universidade do minho escola de engenharia · nesta fase, foram realizados ensaios de compressão...
TRANSCRIPT

UNIVERSIDADE DO MINHO ESCOLA DE ENGENHARIA
ANÁLISE EXPERIMENTAL E SIMULAÇÃO NUMÉRICA
DE ELEMENTOS DE BARRA
DE PÓRTICO TRIDIMENSIONAL DE BETÃO ARMADO
António Ventura Gouveia
Dissertação para obtenção do grau de Mestre em Engenharia Civil,
opção de Estruturas, Geotecnia e Fundações
Dezembro de 1999


UNIVERSIDADE DO MINHO ESCOLA DE ENGENHARIA
ANÁLISE EXPERIMENTAL E SIMULAÇÃO NUMÉRICA
DE ELEMENTOS DE BARRA
DE PÓRTICO TRIDIMENSIONAL DE BETÃO ARMADO
Orientador Científico
Joaquim António Oliveira de Barros
Co-Orientador Científico
Álvaro Ferreira Marques Azevedo
António Ventura Gouveia
Dissertação apresentada à Escola de Engenharia da Universidade do Minho,
para obtenção do grau de Mestre em Engenharia Civil, opção de Estruturas, Geotecnia e Fundações
Dezembro de 1999


À minha esposa Cris


ÍNDICE GERAL
AGRADECIMENTOS ......................................................................................................... iii
RESUMO .............................................................................................................................. v
ABSTRACT ........................................................................................................................ vii
ÍNDICE DO TEXTO............................................................................................................ ix
ÍNDICE DE FIGURAS ......................................................................................................xiii
ÍNDICE DE QUADROS.................................................................................................... xxi
SIMBOLOGIA .................................................................................................................xxiii
CAPÍTULO 1 – INTRODUÇÃO.......................................................................................... 1
CAPÍTULO 2 – CARACTERIZAÇÃO DOS MATERIAIS E DOS PROVETES
ENSAIADOS ............................................................................................. 5
CAPÍTULO 3 – PROGRAMA EXPERIMENTAL............................................................ 33
CAPÍTULO 4 – MODELO NUMÉRICO........................................................................... 83
CAPÍTULO 5 – CONCLUSÃO........................................................................................ 181
REFERÊNCIAS BIBLIOGRÁFICAS .............................................................................. 185
ANEXO I........................................................................................................................... 189
ANEXO II ......................................................................................................................... 207


Agradecimentos
Quero em primeiro lugar agradecer ao Professor Joaquim Barros, orientador científico
desta tese, a sua amizade, o seu apoio, incentivo, orientação e total disponibilidade na
discussão de todos os assuntos. Agradeço ainda todos os ensinamentos transmitidos ao
longo destes anos, desde que comecei como seu aluno.
Ao Professor Álvaro Azevedo, co-orientador deste trabalho, manifesto a minha gratidão
pela disponibilidade, incentivo, esclarecimentos e ensinamentos transmitidos.
Um agradecimento geral a todos os colegas do Departamento de Engenharia Civil da
Escola de Engenharia da Universidade do Minho, em particular aos Professores Barreiros
Martins, Paulo Cruz, Paulo Lourenço e Paulo Pereira.
Aos amigos Aires Camões, Carlos Gomes, Castorina Vieira, Daniel Oliveira, Francisco,
Francisco Oliveira, Luís Neves e Rui Miguel, agradeço toda a amizade, motivação e apoio
concedidos.
Ao meu amigo Sena Cruz, um reconhecimento especial por toda a sua amizade, apoio e
disponibilidade na troca de impressões que contribuíram para a realização deste trabalho.
À empresa FERSEQUE, no nome do Engenheiro Hélio Igrejas, quero manifestar o meu
agradecimento pelos recursos humanos e materiais disponibilizados para a fabricação das
vigas de betão armado, dos provetes cilíndricos e das vigas de betão simples.
Ao Engenheiro Daniel Pinheiro, ao Sr. Gonçalves e a todos os outros funcionários do
Laboratório de Engenharia Civil da Universidade do Minho, quero exprimir a minha
gratidão pela colaboração na realização dos ensaios. Um obrigado especial ao Sr. Matos
pela sua amizade e incansável colaboração na preparação e realização dos ensaios.

Agradecimentos
iv
A todos os alunos da Licenciatura em Engenharia Civil que colaboraram na realização dos
ensaios efectuados nas vigas de betão armado, exprimo os meus sinceros agradecimentos
pelo apoio e disponibilidade demonstrada. De um modo especial aos alunos Álvaro
Fernandes, André Nicolau, Artur Feio, Daniel Portela, Eduardo Pereira, José Gama
Simões, Miguel Magalhães e Vítor Cunha.
Ao longo do trabalho desenvolvido, muitas foram as pessoas que de um certo modo
colaboraram na sua realização. A todas o meu muito obrigado.
“Os últimos são sempre os primeiros”, por isso quero agradecer à minha família. À minha
mãe pelo dom da vida que me concedeu; ao meu pai pela coragem e força que sempre me
transmitiu e pela confiança que em mim depositou; à minha irmã por todo o seu afecto,
compreensão e apoio incondicional; ao Fernando pelo grande amigo que sempre foi; ao
Sr. Aguiar e D. Mariazinha pela amizade, carinho e força que sempre me deram, de um
modo especial na fase final deste trabalho; ao Manel, à Lena, à Fatinha, à Filipa e à Rafa
toda a amizade que tiveram para comigo; e, por fim, mas não menos importante, à minha
esposa, Cris, que sempre me soube compreender, ajudar, apoiar, encorajar, motivar e
orientar. A ela dedico todo este trabalho.
Espero que possa retribuir em dobro tudo aquilo que por mim fizeram.

Resumo
O presente trabalho pretende ser um contributo no estudo do comportamento não linear
material de estruturas porticadas espaciais de betão armado. Para tal, desenvolveu-se,
trabalho de investigação experimental e de modelação numérica.
Na fase da investigação experimental efectuaram-se ensaios em vigas de secção
rectangular oca de betão armado, tendo sido submetidas a flexão, corte e torção. Ainda
nesta fase, foram realizados ensaios de compressão uniaxial em provetes cilíndricos de
betão simples e ensaios de flexão sob três pontos de carga em vigas entalhadas de betão
simples, para determinar as principais características do betão. Foram igualmente
efectuados ensaios de tracção em varões de aço.
Na fase da investigação numérica foi desenvolvido um modelo de análise não linear
material para pórticos tridimensionais de betão armado. As barras podem ter uma secção
qualquer, variável ao longo do seu comprimento e com o centro de corte não coincidente
com o centro de gravidade, sendo discretizadas por elementos de Timoshenko 3D. Para
determinar a matriz de rigidez e as forças nodais equivalentes, a secção da barra pode ser
discretizada por elementos finitos isoparamétricos de 4, 8 ou 9 nós, constituindo, assim, o
que se designa geralmente por modelo de fibras. Por intermédio das leis constitutivas dos
materiais intervenientes, são obtidos os esforços internos e a matriz constitutiva tangente.
A análise não linear foi efectuada com um método incremental e iterativo. Para a solução
das equações não lineares adoptou-se o algoritmo de Newton-Raphson.
A aferição do modelo foi efectuada por comparação entre os resultados determinados nos
ensaios, na fase de investigação experimental, e os obtidos na simulação numérica dos
mesmos ensaios.


Abstract
This work is based on the experimental research and mathematical modeling of the
behavior of 3D reinforced concrete frames, whose material behavior is assumed to be
nonlinear. An extensive set of laboratory experiments was carried out and a computer code
was developed.
In the experimental tests, reinforced concrete beams have been simultaneously subjected to
bending, shear and torsion. In order to evaluate the main characteristics of the concrete
used in the beams, uniaxial compression tests on cylindrical specimens and three point
bending tests have been performed. Some tests on steel bars subjected to tension were also
carried out.
The numerical research was based on the development of a constitutive model to simulate
the nonlinear material behavior of three dimensional reinforced concrete frames.
Timoshenko 3D finite elements with arbitrary cross section geometry and variable
distribution along its axis are used to discretize the frame members. In each cross section
the shear center and the gravity center may be located in different positions. The
calculation of the stiffness matrix and equivalent nodal forces is based on a discretization
of the cross section of each bar using isoparametric finite elements with 4, 8 or 9 nodes.
Using appropriate constitutive laws for each type of material the internal forces and the
tangent matrix can be easily obtained.
The nonlinear analysis algorithm is based on an incremental and iterative solution scheme.
Each system of nonlinear equations is solved by the Newton-Raphson method.
The results of the numerical model are compared against the observations of the physical
experiments and a good agreement can be observed.


ÍNDICE DO TEXTO
CAPÍTULO 1 – Introdução
1.1 .Considerações gerais ...................................................................................................... 1
1.2 .Objectivos....................................................................................................................... 2
1.3 .Organização da dissertação ............................................................................................ 3
CAPÍTULO 2 – Caracterização dos Materiais e dos Provetes ensaiados
2.1 Introdução....................................................................................................................... 5
2.2 Características e concepção dos modelos....................................................................... 6
2.2.1 Geometria.............................................................................................................. 6
2.2.2 Pormenorização das armaduras das vigas............................................................. 7
2.2.3 Nomenclatura utilizada ....................................................................................... 11
2.2.4 Concepção dos modelos...................................................................................... 12
2.3 Caracterização dos Materiais........................................................................................ 19
2.3.1 Armadura ............................................................................................................ 19
2.3.2 Betão ................................................................................................................... 23
2.3.2.1 Ensaios dos provetes cilíndricos à compressão uniaxial......................... 24
2.3.2.2 Ensaios das vigas de BS à flexão............................................................. 27
CAPÍTULO 3 – Programa Experimental
3.1 Introdução..................................................................................................................... 33
3.2 Sistema de ensaio ......................................................................................................... 34
3.2.1 Configuração dos ensaios ................................................................................... 34

Índice do Texto
x
3.2.2 Instrumentação.....................................................................................................39
3.2.3 Sistema de aquisição de dados.............................................................................45
3.2.4 Procedimento de ensaio .......................................................................................49
3.3 Apresentação dos resultados .........................................................................................53
3.3.1 Introdução ............................................................................................................53
3.3.2 Apresentação dos resultados de uma viga ...........................................................54
3.3.2.1 Diagrama força - deslocamento vertical ..................................................58
3.3.2.2 Diagrama momento flector - rotação por flexão......................................61
3.3.2.3 Diagrama momento torsor - rotação por torção.......................................63
3.3.3 Análise comparativa dos resultados.....................................................................66
3.4 Conclusões ....................................................................................................................80
CAPÍTULO 4 – Modelo Numérico
4.1 Introdução .....................................................................................................................83
4.2 Modelo de análise estática linear ..................................................................................84
4.2.1 Introdução ............................................................................................................84
4.2.2 Elemento de viga de Timoshenko no espaço.......................................................85
4.2.2.1 Considerações gerais................................................................................85
4.2.2.2 Campo de deslocamentos.........................................................................93
4.2.2.3 Campo de deformações............................................................................95
4.2.2.4 Tensões ....................................................................................................98
4.2.2.5 Lei de Hooke............................................................................................98
4.2.2.6 Esforços....................................................................................................99
4.2.2.7 Expressão do trabalho virtual.................................................................104
4.2.3 Formulação do elemento de viga de Timoshenko no espaço por elementos
finitos isoparamétricos de classe C0..................................................................106
4.2.3.1 Definição da geometria ..........................................................................106
4.2.3.2 Deslocamentos .......................................................................................107
4.2.3.3 Matrizes de deformação.........................................................................108
4.2.3.4 Matriz de rigidez ....................................................................................114

Índice do Texto
xi
4.2.3.5 Vector solicitação.................................................................................. 118
4.3 Modelo de análise estática não linear......................................................................... 128
4.3.1 Introdução ......................................................................................................... 128
4.3.2 Matriz de rigidez ............................................................................................... 129
4.3.2.1 Contribuição do betão ........................................................................... 132
4.3.2.2 Contribuição da armadura ..................................................................... 136
4.3.3 Forças internas .................................................................................................. 138
4.3.3.1 Contribuição do betão ........................................................................... 139
4.3.3.2 Contribuição da armadura ..................................................................... 141
4.3.4 Leis constitutivas .............................................................................................. 142
4.3.4.1 Lei constitutiva do betão à compressão................................................. 142
4.3.4.2 Lei constitutiva do betão à tracção........................................................ 144
4.3.4.3 Lei constitutiva do betão ao corte ......................................................... 147
4.3.4.4 Lei constitutiva da armadura ................................................................. 148
4.3.5 Algoritmo de análise não linear – método de Newton-Raphson ...................... 151
4.3.6 Simulação numérica.......................................................................................... 153
4.4 Conclusões.................................................................................................................. 178
CAPÍTULO 5 – Conclusão
5.1 Conclusões gerais ....................................................................................................... 181
5.2 Sugestões para futuros desenvolvimentos .................................................................. 182
REFERÊNCIAS BIBLIOGRÁFICAS .......................................................................... 185
ANEXO I .......................................................................................................................... 189
ANEXO II......................................................................................................................... 207


ÍNDICE DE FIGURAS
CAPÍTULO 2 – Caracterização dos Materiais e dos Provetes ensaiados
Figura 2.1 - Esquema da viga a ensaiar ..............................................................................................................6
Figura 2.2 - Esquema do ensaio e diagramas de esforços ao longo da viga .......................................................8
Figura 2.3 - Fotografia da armadura utilizada nas vigas com estribos afastados 150 mm na zona central.........9
Figura 2.4 - Fotografia da armadura utilizada nas vigas com estribos afastados 75 mm na zona central...........9
Figura 2.5a - Corte transversal da viga na zona maciça (A-A’) .......................................................................10
Figura 2.5b - Corte transversal da viga na zona oca (B-B’) .............................................................................10
Figura 2.6 - Pormenores da armadura e das placas de poliestireno expandido utilizadas
na zona oca das vigas de BA.........................................................................................................12
Figura 2.7 - Pormenor da armadura utilizada na zona maciça das vigas de BA................................................13
Figura 2.8 - Pormenor da colocação dos parafusos e da placa de topo em aço ................................................13
Figura 2.9 - Placa de topo em aço, parafusos e pormenor da colocação da armadura nos moldes de madeira 14
Figura 2.10 - Moldes de madeira utilizados nas vigas de BA ...........................................................................15
Figura 2.11 - Vibração do betão .......................................................................................................................16
Figura 2.12 - Colocação do toldo de serapilheira para manter as vigas húmidas .............................................17
Figura 2.13 - Molde utilizado para a betonagem dos cilindros de BS...............................................................18
Figura 2.14 - Molde utilizado para a betonagem das vigas de BS ....................................................................19
Figura 2.15 - Tipo de varões de aço: φ6,φ10 e φ12...........................................................................................20
Figura 2.16 - Resposta – tipo dos varões de aço φ10 e φ12 ensaiados à tracção simples .................................20
Figura 2.17 - Resposta – tipo dos varões de aço φ6 ensaiados à tracção simples .............................................21
Figura 2.18 - Ensaio de tracção uniaxial dos varões de aço .............................................................................23
Figura 2.19 - Ensaio de compressão uniaxial ...................................................................................................26
Figura 2.20 - Esquema de ensaio das vigas de BS ............................................................................................28
Figura 2.21 - Fotografia da viga entalhada e da estrutura utilizada nos ensaios de flexão ...............................29
Figura 2.22 - Pormenor da instrumentação da viga ..........................................................................................29
Figura 2.23 - Relação F-δ nas vigas da série 1 ................................................................................................30
Figura 2.24 - Relação F-δ nas vigas da série 2 ................................................................................................31

Índice de Figuras
xiv
CAPÍTULO 3 – Programa Experimental
Figura 3.1 - Esquema do ensaio da viga de betão armado ...............................................................................35
Figura 3.2 - Fotografia lateral da viga e respectiva instrumentação.................................................................35
Figura 3.3 - Corte A-A’ – secção de encastramento.........................................................................................36
Figura 3.4 - Fotografia ilustrativa da zona do encastramento ..........................................................................36
Figura 3.5 - Corte B-B’ – extremidade livre ....................................................................................................37
Figura 3.6 - Fotografia da ligação do perfil metálico à viga, na secção da extremidade livre..........................37
Figura 3.7 - Corte C-C’ – vista lateral da secção de encastramento.................................................................38
Figura 3.8 - Pormenorização do encastramento ...............................................................................................38
Figura 3.9 - Secções de instrumentação da viga...............................................................................................39
Figura 3.10 - Transdutor eléctrico (LVDT ±25 mm) ........................................................................................40
Figura 3.11 - Transdutor eléctrico (LVDT ±12.5 mm) .....................................................................................40
Figura 3.12 - Transdutor eléctrico (LVDT ±2.5 mm) .......................................................................................40
Figura 3.13 - Comparador mecânico de 0.01 mm de precisão .........................................................................41
Figura 3.14 - Comparador mecânico de 0.002 mm de precisão .......................................................................41
Figura 3.15 - Disposição de toda a instrumentação no lado A da viga .............................................................42
Figura 3.16 - Disposição de toda a instrumentação no lado B da viga .............................................................42
Figura 3.17 - Disposição dos aparelhos na secção S0 do lado A da viga..........................................................43
Figura 3.18 - Disposição dos aparelhos na secção S0 do lado B da viga..........................................................43
Figura 3.19 - Disposição dos aparelhos na secção S1 do lado A da viga..........................................................43
Figura 3.20 - Disposição dos aparelhos na secção S1 do lado B da viga..........................................................43
Figura 3.21 - Disposição dos aparelhos na secção S2 e S3 do lado A da viga..................................................44
Figura 3.22 - Disposição dos aparelhos na secção S2 e S3 do lado B da viga..................................................44
Figura 3.23 - Transdutor de força e actuador hidráulico ..................................................................................45
Figura 3.24 - Elementos pertencentes ao sistema de ensaio, controlo e aquisição de dados............................46
Figura 3.25 - Lei de deslocamentos impostos às vigas de BA .........................................................................50
Figura 3.26 - Procedimento programado no sistema de aquisição de dados ....................................................51
Figura 3.27 - Pormenor da cinta em aço na ligação perfil – viga de BA ..........................................................54
Figura 3.28 - Padrão de fendilhação na face A da viga ....................................................................................55
Figura 3.29 - Padrão de fendilhação na face B da viga ....................................................................................55
Figura 3.30 - Padrão de fendilhação na face inferior da viga ...........................................................................56
Figura 3.31 - Evolução da fendilhação.............................................................................................................56
Figura 3.32 - Esmagamento do betão na zona de compressão máxima ...........................................................57
Figura 3.33 - Diagrama F-δ na secção S1 da viga V2_l12_t75 .......................................................................59
Figura 3.34 - Diagrama F-δ na secção S2 da viga V2_l12_t75 .......................................................................59
Figura 3.35 - Diagrama F-δ na secção S3 da viga V2_l12_t75 .......................................................................60
Figura 3.36 - Flecha na extremidade livre da viga ...........................................................................................60
Figura 3.37 - Diagrama Mf -θf na secção S1 da viga V2_l12_t75 ....................................................................62

Índice de Figuras
xv
Figura 3.38 - Diagrama Mf -θf na secção S2 da viga V2_l12_t75 .....................................................................62
Figura 3.39 - Diagrama Mt -θt na secção S1 da viga V2_l12_t75.....................................................................64
Figura 3.40 - Diagrama Mt -θt na secção S2 da viga V1_l12_t75.....................................................................64
Figura 3.41 - Contribuição dos dois materiais constituintes das vigas de BA...................................................65
Figura 3.42 - Diagramas F-δ na secção S1 para todas as vigas .......................................................................68
Figura 3.43 - Diagramas F-δ na secção S2 para todas as vigas .......................................................................68
Figura 3.44 - Diagramas F-δ na secção S3 para todas as vigas .......................................................................69
Figura 3.45 - Diagramas F-δ relativo entre as secções S1 e S2 para todas as vigas ........................................69
Figura 3.46 - Diagramas F-δ relativo entre as secções S2 e S3 para todas as vigas ........................................70
Figura 3.47 - Diagramas Mf -θf na secção S1 ...................................................................................................72
Figura 3.48 - Diagramas Mf -θf na secção S2 ...................................................................................................72
Figura 3.49 - Diagramas Mf -θf na secção S1 para todas as vigas não descontando a rotação da secção S0 ....73
Figura 3.50 - Diagramas Mf -θf na secção S2 para todas as vigas não descontando a rotação da secção S0 ....73
Figura 3.51 - Diagramas Mt -θt na secção S1 para todas as vigas ....................................................................75
Figura 3.52 - Diagramas Mt -θt na secção S2 para todas as vigas ....................................................................75
Figura 3.53 - Diagramas Mt -θt na secção S1 para todas as vigas não descontando a rotação da secção S0 ....76
Figura 3.54 - Diagramas Mt -θt na secção S2 para todas as vigas não descontando a rotação da secção S0.....76
Figura 3.55 - Padrão de fendilhação junto ao encastramento da viga V1_l10_t150 .........................................77
Figura 3.56 - Padrão de fendilhação junto ao encastramento da viga V1_l12_t75 ...........................................77
CAPÍTULO 4 – Modelo Numérico
Figura 4.1 - Elemento de viga de Timoshenko no espaço ................................................................................86
Figura 4.2 - Referencial global .........................................................................................................................86
Figura 4.3 - Referencial normalizado ...............................................................................................................87
Figura 4.4 - Referencial local ...........................................................................................................................88
Figura 4.5 - Barra dirigida segundo o sentido positivo a) e negativo b) do eixo g3..........................................90
Figura 4.6 - Definição do referencial local da barra para α não nulo ..............................................................92
Figura 4.7 - Exemplo: perfil em Z dirigido segundo o sentido positivo a) e negativo b) do eixo g3. ...............92
Figura 4.8 - Secção de um elemento de viga de Timoshenko no espaço..........................................................93
Figura 4.9 - Campo de deslocamentos..............................................................................................................94
Figura 4.10 - Tensões .......................................................................................................................................98
Figura 4.11 - Esforços na secção de um elemento de Timoshenko no espaço ...............................................100
Figura 4.12 - Forças generalizadas aplicadas em pontos do interior de elementos.........................................119
Figura 4.13 - Forças distribuídas por unidade de comprimento num elemento de
Timoshenko 3D de 3 nós ..........................................................................................................123

Índice de Figuras
xvi
Figura 4.14 - Forças nodais equivalentes às forças generalizadas distribuídas num elemento ......................126
Figura 4.15 - Discretização de um elemento de betão armado, com uma secção qualquer,
de acordo com o modelo de fibras desenvolvido......................................................................130
Figura 4.16 - Esquema para a obtenção da matriz de rigidez de um elemento...............................................131
Figura 4.17 - Esquema para a obtenção das forças internas de um elemento.................................................139
Figura 4.18 - Diagrama σc - εc proposto pelo código modelo CEB-FIP 1990 [MC90] para simular o
comportamento do BS à compressão uniaxial ..........................................................................144
Figura 4.19 - Diagrama de retenção de tensões de tracção para o BS ............................................................146
Figura 4.20 - Diagrama de retenção de tensões de tracção para o BA [Bar95]
a) Relação entre a extensão média e a tensão na armadura.
b) Relação entre a extensão média e a tensão no betão entre fendas .........................................147
Figura 4.21 - Diagrama linear-parábola .........................................................................................................149
Figura 4.22 - Diagrama trilinear.....................................................................................................................151
Figura 4.23 - Discretização da secção maciça em elementos finitos de 4 nós de 3×3 pontos de Gauss, da
armadura e respectivas leis constitutivas. .................................................................................155
Figura 4.24 - Discretização da secção oca em elementos finitos de 4 nós de 3×3 pontos de Gauss, da
armadura e respectivas leis constitutivas ..................................................................................156
Figura 4.25 - Carregamento aplicado no modelo numérico, na simulação dos ensaios experimentais ..........157
Figura 4.26 - Área de influência de cada varão e definição da percentagem efectiva de
armadura para a secção oca a) e cheia b)..................................................................................159
Figura 4.27 - Diagrama F-δ na secção S1 .....................................................................................................161
Figura 4.28 - Diagrama Mf -θf na secção S1...................................................................................................161
Figura 4.29 - Diagrama Mt -θt na secção S1...................................................................................................162
Figura 4.30 - Diagrama F-δ na secção S1 com a correcção das rotações.....................................................163
Figura 4.31 - Diagrama Mf -θf na secção S1 com a correcção das rotações ...................................................164
Figura 4.32 - Diagrama Mt -θt na secção S1 com a correcção das rotações ...................................................164
Figura 4.33 - Diagrama F-δ na secção S1 com “tension stiffening” e corte não linear ................................166
Figura 4.34 - Diagrama Mf -θf na secção S1 com “tension stiffening” e corte não linear..............................166
Figura 4.35 - Diagrama Mt -θt na secção S1 com “tension stiffening” e corte não linear..............................167
Figura 4.36 - Diagrama F-δ na secção S2 com “tension stiffening” e corte não linear ................................167
Figura 4.37 - Diagrama Mf -θf na secção S2 com “tension stiffening” e corte não linear..............................168
Figura 4.38 - Diagrama Mt -θt na secção S2 com “tension stiffening” e corte não linear..............................168
Figura 4.39 - Diagrama F-δ na secção S3 com “tension stiffening” e corte não linear ................................169
Figura 4.40 - Contribuição do “tension stiffening”........................................................................................170
Figura 4.41 - Diagrama F-δ na secção S1 com redução do módulo de elasticidade do aço..........................171
Figura 4.42 - Diagrama Mf -θf na secção S1 com redução do módulo de elasticidade do aço .......................171
Figura 4.43 - Diagrama Mt -θt na secção S1 com redução do módulo de elasticidade do aço .......................172
Índice de Figuras
xvii
Figura 4.44 - Diagrama F-δ na secção S2 com redução do módulo de elasticidade do aço ..........................172
Figura 4.45 - Diagrama Mf -θf na secção S2 com redução do módulo de elasticidade do aço........................173
Figura 4.46 - Diagrama Mt -θt na secção S2 com redução do módulo de elasticidade do aço........................173
Figura 4.47 - Diagrama F-δ na secção S3 com redução do módulo de elasticidade do aço ..........................174
Figura 4.48 - Diagrama F-δ na secção S1 com redução das tensões de cedência e de rotura do aço ............175
Figura 4.49 - Diagrama Mf -θf na secção S1 com redução das tensões de cedência e de rotura do aço..........175
Figura 4.50 - Diagrama Mt -θt na secção S1 com redução das tensões de cedência e de rotura do aço .........176
Figura 4.51 - Diagrama F-δ na secção S2 com redução das tensões de cedência e de rotura do aço ............176
Figura 4.52 - Diagrama Mf -θf na secção S2 com redução das tensões de cedência e de rotura do aço..........177
Figura 4.53 - Diagrama Mt -θt na secção S2 com redução das tensões de cedência e de rotura do aço ..........177
Figura 4.54 - Diagrama F-δ na secção S3 com redução das tensões de cedência e de rotura do aço ............178
ANEXO I
Figura I.1 - Diagrama F-δ na secção S1 da viga V1_l10_t150 ......................................................................191
Figura I.2 - Diagrama F-δ na secção S2 da viga V1_l10_t150 ......................................................................191
Figura I.3 - Diagrama F-δ na secção S3 da viga V1_l10_t150 ......................................................................191
Figura I.4 - Diagrama Mf -θf na secção S1 da viga V1_l10_t150 ...................................................................192
Figura I.5 - Diagrama Mf -θf na secção S2 da viga V1_l10_t150 ...................................................................192
Figura I.6 - Diagrama Mt -θt na secção S1 da viga V1_l10_t150 ...................................................................192
Figura I.7 - Diagrama Mt -θt na secção S2 da viga V1_l10_t150 ...................................................................192
Figura I.8 - Diagrama F-δ na secção S1 da viga V2_l10_t150 ......................................................................193
Figura I.9 - Diagrama F-δ na secção S2 da viga V2_l10_t150 ......................................................................193
Figura I.10 - Diagrama F-δ na secção S3 da viga V2_l10_t150 ....................................................................193
Figura I.11 - Diagrama Mf -θf na secção S1 da viga V2_l10_t150 .................................................................194
Figura I.12 - Diagrama Mf -θf na secção S2 da viga V2_l10_t150 .................................................................194
Figura I.13 - Diagrama Mt -θt na secção S1 da viga V2_l10_t150 .................................................................194
Figura I.14 - Diagrama Mt -θt na secção S2 da viga V2_l10_t150 .................................................................194
Figura I.15 - Diagrama F-δ na secção S1 da viga V1_l10_t75 ......................................................................195
Figura I.16 - Diagrama F-δ na secção S2 da viga V1_l10_t75 ......................................................................195
Figura I.17 - Diagrama F-δ na secção S3 da viga V1_l10_t75 ......................................................................195
Figura I.18 - Diagrama Mf -θf na secção S1 da viga V1_l10_t75 ...................................................................196
Figura I.19 - Diagrama Mf -θf na secção S2 da viga V1_l10_t75 ...................................................................196
Figura I.20 - Diagrama Mt -θt na secção S1 da viga V1_l10_t75 ...................................................................196
Figura I.21 - Diagrama Mt -θt na secção S2 da viga V1_l10_t75 ...................................................................196

Índice de Figuras
xviii
Figura I.22 - Diagrama F-δ na secção S1 da viga V2_l10_t75 ......................................................................197
Figura I.23 - Diagrama F-δ na secção S2 da viga V2_l10_t75 ......................................................................197
Figura I.24 - Diagrama F-δ na secção S3 da viga V2_l10_t75 ......................................................................197
Figura I.25 - Diagrama Mf -θf na secção S1 da viga V2_l10_t75 ...................................................................198
Figura I.26 - Diagrama Mf -θf na secção S2 da viga V2_l10_t75 ...................................................................198
Figura I.27 - Diagrama Mt -θt na secção S1 da viga V2_l10_t75 ...................................................................198
Figura I.28 - Diagrama Mt -θt na secção S2 da viga V2_l10_t75 ...................................................................198
Figura I.29 - Diagrama F-δ na secção S1 da viga V1_l12_t150 ....................................................................199
Figura I.30 - Diagrama F-δ na secção S2 da viga V1_l12_t150 ....................................................................199
Figura I.31 - Diagrama F-δ na secção S3 da viga V1_l12_t150 ....................................................................199
Figura I.32 - Diagrama Mf -θf na secção S1 da viga V1_l12_t150 .................................................................200
Figura I.33 - Diagrama Mf -θf na secção S2 da viga V1_l12_t150 .................................................................200
Figura I.34 - Diagrama Mt -θt na secção S1 da viga V1_l12_t150 .................................................................200
Figura I.35 - Diagrama Mt -θt na secção S2 da viga V1_l12_t150 .................................................................200
Figura I.36 - Diagrama F-δ na secção S1 da viga V2_l12_t150 ....................................................................201
Figura I.37 - Diagrama F-δ na secção S2 da viga V2_l12_t150 ....................................................................201
Figura I.38 - Diagrama F-δ na secção S3 da viga V2_l12_t150 ....................................................................201
Figura I.39 - Diagrama Mf -θf na secção S1 da viga V2_l12_t150 .................................................................202
Figura I.40 - Diagrama Mf -θf na secção S2 da viga V2_l12_t150..................................................................202
Figura I.41 Diagrama Mt -θt na secção S1 da viga V2_l12_t150 ..................................................................202
Figura I.42 - Diagrama Mt -θt na secção S2 da viga V2_l12_t150 .................................................................202
Figura I.43 - Diagrama F-δ na secção S1 da viga V1_l12_t75 ......................................................................203
Figura I.44 - Diagrama F-δ na secção S2 da viga V1_l12_t75 ......................................................................203
Figura I.45 - Diagrama F-δ na secção S3 da viga V1_l12_t75 ......................................................................203
Figura I.46 - Diagrama Mf -θf na secção S1 da viga V1_l12_t75....................................................................204
Figura I.47 - Diagrama Mf -θf na secção S2 da viga V1_l12_t75....................................................................204
Figura I.48 - Diagrama Mt -θt na secção S1 da viga V1_l12_t75 ...................................................................204
Figura I.49 - Diagrama Mt -θt na secção S2 da viga V1_l12_t75 ....................................................................204
Figura I.50 - Diagrama F-δ na secção S1 da viga V2_l12_t75 ......................................................................205
Figura I.51 - Diagrama F-δ na secção S2 da viga V2_l12_t75 ......................................................................205
Figura I.52 - Diagrama F-δ na secção S3 da viga V2_l12_t75 ......................................................................205
Figura I.53 - Diagrama Mf -θf na secção S1 da viga V2_l12_t75...................................................................206
Figura I.54 - Diagrama Mf -θf na secção S2 da viga V2_l12_t75 ....................................................................206
Figura I.55 - Diagrama Mt -θt na secção S1 da viga V2_l12_t75 ....................................................................206
Figura I.56 - Diagrama Mt -θt na secção S2 da viga V2_l12_t75 ...................................................................206

Índice de Figuras
xix
ANEXO II Figura II.1 - Diagrama F-δ relativo entre as secções S1 e S2 da viga V1_l10_t150. .....................................209
Figura II.2 - Diagrama F-δ relativo entre as secções S2 e S3 da viga V1_l10_t150. .....................................209
Figura II.3 - Diagrama F-δ relativo entre as secções S1 e S2 da viga V2_l10_t150. .....................................209
Figura II.4 - Diagrama F-δ relativo entre as secções S2 e S3 da viga V2_l10_t150. .....................................209
Figura II.5 - Diagrama F-δ relativo entre as secções S1 e S2 da viga V1_l10_t75. .......................................210
Figura II.6 - Diagrama F-δ relativo entre as secções S2 e S3 da viga V1_l10_t75. .......................................210
Figura II.7 - Diagrama F-δ relativo entre as secções S1 e S2 da viga V2_l10_t75. .......................................210
Figura II.8 - Diagrama F-δ relativo entre as secções S2 e S3 da viga V2_l10_t75. .......................................210
Figura II.9 - Diagrama F-δ relativo entre as secções S1 e S2 da viga V1_l12_t150. .....................................211
Figura II.10 - Diagrama F-δ relativo entre as secções S2 e S3 da viga V1_l12_t150. ...................................211
Figura II.11 - Diagrama F-δ relativo entre as secções S1 e S2 da viga V2_l12_t150. ...................................211
Figura II.12 - Diagrama F-δ relativo entre as secções S2 e S3 da viga V2_l12_t150. ...................................211
Figura II.13 - Diagrama F-δ relativo entre as secções S1 e S2 da viga V1_l12_t75. .....................................212
Figura II.14 - Diagrama F-δ relativo entre as secções S2 e S3 da viga V1_l12_t75. .....................................212
Figura II.15 - Diagrama F-δ relativo entre as secções S1 e S2 da viga V2_l12_t75. .....................................212
Figura II.16 - Diagrama F-δ relativo entre as secções S2 e S3 da viga V2_l12_t75. .....................................212


ÍNDICE DE QUADROS
CAPÍTULO 2 – Caracterização dos Materiais e dos Provetes ensaiados
Quadro 2.1 - Quantidade de armaduras para cada peça....................................................................................10
Quadro 2.2 - Nomenclatura utilizada e principais características dos modelos de viga ensaiados...................11
Quadro 2.3 - Principais características mecânicas dos varões de aço...............................................................22
Quadro 2.4 - Composição do betão ..................................................................................................................24
Quadro 2.5 - Resultados dos ensaios de compressão uniaxial aos 28 dias .......................................................25
Quadro 2.6 - Resultados dos ensaios de compressão uniaxial na altura dos ensaios das vigas de BA .............26
Quadro 2.7 - Resultados dos ensaios de flexão nas vigas com entalhe.............................................................31
CAPÍTULO 3 – Programa Experimental
Quadro 3.1 - Valores relativos à fendilhação....................................................................................................78
Quadro 3.2 - Valores relativos aos valores máximos lidos nos gráficos ..........................................................79
CAPÍTULO 4 – Modelo Numérico
Quadro 4.1 - Pontos de Gauss para integração numérica das submatrizes de rigidez do elemento de
Timoshenko no espaço...............................................................................................................117
Quadro 4.2 - Algoritmo para a resolução das equações não lineares, resultantes do comportamento
não linear material.....................................................................................................................154
Quadro 4.3 - Características mecânicas dos varões de aço.............................................................................158
Quadro 4.4 - Características relativas ao betão...............................................................................................159
Quadro 4.5 - Definição do modelo não linear de corte proposto ....................................................................160


Simbologia
SIGLAS
BA – Betão Armado
BS – Betão Simples
BRFA – Betão Reforçado com Fibras de Aço
Cil(i) – Designação de provete cilíndrico de betão simples, em que i numera o
provete
CM – Comparador Mecânico
e – Directriz
gi – Sistema de eixos global, com i=1,2 e 3
il – Sistema coordenado local, com i=1,2 e 3
LVDT – Linear Voltage Displacement Transducer
MEF – Método dos Elementos Finitos
PTV – Princípio dos Trabalhos Virtuais
s1 – Coordenada normalizada
SF – Superfície de fractura
Si – Secção de leitura, em que i numera as secções
Vig(i) – Designação da viga entalhada de betão simples, em que i numera o provete
Vi_lj_tk – Designação da viga i de betão armado com armadura longitudinal de
diâmetro j (em milímetros) e armadura transversal com um afastamento de k
milímetros
ESCALARES
a – Altura do entalhe
a/c – Relação água/cimento
A(e) – Área das secções transversais planas de um elemento

