viabilidade tÉcnica de sistema de carregamento...
TRANSCRIPT
VIABILIDADE TÉCNICA DE SISTEMA DE
CARREGAMENTO PARA NAVIOS DE APOIO OFFSHORE
Juliana Viana Melo
Projeto de Graduação apresentado ao Curso de
Engenharia Naval e Oceânica da Escola
Politécnica, Universidade Federal do Rio de
Janeiro, como parte dos requisitos necessários à
obtenção do título de Engenheira Naval e
Oceânica.
Orientadora: Marta Cecilia Tapia Reyes, D. Sc.
Rio de Janeiro
Março de 2016

VIABILIDADE TÉCNICA DE SISTEMA DE CARREGAMENTO PARA NAVIOS
DE APOIO OFFSHORE
Juliana Viana Melo
PROJETO DE GRADUAÇÃO SUBMETIDO AO CORPO DOCENTE DO CURSO
DE ENGENHARIA NAVAL E OCEÂNICA DA ESCOLA POLITÉCNICA DA
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS
REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE
ENGENHEIRA NAVAL E OCEÂNICA.
Examinado por:
______________________________________
Prof.ª Marta Cecilia Tapia Reyes, D. Sc.
______________________________________
Prof. Julio Cesar Ramalho Cyrino, D. Sc.
______________________________________
Prof. Severino Fonseca da Silva Neto, D. Sc.
RIO DE JANEIRO, RJ – BRASIL
MARÇO DE 2016

i
Melo, Juliana Viana
Viabilidade Técnica de Sistema de Carregamento para
Navios de Apoio Offshore / Juliana Viana Melo – Rio de
Janeiro: UFRJ/ESCOLA POLITÉCNICA, 2016.
X, 49 p. : il.; 29,7 cm.
Orientadora: Marta Cecilia Tapia Reyes, D. Sc.
Projeto de Graduação – UFRJ/POLI/Engenharia Naval
e Oceânica, 2016.
Referências Bibliográficas: p. 49.
1. Viabilidade Técnica. 2. Sistema de Carregamento. 3.
Navios de Apoio Offshore. 4. Estabilidade. I. Reyes,
Marta Cecilia Tapia. II. Universidade Federal do Rio de
Janeiro, UFRJ, Engenharia Naval e Oceânica. III.
Viabilidade Técnica de Sistema de Carregamento para
Navios de Apoio Offshore.
ii
AGRADECIMENTOS
Em primeiro lugar agradeço e louvo a Deus, que com Seu infinito amor e
incontáveis bênçãos e misericórdias me conduziu até o fim desta jornada. A Ele, toda
honra e toda glória!
Aos meus pais, Ruth e Edson, por todo o apoio e cuidado em todos os anos de
minha vida. Por terem sempre feito mais do que podiam para proporcionar o melhor a
mim e aos meus irmãos. Sem vocês eu não teria chegado até aqui. Essa conquista não
poderia ser minha sem antes ser de vocês!
À minha amada avó Diomar, que me sustenta a cada dia com suas orações e que me
ensina todos os dias a maior virtude que o ser humano pode ter, a humildade.
Aos meus irmãos, Érica e Edinho, que dividem comigo os melhores momentos de
descontração, as melhores risadas e que me deram os melhores presentes que já ganhei,
meus sobrinhos Marcos Alexandre e Catarina.
Ao meu namorado André, que esteve ao meu lado na maior parte deste caminho.
Ele, como mais ninguém, aturou meus melhores e piores momentos e com muito amor e
paciência me apoiou e ajudou a passar por cada um deles. Sem ele, seu suporte e seu
carinho teria sido absurdamente mais difícil chegar até aqui.
A todos os amigos feitos durante estes muitos anos, especialmente ao período
2010.1. Sem o suporte dos amigos essa caminhada teria sido muito mais árdua e
extremamente menos prazerosa.
À minha orientadora, Professora Marta, sempre muito paciente e solícita na
condução deste trabalho, mesmo nos momentos difíceis.
A todos os professores que passaram pela minha vida, sem os quais teria sido
impossível chegar ao fim deste caminho.

iii
Resumo do Projeto de Graduação apresentado à Escola Politécnica/UFRJ como parte
dos requisitos necessários para a obtenção do grau de Engenheira Naval e Oceânica.
Viabilidade Técnica de Sistema de Carregamento para Navios de Apoio Offshore
Juliana Viana Melo
Março/2016
Orientadora: Marta Cecilia Tapia Reyes
Curso: Engenharia Naval e Oceânica
O estudo desenvolvido neste projeto é centrado na verificação da viabilidade
técnica de um novo sistema de carregamento para navios de apoio offshore. Para que
esse novo sistema de carregamento – que se utiliza de um convés móvel – seja viável, é
necessário que o navio se mantenha em condição de equilíbrio sem trim, e com seu
convés principal completamente nivelado com o cais do porto em questão durante todo
o procedimento de carregamento. Além disso, o navio também deve se manter estável
do início ao fim do processo. Dito isto, a viabilidade técnica foi garantida por meio de
estudos de nivelamento do navio com o cais e de análises de equilíbrio e de estabilidade
do navio.
Palavras-chave: Sistema de Carregamento, Convés Móvel, Apoio Offshore, Navio de
Apoio, PSV, Platform Supply Vessel, Nivelamento, Equilíbrio, Estabilidade.

iv
Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulfillment of
the requirements for the degree of Naval and Ocean Engineer.
Technical Feasibility of Load-out System for Offshore Support Vessels
Juliana Viana Melo
March/2016
Advisor: Marta Cecilia Tapia Reyes
Course: Naval and Ocean Engineering
The study developed in this project is centered in the verification of the technical
feasibility of a new load-out / load-in system for offshore support vessels. To make this
new load-out / load-in system – which utilizes a mobile deck - feasible, it is necessary
that the vessel maintains itself in an equilibrium condition with no trim and with its
main deck completely leveled with the specified port dock during the entire loading
procedure. Besides that, the vessel should also maintain itself stable from the beginning
to the end of the process. That being said, the technical feasibility was granted by
studies of the leveling of the vessel with de dock and by equilibrium and stability
analyses.
Keywords: Load out System, Mobile Deck, Offshore Support, Support Vessel, PSV,
Platform Supply Vessel, Leveling, Equilibrium, Stability.
v
ÍNDICE
1. Introdução .............................................................................................................. 1
2. Embarcações de Apoio Offshore ........................................................................... 2
2.1 Cargas Transportadas ..................................................................................... 2
3. Sistemas de Transferência de Carga ...................................................................... 4
3.1 Sistema de Transferência do Convés Móvel .................................................. 6
4. Apresentação do Problema e Premissas do Projeto ............................................... 9
4.1 Navio Escolhido ........................................................................................... 10
4.2 Sistema de Carregamento ............................................................................. 10
4.2.1 Carga Crítica ......................................................................................... 11
4.2.2 Convés Móvel ....................................................................................... 11
4.2.3 Meio de Transferência .......................................................................... 12
4.3 Porto do Rio de Janeiro ................................................................................ 13
4.3.1 Marés .................................................................................................... 14
5. Nivelamento do Convés ...................................................................................... 16
5.1 Calados Objetivo .......................................................................................... 19
6. Processo de Load-out \ Load –in do Convés Móvel ............................................ 21
6.1 Etapas do Load-out....................................................................................... 21
6.1.1 Cálculos de Peso e CG .......................................................................... 22
6.1.2 Embarque do Conjunto ......................................................................... 24
6.1.3 Convés Móvel Posicionado .................................................................. 27
6.1.4 Desembarque dos Boogies .................................................................... 28
7. Análises Equilíbrio e Estabilidade ....................................................................... 32
7.1 Análise de Equilíbrio .................................................................................... 35
7.2 Análise de Estabilidade ................................................................................ 35
7.3 Resultados .................................................................................................... 37
vi
7.3.1 Maré Baixa – d = 4,5m ......................................................................... 37
7.3.2 Maré Zero – d = 5.5m ........................................................................... 40
7.3.3 Maré Alta – d = 6.5m ............................................................................ 43
8. Conclusões e Trabalhos Futuros .......................................................................... 47
8.1 Trabalhos Futuros ......................................................................................... 48
9. Referências Bibliográficas ................................................................................... 49
vii
LISTA DE FIGURAS
Figura 2.1 – VARD 1 09 Platform Supply Vessel ........................................................ 2
Figura 3.1 – Içamento de torre de perfuração no Estaleiro Hyundai por meio de cábrea ...... 4
Figura 3.2 – Içamento de um container para embarcação por meio de guindaste ........ 5
Figura 3.3 – Deslizamento de plataforma SPAR com uso de trilhos ........................... 5
Figura 3.4 – SPMT Modelo Kamag 2400 .................................................................... 6
Figura 3.5 – Sistema de suspensão hidráulica dos SPMTs ........................................... 6
Figura 3.6 – Características técnicas dos modelos do SPMT ....................................... 6
Figura 3.7 – Dimensões dos modelos do SPMT ........................................................... 7
Figura 3.8 – Movimento de avanço do SPMT .............................................................. 7
Figura 3.9 – Movimento circular de raio externo do SPMT ......................................... 8
Figura 3.10 – Movimento circular de raio interno do SPMT ....................................... 8
Figura 3.11 – Movimento de giro no próprio eixo do SPMT ....................................... 8
Figura 3.12 – Movimento lateral do SPMT .................................................................. 8
Figura 3.13 – Movimento diagonal do SPMT .............................................................. 8
Figura 4.1 – Exemplo de desnivelamento entre convés principal e cais ...................... 9
Figura 4.2 – Distribuição dos risers de perfuração no convés móvel [1] ................... 11
Figura 4.3 – Estrutura do convés móvel modelada [1] ............................................... 12
Figura 4.4 – Módulo 2406 [2] ..................................................................................... 12
Figura 4.5 – Características Módulo 2406 [2] ............................................................ 13
Figura 4.6 – Vistas superior e lateral da configuração dos boogies no convés móvel 13
Figura 4.7 – Terminal de apoio offshore do Porto do Rio de Janeiro ........................ 14
Figura 4.8 – Períodos de maré baixa no dia [3] .......................................................... 15
Figura 4.9 – Períodos de maré alta no dia [3] ............................................................. 15
Figura 4.10 - Distâncias entre linha d’água e cais nos três tipos de marés [4] ........... 15
Figura 5.1 – Calado leve nas marés alta, zero e baixa ................................................ 16
Figura 5.2 – Navio totalmente lastrado nas marés alta, zero e baixa .......................... 17
Figura 5.3 - Navio com tanques de carga cheios nas marés alta, zero e baixa ........... 18
Figura 5.4 - Calado alinhado com o cais na maré alta ................................................ 19
Figura 5.5 - Calado alinhado com o cais na maré zero ............................................... 20
Figura 5.6 - Calado alinhado com o cais na maré baixa ............................................. 20
Figura 6.1 – Convés móvel carregado na condição 0 do load-out .............................. 21
Figura 6.2 – Condição de carregamento 1 .................................................................. 25
viii
Figura 6.3 – Condição de carregamento 2 .................................................................. 25
Figura 6.4 – Condição de carregamento 3 .................................................................. 26
Figura 6.5 – Condição de carregamento 4 .................................................................. 26
Figura 6.6 – Condição de carregamento 5 .................................................................. 27
Figura 6.7 – Condição de carregamento 6 .................................................................. 27
Figura 6.8 – Condição de carregamento 7 .................................................................. 28
Figura 6.9 – Condição de carregamento 8 .................................................................. 29
Figura 6.10 – Condição de carregamento 9 ................................................................ 29
Figura 6.11 – Condição de carregamento 10 .............................................................. 30
Figura 6.12 – Condição de carregamento 11 .............................................................. 30
Figura 7.1 – Compartimentação do PSV .................................................................... 34
Figura 7.2 – Ilustração do Braço de Endireitamento .................................................. 35
Figura 7.3 – Exemplo de Curva de Estabilidade Estática ........................................... 36
ix
LISTA DE TABELAS
Tabela 4.1 – Dimensões principais da embarcação .................................................... 10
Tabela 4.2 – Dimensões de uma unidade do riser de perfuração ............................... 11
Tabela 4.3 – Dimensões da estrutura do convés móvel [1] ........................................ 12
Tabela 5.1 – Resumo das distâncias cais-convés nas condições estudadas ................ 19
Tabela 6.1 – Peso e CG do convés móvel carregado .................................................. 22
Tabela 6.2 – Peso dos boogies .................................................................................... 23
Tabela 6.3 – Dimensões dos boogies .......................................................................... 23
Tabela 6.4 – Peso e CG da condição de carregamento 1 ............................................ 25
Tabela 6.5 – Peso e CG da condição de carregamento 2 ............................................ 25
Tabela 6.6 – Peso e CG da condição de carregamento 3 ............................................ 26
Tabela 6.7 – Peso e CG da condição de carregamento 4 ............................................ 26
Tabela 6.8 – Peso e CG da condição de carregamento 5 ............................................ 27
Tabela 6.9 – Peso e CG da condição de carregamento 6 ............................................ 28
Tabela 6.10 – Peso e CG da condição de carregamento 7 .......................................... 28
Tabela 6.11 – Peso e CG da condição de carregamento 8 .......................................... 29
Tabela 6.12 – Peso e CG da condição de carregamento 9 .......................................... 29
Tabela 6.13 – Peso e CG da condição de carregamento 10 ........................................ 30
Tabela 6.14 – Peso e CG da condição de carregamento 11 ........................................ 30
Tabela 6.15 – Resumo das condições de carregamento.............................................. 31
Tabela 7.1 – Tabela de Capacidades do PSV ............................................................. 34
Tabela 7.2 – Resultados Estabilidade Maré Baixa Condição 0 .................................. 37
Tabela 7.3 – Resultados Estabilidade Maré Baixa Condição 1 .................................. 38
Tabela 7.4 – Resultados Estabilidade Maré Baixa Condição 2 .................................. 38
Tabela 7.5 – Resultados Estabilidade Maré Baixa Condição 3 .................................. 38
Tabela 7.6 – Resultados Estabilidade Maré Baixa Condição 4 .................................. 38
Tabela 7.7 – Resultados Estabilidade Maré Baixa Condição 5 .................................. 39
Tabela 7.8 – Resultados Estabilidade Maré Baixa Condição 6 .................................. 39
Tabela 7.9 – Resultados Estabilidade Maré Baixa Condição 7 .................................. 39
Tabela 7.10 – Resultados Estabilidade Maré Baixa Condição 8 ................................ 39
Tabela 7.11 – Resultados Estabilidade Maré Baixa Condição 9 ................................ 39
Tabela 7.12 – Resultados Estabilidade Maré Baixa Condição 10 .............................. 40
Tabela 7.13 – Resultados Estabilidade Maré Baixa Condição 11 .............................. 40
x
Tabela 7.14 – Resultados Estabilidade Maré Zero Condição 0 .................................. 41
Tabela 7.15 – Resultados Estabilidade Maré Zero Condição 1 .................................. 41
Tabela 7.16 – Resultados Estabilidade Maré Zero Condição 2 .................................. 41
Tabela 7.17 – Resultados Estabilidade Maré Zero Condição 3 .................................. 41
Tabela 7.18 – Resultados Estabilidade Maré Zero Condição 4 .................................. 41
Tabela 7.19 – Resultados Estabilidade Maré Zero Condição 5 .................................. 42
Tabela 7.20 – Resultados Estabilidade Maré Zero Condição 6 .................................. 42
Tabela 7.21 – Resultados Estabilidade Maré Zero Condição 7 .................................. 42
Tabela 7.22 – Resultados Estabilidade Maré Zero Condição 8 .................................. 42
Tabela 7.23 – Resultados Estabilidade Maré Zero Condição 9 .................................. 42
Tabela 7.24 – Resultados Estabilidade Maré Zero Condição 10 ................................ 43
Tabela 7.25 – Resultados Estabilidade Maré Zero Condição 11 ................................ 43
Tabela 7.26 – Resultados Estabilidade Maré Alta Condição 0 .................................. 44
Tabela 7.27 – Resultados Estabilidade Maré Alta Condição 1 .................................. 44
Tabela 7.28 – Resultados Estabilidade Maré Alta Condição 2 .................................. 44
Tabela 7.29 – Resultados Estabilidade Maré Alta Condição 3 .................................. 45
Tabela 7.30 – Resultados Estabilidade Maré Alta Condição 4 .................................. 45
Tabela 7.31 – Resultados Estabilidade Maré Alta Condição 5 .................................. 45
Tabela 7.32 – Resultados Estabilidade Maré Alta Condição 6 .................................. 45
Tabela 7.33 – Resultados Estabilidade Maré Alta Condição 7 .................................. 45
Tabela 7.34 – Resultados Estabilidade Maré Alta Condição 8 .................................. 46
Tabela 7.35 – Resultados Estabilidade Maré Alta Condição 9 .................................. 46
Tabela 7.36 – Resultados Estabilidade Maré Alta Condição 10 ................................ 46
Tabela 7.37 – Resultados Estabilidade Maré Alta Condição 11 ................................ 46
1
1. Introdução
A proposta de um novo sistema de carregamento para navios de apoio offshore por
meio de um convés móvel, feita por PEREIRA [1], teve a intenção de aumentar a
eficiência do carregamento desses navios no porto do Rio de Janeiro, evitar filas na área
de fundeio e, portanto, reduzir custos.
Em épocas de crise política e econômica, como a que se vive atualmente, a
importância da redução de custos fica ainda mais acentuada e pode, inclusive, definir se
determinado projeto vai sair do papel ou ser abandonado. Por esse motivo é muito
importante explorar as ideias que possam gerar redução de custos em todas as áreas e,
sendo elas viáveis, implantá-las.
Nessa linha de pensamento e enxergando essa nova proposta de sistema de
carregamento como uma potencial melhoria em relação os sistemas utilizados
atualmente, foi feito um estudo técnico do sistema do convés móvel a fim de verificar a
viabilidade de sua implantação.
Para que seja possível implantar o sistema de carregamento – ou load-out / load-in
– com o convés móvel, é necessário que o navio se mantenha alinhado com o cais do
porto durante todo o procedimento, em todas as possíveis condições de maré. Além
disso, é também necessário que o navio se mantenha estável do início ao fim do
processo. Essa é a base do estudo de viabilidade técnica apresentado neste relatório.
O estudo começa, nos capítulos 2 e 3, com uma apresentação das embarcações
envolvidas, dos sistemas de carregamento existentes e, por fim, do sistema cuja
viabilidade será estudada – o convés móvel.
No capítulo 4 o problema que rege este estudo é apresentado em mais detalhe e
também são definidas as premissas do projeto.
A partir daí, nos capítulos 5, 6 e 7, todo estudo desenvolvido é explicado e
detalhado e também são apresentados os resultados obtidos.
Finalmente, no capítulo 8, é apresentada uma conclusão e sugestões de estudos
complementares aos que foram feitos até o presente momento.
2
2. Embarcações de Apoio Offshore
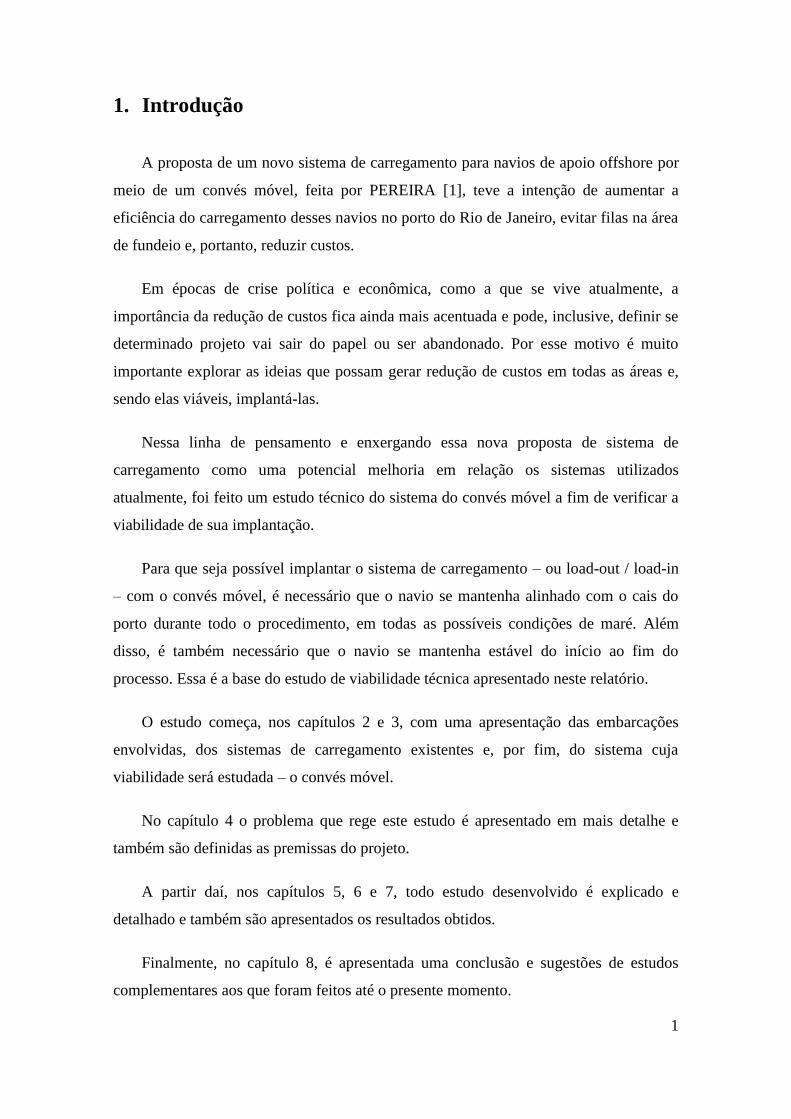
Um PSV – Platform Supply Vessel –, como o da Figura 2.1, é um navio que tem a
finalidade de suprir as unidades de perfuração e produção de petróleo e gás offshore.
Eles costumam ter entre 60m e 100m de comprimento e uma superestrutura localizada
bem à vante, o que possibilita uma grande área de convés livre, que pode ser preenchida
com diversos tipos de carga dependendo da viagem a ser feita.
Figura 2.1 – VARD 1 09 Platform Supply Vessel
A principal função desse tipo de embarcação é o apoio logístico às unidades
offshore com o transporte de insumos, ferramentas e equipamentos para as unidades e
de outras cargas de volta à costa. Por esse motivo, os PSVs são navios muito versáteis,
que podem carregar diferentes tipos de cargas nas mais diversas combinações.
O aumento da exploração de petróleo em águas profundas e ultra-profundas e,
consequentemente, o distanciamento cada vez maior da costa trouxe a necessidade de
PSVs com maior capacidade de carga, o que justifica o investimento crescente em
unidades com porte bruto variando principalmente entre 4000 e 4500 toneladas.
2.1 Cargas Transportadas
Um PSV típico transporta cargas tanto em seu convés quanto abaixo dele, em
tanques. As cargas transportadas abaixo do convés podem ser:
3
Água Potável e Água Doce – Ambas para consumo da tripulação da unidade a
ser suprida e também do próprio PSV.
Óleo Combustível – Para abastecer a plataforma e o PSV, sendo o óleo diesel o
mais comumente transportado.
Lama/Fluido de Perfuração – Mistura de substâncias químicas com argila
utilizada durante a perfuração do poço. Tem a finalidade de limpar e manter a
integridade estrutural do poço e lubrificar e esfriar a broca, por exemplo.
Salmoura – Solução de água e sal em grande concentração utilizada durante a
perfuração para evitar o colapso do poço, fortalecendo suas paredes.
Cimento – Utilizado para estruturar, revestir e isolar o poço que deve ser
transportado em silos.
Já as cargas transportadas acima do convés – centro do trabalho aqui desenvolvido
– são cargas sólidas, que podem ser armazenadas em diferentes sistemas como, por
exemplo, containers, cestas e carretéis, dependendo da natureza da carga.
Os containers costumam ser utilizados no transporte de equipamentos e alimentos,
podem ser refrigerados ou não e também podem ser utilizados como estações móveis de
trabalho.
As cestas de resíduos geralmente transportam resíduos produzidos pela unidade
offshore até a costa para que possam ser propriamente descartados e/ou tratados.
Os carretéis e bobinas transportam cabos, cordas, mangueiras e podem, inclusive,
conter unidade própria de força para carga e descarga.
Além dessas unidades outras cargas podem também ser transportadas no próprio
convés, sem necessidade de nenhum sistema de armazenamento específico. Essas cargas
costumam ser grandes peças e equipamentos como risers de perfuração e produção,
árvores de natal, BOPs – Blow Out Preventers –, entre outros.

