vibraÇÕes dos sistemas mecÂnicosvirgilio/vibra%e7oes%20dos%20sistemas%20mecanicos/... · ... em...
TRANSCRIPT

UNIVERSIDADE FEDERAL DA PARAÍBA
CENTRO DE TECNOLOGIA
DEPARTAMENTO DE ENGENHARIA MECÂNICA
VIBRAÇÕES DOS SISTEMAS MECÂNICOS
Fundamentos de Vibrações
Histórico, Importância do Estudo das Vibrações, Movimento Harmônico, Classificação das Vibrações e Tópicos Essenciais.
N O T A S D E A U L A S
Virgílio Mendonça da Costa e Silva
Janeiro – 2018

1. Fundamentos de Vibração 1.1 Observações Preliminares
Este capítulo introduz o assunto de vibrações de maneira relativamente
simples. Começa com um breve histórico do assunto e continua com uma
explanação de sua importância. Em vários passos envolve análise de vibrações
de um sistema de engenharia onde são introduzidas definições especificas e
conceitos básicos de vibrações. Segue com a apresentação de conceitos de
analise harmônica geralmente usada para análise de movimentos vibratórios,
sem tratamento exaustivo. Concluímos com tópicos essenciais para modelagem
de sistemas mecânicos.
1.2 Breve Histórico de Vibrações
Os povos, de uma maneira geral, se tornaram interessados em vibrações
quando da descoberta do primeiro instrumento musical, provavelmente um
instrumento de sopro ou tambor. Mais tarde, vários instrumentos musicais
(percussão, cordas, metais, etc.) foram concebidos, aproveitando movimentos
vibratórios, geradores de ondas sonoras. Desde então surgiram às primeiras
investigações para estudos de fenômenos vibratórios.
O desenvolvimento da teoria da vibração resultou dos avanços das
ciências básicas das quais deriva: matemática e mecânica geral.
A origem, em termos históricos, encontra-se nos registros dos antigos
filósofos gregos do primeiro milênio antes de Cristo. O primeiro interessante do
envolvimento de um filósofo grego com um problema de natureza vibratória é
registrado em um incidente envolvendo Pitágoras (cerca de 570-497 A.C.)
Pitágoras estava passando por uma espécie de fundição e/ou forjaria e
percebeu uma certa harmonia entre os diversos sons produzidos pelos
martelos. Entrando no local ele suspeitou que a diversidade de sons fosse
originada pelas diferentes forças empregadas no uso dos martelos, concluindo,
entretanto, que a causa era o peso dos martelos. Pitágoras, então, estabeleceu

um método racional de medir frequências sonoras (origem do diapasão)
podendo ser considerado como o fundador da acústica.
Ele realizou experiências com martelos, cordas, tubos e placas criando o
primeiro laboratório de pesquisas em vibrações conhecido. O fato que existem
frequências que podem produzir movimento harmônico já era conhecido por
músicos quando foi estabelecido como uma lei natural por Pitágoras. Além
disso, ele provou com suas experiências com martelos que as frequências
naturais são propriedades dos sistemas e não dependem da magnitude da força
atuante. Ele provou ainda que:
1. A frequência natural de uma corda é inversamente proporcional ao seu
comprimento e diâmetro; ela cresce quando cresce a tensão “com outras
proporções” (não especificadas). É bastante provável que Pitágoras tenha
conhecido a regra correta de dependência da frequência natural com a
tensão.
2. A frequência natural da vibração longitudinal de uma coluna é
inversamente proporcional ao comprimento da mesma.
3. A tese anterior também é válida para recipientes. Pitágoras mudava a
frequência natural colocando água dentro deles.
4. Pitágoras também testou discos, mas não existem registros de
resultados. Existe um relato em Phaedon de Platão, que Hipasos (um
discípulo de Pitágoras que diz-se tenha sido morto por revelar segredos
pitagóricos) testou quatro discos de bronze e encontrou frequências
naturais inversamente proporcionais às espessuras
As pesquisas sobre o movimento do pêndulo se originaram nas culturas
grega e chinesa, encontrando-se indicações que tenha sido utilizado como
medidor de tempo (portanto sendo conhecido o seu isocronismo – período
constante) nos tempos de Aristófanes (450-388 A.C. ).
O primeiro texto sobre acústica, On Acoustics, foi escrito por Aristóteles,
tendo sido o termo utilizado pela primeira nesta época. Os instrumentos de
medição de vibrações se originam na Grécia e China antigas.

Heródoto (cerca de 484 a 425 A.C.) registra a existência de um
transdutor de vibração (um escudo coberto com uma fina camada de bronze)
que era encostado ao solo produzindo som quando este apresentava qualquer
movimento vibratório. Foi utilizado no sexto século A.C. para detectar a
escavação de túneis subterraneos em Barca, norte da África, atual Líbia, então
sob dominação persa.
Vários outros instrumentos podem ser citados, mas um merece especial
atenção: um sismógrafo construído na China por volta do ano de 132 D.C. O
governo imperial desejava detectar antecipadamente terremotos, para que
pudessem se preparar. O cientista e matemático Zhang Heng inventou um
instrumento que era constituído por um pêndulo de 3 m de comprimento,
usando bolas para registrar a direção e, talvez, a magnitude. Com 2 metros de
largura, parecia um jarro de bronze. Oito cabeças de dragão circundavam a
parte superior. Debaixo de cada uma havia um sapo de bronze. Quando o jarro
sentia um tremor de terra, mesmo ínfimo, uma bola caía de um dragão na boca
de um sapo. A genialidade desse ancestral de todos os sismógrafos estava no
fato de que a bola caía na direção de onde vinha o tremor graças a um
mecanismo no interior do jarro.
Alguns engenheiros supõem que se tratava de um pêndulo suspenso por
um cabo com oito alavancas ligadas às oito bocas de dragão. Quando um tremor
vinha do sul, por exemplo, fazia com que a parte inferior do pêndulo oscilasse
para o norte. Assim a parte superior inclinava-se para o sul, acionando a
alavanca ligada ao dragão do sul. Sua boca abria-se e a bola caía. Desse modo,
Zhang Heng podia informar à corte quando ocorria um terremoto, indicando a
direção da área atingida.
Este instrumento instalado no Departamento de Astronomia e
Calendário, da cidade de Luoyang, então capital da Dinastia Han (de 206 A.C. a
220 D.C.), registrou um terremoto ocorrido a cerca de 600 km de distância, não
sensível ao ser humano o que convenceu a todos da utilidade do mesmo.
Registro da National Geographic Brasil, fevereiro de 2004.
Registros da Era Moderna 1590 Galileu Galilei (*) Ele escreveu o primeiro tratado em dinâmica moderna. Seu trabalho em
oscilações de um pêndulo simples e vibrações de uma corda foram de
fundamental significância na teoria de vibrações.
� Descobriu a relação entre comprimento de um pendulo e sua frequência.
� Descobriu a ressonância entres corpos conectados.
� Descobriu a relação entre densidade, tensão e frequência de uma corda vibrante.
Físicos Wallis e Sauveur.
� Observaram, em trabalhos independentes em cordas vibrantes, o
fenômeno de forma dos modos de vibração com pontos estacionários
chamados nós.
� Descobriram que a frequência do segundo modo é o dobro da frequência
do primeiro e que a frequência do terceiro modo é três vezes a do
primeiro.
Físico Sauveur
� Criou o termo de frequência fundamental para representar a frequência
mais baixa e harmônicos para as demais frequência de um movimento
vibratório.
� Matemáticos Taylor, Bernoulli, D’Alembert, Euler, Lagrange e Fourier
Deram grandes contribuições para o desenvolvimento da teoria das vibrações
(*)(1564 -1642) Astrônomo italiano, filósofo, e professor de matemática da universidade de Pisa e Pádua, em 1609 se tornou o primeiro homem a apontar um telescópio para o céu.