Simbologia
xxiv
i,GPA – Área do betão associada ao ponto de Gauss i da secção
n,sA – Área associada à armadura n
AL – Armadura longitudinal
AT – Armadura transversal nas zonas maciças
A*T – Armadura transversal na zona oca
b – Largura da secção da viga de betão simples
d – Altura da secção da viga de betão simples
di – Deslocamento medido nos comparadores mecânicos ou nos transdutores de
deslocamentos, em que i numera os comparadores ou os transdutores b
i,afD – Módulo de elasticidade longitudinal tangente do betão associado ao ponto
de Gauss i da secção b
i,ctD – Módulo de elasticidade transversal tangente do betão associado ao ponto
de Gauss i da secção s
n,afD – Módulo de elasticidade longitudinal tangente da armadura n
E – Módulo de elasticidade longitudinal
sE – Módulo de elasticidade longitudinal da armadura
stE – Módulo de elasticidade longitudinal tangente da armadura
1sE – Módulo de elasticidade longitudinal da armadura do segundo tramo
2sE – Módulo de elasticidade longitudinal da armadura do terceiro tramo
1cE – Módulo de elasticidade longitudinal secante do betão em compressão
ciE – Módulo de elasticidade longitudinal tangente do betão em compressão
fc – Resistência à compressão no betão
fcm – Resistência média à compressão no betão
fctm – Resistência à tracção do betão
ffnet – Resistência máxima à tracção em flexão na secção do entalhe
fsy, fsy1 – Tensão de cedência da armadura
fsy2 – Tensão da armadura no segundo tramo
fsu – Tensão de rotura da armadura
F – Força
Fmáx – Força máxima g
iGF – Força aplicada segundo o grau de liberdade i no referencial global

Simbologia
xxv
FSi – Força na secção de leitura i
g – Aceleração da gravidade gig – Aceleração segundo g
ix
G , LG – Módulo de elasticidade transversal
12G , 13G – Módulo de elasticidade transversal nos planos 21ll e 31ll
2G – Módulo de distorção do segundo tramo
3G – Módulo de distorção do terceiro tramo
fG – Energia de fractura
ii – Versor do eixo global i
l1I – Momento de inércia em torno do eixo 1l
l2I , l
3I – Momentos de inércia em torno dos eixos 2l e 3l
)e(J – Jacobiano avaliado na coordenada normalizada s1
il – Versor do eixo local i
l – Vão da viga de betão simples ou distância entre os comparadores mecânicos
ou entre os transdutores de deslocamento
lb – Largura de banda de fendilhação
L – Comprimento da viga de betão simples ou configuração da chapa de suporte
aos cursores dos comparadores mecânicos
mi – Massa
Mf – Momento flector
Mf,Si – Momento flector na secção i l
1M – Momento torsor segundo o eixo 1l no referencial local
l2M – Momento flector segundo o eixo 2l no referencial local
l3M – Momento flector segundo o eixo 3l no referencial local
tM – Momento torsor
Mt,Si – Momento torsor na secção i
giM – Momento aplicado segundo o grau de liberdade i no referencial global
l1N – Esforço axial segundo o eixo 1l no referencial local
asN
1 – Número de pontos de Gauss associados à integração numérica da matriz de
rigidez axial

Simbologia
xxvi
csN
1 – Número de pontos de Gauss associados à integração numérica da matriz de
rigidez de corte tsN
1 – Número de pontos de Gauss associados à integração numérica da matriz de
rigidez de torção f
sN1 – Número de pontos de Gauss associados à integração numérica da matriz de
rigidez de flexão afsN
1 – Número de pontos de Gauss associados à integração numérica da matriz de
rigidez axial, de flexão, axial-flexão e flexão-axial ctsN
1 – Número de pontos de Gauss associados à integração numérica da matriz de
rigidez de corte, de torção, de corte-torção e torção-corte
tNG
sec – Número de pontos de Gauss de cada elemento finito da secção
NS – Número de armaduras na secção
iN – Função de forma do nó i
( )1sN k – Função de forma do elemento relativa ao nó k, avaliada na coordenada
normalizada 1s
( )Am sN ,1 – Função de forma do elemento relativa ao nó m, avaliada no ponto A da
coordenada normalizada 1s
α,p1 – Parâmetros de fractura
j
kLq l, – Força generalizada atribuída ao nó k do elemento, dirigida segundo o eixo
jl do referencial local
j
Lq l – Força generalizada distribuída por unidade de comprimento ao longo do
elemento, dirigida segundo o eixo jl do referencial local
giu – Deslocamento segundo i no referencial global
giGu – Deslocamento segundo i no centro de gravidade e no referencial global
gkiGu , – Deslocamento segundo i no centro de gravidade do nó k, no referencial
global liu – Deslocamento segundo i no referencial local
( )eV – Volume do elemento e
l2V – Esforço de corte segundo o eixo 2l no referencial local
l3V – Esforço de corte segundo o eixo 3l no referencial local

Simbologia
xxvii
0W – Trabalho
)e(extW – Trabalho externo do elemento e
)e(intW – Trabalho interno do elemento e
l2x , l
3x – Coordenadas de um ponto em relação ao centro de gravidade da secção
segundo o eixo 2l e 3l
lix ,2 , l
ix ,3 – Coordenadas locais do ponto de Gauss i da secção segundo 2l e 3l em
relação ao centro de gravidade lCx2 , l
Cx3 – Coordenadas do centro de corte em relação ao centro de gravidade da
secção segundo o eixo 2l e 3l
gkiGx , – Coordenadas segundo i do centro de gravidade do nó k, no referencial
global gmix , – Componente i do nó m do elemento no referencial global
gAix , – Componente i do ponto A do elemento no referencial global
α – Parâmetro de correcção ou ângulo entre os eixos local e os eixos associados
aos eixos principais centrais de inércia l2α , l
3α – Coeficientes de distorção
21 ββ , – Factores que atendem às propriedades de aderência da armadura e ao tipo
de carregamento
δ – Deslocamento genérico
δSi – Deslocamento na secção de leitura i
δu – Deslocamento máximo
ε – Extensão
εm – Extensão média
cε – Extensão no betão
crε – Extensão correspondente à resistência à tracção do betão
lim,cε – Extensão limite
1cε – Extensão correspondente à tensão máxima de compressão do betão
sε – Extensão na armadura
1sε – Extensão na armadura no segundo tramo

Simbologia
xxviii
2sε – Extensão na armadura no terceiro tramo
suε – Extensão de rotura na armadura
l1ε – Extensão segundo o eixo 1l
l12γ – Distorção no plano 1l 2l
l13γ – Distorção no plano 1l 3l
ν – Coeficiente de Poisson g
iθ – Rotação segundo i no referencial global
liθ – Rotação segundo i no referencial local
gki ,θ – Rotação segundo i do nó k no referencial global
θf – Rotação por flexão
θf,Si – Rotação por flexão na secção i
θt – Rotação por torção
θt,Si – Rotação por torção na secção i
ρ – Massa por unidade de volume
i,effρ – Percentagem efectiva de armadura i
σ – Tensão
cσ – Tensão no betão
soctσ – Tensão de tracção retida pelo betão simples fendilhado
stctσ – Tensão de tracção retida pelo betão armado fendilhado
smσ – Tensão média na armadura
l1σ – Tensão normal segundo o eixo 1l
bi,afσ – Tensão normal no betão, no ponto de Gauss i da secção
sn,afσ – Tensão normal na armadura n
l12τ – Tensão de corte no plano 1l 2l
l13τ – Tensão de corte no plano 1l 3l
2τ – Tensão de corte do segundo tramo
crτ – Tensão de corte correspondente ao início de fendilhação
uτ – Tensão de rotura por corte

Simbologia
xxix
bi,12τ – Tensão tangencial no betão, no ponto de Gauss i da secção, segundo o eixo
local 2l
bi,13τ – Tensão tangencial no betão, no ponto de Gauss i da secção, segundo o eixo
local 3l
MATRIZES E VECTORES
B – Matriz de deformação
aB – “Matriz” de deformação axial
cB – Matriz de deformação de corte
tB – “Matriz” de deformação de torção
fB – Matriz de deformação de flexão
( )1sBk – Matriz de deformação relativa ao nó k, avaliada na coordenada normalizada 1s
( )1, sB ka – “Matriz” de deformação axial relativa ao nó k, avaliada na coordenada
normalizada 1s
( )1, sB kc – Matriz de deformação de corte relativa ao nó k, avaliada na coordenada
normalizada 1s
( )1, sB kt – “Matriz” de deformação de torção relativa ao nó k, avaliada na coordenada
normalizada 1s
( )1, sB kf – Matriz de deformação de flexão relativa ao nó k, avaliada na coordenada
normalizada 1s
D – Matriz constitutiva
TD – Matriz constitutiva tangente
aD – “Submatriz” associada à rigidez axial
cD – Submatriz associada à rigidez de corte
tD – “Submatriz” associada à rigidez de torção
fD – Submatriz associada à rigidez de flexão
bfD – Submatriz do betão associada à rigidez de flexão

Simbologia
xxx
bafD – Submatriz do betão associada à rigidez axial-flexão
bfaD – Submatriz do betão associada à rigidez flexão-axial
bcD – Submatriz do betão associada à rigidez de corte
btD – Submatriz do betão associada à rigidez de torção
bctD – Submatriz do betão associada à rigidez corte-torção
btcD – Submatriz do betão associada à rigidez torção-corte
saD – Submatriz da armadura associada à rigidez axial
sfD – Submatriz da armadura associada à rigidez de flexão
safD – Submatriz da armadura associada à rigidez axial-flexão
sfaD – Submatriz da armadura associada à rigidez flexão-axial
kextf
, – Vector das forças exteriores do incremento k
1, −kextf – Vector das forças exteriores do incremento k-1
i
kf
int, – Vector das forças nodais equivalentes do incremento k e da iteração i
bfint
– Forças nodais equivalentes ao estado de tensão no betão
sfint
– Forças nodais equivalentes ao estado de tensão na armadura
)(
int
ef – Forças internas do elemento
b
aint,f – Forças nodais correspondentes a graus de liberdade de deformação axial,
equivalentes ao estado de tensão no elemento b
fint,f – Forças nodais correspondentes a graus de liberdade de deformação por flexão,
equivalentes ao estado de tensão no elemento b
cint,f – Forças nodais correspondentes a graus de liberdade de deformação por corte,
equivalentes ao estado de tensão no elemento b
tint,f – Forças nodais correspondentes a graus de liberdade de deformação por torção,
equivalentes ao estado de tensão no elemento s
aint,f – Forças nodais correspondentes a graus de liberdade de deformação axial,
equivalentes ao estado de tensão na armadura

Simbologia
xxxi
s
fint,f – Forças nodais correspondentes a graus de liberdade de deformação por flexão,
equivalentes ao estado de tensão na armadura
F – Vector dos esforços generalizados resistentes
lVF – Vector das forças de volume no referencial local
gVF – Vector das forças de volume no referencial global
lg – Vector das acelerações no referencial local
gg – Vector das acelerações no referencial global
)e(K – Matriz de rigidez de um elemento
)(eTK – Matriz de rigidez tangente de um elemento
)e(aK – Submatriz de rigidez de um elemento associada à deformação axial
)e(cK – Submatriz de rigidez de um elemento associada à deformação de corte
)e(tK – Submatriz de rigidez de um elemento associada à deformação de torção
)e(fK – Submatriz de rigidez de um elemento associada à deformação de flexão
)(eafK – Submatriz de rigidez de um elemento associada à deformação de interacção
axial-flexão )(e
faK – Submatriz de rigidez de um elemento associada à deformação de interacção
flexão-axial )(e
ctK – Submatriz de rigidez de um elemento associada à deformação de interacção
corte-torção )(e
tcK – Submatriz de rigidez de um elemento associada à deformação de interacção
torção-corte )E(gK – Matriz de rigidez da estrutura no referencial global
)(EgllK – Submatriz de rigidez da estrutura no referencial global que inclui os termos de
rigidez relativos à interacção entre os graus de liberdade livres )(Eg
ffK – Submatriz de rigidez da estrutura no referencial global que inclui os termos de
rigidez relativos à interacção entre os graus de liberdade fixos )(Eg
lfK – Submatriz de rigidez da estrutura no referencial global que inclui os termos de
rigidez relativos à interacção entre os graus de liberdade livres e fixos

Simbologia
xxxii
)(EgflK – Submatriz de rigidez da estrutura no referencial global que inclui os termos de
rigidez relativos à interacção entre os graus de liberdade fixos e livres bK – Matriz de rigidez do betão
baK – Submatriz de rigidez do betão associada à deformação axial
bfK – Submatriz de rigidez do betão associada à deformação de flexão
bafK – Submatriz de rigidez do betão associada à deformação de interacção
axial-flexão bfaK – Submatriz de rigidez do betão associada à deformação de interacção
flexão-axial bcK – Submatriz de rigidez do betão associada à deformação de corte
btK – Submatriz de rigidez do betão associada à deformação de torção
bctK – Submatriz de rigidez do betão associada à deformação de interacção
corte-torção btcK – Submatriz de rigidez do betão associada à deformação de interacção
torção-corte sK – Matriz de rigidez das armaduras
saK – Submatriz de rigidez da armadura associada à deformação axial
sfK – Submatriz de rigidez da armadura associada à deformação de flexão
safK – Submatriz de rigidez da armadura associada à deformação de interacção
axial-flexão sfaK – Submatriz de rigidez da armadura associada à deformação de interacção
flexão-axial i
kTK , – Matriz de rigidez tangente do incremento k e iteração i
l
Lq – Forças generalizadas distribuídas ao longo do elemento no referencial local
g
Vq – Forças generalizadas proporcionais à sua massa no referencial global
gQ – Forças generalizadas aplicadas em pontos nodais da estrutura no referencial
global g
iQ – Forças generalizadas aplicadas no ponto i da estrutura no referencial global

Simbologia
xxxiii
)(EgQ – Forças nodais equivalentes da estrutura no referencial global
)(Eg
lQ – Vector das forças nodais equivalentes da estrutura no referencial global em
correspondência com os graus de liberdade livres )(Eg
fQ – Vector das forças nodais equivalentes da estrutura no referencial global em
correspondência com os graus de liberdade fixos g
LQ – Vector das forças nodais equivalentes às forças generalizadas distribuídas ao
longo do elemento no referencial global 0kr – Vector das forças residuais iniciais do incremento k
finalkr – Vector das forças residuais finais do incremento k
finalkr 1− – Vector das forças residuais finais do incremento k-1
ikr – Vector das forças residuais do incremento k e da iteração i
1−ikr – Vector das forças residuais do incremento k e da iteração i-1
)(EgR – Vector que inclui as reacções nos apoios da estrutura no referencial global
gT
l – Submatriz que converte entidades do referencial local para o referencial global
gT l – Matriz que converte entidades do referencial local para o referencial global
)( 1, sT gka
l – “Matriz” de transformação associada ao grau de liberdade axial
)( 1, sT gkc
l – Matriz de transformação associada aos graus de liberdade de corte
)( 1, sT gkt
l – “Matriz” de transformação associada ao grau de liberdade de torção
)( 1, sT gkf
l – Matriz de transformação associada aos graus de liberdade de flexão
ll′T – Submatriz que converte entidades do referencial local para o referencial
associado aos eixos principais centrais de inércia ll′T – Matriz que converte entidades do referencial local para o referencial associado
aos eixos principais centrais de inércia 0ku – Vector dos deslocamentos iniciais do incremento k
finalku – Vector dos deslocamentos finais do incremento k
finalku 1− – Vector dos deslocamentos finais do incremento k-1
iku – Vector dos deslocamentos do incremento k e iteração i

Simbologia
xxxiv
1−iku – Vector dos deslocamentos do incremento k e iteração i-1
U – Vector dos deslocamentos generalizados
)E(gU – Vector dos deslocamentos da estrutura no referencial global
)(EglU – Vector dos deslocamentos da estrutura no referencial global que inclui os graus
de liberdade livres )(Eg
fU – Vector dos deslocamentos da estrutura no referencial global que inclui os graus
de liberdade fixos )(egU – Vector dos deslocamentos dos nós do elemento no referencial global
)( 1sU g – Vector dos deslocamentos de um ponto do elemento, na coordenada
normalizada 1s , no referencial global
gU – Vector dos deslocamentos no referencial global
gkU – Vector dos deslocamentos do nó k no referencial global
lU – Vector dos deslocamentos no referencial local
lkU – Vector dos deslocamentos do nó k no referencial local
lk,aU – Deslocamento do nó k segundo o eixo local 1l , associado deformação axial
gkaU , – Vector dos deslocamentos do nó k, no referencial global, associados à
deformação axial l
kcU , – Vector dos deslocamentos do nó k, no referencial local, associados à
deformação por corte g
kcU , – Vector dos deslocamentos do nó k, no referencial global, associados à
deformação por corte l
k,tU – Rotação do nó k segundo o eixo local 1l , associada à deformação por torção
gktU , – Vector das rotações do nó k, no referencial global, associadas à deformação por
torção l
k,fU – Vector das rotações do nó k, no referencial local, associadas à deformação por
flexão g
kfU , – Vector das rotações do nó k, no referencial global, associadas à deformação por
flexão 'lU – Vector dos deslocamentos do elemento no referencial local quando este não
coincide com os eixos principais centrais de inércia

Simbologia
xxxv
gkx – Vector das coordenadas do nó k no referencial global
)( 1sx g – Vector das coordenadas de um ponto do elemento, na coordenada normalizada
1s , no referencial global
)(egX – Vector das coordenadas dos nós do elemento no referencial global
kextf
,∆ – Vector dos incrementos das forças exteriores (incremento k)
iku∆ – Vector dos incrementos dos deslocamentos (incremento k e iteração i)
ε∆ – Vector dos incrementos de deformação
σ∆ – Vector dos incrementos de tensão
ε – Vector das extensões
lε – Vector das extensões no referencial local
lε – Vector das extensões no referencial local, na fibra coincidente com o eixo
baricêntrico da secção
)( 1slε – Vector das extensões num ponto do elemento, na coordenada normalizada 1s ,
no referencial local e na fibra coincidente com o eixo baricêntrico da secção l
aε – Extensão axial no referencial local e na fibra coincidente com o eixo
baricêntrico da secção lcε – Vector das extensões por corte no referencial local e na fibra coincidente com o
eixo baricêntrico da secção l
tε – Extensão por torção no referencial local e na fibra coincidente com o eixo
baricêntrico da secção lfε – Vector das extensões de flexão no referencial local e na fibra coincidente com o
eixo baricêntrico da secção
σ – Vector das tensões
lσ – Vector das tensões no referencial local
lσ – Vector dos esforços no referencial local


CAPÍTULO 1
Introdução
1.1 Considerações gerais
As estruturas porticadas de betão armado (BA) são ainda as mais utilizadas na Indústria da
Construção Civil. Diversos programas de cálculo automático de análise linear deste tipo de
estruturas têm sido desenvolvidos nos últimos anos e utilizados pelos projectistas no seu
dimensionamento. Contudo, o comportamento dos materiais intervenientes é
manifestamente não linear. O betão em compressão entra em regime não linear acima de
determinada percentagem da sua resistência. Após o pico de carga, sofre amolecimento
“compression softening” na nomenclatura inglesa. Em tracção, o betão tem reduzida
resistência (aproximadamente 10% da sua resistência à compressão), apresentando
comportamento linear e elástico até praticamente fendilhar. Após fendilhação, o
comportamento do betão é regido pela sua capacidade de absorção de energia, denominada
de energia de fractura, e pelas características da armadura, se existir, que atravessa o betão
fendilhado.
No caso do betão simples (BS), a lei que define o comportamento deste material fendilhado
em tracção denomina-se de amolecimento em tracção “tension softening”. No caso do
betão armado, esta lei denomina-se de endurecimento “tension stiffening”.
A lei constitutiva do betão depende ainda do grau de confinamento proporcionado pelos
estribos e cintas. Da investigação experimental verifica-se que a resistência e a ductilidade

Capítulo 1
2
do betão aumentam com a percentagem dessas armaduras. Por seu lado, a armadura
também apresenta comportamento não linear a partir de determinado nível de carga.
Assim, o betão armado é um compósito com elevado grau de não linearidade material. A
simulação do comportamento de estruturas porticadas de betão armado exige que o modelo
atenda aos fenómenos descritos.
No presente trabalho foi desenvolvido um modelo de análise não linear material de
pórticos tridimensionais de betão armado com barras de secção qualquer. Os principais
fenómenos de não linearidade material foram modelados.
Os pórticos tridimensionais podem ser discretizados com elementos finitos de barra de
Timoshenko de dois ou três nós.
Neste trabalho, admitiu-se que os fenómenos de não linearidade material são devidos a
deformações por esforço axial, por esforço transverso, por momento flector e momento
torsor. A não linearidade geométrica não foi considerada no presente modelo.
1.2 Objectivos
Esta dissertação teve como objectivo essencial, desenvolver um modelo de análise não
linear material de estruturas porticadas 3D de betão armado. Para tal foi desenvolvida
investigação experimental e numérica. Com os ensaios experimentais pretendeu-se obter
um conjunto de resultados que, por um lado, ajudassem a caracterizar o comportamento de
elementos de BA de estruturas espaciais sujeitos a esforços multiaxiais, e, por outro,
pudessem ser utilizados para a calibração do modelo analítico desenvolvido, procurando
que este traduzisse o comportamento de tais estruturas o mais correctamente possível.
Introdução
3
1.3 Organização da dissertação
Os materiais utilizados na construção dos modelos ensaiados são caracterizados no
capítulo 2. Os ensaios à tracção efectuados nos varões de aço, os ensaios à compressão
realizados nos provetes cilíndricos de BS e os ensaios à flexão sob três pontos de carga
efectuados nas vigas entalhadas de BS são descritos neste capítulo, e os resultados obtidos
são apresentados e discutidos. O processo de fabrico das vigas de BA, dos provetes
cilíndricos de BS e das vigas entalhadas de BS também é apresentado.
Os ensaios efectuados nos modelos de vigas de BA são descritos no capítulo 3. Numa
primeira parte, todo o sistema de ensaio utilizado é apresentado e descrito, bem como os
procedimentos adoptados para a realização dos ensaios. Numa segunda fase, apresentam-se
os resultados obtidos, tendo-se efectuado a sua análise e retiradas algumas conclusões, com
o intuito de caracterizar melhor o comportamento não linear de elementos de BA de
estruturas espaciais.
O capítulo 4 descreve, numa primeira fase, a formulação do modelo para análise estática
linear, tendo como base o elemento de Timoshenko no espaço. Numa segunda fase, o
modelo de fibras desenvolvido para a análise não linear material de estruturas de betão
armado é apresentado, descrevendo-se as alterações que devem ser efectuadas no modelo
de análise estática linear, por forma a ter em conta a não linearidade do comportamento do
betão e da armadura. As leis constitutivas da armadura e do betão também são
apresentadas. O betão à tracção é modelado por intermédio de uma formulação que simula
a capacidade de retenção de tensões de tracção do betão fendilhado. Numa última fase, as
simulações numéricas efectuadas com o modelo desenvolvido são descritas. Os resultados
obtidos com o modelo numérico e os determinados experimentalmente nos ensaios
efectuados nas vigas de BA, descritos no capítulo 3, são comparados.
Por último, o capítulo 5 expõe as principais conclusões do trabalho desenvolvido, bem
como algumas indicações e sugestões a ter em conta em futuros desenvolvimentos.


CAPÍTULO 2
Caracterização dos Materiais
e dos Provetes Ensaiados
2.1 Introdução
As técnicas de fabrico das vigas de betão armado (BA), dos provetes cilíndricos de betão
simples (BS) e das vigas de BS, bem como todos os materiais necessários à sua obtenção
são sucintamente descritos neste capítulo. As vigas de BA foram sujeitas a ensaios de
flexão, corte e torção, como será descrito no capítulo 3. Para caracterizar o betão utilizado,
foram ensaiados os provetes cilíndricos de BS à compressão simples e as vigas de BS à
flexão.
Todos os trabalhos inerentes à realização das vigas de BA, dos provetes cilíndricos de BS e
das vigas de BS foram executados na empresa de construção FERSEQUE, que forneceu
toda a mão-de-obra necessária para a construção dos modelos, assim como grande parte
dos materiais utilizados, em colaboração com o Laboratório de Engenharia Civil da
Universidade do Minho (LEC-UM).
A opção da construção das vigas em obra teve como finalidade possibilitar que os
resultados obtidos nos ensaios fossem representativos do comportamento de peças de BA
Capítulo 2
6
efectuadas sob condições correntes, disponíveis num estaleiro tipo. Os resultados foram
utilizados na calibração do modelo numérico, descrito no capítulo 4.
2.2 Características e concepção dos modelos
2.2.1 Geometria
Conforme se referiu no capítulo 1, o objectivo essencial deste trabalho foi desenvolver um
modelo numérico para simulação do comportamento não linear de pórticos tridimensionais.
Para calibrar e avaliar o desempenho deste modelo, optou-se pela realização de ensaios em
elementos de viga sujeitos a esforços de flexão, corte e torção, que, juntamente com os
esforços axiais, são preponderantes nos elementos do referido tipo de estruturas. Nas
dimensões das vigas ensaiadas, foram tidas em consideração as limitações impostas pelo
equipamento e infra-estruturas de ensaio disponíveis no LEC-UM.
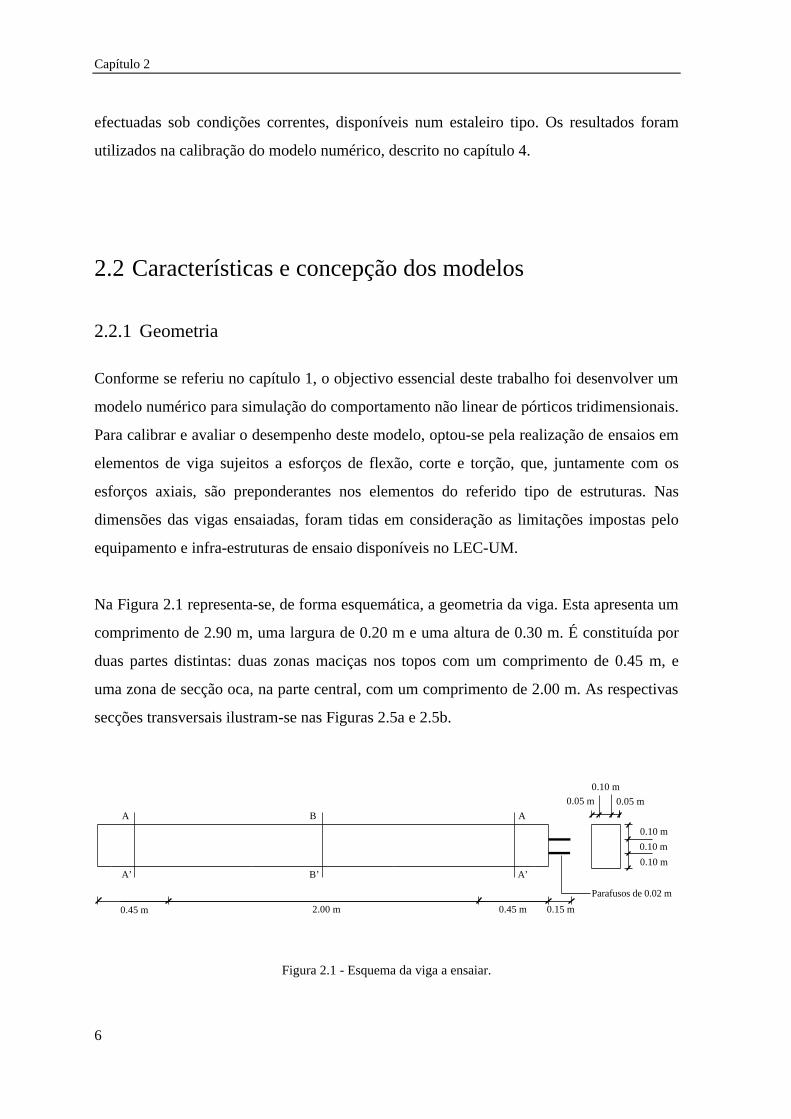
Na Figura 2.1 representa-se, de forma esquemática, a geometria da viga. Esta apresenta um
comprimento de 2.90 m, uma largura de 0.20 m e uma altura de 0.30 m. É constituída por
duas partes distintas: duas zonas maciças nos topos com um comprimento de 0.45 m, e
uma zona de secção oca, na parte central, com um comprimento de 2.00 m. As respectivas
secções transversais ilustram-se nas Figuras 2.5a e 2.5b.
A
A’
0.45 m 0.15 m
Parafusos de 0.02 m
0.45 m2.00 m
B
B’
A
A’
0.10 m
0.10 m
0.10 m
0.05 m0.10 m
0.05 m
Figura 2.1 - Esquema da viga a ensaiar.

Caracterização dos Materiais e dos Provetes Ensaiados
7
As estruturas espaciais estão sujeitas a um conjunto diversificado de esforços, muitos dos
quais a actuarem simultaneamente numa determinada secção, pelo que se procurou fazer
um ensaio em que estivesse presente a interacção de alguns desses esforços.
Na Figura 2.2 representa-se, de forma esquemática, a aplicação do carregamento, bem
como os esforços desenvolvidos ao longo da viga.
2.2.2 Pormenorização das armaduras das vigas
A armadura transversal é constituída por varões de φ6 constituindo estribos para a
resistência ao corte e à torção. Esta armadura não tem a mesma distribuição ao longo de
toda a viga. Na zona maciça, há um menor afastamento entre estribos, enquanto que, na
zona central oca, o afastamento é maior, como se ilustra na Figura 2.3 e na Figura 2.4. Esta
diferença deve-se ao facto de uma das extremidades ser introduzida no encastramento e a
outra estar próxima da aplicação da carga. Nas figuras podem ver-se ainda os pormenores
das placas de poliestireno expandido utilizadas na zona central, para garantir a secção oca
pretendida nessa zona.
A armadura longitudinal é constituída por 8 varões de φ10 ou φ12 e resiste aos esforços de
flexão e de torção.

Capítulo 2
8
0.5 m
2.74 m
perfis HEB 200 viga de BA a ensaiar perfil metálico de secção rectangular oca actuador encastramento
Mt
Mf
V
Figura 2.2 - Esquema do ensaio e diagramas de esforços ao longo da viga.

Caracterização dos Materiais e dos Provetes Ensaiados
9
Figura 2.3 - Fotografia da armadura utilizada nas vigas com estribos afastados 150 mm na zona central.
Figura 2.4 - Fotografia da armadura utilizada nas vigas com estribos afastados 75 mm na zona central.
Nas Figuras 2.5a e 2.5b apresentam-se as secções correspondentes às zonas maciça e oca,
respectivamente. O pormenor da amarração da armadura transversal ilustrado nessas
figuras, tem em conta o preconizado no REBAP [Reb93] para secções sujeitas a esforços
de torção.

Capítulo 2
10
0.30m
0.20m
AT
AL0.075m
0.125m
0.125m
0.075m
Figura 2.5a - Corte transversal da viga na zona
maciça (A-A’).
A*T
AL0.075m
0.125m
0.125m
0.05m
0.20m
0.05m
0.05m
0.05m 0.10m
0.075m
Figura 2.5b - Corte transversal da viga na zona
oca (B-B’).
Foram construídas quatro séries distintas, tendo-se variado tanto a armadura longitudinal
como a armadura transversal. Mantendo um determinado diâmetro dos varões
longitudinais, modificou-se a armadura transversal. A quantidade de armadura e o número
de peças de cada série estão indicados no Quadro 2.1.
Quadro 2.1 - Quantidade de armaduras para cada peça.
Armadura longitudinal (AL)
Armadura transversal (secção A-A’ (AT))
Armadura transversal (secção B-B’ (A*
T)) Número de vigas
8φ10 φ6@50 φ6@75 2
8φ10 φ6@50 φ6@150 2
8φ12 φ6@50 φ6@75 2
8φ12 φ6@50 φ6@150 2

Caracterização dos Materiais e dos Provetes Ensaiados
11
2.2.3 Nomenclatura utilizada
Com a intenção de facilitar a compreensão e exposição deste trabalho, criou-se uma
nomenclatura para caracterizar cada viga de BA. Esta nomenclatura procura diferenciar as
várias séries e, dentro destas, distinguir as vigas com base na quantidade de armadura
longitudinal e de estribos utilizados.
Para uma viga genérica Vi_lj_tk, o significado é o seguinte:
i. a letra “V” designa a viga e a letra “i” um número que identifica cada viga da
mesma série;
ii. a letra “l” significa “longitudinal” e a letra “j” indica o diâmetro dos varões
longitudinais (valores em milímetros);
iii. a letra “t” significa “transversal” e a letra “k” indica o afastamento da armadura
transversal na zona oca (valores em milímetros);
Entende-se por série o conjunto de todas as vigas que, para um determinado diâmetro dos
varões longitudinais, têm a mesma quantidade de armadura transversal. No Quadro 2.2
sintetizam-se, para cada série, todas as características de cada uma das vigas utilizadas
neste trabalho.
Quadro 2.2 - Nomenclatura utilizada e principais características dos modelos de viga ensaiados.
Designação Armadura
longitudinal (diâmetro - mm)
Armadura transversal na zona oca
(espaçamento - mm)
V1_l10_t75 10 75
V2_l10_t75 10 75
V1_l10_t150 10 150
V2_l10_t150 10 150
V1_l12_t75 12 75
V2_l12_t75 12 75
V1_l12_t150 12 150
V2_l12_t150 12 150

Capítulo 2
12
2.2.4 Concepção dos modelos
Na realização dos modelos, procuraram reproduzir-se, da melhor forma possível, as
condições de execução em obra dos elementos de BA. Por conseguinte, os modelos foram
realizados segundo processos construtivos correntes.
Os profissionais que realizaram a armadura tiveram o cuidado de respeitar todos os
espaçamentos e dobragens previstos.
Para que a zona central da viga fosse constituída por uma secção rectangular oca,
colocaram-se placas de poliestireno expandido para criar esse vazio. Estas placas,
amarradas tanto à armadura transversal como à armadura longitudinal, impedindo, assim, a
sua deslocação durante a betonagem, possibilitaram que a parede ao longo de toda a secção
tivesse espessura constante, como se ilustra na Figura 2.6 e na Figura 2.7.
Figura 2.6 - Pormenores da armadura e das placas de poliestireno expandido utilizadas na zona oca das vigas
de BA.
Amarração das placas de poliestireno expandido e garantia do recobrimento
Amarração das placas de poliestireno expandido e garantia do recobrimento
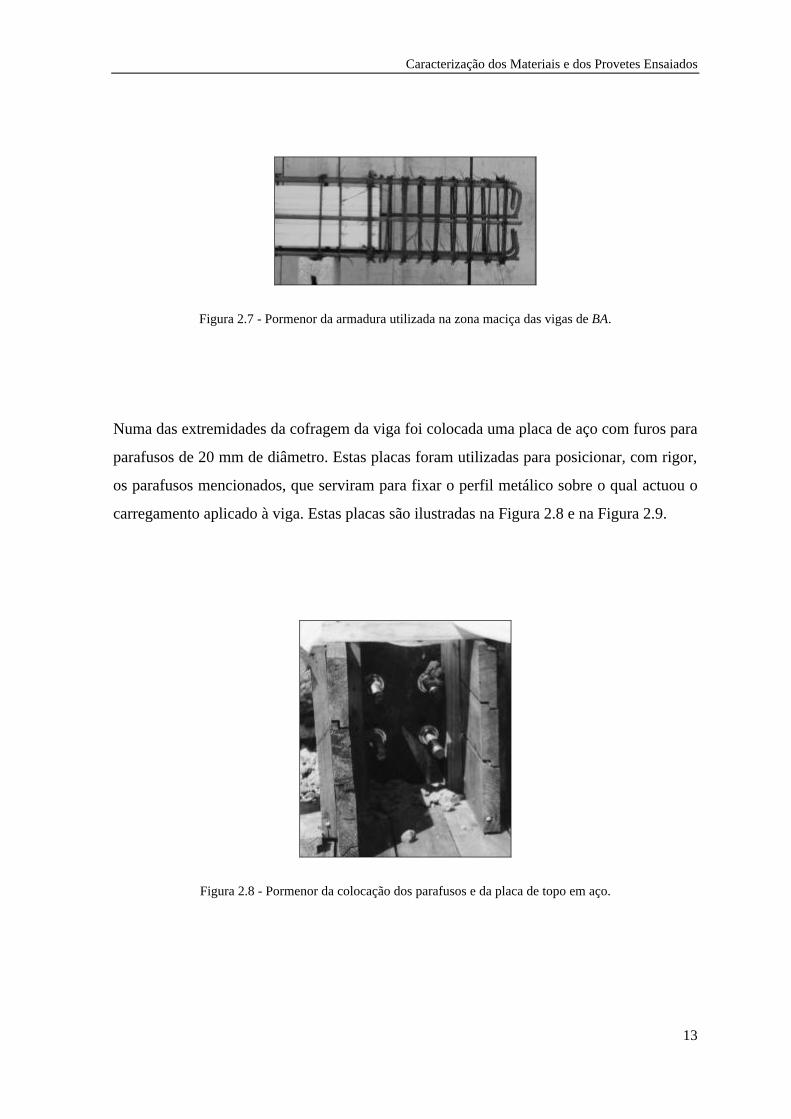
Caracterização dos Materiais e dos Provetes Ensaiados
13
Figura 2.7 - Pormenor da armadura utilizada na zona maciça das vigas de BA.
Numa das extremidades da cofragem da viga foi colocada uma placa de aço com furos para
parafusos de 20 mm de diâmetro. Estas placas foram utilizadas para posicionar, com rigor,
os parafusos mencionados, que serviram para fixar o perfil metálico sobre o qual actuou o
carregamento aplicado à viga. Estas placas são ilustradas na Figura 2.8 e na Figura 2.9.
Figura 2.8 - Pormenor da colocação dos parafusos e da placa de topo em aço.

