universidade federal do rio de janeiro departamento de...
TRANSCRIPT

UNIVERSIDADE FEDERAL DO RIO DE JANEIRO Departamento de Engenharia Mecânica
DEM/POLI/UFRJ
PROJETO MECÂNICO DE UM AEROGERADOR DE EIXO HORIZONTAL
Daniel Vercillo Carneiro Garcia
Projeto de Graduação apresentado ao Curso de
Engenharia Mecânica da Escola Politécnica,
Universidade Federal do Rio de Janeiro, como
parte dos requisitos necessários à obtenção do
título de Engenheiro.
Orientador: Prof. Flávio de Marco Filho, D. Sc.
Rio de Janeiro, RJ - BRASIL
Março de 2016
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO Departamento de Engenharia Mecânica
DEM/POLI/UFRJ
PROJETO MECÂNICO DE UM AEROGERADOR DE EIXO HORIZONTAL
Daniel Vercillo Carneiro Garcia
PROJETO FINAL SUBMETIDO AO CORPO DOCENTE DO DEPARTAMENTO DE
ENGENHARIA MECÂNICA DA ESCOLA POLITÉCNICA DA UNIVERSIDADE
FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS
NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE ENGENHEIRO MECÂNICO.
Aprovado por:
________________________________________________
Orientador: Prof. Flavio de Marco Filho, D. Sc.
________________________________________________
Prof. Ricardo Eduardo Musafir, D. Sc.
________________________________________________
Prof. Vitor Ferreira Romano, Dott.Ric.
RIO DE JANEIRO, RJ - BRASIL
MÊS DE 2016

I
Daniel Vercillo Carneiro Garcia.
Projeto mecânico de um aerogerador de eixo horizontal /
Daniel Vercillo Carneiro Garcia – Rio de Janeiro: UFRJ /
Escola Politécnica, 2016.
IX,91p.:il.; 29,7 cm
Orientador: Flávio de Marco Filho, D. Sc.
Projeto de Graduação – UFRJ / Escola Politécnica / Curso
de Engenharia Mecânica, 2016.
Referências Bibliográficas: p. 67-68
1. Aerogerador. 2. Turbina Eólica. 3. Projeto. 4.Geração
de Energia.
I. Filho, Flávio de Marco. II. Universidade Federal do Rio
de Janeiro, Escola Politécnica, Curso de Engenharia
Mecânica. III. Projeto de um protótipo de um aerogerador
para Utilização em pesquisa e desenvolvimento de
tecnologias na área de geração eólica.
II
AGRADECIMENTO
A Denise Cristina Vercillo Carneiro Garcia e Sergio Monteiro Garcia,
respectivamente minha mãe e meu pai, por me apoiar e aconselhar sempre nas minhas
decisões sendo os principais responsáveis pela minha formação de caráter.
Ao meu tio, Moisés Fortes, pelo incentivo à minha decisão de seguir a carreira de
engenharia, pelos conselhos e inspirações que me passou.
Ao meu irmão, Davi Vercillo Carneiro Garcia, pelos incentivos, cobranças e inspirações,
que me passou ao longo da minha vida.
A Deborah Maria Martins da Silveira, minha namorada, por estar sempre ao meu lado, me
auxiliando a focar na realização deste trabalho.
A família e aos Amigos, pelos momentos de alegria e descontração durante toda a minha
formação acadêmica.
Aos Professores, por transmitirem seus conhecimentos e experiências.
Especialmente ao Professor e Orientador Flávio, pelo incentivo, apoio e conselhos dados
para a efetuação desse projeto.
III
Resumo do Projeto de Graduação apresentado à Escola Politécnica/ UFRJ como parte
dos requisitos necessários para a obtenção do grau de Engenheiro Mecânico.
PROJETO MECÂNICO DE UM AEROGERADOR DE EIXO HORIZONTAL
Daniel Vercillo Carneiro Garcia
Março/2016
Orientador: Flávio de Marco Filho. D. Sc.
Curso: Engenharia Mecânica
Uma das fontes de energia sustentável, alvo de diversos estudos, é a energia eólica, cuja
sua utilização tem aumentado ao longo da última década pelo fato de possuir uma boa
eficiência e de ser uma fonte de energia limpa. Este projeto final de graduação visa
desenvolver um projeto de aerogerador de eixo horizontal através da combinação de um
estudo aerodinâmico, o dimensionamento de diversos componentes mecânicos e seleção
de alguns componentes comerciais, junto com o desenvolvimento de desenhos técnicos
referentes a cada um dos componentes do presente projeto. Ao conceber um projeto de
uma turbina eólica, tem-se como resultado uma contribuição para o desenvolvimento e
notoriedade das tecnologias que envolvem o desenvolvimento e a produção de uma
aerogerador.
Palavras-chave: Aerogerador, Turbina Eólica, Protótipo, Geração de Energia.

IV
Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulfillment of
the requirements for the degree of Mechanical Engineer.
MECHANICAL PROJECT OF A HORIZONTAL AXIS WIND TURBINE
Daniel Vercillo Carneiro Garcia
March/2016
Advisor: Flávio de Marco Filho, D. Sc.
Course: Mechanical Engineering
One of the sources of sustainable energy, the subject of several studies, is wind energy,
which its use has increased over the last decade, since it has a good efficiency and its
clean energy source. This undergraduate final project aim to develop a horizontal axis
wind turbine design by combining an aerodynamic study, the design of several
mechanical components and selection of some commercial components, along with the
development of technical drawings related to each of this components project. When
designing a design of a wind turbine, has as a result a contribution to the development
and well known technologies involving the development and production of a wind
turbine.
Keywords: Wind Turbine, Prototype, Wind Power, Power Generation
V
Sumário
1 Introdução 1
2 Fontes de Energia 2
2.1 - Breve história das fontes de energia ...................................... 2
2.2 - Papel das fontes energia em uma sociedade .......................... 3
2.3 - Tipos de fontes de energia ..................................................... 3
2.4 - Energia eólica ......................................................................... 4
2.5 - Energia eólica no Brasil ......................................................... 7
3 Turbinas Eólicas (Aerogeradores) 9
3.1 - Fundamentos dos aerogeradores ............................................. 9
3.2 - Aerogeradores de eixo horizontal (HAWT) ........................... 11
4 Projeto Mecânico de um Aerogeradores 13
4.1 - Principio de funcionamento ..................................................... 13
4.2 - Considerações iniciais ............................................................. 14
4.3 - Estudo aerodinâmico do projeto ............................................. 14
4.4 - Projeto da pá do aerogerador ................................................. 22
4.5 - Projeto do cubo do aerogerador .............................................. 24
4.6 - Seleção do gerador elétrico ..................................................... 25
4.7 - Seleção do freio ...................................................................... 28
4.8 - Projeto do multiplicador de velocidades ............................... 29
4.8.1 - Projeto das engrenagens do multiplicador de velocidades 29
4.8.2 - Projeto das arvores do multiplicador de velocidades ......... 42
4.8.3 - Seleção dos rolamentos do multiplicador de velocidades 54
4.9 - Projeto do suporte do conjunto ............................................... 56
4.10 - Seleção do acoplador ............................................................... 57
4.11 - Projeto da nacele .................................................................... 58
4.12 - Dimensionamento da torre do aerogerador .............................. 59
4.13 - Projeto do sistema de guinada (yaw) ...................................... 63
5 Documentação gráfica do projeto 65
6 Conclusão 66
Bibliografia 67
Apêndice A
Apêndice B
1
Capítulo 1
Introdução
Estudando a história das civilizações e todo o seu desenvolvimento social, político
e econômico, observa-se que o mesmo está intrinsicamente ligado ao descobrimento,
aprimoramento e ao uso de diversas fontes de energia. Cita-se como principais: energia
hidráulica, energia fóssil, energia nuclear, energia solar e energia eólica.
Considerando ser notório que algumas dessas fontes de energia são seriamente
prejudiciais e danosas ao meio ambiente e, buscando o desenvolvimento sustentável da
civilização, priorizou a busca e incentivo à pesquisa e aos estudos no ramo de geração de
energia com o intuito de: descobrir novas fontes de energia que sejam limpas, rentáveis e
confiáveis; bem como aprimorar algumas outras, há muito utilizadas, que sejam limpas.
Uma das fontes de energia já utilizada e que é alvo de diversas pesquisas, é a
energia eólica, cuja sua utilização tem aumentado ao longo da última década, tanto no
mundo como no Brasil. Assim, o presente trabalho de graduação objetiva realizar uma
análise inicial para o desenvolvimento de um projeto de turbina eólica tendo como
finalidade o esboço de um protótipo de um aerogerador de arvore horizontal.
A tendência mundial de buscar desenvolver e implementar fontes alternativas de
energia que sejam sustentáveis, e, especialmente, em decorrência do aumento na
utilização e desenvolvimento de turbinas eólicas, este trabalho tem como motivação
primordial analisar uma das alternativas a geração de energia, por meio do
dimensionamento e da seleção dos componentes de um aerogerador de pequeno porte
para: uso doméstico; bem como em pesquisas de desenvolvimento desta tecnologia.
O presente trabalho busca desenvolver, analisar e esboçar o projeto de um
protótipo de aerogerador de arvore horizontal, como acima mencionado, passando a
apresentar as memórias de cálculo e desenhos técnicos pertinentes.
2
Capítulo 2
Fontes de Energia
2.1 – Breve história das Fontes de Energia
Ao longo da história, os homens buscam continuamente, desenvolver e
aperfeiçoar suas técnicas de captação e extração de energia da natureza.
Nos primórdios da nossa era, a fonte primordial de energia eram próprios
músculos (energia corporal). Com o passar do tempo, outras fontes de energia foram
sendo aproveitadas e incorporadas à cadeia produtiva, tais como: tração animal, fogo,
água, vento.
Durante a primeira revolução industrial (século XVIII), os seres humanos foram
capazes de extrair novas fontes de energia da natureza a partir de combustíveis fosseis
visando alimentar as recém descobertas máquinas a vapor.
Posteriormente, com a segunda revolução industrial (século XIX), verifica-se o
aparecimento da eletricidade, o desenvolvimento dos motores a gasolina ou demais
derivados do petróleo e, assim, um notável desenvolvimento nas explorações petrolíferas.
Em meados do século XX, surge a energia nuclear, que tem como princípio a
fissão nuclear.
Figura 1.1 – Exemplos das energias utilizadas durante os séculos.
Atualmente, buscam-se novas fontes de energia sustentável com novas
tecnologias de extração e captação a partir da natureza, e no desenvolvimento de maneiras
eficientes e mais rentáveis de utilização das fontes de energia já descobertas.
3
2.2 – Papel das Fontes de Energia em uma sociedade
Nas diversas atividades de produção ou na distribuição de consumo de bens e
serviços faz-se necessário a utilização cada vez maior de energia, uma vez que a procura
pelo desenvolvimento é sempre continua.
Adicionalmente, a energia é indispensável à sobrevivência de uma civilização,
pois proporciona meios para auxiliar e manter a vida humana – calor para aquecimento,
para cozinhar alimentos, energia elétrica para as indústrias, ou força para o transporte e
para o trabalho mecânico.
É dever da sociedade atual promover a realização de pesquisas visando o
desenvolvimento e a difusão de tecnologias ambientalmente sustentáveis, bem como de
estimular o uso de fontes de energias limpas e renováveis, com programas educacionais
para evitar o seu desperdício.
2.2 – Tipos de Fontes de Energia
É possível dividir os tipos de fontes de energia de duas formas distintas: fontes de
energia convencionais ou fontes de energia alternativas; e fontes de energia não
renováveis ou fontes de energia renováveis.
As fontes de energia convencionais, de uma maneira geral, já estão plenamente
desenvolvidas tecnologicamente e já são tradicionalmente utilizadas, tais como: energia
térmica, energia potencial gravitacional e energia nuclear.
Enquanto que as fontes de energia alternativas se encontram ainda em
desenvolvimento tecnológico, e, portanto, não são muito utilizadas. Pode-se citar como
exemplos a energia eólica, energia de biomassa, energia solar, energia das marés, energia
do hidrogênio e etc.
As fontes de energia não renováveis são caracterizadas pela de extração matéria-
prima finita da natureza. Os principais exemplos de fontes de energia não renováveis são
os combustíveis fósseis e nucleares.
Enquanto que as fontes de energia renováveis, se caracterizam por fazerem parte
da natureza e serem, assim, naturalmente reabastecidas. Os principais exemplos de fonte
de energia renováveis são o sol, o vento, a chuva, as marés e a calor do solo.
4
2.3 – Energia Eólica.
Energia eólica é fruto da transformação da energia do vento em energia útil, tal
como na utilização de aerogeradores para produzir eletricidade, moinhos de vento para
produzir energia mecânica ou velas para impulsionar veleiros. A energia eólica, enquanto
alternativa aos combustíveis fósseis, é renovável, está permanentemente disponível, pode
ser produzida em qualquer região, é limpa, não produz gases de efeito de estufa durante
a produção e requer menos terreno para sua instalação.
Figura 2.1 – Utilizações distintas para a energia eólica.
O vento é fruto do movimento do ar ao longo da superfície da Terra, sendo
influenciado pelas zonas de altas e baixas pressões atmosféricas. O sol não aquece a
superfície de forma regular, em razão da diferença no ângulo de incidência dos raios
solares que não é uniforme ao longo do globo e, também, da superfície na qual incide os
raios solares ser coberto ou não por vegetação.
As massas de água, como os oceanos, aquecem e esfriam mais lentamente do que
em terra. A energia em forma de calor absorvida pela superfície da Terra é transferida
para a atmosfera e, uma vez que o ar aquecido é menos denso que o ar frio, sobe acima
do ar esfriado para formar áreas de elevada pressão atmosférica criando diferenciais de
pressão. A rotação da Terra arrasta a atmosfera envolvente, o que provoca turbulência. É
a conjugação de todos estes fenómenos que provoca a alteração constante do padrão de
ventos.
5
Figura 2.2 – Diagrama do fluxo de vento ao longo da Terra.
Na atualidade, grandes turbinas posicionadas em lugares com grande
disponibilidade de vento para mover aerogeradores. Essas turbinas têm a forma de um
cata-vento ou um moinho que produz energia elétrica com o movimento das pás. É
necessário o agrupamento de diversos aerogeradores, resultando em parques eólicos, para
que a produção de energia se torne rentável, no entanto, podem ser usados
individualmente, para alimentar localidades remotas e distantes da rede de transmissão.
[1]
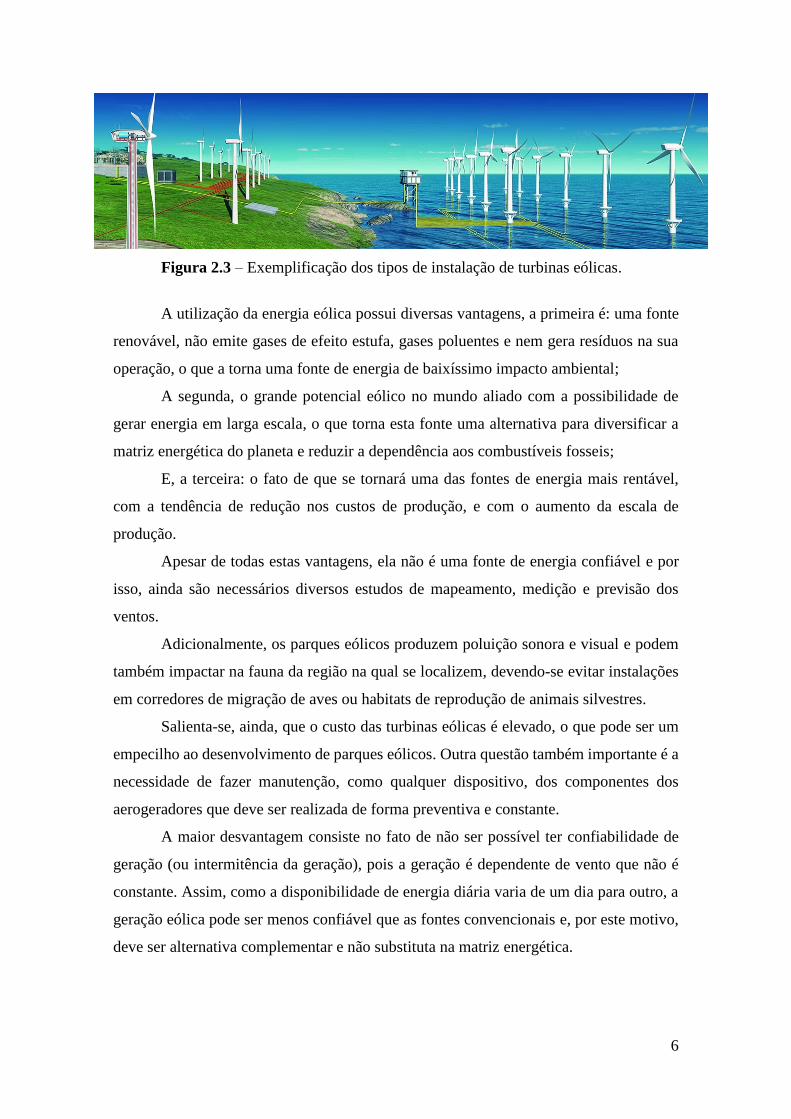
Existem dois tipos de instalação de aerogeradors, sendo estes “onshore” (em terra)
ou “offshore” (marítima). As instalações “offshore” possuem o custo de instalação mais
alto, quando comparado com uma instalação “onshore”, entretanto na offshore o potencial
de geração é maior. Por este motivo a tecnologia offshore é utilizada em países com
pequena extensão territorial, com pouco espaço disponível para as instalações em terra.
O sistema de geração de energia elétrica pode ser “on-grid” (interligado à rede)
ou off-grid (isolado da rede). No sistema “on-grid” a geração de energia é interligada à
rede elétrica do Sistema Interligado Nacional (SIN) o qual é mais utilizado
comercialmente. Já no sistema off-grid a geração é isolada da rede convencional
trabalhando de forma autônoma, aplicado em regiões rurais ou marítimas afastadas em
que não é viável traspor linhas de transmissão.
6
Figura 2.3 – Exemplificação dos tipos de instalação de turbinas eólicas.
A utilização da energia eólica possui diversas vantagens, a primeira é: uma fonte
renovável, não emite gases de efeito estufa, gases poluentes e nem gera resíduos na sua
operação, o que a torna uma fonte de energia de baixíssimo impacto ambiental;
A segunda, o grande potencial eólico no mundo aliado com a possibilidade de
gerar energia em larga escala, o que torna esta fonte uma alternativa para diversificar a
matriz energética do planeta e reduzir a dependência aos combustíveis fosseis;
E, a terceira: o fato de que se tornará uma das fontes de energia mais rentável,
com a tendência de redução nos custos de produção, e com o aumento da escala de
produção.
Apesar de todas estas vantagens, ela não é uma fonte de energia confiável e por
isso, ainda são necessários diversos estudos de mapeamento, medição e previsão dos
ventos.
Adicionalmente, os parques eólicos produzem poluição sonora e visual e podem
também impactar na fauna da região na qual se localizem, devendo-se evitar instalações
em corredores de migração de aves ou habitats de reprodução de animais silvestres.
Salienta-se, ainda, que o custo das turbinas eólicas é elevado, o que pode ser um
empecilho ao desenvolvimento de parques eólicos. Outra questão também importante é a
necessidade de fazer manutenção, como qualquer dispositivo, dos componentes dos
aerogeradores que deve ser realizada de forma preventiva e constante.
A maior desvantagem consiste no fato de não ser possível ter confiabilidade de
geração (ou intermitência da geração), pois a geração é dependente de vento que não é
constante. Assim, como a disponibilidade de energia diária varia de um dia para outro, a
geração eólica pode ser menos confiável que as fontes convencionais e, por este motivo,
deve ser alternativa complementar e não substituta na matriz energética.
7
2.4 –Energia Eólica no Brasil
O Brasil é um país cuja produção de eletricidade baseou-se, historicamente, na
dependência de duas principais matrizes: a hidrelétrica, predominante e prioritária, e a
termoelétrica, cuja maioria das usinas opera somente em tempos de baixa da primeira
matriz citada. Por esse motivo, a expansão da energia eólica no Brasil surge a partir da
necessidade de diversificação das fontes energéticas do país para que este fique menos
suscetível a crises no setor e também gere menos impactos ao meio ambiente.
Embora a produção de energia a partir dos ventos ainda seja pouco representativa
no território brasileiro, é perceptível a evolução do setor no país ao longo dos últimos
anos.
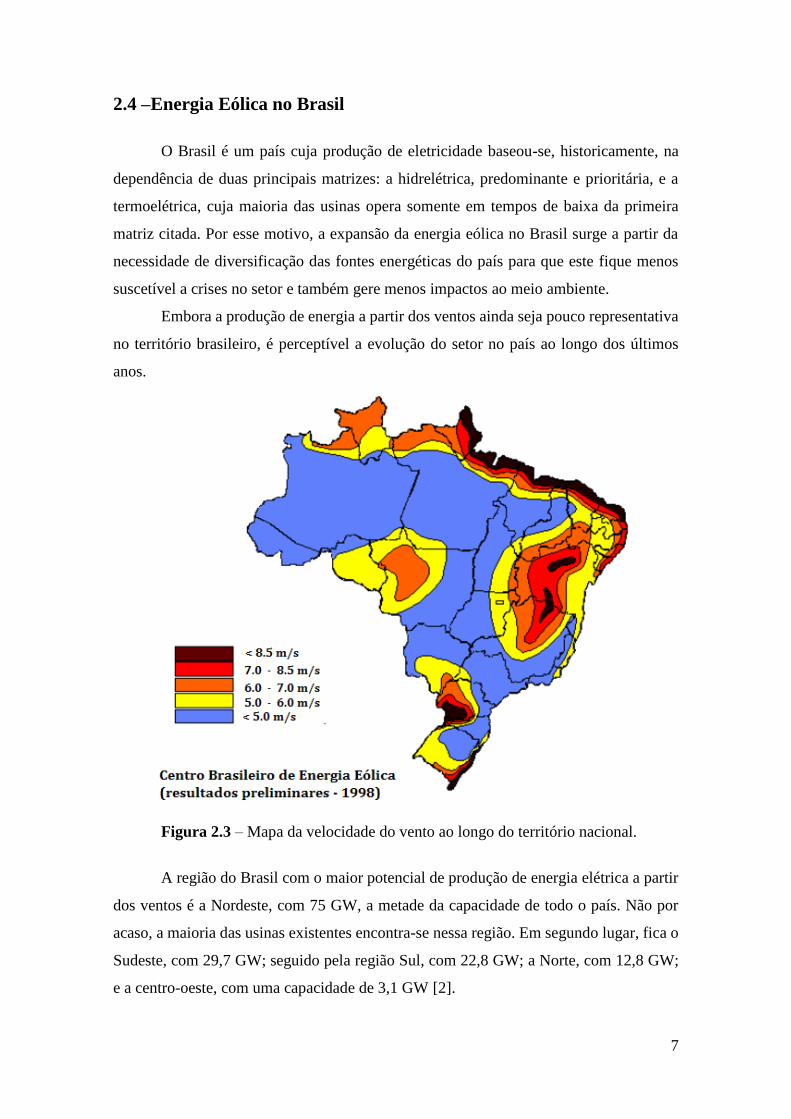
Figura 2.3 – Mapa da velocidade do vento ao longo do território nacional.
A região do Brasil com o maior potencial de produção de energia elétrica a partir
dos ventos é a Nordeste, com 75 GW, a metade da capacidade de todo o país. Não por
acaso, a maioria das usinas existentes encontra-se nessa região. Em segundo lugar, fica o
Sudeste, com 29,7 GW; seguido pela região Sul, com 22,8 GW; a Norte, com 12,8 GW;
e a centro-oeste, com uma capacidade de 3,1 GW [2].
8
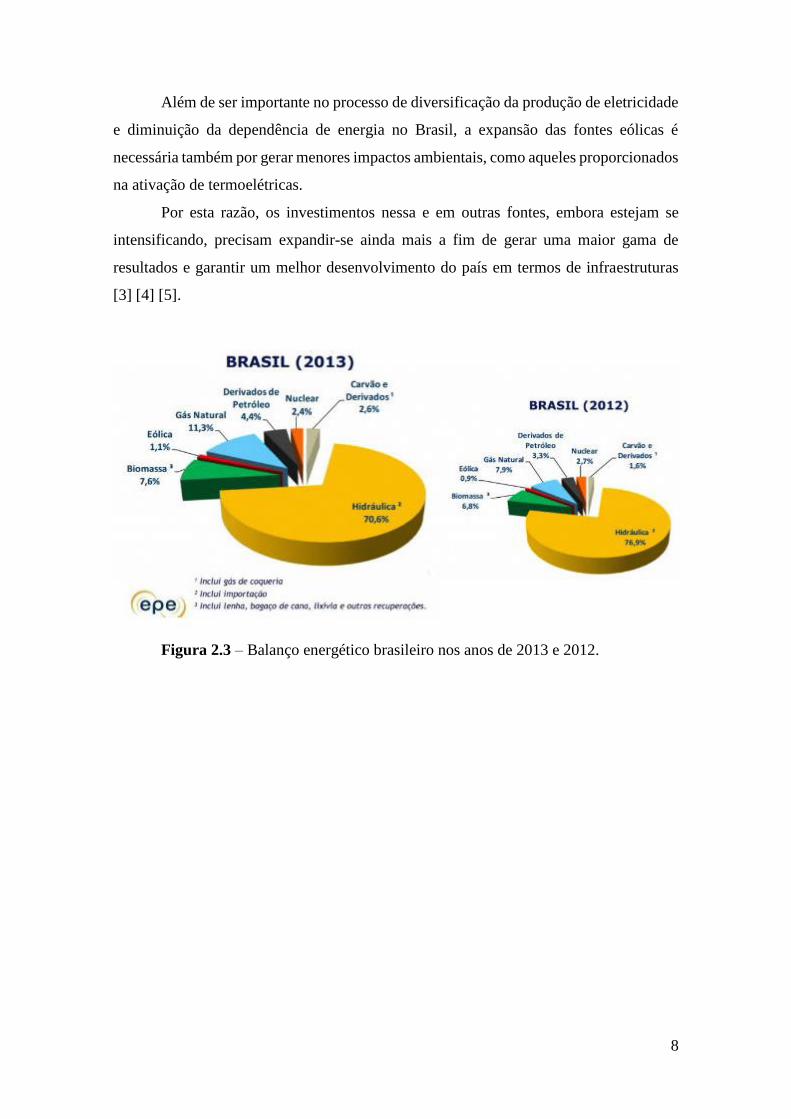
Além de ser importante no processo de diversificação da produção de eletricidade
e diminuição da dependência de energia no Brasil, a expansão das fontes eólicas é
necessária também por gerar menores impactos ambientais, como aqueles proporcionados
na ativação de termoelétricas.
Por esta razão, os investimentos nessa e em outras fontes, embora estejam se
intensificando, precisam expandir-se ainda mais a fim de gerar uma maior gama de
resultados e garantir um melhor desenvolvimento do país em termos de infraestruturas
[3] [4] [5].
Figura 2.3 – Balanço energético brasileiro nos anos de 2013 e 2012.
9
Capítulo 3
Turbinas Eólicas (Aerogeradores)
3.1 – Fundamentos dos aerogeradores
A energia eólica com a finalidade de conversão em energia elétrica pode ser obtida
de várias formas. A mais comum é por meio de aerogeradores. Um aerogerador é um
gerador elétrico integrado ao arvore de um cata-vento e que converte energia eólica em
energia elétrica.
Aerogeradores podem ser classificados de diversas maneiras: quanto ao tipo de
rotor, quanto ao porte, quanto ao número de pás, quanto a direção do vento.
Tipos de rotor
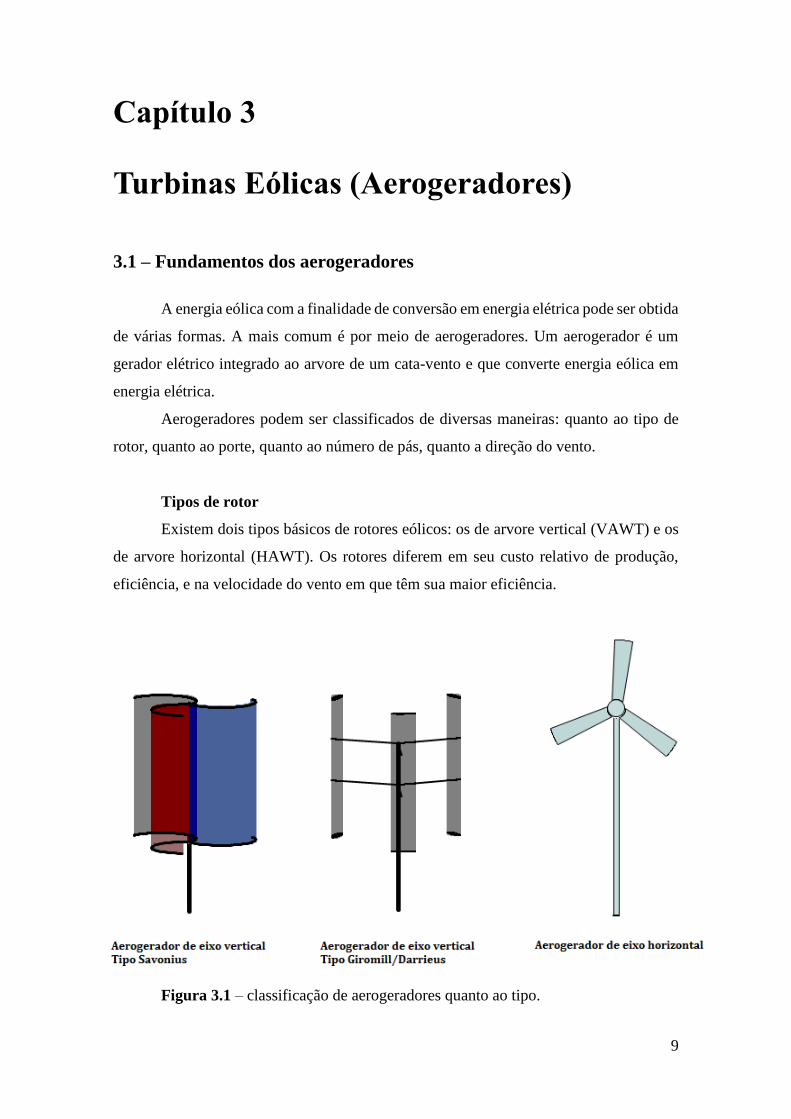
Existem dois tipos básicos de rotores eólicos: os de arvore vertical (VAWT) e os
de arvore horizontal (HAWT). Os rotores diferem em seu custo relativo de produção,
eficiência, e na velocidade do vento em que têm sua maior eficiência.
Figura 3.1 – classificação de aerogeradores quanto ao tipo.
10
Porte
Aerogeradores podem ser classificados de acordo com a quantidade de energia
que conseguem gerar. Existindo assim:
Pequeno porte - são aerogeradores de pequeno porte, geralmente para uso
residencial próprio, gerando no máximo 30kw ou menos alcançando até 37 m de altura e
13 m de diâmetro;
Médio porte - são aerogeradores capazes de alimentar uma vila, gerando no
máximo média de 30kw a 500kw e alcançando até 50m de altura com 30m de diâmetro;
Grande porte - são aerogeradores maiores, normalmente utilizados em parques
eólicos para a geração de energia, gerando no máximo 8mw de energia elétrica,
alcançando até 100 metros de altura.
Número de pás
Aerogeradores também podem ser classificados pelo número de pás que possuem,
podendo ter: uma pá, duas pás, três pás ou multipás.
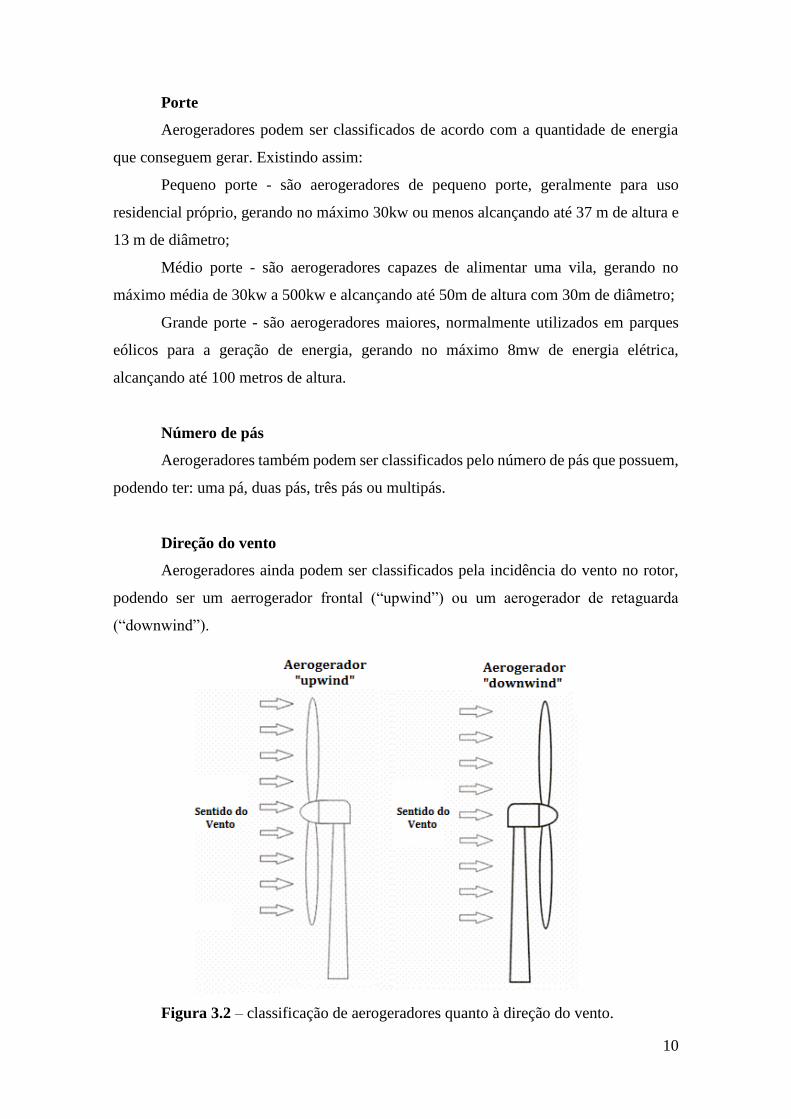
Direção do vento
Aerogeradores ainda podem ser classificados pela incidência do vento no rotor,
podendo ser um aerrogerador frontal (“upwind”) ou um aerogerador de retaguarda
(“downwind”).
Figura 3.2 – classificação de aerogeradores quanto à direção do vento.

