um mini-curso sobre tensores - ime-uspterek/textos/tensores.pdf · um mini-curso sobre tensores ivo...
TRANSCRIPT

Um mini-curso sobre tensores
Ivo Terek
Vamos começar com uma pergunta: o que Geometria Diferencial, To-pologia Algébrica, Relatividade Geral e Mecânica Quântica têm em co-mum? Entre outras coisas, todas elas utilizam como ferramentas certosobjetos chamados tensores.
Seja para definir a curvatura de variedades pseudo-Riemannianas, paraenunciar certos resultados envolvendo a homologia do produto de com-plexos CW (como por exemplo, a fórmula de Kunneth), entender as cele-bradas equações de campo de Einstein (que ditam a relação entre matéria egravidade em um espaço-tempo), ou então descrever o espaço de estadosde um sistema quântico composto, lá estão os tensores.
O intuito deste texto é apresentar uma introdução rápida e básica aostensores, com o mínimo o possível de pré-requisitos: para um bom apro-veitamento do que discutiremos aqui, é recomendado um entendimentomínimo das noções de espaço dual e base dual, vistas talvez em um segundocurso de Álgebra Linear. Além disto, contamos com uma certa maturi-dade matemática do leitor ou leitora (que você provavelmente já possui,se decidiu estudar esse assunto seriamente).
Iniciamos a Seção 1 apresentando tensores sobre um espaço vetorialcomo certas aplicações multilineares. Exibimos bases para os espaços detensores a partir de uma base do espaço inicial, e introduzimos também aconvenção de Einstein (espero que no momento certo, para evitar maiorestraumas).
Na Seção 2, vemos como utilizar um produto escalar não-degeneradopara identificar um espaço vetorial com o seu dual de forma natural (sem ouso de bases), por meio dos chamados isomorfismos musicais. Em particular,vemos como utilizá-los para identificar tensores de diferentes tipos: taisidentificações, expressas em uma base, nada mais são do que a famosatécnica de levantamento e abaixamento de índices.
Concluímos a discussão na Seção 3, onde apresentamos brevementeuma abordagem algébrica dos produtos tensoriais, caracterizados por meiode uma chamada propriedade universal; damos também relações de tal abor-dagem com o que foi exposto nas seções anteriores.
1

Pelo texto você irá se deparar com alguns exercícios, que possuem osimples objetivo de fazer com que você perca o medo dos tensores, e quetambém servem para te ajudar com alguns pontos cujo entendimento re-quer a sua participação ativa (sim, pegue lápis e rascunho).
Observação.
• O pequeno sumário a seguir, bem como os números e páginas dosteoremas, proposições e exercícios mencionados durante o texto pos-suem hiperlinks. Você pode navegar pelo .pdf clicando neles. · ·^
• Os diagramas na Seção 3 foram feitos usando o programa xfig.
Sumário
1 Aplicações multilineares 2
2 E quando temos um produto escalar? 16
3 A propriedade universal 29
Está prestando atenção? Vai começar!
1 Aplicações multilineares
Fixe de uma vez por todas V um espaço vetorial real de dimensão fi-nita, V∗ .
= { f : V → R | f é linear} o seu espaço dual, e denote por Lin(V)o espaço dos operadores lineares1 em V. Para inteiros r, s ≥ 1, denote(V∗)r .
= V∗ × · · · ×V∗ (r vezes) e Vs .= V × · · · ×V (s vezes).
Definição 1.1. Um tensor de tipo (r, s) em V é uma aplicação multilinearT : (V∗)r × Vs → R. O conjunto dos tensores de tipo (r, s) em V é deno-tado por Tr
s(V).
Observação.
• Diremos também que T ∈ Trs(V) é r vezes contravariante e s-vezes
covariante. O número r + s é chamado rank, valência, ou ordem de T.Com operações definidas pontualmente, Tr
s(V) torna-se um espaçovetorial.
1Transformações lineares de V em si mesmo.
2

• Note que T10(V) = V∗∗ ∼= V e que T0
1(V) = V∗. Recorde que aidentificação entre V e V∗∗ é dada por V 3 v 7→ v ∈ V∗∗, onde v édefinindo por v( f ) .
= f (v). A filosofia por trás de v é simples: dadosapenas v ∈ V e f ∈ V∗, só tem um jeito razoável de produzir umnúmero real.
Exercício 1.1. Mostre que V 3 v 7→ v ∈ V∗∗ é de fato um isomor-fismo linear, caso isto seja novidade.
Sugestão. Não esqueça de começar verificando que v é de fato umelemento de V∗∗.
Isto justifica chamar funcionais lineares de covetores. Além disto, con-vencionamos T0
0(V) = R.
• Às vezes é possível encontrarmos aplicações multilineares definidasem domínios que troquem a ordem de V∗ e V. Por exemplo
T : V × (V∗)3 ×V2 ×V∗ → R,
e o conjunto das aplicações multilineares com este domínio fica entãodenotado por T3 1
1 2 (V); índices contravariantes em cima e covarian-tes embaixo. Vamos chamar os domínios de tais tensores de embara-lhados.
Exemplo 1.2.
1. A avaliação δ : V∗ ×V → R dada por δ( f , v) = f (v); δ ∈ T11(V).
2. Dados operadores lineares T, S ∈ Lin(V) e B ∈ T02(V), o (T, S)-
pull-back de B, (T, S)∗B : V × V → R definido por (T, S)∗B(v, w).=
B(Tv, Sw); (T, S)∗B ∈ T02(V).
3. O determinante det : (Rn)n → R, que toma n vetores e devolve o de-terminante da matriz obtida colocando os vetores dados em linhas(ou colunas); det ∈ T0
n(Rn).
4. O traço tr : Mat(n, R) → R, que associa a uma matriz o seu traço;tr ∈ T0
1(Mat(n, R)
).
5. Dados f , g ∈ V∗, o produto tensorial de f e g, f ⊗ g : V × V → R
definido por ( f ⊗ g)(v, w).= f (v)g(w); f ⊗ g ∈ T0
2(V).
6. Dados v ∈ V e f ∈ V∗, o produto tensorial de v e f , v⊗ f : V∗ ×V →R definido por (v⊗ f )(g, w)
.= g(v) f (w); v⊗ f ∈ T1
1(V).
3

Exercício 1.2. Convença-se de que os exemplos acima de fato são tensores.
Em alguns lugares na literatura, dizem que tensores são “arrays n-dimensionais” de números, ou uma generalização de matrizes. Vejamoscomo esta ideia nasce:
Definição 1.3. Sejam B= (ei)ni=1 e B∗ = (ei)n
i=1 bases duais de V e V∗. SeT ∈ Tr
s(V), dizemos que as componentes de T na base B são os números
Ti1...irj1...js
.= T(ei1 , . . . , eir , ej1 , . . . , ejs).
Observação.
• Nunca consideraremos simultaneamente bases de V e V∗ que nãosejam duais ao calcular as componentes de um dado tensor em talbase. Por isso, dizemos que as componentes de T estão apenas nabase B, sem mencionar a base B∗ (que já está determinada por B).Assim:
Em todos os resultados do texto, quando for declarada uma base B= (ei)ni=1
de V, assuma também dada a sua base dual B∗ = (ei)ni=1, com esta notação.
• Para algum tensor com o domínio embaralhado, como T ∈ T2 13 (V),
temos que suas componentes são Ti1i2 i3j1 j2 j3
= T(ei1 , ei2 , ej1 , ej2 , ej3 , ei3).
Exemplo 1.4.
1. Sejam δ como no Exemplo 1.2 acima, e B = (ei)ni=1 uma base de V.
Nesta base, temos por definição que
δij = δ(ei, ej) = ei(ej) =
{1, se i = j,0, se i 6= j.
Temos que o tensor δ é o chamado delta de Kronecker. Suas compo-nentes δi
j em qualquer base também levam o nome de delta de Kro-necker, por simplicidade.
2. Considere det ∈ T0n(R
n). Se B = (ei)ni=1 é uma base ortonormal
e positiva de Rn (segundo o produto interno usual), denotamos ascomponentes de det por
εi1...in.= det(ei1 , . . . , ein)
=
1, se (i1, . . . , in) é uma permutação par de (1, . . . , n)−1, se (i1, . . . , in) é uma permutação ímpar de (1, . . . , n)0, caso contrário.
Temos que εi1...in é o chamado símbolo de Levi-Civita.
4

Exercício 1.3. Se B= (ei)ni=1 é uma base de V, mostre que v = ∑n
i=1 ei(v)eie f = ∑n
i=1 f (ei)ei, para quaisquer v ∈ V e f ∈ V∗. Seguindo a notaçãointroduzida na Definição 1.3 acima, podemos então escrever v = ∑n
i=1 vieie f = ∑n
i=1 fiei.
Sugestão. Você pode verificar que ambos os lados das igualdades pro-posta agem igualmente em alguma base do domínio. Por exemplo, B eB∗.
Exercício 1.4. Fixe B = (ei)ni=1 uma base de V. Seguindo a notação do
Exemplo 1.2 (p. 3), calcule:
(a) ((T, S)∗B)ij em termos das componentes de B e das matrizes (Tij)
ni,j=1
e (Sij)
ni,j=1 de T e S na base B.
(b) (v⊗ f )ij em termos das componentes de v e f .
Proposição 1.5. Seja B= (ei)ni=1 uma base de V. Então B⊗B∗
.= {ei ⊗ ej |
1 ≤ i, j ≤ n} é uma base para T11(V). Em particular, dim T1
1(V) = n2.
Demonstração: Vejamos que B⊗B∗ é linearmente independente. Supo-nha que temos a seguinte combinação linear
n
∑i,j=1
aijei ⊗ ej = 0.
Devemos provar que todos os coeficientes aij são nulos. Avaliando ambos
os lados da igualdade no par (ek, e`), obtemos
0 =
(n
∑i,j=1
aijei ⊗ ej
)(ek, e`) =
n
∑i,j=1
aij(ei ⊗ ej)(ek, e`)
=n
∑i,j=1
aije
k(ei)ej(e`) =n
∑i,j=1
aijδ
kiδ
j`
= ak`,
como desejado.
5

Para ver que B⊗B∗ gera T11(V), considere T ∈ T1
1(V). Aplicando oExercício 1.3 acima, temos:
T( f , v) = T
(n
∑i=1
f (ei)ei,n
∑i=1
ej(v)ej
)=
n
∑i,j=1
f (ei)ej(v)T(ei, ej)
=n
∑i,j=1
Tij f (ei)ej(v) =
n
∑i,j=1
Tij(ei ⊗ ej)( f , v)
=
(n
∑i,j=1
Tijei ⊗ ej
)( f , v),
quaisquer que sejam f ∈ V∗ e v ∈ V, donde T = ∑ni,j=1 Ti
jei ⊗ ej, comodesejado.
Exercício 1.5. Sejam (e1, e2) uma base de R2 e T .= e1 ⊗ e1 + e2 ⊗ e2.
(a) Mostre que T não pode ser escrito na forma v1 ⊗ v2, quaisquer quesejam v1, v2 ∈ R2.
(b) Encontre v1, v2, w1, w2 ∈ R2 tais que T = v1⊗ v2 + w1⊗w2, mas quev1 ⊗ v2 e w1 ⊗w2 não sejam múltiplos de e1 ⊗ e1 e e2 ⊗ e2.
Então um tensor T de tipo (1, 1) pode ser representado por uma matriz(Ti
j)ni,j=1, e um operador linear T ∈ Lin(V) também. Isto nos faz descon-
fiar da existência de um isomorfismo T11(V) ∼= Lin(V). O barato disto
tudo é que não só tal isomorfismo existe, mas também é natural, não de-pendendo de nenhuma escolha de base para V.
Teorema 1.6. A aplicação Ψ : Lin(V) → T11(V) definida por Ψ(T)( f , v) .
=f (T(v)) é um isomorfismo linear.
Demonstração: A verificação de que Ψ(T) ∈ T11(V) é o Exercício 1.6 a
seguir. Vejamos que Ψ é um isomorfismo, utilizando uma base B= (ei)ni=1
de V.Para tanto, basta notar que se Ti
j são as componentes de Ψ(T) na baseB, então
Ψ(T) =n
∑i,j=1
Tijei ⊗ ej e
T(ej) =n
∑i=1
ei(Tej)ei =n
∑i=1
Ψ(T)(ei, ej)ei =n
∑i=1
Tijei.
6