Capítulo 2
14
Figura 2.9 - Placa de topo em aço, parafusos e pormenor da colocação da armadura nos moldes de madeira.
Foram feitas duas betonagens, cada uma delas, com a quantidade suficiente de betão para a
betonagem de quatro vigas de BA, de quatro provetes cilíndricos e de quatro vigas de BS. A
composição apresentada no Quadro 2.4 é para a fabricação de 1 m3 de betão, tendo sido
adaptada para as quantidades necessárias de cada série de amassaduras.
As cofragens das vigas de BA foram concebidas e desenhadas tendo como principal
objectivo a facilidade da sua montagem e desmontagem, bem como a sua posterior
reutilização. Foram executadas por profissionais e construídas em madeira, como se
representa na Figura 2.10.
Placas de topo
Parafusos
Garantia do recobrimento

Caracterização dos Materiais e dos Provetes Ensaiados
15
Figura 2.10 - Moldes de madeira utilizados nas vigas de BA.
As cofragens foram lubrificadas com um produto descofrante, imediatamente antes da sua
betonagem.
O betão foi transportado, com a ajuda de uma grua, da central de betonagem até perto da
zona das cofragens das vigas e depositado em cima de um toldo de plástico. Com ajuda de
pás, foi introduzido nas cofragens, onde previamente se colocara a armadura. Na zona,
central, que continha placas de poliestireno expandido, foi colocado com ajuda de colheres
de trolha, devido à dificuldade de manobra.

Capítulo 2
16
Para garantir uma melhor homogeneização do betão, e evitar que aparecessem zonas sem
betão (ninhos), este foi compactado com a ajuda de um vibrador de agulha (ver Figura
2.11). Nesta compactação foram encontradas algumas dificuldades, tanto nas zonas
maciças, onde a concentração de armadura transversal é elevada, como na zona central oca,
devido à presença das placas de poliestireno expandido. Isto justifica a opção pela
utilização duma brita com dimensão máxima de 15 mm. Adoptou-se uma relação
água/cimento (a/c) de 0.55, de forma a assegurar a necessária trabalhabilidade da mistura.
O betão foi vibrado até ao momento em que a sua superfície se apresentava lisa e brilhante
e se verificava o desaparecimento de bolhas de ar.
Figura 2.11 - Vibração do betão.
As vigas de BA permaneceram cobertas por uma serapilheira húmida durante 7 dias (ver
Figura 2.12). Ao longo destes dias, as vigas foram regadas frequentemente, para manter
sempre um elevado grau de humidade e permitir um bom processo de cura. Após esse
período, foram descofradas lateralmente, permanecendo por mais 15 dias na obra, sob as
condições de cura empregues nos primeiros 7 dias.
Vibrador de agulha

Caracterização dos Materiais e dos Provetes Ensaiados
17
Figura 2.12 - Colocação do toldo de serapilheira para manter as vigas húmidas.
Ao fim de três semanas, as vigas foram transportadas da obra para o Laboratório de
Engenharia Civil da Universidade do Minho onde permaneceram até à altura do ensaio.
Devido às suas grandes dimensões e dificuldade de manuseamento, não puderam ser
colocadas na câmara húmida existente.
Conjuntamente com cada série de betonagem das vigas de BA, foram moldados quatro
provetes cilíndricos de BS de 300 mm de altura e 150 mm de diâmetro e quatro vigas de BS
de 850×100×100 mm3.
Um dos moldes utilizados para fabricar os provetes cilíndricos de BS está representado na
Figura 2.13. Estes dispõem de um eficiente sistema de montagem/desmontagem. As
dimensões utilizadas são as recomendadas pelo REBAP [Reb93] e pelo código modelo
CEB-FIP 1990 [MC90].
Na Figura 2.14 representa-se um dos moldes utilizados para fabricar as vigas de BS. As
dimensões utilizadas estão de acordo com as dimensões recomendadas pelo RILEM
[RIL85], que vêm em função da máxima dimensão do inerte.
Os provetes cilíndricos foram submetidos a ensaios de compressão uniaxial, no intuito de
se obter a resistência máxima à compressão do betão.

Capítulo 2
18
Para cada betonagem, dos quatro cilindros moldados, dois foram ensaiados aos 28 dias e os
restantes aquando da realização dos ensaios dos modelos das vigas de BA (ver secção
2.3.2.1).
As vigas de BS, depois de entalhadas a meio vão, foram submetidas a ensaios de flexão sob
três pontos de carga (ver secção 2.3.2.2), para a quantificação da energia de fractura e da
resistência máxima de tracção em flexão do betão.
Figura 2.13 - Molde utilizado para a betonagem dos cilindros de BS.
Caracterização dos Materiais e dos Provetes Ensaiados
19
Figura 2.14 - Molde utilizado para a betonagem das vigas de BS.
2.3 Caracterização dos Materiais
2.3.1 Armadura
O comportamento dos varões de aço utilizados nos elementos de BA de dureza natural,
pode ser observado num ensaio de tracção efectuado sob controlo de força.
Na construção das vigas de BA, utilizaram-se varões de aço nervurados de 6, 10 e 12
milímetros de diâmetro, como se apresenta na Figura 2.15. As curvas tensão-extensão dos
varões φ10 e φ12, obtidas através dos ensaios de tracção uniaxial, apresentaram todas o
andamento ilustrado na Figura 2.16, enquanto as curvas tensão-extensão dos varões φ6
apresentaram o andamento ilustrado na Figura 2.17.

Capítulo 2
20
(φ6)
(φ10)
(φ12)
Figura 2.15 - Tipo de varões de aço: φ6, φ10 e φ12.
ε
σ
Figura 2.16 - Resposta – tipo dos varões de aço φ10 e φ12 ensaiados à tracção simples.

Caracterização dos Materiais e dos Provetes Ensaiados
21
No diagrama da Figura 2.16, é possível identificar várias fases que se passam a descrever
[Pip93]:
i. numa primeira fase, as extensões são proporcionais às tensões, sendo esta
proporcionalidade traduzida por uma constante, convencionalmente designada
por módulo de Young ou módulo de elasticidade longitudinal do aço.
ii. segue-se a fase em que as extensões aumentam, mantendo-se constante a tensão
aplicada, (patamar de cedência), designando-se esta por tensão de cedência.
iii. por fim, verifica-se novamente um crescimento das extensões com o
crescimento das tensões. Esta é a chamada fase de endurecimento, que se dá a
partir de uma dada extensão, designada por extensão de endurecimento, e se
prolonga até à extensão de rotura, após a qual se dá a rotura do provete.
Do andamento apresentado no diagrama da Figura 2.16, conclui-se que se trata de varões
de aço dúctil.
ε
σ
Figura 2.17 - Resposta – tipo dos varões de aço φ6 ensaiados à tracção simples.

Capítulo 2
22
No diagrama da Figura 2.17, a fase em que as extensões aumentam mantendo-se constante
a tensão aplicada, (patamar de cedência), já não existe. Depois da fase linear, o aço
apresenta logo uma fase não linear até atingir a rotura. Embora o andamento do diagrama
apresente características de um aço frágil, a extensão de rotura é elevada.
No Quadro 2.3 apresentam-se as principais características mecânicas dos varões ensaiados.
Para cada diâmetro dos varões, foram ensaiados três provetes com um comprimento de
400 mm.
Quadro 2.3 - Principais características mecânicas dos varões de aço.
Varão Tensão de cedência
(fsy - MPa)
Tensão de rotura
(fsu - MPa)
Extensão de rotura (εsu - %)
457 598 12.5
φ6 437 586 11.0
442 582 10.0
538 648 8.0
φ10 499 620 8.0
488 609 9.5
513 629 15.5
φ12 470 570 16.5
498 599 14.5
O sistema de ensaio usado para o ensaio de tracção uniaxial é constituído por uma “prensa”
(ver Figura 2.18), um computador responsável pelo controlo do ensaio e um sistema de
aquisição de dados. A norma utilizada para o procedimento do ensaio foi a norma
EN10002-1 [EN10002].

Caracterização dos Materiais e dos Provetes Ensaiados
23
Os varões φ6 foram utilizados como armadura transversal, enquanto que os varões φ10 e
φ12 foram utilizados como armadura longitudinal nas vigas de BA.
Figura 2.18 - Ensaio de tracção uniaxial dos varões de aço.
2.3.2 Betão
Devido às limitações em termos de capacidade de carga do pórtico e do equipamento de
ensaio existente no LEC-UM, optou-se pelo fabrico de um betão de baixa resistência. No
Quadro 2.4 é apresentada a composição do betão utilizado.
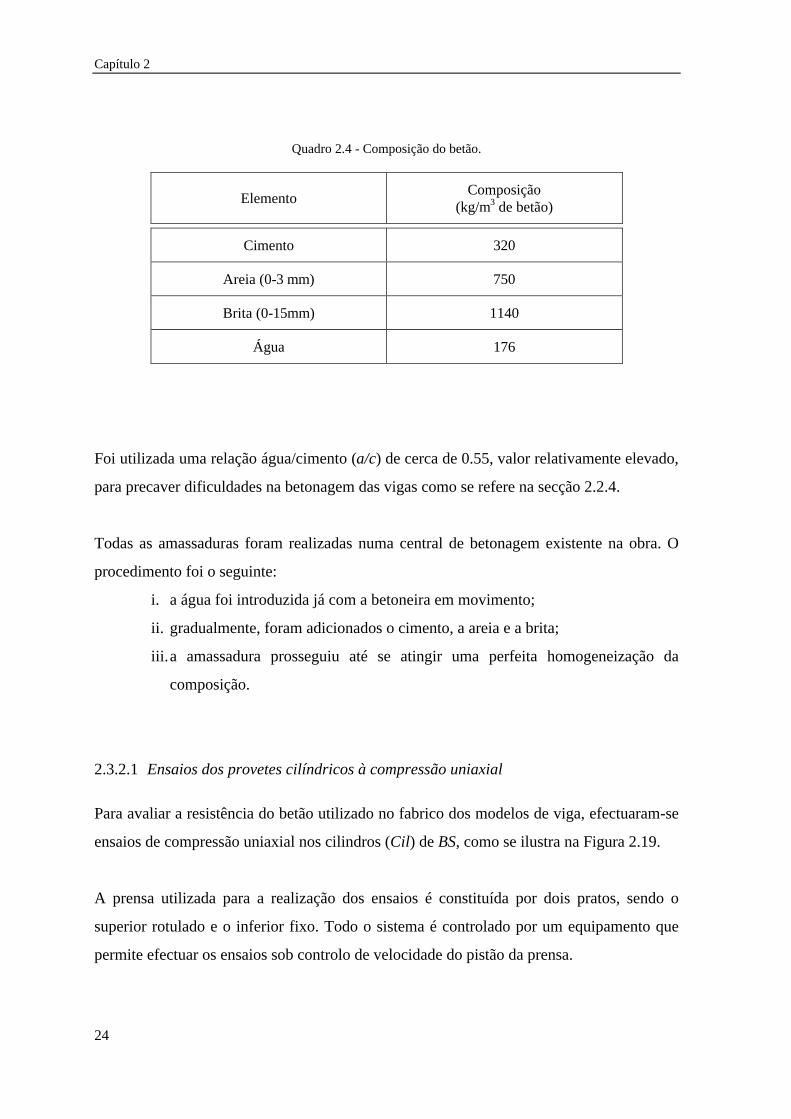
Capítulo 2
24
Quadro 2.4 - Composição do betão.
Elemento Composição (kg/m3 de betão)
Cimento 320
Areia (0-3 mm) 750
Brita (0-15mm) 1140
Água 176
Foi utilizada uma relação água/cimento (a/c) de cerca de 0.55, valor relativamente elevado,
para precaver dificuldades na betonagem das vigas como se refere na secção 2.2.4.
Todas as amassaduras foram realizadas numa central de betonagem existente na obra. O
procedimento foi o seguinte:
i. a água foi introduzida já com a betoneira em movimento;
ii. gradualmente, foram adicionados o cimento, a areia e a brita;
iii. a amassadura prosseguiu até se atingir uma perfeita homogeneização da
composição.
2.3.2.1 Ensaios dos provetes cilíndricos à compressão uniaxial
Para avaliar a resistência do betão utilizado no fabrico dos modelos de viga, efectuaram-se
ensaios de compressão uniaxial nos cilindros (Cil) de BS, como se ilustra na Figura 2.19.
A prensa utilizada para a realização dos ensaios é constituída por dois pratos, sendo o
superior rotulado e o inferior fixo. Todo o sistema é controlado por um equipamento que
permite efectuar os ensaios sob controlo de velocidade do pistão da prensa.

Caracterização dos Materiais e dos Provetes Ensaiados
25
O equipamento, que se descreve na secção 3.2.3 do capítulo 3 foi desenvolvido de forma a
poder, também, controlar os ensaios a serem efectuados na prensa. Assim, é possível
realizar ensaios de compressão uniaxial sob controlo de força ou sob controlo de
deslocamentos. Os ensaios efectuados no presente trabalho serviram também para calibrar
o equipamento desenvolvido e avaliar a capacidade da prensa, em termos de rigidez, para
ser possível efectuar ensaios completos de compressão uniaxial, sob controlo de
deslocamentos.
Por cada série de amassadura, foram betonados quatro cilindros de BS, como se descreve
na secção 2.2.4. Dois cilindros de cada amassadura foram ensaiados aos 28 dias,
apresentando-se os resultados no Quadro 2.5. Os outros cilindros foram ensaiados na altura
dos ensaios das vigas de BA, apresentando-se os resultados obtidos no Quadro 2.6.
Quadro 2.5 - Resultados dos ensaios de compressão uniaxial aos 28 dias.
Série de betonagem Data da betonagem
Data do ensaio
fc aos 28 dias (MPa)
Cil1 18-06-98 16-07-98 15.8 Série 1
Cil2 18-06-98 16-07-98 13.0
Cil1 02-07-98 30-07-98 17.5 Série 2
Cil2 02-07-98 30-07-98 15.6

Capítulo 2
26
Quadro 2.6 - Resultados dos ensaios de compressão uniaxial na altura dos ensaios das vigas de BA.
Série de betonagem Data da betonagem
Data do ensaio
fc (MPa)
Cil3 18-06-98 02-05-99 20.2 Série 1
Cil4 18-06-98 02-05-99 21.0
Cil3 02-07-98 02-08-99 27.1 Série 2
Cil4 02-07-98 02-08-99 21.3
Pela análise dos resultados verifica-se que se trata de um betão de baixa resistência, facto
que se desejava pelas razões já expostas.
Figura 2.19 - Ensaio de compressão uniaxial.
Caracterização dos Materiais e dos Provetes Ensaiados
27
2.3.2.2 Ensaios das vigas de BS à flexão
Para caracterizar o comportamento à flexão das vigas, foram efectuados ensaios de flexão
sob três pontos de carga com as vigas de BS. Antes de serem ensaiadas, estas vigas foram
entalhadas com uma serra adiamantada. Esse entalhe tinha 25 mm de profundidade e 5 mm
de espessura, como se ilustra no esquema de ensaio da Figura 2.20.
O principal objectivo destes ensaios é o de quantificar a energia de fractura do betão. A sua
quantificação é obtida por intermédio da seguinte expressão proposta pelo RILEM [RIL85]
( )[ ]
SFgmmW
G uf
δα 22
10 21 +−+=
(2.1)
em que W0 é o trabalho produzido pela carga F, ou seja, a área sob a curva F-δ; m1 é a
massa do provete entre apoios; m2 é a massa do equipamento que acompanha a deformação
do provete e que não está acoplada ao actuador; 1−= lLα é o parâmetro que corrige o
trabalho produzido pelo peso próprio do provete, tendo em conta que a distância entre
apoios, l, pode ser diferente do comprimento do provete, L (ver Figura 2.20); g é a
aceleração da gravidade; δu é o deslocamento máximo registado no fim do ensaio quando
0=F e SF é a área da superfície de fractura, ( )adb − . Esta expressão tem em conta o
efeito do peso próprio do provete e ainda o efeito de possíveis massas que acompanham a
deformação do provete e que não estão acopladas ao actuador.
Estes ensaios também serviram para quantificar a resistência máxima à tracção em flexão
na secção do entalhe, fnetf , por intermédio da seguinte expressão

Capítulo 2
28
( )[ ]( )
,21
23
22
21
adb
lgmgmFf máx
fnet−
+−+=
α (2.2)
a qual também tem em conta a acção do peso próprio da viga e de possíveis massas de
equipamento não acopladas ao actuador [Bar95].
5 mm
Actuador
α l/2 = 25 mm l/2 = 400 mm
25 mm
75 mm
l/2 = 400 mm
L
d-a
a d
α l/2 = 25 mm
b – largura da viga
Figura 2.20 - Esquema de ensaio das vigas de BS.
Na Figura 2.21 apresenta-se uma fotografia de todo o sistema de ensaio. Os ensaios foram
realizados sob controlo de deslocamento, para se obter a resposta total carga-flecha. Para
tal, utilizou-se um transdutor de deslocamento de ±2.5 mm de curso, acoplado a uma barra
apoiada em dois pontos, que se encontravam na intercepção do eixo longitudinal da viga
com os alinhamentos verticais sobre os apoios (ver Figura 2.22).

Caracterização dos Materiais e dos Provetes Ensaiados
29
O equipamento utlilizado para o controlo do ensaio será descrito na secção 3.2.3 do
capítulo 3. Estes ensaios serviram também para aferir e calibrar o equipamento
desenvolvido.
A velocidade de deformação utilizada no ensaio foi de 6 µm/s. As leituras dos
deslocamentos e das forças foram registadas em cada meio segundo e gravadas num
ficheiro.
A estrutura de reacção dos ensaios era constituída por perfis da série HEB200.
Figura 2.21 - Fotografia da viga entalhada e da estrutura utilizada nos ensaios de flexão.
Figura 2.22 - Pormenor da instrumentação da viga.

Capítulo 2
30
Após tratamento dos resultados, obtiveram-se, para cada série de vigas, as relações
força-flecha representadas na Figura 2.23 e Figura 2.24.
Os valores da força máxima transmitida pelo actuador, máxF , da resistência máxima de
tracção em flexão, fnetf , e da energia de fractura, fG , são apresentados no Quadro 2.7.
Verifica-se uma ligeira dispersão de resultados entre as duas séries de betonagem. Além
disto, constata-se que, na série 1, de menor resistência à compressão, se obtiveram valores
da resistência máxima à tracção em flexão e da energia de fractura maiores que os
determinados na série 2. Esta ocorrência não era esperada, dado que, segundo resultados
obtidos por outros autores [Bar95,MC90], as referidas propriedades deveriam aumentar
com a resistência à compressão. A não verificação desta tendência, nos ensaios efectuados
no âmbito deste trabalho, pode estar relacionada com diferentes processos de cura dos
provetes.
0
500
1000
1500
2000
2500
0.00 0.50 1.00 1.50 2.00 2.50 3.00
Deslocamento (mm)
Forç
a (N
)
Figura 2.23 - Relação F-δ nas vigas da série 1.

Caracterização dos Materiais e dos Provetes Ensaiados
31
0
500
1000
1500
2000
2500
0.00 0.50 1.00 1.50 2.00 2.50 3.00
Deslocamento (mm)
Forç
a (N
)
Figura 2.24 - Relação F-δ nas vigas da série 2.
Quadro 2.7 - Resultados dos ensaios de flexão nas vigas com entalhe.
Série de betonagem
Data da betonagem
Data do ensaio
Fmáx
(N) ffnet
(MPa)
ffnet (média) (MPa)
Gf (N/mm)
Gf (média) (N/mm)
Vig1 18-06-98 20-12-99 1939.8 4.28 0.2510
Vig2 18-06-98 20-12-99 2400.0 5.16 0.2019
Vig3 18-06-98 20-12-99 1994.0 4.41 0.2313 Série 1
Vig4 18-06-98 20-12-99 1768.4 3.92
4.44
0.2043
0.2221
Vig1 02-07-98 20-12-99 1786.5 3.96 0.1994
Vig2 02-07-98 20-12-99 1416.5 3.13 0.1589
Vig3 02-07-98 20-12-99 1615.0 3.61 0.1498 Série 2
Vig4 02-07-98 20-12-99 1795.5 3.98
3.67
0.1764
0.1711


CAPÍTULO 3
Programa Experimental
3.1 Introdução
As tarefas associadas à construção das vigas de betão armado (BA) estão descritas no
capítulo anterior. O programa experimental efectuado com as referidas vigas é apresentado
no presente capítulo. Estas vigas foram sujeitas a ensaios de flexão, corte e torção. Com
estes ensaios, pretendeu dar-se um contributo para o conhecimento do comportamento não
linear de elementos de barra de betão armado submetidos a estados multiaxiais de tensão.
Os resultados obtidos foram utilizados na calibração do modelo numérico desenvolvido,
descrito no capítulo 4.
As estruturas de betão armado, quando sujeitas a carregamentos multiaxiais, têm um
comportamento não linear, principalmente após o início da fendilhação. A caracterização,
quer experimental, quer numérica, do comportamento pós-fendilhação dos elementos que
constituem tais estruturas é ainda escassa.
Na primeira parte deste capítulo, é apresentado o sistema de ensaio utilizado,
descrevendo-se o equipamento, bem como os procedimentos adoptados. A segunda parte
deste capítulo é dedicada à apresentação e análise dos resultados obtidos.

Capítulo 3
34
3.2 Sistema de ensaio
3.2.1 Configuração dos ensaios
O pórtico metálico autoportante que se utilizou na realização dos ensaios das vigas de BA é
constituído por vários elementos metálicos (perfis HEB200) com diferentes dimensões,
podendo combinar-se de diferentes formas, de modo a ajustar-se à configuração dos
ensaios. Nas Figuras 3.1 a 3.8 são apresentados vários esquemas e fotografias das
diferentes vistas e secções do pórtico utilizado.
O esquema estrutural da viga é uma consola. Na tentativa de construir um encastramento
perfeito foi necessário criar um dispositivo de fixação. Este foi realizado por intermédio de
um “anel” de secção rectangular, em chapas de aço, fixado ao pórtico por intermédio de
perfis metálicos, como se ilustra nas Figuras 3.3, 3.4, 3.7 e 3.8. Para apertar e reajustar a
viga, interpôs-se uma chapa de aço entre cada face da viga e o “anel” de encastramento.
Estas chapas foram apertadas contra as faces da viga por intermédio de parafusos. A zona
do encastramento foi reforçada com um perfil metálico, representado na Figura 3.7, por
forma a aumentar a rigidez do encastramento.
A aplicação da carga ao perfil metálico, como se ilustra na Figura 3.5 e na Figura 3.6, foi
feita por intermédio de um actuador hidráulico com um curso máximo de 200 mm. Entre o
actuador e o perfil foi colocado um transdutor de força para quantificar a carga aplicada.
Essa carga foi transmitida à viga de BA por intermédio de uma ligação aparafusada entre o
perfil metálico e a extremidade livre da viga. Para esse efeito, utilizaram-se parafusos de
aço de 20 mm de diâmetro. Entre o transdutor de força e o perfil metálico colocou-se uma
pastilha de aço de 30×30 mm2 de forma a que o braço do binário aplicado à viga se
mantivesse constante durante o ensaio.

Programa Experimental
35
A’
2.00 m 1.00 m 0.20 m0.20 m
0.20 m
A
HEB200
ExtremidadeLivreEncastramento
Viga
0.60 m
0.40 m
0.20 m
B
B’
1.00 m
Figura 3.1 - Esquema do ensaio da viga de betão armado.
Figura 3.2 - Fotografia lateral da viga e respectiva instrumentação.
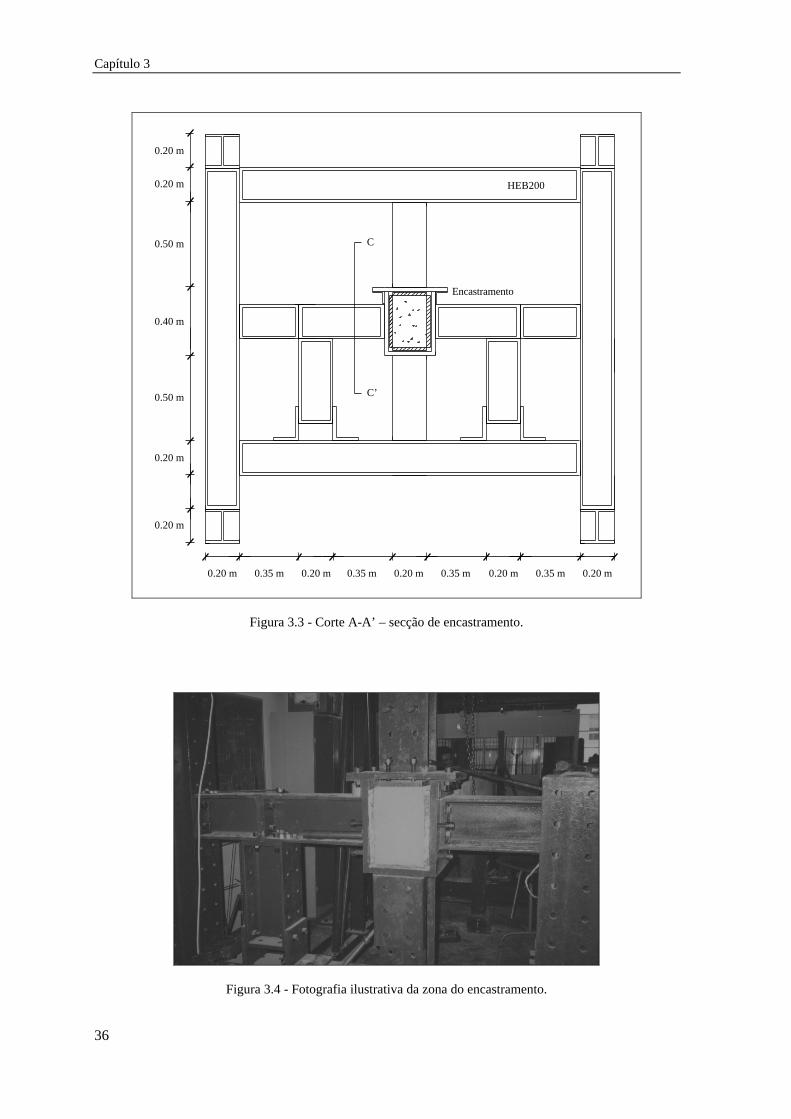
Capítulo 3
36
0.20 m
C’
C
Encastramento
HEB2000.20 m
0.20 m
0.20 m
0.50 m
0.40 m
0.50 m
0.20 m 0.35 m 0.20 m 0.35 m 0.20 m 0.35 m 0.20 m 0.35 m 0.20 m
Figura 3.3 - Corte A-A’ – secção de encastramento.
Figura 3.4 - Fotografia ilustrativa da zona do encastramento.

Programa Experimental
37
0.20 m
Extremidade Livre
Actuador
Perfil rectangularoco 200x100x4 mm
HEB200
2.00 m
0.20 m
0.20 m
2.00 m 0.20 m
Figura 3.5 - Corte B-B’ – extremidade livre.
Figura 3.6 - Fotografia da ligação do perfil metálico à viga, na secção da extremidade livre.

Capítulo 3
38
Figura 3.7 - Corte C-C’ – vista lateral da secção de encastramento.
Viga de BA
Chapas metálicasde aperto
Anel deencastramento
Figura 3.8 - Pormenorização do encastramento.

Programa Experimental
39
3.2.2 Instrumentação
Para monitorizar o comportamento da viga durante o ensaio, foram colocados, em várias
secções da mesma, instrumentos de medida, nomeadamente transdutores de
deslocamentos, comparadores mecânicos e um transdutor de força.
Na Figura 3.9, apresentam-se as secções da viga onde foi colocada a instrumentação.
Existem, fundamentalmente, três secções de leitura, S1, S2 e S3. A secção S0 teve como
objectivo registar alguns movimentos de corpo rígido da viga devido à impossibilidade de
garantir um encastramento perfeito.
0.20 m
S0
S0
0.34 m 1.11 m 1.05 m 0.40 m
S1
S1
S2
S2
Zona maciça Zona maciçaZona oca
2.00 m0.45 m 0.45 m
0.02 m
S3
S3
Figura 3.9 - Secções de instrumentação da viga.
Foram utilizados três tipos de transdutores de deslocamentos eléctricos (LVDT’s – Linear
Voltage Displacement Transducer), que diferem entre si no campo de leitura: amplitude
linear de ±25 mm, ±12.5 mm e ±2.5 mm, como se ilustram nas Figuras 3.10 a 3.12.

Capítulo 3
40
Figura 3.10 - Transdutor eléctrico (LVDT ±25 mm).
Figura 3.11 - Transdutor eléctrico (LVDT ±12.5 mm).
Figura 3.12 - Transdutor eléctrico (LVDT ±2.5 mm).
Dado não se dispor do número necessário de transdutores eléctricos de deslocamentos,
foram também utilizados comparadores mecânicos. Nas Figuras 3.13 e 3.14 apresentam-se
os dois tipos de comparadores mecânicos (CM) utilizados, com uma precisão de 0.01 mm e
de 0.002 mm, respectivamente.
Programa Experimental
41
Figura 3.13 - Comparador mecânico de 0.01 mm de
precisão.
Figura 3.14 - Comparador mecânico de 0.002 mm de
precisão.
Com a intenção de medir os deslocamentos verticais nas secções S1, S2 e S3, colocaram-se
nestas secções LVDT’s com um campo de leitura de ±25 mm. Na secção S0, (ver Figuras
3.17 e 3.18), colocou-se um CM com uma precisão de 0.01 mm, para registar algum
deslocamento vertical junto ao apoio (assentamento de apoio). Estes aparelhos
encontravam-se ligados, por meio de um mecanismo ajustável de alumínio, a uma barra de
aço de secção tubular (ver Figuras 3.15 e 3.16). Esta, por sua vez, encontrava-se apoiada
em dois tripés de aço exteriores à viga.
Para avaliar as rotações por flexão, em cada secção foram colocados dois CM, como se
ilustra nas Figuras 3.18, 3.20 e 3.22. Para dar suporte ao cursor desses CM, foram
previamente coladas nas vigas umas chapas de alumínio em forma de L. Na secção S0,
foram utilizados os CM com uma precisão de 0.002 mm, já que se esperariam rotações
baixas, enquanto que nas secções S1 e S2 se utilizaram CM com uma precisão de 0.01 mm.
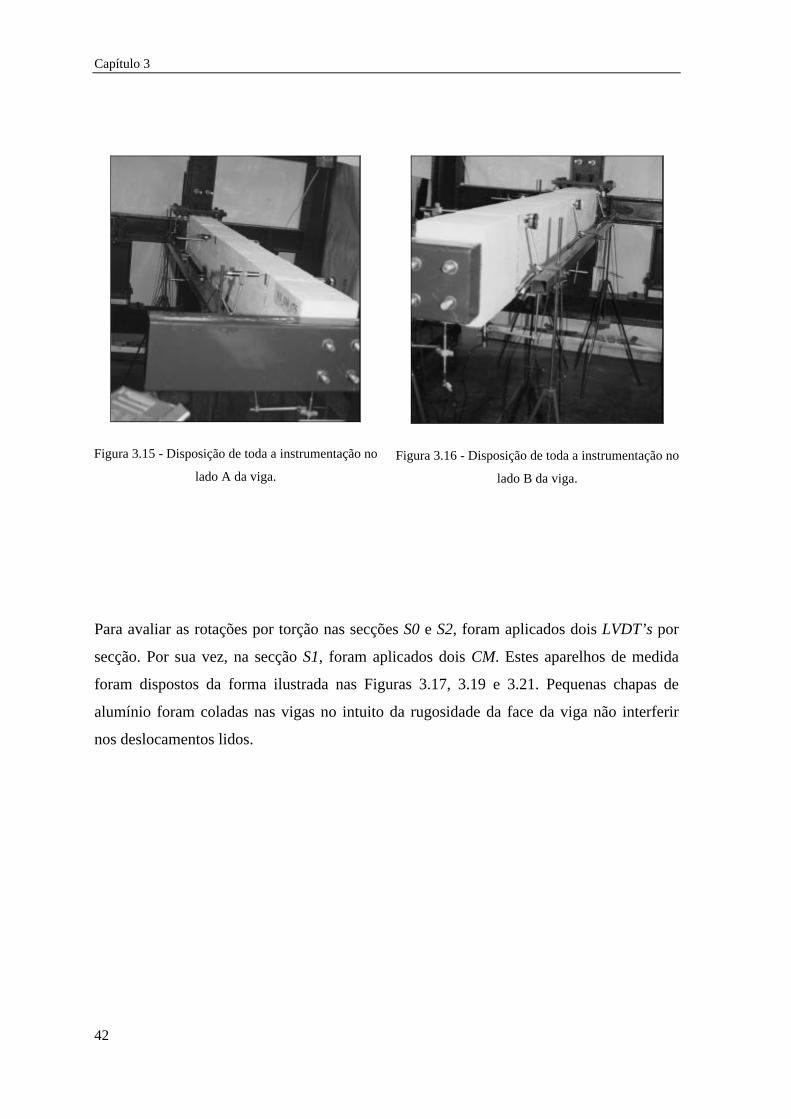
Capítulo 3
42
Figura 3.15 - Disposição de toda a instrumentação no
lado A da viga.
Figura 3.16 - Disposição de toda a instrumentação no
lado B da viga.
Para avaliar as rotações por torção nas secções S0 e S2, foram aplicados dois LVDT’s por
secção. Por sua vez, na secção S1, foram aplicados dois CM. Estes aparelhos de medida
foram dispostos da forma ilustrada nas Figuras 3.17, 3.19 e 3.21. Pequenas chapas de
alumínio foram coladas nas vigas no intuito da rugosidade da face da viga não interferir
nos deslocamentos lidos.

Programa Experimental
43
Figura 3.17 - Disposição dos aparelhos na secção S0
do lado A da viga.
Figura 3.18 - Disposição dos aparelhos na secção S0
do lado B da viga.
Figura 3.19 - Disposição dos aparelhos na secção S1
do lado A da viga.
Figura 3.20 - Disposição dos aparelhos na secção S1
do lado B da viga.

Capítulo 3
44
Figura 3.21 - Disposição dos aparelhos na secção S2
e S3 do lado A da viga.
Figura 3.22 - Disposição dos aparelhos na secção S2
e S3 do lado B da viga.
A força foi aplicada ao perfil metálico por intermédio de um actuador hidráulico, como foi
referido na secção 3.2.1. A descrição das características deste actuador é feita por Barros et
al. [Bar99a]. A carga foi medida por intermédio de um transdutor de força de 50 kN de
capacidade máxima de carga, colocado entre o actuador e o perfil. Estes dois elementos
podem ser visualizados na Figura 3.23.

Programa Experimental
45
Actuador hidráulicode 250 kN de máximacapacidade de carga
Transdutor de forçade 50 kN
Figura 3.23 - Transdutor de força e actuador hidráulico.
3.2.3 Sistema de aquisição de dados
O equipamento utilizado nos ensaios das vigas de BA foi desenvolvido pela Hidromática,
com a colaboração de um aluno finalista do curso de Engenharia Mecânica da Faculdade
de Engenharia da Universidade do Porto (FEUP) e do Prof. Joaquim Barros do
Departamento de Engenharia Civil da Escola de Engenharia da Universidade do Minho
(DEC-UM). Este sistema de aquisição de dados encontra-se ainda em fase de calibração,
pelo que os ensaios realizados se englobam também numa campanha de testes, com vista a
contribuir para um aperfeiçoamento das variáveis que controlam o funcionamento desse
equipamento.

