trabalho final da disciplina 1 objetivo 2 grupo 3 … · 2014-10-23 · matriz de rigidez global da...
TRANSCRIPT
1
CE2 – ESTABILIDADE DAS CONSTRUÇÕES II
TRABALHO FINAL DA DISCIPLINA
Consonante com os objetivos, ementa e conteúdo programático presentes no
plano de ensino, o trabalho final da disciplina será realizado a partir dos conhecimentos
adquiridos nas aulas 18 até aula 24.
1 OBJETIVO
Desenvolver, a partir da Análise Matricial de Estruturas, rotina de cálculo para
simular o comportamento estrutural espacial através de linguagens computacionais ou
programas comerciais tais como Microsoft Excel, Microsoft VBA, AutoCAD Visual LISP, HP
User-RPL, JavaScript, C++ ou qualquer linguagem/programa que o grupo preferir.
2 GRUPO
O trabalho deve ser feito em grupo de três a seis alunos.
3 ENTREGA
Serão realizadas quatro entregas por arquivos digitais contendo todos os
elementos referentes ao desenvolvimento do trabalho (planilhas/rotinas/arquivos executáveis,
etc.).
Os arquivos devem ser compactados e enviados em um único arquivo no formato
*.zip nomeado com o número do grupo e a respectiva parte. Ex.: G5 – Parte III.zip
Serão realizadas quatro entregas sempre aos domingos até as 20 horas no e-mail
[email protected] conforme cronograma:
Objetivo Data limite
PARTE I 12/out
PARTE II 19/out
PARTE III 26/out
PARTE IV 02/nov
Cada entrega tem valor de 12,5% da nota do total trabalho. A não entrega de
alguma parte não anula as demais. Após a entrega final, dois alunos serão selecionados para
explicar o trabalho (fórmulas, rotinas, etc.) e a explicação oral tem valor de 50% do trabalho.
2
4 PRIMEIRA PARTE (ENTRADA DE DADOS)
A entrada de dados deve ser desenvolvida pelo grupo. Trabalhos iguais serão
desconsiderados.
4.1 ENTRADA DE NÓS
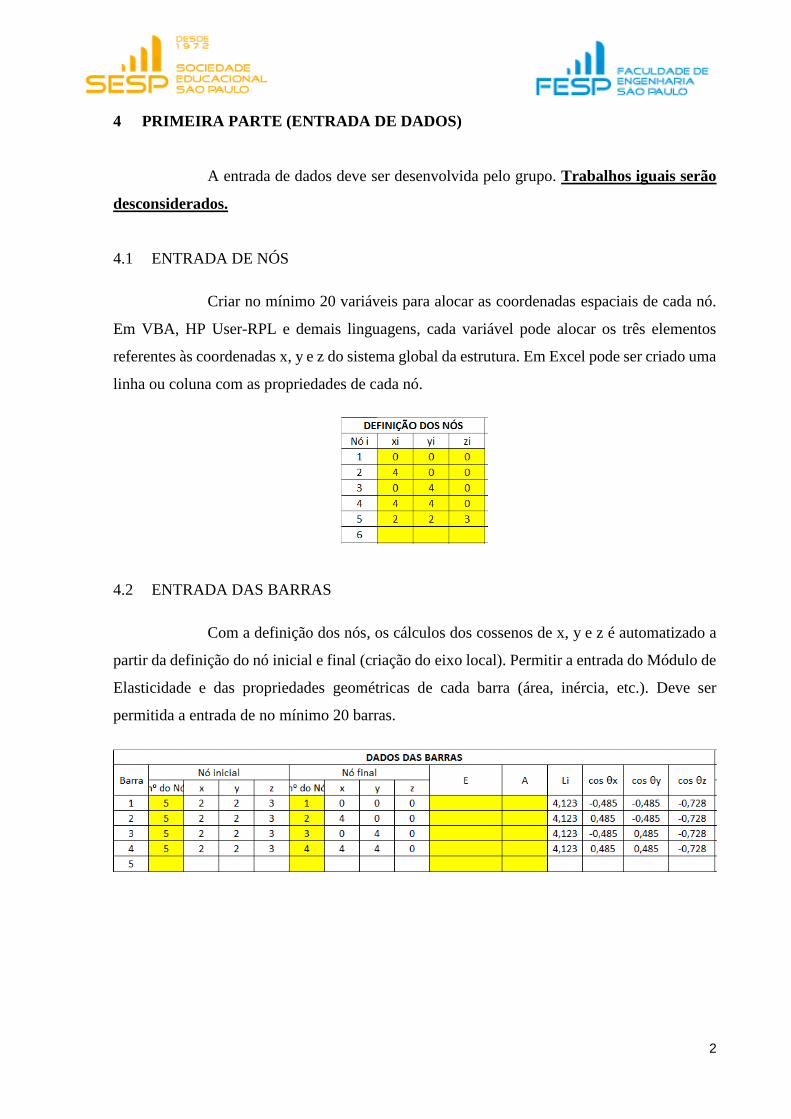
Criar no mínimo 20 variáveis para alocar as coordenadas espaciais de cada nó.
Em VBA, HP User-RPL e demais linguagens, cada variável pode alocar os três elementos
referentes às coordenadas x, y e z do sistema global da estrutura. Em Excel pode ser criado uma
linha ou coluna com as propriedades de cada nó.
4.2 ENTRADA DAS BARRAS
Com a definição dos nós, os cálculos dos cossenos de x, y e z é automatizado a
partir da definição do nó inicial e final (criação do eixo local). Permitir a entrada do Módulo de
Elasticidade e das propriedades geométricas de cada barra (área, inércia, etc.). Deve ser
permitida a entrada de no mínimo 20 barras.