Em outras palavras, a matriz do operador linear na base B e as com-ponentes do tensor associado, na mesma base, na verdade são a mesmacoisa!
Exercício 1.6. Verifique na demonstração acima que de fato Ψ(T) ∈ T11(V).
Por meio deste isomorfismo, é possível falar nas noções de traço e de-terminante de um tensor de tipo (1, 1). O determinante não se generalizafacilmente para tensores de maior valência. Sendo assim, foquemos notraço:
Proposição 1.7. Existe uma única aplicação linear tr 11 : T1
1(V) → R tal quetr 1
1(v⊗ f ) = f (v), para todos f ∈ V∗ e v ∈ V. A operação tr 11 é usualmente
chamada de contração.
Demonstração: Vejamos como esta aplicação deve funcionar, em coorde-nadas. Se B= (ei)
ni=1 é uma base de V e T ∈ T1
1(V), então
tr 11(T) = tr 1
1
(n
∑i,j=1
Tijei ⊗ ej
)=
n
∑i,j=1
Tijtr
11(ei ⊗ ej)
=n
∑i,j=1
Tije
j(ei) =n
∑i,j=1
Tijδ
ji =
n
∑i=1
Tii.
Naturalmente, gostaríamos de definir tr 11(T)
.= ∑n
i=1 Tii, onde (Ti
j)ni,j=1 são
as componentes de T em uma dada base de V. Para legitimar tal definiçãoé então imperativo mostrar que se B = (ei)
ni=1 e B∗ = (ei)n
i=1 são outrasbases duais de V e V∗, vale ∑n
i=1 Tii = ∑n
i=1 Tii.
Faremos isto aplicando o utilíssimo Exercício 1.3 (p. 5):
n
∑i=1
Tii =
n
∑i=1
T(ei, ei) =n
∑i=1
T
(n
∑j=1
ei(ej)ej,
n
∑k=1
ek(ei)ek
)
=n
∑i,j,k=1
ei(ej)ek(ei)T(ej, ek) =
n
∑j,k=1
T jk ek
(n
∑i=1
ei(ej)ei
)
=n
∑j,k=1
T jk ek(ej) =
n
∑j,k=1
T jkδk
j =n
∑j=1
T jj,
como desejado.
Observação.
7

• A notação tr 11 ficará mais clara quando discutirmos contrações para
tensores de tipo (r, s), em breve.
• Observe que, seguindo a notação do Teorema 1.6 (p. 6), de fato temostr 1
1(T) = tr (Ψ(T)), onde o segundo tr denota o traço de operadoreslineares.
• De modo análogo, há uma única aplicação R-linear tr11 : T1
1 (V)→ R
tal que tr11( f ⊗ v) = f (v). Veremos na Seção 2 que na presença de
um produto escalar 〈·, ·〉 em V, tr11 é equivalente à tr 1
1.
Pela primeira vez precisamos saber como as componentes de um dadotensor em diferentes bases se relacionam. Isto acaba sendo de muita im-portância em Física, onde os problemas costumam ser tratados por meiode coordenadas. Para tensores de tipo (1, 1) temos a:
Proposição 1.8. Sejam T ∈ T11(V) e
B= (ei)ni=1, B∗ = (ei)n
i=1, B= (ei)ni=1 e B∗ = (ei)n
i=1
pares de bases duais de V e V∗. Se
ej =n
∑i=1
aijei e ej =
n
∑i=1
bijei,
então
Tij =
n
∑k,`=1
bika`jT
k`.
Demonstração: Façamos o cálculo diretamente:
Tij = T(ei, ej) = T
(n
∑k=1
bikek,
n
∑`=1
a`je`
)=
n
∑k,`=1
bika`jT
k`.
Exercício 1.7. Assuma a notação da proposição acima.
(a) Mostre que de fato temos ei = ∑nk=1 bi
kek e, além disso, que ei =
∑nj=1 ai
jej.
Sugestão. Use o Exercício 1.3 (p. 5).
(b) Mostre que as matrizes (aij)
ni,j=1 e (bi
j)ni,j=1 são inversas.
8

Sugestão. Faça substituições e mostre o pedido via a definição de pro-duto entre matrizes, verificando que ∑n
k=1 aikbk
j = ∑nk=1 bi
kakj = δi
j.
(c) Mostre que se T ∈ T12(V), então Ti
jk = ∑n`,p,q=1 bi
`apja
qkT`
pq. Você con-segue imaginar como fica a relação para tensores T ∈ Tr
s(V)? Spoiler:Teorema 1.14 (p. 15, adiante).
O exercício acima na verdade nos diz várias coisas sobre como tensoresse comportam mediante mudança de base. Em particular, nos diz que abase dual se transforma “na direção oposta” da base inicial. Isso pode serdiscutido para justificar a nomenclatura contravariante/covariante ado-tada, mas não parece haver um acordo uniforme sobre isso.
Agora que estamos um pouco acostumados com tensores de tipo (1, 1),veremos que as adaptações para o caso geral (r, s) são mínimas. Comece-mos dando a definição de produto tensorial no caso geral (mencionadobrevemente nos itens (5) e (6) do Exemplo 1.2, p. 3):
Definição 1.9. O produto tensorial de T ∈ Trs(V) e S ∈ Tr′
s′(V) é o tensorT ⊗ S ∈ Tr+r′
s+s′(V) definido por
(T ⊗ S)( f 1, . . . , f r+r′ , v1, . . . , vs+s′).= T( f 1, . . . , f r, v1, . . . , vs)S( f r+1, . . . , f r+r′ , vs+1, . . . , vs+s′).
Exercício 1.8.
(a) Mostre que ⊗ é associativo.
(b) Dê um exemplo (quando r = r′ e s = s′) que testemunhe que ⊗ não é,em geral, comutativo.
(c) Mostre que se B= (ei)ni=1 é uma base de V, então
(T ⊗ S)i1...ir+r′
j1...js+s′= Ti1...ir
j1...js Sir+1...ir+r′
js+1...js+s′.
(d) Além do resultado do item acima, vemos que⊗ realmente se comportacomo um produto: mostre que se T1, T2, T ∈ Tr
s(V), S1, S2, S ∈ Tr′s′(V)
e λ ∈ R, então:
• (T1 + λT2)⊗ S = T1 ⊗ S + λ(T2 ⊗ S);
• T ⊗ (S1 + λS2) = T ⊗ S1 + λ(T ⊗ S2).
9

Observação. Pode-se também definir o produto tensorial entre tensorescom domínios embaralhados, fornecendo os argumentos e alimentandoos tensores (em ordem) até esgotá-los, de modo a também desembaralharo domínio do produto obtido. Por exemplo, se T ∈ T1 1
2 (V) e S ∈ T21(V),
podemos definir T ⊗ S ∈ T43(V) por
(T ⊗ S)( f 1, f 2, f 3, f 4, v1, v2, v3) = T( f 1, v1, v2, f 2)S( f 3, f 4, v3).
Tal definição nos dá a relação (razoável de se esperar)
(T ⊗ S)i1i2i3i4j1 j2 j3
= Ti1 i2j1 j2
Si3i4j3
.
Exercício 1.9. Defina T ⊗ S ∈ T35(V) para T ∈ T1
3(V) e S ∈ T22(V), e
escreva suas componentes em termos das componentes de T e S.
Com isto, podemos generalizar a Proposição 1.5 (p. 5):
Proposição 1.10. Seja B= (ei)ni=1 uma base de V. Então
B⊗r⊗ (B∗)⊗s .= {ei1⊗· · ·⊗ eir ⊗ ej1⊗· · ·⊗ ejs | 1 ≤ i1, . . . , ir, j1, . . . , js ≤ n}
é uma base para o espaço vetorial Trs(V). Em particular, dim Tr
s(V) = nr+s.
Demonstração: Para ver que B⊗r ⊗ (B∗)⊗s é linearmente independente,considere a combinação linear
n
∑i1,...,ir,j1,...,js=1
ai1...irj1...jr ei1 ⊗ · · · ⊗ eir ⊗ ej1 ⊗ · · · ⊗ ejs = 0.
Aplicando os dois lados de tal igualdade em (ek1 , · · · , ekr , e`1 , · · · , e`s) eutilizando a definição do produto tensorial, obtemos
n
∑i1,...,ir,j1,...,js=1
ai1...irj1...jr e
k1(ei1) · · · ekr(eir)e
j1(e`1) · · · ejs(e`s) = 0.
Simplificando, vem que
n
∑i1,...,ir,j1,...,js=1
ai1...irj1...jr δ
k1i1· · · δkr
ir δj1`1· · · δjs
`s= 0,
donde segue precisamente que ak1...kr`1...`s
= 0. Pela arbitrariedade dos ín-dices, concluímos que B⊗r ⊗ (B∗)⊗s é linearmente independente.
10

Agora, vejamos que B⊗r ⊗ (B∗)⊗s gera Trs(V). De fato, se T ∈ Tr
s(V),afirmamos que
T =n
∑i1...ir,j1,...,js=1
Ti1...irj1...js ei1 ⊗ · · · ⊗ eir ⊗ ej1 ⊗ · · · ⊗ ejs .
Com efeito, basta ver que ambos os lados agem igualmente sobre umabase do domínio (V∗)r × Vs. Assim sendo, considere índices arbitráriose a (r + s)-upla (ek1 , · · · , ekr , e`1 , · · · , e`s). Aplicando a igualdade em tal(r + s)-upla, do lado esquerdo obtemos Tk1...kr
`1...`spor definição, e do di-
reito obtemos também Tk1...kr`1...`s
, por um cálculo análogo ao feito paraverificar a independência linear de B⊗r ⊗ (B∗)⊗s (envolvendo deltas deKronecker).
Exercício 1.10. Assuma a notação da proposição acima.
(a) Mostre que
T =n
∑i1...ir,j1,...,js=1
Ti1...irj1...js ei1 ⊗ · · · ⊗ eir ⊗ ej1 ⊗ · · · ⊗ ejs
diretamente, calculando T( f 1, . . . , f r, v1, . . . , vs) para entradas arbitrá-rias, imitando o caso (r, s) = (1, 1) feito na demonstração da Proposi-ção 1.5 (p. 5).
(b) Compare com atenção as demonstrações das Proposições 1.5 (p. 5) e1.10 acima e convença-se que de fato nenhuma ideia nova foi introdu-zida (além talvez, do mencionado no item (a)).
Observação (Convenção de Einstein). A fim de evitar escrever coisas desa-gradáveis como ∑n
i1...ir,j1,...,js=1 · · · , há a seguinte convenção, devida a Eins-tein:
• É feito um acordo sobre qual conjunto os índices percorrem. Porexemplo, letras do início ou do meio do alfabeto (a, b, c, . . ., ou entãoi, j, k, . . .) percorrem índices de 1 a n, letras gregas (µ, ν, λ, . . .) percor-rem índices de 0 a 4 (comum em Relatividade Geral, para expressaras componentes do tensor métrico de um espaço-tempo como gµν);
11