4
3. Sistemas de Transferência de Carga
A movimentação de cargas e de grandes estruturas é atividade frequente na
indústria naval e offshore. Seja durante a construção, quando é necessário mover
grandes módulos para a edificação das estruturas ou grandes equipamentos para dentro
delas, seja após a finalização da construção, quando surge a necessidade de transferir a
estrutura construída para o mar ou, finalmente, antes de uma viagem, quando é
necessário abastecer as embarcações não só com seus próprios consumíveis como
também com possíveis cargas a serem transportadas.
A operação que envolve a transferência de determinada carga é, portanto, uma
operação corriqueira e, dependendo da atividade e do tipo de carga a ser movimentada,
diferentes métodos de transferência podem ser empregados.
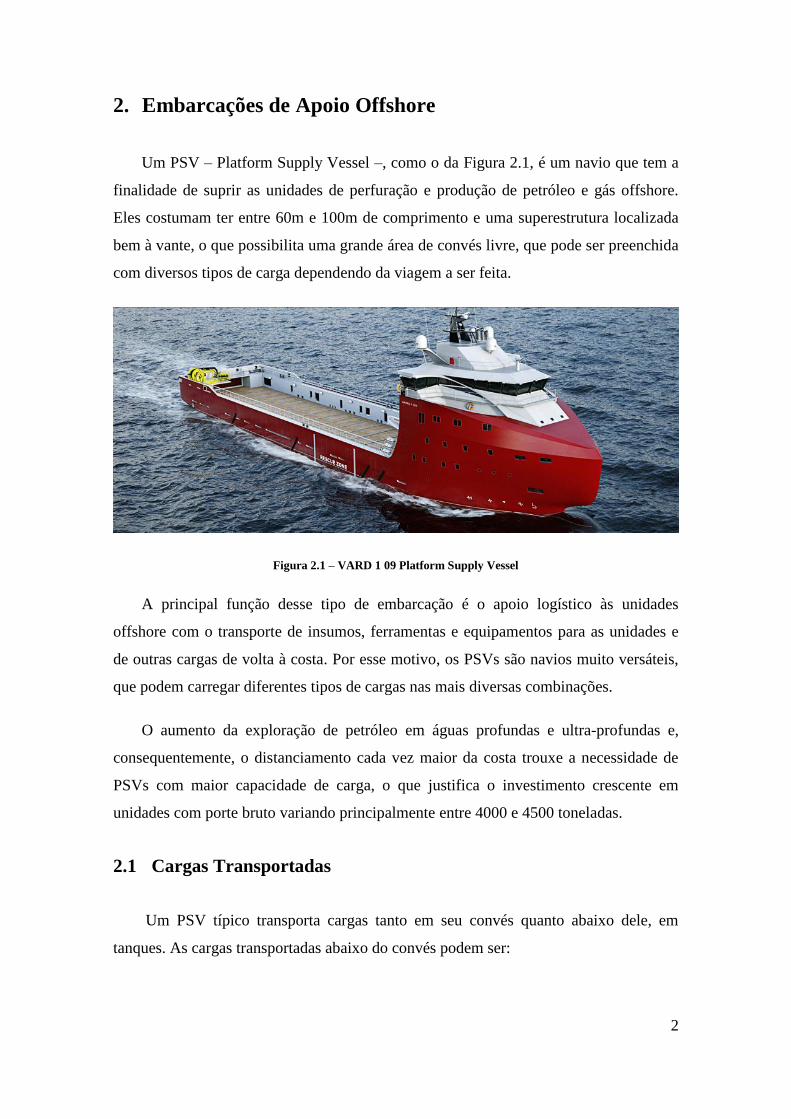
O içamento, por exemplo, é um dos métodos mais comuns de transferência de carga
no meio naval, onde as cargas são elevadas com o auxílio de guindastes ou pórticos de
grandes dimensões. Os guindastes e pórticos podem estar presentes tanto em estaleiros,
auxiliando na construção das estruturas navais, quanto em cábreas flutuantes, destinadas
à movimentação de grandes cargas na água, ou ainda nos portos e nas próprias
embarcações, onde vão auxiliar no carregamento e na movimentação de cargas dentro
delas. A Figura 3.1 mostra uma cábrea içando uma torre de perfuração e a Figura 3.2
mostra um guindaste transferindo um container para uma embarcação.
Figura 3.1 – Içamento de torre de perfuração no Estaleiro Hyundai por meio de cábrea
5
Figura 3.2 – Içamento de um container para embarcação por meio de guindaste
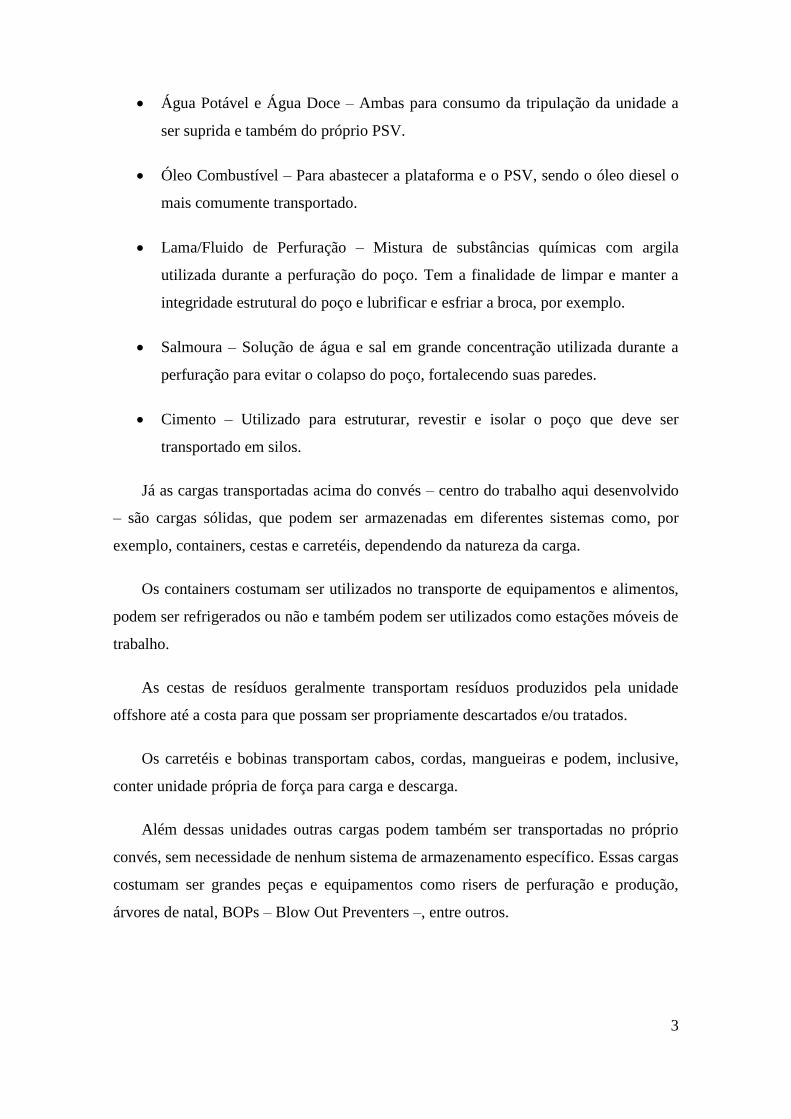
Outro sistema comum de transferência de carga é o skidding, cuja ideia central é o
deslizamento da carga por meio de trilhos com o auxílio de macacos hidráulicos. Esse
sistema costuma ser utilizado para a transferência de grandes cargas como a
movimentação de uma plataforma do tipo SPAR, ilustrada na Figura 3.3 a seguir.
Figura 3.3 – Deslizamento de plataforma SPAR com uso de trilhos
Outros métodos de transferência de carga podem ainda ser empregados dependendo
do tipo de carga em questão e do local a serem instalados. Os citados neste capítulo são,
no entanto, os mais comuns.

6
3.1 Sistema de Transferência do Convés Móvel
O sistema de carregamento – ou load-out / load-in – escolhido para movimentar o
convés móvel em [1] é um sistema sobre rodas, que se utiliza de boogies para
movimentação.
O SPMT – ou Self-Propelled Modular Trailers – [2] é composto por um conjunto
de módulos de plataformas elevatórias de suspensão hidráulica e por uma unidade de
geração de energia, como se pode ver na Figura 3.4. A suspensão hidráulica tem a
vantagem corrigir certos desnivelamentos no caminho sem comprometer a carga
transportada, como mostra a Figura 3.5.
Figura 3.4 – SPMT Modelo Kamag 2400
Figura 3.5 – Sistema de suspensão hidráulica dos SPMTs
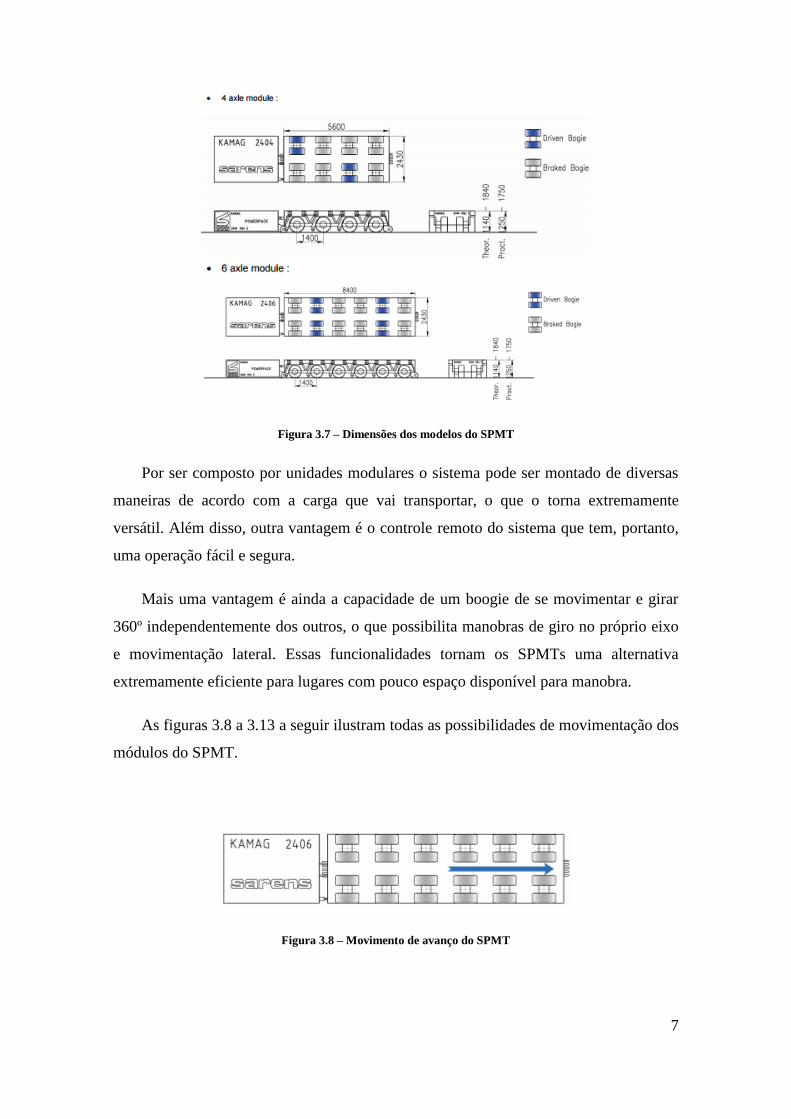
O SPMT do fabricante Sarens apresenta duas opções de boogies, com módulos de 4
ou 6 eixos – modelos 2404 e 2406, respectivamente –, cujas características técnicas são
mostradas na Figura 3.6 e na Figura 3.7.
Figura 3.6 – Características técnicas dos modelos do SPMT
7
Figura 3.7 – Dimensões dos modelos do SPMT
Por ser composto por unidades modulares o sistema pode ser montado de diversas
maneiras de acordo com a carga que vai transportar, o que o torna extremamente
versátil. Além disso, outra vantagem é o controle remoto do sistema que tem, portanto,
uma operação fácil e segura.
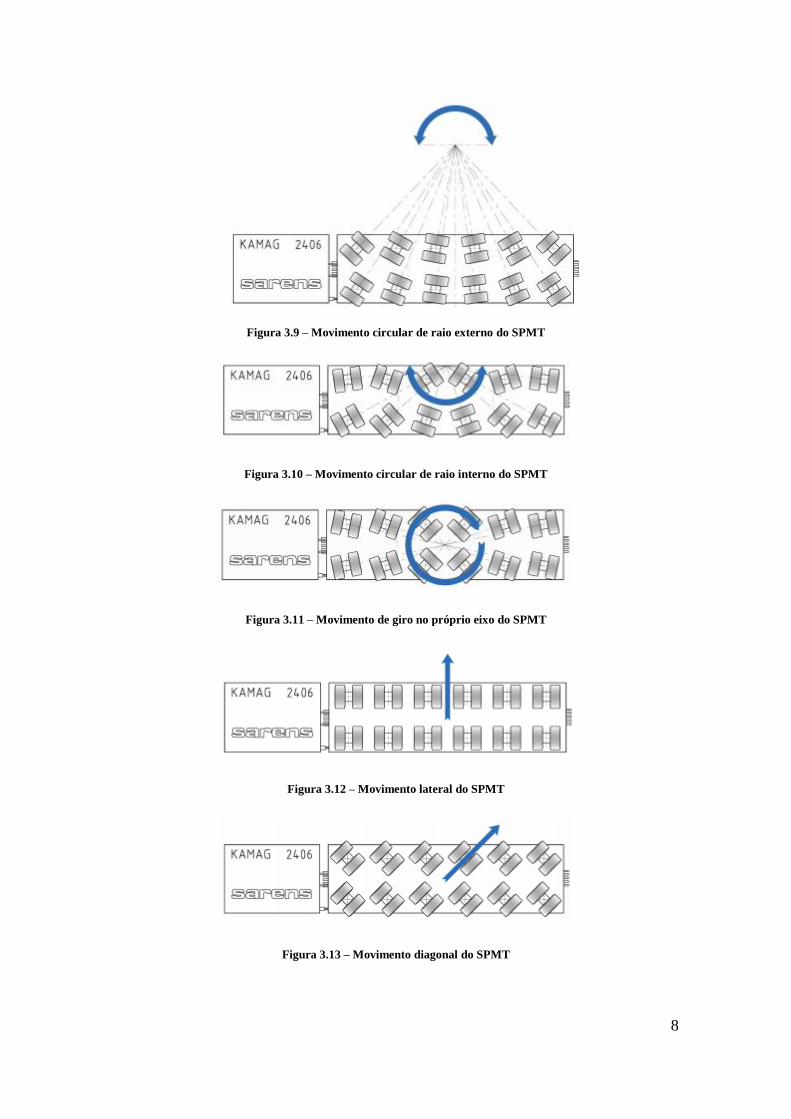
Mais uma vantagem é ainda a capacidade de um boogie de se movimentar e girar
360º independentemente dos outros, o que possibilita manobras de giro no próprio eixo
e movimentação lateral. Essas funcionalidades tornam os SPMTs uma alternativa
extremamente eficiente para lugares com pouco espaço disponível para manobra.
As figuras 3.8 a 3.13 a seguir ilustram todas as possibilidades de movimentação dos
módulos do SPMT.
Figura 3.8 – Movimento de avanço do SPMT
8
Figura 3.9 – Movimento circular de raio externo do SPMT
Figura 3.10 – Movimento circular de raio interno do SPMT
Figura 3.11 – Movimento de giro no próprio eixo do SPMT
Figura 3.12 – Movimento lateral do SPMT
Figura 3.13 – Movimento diagonal do SPMT