Capítulo 3
46
Em virtude de se tratar da sua primeira utilização para o desenvolvimento de um trabalho
científico, é apresentada de seguida uma breve descrição do funcionamento e constituição
dos principais componentes do equipamento, designado de SENTUR (Sistema de Ensaio de
Estruturas), que se representa na Figura 3.24. Para maior pormenorização remete-se o
leitor para o manual deste equipamento [Fre98].
(1)
(2)
(3)
(4)
(5)
Legenda:
(1) Computador (2) Quadro eléctrico (3) Consola (4) Amplificador (5) Mangueiras de ligação
Figura 3.24 - Elementos pertencentes ao sistema de ensaio, controlo e aquisição de dados.
O SENTUR é um equipamento de ensaio laboratorial que se destina a controlar e
monitorizar ensaios estáticos e dinâmicos de elementos estruturais, tais como vigas,
pilares, faixas de laje, etc.
Este equipamento é constituído por um sistema hidráulico versátil e totalmente comandado
por computador, capaz de realizar ensaios sequenciais simples ou múltiplos com
componentes desde estáticas a dinâmicas, programáveis e configuráveis.

Programa Experimental
47
Na sua constituição inicial, o sistema é configurável para ensaios de 0-50 kN, de 0-200 kN
ou de 0-250 kN. Os actuadores têm um curso máximo de 200 mm. Para a monitorização
dos ensaios podem ser utilizados, neste momento, até ao máximo de 8 transdutores de
deslocamento e 4 transdutores de força (ou células de carga).
O software desenvolvido é de natureza "amigável", com selecção por "janelas de diálogo"
e capaz de aceitar facilmente características inseridas pelo utilizador, nomeadamente para
os actuadores ou sensores de medida utilizados em cada ensaio. O software permite definir
os procedimentos que se pretende que sejam executados durante o ensaio.
O software e hardware desenvolvidos incluem múltiplos procedimentos e dispositivos de
segurança que permitem que, depois de programado, o sistema funcione sem
acompanhamento.
No termo de um ensaio, é produzido um relatório genérico descritivo das principais
características e ocorrências verificadas. Um ficheiro mais completo, contendo os
resultados adquiridos durante o ensaio, é igualmente disponibilizado para posterior
utilização por programas adequados, nomeadamente o "Excel".
Todo o sistema de comando é suportado por uma estrutura em perfil de alumínio dotada de
rodízios, sendo por isso fácil de movimentar.
Apresenta-se de seguida uma descrição de todos os componentes constituintes do
SENTUR:
i. Computador
Alojado na estrutura de suporte, o computador encarrega-se do comando automático do
sistema e do registo de dados relevantes durante a execução de um ensaio, podendo ser
utilizado para outras aplicações independentes do programa de comando.
Este computador tem também a seu cargo parte dos procedimentos de segurança do
sistema.

Capítulo 3
48
ii. Quadro Eléctrico
O quadro eléctrico do sistema encontra-se no interior da estrutura de suporte. Neste
quadro, os disjuntores protegem todo o sistema contra possíveis sobrecargas ou
curto-circuitos.
iii. Consola
A consola de comando está montada no canto superior direito da estrutura de suporte do
sistema. Esta consola, com diversos indicadores e botões, permite que o operador actue
sobre o sistema.
iv. Amplificador
A monitorização dos ensaios é assegurada por diversos transdutores ligados a um
“amplificador de instrumentação" que está colocado na prateleira por cima do
compartimento do computador. Este amplificador, modular, suporta oito transdutores de
deslocamento e quatro transdutores de força (distribuídos por doze canais).
v. Central Hidráulica
A central hidráulica, montada na parte posterior da estrutura de suporte, é a fonte de
energia para o actuador hidráulico.
vi. Actuador Hidráulico
O actuador hidráulico poderá ser montado num pórtico ou numa estrutura similar e é o
elemento que actua directamente sobre os elementos a ensaiar.

Programa Experimental
49
vii. Mangueiras de Ligação
A ligação entre a central hidráulica e o actuador é efectuada com recurso a quatro
mangueiras, todas de diâmetro diferente, o que permite evitar qualquer erro de ligação.
Estas mangueiras dispõem de terminais de ligação rápida nos extremos.
3.2.4 Procedimento de ensaio
Não existindo um procedimento predefinido para este tipo de ensaios, procurou criar-se
um, que desse resposta aos objectivos propostos.
Os ensaios foram realizados com controlo de deslocamentos. O software de controlo do
sistema de aquisição de dados permite configurar o procedimento de ensaio, utilizando
algumas “funções” simples, podendo estas ser combinadas conforme o historial de
deslocamentos a impor. Descrevem-se, de seguida, de forma sucinta, essas “funções”:
i. “Patamar” – procedimento que permite manter fixa a variável de controlo,
(neste caso o deslocamento), durante determinado tempo ou até ordem
expressa do operador;
ii. “Rampa” – procedimento que permite provocar uma variação monótona da
grandeza controlada, (neste caso o deslocamento), durante um determinado
tempo;
iii. “Função Triangular” – provoca a variação da grandeza controlada, segundo
uma função triangular;
iv. “Função Sinusoidal” – provoca a variação da grandeza controlada, segundo
uma função periódica sinusoidal.
Para este ensaio foram utilizados somente “Patamares” e “Rampas”. As “Rampas” foram
utilizadas para provocar uma deformação crescente na viga, enquanto que os “Patamares”

Capítulo 3
50
foram utilizados para manter uma deformação constante e permitir as leituras nos
comparadores mecânicos.
A lei de deslocamentos impostos às vigas é apresentada na Figura 3.25. Na Figura 3.26, é
representado o procedimento que se programou no sistema de aquisição de dados.
0
10
20
30
40
50
60
70
0 20 40 60 80 100
Número do procedimento
Des
loca
men
to
0
5
10
0 20
Figura 3.25 - Lei de deslocamentos impostos às vigas de BA.
A resposta da viga depende da velocidade de deformação aplicada [Sha86]. No presente
trabalho optou-se por uma velocidade de deformação de 25 µm/s. No primeiro passo do
procedimento de ensaio, (deformação crescente até 1.0 mm), utilizou-se uma velocidade de
deformação de 10 µm/s, para melhorar a estabilidade do ensaio.

Programa Experimental
51
Início doEnsaio
Deformação constante durante 20 s
Deformação crescente até 1.0 mm
Deformação crescente de 1.5 mm
Ciclo até um deslocamento de 68.5 mm
Deformação constante durante 20 s
Fim doEnsaio
Figura 3.26 - Procedimento programado no sistema de aquisição de dados.
Para cargas baixas, o grupo hidráulico possui um circuito de baixa pressão que pode ser
activado em recuo ou em avanço. Dependendo das necessidades expressas de cada ensaio,
este circuito poderá executar uma força que se subtrai ou se adiciona à força
correspondente à gama seleccionada. Por conseguinte, a gama de 0 a 50 kN pode ser
deslocada, por exemplo, para 20 a 70 kN, se o circuito de baixa pressão executar uma força
de 20 kN em avanço. Nos ensaios efectuados, este circuito foi activado em recuo, com uma
força de 0 kN, dado que, mesmo para este regime, o circuito de baixa pressão entra em
funcionamento, contribuindo para a não oscilação do grupo hidráulico.

Capítulo 3
52
Alguns dias antes do ensaio de uma viga de BA, foi necessário levar a efeito algumas
tarefas, tais como:
i. montagem e fixação da viga no pórtico com a ajuda de um “monta-cargas”;
ii. colocação do perfil metálico na extremidade livre da viga;
iii. pintura da viga de forma a que fosse possível detectar a fendilhação;
iv. colagem das placas e das chapas nas zonas da viga em que se iriam registar os
deslocamentos;
v. colocação das barras metálicas que servem de suporte para a colocação dos CM
e dos LVDT’s.
vi. fixação e ajuste de toda a instrumentação.
Em controlo manual, a carga foi aplicada lentamente ao perfil metálico, por intermédio do
transdutor de força fixado ao actuador hidráulico, sendo aumentada, de forma gradual, até
se atingir uma força próxima de 500 N, de modo a evitar a oscilação do sistema, cujo efeito
poderia ser a paragem do ensaio. Após esta fase, deu-se início a todo o procedimento do
ensaio sob controlo automático.
A evolução foi visualizada por intermédio de dois gráficos existentes no software do
sistema. Cada gráfico permitia visualizar a evolução de um dos transdutores ligados ao
sistema. Os resultados eram obtidos por intermédio de uma placa de aquisição de 12 bits, a
qual incluía um controlador PID que permite efectuar ensaios por intermédio do controlo
de um transdutor [Bar95], declarado como transdutor de controlo nos procedimentos de
ensaio. Nos ensaios realizados, um dos gráficos foi utilizado para observar a evolução dos
deslocamentos no LVDT de controlo e o outro para visualizar a força aplicada e registada
pelo transdutor de força.
Durante as fases de “flecha crescente” (Rampas) foram efectuadas leituras nos LVDT’s, de
dois em dois segundos. Durante as fases de “flecha constante” (Patamares), era dada ordem
de leitura aos operadores que estavam a controlar os nove CM. Ao mesmo tempo, era
registada a força, de modo a sincronizar os dados relativos às leituras efectuadas. Assim,
obteve-se um número suficiente de registos, permitindo caracterizar o comportamento da
viga durante o ensaio.

Programa Experimental
53
No decorrer do ensaio, foram também marcadas as fendas, bem como o valor da carga
actuante. Cada operador controlava uma das faces da viga (face A, face B e face inferior).
Deste modo, obteve-se um registo da evolução da fendilhação.
Observou-se que, para algumas vigas, os procedimentos de ensaio não foram cumpridos na
sua totalidade, devido essencialmente a três factores:
i. foi atingido o campo não-linear de um dos LVDT’s, geralmente o de controlo
(secção S2) ou o da secção S3;
ii. o braço do actuador alcançou o seu máximo curso;
iii. a secção de ligação do perfil metálico com a viga fendilhou, não permitindo a
transferência da carga para a viga.
Cada ensaio teve uma duração de cerca de 61 minutos. Com o objectivo de se analisar o
padrão de fendilhação à posteriori, após retirada toda a instrumentação, a viga foi
envolvida por papel vegetal no qual foram demarcadas as fendas.
3.3 Apresentação dos resultados
3.3.1 Introdução
Durante a campanha de testes, efectuaram-se algumas alterações, de forma a melhorar a
qualidade do controlo da instrumentação e assegurar a estabilidade do ensaio.
Apesar da maior percentagem de estribos na zona de aplicação da carga, verificou-se nos
primeiros ensaios a ocorrência de fendas nesta zona, o que levou à introdução nas vigas
seguintes de uma cinta em aço (ver Figura 3.27).

Capítulo 3
54
O pouco conhecimento do ganho da placa de aquisição levou, ao longo dos ensaios, a
ajustes no parâmetro de ganho. Para ensaios quase-estáticos sobre elementos estruturais
com rotura dúctil, verificou-se que o ganho não influencia significativamente a resposta
estrutural. Contudo, o ganho influencia manifestamente o cumprimento dos procedimentos
estabelecidos.
Figura 3.27 - Pormenor da cinta em aço na ligação perfil – viga de BA.
3.3.2 Apresentação dos resultados de uma viga
De forma a auxiliar na compreensão dos resultados dos ensaios efectuados nas vigas, irão
apresentar-se em seguida, de forma exaustiva, os resultados obtidos numa das vigas
ensaiadas. Foi escolhida a viga V2_l12_t75, que é a segunda viga da série, com uma
armadura longitudinal de 12 mm de diâmetro e cujos estribos na zona oca se encontram
afastados 75 mm.
Os padrões de fendilhação ao longo de toda a viga são ilustrados nas Figuras 3.28 a 3.30.
Pode observar-se que na face A da viga há uma maior fendilhação que na face B. Isto
justifica-se pela aplicação da carga, que provoca mais tracções na face A que na face B.

Programa Experimental
55
O facto das fendas estarem inclinadas é resultado dos esforços a que a viga foi submetida.
Se a viga estivesse sujeita apenas a flexão, as fendas apresentar-se-iam praticamente
perpendiculares ao seu eixo. Neste caso, a profundidade das fendas aumentaria desde a
extremidade livre para o encastramento, dado que o momento flector cresce nesse sentido.
Por outro lado, se a viga sofresse apenas esforços de torção, a fendilhação apresentar-se-ia
de forma inclinada, helicoidal e quase constante. A interacção entre estes esforços e ainda
os de corte justifica o padrão de fendilhação observado [Mon91].
Figura 3.28 - Padrão de fendilhação na face A da viga.
Figura 3.29 - Padrão de fendilhação na face B da viga.
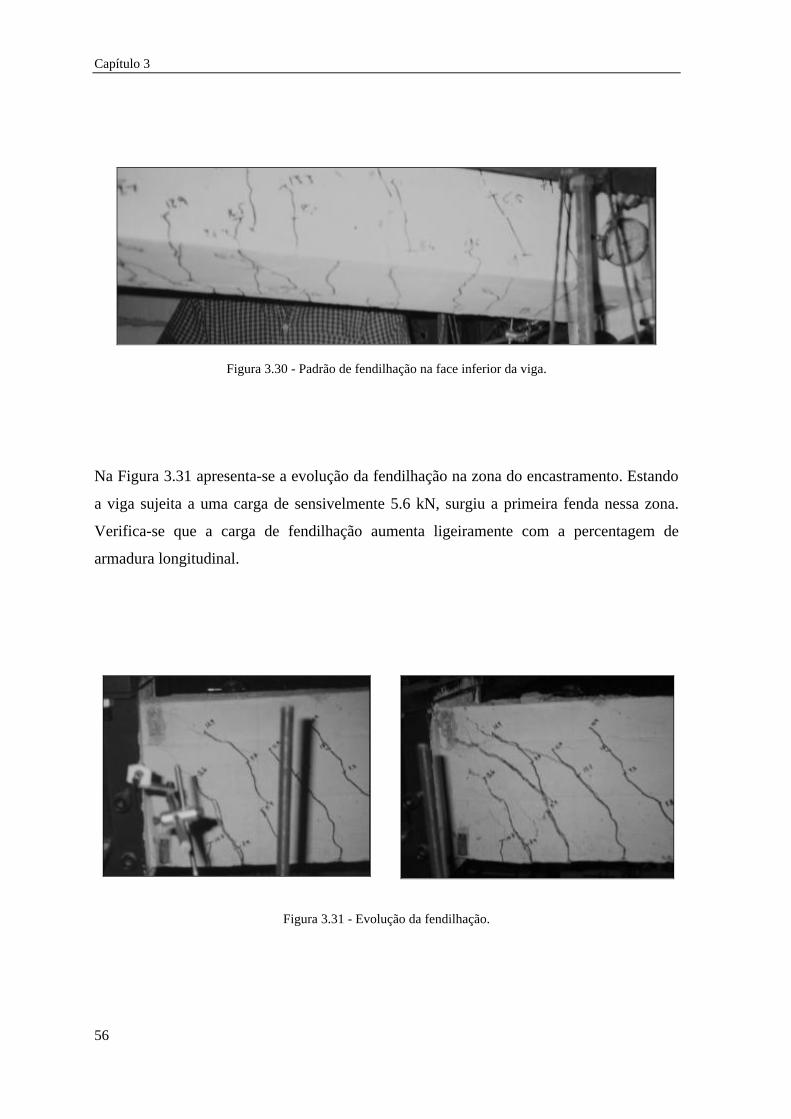
Capítulo 3
56
Figura 3.30 - Padrão de fendilhação na face inferior da viga.
Na Figura 3.31 apresenta-se a evolução da fendilhação na zona do encastramento. Estando
a viga sujeita a uma carga de sensivelmente 5.6 kN, surgiu a primeira fenda nessa zona.
Verifica-se que a carga de fendilhação aumenta ligeiramente com a percentagem de
armadura longitudinal.
Figura 3.31 - Evolução da fendilhação.

Programa Experimental
57
Quando se alcançou a sua capacidade máxima de carga, na face B da zona do
encastramento, onde existem maiores compressões, verificou-se o esmagamento do betão,
como se ilustra na Figura 3.32.
Figura 3.32 - Esmagamento do betão na zona de compressão máxima.
Durante a realização do ensaio, obteve-se uma elevada quantidade de informação. De
forma a avaliar a resposta da viga, e após um tratamento dos resultados por um código
computacional elaborado para o efeito, realizaram-se vários gráficos relacionando
grandezas obtidas directamente dos ensaios ou através de algumas expressões algébricas,
tais como:
i. Diagrama força versus deslocamento vertical (F-δ), para as secções S1, S2 e
S3.
ii. Diagrama momento flector versus rotação por flexão (Mf-θf), para as secções
S1e S2.
iii. Diagrama momento torsor versus rotação por torção (Mt-θt), para as secções
S1e S2.

Capítulo 3
58
3.3.2.1 Diagrama força - deslocamento vertical
Com os deslocamentos registados nos LVDT’s instalados nas secções S1, S2 e S3 das vigas,
e com a força registada no transdutor de força, foi possível traçar os diagramas
força-deslocamento vertical nessas secções. Os gráficos das Figuras 3.33 a 3.35 ilustram
essa relação.
Observa-se que, desde o início, existe uma relação não linear entre a força e o
deslocamento vertical. Este facto permite afirmar que se desenvolve microfissuração no
betão, mesmo para um carregamento relativamente baixo.
O aparecimento de fendilhação, visível nas faces da viga de BA, também se pode observar
nos gráficos. A partir de um nível de carga de cerca de 5 kN, o comportamento não linear
torna-se mais evidente e há uma perda significativa da rigidez da viga, sinal do surgimento
de macro-fendilhação. A partir desse ponto, a rigidez mantém-se aproximadamente
constante, até um nível de carga que corresponde à entrada em plastificação da armadura.
Para esta viga, o nível de carga é de cerca de 19 kN. Observa-se ainda que o
comportamento da viga, após o aparecimento da macro-fendilhação, é governado
fundamentalmente pela armadura longitudinal.
Na Figura 3.36 pode observar-se a flecha máxima alcançada na extremidade livre da viga
de BA.

Programa Experimental
59
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S1 (mm)
Forç
a (k
N)
v2_l12_t75
Figura 3.33 - Diagrama F-δ na secção S1 da viga V2_l12_t75.
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S2 (mm)
Forç
a (k
N)
v2_l12_t75
Figura 3.34 - Diagrama F-δ na secção S2 da viga V2_l12_t75.

Capítulo 3
60
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S3 (mm)
Forç
a (k
N)
v2_l12_t75
Figura 3.35 - Diagrama F-δ na secção S3 da viga V2_l12_t75.
Figura 3.36 - Flecha na extremidade livre da viga.

Programa Experimental
61
3.3.2.2 Diagrama momento flector - rotação por flexão
Com os deslocamentos obtidos em cada par de CM colocados nas secções S1 e S2,
conseguiu calcular-se a rotação por flexão nessas secções através da seguinte expressão
l
2d1df
−=θ (3.1)
em que d1 é o deslocamento medido no CM disposto próximo da superfície superior da
viga, d2 é o deslocamento medido no CM disposto próximo da superfície inferior da viga e
l é a distância entre eles (ver Figuras 3.20 e 3.22).
Analisando os gráficos das Figuras 3.37 e 3.38, verifica-se o mesmo andamento dos
gráficos força-deslocamento vertical. Apresentam um primeiro tramo linear, com pequeno
desenvolvimento, seguindo-se uma fase onde a rigidez da viga diminui, sendo a rigidez da
armadura a responsável pela proporcionalidade entre o momento flector e a rotação por
flexão, até se atingir uma terceira fase, em que se dá a plastificação da armadura. Como
seria de esperar, a rotação da secção S2 é maior que a rotação da secção S1.

Capítulo 3
62
0
5
10
15
20
25
30
0 5 10 15 20 25 30
Rotação - flexão na secção S1 (x10-3)
Mom
ento
flec
tor
na s
ecçã
o S
1 (k
Nm
)
v2_l12_t75
Figura 3.37 - Diagrama Mf -θf na secção S1 da viga V2_l12_t75.
0
5
10
15
20
25
30
0 5 10 15 20 25 30
Rotação - flexão na secção S2 (x10-3)
Mom
ento
flec
tor
na s
ecçã
o S
2 (k
Nm
)
v2_l12_t75
Figura 3.38 - Diagrama Mf -θf na secção S2 da viga V2_l12_t75.

Programa Experimental
63
3.3.2.3 Diagrama momento torsor - rotação por torção
Na secção S1 foram utilizados dois CM, enquanto que na secção S2 se aplicaram dois
LVDT’s. Com os deslocamentos registados, obtiveram-se as rotações por torção nessas
secções através da seguinte expressão
l
2d1dt
−=θ (3.2)
em que d1 é o deslocamento medido no CM ou no LVDT disposto próximo da superfície
superior da viga, d2 é o deslocamento medido no CM ou no LVDT colocado próximo da
superfície inferior da viga e l é a distância entre eles (ver Figuras 3.19 e 3.21).
Da análise dos gráficos das Figuras 3.39 e 3.40, constata-se que a quebra de rigidez na viga
de BA não é assim tão pronunciada como a observada na relação Mf-θf, contudo o
andamento é semelhante.
Dado o esquema estrutural utilizado, o momento torsor ao longo de toda a viga é constante,
ao contrário da rotação por torção que, na secção S2, é maior que a verificada na secção S1,
já que esta última está mais próxima do encastramento.

Capítulo 3
64
0
3
5
8
10
13
15
0 15 30 45 60 75
Rotação - torção na secção S1 (x10-3)
Mom
ento
tors
or (
kNm
)
v2_l12_t75
Figura 3.39 - Diagrama Mt-θt na secção S1 da viga V2_l12_t75.
0
3
5
8
10
13
15
0 15 30 45 60 75
Rotação - torção na secção S2 (x10-3)
Mom
ento
tors
or (
kNm
)
v2_l12_t75
Figura 3.40 - Diagrama Mt-θt na secção S2 da viga V2_l12_t75.

Programa Experimental
65
De uma forma muito simples, pode verificar-se em todos os gráficos apresentados, uma
evolução semelhante à representada na Figura 3.41, que pretende ilustrar as várias
contribuições dos dois materiais constituintes da viga para a resposta não linear que se
observou. Segundo a aproximação sugerida, a contribuição do betão é reduzida e a resposta
é fundamentalmente governada pela armadura existente.
contribuição do betão
contribuição só da armadura
diagrama real
tf ou θθδ ,
tf MouMF ,
Figura 3.41 - Contribuição dos dois materiais constituintes das vigas de BA.
Os gráficos força - deslocamento vertical, momento flector - rotação por flexão e momento
torsor - rotação por torção, correspondentes a todas as vigas das séries ensaiadas, são
apresentados no Anexo I para não sobrecarregar a exposição do presente trabalho.

Capítulo 3
66
3.3.3 Análise comparativa dos resultados
Nesta secção apresenta-se uma comparação dos resultados de todas as vigas das séries
ensaiadas. Para cada par de grandezas a analisar foram sobrepostos os gráficos
correspondentes a cada ensaio:
i. Figuras 3.42 a 3.44 - sobreposição dos diagramas força-deslocamento
vertical;
ii. Figura 3.45 e Figura 3.46 - sobreposição dos diagramas força-deslocamento
vertical relativo entre secções;
iii. Figura 3.47 e Figura 3.48 - sobreposição dos diagramas momento
flector-rotação por flexão;
iv. Figura 3.49 e Figura 3.50 - sobreposição dos diagramas momento
flector-rotação por flexão não descontando a rotação da secção S0;
v. Figura 3.51 e Figura 3.52 - sobreposição dos diagramas momento
torsor-rotação por torção;
vi. Figura 3.53 e Figura 3.54 - sobreposição dos diagramas momento
torsor-rotação por torção não descontando a rotação da secção S0;
Da observação dos diagramas F-δ é possível concluir:
• na zona inicial, até ao aparecimento da fendilhação, observa-se um
comportamento semelhante de todas as vigas, justificado pelo facto de esse
comportamento ser fundamentalmente regido pelo betão;
• após a fendilhação inicial, as respostas das vigas das séries reforçadas com
armaduras longitudinais φ10 e φ12 são diferentes;
• nas vigas das séries com varões longitudinais de 12 mm de diâmetro, há uma
rigidez constante, desde uma carga de cerca de 5 kN até uma carga de
sensivelmente 18 kN, facto este que sustenta a sugestão apontada
anteriormente de que o comportamento das vigas após a fendilhação do betão é
fundamentalmente governado pela armadura longitudinal. Esta constatação
verifica-se também para intervalo de carga de 4.5 kN até 13 kN, das séries com
varões longitudinais de 10 mm de diâmetro;

Programa Experimental
67
• há uma independência em relação à quantidade de armadura transversal
utilizada. Este fenómeno justifica-se pelo facto da zona central da viga ser de
secção oca, pelo que, neste caso, a armadura não tem qualquer efeito de
confinamento do betão. A substituição dos estribos por fibras de aço parece ser
uma solução oportuna, pois é possível aumentar a resistência ao corte do betão,
sem recurso a dispêndio de mão-de-obra na realização e colocação de estribos
em paredes delgadas [Bar95]. A qualidade de betonagem é também melhorada
com a utilização do betão reforçado com fibras de aço (BRFA) em peças de
secção oca e paredes delgadas.;
• o aumento do diâmetro das armaduras longitudinais aumenta a rigidez da viga
e permite alcançar uma carga de plastificação mais elevada.
Teria sido interessante executar os ensaios de forma a ser alcançada uma deformação
superior à obtida. Contudo, tal não foi possível por limitações do curso dos LVDT’s e do
braço do actuador hidráulico. No entanto, da análise das diferentes figuras, verifica-se que
as vigas tinham praticamente alcançado a sua capacidade máxima.
A relação entre a força e os deslocamentos relativos entre as secções S1 e S2 e a relação
entre a força e os deslocamentos relativos entre as secções S2 e S3 estão representadas nas
Figuras 3.45 e 3.46 . Conclusões semelhantes às obtidas anteriormente podem ser aplicadas
na análise destes gráficos.
Para permitir uma melhor análise dos gráficos, força-deslocamento vertical relativo, no
Anexo II, serão apresentados separadamente os diagramas para todas as vigas das séries
ensaiadas.

Capítulo 3
68
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S1 (mm)
Forç
a (k
N)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
v1_l12_t150
v2_l12_t150
v1_l12_t75
v2_l12_t75
Figura 3.42 - Diagramas F-δ na secção S1 para todas as vigas.
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S2 (mm)
Forç
a (k
N)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
v1_l12_t150
v2_l12_t150
v1_l12_t75
v2_l12_t75
Figura 3.43 - Diagramas F-δ na secção S2 para todas as vigas.

Programa Experimental
69
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S3 (mm)
Forç
a (k
N)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
v1_l12_t150
v2_l12_t150
v1_l12_t75
v2_l12_t75
Figura 3.44 - Diagramas F-δ na secção S3 para todas as vigas.
0
4
8
12
16
20
24
0 10 20 30 40
Deslocamento vertical relativo entre as secções S1-S2 (mm)
Forç
a (k
N)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
v1_l12_t150
v2_l12_t150
v1_l12_t75
v2_l12_t75
Figura 3.45 - Diagramas F-δ relativo entre as secções S1 e S2 para todas as vigas.

Capítulo 3
70
0
4
8
12
16
20
24
0 10 20 30 40
Deslocamento vertical relativo entre as secções S2-S3 (mm)
Forç
a (k
N)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
v1_l12_t150
v2_l12_t150
v1_l12_t75
v2_l12_t75
Figura 3.46 - Diagramas F-δ relativo entre as secções S2 e S3 para todas as vigas.
Como foi referido na secção 3.2.2, foi também colocada instrumentação numa secção
muito próxima do encastramento, S0, com o objectivo de registar alguns movimentos de
corpo rígido. Assim, a todos os valores registados nas outras secções foram retirados os
deslocamentos e as rotações sofridas pelo encastramento. Da análise dos diagramas Mf-θf
apresentados nas Figuras 3.47 e 3.48, verifica-se que ao subtrair-se as rotações da secção
S0, as respostas das diferentes vigas são mais distintas, afastando-se, assim, das conclusões
já apuradas relativamente aos gráficos F-δ.
Após uma análise criteriosa, concluiu-se que as rotações medidas na secção S0 não podem
representar a rotação de corpo rígido do encastramento, já que, devido a problemas
técnicos de colocação da instrumentação, essa secção se encontra a 20 mm do
encastramento (ver Figura 3.9). Deste modo, a secção S0 sofreu deslocamentos, distintos
dos movimentos do elemento de viga encaixada na zona de encastramento.

Programa Experimental
71
Com o objectivo de verificar as razões apresentadas, representam-se nas Figuras 3.49 e
3.50 os diagramas Mf-θf sem o desconto da rotação na secção S0. Principalmente no
diagrama da secção S1, verifica-se um andamento muito próximo do esperado, ou seja:
• um afastamento do comportamento das vigas das séries cujas armaduras
longitudinais diferem no diâmetro, após a fase da fendilhação inicial;
• uma independência em relação à quantidade de armadura transversal utilizada.
Estes gráficos carecem do desconto da rotação de corpo rígido no encastramento. Este
poderia ser avaliado se fosse colocado um sistema de medida no interior do anel de
encastramento e não numa secção da viga muito próxima dele.
Da observação das figuras, é ainda possível concluir que:
• há uma perda de rigidez após o início da fendilhação;
• foi atingida a plastificação da armadura, após uma fase em que se constata uma
relação quase linear entre o momento flector e a rotação por flexão;
• para o mesmo momento flector, as secções das vigas das séries com armadura
longitudinal de 10 mm de diâmetro rodam mais.
Na secção S0 das vigas V2_l10_75 e V2_l12_t150, as chapas em L que dão suporte aos
cursores dos CM descolaram-se. Assim, não foi possível representar nas Figuras 3.47 e
3.48 os resultados relativos a essas vigas.
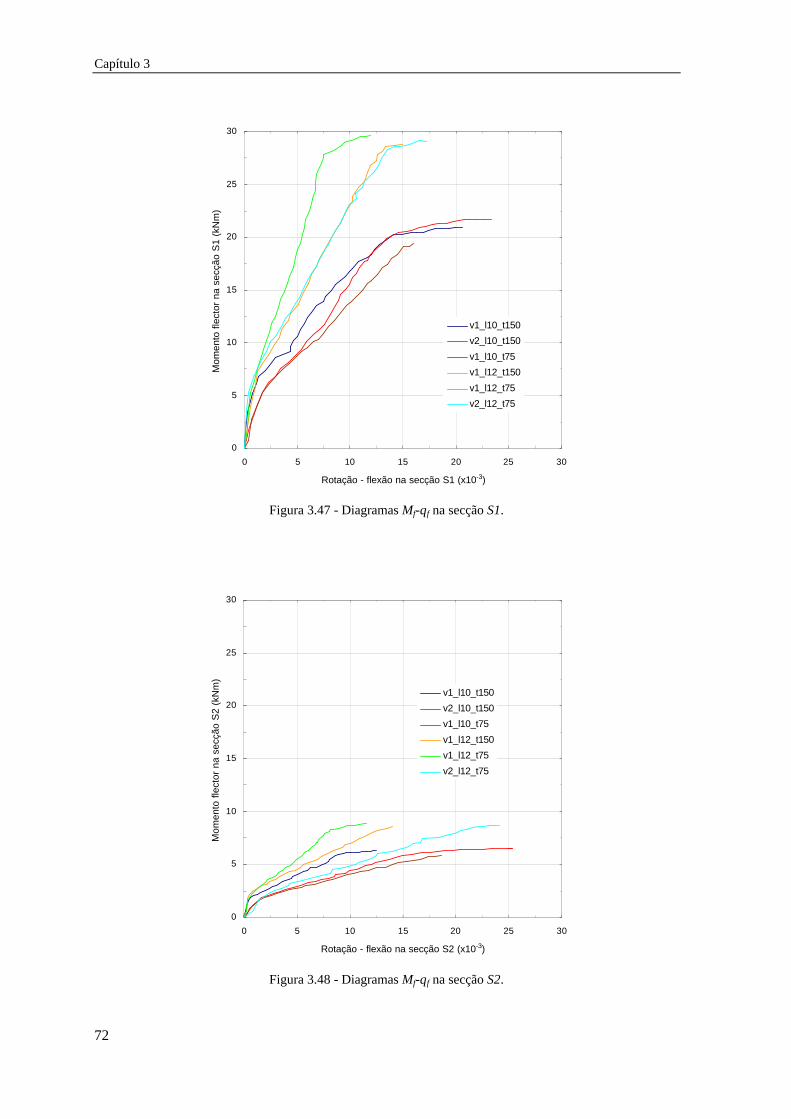
Capítulo 3
72
0
5
10
15
20
25
30
0 5 10 15 20 25 30
Rotação - flexão na secção S1 (x10-3)
Mom
ento
flec
tor
na s
ecçã
o S
1 (k
Nm
)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v1_l12_t150
v1_l12_t75
v2_l12_t75
Figura 3.47 - Diagramas Mf-θf na secção S1.
0
5
10
15
20
25
30
0 5 10 15 20 25 30
Rotação - flexão na secção S2 (x10-3)
Mom
ento
flec
tor
na s
ecçã
o S
2 (k
Nm
)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v1_l12_t150
v1_l12_t75
v2_l12_t75
Figura 3.48 - Diagramas Mf-θf na secção S2.

Programa Experimental
73
0
5
10
15
20
25
30
0 5 10 15 20 25 30
Rotação - flexão na secção S1 (x10-3)
Mom
ento
flec
tor
na s
ecçã
o S
1 (k
Nm
)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
v1_l12_t150
v2_l12_t150
v1_l12_t75
v2_l12_t75
Figura 3.49 - Diagramas Mf-θf na secção S1 para todas as vigas não descontando a rotação da secção S0.
0
5
10
15
20
25
30
0 5 10 15 20 25 30
Rotação - flexão na secção S2 (x10-3)
Mom
ento
flec
tor
na s
ecçã
o S
2 (k
Nm
) v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
v1_l12_t150
v2_l12_t150
v1_l12_t75
v2_l12_t75
Figura 3.50 - Diagramas Mf-θf na secção S2 para todas as vigas não descontando a rotação da secção S0.

Capítulo 3
74
Com o objectivo de avaliar o comportamento das vigas sob o momento torsor aplicado,
elaboraram-se os diagramas representados nas Figuras 3.51 e 3.52. Analisando as figuras,
pode concluir-se:
• há um afastamento do comportamento das vigas das séries cujas armaduras
longitudinais diferem no diâmetro;
• verifica-se uma independência do comportamento em relação à quantidade de
armadura transversal utilizada;
• as respostas das vigas têm um andamento parabólico, não sendo tão evidente
uma fase linear da relação Mt-θt, o que é justificado pelo baixo momento torsor
aplicado e o betão ter ainda boa capacidade de absorção do esforço de torção. É
de referir, aliás, que a secção é uma secção rectangular oca, adaptando-se bem
a esforços de torção.
Nas Figuras 3.53 e 3.54, apresentam-se os diagramas Mt-θt sem descontar a rotação por
torção sofrida pela secção S0, devido às razões já apontadas. Verifica-se que as respostas
são muito idênticas, justificadas pelo facto de que a viga no encastramento quase não
sofreu rotação por torção.

Programa Experimental
75
0
3
5
8
10
13
15
0 15 30 45 60 75
Rotação - torção na secção S1 (x10-3)
Mom
ento
tors
or (
kNm
)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
v1_l12_t150
v2_l12_t150
v1_l12_t75
v2_l12_t75
Figura 3.51 - Diagramas Mt-θt na secção S1 para todas as vigas.
0
3
5
8
10
13
15
0 15 30 45 60 75
Rotação - torção na secção S2 (x10-3)
Mom
ento
tors
or (
kNm
)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
v1_l12_t150
v2_l12_t150
v1_l12_t75
v2_l12_t75
Figura 3.52 - Diagramas Mt-θt na secção S2 para todas as vigas.

Capítulo 3
76
0
3
5
8
10
13
15
0 15 30 45 60 75
Rotação - torção na secção S1 (x10-3)
Mom
ento
tors
or (
kNm
)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
v1_l12_t150
v2_l12_t150
v1_l12_t75
v2_l12_t75
Figura 3.53 - Diagramas Mt-θt na secção S1 para todas as vigas não descontando a rotação da secção S0.
0
3
5
8
10
13
15
0 15 30 45 60 75
Rotação - torção na secção S2 (x10-3)
Mom
ento
tors
or (
kNm
)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
v1_l12_t150
v2_l12_t150
v1_l12_t75
v2_l12_t75
Figura 3.54 - Diagramas Mt-θt na secção S2 para todas as vigas não descontando a rotação da secção S0.

Programa Experimental
77
Com o intuito de comparar os vários padrões de fendilhação das vigas das diferentes séries,
ilustram-se nas Figuras 3.55 e 3.56 padrões de fendilhação das vigas V1_l10_t150 e
V1_l12_t75, respectivamente.
Pela análise, pode constatar-se que, para uma maior percentagem de armadura, as fendas
têm uma menor profundidade.
Figura 3.55 - Padrão de fendilhação junto ao encastramento da viga V1_l10_t150.
Figura 3.56 - Padrão de fendilhação junto ao encastramento da viga V1_l12_t75.