Matemático Bernoulli
� Foi quem primeiro propôs o principio de superposição de harmônicos e
descobriu que qualquer configuração geral de vibrações livres é composta
das configurações de harmônicos, atuando independentemente da
variação de forças.
1676 Lei de Hook’s da Elasticidade
1744 Euler e 1751 Bernoulli � Determinaram a equação diferencial que representa a vibração de um
barra prismática e investigaram sua solução para pequenas deflexões.
1784 Coulomb
� Apresentou estudos teóricos e experimentais de oscilações torcionais de
um cilindro metálico suspenso por fios.
1802 Chladni
� Desenvolveu um método de colocação de areia sobre uma placa vibrante
para encontrar as formas dos modos de vibrações e observar a beleza e a
complexidade das formas modais de placas vibrantes.
1816 Sophie Germain
� Foi premiado com 3000 francos por uma academia francesa pela
derivação da equação diferencial do movimento para as placas vibrantes
estudadas por Chladni, concorrendo sozinho, após ter sido desclassificado
por Lagrange (jurado) em 1811 devido a erro na derivação da equação e
em 1813 por falta de justificativa física para as suposições admitidas no
seu modelo. Premio concedido por Napolean Bonaparte, que estava
presente a um dos encontros onde Chladni apresentou o seu
experimento, para premiar a primeira pessoa que desse um tratamento
matemático satisfatório para a teoria de vibrações em placas.
� O fato é que mais tarde se descobriu que sua equação diferencial estava
correta, mas as condições de contornos estavam erradas.
1850 Kirchhoff
� Determinou as corretas condições de Contorno para placas vibrantes. 1877 Lord Rayleigh
� Publicou seu livro sobra a teoria do som considerado até hoje um clássico
no assunto de vibrações.
� Uma das mais notáveis contribuições de Rayleigh é o método para
encontrar a frequência fundamental de vibrações de sistemas
conservativos usando o principio de conservação de energia, conhecido
como Método de Rayleigh.
1902 Frahm
� Investigou a importância do estudo de vibração torcional no projeto de
eixos de hélices de navios.
1909 Frahm
� Propôs o absorvedor dinâmico de vibração, composto da adição de um
segundo sistema massa-mola para eliminar a vibração do sistema
principal.
Após 1909: Stodola
� Desenvolveu um método para analise de vibrações em vigas também
aplicado a pás de turbinas.
Timoshenko e Mindlin
� Aprimoraram importantes resultados para a teoria de vibrações de vigas e placas.
Após 1909
� Deu-se mais atenção a sistemas não lineares. Já há algum tempo tinha-se
observado que muitos problemas básicos da mecânica, incluindo
vibrações eram não lineares e que o tratamento linear comumente
adotado na época eram completamente satisfatórios para algumas
finalidades, mas não tão adequados para todos os casos, ou seja, em
sistemas não lineares frequentemente ocorrem fenômenos que são
teoricamente impossíveis de serem tratados como sistemas lineares.
No final do último século Poincaré e Lyapunov
� Já vinha utilizando a teoria matemática de vibrações não lineares nos
seus trabalhos.
Mas só após 1920 Duffing e Van der Pol
� Apresentaram a primeira solução definitiva da teoria de vibrações não
lineares e atraíram a atenção para a sua importância na engenharia.
A partir desta época
A atenção se voltou para vibrações aleatórias. Observou-se que as
características aleatórias estavam presentes em diversos fenômenos tais
como terremotos, ciclones, transporte de mercadoria em veículos de
rodas, mísseis e ruídos de turbinas a jato, etc. Se tornou necessário
desenvolver conceitos e métodos de análise de vibrações desses efeitos
aleatórios.
Embora em meados de 1905 Einstein
Ter considerado movimento Brawniano, um particular tipo de vibração
aleatória, nenhuma aplicação foi investigada até 1930.

1930 Taylor
� Desenvolveu a função de correlação. 1930 Wiener and Khinchin
� Desenvolveram a densidade espectral. 1943 Lin e 1945 Rice
� Publicaram artigos mostrando uma maneira para aplicações de vibrações
aleatórias em problemas práticos de engenharia.
Nesta época, contando com os avanços significativos da ciência, os estudos
de vibrações mesmo que relacionados com complexos sistemas de engenharia
eram feitos usando modelos grosseiros com poucos graus de liberdade.
1950 O advento de computadores digitais de alta velocidade
� Se tornou possível o tratamento de sistemas complexos e a geração de
soluções de forma semi-fechadas contando com métodos clássicos de
soluções usando avaliação numérica de certos termos que não podem ser
expresso de forma fechada.
Hoje em dia os desenvolvimentos de simulação pelo método de elementos
finitos habilitam engenheiros a usarem computadores digitais para detalhar
numericamente o comportamento da análise de vibrações de sistemas
mecânicos complexos, tais como veículos e estruturas com a exibição de
milhares de graus de liberdade.
1.3 Importância do estudo das vibrações
A vibração está tão intimamente ligada a nós que raramente paramos
para analisar suas características. Muitas das atividades humanas envolvem de
uma ou outra forma movimentos vibratórios. Exemplos:
� Nós ouvimos porque nossos tímpanos vibram.
� Nós vemos porque as ondas luminosas passam vibrando.
� A nossa respiração está associada com a vibração dos pulmões.
� Nossa caminhada envolve movimentos oscilatórios periódicos das pernas
e das mãos.
� Nós falamos devido o movimento oscilatório da laringe (língua).
Muitas instituições de ensino concentram seus esforços no conhecimento
de fenômenos naturais e desenvolvimento de teorias matemáticas para
descrever as vibrações de sistemas físicos.
Muitas investigações têm sido motivadas em engenharia por aplicações
de vibrações em projeto de máquinas, fundações, estruturas, turbinas, sistemas
de controle, etc.
Alguns problemas de vibrações
� Muitos sistemas mecânicos têm problemas vibracionais devidos o
desbalanceamento inerente das partes rotativas. O desbalanceamento
pode ser devido às falhas de projeto ou defeitos de fabricação.
� O desbalanceamento em motores diesel, por exemplo, pode causar ondas
terrestres suficientemente poderosas para criar perturbações em áreas
urbanas.
� As rodas de algumas locomotivas podem elevar mais que um centímetro
dos trilhos em altas velocidades devido o desbalanceamento.
� Em turbinas, as vibrações causam enormes falhas mecânicas. Muitas
vezes os engenheiros não são capazes de prever as falhas que resultam
da vibração de pás e discos em turbinas.
� Naturalmente as estruturas projetadas para suportarem pesadas
máquinas rotativas, tais como motores e turbinas ou maquinas
alternativas tais como motores a vapor e a gás e bombas alternativas
estão também sujeitos as vibrações. Em todas essas situações a estrutura
ou componentes das máquinas sujeitos as vibrações podem falhar por
causa da fadiga do material resultando de numa variação cíclica de
tensões induzidas. Além disso, as vibrações causam mais rapidamente