9
4. Apresentação do Problema e Premissas do Projeto
Um ponto indispensável na viabilização desse novo tipo de sistema de
carregamento utilizando um convés móvel é o alinhamento entre o convés principal do
navio e o cais do porto em questão. Sem haver esse perfeito alinhamento não é possível
entrar com o convés móvel no navio e, portanto, o sistema em questão se torna
impraticável. Um exemplo desse tipo de situação pode ser visto na Figura 4.1, que
representa uma condição de carregamento em que o convés principal do navio fica
2.44m acima do cais.
Figura 4.1 – Exemplo de desnivelamento entre convés principal e cais
A proposta do trabalho aqui desenvolvido é, então, estudar a fundo as possíveis
condições de carregamento de um determinado PSV e verificar se é possível atingir esse
nivelamento entre convés principal e cais.
Além disso, é também indispensável verificar se, nessas condições, a embarcação
se mantém estável e em equilíbrio durante todo o procedimento de embarque do convés
móvel com todos os seus pesos associados.
Os próximos capítulos vão detalhar as premissas do projeto, todos os estudos e
análises que foram feitos e, por fim, serão apresentados os resultados.
Ao fim de todas as análises será, então, possível verificar se o projeto é de fato
viável ou se ainda precisa ser adaptado.
10
Nos próximos subcapítulos serão apresentadas as informações que serviram de base
para o estudo aqui apresentado.
4.1 Navio Escolhido
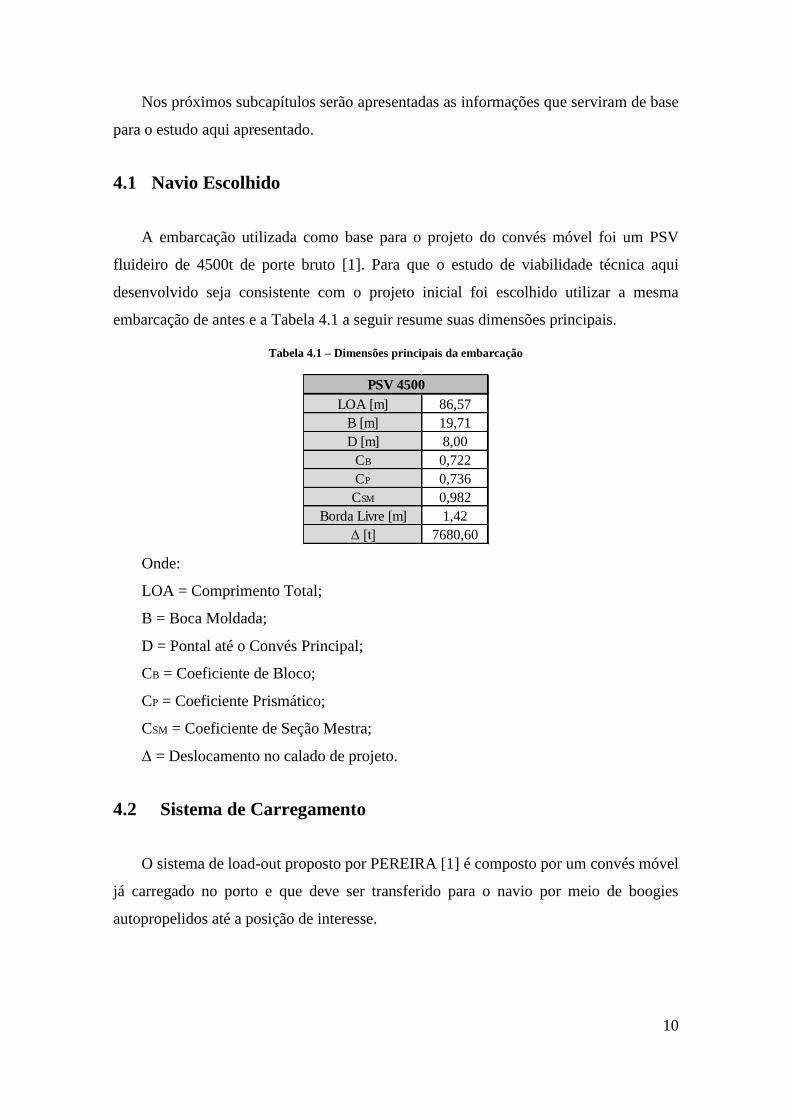
A embarcação utilizada como base para o projeto do convés móvel foi um PSV
fluideiro de 4500t de porte bruto [1]. Para que o estudo de viabilidade técnica aqui
desenvolvido seja consistente com o projeto inicial foi escolhido utilizar a mesma
embarcação de antes e a Tabela 4.1 a seguir resume suas dimensões principais.
Tabela 4.1 – Dimensões principais da embarcação
Onde:
LOA = Comprimento Total;
B = Boca Moldada;
D = Pontal até o Convés Principal;
CB = Coeficiente de Bloco;
CP = Coeficiente Prismático;
CSM = Coeficiente de Seção Mestra;
Δ = Deslocamento no calado de projeto.
4.2 Sistema de Carregamento
O sistema de load-out proposto por PEREIRA [1] é composto por um convés móvel
já carregado no porto e que deve ser transferido para o navio por meio de boogies
autopropelidos até a posição de interesse.
LOA [m] 86,57
B [m] 19,71
D [m] 8,00
CB 0,722
CP 0,736
CSM 0,982
Borda Livre [m] 1,42
Δ [t] 7680,60
PSV 4500

11
4.2.1 Carga Crítica
Como citado no capítulo 2, a carga transportada por um navio PSV pode ter uma
grande variedade de combinações. Pensando nisso, o convés móvel desenvolvido em [1]
foi projetado considerando-se a condição mais crítica dentro de uma série de condições
de carregamento possíveis.
A condição identificada como a mais crítica dentre as analisadas foi a que
apresentava o maior peso total e a posição mais elevada do centro de gravidade – CG.
Essa condição representa uma carga composta por 48 risers de perfuração ocupando
toda a dimensão do convés, empilhados em três camadas e com cinco unidades na base,
conforme a Figura 4.2. A Tabela 4.2 mostra as características do tipo de riser
transportado nessa condição.
Figura 4.2 – Distribuição dos risers de perfuração no convés móvel [1]
Tabela 4.2 – Dimensões de uma unidade do riser de perfuração
4.2.2 Convés Móvel
No projeto preliminar da estrutura do convés móvel [1] foi dimensionada a
espessura do chapeamento e também os reforçadores transversais. A Tabela 4.3 resume
as dimensões encontradas e a Figura 4.3 mostra o modelo dessa estrutura.
Comprimento [m] 27,50
Diâmetro [m] 1,40
Peso [tf] 31,00
Riser de Perfuração

12
Tabela 4.3 – Dimensões da estrutura do convés móvel [1]
Figura 4.3 – Estrutura do convés móvel modelada [1]
4.2.3 Meio de Transferência
O transporte do convés móvel do cais do porto para o convés principal da
embarcação ficou a cargo dos boogies já mencionados no item 3.1. O módulo
selecionado foi o 2406, de seis eixos, cujas características podem ser vistas na Figura
4.4 e na Figura 4.5 a seguir.
Figura 4.4 – Módulo 2406 [2]
t [mm] 12,50
ta [mm] 12,50
ha [mm] 1000,00
tf [mm] 16,00
lf [mm] 200,00
Reforçador
Chapa

13
Figura 4.5 – Características Módulo 2406 [2]
Foi também definido que seriam utilizados dez boogies, divididos em duas fileiras
iguais de cinco módulos, conforme mostra a Figura 4.6.
Figura 4.6 – Vistas superior e lateral da configuração dos boogies no convés móvel
4.3 Porto do Rio de Janeiro
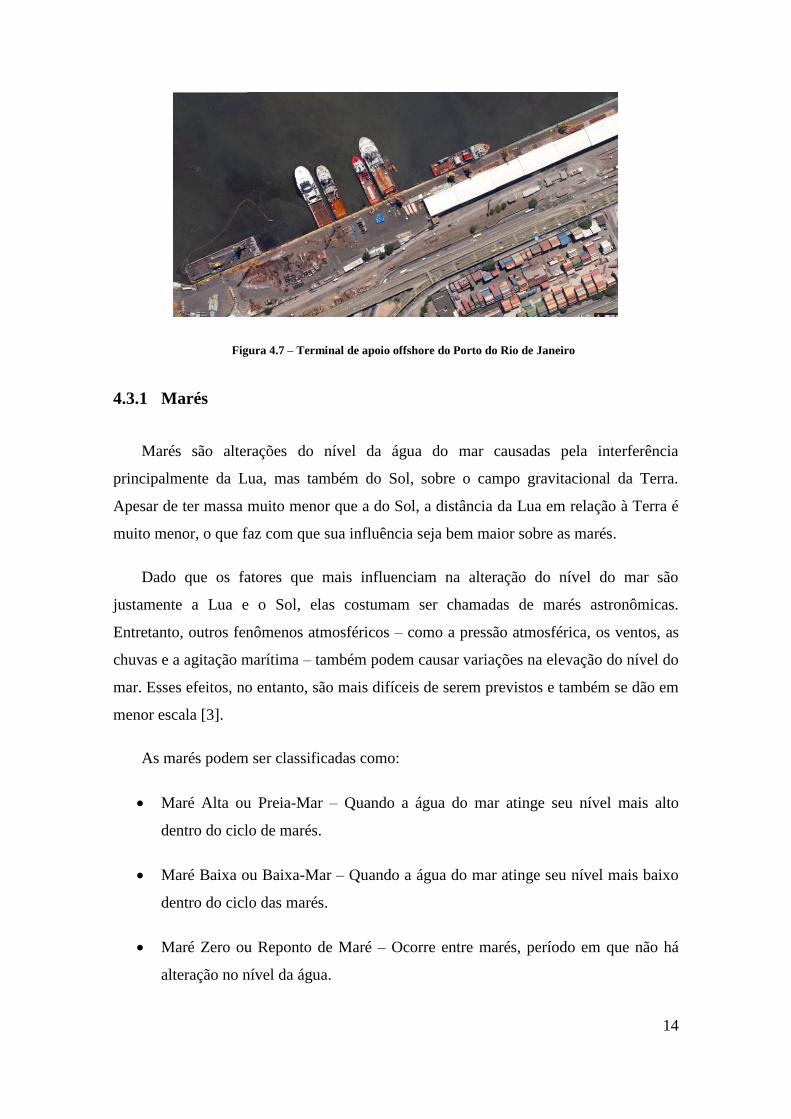
O Porto do Rio de Janeiro – Figura 4.7 – tem grande importância no cenário atual
de apoio às operações de exploração e produção de petróleo offshore. Sua localização se
mostra muito favorável considerando-se que as principais bacias exploradoras do país se
localizam também na região sudeste.
Com o objetivo de reduzir o tempo de carregamento dos PSVs e, portanto, seu
tempo de atracamento no terminal, a utilização do convés móvel como alternativa ao
sistema usual se mostra muito interessante financeiramente já que pode influenciar
diretamente na redução dos custos operacionais – tanto na fila na área de fundeio quanto
no próprio tempo de atracamento.
14
Figura 4.7 – Terminal de apoio offshore do Porto do Rio de Janeiro
4.3.1 Marés
Marés são alterações do nível da água do mar causadas pela interferência
principalmente da Lua, mas também do Sol, sobre o campo gravitacional da Terra.
Apesar de ter massa muito menor que a do Sol, a distância da Lua em relação à Terra é
muito menor, o que faz com que sua influência seja bem maior sobre as marés.
Dado que os fatores que mais influenciam na alteração do nível do mar são
justamente a Lua e o Sol, elas costumam ser chamadas de marés astronômicas.
Entretanto, outros fenômenos atmosféricos – como a pressão atmosférica, os ventos, as
chuvas e a agitação marítima – também podem causar variações na elevação do nível do
mar. Esses efeitos, no entanto, são mais difíceis de serem previstos e também se dão em
menor escala [3].
As marés podem ser classificadas como:
Maré Alta ou Preia-Mar – Quando a água do mar atinge seu nível mais alto
dentro do ciclo de marés.
Maré Baixa ou Baixa-Mar – Quando a água do mar atinge seu nível mais baixo
dentro do ciclo das marés.
Maré Zero ou Reponto de Maré – Ocorre entre marés, período em que não há
alteração no nível da água.