11
3.2 – Aerogeradores de arvore horizontal (HAWT)
Os aerogeradores de arvore horizontal baseiam-se no princípio de funcionamento
dos moinhos de vento.
Apesar dos rotores com 2 pás serem mais eficientes, são mais instáveis e
propensos a turbulências, trazendo risco, o que não acontece nos rotores de 3 pás que são
muito mais estáveis, barateando seu custo e possibilitando a construção de aerogeradores
de mais altos e com grande capacidade de geração de energia. Em seu pico de geração de
energia, sua eficiência pode passar dos 45%.
Os rotores de 3 pás possuem uma boa relação entre coeficiente de potência, custo
e velocidade de rotação, bem como uma melhor estética comparada às turbinas de 2 pás.
Rotores multipás são mais utilizados para bombeamento de água de poços
artesianos, mas nada impede que sejam utilizados para geração de energia elétrica.
Impulsionados tanto por força de arrasto como por força de sustentação, esses rotores têm
seu pico de eficiência em ventos fracos, com uma eficiência de 30%
Aerogeradores de arvore horizontal são os mais utilizados em razão de seu
rendimento aerodinâmico ser superior aos de arvore vertical e estão menos expostos aos
esforços mecânicos, compensando seu maior custo.
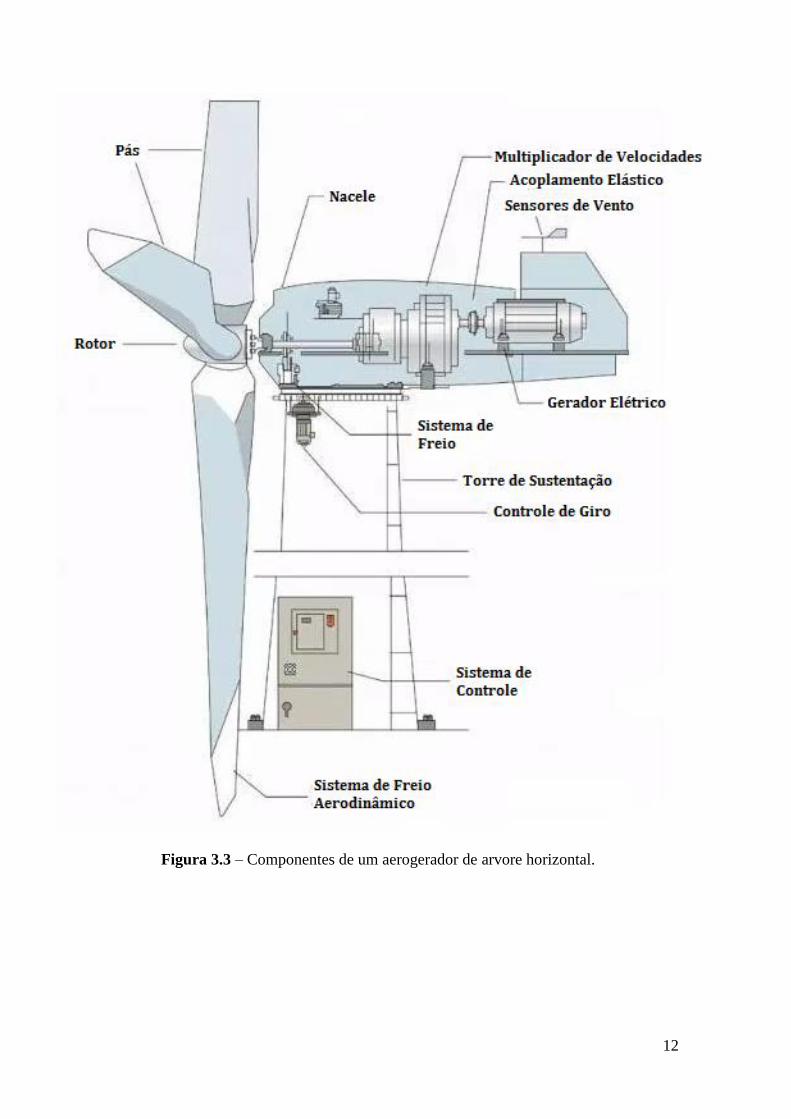
Um aerogerador de arvore horizontal possui diversos componentes, alguns deles
podem ser observados na figura abaixo.
12
Figura 3.3 – Componentes de um aerogerador de arvore horizontal.
13
Capítulo 4
Projeto mecânico de um aerogerador
4.1 – Principio de funcionamento
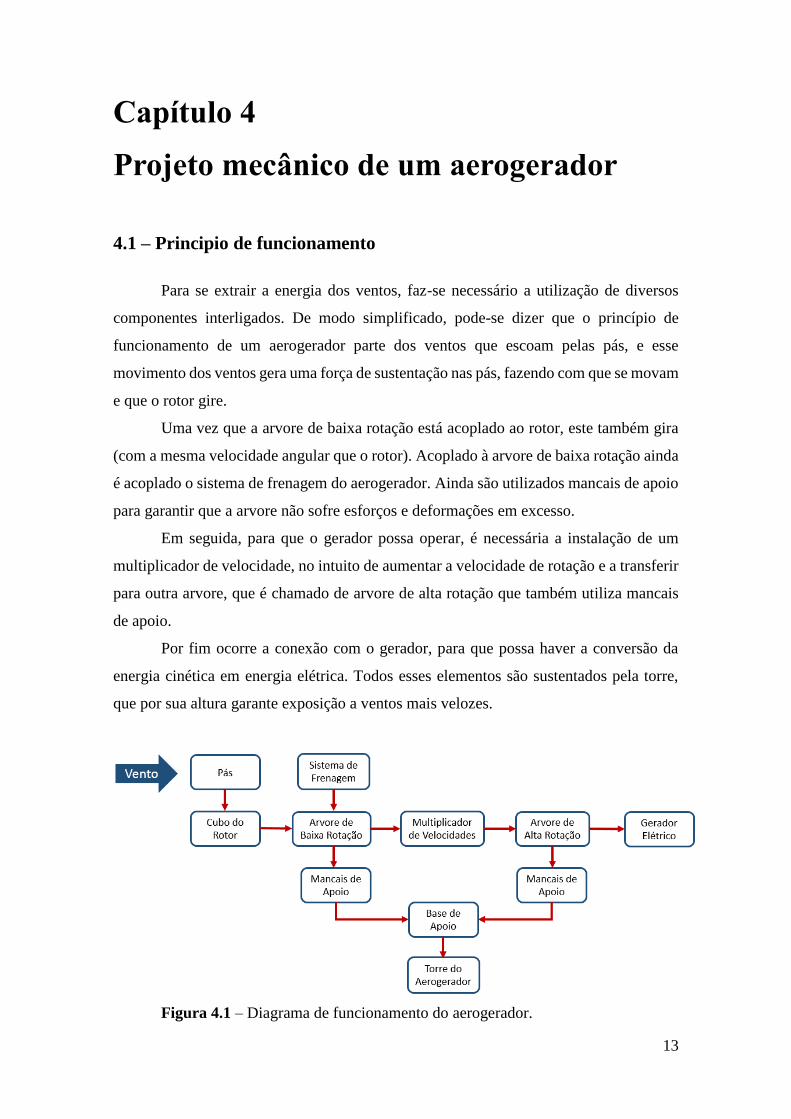
Para se extrair a energia dos ventos, faz-se necessário a utilização de diversos
componentes interligados. De modo simplificado, pode-se dizer que o princípio de
funcionamento de um aerogerador parte dos ventos que escoam pelas pás, e esse
movimento dos ventos gera uma força de sustentação nas pás, fazendo com que se movam
e que o rotor gire.
Uma vez que a arvore de baixa rotação está acoplado ao rotor, este também gira
(com a mesma velocidade angular que o rotor). Acoplado à arvore de baixa rotação ainda
é acoplado o sistema de frenagem do aerogerador. Ainda são utilizados mancais de apoio
para garantir que a arvore não sofre esforços e deformações em excesso.
Em seguida, para que o gerador possa operar, é necessária a instalação de um
multiplicador de velocidade, no intuito de aumentar a velocidade de rotação e a transferir
para outra arvore, que é chamado de arvore de alta rotação que também utiliza mancais
de apoio.
Por fim ocorre a conexão com o gerador, para que possa haver a conversão da
energia cinética em energia elétrica. Todos esses elementos são sustentados pela torre,
que por sua altura garante exposição a ventos mais velozes.
Figura 4.1 – Diagrama de funcionamento do aerogerador.

14
4.2 – Considerações iniciais
Para a realização do projeto do aerogerador, deve-se fazer algumas considerações
iniciais, tais como:
Velocidade do vento (𝑈∞) = 8,0 m/s;
Altura do eixo do rotor (𝐻) = 8,0 m;
Diâmetro do rotor (𝐷𝑟𝑜𝑡𝑜𝑟) = 2,5 m.
Adicionalmente, por se tratar de uma instalação de pequeno porte (domiciliar) a
nível do mar, é possível determinar:
Temperatura Ambiente (𝑇𝑎𝑚𝑏𝑖𝑒𝑛𝑡𝑒) = 25𝑜𝐶
Pressão (𝑃𝑎𝑡𝑚) = 101,3 . 105 𝑃𝑎;
Massa específica do ar (𝜌𝑎𝑟) = 1,225 𝐾𝑔/𝑚3;
Viscosidade absoluta do ar (µ𝑎𝑟) = 17,4 . 10−6 𝑃𝑎. 𝑠
E também é possível calcular a área de varredura (𝐴𝑟𝑜𝑡𝑜𝑟) do rotor por meio da
formula:
𝐴𝑟𝑜𝑡𝑜𝑟 =𝜋 𝐷𝑟𝑜𝑡𝑜𝑟
2
4≅ 4,91 𝑚2
4.3 – Estudo aerodinâmico do projeto
Para realizar o estudo aerodinâmico do projeto, faz-se necessário calcular a
potência disponível do vento (𝑃𝑜𝑡𝑣𝑒𝑛𝑡𝑜) por meio das equações de fluxo de energia
cinética (𝐸𝑐) e de fluxo mássico (�̇�):
𝐸�̇� = 1
2 �̇� 𝑈∞
2
�̇� = 𝜌𝑎𝑟 𝐴𝑟𝑜𝑡𝑜𝑟 𝑈∞
Sendo assim,
𝑃𝑜𝑡𝑣𝑒𝑛𝑡𝑜 =1
2 𝜌𝑎𝑟 𝐴𝑟𝑜𝑡𝑜𝑟 𝑈∞
3 ≅ 1539,46 𝑊
15
Entretanto, para aproveitar toda a potência disponível no vento, seria necessário
que toda a massa de ar que passasse pelo rotor tivesse sua velocidade reduzida a 0,
fazendo com que o rotor do aerogerador não se movimentasse. Sendo assim, nem toda
potência disponível no vento é transmitida para o rotor, e deve-se considerar um
rendimento aerodinâmico (𝐶𝑝). Em 1919, o físico alemão Albert Betz definiu
matematicamente o máximo rendimento aerodinâmico (𝐶𝑝 𝑀𝐴𝑋), sendo assim conhecido
por Limite de Betz [6] [7].
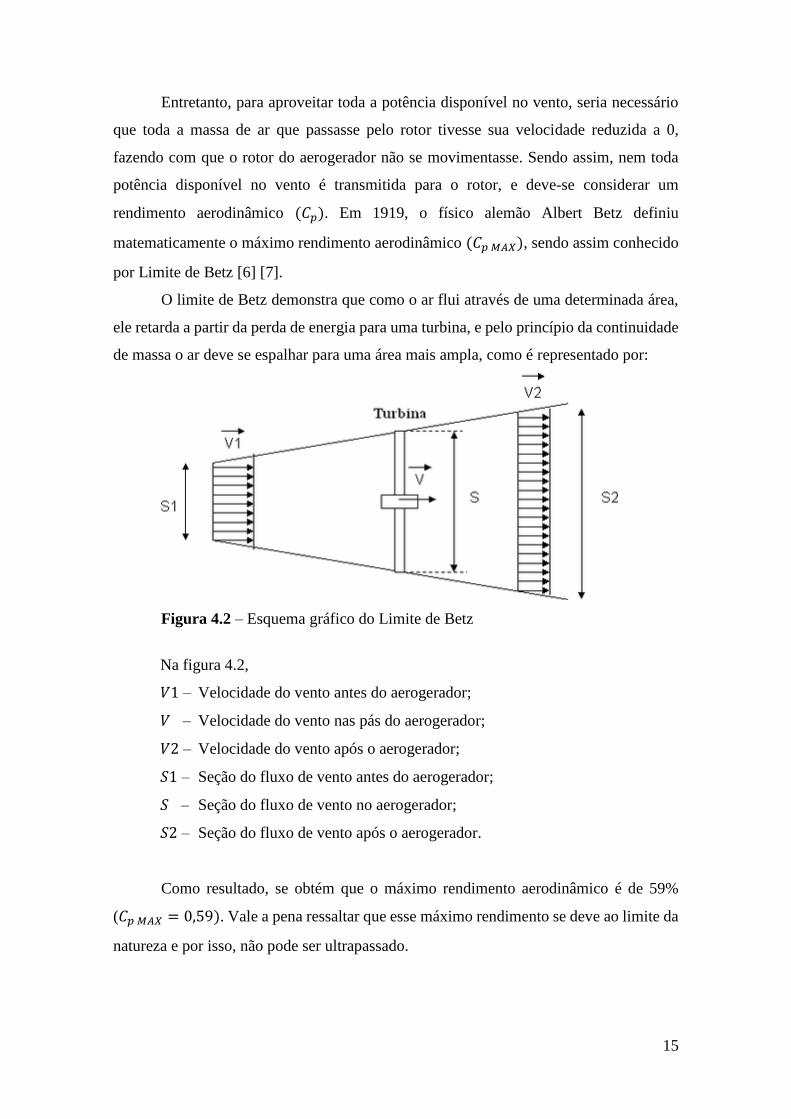
O limite de Betz demonstra que como o ar flui através de uma determinada área,
ele retarda a partir da perda de energia para uma turbina, e pelo princípio da continuidade
de massa o ar deve se espalhar para uma área mais ampla, como é representado por:
Figura 4.2 – Esquema gráfico do Limite de Betz
Na figura 4.2,
𝑉1 – Velocidade do vento antes do aerogerador;
𝑉 – Velocidade do vento nas pás do aerogerador;
𝑉2 – Velocidade do vento após o aerogerador;
𝑆1 – Seção do fluxo de vento antes do aerogerador;
𝑆 – Seção do fluxo de vento no aerogerador;
𝑆2 – Seção do fluxo de vento após o aerogerador.
Como resultado, se obtém que o máximo rendimento aerodinâmico é de 59%
(𝐶𝑝 𝑀𝐴𝑋 = 0,59). Vale a pena ressaltar que esse máximo rendimento se deve ao limite da
natureza e por isso, não pode ser ultrapassado.
16
Após o cálculo da potência disponível do vento e sabendo qual é o máximo
rendimento aerodinâmico de um aerogerador, é necessário, definir o perfil das pás e os
esforços aplicados às mesmas.
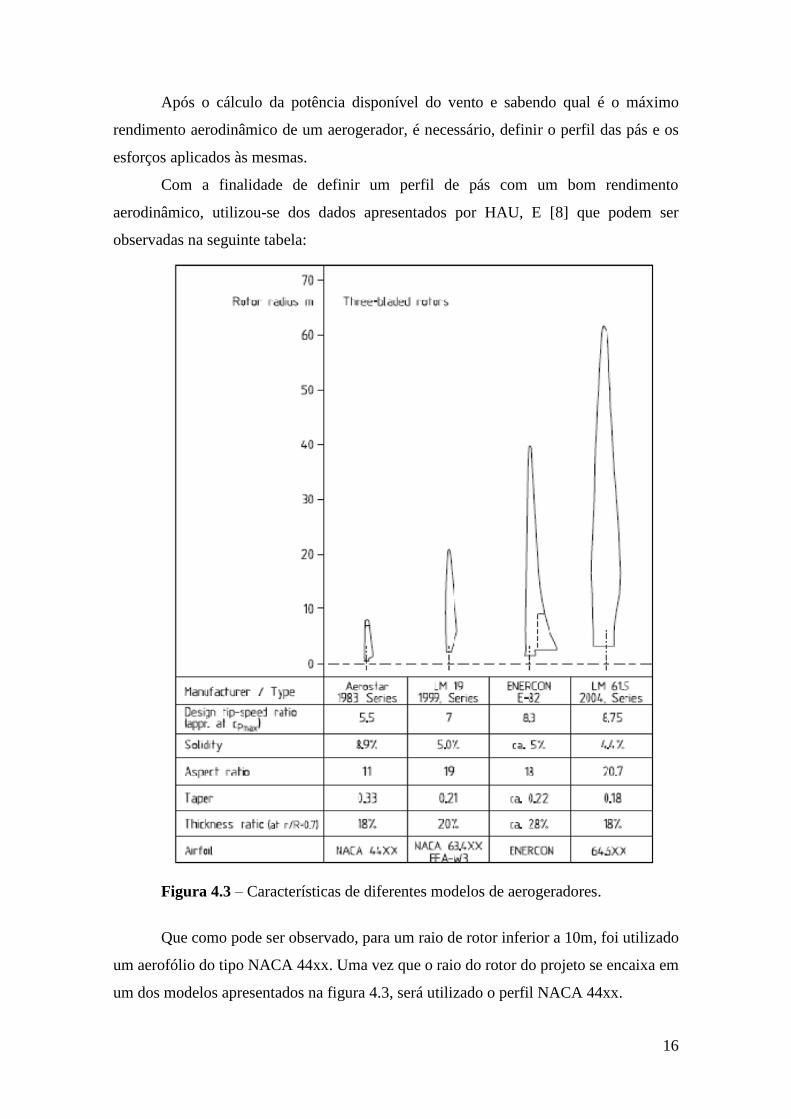
Com a finalidade de definir um perfil de pás com um bom rendimento
aerodinâmico, utilizou-se dos dados apresentados por HAU, E [8] que podem ser
observadas na seguinte tabela:
Figura 4.3 – Características de diferentes modelos de aerogeradores.
Que como pode ser observado, para um raio de rotor inferior a 10m, foi utilizado
um aerofólio do tipo NACA 44xx. Uma vez que o raio do rotor do projeto se encaixa em
um dos modelos apresentados na figura 4.3, será utilizado o perfil NACA 44xx.

17
A partir dos modelos descritos em [8], é definido que o “tip-speed ratio” TSR (𝜆),
que é a razão entre a velocidade tangencial na ponta da pá e a velocidade do vento no
projeto é igual a 5,5 (𝜆 = 5,5). Ainda deste modelo, é definido que o índice de solidez do
rotor (𝜎), porcentagem da aérea do rotor coberta pelas pás, é igual 0,089.
A partir do TSR (𝜆) e índice de solidez do rotor (𝜎), é possível calcular a
velocidade angular do rotor (𝛺𝑟𝑜𝑡𝑜𝑟) e o tamanho da corda (𝑐) do perfil aerodinâmico
escolhido utilizado as equações
𝜆 = 𝛺𝑟𝑜𝑡𝑜𝑟 . 𝐷𝑟𝑜𝑡𝑜𝑟
2 𝑈∞
𝑐 = 𝜎.𝜋 𝐷𝑟𝑜𝑡𝑜𝑟
2
2 . 𝑧 (𝐷𝑟𝑜𝑡𝑜𝑟 − 𝐷𝑐𝑢𝑏𝑜)
em que:
𝐷𝑐𝑢𝑏𝑜 – Diâmetro de cubo do rotor;
𝑧 – Número de pás
Como já mencionado, para número de pás (𝑧) igual a 3 é obtida uma maior
estabilidade no sistema além de ter um bom rendimento. Definindo que o diâmetro do
cubo do rotor (𝐷𝑐𝑢𝑏𝑜) é de 0,20m, é obtido que:
𝛺𝑟𝑜𝑡𝑜𝑟 = 35,2 𝑟𝑎𝑑/𝑠 ≅ 336,14 𝑟𝑝𝑚
𝑐 = 0,1266 𝑚 ≅ 0,12 𝑚
A partir do valor de tamanho de corda, é possível calcular o número de Reynolds
(𝑅𝑒) descrita por MCDONALD, A., T., FOX, R., W., PRITCHARD, P., J. [9], que é
definido pela equação:
𝑅𝑒 =𝑈∞. 𝑐. 𝜌𝑎𝑟
µ𝑎𝑟= 67586,20 ≅ 67000
Utilizando o número de Reynolds (𝑅𝑒) calculado, com o auxílio dos ensaios de
perfis de pás conduzidos por H. ABBOTT, I., E. VON DOENHOFF, A. [10], onde pode-
se observar as curvas de coeficiente de arrasto (𝐶𝐷), coeficiente de sustentação (𝐶𝐿) e o
coeficiente de momento (𝐶𝑀) em relação a um ângulo de ataque (φ).
18
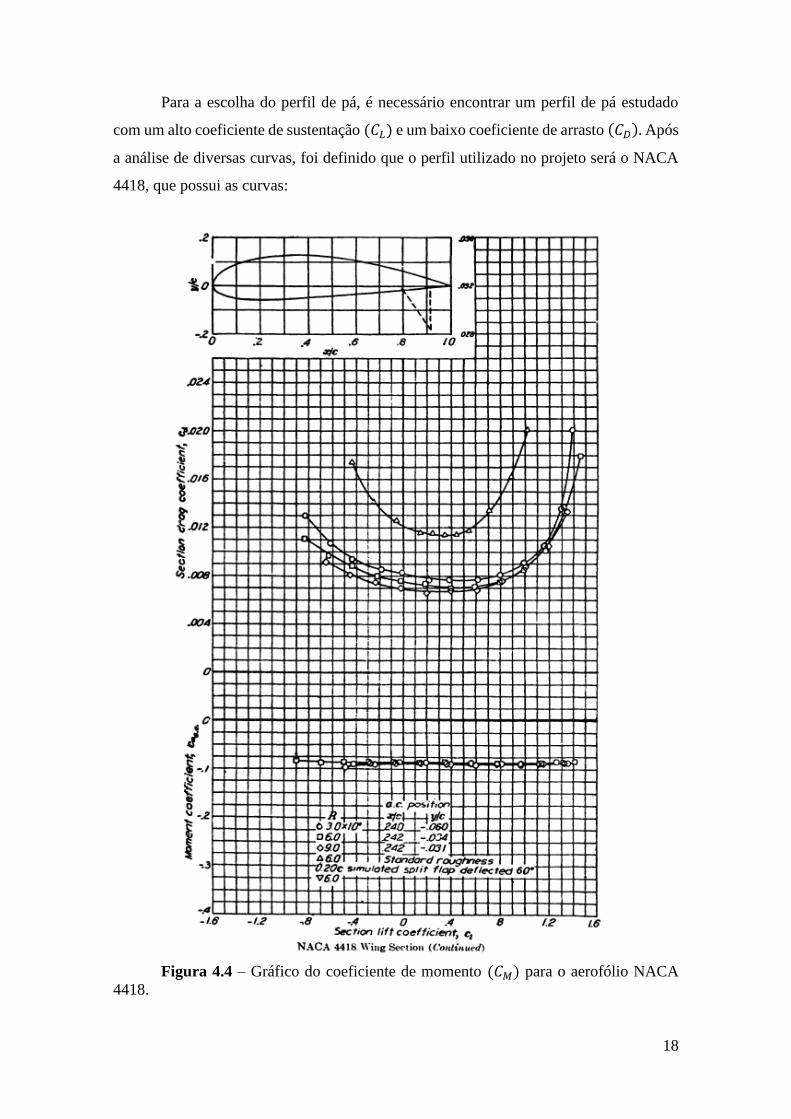
Para a escolha do perfil de pá, é necessário encontrar um perfil de pá estudado
com um alto coeficiente de sustentação (𝐶𝐿) e um baixo coeficiente de arrasto (𝐶𝐷). Após
a análise de diversas curvas, foi definido que o perfil utilizado no projeto será o NACA
4418, que possui as curvas:
Figura 4.4 – Gráfico do coeficiente de momento (𝐶𝑀) para o aerofólio NACA
4418.