desgaste em partes de máquinas tais como mancais e engrenagens e
também causam excessivos níveis de ruído.
� Em máquinas, as vibrações causam afrouxamento dos parafusos de
fixação deixando as máquinas soltas.
� Em processo de usinagem de metais a vibração pode causar trepidações
que levam a um péssimo acabamento da superfície usinada.
� Sempre que a frequência natural de vibração de uma máquina ou
estrutura conhecide com a frequência de excitação ocorre um fenômeno
conhecido como ressonância o qual leva a excessiva deflexão e falha.
� A literatura está repleta de casos de falhas em sistemas devido à
ressonância e excessos de vibrações em componentes e sistemas.
� Por causa do poder de destruição da vibração em máquinas e estruturas,
teste de vibrações tem se tornado procedimentos padrão nos projeto e
desenvolvimento de muitos sistemas de engenharia.
� Em muitos sistemas de engenharia, o homem atua com parte integral do
sistema. A transmissão da vibração para o homem resulta em desconforto
e perda de eficiência do trabalho. As vibrações em painéis de
instrumentos podem causar mal funcionamento ou dificuldades em
leitura dos medidores. Assim uma das mais importantes propostas de
estudos em vibrações e reduzir a vibração na fase de desenvolvimento do
próprio projeto da máquina e em seguida em suas instalações. Neste
sentido o engenheiro mecânico tenta projetar o motor ou máquina de
modo a minimizar o desbalanceamento enquanto o engenheiro de
estruturas tenta projetar a estrutura de suporte de modo a assegurar que
o efeito do desbalanceamento não causara danos.
1.4 Estudos das Vibrações
No mundo tecnológico atual o homem está sujeito a efeitos dinâmicos
não naturais, com grande frequência. Isto pode ser verificado em elevadores,
automóveis e, mais recentemente em veículos aeroespaciais, para citar alguns
exemplos práticos, onde o homem está sujeito a excessivas acelerações. Caso
de excessos de vibrações também é muito frequente, por exemplo, em
maquinas ferramentas e perfuradoras pneumáticas.
Na maioria dos casos a vibração é um subproduto indesejável de sistemas
mecânicos. É claro, que se a vibração ou seu efeito, a aceleração, não pode ser
eliminada pela adoção de um diferente principio de trabalho, precisam ser
adotadas medidas de contra atuação ou então é preciso introduzir nos projetos
arranjos dinâmicos para controlar ou isolar o efeito dentro de limites aceitáveis.
As vibrações de Sistemas Mecânicos podem ser analisadas sob dois
pontos de vistas:
� Do ponto de vistas de Engenharia Mecânica, movimento de máquinas, ela
provoca fadiga dos órgãos mecânicos (elementos de máquinas) levando-
os a ruptura do material. Neste caso é fundamental a seguinte pergunta:
Qual é o objetivo da análise? Em geral a análise recai sobre três
categorias
� Pesquisa e Desenvolvimento de Produtos/Máquinas
� Produção e Controle de Qualidade
Severidade � Manutenção e Monitoramento em Operação
Diagnóstico
� Do ponto de vistas de Engenharia de Segurança ela provoca desconforto
humano ou dor como também pode aparecer na forma de ruído. Este
último pode levar o ser humano à morte.
� Quando um ser humano é exposto a um campo excessivamente
ruidoso, o seu organismo pode apresentar diversos distúrbios,
como mostra a Figura 1.
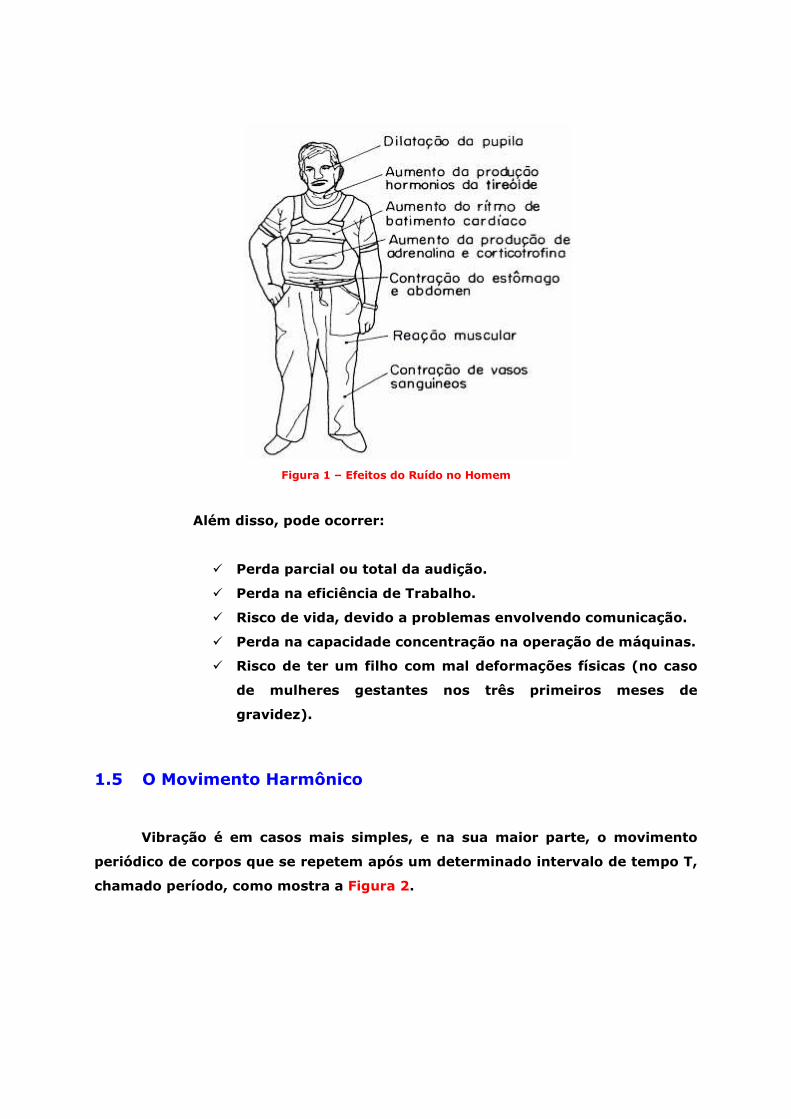
Figura 1 – Efeitos do Ruído no Homem
Além disso, pode ocorrer:
� Perda parcial ou total da audição.
� Perda na eficiência de Trabalho.
� Risco de vida, devido a problemas envolvendo comunicação.
� Perda na capacidade concentração na operação de máquinas.
� Risco de ter um filho com mal deformações físicas (no caso
de mulheres gestantes nos três primeiros meses de
gravidez).
1.5 O Movimento Harmônico
Vibração é em casos mais simples, e na sua maior parte, o movimento
periódico de corpos que se repetem após um determinado intervalo de tempo T,
chamado período, como mostra a Figura 2.