15
De modo geral, a maré sobe quando a Lua passa “por cima” ou “por baixo” de um
determinado local e, por isso, ocorrem com um intervalo médio de meio dia lunar -
aproximadamente 12h [3]. Os períodos entre marés altas são os de maré baixa, que
podem ser vistos na Figura 4.8 a seguir. A Figura 4.9 mostra os períodos de maré alta.
Figura 4.8 – Períodos de maré baixa no dia [3]
Figura 4.9 – Períodos de maré alta no dia [3]
Para o estudo de viabilidade técnica desenvolvido foram considerados os três tipos
de maré [4] – maré alta, maré zero e maré baixa – e a Figura 4.10 a seguir mostra, para
cada uma dessas marés, a distância da linha d’água até o cais do porto.
Figura 4.10 - Distâncias entre linha d’água e cais nos três tipos de marés [4]
16
5. Nivelamento do Convés
Reunindo todas as informações descritas no capítulo anterior, começou-se então a
estudar as condições de carregamento originais da embarcação em cada uma das
condições de maré.
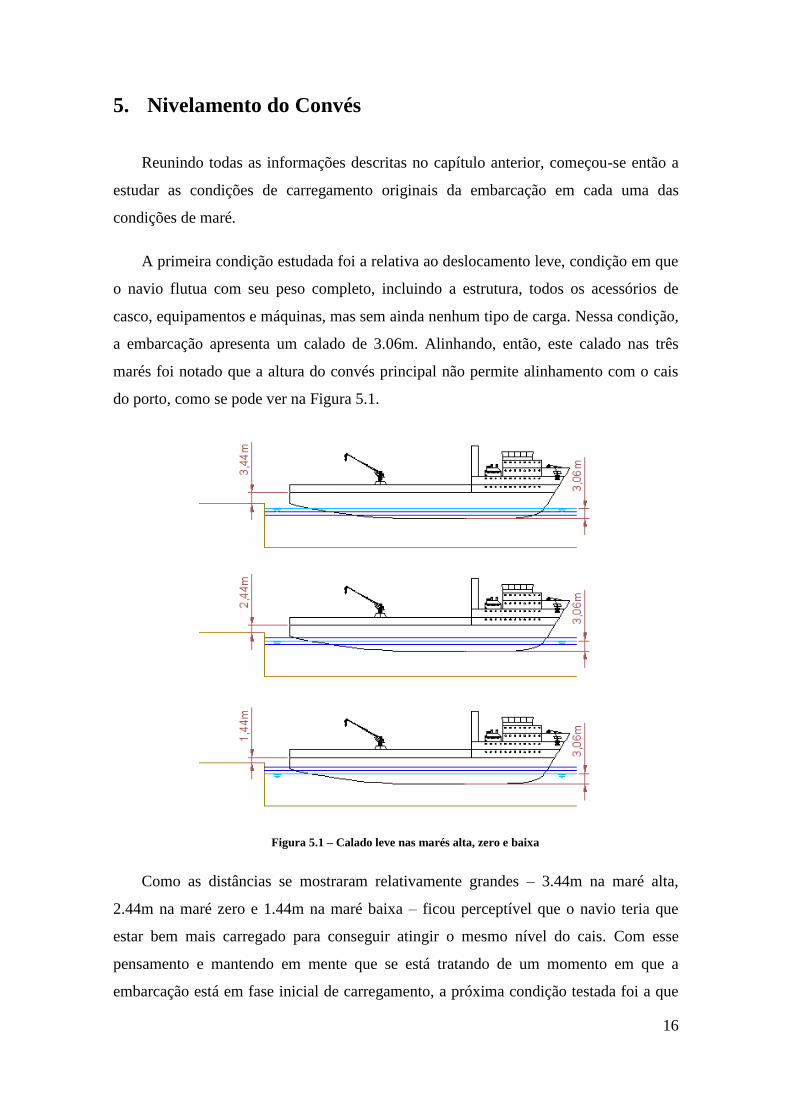
A primeira condição estudada foi a relativa ao deslocamento leve, condição em que
o navio flutua com seu peso completo, incluindo a estrutura, todos os acessórios de
casco, equipamentos e máquinas, mas sem ainda nenhum tipo de carga. Nessa condição,
a embarcação apresenta um calado de 3.06m. Alinhando, então, este calado nas três
marés foi notado que a altura do convés principal não permite alinhamento com o cais
do porto, como se pode ver na Figura 5.1.
Figura 5.1 – Calado leve nas marés alta, zero e baixa
Como as distâncias se mostraram relativamente grandes – 3.44m na maré alta,
2.44m na maré zero e 1.44m na maré baixa – ficou perceptível que o navio teria que
estar bem mais carregado para conseguir atingir o mesmo nível do cais. Com esse
pensamento e mantendo em mente que se está tratando de um momento em que a
embarcação está em fase inicial de carregamento, a próxima condição testada foi a que
17
continha todos os tanques de lastro cheios. Isso foi feito com a finalidade de tentar
aumentar o calado da embarcação e, com isso, reduzir a distância entre o convés
principal e o cais.
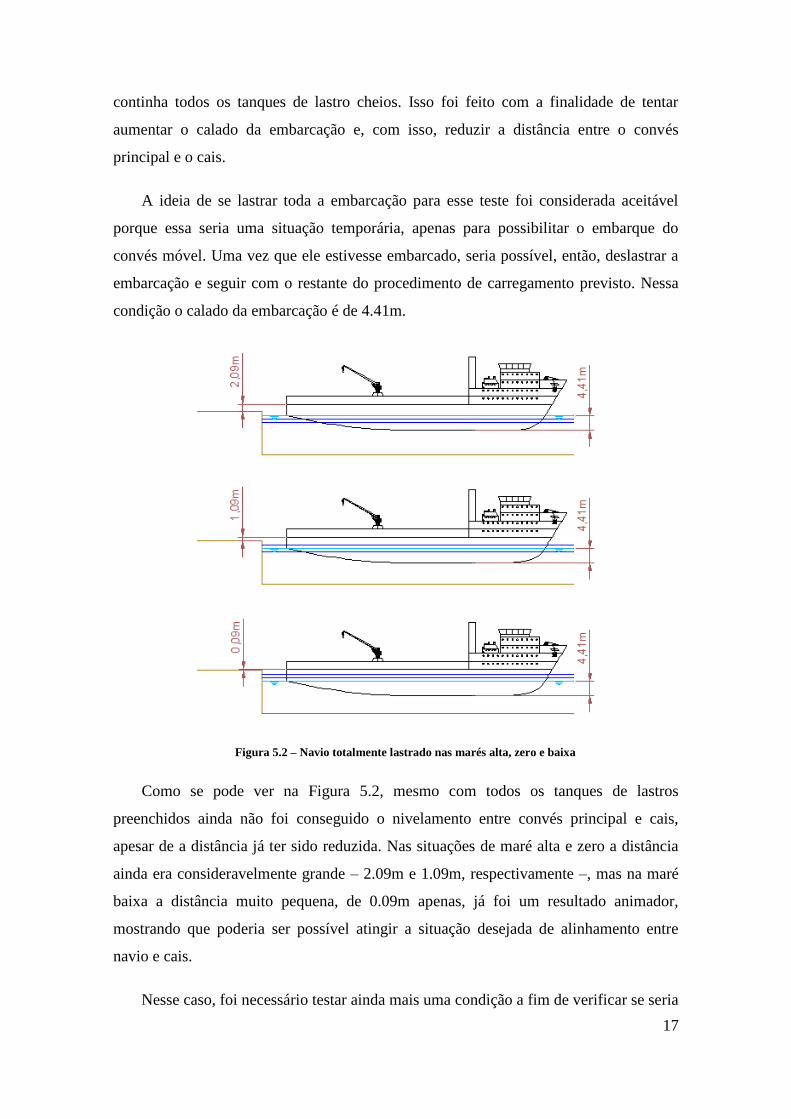
A ideia de se lastrar toda a embarcação para esse teste foi considerada aceitável
porque essa seria uma situação temporária, apenas para possibilitar o embarque do
convés móvel. Uma vez que ele estivesse embarcado, seria possível, então, deslastrar a
embarcação e seguir com o restante do procedimento de carregamento previsto. Nessa
condição o calado da embarcação é de 4.41m.
Figura 5.2 – Navio totalmente lastrado nas marés alta, zero e baixa
Como se pode ver na Figura 5.2, mesmo com todos os tanques de lastros
preenchidos ainda não foi conseguido o nivelamento entre convés principal e cais,
apesar de a distância já ter sido reduzida. Nas situações de maré alta e zero a distância
ainda era consideravelmente grande – 2.09m e 1.09m, respectivamente –, mas na maré
baixa a distância muito pequena, de 0.09m apenas, já foi um resultado animador,
mostrando que poderia ser possível atingir a situação desejada de alinhamento entre
navio e cais.
Nesse caso, foi necessário testar ainda mais uma condição a fim de verificar se seria
18
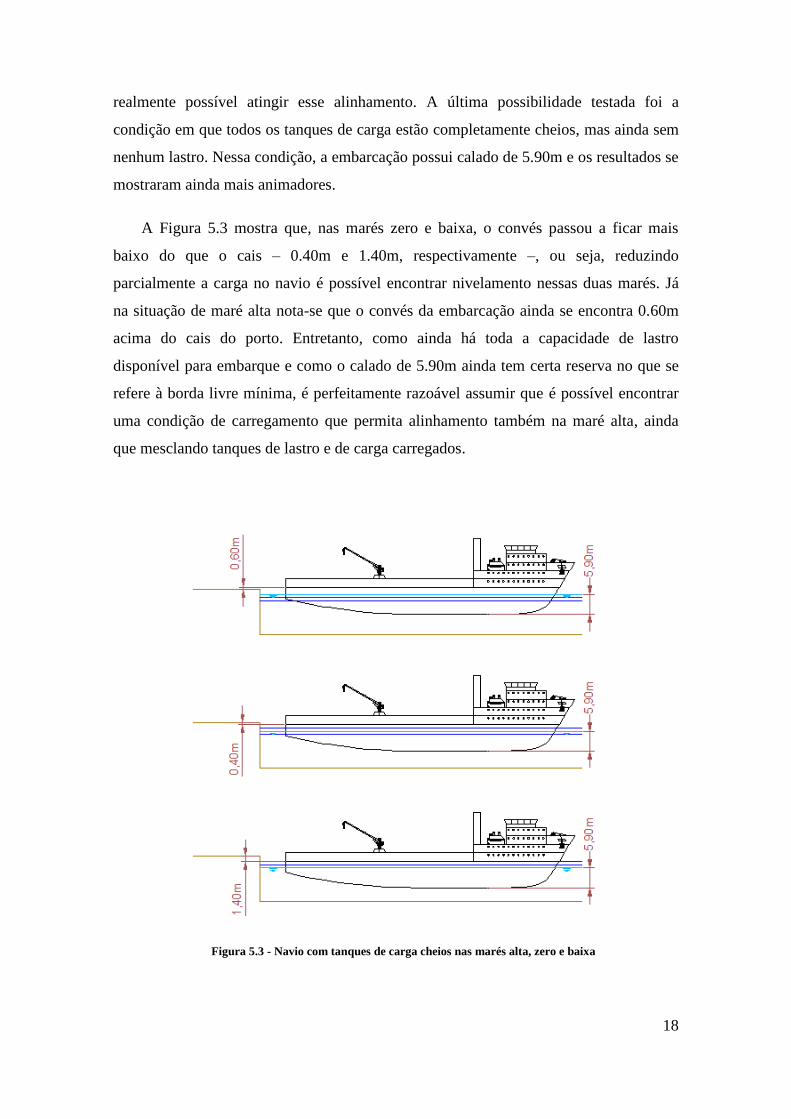
realmente possível atingir esse alinhamento. A última possibilidade testada foi a
condição em que todos os tanques de carga estão completamente cheios, mas ainda sem
nenhum lastro. Nessa condição, a embarcação possui calado de 5.90m e os resultados se
mostraram ainda mais animadores.
A Figura 5.3 mostra que, nas marés zero e baixa, o convés passou a ficar mais
baixo do que o cais – 0.40m e 1.40m, respectivamente –, ou seja, reduzindo
parcialmente a carga no navio é possível encontrar nivelamento nessas duas marés. Já
na situação de maré alta nota-se que o convés da embarcação ainda se encontra 0.60m
acima do cais do porto. Entretanto, como ainda há toda a capacidade de lastro
disponível para embarque e como o calado de 5.90m ainda tem certa reserva no que se
refere à borda livre mínima, é perfeitamente razoável assumir que é possível encontrar
uma condição de carregamento que permita alinhamento também na maré alta, ainda
que mesclando tanques de lastro e de carga carregados.
Figura 5.3 - Navio com tanques de carga cheios nas marés alta, zero e baixa

19
A Tabela 5.1 a seguir resume as distâncias entre o cais do porto e o convés
principal do navio em cada condição estudada, para as três marés. As distâncias com
sinal negativo simbolizam as condições em que o convés principal está mais baixo do
que o cais e, portanto, as distâncias sem sinal simbolizam as situações de convés mais
alto do que o cais.
Tabela 5.1 – Resumo das distâncias cais-convés nas condições estudadas
5.1 Calados Objetivo
Foi mostrado ainda neste capítulo que deve ser possível encontrar condições de
carregamento que permitam o alinhamento do convés do navio com o cais do porto,
uma vez que a capacidade de carga e de lastro da embarcação se mostrou suficiente para
isso. Deste modo, foram então identificados os calados em que o navio deve flutuar para
que este fique nivelado com o cais.
A Figura 5.4 mostra que, para que o navio fique alinhado na maré alta, é necessário
atingir um calado de 6.5m. A Figura 5.5 e a Figura 5.6 mostram que para que o mesmo
aconteça nas marés zero e baixa, respectivamente, devem ser atingidos calados de 5.5m
para a primeira e 4.5m para a segunda.
Figura 5.4 - Calado alinhado com o cais na maré alta
Alta
Zero
Baixa
-0,4
-1,4
Distância Cais - Convés [m]
Maré
d = 5,90m
0,6
Carga Total
2,44 1,09
1,44 0,09
Calado Leve Lastro Total
d = 3,06m d = 4,41m
3,44 2,09

20
Figura 5.5 - Calado alinhado com o cais na maré zero
Figura 5.6 - Calado alinhado com o cais na maré baixa
Tendo feito isso, foi necessário estudar as condições de carregamento de todo o
processo de load-out do convés móvel a fim de verificar se essas condições podem
mesmo ser atingidas com as diferentes combinações de carga e lastro e se elas
apresentam estabilidade. Isso é o que será demonstrado nos capítulos a seguir.
21
6. Processo de Load-out \ Load –in do Convés Móvel
O procedimento de transferência do convés móvel para dentro do navio foi tratado
em duas partes: A primeira considera o conjunto do convés móvel – estrutura, carga e
boogies – sendo embarcado no navio, e a segunda considera os boogies saindo do navio
após o convés já estar em sua posição final.
Tanto o embarque do conjunto quanto o desembarque dos boogies foram divididos
em etapas, a fim de considerar parcialmente o deslocamento de todo o peso em questão
para dentro ou para fora da embarcação. Com isso, acredita-se que os resultados obtidos
com as análises podem ser considerados mais fiéis à realidade de um procedimento de
load-out e, portanto, tornam-se mais confiáveis. O número de etapas foi definido a partir
do número de boogies utilizado e também de sua distribuição ao longo do convés