19
Figura 4.5 – Gráfico do coeficiente de arrasto (𝐶𝐷) e coeficiente de sustentação
(𝐶𝐿) para o aerofólio NACA 4418.
A partir das figuras 4.4 e 4.5, quando utilizado com um ângulo de ataque (∝) =
8°, o aerofólio do tipo NACA 4418 fornece:
Um coeficiente de arrasto (𝐶𝐷) ≅ 0,11;
Um coeficiente de sustentação (𝐶𝐿) ≅ 1,2; e
Um coeficiente de momento (𝐶𝑀) ≅ -0,9
20
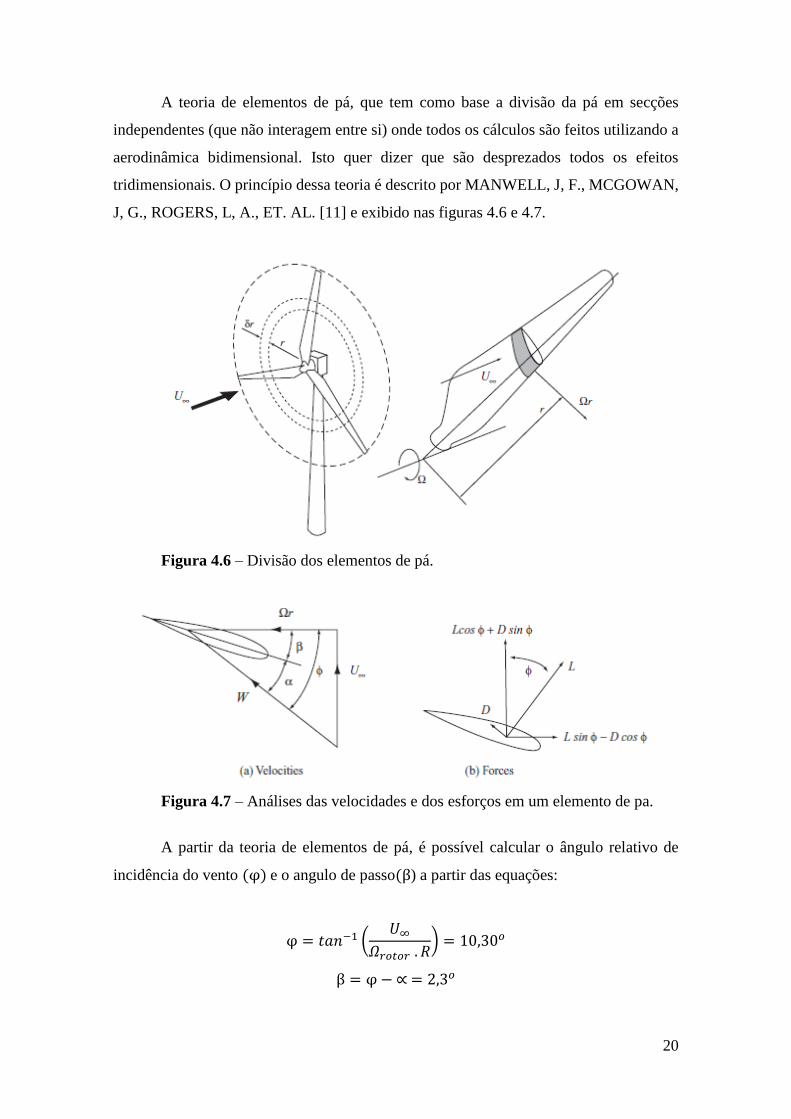
A teoria de elementos de pá, que tem como base a divisão da pá em secções
independentes (que não interagem entre si) onde todos os cálculos são feitos utilizando a
aerodinâmica bidimensional. Isto quer dizer que são desprezados todos os efeitos
tridimensionais. O princípio dessa teoria é descrito por MANWELL, J, F., MCGOWAN,
J, G., ROGERS, L, A., ET. AL. [11] e exibido nas figuras 4.6 e 4.7.
Figura 4.6 – Divisão dos elementos de pá.
Figura 4.7 – Análises das velocidades e dos esforços em um elemento de pa.
A partir da teoria de elementos de pá, é possível calcular o ângulo relativo de
incidência do vento (φ) e o angulo de passo(β) a partir das equações:
φ = 𝑡𝑎𝑛−1 (𝑈∞
𝛺𝑟𝑜𝑡𝑜𝑟 . 𝑅) = 10,30𝑜
β = φ − ∝ = 2,3𝑜

21
Assim como também é possível calcular, a força de sustentação(L), a força de
arrasto (D) e o momento relativo ao gradiente de pressão (M) atuante em uma pá
utilizando as formulas apresentadas por LEWIS, H. R., PAPADIMITRIOU, C. H. [12] e
BURTON, T., SHARPE, D. JENKINS, N., BOSSANYI, E.[13]
𝐿 = ∫1
2 𝜌 . (𝛺𝑟𝑜𝑡𝑜𝑟 . 𝑟)2 . 𝐶𝐿 . 𝑐 𝛿𝑟
𝐷𝑟𝑜𝑡𝑜𝑟2
𝐷𝑐𝑢𝑏𝑜2
= 71,11 𝑁
𝐷 = ∫1
2 𝜌 . (𝛺𝑟𝑜𝑡𝑜𝑟 . 𝑟)2 . 𝐶𝐷 . 𝑐 𝛿𝑟
𝐷𝑟𝑜𝑡𝑜𝑟2
𝐷𝑐𝑢𝑏𝑜2
= 6,51 𝑁
𝑀 = ∫1
2 𝜌 . (𝛺𝑟𝑜𝑡𝑜𝑟 . 𝑟)2 . 𝐶𝑀 . 𝑐2 . 𝛿𝑟
𝐷𝑟𝑜𝑡𝑜𝑟2
𝐷𝑐𝑢𝑏𝑜2
= −0,64 𝑁. 𝑚
É notório que a formulação das forças de sustentação e arrasto formuladas a partir
da teoria de elementos de pá não estão de acordo com as coordenadas fixas do rotor do
aerogerador.
Com a finalidade de facilitar os cálculos estruturais futuros para o resto do
aerogerador, são calculadas as forças normais (𝐹𝑁), tangenciais (𝐹𝑇) e o torque resultante
(𝑇) atuantes em uma pá.
𝐹𝑁 𝑝á = 𝐿 . 𝐶𝑜𝑠φ + + 𝐷 . 𝑆𝑒𝑛φ = 71,12 N
𝐹𝑇 𝑝á = 𝐿 . 𝑆𝑒𝑛φ + + 𝐷 . 𝐶𝑜𝑠φ = 6,31 N
𝑇𝑝á = 𝑟. 𝐹𝑇 = 𝑟 ( 𝐿 . 𝑆𝑒𝑛 φ − 𝐷 . 𝐶𝑜𝑠φ) = 5,55N
𝑀𝑟𝑜𝑡𝑜𝑟 = −0,64 𝑁. 𝑚
Considerando as três pás, se obtém que os esforços atuantes no rotor são
calculados multiplicando por 3 os esforços atuantes em uma pá,
𝐹𝑁 𝑅𝑜𝑡𝑜𝑟 = 213,33 𝑁
𝐹𝑇 𝑟𝑜𝑡𝑜𝑟 = 0 𝑁 (𝑑𝑒𝑣𝑖𝑑𝑜 𝑎 𝑠𝑖𝑚𝑒𝑡𝑟𝑖𝑎)
𝑇𝑟𝑜𝑡𝑜𝑟 = 16,65 𝑁
𝑀𝑟𝑜𝑡𝑜𝑟 = 0 𝑁. 𝑚 (𝑑𝑒𝑣𝑖𝑑𝑜 𝑎 𝑠𝑖𝑚𝑒𝑡𝑟𝑖𝑎)
22
A partir do torque atuante no rotor, pode-se calcular a potência fornecida ao rotor
pelo vento,
𝑃𝑜𝑡𝑟𝑜𝑡𝑜𝑟 = 𝑇 . 𝜔 = 586,08 𝑊.
Uma vez obtida a potência fornecida ao rotor pelo vento (𝑃𝑜𝑡𝑟𝑜𝑡𝑜𝑟), é possível
calcular o coeficiente aerodinâmico (𝐶𝑝) do perfil utilizado nesse projeto,
𝐶𝑝 =𝑃𝑜𝑡𝑟𝑜𝑡𝑜𝑟
𝑃𝑜𝑡𝑣𝑒𝑛𝑡𝑜= 0,3807 = 38%
4.4 – Projeto das Pás do Aerogerador
Figura 4.8 – Pá com o perfil NACA 4418 utilizada no projeto.
A pá pode ser fabricada a partir de uma liga de alumínio 7075 T6, que possui boa
resistência mecânica e baixa massa especifica. Com a referida liga, é feito o encaixe no
cubo do rotor, assim como é feito uma viga de modo a suportar os esforços atuantes em
cada pá. Cada pá possuiria aproximadamente 5 Kg.
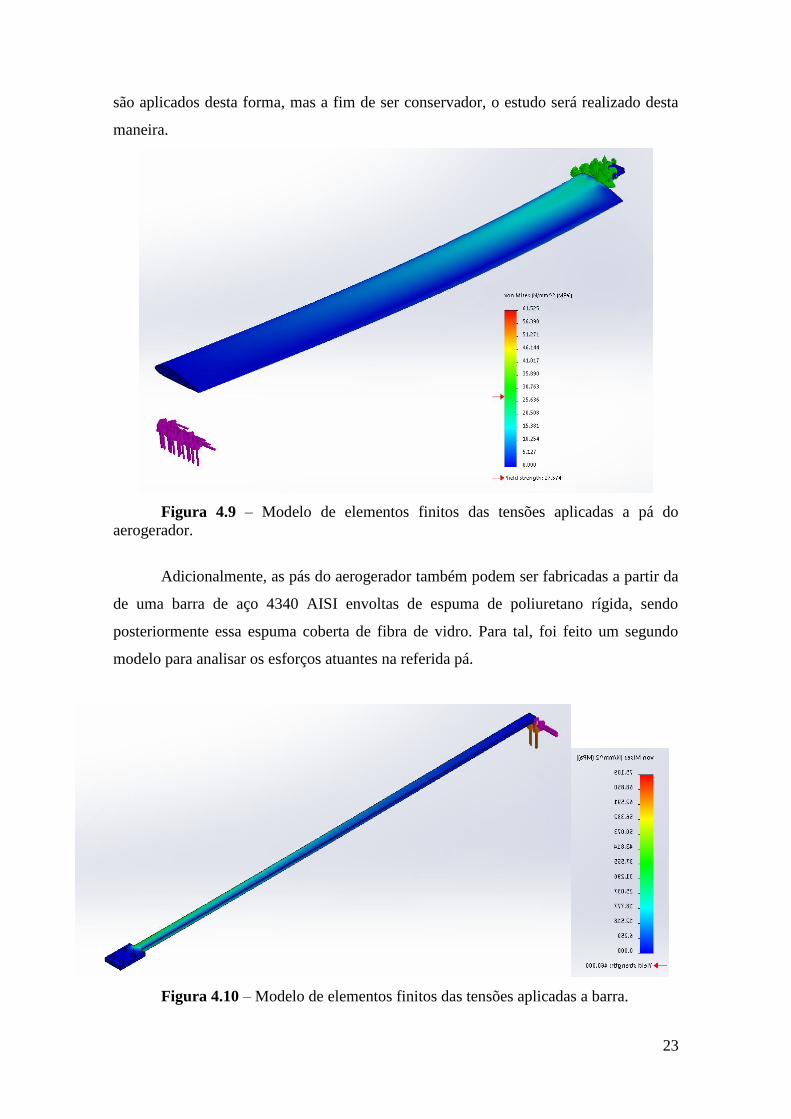
A fim de verificar os esforços atuantes na pá, foi realizado um estudo de elementos
finitos, onde a extremidade com os furos foi fixada e as forças encontradas pelo estudo
aerodinâmico da pá foram aplicadas na outra extremidade. Sabe-se que os esforços não
23
são aplicados desta forma, mas a fim de ser conservador, o estudo será realizado desta
maneira.
Figura 4.9 – Modelo de elementos finitos das tensões aplicadas a pá do
aerogerador.
Adicionalmente, as pás do aerogerador também podem ser fabricadas a partir da
de uma barra de aço 4340 AISI envoltas de espuma de poliuretano rígida, sendo
posteriormente essa espuma coberta de fibra de vidro. Para tal, foi feito um segundo
modelo para analisar os esforços atuantes na referida pá.
Figura 4.10 – Modelo de elementos finitos das tensões aplicadas a barra.
24
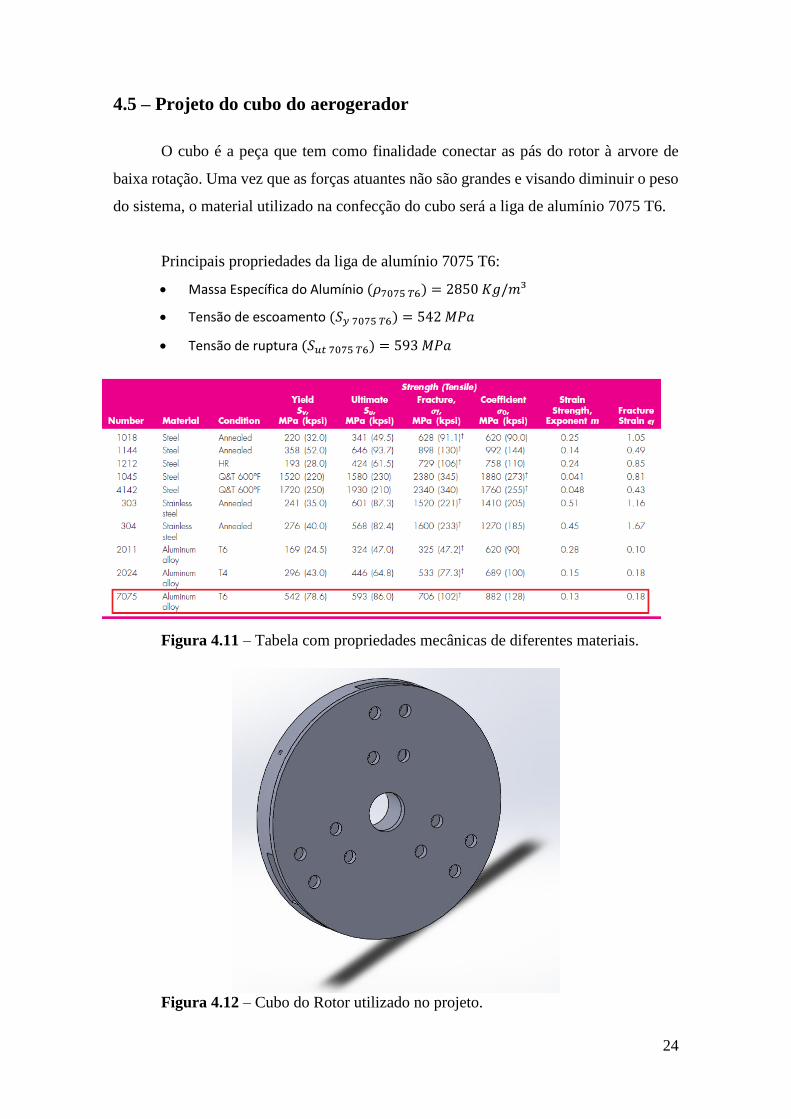
4.5 – Projeto do cubo do aerogerador
O cubo é a peça que tem como finalidade conectar as pás do rotor à arvore de
baixa rotação. Uma vez que as forças atuantes não são grandes e visando diminuir o peso
do sistema, o material utilizado na confecção do cubo será a liga de alumínio 7075 T6.
Principais propriedades da liga de alumínio 7075 T6:
Massa Específica do Alumínio (𝜌7075 𝑇6) = 2850 𝐾𝑔/𝑚³
Tensão de escoamento (𝑆𝑦 7075 𝑇6) = 542 𝑀𝑃𝑎
Tensão de ruptura (𝑆𝑢𝑡 7075 𝑇6) = 593 𝑀𝑃𝑎
Figura 4.11 – Tabela com propriedades mecânicas de diferentes materiais.
Figura 4.12 – Cubo do Rotor utilizado no projeto.
25
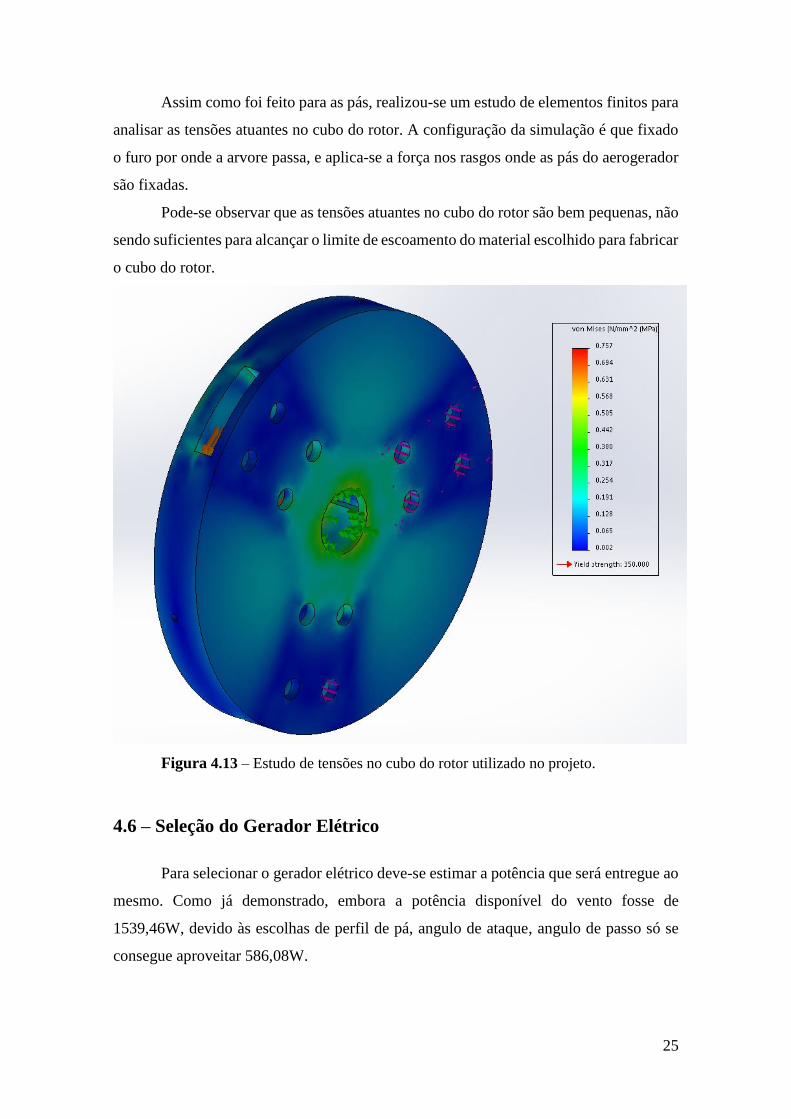
Assim como foi feito para as pás, realizou-se um estudo de elementos finitos para
analisar as tensões atuantes no cubo do rotor. A configuração da simulação é que fixado
o furo por onde a arvore passa, e aplica-se a força nos rasgos onde as pás do aerogerador
são fixadas.
Pode-se observar que as tensões atuantes no cubo do rotor são bem pequenas, não
sendo suficientes para alcançar o limite de escoamento do material escolhido para fabricar
o cubo do rotor.
Figura 4.13 – Estudo de tensões no cubo do rotor utilizado no projeto.
4.6 – Seleção do Gerador Elétrico
Para selecionar o gerador elétrico deve-se estimar a potência que será entregue ao
mesmo. Como já demonstrado, embora a potência disponível do vento fosse de
1539,46W, devido às escolhas de perfil de pá, angulo de ataque, angulo de passo só se
consegue aproveitar 586,08W.

26
Figura 4.14 – Gerador elétrico da fabricante WEG.
Essa potência 586,08W seria a potência de entrada no aerogerador, no entanto,
devido ao sistema mecânico do aerogerador, haverá mais perdas. Após um estudo de
diversos documentos, teses e livros, estima-se que os rendimentos de transferência de
potência dos seguintes elementos são:
Arvores – 1.0
Pares Mancais de Rolamento – 0.99
Pares de Engrenagens – 0,96
Acopladores – 0,96
Considerando que no nosso sistema possui: 5 arvores, 5 pares de mancais de
rolamento, 2 pares de engrenagens e 2 acopladores, estima-se que o rendimento mecânico
(𝜂𝑚𝑒𝑐) do sistema é:
𝜂𝑚𝑒𝑐 = 80%
Sendo assim, a potência de entrada no gerador elétrico (𝑃𝑒𝑛𝑡𝑟𝑎𝑑𝑎 𝐺𝐸) é estimada
como:
27
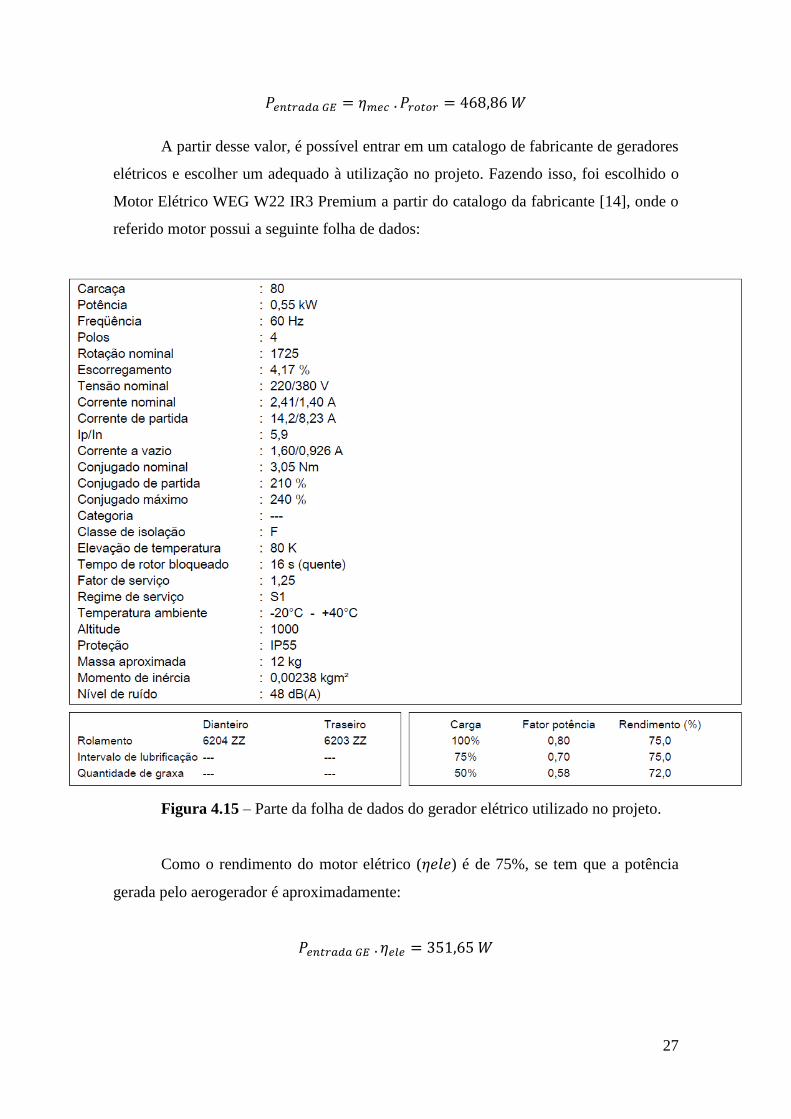
𝑃𝑒𝑛𝑡𝑟𝑎𝑑𝑎 𝐺𝐸 = 𝜂𝑚𝑒𝑐 . 𝑃𝑟𝑜𝑡𝑜𝑟 = 468,86 𝑊
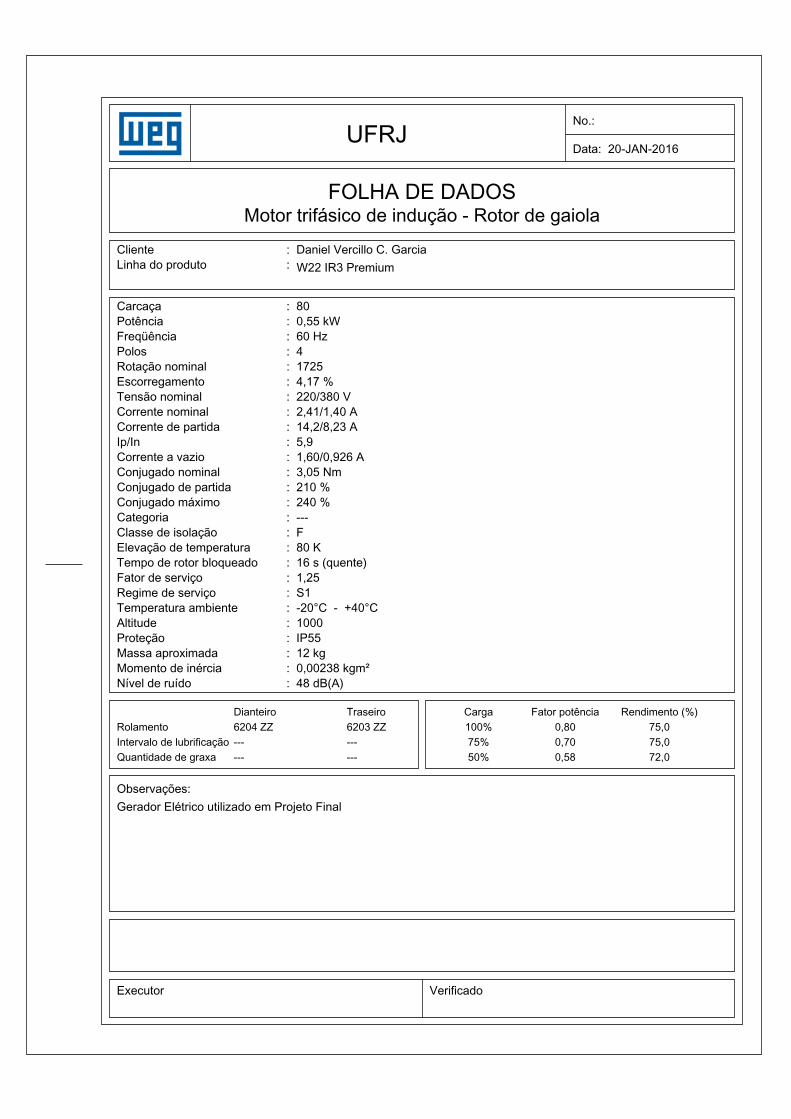
A partir desse valor, é possível entrar em um catalogo de fabricante de geradores
elétricos e escolher um adequado à utilização no projeto. Fazendo isso, foi escolhido o
Motor Elétrico WEG W22 IR3 Premium a partir do catalogo da fabricante [14], onde o
referido motor possui a seguinte folha de dados:
Figura 4.15 – Parte da folha de dados do gerador elétrico utilizado no projeto.
Como o rendimento do motor elétrico (𝜂𝑒𝑙𝑒) é de 75%, se tem que a potência
gerada pelo aerogerador é aproximadamente:
𝑃𝑒𝑛𝑡𝑟𝑎𝑑𝑎 𝐺𝐸 . 𝜂𝑒𝑙𝑒 = 351,65 𝑊

28
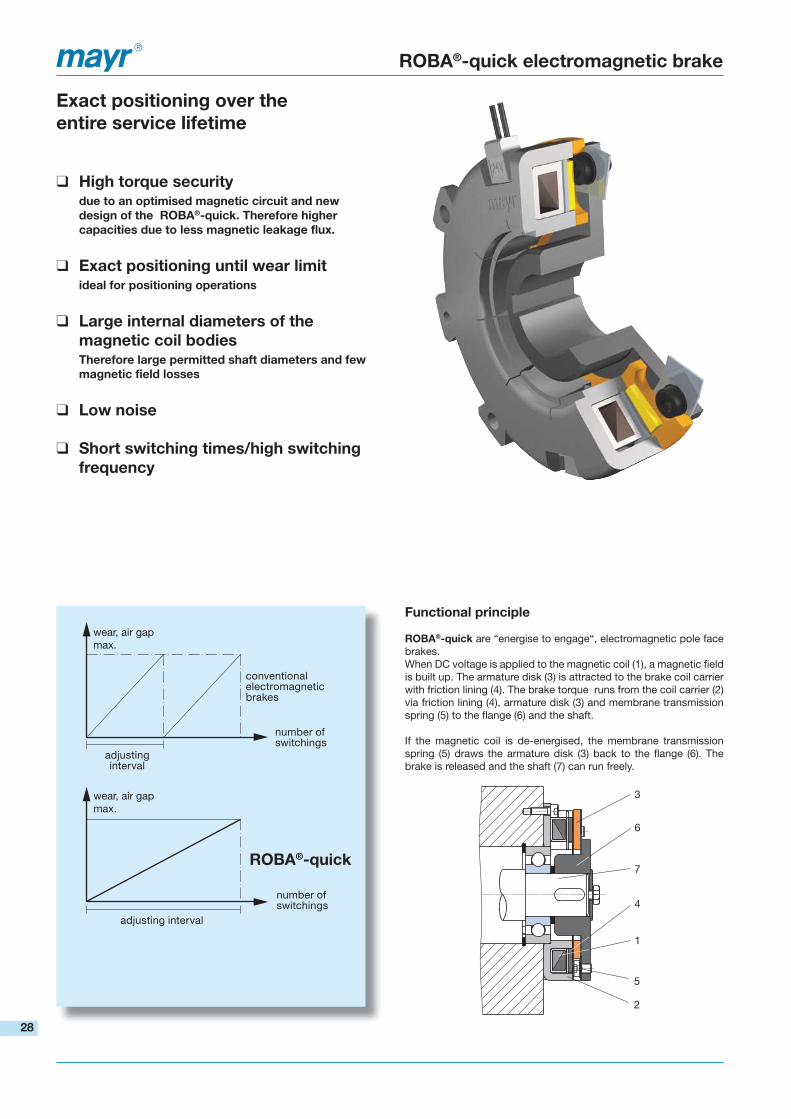
4.7 – Seleção do Freio
Ao selecionar o freio do sistema, deve-se considerar dois fatores: a velocidade
angular da arvore de baixa rotação (𝛺𝑟𝑜𝑡𝑜𝑟) e torque nele atuante (𝑇𝑟𝑜𝑡𝑜𝑟). Utilizando o
catalogo da Mayr [15], é selecionado um freio eletromagnético, modelo Roba-Quick
520.205.0 que tem a capacidade de frear uma arvore a 6100 rpm e com 45 N.m de torque.
Deve-se ressaltar que o diâmetro do flange é variável, sendo o diâmetro mínimo igual a
15mm e o máximo igual a 35 mm (sendo preferencialmente igual a 25mm ou 30mm). A
do partir dos cálculos realizados para as arvores neste projeto, o diâmetro do flange será
de 25mm
Figura 4.16 – Ilustração do freio eletromagnético Roba-Quick 520.20_.0.
Esse tipo de freio tem como princípio de funcionamento, a aplicação de uma
corrente em uma bobina que por reação atrai um disco de freio e assim, provocando a
frenagem da arvore.
29
4.8 – Projeto do Multiplicador de velocidades
4.8.1 – Projeto das Engrenagens do Multiplicador de velocidades
Como já mencionado, o multiplicador de velocidades tem como objetivo
aumentar a velocidade de angular para entrega-la á arvore do gerador elétrico,
preferencialmente o mais próximo possível da velocidade angular nominal do gerador.
Portanto, o multiplicador deve ser dimensionado em conformidade com a velocidade
angular da arvore do rotor (𝛺𝑟𝑜𝑡𝑜𝑟) e com a velocidade angular nominal do gerador
(𝛺𝑛𝑜𝑚𝑖𝑛𝑎𝑙 𝐺). Inicialmente se tem que:
Torque de Entrada (𝑇𝑟𝑜𝑡𝑜𝑟) = 16,65 𝑁. 𝑚
Rotação de Entrada (𝛺𝑟𝑜𝑡𝑜𝑟) = 336,14 𝑟𝑝𝑚
Rotação Nominal do Gerador (𝛺𝑛𝑜𝑚𝑖𝑛𝑎𝑙 𝐺) = 1725 𝑟𝑝𝑚
Sendo assim, pode-se determinar a razão total de engrenamento do multiplicador
de velocidades (𝑖𝑡) por meio da formula:
𝑖𝑡 =𝛺𝑛𝑜𝑚𝑖𝑛𝑎𝑙 𝐺
𝛺𝑟𝑜𝑡𝑜𝑟≅ 5,132
Segundo BUDYNAS, R., G., NISBETT, J., K. [16], recomenda-se a utilização de
uma razão de engrenamento (𝑖) inferior a 4. Adicionalmente, de modo a minimizar o
tamanho das engrenagens do multiplicador de velocidades, serão utilizado dois pares de
engrenagens com o mesmo fator de engrenamento, que é definido a partir de:
√𝑖𝑡 ≅ 2,265
Então, escolhe-se trabalhar com a razão de engrenamento de projeto (𝑖) igual a
2,25 para os dois pares de engrenagem. Portanto, pode-se calcular as velocidades de
rotação de cada etapa do multiplicador de velocidades.
Velocidade de rotação de entrada (𝛺1 = 𝛺𝑟𝑜𝑡𝑜𝑟) = 336,14 𝑟𝑝𝑚 = 35,2 𝑟𝑎𝑑/𝑠
Velocidade de rotação intermediaria (𝛺2 = 𝛺1. 𝑖) = 756,32 rpm = 79,2 𝑟𝑎𝑑/𝑠
Velocidade de rotação de saída (𝛺3 = 𝛺2. 𝑖) = 1701,71 𝑟𝑝𝑚 = 178,2 𝑟𝑎𝑑/𝑠

30
Assim como também é possível calcular o torque que cada etapa do multiplicador de
velocidades transmite.
Torque na arvore de entrada (𝑇1 = 𝑇𝑟𝑜𝑡𝑜𝑟) = 336,14 𝑟𝑝𝑚 = 16,65 𝑁. 𝑚
Torque na arvore de intermediaria (𝑇2 =𝑃𝑜𝑡𝑟𝑜𝑡𝑜𝑟
𝛺2⁄ ) = 0,62 𝑁. 𝑚
Torque na arvore de saída (𝑇3 =𝑃𝑜𝑡𝑟𝑜𝑡𝑜𝑟
𝛺3⁄ ) = 0,28 𝑁. 𝑚
Considerando que as engrenagens possuem um ângulo de pressão dos dentes (𝜃)
de 20º, se tem que o número mínimo de dentes para o pinhão (𝑧𝑚𝑖𝑛) é de:
𝑧𝑚𝑖𝑛 =2𝑘
𝑆𝑒𝑛2𝜃= 17,1 = 18 𝑑𝑒𝑛𝑡𝑒𝑠
em que as engrenagens possuem uma altura de cabeça (𝑘) igual a 1,0.
A partir da razão de engrenamento (𝑖) e do número mínimo de dentes para o
pinhão (𝑧𝑚𝑖𝑛), estipula-se que o número de dentes dos pinhões (𝑧𝑝) é de 24 dentes. Dessa
maneira, o número de dentes das coroas (𝑧𝑐) é dado por:
𝑧𝑐 = 𝑧𝑝 . 𝑖 = 54 𝑑𝑒𝑛𝑡𝑒𝑠
A escolha do módulo das engrenagens (𝑚) interfere diretamente nos tamanhos
das engrenagens e consequentemente nos esforços que atuam sobre elas. Como
mencionado anteriormente, é desejado um multiplicador de velocidades compacto, sendo
assim escolhe-se um módulo das engrenagens (𝑚) a partir dos que são utilizados
normalmente, presentes na tabela:
Figura 4.17 – Tabela de módulos de engrenagens (𝑚) usualmente utilizados.