• Omitem-se todos os símbolos de somatório, ficando implícito quese um mesmo índice aparece uma única vez em cima e em baixo,estamos somando sobre ele. Por exemplo:
v =n
∑i=1
viei −→ v = viei
f =n
∑i=1
fiei −→ f = fiei
tr 11(T) =
n
∑i=1
Tii −→ tr 1
1(T) = Tii
Tij =
n
∑k,`=1
bika`jT
k` −→ Ti
j = bika`jT
k`
Ai =n
∑j=1
BijC
j −→ Ai = BijC
j
n
∑i=1
Aiji −→ Ai
ji
n
∑k=1
aikbk
j = δij −→ ai
kbkj = δi
j
• Deve-se tomar cuidado com quais índices são “mudos” e quais nãosão. É a mesma situação quando lidamos com índices mudos em so-matórios ou em variáveis mudas em integrais indefinidas. Por exem-plo, temos que
viei = vjej = vkek = · · · ,
etc., mas note que nestas situações, os índices repetidos aparecemuma única vez em cima e em baixo. Sendo assim, expressões comovivi ou vi + ui não são compatíveis com a convenção de Einstein. Por-tanto, voltaremos com os símbolos de somatório quando necessário.
• Neste sentido, o delta de Kronecker tem a ação de trocar o índice queestá sendo somado. Por exemplo, δi
jvj = vi, δi
jδk`Aj` = Aik, etc..
• Quando fazendo substituições, deve-se tomar o cuidado de não re-petir índices mudos. Por exemplo, se pi = ai
jvj e vj = bj
iwi, é er-
rado escrever pi = aijb
jiw
i. Note que o índice i aparece três vezes no
12

lado esquerdo. O correto é identificar que na expressão vj = bjiw
i,o índice i é mudo. Assim, podemos escrever vj = bj
kwk e substituir
pi = aijb
jkwk, sem conflitos (observe o somatório duplo implícito).
Exercício 1.11.
(a) Suponha que vi = aijw
j e que (bij)
ni,j=1 seja a matriz inversa de (ai
j)ni,j=1.
Mostre que wi = bijv
j.
Sugestão. Multiplique os dois lados de vi = aijw
j por bki e, depois de
simplificar, renomeie k→ i.
(b) Simplifique:
• δijδ
jkδk
i.
• ε1jk`δj2δk
4δ`3.
• δijviuj.
• δ2jδ
jkvk.
• δ3jδ
j1;
• εi3kδipvk.
(c) O delta de Kronecker e o símbolo de Levi-Civita são tensores muitoparticulares, que após devidas identificações (que veremos na Seção2), podem ser identificados com tensores cujas componentes são, embases adequadas, δij e εi
jk, assumindo os mesmos valores que δij e εijk
(reveja o Exemplo 1.4, p. 4). Mostre que
εijkεk
`m = δi`δjm − δi
mδj`.
Sugestão. Tenha paciência e analise casos, é um exercício de combina-tória. Observe que não há nenhuma soma ocorrendo no lado direito,somente no esquerdo.
(d) Refaça o Exercício 1.7 (p. 8) utilizando a convenção de Einstein.
(e) (Desafio) Mostre que se n = (n1, n2, n3) ∈ R3 é um vetor unitário,
Nij .= δij − ε
ijknk + ninj e M j
i.= δij + ε
ji knk,
então NijM kj = 2δik.
13

Sugestão. Os valores numéricos de δ e ε com quaisquer posiciona-mentos de índices são o que você imagina. Pelo item (c), temos queε
ijrεk
j s = δisδ
kr − δikδrs. Além disto, ε k
j snjns = 0 (por quê?), e n ser
unitário nos diz que δrsnrns = 1.
Adotaremos a convenção de Einstein deste ponto em diante.
Voltemos aos tensores. O mesmo raciocínio feito na demonstração daProposição 1.10 (p. 10) nos permite encontrar bases para espaços de ten-sores com domínios embaralhados. Por exemplo:
Exercício 1.12. Seja B= (ei)ni=1 uma base de V. Mostre que
B∗ ⊗B⊗B∗.= {ei ⊗ ej ⊗ ek | 1 ≤ i, j, k ≤ n}
é uma base para o espaço vetorial T11 1(V), com operações entre tensores
definidas ponto a ponto. Em particular, dim T11 1(V) = n3.
Em geral, os vários espaços de tensores com a mesma valência são to-dos isomorfos, independente de como os domínios estão embaralhados.É possível exibir tais isomorfismos sem escolher bases de V e V∗, quandodispomos de um produto escalar e não-degenerado 〈·, ·〉 em V. Veremoscomo isto funciona na Seção 2.
Na Proposição 1.7 (p. 7), apresentamos a contração tr 11 : T1
1(V) → R.Para tensores de tipo (r, s), a contração que definiremos a partir de tr 1
1 nãoproduz um número real, mas sim outro tensor:
Definição 1.11. Sejam r, s ≥ 1. A contração no a-ésimo índice contravari-ante e no b-ésimo índice covariante é a aplicação tr a
b : Trs(V) → Tr−1
s−1(V)definida por
tr ab(T)( f 1, . . . , f r−1, v1, . . . , vs−1)
.=
.= tr 1
1(T( f 1, . . . , f a−1, •, f a, . . . , f r−1, v1, . . . , vb−1, •, vb, . . . , vs)
).
Observação. A notação com • indica exatamente quais os argumentos per-manecem livres. Por exemplo, se T ∈ T1
1(V) e f ∈ V∗ está fixado, T( f , •)indica o elemento de T0
1(V) dado por V 3 v 7→ T( f , v) ∈ R.
Essencialmente, travam-se todos os argumentos possíveis de modo ase obter um tensor de tipo (1, 1), e então faz-se a contração tr 1
1 usual.
Exemplo 1.12. Fixe uma base B= (ei)ni=1 de V.
14

1. Se δ : V∗ ×V → R é dado por δ( f , v) = f (v), como no Exemplo 1.2(p. 3), então tr 1
1(δ) = δii = n.
2. Se B ∈ T12(V) é dado por B = Bi
jkei ⊗ ej ⊗ ek, então temos duascontrações possíveis, a saber:
tr 11(B) = Bi
ikek e tr 12(B) = Bi
jiej.
3. Se W ∈ T23(V) é dado por W = W ij
k`mei ⊗ ej ⊗ ek ⊗ e` ⊗ em, temos2 · 3 = 6 contrações (todas elas tensores de valência 3). Algumasdelas são
tr 11(W) = W ij
i`mej ⊗ e` ⊗ em,
tr 12(W) = W ij
kimej ⊗ ek ⊗ em, e
tr 23(W) = W ij
k`jei ⊗ ek ⊗ e`.
Exercício 1.13. Encontre as contrações restantes tr 13(W), tr 2
1(W) etr 2
2(W).
Uma vez entendido os exemplos acima, não é surpreendente o enunci-ado do caso geral (é um corolário automático da Proposição 1.7, p. 7):
Proposição 1.13. Sejam B= (ei)ni=1 uma base de V e T ∈ Tr
s(V). Então dados1 ≤ a ≤ r e 1 ≤ b ≤ s, temos
(tr ab(T))
i1...ir−1j1...js−1
= Ti1...ia−1kia ...ir−1j1...jb−1kjb ...js−1
.
De modo paralelo ao feito anteriormente quando discutimos tensoresde tipo (1, 1), vejamos agora como as componentes de um tensor se com-portam mediante mudança de base:
Teorema 1.14. Sejam T ∈ Trs(V) e
B= (ei)ni=1, B∗ = (ei)n
i=1, B= (ei)ni=1 e B∗ = (ei)n
i=1
pares de bases duais de V e V∗. Se ej = aijei e ej = bi
jei então
Ti1...irj1...js = bi1
k1· · · bir
kra`1
j1· · · a`s
js Tk1...kr
`1...`s.
15

Observação. Um jeito de pensar nesta lei de transformação é em termosde (ai
j)ni,j=1, tendo em mente que (bi
j)ni,j=1 é a sua matriz inversa (nós já vi-
mos isso no Exercício 1.7, p. 8): para cada índice covariante (inferior), umtermo a contribui, enquanto que para cada índice contravariante (supe-rior), um termo b contribui. Ou seja, termos “co” correspondem à matrizde coeficientes “direta”, e termos “contra” à sua inversa.
Demonstração: É quase automático, usando o Exercício 1.7 (p. 8) e a con-venção de Einstein:
Ti1...irj1...js = T(ei1 , . . . , eir , ej1 , . . . , ejs)
= T(bi1k1
ek1 , . . . , birkr
ekr , a`1j1
e`1 , . . . , a`sjs e`s)
= bi1k1· · · bir
kra`1
j1· · · a`s
js T(ek1 , . . . , ekr , e`1 , . . . , e`s)
= bi1k1· · · bir
kra`1
j1· · · a`s
js Tk1...kr
`1...`s.
2 E quando temos um produto escalar?
Sabemos o que é um produto interno positivo-definido em um espaçovetorial. A condição de que o produto seja positivo-definido pode ser en-fraquecida sem que percamos resultados relevantes na nossa discussãoaqui. Vamos registrar esta pequena generalização que usaremos, aprovei-tando a linguagem de tensores que introduzimos até agora:
Definição 2.1. Um produto escalar (pseudo-Euclideano) em V é um tensor〈·, ·〉 ∈ T0
2(V) satisfazendo:
(i) 〈x, y〉 = 〈y, x〉 para todos os x, y ∈ V. Ou seja, 〈·, ·〉 é simétrico.
(ii) se 〈x, y〉 = 0 para todo y ∈ V, então necessariamente x = 0. Ou seja,〈·, ·〉 é não-degenerado.
Se ao invés de (ii), valer a condição mais forte
(iii) 〈x, x〉 ≥ 0 para todo x ∈ V, e 〈x, x〉 = 0 se e somente se x = 0,
então 〈·, ·〉 é chamado um produto interno (Euclideano, positivo-definido).
Observação. Note que (iii) implica em (ii), basta tomar y = x. Já em outroscontextos um pouco mais gerais, um tal produto escalar 〈·, ·〉 também échamados um tensor métrico.
16

Fixamos daqui em diante um produto escalar 〈·, ·〉 em V.
Como 〈·, ·〉 é um tensor, em particular sabemos o que são suas componen-tes numa base B = (ei)
ni=1 de V: gij
.= 〈ei, ej〉. As imposições dadas na
definição de 〈·, ·〉 nos dão boas condições sobre tais componentes, qual-quer que seja a base B escolhida:
• A condição (i) garante que a matriz (gij)ni,j=1 é simétrica;
• A condição (ii) garante que a matriz (gij)ni,j=1 é não-singular (ou seja,
possui inversa).
A matriz inversa de (gij)ni,j=1 é usualmente denotada por (gij)n
i,j=1. Asvantagens de possuir um produto escalar começam quando utilizamos-opara obter novas identificações naturais (que não dependem da escolha deuma base do espaço).
Exercício 2.1. Simplifique:
• δijgkigj`δk
`.
• ε1`mgijgjkδ1kδ`2δm
3 .
Comecemos identificando decentemente V com o seu dual V∗, usando〈·, ·〉:
Proposição 2.2 (Isomorfismos musicais).
(i) A aplicação bemol [ : V → V∗ definida por v[(w).= 〈v, w〉 é um isomor-
fismo.
(ii) Dado f ∈ V∗ existe um único f ] ∈ V tal que f (v) = 〈 f ], v〉, para todov ∈ V. Fica então bem definida a aplicação sustenido ] : V∗ → V, que é oisomorfismo inverso de bemol.
Demonstração: Claramente [ é linear. Como V tem dimensão finita, bastaprovar que [ é injetor. Mas se v ∈ ker [, temos 〈v, w〉 = 0 para todow ∈ V. Uma vez que 〈·, ·〉 é não-degenerado, segue que v = 0. Logo [ éum isomorfismo, e assim fica bem definido o isomorfismo inverso ].
O próximo passo natural é analisar como os isomorfismos musicaisfuncionam em coordenadas:
17