3
4.3 GRAU DE LIBERDADE DOS NÓS
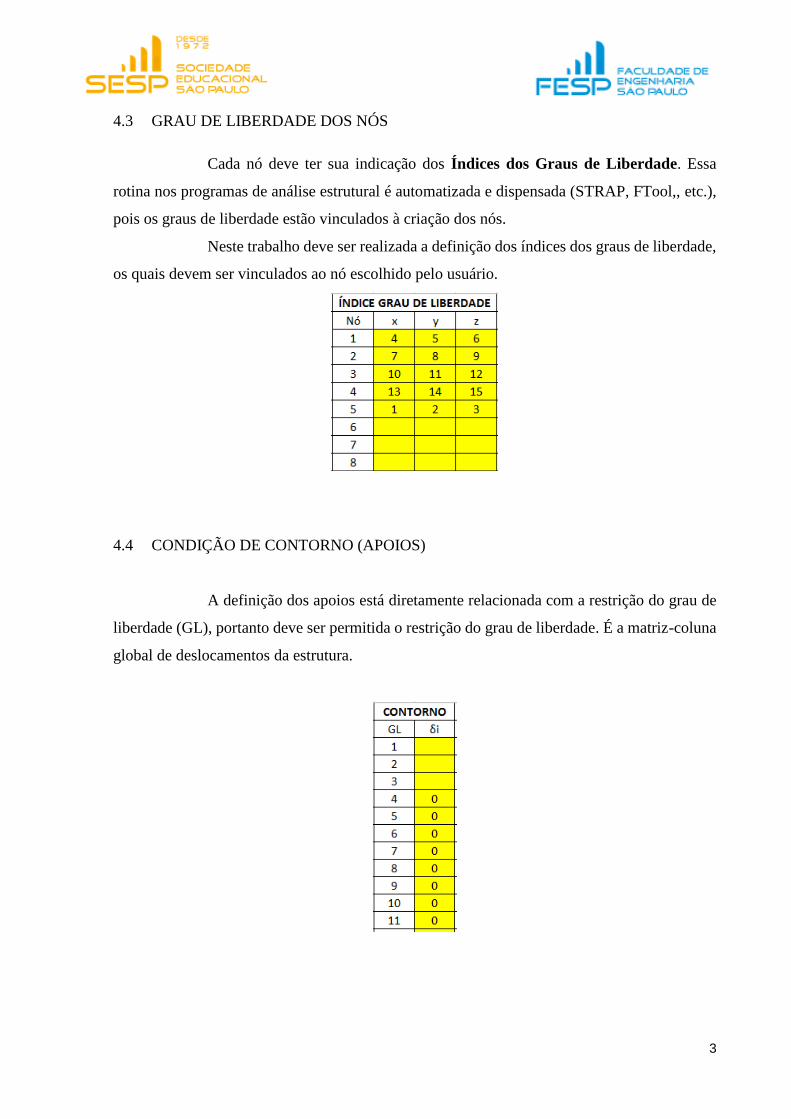
Cada nó deve ter sua indicação dos Índices dos Graus de Liberdade. Essa
rotina nos programas de análise estrutural é automatizada e dispensada (STRAP, FTool,, etc.),
pois os graus de liberdade estão vinculados à criação dos nós.
Neste trabalho deve ser realizada a definição dos índices dos graus de liberdade,
os quais devem ser vinculados ao nó escolhido pelo usuário.
4.4 CONDIÇÃO DE CONTORNO (APOIOS)
A definição dos apoios está diretamente relacionada com a restrição do grau de
liberdade (GL), portanto deve ser permitida o restrição do grau de liberdade. É a matriz-coluna
global de deslocamentos da estrutura.
4
4.5 FORÇAS
A definição das forças nos nós está diretamente relacionada com os índices do
grau de liberdade (GL). É a matriz-coluna global de forças da estrutura.
5 SEGUNDA PARTE (REARRANJO DA MATRIZ DE RIGIDEZ GLOBAL DAS
BARRAS)
Conforme exposto em aula, a dimensão da matriz de rigidez de cada barra é igual
ao grau de liberdade da estrutura.