31
O valor escolhido, que atende aos critérios estipulados, é o módulo das
engrenagens (𝑚) igual a 2,5 mm. Por resultado, se tem que o passo diametral (𝑃𝑑) é dado
por:
𝑃𝑑 =1
𝑚= 0,4 𝑚𝑚−1
A partir do módulo das engrenagens (𝑚), calcula-se o diâmetro primitivo dos
pinhões (𝐷𝑝 𝑝𝑖𝑛ℎã𝑜) e o diâmetro primitivo das coroas (𝐷𝑝 𝑐𝑜𝑟𝑜𝑎) por meio das fórmulas:
𝐷𝑝 𝑝𝑖𝑛ℎã𝑜 = 𝑧𝑝 . 𝑚 = 60 𝑚𝑚
𝐷𝑝 𝑐𝑜𝑟𝑜𝑎 = 𝑧𝑐 . 𝑚 = 135 𝑚𝑚
Uma vez que se possui os diâmetros primitivos e as velocidades de rotação das
engrenagens, é possível encontrar as velocidades lineares nos círculos primitivos de cada
engrenagem. Estes são dados por:
𝑉𝑐𝑜𝑟𝑜𝑎 1 = 𝛺1 . 𝐷𝑝 𝑐𝑜𝑟𝑜𝑎 = 2,376 𝑚/𝑠
𝑉𝑝𝑖𝑛ℎã𝑜 1 = 𝛺2 . 𝐷𝑝 𝑝𝑖𝑛ℎã𝑜 = 2,376 𝑚/𝑠
𝑉𝑐𝑜𝑟𝑜𝑎 2 = 𝛺2 . 𝐷𝑝 𝑐𝑜𝑟𝑜𝑎 = 5,346 𝑚/𝑠
𝑉𝑝𝑖𝑛ℎã𝑜 2 = 𝛺3 . 𝐷𝑝 𝑝𝑖𝑛ℎã𝑜 = 5,346 𝑚/𝑠
onde:
𝑉𝑐𝑜𝑟𝑜𝑎 1 – Velocidade da coroa no primeiro par de engrenagens;
𝑉𝑝𝑖𝑛ℎã𝑜 1– Velocidade do pinhão no primeiro par de engrenagens;
𝑉𝑐𝑜𝑟𝑜𝑎 2 – Velocidade da coroa no segundo par de engrenagens;
𝑉𝑝𝑖𝑛ℎã𝑜 2– Velocidade do pinhão no segundo par de engrenagens.
Por meio das velocidades lineares nos círculos primitivos de cada engrenagem
(𝑉𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚)e da potência transmitida ao longo do multiplicador de velocidades
(𝑃𝑜𝑡𝑟𝑜𝑡𝑜𝑟), consegue-se calcular as forças tangencial (𝑊𝑇𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚) e radial
(𝑊𝑅𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚) atuante nos dentes de cada par de engrenagens a partir das formulas:
32
𝑊𝑇𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚 =
𝑃𝑜𝑡𝑟𝑜𝑡𝑜𝑟
𝑉𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚
𝑊𝑅𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚 = 𝑊𝑇
𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚 . tan 𝜃
obtendo-se os seguintes valores para os esforços atuantes em cada par de
engrenagem:
𝑊𝑇𝑐𝑜𝑟𝑜𝑎 1 = 𝑊𝑇
𝑝𝑖𝑛ℎã𝑜 1 = 197,33 𝑁
𝑊𝑅𝑐𝑜𝑟𝑜𝑎 1 = 𝑊𝑅
𝑝𝑖𝑛ℎã𝑜 1 = 71,82 𝑁
𝑊𝑇𝑐𝑜𝑟𝑜𝑎 2 = 𝑊𝑇
𝑝𝑖𝑛ℎã𝑜 2= 87,70 𝑁
𝑊𝑅𝑐𝑜𝑟𝑜𝑎 2 = 𝑊𝑅
𝑝𝑖𝑛ℎã𝑜 2= 31,92 𝑁
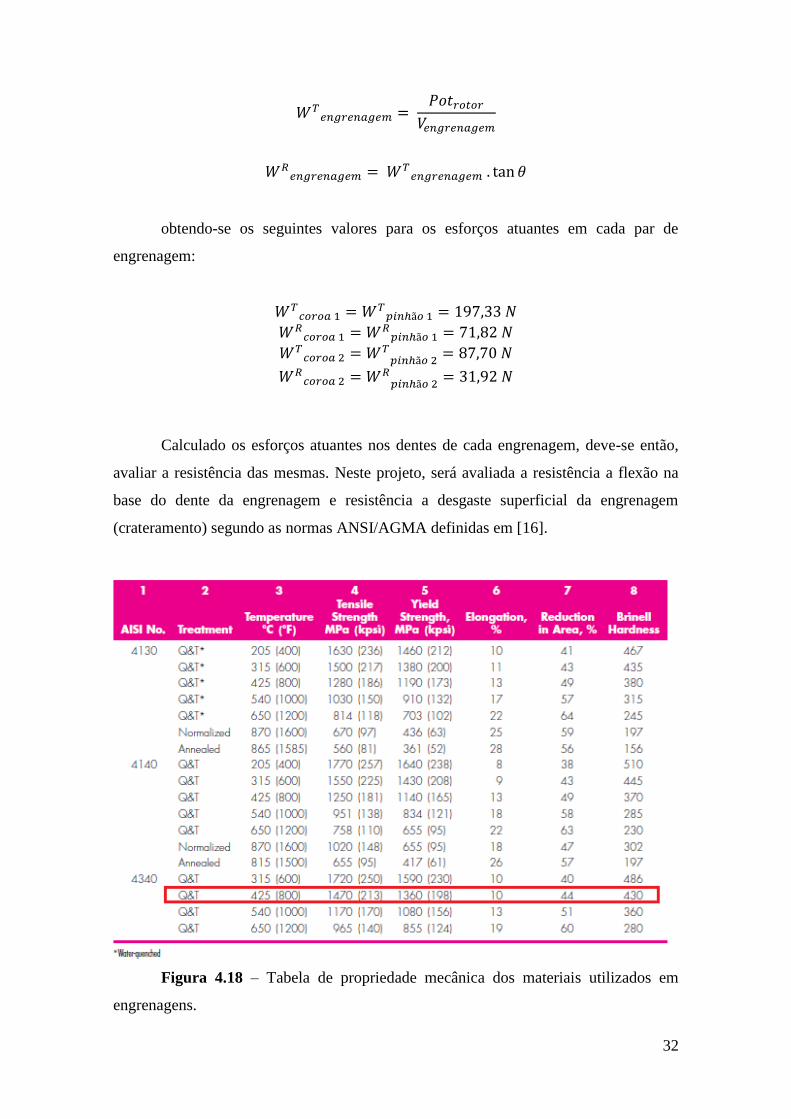
Calculado os esforços atuantes nos dentes de cada engrenagem, deve-se então,
avaliar a resistência das mesmas. Neste projeto, será avaliada a resistência a flexão na
base do dente da engrenagem e resistência a desgaste superficial da engrenagem
(crateramento) segundo as normas ANSI/AGMA definidas em [16].
Figura 4.18 – Tabela de propriedade mecânica dos materiais utilizados em
engrenagens.
33
Por meio da tabela acima, apresentada por [16], se define que o material utilizado
na fabricação das engrenagens será o AISI 4340 temperado (em banho de água) e
revenido a 425ºC.
Principais propriedades do aço AISI 4340 Q&T 425ºC:
Tensão de escoamento (𝑆𝑦 4340) = 1360 𝑀𝑃𝑎
Tensão de ruptura (𝑆𝑢𝑡 4340) = 1470 𝑀𝑃𝑎
Dureza Brinell (𝐻𝐵4340) = 430 𝐻𝐵
Principais propriedades das engrenagens do projeto.
Ângulo de pressão das engrenagens (𝜃) = 20°
Razão de engrenamento do multiplicador de velocidades (𝑖) = 2,25
Módulo das engrenagens (𝑚) = 2,5 𝑚𝑚
Tem-se como recomendação que a largura de face (𝑏) deve ser de 3 a 5 vezes o
passo circular (𝑝). Sendo o passo circular obtido através da formula:
𝑝 = 𝜋 . 𝑚 = 7,854 𝑚𝑚
Pela recomendação acima tem-se que a largura de face (𝑏) deve ser 23,56 𝑚𝑚 <
𝑏 < 39,27 𝑚𝑚. Tendo em vista que os esforços aplicados nas engrenagens não são muito
altos e que o material utilizado possui altos valores de resistência, será utilizada a largura
de face (𝑏) = 20𝑚𝑚. Mesmo sabendo que o valor escolhido foge da recomendação, a
escolhe foi feita a fim de evitar o superdimensionamento das engrenagens.
Deve-se ressaltar que para o cálculo de resistência das engrenagens será
considerado as piores situações, ou seja, onde atuam os maiores esforços e aonde estes
são mais críticos.
Considerando que os pares de engrenagens seriam feitas do mesmo material, serão
realizados os cálculos de resistência para o pinhão do primeiro par de engrenagens, já que
este está submetido à maior força tangencial e possui a geometria mais crítica (menor).
A partir dos dados anteriormente obtidos, é possível calcular a resistência da
engrenagem à fadiga na base do dente a flexão segundo as normas AISI/AGMA, descritas
na formula:
34
𝜎 = 𝑊𝑇 . 𝐾𝑜 . 𝐾𝑣 . 𝐾𝑠 . (1
𝑏 . 𝑚) . (
𝐾ℎ . 𝐾𝑏
𝑌𝑗)
onde:
𝜎 – Tensão atuante na base do dente da engrenagem;
𝑊𝑇 – Força transmitida pelos dentes das engrenagens;
𝐾𝑜 – Fator de sobrecarga;
𝐾𝑣 – Fator de dinâmico;
𝐾𝑠 – Fator de tamanho;
𝑏 – Largura do dente;
𝑚 – Módulo geométrico;
𝐾ℎ – Fator de distribuição de carga no dente;
𝐾𝑏 – Fator de espessura de dente; e
𝑌𝑗 – Fator geométrico.
A força transmitida pelos dentes das engrenagens (𝑊𝑇) será equivalente a força
tangencial atuante nos dentes do pinhão do primeiro par de engrenagens (𝑊𝑇𝑝𝑖𝑛ℎã𝑜 1 =
197,33 𝑁).
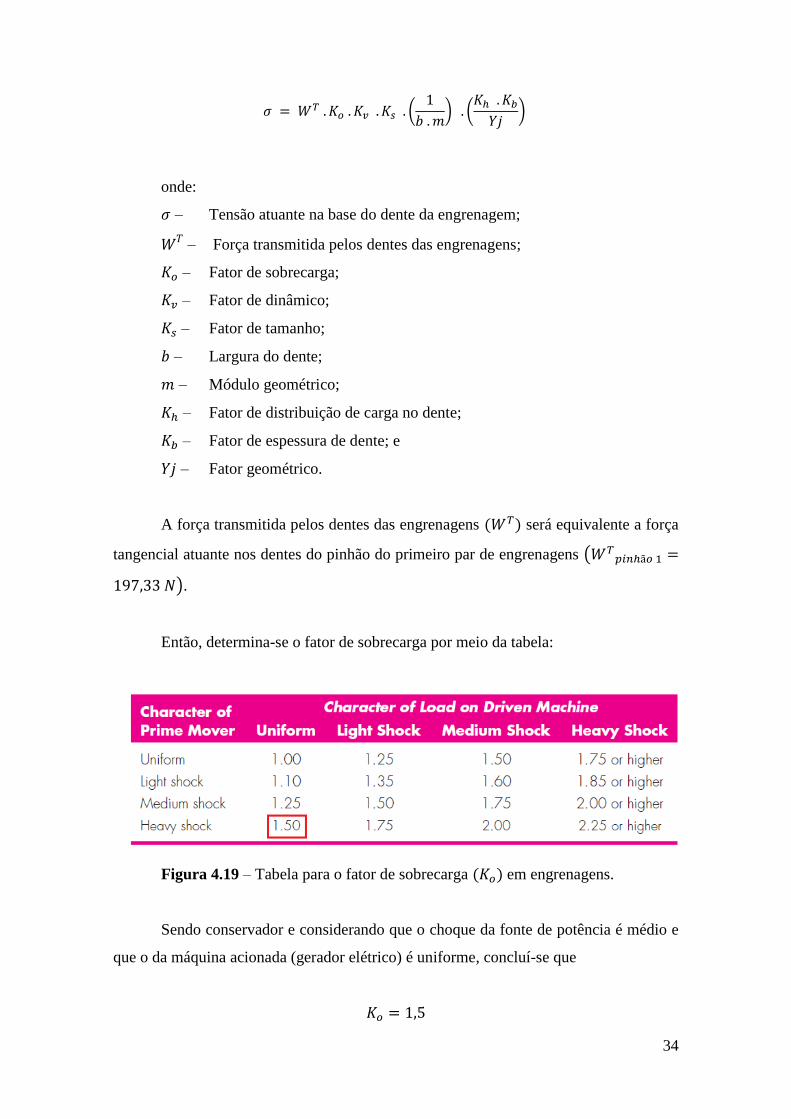
Então, determina-se o fator de sobrecarga por meio da tabela:
Figura 4.19 – Tabela para o fator de sobrecarga (𝐾𝑜) em engrenagens.
Sendo conservador e considerando que o choque da fonte de potência é médio e
que o da máquina acionada (gerador elétrico) é uniforme, concluí-se que
𝐾𝑜 = 1,5
35
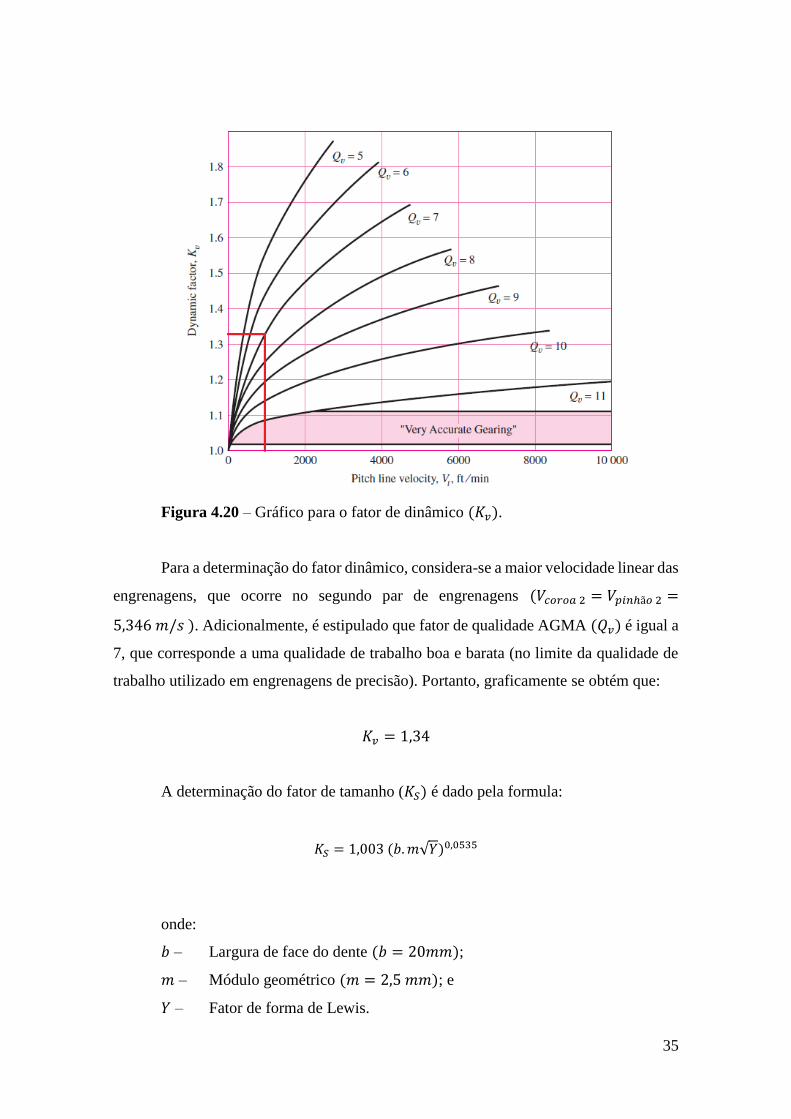
Figura 4.20 – Gráfico para o fator de dinâmico (𝐾𝑣).
Para a determinação do fator dinâmico, considera-se a maior velocidade linear das
engrenagens, que ocorre no segundo par de engrenagens (𝑉𝑐𝑜𝑟𝑜𝑎 2 = 𝑉𝑝𝑖𝑛ℎã𝑜 2 =
5,346 𝑚/𝑠 ). Adicionalmente, é estipulado que fator de qualidade AGMA (𝑄𝑣) é igual a
7, que corresponde a uma qualidade de trabalho boa e barata (no limite da qualidade de
trabalho utilizado em engrenagens de precisão). Portanto, graficamente se obtém que:
𝐾𝑣 = 1,34
A determinação do fator de tamanho (𝐾𝑆) é dado pela formula:
𝐾𝑆 = 1,003 (𝑏. 𝑚√𝑌)0,0535
onde:
𝑏 – Largura de face do dente (𝑏 = 20𝑚𝑚);
𝑚 – Módulo geométrico (𝑚 = 2,5 𝑚𝑚); e
𝑌 – Fator de forma de Lewis.
36
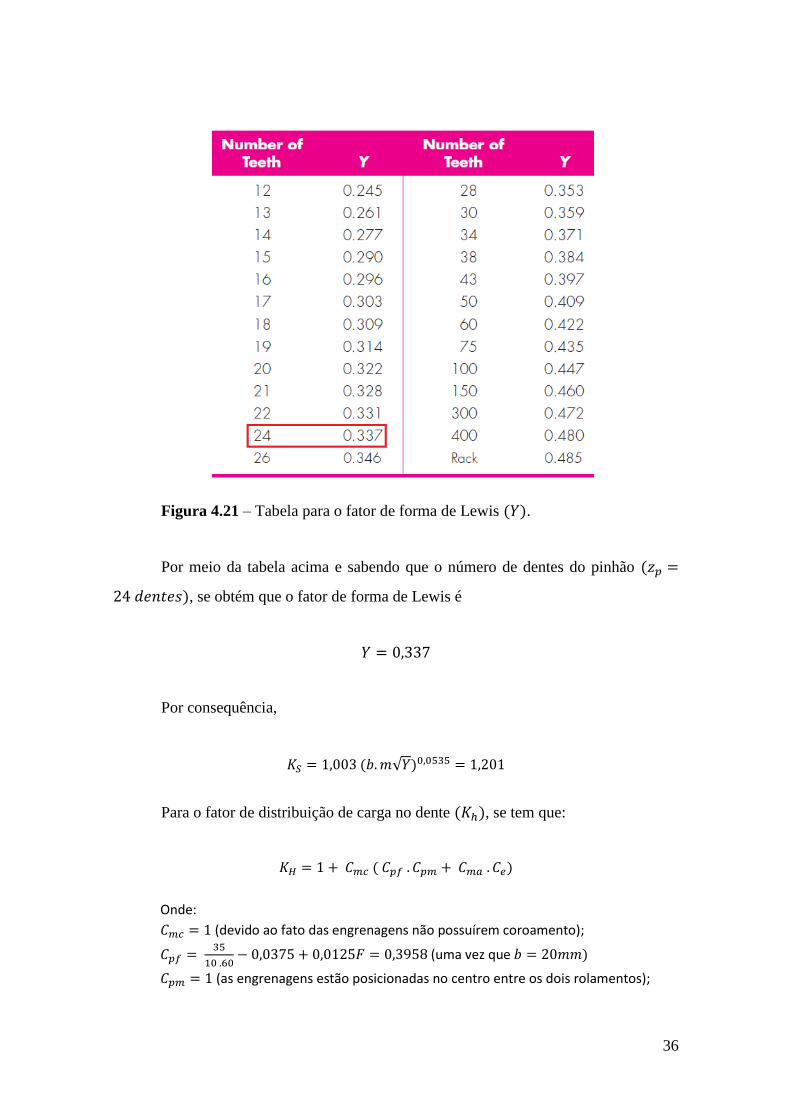
Figura 4.21 – Tabela para o fator de forma de Lewis (𝑌).
Por meio da tabela acima e sabendo que o número de dentes do pinhão (𝑧𝑝 =
24 𝑑𝑒𝑛𝑡𝑒𝑠), se obtém que o fator de forma de Lewis é
𝑌 = 0,337
Por consequência,
𝐾𝑆 = 1,003 (𝑏. 𝑚√𝑌)0,0535 = 1,201
Para o fator de distribuição de carga no dente (𝐾ℎ), se tem que:
𝐾𝐻 = 1 + 𝐶𝑚𝑐 ( 𝐶𝑝𝑓 . 𝐶𝑝𝑚 + 𝐶𝑚𝑎 . 𝐶𝑒)
Onde:
𝐶𝑚𝑐 = 1 (devido ao fato das engrenagens não possuírem coroamento);
𝐶𝑝𝑓 = 35
10 .60− 0,0375 + 0,0125𝐹 = 0,3958 (uma vez que 𝑏 = 20𝑚𝑚)
𝐶𝑝𝑚 = 1 (as engrenagens estão posicionadas no centro entre os dois rolamentos);
37
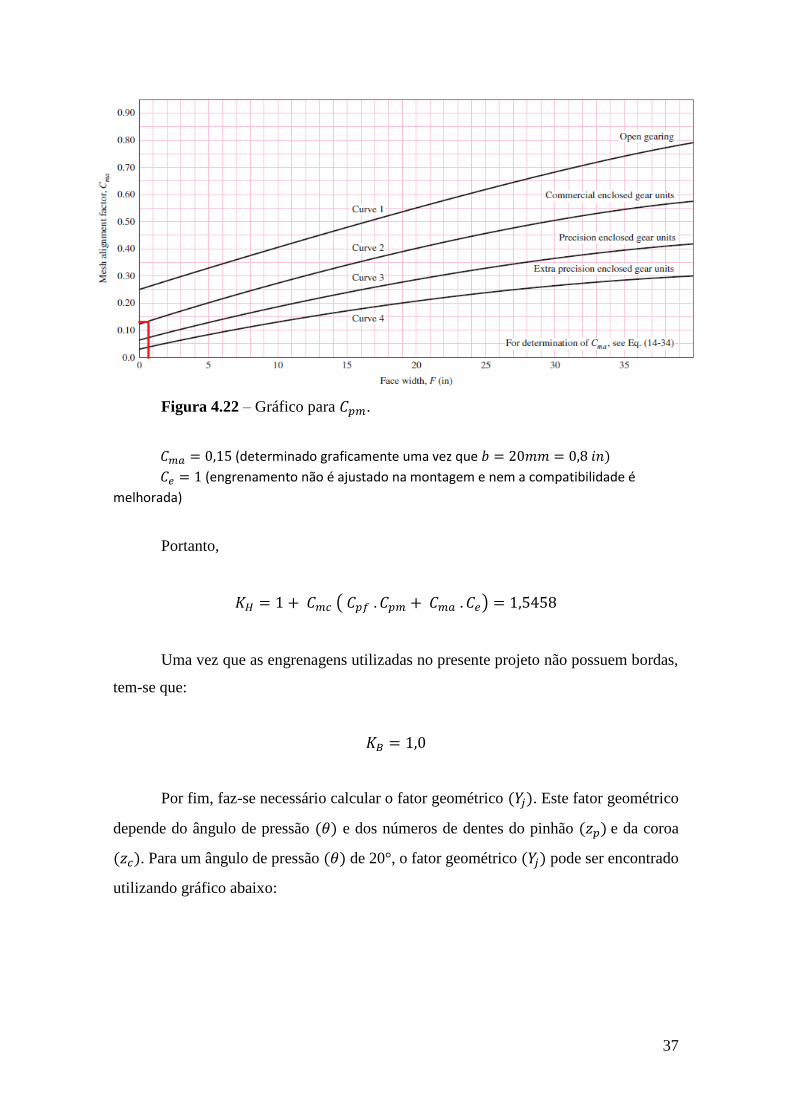
Figura 4.22 – Gráfico para 𝐶𝑝𝑚.
𝐶𝑚𝑎 = 0,15 (determinado graficamente uma vez que 𝑏 = 20𝑚𝑚 = 0,8 𝑖𝑛)
𝐶𝑒 = 1 (engrenamento não é ajustado na montagem e nem a compatibilidade é
melhorada)
Portanto,
𝐾𝐻 = 1 + 𝐶𝑚𝑐 ( 𝐶𝑝𝑓 . 𝐶𝑝𝑚 + 𝐶𝑚𝑎 . 𝐶𝑒) = 1,5458
Uma vez que as engrenagens utilizadas no presente projeto não possuem bordas,
tem-se que:
𝐾𝐵 = 1,0
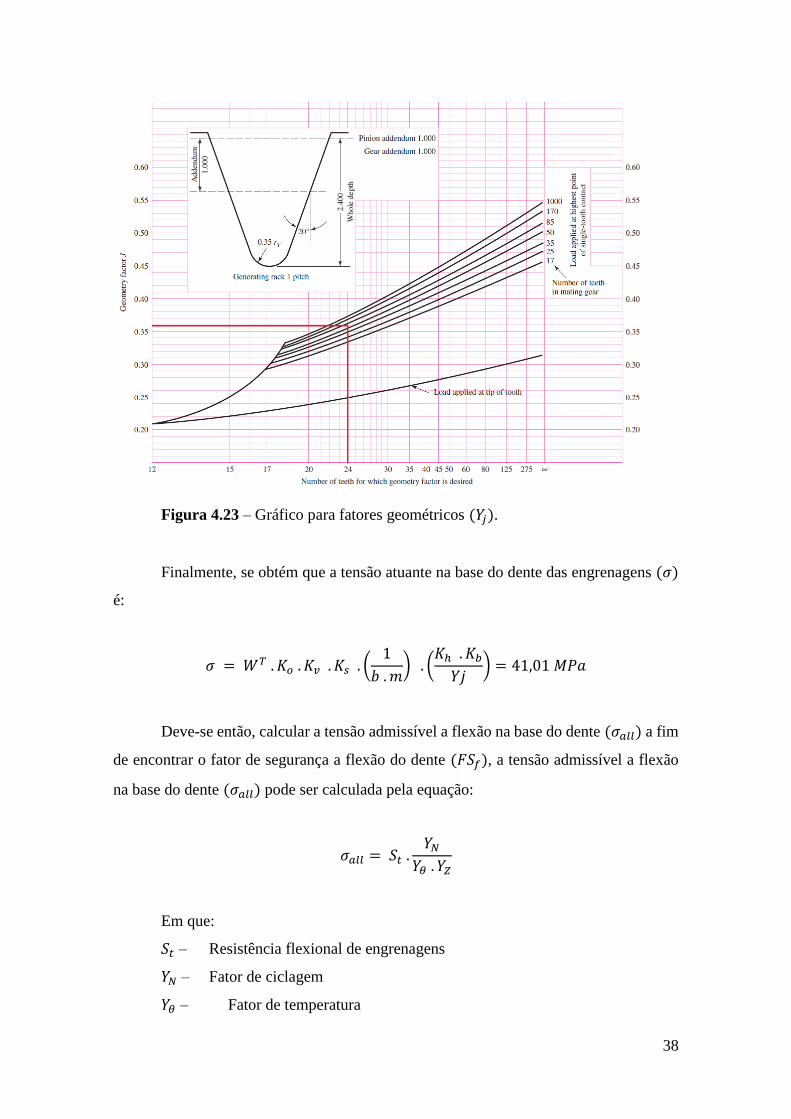
Por fim, faz-se necessário calcular o fator geométrico (𝑌𝑗). Este fator geométrico
depende do ângulo de pressão (𝜃) e dos números de dentes do pinhão (𝑧𝑝) e da coroa
(𝑧𝑐). Para um ângulo de pressão (𝜃) de 20°, o fator geométrico (𝑌𝑗) pode ser encontrado
utilizando gráfico abaixo:
38
Figura 4.23 – Gráfico para fatores geométricos (𝑌𝑗).
Finalmente, se obtém que a tensão atuante na base do dente das engrenagens (𝜎)
é:
𝜎 = 𝑊𝑇 . 𝐾𝑜 . 𝐾𝑣 . 𝐾𝑠 . (1
𝑏 . 𝑚) . (
𝐾ℎ . 𝐾𝑏
𝑌𝑗) = 41,01 𝑀𝑃𝑎
Deve-se então, calcular a tensão admissível a flexão na base do dente (𝜎𝑎𝑙𝑙) a fim
de encontrar o fator de segurança a flexão do dente (𝐹𝑆𝑓), a tensão admissível a flexão
na base do dente (𝜎𝑎𝑙𝑙) pode ser calculada pela equação:
𝜎𝑎𝑙𝑙 = 𝑆𝑡 .𝑌𝑁
𝑌𝜃 . 𝑌𝑍
Em que:
𝑆𝑡 – Resistência flexional de engrenagens
𝑌𝑁 – Fator de ciclagem
𝑌𝜃 – Fator de temperatura
39
𝑌𝑍 – Fator de confiabilidade
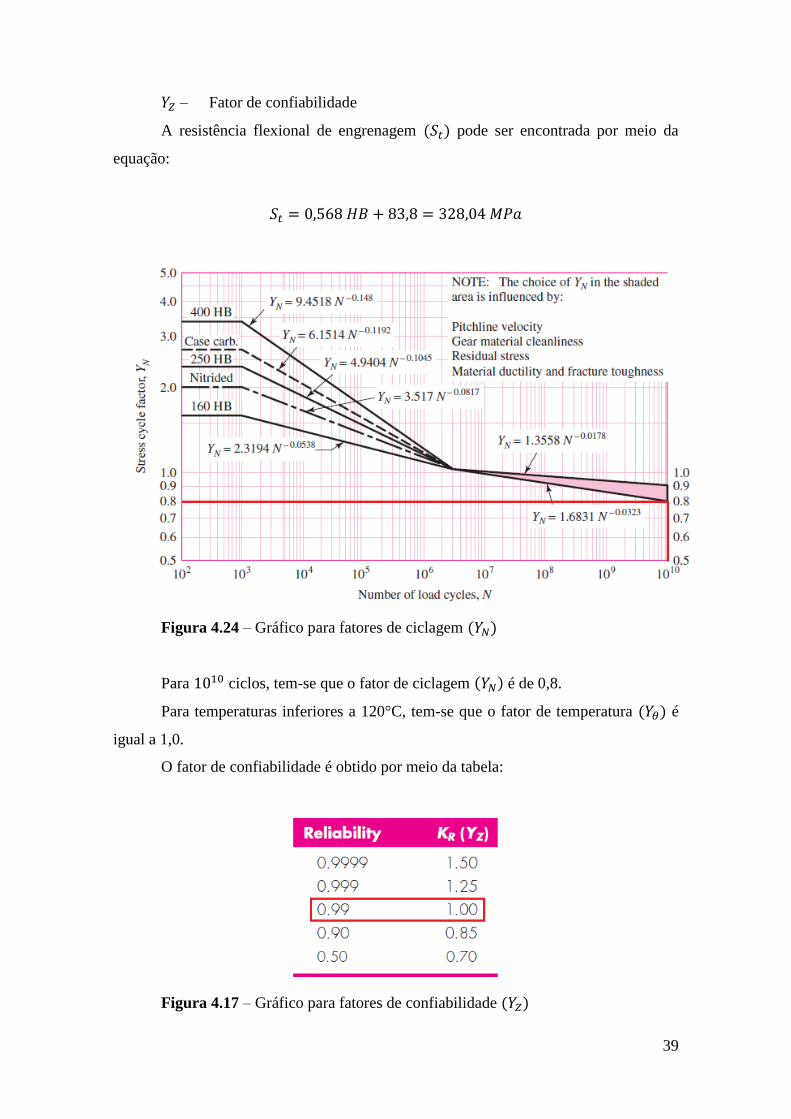
A resistência flexional de engrenagem (𝑆𝑡) pode ser encontrada por meio da
equação:
𝑆𝑡 = 0,568 𝐻𝐵 + 83,8 = 328,04 𝑀𝑃𝑎
Figura 4.24 – Gráfico para fatores de ciclagem (𝑌𝑁)
Para 1010 ciclos, tem-se que o fator de ciclagem (𝑌𝑁) é de 0,8.
Para temperaturas inferiores a 120°C, tem-se que o fator de temperatura (𝑌𝜃) é
igual a 1,0.
O fator de confiabilidade é obtido por meio da tabela:
Figura 4.17 – Gráfico para fatores de confiabilidade (𝑌𝑍)