Capítulo 3
78
São apresentados no Quadro 3.1, para as diferentes secções das vigas ensaiadas, os valores
do deslocamento vertical, da rotação por flexão, da rotação por torção, bem como a
correspondente força, momento flector e momento torsor, relativos ao início da
fendilhação. A determinação desses valores foi feita com o auxílio do padrão de
fendilhação registado em folhas de papel vegetal e dos diagramas, determinando o ponto
da perda de rigidez da viga.
Os valores máximos das grandezas em causa são apresentados no Quadro 3.2. Estes
correspondem aos valores máximos lidos nos diferentes diagramas. Como já se referiu,
todos os valores dos diagramas foram sujeitos a um tratamento por um código
computacional elaborado para o efeito. Deste modo, os valores máximos dos momentos
flectores ou dos momentos torsores, podem não ter uma relação directa com o valor da
máxima força alcançada.
Quadro 3.1 - Valores relativos à fendilhação.
Viga F (kN)
δS1 (mm)
δS2 (mm)
δS3 (mm)
V1_l10_t150 4.40 2.49 6.24 7.52
V2_l10_t150 4.40 2.73 6.34 7.66
V1_l10_t75 5.00 3.76 8.81 10.67
V2_l10_t75 5.00 3.94 10.19 11.93
V1_l12_t150 5.00 2.47 5.80 6.83
V2_l12_t150 5.60 3.52 8.35 9.89
V1_l12_t75 5.00 3.01 6.86 8.01
V2_l12_t75 5.60 3.60 8.12 9.50

Programa Experimental
79
Quadro 3.1 - Valores relativos à fendilhação (cont.).
Viga Mf,S1 (kNm)
θf,S1 (x10-3)
Mf,S2 (kNm)
θf,S2 (x10-3)
Mt,S1 (kNm)
θt,S1 (x10-3)
Mt,S2 (kNm)
θt,S2 (x10-3)
V1_l10_t150 6.6 3.27 1.98 3.35 2.2 0.96 2.2 1.08
V2_l10_t150 6.6 3.90 1.98 4.15 2.2 1.23 2.2 1.22
V1_l10_t75 7.5 6.50 2.25 6.79 2.5 2.25 2.5 3.23
V2_l10_t75 7.5 5.75 2.25 9.05 2.5 3.12 2.5 3.53
V1_l12_t150 7.5 3.25 2.25 5.35 2.5 0.84 2.5 0.95
V2_l12_t150 8.4 3.00 2.52 6.62 2.8 0.86 2.8 1.80
V1_l12_t75 7.5 3.25 2.25 3.01 2.5 1.04 2.5 1.93
V2_l12_t75 8.4 4.12 2.52 3.40 2.8 1.03 2.8 1.67
Quadro 3.2 - Valores relativos aos valores máximos lidos nos gráficos.
Viga FS1 (kN)
δS1 (mm)
FS2 (kN)
δS2 (mm)
FS3 (kN)
δS3 (mm)
V1_l10_t150 14.32 26.00 14.32 63.40 14.32 77.65
V2_l10_t150 14.68 25.40 14.68 60.87 14.68 75.14
V1_l10_t75 13.14 18.15 13.23 44.13 13.14 53.63
V2_l10_t75 14.50 21.23 14.59 56.63 14.59 68.81
V1_l12_t150 19.49 22.63 19.49 53.00 19.31 63.68
V2_l12_t150 18.22 20.15 18.31 48.31 18.31 57.5
V1_l12_t75 20.03 27.59 19.94 63.37 20.03 77.63
V2_l12_t75 19.84 27.96 19.76 65.53 19.85 77.64

Capítulo 3
80
Quadro 3.2 - Valores relativos aos valores máximos lidos nos gráficos (cont.).
Viga Mf,S1 (kNm)
θf,S1 (x10-3)
Mf,S2 (kNm)
θf,S2 (x10-3)
Mt,S1 (kNm)
θt,S1 (x10-3)
Mt,S2 (kNm)
θt,S2 (x10-3)
V1_l10_t150 20.80 29.53 6.28 22.79 7.02 38.0 7.12 54.59
V2_l10_t150 21.48 29.87 6.32 29.28 7.25 38.0 7.34 50.97
V1_l10_t75 19.44 25.71 5.83 28.33 6.66 19.91 6.62 29.76
V2_l10_t75 21.62 28.58 5.01 29.77 7.30 39.38 6.89 54.09
V1_l12_t150 28.82 26.46 8.56 25.21 8.93 20.52 9.61 40.50
V2_l12_t150 27.19 19.07 8.16 29.36 9.06 19.96 9.06 38.15
V1_l12_t75 29.64 29.71 8.85 28.92 9.88 31.32 9.97 55.73
V2_l12_t75 28.82 29.20 8.03 29.19 9.56 24.50 9.92 38.87
3.4 Conclusões
Neste capítulo, descreveu-se todo o estudo realizado com elementos de viga de betão,
reforçados com diferentes percentagens de armadura longitudinal e transversal, sujeitos a
esforços de flexão, corte e torção.
Com base nos ensaios efectuados verificou-se que para secções rectangulares ocas, a
resposta não linear é praticamente independente da percentagem de armadura transversal
utilizada. Se se tiver ainda em conta o elevado custo da mão-de-obra necessária para
aplicação de estribos em peças ocas de parede delgada, pode sugerir-se que as fibras de aço

Programa Experimental
81
têm, neste tipo de estruturas, um campo de aplicação a ser explorado [Bar95],
principalmente nos elementos não sujeitos a esforços predominantemente de compressão.
Verificou-se, ainda, que o comportamento não linear deste tipo de estruturas, submetidas a
estados multiaxiais de tensão é controlado fundamentalmente pelas características de
ductilidade das suas armaduras.


CAPÍTULO 4
Modelo Numérico
4.1 Introdução
As estruturas reticuladas, quando sujeitas a um determinado conjunto de esforços,
apresentam um comportamento manifestamente não linear a partir de um determinado
nível do carregamento. Esse comportamento não linear resulta da consideração das
deformações de 2ª ordem e/ou do facto de os materiais possuírem leis constitutivas não
lineares, designando-se por comportamento não linear geométrico o primeiro caso e por
comportamento não linear material o segundo [Aze85].
Este capítulo será dedicado ao desenvolvimento de um modelo para a análise não linear
material de pórticos tridimensionais de betão armado. As barras serão discretizadas por
elementos de peça prismática de Timoshenko 3D. A não linearidade geométrica e o facto
de propriedades dos matérias dependerem do tempo não serão tidas em conta no presente
trabalho.
Em primeiro lugar, os fundamentos teóricos referentes ao modelo de análise estática
utilizado serão expostos, apresentando-se, em pormenor, a formulação do elemento de peça
prismática de Timoshenko 3D baseada no método dos elementos finitos (MEF). De
seguida, é apresentado o modelo de análise não linear material de betão armado
desenvolvido. Este modelo tem em conta o comportamento dos vários materiais que
constituem a secção de betão armado, uma vez que esta é discretizada em elementos

Capítulo 4
84
finitos, e que a cada um é atribuída uma lei que caracteriza o comportamento material
desse elemento, constituindo o que geralmente se designa por modelo de fibras. Por último,
a aferição do modelo é efectuada, por intermédio da comparação entre os resultados
obtidos numericamente e os resultados adquiridos nos ensaios efectuados nas vigas de BA,
apresentados no capítulo 3.
4.2 Modelo de análise estática linear
4.2.1 Introdução
A teoria subjacente ao modelo de análise estática linear [Bar99b] é exposta na presente
secção.
Existem duas abordagens principais para a simulação do comportamento de elementos de
vigas e pilares. Elas estão sustentadas por duas teorias: a teoria da viga de Euler-Bernoulli
e a teoria da viga de Timoshenko.
A clássica teoria de vigas, ou de Euler-Bernoulli, baseia-se nas três hipóteses seguintes
[Oña95]:
• Os deslocamentos verticais (flechas) de todos os pontos de uma secção
transversal são pequenos e iguais aos do eixo da viga;
• O deslocamento lateral é nulo;
• As secções transversais normais ao eixo da viga, antes da deformação,
permanecem planas e ortogonais ao referido eixo após a deformação.
Da terceira hipótese conclui-se que a rotação da secção transversal é igual à inclinação do
eixo da viga. Assim, a deformação por corte não é tida em conta, razão pela qual esta teoria
só deverá ser utilizada em vigas esbeltas.

Modelo Numérico
85
Na teoria da viga de Timoshenko, as duas primeiras hipóteses da teoria de Euler-Bernoulli
mantêm-se. Todavia a terceira hipótese é substituída por uma outra que indica que as
secções transversais planas e normais ao eixo da viga, antes da deformação, permanecem
planas mas não necessariamente ortogonais ao eixo após a deformação [Tim70]. Esta
hipótese representa uma melhor aproximação à deformação real da secção transversal de
vigas espessas. À medida que a relação comprimento/altura diminui, a deformação por
esforço transverso passa a ser mais significativa [Oña95].
Face ao exposto, optou-se pela formulação de Timoshenko. A formulação da viga de
Timoshenko foi estendida à simulação de barras de estruturas reticuladas tridimensionais
de forma a ser possível analisar quer vigas espessas, quer vigas esbeltas.
Na secção seguinte, será exposta a formulação teórica do elemento de peça prismática de
Timoshenko no espaço, bem como os procedimentos a adoptar para a sua implementação
num código computacional baseado no MEF.
4.2.2 Elemento de viga de Timoshenko no espaço
4.2.2.1 Considerações gerais
Considere-se uma peça curva definida num sistema de eixos global ( )321 ,, gggg i , pela sua
directriz e e a geometria das diferentes secções transversais planas de área )(eA e
ortogonais a e (ver Figura 4.1). Antes de mais, é necessário definir os diversos sistemas
coordenados a que a geometria, os deslocamentos e os esforços generalizados serão
referidos.

Capítulo 4
86
C
G
e
s1
A(e)
0s1 =
1s1 −=
1s1 +=
3l
2l
1l
Figura 4.1 - Elemento de viga de Timoshenko no espaço.
– Sistemas coordenados i. Sistema coordenado global - ( )321 ,, gggg i
Sistema coordenado cartesiano usado para definir a geometria da estrutura no espaço
(Figura 4.2). Os deslocamentos dos nós, a matriz de rigidez e o vector das forças nodais
equivalentes da estrutura também são referidos a este sistema.
ggug 222 ,, θggug 111 ,, θ
1i
3i
2i
ggug 333 ,, θ
Figura 4.2 - Referencial global

Modelo Numérico
87
ii. Sistema coordenado normalizado - 1s
Sistema coordenado que serve de base à definição das funções de forma do elemento
(Figura 4.3). A coordenada normalizada 1s varia de –1 a +1 ao longo do eixo do elemento,
que coincide com a linha que contém os centros de gravidade das secções da peça.
-1 0 +1
1 N1
s1 -1 0 +1
1
N2
s1 -1 0 +1 s1
1N3
( )12 1
11 −⋅= s
sN ( )1
2 11
3 +⋅= ss
N( ) ( )112 11 ssN +⋅−=
Figura 4.3 - Referencial normalizado.
iii. Sistema coordenado local - ( )321 ,, llll i
Sistema coordenado cartesiano definido localmente em qualquer secção do elemento. A
definição deste referencial nos pontos de integração numérica (pontos de amostragem)
serve de referência à definição dos estados de tensão e de deformação (Figura 4.4). A este
referencial, atribui-se, por vezes, a designação de tangencial, pelo facto do eixo 1l ser
tangente ao eixo do elemento.

Capítulo 4
88
C
G
e
3l
2l
1l
Figura 4.4 - Referencial local.
Para cada ponto de amostragem do elemento, este sistema é definido por intermédio do
procedimento que se passa a descrever [Bar97a, Ven96]:
– Versor do eixo 1l
O vector 1l é tangente, no ponto de amostragem, ao eixo curvilíneo 1s . Assim,
T
sx
sx
sx
=
1
3
1
2
1
11 ∂
∂∂∂
∂∂
l (4.1)
e
[ ]T312111
1
11
ˆ lllll
l == (4.2)
sendo 1l o versor de 1l .

Modelo Numérico
89
– Versor do eixo 2l
Para se definir o versor de 2l , vai começar-se por admitir que este eixo é ortogonal ao
plano definido por 3i e 1l , pelo que
( )3211121211
221
13312111
321
13
132
ˆ.0ˆ.ˆ.)()(
1
ˆˆ1
100
ˆˆˆ
ˆˆ
ˆˆˆ
iii
i
iii
i
i
++−+
=
×=
×
×=
llll
llll
l
ll
. (4.3)
Se 02111 == ll , então 3i e 1l são colineares. Se além disto 031 >l , isto é, se a barra
está orientada segundo o sentido positivo do eixo 3g , como se ilustra na Figura 4.5a,
então 2l obtém-se a partir do produto vectorial de 1l e 1i . Neste caso,
[ ]T010ˆ2 =l . (4.4)
Se 031 <l , isto é, se a barra está orientada segundo o sentido negativo do eixo 3g (ver
Figura 4.5b), então 2l obtém-se a partir do produto vectorial de 1i e 1l , pelo que,
[ ]T010ˆ2 =l . (4.5)

Capítulo 4
90
3l
g1
13 l≡g
22 l≡g
a)
1l
31 l≡g
g3
22 l≡g
b)
Figura 4.5 - Barra dirigida segundo o sentido positivo a) e negativo b) do eixo 3g .
Se 011 ≠l ou 021 ≠l , isto é, se o elemento não é colinear com o eixo 3g então 2l
obtém-se a partir do produto vectorial de 3i com 1l (4.3).
– Versor do eixo 3l
O versor do eixo 3l obtém-se por intermédio do produto vectorial de 1l com 2l
213
ˆˆˆ lll ×= . (4.6)

Modelo Numérico
91
Assim, a matriz que converte entidades do referencial local para o referencial global
apresenta a seguinte constituição
[ ]
==
33
23
13
32
22
12
31
21
11
321ˆˆˆ
l
l
l
ll
l
ll
l
llllg
T . (4.7)
No caso de 2l e 3l não coincidirem com os eixos principais centrais de inércia, estes
versores são convertidos do referencial il′ para o referencial associado aos eixos
principais centrais de inércia il (Figura 4.6),
llll ′′= UTU (4.8a)
em que
= ′
′′
ll
llll
TTT
00 (4.8b)
e
−=
′
αααα
cossin0sincos0
001ll
T , (4.8c)
sendo α o ângulo entre 2l′ e 2l (ou 3l′ e 3l ), (ver Figura 4.6). Assim,
( )ll
llll
ll
UT
UTT
UTU
g
Tg
gg
=
=
=′′
′′
. (4.8d)

Capítulo 4
92
11 ll ′≡
2l′
2l
3l′ 3l
i
j
+α
+α
Exemplo: perfil em Z com a alma num plano vertical
j > i
= 0
Figura 4.6 – Definição do referencial local da barra para α não nulo.
Neste caso, também é tido em conta o facto de a barra estar orientada segundo o sentido
positivo do eixo 3g ou segundo o sentido negativo do eixo 3g , como se ilustra na
Figura 4.7a e Figura 4.7b, respectivamente.
2l
g1
113 ll ′≡≡g
22 l′≡g
3l
3l′+α
+α
a)
2l
g3
11 ll ′≡
22 l′≡g
3l
31 l′≡g
+α
+α
b)
Figura 4.7 – Exemplo: perfil em Z dirigido segundo o sentido positivo a) e negativo b) do eixo 3g .

Modelo Numérico
93
Como foi referido na secção anterior, a formulação de Timoshenko supõe que as secções
transversais planas e ortogonais ao eixo da viga permanecem planas, mas não
necessariamente ortogonais ao referido eixo. É possível então simular a contribuição do
esforço transverso para a deformação da viga. O centro de corte pode não coincidir com o
centro de gravidade da secção (ver Figura 4.8), provocando rotações adicionais em relação
ao centro de corte, se as forças estiverem aplicadas no centro de gravidade da secção. Tal
facto também foi tido em conta no modelo numérico desenvolvido.
3l
C
GlCx2
lCx3
2l
Figura 4.8 - Secção de um elemento de viga de Timoshenko no espaço.
4.2.2.2 Campo de deslocamentos
Considere-se a secção do elemento representada na Figura 4.9. O campo de deslocamentos
define-se por intermédio das seguintes expressões,
( ) ( ) ( ) ( )llllllllllll132123113211 ,, xxxxxuxxxu G θθ −+= , (4.9a)
( ) ( ) ( ) ( )llllllllll1133123212 ,, xxxxuxxxu CG θ−−= , (4.9b)
( ) ( ) ( ) ( )llllllllll1122133213 , xxxxuxxxu CG θ−+= , (4.9c)

Capítulo 4
94
em que lCx2 e l
Cx3 são as coordenadas do centro de corte em relação ao centro de gravidade
da secção (ver Figura 4.8), e
( ) ( )0,0, 321111 === llllll xxxuxu G , (4.10a)
( ) ( )0,0, 321212 === llllll xxxuxu G , (4.10b)
( ) ( )0,0, 321313 === llllll xxxuxu G . (4.10c)
G
e
3l
lGu2
lGu3
lGu1
l1θ
l3θ
l2θ
C
lCx2
lCx3
P
l2x
l3x
2l
1l
Figura 4.9 – Campo de deslocamentos.
No referencial local e global, o vector dos deslocamentos tem, respectivamente, as
seguintes componentes
[ ]lllllll321321 θθθGGG uuuU = , (4.11)

Modelo Numérico
95
e
[ ]ggggG
gG
gG
g uuuU 321321 θθθ= . (4.12)
A conversão dos deslocamentos do referencial local para o referencial global efectua-se a
partir da matriz de transformação gT l ,
ll UTU gg = (4.13)
em que
= g
gg
TTT l
ll
00 (4.14)
foi definida na secção anterior.
4.2.2.3 Campo de deformações
As extensões são definidas no referencial local, sendo as componentes não nulas as
seguintes
∂∂
−+∂
∂+
∂∂
−−∂
∂+−
∂∂
−∂∂
+∂∂
=
∂∂
+∂∂
∂∂
+∂∂
∂∂
=
=
l
lll
l
ll
l
lll
l
ll
l
ll
l
ll
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
1
122
1
32
1
133
1
23
1
32
1
23
1
1
1
3
3
1
1
2
2
1
1
1
13
12
1
)(
)(
xxx
xu
xxx
xu
xx
xx
xu
xu
xu
xu
xu
xu
CG
CG
G
θθ
θθ
θθ
γ
γ
ε
ε (4.15a)
ou
Capítulo 4
96
∂∂∂∂∂∂
∂∂
−+∂∂
∂∂
+−∂
∂∂∂
−−
=
l
l
l
l
l
l
l
lll
l
l
l
lll
l
l
l
l
l
l
ll
l
1
3
1
2
1
1
1
122
1
3
1
133
1
2
1
1
2
3
23
0010000010
0001
x
x
x
xx
xu
xx
xu
xu
xx
xxC
G
CG
G
θ
θ
θ
θθ
θθ
ε (4.15b)
que em notação matricial fica
ll εε R= (4.15c)
sendo
−−
=0010000010
0001
2
3
23
l
l
ll
xx
xxR (4.16)
e
=
∂∂∂∂∂∂
∂∂
−+∂∂
∂∂
+−∂
∂∂∂
=
l
l
l
l
l
l
l
l
l
l
l
lll
l
l
l
lll
l
l
l
l
l
f
t
c
aC
G
CG
G
x
x
x
xx
xu
xx
xu
xu
εεεε
θ
θ
θ
θθ
θθ
ε
1
3
1
2
1
1
1
122
1
3
1
133
1
2
1
1
, (4.17a)

Modelo Numérico
97
cujas componentes, laε , l
cε , ltε e l
fε estão no referencial local e referem-se a extensões
da fibra coincidente com o eixo baricêntrico da secção, em que
l
ll
1
1
xu G
a ∂∂
=ε (4.17b)
é a extensão axial,
∂∂
−+∂∂
∂∂
+−∂
∂
=
l
lll
l
l
l
lll
l
l
l
1
122
1
3
1
133
1
2
xx
xu
xx
xu
CG
CG
c θθ
θθ
ε (4.17c)
é o vector das extensões por corte,
l
ll
1
1
xt ∂∂
=θ
ε (4.17d)
é a extensão por torção, e
∂∂∂∂
=
l
l
l
l
l
1
3
1
2
x
xf θ
θ
ε (4.17e)
é o vector das extensões de flexão.

Capítulo 4
98
4.2.2.4 Tensões
As tensões são definidas no referencial local, sendo as componentes não nulas as seguintes
(ver Figura 4.10)
[ ]Tllll13121 ττσσ = . (4.18)
G
e
3l
l13τ 2l
1ll1σ
l12τ
Figura 4.10 - Tensões.
4.2.2.5 Lei de Hooke
A relação entre o vector das tensões e das extensões é estabelecida por intermédio da
matriz constitutiva D , no referencial local,
ll εσ D= (4.19a)
ou

Modelo Numérico
99
=
l
l
l
l
l
l
13
12
1
13
12
13
12
1
000000
γ
γ
ε
τ
τ
σ
GG
E, (4.19b)
em que E é o módulo de elasticidade longitudinal do material e 12G e 13G são os módulos
de elasticidade transversal do material nos planos 21ll e 31ll , respectivamente. Se o
material for homogéneo e isotrópico, ( )( )υ+=== 121312 EGGG , sendo υ o coeficiente
de Poisson do material.
4.2.2.6 Esforços
As componentes dos esforços numa secção do elemento, no referencial local, são as
seguintes (Figura 4.11)
[ ]TMMMVVN lllllll
321321=σ (4.20)
em que
( )
∫
∫
∫
∫
∫
∫
−=
=
+−=
=
=
=
A
A
A
A
A
A
dAxM
dAxM
dAxxM
dAV
dAV
dAN
lll
lll
lllll
ll
ll
ll
213
312
2133121
133
122
11
,
,
,
,
,
σ
σ
ττ
τ
τ
σ
(4.21)

Capítulo 4
100
são o esforço axial, o esforço de corte segundo o eixo 2l , o esforço de corte segundo o
eixo 3l , o momento torsor, o momento flector segundo o eixo 2l e o momento flector
segundo o eixo 3l , respectivamente.
G
e
3l
l3V
l2x
l3x
2l
1l
l3M
l1N
l2M
l1M
l13τ
l12τ
l1σ
l2V
Figura 4.11 - Esforços na secção de um elemento de Timoshenko no espaço.
A relação (4.21) pode ser rescrita da seguinte forma
dA
xx
xx
M
M
M
V
V
N
A∫
−
−=
=l
l
l
l
l
ll
l
l
l
l
l
l
l
13
12
1
2
3
23
3
2
1
3
2
1
0000
0100010001
τ
τ
σ
σ (4.22)
pelo que

Modelo Numérico
101
dARA
T ll σσ ∫= . (4.23)
Substituindo (4.19a) em (4.23) e tendo em atenção a relação (4.15c) obtém-se
dARDR
dADR
A
T
A
T
l
ll
ε
εσ
∫
∫=
=. (4.24)
Efectuando o produto matricial RDRT obtém-se
( ) ( )( )
( )
⋅
−−−
+−
−−
= ∫∫AA
T dA
ExExxExExxExEx
xGxGGxGxGxGGxG
ExExE
dARDR
2
2322
32
2
33
2
213
2
312132123
13213
12312
23
000000
00000000000
000
llll
llll
llll
l
l
ll
(4.25)
Como os eixos 1l e 2l são principais centrais de inércia, e admitindo-se material
homogéneo e isotrópico,
EAdAEA
=∫ , (4.26a)
*21212lGAGAdAG
A
==∫ α , (4.26b)
*
31313lGAGAdAG
A
==∫ α , (4.26c)

Capítulo 4
102
3,2/0 === ∫∫ ipdAxEdAxEA
iiA
ll , (4.26d)
3,2/0 === ∫∫ ipdAxGdAxGA
iiA
ll , (4.26e)
jicjipdAxxEdAxxEA
jijiA
≠=== ∫∫ /3,2,/0llll , (4.26f)
( ) ( ) lll2
2
3
2
3 IEdAxEdAxEAA
== ∫∫ , (4.26g)
( ) ( ) lll3
2
2
2
2 IEdAxEdAxEAA
== ∫∫ , (4.26h)
( ) ( )[ ] ( ) ( )[ ] lllll1
2
3
2
2
2
312
2
213 GIdAxxGdAxGxGAA
=+=+ ∫∫ (4.26i)
em que *2lA e *
3lA são as áreas reduzidas de corte segundo os eixos 2l e 3l , l
2I e l3I são
os momentos de inércia em torno dos eixos 2l e 3l e l1I é o momento de inércia em torno
de 1l . Assim,
== ∫
l
l
l
l
l
l
3
2
1
*3
*2
000000000000000000000000000000
ˆ
EIEI
GIGA
GAEA
dARDRDA
T . (4.27)
Os esforços determinam-se por intermédio da seguinte relação
lll εσ D= (4.28a)
ou

Modelo Numérico
103
∂∂∂∂∂∂
∂∂
−+∂∂
∂∂
+−∂
∂∂∂
=
l
l
l
l
l
l
l
lll
l
l
l
lll
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
1
3
1
2
1
1
1
122
1
3
1
133
1
2
1
1
3
2
1
*3
*2
3
2
1
3
2
1
00000
00000
00000
00000
00000
00000
x
x
x
xx
xu
xx
xu
xu
EI
EI
GI
GA
GA
EA
M
M
M
V
V
N
CG
CG
G
θ
θ
θ
θθ
θθ
(4.28b)
em que
=
f
t
c
a
DD
DD
D
ˆ0000ˆ0000ˆ0000ˆ
ˆ (4.29a)
sendo
EADa =ˆ , (4.29b)
=
*3
*2
00ˆ
l
l
GAGA
D c , (4.29c)
l1
ˆ GIDt = , (4.29d)
e
=
l
l
3
2
00ˆ
EIEI
D f (4.29e)
as submatrizes associadas à rigidez axial, corte, torção e flexão, respectivamente.

Capítulo 4
104
Na formulação de Timoshenko, a distribuição das tensões de corte 12τ e 13τ é considerada
constante em toda a secção transversal. Tal facto deriva da hipótese de que as secções
transversais se mantêm planas após a deformação, o que não acontece na realidade, pois
ocorrem distorções na secção. Assim, para ter em conta essas distorções, e
consequentemente uma distribuição de tensões não constante ao longo da secção,
multiplica-se a área l2A e l
3A da secção pelos coeficientes l2α e l
3α , respectivamente.
Estes coeficientes são designados por coeficientes de forma ou de distorção. A sua
obtenção para cada direcção, 2l e 3l , é feita aplicando o Princípio dos Trabalhos Virtuais
(PTV), de forma a que o trabalho de deformação da tensão tangencial constante coincida
com o exacto da teoria das vigas [Bar89,Bar97b]. As áreas resultantes são designadas por
áreas reduzidas de corte ( *2lA e *
3lA ).
4.2.2.7 Expressão do trabalho virtual
Considere-se um elemento de viga de volume ( )eV submetido a forças generalizadas
proporcionais à sua massa, g
Vq , forças generalizadas distribuídas ao longo do elemento,
l
Lq , e forças generalizadas aplicadas em pontos nodais da estrutura, gQ . Sob este
carregamento, o corpo sofre extensões e deslocamentos virtuais, εd e Ud ,
respectivamente, pelo que, pela aplicação do PTV, o trabalho interno é igual ao trabalho
externo realizado durante a deformação virtual do elemento, isto é,
( )( )
[ ] [ ]( )
[ ]( )∫∫∫ ++=
eee LL
T
V
g
V
TggTg
V
TdLqUdVqUQUdV llll δδδσεδ (4.30)
em que

Modelo Numérico
105
( ) ( )( )
( )( )∫∫ ++==
ee VV
Te dVdVW llllllll1313121211int τδγτδγσδεσεδδ (4.31)
é o trabalho interno de deformação virtual realizado durante as extensões virtuais lεδ , e
( ) [ ] [ ]( )
[ ]( )∫∫ ++=
ee LL
T
V
g
V
TggTgeext dLqUdVqUQUW llδδδδ (4.32)
é o trabalho externo produzido durante os deslocamentos virtuais, Uδ . Desenvolvendo a
parcela do trabalho interno e tendo em conta as relações (4.15c), (4.19a) e (4.27), obtém-se
( ) ( )( )
( )( )
( )( )
( )( )( )
( )( )∫
∫ ∫
∫
∫
∫
=
=
=
=
=
e
e e
e
e
e
L
T
L A
TT
V
TT
V
TT
V
Te
dLD
dLdARDR
dVRDR
dVDR
dVW
lll
ll
ll
ll
ll
εεδ
εεδ
εεδ
εεδ
σεδδ
ˆ
int
. (4.33)

Capítulo 4
106
4.2.3 Formulação do elemento de viga de Timoshenko no espaço por
elementos finitos isoparamétricos de classe C0
4.2.3.1 Definição da geometria
As coordenadas cartesianas de um ponto qualquer do elemento, na coordenada
normalizada 1s , obtêm-se por intermédio da seguinte relação
( ) ( )∑=
=n
k
gkk
g xsNsx1
11 (4.34a)
ou
( )( ) ( )
( ) ( )( ) ( )
=
gnG
gnG
gnG
gG
gG
gG
n
n
n
g
g
g
xxx
xxx
sNsNsNsN
sNsNs
xxx
,3
,2
,1
1,3
1,2
1,1
111
111
111
1
3
2
1
000000000000
MLLL
(4.34b)
em que n é o número de nós do elemento (dois ou três nós), ( )1sN k é a função de forma do
elemento relativa ao nó k, avaliada na coordenada normalizada 1s e gkiGx , c/i=1,2,3
representa as coordenadas do nó k no referencial global. A relação (4.34b) pode ainda ser
rescrita da seguinte forma
( ) ( ) ( ) ( )egex
g XsNsx 11 = (4.34c)

Modelo Numérico
107
em que ( )egX é o vector contendo as coordenadas, no referencial global, dos nós do
elemento.
4.2.3.2 Deslocamentos
Conhecidos os deslocamentos dos nós do elemento no referencial global, ( )egU , os
deslocamentos de um ponto qualquer do elemento, na coordenada normalizada 1s ,
obtêm-se por intermédio da seguinte relação
( ) ( )∑=
=n
k
gkk
g UsNsU1
11 (4.35a)
ou
( )
( ) ( )( ) ( )
( ) ( )( ) ( )
( ) ( )( ) ( )
=
gn
gn
gn
gnG
gnG
gnG
g
g
g
gG
gG
gG
n
n
n
n
n
n
g
g
g
gG
gG
gG
uuu
uuu
sNsNsNsN
sNsNsNsN
sNsNsNsN
suuu
,3
,2
,1
,3
,2
,1
1,3
1,2
1,1
1,3
1,2
1,1
111
111
111
111
111
111
1
3
2
1
3
2
1
000000000000000000000000000000000000000000000000000000000000
θθθ
θθθ
θθθ
M
LLLLLL
(4.35b)
em que gkiGu , e g
ki ,θ c/i=1,2,3 representam os deslocamentos e as rotações do nó k no
referencial global. A relação (4.35b) pode ainda ser rescrita da seguinte forma
( ) ( ) ( ) ( )egeu
g UsNsU 11 = (4.35c)

Capítulo 4
108
4.2.3.3 Matrizes de deformação
As extensões num ponto do elemento, na coordenada normalizada 1s , obtêm-se a partir dos
deslocamentos dos nós do elemento, efectuando a seguinte operação
( ) ( ) llk
n
kk UsBs 1
11 ∑
=
=ε (4.36)
em que
( )
( )
( ) ( ) ( )( ) ( ) ( )
( )
( )
( )
−
−
=
l
l
l
ll
l
ll
l
l
1
1
1
1
1
1
11
12
1
1
11
13
1
1
1
1
1
00000
00000
00000
000
000
00000
dxsdN
dxsdN
dxsdN
sNdx
sdNx
dxsdN
sNdx
sdNx
dxsdN
dxsdN
sB
k
k
k
kk
Ck
kk
Ck
k
k (4.37)
é a matriz de deformação relativa ao nó k, avaliada na coordenada normalizada 1s , e
[ ]T
kkkkGkGkGk uuuU lllllll,3,2,1,3,2,1 θθθ= (4.38)
é o vector dos deslocamentos do nó k, no referencial local do elemento.
Substituindo (4.13) em (4.36) obtém-se
( ) ( ) ( )[ ] gk
Tgn
kk UsTsBs 1
111
ll ∑=
=ε (4.39a)
ou

Modelo Numérico
109
( ) ( ) gk
n
kk UsBs ∑
=
=1
11lε (4.39b)
em que
[ ]Tgk
gk
gk
gkG
gkG
gkG
gk uuuU ,3,2,1,3,2,1 θθθ= (4.40)
é o vector dos deslocamentos do nó k, no referencial global, ( )1sT gl é a matriz de
transformação do referencial local para o referencial global, definida na secção 4.2.2.1, e
( ) ( ) ( )[ ]Tgkk sTsBsB 111
l= . (4.41)
Para calcular ( ) l11 dxsdN k da matriz kB efectua-se o seguinte procedimento
( ) ( )
ll1
1
1
1
1
1
dxds
dssdN
dxsdN kk = . (4.42)
Dado que
( ) ( ) ( )2
3
2
2
2
11ggg dxdxdxdx ++=l (4.43)
então
( ) ( ) ( )
212
1
3
2
1
2
2
1
1
1
2
3
2
2
2
1
1
1
+
+
=
++=
dsdx
dsdx
dsdx
ds
dxdxdx
dsdx
ggg
gggl
. (4.44a)
Substituindo (4.34) em (4.44a) obtém-se

Capítulo 4
110
( ) ( ) ( )
( )e
n
k
gkG
kn
k
gkG
kn
k
gkG
k
J
xds
sdNx
dssdN
xds
sdNdsdx
=
+
+
= ∑∑∑
===
212
1,3
1
1
2
1,2
1
1
2
1,1
1
1
1
1l
(4.44b)
que é o jacobiano avaliado na coordenada normalizada 1s . Substituindo (4.44b) em (4.42)
obtém-se
( ) ( )
( )ekk
JdssdN
dxsdN 1
1
1
1
1 =l. (4.45)
Na secção 4.2.2.3, as extensões foram decompostas nas componentes de extensão axial,
extensões de corte, extensão por torção e extensões por flexão. Para determinar estas
componentes de extensão, a partir dos deslocamentos dos nós, efectua-se o procedimento
que se passa a descrever.
– Extensão axial
( ) ( )
( ) ( )[ ] gka
n
k
Tgkaka
ka
n
kkaa
UsTsB
UsBs
,1
1,1,
,11
,1
∑
∑
=
=
=
=
l
llε (4.46)
em que ( )[ ] ( )1,11,ˆ ssT T
k
Tgka ll = é o versor do eixo local 1l no referencial global, pelo que é
constituído pelos cosenos dos ângulos que esse eixo faz com os eixos ( )321 ,, gggg i do
referencial global e
( )[ ] gka
Tgkaka UsTU ,1,,
ll = . (4.47)
Por sua vez,

Modelo Numérico
111
( ) ( )l1
11, dx
sdNsB k
ka = (4.48)
é a “matriz” de deformação axial,
llkGka uU ,1, = (4.49)
é o deslocamento do nó k segundo o eixo local 1l , e
[ ]TgkG
gkG
gkG
gka uuuU ,3,2,1, = (4.50)
é o vector dos deslocamentos do nó k segundo o eixos globais ( )321 ,, gggg i .
– Extensões de corte
( ) ( )
( ) ( )[ ] gkc
n
k
Tgkckc
kc
n
kkcc
UsTsB
UsBs
,1
1,1,
,11
,1
∑
∑
=
=
=
=
l
llε (4.51)
em que
( )k
ggkc
TsT
= l
l ll0
0ˆˆ32
1, (4.52)
é a matriz de transformação associada aos graus de liberdade de corte e
( )[ ] gkc
Tgkckc UsTU ,1,,
ll = . (4.53)
Por sua vez,

Capítulo 4
112
( )
( ) ( ) ( )( ) ( ) ( )
−
−=
00
00
11
12
1
1
11
13
1
1
1,
sNdx
sdNx
dxsdN
sNdx
sdNx
dxsdN
sBk
kC
k
kk
Ck
kc
ll
ll
(4.54)
é a matriz de deformação de corte,
[ ]T
kkkkGkGkc uuU llllll,3,2,1,3,2, θθθ= (4.55)
é o vector dos deslocamentos do nó k no referencial local, e
[ ]Tgk
gk
gk
gkG
gkG
gkG
gkc uuuU ,3,2,1,3,2,1, θθθ= (4.56)
é o vector dos deslocamentos do nó k no referencial global.
– Extensão de torção
( ) ( )
( ) ( )[ ] gkt
n
k
Tgktkt
kt
n
kktt
UsTsB
UsBs
,1
1,1,
,11
,1
∑
∑
=
=
=
=
l
lε (4.57)
em que ( )[ ] ( )1,11,ˆ ssT T
k
Tgkt ll = é o versor do eixo local 1l no referencial global e
( )[ ] gkt
Tgktkt UsTU ,1,,
ll = . (4.58)
Por sua vez,
( ) ( )l1
11, dx
sdNsB k
kt = (4.59)