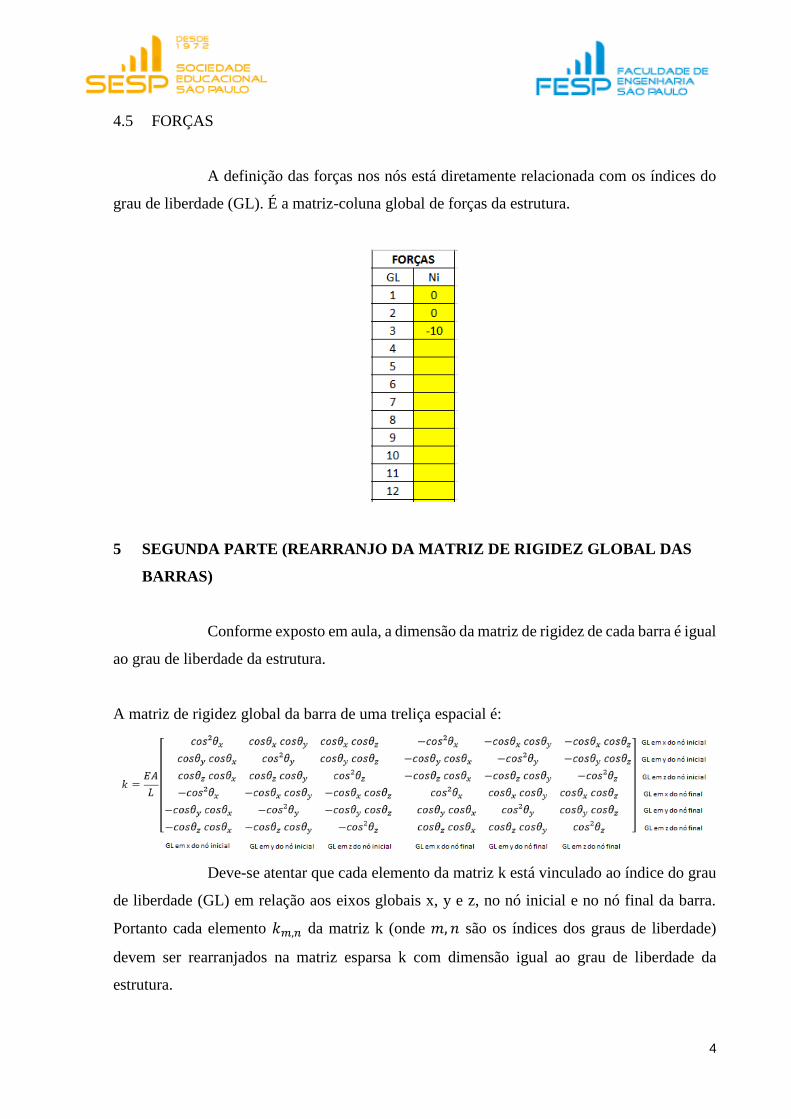
A matriz de rigidez global da barra de uma treliça espacial é:
Deve-se atentar que cada elemento da matriz k está vinculado ao índice do grau
de liberdade (GL) em relação aos eixos globais x, y e z, no nó inicial e no nó final da barra.
Portanto cada elemento 𝑘𝑚,𝑛 da matriz k (onde 𝑚, 𝑛 são os índices dos graus de liberdade)
devem ser rearranjados na matriz esparsa k com dimensão igual ao grau de liberdade da
estrutura.
5
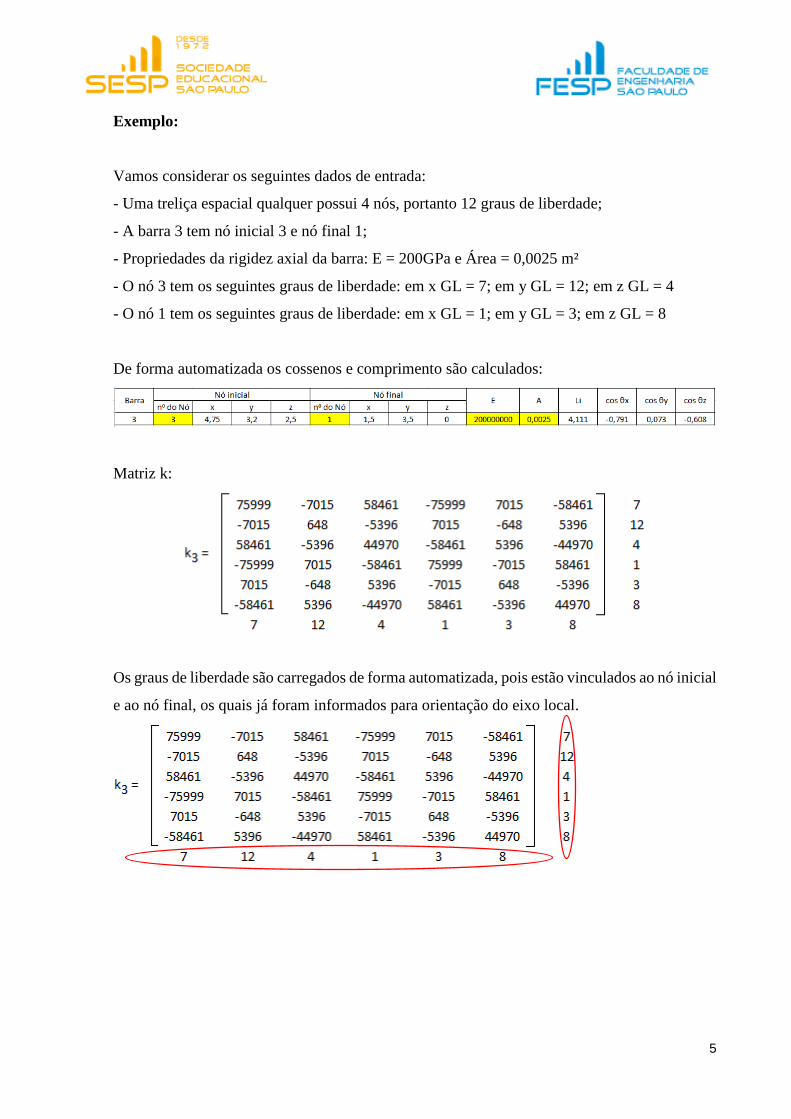
Exemplo:
Vamos considerar os seguintes dados de entrada:
- Uma treliça espacial qualquer possui 4 nós, portanto 12 graus de liberdade;
- A barra 3 tem nó inicial 3 e nó final 1;
- Propriedades da rigidez axial da barra: E = 200GPa e Área = 0,0025 m²
- O nó 3 tem os seguintes graus de liberdade: em x GL = 7; em y GL = 12; em z GL = 4
- O nó 1 tem os seguintes graus de liberdade: em x GL = 1; em y GL = 3; em z GL = 8
De forma automatizada os cossenos e comprimento são calculados:
Matriz k:
Os graus de liberdade são carregados de forma automatizada, pois estão vinculados ao nó inicial
e ao nó final, os quais já foram informados para orientação do eixo local.