40
Portanto, define-se que o fator de confiabilidade (𝑌𝑍) é igual a 1,0.
Sendo assim,
𝜎𝑎𝑙𝑙 = 𝑆𝑡 .𝑌𝑁
𝑌𝜃 . 𝑌𝑍= 262,432 𝑀𝑃𝑎
Em posse da tensão atuante na base do dente das engrenagens (𝜎) e da tensão
admissível a flexão na base do dente (𝜎𝑎𝑙𝑙), pode se calcular o fator de segurança a flexão
do dente (𝐹𝑆𝑓).
𝐹𝑆𝑓 = 𝜎𝑎𝑙𝑙
𝜎= 6,399
Após o calcular de resistência da engrenagem à fadiga na base do dente a flexão,
deve-se então calcular a resistência da engrenagem à crateramento (desgaste superficial)
da segundo as normas AISI/AGMA, descritas na formula:
𝜎𝑐 = 𝑍𝑒 . √𝑊𝑇 . 𝐾0 . 𝐾𝑣. 𝐾𝐻
1
𝐷𝑝. 𝑏.𝑍𝑟
𝑍𝑙
Em que:
𝜎𝑐 – Resistência a crateramento (desgaste)
𝑍𝑒 – Coeficiente elástico
𝑊𝑇 – Força transmitida pelos dentes das engrenagens
𝐾0 – Fator de sobrecarga
𝐾𝑣 – Fator de dinâmico
𝐾𝐻 – Fator de distribuição de carga no dente
𝐷 – Diâmetro primitivo
𝑏 – Largura do dente
𝑍𝑟 – Fator de condição superficial
𝑍𝑙 – Fator geométrico
Uma vez que a coroa e o pinhão são fabricados com o mesmo material (aço AISI
4340), eles possuem o mesmo módulo de elasticidade (𝐸𝑃 = 𝐸𝑐 ≅ 200 𝐺𝑃𝑎) e mesmo
coeficiente de Poisson (𝜈𝑃 = 𝜈𝑐 = 0,3). Calcula-se então o coeficiente elástico (𝑍𝑒):

41
𝑍𝑒 = [1
𝜋 (1 − 𝜈𝑃
2
𝐸𝑃+
1 − 𝜈𝐺2
𝐸𝐺)
]
12⁄
= 191 𝑀𝑃𝑎
A partir do momento em que as engrenagens utilizadas no multiplicador de
velocidade são novas, tem-se que o fator de condição superficial (𝑍𝑅) é igual a 1,0.
Adicionalmente, uma vez que o ângulo de pressão das engrenagens (𝜃) é de 20°, a razão
de engrenamento (𝑖) é de 2,25 e a razão de compartilhamento de carga (𝑚𝑁) é de 1,0
(utilização de dentes retos), se obtém o fator geométrico a partir de:
𝑍𝐿 =𝐶𝑜𝑠𝜑𝑇 . 𝑆𝑒𝑛𝜑𝑇
2 𝑚𝑛 .
𝑚𝐺
𝑚𝐺 + 1= 0,111
Logo,
𝜎𝑐 = 𝑍𝑒 . √𝑊𝑇 . 𝐾0 . 𝐾𝑣. 𝐾𝐻
1
𝐷𝑝. 𝑏.𝑍𝑟
𝑍𝑙= 410,34 𝑀𝑃𝑎
Assim como foi feito para o critério de resistência a flexão na base do dente, se
deve calcular a tensão de contato admissível (𝜎𝑐𝑎𝑙𝑙) para a superfície da engrenagem. Esta
é obtida por meio da equação:
𝜎𝑐𝑎𝑙𝑙 = 𝜎𝐻𝑃 .𝑌𝑛 . 𝑍𝑤
𝑌𝜃 . 𝑌𝑧
Em que:
𝜎𝐻𝑃 – Tensão admissível de contato do material
𝑌𝑛 – Fator de ciclagem
𝑍𝑤 – Fator de razão de dureza
𝑌𝜃 – Fator de temperatura
𝑌𝑧 – Fator de confiabilidade

42
Para uma engrenagem de aço grau 1 endurecido por chama ou indução e raízes
não endurecidas, se tem que a tensão admissível de contato do material (𝜎𝐻𝑃) é de 22500
psi ou 1551 Mpa.
Pelo fato das engrenagens serem fabricadas a partir do mesmo material, ambas
possuem a mesma dureza. Logo a razão entre a dureza do pinhão pela coroa é igual a 1,0,
resultando em um fator de razão de dureza (𝑍𝑤) igual a 1,0
Portanto, se obtém que:
𝜎𝑐𝑎𝑙𝑙 = 𝜎𝐻𝑃 .𝑌𝑛 . 𝑍𝑤
𝑌𝜃 . 𝑌𝑧= 1240 𝑀𝑃𝑎
Analogamente ao critério de resistência anterior, calcula-se o fator de segurança
de crateramento (𝐹𝑆𝑐) por:
𝐹𝑆𝑐 = 𝜎𝑐𝑎𝑙𝑙
𝜎𝑐= 3,021
Como ambos os critérios de resistência AISI/AGMA foram satisfeitos com um
fator de segurança relativamente alto, as considerações e escolhas adotadas nesse projeto
aparentam estar corretas.
4.8.2 – Projeto das Arvores do Multiplicador de velocidades
Figura 4.25 – Esquema da arvore mais solicitado do multiplicador de velocidades
43
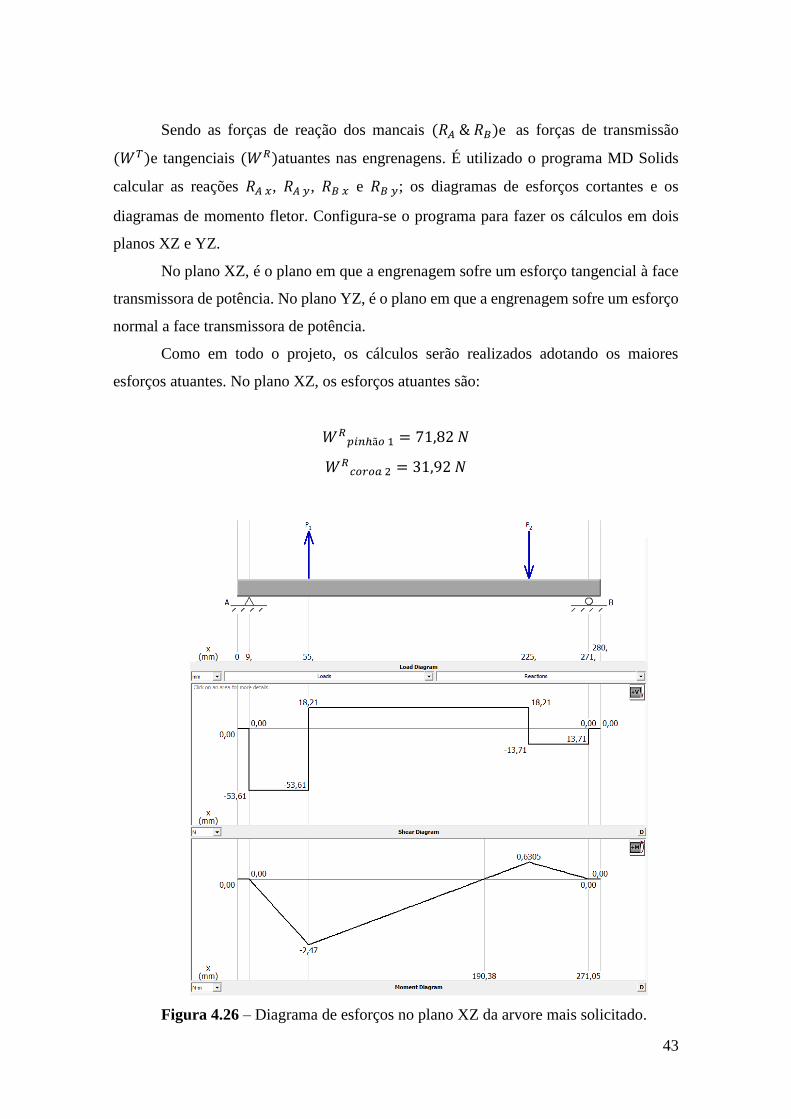
Sendo as forças de reação dos mancais (𝑅𝐴 & 𝑅𝐵)e as forças de transmissão
(𝑊𝑇)e tangenciais (𝑊𝑅)atuantes nas engrenagens. É utilizado o programa MD Solids
calcular as reações 𝑅𝐴 𝑥, 𝑅𝐴 𝑦, 𝑅𝐵 𝑥 e 𝑅𝐵 𝑦; os diagramas de esforços cortantes e os
diagramas de momento fletor. Configura-se o programa para fazer os cálculos em dois
planos XZ e YZ.
No plano XZ, é o plano em que a engrenagem sofre um esforço tangencial à face
transmissora de potência. No plano YZ, é o plano em que a engrenagem sofre um esforço
normal a face transmissora de potência.
Como em todo o projeto, os cálculos serão realizados adotando os maiores
esforços atuantes. No plano XZ, os esforços atuantes são:
𝑊𝑅𝑝𝑖𝑛ℎã𝑜 1 = 71,82 𝑁
𝑊𝑅𝑐𝑜𝑟𝑜𝑎 2 = 31,92 𝑁
Figura 4.26 – Diagrama de esforços no plano XZ da arvore mais solicitado.
44
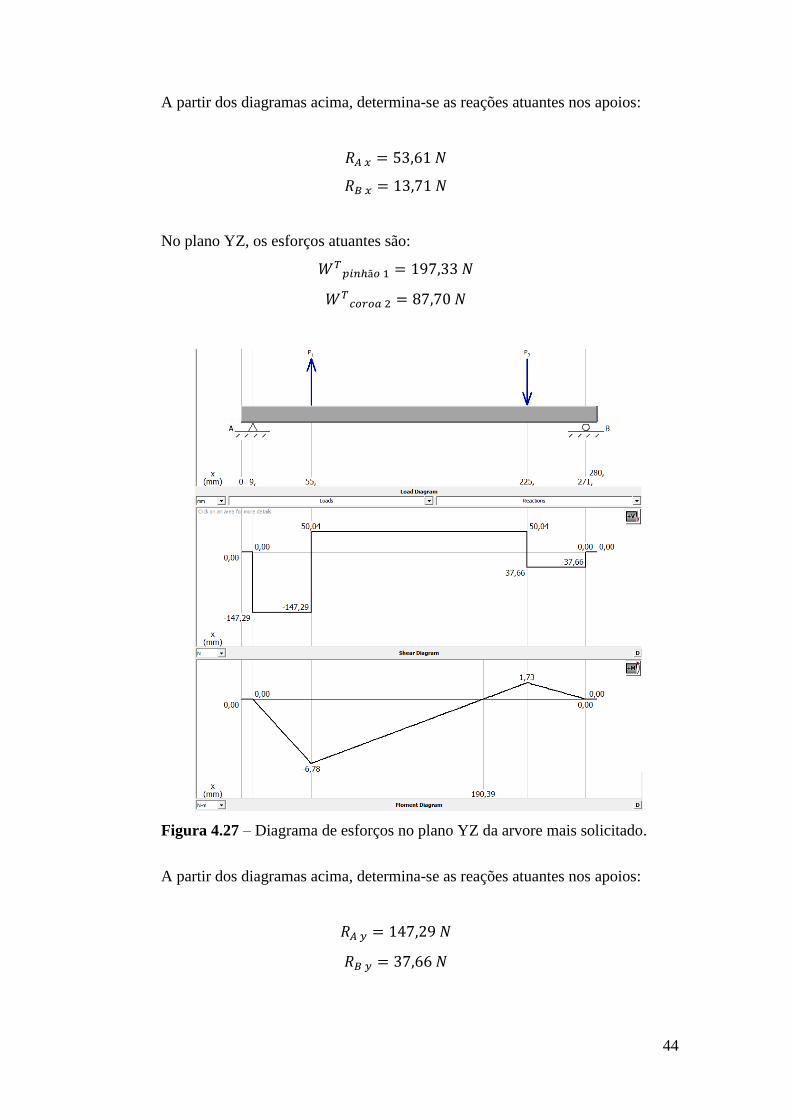
A partir dos diagramas acima, determina-se as reações atuantes nos apoios:
𝑅𝐴 𝑥 = 53,61 𝑁
𝑅𝐵 𝑥 = 13,71 𝑁
No plano YZ, os esforços atuantes são:
𝑊𝑇𝑝𝑖𝑛ℎã𝑜 1 = 197,33 𝑁
𝑊𝑇𝑐𝑜𝑟𝑜𝑎 2 = 87,70 𝑁
Figura 4.27 – Diagrama de esforços no plano YZ da arvore mais solicitado.
A partir dos diagramas acima, determina-se as reações atuantes nos apoios:
𝑅𝐴 𝑦 = 147,29 𝑁
𝑅𝐵 𝑦 = 37,66 𝑁
45
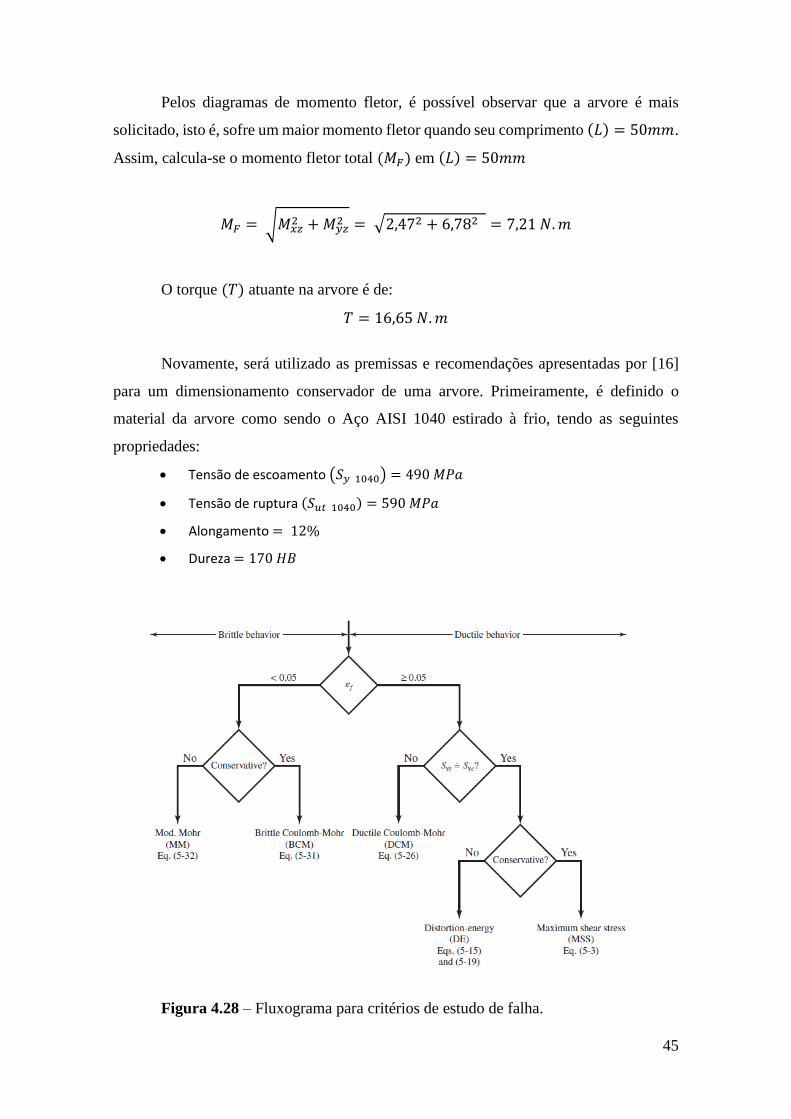
Pelos diagramas de momento fletor, é possível observar que a arvore é mais
solicitado, isto é, sofre um maior momento fletor quando seu comprimento (𝐿) = 50𝑚𝑚.
Assim, calcula-se o momento fletor total (𝑀𝐹) em (𝐿) = 50𝑚𝑚
𝑀𝐹 = √𝑀𝑥𝑧2 + 𝑀𝑦𝑧
2 = √2,472 + 6,782 = 7,21 𝑁. 𝑚
O torque (𝑇) atuante na arvore é de:
𝑇 = 16,65 𝑁. 𝑚
Novamente, será utilizado as premissas e recomendações apresentadas por [16]
para um dimensionamento conservador de uma arvore. Primeiramente, é definido o
material da arvore como sendo o Aço AISI 1040 estirado à frio, tendo as seguintes
propriedades:
Tensão de escoamento (𝑆𝑦 1040) = 490 𝑀𝑃𝑎
Tensão de ruptura (𝑆𝑢𝑡 1040) = 590 𝑀𝑃𝑎
Alongamento = 12%
Dureza = 170 𝐻𝐵
Figura 4.28 – Fluxograma para critérios de estudo de falha.

46
Aplicando o critério de estático da Máxima Energia de Distorção, pode-s4 calcular
o diâmetro mínimo necessário, segundo a formula:
𝑑𝑚𝑖𝑛 = √32 . 𝐹𝑆
𝜋 . 𝑆𝑦 √𝑀𝐹
2 + 0,75 𝑇23
= 0,00944 𝑚
Encontra-se que o diâmetro mínimo (𝑑𝑚𝑖𝑛) para suportar a carga estática é de
9,44mm (utilizando um fator de segurança (𝐹𝑆) = 2,0). Ainda assim, deve-se calcular
o diâmetro mínimo necessário para suportar as cargas alternadas.
Figura 4.29 – Gráfico que demonstra os critérios de estudo de falha.
Dentre os critérios apresentados por [16] o mais conservador é o critério de
Soderberg. Portanto, como está sendo adotado uma postura conservadora em todo o
projeto, será utilizado o critério de fadiga de Soderberg, que é:
1
𝐹𝑆=
𝜎𝑎′
𝑆𝑒+
𝜎𝑚′
𝑆𝑢𝑡
Em que:
𝐹𝑆 – Fator de segurança;
𝜎𝑎′ – Tensão alternada;
𝜎𝑚′ – Tensão média;
𝑆𝑒 – Resistência a fadiga; e
𝑆𝑢𝑡 – Resistência a ruptura.
47
Realiza-se então, o cálculo da resistência à fadiga da arvore, calculando o valor
limite de resistência à fadiga (𝑆𝑒), que é dado por:
𝑆𝑒 = 𝐾𝑎 . 𝐾𝑏 . 𝐾𝑐 . 𝐾𝑑 . 𝐾𝑒 . 𝑆𝑒′
Em que:
𝐾𝑎 – Fator de superfície
𝐾𝑏 – Fator de tamanho
𝐾𝑐 – Fator de carregamento
𝐾𝑑 – Fator de temperatura
𝐾𝑒 – Fator de confiabilidade
𝑆𝑒′ – Limite de resistência a fadiga
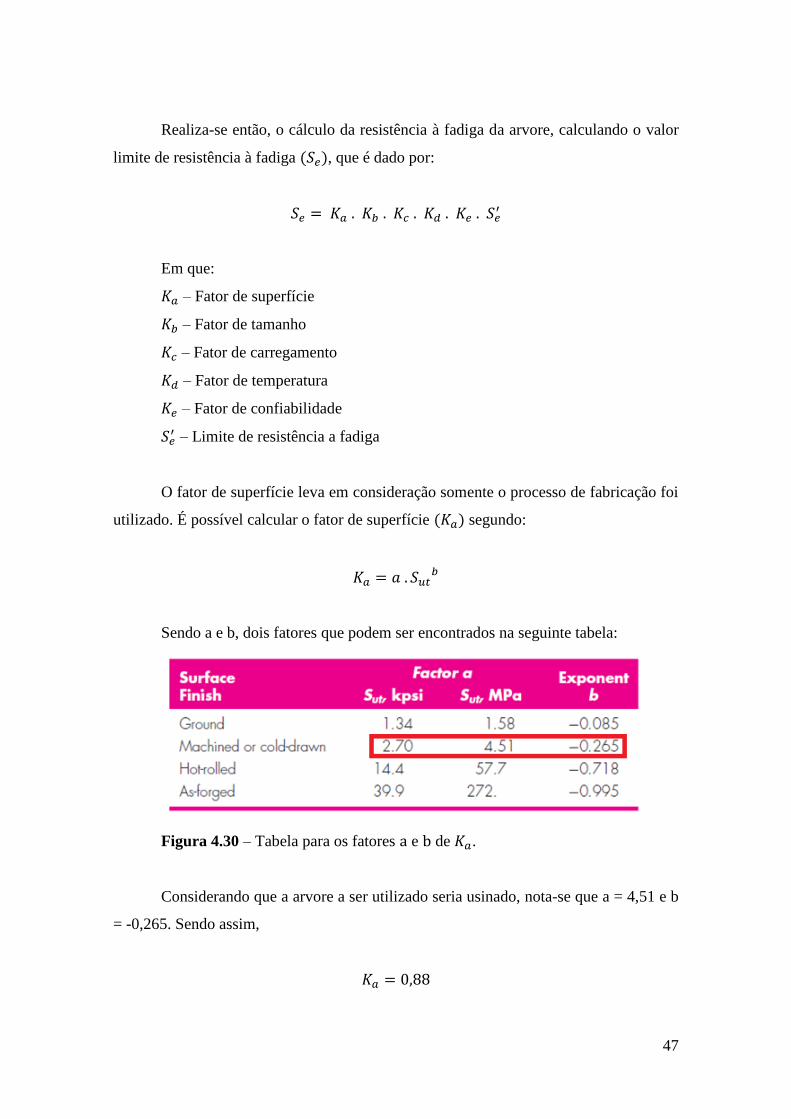
O fator de superfície leva em consideração somente o processo de fabricação foi
utilizado. É possível calcular o fator de superfície (𝐾𝑎) segundo:
𝐾𝑎 = 𝑎 . 𝑆𝑢𝑡𝑏
Sendo a e b, dois fatores que podem ser encontrados na seguinte tabela:
Figura 4.30 – Tabela para os fatores a e b de 𝐾𝑎.
Considerando que a arvore a ser utilizado seria usinado, nota-se que a = 4,51 e b
= -0,265. Sendo assim,
𝐾𝑎 = 0,88