Proposição 2.3. Seja B= (ei)ni=1 uma base de V. Suponha que v = viei ∈ V e
f = fiei ∈ V∗. Então v[ = viei e f ] = f iei, onde
vi = gijvj e f i = gij f j.
Observação.
• Observe os abusos de notação (v[)i = vi e ( f ])i = f i.
• O produto 〈·, ·〉 é utilizado para subir e descer índices das coordena-das de v e f . Tal operação é muito comum em Física e Geometria.Note a semelhança da ação dos coeficientes gij e gij com o delta deKronecker.
• Isto justifica a nomenclatura de isomorfismos “musicais”: o isomor-fismo [ abaixa meio tom (abaixa o índice) das componentes de v(vi → vi), enquanto o isomorfismo ] aumenta meio tom (aumentao índice) das componentes de f ( fi → f i).
• Mnemônico: vetores tem “pontas afiadas” (sharp↗), então f ] é umvetor.
Demonstração: Por um lado, a igualdade v[(ej) = 〈v, ej〉 se lê como vjej(ei) =
〈vjej, ei〉, ou seja, vi = gjivj = gijvj, como desejado.De outro lado, f (ej) = 〈 f ], ej〉 se torna fiei(ej) = 〈 f iei, ej〉, donde f j =
gij f i. Multiplicando tudo por gkj (e somando em j, claro2), temos
gkj f j = gkjgij f i = δki f i = f k,
e renomear k→ i nos dá f i = gij f j, como no enunciado.
Proposição 2.4. Seja B= (ei)ni=1 uma base de V. Então
(ei)[ = gijej e (ei)] = gijej.
Demonstração: Façamos o primeiro. Como ei = δjiej, a proposição ante-
rior nos dá que(ei)[ = gjkδk
iej = gjiej = gijej,
como desejado.
Exercício 2.2.2Alguns textos chamam esta operação de “contrair contra gkj”.
18

(a) Tenha certeza de que entendeu as manipulações feitas utilizando aconvenção de Einstein nas duas últimas demonstrações.
(b) Verifique que (ei)] = gijej, completando a demonstração acima.
Mudando um pouco o ponto de vista, o que acabamos de fazer foi vercomo usar 〈·, ·〉 para identificar T0
1(V) e T10(V). Isto pode ser feito para
identificar Trs(V) com Tr′
s′(V), desde que r + s = r′ + s′. Vejamos algunscasos com valência baixa, para começar.
Proposição 2.5. A aplicação ]1 : T02(V)→ T1
1(V) dada por T]1( f , v) .= T( f ], v)
é um isomorfismo.
Demonstração: É claro que ]1 é linear, e como dim T02(V) = dim T1
1(V),basta ver que ]1 é injetor. Seja B= (ei)
ni=1 uma base de V. Note que
(T]1)ij = T]1(ei, ej) = T((ei)], ej) = T(gikek, ej) = gikT(ek, ej) = gikTkj.
Se T]1 = 0, então gikTkj = 0. Multiplicando tudo por g`i, temos
0 = g`igikTkj = δk`Tkj = T`j,
e como os índices eram arbitrários, segue que T = 0.
Observação. Ao invés de escrever (T]1)ij = gikTkj, usualmente escreve-se
apenas Tij = gikTkj, como viemos fazendo com vetores e covetores.
Exercício 2.3.
(a) Mostre que a aplicação [1 : T20(V) → T1
1(V) definida por T[1( f , v) .
=T( f , v[) é um isomorfismo.
(b) Caso já não tenha feito isso durante o item (a), verifique também queTi
j = gjkTik.
Exercício 2.4.
(a) Mostre que [1,2 : T20(V) → T0
2(V) dada por T[1,2(v, w) = T(v[, w[) é
um isomorfismo.
(b) Caso já não tenha feito isso durante o item (a), verifique também queTij = gikgj`Tk`.
Com isto, poderíamos pensar que temos todas as identificações pos-síveis entre tensores de valência igual a 2. Mas não nos esqueçamos dostensores com domínios embaralhados:
19

Proposição 2.6. A aplicação ]1[1
: T11 (V)→ T1
1(V) dada por
T]1[1( f , v) = T( f ], v[)
é um isomorfismo.
Demonstração: Como na Proposição 2.5 (p. 19), basta provar que ]1[1
éinjetora. Faremos isto usando coordenadas, novamente: considere umabase B= (ei)
ni=1 de V. Temos:
Tij = T]1
[1(ei, ej) = T((ei)], (ej)[) = T(gikek, gj`e`) = gikgj`T `
k .
Se T]1[1= 0, então gikgj`T `
k = 0. Multiplicando tudo por gpigqj, obtemos
0 = gpigqjgikgj`T `k = δk
pδq`T
`k = T q
p ,
e a arbitrariedade dos índices nos diz que T = 0.
Observação.
• Na demonstração acima, multiplicar tudo por gpigqj não foi um deusex machina, tirado da cartola. É justamente “o que faltava” para quesurgissem os deltas de Kronecker necessários para concluir o argu-mento, tomando o cuidado para não repetir índices em cima ou embaixo (por isso os índices novos p e q). Isto deve ter ficado mais claro,caso você tenha feitos os exercícios 2.3 e 2.4 acima.
• Todas as facetas de um mesmo tensor acabam por ser representadaspela mesma letra, no caso T. Em qual espaço T está depende dosseus argumentos, e do contexto.
• Subindo e descendo o índice do delta de Kronecker e do Símbolode Levi-Civita (cujas coordenadas independem da base) usando umproduto positivo-definido, concluímos que numericamente vale δi
j =
δij = δij = δ ij , bem como εi
jk = εijk = εijk, etc., justificando a notação
adotada no Exercício 1.11 (p. 13). Por exemplo εijk = δi`ε`jk.
Registramos então o caso geral:
Teorema 2.7. Se r + s = r′ + s′, então Trs(V) ∼= Tr′
s′(V) de forma natural (ouseja, é possível exibir um isomorfismo que não depende da escolha de uma basepara V, lançando mão de 〈·, ·〉).
20

Observação. Existem inúmeras possibilidades de isomorfismos entre es-tes espaços. Por exemplo, poderíamos abaixar todos os índices contrava-riantes, obtendo isomorfismos com o espaço T0
r+s(V).
Na seção anterior, vimos uma generalização do traço: a contração entreíndices contravariantes e covariantes. Combinando isto com os isomorfis-mos musicais, podemos definir traços entre índices do mesmo tipo, comotr a,b e tr a,b. Vejamos como fazer isto, começando com casos de valênciabaixa, como sempre:
Definição 2.8.
(i) A contração covariante é a aplicação tr 1,2 : T02(V)→ R dada por
tr 1,2(T).= tr 1
1(T]1),
onde ]1 : T02(V) → T1
1(V) é o isomorfismo dado na Proposição 2.5(p. 19).
(ii) A contração contravariante é a aplicação tr 1,2 : T20(V)→ R dada por
tr 1,2(T) .= tr 1
1(T[1),
onde [1 : T20(V)→ T1
1(V) é o isomorfismo dado no Exercício 2.3 (p.19).
Exercício 2.5. Mostre que se T é um tensor de valência igual a 2 e B =(ei)
ni=1 é uma base de V, então Ti
i = T ii .
Observação. Em geral Tij 6= T j
i . Este exercício mostra que também pode-ríamos ter “transferido” toda a situação para T1
1 (V) e usado a aplicaçãotr1
1, brevemente mencionada na Seção 1.
Proposição 2.9. Seja B= (ei)ni=1 uma base de V.
(a) Se T ∈ T02(V), temos que tr 1,2(T) = gijTij.
(b) Se T ∈ T20(V), temos que tr 1,2(T) = gijTij.
Demonstração: Basta notar que Tii = gijTij = gijTij.
Corolário 2.10. Seja T ∈ Lin(V) um operador linear. Definindo T ∈ T02(V)
por T(x, y) = 〈T(x), y〉, tem-se que tr (T) = tr 1,2(T).
21

Observação. A importância deste corolário está no fato de que a quanti-dade tr (T) não depende do produto escalar. Ou seja, um método paracalcular o traço de T é escolher algum produto 〈·, ·〉 em V, definir o tensorT associado, para então aplicar a contração tr 1,2.
Exercício 2.6. Complete os detalhes da demonstração da Proposição 2.9,caso não tenha se convencido. Também mostre o corolário acima.
Exemplo 2.11. Suponha que B = (ei)ni=1 é uma base ortonormal de V.
Quando 〈·, ·〉 não é necessariamente um produto positivo-definido, “or-tonormal” quer dizer que 〈ei, ej〉 = 0 se i 6= j, e que para cada índice1 ≤ i ≤ n temos εi
.= 〈ei, ei〉 ∈ {−1, 1}. Ou seja, em forma matricial3
temos (gij)ni,j=1 = diag(ε1, . . . , εn) e, em particular, (gij)n
i,j=1 = (gij)ni,j=1.
Segue disto que:
1. Se T ∈ T02(V), então tr 1,2(T) = ∑n
i=1 εiT(ei, ei).
2. Se T ∈ T20(V), então tr 1,2(T) = ∑n
i=1 εiT(ei, ei).
Lembre que o traço generalizado tr ab : Tr
s(V)→ Tr−1s−1(V) era uma apli-
cação que diminuia a valência de um dado tensor em 2. Isto continuarásendo verdade:
Definição 2.12. Sejam a ≤ b inteiros não-negativos.
(i) Seja s ≥ 2. A contração covariante nos índices a e b é a aplicaçãotr a,b : Tr
s(V)→ Trs−2(V) definida por:
tr a,b(T)( f 1, . . . , f r, v1, . . . , vs−2).=
.= tr 1,2
(T( f 1, . . . , f r, v1, . . . , •, . . . , •, . . . , vs−2)
),
onde os • estão nas a-ésima e na b-ésima entradas covariantes.
(ii) Seja r ≥ 2. A contração contravariante nos índices a e b é a aplicaçãotr a,b : Tr
s(V)→ Tr−2s (V) definida por:
tr a,b(T)( f 1, . . . , f r−2, v1, . . . , vs).=
.= tr 1,2(T( f 1, . . . , •, . . . , •, . . . , f r−2, v1, . . . , , vs)
),
onde os • estão nas a-ésima e na b-ésima entradas contravariantes.3A quantidade de εi negativos é a mesma para cada base ortonormal de V (este resul-
tado não-trivial é conhecido como Lei da Inércia de Sylvester).
22