6
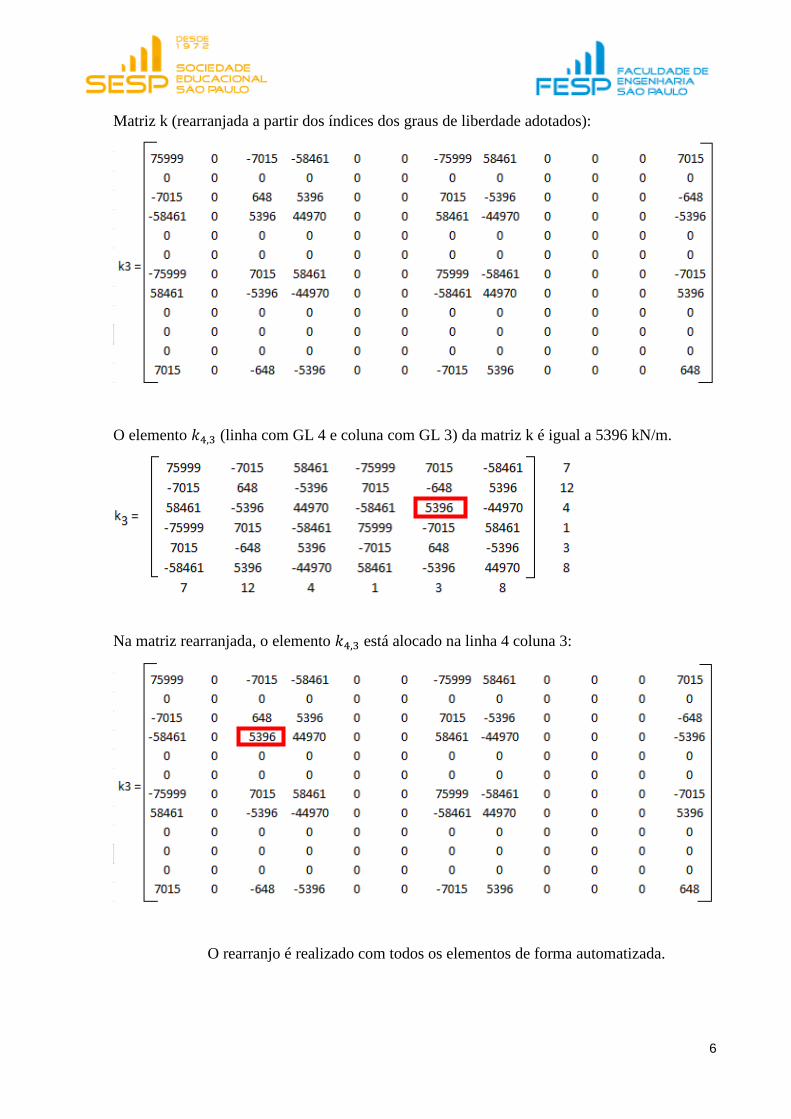
Matriz k (rearranjada a partir dos índices dos graus de liberdade adotados):
O elemento 𝑘4,3 (linha com GL 4 e coluna com GL 3) da matriz k é igual a 5396 kN/m.
Na matriz rearranjada, o elemento 𝑘4,3 está alocado na linha 4 coluna 3:
O rearranjo é realizado com todos os elementos de forma automatizada.

7
Para segunda parte do trabalho é solicitado que a matriz de rigidez de uma barra
(matriz não rearranjada com a dimensão 6x6) seja automaticamente rearranjada para a matriz
com dimensão igual ao grau de liberdade da estrutura.
6 TERCEIRA PARTE (MATRIZ DE RIGIDEZ GLOBAL DA ESTRUTURA E
CRIAÇÃO DAS SUBMATRIZES 𝑲𝟏𝟏, 𝑲𝟏𝟐, 𝑲𝟐𝟏 E 𝑲𝟐𝟐)
Todas as matrizes de rigidezes globais das barras foram rearranjadas e
apresentam a mesma dimensão (igual grau de liberdade total da estrutura). Assim todas as
matrizes de rigidezes das barras devem ser somadas para obter a matriz de rigidez global da
estrutura:
𝑲 = 𝑘1 + 𝑘2 + … + 𝑘𝑛 = ∑ 𝑘𝑖
𝑛
𝑖=1
i barra i
n número total de barras
A matriz-coluna global de forças (F) e a matriz-coluna global de deslocamentos
(Δ) da estrutura já estão definidas, portanto para determinar as forças e deslocamentos
desconhecidos basta resolver o sistema linear:
F = K Δ
O sistema linear apresentará o número de equações igual ao grau de liberdade
total da estrutura. Por exemplo, se uma treliça espacial apresenta 6 nós, terá 18 graus de
liberdade e o sistema linear final apresentará 18 equações lineares.
Existem dois tipos de equações:
Equações com Forças desconhecidas e Deslocamentos conhecidos;
Equações com Forças conhecidas e Deslocamentos desconhecidos.
Uma das alternativas para solução é a divisão da solução F = K Δ em submatrizes
baseadas nos coeficientes dos tipos equações apresentados acima. Ou seja, dividir as matrizes-
colunas em duas submatrizes e a matriz de rigidez em quatro submatrizes.