Modelo Numérico
113
é a “matriz” de deformação de torção,
llkktU ,1, θ= (4.60)
é a rotação do nó k segundo o eixo local 1l , e
[ ]Tgk
gk
gk
gktU ,3,2,1, θθθ= (4.61)
é o vector das rotações do nó k no referencial global.
– Extensões de flexão
( ) ( )
( ) ( )[ ] gkf
n
k
Tgkfkf
kf
n
kkff
UsTsB
UsBs
,1
1,1,
,11
,1
∑
∑
=
=
=
=
l
llε (4.62)
em que
( ) [ ] kg
kf sT 321,ˆˆ lll = (4.63)
é a matriz de transformação associada aos graus de liberdade de flexão e
( )[ ] gkf
Tgkfkf UsTU ,1,,
ll = . (4.64)
Por sua vez,
( )( )
( )
=
l
l
1
1
1
1
1,
0
0
dxsdN
dxsdN
sBk
k
kf (4.65)

Capítulo 4
114
é a matriz de deformação de flexão,
[ ]T
kkkfU lll,3,2, θθ= (4.66)
é o vector das rotações do nó k no referencial local, e
[ ]Tgk
gk
gk
gkfU ,3,2,1, θθθ= (4.67)
é o vector das rotações do nó k no referencial global.
4.2.3.4 Matriz de rigidez
Substituindo as expressões (4.39) em (4.33) obtém-se
( ) ( )( )
( )[ ] [ ] ( )
( )∫
∫
=
=
e
e
L
egTgTgTeg
L
Te
dLUTBDBTU
dLDW
lll
lll
ˆ
ˆint
δ
εεδδ. (4.68)
Convertendo (4.68) para coordenadas normalizadas, resulta
( ) ( )[ ] [ ] ( ) ( )∫+
−=
1
1 1intˆ egeTgTgTege UdsJTBDBTUW lllδδ (4.69)
em que
( ) [ ] ( )∫+
−=
1
1 1ˆ dsJTBDBTK eTgTge lll (4.70)

Modelo Numérico
115
é a matriz de rigidez do elemento. Aplicando a integração numérica de Gauss-Legendre ao
cálculo da matriz de rigidez, a relação (4.70) reduz-se à seguinte
( ) [ ]{ }( )
p
N
p
e
s
TgTge WJTBDBTKs
p∑=
=1
11
ˆ lll (4.71)
em que 1SN é o número de pontos de integração na direcção 1s , em correspondência com a
regra de integração seleccionada, pW é o peso associado ao ponto de integração de
coordenadas ps1 e J é o valor do Jacobiano. No caso de elementos de dois ou três nós, com
o nó intermédio localizado a meio do elemento, o valor de J é 2L , ou seja metade do
comprimento do elemento [Oña95].
A matriz de rigidez de um elemento pode ser obtida calculando-se as submatrizes de
rigidez associadas à deformação axial, às deformações de corte, à deformação de torção e
às deformações de flexão. Assim, substituindo (4.17a) e (4.29a) em (4.33) obtém-se
( ) ( )( )
( ) ( ) ( ) ( )[ ]( )
.
ˆ0000ˆ0000ˆ0000ˆ
ˆint
∫
∫
=
=
e
e
L
f
t
c
a
f
t
c
a
T
f
T
t
T
c
T
a
L
Te
dL
DD
DD
dLDW
l
l
l
l
llll
lll
εεεε
εδεδεδεδ
εεδδ
(4.72)
Efectuando os produtos matriciais em (4.72) e fazendo intervir as relações (4.46), (4.51)
(4.57) e (4.62) obtém-se
( ) ( )[ ] [ ]( )
( )[ ] [ ]( )
( )[ ] [ ]( )
( )[ ] [ ]( )
gf
L
Tgfff
Tf
gf
Tgf
gt
L
Tgttt
Tt
gt
Tgt
gc
L
Tgccc
Tc
gc
Tgc
ga
L
Tgaaa
Ta
ga
Tga
e
UdLTBDBTUUdLTBDBTU
UdLTBDBTUUdLTBDBTUW
ee
ee
∫∫
∫∫
+
++=
llll
llll
ˆˆ
ˆˆ int
δδ
δδδ
(4.73)

Capítulo 4
116
em que
( ) [ ]( )∫=
eL
Tgaaa
Ta
ga
ea dLTBDBTK ll ˆ , (4.74a)
( ) [ ]( )∫=
eL
Tgccc
Tc
gc
ec dLTBDBTK ll ˆ , (4.74b)
( ) [ ]( )∫=
eL
Tgttt
Tt
gt
et dLTBDBTK ll ˆ , (4.74c)
( ) [ ]( )∫=
eL
Tgfff
Tf
gf
ef dLTBDBTK ll ˆ (4.74d)
são as submatrizes de rigidez axial, corte, torção e flexão, respectivamente. Aplicando a
integração numérica de Gauss-Legendre, as relações (4.74) convertem-se nas seguintes
( ) [ ]{ }( )
p
N
p
e
s
Tgaaa
Ta
ga
ea WJTBDBTK
as
p∑=
=1
11
ˆ ll , (4.75a)
( ) [ ]{ }( )
p
N
p
e
s
Tgccc
Tc
gc
ec WJTBDBTK
cs
p∑=
=1
11
ˆ ll , (4.75b)
( ) [ ]{ }( )
p
N
p
e
s
Tgttt
Tt
gt
et WJTBDBTK
ts
p∑=
=1
11
ˆ ll , (4.75c)
( ) [ ]{ }( )
p
N
p
e
s
Tgfff
Tf
gf
ef WJTBDBTK
fs
p∑=
=1
11
ˆ ll (4.75d)
em que asN1, c
sN1, t
sN1 e f
sN1 são os números de pontos de Gauss associados à integração
numérica da matriz de rigidez axial, corte, torção e flexão, respectivamente, fornecidos no
Quadro 4.1.

Modelo Numérico
117
Quadro 4.1 - Pontos de Gauss para integração numérica das submatrizes de rigidez do elemento de Timoshenko no espaço.
Elemento Ordem de integração Função de
forma Linear Quadrática
Axial 1 2
Corte 2 3
Torção 1 2 Completa
Flexão 1 2
Axial 1 2
Corte 1 2
Torção 1 2 Reduzida = Selectiva
Flexão 1 2
A utilização de várias técnicas de integração numérica tem como objectivo reduzir a
probabilidade de ocorrência do fenómeno correntemente denominado por locking. Este
fenómeno representa uma sobrestimação da rigidez de corte em relação à rigidez de flexão,
conduzindo a soluções numéricas demasiado rígidas [Bar97b].
As várias submatrizes da matriz de rigidez podem ser calculadas, optativamente, por
intermédio de regras de integração numérica completa, selectiva ou reduzida. Estas últimas
(selectiva e reduzida) são técnicas de subintegração que têm como objectivo principal
diminuir a probabilidade da ocorrência do fenómeno de locking, além de diminuírem o
tempo de processamento do cálculo.
Para comparar as várias técnicas de integração numérica, Sena [Sen98] e Oñate [Oña95]
realizaram estudos sobre o comportamento do elemento de viga de Timoshenko 2D, onde
se concluiu que as regras de integração reduzida/selectiva permitem melhores resultados
que a integração completa. Conclusões idênticas foram obtidas por Barros [Bar97b] e
Ventura [Ven97] na análise das várias técnicas de integração numérica para a obtenção da
matriz de rigidez de uma casca plana.

Capítulo 4
118
4.2.3.5 Vector solicitação
i. Introdução
Para complementar o sistema de equações de equilíbrio, será necessário determinar as
forças nodais equivalentes às acções exteriores. Nesta secção, descrevem-se os
procedimentos necessários à obtenção das forças nodais equivalentes aos seguintes tipos de
acções:
Forças aplicadas em pontos nodais da estrutura;
Forças aplicadas em pontos do interior de elementos;
Forças de volume;
Forças distribuídas por unidade de comprimento;
Deslocamentos prescritos.
ii. Forças aplicadas em pontos nodais da estrutura
Considere-se que num ponto P da estrutura está aplicado o vector de forças
[ ] T
Pgggg
GgG
gG
g
PMMMFFFQ 321321= (4.76)
cujas componentes estão referidas ao sistema global de eixos e estão em correspondência
com os graus de liberdade definidos em (4.12). Neste caso, as forças nodais equivalentes à
acção de g
PQ obtêm-se espalhando g
PQ no vector das forças nodais equivalentes da
estrutura ( )EgQ .

Modelo Numérico
119
iii. Forças aplicadas em pontos do interior de elementos
No ponto A de coordenada local sA1 do elemento representado na Figura 4.12 está aplicado
o vector de forças
[ ] T
Agggg
GgG
gG
g
AMMMFFFQ 321321= (4.77)
cujas componentes estão referidas ao sistema global de eixos e estão em correspondência
com os graus de liberdade definidos em (4.12).
1g
2gAF
3gAF
1gAF
2gAM
3gAM
1gAM
3g
2g
1
A3
2
Figura 4.12 - Forças generalizadas aplicadas em pontos do interior de elementos.
Para determinar as forças nodais no nó m, equivalentes ao vector (4.77), aplica-se o
princípio dos trabalhos virtuais obtendo-se
( )
m
g
g
g
gG
gG
gG
Am
A
g
g
g
gG
gG
gG
m
g
g
g
gG
gG
gG
m
g
g
g
gG
gG
gG
uuu
sN
MM
MF
FF
uuu
MM
MF
FF
=
3
2
1
3
2
1
,1
3
2
1
3
2
1
3
2
1
3
2
1
3
2
1
3
2
1
000000000000000000000000000000
000000000000000000000000000000
δθδθδθδδδ
δθδθδθδδδ
(4.78)
em que,

Capítulo 4
120
gm
mg
g
g
gG
gG
gG
Uuuu
δ
δθδθδθδδδ
=
3
2
1
3
2
1
(4.79)
é o vector dos deslocamentos virtuais no nó m no referencial global. Como os
deslocamentos virtuais são quaisquer, (4.78) simplificar-se-á para
( )
Ag
g
g
gG
gG
gG
Am
mg
g
g
gG
gG
gG
MMMFFF
sN
MMMFFF
=
3
2
1
3
2
1
,1
3
2
1
3
2
1
(4.80a)
ou
( ) g
AAmg
mQsNQ ,1= . (4.80b)
A coordenada normalizada, As ,1 , do ponto de aplicação do vector de forças g
AQ pode ser
obtida recorrendo-se à condição de se estar a trabalhar com elementos finitos
isoparamétricos, isto é,
( ) gmi
n
mAm
gAi xsNx ,
1,1, ∑
=
= c/i=1 ou 2 ou 3 (4.81)
em que gmix , é a componente i do nó m do elemento, e g
Aix , é a componente i do ponto A do
elemento, no referencial global. Substituindo o valor de As ,1 em (4.80), determinam-se as
forças nodais no nó m, equivalentes ao vector de forças generalizadas aplicadas num ponto
genérico A do interior de um elemento.

Modelo Numérico
121
iv. Forças de volume
Neste trabalho, os efeitos de acelerações rotacionais são desprezados, pelo que apenas se
simulam os efeitos de acelerações que geram forças segundo o sistema coordenado global.
Assim, um volume infinitesimal de um elemento de viga de Timoshenko no espaço fica
submetido às seguintes forças
dVggg
dQdQdQ
g
g
g
gV
gV
gV
=
3
2
1
3,
2,
1,
ρ (4.82a)
ou
dVgFd ggV ρ= (4.82b)
em que gg1 , gg2 e gg3 são acelerações segundo gx1 , gx2 e gx3 , respectivamente, e ρ é a
massa por unidade de volume do material que constitui o elemento. Aplicando o princípio
dos trabalhos virtuais e integrando na área do elemento, )(eA , obtém-se a seguinte
expressão
( )( ) ( )
( )
dLAgUNUFeL
emm
e
mVllll ∫= ρδδ (4.83a)
( )( ) ( )
( )
[ ] dLAgTUNUF gTg
L
emm
e
mVe
llll ∫= ρδδ (4.83b)
em que
[ ] T
mGGGm uuuU llll321 δδδδ = (4.84)
são os deslocamentos virtuais de translação no nó m segundo os eixos locais.

Capítulo 4
122
Como os deslocamentos virtuais devem ser quaisquer, a relação (4.83) converte-se na
seguinte
( )
( )
( )[ ] dLAgTNF gTge
L
memV
e
ll ρ∫=, (4.85)
Aplicando a integração numérica de Gauss Legendre ao integral de (4.85) obtém-se
[ ] ( )
[ ]
{ }∑
∑
∫
=
=
−
=
=
=
1
1
1
1
1
)(
1
)()(
1
11
)()(,
s
p
s
p
N
pp
e
sVm
N
pp
e
s
gTgem
egTgem
emV
WJFN
WJAgTN
dsJAgTNF
l
l
ll
ρ
ρ
(4.86)
em que
( ) [ ]ps
gTgepV AgTsF
1
)(1
= ll ρ (4.87)
são as forças segundo os eixos do referencial local associado ao ponto de Gauss, avaliadas
nesse ponto.
O vector é convertido para o referencial global, por intermédio da matriz de transformação,
obtendo-se
( ) ( ) ( )pemVp
gp
egmV sFsTsF ,1
)(,,1,1
)(,
ll= . (4.88a)
v. Forças distribuídas por unidade de comprimento
Um elemento de Timoshenko 3D pode ser solicitado por forças generalizadas distribuídas
em correspondência com os graus de liberdade, conforme se representa na Figura 4.13.

Modelo Numérico
123
Nesta figura, j
kLq l, ( q f= para forças e q m= para momentos) representa a força
generalizada atribuída ao nó k do elemento, e dirigida segundo o eixo jl , c/j=1,2,3, do
referencial local de um ponto do elemento. Por sua vez j
Lql ( q f= para forças e q m=
para momentos) é a força generalizada distribuída por unidade de comprimento ao longo
do elemento, dirigida segundo o eixo jl .
3
32
2
1
1
11,
lLf
12,
lLf
1lLf
1lLf
13,
lLf
3l2l
1l
2l
3
32
2
1
1
3l
1l
2lLf
2lLf 2
3,l
Lf22,
lLf
21,
lLf
1l2l 3l
3
2
13
2
1
3lLf
3lLf
33,
lLf
32,
lLf
31,
lLf
3
32
2
1
1
11,
lLm 1
2,lLm
1lLm
1lLm
13,
lLm
3l2l
1l
2l
3
32
2
1
1
3l
1l
2lLm
2lLm 2
3,lLm
22,
lLm
21,
lLm
1l2l 3l
3
2
13
2
1
3lLm
3lLm
33,
lLm
32,
lLm
31,
lLm
Figura 4.13 - Forças distribuídas por unidade de comprimento num elemento de Timoshenko 3D de 3 nós.

Capítulo 4
124
Para uma determinada posição 1s ao longo do elemento, o valor da carga uniformemente
distribuída obtém-se por intermédio das seguintes relações (no caso de elementos de três
nós)
( ) ( ) ( ) ( )( ) ( ) ( ) ( )( ) ( ) ( ) ( )( ) ( ) ( ) ( )( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 3333
2222
1111
3333
2222
1111
3,132,121,111
3,132,121,111
3,132,121,111
3,132,121,111
3,132,121,111
3,132,121,111
llll
llll
llll
llll
llll
llll
LLLL
LLLL
LLLL
LLLL
LLLL
LLLL
msNmsNmsNsm
msNmsNmsNsm
msNmsNmsNsm
fsNfsNfsNsf
fsNfsNfsNsf
fsNfsNfsNsf
++=
++=
++=
++=
++=
++=
(4.89a)
ou,
( ) ( ) ll
L
e
LqsNsq 1
)(1 = (4.89b)
em que
( )
=
321
321
321
321
321
321
000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000
NNNNNN
NNNNNN
NNNNNN
N e
(4.90)
e
[ ]T
LLLLLLLLLLLLLLLLLLLmmmfffmmmfffmmmfffq 321321321321321321
3,3,3,3,3,3,2,2,2,2,2,2,1,1,1,1,1,1,lllllllllllllllllll = . (4.91)
No comprimento infinitesimal l1dxdL = , a resultante das forças generalizadas é

Modelo Numérico
125
( ) ( )( ) ( )( ) ( )( ) ( )( ) ( )( ) ( )dLsmsdM
dLsmsdM
dLsmsdM
dLsfsdF
dLsfsdF
dLsfsdF
LL
LL
LL
LL
LL
LL
11
11
11
11
11
11
33
22
11
33
22
11
ll
ll
ll
ll
ll
ll
=
=
=
=
=
=
(4.92)
ou
( ) ( )dLsqsQdLL 11ll = . (4.93)
Para converter l
Lqd (força generalizada distribuída em dL ) para o referencial global
efectua-se a seguinte operação
)()()( 111 sqdsTsqdL
gg
L
ll= (4.94)
em que )( 1sT gl é a matriz de transformação deduzida na secção 4.2.2.1. Aplicando o
princípio dos trabalhos virtuais e integrando ao longo do lado solicitado, obtém-se
( )[ ]( )
dLqNQ g
LL
Teg
Le∫= . (4.95)
Convertendo este integral para coordenadas locais obtém-se
[ ]
[ ] 1)(
1
1
)(
1)(
1
1
)(
dsjqTN
dsjqNQ
e
L
gTe
eg
L
Teg
L
ll∫
∫
−
−
=
=
. (4.96)
Recorrendo-se à integração numérica de Gauss-Legendre (4.96) converte-se em

Capítulo 4
126
[ ]{ } p
e
s
Ns
pL
gTeg
LWjqTNQ
p
)(
1
)(
1
∑=
= ll (4.97)
em que Ns é o número de pontos de Gauss utilizados na integração ao longo do elemento
e g
LQ é o vector constituído pelas forças nodais equivalentes às forças generalizadas
distribuídas ao longo do elemento, no referencial global, tal como se representa na Figura
4.14.
1g 21,
gLf
31,
gLf
11,
gLf
11,
gLm
21,
gLm
31,
gLm
22,
gLf
32,
gLf
12,
gLf
12,
gLm
22,
gLm
31,
gLm
23,
gLf
33,
gLf
13,
gLf
13,
gLm
23,
gLm
33,
gLm
3g
2g
1
2
3
Figura 4.14 - Forças nodais equivalentes às forças generalizadas distribuídas num elemento.
vi. Assentamentos de apoio (deslocamentos prescritos)
Os assentamentos de apoio podem ser introduzidos directamente no vector dos
deslocamentos, nas posições correspondentes aos graus de liberdade com deslocamentos
prescritos. Para tal, o sistema de equações de equilíbrio [Bar97a],
( ) ( ) ( )EgEgEg QUK = (4.98)

Modelo Numérico
127
é reorganizado da seguinte forma
( ) ( )
( ) ( )
( )
( )
( )
( ) ( )
+=
EgEg
f
Eg
lEg
f
Egl
Egff
Egfl
Eglf
Egll
RQ
Q
UU
KKKK
(4.99)
em que ( )EgllK inclui as linhas e as colunas de interacção entre graus de liberdade livres;
( )EgffK inclui as linhas e as colunas de interacção entre graus de liberdade fixos,
( ) ( )[ ]TEgfl
Eglf KK = inclui os termos de rigidez relativos à interacção entre os graus de
liberdade livres e fixos; ( )EglU e ( )Eg
fU são os vectores que incluem os graus de liberdade
livres, a determinar, e os graus de liberdade fixos, conhecidos, (de valor nulo ou imposto,
como sejam os assentamentos de apoio); ( )Eg
lQ e ( )Eg
fQ são os vectores que englobam as
forças nodais equivalentes em correspondência com os graus de liberdade livres e fixos,
respectivamente; e ( )EgR é o vector que inclui as reacções nos apoios da estrutura. Assim,
os assentamentos de apoio são introduzidos no vector ( )EgfU .

Capítulo 4
128
4.3 Modelo de análise estática não linear
4.3.1 Introdução
O comportamento de elementos de betão armado é manifestamente não linear. Essa não
linearidade resulta, fundamentalmente, do facto das leis constitutivas dos materiais serem
não lineares.
A utilização de um modelo de fibras para a simulação do comportamento não linear de
estruturas reticuladas de betão armado tem algumas vantagens, já que é tida em conta a
pormenorização da estrutura ao nível da secção [Gue94,Gue97,Tau91]. Em vez de se
utilizar uma lei constitutiva global para a secção transversal (geralmente uma relação
momento-curvatura), o modelo de fibras calcula as deformações em vários pontos da
secção transversal, avalia as tensões, segundo as leis constitutivas dos materiais nesses
pontos e calcula as forças locais, que depois são integradas ao longo de toda a secção,
sabendo a posição que ocupam na secção transversal e a área de influência de cada ponto.
Assim, os elementos de uma estrutura estão divididos não só em elementos de viga de
Timoshenko 3D, mas também em fibras longitudinais.
De uma forma esquemática, como se pode ver na Figura 4.15, um elemento de betão
armado é discretizado num elemento de viga de Timoshenko 3D de dois ou três nós (seis
graus de liberdade por nó). Cada elemento finito 3D é dividido longitudinalmente em
fibras. Ao nível da secção essas fibras são discretizadas por elementos finitos planos. As
deformações e as tensões são avaliadas nos pontos de Gauss desses elementos por
intermédio das leis constitutivas dos materiais de cada elemento finito plano. A armadura
longitudinal é também tida em conta, sendo discretizada por elementos finitos de barra
biarticulada 3D (fibras) ao nível do elemento. A posição das armaduras fica definida ao
nível da secção transversal e o seu comportamento é governado por leis constitutivas não
lineares.

Modelo Numérico
129
A solução do sistema de equações de equilíbrio, não lineares, foi obtida por intermédio da
aplicação do método de Newton-Raphson, descrito na secção 4.3.5.
Os ensaios realizados nas vigas de BA, descritos no capítulo 3, foram simulados por
intermédio do modelo numérico desenvolvido. Os resultados obtidos são apresentados e
analisados na secção 4.3.6.
4.3.2 Matriz de rigidez
Tendo em conta a divisão da secção em elementos finitos, a matriz de rigidez é obtida de
forma diferente da descrita na secção 4.2.3.4. A matriz de rigidez de cada elemento, )(eK ,
é a “adição” da rigidez do betão dos elementos finitos que discretizam a secção do
elemento, bK , com a rigidez das armaduras que atravessam a secção, sK .
Quando a resposta dos elementos de uma estrutura passa a ser não linear, a rigidez começa
a depender do estado de deformação a que esses elementos estão sujeitos. O estado de
deformação numa secção de um elemento estrutural pode variar de ponto (fibra) para ponto
(fibra), o que conduz a estados de tensão também diferentes. Sendo as leis constitutivas dos
materiais intervenientes não lineares, a contribuição para a matriz de rigidez de cada fibra
da secção é diferente. A matriz de rigidez obtida desta forma é uma matriz de rigidez
tangente.

Capítulo 4
130
x x
x x
Figura 4.15 – Discretização de um elemento de betão armado, com uma secção qualquer, de acordo com o
modelo de fibras desenvolvido.

Modelo Numérico
131
A relação entre o estado de tensão e o estado de deformação estabelecida em (4.19a) será
rescrita em termos incrementais por forma a analisar-se o comportamento não linear do
material, isto é,
εσ ∆=∆ TD (4.100)
em que TD é a matriz constitutiva tangente.
O cálculo da matriz de rigidez de cada elemento efectua-se através do seguinte
procedimento (Figura 4.16):
– avaliação dos deslocamentos generalizados (U ) nos pontos de integração
(pontos de Gauss) de cada elemento 3D, conhecidos os deslocamentos
generalizados nos nós;
– cálculo das deformações (ε ) ao nível de cada ponto de Gauss dos elementos
finitos que discretizam a secção;
– cálculo da matriz constitutiva tangente ( TD ) ao nível de cada ponto de Gauss
da secção, tendo em conta as relações constitutivas dos materiais
intervenientes;
– cálculo da matriz de rigidez de cada elemento 3D, )(eTK (quer de betão, bK ,
quer de armadura, sK ).
Ao nível do elemento 3D: U )(eTK
⇓ ⇑
Ao nível da secção: ε ⇒ TD
Figura 4.16 – Esquema para a obtenção da matriz de rigidez de um elemento.

Capítulo 4
132
4.3.2.1 Contribuição do betão
A matriz de rigidez de um elemento pode ser obtida calculando as submatrizes de rigidez
associadas à deformação axial, às deformações de corte, à deformação de torção e às
deformações de flexão, tal como se descreve na secção 4.2.3.4, por intermédio das
expressões (4.74a) a (4.74d). Tendo em conta o comportamento não linear material, os
termos que se anulavam nas equações (4.25) e (4.26) na análise estática linear podem não
se anular na análise não linear material. Assim, à matriz de rigidez de um elemento terão
de se adicionar as submatrizes de rigidez associadas à deformação de interacção
axial-flexão (4.101a), flexão-axial (4.101b), corte-torção (4.101c) e torção-corte (4.101d),
( ) [ ]
( )∫=
eL
Tgffaf
Ta
ga
eaf dLTBDBTK ll ˆ , (4.101a)
( ) [ ]
( )∫=
eL
Tgaafa
Tf
gf
efa dLTBDBTK ll ˆ , (4.101b)
( ) [ ]
( )∫=
eL
Tgttct
Tc
gc
ect dLTBDBTK ll ˆ , (4.101c)
( ) [ ]
( )∫=
eL
Tgcctc
Tt
gt
etc dLTBDBTK ll ˆ . (4.101d)
Tendo em consideração que o elemento, na sua espessura, é discretizado em fibras, e
aplicando a integração numérica de Gauss-Legendre, as submatrizes de rigidez de (4.74) e
(4.101) passam a ser obtidas segundo as seguintes expressões:
– submatriz associada à deformação axial
[ ]{ } p
N
ps
Tgaa
ba
Ta
ga
ba WJTBDBTK
afs
p∑=
=1
11
ˆ ll (4.102a)

Modelo Numérico
133
em que,
∑=
=tNG
iiGP
biaf
ba ADD
sec
1,,
ˆ (4.102b)
sendo tsecNG o número de pontos de Gauss de cada elemento finito da secção, iGPA , e
biafD , a área e o módulo de elasticidade longitudinal tangente do betão associado ao ponto
de Gauss i da secção.
– submatriz associada à deformação de flexão
[ ]{ } p
N
ps
Tgff
b
fTf
gf
bf WJTBDBTK
afs
p∑=
=1
11
ll (4.103a)
em que,
( )
( )∑=
−
−=
=
tsecNG
i i,GPi,b
i,afi,GPi,i,b
i,af
i,GPi,i,b
i,afi,GPi,b
i,afb
,fb
,f
b,f
b,fb
fAxDAxxD
AxxDAxDDDDD
D1
2
232
32
2
3
2221
1211
lll
lll
(4.103b)
sendo li,x2 e l
i,x3 as coordenadas locais do ponto de Gauss i da secção segundo 2l e 3l em
relação ao centro de gravidade da mesma.
– submatriz associada à deformação de interacção axial-flexão
[ ]{ } p
N
ps
Tgff
b
afTa
ga
baf WJTBDBTK
afs
p∑=
=1
11
ll (4.104a)
em que,

Capítulo 4
134
{ } { }∑=
−==tsecNG
ii,GPi,
bi,afi,GPi,
bi,af
b,af
b,af
b
af AxDAxDDDD1
231211ll . (4.104b)
– submatriz associada à deformação de interacção flexão-axial
[ ]{ } p
N
ps
Tgaa
b
faTf
gf
bfa WJTBDBTK
afs
p∑=
=1
11
ll (4.105a)
em que,
∑=
−=
=tsecNG
i i,GPi,b
i,af
i,GPi,b
i,af
b,fa
b,fab
faAxD
AxD
D
DD
1 2
3
21
11
l
l
. (4.105b)
– submatriz associada à deformação de corte
[ ]{ } p
N
ps
Tgcc
b
cTc
gc
bc WJTBDBTK
cts
p∑=
=1
11
ll (4.106a)
em que,
∑=
=
=
tsecNG
i*
i,GPb
i,ct
*i,GP
bi,ct
b,c
b,c
b,c
b,cb
c ADAD
DDDD
D12221
1211
00
(4.106b)
sendo bictD , o módulo de elasticidade transversal tangente.

Modelo Numérico
135
– submatriz associada à deformação de torção
[ ]{ } p
N
ps
Tgtt
bt
Tt
gt
bt WJTBDBTK
afs
p∑=
=1
11
ll (4.107a)
em que,
( ) ( )[ ]∑=
+=tNG
iiGPii
bict
bt AxxDD
sec
1,
2
,2
2
,3,ˆ ll . (4.107b)
– submatriz associada à deformação de interacção corte-torção
[ ]{ } p
N
ps
Tgtt
b
ctTc
gc
bct WJTBDBTK
cts
p∑=
=1
11
ll (4.108a)
em que,
∑=
−
=
=tsecNG
i i,GPi,b
i,ct
i,GPi,b
i,ct
b,ct
b,ctb
ctAxD
AxD
D
DD
1 2
3
21
11
l
l
. (4.108b)
– submatriz associada à deformação de interacção torção-corte
[ ]{ } p
N
ps
Tgcc
b
tcTt
gt
btc WJTBDBTK
cts
p∑=
=1
11
ll (4.109a)
em que,
{ } { }∑=
−==tsecNG
ii,GPi,
bi,cti,GPi,
bi,ct
b,tc
b,tc
b
tc AxDAxDDDD1
231211ll . (4.109b)
Capítulo 4
136
O número de pontos de Gauss associados à integração das submatrizes de rigidez axial,
flexão, axial-flexão e flexão axial, afsN 1 , são os mesmos. Verifica-se uma situação idêntica
com o número de pontos de Gauss associados à integração das submatrizes de rigidez de
corte, torção, corte-torção, torção-corte, ctsN 1 .
4.3.2.2 Contribuição da armadura
A armadura é discretizada por elementos de barra biarticulada 3D de dois ou três nós.
Tendo em conta a sua localização na secção transversal, para além dos termos da matriz de
rigidez associados à deformação axial que se adicionam aos do betão, é preciso também
adicionar os termos da matriz de rigidez associados à deformação de flexão e à interacção
axial-flexão e flexão-axial. Assim, o número de pontos de Gauss associados à integração
das submatrizes de rigidez da armadura, sK , são os mesmos que os utilizados na
integração das submatrizes de rigidez afectas ao betão, bK .
Tendo em conta o número de armaduras, a sua localização na secção transversal e
aplicando a integração numérica de Gauss-Legendre, as submatrizes de rigidez da
armadura passam a ser obtidas a partir das expressões que se apresentam de seguida:
– submatriz associada à deformação axial
[ ]{ } p
N
ps
Tgaa
sa
Ta
ga
sa WJTBDBTK
afs
p∑=
=1
11
ll (4.110a)
em que,
∑=
=NS
nns
snaf
sa ADD
1,,
ˆ (4.110b)

Modelo Numérico
137
sendo NS o número de armaduras na secção, nsA , a área associada à armadura n e snafD , o
módulo de elasticidade longitudinal tangente da armadura n .
– submatriz associada à deformação de flexão
[ ]{ } p
N
ps
Tgff
s
fTf
gf
sf WJTBDBTK
afs
p∑=
=1
11
ll (4.111a)
em que,
( )
( )∑=
−
−=
=
NS
n nsns
nafnsnns
naf
nsnns
nafnsns
nafsf
sf
sf
sfs
fAxDAxxD
AxxDAxDDDDD
D1 ,
2
,2,,,3,2,
,,3,2,,
2
,3,
22,21,
12,11,
ˆˆˆˆ
ˆlll
lll
(4.111b)
sendo lnx ,2 e l
nx ,3 as coordenadas locais da armadura n segundo 2l e 3l , em relação ao
centro de gravidade da secção.
– submatriz associada à deformação de interacção axial-flexão
[ ]{ } p
N
ps
Tgff
s
afTa
ga
saf WJTBDBTK
afs
p∑=
=1
11
ll (4.112a)
em que,
{ } { }∑=
−==NS
nnsn
snafnsn
snafafaf
s
af AxDAxDDDD1
,,2,,,3,12,11,ˆˆˆ ll . (4.112b)

Capítulo 4
138
– submatriz associada à deformação de interacção flexão-axial
[ ]{ } p
N
ps
Tgaa
s
faTf
gf
sfa WJTBDBTK
afs
p∑=
=1
11
ll (4.113a)
em que,
∑=
−=
=NS
n nsns
naf
nsns
naf
sfa
sfas
faAxD
AxD
D
DD
1 ,,2,
,,3,
21,
11,
ˆ
ˆˆ
l
l
. (4.113b)
4.3.3 Forças internas
As forças nodais equivalentes ao estado de tensão na estrutura também têm que ser
avaliadas. O processo é idêntico ao cálculo da matriz de rigidez. Quer o betão, bfint
, quer
as armaduras, sfint
, contribuem para o cálculo das forças internas, )(
int
ef .
Para o cálculo dessas forças internas em cada elemento, efectua-se o seguinte
procedimento (Figura 4.17):
– avaliação dos deslocamentos generalizados (U ) nos pontos de integração
(pontos de Gauss) de cada elemento 3D, conhecidos os deslocamentos
generalizados nos nós;
– cálculo das deformações (ε ) ao nível de cada ponto de Gauss dos elementos
finitos que discretizam a secção;
– cálculo das tensões (σ ) ao nível de cada ponto de Gauss da secção, tendo em
conta as relações constitutivas dos materiais intervenientes;
– integração, ao longo da secção, das tensões para se obterem os esforços
generalizados resistentes ( F );

Modelo Numérico
139
– cálculo das forças internas em cada elemento 3D, )(
int
ef (do betão, bfint
e da
armadura, sfint
).
Ao nível do elemento 3D: U )(
int
ef
⇓ ⇑
Ao nível da secção: ε ⇒ σ ⇒ F
Figura 4.17 – Esquema para a obtenção das forças internas de um elemento.
4.3.3.1 Contribuição do betão
Tendo em conta os vários esforços na secção e a integração numérica de Gauss-Legendre,
as forças nodais equivalentes ao estado de tensão instalado no betão determinam-se a partir
das expressões:
– forças nodais correspondentes a graus de liberdade de deformação axial, equivalentes
ao estado de tensão no elemento
{ } p
N
psb
Ta
ga
b
aint,WJNBTf
afs
p∑=
=1
11
l (4.114a)
em que,
∑=
=tsecNG
ii,GP
bi,afb AN
1
σ (4.114b)
sendo biaf ,σ a tensão normal no betão, no ponto de Gauss i da secção.
Capítulo 4
140
– forças nodais correspondentes a graus de liberdade de deformação por flexão,
equivalentes ao estado de tensão no elemento
{ } p
N
psb
Tf
gf
b
fint,WJMBTf
afs
p∑=
=1
11
l (4.115a)
em que,
∑=
−=
tsecNG
i i,GPi,b
i,af
i,GPi,b
i,afb Ax
AxM
1 2
3l
l
σσ
. (4.115b)
– forças nodais correspondentes a graus de liberdade de deformação por corte,
equivalentes ao estado de tensão no elemento
{ } p
N
psb
Tc
gc
b
cint,WJQBTf
afs
p∑=
=1
11
l (4.116a)
em que,
∑=
=tsecNG
i*
i,GPb
i,
*i,GP
bi,
b AA
Q1 13
12
ττ
(4.116b)
sendo bi,12τ e b
i,13τ as tensões tangenciais no betão no ponto de Gauss i da secção segundo
os eixos locais 2l e 3l .
– forças nodais correspondentes a graus de liberdade de deformação por torção,
equivalentes ao estado de tensão no elemento
{ } p
N
psb
Tt
gt
b
tint,WJTBTf
afs
p∑=
=1
11
l (4.117a)

Modelo Numérico
141
em que,
iGPl
ib
i
NG
iiGP
li
bib AxAxT
t
,,2,131
,,3,12
sec
ˆ ττ∑=
+−= (4.117b)
4.3.3.2 Contribuição da armadura
As forças nodais equivalentes ao estado de tensão instalado na armadura, s
af
int,, s
ff
int,, são
obtidas da forma seguinte: – forças nodais correspondentes a graus de liberdade de deformação axial, equivalentes
ao estado de tensão na armadura
{ } p
N
pss
Ta
ga
s
aint,WJNBTf
afs
p∑=
=1
11
l (4.118a)
em que,
∑=
=NS
nns
snafs AN
1,,
ˆ σ (4.114b)
sendo snaf ,σ a tensão normal na armadura n .
– forças nodais correspondentes a graus de liberdade de deformação por flexão,
equivalentes ao estado de tensão na armadura
{ } p
N
pss
Tf
gf
s
fint,WJMBTf
afs
p∑=
=1
11
l (4.119a)
em que,

Capítulo 4
142
∑=
−=
NS
n n,sn,s
n,af
n,sn,s
n,afs Ax
AxM
1 2
3l
l
σσ
. (4.115b)
As forças nodais equivalentes e a matriz de rigidez foram calculadas utilizando-se a mesma
ordem de integração.
4.3.4 Leis constitutivas
Nesta secção apresentam-se as leis constitutivas utilizadas para simular o comportamento
dos materiais intervenientes, designadamente, betão e armaduras.
4.3.4.1 Lei constitutiva do betão à compressão
Para simular o comportamento à compressão uniaxial do betão simples utilizou-se a lei
proposta pelo código modelo CEB-FIP 1990 [MC90], cujos ramos são definidos pelas
seguintes equações,
lim,
11
2
111 ,21
cccm
c
c
c
ci
c
c
c
c
c
ci
c f
EE
EE
εε
εε
εε
εε
σ <
−+
−
= (4.120)
com,

Modelo Numérico
143
−
++
+=
2/12
111lim, 2
11
21
41
121
21
c
ci
c
cicc E
EEE
εε (4.121)
e,
( ) lim,
1
11lim,
2
12
1lim,1lim,
,/
4/2
/1
cccmc
c
ccc
c
ccccc f εε
εε
ξεεε
ε
εεξ
εεσ ≥
−+
−=
−
(4.122)
com
2
11
lim,
11
lim,
1
2
1
lim,
12
224
+
−
−+
−
=
c
ci
c
c
c
ci
c
c
c
ci
c
c
EE
EE
EE
ε
ε
ε
ε
ε
ε
ξ . (4.123)
O módulo de elasticidade tangente, ciE , o módulo de elasticidade secante, 1cE , a extensão
correspondente à tensão máxima de compressão no betão, 1cε e a extensão limite, lim,cε ,
encontram-se representados na Figura 4.18. O valor sugerido para εc1 é de 0.0022.