Exemplo 2.13. Fixe uma base B= (ei)ni=1 de V.
1. Como 〈·, ·〉 ∈ T02(V), faz sentido calcularmos tr 1,2(〈·, ·〉). A Propo-
sição 2.9 (p. 21) nos dá tr 1,2(〈·, ·〉) = gijgij = gjigij = δjj = n.
2. Temos que se det ∈ T0n(R
n) e 〈·, ·〉 é o produto escalar usual em Rn,então tr a,b(det) é o tensor nulo, para quaisquer escolhas de a e b, poisdet é totalmente anti-simétrico.
3. Se v, w ∈ V, então tr 1,2(v⊗w) = 〈v, w〉. De fato, pela Proposição2.9 temos
tr 1,2(v⊗w) = gij(v⊗w)ij = gijviwj = 〈v, w〉.
4. De modo análogo ao exemplo anterior, se f , g ∈ V∗, então temos quetr 1,2( f ⊗ g) = 〈 f ], g]〉. Vejamos em coordenadas:
tr 1,2( f ⊗ g) = gij( f ⊗ g)ij = gij figj
= gijgik f kgj`g` = δi`gik f kg`
= gk` f kg` = 〈 f ], g]〉.
Exercício 2.7. Já que falamos na quantidade 〈 f ], g]〉, vamos definirum novo produto 〈·, ·〉∗ : V∗ × V∗ → R por 〈 f , g〉∗ .
= 〈 f ], g]〉. Mos-tre que 〈·, ·〉∗ é um produto escalar não-degenerado em V∗, que épositivo-definido se 〈·, ·〉 o for. Quais são suas componentes, em ter-mos de (gij)
ni,j=1?
Note que T02(V
∗) = T20(V), então quem chamamos de “vetores”
e quem chamamos de “covetores” na verdade depende do nossoponto de vista.
5. Se W ∈ T23(V) é dado por W = W ij
k`mei ⊗ ej ⊗ ek ⊗ e` ⊗ em, comono Exemplo 1.12 (p. 14), temos que tr 1,2(W) ∈ T0
3(V) é dado por
tr 1,2(W) = gijWijk`mek ⊗ e` ⊗ em.
Também podemos calcular tr 1,3(W) ∈ T21(V):
tr 1,3(W) = gkmW ijk`mei ⊗ ej ⊗ e`.
Exercício 2.8. Como fica tr 1,2(W) ∈ T21(V)?
23

De modo análogo à Proposição 1.13 (p. 15), registramos o caso geralpara as expressões das contrações em coordenadas:
Proposição 2.14. Sejam B= (ei)ni=1 uma base de V e T ∈ Tr
s(V).
(i) Se s ≥ 2, então
(tr a,b(T))i1...ir
j1...js−2= gk`Ti1...ir
j1...k...`...js−2.
(ii) Se r ≥ 2, então
(tr a,b(T))i1...ir−2j1...js = gk`T
i1...k...`...irj1...js .
Os índices indicados em vermelho em T estão nas a-ésima e b-ésima posições.
Os próximos dois exercícios são para sedimentar de forma definitiva otraquejo com índices que buscamos adquirir até agora:
Exercício 2.9 (Um gostinho de Geometria). Um tensor R ∈ T04(V) é dito
de tipo curvatura se satisfaz
(i) R(x, y, z, w) = −R(y, x, z, w) = −R(x, y, w, z);
(ii) R(x, y, z, w) = R(z, w, x, y).
(iii) R(x, y, z, ·) + R(y, z, x, ·) + R(z, x, y, ·) = 0;
Suponha que V possui um produto escalar 〈·, ·〉.
(a) Mostre que:
tr 1,2(R) = tr 3,4(R) = 0,tr 2,4(R) = tr 1,3(R) etr 1,4(R) = tr 2,3(R) = −tr 1,3(R).
Ou seja, basta conhecer tr 1,3(R) para ter todas as informações neces-sárias sobre as contrações de R.
Sugestão. Como ficam as simetrias (i) e (ii) em coordenadas?
(b) Mostre que R0 : V4 → R definido por
R0(x, y, z, w).= 〈y, z〉〈x, w〉 − 〈x, z〉〈y, w〉
é um tensor de tipo curvatura. O tensor R0 é chamado a curvaturafundamental de 〈·, ·〉.
24

(c) Se R é um tensor de tipo curvatura, como 〈·, ·〉 é não-degenerado ficabem definido R : V3 → V tal que R(x, y, z, w) = 〈R(x, y)z, w〉. Otensor de Ricci associado à R é Ric ∈ T0
2(V), dado por
Ric(x, y) .= tr (R(·, x)y).
Mostre que para a curvatura fundamental de 〈·, ·〉, vale a relação
Ric0(x, y) = (n− 1)〈x, y〉.
Observação. É comum em Geometria escrever R(x, y)z ao invés deR(x, y, z). Não é um engano.
(d) A curvatura escalar associada à R é definida por S .= tr 1,2(Ric). Para
a curvatura fundamental de 〈·, ·〉, use o item anterior e conclua queS0 = n(n− 1).
Observação. Curiosidades:
• Na definição de tensor de tipo curvatura, na verdade as condições (i)e (iii) juntas implicam a condição (ii)! Ou seja, a condição (ii) é supér-flua. O argumento padrão é conhecido como “octaedro de Milnor”.
• Além disto, é possível mostrar que o subespaço R(V) ⊆ T04(V) for-
mado pelos tensores de tipo curvatura possui dimensão dimR(V) =n2(n2 − 1)/12.
Exercício 2.10. Sejam T, S ∈ T02(V). O produto de Kulkarni-Nomizu de T e
S é definido como
(T©∧ S)(x, y, z, w).=
.= T(x, z)S(y, w) + T(y, w)S(x, z)− T(x, w)S(y, z)− T(y, z)S(x, w).
(a) Verifique que T©∧ S ∈ T04(V) e que satisfaz as simetrias (i) e (ii) da
definição de tensor de tipo curvatura.
(b) Mostre que se T e S são simétricos então T©∧ S satisfaz também asimetria (iii), e portanto é um tensor de tipo curvatura.
(c) Suponha que V possui um produto escalar 〈·, ·〉. Mostre que
tr 1,3(T©∧ S) = tr 1,2(T)S + tr 1,2(S)T − tr 2,3(S⊗ T)− tr 2,3(T ⊗ S).
25

(d) Suponha que V possui um produto escalar 〈·, ·〉. Mostre que
〈·, ·〉 ©∧ 〈·, ·〉 = −2R0,
onde R0 é a curvatura fundamental de 〈·, ·〉.
Antes de partirmos para a Seção 3 falar de Álgebra, vamos ver comousar a linguagem de tensores para estabelecer de modo simples fórmulasenvolvendo o produto vetorial em R3. Suponha então até o fim desta seçãoque V = R3 e que 〈·, ·〉 é o produto interno usual. Vamos começar comuma definição de produto vetorial que não dependa de coordenadas:
Definição 2.15. Sejam v, w ∈ R3. O produto vetorial de v e w é o únicovetor v×w ∈ R3 tal que 〈v×w, x〉 = det(v, w, x), para todo x ∈ R3.
Lema 2.16. Seja B= (ei)3i=1 uma base ortonormal e positiva de R3. Então vale
que (v ×w)i = εijkvjwk, onde εi
jk é o símbolo de Levi-Civita (apresentado noExemplo 1.4, p. 4 e no Exercício 1.11, p. 13) .
Demonstração: Fazendo x = ei na definição de v×w, de um lado temos
〈v×w, ei〉 = 〈(v×w)jej, ei〉 = (v×w)jδji = (v×w)i.
De outro lado:
det(v, w, ei) = det(vjej, wkek, ei) = vjwkεjki = εijkvjwk.
Portanto (v×w)i = εijkvjwk. Levantando o índice i nos dois lados seguea conclusão desejada.
Observação. Agora você pode escrever a expressão para v×w explicita-mente e se convencer se que ele é expresso via aquele determinante, comovocê aprendeu quando era criancinha · ·^.
Um exemplo de aplicação desta expressão é a seguinte:
Proposição 2.17. Sejam v, w, z ∈ R3. Então vale que
(v×w)× z = 〈z, v〉w− 〈z, w〉v.
26

Demonstração: Basta analisarmos a nível de coordenadas, numa base or-tonormal e positiva de R3, utilizando o Exercício 1.11 (p. 13). Temos:
((v×w)× z)i = εijk(v×w)jzk
= εijkε
j`mv`wmzk
= εikjε
jm`v
`wmzk
= (δimδk` − δi
`δkm)v`wmzk
= δimδk`v`wmzk − δi
`δkmv`wmzk
= δk`zkv`wi − δkmzkwmvi
= 〈z, v〉wi − 〈z, w〉vi,
como desejado.
Corolário 2.18 (Identidade de Jacobi). Sejam v, w, z ∈ R3. Então vale que
(v×w)× z + (w× z)× v + (z× v)×w = 0.
Exercício 2.11. Mostre o corolário acima.
Tais manipulações também nos permitem estabelecer algumas identi-dades envolvendo operadores diferenciais, como o gradiente, rotacionale o divergente. Se can = (ei)
3i=1 é a base canônica, e ∇ = (∂1, ∂2, ∂3) é
o vetor de operadores diferenciais, recorde que se ϕ : R3 → R é suave, eF : R3 → R3 é um campo de vetores suave em R3, valem
grad ϕ = ∇ϕ = (∂1ϕ, ∂2ϕ, ∂3ϕ),
div F = 〈∇, F〉 = ∂1F1 + ∂2F2 + ∂3F3 e
rot F = ∇× F = εij
k∂jFkei.
Proposição 2.19. Seja ϕ : R3 → R suave. Então rot grad ϕ = 0.
Demonstração: Basta observar que (rot grad ϕ)i = εij
k∂j∂k ϕ. Como os ín-dices j e k são mudos, temos que
εij
k∂j∂k ϕ = εikj∂k∂j ϕ = εik
j∂j∂k ϕ,
usando no último passo que derivadas parciais de segunda ordem comu-tam. Por outro lado, como o símbolo de Levi-Civita é anti-simétrico, temos
εij
k∂j∂k ϕ = −εikj∂j∂k ϕ.
Logo εij
k∂j∂k ϕ = 0.
27

Exercício 2.12. Faça um argumento análogo ao acima (prestando atençãoaos índices mudos) e mostre que se F : R3 → R3 é um campo de vetoressuave em R3, então div rot F = 0.
Proposição 2.20. Seja F : R3 → R3 um campo de vetores suave em R3. Então
rot rot F = grad(div F)−∇2F,
onde ∇2F indica o Laplaceano (vetorial) de F.
Demonstração: Vamos proceder como na Proposição 2.17 (p. 26), utili-zando a identidade do Exercício 1.11 (p. 13) com o balanceamento corretode índices. Temos que:
(rot rot F)i = εij
k∂j(rot F)k
= εij
k∂jεk`
m∂`Fm
= εij
kεk`m∂j∂`Fm
= (δi`δjm − δi
mδj`)∂j∂`Fm
= δi`δjm∂j∂`Fm − δi
mδj`∂j∂`Fm
= δi`∂j∂`Fj − δj`∂j∂`Fi
= δi`∂`(div F)− δj`∂j∂`Fi
= (grad(div F))i − (∇2F)i
= (grad(div F)−∇2F)i,
como desejado.
Exercício 2.13. Sejam F, G : R3 → R3 são campos de vetores suaves emR3.
(a) Mostre que div(F ×G) = 〈rot F, G〉 − 〈rot G, F〉.
(b) Mostre que
rot(F ×G) = 〈G,∇〉F + (div G)F − 〈F,∇〉G− (div F)G,
onde 〈F,∇〉G indica o operador diferencial F1∂1 + F2∂2 + F3∂3 agindoem cada componente do campo G, etc..
(c) Mostre que
grad〈F, G〉 = 〈G,∇〉F + 〈F,∇〉G− (rot F)×G− (rot G)× F.
28