48
O fator de tamanho (𝐾𝑏) leva em consideração o diâmetro da arvore e é calculado
da seguinte forma:
𝐾𝑏 = 1,24 . 𝑑−0,107 𝑆𝑒 2,79 ≤ 𝑑 ≤ 51 𝑚𝑚
𝐾𝑏 = 1,51 . 𝑑−0,157 𝑆𝑒 51 ≤ 𝑑 ≤ 254 𝑚𝑚
É possível inferir que pelas cargas exercidas nas arvores que o diâmetro da arvore
não deve ser maior do que 51mm. Para realizar um cálculo preliminar, considera-se d =
20mm. Logo,
𝐾𝑏 = 0,90
O fator de carregamento (𝐾𝑐) leva em consideração qual tipo de carregamento é
empregado na arvore. Nesse caso, se tem que:
𝐾𝑐 = {1,0 − 𝐹𝑙𝑒𝑥ã𝑜 0,85 − 𝐴𝑥𝑖𝑎𝑙
0,59 − 𝑇𝑜𝑟çã𝑜
No entanto, [16] recomenda a utilização de 𝐾𝑐 = 0,59 somente para fadiga
torcional pura. Quando a torção está combinada com outras tensões tais como flexão,
𝐾𝑐 = 1,00 e o carregamento combinado é tratado usando-se a tensão efetiva de Von
Mises.
𝐾𝑐 = 1,00
O fator de temperatura (𝐾𝑑) leva em consideração a temperatura operacional da
arvore. Nesse caso, se tem que:
𝐾𝑑 = 1,025 (𝑝𝑎𝑟𝑎 𝑇 ≤ 150°𝐶)
Seguindo a temperatura de trabalho adotada nos cálculos das engrenagens e
adotando uma postura conservadora, considera-se que as arvores trabalham em uma
temperatura inferior a 150°C.
49
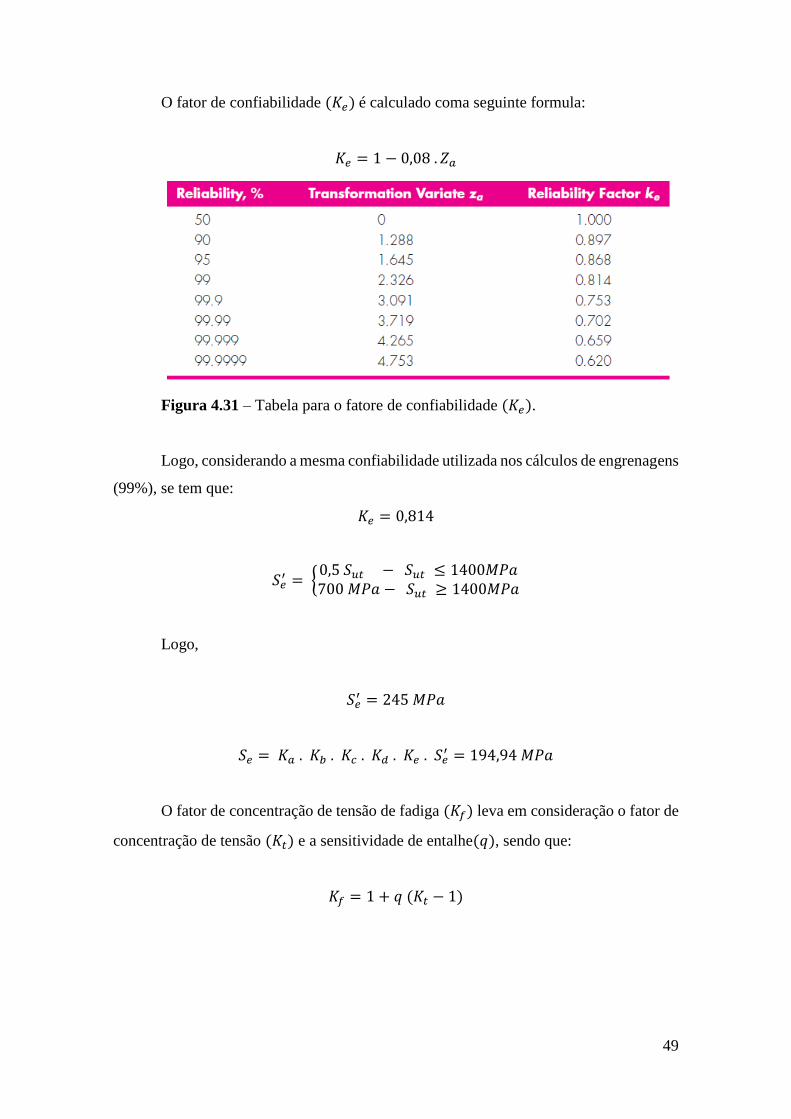
O fator de confiabilidade (𝐾𝑒) é calculado coma seguinte formula:
𝐾𝑒 = 1 − 0,08 . 𝑍𝑎
Figura 4.31 – Tabela para o fatore de confiabilidade (𝐾𝑒).
Logo, considerando a mesma confiabilidade utilizada nos cálculos de engrenagens
(99%), se tem que:
𝐾𝑒 = 0,814
𝑆𝑒′ = {
0,5 𝑆𝑢𝑡 − 𝑆𝑢𝑡 ≤ 1400𝑀𝑃𝑎700 𝑀𝑃𝑎 − 𝑆𝑢𝑡 ≥ 1400𝑀𝑃𝑎
Logo,
𝑆𝑒′ = 245 𝑀𝑃𝑎
𝑆𝑒 = 𝐾𝑎 . 𝐾𝑏 . 𝐾𝑐 . 𝐾𝑑 . 𝐾𝑒 . 𝑆𝑒′ = 194,94 𝑀𝑃𝑎
O fator de concentração de tensão de fadiga (𝐾𝑓) leva em consideração o fator de
concentração de tensão (𝐾𝑡) e a sensitividade de entalhe(𝑞), sendo que:
𝐾𝑓 = 1 + 𝑞 (𝐾𝑡 − 1)
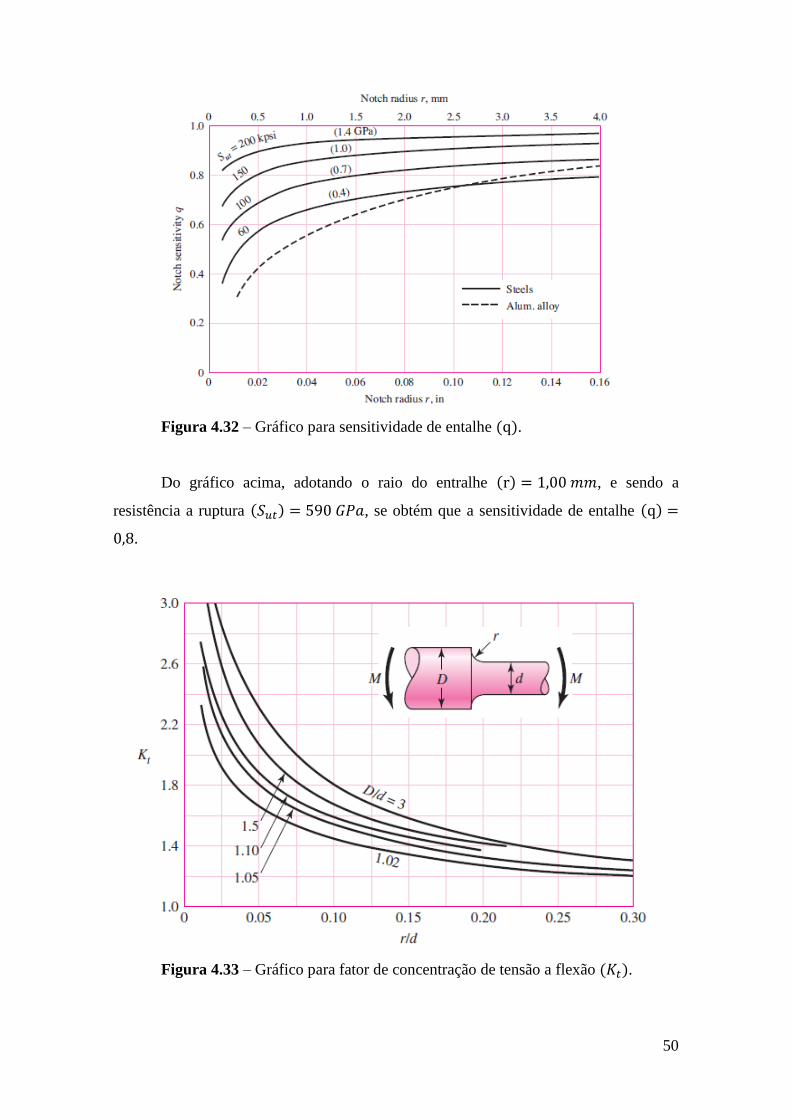
50
Figura 4.32 – Gráfico para sensitividade de entalhe (q).
Do gráfico acima, adotando o raio do entralhe (r) = 1,00 𝑚𝑚, e sendo a
resistência a ruptura (𝑆𝑢𝑡) = 590 𝐺𝑃𝑎, se obtém que a sensitividade de entalhe (q) =
0,8.
Figura 4.33 – Gráfico para fator de concentração de tensão a flexão (𝐾𝑡).
51
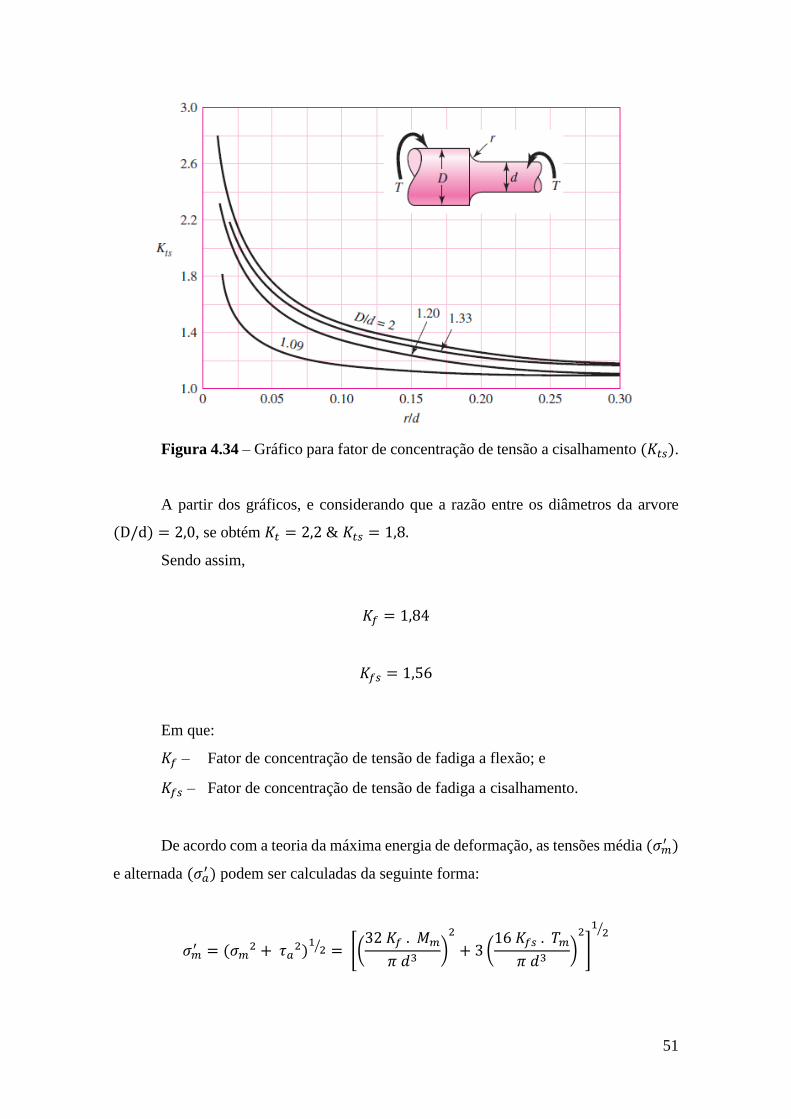
Figura 4.34 – Gráfico para fator de concentração de tensão a cisalhamento (𝐾𝑡𝑠).
A partir dos gráficos, e considerando que a razão entre os diâmetros da arvore
(D/d) = 2,0, se obtém 𝐾𝑡 = 2,2 & 𝐾𝑡𝑠 = 1,8.
Sendo assim,
𝐾𝑓 = 1,84
𝐾𝑓𝑠 = 1,56
Em que:
𝐾𝑓 – Fator de concentração de tensão de fadiga a flexão; e
𝐾𝑓𝑠 – Fator de concentração de tensão de fadiga a cisalhamento.
De acordo com a teoria da máxima energia de deformação, as tensões média (𝜎𝑚′ )
e alternada (𝜎𝑎′ ) podem ser calculadas da seguinte forma:
𝜎𝑚′ = (𝜎𝑚
2 + 𝜏𝑎2)
12⁄ = [(
32 𝐾𝑓 . 𝑀𝑚
𝜋 𝑑3)
2
+ 3 (16 𝐾𝑓𝑠 . 𝑇𝑚
𝜋 𝑑3)
2
]
12⁄

52
𝜎𝑎′ = (𝜎𝑎
2 + 𝜏𝑎2)
12⁄ = [(
32 𝐾𝑓 . 𝑀𝑎
𝜋 𝑑3)
2
+ 3 (16 𝐾𝑓𝑠 . 𝑇𝑎
𝜋 𝑑3)
2
]
12⁄
Em que:
𝑀𝑚 – Momento fletor médio;
𝑇𝑚 – Torque médio;
𝑀𝑎 – Momento fletor alternado; e
𝑇𝑎 – Torque alternado.
Combinando essas três equações, é possivél determinar o diâmetro mínimo que
suporte o critério de fadiga de Soderberg. Uma vez que o momento fletor (𝑀𝑚) e o
torque alternado (𝑇𝑎) são nulos e para um fator de segurança (𝐹𝑆) = 1,5, se obtém que:
𝑑𝑚𝑖𝑛 = √32 . 𝐹𝑆
𝜋 √
(𝐾𝑓 . 𝑀𝑎)2
𝑆𝑒2 + 0,75
(𝐾𝑓𝑠 . 𝑇𝑚)2
𝑆𝑦2
3
𝑑𝑚𝑖𝑛 = 0,0109𝑚 → 11𝑚𝑚
Como foi demonstrado, para os carregamentos apresentados pelo multiplicador
de velocidades, o menor diâmetro possível para as arvores utilizados neste deve ser de
11mm. No entanto, visando facilitar a fabricação e para que os rolamentos tenham uma
maior vida, serão utilizadas arvores de diâmetros próximos a 25mm em todo o projeto.
Nesse projeto, não foram utilizadas arvores estriados. Logo, a transferência de
potência das arvores ocorre por meio de chavetas. Estas serão dimensionadas a seguir.
Utiliza-se o aço SAE 1008 para a confecção das chavetas, esse material tem como
propriedades:
Módulo de Elasticidade (𝐸𝑆𝐴𝐸 1008) = 130 𝐺𝑃𝑎
Tensão de escoamento (𝑆𝑦 𝑆𝐴𝐸 1008) = 170 𝑀𝑃𝑎
Tensão de ruptura (𝑆𝑢𝑡 𝑆𝐴𝐸 1008) = 305 𝑀𝑃𝑎
Alongamento = 30%
53
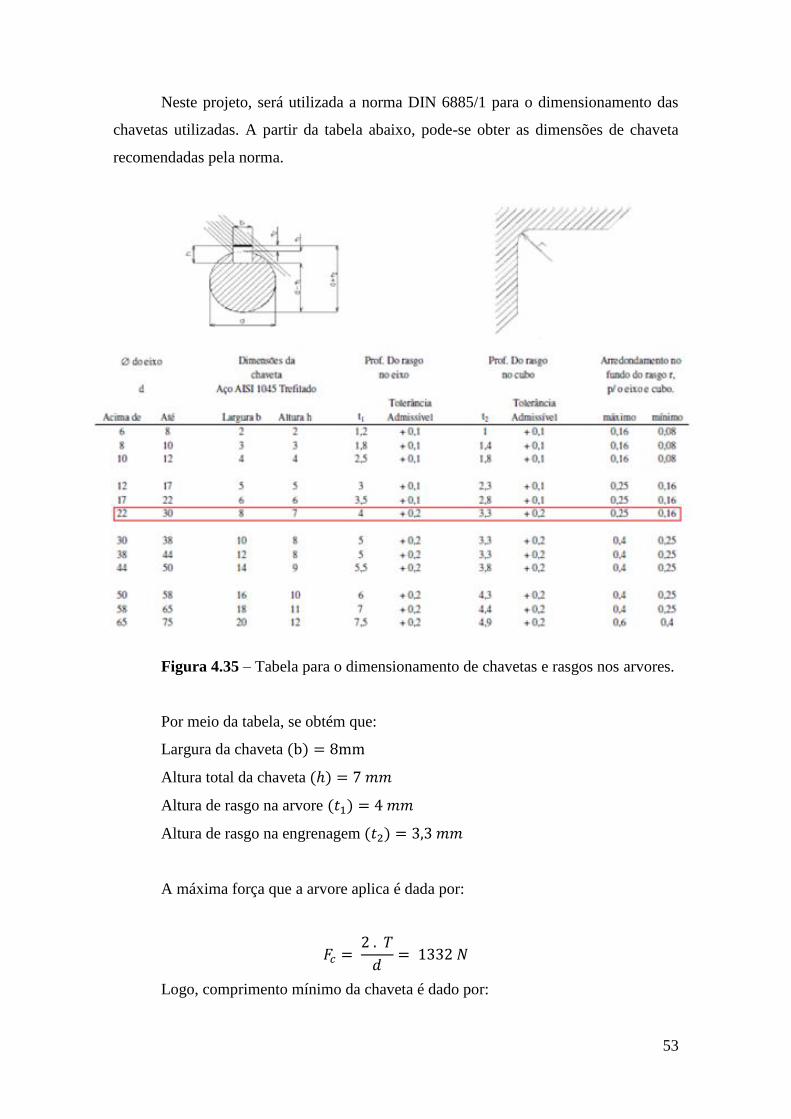
Neste projeto, será utilizada a norma DIN 6885/1 para o dimensionamento das
chavetas utilizadas. A partir da tabela abaixo, pode-se obter as dimensões de chaveta
recomendadas pela norma.
Figura 4.35 – Tabela para o dimensionamento de chavetas e rasgos nos arvores.
Por meio da tabela, se obtém que:
Largura da chaveta (b) = 8mm
Altura total da chaveta (ℎ) = 7 𝑚𝑚
Altura de rasgo na arvore (𝑡1) = 4 𝑚𝑚
Altura de rasgo na engrenagem (𝑡2) = 3,3 𝑚𝑚
A máxima força que a arvore aplica é dada por:
𝐹𝑐 = 2 . 𝑇
𝑑= 1332 𝑁
Logo, comprimento mínimo da chaveta é dado por:

54
𝑙𝑚𝑖𝑛 = 2 . 𝐹𝑐 . 𝑛
𝑡 . 𝑆𝑦= 0,0078 𝑚 = 8𝑚𝑚
No projeto, será utilizado o comprimento de chaveta (𝑙) = 9 𝑚𝑚.
4.8.3 – Seleção dos Rolamentos do Multiplicador de velocidades
Como mencionado anteriormente, o diâmetro da arvore utilizada no projeto será
de 25mm. Sendo assim, será escolhido a princípio o rolamento SKF6005-2Z a partir do
Catálogos SKF [17] para rolamentos, com:
𝐶 = 11900 𝑁 (𝐶𝑎𝑟𝑔𝑎 𝐷𝑖𝑛â𝑚𝑖𝑐𝑎)
𝐶0 = 6550 𝑁 (𝐶𝑎𝑟𝑔𝑎 𝑒𝑠𝑡á𝑡𝑖𝑐𝑎)
Calculam-se os esforços radiais e axias que os mancais sofrem a partir dos
cálculos realizados para as arvores e para as pás. O maior esforço radial é proveniente do
multiplicador de velocidade, que é:
𝑅𝐴 𝑥 = 47,01 𝑁
𝑅𝐴 𝑦 = 129,17 𝑁
𝐹𝑟 = √(𝑅𝐴 𝑥)2 + (𝑅𝐴 𝑦)2 = 137,45 𝑁
O maior esforço axial é proveniente das pás, que é:
𝐹𝑎 = 213,33 𝑁
Sendo assim, os cálculos para a carga dinâmica (𝑃) equivalente são:
𝑃 = 𝐹𝑟
E os cálculos para a carga estática equivalente (𝑃0) são:
𝑃0 = 𝐹𝑟

55
Calcula-se então a razão 𝐹𝑎/𝐶0 para se obter e, Y1 e Y2.
𝐹𝑎
𝐶0= 0,325
Se obtém que:
e = 0,22
X = 0,56
Y = 1,99
Logo, se obtém que:
𝑃 = 501,5 𝑁
𝑃0 = 189,2 𝑁
Então, calcula-se a números de ciclos que o mancal escolhido consegue operar,
quando submetido ao referente carregamento:
𝐿 = 𝑎1 . 𝑎SKF (𝐶
𝑃)
𝑎
Em que:
𝐿 – Número de rotações (vida)
𝑎1 – Fator de confiabilidade
𝑎𝑆𝐾𝐹 – Fator da SKF (lubrificação, velocidade, fadiga)
𝑎 – Constante para o tipo de rolamento
𝐶 – Capacidade de carga
𝐶 – Carga dinâmica
Consultando o manual do fabricante (SKF), encontra-se que:
𝑎1 = 0,25 (99% de confiabilidade)
𝑎SKF ≅ 4
𝑎 = 3 (Rolamento esférico)
Logo, encontra-se que o número de ciclos realizados pelo rolamento é de:
𝐿 = 6489 . 109 𝑅𝑒𝑣𝑜𝑙𝑢çõ𝑒𝑠
56
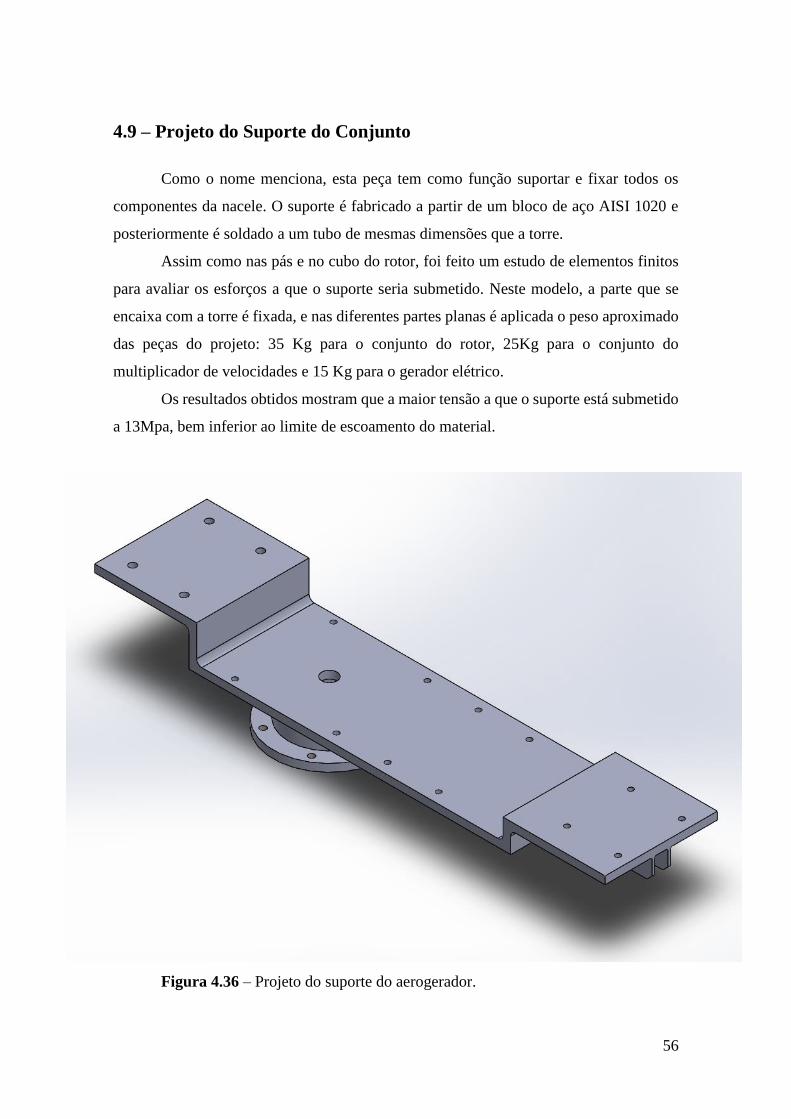
4.9 – Projeto do Suporte do Conjunto
Como o nome menciona, esta peça tem como função suportar e fixar todos os
componentes da nacele. O suporte é fabricado a partir de um bloco de aço AISI 1020 e
posteriormente é soldado a um tubo de mesmas dimensões que a torre.
Assim como nas pás e no cubo do rotor, foi feito um estudo de elementos finitos
para avaliar os esforços a que o suporte seria submetido. Neste modelo, a parte que se
encaixa com a torre é fixada, e nas diferentes partes planas é aplicada o peso aproximado
das peças do projeto: 35 Kg para o conjunto do rotor, 25Kg para o conjunto do
multiplicador de velocidades e 15 Kg para o gerador elétrico.
Os resultados obtidos mostram que a maior tensão a que o suporte está submetido
a 13Mpa, bem inferior ao limite de escoamento do material.
Figura 4.36 – Projeto do suporte do aerogerador.
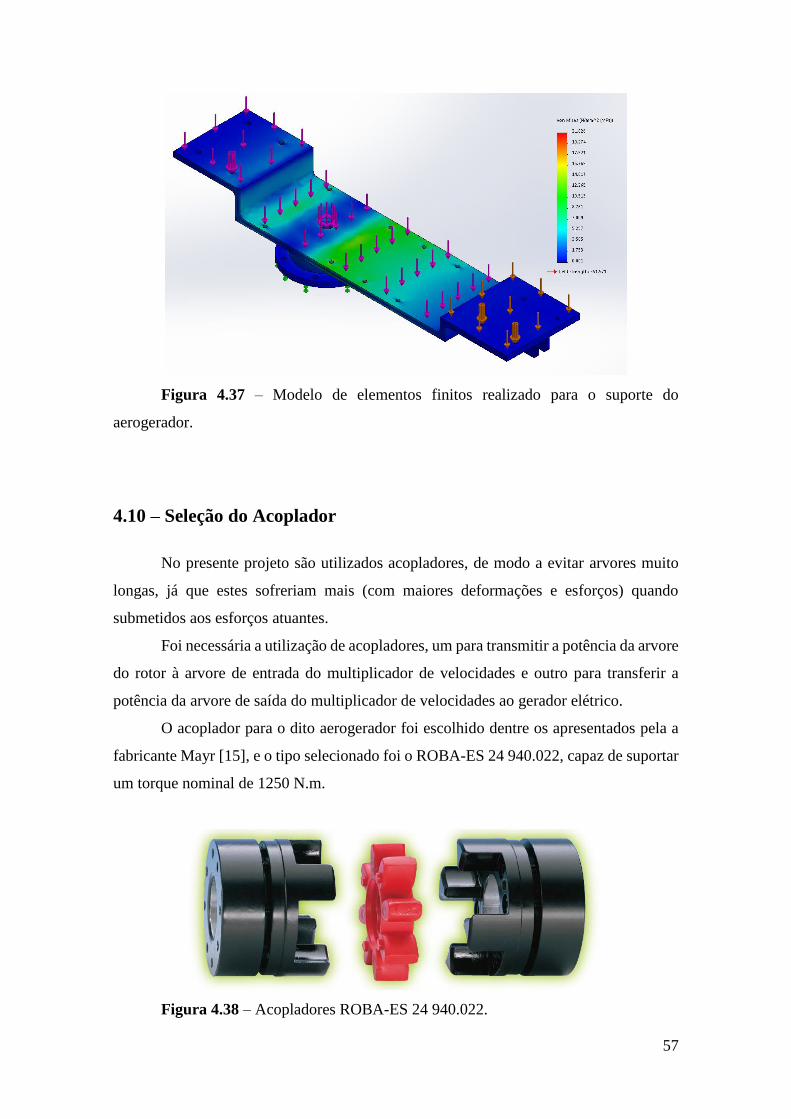
57
Figura 4.37 – Modelo de elementos finitos realizado para o suporte do
aerogerador.
4.10 – Seleção do Acoplador
No presente projeto são utilizados acopladores, de modo a evitar arvores muito
longas, já que estes sofreriam mais (com maiores deformações e esforços) quando
submetidos aos esforços atuantes.
Foi necessária a utilização de acopladores, um para transmitir a potência da arvore
do rotor à arvore de entrada do multiplicador de velocidades e outro para transferir a
potência da arvore de saída do multiplicador de velocidades ao gerador elétrico.
O acoplador para o dito aerogerador foi escolhido dentre os apresentados pela a
fabricante Mayr [15], e o tipo selecionado foi o ROBA-ES 24 940.022, capaz de suportar
um torque nominal de 1250 N.m.
Figura 4.38 – Acopladores ROBA-ES 24 940.022.
58
4.11 – Projeto da nacele
Figura 4.39 – Projeto da nacele.
A nacele foi desenhada de forma a comportar todos os equipamentos do
aerogerador de forma compacta e a ser, quando possível aerodinâmico também. A nacele
é fabricada utilizando fibra de vidro, que fornece uma boa resistência mecânica, além de
ser mais barata.
Figura 4.40 – Projeto da nacele com a sua fixação.
Conforme pode ser observado na figura 4.40, são utilizados diversos parafusos do
tipo M6 para a fixação das duas partes da nacele.