8
6.1 DIVISÃO DA MATRIZ-COLUNA GLOBAL DAS FORÇAS (F)
Deve ser dividida em duas submatrizes-colunas globais de forças, sendo:
𝐹𝐶 Submatriz-coluna global das forças conhecidas
𝐹𝐷 Submatriz-coluna global das forças desconhecidas
6.2 DIVISÃO DA MATRIZ-COLUNA GLOBAL DOS DESLOCAMENTOS (Δ)
Deve ser dividida em duas submatrizes-colunas globais de deslocamentos,
sendo:
Δ𝐷 Submatriz-coluna global dos deslocamentos desconhecidos
Δ𝐶 Submatriz-coluna global dos deslocamentos conhecidos
6.3 DIVISÃO DA MATRIZ DE RIGIDEZ GLOCAL DA ESTRUTURA (K)
Deve ser dividida em quatro submatrizes baseadas no sistema linear:
𝐹𝐶 = 𝑲𝟏𝟏 ∗ Δ𝐷 + 𝑲𝟏𝟐 ∗ Δ𝐶
𝐹𝐷 = 𝑲𝟐𝟏 ∗ Δ𝐷 + 𝑲𝟐𝟐 ∗ Δ𝐶
𝑲𝟏𝟏 Submatriz com os coeficientes dos deslocamentos desconhecidos nas linhas das forças
conhecidas