3 A propriedade universal
Existe uma outra abordagem para este assunto, mais preferida por al-gebristas, em Matemática. Vamos discutí-la um pouco e dar a relação comtudo o que fizemos até agora. Fixe V e W dois espaços vetoriais (reais) dedimensão finita, até o final da seção.
Definição 3.1. Um produto tensorial de V e W é um par (T,⊗), onde T
é um espaço vetorial e ⊗ : V ×W → T é uma aplicação bilinear satisfa-zendo a seguinte propriedade universal: dado qualquer espaço vetorial Z equalquer aplicação bilinear B : V ×W → Z, existe uma única aplicaçãolinear B : T→ Z tal que B ◦ ⊗ = B. Em outras palavras, o seguinte dia-grama sempre se completa de forma única:
Z
T
B
B⊗
V ×W
Figura 1: A propriedade universal de (T,⊗)
Observação.
• Normalmente já escreveríamos ⊗ ao invés de ⊗. Vamos carregar anotação⊗ até estabelecermos os isomorfismos necessários para iden-tificar ⊗ com a operação ⊗ que estudamos nas seções 1 e 2.
• Nestas condições, diremos que B é uma linearização de B (via ⊗).
Ou seja, um produto tensorial de V e W é um espaço vetorial munidode uma aplicação ⊗ que lineariza universalmente todas as aplicações bi-lineares definidas em V ×W. Tal produto tensorial na verdade age comoum “tradutor”, convertendo aplicações bilineares B em aplicações linearesB que são, em um certo sentido, equivalentes à B, e ⊗ é o seu dicionário.
O problema com esta definição é que não fica claro se um produto ten-sorial entre dois dados espaços sequer existe, ou se é único. Como ocorrefrequentemente em Matemática, a unicidade é mais fácil de ser verificadado que a existência:
29
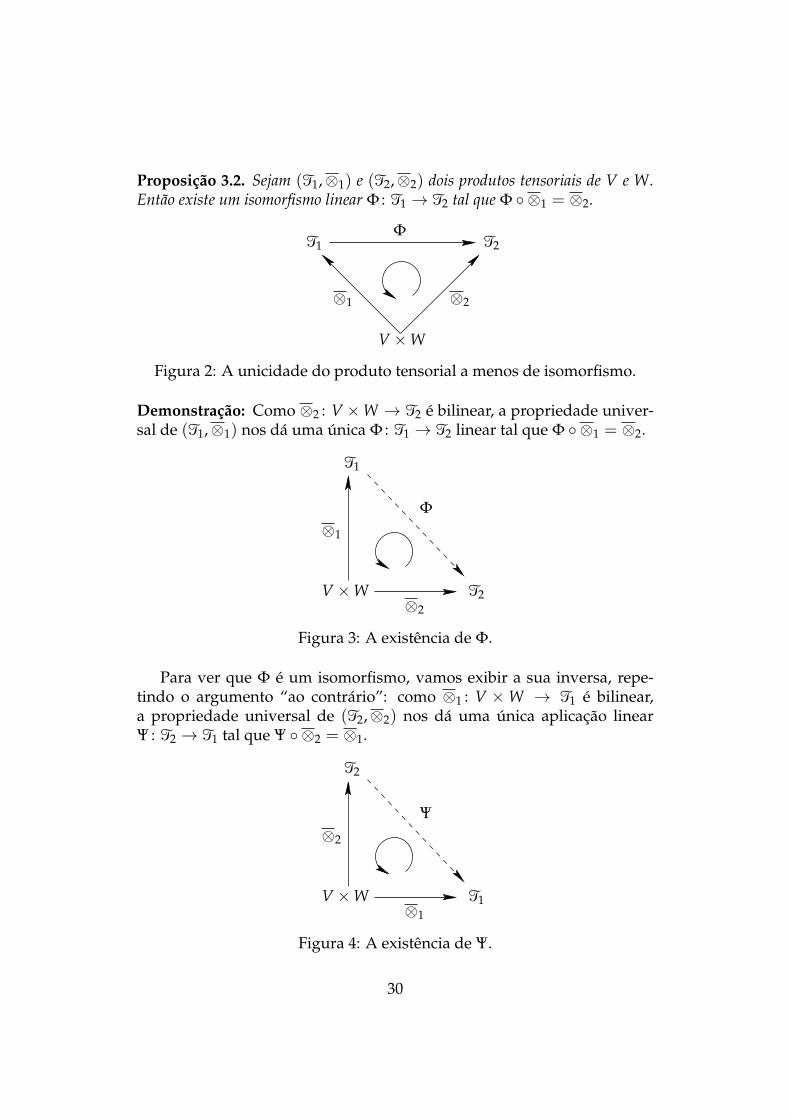
Proposição 3.2. Sejam (T1,⊗1) e (T2,⊗2) dois produtos tensoriais de V e W.Então existe um isomorfismo linear Φ : T1 → T2 tal que Φ ◦ ⊗1 = ⊗2.
Φ
V ×W
⊗2⊗1
T2T1
Figura 2: A unicidade do produto tensorial a menos de isomorfismo.
Demonstração: Como ⊗2 : V ×W → T2 é bilinear, a propriedade univer-sal de (T1,⊗1) nos dá uma única Φ : T1 → T2 linear tal que Φ ◦ ⊗1 = ⊗2.
V ×W T2⊗2
T1
Φ⊗1
Figura 3: A existência de Φ.
Para ver que Φ é um isomorfismo, vamos exibir a sua inversa, repe-tindo o argumento “ao contrário”: como ⊗1 : V ×W → T1 é bilinear,a propriedade universal de (T2,⊗2) nos dá uma única aplicação linearΨ : T2 → T1 tal que Ψ ◦ ⊗2 = ⊗1.
V ×W
T2
⊗2
Ψ
T1⊗1
Figura 4: A existência de Ψ.
30

Resta verificar que Ψ é de fato a inversa de Φ. Para tal, vamos ape-lar para a unicidade garantida pelas propriedades universais. Explore-mos agora a propriedade universal de (T1,⊗1) para a aplicação bilinear⊗1 : V ×W → T1. Claramente IdT1 : T1 → T1 satisfaz IdT1 ◦ ⊗1 = ⊗1, maspor outro lado
(Ψ ◦Φ) ◦ ⊗1 = Ψ ◦ (Φ ◦ ⊗1) = Ψ ◦ ⊗2 = ⊗1,
de modo que Ψ ◦Φ = IdT1 .
V ×W
T1
⊗1
⊗2T1
IdT1
V ×W
T1
⊗1
⊗2T1
Ψ ◦Φ
Figura 5: A demonstração de Ψ ◦Φ = IdT1 .
Analogamente mostra-se que Φ ◦Ψ = IdT2 .
Para nosso conforto psicológico, resta mostrar a existência de um pro-duto tensorial de V e W. Vamos lançar mão de uma construção um poucomais geral:
Exemplo 3.3 (Espaço vetorial livre). Seja S um conjunto não-vazio e con-sidere a coleção F(S) das funções f : S→ R tais que f (s) 6= 0 apenas parauma quantidade finita de elementos de S. As operações de adição e mul-tiplicação real em F(S), ponto a ponto, o tornam um espaço vetorial. Paracada a ∈ S, defina δa : S→ R por δa(x) = 1 se x = a e 0 caso contrário.
Exercício 3.1. Mostre que {δa | a ∈ S} é uma base para F(S).
Ainda, a aplicação S 3 s 7→ δs ∈ {δa | a ∈ S} é uma bijeção, de modoque podemos identificar a com δa, para cada a ∈ S. Fica então provadoque dado um conjunto não-vazio, existe um espaço vetorial que tem esteconjunto como base.
31

Para exibir um produto tensorial de V e W, consideramos o quocientede F(V ×W) pelo subespaço F0 gerado pelos elementos da forma
(v1 + v2, w)− (v1, w)− (v2, w),(v, w1 + w2)− (v, w1)− (v, w2),
(λv,w)− λ(v, w) e(v, λw)− λ(v, w).
Suponha que⊗ : V×W → F(V×W)/F0 a é aplicação que associa à cada(v, w) a sua classe v ⊗ w em F(V ×W)/F0. Note que o quociente feitonos dá as relações
(v1 + v2) ⊗ w = v1 ⊗ w + v2 ⊗ wv ⊗ (w1 + w2) = v ⊗ w1 + v ⊗ w2
(λv) ⊗ w = λ(v ⊗ w) = v ⊗ (λw).
Compare-as com o Exercício 1.8 (p. 9). Finalmente:
Proposição 3.4. O par (F(V ×W)/F0,⊗) é um produto tensorial de V e W.
Demonstração: A aplicação ⊗ é bilinear, por construção. Sejam Z um es-paço vetorial qualquer e B : V ×W → Z bilinear. Como V ×W é umabase de F(V ×W), existe uma extensão linear B : F(V ×W) → Z de B.Sendo B bilinear, B se anula nos elementos de F0, e portanto desce ao quo-ciente como uma aplicação linear B : F(V ×W)/F0 → Z, satisfazendoB(v⊗w) = B(v, w), como desejado.
Sendo assim, denotamos V ⊗ W = (F(V ×W)/F0,⊗). Antes deprosseguir, chamamos a atenção para dois detalhes importantes:
• Um elemento genérico de V ⊗ W não é necessariamente da formav ⊗ w para certos v ∈ V e w ∈W, mas sim é uma soma de elementosdessa forma (chamados decomponíveis).
• Para definir aplicações lineares em V ⊗ W, necessariamente deve-mos utilizar a propriedade universal. Isto é evidenciado pela rea-lização como um quociente dada acima, mas o problema é que umdado elemento de V ⊗ W pode ser representado de mais de umamaneira. A propriedade universal garante que todas estas maneirasforam contempladas.
Com isto em mente, a identificação que buscamos é a seguinte:
32

Proposição 3.5. A aplicação
B : V ×W → Lin2(V∗ ×W∗, R)
dada por B(v, w)( f , g) .= f (v)g(w) induz um isomorfismo
V⊗W ∼= Lin2(V∗ ×W∗),
onde Lin2(V∗ ×W∗, R) = {T : V∗ ×W∗ → R | T é bilinear}.
Demonstração: Claramente B é bilinear. Pela propriedade universal deV ⊗W, existe B : V ⊗W → Lin2(V∗ ×W∗, R) linear tal que
B(v⊗ w)( f , g) = f (v)g(w).
Para verificar que B é um isomorfismo, introduzamos uma notação con-veniente: defina o produto tensorial v⊗w ∈ V∗ ×W∗ por
(v⊗w)( f , g) .= f (v)g(w),
agora entre vetores de espaços possivelmente diferentes. Deste modo, te-mos B(v⊗ w) = v⊗w.
Naturalmente vale um análogo da Proposição 1.5 (p. 5): se B= (vi)ni=1
e C= (wi)mi=1 são bases de V e W, então
B⊗ C.= {vi ⊗wj | 1 ≤ i ≤ n e 1 ≤ j ≤ m}
é uma base de Lin2(V∗ ×W∗, R), cuja dimensão é então nm.Fixadas tais bases, o resto do argumento é simplificado. Como os espa-
ços tem dimensões diferentes, abandonamos a convenção de Einstein atéo fim desta demonstração.
(i) Vejamos que B é injetor: seja ∑Ni=1 xi ⊗ yi um elemento genérico
de V ⊗ W que esteja em ker B. Escrevendo xi = ∑nj=1 aj
ivj e y =
∑nk=1 bk
iwk, temos
0 = B
(N
∑i=1
xi ⊗ yi
)=
N
∑i=1
B(xi ⊗ yi)
=N
∑i=1
xi ⊗ yi =N
∑i=1
(n
∑j=1
ajivj
)⊗(
m
∑k=1
bkiwk
)
=n
∑j=1
m
∑k=1
(N
∑i=1
ajib
ki
)vj ⊗wk.
33