Capítulo 4
144
εc1 εc,lim εcu cε
σ c
f cm
05. fcm
eq.(4.120)
eq.(4.122)Ec1
Eci
Figura 4.18 – Diagrama σ εc c− proposto pelo código modelo CEB-FIP 1990 [MC90] para simular o
comportamento do BS à compressão uniaxial.
O confinamento no betão devido ao efeito das armaduras transversais não foi tido em conta
no modelo desenvolvido. Esta opção deve-se ao facto das vigas que se ensaiaram
apresentarem uma secção oca na maior parte do seu desenvolvimento, e não estarem
submetidas a esforços axiais, pelo que é irrelevante a consideração do efeito de
confinamento nestes casos. Contudo, o desempenho do modelo, quando aplicado a
estruturas porticadas, exigirá a inclusão de leis constitutivas que atendam ao confinamento
proporcionado pelas cintas e estribos.
4.3.4.2 Lei constitutiva do betão à tracção
Em tracção, o betão apresenta um comportamento linear e elástico até fendilhar. Após
fendilhar, o seu comportamento é regido pela sua capacidade de absorção de energia,
denominada de energia de fractura, e, se existir armadura, pelas características das
armaduras que atravessam o betão fendilhado. No caso do betão simples a lei que governa
o comportamento do betão fendilhado denomina-se de amolecimento em tracção (tension
softening), enquanto no caso do betão armado a lei designa-se de endurecimento (tension
stiffening).

Modelo Numérico
145
O modelo utilizado neste trabalho para o betão armado fendilhado é o modelo utilizado por
Barros [Bar95]. Este modelo é uma alteração ao modelo proposto por Massicotte et al.
[Mas90] o qual se baseia no princípio de que o comportamento do betão armado
fendilhado deve ser governado pelas propriedades de fractura do betão e pelas
características das armaduras que atravessam as fendas.
– Tension Softening
Para definir o comportamento uniaxial do betão simples fendilhado é proposto um
diagrama bilinear como se ilustra na Figura 4.19. Esta relação constitutiva depende da
resistência à tracção, ctmf , da energia de fractura, fG , da banda de fendilhação, bl , e de
dois parâmetros, α e 1p [Bar95].
Do ponto de vista da ciência dos materiais, e na falta de modelo com base mais científica, a
largura de banda de fendilhação, bl , pode ser considerada igual a três vezes a máxima
dimensão do inerte, tal como é proposto por Bazant e Oh [Baz83]. Do ponto de vista da
modelação numérica, a largura de banda de fendilhação deve estar relacionada com a
dimensão dos elementos finitos, por forma a que os resultados sejam independentes da
malha de elementos finitos adoptada na discretização da estrutura. No presente trabalho
optou-se por atribuir à largura de banda de fendilhação o comprimento associado ao ponto
de Gauss do elemento.
A energia de fractura é obtida por intermédio da expressão apresentada no capítulo 2,
aquando da apresentação dos ensaios de flexão efectuados sob três pontos de carga, nas
vigas entalhadas de BS.
O valor de 2p é calculado através da expressão seguinte [Bar95],
pG
l fpf
b ctm cr2
12
= −−
α εα
α (4.124)

Capítulo 4
146
crp ε1 ctε
soctσ
ctmf
ctmfα
crε crp ε2
Eci
bff l/Gg =
Figura 4.19 – Diagrama de retenção de tensões de tracção para o BS.
– Tension Stiffening
Analisando o processo de fendilhação de um tirante de betão armado, observam-se
diversas fases que correspondem aos pontos característicos representados no diagrama de
retenção de tensões de tracção da Figura 4.20. O ponto A corresponde ao início da
fendilhação, o ponto B corresponde à estabilização da fendilhação, o ponto C está
associado à cedência da armadura na secção da fenda e o ponto D é o ponto onde a
extensão média no tirante alcança a extensão de cedência da armadura.
No diagrama da Figura 4.20b é possível constatar que a capacidade de retenção de tensões
de tracção do betão entre fendas diminui com o aumento da extensão média.
A descrição pormenorizada do modelo de endurecimento encontra-se em [Bar95].

Modelo Numérico
147
FA s
l/2 l o
FcA
l/2
sm
armaduraisolada
a)
∆ ∆
σ = F/As
ctσ = F/Acst
fctm
Fx∆
Fx∆ct,xσ = Ast
c
mε = l/l∆
mε
o
b)
Fx∆ - parcela de força retida pelo betão
A B
C D
D
C
B
A
Figura 4.20 – Diagrama de retenção de tensões de tracção para o BA [Bar95].
a) Relação entre a extensão média e a tensão na armadura.
b) Relação entre a extensão média e a tensão no betão entre fendas.
4.3.4.3 Lei constitutiva do betão ao corte
O betão, quando sujeito a esforços de corte, também desenvolve comportamento não
linear. Para simular esse comportamento é proposta uma lei tensão tangencial-distorção
com um desenvolvimento trilinear, idêntica à utilizada na simulação do comportamento da
armadura (Figura 4.22). Segundo o modelo que se propõe, a resposta é linear até ao
aparecimento da primeira fendilhação. A partir desse ponto, a rigidez ao corte do betão
decresce significativamente, pelo que, os dois ramos lineares que se seguem traduzem essa
diminuição de rigidez até se atingir a tensão de rotura ao corte do betão. A forma da lei
proposta foi calibrada por intermédio dos resultados experimentais obtidos. No entanto,
não foi tida em conta a contribuição da armadura para a rigidez ao corte. Além disto, a lei

Capítulo 4
148
não tem suporte matemático, apenas pretende simular comportamentos observados
experimentalmente.
4.3.4.4 Lei constitutiva da armadura
No modelo desenvolvido, a simulação do comportamento das armaduras pode ser
efectuada por um diagrama linear-parábola ou por um diagrama trilinear [Bar95], como se
ilustra na Figura 4.21 e Figura 4.22, respectivamente.
Para extensões superiores à extensão correspondente à tensão de rotura, suf , admite-se que
o aço desenvolve comportamento perfeitamente plástico.
– Diagrama linear-parábola
Na Figura 4.21 representa-se um diagrama constituído, numa primeira fase, por uma
relação linear entre a extensão e a tensão, seguindo-se uma relação não linear constituída
por uma parábola do 2º grau. A relação ss εσ − deste diagrama expressa-se por,
sss E εσ = se s
sus E
fαε < , (4.125)
22 2 susussuss f γεγεεγεσ ++−= se s
sus E
fαε ≥ , (4.126)
sus f=σ se sus εε > , (4.127)
em que

Modelo Numérico
149
( )
2
2
2 2
1
sus
susu
s
su
su
Ef
Ef
f
εαεα
αγ
+−
−= . (4.128)
Para se demarcar a fase linear da fase não linear é utilizado o parâmetro α que pode variar
de 0 a 1. O módulo de elasticidade longitudinal tangente obtém-se derivando a expressão
(4.126) em relação a sε obtendo-se,
( )susstE εεγ −= 2 (4.129)
σ s
fsu
α f su
Est
Es
ε su ε s
Est ( ) = 0ε sε su=
( ) =ε s =σ s
α f su
Es
( ) =ε sε su=σ s
α f su
f su
Figura 4.21 – Diagrama linear-parábola.

Capítulo 4
150
– Diagrama trilinear
Este diagrama apresenta três ramos lineares (ver Figura 4.22). As expressões para calcular
as tensões para uma determinada deformação são as seguintes,
sss E εσ = se 1ss εε < , (4.130)
( )111 ssssys Ef εεσ −+= se 21 sss εεε ≤< , (4.131)
( )222 ssssys Ef εεσ −+= se suss εεε ≤<2 , (4.132)
sus f=σ se sus εε > , (4.133)
em que,
s
sys E
f 11 =ε , (4.134)
( )
1
1212
s
sysyss E
ff −+= εε , (4.135)
( )
2
22
s
sysussu E
ff −+= εε . (4.136)

Modelo Numérico
151
σ s
fsy2
sE
Es1
εs
fsuEs2
f sy1
εsuεs2εs1
Figura 4.22 – Diagrama trilinear.
Neste trabalho admitiu-se que o aço tem o mesmo comportamento à tracção e à
compressão.
4.3.5 Algoritmo de análise não linear – método de Newton-Raphson
Na análise não linear de uma estrutura, para se acompanhar a evolução do campo de
deformações e de tensões, deve aplicar-se a solicitação por incrementos, aumentando assim
a precisão do método [Aze85,Cru91]. Como os incrementos da solicitação não são
infinitamente pequenos, é preciso que em cada incremento se realizem iterações de modo a
encontrar a solução correcta. No presente trabalho o método de Newton-Raphson foi o
método incremental-iterativo utilizado [Owe80,Zie89].
No modelo desenvolvido estão disponíveis várias vertentes do método de Newton-Raphson
[Owe80]. Assim, a matriz de rigidez pode ser calculada:
– em cada incremento e iteração;
– no 1º incremento e 1ª iteração;
– na 1ª iteração de cada incremento;

Capítulo 4
152
– na 2ª iteração de cada incremento;
– na 1ª e 2ª iteração de cada incremento.
A matriz de rigidez da estrutura terá sempre que ser calculada na 1ª iteração do 1º
incremento.
Em todos os processos iterativos, a solução numérica alcançada é uma solução aproximada
da solução real. Assim, é necessário definir uma tolerância limite, abaixo da qual se admite
que o processo convergiu para a solução.
Vários são os critérios de convergência utilizados:
– norma de deslocamentos;
– norma energética;
– norma de forças.
O critério utilizado no código computacional desenvolvido foi o critério de convergência
em termos de norma de forças. Em determinado incremento k e iteração i , a norma do
resíduo (4.137), ou seja, da diferença entre as forças externas e as forças internas dessa
iteração, em relação à norma das forças exteriores desse incremento, tem que ser menor
que uma determinada tolerância t (4.138).
i
kkext
ik ffr
int,,−= (4.137)
tf
ff
kext
i
kkext <−
,
int,, (4.138)

Modelo Numérico
153
A tolerância depende do tipo de critério utilizado, sendo valores correntes na ordem de
031 −= et para os critérios em termos de norma de deslocamentos e de norma de forças e
de 061 −= et para o critério em termos de norma energética.
No Quadro 4.2 apresenta-se o algoritmo para a resolução das equações não lineares,
resultantes do comportamento não linear material, utilizado no modelo numérico
desenvolvido.
4.3.6 Simulação numérica
Para calibrar e avaliar o desempenho do modelo desenvolvido, os ensaios experimentais
efectuados e descritos no capítulo 3 foram simulados.
A viga foi dividida longitudinalmente em vários elementos finitos de três nós. O
comprimento de cada elemento teve em conta o facto da viga ser constituída por dois
tramos de secção cheia e um tramo de secção oca, e, ainda, que a posição dos pontos de
Gauss de cada elemento coincidisse com as várias secções de leitura, para que os
resultados obtidos através do modelo numérico pudessem ser comparados com os
resultados obtidos por via experimental (ver Figura 3.9).
As secções, maciça e oca, foram discretizadas em elementos finitos planos de 4 nós com
33× pontos de Gauss. A área de influência de cada ponto de Gauss constituiu uma fibra na
secção transversal (ver Figuras 4.23 e 4.24).
A área da secção dos varões e as coordenadas locais da posição que ocupam na secção
transversal definem os varões longitudinais de aço (ver Figuras 4.23 e 4.24).

Capítulo 4
154
Quadro 4.2 – Algoritmo para a resolução das equações não lineares, resultantes do comportamento não linear material.
i) Ciclo aos incrementos ( mk →= 1 ):
i.1) Incremento da solicitação kext
f,
e do vector das forças residuais iniciais 0kr , e
cálculo do vector dos deslocamentos iniciais 0ku :
kextkextkextfff
,1,,∆+=
− ; final
kkextk rfr 1,
0−+∆= ; final
kk uu 10
−=
Nota: para 1=k ⇒ 01,
=−kext
f , 01 =−finalkr e 01 =−
finalku .
i.2) Ciclo iterativo ( ni →= 1 ):
i.2.1) Cálculo, se necessário, da matriz de rigidez tangente ikTK , tendo em
conta o estado de deformação da iteração anterior 1−iku ;
i.2.2) Resolução do sistema de equações:
ik
ikT
ik uKr ∆=−
,1
sendo 1−ikr o vector das forças residuais do incremento actual k e da
iteração 1−i ; i.2.3) Actualização dos deslocamentos nodais:
ik
ik
ik uuu ∆+= −1
i.2.4) Com base nos novos deslocamentos iku , cálculo das forças nodais
equivalentes i
kf
int,;
i.2.5) Cálculo do vector das forças residuais ikr :
i
kkext
ik ffr
int,,−=
i.2.6) Verificação do critério de convergência:
tf
r
f
ff
kext
ik
kext
i
kkext ≤=−
,,
int,, ?
i.2.7) Se a solução convergiu, então o ciclo às iterações acaba: ik
finalk uu = e
ik
finalk rr = , novo incremento de carga ⇒ i); se não, nova iteração ⇒ i.2).
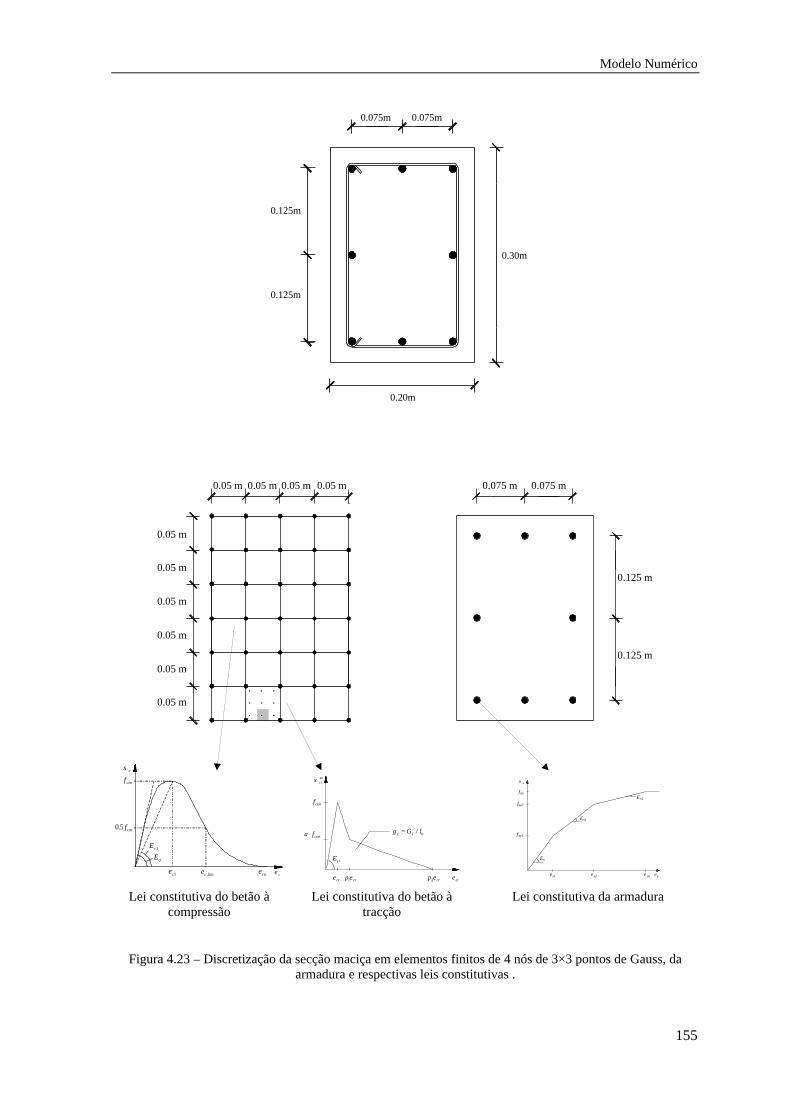
Modelo Numérico
155
0.30m
0.20m
0.075m
0.125m
0.125m
0.075m
⇓ 0.05 m
0.05 m
0.05 m
0.05 m
0.05 m
0.05 m
0.05 m
0.05 m0.05 m0.05 m
× ×× × ×
×
× ××
0.075 m0.075 m
0.125 m
0.125 m
εc1 εc,lim εcu cε
σ c
f cm
0 5. fcm
Ec1
Eci
crp ε1 ctε
soctσ
ctmf
ctmfα
crε crp ε2
Eci
bff l/Gg =
σ s
fsy2
sE
Es1
εs
fsuEs2
f sy1
εsuεs2εs1 Lei constitutiva do betão à
compressão Lei constitutiva do betão à
tracção Lei constitutiva da armadura
Figura 4.23 – Discretização da secção maciça em elementos finitos de 4 nós de 3×3 pontos de Gauss, da armadura e respectivas leis constitutivas .

Capítulo 4
156
0.075m
0.125m
0.125m
0.05m
0.20m
0.05m
0.05m
0.05m 0.10m
0.075m
⇓ 0.05 m
0.05 m
0.05 m
0.05 m
0.05 m
0.05 m
0.05 m
0.05 m0.05 m0.05 m
× ×× × ×
×
× ××
0.075 m0.075 m
0.125 m
0.125 m
εc1 εc,lim εcu cε
σ c
f cm
0 5. fcm
Ec1
Eci
crp ε1 ctε
soctσ
ctmf
ctmfα
crε crp ε2
Eci
bff l/Gg =
σ s
fsy2
sE
Es1
εs
fsuEs2
f sy1
εsuεs2εs1 Lei constitutiva do betão à
compressão Lei constitutiva do betão à
tracção Lei constitutiva da armadura
Figura 4.24 – Discretização da secção oca em elementos finitos de 4 nós de 3×3 pontos de Gauss, da armadura e respectivas leis constitutivas .

Modelo Numérico
157
A solicitação consistiu na aplicação incremental de uma carga pontual (P) na extremidade
livre da viga em consola (Figura 4.25), em conjunto com um momento torsor (P×0.5m).
Este momento torsor pretende simular o facto da carga ter sido aplicada na extremidade de
um perfil em aço ligado à viga, como se ilustra na Figura 2.2.
Os resultados da simulação numérica foram sobrepostos com os resultados experimentais
obtidos em todas as vigas das séries ensaiadas.
P
P×0.5m
2.74 m
Figura 4.25 – Carregamento aplicado no modelo numérico, na simulação dos ensaios experimentais.
Foram realizadas várias simulações dos ensaios por forma a comparar o efeito de alguns
fenómenos, tais como o “tension stiffening”, a forma da lei constitutiva de simulação do
comportamento ao corte do betão, a ocorrência de deslizamento ente o betão e as
armaduras e ainda a influência da redução de algumas características mecânicas da
armadura.
O deslizamento entre o betão e as armaduras é um fenómeno que não está a ser simulado,
directamente, pelo modelo numérico desenvolvido. Para ter em conta a ocorrência de
deslizamento, o que provoca uma deformação adicional na resposta de elementos de BA
fendilhados, Guedes [Gue97] optou pela diminuição do módulo de elasticidade da
armadura longitudinal. Como a armadura é a principal responsável pelo comportamento
pós-fendilhação do BA, ao reduzir-se o módulo de elasticidade diminui-se a rigidez da
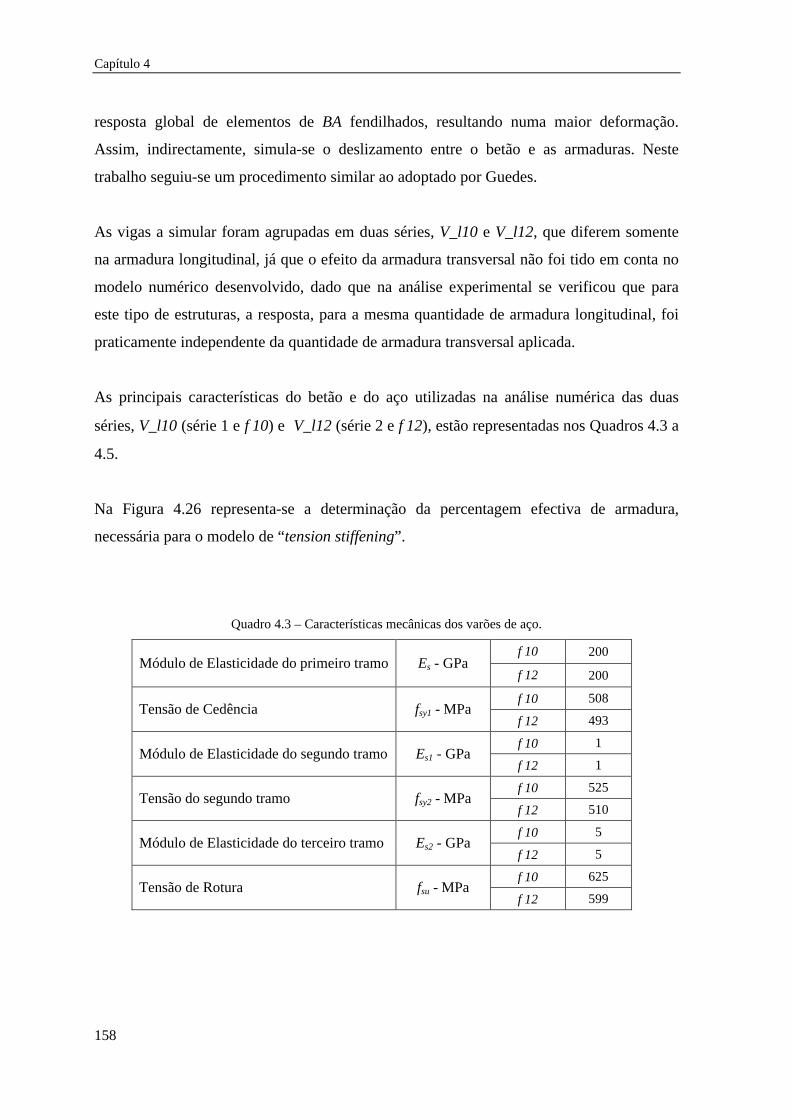
Capítulo 4
158
resposta global de elementos de BA fendilhados, resultando numa maior deformação.
Assim, indirectamente, simula-se o deslizamento entre o betão e as armaduras. Neste
trabalho seguiu-se um procedimento similar ao adoptado por Guedes.
As vigas a simular foram agrupadas em duas séries, V_l10 e V_l12, que diferem somente
na armadura longitudinal, já que o efeito da armadura transversal não foi tido em conta no
modelo numérico desenvolvido, dado que na análise experimental se verificou que para
este tipo de estruturas, a resposta, para a mesma quantidade de armadura longitudinal, foi
praticamente independente da quantidade de armadura transversal aplicada.
As principais características do betão e do aço utilizadas na análise numérica das duas
séries, V_l10 (série 1 e φ10) e V_l12 (série 2 e φ12), estão representadas nos Quadros 4.3 a
4.5.
Na Figura 4.26 representa-se a determinação da percentagem efectiva de armadura,
necessária para o modelo de “tension stiffening”.
Quadro 4.3 – Características mecânicas dos varões de aço.
φ10 200 Módulo de Elasticidade do primeiro tramo Es - GPa
φ12 200
φ10 508 Tensão de Cedência fsy1 - MPa
φ12 493
φ10 1 Módulo de Elasticidade do segundo tramo Es1 - GPa
φ12 1
φ10 525 Tensão do segundo tramo fsy2 - MPa
φ12 510
φ10 5 Módulo de Elasticidade do terceiro tramo Es2 - GPa
φ12 5
φ10 625 Tensão de Rotura fsu - MPa
φ12 599

Modelo Numérico
159
Quadro 4.4 – Características relativas ao betão.
série 1 20.6 Tensão média de rotura à compressão uniaxial cmf - MPa
série 2 24.2
Módulo de elasticidade longitudinal tangente ciE - GPa série 1 e 2 26.0
Extensão correspondente à tensão máxima de compressão 1cε série 1 e 2 0.0022
Tensão de rotura à tracção ctmf - MPa série 1 e 2 2.0
série 1 0.2221 Energia de fractura fG - N/mm
série 2 0.1711
α série 1 e 2 1/3 Parâmetros de fractura
1p série 1 e 2 3.0
ci
s
EE
n = série 1 e 2 7.69
1β série 1 e 2 1.0
2β série 1 e 2 1.0
série 1 3.14 1,effρ - %
série 2 4.52
série 1 1.57 2,effρ - %
série 2 2.26
série 1 0.79
Variáveis utilizadas no modelo de “tension stiffening” [Bar95]
3,effρ - % série 2 1.13
1,effρ
2,effρ
3,effρ
ci
sii,eff A
A=ρ
1,effρ
2,effρ
3,effρ
ci
sii,eff A
A=ρ
a) b)
Figura 4.26 – Área de influência de cada varão e definição da percentagem efectiva de armadura para a
secção oca a) e cheia b).

Capítulo 4
160
Quadro 4.5 – Definição do modelo não linear de corte proposto.
Módulo de distorção do primeiro tramo GL - GPa série 1 e 2 10.83
série 1 0.4 Tensão de corte correspondente ao início de fendilhação τcr - MPa
série 2 0.6
série 1 0.8 Módulo de distorção do segundo tramo G2 - GPa
série 2 1.1
série 1 1.4 Tensão de corte do segundo tramo τ 2 - MPa
série 2 1.6
série 1 0.1 Módulo de distorção do terceiro tramo G3 - GPa
série 2 0.55
série 1 2.0 Tensão de rotura por corte τu - MPa
série 2 2.2
Na primeira simulação, apenas da série V_l10, considerou-se um diagrama linear para a lei
constitutiva relativa ao corte e não se teve em conta o efeito do “tension stiffening”. Os
resultados da simulação numérica e os obtidos experimentalmente, na secção S1,
correspondentes às relações força-deslocamento vertical (F-δ), momento flector-rotação
por flexão (Mf -θf) e momento torsor-rotação por torção (Mt -θt) são comparados nas
Figuras 4.27 a 4.29.

Modelo Numérico
161
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S1 (mm)
Forç
a (k
N)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
Numérico v_l10
Figura 4.27 – Diagrama F- δ na secção S1.
0
5
10
15
20
25
30
0 5 10 15 20 25 30
Rotação - flexão na secção S1 (x10-3)
Mom
ento
flec
tor
na s
ecçã
o S
1 (k
Nm
)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
Numérico v_l10
Figura 4.28 – Diagrama Mf -θf na secção S1.

Capítulo 4
162
0
3
5
8
10
13
15
0 15 30 45 60 75
Rotação - torção na secção S1 (x10-3)
Mom
ento
tors
or (
kNm
)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
Numérico v_l10
Figura 4.29 – Diagrama Mt -θt na secção S1.
Analisando os gráficos verifica-se um afastamento das curvas da simulação numérica em
relação às obtidas experimentalmente. Depois de uma análise crítica dos resultados,
verificou-se que as curvas obtidas por via experimental, incluem deslocamentos/rotações
de corpo rígido devidas à rotação do “encastramento”, que não foi possível quantificar por
intermédio da instrumentação colocada na secção S0, como se descreveu no capítulo 3.
Para tentar resolver este problema, simulou-se o ensaio em regime linear, incluindo o
pórtico com a sua rigidez real. Verificou-se que a secção de encastramento sofreu
deslocamentos, sendo a rotação por flexão significativa.

Modelo Numérico
163
Com base nas respostas experimentais e numéricas durante a fase elástica das vigas,
estimou-se a rotação do sistema constituído para simular o encastramento.
Calculando os deslocamentos, nas secções instrumentadas, devidos às referidas rotações e
adicionando-os aos resultados obtidos numericamente obtiveram-se as respostas
representadas nas Figuras 4.30 a 4.32, para a secção de leitura S1.
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S1 (mm)
Forç
a (k
N)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
Numérico v_l10
Figura 4.30 – Diagrama F- δ na secção S1 com a correcção das rotações.

Capítulo 4
164
0
5
10
15
20
25
30
0 5 10 15 20 25 30
Rotação - flexão na secção S1 (x10-3)
Mom
ento
flec
tor
na s
ecçã
o S
1 (k
Nm
)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
Numérico v_l10
Figura 4.31 – Diagrama Mf -θf na secção S1 com a correcção das rotações.
0
3
5
8
10
13
15
0 15 30 45 60 75
Rotação - torção na secção S1 (x10-3)
Mom
ento
tors
or (
kNm
)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
Numérico v_l10
Figura 4.32 – Diagrama Mt -θt na secção S1 com a correcção das rotações.

Modelo Numérico
165
Da análise das curvas F-δ e Mf -θf, pode-se concluir que:
– a curva numérica apresenta uma fase linear de pequeno desenvolvimento até
atingir o início de fendilhação do betão. Nesta fase os resultados numéricos
aproximam-se, com bastante rigor, dos experimentais;
– depois do início da fendilhação, a curva numérica apresenta uma perda de
rigidez que depois é recuperada. Nesta fase a concordância entre as curvas
numérica e experimentais já não é tão boa;
– na parte final, a curva numérica afasta-se do comportamento registado pelas
curvas experimentais, apresentando uma rigidez e uma capacidade de carga
mais elevada.
Analisando o gráfico Mt-θt, verifica-se que há um grande afastamento entre a curva
numérica e as curvas experimentais, facto que deriva da consideração de um modelo linear
para o corte.
Na simulação seguinte considerou-se o efeito de “tension stiffening” e utilizou-se o modelo
não linear de corte proposto, que simula a degradação da rigidez de corte após a
fendilhação. As Figuras 4.33 a 4.39, apresentam os resultados para as diferentes secções de
leitura e para as duas séries, V_l10 e V_l12.

Capítulo 4
166
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S1 (mm)
Forç
a (k
N)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
v1_l12_t150
v2_l12_t150
v1_l12_t75
v2_l12_t75
Numérico v_l10
Numérico v_l12
Figura 4.33 – Diagrama F- δ na secção S1 com “tension stiffening” e corte não linear.
0
5
10
15
20
25
30
0 5 10 15 20 25 30
Rotação - flexão na secção S1 (x10-3)
Mom
ento
flec
tor
na s
ecçã
o S
1 (k
Nm
)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
v1_l12_t150
v2_l12_t150
v1_l12_t75
v2_l12_t75
Numérico v_l10
Numérico v_l12
Figura 4.34 – Diagrama Mf -θf na secção S1 com “tension stiffening” e corte não linear.

Modelo Numérico
167
0
3
5
8
10
13
15
0 15 30 45 60 75
Rotação - torção na secção S1 (x10-3)
Mom
ento
tors
or (
kNm
)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
v1_l12_t150
v2_l12_t150
v1_l12_t75
v2_l12_t75
Numérico v_l10
Numérico v_l12
Figura 4.35 – Diagrama Mt -θt na secção S1 com “tension stiffening” e corte não linear.
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S2 (mm)
Forç
a (k
N)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
v1_l12_t150
v2_l12_t150
v1_l12_t75
v2_l12_t75
Numérico v_l10
Numérico v_l12
Figura 4.36 – Diagrama F- δ na secção S2 com “tension stiffening” e corte não linear.

Capítulo 4
168
0
5
10
15
20
25
30
0 5 10 15 20 25 30
Rotação - flexão na secção S2 (x10-3)
Mom
ento
flec
tor
na s
ecçã
o S
2 (k
Nm
)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
v1_l12_t150
v2_l12_t150
v1_l12_t75
v2_l12_t75
Numérico v_l10
Numérico v_l12
Figura 4.37 – Diagrama Mf -θf na secção S2 com “tension stiffening” e corte não linear.
0
3
5
8
10
13
15
0 15 30 45 60 75
Rotação - torção na secção S2 (x10-3)
Mom
ento
tors
or (
kNm
)
v1_l10_t150v2_l10_t150v1_l10_t75v2_l10_t75v1_l12_t150v2_l12_t150v1_l12_t75v2_l12_t75Numérico v_l10Numérico v_l12
Figura 4.38 – Diagrama Mt -θt na secção S2 com “tension stiffening” e corte não linear.

Modelo Numérico
169
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S3 (mm)
Forç
a (k
N)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
v1_l12_t150
v2_l12_t150
v1_l12_t75
v2_l12_t75
Numérico v_l10
Numérico v_l12
Figura 4.39 – Diagrama F- δ na secção S3 com “tension stiffening” e corte não linear.
O efeito de perda brusca de rigidez após o início da fendilhação já não é visível na
simulação que inclui o efeito de “tension stiffening”, como se pode verificar nos gráficos
força – deslocamento e momento flector – rotação por flexão. A aproximação das curvas
numéricas com as curvas experimentais pode considerar-se aceitável, sendo a resposta da
simulação numérica mais rígida. Na parte final, há um maior afastamento das curvas,
apresentando, como se referiu, uma maior rigidez em relação à obtida nas curvas
experimentais. Este fenómeno pode ser devido a deslizamentos que tenham ocorrido entre
o betão e a armadura, e que resultaria num acréscimo de deformação.
Da análise das curvas Mt-θt, verifica-se, que com a adopção de uma lei constitutiva não
linear para o corte, o comportamento real da viga é simulado com bastante rigor.

Capítulo 4
170
A relação Mf -θf na secção S1, desprezando e considerando o “tension stiffening”, está
representada na Figura 4.40. Verifica-se que, após a fendilhação do betão o efeito de
“tension stiffening” introduz uma maior capacidade de carga ao elemento, devido à maior
capacidade de retenção de tensões do betão entre fendas.
0
5
10
15
20
25
30
0 5 10 15 20 25 30
Rotação - flexão - S1 (x10-3)
Mom
ento
flec
tor
- S
1 (k
Nm
)
Numérico v_l10 - comtension stiffening
Numérico v_l10
Figura 4.40 – Contribuição do “tension stiffening”.
Para tentar simular o escorregamento entre a armadura e o betão realizou-se mais uma
simulação. Como a resposta após o início da fendilhação é governada fundamentalmente
pela armadura, diminuiu-se em cerca de 35% o valor do módulo de elasticidade do aço,
com o objectivo de tornar a resposta menos rígida e simular o acréscimo de deformação
que o fenómeno de escorregamento provoca [Gue97]. Os resultados para as duas séries,
V_l10 e V_l12, estão apresentados nas Figuras 4.41 a 4.47.

Modelo Numérico
171
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S1 (mm)
Forç
a (k
N)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
v1_l12_t150
v2_l12_t150
v1_l12_t75
v2_l12_t75
Numérico v_l10
Numérico v_l12
Figura 4.41 – Diagrama F- δ na secção S1 com redução do módulo de elasticidade do aço.
0
5
10
15
20
25
30
0 5 10 15 20 25 30
Rotação - flexão na secção S1 (x10-3)
Mom
ento
flec
tor
na s
ecçã
o S
1 (k
Nm
)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
v1_l12_t150
v2_l12_t150
v1_l12_t75
v2_l12_t75
Numérico v_l10
Numérico v_l12
Figura 4.42 – Diagrama Mf -θf na secção S1 com redução do módulo de elasticidade do aço.

Capítulo 4
172
0
3
5
8
10
13
15
0 15 30 45 60 75
Rotação - torção na secção S1 (x10-3)
Mom
ento
tors
or (
kNm
)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
v1_l12_t150
v2_l12_t150
v1_l12_t75
v2_l12_t75
Numérico v_l10
Numérico v_l12
Figura 4.43 – Diagrama Mt -θt na secção S1 com redução do módulo de elasticidade do aço.
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S2 (mm)
Forç
a (k
N)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
v1_l12_t150
v2_l12_t150
v1_l12_t75
v2_l12_t75
Numérico v_l10
Numérico v_l12
Figura 4.44 – Diagrama F- δ na secção S2 com redução do módulo de elasticidade do aço.