59
4.12 – Dimensionamento da torre do aerogerador
Sabe-se que a altura do aerogerador deve ser 8m (dados iniciais de projeto). A fim
de evitar os efeitos de deflexão e flambagem, utilizam-se três tubos de 2,5m de
comprimento e o encaixe do aerogerador na torre terá os 0,5m restantes.
A partir do Catálogos Votorantim [18] utiliza-se o perfil KR-1393 que tem como
propriedades:
Diâmetro externo (𝐷𝑒) = 160 𝑚𝑚;
Espessura de parede (𝑡) = 10 𝑚𝑚;
Massa específica linear (𝑞) = 12,723 𝐾𝑔/𝑚;
Módulo de Elasticidade (𝐸) = 201 𝐺𝑃𝑎;
Tensão de escoamento (𝑆𝑦) = 390 𝑀𝑃𝑎.
Sendo assim, pode-se calcular o diâmetro interno (𝐷𝑖), a área da seção do tubo
(𝐴), a área de contato com o vento (𝐴𝑐𝑜𝑛𝑡𝑎𝑡𝑜 𝑐𝑜𝑚 𝑜 𝑣𝑒𝑛𝑡𝑜), o momento de inercia da torre
(𝐼) e o peso da torre (𝑃𝑒𝑠𝑜𝑡𝑜𝑟𝑟𝑒).
𝐷𝑖 = 𝐷𝑒 − 2𝑡 = 140 𝑚𝑚
𝐴 =𝜋
4 (𝐷𝑒
2 − 𝐷𝑖2) = 4712 𝑚𝑚2
𝐴𝑐𝑜𝑛𝑡𝑎𝑡𝑜 𝑐𝑜𝑚 𝑜 𝑣𝑒𝑛𝑡𝑜 = 𝐿 . 𝐷𝑒 = 1,28 𝑚2
𝐼 = 𝜋
64 (𝐷𝑒
4 − 𝐷𝑖4) = 1,331 107 𝑚𝑚4
𝑃𝑒𝑠𝑜𝑡𝑜𝑟𝑟𝑒 = 𝑞 𝐿 𝑔 = 998 𝑁 ≅ 1000𝑁
Em posse dos dados acima, pode-se realizar o cálculo de flambagem para os tubos
da torre do aero gerador. Primeiramente, calcula-se a carga crítica para o próprio peso
(𝑃𝑐𝑟𝑖𝑡 𝑖) & a carga crítica para um carregamento externo (𝑃𝑐𝑟𝑖𝑡 𝑒), a partir das formulações
elaboradas por FÉODOSIEV, V. [19] e CRANDALL, S. [20]:

60
𝑃𝑐𝑟𝑖𝑡 𝑖 = 7,83 . 𝐸1020 . 𝐼
𝐿2= 3,27 . 105 𝑁
𝑃𝑐𝑟𝑖𝑡 𝑒 = 𝜋2. 𝐸1020 . 𝐼
4 . 𝐿2= 1,07 . 105 𝑁
Pode-se afirmar que a torre não sofrerá flambagem, considerando que o peso da
própria torre é infinitamente menor do que a sua carga crítica e que o conjunto nacele e
rotor possuem um peso inferior ao da carga crítica para um carregamento externo.
Sendo assim, avalia-se a deflexão que a torre sofre. Para isso, deve-se calcular o
número de Reynolds (𝑅𝑒) para o escoamento do vento sobre a torre:
𝑅𝑒 = 𝜌𝑎𝑟
µ𝑎𝑟 𝑈𝑚á𝑥𝑖𝑚𝑎 . 𝐷0 = 281606
Figura 4.41 – Gráfico para o coeficiente de arrasto (𝐶𝑑) de um cilindro liso.
A partir do gráfico acima, se obtém que o coeficiente de arrasto (𝐶𝑑) da torre é:
𝐶𝑑 = 1,0
A força de arrasto sofrida pela torre pode ser calculada por:
𝐹𝐷 = 𝐶𝑑
2 𝜌𝑎𝑟 . 𝑈𝑚á𝑥𝑖𝑚𝑎
2 . 𝐴𝑐𝑜𝑛𝑡𝑎𝑡𝑜 𝑐𝑜𝑚 𝑜 𝑣𝑒𝑛𝑡𝑜 = 490 𝑁

61
Sendo está força realizada de forma linear na torre, se tem que o momento fletor
(𝑀𝐷) que atua no engaste é:
𝑀𝐷 = 𝐹𝐷 . 𝐿
2 = 1960 𝑁 . 𝑚
Calcula-se então o momento fletor (𝑀𝑛𝑎𝑐𝑒𝑙𝑒) atuante no engaste que é resultado
das forças aplicadas na nacele:
𝐹𝑛𝑎𝑐𝑒𝑙𝑒 = 213,33 𝑁
𝐿 = 8 𝑚
𝑀𝑛𝑎𝑐𝑒𝑙𝑒 = 𝐹𝑛𝑎𝑐𝑒𝑙𝑒 . 𝐿 = 1707 𝑁. 𝑚
A partir das forças e dos momentos calculados, é possível calcular as tensões, o
Fator de Segurança, as deflexões lineares e as deflexões angulares sofridas pela torre.
Tensão devido a flexão (𝜎𝐹):
𝜎𝐹 =(𝑀𝐷 + 𝑀𝑛𝑎𝑐𝑒𝑙𝑙𝑒) . 𝐷𝑒
2 . 𝐼= 22,041 𝑀𝑃𝑎
Tensão devido a compressão (𝜎𝐶):
𝜎𝐶 =𝑃𝑒𝑠𝑜𝑡𝑜𝑡𝑎𝑙
𝐴=
𝑃𝑒𝑠𝑜𝑛𝑎𝑐𝑒𝑙𝑒 + 𝑃𝑒𝑠𝑜𝑡𝑜𝑟𝑟𝑒
𝐴≅
4000
4712 = 0,849 𝑀𝑃𝑎
Tensão de cisalhamento na base da torre (𝜏):
𝜏 =𝐹𝐷 + 𝐹𝑛𝑎𝑐𝑒𝑙𝑒
𝐴= 149,26 𝑀𝑃𝑎
Tensão de Von Mises (𝜎𝑉𝑜𝑛 𝑀𝑖𝑠𝑒𝑠):
𝜎𝑉𝑜𝑛 𝑀𝑖𝑠𝑒𝑠 = √(𝜎𝐹 + 𝜎𝐶)2 + 3𝜏 = 249,537 𝑀𝑃𝑎
62
Fator de Segurança (𝐹𝑆):
𝐹𝑆 =𝑆𝑦
𝜎𝑉𝑜𝑛 𝑀𝑖𝑠𝑒𝑠= 1,56
Deflexão angular (𝜑𝐷) devido a força de arrasto na torre:
𝜑𝐷 = 𝐹𝐷 . 𝐿2
6 . 𝐸1020 . 𝐼= 0,001954 𝑟𝑎𝑑 = 0,112 °
Deflexão linear (𝛿𝐷) devido a força de arrasto na torre:
𝛿𝐷 = 𝐹𝐷 . 𝐿3
8 . 𝐸1020 . 𝐼= 0,013609 𝑚 = 11,724 𝑚𝑚
Deflexão angular (𝜑𝐷 𝑟𝑜𝑡𝑜𝑟) devido a força de arrasto no rotor:
𝜑𝐷 𝑟𝑜𝑡𝑜𝑟 = 𝐹𝑟𝑜𝑡𝑜𝑟 . 𝐿2
2 . 𝐸1020 . 𝐼= 0,002552 𝑟𝑎𝑑 = 0,146 °
Deflexão linear (𝛿𝐷 𝑟𝑜𝑡𝑜𝑟) devido a força de arrasto no rotor:
𝛿𝐷 𝑟𝑜𝑡𝑜𝑟 = 𝐹𝑟𝑜𝑡𝑜𝑟 . 𝐿3
3 . 𝐸1020 . 𝐼= 0,013609 𝑚 = 13,609 𝑚𝑚
Sendo assim, as deflexões totais são:
𝜑𝑇 = 𝜑𝐷 + 𝜑𝐷 𝑟𝑜𝑡𝑜𝑟 = 0,258°
𝛿𝑇 = 𝛿𝐷 + 𝛿𝐷 𝑟𝑜𝑡𝑜𝑟 = 25,333 𝑚𝑚
63
4.13 – Projeto do mecanismo de guinada (yaw)
O sistema de guinada (yaw) tem como objetivo orientar o rotor contra o vento. As
turbinas eólicas de eixo horizontal necessitam utilizar algum tipo de sistema que oriente
o rotor contra o vento de modo a extrair a máxima energia do escoamento do ar.
Existem dois tipos de sistema de guinada (yaw): sistemas passivos e ativos. Onde
cada um têm vantagens e desvantagens particulares, além de fornecerem diversas
soluções de projeto.
O sistema de guinada (yaw) utilizado no presente pedido funciona de forma
passiva (sistema livre), onde a nacele é apoiada em mancais de rolamento, que permitem
livremente a sua rotação quando solicitada pelo momento provocado pela incidência de
vento na cauda do sistema.
No presente projeto, o sistema de guinada (yaw) é fabricado utilizando uma barra
de perfil quadrado de Aço AISI 1020 e uma chapa de Aço AISI 1020, sendo a barra presa
à chapa por parafusos.
O mecanismo de guinada (yaw) é fixada no suporte do aerogerador também por
meio de parafusos.
Figura 4.39 – Projeto do mecanismo de guinada (yaw).
64
Figura 4.40 – Mecanismo de guinada (yaw) fixado ao suporte do aerogerador.
65
Capítulo 5
Documentação gráfica do projeto
Neste projeto foram dimensionados diversos componentes mecânicos em
conjunto com a seleção de alguns elementos comerciais. A fim de melhor ilustrar e
permitir uma maior compreensão da matéria abordada neste projeto, foram concebidos
diversos desenhos técnicos referentes ao presente trabalho.
Essa documentação gráfica foi produzida utilizando um software de CAD, onde
foi possível realizar a montagem virtual do conjunto.
A dita documentação gráfica pode ser encontrada no Apêndice B
66
Capítulo 6
Conclusões
Nesse projeto foi realizado um estudo inicial para o desenvolvimento de um
protótipo de aerogerador.
Foi realizado um estudo aerodinâmico simples, ao escolher o perfil de pá,
decorrente dos dados apresentados por [6], a ser utilizado a partir das condições iniciais
estipuladas. Consequentemente, foram determinados os esforços aplicados ao rotor e as
pás.
A partir dos esforços aerodinâmicos calculados, foi possível realizar a seleção de
diversos componentes do aerogerador, tais como: freio, gerador elétrico, acoplamentos.
Adicionalmente, a partir dos ditos esforços calculados, foi possível dimensionar os
diversos elementos de máquina que compõe um aerogerador, tais como: arvores, mancais
de rolamento, engrenagens e chavetas.
O projeto do aerogerador, tanto na seleção de componentes quanto no
dimensionamento de elementos de máquina apresentou resultados satisfatórios, resistindo
aos esforços aplicados e possuindo fatores de segurança acima do esperado, conforme
apresentado no capitulo 4.
Adicionalmente, a torre foi satisfatoriamente definida, determinando por meio de
cálculos que as tensões aplicadas a base da torre, assim como as condições de carga
críticas de flambagem e de deflexão na extremidade superior da torre foram
satisfatoriamente pequenas.
67
Bibliografia
[1] Energia Eólica, https://pt.wikipedia.org/wiki/Energia_e%C3%B3lica, acessado em 25
de Março de 2016
[2] Energia Eólica no Brasil, http://mundoeducacao.bol.uol.com.br/geografia/energia-
eolica-no-brasil.htm, acessado em 25 de Março de 2016
[3] AMARANTE, O., A., C., BROWER, M., ZACK, J., SÁ, A., L., "Atlas do Potencial
Eólico Brasileiro" – Brasília, 2001
[4] WIKIPEDIA,"Windpump", Disponível em http://en.wikipedia.org/wiki/Windpump.
Acessado em 25 de Março de 2016
[5] Energia Eólica, http://www.aneel.gov.br/aplicacoes/atlas/energia_eolica/6_2.htm,
Acesso em Março de 2016.
[6] Limite de Betz, http://www.aerogeradores.org/limitedebetz.php, acessado em 25 de
Março de 2016
[7] Aerogerador, https://pt.wikipedia.org/wiki/Aerogerador, acessado em 25 de Março de
2016
[8] HAU, E., “Wind Turbines – Fundamentals, Technologies, Aplication, Economics”. 2ª
edição, Reino Unido, 2005.
[9] MCDONALD, A., T., FOX, R., W., PRITCHARD, P., J., "Introduction to Fluid
Mechanics", 6a edição, JOHN WILEY & SONS – USA, 2004
[10] H. ABBOTT, I., E. VON DOENHOFF, A., “Theory of Wing Sections” – New York,
1958
[11] MANWELL, J, F., MCGOWAN, J, G., ROGERS, L, A., ET. AL., "Wind Energy
Explained Theory Design and Application", WILLEY – 2009
[12] LEWIS, H. R., PAPADIMITRIOU, C. H., “Wind Turbines -Fundamentals,
Technologies, Application, Economics”. Munich, 2012.
[13] BURTON, T., SHARPE, D. JENKINS, N., BOSSANYI, E., “Wind Energy
Handbook.
[14] Cátalogos WEG, Disponível em http://www.weg.net/br. acessado em 25 de Março
de 2016
[15] Cátalogos Mayr, Disponível em http://www.mayr.com/br. Acessado em 25 de Março
de 2016
68
[16] BUDYNAS, R., G., NISBETT, J., K., "Elementos de Máquinas de Shigley", 8a
edição, AMGH Editora – São Paulo, 2011
[17] Catálogos SKF, Disponível em http://www.skf.com/br/. Acessado em 25 de Março
de 2016
[18] Catálogos Votorantim, Disponível em http://www.votorantim.com.br. Acessado em
25 de Março de 2016
[19] FÉODOSIEV, V., "Resistência dos Materiais", Editora Livraria Lopes da Silva –
Porto, 1980
[20] CRANDALL, S., H., ARCHER, R., R., COOK, N., H., DAHL, N., C., LARDNER,
T., J., MCCLINTOCK, F., A., RABINOWICZ, E., REICHENBACH, G., S., "An
Introduction to the Mechanics of Solids", 2a edição, McGRAW-HILL BOOK
COMPANY – Singapore 1978

Apêndice A
Este apêndice tem como objetivo apresentar alguns dados e catálogos dos
elementos comerciais utilizados no presente projeto.
UFRJNo.:
Data: 20-JAN-2016
FOLHA DE DADOSMotor trifásico de indução - Rotor de gaiola
Cliente : Daniel Vercillo C. GarciaLinha do produto : W22 IR3 Premium
Carcaça : 80Potência : 0,55 kWFreqüência : 60 HzPolos : 4Rotação nominal : 1725Escorregamento : 4,17 %Tensão nominal : 220/380 VCorrente nominal : 2,41/1,40 ACorrente de partida : 14,2/8,23 AIp/In : 5,9Corrente a vazio : 1,60/0,926 AConjugado nominal : 3,05 NmConjugado de partida : 210 %Conjugado máximo : 240 %Categoria : ---Classe de isolação : FElevação de temperatura : 80 KTempo de rotor bloqueado : 16 s (quente)Fator de serviço : 1,25Regime de serviço : S1Temperatura ambiente : -20°C - +40°CAltitude : 1000Proteção : IP55Massa aproximada : 12 kgMomento de inércia : 0,00238 kgm²Nível de ruído : 48 dB(A)
Dianteiro Traseiro Carga Fator potência Rendimento (%)Rolamento 6204 ZZ 6203 ZZ 100% 0,80 75,0Intervalo de lubrificação --- --- 75% 0,70 75,0Quantidade de graxa --- --- 50% 0,58 72,0
Observações:Gerador Elétrico utilizado em Projeto Final
Executor Verificado
ROBA®-quick electromagnetic brake
High torque securitydue to an optimised magnetic circuit and new
design of the ROBA®-quick. Therefore higher
capacities due to less magnetic leakage flux.
Exact positioning until wear limitideal for positioning operations
Large internal diameters of the
magnetic coil bodiesTherefore large permitted shaft diameters and few
magnetic field losses
Low noise
Short switching times/high switching
frequency
❑
❑
❑
❑
❑
Functional principle
ROBA®-quick are “energise to engage“, electromagnetic pole face
brakes.
When DC voltage is applied to the magnetic coil (1), a magnetic field
is built up. The armature disk (3) is attracted to the brake coil carrier
with friction lining (4). The brake torque runs from the coil carrier (2)
via friction lining (4), armature disk (3) and membrane transmission
spring (5) to the flange (6) and the shaft.
If the magnetic coil is de-energised, the membrane transmission
spring (5) draws the armature disk (3) back to the flange (6). The
brake is released and the shaft (7) can run freely.
Exact positioning over the
entire service lifetime
wear, air gap
max.
wear, air gap
max.
adjusting interval
adjusting interval
number of switchings
number of switchings
conventional electromagnetic brakes
ROBA®-quick
2828
Summary of structural designs ROBA®-quick
ROBA®-quick standard
Sizes 3 to 7Type 520.20_.0
without accessories Type 520.200.0flange hub Type 520.201.0internal hub Type 520.202.0
Pages 30 – 31
ROBA®-quick standard
Sizes 8 to 9 Type 520.1_0
without accessories Type 520.100.0flange hub Type 520.110.0internal hub Type 520.120.0
Pages 32 – 33
ROBA®-quick
small mounting diameter
Sizes 3 to 7 Type 520.21_.0
without accessories Type 520.210.0flange hub Type 520.211.0internal hub Type 520.212.0
Pages 34 – 35
ROBA®-quick electromagnetic brake
2929
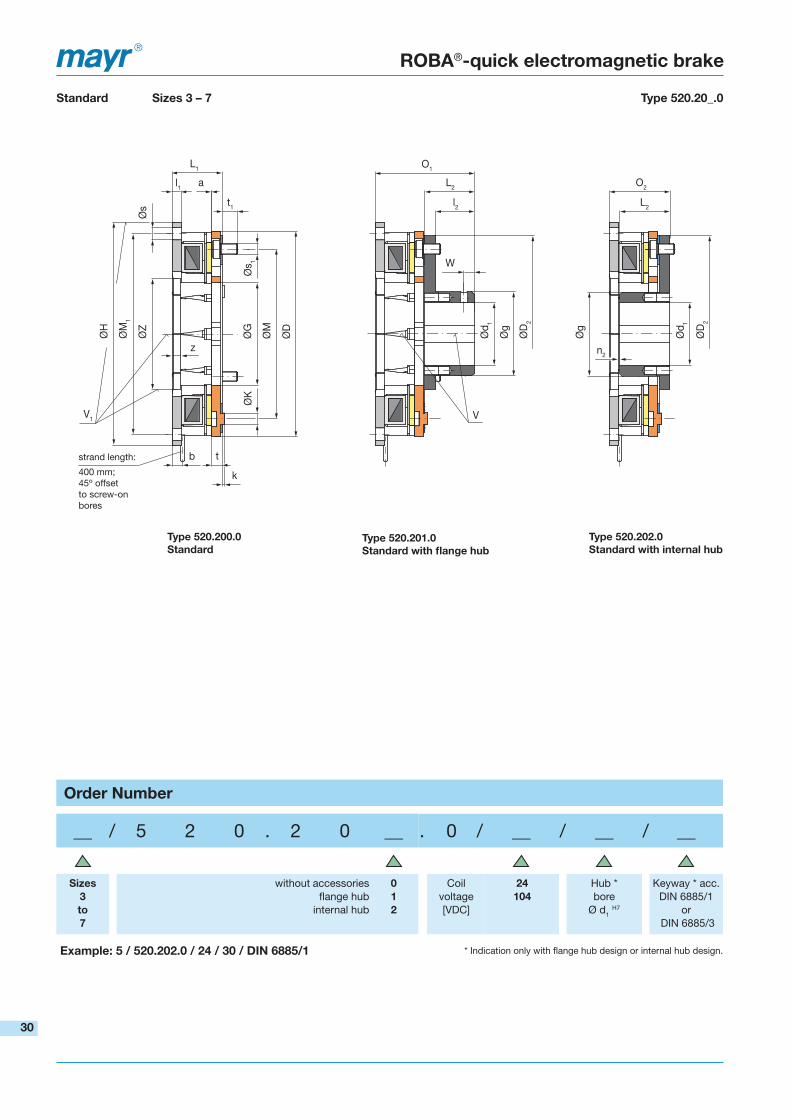
Order Number
__ / 5 2 0 . 2 0 __ . 0 / __ / __ / __
Sizes
3
to
7
without accessories
flange hub
internal hub
0
1
2
Coil
voltage
[VDC]
24
104
Hub *
bore
Ø d1 H7
Keyway * acc.
DIN 6885/1
or
DIN 6885/3
Example: 5 / 520.202.0 / 24 / 30 / DIN 6885/1 * Indication only with flange hub design or internal hub design.
Type 520.20_.0
Standard Sizes 3 – 7
Type 520.200.0
Standard
strand length:
400 mm;
45º offset
to screw-on
bores
ROBA®-quick electromagnetic brake
Type 520.201.0
Standard with flange hub
Type 520.202.0
Standard with internal hub
3030
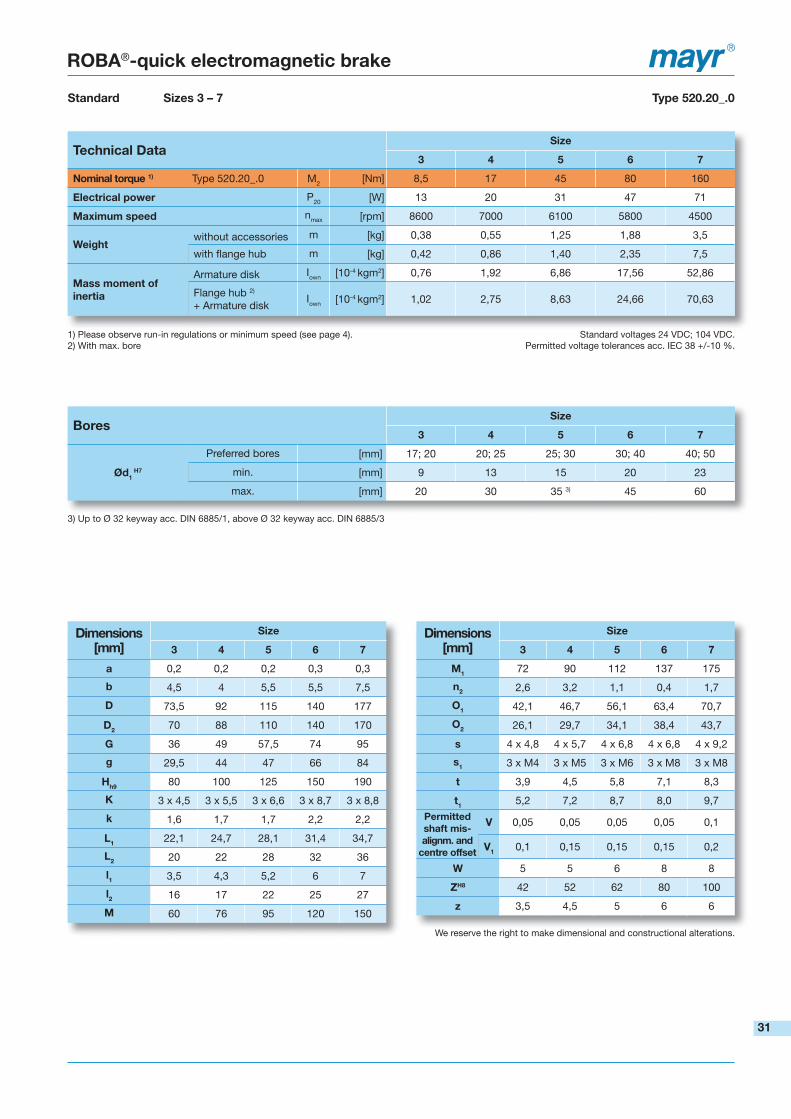
ROBA®-quick electromagnetic brake
Dimensions [mm]
Size
3 4 5 6 7
a 0,2 0,2 0,2 0,3 0,3
b 4,5 4 5,5 5,5 7,5
D 73,5 92 115 140 177
D2
70 88 110 140 170
G 36 49 57,5 74 95
g 29,5 44 47 66 84
Hh9
80 100 125 150 190
K 3 x 4,5 3 x 5,5 3 x 6,6 3 x 8,7 3 x 8,8
k 1,6 1,7 1,7 2,2 2,2
L1
22,1 24,7 28,1 31,4 34,7
L2 20 22 28 32 36
l1 3,5 4,3 5,2 6 7
l2 16 17 22 25 27
M 60 76 95 120 150
BoresSize
3 4 5 6 7
Ød1 H7
Preferred bores [mm] 17; 20 20; 25 25; 30 30; 40 40; 50
min. [mm] 9 13 15 20 23
max. [mm] 20 30 35 3) 45 60
Technical Data Size
3 4 5 6 7
Nominal torque 1) Type 520.20_.0 M2
[Nm] 8,5 17 45 80 160
Electrical power P20
[W] 13 20 31 47 71
Maximum speed nmax [rpm] 8600 7000 6100 5800 4500
Weightwithout accessories m [kg] 0,38 0,55 1,25 1,88 3,5
with flange hub m [kg] 0,42 0,86 1,40 2,35 7,5
Mass moment of
inertia
Armature disk Iown
[10-4 kgm2] 0,76 1,92 6,86 17,56 52,86
Flange hub 2)
+ Armature diskIown
[10-4 kgm2] 1,02 2,75 8,63 24,66 70,63
3) Up to Ø 32 keyway acc. DIN 6885/1, above Ø 32 keyway acc. DIN 6885/3
Dimensions [mm]
Size
3 4 5 6 7
M1
72 90 112 137 175
n2 2,6 3,2 1,1 0,4 1,7
O1 42,1 46,7 56,1 63,4 70,7
O2 26,1 29,7 34,1 38,4 43,7
s 4 x 4,8 4 x 5,7 4 x 6,8 4 x 6,8 4 x 9,2
s1 3 x M4 3 x M5 3 x M6 3 x M8 3 x M8
t 3,9 4,5 5,8 7,1 8,3
t1
5,2 7,2 8,7 8,0 9,7
Permitted
shaft mis-
alignm. and
centre offset
V 0,05 0,05 0,05 0,05 0,1
V1
0,1 0,15 0,15 0,15 0,2
W 5 5 6 8 8
ZH8 42 52 62 80 100
z 3,5 4,5 5 6 6
We reserve the right to make dimensional and constructional alterations.
Standard voltages 24 VDC; 104 VDC.
Permitted voltage tolerances acc. IEC 38 +/-10 %.
1) Please observe run-in regulations or minimum speed (see page 4).
2) With max. bore
Type 520.20_.0Standard Sizes 3 – 7
3131
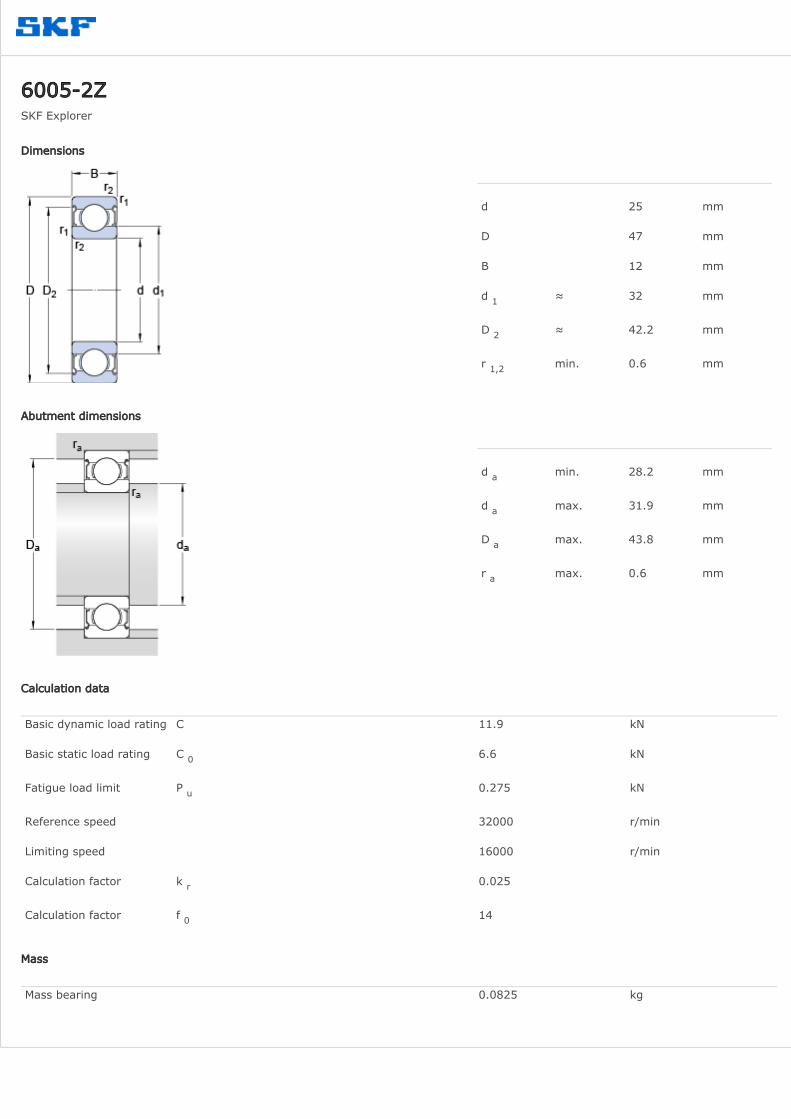
6005-2ZSKF Explorer
d a min. 28.2 mm
d a max. 31.9 mm
D a max. 43.8 mm
r a max. 0.6 mm
d 25 mm
D 47 mm
B 12 mm
d 1 ≈ 32 mm
D 2 ≈ 42.2 mm
r 1,2 min. 0.6 mm
Dimensions
Abutment dimensions
Calculation data
Basic dynamic load rating C 11.9 kN
Basic static load rating C 0 6.6 kN
Fatigue load limit P u 0.275 kN
Reference speed 32000 r/min
Limiting speed 16000 r/min
Calculation factor k r 0.025
Calculation factor f 0 14
Mass
Mass bearing 0.0825 kg
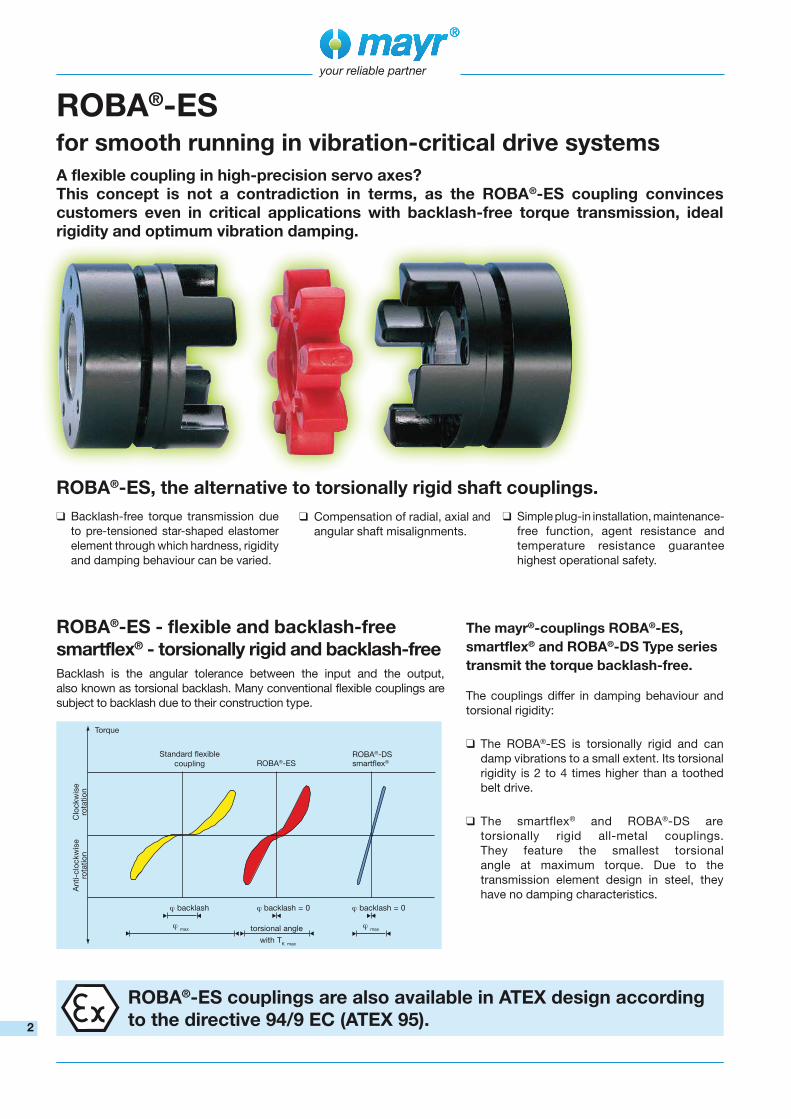
your reliable partner
ROBA®-ESfor smooth running in vibration-critical drive systems
A flexible coupling in high-precision servo axes?
This concept is not a contradiction in terms, as the ROBA®-ES coupling convinces
customers even in critical applications with backlash-free torque transmission, ideal
rigidity and optimum vibration damping.
ROBA®-ES couplings are also available in ATEX design according
to the directive 94/9 EC (ATEX 95).
ROBA®-ES - flexible and backlash-free
smartflex® - torsionally rigid and backlash-free
Backlash is the angular tolerance between the input and the output,
also known as torsional backlash. Many conventional flexible couplings are
subject to backlash due to their construction type.
The mayr®-couplings ROBA®-ES,
smartflex® and ROBA®-DS Type series
transmit the torque backlash-free.
The couplings differ in damping behaviour and
torsional rigidity:
❑ The ROBA®-ES is torsionally rigid and can
damp vibrations to a small extent. Its torsional
rigidity is 2 to 4 times higher than a toothed
belt drive.
❑ The smartflex® and ROBA®-DS are
torsionally rigid all-metal couplings.
They feature the smallest torsional
angle at maximum torque. Due to the
transmission element design in steel, they
have no damping characteristics.
❑ Backlash-free torque transmission due
to pre-tensioned star-shaped elastomer
element through which hardness, rigidity
and damping behaviour can be varied.
❑ Compensation of radial, axial and
angular shaft misalignments.
❑ Simple plug-in installation, maintenance-
free function, agent resistance and
temperature resistance guarantee
highest operational safety.
ROBA®-ES, the alternative to torsionally rigid shaft couplings.
Clockwise
rotation
Anti-clockwise
rotation
Standard flexible
coupling
Torque
torsional angle
ϕ backlash = 0ϕ backlash = 0ϕ backlash
ϕ max
with TK max
ϕ max
ROBA®-ES smartflex®ROBA®-DS
2
your reliable partner
ROBA®-ES Contents
Elastomeric Elements Page 4
Nominal torques 4 to 1250 Nm Temperature Influence Page 4
Agent Resistance Page 4
Max. axial displacement 2,6 mm Torques Page 5
Max. radial misalignment 0,26 mm Perm. Misalignment Values Page 5
Max. angular misalignment 1,3° Spring Rigidity Page 5
ROBA®-ES with keyways Type 940._22._ Page 6
Nominal torques 4 to 1250 Nm Technical Data Page 6
Bores 6 to 80 mm Dimensions Sheet Page 6
Max. axial displacement 2,6 mm Order Example Page 6
Max. radial misalignment 0,26 mm
Max. angular misalignment 1,3°
ROBA®-ES with clamping hubs Type 940._00._ Page 7
Nominal torques 4 to 1250 Nm Technical Data Page 7
Bores 6 to 80 mm Dimensions Sheet Page 7
Max. axial displacement 2,6 mm Order Example Page 7
Max. radial misalignment 0,26 mm
Max. angular misalignment 1,3°
ROBA®-ES with aluminium shrink disk hubs Type 940._11. A Page 8
Nominal torques 4 to 405 Nm Technical Data Page 8
Bores 6 to 45 mm Dimensions Sheet Page 8
Max. axial displacement 1,8 mm Order Example Page 8
Max. radial misalignment 0,2 mm
Max. angular misalignment 1,3°
ROBA®-ES with steel shrink disk hubs Types 940._11.P and 940._11.F Page 9
Nominal torques 4 to 1250 Nm Technical Data Page 9
Bores 6 to 75 mm Dimensions Sheet Page 9
Max. axial displacement 2,6 mm Order Example Page 9
Max. radial misalignment 0,26 mm
Max. angular misalignment 1,3°
Frictionally-locking transmittable torques on clamping and shrink disk hubs Page 10
Technical Explanations Page 12
Installation Guidelines and Examples Page 13
Coupling Dimensioning Page 143