Por independência linear de B⊗ C, temos que ∑Ni=1 aj
ibki = 0 para
quaisquer 1 ≤ j ≤ n e 1 ≤ k ≤ m. Com isto, repetimos a conta acimausando a bilinearidade de ⊗:
N
∑i=1
xi ⊗ yi =N
∑i=1
(n
∑j=1
ajivj
)⊗(
m
∑k=1
bkiwk
)
=n
∑j=1
m
∑k=1
(N
∑i=1
ajib
ki
)vj ⊗ wk = 0,
como desejado.
(ii) Vejamos que B é sobrejetor: seja T ∈ Lin2(V∗ ×W∗, R). EscrevendoT = ∑n
i=1 ∑mj=1 Tijvi ⊗wj, temos que
B
(n
∑i=1
m
∑j=1
Tijvi ⊗ wj
)=
n
∑i=1
m
∑j=1
TijB(vi ⊗ wj)
=n
∑i=1
m
∑j=1
Tijvi ⊗wj = T.
Exercício 3.2. Mostre o análogo da Proposição 1.5 (p. 5) mencionado nademonstração acima.
Note que o argumento acima mostra que (Lin2(V∗×W∗),⊗) é um pro-duto tensorial de V e W, que denotaremos por V ⊗W. Ou seja, comoV ⊗ W ∼= V ⊗W, abandonamos para sempre a notação ⊗ e a construçãocomplicada apresentada (que diga-se de passagem, na verdade não foi uti-lizada concretamente em nenhum ponto), em favor de ⊗ e de espaços deaplicações bilineares. Sendo assim, fazendo W = V e W = V∗, e tambémtomando V∗ no lugar de V, fica provado também que
T11(V) = V ⊗V∗, T1
1 (V) = V∗ ⊗V,
T20(V) = V ⊗V e T0
2(V) = V∗ ⊗V∗.
Exemplo 3.6.
1. Se 〈·, ·〉 é um produto escalar em V, como 〈·, ·〉 : V × V → R é bili-near, sabemos que existe uma aplicação linear de V ⊗ V em R queleva v⊗w em 〈v, w〉. Pela unicidade da linearização, sabemos queesta aplicação é tr 1,2.
34

2. De modo análogo, como 〈·, ·〉∗ : V∗ × V∗ → R (visto no Exercício2.7, p. 23) é bilinear, sabemos que existe uma única aplicação lineardefinida em V∗ ⊗V∗ que lineariza 〈·, ·〉∗, a saber, tr 1,2.
Gostaríamos de caracterizar os outros espaços Trs(V) desta maneira.
Para tanto, precisamos generalizar a Definição 3.7 (p. 35):
Definição 3.7. Sejam V1, . . . , Vp espaços vetoriais. Um produto tensorial deV1, . . . , Vp é um par (T,⊗), onde Té um espaço vetorial e
⊗ : V1 × · · · ×Vp → T
é uma aplicação multilinear satisfazendo a seguinte propriedade universal:dado qualquer espaço vetorial Z e qualquer aplicação multilinear
B : V1 × · · · ×Vp → Z,
existe uma única aplicação linear B : T→ Z tal que B ◦ ⊗ = B. Em outraspalavras, o seguinte diagrama sempre se completa de forma única:
Z
T
B
V1 × · · · ×VpB
⊗
Figura 6: A propriedade universal de (T,⊗), novamente.
É a mesma história de antes: um produto tensorial lineariza universal-mente todas as aplicações multilineares, utilizando uma única aplicação⊗. A filosofia por trás das ideias dadas até agora não muda.
Exercício 3.3. Sejam V1, . . . , Vp espaços vetoriais, e (T1,⊗1) e (T2,⊗2) doisprodutos tensoriais de V1, . . . , Vp. Mostre que existe um isomorfismo li-near Φ : T1 → T2 tal que Φ ◦ ⊗1 = ⊗2.
No que toca a existência do produto tensorial neste caso, considera-mos novamente um quociente da forma F(V1 × · · · × Vp)/F0, onde F0 éo subespaço gerado por certos elementos que farão com que a projeção noquociente restrita à V1 × · · · ×Vp seja multilinear.
35

Exercício 3.4. Tente descrever o subespaço F0 quando p = 3.
E, como antes, prova-se que o produto tensorial de V1, . . . , Vp assimconstruído, denotado por
⊗pi=1 Vi ou V1 ⊗ · · · ⊗ Vp, é isomorfo ao espaço
das aplicações multilineares de V∗1 × · · · ×V∗p em R.Se V1 = · · · = Vp = V, escrevemos apenas V⊗p =
⊗pi=1 Vi =
⊗p V.Com esta notação, fica então estabelecido que
Trs(V) = V⊗r ⊗ (V∗)⊗s.
Exercício 3.5. Escreva T1 22 (V) e T2
1 3(V) como produtos tensoriais de V eV∗.
Para concluirmos a discussão, vejamos algumas outras aplicações dapropriedade universal:
Proposição 3.8 (Comutatividade). Sejam V e W dois espaços vetoriais. EntãoV ⊗W ∼= W ⊗V.
Demonstração: A esta altura, deve ser razoavelmente evidente que que-remos B : V ⊗W →W ⊗V, dada por B(v⊗w) = w⊗ v. Para definir estaaplicação rigorosamente, consideramos B : V ×W → W ⊗ V dada porB(v, w) = w⊗ v. Como B é bilinear, a propriedade universal de V ⊗Wnos fornece B.
B
B
V ×W W ⊗V
⊗
V ⊗W
Figura 7: Formalizando B(v⊗w) = w⊗ v.
A fim de provar que B é um isomorfismo, usa-se o mesmo argumentopara construir a sua inversa.
Exercício 3.6. Construa formalmente a inversa de B.
Sugestão. Não esqueça de usar a unicidade da linearização fornecida pelapropriedade universal para garantir que a inversa que você construiu defato funciona, como fizemos na Proposição 3.2 (p. 30).
36
⊗
W ×V
W ⊗V
V ⊗W
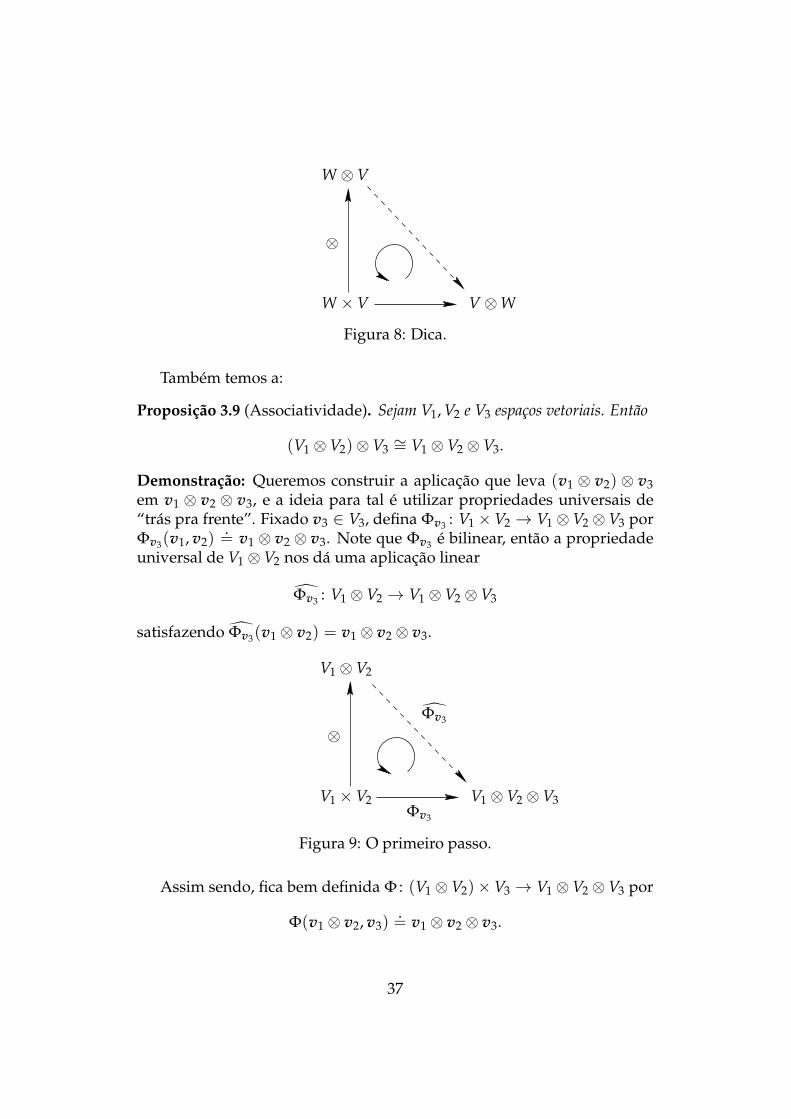
Figura 8: Dica.
Também temos a:
Proposição 3.9 (Associatividade). Sejam V1, V2 e V3 espaços vetoriais. Então
(V1 ⊗V2)⊗V3∼= V1 ⊗V2 ⊗V3.
Demonstração: Queremos construir a aplicação que leva (v1 ⊗ v2) ⊗ v3em v1 ⊗ v2 ⊗ v3, e a ideia para tal é utilizar propriedades universais de“trás pra frente”. Fixado v3 ∈ V3, defina Φv3 : V1 ×V2 → V1 ⊗V2 ⊗V3 porΦv3(v1, v2)
.= v1 ⊗ v2 ⊗ v3. Note que Φv3 é bilinear, então a propriedade
universal de V1 ⊗V2 nos dá uma aplicação linear
Φv3 : V1 ⊗V2 → V1 ⊗V2 ⊗V3
satisfazendo Φv3(v1 ⊗ v2) = v1 ⊗ v2 ⊗ v3.
⊗Φv3
V1 ⊗V2 ⊗V3Φv3
V1 ×V2
V1 ⊗V2
Figura 9: O primeiro passo.
Assim sendo, fica bem definida Φ : (V1 ⊗V2)×V3 → V1 ⊗V2 ⊗V3 por
Φ(v1 ⊗ v2, v3).= v1 ⊗ v2 ⊗ v3.
37
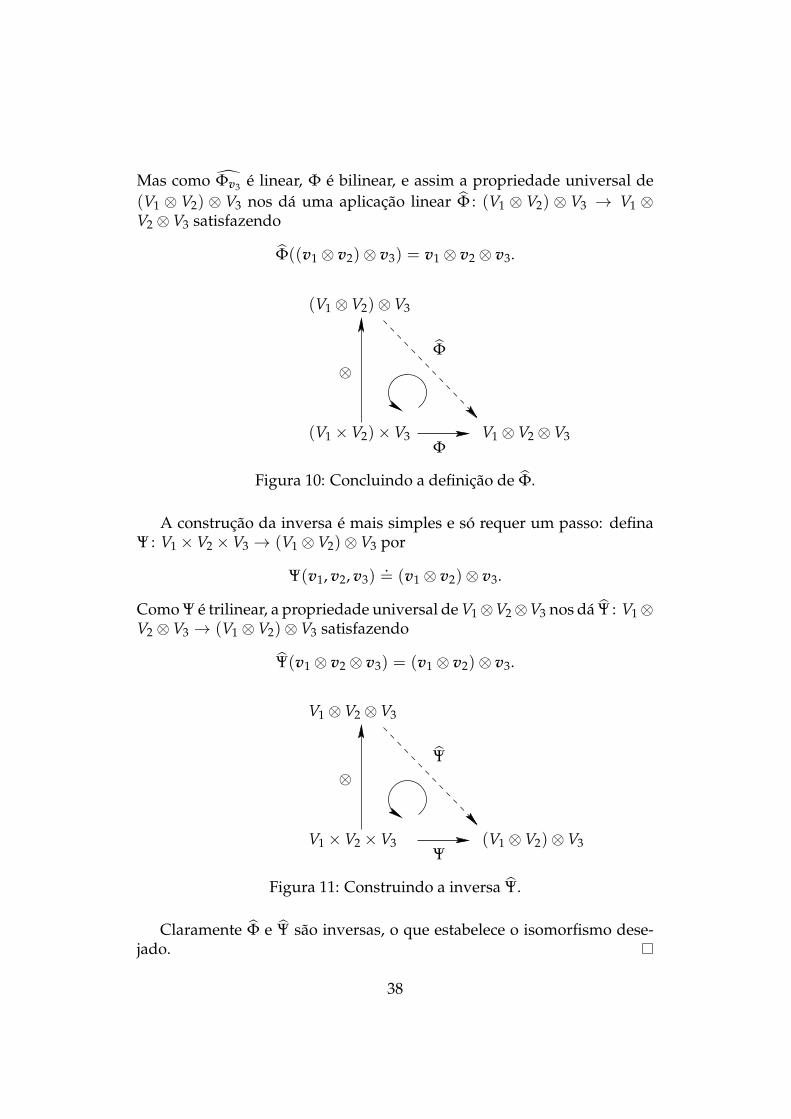
Mas como Φv3 é linear, Φ é bilinear, e assim a propriedade universal de(V1 ⊗ V2) ⊗ V3 nos dá uma aplicação linear Φ : (V1 ⊗ V2) ⊗ V3 → V1 ⊗V2 ⊗V3 satisfazendo
Φ((v1 ⊗ v2)⊗ v3) = v1 ⊗ v2 ⊗ v3.
⊗
V1 ⊗V2 ⊗V3
Φ
(V1 ⊗V2)⊗V3
(V1 ×V2)×V3Φ
Figura 10: Concluindo a definição de Φ.
A construção da inversa é mais simples e só requer um passo: definaΨ : V1 ×V2 ×V3 → (V1 ⊗V2)⊗V3 por
Ψ(v1, v2, v3).= (v1 ⊗ v2)⊗ v3.
Como Ψ é trilinear, a propriedade universal de V1⊗V2⊗V3 nos dá Ψ : V1⊗V2 ⊗V3 → (V1 ⊗V2)⊗V3 satisfazendo
Ψ(v1 ⊗ v2 ⊗ v3) = (v1 ⊗ v2)⊗ v3.
⊗
V1 ×V2 ×V3
V1 ⊗V2 ⊗V3
(V1 ⊗V2)⊗V3Ψ
Ψ
Figura 11: Construindo a inversa Ψ.
Claramente Φ e Ψ são inversas, o que estabelece o isomorfismo dese-jado.
38