Figura 2 – Movimento Vibratório
Matematicamente, podemos escrever:
( ) ( )X t = X t T+ (1.1)
O Movimento Harmônico é o tipo mais simples de movimento periódico,
Figura 3, onde a relação deslocamento e tempo pode ser representada por:
Figura 3 – Movimento Harmônico Simples
Considera um sistema harmônico representado pela equação (1.2) e
Figura 4
( ) ( ) ( )X t = A sen = A sen t⋅ θ ⋅ ω (1.2)
onde:
ω é a frequência angular em rad/s
A é a amplitude do movimento em mµ

T
A
Figura 4 – Movimento Harmônico Simples Deslocamento em µM
A Frequência Natural de Vibração é o Número de Oscilações por unidade
de Tempo, ou seja:
1f = Hz
T (1.3)
No caso do movimento harmônico tem-se:
Amplitude do Movimento - A mµ
Frequência Angular - rad/sω
Frequência Natural - f Hz
Tempo - T s
Substituindo a equação (1.2) na equação (1.1) tem-se:
( ) ( )( )A sen t = A sen t + T⋅ ω ⋅ ω (1.4)
Resolvendo a equação (1.4) chega-se a:
( ) t + T = t + 2 n ω ω π (1.5)

onde n é o número de ciclos.
Para um ciclo, n 1= , tem-se:
T = 2 ω π ⇒ 2
T = π
ω (1.6)
Substituindo a equação (1.6) na equação (1.3) tem-se:
f = 2
ωπ
(1.7)
ou
= 2 fω π (1.8)
1.6 Classificação dos Movimentos Vibratórios
Um sistema vibratório para ser bem definido, é necessário que se
classifique pelas condições a seguir.
1. Sistema Linear ou Não Linear
No sistema linear a relação causa/efeito pode ser analisada pela teoria de
sistemas lineares, ou seja: Causa/Efeito = constante.
2. Número de Graus de Liberdade - GL
Número mínimo de coordenadas independentes necessário para se
estudar o comportamento do sistema.
Exemplo: Uma partícula no espaço: 3 GL
Um corpo rígido no espaço: 6 GL
Um corpo elástico no espaço: ∞ GL
3. Coeficientes da Equação Diferencial do Movimento
Paramétrica: Parâmetros do sistema dinâmico variando com o tempo.
Não Paramétrica: Parâmetros do sistema dinâmico não variando com o
tempo.

4. Classe da Vibração (Mecanismo de Surgimento)
Livre: O sistema oscila sob a ação de forças que lhe são inerentes e na
ausência da ação de qualquer força externa.
No caso de vibração livre o sistema poderá vibrar com uma ou mais de
suas frequências naturais, que são peculiares ao sistema dinâmico estabelecido
pela distribuição de suas massas e rigidez.
Forçada: O sistema oscila sob a ação de forças externa.
Quando a excitação é harmônica o sistema é obrigado a vibrar na
frequência de excitação. Se a frequência de excitação coincidir com uma das
frequências naturais do sistema, forma-se um estado de ressonância, dai
podendo resultar em amplas e perigosas oscilações.
Auto-excitada: Vibrações sem amortecimento sustentada por forças
externas, cujo caráter de influência determina-se pelo próprio processo
vibratório.
Exemplo: Motor a vapor alternativo ordinário de um cilindro, cujo pistão,
obviamente executa um movimento alternado.
5. Cinemática das Vibrações
Periódica: ( ) ( )X t X t T= +
Não Periódica: ( ) ( )X t X t T≠ +
Quase Periódica: ( ) ( )X t T X t+ − ≤ ξ onde 1ξ <<
6. Balanço Energético
Sistema Conservativo: Só atuam forças conservativas.
Sistema Não Conservativo: Existe pelo menos uma força não conservativa
7. Aplicação Técnica
Sistemas Elétricos – Composto de componentes elétricos.
Sistemas Mecânicos – Composto de componentes mecânicos.

1.7 Modelos de Sistemas Mecânicos
Todo sistema que possui massa (ou inércia) e elasticidade é capaz de
vibrar. Adiciona-se ainda a influência de amortecedores e forças externas.
Parâmetros de um sistema vibratório:
Obrigatório: Massa ou Inércia ( M ) ou ( I )
Mola (Elasticidade) ( K )
Não Obrigatório: Amortecedor: ( C )
Força de Excitação: ( F )
Procedimento de uma análise dinâmica:
1. Escolher um modelo físico que seja representativo para o tipo de
análise desejada. Este modelo deve ser formado por uma associação dos
quatros parâmetros acima, levando-se em consideração o número de graus de
liberdade do sistema.
2. Montar um modelo matemático para o sistema físico.
A descrição matemática (modelo) de um sistema mecânico é feita através
de um modelo idealizado, associado ao sistema real por qualquer dos métodos a
seguir:
- Sistemas Discretos de Vários Corpos
- Elementos Finitos
- Sistemas Contínuos
- Sistemas Híbridos
3. Resolver o modelo matemático (Equação diferencial do Movimento -
EDM)
De posse da solução do modelo matemático observa-se a influência dos
parâmetros do sistema. A resposta é função do tipo de excitação e do
amortecimento presente. Pode-se a partir desta etapa alterar alguns
parâmetros (os mais convenientes) de modo a obter-se a solução otimizada, ou
seja, sem comprometer o projeto da máquina (Resistência dos Materiais) e a
segurança e conforto do homem.

Exemplos de alguns modelos físicos:
Figura 5 - Modelo de uma Máquina Desbalanceada de 1GL
Figura 6 - Modelo de um Veículo com 1GL
Figura 7 - Modelo de um veículo com 5 GL

Figura 8 - Modelo de uma Turbina Kaplan
Figura 9 - Modelo de um Veículo Espacial por Elementos Finitos
Figura 10 - Modelo de uma Motocicleta de 2 1GL