your reliable partner
ROBA®-ES Elastomeric Elements The elastomeric elements are the central element of the
ROBA®-ES coupling. They define the application range as well as
the shaft connection behaviour via the permitted torque, the rigidity,
the damping and the misalignment values.
By using a unique polyurethane material and a special injection
procedure, it is possible to achieve a high dimensional accuracy
and evenness in the teeth of the elastomeric element.
The elastomeric elements are available in different shore hardnesses.
The teeth of the elastomeric element are chamfered at the sides.
This makes blind assembly easier.
Temperature Influence
The ambient temperatures present during operation have a
considerable effect on the dimensioning of a ROBA®-ES coupling
(see Dimensioning page 14).
Agent Resistance
The elastomeric elements are very resistant against:
• pure mineral oils (lubricating oils)
• and anhydrous greases.
They have a similar resistance against fuels such as
• regular-grade petroleum
• diesel oil
• kerosene.
Damage may occur after longer exposure to
• alcohols or
• aromatic fuels (super/four star petrol).
The elastomeric element material used is resistant to hydrolysis.
In contrast to other polyurethane materials, water (including seawater)
causes, even after years of exposure, no particular changes to
the mechanical characteristics. Hot water, however, reduces the
mechanical strength.
For information on contact with special agents or radiation, please
contact the manufacturers.
Dimensioning
The characteristics of ROBA®-ES couplings can be greatly varied
by using different elastomeric elements. Due to different damping
characteristics and the non-linear rigidity of the elastomer, this
element also offers more parameters than the steel shaft
connection, which should be taken into account on selection.
We therefore recommend careful, thorough coupling dimensioning
(see Dimensioning page 14).
Elastomeric element
hardness
[Shore]
Colour
Permitted temperature range
Permanent temperature Temporary max. temperature
80 Sh A Blue -50 to +80 °C -60 to +120 °C
92 Sh A Yellow -40 to +90 °C -50 to +120 °C
98 Sh A Red -30 to +90 °C -40 to +120 °C
64 Sh D Green -30 to +100 °C -40 to +140 °C
According to German notation, decimal points
in this catalogue are represented with a comma
(e.g. 0,5 instead of 0.5).4
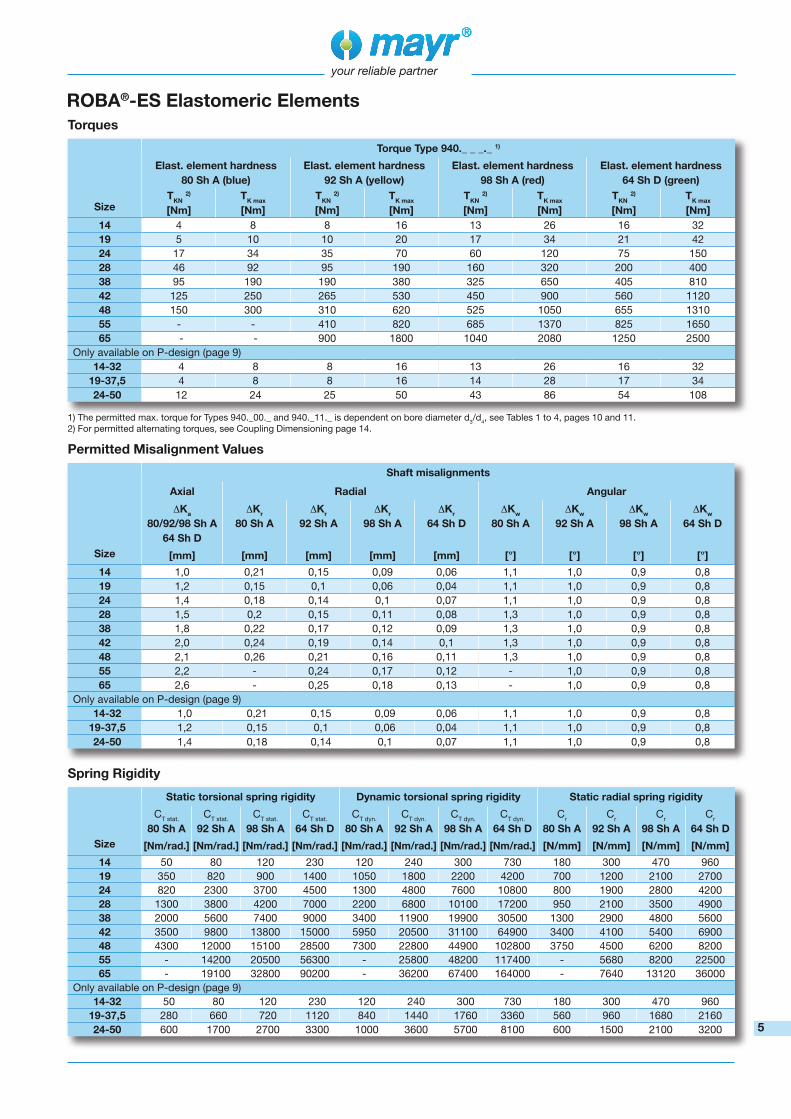
your reliable partner
ROBA®-ES Elastomeric Elements
Size
Torque Type 940._ _ _._ 1)
Elast. element hardness
80 Sh A (blue)
Elast. element hardness
92 Sh A (yellow)
Elast. element hardness
98 Sh A (red)
Elast. element hardness
64 Sh D (green)
TKN 2)
[Nm]
TK max
[Nm]
TKN 2)
[Nm]
TK max
[Nm]
TKN 2)
[Nm]
TK max
[Nm]
TKN 2)
[Nm]
TK max
[Nm]
14 4 8 8 16 13 26 16 32
19 5 10 10 20 17 34 21 42
24 17 34 35 70 60 120 75 150
28 46 92 95 190 160 320 200 400
38 95 190 190 380 325 650 405 810
42 125 250 265 530 450 900 560 1120
48 150 300 310 620 525 1050 655 1310
55 - - 410 820 685 1370 825 1650
65 - - 900 1800 1040 2080 1250 2500
Only available on P-design (page 9)
14-32 4 8 8 16 13 26 16 32
19-37,5 4 8 8 16 14 28 17 34
24-50 12 24 25 50 43 86 54 108
Torques
Permitted Misalignment Values
Spring Rigidity
1) The permitted max. torque for Types 940._00._ and 940._11._ is dependent on bore diameter d3/d
4, see Tables 1 to 4, pages 10 and 11.
2) For permitted alternating torques, see Coupling Dimensioning page 14.
Size
Shaft misalignments
Axial Radial Angular
ΔKa
80/92/98 Sh A
64 Sh D
ΔKr
80 Sh A
ΔKr
92 Sh A
ΔKr
98 Sh A
ΔKr
64 Sh D
ΔKw
80 Sh A
ΔKw
92 Sh A
ΔKw
98 Sh A
ΔKw
64 Sh D
[mm] [mm] [mm] [mm] [mm] [°] [°] [°] [°]
14 1,0 0,21 0,15 0,09 0,06 1,1 1,0 0,9 0,8
19 1,2 0,15 0,1 0,06 0,04 1,1 1,0 0,9 0,8
24 1,4 0,18 0,14 0,1 0,07 1,1 1,0 0,9 0,8
28 1,5 0,2 0,15 0,11 0,08 1,3 1,0 0,9 0,8
38 1,8 0,22 0,17 0,12 0,09 1,3 1,0 0,9 0,8
42 2,0 0,24 0,19 0,14 0,1 1,3 1,0 0,9 0,8
48 2,1 0,26 0,21 0,16 0,11 1,3 1,0 0,9 0,8
55 2,2 - 0,24 0,17 0,12 - 1,0 0,9 0,8
65 2,6 - 0,25 0,18 0,13 - 1,0 0,9 0,8
Only available on P-design (page 9)
14-32 1,0 0,21 0,15 0,09 0,06 1,1 1,0 0,9 0,8
19-37,5 1,2 0,15 0,1 0,06 0,04 1,1 1,0 0,9 0,8
24-50 1,4 0,18 0,14 0,1 0,07 1,1 1,0 0,9 0,8
Size
Static torsional spring rigidity Dynamic torsional spring rigidity Static radial spring rigidity
CT stat.
80 Sh A
CT stat.
92 Sh A
CT stat.
98 Sh A
CT stat.
64 Sh D
CT dyn.
80 Sh A
CT dyn.
92 Sh A
CT dyn.
98 Sh A
CT dyn.
64 Sh D
Cr
80 Sh A
Cr
92 Sh A
Cr
98 Sh A
Cr
64 Sh D
[Nm/rad.] [Nm/rad.] [Nm/rad.] [Nm/rad.] [Nm/rad.] [Nm/rad.] [Nm/rad.] [Nm/rad.] [N/mm] [N/mm] [N/mm] [N/mm]
14 50 80 120 230 120 240 300 730 180 300 470 960
19 350 820 900 1400 1050 1800 2200 4200 700 1200 2100 2700
24 820 2300 3700 4500 1300 4800 7600 10800 800 1900 2800 4200
28 1300 3800 4200 7000 2200 6800 10100 17200 950 2100 3500 4900
38 2000 5600 7400 9000 3400 11900 19900 30500 1300 2900 4800 5600
42 3500 9800 13800 15000 5950 20500 31100 64900 3400 4100 5400 6900
48 4300 12000 15100 28500 7300 22800 44900 102800 3750 4500 6200 8200
55 - 14200 20500 56300 - 25800 48200 117400 - 5680 8200 22500
65 - 19100 32800 90200 - 36200 67400 164000 - 7640 13120 36000
Only available on P-design (page 9)
14-32 50 80 120 230 120 240 300 730 180 300 470 960
19-37,5 280 660 720 1120 840 1440 1760 3360 560 960 1680 2160
24-50 600 1700 2700 3300 1000 3600 5700 8100 600 1500 2100 3200 5
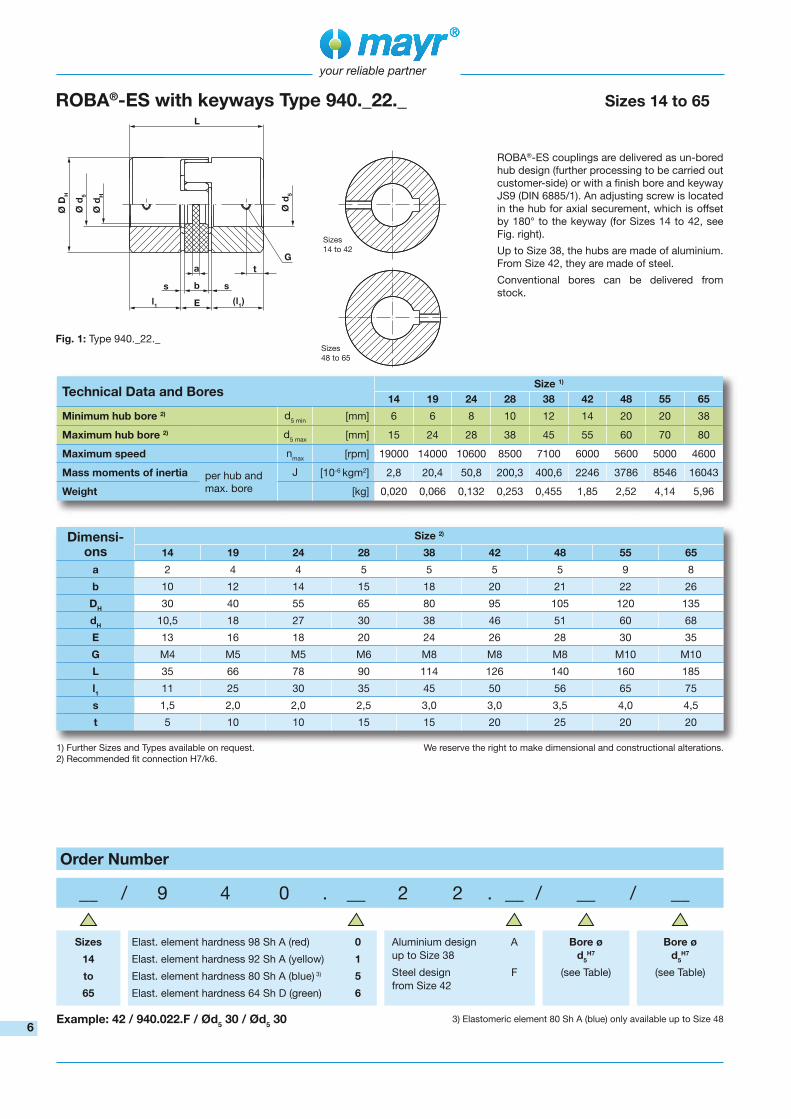
l1
(l1)
your reliable partner
Fig. 1: Type 940._22._
ROBA®-ES with keyways Type 940._22._ Sizes 14 to 65
Dimensi-ons
Size 2)
14 19 24 28 38 42 48 55 65
a 2 4 4 5 5 5 5 9 8
b 10 12 14 15 18 20 21 22 26
DH
30 40 55 65 80 95 105 120 135
dH
10,5 18 27 30 38 46 51 60 68
E 13 16 18 20 24 26 28 30 35
G M4 M5 M5 M6 M8 M8 M8 M10 M10
L 35 66 78 90 114 126 140 160 185
l1
11 25 30 35 45 50 56 65 75
s 1,5 2,0 2,0 2,5 3,0 3,0 3,5 4,0 4,5
t 5 10 10 15 15 20 25 20 20
Technical Data and BoresSize 1)
14 19 24 28 38 42 48 55 65
Minimum hub bore 2) d5 min
[mm] 6 6 8 10 12 14 20 20 38
Maximum hub bore 2) d5 max
[mm] 15 24 28 38 45 55 60 70 80
Maximum speed nmax
[rpm] 19000 14000 10600 8500 7100 6000 5600 5000 4600
Mass moments of inertia per hub and
max. bore
J [10-6 kgm2] 2,8 20,4 50,8 200,3 400,6 2246 3786 8546 16043
Weight [kg] 0,020 0,066 0,132 0,253 0,455 1,85 2,52 4,14 5,96
1) Further Sizes and Types available on request. We reserve the right to make dimensional and constructional alterations.
2) Recommended fit connection H7/k6.
Order Number
__ / 9 4 0 . __ 2 2 . __ / __ / __
Sizes
14
to
65
Elast. element hardness 98 Sh A (red)
Elast. element hardness 92 Sh A (yellow)
Elast. element hardness 80 Sh A (blue) 3)
Elast. element hardness 64 Sh D (green)
0
1
5
6
Aluminium design
up to Size 38
Steel design
from Size 42
A
F
Bore ø
d5H7
(see Table)
Bore ø
d5H7
(see Table)
Example: 42 / 940.022.F / Ød5 30 / Ød
5 30 3) Elastomeric element 80 Sh A (blue) only available up to Size 48
ROBA®-ES couplings are delivered as un-bored
hub design (further processing to be carried out
customer-side) or with a finish bore and keyway
JS9 (DIN 6885/1). An adjusting screw is located
in the hub for axial securement, which is offset
by 180° to the keyway (for Sizes 14 to 42, see
Fig. right).
Up to Size 38, the hubs are made of aluminium.
From Size 42, they are made of steel.
Conventional bores can be delivered from
stock.
Sizes
14 to 42
Sizes
48 to 65
6
Apêndice B
Este apêndice tem como objetivo apresentar a documentação gráfica do projeto.
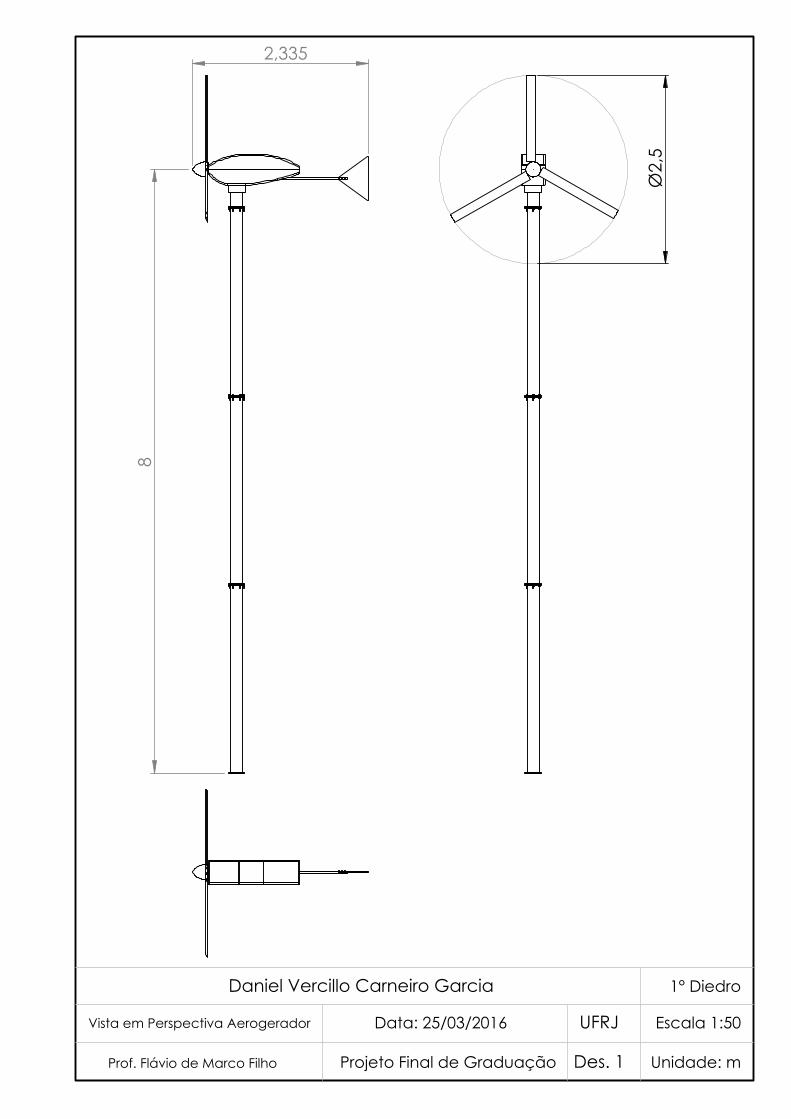
2,335
8
Ø2,
5
Daniel Vercillo Carneiro Garcia
Vista em Perspectiva Aerogerador
Prof. Flávio de Marco Filho
Data: 25/03/2016
Projeto Final de Graduação
1° Diedro
UFRJ
Des. 1
Escala 1:50
Unidade: m
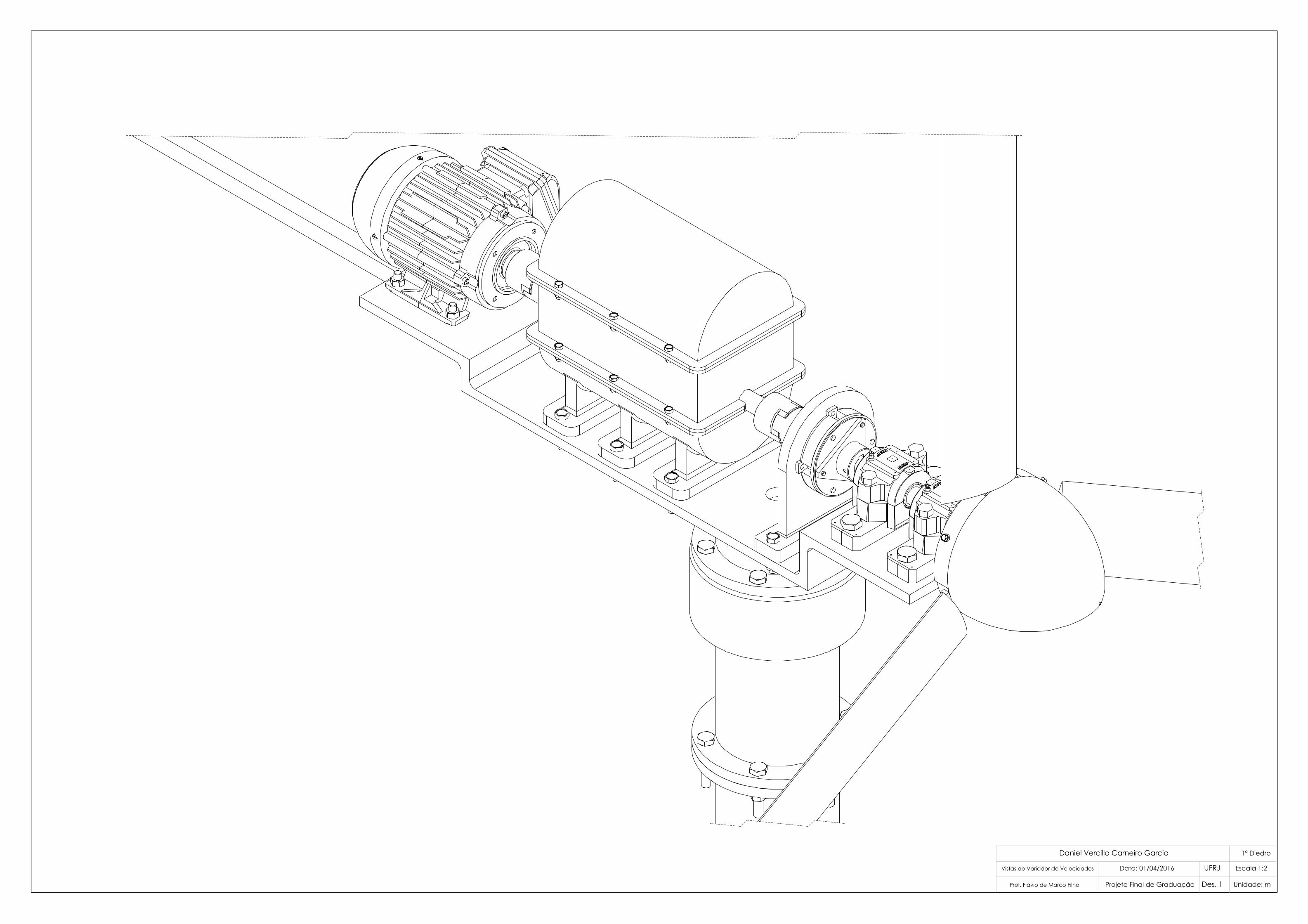
SCALE 1 : 2
Daniel Vercillo Carneiro Garcia
Vistas do Variador de Velocidades
Prof. Flávio de Marco Filho
Data: 01/04/2016
Projeto Final de Graduação
1° Diedro
UFRJ
Des. 1
Escala 1:2
Unidade: m
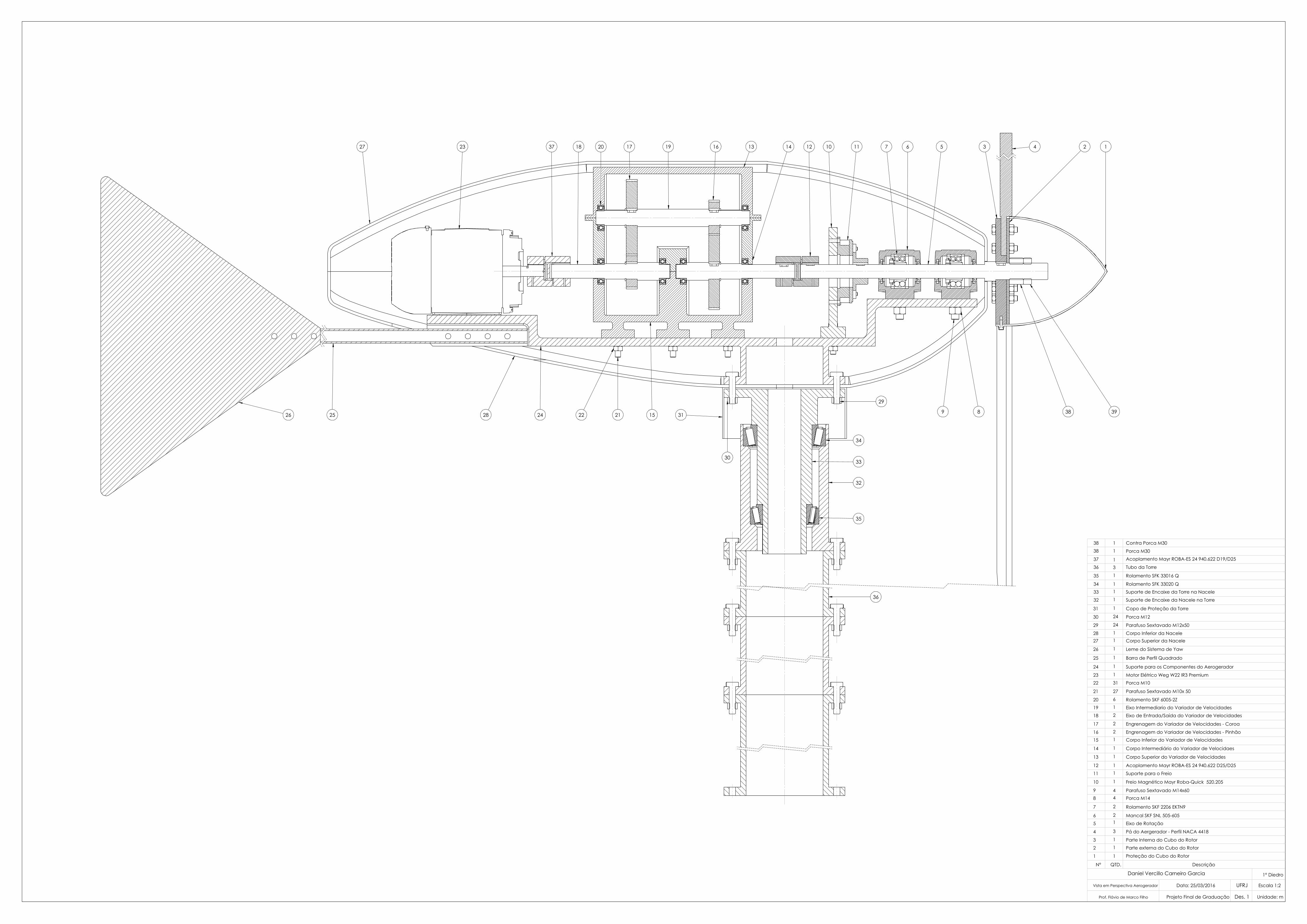
BB
SCALE 1 : 2
SECTION B-B
SCALE 1 : 2
123 456711101213 141617 1920183723
26 25 24 212228 31
30
29
34
33
32
35
36
8915
27
38 39
38
37
36
35
3433
32
31
30
29
2827
26
25
24
2322
21
201918
17
1615
14
13
12
11
10
98
7
6
5
4
3
2
1
13
1
11
1
1
24
24
11
1
1
1
1
31
27
612
2
21
1
1
11
1
44
2
21
3
1
1
1 1
Porca M30Acoplamento Mayr ROBA-ES 24 940.622 D19/D25
Tubo da Torre
Rolamento SFK 33016 Q
Rolamento SFK 33020 QSuporte de Encaixe da Torre na Nacele
Suporte de Encaixe da Nacele na Torre
Copo de Proteção da Torre
Porca M12
Parafuso Sextavado M12x50
Corpo Inferior da NaceleCorpo Superior da Nacele
Leme do Sistema de Yaw
Barra de Perfil Quadrado
Suporte para os Componentes do Aerogerador
Motor Elétrico Weg W22 IR3 PremiumPorca M10
Parafuso Sextavado M10x 50
Rolamento SKF 6005-2ZEixo Intermediario do Variador de VelocidadesEixo de Entrada/Saída do Variador de Velocidades
Engrenagem do Variador de Velocidades - Coroa
Engrenagem do Variador de Velocidades - PinhãoCorpo Inferior do Variador de Velocidades
Corpo Intermediário do Variador de Velocidaes
Corpo Superior do Variador de Velocidades
Acoplamento Mayr ROBA-ES 24 940.622 D25/D25
Suporte para o Freio
Freio Magnético Mayr Roba-Quick 520.205
Parafuso Sextavado M14x60Porca M14
Rolamento SKF 2206 EKTN9
Mancal SKF SNL 505-605
Eixo de Rotação
Pá do Aergerador - Perfil NACA 4418
Parte Interna do Cubo do Rotor
Parte externa do Cubo do Rotor
Proteção do Cubo do Rotor
38 1Contra Porca M30
QTD. DescriçãoN°
Daniel Vercillo Carneiro Garcia
Vista em Perspectiva Aerogerador
Prof. Flávio de Marco Filho
Data: 25/03/2016
Projeto Final de Graduação
1° Diedro
UFRJ
Des. 1
Escala 1:2
Unidade: m