Pratique a escrita:
Exercício 3.7. Sejam V1, V2 e V3 espaços vetoriais. Mostre que
V1 ⊗ (V2 ⊗V3) ∼= V1 ⊗V2 ⊗V3.
Em geral, vale esta associatividade para o produto tensorial de umaquantidade qualquer (finita, claro) de espaços vetoriais. Note que entãonão há ambiguidade em escrever Tr
s(V) = V⊗r ⊗ (V∗)⊗s.
Exercício 3.8. Sejam V1, W1, V2 e W2 espaços vetoriais, e T : V1 → W1 eS : V2 →W2 duas aplicações lineares. Mostre que existe uma única aplica-ção linear T ⊗ S : V1 ⊗V2 →W1 ⊗W2 tal que
(T ⊗ S)(v1 ⊗ v2) = T(v1)⊗ S(v2),
para todos v1 ∈ V1 e v2 ∈ V2.
Observação.
• Isto indica como generalizar o produto tensorial que definimos naSeção 1 para aplicações multilineares com contradomínios mais com-plicados que R. Tenha em mente que R⊗p ∼= R, para todo p.
• Pode-se mostrar que se B1, B2, C1 e C2 são bases de V1, V2, W1 e W2,respectivamente (com dimensões n1, n2, m1 e m2), e [T]B1,C1 = A =
(aij) e [S]B2,C2 = B = (bi
j), então
[T ⊗ S]B1⊗B2,C1⊗C2 ≡ A⊗ B .=
a11B · · · a1
n1B
... . . . ...am1
1 B · · · am1n1 B
.
A matriz A⊗ B é chamada o produto de Kronecker de A e B. Tal pro-duto tem algumas propriedades interessantes. Por exemplo, se A eB são matrizes quadradas de ordens n e m, respectivamente, entãovale a identidade4
det(A⊗ B) = (det A)m(det B)n.
Existem outras propriedades universais além da apresentada para oproduto tensorial. Vamos dar um exemplo:
4Sim, a ordem de A é o expoente de det B, e vice-versa. Não é um engano.
39

Definição 3.10 (Complexificação). Seja V um espaço vetorial real. Umacomplexificação de V é um par (VC, ι), onde VC é um espaço vetorial com-plexo e ι : V → VC é uma aplicação R-linear satisfazendo a seguinte pro-priedade universal: dado qualquer espaço vetorial complexo Z e uma apli-cação R-linear T : V → Z, existe uma única aplicação C-linear TC : VC → Ztal que TC ◦ ι = T. Ou seja, o seguinte diagrama sempre se completa deforma única:
ZVT
TC
ι
VC
Figura 12: A propriedade universal de (VC, ι).
Não devem ser surpreendentes o próximo resultado, e tampouco suademonstração:
Proposição 3.11. Sejam V um espaço vetorial real, e (VC1, ι1) e (VC2, ι2) duascomplexificações de V. Então existe um isomorfismo C-linear Φ : VC1 → VC2 talque Φ ◦ ι1 = ι2.
Φ
ι2
VC2
V
VC1
ι1
Figura 13: A unicidade da complexificação a menos de isomorfismo.
Demonstração: A demonstração é análoga à da Proposição 3.2 (p. 30).Sendo ι2 : V → VC2 uma aplicação R-linear, a propriedade universal de(VC1, ι1) nos dá uma única aplicação C-linear Φ : VC1 → VC2 tal que Φ ◦ι1 = ι2.
40

Vι2
Φ
VC2
ι1
VC1
Figura 14: A construção de Φ.
Analogamente, usando que ι1 : V → VC1 é R-linear, a propriedade uni-versal de (VC2, ι2) nos dá uma única aplicação C-linear Ψ : VC2 → VC1 talque Ψ ◦ ι2 = ι1.
V
VC2
ι2
Ψ
ι1VC1
Figura 15: A construção de Ψ.
As aplicações Φ e Ψ são então inversas.
Vι1
VC1
VC1
ι1
IdVC1
Vι1
VC1
VC1
ι1
Ψ ◦Φ
Figura 16: A demonstração de Ψ ◦Φ = IdVC1.
Analogamente mostra-se que Φ ◦Ψ = IdVC2.
41

Observação. O argumento dado acima serve, em geral, para caracterizarqualquer tipo de objeto utilizando uma dada propriedade universal.
Exercício 3.9. Os seguintes objetos também podem ser caracterizados porpropriedades universais, pesquise como:
(a) A soma direta⊕
i∈I Vi de uma família de espaços vetoriais (Vi)i∈I .
(b) O produto direto ∏i∈I Vi de uma família de espaços vetoriais (Vi)i∈I .
(c) O quociente V/W de um espaço vetorial V por um subespaço W.
(d) O espaço vetorial livre F(S), tendo como base qualquer conjunto não-vazio S (visto no Exemplo 3.3, p. 31).
Propriedades universais aparecem em várias outras áreas da Matemática.Isto é estudado com maior profundidade em Teoria das Categorias.
Felizmente, a construção de complexificações é mais simples. Uma dasmais usuais, que você talvez já conheça, fica delinada no:
Exercício 3.10. Defina no produto cartesiano V ×V a seguinte multiplica-ção por escalar complexo:
(a + bi)(u, v) .= (au− bv, bu + av).
(a) Com esta multiplicação e a adição usual feita coordenada à coorde-nada, mostre que V × V é um espaço vetorial complexo. Note que(u, v) = (u, 0) + i(0, v). Assim, escrevemos V ⊕ iV .
= V ×V.
Observação. Se você se sentir confortável, pode escrever u ≡ (u, 0)e iv ≡ (0, v), de modo que (u, v) = u + iv, e fazer contas como seestivesse em C.
(b) Mostre que se (vi)ni=1 é uma R-base de V, então ((vi, 0))n
i=1 é uma C-base de VC. Portanto dimC VC = dimR V.
(c) Sendo ι : V → V ⊕ iV dada por ι(u) = (u, 0), mostre que (V ⊕ iV, ι)satisfaz a propriedade universal da complexificação.
(d) Bônus: suponha que 〈·, ·〉 é um produto escalar em V. Mostre que
〈u1 + iv1, u2 + iv2〉C.= 〈u1, u2〉+ 〈v1, v2〉+ i(〈v1, u2〉 − 〈u1, v2〉)
é um produto sesquilinear5 e hermiteano em V ⊕ iV, ou seja, é linear naprimeira entrada e antilinear na segunda, e satisfaz 〈z, w〉C = 〈w, z〉C.
5Melhor que linear, mais fraco que bilinear: 1, 5-linear.
42

Várias propriedades podem ser provadas a partir da unicidade dadapela propriedade universal da complexificação. Por exemplo:
Exercício 3.11. Seja (VC, ι) uma complexificação de V. Mostre que se Z éum espaço vetorial complexo, T, S : V → Z são R-lineares e λ ∈ R, então:
(a) (T + S)C = TC + SC;
(b) (λT)C = λTC.
Outra possibilidade de construção da complexificação é por meio doproduto tensorial:
Proposição 3.12. O par (C⊗V, 1⊗−) é uma complexificação de V.
Demonstração: Antes de qualquer coisa, note que a multiplicação por es-calar complexo definida por µ(λ⊗ v) .
= (µλ)⊗ v torna C⊗V um espaçovetorial complexo. Claramente a aplicação
V 3 v ι7−→ 1⊗ v ∈ C⊗V
é R-linear. Então sejam Z um espaço vetorial complexo e uma aplicaçãoR-linear T : V → Z. Definimos T : C×V → Z pondo T(λ, v) .
= λT(v).
ZC×VT
TC
⊗
C⊗V
Figura 17: A construção de TC via a propriedade universal de C⊗V.
Como T é R-bilinear, existe uma única aplicação R-linear TC : C⊗V →Z tal que
TC(λ⊗ v) = λT(v),
para todos λ ∈ C e v ∈ V. Em particular, TC(ι(v)) = T(v), e assim sóresta mostrarmos que TC é na verdade C-linear. Mas
TC(µ(λ⊗ v)) = TC((µλ)⊗ v) = (µλ)T(v) = µ(λT(v)) = µTC(λ⊗ v),
como queríamos.
43