móvel.
6.1 Etapas do Load-out
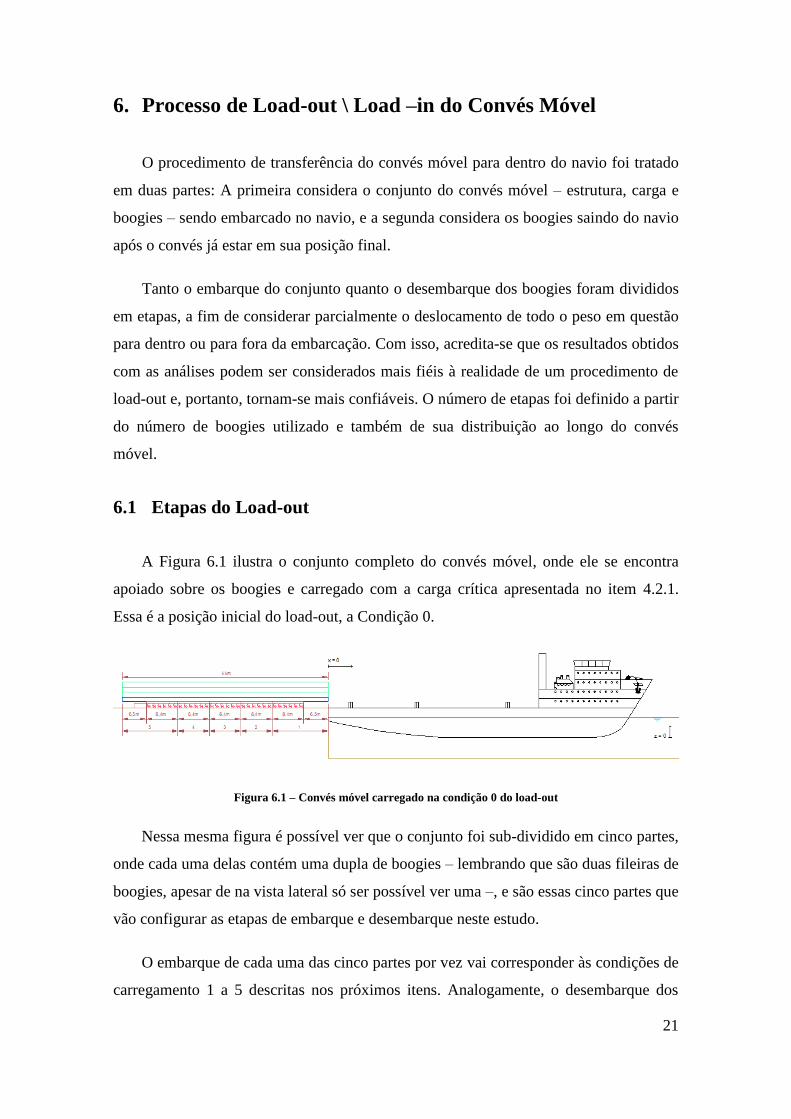
A Figura 6.1 ilustra o conjunto completo do convés móvel, onde ele se encontra
apoiado sobre os boogies e carregado com a carga crítica apresentada no item 4.2.1.
Essa é a posição inicial do load-out, a Condição 0.
Figura 6.1 – Convés móvel carregado na condição 0 do load-out
Nessa mesma figura é possível ver que o conjunto foi sub-dividido em cinco partes,
onde cada uma delas contém uma dupla de boogies – lembrando que são duas fileiras de
boogies, apesar de na vista lateral só ser possível ver uma –, e são essas cinco partes que
vão configurar as etapas de embarque e desembarque neste estudo.
O embarque de cada uma das cinco partes por vez vai corresponder às condições de
carregamento 1 a 5 descritas nos próximos itens. Analogamente, o desembarque dos
22
boogies correlatos à cada uma dessas partes corresponde às condições 7 a 11. A
condição intermediária 6 trata do momento em que o convés móvel já está totalmente
apoiado sobre o navio, antes dos boogies começarem a desembarcar.
Essa divisão em cinco partes possibilitou a consideração do peso completo de uma
dupla de boogies em cada condição de carregamento, o que tornou o desenvolvimento
do estudo mais prático sem, entretanto, comprometer sua qualidade. O próximo item vai
explicar a metodologia utilizada para os cálculos de peso e centro de gravidade das
condições de carregamento analisadas.
6.1.1 Cálculos de Peso e CG
Para o cálculo do peso e do centro de gravidade de cada uma das partes de interesse
foram consideradas as contribuições tanto do convés com sua carga – os risers de
perfuração – quanto dos boogies e, quando houvesse, da unidade de energia – o
powerpack. A seguir é explicado como foram feitas essas considerações e, como
exemplo, são explicitados os cálculos da Condição 1 que se refere ao embarque no
navio da Parte 1 da Figura 6.1.
Convés + Carga:
Como a estrutura do convés móvel e a distribuição da carga sobre ele são uniformes
no eixo longitudinal, sem nenhum tipo de assimetria ou descontinuidade, a distribuição
de peso desse conjunto também foi considerada uniforme. Na Tabela 6.1 podem ser
vistas as informações de peso e CG do convés móvel carregado, onde o referencial para
a coordenada vertical do CG é considerado a partir da linha de base do navio.
Tabela 6.1 – Peso e CG do convés móvel carregado
Com isso, a partir do peso total do conjunto “convés + carga”, o peso de cada uma
das cinco partes foi considerado proporcional aos respectivos comprimentos, assim
como a posição da coordenada longitudinal do CG. Por exemplo, a Parte 1 mostrada na
Figura 6.1 teve seu peso calculado da seguinte forma:
Peso [tf] XG [m] YG [m] ZG [m]
1700 27,5 0 12,17
23
( )
Também para a Parte 1 a coordenada X do CG foi considerada na metade de seu
comprimento – 7,45m – e a coordenada Z ficou com o mesmo valor do conjunto
completo uma vez que a altura da Parte 1 é igual à do conjunto.
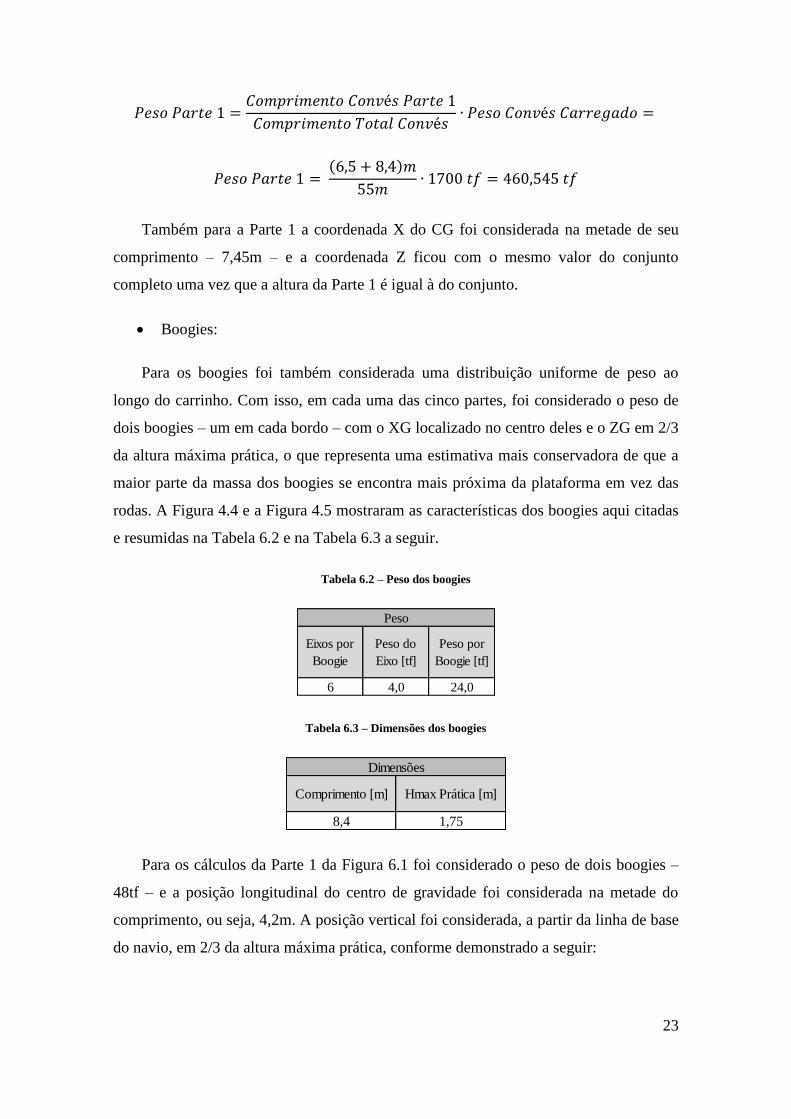
Boogies:
Para os boogies foi também considerada uma distribuição uniforme de peso ao
longo do carrinho. Com isso, em cada uma das cinco partes, foi considerado o peso de
dois boogies – um em cada bordo – com o XG localizado no centro deles e o ZG em 2/3
da altura máxima prática, o que representa uma estimativa mais conservadora de que a
maior parte da massa dos boogies se encontra mais próxima da plataforma em vez das
rodas. A Figura 4.4 e a Figura 4.5 mostraram as características dos boogies aqui citadas
e resumidas na Tabela 6.2 e na Tabela 6.3 a seguir.
Tabela 6.2 – Peso dos boogies
Tabela 6.3 – Dimensões dos boogies
Para os cálculos da Parte 1 da Figura 6.1 foi considerado o peso de dois boogies –
48tf – e a posição longitudinal do centro de gravidade foi considerada na metade do
comprimento, ou seja, 4,2m. A posição vertical foi considerada, a partir da linha de base
do navio, em 2/3 da altura máxima prática, conforme demonstrado a seguir:
6 4,0 24,0
Peso
Eixos por
Boogie
Peso do
Eixo [tf]
Peso por
Boogie [tf]
Comprimento [m]
Dimensões
Hmax Prática [m]
8,4 1,75
24
Peso e CG Resultantes:
Tendo os pesos e posições do centro de gravidade de interesse – convés + carga e
boogies – ainda é necessário calcular os valores resultantes para cada uma das
condições.
O peso total da Parte 1, por exemplo, nada mais é do que o somatório do peso do
primeiro par de boogies com o peso do convés e da carga correspondente a essa parte.
Já a posição do centro de gravidade é calculada como a posição média de toda a
massa do sistema, a Parte 1. As coordenadas X e Z do CG são então calculadas como
mostrado a seguir:
Como todas as cargas são consideradas simétricas em relação ao eixo transversal, a
coordenada Y sempre vale: YGResult = 0.
Os resultados dos cálculos aqui explicitados se encontram resumidos na Tabela 6.4
do próximo item, que mostra a Condição 1 de carregamento do convés móvel.
Para cada condição de carregamento mostrada nos próximos itens – 11 ao todo – há
uma breve explicação, uma figura ilustrando a situação em questão e também uma
tabela com o resultado do cálculo do peso total e do centro de gravidade resultante.
6.1.2 Embarque do Conjunto
A seguir são apresentadas as cinco primeiras condições de carregamento testadas,
elas consideram o embarque do conjunto completo – convés móvel, carga e boogies.
25
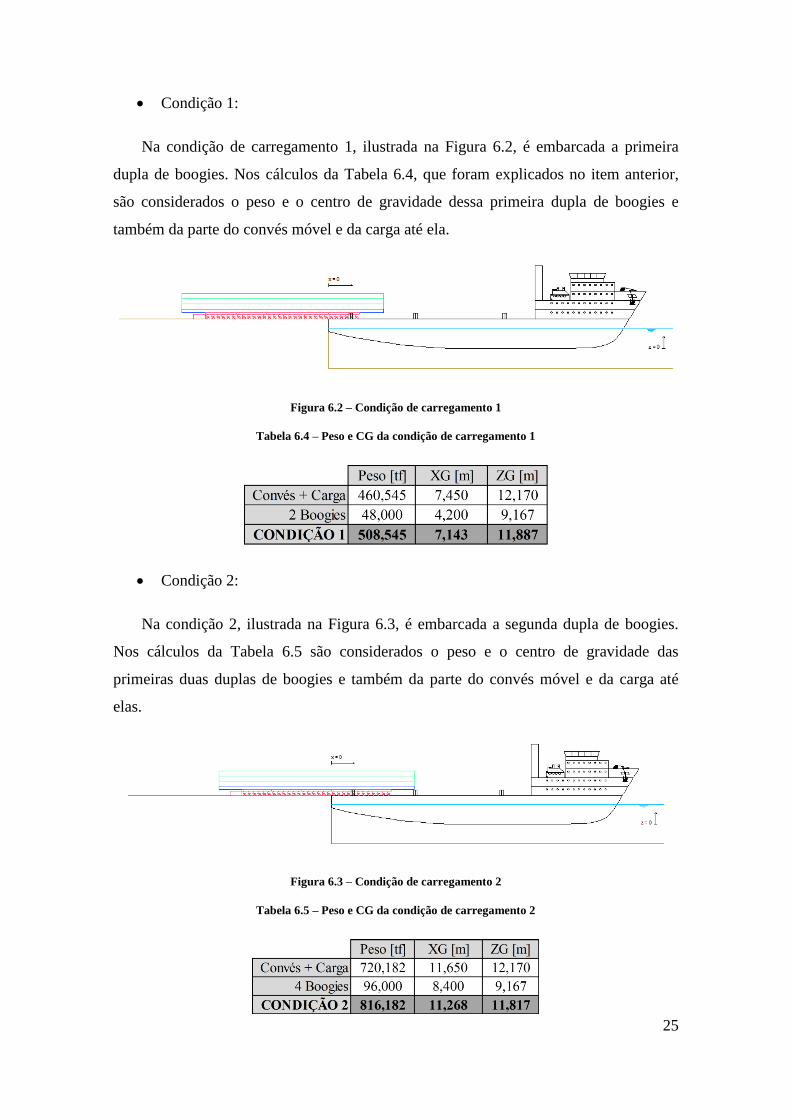
Condição 1:
Na condição de carregamento 1, ilustrada na Figura 6.2, é embarcada a primeira
dupla de boogies. Nos cálculos da Tabela 6.4, que foram explicados no item anterior,
são considerados o peso e o centro de gravidade dessa primeira dupla de boogies e
também da parte do convés móvel e da carga até ela.
Figura 6.2 – Condição de carregamento 1
Tabela 6.4 – Peso e CG da condição de carregamento 1
Condição 2:
Na condição 2, ilustrada na Figura 6.3, é embarcada a segunda dupla de boogies.
Nos cálculos da Tabela 6.5 são considerados o peso e o centro de gravidade das
primeiras duas duplas de boogies e também da parte do convés móvel e da carga até
elas.
Figura 6.3 – Condição de carregamento 2
Tabela 6.5 – Peso e CG da condição de carregamento 2
26
Condição 3:
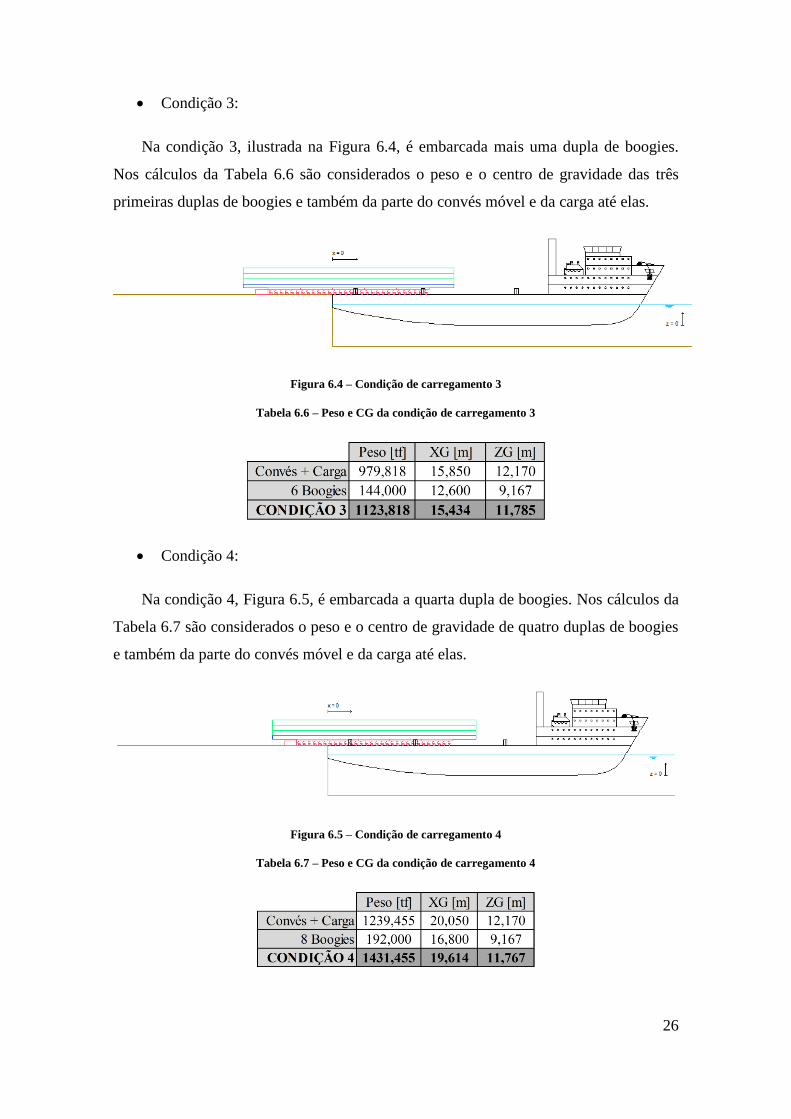
Na condição 3, ilustrada na Figura 6.4, é embarcada mais uma dupla de boogies.
Nos cálculos da Tabela 6.6 são considerados o peso e o centro de gravidade das três
primeiras duplas de boogies e também da parte do convés móvel e da carga até elas.
Figura 6.4 – Condição de carregamento 3
Tabela 6.6 – Peso e CG da condição de carregamento 3
Condição 4:
Na condição 4, Figura 6.5, é embarcada a quarta dupla de boogies. Nos cálculos da
Tabela 6.7 são considerados o peso e o centro de gravidade de quatro duplas de boogies
e também da parte do convés móvel e da carga até elas.
Figura 6.5 – Condição de carregamento 4
Tabela 6.7 – Peso e CG da condição de carregamento 4