Figura 11 - Modelo Mecânico do Corpo Humano
1.8 Tópicos Essenciais ao Estudo das Vibrações de Sistemas Mecânicos
Antes de iniciamos com os estudos de vibrações apresentamos
preliminares sobre alguns tópicos essenciais à modelagem matemática de
sistemas mecânicos, que incluem:
A equação de Lagrange de segunda espécie para vibrações de
sistemas e as vantagens de seu uso em sistemas com um grau de
Liberdade com ou sem amortecimento;
O cálculo das formas exatas e aproximadas de energia cinética em
sistemas mecânicos oscilatórios;
A linearização de sistemas com uma e várias variaveis;
O cálculo das formas exatas e aproximadas de energia potencial em
sistemas mecânicos oscilatórios;
O cálcular a energia potencial gravitacional;
A influência da pré-carga de uma mola no cálculo de sua
energia potencial, ou seja, no cálculo da energia potencial de uma
mola com deformação estática;
Os detalhes no cálculo da energia potencial de uma mola
considerando suas deformações em duas direções ortogonais;
1.8.1 A Equação de Lagrange para Sistemas Mecânicos Oscilatórios
Existem várias maneiras que se pode usar para determinar as equações
diferenciais de movimento de sistemas mecânicos. Por exemplo, na mecânica
newtoniana, os principais papéis são desempenhados pelas quantidades
vetoriais: forças e acelerações expressas em termos de certas coordenadas.
Assim, os diagramas de corpo livres precisam ser formados, e aparecem forças
de restrição e reação. Essas forças são a princípio desconhecidas e algumas
equações adicionais são muitas vezes necessárias para tornar o número de
desconhecidos e de equações disponíveis iguais. Consequentemente, em alguns
casos, este procedimento pode ser complicado ou menos atraente.
Por outro lado, na base de mecânica analítica ou lagrangiana, três
quantidades escalares têm específicas importâncias: energia cinética, energia
potencial e trabalho virtual (ou resultante das forças generalizadas).
Independentemente do número de graus de liberdade, as equações de
movimento são derivadas dessas três quantidades. Além do mais, não há
necessidade de construir diagramas de corpo livres uma vez que o sistema é
considerado como um todo, e as restrições e reações das forças ideais não
aparecem na formulação. O número de equações de Lagrange coincide com o
número de graus de liberdade, e não são necessárias equações adicionais uma
vez que todos as quantidades precisam ser expressas em termos de
coordenadas generalizadas. O desenvolvimento para obtenção da equação de
Lagrange é omitido aqui neste capitulo. O foco está em seu uso para obter as
equações de movimento de certos sistemas mecânicos. Assim, apenas os
conceitos básicos necessários para este propósito são apresentados. Sua
derivação pode ser obtida a partir de princípios de trabalho virtual e princípios
integrais, como detalhado e apresentada no Capitulo V. Observe também que o
termo Equação de Lagrange refere-se apenas à equação de Lagrange de
segunda espécie. A Equação de Lagrange foi desenvolvida e apresentada pelo
matemático italiano Joseph Louis Lagrange (1736–1813) na sua obra-prima

Mechanique. A Equação de Lagrange é muito utilizada nos estudos de vibrações
de sistemas mecânicos com múltiplos graus de liberdade.
Comecemos por um sistema que tenha N graus de liberdade. Então, é
descrito por N coordenadas generalizadas qk (k = 1, ... , N). Essas coordenadas
generalizadas são mutuamente independentes e sem restrições, e definem de
forma exclusiva a configuração do sistema. Assim, para este sistema existem N
associadas equações de Lagrange, que têm a seguinte forma:
kk k k k
d T T D U - + + = Q
d t q q q q& &
∂ ∂ ∂ ∂∂ ∂ ∂ ∂
(1.9)
onde:
. o ponto aqui representa a derivada em relação ao tempo t;
d()/dt denota derivada no tempo total;
k()/ q∂ ∂ denota derivada parcial com relação a coordenada generalizada
kq ;
k()/ q∂ ∂ & denota derivada parcial com relação a velocidade da coordenada
generalizada;
T é a energia cinética do sistema;
U é a energia potencial do sistema;
D é a energia dissipada do sistema;
kQ é a k-éssima força externa não conservativa generalizada aplicada ao
sistema, que é obtida das considerações de trabalho virtual;
kq é a k-éssima coordenada generalizada do sistema
Se o sistema executa pequenas oscilações em torno da posição de
equilíbrio estável, Kq 0= , estas equações de Lagrange podem ser simplificadas
para:
kk k k
d T D U + + = Q
d t q q q& &
∂ ∂ ∂∂ ∂ ∂
(1.10)
enquanto as formas de energia cinética, função de dissipação, energia potencial
e as forças generalizadas serão discutidas a seguir.

Se um sistema possui um grau de liberdade ele é descrito apenas pela
coordenada generalizada q X= . Neste caso, há apenas uma equação de
Lagrange:
d T T D U - + + = Q
d t X X X X& &
∂ ∂ ∂ ∂∂ ∂ ∂ ∂
(1.11)
A sua simplificação também acompanha para o caso quando o sistema
executa pequenas oscilações em torno da posição de equilíbrio estável, q 0= .
A equação de Lagrange agora se torna:
d T D U + + = Q
d t X X X& &
∂ ∂ ∂∂ ∂ ∂
(1.12)
enquanto a energia cinética, a função de dissipação, a energia potencial e
as forças generalizadas também podem ser obtidas de forma simplificada e
aproximada com respeito às suas formas exatas existentes nas Equações (1.9)
e (1.11). Nas seções a seguir apresentamos princípios básicos teóricos para
essas simplificações, onde observa-se que o termo "pequenas oscilações"
assume que apenas existem termos lineares na equação de movimento
representada pelas Equações (1.10) e (1.12).
1.8.2 A Energia Cinética em Sistemas Mecânicos Oscilatórios
A energia cinética dos sistemas mecânicos, em geral, depende do tempo,
das coordenadas generalizadas e suas velocidades,
( )K KT = T t, q , q& (1.13)
e em caso de restrições escleronomicas (que não dependem exclusivamento do
tempo) podem ser representadas pela seguinte forma quadrática

n n
ij i ji 1 j 1
1T = T qq
2 = =∑∑ % & & (1.14)
onde os chamados coeficientes inerciais ijT% dependem das coordenadas
generalizado, isto é, ij ij i jT = T (q ,q )% % .
Sem perda de generalidade, esta forma e suas transformações adicionais
serão mostrado nos sistemas com dois graus de liberdade (n = 2, e coordenadas
generalizadas q1 e q2). Neste caso, a energia cinética Equação (1.14) é agora
dada por:
( )2 211 1 12 1 2 22 2
1T = T q + 2T q q + T q
2% % %& & & & (1.15)
De particular interesse aqui é mostrar como essa formuláção muda se o
sistema realiza pequenas oscilações sobre a posição de equilíbrio estável q1=0 e
q2=0. Para esse fim, os coeficientes inerciais podem ser desenvolvidos em série
como:
ij ijij i j ij 1 2
1 2(0,0) (0,0)
T TT (q ,q ) = T (0,0) + q + q +
q q
∂ ∂ ∂ ∂
% %% %
L (1.16)
Dado o requisito de que apenas os termos lineares aparecem nas
equações do movimento, deve-se realmente simplificar esta expressão apenas
para o primeiro termo:
ij 1 2 ijT (q ,q ) T (0,0)≈% % (1.17)
o que nos leva a uma conclusão muito importante quanto ao modo como a
energia cinética pode ser calculada em um sistema que realiza pequenas
oscilações sobre uma posição de equilíbrio estável: não há necessidade de
considerá-lo em uma posição arbitrária, mas apenas na posição quando o

sistema passa pela posição de equilíbrio ou é presumido que está passando por
esta posição.
Se o sistema tiver apenas um grau de liberdade, a análise análoga é
válida. Partindo da seguinte forma de energia cinética:
2ij ij
1T (q,q) = T q
2%& & (1.18)
pode-se desenvolver o coeficiente inercial na série e truncar a primeiro termo
apenas:
T(q) T(0) = constante≈% % (1.19)
levando a
21T = T(0)q
2% & (1.20)
que corresponde ao caso quando o sistema passa pelo posição de equilíbrio, de
modo que a coordenada generalizada seja igual a zero e a velocidade
generalizada é diferente de zero. A forma dada pela Equação (1.20) é a razão
pela qual o termo T / q∂ ∂ não aparece na Equação (1.12).
É interessante notar que a Equação (1.20) corresponde completamente à
energia cinética de um bloco de massa m deslizando ao longo de uma superfície,
como mostra a Figura 12 a seguir.
21T = mX
2& (1.21)
Figura 12 – Sistema Massa-Mola com 1 GL e Movimento na Horizontal
onde a coordenada generalizada é escolhida para ser a coordenada X.