𝑲𝟏𝟐 Submatriz com os coeficientes dos deslocamentos conhecidos nas linhas das forças
conhecidas
𝑲𝟐𝟏 Submatriz com os coeficientes dos deslocamentos desconhecidos nas linhas das forças
desconhecidas
𝑲𝟐𝟐 Submatriz com os coeficientes dos deslocamentos conhecidos nas linhas das forças
desconhecidas
9
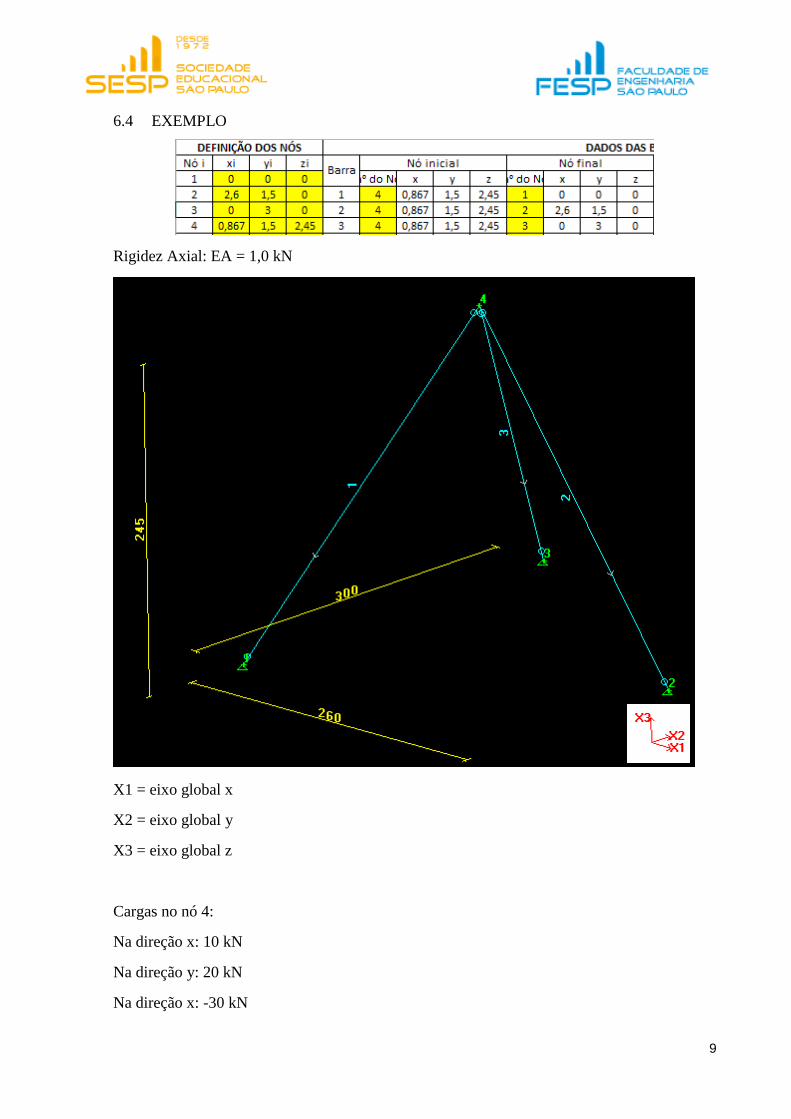
6.4 EXEMPLO
Rigidez Axial: EA = 1,0 kN
X1 = eixo global x
X2 = eixo global y
X3 = eixo global z
Cargas no nó 4:
Na direção x: 10 kN
Na direção y: 20 kN
Na direção x: -30 kN
10
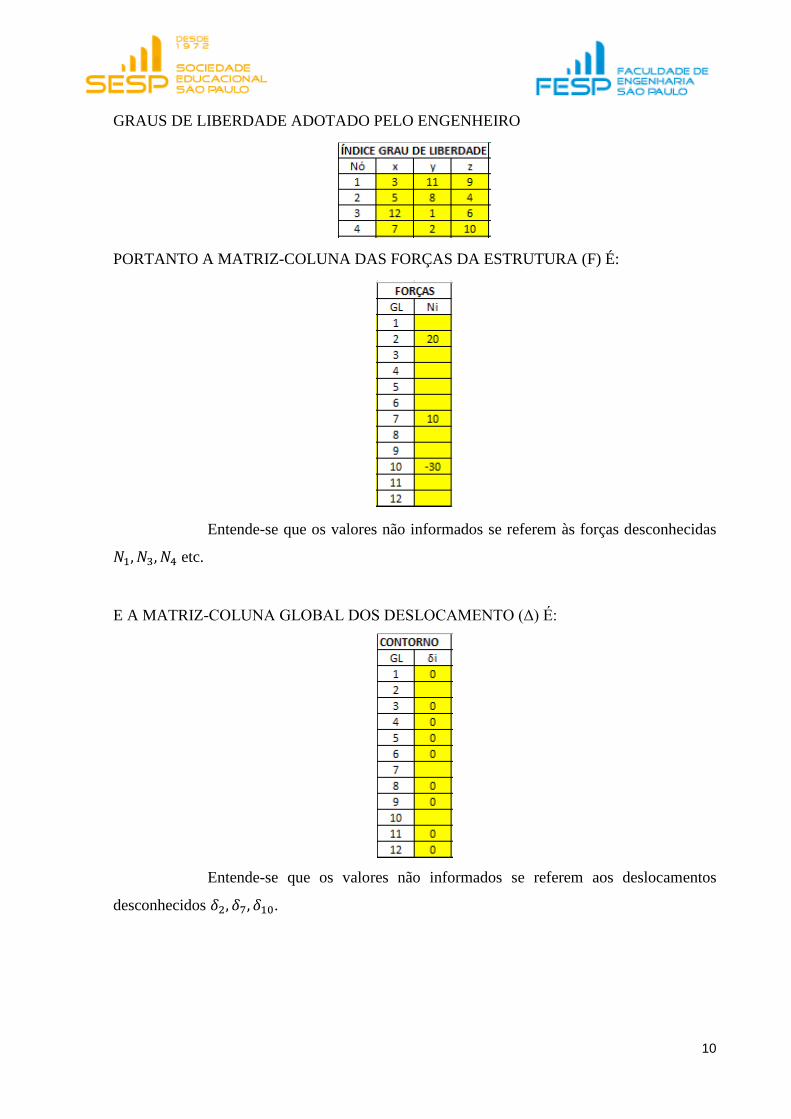
GRAUS DE LIBERDADE ADOTADO PELO ENGENHEIRO
PORTANTO A MATRIZ-COLUNA DAS FORÇAS DA ESTRUTURA (F) É:
Entende-se que os valores não informados se referem às forças desconhecidas
𝑁1, 𝑁3, 𝑁4 etc.
E A MATRIZ-COLUNA GLOBAL DOS DESLOCAMENTO (Δ) É:
Entende-se que os valores não informados se referem aos deslocamentos
desconhecidos 𝛿2, 𝛿7, 𝛿10.
11
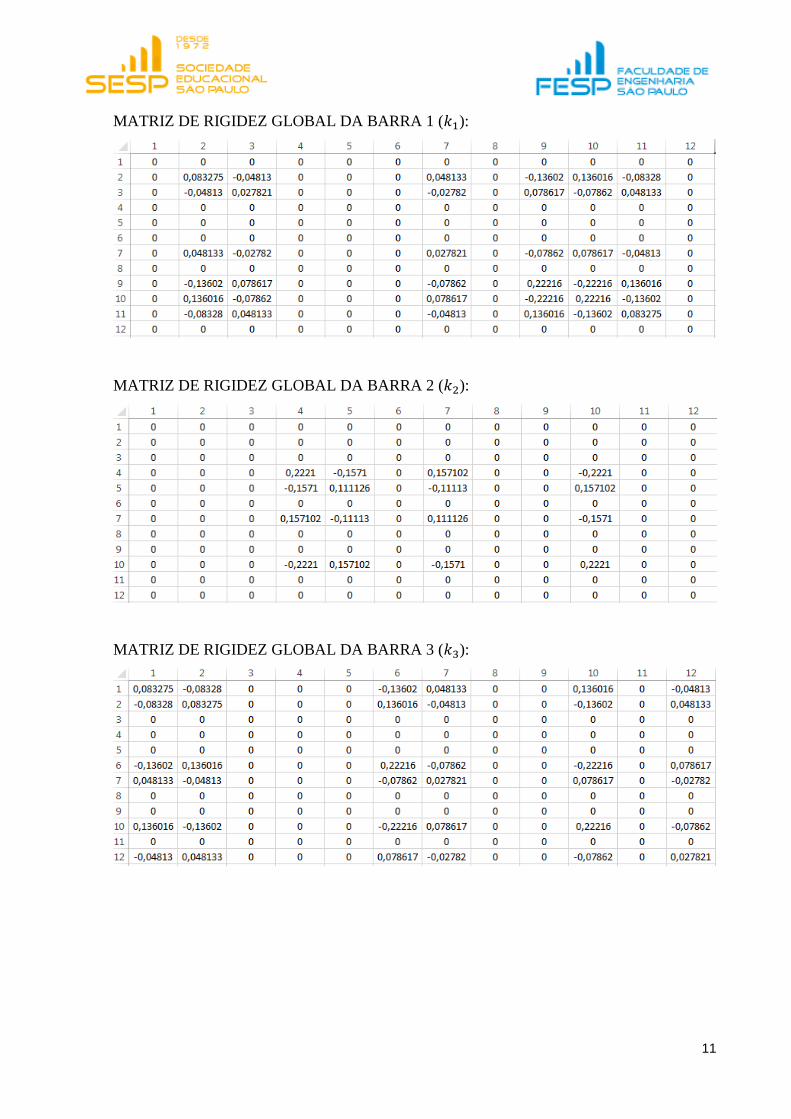
MATRIZ DE RIGIDEZ GLOBAL DA BARRA 1 (𝑘1):
MATRIZ DE RIGIDEZ GLOBAL DA BARRA 2 (𝑘2):
MATRIZ DE RIGIDEZ GLOBAL DA BARRA 3 (𝑘3):

12
MATRIZ DE RIGIDEZ GLOBAL DA ESTRUTURA (K):
𝑲 = 𝑘1 + 𝑘2 + 𝑘3
SUBMATRIZ DAS FORÇAS CONHECIDAS (𝐹𝐶):
SUBMATRIZ DAS FORÇAS DESCONHECIDAS (𝐹𝐷):
13
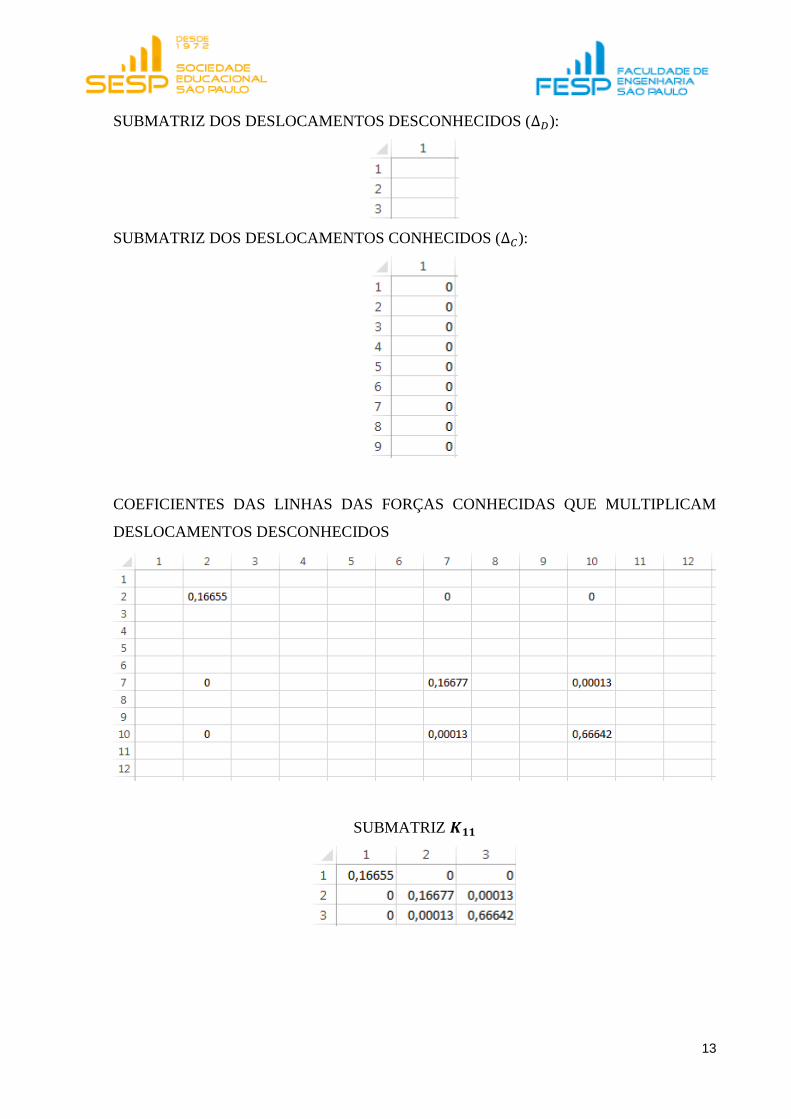
SUBMATRIZ DOS DESLOCAMENTOS DESCONHECIDOS (Δ𝐷):
SUBMATRIZ DOS DESLOCAMENTOS CONHECIDOS (Δ𝐶):
COEFICIENTES DAS LINHAS DAS FORÇAS CONHECIDAS QUE MULTIPLICAM
DESLOCAMENTOS DESCONHECIDOS
SUBMATRIZ 𝑲𝟏𝟏

14
COEFICIENTES DAS LINHAS DAS FORÇAS CONHECIDAS QUE MULTIPLICAM
DESLOCAMENTOS CONHECIDOS
SUBMATRIZ 𝑲𝟏𝟐
15
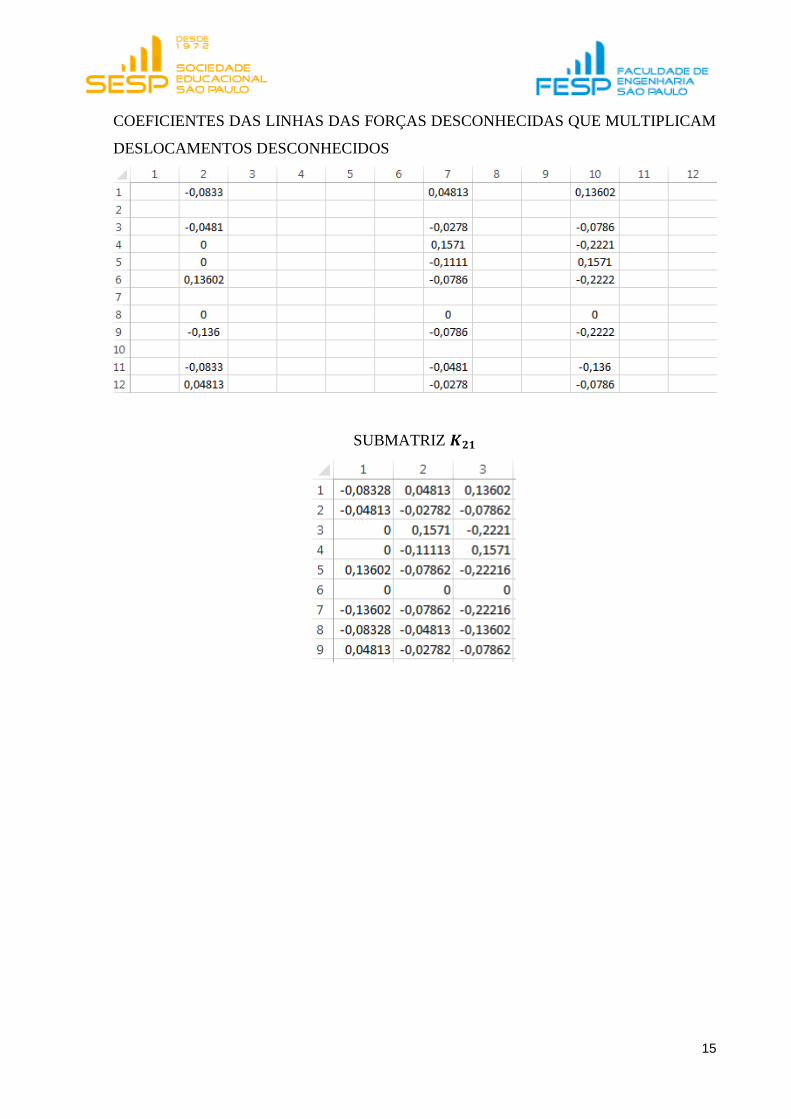