27
Condição 5:
Na condição 5, Figura 6.6, é embarcada a última dupla de boogies juntamente com
o powerpack. Nos cálculos da Tabela 6.8 são considerados o peso e o centro de
gravidade de todos os boogies, do powerpack e também da totalidade do convés móvel
com a carga.
Figura 6.6 – Condição de carregamento 5
Tabela 6.8 – Peso e CG da condição de carregamento 5
6.1.3 Convés Móvel Posicionado
Esta condição se assemelha muito à condição 5 anterior mas, nesse caso, o convés
móvel já se encontra totalmente sobre os apoios no navio e os boogies baixaram para
que comecem a ser desembarcados, como se pode ver na Figura 6.7. Na Tabela 6.9 é
considerada a mesma situação da condição 5 para os boogies e os powerpacks, mas a
posição vertical do centro de gravidade do convés móvel e da carga já é a final.
Condição 6:
Figura 6.7 – Condição de carregamento 6

28
Tabela 6.9 – Peso e CG da condição de carregamento 6
6.1.4 Desembarque dos Boogies
Finalmente, são apresentadas as cinco últimas condições de carregamento
analisadas, que consideram que o convés móvel e a carga estão fixos sobre os apoios no
navio e os boogies estão sendo desembarcados.
Condição 7:
Na condição 7, Figura 6.8, o conjunto convés móvel mais carga se encontra apoiado
no navio e são desembarcados dois boogies e o powerpack. Nos cálculos da Tabela 6.10
são considerados o peso e o centro de gravidade das quatro duplas de boogies que ainda
se encontram no navio e também o peso total do convés móvel com a carga e sua
posição final.
Figura 6.8 – Condição de carregamento 7
Tabela 6.10 – Peso e CG da condição de carregamento 7
29
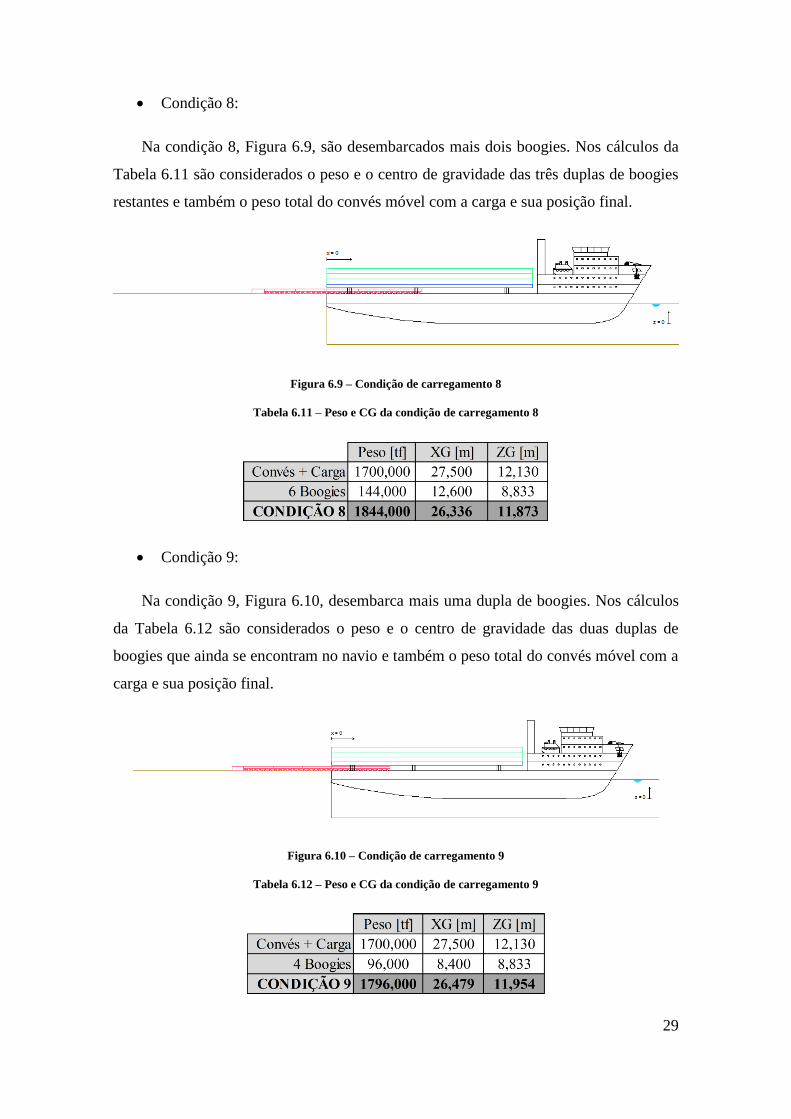
Condição 8:
Na condição 8, Figura 6.9, são desembarcados mais dois boogies. Nos cálculos da
Tabela 6.11 são considerados o peso e o centro de gravidade das três duplas de boogies
restantes e também o peso total do convés móvel com a carga e sua posição final.
Figura 6.9 – Condição de carregamento 8
Tabela 6.11 – Peso e CG da condição de carregamento 8
Condição 9:
Na condição 9, Figura 6.10, desembarca mais uma dupla de boogies. Nos cálculos
da Tabela 6.12 são considerados o peso e o centro de gravidade das duas duplas de
boogies que ainda se encontram no navio e também o peso total do convés móvel com a
carga e sua posição final.
Figura 6.10 – Condição de carregamento 9
Tabela 6.12 – Peso e CG da condição de carregamento 9
30
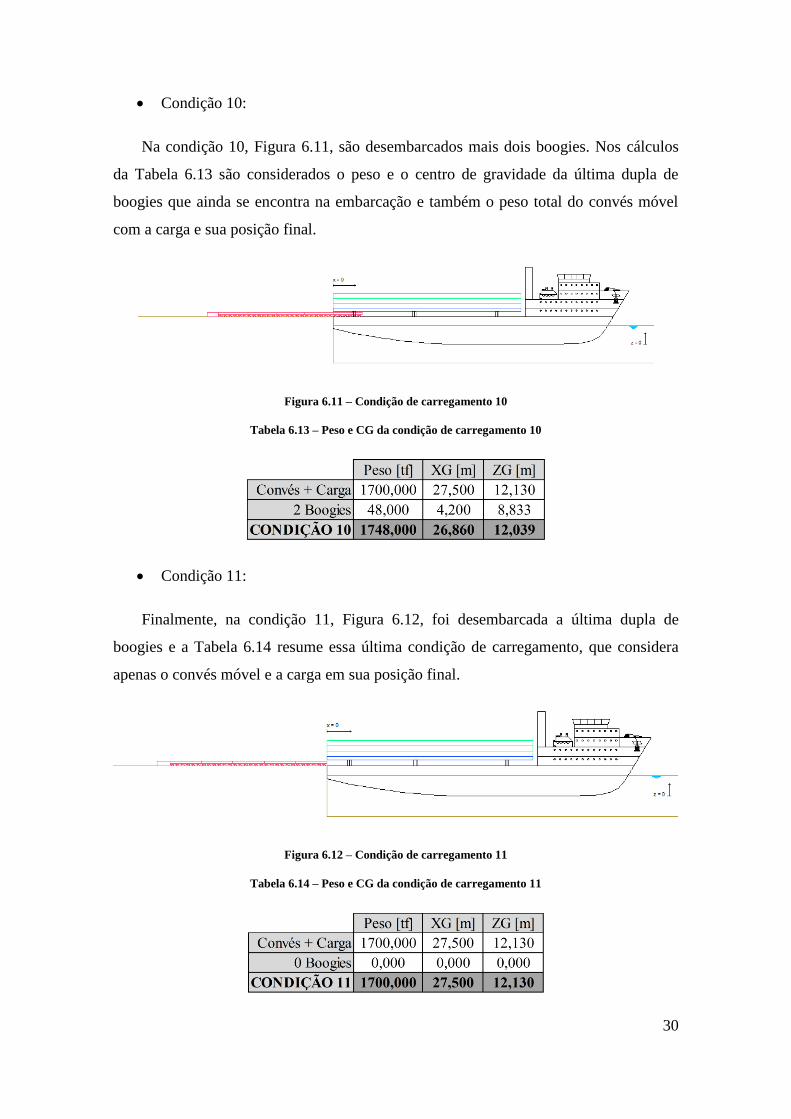
Condição 10:
Na condição 10, Figura 6.11, são desembarcados mais dois boogies. Nos cálculos
da Tabela 6.13 são considerados o peso e o centro de gravidade da última dupla de
boogies que ainda se encontra na embarcação e também o peso total do convés móvel
com a carga e sua posição final.
Figura 6.11 – Condição de carregamento 10
Tabela 6.13 – Peso e CG da condição de carregamento 10
Condição 11:
Finalmente, na condição 11, Figura 6.12, foi desembarcada a última dupla de
boogies e a Tabela 6.14 resume essa última condição de carregamento, que considera
apenas o convés móvel e a carga em sua posição final.
Figura 6.12 – Condição de carregamento 11
Tabela 6.14 – Peso e CG da condição de carregamento 11
31
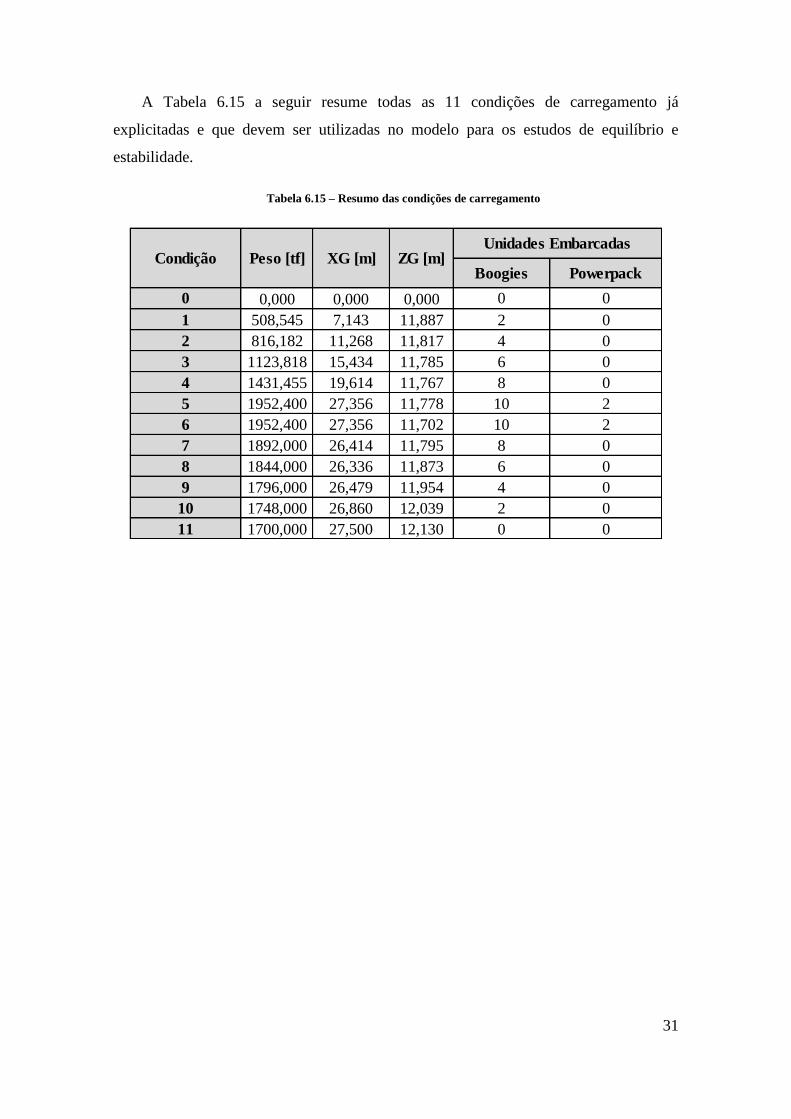
A Tabela 6.15 a seguir resume todas as 11 condições de carregamento já
explicitadas e que devem ser utilizadas no modelo para os estudos de equilíbrio e
estabilidade.
Tabela 6.15 – Resumo das condições de carregamento
0,000 0,000 0,000
508,545 7,143 11,887
816,182 11,268 11,817
1123,818 15,434 11,785
1431,455 19,614 11,767
1952,400 27,356 11,778
1952,400 27,356 11,702
1892,000 26,414 11,795
1844,000 26,336 11,873
1796,000 26,479 11,954
1748,000 26,860 12,039
1700,000 27,500 12,130
Condição Peso [tf]
9
10
11
4
5
6
7
8
1
2
3
0
XG [m] ZG [m]Boogies Powerpack
2 0
00
Unidades Embarcadas
0
0
0
2
2
8
6
4
2
4
6
8
10
10
0
0
0
0
00
32
7. Análises Equilíbrio e Estabilidade
Com as condições de carregamento definidas pôde-se partir para as análises de
equilíbrio e estabilidade de cada uma delas. No projeto preliminar do convés móvel [1]
foi estudada a estabilidade de algumas condições de carregamento, mas elas diziam
respeito a situações em que o convés móvel já estava embarcado e tinham a intenção de
verificar o quanto essa nova situação afetaria a estabilidade do navio em relação à sua
condição de projeto.
Uma vez que foi identificado o problema do desnivelamento entre o convés
principal do navio e o cais do porto – o que poderia inviabilizar a utilização do convés
móvel como sistema de carregamento –, tornou-se crucial um estudo mais aprofundado
da estabilidade do navio durante todo o procedimento de load-out.
Como já explicado no capítulo 5, as diferentes marés causam diferentes
desnivelamentos entre navio e cais. No item 5.1 foram identificados os calados que a
embarcação deve manter para que seja possível o alinhamento com o cais nas três
condições de maré estudadas. São eles: 4,5m para a maré baixa, 5,5m para a maré zero e
6,5m para a maré alta.
Para garantir que a utilização do convés móvel é viável tecnicamente, é
fundamental que se consiga encontrar condições de equilíbrio para o navio que
permitam alinhamento com o cais nas três condições de maré durante todas as etapas do
load-out. Isso quer dizer que as 11 condições de carregamento mostradas no capítulo
anterior devem ser testadas em cada um dos três calados correspondentes às três
condições de maré, resultando num total de 33 análises de equilíbrio e estabilidade.
O procedimento seguido para essas análises pode ser resumido como o seguinte,
para cada uma das marés:
1) Com o navio completamente vazio, na Condição 0 já mostrada na Figura 6.1,
carregar alguns tanques até atingir o calado objetivo.
2) Verificar se há equilíbrio e estabilidade nessa condição de carregamento.
33
3) Repetir o mesmo processo para as 11 condições de carregamento, variando, no
convés principal do navio, o peso e o CG calculados para cada uma delas.
Esse procedimento pode parecer simples, mas há uma série de considerações que
devem ser feitas e também de restrições que devem ser atendidas em cada uma das
condições testadas. Por exemplo, como o navio escolhido para as análises é um PSV
fluideiro, podem existir várias combinações de carregamento de tanques que levem a
um mesmo resultado. Pensando nisso, foram adotados também alguns princípios que
deveriam guiar esse carregamento dos tanques para tornar o processo mais prático e
próximo da realidade. Foram eles:
Sempre que possível, carregar/descarregar apenas tanques de lastro na variação
das condições de carregamento;
Não sendo possível trabalhar apenas com os tanques de lastro, usar também os
tanques de carga de água.
Ao fim do load-out o navio deve estar com os tanques de consumíveis
totalmente carregados. Nesse caso ele poderia, ao fim do load-out, já estar
pronto para seguir viagem ou ainda continuar seu processo de carregamento,
mas já com o convés móvel em sua devida posição.
Atentar para que nenhuma condição ultrapasse a borda-livre mínima do navio;
Sempre que possível, tentar reduzir o efeito de superfície livre nos tanques, o
que poderia acarretar em perda de estabilidade.
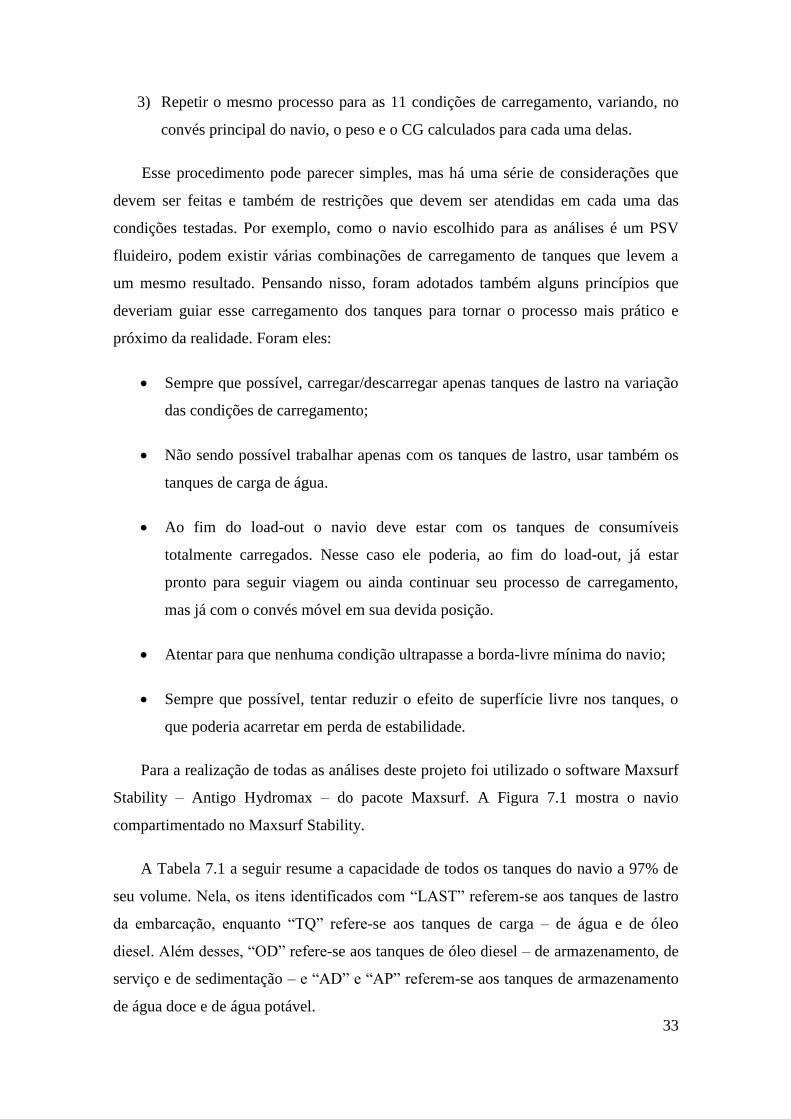
Para a realização de todas as análises deste projeto foi utilizado o software Maxsurf
Stability – Antigo Hydromax – do pacote Maxsurf. A Figura 7.1 mostra o navio
compartimentado no Maxsurf Stability.
A Tabela 7.1 a seguir resume a capacidade de todos os tanques do navio a 97% de
seu volume. Nela, os itens identificados com “LAST” referem-se aos tanques de lastro
da embarcação, enquanto “TQ” refere-se aos tanques de carga – de água e de óleo
diesel. Além desses, “OD” refere-se aos tanques de óleo diesel – de armazenamento, de
serviço e de sedimentação – e “AD” e “AP” referem-se aos tanques de armazenamento
de água doce e de água potável.
34
Figura 7.1 – Compartimentação do PSV
Tabela 7.1 – Tabela de Capacidades do PSV
PIQUE TANQUE RÉ 192,346 187,654 LAST2_C_BB 58,460 57,034
PIQUE TANQUE VANTE 136,596 133,264 LAST2_C_BE 58,460 57,034
LAST8_F_BB 63,672 62,119 LAST1_C_BB 57,522 56,119
LAST8_F_BE 63,672 62,119 LAST1_C_BE 57,522 56,119
LAST7_F_BB 79,336 77,401 TQ_AP1_BB 301,688 301,688
LAST7_F_BE 79,336 77,401 TQ_AP1_BE 301,688 301,688
LAST6_F_BB 81,092 79,114 TQ_AP2_BB 301,688 301,688
LAST6_F_BE 81,092 79,114 TQ_AP2_BE 301,688 301,688
LAST5_F_BB 70,438 68,720 TQ_AP3_BB 301,688 301,688
LAST5_F_BE 70,438 68,720 TQ_AP3_BE 301,688 301,688
LAST4_F_BB 66,514 64,892 TQ_AP4_BB 301,688 301,688
LAST4_F_BE 66,514 64,892 TQ_AP4_BE 301,688 301,688
LAST3_F_BB 70,846 69,118 TQ_AP5_BB 284,067 284,067
LAST3_F_BE 70,846 69,118 TQ_AP5_BE 284,067 284,067
LAST2_F_BB 71,407 69,665 TQ_OD1_BB 186,798 222,378
LAST2_F_BE 71,407 69,665 TQ_OD1_BE 186,798 222,378
LAST1_F_BB 70,217 68,504 TQ_OD2_BB 179,447 213,627
LAST1_F_BE 70,217 68,504 TQ_OD2_BE 179,447 213,627
LAST8_C_BB 31,792 31,017 TQ_OD3_BB 149,843 178,384
LAST8_C_BE 31,792 31,017 TQ_OD3_BE 149,843 178,384
LAST7_C_BB 40,309 39,326 OD_ARM_BB 72,694 86,540
LAST7_C_BE 40,309 39,326 OD_ARM_BE 72,694 86,540
LAST6_C_BB 42,718 41,676 OD_SERV_BB 29,210 34,774
LAST6_C_BE 42,718 41,676 OD_SERV_BE 29,210 34,774
LAST5_C_BB 54,997 53,655 OD_SED_BB 26,169 31,154
LAST5_C_BE 54,997 53,655 OD_SED_BE 26,169 31,154
LAST4_C_BB 58,549 57,121 AD_ARM_BB 4,966 4,966
LAST4_C_BE 58,549 57,121 AD_ARM_BE 4,966 4,966
LAST3_C_BB 58,633 57,203 AP_ARM_BB 2,092 2,092
LAST3_C_BE 58,633 57,203 AP_ARM_BE 2,092 2,092
Volume [m³] TanquePeso [t]Tanque Peso [t] Volume [m³]
35
7.1 Análise de Equilíbrio
Antes das análises de estabilidade é necessário verificar, em todos os casos, se as
condições de carregamento trabalhadas garantem que o navio está em equilíbrio, dentro
dos limites admitidos para o projeto. Por isso são feitas as análises de equilíbrio.
Para atingir o perfeito nivelamento com o cais e, consequentemente, iniciar o
procedimento de load-out de maneira eficaz e segura, é necessário atentar para as
seguintes restrições às análises de equilíbrio que devem, indispensavelmente, ser
atendidas:
Não pode haver trim;
Não pode haver banda;
O mesmo calado deve ser mantido, para um mesmo tipo de maré, durante as 11
condições de carregamento.
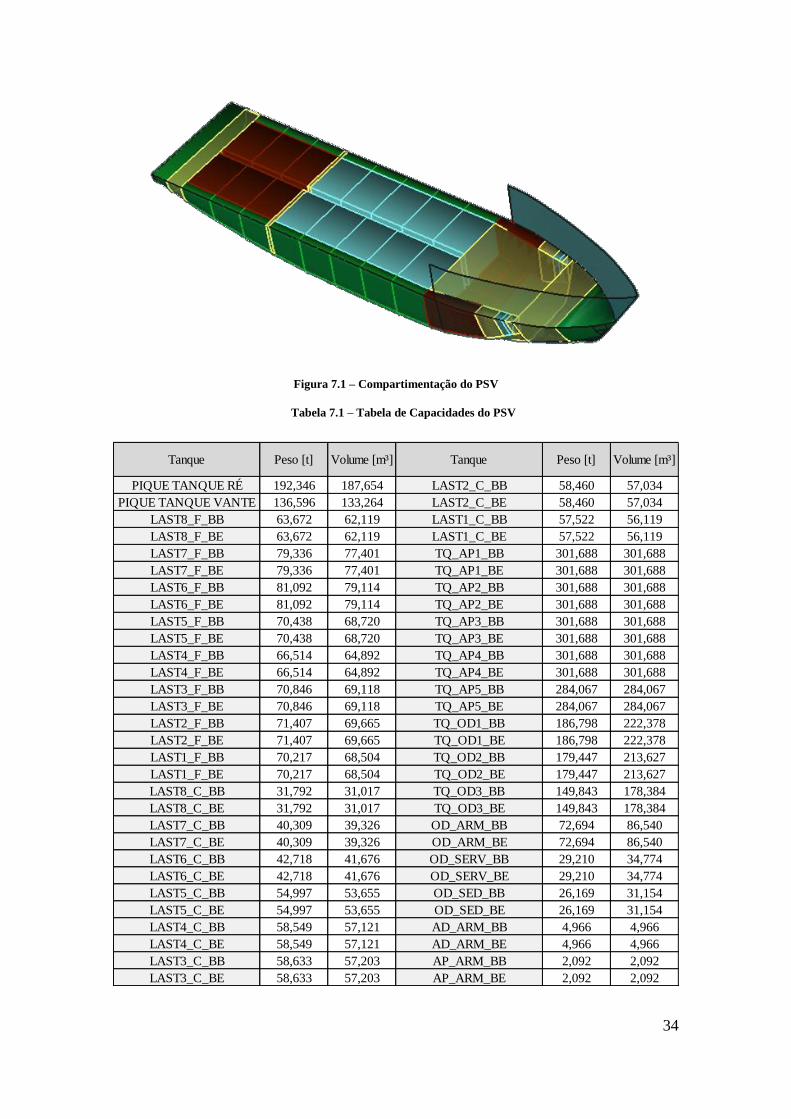
7.2 Análise de Estabilidade
Tendo obedecido aos critérios das análises de equilíbrio, podem então ser feitos os
testes de estabilidade. A International Maritime Organization, IMO, define critérios
mínimos para que uma embarcação possa ser considerada estável com base na Curva de
Estabilidade Estática, ou curva GZ [5].
Figura 7.2 – Ilustração do Braço de Endireitamento
O braço de endireitamento – GZ –, que pode ser visto na Figura 7.2, é definido
como a distância horizontal, medida em metros, entre o centro de gravidade e a linha