A mesma forma pode ser reconhecida na energia cinética do pêndulo da
Figura 13 a seguir.
Figura 13 – Sistema de Um Grau de Liberdade - O Pendulo Simples
2 21T = ml
2ϕ& (1.22)
onde a coordenada generalizada é escolhida para ser o ângulo φ. Ambos
coeficientes inerciais em (2.21) e (2.22) são obviamente constantes. Estes dois
exemplos mostrados, representam paradigmas para osciladores harmônicos
simples, e serão analisados detalhadamentes no próximo Capítulo. Também, em
ambos os casos, a forma exata da energia cinética tem a mesma forma quando
o sistema passa pela posição de equilíbrio, que é nem sempre é o caso.
1.8.3 A linearização de Sistemas com Uma e Duas Variáveis
Antes de abordarmos sobre a Energia Potencial em Sistemas Mecânicos
Oscilatórios, tratamos sobre a representação de funções em séries de Uma e
Duas Variáveis. A motivação para representação de funções em séries deve-se
ao fato de que quando deparamos com alguns sistemas reais ou fenômenos
reais da natureza, e precisamos descrevê-los de formas analíticas, os mesmos
apresentam relações matemáticas muito complexas que envolvem funções
complexas cujo cálculo extrapola muitas vezes o nosso conhecimento. Diante
dessas limitações, as representações por série dessas funções podem ser
aproximadas a funções mais simples, lineares, ou mesmo quadráticas.
Começaremos com funções de uma variável e estenderemos a seguir para duas
variáveis.
Considera uma função f(x) continua diferenciavel, representada pela

série de potências a seguir:
( ) ( ) ( ) ( ) ( )2 3 n
0 1 2 3 nf x = c + c x - a + c x - a + c x - a + + c x - a + L L
(1.23)
Fazendo suas derivadas, obtém-se:
( ) ( ) ( ) ( )2 n-1'1 2 3 nf x = c + 2c x - a + 3c x - a + + nc x - a + L L
( ) ( ) ( ) ( )n-2''2 3 nf x = 2c + 6c x - a + + n n-1 c x - a + L L (1.24)
L
( ) ( )n
nf x = n!c + L
onde ( ) ( )nf x representa a derivada enésima da função ( )f x .
Se substituímos x=a em cada uma das equações (1.24), obtém-se:
( ) ( ) ( ) ( )n' ''1 2 nf a = c , f a = 2c , , f a = n!c L L (1.25)
Se explicitamos os coeficientes nc das equações (1.25) e substituímos na
função f(x) representada pelo polinômio da equação (1.23), no ponto a, obtém-
se:
( ) ( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( )n' '' '''
2 3 n
0
f a f a f a f af x = c + x - a + x - a + x - a + + x - a +
1! 2! 3! n!L L
(1.26)
ou
( )( ) ( ) ( )n
n
n 0
f af x = x - a
n!
∞
=∑ (1.27)
onde: 0! = 1 e ( ) ( )0f x = f x .
A função f(x) representada pela série de potências da Equação (1.26) ou
(1.27), é conhecido como Polinômio ou Série de Taylor.
Para o caso especial a = 0 a série de Taylor tem a forma:

( ) ( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( )n' '' '''
2 3 n
0
f 0 f 0 f 0 f 0f x = c + x + x + x + + x +
1! 2! 3! n!L L(1.28)
ou
( )( ) ( ) ( )n
n
n 0
f 0f x = x
n!
∞
=∑ (1.29)
A função f(x) representada pela série de potências da equação (1.28) ou
(1.29), é conhecido como Polinômio ou Série de Mclaurin. A Série de Mclaurin é
utilizada para aproximações de funções de Sistemas Mecânicos com um grau de
liberdade em funções lineares ou em formas de grau superior mais simples.
Exemplo 1:
Encontar a série de Mclaurin da função f(x) = f(θ) = sen(θ) e linearizar
para pequenos valores de θ.
Solução:
As derivadas da função f(θ) = sen(θ) no ponto θ = 0 são:
( ) ( )(0)f = senθ θ ⇒ ( ) ( )(0)f 0 = sen 0 = 0
( ) ( )'f = cosθ θ ⇒ ( ) ( )'f 0 = cos 0 = 1
( ) ( )''f = - senθ θ ⇒ ( ) ( )''f 0 = - sen 0 = - 0
( ) ( )'''f = - cosθ θ ⇒ ( ) ( )'''f 0 = - cos 0 = - 1
L
Substituindo os resultados das derivadas da função f(θ) = sen(θ) no ponto
θ = 0, na equação (1.28), tem-se:
( )3
sen = 0 + - 0 - + 6θθ θ L
Considerando pequenos valores de θ, a função f(θ) = sen(θ) pode ser
aproximada (linearizada) para ( )sen θ ≈ θ .
Exemplo 2:
Encontrar a série de Mclaurin da função f(x) = f(θ) = cos(θ) e,

considerando pequenos valores de θ, aproximar para segunda ordem.
Solução:
As derivadas da função f(θ) = cos(θ) no ponto θ = 0 são:
( ) ( )(0)f = cosθ θ ⇒ ( ) ( )(0)f 0 = cos 0 = 1
( ) ( )'f = - senθ θ ⇒ ( ) ( )'f 0 = - sen 0 = - 0
( ) ( )''f = - cosθ θ ⇒ ( ) ( )''f 0 = - cos 0 = - 1
( ) ( )'''f = senθ θ ⇒ ( ) ( )'''f 0 = sen 0 = 0
L
Substituindo os resultados das derivadas da função f(θ) = cos(θ) no ponto
θ = 0, na equação (1.29), tem-se:
( )2
cos = 1 - 0 - + 0 + 2θθ L
Considerando pequenos valores de θ, a função f(θ) = cos(θ) pode ser
aproximada para forma quadrática ( )2
cos 1 - 2θθ ≈ .
Quando abordamos o polinômio de Taylor para uma variável os
representamos por
( ) ( )n
nn 0
f x = c x - a∞
=∑ (1.30)
e desenvolvemos até chegarmos na equação (1.28) ou (1.29).
Fica induzido, portanto, que para duas variáveis a séria de Taylor passa a
ser:
( ) ( ) ( )n? n?
nn 0
f x, y = c x - a y - b∞
=∑ (1.31)
Por limitações de tempo, não iremos desenvolver a formulação
matemática do Polinômio de Taylor para função de duas variáveis, mas