Modelo Numérico
173
0
5
10
15
20
25
30
0 5 10 15 20 25 30
Rotação - flexão na secção S2 (x10-3)
Mom
ento
flec
tor
na s
ecçã
o S
2 (k
Nm
)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
v1_l12_t150
v2_l12_t150
v1_l12_t75
v2_l12_t75
Numérico v_l10
Numérico v_l12
Figura 4.45 – Diagrama Mf -θf na secção S2 com redução do módulo de elasticidade do aço.
0
3
5
8
10
13
15
0 15 30 45 60 75
Rotação - torção na secção S2 (x10-3)
Mom
ento
tors
or (
kNm
)
v1_l10_t150v2_l10_t150v1_l10_t75v2_l10_t75v1_l12_t150v2_l12_t150v1_l12_t75v2_l12_t75Numérico v_l10Numérico v_l12
Figura 4.46 – Diagrama Mt -θt na secção S2 com redução do módulo de elasticidade do aço.

Capítulo 4
174
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S3 (mm)
Forç
a (k
N)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
v1_l12_t150
v2_l12_t150
v1_l12_t75
v2_l12_t75
Numérico v_l10
Numérico v_l12
Figura 4.47 – Diagrama F- δ na secção S3 com redução do módulo de elasticidade do aço.
Após o início da fendilhação constata-se que houve uma perda significativa de rigidez das
respostas numéricas e que a aproximação às respostas experimentais é bastante boa.
Verifica-se ainda que a redução do módulo de elasticidade longitudinal do aço, não altera
significativamente o comportamento das vigas de BA antes do início da fendilhação.
Na série V_l10, a curva numérica atinge uma carga última superior às curvas experimentais
respectivas. Assim, numa última simulação, reduziu-se em cerca de 10% a tensão de
cedência e a tensão de rotura do aço, já que estas apresentaram valores superiores àqueles
que se esperavam para o tipo de aço em questão. As Figuras 4.48 a 4.54, apresentam os
resultados para as diferentes secções de leitura. A concordância entre curvas numérica e
experimentais é boa.

Modelo Numérico
175
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S1 (mm)
Forç
a (k
N)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
Numérico v_l10
Figura 4.48 – Diagrama F- δ na secção S1 com redução das tensões de cedência e de rotura do aço.
0
5
10
15
20
25
30
0 5 10 15 20 25 30
Rotação - flexão na secção S1 (x10-3)
Mom
ento
flec
tor
na s
ecçã
o S
1 (k
Nm
)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
Numérico v_l10
Figura 4.49 – Diagrama Mf -θf na secção S1 com redução das tensões de cedência e de rotura do aço.

Capítulo 4
176
0
3
5
8
10
13
15
0 15 30 45 60 75
Rotação - torção na secção S1 (x10-3)
Mom
ento
tors
or (
kNm
)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
Numérico v_l10
Figura 4.50 – Diagrama Mt -θt na secção S1 com redução das tensões de cedência e de rotura do aço.
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S2 (mm)
Forç
a (k
N)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
Numérico v_l10
Figura 4.51 – Diagrama F- δ na secção S2 com redução das tensões de cedência e de rotura do aço.

Modelo Numérico
177
0
5
10
15
20
25
30
0 5 10 15 20 25 30
Rotação - flexão na secção S2 (x10-3)
Mom
ento
flec
tor
na s
ecçã
o S
2 (k
Nm
)v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
Numérico v_l10
Figura 4.52 – Diagrama Mf -θf na secção S2 com redução das tensões de cedência e de rotura do aço.
0
3
5
8
10
13
15
0 15 30 45 60 75
Rotação - torção na secção S2 (x10-3)
Mom
ento
tors
or (
kNm
)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
Numérico v_l10
Figura 4.53 – Diagrama Mt -θt na secção S2 com redução das tensões de cedência e de rotura do aço.

Capítulo 4
178
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S3 (mm)
Forç
a (k
N)
v1_l10_t150
v2_l10_t150
v1_l10_t75
v2_l10_t75
Numérico v_l10
Figura 4.54 – Diagrama F- δ na secção S3 com redução das tensões de cedência e de rotura do aço.
Com todas estas simulações, também se pretendeu, mostrar a dependência dos vários
parâmetros que governam as leis constitutivas dos materiais, o que significa que o seu
conhecimento, (e correcta determinação), é fundamental para simular o comportamento de
elementos de betão armado.
4.4 Conclusões
O modelo numérico desenvolvido para a análise não linear material de estruturas
tridimensionais de betão armado foi apresentado neste capítulo. A formulação do elemento
de viga de Timoshenko 3D para a análise estática linear foi descrita. Esta formulação tem
em conta a deformação provocada pelo esforço transverso e atende aos casos em que o
centro de corte não coincide com o centro de gravidade da secção.

Modelo Numérico
179
O modelo de fibras desenvolvido para secções com geometria qualquer foi apresentado. A
secção pode ser discretizada em elementos finitos planos, e a cada um atribui-se uma lei
constitutiva do material interveniente. As alterações efectuadas no cálculo da matriz de
rigidez e das forças nodais equivalentes por forma a atender ao comportamento não linear
dos materiais também foram apresentadas.
Para simular o comportamento do betão à compressão utilizou-se a lei do CEB-FIP 1990.
O efeito de “tension stiffening” foi tido em consideração e propôs-se para o corte uma lei
não linear, por forma a simular a degradação de rigidez ao corte após a fendilhação. O
comportamento da armadura pode ser simulado através de um diagrama linear-parábola ou
de um diagrama trilinear.
A simulação numérica dos ensaios experimentais foi efectuada, constatando-se que o
modelo simula, com bastante rigor, a resposta experimental das vigas de BA.
Em conclusão, pode dizer-se que o modelo de fibras desenvolvido ao nível da secção, em
conjunto com o elemento de viga de Timoshenko 3D, constitui uma ferramenta útil na
análise não linear material de estruturas de betão armado. Embora só tenham sido
realizados ensaios monotónicos e introduzidas no modelo leis constitutivas para simular
este tipo de ensaios, o modelo de fibras proposto é um modelo versátil e generalista,
podendo ser introduzidas, com facilidade, novas leis constitutivas e assim, simular, por
exemplo, ensaios cíclicos.


CAPÍTULO 5
Conclusão
5.1 Conclusões gerais
O trabalho desenvolvido foi constituído, basicamente, por uma componente experimental e
por uma componente de modelação numérica onde se desenvolveu um código
computacional para a simulação do comportamento não linear material de pórticos
tridimensionais de betão armado.
Durante a campanha experimental, foram efectuados ensaios sobre elementos de viga de
betão reforçados com diferentes percentagens de armadura longitudinal e transversal,
sujeitos a esforços de flexão, de corte e de torção. Para caracterizar os materiais
intervenientes, efectuaram-se testes de compressão uniaxial em provetes cilíndricos de
betão simples (BS), ensaios de flexão sob três pontos de carga em vigas entalhadas de BS e
ensaios de tracção em varões de aço.
Analisando os resultados dos ensaios efectuados com vigas de betão armado (BA) de
secção oca, constatou-se que a resposta é praticamente independente da percentagem de
armadura transversal utilizada. Neste tipo de estruturas, as fibras de aço podem ter um
campo de aplicação a estudar, nomeadamente se se tiver em consideração o elevado custo
da mão-de-obra necessária na aplicação de estribos em peças ocas de parede delgada, bem

Capítulo 5
182
como a dificuldade de betonagem das mesmas. Naturalmente, estas conclusões carecem de
confirmação experimental.
Dos resultados experimentais verifica-se, ainda que a resposta das vigas de BA é
controlada, fundamentalmente, pelas armaduras.
Para simular o comportamento não linear material de estruturas tridimensionais de betão
armado, foi desenvolvido um modelo, baseado no método dos elementos finitos. As barras
de tais estruturas são discretizadas por elementos de Timoshenko 3D. O modelo, ao nível
da secção, é um modelo de fibras, permitindo, assim, por intermédio de leis constitutivas
adequadas aos materiais intervenientes, representar o comportamento não linear dessas
estruturas.
Comparando os resultados numéricos com os resultados obtidos por via experimental, pode
concluir-se que o modelo desenvolvido consegue avaliar, com boa aproximação, a resposta
das vigas de BA ensaiadas.
Apesar de apenas se terem ensaiado vigas, o modelo revela potencial para ser aplicado na
análise não linear de estruturas tridimensionais de BA.
5.2 Sugestões para futuros desenvolvimentos
No desenrolar do presente trabalho foram surgindo novos factos que por limitação
temporal não puderam ser explorados. São, deste modo, apresentadas algumas sugestões
tendo em vista futuros desenvolvimentos do tema abordado nesta dissertação:
– Tendo em conta o facto de, nos resultados obtidos experimentalmente, a
capacidade resistente de peças de secção oca de BA ser pouco sensível à
percentagem corrente de armadura transversal, a substituição dessa armadura

Conclusão
183
por fibras deve ser uma alternativa a explorar com a realização de uma
campanha de ensaios em vigas de secção rectangular oca de betão reforçado
com várias percentagens de fibras de aço.
– Introdução de um modelo de confinamento do betão, de forma a simular a
maior resistência e ductilidade do betão com estribos ou cintas.
– Melhoramento do modelo de corte, introduzindo a contribuição da armadura,
de modo a que o comportamento não linear das forças de corte seja
correctamente simulado.
– Simulação da encurvadura da armadura longitudinal, bem como o
escorregamento entre esta e o betão.


Referências Bibliográficas
[Aze85] Azevedo, A.F.M., (1985), “Análise não linear de estruturas planas de betão armado pelo método dos elementos finitos”, Tese para a obtenção do grau de Mestre pela Faculdade de Engenharia da Universidade do Porto.
[Bar89] Barros, J.A.O. (1989), “Modelos de análise de estruturas laminares e de compósitos laminados”, Tese de Mestrado, Faculdade de Engenharia da Universidade do Porto.
[Bar95] Barros, J.A.O. (1995), “Comportamento do betão reforçado com fibras – análise experimental e simulação numérica”, Tese para a obtenção do grau de doutor em Engenharia Civil pela Faculdade de Engenharia da Universidade do Porto.
[Bar97a] Barros, J.A.O. (1997), “Apontamentos da disciplina de Estruturas”, Departamento de Engenharia Civil da Escola de Engenharia da Universidade do Minho.
[Bar97b] Barros, J.A.O. (1997), “Apontamentos da disciplina de Cascas e Lajes do Mestrado em Engenharia Civil, opção de Estruturas, Geotecnia e Fundações”, Departamento de Engenharia Civil da Escola de Engenharia da Universidade do Minho.
[Bar99a] Barros, J.A.O.; Sena Cruz, J.; Erik Ulrix, (1999), “Avaliação da capacidade de absorção de energia de betões reforçados com fibras de aço”, revista da Associação Portuguesa de Análise Experimental de Tensões, Novembro.
[Bar99b] Barros, J.A.O. (1999), “Apontamentos da disciplina de Complementos de Estruturas”, Departamento de Engenharia Civil da Escola de Engenharia da Universidade do Minho.

Referências Bibliográficas
186
[Baz83] Bazant, Z.P.; Oh, B.H. (1983), “Microplane model for progressive fracture of concrete and rock”, Jour. of Eng. Mech., ASCE, Vol. 111, Nº 4, pp. 559-582, April.
[Cru91] Cruz, P.J.S. (1991), “Análise não linear de estruturas porticadas planas de betão”, Tese para a obtenção do grau de Mestre em Engenharia Civil pela Faculdade de Engenharia da Universidade do Porto, Março.
[EN10002] European Standard EN 10002-1, “Tensile testing of metallic materials - part 1 - Method of test at ambient temperature”, British Standards Institution, CEN 1990.
[Fre98] Freitas, F; Barros, J.A.O.; Fonseca, P., (1998), “SENTUR – Sistema de Ensaio de Estruturas”, manual de utilização, versão 1.0, Setembro.
[Gue94] Guedes, J.P.S.C.M.; Pegon, P.; Pinto, A. V. (1994), “A Fibre/Timoshenko beam element in CASTEM 2000”, Joint Research Centre, special publication n. I.94.31, July.
[Gue97] Guedes, J.P.S.C.M. (1997), “Seismic behavior of reinforced concrete bridges – Modelling, numerical analysis and experimental assessment”, Tese para a obtenção de grau do doutor em Engenharia Civil na Faculdade de Engenharia da Universidade do Porto.
[Mas90] Massicotte, B.; Elwi, A.E.; MacGregor, J.G. (1990), “Tension-stiffening model for planar reinforced concrete beams”, Journal of Structural Engineering, ASCE, Vol. 116, nº 11, pp. 3039-3058, November.
[MC90] Comité Euro-International du Beton (1990), CEB-FIP Model Code 1990 “Design Code”, Thomas Telford.
[Mon91] Montoya, P. J.; Meseguer, A. G.; Cabré, F. M. (1991), “Hormigón Armado”, Editorial Gustavo Gili, S.A., Barcelona, Vol. 1, 13ª edicion.
[Oña95] Oñate, E. (1995), “Cálculo de estructuras por el metodo de elementos finitos. Análisis estático lineal”, Centro Internacional de Métodos Numéricos en Ingeniería, 2ª edicion., Setembro.
Referências Bibliográficas
187
[Owe80] Owen, D.R.J.; Hinton, E. (1980), “Finite elements in plasticity: theory and
practice”, Pineridge Press Limited, Swansea, U.K..
[Pip93] Pipa, M.J.A.L. (1993), “Ductilidade de elementos de betão armado sujeitos a acções cíclicas- Influência das características mecânicas das armaduras”, Tese elaborada no Laboratório Nacional de Engenharia Civil para a obtenção do grau de doutor em Engenharia Civil pela Universidade Técnica de Lisboa.
[Reb93] “Regulamento de estruturas de betão armado e pré-esforçado”, Porto Editora, Porto, 1993.
[RIL85] RILEM (1985), Draft Recommendation, 50-FMC Committee Fracture Mechanics of Concrete, “Determination of the fracture energy of mortar and concrete by means of three-point bending tests on notched beams”, Materials and Structures, Vol. 85, Nº 85, pp. 285-290.
[Sen98] Sena Cruz, J.M., (1998), “Comportamento cíclico de estruturas porticadas de betão armado reforçado com fibras de aço – simulação numérica e análise experimental”, Tese para a obtenção do grau de Mestre em Engenharia Civil pela Faculdade de Engenharia da Universidade do Porto, Julho.
[Sha86] Shah, A.P.; Gopalaratnam, V.S., (1986), “Impact resistance measurements for fibre cement composites”, Third International Symposium and Developments in fibre reinforced cement and concrete, eds. R.N. Swamy, R.L. Wagstaffe, D.R. Oakley, volume 1, artigo 3.9, julho.
[Tau91] Taucer, F.; Spacone, E.; Filippou, F. C. (1991), “A fiber beam-column element for seismic response analysis of reinforced concrete structures”, Report n. UCB/EERC-91/17, College of Engineering, University of California at Berkeley, December .
[Tim70] Timoshenko, S.P.; Goodier, J.N. (1970), “Theory of elasticity”, McGraw - Hill,
Third Edition.
[Ven96] Ventura Gouveia, A. (1996), “Análise de estruturas reticuladas segundo o método dos deslocamentos”, Relatório de estágio da Licenciatura em Engenharia Civil, Departamento de Engenharia Civil da Escola de Engenharia da Universidade do Minho.

Referências Bibliográficas
188
[Ven97] Ventura Gouveia, A. (1997), “Trabalho de Lajes e Cascas – Alterações ao
programa de cálculo FEMIXLS”, Mestrado em Engenharia Civil, opção de Estruturas, Geotecnia e Fundações, Departamento de Engenharia Civil da Escola de Engenharia da Universidade do Minho.
[Zie89] Zienkiewicz, O.C.; Taylor, R.L. (1989), “The finite element method”, McGraw-Hill International (UK), Fourth Edition, Vol. 1 e Vol. 2.

ANEXO I


Anexo I
191
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S1 (mm)
For
ça (
kN)
v1_l10_t150
Figura I.1 – Diagrama F-δ na secção S1 da viga
V1_l10_t150.
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S2 (mm)
Forç
a (k
N)
v1_l10_t150
Figura I.2 – Diagrama F-δ na secção S2 da viga
V1_l10_t150.
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S3 (mm)
For
ça (
kN)
v1_l10_t150
Figura I.3 – Diagrama F-δ na secção S3 da viga V1_l10_t150.

Anexo I
192
0
5
10
15
20
25
30
0 5 10 15 20 25 30
Rotação - flexão na secção S1 (x10-3)
Mom
ento
flec
tor
na s
ecçã
o S
1 (k
Nm
)
v1_l10_t150
Figura I.4 – Diagrama Mf-θf na secção S1 da viga
V1_l10_t150.
0
5
10
15
20
25
30
0 5 10 15 20 25 30
Rotação - flexão na secção S2 (x10-3)
Mom
ento
flec
tor
na s
ecçã
o S
2 (k
Nm
)
v1_l10_t150
Figura I.5 – Diagrama Mf-θf na secção S2 da viga
V1_l10_t150.
0
3
5
8
10
13
15
0 15 30 45 60 75
Rotação - torção na secção S1 (x10-3)
Mom
ento
tors
or (
kNm
)
v1_l10_t150
Figura I.6 – Diagrama Mt-θt na secção S1 da viga
V1_l10_t150.
0
3
5
8
10
13
15
0 15 30 45 60 75
Rotação - torção na secção S2 (x10-3)
Mom
ento
tors
or (
kNm
)
v1_l10_t150
Figura I.7 – Diagrama Mt-θt na secção S2 da viga
V1_l10_t150.

Anexo I
193
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S1 (mm)
Forç
a (k
N)
v2_l10_t150
Figura I.8 – Diagrama F-δ na secção S1 da viga
V2_l10_t150.
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S2 (mm)
For
ça (
kN)
v2_l10_t150
Figura I.9 – Diagrama F-δ na secção S2 da viga
V2_l10_t150.
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S3 (mm)
Forç
a (k
N)
v2_l10_t150
Figura I.10 – Diagrama F-δ na secção S3 da viga V2_l10_t150.

Anexo I
194
0
5
10
15
20
25
30
0 5 10 15 20 25 30
Rotação - flexão na secção S1 (x10-3)
Mom
ento
flec
tor
na s
ecçã
o S
1 (k
Nm
)
v2_l10_t150
Figura I.11 – Diagrama Mf-θf na secção S1 da viga
V2_l10_t150.
0
5
10
15
20
25
30
0 5 10 15 20 25 30
Rotação - flexão na secção S2 (x10-3)
Mom
ento
flec
tor
na s
ecçã
o S
2 (k
Nm
)
v2_l10_t150
Figura I.12 – Diagrama Mf-θf na secção S2 da viga
V2_l10_t150.
0
3
5
8
10
13
15
0 15 30 45 60 75
Rotação - torção na secção S1 (x10-3)
Mom
ento
tors
or (
kNm
)
v2_l10_t150
Figura I.13 – Diagrama Mt-θt na secção S1 da viga
V2_l10_t150.
0
3
5
8
10
13
15
0 15 30 45 60 75
Rotação - torção na secção S2 (x10-3)
Mom
ento
tors
or (
kNm
)
v2_l10_t150
Figura I.14 – Diagrama Mt-θt na secção S2 da viga
V2_l10_t150.

Anexo I
195
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S1 (mm)
Forç
a (k
N)
v1_l10_t75
Figura I.15 – Diagrama F-δ na secção S1 da viga
V1_l10_t75.
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S2 (mm)
Forç
a (k
N)
v1_l10_t75
Figura I.16 – Diagrama F-δ na secção S2 da viga
V1_l10_t75.
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S3 (mm)
Forç
a (k
N)
v1_l10_t75
Figura I.17 – Diagrama F-δ na secção S3 da viga V1_l10_t75.

Anexo I
196
0
5
10
15
20
25
30
0 5 10 15 20 25 30
Rotação - flexão na secção S1 (x10-3)
Mom
ento
flec
tor
na s
ecçã
o S
1 (k
Nm
)
v1_l10_t75
Figura I.18 – Diagrama Mf-θf na secção S1 da viga
V1_l10_t75.
0
5
10
15
20
25
30
0 5 10 15 20 25 30
Rotação - flexão na secção S2 (x10-3)
Mom
ento
flec
tor
na s
ecçã
o S
2 (k
Nm
)
v1_l10_t75
Figura I.19 – Diagrama Mf-θf na secção S2 da viga
V1_l10_t75.
0
3
5
8
10
13
15
0 15 30 45 60 75
Rotação - torção na secção S1 (x10-3)
Mom
ento
tors
or (
kNm
)
v1_l10_t75
Figura I.20 – Diagrama Mt-θt na secção S1 da viga
V1_l10_t75.
0
3
5
8
10
13
15
0 15 30 45 60 75
Rotação - torção na secção S2 (x10-3)
Mom
ento
tors
or (
kNm
)
v1_l10_t75
Figura I.21 – Diagrama Mt-θt na secção S2 da viga
V1_l10_t75.

Anexo I
197
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S1 (mm)
For
ça (
kN)
v2_l10_t75
Figura I.22 – Diagrama F-δ na secção S1 da viga
V2_l10_t75.
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S2 (mm)
Forç
a (k
N)
v2_l10_t75
Figura I.23 – Diagrama F-δ na secção S2 da viga
V2_l10_t75.
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S3 (mm)
Forç
a (k
N)
v2_l10_t75
Figura I.24 – Diagrama F-δ na secção S3 da viga V2_l10_t75.

Anexo I
198
0
5
10
15
20
25
30
0 5 10 15 20 25 30
Rotação - flexão na secção S1 (x10-3)
Mom
ento
flec
tor
na s
ecçã
o S
1 (k
Nm
)
v2_l10_t75
Figura I.25 – Diagrama Mf-θf na secção S1 da viga
V2_l10_t75.
0
5
10
15
20
25
30
0 5 10 15 20 25 30
Rotação - flexão na secção S2 (x10-3)
Mom
ento
flec
tor
na s
ecçã
o S
2 (k
Nm
)
v2_l10_t75
Figura I.26 – Diagrama Mf-θf na secção S2 da viga
V2_l10_t75.
0
3
5
8
10
13
15
0 15 30 45 60 75
Rotação - torção na secção S1 (x10-3)
Mom
ento
tors
or (
kNm
)
v2_l10_t75
Figura I.27 – Diagrama Mt-θt na secção S1 da viga
V2_l10_t75.
0
3
5
8
10
13
15
0 15 30 45 60 75
Rotação - torção na secção S2 (x10-3)
Mom
ento
tors
or (
kNm
)
v2_l10_t75
Figura I.28 – Diagrama Mt-θt na secção S2 da viga
V2_l10_t75.

Anexo I
199
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S1 (mm)
For
ça (
kN)
v1_l12_t150
Figura I.29 – Diagrama F-δ na secção S1 da viga
V1_l12_t150.
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S2 (mm)
Forç
a (k
N)
v1_l12_t150
Figura I.30 – Diagrama F-δ na secção S2 da viga
V1_l12_t150.
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S3 (mm)
Forç
a (k
N)
v1_l12_t150
Figura I.31 – Diagrama F-δ na secção S3 da viga V1_l12_t150.

Anexo I
200
0
5
10
15
20
25
30
0 5 10 15 20 25 30
Rotação - flexão na secção S1 (x10-3)
Mom
ento
flec
tor
na s
ecçã
o S
1 (k
Nm
)
v1_l12_t150
Figura I.32 – Diagrama Mf-θf na secção S1 da viga
V1_l12_t150.
0
5
10
15
20
25
30
0 5 10 15 20 25 30
Rotação - flexão na secção S2 (x10-3)
Mom
ento
flec
tor
na s
ecçã
o S
2 (k
Nm
)
v1_l12_t150
Figura I.33 – Diagrama Mf-θf na secção S2 da viga
V1_l12_t150.
0
3
5
8
10
13
15
0 15 30 45 60 75
Rotação - torção na secção S1 (x10-3)
Mom
ento
tors
or (
kNm
)
v1_l12_t150
Figura I.34 – Diagrama Mt-θt na secção S1 da viga
V1_l12_t150.
0
3
5
8
10
13
15
0 15 30 45 60 75
Rotação - torção na secção S2 (x10-3)
Mom
ento
tors
or (
kNm
)
v1_l12_t150
Figura I.35 – Diagrama Mt-θt na secção S2 da viga
V1_l12_t150.

Anexo I
201
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S1 (mm)
For
ça (
kN)
v2_l12_t150
Figura I.36 – Diagrama F-δ na secção S1 da viga
V2_l12_t150.
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S2 (mm)
Forç
a (k
N)
v2_l12_t150
Figura I.37 – Diagrama F-δ na secção S2 da viga
V2_l12_t150.
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S3 (mm)
Forç
a (k
N)
v2_l12_t150
Figura I.38 – Diagrama F-δ na secção S3 da viga V2_l12_t150.

Anexo I
202
0
5
10
15
20
25
30
0 5 10 15 20 25 30
Rotação - flexão na secção S1 (x10-3)
Mom
ento
flec
tor
na s
ecçã
o S
1 (k
Nm
)
v2_l12_t150
Figura I.39 – Diagrama Mf-θf na secção S1 da viga
V2_l12_t150.
0
5
10
15
20
25
30
0 5 10 15 20 25 30
Rotação - flexão na secção S2 (x10-3)
Mom
ento
flec
tor
na s
ecçã
o S
2 (k
Nm
)
v2_l12_t150
Figura I.40 – Diagrama Mf-θf na secção S2 da viga
V2_l12_t150.
0
3
5
8
10
13
15
0 15 30 45 60 75
Rotação - torção na secção S1 (x10-3)
Mom
ento
tors
or (
kNm
)
v2_l12_t150
Figura I.41 – Diagrama Mt-θt na secção S1 da viga
V2_l12_t150.
0
3
5
8
10
13
15
0 15 30 45 60 75
Rotação - torção na secção S2 (x10-3)
Mom
ento
tors
or (
kNm
)
v2_l12_t150
Figura I.42 – Diagrama Mt-θt na secção S2 da viga
V2_l12_t150.

Anexo I
203
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S1 (mm)
For
ça (
kN)
v1_l12_t75
Figura I.43 – Diagrama F-δ na secção S1 da viga
V1_l12_t75.
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S2 (mm)
Forç
a (k
N)
v1_l12_t75
Figura I.44 – Diagrama F-δ na secção S2 da viga
V1_l12_t75.
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S3 (mm)
Forç
a (k
N)
v1_l12_t75
Figura I.45 – Diagrama F-δ na secção S3 da viga V1_l12_t75.

Anexo I
204
0
5
10
15
20
25
30
0 5 10 15 20 25 30
Rotação - flexão na secção S1 (x10-3)
Mom
ento
flec
tor
na s
ecçã
o S
1 (k
Nm
)
v1_l12_t75
Figura I.46 – Diagrama Mf-θf na secção S1 da viga
V1_l12_t75.
0
5
10
15
20
25
30
0 5 10 15 20 25 30
Rotação - flexão na secção S2 (x10-3)
Mom
ento
flec
tor
na s
ecçã
o S
2 (k
Nm
)
v1_l12_t75
Figura I.47 – Diagrama Mf-θf na secção S2 da viga
V1_l12_t75.
0
3
5
8
10
13
15
0 15 30 45 60 75
Rotação - torção na secção S1 (x10-3)
Mom
ento
tors
or (
kNm
)
v1_l12_t75
Figura I.48 – Diagrama Mt-θt na secção S1 da viga
V1_l12_t75.
0
3
5
8
10
13
15
0 15 30 45 60 75
Rotação - torção na secção S2 (x10-3)
Mom
ento
tors
or (
kNm
)
v1_l12_t75
Figura I.49 – Diagrama Mt-θt na secção S2 da viga
V1_l12_t75.

Anexo I
205
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S1 (mm)
For
ça (
kN)
v2_l12_t75
Figura I.50 – Diagrama F-δ na secção S1 da viga
V2_l12_t75.
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S2 (mm)
Forç
a (k
N)
v2_l12_t75
Figura I.51 – Diagrama F-δ na secção S2 da viga
V2_l12_t75.
0
4
8
12
16
20
24
0 20 40 60 80
Deslocamento vertical na secção S3 (mm)
Forç
a (k
N)
v2_l12_t75
Figura I.52 – Diagrama F-δ na secção S3 da viga V2_l12_t75.

Anexo I
206
0
5
10
15
20
25
30
0 5 10 15 20 25 30
Rotação - flexão na secção S1 (x10-3)
Mom
ento
flec
tor
na s
ecçã
o S
1 (k
Nm
)
v2_l12_t75
Figura I.53 – Diagrama Mf-θf na secção S1 da viga
V2_l12_t75.
0
5
10
15
20
25
30
0 5 10 15 20 25 30
Rotação - flexão na secção S2 (x10-3)
Mom
ento
flec
tor
na s
ecçã
o S
2 (k
Nm
)
v2_l12_t75
Figura I.54 – Diagrama Mf-θf na secção S2 da viga
V2_l12_t75.
0
3
5
8
10
13
15
0 15 30 45 60 75
Rotação - torção na secção S1 (x10-3)
Mom
ento
tors
or (
kNm
)
v2_l12_t75
Figura I.55 – Diagrama Mt-θt na secção S1 da viga
V2_l12_t75.
0
3
5
8
10
13
15
0 15 30 45 60 75
Rotação - torção na secção S2 (x10-3)
Mom
ento
tors
or (
kNm
)
v2_l12_t75
Figura I.56 – Diagrama Mt-θt na secção S2 da viga
V2_l12_t75.

ANEXO II


Anexo II
209
0
4
8
12
16
20
24
0 10 20 30 40
Deslocamento vertical relativo entre as secções S1-S2 (mm)
Forç
a (k
N)
v1_l10_t150
Figura II.1 – Diagrama F-δ relativo entre as secções
S1 e S2 da viga V1_l10_t150.
0
4
8
12
16
20
24
0 10 20 30 40
Deslocamento vertical relativo entre as secções S2-S3 (mm)
For
ça (
kN)
v1_l10_t150
Figura II.2 – Diagrama F-δ relativo entre as secções
S2 e S3 da viga V1_l10_t150.
0
4
8
12
16
20
24
0 10 20 30 40
Deslocamento vertical relativo entre as secções S1-S2 (mm)
For
ça (
kN)
v2_l10_t150
Figura II.3 – Diagrama F-δ relativo entre as secções
S1 e S2 da viga V2_l10_t150.
0
4
8
12
16
20
24
0 10 20 30 40
Deslocamento vertical relativo entre as secções S2-S3 (mm)
Forç
a (k
N)
v2_l10_t150
Figura II.4 – Diagrama F-δ relativo entre as secções
S2 e S3 da viga V2_l10_t150.
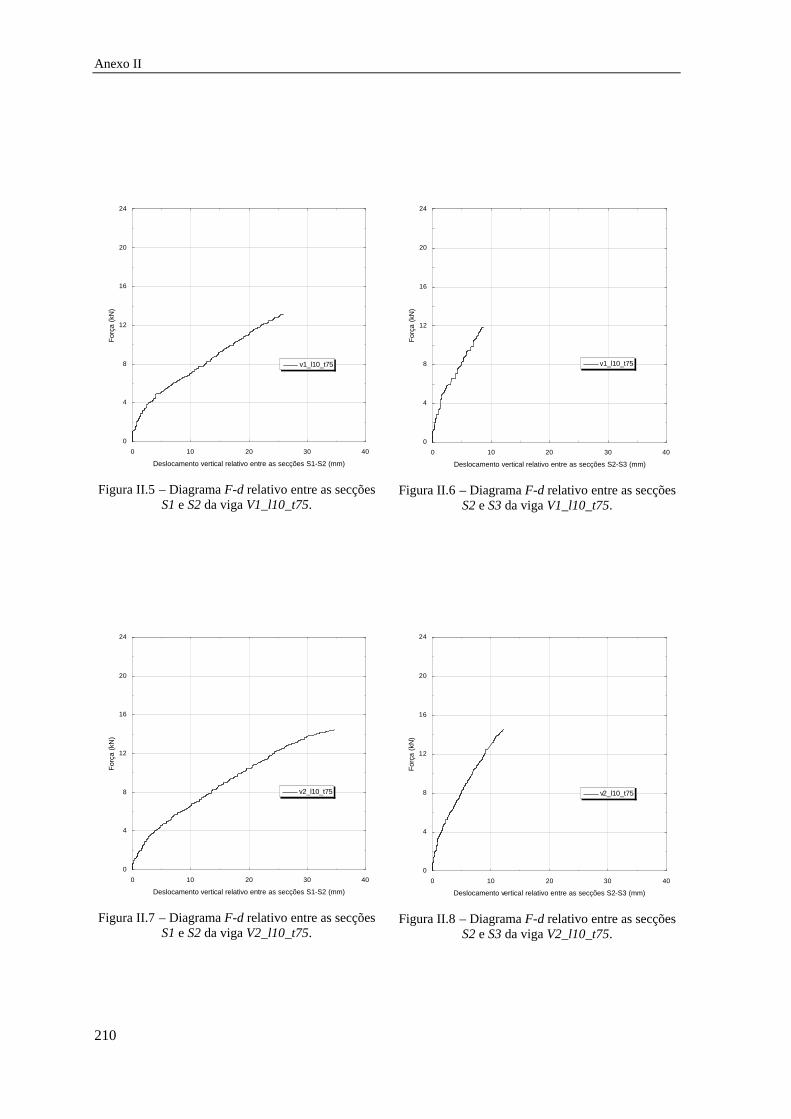
Anexo II
210
0
4
8
12
16
20
24
0 10 20 30 40
Deslocamento vertical relativo entre as secções S1-S2 (mm)
For
ça (
kN)
v1_l10_t75
Figura II.5 – Diagrama F-δ relativo entre as secções
S1 e S2 da viga V1_l10_t75.
0
4
8
12
16
20
24
0 10 20 30 40
Deslocamento vertical relativo entre as secções S2-S3 (mm)
Forç
a (k
N)
v1_l10_t75
Figura II.6 – Diagrama F-δ relativo entre as secções
S2 e S3 da viga V1_l10_t75.
0
4
8
12
16
20
24
0 10 20 30 40
Deslocamento vertical relativo entre as secções S1-S2 (mm)
For
ça (
kN)
v2_l10_t75
Figura II.7 – Diagrama F-δ relativo entre as secções
S1 e S2 da viga V2_l10_t75.
0
4
8
12
16
20
24
0 10 20 30 40
Deslocamento vertical relativo entre as secções S2-S3 (mm)
Forç
a (k
N)
v2_l10_t75
Figura II.8 – Diagrama F-δ relativo entre as secções
S2 e S3 da viga V2_l10_t75.

Anexo II
211
0
4
8
12
16
20
24
0 10 20 30 40
Deslocamento vertical relativo entre as secções S1-S2 (mm)
For
ça (
kN)
v1_l12_t150
Figura II.9 – Diagrama F-δ relativo entre as secções
S1 e S2 da viga V1_l12_t150.
0
4
8
12
16
20
24
0 10 20 30 40
Deslocamento vertical relativo entre as secções S2-S3 (mm)
Forç
a (k
N)
v1_l12_t150
Figura II.10 – Diagrama F-δ relativo entre as secções
S2 e S3 da viga V1_l12_t150.
0
4
8
12
16
20
24
0 10 20 30 40
Deslocamento vertical relativo entre as secções S1-S2 (mm)
For
ça (
kN)
v2_l12_t150
Figura II.11 – Diagrama F-δ relativo entre as secções
S1 e S2 da viga V2_l12_t150.
0
4
8
12
16
20
24
0 10 20 30 40
Deslocamento vertical relativo entre as secções S2-S3 (mm)
Forç
a (k
N)
v2_l12_t150
Figura II.12 – Diagrama F-δ relativo entre as secções
S2 e S3 da viga V2_l12_t150.

Anexo II
212
0
4
8
12
16
20
24
0 10 20 30 40
Deslocamento vertical relativo entre as secções S1-S2 (mm)
Forç
a (k
N)
v1_l12_t75
Figura II.13 – Diagrama F-δ relativo entre as secções
S1 e S2 da viga V1_l12_t75.
0
4
8
12
16
20
24
0 10 20 30 40
Deslocamento vertical relativo entre as secções S2-S3 (mm)
Forç
a (k
N)
v1_l12_t75
Figura II.14 – Diagrama F-δ relativo entre as secções
S2 e S3 da viga V1_l12_t75.
0
4
8
12
16
20
24
0 10 20 30 40
Deslocamento vertical relativo entre as secções S1-S2 (mm)
Forç
a (k
N)
v2_l12_t75
Figura II.15 – Diagrama F-δ relativo entre as secções
S1 e S2 da viga V2_l12_t75.
0
4
8
12
16
20
24
0 10 20 30 40
Deslocamento vertical relativo entre as secções S2-S3 (mm)
Forç
a (k
N)
v2_l12_t75
Figura II.16 – Diagrama F-δ relativo entre as secções
S2 e S3 da viga V2_l12_t75.