36
vertical de ação da força de empuxo agindo no centro de carena, quando a embarcação
encontra-se inclinada. Plotando-se os braços de endireitamento para vários ângulos de
inclinação tem-se, então, a Curva de Estabilidade Estática, exemplificada pela Figura
7.3 a seguir.
Figura 7.3 – Exemplo de Curva de Estabilidade Estática
Os critérios gerais da IMO para a curva GZ são aplicáveis a todos os tipos de
navios, mas para alguns tipos específicos – como navios de pesca e de apoio offshore –
alguns limites mais brandos são considerados aceitáveis.
No decorrer das análises, apenas um dos critérios gerais da IMO apresentou-se
crítico para o procedimento de load-out, que foi o que diz respeito ao ângulo mínimo
em que deve ocorrer o GZ máximo. Nos critérios gerais esse ângulo não pode ser menor
do que 25º, enquanto que na regra para navios de apoio offshore o valor mínimo
aceitável é de 15º. Nesse critério, exclusivamente, foi então adotado como limite o valor
para os navios de apoio offshore.
Com isso, os critérios de estabilidade utilizados neste projeto foram, em resumo:
Área sob a curva GZ entre 0 e 30º não pode ser menor que 3,151 m.deg;
Área sob a curva GZ entre 0 e 40º não pode ser menor que 5,157 m.deg;
Área sob a curva GZ entre 30º e 40º não pode ser menor que 1,719 m.deg;
37
O braço de endireitamento (GZ) em 30º não pode ser menor que 0.2m;
O braço de endireitamento máximo deve ocorrer em um ângulo maior ou igual a
15º;
A altura metacêntrica inicial (GMt) não deve ser menor que 0.15m.
7.3 Resultados
Atentando sempre às restrições mostradas no item anterior foram encontradas todas
as 33 condições de equilíbrio – 11 condições de carregamento para cada uma das três
marés. Os próximos itens mostram os resultados das análises de estabilidade para cada
uma dessas condições.
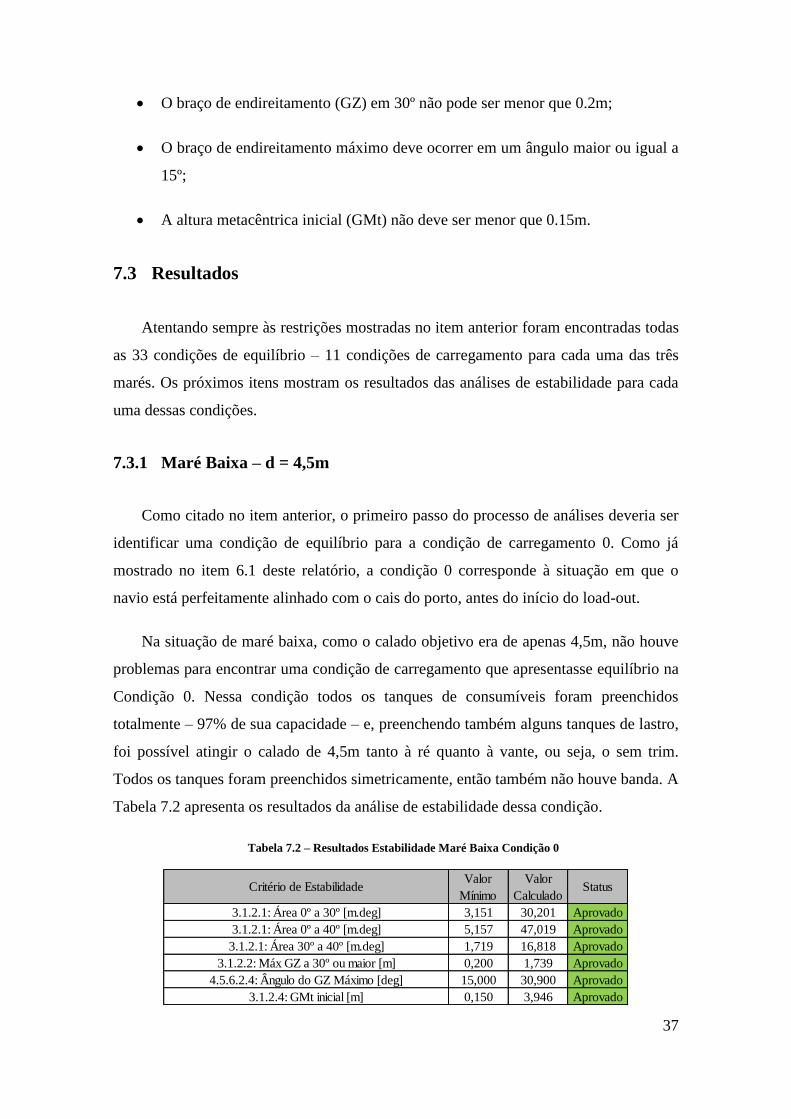
7.3.1 Maré Baixa – d = 4,5m
Como citado no item anterior, o primeiro passo do processo de análises deveria ser
identificar uma condição de equilíbrio para a condição de carregamento 0. Como já
mostrado no item 6.1 deste relatório, a condição 0 corresponde à situação em que o
navio está perfeitamente alinhado com o cais do porto, antes do início do load-out.
Na situação de maré baixa, como o calado objetivo era de apenas 4,5m, não houve
problemas para encontrar uma condição de carregamento que apresentasse equilíbrio na
Condição 0. Nessa condição todos os tanques de consumíveis foram preenchidos
totalmente – 97% de sua capacidade – e, preenchendo também alguns tanques de lastro,
foi possível atingir o calado de 4,5m tanto à ré quanto à vante, ou seja, o sem trim.
Todos os tanques foram preenchidos simetricamente, então também não houve banda. A
Tabela 7.2 apresenta os resultados da análise de estabilidade dessa condição.
Tabela 7.2 – Resultados Estabilidade Maré Baixa Condição 0
3.1.2.1: Área 0º a 30º [m.deg] 3,151 30,201 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 47,019 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 16,818 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 1,739 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 30,900 Aprovado
3.1.2.4: GMt inicial [m] 0,150 3,946 Aprovado
Valor
MínimoCritério de Estabilidade
Valor
CalculadoStatus
38
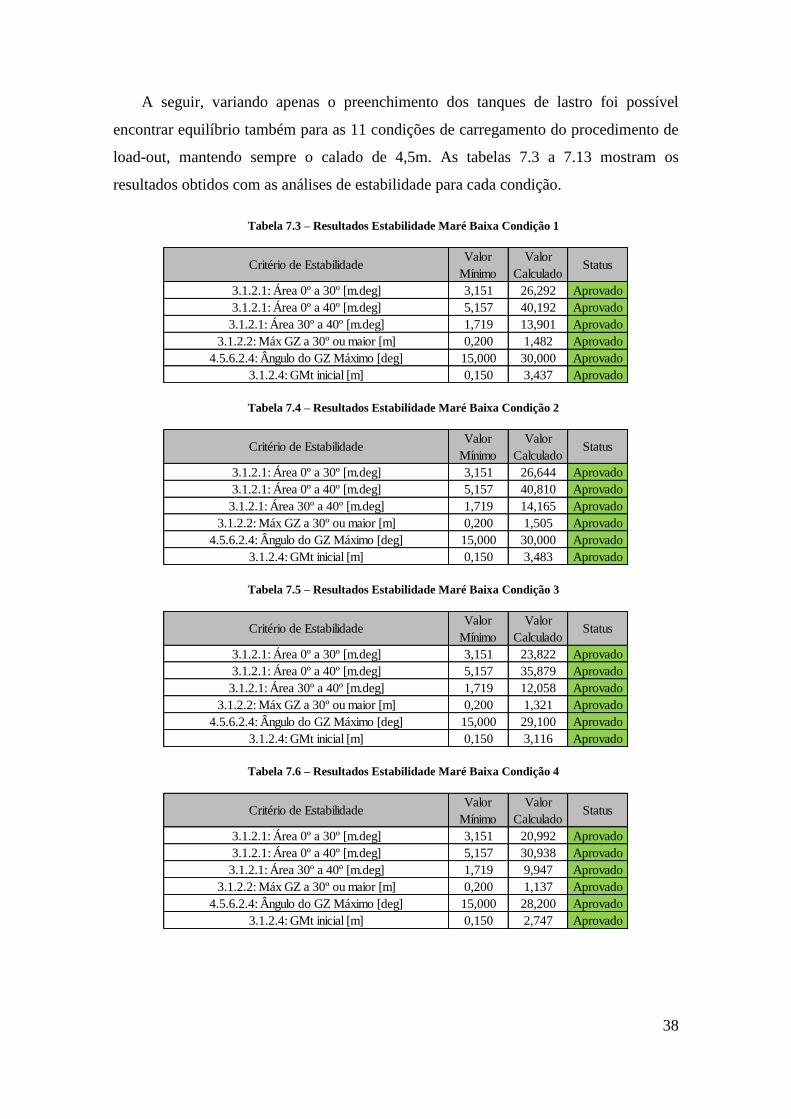
A seguir, variando apenas o preenchimento dos tanques de lastro foi possível
encontrar equilíbrio também para as 11 condições de carregamento do procedimento de
load-out, mantendo sempre o calado de 4,5m. As tabelas 7.3 a 7.13 mostram os
resultados obtidos com as análises de estabilidade para cada condição.
Tabela 7.3 – Resultados Estabilidade Maré Baixa Condição 1
Tabela 7.4 – Resultados Estabilidade Maré Baixa Condição 2
Tabela 7.5 – Resultados Estabilidade Maré Baixa Condição 3
Tabela 7.6 – Resultados Estabilidade Maré Baixa Condição 4
3.1.2.1: Área 0º a 30º [m.deg] 3,151 26,292 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 40,192 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 13,901 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 1,482 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 30,000 Aprovado
3.1.2.4: GMt inicial [m] 0,150 3,437 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus
3.1.2.1: Área 0º a 30º [m.deg] 3,151 26,644 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 40,810 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 14,165 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 1,505 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 30,000 Aprovado
3.1.2.4: GMt inicial [m] 0,150 3,483 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus
3.1.2.1: Área 0º a 30º [m.deg] 3,151 23,822 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 35,879 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 12,058 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 1,321 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 29,100 Aprovado
3.1.2.4: GMt inicial [m] 0,150 3,116 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus
3.1.2.1: Área 0º a 30º [m.deg] 3,151 20,992 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 30,938 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 9,947 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 1,137 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 28,200 Aprovado
3.1.2.4: GMt inicial [m] 0,150 2,747 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus
39
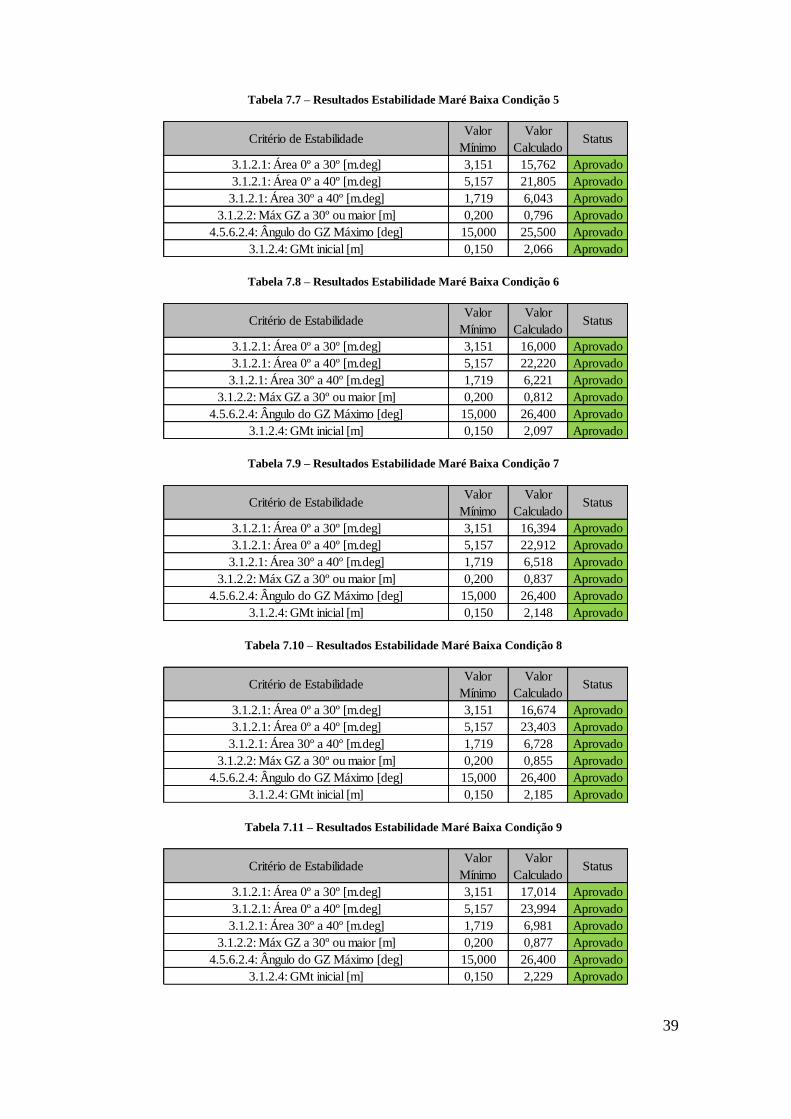
Tabela 7.7 – Resultados Estabilidade Maré Baixa Condição 5
Tabela 7.8 – Resultados Estabilidade Maré Baixa Condição 6
Tabela 7.9 – Resultados Estabilidade Maré Baixa Condição 7
Tabela 7.10 – Resultados Estabilidade Maré Baixa Condição 8
Tabela 7.11 – Resultados Estabilidade Maré Baixa Condição 9
3.1.2.1: Área 0º a 30º [m.deg] 3,151 15,762 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 21,805 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 6,043 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 0,796 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 25,500 Aprovado
3.1.2.4: GMt inicial [m] 0,150 2,066 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus
3.1.2.1: Área 0º a 30º [m.deg] 3,151 16,000 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 22,220 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 6,221 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 0,812 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 26,400 Aprovado
3.1.2.4: GMt inicial [m] 0,150 2,097 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus
3.1.2.1: Área 0º a 30º [m.deg] 3,151 16,394 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 22,912 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 6,518 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 0,837 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 26,400 Aprovado
3.1.2.4: GMt inicial [m] 0,150 2,148 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus
3.1.2.1: Área 0º a 30º [m.deg] 3,151 16,674 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 23,403 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 6,728 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 0,855 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 26,400 Aprovado
3.1.2.4: GMt inicial [m] 0,150 2,185 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus
3.1.2.1: Área 0º a 30º [m.deg] 3,151 17,014 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 23,994 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 6,981 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 0,877 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 26,400 Aprovado
3.1.2.4: GMt inicial [m] 0,150 2,229 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus
40
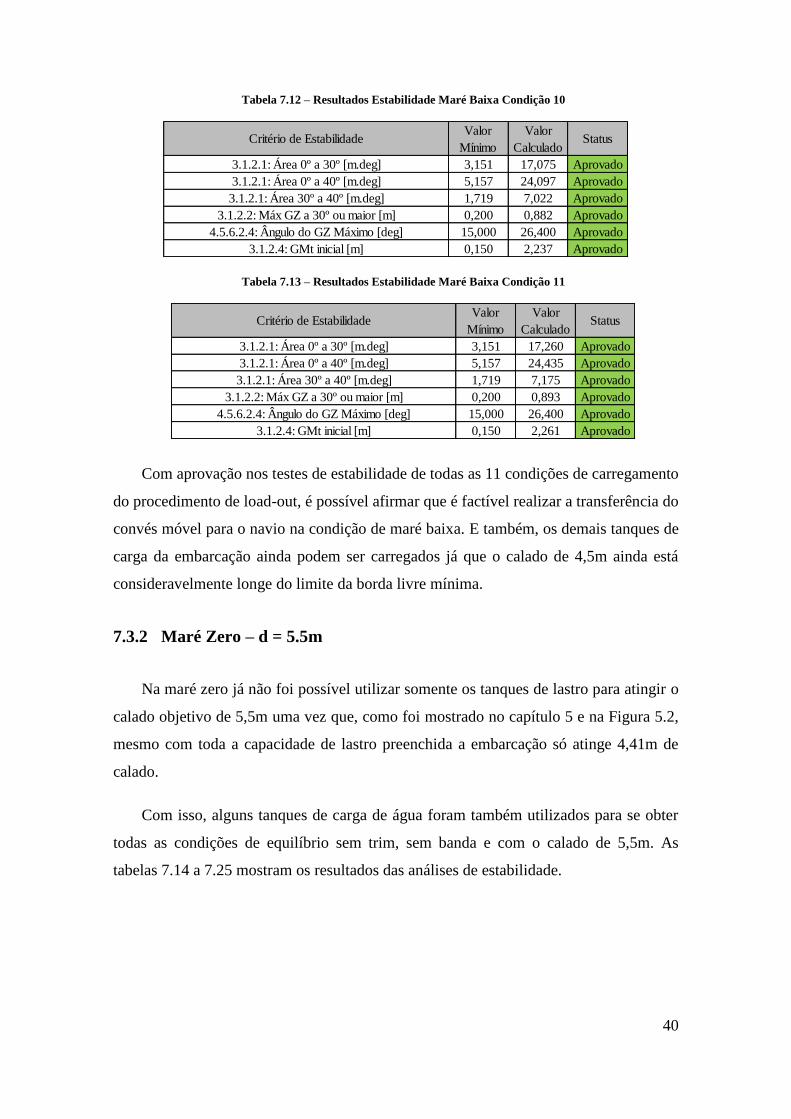
Tabela 7.12 – Resultados Estabilidade Maré Baixa Condição 10
Tabela 7.13 – Resultados Estabilidade Maré Baixa Condição 11
Com aprovação nos testes de estabilidade de todas as 11 condições de carregamento
do procedimento de load-out, é possível afirmar que é factível realizar a transferência do
convés móvel para o navio na condição de maré baixa. E também, os demais tanques de
carga da embarcação ainda podem ser carregados já que o calado de 4,5m ainda está
consideravelmente longe do limite da borda livre mínima.
7.3.2 Maré Zero – d = 5.5m
Na maré zero já não foi possível utilizar somente os tanques de lastro para atingir o
calado objetivo de 5,5m uma vez que, como foi mostrado no capítulo 5 e na Figura 5.2,
mesmo com toda a capacidade de lastro preenchida a embarcação só atinge 4,41m de
calado.
Com isso, alguns tanques de carga de água foram também utilizados para se obter
todas as condições de equilíbrio sem trim, sem banda e com o calado de 5,5m. As
tabelas 7.14 a 7.25 mostram os resultados das análises de estabilidade.
3.1.2.1: Área 0º a 30º [m.deg] 3,151 17,075 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 24,097 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 7,022 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 0,882 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 26,400 Aprovado
3.1.2.4: GMt inicial [m] 0,150 2,237 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus
3.1.2.1: Área 0º a 30º [m.deg] 3,151 17,260 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 24,435 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 7,175 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 0,893 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 26,400 Aprovado
3.1.2.4: GMt inicial [m] 0,150 2,261 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus

41
Tabela 7.14 – Resultados Estabilidade Maré Zero Condição 0
Tabela 7.15 – Resultados Estabilidade Maré Zero Condição 1
Tabela 7.16 – Resultados Estabilidade Maré Zero Condição 2
Tabela 7.17 – Resultados Estabilidade Maré Zero Condição 3
Tabela 7.18 – Resultados Estabilidade Maré Zero Condição 4
3.1.2.1: Área 0º a 30º [m.deg] 3,151 23,565 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 35,553 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 11,987 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 1,231 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 29,100 Aprovado
3.1.2.4: GMt inicial [m] 0,150 3,353 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus
3.1.2.1: Área 0º a 30º [m.deg] 3,151 22,138 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 33,060 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 10,922 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 1,138 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 28,200 Aprovado
3.1.2.4: GMt inicial [m] 0,150 3,169 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus
3.1.2.1: Área 0º a 30º [m.deg] 3,151 20,592 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 30,358 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 9,767 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 1,037 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 26,400 Aprovado
3.1.2.4: GMt inicial [m] 0,150 2,965 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus
3.1.2.1: Área 0º a 30º [m.deg] 3,151 16,128 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 22,562 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 6,433 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 0,746 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 23,600 Aprovado
3.1.2.4: GMt inicial [m] 0,150 2,386 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus
3.1.2.1: Área 0º a 30º [m.deg] 3,151 14,047 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 18,927 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 4,880 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 0,610 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 22,700 Aprovado
3.1.2.4: GMt inicial [m] 0,150 2,116 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus

42
Tabela 7.19 – Resultados Estabilidade Maré Zero Condição 5
Tabela 7.20 – Resultados Estabilidade Maré Zero Condição 6
Tabela 7.21 – Resultados Estabilidade Maré Zero Condição 7
Tabela 7.22 – Resultados Estabilidade Maré Zero Condição 8
Tabela 7.23 – Resultados Estabilidade Maré Zero Condição 9
3.1.2.1: Área 0º a 30º [m.deg] 3,151 12,300 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 15,875 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 3,575 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 0,497 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 21,800 Aprovado
3.1.2.4: GMt inicial [m] 0,150 1,885 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus
3.1.2.1: Área 0º a 30º [m.deg] 3,151 12,484 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 16,195 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 3,712 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 0,509 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 21,800 Aprovado
3.1.2.4: GMt inicial [m] 0,150 1,909 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus
3.1.2.1: Área 0º a 30º [m.deg] 3,151 12,636 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 16,461 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 3,825 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 0,519 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 21,800 Aprovado
3.1.2.4: GMt inicial [m] 0,150 1,931 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus
3.1.2.1: Área 0º a 30º [m.deg] 3,151 12,821 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 16,784 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 3,963 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 0,531 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 21,800 Aprovado
3.1.2.4: GMt inicial [m] 0,150 1,955 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus
3.1.2.1: Área 0º a 30º [m.deg] 3,151 13,204 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 17,453 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 4,249 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 0,556 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 22,700 Aprovado
3.1.2.4: GMt inicial [m] 0,150 2,002 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus

43
Tabela 7.24 – Resultados Estabilidade Maré Zero Condição 10
Tabela 7.25 – Resultados Estabilidade Maré Zero Condição 11
Como pode ser observado, todas as condições de carregamento do load-out foram
também aprovadas na estabilidade. Sendo assim, pode-se afirmar que é possível realizar
o carregamento do convés móvel ainda no momento de maré zero. Além disso, como
ainda há certa reserva de flutuabilidade, a embarcação ainda pode ter seus tanques
restantes carregados, desde que as devidas análises sejam realizadas.
7.3.3 Maré Alta – d = 6.5m
Por fim, na condição de maré alta, foram também encontradas todas as condições
de equilíbrio sem trim, sem banda e, dessa vez, com calado de 6,5m utilizando-se do
carregamento de alguns tanques de carga. Mas, dessa vez, além dos tanques de carga de
água, foi necessário preencher também tanques de carga de óleo diesel para não haver
trim.
Esta última condição de maré é a que pede o maior calado da embarcação e, com
isso, seria de se imaginar que o navio teria bem mais estabilidade nela. Entretanto, no
decorrer das análises não foi isso que foi observado. Algumas condições de
carregamento apresentavam reprovação nos critérios de estabilidade e isso era causado
porque o ZG estava muito alto.
3.1.2.1: Área 0º a 30º [m.deg] 3,151 10,396 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 12,548 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 2,152 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 0,373 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 20,900 Aprovado
3.1.2.4: GMt inicial [m] 0,150 1,638 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus
3.1.2.1: Área 0º a 30º [m.deg] 3,151 10,688 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 13,059 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 2,371 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 0,392 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 20,900 Aprovado
3.1.2.4: GMt inicial [m] 0,150 1,677 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus
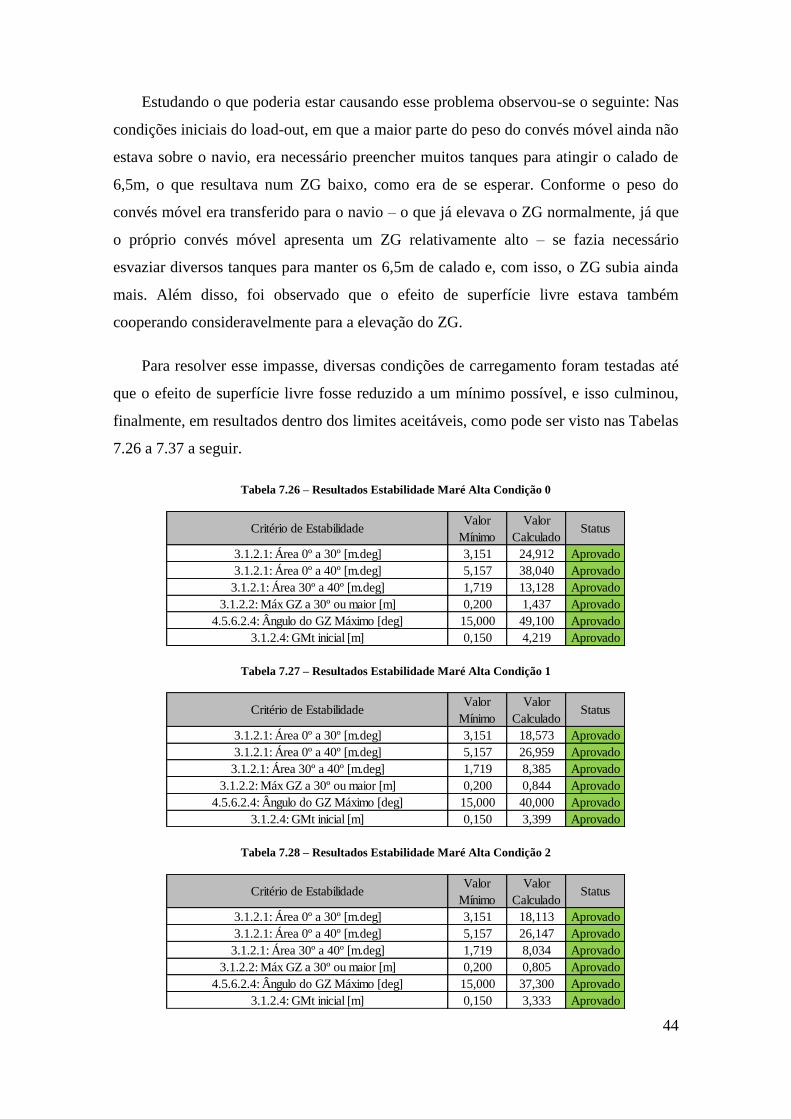
44
Estudando o que poderia estar causando esse problema observou-se o seguinte: Nas
condições iniciais do load-out, em que a maior parte do peso do convés móvel ainda não
estava sobre o navio, era necessário preencher muitos tanques para atingir o calado de
6,5m, o que resultava num ZG baixo, como era de se esperar. Conforme o peso do
convés móvel era transferido para o navio – o que já elevava o ZG normalmente, já que
o próprio convés móvel apresenta um ZG relativamente alto – se fazia necessário
esvaziar diversos tanques para manter os 6,5m de calado e, com isso, o ZG subia ainda
mais. Além disso, foi observado que o efeito de superfície livre estava também
cooperando consideravelmente para a elevação do ZG.
Para resolver esse impasse, diversas condições de carregamento foram testadas até
que o efeito de superfície livre fosse reduzido a um mínimo possível, e isso culminou,
finalmente, em resultados dentro dos limites aceitáveis, como pode ser visto nas Tabelas
7.26 a 7.37 a seguir.
Tabela 7.26 – Resultados Estabilidade Maré Alta Condição 0
Tabela 7.27 – Resultados Estabilidade Maré Alta Condição 1
Tabela 7.28 – Resultados Estabilidade Maré Alta Condição 2
3.1.2.1: Área 0º a 30º [m.deg] 3,151 24,912 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 38,040 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 13,128 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 1,437 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 49,100 Aprovado
3.1.2.4: GMt inicial [m] 0,150 4,219 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus
3.1.2.1: Área 0º a 30º [m.deg] 3,151 18,573 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 26,959 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 8,385 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 0,844 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 40,000 Aprovado
3.1.2.4: GMt inicial [m] 0,150 3,399 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus
3.1.2.1: Área 0º a 30º [m.deg] 3,151 18,113 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 26,147 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 8,034 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 0,805 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 37,300 Aprovado
3.1.2.4: GMt inicial [m] 0,150 3,333 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus
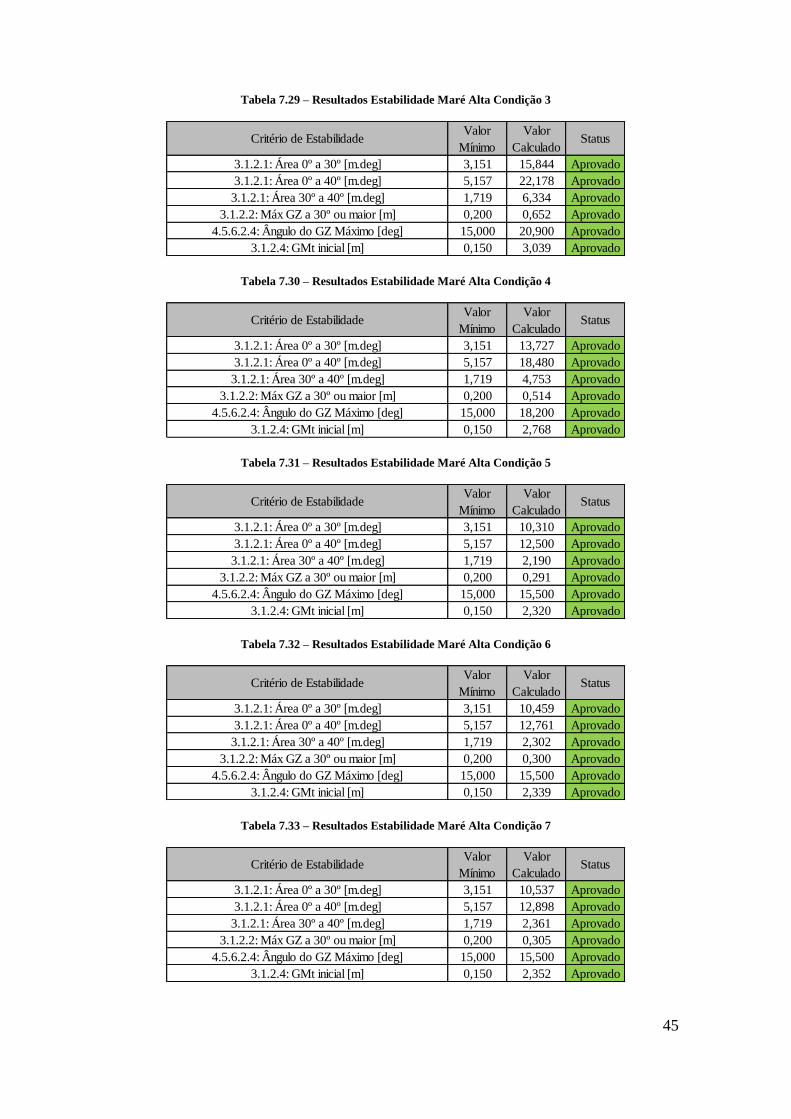
45
Tabela 7.29 – Resultados Estabilidade Maré Alta Condição 3
Tabela 7.30 – Resultados Estabilidade Maré Alta Condição 4
Tabela 7.31 – Resultados Estabilidade Maré Alta Condição 5
Tabela 7.32 – Resultados Estabilidade Maré Alta Condição 6
Tabela 7.33 – Resultados Estabilidade Maré Alta Condição 7
3.1.2.1: Área 0º a 30º [m.deg] 3,151 15,844 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 22,178 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 6,334 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 0,652 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 20,900 Aprovado
3.1.2.4: GMt inicial [m] 0,150 3,039 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus
3.1.2.1: Área 0º a 30º [m.deg] 3,151 13,727 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 18,480 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 4,753 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 0,514 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 18,200 Aprovado
3.1.2.4: GMt inicial [m] 0,150 2,768 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus
3.1.2.1: Área 0º a 30º [m.deg] 3,151 10,310 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 12,500 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 2,190 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 0,291 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 15,500 Aprovado
3.1.2.4: GMt inicial [m] 0,150 2,320 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus
3.1.2.1: Área 0º a 30º [m.deg] 3,151 10,459 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 12,761 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 2,302 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 0,300 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 15,500 Aprovado
3.1.2.4: GMt inicial [m] 0,150 2,339 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus
3.1.2.1: Área 0º a 30º [m.deg] 3,151 10,537 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 12,898 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 2,361 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 0,305 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 15,500 Aprovado
3.1.2.4: GMt inicial [m] 0,150 2,352 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus
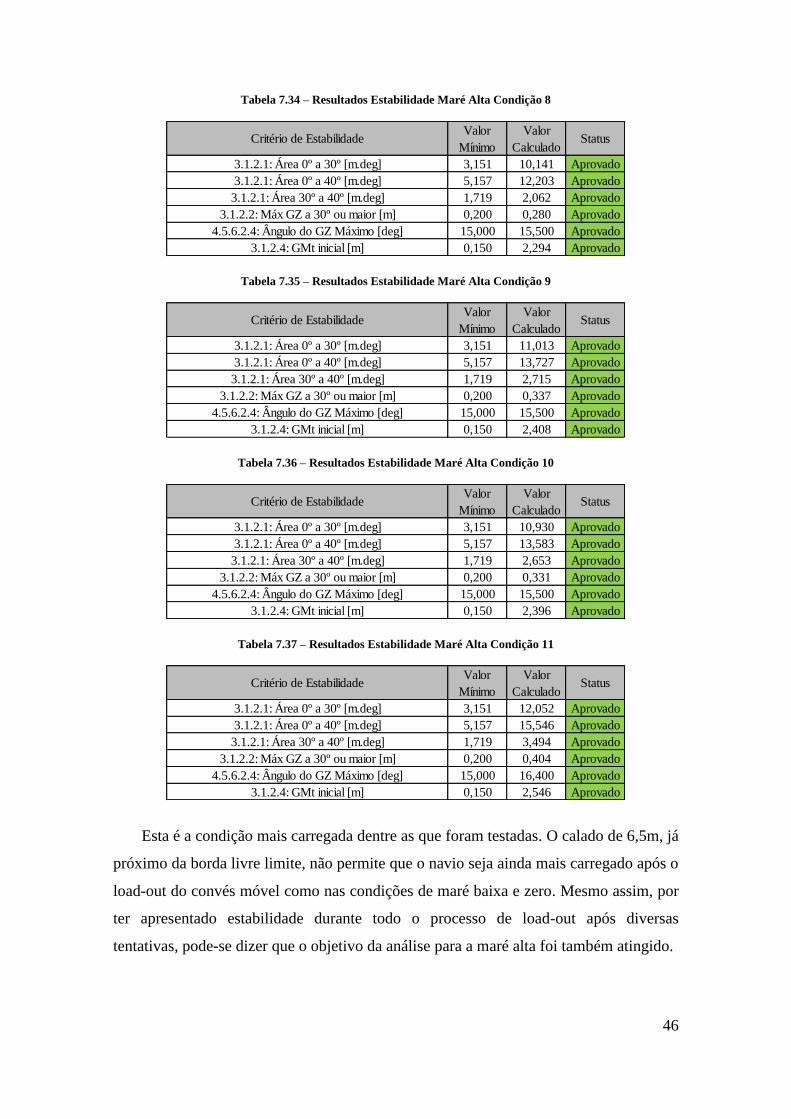
46
Tabela 7.34 – Resultados Estabilidade Maré Alta Condição 8
Tabela 7.35 – Resultados Estabilidade Maré Alta Condição 9
Tabela 7.36 – Resultados Estabilidade Maré Alta Condição 10
Tabela 7.37 – Resultados Estabilidade Maré Alta Condição 11
Esta é a condição mais carregada dentre as que foram testadas. O calado de 6,5m, já
próximo da borda livre limite, não permite que o navio seja ainda mais carregado após o
load-out do convés móvel como nas condições de maré baixa e zero. Mesmo assim, por
ter apresentado estabilidade durante todo o processo de load-out após diversas
tentativas, pode-se dizer que o objetivo da análise para a maré alta foi também atingido.
3.1.2.1: Área 0º a 30º [m.deg] 3,151 10,141 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 12,203 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 2,062 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 0,280 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 15,500 Aprovado
3.1.2.4: GMt inicial [m] 0,150 2,294 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus
3.1.2.1: Área 0º a 30º [m.deg] 3,151 11,013 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 13,727 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 2,715 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 0,337 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 15,500 Aprovado
3.1.2.4: GMt inicial [m] 0,150 2,408 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus
3.1.2.1: Área 0º a 30º [m.deg] 3,151 10,930 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 13,583 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 2,653 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 0,331 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 15,500 Aprovado
3.1.2.4: GMt inicial [m] 0,150 2,396 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus
3.1.2.1: Área 0º a 30º [m.deg] 3,151 12,052 Aprovado
3.1.2.1: Área 0º a 40º [m.deg] 5,157 15,546 Aprovado
3.1.2.1: Área 30º a 40º [m.deg] 1,719 3,494 Aprovado
3.1.2.2: Máx GZ a 30º ou maior [m] 0,200 0,404 Aprovado
4.5.6.2.4: Ângulo do GZ Máximo [deg] 15,000 16,400 Aprovado
3.1.2.4: GMt inicial [m] 0,150 2,546 Aprovado
Critério de EstabilidadeValor
Mínimo
Valor
CalculadoStatus
47
8. Conclusões e Trabalhos Futuros
Como visto nos capítulos anteriores deste relatório, nas 11 condições de
carregamento estudadas para cada uma das três marés, o navio se manteve em equilíbrio
sem trim e sem banda e atendeu a todos os requisitos de estabilidade da IMO. Isso quer
dizer que, para todo o procedimento de load-out / load-in do convés móvel no convés
principal do PSV, foram obtidos resultados satisfatórios e que comprovam que este
novo sistema de carregamento pode ser viável.
Além disso, é importante ressaltar que a carga do convés móvel para a qual este
estudo foi desenvolvido – os risers de perfuração citados no item 4.2.1 – era a carga
mais crítica considerada no projeto preliminar do convés móvel [1] e, como tal,
apresentava o maior peso e a mais elevada posição vertical do centro de gravidade.
Desse modo, os resultados indicam que para outras cargas do convés móvel, menos
críticas, os resultados devem se mostrar ainda melhores.
Outra observação importante é o fato de que nas análises relativas à condição de
maré alta – calado 6.5m – foram observados os resultados mais restritos na estabilidade,
apesar de se esperar justamente o contrário. Por esse motivo, poderia ser sugerido que o
procedimento de load-out/load-in fosse realizado apenas nas condições de maré baixa e
maré zero a fim de garantir maior possibilidade de sucesso da operação.
Por outro lado, a ideia de limitar a possibilidade de janela para realização do
procedimento pode resultar na ineficiência do processo e até na impossibilidade de se
realizar a operação de load-out/load-in. Somando isso ao fato de que, por meio da
redução dos efeitos de superfície livre nos tanques, essas restrições na estabilidade
foram superadas e foram encontrados resultados satisfatórios mesmo nessa condição de
maré alta, não há motivo, então, para excluir essa maré da janela de operação possível.
Conclui-se, por fim, que os resultados adequados às expectativas e o atendimento a
todas as premissas do projeto afirmam a viabilidade técnica do sistema de carregamento
com o convés móvel do ponto de vista do equilíbrio e da estabilidade da embarcação.

48
8.1 Trabalhos Futuros
Como complemento ao presente trabalho sugere-se que sejam feitos estudos que
incluam mais embarcações, com diferentes capacidades. Isso vai requerer também
estudos de adaptação do próprio convés móvel a essas diferentes capacidades - um PSV
3000, por exemplo, vai requerer um convés móvel menor que o estudado neste projeto -,
mas vai também dar uma abrangência maior ao projeto.
Outra possibilidade são os estudos de viabilidade econômica e de logística, no que
se refere à implantação deste novo sistema no porto. Esses estudos podem ser simples,
mas trarão mais consistência ao projeto e também mais garantia de sucesso em sua
implantação.
Por fim, estudos sobre possíveis adaptações na estrutura dos PSVs para receber o
convés móvel podem também ser importantes para tornar o projeto mais aperfeiçoado.
49
9. Referências Bibliográficas
1. PEREIRA, F. P. B., Projeto Preliminar de Sistema de Carregamento para PSVs,
2014.
2. Catálogo Sarens Group, SPMTs Information. Disponível em:
<http://www.sarens.com/media/catalog/SPD/SPMT/Kamag%202400/Data%20Kama
g%202400.pdf >. Acesso em: 13/03/2016.
3. Instituto Hidrográfico da Marinha de Portugal, Glossário Científico - Marés.
Disponível em: <http://www.hidrografico.pt/glossario-cientifico-mares.php>. Acesso
em: 03/03/2016.
4. Praticagem RJ, Tábua de Marés. Disponível em: <http://www.praticagem-
rj.com.br/>. Acesso em: 16/02/2016.
5. IMO, Resolution A749(18) - Code on Intact Stability for all Types of Ships Covered
by IMO Instruments, International Maritime Organization, 1993.
6. PIMENTEL, B. e LEVY, V., Relatório 2 - Projeto de Sistemas Oceânicos II.
Disponível em: <http://www.oceanica.ufrj.br/deno/prod_academic/relatorios/2013/
victor_braulio/relat2/relat2braulyovictor.htm>. Acesso em: 15/02/2016.