COEFICIENTES DAS LINHAS DAS FORÇAS DESCONHECIDAS QUE MULTIPLICAM
DESLOCAMENTOS DESCONHECIDOS
SUBMATRIZ 𝑲𝟐𝟏
16
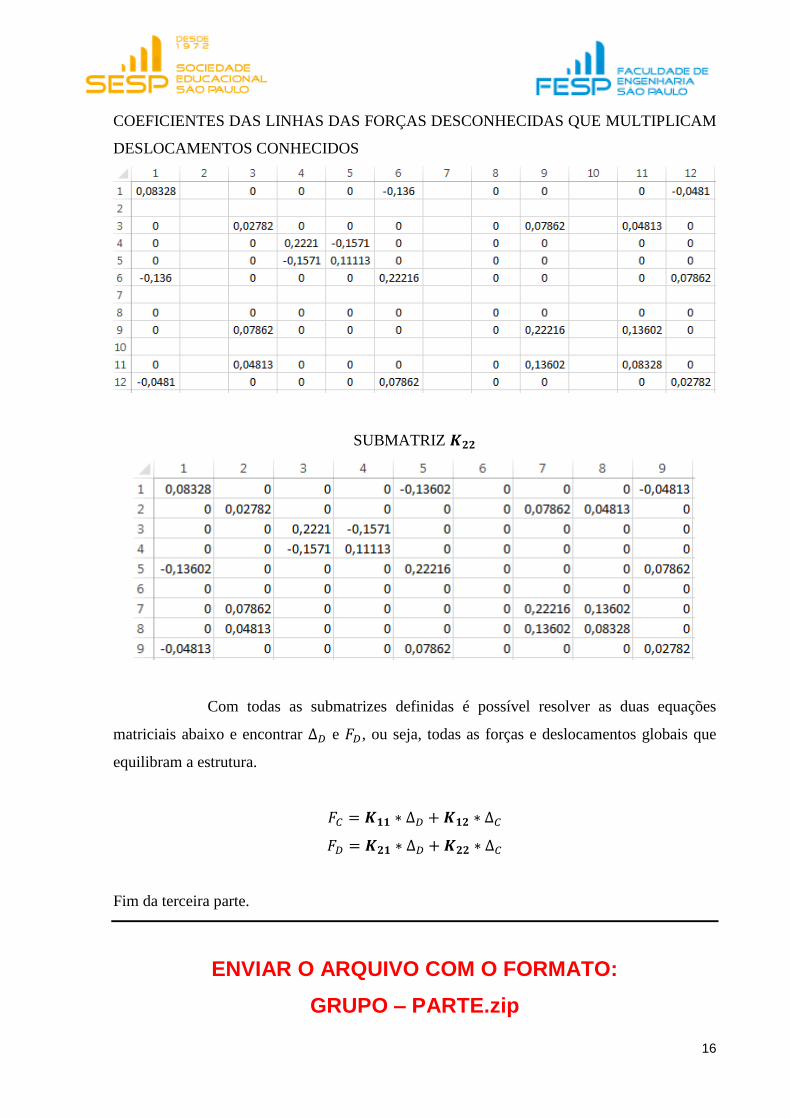
COEFICIENTES DAS LINHAS DAS FORÇAS DESCONHECIDAS QUE MULTIPLICAM
DESLOCAMENTOS CONHECIDOS
SUBMATRIZ 𝑲𝟐𝟐
Com todas as submatrizes definidas é possível resolver as duas equações
matriciais abaixo e encontrar Δ𝐷 e 𝐹𝐷, ou seja, todas as forças e deslocamentos globais que
equilibram a estrutura.
𝐹𝐶 = 𝑲𝟏𝟏 ∗ Δ𝐷 + 𝑲𝟏𝟐 ∗ Δ𝐶
𝐹𝐷 = 𝑲𝟐𝟏 ∗ Δ𝐷 + 𝑲𝟐𝟐 ∗ Δ𝐶
Fim da terceira parte.
ENVIAR O ARQUIVO COM O FORMATO:
GRUPO – PARTE.zip
17
(ver lista de grupos publicada no site)
Exemplo do nome do arquivo a ser enviado:
G4 – Parte III.zip
Entrega até 26 de outubro até às 20:00hs no e-mail
Entregas após às 20:00hs serão desconsideradas.