apresentamos a sua formatação a seguir:
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( )
0 0 0 0 0 0 0 0
2 2 22 2
0 0 0 0 0 0 0 0 0 02 2
nnn - j j
0 0 0 0n - j jj - 0
f ff x, y = f x , y + x , y x - x + x , y y - y
x y
1 f f f+ x , y x - x + 2 x , y x - x y - y + x , y y - y
2! x yx y
n1 f+ + x , y x - x y - y
n! x yj
∂ ∂∂ ∂
∂ ∂ ∂ ∂ ∂∂ ∂
∂ ∂ ∂
∑L
(1.32)
Assim, para funções de duas variáveis a Série de Taylor será:
( ) ( ) ( ) ( )nn
n - j j
0 0 0 0n - j jn = 0 j - 0
n1 ff x, y = x , y x - x y - y
n! x yj
∞ ∂ ∂ ∂
∑ ∑ (1.33)
Fazendo o ponto ( ) ( )0 0x , y = 0, 0 chegaremos a Série de Mclaurin
para funções de duas variáveis, ou seja
( ) ( ) ( ) ( )nn
n - j j
n - j jn = 0 j - 0
n1 ff x, y = 0, 0 x y
n! x yj
∞ ∂ ∂ ∂
∑ ∑ (1.31)
1.8.4 A Energia Potencial em Sistemas Mecânicos Oscilatórios
A energia potencial dos sistemas mecânicos, em geral, depende do tempo
e das coordenadas generalizadas,
( )KU = U t, q (1.32)
e em caso de restrições escleronomicas podem ser representadas no seguinte
forma quadrática
n n
ij i ji 1 j 1
1U = U qq
2 = =∑∑ % (1.33)

onde ijU% representa os chamados coeficientes elásticos (rigidez equivalente).
Como no caso da energia cinética, a consideração da energia potencial
dos sistemas escleronomicos e suas aproximações para pequenas oscilações em
torno da posição de equilíbrio estável será relacionada à sua forma
correspondente a sistemas com dois graus de liberdade i jU= U(q ,q ). Agora, ele
pode ser desenvolvido em série da seguinte forma:
( ) ( ) ( ) ( )
( ) ( ) ( )
1 2 1 21 2
2 2 22 21 1 2 22 2
1 21 2
U UU q , q = U 0, 0 + 0, 0 q + 0, 0 q
q q
1 U U U+ 0, 0 q + 2 0, 0 q q + 0, 0 q +
2! q qq q
∂ ∂∂ ∂
∂ ∂ ∂ ∂ ∂∂ ∂
L
(1.34)
Observe que a série está truncada apenas nos termos quadráticos, pois
isso resultará na existência de termos lineares nas equações de movimento.
É sempre possível calibrar a energia potencial para que seja igual a zero
na posição de equilíbrio. Mesmo que isso não tenha sido feito, o termo U(0, 0) é
constante e será perdido durante o processo de formação das equações do
movimento, uma vez que será diferenciado. Além disso, o sistema oscilará em
torno da posição de equilíbrio, que corresponde ao mínimo de energia potencial,
isto é:
( )1
U0, 0 = 0
q∂∂
e ( )2
U0, 0 = 0
q∂∂
(1.35)
Assim, a energia potencial (1.34) tem a forma:
( ) ( ) ( ) ( )2 2 2
2 21 2 1 1 2 22 2
1 21 2
1 U U UU q , q 0, 0 q + 2 0, 0 q q + 0, 0 q
2! q qq q
∂ ∂ ∂≈ ∂ ∂∂ ∂
(1.36)
ou, pode ser expresso como
( ) ( )2 21 2 11 1 12 1 2 22 2
1U q , q U q + 2 U q q + U q
2!≈ % % % (1.37)

Para sistemas com um grau de liberdade, a forma (1.36) torna-se:
( ) 21U q Uq
2≈ % (1.38)
onde U% é uma constante.
1.8.4.1 Energia Potencial Gravitacional
A energia potencial gravitacional Ug é a energia que um objeto maciço
possui por sua posição em um campo gravitacional. O uso mais comum de
energia potencial gravitacional é para objetos próximos da superfície do terra,
onde a aceleração gravitacional g pode ser assumida como constante.
Existem várias maneiras pelas quais ela pode ser obtida, mas é sempre
proporcional ao peso mg. O primeiro método é apresentado na Figura 14 (a),
quando depende da coordenada z em um sistema de coordenadas fixo:
g cU mgz= (1.39)
Figura 14 – Formas de Energia Potencial Gravitacional
Se o eixo tiver a direção oposta, Figura 14 (b), a energia potencial será:
g cU - mgy= (1.40)
Além disso, é possível defini-lo em relação ao zero de energia potencial

gravitacional, gU 0≡ , que pode ser escolhida como uma horizontal através de
qualquer ponto fixo (como a escolha do zero de um sistema de coordenadas).
Dois destes são mostrados na Figura 14 (c). Neste caso, a energia potencial
depende da distância vertical em relação a cada uma destas linhas zero:
g 1U + mgh= (1.41)
ou
g 2U - mgh= (1.42)
O sinal de mais é usado quando o centro de gravidade está acima do zero
de energia potencial gravitacional e o sinal de menos quando está abaixo desse
nível. Na formulação Lagrangeana, a altura/distância vertical do zero da
energia potencial gravitacional é a função de coordenadas generalizadas
ih h(q )= .
Para as considerações em sistemas que realizam pequenas oscilaçõe em
torno de uma posição de equilíbrio, isso deve ser desenvolvido em uma série
truncada aos termos quadráticos de coordenadas generalizadas, como veremos
mais adiante.
1.8.4.2 Energia Potencial de uma Mola (Energia Potencial Elástica)
Uma mola é um componente elástico fundamental encontrado em muitas
sistemas. Uma mola também é usada como modelo físico para representar
certas propriedades de materiais elásticos. Suas características básicas são a
rigidez, constante elástica da mola – K, e a deflexão total ∆l. Eles são de
particular importância uma vez que definem a força de restauração
correspondente F e a energia potencial U.
Para molas lineares, elas são respectivamente dadas por:
TF K l= ∆ (1.43)
( )2
T
1U K l
2= ∆ (1.44)
A deflexão total, ver Figura 15 a seguir, é dada por:
T 0l = l - l∆ (1.45)

