro procedimento realizado foi o treinamento, onde as amostras são coletadas sobre a
imagem na área do desenho e posteriormente validadas através da estatística gerada pelo
software.
A classificador utilizado para separar as classes foi o Bhattacharya 99.9%.

5 RESULTADOS E DISCUSSÕES
5.1 Classe Baixa
Figura 6 – Amostra 1
Figura 7– Segmentação da Classe Baixa

Figura 8 – Classificação da Classe Baixa
As tabelas 3 e 4 apresentam dados referentes à matriz de classificação e às áreas das
classes, respectivamente. O gráfico 1 mostra a distribuição percentual das variáveis na
classe baixa.
Tabela 3 – Matriz de Classificação da Classe Baixa
Matriz de Classificação Dados de Referência
1863 Asfalto 25,37%
2880 Solo 39,22%
1127 Vegetação 15,35%
1026 Cerâmica 13,97 277 Cimentada 3,77 17 Metálica
0,23 Soma 7344

Tabela 4 – Medidas das Classes da Classe Baixa
Medidas de Classes
Cálculo de áreas/Comprimento por Geo-
classe
unidade (m²)
Asfalto 8156,520648
Solo 16622,641321
Vegetação 10937,880869
Cimentada 8894,160707
Laje 1968,480156
Metálica 733,680058
Área Total das Classes 47313,363760
Gráfico 1 – Percentuais da Classe Baixa
0369121518212427303336
Percentuais da Classe Baixa
asfaltosolovegetaçãocerâmicacimentadametálicaágua
A variável solo destacou-se em relação às outras, devido à pequena quantidade de área
construída dentro de cada lote. Isso reflete o alto índice de vegetação e o baixo índice de
cerâmica encontrado nessa amostra. O baixo índice de Cobertura cimentada se dá pelo fato
de que a quadra selecionada é formada, em sua maioria, por casas populares. A cobertura
metálica representa alteração das edificações pelos moradores, sendo representada, por
exemplo, por garagens cobertas. Nesta área não foi detectada a presença de água.

5.2 Classe Média
Figura 9 – Amostra 2
Figura 10 – Segmentação da Classe Média

Figura 11 – Classificação da Classe Média As tabelas 5 e 6 apresentam dados referentes à matriz de classificação e às áreas das
classes, respectivamente. O gráfico 2 mostra a distribuição percentual das variáveis na
classe média.
Tabela 5 – Matriz de Classificação da Classe Média
Matriz de Classificação Dados de Referência
7008 Asfalto 49,96%
2172 Solo 15,45%
1145 Vegetação 8,15% 2736 Cerâmica
19,47% 955 Cimentada
6,80% 38 Metálica
0,27% Soma 14054

Tabela 6 – Medidas de Classes da Classe Média
Medidas de Classes
Cálculo de áreas/Comprimento por Geo-
classe
unidade (m²)
Asfalto 5123,880407
Solo 7526,520598
Vegetação 4005,360318
Cimentada 5239,440416
Laje 3003,840232
Metálica 134,280011
Área Total das Classes 25033,321989
Gráfico 2 – Percentuais da Classe Média
036912151821242730
Percentuais da Classe Média
asfaltosolovegetaçãocerâmicacimentadametálicaágua
Nessa amostra o índice de cerâmica elevado demonstra uma relevante presença de área
construída, porém com preservação de solo exposto (quintais), o que é demonstrado no
índice solo e vegetação. Devido à dimensão dos arruamentos há uma presença considerável
do índice asfalto. A cobertura metálica é quase inexistente na amostra e pode se referir a
materiais que possuam resposta espectral semelhante. Nesta área não foi detectada a
presença de água.

5.3 Classe Alta
Figura 12 – Amostra 3
Figura 13 – Segmentação da Classe Alta

Figura 14 - Classificação da Classe Alta
As tabelas 7 e 8 apresentam dados referentes à matriz de classificação e às áreas das
classes, respectivamente. O gráfico 3 mostra a distribuição percentual das variáveis na
classe média.
Tabela 7 – Matriz de Classificação da Amostra 3
Matriz de Classificação
Dados de Referência 7068 Asfalto
50,74% 868 Solo
6,23% 1339 Vegetação
9,61% 3954 Cerâmica
28,38% 475 Cimentada
3,41% 91 Metálica
0,65% 136 Água
0,98% Soma 13931

Tabela 8 – Medidas de Classes da Classe Alta
Medidas de Classes
Cálculo de áreas/Comprimento por Geo-classe unidade (m²)
Asfalto 5123,880407
Solo 4871,160387
Vegetação 5538,240440
Cimentada 6415,560510
Laje 2091,600166
Metálica 154,080012
Água 136,080011
Área Total das Classes 26759,162127
Gráfico 3 - Percentuais da Classe Alta
036912151821242730
Percentuais da Classe Alta
asfaltosolovegetaçãocerâmicacimentadametálicaágua
A maior presença de cerâmica em relação ao solo e vegetação é explicada pela grande
quantidade de área construída dentro de cada lote. O alto índice de asfalto se deve à
presença de ruas mais largas e áreas de solo coberto com material de resposta espectral
semelhante a do asfalto. O alto índice de cobertura cimentada apresentado ocorre pelo fato
de existirem dois pontos comerciais na área e pela presença de materiais com resposta
espectral semelhante, localizados ao redor das piscinas. A presença de cobertura metálica é
quase inexistente. O índice água representado por piscinas, apesar de apresentar valor
baixo, é uma variável de grande significância para identificar alto poder aquisitivo.