onde l é o comprimento da mola em uma posição arbitrária e l0 é o comprimento
da mola não deformada.
Figura 15 – Sistema Massa Mola com Deformação Colinear com a Direção da Mola
Esta deflexão também pode ser expressa como a soma da deflexão
estática da mola stl∆ e a deflexão medida a partir da posição de equilíbrio
estático X, isto é,
T stl = l + X∆ ∆ (1.46)
Como pode ser visto na Figura 15 a deflexão adicional X é a diferença
entre o comprimento da mola l e o comprimento da mola na posição de
equilíbrio estática lst
stX = l - l (1.47)
Deve-se enfatizar que o procedimento para a obtenção da deflexão da
mola usando as equations (1.45) ou (1.46) é fácil e direto para mola que se
deforma axialmente, isto é, colinearmente com a direção da mola na posição de
equilíbrio estático, independente da mesma está na posição vertical ou
horizontal. No entanto, em muitos sistemas reais, este não é o caso, pois as
molas exibem deformações no plano. Então, a deflexão da mola leva à
consideração de não linearidade geométrica. Neste caso, a expressão
correspondente pode ter uma formulação inadequada para exibições na forma
análitica, o que nós leva a fazer um desenvolvimento direto em forma de série
polinomial com relação a(s) coordenada(s) generalizada(s).
A pergunta que surge naturalmente é: Como pode-se determinar
facilmente a deflexão e a energia potencial, alternativamente, para evitar
cálculos longos relacionado à deflexão total exata e levando-se em
consideração a deflexão estática (se existir)? A seção a seguir tem como
objetivo responder esta pergunta apresentando um método original para
determinar aproximações para a deflexão de uma mola e sua energia potencial
de forma conveniente. Este método foi desenvolvido originalmente, a priori,
para molas lineares e estendido posteriormente para molas não-lineares.
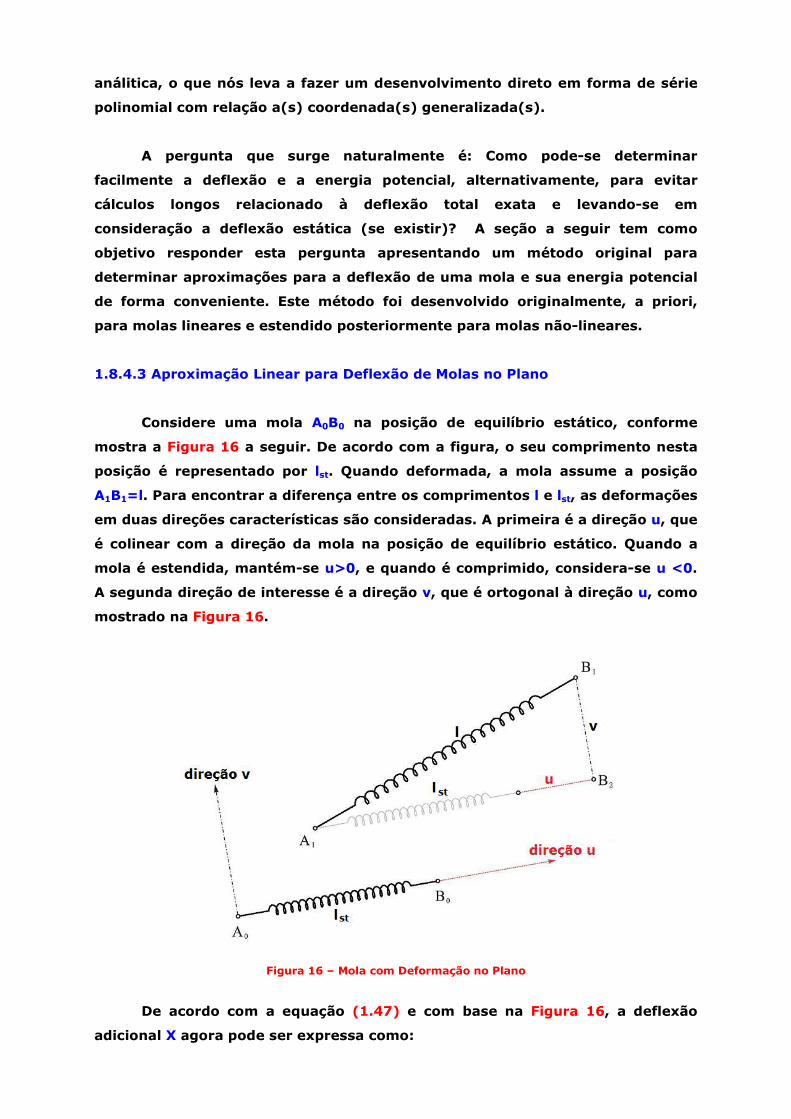
1.8.4.3 Aproximação Linear para Deflexão de Molas no Plano
Considere uma mola A0B0 na posição de equilíbrio estático, conforme
mostra a Figura 16 a seguir. De acordo com a figura, o seu comprimento nesta
posição é representado por lst. Quando deformada, a mola assume a posição
A1B1=l. Para encontrar a diferença entre os comprimentos l e lst, as deformações
em duas direções características são consideradas. A primeira é a direção u, que
é colinear com a direção da mola na posição de equilíbrio estático. Quando a
mola é estendida, mantém-se u>0, e quando é comprimido, considera-se u <0.
A segunda direção de interesse é a direção v, que é ortogonal à direção u, como
mostrado na Figura 16.
Figura 16 – Mola com Deformação no Plano
De acordo com a equação (1.47) e com base na Figura 16, a deflexão
adicional X agora pode ser expressa como:
( ) ( )2 2st stX X u,v = l u + v - l≡ + (1.48)
A deflexão adicional X é uma função de duas variáveis, u e v, e pode ser
desenvolvida em uma série Maclaurin, que, truncado para a quinta ordem, nos
leva a:
( )( ) ( ) ( ) ( ) ( )
2 2 2 2 4 3 2 42 3 3 4 4
st st st st st st
1 1 1 1 1 3X u,v u + v - uv + u v - v - u v + uv +
2l 2 l 2 l 8 l 2 l 8 l≈ L
(1.49)
Esta expressão mostra que é preciso determinar a deflexão nas direções
u e v, mas a questão da importância aqui é a ordem de truncamento da série
(1.49), bem como a ordem das expressões para u e v em termos da(s)
coordenada(s) generalizada(s). Isso é discutido posteriormente para molas
lineares que estão deformadas ou não deformadas na posição de equilibrio
estático.
I - Mola linear deformada na posição de equilíbrio estática em um sistema que
executa pequenas oscilações
Consideremos primeiro uma mola linear e pré-deforçada na posição de
equilíbrio estático, em torno da qual oscila realizando pequenas oscilações.
Usando as equations (1.44) e (1.46), obtem-se para a energia potencial:
2st
1U = K l X + KX + Constante
2∆ ou 2
st
1U = K l X + KX
2∆ (1.50)
onde o terceiro termo constante na primeira expressão pode ser omitido uma
vez que a energia potencial não depende da constante, conforme discutido
anteriormente.
Agora, a série (1.49) deve ser substituída na equação (1.50). No entanto,
sabendo que para o caso de pequenas oscilações (lineares), a energia potencial
tem uma forma quadrática em relação à coordenada generalizada. Assim, pode-
se concluir que a série que representa a deflexão adicional X deve ser truncada
para ordem quadrática, isto é,
( ) 2
st
1X u,v u + v
2l≈ (1.51)
Além disso, à medida que a deflexão adicional (1.51) aparece na energia
potencial (1.50) em um termo linear e quadrático, segue-se que você deve
conter o termo u até a ordem quadrática, enquanto v deve incluir apenas um
termo linear, isto é,
21 1u = A q + B q (1.52)
e
2v = A q (1.53)
onde 1A , 1B , 2A são constantes. Então, para encontrar a deflexão e a energia
potencial da mola linear pré-deforçada, deve-se procurar deflexões (1) na
direção u, truncando-o para os termos quadráticos do coordenada generalizada
e (2) na direção v, expressando-a como uma função linear da coordenada
generalizada.
II - Mola linear não deformada na posição estática de equilíbrio em um sistema
que executa pequenas oscilações
Se a mola linear considerada não estiver deformada na posição de
equilíbrio estático, stl 0∆ = . De acordo com a equação (1.46), a energia
potencial (1.44) torna-se:
21U = KX
2 (1.54)
Usando novamente o fato de que, para o sistema considerado, a energia
potencial é uma função quadrática da coordenada generalizada, conclui-se que
1X u = A q≡ (1.53)
Assim, para encontrar a deflexão e a energia potencial de uma mola
linear que não está pré-deforçada, pode-se ignorar a deflexão na direção v,
determinar a extensão/compressão na direção do u e truncar para um termo
linear em relação à coordenada generalizada.