Gráfico 4 – Percentual das Classes
0369121518212427303336
Classe-Baixa Classe-Média Classe-Alta
Percentual das Classes
asfaltosolovegetaçãocerâmicacimentadametálicaágua
Analisando o gráfico 4, que apresenta o percentual das três classes, observou-se que os
índices asfalto e cerâmica apresentam-se crescentes e o índice solo apresenta-se
decrescente de acordo com o aumento do poder aquisitivo das classes sócio-econômicas.
A justificativa para diferença de valores no índice asfalto é a dimensão dos arruamentos
encontrados em cada área. A cobertura cerâmica é a variável mais importante para
identificação das classes sócio-econômicas, apresentando valores mais altos na presença de
grandes áreas construídas. A cobertura solo exposto identifica as áreas onde não há
presença de edificações. A classe alta demonstra isso claramente, pois possui baixo índice
de solo e o maior índice de área construída das amostras.
A cobertura cimentada e metálica não foram relevantes na identificação das classes, pois
além de apresentar valores baixos, apresentou conflitos com outros materiais
principalmente na classe alta.
O índice vegetação, neste caso, não pode ser utilizado como parâmetro classificatório,
apresentando altos índices nas classes baixas e altas.
O índice água foi decisivo na classificação da classe alta, demonstrando presença de
piscinas ao contrário das outras áreas onde o índice foi nulo.

6 CONCLUSÃO
A utilização de imagens de sensoriamento remoto, juntamente com as técnicas de
processamento digital, possibilita de forma econômica e eficiente o levantamento de dados,
análise e monitoramento de áreas urbanas.
O método classificatório empregado permitiu uma separação fiel das variáveis,
confirmando com valores percentuais, características visuais que representam a realidade
sócio-econômica das amostras.
Apesar dos resultados satisfatórios, algumas rotinas que não foram utilizadas podem ser
adotadas para se chegar a resultados mais seguros e fidedignos, por exemplo:
- utilizar limites oficiais para definir as amostras;
- fazer uso de uma quantidade significativa de amostras;
- estudar de forma exaustiva a resposta espectral dos alvos.

REFERÊNCIAS BIBLIOGRÁFICAS ANTUNES, Celso. Geografia e participação. 3. ed. São Paulo: Scipione, 1991. 160p.
CROSTA, Álvaro Penteado. Processamento Digital de Imagens de Sensoriamento Remoto. Edição Revisada. Campinas: Instituto de Geociências, 1992. 170 p.
DUTRA, Luciano Vieira. Fundamentos de Processamento Digital de Imagens de Sensoriamento Remoto. Notas de aula da UFMG, Belo Horizonte, set. 2003.
ELMIRO, Marcos A. Timbó. Curso de Extensão em Geoprocessamento. Notas de aula do Departamento de Cartografia da UFMG. Belo Horizonte, 2004.
EMBRAPA, Satélites de monitoramento. QuickBird. Disponível em: http://www.sat.cnpm.embrapa.br/satelite/quickbird.html. Acesso em: 3 de outubro de 2005. INPE, Instituto Nacional de Pesquisas Espaciais. SPRING 3.6: Tutorial 10 aulas. São José dos Campos, 2002.
INTERSAT, Soluções em Imagem de Satélite. Sensoriamento Remoto. Disponível em: www.intersat.com.br. Acesso em: 3 de outubro de 2005.
MAILLARD, Philippe. Introdução ao Sensoriamento Remoto. Notas de aula do Departamento de Cartografia da UFMG. Belo Horizonte, 2000.
MAILLARD, Philippe. Introdução ao Processamento Digital de Imagens. Notas de aula do Departamento de Cartografia da UFMG. Belo Horizonte, 2000.
MOURA, Ana Clara Mourão. A importância dos metadados no uso das Geotecnologias e na difusão da Cartografia Digital. Departamento de Cartografia, UFMG. Belo Horizonte.
PAES, Fernando Camilo; PINTO, Sérgio dos Anjos F.; DUTRA, Luciano V. In: Simpósio Brasileiro de Sensoriamento Remoto, 10, 2003, Belo Horizonte. Anais XI SBSR, Belo Horizonte, Brasil, 05 - 10 abril 2003, INPE, p. 1907 - 1914.
PRODEMGE. Bases Digitais das Sedes dos Municípios de Minas Gerais. 1998.

SENE, Eustáquio; MOREIRA, João Carlos. Geografia: Geral e do Brasil. São Paulo: Scipione, 2000. 503p.
TIMBÓ, Marcos A. Levantamentos Através do Sistema GPS. Notas de aula do Departamento de Cartografia da UFMG. Belo Horizonte, 2000.